Upload
mario-silva-neto
View
32
Download
8
Embed Size (px)
DESCRIPTION
SUSPENSÃO DUPLO A
Citation preview
Universidade de Braslia - UnB Faculdade UnB Gama - FGA
Curso de Engenharia Automotiva
DIMENSIONAMENTO GEOMTRICO E ANLISE
ELASTOCINEMTICA DE SUSPENSO AUTOMOTIVA DO TIPO DUPLO A
Autor: Guilherme de Oliveira Andrade Orientadores: Dr. Rita de Cssia Silva
Dr. Maria Alzira Arajo Nunes
Braslia, DF
2013
Guilherme Oliveira Andrade
DIMENSIONAMENTO GEOMTRICO E ANLISE ELASTOCINEMTICA DE SUSPENSES AUTOMOTIVAS: GEOMETRIA DUPLO A
Monografia submetida ao curso de graduao em engenharia automotiva da Universidade de Braslia, como requisito parcial para obteno do Ttulo de Bacharel em engenharia automotiva. Orientadores: Dr. Rita de Cssia Silva Dr. Maria Alzira Arajo Nunes
Braslia, DF 2013
CIP Catalogao Internacional da Publicao*
O. Andrade, Guilherme.
Dimensionamento geomtrico e anlise elastocinemtica
de suspenso automotiva do tipo Duplo A / Guilherme de
Oliveira Andrade. Braslia: UnB, 2013. 103 p.96: il. ; 29,5
cm.
Monografia (Graduao) Universidade de Braslia
Faculdade do Gama, Braslia, 2013. Orientao: Rita de Cssia
Silva e Maria Alzira de Arajo Nunes.
1. Double Wishbone. 2. Suspenso Automotiva. 3. Off-Road I. C. Silva, Rita. II. Dimensionamento geomtrico e anlise
elastocinemtica de suspenso automotiva do tipo Duplo A.
CDU Classificao
DIMENSIONAMENTO GEOMTRICO E ANLISE ELASTOCINEMTICA DE SUSPENSO AUTOMOTIVA DO TIPO DUPLO A
Guilherme de Oliveira Andrade
Monografia submetida como requisito parcial para obteno do Ttulo de Bacharel em engenharia automotiva da Faculdade UnB Gama - FGA, da Universidade de Braslia, em 11 de dezembro de 2013 apresentada e aprovada pela banca examinadora abaixo assinada:
Prof. Dr: Rita de Cssia Silva, UnB/ FGA Orientador
Prof. Dr: Maria Alzira de Arajo Nunes, UnB/ FGA Orientador
Prof. Dr: Suzana vila, UnB/ FGA Membro Convidado
Prof. Msc: Saleh Kalil, UnB/ FGA Membro Convidado
AGRADECIMENTOS
Agradeo aos meus pais e avs, pela determinao e luta na minha formao. s minhas orientadoras, que desde o incio de meu curso contriburam com minha formao.
Agradeo equipe de S.A.E. Baja da Universidade de Braslia, Piratas do Cerrado, que me concedeu grande parte dos conhecimentos prticos e tericos sobre suspenses.
Um agradecimento especial se faz necessrio minha amiga e companheira Natasha Wiechers, que tornou os meus anos de faculdade, ao seu lado, mais felizes e prazerosos.
E no poderia deixar de agradecer pelo companheirismo e amizade dos colegas de Engenharia, que sempre estiveram ao meu lado e que sempre terei um carinho especial.
Guilherme de Oliveira Andrade
Seja humilde, pois, at o sol em sua grandeza se pe e deixa a lua brilhar.
Bob Marley
RESUMO
O presente trabalho tem como objetivo o desenvolvimento de uma rotina matemtica utilizando-se do software MatLab, para o clculo dos principais parmetros de uma suspenso com geometria Duplo A (Double Wishbone). Tal ser feito em trs dimenses considerando as influncias do sistema de direo, sendo os principais parmetros: cambagem, altura do centro de rolagem, inclinao do pino mestre, cster, convergncia e comprimento do amortecedor. A rotina calcula estes com a suspenso em repouso e bem como em movimentao vertical do subsistema. O desenvolvimento de uma interface grfica foi realizado a fim de auxiliar a compreenso e facilitar o pr-dimensionamento de suspenses. O software foi submetido verificao, a partir de um estudo de caso, o qual a suspenso dianteira do prottipo utilizado pela equipe de S.A.E. Baja da Universidade de Braslia (Piratas do Cerrado) foi modelada utilizando-se a rotina matemtica desenvolvida. Os resultados foram analisados, discutidos e comparados com o software comercial de modelagem multicorpos ADAMS/Car. Da comparao entre os resultados analticos fornecidos pelo software comercial e a rotina desenvolvida, constata-se que as divergncias so inferiores a 10%. Palavras-chave: Double Wishbone. Suspenso Automotiva. Off-Road. Duplo A
ABSTRACT
This work has as its goal the development of a mathematical routine using the Matlab software, for the calculation of the main parameters of suspension of a "Double A" (Double wishone) geometry. This will be done in three dimensions, considering the influences of the steering system, and the main parameters: camber, roll center height, Kingpin inclination, caster, toe and length of the damper. The routine calculates these with the suspension at rest, as well as with the vertical movement of the subsystem. The development of graphical user interface was made to assist the understanding and ease of preliminary design suspensions. The software has been subjected to verification from a case study, in which the front suspension of the prototype used by the team of S.A.E. Baja from Universidade de Braslia (Piratas do Cerrado) was modeled using the developed mathematical routine. The results were compared with the commercial software for modeling multibody ADAMS/Car. Comparing the analytical results provided by commercial software and the routine developed, it appears that the differences are less than 10% Keywords: Double Wishbone. Automotive Suspension. Off-Road. Double A
LISTA DE FIGURAS
Figura 1 Eixo slido (Hotchkiss) - www.offroad.automotive.com ................................. 5
Figura 2 Suspenso Mac Pherson (Valdeck, 2007) ....................................................... 6
Figura 3 - Suspenso Trailing-Arm (Valdeck, 2007) .......................................................... 6
Figura 4 - Suspenso Multi-Link (Valdeck, 2007) ............................................................... 7
Figura 5 - Suspenso Duplo A (Valdeck, 2007) .................................................................. 7
Figura 6 - Sobre e sub esteramento (www.mytrackshedule.com) ................................. 9
Figura 7 - Inclinao do pino mestre (adaptado de: Jazar, R., 2008) ........................... 10
Figura 8 - Visualizao do ngulo de cambagem ............................................................ 12
Figura 9 - Metodologia geomtrica para determinao do centro de rolagem.
(Dixon,1996) ........................................................................................................................... 13
Figura 10 - Visualizao do ngulo de cster (Jazar, R., 2008) .................................... 14
Figura 11 - ngulo de convergncia (Toe) ........................................................................ 15
Figura 12 - Representao de uma suspenso do tipo Duplo A (Jazar, R.) ............. 17
Figura 13 - Representao de um sistema de direo (Jazar, R.) ................................ 18
Figura 14 - Pontos de fixao dos braos de suspenso. .............................................. 20
Figura 15 Definio do eixo de origens utilizado. ......................................................... 21
Figura 16 - Pontos de fixao do conjunto mola amortecedor e da ponta de eixo ..... 22
Figura 17 - Utilizao de ferramentas de cotagem para determinao da inclinao
do pino mestre ........................................................................................................................ 23
Figura 18 Fluxograma da rotina desenvolvida ............................................................... 27
Figura 19 - Determinao do comprimento da manga .................................................... 28
Figura 20 Determinao dos comprimentos dos links referentes bandeja inferior.
.................................................................................................................................................. 29
Figura 21 - Determinao dos comprimentos dos links referentes bandeja inferior.
