Embed Size (px)
Citation preview

ANÁLISE DE ESTRUTURAS INTELIGENTES COM MEMÓRIA DE FORMA
UTILIZANDO O MÉTODO DOS ELEMENTOS FINITOS
Raphael Santana Silva
Projeto de Graduação apresentado ao Curso
de Engenharia Mecânica da Escola
Politécnica, Universidade Federal do Rio de
Janeiro, como parte dos requisitos
necessários à obtenção do título de
Engenheiro.
Orientador: Marcelo Amorim Savi
Rio de Janeiro
Março de 2016

UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
Departamento de Engenharia Mecânica
DEM/POLI/UFRJ
ANÁLISE DE ESTRUTURAS INTELIGENTES COM MEMÓRIA DE FORMA
UTILIZANDO O MÉTODO DOS ELEMENTOS FINITOS
Raphael Santana Silva
PROJETO FINAL SUBMETIDO AO CORPO DOCENTE DO DEPARTAMENTO DE
ENGENHARIA MECÂNICA DA ESCOLA POLITÉCNICA DA UNIVERSIDADE
FEDERAL DO RIO DE JANEIRO COMO PARTE DOS REQUISITOS NECESSÁRIOS
PARA A OBTENÇÃO DO GRAU DE ENGENHEIRO MECÂNICO.
Aprovado por:
________________________________________________
Prof. Marcelo Amorim Savi, D.Sc.
________________________________________________
Prof. Anna Carla Monteiro de Araújo, D.Sc.
________________________________________________
Prof. Thiago Gamboa Ritto, D.Sc.
RIO DE JANEIRO, RJ - BRASIL
MARÇO DE 2016

i
Silva, Raphael Santana
Análise de Estruturas Inteligentes com Memória de
Forma Utilizando o Método dos Elementos Finitos/
Raphael Santana Silva. – Rio de Janeiro: UFRJ/ ESCOLA
POLITÉCNICA, 2016.
xi, 92 p.: il.; 29,7 cm.
Orientador: Marcelo Amorim Savi.
Projeto de Graduação – UFRJ/ Escola Politécnica/
Curso de Engenharia Mecânica, 2016.
Referências Bibliográficas: p.62-64.
1. Estruturas Inteligentes. 2. Ligas com Memória de
Forma. 3. Método dos Elementos Finitos. I. Savi, Marcelo
Amorim. II. Universidade Federal do Rio de Janeiro, Escola
Politécnica, Curso de Engenharia Mecânica. III. Análise de
Estruturas Inteligentes com Memória de Forma Utilizando
o Método dos Elementos Finitos.

ii
Para minha família
e minha namorada.

iii
Agradecimentos
A toda minha Família e em especial a: minha avó Carmem, pela criação, boas
histórias e dedicação incondicional; minha irmã Michelle, que sempre esteve comigo,
exceto nas disputas pelo controle remoto; meu pai Antônio, pelo exemplo, suporte e
investimento em mim, da qual resulta o título de engenheiro mecânico; minha mãe que
acreditou demais em mim, até mesmo quando disse, há 3 anos, que iria limpar um baú
com papéis das matérias da faculdade. Eu não limpei, ainda, mas vou.
A minha namorada, Tainara, por todo o carinho e por conseguir me aturar
durante toda essa etapa, apesar da minha cabeça dura e procrastinação. Obrigado pelo
incentivo e broncas enquanto eu passava por tudo isto. Não foi fácil, nem era para ser,
mas é fundamental para mim. Você já me ajudou muito, mas continue aqui. Ok? Ok.
Aos meus melhores amigos mais próximos: Marcinha, Mari e Tutuba. Obrigado
por estarem sempre presentes, animados e companheiros.
Aos mosqueteiros, Bessa, Mou e Vince, pelo companheirismo e ensinamentos
diários nos dias de estágio e, ainda, pelos grandes exemplos de profissionais que são.
A minha melhor amiga, Juliana, presente da minha Bahia. Saudades.
A todos os cientistas e engenheiros que acreditam que o conhecimento é
universal e sem fronteiras, disponibilizando suas produções a toda comunidade
científica. Todos foram fundamentais nos meus estudos durante a graduação
Ao departamento de engenharia mecânica, cujo mestres e o Tito foram sempre
solícitos aos meus questionamentos e me guiaram ao profissional que eu quero ser. Em
especial aos professores que convido para minha banca e ao meu orientador, Prof.
Marcelo A. Savi, por apostar em mim desde o quinto período, quando me indicou ao
intercâmbio na FMC Technologies, pela exímia orientação deste trabalho, pelos
conselhos e grande incentivo ao mestrado.
Aos amigos do LAMCE/COPPE, pelos melhores habilidades acadêmicas que eu
recebi em toda minha vida. Tudo o que eu aprendi na iniciação científica está aqui.
A todos os Alunos Contadores de Histórias do IPPMG/UFRJ, cuja riqueza de
suas personalidades com a qual tive sorte de ter contato e que acredito que deixaram
um pouco em mim, ensinaram-me a pessoa que eu quero ser. Obrigado pelas vivências,
oportunidades, convites e boas amizades. Teremos sempre boas histórias para contar.
A FMC Technologies, a empresa responsável pela maior transformação da
minha graduação, a proposta irrecusável de estágio e intercâmbio cultural e acadêmico
na Texas A&M University. Em especial a Cristina Fetter, Luíz Saraiva e Kam Owens.
A TenarisConfab, o apreço pela minha formação e proposta exemplar com o
Roberto Rocca Education Program. Tanto incentivo foi especial. Espero retribuí-los.
Aos citados, muito obrigado. Esse trabalho é graças a vocês. Devo-lhes essa.

iv
Resumo do Projeto de Graduação apresentado à Escola Politécnica/ UFRJ como parte
dos requisitos necessários para a obtenção do grau de Engenheiro Mecânico.
ANÁLISE DE ESTRUTURAS INTELIGENTES COM MEMÓRIA DE FORMA
UTILIZANDO O MÉTODO DOS ELEMENTOS FINITOS
Raphael Santana Silva
Março/2016
Orientador: Marcelo Amorim Savi
Curso: Engenharia Mecânica
As crescentes aplicações das ligas com memória de forma tem motivado estudos em
função da necessidade de engenheiros em descrever o comportamento de estruturas
sob solicitações termomecânicas por meio de simulações numéricas, antes mesmo da
prototipagem e fase de testes. Essa boa prática em engenharia auxilia o
desenvolvimento de inovação de novos produtos e na manutenção de componentes
estruturais. O método dos elementos finitos é usualmente empregado para essas
investigações, auxiliando projetistas e pesquisadores na busca por resoluções em
típicos problemas de valor de contorno. Neste trabalho, estruturas inteligentes são
analisadas com o auxílio de um programa comercial, tendo como objetivo investigar
diferentes tipos de estruturas com respostas típicas a tração, torção, flexão ou variação
de temperatura. De uma maneira geral, teorias aproximadas são investigadas
considerando elementos de viga, plano, casca e sólido. Os resultados obtidos são
comparados com os disponíveis na literatura. Este estudo apresenta uma coleção de
resultados característicos que podem ser estendidos a outras geometrias e parâmetros
de materiais inteligentes. Mostram-se os principais fenômenos constitutivos que
representam o comportamento geral de estruturas inteligentes com memória de forma.
Palavras-chave: Estruturas Inteligentes, Ligas com Memória de Forma, Método dos
Elementos Finitos.

v
Abstract of Undergraduate Project presented to POLI/UFRJ as a partial fulfillment of the
requirements for the degree of Mechanical Engineer.
ANALYSIS OF SMART STRUCTURES WITH SHAPE MEMORY UNDER FINITE
ELEMENT METHOD
Raphael Santana Silva
March/2016
Advisor: Marcelo Amorim Savi
Course: Mechanical Engineering
The growth of shape memory alloys applications have been motivating studies as a
function of engineers needs for describing structures’ behaviors under thermomechanics
loads in numerical simulation, even before prototyping or phase tests. This engineering
good practice supports the development of innovative new products and maintenance of
structure components. The finite elements method is usually applied for these
investigations, assisting designers and researchers in search of solving typical boundary
value problems. In this work, smart structures are analyzed with a computer-aided
software, having as objective to investigate different types of structures with typical
responses due traction, torsion, bending or temperature variations. More generally,
approximated theories are investigated considering beam, plane, shell and solid
elements. Results here presented are compared with the ones available from literature.
This study presents a collection of characteristics outcomes that may extends
themselves to others geometries and smart materials parameters. It has been shown the
mainly constitutive phenomena that represent the general behavior of smart structures
with shape memory.
Keywords: Smart Structures, Shape Memory Alloys, Finite Element Method.

vi
Sumário
1 Introdução ...................................................................................................................... 1
2 Ligas com memória de forma ........................................................................................ 3
2.1 Comportamento termomecânico ............................................................................ 3
2.1.1 Superelasticidade ............................................................................................. 6
2.1.2 O efeito memória de forma .............................................................................. 7
2.2 Aplicações ............................................................................................................... 9
2.3 Modelo constitutivo ............................................................................................... 11
2.4 Parâmetros do modelo constitutivo ...................................................................... 13
3 Método dos elementos finitos ..................................................................................... 18
3.1 Modelagem de estruturas por elementos finitos .................................................. 18
3.2 Análises de estruturas não-lineares ..................................................................... 19
3.2.1 Não-linearidade geométrica ........................................................................... 20
3.2.2 Não-linearidade constitutiva .......................................................................... 21
3.3 Formulação matemática – problema de valor de contorno ................................. 22
3.4 Parâmetros das ligas com memória de forma ..................................................... 25
3.5 Elementos unidimensionais .................................................................................. 26
3.5.1 Hipóteses e restrições ................................................................................... 28
3.6 Elementos bidimensionais .................................................................................... 28
3.6.1 Elemento de plano ......................................................................................... 28
3.6.2 Hipóteses e restrições ................................................................................... 29
3.6.3 Elemento de casca......................................................................................... 30
3.6.4 Hipóteses e restrições ................................................................................... 31
3.7 Elemento de sólido ............................................................................................... 31
3.7.1 Hipóteses e restrições ................................................................................... 32
4 Estruturas unidimensionais ......................................................................................... 33
4.1 Tração de barra .................................................................................................... 33
4.2 Torção de eixo ...................................................................................................... 38
4.3 Flexão de viga ....................................................................................................... 41
5 Estruturas em estado plano ........................................................................................ 46
5.1 Estado plano de tensão ........................................................................................ 46
5.2 Cisalhamento puro ................................................................................................ 48
6 Estruturas bidimensionais ........................................................................................... 51
6.1 Flexão de viga no plano ....................................................................................... 51
6.2 Flexão de viga fora do plano ................................................................................ 52
6.3 Mola ...................................................................................................................... 54

vii
7 Estruturas tridimensionais ........................................................................................... 57
7.1 Mola ...................................................................................................................... 57
7.2 Espaçador de coluna vertebral ............................................................................. 58
8 Conclusões .................................................................................................................. 61
Referências bibliográficas .............................................................................................. 62
Apêndice A ..................................................................................................................... 65
Apêndice B ..................................................................................................................... 68
Apêndice C ..................................................................................................................... 72
Apêndice D ..................................................................................................................... 76
Apêndice E ..................................................................................................................... 79
Apêndice F ...................................................................................................................... 81
Apêndice G ..................................................................................................................... 84
Apêndice H ..................................................................................................................... 87
Apêndice I ....................................................................................................................... 90

viii
Lista de Figuras
Figura 1 - Esquema do diagrama de fases na curva tensão-temperatura para as ligas
de memória de forma (Fonte: adaptado de LAGOUDAS e KUMAR [4]). ....................... 4
Figura 2 - Transformação de fase induzida por temperatura sem carregamento
mecânico (Fonte: adaptado de LAGOUDAS e KUMAR [4]). .......................................... 5
Figura 3 - Transformação de fase induzida por temperatura com carregamento
mecânico (Fonte: adaptado de LAGOUDAS e KUMAR [4]). .......................................... 5
Figura 4 - Efeito superelástico: curva tensão-deformação à esquerda e diagrama
tensão-temperatura à direita. ........................................................................................... 6
Figura 5 - Efeito memória de forma: curva tensão-deformação à esquerda e diagrama
tensão-temperatura à direita. ........................................................................................... 7
Figura 6 - Efeito memória de forma: curva tridimensional tensão-deformação-
temperatura (Fonte: adaptado de LAGOUDAS e KUMAR [4]). ...................................... 8
Figura 7 - Cryofit® à Esquerda em união de dois tubos e à direita em esboço do corte
na seção longitudinal (Fonte: HARRISON e HODGSON [11]). ...................................... 9
Figura 8 - Aplicações biomédicas para o NITINOL. À esquerda, exemplos de âncora
de sutura. Ao centro, agulha para biópsia em mamas. À direita, stents de angioplastia
(Fonte: PELTON et al. [12]). ........................................................................................... 10
Figura 9 - Crescimento de patentes nos EUA e de pesquisas com as ligas de memória
de forma (Fonte: adaptado de MOHD JANI [5]). ........................................................... 11
Figura 10 - Dependência do raio do domínio elástico (𝑅) com a temperatura (Fonte:
AURICCHIO et al. [19]). ................................................................................................. 14
Figura 11 - Representação gráfica dos parâmetros do material pelo modelo constitutivo
apresentado. Superelasticidade, à esquerda, e Efeito Memória de Forma, à direita
(Fonte: AURICCHIO et al. [9]). ....................................................................................... 14
Figura 12 - Dependência da temperatura para a tensão transformação (𝜎𝑦) (Fonte:
AURICCHIO et al. [9]). ................................................................................................... 15
Figura 13 - Duas curvas deformação-temperatura para tensões constantes tal que
𝜎(1) > 𝜎(2) (Fonte: AURICCHIO et al. [20]). ................................................................ 15
Figura 14 - Principais tipos de elementos (Fonte: FUNNELL [22]). .............................. 19
Figura 15 - Esquema com as subetapas de carregamento e intervalos de tempo. ..... 20
Figura 16 - Vigas sob diferentes condições de contorno, influência na rigidez da
resposta ao carregamento (Fonte: ANSYS [23]). .......................................................... 21
Figura 17 - Comparação na resposta a duas condições geométricas. Material aço e
comprimento de 10mm e seção circular de raio 0.5 mm. ............................................. 21
Figura 18 - Barra reta submetida a esforços axiais. ...................................................... 22
Figura 19 - Geometria do tipo de elemento BEAM188 (Fonte: ANSYS [23]). .............. 26
Figura 20 - Malha da seção transversal do elemento BEAM188. ................................. 27
Figura 21 - Geometria do tipo de elemento PLANE182 (Fonte: ANSYS [23]).............. 28

ix
Figura 22 - Estado plano de tensões (Fonte: adaptado de FELIPPA [28]). .................. 29
Figura 23 - Geometria do tipo de elemento SHELL181 (Fonte: ANSYS [23]). ............. 30
Figura 24 - Geometria do tipo de elemento SOLID185 (Fonte: ANSYS [23])............... 31
Figura 25 - Geometria da barra sujeita a esforços axiais. Elemento de viga. .............. 34
Figura 26 - Resultado da simulação: curva tensão-deformação para tração a 10°C. .. 34
Figura 27 - Variação temporal do alongamento (Esq. Sup.), deformação (Dir. Sup.),
força (Esq. Inf.) e fração volumétrica de martensita (Dir. Inf.) a 10ºC. ......................... 35
Figura 28 - Curvas tensão-deformação para diferentes temperaturas. ........................ 35
Figura 29 - Resultado da simulação: curva tensão-deformação para tração a -20°C. . 37
Figura 30 - Resultado da simulação: efeito memória de forma, curva tridimensional. . 37
Figura 31 - Variação temporal da temperatura (Esq. Sup.), deformação (Dir. Sup.),
força (Esq. Inf.) e fração volumétrica de martensita (Dir. Inf.). ...................................... 38
Figura 32 - Geometria da barra sujeita a esforços de torção. Elemento de viga. ........ 39
Figura 33 - Resultado da simulação: curva do torque (à esquerda) e deformação axial
em relação ao ângulo de torção. .................................................................................... 39
Figura 34 - Resultado da simulação: distribuição da tensão devido a torção............... 40
Figura 35 - Distribuição da fração volumétrica de martensita devido a torção do eixo. 41
Figura 36 - Flexão em 3 pontos, esquema do teste à esquerda e resultados
experimental e numérico à direita (Fonte: AURICCHIO et al. [8]). ............................... 41
Figura 37 - Geometria do elemento CONTA 176 e TARGE170 para a simulação com
contato, à esquerda. À direita, a ilustração para vigas perpendiculares que se cruzam
(Fonte: ANSYS [23]). ...................................................................................................... 43
Figura 38 - Resultado simulação: posição inicial (tracejada) e posição deformada (azul)
ao fim da aplicação da carga ao centro da viga em flexão em 3 pontos. À direita, a
curva força-deflexão. ...................................................................................................... 44
Figura 39 - Distribuição de Martensita não-maclada na seção transversal da viga.
Apresentação para o nó central. .................................................................................... 44
Figura 40 - Distribuição da tensão devido a flexão na seção transversal para três
diferentes pontos da viga em flexão analisada. ............................................................. 45
Figura 41 - Esquemas de aplicações das forças. Em consonância com as condições
de contorno da Tabela 10. ............................................................................................. 47
Figura 42 - Estado plano de tensão: resultado para tração nas duas direções
perpendiculares. ............................................................................................................. 47
Figura 43 - Estado plano de tensão: resultado para tração e compressão em direções
perpendiculares. ............................................................................................................. 48
Figura 44 - Estado plano de tensão: resultado para compressão em direções
perpendiculares. ............................................................................................................. 48
Figura 45 - Elemento em Cisalhamento puro, à esquerda. Ao lado, o Círculo de Mohr
para o caso ilustrado (Fonte: TIMOSHENKO [31]). ...................................................... 49
Figura 46 - Forma inicial (tracejada) e posição deformada (azul) ao fim da aplicação de
1000 N de carga nas direções horizontal e vertical nos vértices. Escala real 1:1. ....... 50

x
Figura 47 - Resultado da simulação: modelagem do comportamento durante a flexão
de uma viga reta no plano. ............................................................................................. 52
Figura 48 - Resultado da simulação: Modelagem do comportamento durante a flexão
fora do plano. .................................................................................................................. 53
Figura 49 - Resultado da simulação: curva para força-deslocamento e temperatura. . 54
Figura 50 - Geometria e resultados analíticos (Fonte: EVANGELISTA et al. [33]). ..... 54
Figura 51 - Geometria da mola modelada por casca. ................................................... 56
Figura 52 - Resultado da simulação: Modelagem do comportamento de um elemento
de uma mola através de elemento de casca no plano de simetria. .............................. 56
Figura 53 - Resultado da simulação: geometria deformada da mola em solução via
elemento de sólido. À direita, curva força-deflexão da extremidade livre. .................... 57
Figura 54 - Comparação entre viga, casca e sólido para a mola proposta. ................. 58
Figura 55 - Espaçador de coluna vertebral (Fonte: Adaptado de PETRINI et al. [35]). 59
Figura 56 - Geometria e malha tetraédrica do espaçador. Elemento de sólido. .......... 60
Figura 57 - Resultado da simulação: à esquerda, tensões equivalentes de von Mises
para o elemento de simetria do espaçador na etapa 2, à direita, deslocamentos. ...... 60

xi
Lista de tabelas
Tabela 1 - Ligas que exibem o efeito memória de forma (Fonte: DUERIG et al. [10]) .. 8
Tabela 2 - Comparação entre a liga NiTi e o aço inoxidável. Valores médios gerais
(Fonte: BARRETT e FRIDLINE [16]). ............................................................................ 11
Tabela 3 - Parâmetros das simulações do elemento de pórtico e plano. ..................... 25
Tabela 4 - Parâmetros das simulações dos elementos de casca e sólido. .................. 25
Tabela 5 - Parâmetros específicos da simulação de superelasticidade. ...................... 33
Tabela 6 - Parâmetros específicos da simulação de efeito memória de forma ............ 36
Tabela 7 - Parâmetros específicos da simulação de torção ......................................... 38
Tabela 8 - Parâmetros da simulação de flexão (Fonte: AURICCHIO et al. [8]). ........... 42
Tabela 9 - Parâmetros específicos para a simulação de flexão de viga. ...................... 42
Tabela 10 - Parâmetros para a simulação de estado plano de tensões ....................... 47
Tabela 11 - Parâmetros para a simulação do estado de cisalhamento puro. ............... 49
Tabela 12 - Comparação entre cisalhamento puro e tração e compressão. ................ 50
Tabela 13 - Parâmetros adicionais para a simulação de flexão no plano. ................... 51
Tabela 14 - Parâmetros adicionais para a simulação de flexão no plano. ................... 52
Tabela 15 - Parâmetros adicionais para a simulação de flexão no plano. ................... 55
Tabela 16 - Parâmetros do material da simulação (Fonte: PETRINI et al. [35]). ......... 59
Tabela 17 - Parâmetros específicos para a simulação (Fonte: PETRINI et al. [35]). ... 59
1. FIM DA PARTE PRÉ-TEXTUAL

1
1 Introdução
Por séculos, os metais desempenham importantes atribuições como materiais
estruturais. Com o avanço da ciência e tecnologia resultando no conhecimento mais
aprofundado dos efeitos da organização da microestrutura e das técnicas de
processamento do comportamento das ligas metálicas, o campo da ciência dos
materiais vem sendo rapidamente aperfeiçoado nas últimas décadas. Acompanhando
estas prerrogativas, as pesquisas acerca das ligas com memória de forma cresceram
extensamente nos últimos anos devido a multiplicidade no emprego desses materiais
em um grande número de aplicações em diversas áreas do conhecimento.
A descoberta das transformações de fase que podem gerar interessantes
comportamentos macroscópicos foi descrita primeiramente pelo sueco Arne Ölander no
seu trabalho com a liga de Ouro-Cádmio (Au-Cd) [1] em 1932. Seu trabalho, porém, não
desenvolveu uma descrição dos efeitos fenomenológicos da liga como o realizado por
CHANG e READ [2] em 1951 nos experimentos também em ligas de Au-Cd por
observações em raios-X.
Na década de 1960, com as pesquisas em ligas de Níquel-Titânio (Ni-Ti)
apresentadas pelo laboratório da marinha norte-americana [3] (NOL, “US Naval
Ordinance Laboratory”), as ligas de memória de forma enfim despertaram o interesse
tecnológico, sendo comandadas pelo menor custo (em relação a ligas de ouro e
cádmio), resistência mecânica próxima a de outros metais, grande variação de forma e
facilidade de fabricação tanto do Ni-Ti quanto da liga Cobre-Zinco-Alumínio (Cu-Zn-Al).
A liga de Ni-Ti ficou conhecida pela sigla NITINOL (aglutinação das siglas Ni-Ti NOL,
pronunciado, em inglês, como “Night in All”) e é, hoje, o material com memória de forma
mais utilizado em aplicações comerciais.
As ligas de memória de forma são capazes de absorver e dissipar energia
mecânica por suportar uma mudança de fase reversível e com histerese ao ser
submetido a uma carga termomecânica cíclica. Essas características habilitam [4] esses
materiais para aplicações em sensores e atuadores, absorvedores de impacto e
amortecedores de vibração, sendo, desta forma, passíveis de aplicações em uma ampla
variedade de áreas, tais como, por exemplo, a aeroespacial, automotiva, ortodôntica,
biomédica e de exploração de petróleo, brevemente apresentadas no capítulo a seguir.
O crescimento no número de publicações e de patentes funcionam como
interessantes “termômetros” para imaginar o volume do uso das ligas com memória de
forma no futuro próximo. Segundo projeções de MOHD JANI et al. [5], até 2019 o

2
número de patentes no Estados Unidos deve triplicar enquanto o número de publicações
deverá quintuplicar, o que gera um otimismo para os pesquisadores na área.
As ligas com memória de forma tem sido aplicadas com sucesso em estruturas,
chamadas de estruturas inteligentes. Muitos esforços de pesquisa e desenvolvimento
de diversas equipes ao redor do mundo tem sido feitos para que a liga desempenhasse
a multiplicidade de aplicações da qual tem potencial. A chave para isso são modelos
que descrevam de forma satisfatória os principais aspectos do comportamento
termomecânico dessas ligas. Neste sentido, surgem diversas teorias para descrever o
material, permitindo simular as aplicações antes mesmo dos protótipos.
De uma maneira geral, as teorias constitutivas podem ser divididas [5] em
modelos microscópicos (variáveis internas definidas na escala granular) e
macroscópicos (as variáveis internas são definidas para um elemento de volume
representativo). Para os modelos macroscópicos, as descrições fenomenológicas são
feitas propondo equações constitutivas do material.
No que diz respeito a teoria de estruturas, tem-se grande interesse nas teorias
aproximadas de viga e casca, além das teoria plana e sólida, incorporando não-
linearidades constitutivas e geométrica. O surgimento das não-linearidades da
formulação proposta para as ligas com memória de forma tornam essencial o uso de
procedimentos numéricos e, neste sentido, o método de elementos finitos tem destaque
especial nos cálculos estruturais.
Este trabalho apresenta uma discussão de estruturas inteligentes com memória
de forma analisadas sob as principais teorias aproximadas utilizando o método dos
elementos finitos. Tratam-se teorias unidimensionais como barras, vigas e eixos
circulares; bidimensionais como planos em estado de tensão e deformação, placas,
cascas; assim como estruturas tridimensionais, sólidos, utilizadas como referência em
soluções mais precisas.
Os resultados apresentados são obtidos a partir do ANSYS® Mechanical
APDL™, programa comercial de elementos finitos com suporte nativo de um modelo
para as ligas de memória de forma.

3
2 Ligas com memória de forma
De forma a entender o material em estudo neste trabalho, bem como as
capacidades, suposições e limitações do modelo utilizado, esta seção apresenta uma
revisão sobre as ligas com memória de forma. A abordagem segue dividida em quatro
partes: comportamento termomecânico; aplicações; modelagem matemática; e
elementos finitos.
2.1 Comportamento termomecânico
As ligas com memória de forma (SMAs, do inglês “shape memory alloys”) são
materiais metálicos que, depois de sujeitos a severa deformação residual, possuem a
habilidade singular de recuperar sua forma original sob um apropriado tratamento
termomecânico. Esse comportamento termomecânico está associado a transformação
de fases entre austenita e martensita (esta última em estrutura cristalina maclada e não-
maclada).
A austenita é uma fase mais organizada, estável a altas temperaturas e baixas
tensões enquanto que a martensita é uma fase menos organizada, estável a baixas
temperaturas e altas tensões. A ativação e evolução das transformações de fase
dependem da temperatura e da tensão. Essas transformações são reversíveis e, em
geral, independem da taxa de transformação [6].
As ligas com memória de forma apresentam diferentes comportamentos a baixa
e altas temperatura. Existem dois efeitos principais:
a) superelasticidade ou pseudoelasticidade;
b) efeito memória de forma.
Antes da definição dos efeitos, apresenta-se o diagrama de fases na curva
Tensão-Temperatura. Na Figura 1, é possível observar as diferentes estruturas
cristalinas: a martensita maclada (𝑀𝑡) em equilíbrio a baixas tensões (abaixo de 𝜎𝑆) e
baixas temperaturas (a esquerda da linha de 𝑀𝑓); a martensita não-maclada (𝑀𝑑) em
equilíbrio a altas tensões (acima de 𝜎𝑓) e a esquerda da linha de 𝑀𝑓. A austenita (𝐴) em
equilíbrio a tensões moderadas (abaixo da linha de 𝐴𝑓) e altas temperaturas (a direita
da linha de 𝐴𝑓).

4
Figura 1 - Esquema do diagrama de fases na curva tensão-temperatura para as ligas
de memória de forma (Fonte: adaptado de LAGOUDAS e KUMAR [4]).
Ainda sobre a figura acima, as linhas que se interceptam nos pontos sobre o eixo
das abscissas, 𝑀𝑓 ,𝑀𝑆, 𝐴𝑆 e 𝐴𝑓, são importantes propriedades do material, sendo:
a) 𝑀𝑓: temperatura final da formação da martensita sem carregamento mecânico;
b) 𝑀𝑆: temperatura inicial da formação da martensita sem carregamento mecânico;
c) 𝐴𝑆: temperatura inicial da formação da austenita sem carregamento mecânico;
d) 𝐴𝑓: temperatura final da formação da austenita sem carregamento mecânico.
A Figura 2 mostra a transformação de martensita maclada para austenita (pela
passagem dos pontos 𝐴𝑆 a 𝐴𝑓) e transformação de austenita em martensita maclada
(pela passagem dos pontos 𝑀𝑆 a 𝑀𝑓). Nesse caso, a carga mecânica aplicada provoca
uma tensão constante 𝜎 entre zero e a tensão crítica 𝜎𝑆.
No mesmo sentido, na Figura 3 a transformação de martensita não maclada e
austenita e a reversa são dadas. Porém, é aplicado um carregamento mecânico que
provoca um tensão constante 𝜎 maior que a tensão crítica 𝜎𝑓. 𝑀𝑓𝜎 ,𝑀𝑆
𝜎 , 𝐴𝑆𝜎 e 𝐴𝑓
𝜎 são as
interseções das linhas de início e fim da transformação de fases para dada tensão 𝜎.
A apresentação desses importantes conceitos sobre os carregamentos térmicos
a tensão constante feitos nos últimos parágrafos, qualificam a análise dos dois efeitos
fenomenológicos da liga.

5
Figura 2 - Transformação de fase induzida por temperatura sem carregamento
mecânico (Fonte: adaptado de LAGOUDAS e KUMAR [4]).
Figura 3 - Transformação de fase induzida por temperatura com carregamento
mecânico (Fonte: adaptado de LAGOUDAS e KUMAR [4]).

6
2.1.1 Superelasticidade
O termo superelasticidade foi cunhado por RACHINGER [7] em 1958 e indica a
habilidade do material em se recuperar de grandes deformações em ciclos de carga e
descarga, tanto de tração quanto de compressão, desde que em estado de temperatura
suficientemente alta.
A superelasticidade ou pseudoelasticidade está associada com a transformação
de fase entre a austenita e a martensita não-maclada sob temperatura constante. Com
isso o material pode sofrer grandes deformações (chegando até 8-15% [8]) e retornar
para sua forma original, austenítica, livre de deformação.
De maneira a ilustrar o efeito, a Figura 4 baseada em [9] mostra duas curvas de
tensão para deformação e temperatura. Além de apresentar as formas cristalográficas
da austenita e martensita, nesses esquemas, sete pontos são destacados, são eles:
a) 𝜎𝑆𝐴𝑆: Tensão inicial da transformação de austenita em martensita (sentido direto);
b) 𝜎𝑆𝐴𝑆: Tensão final da transformação de austenita em martensita (sentido direto);
c) 𝜎𝑆𝐴𝑆: Tensão inicial da transformação de martensita em austenita (sentido inverso);
d) 𝜎𝑆𝐴𝑆: Tensão final da transformação de martensita em austenita (sentido inverso);
e) 𝑇∗: Temperatura de análise, constante;
f) 𝐴𝑓: Temperatura final da transformação em austenita;
g) 𝑇𝑜: Temperatura de referência (caracterizada no item 2.4).
Figura 4 - Efeito superelástico: curva tensão-deformação à esquerda e diagrama
tensão-temperatura à direita.
A Figura 4 também mostra a histerese entre os caminhos (indicados pelas setas
no diagrama à esquerda) do comportamento do material durante o carregamento e
descarregamento.

