Embed Size (px)
Citation preview
Universidade Federal de Minas Gerais
Laboratorio de Controle e Automacao I
Prof. Patrıcia N. Pena - DELT
Twin Rotor MIMO System (TRMS)
1 Rotor Duplo (TRMS - Twin Rotor MIMO System)
A unidade TRMS da Feedback [2] e um modelo simplificado de um helicoptero. As duas principaissimplificacoes sao: o TRMS esta fixado em um torre; a posicao e velocidade do helicoptero saocontroladas por meio da variacao da velocidade do rotor. No helicoptero real, a velocidade do rotore aproximadamente constante e a propulsao e variada pela modificacao dos angulos das laminas dorotor. Mesmo com as simplificacoes, as caracterısticas dinamicas mais importantes de um helicopteroestao presentes no TRMS.
Este e um modelo MIMO, com duas entradas (tensao aplicada aos rotores) e duas saıdas (anguloshorizontal e vertical e velocidades angulares).
2 Descricao da Unidade TRMS
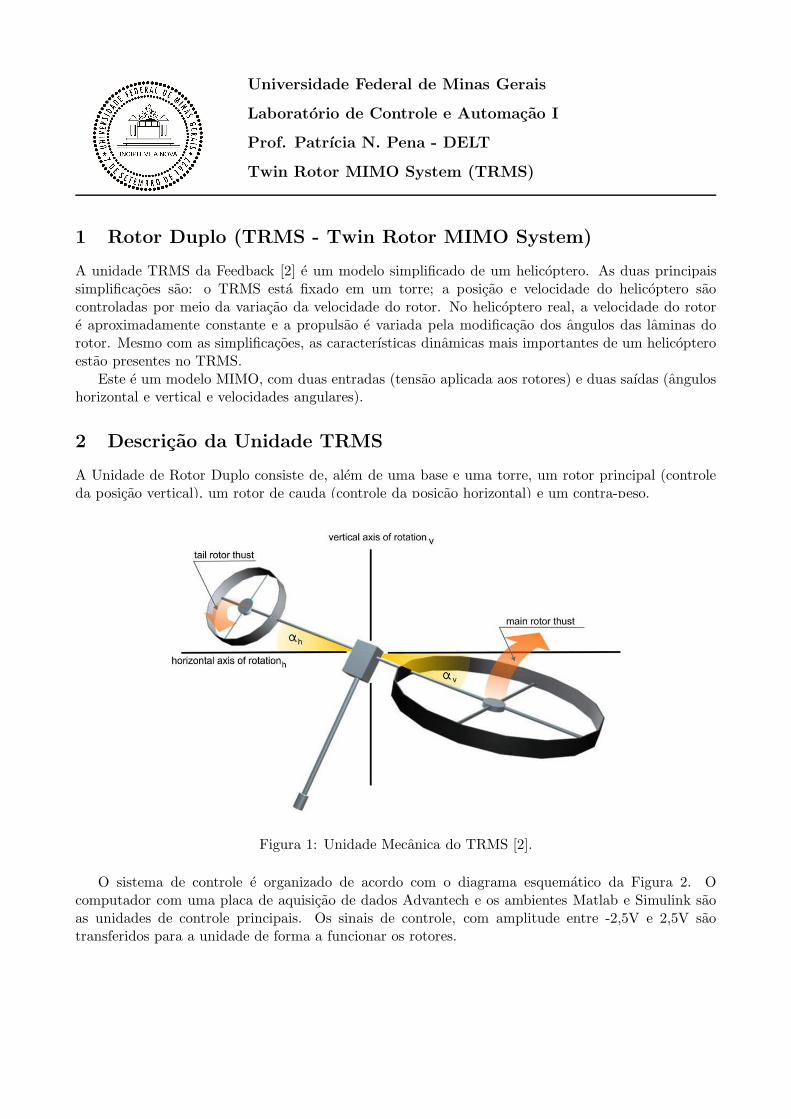
A Unidade de Rotor Duplo consiste de, alem de uma base e uma torre, um rotor principal (controleda posicao vertical), um rotor de cauda (controle da posicao horizontal) e um contra-peso.
Figura 1: Unidade Mecanica do TRMS [2].
O sistema de controle e organizado de acordo com o diagrama esquematico da Figura 2. Ocomputador com uma placa de aquisicao de dados Advantech e os ambientes Matlab e Simulink saoas unidades de controle principais. Os sinais de controle, com amplitude entre -2,5V e 2,5V saotransferidos para a unidade de forma a funcionar os rotores.
