Embed Size (px)
Citation preview

PGMECPÓS-GRADUAÇÃO EM ENGENHARIA MECÂNICAESCOLA DE ENGENHARIAUNIVERSIDADE FEDERAL FLUMINENSE
Dissertação de Mestrado
COMPORTAMENTO MECÂNICO DA
BORRACHA DE SILICONE
REFORÇADA COM DIFERENTES
CONCENTRAÇÕES DE
NANOPARTÍCULAS DE ALUMINA
RAPHAEL DE OLIVEIRA BENEVIDES
MARÇO DE 2015

RAPHAEL DE OLIVEIRA BENEVIDES
COMPORTAMENTO MECÂNICO DA BORRACHADE SILICONE REFORÇADA COM DIFERENTESCONCENTRAÇÕES DE NANOPARTÍCULAS DE
ALUMINA
Dissertação apresentada ao Programa de Pós-graduação em Engenharia Mecânicada UFFcomo parte dos requisitos para a obtenção do tí-tulo de Mestre em Ciências em Engenharia Me-cânica
Orientador(es): Luiz Carlos da Silva Nunes, Ph.D. (PGMEC/UFF)
UNIVERSIDADE FEDERAL FLUMINENSE
NITERÓI, MARÇO DE 2015
COMPORTAMENTO MECÂNICO DA BORRACHADE SILICONE REFORÇADA COM DIFERENTESCONCENTRAÇÕES DE NANOPARTÍCULAS DE
ALUMINA
Esta dissertação foi julgada adequada para a obtenção do título de
MESTRE EM ENGENHARIA MECÂNICA
na área de concentração de Mecânica dos Sólidos, e aprovada em sua formafinal pela Banca Examinadora formada pelos membros abaixo:
Luiz Carlos da Silva Nunes (Ph.D.)Universidade Federal Fluminense – PGMEC/UFF
(Orientador)
Heraldo Silva da Costa Mattos (D.Sc.)Universidade Federal Fluminense – PGMEC/UFF
Lavinia Maria Sanabio Alves Borges (D.Sc.)Universidade Federal do Rio de Janeiro – COPPE/UFRJ
Lista de Figuras
3.1 Resina de silicone e catalisador. . . . . . . . . . . . . . . . . . . . . . . 17
3.2 Nanopartículas de Al2O3. . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.3 Balança de precisão, becker e haste de mistura. . . . . . . . . . . . . 19
3.4 Moinho de esferas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.5 Molde para a fabricação dos corpos de prova. . . . . . . . . . . . . . 20
3.6 Preparação para o ensaio de cisalhamento puro. . . . . . . . . . . . 21
3.7 Preparação para o ensaio de tração. . . . . . . . . . . . . . . . . . . . 22
3.8 Corpos de prova. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.9 Exemplo dos diferentes engastes dos ensaios. . . . . . . . . . . . . . 23
3.10 Equipamentos utilizados. . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.11 Configuração de equipamentos pronta para ensaio. . . . . . . . . . 24
3.12 Exemplo de padrão aleatório utilizado na técnica CID. . . . . . . . 25
4.1 Representação do ensaio de cisalhamento puro. . . . . . . . . . . . . 27
4.2 Representação do ensaio de tração. . . . . . . . . . . . . . . . . . . . 30
5.1 Mapas de deslocamento no ensaio de cisalhamento puro. . . . . . . 38
5.2 Mapas de deslocamento no ensaio de tração. . . . . . . . . . . . . . . 39
5.3 Curva experimental da tensão nominal. . . . . . . . . . . . . . . . . . 40
5.4 Curva experimental da tensão real. . . . . . . . . . . . . . . . . . . . 41
5.5 Ajuste da curva Tensão real x estiramento com o modelo de Ogden. 42
5.6 Evolução do módulo de elasticidade com a porcentagem de nano-
partículas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
5.7 Valores do coeficiente de Poisson para as diferentes quantidades
de nanopartículas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
5.8 Evolução do coeficiente de Poisson ao longo das imagens do ensaio. 46
5.9 Ajuste de curva do silicone puro com os modelos de Yeoh [1] e
Lopez-Pamies [2]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
iv

Lista de Figuras v
5.10 Erro entre a curva experimental e os modelos matemáticos. . . . . 48
5.11 Modelo de Yeoh. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
5.12 Modelo de Lopez-Paimes. . . . . . . . . . . . . . . . . . . . . . . . . . 50
5.13 Erro do modelo de Yeoh. . . . . . . . . . . . . . . . . . . . . . . . . . . 51
5.14 Erro do modelo de Lopez-Paimes. . . . . . . . . . . . . . . . . . . . . 52
5.15 Fator de amplificação da deformação em função da concentração
de nanopartículas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
5.16 Tensão real x Estiramento com diferentes percentuais na região
inicial. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
5.17 Módulo de elasticidade com diferentes percentuais na região inicial. 53
5.18 Coeficiente de Poisson com diferentes percentuais na região inicial. 54

Lista de Tabelas
5.1 Porcentagem volumétrica de nanopartículas . . . . . . . . . . . . . . . . 36
5.2 Parâmetros utilizados no cálculo do módulo de elasticidade . . . . . . . 43
5.3 Parâmetros do silicone puro . . . . . . . . . . . . . . . . . . . . . . . . . 46
vi

Agradecimentos
vii

Resumo
Neste trabalho, foram estudadas as propriedades mecânicas de uma borracha de si-
licone reforçada com nanopartículas de óxido de alumínio. Foram fabricados nano-
compósitos, compostos por uma matriz de silicone reforçada com diferentes frações
volumétricas variando de 0 a 5% de nanopartículas. As amostras foram submetidas a
ensaios de cisalhamento puro e a testes de tração, ambos realizados de forma quase
estática e submetendo as amostras a grandes deformações. A técnica de Correlação
de Imagens Digitais foi utilizada a fim de se obter os campos de deslocamento dos
corpos de prova durante os experimentos e a partir deles, extrair a curva tensão vs
deformação. O módulo de cisalhamento e o coeficiente de Poisson foram medidos
experimentalmente através da análise de dados dos ensaios de cisalhamento puro e tra-
ção, respectivamente. Com esses valores foi possível calcular o módulo de elasticidade
dos nanocompósitos com as diferentes porcentagens de nanopartículas e avaliar a sua
influência no valor desta propriedade mecânica. Por fim, foram utilizados modelos
presentes na literatura, que levam em consideração o conceito de deformação amplifi-
cada, para descrever o comportamento tensão-estiramento dos nanocompósitos.
Palavras chave: hiperelasticidade, elastômero, nanocompósitos, nanopartículas, ci-
salhamento puro, correlação de imagens digitais
viii

Abstract
In this work, the mechanical properties of a silicone rubber reinforced with aluminum
oxide nanoparticles were studied. Nanocomposites were fabricated consisting of a sili-
con matrix reinforced with different volume fractions of nanoparticles ranging from 0
to 5 %. The samples were submitted to pure shear tests and tensile tests, both tests were
carried out in quasi-static load under large deformations. The Digital Image Correla-
tion technique was used to determine the displacement fields of the specimens during
the experiments and from them, obtain the stress vs strain curve. The shear modulus
and Poisson’s ratio were estimated experimentally by analyzing the data from the pure
shear and tensile tests, respectively. With these values, it was possible to calculate the
elastic modulus of the nanocomposites with different percentages of nanoparticles and
evaluate their influence on the value of this mechanical property. Finally, models found
in the literature were used, which take into account the concept of amplified deforma-
tion, to describe the stress-stretch behavior of the nanocomposites.
Keywords: hyperelasticity, elastomer, nanocomposite, nanoparticle, pure shear, digital
image correlation
ix

Sumário
Agradecimentos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii
Resumo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . viii
Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ix
1. Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1 Considerações Gerais . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3 Motivação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.4 Descrição dos Capítulos . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2. Revisão Bibliográfica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3. Materiais e Métodos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.1 Fabricação dos corpos de prova . . . . . . . . . . . . . . . . . . . . . . . 17
3.2 Procedimento experimental . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.3 Técnica de Correlação de imagens Digitais . . . . . . . . . . . . . . . . 23
4. Formulação Matemática . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.1 Obtenção das propriedades mecânicas . . . . . . . . . . . . . . . . . . . 27
4.1.1 Obtenção do módulo de cisalhamento . . . . . . . . . . . . . . 27
4.1.2 Obtenção do coeficiente de Poisson . . . . . . . . . . . . . . . . 30
4.1.3 Determinação do módulo de elasticidade . . . . . . . . . . . . . 30
4.2 Análise da curva tensão x estiramento . . . . . . . . . . . . . . . . . . . 31
4.2.1 Modelo para o cisalhamento puro . . . . . . . . . . . . . . . . . 31
4.2.2 Deformação amplificada . . . . . . . . . . . . . . . . . . . . . . 33
5. Resultados e Discussão . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5.1 Corpos de Prova . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
x

Sumário xi
5.2 Resultados experimentais com a técnica CID . . . . . . . . . . . . . . . 37
5.2.1 Ensaio de cisalhamento puro . . . . . . . . . . . . . . . . . . . . 38
5.2.2 Ensaio de tração . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
5.3 Curva Tensão x Estiramento . . . . . . . . . . . . . . . . . . . . . . . . . 39
5.4 Módulo de Elasticidade . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
5.5 Coeficiente de Poisson . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
5.6 Modelos da literatura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
5.7 Ensaios com diferentes frações volumétricas na região inicial . . . . . . 49
6. Conclusões . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
7. Trabalhos Futuros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
8. BIBLIOGRAFIA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
A. Artigo publicado no Congresso Nacional de Engenharia Mecânica 2014 67
B. Artigo publicado na revista Mechanics of Materials . . . . . . . . . . . . 68

Capítulo 1
Introdução
1.1 Considerações Gerais
A cada dia, o consumo de materiais poliméricos aumenta nas grandes cidades. Cada
vez mais, materiais cerâmicos e metálicos são substituídos pelos polímeros em diversas
aplicações. Principalmente, devido às suas características vantajosas como o baixo
peso e a resistência a corrosão.
Dentre as classes de polímeros, encontra-se a de elastômeros. São materiais ca-
pazes de sofrer grandes deformações e retornar a sua forma original, sem apresentar
deformações permanentes. São classificados, devido a esta característica, como hipe-
relásticos.
Geralmente, os elastômeros possuem baixa resistência mecânica. O que gera a
necessidade de reforçá-los, a fim de que atendam às exigências das especificações de
projetos. Alguns tipos diferentes de materiais podem ser usados para o reforço, como
o carbono e óxidos de metais variados.
Os materiais de reforço podem ser empregados em diferentes formas e tamanhos.
Podem ser utilizadas fibras, micropartículas ou nanopartículas. Quando um material
polimérico é reforçado com essas partículas, gera-se um novo tipo de material, conhe-
cido como compósito.
As nanopartículas têm-se apresentado como as mais eficientes em aumentar as pro-
1

1. Introdução 2
priedades físicas dos elastômeros. Elas costumam ser utilizadas na forma de nanotubos
de carbono, ou de partículas esféricas de diversos óxidos, que formam pequenos aglo-
merados de nanopartículas, aleatoriamente espalhadas na matriz polimérica.
Dentre os elastômeros, encontra-se a borracha de silicone, que quando reforçada
com as nanopartículas, podem ser empregadas em diversas áreas úteis à sociedade. O
silicone reforçado, pode ser usado na biomedicina, para a substituição de tecidos dani-
ficados. Se reforçados com nanopartículas com propriedades eletromagnéticas, podem
servir como aturadores em motores, ou como sensores extensíveis em instrumentos
de medição. E ainda, podem ser usados como materiais de refrigeração em circui-
tos elétricos, através da dissipação de calor, quando reforçados por nanopartículas que
aumentem a condutividade térmica.
Seja qual for a aplicação, é preciso conhecer a influência das nanopartículas nas
propriedades físicas da matriz polimérica. A fim de que seja efetuado um projeto
adequado e a correta especificação do material.
1.2 Objetivos
O propósito principal deste trabalho é estudar o comportamento mecânico de uma bor-
racha de silicone reforçada com nanopartículas, submetida ao estado de cisalhamento
puro em grandes deformações. Como proposições secundárias, tem-se a avaliação do
efeito da adição de nanopartículas sobre suas propriedades mecânicas como o módulo
de elasticidade e o coeficiente de Poisson. E por fim, a utilização de modelos presentes
na literatura, no intuito de tentar prever o comportamento de tensão versus estiramento
do nanocompósito, fabricado com diferentes frações volumétricas de nanopartículas.
1.3 Motivação
Existem alguns fatores que motivaram a realização do estudo nesta área. Um deles
é o crescente uso de materiais poliméricos na indústria e na rotina da maior parte da
população, tornando os polímeros os materiais do futuro.

1. Introdução 3
Outro fator motivacional é o fato de não se saber tanto sobre materiais poliméricos,
ou compósitos com matriz polimérica, em especial os reforçados com nanopartículas,
como se sabe sobre os materiais metálicos, o que é perfeitamente compreensível, já
que os metais vem sendo estudados a vários anos.
Entretanto, o fator principal é o crescente interesse da comunidade científica pelo
estudo de nanopartículas como materiais de reforço a materiais poliméricos hiperelás-
ticos, comprovado pelo crescente número de trabalhos publicados na área. Este inte-
resse é justificável devido ao grande número de aplicações práticas em que materiais
como esse podem ser empregados. E naturalmente, para a correta aplicação de qual-
quer material, as suas propriedades mecânicas devem ser totalmente compreendidas e
seu comportamento deve ser claramente previsto.
1.4 Descrição dos Capítulos
Nesta seção, é apresentada uma descrição de como o texto está organizado ao longo
do trabalho.
No capítulo 2, é feita a revisão bibliográfica deste estudo, onde são apresentados
alguns trabalhos realizados por diversos autores, que tratam de temas pertinentes ao
presente trabalho, como por exemplo, a descrição do comportamento mecânico de
materiais compósitos.
No capítulo 3, é descrito todo o processo de fabricação dos corpos de prova de
silicone reforçados com nanopartículas, a partir da apresentação detalhada dos proce-
dimentos de fabricação, dos materiais e dos equipamentos utilizados. Em seguida, é
feita a descrição do procedimento experimental, desde sua preparação e montagem até
sua realização. Finalmente, uma apresentação da técnica experimental de correlação
de imagens digitais, empregada nos ensaios, é realizada.
No capítulo 4, são mostradas as bases matemáticas necessárias a realização do
trabalho. É feita uma descrição detalhada da obtenção do módulo de elasticidade e
do coeficiente de Poisson, a partir dos dados experimentais, bem como uma análise
da curva tensão estiramento obtida experimentalmente e, por fim, uma abordagem do

1. Introdução 4
conceito de deformação amplificada.
Os resultados obtidos desde a fabricação dos corpos de prova até as últimas aná-
lises matemáticas são expostos no capítulo 5. Para os procedimentos realizados, cada
informação relevante percebida e toda formulação matemática desenvolvida, são apre-
sentados uma discussão e uma análise completa dos mesmos em cada seção do capí-
tulo.
O capítulo 6, de conclusões, traz comentários gerais sobre tudo que foi desen-
volvido ao longo do trabalho, a partir da explicação de onde se pôde chegar com os
resultados obtidos e com as análises realizadas. São expostos os pontos alcançados
pelo estudo e sua relevância dentro do tema.
Finalizando o trabalho, no capítulo 7, são dadas algumas sugestões de trabalhos
futuros que são considerados úteis na complementação do estudo proposto, a fim de
enriquecer o conhecimento sobre o comportamento mecânico de materiais hiperelásti-
cos reforçados com nanopartículas.

