Embed Size (px)
Citation preview
3.4 Filtros e FiltragemEm geral, sistemas de comunicação incluem filtros, com a finalidade de separar um sinal, contendo informação, de contaminações indesejáveis como interferência, ruído e produtos de distorção.
Filtros IdeaisPor definição, um filtro ideal exibe as características de transmissão sem distorção, ao longo de uma ou mais bandas especificadas, e resposta nula à todas as demais frequências.
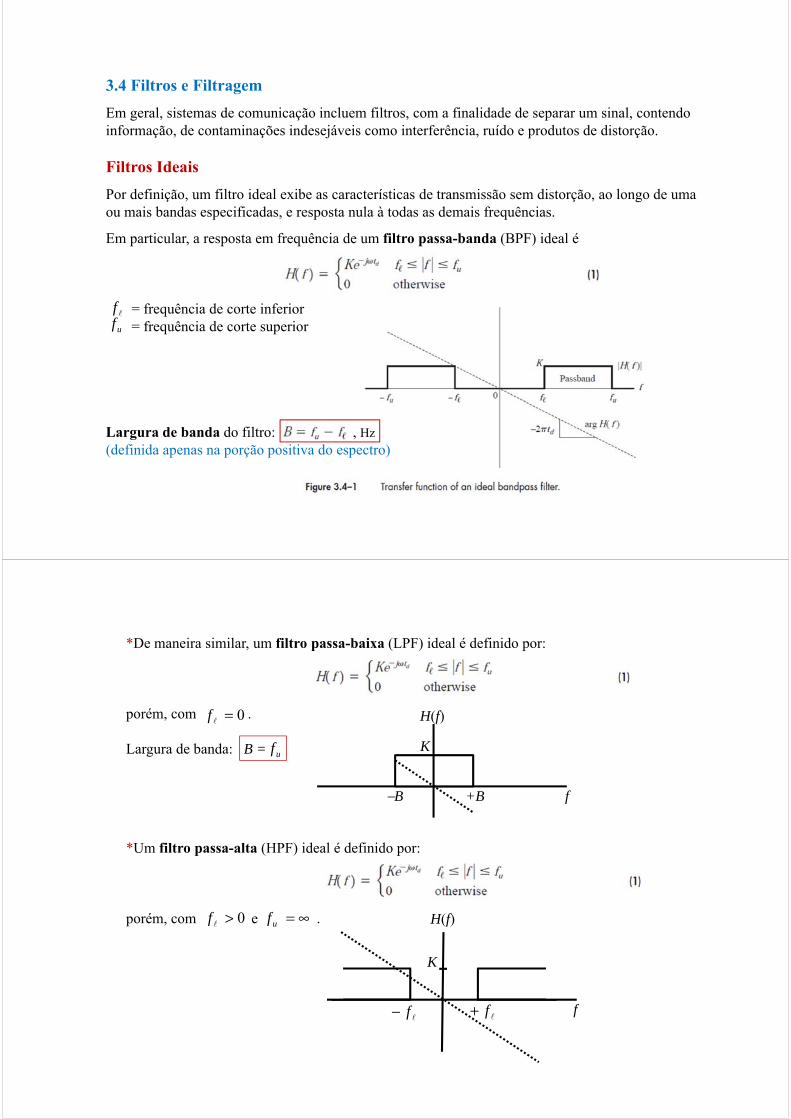
Em particular, a resposta em frequência de um filtro passa-banda (BPF) ideal é
= frequência de corte inferior= frequência de corte superior
Largura de banda do filtro: , Hz(definida apenas na porção positiva do espectro)
fuf
*De maneira similar, um filtro passa-baixa (LPF) ideal é definido por:
porém, com .
Largura de banda: B =
*Um filtro passa-alta (HPF) ideal é definido por:
porém, com e .
0=f H(f)
K
−B +B f
uf
0>f ∞=uf H(f)
K
f+f− f
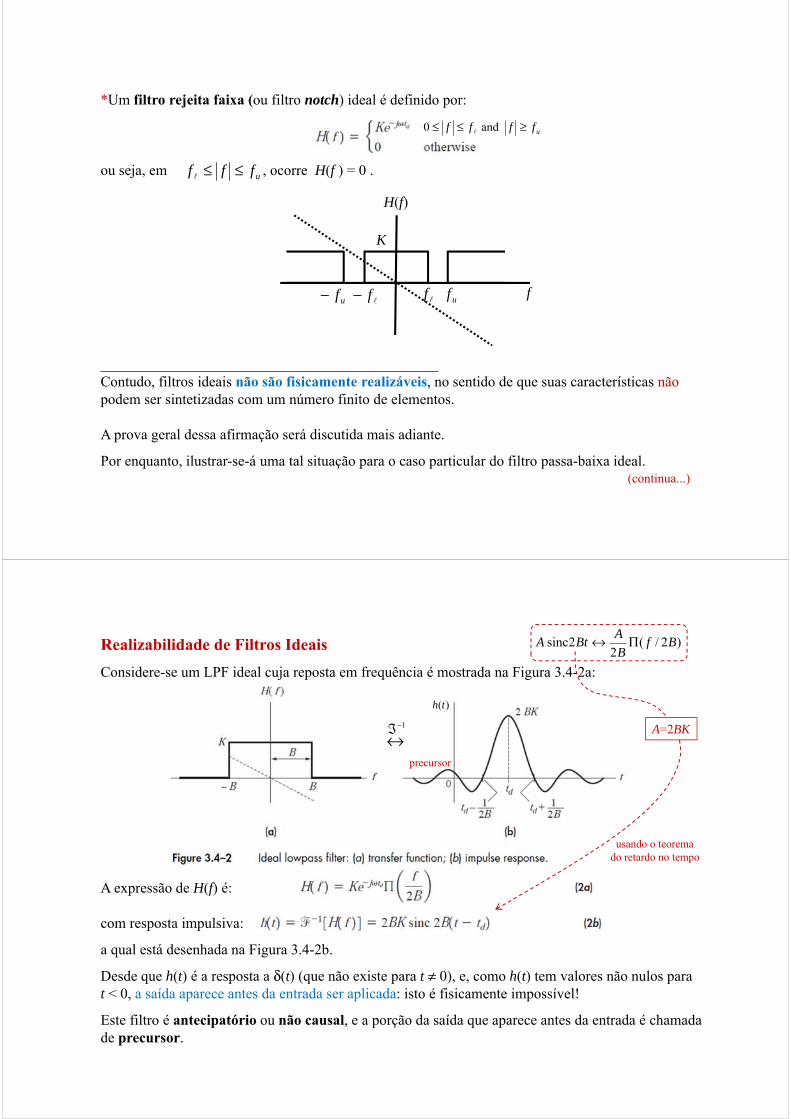
*Um filtro rejeita faixa (ou filtro notch) ideal é definido por:
ou seja, em , ocorre H(f ) = 0 .
______________________________________________Contudo, filtros ideais não são fisicamente realizáveis, no sentido de que suas características nãopodem ser sintetizadas com um número finito de elementos.
A prova geral dessa afirmação será discutida mais adiante.
Por enquanto, ilustrar-se-á uma tal situação para o caso particular do filtro passa-baixa ideal.
ufff ≤≤
H(f)
K
uff fffu −−
(continua...)
uffff ≥≤≤ and0
Realizabilidade de Filtros IdeaisConsidere-se um LPF ideal cuja reposta em frequência é mostrada na Figura 3.4-2a:
A expressão de H(f) é:
com resposta impulsiva:
a qual está desenhada na Figura 3.4-2b.
Desde que h(t) é a resposta a δ(t) (que não existe para t ≠ 0), e, como h(t) tem valores não nulos para t < 0, a saída aparece antes da entrada ser aplicada: isto é fisicamente impossível!
Este filtro é antecipatório ou não causal, e a porção da saída que aparece antes da entrada é chamada de precursor.
)(th
)2/(2
2sinc BfBABtA Π↔
↔1−ℑ A=2BK
precursor
usando o teorema do retardo no tempo

