Embed Size (px)
Citation preview
APLICAÇÃO DA TEORIA DO TANQUE DE ESTABILIZAÇÃO
PASSIVO TIPO U NA DIMINUIÇÃO DO JOGO PARAMÉTRICO
Jorge Antonio Merino Muñoz
DISSERTAÇÃO SUBMETIDA AO CORPO DOCENTE DA COORDENAÇÃO
DOS PROGRAMAS DE PÓS-GRADUAÇÃO DE ENGENHARIA DA
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS
REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE MESTRE
EM CIÊNCIAS EM ENGENHARIA OCEÂNICA.
Aprovada por:
________________________________________________
Prof. Marcelo de Almeida Santos Neves, Ph.D.
________________________________________________ Prof. Carlos Antonio Levi da Conceição, Ph.D.
________________________________________________ Prof. Paulo de Tarso Themistocles Esperança, D.Sc
________________________________________________ Dr. Mauro Costa de Oliveira, D.Sc
RIO DE JANEIRO, RJ - BRASIL
FEVEREIRO DE 2007

Livros Grátis
http://www.livrosgratis.com.br
Milhares de livros grátis para download.

MUÑOZ, JORGE ANTONIO MERINO
Aplicação da Teoria do Tanque de
Estabilização Passivo Tipo U na
Diminuição do Jogo Paramétrico [Rio
de Janeiro] 2007
XIV, 140 p. 29,7 cm (COPPE/UFRJ, M.Sc.,
Engenharia Oceânica, 2007)
Dissertação - Universidade Federal do Rio de
Janeiro, COPPE
1. Tanque de Estabilização em Navios
2. Estabilidade Dinâmica de Navios
3. Ressonância Paramétrica
I. COPPE/UFRJ II. Título (Série)
ii

A Deus pela força espiritual.
A meus pais Jorge e Maria pelo
constante apoio, amor e compreensão
em cada etapa da minha vida.
A meu filho Jorgito pela
força e motivação que me ajuda
a lutar a cada momento.
iii

AGRADECIMENTOS
Ao professor Marcelo de Almeida Santos Neves pelo apoio e orientação
no desenvolvimento do presente trabalho.
Aos professores do Programa de Engenharia Oceânica da COPPE/UFRJ
pelos ensinamentos, aos amigos peruanos pelo companheirismo e a todo o pessoal
do PENO e DENO pela amizade e apoio.
À Coordenação de Aperfeiçoamento de Pessoal de Nível Superior e ao
Programa de Engenharia Oceânica da COPPE/UFRJ pelo suporte financeiro.
iv
Resumo da Dissertação apresentada à COPPE/UFRJ como parte dos requisitos
necessários para a obtenção do grau de Mestre em Ciências (M.Sc.)
APLICAÇÃO DA TEORIA DO TANQUE DE ESTABILIZAÇÃO
PASSIVO TIPO U NA DIMINUIÇÃO DO JOGO PARAMÉTRICO
Jorge Antonio Merino Muñoz
Fevereiro/2007
Orientador: Marcelo de Almeida Santos Neves
Programa: Engenharia Oceânica
Nos últimos anos evidenciou-se a importância da ressonância paramétrica
na estabilidade de embarcações. Trata-se de um fenômeno no qual a embarcação
pode, em poucos ciclos, atingir grandes amplitudes de jogo (jogo paramétrico),
não pela excitação direta das ondas, mas sim por uma excitação interna devido às
variações periódicas de certos parâmetros do sistema oscilatório (excitação
paramétrica).
O presente trabalho aplica a teoria do tanque de estabilização passivo tipo
U para diminuir o jogo paramétrico. Um sistema de equações diferenciais não
lineares que descreve o movimento do fluido dentro do tanque bem como as
forças e momentos que o tanque gera no navio é desenvolvido. O sistema de
equações que representa o sistema navio-tanque é resolvido numericamente em
função do tempo.
Posteriormente, são apresentadas as respostas do navio com e sem tanque
de estabilização, assim como também se analisa a influência dos parâmetros
geométricos do tanque no comportamento do navio. Finalmente, com base nos
resultados, se conclui que um tanque passivo tipo U é um eficiente amortecedor
do jogo paramétrico, reduzindo e eliminando a ressonância paramétrica.
v