Capítulo 2
Revisão Bibliográfica
Estudos na área de compósitos despertam interesse da comunidade cientifica em geral,
principalmente no que diz respeito as suas propriedades térmicas, elétricas e mecâni-
cas.
Uma análise da concentração de partículas, seu tamanho, forma e aglomeração foi
feita por Nielsen [6], em um trabalho onde também estudou a adesão na interface en-
tre partículas e matriz. Uma análise, baseada na experiência experimental, acerca das
propriedades mecânicas obtidas num ensaio dinâmico e do comportamento tensão-
deformação foi apresentada. Ogden [7] recalculou alguns resultados gerais baseados
na lei constitutiva de materiais compósitos, cujos constituintes são capazes de sofrer
uma deformação elástica finita, e também mostrou que a função de energia média
em volume depende apenas do volume médio do gradiente de deformação. E por fim,
demonstrou que materiais com comportamento hiperelástico com inclusões rígidas po-
dem atingir deformações maiores. Já na área das propriedades térmicas, Agari e Uno
[8] propuseram um novo modelo de condução de calor para polímeros carregados com
partículas e os valores obtidos foram comparados com resultados experimentais. O
modelo foi validado experimentalmente para matrizes de polietileno, poliestireno e
poliamida com adições de grafite, cobre e alumina.
Diferentes tipos de partículas são usadas para reforçar os materiais poliméricos.
Dentre as partículas que são utilizadas, existem as nanopartículas. Um número menor
5
2. Revisão Bibliográfica 6
de artigos é encontrado na área em comparação com os adicionantes de tamanhos
maiores.
Ji et al. [40] propuseram um modelo trifásico para calcular o módulo de elastici-
dade de nanocompósitos, que leva em consideração a matriz, a região de interface e
as partículas. O modelo considerou partículas esféricas, cilíndricas ou com formato
de placas, distribuídas aleatoriamente dentro da matriz. Constataram que para uma
mesma fração de partículas, as menores aumentam mais o módulo de elasticidade. O
modelo trifásico proposto apresentou boa concordância com testes experimentais re-
alizados. Wetzel et al. [41] fizeram várias adições de micropartículas de silicato de
cálcio e de nanopartículas de alumina em uma matriz de epóxi para avaliar o reforço
na matriz. A influência das partículas na resistência ao impacto, na resistência a flexão
e em outras propriedades térmicas foi investigada. A melhora nas propriedades foi
verificada com quantidades muito pequenas de nanopartículas de alumina.
Fu et al. [42] fizeram uma análise bem abrangente acerca dos efeitos do tamanho
das partículas, da interface entre partículas e matriz e do carregamento sobre a rigidez,
resistência e tenacidade de compósitos com matriz polimérica, utilizando partículas
com baixa razão de aspecto. Uma avaliação crítica de dados experimentais comparados
com modelos teóricos foi apresentada, sendo esta referente a micro e nano compósitos.
Foi mostrado também, que a resistência e a tenacidade dos materiais são fortemente
dependentes da adesão entre partículas e matriz. Ayatollahi et al. [43] estudaram os
efeitos da tenacidade a fratura de compósitos de epóxi com nanotubos de carbono sub-
metidos a flexão e a cisalhamento. Foi observado que a tenacidade a fratura depende
das condições de carregamento da amostra e que a influência dos nanotubos é maior no
estado de cisalhamento. O mecanismo de fratura foi estudado a partir de imagens da
superfície fraturada tiradas por um microscópio eletrônico de varredura. Foi verificada
uma correlação entre a superfície fraturada e o comportamento mecânico observado
durante os testes.
Os materiais hiperelásticos são um outro tipo de polímero que são largamente es-
tudados. Estes podem sofrer grandes deformações e retornar a seu tamanho original

2. Revisão Bibliográfica 7
sem apresentar alterações permanentes, ou seja, deformação plástica. O amplo número
de trabalhos encontrados a esse respeito revela a importância do tema para a ciência.
Ao longo dos últimos anos, foram publicados artigos com objetivo de explicar o com-
portamento mecânico destes materiais, submetidos a diferentes estados de tensão e a
carregamentos monotônicos e cíclicos.
Diani et al. [13] fizeram uma revisão sobre o efeito Mullin apresentando as evidên-
cias experimentais que caracterizam o fenômeno. Eles estudaram os modelos feno-
menoléogicos dedicados a descrever o comportamento das borrachas sob este efeito.
Algumas teorias baseadas em leis físicas para o comportamento mecânico foram tes-
tadas, entretanto apresentaram capacidade de previsão do comportamento abaixo do
esperado. Consideraram ainda que o efeito Mullin, que é o fenômeno que altera o com-
portamento tensão-deformação de materiais hiperelásticos em função da carga máxima
aplicada em um ensaio cíclico, continua sendo um desafio para futuros estudos.
Govindjee e Simo [9] apresentaram um tratamento micro mecânico ao problema
do efeito de Mullin em um elastômero e desenvolveram um modelo constitutivo con-
tínuo completo. A exatidão do modelo foi comprovada através de comparações com
dados experimentais publicados na literatura. Zúñiga e Beatty [10] propuseram um
novo modelo fenomenológico de relaxamento de tensão para materiais hiperelásticos
isotrópicos e incompressíveis. A teoria foi mostrada para materiais neo-Hookeanos
e foi demonstrado que, para dois modelos de materiais com moléculas de rede não-
Gaussiana, a comparação é mais favorável para dados de deformações uniaxiais.
Marckmann et al. [11] analisaram o fenômeno de relaxamento de tensão que ocor-
rem em materiais borrachosos, durante um carregamento cíclico do ponto de vista da
física. Eles propuseram uma nova equação constitutiva para o efeito de Mullin, con-
siderando borracha natural e elastômeros sintéticos. Os materiais foram considerados
isotrópicos incompressíveis e os efeitos viscosos não foram levados em consideração.
A adequabilidade do modelo foi comprovada por testes de carregamento uniaxial cí-
clico nos dois materiais.
Qi e Boyce [12] apresentaram um modelo constitutivo tridimensional completo

2. Revisão Bibliográfica 8
para descrever o relaxamento de tensão observado no comportamento tensão-deformação.
O conceito de deformação amplificada foi utilizado para mapear a deformação macros-
cópica. A comparação com resultados experimentais de extensões uniaxiais cíclicas
mostrou que o modelo era satisfatório para este tipo de carregamento.
Os materiais hiperelásticos, em geral, apresentam a desvantagem de serem meca-
nicamente pouco resistentes. Uma das formas de se tentar superar essa deficiência é
com a adição de partículas ou fibras reforçadoras, formando assim, um material com-
pósito. Os pesquisadores tentam entender o comportamento mecânico destes materiais
compósitos, estudando a influência das partículas. Variáveis como a quantidade das
partículas, seu tamanho, forma e o modo como elas aderem à matriz são levadas em
consideração, em modelos analíticos e numéricos.
Harwood e Payne [14] mostraram a similaridade entre o grau de relaxamento de
tensão em borracha pura e reforçada com partículas, quando submetidas a carrega-
mentos perto de sua ruptura, confirmando investigações anteriores feitas com tensões
moderadas. Foi feita uma interpretação de que a deformação, observada através do
resultado do comportamento tensão-deformação em um ensaio de tração é aumentada
pela presença dos aditivos. Assim, a razão entre a deformação média da borracha e a
deformação global medida é dada por um fator de amplificação de deformação.
Nicholas e Freudenthal [15] apresentaram os efeitos do tamanho das partículas e da
quantidade delas nas curvas de tensão deformação de um elastômero submetido a altas
taxas de deformação. Além disso, propuseram uma equação para prever o aumento
do valor do módulo de elasticidade do elastômero, pela adição de partículas esféricas
rígidas, que leva em consideração a concentração volumétrica das partículas. Kontou
e Spathis [16] estudaram o efeito de adições de carbono no comportamento elástico de
borrachas vulcanizadas. A relação de Mooney-Rivlin foi usada para descrever o com-
portamento da matriz. Neste trabalho, o relaxamento de tensão também foi estudado.
Um modelo fenomenológico simples foi proposto por Ogden e Roxburgh [17] para
prever o comportamento do efeito Mullin em elastômeros reforçados com partículas.
O modelo foi baseado na teoria da elasticidade isotrópica incompressível adicionada
2. Revisão Bibliográfica 9
de um único parâmetro referenciado como parâmetro de dano. O modelo desenvolvido
pôde ser aplicado a casos multiaxiais de tensão e de deformação.
Em seu trabalho, Heinrich e Klüppel [18] fizeram uma análise das propriedades
viscoelásticas de elastômeros reforçados levando em conta o efeito Payne, que avalia
a influência da amplitude da deformação no comportamento viscoelástico de materiais
hiperelásticos. Concluíram que as partículas reforçadoras espalhadas na matriz têm
um papel crítico na determinação das propriedades mecânicas do material. Huber e
Vilgis [19] apresentaram um modelo para o reforço de borrachas com partículas, in-
vestigando o reforço hidrodinâmico de meios elásticos contínuos com diferentes tipos
de partículas. Os resultados obtidos funcionaram bem para concentrações pequenas e
intermediárias de partículas.
Yin et al. [20] desenvolveram um modelo constitutivo hiperelástico para compósi-
tos baseados em deformação micro estrutural e mecanismos físicos de partículas mag-
néticas incorporadas à matriz de um elastômero. Foram consideradas cargas mecânicas
e de campo magnético. O modelo foi constituído em termos da densidade da energia
de deformação. Em seguida, foi comparado com outros existentes e com resultados
experimentais, sendo adequado para carregamentos mecânicos tridimensionais. Klüp-
pel [21] fez uma análise considerando a natureza aleatória das partículas de reforço em
diferentes escalas de tamanho, relacionando isso as propriedades melhoradas nos com-
pósitos. Trabelsi et al. [22] compararam várias propriedades de elastômeros carregados
com partículas com elastômeros puros.
Dorfmann e Ogden [23] descreveram alguns resultados experimentais que ilustram
o abrandamento de tensão em borrachas reforçadas com partículas juntamente com o
efeito de deformação residual associada. Mostraram nos resultados como a magnitude
da deformação aplicada muda a deformação residual e o relaxamento de tensão. De-
senvolveram um modelo constitutivo para descrever este comportamento, utilizando a
teoria de pseudo elasticidade, que leva em consideração inclusive a diferença entre a
energia dada durante o processo de carga e descarga, através de uma função de dis-
sipação que evolui com o histórico de deformação. A aplicabilidade do modelo foi

2. Revisão Bibliográfica 10
demonstrada pela comparação com dados experimentais de um teste feito com carre-
gamento uniaxial simples cíclico.
Alguns trabalhos falam sobre a influência da interface entre as partículas e a matriz
polimérica, como Bokobza [24], que escreveu sobre os processos de reforço de elastô-
meros por partículas. Avaliou que a interface entre o polímero e as partículas possui
influência crucial no comportamento dinâmico dos compósitos. Concluiu que o uso de
partículas com alta razão de aspecto gera materiais com propriedades mecânicas muito
boas devido a elevada anisotropia e capacidade de orientação destas partículas.
Lopez-Pamies e Castañeda [25] apresentaram um modelo analítico para determinar
a resposta constitutiva global de elastômeros reforçado com fibras submetidos a defor-
mações finitas. O modelo leva em conta a micro estrutura do material, incluindo a
rotação das partículas que são induzidas pela carga aplicada. Todavia, o método ainda
estava em fase de desenvolvimento sendo tratado em artigos posteriores.
Moraleda et al. [26] estudaram a deformação finita bidimensional, de elastômeros
incompressíveis reforçados com fibras, utilizando simulação computacional. Utilizou-
se uma dispersão aleatória e homogênea de fibras rígidas em matrizes hiperelásticas.
Diferentes tipos de matrizes, fibras e frações volumétricas foram analisadas, através de
simulações usando elementos finitos. Agoras et al. [27] apresentaram um novo modelo
constitutivo para a resposta efetiva de elastômeros reforçados sob deformações finitas.
A matriz e as fibras foram consideradas hiperelásticas, isotrópicas e incompressíveis.
O modelo foi baseado na teoria de homogeneização de segunda ordem. Foi conside-
rado com bons méritos, visto que utiliza soluções exatas para fases neo-Hookeanas
incompressíveis, assim como outras soluções exatas para casos especiais de carrega-
mentos.
Lopez-Pamies [28] fez uso de um procedimento iterativo de homogeneização em
elasticidade finita a fim de obter uma resposta para o comportamento macroscópico de
sólidos neo-Hookeanos, reforçados com partículas rígidas com distribuição aleatória
e isotrópica. Os resultados mostraram que o procedimento era apropriado para casos
com ampla distribuição de tamanhos de partículas. Freund et al. [29] desenvolveram
2. Revisão Bibliográfica 11
um modelo para carregamentos uniaxiais, baseado em micro estruturas para descrever
o comportamento mecânico inelástico de elastômeros com partículas. Foi feita uma
generalização para um modelo tridimensional completo através do conceito de dire-
ções representativas. O modelo generalizado apresentou adequação satisfatória para
casos de tração uniaxial cíclica, testes de compressão e testes de cisalhamento sim-
ples. A implementação em elementos finitos foi aconselhada apenas para casos de
carregamento uniaxial.
O comportamento mecânico de elastômeros magneticamente sensíveis sob o efeito
de um campo magnético externo uniforme foi descrito em uma teoria proposta por
Ivaneyko et al. [30]. O trabalho foi focado em elastômeros com distribuição isotrópica
de partículas magnéticas. A deformação magnética induzida e o módulo de Young
foram calculados a partir da força do campo magnético externo. Foi mostrado que
o comportamento mecânico do material é muito sensível a distribuição de partículas
magnéticas na matriz.
Avazmohammadi e Castañeda [31] desenvolveram um modelo constitutivo novo
para prever o comportamento macroscópico de elastômeros com partículas submeti-
dos a um estado geral de deformação finita. O método forneceu estimativas para o
comportamento de compósitos elásticos não lineares. Yang et al. [32] propuseram um
modelo micro mecânico para deformações finitas de elastômeros, baseado no tensor
generalizado de Eshelby e no método de Mori-Tanaka. Foram feitas comparações com
resultados experimentais e com outros modelos micro mecânicos. O método apresen-
tou um aumento na capacidade de previsão para compósitos com partículas aleatoria-
mente espalhadas. Lopez-Pamies et al. [33] conseguiram uma solução para a resposta
elástica de borrachas ideais reforçadas com partículas com distribuição isotrópica sob
grandes deformações arbitrárias. Foi utilizado um novo método de homogeneização
iterativo para elasticidade finita que permitiu a obtenção de soluções exatas para com-
pósitos não lineares de duas fases. As soluções foram comparadas com simulações
3D usando elementos finitos resultando em boa concordância para diferentes casos de
carregamentos.

