Embed Size (px)
Citation preview

ALGORITMOS PARA OS PROBLEMAS DE ROTEIRIZAÇÃO ESTÁTICA E
DINÂMICA DE VEÍCULOS COM JANELAS DE TEMPO
Orivalde Soares da Silva Júnior
José Eugenio Leal Departamento de Engenharia Industrial - PUC-Rio
RESUMO
Neste trabalho são propostos diversos algoritmos para resolver as versões estática e dinâmica de roteirização de
veículos com janelas de tempo. Estes problemas têm como objetivo determinar rotas de custo mínimo para uma
frota homogênea, atendendo a demanda de um conjunto de clientes dentro de intervalos de tempo, chamados de
janelas de tempos. Além disto, na versão dinâmica no problema, novos clientes podem ser atendidos durante a
execução das rotas pelos veículos. Para a versão estática do problema propôs-se um algoritmo híbrido utilizando
otimização por colônias de formigas e o método de descida em vizinhança variável aleatória. Para a versão
dinâmica do problema foram propostos seis algoritmos, baseados em métodos de inserção, de otimização por
colônia de formigas e das versões sequencial e aleatória do método de busca em vizinhança variável. Os
resultados computacionais mostram que a maior parte dos algoritmos propostos é competitiva com os algoritmos
propostos na literatura.
ABSTRACT
This paper proposes several algorithms to solve the static and dynamic versions of the vehicle routing problem
with time windows. These problems involve determining minimum cost routes for a homogeneous fleet in order
to meet the demand of a set of customers within specified time intervals popularly called time windows. In
addition, in the dynamic version of the problem, new customers can be assigned to vehicles during the execution
of the routes. For the static version it was proposed a hybrid algorithm using ant colony optimization and the
random variable neighborhood search method. For the dynamic version it was proposed six algorithms, based on
an insertion procedure, ant colony optimization and random and sequential versions of variable neighborhood
search methods. Computational results show that most of the proposed algorithms are competitive regarding the
state of the art.
1. INTRODUÇÃO
O investimento em pesquisas que visam a proposição de novos algoritmos para a resolução de
problemas de roteirização é relevante tanto sob o ponto de vista teórico quando o ponto de
vista prático. Quanto ao ponto de vista teórico, a otimização do problema de roteirização e
suas variantes, pertencem à classe NP-Difícil (Lenstra e Rinnooy Kan, 1981). Desta forma, a
resolução eficiente destes problemas corresponde a um desafio para os pesquisadores, que
precisam desenvolver métodos para obter soluções de boa qualidade no menor tempo
computacional possível. Para tanto, a maioria dos pesquisadores optam pelo desenvolvimento
de heurísticas e meta-heurísticas. No ponto de vista prático, os custos relacionados ao
transporte de pessoas e mercadorias geralmente são elevados e absorvem, em média, a
porcentagem mais elevada de custos do que qualquer outra atividade logística (Ballou, 2006).
Visando a redução destes custos, as empresas procuram ser cada vez mais competitivas no
mercado, buscando por soluções de apoio à decisão às atividades logísticas que atendam as
suas características reais de planejamento. Uma destas características é a possibilidade de
atender novas requisições, ou seja, que são recebidas em tempo real. Neste ambiente, os
gerenciadores da frota frequentemente precisam reconfigurar as rotas dos veículos em tempo
real para melhorar a eficiência e aumentar a qualidade do serviço com o atendimento de novas
requisições. Com os avanços em tecnologias de informação, tornou-se possível o
gerenciamento de frota em tempo real.

Atualmente, muitas empresas possuem sistemas de rastreamento e monitoramento de
veículos, sistemas de comunicação com motoristas, informações sobre o trânsito e sobre o
clima e outras informações obtidas em tempo real. Porém, em geral não possuem softwares de
roteirização que permitam utilizar estas informações para realização de alterações nas rotas
em tempo real.
O presente trabalho realiza o estudo, implementação e avaliação de algoritmos de otimização
(heurísticas e meta-heurísticas) visando à solução do Problema de Roteirização de Veículos
com Janelas de Tempo (Vehicle Routing Problem with Time Windows – VRPTW) e do
Problema de Roteirização Dinâmica de Veículos com Janelas de Tempo (Dynamic Vehicle
Routing Problem with Time Windows – DVRPTW).
O artigo está organizado da seguinte forma: a seção 2 apresenta a definição do VRPTW e do
DVRPTW. Na seção 3, apresenta-se a revisão bibliográfica destes problemas e os métodos já
propostos para resolvê-los. Na seção 4, apresentam-se seis algoritmos propostos para resolver
o VRPTW e o DVRPTW. Na seção 5 são apresentados os resultados computacionais. Por fim,
na seção 6 são apresentadas as conclusões e as contribuições do artigo ao estado da arte.
2. DEFINIÇÕES DOS PROBLEMAS
O VRPTW pode ser descrito por um grafo G(N,A), onde N é um conjunto contendo todos os
nós, e A é um conjunto contendo todos os arcos. Os nós representam os clientes e o depósito,
os quais são representados através dos índices i ou j. O depósito, de onde partem as rotas,
usualmente é representado pelo nó com índice 0. Os arcos representam os caminhos que ligam
estes nós e são acessados através do par ordenado i-j. Considera-se o grafo como sendo
completo, ou seja, existe um arco ij entre todos os nós i e j para ij. Cada arco ij possui um
custo cij associado, que para o Problema do Caixeiro Viajante (Travelling Salesman Problem
– TSP), usualmente representa a distância de cada arco. No caso do VRPTW, este custo
também pode representar o tempo necessário para se percorrer cada arco tij, onde tij=cij.
No depósito, existem V veículos homogêneos à disposição, todos com a mesma capacidade K.
