Embed Size (px)
Citation preview
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
3
1.Equações do Modelo de Estado de
Sistemas Lineares Contínuos
Objectivo:
Mostrar que há um conjunto diversificado de sistemas que podem ser
modelados através das equações de estado.
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
4
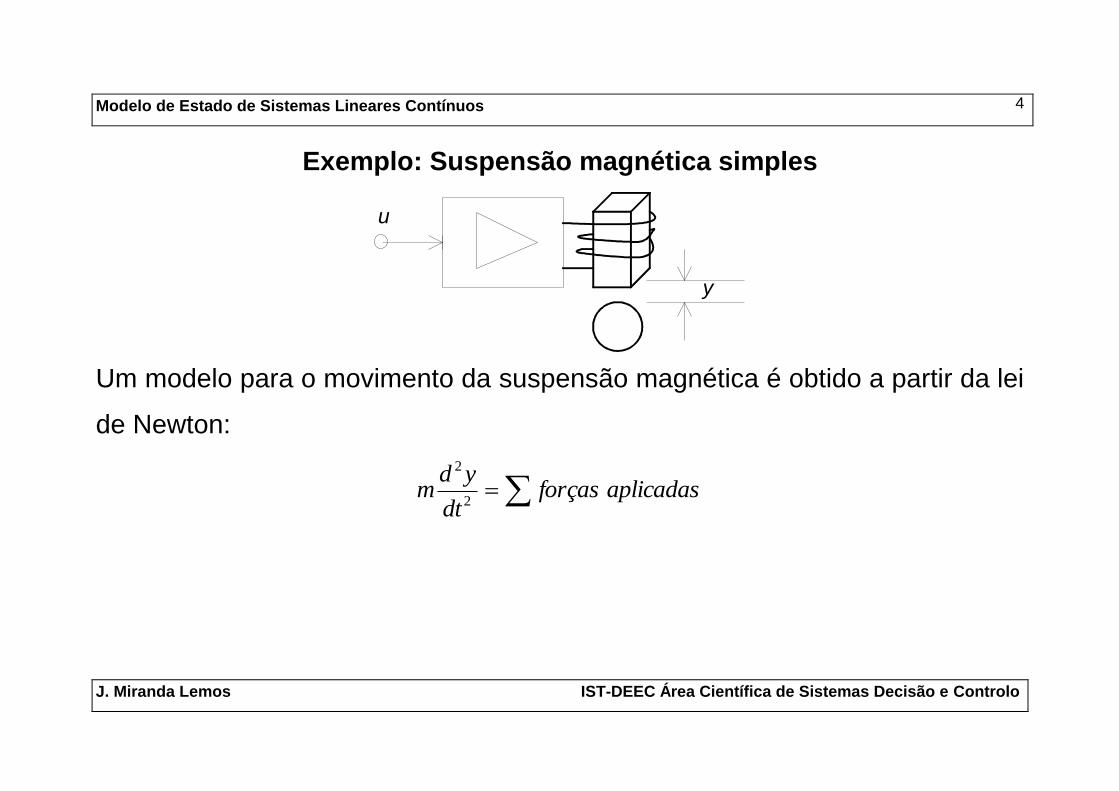
Exemplo: Suspensão magnética simples
u
y
Um modelo para o movimento da suspensão magnética é obtido a partir da lei
de Newton:
aplicadasforçasdt
ydm
2
2
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
5
aplicadasforçasdt
ydm
2
2
As forças aplicadas são o peso P e a força electromagética. Admite-se que esta se
decompõe em duas parcelas, uma que compensa o peso e a outra que é proporcional
ao sinal u . Admitindo 1m e a constante de proporcionalidade entre u e a força
igual a 1, vem o modelo simplificado
udt
yd
2
2
O modelo é descrito por uma equação diferencial de 2ª ordem.
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
6
Não é surpreendente que a suspensão magnética seja descrita por uma
equação diferencial de segunda ordem.
De facto, para conhecermos o movimento da esfera precisamos de duas
variáveis: A sua posição e a sua velocidade.
Isso sugere que o modelo da suspensão seja descrito por duas equações
diferenciais de primeira ordem, nestas variáveis, em vez de uma única
equação diferencial de segunda ordem.
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
7
Tomem-se como variáveis a posição
)()(1 tytx
e a velocidade
)()(2 tytx
Com estas variáveis, a esfera pode ser descrita pelo seguinte sistema de
duas equações diferenciais de primeira ordem:
udt
dx
xdt
dx
2
21
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
8
O sistema de duas equações diferenciais de primeira ordem
udt
dx
xdt
dx
2
21
é equivalente à equação diferencial de 2ª ordem
udt
yd
2
2
Em ambos os casos devem ser especificadas duas condições iniciais.
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
9
Podemos descrever o sistema de equações diferenciais
udt
dx
xdt
dx
2
21
na forma matricial equivalente
ux
x
x
x
1
0
00
10
2
1
2
1
2
101
x
xy
que constitui o modelo de estado da esfera, sendo o vector