2. Revisão Bibliográfica 12
Um modelo micro mecânico para cristalização induzida por deformação em bor-
rachas reforçadas com partículas foi proposto por Dargazany et al. [34]. O modelo
levou em consideração algumas características inelásticas da borracha como o efeito
de Mullin e anisotropia induzida. A seguir, o mesmo foi testado, comparando seus re-
sultados com dados experimentais de tensão-deformação e cristalização-deformação,
tendo concordância satisfatória, apesar de sua simplicidade. Por fim, os autores consi-
deraram o modelo como uma boa opção para implementação em elementos finitos.
Como mencionado por Guo et al. [35], um problema básico em se tratando de
materiais compósitos é o de como prever seu comportamento mecânico com base no
comportamento de seus constituintes. Em seu trabalho, foi utilizada uma abordagem
de homogeneização numérica para investigar o comportamento mecânico de materi-
ais hiperelásticos, reforçados com partículas, sob um caso de deformação geral finita.
Verificou-se que o comportamento mecânico pode ser estimado por um modelo neo-
Hookeano incompressível simples, para deformações maiores que o método numérico
pode alcançar, e inclusive, que o módulo de cisalhamento pode ser previsto como uma
função da fração volumétrica de partículas e da relação de rigidez entre o material da
partícula e o da matriz.
Os trabalhos encontrados na literatura mostram que o mecanismo de reforço com
nanopartículas é diferente do mecanismo usando partículas maiores, assim, novos es-
tudos são necessários nessa área para descrever o comportamento mecânico destes
nanocompósitos. No que concerne aos elastômeros, são feitas muitas pesquisas sobre
os métodos de fabricação e a influência das partículas na elasticidade e na resistência
do material resultante.
Wu et al. [44] avaliaram o módulo de elasticidade de nanocompósitos de borracha
e argila, utilizando teorias conhecidas para compósitos reforçados, de modo a saber
se elas eram adequadas a este caso. A capacidade de previsão das teorias testadas foi
melhorada a partir da introdução de um fator de redução do módulo de elasticidade.
Bokobza e Kolodziej [45] investigaram compósitos feitos com borracha e nanotubos
de carbono. As amostras foram comparadas com outras feitas com partículas con-
2. Revisão Bibliográfica 13
vencionais de carbono. O estado de dispersão das partículas foi avaliado através de
microscopia de transmissão de elétrons e de força atômica. O trabalho mostrou o po-
tencial de nanotubos de carbono como partículas capazes de reforçar elastômeros.
Bhattacharyya et al. [46] reforçaram borracha natural com nanotubos de carbono.
Eles analisaram a estrutura com microscopia de transmissão de elétrons e de força atô-
mica. Testes dinâmicos e de tração evidenciaram o aumento no módulo de elasticidade,
na resistência a tração e na energia absorvida no regime elástico durante pequenas de-
formações, mesmo tendo sido adicionado pequenas quantidades de partículas. Uma
redução mínima na elasticidade até a ruptura foi observada. Nie et al. [47] aperfeiçoa-
ram as propriedades mecânicas de uma borracha natural pela adição de nanopartículas
de alumina. Para compreender o funcionamento da melhora nas propriedades, foi uti-
lizada a técnica de difração de raios-X para monitorar a estrutura molecular em tempo
real, durante uma aplicação de deformação.
Chun et al. [4] apresentaram um material nanocompósito composto por nanotubos
de carbono, um líquido iônico e nanopartículas de prata em uma matriz de poliestireno-
poliisopropeno-poliestireno, que possui uma elevada condutividade elétrica e era capaz
de se alongar a 288%, sem apresentar deformação permanente. Foi observada uma de-
pendência considerável da condutividade elétrica com a deformação. A grande sensi-
bilidade a deformação permite a aplicabilidade em sensores de deformação, incluindo
os que são usados para controlar diretamente motores.
Dentre os elastômeros, o silicone desperta muito interesse devido a sua vasta gama
de aplicabilidade. Este material recebe significativa atenção da comunidade científica
e tem suas propriedades estudadas por alguns autores. Wen e Mark [36] carregaram
matrizes de silicone com partículas de silicato de sódio e de silicato de alumínio que
possuíam diferentes tamanhos de cavidades. O reforço proporcionado nas proprieda-
des mecânicas foi caracterizado por medidas de tensão e deformação. Ambos melho-
raram as propriedades, sendo que o aumento foi maior nas amostras reforçadas com os
zeólitos de maior cavidade.
Yuan et al. [37] realizaram simulações computacionais modelando compósitos de

2. Revisão Bibliográfica 14
silicone com partículas esféricas aleatoriamente espalhadas. Partículas de menor tama-
nho foram identificadas como as que mais aumentaram o módulo de elasticidade e o
comportamento não Gaussiano do compósito. Sim et al. [38] estudaram as caracterís-
ticas de cura, bem como as propriedades térmicas e mecânicas da borracha de silicone
reforçada com óxido de alumínio e com óxido de zinco. Foi constatado que o óxido de
zinco retarda o processo de cura, enquanto a alumina o acelera. Os valores dos torques
máximo e mínimo suportáveis foram observados nas matrizes reforçadas com zinco.
O zinco foi apontado como um aditivo mais eficiente no reforço do silicone através de
um teste de tração e da medida do alongamento no momento do rompimento, entre-
tanto o aumento da dificuldade de processamento foi apontado como desvantagem do
zinco.
Zhou et al. [39] investigaram as propriedades mecânicas do silicone, que foi refor-
çado com uma combinação de partículas de alumina de dois tamanhos diferentes para
cada amostra. Os resultados mostraram que cada amostra com a mistura binária apre-
sentou propriedades térmicas e mecânicas superiores a amostras com um só tamanho,
mas em contra partida, ocorreu diminuição da constante dielétrica. Foi verificado que
o alongamento no momento da ruptura foi um pouco menor e que as amostras com
partículas maiores apresentavam menor resistência a tração do que as reforçadas com
partículas menores.
Os nanocompósitos poliméricos que possuem o silicone como matriz, tem atraído
atenção dos pesquisadores e da indústria na última década. Alguns artigos que tratam
de temas semelhantes ao deste trabalho podem ser encontrados na literatura.
Pesquisas referentes as nanopartículas propriamente ditas também foram realiza-
das, como no trabalho de Wen e Mark [48], que criaram novos adicionantes em uma
matriz de PDMS com mistura de dois óxidos diferentes que aderiram perfeitamente a
matriz polimérica. Os novos compósitos apresentaram propriedades mecânicas supe-
riores aos feitos com apenas um óxido e em alguns casos aumentaram a capacidade do
material se alongar. A distribuição de partículas também foi satisfatória apresentando
poucos aglomerados. Outra vantagem observada foi que certas partículas aumentaram

2. Revisão Bibliográfica 15
a temperatura de início da degradação do PDMS.
Charitidis e Koumoulos [49] realizou testes de nano indentação em compósitos de
silicone para estimar as propriedades nano mecânicas do material. Foram medidas
a dureza e o módulo de elasticidade. Em seguida, realizou-se a caracterização dos
compósitos por espectroscopia infravermelha, difração de raios-X e ensaios de tração.
Foi constatado que as adições incrementaram as propriedades mecânicas medidas do
compósito de silicone.
Ibrahim et al. [50] destacaram que elastômeros necessitam do incremento de partí-
culas para melhorarem suas propriedades mecânicas e que as alterações são fortemente
dependentes do tamanho das inclusões. Em seu trabalho, investigaram as alterações
das propriedades de nanocompósitos de silicone com silica em função do tamanho das
partículas e de sua concentração volumétrica, confirmando que as propriedades eram
dependentes do tamanho das partículas. O fenômeno também foi atribuído a alta área
superficial específica das inclusões nanométricas que levam a um aumento das intera-
ções superficiais.
Yan et al. [51] relataram as propriedades mecânicas da borracha de silicone pura e
reforçada com nanopartículas submetidas a cisalhamento. Os efeitos das inclusões foi
estudado levando em consideração a taxa de deformação e temperatura. Uma relação
utilizando lei de potência foi obtida para descrever o comportamento em cisalhamento.
Misra e Yuan [52] elucidaram a resposta biomecânica e o comportamento mecânico em
grandes deformações de silicone, carregados com dispersões nanométricas de carbono
de diferentes formas. O comportamento do silicone reforçado foi comparado com o
do silicone puro. Lee e Khang [3] estudaram as propriedades elétricas e mecânicas de
um elastômero. Eles fabricaram materiais compósitos com matriz de PDMS e nanotu-
bos de carbono por mistura simples e, assim, determinaram a porcentagem em massa
de nanotubos que acarretariam em uma queda acentuada de resistência no material.
Também mediram o módulo de elasticidade do material por testes de flambagem e de
microtração, chegando a conclusão de que o teste de flambagem leva a uma medida
sistêmica 20% maior que o de microtração. Uma aplicação deste material elástico

2. Revisão Bibliográfica 16
condutor na forma de dispositivos extensíveis é citada no texto.
Xia et al. [5] fizeram um interessante trabalho no qual investigaram a influência
da adição de nanopartículas, nanofibras e nanoargilas no módulo de Young de uma
matriz de silicone. Nano aditivos com diferentes tamanhos, formas e propriedades
superficiais foram adicionados a matriz e suas propriedades foram estudadas experi-
mentalmente. Foi observado que partículas esféricas aumentaram consideravelmente
o módulo de elasticidade, enquanto que os outros aditivos apresentaram resultados li-
mitados. Outra constatação foi que partículas menores são mais eficientes que as de
maior tamanho. Namitha et al. [53] fabricaram compósitos de silicone com micro e
nano partículas de alumina e testaram o efeito das adições sobre várias propriedades
dos compósitos, incluindo as propriedades mecânicas. Foi contatado que os materiais
com nano partículas apresentaram propriedades mecânicas superiores.
Para a adequada utilização de um material, é necessário que se conheça bem seu
comportamento mecânico sob a influência de diferentes carregamentos. Isso traz a
necessidade de que sejam realizados mais estudos no que concerne as propriedades
mecânicas da borracha de silicone reforçada com nanopartículas, já que vários artigos
apresentados aqui, comprovam que a adição de nanopartículas aumenta a resistência
mecânica dos compósitos.

Capítulo 3
Materiais e Métodos
3.1 Fabricação dos corpos de prova
Os corpos de prova foram fabricados com uma matriz de borracha de silicone com
adição de nanopartículas. Para a matriz, foi utilizada a borracha de silicone da ca-
tegoria dos polidimetilsiloxanos (PDMS), modelo RT 402 M da empresa Moldflex
(São Paulo, Brasil), tratando-se de uma borracha RTV-2, bi-componente, vulcanizá-
vel a temperatura ambiente. Foram utilizadas nanopartículas de óxido de alumínio
(Al2O3-α), com geometria esférica de 150nm de diâmetro e 99% de pureza, adquirida
da empresa Nanostructured & Amorphous Materials Inc (Houston, EUA). A Figura
3.1 mostra a resina e seu catalisador, a Figura 3.2 ilustra as nanopartículas utilizadas.
Fig. 3.1: Resina de silicone e catalisador.
17

3. Materiais e Métodos 18
Fig. 3.2: Nanopartículas de Al2O3.
Para realização dos experimentos, foram fabricados corpos de prova com diferentes
porcentagens em volume de nanopartículas de óxido de alumínio. Os testes foram
realizados em amostras puras e em amostras com adição de 1,5%, 2,5%, 3,5% e 5%
em volume de nanopartículas. Para a realização dos experimentos foram fabricados
três corpos de prova para cada valor diferente de fração volumétrica de nanopartículas.
O processo de fabricação consistiu no cálculo da quantidade de resina de silicone
necessária para preencher os moldes, com base nessa quantidade foram calculadas as
massas de catalisador e de nanopartículas a serem utilizadas. Para atingir a porcenta-
gem volumétrica desejada de nanopartículas, foi utilizada a seguinte expressão:
Mn = ρp Mr(ρcat + rρr
)φ
ρrρcat(1−φ) (3.1)
Onde ρp é a massa específica das nanopartículas, equivalente a 3700kg/m3. Mr é
a massa de resina necessária para a fabricação das amostras. A proporção mássica de
catalisador r é igual a 4%, sendo ρcat a sua massa específica com valor equivalente a
1000kg/m3. A massa específica da resina ρr é equivalente a 1310kg/m3 e φ é a fração
volumétrica de nanopartículas desejada.
Na fabricação dos corpos de prova, primeiramente, a quantidade de nanopartículas
a ser utilizada era colocada em uma estufa para secagem a 120◦C por 24 horas. A
massa de resina era medida dentro de um becker por uma balança de precisão e em
seguida, era adicionada a massa de nanopartículas desejada. Esse conjunto era mis-

3. Materiais e Métodos 19
turado, manualmente, utilizando uma haste visando uma leve homogeneização. Tais
equipamentos estão ilustrados na Figura 3.3. Em seguida, o material preparado era
colocado em um moinho de esferas, onde era misturado por uma hora a velocidade
de 200rpm. O moinho de esferas é mostrado na Figura 3.4. A mistura, totalmente
homogênea, era retirada do moinho e o catalisador era adicionado. A seguir era feita
a mistura manual entre a resina carregada de nanopartículas e o catalisador e final-
mente, a mistura era colocada no molde. No caso da fabricação dos corpos de prova
com silicone puro, a resina foi simplesmente misturada com o catalisador nas devidas
proporções e a mistura vazada no molde. Antes dos testes serem realizados, o corpo
de prova era deixado para cura por pelo menos três dias, a fim de adquirir todas as suas
propriedades mecânicas.
Fig. 3.3: Balança de precisão, becker e haste de mistura.
Fig. 3.4: Moinho de esferas.

3. Materiais e Métodos 20
O molde foi composto por finas barras de alumínio coladas em uma base de vidro.
As hastes metálicas eram coladas de modo a fazer uma forma retangular de 174mm x
70mm. A Figura 3.5 mostra um molde preparado para produzir três corpos de prova.
A base de vidro foi apoiada em um suporte ajustável, a fim de garantir o nivelamento
da superfície e se obter uma espessura constante na amostra.
Fig. 3.5: Molde para a fabricação dos corpos de prova.
Os corpos de prova resultantes eram finas tiras retangulares. Para a realização dos
testes, eles eram preparados de acordo com os ensaios a serem realizados. No caso dos
corpos de prova destinados aos ensaios de cisalhamento puro, eram cortadas finas tiras
nas laterais com um corte único, a fim de se evitar trincas provenientes da fabricação,
que prejudicariam o resultado do ensaio. Em seguida, pintava-se uma faixa na parte
central com um tom aleatório de cinza, padrão de pintura necessário a utilização da
técnica de correlação de imagens digitais. A pintura foi feita com um spray de tinta
preta e era esperado um dia para a secagem da tinta. A Figura 3.6 esquematiza o
processo.
O processo de preparação dos corpos de prova para o ensaio de tração foi muito
semelhante. Eram cortadas tiras longitudinais, com o mesmo fim de evitar as trincas, e
a amostra era pintada com o padrão aleatório de cinza, como mostrado na Figura 3.7.
A Figura 3.8 mostra os corpos de prova recém retirados do molde (Figura 3.8a), os
preparados para o ensaio de cisalhamento puro (Figura 3.8b) e os prontos para o ensaio
de tração (Figura 3.8c).