Cada cliente i possui uma demanda di≥0 associada, bem como um tempo de serviço si. Além
disso, cada cliente possui também sua janela de tempo; esta janela é dada por [ai, bi], sendo
que ai representa o instante mais cedo para início do atendimento e bi o instante mais tarde
para início do atendimento. O depósito possui demanda e tempo de serviço iguais a zero e
janela de tempo com a0 igual a zero e b0 igual a um valor que indique o horário de fechamento
do depósito. A janela de tempo do depósito é chamada de jornada de trabalho JT.
O objetivo do problema é encontrar rotas de distância total mínima que atendam todos os
clientes, respeitando as restrições de capacidade dos veículos e das janelas de tempo. Além
disso, deseja-se encontrar o número mínimo de veículos necessários para a realização da
tarefa. Na literatura, diversos autores, principalmente aqueles que propõem métodos exatos,
priorizam a minimização da distância total. No entanto, a maioria dos autores hierarquiza os
objetivos de forma que a minimização do número de veículos (NV) é mais importante que a
distância total (DT). Esta hierarquização sugere uma maior aproximação com a realidade, pois
o custo fixo de se alocar um veículo geralmente é bem maior que o custo operacional do
percurso.

No contexto da taxonomia proposta por Psaraftis (1995) e adaptada por Pillac et al. (2013), o
DVRPTW abordado neste trabalho trata problemas que são dinâmicos e determinísticos. Não
são aceitas interrupções do destino atual dos veículos (não-preemptivo) (Gendreau et al.,
1999). Novos veículos podem ser inseridos na solução, deste que estejam disponíveis no
depósito. A restrição que obriga que todos os clientes sejam visitados é relaxada, podendo
existir soluções factíveis com clientes não atendidos. A cada cliente i {1, 2,..., N} são
associados os parâmetros: momento que o cliente é conhecido tai ≥0; estado do cliente ei
{planejado, atribuído, em_trânsito, entregue}. O problema passa a ter um terceiro objetivo,
que é a minimização do número de clientes não atendidos. Os objetivos passam a ser:
minimizar o número de clientes não atendidos (NA), minimizar o número de veículos (NV) e
minimizar a distância total (DT).
3. REVISÃO DA LITERATURA
O VRPTW é um problema clássico que tem sido intensivamente estudado na literatura e
diversos métodos exatos e aproximados têm sido propostos. O trabalho precursor foi
desenvolvido por Solomon (1987), no qual foram estudadas diversas heurísticas e foram
propostas 56 instâncias do problema com 100 clientes, as quais são utilizadas até hoje como
base para avaliação do desempenho dos algoritmos propostos para o VRPTW. Apesar de
serem instâncias relativamente pequenas, é importante ressaltar que apenas no ano de 2012 é
que foram descobertas as soluções ótimas para as 56 instâncias (Ropke, 2013) e (Roberti,
2012). Estas soluções foram obtidas por métodos exatos visando apenas minimizar a distância
total das rotas. Sendo assim, ainda existe uma lacuna para descoberta de novas soluções
considerando como primeiro objetivo a minimização do número de veículos. Outras
instâncias que ainda podem ser exploradas são as instâncias de Homberger e Gehring (1999)
que são extensões das instâncias de Solomon (1987) com 200, 400, 800 e 1000 clientes.
Quanto à versão dinâmica do problema de roteirização, o trabalho precursor é do Psaraftis
(1980), com o desenvolvimento de uma abordagem de programação dinâmica para o
problema de coletas e entregas com janelas de tempo, mais conhecido como Dial-a-Ride-
Problem (DARP) que consiste na procura por uma solução ótima cada vez que um novo
cliente dinâmico é conhecido. O autor também apresenta diversas diferenças entre os
problemas estático e dinâmico (Psaraftis, 1988 e 1995).
Pillac et al. (2013) realizou uma extensa revisão sobre os problemas de roteirização dinâmica.
O autor também propôs uma taxonomia baseando-se nos conceitos de evolução e qualidade da
informação (Psaraftis, 1995), a qual classifica os problemas de roteirização em:
Problemas estáticos e determinísticos: todas as entradas são conhecidas antecipadamente e
as rotas dos veículos não mudam uma vez que estão sendo executadas.
Problemas estáticos e estocásticos: são caracterizados pela entrada parcialmente conhecida
como variáveis aleatórias, as quais seguem, geralmente, uma distribuição de Poisson.
Problemas dinâmicos e determinísticos: também é chamada por outros autores como
roteirização online ou real time (Ichoua et al., 2000). O suporte de tecnologias de
comunicação em tempo real é essencial para comunicação entre os veículos e o tomador de
decisões. Parte ou o total das entradas é desconhecida e é revelada dinamicamente ao longo
do tempo, durante a execução das rotas (Psaraftis, 1995).
Problemas dinâmicos e estocásticos: todas ou parte das entradas são desconhecidas e
reveladas dinamicamente durante a execução das rotas, mas neste caso, a informação
estocástica é disponibilizada dinamicamente.

3.1. Classificação do DVRPTW abordado
O DVRPTW abordado neste trabalho é classificado como um problema dinâmico e
determinístico. Uma abordagem bastante utilizada para resolver este problema é a divisão em
em duas fases: a-priori e a-posteriori. Na fase a-priori, são obtidas rotas para as entradas já
conhecidas e o problema pode ser resolvido com um método de roteirização estática. Na fase
de a-posteriori as rotas são obtidas diversas vezes no decorrer do horizonte de planejamento,
através da re-otimização das rotas, a qual pode ser realizada de modo contínuo ou periódico.
