Embed Size (px)
Citation preview

Sistemas Operacionais 1 - Resumo
Prof. Ricardo Pinheiro
23/04/2010

Sumário
1 Introdução 41.1 O que é um Sistema Operacional (SO)? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.1.1 Funções: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.1.2 Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2 Máquina de Níveis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.3 Tipos de Sistemas Operacionais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3.1 Sistemas Monotarefa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.3.2 Sistemas Multitarefa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3.2.1 Lote ou Batch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.3.2.2 Tempo Compartilhado (Time-Share) . . . . . . . . . . . . . . . . . . . . . 61.3.2.3 Tempo Real (Real-Time) . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3.3 Multiplas UCP´s . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.3.3.1 Multiprocessadores, ou sistemas fortemente acoplados . . . . . . . . . . . 71.3.3.2 Multicomputadores, ou sistemas fracamente acoplados. . . . . . . . . . . . 8
2 Concorrência 92.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.2 Interrupções . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.3 Exceções . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.4 Controladoras de E/S . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.4.1 No início... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.4.2 E/S Controlada por Programa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.4.3 Polling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.4.4 E/S Controlada por Interrupção . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.4.5 DMA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.4.5.1 Canal DMA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.5 Buffering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.6 Spooling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.7 Reentrância . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.8 Proteção do Sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3 Estrutura do sistema operacional 143.1 Kernel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143.2 Bibliotecas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.2.1 Chamadas do sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.3 Utilitários . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.4 Modos de acesso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1

SUMÁRIO 2
3.5 Tipos de kernel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163.5.1 Monolítico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163.5.2 Camadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163.5.3 Máquina Virtual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163.5.4 Microkernel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4 Processos e threads 194.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194.2 Partes do processo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194.3 Bloco de controle do processo (PCB) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 204.4 Estados do processo e mudanças de estado . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.4.1 Mudanças de estado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 204.5 Criação e eliminação de processos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 214.6 Concorrência dentro de uma aplicação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 214.7 Tipos de processo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 214.8 Sinais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 214.9 Threads . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
4.9.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 224.9.2 Ambientes monothread e multithread . . . . . . . . . . . . . . . . . . . . . . . . . . 22
4.9.2.1 Monothread . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 224.9.2.2 Multithread . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.9.3 Formas de implementação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234.9.3.1 Threads em Modo Usuário (TMU) . . . . . . . . . . . . . . . . . . . . . . 234.9.3.2 Threads em Modo Kernel (TMK) . . . . . . . . . . . . . . . . . . . . . . . 234.9.3.3 Threads em Modo Híbrido (TMH) . . . . . . . . . . . . . . . . . . . . . . 244.9.3.4 Scheduler activations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
5 Sincronização entre processos 255.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 255.2 Concorrência no código fonte: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
5.2.1 Comandos FORK e JOIN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 255.2.1.1 Como funciona . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
5.2.2 ParBegin e ParEnd (CoBegin e CoEnd) . . . . . . . . . . . . . . . . . . . . . . . . . 265.2.2.1 Como funciona . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
5.3 Exemplos de problemas de sincronização . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265.3.1 Sistema de conta corrente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265.3.2 2 processos e 1 variável . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
5.4 Exclusão Mútua . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 285.4.1 Condição de disputa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 285.4.2 Região Crítica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 285.4.3 Exclusão Mútua . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 295.4.4 Situações indesejáveis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
5.5 Sincronização condicional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 295.6 Soluções para a exclusão mútua . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
5.6.1 Soluções por hardware . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 315.6.1.1 Desligar as interrupções . . . . . . . . . . . . . . . . . . . . . . . . . . . . 315.6.1.2 Instruções test-and-set . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31

SUMÁRIO 3
5.6.2 Soluções por software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 325.6.2.1 Algoritmo 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 325.6.2.2 Algoritmo 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 335.6.2.3 Algoritmo 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 345.6.2.4 Algoritmo 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 345.6.2.5 Algoritmo de Dekker . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 365.6.2.6 Algoritmo de Peterson . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5.7 Semáforos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 365.7.1 Exclusão mútua com semáforos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 375.7.2 Sincronização condicional com semáforos . . . . . . . . . . . . . . . . . . . . . . . . 395.7.3 Jantar dos filósofos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5.8 Monitores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 405.9 Troca de mensagens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 415.10 Deadlock . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
5.10.1 Prevenção de deadlocks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 425.10.2 Detecção de deadlocks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 435.10.3 Correção de deadlocks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
6 Gerência da UCP 446.1 Escalonamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
6.1.1 Funções básicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 446.1.2 Partes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 446.1.3 Critérios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 446.1.4 Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
6.2 Tipos de Escalonamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 456.2.1 Não-preemptivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
6.2.1.1 FIFO (First In First Out) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 456.2.1.2 SJF (Shortest Job First) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 466.2.1.3 Cooperativo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
6.2.2 Preemptivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 466.2.2.1 Circular . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 476.2.2.2 Prioridades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 476.2.2.3 Circular com Prioridades . . . . . . . . . . . . . . . . . . . . . . . . . . . 486.2.2.4 Múltiplas filas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 486.2.2.5 Múltiplas filas com realimentação . . . . . . . . . . . . . . . . . . . . . . 49
6.3 Politicas de Escalonamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 496.3.1 Tempo Compartilhado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 496.3.2 Tempo Real . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49

Capítulo 1
Introdução
1.1 O que é um Sistema Operacional (SO)?• Programa.
• Conjunto de rotinas.
• Executado de forma não-seqüencial.
1.1.1 Funções:1. Interação homem-máquina.
2. Gerência de recursos.
3. Administração de usuários da máquina (usuários = programas, pessoas).
1.1.2 Objetivos1. Compartilhar os recursos de forma organizada e protegida.
2. Facilitar o acesso aos recursos.
OBS: Recursos→ UCP, memória, HD ....
1.2 Máquina de Níveis• Computador→ hardware e software como uma coisa só para o usuário.
• 6 níveis:
1. São independentes entre si.
2. A passagem por cada uma é obrigatória.
3. Há uma interface entre as camadas.
4

CAPÍTULO 1. INTRODUÇÃO 5
São eles:Aplicações
Linguagem de MontagemSistema Operacional
Linguagem de máquinaMicroprogramação
Hardware (Lógica Digital)
1.3 Tipos de Sistemas OperacionaisTipos de SO Subtipos
Monotarefa ou Monoprogramável –Multitarefa ou Multiprogramável Batch, ou em lote; Tempo Compartilhado; Tempo Real
Múltiplas UCPs Sistemas fortemente e fracamente acoplados
• Diferem quanto à:
1. Aplicação
2. Hardware empregado
3. Estrutura interna – complexidade
• Desejável:
1. Escalável
2. Rápido
3. Flexível
4. Seguro
5. Tolerante a Falhas
6. Robusto
1.3.1 Sistemas Monotarefa• Um único programa em execução.
• Todos os recursos dedicados a esse programa - desperdício
• Estrutura simples
Ex: MS-DOS, PALM OS

CAPÍTULO 1. INTRODUÇÃO 6
1.3.2 Sistemas Multitarefa• Vários programas em execução.
• Compartilhamento e gerência dos recursos.
• Melhor aproveitamento.
• Estrutura complexa.
• Alguns são multiusuário.
1.3.2.1 Lote ou Batch
• 1º SO multitarefa
• fila de submissão de tarefas
• tarefas não interativas
• Saída em impressora ou disco
• Podem ser eficientes, como também podem ter tempos de resposta longos
• Não são mais usados
1.3.2.2 Tempo Compartilhado (Time-Share)
• Tipo mais comum.
• Conceito de fatia de tempo
• Cada tarefa fica em execução até o tempo acabar, dando lugar a outra
• Tarefas interativas
Ex: UNIX, WINDOWS
1.3.2.3 Tempo Real (Real-Time)
• Semelhante ao sistema time-share, mas não são iguais.
• Tempo de resposta→ dentro de intervalos rígidos.
• Conceito de prioridade→tarefa em execução enquanto não houver outro de mais prioridade do que ele
• Prioridade definida pela aplicação.
• Uso em sistemas de missão critica e controle de processos: refinarias, siderúrgicas, trafego aéreo.