3. Materiais e Métodos 21
Fig. 3.6: Preparação para o ensaio de cisalhamento puro.
3.2 Procedimento experimental
Neste trabalho, foram realizados dois tipos de ensaios mecânicos: um ensaio de cisa-
lhamento puro ou tensão planar, para aferição do módulo de cisalhamento; e um ensaio
para determinar o coeficiente de Poisson, que consistiu na deformação longitudinal de
uma placa fina do material, semelhante a um ensaio de tração.
Em ambos os ensaios, foi utilizado o mesmo aparato de tração. A principal dife-
rença entre os dois ensaios era basicamente o modo de engaste do corpo de prova no
aparato de tração. No ensaio de cisalhamento puro, o corpo de prova era preso ao longo
do seu maior comprimento, deixando uma faixa fina visível. Já no ensaio de tração,
as pontas do corpo de prova eram presas deixando toda a superfície do corpo visível.
A Figura 3.9 exemplifica os engastes descritos, em que na imagem 3.9a é mostrado o
engaste utilizado para o ensaio de cisalhamento puro e na 3.9b o engaste do ensaio de
tração.
Durante a realização dos ensaios, foram utilizados os seguintes equipamentos: um
aparato de tração, uma câmara de alta resolução (1376 x 1024 pixels) Sony XCD-
SX910 com lente 10xZoom e uma célula de carga. A câmera de alta resolução foi
posicionada de forma perpendicular ao corpo de prova preso a máquina. A Figura 3.10
mostra os equipamentos listados. As luzes acopladas a câmera servem para melhorar

3. Materiais e Métodos 22
Fig. 3.7: Preparação para o ensaio de tração.
(a) Corpos de prova recém retiradosdo molde.
(b) Corpos de prova para o ensaio decisalhamento puro.
(c) Corpos de provapara o ensaio detração.
Fig. 3.8: Corpos de prova.
a qualidade da imagem adquirida. Neste caso, as lâmpadas emitem uma luz monocro-
mática vermelha, a que melhor se enquadra às características da câmera. Na Figura
3.11, é possível ver a configuração pronta para a realização dos ensaios, com a câmera
posicionada na direção do aparelho de tração.
Após a preparação e posicionamento dos equipamentos, o ensaio era iniciado. No
ensaio de cisalhamento puro, primeiramente, uma imagem de referência era adqui-
rida, após isso era aplicado um pequeno deslocamento ao corpo de prova e uma nova
imagem era adquirida, bem como era registrada a carga necessária na aplicação do
deslocamento, lida a partir da célula de carga. Esse processo era repetido até a ruptura

3. Materiais e Métodos 23
(a) Engaste do ensaio de cisalhamento puro. (b) Engaste do ensaio de tração.
Fig. 3.9: Exemplo dos diferentes engastes dos ensaios.
(a) Display da célula de carga. (b) Câmera de alta resolução.
Fig. 3.10: Equipamentos utilizados.
do corpo de prova. No ensaio de tração, o mesmo procedimento era realizado, com
exceção da aferição do valor da carga pois, neste caso, não era necessário, já que a
única informação relevante a ser obtida era o deslocamento. As imagens eram poste-
riormente analisadas por um programa próprio de correlação de imagens digitais feito
no software MatLab. A precisão obtida nestes ensaios foi de 0.01 pixels. Em ambos os
ensaios, o deslocamento era aplicado de forma lenta para configurar um ensaio quase
estático. Ressalta-se que os testes sempre foram realizados a temperatura ambiente, ou
seja, a aproximadamente 25◦C.
3.3 Técnica de Correlação de imagens Digitais
O método de correlação de imagens digitais é uma técnica experimental óptica, sem
contato, utilizada para se obter o campo de deslocamento de uma superfície a qual
se deseja analisar. É uma técnica muito utilizada em diversas áreas do conhecimento,

3. Materiais e Métodos 24
(a) Ensaio de cisalhamento puro. (b) Ensaio de tração.
Fig. 3.11: Configuração de equipamentos pronta para ensaio.
como alguns exemplos encontrados em Sutton et al. [54]: reconhecimento de placas de
automóveis, crescimento biológico, mapeamento geológico, entre outros. Tal técnica
pode ser usada para aferições de pequenos e grandes deslocamentos. Ao longo dos
últimos anos, ela tem sido largamente utilizada como técnica experimental em diversos
trabalhos como em Christmann et al. [57], Moreira et al. [55], Fedele e Santoro [59],
Moreira e Nunes [56] e Crammond et al. [58].
Ela consiste, basicamente, na aquisição de imagens consecutivas de um corpo de
prova cuja superfície é preparada adequadamente, que sofre a aplicação de um deslo-
camento, no posterior processamento dessas imagens, utilizando um computador com
software apropriado e na obtenção do campo de deslocamento. Sua aplicação deve
levar em conta os seguintes passos:
1. Preparar o corpo de prova: padrão aleatório
2. Registrar as imagens antes e em diferentes instantes do deslocamento
3. Processar as imagens
Para a utilização dessa técnica, primeiramente, a superfície do corpo de prova deve
ser preparada. Como a análise será feita em cima de fotografias da superfície dos cor-
pos de prova, esta deve ter características especiais. O software tomará uma pequena
região como referência e, em seguida, buscará a nova localização desta pequena região
na imagem deformada, obtendo assim o deslocamento. Para que o software funcione

3. Materiais e Métodos 25
corretamente, a superfície não pode apresentar um padrão na textura e nem uma dire-
ção preferencial, pois a correspondência tem que ser única. A superfície deve possuir
um padrão aleatório em sua imagem e que esse padrão se deforme junto com a super-
fície, ou seja, deve estar preso a ela. Este padrão pode ser adicionado a superfície com
tinta, por exemplo, ou então, ser uma característica natural dela. A Figura 3.12 ilustra
um desses padrões. O fato do padrão aleatório estar preso a superfície faz com que
se consiga uma precisão muito boa, tanto para pequena, quanto para grandes deforma-
ções. Como é relativamente fácil fazer uma simples pintura em um corpo de prova,
essa técnica pode ser usada para se obter o campo de deslocamento em toda a amostra,
caso seja desejado no experimento. (Sutton et al. [54], Sharpe Jr. [60])
Fig. 3.12: Exemplo de padrão aleatório utilizado na técnica CID.
No início do ensaio, é feito o registro da imagem de referência. Ao longo da aplica-
ção do deslocamento são feitas diversas imagens a fim de se acompanhar o desenvolver
do deslocamento. Durante o processamento computacional, uma região do corpo de
prova, antes do deslocamento, é selecionada para ter o seu deslocamento acompa-
nhado, essa região é dividida em pequenas sub-regiões e conhecidas como imagem de
referência. O programa computacional de correlação de imagens digitais irá procurar
essas pequenas sub-regiões nas imagens deslocadas até achar uma correspondência e
assim, determinar o deslocamento da sub-região. Esse procedimento é feito em todas
as imagens até se obter o campo de deslocamento completo do ensaio (Sharpe Jr. [60]).
Existem dois requisitos básicos para a correta aquisição do campo de deslocamento: o
primeiro é que é necessário que o deslocamento da superfície analisada seja no plano;
e o segundo é que o sensor, no caso a câmera, esteja posicionada perpendicularmente

3. Materiais e Métodos 26
ao corpo de prova para a correta aquisição das imagens (Sutton et al. [54]).
Como uma técnica experimental, o método de correlação de imagens digitais é
caracterizado por ser uma técnica não destrutiva e sem contato, o que faz com que
ela não interfira nas medidas, por ter uma precisão muito boa para variadas escalas de
deslocamento e por ser capaz de fornecer o campo de deslocamento completo de uma
superfície, tudo isso com uma montagem de equipamentos relativamente simples de
ser feita.
Capítulo 4
Formulação Matemática
4.1 Obtenção das propriedades mecânicas
4.1.1 Obtenção do módulo de cisalhamento
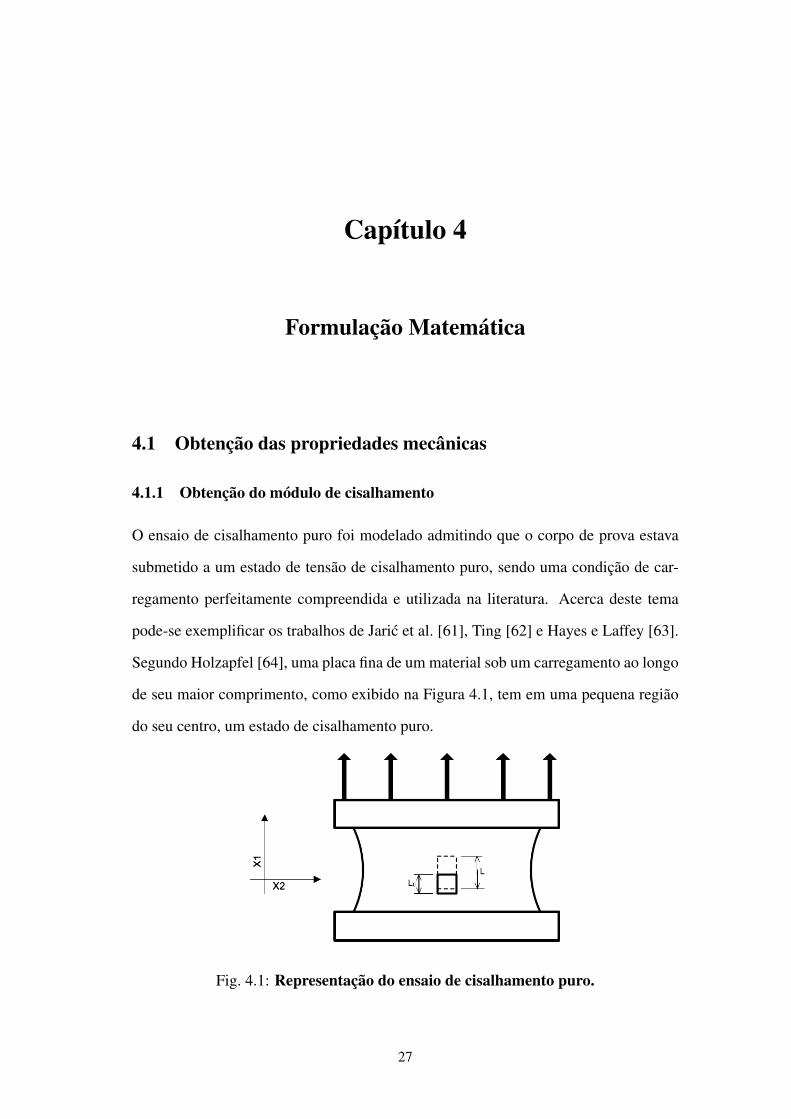
O ensaio de cisalhamento puro foi modelado admitindo que o corpo de prova estava
submetido a um estado de tensão de cisalhamento puro, sendo uma condição de car-
regamento perfeitamente compreendida e utilizada na literatura. Acerca deste tema
pode-se exemplificar os trabalhos de Jaric et al. [61], Ting [62] e Hayes e Laffey [63].
Segundo Holzapfel [64], uma placa fina de um material sob um carregamento ao longo
de seu maior comprimento, como exibido na Figura 4.1, tem em uma pequena região
do seu centro, um estado de cisalhamento puro.
Fig. 4.1: Representação do ensaio de cisalhamento puro.
27

4. Formulação Matemática 28
Um estado de cisalhamento puro é escrito em função dos seus estiramentos princi-
pais da seguinte forma:
x1 =λ1X1 (4.1)
x2 =λ2X2 (4.2)
x3 =λ3X3 (4.3)
Onde os xn representam a configuração atual, os Xn representam a configuração
inicial ou de referência e os λn representam os estiramentos nas direções n, sendo
o estriamento principal λ1 definido a partir da razão do comprimento inicial L0 pelo
final L da região de interesse. No caso analisado algumas considerações podem ser
feitas. A primeira é que a deformação ao longo do eixo x2 é muito pequena e pode ser
desprezada, isso implica em λ2 = 1. A outra é que o material é incomprensível, levando
a conclusão de que o produto de seus estiramentos principais é igual a 1. Levando a:
λ1λ2λ3 = 1 (4.4)
λ1λ3 = 1 (4.5)
λ1 = 1
λ3(4.6)
Alternativamente, as relações entre λ1 e λ3 podem ser rescritas para simplificação
de notação como:
λ1 =λ e λ3 = 1
λ(4.7)
Utilizando esta formulação e as considerações expostas, a matriz do gradiente de
deformação assume a seguinte forma:

4. Formulação Matemática 29
F = ∂~x
∂~X=
λ 0 0
0 1 0
0 0 λ−1
(4.8)
No caso analisado, a tensão que foi medida experimentalmente foi a nominal, a
partir da aferição da carga e divisão desta pela área inicial, medida do corpo de prova.
A tensão nominal é dada pelo primeiro tensor tensão de Piola-Kirchhoff, mostrado na
equação 4.9, onde F representa a força medida nos ensaios experimentais e A0 a área
inicial das amostras.
P = F
A0(4.9)
É necessário transformar essa tensão nominal na tensão real. Isso é feito através da
transformação do tensor tensão de Piola-Kirchhoff (P) no tensor tensão de Cauchy (σ)
pela simples formulação matemática abaixo:
AL = A0L0 ⇒ A = A0L0
L(4.10)
σ= F
A(4.11)
σ= F L
A0L0= F
A0
L
L0= Pλ (4.12)
Utilizando a equação 4.12 foi possível obter a tensão real σ a partir dos dados que
foram medidos experimentalmente, o tensor tensão de Piola-Kirchhoff P e o estira-
mento λ.
As curvas de tensão real por estiramento (σ x λ) foram ajustadas seguindo o modelo
obtido em Ogden [65], mostrado na equação 4.13. O ajuste foi feito para se obter os
parâmetros µ1 e α1 e finalmente calcular o módulo de cisalhamento pela expressão
4.14.
σ=µ1
(λα1 − 1
λα1
)(4.13)

4. Formulação Matemática 30
µ= µ1α1
2(4.14)
4.1.2 Obtenção do coeficiente de Poisson
O coeficiente de Poisson foi obtido através da realização do ensaio de tração nas amos-
tras. Uma amostra era presa ao aparato de tração e tencionada, causando assim uma
deformação, ilustrada na Figura 4.2. Com o uso da técnica CID, as deformações na
direção longitudinal do carregamento εx e transversal εy foram obtidos. A partir dessas
deformações, o coeficiente de Poisson foi diretamente calculado pela equação 4.15.
Fig. 4.2: Representação do ensaio de tração.
ν=−εx
εy(4.15)
Juntando este valor com o valor do módulo de cisalhamento µ obtido com a equa-
ção 4.14, o módulo de elasticidade pode ser calculado com o uso da expressão 4.16
para as diferentes porcentagens de nanopartículas.
4.1.3 Determinação do módulo de elasticidade
O módulo de elasticidade foi calculado pela utilização da equação 4.16. Para sua
utilização, foi necessário obter previamente os parâmetros µ e ν, que são o módulo