3.1.1. Re-otimização contínua
A re-otimização contínua consiste na otimização ao longo do dia de forma contínua, ou seja,
sempre que forem realizadas alterações nos dados disponíveis, o método de roteirização
obtém imediatamente uma nova solução atual. Nesta abordagem podem ser utilizados os
métodos de re-roteirização ou métodos de operações locais rápidas.
Yang et al. (2004) abordaram o problema de roteirização com coleta e entrega, onde os
pedidos de serviço ponto-a-ponto de transporte chegam de forma dinâmica. Os autores
propõem um algoritmo denominado MYOPT, que é uma abordagem de horizonte rolante com
base em programação linear, que é resolvido sempre que um novo cliente dinâmico é
conhecido.
Lackner (2004) desenvolveu quatro métodos meta-heurísticos. O primeiro e o segundo,
denominados ES1-DVRPTW e ES2-DVRPTW, baseiam-se em Algoritmos Genéticos. O
terceiro, denominado MACS-DVRPTW, baseia-se em Otimização por Colônia de Formigas,
no algoritmo MACS-VRPTW (Gambardella et al., 1999). O quarto, denominado AS-
DVRPTW, baseia-se em Recozimento Simulado (Simulated Annealing). Para comparação dos
resultados, o autor propôs extensões para as 56 instâncias de Solomon (1987) para cinco
diferentes graus de dinamismo, totalizando 280 instâncias. O autor conclui que o método que
apresentou os melhores resultados foi o ES1-DVRPTW, seguido pelo MACS-DVRPTW,
ES2-DVRPTW e AS-DVRPTW.
Hong (2012) desenvolveu um método baseado na Busca em Vizinhança Larga (Large
Neighborhood Search - LNS) proposto por Shaw (1998) e aplicou ao DVRPTW. Este método
trabalha através da destruição (removendo nós) e reparação (inserindo nós) da solução atual,
utilizando operadores de destruir e reparar. A vizinhança é chamada de larga, pois um nó que
é removido pode ser reinserido na mesma rota de origem ou em qualquer outra rota da
solução atual. Além deste processo, são aplicadas buscas locais com diversas vizinhanças. O
autor comparou os resultados com os trabalhos de Lackner (2004) e Yang et al. (2004) e
concluiu que o método proposto apresenta melhores resultados e com menor esforço
computacional.
Pillac et al. (2012) desenvolveu uma versão paralela do ALNS (Adaptive Large
Neighborhood Search), denominada pALNS, que é uma versão adaptativa do LNS proposta
por Pisinger e Ropke (2007). O ALNS adiciona uma camada adaptativa, que seleciona
aleatoriamente os operadores de destruição e remoção dependendo de seu desempenho
passado, ajustando o algoritmo automaticamente para a instância. Os autores compararam os
resultados com os trabalhos de Lackner (2004) e Hong (2012) e concluíram que o pALNS é
capaz de alcançar o estado da arte e traz melhorias de até 12%.

3.1.2. Re-otimização periódica
A re-otimização periódica consiste na otimização ao longo do dia de forma periódica. Este
tempo entre aplicações do método de roteirização pode ser representado por um intervalo de
tempo fixo, também conhecido como épocas de decisão (Chen e Xu, 2006) ou fatias de tempo
(Kilby et al., 1998 e Montemanni et al., 2002).
A vantagem da re-otimização periódica é que ela não requer a execução do método de
roteirização toda vez que algum dado do problema for atualizado. A principal desvantagem é
que o atraso na tomada de uma decisão pode acarretar no aumento da distância total das rotas,
no número de veículos ou na inviabilidade ou atraso de atendimento de um ou mais clientes,
em particular, quando na presença de janelas de tempo.
Seguindo a mesma linha de programação linear, Chen e Xu (2006) desenvolveram um
algoritmo de geração dinâmica de colunas (DYCOL) para o DVRPTW. Os autores propõem o
conceito de épocas de decisão ao longo do horizonte de planejamento, que são as datas em
que o processo de otimização é executado. A novidade de sua abordagem se baseia em na
geração de colunas dinamicamente para um modelo de particionamento de conjuntos, usando
colunas da época de decisão anterior, o que reduziu muito o tempo computacional.
Montemanni et al. (2002) desenvolveram um Sistema de Colônia de Formigas (ACS) para
resolver o DVRP. Semelhante a Kilby et al. (1998), sua abordagem utiliza fatias de tempo, ou
seja, o dia é dividido em períodos de igual duração. Com o decorrer do tempo, novos pedidos
são acumulados. No fim da fatia de tempo é realizada a otimização das rotas utilizando o
método de roteirização estática. Uma característica interessante da sua abordagem é o uso de
uma estratégia que realiza a transmissão dos feromônios da otimização de uma fatia de tempo
para a fatia de tempo seguinte. Uma abordagem semelhante foi também utilizada por Rizzoli
et al. (2007), Gambardella et al. (2003) e Silva Júnior e Leal (2009).
3.1.3. Classificação dos métodos para problemas dinâmicos e determinísticos
Além dos modos contínuo e periódico de re-otimização, uma escolha importante é o tipo de
método a ser utilizado para resolver a fase a-posteriori dos problemas dinâmicos e
determinísticos de roteirização, que podem ser classificados em métodos de re-roteirização e
métodos inserção, também conhecidos como métodos de operações locais rápidas.
3.1.3.1. Métodos de Re-roteirização
Nos métodos de re-roteirização as soluções são construídas, destruídas e reconstruídas várias
vezes. Na fase a-priori, uma solução é construída com objetivo de atender todos os clientes.
Com o avanço do tempo, os clientes são atendidos ou comprometidos (possui um veículo
viajando em sua direção) e surgem novos clientes dinâmicos. Na fase a-posteriori, todos os
clientes que não foram atendidos ou comprometidos são removidos da solução (destruição) e
a solução é reconstruída. Na reconstrução, cada rota deve iniciar a partir do depósito ou a
partir do último cliente atendido ou comprometido. Se o método de roteirização utilizado
possuir uma memória das soluções já criadas, esta informação pode ser utilizada de forma a
reduzir o tempo computacional.