7
2.1.2 O efeito memória de forma
O efeito memória de forma é uma habilidade das ligas com memória de forma
em “lembrar” sua forma original. Esse processo é obtido por meio de um carregamento
mecânico anterior. Este efeito também envolve as transformações de fases, implica em
cargas térmicas impostas. Considere o caso mostrado na Figura 5. Inicialmente, o corpo
se encontra na temperatura 𝑇∗, abaixo da temperatura 𝑀𝑓 indicada e livre de
carregamento. Aplicando-se a uma temperatura constante, uma carga mecânica que
provoque o caminho indicado à esquerda, passando pelo ponto 𝜎𝑠 e indo além do ponto
𝜎𝑓, observa-se que, após o descarregamento, o material apresenta deformação
residual, não recuperando a sua forma original. Isso é similar ao que acontece com a
maioria dos materiais quando submetidos a deformação além do limite de escoamento,
plasticidade.
Figura 5 - Efeito memória de forma: curva tensão-deformação à esquerda e diagrama
tensão-temperatura à direita.
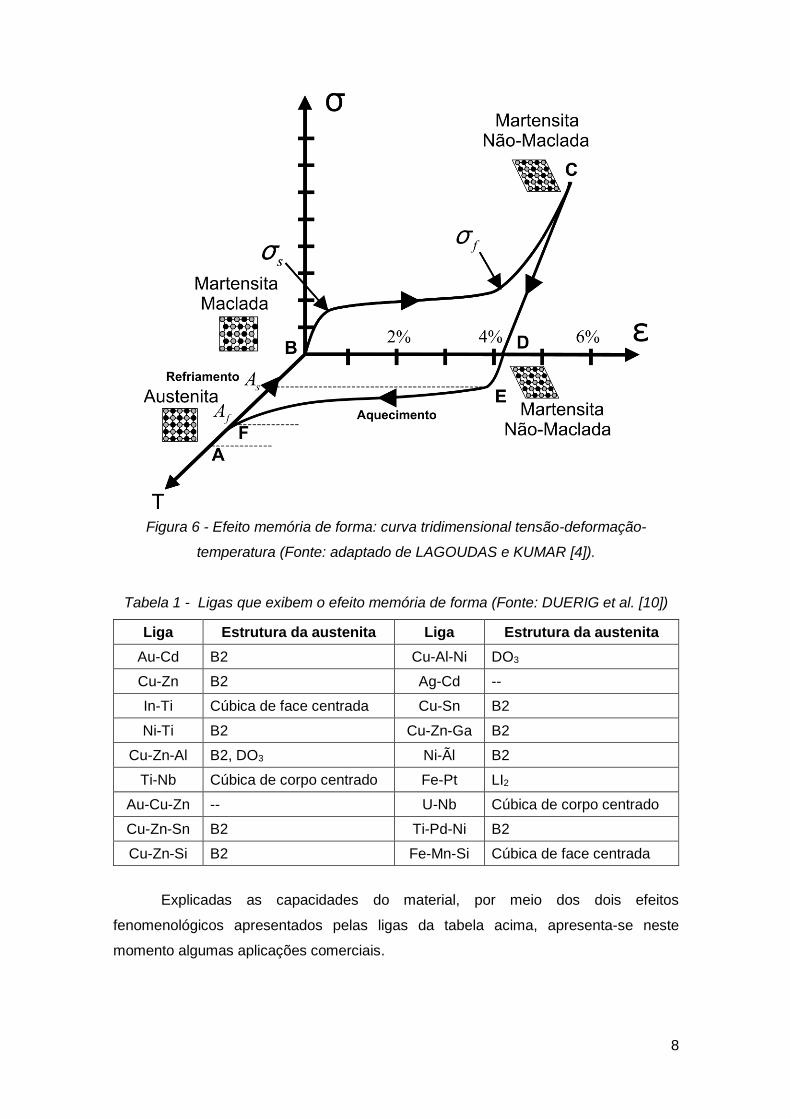
Porém, as ligas com memória de forma possuem a capacidade de retornar a sua
forma original após sofrerem um subsequente ciclo térmico. Para ilustrar esse efeito,
deste ponto em diante, a Figura 6 possui 3 eixos, incluindo também a temperatura. Desta
forma, observa-se o caminho a partir do ponto D, mostrando o processo de aquecimento
(D-E-F) até uma temperatura superior ao ponto 𝐴𝑓 e posterior resfriamento (F-B)
retornando a forma original, sem vestígios de deformação residual.
A Tabela 1 exemplifica algumas das ligas que apresentam tal efeito e,
adicionalmente, a estrutura cristalina da austenita em sua forma estável.
8
Figura 6 - Efeito memória de forma: curva tridimensional tensão-deformação-
temperatura (Fonte: adaptado de LAGOUDAS e KUMAR [4]).
Tabela 1 - Ligas que exibem o efeito memória de forma (Fonte: DUERIG et al. [10])
Liga Estrutura da austenita Liga Estrutura da austenita
Au-Cd B2 Cu-Al-Ni DO3
Cu-Zn B2 Ag-Cd --
In-Ti Cúbica de face centrada Cu-Sn B2
Ni-Ti B2 Cu-Zn-Ga B2
Cu-Zn-Al B2, DO3 Ni-Ãl B2
Ti-Nb Cúbica de corpo centrado Fe-Pt LI2
Au-Cu-Zn -- U-Nb Cúbica de corpo centrado
Cu-Zn-Sn B2 Ti-Pd-Ni B2
Cu-Zn-Si B2 Fe-Mn-Si Cúbica de face centrada
Explicadas as capacidades do material, por meio dos dois efeitos
fenomenológicos apresentados pelas ligas da tabela acima, apresenta-se neste
momento algumas aplicações comerciais.
9
2.2 Aplicações
O início do uso comercial para as ligas de memória de forma foi irregular. Apesar
da superabundância de programas de pesquisas governamentais e industriais, além de
centenas de patentes, poucos produtos foram comercialmente lançados nas duas
primeiras décadas da descoberta do NITINOL. Por essa época, vinte anos da
descoberta do NITINOL haviam se passado sem encontrar um produto de sucesso
comercial e as agências de financiamento perdiam o interesse no patrocínio. Era uma
solução procurando por um problema.
Alguns fatores foram responsáveis pelo atraso de seu uso comercial:
a) custos e escassez de fontes confiáveis do material (a liga, em sua forma pronta);
b) dificuldades em fabricar e manufaturar se estendiam desde a precisão na
fundição, pureza, conformação e usinagem;
c) ausência de conhecimento sobre as aplicações possíveis ou, ainda mais
importante, as que não eram possíveis com o material.
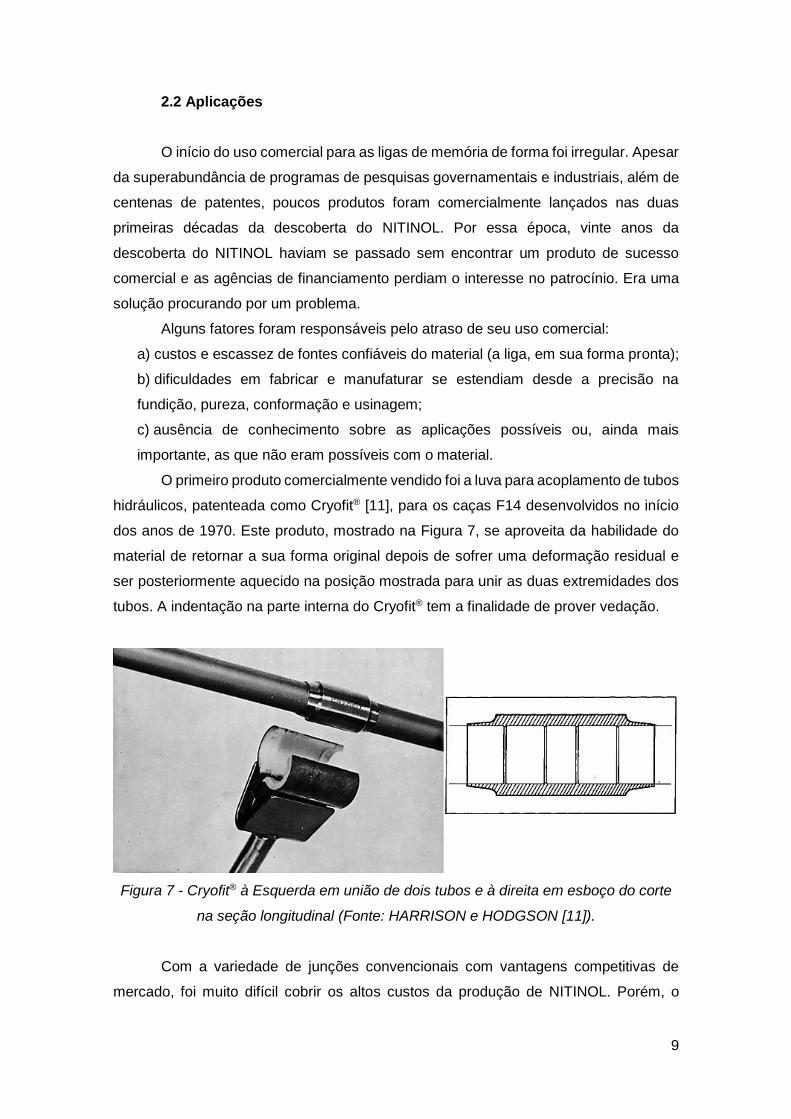
O primeiro produto comercialmente vendido foi a luva para acoplamento de tubos
hidráulicos, patenteada como Cryofit® [11], para os caças F14 desenvolvidos no início
dos anos de 1970. Este produto, mostrado na Figura 7, se aproveita da habilidade do
material de retornar a sua forma original depois de sofrer uma deformação residual e
ser posteriormente aquecido na posição mostrada para unir as duas extremidades dos
tubos. A indentação na parte interna do Cryofit® tem a finalidade de prover vedação.
Figura 7 - Cryofit® à Esquerda em união de dois tubos e à direita em esboço do corte
na seção longitudinal (Fonte: HARRISON e HODGSON [11]).
Com a variedade de junções convencionais com vantagens competitivas de
mercado, foi muito difícil cobrir os altos custos da produção de NITINOL. Porém, o

10
Cryofit® foi mais do que o primeiro produto de uso comercial, tendo proporcionado o
incentivo de se manufaturar as ligas em larga escala, fazendo o material de alta
qualidade disponível para pesquisadores ao redor do mundo. Uma vez que o material
estava amplamente acessível, vários desenvolvedores de produtos passaram a explorar
as possibilidades de aplicação.
Na década de 1990 a demanda de aparelhos médicos menores, menos
invasivos e biocompatíveis, alavancou a utilização das indústrias que utilizam e fabricam
as ligas com memória de forma. Dos variados equipamentos médico-cirúrgicos
desenvolvidos [12], Figura 8, os stents foram o mais emblemático por ser o primeiro
protótipo integralmente concebido para o NITINOL.
Figura 8 - Aplicações biomédicas para o NITINOL. À esquerda, exemplos de âncora
de sutura. Ao centro, agulha para biópsia em mamas. À direita, stents de angioplastia
(Fonte: PELTON et al. [12]).
O uso de fios para aparelhos ortodônticos [13], atuadores para flaps na indústria
aeroespacial [14] e atenuadores de vibração em arruelas belleville para flanges [15] em
tubulações, são alguns poucos exemplos que ilustram a potencialidade das aplicações
e áreas.
A Figura 10 apresenta o crescimento das aplicações em estruturas inteligentes
(através do número de patentes registradas nos períodos de décadas discriminado) e o
crescimento das pesquisas (pelo número de publicações científicas) que auxiliam a
diversificação e inovação em usos. As projeções apresentadas são ousadas, mas
refletem o cenário de otimismo do setor.
Por fim, a Tabela 2 apresenta algumas propriedades das ligas com memória de
forma comparadas com um material convencional, o aço inoxidável. Procura-se
evidenciar as características comuns desejadas pelos em materiais “normais” em
projetos (diminuição de peso, boa resistência e alta tensão de ruptura) com o
refinamento do uso da liga Níquel-Titânio.

11
Figura 9 - Crescimento de patentes nos EUA e de pesquisas com as ligas de memória
de forma (Fonte: adaptado de MOHD JANI [5]).
Tabela 2 - Comparação entre a liga NiTi e o aço inoxidável. Valores médios gerais
(Fonte: BARRETT e FRIDLINE [16]).
Propriedade NiTi Aço inoxidável
Deformação máxima recuperável ~8% ~0.8%
Biocompatibilidade Excelente Normal
Módulo de elasticidade efetivo ~48 [GPa] ~193 [GPa]
Resistência ao Torque Excelente Pobre
Densidade 6.45 [g/cm³] 8.03 [g/cm³]
Magnético Não Sim
Tensão máxima de ruptura ~1240 [MPa] ~760 [MPa]
2.3 Modelo constitutivo
O modelo de AURICCHIO et al. [17] foi implementado no software comercial de
análise pelo método de elementos finitos, ANSYS (desde a sua versão 14.5), para as
ligas com memória de forma, como caracterização dos parâmetros necessários do
material. Este modelo fenomenológico é baseado no trabalho de SOUZA et al. [18],
desenvolvido a partir da teoria do potencial para a energia livre de Helmholtz, Equação
(1) a seguir:

12
Ψ(ε, εtr, 𝑇) =
1
2𝐸(ε − εtr)2 + β⟨T − Mf⟩|ε
tr| +1
2ℎ(εtr)2 + ℐεL(ε
tr) (1)
onde 𝐸 = 𝐸𝐴 + 𝜉𝑀(𝐸𝑀 − 𝐸𝐴), 휀 é a deformação e 휀𝑡𝑟 é a deformação de
transformação, 𝛽 é uma função que define a dependência com a temperatura, 𝑇 é a
temperatura e 𝑀𝑓 a temperatura da qual a fase martensita é estável no estado livre de
tensões, ℎ é um parâmetro de endurecimento do material e ℐ𝜀𝐿 é uma restrição
introduzida para satisfazer a norma da transformação de deformação, definida, a seguir:
ℐ𝜀𝐿(휀
𝑡𝑟) = {0, 𝑠𝑒 |휀𝑡𝑟| ≤ 휀𝐿
+∞, 𝑠𝑒 |휀𝑡𝑟| > 휀𝐿 (2)
Tal como mostrado em [17], tem-se, a partir de (1), as forças termodinâmicas:
{
𝝈 =𝜕𝛹
𝜕𝑥= 𝐸(𝜺 − 𝜺𝑡𝑟)
𝑿 = −𝜕𝛹
𝜕휀𝑡𝑟= 𝝈 − 𝛽⟨𝑇 −𝑀𝑓⟩
𝜺𝑡𝑟
|𝜺𝑡𝑟|− ℎ휀𝑡𝑟 − 𝛾
𝜺𝑡𝑟
|𝜺𝑡𝑟|
(3)
a variável 𝛾 surge da diferenciação da função indicatriz 𝜕ℐ𝜀𝐿(휀𝑡𝑟) e é definida da seguinte
forma:
{𝛾 = 0, 𝑠𝑒 |휀𝑡𝑟| < 휀𝐿 ,
𝛾 ≥ 0, 𝑠𝑒 |휀𝑡𝑟| = 휀𝐿 (4)
sendo 𝜕ℐ𝜀𝐿(𝑒𝑡𝑟) = 𝛾
𝜀𝑡𝑟
|𝜀𝑡𝑟|.
Para controlar a evolução da variável interna 휀𝑡𝑟, uma função limite é introduzida:
𝐹(𝑋) = |𝑋| − 𝑅(𝑇) (5)
onde R(T) é o raio do domínio elástico e controla a largura do laço de histerese. A
equação de evolução da variável ε𝑡𝑟 é dada por:
�̇�𝑡𝑟 = �̇�𝑀
𝜕𝐹
𝜕𝑿= −�̇�𝑀
𝑿
∥ 𝑿 ∥ (6)
Ainda, de modo a seguir o princípio da máxima dissipação para a evolução das
variáveis internas [4], as condições de Kuhn-Tucker devem ser satisfeitas, tal que:
�̇�𝑀 ≥ 0, 𝐹 ≤ 0, �̇�𝑀𝐹 = 0 (7)
com �̇�𝑀 a evolução da fração volumétrica na transformação de fase entre austenita e
martensita, possuindo em um papel similar ao do parâmetro de consistência plástica.

13
2.4 Parâmetros do modelo constitutivo
A implementação do modelo constitutivo no ANSYS está associado a
determinação de parâmetros (AURICCHIO et al. [9]). A seguir, é feita a identificação de
cada um através de testes experimentais, mas antes, descreve-se cada um deles:
a) 𝐸𝐴: módulo de elasticidade da austenita (também conhecido como módulo de
Young). Unidade de pressão, MPa;
b) 𝐸𝑀: módulo de elasticidade para a martensita. Unidade de pressão, MPa;
c) 𝜈: constante de Poisson do material. Neste modelo, a mesma constante de
Poisson é avaliada para as duas fases, martensita e austenita. Adimensional;
d) ℎ: coeficiente angular da curva tensão-deformação durante a transformação direta
e inversa. Unidade de pressão, MPa;
e) 𝑇𝑜: temperatura de referência para o estado livre de deformações na ausência de
tensões aplicadas. Unidade de temperatura, K;
f) 𝑅: raio do domínio elástico para todas as temperaturas. Neste modelo, não há
evolução com a temperatura. O raio é correspondente a metade da altura de
histerese. Unidade de pressão, MPa;
g) 𝛽: coeficiente angular da curva da tensão com respeito a temperatura. Unidade
de pressão dividido pela temperatura, MPa/K;
h) 휀𝐿: máxima deformação de transformação. Mede a máxima deformação obtida
pela reordenação das fases martensíticas. Adimensional;
i) 𝑚: parâmetro de dependência de Lode, uma relação sobre a simetria ou assimetria
entre as tensões críticas de tração e compressão. Adimensional.
Iniciando-se pela discussão da variação do parâmetro 𝑅 com a temperatura,
mostrado na Figura 10, vê-se que o valor para 𝑅 está dividido em três regiões diferentes.
Os valores para 𝑅0 e 𝑅1 são obtidos graficamente na curva do ensaio de tensão uniaxial
da Figura 11. Como input ao Mechanical APDL™, apenas o valor de 𝑅 na temperatura
de referência é inserido. Internamente o programa é capaz de extrapolar o valor para
aproximação de 𝑅0. Ou seja, com base nas imagens mencionadas, temos o parâmetro
caracterizado em (8):
𝑅 = 𝑅1 (8)

14
Figura 10 - Dependência do raio do domínio elástico (𝑅) com a temperatura
(Fonte: AURICCHIO et al. [19]).
Para identificação dos parâmetros seguintes do material, os diagramas dos
pares tensão-deformação (Figura 11), tensão-temperatura (Figura 12) e deformação-
temperatura (Figura 13) são apresentados e contém, de forma ilustrativa, a
caracterização nos contextos experimentais.
Figura 11 - Representação gráfica dos parâmetros do material pelo modelo constitutivo
apresentado. Superelasticidade, à esquerda, e Efeito Memória de Forma, à direita
(Fonte: AURICCHIO et al. [9]).
Ainda na Figura 11 é possível obter os módulos de elasticidade (𝐸𝐴 e 𝐸𝑀) e a
máxima deformação de transformação (휀𝐿), além dos raios de domínio elástico (𝑅0 e 𝑅1).
𝐸𝐴 e 𝐸𝑀 são obtidos pelo coeficiente angular das retas a baixas tensões (somente
A
M
M
M
15
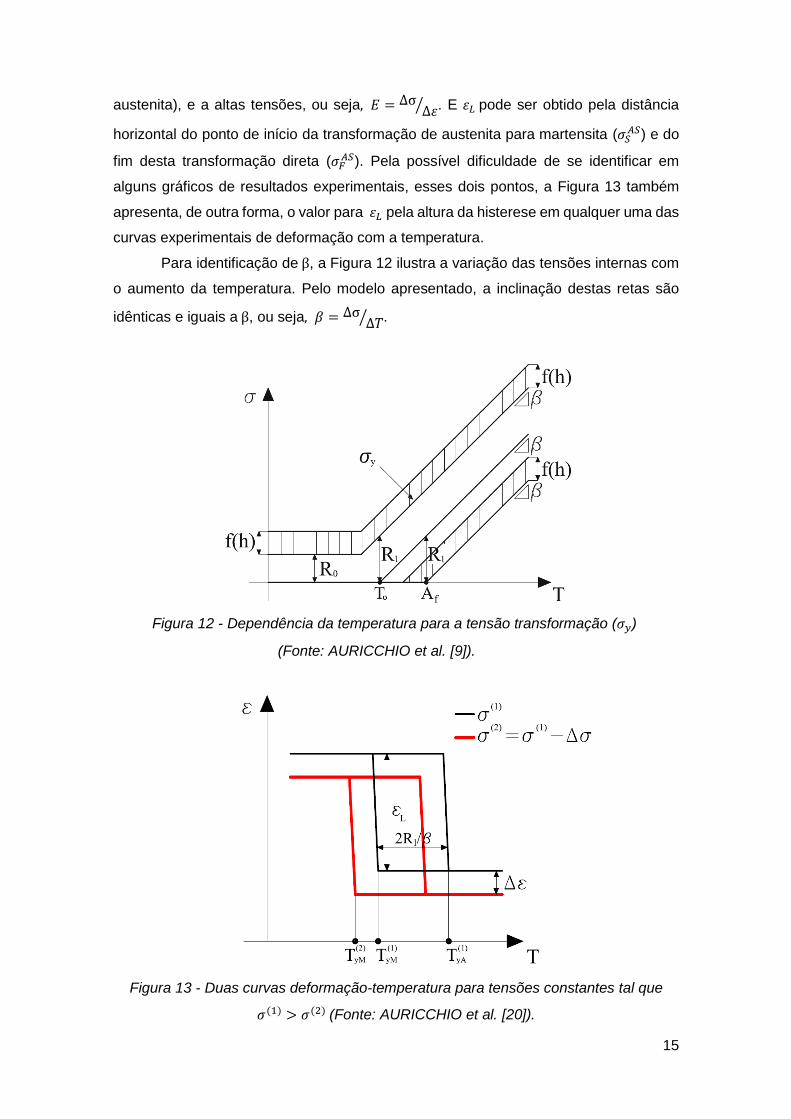
austenita), e a altas tensões, ou seja, 𝐸 = Δσ Δ휀⁄ . E 휀𝐿 pode ser obtido pela distância
horizontal do ponto de início da transformação de austenita para martensita (𝜎𝑆𝐴𝑆) e do
fim desta transformação direta (𝜎𝐹𝐴𝑆). Pela possível dificuldade de se identificar em
alguns gráficos de resultados experimentais, esses dois pontos, a Figura 13 também
apresenta, de outra forma, o valor para 휀𝐿 pela altura da histerese em qualquer uma das
curvas experimentais de deformação com a temperatura.
Para identificação de β, a Figura 12 ilustra a variação das tensões internas com
o aumento da temperatura. Pelo modelo apresentado, a inclinação destas retas são
idênticas e iguais a β, ou seja, 𝛽 = Δσ Δ𝑇⁄ .
Figura 12 - Dependência da temperatura para a tensão transformação (𝜎𝑦)
(Fonte: AURICCHIO et al. [9]).
Figura 13 - Duas curvas deformação-temperatura para tensões constantes tal que
𝜎(1) > 𝜎(2) (Fonte: AURICCHIO et al. [20]).

16
De posse do valor de β, pode-se, também, na Figura 13 identificar o valor de 𝑅
pela largura de qualquer uma das curvas, como sendo proporcional a 2 ⋅ R β⁄ . Esta
proporção se segue da equação (5), igualando-se a zero para cada uma das curvas da
Figura 13, como mostrado abaixo:
𝐹 = |𝑋| − 𝑅 = 0 →
{𝜎 − 𝛽(𝑇𝑦𝑀 − 𝑇𝑜) = 𝑅
𝜎 − 𝛽(𝑇𝑦𝐴 − 𝑇𝑜) = −𝑅
(9)
e subtraindo-se as equações resultantes da equação (9) uma pela outra:
𝑇𝑦𝐴(1)− 𝑇𝑦𝑀
(1)= 2 ⋅
R
β (10)
obtém-se a relação indicada como se queria mostrar.
A função 𝑓(ℎ) hachurada na Figura 12 corresponde a f(h) =E⋅h
E+h⋅ εL e necessita
apenas da resolução do valor de ℎ para ser completamente caraterizada, sendo ℎ obtido
indiretamente por:
𝜕𝜎
𝜕휀=𝐸 ⋅ h
𝐸 + ℎ (11)
Reescrevendo a expressão, chega-se a:
𝜕𝜎
𝜕휀=𝜕𝜎
𝜕𝑇⋅𝜕𝑇
𝜕휀= 𝛽 ⋅
𝜕𝑇
𝜕휀 𝑟𝑒𝑜𝑟𝑔𝑎𝑛𝑖𝑧𝑎𝑛𝑑𝑜→ ℎ =
1
1𝛽⋅∂ε∂T −1E
(12)
Para determinação da temperatura de referência, tem-se duas alternativas: a
primeira segue da Figura 12:
𝑇𝑜 = 𝐴𝑓 −𝑅1𝛽 (13)
com 𝐴𝑓 obtido por um calorímetro de escaneamento diferencial, correspondendo a
temperatura final de transformação em austenita.
A segunda alternativa segue de qualquer uma das equações de (9) para
qualquer uma das curvas experimentais:
𝜎(1) − 𝛽 (𝑇𝑦𝑀(1) − 𝑇𝑜) = 𝑅
𝑟𝑒𝑜𝑟𝑔𝑎𝑛𝑖𝑧𝑎𝑛𝑑𝑜→ 𝑇𝑜 = 𝑇𝑦𝑀
(1) +𝑅 − 𝜎(1)
𝛽 (14)

17
Por fim, o parâmetro de Lode procura caracterizar a diferença de comportamento
da liga com memória de forma e é relacionada em AURICCHIO e PETRINI [17] na
equação que se segue abaixo:
𝑚 = √27
2 σc − σ𝑡σc + σt
(15)
onde σt e σc são as tensões críticas uniaxial para a tração e compressão,
respectivamente.
18
3 Método dos elementos finitos
Este capítulo tem como objetivo apresentar uma discussão sobre o uso do
método dos elementos finitos (MEF) para tratar estruturas inteligentes com memória de
forma.
3.1 Modelagem de estruturas por elementos finitos
Sete etapas podem caracterizar [21] as ações necessárias para a modelagem
de uma estrutura pelo método de elementos finitos. Cada uma delas segue com uma
descrição abaixo:
a) idealização do problema: suposições e hipóteses são feitas de forma a simplificar
o problema, possivelmente a redução das dimensões, caracterizando as condições
de apoio ou excluindo detalhes, tais como pequenos furos ou abaulamentos
insignificantes para a análise, mas que complicam a geração da malha;
b) discretização do domínio: agrupamento da geometria em formas mais simples, os
elementos são interconectados por nós em comum. A discretização pode ser feita
em todas as dimensões, dependendo da idealização do problema;
c) escolha do tipo de elemento: cada elemento possui uma teoria na sua formulação
que prevê o uso e capacidades de modelagem. Nas análises unidimensional,
bidimensional e tridimensional os elementos mais comuns são a viga, placa e sólido,
respectivamente. A Figura 14 ilustra os principais tipos de elementos usados;
d) formação da malha de elementos: as equações para cada elemento são
montadas em um conjunto de equações globais que modelarão as propriedade do
sistema em análise;
e) aplicação das condições de contorno: os problemas precisam ser completamente
restringidos para evitar movimentos não correlacionados ao caso real devido aos
carregamentos termomecânicos que são impostos. Diferentes tipos de condições de
contorno geram resultados diferentes nas soluções das equações globais;
f) solução das equações: as resoluções das equações são feitas para as variáveis
principais, i.e., graus de liberdade dos nós;
g) solução das variáveis derivadas: calculadas usando os valores dos graus de
liberdade nos nós através das relações presentes nas teorias de cada elemento;
h) Avaliação dos resultados obtidos: observação e discussão a respeito das
respostas aos esforços estruturais.

19
Figura 14 - Principais tipos de elementos (Fonte: FUNNELL [22]).
3.2 Análises de estruturas não-lineares
As não-linearidades de uma estrutura possuem duas fontes:
a) geométrica: grandes deformações, deslocamentos ou rotações;
b) física (constitutiva): associada com uma relação tensão-deformação não-linear,
mudanças de condições ambientes (temperatura) ou o período de tempo em que
uma carga é aplicada.
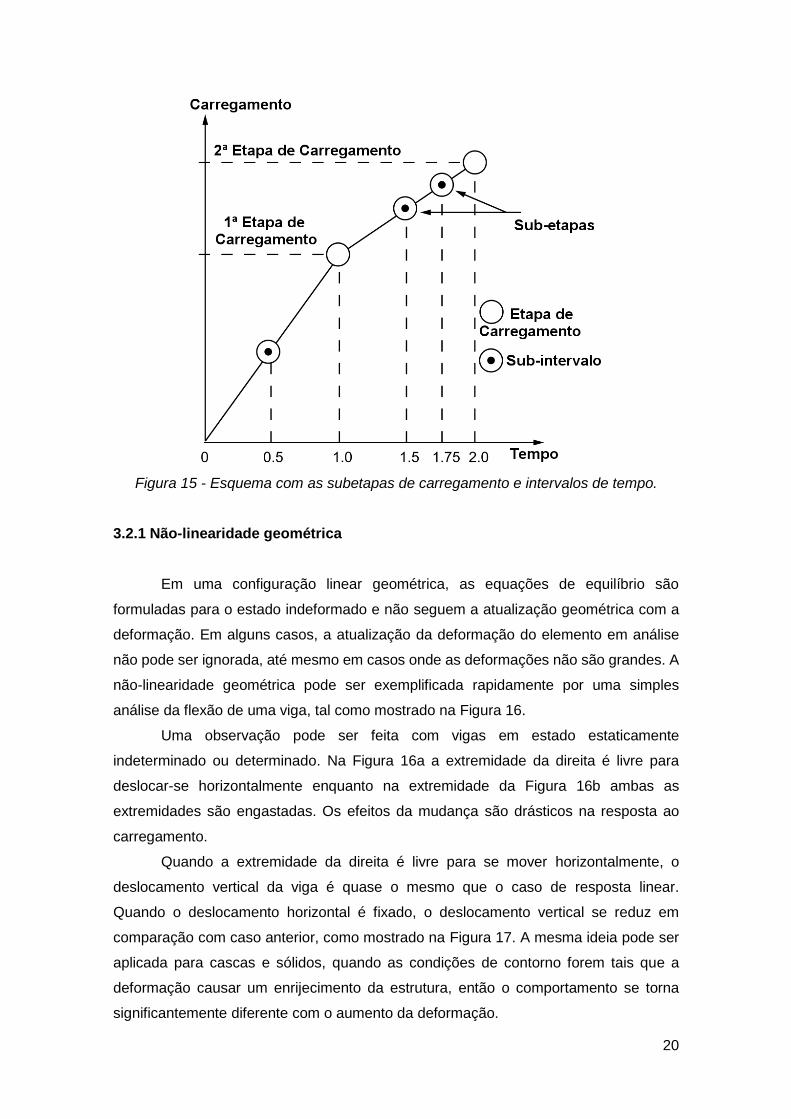
Numericamente, uma análise não-linear é solucionada em processo quasi-
estático, com aplicação gradual da carga. Essas estão organizadas em três níveis de
operação (ANSYS [23]), ilustrados na Figura 15:
a) o nível superior consiste em um falso transiente através de etapas de
carregamento (em inglês, “load steps”) definidos explicitamente através de um
intervalo de tempo. A carga é assumida como variação linear entre as etapas de
carregamento (mesmo para análises estáticas);
b) em cada etapa é possível direcionar a aplicação gradual da carga, organizando-
se em subetapas (em inglês, “substeps”) de intervalos de tempo;
c) a cada subetapa, o programa realiza um número de iterações de equilíbrio para
obter a convergência da solução.
Ao se utilizar múltiplas subetapas é preciso alcançar um balanço entre precisão
e economia: mais subetapas (isto é, intervalos de tempo menores) geralmente resultam
em melhor precisão, mas, ao mesmo tempo, elevam o tempo de processamento. Os
critérios de convergência podem ser definidos baseados na análise de forças,
momentos, deslocamentos ou rotações, desassociados ou combinados. Cada grau de
liberdade pode ter seu critério definido individualmente.
A seguir realizam-se algumas considerações importantes sobre os tipos de não-
linearidades propostos.
20
Figura 15 - Esquema com as subetapas de carregamento e intervalos de tempo.
3.2.1 Não-linearidade geométrica
Em uma configuração linear geométrica, as equações de equilíbrio são
formuladas para o estado indeformado e não seguem a atualização geométrica com a
deformação. Em alguns casos, a atualização da deformação do elemento em análise
não pode ser ignorada, até mesmo em casos onde as deformações não são grandes. A
não-linearidade geométrica pode ser exemplificada rapidamente por uma simples
análise da flexão de uma viga, tal como mostrado na Figura 16.
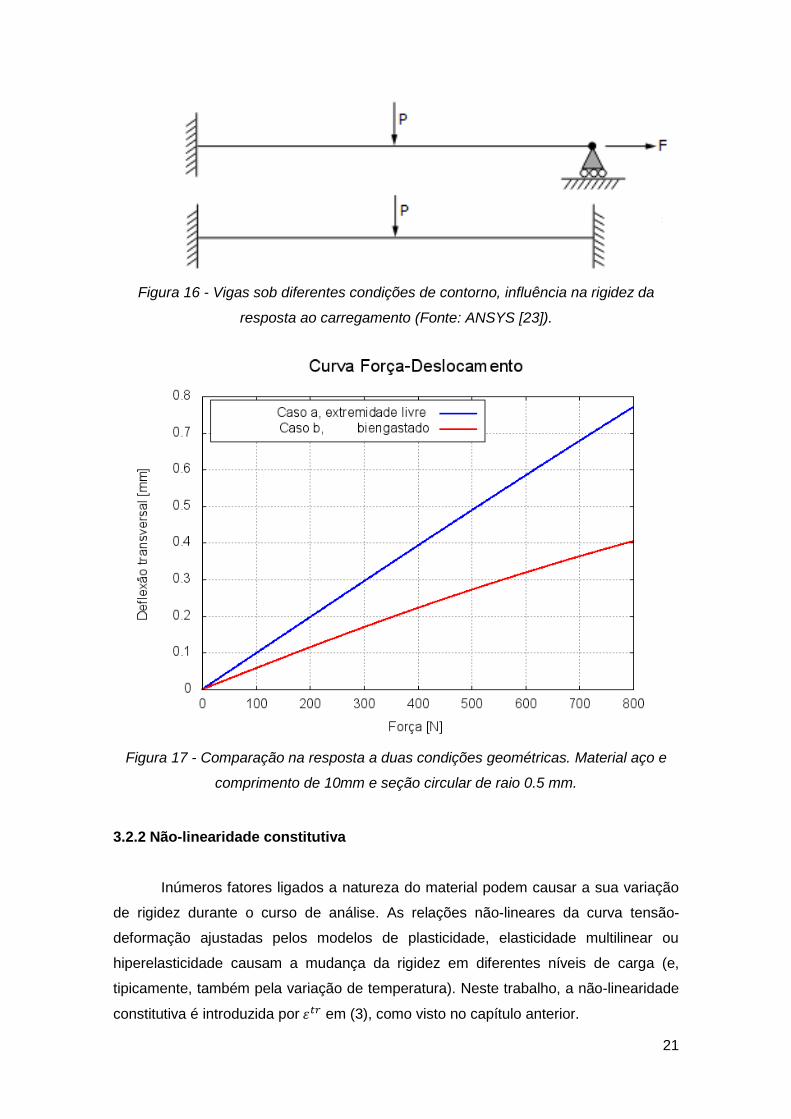
Uma observação pode ser feita com vigas em estado estaticamente
indeterminado ou determinado. Na Figura 16a a extremidade da direita é livre para
deslocar-se horizontalmente enquanto na extremidade da Figura 16b ambas as
extremidades são engastadas. Os efeitos da mudança são drásticos na resposta ao
carregamento.
Quando a extremidade da direita é livre para se mover horizontalmente, o
deslocamento vertical da viga é quase o mesmo que o caso de resposta linear.
Quando o deslocamento horizontal é fixado, o deslocamento vertical se reduz em
comparação com caso anterior, como mostrado na Figura 17. A mesma ideia pode ser
aplicada para cascas e sólidos, quando as condições de contorno forem tais que a
deformação causar um enrijecimento da estrutura, então o comportamento se torna
significantemente diferente com o aumento da deformação.
21
Figura 16 - Vigas sob diferentes condições de contorno, influência na rigidez da
resposta ao carregamento (Fonte: ANSYS [23]).
Figura 17 - Comparação na resposta a duas condições geométricas. Material aço e
comprimento de 10mm e seção circular de raio 0.5 mm.
3.2.2 Não-linearidade constitutiva
Inúmeros fatores ligados a natureza do material podem causar a sua variação
de rigidez durante o curso de análise. As relações não-lineares da curva tensão-
deformação ajustadas pelos modelos de plasticidade, elasticidade multilinear ou
hiperelasticidade causam a mudança da rigidez em diferentes níveis de carga (e,
tipicamente, também pela variação de temperatura). Neste trabalho, a não-linearidade
constitutiva é introduzida por 휀𝑡𝑟 em (3), como visto no capítulo anterior.

