Embed Size (px)
Citation preview

Anais WSCAD 2005
Ambiente de Simulação de Escalonamento em Sistemas Distribuídos Hierárquicos
Camilo Cardoso Figueira* Felipe Kraus* Cristina Boerest Instituto de Computação, Universidade Federal Fluminense (UFF)
Niterói, RJ, Brasil { cfigueira,fkraus,boeres} @ic.uff:br
Resumo
Um dos objetivos de um escalonador de tarefas em um ambiente como as grades computacionais é a redução do tempo de execução da aplicação. Devido a distribuição geográfica dos recursos da grade, faz-se necessário a criação de um sistema hierárquico de escalonamento para que esses recursos possam ser explorados de forma eficiente. O sistema hierárquico adotado pelo projeto EasyGrid tem como base um escalonamento htbrido, que mescla a utilização de escalonamento estático e dinâmico. Este trabalho propõe um ambiente de simulação de escalonamento dinâmico que visa atender estas necessidades, oferecendo uma ferramenta para desenvolvimento e análise de estratégias de escalonamento dinâmico e execução de aplicações em grades.
1. Introdução
Atualmente, com a disseminação de redes de alta velocidade, é possível criar um ambiente computacional constituído por um conjunto de computadores ou processadores heterogêneos interconectados através desta rede e oferecer uma nova plataforma de computação: as Grades Computacionais [5, 6]. Nesses ambientes, é possível executar aplicações paralelas e distribuídas que necessitam de um alto poder computacional, poder este não disponível em um computador paralelo tradicional.
As grades computacionais podem ser constituídas por c/usters de processadores, computadores pessoais, e até mesmo supercomputadores, geograficamente distribuídos. Em geral, esses ambientes possuem um grande número de processadores heterogêneos e compartilhados por diferentes usuários, sendo necessário que
+ Bolsistas de Iniciação Científica do CNPq/PIBIC (UFF)
t Financiamento parcial com bolsa de Pesquisa - CNPQ
201
as aplicações dos usuários sejam cuidadosamente alocadas nos processadores distribuídos para se tirar proveito de toda essa potencialidade computacional.
Para isso, é preciso implementar meios para tomar possível a execução de uma aplicação em um ambiente distribuído de acordo com um escalonamento eficiente. Por ser o problema de escalonamento de aplicações, em sua forma geral, NP-Completo [9], toma-se necessário desenvolver heurísticas de escalonamento eficientes, assim como captar as características dominantes da aplicação e da arquitetura alvo. Entretanto, em computação distribuída, não se encontra disponível um modelo padrão de computador distribuído em que as características que mais afetam o desempenho da execução de aplicações no sistema tenham sido identificadas.
Em linhas gerais, existem duas classes principais de escalonamento de tarefas em um ambiente distribuído: estático e dinâmico. A diferença entre elas se dá de acordo com o momento em que as decisões do escalonamento são tomadas. No escalonamento estático, as decisões são efetuadas antes da execução da aplicação ser realizada, ou seja, todas as tarefas são escalonadas antes do sistema iniciar a execução da aplicação. No escalonamento dinâmico, as decisões ocorrem ao longo da execução. Desta forma, na tentativa de minimizar o grau de intrusão do escalonador na execução da aplicação, ele é acionado de tempos em tempos para escalonar parte da aplicação que ainda não foi executada. Esse processo se repete até completar a execução de toda a aplicação.
Uma terceira classe de escalonamento existente é o escalonamento híbrido, que é composto de duas etapas consecutivas: a primeira de escalonamento estático e a segunda de escalonamento dinâmico. Esse escalonamento possui a vantagem de fornecer uma boa estimativa estática inicial do escalonamento, unido com a possível eficiência de um escalonador dinâmico de adaptar o escalonamento em tempo de execução.
Este trabalho descreve um framework para simulação de ambientes hierárquicos que utiliza escalonamento híbrido

Anais WSCAD 2005
em grades computacionais. O objetivo principal é prover um ambiente de análise de diversas políticas de escalonamento dinâmico.