Abstract of Dissertation presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Master of Science (M.Sc.)
APLICATION OF THE U PASSIVE STABILIZATION TANK THEORY
ON THE REDUCTION OF PARAMETRIC ROLL
Jorge Antonio Merino Muñoz
February/2007
Advisor: Marcelo de Almeida Santos Neves
Department: Ocean Engineering
This work uses the U passive stabilization tank theory to reduce parametric
roll. The behavior of ships prone to parametric resonance is studied. The nonlinear
differential equation that describes the fluid movement in the tank and the forces
and moments that this movement generates on the ship are presented. A
mathematical model that describes the ship movements is a third order nonlinear
model applied to ship with three degrees of freedom. The nonlinear equations are
solved numerically in time domain, after the ship’s response in frequency domain
is obtained from steady state of each time domain. To obtain the ship’s responses
is supposed the ship navigating on regular waves in head seas conditions.
The ship behavior with and without stabilization tank are presented in
frequency domain. The influence of the stabilization tank’s geometric parameters
on the performance ship is analyzed. Finally, it was concluded that the well tuned
U passive tank is an efficient damper of parametric roll, reducing and eliminating
the parametric resonance.
vi
ÍNDICE
CAPITULO 1: INTRODUÇÃO 01
1.1 Generalidades e Motivação do Presente Trabalho 02 1.1.1 Jogo Clássico 02 1.1.2 Jogo Paramétrico 02
1.2 Estabilização do Movimento de Jogo 05
1.3 Classificação dos Tanques de Estabilização 07 1.3.1 Segundo a Natureza do Trabalho 07 1.3.2 Segundo a Geometria 08
1.4 Antecedentes e Cenário Atual 09
1.5 Objetivo e Conteúdo da tese 15
CAPITULO 2: MODELO MATEMÁTICO 17
2.1 Sistemas de Referência 17
2.2 Equação do Movimento de Fluido dentro do Tanque 20 2.2.1 Reservatório de Bombordo 20 2.2.2 Duto de Conexão Horizontal 26 2.2.3 Reservatório de Boreste 30 2.2.4 Equação Não-Linear do Tanque 33 2.2.5 Forças e Momentos Exercidos sobre o Navio
Devido ao Movimento do Fluido Dentro do Tanque
39
2.2.6 Equação Linear do Tanque 45
2.3 Movimento do Navio em Ondas 47 2.3.1 Equações Lineares do Comportamento do Navio
em Ondas 49
2.3.2 Coeficientes Hidrodinâmicos e as Forças de Excitação
50
2.3.3 Coeficientes de Amortecimento em Jogo 52 2.3.4 Equações Não-Lineares do Comportamento do
Navio em Ondas 53
vii