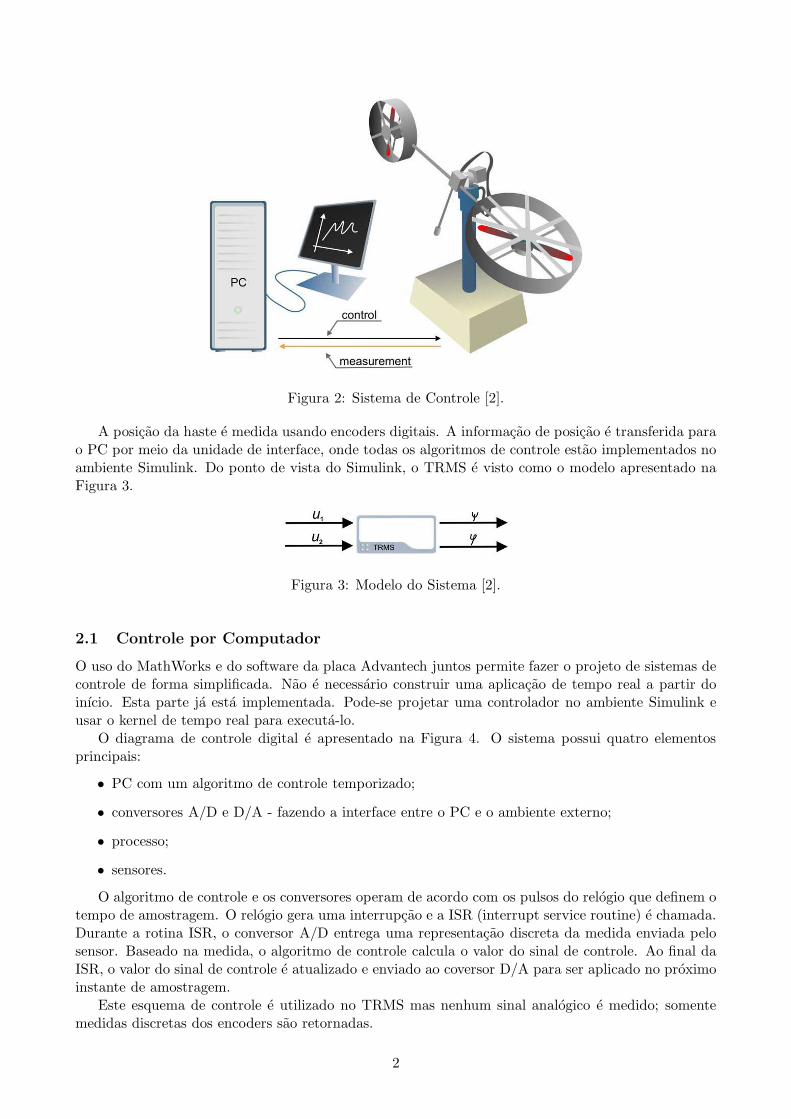
Figura 2: Sistema de Controle [2].
A posicao da haste e medida usando encoders digitais. A informacao de posicao e transferida parao PC por meio da unidade de interface, onde todas os algoritmos de controle estao implementados noambiente Simulink. Do ponto de vista do Simulink, o TRMS e visto como o modelo apresentado naFigura 3.
Figura 3: Modelo do Sistema [2].
2.1 Controle por Computador
O uso do MathWorks e do software da placa Advantech juntos permite fazer o projeto de sistemas decontrole de forma simplificada. Nao e necessario construir uma aplicacao de tempo real a partir doinıcio. Esta parte ja esta implementada. Pode-se projetar uma controlador no ambiente Simulink eusar o kernel de tempo real para executa-lo.
O diagrama de controle digital e apresentado na Figura 4. O sistema possui quatro elementosprincipais:
• PC com um algoritmo de controle temporizado;
• conversores A/D e D/A - fazendo a interface entre o PC e o ambiente externo;
• processo;
• sensores.
O algoritmo de controle e os conversores operam de acordo com os pulsos do relogio que definem otempo de amostragem. O relogio gera uma interrupcao e a ISR (interrupt service routine) e chamada.Durante a rotina ISR, o conversor A/D entrega uma representacao discreta da medida enviada pelosensor. Baseado na medida, o algoritmo de controle calcula o valor do sinal de controle. Ao final daISR, o valor do sinal de controle e atualizado e enviado ao coversor D/A para ser aplicado no proximoinstante de amostragem.
Este esquema de controle e utilizado no TRMS mas nenhum sinal analogico e medido; somentemedidas discretas dos encoders sao retornadas.
2

Figura 4: Diagrama Completo do Sistema de Controle [2].
3 Operacao da Unidade TRMS
Ha um ıcone (TRMS Simulink Models) na area de trabalho para os modelos em Simulink parasimulacao e controle da Unidade TRMS. A execucao deste atalho abre o Matlab e a janela de Simulinkapresentada na Figura 5.
Figura 5: Modelos no Simulink [2].
Outra forma de abrir a janela apresentada na Figura 5 e navegando a partir do menu Start doWindows:
Start menu→All Programs→Feedback Instruments→Feedback 33-949→Simulink Models.
