Embed Size (px)
Citation preview

70
4. Desenvolvimento, testes e resultados de um sistema
óptico para controle de polarização
Após a realização de pesquisas bibliográficas, estudos teóricos e seleção de
materiais e dispositivos, apresenta-se neste capítulo um sistema óptico de baixa
velocidade de rotação, com finalidade de implementação em bancada de teste, para
controle do SOP em fibras ópticas. As seções a seguir descrevem a bancada óptica
realizada, sua operação, a utilização de uma portadora de sinal RF em 2,15 GHz e
comoprimento de onda 1550 nm, para o controle do SOP em sistemas multiplexados e
introduz o algoritmo desenvolvido.
4.1. Descrição da bancada óptica desenvolvida
No diagrama de fluxo exibido na Figura 42 a seguir, são apresentadas os
componentes e etapas numeradas do sistema de controle do SOP.
Figura 42 – Sistema para controle de polarização. A numeração indica a ordem de
acontecimento das etapas do sistema.
Na figura acima, a fonte óptica utilizada (laser DFB (1)) gera o sinal luminoso
que se propaga nas fibras ópticas que interconectam todos os dispositivos do sistema.

71
Inicialmente, o sistema é ajustado manualmente para um SOP próximo do ideal e
potência óptica máxima de acordo com o indicado no display do medidor de potência
(5). Quando em operação, uma ferramenta computacional desenvolvida na plataforma
LabVIEW atua sobre os conversores A/D e D/A (6) e (8) no processo de maximização
do sinal recebido. Uma matriz de transformação possibilita que um determinado SOP de
entrada seja mapeado e modificado para o SOP ideal. Na primeira iteração do loop do
software desenvolvido, os dispositivos do sistema são acionados de acordo com a
numeração indicada na Figura 42. Antes do módulo de detecção de potência óptica,
introduz-se um dispositivo denominado polarizador linear (4), cuja operação está
descrita na secção (3.4) da presente dissertação. Desta forma, a potência máxima no
receptor só será obtida quando a polarização do sinal óptico estiver alinhada com o eixo
y correspondente ao alinhamento do polarizador linear utilizado, isto é, ao SOP ideal.
O sistema de controle do SOP é então apresentado na Figura 43, com os
respectivos dispositivos selecionados e descritos no Capítulo 3.
Figura 43 – Bancada para testes do sistema de controle de polarização. A numeração segue a mesma ordem descrita na Figura 42.
(2)
(1)
(3)
(6) (8)
(4)
(5)
(7)

72
4.2. Descrição do algoritmo desenvolvido em LabVIEW
O procedimento para correção de SOP foi desenvolvido em LabVIEW por meio
de uma malha de realimentação. Para melhor compreensão, este procedimento é
desmembrado em etapas descritas a seguir e ilustradas pelos diagramas de blocos da
plataforma nas figuras a seguir. São mostradas também os respectivos paineís frontais,
onde podem ser alterados os parâmetros de entrada (configuração) do procedimento.
Nestes paineís, os sinais revelantes podem ser observados durante a execução.
O ambiente gráfico de programação descrito no item (3.6) da presente
dissertação possibilita o controle de instrumentos e dispositivos de acordo com uma
programação. Desta forma, um algoritmo dedicado à obtenção do máximo de potência
óptica é implementado através de um controlador de polarização. Conforme citado na
Seção (3.7), os dispositivos NI-DAQmX possibilitam a comunicação entre o sistema e
instrumento virtual. Portanto, é necessário que haja um instrumento virtual dedicado à
leitura do dispositivo com seu respectivo painel frontal para ajustes de tensão e escolha
da porta de entrada ou saída a ser utilizada para tal finalidade. Para facilitar o usuário, o
software possui algumas ferramentas de ajuda a construção deste instrumento. Na
Figura 44 é apresentado o instrumento virtual empregado na bancada de testes do
sistema de controle de polarização.