2
1
x
x o estado do
sistema.
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
10
Forma padrão do modelo de estado da suspensão magnética
ux
x
x
x
1
0
00
10
2
1
2
1
2
101
x
xy
Definam-se as matrizes
00
10A
1
0B
01C 0D
O modelo de estado escreve-se na forma padrão
buAxx
DuCxy
Em todos os casos que vamos considerar 0D (sistemas com mais pólos que
zeros).
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
11
O espaço de estados da suspensão magnética
A vantagem de considerarmos o modelo de estado é podermos imaginar a
sua evolução em termos geométricos no espaço das variáveis
2
1
x
x .
A este espaço chama-se espaço de estados.
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
12
A evolução das variáveis de estado pode ser pensada como trajectórias no
espaço
2
1
x
x .
Por exemplo, se o estado da esfera estiver no ponto A do espaço de estados,
ele vai inicialmente alterar-se no sentido da seta:
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
13
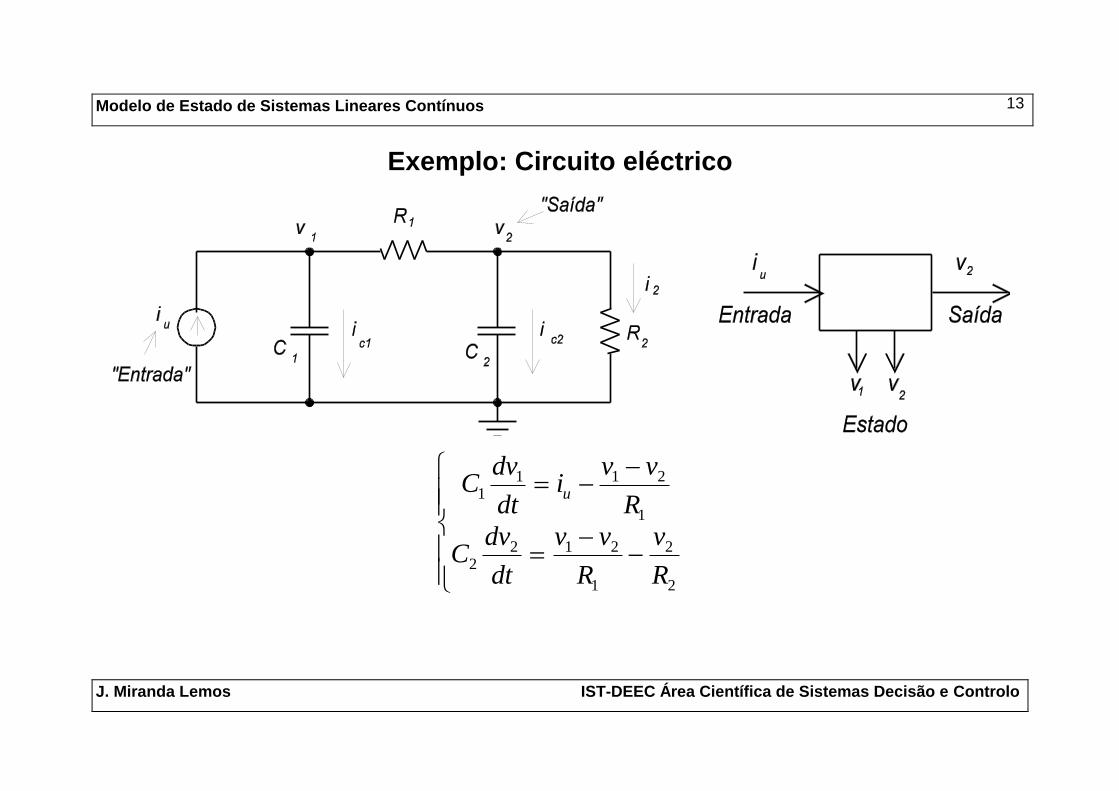
Exemplo: Circuito eléctrico
2
2
1
2122
1
2111
R
v
R
vv
dt
dvC
R
vvi
dt
dvC u
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
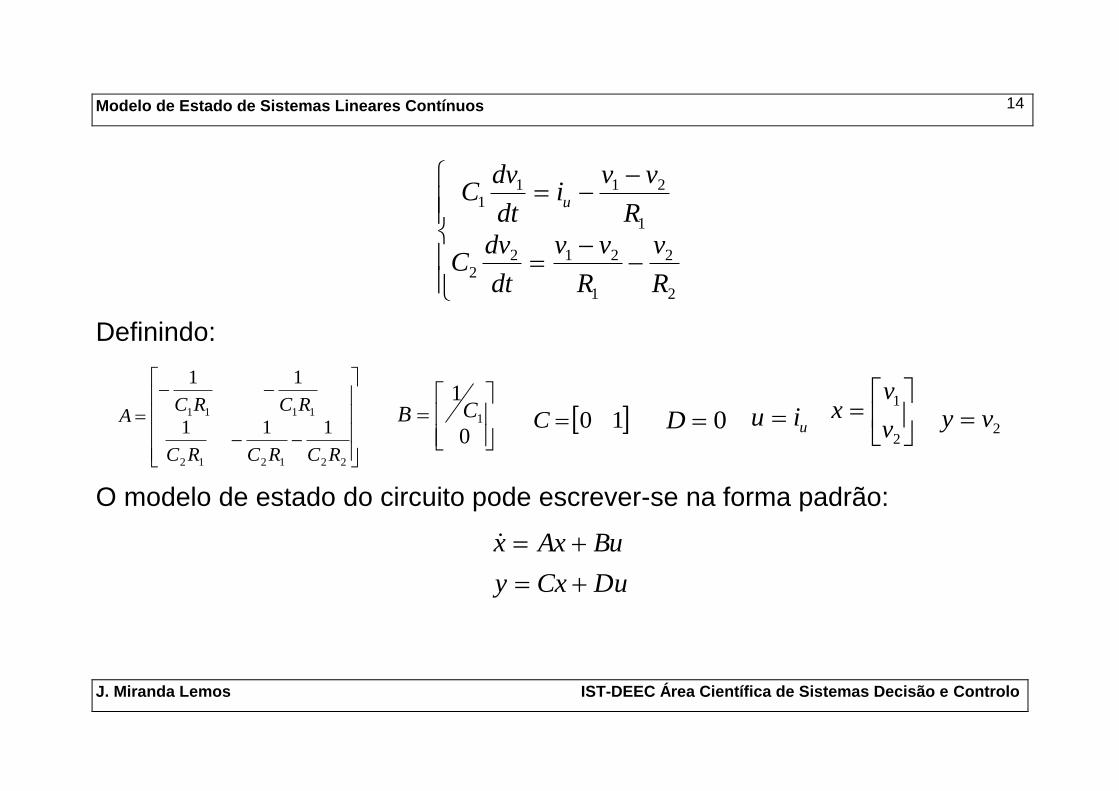
14
2
2
1
2122
1
2111
R
v
R
vv
dt
dvC
R
vvi
dt
dvC u
Definindo:
221212
1111
111
11
RCRCRC
RCRCA
0
11CB
10C 0D uiu
2
1
v
vx
2vy
O modelo de estado do circuito pode escrever-se na forma padrão:
DuCxy
BuAxx
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
15
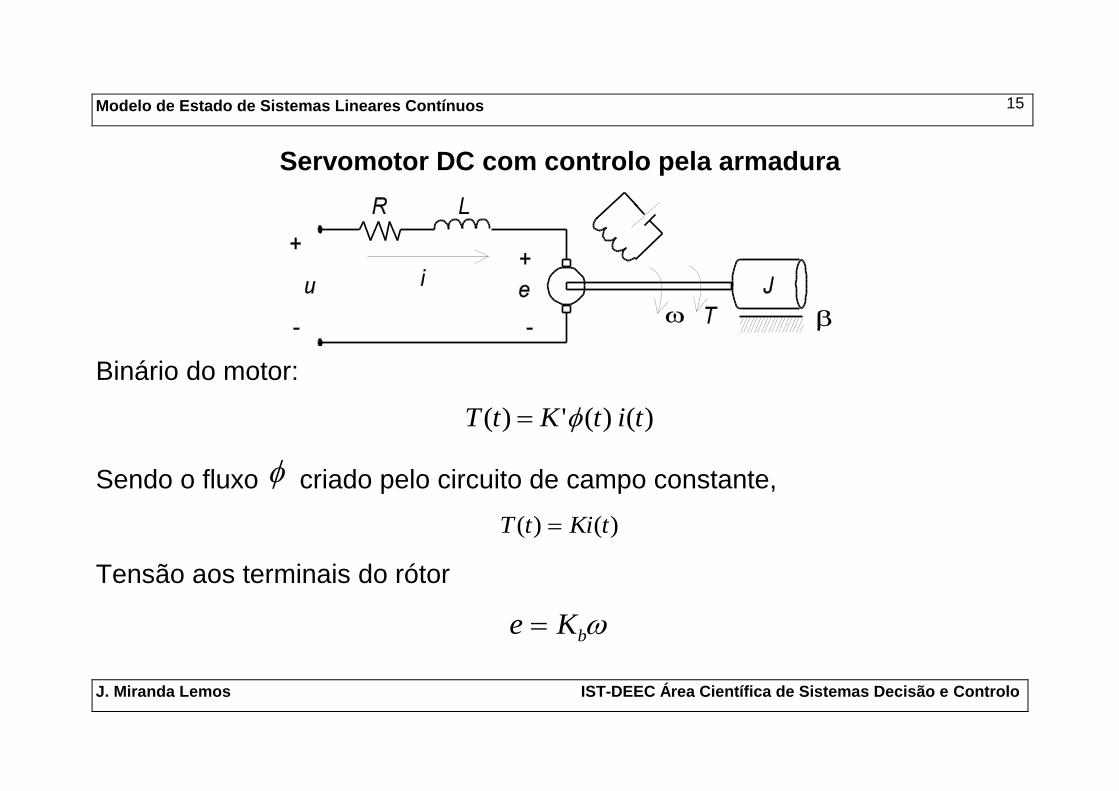
Servomotor DC com controlo pela armadura
Binário do motor:
)()(')( titKtT
Sendo o fluxo criado pelo circuito de campo constante,
)()( tKitT
Tensão aos terminais do rótor
bKe
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
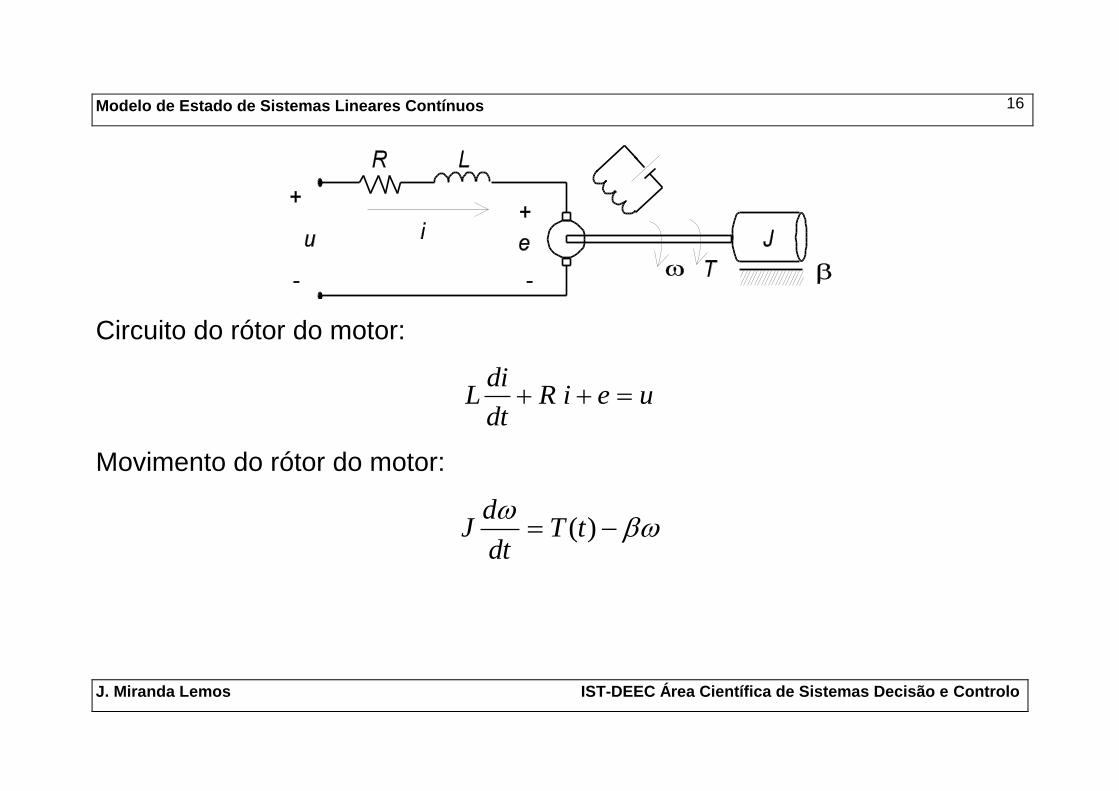
16
Circuito do rótor do motor:
ueiRdt
diL
Movimento do rótor do motor:
)(tTdt
dJ
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
17
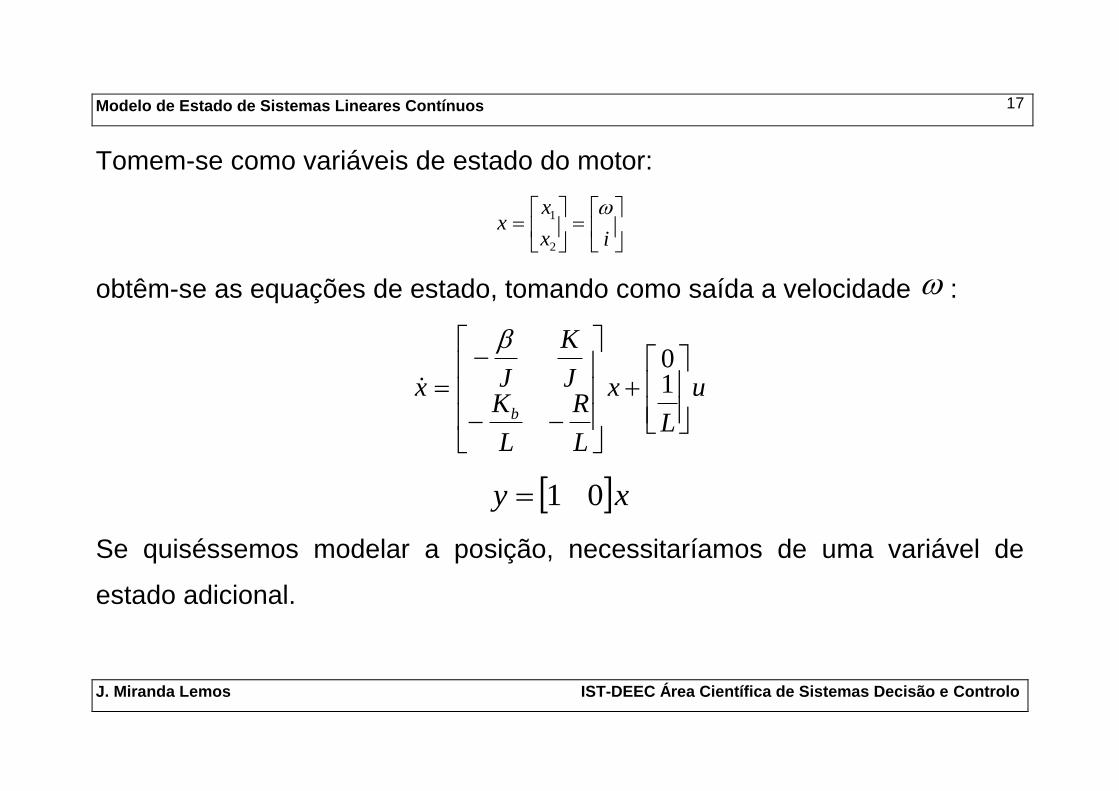
Tomem-se como variáveis de estado do motor:
ix
xx
2
1
obtêm-se as equações de estado, tomando como saída a velocidade :
u
L
x
L
R
L
KJ
K
Jxb
1
0
xy 01
Se quiséssemos modelar a posição, necessitaríamos de uma variável de
estado adicional.