Limitação em Banda e Limitação no Tempo
Já foi estabelecido que um sinal v(t) é limitado em banda se existir uma constante W tal que:
ou seja, o espectro não apresenta nenhum conteúdo fora de | f | < W.
De forma similar, um sinal é limitado no tempo se, para as constantes t1 < t2 , ocorre:
ou seja, o sinal começa em t ≥ t1 e termina em t ≤ t2 .________________________________________________A aplicação de um sinal a um LPF ideal produz um sinal limitado em banda na saída.
Viu-se que a resposta impulsiva de um LPF ideal é um pulso ‘sinc’ que persiste por todos os tempos.
Afirma-se que qualquer sinal que emerge de um LPF ideal existirá para todos os tempos (ver teorema a seguir).
Consequentemente, um sinal estritamente limitado em banda não pode ser limitado no tempo.
Inversamente, recorrendo-se ao teorema da dualidade, um sinal estritamente limitado no tempo não pode ser limitado em banda.
Causalidade
Em sistemas práticos, o efeito (ou resposta) devido a uma causa (ou entrada) não pode se antecipar à entrada.A saída de um sistema causal em qualquer instante particular depende apenas da entrada anterior àquele tempo, e não de valores futuros de entrada.
Teorema*: Para um sistema linear ser causal é necessário e suficiente que a resposta ao impulso, h(t), seja zero para t < 0.

Causalidade
Em sistemas práticos, o efeito (ou resposta) devido a uma causa (ou entrada) não pode se antecipar à entrada.A saída de um sistema causal em qualquer instante particular depende apenas da entrada anterior àquele tempo, e não de valores futuros de entrada.
Teorema*: Para um sistema linear ser causal é necessário e suficiente que a resposta ao impulso, h(t), seja zero para t < 0._______________________________________________________________________________Prova:a) Suficiência (se h(t) = 0 para t < 0, então, é causal):
A saída y(t) à entrada x(t) é dada por: .
Se h(t) = 0 para t < 0, ocorre: .
Mudando as variáveis: k=t−λ λ = t−k dλ = −dk, λ= +∞ k = −∞, λ = 0 k = t.
Portanto, y(t) depende apenas de x(k) para −∞< k < t, ou seja, dos valores passados de x(k). #______________________________________________________*Roden, M.S., Analog and Digital Communication Systems, 4th ed., Prentice Hall, p.560, 1996.
λλλ dtxhty )()()( −= ∞
∞−
λλλ dtxhty )()()(0
−= ∞
dkkthkxdkkxkthtyt
∞−
−∞
−=−−=0
)()()()()(
(continua...)
Teorema: Para um sistema linear ser causal é necessário e suficiente que a resposta ao impulso h(t) seja zero para t < 0.Prova:__________________________________________________________b) Necessidade (se causal, então, h(t) = 0 para t < 0):
Sabe-se que δ(t) = 0 para todo t < 0.
Num sistema causal, x(t) = 0 e x(t) = δ(t) devem gerar as mesmas saídas para todo t < 0.
Isto é, se o sistema não puder antecipar valores futuros de entrada, então, ele não tem nenhum modo de estabelecer a diferença entre x(t) = 0 e x(t) = δ(t) antes do tempo t = 0.
Porém, sabe-se que num sistema linear, uma entrada identicamente nula x(t) = 0 causa uma saída identicamente nula.
Portanto, h(t) , a resposta a x(t) = δ(t) , deve ser igual a zero para t < 0, estabelecendo assim a necessidade. #_______________________________Nota:O critério de causalidade estabelecido neste teorema aplica-se aos casos onde h(t) é previamente conhecido.
Entretanto, nas situações onde h(t) é de difícil obtenção, porém, onde H(f) é conhecido, pode-se aplicar o critério de Paley-Wiener.