2. O Portal EasyGrid
O trabalho proposto foi desenvolvido como parte da ferramenta de avaliação de algoritmos de escalonamento do Projeto EasyGrid, o Scheduling Portal (2, 4]. Nesse Portal, a execução de aplicações, de acordo com uma determinada polftica de escalonamento dinâmico, é realizada através de simulações. A ferramenta SimGrid [7. 3] foi utilizada para implementar a versão inicial do escalonador hibrido. Este trabalho tem como objetivo implementar a versão do simulador de escalonador hibrido distribuído, de forma hierárquica.
3. Modelos Considerados
A aplicação, a arquitetura e a política de escalonamento são dados necessários para a execução do simulador de escalonador hibrido. A implementação do ambiente de simulação conta ainda com uma ferramenta de simulação, o SimGrid, além das bibliotecas de comunicação através de threads (pthread.h) e a plataforma de comunicação MP/ [8].
As aplicações analisadas neste trabalho são representadas por um grafo acíclico direcionado (GAD). Um GAD é denotado por G = (V,E,E,w), onde V = { vo, v1 , .. . , Vn-d é o conjunto de vértices que representamas tarefaseE = {{v; ,vj) lvi , Vj E V} é o conjunto de arcos que representam as relações de precedência entre as tarefas. Denota-se por E( v;), o peso de execução de uma tarefa v; E V e por w( v; , v i), o peso de dados associado ao arco (v; , Vj) E E, que representa a quantidade de dados transmitida de v; para vi . A seguir serão descritas as classes de aplicações que foram utilizadas ao longo deste trabalho.
Árvores Binárias Completas ( Out-tree ). Representam aplicações como difusão e divisão e conquista, onde os dados migram da raiz até as folhas.
Árvores Binárias Reversas Completas (ln-tree). Representam algoritmos em que os dados partem das folhas em direção à raiz havendo uma redução nas operações, como na soma em paralelo.
Diamantes (Di). É um bom representante de aplicações como decomposição LU e multiplicação de matrizes.
Randômicos (Ran). Estes grafos são gerados aleatoriamente e têm como objetivo representar uma aplicação paralela qualquer para que se possa avaliar o desempenho de uma heurística de escalonamento sobre grafos com estruturas irregulares.
202
O modelo arquitetura! adotado neste trabalho especifica as seguintes características relevantes do sistema destino. Define-se como arquitetura P = {po, Pt , ... , Pq- d o conjunto de q processadores, sendo h(p;) o fator de heterogeneidade do processador p;. Assim, o tempo de execução de uma tarefa vi em um processador p; é dada por E( Vj) x h(p;). Para duas tarefas u e v adjacentes que foram alocadas em processadores distintos Pu e Pv respectivamente, o custo de comunicação entre u e v será w( u, v ) x L, onde a latência L é o fator multiplicativo de comunicação em qualquer canal do sistema. Esse atraso corresponde ao tempo de transmissão por byte em um canal de comunicação.
A fim de representar a hierarquia das grades computacionais, o sistema é modelado de tal maneira que os processadores alocados geograficamente próximos serão agrupados em conjuntos. A cada conjunto de r processadores, r :5 q, totalmente interconectados será dado o nome de si te. Dentro de um site, apenas um processador estará apto a enviar e receber mensagens de outros processadores fora do site. Tal processador deverá repassar estas mensagens para os demais processadores do site e também será responsável por algumas funções que serão vistas a seguir. ·
4. Framework de Escalonamento Hierárquico
Este trabalho descreve o simulador de Framework de Escalonamento Hierárquico, framework este proposto em [2], que visa viabilizar o escalonamento de aplicações paralelas em grades computacionais tentando diminuir o overhead dos custos de comunicação entre os processadores. Essa hierarquia possui três níveis distintos, cada um com sua classe de escalonador. No primeiro nível da hierarquia de escalonamento existe apenas um processo, que será chamado de Escalonador Global. No segundo nível da hierarquia encontram-se os Escalonadores Locais e, por último, no terceiro nível encontram-se os Escalonadores da Máquina. Cada escalonador possui uma função distinta dentro da hierarquia de escalonamento, cuja simulação será descrita a seguir. É importante lembrar que este trabalho trata da simulação desta proposta hierárquica e distribuída de escalonadores dinâmicos.