Figura 44 – Painel frontal e diagrama de blocos representativo do instrumento virtual para aquisição e variação dos dados fornecidos e gerados pelo dispositivo USB NI-DAQmX. A Figura ilustra o exemplo de geração de tensões para o estágio 1 do PC [56].

73
O primeiro estágio do controlador é inicalmente ativado variando-se a tensão de
entrada no intervalo de 0 a 4 V, em passos de 0,1 V através do conversor D/A
controlado pelo computador descrito na seção (3.7). Estes sinais são amplificados para
níveis próximos a 160 V e ativam o campo elétrico no primeiro estágio do guia óptico
do controlador. Para cada tensão, a potência óptica foi verificada através do conversor
A/D. O estágio teve uma tensão de entrada fixada através do D/A num valor
correspondente a máxima potência observada pelo A/D. Este procedimento se aplica
igualmente nos outros três estágios, resultando na obtenção de uma potência máxima
correspondendo a um SOP o mais próximo possível do ideal.
No diagrama de fluxo do algoritmo de maximização apresentado a seguir na
Figura 45, são indicados os passos adotados em sua construção. A imagem apresenta a
situação em que há variação do estágio 1 do controlador de polarização, enquanto os
outros quatro estágios tem seus níveis de tensão mantidos em 0 V.
Figura 45 – Diagrama de Fluxo do algoritmo de maximização para o controle de polarização nos estágios 1, 2, 3 e 4.
Não
Não
Sim
V = 0 V
Pmáx = P(0)
V = V + 0,1 V
P(V) > Pmáx ? Pmáx = P(V)
V ≤ 4 V ?
Fim

74
Observação: Os estágios 2, 3 e 4 possuem a mesma estrutura do Diagrama de Fluxo do
estágio 1, o que significa obter por último o diagrama de fluxo da maximização do nível
de potencia óptica do sistema conforme representado na Figura .
Figura 46 – Diagrama de Fluxo do máximo de potência óptica otimizada.
Para melhor compreensão do algoritmo desenvolvido em diagrama de blocos, a
ferramenta computacional elaborada e organizada para controle do SOP é exibida por
fases nas imagens das figuras que se seguem. Em conjunto, é exposto o painel frontal de
execução e análise do algoritmo, onde os resultados são observados enquanto o sistema
está em funcionamento, e possibilita ainda realizar alterações das variáveis previamente
selecionadas.
Na Figura , mostra-se uma tela do algoritmo desenvolvido para o controle dos
quatro estágio de entrada do controlador de polarização. O processo de variação das
tensões ocorre concomitantemente pelas etapas:
1) Na primeira tela ([0...4], conforme indicado na parte superior da Figura ) é ativada
por software a variação da tensão no estágio 1, enquanto que nos outros três estágios
o nível de tensão é 0 V. Estabelecido o máximo de potência óptica, o ponto de
variação de tensão correspondente a este dado é então fixado. A janela referente a
este diagrama de bloco é apresentada no painel frontal da Figura 8.
2) Estando fixa a tensão no estágio 1, o software automaticamente inicia a variação de
0 a 4 V no estágio 2, enquanto que as tensões nos estágios 3 e 4 permanecem em 0
V. Concluída esta transformação, o mesmo procedimento ocorrerá em seguida para
os estágios 3 e 4.
3) Ao fim da variação das tensões no estágio 4, numa ultima tela sequencial que é
apresentada na Figura , têm-se os quatro valores das tensões fixas dos estágios do
controlador de polarização e a máxima intensidade do sinal óptico propagante
Estágio 1 Estágio 2 Estágio 3 Estágio 4
VFIXA = V1MÁX VFIXA = V2MÁX VFIXA = V3MÁX VFIXA = V4MÁX
V = VMÁX e P = PÓPTICA MÁX

75
finalmente garantida. Este resultado descrito refere-se à imagem apresentada no
painel frontal da Figura . É importante ressaltar que quaisquer modificações que
possam vir a ocorrer no sistema desenvolvido, tais como, por exemplo, um simples
mexer nas fibras ópticas ou mudar o SOP por auxílio de um dispositivo controlador
de polarização mecânico (2) (descrito na secção 3.2.1), não impedem que o
algoritmo elaborado reestabeleça a partir de uma próxima iteração do loop o
máximo nível de potência óptica desejado.
