Embed Size (px)
Citation preview
1
Universidade Federal de ItajubáInstituto de Engenharia de Sistemas e Tecnologias da Informação
Engenharia da Computação
ELT403 – Eletrônica Aplicada II
Conversores de Dados
(Introdução e Conversores D/A)
Prof. Paulo C. Crepaldi Prof. Leonardo B. Zoccal
Itajubá, Agosto de 2010

2
Considerações Gerais
Atualmente, é comum o uso de máquinas digitais (um computador pessoal, por exemplo) para o controle e a supervisão de processos.
O processamento digital apresenta vantagens como a operação em tempo real e a flexibilidade de mudanças que podem ser efetuadas por software.
Contudo, devemos ter em mente que os sinais provenientes deste processos são sinais físicos e analógicos com temperatura, pressão, deslocamentos, etc.
Portanto, é necessário, antes de tudo, o uso de sensores e transdutores que irão converter os sinais físicos em sinais elétricos. Não basta apenas esta
conversão para sinais elétricos mas, também, uma conversão adicional para sinais elétricos que sejam corretamente interpretados pela máquina digital, ou
seja, é preciso o uso de conversores analógico-digitais (conversores A/D).Se a máquina digital precisa intervir no processo, também é necessário um
caminho inverso de conversão, ou seja, os sinais digitais são convertidos em sinais analógicos pelo uso de conversores digital-analógicos (conversores D/A) e, na seqüência, entregues a circuitos especializados denominados de
atuadores. Os atuadores irão agir no processo de forma a se obter os resultados desejados de operação.

3
Diagrama de blocos de um Sistema de Controle Digital
O bloco de tratamento e condicionamento é fundamental para adequar o sinal elétrico, proveniente dos sensores/transdutores, aos conversores
A/D. Suas principias funções são: Amplificação, Isolação, Multiplexagem, Filtragem, Linearização e Excitação.
Os atuadores agem nos equipamentos presentes no processo. Os atuadores mais comuns são dispositivos pneumáticos, hidráulicos e
eletro-eletrônicos de potência.Neste curso, o objetivo será a análise dos conversores A/D e D/A.

4
Exemplo de um Sistema de Aquisição de Dados (PC-Based)

5
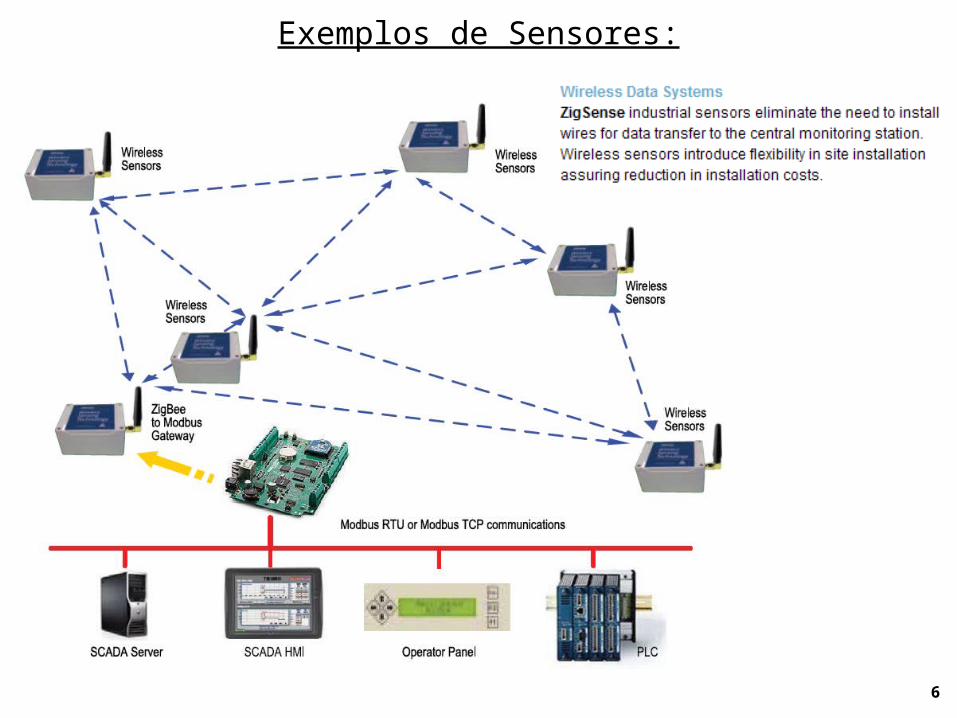
Exemplos de Sensores:
6
Exemplos de Sensores:

7
Exemplos de Sensores:

8
Exemplos de Sensores: Aplicações Biomédicas

9
Exemplos de Sensores: Aplicações Automotivas

10
Exemplos de Atuadores:

11
Exemplos de Atuadores:

12
Exemplos de Atuadores:
Atuadores Elétricos (Outras Empresas)

13
Exemplos de Atuadores:

14
Conversor Digital-Analógico (D/A ou DAC)
Um DAC converte um sinal digital, expresso por um número binário de n bits, em uma tensão analógica. Esta tensão analógica
“equivalente” pode assumir 2n valores distintos.
O DAC pode ser classificado, ainda, como unipolar ou sinalizado. Os conversores unipolares apresentam uma tensão analógica de saída
sempre positiva. Para os sinalizados é pressuposto que o número binário é sinalizado e, desta forma, a polaridade da tensão analógica
de saída depende do bit de sinal (geralmente o MSB).
Normalmente, o DAC é representado como ilustrado na Figura ao lado. Observar a necessidade de uma
tensão de referência (estável) que servirá de base para produzir o sinal
analógico de saída.
15
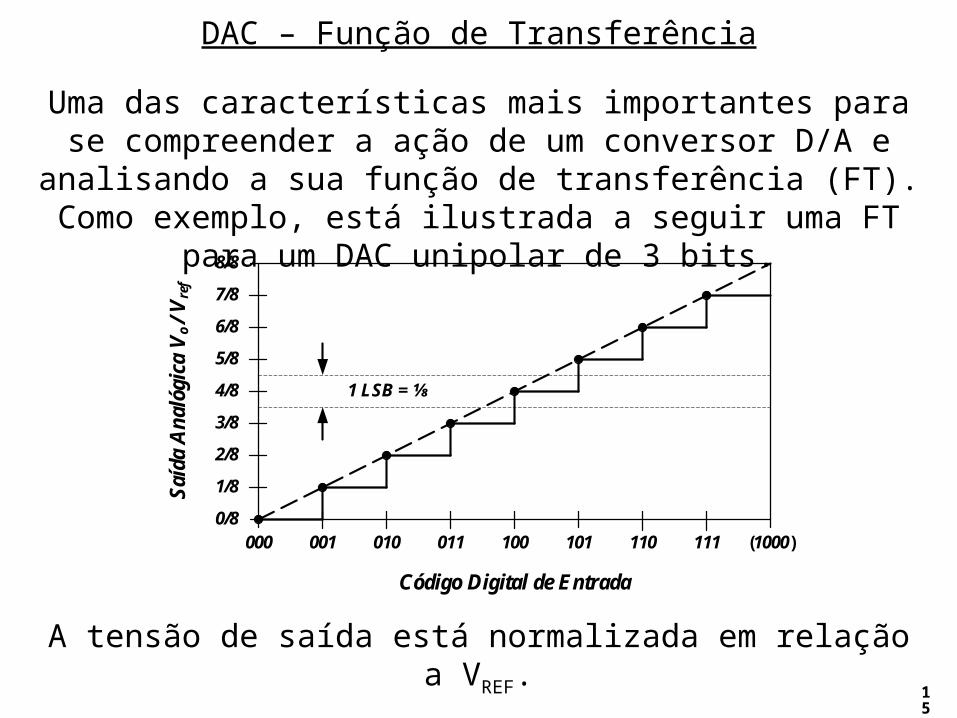
DAC – Função de Transferência
Uma das características mais importantes para se compreender a ação de um conversor D/A e analisando a sua função de transferência
(FT). Como exemplo, está ilustrada a seguir uma FT para um DAC unipolar de 3 bits.
000 001 011 101 1100/8
1/8
010 100 (1000)
2/8
3/8
4/8
5/8
6/8
7/8
8/8
111
1 LSB = ⅛
Código Digital de Entrada
Saí
da A
nal
ógic
a V
o / V
ref
A tensão de saída está normalizada em relação a VREF.
16
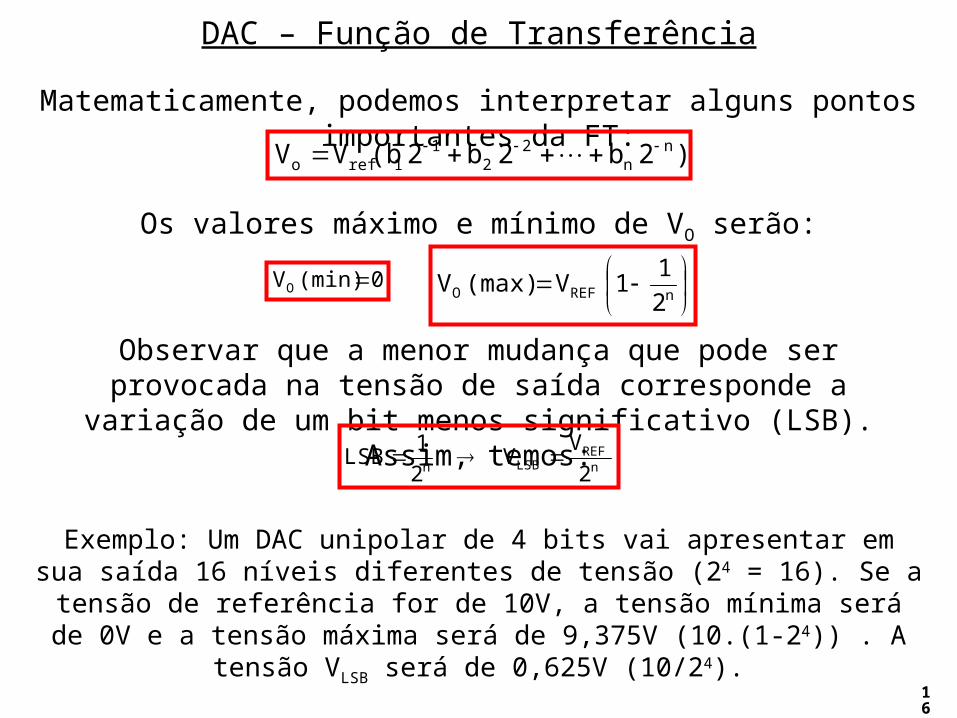
DAC – Função de Transferência
Matematicamente, podemos interpretar alguns pontos importantes da FT:
)2b2b2(bVV nn
22
11refo
0(min)VO
nREFO 2
11V(max)V
Os valores máximo e mínimo de VO serão:
Observar que a menor mudança que pode ser provocada na tensão de saída corresponde a variação de um bit menos significativo (LSB). Assim, temos:
nREF
LSBn 2
VV
2
1LSB
Exemplo: Um DAC unipolar de 4 bits vai apresentar em sua saída 16 níveis diferentes de tensão (24 = 16). Se a tensão de referência for de 10V, a tensão
mínima será de 0V e a tensão máxima será de 9,375V (10.(1-24)) . A tensão VLSB será de 0,625V (10/24).