4. Formulação Matemática 31
de cisalhamento e o coeficiente de Poisson das amostras, respectivamente. Para a
obtenção desses dois parâmetros, foram feitos ensaios experimentais nas amostras e
formulações matemáticas relativamente simples e específicas. No processo relativo
ao módulo de cisalhamento, foi feito um ensaio de tensão planar e, para o processo
de aferição do coeficiente de Poisson, foi realizado um ensaio de tração. As duas
metodologias utilizadas foram descritas nas subseções anteriores.
E = 2µ(1+ν) (4.16)
4.2 Análise da curva tensão x estiramento
4.2.1 Modelo para o cisalhamento puro
Considere um corpo homogêneo, incompreensível e isotrópico caracterizado por uma
energia de deformação que depende apenas do primeiro invariante, ou seja:
Ψ=Ψ(I1) (4.17)
Da literatura referente a materiais hiperelásticos, é sabido que o termo referente
a derivada da energia de deformação em relação ao segundo invariante, I2 é muito
pequena e pode ser desprezada. Além disso, a densidade da energia de deformação
é fortemente dependente do primeiro invariante I1, assim o tensor tensão de Cauchy
pode ser escrito da seguinte forma:
σ=−pI+2dΨ
d I1B (4.18)
Onde p é o multiplicador de Lagrange e B é o tensor deformação de Cauchy-Green
a esquerda, que é obtido a partir do gradiente de deformação F dado pela equação 4.8,
a partir do seguinte cálculo:

4. Formulação Matemática 32
B = FFT =
λ 0 0
0 1 0
0 0 λ−1
λ 0 0
0 1 0
0 0 λ−1
=
λ2 0 0
0 1 0
0 0 λ−2
(4.19)
O primeiro invariante do tensor de Cauchy-Green a esquerda é dado pela relação:
I1 = tr B =λ12 +λ2
2 +λ32 =λ2 +λ−2 +1 (4.20)
Com isso, é possível utilizar as expressões 4.19 e 4.20 combinadas com a equação
4.18, e obter o tensor tensão de Cauchy, que fica:
σ1 = 2(λ2 −λ−2) ∂Ψ
∂I1(4.21)
Existem diversos modelos para a função de energia de deformação que dependem
apenas do primeiro invariante que podem ser encontradas na literatura. Neste trabalho,
foram utilizadas as expressões de Lopez-Pamies [2] e Yeoh [1].
A expressão para a energia de deformação proposta por de Yeoh [1] é a seguinte:
ΨY =C10 (I1 −3)+C20 (I1 −3)2 +C30 (I1 −3)3 (4.22)
Onde C10, C20 e C30 são constantes do material, sendo o módulo de cisalhamento
inicial dado por:
µ= 2C10 (4.23)
O modelo para a energia de deformação segundo Lopez-Pamies [2] é dado pela
equação a seguir:
ΨLP =M∑
r=1
31−αr
2αrµr
(I1αr −3αr
)(4.24)
Onde M determina o número de termos do somatório e µr e αr constituem pa-
râmetros do material que obedecem as restrições de µr > 0 e αr > 12 . O módulo de

4. Formulação Matemática 33
cisalhamento inicial é dado por:
µ=M∑
r=1µr (4.25)
Considerando apenas um termo da equação 4.24 a expressão fica:
ΨLP = 31−α1
2α1µ1
(I1α1 −3α1
)(4.26)
Utilizando o modelo de Yeoh [1] (equação 4.22) na expressão do tensor tensão de
Cauchy 4.21, a equação para a tensão fica:
σ1 = 2(λ2 −λ−2)[C10 +2C20
(λ2 −λ−2 −2
)+3C30(λ2 −λ−2 −2
)2]
(4.27)
Fazendo o mesmo para a equação de Lopez-Pamies [2] (equação 4.24), obtem-se:
σ1 =µ131−α1(λ2 −λ−2)(λ2 +λ−2 +1
)α1−1 (4.28)
4.2.2 Deformação amplificada
Nesta seção, será apresentado o conceito da deformação amplificada para modelos de
materiais reforçados, submetidos a um estado de cisalhamento puro e baseados no
primeiro invariante I1. Para representar o comportamento mecânico da borracha de
silicone reforçada com nanopartículas, submetida a tensão planar com grandes defor-
mações, foram usados os modelos de deformação amplificada de Mullins e Tobin [66]
e de Bergström e Boyce [67].
O modelo de deformação ampificada proposto por Mullins e Tobin [66] é dado pela
seguinte equação:
Λ= 1+X (λ−1) (4.29)
Onde λ é o estiramento aplicado ao material sob teste e X é o fator amplificador da

4. Formulação Matemática 34
deformação, sendo dependente da fração volumétrica de nanopartículas. Esse fator foi
calculado usando a expressão de Guth [68]:
X = 1+0.67gφ+1.62g 2φ2 (4.30)
Em que φ representa a fração volumétrica de nanopartículas e g é um fator base-
ado na assimetria dos aglomerados de nanopartículas na matriz polimérica. Usando o
modelo de Mullins e Tobin [66], em que o estiramento λ é substituído pelo estiramento
amplificado Λ nas equações constitutivas, os modelos de Yeoh [1] e Lopez-Pamies [2],
dados pelas equações 4.27 e 4.28 respectivamente, ficam:
σ1 = 2(Λ2 −Λ−2)[C10 +2C20
(Λ2 −Λ−2 −2
)+3C30(Λ2 −Λ−2 −2
)2]
(4.31)
σ1 =µ131−α1(Λ2 −Λ−2)(Λ2 +Λ−2 +1
)α1−1 (4.32)
Bergström e Boyce [67] propuseram um modelo de amplificação do primeiro in-
variante de deformação, que pode ser entendida como uma medida escalar média da
deformação, sendo:
I 1m = X(I 1 −3
)+3 (4.33)
Onde I 1 é o invariante macroscópico do estiramento, I 1m é a amplificação do pri-
meiro invariante do estiramento, a barra em cima dos invariantes representa uma média
volumétrica e o fator de amplificação X é dado pela equação abaixo:
X = 1+3.5φ+30φ2 (4.34)
Para este modelo, a função energia de deformação é reescrita como sendo:
Ψ= (1−φ)
Ψm
(I 1m
)(4.35)
Com essas novas expressões, o tensor tensão de Cauchy, dado pela equação 4.21, é

4. Formulação Matemática 35
reescrito como sendo:
σ1 = 2(1−φ)(
λ2 −λ−2) ∂Ψm
∂I 1
(4.36)
Com isso, as equações 4.27 e 4.28 referentes aos modelos de Yeoh [1] e Lopez-
Pamies [2] ficam da seguinte forma:
σ1 = 2(1−φ)(
λ2 −λ−2)[C10X +2C20X 2(I 1 −3
)+3C30X 3
(I 1 −3
)2]
(4.37)
σ1 =µ131−α1(1−φ)(
λ2 −λ−2) X[
X(I 1 −3
)+3
]α1−1(4.38)
Em que: I 1 −3 =λ2 +λ−2 −2.

Capítulo 5
Resultados e Discussão
5.1 Corpos de Prova
Para as análises mais detalhadas contidas neste trabalho, foram fabricados corpos de
prova com os seguintes percentuais de nanopartículas: 0%, 1,5%, 2,5%, 3,5% e 5%.
Após a fabricação, foram medidas as densidades dos compósitos fabricados a fim
de se verificar a sua real porcentagem de nanopartículas, bem como a adequabilidade
do processo de fabricação. A Tabela 5.1 apresenta os resultados obtidos desta aferição.
Nela consta a porcentagem nominal φn , a porcentagem em peso correspondente a
esse valor φp , o valor da densidade do compósito ρc e a porcentagem volumétrica
real obtida pela medida da densidade φr . Vale ressaltar que, experimentalmente, foi
medido um valor para a densidade da resina pura de 1294 kg/m3, valor bem próximo
ao fornecido pelo fabricante de 1310 kg/m3. No caso das nanopartículas, foi utilizado
para os cálculos o valor da densidade fornecido pelo fabricante de 3700 kg/m3.
Tab. 5.1: Porcentagem volumétrica de nanopartículas
φn (%) φp (%) ρc (kg/m3) φr (%)0 0 1294 0
1.5 4.2 1341 1.92.5 6.8 1354 2.53.5 9.4 1383 3.75.0 13.1 1408 4.7
36

5. Resultados e Discussão 37
A partir da análise dos resultados apresentados na Tabela 5.1, observa-se que os
valores reais medidos da porcentagem volumétrica de nanopartículas se mostram bem
próximos dos valores nominais pretendidos. Dois pontos se destacam na Tabela 5.1: o
de φn = 2.5%, pela sua precisão, coincidindo o valor medido experimentalmente com
o valor nominal; e o ponto φn = 1.5%, por apresentar a maior diferença percentual
entre o valor experimental e o nominal. Neste ponto, ocorreu algum erro durante o
seu processo de fabricação, possivelmente um excesso de perda de resina no becker,
utilizado para mistura e no recipiente utilizado no moinho de esferas. Os outros dois
pontos, φn = 3.5% e φn = 5.0%, estão de acordo com o esperado pelo valor nominal,
apresentando erros percentuais menores que 6%.
Durante os cálculos envolvendo os valores dos percentuais volumétricos dos com-
pósitos realizados neste estudo, foram utilizados os valores reais medidos experimen-
talmente pela medida de densidade das amostras, representados pelo φr , na última
coluna da Tabela 5.1.
Os experimentos foram feitos com corpos de prova com até 5% de nanopartículas
adicionadas a matriz polimérica. Isso foi realizado pois, operacionalmente, tornou-se
difícil se trabalhar com porcentagens maiores, uma vez que a mistura ficava excessi-
vamente densa e viscosa. A mistura, assim, não podia ser adequadamente manuseada
ou misturada pelos processos utilizados na fabricação, logo não podia ser assegurada
a qualidade das amostras produzidas com quantidades maiores de nanopartículas na
matriz de silicone.
5.2 Resultados experimentais com a técnica CID
Como explicado anteriormente nas seções 3.2 e 3.3, a técnica de correlação de imagens
digitais (CID), foi utilizada para a obtenção experimental do campo de deslocamento
dos corpos de prova durante os ensaios, tanto para os testes de cisalhamento puro
quanto para os ensaios de tração. Os resultados encontram-se explicados a seguir nos
itens 5.2.1 e 5.2.2.

5. Resultados e Discussão 38
5.2.1 Ensaio de cisalhamento puro
A Figura 5.1 mostra exemplos dos mapas de deslocamentos obtidos nos ensaios de
cisalhamento puro. Os exemplos mostrados na referida figura, especificamente, são de
um ensaio utilizando um corpo de prova fabricado com a resina pura. Neste tipo de
ensaio, é esperado que o deslocamento ocorra no sentido do deslocamento, no caso o
sentido vertical, e seja desprezível no sentido transversal, no caso o sentido horizontal.
x(mm)2 3 4 5 6 7
y(m
m)
-6.5
-6
-5.5
-5
-4.5
-4
-3.5
-3
-2.5
-2
v(mm)
6
6.5
7
7.5
(a) Mapa de deslocamento vertical.
x(mm)2 3 4 5 6 7
y(m
m)
-6.5
-6
-5.5
-5
-4.5
-4
-3.5
-3
-2.5
-2
u(mm)
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
(b) Mapa de deslocamento horizontal.
Fig. 5.1: Mapas de deslocamento no ensaio de cisalhamento puro.
Os mapas de deslocamento observados na Figura 5.1 segue estes padrões esperados
de deslocamento. No campo a esquerda, representando o deslocamento vertical v(x, y),
pode-se observar um deslocamento significativo pelos diferentes padrões de cores, e
também um estiramento do corpo em análise, visto que a parte inferior experimenta um
deslocamento menor que a parte superior da região analisada. No campo representado
a direita u(x, y), nota-se que não há deslocamento significativo quando comparado ao
deslocamento vertical. Nota-se que não há mudança no patamar de cores e que as
escalas das duas figuras estão no mesmo patamar de grandeza.
A análise desses campos de deslocamentos demonstra que a hipótese do estado de
cisalhamento puro está bem representada pelo arranjo experimental montado.
5.2.2 Ensaio de tração
O ensaio de tração foi feito com o intuito de se medir experimentalmente o coeficiente
de Poisson das amostras. Diferentemente do caso anterior, neste teste, espera-se que

5. Resultados e Discussão 39
seja possível observar um deslocamento significativo ao longo dos dois eixos. Isso vai
garantir que sejam obtidas as deformações no sentido do deslocamento e transversal a
ele, e com isso, calcular o coeficiente de Poisson.
x(mm)4 6 8 10 12 14
y(m
m)
-13
-12
-11
-10
-9
-8
-7
-6
-5
-4
-3
v(mm)
9.5
10
10.5
11
11.5
(a) Mapa de deslocamento vertical.
x(mm)4 6 8 10 12 14
y(m
m)
-13
-12
-11
-10
-9
-8
-7
-6
-5
-4
-3
u(mm)
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
(b) Mapa de deslocamento horizontal.
Fig. 5.2: Mapas de deslocamento no ensaio de tração.
Na Figura 5.2, é mostrado exemplos de resultado dos mapas de deslocamentos de
um ensaio com resina pura. É possível notar que no eixo vertical, a esquerda, e no eixo
horizontal, a direita, ocorrem deslocamentos significativos, tornando o ensaio então,
eficiente para a obtenção do coeficiente de Poisson.
Tanto no teste de tração, quanto no ensaio de cisalhamento puro, é importante que
não haja uma deformação maior de um lado do que do outro, ou seja, em um desloca-
mento vertical, a extremidade superior direita da amostra deve subir ao mesmo tempo
que a extremidade esquerda, para não haver distorções nos resultados. A garantia de
que o deslocamento foi bem executado também pode ser observada nos mapas de des-
locamento, ao checar se as diferentes escalas de cores estão perfeitamente paralelas,
sem a interseção de nenhuma escala de cores aparecer de forma inclinada. Com isso,
pode-se garantir que o ensaio foi bem executado, sem nenhum deslizamento dos corpos
de prova ao longo do teste.
5.3 Curva Tensão x Estiramento
A primeira informação retirada dos ensaios realizados nos corpos de prova com dife-
rentes porcentagens de nanopartículas foi a curva tensão x estiramento. A curva da

5. Resultados e Discussão 40
tensão nominal, calculada pela equação 4.9, e a curva da tensão real dada pela expres-
são 4.12 são mostradas, respectivamente, nas Figuras 5.3 e 5.4. O estiramento, como
explicado anteriormente na seção 4.1.1, é dado pela razão entre o comprimento do
corpo em um dado instante e o seu comprimento inicial, ou seja, λ= L/L0.
λ
1 1.05 1.1 1.15 1.2 1.25 1.3 1.35 1.4 1.45
P (
MP
a)
0
0.1
0.2
0.3
0.4
0.5
0.6
Puro
Alumina 1,5%
Alumina 2,5%
Alumina 3,5%
Alumina 5%
Fig. 5.3: Curva experimental da tensão nominal.
Em uma composição de dois materiais diferentes, é esperado que o novo material
compósito tenha propriedades com valores intermediários aos dos seus constituintes.
Dessa maneira, esperava-se que os corpos de prova nos quais foram adicionados na-
nopartículas fossem mais resistentes que a amostra de silicone puro. Isso ocorreu con-
forme o esperado, como pode ser observado nas Figuras 5.3 e 5.4. Nelas, é possível
observar que a inclinação das curvas foram gradativamente aumentando, juntamente
com o aumento da porcentagem de nanopartículas.
Observando com mais atenção o aumento de inclinação das curvas, nota-se que
um pequeno aumento da quantidade de nanopartículas provoca um grande aumento na
resistência do material, vide que a inclinação das curvas aumentam consideravelmente
de uma para outra. Outra observação importante é que as curvas tensão-estiramento,

5. Resultados e Discussão 41
λ
1 1.05 1.1 1.15 1.2 1.25 1.3 1.35 1.4 1.45
σ (
MP
a)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Puro
Alumina 1,5%
Alumina 2,5%
Alumina 3,5%
Alumina 5%
Fig. 5.4: Curva experimental da tensão real.
tanto para as tensões nominais, quanto para as reais não são lineares.
As curvas correspondentes a adição de 1,5% e 2,5% de nanopartículas são uma
exceção a essa regra, elas estão muito próximas entre si, sendo difícil de distinguir
qual a que proporciona a maior resistência. Isso pode significar que adições pequenas
de nanopartículas até 2,5% geram um crescimento no módulo de elasticidade que deve
ser observada com mais atenção. Uma análise dessa região será feita mais adiante no
texto.
Uma importante conclusão que se pode tirar das Figuras 5.3 e 5.4 é que com a
adição das nanopartículas, há uma redução na capacidade do material em se alongar,
entretanto ele continua com a sua hiperelasticidade, pois experimenta deformações su-
periores a 20%. Como os testes foram feitos até o rompimento das amostras, o último
ponto do gráfico representa uma estimativa de sua deformação máxima, tornando pos-
sível tais conclusões.