76
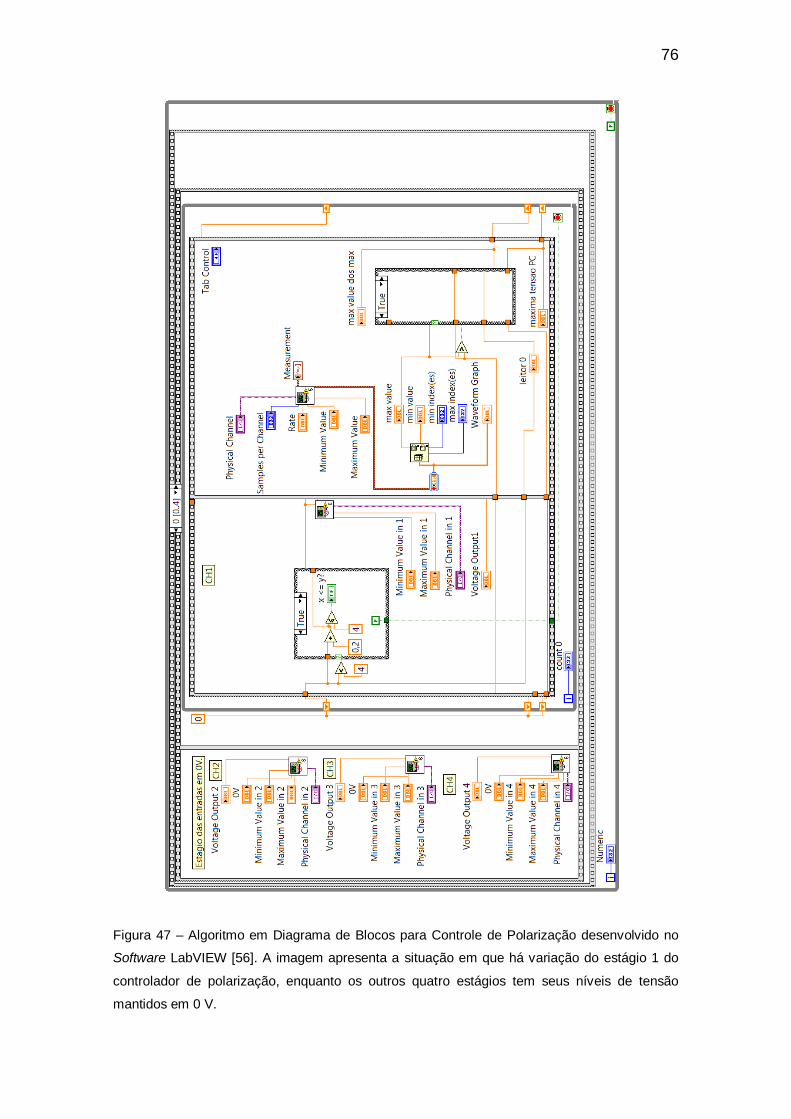
Figura 47 – Algoritmo em Diagrama de Blocos para Controle de Polarização desenvolvido no
Software LabVIEW [56]. A imagem apresenta a situação em que há variação do estágio 1 do
controlador de polarização, enquanto os outros quatro estágios tem seus níveis de tensão
mantidos em 0 V.