.................................................................................................................................................. 31
Figura 22 - Metodologia para determinao da inclinao do pino mestre ................. 33
Figura 23 - Metodologia para determinao do cster .................................................... 34
Figura 24 Sistema de direo acoplada ao sistema de suspenso. .......................... 35
Figura 25 Distncia entre os pontos B.S.M. e LINK denominada Dlinkbsm e distncia
entre B.I.M. e LINK denominada Dlinkbim. ............................................................................ 36
Figura 26 - Destaque em Dprmbsm, distncia entre os pontos B.S.M e P.R.M. ............. 38
Figura 27 - Destaque em Dprmbim, distncia entre os pontos B.I.M e P.R.M. ............... 39
Figura 28 - Destaque em Dprmlink, distncia entre os pontos LINK e P.R.M. ................ 40
Figura 29 - Destaque nas distncias Dpembsm e Dpembim. .................................................. 41
Figura 30 - Determinao do comprimento da ponta de eixo ........................................ 42
Figura 31 - Representao da manga e da ponta de eixo, com detalhe nos pontos 1
e 2 que representam respectivamente P.E.M e P.R.M. .................................................. 43
Figura 32 - Metodologia para determinao da cambagem ........................................... 44
Figura 33- Metodologia para determinao da convergncia ........................................ 45
Figura 34 - Representao do amortecedor ligado ao chassi (ponto 2) e ao brao
inferior (ponto 1). .................................................................................................................... 46
Figura 35 - Representao da distncia entre os pontos F.A.B. e B.I.C. ..................... 47
Figura 36 - Representao da distncia entre os pontos F.A.B. e B.I.C.T. ................. 48
Figura 37 - Determinao da distncia Dfabm. ................................................................... 49
Figura 38 - Representao em ambiente CAD do pneu e do ponto de encontro do
pneu com o solo (ponto1) ..................................................................................................... 50
Figura 39 - Representao da distncia Dpneuprm ............................................................... 51
Figura 40 - Representao da distncia e Dpneubim ............................................................ 52
Figura 41 - Representao da distncia e Dpneubsm ........................................................... 53
Figura 42 - Metodologia de determinao do ponto de encontro do prolongamento de
retas das bandejas (Braos divergentes). ......................................................................... 55
Figura 43 - Metodologia para determinao do centro de rolagem instantneo da
suspenso. (C.R.) .................................................................................................................. 57
Figura 44 - Interface grfica desenvolvida em ambiente Guide ..................................... 58
Figura 45 - Representao dos arcos de suspenso ...................................................... 62
Figura 46 - Representao dos trs estgios da suspenso (Bound, Repouso e
Rebound) ................................................................................................................................. 62
Figura 47 - Variao da inclinao do pino mestre com o trabalho da suspenso .... 63
Figura 48 - Variao da altura do centro de rolagem instantneo com o trabalho da
suspenso ............................................................................................................................... 64
Figura 49 - Variao do ngulo de cambagem com o trabalho da suspenso ........... 65
Figura 50 - Variao do cster com o trabalho da suspenso ....................................... 66
Figura 51 Variao da convergncia com o trabalho da suspenso ......................... 67
Figura 52 - Variao do comprimento do amortecedor com o trabalho da suspenso
.................................................................................................................................................. 68
Figura 53 - Suspenso modelada em ambiente multicorpos ......................................... 69
Figura 54 - Suspenso em simulao ................................................................................ 70
Figura 55 - Ambiente Post/Processor ................................................................................. 70
Figura 56 - Comparao dos resultados obtidos para inclinao da manga ............... 71
Figura 57 - Comparao dos resultados obtidos para cambagem ................................ 72
Figura 58 - Comparao dos resultados obtidos para o cster ..................................... 73
Figura 59 - Comparao dos resultados obtidos para convergncia ............................ 74
LISTA DE TABELAS
Tabela 1 - Pontos de fixao da suspenso de tipo Duplo A ...................................... 19
Tabela 2 - Coordenadas necessrias (manga de eixo). ................................................. 21
Tabela 3 - Pontos de fixao da suspenso de tipo Duplo A ...................................... 22
Tabela 4 - Coordenadas necessrias (sistema de direo) ........................................... 35
Tabela 5 - Coordenadas necessrias (ponta de eixo). .................................................... 38
Tabela 6 - Coordenadas necessrias (amortecedor). ..................................................... 46
Tabela 7 - Coordenadas necessrias (centro de rolagem). ........................................... 56
LISTA DE SMBOLOS
B.S.M. : Ponto de fixao da bandeja superior na manga
B.S.C. : Ponto de fixao da bandeja superior no chassi
B.I.M. : Ponto de fixao da bandeja inferior na manga
B.I.C. : Ponto de fixao da bandeja inferior no chassi
P.R.M. : Ponto de fixao da ponta de eixo na roda
P.E.M. : Ponto de fixao da ponta de eixo na manga
F.A.B. : Ponto de fixao do amortecedor no brao
F.A.C. : Ponto de fixao do amortecedor no chassi
P.R.S. : Centro instantneo de rotao
PNEU : Ponto de encontro do pneu com o solo
B.S.M.X : Coordenada X do ponto de fixao da bandeja superior na manga
B.S.M.Y : Coordenada Y do ponto de fixao da bandeja superior na manga
B.S.M.Z : Coordenada Z do ponto de fixao da bandeja superior na manga
B.S.C.X : Coordenada X do ponto de fixao da bandeja superior no chassi
B.S.C.Y : Coordenada Y do ponto de fixao da bandeja superior no chassi
B.S.C.Z : Coordenada Z do ponto de fixao da bandeja superior no chassi
B.I.M.X : Coordenada X do ponto de fixao da bandeja inferior na manga
B.I.M.Y : Coordenada Y do ponto de fixao da bandeja inferior na manga
B.I.M.Z : Coordenada Z do ponto de fixao da bandeja inferior na manga
B.I.C.X : Coordenada X do ponto de fixao da bandeja inferior no chassi
B.I.C.Y : Coordenada Y do ponto de fixao da bandeja inferior no chassi
B.I.C.Z : Coordenada Z do ponto de fixao da bandeja inferior no chassi
P.R.M.X : Coordenada X do ponto de fixao da ponta de eixo na roda
P.R.M.Y : Coordenada Y do ponto de fixao da ponta de eixo na roda
P.R.M.Z : Coordenada Z do ponto de fixao da ponta de eixo na roda
P.E.M.X : Coordenada X do ponto de fixao da ponta de eixo na manga
P.E.M.Y : Coordenada Y do ponto de fixao da ponta de eixo na manga
P.E.M.Z : Coordenada Z do ponto de fixao da ponta de eixo na manga
F.A.B.X : Coordenada X do ponto de fixao do amortecedor no brao
F.A.B.Y : Coordenada Y do ponto de fixao do amortecedor no brao
F.A.B.Z : Coordenada Z do ponto de fixao do amortecedor no brao
F.A.C.X : Coordenada X do ponto de fixao do amortecedor no chassi
F.A.C.Y : Coordenada Y do ponto de fixao do amortecedor no chassi
F.A.C.Z : Coordenada Z do ponto de fixao do amortecedor no chassi
P.R.S.Y : Coordenada Y do centro instantneo de rotao
P.R.S.Z : Coordenada Z do centro instantneo de rotao
PNEUX : Coordenada Y do ponto de encontro do pneu com o solo
PNEUY : Coordenada Y do ponto de encontro do pneu com o solo
PNEUZ : Coordenada Z do ponto de encontro do pneu com o solo
XBSM : Vetor de armazenamento da coordenada X do ponto de fixao da bandeja
superior com a manga
YBSM : Vetor de armazenamento da coordenada Y do ponto de fixao da bandeja
superior com a manga
ZBSM : Vetor de armazenamento da coordenada Z do ponto de fixao da bandeja
superior com a manga
XBIM : Vetor de armazenamento da coordenada X do ponto de fixao da bandeja
inferior com a manga
YBIM : Vetor de armazenamento da coordenada Y do ponto de fixao da bandeja
inferior com a manga
ZBIM : Vetor de armazenamento da coordenada Z do ponto de fixao da bandeja
inferior com a manga
XBSC : Vetor de armazenamento da coordenada X do ponto de fixao da bandeja
superior com o chassi
YBSC : Vetor de armazenamento da coordenada Y do ponto de fixao da bandeja
superior com o chassi
ZBSC : Vetor de armazenamento da coordenada Z do ponto de fixao da bandeja
superior com o chassi
XBIC : Vetor de armazenamento da coordenada X do ponto de fixao da bandeja
inferior com o chassi
YBIC : Vetor de armazenamento da coordenada Y do ponto de fixao da bandeja
inferior com o chassi
ZBIC : Vetor de armazenamento da coordenada Z do ponto de fixao da bandeja
inferior com o chassi
XPRM : Vetor de armazenamento da coordenada X do ponto de fixao da ponta de
eixo na roda
YPRM : Vetor de armazenamento da coordenada Y do ponto de fixao da ponta de
eixo na roda
ZPRM : Vetor de armazenamento da coordenada Z do ponto de fixao da ponta de
eixo na roda
XPEM : Vetor de armazenamento da coordenada X do ponto de fixao da ponta de
eixo na manga
YPEM : Vetor de armazenamento da coordenada Y do ponto de fixao da ponta de
eixo na manga
ZPEM : Vetor de armazenamento da coordenada Z do ponto de fixao da ponta de
eixo na manga
XFAB : Vetor de armazenamento da coordenada X ponto de fixao do amortecedor
no brao
YFAB : Vetor de armazenamento da coordenada Y ponto de fixao do amortecedor
no brao
ZFAB : Vetor de armazenamento da coordenada Z do ponto de fixao do
amortecedor no brao
XFAC : Vetor de armazenamento da coordenada X ponto de fixao do amortecedor
no chassi
YFAC : Vetor de armazenamento da coordenada Y ponto de fixao do amortecedor
no chassi
ZFAC : Vetor de armazenamento da coordenada Z ponto de fixao do amortecedor
no chassi
XPNEU : Vetor de armazenamento da coordenada X do ponto de encontro do pneu
com o solo
YPNEU : Vetor de armazenamento da coordenada Y do ponto de encontro do pneu
com o solo
ZPNEU : Vetor de armazenamento da coordenada Z do ponto de encontro do pneu
com o solo
DManga : Comprimento da manga
Dbictbim : Distncia da ponto de fixao traseiro da bandeja inferior no chassi ao ponto
de fixao da bandeja inferior na manga
Dbicbim : Distncia da ponto de fixao frontal da bandeja inferior no chassi ao ponto
de fixao da bandeja inferior na manga
Dbsctbsm : Distncia da ponto de fixao traseiro da bandeja superior no chassi ao
ponto de fixao da bandeja superior na manga
Dbsctbsm : Distncia da ponto de fixao frontal da bandeja superior no chassi ao
ponto de fixao da bandeja superior na manga
Mmanga : Inclinao da manga
Mcaster : Inclinao do cster
Dbracodirecao : Comprimento do brao de direo
Dlinkbsm : Distncia do ponto de fixao da barra de direo na manga ao ponto de
fixao do brao superior na manga
Dlinkbim : Distncia do ponto de fixao da barra de direo na manga ao ponto de
fixao do brao inferior na manga
Dprmbsm : Distncia entre o ponto de fixao da ponta de eixo na roda e o ponto de
fixao do brao superior na manga
Dprmbim : Distncia entre o ponto de fixao da ponta de eixo na roda e o ponto de
fixao da bandeja inferior na manga
Dprmlink : Distncia da ponta de eixo at o ponto de fixao do brao de direo na
manga
Dpembsm : Distncia da ponta de eixo at o ponto de fixao do brao de direo na
manga
Dpembsm : Distncia entre o ponto de fixao da ponta de eixo na manga e o ponto de
fixao do brao superior na manga
Dpembim : Distncia entre o ponto de fixao da ponta de eixo na manga e o ponto de
fixao do brao inferior na manga
Dpeixo : Comprimento da ponta de eixo
Mcamber : Cambagem
Mconvergencia : Convergncia
Dfab : Distncia entre o ponto de fixao do amortecedor no brao e o ponto de
fixao do brao inferior frontal no chassi
Dfabt : Distncia entre o ponto de fixao do amortecedor no brao e o ponto de
fixao do brao inferior traseiro no chassi
Dfabm : Distncia do ponto de fixao do amortecedor no brao inferior ao ponto de
fixao do brao inferior na manga
compAmort: Comprimento do amortecedor
Dpneuprm : Distncia entre o ponto de encontro do pneu com o solo e o ponto de
encontro da ponta de eixo com a roda
Dpneubim : Da mesma forma a distncia entre o ponto de encontro do pneu com o solo
e o ponto de encontro da bandeja inferior com a manga
Dpneubsm : Distncia entre o ponto de encontro com do pneu com o solo at o ponto
de encontro da bandeja superior com a manga
YO : Vetor de armazenamento da coordenada Y do centro instantneo de rotao
ZO : Vetor de armazenamento da coordenada Z do centro instantneo de rotao
MOPNEU : Inclinao da reta suporte
Minf : Inclinao do bandeja inferior
Msup : Inclinao da bandeja superior
HCR : Altura do centro de rolagem
DR : Dimetro da roda
AP : Altura do pneu
Largassoalho : Largura do assoalho
Sumrio
1. INTRODUO ............................................................................................................................................... 1
