Embed Size (px)
Citation preview

���������������� �
�����������������
����������� ��� �� ���
�������� �� ��������

Superfícies Retilíneas Desenvolvíveis
NCA – Núcleo de Computação Gráfica Aplicada
1
Superfícies Retilíneas Desenvolvíveis
Fábio Gonçalves Teixeira1
Superfícies retilíneas desenvolvíveis são superfícies geradas pelo
deslocamento de retas (retilíneas) e que podem ser planificáveis (desenvolví-
veis). Pertencem a este grupo de superfícies cones, cilindros, pirâmides e
prismas. Este tipo de superfície ocorre corriqueiramente em objetos dos mais
variados tipos em Engenharia, Arquitetura e até na natureza.
Componentes de motores e máquinas, tais como: engrenagens, eixos e pis-
tões são exemplos de objetos cujas superfícies são retilíneas e desenvolví-
veis. Elementos estruturais e arquitetônicos como vigas e pilares, paredes, al-
guns tipos de coberturas e até os volumes dos edifícios podem ter superfícies
retilíneas desenvolvíveis.
GERAÇÃO
A geração das superfícies retilíneas desenvolvíveis é fundamentada nos se-
guintes elementos geradores:
• Diretriz – Linha curva ou poligonal, aberta ou fechada, plana ou espacial.
• Vértice – Ponto próprio ou impróprio.
• Geratriz – Reta.
Lei de Geração – A geratriz desloca-se apoiada simultaneamente sobre a di-
retriz e o vértice, sendo que as sucessivas posições da geratriz definem uma
superfície retilínea desenvolvível. A superfície é o lugar geométrico das su-
cessivas posições da reta geratriz.
1 Professor Assistente do Departamento de Expressão Gráfica da UFRGS

Superfícies Retilíneas Desenvolvíveis
NCA – Núcleo de Computação Gráfica Aplicada
2
O tipo de diretriz e a posição do vértice determinam como as superfícies retilí-
neas desenvolvíveis podem ser classificadas:
Superfícies Cônicas – Gera-
das pelo deslocamento da reta
geratriz apoiada e em diretriz
curva (aberta ou fechada) e em
vértice próprio (a uma distância
finita da diretriz).
Superfícies Piramidais – Gera-
das pelo deslocamento da reta
geratriz apoiada e em diretriz po-
ligonal (aberta ou fechada) e em
vértice próprio (a uma distância
finita da diretriz).
VérticeGeratriz
Diretriz
Superfície Cônica
Superfície Piramidal

Superfícies Retilíneas Desenvolvíveis
NCA – Núcleo de Computação Gráfica Aplicada
3
Superfícies Cilíndricas – Gera-
das pelo deslocamento da reta
geratriz apoiada e em diretriz cur-
va (aberta ou fechada) e em vér-
tice impróprio (a uma distância
infinita da diretriz). Neste tipo de
superfície, todas as posições de
geratriz são paralelas.
Superfícies Prismáticas – Gera-
das pelo deslocamento da reta ge-
ratriz apoiada e em diretriz poligo-
nal (aberta ou fechada) e em vér-
tice impróprio (a uma distância in-
finita da diretriz). Neste tipo de
superfície, todas as posições de
geratriz são paralelas.
Superfície Cilíndrica
V∞
V∞
SuperfíciePrismática

Superfícies Retilíneas Desenvolvíveis
NCA – Núcleo de Computação Gráfica Aplicada
4
CARACTERÍSTICAS GERAIS
As superfícies retilíneas desenvolvíveis apresentam um série de característi-
cas importantes:
As superfícies retilíneas desenvolvíveis são planificáveis (desenvolvíveis) de
forma exata, pois são compostas pelo conjunto de sucessivas posições co-
planares de retas geratrizes (concorrentes ou paralelas).
Superfícies de diretrizes poligonais apresentam arestas visíveis e faces pla-
nas. As arestas são as geratrizes limites de faces adjacentes. Já as superfí-
cies de diretrizes curvas não apresentam arestas visíveis.
As superfícies são teoricamente infinitas, pois são formadas por retas (geratri-
zes), objetos infinitos. Desta forma, superfícies de vértice próprio apresentam
duas folhas, uma de cada lado do vértice. Porém, não é prático representar
superfícies infinitas. Normalmente, as superfícies retilíneas desenvolvíveis
são representadas limitadas entre a diretriz e o vértice, para as Cônicas e as
Piramidais, e em um comprimento específico, para as superfícies de vértice
impróprio.

Superfícies Retilíneas Desenvolvíveis
NCA – Núcleo de Computação Gráfica Aplicada
5
REPRESENTAÇÃO EM ÉPURA
A representação em épura das superfícies retilíneas desenvolvíveis leva em
conta que estas são opacas, portanto há linhas visíveis e invisíveis. Outro
ponto importante é que a superfície retilínea em estudo é composta somente
pelas posições onde há geratrizes. Isto quer dizer que não serão levadas em
consideração qualquer tipo de tampa ou plano de base. A representação é
feita através das geratrizes limites de visibilidade nas vistas (ou projeções)
correspondentes. Para cada posição de observador existem sempre duas ge-

Superfícies Retilíneas Desenvolvíveis
NCA – Núcleo de Computação Gráfica Aplicada
6
ratrizes limites correspondentes. Para superfícies de diretrizes curvas, as ge-
ratrizes limite são sempre tangentes à diretriz. Para superfícies de diretrizes
poligonais, as geratrizes limite correspondem sempre a arestas da superfície.
As arestas de uma superfície são todas as posições de geratriz que passam
pelos vértices da sua diretriz.
Só existe uma regra para a determinação da visibilidade: são invisíveis, em
uma vista ou projeção, aquelas linhas que se encontram em posições onde a
superfície está entra as linhas e o observador. Para conferir se a visibilidade
está correta, é possível observar alguns aspectos:
• contorno aparente é sempre visível.
• No cruzamento de duas linhas, certamente uma é visível e a outra linha é
invisível.
• No encontro de linhas fora do contorno aparente, as linhas devem possuir
a mesma visibilidade: visível com visível e invisível com invisível.
PERTINÊNCIA
A pertinência de ponto a uma superfície está relacionada com o tipo de gera-
ção da superfície. Em superfícies retilíneas, qualquer ponto que pertença a
superfície deve pertencer a uma geratriz, uma vez que a superfície é o lugar
geométrico das sucessivas posições da
reta geratriz. Isto determina também a
visibilidade do ponto, que será visível,
se a geratriz for visível, e invisível, se a
geratriz for invisível.
A pertinência de retas às superfícies re-
cai no caso do ponto. Se um reta possui
dois pontos não coincidentes que per-
tençam à superfície então a reta perten-
ce à superfície.
Q1
Q’1
Q2 ≡ Q’2
P1
P2

Superfícies Retilíneas Desenvolvíveis
NCA – Núcleo de Computação Gráfica Aplicada
7
INTERSEÇÕES COM SUPERFÍCIES RETILÍNEAS DESENVOLVÍVEIS
O estudo de interseções entre superfície e plano e entre superfície e reta
permite entender melhor o processo de geração da superfície, bem como a
aplicação prática das superfícies.
Interseção é a porção comum a dois ou mais objetos. No caso de plano e su-
perfície, a interseção é sempre um linha plana curva ou poligonal, conforme o
tipo de superfície. Entre reta e superfície a interseção poderá ser um ou mais
pontos e até mesmo a própria reta, quando esta pertence à superfície.
INTERSEÇÕES ENTRE SUPERFÍCIES E PLANOS
A determinação da interseção entre uma superfície e um plano em épura é
imediata quando o plano está acumulado em uma das projeções. Quando isto
ocorre, basta determinar a interseção de um conjunto significativo de posições
de geratriz com o plano, o que é feito de maneira direta na vista onde o plano
é acumulado. Depois basta unir os pontos para se obter a linha interseção. No
caso de superfícies de diretrizes poligonais, basta determinar a interseção do
plano com as posições de geratriz que contenham os vértices da poligonal.
Em superfícies de diretrizes curvas, deve-se utilizar um conjunto apropriado
de posições de geratriz para que seja possível o traçado da curva interseção
com alguma precisão.
A interseção de planos com superfícies cônicas produz como resultado as

Superfícies Retilíneas Desenvolvíveis
NCA – Núcleo de Computação Gráfica Aplicada
8
chamadas curvas cônicas: elipse, parábola e hipérbole. O fator que determina
o tipo de curva interseção é a inclinação relativa do plano secante em relação
às geratrizes do cone. Quando o ângulo do plano em relação ao eixo do cone
é maior que o ângulo das geratrizes medido em relação ao eixo, o plano
corta todas as geratrizes do cone, a curva interseção é uma elipse. Quando o
ângulo do plano é igual ao ângulo das geratrizes, a curva resultante é uma
parábola. Se o ângulo do plano é menor que o ângulo das geratrizes, este
corta as geratrizes nas duas folhas do cone, gerando uma curva de dois ra-
mos, a hipérbole.
O procedimento para determinar a interseção é o mesmo em qualquer dos
três casos. Há ainda alguns casos particulares que devem ser mencionados.
Quando o plano secante contém o vértice a interseção pode ser um ponto,
uma reta ou duas retas conforme o ângulo do plano em relação ao eixo:
• Quando o ângulo é maior que o ângulo das geratrizes, a interseção é um
ponto.
• Quando o ângulo é igual ao ângulo das geratrizes, este tangência a su-
perfície nas duas folhas e a interseção é uma reta.
• Caso o ângulo do plano seja menor do que o ângulo das geratrizes, a in-
terseção resulta em duas retas, geratrizes da superfície.
Parábola Elipse Hipérbole

Superfícies Retilíneas Desenvolvíveis
NCA – Núcleo de Computação Gráfica Aplicada
9
Outro caso particular, ocorre quando a superfície cônica possui diretriz circu-
lar, eixo normal ao plano da diretriz e o plano secante faz um ângulo reto em
relação ao eixo. Nestas condições a interseção é uma circunferência.