Um exemplo desta aplicação é proposto por Taillard et al. (2001), o qual se utiliza de uma
memória adaptativa sobre as boas soluções. Esta memória auxilia na redução do tempo
computacional necessário para obter uma nova solução. No entanto, a implementação deste

método se torna mais complexa. Esta abordagem foi utilizada por Gendreau et al. (1999) para
adaptação da versão paralela do método Busca Tabu (Taillard et al., 1997) para resolver o
DVRPTW aplicado a serviços de expressos de correios. Sua abordagem mantém um conjunto
de boas rotas numa memória adaptativa que é utilizada para gerar soluções iniciais para a
Busca Tabu. Sempre que um novo cliente é conhecido, verifica-se uma possível inserção em
todas as soluções da memória adaptativa para decidir se deve ser aceito ou rejeitado.
3.1.3.2. Métodos de Inserção
Estes métodos se utilizam dos métodos de inserção adaptados para resolverem a fase a-
posteriori do problema. A solução é construída a partir de inserções consecutivas de clientes
dinâmicos na solução atual (encontrada na fase a-priori) à medida que são solicitadas. São
realizadas tentativas de inserção entre todos os possíveis pares de nós e a solução escolhida
será aquela que não viola as restrições do problema e que possui o menor custo. Uma restrição
adicional do problema no caso dinâmico é a proibição de inserções entre clientes já
comprometidos ou atendidos.
4. ALGORITMOS PROPOSTOS
As estratégias e algoritmos utilizados como base para desenvolvimento dos algoritmos
propostos para o VRPTW e DVRPTW são descritos a seguir:
Vizinho Mais Próximo (NN) foi abordado no trabalho de Solomon (1987).
Push Forward Insertion Heuristic (PFIH) foi detalhada por Thangiah et al. (1994) e
proposta por Solomon (1987).
MACS-VRPTW foi proposto por Gambardella et al., (1999) e utiliza-se de duas colônias
de formigas, uma denominada ACS-VEI que busca minimizar o número de veículos e
outra denominada ACS-TIME que busca minimizar o tempo total (ou distância) das rotas.
Descida em Vizinhança Variável Aleatória (Random Variable Neighborhood Descent -
RVND) proposto por Subramanian (2012), utilizando-se de sete estruturas de vizinhança
inter-rota, Swap(1,1), Swap(2,1), Swap(2,2), Shift(1,0) e Shift(2,0), e cinco estruturas intra-
rota, Or-Opt1, Or-Opt2, Or-Opt3, 2-opt, Exchange e K-Opt.
Descida em Vizinhança Variável (Variable Neighborhood Descent - VND) proposto por
Mladenović e Hansen (1997), com as mesmas estruturas de vizinhança do RVND.
ECF - Estratégia de Conservação dos Feromônios entre as fases da roteirização dinâmica,
proposta por Guntsch e Middendorf (2001).
RP - Roteirização Periódica proposta por Kilby et al. (1998) e Montemanni et al. (2002).
4.1. O algoritmo proposto para o VRPTW
O primeiro algoritmo proposto para o VRPTW, denominado MACS-RVND é um algoritmo
híbrido que consiste numa extensão melhorada do MACS-VRPTW. As modificações
propostas são descritas em Silva Júnior e Leal (2012).
4.2. Os algoritmos propostos para o DVRPTW
A metodologia aplicada consiste na solução de uma sequência de n problemas estáticos e
determinísticos PEn com várias soluções sn durante a jornada de trabalho tempo_total = bn+1.O
tamanho de n depende da abordagem utilizada na fase a-posteriori. Na re-otimização
contínua, n será igual ao número de novos clientes. Já na re-otimização periódica, n será igual
ao número de faixas de tempo nts de tamanhos iguais f. Este é um processo iterativo, que
evolui em função do tempo e novas entradas devem ser inseridas no procedimento durante sua
execução. Para flexibilizar o uso destas abordagens, propôs-se o Algoritmo 1 (DVRPTW).

Algoritmo 1: DVRPTW 1: Procedimento DVRPTW(estratégia, tipo_método)
2: tempo ← 0 n ← 0
3: PEn ← {depósito e clientes conhecidos, com tai <=tempo}
4: // Obter uma solução inicial utilizando um método de roteirização estática para o VRPTW
5: sn ← obter_solução_inicial(N)
6: Para tempo = 1... tempo_total faça
7: D ← D {novos clientes com tai =tempo}
8: Se D ≠ {} então
9: Se estratégia = contínua OU (estratégia = periódica E tempo MOD f = 0)
10: n ← n + 1
11: PEn ← PEn-1 D
12: D ← {}
13: Se tipo_método = inserção então
14: s’ ← sn-1
15: Senão Se tipo_método = re-roteirização então
16: // Remover de s os clientes com ei {em_trânsito, entregue, atribuído}
17: s’ ← extrair_solução_parcial(sn-1)
18: Fim se
19: // Obter uma solução utilizando um método de roteirização estática adaptado
20: sn ← obter_solução_intermediaria(s’, PEn)
21: Fim se
22: Fim se 23: // Atualizar os estados dos clientes
24: Para r1 = 1...V faça
25: // Para todos os clientes i da rota r1
26: Para i=1 até o tamanho de r1 faça
27: inicio_viagemi ← Ti – ti-1,i
28: Se tempo inicio_viagemi E tempo < Ti então
29: ei ← em_trânsito
30: Senão Se tempo Ti E tempo < Ti + si então
31: ei ← entregue
32: Senão Se estratégia = periódica E inicio_viagemi n.f então
33: ei ← atribuído
34: Senão
35: ei ← planejado
36: Fim se
37: Fim para
38: Fim para
39: Retorne s
O Algoritmo 1 é iniciado com uma estratégia de re-otimização contínua ou periódica e com
um tipo_método que pode ser de inserção ou re-roteirização. No problema PE0 são inseridos
o depósito e os clientes já conhecidos e uma solução inicial s0 é obtida utilizando um método
desejado para resolver o VRPTW. Um procedimento iterativo em função do tempo é iniciado
com tempo=1 até o fim da jornada de trabalho (tempo_total). Novos clientes dinâmicos são
conhecidos e inseridos no conjunto D. Se o conjunto D possuir algum cliente, então é
verificada a abordagem da re-otimização, caso contrário são atualizados os estados dos
clientes. Se a abordagem for contínua ou periódica com tempo igual ao início de uma faixa de
tempo, então é incrementado o contador n. Em seguida é criado um novo problema estático
PEn com a união dos nós de PEn-1 e dos nós do conjunto D. Uma solução parcial s’ é criada.