Critério de Paley-Wiener (condição necessária, mas não suficiente♦ , da causalidade):
Se um sistema é causal, então, H(f) deve ser tal que (é necessário que):
e
O contrário pode não ser verdadeiro.
A prova deste critério está além do escopo deste curso._________________________________________________________________________Este critério não satisfaz a condição de suficiência, uma vez que não leva em conta a fase de H(f), mas apenas seu módulo.
Assim, pode-se ter valores de |H(f)| idênticos, porém, com fases distintas, sendo que um deles conduza um sistema causal e outro não._______________________________________________________
Exemplo:↔ H(f) ↔
0 t −td 0 t
Ambas as funções H(f) podem possuir |H(f)| que satisfazem ao critério de Paley-Wiener, porém, somente a primeira é causal. #
∞<∞
∞−
dffH 2)(
dtjefH ω+)(h(t) f(t)=h(t+td )
precursor
♦Ver: Roden, M.S., Analog and Digital Communication Systems, 4th ed., Prentice Hall, p.560, 1996.
(ambos os espectros têm o mesmo )( )H f
2
ln ( )1 (2 )
H fdf
fπ
∞
−∞
< ∞+
________________________________________________________Exemplo: Filtro passa-baixa ideal
|H(f)| = 0 para | f | > B.|H(f)|
K Para os valores de | f | > B | ln H(f) |→∞.
Então, como o critério de Paley-Wiener não é −B 0 +B f satisfeito, h(t) não é causal. #
_________________________________________________________________________________________________________________
Corolário: Desde que o logaritmo de zero se aproxima de −∞, se |H(f)| = 0 para qualquer intervalo não nulo ao longo do eixo f, então, a primeira integral acima não converge.
Por isso, um tal sistema não pode ser causal.
Portanto, todos os filtros passa-baixa, passa-banda, ... ideais são não causais. ______________________________________*A observação acima sobre H(f) é um caso especial do teorema geral que estabelece que “um sinal limitado em banda não pode ser estritamente limitado no tempo, e vice-versa”.
*Supondo que , então, se h(t) é identicamente nulo para alguma faixa finita ao
longo do eixo t, sua TF não pode ser zero para qualquer faixa finita ao longo do eixo f, e vice-versa.
∞<∞
∞−
dffH 2)(
∞<∞
∞−
dtth 2)(
Para H(f) ser causal é necessário que: e
a primeira integral diverge para +∞
2
ln ( )1 (2 )
H fdf
fπ
∞
−∞
< ∞+

Considerações sobre a utilização de filtros ideais
As observações anteriores geram preocupações a respeito dos modelos de sinais e filtros usados no estudo de sistemas de comunicação.
Como um sinal não pode ser limitado em banda e no tempo simultaneamente, deveria se abandonar o conceito de sinais limitados em banda (e daí, os filtros ideais), ou então, no caso contrário, aceitar modelos de sinais que existam para todos os tempos.
Por outro lado, se reconhece que qualquer sinal prático é limitado no tempo, tendo um tempo de início e um tempo de fim. _________________________________________________________Contudo, os conceitos de espectro limitado em banda e filtros ideais são muito úteis e atraentes para serem totalmente descartados.
Além disso, muitos filtros reais possuem comportamentos muito próximos do ideal.
Embora um sinal estritamente limitado no tempo não seja estritamente limitado em frequência, seu espectro pode ser desprezivelmente pequeno acima de algum limite superior de frequência W.
Da mesma forma, um sinal estritamente limitado em banda pode ser desprezivelmente pequeno forade um certo intervalo de tempo t1 ≤ t ≤ t2 .
Portanto, será assumido que os sinais são essencialmente limitados em banda e no tempo para a maioria das aplicações práticas.
Filtros PráticosNa Figura 3.4-3 mostra-se o espectro de amplitudes de um típico filtro passa-banda prático:
Comparado com o BPF ideal, o filtro prático tem uma banda passante onde |H(f)| é relativamente grande (mas não constante), e uma banda de rejeição na qual |H(f)| é muito pequena (mas não nula).
Os pontos extremos da banda passante geralmente são definidos por:
tal que |H(f)|2 decai à K2 /2 para
A largura de banda é então chamada de largura de banda de meia potência ou de 3 dB.

_______________________________________________Os pontos extremos das bandas de rejeição podem ser tomados onde |H(f)| decai a um valor adequada-mente pequeno, tais como, K/10 ou K/100 (de acordo com a aplicação).
Entre a banda passante e as bandas de rejeição estão as bandas de transição, dentro das quais não há nem passagem nem rejeição significativas das componentes de frequência.
Uma filtragem mais efetiva ocorre em filtros com regiões de transição muito estreitas, algo que ocorre com filtros de ordem superior.
K/10 or K/100K/10 or K/100
Filtro Butterworth
O filtro mais simples dentre os filtros padrões é o LPF Butterworth de ordem n, cujo circuito contémn elementos reativos (capacitores e indutores).
A resposta em frequência com magnitude máxima K = 1 tem a forma:
onde B é a largura de banda de 3 dB e Pn(jf /B) é um polinômio complexo.
Na Tabela 3.4-1 estão listados polinômios para n entre 1 e 4, usando a variável normalizada p = jf /B:

A família de polinômios de Butterworth exibe as seguintes propriedades:
tal que
Consequentemente, a primeira derivada de |H(f)| é igual a zero em f =0 , e se diz que |H(f)| possui planicidade máxima (maximally flat).________________________________________________Prova:
________________________________________________________________________________
A relação (3.4-4b) também pode ser escrita como:
sendo ω/ωC = f /B = − jp, com ωC = 2πB.
Na sequência, procura-se fatorar o denominador desta expressão a fim de se obter os polinômiosde Butterworth.
0211211
)(
0
122/322/1
0
2
0
=
+−=
+=
=
−−−
==f
nn
f
n
f Bfn
BBf
Bf
dfd
dffHd
Sobre os polinômios de Butterworth
2222
2 )()/(
1
1
1
1)( pHH
Bf
fH Cn
C
n ==
+
=
+
= ωω
ωω
(continua...)
Polinômios de ButterworthNo domínio da transformada de Laplace, |H(s)|2 = H(s) H*(s) e H(−s) = H*(s).
Procurar-se-á fatorar a expressão:
a qual é convertida em |H(ω/ωC )|2 (mostrada acima) quando s = jω.
Os n pólos de H(s) H(−s) ocorrem sobre um círculo de raio ωC , em pontos igualmente espaçados em ângulo e com simetria em torno do eixo imaginário do plano-s.
Para estabilidade, a função de transferência H(s) é escolhida tal que contenha apenas pólos no semi-plano real negativo de s.
Sendo sk o k-ésimo pólo de H(s) H(−s) , procura-se uma fatoração através da forma (p=jω/ωC=s/ωC):
2222
2 )()/(
1
1
1
1)( pHH
Bf
fH Cn
C
n ==
+
=
+
= ωω
ωω
n
C
ssHsHsH 2
2
2
2
1
1)()()(
−+
=−=
ω
)(1
)/(11)(*)( 222
1
pPsPsssHsH
nCn
C
kn
k
==
−=
∏=
ω
ω
_____________________________________________
(continua...)
)(1
)/(11)(*)( 222
1
pPsPsssHsH
nCn
C
kn
k
==
−=
∏=
ω
ω
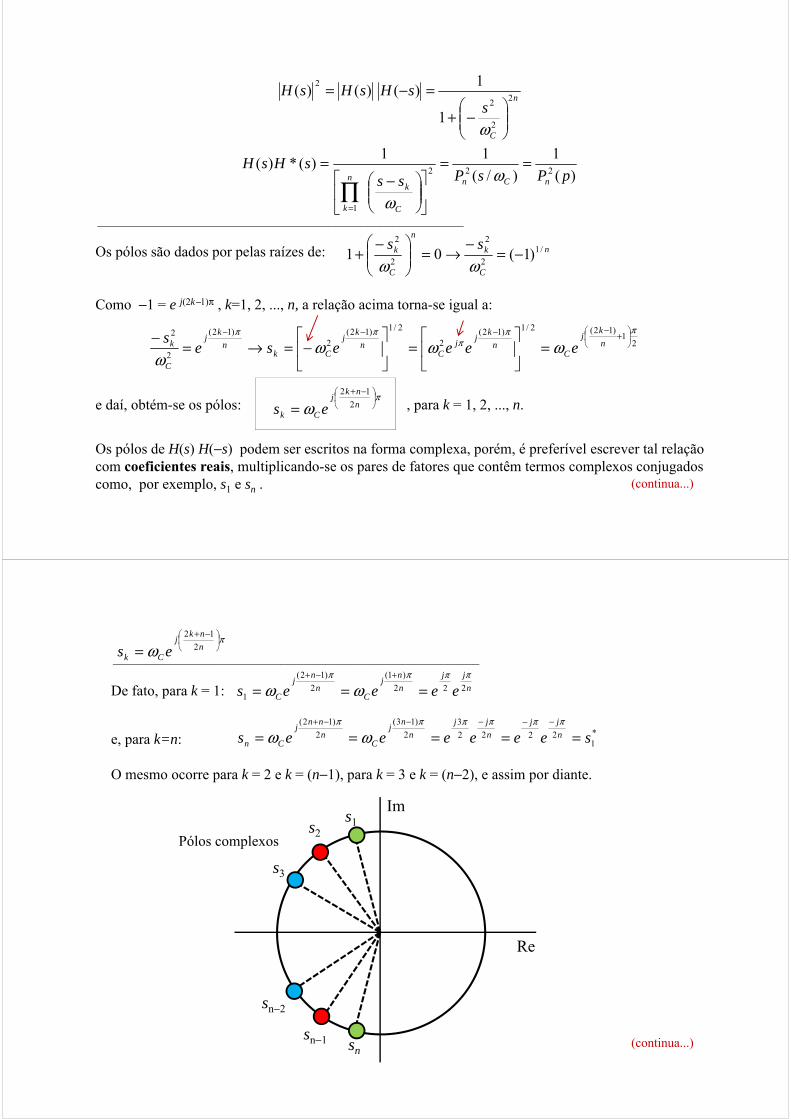
Os pólos são dados por pelas raízes de:
Como −1 = e j(2k−1)π , k=1, 2, ..., n, a relação acima torna-se igual a:
e daí, obtém-se os pólos: , para k = 1, 2, ..., n.
Os pólos de H(s) H(−s) podem ser escritos na forma complexa, porém, é preferível escrever tal relaçãocom coeficientes reais, multiplicando-se os pares de fatores que contêm termos complexos conjugados como, por exemplo, s1 e sn .
n
C
k
n
C
k ss /12
2
2
2
)1(01 −=−
→=
−+
ωω
21)12(2/1)12(
2
2/1)12(2
)12(
2
2 πππ
ππ
ωωωω
+
−−−−
=
=
−=→=
− nkj
Cn
kjjC
nkj
Ckn
kj
C
k eeeeses
πω
−+
= nnkj
Ck es 212
n
C
ssHsHsH 2
2
2
2
1
1)()()(
−+
=−=
ω
_________________________________________________________
(continua...)
De fato, para k = 1:
e, para k=n:
O mesmo ocorre para k = 2 e k = (n−1), para k = 3 e k = (n−2), e assim por diante.
njj
nnj
Cn
nj
C eeees 222)1(
2)12(
1
ππππ
ωω ===+−+
πω
−+
= nnkj
Ck es 212
*1
22223
2)13(
2)12(
seeeeees njj
njj
nnj
Cnnnj
Cn =====−−−−−+ ππππππ
ωω
s1
sn
Re
Ims2
s3
sn−1
sn−2
Pólos complexos
_________________________________________________________
(continua...)

A fim de se confirmar o fato, sejam e pares complexos conjugados. Com isto:
sendo p = jf /B = s/ωC , ωC = 2πB e s = jω = j2πf.
Recordando:
então, H(s) sozinho será:
e o polinômio de Buterworth será:
ϕωω jCC ezs ==1
ϕωω jCCn ezs == *
.1para1cos2ou1cos2cos2
)(**)(*)()(
222
22
2
22
2
22
=+−+−=+−
=
++−=
++−=
−− −−
CC
CC
C
jjC
jjC
C
CC
C
C
C
C
ssppss
eeeesszzzzsszszs
ωϕϕω
ωϕωω
ωωω
ωωωω
ωω ϕϕϕϕ
)(1
)/(11)(*)( 222
1
pPsPsssHsH
nCn
C
kn
k
==
−=
∏=
ω
ω
)/(11)(
1
Cn
C
kn
k
sPsssH
ωω
=
−=
∏=
−= ∏
= C
kn
kCn
sssPω
ω1
)/(
(continua...)
1cos2)()( 21 +−=−− ϕωω
ppssss
C
n
C
ϕπ
ωω jC
nnkj
Ck ees ==
−+
212
Dados: , , p = s/ωC
Para n par tem-se que:
No caso em que n é ímpar, o produto é realizado em pares complementares até (n − 1)/2, e então, acrescenta-se o fator central devido a k = [(n−1)/2+1] = (n+1)/2, ou seja,
devido a:
e daí: ... n ímpar.
#
)(12
12cos2)/( 22/
11pP
nnkppsssP n
n
kC
kn
kCn =
+
−+−=
−= ∏∏
==
πω
ω
Cj
C
nn
j
C
nnn
j
Cn eees ωωωω πππ−====
−++
+
2211
2)1(2
21
2/)1(
+
−+−+= ∏
−
=
12
12cos2)1()( 22/)1(
1π
nnkppppP
n
kn
Pn(s/ωC) para ωC=1
_________________________________________________________