2.4 Equações Acopladas de Quarta Ordem do Sistema Navio-
Tanque 54
CAPITULO 3: ANÁLISES E RESULTADOS 57
3.1 Generalidades 57
3.2 Testes Experimentais – Resultados 58
3.3 Sem tanque de estabilização – Respostas do Navio em Jogo 62
3.3.1 Efeito da Freqüência Natural de Jogo ( 4nω ) 62 3.3.2 Efeito da Velocidade de Avanço, Número de
Froude (Fn) 65
3.3.3 Efeito da Inclinação da Onda ( /w wH L ) 67
3.3.4 Efeito da Amplitude de Onda ( ) wA 69 3.3.5 Mapeamento no Plano 4/e nω ω vs. wA 72
3.4 Projeto e Sintonização do Tanque 82
3.5 Respostas em Jogo COM Tanque de Estabilização 86 3.5.1 Influência da Freqüência do Tanque ( tω ) 86 3.5.2 Influência da Massa do Fluido Dentro do Tanque
( ) tm 88
3.5.3 Influência do Amortecimento do Tanque ( tη ) 90 3.5.4 Influência da Posição Vertical ( ) do Tanque zL 93 3.5.5 Simulações no Tempo 95
CAPITULO 4: CONCLUSÕES E RECOMENDAÇÕES 99 4.1 Conclusões e Recomendações Gerais 100 4.2 Trabalhos Futuros 102
REFERÊNCIAS BIBLIOGRÁFICAS 104
APÊNDICE I 111 APÊNDICE II 120
viii
LISTA DE SÍMBOLOS
GERAL g - aceleração da gravidade;
ugr - vetor unitário na direção da aceleração da gravidade; x, y, z - eixos do sistema de coordenadas móveis (solidário ao navio); X,Y,Z - eixos do sistema de coordenadas inercial (fixo à terra); NAVIO E ONDA
wA - amplitude da onda (m); Fn - número de Froude;
wL - comprimento da onda (m); k - número de onda; χ (ksi) - ângulo de incidência da onda (º); m - massa do navio;
,xx yyJ J - momentos de inércia do navio com respeito aos eixos x e y respectivamente;
wω - freqüência da onda (rad/s);
eω - freqüência de encontro (rad/s);
4nω - freqüência natural de jogo (rad/s);
, ,x y z - deslocamento do navio na direção dos eixos, x, y, z ,
respectivamente (avanço, desvio e afundamento);
, ,u v w - velocidade do navio na direção dos eixos x, y, z respectivamente;
ix
, ,φ θ ψ - deslocamentos angulares do navio na direção dos eixos, x, y, z ,
respectivamente (jogo, arfagem e guinada);
, , ,p q rΩ - velocidade angular do navio e as componentes na direção dos eixos x, y, z , respectivamente;
, ,p q r& & & - aceleração angular do navio na direção dos eixos x, y, z ,
respectivamente;
0 0v ,a - velocidade e aceleração absoluta da origem de coordenadas O, respectivamente;
U - velocidade do navio;
, ,w w wZ K M - excitação externa exercida sobre o navio devido às ondas nos movimentos de afundamento, jogo e arfagem;
TANQUE DE ESTABILIZAÇÃO a A - aceleração absoluta do diferencial de volume de fluido;
,r dA A - área da seção transversal do reservatório e do duto,
respectivamente;
tB - amortecimento devido às paredes dentro do tanque;
2,,, HWHB rdw - parâmetros geométricos do tanque (vide Figura 2.2);
1 2, ,wB C C% - constantes;
b, db - posição e largura do diferencial de volume de fluido no duto
horizontal, com respeito ao ponto O;
h, dh - posição e altura do diferencial de volume de fluido nos
reservatórios, com respeito à posição de equilíbrio;
x