Se o tipo_método for inserção, então é utilizada sn-1 como solução parcial. Caso contrário é
extraída uma solução parcial de sn-1 com apenas os clientes comprometidos, ou seja, aqueles
que possuem o estado em_trânsito, entregue ou atribuído. Uma nova solução intermediária sn

é obtida para o problema estático PEn, utilizando a solução parcial s’ para iniciar as novas
rotas. Se necessário, novos veículos v podem ser alocados para atender o maior número de
clientes possível. A atualização dos estados dos clientes é realizada em todas as rotas da
solução sn. Se o tempo for maior ou igual ao início da viagem do veículo v na rota r1 para o
cliente i e menor que o tempo de chegada Ti, então o estado ei é atualizado para em_trânsito.
Caso contrário, se o tempo for maior ou igual o tempo de chegada Ti e menor que o tempo de
processamento tpi (Ti + si), então o estado ei é atualizado para entregue. Caso contrário, se a
estratégia for de re-otimização periódica e início da viagem em direção ao cliente i for menor
do que o tamanho da faixa de tempo f multiplicado pelo número da faixa n, então o estado ei é
atualizado para atribuído. Caso contrário, o estado ei é atualizado para planejado. Ao fim da
jornada de trabalho, a solução sn será a solução final para o DVRPTW.
Todos os algoritmos propostos se baseiam no Algoritmo 1. A Tabela 1 mostra os nomes e as
respectivas abordagens de re-otimização, classificação dos algoritmos, métodos para obter a
solução inicial e as soluções intermediárias.
Tabela 1 – Algoritmos propostos para o DVRPTW
Nome do Algoritmo Abordagem de
re-otimização Classificação Solução inicial Solução intermediária
PFIH_PFIH Contínua Inserção PFIH PFIH
PFIH_PFIH-VND Contínua Inserção PFIH PFIH + VND
PFIH-VND_PFIH-VND Contínua Inserção PFIH + VND PFIH + VND
MACS-RVND_PFIH-VND Contínua Inserção MACS-RVND PFIH + VND
MACS-RVND_Re-roteiriza Contínua Re-roteirização MACS-RVND MACS-RVND + ECF
MACS-RVND-Periódico Periódica Re-roteirização MACS-RVND MACS-RVND+ECF+RP
5. RESULTADOS COMPUTACIONAIS
O objetivo desta seção é mostrar o desempenho dos algoritmos propostos para o VRPTW e
DVRPTW. Para execução dos algoritmos utilizou-se de um servidor PowerEdge T110 II com
processador Intel Xeon Quad-Core de 3,4 GHz e 8GB de memória RAM, sob plataforma
Linux, com a distribuição do CentOS 6.3 64 bits.
Para aplicação do algoritmo MACS-RVND aos problemas do VRPTW, foram definidos os
parâmetros ρ=0,1, beta=1, q0=0,9 propostos Gambardella et al. (1999). Cada simulação das
funções ACS-TIME e ACS-VEI foi feita com 20 iterações com k=10 formigas cada uma. O
critério de parada foi definido como sendo o tempo máximo de execução de 5 minutos. Os
problemas adotados para a validação dos algoritmos são as 56 instâncias criadas por Solomon
(1987) e os valores das melhores soluções foram obtidos em Sintef (2013).
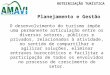
Tabela 2 – Comparação com resultados do MACS-RVND com o MACS-VRPTW e com o melhor conhecido
Autores R1 R2 C1 C2 RC1 RC2
SNV
SDT
Melhor conhecido
(diversos autores)
11,92 2,73 10,00 3,00 11,50 3,25 405
1.209,89 951,02 828,38 589,86 1.384,16 1.119,17 57.181
MACS-RVND 12,08 2,82 10,00 3,00 11,63 3,25 409
1.212,38 945,06 828,38 589,86 1.381,08 1.120,15 57.128
Gambardella et al., 1999 12,38 3,00 10,00 3,00 11,92 3,33 418
1.210,83 960,31 828,38 591,85 1.388,13 1.149,28 57.583
Na Tabela 2, são apresentados os valores médios por classe de instância e a soma total de
veículos e tempo total das rotas de todas as instâncias, que foram reportados por diversos

autores. O objetivo primário é minimizar o número total de veículos e objetivo secundário é
minimizar a o tempo total de viagem. A primeira coluna mostra as referências dos trabalhos
que reportaram estes resultados. As colunas R1, R2, C1, C2, RC1 e RC2 mostram o número
médio de veículos e o tempo total médio de viagem para os seus respectivos grupos de
instâncias. A coluna SNV/SDT indica o somatório de número de veículos (SNV) e o
somatório do tempo de viagem (SDT) de todas as 56 instâncias. Observa-se que o método
proposto é competitivo com os métodos propostos por diversos autores, incluindo vários
autores que encontraram algumas das melhores soluções conhecidas para o VRPTW.