22
3.3 Formulação matemática – problema de valor de contorno
A fim de exemplificar as formulações que devem ser feitas para cada tipo de
elemento a ser utilizado, apresenta-se, como um exemplo, as operações a partir da
equação diferencial na formulação forte que rege os deslocamentos em uma barra
submetida apenas a esforços axiais em um problema de valor de contorno [24] seguem-
se abaixo:
𝑑
𝑑𝑥(𝐸𝐴
𝑑𝑢
𝑑𝑥) + 𝑓(𝑥) = 0, em ]0, 𝐿[ (16)
{𝑢(0) = 0
𝐸𝐴𝑑𝑢
𝑑𝑥(𝐿) = 𝐹
(17)
onde 𝐸 é o módulo de elasticidade do material, 𝐴 é a área da seção transversal da
barra, 𝑢 é o deslocamento linear, 𝑓(𝑥) é a força distribuída sobre a barra, 𝑢(0) = 0 a
condição de contorno essencial e 𝐸𝐴𝑑𝑢
𝑑𝑥(𝐿) = 𝐹 é a condição de contorno natural do
problema de valor de contorno ilustrado na Figura 18 abaixo.
Figura 18 - Barra reta submetida a esforços axiais.
Aplicando o princípio dos trabalhos virtuais ou do método dos resíduos
ponderados, a formulação variacional é dada por:
∫ (𝐸𝐴𝑑𝑢
𝑑𝑥) 𝛿휀 𝑑𝑥
𝐿
0
= ∫ 𝑓(𝑥)𝛿𝑢 𝑑𝑥𝐿
0
+ 𝐹𝛿𝑢(𝐿) (18)
Em que 𝛿𝑢 atua como o campo de deslocamentos virtuais e 𝛿휀 o campo de deformações
virtuais, os trabalhos das forças internas Eq. (24) e forças externas, Eq. (25):
A equação constitutiva é dada por:
𝜎𝑥 = 𝐸휀𝑥 = 𝐸(휀𝑒 + 휀𝑡𝑟) (19)
com 𝜎𝑥 a tensão axial da barra e 휀𝑥 a deformação na direção x, divido na parte elástica
휀𝑒 e na parte associada a transformação de fase 휀𝑡𝑟, cuja evolução é dada por:

23
�̇�𝑡𝑟 = �̇�𝑀
𝜕𝐹
𝜕𝑿= −�̇�𝑀
𝑿
∥ 𝑿 ∥ (20)
onde 𝑋 é uma força termodinâmica similar a tensão 𝜎, mas com diferenciação do
potencial de Helmholtz com respeito a 휀𝑡𝑟. E os parâmetros:
𝐸 = 𝐸𝐴 + 𝜉𝑀(𝐸𝑀 − 𝐸𝐴) (21)
휀𝑥 = 𝑑𝑢
𝑑𝑥= 휀𝑒 + 휀𝑡𝑟 =
𝑑𝑢𝑒
𝑑𝑥+𝑑𝑢𝑡𝑟
𝑑𝑥 (22)
𝐸𝑀 e 𝐸𝐴 são os módulos de elasticidade da martensita e austenita, respectivamente.
E, 𝜉𝐴 é a fração volumétrica de austenita e 𝜉𝑀 é a fração volumétrica de martensita, de
tal forma que:
𝜉𝐴 + 𝜉𝑀 = 1, �̇�𝑀 = −�̇�A (23)
Desta forma,
∫ (𝐸𝐴𝑑𝑢
𝑑𝑥)𝛿휀 𝑑𝑥
𝐿
0
= ∫ 𝐸𝐴휀𝑥𝛿휀 𝑑𝑥𝐿
0
= ∫ 𝐸𝐴휀𝑒𝛿휀 𝑑𝑥𝐿
0
+∫ 𝐸𝐴휀𝑡𝑟𝛿휀 𝑑𝑥𝐿
0
(24)
∫ 𝑓(𝑥)𝛿𝑢 𝑑𝑥𝐿
0
+ 𝐹𝛿𝑢(𝐿) (25)
o termo ∫ 𝐸𝐴휀𝑡𝑟𝛿휀 𝑑𝑥𝐿
0 introduz a não-linearidade do material no problema de valor de
contorno. Integrando-se por partes com o propósito de diminuir a ordem da
diferenciação de 𝑢(𝑥), tem-se:
−∫ 𝐸𝐴𝑑𝑢𝑒
𝑑𝑥
𝑑𝛿휀
𝑑𝑥 𝑑𝑥
𝐿
0
−∫ 𝐸𝐴𝑑𝑢𝑡𝑟
𝑑𝑥
𝑑𝛿휀
𝑑𝑥 𝑑𝑥
𝐿
0
= −∫ 𝑓𝛿𝑢 𝑑𝑥𝐿
0
− 𝐸𝐴𝑑𝑢
𝑑𝑥𝛿𝑢|
0
1
(26)
Introduzindo as aproximações arbitrárias �̂� e �̂�:
�̂�(𝑥) =∑𝑁𝑗(𝑥)𝑢𝑗
𝑛
𝑗=1
, �̂�(𝑥) ∈ �̂� (�̂� ⊂ 𝑈) (27)
�̂�(𝑥) =∑𝑁𝑖(𝑥)𝑤𝑖
𝑛
𝑖=1
, �̂�(𝑥) ∈ �̂� (�̂� ⊂ 𝑊) (28)
𝑁𝑖 e 𝑁𝑗 são as funções de forma e as aproximações respectivas são: 𝛿𝑢 = �̂�(𝑥) e 𝛿휀 =
�̂�(𝑥). Sabendo-se que o trabalho das forças internas é igual a das forças externas,
obtêm-se a formulação variacional discreta:

24
∫ 𝐸𝐴𝑑�̂�𝑒
𝑑𝑥
𝑑�̂�
𝑑𝑥 𝑑𝑥
𝐿
0
+∫ 𝐸𝐴𝑑�̂�𝑡𝑟
𝑑𝑥
𝑑�̂�
𝑑𝑥 𝑑𝑥
𝐿
0
= ∫ 𝑓�̂� 𝑑𝑥𝐿
0
+ 𝐹�̂�(𝐿) (29)
Fazendo 𝑤𝑖 = 1 e 𝑤𝑗 = 0, para 𝑗 ≠ 𝑖 e 𝑖 = 1,… , 𝑛:
∑((∫ 𝐸𝐴
𝑑𝑁𝑗
𝑑𝑥
𝑑𝑁𝑖𝑑𝑥 𝑑𝑥
𝐿
0
+∫ 𝐸𝐴𝑑𝑁𝑗
𝑡𝑟
𝑑𝑥
𝑑𝑁𝑖𝑑𝑥 𝑑𝑥
𝐿
0
)𝑢𝑗 = ∫ 𝑓𝑁𝑖 𝑑𝑥𝐿
0
+ 𝐹𝑁𝑖(𝐿))
𝑛
𝑗=1
,
(𝑖 = 1,… , 𝑛)
(30)
O sistema de n equações e n incógnitas 𝑢𝑗 pode ser escrito da forma:
(𝐊𝐋 + 𝐊𝐍𝐂)𝐮 = 𝐅 (31)
Com 𝐾𝑖𝑗,𝐹𝑖 e 𝐹𝑖𝑁𝐶 claramente correspondentes, neste caso, a:
𝐾𝑖𝑗𝐿 = ∫ 𝐸𝐴
𝑑𝑁𝑗
𝑑𝑥
𝑑𝑁𝑖𝑑𝑥 𝑑𝑥
𝐿
0
(32)
𝐾𝑖𝑗𝑁𝐶 = ∫ 𝐸𝐴
𝑑𝑁𝑗𝑡𝑟
𝑑𝑥
𝑑𝑁𝑖𝑑𝑥 𝑑𝑥
𝐿
0
(33)
𝐹𝑖 = ∫ 𝑓𝑁𝑖 𝑑𝑥𝐿
0
+ 𝐹𝑁𝑖(𝐿) (34)
Neste exemplo não foi abordado os termos das não linearidades geométrica e
das condições de contorno. BANDEIRA et al. [25] usando uma formulação
termomecânica para ligas com memória de forma e com o uso dos tensores de tensão
de Cauchy, o segundo tensor Piola-Kirchhoff e o Tensor de deformação de Lagrange,
obtiveram as matrizes e vetores da forma mostrada abaixo:
𝐊𝐮 = (𝐊𝐋 +𝐊𝐍𝐆 + 𝐊𝐍𝐂)𝐮 = 𝐅 − �̂� (35)
onde 𝐊𝐍𝐆 e 𝐊𝐍𝐂 correspondem a variação da rigidez devido a não-linearidade
geométrica e constitutiva, respectivamente, e �̂� é o termo não-linear constitutivo.
A forma apresentada em (35) é a mais genérica e representa a forma da equação
na modelagem por elementos finitos em todos os casos discutidos neste trabalho.
Para realizar análises que exigem grandes deformações, deve ser incluído um
termo de variação da rigidez da matriz de tensão, caracterizado pela matriz de não-
linearidade geométrica. Este termo está apresentado por 𝐊𝐍𝐂 porém não caracterizado
neste trabalho.

25
3.4 Parâmetros das ligas com memória de forma
A Tabela 3 apresenta as propriedades do NITINOL apresentadas por REALI et
al. [20] que, para fins de comparação, foram as propriedades utilizadas nas simulações
dos testes em elementos de pórtico e plano.
Tabela 3 - Parâmetros das simulações do elemento de pórtico e plano.
Propriedade Símbolo Valor
Módulo de Elasticidade - Austenita 𝐸𝐴 50 000 [MPa]
Constante de Poisson 𝜈 0,33
Parâmetro de Endurecimento ℎ 1100 [MPa]
Temperatura de Referência 𝑇𝑜 238,15 [K]
Limite de Elasticidade R 130 [MPa]
Parâmetro de Escala da Temperatura 𝛽 3,5 [MPa.K-1]
Módulo de Elasticidade - Martensita 𝐸𝑀 26 000 [MPa]
Deformação Máxima de Transformação 휀𝐿 5,8 [%]
Parâmetro de Lode 𝑚 0
A Tabela 4 apresenta as propriedades do NITINOL apresentadas por SITTNER
et al. [26] que, também para fins de comparação, foram utilizadas nas simulações dos
testes em elementos de casca e sólido.
Tabela 4 - Parâmetros das simulações dos elementos de casca e sólido.
Propriedade Símbolo Valor
Módulo de Elasticidade 𝐸𝐴 53 000 [MPa]
Constante de Poisson 𝜈 0,36
Parâmetro de Endurecimento ℎ 1100 [MPa]
Temperatura de Referência 𝑇𝑜 223,15 [K]
Limite de Elasticidade R 50 [MPa]
Parâmetro de Escala da Temperatura 𝛽 2,1 [MPa.K-1]
Deformação Máxima de Transformação 휀𝐿 4,0 [%]
Parâmetro de Lode 𝑚 0
Utilizando o modelo e as equações constitutivas já discutidos, são apresentados
na sequência os elementos, suas geometrias, capacidades, hipóteses e restrições. A
família de elementos 18x foi utilizada por suportar a particularização da
superelasticidade (opção para o material “SUPE”) e do efeito memória de forma (opção
para o material “MEFF”) no programa ANSYS® Mechanical APDL™ 16.2.

26
Os próximos itens são extraídos das informações encontradas nas seção
específicas da documentação de referências dos elementos no ANSYS versão 16.2 [23].
Todas as macros produzidas foram criadas e manipuladas no software OpenSource
Notepad++ (editor de texto com suporte a diferentes tipos de linguagem de
programação) por sua simplicidade e ampla utilização. A linguagem utilizada é baseada
em FORTRAN 90 com as funções nativas do software de análise por elementos finitos,
ANSYS® Mechanical APDL™ 16.2, cuja licença da sua versão estudantil foi obtida
através do site oficial e utilizada em todos os métodos computacionais deste presente
trabalho.
3.5 Elementos unidimensionais
O elemento unidimensional é baseado na teoria de viga de Timoshenko [27] e,
portanto, as deformações cisalhantes estão inclusas nas análises. Um componente axial
e dois transversais de deformação são usados. O elemento é ideal para análises linear
ou não-linear em aplicações com grandes deformações deslocamento ou grandes
rotação envolvidas.
Figura 19 - Geometria do tipo de elemento BEAM188 (Fonte: ANSYS [23]).
O elemento BEAM188 é usado para modelar vigas de espessura fina a
moderada. Na Figura 19, observa-se a orientação do elemento, bem como a disposição
dos dois nós I e J, onde as informações desejadas (reações: forças e momentos;
tensões: direções das coordenadas globais, principais, de cisalhamentos e Von Mises;
deslocamentos, deformação e curvatura) são calculadas. São seis graus de liberdade:
translações nas direções X, Y e Z e rotações em X, Y e Z, com funções de forma
lineares, pela presença de apenas dois nós, sem a criação de nó fictício. A temperatura
é calculada uniforme na seção transversal em cada nó e linear pelo comprimento do
elemento. O círculo em destaque na Figura 19 ilustra em corte a seção transversal do

27
elemento, que pode assumir diferentes formas pré-definidas ou personalizada pelo o
usuário.
Os elementos de vigas nas simulações deste trabalho tem a forma transversal
tal como na Figura 20, onde pode-se obter as dimensões, posição do centroide e do
centro de cisalhamento, momentos de área e a malha representa em cada uma de suas
interseções, os nós da seção transversal, onde todas informações são, também,
calculadas e armazenadas. São ao todo 501 pontos da seção transversal, de cada nó,
em 25 divisões radiais e 20 divisões angulares, todos parâmetros controlados conforme
os resultados desejados.
A análise de convergência de malha para o elemento de viga foi realizada para
todos os testes propostos em comprimentos de 50, 25, 10, 5, 2 e 1 milímetro. As
dimensões de geometria são especificadas em cada um dos casos.
Figura 20 - Malha da seção transversal do elemento BEAM188.
28
3.5.1 Hipóteses e restrições
As suposições feitas para a teoria de viga de Timoshenko são [28]:
a) simetria plana: o eixo longitudinal da viga é reto e a seção transversal possui um
plano de simetria longitudinal. As resultantes aos carregamentos transversais de
cada seção estão neste plano de simetria. As condições de apoio também mantem
simetrias sobre esse plano;
b) seção transversal constante: ao longo do comprimento, a forma da seção se
mantem constante ou com variação suave;
c) sistema de coordenadas tem sua origem no centroide da seção transversal;
d) tamanho do elemento é não nulo;
e) apenas elementos de espessura moderada pode ser usado na análise, possuindo
o índice de esbeltes (𝐺𝐴𝐿2
𝐸𝐼⁄ ) acima de 30;
f) para cada nó é possível três graus de liberdade translacionais e três rotacionais.
3.6 Elementos bidimensionais
Os elementos bidimensionais são essencialmente representados pelos
elementos plano e de casca, pertencentes a família 18x de elementos nativos do
ANSYS®.
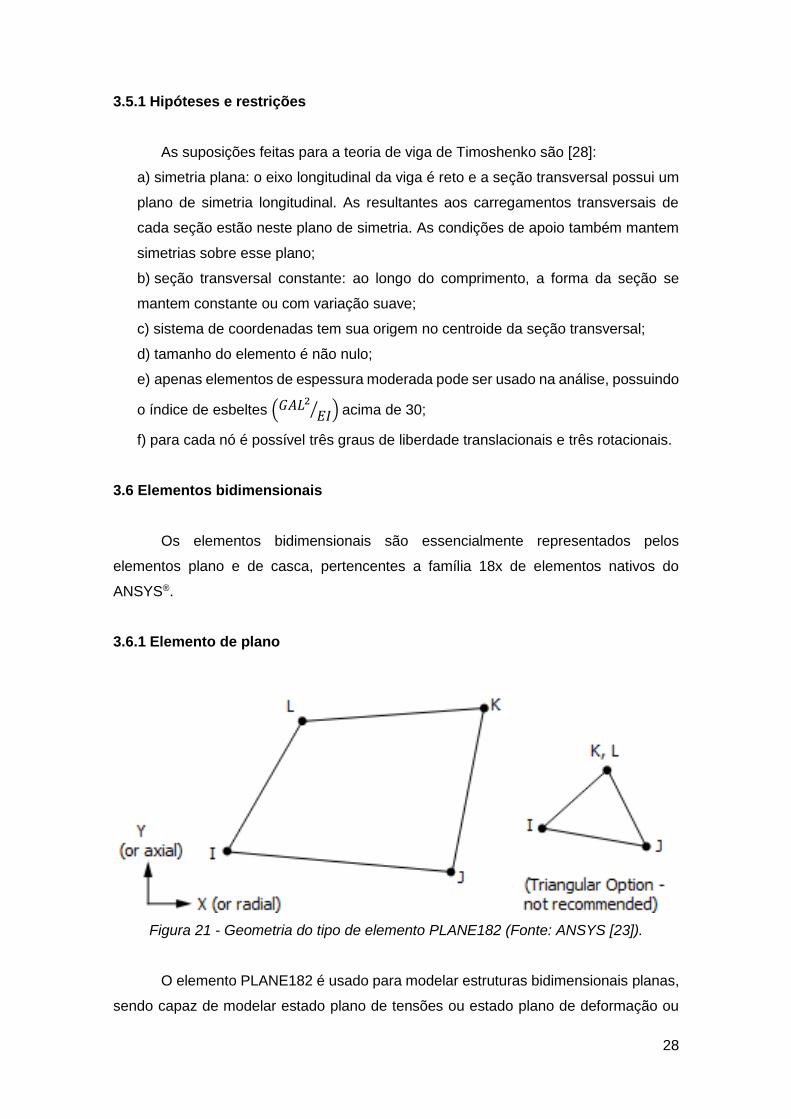
3.6.1 Elemento de plano
Figura 21 - Geometria do tipo de elemento PLANE182 (Fonte: ANSYS [23]).
O elemento PLANE182 é usado para modelar estruturas bidimensionais planas,
sendo capaz de modelar estado plano de tensões ou estado plano de deformação ou

29
qualquer estado geral identificado por um sólido de simetria radial. O elemento é
também capaz de modelar um sólido de simetria axial, em sua seção longitudinal, plana,
caso que não será abordado aqui.
Na imagem acima, Figura 21, é disposta a posição dos quatro nós I, J, K, L
(sentido anti-horário), onde as informações desejadas serão calculadas e estarão
disponíveis. São 2 graus de liberdade para cada nó: translação nas direções X e Y e a
temperatura é calculada bilinear pelo elemento e constante através da espessura ou
entorno da circunferência (caso simetria axial). Em estados planos de tensão, a
espessura pode ser adicionada para o elemento, de modo a observar-se a sua variação.
A Figura 22 faz um esquema das componentes importantes numa análise via
elemento sob estado plano de tensões. Da mesma forma, um esquema para o estado
plano de deformações pode ser traçado de forma a auxiliar a visualização da análise.
Figura 22 - Estado plano de tensões (Fonte: adaptado de FELIPPA [28]).
3.6.2 Hipóteses e restrições
As suposições que são feitas para o elemento plano são:
a) a área do elemento deve ser maior que zero;
b) o elemento deve, obrigatoriamente, estar contido no plano XY;
c) a geometria pode ser adaptada para o caso triangular, de forma a se adequar a
geometria do modelo. Para isso, os nós K e L se tornam coincidentes;

30
d) o elemento é capaz de modelar as não-linearidades do material, através da
plasticidade, hiperelasticidade e variações do tensor de tensão, e as geométricas
pelas grandes deformações e deflexões;
e) todas as cargas atuam nas direções no plano XY e, por questão de equilíbrio,
possuem simetria em relação ao plano médio longitudinal;
f) os deslocamentos, deformações e tensões são tomadas uniformemente ao longo
da espessura, quando esta for definida;
g) o material é constante ao longo da espessura, ou seja, é transversalmente
homogêneo.
3.6.3 Elemento de casca
Figura 23 - Geometria do tipo de elemento SHELL181 (Fonte: ANSYS [23]).
O elemento SHELL181 é usado para análise de estruturas de espessuras finas
a moderadas, possuindo quatro nós com seis graus de liberdade em cada nó:
translações nas direções X, Y e Z e rotações em X, Y e Z. De modo a adequar-se com
a geometria, o elemento pode se adequar a forma triangular. O elemento é ideal para
análises lineares ou não-lineares em aplicações com grandes deformações
deslocamento ou grandes rotação envolvidas.
As seções transversais ao elemento são na forma de camadas, sendo, desta
forma, capazes de modelar estruturas de compósitos em cascas ou em construções do
tipo “sanduíche” com possibilidade de diferentes espessuras, materiais, orientações e

31
número de pontos de integração. A precisão do método é dada pela teoria de casca de
Mindlin-Reissner, teoria de deformação cisalhante de primeira ordem.
A temperatura é calculada bilinear pelo elemento e constante através de cada
camada. As formulações para grandes deformações é apresentada pelas deformações
logarítmicas e tensões verdadeiras em relações cinemáticas para deformação finita,
porém com pequenas variações para mudanças de curvaturas.
3.6.4 Hipóteses e restrições
As suposições que são feitas para o elemento de casca são:
a) a área do elemento deve ser maior que zero;
b) espessura nula não é permitida em nenhum dos nós do elemento;
c) não há escorregamento entre as camadas
d) as normais ao centro do plano permanecem retas após a deformação, mas não
necessariamente normais ao próprio centro do plano;
e) em cada camada, a orientação do material é a mesma através da espessura do
elemento;
f) a análise é interrompida caso a espessura em alguma parte do elemento seja
levada a zero.
3.7 Elemento de sólido
Figura 24 - Geometria do tipo de elemento SOLID185 (Fonte: ANSYS [23]).

32
Elementos sólidos são os tipos mais genéricos para investigações de estruturas,
visto que são capazes de se adequar a múltiplas geometrias, com os devidos limites. O
elemento é ideal para análises linear ou não-linear em aplicações com grandes
deformações deslocamento ou grandes rotação envolvidas.
O elemento SOLID185 é usado para modelar estruturas sólidas tridimensionais.
Na Figura 24, é disposta a posição dos oito nós constituintes, no sentido anti-horário, I,
J, K, L, M, N, O, P, Q, onde as informações desejadas serão calculadas e estarão
disponíveis. São três graus de liberdade: apenas as translações nas direções X, Y e Z.
A temperatura é calculada tri-linear pelo elemento.
A geometria permite formas prismáticas, tetraédricas e piramidais, dependendo
da irregularidade das regiões, através das coincidências dos nós O e P (prisma), M, N,
O e P (tetraedro) e M, N, O e P (pirâmide). Esse elemento também pode simular um
sólido em camadas, através de opções específicas.
3.7.1 Hipóteses e restrições
Duas suposições que são feitas para o elemento de casca:
a) o volume do elemento deve ser maior que zero;
b) a numeração dos nós deste elemento é importante e não pode haver uma torção
de seus planos tais que o sólido apresente dois volumes separados durante o
decorrer da simulação.

33
4 Estruturas unidimensionais
O objetivo deste capítulo é investigar estruturas unidimensionais submetidas a
diferentes tipos de esforços termomecânicos. Três análises distintas são realizadas:
a) tração e compressão de barra cilíndrica, investigação do efeito superelástico a
diversas temperaturas e efeito memória de forma;
b) torção de eixo circular sujeito a grandes rotações;
c) flexão de vigas em três pontos sujeitas a grandes deflexões.
Os resultados experimentais disponibilizados no Simpósio Europeu de
Transformações Martensíticas (ESOMAT), ocorrido em Praga em 2009 [29] e em
AURICCHIO et al. [8] são utilizados como referência para verificar os resultados
simulados.
Nos Apêndice A ao Apêndice D encontram-se as transcrições de todos os
códigos produzidos para discussão neste capítulo.
4.1 Tração de barra
Considere um caso de tração de uma barra composta de uma liga com memória
de forma, Níquel-Titânio conforme mostrado no ESOMAT [29], e a modelagem das
constantes do material, apresentada na Tabela 3 para representar os resultados
experimentais de testes de tração e compressão neste estudo.
O Apêndice A contém o programa com as entradas necessárias para a
simulação. Contudo, a Tabela 5 resume os parâmetros utilizados, com 𝑇 a temperatura
de 10ºC constante e uniforme durante toda a análise. As condições de contorno na
simulação considera o deslocamento prescrito em uma das extremidades enquanto
outra encontra-se engastada, como apresentadas na Figura 25. Simulação com 50
elementos.
Tabela 5 - Parâmetros específicos da simulação de superelasticidade.
Propriedade Símbolo Valor Descrição
Temperatura 𝑇 10,0 [ºC] Uniforme e constante
Condição de contorno 1 ENGASTE 0,0 [mm] Engaste
Condição de contorno 2 DSP_LOAD 4,0 [mm] Deslocamento prescrito
Comprimento 𝐿 50,0 [mm] Tamanho
Raio da seção RADIUS 0,05 [mm] Raio de espessura da barra

34
Figura 25 - Geometria da barra sujeita a esforços axiais. Elemento de viga.
Figura 26 - Resultado da simulação: curva tensão-deformação para tração a 10°C.
Na Figura 27, ilustra-se a evolução no tempo das principais variáveis do
problema: alongamento axial; deformação; força axial; e fração volumétrica de
martensita. A Figura 28 apresenta a resposta da barra para diferentes temperaturas,
mostrando a dependência da posição do laço de histerese com a temperatura.