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
18
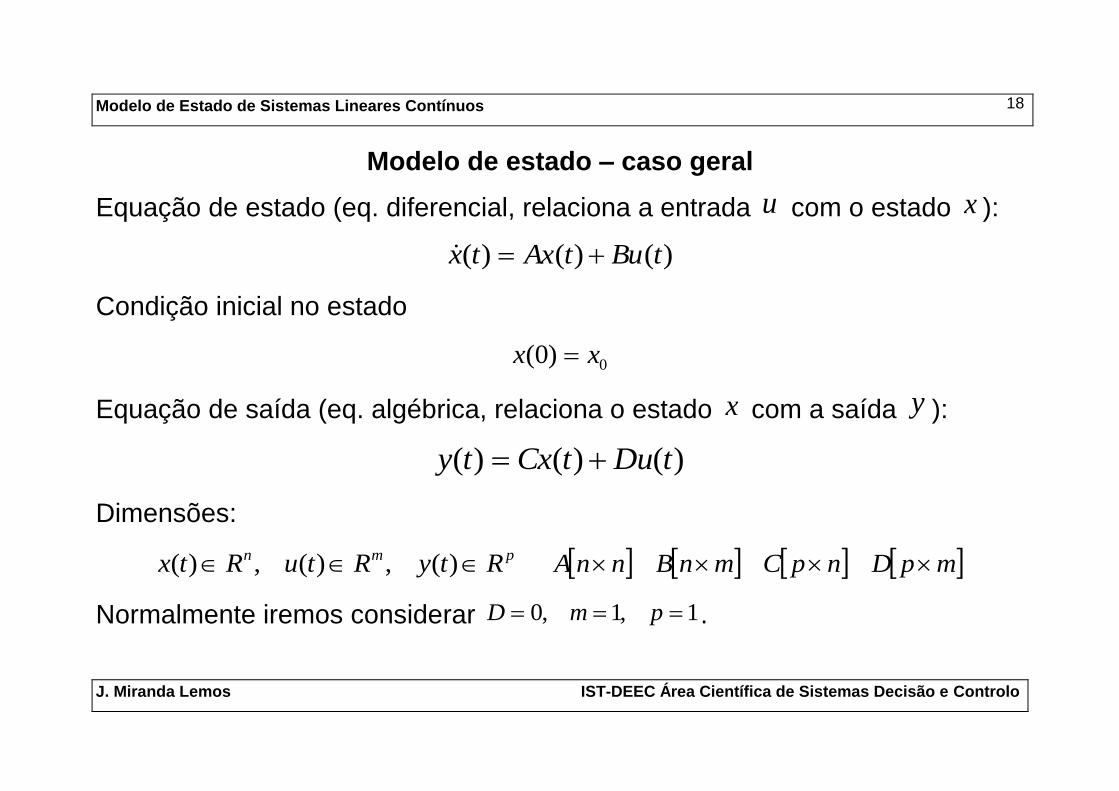
Modelo de estado – caso geral
Equação de estado (eq. diferencial, relaciona a entrada u com o estado x ):
)()()( tButAxtx
Condição inicial no estado
0)0( xx
Equação de saída (eq. algébrica, relaciona o estado x com a saída y ):
)()()( tDutCxty
Dimensões:
pmn RtyRtuRtx )(,)(,)( mpDnpCmnBnnA
Normalmente iremos considerar 1,1,0 pmD .
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
19
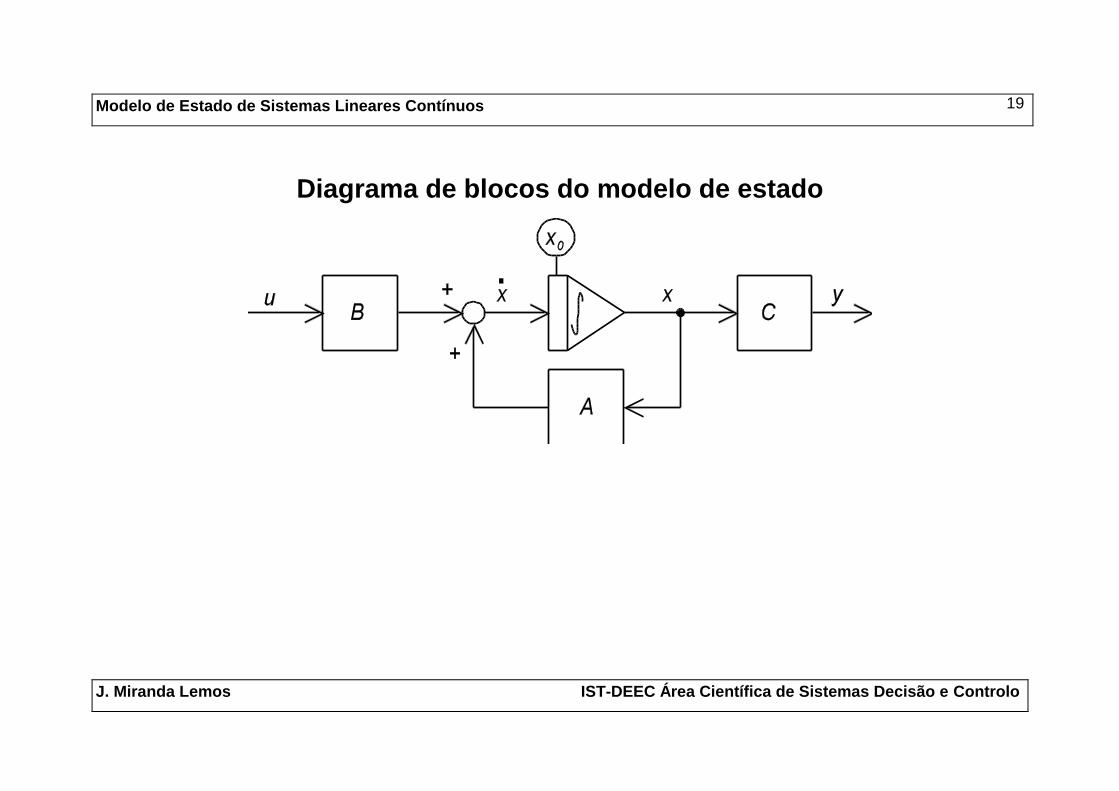
Diagrama de blocos do modelo de estado
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
20
Escolha das variáveis de estado
As variáveis de estado constituem um conjunto de variáveis que, dadas
condições iniciais, podem ser conhecidas para qualquer instante futuro, por
integração das equações de estado.
As variáveis de estado estão muitas vezes associadas aos elementos que
armazenam energia (por exemplo, na escolha feita para o motor DC), mas
isso não é necessariamente assim, embora a energia possa ser uma ajuda
importante para estabelecer o modelo de estado e projectar o controlo.
As variáveis de estado não são únicas, nem têm de ser em número mínimo.
Estes pontos serão discutidos posteriormente.
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
21
Plano de estado
Para um sistema com duas variáveis de estado, o espaço de estado reduz-se
a um plano, denominado plano de estado.
Exemplo
dx
dtx
dx
dtx x
12
21 22 2
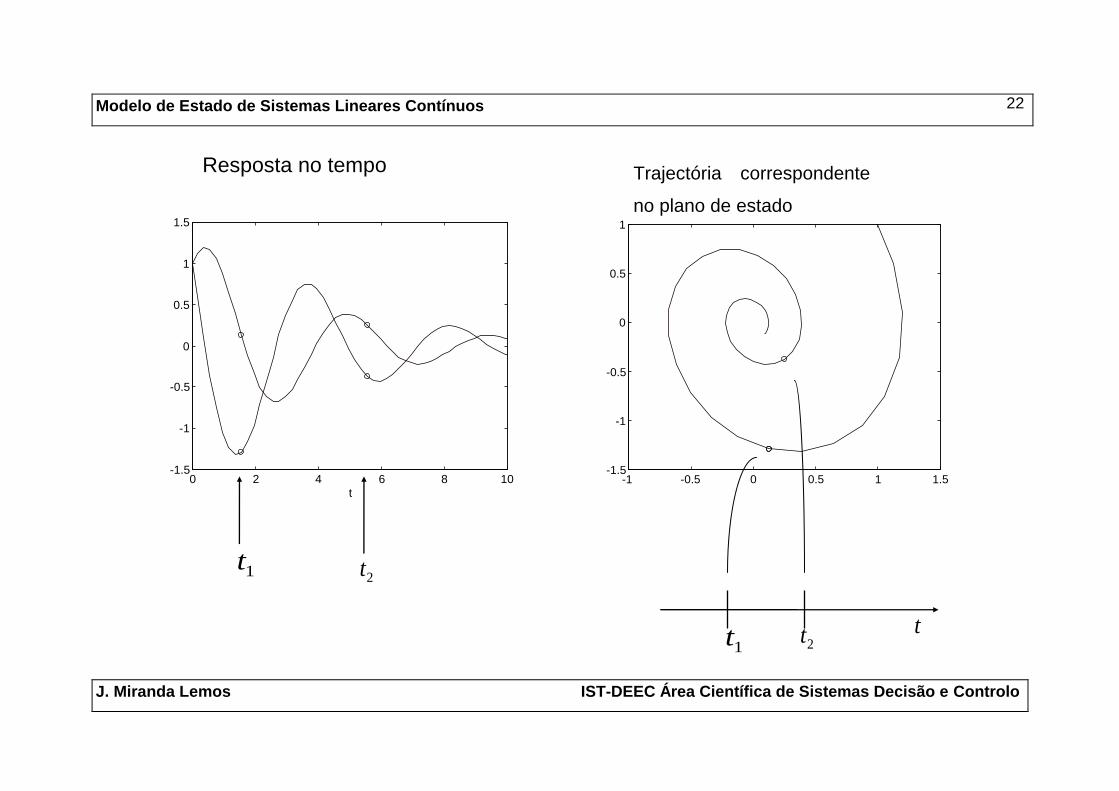
com condição inicial x x1 20 1 0 1( ) ( ) . A solução no tempo e a
correspondente órbita no espaço (plano) de estado mostram-se na figura
seguinte.
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
22
0 2 4 6 8 10-1.5
-1
-0.5
0
0.5
1
1.5
t -1 -0.5 0 0.5 1 1.5
-1.5
-1
-0.5
0
0.5
1
Resposta no tempo Trajectória correspondente
no plano de estado
t1
t2
t1
t2
t
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
23
2.Conversão entre o modelo de estado e a
função de transferência
Objectivo:
Após estudar este módulo, o aluno deverá ser capaz de obter as matrizes que
definem o modelo de estado dada uma função de transferência e vice-versa.
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
24
Obtenção da função de transferência a partir do modelo de estado
)()(
)()()(
tCxty
tbutAxtx
Tome-se a transformada de Laplace com condições iniciais nulas:
)()(
)()()(
sCXsY
sbUsAXssX
)()()()( uTLsUxTLsX
Daqui vem
)()()( sbUsXAsI )()()( 1 sbUAsIsX
ou seja
)()()( 1 sUbAsICsY
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
25
)()()( 1 sUbAsICsY
A função de transferência vem pois dada por
bAsICsG 1)()(
Dado que
)det(
)()( 1
AsI
AsIadjAsI
a função de transferência escreve-se
)det(
)()(
AsI
bAsIadjCsG
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
26
Nota sobre Álgebra Linear – Adjunta de uma matriz
A adjunta de uma matriz
ij
mM é dada por
TijMMadj )(
em que ijM é o co-factor do elemento ijm , ou seja, é dada pelo determinante
da matriz que se obtém eliminando a linha i e a coluna j , multiplicado por
ji1 .
Exemplo:
ac
bd
dc
baadj
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
27
Adjunta de uma matriz – Exemplo
160
005
321
M
10630
1515
0160
10150
6116
3050
)(
T
Madj
Para verificar o resultado, observe-se que
3
10630
1515
0160
160
005
321
80
1
)det(
)(I
M
MadjM
Referência: G. Strang, Linear Algebra and its Applications, 2ª ed., p 170.