Superfícies Retilíneas Desenvolvíveis
NCA – Núcleo de Computação Gráfica Aplicada
10
INTERSEÇÃO ENTRE SUPERFÍCIES E RETAS
Interseção entre reta e superfície re-
sulta em um ou mais pontos depen-
dendo da forma da superfície e da
posição relativa entre a reta e a su-
perfície. O método para determinar
os pontos de interseção utiliza pla-
nos auxiliares. Este método tem o
mesmo princípio do método de pla-
nos auxiliares para determinação de
interseção entre reta e plano. O pla-
no auxiliar deve conter a reta e a in-
terseção deste plano com a superfí-
cie gera uma linha coplanar à reta. Se a reta apre-
senta um ou mais pontos em comum com esta linha, é
possível afirmar que estes pontos são a interseção da
reta com a superfície, uma vez que a linha pertence à
superfície. Qualquer plano que contenha a reta pode
ser utilizado, porém na prática utilizam-se planos
acumulados devido à facilidade na determinação da
interseções entre planos acumulados e superfícies.
O problema fica então reduzido à determinação da
interseção plano-superfície. Isto pode ser trabalhoso
quando a superfície é cilíndrica ou cônica. Alternati-
vamente pode-se utilizar planos não acumulados que, se forem apropriada-
mente escolhidos, podem facilitar o processo e reduzir o trabalho necessário.
Uso de Planos Auxiliares Não Acumulados na Determinação de Interse-
ções Entre Retas e Superfícies de Vértice Próprio
Na verdade, para um conjunto reta-superfície, existe somente um plano que
contém a reta e o vértice da superfície.Como a interseção entre a superfície e
um plano que contém o seu vértice só pode ser um ponto (o que não se apli-
ca), uma reta (quando o plano é tangente à superfície) e duas retas (quando o

Superfícies Retilíneas Desenvolvíveis
NCA – Núcleo de Computação Gráfica Aplicada
11
r1
s2
s1
r2
t2
t1
V2
V1
A
A
B1
B2
I
J1
J2
I1
v1
v2
u2
u1
plano corta a superfície), a
determinação da interseção
entre reta e superfície fica
muito simples. A seguir são
descritos os procedimentos
para a determinação da inter-
seção entre reta e superfície
de vértice próprio:
1. Seja uma superfície de
vértice próprio e uma reta r cuja interseção com a superfície pretende-se
determinar.
2. Seja um plano a definido por duas retas concorrentes, uma a própria reta
r e a outra uma reta s, que contém o vértice e é concorrente à primeira.
3. A interseção de a com o plano β que contém a diretriz da superfície é a
reta t. Se r possui interseção com a superfície a reta t possui um ou mais
pontos em comum (A e B) com a diretriz da superfície.
4. Unindo-se estes pontos ao vértice, obtém-se as retas u e v. Estas retas
são coplanares a r, pois todas pertencem a a.
5. Portanto I e J, interseções entre r e u e entre r e v, respectivamente, são
os pontos de interseção entre r e a superfície, uma vez que estes pontos
pertencem à r e à superfície, pois u e v são geratrizes. Deste modo a inter-
seção entre o plano e a superfície sempre será uma ou mais retas, isto
facilita o processo e aumenta a pre-
cisão com um número reduzido de
passos.
V
ru
sA
t
v
J
B
I
β
α

Superfícies Retilíneas Desenvolvíveis
NCA – Núcleo de Computação Gráfica Aplicada
12
Uso de Planos Auxiliares Não Acumulados na Determinação de Interse-
ções Entre Retas e Superfícies de Vértice Impróprio
A utilização de um plano auxiliar
que contém o vértice pode também
ser utilizada para determinar inter-
seções entre retas e superfícies de
vértice impróprio. Isto é possível
porque um plano pode conter o
ponto impróprio de uma reta se o
plano é paralelo à reta. Portanto, se
o plano auxiliar é paralelo às gera-
trizes é possível afirmar que o pla-
no contém o vértice impróprio da
superfície.
1. Seja uma superfície de vértice
impróprio e uma reta r cuja
interseção com a superfície
pretende-se determinar.
2. Seja um plano a definido por
duas retas concorrentes, uma
a própria reta r e a outra uma
reta s, paralela às geratrizes
da superfície e é concorrente
à primeira.
3. A interseção de a com o plano que contém a diretriz da superfície é a reta
t. Esta reta possui um ou mais pontos em comum com a diretriz de super-
fície (A e B) se r possui interseção com a superfície.
4. Traçando-se por estes pontos as geratrizes correspondentes, obtém-se as
retas u e v. Estas retas são coplanares a r, pois todas pertencem a a.
5. Portanto I e J, interseções entre r e u e entre r e v, respectivamente, são
os pontos de interseção entre r e a superfície, uma vez que estes pontos
pertencem à r e à superfície, pois u e v são geratrizes.
V
r
u
sA
t
v
J
B
I
α
r2
u
s
A
v2
J
I
Bt2
r1
u
s
A
v1
I
B
t1
J

Superfícies Retilíneas Desenvolvíveis
NCA – Núcleo de Computação Gráfica Aplicada
13
EXERCÍCIOS
1 – Representar a épura da superfície retilínea cuja diretriz é uma circunfe-
rência de raio igual a 30 mm, contida num plano frontal de afastamento 50
mm e centro O(80,_,40). O vértice é próprio V(00,10,10). Analisar a visibilida-
de do ponto P(30,_,20) pertencente à superfície.
2 – Representar a épura da superfície retilínea cuja diretriz é uma circunfe-
rência de centro O(30,_,40) contida num plano frontal distando 15 mm de π2;
uma posição de geratriz é o segmento horizontal AB que faz 60° com π2 no
sentido anti-horário. A(30,_,10); B(80,_,_); o ponto A pertence à diretriz; o
vértice é impróprio. Analisar a visibilidade do ponto P(50,_60) contido na su-
perfície.
π1π2
Ο2
Ο1
V2
V1
P2π1π2
Ο2
Ο1
V2
V1
P2
P1'
P1’
π1π2
Ο2
Α2Β2
Ο1 ≡ Α1
Β1
P2
π1π2
Ο2
Α2Β2
Ο1 = Α1
Β1
P2
P1

Superfícies Retilíneas Desenvolvíveis
NCA – Núcleo de Computação Gráfica Aplicada
14
3 – Desenhar em épura a superfície cilíndrica cuja diretriz é uma circunferên-
cia de centro em A(40,10,100), R=30 mm e contida em um plano frontal. Ge-
ratrizes são retas de perfil, comprimento 80 mm e inclinadas de 45° horários à
π1. Determinar projeção de B(20,40,_) e estudar a visibilidade.
4 – Representar a superfície prismática cuja diretriz é um quadrado inscrito
em circunferência R=40 mm, centro A(60,50,50) em um plano horizontal. Uma
das diagonais do quadrado é uma reta de topo. Geratrizes são retas frontais
com 60° anti-horários e comprimento 60 mm. A superfície se projeta acima da
diretriz dada. Achar projeções de B(40,40,_) e estudar a visibilidade.
π1π2
B’1≡B”1
A1
A2 A0
π1π2
B’1≡B”1
B’2
B”2
B’0
B”0
π1π2
A2
A1B1
π1π2
Α1
Α2
Β1
Β2
60
60°

Planificação de Superfícies
NCA – Núcleo de Computação Gráfica Aplicada
15
PLANIFICAÇÃO DE SUPERFÍCIES
Fábio Gonçalves Teixeira
Deli O. Barreto
Planificação é o processo através do qual desdobra-se uma superfície
sobre um plano, evitando-se, ao máximo, deformações e rupturas. A
planificação também recebe o nome de desenvolvimento ou transformação
da superfície. Algumas superfícies são passíveis de serem planificadas com
exatidão, ou seja, ao longo do processo não sofrem nenhuma deformação,
são as superfícies que possuem geratrizes ou arestas paralelas (vértice
impróprio) ou concorrentes (vértice próprio). As superfície reversas como
conóide, cilindróides, etc. só podem ser planificadas por aproximação, uma
vez que suas geratrizes são reversas entre si (não coplanares). O mesmo
acontece com as superfícies de revolução.
A planificação objetiva encontrar modelo ou “molde” da superfície para que a
mesma possa ser construída. Obtido o modelo, corta-se o material que pode
ser qualquer superfície plana, e depois monta-se a superfície.
Uma superfície planificada é apresentada em uma única projeção e em
verdadeira grandeza. As superfícies de diretrizes poligonais – piramidais e
prismáticas – são apresentadas com suas faces dispostas lado a lado.
Quando a superfície é fechada, a planificação depende da ruptura da
superfície em uma das arestas. Esta aresta, também chamada de aresta de
fechamento (pois representa a posição onde deve ser feita a costura na
montagem da superfície), se apresenta duplicada na superfície planificada.
a1 b1
c1 d1
a2≡d2
b2≡c2
d a
b
c
c
Aresta de
fechamento

Planificação de Superfícies
NCA – Núcleo de Computação Gráfica Aplicada
16
Superfícies de diretrizes curvas – cônicas e cilíndricas – são planificadas
através de aproximações. Estas superfícies são tratadas como superfícies de
diretriz poligonal com um grande número de lados, resultando em um grande
número de faces. Quanto maior o número faces, mais precisa a aproximação.
Qualquer que seja o tipo de superfície desenvolvível, o problema de
planificação fica reduzido à determinação das verdadeiras grandezas das
faces que compõem a superfície. As várias técnicas utilizadas para
planificação de superfícies dizem respeito, principalmente, à obtenção das
VGs das faces da superfície e do transporte das respectivas geometrias para
a posição de planificação. Portanto, antes de se iniciar a planificação, é
necessário conhecer as técnicas de construção e transporte de polígonos.

Planificação de Superfícies
NCA – Núcleo de Computação Gráfica Aplicada
17
TÉCNICAS DE CONSTRUÇÃO E TRANSPORTE DE POLÍGONOS
As técnicas de construção e transporte de polígonos resolvem qualquer
problema de Verdadeira Grandeza de face poligonal. A idéia fundamental é a
obtenção das VGs dos polígonos que constituem as faces planas de uma
superfície com o mínimo de operações descritivas, valendo-se de conceitos
fundamentais de geometria plana.
TRIÂNGULOS
Para se construir um triângulo, basta
conhecer as medidas de seus lados.
Isto pode ser escrito da seguinte forma:
Se é possível construir um triângulo a
partir de três segmentos de reta, a
solução é única em termos de forma,
não levando-se em conta a posição do
triângulo. A construção de um triângulo a partir de três segmentos pode ser
resumida nos seguintes passos:
1. Sejam três segmentos de reta a, b e c.
2. Transportar um dos segmentos, por exemplo: c, para a posição onde o
triângulo deve ser construído. Isto determina dois dos três vértices do
triângulo.
3. Traçar uma circunferência de raio a com o centro em uma das
extremidades do segmento c.
4. Traçar uma circunferência de raio b com o centro na outra extremidade do
segmento c.
5. Se houver interseções entre as duas circunferências, a solução existe. O
terceiro vértice é definido pela interseção das duas circunferências.
Aparentemente existem duas soluções, pois há duas interseções. Porém,
levando-se em conta somente a forma do triângulo, existe apenas uma
solução, uma vez que as duas soluções obtidas diferem apenas na
posição, já que são simétricas em relação ao segmento base c.
a b c
a
b
c

Planificação de Superfícies
NCA – Núcleo de Computação Gráfica Aplicada
18
TRANSPORTE DE POLÍGONOS COM N LADOS
Polígonos com quatro lados ou mais não admitem
uma única configuração topológica conhecendo-se
apenas os comprimentos de seus lados. Neste caso
existem infinitas configurações possíveis. No
entanto, qualquer polígono com mais de três lados
pode ser decomposto em triângulos, reduzindo o
problema de construção de polígonos à construção
dos triângulos que os compõem. Conforme o
número de lados de um polígono, podem existir
várias configurações possíveis para os triângulos
que o subdividem. Porém, qualquer configuração
deve permitir a construção do polígono a partir dos
triângulos resultantes.
Quando um polígono é decomposto em triângulos, cada um dos lados do
polígono coincide com um lado de algum triângulo, bem como algumas de
suas diagonais. Em sendo assim, para se construir um polígono a partir de
triângulos é necessário conhecer todos os seus lados e, conforme a
configuração escolhida, as diagonais que são também lados dos triângulos.
Um quadrilátero pode ser construído conhecendo-se seus lados e uma
diagonal.
Para entender melhor este processo de construção
será apresentado um exemplo de transporte de um
polígono:
1. Seja um polígono ABCDEF conhecido.
2. Subdividir o polígono em triângulos. Aqui foi
escolhida a seguinte configuração: ABC, ACF,
FCD e FDE (existem outras possíveis).
3. Transportar o segmento A, para a posição desejada.
4. Traçar uma circunferência com centro em A e raio AC e outra com centro
em B e raio BC. No encontro destas circunferências, marcar o ponto C.
r
A
B
CD
EF
A
BC
D
E
F
A
BC
D
E
F

Planificação de Superfícies
NCA – Núcleo de Computação Gráfica Aplicada
19
5. Repetir os passos 3 e 4 para os triângulos restantes, levando-se em conta
que o próximo triângulo deve ser adjacente ao triângulo anterior.