1.1. CONTEXTUALIZAO ................................................................................................................................... 1 1.2. JUSTIFICATIVA .............................................................................................................................................. 1 1.3. RELEVNCIA E CONTRIBUIO DESTE TRABALHO ....................................................................................... 2 1.4. ORGANIZAO DO TRABALHO ..................................................................................................................... 2
2. SUSPENSES ................................................................................................................................................ 4
2.1. PROJETO DE SUSPENSO ............................................................................................................................. 4 2.2. TIPOS DE SUSPENSES ................................................................................................................................. 4
2.2.1. Suspenses do tipo eixo rgido ............................................................................................................. 4 2.2.2. Suspenses Independentes ............................................................................................................... 5
2.2.2.1. MAC PHERSON ............................................................................................................................................. 5 2.2.2.2. TRAILING ARM (BRAOS ARRASTADOS) ...................................................................................................... 6 2.2.2.3 MULTI-LINK (BARRAS MLTIPLAS) ............................................................................................................... 7 2.2.2.4 DOUBLE WISHBONE (DUPLO A) .................................................................................................................... 7
3. GEOMETRIA DA SUSPENSO: DESCRIO DOS PRINCIPAIS PARMETROS .................................................. 9
3.1 SUBESTERAMENTO E SOBREESTERAMENTO ............................................................................................ 9 3.2. NGULO DE INCLINAO DO PINO MESTRE (KINGPIN INCLINATION)........................................................ 10 3.3. NGULO DE CAMBAGEM ........................................................................................................................... 11 3.4. CENTRO DE ROLAGEM (ROLL CENTER) ....................................................................................................... 12 3.5. CSTER ....................................................................................................................................................... 13 3.6 CONVERGNCIA (TOE) ................................................................................................................................. 14
4. METODOLOGIA ........................................................................................................................................... 16
4.1 DIMENSIONAMENTO GEOMTRICO ........................................................................................................... 16 4.1.1. Determinao da geometria de suspenso ....................................................................................... 16 4.1.2 Determinao da geometria de direo ............................................................................................. 18
4.2. MODELAGEM CAD ..................................................................................................................................... 19 4.3. MODELAGEM ANALTICA ........................................................................................................................... 23
4.3.1. Determinao do curso da manga de eixo ......................................................................................... 28 4.3.1.1. Determinao da inclinao do pino mestre ................................................................................................ 32 4.3.1.2. Determinao do cster ............................................................................................................................... 34
4.3.2. Determinao do curso do brao de direo ..................................................................................... 35 4.3.3. Determinao do curso da ponta de eixo .......................................................................................... 37
4.3.3.1. Determinao da cambagem ....................................................................................................................... 43 4.3.3.2. Determinao da convergncia .................................................................................................................... 44
4.3.4. Determinao do Curso do Amortecedor ........................................................................................... 45 4.3.4.1. Determinao do curso do amortecedor: quando em trabalho de compresso ......................................... 49
4.3.5. Determinao do ponto de encontro do pneu com o solo ................................................................. 50 4.3.5.1. Determinao do centro de rolagem instantneo do veculo ...................................................................... 54
4.4. INTERFACE GRFICA ................................................................................................................................... 58 4.5. MODELAGEM EM AMBIENTE MULTICORPOS (ADAMS/CAR) ................................................................... 60
5. RESULTADOS E DISCUSSO ......................................................................................................................... 61
5.1. ANLISE ELASTOCINEMATICA DA SUSPENSO (MATLAB) ....................................................................... 61 5.1.1. Resultados .......................................................................................................................................... 61
6. VALIDAO E ANLISE DOS RESULTADOS ................................................................................................... 69
6.1. CRIAO DO MODELO EM AMBIENTE MULTICORPOS (ADAMS/CAR) ..................................................... 69 6.2. INCLINAO DO PINO MESTRE .................................................................................................................. 71 6.3. CAMBAGEM ............................................................................................................................................... 72 6.4. CSTER ....................................................................................................................................................... 73 6.5. CONVERGNCIA ......................................................................................................................................... 73
7. CONCLUSES E TRABALHOS FUTUROS ........................................................................................................ 75
7.1. CONCLUSES ............................................................................................................................................. 75 7.2. TRABALHOS FUTUROS ................................................................................................................................ 75
REFERNCIAS .................................................................................................................................................. 77
1
1. INTRODUO
1.1. CONTEXTUALIZAO
H tempos o desenvolvimento de suspenses auxiliado por softwares de
CAD (Computer Aided Desing) e CAE (Computer Aided Engineering) para
simulaes, utilizando-se ainda de softwares matemticos, que auxiliam em
desenvolvimentos especficos ou tratamento de dados. Este desenvolvimento em
ambiente virtual vem poupando tempo e dinheiro na fase de projeto de suspenses,
devido eficincia e confiabilidade dos softwares (Rezende e Borges, 2003).
Entretanto, antes de se iniciar o estudo de suspenses importante entender bem a
sua funo e os seus principais componentes.
Com o objetivo principal de diminuir as aceleraes verticais transmitidas ao
habitculo do motorista, o sistema de suspenso realiza ainda o aumento de
aderncia do veculo ao solo, gerando com isso estabilidade e segurana ao piloto, e
formada basicamente por um conjunto de mola e amortecedor. Dentre o meio
automobilstico so inmeras as opes de geometrias que podem ser utilizadas,
cabendo ao projetista avaliar as necessidades para adequao do melhor projeto.
1.2. JUSTIFICATIVA
Devido as caractersticas referentes a suspenso do tipo Duplo A, a sua
ampla utilizao em veculos de alto desempenho e a necessidade de um
dimensionamento criterioso torna-se frequente o desenvolvimento de rotinas para o
correto dimensionamento deste subsistema.
O custo elevado associado aos softwares, j existentes no mercado, que
auxiliam no desenvolvimento de suspenses motivou a criao de uma rotina
computacional Freeware e de baixo custo computacional, que pudesse auxiliar o
desenvolvimento de suspenses do tipo Duplo A na determinao de geometrias
com alto desempenho a serem utilizadas nos prottipos desenvolvidos pela equipe
de SAE Baja da Universidade de Braslia (Piratas do Cerrado).
Verificou-se ainda, nos softwares existentes no mercado, uma carncia de
interfaces grficas que auxiliem o manuseio dos programas, muitas vezes
inviabilizando a sua utilizao, o que serviu de justificativa para o desenvolvimento
2
de uma interface deste tipo associada rotina de desenvolvimento de suspenses
no presente estudo.
1.3. RELEVNCIA E CONTRIBUIO DESTE TRABALHO
A preocupao com a correta determinao da geometria de suspenso,
ainda em fase de projeto, se faz crucial para a construo de uma suspenso
condizente com as caractersticas de projeto requisitadas. Neste sentido, o presente
trabalho tem o objetivo de tratar de uma maneira analtica a geometria de
suspenses, no que tange aos parmetros com significativa relevncia na dinmica
veicular, que so: ngulo de inclinao do pino mestre, ngulo de cambagem;
ngulo de cster; ngulo de convergncia e altura do centro de rolagem.
Desta forma, a finalidade do presente projeto de graduao o
desenvolvimento de uma rotina matemtica em ambiente MatLab que calcule, a
partir de coordenadas geomtricas de suspenses Duplo A, os principais
parmetros do subsistema de suspenso: inclinao do pino mestre, cambagem,
altura do centro de rolagem, cster e convergncia, considerando ainda a influncia
que o sistema de direo tem sobre estes parmetros, tendo em vista a sua vasta
aplicao em veculos de alto desempenho.
Com isso, a rotina aqui desenvolvida ter sua maior contribuio por se tratar
de um cdigo livre e acrescido de uma interface grfica, caracterstica fundamental
no auxlio de equipes de pequeno porte que almejam o desenvolvimento de
subsistemas de suspenses do tipo Duplo A, como no caso das equipes de SAE
Baja e Frmula SAE.
1.4. ORGANIZAO DO TRABALHO
Com o intuito de facilitar a compreenso do trabalho aqui desenvolvido, este
item esclarece a organizao que foi utilizada para se desenvolver a rotina e sua
interface grfica correspondente.
Para introduzir ao leitor os conceitos de suspenses que foram utilizados
durante o trabalho, o captulo 2 vem com o intuito de elucidar como se d um projeto
de suspenso, passando pela importante escolha do tipo de suspenso que ser
adotado e suas principais vantagens e desvantagens.
3
Esclarecido as funcionalidades de suspenso, o captulo 3 mostra os
principais parmetros deste subsistema que influem na dinmica veicular, ilustrando
os comportamentos obtidos com cada parmetro estabelecido.
Devido importncia destes parmetros, suas variaes foram determinadas
como sada da rotina desenvolvida e o captulo 4 mostra ento a metodologia que foi
utilizada para equacionar analiticamente estas variaes. O captulo 4, enfatiza
ainda a influncia do modelamento em CAD no auxlio do modelamento analtico
(item 4.2).
O captulo 4 conta ainda com o item 4.4 referente ao desenvolvimento da
interface grfica, utilizada para facilitar a interao usurio mquina. Alm disto, o
item 4.5 mostra como se d a modelagem de subsistemas de suspenso para uma
posterior anlise de seus parmetros elastocinemticos.
Os resultados e discusses so mostrados no captulo 5, onde foi aplicado
um estudo de caso referente ao subsistema dianteiro do veculo off-road da equipe
Piratas do Cerrado, competidora da competio Baja SAE. Os resultados, referentes
da rotina matemtica desenvolvida, foram analisados afim de justificar sua geometria
utilizada, verificando-se assim, se a variao dos principais parmetros est
condizente com o comportamento requerido pela equipe.
Afim de mostrar a convergncia entre os resultados encontrados na rotina
desenvolvida e o software comercial Adams/Car, o captulo 6 mostra o comparativo
encontrado entre os resultados, referenciando as divergncias encontradas em cada
parmetros analisado.
Por fim, o captulo 7 mostra as concluses obtidas com o trabalho aqui
desenvolvido e propostas de trabalhos futuros a serem desenvolvidos nesta linha de
pesquisa.