rH - altura de equilíbrio de fluido dentro do tanque;
d ,drVol Vold - diferencial de volume do fluido, no reservatório e no duto,
respectivamente;
tη - amortecimento adimensional do tanque;
tL - comprimento longitudinal do tanque na direção do eixo x (m);
,r dτ τ - esforços tangenciais nas paredes do reservatório e do duto, respectivamente;
,x yN N - componentes normais das ações que as paredes do tanque exercem
sobre o fluido, nas direções do eixo x e y , respectivamente; E - potência entregue pela bomba ao fluido;
acelF - força exercida sobre o fluido do tanque devido à aceleração absoluta e da gravidade;
tanqueF , , ,ta ta taX Y Z - força que o fluido do tanque exerce sobre o navio, e suas
componentes na direção dos eixos x, y e z , respectivamente;
tanqueM , , ,ta ta taK M N - momento que o fluido do tanque exerce sobre o navio e suas componentes na direção dos eixos x, y e z respectivamente;
K - coeficiente de perda de carga nas uniões internas do tanque;
,x zL L - componentes do vetor posição do centro do duto com respeito ao ponto O, na direção dos eixos x e z , respectivamente;
r , v ,aB B B - posição, velocidade e aceleração absoluta do diferencial de volume,
respectivamente; dF ,dF ,dFpeso pressao paredes - forças devidas ao peso, à pressão e às paredes do tanque
sobre o diferencial de volume; d tm - massa do diferencial de volume;
tm - massa do fluido dentro do tanque;
tρ - densidade do fluido dentro do tanque;
xi
P, dP - pressão e diferencial de pressão exercido sobre o diferencial de volume;
,p sP P - pressão interna ao tanque nos reservatórios de bombordo e boreste,
respectivamente;
1 2 3 4 5 6P ,P ,P ,P ,P ,P - pressões internas em diferentes seções do tanque (vide Figura 2.2).
,r dPe Pe - perímetro da seção transversal do reservatório e do duto,
respectivamente; R - relação entre as áreas do reservatório e do duto, respectivamente;
tω - freqüência natural do tanque (rad/s);
( ) ( ) ( ), ,t t tZ Z Z& && - posição, velocidade e aceleração relativa do fluido dentro do tanque;
Coeficientes Devido ao Tanque
, , , , , , , , , ,
, , , , , , , ,z x y
ext y x z
T T T T T T T T T T
T T T T T T T T Tτ τ τ φθτθτ θτ φτ φφτ θθτ φψτ
φθ ψ ψφ φθ φ θψ
&& & & & & & & &&& & && && &
& & & && && &&&& & &&
- da Equação do TANQUE nos seis
graus de liberdade do navio
, , , , , , ,
,z ,Z Z Z Z Z Z Z Z
Z Zτ τφθτθ φτ τφφ τθθ φτ
φφττ θθττ
&& & & & & & && &&&& &
& & & &
ττ - das forças devido ao tanque na equação
de AFUNDAMENTO
, , , , , , ,
, , , , , ,z z
z
K K K K K K K
K K K K K K Kτ τ τφθτφ θτ τ φ τφθ
φθτ φθττθθτ φττ φττ φττ φθττ
&& && & & &&& && &
& & && & & & && &
- dos momentos devido ao tanque na
equação de JOGO
, , , , , , ,
, , , , , ,z z
z
M M M M M M M M
M M M M M M M
,τ τθ τφθτθ φτ φτ τφφ τ θ
ττ θττθττ θττ φθτ φφττ θ ττ
&& && & & & &&& & &
&& & & & & & &&& & &
- dos momentos devido ao tanque na
equação de ARFAGEM
xii

COEFICIENTES DE MASSA ADICIONAL E AMORTECIMENTO
, ,zZ K Mφ θ&& &&&& - Coeficientes de massa adicional em afundamento, jogo e arfagem, respectivamente;
, zZ Mθ&& && - Coeficientes de massa adicional entre os modos acoplados de
afundamento e arfagem;
, ,zZ K Mφ θ& && - Coeficientes de amortecimento linear em afundamento, jogo e arfagem, respectivamente;
K
φ φ& & - Coeficientes de amortecimento quadrático em jogo;
COEFICIENTES DE RESTAURAÇÃO Linear
, ,zZ K Mφ θ - Coeficientes de restauração linear em afundamento, jogo e arfagem, respectivamente;
, zZ Mθ - Coeficientes de restauração linear entre os modos acoplados de
afundamento e arfagem; Segunda ordem
, , ,zz zZ Z Z Zθ φφ θθ - Coeficientes de restauração em afundamento;
,zK Kφ φθ - Coeficientes de restauração em jogo;
, , ,zz zM M M Mθ φφ θθ - Coeficientes de restauração em arfagem; Terceira ordem
, , , , ,zzz zz z zZ Z Z Z Z Zθ φφ φφθ θθ θθθ - Coeficientes de restauração em afundamento;
, ,zzK K Kφ φφφ θθφ - Coeficientes de restauração em jogo;
, , , , ,zzz zz z zM M M M M Mθ φφ φφθ θθ θθθ - Coeficientes de restauração em arfagem;
xiii

