Embed Size (px)
Citation preview

CONCEITOS DE SEGURANÇA APLICADOS AO CONTROLE E AUTOMAÇÃO DE COMPORTAS
(SAFETY CONCEPTS APPLIED IN CONTROL AND AUTOMATION OF GATES)
João Carlos Matheus, Diretor Geral da JONFRA Automação Industrial Resumo:
Este trabalho tem como objetivo apresentar conceitos de segurança aplicados aos sistemas de controle de comportas, desde a concepção dos sistemas de acionamento mecânico e hidráulico, passando pelo projeto elétrico dos painéis de controle, definição de instrumentação adequada, chegando até os softwares de controle. Os conceitos serão abordados com base em referências normativas da área de hidromecânicos, mas também serão apresentados de forma bastante prática, com base na experiência do autor aplicadas nos mais diversos projetos.
INTRODUÇÃO.
Todos nós sabemos que, em geral, o principal objetivo de uma usina hidrelétrica é a geração de energia, mesmo em projetos de aproveitamento múltiplo dos recursos hídricos, porém a importância que normalmente se dá ao conjunto gerador de energia, em relação aos equipamentos hidromecânicos, chega a ser totalmente desproporcional e por muitas vezes até perigosa para o próprio sucesso do empreendimento. Não queremos aqui polemizar nem comparar a importância da “Casa de Força” em relação aos demais conjuntos hidromecânicos, como o Vertedouro ou Tomada D’água de uma hidrelétrica, mas apenas ressaltar a importância do perfeito funcionamento destes equipamentos, para que o objetivo maior seja alcançado: gerar energia com eficiência e principalmente segurança.
De maneira geral, sob o ponto de vista de controle e automação, as atenções também são prioritariamente voltadas aos sistemas de geração de energia, como controladores de velocidade e controladores de tensão, tudo centralizado em através dos sistemas digitais. Também neste aspecto é perceptível a falta de atenção aos sistemas de controle das comportas e outros equipamentos hidromecânicos, o que aumenta as chances de que estes se tornem o centro de problemas que impedem o bom funcionamento da usina e consequentemente o resultado esperado pelos fabricantes dos equipamentos, construtores e muitas vezes pelo proprietário da obra.
Outro indício claro da falta de atenção dispensada aos sistemas de controle de equipamentos hidromecânicos está na completa falta de legislação e normalização. As normas existentes tratam de projeto e fabricação mecânica e hidráulica (NBR 8883:2008) e de como comissionar uma comporta (NBR 13115:1994), mas não há quase nenhuma referência sobre os sistemas de controle. Tão pouco existe Normas Regulamentadoras específicas para a área, porém neste caso podemos utilizar as “NR´s” que são aplicáveis como, por exemplo, a NR-12 (Segurança no Trabalho em Máquinas e Equipamentos) e NR-10 (Segurança em Instalações e Serviços em Eletricidade), ainda que em alguns casos temos que considerar a aplicabilidade por analogia.
Página 1 de 14