5. Resultados e Discussão 42
5.4 Módulo de Elasticidade
Os cálculos referentes a obtenção do módulo de elasticidade foram detalhados na se-
ção 4.1.3, as curvas da tensão real pelo estiramento foram ajustadas de acordo com a
equação 4.13 para serem obtidos os parâmetros µ1 e α1 e, assim, o módulo de cisalha-
mento inicial µ ser calculado pela equação 4.14. O coeficiente de Poisson, por sua vez,
foi obtido pela expressão 4.15.
λ
1 1.05 1.1 1.15 1.2 1.25 1.3
σ (
MP
a)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8 Ajuste
Experimental
Fig. 5.5: Ajuste da curva Tensão real x estiramento com o modelo de Ogden.
A Figura 5.5 mostra um exemplo de uma curva Tensão real x estiramento sendo
ajustada pelo modelo de Ogden [65], dado pela equação 4.13. Nesta figura está ex-
posto o ajuste da curva da amostra com 3,5% de nanopartículas, a fim de ilustrar a
adequação do modelo a curva experimental, já que a curva ajustada apresenta uma
excelente concordância com a curva experimental. Os ajustes foram realizados a par-
tir da ferramenta cftool do software MatLab, utilizando-se o método Nonlinear Least
Squares.
A Tabela 5.2 mostra um resumo dos parâmetros utilizados no cálculo do módulo
de elasticidade, para todos os corpos de prova com as diferentes porcentagens de nano-
partículas, bem como cada resultado obtido para o valor do módulo de elasticidade. A
porcentagem volumétrica de nanopartículas é representada por φn . Os parâmetros µ1

5. Resultados e Discussão 43
e α1 foram obtidos com o ajuste de curva, ν é o coeficiente de Poisson e E é o módulo
de elasticidade.
Tab. 5.2: Parâmetros utilizados no cálculo do módulo de elasticidade
φn (%) µ1 (MPa) α1 µ (MPa) ν E (MPa)0.1313 4.438 0.2914
0 0.1344 4.232 0.2844 0.4962 0.880.1648 3.724 0.30690.1781 4.649 0.4140
1.5 0.1937 4.353 0.4216 0.4781 1.250.1577 5.629 0.44380.1755 4.749 0.4167
2.5 0.1474 5.783 0.4262 0.4921 1.200.1363 5.649 0.38500.0919 8.462 0.3889
3.5 0.1784 6.123 0.5462 0.4800 1.440.1889 5.579 0.52690.1921 6.718 0.6453
5.0 0.2115 6.793 0.7184 0.4780 2.220.3459 5.050 0.8734
A Figura 5.6 mostra os valores do módulo de elasticidade em função da porcen-
tagem de nanopartículas. Nesta, é possível observar a curva de tendência do valor do
módulo de Young, conforme se aumenta a porcentagem de nanopartículas na matriz
polimérica. Como esperado, a resistência do material aumenta com a adição de mais
nanopartículas de óxido de alumínio. Sendo perfeitamente compreensível, pois quando
se misturam dois materiais, é normal que o compósito resultante tenha propriedades
intermediárias entre os dois constituintes.
A curva mostra inclusive, uma tendência de rápido incremento da resistência inicial
até o ponto correspondente a 1,5%. Assim, com pequenos aumentos da porcentagem
volumétrica de nanopartículas, haverá um grande aumento do valor do módulo de elas-
ticidade. Entretanto, não é verificado aumento entre os pontos com 1,5% e 2,5% de
nanopartículas, o que pode representar que existe uma região de estabilidade da resis-
tência, caracterizando uma saturação. Com adições superiores a 2,5% em volume de
nanopartículas, a resistência dos corpos de prova volta a aumentar e é percebido uma
tendência de crescimento exponencial.
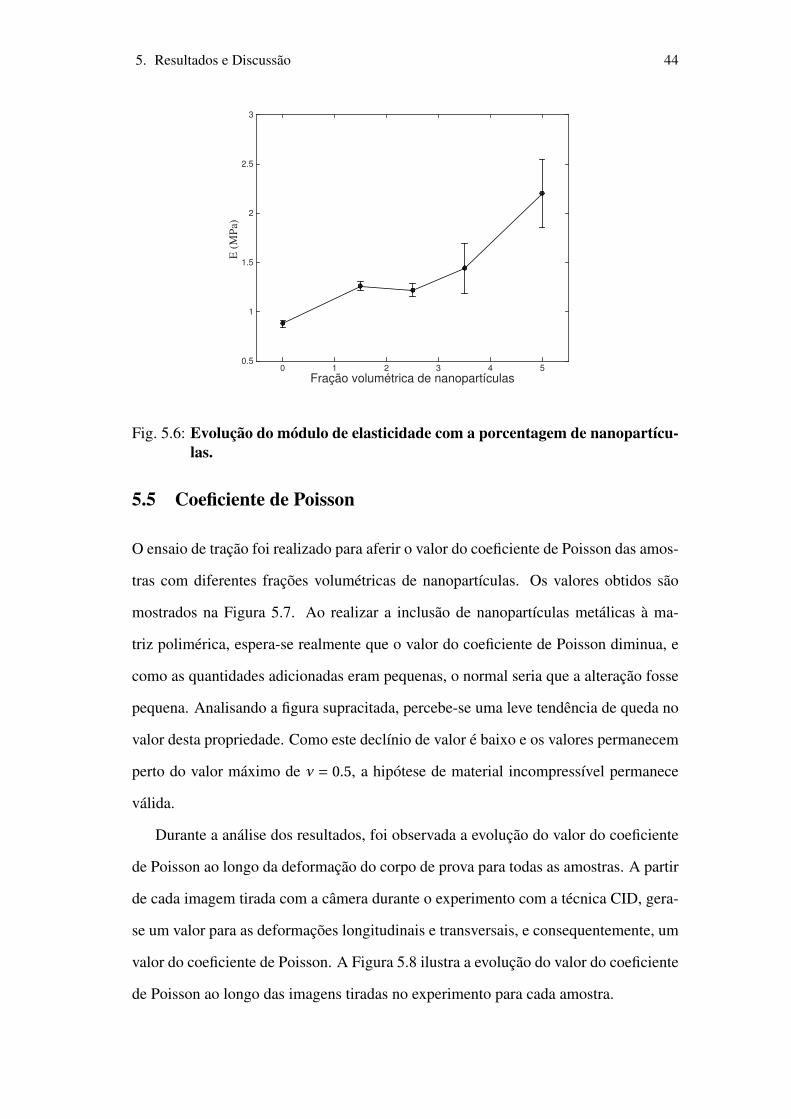
5. Resultados e Discussão 44
Fração volumétrica de nanopartículas
0 1 2 3 4 5
E (
MP
a)
0.5
1
1.5
2
2.5
3
Fig. 5.6: Evolução do módulo de elasticidade com a porcentagem de nanopartícu-las.
5.5 Coeficiente de Poisson
O ensaio de tração foi realizado para aferir o valor do coeficiente de Poisson das amos-
tras com diferentes frações volumétricas de nanopartículas. Os valores obtidos são
mostrados na Figura 5.7. Ao realizar a inclusão de nanopartículas metálicas à ma-
triz polimérica, espera-se realmente que o valor do coeficiente de Poisson diminua, e
como as quantidades adicionadas eram pequenas, o normal seria que a alteração fosse
pequena. Analisando a figura supracitada, percebe-se uma leve tendência de queda no
valor desta propriedade. Como este declínio de valor é baixo e os valores permanecem
perto do valor máximo de ν = 0.5, a hipótese de material incompressível permanece
válida.
Durante a análise dos resultados, foi observada a evolução do valor do coeficiente
de Poisson ao longo da deformação do corpo de prova para todas as amostras. A partir
de cada imagem tirada com a câmera durante o experimento com a técnica CID, gera-
se um valor para as deformações longitudinais e transversais, e consequentemente, um
valor do coeficiente de Poisson. A Figura 5.8 ilustra a evolução do valor do coeficiente
de Poisson ao longo das imagens tiradas no experimento para cada amostra.

5. Resultados e Discussão 45
Fração volumétrica de nanopartículas (%)
0 1 2 3 4 5
ν
0.4
0.45
0.5
0.55
Fig. 5.7: Valores do coeficiente de Poisson para as diferentes quantidades de na-nopartículas.
A Figura 5.8 mostra excelente evolução de valores para a amostra de resina pura
e para as com 1,5% e 5,0% de nanopartículas, uma vez que o valor é praticamente
constante ao longo do ensaio. A amostra com 2,5% apresentou uma curva com uma
tendência de queda e a amostra de 3,5% apresentou uma queda mais acentuada. Os
valores do coeficiente de Poisson utilizados nos cálculos deste estudo são mostrados
na Figura 5.7, foram os valores médios retirados destas curvas.
5.6 Modelos da literatura
A teoria desenvolvida na seção 4.2, que utiliza modelos presentes na literatura, foi
empregada para a análise das curvas experimentais. Os resultados são mostrados a
seguir.
Os modelos de Yeoh [1] e Lopez-Pamies [2] foram utilizados para fazer a carac-
terização do corpo de prova feito de silicone puro e, assim, obter os parâmetros do
material. Na Figura 5.9 é mostrado a curva da tensão real pelo estiramento do experi-
mento realizado com o silicone puro, bem como as curvas ajustadas com os modelos
dados pelas equações 4.27 e 4.28, sendo o modelo de Yeoh [1] e Lopez-Pamies [2]

5. Resultados e Discussão 46
Imagem
5 10 15 20 25 30
ν
0.46
0.47
0.48
0.49
0.5
0.51
0.52
0.53
Resina pura
Alumina 1,5%
Alumina 2,5%
Alumina 3,5%
Alumina 5,0%
Fig. 5.8: Evolução do coeficiente de Poisson ao longo das imagens do ensaio.
respectivamente. Para a realização do ajuste de curva, foi usado o método clássico de
Lavenberg-Marquardt para identificação de parâmetros.
As constantes do material obtidas através do ajuste de curva estão mostradas na
Tabela 5.3. Era previsto que o módulo de cisalhamento inicial fosse o mesmo para os
dois modelos, e isso ocorre de fato, como mostrado na referida tabela.
Tab. 5.3: Parâmetros do silicone puro
Modelo Parâmetros do material Módulo de cisalhamento inicial (MPa)
C10 = 0.149 (MPa)Yeoh C20 = 0.029 (MPa) µ= 2C10 = 0.298
C30 = 0.012 (MPa)Lopez-Paimes µ1 = 0.296 (MPa) µ=µ1 = 0.296
α1 = 2.515
A Figura 5.9 indica que o ajuste foi adequado em relação aos resultados experimen-
tais, mas para melhor analisar essa resultado, foi feita uma medida da diferença entre
os resultados experimentais e os valores obtidos nos ajustes. Essa diferença encontra-
se na Figura 5.10, na qual se pode observar que os erros apresentam uma aleatoriedade,
além de ter ordem de grandeza de 10−3. Isso corrobora a utilização dos modelos mate-
máticos na situação física proposta.

5. Resultados e Discussão 47
λ
1 1.05 1.1 1.15 1.2 1.25 1.3 1.35 1.4 1.45
σ1 (
MP
a)
0
0.1
0.2
0.3
0.4
0.5Experimental
Modelo de Yeoh
Modelo de Lopez-Pamies
Fig. 5.9: Ajuste de curva do silicone puro com os modelos de Yeoh [1] e Lopez-Pamies [2].
O conceito de deformação amplificada, apresentado na seção 4.2.2, foi utilizado
aqui, para investigar o comportamento mecânico da borracha de silicone com diferen-
tes concentrações de nanopartículas.
Os parâmetros do material, cujos valores encontram-se na Tabela 5.3, foram colo-
cados nas equações 4.31, 4.32, 4.37 e 4.38. Em seguida, os valores do fator de defor-
mação amplificada X foram obtidos por ajustes de curva dos dados experimentais com
as equações utilizadas para prever o comportamento do sistema.
A Figura 5.11 mostra os resultados experimentais para as diferentes concentrações
de nanopartículas, bem como o modelo ajustado de Yeoh [1], considerando as abor-
dagens de Mullins e Tobin [66], representado na referida figura pelo subscrito MT, e
Bergström e Boyce [67], representado pelo subscrito BB. Já na Figura 5.12, são mos-
trados os mesmos parâmetros com o modelo de Lopez-Pamies [2].
A questão dos erros também é avaliada no caso das Figuras 5.11 e 5.12 para avaliar
a diferença entre os dados experimentais e os modelos ajustados para as diferentes por-
centagens de nanopartículas. A Figura 5.13 mostra o erro referente ao uso do modelo
de Yeoh, bem como na Figura 5.14, é mostrado o erro para o modelo de Lopes-Pamies,
ambos com as duas abordagens diferentes utilizadas.