77
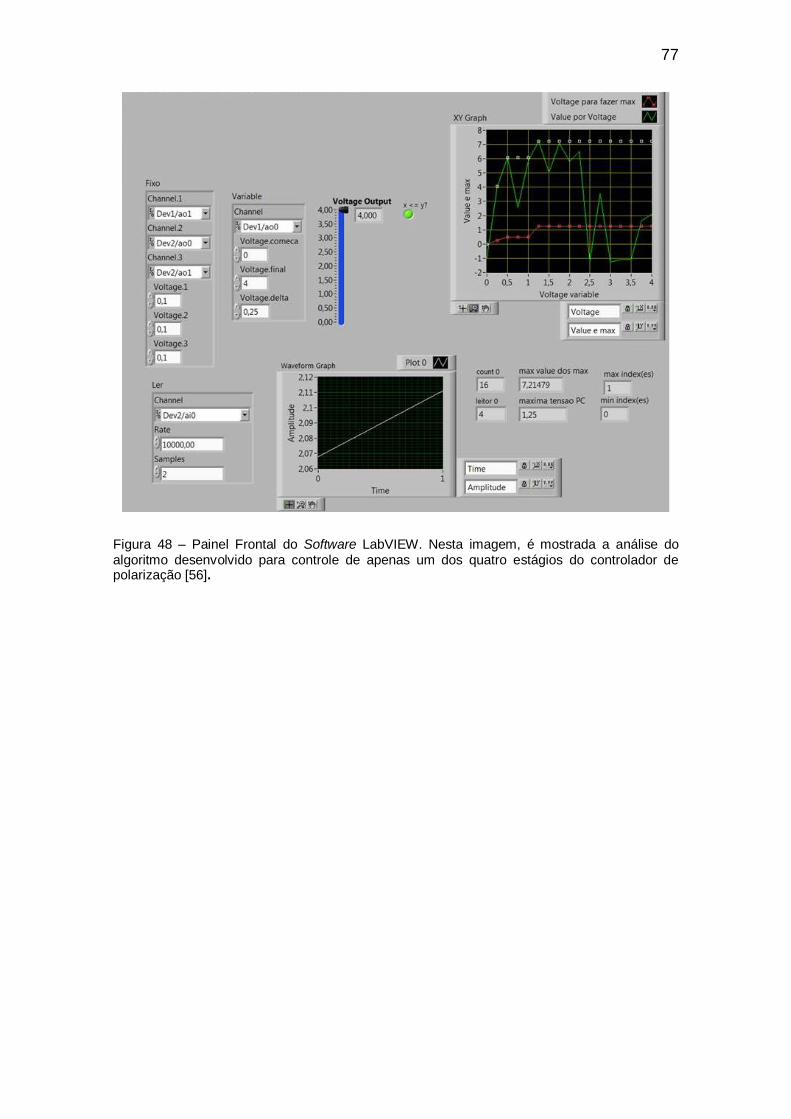
Figura 48 – Painel Frontal do Software LabVIEW. Nesta imagem, é mostrada a análise do algoritmo desenvolvido para controle de apenas um dos quatro estágios do controlador de polarização [56].