4
2. SUSPENSES
2.1. PROJETO DE SUSPENSO
O processo de desenvolvimento de suspenses complexo e inicia-se pela
identificao das caractersticas do veculo a qual o projeto de suspenso vai
atender. Inicialmente deve-se verificar se o veculo possui caractersticas para
terrenos asfaltados, fora-de-estrada ou misto, condio que modifica completamente
a exigncia do subsistema. Em seguida se faz necessrio a definio das
caractersticas de desempenho do automvel, definindo se o veculo de passeio,
transporte de carga, alto desempenho, militar, implementaes agrcolas, dentre
outros. (Reimpell, 2001).
Os veculos de alto desempenho, como exemplo, possuem a caracterstica da
exigncia do controle preciso de parmetros de suspenso, facilidade de regulagem
dos mesmos e a robustez do sistema, desta forma, algumas das geometrias
existentes no mercado so mais comumente requisitadas, como a geometria Multi-
link (barras mltiplas) e a Duplo A, objeto de estudo deste trabalho. Definida
aplicao do veculo se escolhe ento o tipo de suspenso a ser utilizada,
mostradas no item 2.2 abaixo. (Soares, 2005).
2.2. TIPOS DE SUSPENSES
Com as aplicaes definidas, possvel se determinar qual ser o tipo de
suspenso mais adequado, deve ser considerado ainda o espao disponvel para
fixao do subsistema de suspenso, transmisso dianteira ou traseira, dentre
outras caractersticas de projeto.
Historicamente alguns tipos de suspenso se destacaram por suas
caractersticas prprias, e podem ser dividas incialmente entre suspenses
independentes e eixo rgido.
2.2.1. Suspenses do tipo eixo rgido
Suspenses do tipo eixo rgido so caracterizadas pela ligao direta das
rodas por meio de um eixo, desta forma, em caso de trepidao de uma das rodas a
roda oposta tambm ir trepidar, devido a este fato, suspenses do tipo eixo rgido
so conhecidas como dependentes. As suspenses dependentes so
5
caracterizadas tambm por sua robustez quando comparada as suspenses
independentes.
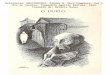
O modelo mais utilizado de suspenso dependente chamado de Hotchkiss,
ou eixo slido, geralmente utilizada no eixo traseiro acoplado ao sistema de trao.
Se utiliza de feixe de mola acoplado ao chassi e ao eixo rgido, como mostrado na
Fig. (1), caracterstica que confere robustez ao sistema. Entretanto, se observa uma
rolagem excessiva no veculo, o que para veculos que desenvolvem velocidades
altas no recomendado, restando a sua utilizao veculos de baixa velocidade e
alta carga.
Figura 1 Eixo slido (Hotchkiss) - www.offroad.automotive.com
2.2.2. Suspenses Independentes
Suspenses independentes so caracterizadas por serem mais eficientes e
por no haver uma ligao rgida entre uma roda e outra, desta forma, a estabilidade
e o conforto do veculo so priorizados.
2.2.2.1. MAC PHERSON
A suspenso Mac Pherson amplamente utilizada no meio automobilstico,
chegando a 86% de utilizao em eixos dianteiros, e isto se deve instalao deste
tipo de suspenso ser mais vantajosa em veculos com motores transversais, devido
separao dos pontos de fixao. (Gillespie, 1992). Geometricamente, trata-se de
uma bandeja inferior e um conjunto de mola e amortecedor que agem como um
brao de controle, mantendo a roda na cambagem definida, como visto na Fig. (2)
abaixo.
6
Figura 2 Suspenso Mac Pherson (Valdeck, 2007)
Possui como maior desvantagem o comprimento do fuso do amortecedor, que
por ser to esbelto, pode ser submetido flexo.
2.2.2.2. TRAILING ARM (BRAOS ARRASTADOS)
Este tipo de suspenso comumente utilizada em eixos traseiros de veculos
com trao traseira, quando aplicada ao eixo dianteiro considerada um dos
modelos mais simples e econmicos de suspenso independente, desta forma foi
largamente utilizada em veculos de passeio de baixo custo. Este modelo possui
braos paralelos que so presos estrutura, mantendo a roda paralela carroceria,
como mostrado na Fig. (3).
Figura 3 - Suspenso Trailing-Arm (Valdeck, 2007)
7
2.2.2.3 MULTI-LINK (BARRAS MLTIPLAS)
Suspenso conhecida pela alta quantidade de braos de controle, em geral
quatro ou cinco, mostrados na Fig. (4), possui como principal vantagem o controle
preciso de todos os parmetros de forma independente. Devido s suas
caractersticas de acerto fino dos parmetros, geralmente utilizada em veculos
que visam o desempenho. Tem como principal desvantagem o alto custo e o alto
peso associado.
Figura 4 - Suspenso Multi-Link (Valdeck, 2007)
2.2.2.4 DOUBLE WISHBONE (DUPLO A)
A suspenso Duplo A, mundialmente conhecida por Double Wishbone,
constituda normalmente por dois braos em forma de A, o que d o nome ao tipo
de suspenso, sendo que os amortecedores e molas podem ser fixados em
qualquer um dos braos, como mostrado na Fig. (5), e tambm na manga.
Figura 5 - Suspenso Duplo A (Valdeck, 2007)
8
Em casos em que o desempenho do veculo est acima de outros fatores, a
melhor soluo normalmente a utilizao deste tipo de geometria. No mercado
nacional muito implementada em veculos off-road, caminhonetes e em alguns
sistemas traseiros, como no caso do Honda Civic 2011. Em competies
automobilsticas de alto desempenho, como a Formula 1, Stock Car e em
superesportivos este tipo de geometria amplamente utilizado, isto se deve s
caractersticas mostradas abaixo:
Vantagens:
Controle preciso da cambagem
Ampla gama de escolha da altura do centro de rolagem
Pouca vibrao transmitida
Robustez do sistema
Desvantagens
Redundncia nos elementos de ligao
Necessidade de um dimensionamento criterioso
Custo elevado
Alto peso da massa no suspensa
9
3. GEOMETRIA DA SUSPENSO: DESCRIO DOS PRINCIPAIS
PARMETROS
Este captulo tem como principal objetivo apresentar os principais parmetros da geometria da suspenso
Para se analisar o comportamento dinmico e cinemtico de um veculo, faz-
se necessrio um estudo detalhado dos principais parmetros da suspenso. Sendo
assim, o bom entendimento de cada um deles, bem como sua influncia na dinmica
veicular de fundamental importncia. Tendo em vista isto, fez-se o uso, neste
captulo, de uma introduo terica explicitando os principais parmetros que so
analisados em um projeto de desenvolvimento de suspenses e suas respectivas
variaes com o deslocamento vertical da suspenso (Bound e Rebound), na qual o
Bound refere-se ao deslocamento vertical da suspenso para cima e o Rebound o
deslocamento da suspenso para baixo.
3.1 SUBESTERAMENTO E SOBREESTERAMENTO
A definio do comportamento do veculo, quando em curvas, se faz
necessrio para o desenvolvimento de veculos, desta forma, o carro pode
apresentar trs comportamentos distintos, sendo eles: Sobreesteramento (Over
Steer), Subesteramento (Under Steer) e Neutro, como mostrado na Fig. (6) abaixo
(Milliken, 1995).
Figura 6 - Sobre e sub esteramento (www.mytrackshedule.com)
O subesteramento diz respeito tendncia do veculo de sair de frente em
curvas, na qual, o subestercamento moderado aumenta a aderncia nas retas e
10
curvas e evita o excessivo desgaste dos pneus, amplamente utilizado nos carros
nacionais.
O sobreesteramento a tendncia do veculo em sair de traseira nas curvas,
em veculos de competio utilizado devido ao deslizamento da parte traseira do
veculo muitas vezes requisitadas em projeto.
A tendncia neutra ser ento o meio termo entres os comportamentos
apresentados anteriormente, o carro no possui tendncia alguma de sair nas
curvas.
Em veculos off road, como veculos SAE Baja, o sobreesteramento
altamente requisitado, diminuindo desta forma os esforos requisitados pela direo,
utilizando com isso a trao traseira e a maior distribuio de pesos na parte
posterior para aumentar este efeito.
3.2. NGULO DE INCLINAO DO PINO MESTRE (KINGPIN INCLINATION)
No plano frontal do veculo, identifica-se um ngulo conhecido como
inclinao do pino mestre. Este medido em graus () e obtido entre a linha que
passa pelo eixo de rotao da roda na vista frontal e a linha de centro vertical da
roda (eixo Z), resultando no ngulo , conforme pode ser visto na Fig. (7). (Jazar,
R., 2008)
Figura 7 - Inclinao do pino mestre (adaptado de: Jazar, R., 2008)
11
Este eixo de rotao da roda, Fig.(7), o mesmo utilizado para a
determinao do cster, porm este ltimo determinado pela vista lateral. Para que
se obtenha um comportamento ideal, o prolongamento do eixo de rotao da roda,
identificado pelos locais de unio do pino mestre suspenso (B.S.M. e B.I.M.),
deve passar o mais prximo possvel da linha de centro vertical da roda (eixo Z) que
define o centro de rea de contato do pneu com o solo, ponto O mostrado na Fig.
(7). Isto serve para que haja o mnimo de arraste do pneu em manobras a baixas
velocidades, diminuindo o esforo do motorista e do sistema de direo.
A inclinao do pino mestre junto com o cster so responsveis pelo retorno
da direo posio de trajetria em linha reta, aps as curvas ou, quando o veculo
est percorrendo uma curva e o volante solto. tambm responsvel por manter a
trajetria retilnea do veculo em estradas que no possuem inclinaes laterais.
3.3. NGULO DE CAMBAGEM
A cambagem um dos parmetros mais importantes com relao ao
desenvolvimento cinemtico e dinmico de suspenses, devido a suas influncias
nas foras laterais e longitudinais de um automvel. Identifica-se este ngulo, no
plano frontal do veculo, como sendo o ngulo dado entre a linha vertical (eixo Z) e a
linha de centro do pneu, como mostrado na Fig. (8). A cambagem dita positiva
quando, em vista frontal, a parte superior do pneu aponta para fora do veculo e
negativa quando a parte superior do pneu aponta para dentro do veculo. (Jazar, R.,
2008)
A cambagem possui um valor esttico, determinada para o veculo parado,
mas pode variar amplamente em situaes de deslocamento vertical da roda
acentuados. Uma das funes desempenhadas pela suspenso manter cada roda
com a cambagem desejada, tanto em linha reta, quanto em curvas.