Um bom começo seria classificar a categoria de segurança adequada para uma comporta, conforme “NBR 14153:1998”, que é direcionada para máquinas, mas serve muito bem como ponto de partida de um bom projeto, afinal, seria uma comporta um equipamento menos crítico que uma prensa, sob o aspecto de segurança? A pergunta cabe também porque a própria NR-12 (versão dada pela “Portaria SIT n.º 293, de 08 de dezembro de 2011 de 09/12/11”), por exemplo, dedica o “ANEXO VIII-PRENSAS E SIMILARES” de quase 6 páginas à esta categoria de máquinas, enquanto que não temos qualquer referência aos equipamentos hidromecânicos, que podem colocar em risco a vida de milhares de pessoas, com apenas uma única falha em seu funcionamento.
Qualitativamente, utilizando um gráfico de risco baseado na “NBR 14153:1998” (Segurança de máquinas - Partes de sistemas de comando relacionadas à segurança - Princípios gerais para projeto), podemos afirmar que em geral, uma comporta hidráulica sempre deverá estar enquadrada entre categoria de segurança 3 ou 4, dependendo da função o que para o sistema de controle leva aos requisitos e reações conforme Tabela 1:
Categoria de Segurança Requisitos do controle Reação controle (no caso de falha)
3 Uma única falha não deve causar perda da função de segurança. Esta falha deve ser detectada sempre que possível.
Função de segurança assegurada, exceto quando há acúmulo de falhas
4
Uma única falta não deve causar perda da função de segurança. Esta falha deve ser detectada antes ou quando a função de segurança for chamada. Um acúmulo de falhas não deve causar perda da função de segurança.
Função de segurança sempre assegurada, acúmulo de falhas não é possível.
Tabela 1 – categoria de segurança Desta forma, a solução encontrada por nós projetistas é utilizar os conceitos e os
aprendizados de outras áreas da indústria de manufatura e de processos, para aplicá-los em nossos projetos de sistemas de controle e automação de equipamentos hidromecânicos, tornando-os mais eficientes e confiáveis. Neste sentido, apresentaremos a seguir algumas das diversas soluções aplicadas aos projetos de controle de equipamentos hidromecânicos, nos últimos 20 anos, abordando de forma prática desde a concepção dos sistemas de acionamento até os softwares de controle.
ACIONAMENTOS DE COMPORTAS.
As comportas hidráulicas “são classificadas segundo a sua movimentação em funcionamento”, como traz textualmente a “NBR 7259:2001” (Comportas hidráulicas - Terminologia), porém o acionamento que as movimentam podem ser divididos basicamente em 2 grupos: acionamentos mecânicos (guinchos) e acionamentos hidráulicos.
Página 2 de 14

Como o foco deste trabalho está no sistema de controle e automação, não será tratada aqui as comportas que são movimentadas através de máquinas de elevação e movimentação de cargas, como Pontes Rolantes e Pórticos, porém os conceitos de segurança destas máquinas serão aqui abordados mais adiante, em função de sua aplicabilidade aos guinchos dedicados das comportas.
Os acionamentos mecânicos mais comumente utilizados são compostos de dois guinchos, que operam de modo sincronizado através de eixos mecânicos, utilizados no acionamento de comportas tipo SEGMENTO de VERTEDOURO, que executam movimento de rotação em torno do munhão. Apesar deste tipo de acionamento estar praticamente extinto dos novos projetos, ainda estão presentes em muitas hidrelétricas que devem ser modernizadas e respondem por quase 10% do total de comportas automatizadas, nos últimos 20 anos, pela nossa empresa, como no exemplo do Vertedouro da UHE Salto Santiago mostrado na Figura 1A e 1B, que foi modernizado em 2005.
Figura 1A e 1B – vertedouro UHE Salto Santiago
Os comandos elétricos destes guindastes costumam ser extremamente simples, baseado numa simples partida reversora, uma vez que o sincronismo entre ambos é garantido mecanicamente.
Por outro lado, se os acionamentos mecânicos estão praticamente extintos dos novos projetos de comportas do tipo segmento, eles ainda são aplicados em comportas do tipo GUILHOTINA, que podem ser aplicadas em grandes vãos, como no caso das eclusas e por isto o sincronismo (ou simultaneidade) dos guinchos é garantido exclusivamente através do sistema de controle, baseados em inversores de frequência que trabalham em malha fechada, normalmente supervisionados por um CLP (Controlador Lógico Programável). Exemplo da precisão deste tipo de sistema de controle está na comporta Guilhotina de Jusante, da Eclusa I da UHE Tucurui mostrada na Figura 2A e 2B, que tem 33 metros de largura, pesa 1.500ton, é acionada por 2 guindastes de 200ton mais contra pesos e teve um sincronismo aferido pela topografia de aproximadamente ±1,8mm.
Página 3 de 14