O Escalonador Global é um processo alocado em um único processador p; que conterá todas as informações necessárias ao escalonamento, tais como o escalonamento estático inicial, os processadores onde estão executando os Escalonadores Locais de cada site e a aplicação. O Escalonador Global comandará todo o escalonamento dinâmico, sendo posto em execução a cada evento de escalonamento (definido em [1]). Durante um evento de escalonamento, enquanto o Escalonador Global estiver executando, ele decidirá quais tarefas da aplicação serão re-escalonadas e em que sites essas tarefas deverão ser alocadas. Após tomar essa decisão, o Escalonador Global irá disparar uma thread
Anais WSCAD 2005
simulando um Escalonador Local, passando para elas as tarefas que deverão executar dentro de seus sites. A criação das threads (Escalonadores Locais) é implementado pela biblioteca pthread.h.
Os Escalonadores Locais são threads responsáveis pelo recebimento das tarefas a serem executadas no seu respectivo site, só existindo um Escalonador Local por site. Eles são encarregados pela comunicação interna no site. Para isso, essas threads enviam mensagens através de links para os Escalonadores da Máquina. Os links e a maneira como as mensagens são enviadas são implementados nas bibliotecas do SimGrid [7, 3]. Os Escalonadores Locais também são responsáveis pelo envio de informações ao Escalonador Global após a execução das tarefas nos Escalonadores da Máquina. A comunicação das threads com o Escalonador Global é implementado pela biblioteca pthread.h.
Os Escalonadores da Máquina executam em todos os outros processadores do site e são implementados utilizando o SimGrid [7, 3]. Eles são responsáveis por executar as tarefas da aplicação e retomar os resultados para o Escalonador Local. As associações do escalonamento e a execução das tarefas realizadas por esses escalonadores são implementadas através do uso de métodos das bibliotecas do SimGrid [7, 3], tais como SG..ScheduleTaskOnResource e SG..Simulate.
4.1. Descrição de Caso
A seguir serão mostrados exemplos do funcionamento do Framework de Escalonamento Hierárquico. Para tais exemplos considere a hierarquia de escalonamento mostrada na Figura I onde é possível visualizar a distribuição dos processos escalonadores entre as máquinas da grade, com seus respectivos fatores de heterogeneidade h(Pi)· Neste caso, a latência L entre as máquinas de um mesmo site é unitária enquanto que entre sites esse valor duplica.
Exemplo l. Para esse primeiro exemplo, considere o GAD da Figura 2(a) que representa uma aplicação In-tree. O escalonamento estático inicial das tarefas foi realizado utilizando o algoritmo List-Scheduling (configurável) [4], e seu resultado pode ser visto na Figura 3(a).