Planificação de Superfícies
NCA – Núcleo de Computação Gráfica Aplicada
20
PLANIFICAÇÃO DE SUPERFÍCIES DE VÉRTICE PRÓPRIO
As superfícies de vértice próprio – cônicas e piramidais – possuem faces
triangulares (as superfícies cônicas são aproximadas por superfícies
piramidais), quando o vértice faz parte da porção em estudo, e quadriláteros
quando a porção em estudo não contém o vértice. Mesmo quando o vértice
não pertence à porção em estudo, é possível tratar a superfície considerando-
se o vértice (faces triangulares), se o mesmo é acessível.
VÉRTICE ACESSÍVEL
Quando o vértice da superfície está próximo, é possível determinar as VGs de
todas as arestas utilizando-se o método da rotação, através de um único eixo
que contenha o vértice da superfície. Além das arestas, é necessário
determinar as verdadeiras grandezas dos lados da diretriz. Para isto, pode ser
utilizado qualquer método descritivo, porém, o método da rotação
(rebatimento) em geral é menos trabalhoso e mais preciso.
O procedimento para a planificação de uma superfície com vértice próprio e
acessível pode ser sistematizado da seguinte forma:
1. Seja uma superfície retilínea desenvolvível de diretriz ABCD e vértice V.
2. Verificar, para cada face, se existem lados que não se apresentam em VG,
discriminando se pertencem à diretriz ou se são geratrizes.
3. Para as geratrizes, correspondentes às arestas da superfície, que não
estão em VG, utilizar o processo de rotação com um eixo que contenha o
vértice da superfície. Com isso, as verdadeiras grandezas das arestas são
determinadas rapidamente.
A
B
C
DA
V
A1
A’1
B’1B1
C’1C1
D1 D’1
A2B2 C2 D2
A’2 B’2C’2D’2
e1
V1
e2≡V2

Planificação de Superfícies
NCA – Núcleo de Computação Gráfica Aplicada
21
4. As VGs dos lados pertencentes à geratriz podem ser determinadas pelo
rebatimento do plano da diretriz, caso esta seja plana. Em caso contrário,
é necessário determinar a VG de cada segmento da diretriz
individualmente.
5. Escolher a aresta de fechamento. A montagem da superfície planificada
começa e acaba pela aresta de fechamento.
6. Montar a superfície planificada através da construção sucessiva das faces
(triângulos) adjacentes.
Superfícies truncadas (tronco de cone e tronco de pirâmide), porém com
vértices acessíveis, são tratadas como superfícies não truncadas para efeitos
de planificação. Neste caso o processo é realizado em duas etapas. A
primeira etapa corresponde à planificação da superfície como se esta não
fosse truncada. Na segunda etapa a porção truncada na superfície original é
subtraída da superfície planificada. Este processo é muito simples, bastando
descontar de cada aresta a porção cortada de cada aresta individualmente.
As superfícies cônicas são aproximadas por superfícies piramidais, para
efeitos de planificação. Porém, esta aproximação deve ser feita respeitando
alguns critérios mínimos:
• A diretriz poligonal deve ter seus lados iguais. Isto melhora a precisão e
facilita a montagem da planificação.
• Quanto maior o número de faces da superfície auxiliar, mais precisa é a
aproximação.
• Se a superfície possui algum plano de simetria, isto deve ser aproveitado
para reduzir o trabalho de determinação das VGs das arestas.
A1 A’1
B’1B1
C’1C1
D1 D’1
A2B2 C2 D2
A’2 B’2C’2D’2
e1
V1
e2≡V2
E1
F1
G1
H1
E2F2
G2H2
E’1
F’1
G’1
H’1
A
B
C
DA
V
E
F GH
E

Planificação de Superfícies
NCA – Núcleo de Computação Gráfica Aplicada
22
12 divisões 16 divisões
6s5s4s
3s
2s
5 7 64321
7
6
5
432
1
7
1
1
6
5
43
2
67432 5
1'
2'3'
4'
5'
6'
7'
12
3
4
5
6
7

Planificação de Superfícies
NCA – Núcleo de Computação Gráfica Aplicada
23
VÉRTICE INACESSÍVEL
Quando uma superfície possui vértice próprio, porém inacessível (ex: tronco
de cone e tronco de pirâmide), a maneira mais simples de planificar é através
da triangularização das suas faces. Neste caso é necessário encontrar as
verdadeiras grandezas das diagonais, além dos lados das faces. Este
procedimento também pode ser utilizado para a planificação de superfícies
com vértice impróprio.
A seguir o processo de planificação de superfícies de vértice inacessível será
apresentado através da planificação de um tronco de pirâmide.
1. Seja uma superfície cuja base inferior (diretriz) é o polígono ABCD e sua
base superior é o polígono EFGH.
2. Identificar as faces e os seus lados, para determinar quais lados estão em
VG e quais a verdadeira grandeza deve ser determinada. (No exemplo os
lados que são também geratrizes não se apresentam em VG – AE, BF, CG
B1
A1
C1
D1
F1
E1
G1
H1
B2 A2 C2 D2
F2 E2 G2 H2
B1
A1
C1
D1
F1
E1
G1
H1
B2 A2 C2 D2
F2 E2 G2 H2
B1
A1
C1
D1
F1
E1
G1
H1
B2 A2 C2 D2
F2 E2 G2 H2
H’1 H”
1 H’’’1
G’1
F’1
E”1
E’1
G”1

Planificação de Superfícies
NCA – Núcleo de Computação Gráfica Aplicada
24
e DH – mas os que fazem parte das bases – AB, BC, CD, DA, EF, FG, GH
e HE – estão em planos horizontais, portanto em VG).
3. Escolher uma diagonal de cada face para decompor cada uma em dois
triângulos. Se as diagonais escolhidas não estão em VG, é necessário
utilizar algum processo descritivo para a sua determinação. (No exemplo
nenhuma das diagonais das quatro faces se apresentam em VG, sendo
que as diagonais escolhidas foram: AH, BE, BG e CH).
4. Determinar a VG de todos os segmentos identificados. (No exemplo foi
utilizado o processo de rotação e as VGs correspondem às projeções:
A1E’1, B1F’1, C1G’1, D1H”’1, A1,H’1, B1E”1, B1G’1 e C1H”1).
5. Montar a superfície planificada
através da construção sucessiva
dos triângulos adjacentes que
compõem as faces. (No exemplo
iniciou-se a construção pela face
ABFE. Os triângulos foram
montados na seguinte ordem:
ABE, BEF, BFG, BGC, CGH,
CHD, DHA e AHE).
B
A CD
FE
GH
A
E
1 – ABE 5 – CGH2 – BEF 6 – CHD3 – BFG 7 – DHA4 – BGC 8 – AHE

Planificação de Superfícies
NCA – Núcleo de Computação Gráfica Aplicada
25
SUPERFÍCIES DE VÉRTICE IMPRÓPRIO
As superfícies de vértice impróprio – cilíndricas e prismáticas – possuem
faces quadriláteras (as superfícies cilíndricas são aproximadas por superfícies
prismáticas). Existem dois enfoques para planificar superfícies de vértice
impróprio: triangularização das faces (procedimento idêntico ao utilizado nas
superfícies de vértice inacessível) e processo simplificado (baseado na
distância entre as geratrizes)
TRIANGULARIZAÇÃO DAS FACES
O processo de planificação de uma superfície de vértice impróprio através da
triangularização de suas faces é idêntico àquele utilizado para a planificação
de superfícies de vértice próprio inacessível:
1. Seja uma superfície de retilínea desenvolvível de vértice impróprio.
2. Identificar as faces e os seus lados, para determinar quais lados estão em
VG e quais deve ter a verdadeira grandeza determinada (as superfícies
cilíndricas são aproximadas por superfícies prismáticas).
3. Escolher uma diagonal de cada face para decompor cada uma em dois
triângulos. Se as diagonais escolhidas não estão em VG, é necessário
utilizar algum processo descritivo para a sua determinação.
4. Determinar a VG de todos os segmentos identificados.
5. Escolher a aresta de fechamento. A montagem da superfície planificada
começa e acaba pela aresta de fechamento.
6. Montar a superfície planificada através da construção sucessiva dos
triângulos adjacentes que compõem as faces.
B1
A1
C1
D1
F1
E1
G1
H1
B2A2
C2D2
F2
E2
G2
H2
B1
A1
C1
D1
F1
E1
G1
H1
B2A2
C2D2
F2
E2
G2
H2

Planificação de Superfícies
NCA – Núcleo de Computação Gráfica Aplicada
26
SIMPLIFICAÇÃO PARA SUPERFÍCIES COM VÉRTICE IMPRÓPRIO
As superfícies de vértice impróprio possuem geratrizes paralelas, isto
simplifica muito o processo de planificação, pois conhecendo-se a distância
entre as arestas, ou geratrizes, fica mais fácil a montagem das faces na
planificação sem a necessidade do conhecimento das diagonais. As
distâncias entre as arestas são determinadas obtendo-se a VG de uma seção
transversal (perpendicular as arestas ou geratrizes) da superfície. Quando se
conhece a seção transversal da superfície, o problema de planificação fica
praticamente resolvido, porém a etapa mais complexa é justamente o traçado
e a determinação da verdadeira grandeza da seção transversal.
O traçado de uma seção transversal é feito através da interseção de um plano
perpendicular às arestas da superfície com a mesma. Para traçar um plano
B1
A1
C1
D1
F1
E1
G1
H1
B2A2
C2D2
F2
E2
G2
H2
BA
CD
FE
G H
A
E

Planificação de Superfícies
NCA – Núcleo de Computação Gráfica Aplicada
27
perpendicular a uma reta, de uma maneira prática e segura, é necessário que
a reta esteja em VG, o plano acumulado e as projeções (VG da reta e
acumulação do plano) perpendiculares entre si. Isto implica em fazer uma
operação descritiva com toda a superfície para determinar a VG das
geratrizes da superfície, caso as mesmas não estejam inicialmente em
verdadeira grandeza. A verdadeira grandeza da seção transversal é
determinada através de algum método descritivo (mudança de plano ou
rebatimento).
A montagem da planificação, neste caso, não depende das VGs das
diagonais das faces, pois não é utilizado o processo de triangularização, o
que reduz e facilita o processo de planificação. A seguir são descritos os
passos para a planificação utilizando-se o método simplificado:
1. Seja uma superfície retilínea desenvolvível de vértice impróprio.
2. Verificar se em alguma projeção a superfície apresenta as geratrizes em
VG. Em caso contrário, realizar processo descritivo sobre a superfície para
obter projeção onde as arestas (geratrizes) se encontrem em verdadeira
grandeza.
3. Na projeção onde há VG das geratrizes traçar plano acumulado
perpendicular às mesmas. Por pertinência, encontrar as demais projeções
da seção do plano na superfície.
4. Determinar a verdadeira grandeza da seção transversal.
B1
A1
C1
D1
F1
E1
G1
H1
B2A2
C2D2
F2
E2
G2
H2
1
2
3
4
1
2
34
12
34
BA
CD
FE
G H
1 2 3 4 1
A
E