Figura 2A e 2B – comporta guilhotina Eclusa I – UHE Tucurui
Como já citado, os conceitos de segurança que devem ser aplicados aos
guindastes das comportas, são os mesmos que aplicados aos sistemas de elevação de Pontes Rolantes, dentre os quais podemos destacar os presentes nos seguintes dispositivos:
Detector de Limite Superior do Guindaste: dispositivo atuado mecanicamente que garante a parada de subida do guindaste, evitando sobrecarga no conjunto de elevação.
Detector de Cabo Frouxo: dispositivo eletromecânico que detecta que a carga no guindaste foi aliviada, o que pode significar enrosco da comporta ou falha na monitoração de chegada ao limite inferior. Em ambos os casos a descida deve ser interrompida.
Supervisor de Cabo em Final do Tambor: tipo de apalpador mecânico que indica que o cabo foi desenrolado além do limite máximo permitido, que em geral é de 2 ou 3 voltas. A descida deve ser interrompida, pois indica que o cabo está chegando ao final.
Supervisor de Cabo Remontado no Tambor: varão que fica paralelo ao eixo do tambor para detectar que o cabo foi remontado no tambor, aumentando assim os esforços. Todo o movimento deve ser interrompido e requer intervenção da manutenção.
Estes dispositivos são aplicados aos guindastes, porém existem outros conceitos que podem também ser aplicados às comportas movimentadas através de acionamentos hidráulicos, que hoje estão presentes na grande maioria dos novos projetos de comportas com acionamento próprio.
No universo dos acionamentos através de conjuntos compostos por unidades e cilindros hidráulicos, que também chamados de “servomotor hidráulico”, temos inúmeros arranjos que podem garantir uma espécie de “segurança intrínseca” do próprio acionamento, para garantir determinadas situações seguras de operação.
Página 4 de 14

Um exemplo típico está no fechamento de uma comporta tipo VAGÃO de EMERGÊNCIA, que pode estar instalada na TOMADA D’ÁGUA ou no TUBO DE SUCÇÃO, cuja prioridade é fechar sob fluxo máximo durante um eventual disparo da unidade. O acionamento hidráulico permite que a comporta feche com velocidade controlada por gravidade, apenas com energização (ou desenergização) de uma válvula, sem depender de qualquer alimentação de potência. Os detalhes do acionamento elétrico das válvulas de fechamento serão abordados mais adiante, mas considerando ainda o exemplo citado, podemos ter no circuito hidráulico um arranjo com elementos lógicos formando um “selo hidráulico”, que garanta o fechamento completo da comporta, com um simples impulso elétrico na válvula de fechamento, sem necessidade de manter a válvula energizada até o final do movimento.
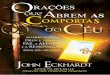
Outro exemplo de segurança operacional implementada no acionamento hidráulico está na abertura para enchimento do conduto, procedimento comum em muitos projetos de comporta de tomada d’água, que consiste num movimento de pequena abertura, em geral 100mm para comportas com mais de 10 metros de curso vertical. Para garantir a precisão desta abertura, existem sistemas hidráulicos que utilizam uma “pré-dosagem” do volume de óleo necessário ao movimento, num pequeno cilindro de haste duplo chamado “CT - Cilindro de Transferência”, como mostrado no esquema hidráulico da Figura 3, aplicada nas comportas Vagão de Tomada D’água da UHE Irapé.
Figura 3 – esquema hidráulico comporta Vagão de Tomada D’água – UHE Irapé
Esta solução é pouco utilizada devido ao seu alto custo e complexidade de ajustes, porém serve de exemplo de iniciativa de se usar uma concepção segura implementada diretamente no atuador.
Existem inúmeros dispositivos de segurança, puramente mecânicos, aplicados nas centrais hidráulicas, como por exemplo, válvulas de segurança, limitadoras de
Página 5 de 14