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
28
Pólos e zeros
)det(
)()(
AsI
bAsIadjCsG
Os pólos são as raízes do polinómio característico da matriz A , dado por
)det( AsI
Os zeros são as raízes do polinómio
bAsIadjC )(
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
29
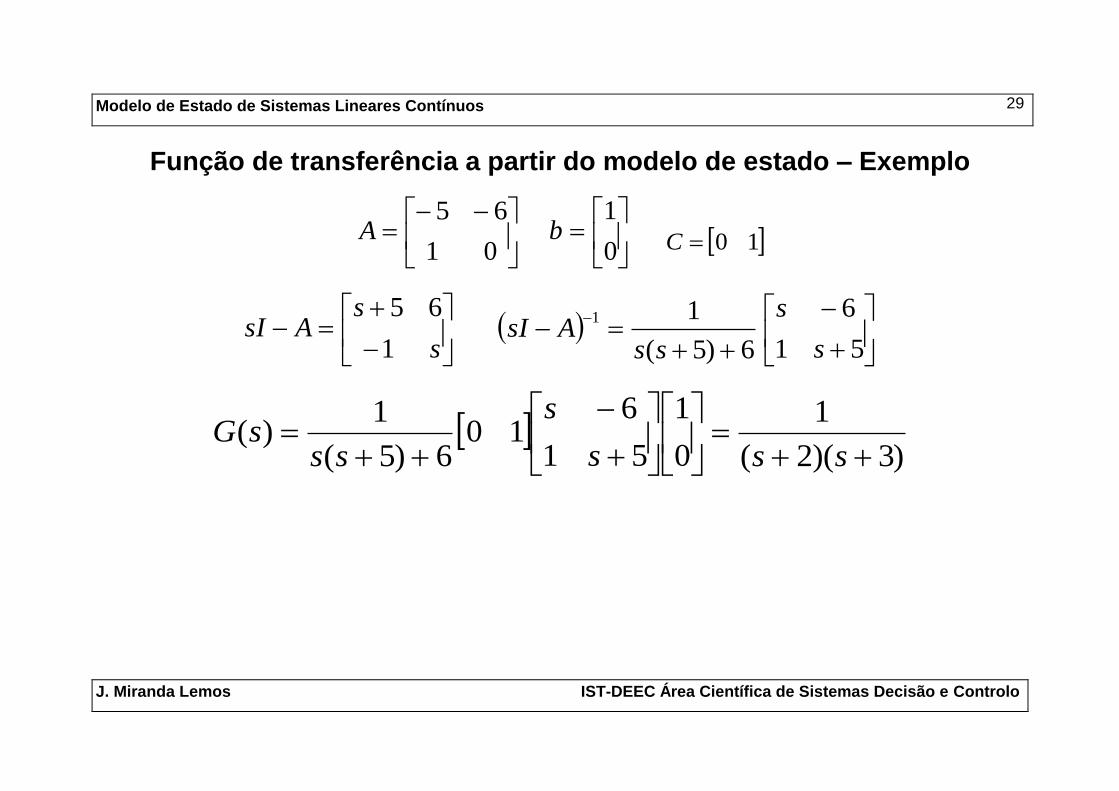
Função de transferência a partir do modelo de estado – Exemplo
01
65A
0
1b
10C
s
sAsI
1
65
51
6
6)5(
11
s
s
ssAsI
)3)(2(
1
0
1
51
610
6)5(
1)(
sss
s
sssG
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
30
Obtenção do modelo de estado – Sistemas sem zeros
Dada a função de transferência apenas com pólos:
32
2
1
3
0)(asasas
bsG
Pretende-se obter um modelo de estado que a represente.
Repare-se que este modelo de estado não é único.
Vamos começar por introduzir um tipo de variáveis de estado denominadas
variáveis de fase, em que o vector de estado é dado pela saída e pelas suas
1n primeiras derivadas. Neste exemplo, 3n .
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
31
Obtenção da equação diferencial:
32
2
1
3
0)(asasas
bsG
)()()()()( 032
2
1
3 sUbsYassYasYsasYs
Daqui vem a equação diferencial:
)()()()()( 0321 tubtyatyatyaty
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
32
)()()()()( 0321 tubtyatyatyaty
Variáveis de estado (saída e derivadas até à ordem 21n ):
23
12
1
xyx
xyx
yx
A equação diferencial escreve-se
)(01322313 tubxaxaxax
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
33
O modelo de estado fica:
21 xx
32 xx
)(01322313 tubxaxaxax
ou, em termos matriciais:
u
b
x
aaa
x
0123
0
0
100
010
xy 001
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
34
A matriz da dinâmica
123
100
010
aaa
tem uma estrutura com propriedades suficientemente importantes para
merecer um nome. Diz-se na forma companheira.
Consiste numa identidade de ordem 1n no canto superior direito, tendo ao
lado uma coluna de zeros e em baixo uma linha com os coeficientes do
polinómio característico da matriz (denominador da função de transferência).
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
35
Nota sobre Álgebra Linear – Polinómio Característico de uma matriz
O polinómio característico de uma matriz quadrada A é dado por
)det( AsI
Para matrizes na forma companheira o polinómio característico pode ser
escrito por inspecção.
Posteriormente ver-se-á que as raízes do polinómio característico,
denominadas valores próprios da matriz, têm uma importante interpretação
geométrica. Já vimos que correspondem aos pólos da função de
transferência, pelo que determinam a resposta no tempo do sistema.
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
36
Sistemas com zeros
32
2
1
3
10)(asasas
bsbsG
Se aplicarmos a técnica anterior, surge uma derivada da entrada, o que causa
uma dificuldade.
Uma possibilidade (há mais!) é “partir” o sistema nos zeros e nos pólos,
tomando como variáveis de estado a saída do bloco dos pólos e as suas duas
primeiras derivadas.
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
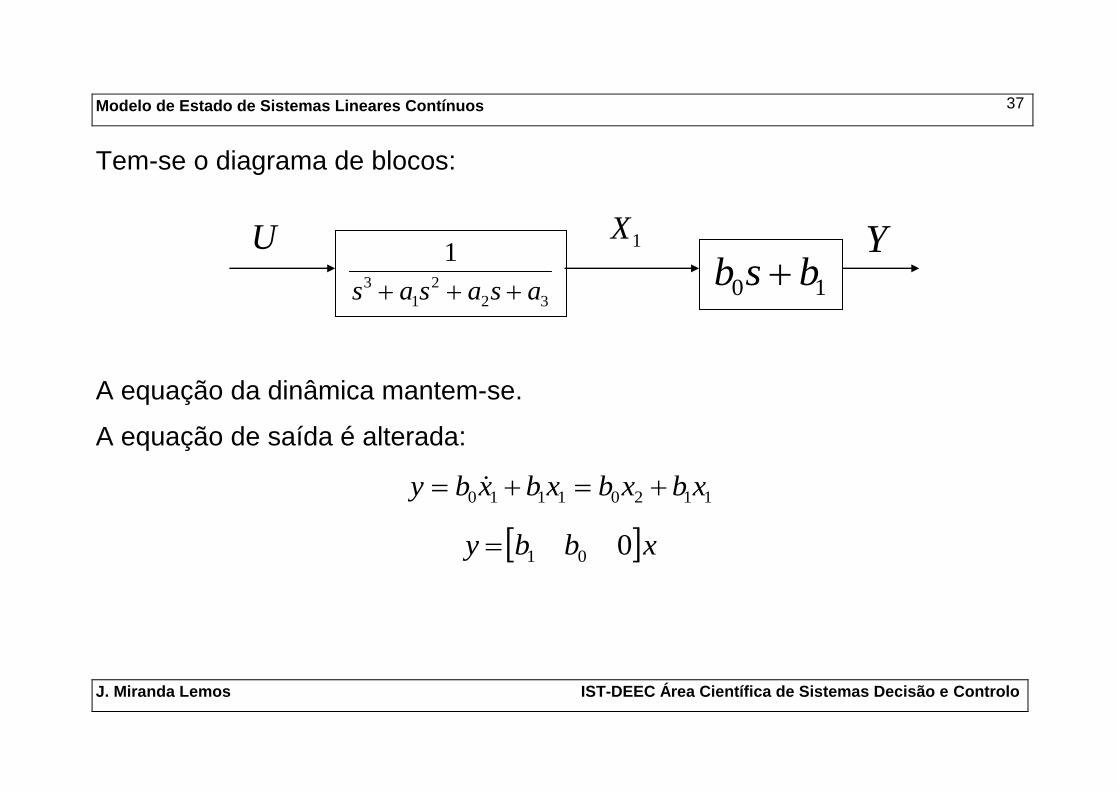
37
Tem-se o diagrama de blocos:
A equação da dinâmica mantem-se.
A equação de saída é alterada:
11201110 xbxbxbxby
xbby 001
32
2
1
3
1
asasas 10 bsb
U 1X Y
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
38
3.Mudanças de Coordenadas
Objectivo:
Dado um modelo de estado e uma transformação linear das
variáveis de estado, calcular as equações do modelo de estado
nas novas coordenadas.
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
39
Transformação de coordenadas no modelo de estado
Considere o modelo de estado com equações
)()()( tbutAxtx
)()( tCxty
É feita uma transformação de coordenadas
)()( tTxtz
em que T é uma matriz quadrada invertível.
Qual o modelo de estado verificado pelo vector )(tz ?
Sugestão: Derive )()( tTxtz
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
40
)()( tTxtz
Derivando:
)()( txTtz
Usando o modelo de estado de )(tx :
))()(()( tbutAxTtz
Usando a transformação inversa
))()()( 1 tTbutzTATtz
)()()( 1 txCTtCxty
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
41
Transformação de coordenadas no modelo de estado
Dado o modelo de estado com equações
)()()( tbutAxtx )()( tCxty
é feita uma transformação de coordenadas
)()( tTxtz
em que T é uma matriz quadrada invertível.
Nas novas coordenadas as equações de estado são
)()()( tutztz )()( tHxty
1 TATE 1 CTH
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
42
4.A equação homogénea
Objectivo:
Apresentar a estrutura da solução da equação homogénea.
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
43
A equação homogénea
A equação
)()( tAxtx 0)0( xx
denomina-se equação homogénea.
A solução desta equação desempenha um papel fundamental na solução da
equação de estado.
A estrutura da solução depende dos valores próprios e dos vectores próprios
da matriz da dinâmica, A .