Planificação de Superfícies
NCA – Núcleo de Computação Gráfica Aplicada
28
5. Escolher a aresta de fechamento.
6. No local da planificação, traçar uma linha reta com o comprimento igual ao
perímetro da seção transversal, correspondendo à planificação da seção
transversal, tomando o cuidado de marcar todos os vértices. O primeiro, e
também o último vértice, deve ser aquele que pertence à aresta de
fechamento.
7. Transportar cada uma das arestas, posicionando-as sobre o vértice
correspondente, perpendicular à linha da seção transversal mantendo a
mesma posição relativa entre as arestas e a seção transversal.
Utilizando-se esta técnica, não há necessidade de determinar as VGs dos
lados das faces correspondentes às bases, justamente porque a posição das
arestas é determinada pela distância entre as mesmas e a sua posição em
relação à seção transversal.
Este método simplificado se presta muito bem para planificação de superfícies
cilíndricas, pois estas são aproximadas por superfícies prismáticas com um
grande número de faces, o que torna o processo de triangularização muito
trabalhoso. No método simplificado é necessário achar VG somente das
geratrizes e da seção transversal. E, para isto, são necessárias no máximo
duas operações descritivas pois as geratrizes são paralelas e a seção
transversal, por ser normal às geratrizes, está sempre acumulada quando
estas estão em VG.

Planificação de Superfícies
NCA – Núcleo de Computação Gráfica Aplicada
29
PLANIFICAÇÃO DAS SUPERFÍCIES DE CONCORDÂNCIA
CONSTRUÇÃO Superfícies de concordância ou de transição, como
o próprio nome diz, são superfícies que realizam a
transição entre duas superfícies de seções
diferentes. Este tipo de situação é comum em
sistemas de ar-condicionado e em fábricas onde há
dutos de circulação de ar e gases em geral
provenientes de algum processo industrial.
Quando uma das superfícies, a serem conectadas,
tem seção curva e a outra tem seção poligonal a superfície de transição pode
ser composta de
conóides ou uma
superfície composta de
faces triangulares e
porções cônicas.
Superfícies compostas
de conóides não podem
ser planificadas de
forma exata, pois
conóides são superfícies reversas. Isto torna mais complexo e caro o
processo de fabricação deste tipo de superfície.

Planificação de Superfícies
NCA – Núcleo de Computação Gráfica Aplicada
30
Superfícies compostas de faces triangulares e porções cônicas são
planificáveis de forma exata. E a fabricação pode ser feita a partir da
dobradura de uma única chapa. A construção da superfície depende da
escolha dos vértices das faces triangulares sobre a curva. Para que a
superfície tenha um aspecto equilibrado é aconselhável (não é obrigatório)
seguir os seguintes passos para a determinação dos vértices:
• Sejam duas seções: uma circunferência e outra poligonal fechada.
Construir uma superfície de transição entre as seções.
• Utilizando uma projeção onde as seções se apresentam em VG, traçar
retas (tantas quanto o número de lados da poligonal) que contenham o
centro da circunferência e perpendiculares a cada um dos lados da seção
poligonal.
• Os pontos onde as retas encontram a
circunferência correspondem aos vértices
das faces triangulares.
• Os vértices da seção poligonal
correspondem aos vértices das porções
cônicas.
A superfície fica composta de porções
cônicas e faces triangulares alternadas.
Cada porção cônica tem como diretriz o arco limitado por dois vértices
consecutivos de duas faces triangulares situados sobre a seção circular.

Planificação de Superfícies
NCA – Núcleo de Computação Gráfica Aplicada
31
PLANIFICAÇÃO
Como as superfícies de transição são compostas por triângulos e superfícies
cônicas de vértice acessível, sua planificação obedecem às mesmas regras
da planificação das superfícies retilíneas de vértice próprio. As porções
cônicas devem ser aproximadas por superfícies piramidais, com isto a
superfície fica composta por uma série de faces triangulares.
Devido ao grande número de faces, é necessário uma grande quantidade de
operações descritivas (rotações) para determinar as VGs dos lados dos
triângulos.
A construção da planificação é realizada através da montagem em VG de
todos triângulos que compõem a superfície, mantendo adjacentes os
triângulos com lados (geratrizes) comuns. Em geral utiliza-se como aresta ou
geratriz de fechamento um dos lados das faces triangulares.
Superícies Retilíneas Não Desenvolvíveis
NCA – Núcleo de Computação gráfica Aplicada
31
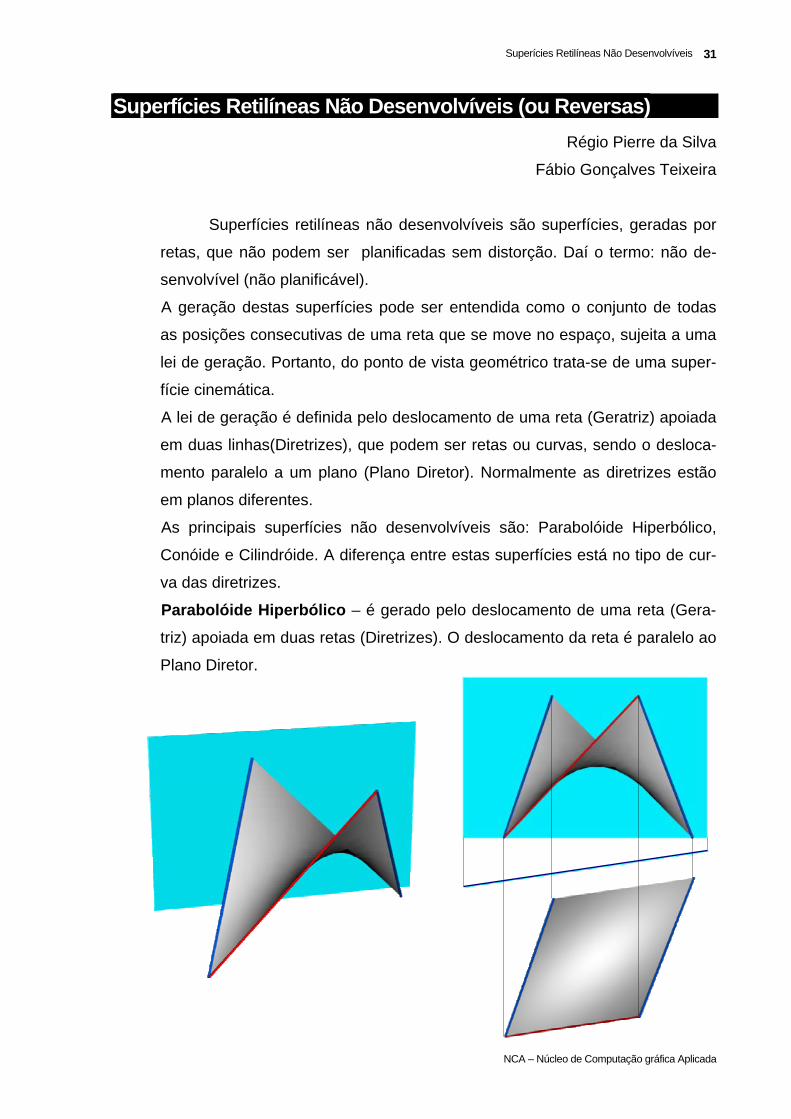
Superfícies Retilíneas Não Desenvolvíveis (ou Reversas) Régio Pierre da Silva
Fábio Gonçalves Teixeira
Superfícies retilíneas não desenvolvíveis são superfícies, geradas por
retas, que não podem ser planificadas sem distorção. Daí o termo: não de-
senvolvível (não planificável).
A geração destas superfícies pode ser entendida como o conjunto de todas
as posições consecutivas de uma reta que se move no espaço, sujeita a uma
lei de geração. Portanto, do ponto de vista geométrico trata-se de uma super-
fície cinemática.
A lei de geração é definida pelo deslocamento de uma reta (Geratriz) apoiada
em duas linhas(Diretrizes), que podem ser retas ou curvas, sendo o desloca-
mento paralelo a um plano (Plano Diretor). Normalmente as diretrizes estão
em planos diferentes.
As principais superfícies não desenvolvíveis são: Parabolóide Hiperbólico,
Conóide e Cilindróide. A diferença entre estas superfícies está no tipo de cur-
va das diretrizes.
Parabolóide Hiperbólico – é gerado pelo deslocamento de uma reta (Gera-
triz) apoiada em duas retas (Diretrizes). O deslocamento da reta é paralelo ao
Plano Diretor.

Superícies Retilíneas Não Desenvolvíveis
NCA – Núcleo de Computação gráfica Aplicada
32
Conóide – é gerado pelo deslocamento de uma reta (Geratriz) apoiada em
uma reta e uma curva (Diretrizes). O deslocamento da reta é paralelo ao
Plano Diretor.
Cilindróide – é gerado pelo deslocamento de uma reta (Geratriz) apoiada em
duas curvas (Diretrizes). O deslocamento da reta é paralelo ao Plano Diretor.