pressão e de fluxo, porém os outros tantos que são eletromecânicos, serão tratados mais adiante, junto com o restante da instrumentação.
Mostraremos a seguir as concepções dos projetos elétricos que controlam os acionamentos de comportas aqui apresentados.
PAINEL ELÉTRICO DE CONTROLE DE COMPORTAS.
No início dos anos 90, as especificações técnicas consideravam que o controle das comportas deveria ser feito exclusivamente através de um painel elétrico com lógica eletromecânica, implementada basicamente com uso de relês e temporizadores discretos. Em geral havia uma grande barreira para se utilizar um controlador eletrônico, como um CLP, porque a maioria dos projetistas da área considerava que o comando ficaria menos seguro.
Para derrubar este paradigma, propusemos na época que os comandos de comportas via CLP contemplassem sempre um controle eletromecânico paralelo ao controle eletrônico. Desde então, esta solução se tornou uma referência e passou a ser aplicada em praticamente todos os novos projetos da área, até chegar a fazer parte das especificações técnicas, como ocorre nos dias de hoje, abrindo definitivamente as portas para aplicação de CLP´s no controle de hidromecânicos.
Basicamente nossa solução propunha 2 formas de aplicação do comando eletromecânico junto com o comando a CLP:
Comando Excepcional: o comando eletromecânico serve de retaguarda, com intertravamento e funcionalidades limitadas, para uma situação decorrente de falha do controle eletrônico. Aplicação usual: comportas de vertedouro.
Comando Redundante: o comando eletromecânico funciona o tempo todo em paralelo ao comando eletrônico, de maneira redundante mesmo. Aplicação usual: circuito de fechamento de comportas de emergência, seja de tomada d’água ou tubo de sucção.
Consequência disto, a concepção e complexidade do projeto elétrico do painel de controle de uma comporta, passou normalmente a demandar maiores cuidados do que o próprio software de controle do CLP. Como exemplo, temos na Figura 4 um trecho do circuito de controle de comporta de vertedouro, que mostra o comando de 2 partidas diretas de motores de bombas hidráulicas, alimentadas por uma linha de comando geral chamada “220Vac” e outra chamada “220Vac (CLP INATIVO)”:
Página 6 de 14

Figura 4 – comando de bombas com CLP ativo e inativo
Em qualquer área, uma boa prática de projeto elétrico deve prever a máxima disponibilidade possível, para se manobrar o equipamento controlado. Neste sentido, é recomendável que sejam previstas alimentações redundantes de potência e comando e que estas redundâncias sigam em paralelo até os atuadores, como motores e válvulas. Além disso, é desejável que os painéis sejam compartimentados para que seja possível que seja feita a manutenção de um circuito redundante, mantendo a disponibilidade do outro.
Um bom projeto elétrico deve também supervisionar e manobrar recursos dos atuadores e alimentadores, para garantir disponibilidade máxima do equipamento. Um exemplo de redundância de alimentação e ao mesmo tempo de supervisão de disponibilidade está mostrado na Figura 5, onde temos uma dupla alimentação de 125Vcc e a monitoração da integridade das bobina do solenóide da válvula de fechamento de uma comporta de emergência.
Página 7 de 14

Figura 5 – comando de válvula com alimentação redundante e supervisão de solenóide
Outra barreira enfrentada e vencida no início dos anos 90, foi convencer aos profissionais da área de que os painéis elétricos deveriam contemplar os conceitos de “falha segura”, que garante que a condição segura do intertravamento elétrico não é afetada pela falta de energia. De uma maneira simplista, podemos dizer que este conceito prevê que “um componente energizado está em sua condição normal”, assim a falta de energia, qualquer que seja o motivo, faz com que o componente sinalize falha e bloqueie uma operação indevida. De modo geral, é mais provável ter um falso alarme que a perda de função de segurança, o que nos aproxima do atendimento de uma categoria de segurança 3 ou 4.
INSTRUMENTAÇÃO E TRANSDUTORES DE COMPORTAS.
Especial atenção também deve ser dedicada à instrumentação aplicada no controle de comportas, pois não adianta todo o sistema de controle e atuadores estarem devidamente projetados para reagir corretamente se a informação vinda da instrumentação não é confiável.
Começando pela instrumentação presente nos atuadores, temos nas diversas configurações de chaves fim de curso e sensores indutivos, os principais instrumentos para garantir as funções de segurança já citadas dos guindastes, porém para os atuadores hidráulicos, temos outras funções de segurança que devem ser garantidas, dentre as quais podemos citar:
Página 8 de 14