5. Resultados e Discussão 48
λ
1 1.05 1.1 1.15 1.2 1.25 1.3 1.35 1.4
σ1E
xp- σ
1Model
o (
MP
a)
×10-3
-4
-3
-2
-1
0
1
2
3
4
5
Modelo de Yeoh
Modelo de Lopez-Pamies
Fig. 5.10: Erro entre a curva experimental e os modelos matemáticos.
Ao se observar as Figuras 5.13 e 5.14, nota-se uma concordância satisfatória entre
os resultados, uma vez que o valor absoluto da diferença entre os resultados não ul-
trapassa 0.02 MPa, ao longo de todo o intervalo de medida. Outra observação é que a
abordagem de Mullins-Tobin apresenta valores mais aproximados aos dos resultados
experimentais.
Como mencionado anteriormente, o fator de amplificação X foi obtido utilizando-
se os modelos de Yeoh e de Lopez-Pamies com ambas as abordagens de Mullins-
Tobin e de Bergström-Boyce. Na Figura 5.15, é mostrado o fator de amplificação
da deformação em função da concentração de nanopartículas, e também o modelo
modificado de Guth, proposto por Bergström-Boyce e o modelo de Guth com o fator
g igual a 15.
Pode-se observar que os valores do fator de amplificação de deformação são pra-
ticamente os mesmos tanto para o modelo de Yeoh quanto para o modelo de Lopes-
Paimes considerando a mesma abordagem, entretanto são diferentes considerando as
diferentes abordagens de Mullins-Tobin e Bergström-Boyce.
Os resultados apresentados até agora indicam que um pequeno aumento na concen-
tração de nanopartículas aumentam consideravelmente a resistência do compósito. Por

5. Resultados e Discussão 49
λ
1 1.05 1.1 1.15 1.2 1.25 1.3 1.35 1.4
σ1 (
MP
a)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Resina Pura
Alumina 1,5%
Alumina 2,5%
Alumina 3,5%
Alumina 5%
Yeoh MT
Yeoh BB
Fig. 5.11: Modelo de Yeoh.
essa razão, o modelo proposto para o fator X de Bergstrom-Boyce não é adequado para
a situação problema proposta. Em contrapartida, o modelo de Guth pode ser utilizado.
O valor do parâmetro g pode indicar a formação de aglomerados de nanopartículas
na matriz polimérica, visto que é difícil obter experimentalmente misturas perfeita-
mente homogêneas. É importante dizer que, normalmente, o aumento da resistência,
mesmo com pequenas quantidades de partículas, se deve a alta razão entre a área su-
perficial e o volume das nanopartículas.
5.7 Ensaios com diferentes frações volumétricas na região inicial
Durante a realização dos ensaios e suas posteriores análises de dados, percebeu-se uma
similaridade grande no comportamento dos corpos de prova incrementados com 1,5%
e com 2,5% de nanopartículas.
O fato do comportamento destas duas curvas serem muito semelhantes, leva a crer
que existe uma região inicial de quantidade de nanopartículas que gera um compor-
tamento particular. Com o intuito de tentar compreender este comportamento, foram

5. Resultados e Discussão 50
λ
1 1.05 1.1 1.15 1.2 1.25 1.3 1.35 1.4
σ1 (
MP
a)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Resina Pura
Alumina 1,5%
Alumina 2,5%
Alumina 3,5%
Alumina 5%
Lopez-Pamies MT
Lopez-Pamies BB
Fig. 5.12: Modelo de Lopez-Paimes.
realizados novos ensaios com amostras com 1,0% e 2,0% de nanopartículas.
A realização dos novos ensaios confirmou a existência de um comportamento di-
ferenciado nesta área. A adição de nanopartículas na faixa de 1,0% a 2,5% não gera
um aumento significativo de resistência do material e não altera de forma significativa
o módulo de elasticidade e nem o coeficiente de Poisson.
A Figura 5.16 mostra as curvas de tensão estiramento, onde se pode observar que
não há diferenças tão significativas na resistência do material na faixa entre 1,0% a
2,5% de nanopartículas. Nesta figura, as barras de erro foram omitidas para evitar a
poluição da imagem e não dificultar a sua observação. Na Figura 5.17, em que é mos-
trado o valor do módulo de elasticidade das amostras, pode-se perceber uma constância
nos valores na região analisada. E finalmente, na Figura 5.18 são mostrados os valores
do coeficiente de Poisson, onde também não é possível observar uma regularidade nos
resultados na região inicial considerada.
Esses resultados revelam a necessidade de um estudo específico nesta região, para
se poder entender e prever qual será o comportamento do material com adições de

5. Resultados e Discussão 51
1 1.05 1.1 1.15 1.2 1.25 1.3
-0.02
-0.01
0
0.01
0.02
Yeoh MT
λ
1 1.05 1.1 1.15 1.2 1.25 1.3
σ 1E
xp- σ
1Model
o (
MP
a)
-0.02
-0.01
0
0.01
0.02
Yeoh BB
Alumina 1,5%
Alumina 2,5%
Alumina 3,5%
Alumina 5,0%
Fig. 5.13: Erro do modelo de Yeoh.
nanopartículas nestes níveis. Os resultados podem ter indicado a presença de uma
região de saturação no aumento da resistência do compósito, que tende a ser entre
1,0% e 2,5% em volume de nanopartículas.
Nesses dois pontos novos, não foi feita a análise completa como foi apresentada
até agora para os outros pontos gerados. Eles foram realizados apenas com o intuito
de confirmar a hipótese do comportamento análogo para quantidades até 2,5% de na-
nopartículas, percebida durante os experimentos.
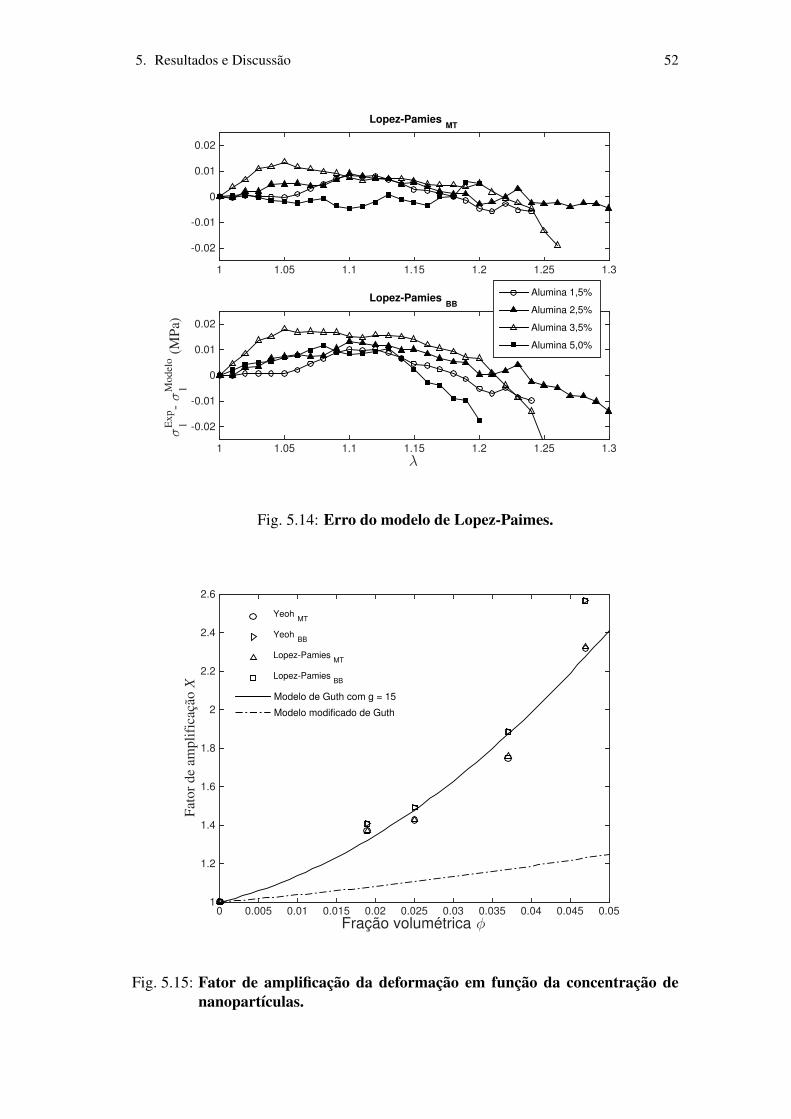
5. Resultados e Discussão 52
1 1.05 1.1 1.15 1.2 1.25 1.3
-0.02
-0.01
0
0.01
0.02
Lopez-Pamies MT
λ
1 1.05 1.1 1.15 1.2 1.25 1.3
σ1E
xp- σ
1Model
o (
MP
a)
-0.02
-0.01
0
0.01
0.02
Lopez-Pamies BB
Alumina 1,5%
Alumina 2,5%
Alumina 3,5%
Alumina 5,0%
Fig. 5.14: Erro do modelo de Lopez-Paimes.
Fração volumétrica φ0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.045 0.05
Fat
or
de
amp
lifi
caçã
o X
1
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6
Yeoh MT
Yeoh BB
Lopez-Pamies MT
Lopez-Pamies BB
Modelo de Guth com g = 15
Modelo modificado de Guth
Fig. 5.15: Fator de amplificação da deformação em função da concentração denanopartículas.

5. Resultados e Discussão 53
λ
1 1.05 1.1 1.15 1.2 1.25 1.3 1.35 1.4 1.45
σ (
MP
a)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Puro
Alumina 1,0%
Alumina 1,5%
Alumina 2,0%
Alumina 2,5%
Alumina 3,5%
Alumina 5%
Fig. 5.16: Tensão real x Estiramento com diferentes percentuais na região inicial.
Fração volumétrica de nanopartículas (%)
0 1 2 3 4 5
E (
MP
a)
0.5
1
1.5
2
2.5
3
Fig. 5.17: Módulo de elasticidade com diferentes percentuais na região inicial.

5. Resultados e Discussão 54
Fração volumétrica de nanopartículas (%)
0 1 2 3 4 5
ν
0.4
0.45
0.5
0.55
Fig. 5.18: Coeficiente de Poisson com diferentes percentuais na região inicial.

Capítulo 6
Conclusões
Ao realizar este estudo, foi possível avaliar a complexidade dos problemas que envol-
vem materiais hiperelásticos reforçados com nanopartículas. Trata-se de um sistema fí-
sico que experimenta grandes deformações não lineares, assim se exige conhecimento
teórico suficiente para sua correta análise. Outra peculiaridade deste área do conheci-
mento é o fato de ser multidisciplinar, já que possui áreas de interesse em mecânica
dos sólidos, técnicas experimentais, química e ciência dos materiais.
A partir da comparação dos valores medidos experimentalmente da porcentagem
volumétrica de nanopartículas, mostrada na Tabela 5.1 na secão 5.1, com os valores
nominais pretendidos, pode-se observar que o método de fabricação dos corpos de
prova apresentou-se satisfatório. Uma vez que os valores medidos experimentalmente,
através da medição da densidade da amostra pronta, apontam valores muito próximos
dos valores nominais planejados para cada amostra. Desta forma, é possível utilizar a
metodologia para fabricações da mesma natureza. Outro ponto importante é que, com
a resina utilizada, foi difícil a concepção de amostras com adições superiores a 5%
em volume de nanopartículas, devido a mistura ficar excessivamente densa e viscosa,
tornando complicado o manuseio e o vazamento no molde.
A técnica experimental utilizada neste trabalho foi a Correlação de Imagens Digi-
tais (CID). Esta técnica foi extremamente útil nas análises realizadas, uma vez que ela
fornece informações sobre o campo de deslocamento completo da região de interesse,
55

6. Conclusões 56
exemplificados nas Figuras 5.1 e 5.2. A Figura 5.1 mostra que os resultados experimen-
tais foram condizentes com o que era esperado, a partir do estudo da teoria referente
ao estado de cisalhamento puro. Por ser uma técnica de medida de deslocamentos sem
contato e assim, não interferir nas medidas obtidas, foi de extrema importância, dado
que o material é muito sensível a carregamentos leves, e qualquer contato poderia levar
a erros sistemáticos de medidas, tornando difícil a colagem de sensores. Com o que
foi exposto, nota-se que esta técnica pode ser empregada em experimentos da mesma
natureza, com grau de confiabilidade elevado.
Foi comprovado que a adição de pequenas quantidades de nano partículas aumen-
tam consideravelmente a resistência da matriz polimérica. A Figura 5.4, que mostra
a tensão real em função do estiramento, indica a elevação da resistência através do
aumento da inclinação das curvas, para as diferentes frações volumétricas de nanopar-
tículas. O aumento do módulo de elasticidade é comprovado pela Figura 5.6, na qual é
possível observar a tendência de crescimento desta propriedade. A Figura 5.6 ilustra o
aumento da resistência mesmo com pequenas quantidades de aditivos, pela tendência
exponencial da curva. O aumento da resistência causado pelas nanopartículas é devido
a alta razão entre a área superficial e o seu volume. São formados pequenos aglome-
rados de nanopartículas esféricas, aleatoriamente espalhados na matriz, que resultam
nessa propriedade.
Os valores do fator de amplificação X foram avaliados com diferentes modelos
presentes na literatura e foram mostrados na seção 5.6. Os valores das abordagens de
Mullins-Tobin e de Bergström-Boyce, para as diferentes concentrações volumétricas
de nanopartículas, foram avaliados usando os modelos de Yeoh e no de Lopez-Pamies.
Os modelos apresentaram resultados semelhantes, quando foi utilzada a mesma abor-
dagem para o fator de amplificação. Porém, em grandes deformações, as duas aborda-
gens apresentaram comportamentos diferenciados. A abordagem proposta por Bergström-
Boyce não se mostrou adequada para descrever o problema proposto.
As considerações feitas na seção 5.7 mostram que não há diferença significativa
na resistência do material para adições de nanopartículas no intervalo de 1,0% a 2,5%

6. Conclusões 57
em volume. A semelhança na inclinação das curvas mostradas na Figura 5.16 e nos
valores do módulo de Young colocados na Figura 5.17 ilustram a afirmação. Desta
forma, não é economicamente vantajoso carregar a matriz com 2,5% em volume de
nanopartículas, pois as mesmas vantagens seriam obtidas com apenas 1,0%.
Este trabalho se configura como uma contribuição relevante no estudo das pro-
priedades mecânicas de elastômeros reforçados com nanopartículas. Foi apresentado
um método de fabricação e uma técnica experimental adequados ao tratamento do
problema. Foram gerados dados experimentais que mostram a evolução do compor-
tamento tensão deformação e também propriedades mecânicas importantes, como o
módulo de elasticidade e o coeficiente de Poisson. Por fim, modelos da literatura fo-
ram testados, sendo um condizente e outro não adequado aos dados experimentais
considerados.
Capítulo 7
Trabalhos Futuros
A fim de se complementar o estudo realizado neste trabalho, alguns experimentos adi-
cionais e diferentes análises podem ser feitas, a fim de permitir um maior entendimento
do assunto e de melhorar a previsibilidade do comportamento mecânico de novos na-
nocompósitos.
A utilização de um microscópio eletrônico de varredura para observar a microes-
trutura do nanocompósito pode contribuir para o estudo, uma vez que seria possível
analisar a formação dos aglomerados de nanopartículas e avaliar o grau de aleatorie-
dade com o qual estes ficam espalhados na matriz.
A mesma metodologia pode ser utilizada para testar corpos de prova com quantida-
des menores de nanopartículas. Esses novos ensaios complementariam o entendimento
do comportamento dos compósitos na região inicial da curva tensão x estiramento.
Mais experimentos variando o tamanho das nanopartículas podem ser realizados.
Esses testes tem a possibilidade de indicar se existe um tamanho ideal de partícula que
levaria a um aumento máximo na resistência da matriz polimérica.
Por fim, seria interessante desenvolver um modelo analítico que descrevesse a evo-
lução do módulo de elasticidade. Uma equação que levasse em conta parâmetros con-
troláveis como o módulo de elasticidade da matriz, das nanopartículas e a quantidade
delas inseridas no compósito. Essa equação seria de grande utilidade ao processo de
fabricação dos nanocompósitos.
58