12
Figura 8 - Visualizao do ngulo de cambagem
No que diz respeito ao comportamento dinmico, o cmber afeta na
aderncia, seja nas retas ou nas curvas. Um cmber negativo reduz o
subesteramento (tendncia de deslizamento das rodas dianteiras) e aumenta a
aderncia nas curvas, entretanto, reduz a aderncia nas retas. J o cmber positivo
reduz o sobreesteramento (tendncia de deslizamento das rodas traseiras), mas
pode tornar o carro instvel. (Forza Motorsport, 2011)
Este parmetro tem grande influncia na ampliao da vida til dos pneus.
Uma cambagem demasiadamente negativa causa um desgaste maior na parte
externa dos pneus, sendo que uma cambagem positiva causa um desgaste maior na
parte mais interna dos pneus. Dessa forma deve-se encontrar um equilbrio entre o
desgaste e o desempenho do veculo. (Areal, 2008)
3.4. CENTRO DE ROLAGEM (ROLL CENTER)
De acordo com a SAE J670e (1976), define-se o centro de rolagem (C.R.)
como sendo um ponto no plano transversal de qualquer par de rodas, que esteja
sobre um mesmo eixo transversal, onde foras laterais podem ser aplicadas sem
que se produza rolagem da suspenso.
A determinao geomtrica da posio do C.R. Fig.(9), no caso de uma
suspenso Duplo A, ser discutida em detalhes no item 4.3.5.1. O C.R. dito
13
positivo se est acima do plano que define o solo, ao contrrio dito negativo se
abaixo deste. Geralmente, alturas de C.R. baixas garantem uma maior aderncia do
veculo em curvas (Dixon, 1996).
Figura 9 - Metodologia geomtrica para determinao do centro de rolagem.
(Dixon,1996)
Diante da dinmica do veculo em curvas, pode-se afirmar que a
determinao da altura do C.R. resume o efeito das bandejas ou links da suspenso
permitindo o estudo do movimento lateral (curvas) da massa suspensa (rolagem).
3.5. CSTER
No plano lateral do veculo, identifica-se o ngulo de cster, este medido em
graus e obtido entre o eixo de esteramento e o eixo vertical do veculo, positiva
quando a parte superior do eixo de esteramento inclinada para traseira do
veculo, conforme pode ser visto na Fig. (10)
14
Figura 10 - Visualizao do ngulo de cster (Jazar, R., 2008)
O cster possui uma importante influncia na dirigibilidade do veculo e na
sua dinmica veicular, a presena de cster produz alteraes na direo, sentidos
pelo motorista. O Cster provoca alteraes na variao da cambagem da
suspenso, quando a mesma est em trabalho vertical.
O parmetro de cster escolhido para o repouso do subsistema de suspenso
incorpora um grau de rotao que faz com que as rodas tenham tendncia a voltar
naturalmente linha reta ou posio frontal, tornando o sistema direcional estvel.
3.6 CONVERGNCIA (TOE)
O ngulo de convergncia medido pela diferena entre as distncias da
frente e de trs que separam o eixo central de um par de rodas. Rodas so
consideradas convergentes (Toe in) quando os eixos centrais das rodas convergem
em direo parte dianteira do veculo, como mostrado na Fig. (11).
15
Figura 11 - ngulo de convergncia (Toe)
Ajustar a convergncia influi diretamente na melhora da resposta nas
entradas de curvas (transio entre retas e curvas). A direo convergente se d
quando os pneus esto mais abertos atrs do que na frente. Isso aumenta a
estabilidade, mas reduz a resposta nas entradas de curvas. A direo divergente se
d quando os pneus esto mais abertos na frente do que atrs. Isso aumenta a
resposta nas entradas de curvas, mas reduz a estabilidade.
Da mesma forma que a cambagem, a convergncia tambm possui grande
influncia na ampliao da vida til dos pneus. A literatura recomenda-se a no
utilizao de extremos, tendo em vista que divergncias ou convergncias
excessivas tendem a desgastar os pneus mais rapidamente.
Visto como se d a determinao dos principais parmetros de suspenso e
suas respectivas influncias no comportamento dinmico do veculo, o capitulo 4 a
seguir, enfatizar como se deu a metodologia utilizada para determinao da
variao dos parmetros.
O captulo 4, passa ainda pela importante determinao dos pontos da
suspenso e direo, a importncia das ferramentas de CAD no desenvolvimento de
suspenses, e a deduo das equaes utilizadas no desenvolvimento analtico.
16
4. METODOLOGIA
4.1 DIMENSIONAMENTO GEOMTRICO
Como visto anteriormente, o processo de desenvolvimento de suspenses
complexo e demanda uma srie de tomadas de decises importantes referentes ao
projeto, por fim, definido o tipo de suspenso que ser utilizado, o projetista deve
seguir uma metodologia para determinao da geometria de suspenso, ou seja, os
pontos de fixao da suspenso na estrutura e as fixao do conjunto mola
amortecedor no sistema.
A escolha da geometria de suspenso tem fundamental importncia no
projeto de veculos, pois engloba vrios parmetros de relevncia no comportamento
da dinmica veicular. (Dixon, 1996).
4.1.1. Determinao da geometria de suspenso
Nesta etapa, o projetista deve ento levar em considerao caratersticas de
projeto como: a localizao do motor e o seu tamanho, sistema de trao dianteiro
ou traseiro, espao disponvel da caixa de roda, entre eixo do veculo, distncia do
solo dentre outros fatores importantes. Deve-se ainda verificar o posicionamento e a
configurao do conjunto mola amortecedor, fator que influi diretamente na
transmissibilidade do subsistema de suspenso. (Gillespie,1992)
Desta forma, necessrio definio das coordenadas que fornecem o
posicionamento geomtrico dos componentes de suspenso, relativamente a um
sistema de referncia. A Fig. (12) abaixo ilustra de suspenso duplo A, em que
os nmeros de 1 a 10 definem os pontos em que so necessrias fornecer as
coordenadas para que se possa constru-la em ambiente virtual. No presente
trabalho este tipo de suspenso ser objeto de estudo e a especificao das
coordenadas dos pontos ilustrados permitir a construo do modelo em CAD, como
mostrado no item 4.2, e tambm o estudo da cinemtica da suspenso como ser
visto no item 4.3.
17
Figura 12 - Representao de uma suspenso do tipo Duplo A (Jazar, R.)
De fato, a definio da geometria de suspenso passa pela importante
escolha dos pontos de ancoragem da suspenso no chassi, representado na Fig.
(12) pelos pontos 1, 2, 4 e 5, os quais representam os pontos de encontro da
bandeja inferior no chassi (1,2) e os pontos de encontro da bandeja superior no
chassi (4,5).
Vale reforar que a escolha dos pontos de ancoragem (1,2,4 e 5), e tambm,
dos pontos de fixao das bandejas na manga (3 e 6) deve levar em considerao,
as principais caractersticas de projeto, que este subsistema de suspenso deve
atender, julgando a prioridade da determinao destes pontos em um projeto final de
suspenso. (Milliken, 1995)
Alm da escolha dos pontos de ancoragem da suspenso importante
definio da localizao dos componentes de amortecedor e mola da suspenso (7
e 8), assim como os coeficientes de amortecimento e rigidez a serem utilizados e a
configurao mais adequada a ser adotada, como exemplo, o uso de amortecedores
e molas em srie ou paralelo, que afetam diretamente na transmissibilidade de
esforos ao piloto.
18
4.1.2 Determinao da geometria de direo
Alm da definio da geometria de suspenso, se faz necessrio a definio
dos pontos que representam a direo. O comportamento da direo de um veculo
basicamente definido pelo ponto de fixao do brao de direo na caixa de
direo e o ponto de fixao do brao de direo na manga de eixo, representados
na Fig. (13) abaixo pelos pontos 11 e 12 respectivamente.
Figura 13 - Representao de um sistema de direo (Jazar, R.)
A geometria de direo definida influi diretamente no comportamento de
alguns parmetros da suspenso. Com o trabalho vertical da suspenso, a fixao
do brao de direo manga de eixo limita a sua movimentao provocando uma
rotao da manga o que acarreta em mudana nos ngulos de cster, cmber ou
convergncia dependendo do eixo em que for rotacionada (Portella, 2008).
O trabalho aqui exposto no teve como foco estabelecer uma metodologia
para o correto dimensionamento do sistema de direo, de forma que, foi utilizado
19
uma geometria de direo arbitraria para que se fosse estudado, exclusivamente, a
variao dos parmetros de suspenso, entretanto, vasta a bibliografia que auxilia
no desenvolvimento de geometrias de direo para que se obtenha, a partir do
posicionamento dos pontos de fixao do brao de direo, o comportamento mais
adequado de acordo com as caractersticas de projeto.
Neste sentido, o presente estudo se utilizar do seguinte conjunto de pontos
Tab. (1) da suspenso Duplo A, mostrados na Fig. (12), que determinam sua
geometria, acrescidos dos pontos referentes ao sistema de direo, ilustrados na
Fig. (13), para construo do modelo em CAD, sua posterior anlise na rotina
matemtica e pr fim a modelagem em CAE.
Tabela 1 - Pontos de fixao da suspenso de tipo Duplo A
Coordenadas de entrada
1, 2 pontos de fixao do brao inferior na estrutura;
3 ponto de fixao do brao inferior na manga;
4, 5 pontos de fixao do brao superior na estrutura;
6 ponto de fixao do brao superior na manga;
7 ponto de fixao do amortecedor no brao;
8 - ponto de fixao do amortecedor na estrutura;
9 ponto de fixao da ponta de eixo na manga;
10 ponto de fixao da ponta de eixo na roda
11 ponto de fixao do brao de direo na caixa
12 ponto de fixao do brao de direo na manga
Definido as coordenadas X, Y e Z dos pontos mostrados na Tab. (1)
possvel determinar o modelo em CAD, como ser mostrado a seguir.
4.2. MODELAGEM CAD
A metodologia utilizada para determinao das equaes analticas que
descrevem o curso dos componentes de suspenso durante o trabalho da mesma
(denominado de bound e rebound) pode ser considerada em duas etapas. Primeiro
a modelagem CAD do subsistema suspenso e em segundo a modelagem analtica,
deduzida no item 4.3, baseada na geometria descrita pela mesma durante a
solicitao do subsistema.
20
A primeira etapa, modelagem em CAD, se justifica pelo fato de ajudar a
compreender melhor o funcionamento da mesma, atravs da anlise visual,
auxiliando o projetista no desenvolvimento das relaes trigonomtricas necessrias
para a formulao analtica, e ainda na validao dos parmetros, quando a
suspenso se encontra em repouso.