Pressostatos de baixa pressão “de linha”: têm a função de desligar os motores, durante a abertura da comporta, na ocorrência de uma queda de pressão no sistema.
Pressostatos de baixa pressão “de retorno”: têm a função de sinalizar perda de pressão no sistema devido a uma ruptura na tubulação.
Pressostatos de alta pressão: têm a função de desligar os motores, durante a abertura da comporta, na ocorrência de um aumento de pressão no sistema e normalmente têm como retaguarda, válvulas mecânicas limitadoras de pressão.
Vacuostatos dos filtros de retorno: têm a função de sinalizar filtro sujo. Fluxostatos: têm a função de indicar falha no fluxo de óleo e a
necessidade de transferir a abertura das comportas para a bomba hidráulica adjacente, no caso de falha em uma das bombas da central hidráulica.
Chaves fim de curso ou sensores de registros: têm a função de impedir o acionamento indevido dos grupos moto bomba, quando da manutenção dos mesmos ou de seus filtros de sucção. Tornam a bomba indisponível.
Considerando que o objetivo final do sistema controle e automação de qualquer equipamento hidromecânico é o posicionamento do mesmo, não temos dúvidas em afirmar que são os transdutores de posição das comportas os elementos fundamentais no fechamento da malha de controle das mesmas. São eles os responsáveis por trazer as informações que vão nortear a tomada de decisão da automação e dos operadores.
Como não poderia deixar de ser, neste caso também a redundância de sinais são bem vindas e agregam segurança aos sistemas. Exemplo disto nas várias soluções de Transdutores Lineares, aplicáveis normalmente às comportas tipo vagão, lagarta ou deslizante. Estes equipamentos possuem diferentes arranjos customizados que garantem redundância de sinais, através da combinação de sinais discretos, vindo de sensores magnéticos, indutivos ou mesmo de fins de curso, com sinais contínuos vindos de encoders absolutos, que permitem a indicação de posição além de monitorar a consistência dos sinais discretos.
Dentre os vários modelos possíveis podemos destacar o “Transdutor Linear com Guia Deslizante” (TL-GD). Como o próprio nome já diz, este se utiliza de uma haste rígida que se movimenta por uma guia deslizante, com relação 1:1mm em relação ao movimento da comporta, atuando os sensores discretos e movimentando um encoder absoluto multivoltas, através de conjunto de polias e correia sincronizada, como mostrado na foto e ilustração da Figura 6 abaixo:
Página 9 de 14

Figura 6 – Transdutor Linear com Guia Deslizante (TL-GD)- montado e ilustração
A grande vantagem deste sistema é a facilidade de se ajustar os pontos discretos, devido à relação 1:1 de movimento e ao mesmo tempo a robustez, que garante que os pontos discretos serão atuados mecanicamente, mesmo que a correia que atua o encoder se rompa. A única desvantagem está no tamanho, já que deve ter o mesmo curso do cilindro, por isto recomendamos que a montagem seja feita em fábrica.
Outro modelo de transdutor linear, que possui arranjo mais compacto e, portanto maior facilidade de transporte e montagem em separado é o Transdutor Linear com Correia e Contrapeso (TL-CC), que também possui relação 1:1mm em relação ao movimento da comporta, porém tanto os sensores discretos como o encoder absoluto multivoltas, são movimentados através do mesmo conjunto de polias e correia sincronizada, como mostrado na Figura 7.
Detector de quebra de correia
Polia do encoder
Sensoresuperior
r
Figura 7 – Transdutor Linear com Correia e Contrapeso (TL-CCEste modelo não é tão robusto como o TL-GD, porém é e
de fácil ajuste, porém deve ser usado apenas com sensores seou indutivos, já que o acionador não é rígido, pois fica presincronizada fabricada com alma de Kevlar.
Vale lembrar, que muitos projetistas ainda consideram, e“comporta linear não requer precisão, uma vez que não t
Página 10 de 14
Acionado
s parte
Sensores parte inferior
)- montado e detalhe xtremamente preciso e m contato, magnéticos so na própria correia
quivocadamente, que rabalha em posições