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
44
Interpretação da solução da equação no espaço de estado
Equação homogénea:
)()( tAxtx
Aproximando a derivada por diferenças finitas:
h
khxhkxtx
)())1(()(
A equação pode aproximar-se pela equação de diferenças
)()())1(( khAxhkhxhkx
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
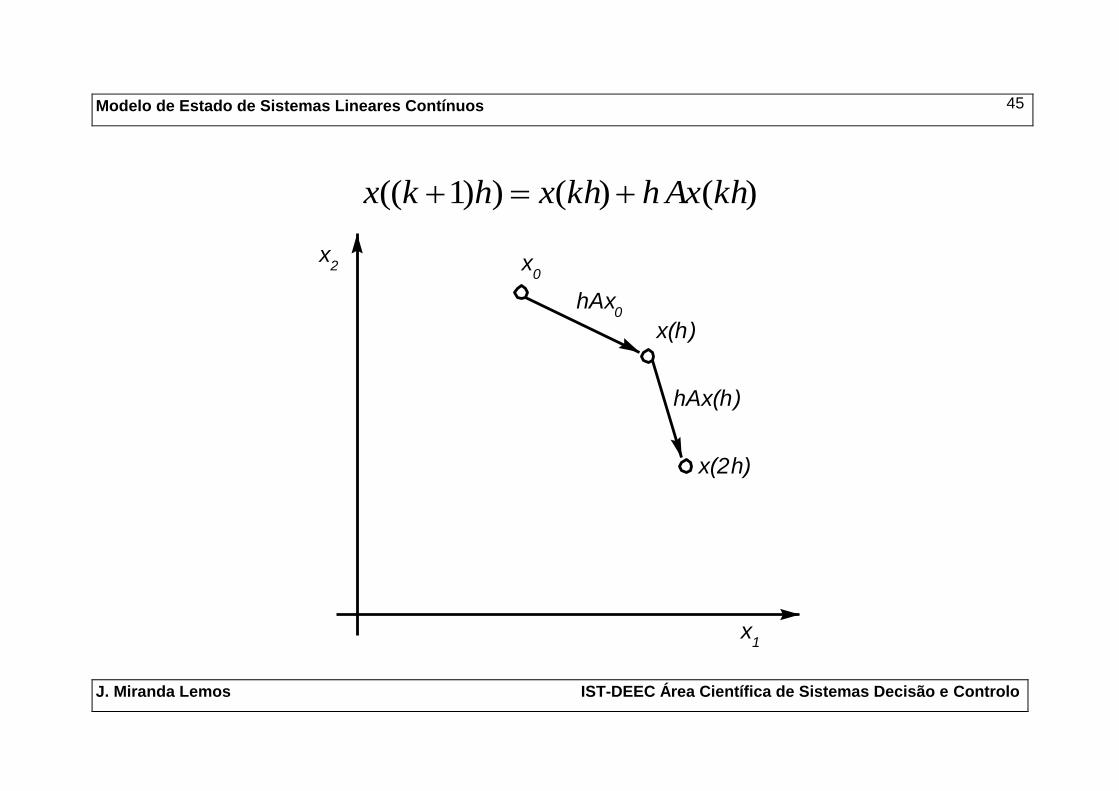
45
)()())1(( khAxhkhxhkx
x1
x2 x
0
x(h)
x(2h)
hAx0
hAx(h)
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
46
)()())1(( khAxhkhxhkx
No espaço de estados, a solução pode assim ser interpretada do seguinte
modo:
Começamos com uma condição inicial 0x no instante 0k .
Para obter o novo ponto no instante hk somamos ao vector 0x um
vector um vector proporcional a 0Ax (mais exactamente 0hAx ). Obtém-se
um ponto 0)( hAxhx .
O processo é em seguida iterado.
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
47
-10 -5 0 5 10-10
-8
-6
-4
-2
0
2
4
6
8
10
x1
x 2
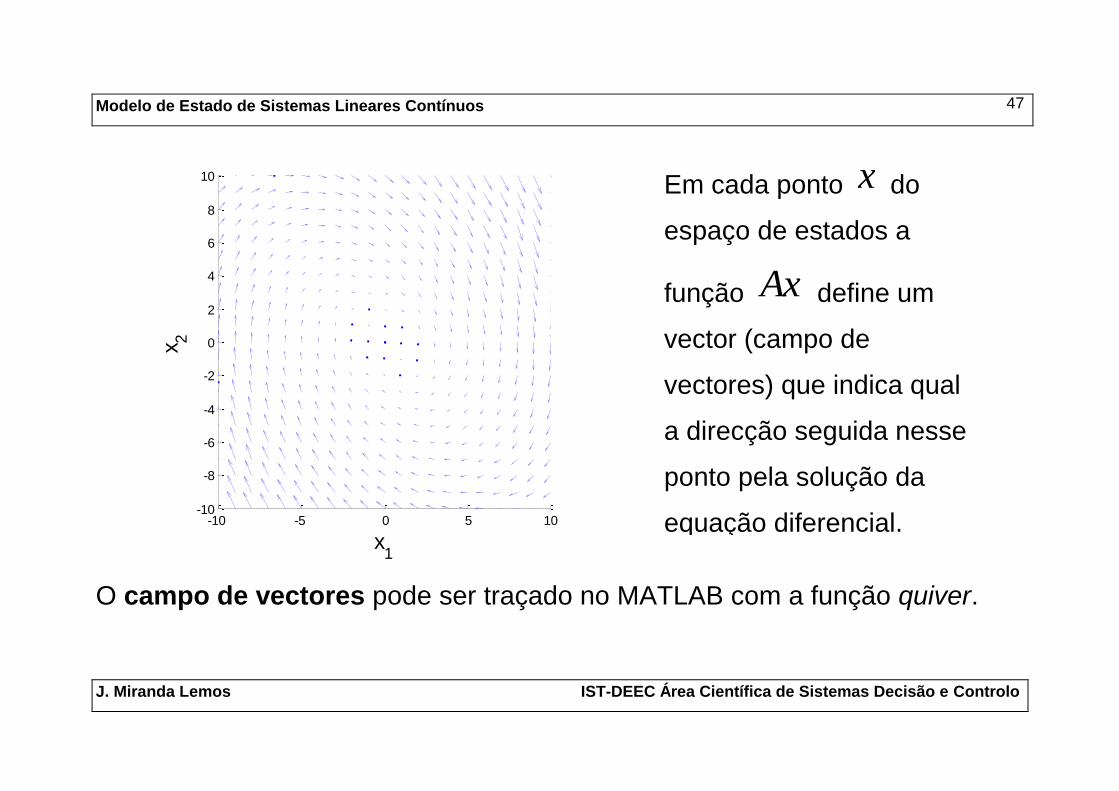
O campo de vectores pode ser traçado no MATLAB com a função quiver.
Em cada ponto x do
espaço de estados a
função Ax define um
vector (campo de
vectores) que indica qual
a direcção seguida nesse
ponto pela solução da
equação diferencial.
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
48
-10 -5 0 5 10 15-15
-10
-5
0
5
10
x1
x 2
x0
xA
xB
v0
vA
vB
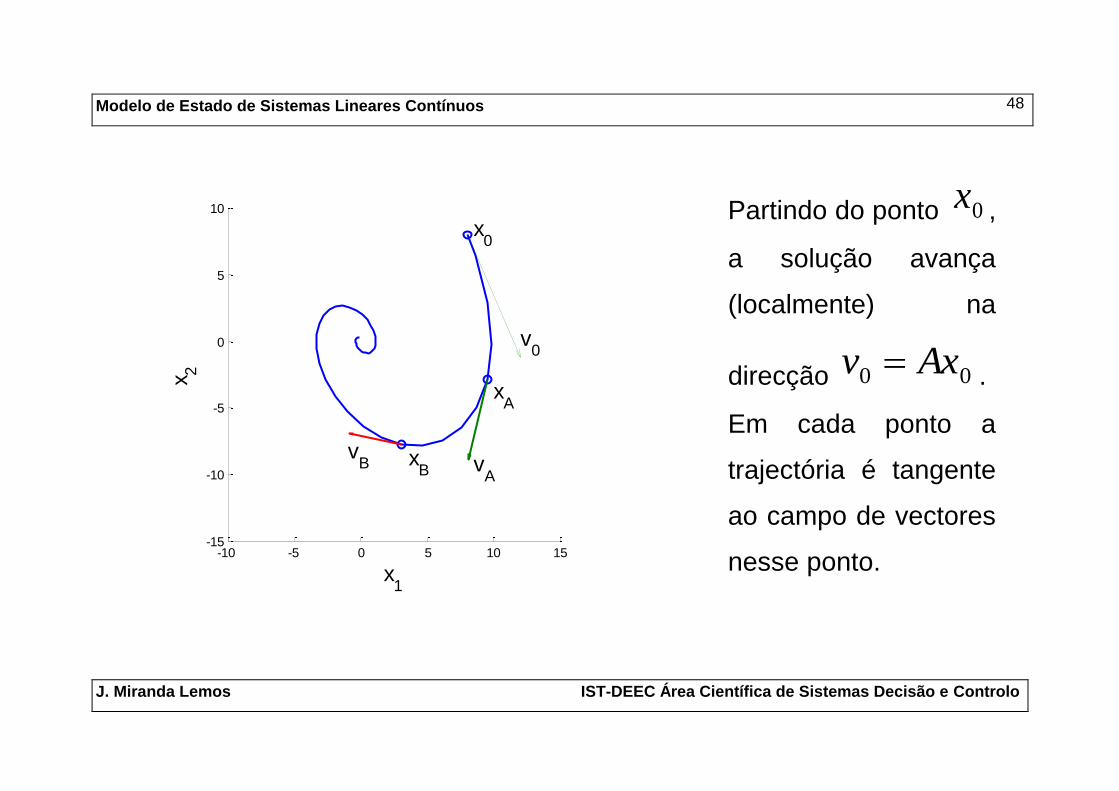
Partindo do ponto 0x ,
a solução avança
(localmente) na
direcção 00 Axv .
Em cada ponto a
trajectória é tangente
ao campo de vectores
nesse ponto.
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
49
-10 -5 0 5 10 15-15
-10
-5
0
5
10
x1
x 2
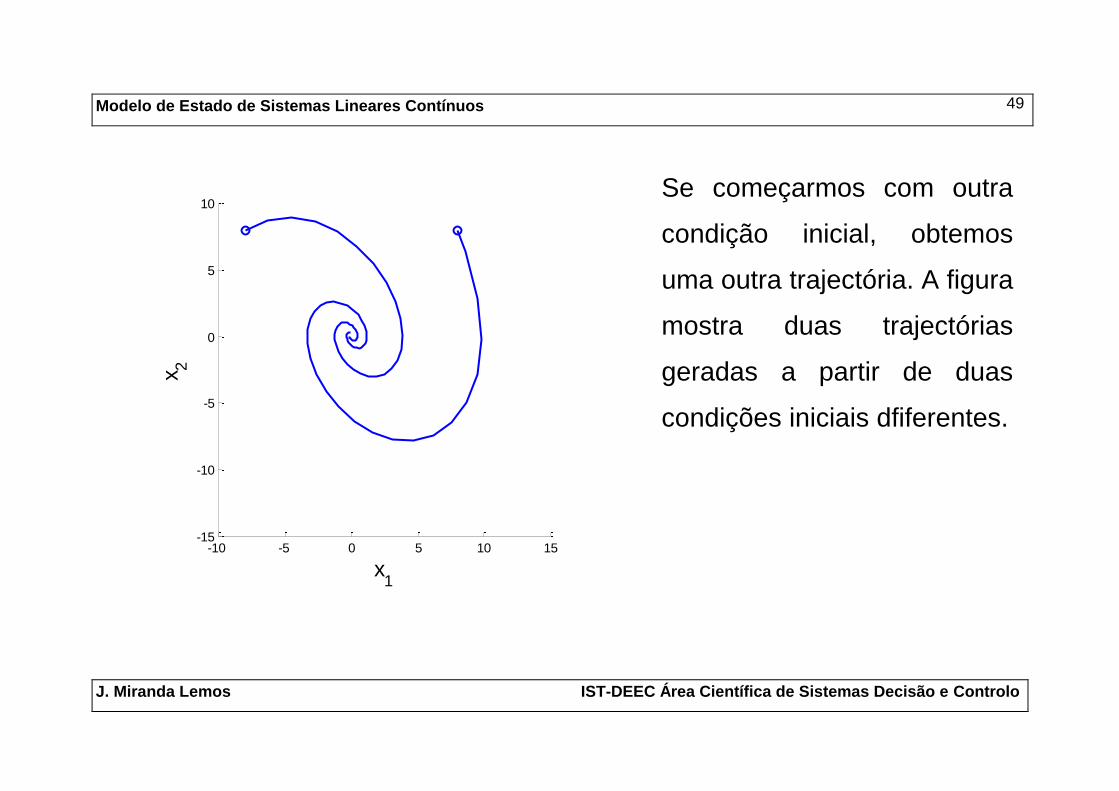
Se começarmos com outra
condição inicial, obtemos
uma outra trajectória. A figura
mostra duas trajectórias
geradas a partir de duas
condições iniciais dfiferentes.