O filtro Butterworth de primeira ordem é dado por:
e tem a característica de um filtro RC passa-baixa, já estudado na seção 3.1 [ver Eq. (3.1-18a)].
Largura de banda:
Esta aproximação é pobre, estando longe de um LPF ideal.
As aproximações melhoram à medida que se aumenta n,acrescentando-se mais elementos ao circuito.
BjfppPfH
/11
11
)(1)(
1 +=
+==
RCB
π21=
(continua...)
Bjfp /=
um elemento reativo, n=1
ver Exemplo 3.1-2
)()(21 ft
dffdt dd == θ
π
Na Figura 3.4-4a, ilustra-se a resposta impulsiva de um filtro de terceira ordem, a qual lembra a do filtro LPF ideal [ ], logicamente, sem precursores.
As curvas de resposta em frequência estão mostradas na Figura 3.4-4b.
Nota-se que o deslocamento de fase tem uma inclinação razoavelmente linear ao longo da banda passante.
_________________________________________Já foi visto que, se arg H(f) = θ(f), então, o time delay (eq. 3.2-3) é: .
O deslocamento de fase θ (f) implica em time-delay, e também, um pouco de distortion delay.(continua...)
↔ H(f) = 1

Na Figura 3.4-5 ilustra-se o diagrama de Bode (escala log × dB) do LPF Butterworth com vários valores de n, enfatizando-se o comportamento da região de transição de |H(f)|.
Definindo-se (arbitrariamente) a borda superior da banda de rejeição como |H(f)| = −20 dB, a largura dessa região quando n =1 é 10B −B= 9B.
Quando n = 10 ela cai para apenas 1,25B−B = 0,25B.
Fica claro que, quando n → ∞,|H(f)| se aproxima da característica retangular do LPF ideal no limite.
O aumento da ordem do filtro Butterworth causa aumento das oscilações na sua resposta impulsiva h(t).(continua...)
escala logarítmica
Contudo, enquanto |H(f)| tende à característica do LPF ideal quando n → ∞, ao mesmo tempo, a inclinação da curva de deslocamento de fase aumenta [sem ser linear, ou, td = td(f)], e, com isso, a distorção por delay (distortion delay) torna-se intolerável.
Para valores de n muito elevadosa fase torna-se não linear dentro da faixa 0<f/B<1.
Para valores de n muito elevados(n>>4), |H(f)| tende ao LPF ideal dentro da faixa 0<f/B<1.

Outros tipos de filtros de ordem superior:
• Filtros ButterworthVantagem: maximally flat, pequena largura da região de rejeição quando n → ∞.Desvantagem: distortion delay quando n → ∞.
• Filtros Bessel–ThomsonVantagem: maximally linear phase shift para um dado valor de n.Desvantagem: região de transição mais larga.Aplicações típicas: pulsos (onde se exige elevado desempenho no transitório).
• Filtros Equiripple (Chebyshev e elíptico)Vantagem: menor região de transição de todos (sharpest transition) para um dado n.Desvantagem: pequenas amplitudes de ripple na banda passante e deslocamento de fase não linear
significativo.Aplicações típicas: áudio.
Observações gerais:
• Todas essas classes de filtros podem ser implementadas com dispositivos ativos (amplificadores operacionais).
• Todas podem ser modificadas (a partir do filtro passa-baixa) para se obter filtros passa-alta e passa-banda.
Filtros mecânicosProblemas de ordem prática podem surgir quando se deseja implementar um filtro passa-banda com uma banda passante relativamente estreita e razoavelmente retangular (principalmente em rádio-frequências, RF).
Filtros especiais que exploram o fenômeno eletromecânico têm sido projetados para essas aplicações:são os filtros mecânicos.
Na Fig. 3.4-6 mostra-seo espectro de amplitudede um BPF em cristalmonolítico, de sétima ordem e dedicado ao uso em rádio AM (filtro deFI operando em tornode 455 kHz).
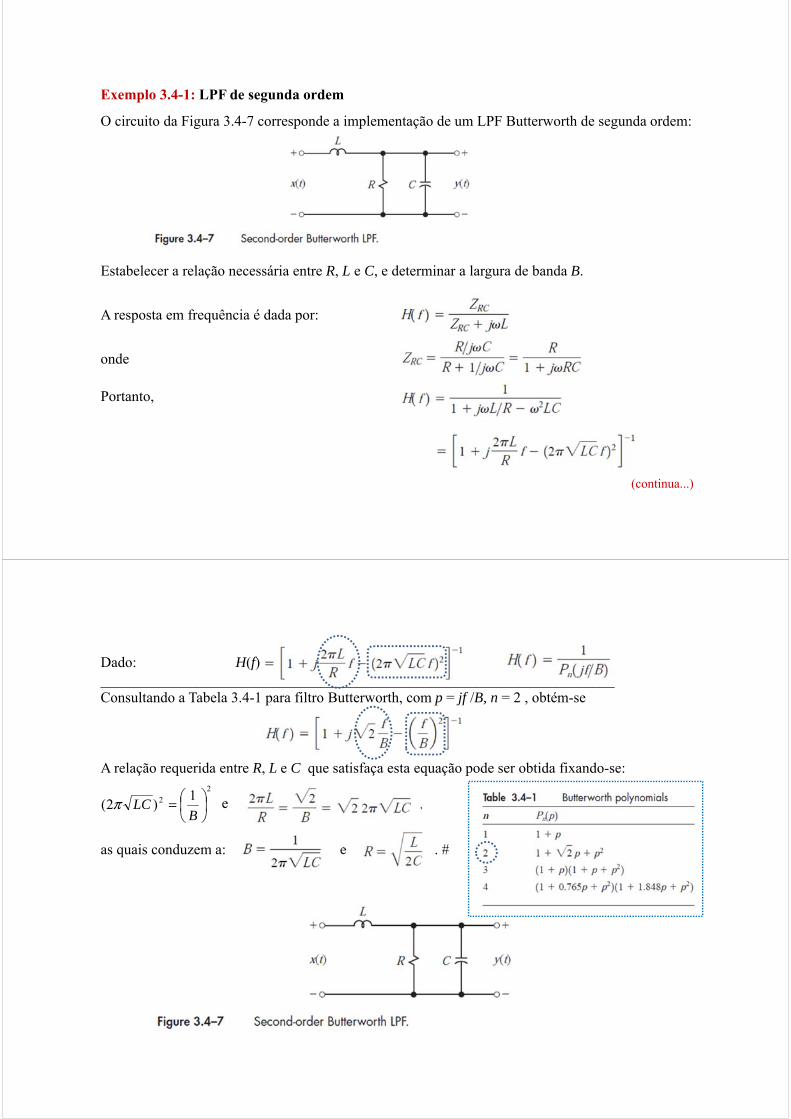
Exemplo 3.4-1: LPF de segunda ordem
O circuito da Figura 3.4-7 corresponde a implementação de um LPF Butterworth de segunda ordem:
Estabelecer a relação necessária entre R, L e C, e determinar a largura de banda B.
A resposta em frequência é dada por:
onde
Portanto,
(continua...)
Dado: H(f) ______________________________________________________________________Consultando a Tabela 3.4-1 para filtro Butterworth, com p = jf /B, n = 2 , obtém-se
A relação requerida entre R, L e C que satisfaça esta equação pode ser obtida fixando-se:
e ,
as quais conduzem a: e . #
22 1)2(
=
BLCπ