Suponha que por algum motivo após o início da execução da aplicação (de acordo com o escalonamento estático) ocorra uma sobrecarga de trabalho no processador p6 , fazendo com que h (p6 ) passe a ser 3, triplicando o tempo de execução da tarefa v2, inicialmente alocada a ele. No momento inicial da execução da aplicação na Grade, durante o primeiro evento de escalonamento, o escalonador dinãmico seleciona um bloco de tarefas para ser re-escalonado de acordo com políticas estudadas em [1]. Para o primeiro bloco, v0, Vt. v2 e v3, utilizando a política de escolha do processador que minimiza o tempo de fim da execução da tarefa em um proces-
203
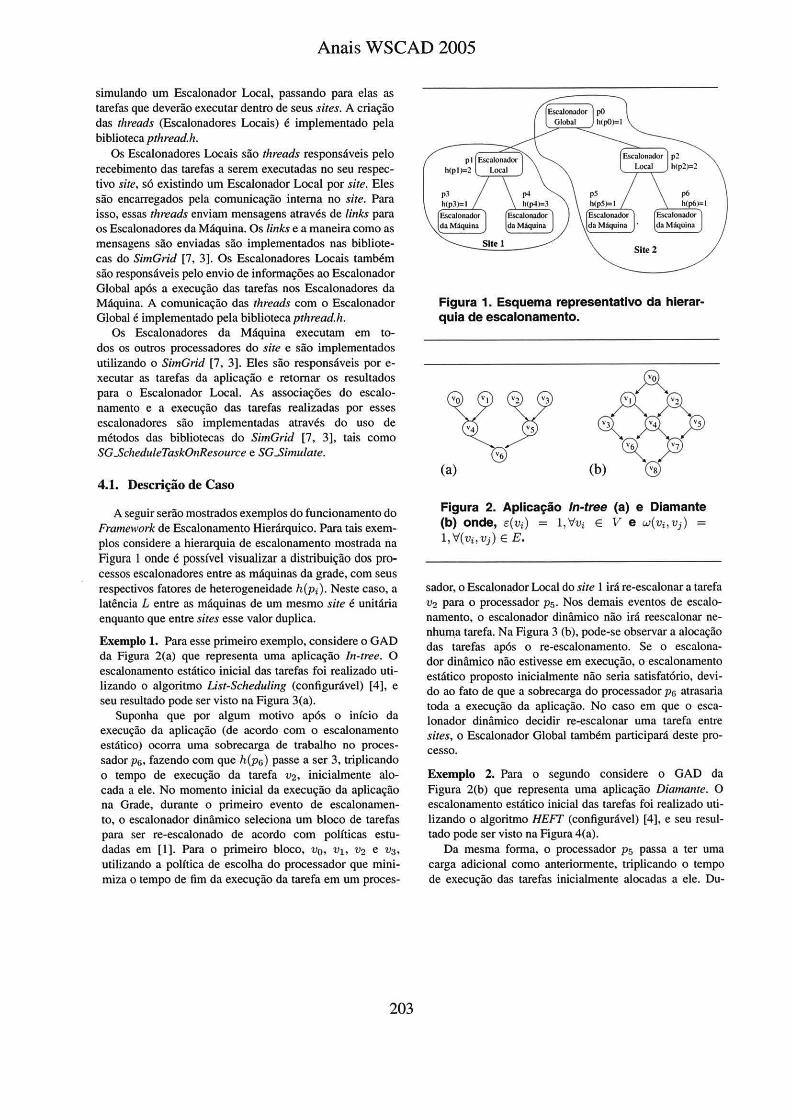
Figura 1. Esquema representativo da hierarquia de escalonamento.
Figura 2. Aplicação ln-tree (a) e Diamante (b)onde, e(vi) = 1,\ivi E V e w(vi,vi) = 1,\i(vi,Vj) E E .
sador, o Escalonador Local do site I irá re-escalonar a tarefa v2 para o processador p5 . Nos demais eventos de escalonamento, o escalonador dinãmico não irá reescalonar nenhuma tarefa. Na Figura 3 (b), pode-se observar a alocação das tarefas após o re-escalonamento. Se o escalonador dinãmico não estivesse em execução, o escalonamento estático proposto inicialmente não seria satisfatório, devido ao fato de que a sobrecarga do processador p6 atrasaria toda a execução da aplicação. No caso em que o escalonador dinâmico decidir re-escalonar uma tarefa entre sites, o Escalonador Global também participará deste processo.
Exemplo 2. Para o segundo considere o GAD da Figura 2(b) que representa uma aplicação Diamante. O escalonamento estático inicial das tarefas foi realizado utilizando o algoritmo HEFT (configurável) [4], e seu resultado pode ser visto na Figura 4(a).