O incio do desenvolvimento de uma suspenso se d na determinao dos
principais pontos (posio geomtrica), como explicitado anteriormente e mostrado
na Tab. (1), dos elementos da suspenso. Tais pontos so necessrios de modo a
determinar o comprimento dos componentes de suspenso, tamanho dos braos,
comprimento da manga, e os pontos de ancoragem do sistema no chassi.
Primeiramente so enumerados os seis primeiros pontos necessrios para a
definio do curso da manga de eixo, nesta etapa, utilizou-se o software
SolidWorks para modelagem da suspenso Duplo A, utilizada em um veculo do
tipo SAE Baja, desenvolvida em ambiente virtual pela equipe Piratas do Cerrado.
Como pode ser visto na Fig. (14), na qual o sistema da suspenso est modelado
em CAD.
Figura 14 - Pontos de fixao dos braos de suspenso.
Os pontos necessrios para o modelamento matemtico do curso da manga
de eixo foram enumerados na Fig. (14), e descritos na Tab.(2).
21
Tabela 2 - Coordenadas necessrias (manga de eixo).
Coordenadas necessrias para a determinao do curso da manga de eixo (X, Y, Z)
1 Ponto de Fixao Frontal do Brao Inferior no Chassi (B.I.C.)
2 Ponto de Fixao Traseiro do Brao Inferior no Chassi (B.I.C.T)
3 Ponto de Fixao Frontal do Brao Inferior na Manga (B.I.M.)
4 Ponto de Fixao Frontal do Brao Superior no Chassi (B.S.C.)
5 Ponto de Fixao Traseiro do Brao Superior no Chassi (B.S.C.T)
6 Ponto de Fixao Frontal do Brao Superior na Manga (B.S.M.)
Para que o modelo numrico, desenvolvido para a determinao do curso da
manga de eixo, possa ser validado utilizando o modelo CAD e, posteriormente,
modelo CAE, h a necessidade de que a origem dos eixos seja a mesma para
ambos os modelos considerados. Para isto considerou-se que o ponto mostrado na
Fig. (15) seja a origem das coordenadas, considerando o eixo Z na vertical, o eixo Y
na horizontal e o eixo X longitudinal (perpendicular ao plano ZY).
O eixo de origens encontrado traando o eixo de rotao da bandeja inferior
e em seguida deve-se traar uma linha perpendicular ao eixo de rotao ligando o
eixo de rotao inferior com a fixao inferior da manga, ilustrado na Fig.(15).
Figura 15 Definio do eixo de origens utilizado.
Determinado os pontos que definem a variao do curso da manga de eixo,
necessrio definir mais quatro pontos, primeiramente, os pontos que definem o
conjunto mola amortecedor, pontos 7 e 8, e os pontos que definem o comportamento
22
da ponta de eixo, pontos 9 e 10, como mostrados na Fig. (16) abaixo e explicitados
na Tab. (3).
Figura 16 - Pontos de fixao do conjunto mola amortecedor e da ponta de eixo
Tabela 3 - Pontos de fixao da suspenso de tipo Duplo A
Coordenadas necessrias para a determinao dos demais parmetros (X, Y, Z)
7 Ponto de Fixao do Amortecedor na Bandeja (F.A.B.)
8 Ponto de Fixao do Amortecedor no Chassi (F.A.C.)
9 Ponto de Fixao da Ponta de Eixo na Manga (P.E.M.)
10 Ponto de Fixao da Ponta de Eixo na Roda (P.R.M.)
A partir do modelo CAD construdo, as coordenadas dos pontos 1 a 10
descritos nas Tab. (2) e Tab. (3) foram exportados para utilizao dos mesmos no
modelo analtico desenvolvido no item 4.3.
A partir do software CAD, utilizando-se de ferramentas de cotagem,
possvel verificar os principais parmetros da suspenso, como exemplo a inclinao
do pino mestre, mostrada na Fig. (17), cujo seus conceitos foram melhor tratados no
item 3.
23
Figura 17 - Utilizao de ferramentas de cotagem para determinao da inclinao
do pino mestre
4.3. MODELAGEM ANALTICA
Neste item ser mostrado como se deu o desenvolvimento da metodologia
analtica aplicada para a abordagem em trs dimenses da geometria de
suspenso. Para criao da rotina de abordagem 3D, primeiramente, foi necessrio
definir quais parmetros de sada so requisitados, para que fosse, ento,
determinada a melhor combinao de parmetros de entrada com o intuito de
simplificar a rotina. Com isso, os dados de sada desejados so:
Cambagem no repouso;
Inclinao do pino mestre no repouso;
Cster no repouso
Convergncia no repouso
Altura do centro de rolagem do veculo em repouso;
Comprimento do amortecedor em compresso e extenso;
Variao da inclinao do pino mestre;
24
Variao do cster
Variao da convergncia no repouso
Variao da cambagem;
Variao do comprimento do amortecedor;
Variao do centro de rolagem instantneo;
Determinao da mxima e mnima variao dos principais parmetros;
Verificada a possibilidade de quais variveis de entrada facilitariam a
utilizao e aumentaria a velocidade de clculo da rotina, chegou-se concluso
dos seguintes pontos, mostrados abaixo:
Coordenada de fixao do brao de suspenso inferior na manga;
Coordenada de fixao do brao de suspenso superior na manga;
Coordenada de fixao do brao de suspenso inferior no chassi;
Coordenada de fixao do brao de suspenso superior no chassi;
Coordenada de fixao do amortecedor no brao;
Coordenada de fixao do amortecedor no chassi;
Coordenada de fixao da roda na ponta de eixo;
Coordenada de fixao da ponta de eixo na manga;
Coordenada de fixao do brao de direo na caixa de direo;
Coordenada de fixao do brao de direo na manga de eixo;
Trabalho da suspenso (Bound e Rebound);
25
Dimetro do pneu + roda;
Largura do assoalho;
Largura do pneu;
Cabe ressaltar novamente, que a modelagem analtica apresenta algumas
restries, dentre elas: o fato do equacionamento ter sido desenvolvido
especificamente para uma geometria de suspenso do tipo Duplo A, o
posicionamento da origem dos eixos no programa de CAD, e limitaes da variao
do curso da suspenso. (Milliken, 1995).
Sendo assim, necessrio, inicialmente, determinar como se d a variao
dos pontos de ancoragem da suspenso na manga, para que possa, ento, ser
definido como ser a movimentao dos braos de suspenso, quando se
aplicada uma movimentao vertical (eixo Z) definida no item 4.3.1. para ento
definir a inclinao do pino mestre (item 4.3.1.1.) e posteriormente o cster (item
4.3.1.2)
Em seguida, necessrio definir o comportamento do brao de direo, item
4.3.2., para que ento possa se verificar o posicionamento dos pontos de
ancoragem da ponta de eixo na manga e na roda, item 4.3.3. para que se possa
definir, enfim, a cambagem 4.3.3.1 e a convergncia 4.3.3.2.
Aps determinada os pontos de ancoragem dos braos de suspenso e da
manga se v necessria determinao da variao das coordenadas de fixao do
amortecedor, item 4.3.4., e em seguida definida a sua variao de comprimento
(item 4.3.4.1).
Por fim, definida a variao das coordenadas do ponto de encontro do pneu
com o solo, item 4.3.5., e em seguida definido a variao de seu parmetro
associado, a altura do centro de rolagem instantneo. (item 4.3.5.1.) Tal
metodologia pode ser simplificada pelo Fluxograma mostrado na Fig. (18) abaixo.
26
O fluxograma dividido basicamente em quatro fases. Contendo treze
entradas e seis parmetros principais de sada.
importante ressaltar no fluxograma mostrado, que as variveis
intermedirias so processadas de acordo com funes do MatLab, conhecidas
como Functions, na qual as variveis de entrada e os grficos resultantes dessas
funes ficam bem explcitos no fluxograma.
27
Figura 18 Fluxograma da rotina desenvolvida
28
4.3.1. Determinao do curso da manga de eixo
A partir das coordenadas dos pontos definidos no modelo CAD (Tab. 2) inicia-
se a deduo do equacionamento analtico para determinao do curso da manga
de eixo. Para determinao do posicionamento da manga de eixo em funo do
trabalho da suspenso (ou seja, do curso vertical desta) necessrio compreender,
a priori, a dependncia entre o posicionamento deste componente com a posio
dos demais pontos de fixao da suspenso (B.I.C., B.I.C.T., B.S.C., B.I.C.T.),
durante a movimentao dos braos da suspenso. De maneira simplificada, como
exemplo, quando se produz um deslocamento no ponto B.S.M., consequentemente,
um deslocamento ser produzido no ponto B.I.M. e isto se deve ao fato de ambos os
pontos estarem fixados na manga de eixo, conforme mostrado anteriormente na Fig.
(19).
Figura 19 - Determinao do comprimento da manga
Desta forma, determinando o comprimento da manga de eixo e sendo
este um valor fixo, ou seja, no varia durante o trabalho da suspenso, utilizam-se
relaes trigonomtricas e conceitos de geometria analtica (Dante, 1999.) para
calcular a distncia (Dmanga) entre estes dois pontos (B.I.M. e B.S.M.) no espao
(XYZ), mostrado na Fig. (19), onde os subscritos X, Y e Z representam os eixos das
coordenadas, obtendo, portanto:
29
( 1 )
Entretanto vale ressaltar que com o trabalho vertical da suspenso, os valores
das coordenadas de fixao dos braos nas mangas (B.I.M. e B.S.M.) ir se alterar,
desta forma, com o intuito de determinar esta variao, possvel determinar o
comprimento dos links da bandeja inferior e com isso determinar o vetor
correspondente variao dos pontos B.I.M. e B.S.M., como ser mostrado a seguir.
Porm, vale ressaltar, que no necessariamente os comprimentos dos links
referentes bandeja inferior so iguais, sendo necessrio desta forma calcular o
comprimento de cada um dos dois, denominados de Dbimbic e Dbimbict, como mostrados
na Fig. (20) abaixo, sendo Dbimbic a distncia da ponto de fixao frontal da bandeja
inferior no chassi ao ponto de fixao da bandeja inferior na manga e Dbimbict a
distncia da ponto de fixao traseiro da bandeja inferior no chassi ao ponto de
fixao da bandeja inferior na manga.
Figura 20 Determinao dos comprimentos dos links referentes bandeja inferior.
As equaes referentes aos comprimentos dos links da bandeja inferior so
ento mostradas abaixo.