Filtro de Cancelamento AdaptativoSinais frequentemente são contaminados por interferências geradas por fontes humanas.
Um exemplo é o sinal de áudio contaminado pelo 60 Hz (hum ou zumbido) da rede elétrica.
A solução óbvia seria usar um filtro rejeita banda (notch), que rejeitaria a componente de 60 Hz mas deixaria passar todo o resto.
Contudo, como não existe filtro notch ideal, um filtro prático também rejeitaria, além da interferência indesejável em 60 Hz, algumas componentes desejáveis.
Uma solução é usar o cancelamento adaptativo mostrado na Fig. 3.4-8:
(continua...)
O sinal y(t) observado consiste do sinal desejado x(t) e da interferência em 60 Hz, resultando em:
sendo AI e φI a amplitude e a fase do sinal de interferência, respectivamente.
Uma referência de 60 Hz é criada no ramo de baixo do sistema:
sendo AR e φR a amplitude e a fase do sinal de referência, respectivamente.
Variam-se AR e φR tal que, quando xR(t) é subtraído do sinal contaminado y(t), o sinal interferente em 60 Hz é cancelado.
____________________________________________
(continua...)
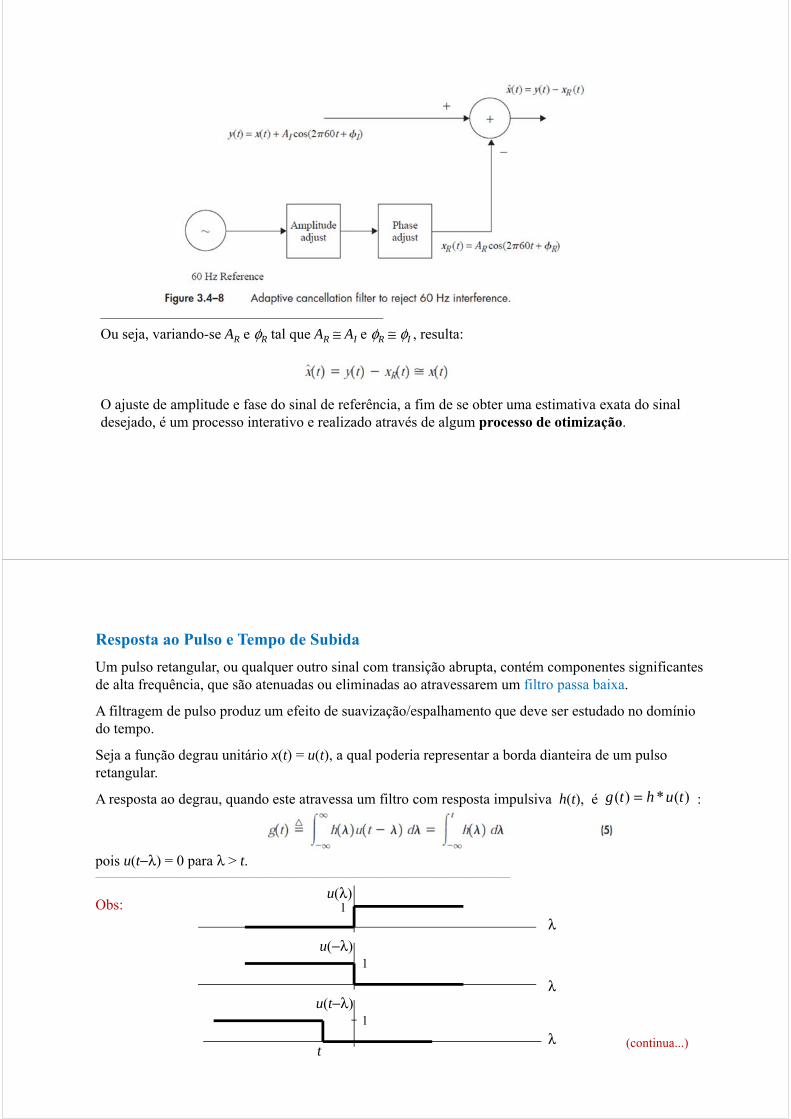
Ou seja, variando-se AR e φR tal que AR ≅ AI e φR ≅ φI , resulta:
O ajuste de amplitude e fase do sinal de referência, a fim de se obter uma estimativa exata do sinal desejado, é um processo interativo e realizado através de algum processo de otimização.
____________________________________________
Resposta ao Pulso e Tempo de SubidaUm pulso retangular, ou qualquer outro sinal com transição abrupta, contém componentes significantes de alta frequência, que são atenuadas ou eliminadas ao atravessarem um filtro passa baixa.
A filtragem de pulso produz um efeito de suavização/espalhamento que deve ser estudado no domínio do tempo.
Seja a função degrau unitário x(t) = u(t), a qual poderia representar a borda dianteira de um pulso retangular.
A resposta ao degrau, quando este atravessa um filtro com resposta impulsiva h(t), é :
pois u(t−λ) = 0 para λ > t._________________________________________________________________________________________________________________
Obs:u(λ)
u(−λ)
u(t−λ)
λ
λ
λt
)(*)( tuhtg =
1
1
1
(continua...)