Observa-se também que o uso do método RVND combinado com o MACS-VRPTW pode
melhorar consideravelmente o método original proposto por Gambardella et al. (1999).
Os algoritmos propostos para resolver o DVRPTW foram testados com as instâncias
propostas por Lackner (2004), que são extensões das instâncias de Solomon (1987) para o
DVRPTW. Estas extensões utilizaram os graus de dinamismo iguais a 10, 30, 50, 70 e 90.
Para cada instância e para cada grau de dinamismo, o autor criou um novo parâmetro que
indica o momento em que o cliente é conhecido (tai), totalizando 280 instâncias. Nas versões
adaptadas dos algoritmos PFIH, VND e MACS-RVND para resolver os problemas da fase a-
posteriori foram utilizados os mesmo valores para os parâmetros dos algoritmos originais. O
parâmetro de conservação de feromônios foi definido como γr=0,3 para os algoritmos MACS-
RVND_Reroteiriza e MACS-RVND_Periódico, conforme Guntsch e Middendorf (2001).
Nos algoritmos PFIH_PFIH, PFIH_PFIH-VND e PFIH-VND_PFIH-VND o tempo de
execução na fase a-priori não ultrapassa de 10 segundos. Na fase a-posteriori, o tempo de
execução não ultrapassa dos 2 segundos. Por serem algoritmos determinísticos, que retornam
sempre a mesma solução, cada um deles foi executado apenas uma vez para cada instância. Já
para os algoritmos MACS-RVND_PFIH-VND, MACS-RVND_Re-roteiriza e MACS-
RVND-Periódico, o critério de parada para a solução da fase a-priori foi definido como o
tempo máximo de execução de 5 minutos. Na fase a-posteriori, cada subproblema é resolvido
com o tempo máximo de execução de 10 segundos. Por serem algoritmos probabilísticos, que
podem retornar diferentes soluções, foram realizadas cinco execuções para cada instância e
foi obtida a melhor solução.
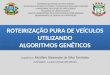
A Tabela 3 apresenta a soma dos totais médios obtidos em cada um dos algoritmos e
considerando os cinco graus de dinamismo. Avaliando os seis algoritmos propostos e
considerando a hierarquia dos objetivos de minimizar o NA, NV e DT, conclui-se que o
algoritmo que apresentou os melhores resultados é o MACS-RVND_Re-roteiriza. Realizou-se
uma comparação deste algoritmo com outras abordagens propostas na literatura.
Tabela 3 – Comparação dos resultados dos algoritmos propostos para o DVRPTW
Nome do Algoritmo NA NV DT
PFIH_PFIH 5,56 327 70.572
PFIH_PFIH-VND 8,08 257 33.654
PFIH-VND_PFIH-VND 6,39 253 33.450
MACS-RVND_PFIH-VND 8,63 251 32.673
MACS-RVND_Re-roteiriza 5,93 252 32.762
MACS-RVND-Periódico 6,25 258 34.777
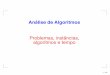
A Tabela 4 apresenta os melhores resultados obtidos pelo algoritmo MACS-RVND_Re-
roteiriza e pelo estado da arte da literatura para o DVRPTW, que até o presente momento é

composto pelos trabalhos de Lackner (2004), Hong (2012), Pillac et al. (2012). Estes autores
não publicaram a solução obtida para cada uma das 280 instâncias. Foram publicados apenas
os valores médios por classe de instância e grau de dinamismo. Com base nestes valores,
foram comparados os resultados com o algoritmo MACS-RVND_Re-roteiriza. Observa-se o
algoritmo proposto obteve melhores soluções em termos de distância total média do que as
abordagens propostas Lackner (2004) e Hong (2012). Quanto ao percentual total médio de
clientes não atendidos, o algoritmo proposto apresentou melhores resultados do que Pillac et
al., (2012), Hong, (2012) e Lackner, (2004).