17
DAC – Características Estáticas
Existe um conjunto de características (estáticas e dinâmicas) associadas aos conversores que representam figuras de mérito
importantes. Principalmente quando for necessário fazer a escolha de um conversor para uma dada aplicação. É essencial fazer a
escolha que maximize a solução custo-benefício.
Inicialmente, vamos abordar as características estáticas:
Resolução;
Fundo de Escala (Full-Scale output voltage);
Exatidão.
Depois de abordadas as suas definições vamos verificar que existem erros (erro de offset, erro de ganho e erro de linearidade) que
podem afetá-las.

18
DAC – Características Estáticas – Fundo de Escala (FS) e Resolução
FS: É definida como sendo a diferença entre as tensões analógicas produzidas pela maior e pela menor palavra digital de entrada. Deve-se considerar, entretanto, que a resolução do conversor é infinita (n=∞):
REFREFOOFS V02
11V(min)V(max)VV
Resolução: 1) É o número de diferentes valores analógicos de saída, sendo expressa em número de bits:
Resolução = n [bits]
2) É o “degrau” de tensão que existe quando se varia 1LSB na palavra digital de entrada:
Resolução = VO(max)/(2n-1) [V/LSB]
Atenção: observe que pelo fato dos conversores reais não terem resolução infinita, o máximo valor analógico de saída é inferior a FS. Um conversor
apresentar uma alta resolução não é um indicativo de boa exatidão.
19
DAC – Características Estáticas – Exatidão
Exatidão: É definida como sendo a diferença entre a resposta ideal esperada e a resposta real do conversor incluindo os erros de
Offset, de Ganho e de Linearidade.
Esta figura de mérito é expressa através de uma porcentagem do fundo de escala, em número de bits ou em função do LSB.
Atenção:
1. Os erros de Offset e Ganho podem ser minimizados (em alguns casos até eliminados), na prática, por um processo de calibragem chamado de “trimming”;