35
Figura 27 - Variação temporal do alongamento (Esq. Sup.), deformação (Dir. Sup.),
força (Esq. Inf.) e fração volumétrica de martensita (Dir. Inf.) a 10ºC.
Figura 28 - Curvas tensão-deformação para diferentes temperaturas.
36
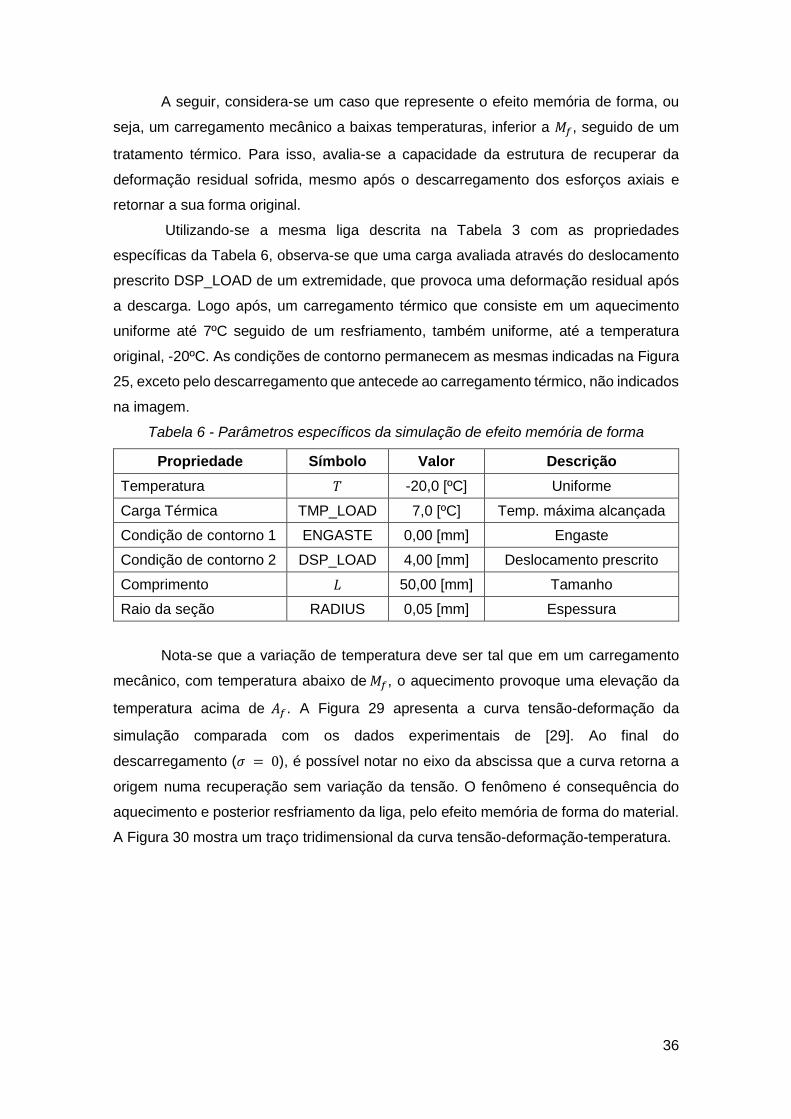
A seguir, considera-se um caso que represente o efeito memória de forma, ou
seja, um carregamento mecânico a baixas temperaturas, inferior a 𝑀𝑓, seguido de um
tratamento térmico. Para isso, avalia-se a capacidade da estrutura de recuperar da
deformação residual sofrida, mesmo após o descarregamento dos esforços axiais e
retornar a sua forma original.
Utilizando-se a mesma liga descrita na Tabela 3 com as propriedades
específicas da Tabela 6, observa-se que uma carga avaliada através do deslocamento
prescrito DSP_LOAD de um extremidade, que provoca uma deformação residual após
a descarga. Logo após, um carregamento térmico que consiste em um aquecimento
uniforme até 7ºC seguido de um resfriamento, também uniforme, até a temperatura
original, -20ºC. As condições de contorno permanecem as mesmas indicadas na Figura
25, exceto pelo descarregamento que antecede ao carregamento térmico, não indicados
na imagem.
Tabela 6 - Parâmetros específicos da simulação de efeito memória de forma
Propriedade Símbolo Valor Descrição
Temperatura 𝑇 -20,0 [ºC] Uniforme
Carga Térmica TMP_LOAD 7,0 [ºC] Temp. máxima alcançada
Condição de contorno 1 ENGASTE 0,00 [mm] Engaste
Condição de contorno 2 DSP_LOAD 4,00 [mm] Deslocamento prescrito
Comprimento 𝐿 50,00 [mm] Tamanho
Raio da seção RADIUS 0,05 [mm] Espessura
Nota-se que a variação de temperatura deve ser tal que em um carregamento
mecânico, com temperatura abaixo de 𝑀𝑓, o aquecimento provoque uma elevação da
temperatura acima de 𝐴𝑓. A Figura 29 apresenta a curva tensão-deformação da
simulação comparada com os dados experimentais de [29]. Ao final do
descarregamento (𝜎 = 0), é possível notar no eixo da abscissa que a curva retorna a
origem numa recuperação sem variação da tensão. O fenômeno é consequência do
aquecimento e posterior resfriamento da liga, pelo efeito memória de forma do material.
A Figura 30 mostra um traço tridimensional da curva tensão-deformação-temperatura.

37
Figura 29 - Resultado da simulação: curva tensão-deformação para tração a -20°C.
Figura 30 - Resultado da simulação: efeito memória de forma, curva tridimensional.
A Figura 31 apresenta a história temporal das variáveis de interesse. Mostra-se
a temperatura e a força axial aplicada; a deformação e a fração volumétrica.

38
Figura 31 - Variação temporal da temperatura (Esq. Sup.), deformação (Dir. Sup.),
força (Esq. Inf.) e fração volumétrica de martensita (Dir. Inf.).
4.2 Torção de eixo
Esta seção discute a torção de eixos considerando o caso de torção combinada
com esforço axial constante.
Os resultados experimentais disponíveis em [29] são utilizados como referência.
Utiliza-se a mesma liga descrita na Tabela 3 e as propriedades da simulação adicionais
são resumidas na Tabela 7 abaixo. O modelo e condições de contorno são ilustrados
na Figura 32.
Tabela 7 - Parâmetros específicos da simulação de torção
Propriedade Símbolo Valor Descrição
Temperatura 𝑇 30 [°C] Uniforme e constante
Condição de contorno 1 ENGASTE 0.00 [mm] Engaste
Condição de contorno 2 FRC_LOAD 2,00 [N] Constante na Extremidade
Condição de contorno 3 MOM_LOAD 0,15 [N.mm] Extremidade livre
Comprimento 𝐿 50,00 [mm] Tamanho
Raio da seção RADIUS 0,05 [mm] Espessura

39
Figura 32 - Geometria da barra sujeita a esforços de torção. Elemento de viga.
A simulação da estrutura se desenvolveu com 50 elementos a temperatura
constante de 30ºC, na qual iniciou-se pelo pré-carregamento axial de tração constante,
seguido do torque positivo, descarregamento do torque, aplicação do torque no sentido
oposto e finalizado por descarregamento total. A Figura 33 apresenta os resultados
obtidos, comparados com os resultados experimentais de [29].
Figura 33 - Resultado da simulação: curva do torque (à esquerda) e deformação axial
em relação ao ângulo de torção.
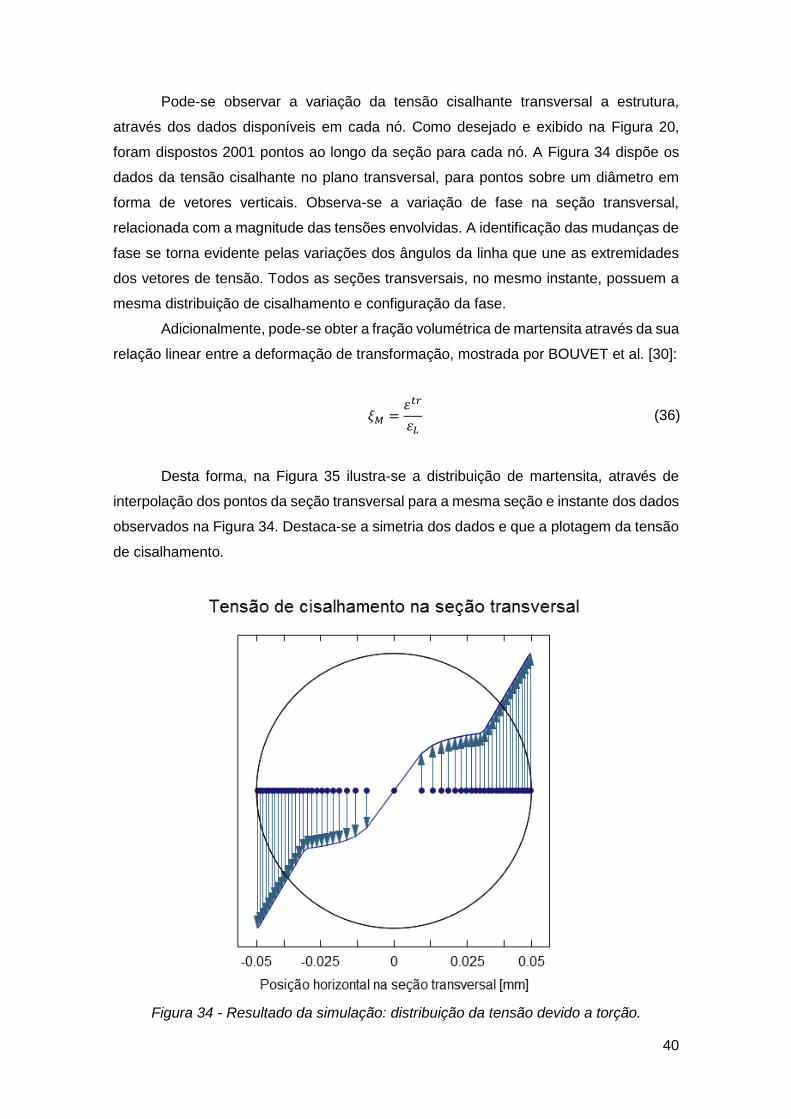
40
Pode-se observar a variação da tensão cisalhante transversal a estrutura,
através dos dados disponíveis em cada nó. Como desejado e exibido na Figura 20,
foram dispostos 2001 pontos ao longo da seção para cada nó. A Figura 34 dispõe os
dados da tensão cisalhante no plano transversal, para pontos sobre um diâmetro em
forma de vetores verticais. Observa-se a variação de fase na seção transversal,
relacionada com a magnitude das tensões envolvidas. A identificação das mudanças de
fase se torna evidente pelas variações dos ângulos da linha que une as extremidades
dos vetores de tensão. Todos as seções transversais, no mesmo instante, possuem a
mesma distribuição de cisalhamento e configuração da fase.
Adicionalmente, pode-se obter a fração volumétrica de martensita através da sua
relação linear entre a deformação de transformação, mostrada por BOUVET et al. [30]:
𝜉𝑀 =휀𝑡𝑟
휀𝐿 (36)
Desta forma, na Figura 35 ilustra-se a distribuição de martensita, através de
interpolação dos pontos da seção transversal para a mesma seção e instante dos dados
observados na Figura 34. Destaca-se a simetria dos dados e que a plotagem da tensão
de cisalhamento.
Figura 34 - Resultado da simulação: distribuição da tensão devido a torção.

41
Figura 35 - Distribuição da fração volumétrica de martensita devido a torção do eixo.
4.3 Flexão de viga
A flexão de viga é discutida nesta seção e comparados com os resultados
apresentados em AURICCHIO et al. [8]. A Figura 36 mostra a geometria do experimento
de flexão em 3 pontos, com apoios sobre roletes, lado a lado com os resultados obtidos
experimentalmente e pela simulação proposta no artigo. Na Tabela 8, encontram-se os
parâmetros do material e na Tabela 9 os valores específicos para esta simulação.
Figura 36 - Flexão em 3 pontos, esquema do teste à esquerda e resultados
experimental e numérico à direita (Fonte: AURICCHIO et al. [8]).

42
Tabela 8 - Parâmetros da simulação de flexão (Fonte: AURICCHIO et al. [8]).
Propriedade Símbolo Valor
Módulo de Elasticidade - Austenita 𝐸𝐴 60 000 [MPa]
Módulo de Elasticidade - Martensita 𝐸𝑀 17 000 [MPa]
Constante de Poisson 𝜈 0.30
Deformação Máxima de Transformação 휀𝐿 6,7%
Tensão de início da transformação direta 𝑆𝑆𝐴𝑆 520 [MPa]
Tensão do final da transformação direta 𝑆𝐹𝐴𝑆 600 [MPa]
Tensão de início da transformação inversa 𝑆𝑆𝑆𝐴 275 [MPa]
Tensão do final da transformação inversa 𝑆𝐹𝑆𝐴 200 [MPa]
Tabela 9 - Parâmetros específicos para a simulação de flexão de viga.
Propriedade Símbolo Valor Descrição
Condição de Contorno 1 Roletes 0 [mm] Suporte fixo
Condição de Contorno 2 DSP_LOAD 5.2 [mm] Deslocamento prescrito
Elemento Finito 1 ET,1 e ET,2 BEAM188 Viga e Suporte
Elemento Finito 2 ET,3 CONTA176 Contato
Elemento Finito 3 ET,4 TARGE170 Alvo
Rigidez do rolete E 100 [GPa] Linear
Resistência normal FKN 10000 [N/mm²] Fator de contato
Resistência tangencial FKT 10 [N/mm²] Fator de contato
Comprimento 𝐿 20 [mm] Tamanho entre roletes
Diâmetro 𝐷 1,49 [mm] Espessura
A simulação considera o contato entre a viga e os roletes para melhor descrever
o comportamento da viga sujeita a flexão concentrada em seu centro, dado que não há
restrição do rolamento pelo escorregamento da viga sobre o rolete, com fricção
𝐹𝐾𝑇 praticamente nula. O fator de contato, 𝐹𝐾𝑁, é elevado para evitar que haja
deflexões relevantes no contato. A Figura 37 mostra a disposição tridimensional do
modelo de contato e a forma interpretada pelo software, levando em conta os raios das
linhas em contato.
Para modelar uma estrutura sujeita a flexão, são utilizados 40 elementos para o
elemento em análise e apenas um elemento elástico linear rígido para cada um dos
apoios.

43
Figura 37 - Geometria do elemento CONTA 176 e TARGE170 para a simulação com
contato, à esquerda. À direita, a ilustração para vigas perpendiculares que se cruzam
(Fonte: ANSYS [23]).
A Figura 38 ilustra a configuração deformada (em azul) ao fim do carregamento
em vista lateral em relação ao comprimento do elemento. Na comparação experimental,
o resultado apresenta melhor desempenho a forças maiores em relação a simulação de
AURICCHIO et al. [8], pois leva em conta diferentes módulos de elasticidade para a
austenita e martensita, o que não era previsto nas duas simulações propostas por eles.
A Figura 38 ilustra a disposição geométrica deformada ao fim da carga máxima
(em verde e linhas contíguas) e a posição inicial (em linhas tracejadas) da viga. À direita,
há o diagrama força-deflexão de todo o período de análise para o ponto ao centro da
viga. Tal como proposto para a torção de um eixo, um diagrama da fração volumétrica
de martensita é indicado na Figura 39. Observa-se a simetria em relação ao eixo y=0,
já que este contem a linha neutra. Há a transformação de fase na compressão, parte
superior da seção transversal e a transformação na parte inferior da seção transversal.
Uma observação adicional sobre a simulação desta estrutura pode ser dada com
a análise da distribuição da tensão devido a flexão na seção transversal do elemento de
viga. É possível observar a variação da tensão com a distância ao centro a linha neutra
da flexão, esta, deslocada do centróide devido ao contato com apoio, que gera
pequenas forças de atrito, na direção axial da viga, e grande força de reação, na direção
transversal a viga.
A Figura 40 mostra diferentes seções transversais da viga em análise. A
distribuição da tensão na seção transversal, no caso de flexão, varia com o
carregamento e também, neste caso de flexão em três pontos, há a variação com a
posição do nó na viga, tendo em vista que o momento fletor varia ao longo do
comprimento, como esperado.
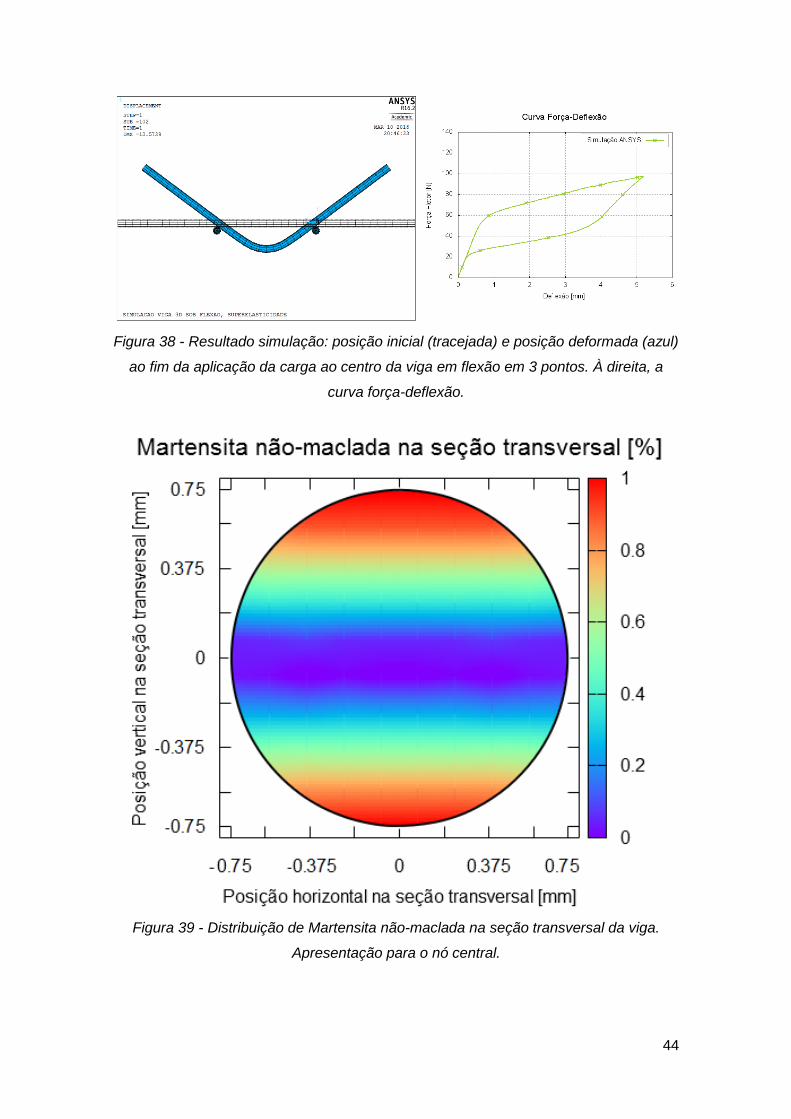
44
Figura 38 - Resultado simulação: posição inicial (tracejada) e posição deformada (azul)
ao fim da aplicação da carga ao centro da viga em flexão em 3 pontos. À direita, a
curva força-deflexão.
Figura 39 - Distribuição de Martensita não-maclada na seção transversal da viga.
Apresentação para o nó central.
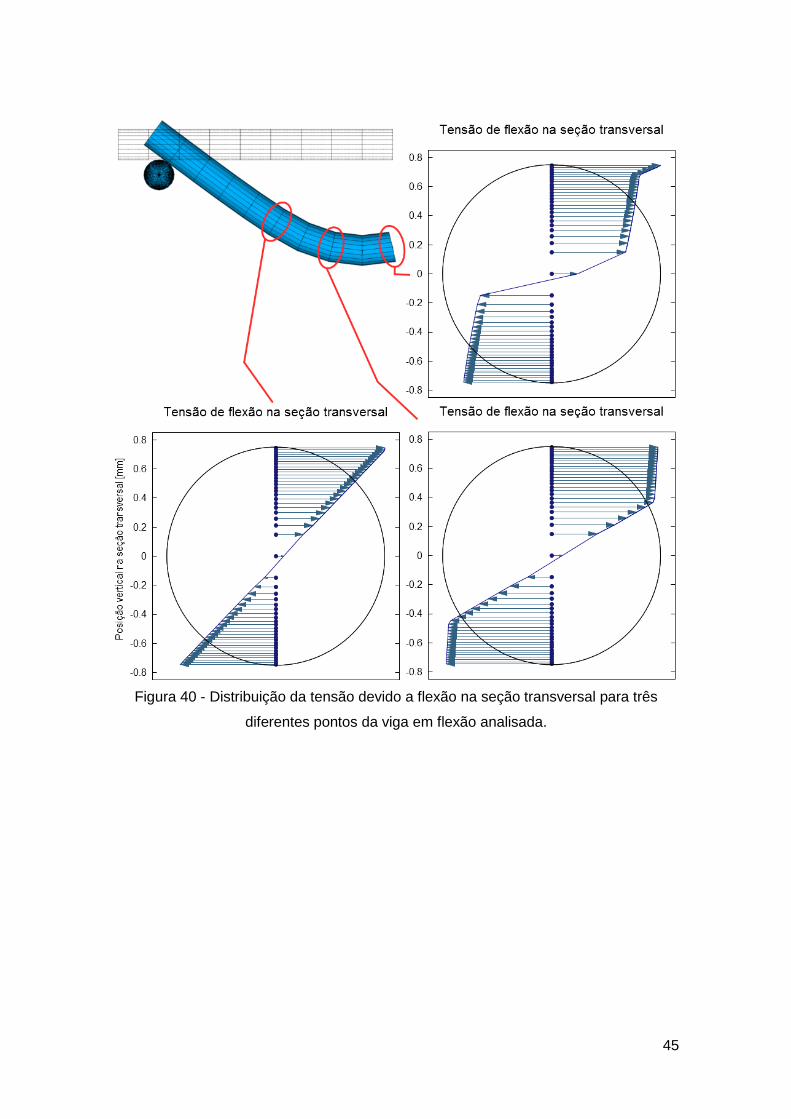
45
Figura 40 - Distribuição da tensão devido a flexão na seção transversal para três
diferentes pontos da viga em flexão analisada.

46
5 Estruturas em estado plano
Neste capítulo são discutidas estruturas bidimensionais caracterizadas pelos
estado plano de tensão. No estado plano de tensões, o corpo é aproximado a uma
configuração bidimensional com a condição de que a tensão perpendicular a este plano
seja nula, podendo haver deformações representadas pelas constantes de Poisson na
direção perpendicular ao plano. No espaço tridimensional, um corpo com uma dimensão
muito menor que as outras, ou seja, fino, é melhor caracterizado exatamente pelo estado
plano de tensões.
No estado plano de deformações, por outro lado, o corpo também é aproximado
por uma geometria bidimensional, com a condição de que deformação perpendicular ao
plano é nula. Há a presença de tensão na direção perpendicular, fato que pode se dar
em virtude de restrições de contorno. No espaço tridimensional, um corpo com uma
dimensão muito maior que as outras, ou seja, longo, é melhor caracterizado por este
estado.
Duas análises distintas são apresentadas:
a) estado plano de tensão;
b) cisalhamento puro.
O Apêndice E apresenta a transcrição dos códigos produzidos neste capítulo.
5.1 Estado plano de tensão
Nesta seção, uma estrutura bidimensional é submetida a tração nas duas
dimensões, tração e compressão em direções perpendiculares e compressão nas duas
dimensões. Assume-se que a carga crítica de flambagem é superior as cargas
aplicadas.
A Tabela 3 contém as propriedades do material e o resumo das propriedades
específicas desta análise está na Tabela 10 abaixo. Na primeira análise, usar-se-á a
condição de contorno 1. Na segunda análise, as condições de contorno 2. E, na última
análise a condição de contorno 3.
A Figura 41 a seguir mostra os esquemas das três condições propostas. Onde
P é o carregamento no lado livre para se deslocar. As condições impostas na lateral
esquerda servem para equilíbrio dos planos.

47
Figura 41 - Esquemas de aplicações das forças. Em consonância com as condições
de contorno da Tabela 10.
Tabela 10 - Parâmetros para a simulação de estado plano de tensões
Propriedade Símbolo Valor Descrição
Temperatura 𝑇 10 [°C] Uniforme
C.C. 1 DSP_LOAD 0,5 [mm] Deslocamento nos sentidos X e Y
C.C. 2 DSP_LOAD 0,7 [mm] Deslocamento nos sentidos X e -Y
C.C. 3 DSP_LOAD 0,5 [mm] Deslocamento nos sentidos -X e -Y
Lado L 10,00 [mm] Tamanho quadrado
Os resultados são dados nas Figura 42, Figura 43 e Figura 44. A imagens
ilustram também a malha retangular do estudo na configuração deformada, em azul, e
indeformada, contorno tracejado. As curvas de tensão-deformação foram traçadas a
partir da tensão equivalente de von Mises e, também, da deformação equivalentes. As
respostas aos carregamentos são comparadas as curvas tensão-deformação do
material, o mesmo utilizado no teste de tração unidimensional, no capítulo anterior.
Figura 42 - Estado plano de tensão: resultado para tração nas duas direções
perpendiculares.

48
Figura 43 - Estado plano de tensão: resultado para tração e compressão em direções
perpendiculares.
Figura 44 - Estado plano de tensão: resultado para compressão em direções
perpendiculares.
5.2 Cisalhamento puro
O estudo do cisalhamento puro é importante para assegurar que o modelo é
invariante a mudança de coordenadas. Assim consideram-se casos equivalentes
envolvendo o cisalhamento puro e cargas de tração-compressão com mesmo módulo,
mas em direções perpendiculares, como na Figura 45, por TIMOSHENKO [31].
Na Figura 45, o elemento quadricular em análise, 𝑎𝑏𝑐𝑑, está sujeito ao
cisalhamento puro 𝜏 devido a condição geométrica, que o força a deformação indicada
em linhas tracejadas 𝑎1𝑏1𝑐1𝑑1. Contudo, o elemento maior, com os carregamentos em
destaque, está submetido a análise já aqui qualificada. Ressalta-se que, no estado de
cisalhamento puro, não há variação de comprimento dos lados do elemento 𝑎𝑏𝑐𝑑
estudado, apenas a deformação dos ângulos em seus vértices.

49
Figura 45 - Elemento em Cisalhamento puro, à esquerda. Ao lado, o Círculo de Mohr
para o caso ilustrado (Fonte: TIMOSHENKO [31]).
As propriedades do material são as mesmas constantes na Tabela 3. Na Tabela
11 abaixo, as condições de contorno são apresentadas.
Tabela 11 - Parâmetros para a simulação do estado de cisalhamento puro.
Propriedade Símbolo Valor Descrição
Temperatura 𝑇 10 [°C] Uniforme
C.C. 1 DSP_LOAD 0,7 [mm] Deslocamento do nó 1 no sentido -X
C.C. 2 DSP_LOAD 0,7 [mm] Deslocamento do nó 2 na sentido Y
C.C. 3 DSP_LOAD 0,7 [mm] Deslocamento do nó 3 na sentido X
C.C. 4 FRC_LOAD 0,7 [mm] Deslocamento do nó 4 na sentido -Y
Lado L 10,00 [mm] Tamanho quadrado
Para a simulação, apenas um elemento de 4 nós foi utilizado e cada uma de
suas extremidades foi submetido ao carregamento indicado na Tabela 11. Na Figura 46,
as forças foram aplicadas nos nós (vértices), nas direções dos eixos cartesianos,
provocando as deformações mostradas. Estas análises propostas foram estáticas e
atemporais. À esquerda, a imagem busca simular o quadrado 𝑎𝑏𝑐𝑑 mostrado na Figura
45 e à direita, o quadrado de lados paralelos ao sistema cartesiano. Tal como ilustrado
em TIMOSHENKO [31].
𝜏

50
Figura 46 - Forma inicial (tracejada) e posição deformada (azul) ao fim da aplicação de
1000 N de carga nas direções horizontal e vertical nos vértices. Escala real 1:1.
De modo a comparar os resultados, na Tabela 12 é listada as tensões no plano
em relação aos eixos x e y para os dois casos em análise. A comparação entre as
soluções é feita a partir da tensão equivalente de von Mises (𝜎𝑒𝑞𝑣), descrita na Equação
(37), para as duas situações.
Tabela 12 - Comparação entre cisalhamento puro e tração e compressão.
Tensão Tração e Compressão
Combinados Cisalhamento Puro
𝜎𝑥𝑥 241,31 [MPa] -22,97 [MPa]
𝜎𝑦𝑦 -287,25 [MPa] -22,97 [MPa]
𝜏𝑥𝑦 0,00 [MPa] -264,28 [MPa]
𝜎𝑒𝑞𝑣 458,32 [MPa] 458,32 [MPa]
𝜎𝑒𝑞𝑣 =1
√2√(𝜎𝑥𝑥 − 𝜎𝑦𝑦)
2+ 𝜎𝑥𝑥
2 + 𝜎𝑦𝑦2 + 6𝜏𝑥𝑦
2 (37)
Dado o estado de tensão e compressão combinados a uma tensão equivalente
de 458,32 MPa, espera-se que a tensão cisalhante no estado de cisalhamento puro,
seja:
458,32 =1
√2√6𝜏𝑥𝑦
2 𝑞𝑢𝑒 𝑟𝑒𝑠𝑢𝑙𝑡𝑎 𝑒𝑚→ 𝜏𝑥𝑦 = 264,61 𝑀𝑃𝑎 (38)
e como observado na Tabela 12, a simulação para o caso de cisalhamento puro
apresentou a tensão cisalhante de 𝜏𝑥𝑦 = 264.28 𝑀𝑃𝑎, o que mostra um erro de
aproximação de 0,12%, que se reflete na forma de tensões em 𝜎𝑥𝑥 = 𝜎𝑦𝑦 =
−22,97 𝑀𝑃𝑎, mas que ainda indicam ótima consonância entre as equivalências dos
casos.

51
6 Estruturas bidimensionais
Este capítulo trata estruturas baseadas em teorias aproximadas bidimensionais
em duas categorias principais:
a) Placa: se a superfície é inicialmente plana;
b) Casca: se a superfície é inicialmente curva.
Três casos são investigados: flexão no plano; flexão fora do plano; e mola. Nos
Apêndice F e Apêndice G apresentam-se as macros produzidas neste capítulo.
6.1 Flexão de viga no plano
Considera-se uma viga construída de uma liga com memória de forma,
representada em duas dimensões. A flexão ocorre no plano de simetria e os esforços
são assumidos constantes através da espessura. A geometria e a proposta analítico-
teórica de BISEGNA et al. [32], EVANGELISTA et al. [33] e ARTIOLI et al. [34] são
utilizados na composição desta investigação, observando-se a boa concordância na
comparação [32] dos três trabalhos.
Aqui, reproduz-se a análise de viga plana considerando as propriedades do
material na Tabela 4 e as características do modelo MEF analisado na Tabela 13.
Tabela 13 - Parâmetros adicionais para a simulação de flexão no plano.
Propriedade Símbolo Valor Descrição
Temperatura 𝑇 12 [ºC] Uniforme
C.C. 1 Apoio 0.00 [mm] Restrição do movimento em Y
C.C. 2 FRC_LOAD 1.8 [kN] Aplicado na extremidade de simetria
C.C. 3 SYMMETRY - Simetria em relação ao comprimento.
Tamanho 𝐿 500,00 [mm] Comprimento até o plano de cimetria
Largura 𝑤 40,0 [mm] Largura
Espessura 𝑡 3,00 [mm] Espessura
Considere uma viga de comprimento L, largura 𝑤 e espessura 𝑡 a uma
temperatura de 12ºC, uniforme e constante durante toda a análise, submetida a um
carregamento FRC_LOAD que impõe um deslocamento perpendicular ao seu
comprimento, provocando uma flexão de três pontos no plano londitudinal e um posterior
descarregamento. A geometria de deformação é mostrada na Figura 47, onde, devido
a simetria, apenas metade da viga é exibida e é analisada. Como visto à direita a

52
resposta da estrutura à solicitação mostra um comportamento pseudoelástico. O
resultado da simulação possui boa concordância com as referências destacadas.
Figura 47 - Resultado da simulação: modelagem do comportamento durante a flexão
de uma viga reta no plano.
6.2 Flexão de viga fora do plano
Neste momento, considera-se que a flexão da viga está ocorrendo fora do plano.
Para isso, novamente uma flexão de três pontos proposta em [32], [33] e [34] é
analisada. No entanto, as análises ocorrem a uma temperatura inferior à 𝐴𝑠, de forma
que, após o descarregamento, a viga apresenta uma deformação residual, a ser
recuperada através do ciclo térmico de aquecimento seguido de resfriamento a
temperatura original. Espera-se ainda, observar o efeito memória de forma.
Esta estrutura bidimensional possui comportamento parecido ao observado no
caso anterior, porém, com a flexão sobre a espessura, resultando em amplitudes
maiores para cargas em ordem de menor grandeza. As propriedades do material
permanecem as mesmas e as propriedades específicas são resumidas na Tabela 14.
Tabela 14 - Parâmetros adicionais para a simulação de flexão no plano.
Propriedade Símbolo Valor Descrição
Temperatura 𝑇 -33 [ºC] Uniforme
C.C. 1 Apoio 0.00 [mm] Restrição do movimento em Z
C.C. 2 FRC_LOAD 100 [N] Extremidade livre
C.C. 3 SYMMETRY - Simetria em relação ao comprimento.
C.C. 4 TMP_LOAD -26 [ºC] Carga térmica para o ciclo aq. e resf.
Tamanho 𝐿 250.00 [mm] Comprimento até o plano de simetria
Largura 𝑤 40.0 [mm] Espessura
Espessura 𝑡 4.00 [mm] Espessura

53
Uma viga de tamanho 𝐿, largura 𝑤 e espessura 𝑡 a uma temperatura uniforme
de -33ºC é submetida a um carregamento FRC_LOAD que impõe um deslocamento
transversal, provocando uma flexão de três pontos no plano. Após o completo
descarregamento, observa-se, pela curva força-deflexão à direita da Figura 48, que a
estrutura não retoma a sua posição inicial, indeformada, por apresentar deformação
residual. A fim de recuperar a estrutura ao estado inicial, submete-se a mesma a um
ciclo térmico, aquecimento até atingir temperaturas da ordem de -26ºC e resfriamento
retomando-a a temperatura inicial.
A geometria de deformação é mostrada na Figura 48 à esquerda, onde, por
condições de simetria, apenas metade da viga é exibida e analisada. Como visto no
gráfico à direita, a resposta da estrutura à solicitação mostra um comportamento típico
da liga com memória de forma. Observa-se também a comparação das curvas de força-
deslocamento para as propostas na literatura. Uma discrepância dos valores é
observada e pode ser atribuída à modelagem das condições de contorno, não definidas
rigorosamente em [32], mas, ainda assim, aponta uma similaridade na resposta com a
simulação realizada.
Destaca-se a amplitude elevada dos deslocamentos, inclusive ao fim do
carregamento. E, mesmo nessa condição, a recuperação total é alcançada ao fim do
ciclo térmico com variação de poucos graus célsius.
Figura 48 - Resultado da simulação: Modelagem do comportamento durante a flexão
fora do plano.
Adicionalmente, na Figura 49 é obtido o gráfico tridimensional para a simulação.
O comportamento para esta estrutura é o esperado e, portanto, valida-se a capacidade
do elemento de casca para a modelagem da estruturas bidimensionais inteligentes.