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
50
-10 -5 0 5 10-10
-8
-6
-4
-2
0
2
4
6
8
10
x1
x 2
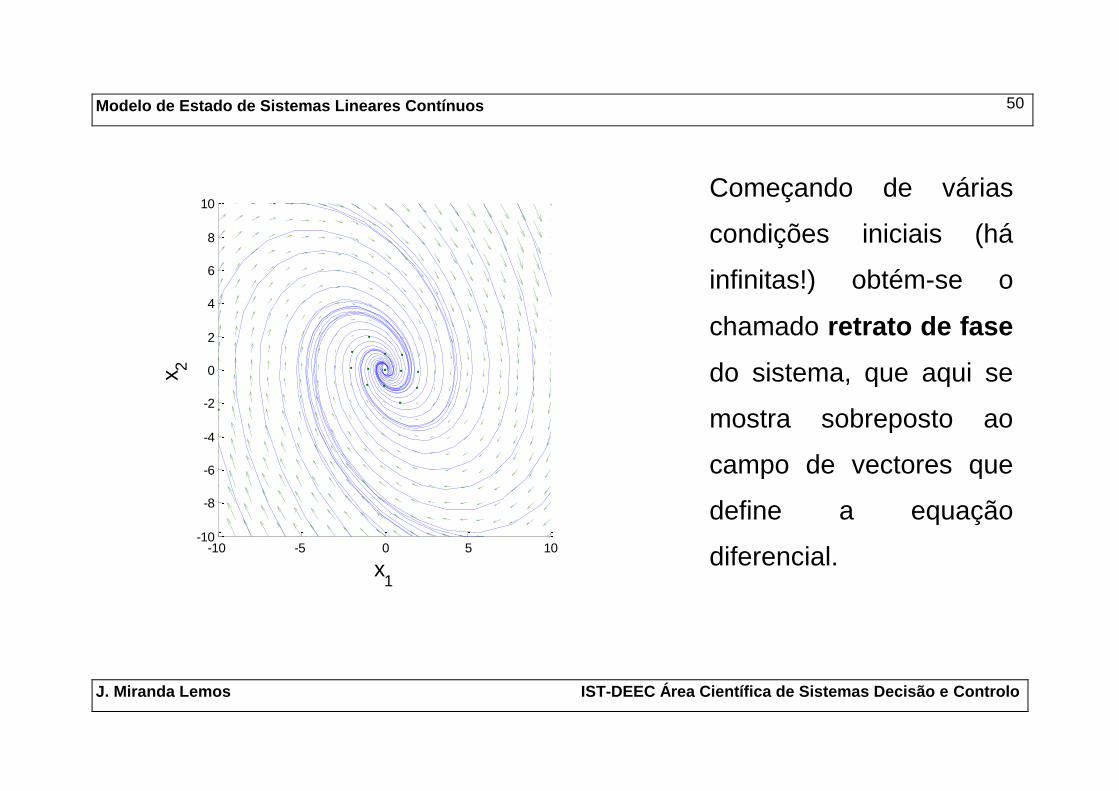
Começando de várias
condições iniciais (há
infinitas!) obtém-se o
chamado retrato de fase
do sistema, que aqui se
mostra sobreposto ao
campo de vectores que
define a equação
diferencial.
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
51
Nota sobre álgebra linear: Valores próprios e vectores próprios
Dada uma matriz A quadrada nn , os vectores próprios iv satisfazem
iii vAv
em que i é o correspondente valor próprio.
Há, no máximo, n vectores próprios linearmente independentes (mas pode
haver menos).
Aos vectores próprios também se dá o nomde vectores modo.
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
52
Determinação dos vectores próprios e dos valores próprios
Como
iii vAv
os vectores próprios satisfazem o sistema de equações algébrico
0)( ii vIA
Para que este sistema tenha soluções não triviais 0iv , ele tem de ser
indeterminado, pelo que os valores próprios i devem satisfazer a equação
polinomial:
0)det( IA i
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
53
Para calcular os valores próprios e os vectores próprios de uma matriz A
quadrada nn deve pois proceder-se do seguinte modo:
a) Calcular os valores próprios resolvendo a equação polinomial:
0)det( IA i
b) Para cada um dos valores próprios i obter os valores próprios
correspondentes resolvendo o sistema
0)( ii vIA
Como este sistema é indeterminado, a sua solução é obtida a menos de uma
constante de normalização, que pode ser escolhida como fôr conveniente.
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
54
Cálculo dos valores e vectores próprios – Exemplo
32
54A
32
54IA
Polinómio característico da matriz:
0)det( IA
)2)(1(210)3)(4(32
542
Os valores próprios são as raízes deste polinómio:
21 21
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
55
Vectores próprios:
11
0
0
22
55)(
2,1
1,1
11v
vvIA
A solução é qualquer múltiplo de
1
11v
22
0
0
52
52)(
2,2
1,2
22v
vvIA
A solução é qualquer múltiplo de
2
52v
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
56
Diagonalização de matrizes
Hipótese: A matriz A tem n vectores próprios linearmente independentes.
Matriz modal (as colunas são os vectores próprios):
nvvM 1
Matriz diagonal dos valores próprios
),,( 1 ndiag
Atenção: Nem todas as matrizes verificam esta hipótese.
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
57
Como, para cada par vector próprio/valor próprio
iii vAv
vem
MAM
ou seja, a matriz A admite a seguinte decomposição:
1 MMA
Tem-se ainda, multiplicando à direita por M e à esquerda por 1M :
AMM 1
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
58
Solução da equação homogénea por diagonalização
Válida quando a matriz da dinâmica tem n vectores próprios linearmente
independentes.
)()( tAxtx 0)0( xx
Faz-se uma transformação de variáveis associada à matriz modal:
xMz 1 ou Mzx
Nas coordenadas z a dinâmica fica
zAMzMAxMxMz 111
Ou seja, as componentes de z ficam desacopladas, pelo que as equações
podem ser resolvidas separadamente!
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
59
zz
Esta equação matricial corresponde ao sistema de equações diferenciais:
nnn zz
zz
111
Como as equações estão separadas, podem ser resolvidas separadamente:
t
nn
t
nektz
ektz
)(
)( 1
11
Os ik são constantes que
dependem das condições
iniciais
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
60
Estrutura da resposta nas coordenadas x :
t
t
n
ek
ek
vvMzx
2
1
2
1
1
ou seja:
t
nn
t nevkevkx
1
11
A cada um dos termos
t
iiev
dá-se o nome de modo do sistema. A resposta do sistema é uma combinação
linear dos modos em que os coeficientes dcependem das condições iniciais.
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
61
Exemplo
A resposta no tempo do sistema homogéneo
)()( tAxtx
com
32
54A
5
8)0(x
é da forma (ver exemplo anterior sobre valores e vectores próprios):
tt ekektx 2
2
1
12
5
1
1)(
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
62
Determinação das constantes 1k e 2k a partir das condições iniciais:
Para 0t :
212
5
1
1
5
8kk
Este sistema pode ser escrito na forma
5
8
21
51
2
1
k
k
1,3 21 kk

Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
63
5.A matriz de transição
Objectivo:
A solução da equação homogénea como uma transformação do estado
associada à matriz de transição.
Principais propriedades da matriz de transição
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
64
A série de Peano-Baker e a matriz de transição
Axx 00)( xtx
Tem por solução
)(),()( 00 txtttx
em que a matriz ),( 0tt , denominada matriz de transição, é dada pela série
que converge uniformemente e que define a matriz exponencial:
3
0
32
0
2
0
)(
0 )(!3
1)(
!2
1)(),( 0 ttAttAttAIett
ttA
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
65
Cálculo da matriz de transição com a Transformada de Laplace
Axx 0)0( xx
Tomando transformada de Laplace:
AXxsX 0
0)( xXAsI
0
1)( xAsIX
0
11 )()( xAsITLtx
Conclusão:
11
0 )(),( AsITLtt
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
66
Exemplo: Cálculo da matriz de transição pela transformada de Laplace
Considere um sistema cuja matriz da dinâmica é dada por
14
11A
Determine a matriz de transição recorrendo à transformada de Laplace.
Solução:
11
0 )(),( AsITLtt
14
11
s
sAsI
)1)(3()det( ssAsI
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
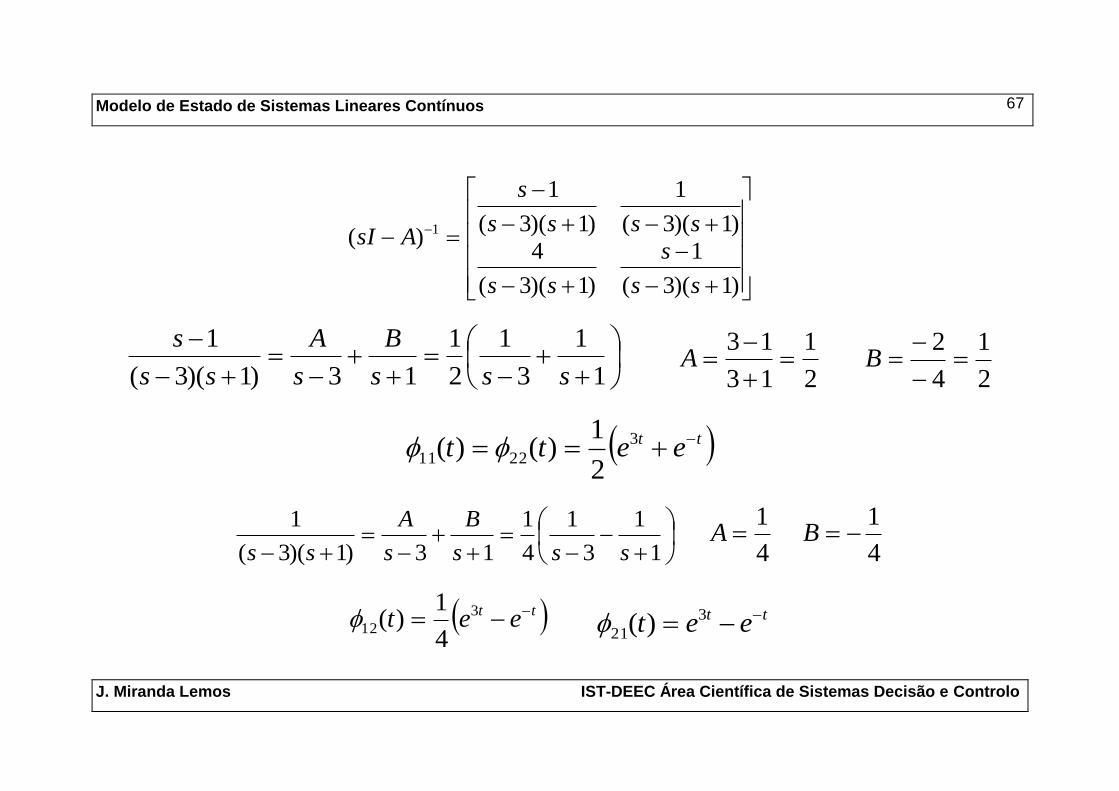
67
)1)(3(
1
)1)(3(
4
)1)(3(
1
)1)(3(
1
)( 1
ss
s
ss
ssss
s
AsI
1
1
3
1
2
1
13)1)(3(
1
sss
B
s
A
ss
s 2
1
13
13
A 2
1
4
2
B
tt eett 3
22112
1)()(
1
1
3
1
4
1
13)1)(3(
1
sss
B
s
A
ss 4
1A 4
1B
tt eet 3
124
1)(
tt eet 3
21 )(
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
68
tttt
tttt
eeee
eeeet
33
33
2
14
1
2
1
)0,(
Fim do exemplo
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
69
Cálculo da matriz de transição a partir da exponencial de A
3
0
32
0
2
00 )(!3
1)(
!2
1)(),( ttAttAttAItt
Esta série é reconhecida como a série da exponencial de uma matriz. Assim:
)(
00),(
ttAett
Repare-se que
)(),( 00 tttt
Atenção: Estas propriedades aplicam-se apenas a sistemas invariantes no
tempo, em que a matriz A é constante.