No caso do filtro RC passa baixa estudado no Exemplo 3.1-1,
a resposta ao degrau x(t) = u(t) resultou na
expressão (3.1-8a), y(t) = g(t) tal que:
onde é a largura de banda de 3 dB (ver Exemplo 3.1-2).
Obviamente, um LPF de primeira ordem não restringe severamente a transmissão de alta frequência.__________________________________________________________________________________
Analisa-se agora o caso extremo do LPF ideal, considerando-se ganho unitário (K = 1) e tempo de resposta nulo (td = 0) na expressão (3.4-2b), ou seja, na resposta impulsiva:
obtendo-se assim:
Neste caso, (3.4-5) torna-se:
onde μ = 2Bλ e dμ = 2Bdλ (e quando λ = t → μ = 2Bt).
RCB
π21=
BtBth 2 sinc2)( =
∞−=
tdhtg λλ)()(
(continua...)
λλ dhtgt
)()( ∞−= (3.4-5)
esta equação não foi obtida pela integral de h(λ)
função par
g(t)
A primeira integral é bem conhecida: resulta igual a 1/2.
Prova: recorrendo-se a (2.2-19ab):
e fazendo A = 2W:
Portanto, , c.q.d.
_________________________________________Por outro lado, a segunda integral exige avaliação numérica.
Na realidade, o resultado pode ser expresso em termos da função seno integral, definida como:
(α = πμ dα = π dμ , α=θ → μ=θ/π) cujos valores encontram-se tabelados em livros de matemática.
Π=↔=
WffZWtWtz
2)(2sinc2)(
Π=↔=
Wf
WAfZWtAtz
22)(2sinc)(
∞−∞−∞−
∞
∞−
=====
=Π=
000
sinc22sinc22)(2)(12
0)0( μμ ddtWtWdttzdttzW
fZ
_______________________________________________
μ
(continua...)
= ???
área
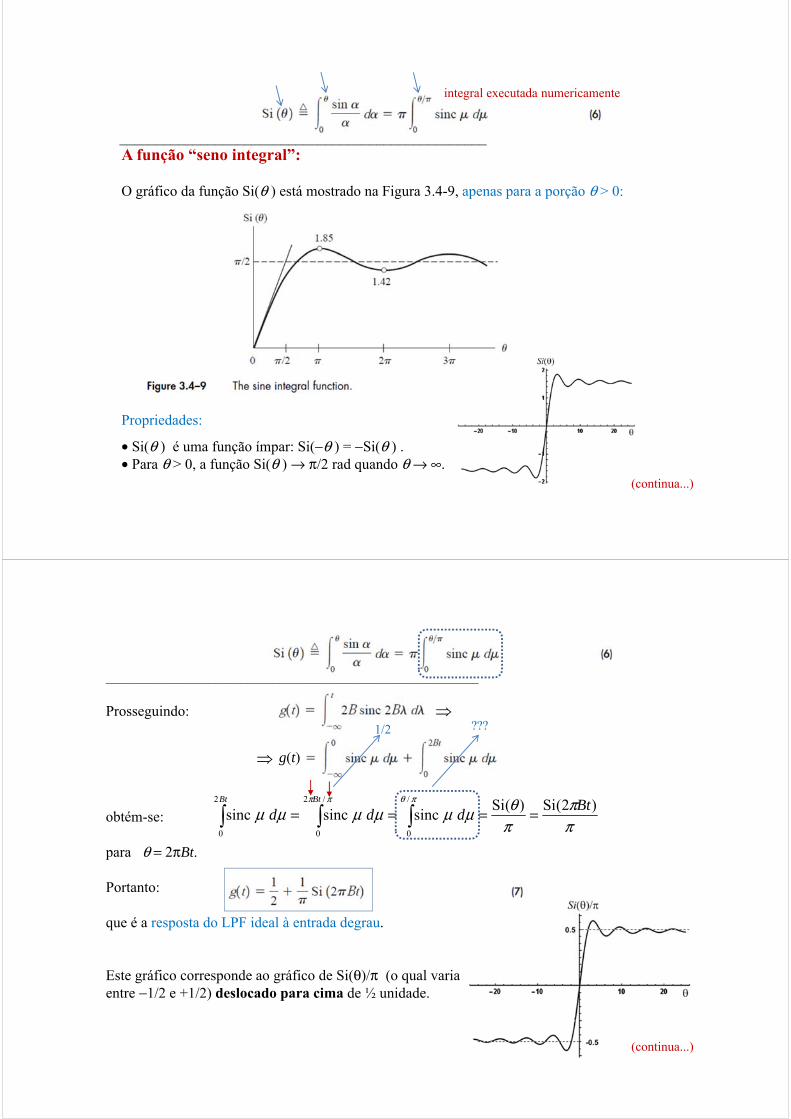
A função “seno integral”:
O gráfico da função Si(θ ) está mostrado na Figura 3.4-9, apenas para a porção θ > 0:
Propriedades:
• Si(θ ) é uma função ímpar: Si(−θ ) = −Si(θ ) .• Para θ > 0, a função Si(θ ) → π/2 rad quando θ → ∞.
__________________________________________________
integral executada numericamente
(continua...)
g(t)
Prosseguindo:
obtém-se:
para θ = 2πBt.
Portanto:
que é a resposta do LPF ideal à entrada degrau.
Este gráfico corresponde ao gráfico de Si(θ)/π (o qual varia entre −1/2 e +1/2) deslocado para cima de ½ unidade.
ππ
πθμμμμμμ
πθππ )2(Si)(Sisincsincsinc/
0
/2
0
2
0
BtdddBtBt
====
__________________________________________________________
(continua...)
1/2 ???