Superícies Retilíneas Não Desenvolvíveis
NCA – Núcleo de Computação gráfica Aplicada
33
REPRESENTAÇÃO EM ÉPURA A representação em épura destas superfícies é semelhante a das superfícies
retilíneas desenvolvíveis visto anteriormente. São representadas as linhas vi-
síveis e invisíveis. A representação é feita através de todas as geratrizes utili-
zadas para construir a superfície. O número de geratrizes utilizadas não deve
ser muito pequeno (distribuídas uniformemente ao longo das diretrizes), para
que a visibilidade nas vistas (projeções) não seja deficiente. Outro cuidado a
ser tomado diz respeito a disposição das geratrizes quando da representação
da superfície nas projeções. As geratrizes serão paralelas ao plano diretor e
devem ser traçadas sempre dos pontos de maior afastamento (ou cota) para
os pontos de menor afastamento (ou cota), dependendo do tipo do plano dire-
tor, para que a visibilidade possa ser facilmente determinada.
π1π2
α1
π1π2
α1

Superícies Retilíneas Não Desenvolvíveis
NCA – Núcleo de Computação gráfica Aplicada
34
PERTINÊNCIA A pertinência de um ponto à superfície, conforme explicado no capítulo ante-
rior, está vinculada ao tipo de geração da superfície. Em superfícies retilíneas,
um ponto pertence à superfície se pertencer a uma geratriz da mesma. A so-
lução de problemas de pertinência de ponto à superfície em épura pode en-
volver duas situações distintas quando uma das projeções de um ponto é co-
nhecida.
CASO I – Se a projeção
conhecida do ponto está
localizada na mesma vista
onde o plano diretor da
superfície é acumulado, o
problema é simples, pois
fica reduzido à pertinência
entre ponto e reta. Como
o plano diretor é acumula-
do, a direção da geratriz é
obvia. Os procedimentos
para determinar a proje-
ção do ponto são descri-
tos a seguir:
1. Seja um superfície
retilínea reversa de
diretrizes a e b e
plano diretor α, acu-
mulado em αj, e um
ponto P que perten-
ce à superfície, do qual se conhece apenas a projeção Pj (na vista onde
α é acumulado). Deseja-se encontrar Pi.
2. Traçar uma geratriz gj, paralela a αj, e que contém a projeção Pj.
3. Onde gj encontra aj e bj, determinam-se os pontos Aj e Bj. A partir de Aj e
Bj, traçar linhas de chamada até encontrar ai e bi, determinando Ai e Bi.
4. O segmento AiBi corresponde a gi. A partir de Pj, traça-se uma linha de
chamada até encontrar gi, determinando Pi, que é a projeção procurada.
P1
P2
g1
g2

Superícies Retilíneas Não Desenvolvíveis
NCA – Núcleo de Computação gráfica Aplicada
35
CASO II – Se a projeção conhecida do ponto está localizada em uma vista
onde o plano diretor da superfície não está acumulado, o problema deixa de
ser um simples caso pertinência entre ponto e reta. Como o plano diretor não
está acumulado, fica impossível determinar com precisão a direção para a
projeção da geratriz que contém a projeção do ponto em um único passo. A
solução deste problema resulta em um processo iterativo para a determinação
da posição correta de geratriz que contém o ponto. O processo iterativo pode
ser resumido nos seguintes passos:
1. Seja um superfície retilínea reversa de diretrizes a e b e plano diretor α,
acumulado em αj, e um ponto P que pertence à superfície, do qual se
conhece apenas a projeção Pi (na vista onde α não é acumulado). Dese-
ja-se encontrar g, a geratriz que contém P, e Pj.
2. Fazer n = 1. Traçar uma reta r(n)i que contém Pi , tendo o cuidado de
seguir uma direção média entre as duas geratrizes adjacentes.
3. A(n)i e B(n)i são os pontos de interseção de r(n)i com ai e bi. A partir de
B(n)i, traçar uma linha de chamada até bj, encontrando a projeção B(n)j.
4. A partir do ponto B(n)j, traçar uma reta paralela ao plano diretor até en-
contrar aj no ponto A’(n)j. Esta reta é a projeção r(1)j.
5. A partir do ponto A’(n)j, traçar uma linha de chamada até ai, encontrando
A’(n)i.
6. Se A’(n)i ≡ A(n)i , significa que r(n) ≡ g, a geratriz procurada. Ir para 10.
7. Se A’(n)i ≠ A(n)i , significa que r(n) não é a geratriz procurada, pois não
pertence à superfície.
8. Fazer n=n+1. Traçar r(n)i que contém A’(n)i e Pi.
9. Voltar para 3.
10. A partir de Pi, traçar linha de chamada até gj, encontrando Pj.
O número de iterações depende da aproximação inicial, da precisão requerida e
da precisão dos instrumentos utilizados. Utilizando um programa CAD, é possível
obter um alto grau de precisão, devido aos tipos de ferramentas embutidas nes-
tes aplicativos. Já com o uso de instrumentos convencionais, não se pode espe-

Superícies Retilíneas Não Desenvolvíveis
NCA – Núcleo de Computação gráfica Aplicada
36
rar grande precisão, pois até a espessura do grafite utilizado interfere na precisão
do método. No entanto, a precisão que pode ser atingida, em geral, é satisfatória.
Uma alternativa ao processo iterativo, é a utilização de um plano auxiliar para de-
terminar a pertinência do ponto à superfície.
A visibilidade do ponto está diretamente relacionada com a visibilidade da super-
fície. Se o ponto está contido em uma porção visível da superfície, então o ponto
também é visível. Isto pode facilmente ser verificado através da análise da visibi-
lidade da geratriz que contém o ponto. Se a geratriz é visível na porção onde se
localiza o ponto, também o ponto será visível.
P1
P2
r(1)1
r(2)1
g1
r(1)2
r(2)2
g2

Superícies Retilíneas Não Desenvolvíveis
NCA – Núcleo de Computação gráfica Aplicada
37
INTERSEÇÕES Conforme apresentado no capítulo anterior, a interseção é a porção comum a
dois ou mais objetos. No caso da interseção entre a superfície retilínea rever-
sa e um plano é uma linha plana , que pode ser aberta ou fechada conforme o
tipo da superfície. A interseção entre a superfície e a reta poderá ser um ou
mais pontos.
SUPERFÍCIE E PLANO A determinação da interseção entre uma superfície reversa e um plano, em
épura, é imediata quando o plano apresenta uma de suas projeções acumu-
lada. Basta determinar onde o plano intercepta as geratrizes e, após ligar os
pontos para determinar a linha interseção. Caso o plano não apresente uma
das projeções acumulada, deve-se fazer uma operação gráfica (Mudança de
Plano de Projeção, por exemplo) para obter a projeção acumulada.
α1 α1

Superícies Retilíneas Não Desenvolvíveis
NCA – Núcleo de Computação gráfica Aplicada
38
SUPERFÍCIE E RETA A interseção entre uma superfície retilínea reversa e uma reta pode ser um
ou mais pontos, dependendo da forma da superfície e, também, da posição
relativa entre a reta e a superfície. A determinação dos pontos de interseção é
feita pelo uso de planos auxiliares. A metodologia é a mesma utilizada na de-
terminação da interseção de reta com plano. O procedimento para a determi-
nar a interseção entre reta superfície pode ser resumido da seguinte maneira:
1. Seja uma superfície reversa e uma reta r. Deseja-se saber os pontos de
interseção entre a r e a superfície.
2. Traçar um plano auxiliar α
que contenha a reta. Nor-
malmente utiliza-se um pla-
no de projeção acumulada
coincidente com uma das
projeções da reta.
3. A linha i é a interseção en-
tre a superfície e o plano
auxiliar α, e pode ser uma
linha aberta ou fechada.
4. Como r e i pertencem a α,
qualquer coincidência ou
cruzamento de projeções
entre r e i caracterizam in-
terseções entre os mesmos.
5. Se existe um ponto I que é interseção entre r e i, este ponto I é também
é a interseção entre r e a superfície, pois I pertence a i que pertence à
superfície, e I pertence a r, portanto I pertence a r e à superfície.
r
α
iI
I2
I1
i1
r2 ≡ α2 ≡ i2
r1

Superícies Retilíneas Não Desenvolvíveis
NCA – Núcleo de Computação gráfica Aplicada
39
6. Após a determinação dos pontos de interseção deve-se realizar o estudo
de visibilidade da reta, através da análise das projeções dos objetos e
das coordenadas de seus pontos.

Superfícies de Revolução
NCA – Núcleo de Computação Gráfica Aplicada
40
Superfícies de Revolução
Fábio Gonçalves Teixeira
INTRODUÇÃO
Superfícies de revolução são superfícies geradas
pelo movimento de rotação de uma linha qualquer
em torno de um eixo. Pertencem a este tipo de su-
perfícies os cones e cilindros retos, a esfera, o toro,
ogivas, e muitas outras. Este tipo de superfície tem
grande aplicação prática e pode ser encontrado em
uma variedade muito grande de objetos, tais como:
utensílios domésticos, embalagens, componentes
mecânicos, elementos arquitetônicos, fuselagens de
foguetes e mísseis.
Neste tipo de superfície o processo de fabricação
está intimamente relacionado ao processo teórico de
geração; um bom exemplo disto é a fabricação de
peças torneadas. Neste processo de fabricação, a
peça fica girando a uma determinada velocidade
enquanto uma ferramenta desloca-se esculpindo o
contorno da superfície. Um torno pode ser um equi-
pamento extremamente complexo, com ferramenta
de diamante e controles computadorizados para a fabricação de
peças onde um alto grau de precisão é necessário. No entanto, um
torno também pode ser um equipamento muito simples, de acio-
namento a pedal e onde as mãos do operador são utilizadas como
ferramenta. Equipamentos deste tipo são utilizados para a fabrica-
ção de peças de argila por
artesãos em pequenas ofi-
cinas.
Torno Mecânico

Superfícies de Revolução
NCA – Núcleo de Computação Gráfica Aplicada
41
GERAÇÃO
A geração das superfícies de revolução é fundamentada nos seguintes ele-
mentos fundamentais:
• Geratriz – Linha curva, reta ou poligonal, aberta ou fechada, plana ou es-
pacial.
• Eixo – Reta.
Lei de Geração – A linha geratriz desloca-se realizando um movimento de
revolução em torno do eixo. A superfície é o lugar geométrico das sucessivas
posições da reta geratriz.
De um modo geral o eixo e a geratriz estão situadas no mesmo plano. Porém,
isto não é obrigatório.
Na geração deste tipo de superfície cada ponto da
geratriz descreve uma circunferência, que está num
plano perpendicular ao eixo da superfície (plano de
rotação do ponto).
A revolução da geratriz em torno do eixo não é, obrigatoriamente, completa
(360o). É possível gerar superfícies com ângulos de revolução menores que
90o, mas ainda assim, estas superfícies são chamadas de superfícies de revo-
lução.
Eixo
Geratriz
360o 270o
Plano de rotação

Superfícies de Revolução
NCA – Núcleo de Computação Gráfica Aplicada
42
CARACTERÍSTICAS GERAIS
Numa superfície de revolução algumas linhas características merecem desta-
que, uma vez que podem auxiliar na resolução de problemas envolvendo tais
superfícies. Estas linhas são determinadas pela interseção da superfície com
planos que contém o eixo de rotação, ou são perpendiculares a este.
Assim, a linha resultante da interseção da superfície com um plano que con-
tém o eixo de rotação chama-se Meridiano. Quando o plano for paralelo a um
dos planos principais de projeção (π1 ou π2), a linha é denominada Meridiano
Principal.
No caso do plano de interseção ser perpendicular ao eixo de rotação, a linha
de interseção resultante (geralmente uma circunferência) recebe o nome ge-
nérico de Paralelo. O paralelo que contém um ponto onde a tangente à gera-
triz é paralela ao eixo de rotação e pertence a uma região onde a a superfície
é convexa, é denominado Equador.
Quando o paralelo contém um ponto onde a tangente à geratriz é paralela ao
eixo de rotação e pertence a uma região onde a superfície é côncava, é de-
nominado Gola. Pode existir mais de um equador em uma superfície, mas
também pode não existir nem um. O mesmo pode ser dito da gola. O número
de equadores e golas depende, exclusivamente, da forma da geratriz.
Se a linha geratriz interceptar o eixo de rotação o ponto de interseção deno-
mina-se Pólo e, portanto o paralelo tem diâmetro igual a zero.
Na maioria das superfícies de revolução estas linhas, paralelos (equador e
gola) e meridianos principais, são os contornos aparentes em projeção mon-
geana.
Meridiano Paralelos