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
70
Equação diferencial verificada pela matriz de transição
A matriz de transição verifica
),(),( 00 ttAttdt
d
Itt ),( 00
Estas propriedades são consequência de
)(),()( 00 txtttx
e da unicidade da solução da equação homogénea com condições iniciais
dadas.
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
71
Invertibilidade da matriz de transição
Teorema de Abel-Jacobi-Liouville (caso particular):
trAttttAee
)()( 00det
em que o traço de A , representado por trA , é a soma dos elementos da
diagonal.
Daqui conclui-se que a matriz de transição é sempre invertível pois o seu
determinante nunca se anula.
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
72
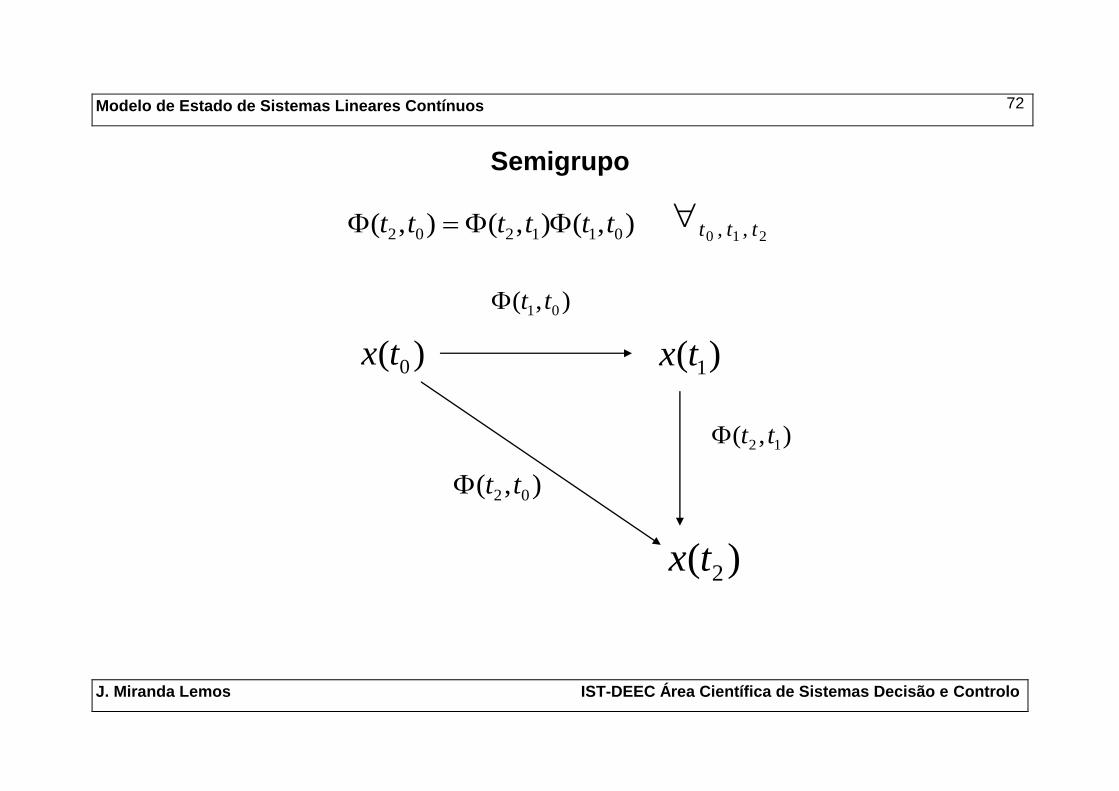
Semigrupo
),(),(),( 011202 tttttt 210 ,, ttt
)( 0tx
)( 1tx
)( 2tx
),( 02 tt
),( 12 tt
),( 01 tt
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
73
Demonstração da propriedade de semigrupo
)(),()( 0022 txtttx
Por outro lado,
)(),(),()(),()( 001121122 txtttttxtttx
Assim:
)(),(),()(),( 00112002 txtttttxtt
Como esta igualdade se verifica )( 0tx :
),(),(),( 011202 tttttt
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
74
Inversa da matriz de transição
),(),( 00
1 tttt Rtt 0,
Demonstração:
A matriz inversa ),( 0
1 tt existe sempre (Teorema de Abel-Jacobi-Liouville).
Itttttt ),(),(),( 00
Consequência: Reversibilidade no tempo
)(),()( 00 txtttx
Podemos recuperar a condição inicial a partir do estado actual.
Nem sempre é válida para sistemas discretos!
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
75
Continuidade
A matriz de transição
),( 0tt
é uma função contínua em t e 0t .
Demonstração: Omitida. É uma consequência do teorema de existência e
unicidade de solução de quações diferenciais.
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
76
Mudança de Coordenadas
Dado o SLIT representado pelo modelo de estado:
)()( tAxtx 00)( xtx
em que a matriz de transição é ),( 0ttA ,
)(),()( 00 txtttx A
Faz-se uma mudança de coordenadas:
)()( tTxtz
em que T é uma matriz constante e invertível.
Qual é a matriz de transição no novo sistema de coordenadas?
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
77
)()( tTxtz
Derivando
)()()()( 1 tzTATtTAxtxTtz
Qual a matriz de transição associada a 1TAT ? Chamemos-lhe 1
TAT
)(),()(),()()( 0
1
000 tzTttTtxttTtTxtz AA
Conclusão:
11
TT ATAT
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
78
Frequências naturais numa transformação de coordenadas
Considere o SLIT representado pelo modelo de estado:
)()( tAxtx 00)( xtx
Faz-se uma mudança de coordenadas:
)()( tTxtz
em que T é uma matriz constante e invertível.
Mostre que realizações de estado semelhantes têm as mesmas frequências
naturais (valores próprios da matriz da dinâmica).
Sugestão: Calcule os valores próprios da matriz da dinâmica nas
coordenadas z.
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
79
Nas novas coordenadas a dinâmica é
)()( 1 tzTATtz
O polinómio característico de 1TAT é
11 )(det)det( TAsITTATsI
)det(
1)det()det()det()det()det( 1
TAsITTAsIT
)det( AsI
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
80
Cálculo de Ate por diagonalização
Caso em que há n vectores próprios linearmente independentes
Sendo Axx então )0()( xetx At
Havendo n vectores próprios linearmente independentes, a matriz modal M é
invertível.
nvvM ||1 ),,( 1 ndiag 1 MMA
Mudança de coordenadas:
)()( tMztx
)()()()()( 111 tztAMzMtAxMtxMtz
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
81
Nas coordenadas z:
)()( tztz
Sendo diagonal, é fácil somar a série que define a sua exponencial:
t
t
t
ne
e
ttIe
0
0
!2
1
1
22
)0()0()()( 1xMMezMetMztx tt
1 MMee tAt
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
82
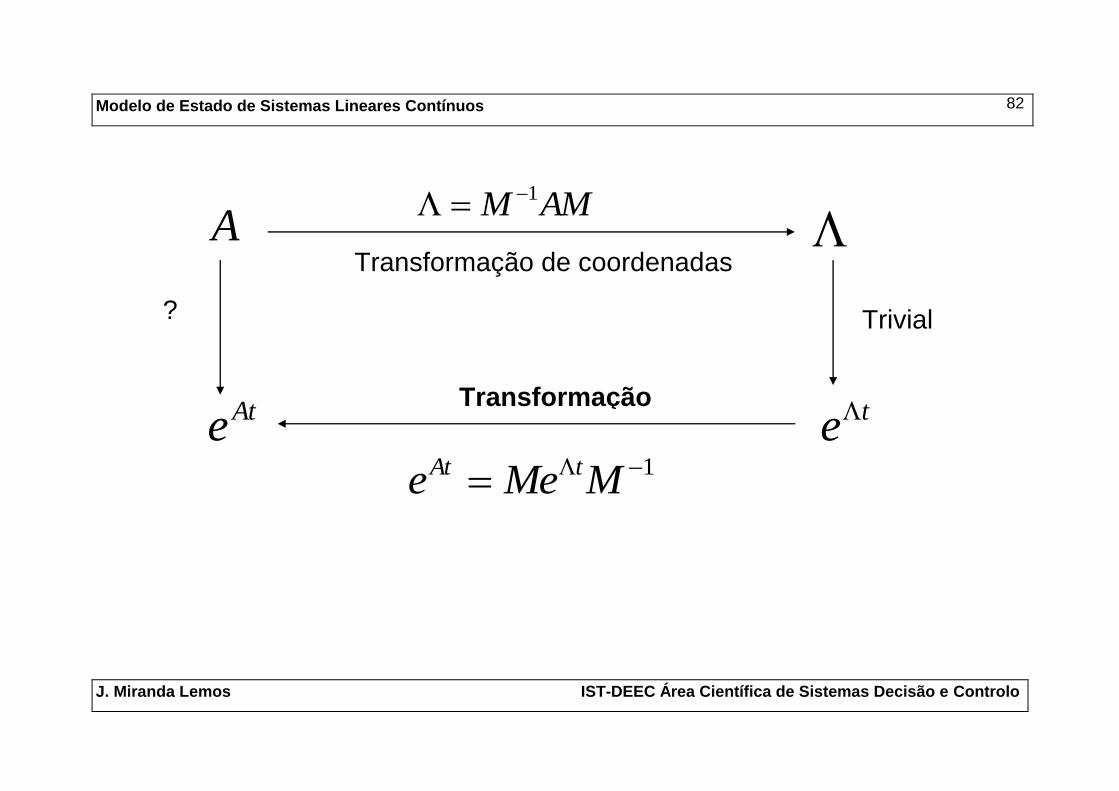