intermediárias”. Flagrante disto é que ainda muitas especificações técnicas sequer determinam a precisão requerida para um transdutor linear. O equívoco aqui é facilmente explicável com uma pergunta: se uma comporta vagão de tomada d’água de 10.000mm de altura, foi projetada para abrir 100mm para enchimento de conduto e fazer reposição na posição totalmente aberta ao baixar 100mm, qual a precisão requerida para a posição da comporta? A resposta está na própria pergunta, pois o posicionamento inicial corresponde a 1% da abertura total e, portanto não cabe falar em precisão menor do que ±0,2%, que já levaria a um erro de ±20,0% ou ±20mm na abertura para enchimento de conduto, algo que pode ser considerado inaceitável em muitos casos!
Vale lembrar que a precisão e confiabilidade da medição de posição de uma comporta de emergência podem afetar diretamente a segurança, como em casos reais onde uma comporta de tomada d’água já cortava o fluxo, porém indicava posição de abertura total, devido a falha no sistema mecânico de um indicador baseado em “enrolador de cabos”.
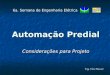
Em relação aos transdutores angulares, aplicáveis às comportas tipo segmento, os problemas de avaliação de precisão requerida são ainda maiores. O motivo é que os transdutores normalmente utilizados são angulares, baseados em encoder absoluto de uma volta e a confusão mais comum é confundir a resolução do encoder (em “bits”) com a precisão requerida para a abertura aparente da comporta em metros lineares. A relação entre a abertura aparente (H) e o ângulo de abertura é trigonométrica, como mostrado na Figura 8, que inclui ainda foto de um transdutor angular instalado no braço de uma comporta segmento.
Figura 8 – Abertura aparente de Comporta Segmento e Transdutor Angular instalado
Aqui as precisões já aparecem nas especificações técnicas, porém algumas exageram ao exigir precisão global da ordem de ±20mm para comportas com raio de mais de 20 metros, precisão esta até possível de ser atingida com os transdutores de hoje que chegam teoricamente a precisões da ordem de ±0,044º, ou aproximadamente ±16mm para raio de 20 metros, mas o problema é que a precisão mecânica da comporta, peças fixas e construção civil, não são compatíveis com este requisito e por vezes exigem calibração do transdutor no local, para compensar tais diferenças.
Página 11 de 14

Sob o aspecto de segurança, os transdutores angulares também são combinados de maneira redundante com sinais discretos, de sensores ou fins de curso, normalmente associados aos limites de movimento da comporta, como comporta fechada, abertura máxima e abertura extrema.
A precisão na leitura de posição de uma comporta segmento normalmente não afeta a segurança da operação, mas pode atrapalhar bastante nos cálculos de vazão vertida, trazendo problemas operacionais, inclusive na reposição de posição automática da comporta. Neste sentido, já que temos limites para melhorar a precisão dos arranjos e transdutores, para qualquer tipo de comporta temos o dever de eliminar das especificações técnicas e novos projetos tudo o que possa atrapalhar a transmissão da informação de posição do transdutor até o painel local e SDSC. Um bom começo seria eliminar toda a forma de transmissão que embute algum erro por conversão ou variação térmica, como por exemplo, sinal analógico de 4/20mA e utilizar somente comunicação digital, via meios físicos e protocolos de comunicação abertos e confiáveis.
Fechando o conjunto de equipamentos e componentes do sistema de controle e automação, não podemos deixar de mencionar a importância de se ter um bom projeto e boa qualidade na interligação elétrica entre SDSC, painel local, central hidráulica e instrumentação da comporta, preferencialmente supervisionada pelo fabricante do sistema, garantindo assim a integração e performance do sistema.
SOFTWARE DO CLP DE CONTROLE LOCAL.
Chegando ao que consideramos o último estágio do sistema de controle e automação de um equipamento hidromecânico, não poderíamos deixar de mencionar, ainda que superficialmente, boas práticas no desenvolvimento de software de controle do CLP que equipa os painéis locais.
Certamente que, como já citado, todas as ações tomadas pelo software do CLP local dependem de informações confiáveis da instrumentação, porém entendemos que as funcionalidades citadas abaixo, servem para aumentar a confiabilidade de qualquer sistema de controle de uma comporta:
“Time-out” e tempo máximo de manobra: independentemente da leitura do transdutor de posição e dos demais sinais discretos não indicarem qualquer normalidade, todo comando deve ter um tempo de supervisão máximo para o retorno da ação, através de uma função de “time-out” que cancela a ação e sinaliza alarme. Inclusive o movimento da comporta deve ter um tempo limite, preferivelmente por software e eletromecânico, que cessa o movimento independente da posição da comporta.
Supervisão de velocidade: através dos transdutores das comportas, devem ser implementados algoritmos que calculem e monitorem a velocidade da comporta, que deve ficar dentro de limites e acusar alarme de sub ou sobre velocidade todas as vezes que estes limites forem extrapolados.
Supervisão de sinais discretos: também através dos transdutores das comportas, devem ser implementados algoritmos que monitorem as posições dos sinais discretos, por exemplo, durante a abertura de uma comporta
Página 12 de 14