2. O projeto ou especificação de um bom conversor D/A necessita que a exatidão seja menor que a sua resolução.
20
DAC – Erro de Offset
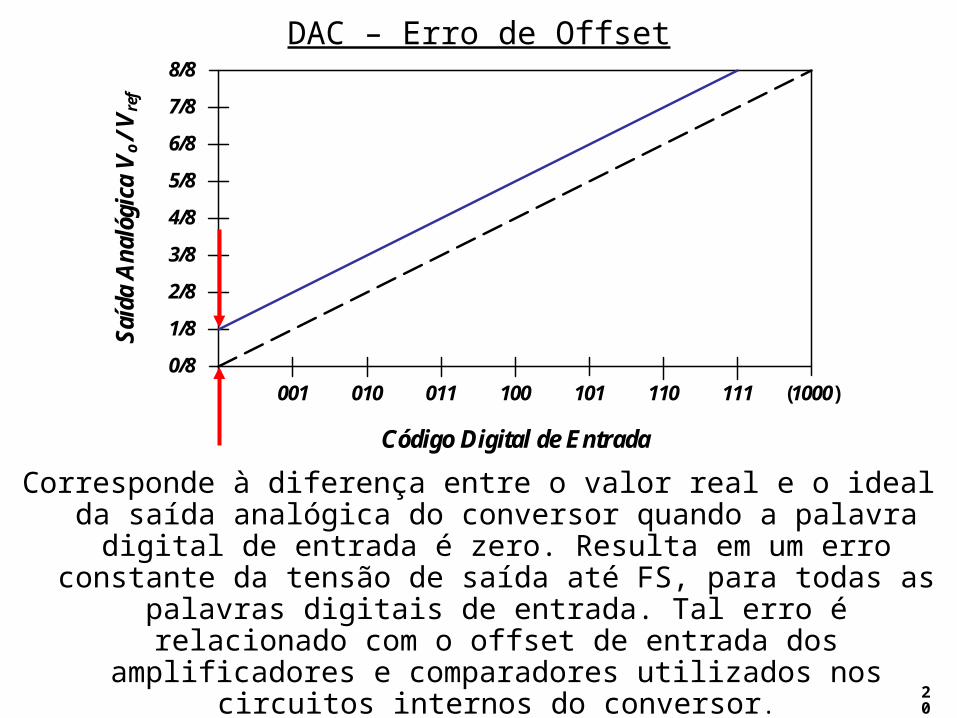
Corresponde à diferença entre o valor real e o ideal da saída analógica do conversor quando a palavra digital de entrada é zero. Resulta em um erro
constante da tensão de saída até FS, para todas as palavras digitais de entrada. Tal erro é relacionado com o offset de entrada dos amplificadores
e comparadores utilizados nos circuitos internos do conversor.
A linha tracejada representa a resposta ideal de um DAC de 3 bits.
001 011 101 1100/8
1/8
010 100 (1000)
2/8
3/8
4/8
5/8
6/8
7/8
8/8
111
Código Digital de Entrada
Saí
da A
nal
ógic
a V
o / V
ref
21
DAC – Erro de Ganho
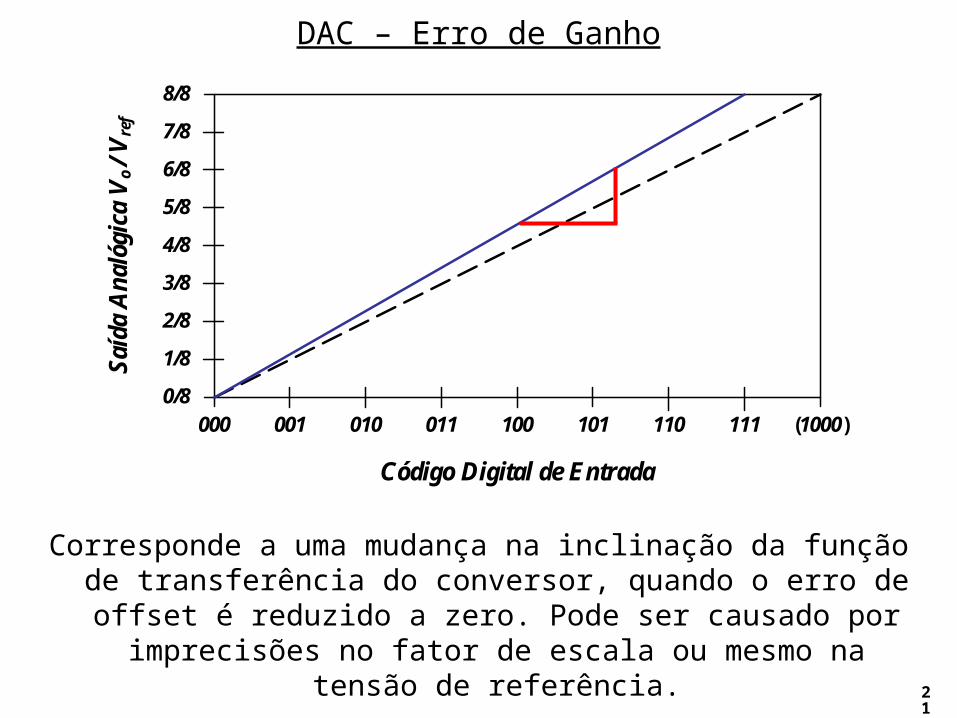
Corresponde a uma mudança na inclinação da função de transferência do conversor, quando o erro de offset é reduzido a zero. Pode ser causado por imprecisões no fator de escala ou mesmo na tensão de referência.
A linha tracejada representa a resposta ideal de um DAC de 3 bits.
000 001 011 101 1100/8
1/8
010 100 (1000)
2/8
3/8
4/8
5/8
6/8
7/8
8/8
111
Código Digital de Entrada
Saí
da A
nal
ógic
a V
o / V
ref
22
DAC – Erro de Linearidade
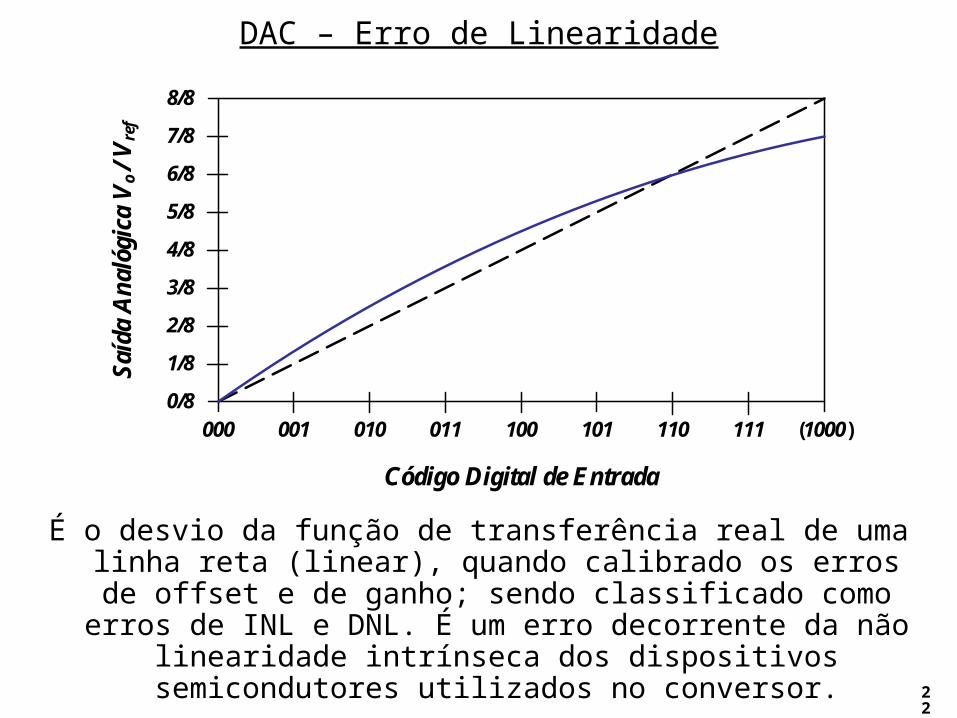
É o desvio da função de transferência real de uma linha reta (linear), quando calibrado os erros de offset e de ganho; sendo classificado como erros de
INL e DNL. É um erro decorrente da não linearidade intrínseca dos dispositivos semicondutores utilizados no conversor.
A linha tracejada representa a resposta ideal de um DAC de 3 bits.
000 001 011 101 1100/8
1/8
010 100 (1000)
2/8
3/8
4/8
5/8
6/8
7/8
8/8
111
Código Digital de Entrada
Saí
da A
nal
ógic
a V
o / V
ref