Ainda, de dentro do Matlab, acesse C:\Feedback\TRMS\Examples\Real-time models\.A janela apresentada na Figura 6 e aberta e os parametros da simulacao ja estao conFigura dos.
Para fazer uma aplicacao, sugere-se usar uma das aplicacoes existentes, modificando apenas o que for
3
necessario, sem nunca modificar os parametros de simulacao.
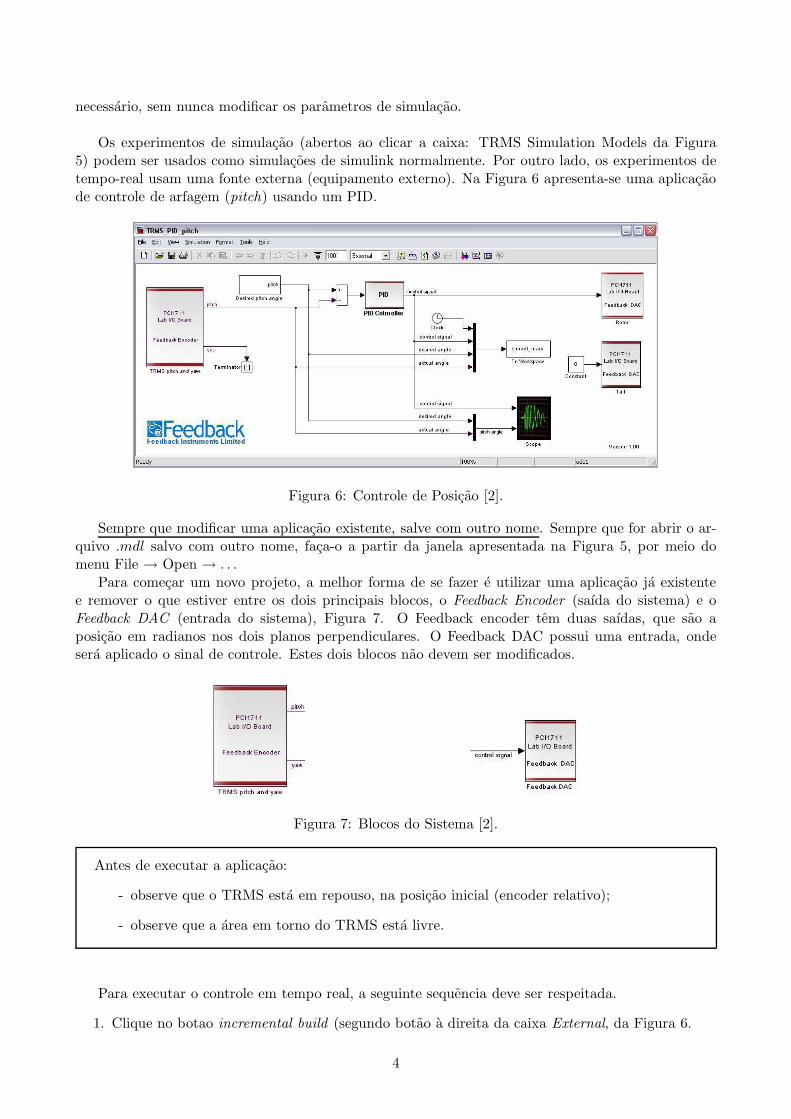
Os experimentos de simulacao (abertos ao clicar a caixa: TRMS Simulation Models da Figura5) podem ser usados como simulacoes de simulink normalmente. Por outro lado, os experimentos detempo-real usam uma fonte externa (equipamento externo). Na Figura 6 apresenta-se uma aplicacaode controle de arfagem (pitch) usando um PID.
Figura 6: Controle de Posicao [2].
Sempre que modificar uma aplicacao existente, salve com outro nome. Sempre que for abrir o ar-quivo .mdl salvo com outro nome, faca-o a partir da janela apresentada na Figura 5, por meio domenu File → Open → . . .