78
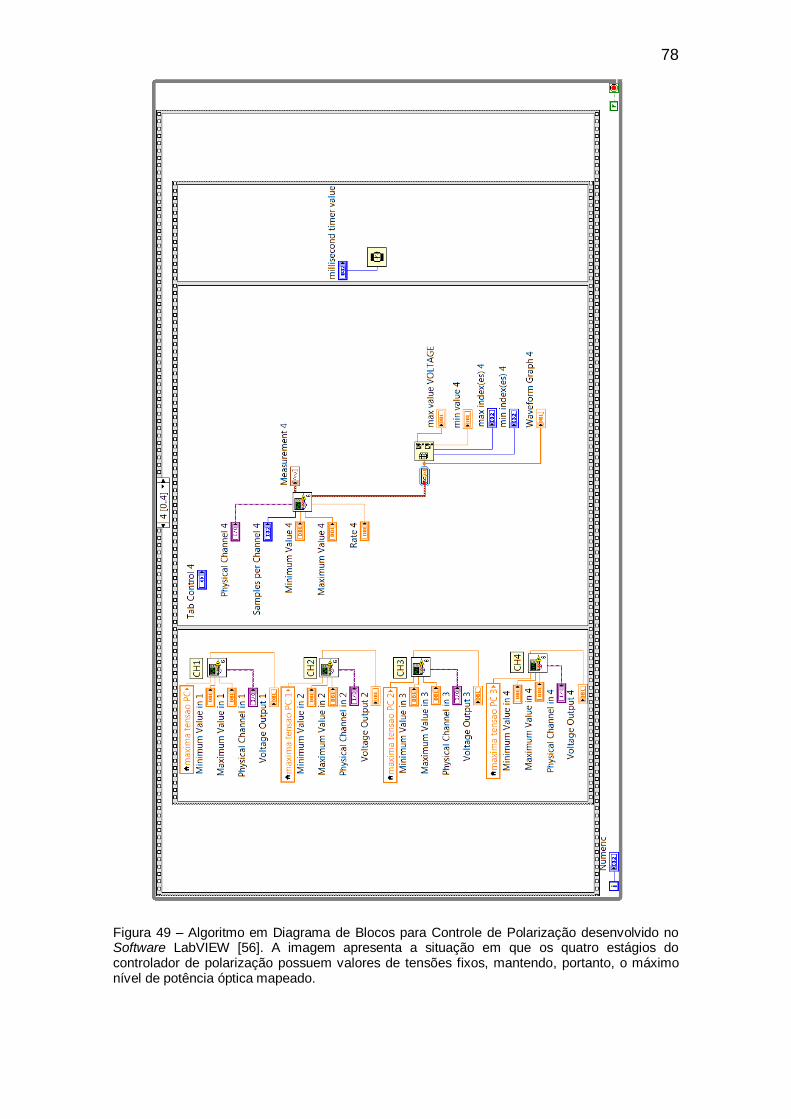
Figura 49 – Algoritmo em Diagrama de Blocos para Controle de Polarização desenvolvido no Software LabVIEW [56]. A imagem apresenta a situação em que os quatro estágios do controlador de polarização possuem valores de tensões fixos, mantendo, portanto, o máximo nível de potência óptica mapeado.
79
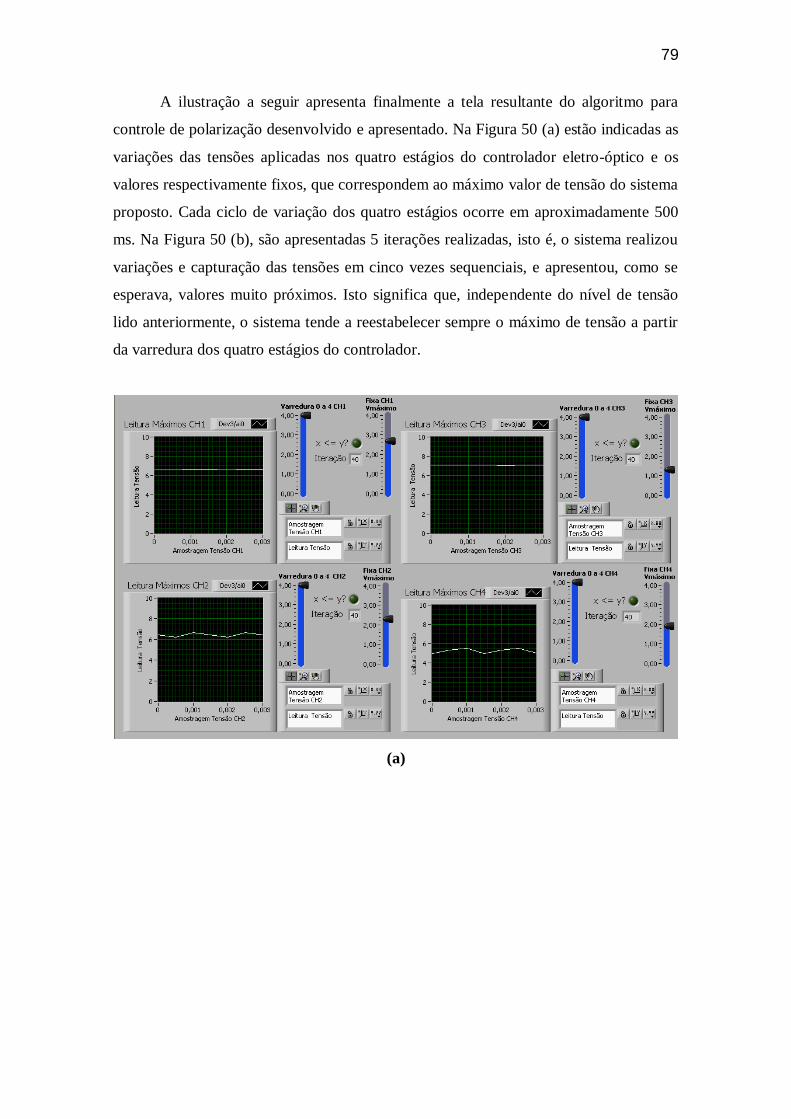
A ilustração a seguir apresenta finalmente a tela resultante do algoritmo para
controle de polarização desenvolvido e apresentado. Na Figura 50 (a) estão indicadas as
variações das tensões aplicadas nos quatro estágios do controlador eletro-óptico e os
valores respectivamente fixos, que correspondem ao máximo valor de tensão do sistema
proposto. Cada ciclo de variação dos quatro estágios ocorre em aproximadamente 500
ms. Na Figura 50 (b), são apresentadas 5 iterações realizadas, isto é, o sistema realizou
variações e capturação das tensões em cinco vezes sequenciais, e apresentou, como se
esperava, valores muito próximos. Isto significa que, independente do nível de tensão
lido anteriormente, o sistema tende a reestabelecer sempre o máximo de tensão a partir
da varredura dos quatro estágios do controlador.
(a)

80
(b)
Figura 50 – Painel Frontal do Software LabVIEW [56] apresentando os resultados do sistema para controle de polarização desenvolvido. As tensões fixas nos quatro estágios do controlador de polarização. Por análise dos resultados obtidos, nota-se que o máximo valor de tensão afixado é da ordem de 7 V.
4.3. Descrição dos testes realizados
Os testes realizados e aqui descritos são baseados num cenário montado onde as