23
DAC – INL e DNL
INL – Integral Nonlinearity(Algumas vezes referenciada como Relative Accuracy ou Static Accuracy)
Corresponde ao maior desvio da saída analógica em relação a uma linha reta desenhada entre a origem e o fundo de escala (conversor ideal).
Normalmente expressa em LSB ou em % de FS.
DNL – Differential Nonlinearity
Corresponde ao máximo desvio de quaisquer duas saídas analógicas adjacentes com relação ao degrau de transferência ideal de 1LSB. Também
expressa em LSB ou em % FS.
Atenção:
O DAC é dito ser Monotônico se a tensão analógica de saída aumenta ou permanece constante para um respectivo incremento do código digital de
entrada. Para tanto:
LSB1DNLeLSB2
1INL
24
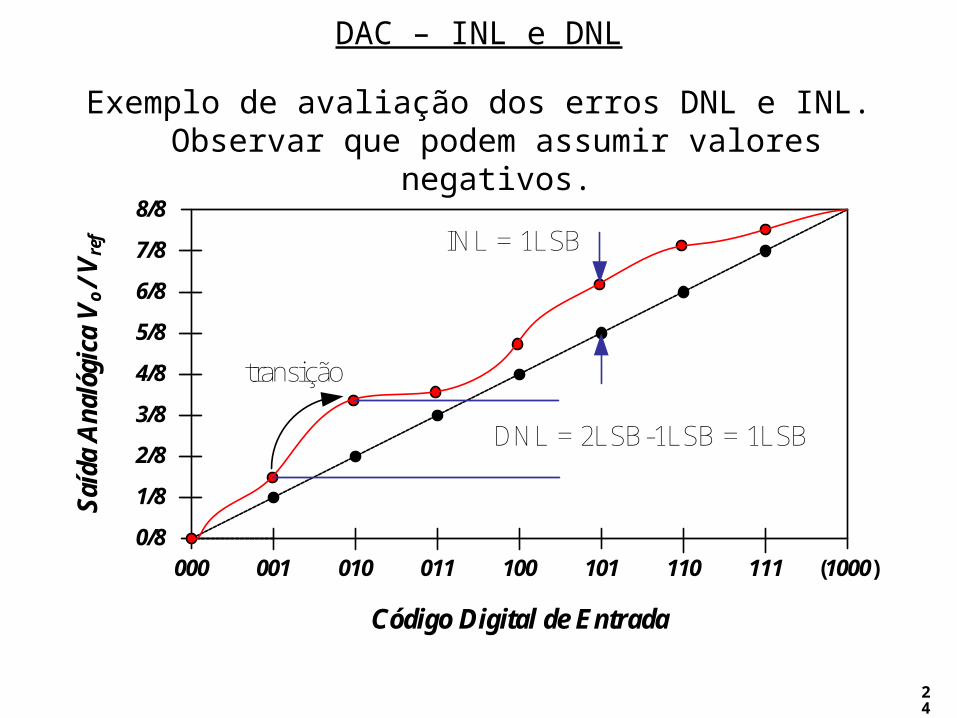
DAC – INL e DNL
Exemplo de avaliação dos erros DNL e INL. Observar que podem assumir valores negativos.
000 001 011 101 1100/8
1/8
010 100 (1000)
2/8
3/8
4/8
5/8
6/8
7/8
8/8
111
Código Digital de Entrada
Saí
da A
nal
ógic
a V
o / V
ref INL = 1LSB
DNL = 2LSB-1LSB = 1LSB
transição
25
DAC – Características Dinâmicas
Settling Time
Tempo necessário para que a saída analógica atinja o seu final dentro de uma faixa de erro pré estabelecida (normalmente ± ½ LSB). Tipicamente situa-se
na faixa de centenas de nS a unidades de S.
Taxa de Amostragem
Corresponde a velocidade com a qual o DAC pode realizar conversões sucessivas. Esta grandeza é afetada pelas demoras de propagação, “slew rate” e settling time dos circuitos internos do conversor. Normalmente expressa em
conversões por segundo (Samples/s).
Faixa Dinâmica
Representa a amplitude a qual o sinal de saída pode excursionar mantendo o grau de linearidade estabelecida para o conversor. Os sinais devem ser
condicionados de forma a possibilitar a utilização otimizada desta faixa.