CAPÍTULO 1. INTRODUÇÃO 7
1.3.3 Multiplas UCP´s• Processamento paralelo
• Conceitos:
1. escalabilidade
2. disponibilidade
3. balanceamento de carga
• tendência atual
• Problemas:
1. Necessidade de desempenho
2. Problemas mais caros computacionalmente.
3. ”Lei” de Moore – limite físico.
• Solução:
1. uso de arquiteturas com mais de uma UCP
2. software que tire proveito e escalone entre as UCP´s presentes
• Caracteristicas desejáveis:
1. escalabilidade – alta
2. disponibilidade – alta
3. balanceamento de carga – justo
4. transparência
5. imagem única do sistema
1.3.3.1 Multiprocessadores, ou sistemas fortemente acoplados
• Memória única.
• Tudo gerênciado por um único SO.
• Subdividido em
SMP - Arquitetura simétrica.
NUMA - Acesso Não-Uniforme a Memória.
• Custo de produção mais elevado.

CAPÍTULO 1. INTRODUÇÃO 8
1.3.3.2 Multicomputadores, ou sistemas fracamente acoplados.
• Memória “espalhada”
• Um único SO ou vários
• Cada membro do sistema esta conectado aos outros por um link de dados
• Custo de produção mais baixo.
• Tendência atual

Capítulo 2
Concorrência
2.1 Introdução• Computador - seu uso é caro computacionalmente
• Objetivo: minimizar o desperdício (tempo que a UCP fica parada)
• Momentos de desperdício:
– Frequência da UCP é maior do que a frequência da memória
– Velocidade da UCP é muito maior do que a velocidade de E/S.
– Baixo uso da UCP em si.
• Solução: Manter a UCP o mais ocupada possível, executando instruções de forma concorrente.
Exemplo: Programa pega 100 registros, ordena e grava o resultado:
Operação Uso TempoLer 100 registros: E/S 0,04 s
Ordenar: UCP 0,01 sGravar o resultado: E/S 0,05 s
Total: 0,10 s.Total de uso da UCP: 0,01
0,10 s = 0,1 = 10%.
Concorrência - conjunto de técnicas que permite a UCP passar mais tempo ocupada – desempenhando maistarefas por instante de tempo (throughput).
Abaixo, algumas técnicas de concorrência.
2.2 Interrupções• Durante a execução, eventos inesperados podem ocorrer→Desvio forçado na execução - interrupção.
Características:
• Evento assíncrono.
9

CAPÍTULO 2. CONCORRÊNCIA 10
• Evento é externo ao programa.
• Evento gerado por software ou hardware.
• A interrupção é o fundamento básico de concorrência, usado para a sincronização das rotinas do S. O.,programas, etc.
• Arquitetura IBM-PC: 16 interrupções de hardware, divididas entre 2 controladoras de interrupção (inter-ligadas em cascata):
Exemplo: IRQ1 - relógio (timer); IRQ3 - porta serial 1; IRQ7 - porta paralela; IRQ13 - IDE 1; etc.
• Há a necessidade de termos mecanismos apropriados para cada tipo de interrupção.
• Como são tratadas:
– Rotina de tratamento de interrupção
– Vetor de interrupção
• Como são assíncronos, podem ocorrer várias vezes, o que atrapalha a execução do programa. Por isso,temos 2 tipos de interrupções:
– Mascaráveis – podem ser ignoradas.
– Não-mascaráveis – não podem ser ignoradas.
• Controlador de pedidos de interrupção - Hardware que gerencia as interrupções.
2.3 Exceções• Parecidos com as interrupções, mas diferem nos quesitos:
– Evento interno ao programa.
– Evento síncrono.
– Tratamento é todo via software.
Exemplo: Divisão por zero, buffer overflow, stack overflow, etc.
• Tratamento feito pelo desenvolvedor, ou pelo hardware (em alguns casos).
• Segurança:
– Falhas em programas geram exceções.
– Programação segura.

CAPÍTULO 2. CONCORRÊNCIA 11
2.4 Controladoras de E/S
2.4.1 No início...• UCP fala diretamente com os dispositivos de E/S.
• Problema: E/S é muito mais lento do que a memória ou a UCP.
• Introdução do controlador (ou controladora) de E/S:
– Gerência do acesso aos dispositivos de E/S.
– Tira da UCP o trabalho de cuidar dos dispositivos.
– Mais eficiente do que a UCP fazer o controle.
• Problema ainda existe→a transferência de dados entre a memória e dispositivo de E/S é feita pela UCP.
• ”Interferência” da UCP.
• Abaixo, algumas técnicas empregadas.
2.4.2 E/S Controlada por Programa• UCP envia a requisição e move os dados entre a memória e a controladora, aguardando o término da
operação.
• UCP fica “presa”, aguardando o término da operação - nada eficiente.
2.4.3 Polling• UCP envia a requisição, move os dados e é liberada.
• De tempos em tempos, testa para ver se a operação foi concluída.
2.4.4 E/S Controlada por Interrupção• UCP envia a requisição, move os dados, e é liberada.
• Quando a operação for concluída, a controladora gera uma interrupção, avisando à UCP o término daoperação.
• Muito eficiente, mas ainda requer a interferência direta da UCP, fazendo a transferência de dados.
2.4.5 DMA• Acesso direto a memória
• Controladora fala direto com a memória, sem passar pela UCP - apenas no início e no fim da transferên-cia.
• A UCP repassa à controladora a posição inicial da memória a ser lida/escrita, e é liberada.

CAPÍTULO 2. CONCORRÊNCIA 12
2.4.5.1 Canal DMA
• Extensão do conceito.
• Diversas “vias” ligando as controladoras da máquina à memória.
• Na arquitetura PC há 8 canais
• Chance de uso de buffers para aumentar ainda mais o desempenho.
2.5 Buffering• Uso de uma área na memória principal, o buffer.
• Velocidade da UCP é muito maior do que a velocidade de E/S.
• Objetivo: acelerar o acesso aos dispositivos de E/S (leitura e gravação).
• Manter UCP e E/S ocupados na maior parte do tempo.
• Registro como unidade de transferência.
2.6 Spooling• Fila de submissão de tarefas - inicialmente em fitas magnéticas.
• Arquivo de spool - usado inicialmente em SO´s do tipo batch.
• Fila: 1º a entrar , 1º a sair (FIFO).
• Seqüencial - uso de discos com acesso direto – spooling mais eficiente.
• Não-sequencial - arquivo no disco.
• Uso no gerenciamento de impressão hoje em dia.
2.7 Reentrância• Mais comum em sistemas multiusuário.
• Vários usuários usando os mesmos programas.
• Problema: Várias cópias do mesmo programa na memória→desperdício.
• Reentrância: capacidade do código-fonte do programa ser executado e compartilhado entre os usuáriosdo sistema.
• Código executável = código reentrante.
• O código deve ter compilado com essa opção.
• Uso mais eficiente da memória e aumento do desempenho do sistema.

CAPÍTULO 2. CONCORRÊNCIA 13
2.8 Proteção do Sistema• Sistemas mais novos - mais complexos.
• Necessidade de aumentar a segurança
• É preciso garantir a confiabilidade e integridade de programas e dados
• Situações em que mecanismos de proteção são necessários:
1. áreas reservadas para cada programa e seus dados - evitar a sobreposição dessas áreas.
2. comunicação entre programas de forma sincronizada.
3. Compartilhamento de arquivos no disco
4. Evitar “monopólios” da UCP.
5. Contornar exceções.
• O sistema operacional deve evitar esses problemas com mecanismos de controle.