Tabela 4 – Comparação dos resultados do MACS-RVND_Re-roteiriza com o estado da arte para o DVRPTW
MACS-RVND_Re-roteiriza Pillac et al., 2012 Hong, 2012 Lackner, 2004
Grupo δ DT NA DT NA DT NA DT NA
C1 10 891,17 0,00
850,60 0,11
895,80 0,22
996,40 0,00
30 919,83 0,00
874,90 0,11
962,10 0,33
1.066,90 0,00
50 958,85 0,00
903,40 0,11
1.001,20 0,22
1.236,10 0,00
70 998,75 0,00
919,10 0,11
1.031,70 0,22
1.261,30 0,00
90 1.012,84 0,00 929,90 0,11 1.039,80 0,22 1.479,60 0,00
C2 10 598,85 0,00
597,20 0,00
594,70 0,00
629,10 0,00
30 605,39 0,00
597,60 0,00
651,40 0,00
632,30 0,04
50 628,88 0,00
604,00 0,00
605,00 0,00
689,30 0,13
70 621,16 0,00
619,20 0,00
636,50 0,00
743,80 0,21
90 637,45 0,00 625,70 0,00 636,80 0,00 792,50 0,29
R1 10 1.276,10 0,18
1.197,40 0,25
1.257,10 0,17
1.278,10 0,47
30 1.273,95 0,27
1.212,90 0,80
1.286,60 0,58
1.337,90 0,72
50 1.299,77 0,64
1.225,00 1,25
1.295,80 0,67
1.330,00 0,78
70 1.318,73 1,00
1.237,30 1,71
1.331,30 1,75
1.336,10 0,94
90 1.349,23 1,09 1.230,10 2,55 1.335,90 2,33 1.278,30 0,75
R2 10 973,98 0,00
893,00 0,00
950,00 0,09
1.052,90 0,03
30 985,30 0,00
915,60 0,00
985,50 0,00
1.085,40 0,15
50 1.021,71 0,00
948,60 0,00
1.016,50 0,00
1.138,80 0,21
70 1.023,12 0,00
967,70 0,00
1.032,00 0,09
1.116,90 0,30
90 1.021,69 0,00 981,70 0,00 1.047,80 0,09 1.193,30 0,52
RC1 10 1.438,97 0,25
1.389,40 0,04
1.436,20 1,13
1.426,90 0,46
30 1.480,79 0,25
1.421,50 0,28
1.492,20 1,13
1.439,70 0,42
50 1.511,98 0,50
1.463,40 0,23
1.514,70 1,38
1.448,10 0,46
70 1.507,05 0,63
1.470,10 0,58
1.511,30 1,88
1.488,40 0,58
90 1.555,77 1,13 1.495,50 0,51 1.513,90 2,00 1.475,20 0,42
RC2 10 1.122,49 0,00
1.024,40 0,00
1.103,30 0,00
1.220,90 0,00
30 1.151,20 0,00
1.053,10 0,00
1.166,00 0,25
1.244,90 0,04
50 1.170,26 0,00
1.060,50 0,00
1.190,50 0,13
1.244,90 0,00
70 1.194,84 0,00
1.091,40 0,00
1.239,50 0,00
1.269,30 0,00
90 1.212,11 0,00 1.130,30 0,00 1.257,20 0,13 1.346,80 0,13
TM 32.762,21 5,93 30.930,50 8,75 33.018,30 15,01 35.280,10 8,05
GAP (%) 5,92 -32,21 -0,78 -60,48 -7,14 -26,31
6. CONCLUSÕES
O problema de roteirização de veículos possui um papel muito importante no gerenciamento
da frota das empresas e durante décadas, as aplicações práticas estiveram voltadas apenas ao
problema estático. Com os recentes avanços em tecnologias de informação foram
disponibilizadas as ferramentas necessárias para que as empresas gerenciem suas frotas em
tempo real. No entanto, estas novas tecnologias também introduziram mais complexidade na
gestão da frota, revelando a necessidade do desenvolvimento de sistemas de apoio à decisão
para roteirização dinâmica de veículos.

Para resolver o problema de roteirização de veículos com janelas de tempo foi proposto um
algoritmo híbrido do Sistema de Múltiplas Colônias de Formigas (MACS) com o método de
Descida em Vizinhança Variável Aleatória (RVND). O algoritmo foi apresentado em detalhes
e foram mostradas as modificações propostas nos métodos originalmente propostos. Através
da aplicação do algoritmo a 56 instâncias de benchmark de Solomon (1987) demonstrou-se a
eficiência do algoritmo, pois para 29 delas foram encontradas as melhores soluções
conhecidas, para 23 foram encontradas soluções com o menor número de veículos conhecido
e com GAP de distância total de no máximo 0,62% e apenas para 4 instâncias foram
encontradas soluções com 1 veículo a mais, porém com distância total menor que nas
melhores soluções conhecidas, com uma diferença média de -5,21%.
Para resolver o problema de roteirização dinâmica de veículos com janelas de tempo foi
proposto um algoritmo genérico o qual foi utilizado como modelo para proposta de seis novos
algoritmos. Estes algoritmos foram baseados no algoritmo de Inserção (PFIH), no método de
Descida em Vizinhança Variável (VND) e no Sistema de Múltiplas Colônias de Formigas
com Descida em Vizinhança Variável Aleatória (MACS-RVND). Estes algoritmos foram
aplicados a 280 instâncias de benchmark propostas por Lackner (2004) e foi selecionado o
melhor algoritmo, que por sua vez, foi comparado com os melhores resultados apresentados
na literatura. Por se tratar de um problema relativamente novo, a literatura do problema
dinâmico abordado ainda é escassa e os autores não disponibilizam todos os dados necessários
para realizar uma comparação efetiva e não foi possível comparar o número de veículos
utilizados pelos autores. No entanto, a comparação da distância média total e o percentual
médio total de clientes não atendidos demonstrou que o algoritmo proposto fornece soluções
de ótima qualidade, superando os resultados de todas as abordagens propostas na literatura.
Agradecimento
O presente trabalho foi realizado com apoio do CNPq, Conselho Nacional de Desenvolvimento Científico e
Tecnológico - Brasil.
REFERÊNCIAS BIBLIOGRÁFICAS Ballou, R. H. (2006) Gerenciamento da Cadeia de Suprimentos / Logística Empresarial. São Paulo: Bookman.
Chen, Z.; Xu, H. (2006) Dynamic column generation for dynamic vehicle routing with time windows.
Transportation Science, 40(1):74-88.
Gambardella, L. M.; Taillard, É.; Agazzi, G. (1999) MACS-VRPTW: A Multiple Ant Colony System for vehicle
routing problems with time windows. New Ideas in Optimization. Londres: McGraw-Hill. p. 63-76.
Gambardella, L.; Rizzoli, A.; Oliverio, F.; Casagrande, N.; Donati, A.; Montemanni, R.; Lucibello, E. (2003) Ant
colony optimization for vehicle routing in advanced logistics systems. International Workshop on
Modelling and Applied Simulation (MAS 2003). [S.l.]: [s.n.]. p. 3-9.
Gendreau, M.; Guertin, F.; Potvin, J. Y.; Taillard, E. (1999) Parallel tabu search for real-time vehicle routing
and dispatching. Transportation Science, Vol. 33 No 4:381-390.