Superfícies de Revolução
NCA – Núcleo de Computação Gráfica Aplicada
43
PRINCIPAIS SUPERFÍCIES DE REVOLUÇÃO
As principais superfícies de revolução são: cone de revolução, cilindro de re-
volução, hiperbolóide de revolução, superfície esférica, e elipsóide de revolu-
ção.
Cone
O cone de revolução é o resultado da rotação de uma reta
em torno do eixo de rotação, a posição da reta é concor-
rente ao eixo, estando, portanto, no mesmo plano do eixo
de rotação. A superfície cônica de revolução é idêntica à
um superfície cônica gerada como superfície retilínea de-
senvolvível com diretriz circular e vértice contido sobre uma
reta que contém o centro do círculo e normal ao plano deste.
Cilindro
O cilindro de revolução é obtido pela rotação de uma reta
em torno do eixo de rotação, sendo que esta reta é paralela
ao eixo, novamente, reta e eixo de rotação estão no mes-
mo plano. Superfície idêntica pode ser gerada como super-
fície retilínea desenvolvível com diretriz circular e geratriz
normal ao plano da diretriz.
Hiperbolóide
O hiperbolóide de revolução pode ser gerado pela revolu-
ção de uma hipérbole em torno de um eixo (geratriz e eixo
no mesmo plano). Neste caso a forma do hiperbolóide está
relacionada à forma da hipérbole e à posição desta em re-
lação ao eixo.
O hiperbolóide de revolução também pode ser gerado pela
revolução de uma reta em torno do eixo de rotação, sendo
que esta reta deve ser reversa ao eixo, portanto com gera-
triz e eixo em planos diferentes. Neste caso, a forma do hi-
perbolóide é relacionada somente à posição relativa entre a
reta geratriz e o eixo.
As superfícies geradas pelas duas maneiras são exatamente iguais, porém o
uso de geratrizes retas sempre facilita o processo de geração.
Superfícies de Revolução
NCA – Núcleo de Computação Gráfica Aplicada
44
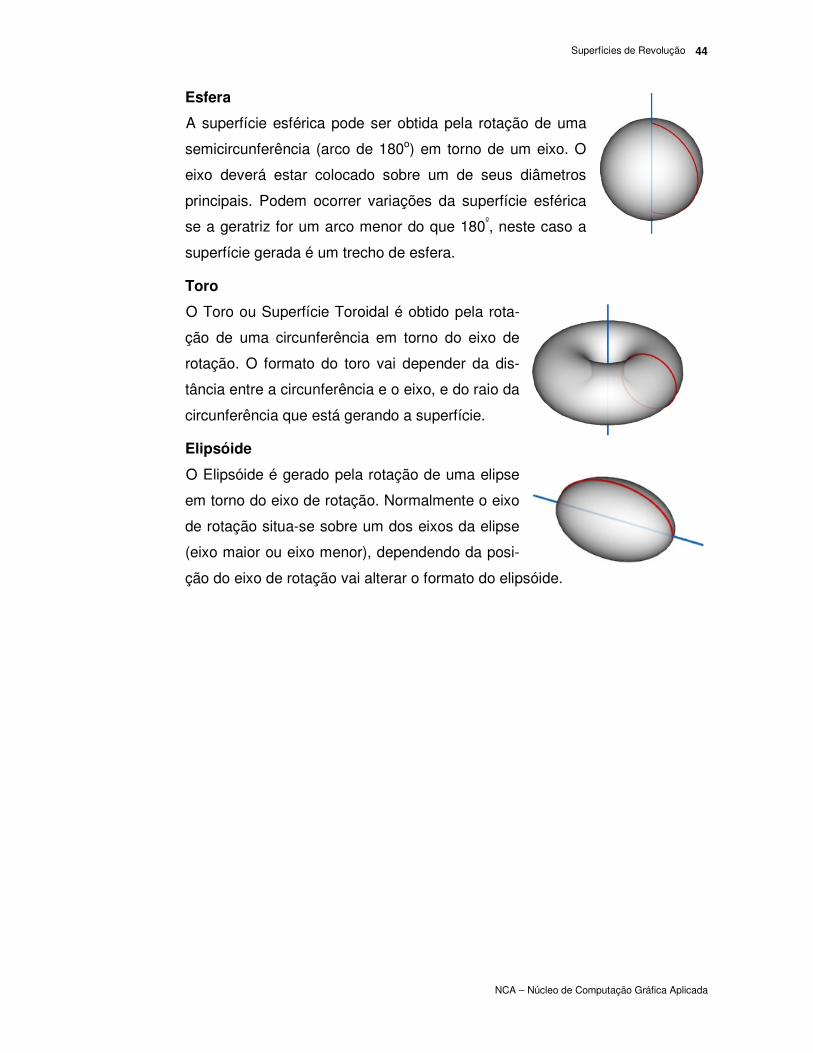
Esfera
A superfície esférica pode ser obtida pela rotação de uma
semicircunferência (arco de 180o) em torno de um eixo. O
eixo deverá estar colocado sobre um de seus diâmetros
principais. Podem ocorrer variações da superfície esférica
se a geratriz for um arco menor do que 180º, neste caso a
superfície gerada é um trecho de esfera.
Toro
O Toro ou Superfície Toroidal é obtido pela rota-
ção de uma circunferência em torno do eixo de
rotação. O formato do toro vai depender da dis-
tância entre a circunferência e o eixo, e do raio da
circunferência que está gerando a superfície.
Elipsóide
O Elipsóide é gerado pela rotação de uma elipse
em torno do eixo de rotação. Normalmente o eixo
de rotação situa-se sobre um dos eixos da elipse
(eixo maior ou eixo menor), dependendo da posi-
ção do eixo de rotação vai alterar o formato do elipsóide.

Superfícies de Revolução
NCA – Núcleo de Computação Gráfica Aplicada
45
REPRESENTAÇÃO EM ÉPURA
A representação em épura das superfícies de revolução está
diretamente associada ao processo de geração destas super-
fícies. Em geral, tem-se um linha geratriz e o eixo em suas
projeções. As projeções da superfície construídas determi-
nando-se a trajetória dos pontos da geratriz em torno do eixo
nas projeções onde a superfície deve ser representada. A se-
guir serão descritos os passos para a representação de uma
superfície de revolução genérica.
1. Sejam a linha geratriz g e o eixo e. Para efeitos de simplifi-
cação, considerar o eixo e normal a um dos planos de pro-
jeção e, conseqüentemente, paralelo a outro.
2. Tomar os seguintes pontos da geratriz:
• Extremidades de g;
• Pontos cujas tangentes são paralelas ao eixo (golas e
equadores);
3. Para cada ponto, traçar uma circunferência com centro na
acumulação do eixo e raio igual a distância do ponto ao
eixo.
4. Na projeção onde o eixo está em VG, traçar a projeção
acumulada do círculo. Esta projeção é um segmento de
comprimento igual ao diâmetro do círculo e normal ao ei-
xo. Como o círculo é a trajetória do ponto, todas as suas
projeções devem conter as projeções do ponto. Portanto,
a projeção acumulada do círculo deve cortar a geratriz no
ponto em estudo.
5. Escolher um número de pontos intermediários apropriado
à precisão desejada e repetir os passos 3 e 4.
6. Depois de realizar os passos 3 e 4 para todos os pontos escolhidos, traçar
o meridiano principal e completar, se necessário, o contorno aparente nas
projeções da superfície. Nesta etapa deve-se cuidar a visibilidade, princi-
palmente das linhas reais.

Superfícies de Revolução
NCA – Núcleo de Computação Gráfica Aplicada
46
O número de pontos cujas trajetórias
devem ser representadas, depende do
grau de precisão exigido na represen-
tação.
A representação em épura das super-
fícies de revolução é composta, princi-
palmente, pelas linhas principais das
mesmas (equador, gola, meridianos
principais), que geralmente limitam as
suas projeções, determinando o seu
contorno aparente. São representadas linhas visíveis e invisíveis. As linhas
reais (que realmente aparecem na superfície real, ex.: equador, gola e meridi-
ano principal em VG) devem ter maior espessura que as linhas de construção
(paralelos intermediários em VG e paralelos acumulados que não pertençam
ao contorno da projeção).
Se o eixo da superfície for paralelo a um dos planos de projeção, o contorno
aparente da superfície, neste plano de projeção, contém, necessariamente, o
meridiano principal.
Se o eixo for perpendicular a um dos pla-
nos de projeção, o contorno aparente da
projeção neste plano é obrigatoriamente
composto por circunferências (paralelos
em VG) que poderão ser golas, equado-
res e/ou paralelos de extremidades, se
houver.
LINHAS REAIS
Meridiano principal
Linhas de extremidades
Gola
Equador

Superfícies de Revolução
NCA – Núcleo de Computação Gráfica Aplicada
47
PERTINÊNCIA
A pertinência de um ponto a uma superfície de revolução está relacionada
com a forma de geração da mesma. Devido ao caráter cinemático utilizado
para a geração da superfície, todo ponto que pertence a geratriz descreve
uma circunferência. Em qualquer momento, um ponto da superfície deve estar
sobre uma circunferência.
O procedimento para a determinação da(s) projeção(ões) possíveis de um
ponto pode ser resumido da seguinte maneira:
1. Seja uma superfície de revolução e uma projeção de um ponto P. Deseja-
se determinar todas as projeções possíveis para
que P pertença a superfície.
2. A partir a projeção de P fornecida do ponto traçar
uma circunferência que contenha esta projeção. A
circunferência pode ser representada em verdadei-
ra grandeza (V.G.) ou acumulada, conforme o pla-
no de projeção que está sendo utilizado.
3. Onde a circunferência interceptar a projeção do
meridiano principal marcar o ponto R. Por pertinên-
cia, encontrar a outra projeção de R no plano de
projeção adjacente. A partir desta projeção de R
traçar a outra projeção da circunferência.
4. Novamente por pertinência, encontrar as possíveis
projeções de P sobre a circunferência encontrada
no item 3. Dependendo da forma da superfície po-
dem existir uma ou mais projeções possíveis.
P’2
P2
P1
R’2
R2
R1

Superfícies de Revolução
NCA – Núcleo de Computação Gráfica Aplicada
48
INTERSEÇÕES
INTERSEÇÃO COM PLANO
A interseção entre uma superfície de revolução e um plano é uma, ou mais li-
nhas planas, que podem ser abertas ou fechadas dependendo da forma da
superfície e a posição do plano secante em relação a superfície.
A interseção de uma superfície de revolução com um plano secante deve ser
executada quando este pl0ano apresenta uma projeção acumulada. Caso o
plano não apresente projeção acumulada faz-se uma Mudança de Plano de
Projeção acumulando uma projeção do mesmo.
A partir daí, na projeção acumulada do plano secante, determina-se onde o
plano intercepta as linhas principais da superfície (gola, equador, meridiano
principal). Dependendo da superfície, normalmente, pode-se obter 4 pontos
resultantes da linha de interseção resul-
tante. Os demais pontos necessários a
caracterização da linha de interseção
serão obtidos com o emprego de planos
auxiliares (horizontais ou frontais).
A interseção dos planos auxiliares com
as superfícies geram circunferências em
verdadeira grandeza na projeção adja-
cente. A interseção destes planos auxili-
ares com o plano secante geram retas.
Onde a reta interceptar a circunferência
resultantes do mesmo plano auxiliar ob-
tém-se pontos que vão dar a forma final
da linha de interseção. A interseção re-