A
Ate
te
Transformação de coordenadas
Transformação
inversa
? Trivial
AMM 1
1 MMee tAt
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
83
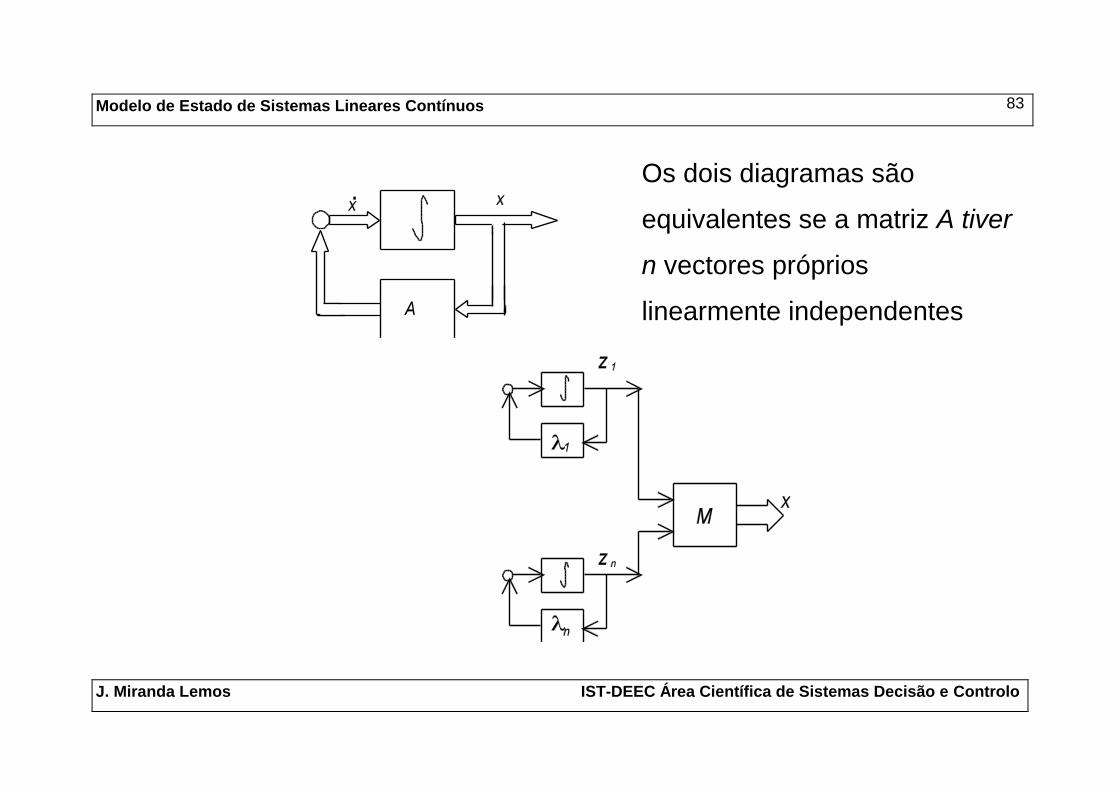
Os dois diagramas são
equivalentes se a matriz A tiver
n vectores próprios
linearmente independentes
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
84
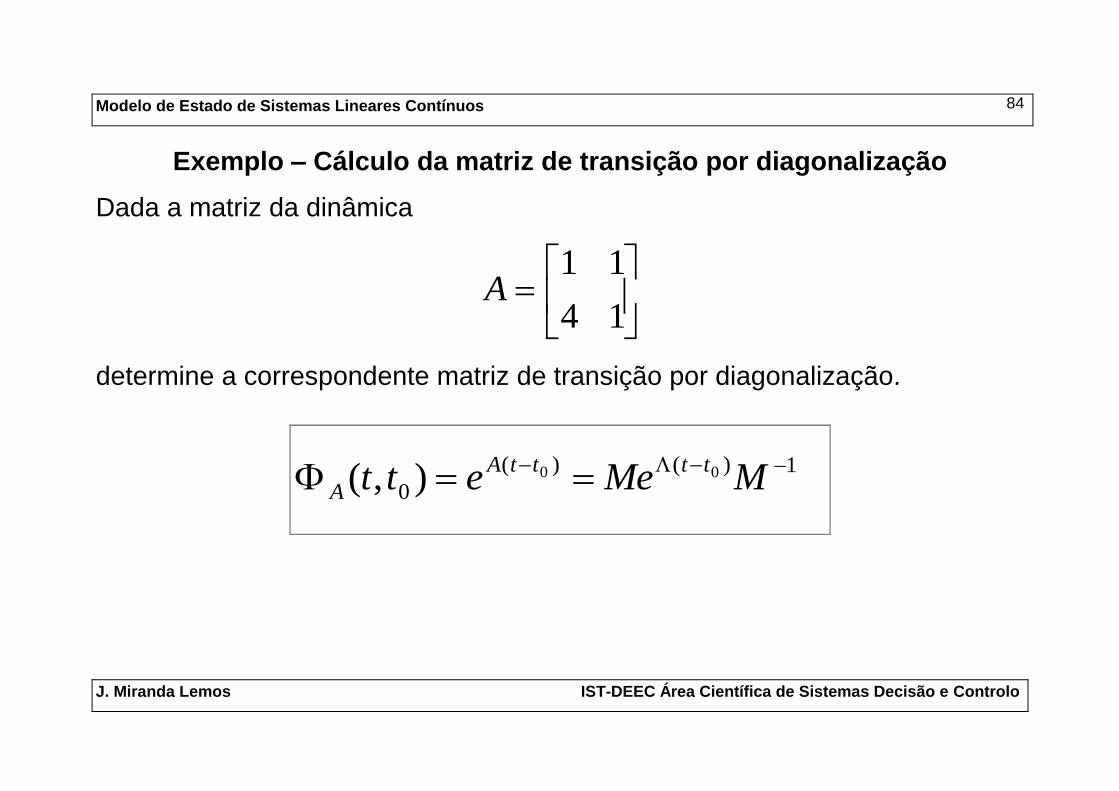
Exemplo – Cálculo da matriz de transição por diagonalização
Dada a matriz da dinâmica
14
11A
determine a correspondente matriz de transição por diagonalização.
1)()(
000),(
MMeettttttA
A
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
85
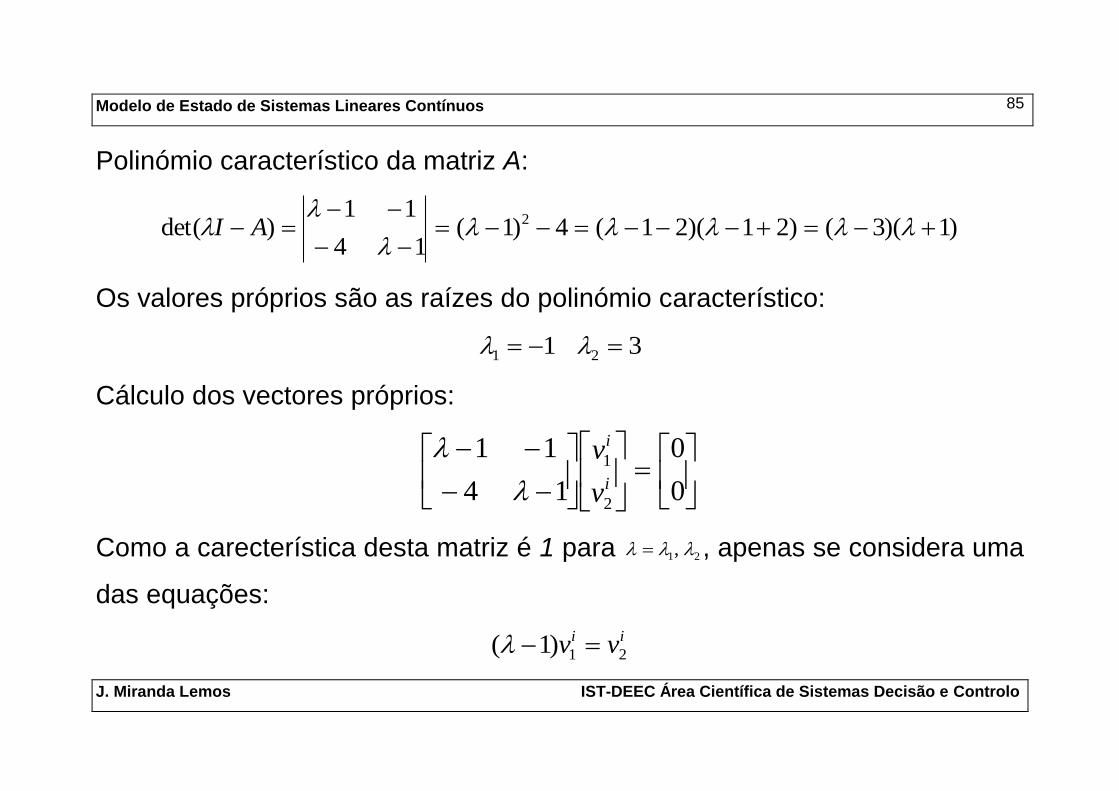
Polinómio característico da matriz A:
)1)(3()21)(21(4)1(14
11)det( 2
AI
Os valores próprios são as raízes do polinómio característico:
31 21
Cálculo dos vectores próprios:
0
0
14
11
2
1
i
i
v
v
Como a carecterística desta matriz é 1 para 21, , apenas se considera uma
das equações:
ii vv 21)1(
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
86
ii vv 21)1(
Faça-se a normalização
11 iv
Vectores próprios:
2
11v
2
12v
Matriz modal:
22
11M
12
12
4
11M
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
87
12
12
224
1
4
1
12
12
0
0
22
113
3
3
1
tt
tt
t
t
tAt
ee
ee
e
eMMee
tttt
tttt
At
eeee
eeeee
33
33
2244
22
4
1
Fim do exemplo
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
88
6.Sistemas não homogéneos
Objectivo:
Cálculo da resposta no tempo de um SLIT não homogéneo descrito pelo
modelo de estado.
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
89
Sistemas não homogéneos (caso contínuo)
No caso de sistemas não homogéneos a solução obtém-se da solução da
equação homogénea tendo em conta a entrada e recorrendo ao Princípio de
Sobreposição.
Sendo o sistema descrito pela equação de estado
)()()( tbutAxtx
a evolução temporal do estado vem dado por
t
t
tAttAdbuexetx
0
0 )()( )(
0
)(
Regime
livre
Regime forçado
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
90
7.Modelo de estado de sistemas discretos
Objectivo:
Estudo muito abreviado da resposta no tempo de sistemas discretos
representados pelo modelo de estado.
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
91
Equação homogénea (sistemas discretos)
00 )()()1( xkxkAxkx
Uma vez mais o estado no instante k está relacionado com o estado no
instante kk 0 por um operador matricial linear (matriz de transição de
estado):
)()( 00 kxAkx
kk
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
92
Não invertibilidade da matriz de transição no caso discreto
Uma diferença com consequências do caso discreto em relação ao contínuo é
que, no caso discreto, a matriz de transição pode não ser invertível (ao
contrário dos sistemas contínuos em que a matriz de transição é sempre
invertível). Se a matriz A fôr singular as suas potências também o serão.
Isto sognifica que há sistemas discretos para os quais, sabendo o estado no
instante k , não podemos inferir qual a condição inicial de onde ele partiu, ao
contrário dos sistemas contínuos em que isso é sempre possível.
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
93
Solução da equação não homogénea (caso discreto)
11
0
0
0 )()(k
kj
jkkkjbuAxAkx
Com condições iniciais nulas:
)1()1()0()( 21 kbubuAbuAkx kk
Este resultado pode ser facilmente demonstrado através do Princípio de
Sobreposição.
Regime livre Regime forçado
Modelo de Estado de Sistemas Lineares Contínuos
J. Miranda Lemos IST-DEEC Área Científica de Sistemas Decisão e Controlo
94
Conhecida a sequência de entrada e a condição inicial do estado, as
expressões anteriores permitem calcular o estado no final do intervalo de
tempo (quer em tempo contínuo, quer discreto).
Pode naturalmente pensar-se no problema inverso. Este será estudado
posteriormente.