Guntsch, M.; Middendorf, M. (2001) Pheromone modification strategies for ant algorithms applied to dynamic
TSP. In: al., B. E. Application of evolutionary computing: Proceedings of EcoWorkshops. [S.l.]: [s.n.], v.
Lecture Notes in Computer Science 2037. p. 213-222.
Homberger, J.; Gehring, H. (1999) Two evolutionary metaheuristics for the vehicle routing problem with time
windows. Inform. Systems Oper. Res, 37:297-318.
Hong, L. (2012) An improved LNS algorithm for real-time vehicle routing problem with time windows.
Computers & Operations Research, 39(2):151-163.
Ichoua, S.; Gendreau, M.; Potvin, J. Y. (2000) Diversion issues in real-time vehicle dispatching. Transportation
Science, 34(4):426-438.
Kilby, P.; Prosser, P.; Shaw, P. (1998) Dynamic VRPs: a study of scenarios. Strathclyde, U.K..
Lackner, A. (2004). Dynamische Tourenplanung mit ausgewählten Metaheuristiken, volume 47 of Göttinger
Wirtschaftsinformatik. Cuvillier.

Lenstra, J.; Rinnooy Kan, A. H. G. (1981) Complexity of vehicle routing and scheduling problems. Networks,
11:221-227.
Mladenovic, N.; Hansen, P. (1997) Variable Neighbourhood Search. Computers & Operations Research,
24(11):1097-1100.
Montemanni, R.; Gambardella, L. M.; Rizzoli, A. E.; Donati, A. V. (2002) A new algorithm for a Dynamic
Vehicle Routing Problem based on Ant Colony System. Journal of Combinatorial Optimization, Springer
Netherlands, Vol. 10, No 4:327-343.
Pillac, V.; Gendreau, M.; Guéret, C.; Medaglia, A. L. (2013) A review of dynamic vehicle routing problems.
European Journal of Operational Research, 225(1):1-11.
Pillac, V.; Guéret, C.; Medaglia, A. L. (2012) A fast re-optimization approach for dynamic vehicle routing. p. 1-
22 École des Mines de Nantes, Nantes, France.
Psaraftis, H. N. (1980) A Dynamic Programming Solution to the Single-Vehicle Many-to-Many Immediate
Request Dial-a-Ride Problem. Transp. Sci., 14:130–154.
Psaraftis, H. N. (1988) Dynamic vehicle routing problems. In: Assad, B. L. G. A. A. A. Vehicle Routing:
Methods and Studies. North-Holland: Elsevier. p. 223–248.
Psaraftis, H. N. (1995) Dynamic vehicle routing: Status and prospects. Ann Oper Res, 61:143–164.
Rizzoli, A.; Montemanni, R.; Lucibello, E.; And Gambardella, L. (2007) Ant colony optimization for real-world
vehicle routing problems. Swarm Intelligence, 1:135-151.
Roberti, R. (2012) Exact Algorithms for Different Classes of Vehicle Routing Problems. Alma Mater Studiorum-
University of Bologna, Bologna.
Pisinger, D.; Ropke, S. (2007) A general heuristic for vehicle routing problems. Computers & Operations
Research, 34(8):2403-2435.
Ropke, S. (2013). Branching decisions in branchand-cut-and-price algorithms for vehicle routing problems.
DTU Transport. Disponível em: http://www.gerad.ca/colloques/ColumnGeneration2012/presentations/
session7/Ropke.pdf. Acesso em 10 de julho de 2013.
Shaw, P. (1998) Using Constraint Programming and Local Search Methods to Solve Vehicle Routing Problems.
In: Maher, M. P. J. F. Principles and Practice of Constraint Programming - CP98 Lecture Notes in
Computer Science. New York: Springer-Verlag. p. 417-431.
Silva Júnior, O. S.; Leal, J. E. (2009) Roteirização dinâmica de veículos com janelas de tempo usando de um
algoritmo de colônia de formigas. Congresso de Pesquisa e Ensino em Transportes. Vitória, ES: Anais do
XXIII ANPET.
Solomon, M. M. (1987) Algorithms for the Vehicle Routing and Scheduling Problems with Time Windows
Constraints. Operations Research, 35(2):254-265.
Subramanian, A. (2012) Heuristic, Exact and Hybrid Approaches for Vehicle Routing Problem. Tese de
Doutorado. Universidade Federal Fluminense, Niterói.
Taillard, E. D.; Gambardella, L. M.; Gendreau, M.; And Potvin, J.-Y. (2001) Adaptive memory programming: A
unified view of metaheuristics. European Journal of Oper. Research, 135(1):1-16.
Taillard, E.; Badeau, P.; Gendreau, M.; Guertin, F.; Potvin, J. (1997) A tabu search heuristic for the vehicle
routing problem with soft time windows. Transportation Science, 31(2):170-186.
Thangiah, S. R.; Osman, I. H.; Sun, T. (1994) Hybrid Genetic Algorithm Simulated Annealing and Tabu Search
Methods for Vehicle Routing Problem with Time Windows. Technical Report 27, Computer Science
Department, Slippery Rock University.
Sintef (2013) Benchmarks-Vehicle Routing and Travelling Salesperson Problems, Benchmark data sets for
vehicle routing problems with time window. Disponível em: http://www.sintef.no/Projectweb/TOP/
Problems/VRPTW/Solomon-benchmark/100-customers/. Acesso em 06 de junho de 2013.
Yang, J.; Jaillet, P.; Mahmassani, H. (2004) Real-time multivehicle truckload pickup and delivery problems.
Transportation Science, 38(2):135-148.
__________________________________________________________________________________________
Orivalde Soares da Silva Júnior ([email protected])
José Eugênio Leal ([email protected])
Departamento de Engenharia de Produção, PUC-Rio, Rio de Janeiro, RJ, Brasil