54
Figura 49 - Resultado da simulação: curva para força-deslocamento e temperatura.
6.3 Mola
Figura 50 - Geometria e resultados analíticos (Fonte: EVANGELISTA et al. [33]).
Nesta última análise bidimensional, busca-se uma geometria inicial fora do
plano, espacial, como o apresentado por esta mola. O resultado no gráfico da Figura 50
compara duas teorias propostas por EVANGELISTA [33]. Neste item será utilizada a
teoria de deformação finita para comparação, pois admite-se grandes deformações para
a estrutura em estudo.
Uma mola com as propriedades das ligas com memória de forma pode funcionar
como um atuador em um sistema inteligente por controle dinâmico, ao ser acionada por
solicitações termomecânicas. Motiva-se, desta forma, a importância da análise desta
estrutura.

55
As propriedades do material seguem as mesmas do capítulo e na Tabela 15
abaixo, as propriedades específicas para o modelo geométrico e das condições de
contornos apresentadas para o modelo da mola.
Tabela 15 - Parâmetros adicionais para a simulação de flexão no plano.
Propriedade Símbolo Valor Descrição
Temperatura 𝑇 12 [ºC] Uniforme
C.C. 1 ENGASTE 0,00 [mm] Engaste
C.C. 2 FRC_LOAD 8,2 [N/mm²] Extremidade livre
C.C. 3 SYMMETRY - Simetria em relação ao comprimento.
C.C. 4 TMP_LOAD 127 [ºC] Aquecimento sob carregamento
Comprimento 𝐿 15,7 [mm] Tamanho do lado interno
Diâmetro 𝐷 3,5 [mm] Diâmetro externo
Largura 𝑤 1,0 [mm] Base da seção transversal
Espessura 𝑡 0,5 [mm] Altura da seção transversal
Passo 𝑝 1,26 [mm] Distância entre uma revolução
A geometria apresentada pode não ser a priori, compatível por uma análise de
elemento de casca. No entanto, na Figura 51 abaixo, mostra-se a geometria em casca,
superfície à esquerda, e a ilustração visual de sua espessura, tratada apenas como
propriedade do elemento, à direita.
Devido a simetria presente em uma mola, apenas um passo será avaliado. Uma
das extremidades é restringida a zero e a outra, livre para se mover, é solicitada com
uma carga FRC_LOAD, que tende a tracionar a mola. O comprimento 𝐿, passo 𝑝, largura
𝑤 e espessura 𝑡 definem as condições geométricas da mola. Após descarregamento,
observa-se novamente uma deformação residual e, por isso, eleva-se a temperatura até
TMP_LOAD e seguido de resfriamento à temperatura inicial.
O comportamento ante a solicitação vertical em sua extremidade livre,
aquecimento com carregamento constante e retorno a temperatura original por
resfriamento é mostrada na Figura 52. Não é esperado que a recuperação da forma
inicial seja completa, exatamente como visto em [33].
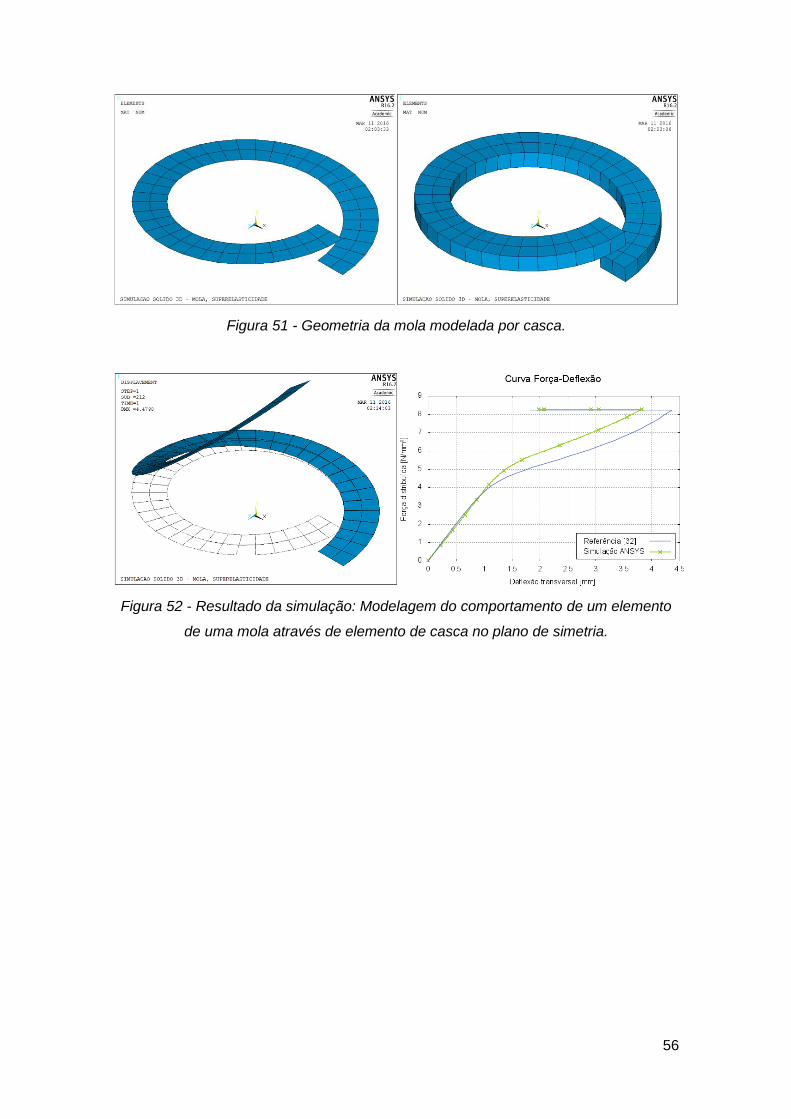
56
Figura 51 - Geometria da mola modelada por casca.
Figura 52 - Resultado da simulação: Modelagem do comportamento de um elemento
de uma mola através de elemento de casca no plano de simetria.

57
7 Estruturas tridimensionais
Neste capítulo, consideram-se estruturas tridimensionais e duas investigações
são feitas: a mola apresentada no capítulo anterior e um espaçador para coluna
vertebral.
Nos Apêndice H e Apêndice I encontram-se as transcrições das macros
produzidas neste capítulo.
7.1 Mola
Retomando a análise da mola, primeiramente analisada sob elemento de casca,
propõe-se o elemento de sólido para esta estrutura e, logo após, é realizada uma
comparação entre as respostas quando da modelagem em elemento de viga, casca e
sólido. Com as mesmas propriedades da Tabela 15, o elemento de sólido é usado na
mola, em sua aplicação tridimensional.
Na Figura 53 é exibida, da mesma forma, a resposta da estrutura à aplicação da
carga e ciclo térmico. O gráfico ao lado apresenta a resposta à simulação e uma
reprodução do resultado numérico proposto em [33] para comparação dos resultados.
Figura 53 - Resultado da simulação: geometria deformada da mola em solução via
elemento de sólido. À direita, curva força-deflexão da extremidade livre.
Visto que esta estrutura já foi analisada anteriormente, busca-se, para uma
rápida observação a respeito da influência do elemento finito na resposta do modelo
numérico, a uma dada geometria, a comparação na Figura 54 entre os três tipos de
elementos aplicáveis a este atuador mecânico.

58
Figura 54 - Comparação entre viga, casca e sólido para a mola proposta.
O elemento sólido apresenta melhor concordância na aproximação da mola para
os esforços termomecânicos, conforme visto na comparação mostrada na curva força-
deflexão. As demais curvas são traçadas para observação da evolução da resposta no
tempo da estrutura às solicitações. A curva temperatura-deflexão apresenta-se a forma
característica para as propriedades do material.
7.2 Espaçador de coluna vertebral
Uma pequena estrutura sólida com aplicação de interesse na área biomédica,
chamada espaçador de coluna, é descrita em PETRINI et al. [35]. Mostrado na Figura
55, o sólido possui simetria radial e, por isso, pode ser analisado por um simplificação
simétrica, com apenas um quarto do modelo geométrico.
Seguindo [35], pôde-se obter os parâmetros geométricos da estrutura avaliada.
Tem-se as propriedades do material na Tabela 16 e para a geometria na Tabela 17.
Busca-se comparar as repostas aos carregamentos termomecânicos obtidos com a
simulação proposta e os dados do modelo disponibilizados em [35].
Com sucesso, replica-se a modelagem dos carregamentos termomecânicos na
simulação realizada no ANSYS, que consiste no esmagamento plano vertical,

59
descarregamento e aquecimento em três fases, que se diferenciam pela taxa de
transformação, devido a convergência durante a mudança de fases, e, por fim, no
esfriamento.
Figura 55 - Espaçador de coluna vertebral Modelo no Solidworks®.
Tabela 16 - Parâmetros do material da simulação (Fonte: PETRINI et al. [35]).
Propriedade Símbolo Valor
Módulo de Elasticidade - Austenita 𝐸𝐴 70000 [MPa]
Módulo de Elasticidade - Martensita 𝐸𝑀 17000 [MPa]
Constante de Poisson 𝜈 0,30
Deformação Máxima de Transformação 휀𝐿 7.0%
Parâmetro de Endurecimento ℎ 500 [MPa]
Temperatura de Referência 𝑇𝑜 311,15 [K]
Limite de Elasticidade R 120 [MPa]
Parâmetro de Escala da Temperatura 𝛽 8,3 [MPa.K-1]
Módulo de Elasticidade - Martensita 𝐸𝑀 26000 [MPa]
Parâmetro de Lode 𝑚 0
Tabela 17 - Parâmetros específicos para a simulação (Fonte: PETRINI et al. [35]).
Propriedade Símbolo Valor Descrição
C. C. 1 ENGASTE 0,0 [mm] Restrição para equilíbrio.
C. C. 2 SIMETRIA - Simetria em relação ao centro, 1/4.
C. C. 3 ESMAGA 4.5 [mm] Esmagamento por um plano.
Nº de Elementos NEL 10579 Número de elementos tetraédricos

60
A Figura 56 apresenta a malha de tetraedros e as condições de contorno.
Figura 56 - Geometria e malha tetraédrica do espaçador. Elemento de sólido.
Na Figura 57, à esquerda, a tensão de von Mises para o espaçador revela os
principais pontos de concentração das cargas ao final da segunda etapa, quando
esmagado por uma superfície rígida no topo e, à direita, apresenta os deslocamentos
para um nó na parte superior. Observa-se que sob os alto níveis de tensão
apresentados, em uma situação real implicaria no escoamento do material ou até
mesmo em falha por ruptura.
Figura 57 - Resultado da simulação: à esquerda, tensões equivalentes de von Mises
para o elemento de simetria do espaçador na etapa 2, à direita, deslocamentos.

61
8 Conclusões
Neste trabalho, diferentes estruturas formadas por ligas com memória de forma
são analisadas utilizando o método dos elementos finitos. O objetivo é discutir os
diferentes tipos de teorias destacando as principais características do comportamento
termomecânico associado as transformações de fase em sólidos. Os resultados são
obtidos a partir do programa comercial de engenharia, ANSYS® Mechanical APDL™
16.2. O modelo constitutivo de AURICCHIO et al. [17] é empregado.
A análise é dividida em três níveis de complexidade da estrutura:
unidimensionais, bidimensionais e tridimensionais. De uma maneira geral, os resultados
são comparados com outros resultados experimentais ou numéricos disponíveis na
literatura.
Para estruturas unidimensionais, emprega-se o elemento de viga. Testes
envolvendo tração de barras, torção de eixos e flexão de vigas são realizados. Os
resultados mostram que o método dos elementos finitos captura o comportamento
termomecânico das ligas com memória de forma, apresentando os comportamentos de
pseudoelasticidade e memória de forma.
Em relação a estruturas bidimensionais, procede-se uma análise de estado
plano e também considerando elementos de casca. Neste contexto, investigam-se as
teorias dos estados planos tensão e deformação, e cisalhamento puro. O elemento de
casca é utilizado para representar a flexão de viga e uma mola helicoidal.
Por último, as estruturas tridimensionais são analisadas com o elemento sólido.
Duas aplicações são usadas: um espaçador de coluna vertebral e uma mola.
Os resultados deste trabalho mostram que o método dos elementos finitos
associado ao modelo constitutivo de AURICCHIO et al. [17] representam de forma
coerente diversos elementos estruturais. Essa verificação é muito útil em uma
perspectiva de engenharia, permitindo uma evolução para análise de aplicações
específicas.
62
Referências bibliográficas
[1] ÖLANDER, A., "An electrochemical investigation of solid cadmium–gold alloys",
Journal of the American Chemical Society, n. 10, 1932.
[2] CHANG, L. C.; READ, T. A., "Plastic deformation and difussionless phase
changes in metals: the gold cadmium beta phase", Transactions of the
Metallurgical Society of AIME, 191, n. 47, pp. 47-52., 1951
[3] BUEHLER, W. J.; WILEY, R. C.; GILFRICH, J. V., "Effects of Low-Temperature
Phase Changes on the Mechanical Properties of Alloys Near Composition TiNi",
Journal of Applied Physics, n. 2, 1963.
[4] LAGOUDAS, D. C.; KUMAR, P. K., Introduction to Shape Memory Alloys. 1
ed. [S.l.], Springer US, v. 1, 2008.
[5] MOHD JANI, J.; LEARY, M.; SUBIC, A., et al., "A review of shape memory alloy
research, applications", Journal of Materials & Design, Abril 2014.
[6] AURICCHIO, F.; SACCO, E., "A Superelastic Shape-Memory-Alloy Beam Model",
Journal of Intelligent Material Systems and Structures, n. 6, 1997.
[7] RACHINGER, W. A., "A “super-elastic” single crystal calibration bar", British
Journal of Applied Physics, n. 6, 1958.
[8] AURICCHIO, F.; TAYLOR, R. L.; LUBLINER, J., "Shape-memory alloys:
macromodelling and numerical simulations of the superelastic behavior",
Computer Methods in Applied Mechanics and Engineering, n. 3-4, Julho
1997.
[9] AURICCHIO, F.; CODA, A.; REALI, A., et al., "SMA Numerical Modeling Versus
Experimental Results: Parameter Identification and Model Prediction Capabilities",
Journal of Materials Engineering and Performance, n. 5-6, Março 2009.
[10] DUERIG, T. W.; MELTON, K. N.; STÖCKEL, D., et al., Engineering Aspects of
Shape Memory Alloys. 1 ed. [S.l.], Butterworth-Heinemann, 1990.
[11] HARRISON, J. D.; HODGSON, D. E., "Use of TiNi in Mechanical and Electrical
Connectors", In: PERKINS, J. Shape Memory Effects in Alloys. 1 ed. [S.l.]:
Springer US, 1975. Cap. 28, p. 517-523.
[12] PELTON, A. R.; STÖCKEL, D.; DUERING, T. W., "Medical uses of NITINOL". In:
Proceedings of the International Symposium on Shape Memory Materials, v.
327-328, pp. 63-70, Kanazawa, Materials Science Forum, 2000.
[13] FERNANDES, D. J.; PERES, R. V.; MENDES, et al., "Understanding the Shape-
Memory Alloys Used in Orthodontics", ISRN Dentistry, 2011, 2011
[14] SENTHILKUMAR, M., "Analysis of SMA Actuated Plain Flap Wing", Journal of
Engineering Science and Technology, n. 1, 2012.
[15] SILVA, P. C. S.; ARAÚJO, C. J.; SAVI, M. A., "Análise numérica do
comportamento pseudoelástico de atenuadores do tipo molas belleville usando
63
elementos finitos". In: Proceedings of the XXXV Iberian Latin American
Congress on Computational Methods in Engeneering, Fortaleza, ABMEC,
2014.
[16] BARRETT, P. R.; FRIDLINE, D., "User implemented nitinol material model in
ANSYS". In: Proceedings of the Tenth International ANSYS Conference and
Exhibition, v. X, Pittsburgh, ASAP INC., 2002.
[17] AURICCHIO, F.; PETRINI, L., "A three-dimensional model describing stress-
temperature induced solid phase transformations. Part I: solution algorithm and
boundary value problems", International Journal for Numerical Methods in
Engineering, n. 6, Outubro 2004.
[18] SOUZA, A. C.; MAMIYA, E. N.; ZOUAIN, N., "Three-dimensional model for solids
undergoing stress-induced phase transformations", European Journal of
Mechanics - A/Solids, n. 5, Setembro 1998.
[19] AURICCHIO, F.; MORGANTI, S.; REALI, A., et al., "Theoretical and Experimental
Study of the Shape Memory Effect of Beams in Bending Conditions", Journal of
Materials Engineering and Performance, n. 4, Julho 2011.
[20] REALI, A.; AURICCHIO, F.; MORGANTI, S., "SMA numerical modeling versus
experimental results". In: ESOMAT, Praga, European Symposium on Martensitic
Transformations, 2009.
[21] BOERAEVE, I. P. Introduction To The Finite Element Method (FEM). Gramme
Institut. Liege, Bélgica, p. 68. 2010.
[22] FUNNELL, W. R. Finite-element method. McGill University. Montreal, p. 13.
2009.
[23] SAS IP INC., Ansys Mechanical APDL Element Reference. Canonsburg, PA,
ANSYS, Inc., 2015.
[24] RIBEIRO, F. L. B. Introdução ao Método dos Elementos Finitos. Programa de
Engenharia Civil, COPPE/UFRJ. Rio de Janeiro, p. 93. 2004.
[25] BANDEIRA, E. L.; SAVI, M. A.; NETTO, T. A., et al., "Finite element analysis of
shape memory alloy adaptive trusses with geometrical nonlinearities", Archieve
of Applied Mechanics, n. 3-4, Março 2006.
[26] SITTNER, P.; HARA, Y.; TOKUDA, M., "Experimental study on the thermoelastic
martensitic transformation in shape memory alloy polycrystal induced by
combined external forces", Metallurgical and Materials Transactions A, n. 11,
Novembro 1995.
[27] TIMOSHENKO, S. P.; MACCULLOUOH, G. H., Elements of Strength of
Materials. 3 ed. Nova York, van Nostrand, 1949.
[28] FELIPPA, C. Introduction to Aerospace Structures (ASEN 3112)., 2015.
Disponivel em:

64
<http://www.colorado.edu/engineering/CAS/courses.d/Structures.d/>. Acesso em:
16 Fevereiro 2016.
[29] SITTNER, P.; HELLER, L.; PILCH, J., et al., "Roundrobin SMA modeling". In:
ESOMAT, Praga, European Symposium on Martensitic Transformations, 2009.
[30] BOUVET, C.; CALLOCH, S. . L. C., "A phenomenological model for
pseudoelasticity of shape memory", European Journal of Mechanics A/Solids,
n. 1, Fevereiro 2004.
[31] TIMOSHENKO, S., Resistência dos materiais. 3 ed. Rio de Janeiro, Livros
Técnicos e Científicos Editora S.A., 1976.
[32] BISEGNA, P.; CASELLI, F.; MARFIA, S., et al., "A new SMA shell element based
on the corotational formulation", Journal of Computational Mechanics , n. 5,
Novembro 2014.
[33] EVANGELISTA, V.; MARFIA, S.; SACCO, E., "A 3D SMA constitutive model in
the framework of finite strain", International Journal for Numerical Methods in
Engineering, n. 6, Agosto 2009.
[34] ARTIOLI, E.; MARFIA, S.; SACCO, E., et al., "A nonlinear plate finite element
formulation for shape memory alloy applications", International Journal for
Numerical Methods in Engineering, n. 10, Outubro 2011.
[35] PETRINI, L.; MIGLIAVACCA, F.; MASSAROTTI, P., et al., "Computational
Studies of Shape Memory Alloy Behavior in Biomedical Applications", Journal of
Biomechanical Engineering, n. 4, Janeiro 2005.
1. FIM DAS REFERÊNCIAS
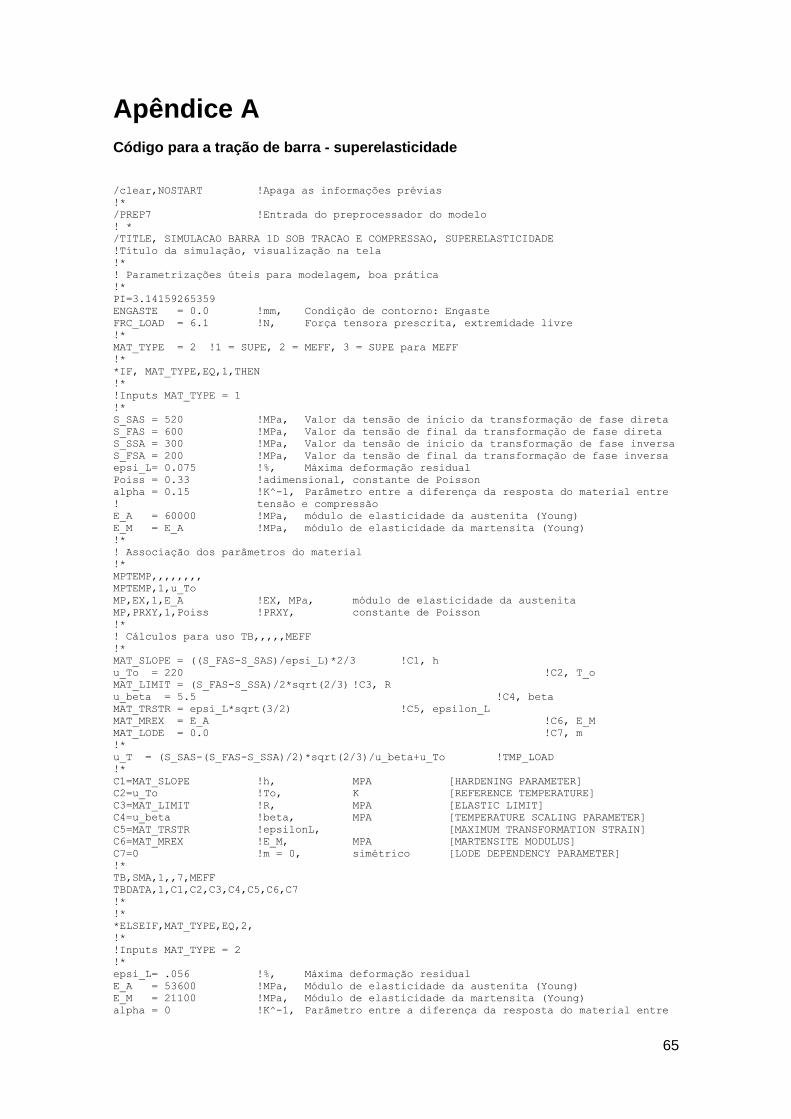
65
Apêndice A
Código para a tração de barra - superelasticidade
/clear,NOSTART !Apaga as informações prévias
!*
/PREP7 !Entrada do preprocessador do modelo
! *
/TITLE, SIMULACAO BARRA 1D SOB TRACAO E COMPRESSAO, SUPERELASTICIDADE
!Título da simulação, visualização na tela
!*
! Parametrizações úteis para modelagem, boa prática
!*
PI=3.14159265359
ENGASTE = 0.0 !mm, Condição de contorno: Engaste
FRC_LOAD = 6.1 !N, Força tensora prescrita, extremidade livre
!*
MAT_TYPE = 2 !1 = SUPE, 2 = MEFF, 3 = SUPE para MEFF
!*
*IF, MAT_TYPE,EQ,1,THEN
!*
!Inputs MAT_TYPE = 1
!*
S_SAS = 520 !MPa, Valor da tensão de início da transformação de fase direta
S_FAS = 600 !MPa, Valor da tensão de final da transformação de fase direta
S_SSA = 300 !MPa, Valor da tensão de início da transformação de fase inversa
S_FSA = 200 !MPa, Valor da tensão de final da transformação de fase inversa
epsi_L= 0.075 !%, Máxima deformação residual
Poiss = 0.33 !adimensional, constante de Poisson
alpha = 0.15 !K^-1, Parâmetro entre a diferença da resposta do material entre
! tensão e compressão
E_A = 60000 !MPa, módulo de elasticidade da austenita (Young)
E_M = E_A !MPa, módulo de elasticidade da martensita (Young)
!*
! Associação dos parâmetros do material
!*
MPTEMP,,,,,,,,
MPTEMP,1,u_To
MP,EX,1,E_A !EX, MPa, módulo de elasticidade da austenita
MP,PRXY,1,Poiss !PRXY, constante de Poisson
!*
! Cálculos para uso TB,,,,,MEFF
!*
MAT_SLOPE = ((S_FAS-S_SAS)/epsi_L)*2/3 !C1, h
u_To = 220 !C2, T_o
MAT_LIMIT = (S_FAS-S_SSA)/2*sqrt(2/3) !C3, R
u_beta = 5.5 !C4, beta
MAT_TRSTR = epsi_L*sqrt(3/2) !C5, epsilon_L
MAT_MREX = E_A !C6, E_M
MAT_LODE = 0.0 !C7, m
!*
u_T = (S_SAS-(S_FAS-S_SSA)/2)*sqrt(2/3)/u_beta+u_To !TMP_LOAD
!*
C1=MAT_SLOPE !h, MPA [HARDENING PARAMETER]
C2=u_To !To, K [REFERENCE TEMPERATURE]
C3=MAT_LIMIT !R, MPA [ELASTIC LIMIT]
C4=u_beta !beta, MPA [TEMPERATURE SCALING PARAMETER]
C5=MAT_TRSTR !epsilonL, [MAXIMUM TRANSFORMATION STRAIN]
C6=MAT_MREX !E_M, MPA [MARTENSITE MODULUS]
C7=0 !m = 0, simétrico [LODE DEPENDENCY PARAMETER]
!*
TB,SMA,1,,7,MEFF
TBDATA,1,C1,C2,C3,C4,C5,C6,C7
!*
!*
*ELSEIF,MAT_TYPE,EQ,2,
!*
!Inputs MAT_TYPE = 2
!*
epsi_L= .056 !%, Máxima deformação residual
E_A = 53600 !MPa, Módulo de elasticidade da austenita (Young)
E_M = 21100 !MPa, Módulo de elasticidade da martensita (Young)
alpha = 0 !K^-1, Parâmetro entre a diferença da resposta do material entre

66
! tensão e compressão
Poiss = 0.33 !adimensional, Constante de Poisson
!*
!u_ significa input adicionais do usuário
!*
u_T = 283.15 !K, T
u_h = 1000 !h, MPA [HARDENING PARAMETER]
u_To = 243.15 !To, K [REFERENCE TEMPERATURE]
u_R = 100 !R, MPA [ELASTIC LIMIT]
u_beta= 6.1 !beta, MPA [TEMPERATURE SCALING PARAMETER]
u_m = 0 !m = 0, simétrico [LODE DEPENDENCY PARAMETER]
!*
tref, u_To !indicação da temperatura de referência
MPTEMP,,,,,,,, !inicialização da função
MPTEMP,1,u_To !associação da temperatura dos parâmetros
MPDATA,EX,1,,E_A !EX, MPa, módulo de elasticidade da austenita (Young)
MPDATA,PRXY,1,,Poiss !PRXY, adimensional, constante de Poisson
!*
! Definindo as constantes da liga
!*
C1=u_h !h, MPA [HARDENING PARAMETER]
C2=u_To !To, K [REFERENCE TEMPERATURE]
C3=u_R !R, MPA [ELASTIC LIMIT]
C4=u_beta !beta, MPA [TEMPERATURE SCALING PARAMETER]
C5=epsi_L !epsilonL, [MAXIMUM TRANSFORMATION STRAIN]
C6=E_M !E_M, MPA [MARTENSITE MODULUS]
C7=0 !m = 0, simétrico [LODE DEPENDENCY PARAMETER]
!*
TB,SMA,1,,7,MEFF
TBTEMP,u_To
TBDATA,1,C1,C2,C3,C4,C5,C6,C7
!*
!*
*ELSEIF,MAT_TYPE,EQ,3,
!*
!Inputs MAT_TYPE = 3
!*
S_SAS = 520 !MPa, Valor da tensão de início da transformação de fase direta
S_FAS = 600 !MPa, Valor da tensão de final da transformação de fase direta
S_SSA = 300 !MPa, Valor da tensão de início da transformação de fase inversa
S_FSA = 200 !MPa, Valor da tensão de final da transformação de fase inversa
epsi_L= 0.075 !%, Máxima deformação residual
Poiss = 0.33 !adimensional, constante de Poisson
alpha = 0.15 !K^-1, Parâmetro entre a diferença da resposta do material entre
! tensão e compressão
E_A = 60000 !MPa, módulo de elasticidade da austenita (Young)
E_M = E_A !MPa, módulo de elasticidade da martensita (Young)
!*
epsi_L = epsi_L
MAT_ALPHA = alpha
!*
tref, u_To !indicação da temperatura de referência
MPTEMP,,,,,,,, !inicialização da função
MPTEMP,1,u_To !associação da temperatura dos parâmetros
MPDATA,EX,1,,E_A !EX, MPa, módulo de elasticidade da austenita (Young)
MPDATA,PRXY,1,,Poiss !PRXY, adimensional, constante de Poisson
!*
C1=S_SAS !MPa, Valor da tensão de início da transformação de fase direta
C2=S_FAS !MPa, Valor da tensão de final da transformação de fase direta
C3=S_SSA !MPa, Valor da tensão de início da transformação de fase inversa
C4=S_FSA !MPa, Valor da tensão de final da transformação de fase inversa
C5=episi_L !%, Máxima deformação residual
C6=alpha !K^-1, Parâmetro entre a diferença da resposta do material entre
! tensão e compressão
!*
TB,SMA,1,,6,SUPE !Superelasticidade da liga com memória de forma
TBDATA,1,C1,C2,C3,C4,C5,C6 !Associação das constantes para SMA,,,,SUPE
!*
*ENDIF !Fim da operação booleana IF!*
K,1,0,0,0
K,2,0,0,50
L,1,2
!*
ET,1,BEAM188 !Viga 3D, 2 Nós, suporte a TB,SMA
KEYOPT,1,4,2 !Output para Tensão cisalhante por torção e flexão
KEYOPT,1,6,3 !Output para as informações da seção transversal para cada nó do
elemento.