26
DAC – Topologias Básicas
Existem 3 topologias básicas para a construção dos conversores D/A:
Conversores com Rede Ponderada;
Conversores com Malha R-2R (ou Multiplicativos);
Conversores por Modulação de Largura de Pulso (PWM).
Os conversores em CI comerciais mais comuns (série DAC 08XX, por exemplo) utilizam a conversação através da malha R-2R. O conversor por PWM pode ser obtido, de forma simples, usando-se a saída PWM
que um microcontrolador usualmente oferece e um filtro RC.
27
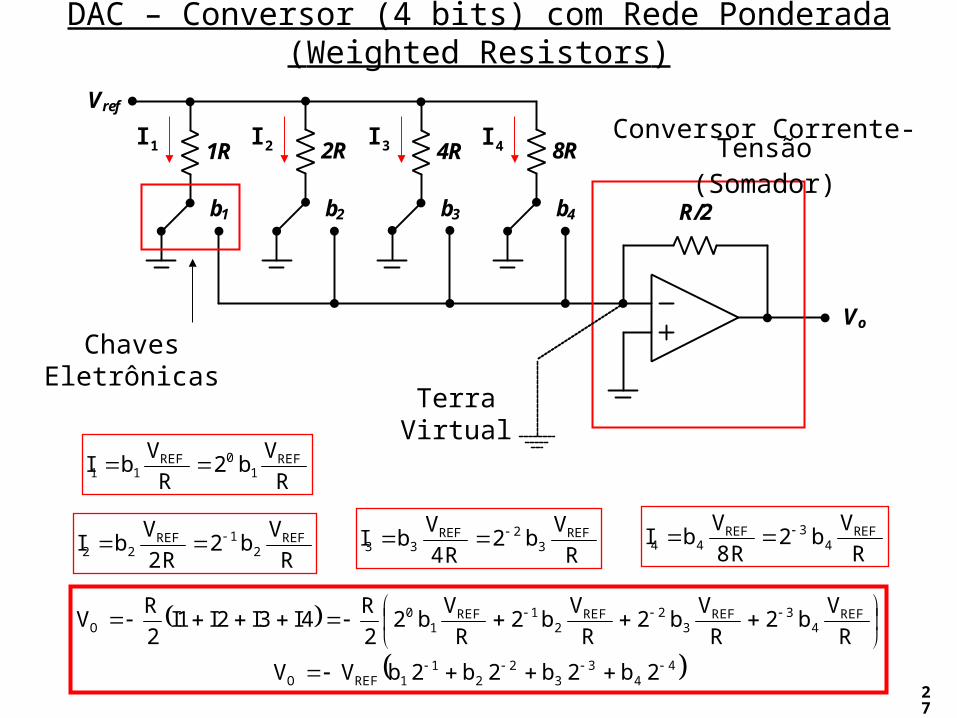
DAC – Conversor (4 bits) com Rede Ponderada (Weighted Resistors)
R/2
Vo
1R
b3b1
2R 4R
b4b2
8R
Vref
Conversor Corrente-Tensão(Somador)
Terra Virtual
Chaves Eletrônicas
I1 I2 I3 I4
R
Vb2
R
VbI REF
10REF
11
R
Vb2
R2
VbI REF
21REF
22 R
Vb2
R4
VbI REF
32REF
33
R
Vb2
R8
VbI REF
43REF
44
44
33
22
11REFO
REF4
3REF3
2REF2
1REF1
0O
2b2b2b2bVV
R
Vb2
R
Vb2
R
Vb2
R
Vb2
2
R4I3I2I1I
2
RV
28
R
Vo
2R
b3b1
2R 2R
b4b2
2R
Vref
R R R 2R
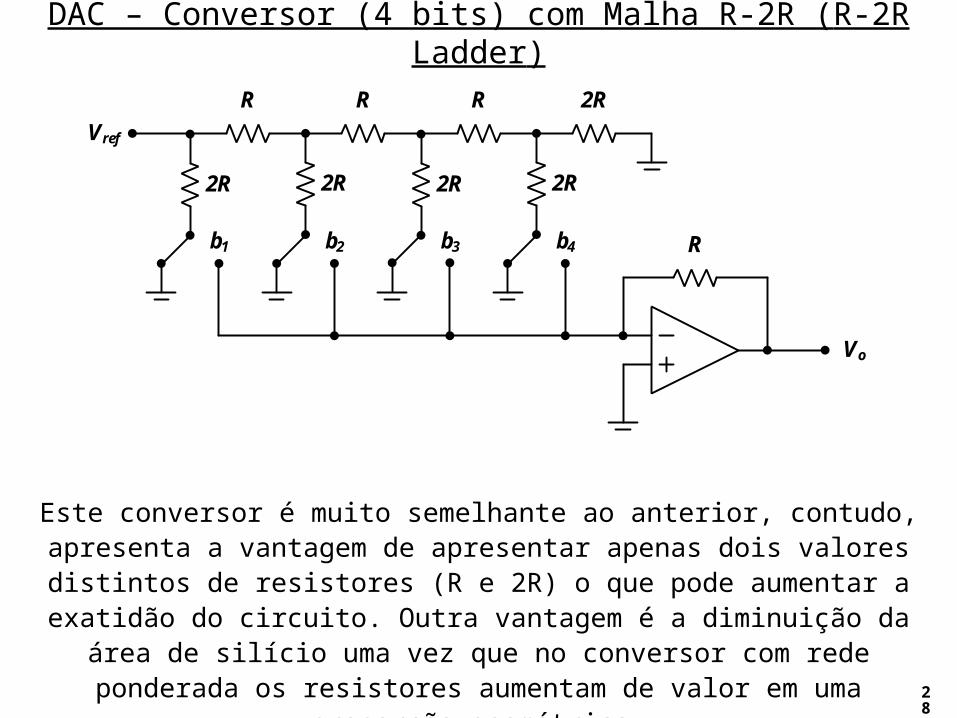
DAC – Conversor (4 bits) com Malha R-2R (R-2R Ladder)
Este conversor é muito semelhante ao anterior, contudo, apresenta a vantagem de apresentar apenas dois valores distintos de resistores (R e 2R) o que pode aumentar a exatidão do circuito. Outra vantagem é a diminuição da área de silício uma vez que
no conversor com rede ponderada os resistores aumentam de valor em uma proporção geométrica.

29
DAC – Característica da Malha R-2R
Terra Virtual(AMPOP)
O lado inferior dos resistores 2R sempre “enxergam” o
potencial zero, independentemente da
posição das chaves.
I1 I2 I3 I4
Para qualquer um dos nós, em relação à referência, observa-se, então, que o circuito equivalente consiste de dois resistores iguais a 2R em paralelo. Desta forma, as
correntes são divididas por 2 sucessivamente. Com uma dedução semelhante a do conversor com rede ponderada chega-se a:
44
33
22
11REFO 2b2b2b2bVV
IO=b1I1+b2I2+b3I3+b4I4
IO

30
DAC – Interfaceamento
Vo
VREF
Barramento de Dados
b0 ~ bn
Barramento de Endereços
Decodificador de
Endereços
DACn bits
CEa0 ~ am
WR
P
R/W
Basicamente, trata-se de um dispositivo de E/S para o qual deverá ser alocado uma posição específica de endereçamento através do decodificador de endereços. O chip é
habilitado por linhas do tipo Chip Select (CS) ou Chip Enable (CE). Alguns DACs apresentam latchs internos para receber a palavra digital a ser convertida e
apresentam linhas adicionais do tipo Write (WR).