fibras ópticas e demais dispositivos e instrumentos da bancada óptica em funcionamento
possuam seu posicionamento determinado. Essa observação é valiosa, vez que um
simples toque numa fibra óptica pode fazer com que o valor da potência óptica indicada
no display do medidor de potência se modifique, ou seja, cause mudança do SOP da luz
do laser.
A primeira medida de potência apurada por ajustes manuais, na ordem de 2
dBm, foi realizada com o laser DFB e medidor de potência óptica ligados. Os
controladores de polarização óptico e mecânico funcionam apenas como um trecho de
fibra óptica. A fim de minimizar problemas com as posições das fibras, estes
dispositivos sensíveis foram afixados na bancada com fita adesiva. Os adaptadores que
acoplam os trechos de fibra devem estar bem conectados, sendo importante observar a
conexão correta entre os conectores FC/PC e FC/ APC, a fim de minimizar as perdas
por má conectorização. Em seguida, todas as alimentações são fornecidas aos
dispositivos envolvidos no sistema e a bancada óptica é finalmente ligada e preparada

81
para testes. O controlador de polarização mecânico é propositalmente ajustado para um
menor nível de potência (ordem de -17 dBm), com objetivo de variar as tensões nos
estágios de entrada do controlador de polarização óptico através do algoritmo proposto e
reestabelecer o nível de potência óptica o mais próximo possível do primeiro valor lido
e ajustado (+2 dBm). Esta operação deve ser rápida o suficiente para que caso haja uma
nova variação no SOP, o algoritmo reestabeleça na iteração seguinte novamente o
máximo nível de potência esperado.