67
KEYOPT,1,7,2 !Output Tensões e deformações em cada ponto da seção transversal
KEYOPT,1,9,3 !Output Tensões e deformações em cada nó da seção transversal
!*
radius=0.05 !Raio da seção transversal circular
N_u=10 !N de Divisões angulares da seção transversal
T_u=5 !N de Divisões radiais da seção transversal
ESIZE,1 !Tamanho do elemento
TYPE,1 !Referencia ao número do elemento para configuração da malha
MAT,1 !Referencia ao número do material para configuração da malha
SECTYPE, 1, BEAM, CSOLID, perfil, 0 !Perfil circular sólido da viga
SECOFFSET, CENT !Offset para o centróide da área
SECDATA,radius,N_u,T_u,0,0,0,0,0,0,0,0,0 !Formação da malha transversal
LMESH,ALL !Formação da malha de elementos e nós.
!*
D,1,ALL, ENGASTE !Condição de contorno, engaste em uma estremidade.
!*
FINISH !Sair do preprocessador (prep7)
!*
!*
/SOL !Inicia as opções de solução
!*
ANTYPE,STATIC, !Indicação de análise estática (evolução no tempo quasi-estática)
NLGEOM, ON !Grandes deformações habilitada
!*
tref, u_To !Indicação da temperatura de referência
tunif,u_T !Indicação da temperatura de análise
!*
OUTRES,ALL,ALL !Salvar todos os resultados
NROPT,UNSYM !Usar matriz assimétrica dos elementos para cálculos complestos !
por Newton-Raphson
kbc,0 !A evolução das cargas é em "rampa", linear
AUTOTS,ON !intervalo de tempo ou carga é automático
LNSRCH,AUTO !Procurar automaticamente a linha a ser usada com Newton-Raphson
NSUBST,200,1000,100 !Especifica o número de substeps para os próximos tempos
NEQIT,1000 !Especifica o número máximo de iterações de esquilíbro para
! análises não linear
!*
TIME,1 !Especifica o tempo ao final da solução
F,2,FZ,FRC_LOAD !C.C. nó 2: Força tensora na direção Z de magnitude FRC_LOAD
SOLVE !Soluciona para o tempo 1.0
!*
TIME,2 !Especifica o tempo ao final da solução
F,2,FZ,0.0 !C.C. nó 2: Descarregamento do Momento na direção Z
SOLVE !Soluciona para o tempo 2.0
!*
FINISH !Sair do solucionador (sol)
!*
! Invertendo as cores padrão do programa
!*
/RGB,INDEX, 100, 100, 100, 0 !preto
/RGB,INDEX, 80, 80, 80, 13 !tom de cinza 1
/RGB,INDEX, 60, 60, 60, 14 !tom de cinza 2
/RGB,INDEX, 0, 0, 0, 15 !branco
!*
!*
/POST26 !Entrada do visualizador temporal dos resultados
!*
NSOL,2,2,U,Z, DISP_Z, !Lê a deflexão em Z no no 2 e armazena na variável 2
RFORCE,3,1,F,Z, FORCE_Z !Lê as forçãs de reação no nó 1 e armazena na variável 3
ESOL,4,1, ,SMIS,20,STRAIN_Z !Lê a deformação elástica do elemento 1 e armazena na
! variável 4
ESOL,5,1, ,SMIS,31,STRESS_Z !Lê a tensão do elemento 1 e armazena na variável 5
PROD,6,4, , ,STRAIN, , ,100 !Multiplica o valor da deformação para porcentagem, x100.
ESOL,7,1, ,SMIS,51,TEMPERATURE!Lê a evolução da temperatura do elemento 1 no tempo e
! armazena na variavel 7
PROD,8,3, , ,FORCE_Z, , ,-1 !Multiplica o valor da força de reação para ser a força
! aplicada, x-1.
!*
FINISH !Sair do analisador no tempo (post26)
!*
/eof !End of File, termina a execução do arquivo.
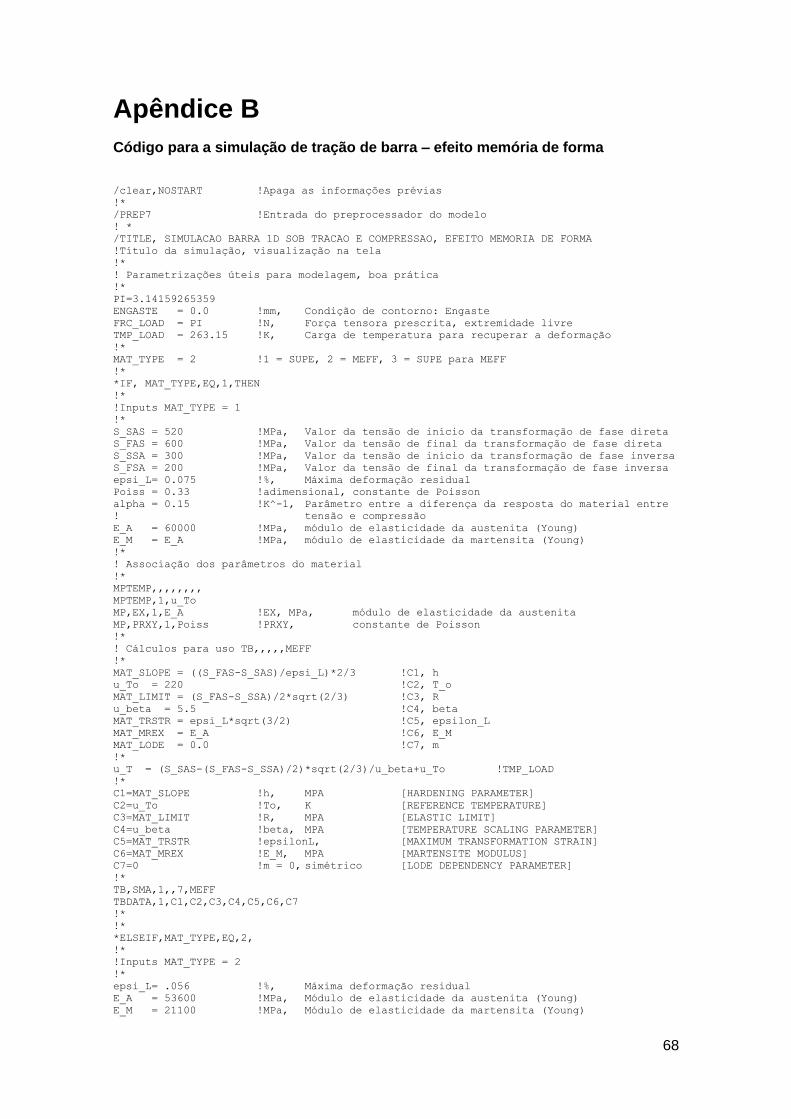
68
Apêndice B
Código para a simulação de tração de barra – efeito memória de forma
/clear,NOSTART !Apaga as informações prévias
!*
/PREP7 !Entrada do preprocessador do modelo
! *
/TITLE, SIMULACAO BARRA 1D SOB TRACAO E COMPRESSAO, EFEITO MEMORIA DE FORMA
!Título da simulação, visualização na tela
!*
! Parametrizações úteis para modelagem, boa prática
!*
PI=3.14159265359
ENGASTE = 0.0 !mm, Condição de contorno: Engaste
FRC_LOAD = PI !N, Força tensora prescrita, extremidade livre
TMP_LOAD = 263.15 !K, Carga de temperatura para recuperar a deformação
!*
MAT_TYPE = 2 !1 = SUPE, 2 = MEFF, 3 = SUPE para MEFF
!*
*IF, MAT_TYPE,EQ,1,THEN
!*
!Inputs MAT_TYPE = 1
!*
S_SAS = 520 !MPa, Valor da tensão de início da transformação de fase direta
S_FAS = 600 !MPa, Valor da tensão de final da transformação de fase direta
S_SSA = 300 !MPa, Valor da tensão de início da transformação de fase inversa
S_FSA = 200 !MPa, Valor da tensão de final da transformação de fase inversa
epsi_L= 0.075 !%, Máxima deformação residual
Poiss = 0.33 !adimensional, constante de Poisson
alpha = 0.15 !K^-1, Parâmetro entre a diferença da resposta do material entre
! tensão e compressão
E_A = 60000 !MPa, módulo de elasticidade da austenita (Young)
E_M = E_A !MPa, módulo de elasticidade da martensita (Young)
!*
! Associação dos parâmetros do material
!*
MPTEMP,,,,,,,,
MPTEMP,1,u_To
MP,EX,1,E_A !EX, MPa, módulo de elasticidade da austenita
MP,PRXY,1,Poiss !PRXY, constante de Poisson
!*
! Cálculos para uso TB,,,,,MEFF
!*
MAT_SLOPE = ((S_FAS-S_SAS)/epsi_L)*2/3 !C1, h
u_To = 220 !C2, T_o
MAT_LIMIT = (S_FAS-S_SSA)/2*sqrt(2/3) !C3, R
u_beta = 5.5 !C4, beta
MAT_TRSTR = epsi_L*sqrt(3/2) !C5, epsilon_L
MAT_MREX = E_A !C6, E_M
MAT_LODE = 0.0 !C7, m
!*
u_T = (S_SAS-(S_FAS-S_SSA)/2)*sqrt(2/3)/u_beta+u_To !TMP_LOAD
!*
C1=MAT_SLOPE !h, MPA [HARDENING PARAMETER]
C2=u_To !To, K [REFERENCE TEMPERATURE]
C3=MAT_LIMIT !R, MPA [ELASTIC LIMIT]
C4=u_beta !beta, MPA [TEMPERATURE SCALING PARAMETER]
C5=MAT_TRSTR !epsilonL, [MAXIMUM TRANSFORMATION STRAIN]
C6=MAT_MREX !E_M, MPA [MARTENSITE MODULUS]
C7=0 !m = 0, simétrico [LODE DEPENDENCY PARAMETER]
!*
TB,SMA,1,,7,MEFF
TBDATA,1,C1,C2,C3,C4,C5,C6,C7
!*
!*
*ELSEIF,MAT_TYPE,EQ,2,
!*
!Inputs MAT_TYPE = 2
!*
epsi_L= .056 !%, Máxima deformação residual
E_A = 53600 !MPa, Módulo de elasticidade da austenita (Young)
E_M = 21100 !MPa, Módulo de elasticidade da martensita (Young)

69
alpha = 0 !K^-1, Parâmetro entre a diferença da resposta do material entre
! tensão e compressão
Poiss = 0.33 !adimensional, Constante de Poisson
!*
!u_ significa input adicionais do usuário
!*
u_T = 243.15 !K, T
u_h = 1000 !h, MPA [HARDENING PARAMETER]
u_To = 243.15 !To, K [REFERENCE TEMPERATURE]
u_R = 100 !R, MPA [ELASTIC LIMIT]
u_beta= 6.1 !beta, MPA [TEMPERATURE SCALING PARAMETER]
u_m = 0 !m = 0, simétrico [LODE DEPENDENCY PARAMETER]
!*
tref, u_To !indicação da temperatura de referência
MPTEMP,,,,,,,, !inicialização da função
MPTEMP,1,u_To !associação da temperatura dos parâmetros
MPDATA,EX,1,,E_A !EX, MPa, módulo de elasticidade da austenita (Young)
MPDATA,PRXY,1,,Poiss !PRXY, adimensional, constante de Poisson
!*
! Definindo as constantes da liga
!*
C1=u_h !h, MPA [HARDENING PARAMETER]
C2=u_To !To, K [REFERENCE TEMPERATURE]
C3=u_R !R, MPA [ELASTIC LIMIT]
C4=u_beta !beta, MPA [TEMPERATURE SCALING PARAMETER]
C5=epsi_L !epsilonL, [MAXIMUM TRANSFORMATION STRAIN]
C6=E_M !E_M, MPA [MARTENSITE MODULUS]
C7=0 !m = 0, simétrico [LODE DEPENDENCY PARAMETER]
!*
TB,SMA,1,,7,MEFF
TBTEMP,u_To
TBDATA,1,C1,C2,C3,C4,C5,C6,C7
!*
!*
*ELSEIF,MAT_TYPE,EQ,3,
!*
!Inputs MAT_TYPE = 3
!*
S_SAS = 520 !MPa, Valor da tensão de início da transformação de fase direta
S_FAS = 600 !MPa, Valor da tensão de final da transformação de fase direta
S_SSA = 300 !MPa, Valor da tensão de início da transformação de fase inversa
S_FSA = 200 !MPa, Valor da tensão de final da transformação de fase inversa
epsi_L= 0.075 !%, Máxima deformação residual
Poiss = 0.33 !adimensional, constante de Poisson
alpha = 0.15 !K^-1, Parâmetro entre a diferença da resposta do material entre
! tensão e compressão
E_A = 60000 !MPa, módulo de elasticidade da austenita (Young)
E_M = E_A !MPa, módulo de elasticidade da martensita (Young)
!*
epsi_L = epsi_L
MAT_ALPHA = alpha
!*
tref, u_To !Setting reference temperature
MP,EX,1,E_A !EX, MPa [AUSTENITE MODULUS]
MP,PRXY,1,Poiss !PRXY, [POISSON'S RATIO]
!*
C1=S_SAS !MPa, Valor da tensão de início da transformação de fase direta
C2=S_FAS !MPa, Valor da tensão de final da transformação de fase direta
C3=S_SSA !MPa, Valor da tensão de início da transformação de fase inversa
C4=S_FSA !MPa, Valor da tensão de final da transformação de fase inversa
C5=episi_L !%, Máxima deformação residual
C6=alpha !K^-1, Parâmetro entre a diferença da resposta do material entre
! tensão e compressão
!*
MPTEMP,,,,,,,,
MPTEMP,1,u_To
TB,SMA,1,,6,SUPE !Superelasticidade da liga com memória de forma
TBDATA,1,C1,C2,C3,C4,C5,C6 !Associação das constantes para SMA,,,,SUPE
!*
*ENDIF !Fim da operação booleana IF
!*
K,1,0,0,0
K,2,0,0,50
L,1,2
!*
ET,1,BEAM188 !Viga 3D, 2 Nós, suporte a TB,SMA
KEYOPT,1,4,2 !Output para Tensão cisalhante por torção e flexão
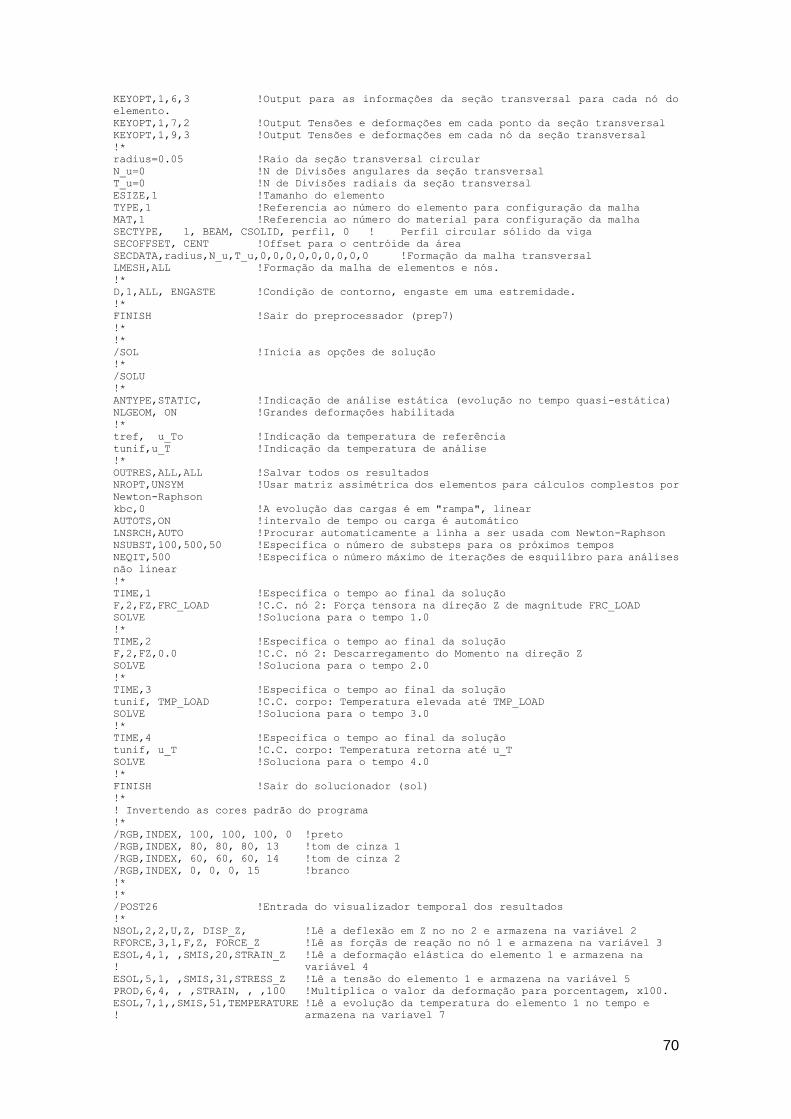
70
KEYOPT,1,6,3 !Output para as informações da seção transversal para cada nó do
elemento.
KEYOPT,1,7,2 !Output Tensões e deformações em cada ponto da seção transversal
KEYOPT,1,9,3 !Output Tensões e deformações em cada nó da seção transversal
!*
radius=0.05 !Raio da seção transversal circular
N_u=0 !N de Divisões angulares da seção transversal
T_u=0 !N de Divisões radiais da seção transversal
ESIZE,1 !Tamanho do elemento
TYPE,1 !Referencia ao número do elemento para configuração da malha
MAT,1 !Referencia ao número do material para configuração da malha
SECTYPE, 1, BEAM, CSOLID, perfil, 0 ! Perfil circular sólido da viga
SECOFFSET, CENT !Offset para o centróide da área
SECDATA,radius,N_u,T_u,0,0,0,0,0,0,0,0,0 !Formação da malha transversal
LMESH,ALL !Formação da malha de elementos e nós.
!*
D,1,ALL, ENGASTE !Condição de contorno, engaste em uma estremidade.
!*
FINISH !Sair do preprocessador (prep7)
!*
!*
/SOL !Inicia as opções de solução
!*
/SOLU
!*
ANTYPE,STATIC, !Indicação de análise estática (evolução no tempo quasi-estática)
NLGEOM, ON !Grandes deformações habilitada
!*
tref, u_To !Indicação da temperatura de referência
tunif,u_T !Indicação da temperatura de análise
!*
OUTRES,ALL,ALL !Salvar todos os resultados
NROPT,UNSYM !Usar matriz assimétrica dos elementos para cálculos complestos por
Newton-Raphson
kbc,0 !A evolução das cargas é em "rampa", linear
AUTOTS,ON !intervalo de tempo ou carga é automático
LNSRCH,AUTO !Procurar automaticamente a linha a ser usada com Newton-Raphson
NSUBST,100,500,50 !Especifica o número de substeps para os próximos tempos
NEQIT,500 !Especifica o número máximo de iterações de esquilíbro para análises
não linear
!*
TIME,1 !Especifica o tempo ao final da solução
F,2,FZ,FRC_LOAD !C.C. nó 2: Força tensora na direção Z de magnitude FRC_LOAD
SOLVE !Soluciona para o tempo 1.0
!*
TIME,2 !Especifica o tempo ao final da solução
F,2,FZ,0.0 !C.C. nó 2: Descarregamento do Momento na direção Z
SOLVE !Soluciona para o tempo 2.0
!*
TIME,3 !Especifica o tempo ao final da solução
tunif, TMP_LOAD !C.C. corpo: Temperatura elevada até TMP_LOAD
SOLVE !Soluciona para o tempo 3.0
!*
TIME,4 !Especifica o tempo ao final da solução
tunif, u_T !C.C. corpo: Temperatura retorna até u_T
SOLVE !Soluciona para o tempo 4.0
!*
FINISH !Sair do solucionador (sol)
!*
! Invertendo as cores padrão do programa
!*
/RGB,INDEX, 100, 100, 100, 0 !preto
/RGB,INDEX, 80, 80, 80, 13 !tom de cinza 1
/RGB,INDEX, 60, 60, 60, 14 !tom de cinza 2
/RGB,INDEX, 0, 0, 0, 15 !branco
!*
!*
/POST26 !Entrada do visualizador temporal dos resultados
!*
NSOL,2,2,U,Z, DISP_Z, !Lê a deflexão em Z no no 2 e armazena na variável 2
RFORCE,3,1,F,Z, FORCE_Z !Lê as forçãs de reação no nó 1 e armazena na variável 3
ESOL,4,1, ,SMIS,20,STRAIN_Z !Lê a deformação elástica do elemento 1 e armazena na
! variável 4
ESOL,5,1, ,SMIS,31,STRESS_Z !Lê a tensão do elemento 1 e armazena na variável 5
PROD,6,4, , ,STRAIN, , ,100 !Multiplica o valor da deformação para porcentagem, x100.
ESOL,7,1,,SMIS,51,TEMPERATURE !Lê a evolução da temperatura do elemento 1 no tempo e
! armazena na variavel 7

71
PROD,8,3, , ,FORCE_Z, , ,-1 !Multiplica o valor da força de reação para ser a força
! aplicada, x-1.
!*
/color,curve,BLUE,1 !Padroniza a cor azul para o gráfico da deflexão no tempo
XVAR,1 !Indica a variável na abscissa
PLVAR,2, !Indica a função no eixo das coordenadas
/AXLAB,X, TEMPO [s] !Identifica o nome apresentado no eixo X
/AXLAB,Y, ALONGAMENTO [mm] !Identifica o nome apresentado no eixo Y
/REPLOT !atualiza a informação na tela
/ui,copy,save,png,graph,color,normal,portrait,yes !Salva a imagem da tela em .png
!*
/color,curve,GREE,1 !Padroniza a cor verde para o gráfico da força no tempo
PLVAR,8, !Indica a função no eixo das coordenadas
/AXLAB,X, TEMPO [s] !Identifica o nome apresentado no eixo X
/AXLAB,Y, FORCE [N] !Identifica o nome apresentado no eixo Y
/REPLOT !atualiza a informação na tela
/ui,copy,save,png,graph,color,normal,portrait,yes !Salva a imagem da tela em .png
!*
/color,curve,ORAN,1 !Padroniza a cor laranja para o gráfico da deformação no
! tempo
PLVAR,6, !Indica a função no eixo das coordenadas
/AXLAB,X, TEMPO [s] !Identifica o nome apresentado no eixo X
/AXLAB,Y, DEFORMACAO [%] !Identifica o nome apresentado no eixo Y
/REPLOT !atualiza a informação na tela
/ui,copy,save,png,graph,color,normal,portrait,yes !Salva a imagem da tela em .png
!*
/color,curve,BMAG,1 !Padroniza a cor azul-magenta para o gráfico da temperatura
! no tempo
PLVAR,7, !Indica a função no eixo das coordenadas
/AXLAB,X, TEMPO [s] !Identifica o nome apresentado no eixo X
/AXLAB,Y, TEMPERATURA [K] !Identifica o nome apresentado no eixo Y
/REPLOT !atualiza a informação na tela
/ui,copy,save,png,graph,color,normal,portrait,yes !Salva a imagem da tela em .png
!*
/color,curve,MAGE,1 !Padroniza a cor magenta para o gráfico da tensão no tempo
PLVAR,5, !Indica a função no eixo das coordenadas
/AXLAB,X, TEMPO [s] !Identifica o nome apresentado no eixo X
/AXLAB,Y, TENSAO [MPa] !Identifica o nome apresentado no eixo Y
/REPLOT !atualiza a informação na tela
/ui,copy,save,png,graph,color,normal,portrait,yes !Salva a imagem da tela em .png
!*
/color,curve,RED,1 !Padroniza a cor vermelho para o gráfico da tensão no tempo
XVAR,6 !Indica a variável na abscissa
PLVAR,5, !Indica a função no eixo das coordenadas
/GROPT,DIVX,8 !Divide a grid em 8 partes
/GROPT,DIVY,10 !Divide a grid em 9 partes
/AXLAB,X, DEFORMACAO [%] !Identifica o nome apresentado no eixo X
/AXLAB,Y, TENSAO [MPa] !Identifica o nome apresentado no eixo Y
/YRANGE,0,500 !Estabelece o intervalo do eixo da ordenada
/XRANGE,0,8 !Estabelece o intervalo do eixo da abscissa
/REPLOT !atualiza a informação na tela
/ui,copy,save,png,graph,color,normal,portrait,yes !Salva a imagem da tela em .png
!*
FINISH !Sair do analisador no tempo (post26)
!*
/eof !End of File, termina a execução do arquivo.

72
Apêndice C
Código para a simulação para torção de eixo
/clear,NOSTART !Apaga as informações prévias
!*
/PREP7 !Entrada do preprocessador do modelo
!*
/TITLE, SIMULACAO TORCAO + TRACAO, SUPERELASTICIDADE
!Título da simulação, visualização na tela
!*
!Parametrizações úteis para modelagem, boa prática
!*
PI=3.14159265359
ENGASTE = 0.0 !Condição de contorno: Engaste
FRC_LOAD = 2 !Força tensora prescrita, carga inicial, extremidade livre
MOM_LOAD = .15 !Momento prescrito, extremidade livre
!*
MAT_TYPE = 2 !1 = SUPE, 2 = MEFF, 3 = SUPE para MEFF
!*
*IF, MAT_TYPE,EQ,1,THEN
!*
!Inputs MAT_TYPE = 1
!*
S_SAS = 520 !MPa, Valor da tensão de início da transformação de fase direta
S_FAS = 600 !MPa, Valor da tensão de final da transformação de fase direta
S_SSA = 300 !MPa, Valor da tensão de início da transformação de fase inversa
S_FSA = 200 !MPa, Valor da tensão de final da transformação de fase inversa
epsi_L= 0.075 !%, Máxima deformação residual
Poiss = 0.33 !adimensional, constante de Poisson
alpha = 0.15 !K^-1, Parâmetro entre a diferença da resposta do material entre
! tensão e compressão
E_A = 60000 !MPa, módulo de elasticidade da austenita (Young)
E_M = E_A !MPa, módulo de elasticidade da martensita (Young)
!*
!*
! Associação dos parâmetros do material
!*
u_To = 273 !Temperatura de referencia
MPTEMP,,,,,,,, !Inicia as tabela de temperatura do material para os valores 0
MPTEMP,1,u_To !Indica a temperatura de referencia para os dados do material
MP,EX,1,E_A !EX, MPa, módulo de elasticidade da austenita
MP,PRXY,1,Poiss !PRXY, constante de Poisson
!*
! Cálculos para uso TB,,,,,MEFF
!*
MAT_SLOPE = ((S_FAS-S_SAS)/epsi_L)*3/2 !C1, h
u_To = 273 !C2, T_o
MAT_LIMIT = (S_FAS-S_SSA)*sqrt(2/3)/2 !C3, R
u_beta = 6.1 !C4, beta
MAT_TRSTR = epsi_L*sqrt(2/3) !C5, epsilon_L
MAT_MREX = E_M !C6, E_M
MAT_LODE = 0.0 !C7, m
!*
u_T =(S_SAS-(S_FAS-S_SSA)/2)*sqrt(2)/sqrt(3)/u_beta+u_To !Temperatura
! calculada para a análise (transforma u_beta e u_To dependentes)
!*
C1=MAT_SLOPE !h, MPA [HARDENING PARAMETER]
C2=u_To !To, K [REFERENCE TEMPERATURE]
C3=MAT_LIMIT !R, MPA [ELASTIC LIMIT]
C4=u_beta !beta, MPA [TEMPERATURE SCALING PARAMETER]
C5=MAT_TRSTR !epsilonL, [MAXIMUM TRANSFORMATION STRAIN]
C6=MAT_MREX !E_M, MPA [MARTENSITE MODULUS]
C7=0 !m = 0, simétrico [LODE DEPENDENCY PARAMETER]
!*
TB,SMA,1,,7,MEFF !Material com formulação da liga com memória de forma
TBTEMP, u_To !Temperatura de referência para o material
TBDATA,1,C1,C2,C3,C4,C5,C6,C7 !indicação das constantes
!*
!*
*ELSEIF,MAT_TYPE,EQ,2,
!*
!Inputs MAT_TYPE = 2

73
!*
epsi_L= .056 !%, Máxima deformação residual
E_A = 53600 !MPa, Módulo de elasticidade da austenita (Young)
E_M = 21100 !MPa, Módulo de elasticidade da martensita (Young)
alpha = 0 !K^-1, Parâmetro entre a diferença da resposta do material entre
! tensão e compressão
Poiss = 0.33 !adimensional, Constante de Poisson
!*
!u_ significa input adicionais do usuário
!*
u_T = 303.15 !K, T
u_h = 1000 !h, MPA [HARDENING PARAMETER]
u_To = 243.15 !To, K [REFERENCE TEMPERATURE]
u_R = 100 !R, MPA [ELASTIC LIMIT]
u_beta= 6.1 !beta, MPA [TEMPERATURE SCALING PARAMETER]
u_m = 0 !m = 0, simétrico [LODE DEPENDENCY PARAMETER]
!*
tref, u_To !indicação da temperatura de referência
MPTEMP,,,,,,,, !inicialização da função
MPTEMP,1,u_To !associação da temperatura dos parâmetros
MPDATA,EX,1,,E_A !EX, MPa, módulo de elasticidade da austenita (Young)
MPDATA,PRXY,1,,Poiss !PRXY, adimensional, constante de Poisson
!*
! Definindo as constantes da liga
!*
C1=u_h !h, MPA [HARDENING PARAMETER]
C2=u_To !To, K [REFERENCE TEMPERATURE]
C3=u_R !R, MPA [ELASTIC LIMIT]
C4=u_beta !beta, MPA [TEMPERATURE SCALING PARAMETER]
C5=epsi_L !epsilonL, [MAXIMUM TRANSFORMATION STRAIN]
C6=E_M !E_M, MPA [MARTENSITE MODULUS]
C7=0 !m = 0, simétrico [LODE DEPENDENCY PARAMETER]
!*
TB,SMA,1,,7,MEFF
TBTEMP,u_To
TBDATA,1,C1,C2,C3,C4,C5,C6,C7
!*
!*
*ELSEIF,MAT_TYPE,EQ,3,
!*
!Inputs MAT_TYPE = 3
!*
S_SAS = 350 !MPa, Valor da tensão de início da transformação de fase direta
S_FAS = 350 !MPa, Valor da tensão de final da transformação de fase direta
S_SSA = 125 !MPa, Valor da tensão de início da transformação de fase inversa
S_FSA = 125 !MPa, Valor da tensão de final da transformação de fase inversa
epsi_L= 0.10 !%, Máxima deformação residual
Poiss = 0.33 !adimensional, constante de Poisson
alpha = 0.00 !K^-1, Parâmetro entre a diferença da resposta do material entre
! tensão e compressão
E_A = 47000 !MPa, módulo de elasticidade da austenita (Young)
E_M = E_A !MPa, módulo de elasticidade da martensita (Young)
u_To = 323.15 !K, Temperatura da análise
u_T = u_To
!*
tref, u_To !indicação da temperatura de referência
MPTEMP,,,,,,,, !inicialização da função
MPTEMP,1,u_To !associação da temperatura dos parâmetros
MPDATA,EX,1,,E_A !EX, MPa, módulo de elasticidade da austenita (Young)
MPDATA,PRXY,1,,Poiss !PRXY, adimensional, constante de Poisson
!*
C1=S_SAS !MPa, Valor da tensão de início da transformação de fase direta
C2=S_FAS !MPa, Valor da tensão de final da transformação de fase direta
C3=S_SSA !MPa, Valor da tensão de início da transformação de fase inversa
C4=S_FSA !MPa, Valor da tensão de final da transformação de fase inversa
C5=episi_L !%, Máxima deformação residual
C6=alpha !K^-1, Parâmetro entre a diferença da resposta do material entre
! tensão e compressão
!*
TB,SMA,1,,6,SUPE !Superelasticidade da liga com memória de forma
TBDATA,1,C1,C2,C3,C4,C5,C6 !Associação das constantes para SMA,,,,SUPE
!*
*ENDIF !Fim da operação booleana IF
!*
! Modelando a geometria da barra
!*
K,1,0,0,0 !Keypoint 1 na posição 0,0,0