Da mesma forma, o processador p5 passa a ter uma carga adicional como anteriormente, triplicando o tempo de execução das tarefas inicialmente alocadas a ele. Ou-

Anais WSCAD 2005
o
2
s
6 (a) (b)
Figura 3. Alocação do GAD ln-tree (a) estática e (b) dinâmica.
(a)
Figura 4. Alocação do GAD Diamante (a) estática e (b) dinâmica.
rante a execução da aplicação na Grade, em cada evento de escalonamento, o escalonador dinâmico seleciona o bloco de tarefas e o re-escalona, utilizando a mesma política dinâmica descrita no exemplo anterior. Na Figura 4(b), pode-se observar o resultado do re-escalonamento. Se o escalonador dinâmico não estivesse em execução, o escalonamento estático proposto inicialmente não seria satis fatório, levando a um tempo de execução igual a 14.
204
5. Conclusões
Além de descrever um simulador de framework hierárquico para escalonamento dinâmico em grades computacionais, este trabalho propõe a simulação de um ambiente para análise de diversas políticas de escalonamento de tarefas. Este ambiente possibilitará a avaliação de desempenho de heurísticas de escalonamento híbridas, com a análise de todas as classes de aplicações citadas anteriormente. Os testes de desempenho têm por objetivo comparar os resultados das políticas de escalonamento dinâmico propostas em [I] e adaptadas para o Framework EasyGrid.
As propostas apresentadas neste trabalho estão em fase de desenvolvimento, já sendo possível observar a eficiência da utilização de rhreads na simulação de execuções de políticas dinâmicas de escalonamento. O simulador descrito já é capaz de obter o tempo total de execução de uma aplicação em uma grade, utilizando a mesma política de escalonamento em todos os sites. Porém, uma das metas principais do projeto é a avaliação do desempenho de aplicações considerando sites com diferentes políticas de escalonamento dinâmico.
Referências
[1) C. Boeres, A. Lima, and V. Rebello. Hybrid task scheduling: lntegrating static and dynamic heuristics. In Proc. of the 15th Symposium on Compllter Architecture and High Perfonnance Computing (SBAC-PAD 2003), pages 199-106, São Paulo, Brazi1, November 2003. IEEE Computer Society Press.
[2) C. Boeres and V. E. F. Rebello. EasyGrid: Towards a framework for the automatic grid enab1ing of legacy MPI app1ications. Concurrency and Computation: Practice and Experience, 16(5):425-432, Apri12004.
[3) H. Casanova. Simgrid: a toolkit for the simu1ation of application scheduling. Proc. of 1st IEEEIACM l nt. Symposium on C/uster Compllting and the Grid, May 2001.
[4] A. Fonseca and B. Vianna. Um ambiente para desenvolvimento e avaliação de algoritmos de escalonamento para grades tradicionais. Monografia Final de Curso, Graduação em Ciência da Computaçcio, Agosto 2004.
[5) I. Foster and C. Kesse1man, editors. The GR/D: Blueprint f or a New Compllting lnfrastructure. Morgan Kaufmann, 1999.
[6) I. Foster, C. Kesselman, and S. Tuecke. The anatomy of the Grid: Enab1ing scalable virtual organizations. lnt. Journa/ Supercompwer Applications, 15(3):200-220, 2001.
[7) A. Legrand. L. Marchai, and H. Casanova. Schedu1ing distributed applications: the simgrid simulation framework. Proc. of 3rd IEEEIACM lnt. Symposium on C/uster Compllling and the Grid, 2003.
[8] Message Passing Forum. MPI: A Message Passing Interface. Technical report, University ofTennessee, 1995.
[9) J. D. Ullman. Np-complete schedu1ing problems. Journal of Computerand System Sciences, 10:384-393, 1975.





