Na aquisição dos resultados, os valores de tensão apurados, entregues a entrada
analógica do conversor A/D e apresentados no painel frontal do instrumento virtual são
limitados a velocidade de 10 Hz, por especificações de leitura do instrumento medidor
de potência óptica. Por este motivo, ao fim de cada iteração é estabelecido um intervalo
de 100 ms entre o nível de tensão fixo e a próxima iteração a ser realizada e
posteriormente verificada. Este procedimento evitou erros na interação do medidor de
potência com o dispositivo de aquisição de dados, conversor A/D, e indicação na janela
de análise do instrumento virtual. No entanto, apesar da baixa velocidade do sistema,
todas as variações, medidas e resultados obtidos podem ser adquiridos e salvos em no
máximo 3 segundos.
4.4. Controle de polarização em sistemas multiplexados opticamente
Quando o SOP de um sistema multiplexado se altera, a detecção quadrática
ativada em um fotodiodo não permite a discriminação entre os canais ópticos em x e y,
segundo ilustra a Figura 51.
Figura 51 – Sinal óptico multiplexado em polarização: as projeções sobre x e y apresentam
uma soma quadrática constante, isto é, V1 = V2 para qualquer desvio de polarização.
82
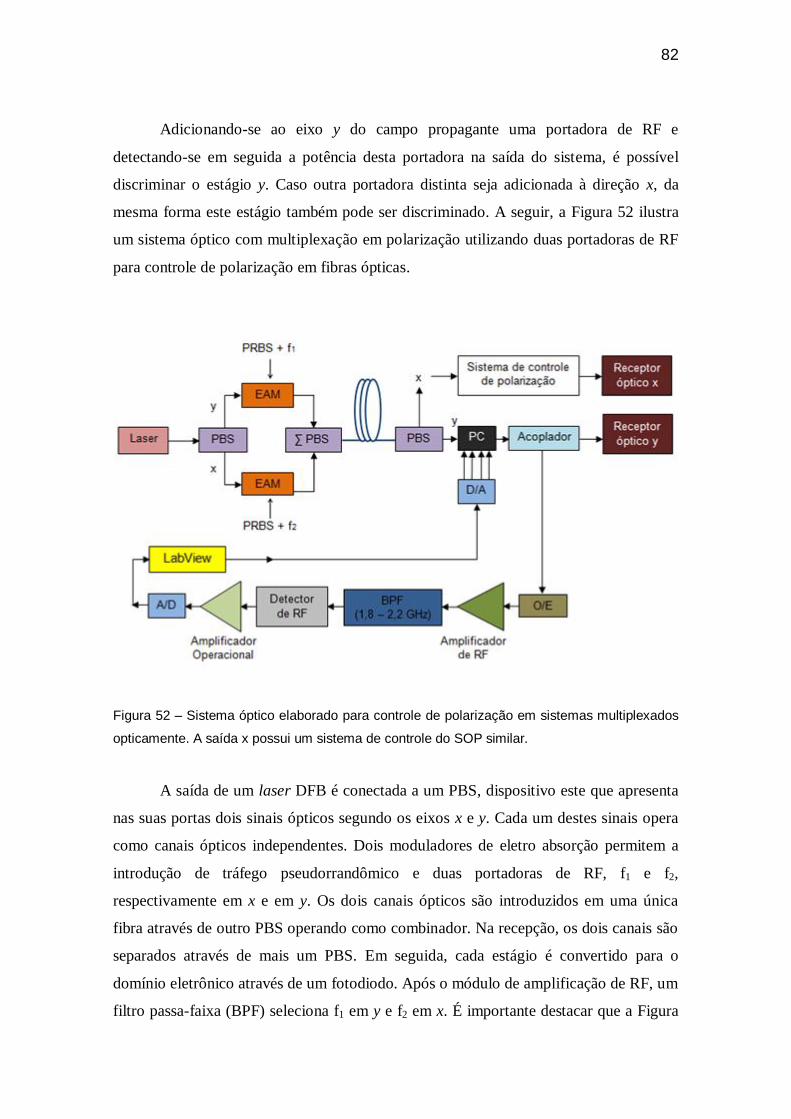
Adicionando-se ao eixo y do campo propagante uma portadora de RF e
detectando-se em seguida a potência desta portadora na saída do sistema, é possível
discriminar o estágio y. Caso outra portadora distinta seja adicionada à direção x, da
mesma forma este estágio também pode ser discriminado. A seguir, a Figura 52 ilustra
um sistema óptico com multiplexação em polarização utilizando duas portadoras de RF
para controle de polarização em fibras ópticas.