segmento todos os sinais discretos de deriva e reposição devem ser monitorados para checar sua integridade.
Existem muitas outras funcionalidades de software que podem trazer segurança e eficiência à operação, por isto é muito importante a interação entre os projetistas mecânicos, hidráulicos, elétricos e de automação para que os requisitos de segurança sejam declarados e as proteções implementadas.
CONCLUSÃO.
Por todas estas funcionalidades e inúmeras tantas outras que não serão tratadas aqui, devido à extensão do tema, é que combatemos veementemente algumas vertentes atuais de engenharia que defendem que a lógica de controle de comportas deve ser levada ao SDSC, com o pretexto de simplificar os painéis locais. Defendemos que o conjunto formado pelo painel elétrico local, junto com a central hidráulica, instrumentação e a própria comporta, deve ser encarado como um “servo acionamento posicionador” completo, que deve garantir todas as funcionalidades de maneira autônoma e independente do SDSC.
Este trabalho não tem a pretensão de determinar de forma definitiva quais os conceitos de segurança e operação que devem ou não ser aplicados ao controle e automação de comportas, mas sim de chamar a atenção para a importância destes conceitos na execução de um bom projeto e da necessidade de uma normalização mais específica para a área.
Página 13 de 14

BIBLIOGRAFIA. - Norma “NBR 8883:2008 Cálculo e fabricação de comportas hidráulicas”. - Norma “NBR 13115:1994 Recepção de comportas hidráulicas – Procedimento”. - Norma “NBR 14153:1998 - Segurança de máquinas - Partes de sistemas de comando relacionadas à segurança - Princípios gerais para projeto”. - Norma “NBR 7259:2001 Comportas hidráulicas – Terminologia”. - Norma Regulamentadora “NR-12 Segurança no Trabalho em Máquinas e Equipamentos”. - Norma Regulamentadora “NR-10 Segurança em Instalações e Serviços em Eletricidade”. - Projeto JONFRA “P0670.00.0 UHE Salto Santiago –Automação Vertedouro”. - Projeto JONFRA “P0660.00.0 UHE Salto Osório –Automação Vertedouros 1 e 2”. - Projeto JONFRA “P1000.03.0 UHE Tucurui –Comporta Guilhotina Eclusa 1” - Projeto JONFRA “P0606.02.0 UHE Irapé –Automação Tomada D’água”.
CURRÍCULO RESUMIDO DO AUTOR.
Engenheiro eletricista formado pela Universidade Federal de Itajubá (UNIFEI) em
1990. Sócio Fundador e Diretor Geral da JONFRA Automação Industrial, fundada em 1991. Responsável técnico direto e executor de grande parte dos mais de 120 projetos de automação de equipamentos hidromecânicos, implantados pela empresa no Brasil e no exterior, incluindo o controle de aproximadamente 470 comportas.
Página 14 de 14