Capítulo 3
Estrutura do sistema operacional
Um sistema operacional é composto de três partes:
1. Kernel.
2. Bibliotecas.
3. Utilitários.
3.1 Kernel• núcleo do sistema.
• Parte central do sistema operacional.
• oferecem serviços aos usuários.
• execução não-sequencial.
• Principais funções:
1. gerência de processos e threads.
2. gerência de memória.
3. gerência de UCP.
4. gerência de dispositivos de E/S.
5. tratamento de interrupções.
6. tratamento de exceções.
7. suporte a redes.
8. segurança.
9. contabilidade e auditoria do sistema.
• Tipos de kernel: como ele fala com o hardware e software, sua organização interna varia de projeto paraprojeto.
• Ideal é que seja pequeno, rápido, estável e seguro.
14

CAPÍTULO 3. ESTRUTURA DO SISTEMA OPERACIONAL 15
3.2 Bibliotecas• Conjunto de rotinas usadas por programas.
• Fornecem serviços para os programas.
• Contém as chamadaa ao sistema.
3.2.1 Chamadas do sistema• Partes integrantes das bibliotecas.
• Meio organizado e padronizado para acesso ao kernel.
• Forma como o kernel pode ser acessado.
• Esconde a complexidade do acesso para o programador.
• Programa→System Calls→Kernel→Hardware
• Nomes diferentes para a mesma coisa:
1. Windows: API´s
2. Open VMS: System Services
3. UNIX: System Calls
OBS: No Unix, o que determina se um sistema é “padrão UNIX” ou não é se ele segue a especificação dasSystem Calls, criada pelo comitê POSIX.
3.3 UtilitáriosProgramas que auxiliam o funcionamento do sistema operacional.
Exemplos: Compiladores, compactadores, ferramentas de acesso ao disco, etc.
3.4 Modos de acesso• A UCP tem instruções:
1. privilegiadas - tem acesso a todos os recursos, e mal-usadas, podem comprometer o funcionamentodo sistema, gerando instabilidade.
2. não-privilegiadas - não comprometem a estabilidade do sistema operacional.
• Modos de acesso - o que são:
1. Solução implementada em hardware, pela UCP.
2. Acesso ou não à instruções privilegiadas.
3. Informação de qual modo de acesso está salvo em um registrador de estado – PSW.

CAPÍTULO 3. ESTRUTURA DO SISTEMA OPERACIONAL 16
4. Hoje em dia, os sistemas são montados de forma que o kernel é o único programa que pode estarsendo executado no modo privilegiado.
• Chaveamento de modos, ou mudança de contexto:
1. Mudança entre os estados do processador, do modo privilegiado para o não-privilegiado, e vice-versa.
2. Custa (pouco) tempo à UCP, mas é desejável que esse tempo seja ainda mais minimizado.
3.5 Tipos de kernelAntes, dividiremos entre modo usuário (não-privilegiado) e modo kernel (privilegiado).
3.5.1 Monolítico• Um grande bloco de código, ou dividido em módulos, todos sendo executados no modo kernel.
• Estrutura mais simples.
• Desenvolvimento mais simples.
• A manutenção pode ser complexa, se não for um projeto bem-feito e bem amarrado.
• Simples na estrutura.
• Rápido.
Ex: MS-DOS, Linux.
3.5.2 Camadas• Níveis sobrepostos.
• Há necessidade de passar por todos os níveis para chegar ao kernel.
• Como as camadas são isoladas, facilita a manutenção e a depuração.
• Desempenho prejudicado pela estrutura - muito burocrático.
Ex: Open VMS, MULTICS, Windows 2000
3.5.3 Máquina Virtual• Sistema computacional composto por níveis, onde o nível mais baixo é o hardware.
• Modelo de máquina virtual - nível intermediário entre o hardware e o sistema operacional - gerência demáquinas virtuais.
• Cada máquina virtual oferece uma cópia virtual do hardware, incluindo os modos de acesso, interrupções,dispositivos de E/S, etc.

CAPÍTULO 3. ESTRUTURA DO SISTEMA OPERACIONAL 17
• Cada máquina virtual é independente das demais, contendo seu próprio sistema operacional, seus pró-prios usuários e suas próprias aplicações.
• Conceito iniciado no VM/370, baseado no OS/370, da IBM (anos 1960).
• Conceito usado também com a linguagem Java - JVM.
• Vantagens:
1. Segurança - Isolamento total das máquinas virtuais.
2. Economia de recursos - mais barato um servidor grande do que vários servidores pequenos.
3. Portabilidade - se o hardware hospedeiro tiver um defeito, basta transferir os arquivos das máquinasvirtuais para outro hardware.
• Desvantagens:
1. Complexidade.
2. Sobrecarga - um hipervisor é complexo e consome muitos recursos do hardware hospedeiro.
3.5.4 Microkernel• Constatação - sistemas atuais ainda são lentos e pesados.
• Microkernel - tornar o núcleo do sistema operacional o menor e mais simples possível.
• Disponibilizar os serviços através de processos a serem executados no nível usuário.
• Cada um desses processos servidores fornecem um recurso específico para o sistema: Gerência de pro-cessos, gerência de arquivos, escalonamento de processos, etc.
• A principal função do kernel então é fazer o diálogo entre os diferentes processos servidores.
• Conceito surgido nos anos 1980, com o sistema operacional Mach, desenvolvido na Universidade Carnegie-Mellon.
• O núcleo do Mach fornece 4 serviços, apenas: Gerência de processos, gerência de memória, comunicaçãopor troca de mensagens e operações de E/S, todas em modo usuário.
• Vantagens:
1. Mais seguro: Se um serviço sair do ar, é recolocado facilmente.
2. Apropriado para computação distribuída: Os serviços podem ser remanejados entre as UCPs.
3. Mais flexível.
4. Mais rápido: com o kernel enxuto, menos código a ser executado.
5. Mais facilmente portado para outras arquiteturas: Menos código no kernel, menos dificuldades parareescrever o kernel para outras plataformas.

CAPÍTULO 3. ESTRUTURA DO SISTEMA OPERACIONAL 18
• Há controvérsias quanto à afirmação de ser mais rápido (ponto no. 4), pois apesar do kernel ser menor, osistema fará muito mais chamadas e mudanças de modo de acesso, ao acessar os serviços que rodam nomodo usuário.
• Na prática, os sistemas microkernel são interessantes, mas ainda não podem estar disponíveis comercial-mente. Existem alguns sistemas que agregam características do microkernel, mas não são completamentenesse estado.
Exemplos: L4, Amoeba, Exokernel, Minix.

Capítulo 4
Processos e threads
4.1 Introdução• Conceito - base para a implementação de um sistema multiprogramável.
• Um programa deve estar sempre associado a um processo.
• Processo - ambiente no qual um programa é executado.
• O processo é colocado em execução e é tirado caso o sistema operacional necessite fazê-lo.
4.2 Partes do processo• Três partes:
1. Espaço de endereçamento: Área de memória usada pelo processo, onde as instruções e os dados doprograma são armaenados para execução.
2. Contexto de hardware: Registradores gerais e específicos da UCP. Quando um processo está emexecução, o contexto de hardware guarda os registradores do processador. Quando ele é tirado deexecução (mudança de contexto), todos os registradores são salvos no contexto de hardware, paraque o processo seja novamente colocado em execução, a partir do ponto onde parou.
3. Contexto de software: Características e limites dos recursos que podem ser alocados pelo processo.Muitas dessas características são determinadas no momento da criação do processo, enquanto outraspodem ser alteradas durante a sua existência. São três grupos de informações:
– Identificação:
* Número de identificação do processo (PID).
* Nome do usuário que criou o processo (UID).
* Grupo do usuário que criou o processo (GID).
– Quotas: Limites de cada recurso do sistema que um prcoesso pode alocar. Exemplos:
* Número máximo de arquivos abertos simultaneamente;
* Número máximo de operações de E/S pendentes;
* Tamanho máximo do buffer para operações de E/S;
19

CAPÍTULO 4. PROCESSOS E THREADS 20
* Número máximo de processos, subprocessos e threads que podem ser criados.
– Privilégios: Ações que um processo pode fazer em relação a ele mesmo, aos demais processos e aosistema operacional. Exemplos:
* Alterar a prioridade de execução;
* Limites alocados na memória principal e secundária;
* Alterar as prioridades de outros processos;
* Desativar o sistema;
* Alterar regras de segurança;
* Criar outros processos privilegiados;
* Mudar a configuração do sistema.
4.3 Bloco de controle do processo (PCB)• O bloco de controle do processo é uma estrutura de dados, mantida pelo sistema operacional, em área
reservada, onde todas as informações necessárias para manter o processo em funcionamento são arqui-vadas.
• A gerência de processos é feita por chamadas do sistema.
4.4 Estados do processo e mudanças de estado• Três estados:
1. Execução: Sendo executado pela UCP.
2. Prontidão (ou pronto): Aguarda a sua vez para ser executado.
3. Espera: Aguarda pelo fim de um evento externo ou por um recurso para continuar o processamento.
Escalonamento: Conjunto de critérios que definem qual processo será colocado em execução primeiro.
4.4.1 Mudanças de estado• Eventos voluntários ou involuntários podem mudar o estado de um processo:
1. Eventos voluntários: O processo muda por causa de eventos originários de si mesmo.
2. Eventos involuntários: O processos muda por ação do sistema operacional.
• Mudanças:
1. Pronto→ execução: Colocado em execução.
2. Execução → espera: Evento externo, como uma operação de E/S, faz o processo ter seu estadomudado.
3. Espera→ pronto: O evento externo foi concluído. Note que não há como passar direto, de esperapara execução.