Figura 52 – Sistema óptico elaborado para controle de polarização em sistemas multiplexados
opticamente. A saída x possui um sistema de controle do SOP similar.
A saída de um laser DFB é conectada a um PBS, dispositivo este que apresenta
nas suas portas dois sinais ópticos segundo os eixos x e y. Cada um destes sinais opera
como canais ópticos independentes. Dois moduladores de eletro absorção permitem a
introdução de tráfego pseudorrandômico e duas portadoras de RF, f1 e f2,
respectivamente em x e em y. Os dois canais ópticos são introduzidos em uma única
fibra através de outro PBS operando como combinador. Na recepção, os dois canais são
separados através de mais um PBS. Em seguida, cada estágio é convertido para o
domínio eletrônico através de um fotodiodo. Após o módulo de amplificação de RF, um
filtro passa-faixa (BPF) seleciona f1 em y e f2 em x. É importante destacar que a Figura

83
mostra apenas o processo de inserção da portadora f1, já que para f2 o procedimento é
repetido. Um detector de envoltória é então utilizado após o amplificador de RF e BFP.
O sinal DC obtido e amplificado através de um amplificador operacional. O nível DC é
então entregue ao módulo de conversão A/D e através do servidor LabVIEW ao
controlador de polarização.
Na presente dissertação foi implementado um sistema segundo o eixo y. O laser
foi modulado diretamente por uma portadora de RF em f1 = 2,150 GHz. Um
amplificador operacional foi projetado e realizado para aplicação. A Figura 53 ilustra o
sistema realizado em bancada.
Figura 53 – Sistema óptico para controle de polarização desenvolvido no laboratório GSOM.
4.5. Limitações do algotirmo utilizado
A busca da potência máxima ou do SOP ideal utiliza a medição de 160 pontos de
tensão. Cada ponto tem que ser amostrado pelo menos duas vezes (por especificações
do DAQ-mX), isto é, 320 pontos são lidos na obtenção do valor desejado.
A posterior aquisição do módulo NI USB-6343 Série X com entradas e saídas
analógicas de respectivamente 500 kS/s e 900 kS/s [57], e posterior a aplicação deste no
sistema desenvolvido em bancada, possibilitou geração e aquisição de dados com maior
velocidade, permitindo realizar o controle dos quatro estágios em tempo inferior a 1s.

84
4.6. Comentários finais do capítulo
Inicialmente, é apresentada e descrita neste capítulo a bancada óptica
desenvolvida para controle do SOP em fibras ópticas. O algoritmo desenvolvido para o
controle e estabilização da polarização utilizando a linguagem de programação gráfica
LabVIEW é descrito e exibido. Em seguida são apresentados os testes realizados no
sistema óptico implementado.
O controle do SOP em sistemas multiplexados opticamente é descrito e uma
solução realizada é apresentada. Por último, as principais limitações do software
utilizado são avaliadas.





