2 2 2( . . . . . . ) ( . . . . . . ) ( . . . . . . )manga X X Y Y Z ZD B S M B I M B S M B I M B S M B I M
30
2 2 2( . . . . . . ) ( . . . . . . . ) ( . . . . . . )bictbim X X Y Y Z ZD B I M B I C T B I M B I C T B I M B I C T ( 2 )
2 2 2( . . . . . . ) ( . . . . . . ) ( . . . . . . )bicbim X X Y Y Z ZD B I M B I C B I M B I C B I M B I C ( 3 )
Com o trabalho da suspenso sabe-se que o comprimento dos links da
bandeja inferior vo se manter constantes assim como os pontos de fixao dos
braos no chassi, desta forma, como j foram determinados os comprimentos a
partir das Eq. (2) e (3), pode-se ento substituir os pontos da manga por seus
respectivos vetores, tendo em vista que seus coordenadas variam durante o trabalho
da suspenso.
Desta forma, restam ento duas equaes Eq. (4) e (5) e trs incgnitas para
a determinao do posicionamento do ponto de fixao da bandeja inferior na
manga.
2 2 2( . . . ) ( . . . . ) ( . . . )bictbim BIM X BIM Y BIM ZD X B I C T Y B I C T Z B I C T ( 4 )
2 2 2( . . . ) ( . . . ) ( . . . )bicbim BIM X BIM Y BIM ZD X B I C Y B I C Z B I C ( 5 )
No sistema linear formado pelas Eq. (4) e (5), tm-se, portanto, trs incgnitas
(YBIM, ZBIM, XBIM) e duas equaes. Para resoluo do sistema, uma anlise
detalhada do movimento da suspenso, quando aplicado um deslocamento vertical
na mesma (simulando um obstculo na pista de rolagem), foi realizada utilizando o
modelo C.A.D. Verifica-se com isso que variando a coordenada Z do ponto B.I.M. em
um intervalo com limites definidos pelo bound e rebound, consequentemente, sua
coordenada correspondente em Y e X podem ser determinadas (YBIM e XBIM),
resultando ento, em um sistema com duas equaes e duas incgnitas (YBIM e
XBIM).
Vale ressaltar que assim como na maioria dos softwares de anlises
elastocinemticas, como exemplo, DINAware e ADAMS/Car, neste trabalho as
simulaes dos parmetros de suspenso sero fornecidas em funo do curso
vertical da suspenso. Desta maneira, a utilizao da rotina em Matlab iniciar com
31
o fornecimento destes dois parmetros pelo usurio. importante ressaltar que a
definio dos parmetros bound e rebound deve ser feita em funo das limitaes
dos arcos de circunferncias produzidos pelos braos da suspenso em cada
projeto.
importante observar que a notao com as abreviaes referentes aos
pontos de ancoragens em forma de sub-ndices foi utilizada nesse documento para
se referenciar a vetores. Desta forma, quando se faz o clculo de variao de
parmetros necessria anlise da variao das coordenadas dos pontos de
fixao da suspenso e para isso sero utilizados os vetores utilizados com esta
notao.
J no caso de referncias s variveis de entrada, valores para a suspenso
em repouso, utilizam-se as abreviaes de forma usual, como em B.S.M.X,
indicando, por exemplo, o ponto de encontro da bandeja superior na manga com a
suspenso em repouso, e o sub-ndice tem agora a funo de discriminar o eixo no
sistema de coordenadas.
Dando continuidade na determinao do curso da manga de eixo, de forma
semelhante utilizada anteriormente, deve-se determinar o comprimento dos links
Dbsctbsm e Dbscbsm, mostrados na Fig.(21) abaixo referentes bandeja superior, a
partir das Eq. (6) e (7) mostradas abaixo.
Figura 21 - Determinao dos comprimentos dos links referentes bandeja inferior.
32
2 2 2( . . . . . . ) ( . . . . . . . ) ( . . . . . . )bsctbsm X X Y Y Z ZD B S M B S C T B S M B S C T B S M B S C T ( 6 )
2 2 2( . . . . . . ) ( . . . . . . ) ( . . . . . . )bscbsm X X Y Y Z ZD B S M B S C B S M B S C B S M B S C ( 7 )
Com o intuito de determinar o posicionamento do ponto de encontro da
bandeja superior com a manga, quando a suspenso estiver em movimento utilizou-
se dos comprimentos determinados pelas Eq. (6) e (7) e do comprimento da manga
Eq. (1), e ento foram substitudos os valores das coordenadas em repouso do
ponto B.S.M. pelos vetores XBSM, YBSM e ZBSM nas Eq. (8), (9) e (10), alm disto,
como houve uma variao do ponto de encontro da bandeja inferior com a manga,
as suas coordenadas correspondentes ao repouso, B.I.M. foram alteradas pelos
vetores XBIM, YBIM e ZBIM na Eq. (8), como mostrado a seguir.
2 2 2( ) ( ) ( )Manga BSM BIM BSM BIM BSM BIMD X X Y Y Z Z ( 8 )
2 2 2( . . . . ) ( . . . . ) ( . . . . )bsctbsm BSM X BSM Y BSM ZD X B S C T Y B S C T Z B S C T ( 9 )
2 2 2( . . . ) ( . . . ) ( . . . )bscbsm BSM X BSM Y BSM ZD X B S C Y B S C Z B S C ( 10 )
Resolvendo ento o sistema linear de trs equaes, Eq. (8), (9) e (10), e
trs incgnitas (XBSM ,YBSM e ZBSM) determina-se pr fim a variao dos pontos
referentes manga de eixo com o trabalho vertical da suspenso.
4.3.1.1. Determinao da inclinao do pino mestre
Para determinar a variao da inclinao da manga necessrio focar na
movimentao dos pontos de fixao da manga nos braos de suspenso, dado
pelos pontos B.I.M., ponto de fixao do brao inferior na manga, e pelo B.S.M.
ponto de fixao do brao superior na manga, determinados anteriormente no item
4.3.1.
33
Tendo em vista que a anlise da variao da inclinao do pino mestre ser
feita pela variao destes pontos, usaram-se, ento, os vetores: YBSM, ZBSM, YBIM, ZBIM
onde os subscritos indicam os pontos de fixao e as letras Y e Z referenciam as
coordenadas.
Para determinao da inclinao do pino mestre, sabe-se que o ngulo entre
a manga e a reta vertical representa a inclinao do pino mestre, sendo mais bem
visualizado em ambiente CAD, mostrado na Fig. (22),
Figura 22 - Metodologia para determinao da inclinao do pino mestre
Analiticamente a inclinao do pino mestre pode ser determinada como sendo
o ngulo entre a manga e a reta vertical que passa pelo ponto superior da manga,
como mostrado na Fig. (22).
Desta forma temos que a inclinao Mmanga dada por:
BIM BSMmanga
BIM BSM
Y Ytg M
Z Z
( 11 )
Onde o smbolo M indica inclinao de retas, e os pontos YBSM, ZBSM, YBIM,
ZBIM indicam os vetores de fixao da manga na suspenso. Com isso o vetor
referente inclinao do pino mestre ser igual ao arco tangente em graus desta
inclinao, como mostrado na Eq. (11).
34
4.3.1.2. Determinao do cster
Assim como a inclinao do pino mestre, o cster um parmetro que
depende do posicionamento da manga de eixo, entretanto sua variao se d em
vista lateral, no plano ZX, representado por na Fig. (23) abaixo.
Figura 23 - Metodologia para determinao do cster
Com isso, a anlise da variao ser feita pela variao dos vetores: ZBSM,
XBSM, ZBIM, XBIM onde os subscritos indicam o ponto e as letras Y e Z referenciam as
coordenadas. Desta forma temos que a inclinao Mcaster dada por:
BIM BSMcaster
BIM BSM
Z Ztg M
X X
( 11 )
Onde o smbolo M indica inclinao de retas, e os pontos ZBIM, XBIM,ZBSM e
XBSM indicam as coordenadas de fixao da manga de eixo no brao inferior e
superior respectivamente. Com isso o Arco tangente em graus desta inclinao
resultar no vetor da variao da inclinao do cster com o trabalho da suspenso.
35
4.3.2. Determinao do curso do brao de direo
Para analisarmos as influncias que o brao de direo provoca no
subsistema de suspenso, tomaremos como prerrogativa que o ponto de fixao do
brao de direo na caixa de direo (CAIXA) no se move, sobrando ao subsistema
de direo variao do ponto de fixao do brao de direo na manga de eixo
(LINK), variveis mostradas na Tab. (4) e ilustradas na Fig. (24) abaixo.
Figura 24 Sistema de direo acoplada ao sistema de suspenso. Tabela 4 - Coordenadas necessrias (sistema de direo)
Coordenadas necessrias para a determinao do sistema de direo
1 Ponto de Fixao do brao de direo na manga de eixo (LINK)
2 Ponto de fixao do brao de direo na caixa de direo (CAIXA)
Com isso, partindo-se do mesmo princpio descrito anteriormente, atravs da
soluo de sistema linear, deve-se ento determinar o posicionamento do brao de
direo em funo do deslocamento vertical da suspenso.
Sabe-se ento que o comprimento do brao de direo constante por se
tratar de uma barra rgida, como mostrado na Fig. (24), desta forma a partir da Eq.
(12) possvel determinar o seu comprimento, quando a suspenso se encontra em
repouso.
2 2 2( ) ( ) ( )bracodirecao X X Y Y Z ZD LINK CAIXA LINK CAIXA LINK CAIXA ( 12 )
36
Entretanto, como sabemos necessrio definir a variao das coordenadas
do ponto de fixao do brao de direo na manga (XLINK, YLINK, ZLINK) com o
trabalho da suspenso, desta forma deve-se definir mais duas equaes para que
se possa solucionar o sistema linear contendo trs equaes e trs incgnitas.
Como a manga de eixo uma pea fixa, como exemplificado na Fig. (25), a
distncia do ponto de fixao da barra de direo na manga ao ponto de fixao do
brao superior na manga (Dlinkbsm) e a distncia do ponto de fixao da barra de
direo ao ponto de fixao do brao inferior na manga (Dlinkbim) so constantes.
Figura 25 Distncia entre os pontos B.S.M. e LINK denominada Dlinkbsm e distncia entre B.I.M. e LINK denominada Dlinkbim.