CAPÍTULO 4. PROCESSOS E THREADS 21
4. Execução→ pronto: O término da fatia de tempo que o processo tem o coloca de volta na fila deprontidão.
• Processos no estado de espera ou pronto podem estar na memória virtual, por falta de espaço. Logo, atécnica de swapping consiste em mover processos entre as memórias principal e virtual.
4.5 Criação e eliminação de processos• Dois estados adicionais:
1. Criação→ Criou-se a entrada no PCB, mas o processo ainda não foi colocado na lista de prontidão.É criado por outros processos.
2. Término→ O programa foi finalizado, mas o PCB ainda existe. É eliminado por outros processosou pelo término nortmal da sua execução.
4.6 Concorrência dentro de uma aplicação• Três maneiras:
1. Processos independentes: Um processo cria outros, sem vínculos. É a maneira mais simples.
2. Subprocessos: Um processo cria outros, de forma que estão vinculados hierarquicamente: Se oprocesso-pai é eliminado, os processos-filho também serão. Compartilham quotas.
3. Threads: Ramificações dentro do processo, compartilhando o contexto de software e o espaço deendereçamento. É um modo de gastar menos tempo com criação, escalonamento e eliminação deprocessos.
4.7 Tipos de processo1. Foreground: Execução em primeiro plano, interage diretamente com o usuário, com entrada-padrão
(teclado) e saída-padrão (monitor).
2. Background: Execução em segundo plano, onde não é preciso interagir diretamente com o usuário. Nessecaso, entrada e saída podem ser arquivos, por exemplo.
3. CPU-Bound: Passa a maior parte da fatia de tempo em estado de execução, ou seja, usando a UCPintensamente.
4. I/O-Bound: Passa a maior parte da fatia de tempo em estado de espera, com muitas operações de E/S.
4.8 Sinais• Mecanismo que permite ”avisar” processos de eventos gerados pelo sistema operacional ou por outros
processos.
• Também são usados para comunicação e sincronização entre processos.

CAPÍTULO 4. PROCESSOS E THREADS 22
• Podem ser associados a temporizadores (eventos associados ao tempo).
Exemplos: Notificação de interrupções e exceções, alarmes de tempo, limites de quotas excedidos, etc.
• Eventos que geram sinais - síncronos ou assíncronos.
• Tratamento do sinal - semelhante ao mecanismo de interupções.
• O sinal está para o processo assim como interrupções e exceções estão para o sistema operacional.
4.9 Threads
4.9.1 Introdução• No início, eram apenas processos.
• Conceito de processo ”leve” (lightweight)→ compartilha o espaço de endereçamento.
• Thread - surge primeiro no sistema operacional Mach, da Universidade de Carnegie-Mellon (1980).
• Ganho de desempenho e flexibilidade, apesar da complexa implementação.
• Aplicações mais complexas - vários trechos de código em execução paralela - para termos comunicaçãoe sincronização de threads deve-se avaliar desempenho, flexibilidade e custo.
• Apesar da dificuldade em desenvolver, compensa devido aos ganhos obtidos.
Exemplos: Windows 2000 e superiores, Linux, Solaris, etc.
4.9.2 Ambientes monothread e multithread4.9.2.1 Monothread
• Cada processo tem apenas um thread.
• Concorrência se dá apenas com processos independentes ou subprocessos.
• Problema - criar, gerenciar e eliminar processos é computacionalmente caro.
• Compartilhar o espaço de endereçamento é complexo, por conta dos mecanismos empregados.
• Processo→Unidade de alocação e de escalonamento.

CAPÍTULO 4. PROCESSOS E THREADS 23
4.9.2.2 Multithread
• Permite que tenhamos aplicações concorrentes de forma mais eficiente:
– Aumenta o desempenho, por dispensar mecanismos de comunicação dentrod o processo.
– Aumenta a eficiência, por termos menos sobrecarga do sistema como um tyodo - menos processose mais threads.
• Programas associados a threads.
• Os threads sofrem mudança de estado (pronto, espera e execução), e tem seu próprio bloco de controle(o TCB).
• Processo→Unidade de alocação.
• Thread→Unidade de escalonamento.
• O S. O. vê e escalona os threads de cada processo.
4.9.3 Formas de implementação• Pacote de threads - Conjunto de rotinas da biblioteca do sistema operacional par aa implementação de
threads.
• Falta de padrão em sistemas Unix, até o comitê POSIX liberar uma norma para termos threads, os PTh-reads.
4.9.3.1 Threads em Modo Usuário (TMU)
• Implementados pela aplicação.
• O sistema operacional não vê os threads, apenas o proceso como um todo.
• Podemos ter aplicações multithread em ambientes monothread.
• São rápidos e eficientes, por não fazerem acessos ao kernel, e as mudanças de modo de acesso da UCP(usuário-kernel-usuário).
• Uma chamada a um dispositivo de E/S, feita por um thread, coloca todo o processo em estado de espera.
• O tratamento dos sinais também é complexo, pois o processo terá que tratar o sinal e direcioná-lo aothread certo.
4.9.3.2 Threads em Modo Kernel (TMK)
• Implementados pelo kernel.
• O sistema operacional gerencia diretamente os threads de um processo.
• Requer mudanças de modo de acesso, logo tem desempenho degradado - bem mais lentos.
• Chamadas bloqueantes colocam apenas o thread em estado de espera, não todo o processo.
• Podemos ter vários threads de um mesmo processo em execução simultânea, em UCPs diferentes.

CAPÍTULO 4. PROCESSOS E THREADS 24
4.9.3.3 Threads em Modo Híbrido (TMH)
• Combina as vantagens dos threads em modo usuário (TMU) e em modo kernel (TMK), mas também asdesvantagens.
• Um processo tem vários TMKs, e cada TMK tem vários TMUs.
• O sistema operacional escalona os TMKs, e eles escalonam os TMUs.
• O objetivo é aumentar a flexibilidade, já que apenas os TMKs são escalonados (diminuindo o número demudanças de modo de acesso), mas também traz os problemas das chamadas bloqueantes, entre outras.
4.9.3.4 Scheduler activations
• Os Threads em Modo Híbrido (TMH) tem problemas devido à falta de comunicação entre os threads.
• É desejável unir o melhor das implementações, fugindo dos problemas de cada uma.
• O scheduler activations foi implementado inicialmente na Universidade de Washington, e nessa forma,há uma estrutura de dados que facilita a troca de informações entre o kernel e a biblioteca de threads.Essa estrutura é o scheduler activations.
• O escalonamento é feito pela própria biblioteca, evitando as mudanças de modo de acesso, como porexemplo a ocorrência de uma chamada bloqueante.
• Ambas as partes se comunicam, e trabalham cooperativamente.