Na Figura 3.4-10 comparam-se os resultados da resposta ao degrau obtidos com o filtro ideal [expressão (3.4-7)] e com o filtro LPF de primeira ordem [expressão (3.1-8a] :
O LPF ideal remove toda a alta frequência |f | > B, porém, produz precursor, overshoot e oscilações na resposta temporal.
Nenhum destes efeitos aparece na resposta temporal do LPF de primeira ordem, porém, como se sabe, este atenua gradativamente, mas não chega a eliminar as altas frequências.
(3.1-8a)
_________________________________________
(continua...)
precursor
gráfico de Si(θ)/π (o qual varia entre−1/2 e +1/2) deslocado para cima de ½ unidade.
A resposta ao degrau de um filtro mais seletivo como, por exemplo, um LPF Butterworth de 3ª. ordem (não mostrada na figura), se pareceria mais com uma versão atrasada no tempo da resposta do LPF ideal (contudo, sem precursores, e mais lento que a resposta de primeira ordem).
Medida de lentidão do filtro?
LPF ideal × primeira ordem:
(3.1-8a)
___________________________________________________________________
mais lento
mais rápido
aumentando a banda B → aumenta rapidez de subida

Tempo de Subida (Risetime)O tempo de subida é uma medida da rapidez da resposta ao degrau, geralmente definido como um intervalo de tempo tr , entre g(t) = 0,1 e g(t) = 0,9 (conhecido como tempo de subida de 10 – 90%).
• LPF de primeira ordem: tr ≅ 0,35/B.• LPF ideal: tr ≅ 0,44/B.
Como ambos os valores estão razoavelmente próximos de 0,5/B, costuma-se utilizar a aproximação:
para o tempo de subida de um LPF arbitrário com largura de banda B.
regra prática
90%
10%
aumenta a ordem → aumenta lentidão
Considera-se, a seguir, a resposta do LPF ideal a um pulso retangular x(t) de amplitude unitária e duração τ, começando em t = 0.
Neste caso, se escreve: para o pulso retangular,
e, portanto, a saída será: ,
Lembrando que:
na Fig. 3.4-11 estão mostrados os resultados para três valores do produto Bτ, sendo que τ está fixado na figura (quem varia é B):
Entrada x(t)
Saídas, y(t)
fixo
Aumenta a banda B, sendo τ cte.
B grande: deixa passar frequências mais altas

• Para Bτ ≥ 2 → y(t) tem a forma mais ou menos retangular• Para Bτ ≤ 1/4 → y(t) torna-se mais espalhado.
Observe-se que, no caso do LPF de 1ª. ordem, se τ ≅ RC →
Neste caso, é interessante comparar a resposta do LPF ideal com o resultado que foi obtido para a Figura 3.2-4b, qual seja, para um LPF de primeira ordem e τ ≅ RC, abaixo reproduzido :
A resposta se parece com uma versão atrasada no tempo (sem precursor) da resposta do LPF ideal.
41
61
21
21
21 <≅==≅
ππτ
πτ RC
RCRCB
_____________________________________________________________
Entrada x(t)
Saída y(t), para Bτ=1/2π
Entrada, x(t)
Saídas, y(t)Saídas para 3 valores do produto Bτ:
Figure 3.2-4b
Considerações gerais sobre a largura de banda necessária para transmissão de pulso•Fidelidade: reproduzir a forma real do pulso exige uma grande largura de banda (grande produto Bτ,
ou Bτ >> 2):
onde τmin = menor duração do pulso de saída.

Considerações gerais sobre a largura de banda necessária para transmissão de pulso•Fidelidade: reproduzir a forma real do pulso exige uma grande largura de banda (grande produto Bτ,
ou Bτ >> 2):
onde τmin = menor duração do pulso de saída.
•Detecção: se for desejado apenas detectar que o pulso foi enviado, pode-se usar uma largura de banda menor:
a qual constitui uma importante regra prática.
Considerações gerais sobre a largura de banda necessária para transmissão de pulso•Fidelidade: reproduzir a forma real do pulso exige uma grande largura de banda (grande produto Bτ,
ou Bτ >> 2):
onde τmin = menor duração do pulso de saída.
•Detecção: se for desejado apenas detectar que o pulso foi enviado, pode-se usar uma largura de banda menor:
a qual constitui uma importante regra prática.
•Resolução: a equação (3.4-10) também fornece a condição para distinguir entre pulsos de saída espaçados por τmin ou mais.
Na Fig. 3.4-12 ilustra-se a condição de resolução para um canal LPF ideal com: B=1/2τmin . (deduzido da Fig. 3.4-11)
Uma largura de banda (B) ou um espaçamento (τ) menor (como Bτ ≤1/4) resultaria num overlap considerável, tornando difícil identificar pulsos distintos.
overlap

•Posição: se a preocupação for com a medida da posição do pulso em relação a algum instante/tempo de referência, existe uma ambiguidade inerente devido à forma arredondada do pulso de saída e ao tempo de subida não nulo das bordas dianteira e de cauda.
Para um tempo de subida mínimo especificado, a relação (3.4-8), qual seja, tr ≅ 1/2B, conduz à largura de banda necessária:
outra importante regra prática. (Quanto menor tr min , maior será a banda B necessária.)
Considerações gerais sobre a largura de banda necessária para transmissão de pulso(continuação...)
90%
10%
•Posição: se a preocupação for com a medida da posição do pulso em relação a algum instante/tempo de referência, existe uma ambiguidade inerente devido à forma arredondada do pulso de saída e ao tempo de subida não nulo das bordas dianteira e de cauda.
Para um tempo de subida mínimo especificado, a relação (3.4-8), qual seja, tr ≅ 1/2B, conduz à largura de banda necessária:
outra importante regra prática. (Quanto menor tr min , maior será a banda B necessária.)
Característica de fase necessária para transmitir pulsos
Se a característica do deslocamento de fase não for satisfatória, a distorção por delay [quando, td =td(f)] tornaria o canal LPF inútil para transmissão de pulsos, a despeito da largura de banda B.
Todas as relações para B citadas anteriormente são válidas desde que o deslocamento de fase seja aproximadamente linear (arg H(f) = −ωtd) ao longo de |f |≤ B.
Uma rede equalizadora de fase pode ser necessária para se atingir esta condição.
Considerações gerais sobre a largura de banda necessária para transmissão de pulso(continuação...)





