31
Exemplo: DAC0800 (descrição geral)
32
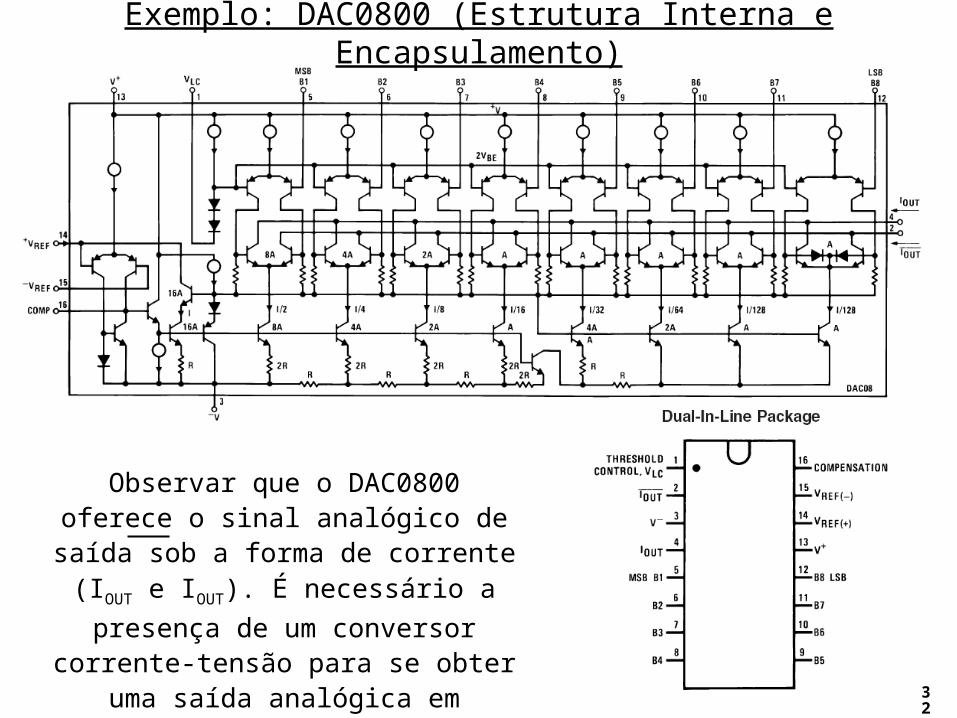
Observar que o DAC0800 oferece o sinal analógico de saída sob a forma de corrente (IOUT e IOUT). É necessário a presença de um
conversor corrente-tensão para se obter uma saída analógica em tensão.
Exemplo: DAC0800 (Estrutura Interna e Encapsulamento)
33
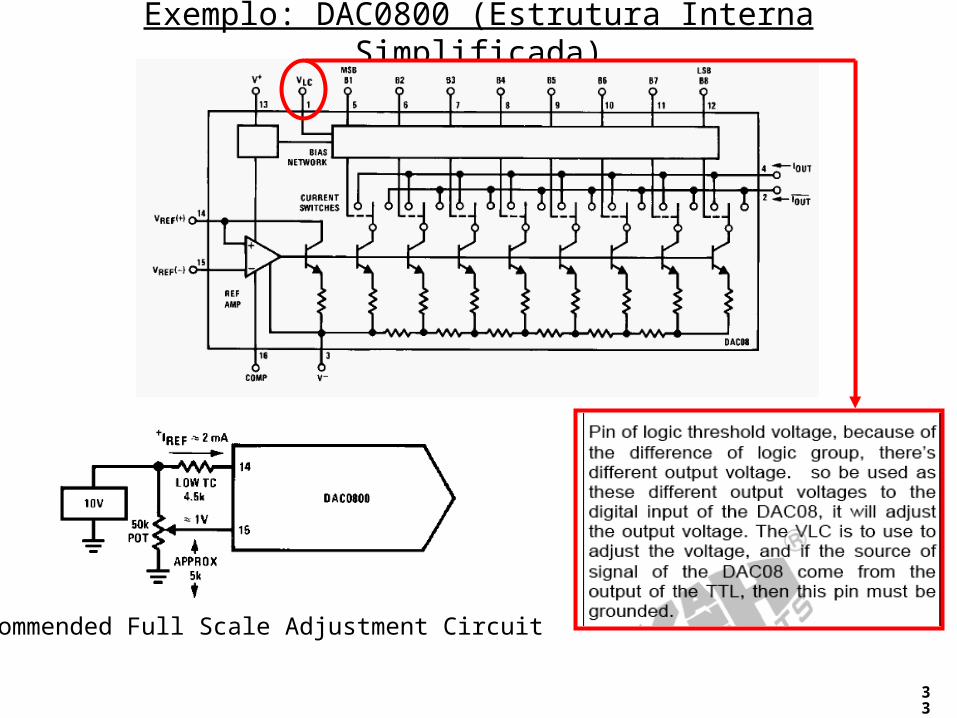
Exemplo: DAC0800 (Estrutura Interna Simplificada)
Recommended Full Scale Adjustment Circuit

34
Exemplo: DAC0800 (Valores Típicos)
A corrente de fundo de escala (IFS)
será dada por:
As correntes IO e IO são
complementares.
Para estes valores, IFS é de
aproximadamente 2mA (1,992mA).