Capítulo 5
Sincronização entre processos
5.1 Introdução• Anos 1960: sistemas operacionais multitarefa →surgem as primeiras aplicações que podem funcionar
de maneira concorrente, ou seja: diferentes partes do código do programa podem funcionar simultanea-mente.
– Uso de subprocessos ou threads.
– Escalonamento organizado pelo SO.
– Objetivo: Aumentar o desempenho.
• Esses processos que compõem a aplicação concorrente precisam compartilhar recursos:
Exemplos: Arquivos, registros, dispositivos de E/S, regiões de memória.
• Podem ocorrer situações indesejáveis, que podem até comprometer a execução da aplicação.
• Importante garantir a integridade e a confiabilidade.
• Necessidade das execuções serem sincronizadas, a partir de mecanismos fornecidos pelo sistema opera-cional, para garantir o processamento correto
• A comunicação entre processos pode ser estabelecida usando mecanismos. É necessário que os proces-sos estejam com sua execução sincronizada
Exemplos: (mecanismos de comunicação) Variáveis compartilhadas da memória principal ou trocas demensagens.
5.2 Concorrência no código fonte:
5.2.1 Comandos FORK e JOIN5.2.1.1 Como funciona
• FORK cria um subprocesso B a partir do processo A.
25

CAPÍTULO 5. SINCRONIZAÇÃO ENTRE PROCESSOS 26
Figura 5.1: Sincronização entre processos.
• Eles são concorrentes.
• JOIN sincroniza A com B→ A p´ara e espera o fim da execução de B.
5.2.2 ParBegin e ParEnd (CoBegin e CoEnd)5.2.2.1 Como funciona
• Implementado de formas diferentes em várias linguagens de programação.
• Ao invés de usar BEGIN e END como delimitadores de bloco, usa-se PARBEGIN e PAREND.
– Todos os comandos que estiverem no bloco serão executados de forma concorrente.
* PARBEGIN: Ramifica o código, criando 1 processo para cada comando.
* PAREND: Cria um ponto de sincronização, reunindo todos os processos e seus resultados numprocesso principal.
5.3 Exemplos de problemas de sincronização
5.3.1 Sistema de conta corrente• Atualização do saldo, realizando entradas e saídas.
• 2 processos fazem lançamentos na concta corrente de um cliente.
– Um faz débitos, e outro realiza créditos:
• Suponhamos então, 2 processos (Caixa 1 e Caixa 2) realizando operações na conta desse cliente.

CAPÍTULO 5. SINCRONIZAÇÃO ENTRE PROCESSOS 27
Figura 5.2: PARBEGIN e PAREND.
Algorithm 5.1 Programa de Conta Corrente.Programa Conta Corrente;..Leia (arquivo de contas, registro do cliente);Leia (valor a ser depositado ou retirado);Registro do cliente.Saldo←Registro do cliente.Saldo + valor a ser depositado ou retirado;Grava (arquivo de contas, registro do cliente);...
Caixa Comando Saldo no arquivo Valor Saldo na memória1 Leia (arquivo de contas, ...) 1000 - 10001 Leia (valor a ser depositado ou retirado) 1000 -200 10001 Registro do cliente.Saldo 1000 -200 8002 Leia (arquivo de contas, ...) 1000 - 10002 Leia (valor a ser depositado ou retirado) 1000 +300 10002 Registro do cliente.Saldo 1000 +300 13001 Grava (arquivo de contas, ...) 1000 -200 8002 Grava (arquivo de contas, ...) 1000 +300 1300Logo, temos uma incoerência, já que um caixa quer salvar o valor de 1300, e o outro quer salvar o valor de
800. Qual deles está certo?

CAPÍTULO 5. SINCRONIZAÇÃO ENTRE PROCESSOS 28
5.3.2 2 processos e 1 variável• Processo A: Incrementa uma variável.
• Processo B: Decrementa uma variável.
Algorithm 5.2 Exemplos de código.Processo A:
• Coloca X em Ra.
• Soma 1 a Ra.
• Salva Ra em X.
Processo B:
• Coloca X em Rb.
• Subtrai 1 a Rb.
• Salva Rb em X.
Processo Comando X Ra RbA Carrega 2 2 -A Soma 2 3 -B Carrega 2 - 2B Subtrai 2 - 1A Salva 3 3 -B Salva 3 - 1
Mais uma incoerência, pois X não poderá ter 2 valores, 3 e 1.
5.4 Exclusão Mútua
5.4.1 Condição de disputa• O problema de inconsistência nos dados, devido à falta de sincronização.
5.4.2 Região Crítica• A parte do código-fonte onde é feito o acesso aos recursos compartilhados.
• Objetivo: Obter a exclusão mútua.
• Logo, só um programa pode acessar a sua região crítica por vez.

CAPÍTULO 5. SINCRONIZAÇÃO ENTRE PROCESSOS 29
5.4.3 Exclusão Mútua• A solução mais simples para evitar os problemas de compartilhamento é impedir que 2 ou mais processos
acessem um mesmo recurso simultaneamente.
• Enquanto um processo estiver acessando determinado recurso, todos os demais processos que queiramacessá-lo deverão esperar pelo término da utilização do recurso.
• Acesso de forma ordenada, organizada e individual ao recurso.
• Exclusividade de acesso.
Exemplo: No problema do banco (subseção 5.3.1), basta garantir que o acesso à conta (a região crítica docódigo) seja exclusivo: um espera equanto o outro acessa.
5.4.4 Situações indesejáveis1. Starvation
• Também conhecida como espera indefinida.
• Um dos processos nunca sai da sua região crítica, e o outro "passa fome".
• Pode ocorrer em escalonamentos onde a escolha é aleatória ou com base em prioridades.
• Uma solução é usar filas de pedidos de alocação para cada recurso, e cada uma dessas filas usandoo escalonamento em fila (FIFO).
2. Espera ocupada;
• Toda vez que um processo não consegue entrar na sua região crítica, ele permanece repetidamentetestando uma condição, tentando acessar o recurso.
• Isso continua até o processo ”persistente” conseguir o acesso.
• Problema: Isso consome tempo do processador de forma desnecessária.
3. Um processo sai da região crítica e não deixa que outros entrem.
• Recurso livre, mas ainda ligado a um processo.
5.5 Sincronização condicional• Situação onde o acesso ao recurso compartilhado exige a sincronização de processos vinculada a uma
condição de acesso.
• Essa condição é bloqueante para os processos.
Exemplo: Modelo produtor-consumidor:
• O recurso compartilhado é um buffer de espaço limitado.
• Dois ou mais processos acessam o recurso:

CAPÍTULO 5. SINCRONIZAÇÃO ENTRE PROCESSOS 30
– Produtores - gravam no buffer
– Consumidores - leem o buffer
• Condições:
– Buffer vazio - consumidor espera
– Buffer cheio - produtor espera
Algorithm 5.3 Modelo produtor-consumidor.Programa PA1;Constante
Tamanho do buffer = X;Variáveis
Buffer: vetor de dado (1 a X);D1, D2: dado;Conta: 0..X;
Procedimento Produtor;Início
RepitaProduz Dado (D1);Enquanto conta for igual a X não faça nada;Grava o buffer (Buffer, D1);Incrementa Conta;
Até que seja falso;Fim;Procedimento Consumidor;Procedimento Produtor;Início
RepitaEnquanto conta for igual a 0 não faça nada;Lê o buffer (Buffer, D2);Consome Dado (D2);Decrementa Conta;
Até que seja falso;Fim;Início
Conta←0;Início (em paralelo)
Produtor;Consumidor;
Fim (em paralelo);Fim.
Nesse caso, teremos a espera ocupada.

CAPÍTULO 5. SINCRONIZAÇÃO ENTRE PROCESSOS 31
5.6 Soluções para a exclusão mútua
5.6.1 Soluções por hardware5.6.1.1 Desligar as interrupções
Algorithm 5.4 Desligamento das interrupções do sistema.Início...
Desliga as interrupções do sistema;Entra na Região Crítica;Sai da Região Crítica;Liga as interrupções do sistema;
.
.
.Fim;
• Dessa forma nenhum outro programa interrompe o primeiro.
• Maneira simples.
• Atrapalha a multiprogramação.
• Se o programa não religar as interrupções, trava tudo.
– Clock usa interrupções.
• Múltiplas UCPs - Essa informação (de desligamento e religamento) deve propagar para todas as UCPs.
• Usado às vezes com partes do kernel.
5.6.1.2 Instruções test-and-set
• Instrução especial da UCP.
– Lê a variavel.
– Salva seu conteódo em outra área da memória.
– Grava um novo valor na mesma variável.
• Dessa forma, 1 variável compartilhada pode ser manipulada por 2 processos simultaneamente.
• Uso:
– Usa-se uma variavel booleana.