Desta forma, pode-se calcular, assim como foi realizado anteriormente as
distncias Dlinkbsm e Dlinkbim, quando a suspenso se encontra em repouso,
representadas respectivamente pelas Eq. (13) e (14)
2 2 2( . . . ) ( . . . ) ( . . . )linkbsm X X Y Y Z ZD LINK B S M LINK B S M LINK B S M ( 13 )
2 2 2( . . . ) ( . . . ) ( . . . )linkbim X X Y Y Z ZD LINK B I M LINK B I M LINK B I M ...........( 14 )
37
Em seguida deve-se resolver o sistema linear com trs equaes e trs
incgnitas, substituindo, quando houver variao do posicionamento, as
coordenadas dos pontos em repouso pelos vetores pertinentes, como mostrado nas
Eq. (15), (16) e (17).
2 2 2( . . . ) ( . . . ) ( . . . )linkbsm LINK X LINK Y LINK ZD X B S M Y B S M Z B S M ( 15 )
2 2 2( . . . ) ( . . . ) ( . . . )linkbim LINK X LINK Y LINK ZD X B I M Y B I M Z B I M ( 16 )
2 2 2( ) ( ) ( )bracodirecao LINK X LINK Y LINK ZD X CAIXA Y CAIXA Z CAIXA ( 17 )
Resolvendo ento o sistema linear de trs equaes, Eq. (15), (16) e (17), e
trs incgnitas (XLINK ,YLINK e ZLINK) determina-se com isso a variao dos pontos
referentes a fixao do brao de direo na manga de eixo.
4.3.3. Determinao do curso da ponta de eixo
Determinado a variao do brao de direo e considerando constante a
distncia entre o ponto de fixao da ponta de eixo na roda (P.R.M.) e o ponto de
fixao do brao superior na manga (B.S.M.), mostrados na Fig. (26), possvel que
se deduza a Eq.(18) abaixo:
38
Figura 26 - Destaque em Dprmbsm, distncia entre os pontos B.S.M e P.R.M.
2 2 2( . . . . . . ) ( . . . . . . ) ( . . . . . . )prmbsm X X Y Y Z ZD P R M B S M P R M B S M P R M B S M ( 18 )
Onde Dprmbsm representa a distncia entre o ponto de fixao da ponta de eixo
na roda e o ponto de fixao da bandeja superior na manga, pontos enumerados
respectivamente por 1 e 2 na Tab. (5) abaixo.
Tabela 5 - Coordenadas necessrias (ponta de eixo).
Coordenadas necessrias para a determinao do curso da ponta de eixo
1 Ponto de Fixao da Ponta de Eixo na Manga (P.E.M.)
2 Ponto de Fixao da ponta de Eixo na Roda (P.R.M.)
Considerando ainda, constante a distncia entre o ponto de fixao da ponta
de eixo na roda (P.R.M.) e o ponto de fixao do brao inferior na manga (B.I.M.),
tem-se que:
39
2 2 2( . . . . . . ) ( . . . . . . ) ( . . . . . . )prmbim X X Y Y Z ZD P R M B I M P R M B I M P R M B I M ( 19 )
Onde Dprmbim representa a distncia entre o ponto de fixao da ponta de eixo
na roda e o ponto de fixao da bandeja inferior na manga, como mostrado na Fig.
(27).
Figura 27 - Destaque em Dprmbim, distncia entre os pontos B.I.M e P.R.M.
As Eq. (18) e (19) podem ser reescritas na forma de um sistema linear,
entretanto, necessrio alm destas equaes definir uma outra equao para se
resolver o sistema linear de trs equaes e trs incgnitas, para isso temos que a
distncia da ponta de eixo at o ponto de fixao do brao de direo na manga,
mostrado na Fig. (27) abaixo, se mantm constante, na qual o seu comprimento no
repouso dado pela Eq. (20).
40
Figura 28 - Destaque em Dprmlink, distncia entre os pontos LINK e P.R.M.
2 2 22( . . . ) ( . . . ) ( . . . )prmlink X X Y Y Z ZD P R M LINK P R M LINK P R M LINK ( 20 )
Em seguida deve-se resolver o sistema linear com trs equaes e trs
incgnitas, substituindo, quando houver variao do posicionamento, as
coordenadas dos pontos em repouso pelos vetores pertinentes, como mostrado nas
Eq. (21), (22) e (23).
2 2 2( ) ( ) ( )prmlink PRM LINK PRM LINK PRM LINKD X X Y Y Z Z ( 21 )
2 2 2( . . . ) ( . . . ) ( . . . )prmbim PRM X PRM Y PRM ZD X B I M Y B I M Z B I M ( 22 )
2 2 2( . . . ) ( . . . ) ( . . . )prmbsm PRM X PRM Y PRM ZD X B S M Y B S M Z B S M ( 23 )
Vale ressaltar que as coordenadas XPRM,YPRM, ZPRM representam as
coordenadas X, Y e Z, do vetor referente ao ponto de fixao da ponta de eixo na
roda quando a suspenso est em movimento.
41
Encontrada a variao das coordenadas do ponto de encontro da ponta de
eixo com a roda (P.R.M.) podemos ento definir a consequente variao de
coordenadas do ponto de fixao da ponta de eixo na manga (P.E.M.).
Utilizando-se ento de relaes trigonomtricas no modelo considerado, a fim
de se deduzir equaes para se tornar a resoluo do sistema possvel, podemos
considerar, ento, que a distncia entre o ponto de fixao da ponta de eixo na
manga (P.E.M.) e o ponto de fixao do brao superior na manga (B.S.M.),
representado pela distncia Dpembsm, e a varivel Dpembim, que representa a distncia
entre o ponto de fixao da ponta de eixo na manga (P.E.M.) e o ponto de fixao do
brao inferior na manga (B.I.M.), se mantm constantes durante o trabalho da
suspenso como visto na Fig. (29). As Eq. (24) e Eq. (25) representam as distncias
Dpembsm, e Dpembim respectivamente.
2 2 2( ) ( ) ( )pembsm PEM BSM PEM BSM PEM BSMD X X Y Y Z Z ( 24 )
2 2 2( ) ( ) ( )pembim PEM BIM PEM BIM PEM BIMD X X Y Y Z Z ( 25 )
Figura 29 - Destaque nas distncias Dpembsm e Dpembim.
42
Considerando que o ngulo entre a ponta de eixo fixada na roda e a manga
constante durante a movimentao da suspenso, conforme ilustra a Fig. (29), tm-
se que as distncias Dpembsm e Dpembim podem ser calculadas, quando a suspenso
est em repouso, como visto nas equaes (26) e (27).
2 2( . . . . . . ) ( . . . . . . )pembsm Y Y Z ZD P E M B S M P E M B S M ( 26 )
2 2( . . . . . . ) ( . . . . . . )pembim Y Y Z ZD P E M B I M P E M B I M ( 27 )
Partindo-se ainda da premissa que o comprimento da ponta de eixo (Dpeixo),
conforme ilustrado na Fig. (30), se mantm constante durante todo o trabalho da
suspenso, temos que:
Figura 30 - Determinao do comprimento da ponta de eixo
2 2 2( . . . . . . ) ( . . . . . . ) ( . . . . . . )peixo X X Y Y Z ZD P R M P E M P R M P E M P R M P E M ( 28 )
Onde a varivel Dpeixo representa o comprimento da ponta de eixo e as demais
variveis so mostradas na Tab. (5), onde os subscritos X, Y e Z representam a
orientao no espao, e ilustradas na Fig. (31).
43
Figura 31 - Representao da manga e da ponta de eixo, com detalhe nos pontos 1
e 2 que representam respectivamente P.E.M e P.R.M.
Tendo em vista que as coordenadas dos pontos P.R.M. e P.E.M. iro se
alterar durante o trabalho da suspenso, devem ser trocadas ento por vetores,
como mostrado na Eq. (29) abaixo.
2 2 2( ) ( ) ( )peixo PRM PEM PRM PEM PRM PEMD X X Y Y Z Z ( 29 )
Utilizando-se, ento, as distncias encontradas nas Eq. (26), (27) e (28)
possvel resolver o sistema linear das Eq. (24), (25) e (29), de onde se obtm o vetor
das variveis XPEM, YPEM e ZPEM as quais representam as coordenadas da ponta de
eixo da suspenso em funo do trabalho da mesma.
4.3.3.1. Determinao da cambagem
Uma vez determinadas as coordenadas XPEM, YPEM, ZPEM, XPRM ,YPRM e ZPRM,
que determinam o posicionamento da ponta de eixo, possvel agora determinar a
variao da cambagem com o trabalho da suspenso, de forma que, a cambagem
pode ser calculada pela inclinao que a ponta de eixo faz com a horizontal, como
visto na Fig. (32), representado pelo ngulo .
44
Figura 32 - Metodologia para determinao da cambagem
importante ressaltar a correlao entre as Fig. (32) e Fig. (8), onde, verifica-
se que ao se aplicar uma rotao na ponta de eixo, a angulao que esta faz com a
vertical (Fig. (8)) e angulao que criada com a horizontal (Fig. (32)) so iguais,
desta forma a cambagem pode ser definida pelos dois mtodos apresentados. A Eq.
(30) possibilita determinar o ngulo de cambagem.
PEM PRM
PEM PRM
Y Ytg Mcamber
Z Z
( 30 )
Onde o smbolo M indica inclinao de retas, e os pontos YPEM,
ZPEM,YPRM e ZPRM indicam as coordenadas de fixao da ponta de eixo na manga e
na roda respectivamente. Com isso o Arco tangente em graus desta inclinao
resultar no vetor da variao da inclinao da cambagem com o trabalho da
suspenso.
4.3.3.2. Determinao da convergncia
Da mesma forma que a cambagem, a convergncia um parmetro
associado ao posicionamento da ponta de eixo, sendo que a convergncia pode ser
calculada como sendo o ngulo, em vista superior, que a ponta de eixo faz com o
eixo Y, como visto na Fig. (33).
45
Figura 33- Metodologia para determinao da convergncia
A Eq. (31) possibilita ento determinar o ngulo correspondente
convergncia.
PRM PEM
PRM PEM
X Xtg Mconvergencia
Y Y
( 31 )
Onde o smbolo M indica inclinao de retas, e os pontos XPEM, YPEM,XPRM e
YPRM indicam as coordenadas de fixao da ponta de eixo na manga e na roda
respectivamente. Com isso o Arco tangente em graus desta inclinao resultar no
vetor da variao da inclinao da convergncia com o trabalho da suspenso.
4.3.4. Determinao do Curso do Amortecedor
Atravs da soluo de sistemas lineares, o prximo passo a determinao
da variao da coordenada do ponto de encontro do amortecedor com o brao
inferior (F.A.B.), tendo em vista que o segundo ponto de fixao do amortecedor fica
no chassi (F.A.C