35
Exemplo: DAC0800 (Unipolar Negative Operation)
Observe que os resistores de 5K fazem a conversão corrente-tensão.

36
Exemplo: DAC0800 (Bipolar Negative Operation)
37
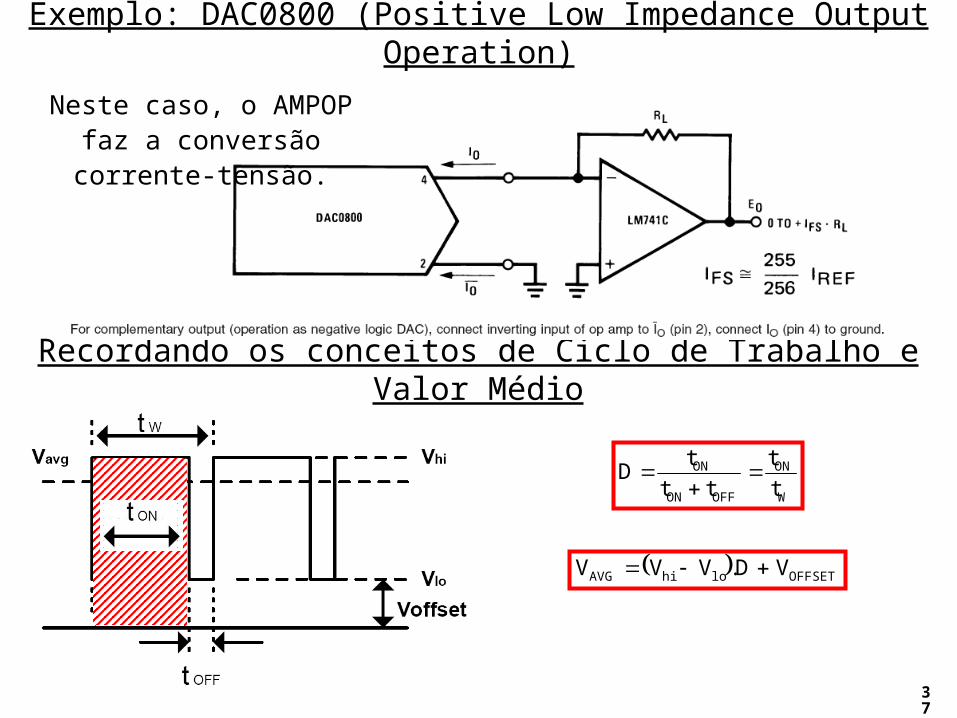
Exemplo: DAC0800 (Positive Low Impedance Output Operation)
Recordando os conceitos de Ciclo de Trabalho e Valor Médio
W
ON
OFFON
ON
t
t
tt
tD
OFFSETlohiAVG VD.VVV
Neste caso, o AMPOP faz a conversão corrente-tensão.
38
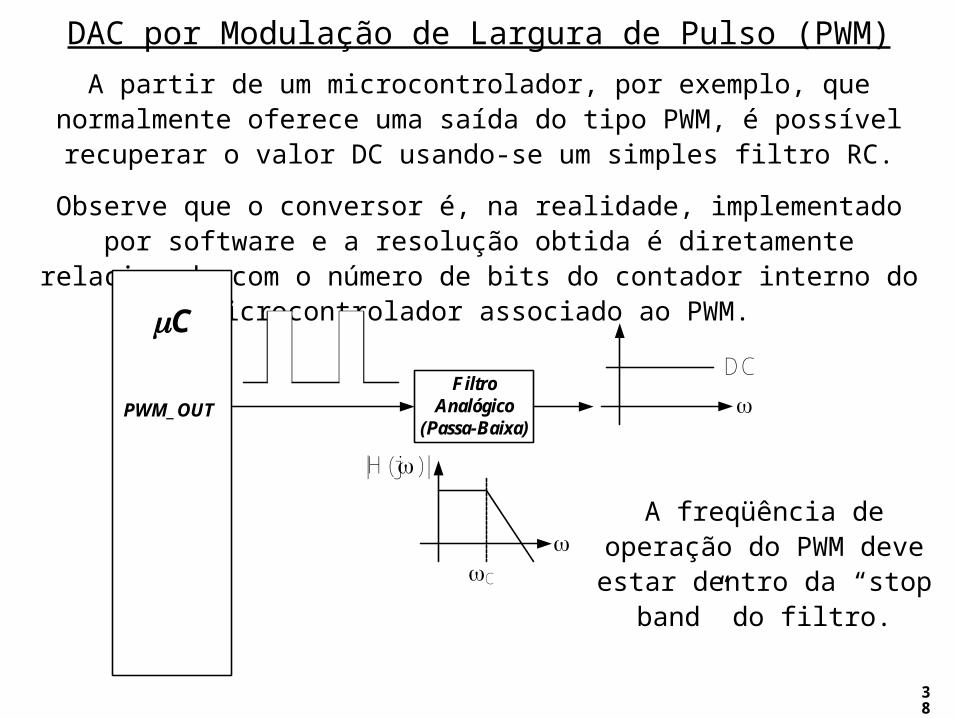
DAC por Modulação de Largura de Pulso (PWM)
A partir de um microcontrolador, por exemplo, que normalmente oferece uma saída do tipo PWM, é possível recuperar o valor DC usando-se um simples filtro RC.
Observe que o conversor é, na realidade, implementado por software e a resolução obtida é diretamente relacionada com o número de bits do contador interno do
microcontrolador associado ao PWM.
Filtro Analógico
(Passa-Baixa)
C
PWM_OUT
|H(jw)|
w
w
DC
wC
A freqüência de operação do PWM deve estar dentro da “stop
band” do filtro.

39
Exemplo: DAC (PWM) usando microcontrolador da família Z8
Filtro Passa Baixa (2ª ordem)
Buffer

40
Exemplo: DAC0830

41
Exemplo: DAC0830
Observar a presença de dois registros internos e a necessidade de uma carta de tempo para ilustrar as
temporizações envolvidas.
A presença deste resistor, interno ao CI (≈ 20K), facilita a interface com
um AMPOP para produzir a conversão corrente-tensão.

42
Exemplo: DAC0830





