CAPÍTULO 5. SINCRONIZAÇÃO ENTRE PROCESSOS 32
* Falso = Qualquer processo pode acessar
* Verdadeiro = Processo acessando o recurso.
• Manuseio simples
• Funciona bem com múltiplas UCP .
• Depende dessa instrução existir na UCP.
• Possibilidade de starvation.
5.6.2 Soluções por software• Diversos algoritimos foram pensados ao longo do tempo.
• Uso de uma variável de bloqueio.
– Testa se a região crítica está liberada ao ler essa variável.
5.6.2.1 Algoritmo 1
Algorithm 5.5 Algoritmo 1 para exclusão mútua.Programa Algoritmo 1;Variável
Vez: caracter;Procedimento A;Início
RepitaEnquanto Vez for igual a B não faça nada;Entre na Região Crítica do procedimento A;
Vez←B;Realize o processamento do procedimento A;
Até que seja falso;Fim;Procedimento B;Início
RepitaEnquanto Vez for igual a A não faça nada;Entre na Região Crítica do procedimento B;
Vez←A;Realize o processamento do procedimento B;
Até que seja falso;Fim;Início (em paralelo)
Procedimento A;Procedimento B;
Fim (em paralelo).

CAPÍTULO 5. SINCRONIZAÇÃO ENTRE PROCESSOS 33
• Só funciona com dois processos.
• Acesso alternado.
• Se não alterar a variável de bloqueio, o recurso fica sempre inacessível, que gera starvation.
5.6.2.2 Algoritmo 2
Algorithm 5.6 Algoritmo 2 para exclusão mútua.Programa Algoritmo 2;Variáveis
CA, CB: Booleano;Procedimento A;Início
RepitaEnquanto CB for Verdadeiro não faça nada;CA←Verdadeiro;Entre na Região Crítica do procedimento A;
CA←Falso;Realize o processamento do procedimento A;
Até que seja falso;Fim;Procedimento B;Início
RepitaEnquanto CA for Verdadeiro não faça nada;CB←Verdadeiro;Entre na Região Crítica do procedimento B;
CB←Falso;Realize o processamento do procedimento B;
Até que seja falso;Fim;Início
CA←Falso;CB←Falso;Início (em paralelo)
Procedimento A;Procedimento B;
Fim (em paralelo).Fim.
• Substituição da variável de bloqueio por duas variáveis, uma para cada processo.
• Não há necessidade de acessar alternadamente.
• Se houver um problema, o recurso não fica bloqueado, a não ser que a falha seja dentro da região crítica.

CAPÍTULO 5. SINCRONIZAÇÃO ENTRE PROCESSOS 34
5.6.2.3 Algoritmo 3
Algorithm 5.7 Algoritmo 3 para exclusão mútua.Programa Algoritmo 3;Variáveis
CA, CB: Booleano;Procedimento A;Início
RepitaCA←Verdadeiro;Enquanto CB for Verdadeiro não faça nada;Entre na Região Crítica do procedimento A;
CA←Falso;Realize o processamento do procedimento A;
Até que seja falso;Fim;Procedimento B;Início
RepitaCB←Verdadeiro;Enquanto CA for Verdadeiro não faça nada;Entre na Região Crítica do procedimento B;
CB←Falso;Realize o processamento do procedimento B;
Até que seja falso;Fim;Início
CA←Falso;CB←Falso;Início (em paralelo)
Procedimento A;Procedimento B;
Fim (em paralelo).Fim.
• O problema do algoritmo anterior consiste em o processo ter algum problema quando está na sua regiãocrítica, e com isso o acesso ao recurso fica travado.
• Uma maneira de resolver o problema do algoritmo anterior é mudar as variáveis CA e CB antes de testarse o recurso está disponível.
• Só que temos um novo problema: ambos os processos podem ficar bloqueados. Se ambos mudarem osvalores das variáveis CA e CB, ninguém entra na sua região crítica e ninguém usa o recurso.
5.6.2.4 Algoritmo 4
• O processo entra na região crítica sem saber se o outro está acessando o recurso.

CAPÍTULO 5. SINCRONIZAÇÃO ENTRE PROCESSOS 35
Algorithm 5.8 Algoritmo 4 para exclusão mútua.Programa Algoritmo 4;Variáveis
CA, CB: Booleano;Procedimento A;Início
RepitaCA←Verdadeiro;Enquanto CB for Verdadeiro não faça nada;Início
CA←Falso;{ pequeno intervalo de tempo }CA←Verdadeiro;
Fim;Entre na Região Crítica do procedimento A;CA←Falso;Realize o processamento do procedimento A;
Até que seja falso;Fim;Procedimento B;Início
RepitaCB←Verdadeiro;Enquanto CA for Verdadeiro não faça nada;Início
CB←Falso;{ pequeno intervalo de tempo }CB←Verdadeiro;
Fim;Entre na Região Crítica do procedimento B;CB←Falso;Realize o processamento do procedimento B;
Até que seja falso;Fim;Início
CA←Falso;CB←Falso;Início (em paralelo)
Procedimento A;Procedimento B;
Fim (em paralelo).Fim.
• Uma maneira de evitar o bloqueio de ambos é dando a chance de reverter o processo, e alterar novamenteo valor das variáveis CA e CB.
• Pode acontecer que ambos os processos alterem seu estado (variável que marca a entrada na região

CAPÍTULO 5. SINCRONIZAÇÃO ENTRE PROCESSOS 36
critica) para falso, simultaneamente. Ou seja, teremos bloqueio para ambos.
5.6.2.5 Algoritmo de Dekker
• A primeira solução completa para o problema da exclusão mútua.
• Baseada nos algoritmos 5.5 e 5.8 para obter a exclusão mútua entre 2 processos.
• Lógica bastante complexa.
5.6.2.6 Algoritmo de Peterson
• Solução baseada no algoritmo de Dekker.
• Facilmente generalizado para n processos.
• Parecido com o algoritmo 5.7.
• Como funciona:
– Cada processo tem uma variável de estado que sinaliza o desejo de entrar na região crítica.– Uma variável é usada para arbitrar conflitos: a variável cede o uso para outro processo.
• O algoritmo de Dekker e a versão inicial do algoritmo de Peterson garantem a exclusão mútua de 2processos.
• O algoritmo de Peterson foi estendido para o caso de N processos por Hofri (1990).
• Lamport propôs um algoritmo para garantir a exclusão mútua, que é o algoritmo do padeiro.
• Todos ainda sofrem de espera ocupada (seção 2).
• Uma maneira de resolver é usando semáforos (ou monitores) como mecanismos de sincronização.
5.7 Semáforos• Ideia simples para sincronização.
• Conceito proposto pro Dijkstra em 1965
• Semáforo:
– Variável inteira e não negativa.– São vinculados ao recurso compartilhado.– Só pode ser manipulada por 2 instruções.
1. UP - incremento.2. DOWN - decremento.
• 2 tipos:
– binários, ou mutexes (mutual exclusion semaphores): 2 estados.– contadores: n estados.

CAPÍTULO 5. SINCRONIZAÇÃO ENTRE PROCESSOS 37
Algorithm 5.9 Algoritmo de Peterson para exclusão mútua.Programa Algoritmo Peterson;Variáveis
CA, CB: Booleano;Vez: Caractere;
Procedimento A;Início
RepitaCA←Verdadeiro;Vez← ”B”;Enquanto CB for Verdadeiro e Vez for igual a ”B”, não faça nada;Entre na Região Crítica do procedimento A;
CA←Falso;Realize o processamento do procedimento A;
Até que seja falso;Fim;Procedimento B;Início
RepitaCB←Verdadeiro;Vez←”A”;Enquanto CA for Verdadeiro e Vez for igual a ”A”, não faça nada;Entre na Região Crítica do procedimento B;
CB←Falso;Realize o processamento do procedimento B;
Até que seja falso;Fim;Início
CA←Falso;CB←Falso;Início (em paralelo)
Procedimento A;Procedimento B;
Fim (em paralelo).Fim.
5.7.1 Exclusão mútua com semáforos• Semáforo ligado ao recurso compartilhado:
– Semáforo está com 1, sofre um DOWN, e muda para o estado 0. →o processo entra na regiãocrítica.
– Semáforo está com 0, sofre um DOWN (não temos o estado -1)→o processo é mantido em estadode espera.
– Semáforo está com 0, sofre um UP, e muda para o estado 1→o processo sai da região crítica.