Superfícies de Revolução
NCA – Núcleo de Computação Gráfica Aplicada
49
ta/circunferência pode gerar um número variável de pontos resultantes. Esta
variação vai depender da forma da superfície de revolução e da posição do
plano secante.
Após determinar a forma da linha de interseção resultante deve-se analisar a
visibilidade da mesma.
INTERSEÇÃO COM RETA
A interseção entre uma superfície de revolução e uma reta pode ser um ou
mais pontos, dependendo da forma da superfície e da posição da reta em re-
lação a superfície. Esta interseção somente pode ser determinada com a utili-
zação de planos auxiliares que contenham a reta secante. Como no casos
das demais superfícies já apresentadas, este plano auxiliar de preferência de-
ve possuir uma projeção acumulada.
O procedimento para determinar a interseção entre a superfície e a reta pode
ser resumido da seguinte maneira:
1. Seja uma superfície de revolução e uma reta r. Pretende-se obter os pon-
tos de interseção entre a superfície e a reta.
2. Traçar um plano auxiliar αααα que contenha a reta r. Normalmente utiliza-se
um plano com projeção acumulada, coincidente com uma das projeções
da reta.
3. Determinar a interseção i entre a superfície e o plano auxiliar αααα. Esta inter-
seção pode ser uma, ou mais linhas abertas ou fechadas.
4. Sabendo que a reta r e a linha i pertencem ao plano auxiliar αααα, qualquer
coincidência ou cruzamento de projeções entre r e i caracterizam interse-
ções entre os mesmos.
5. Existindo um ponto l que é interseção entre r e i, este ponto l é, também,
interseção entre a superfície e a reta r, pois l pertence a i que pertence a
superfície, e l pertence a r , portanto l pertence à superfície e à reta r.
6. Após a determinação dos pontos de interseção entre a superfície e a reta,
deve-se realizar o estudo de visibilidade da reta, através da análise das
projeções dos objetos e das coordenadas de seus pontos.

Superfícies Helicoidais
NCA – Núcleo de Computação Gráfica Aplicada
50
Helicóides
Fábio Gonçalves Teixeira
Marta Regina Tocchetto Lemes
IINNTTRROODDUUÇÇÃÃOO
Helicóides são superfícies geradas pelo movimento de
retas (retilíneas) cujos pontos descrevem trajetórias he-
licoidais. O resultado é um tipo de superfície com inú-
meras aplicações práticas. Helicóides são a base de
componentes tais como: parafusos (cujas aplicações
dispensam comentários), fusos (componentes mecâ-
nicos fundamentais em máquinas e bombas), brocas
(de uso industrial ou doméstico), rampas de acesso he-
licoidais (utilizadas para pedestres ou veículos), esca-
das helicoidais (não são superfícies helicoidais, mas
fazem uso destas para a sua construção e concepção).
Para um perfeito entendimento dos helicóides, é necessário
estudar as hélices, pois todos os pontos de um helicóide des-
crevem como trajetória estas curvas espaciais.
HHÉÉLLIICCEESS
De uma maneira em geral, hélice é uma curva traçada na superfície de um ci-
lindro e que faz ângulos iguais com as geratrizes desse cilindro.
A hélice cilíndrica é conhecida simplesmente por hélice e define-se como a
trajetória descrita por um ponto, quando apoiado na superfície de um cilindro
(denominado cilindro suporte), subordinado a dois mo-
vimentos uniformes e simultâneos:
• Rotação em torno do eixo do cilindro;
• Translação paralela ao eixo do cilindro.
Se a seção reta do cilindro (seção perpendicular às ge-
ratrizes) é uma circunferência, o cilindro é de revolução
e a hélice é chamada de hélice cilíndrica normal.
P
R

Superfícies Helicoidais
NCA – Núcleo de Computação Gráfica Aplicada
51
GGEERRAAÇÇÃÃOO EE CCAARRAACCTTEERRÍÍSSTTIICCAASS GGEERRAAIISS DDAASS HHÉÉLLIICCEESS
Para iniciar o estudo das hélices, é necessário apresentar alguns elementos e
propriedades que definem as suas principais características:
• Ponto gerador – Ponto que, deslocando-se, descreve uma
hélice como trajetória.
• Eixo da hélice – Reta em torno da qual desloca-se o ponto
gerador.
• Passo da hélice (P) – Distância entre dois pontos da hélice
medida sobre uma mesma geratriz do cilindro suporte. Tam-
bém pode-se dizer que o passo é a distância axial necessária
para uma volta completa em torno do eixo.
• Espira – Porção da hélice correspondente a um passo.
• Raio da hélice – Corresponde ao raio do cilindro suporte e à distância do
ponto gerador ao eixo.
• Sentido de Rotação – Sentido da rotação do ponto em torno do eixo.
Lei de Geração – O ponto gerador desloca-se em movimento composto (ro-
tação + translação) ao redor do eixo, sendo que à medida que o ponto deslo-
ca-se na direção axial (paralelamente ao eixo), também gira ao redor do eixo,
a projeção de seu movimento em um plano normal ao eixo percorre uma cir-
cunferência cujo raio é igual ao raio do cilindro suporte. Quando o ponto des-
loca-se de uma distância igual ao passo, na direção axial, ao mesmo tempo
completa um giro de 360°.
O deslocamento axial é proporcional ao deslocamento angular, isto quer dizer
que a um giro de ¼ da circunferência corresponde um deslocamento axial do
ponto de ¼ do passo; a um giro de ½ da circunferência corresponde um des-
locamento axial de metade do passo, e assim sucessivamente.
A orientação do movimento do ponto gerador, que é a combinação do sentido
de translação e o sentido de rotação, determina o tipo de hélice:
• Dextrorsum – Quando o ponto gerador desloca-se segundo a regra da
mão direita, considerando que o polegar define o movimento na direção
axial e o restante dos dedos indica o sentido de rotação.

Superfícies Helicoidais
NCA – Núcleo de Computação Gráfica Aplicada
52
• Sinistrorsum – Quando o ponto gerador
desloca-se segundo a regra da mão es-
querda, considerando que o polegar defi-
ne o movimento na direção axial e o res-
tante dos dedos indica o sentido de rota-
ção.
Quando uma hélice é dextrorsum ou positiva, um observador colocado dentro
do cilindro suporte, na posição de seu eixo, vê o ponto se deslocar da direita
para a esquerda e de baixo para cima. No caso de apenas um destes deslo-
camentos mudar de sentido, a hélice é sinistrorsum ou negativa.
Considerando uma única espira de uma hélice (o que correspondente a um
passo P e um raio R), se a superfície do cilindro suporte é planificada, ela se
transforma em um retângulo onde a base é 2πR e a altura é P, e a hélice plani-
ficada é a diagonal desse retângulo. Com a hélice e o seu cilindro suporte
planificados, é possível definir outras propriedades características das hélices:
• Ângulo (ωωωω) da hélice – Ângulo de inclinação da diagonal do retângulo.
• Declive da hélice – Tangente do ângulo ω, que é obtido pela relação no
triângulo: tg ω = P/2πR .
Uma hélice é uma curva teoricamente infinita, porém na prática as hélices são
representadas limitadas. A representação de uma hélice pode conter um nú-
mero de espiras que não é, necessariamente, inteiro. Desta forma, é possível
representar 0.75 espira, 1 espira ou 2.27 espiras de qualquer hélice. A porção
representada depende do objetivo de tal representação e da aplicação práti-
ca ou teórica que se pretende dar à hélice.
Dextrorsum Sinistrorsum
ω 2πR
P

Superfícies Helicoidais
NCA – Núcleo de Computação Gráfica Aplicada
53
CCOONNSSTTRRUUÇÇÃÃOO EE RREEPPRREESSEENNTTAAÇÇÃÃOO EEMM ÉÉPPUURRAA
A construção e representação em épura de uma hélice obedece à lei de gera-
ção das hélices. O processo consiste em representar a trajetória do ponto ge-
rador, simultaneamente, nas projeções mongeanas envolvidas.
A seguir serão apresentados os passos para a construção das projeções de
uma hélice sendo conhecidos o ponto gerador (Pi, Pj), o eixo (e), o passo e a
orientação da hélice. Para efeitos de simplificação, será considerado um eixo
de projeção acumulada (ei) e, portanto, outra projeção em verdadeira grande-
za (ej).
1. No plano de projeção πi, onde o eixo tem
projeção acumulada, traçar uma circunfe-
rência com centro ei e raio igual a eiPi . Es-
ta circunferência é a projeção da hélice no
plano πi.
2. No plano de projeção πj, onde o eixo tem
projeção em verdadeira grandeza, traçar
um segmento de reta a partir da projeção
Pj paralelo a ej e com comprimento igual ao
passo.
3. Dividir a circunferência em um número de
partes suficientes para construir a hélice
com alguma precisão. Se a circunferência
é dividida em n partes, a hélice tem n+1
pontos determinados com precisão. São
necessários, pelo menos, oito divisões pa-
ra desenhar a hélice à mão livre. Não é obrigatório, porém é conveniente
4. Numerar cada ponto da divisão segundo o sentido de rotação do ponto ge-
rador.
5. Dividir o passo no mesmo número de partes e proporcionais às divisões
da circunferência. No caso de serem utilizados mais de um passo, todos
os passos devem ser divididos em segmentos iguais ao do primeiro passo.
1
5
4
3
2
6
7
8
9
1 ≡
2 3
4
5
6
7
8
9

Superfícies Helicoidais
NCA – Núcleo de Computação Gráfica Aplicada
54
6. Numerar os pontos determinados sobre o passo segundo o sentido de
translação do ponto gerador.
7. Traçar linhas perpendiculares à ej contendo cada um dos pontos das divi-
sões sobre o passo.
8. Traçar uma linha de chamada a partir do ponto 1 do plano πi até linha 1 do
plano πj. Desta forma, determina-se as duas projeções do primeiro ponto
da hélice. Repete-se este processo para cada um dos pontos sobre as di-
visões determinados em ambas as projeções.
9. Traçar a projeção da hélice no plano πj unindo os pontos determinados em
8, interpolando-os. A projeção em πj é uma senóide, pois seu processo de
construção em épura é coincidente com a definição da função Seno.
É importante observar que a projeção da hélice no plano de projeção πj, onde
o eixo tem projeção em verdadeira grandeza, tem sempre como limites late-
rais as linhas de chamada dos limites laterais da circunferência em πi. Na prá-
tica, estes limites são o contorno aparente do cilindro suporte. A forma da pro-
jeção em πj depende muito da posição inicial do ponto gerador.