74
K,2,0,0,50 !Keypoint 2 na posição 0,0,50
L,1,2 !Linha geométrica entre os Keypoints 1 e 2
!*
ET,1,BEAM188 !Viga 3D, 2 Nós, suporte a TB,SMA
KEYOPT,1,3,2 !Funções de forma quadráticas ao longo do comprimento
KEYOPT,1,4,2 !Output para Tensão cisalhante por torção e flexão
KEYOPT,1,6,3 !Output para as informações da seção transversal para cada nó.
KEYOPT,1,7,2 !Output Tensões e deformações em cada ponto da seção transversal
KEYOPT,1,9,3 !Output Tensões e deformações em cada nó da seção transversal
!*
radius=0.05 !Raio da seção transversal circular
N_u=20 !N de Divisões angulares da seção transversal
T_u=25 !N de Divisões radiais da seção transversal
ESIZE,1 !Tamanho do elemento
TYPE,1 !Referencia ao número do elemento para configuração da malha
MAT,1 !Referencia ao número do material para configuração da malha
SECTYPE, 1, BEAM, CSOLID, perfil,0 !Perfil circular sólido da viga
SECOFFSET, CENT !Offset para o centróide da área
SECDATA,radius,N_u,T_u,0,0,0,0,0,0,0,0,0 !Formação da malha transversal
LMESH,ALL !Formação da malha de elementos e nós.
!*
D,1,ALL, Engaste !Condição de contorno, engaste em uma extremidade.
!*
FINISH !Sair do preprocessador (prep7)
!*
!*
/SOL !Inicia as opções de solução
!*
ANTYPE,STATIC, !Indicação de análise estática (evolução no tempo quasi-estática)
NLGEOM, ON !Grandes deformações habilitada
!*
tref, u_To !Indicação da temperatura de referência
tunif,u_T !Indicação da temperatura de análise
!*
OUTRES,ALL,ALL !Salvar todos os resultados
NROPT,UNSYM !Usar matriz assimétrica dos elementos para cálculos complestos por
Newton-Raphson
kbc,0 !A evolução das cargas é em "rampa", linear
AUTOTS,ON !intervalo de tempo ou carga é automático
LNSRCH,AUTO !Procurar automaticamente a linha a ser usada com Newton-Raphson
NEQIT,1000 !Especifica o número máximo de iterações de esquilíbro para análises
não linear
!*
TIME,.1 !Especifica o tempo ao final da solução
F,2,FZ,FRC_LOAD !C.C. nó 2: Força tensora na direção Z de magnitude FRC_LOAD
SOLVE !Soluciona para o tempo 0.1
SAVE !Salva as informações no arquivo
!*
NSUBST,150,500,100 !Especifica o número de substeps para os próximos tempos
!*
TIME,1.1 !Especifica o tempo ao final da solução
F,2,FZ,FRC_LOAD !C.C. nó 2: Força tensora na direção Z de magnitude FRC_LOAD
F,2,MZ,MOM_LOAD !C.C. nó 2: Momento na direção Z de magnitude MOM_LOAD
SAVE !Salva as informações no arquivo
SOLVE !Soluciona para o tempo 1.1
!*
TIME,2.1 !Especifica o tempo ao final da solução
F,2,FZ,FRC_LOAD !C.C. nó 2: Força tensora na direção Z de magnitude FRC_LOAD
F,2,MZ,0 !C.C. nó 2: Descarregamento do Momento na direção Z
SAVE !Salva as informações no arquivo
SOLVE !Soluciona para o tempo 2.1
!*
TIME,3.1 !Especifica o tempo ao final da solução
F,2,FZ,FRC_LOAD !C.C. nó 2: Força tensora na direção Z de magnitude FRC_LOAD
F,2,MZ,-MOM_LOAD !C.C. nó 2: Momento na direção Z de magnitude -MOM_LOAD
SAVE !Salva as informações no arquivo
SOLVE !Soluciona para o tempo 3.1
!*
TIME,4.1 !Especifica o tempo ao final da solução
F,2,FZ,FRC_LOAD !C.C. nó 2: Força tensora na direção Z de magnitude FRC_LOAD
F,2,MZ,0 !C.C. nó 2: Descarregamento do Momento na direção Z
SOLVE !Soluciona para o tempo 4.1
SAVE !Salva as informações no arquivo
!*
! Invertendo as cores padrão do programa
!*
/RGB,INDEX, 100, 100, 100, 0 !preto

75
/RGB,INDEX, 80, 80, 80, 13 !tom de cinza 1
/RGB,INDEX, 60, 60, 60, 14 !tom de cinza 2
/RGB,INDEX, 0, 0, 0, 15 !branco
!*
!*
/POST26 !Entrada do visualizador temporal dos resultados
!*
NUMVAR,200 !Número de variáveis máximo
!*
NSOL,2,2,U,Z, DISP_Z, !Lê o alongamento em Z no no 2 e armazena na var 2
RFORCE,3,1,F,Z, FORCE_Z !Lê a força de reação no nó 1 e armazena na var 3
ESOL,4,1, ,SMIS,20,STRAIN_Z !Lê a deformação elást. do elemento 1 e armazena na var 4
ESOL,5,1, ,SMIS,31,STRESS_Z !Lê a tensão do elemento 1 e armazena na var 5
PROD,6,4, , ,STRAIN, , ,100 !Multiplica o valor da deformação para porcentagem, x100.
ESOL,7,1, ,SMIS,51,TEMP !Lê a evolução da temperatura do elemento 1 no tempo e
! armazena na var 7
PROD,8,3, , ,FORCE_Z, , ,-1 !Multiplica o valor da força de reação para ser a força
! aplicada, x-1.
NSOL,9,2,ROT,Z, ROT_Z, !Lê o ângulo de rotação do nó 2 e armazena na variável 9
PROD,10,9, , ,TWIST, ,,0.02 !Multiplica o valor por 0.02, para dividir rotz por 50,
! tornando ângulo de torção
RFORCE,11,1,M,Z, MZ_3 !Lê o momento de reação no nó 1 e armazena na variável 11
PROD,12,11, , ,TORQUE, ,,-1 !Multiplica o valor do momento de reação para ser o momento
! aplicado, x-1
!*
FINISH !Sair do analisador no tempo (post26)
!*
/eof !End of File, termina a execução do arquivo.
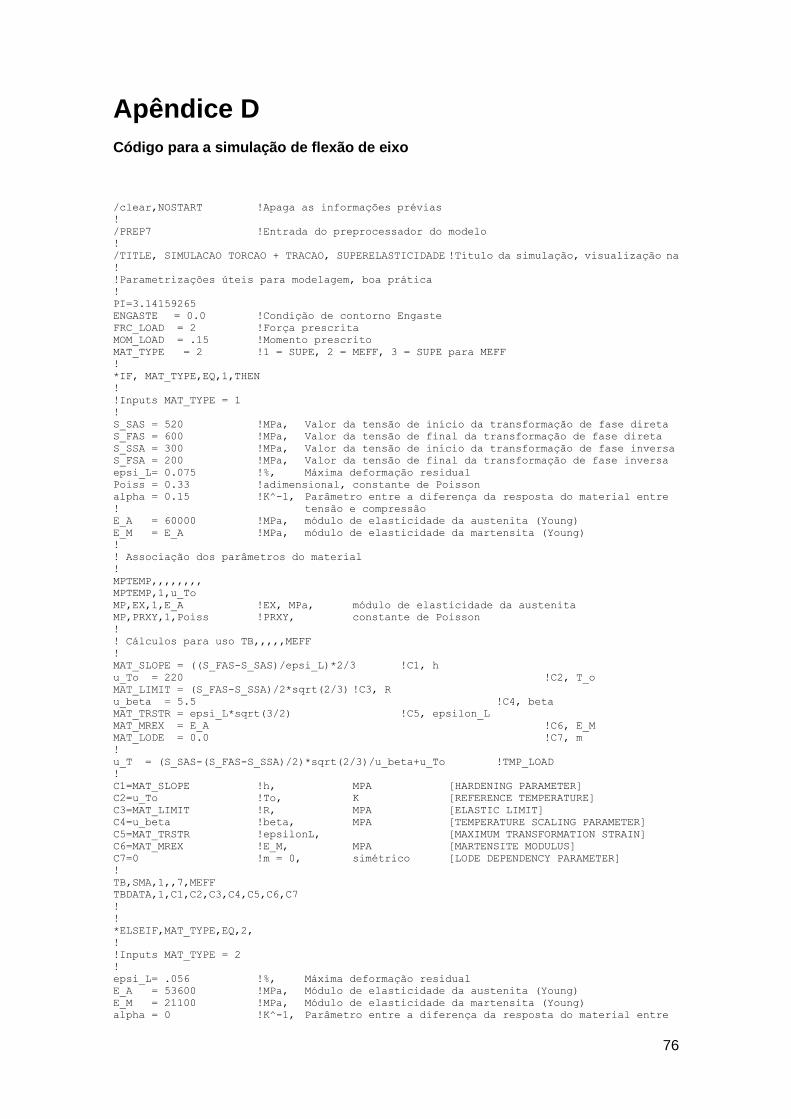
76
Apêndice D
Código para a simulação de flexão de eixo
/clear,NOSTART !Apaga as informações prévias
!
/PREP7 !Entrada do preprocessador do modelo
!
/TITLE, SIMULACAO TORCAO + TRACAO, SUPERELASTICIDADE !Título da simulação, visualização na
!
!Parametrizações úteis para modelagem, boa prática
!
PI=3.14159265
ENGASTE = 0.0 !Condição de contorno Engaste
FRC_LOAD = 2 !Força prescrita
MOM_LOAD = .15 !Momento prescrito
MAT_TYPE = 2 !1 = SUPE, 2 = MEFF, 3 = SUPE para MEFF
!
*IF, MAT_TYPE,EQ,1,THEN
!
!Inputs MAT_TYPE = 1
!
S_SAS = 520 !MPa, Valor da tensão de início da transformação de fase direta
S_FAS = 600 !MPa, Valor da tensão de final da transformação de fase direta
S_SSA = 300 !MPa, Valor da tensão de início da transformação de fase inversa
S_FSA = 200 !MPa, Valor da tensão de final da transformação de fase inversa
epsi_L= 0.075 !%, Máxima deformação residual
Poiss = 0.33 !adimensional, constante de Poisson
alpha = 0.15 !K^-1, Parâmetro entre a diferença da resposta do material entre
! tensão e compressão
E_A = 60000 !MPa, módulo de elasticidade da austenita (Young)
E_M = E_A !MPa, módulo de elasticidade da martensita (Young)
!
! Associação dos parâmetros do material
!
MPTEMP,,,,,,,,
MPTEMP,1,u_To
MP,EX,1,E_A !EX, MPa, módulo de elasticidade da austenita
MP,PRXY,1,Poiss !PRXY, constante de Poisson
!
! Cálculos para uso TB,,,,,MEFF
!
MAT_SLOPE = ((S_FAS-S_SAS)/epsi_L)*2/3 !C1, h
u_To = 220 !C2, T_o
MAT_LIMIT = (S_FAS-S_SSA)/2*sqrt(2/3) !C3, R
u_beta = 5.5 !C4, beta
MAT_TRSTR = epsi_L*sqrt(3/2) !C5, epsilon_L
MAT_MREX = E_A !C6, E_M
MAT_LODE = 0.0 !C7, m
!
u_T = (S_SAS-(S_FAS-S_SSA)/2)*sqrt(2/3)/u_beta+u_To !TMP_LOAD
!
C1=MAT_SLOPE !h, MPA [HARDENING PARAMETER]
C2=u_To !To, K [REFERENCE TEMPERATURE]
C3=MAT_LIMIT !R, MPA [ELASTIC LIMIT]
C4=u_beta !beta, MPA [TEMPERATURE SCALING PARAMETER]
C5=MAT_TRSTR !epsilonL, [MAXIMUM TRANSFORMATION STRAIN]
C6=MAT_MREX !E_M, MPA [MARTENSITE MODULUS]
C7=0 !m = 0, simétrico [LODE DEPENDENCY PARAMETER]
!
TB,SMA,1,,7,MEFF
TBDATA,1,C1,C2,C3,C4,C5,C6,C7
!
!
*ELSEIF,MAT_TYPE,EQ,2,
!
!Inputs MAT_TYPE = 2
!
epsi_L= .056 !%, Máxima deformação residual
E_A = 53600 !MPa, Módulo de elasticidade da austenita (Young)
E_M = 21100 !MPa, Módulo de elasticidade da martensita (Young)
alpha = 0 !K^-1, Parâmetro entre a diferença da resposta do material entre

77
! tensão e compressão
Poiss = 0.33 !adimensional, Constante de Poisson
!
!u_ significa input adicionais do usuário
!
u_T = 333.15 !K, T
u_h = 1000 !h, MPA [HARDENING PARAMETER]
u_To = 243.15 !To, K [REFERENCE TEMPERATURE]
u_R = 100 !R, MPA [ELASTIC LIMIT]
u_beta= 6.1 !beta, MPA [TEMPERATURE SCALING PARAMETER]
u_m = 0 !m = 0, simétrico [LODE DEPENDENCY PARAMETER]
!
tref, u_To !indicação da temperatura de referência
MPTEMP,,,,,,,, !inicialização da função
MPTEMP,1,u_To !associação da temperatura dos parâmetros
MPDATA,EX,1,,E_A !EX, MPa, módulo de elasticidade da austenita (Young)
MPDATA,PRXY,1,,Poiss !PRXY, adimensional, constante de Poisson
!
! Definindo as constantes da liga
!
C1=u_h !h, MPA [HARDENING PARAMETER]
C2=u_To !To, K [REFERENCE TEMPERATURE]
C3=u_R !R, MPA [ELASTIC LIMIT]
C4=u_beta !beta, MPA [TEMPERATURE SCALING PARAMETER]
C5=epsi_L !epsilonL, [MAXIMUM TRANSFORMATION STRAIN]
C6=E_M !E_M, MPA [MARTENSITE MODULUS]
C7=0 !m = 0, simétrico [LODE DEPENDENCY PARAMETER]
!
TB,SMA,1,,7,MEFF
TBTEMP,u_To
TBDATA,1,C1,C2,C3,C4,C5,C6,C7
!
!
*ELSEIF,MAT_TYPE,EQ,3,
!
!Inputs MAT_TYPE = 3
!
S_SAS = 520 !MPa, Starting stress value for the forward phase transformation
S_FAS = 600 !MPa, Final stress value for the forward phase transformation
S_SSA = 300 !MPa, Starting stress value for the reverse phase transformation
S_FSA = 200 !MPa, Final stress value for the reverse phase transformation
epsi_L= 0.075 !%, Maximum residual strain
Poiss = 0.33 !admensional, [POISSON'S RATIO]
alpha = 0.15 !Parameter measuring the difference between material responses in
! tension and compression
E_A = 60000 !MPa [AUSTENITE MODULUS]
E_M = E_A !MPa [MARTENSITE MODULUS]
!
epsi_L = epsi_L
MAT_ALPHA = alpha
!
tref, u_To !Setting reference temperature
MP,EX,1,E_A !EX, MPa [AUSTENITE MODULUS]
MP,PRXY,1,Poiss !PRXY, [POISSON'S RATIO]
!
C1=S_SAS !MPa, Starting stress value for the forward phase transformation
C2=S_FAS !MPa, Final stress value for the forward phase transformation
C3=S_SSA !MPa, Starting stress value for the reverse phase transformation
C4=S_FSA !MPa, Final stress value for the reverse phase transformation
C5=episi_L !%, Maximum residual strain
C6=alpha !Parameter measuring the difference between material responses in
! tension and compression
!
TB,SMA,1,,6,SUPE !SUPERELASTICIDADE da liga com memória de forma
TBDATA,1,C1,C2,C3,C4,C5,C6 !Associação das constantes para SMA,,,,SUPE
!
*ENDIF !Fim da operação booleana IF
!
tunif, u_T !Temperatura uniforme a u_T Kelvins
!
K,1,0,0,0 !Keypoint 1 na posição 0,0,0
K,2,0,0,50 !Keypoint 2 na posição 0,0,50
L,1,2 !Linha geométrica entre os Keypoints 1 e 2
!
ET,1,BEAM188 !Viga 3D, 2 Nós, suporte a TB,SMA
KEYOPT,1,4,2 !Output para Tensão cisalhante por torção e flexão
KEYOPT,1,6,3 !Output para as informações da seção transversal para cada nó do
78
! elemento.
KEYOPT,1,7,2 !Output Tensões e deformações em cada ponto da seção transversal
KEYOPT,1,9,3 !Output Tensões e deformações em cada nó da seção transversal
!
radius=0.05 !Raio da seção transversal circular
N_u=20 !N de Divisões angulares da seção transversal
T_u=25 !N de Divisões radiais da seção transversal
ESIZE,1 !Tamanho do elemento
TYPE,1 !Referencia ao número do elemento para configuração da malha
MAT,1 !Referencia ao número do material para configuração da malha
SECTYPE, 1, BEAM, CSOLID, perfil, 0 !Perfil circular sólido da viga
SECOFFSET, CENT !Offset para o centróide da área
SECDATA,radius,N_u,T_u,0,0,0,0,0,0,0,0,0 !Formação da malha transversal
LMESH,ALL !Formação da malha de elementos e nós.
!
D,1,ALL, ENGASTE !Condição de contorno, engaste em uma estremidade.
!
FINISH !Sair do preprocessador (prep7)
!
!
/SOL !Inicia as opções de solução
!
ANTYPE,STATIC, !Indicação de análise estática (evolução no tempo quasi-estática)
NLGEOM, ON !Grandes deformações habilitada
!
tref, u_To !Indicação da temperatura de referência
tunif,u_T !Indicação da temperatura de análise
!
OUTRES,ALL,ALL !Salvar todos os resultados
NROPT,UNSYM !Usar matriz assimétrica dos elementos para cálculos complestos por
! Newton-Raphson
kbc,0 !A evolução das cargas é em "rampa", linear
AUTOTS,ON !intervalo de tempo ou carga é automático
LNSRCH,AUTO !Procurar automaticamente a linha a ser usada com Newton-Raphson
NEQIT,1000 !Especifica o número máximo de iterações de equilibro para análises
! não linear
!
TIME,.1 !Especifica o tempo ao final da solução
F,2,FZ,FRC_LOAD !Condição de contorno no nó 2: Força na direção Z de magnitude
FRC_LOAD
SOLVE !Soluciona para o tempo 0.1
!
NSUBST,250,1000,100 !Especifica o número de substeps para os próximos tempos
!
TIME,1.1 !Especifica o tempo ao final da solução
F,2,MZ,MOM_LOAD !Condição de contorno no nó 2: Momento na direção Z de magnitude
MOM_LOAD
SOLVE !Soluciona para o tempo 1.1
!
TIME,2.1 !Especifica o tempo ao final da solução
F,2,MZ,-MOM_LOAD !Condição de contorno no nó 2: Momento na direção Z de magnitude -
MOM_LOAD
SOLVE !Soluciona para o tempo 2.1
!
/eof !End of file, termina a execução do arquivo.

79
Apêndice E
Código para a simulação de estados planos
/clear,NOSTART !Apaga as informações prévias
!*
/PREP7 !Entrada do preprocessador do modelo
!*
/TITLE, SIMULACAO ESTADOS PLANOS, SUPERELASTICIDADE
!Título da simulação, visualização na tela
!*
! Parametrizações úteis para modelagem, boa prática
!*
PI=3.14159265359
DSP_LOAD = .15 !Displacement load
FRC_LOAD = 1000 !Force Load
!*
epsi_L= .056 !%, Máxima deformação residual
E_A = 53600 !MPa, Módulo de elasticidade da austenita (Young)
E_M = 21100 !MPa, Módulo de elasticidade da martensita (Young)
alpha = 0 !K^-1, Parâmetro entre a diferença da resposta do material entre
! tensão e compressão
Poiss = 0.33 !adimensional, Constante de Poisson
!*
!u_ significa input adicionais do usuário
!*
u_T = 333.15 !T, K
u_h = 1000 !h, MPA [HARDENING PARAMETER]
u_To = 243.15 !To, K [REFERENCE TEMPERATURE]
u_R = 100 !R, MPA [ELASTIC LIMIT]
u_beta= 6.1 !beta, MPA [TEMPERATURE SCALING PARAMETER]
u_m = 0 !m = 0, simétrico [LODE DEPENDENCY PARAMETER]
!*
tref, u_To !indicação da temperatura de referência
MPTEMP,,,,,,,, !inicialização da função
MPTEMP,1,u_To !associação da temperatura dos parâmetros
MPDATA,EX,1,,E_A !EX, MPa, módulo de elasticidade da austenita (Young)
MPDATA,PRXY,1,,Poiss !PRXY, adimensional, constante de Poisson
!*
! Definindo as constantes da liga
!*
C1=u_h !h, MPA [HARDENING PARAMETER]
C2=u_To !To, K [REFERENCE TEMPERATURE]
C3=u_R !R, MPA [ELASTIC LIMIT]
C4=u_beta !beta, MPA [TEMPERATURE SCALING PARAMETER]
C5=epsi_L !epsilonL, [MAXIMUM TRANSFORMATION STRAIN]
C6=E_M !E_M, MPA [MARTENSITE MODULUS]
C7=0 !m = 0, simétrico [LODE DEPENDENCY PARAMETER]
!*
TB,SMA,1,,7,MEFF !Material com formulação da liga com memória de forma
TBTEMP, u_To !Temperatura de referência para o material
TBDATA,1,C1,C2,C3,C4,C5,C6,C7 !indicação das constantes
!*
ET,1,PLANE182 !Elemento estrutural sólido 2D com 8 nós
KEYOPT,1,1,0 !Método B de integração completa
KEYOPT,1,3,0 !Estado plano de tensão
KEYOPT,1,6,0 !Formulação de puro deslocamento
!*
Length = 10 !mm
!*
!Tipo da análise escolhida:
!(1, TRAÇÃO no eixo X e COMPRESSÃO no eixo Y)
!(2, Cisalhamento puro, rotação em 45 graus)
!(3, TRAÇÃO pura no eixo X)
PLANE_TYPE = 2
*IF, PLANE_TYPE,EQ,2,THEN
N,1,-Length/2,0 !*Definindo a geometria, 4 nós, 1 elemento
N,2,0,-Length/2 !*Definindo a geometria, 4 nós, 1 elemento
N,3,Length/2,0 !*Definindo a geometria, 4 nós, 1 elemento
N,4,0,Length/2 !*Definindo a geometria, 4 nós, 1 elemento
!*
*ELSEIF, PLANE_TYPE,EQ,1,OR,PLANE_TYPE,EQ,3
N,1,-Length/2,-Length/2 !*Definindo a geometria, 4 nós, 1 elemento

80
N,2,Length/2,-Length/2 !*Definindo a geometria, 4 nós, 1 elemento
N,3,Length/2,Length/2 !*Definindo a geometria, 4 nós, 1 elemento
N,4,-Length/2,Length/2 !*Definindo a geometria, 4 nós, 1 elemento
*ENDIF !Fim da análise booleana "se"
!*
TYPE,1 !Referencia ao número do elemento para configuração da malha
MAT,1 !Referencia ao número do material para configuração da malha
E, 1,2,3,4 !Formando o elemento com os nós criados
!*
FINISH !Sair do preprocessador (prep7)
!*
!*
/SOLU !Inicia as opções de solução
!*
ANTYPE,STATIC, !Indicação de análise estática (evolução no tempo quasi-estática)
NLGEOM, ON !Grandes deformações habilitada
!*
tref, u_To !Indicação da temperatura de referência
tunif,u_T !Indicação da temperatura de análise
!*
OUTRES,ALL,ALL !Salvar todos os resultados
NROPT,UNSYM !Usar matriz assimétrica dos elementos para cálculos complestos por
! Newton-Raphson
kbc,0 !A evolução das cargas é em "rampa", linear
AUTOTS,ON !intervalo de tempo ou carga é automático
LNSRCH,AUTO !Procurar automaticamente a linha a ser usada com Newton-Raphson
NEQIT,1000 !Especifica o núm máx de iterações de esquilíbro para análises não linear
!*
TIME,1 !Especifica o tempo ao final da solução
*IF, PLANE_TYPE,EQ,1,THEN !(1, TRAÇÃO no eixo X e COMPRESSÃO no eixo Y)
D,1,UX,0 !Condição de contorno. Fixando o nó na direção X
D,1,UY,0 !Condição de contorno. Fixando o nó na direção Y
D,2,UY,0 !Condição de contorno. Fixando o nó na direção Y
D,4,UX,0 !Condição de contorno. Fixando o nó na direção X
F,2,FX,FRC_LOAD/2 !Aplicação de carga no sentido X
F,3,FX,FRC_LOAD/2 !Aplicação de carga no sentido X
F,3,FY,-FRC_LOAD/2 !Aplicação de carga no sentido Y-
F,4,FY,-FRC_LOAD/2 !Aplicação de carga no sentido Y-
!*
*ELSEIF, PLANE_TYPE,EQ,2, !(2, Cisalhamento puro, rotação em 45 graus)
D,1,UY,0 !Condição de contorno. Fixando o nó na direção Y
D,2,UX,0 !Condição de contorno. Fixando o nó na direção X
D,3,UY,0 !Condição de contorno. Fixando o nó na direção Y
D,4,UX,0 !Condição de contorno. Fixando o nó na direção X
F,1,FX,-FRC_LOAD/2 !Aplicação de carga no sentido X-
F,2,FY,FRC_LOAD/2 !Aplicação de carga no sentido Y
F,3,FX,FRC_LOAD/2 !Aplicação de carga no sentido X
F,4,FY,-FRC_LOAD/2 !Aplicação de carga no sentido Y-
wpro,45.000000,, !rotaciona o plano de trabalho em 45graus
CSYS,4 !utiliza o plano de trabalho como coordenadas de referência
!*
*ELSEIF, PLANE_TYPE,EQ,3, !(3, TRAÇÃO pura no eixo X)
D,1,UX,0 !Condição de contorno. Fixando o nó na direção X
D,1,UY,0 !Condição de contorno. Fixando o nó na direção Y
D,4,UX,0 !Condição de contorno. Fixando o nó na direção X
F,2,FX,FRC_LOAD/2 !Aplicação de carga no sentido X
F,3,FX,FRC_LOAD/2 !Aplicação de carga no sentido X
*ENDIF !Fim da análise booleana "se"
!*
SOLVE !Soluciona para o tempo 1.0
!*
FINISH !Sair do solucionador (sol)
!*
/RGB,INDEX, 100, 100, 100, 0 !preto
/RGB,INDEX, 80, 80, 80, 13 !tom de cinza 1
/RGB,INDEX, 60, 60, 60, 14 !tom de cinza 2
/RGB,INDEX, 0, 0, 0, 15 !branco
!*
/POST1 !Entrada do visualizador dos resultados
RSYS,4 !muda o referencial para qual os valores são mostrados
PLDISP,1 !Mostra a posição deformada e a posição inicial
/DSCALE, 1, 25 !escala o resultado na tela para fins de visualização
/REPLOT !atualiza a informação na tela
/ui,copy,save,png,graph,color,normal,portrait,yes !Salva a imagem da tela
PRESOL,S,COMP !Lista as informações de tensão numa janela
!*
/eof

81
Apêndice F
Código para a simulação de flexão dentro e fora do plano
/clear,NOSTART !Apaga as informações prévias
!*
/PREP7 !Entrada do preprocessador do modelo
!*
/TITLE, SIMULACAO VIGA PLANA SOB FLEXAO NO PLANO, SUPERELASTICIDADE
!Título da simulação, visualização na tela
!*
! Parametrizações úteis para modelagem, boa prática
!*
PI=3.14159265359 !Número pi
DSP_LOAD = 39 !Displacement load
FRC_LOAD = 1800 !Force Load
!*
MAT_TYPE = 2 !1 = SUPE para MEFF, 2 = MEFF, 3 = SUPE
!*
*IF,MAT_TYPE,EQ,1,THEN !Condicional
!*
!Inputs MAT_TYPE = 1
!*
S_SAS = 200 !MPa, Valor da tensão de início da transformação de fase direta
S_FAS = 300 !MPa, Valor da tensão de final da transformação de fase direta
S_SSA = 206.5 !MPa, Valor da tensão de início da transformação de fase inversa
S_FSA = 69.5 !MPa, Valor da tensão de final da transformação de fase inversa
epsi_L= 0.0237 !%, Máxima deformação residual
Poiss = 0.33 !adimensional, constante de Poisson
alpha = 0.0 !K^-1, Parâmetro entre a diferença da resposta do material entre
! tensão e compressão
E_A = 73200 !MPa, módulo de elasticidade da austenita (Young)
E_M = 30000 !MPa, módulo de elasticidade da martensita (Young)
!*
! Associação dos parâmetros do material
!*
u_To = 273 !Temperatura de referencia
MPTEMP,,,,,,,, !Inicia as tabela de temperatura do material para os valores 0
MPTEMP,1,u_To !Indica a temperatura de referencia para os dados do material
MP,EX,1,E_A !EX, MPa, módulo de elasticidade da austenita
MP,PRXY,1,Poiss !PRXY, constante de Poisson
!*
! Cálculos para uso TB,,,,,MEFF
!*
MAT_SLOPE = ((S_FAS-S_SAS)/epsi_L)*1.1 !C1, h
u_To = 273 !C2, T_o
MAT_LIMIT = (S_FAS-S_SSA)*sqrt(2/3)/2*1.1 !C3, R
u_beta = 6.1 !C4, beta
MAT_TRSTR = epsi_L*sqrt(2/3) !C5, epsilon_L
MAT_MREX = E_M !C6, E_M
MAT_LODE = 0.0 !C7, m
!*
u_T =(S_SAS-(S_FAS-S_SSA)/2)*sqrt(2)/sqrt(3)/u_beta+u_To !Temperatura
! calculada para a análise (transforma u_beta e u_To dependentes)
!*
C1=MAT_SLOPE !h, MPA [HARDENING PARAMETER]
C2=u_To !To, K [REFERENCE TEMPERATURE]
C3=MAT_LIMIT !R, MPA [ELASTIC LIMIT]
C4=u_beta !beta, MPA [TEMPERATURE SCALING PARAMETER]
C5=MAT_TRSTR !epsilonL, [MAXIMUM TRANSFORMATION STRAIN]
C6=MAT_MREX !E_M, MPA [MARTENSITE MODULUS]
C7=0 !m = 0, simétrico [LODE DEPENDENCY PARAMETER]
!*
TB,SMA,1,,7,MEFF !Material com formulação da liga de memória de forma
TBTEMP, u_To !Temperatura de referência para o material
TBDATA,1,C1,C2,C3,C4,C5,C6,C7 !indicação das constantes
!*
*ELSEIF,MAT_TYPE,EQ,2, !Condicional
!*
!Inputs MAT_TYPE = 2
!*
epsi_L= .04 !%, Máxima deformação residual
E_A = 53000 !MPa, Módulo de elasticidade da austenita (Young)
E_M = 53000 !MPa, Módulo de elasticidade da martensita (Young)