CAPÍTULO 5. SINCRONIZAÇÃO ENTRE PROCESSOS 38
Algorithm 5.10 Código fonte comum para exemplos com semáforos.tipo semaforo = registro
valor = inteirofila de espera {lista de processos em espera}
fim;Procedimento DOWN (s: inteiro);Início
Se s=0 então coloca o processo na fila de espera;s–;
Fim;Procedimento UP (s:inteiro);Início
s++;Se tem processo esperando, então coloca em execução;
Fim;
Algorithm 5.11 Exclusão mútua usando semáforos.Programa Semáforo 1;Variável A: Semáforo←1;Procedimento processo A;Início
RepitaDOWN(s);Entra na região crítica de A;UP(s);
até que seja falso;Fim;Procedimento processo B;Início
RepitaDOWN(s);Entra na região crítica de B;UP(s);até que seja falso;
Fim;Início (em paralelo)
Procedimento A;Procedimento A;
Fim (em paralelo);

CAPÍTULO 5. SINCRONIZAÇÃO ENTRE PROCESSOS 39
5.7.2 Sincronização condicional com semáforos• Podemos usar semáforos para lidar com a sincronização condicional.
– Quando um processo solicita uma operação de E/S, ele executa um DOWN no semáforo associadoao recurso, e é colocado em estado de espera até que a operação seja completada.
– Quando a operação termina, a rotina de tratamento da interrupção executa um UP no semáforo,liberando o processo do estado de espera.
5.7.3 Jantar dos filósofos• Problema:
– 5 filósofos, que são os processos.
– 5 pratos, que são as regiões críticas.
– 5 garfos, que são os recursos compartilhados.
• Limitações:
1. O filósofo ou pensa (estado de espera), ou come (entra na região crítica).
2. Para comer, o filósofo precisa de 2 garfos.
• Deadlock
– Ocorre se cada um dos filósofos pegar um garfo.
• Algumas soluções
1. O número de filósofos à mesa é menor do que o número de garfos (neste caso, no máximo 4).
2. Um filósofo só pode pegar um garfo se o outro estiver disponível.
3. O filósofo ímpar pega o garfo da direita e depois da esquerda, e o filósofo par pega o grafo daesquerda e depois da direita.
• Ainda temos o risco de um deadlock. Para evitar, podemos acrescentar um novo semáforo contador,para marcar os lugares começando em 4 (menor do que número de talheres), e dessa forma garantir queteremos sempre mais talhetes do que filósofos à mesa. e fazendo down e up tambem. Dessa forma,teremos sempre mais talheres do que filósofos a mesa.

CAPÍTULO 5. SINCRONIZAÇÃO ENTRE PROCESSOS 40
Algorithm 5.12 Algoritmo de sincronização condicional usando semáforos.Programa Semaforo2;Constante
Tamanho do buffer = 2;Tipo
Tipo de dado = {um tipo qualquer};Variáveis
Vazio: semáforo = Tamanho do buffer;Cheio, evento: semáforo = 0;Mutex: semáforo = 1;Buffer = vetor de tipo de dado (1 a Tamanho do buffer);Dado 1, Dado 2: Tipo de dado;
Procedimento Produtor;Início
RepitaProduz Dado (Dado 1);Down (Vazio);Down (Mutex);Grava no buffer (Dado 1, Buffer);Up (Mutex);Up (Cheio);
Até que seja falso;Fim;Procedimento Consumidor;Início
RepitaDown (Cheio);Down (Mutex);Lê o buffer (Dado 2, Buffer);Up (Mutex);Up (Vazio);Consome Dado (Dado 2);
Até que seja falso;Fim;Início (em paralelo)
Produtor;Consumidor;
Fim (em paralelo).
5.8 Monitores• Mecanismos de sincronização semelhantes aos semáforos, mas de alto nível e estruturados.
– Por quê? Os semáforos são não-estruturados, e qualquer engano por parte do programador podelevar a problemas de sincronização.
• Os monitores são hoje em dia estruturas criadas dentro dos programas, que agregam procedimentos e

CAPÍTULO 5. SINCRONIZAÇÃO ENTRE PROCESSOS 41
Algorithm 5.13 Jantar dos filósofos.Programa filósofo 1;Variáveis
Garfos: vetor(1 a 4) de semaforo =1;i: inteiro;
Procedimento filósofo (i:inteiro);Início
repitapensando;down(garfos(i));down(garfos((i+1) mod 5));comendo;up(garfos(i);up(garfos(i+1) mod 5));
até que seja falso;Fim;Início (em paralelo)
Para i←de 1 ate 5 façafilósofo(i)
Fim (em paralelo).
variáveis, e quem garante a exclusão mútua é o compilador: O programa não tem acesso às variáveis queseriam os semáforos, no caso do monitor.
• As variáveis globais, definidas dentro dos monitores, só são visíveis dentro dessas estruturas.
• Os procedimentos criados dentro dos monitores só são acessíveis através dos mesmos.
• O programa verifica com o S. O. se existe outro processo, gerando uma possível condição de disputa. Seexiste, o programa aguarda a sua vez, ficando numa fila de espera. Se não existe, o programa entra nasua região crítica.
• Várias linguagens já tem estruturas implementadas para lidar com monitores, como Modula-2, Modula-3,Concurrent Pascal, etc.
5.9 Troca de mensagens• Mecanismo de comunicação e sincronização entre processos.
• O uso desse mecanismo dispensa o uso de variáveis compartilhadas, mas exige um canal de comunicação,que pode ser um buffer ou um link de dados.
• As execuções entre os rpocessos comunicantes devem estsr sincronizadas, para manter a relação causa-efeito da comunicação (a mensagem deve chegar ao destino com um tempo maior do que saiu).
• Dois tipos:
1. Comunicação direta

CAPÍTULO 5. SINCRONIZAÇÃO ENTRE PROCESSOS 42
– Mensagem endereçada diretamente ao receptor.– Só há a troca de mensagens, apenas.– É preciso declarar claramente quem envia e quem recebe. Se mudar, tem que mudar dentro do
código.
2. Comunicação indireta
– Uso de uma área compartilhada que faz o papel de "caixa de correio" (mailbox, ou port).– Essa área compartilhada pode ser associada a vários processos.– Os procedimentos passam a endereçar a área compartilhada, e não os processos. Logo, caso
mude o processo, não é preciso fazer alterações no código.
5.10 Deadlock• Processo aguarda um recurso que nunca virá, ou um evento que nunca ocorrerá.
• Devido a isso, ele não libera o recurso que está sob seu uso, e outros processos acabam tendo o mesmoproblema, gerando uma reação em cadeia que cria o que chamamos de espera circular:
1. O Processo A retém o recurso 1 e pede o recurso 2, que está com o Processo B.
2. O Processo B retém o recurso 2 e pede o recurso 3, que está com o Processo C.
3. O Processo C retém o recurso 3 e pede o recurso 3, que está com o Processo A.
• Quatro condições para termos um deadlock:
1. Exclusão mútua - O processo está associado a um recurso.
2. Espera por recurso - Processo no aguardo.
3. Não-preempção - Recurso não pode ser liberado para outros processos fazerem uso.
4. Espera circular - Processo aguarda por um recurso que está associado a outro processo, e por aí vai.
5.10.1 Prevenção de deadlocksObjetivo: Garantir que uma das quatro condições acima não aconteça:
1. Se tirarmos a condição 1, gera inconsistências.
2. Se tirarmos a condição 2, quem tem recursos, tem que liberar para poder pegar novos recursos.
(a) Desperdício, na utilização dos recursos.
(b) Não dá para alocar previamente tudo o que o processo vai usar.
3. Se tirarmos a condição 3, então permitiremos que um recurso seja tirado de um processo caso outroprocesso também precise do recurso. Só que isto pode gerar problemas, como por exemplo o processoter a sua execução interrompida. Também poderemos ter starvation.
4. Se tirarmos a condição 4, cada processo só pode alocar um recurso de cada vez, e para alocar um novo,é preciso liberar o primeiro. Isto restringe severamente o compartilhamento de programas.