Capítulo 8
BIBLIOGRAFIA
[1] O. H. Yeoh. Some forms of the strain energy function for rubber. Rubber Chem.
Technol, 66:754–771, 1993.
[2] Oscar Lopez-Pamies. A new i1-based hyperelastic model for rubber elastic ma-
terials. Comptes Rendus Mecanique, 338:3–11, 2010.
[3] Jung-Bae Lee e Dahl-Young Khang. Electrical and mechanical characteriza-
tion of stretchable multi-walled carbon nanotubes/polydimethylsiloxane elasto-
meric composite conductors. Composites Science and Technology, 72:1257–
1263, 2012.
[4] Kyoung-Yong Chun, Shi Hyeong Kim, Min Kyoon Shin, Youn Tae Kim, Geof-
frey M Spinks, Ali E Aliev, Ray H Baughman, e Seon Jeong Kim. Free-standing
nanocomposites with high conductivity and extensibility. Nanotechnology, 24,
2013.
[5] Lijin Xia, Zhonghua Xu, Leming Sun, Patrick M. Caveney, e Mingjun Zhang.
Nano-fillers to tune young’s modulus of silicone matrix. Journal of Nanoparticle
Research, 2013.
[6] Lawrence E. Nielsen. Mechanical properties of particulate-filled systems. Jour-
nal of Composite Materials, 1, 1967.
59

8. BIBLIOGRAFIA 60
[7] R. W. Ogden. On the overall moduli of non-linear elastic composite materials. J.
Mech. Phys. Solids, 22:541–553, 1974.
[8] Y. Agari e T. Uno. Estimation on thermal conductivities of filled polymers. Jour-
nal of applied polymer science, 32:5705–5712, 1986.
[9] Sanjay Govindjee e Juan Simo. A micro-mechanically based continuum damage
model for carbon black-filled rubbers incorporating mullins’ effect. J. Mech.
Phys. Solids, 39:87–112, 1991.
[10] A. E. Zúñiga e M. F. Beatty. A new phenomenological model for stress-softening
in elastomers. Zeitschrift für angewandte Mathematik und Physik, 53:794–814,
2002.
[11] G. Marckmann, E. Verron, L. Gornet, G. Chagnon, P. Charrier, e P. Fort. A theory
of network alteration for the mullins effect. Journal of the Mechanics and Physics
of Solids, 50:2011–2028, 2002.
[12] H. J. Qi e M. C. Boyce. Constitutive model for stretch-induced softening of the
stress-stretch behavior of elastomeric materials. Journal of the Mechanics and
Physics of Solids, 52:2187–2205, 2004.
[13] Julie Diani, Bruno Fayolle, e Pierre Gilormini. A review on the mullins effect.
European Polymer Journal, 45:601–612, 2009.
[14] J. A. C. Harwood e A. R. Payne. Stress softening in natural rubber vulcanizates.
part iii. carbon black-filled vulcanizates. Journal of applied polymer science, 10:
315–324, 1966.
[15] T. Nicholas e A. M. Freudenthal. The effect of filler on the mechanical properties
of an elastomer at high strain rates. Rheologica Acta, 1968.
[16] E. Kontou e G. Spathis. Elastic behaviour of natural rubber filled vulcanizates.
Journal of applied polymer science, 39:649–654, 1990.

8. BIBLIOGRAFIA 61
[17] R. W. Ogden e D. G. Roxburgh. A pseudo-elastic model for the mullins effect in
filled rubber. Proceedings A, 455:2861–2877, 1999.
[18] Gert Heinrich e Manfred Klüppel. Recent advances in the theory of filler networ-
king in elastomers. Advances in Polymer Science, 160, 2002.
[19] Gregor Huber e Thomas A. Vilgis. On the mechanism of hydrodynamic reinfor-
cement in elastic composites. Macromolecules, 35:9204–9210, 2002.
[20] H. M. Yin, L. Z. Sun, e J. S. Chen. Micromechanics-based hyperelastic cons-
titutive modeling of magnetostrictive particle-filled elastomers. Mechanics of
Materials, 34:505–516, 2002.
[21] Manfred Klüppel. The role of disorder in filler reinforcement of elastomers on
various lenght scales. Advances in Polymer Science, 163:1–86, 2003.
[22] S. Trabelsi, P. A. Albouy, e J. Rault. Effective local deformation in stretched
filled rubber. Macromolecules, 36:9093–9099, 2003.
[23] A. Dorfmann e R. W. Ogden. A constitutive model for the mullins effect with
permanent set in particle-reinforced rubber. International Journal of Solids and
Structures, 41:1855–1878, 2004.
[24] Liliane Bokobza. The reinforcement of elastomeric networks by fillers. Macro-
molecular Materials and Engineering, 289:607–621, 2004.
[25] O. Lopez-Pamies e P. Ponte Castañeda. On the overall behavior, microstructure
evolution, and macroscopic stability in reinforced rubbers at large deformations:
I - theory. Journal of the Mechanics and Physics of Solids, 54:807–830, 2006.
[26] Joaquín Moraleda, Javier Segurado, e Javier LLorca. Finite deformation of in-
compressible fiber-reinforced elastomers: A computational micromechanics ap-
proach. Journal of the Mechanics and Physics of Solids, 57:1596–1613, 2009.

8. BIBLIOGRAFIA 62
[27] M. Agoras, O. Lopez-Pamies, e P. Ponte Castañeda. A general hyperelastic model
for incompressible fiber-reinforced elastomers. Journal of the Mechanics and
Physics of Solids, 57:268–286, 2009.
[28] Oscar Lopez-Pamies. An exact result for the macroscopic response of particle-
reinforced neo-hookean solids. Journal of Applied Mechanics, 77, 2010.
[29] M. Freund, H. Lorenz, D. Juhre, J. Ihlemann, e M. Klüppel. Finite element imple-
mentation of a microstructured-based model for filled elastomers. International
Journal of Plasticity, 27:902–919, 2011.
[30] D. Ivaneyko, V. Toshchevikov, M. Saphiannikova, e G. Heinrich. Effects of par-
ticle distribution on mechanical properties of magneto-sensitive elastomers in a
homogeneous magnetic field. Condensed Matter Physics, 15:1–12, 2012.
[31] Reza Avazmohammadi e P. Ponte Castañeda. Tangent second-order estimates for
the large-strain, macroscopic response of particle-reinforced elastomers. Journal
of Elasticity, 112:139–183, 2013.
[32] Hui Yang, Yunpeng Jiang, Puhui Chen, e Hualin Fan. Micromechanics models
of particulate filled elastomer at finite strain deformation. Composites: Part B,
45:881–887, 2013.
[33] Oscar Lopez-Pamies, Taha Goudarzi, e Toshio Nakamura. The nonlinear elastic
response of suspensions of rigid inclusions in rubber: I - an exact result for dilute
suspensions. Journal of the Mechanics and Physics of Solids, 61:1–18, 2013.
[34] Roozbeh Dargazany, Vu Ngoc Khiêm, Emad A. Poshtan, e Mikhail Itskov. Cons-
titutive modeling of strain-induced crystallization in filled rubbers. Physical Re-
view E, 2014.
[35] Zaoyang Guo, Xiaohao Shi, Yang Chen, Huapeng Chen, Xiongqi Peng, e Phi-
lip Harrison. Mechanical modeling of incompressible particle-reinforced neo-
hookean composites based on numerical homogenization. Mechanics of Materi-
als, 70, 2014.

8. BIBLIOGRAFIA 63
[36] J. Wen e J. E. Mark. Mechanical properties and structural characterization of
poly(dimethylsiloxane) elastomers reinforced with zeolite fillers. Journal of Ma-
terials Science, 29:499–503, 1994.
[37] Q. W. Yuan, A. Kloczkowski, J. E. Mark, e M. A. Sharaf. Simulations on the
reinforcement of poly(dimethylsiloxane) elastomers by randomly distributed fil-
ler particles. Journal of Polymer Science: Part B: Polymer Physics, 34:1647–
1657, 1996.
[38] L. C. Sim, C. K. Lee, S. R. Ramanan, e H. Ismail. Cure characteristics, mechani-
cal and thermal properties of al2o3 and zno reinforced silicone rubber. Polymer-
Plastics Technology and Engineering, 45:301–307, 2006.
[39] Wenying Zhou, Demei Yu, Caifeng Wang, Qunli An, e Shuhua Qi. Effect of
filler size distribution on the mechanical and physical properties of alumina-filled
silicone rubber. Polymer engineering and science, 2008.
[40] Xiang Ling Ji, Jiao Kai Jing, Wei Jiang, e Bing Zheng Jiang. Tensile modulus
of polymer nanocomposites. Polymer engineering and science, 42(5):983–993,
2002.
[41] Bernd Wetzel, Frank Haupert, e Ming Qiu Zhang. Epoxy nanocomposites with
high mechanical and tribological performance. Composites Science and Techno-
logy, 63:2055–2067, 2003.
[42] Shao-Yun Fu, Xi-Qiao Feng, Bernd Lauke, e Yiu-Wing Mai. Effects of parti-
cle size, particle/matrix interface adhesion and particle loading on mechanical
properties of particulate-polymer composites. Composites: Part B, 39:933–961,
2008.
[43] M. R. Ayatollahi, S. Shadlou, e M. M. Shokrieh. Fracture toughness of
epoxy/multi-walled carbon nanotube nano-composites under bending and shear
loading conditions. Materials and Design, 32:2115–2124, 2011.

8. BIBLIOGRAFIA 64
[44] You-Ping Wu, Qing-Xiu Jia, Ding-Sheng Yu, e Li-Qun Zhang. Modeling young’s
modulus of rubber-clay nanocomposites using composite theories. Polymer Tes-
ting, 23:903–909, 2004.
[45] Liliane Bokobza e Mélanie Kolodziej. On the use of carbon nanotubes as rein-
forcing fillers for elastomeric materials. Polymer International, 55:1090–1098,
2006.
[46] Sanjib Bhattacharyya, Christophe Sinturel, Ouziyine Bahloul, Marie-Louise Sa-
boungi, Sabu Thomas, e Jean-Paul Salvetat. Improving reinforcement of natural
rubber by networking of activated carbon nanotubes. Carbon, 46:1037–1045,
2008.
[47] Yijing Nie, Guangsu Huang, Liangliang Qu, Peng Zhang, Gengsheng Weng, e
Jinrong Wu. Structural evolution during uniaxial deformation of natural rubber
reinforced with nano-alumina. Polymer advanced technologies, 22:2001–2008,
2011.
[48] Jianye Wen e James E. Mark. Synthesis, structure, and properties of
poly(dimethylsiloxane) networks reinforced by in situ-precipitated silica-titania,
silica-zirconia, and silica-alumina mixed oxides. Journal of applied polymer sci-
ence, 58:1135–1145, 1995.
[49] C. A. Charitidis e E. P. Koumoulos. Nanomechanical properties and nanoscale
deformation of pdms nanocomposites. Plastics, Rubber and Composites, 41(2),
2012.
[50] I. A. M. Ibrahim, A. A. F. Zikry, M. A. Sharaf, J. E. Mark, K. Jacob, I. M. Jasiuk,
e R. Tannenbaumn. Elastic behavior of silica/poly(dimethylsiloxane) nanocom-
posites: nano-size effects. Materials Science and Engineering, 40, 2012.
[51] Lei Yan, David A. Dillard, Robert L. West, Kenneth J. Rubis, e Glenn V.
Gordon. Strain rate and temperature dependence of a nanoparticle-filled

8. BIBLIOGRAFIA 65
poly(dimethylsiloxane) undergoing shear deformation. Journal of Polymer Sci-
ence: Part B: Polymer Physics, 50:929–937, 2012.
[52] R. D. K. Misra e Q. Yuan. Biomechanical properties and large strain deforma-
tion of artificial silicone devices with different forms of nanostructured carbon.
Materials Science and Engineering C, 32:902–908, 2012.
[53] L. K. Namitha, J. Chameswary, S. Ananthakumar, e M. T. Sebastian. Effect
of micro- and nano-fillers on the properties of silicone rubber-alumina flexible
microwave substrate. Ceramics International, 39:7077–7087, 2013.
[54] Michael A. Sutton, Jean Jose Orteu, e Hubert W. Schreier. Image Correlation
for Shape, Motion and Deformation Measurements. Springer Science + Business
Media, LLC, 2009.
[55] D. C. Moreira, L. A. Sphaier, J. M. L. Reis, e L. C. S. Nunes. Determination of
young’s modulus in polyester-al2o3 and epoxy-al2o3 nanocomposites using the
digital image correlation method. Composites: Part A, 2012.
[56] D. C. Moreira e L. C. S. Nunes. Comparison of simple and pure shear for an
incompressible isotropic hyperelastic material under large deformation. Polymer
Testing, 2013.
[57] A. Christmann, P. Ienny, J. C. Quantin, A. S. Caro-Bretelle, e J. M. Lopez-Cuesta.
Mechanical behavior at large strain of polycarbonate nanocomposites during uni-
axial tensile test. Polymer, 52:4033–4044, 2011.
[58] G. Crammond, S. W. Boyd, e J. M. Dulieu-Barton. Speckle pattern quality as-
sessment for digital image correlation. Optics and Lasers in Engineering, 51:
1368–1378, 2013.
[59] Roberto Fedele e Roberta Santoro. Extended identification of mechanical para-
meters and boundary conditions by digital image correlation. Procedia IUTAM,
4:40–47, 2012.

8. BIBLIOGRAFIA 66
[60] William N. Sharpe Jr., editor. Handbook of Experimental Solid Mechanics. Sprin-
ger Science + Business Media, LLC, 2008.
[61] Jovo P. Jaric, Dragoslav S. Kuzmanovic, e Zoran D. Golubovic. On the state of
pure shear. Theoretical and Applied Mechanics, 37(3):229–250, 2010.
[62] T. C. T. Ting. Further study on pure shear. Journal of Elasticity, 83:95–104,
2006.
[63] M. Hayes e T. J. Laffey. Pure shear - a footnote. Journal of Elasticity, 92:109–
113, 2008.
[64] Gerhard A. Holzapfel. Nonlinear Solid Mechanics A Continuum Approach for
Engineering. John Wiley & Sons, LTD, 2000.
[65] R. W. Ogden. Non-linear elastic deformations. Dover Publications, 1997.
[66] L. Mullins e N. R. Tobin. Stress softening in rubber vulcanizates. part i. use of
a strain amplification factor to describe the elastic behavior of filler-reinforced
vulcanized rubber. Journal of applied polymer science, 9:2993–3009, 1965.
[67] Jörgen S. Bergström e Mary C. Boyce. Mechanical behavior of particle filled
elastomers. Rubber Chem. Technol, 72:633–656, 1999.
[68] E. Guth. Theory of filler reinforcement. J. App. Phys., 16:20–25, 1945.

Apêndice A
Artigo publicado no Congresso Nacional de Engenharia
Mecânica 2014
67

Apêndice B
Artigo publicado na revista Mechanics of Materials
doi:10.1016/j.mechmat.2015.02.011
68