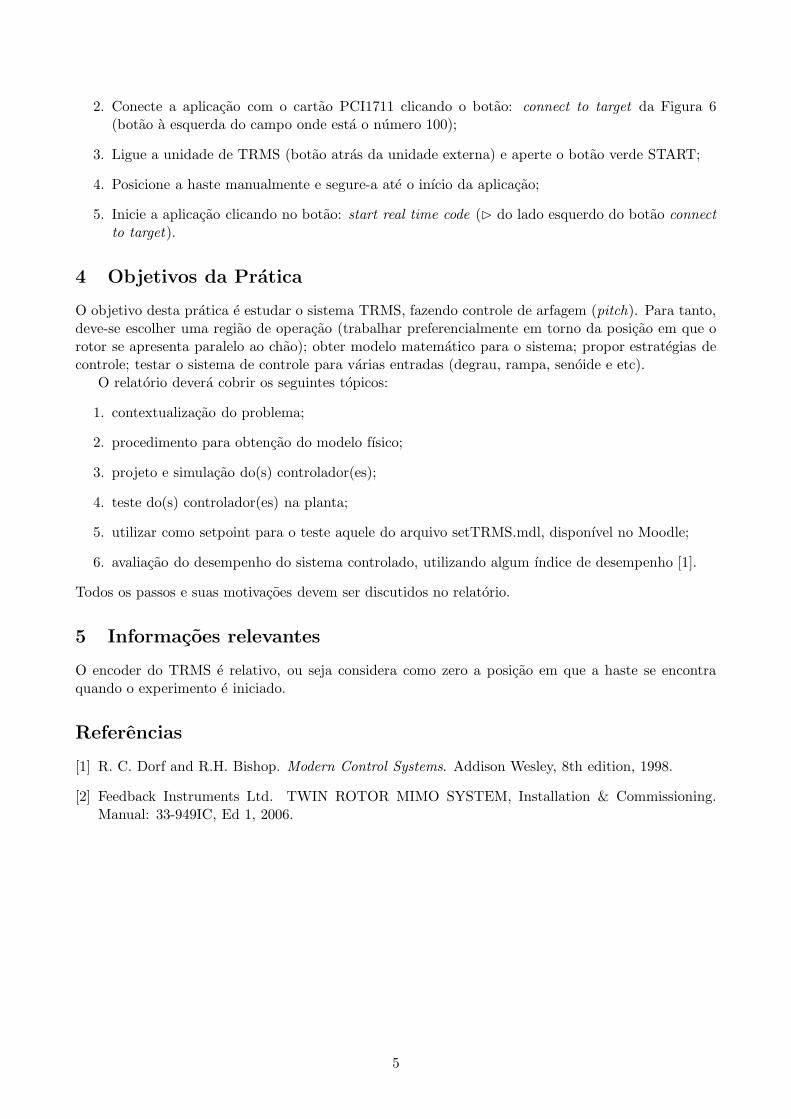
Para comecar um novo projeto, a melhor forma de se fazer e utilizar uma aplicacao ja existentee remover o que estiver entre os dois principais blocos, o Feedback Encoder (saıda do sistema) e oFeedback DAC (entrada do sistema), Figura 7. O Feedback encoder tem duas saıdas, que sao aposicao em radianos nos dois planos perpendiculares. O Feedback DAC possui uma entrada, ondesera aplicado o sinal de controle. Estes dois blocos nao devem ser modificados.
Figura 7: Blocos do Sistema [2].
Antes de executar a aplicacao:
- observe que o TRMS esta em repouso, na posicao inicial (encoder relativo);
- observe que a area em torno do TRMS esta livre.
Para executar o controle em tempo real, a seguinte sequencia deve ser respeitada.
1. Clique no botao incremental build (segundo botao a direita da caixa External, da Figura 6.
4
2. Conecte a aplicacao com o cartao PCI1711 clicando o botao: connect to target da Figura 6(botao a esquerda do campo onde esta o numero 100);
3. Ligue a unidade de TRMS (botao atras da unidade externa) e aperte o botao verde START;
4. Posicione a haste manualmente e segure-a ate o inıcio da aplicacao;
5. Inicie a aplicacao clicando no botao: start real time code (⊲ do lado esquerdo do botao connect
to target).
4 Objetivos da Pratica
O objetivo desta pratica e estudar o sistema TRMS, fazendo controle de arfagem (pitch). Para tanto,deve-se escolher uma regiao de operacao (trabalhar preferencialmente em torno da posicao em que orotor se apresenta paralelo ao chao); obter modelo matematico para o sistema; propor estrategias decontrole; testar o sistema de controle para varias entradas (degrau, rampa, senoide e etc).
O relatorio devera cobrir os seguintes topicos:
1. contextualizacao do problema;
2. procedimento para obtencao do modelo fısico;
3. projeto e simulacao do(s) controlador(es);
4. teste do(s) controlador(es) na planta;
5. utilizar como setpoint para o teste aquele do arquivo setTRMS.mdl, disponıvel no Moodle;
6. avaliacao do desempenho do sistema controlado, utilizando algum ındice de desempenho [1].
Todos os passos e suas motivacoes devem ser discutidos no relatorio.
5 Informacoes relevantes
O encoder do TRMS e relativo, ou seja considera como zero a posicao em que a haste se encontraquando o experimento e iniciado.
Referencias
[1] R. C. Dorf and R.H. Bishop. Modern Control Systems. Addison Wesley, 8th edition, 1998.
[2] Feedback Instruments Ltd. TWIN ROTOR MIMO SYSTEM, Installation & Commissioning.Manual: 33-949IC, Ed 1, 2006.
5





