CAPÍTULO 5. SINCRONIZAÇÃO ENTRE PROCESSOS 43
• Logo, prevenir o deadlock é possível, mas todas as soluções apresentadas não são nada práticas, e con-sequentemente, não são usadas.
• A maneira mais adotada é usar o algoritmo do Banqueiro (Dikjstra, 1965), onde cada processo informaao sistema operacional qual recurso está usando, qual é o estado, entre outras informações. Assim, oalgorimo define qual é o estado de alocação de um recurso, e com base nisso, previne possíveis deadlocks.
5.10.2 Detecção de deadlocksOs sistemas operacionais mantém estruturaa de dados capazes de armazenar informações do sistema, e iden-tificar cada recurso do sistema, quem os está alocando, entre outras infromações. A estrutura é atualizadacom recursos alocados ou liberados, e observando-a, o sistema pode detectar a espera circular que porventuraocorra.
5.10.3 Correção de deadlocks• Depois da detecção, a correção.
• Quebra da espera circular.
– Elimina-se processos para liberar recursos.
– Só que isto pode gerar instabilidades no sistema - Qual processo deve ser eliminado?
• Rollback - Liberar alguns recursos temporariamente, para depois realocá-los aos processos congelados,continuando de onde parou. Na prática é difícil, pois depende do processos a ser congelado, se dá parapará-lo, por exemplo.

Capítulo 6
Gerência da UCP
6.1 Escalonamento• Processo de seleção de um processo a ser executado, e o conjunto de critérios que definem a fila de
execução do sistema operacional.
6.1.1 Funções básicas• Manter a UCP o máximo ocupada.
• Balancear o uso da UCP entre os processos.
• Maximizar o throughput.
• Dar tempos de resposta razoáveis.
6.1.2 Partes• escalonador (scheduler) – decide.
• dispatcher – executa.
6.1.3 Critérios• uso da UCP – em porcentagem.
• throughput – nº de processos / tempo.
• tempo de UCP.
• tempo de espera.
• tempo de turnaround.
• tempo de resposta.
44

CAPÍTULO 6. GERÊNCIA DA UCP 45
6.1.4 Objetivos• Maximizar uso e throughput.
• Minimizar tempos.
6.2 Tipos de Escalonamento
6.2.1 Não-preemptivos• O processo é executado enquanto quiser
6.2.1.1 FIFO (First In First Out)
• O 1º a entrar na fila é o 1º a ser executado.
• Foi usado em sistemas batch.
• Simples, mas não dá para prever quando o processo termina ou vai para estado de espera.
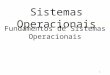
Exemplo: Temos 3 processos a serem executados, com seus respectivos tempos de processador e ordem deexecução:
Processo Tempo de UCP (em unidades de tempo) OrdemA 10 1B 4 2C 3 3
Figura 6.1: Escalonamento FIFO.
O tempo médio de resposta então, é Tm = 0+10+143 = 24
3 = 8u.t.

CAPÍTULO 6. GERÊNCIA DA UCP 46
6.2.1.2 SJF (Shortest Job First)
• A fila de execução é rearranjada de forma que a ordem de execução seja do processo que gasta menostempo para o processo que usa mais tempo de UCP.
• O tempo médio de resposta é baixo.
• É muito complicado prever quem é o menor de todos.
• Em sistemas interativos, é imprevisível.
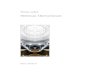
Exemplo: Temos os mesmos 3 processos a serem executados, só que agora, a ordem de execução está deacordo com o processo mais rápido para o processo mais lento:
Processo Tempo de UCP (em unidades de tempo) OrdemA 10 3B 4 2C 3 1
Figura 6.2: Escalonamento SJF.
O tempo médio de resposta então, é Tm = 0+3+73 = 10
3 = 3,3u.t.
6.2.1.3 Cooperativo
• Um processo pode ficar em execução o tempo que quiser.
• Ele voluntariamente volta à fila de prontidão ou interrompe a sua execução, liberando a UCP.
• Foi usado em ambientes operacionais, com o Windows (das versões 1.0 à 3.11.
• Situações indesejadas podem ocorrer, como a não liberação da UCP.
6.2.2 Preemptivos• O sistema operacional interrompe o processo e coloca outro em execução.

CAPÍTULO 6. GERÊNCIA DA UCP 47
6.2.2.1 Circular
• Mais conhecido de todos.
• Muitas variações.
• Conceito de fatia de tempo.
• Não há monopólio de UCP.
• Processos CPU-Bound são privilegiados em detrimento de processos I/O-Bound.
• Problema da escolha de fatia de tempo:
– Se for muito pequena, muitas preempções, e o sistema operacional passa mais tempo escalonandodo que executando.
– Se for muito grande, torna-se um escalonamento FIFO, na prática.
• Uso de uma 2ª fila, de prontidão, para o processo I/O-Bound, que tem preferência para entrar em execuçãodo que os processos CPU-Bound – torna o balanceamento mais equilibrado (fatia de tempo menor).
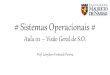
Exemplo: Temos os mesmos 3 processos a serem executados, com uma fatia de tempo de 2 u.t.:
Processo Tempo de UCP (em unidades de tempo) OrdemA 10 1B 4 2C 3 3
Figura 6.3: Escalonamento Circular.
O tempo médio de resposta então, é: Tm = 0+2+4+6+8+10+117 = 41
7 = 5,8u.t.
6.2.2.2 Prioridades
• Baseado num valor associado, a prioridade: maior prioridade, melhor lugar na fila de execução.
• Não há preempção por tempo, a mudança é voluntária, ou um processo de prioridade maior vai para oestado de prontidão, e toma o lugar do outro na execução.
• Pode também ser não-preemptivo

CAPÍTULO 6. GERÊNCIA DA UCP 48
• A prioridade pode ser:
– Estática – não muda.
– Dinâmica – muda ao longo do tempo.
• Risco de starvation, o que pode ser evitado com prioridade dinâmica.
Exemplo: Temos os mesmos 3 processos a serem executados:
Processo Tempo de UCP (em unidades de tempo) PrioridadeA 10 2B 4 1C 3 3
Figura 6.4: Escalonamento por prioridades.
O tempo médio de resposta então, é: Tm = 0+3+133 = 16
3 = 5,3u.t.
6.2.2.3 Circular com Prioridades
• Aqui, une-se conceitos de prioridade associada ao processo e fatia de tempo, logo o processo fica emexecução até que:
1. Ocorra uma preempção por :
(a) Tempo(b) Prioridade
2. Ou o processo encerre a sua execução.
• Este escalonamento é amplamente usado, permitindo melhor balanceamento no uso da UCP.
6.2.2.4 Múltiplas filas
• Várias filas de execução, cada uma com uma prioridade.
• Os processos são associados as filas em função de suas características.
• Cada fila pode ter um mecanismo próprio de escalonamento
• Se o processo mudar de comportamento, ele não pode mudar de fila

CAPÍTULO 6. GERÊNCIA DA UCP 49
6.2.2.5 Múltiplas filas com realimentação
• Aqui, os processos podem trocar de fila durante o processamento.
• Mecanismo de ajuste dinâmico, ou adaptativo.
Exemplo: várias filas:
• Escalonamento com fatias de tempo diferentes para cada fila
1. Processos I/O Bound - ficam nas filas com maior prioridade.
2. Processos CPU-Bound - começam na fila de alta prioridade, é executado e “desce” para uma fila demenor prioridade.
• Quanto mais tempo o processo usa da UCP, mais ele cai para filas de menor prioridade.
• Problemas:
1. Se o comportamento do processo mudar (CPU-Bound para I/O-Bound, por exemplo), isso compro-mete o tempo de resposta.
2. Algoritmo muito complexo, e consequentemente, lento.
6.3 Politicas de Escalonamento
6.3.1 Tempo Compartilhado• Processamento interativo, na maioria dos casos.
• Compartilhamento dos recursos de forma equilibrada.
Exemplos:
• FIFO→Processo CPU-Bound leva clara vantagem.
• Circular→Mais equilibrado – depende do tamanho da fatia.
– Muito grande→ vira FIFO.
– Muito pequeno→ fica mais tempo trocando de contexto do que executando o processo.
• Circular com prioridades→Para compensar, associa-se prioridades maiores para os processos I/O-Bound.Fica mais refinado se as prioridades forem dinâmicas – mais adotado hoje em dia.
• Deve-se levar em conta que algumas operações de E/S são mais lentos do que outras
6.3.2 Tempo Real• Algumas aplicações exigem respostas imediatas, ou em intervalo de tempo rígidos.
• Uso de escalonamento por prioridades – prioridade estática.
• Alguns sistemas tem uma taxa de prioridade onde neles ocorre exclusivamente a preempção por priori-dade.