82
alpha = 0 !K^-1, Parâmetro entre a diferença da resposta do material entre
! tensão e compressão
Poiss = 0.36 !adimensional, Constante de Poisson
!*
!u_ significa input adicionais do usuário
!*
u_T = 285.15 !T, K
u_h = 1100 !h, MPA [HARDENING PARAMETER]
u_To = 223.15 !To, K [REFERENCE TEMPERATURE]
u_R = 50 !R, MPA [ELASTIC LIMIT]
u_beta= 2.1 !beta, MPA [TEMPERATURE SCALING PARAMETER]
u_m = 0 !m = 0, simétrico [LODE DEPENDENCY PARAMETER]
!*
tref, u_To !indicação da temperatura de referência
MPTEMP,,,,,,,, !inicialização da função
MPTEMP,1,u_To !associação da temperatura dos parâmetros
MPDATA,EX,1,,E_A !EX, MPa, módulo de elasticidade da austenita (Young)
MPDATA,PRXY,1,,Poiss !PRXY, adimensional, constante de Poisson
!*
! Definindo as constantes da liga
!*
C1=u_h !h, MPA [HARDENING PARAMETER]
C2=u_To !To, K [REFERENCE TEMPERATURE]
C3=u_R !R, MPA [ELASTIC LIMIT]
C4=u_beta !beta, MPA [TEMPERATURE SCALING PARAMETER]
C5=epsi_L !epsilonL, [MAXIMUM TRANSFORMATION STRAIN]
C6=E_M !E_M, MPA [MARTENSITE MODULUS]
C7=0 !m = 0, simétrico [LODE DEPENDENCY PARAMETER]
!*
TB,SMA,1,,7,MEFF !Material com formulação da liga de memória de forma
TBTEMP, u_To !Temperatura de referência para o material
TBDATA,1,C1,C2,C3,C4,C5,C6,C7 !indicação das constantes
!*
!*
*ENDIF !Fim da operação booleana IF
!*
! Modelando a geometria da viga
!*
LENGHT=250 !Comprimento
HEIGHT=40 !Altura
THICKNESS=3 !Espessura
NUMEL_L=40 !Numero de divisões da malha no sentido do comprimento
NUMEL_H=8 !Numero de divisões da malha no sentido da altura
!*
BLC4,0,0,LENGHT,HEIGHT !Plano de 250x40mm
!*
ET,1,SHELL181 !Viga 3D, 2 Nós, suporte a TB,SMA
KEYOPT,1,1,0
KEYOPT,1,3,2
KEYOPT,1,5,0
KEYOPT,1,8,2
KEYOPT,1,9,0
!*
SECTYPE,1,SHELL,,CASCA !Definindo a seção transversal
SECDATA,THICKNESS, !Espessura
!*
TYPE,1 !Referencia ao número do elemento para configuração da malha
MAT,1 !Referencia ao número do material para configuração da malha
LESIZE, 1, ,, NUMEL_L, !Definindo uma malha personalizada
LESIZE, 2, ,, NUMEL_H, !Definindo uma malha personalizada
LESIZE, 3, ,, NUMEL_L, !Definindo uma malha personalizada
LESIZE, 4, ,, NUMEL_H, !Definindo uma malha personalizada
!*
MSHAPE,0,2D !Malha 2D
MSHKEY,0 !Mapeado
AMESH,ALL !Formação da malha de elementos e nós.
!*
!*
NSEL,S,LOC,X,0 !Seleção dos nós
D,ALL,UY,0 !Restrição geometrica
D,ALL,UZ,0 !Restrição geometrica
NSEL,ALL !Seleciona todos os nós
!*
FINISH !Sair do preprocessador (prep7)
!*
!*
/SOLU !Inicia as opções de solução
83
!*
ANTYPE,STATIC, !Indicação de análise estática (evolução no tempo quasi-estática)
NLGEOM, ON !Grandes deformações habilitada
!*
tref, u_To !Indicação da temperatura de referência
tunif,u_T !Indicação da temperatura de análise
!*
OUTRES,ALL,ALL !Salvar todos os resultados
NROPT,UNSYM !Usar matriz assimétrica dos elementos para cálculos complestos !
por Newton-Raphson
kbc,0 !A evolução das cargas é em "rampa", linear
AUTOTS,ON !intervalo de tempo ou carga é automático
LNSRCH,AUTO !Procurar automaticamente a linha a ser usada com Newton-Raphson
NSUBST,200,1000,100 !Especifica o número de substeps para os próximos tempos
NEQIT,1000 !Especifica o número máximo de iterações de esquilíbro para
! análises não linear
!*
TIME,1 !Especifica o tempo ao final da solução
NSEL,S,LOC,X,LENGHT !Seleciona os nós para condições de contorno
D,ALL,UZ,0 !aplica as condições de contorno
D,ALL,UX,0 !aplica as condições de contorno
DSYM,SYMM,X !aplica as condições de contorno
F,ALL,FY,-FRC_LOAD/9 !aplica as condições de contorno
NSEL,ALL !Seleciona todos os nós
SOLVE !Soluciona para o tempo 1.0
!*
TIME,2 !Especifica o tempo ao final da solução
NSEL,S,LOC,X,LENGHT !Seleciona os nós para condições de contorno
F,ALL,FY,0 !C.C. nó 2: Descarregamento do Momento na direção Z
NSEL,ALL !Seleciona todos os nós
SOLVE !Soluciona para o tempo 2.0
!*
FINISH !Sair do solucionador (sol)

84
Apêndice G
Código para a simulação de mola bidimensional
!*
! Importação da geometria criada em Solidworks
/AUX15
!*
IOPTN,IGES,SMOOTH
IOPTN,MERGE,YES
IOPTN,SOLID,NO
IOPTN,SMALL,YES
IOPTN,GTOLER,0.0001
IGESIN,'spiral_Model_shell','IGS',' '
LPLOT
!*
FINISH
!*
/PREP7
!*
/TITLE, SIMULACAO SOLIDO 3D - MOLA, SUPERELASTICIDADE
!Título da simulação, visualização na tela
!*
! Parametrizações úteis para modelagem, boa prática
!*
PI=3.14159265359
DSP_LOAD = 39 !Displacement load
FRC_LOAD = 4.14 !Force Load
TMP_LOAD = 800
!*
MAT_TYPE = 2 !1 = SUPE para MEFF, 2 = MEFF, 3 = SUPE
!*
*IF, MAT_TYPE,EQ,1,THEN
!*
!Inputs MAT_TYPE = 1
!*
S_SAS = 200 !MPa, Valor da tensão de início da transformação de fase direta
S_FAS = 300 !MPa, Valor da tensão de final da transformação de fase direta
S_SSA = 206.5 !MPa, Valor da tensão de início da transformação de fase inversa
S_FSA = 69.5 !MPa, Valor da tensão de final da transformação de fase inversa
epsi_L= 0.0237 !%, Máxima deformação residual
Poiss = 0.33 !adimensional, constante de Poisson
alpha = 0.0 !K^-1, Parâmetro entre a diferença da resposta do material entre
! tensão e compressão
E_A = 73200 !MPa, módulo de elasticidade da austenita (Young)
E_M = 30000 !MPa, módulo de elasticidade da martensita (Young)
!*
! Associação dos parâmetros do material
!*
u_To = 273 !Temperatura de referencia
MPTEMP,,,,,,,, !Inicia as tabela de temperatura do material para os valores 0
MPTEMP,1,u_To !Indica a temperatura de referencia para os dados do material
MP,EX,1,E_A !EX, MPa, módulo de elasticidade da austenita
MP,PRXY,1,Poiss !PRXY, constante de Poisson
!*
! Cálculos para uso TB,,,,,MEFF
!*
MAT_SLOPE = ((S_FAS-S_SAS)/epsi_L)*1.1 !C1, h
u_To = 273 !C2, T_o
MAT_LIMIT = (S_FAS-S_SSA)*sqrt(2/3)/2*1.1 !C3, R
u_beta = 6.1 !C4, beta
MAT_TRSTR = epsi_L*sqrt(2/3) !C5, epsilon_L
MAT_MREX = E_M !C6, E_M
MAT_LODE = 0.0 !C7, m
!*
u_T =(S_SAS-(S_FAS-S_SSA)/2)*sqrt(2)/sqrt(3)/u_beta+u_To !Temperatura
! calculada para a análise (transforma u_beta e u_To dependentes)
!*
C1=MAT_SLOPE !h, MPA [HARDENING PARAMETER]
C2=u_To !To, K [REFERENCE TEMPERATURE]
C3=MAT_LIMIT !R, MPA [ELASTIC LIMIT]
C4=u_beta !beta, MPA [TEMPERATURE SCALING PARAMETER]
C5=MAT_TRSTR !epsilonL, [MAXIMUM TRANSFORMATION STRAIN]
C6=MAT_MREX !E_M, MPA [MARTENSITE MODULUS]
C7=0 !m = 0, simétrico [LODE DEPENDENCY PARAMETER]
85
!*
TB,SMA,1,,7,MEFF !Material com formulação da liga de memória de forma
TBTEMP, u_To !Temperatura de referência para o material
TBDATA,1,C1,C2,C3,C4,C5,C6,C7 !indicação das constantes
!*
*ELSEIF,MAT_TYPE,EQ,2,
!*
!Inputs MAT_TYPE = 2
!*
epsi_L= .04 !%, Máxima deformação residual
E_A = 53000 !MPa, Módulo de elasticidade da austenita (Young)
E_M = 53000 !MPa, Módulo de elasticidade da martensita (Young)
alpha = 0 !K^-1, Parâmetro entre a diferença da resposta do material entre
! tensão e compressão
Poiss = 0.36 !adimensional, Constante de Poisson
!*
!u_ significa input adicionais do usuário
!*
u_T = 285.15 !T, K
u_h = 1000 !h, MPA [HARDENING PARAMETER]
u_To = 223.15 !To, K [REFERENCE TEMPERATURE]
u_R = 50 !R, MPA [ELASTIC LIMIT]
u_beta= 2.1 !beta, MPA [TEMPERATURE SCALING PARAMETER]
u_m = 0 !m = 0, simétrico [LODE DEPENDENCY PARAMETER]
!*
tref, u_To !indicação da temperatura de referência
MPTEMP,,,,,,,, !inicialização da função
MPTEMP,1,u_To !associação da temperatura dos parâmetros
MPDATA,EX,1,,E_A !EX, MPa, módulo de elasticidade da austenita (Young)
MPDATA,PRXY,1,,Poiss !PRXY, adimensional, constante de Poisson
!*
! Definindo as constantes da liga
!*
C1=u_h !h, MPA [HARDENING PARAMETER]
C2=u_To !To, K [REFERENCE TEMPERATURE]
C3=u_R !R, MPA [ELASTIC LIMIT]
C4=u_beta !beta, MPA [TEMPERATURE SCALING PARAMETER]
C5=epsi_L !epsilonL, [MAXIMUM TRANSFORMATION STRAIN]
C6=E_M !E_M, MPA [MARTENSITE MODULUS]
C7=0 !m = 0, simétrico [LODE DEPENDENCY PARAMETER]
!*
TB,SMA,1,,7,MEFF !Material com formulação da liga de memória de forma
TBTEMP, u_To !Temperatura de referência para o material
TBDATA,1,C1,C2,C3,C4,C5,C6,C7 !indicação das constantes
!*
!*
*ENDIF !Fim da operação booleana IF
!*
! Modelando a geometria da viga
!*
ET,1,SHELL181 !Viga 3D, 2 Nós, suporte a TB,SMA
THICKNESS=0.5
SECTYPE,1,SHELL,,CASCA
secdata, THICKNESS/2,1,0.0,5
secdata, THICKNESS/2,1,0.0,5
secoffset,MID
LDELE,1,2,1
LDELE,4,11,1
LDELE,17,24,1
LPLOT
!*
ADRAG, 3, , , , , , 12
!*
TRANSVERSIZE=2
LESIZE, 1, , ,TRANSVERSIZE, , , , ,1
LESIZE, 3, , ,TRANSVERSIZE, , , , ,1
!*
ALONGSIZE=40
LESIZE,2, , ,ALONGSIZE, , , , ,1
LESIZE,4, , ,ALONGSIZE, , , , ,1
!*
MSHAPE,0,2D
MSHKEY,1
AMESH,1
!*
NSEL,S,LOC,Z,0
NSEL,R,LOC,X,2.4,3.6

86
NSEL,R,LOC,Y,-1,.9
D,ALL,ALL,0
NSEL,ALL
!*
FINISH !Sair do preprocessador (prep7)
!*
!*
/SOLU !Inicia as opções de solução
!*
ANTYPE,STATIC, !Indicação de análise estática (evolução no tempo quasi-estática)
NLGEOM, ON !Grandes deformações habilitada
!*
tref, u_To !Indicação da temperatura de referência
tunif,u_T !Indicação da temperatura de análise
!*
OUTRES,ALL,ALL !Salvar todos os resultados
NROPT,UNSYM !Usar matriz assimétrica dos elementos para cálculos complestos por
! Newton-Raphson
kbc,0 !A evolução das cargas é em "rampa", linear
AUTOTS,ON !intervalo de tempo ou carga é automático
LNSRCH,AUTO !Procurar automaticamente a linha a ser usada com Newton-Raphson
NSUBST,300,1000,200 !Especifica o número de substeps para os próximos tempos
NEQIT,500 !Especifica o número máximo de iterações de esquilíbro para análises não
linear
!*
TIME,1 !Especifica o tempo ao final da solução
NSEL,S,LOC,Z,-0.52E-5, 0.52E-5
NSEL,R,LOC,X,2.4,3.6
NSEL,R,LOC,Y,1,2
F,ALL,FY,FRC_LOAD/3
NSEL,ALL
SOLVE !Soluciona para o tempo 1.0
SAVE
!*
TIME,2 !Especifica o tempo ao final da solução
BFUNIF,TEMP,TMP_LOAD
SOLVE !Soluciona para o tempo 2.0
SAVE
!*
TIME,3 !Especifica o tempo ao final da solução
BFUNIF,TEMP,u_T
SOLVE !Soluciona para o tempo 2.0
SAVE
!*
FINISH !Sair do solucionador (sol)

87
Apêndice H
Código para a simulação de mola sólida
!*
! Importação da geometria criada em Solidworks
/AUX15
!*
IOPTN,IGES,SMOOTH
IOPTN,MERGE,YES
IOPTN,SOLID,NO
IOPTN,SMALL,YES
IOPTN,GTOLER,0.0001
IGESIN,'spiral_Modelwire','IGS',' '
LPLOT
!*
FINISH
!*
/PREP7
!*
/TITLE, SIMULACAO SOLIDO 3D - MOLA, SUPERELASTICIDADE
!Título da simulação, visualização na tela
!*
! Parametrizações úteis para modelagem, boa prática
!*
PI=3.14159265359
DSP_LOAD = 39 !Displacement load
FRC_LOAD = 4.14 !Force Load
TMP_LOAD = 800
!*
MAT_TYPE = 2 !1 = SUPE para MEFF, 2 = MEFF, 3 = SUPE
!*
*IF, MAT_TYPE,EQ,1,THEN
!*
!Inputs MAT_TYPE = 1
!*
S_SAS = 200 !MPa, Valor da tensão de início da transformação de fase direta
S_FAS = 300 !MPa, Valor da tensão de final da transformação de fase direta
S_SSA = 206.5 !MPa, Valor da tensão de início da transformação de fase inversa
S_FSA = 69.5 !MPa, Valor da tensão de final da transformação de fase inversa
epsi_L= 0.0237 !%, Máxima deformação residual
Poiss = 0.33 !adimensional, constante de Poisson
alpha = 0.0 !K^-1, Parâmetro entre a diferença da resposta do material entre
! tensão e compressão
E_A = 73200 !MPa, módulo de elasticidade da austenita (Young)
E_M = 30000 !MPa, módulo de elasticidade da martensita (Young)
!*
! Associação dos parâmetros do material
!*
u_To = 273 !Temperatura de referencia
MPTEMP,,,,,,,, !Inicia as tabela de temperatura do material para os valores 0
MPTEMP,1,u_To !Indica a temperatura de referencia para os dados do material
MP,EX,1,E_A !EX, MPa, módulo de elasticidade da austenita
MP,PRXY,1,Poiss !PRXY, constante de Poisson
!*
! Cálculos para uso TB,,,,,MEFF
!*
MAT_SLOPE = ((S_FAS-S_SAS)/epsi_L)*1.1 !C1, h
u_To = 273 !C2, T_o
MAT_LIMIT = (S_FAS-S_SSA)*sqrt(2/3)/2*1.1 !C3, R
u_beta = 6.1 !C4, beta
MAT_TRSTR = epsi_L*sqrt(2/3) !C5, epsilon_L
MAT_MREX = E_M !C6, E_M
MAT_LODE = 0.0 !C7, m
!*
u_T =(S_SAS-(S_FAS-S_SSA)/2)*sqrt(2)/sqrt(3)/u_beta+u_To !Temperatura
! calculada para a análise (transforma u_beta e u_To dependentes)
!*
C1=MAT_SLOPE !h, MPA [HARDENING PARAMETER]
C2=u_To !To, K [REFERENCE TEMPERATURE]
C3=MAT_LIMIT !R, MPA [ELASTIC LIMIT]
C4=u_beta !beta, MPA [TEMPERATURE SCALING PARAMETER]
C5=MAT_TRSTR !epsilonL, [MAXIMUM TRANSFORMATION STRAIN]
C6=MAT_MREX !E_M, MPA [MARTENSITE MODULUS]
C7=0 !m = 0, simétrico [LODE DEPENDENCY PARAMETER]

88
!*
TB,SMA,1,,7,MEFF !Material com formulação da liga de memória de forma
TBTEMP, u_To !Temperatura de referência para o material
TBDATA,1,C1,C2,C3,C4,C5,C6,C7 !indicação das constantes
!*
*ELSEIF,MAT_TYPE,EQ,2,
!*
!Inputs MAT_TYPE = 2
!*
epsi_L= .04 !%, Máxima deformação residual
E_A = 53000 !MPa, Módulo de elasticidade da austenita (Young)
E_M = 53000 !MPa, Módulo de elasticidade da martensita (Young)
alpha = 0 !K^-1, Parâmetro entre a diferença da resposta do material entre
! tensão e compressão
Poiss = 0.36 !adimensional, Constante de Poisson
!*
!u_ significa input adicionais do usuário
!*
u_T = 285.15 !T, K
u_h = 1000 !h, MPA [HARDENING PARAMETER]
u_To = 223.15 !To, K [REFERENCE TEMPERATURE]
u_R = 50 !R, MPA [ELASTIC LIMIT]
u_beta= 2.1 !beta, MPA [TEMPERATURE SCALING PARAMETER]
u_m = 0 !m = 0, simétrico [LODE DEPENDENCY PARAMETER]
!*
tref, u_To !indicação da temperatura de referência
MPTEMP,,,,,,,, !inicialização da função
MPTEMP,1,u_To !associação da temperatura dos parâmetros
MPDATA,EX,1,,E_A !EX, MPa, módulo de elasticidade da austenita (Young)
MPDATA,PRXY,1,,Poiss !PRXY, adimensional, constante de Poisson
!*
! Definindo as constantes da liga
!*
C1=u_h !h, MPA [HARDENING PARAMETER]
C2=u_To !To, K [REFERENCE TEMPERATURE]
C3=u_R !R, MPA [ELASTIC LIMIT]
C4=u_beta !beta, MPA [TEMPERATURE SCALING PARAMETER]
C5=epsi_L !epsilonL, [MAXIMUM TRANSFORMATION STRAIN]
C6=E_M !E_M, MPA [MARTENSITE MODULUS]
C7=0 !m = 0, simétrico [LODE DEPENDENCY PARAMETER]
!*
TB,SMA,1,,7,MEFF !Material com formulação da liga de memória de forma
TBTEMP, u_To !Temperatura de referência para o material
TBDATA,1,C1,C2,C3,C4,C5,C6,C7 !indicação das constantes
!*
!*
*ENDIF !Fim da operação booleana IF
!*
! Modelando a geometria da viga
!*
ET,1,SOLID185 !SOLIDO 3D, 8 Nós, suporte a TB,SMA
!*
! Eliminação das geometrias desnecessárias
LDELE,1,2,1
LDELE,7,10,1
LDELE,16,23,1
!*
AL,5,4,3,6 !Geração das áreas ligadas às linhas
VDRAG, 1, , , , , , 11 !Criação do volume ao longo de linha
!*
TRANSVERSIZE=2
LESIZE, 1, , ,TRANSVERSIZE, , , , ,1 !Tamanho da malha transversal da mola
LESIZE, 3, , ,TRANSVERSIZE, , , , ,1 !Tamanho da malha transversal da mola
LESIZE, 4, , ,TRANSVERSIZE, , , , ,1 !Tamanho da malha transversal da mola
LESIZE, 5, , ,TRANSVERSIZE, , , , ,1 !Tamanho da malha transversal da mola
LESIZE, 6, , ,TRANSVERSIZE, , , , ,1 !Tamanho da malha transversal da mola
LESIZE, 8, , ,TRANSVERSIZE, , , , ,1 !Tamanho da malha transversal da mola
LESIZE,10, , ,TRANSVERSIZE, , , , ,1 !Tamanho da malha transversal da mola
LESIZE,13, , ,TRANSVERSIZE, , , , ,1 !Tamanho da malha transversal da mola
!*
ALONGSIZE=80
LESIZE,2, , ,ALONGSIZE, , , , ,1 !Tamanho da malha ao longo do comprimento da mola
!*
VSWEEP,1 !Malha a partir de varrimento
!*
NSEL,S,LOC,Z,0 !Seleção dos nós em Z=0
NSEL,R,LOC,X,2.4,3.6 !Reseleção dos nós de X=2.4 a X=3.6

89
NSEL,R,LOC,Y,-1,.9 !Reseleção dos nós de Y=-1 a Y=0.9
D,ALL,ALL,0 !Restrição geométrica
NSEL,ALL !Seleção de todos os nós
!*
FINISH !Sair do preprocessador (prep7)
!*
!*
/SOLU !Inicia as opções de solução
!*
ANTYPE,STATIC, !Indicação de análise estática (evolução no tempo quasi-estática)
NLGEOM, ON !Grandes deformações habilitada
!*
tref, u_To !Indicação da temperatura de referência
tunif,u_T !Indicação da temperatura de análise
!*
OUTRES,ALL,ALL !Salvar todos os resultados
NROPT,UNSYM !Usar matriz assimétrica dos elementos para cálculos complestos por
! Newton-Raphson
kbc,0 !A evolução das cargas é em "rampa", linear
AUTOTS,ON !intervalo de tempo ou carga é automático
LNSRCH,AUTO !Procurar automaticamente a linha a ser usada com Newton-Raphson
NSUBST,300,1000,200 !Especifica o número de substeps para os próximos tempos
NEQIT,1000 !Especifica o número máximo de iterações de esquilíbro para análises não
linear
!*
TIME,1 !Especifica o tempo 1.0s
NSEL,S,LOC,Z,-0.52E-5, 0.52E-5 !Seleção dos nós de Z=-0.52E-5 a Z=0.5E-5
NSEL,R,LOC,X,2.4,3.6 !Reseleção dos nós de X=2.4 a X=.6
NSEL,R,LOC,Y,1,2 !Reseleção dos nós de Y=1 a X=2
F,ALL,FY,FRC_LOAD/9 !Carregamento na extremidade livre
NSEL,ALL !Seleção de todos os nós
SOLVE !Soluciona para o tempo 1.0
SAVE !Salva a simulação
!*
TIME,2 !Especifica o tempo ao final da solução
BFUNIF,TEMP,TMP_LOAD !Associação da temperatura uniforme para o corpo
SOLVE !Soluciona para o tempo 2.0
SAVE !Salva a simulação
!*
TIME,3 !Especifica o tempo ao final da solução
BFUNIF,TEMP,u_T !Associação da temperatura uniforme para o corpo
SOLVE !Soluciona para o tempo 3.0
SAVE !Salva a simulação
!*
FINISH !Sair do solucionador (sol)
90
Apêndice I
Código para a simulação de espaçador de coluna vertebral
!*
! Importação da geometria criada em Solidworks
/AUX15
!*
IOPTN,IGES,SMOOTH
IOPTN,MERGE,YES
IOPTN,SOLID,NO
IOPTN,SMALL,YES
IOPTN,GTOLER,0.0001
IGESIN,'espacador','IGS',' '
LPLOT
!*
FINISH
!*
/PREP7
!*
/TITLE, SIMULACAO SOLIDO 3D - MOLA, SUPERELASTICIDADE
!Título da simulação, visualização na tela
!*
! Parametrizações úteis para modelagem, boa prática
!*
MAT_TYPE = 2 !1 = SUPE para MEFF, 2 = MEFF, 3 = SUPE
!*
*IF, MAT_TYPE,EQ,1,THEN
!*
!Inputs MAT_TYPE = 1
!*
S_SAS = 200 !MPa, Valor da tensão de início da transformação de fase direta
S_FAS = 300 !MPa, Valor da tensão de final da transformação de fase direta
S_SSA = 206.5 !MPa, Valor da tensão de início da transformação de fase inversa
S_FSA = 69.5 !MPa, Valor da tensão de final da transformação de fase inversa
epsi_L= 0.0237 !%, Máxima deformação residual
Poiss = 0.33 !adimensional, constante de Poisson
alpha = 0.0 !K^-1, Parâmetro entre a diferença da resposta do material entre
! tensão e compressão
E_A = 73200 !MPa, módulo de elasticidade da austenita (Young)
E_M = 30000 !MPa, módulo de elasticidade da martensita (Young)
!*
! Associação dos parâmetros do material
!*
u_To = 273 !Temperatura de referencia
MPTEMP,,,,,,,, !Inicia as tabela de temperatura do material para os valores 0
MPTEMP,1,u_To !Indica a temperatura de referencia para os dados do material
MP,EX,1,E_A !EX, MPa, módulo de elasticidade da austenita
MP,PRXY,1,Poiss !PRXY, constante de Poisson
!*
! Cálculos para uso TB,,,,,MEFF
!*
MAT_SLOPE = ((S_FAS-S_SAS)/epsi_L)*1.1 !C1, h
u_To = 273 !C2, T_o
MAT_LIMIT = (S_FAS-S_SSA)*sqrt(2/3)/2*1.1 !C3, R
u_beta = 6.1 !C4, beta
MAT_TRSTR = epsi_L*sqrt(2/3) !C5, epsilon_L
MAT_MREX = E_M !C6, E_M
MAT_LODE = 0.0 !C7, m
!*
u_T =(S_SAS-(S_FAS-S_SSA)/2)*sqrt(2)/sqrt(3)/u_beta+u_To !Temperatura
! calculada para a análise (transforma u_beta e u_To dependentes)
!*
C1=MAT_SLOPE !h, MPA [HARDENING PARAMETER]
C2=u_To !To, K [REFERENCE TEMPERATURE]
C3=MAT_LIMIT !R, MPA [ELASTIC LIMIT]
C4=u_beta !beta, MPA [TEMPERATURE SCALING PARAMETER]
C5=MAT_TRSTR !epsilonL, [MAXIMUM TRANSFORMATION STRAIN]
C6=MAT_MREX !E_M, MPA [MARTENSITE MODULUS]
C7=0 !m = 0, simétrico [LODE DEPENDENCY PARAMETER]
!*
TB,SMA,1,,7,MEFF !Material com formulação da liga de memória de forma
TBTEMP, u_To !Temperatura de referência para o material
TBDATA,1,C1,C2,C3,C4,C5,C6,C7 !indicação das constantes
!*

91
*ELSEIF,MAT_TYPE,EQ,2,
!*
!Inputs MAT_TYPE = 2
!*
epsi_L= .07 !%, Máxima deformação residual
E_A = 70000 !MPa, Módulo de elasticidade da austenita (Young)
E_M = 70000 !MPa, Módulo de elasticidade da martensita (Young)
Poiss = 0.30 !adimensional, Constante de Poisson
!*
!u_ significa input adicionais do usuário
!*
u_T = 311.15 !T, K
u_h = 500 !h, MPA [HARDENING PARAMETER]
u_To = 311.15 !To, K [REFERENCE TEMPERATURE]
u_R = 120 !R, MPA [ELASTIC LIMIT]
u_beta= 8.3 !beta, MPA [TEMPERATURE SCALING PARAMETER]
u_m = 0 !m = 0, simétrico [LODE DEPENDENCY PARAMETER]
!*
tref, u_To !indicação da temperatura de referência
MPTEMP,,,,,,,, !inicialização da função
MPTEMP,1,u_To !associação da temperatura dos parâmetros
MPDATA,EX,1,,E_A !EX, MPa, módulo de elasticidade da austenita (Young)
MPDATA,PRXY,1,,Poiss !PRXY, adimensional, constante de Poisson
!*
! Definindo as constantes da liga
!*
C1=u_h !h, MPA [HARDENING PARAMETER]
C2=u_To !To, K [REFERENCE TEMPERATURE]
C3=u_R !R, MPA [ELASTIC LIMIT]
C4=u_beta !beta, MPA [TEMPERATURE SCALING PARAMETER]
C5=epsi_L !epsilonL, [MAXIMUM TRANSFORMATION STRAIN]
C6=E_M !E_M, MPA [MARTENSITE MODULUS]
C7=0 !m = 0, simétrico [LODE DEPENDENCY PARAMETER]
!*
TB,SMA,1,,7,MEFF !Material com formulação da liga de memória de forma
TBTEMP, u_To !Temperatura de referência para o material
TBDATA,1,C1,C2,C3,C4,C5,C6,C7 !indicação das constantes
!*
!*
*ENDIF !Fim da operação booleana IF
!*
! Modelando a geometria do solido
!*
ET,1,SOLID185 !Solido 3D, 8 Nós, suporte a TB,SMA
ASEL,s,,,1,2,1 !Seleção das áreas
ASEL,a,,,15,19,4 !Seleção das áreas
AESIZE,all,1/2, !Indicação do tamanho das áreas
!*
ESIZE,0.45 !Tamanho do elemento
MSHAPE,1,3D !Indicação da dimensão da malha
MSHKEY,0 !Indicação do mapeamento
vmesh,all !Criação da malha
!*
! Criação da geometria do plano de contato para esmagamento
!*
K,111,-3.5,0,8.1
K,112,3.5,0,8.1
K,113,3.5,-12.2,8.1
K,114,-3.5,-12.2,8.1
A,111,112,113,114
!*
ET,2,170
ET,3,173
KEYOPT,3,2,3
KEYOPT,3,5,1
KEYOPT,3,4,2
R,2,,,,
!*
TYPE,2 !Indica a associação com o tipo de elemento
REAL,2 !Constantes para o contato
ESIZE,1 !Tamanho do elemento
AMESH,21 !Criação da malha
EL,ALL
N,5000, -3.9e-16,-6.1,8.1 !Posição do nó 5000
TSHAP,PILOT !Especifica a geometria do elemento alvo de contato
E,5000 !Cria a malha com o nó 5000
!*

92
TYPE,3 !Indica a associação com o tipo de elemento
REAL,2 !Constantes para o contato
ASEL,S,AREA,,4,12,8 !Seleção das áreas
ASEL,A,AREA,,13 !Seleção das áreas
NSLA,S,1 !Seleciona os nós associados com as áreas
ESLN,S !Seleciona os elementos associados aos nós
ESURF !Gera os elementos sobrepostos para o contato
!*
d,5000,ux,0 !Restrição geométrica no nó 5000
d,5000,uy,0 !Restrição geométrica para equilíbrio no nó 5000
!*
NSEL,S,LOC,Y !Seleciona e fixa a direção Y em Y=0
D,ALL,UY !Restrição geométrica
!*
NSEL,S,LOC,Z !Seleciona e fixa a direção Y em Z=0
D,ALL,UZ !Restrição geométrica
!*
nsel,s,,,node(3.5,0.0,8.0),,1 !Fixa os nós centrais em X na direção X
D,ALL,UX !Restrição geométrica
!*
FINISH !Sai do preprocessador
!*
/SOLU !Inicia as opções de solução
!*
ANTYPE,STATIC, !Indicação de análise estática (evolução no tempo quasi-estática)
NLGEOM, ON !Grandes deformações habilitada
!*
TREF, u_To !Indicação da temperatura de referência
TUNIF,u_T !Indicação da temperatura de análise
!*
OUTRES,ALL,ALL !Salvar todos os resultados
NROPT,UNSYM !Usar matriz assimétrica dos elementos para cálculos complestos por
! Newton-Raphson
KBC,0 !A evolução das cargas é em "rampa", linear
AUTOTS,ON !intervalo de tempo ou carga é automático
LNSRCH,AUTO !Procurar automaticamente a linha a ser usada com Newton-Raphson
NSUBST,150,2000,30 !Especifica o número de substeps para os próximos tempos
NEQIT,1000 !Especifica o núm. de iterações de esquilíbro para análises não lineares
!*
TIME,1.0 !Tempo 1.0s
NSUBST,5,5,5 !Número de subintervalos
NSEL,ALL,ALL !Seleciona todos os elementos
ALLSEL,ALL !Seleciona tudo
BFUNIF,ALL,TEMP,,297 !Associação da temperatura uniforme para o corpo
SOLVE !Soluciona para 1.0s
!*
TIME,2.0 !Tempo 2.0s
NSUBST,150,2000,30 !Número de subintervalos
D,5000,UZ,-3.375 !Desloca os nós do plano para esmagamento
SOLVE
!*
TIME,3.0 !Tempo 3.0s
D,5000,UZ,0 !Retorno da posição, liberação da carga
SOLVE !Soluciona para 3.0s
!*
TIME,4.0 !Tempo 4.0s
NSUBST,5,5,5 !Número de subintervalos
BFUNIF,TEMP,311 !Associação da temperatura uniforme para o corpo
SOLVE !Soluciona para o tempo 4.0s
!*
TIME,5.0 !Tempo 5.0s
NSUBST,150,2000,30 !Número de subintervalos
BFUNIF,TEMP,324 !Associação da temperatura uniforme para o corpo
SOLVE !Soluciona para o tempo 5.0s
!*
TIME,6.0 !Tempo 6.0s
NSUBST,150,2000,30 !Número de subintervalos
BFUNIF,TEMP,325.4 !Associação da temperatura uniforme para o corpo
SOLVE !Soluciona para o tempo 6.0s
!*
TIME,7.0 !Tempo 7.0s
NSUBST,10,10,10 !Número de subintervalos
BFUNIF,TEMP,311 !Associação da temperatura uniforme para o corpo
SOLVE !Soluciona para o tempo 7.0s
Finish !Saída do solucionador (sol)
1. FINAL DO PROJETO – PARTE TEXTUAL