Superfícies Helicoidais
NCA – Núcleo de Computação Gráfica Aplicada
55
SSUUPPEERRFFÍÍCCIIEESS HHEELLIICCOOIIDDAAIISS OOUU HHEELLIICCÓÓIIDDEESS
Helicóides são superfícies geradas por retas que descrevem trajetórias heli-
coidais. A geração de um helicóide depende dos seguintes elementos:
• Geratriz – Segmento de reta.
• Eixo – Reta concorrente ou reversa à geratriz.
• Passo – Passo do movimento helicoidal.
• Orientação – Orientação (positiva ou negativa) do movimento helicoidal.
Lei de Geração – A reta geratriz desloca-se em trajetória helicoidal em torno
do eixo de tal forma que todos os pontos descrevem hélices simultâneas de
mesmo passo, mesmo eixo, mesmo sentido de rotação e de cilindros suporte
diferentes (pontos com raio de rotação diferentes possui cilindros suporte dife-
rentes).
Assim como nas hélices, os helicóides podem ter qualquer comprimento, des-
de que a trajetória seja helicoidal. Portanto, é possível construir helicóides que
percorrem apenas frações de um passo, não completando nem uma espira da
trajetória helicoidal. Por outro lado, também é possível criar helicóides que são
desenvolvidos em mais de um passo, porém não necessariamente em múlti-
plos inteiros de um passo.
Se a geratriz e o eixo são ou não coplanares, os helicóides podem ser classifi-
cados de duas formas:
• Helicóides axiais – Quando as geratrizes e os eixos são concorrentes.
Neste caso, as geratriz posicionam-se de forma radial em vista axial. Desta
forma, o processo de divisão das circunferências, correspondentes às héli-
ces dos pontos das extremidades, pode ser feito em uma única etapa, pois
as divisões são alinhadas.
• Helicóides de núcleo – Quando a geratriz é reversa ao eixo. Nos helicói-
des de núcleo, os pontos das extremidades da geratriz não ficam posicio-
nados na direção radial (no plano de projeção onde o eixo está acumula-
do), portanto as divisões não ficam alinhadas com o centro das circunfe-
rências. Sendo assim, cada circunferência deve ser dividida separadamen-
te, o que aumenta o custo do processo.

Superfícies Helicoidais
NCA – Núcleo de Computação Gráfica Aplicada
56
Estas duas formas de helicóides são naturalmente excludentes, ou seja, ou
um helicóide é axial ou é de núcleo. Alem disso, é possível classificar os heli-
cóides segundo o ângulo formado entre a geratriz e o eixo:
• Helicóides de plano diretor – Se a geratriz é ortogonal ao eixo, durante o
processo de geração a geratriz matem-se paralela a um plano perpendicu-
lar ao eixo. Neste caso, diz-se que o helicóide gerado é um helicóide de
plano diretor.
• Helicóides de cone diretor – Se a geratriz não é ortogonal ao eixo, é
possível afirmar que a geratriz matem-se, durante o processo de geração,
sempre paralela a um cone de revolução cujo ângulo entre a geratriz e o
eixo é igual ao ângulo entre a geratriz do helicóide e seu eixo. O helicóide
assim gerado é chamado de helicóide de cone diretor.
Estas duas formas também são excludentes, ou seja, ou um helicóide é de
plano diretor ou é de cone diretor. Porém, todos os tipos de helicóides exis-
tentes são uma combinação das duas formas de classificação, resultando em
quatro possibilidades, que são os quatro tipos fundamentais de helicóides:
• Helicóides axiais de plano diretor;
• Helicóides axiais de cone diretor;
• Helicóides de núcleo de plano diretor;
• Helicóides de núcleo de cone diretor.
RREEPPRREESSEENNTTAAÇÇÃÃOO EEMM ÉÉPPUURRAA
O processo de construção em épura de um helicóide se assemelha em muito
com o processo de construção das hélices. Na verdade, a construção de héli-
ces é parte do processo de construção de um helicóide. A seguir serão descri-
tos os principais passos para a construção de um helicóide sendo dados a ge-
ratriz AB, eixo e, passo, sentido e número de espiras:
1. Construir a hélice correspondente ao ponto A;
2. Construir a hélice correspondente ao ponto B;
3. Unir as posições de mesma numeração de A e B;
4. Verificar a existência de problemas de visibilidade.

Superfícies Helicoidais
NCA – Núcleo de Computação Gráfica Aplicada
57
HHEELLIICCÓÓIIDDEESS AAXXIIAAIISS DDEE PPLLAANNOO DDIIRREETTOORR
Os helicóides axiais de plano dire-
tor são aqueles cujas geratrizes
são perpendiculares aos eixos.
Estes helicóides são utilizados em
rampas e como base para esca-
das helicoidais, além disso, po-
dem ser utilizados em fusos de
máquinas e equipamentos indus-
triais.
Representação em épura
Os helicóides axiais de plano dire-
tor são os mais fáceis de serem construídos em épura. O processo de cons-
trução consiste basicamente em construir as hélices das extremidades da ge-
ratriz. Além disso, nessas superfícies não há problemas de visibilidade do tipo
onde parte da superfície fica invisível, o que simplifica o processo de constru-
ção. Porém, existe um
problema sutil de visibi-
lidade, que consiste em
determinar as partes
superior e inferior do
helicóide. Quando a ge-
ratriz é paralela ao pla-
no de projeção onde o
eixo está acumulado, os
helicóides axiais de pla-
no diretor sinistrorsum e
HELICÓIDE AXIAL DE PLANO DIRETOR
Neste exemplo, são apresenta-dos dois helicóides com proje-
ções idênticas, porém o pri-meiro é sinistrorsum e o se-
gundo é dextrorsum. A repre-sentação da visibilidade nas
duas superfícies, determinada pela presença de uma figura
humana correndo sobre a rampa, mostra as porções do helicóide onde aparecem as
partes superiores e inferiores.

Superfícies Helicoidais
NCA – Núcleo de Computação Gráfica Aplicada
58
dextrorsum (de mesmo passo, eixo e geratriz) apresentam projeções idênti-
cas, até mesmo, aparentemente, na visibilidade. Na verdade, há uma inver-
são de visibilidade nos dois helicóides: o que é a porção superior em helicóide
sinistrorsum, corresponde à porção inferior do helicóide dextrorsum axial de
plano diretor de mesmo passo e eixo. Neste caso, é necessário diferenciar, de
alguma forma, as porções inferiores das superiores da folha do helicóide.
Quando não se encontra paralela ao plano de projeção onde o eixo se projeta
em VG, helicóides axiais sinistrorsum e dextrorsum (de mesmo passo, eixo e
geratriz) apresentam projeções diferentes na forma e visibilidade.
O processo de construção das hélices é facilitado, pois sendo de plano diretor
os pontos de extremidades descrevem passos alinhados, pertencendo sem-
pre ao mesmo plano normal ao eixo. Neste caso, o processo de divisão do
passo para os dois pontos é feito em uma única etapa.
HHEELLIICCÓÓIIDDEESS AAXXIIAAIISS DDEE CCOONNEE DDIIRREETTOORR
Os helicóides axiais de cone dire-
tor são aqueles gerados por gera-
trizes concorrentes aos eixos e, ao
mesmo tempo, oblíquas aos
mesmos. Estes helicóides são
amplamente utilizados em fusos,
parafusos, roscas em geral e em
transportadores industriais. Muitas
vezes são utilizadas combinações
de dois ou mais helicóides para
formar a superfície de um compo-
nente. Um exemplo disto são as
roscas, onde são utilizados, pelo menos, dois helicóides para formar um filete.
Representação em Épura
Os helicóides de cone diretor apresentam um complicador na divisão do pas-
so para os pontos das extremidades. Estes pontos estão defasados na dire-
ção axial, portanto são necessárias duas etapas para a divisão. Outro pro-
blema deste tipo de superfície está na visibilidade. Sempre há porções invisí-
veis em helicóide de cone diretor.
HELICÓIDE AXIAL DE CONE DIRETOR

Superfícies Helicoidais
NCA – Núcleo de Computação Gráfica Aplicada
59
Quando a geratriz é paralela ao plano de projeção onde o eixo está acumula-
do, os helicóides axiais sinistrorsum e dextrorsum (de mesmo passo, eixo e
geratriz) apresentam projeções muito semelhentes, diferindo apenas na visibi-
lidade. Porém, quando esta situação não ocorre, helicóides axiais sinistrorsum
e dextrorsum (de mesmo pas-
so, eixo e geratriz) apresentam
projeções diferentes na forma
e visibilidade.
Neste exemplo, são apresentados dois helicóides com projeções idênticas, porém a visibilidade mostra as diferenças entre o dextrorsum e o sinis-trorsum. Nestes casos, a diferença entre os dois só aparece no aspecto visibilidade porque a gera-triz parte de uma posição muito particular: para-lela ao plano de projeção onde o eixo está em VG. Em caso contrário, as diferenças ficam evi-dentes na forma das projeções.
Neste exemplo, os dois helicóides sinistrorsum e dextrorsum não são diferenciados somente pela visibilidade. As projeções são diferentes também na forma. Isto ocorre porque a posição inicial das geratrizes em ambos não está paralela ao plano de projeção onde o eixo se projeta em VG. Desta forma, fica evidente o sentido de rotação, o que facilita também o processo de determinação da visibilidade.

Superfícies Helicoidais
NCA – Núcleo de Computação Gráfica Aplicada
60
HHEELLIICCÓÓIIDDEESS DDEE NNÚÚCCLLEEOO DDEE PPLLAANNOO DDIIRREETTOORR EE DDEE CCOONNEE DDIIRREETTOORR
Helicóide de núcleo de plano diretor – são gerados por geratrizes reversas
aos eixos, porém ortogonais a estes.
Helicóides de núcleo de cone diretor – são gerados por geratrizes reversas
aos eixos, porém não ortogonais aos mesmos.
O núcleo é um cilindro com raio i-
gual à distância da reta suporte da
geratriz ao eixo. Portanto, o núcleo
tangencia a reta suporte da geratriz
e, dependendo do comprimento do
segmento geratriz, o núcleo tangen-
cia o próprio helicóide.
Representação em Épura
Nos helicóides de núcleo, os pontos
das extremidades da geratriz não fi-
cam posicionados na direção radial
(no plano de projeção onde o eixo
está acumulado), portanto as divi-
sões não ficam alinhadas com o
centro das circunferências. Sendo
assim, cada circunferência deve ser
dividida separadamente, o que au-
menta o custo do processo.
Helicóides sinistrorsum e dextror-
sum de núcleo com mesma geratriz
passo e eixo nunca apresentam
projeções idênticas, como pode a-
contecer com helicóides axiais.
Neste tipo de superfície é usual a
representação do núcleo, o que ge-
ra problemas de visibilidade adicio-
nais e que devem ser resolvidos.
HELICÓIDE DE NÚCLEO
DE PLANO DIRETOR
HELICÓIDE DE NÚCLEO DE CONE DIRETOR

Superfícies Helicoidais
NCA – Núcleo de Computação Gráfica Aplicada
61
Em um helicóide de núcleo cuja geratriz tangencia o núcleo, é necessário tra-
çar, além das hélices das extremidades, a hélice de tangência do helicóide ao
núcleo. Esta hélice tem como ponto gerador o ponto da geratriz de menor dis-
tância da geratriz em relação ao eixo.
















![3 Q Q Á Á Á X P ] } v µ } X } u X...YDORU FRQVWDQWH UD]mR D D U QQ u 7HUPR ³Q´ WHUPR UD]mR [ SRVLomR ³Q´ ± Q D D TQ u 7HUPR ³Q´ WHUPR [ UD]mR HOHYDGD D ³Q ´ Q Q Q D D](https://img.document.onl/doc/110x75/5f3bc1c56c4daf1ce610581b/3-q-q-x-p-v-x-u-x-ydoru-frqvwdqwh-udmr-d-d-u-qq-u-7hupr.jpg)