zK φθ - Coeficientes de restauração entre os modos acoplados de afundamento, jogo e arfagem;
Devido à Passagem da Onda Segunda Ordem
,zZ Zζ ζθ - em afundamento; Kζφ - em jogo;
,zM Mζ ζθ - em arfagem; Terceira ordem
, , , , ,z zz zZ Z Z Z Z Zζζ ζ ζζθ ζ θ φφζ θθζ - em afundamento;
, ,zK K Kζζφ ζ φ ζφθ - em jogo;
, , , , ,z zz zM M M M M Mζζ ζ ζζθ ζ θ φφζ θθζ - em arfagem
xiv
Capítulo 1.- Introdução
CAPÍTULO 1
INTRODUÇÃO
Os movimentos do navio e o controle desses movimentos têm sido pontos de interesse de
muitos pesquisadores desde muitos anos. Um navio no mar estará suscetível à influência de ondas
e vento que podem ocasionar movimentos de grandes amplitudes, gerando desconforto e ainda
pondo em risco a vida da tripulação e dos passageiros a bordo. Assim, desde o ponto de vista de
segurança a redução dos movimentos do navio é um ponto importante a ser analisado.
Nos navios porta-contentores se tem tratado de evitar os grandes movimentos, que
possam ocasionar danos à carga e embarque de água no convés e que podem ser tão intensos ao
ponto de jogar os contêineres pela borda, como é descrito por France et al (2003). Além disso,
eliminando-se os grandes movimentos pode reduzir-se a resistência ao avanço e
consequentemente o consumo de combustível, aumentando a eficiência e os ganhos do navio.
No caso de embarcações de lançamentos de tubulações (risers) e navios de perfuração,
grandes movimentos podem afetar o desempenho destes. Em navios pesqueiros, podem afetar
diretamente a segurança da tripulação e ocasionar danos aos equipamentos e aparelhos de pesca.
Nas plataformas offshore, navios militares e de suporte, é recomendável uma estabilidade
eficiente para não ocorrer a interdição do heliponto e outros itens cujas operações sejam
limitadas por altos níveis de aceleração. O mesmo aplica-se para navios de passageiros, onde o
critério de conforto a bordo é exigente. Para diminuir os grandes movimentos que o navio sofre
no mar, o capitão se vê forçado a alterar a rota ou diminuir a velocidade; isto pode produzir
indesejáveis limitações na missão de navios militares ou reduzir os ganhos nos navios comerciais.
Neste tipo de tarefas de engenharia a redução e/ou eliminação dos movimentos do navio é a
característica mais importante a ser estudada.
1
Capítulo 1.- Introdução
1.1 Generalidades e Motivação do Presente Trabalho
Dentre os movimentos do navio, o mais crítico corresponde ao movimento
de jogo, devido aos baixos momentos de inércia e amortecimento associados. O
movimento de jogo é propenso a alcançar grandes amplitudes, seja no caso do
Jogo Ressonante Clássico ou do Jogo Paramétrico.
1.1.1 Jogo Ressonante Clássico
O Jogo Clássico é causado pela excitação direta das ondas do mar sobre o
navio. Se o navio, com certa velocidade de avanço, é atingido por ondas com certa
freqüência e ângulo de incidência, determinando uma freqüência de encontro
próxima à freqüência natural de jogo, podem ocorrer condições ressonantes que
levem o navio a atingir movimentos de grandes amplitudes. Esse jogo ressonante
clássico pode ocorrer em ondas de través ou ondas oblíquas. Em ondas
estritamente longitudinais e cascos simétricos o movimento de jogo causado pela
excitação direta das ondas não é possível (Bhattacharyya, 1978, Lewis, 1989).
1.1.2 Jogo Paramétrico
Quando o navio atinge certas freqüências de encontro, em mar de proa ou
popa (ondas longitudinais), o movimento de jogo pode ser excitado indiretamente
e atingir grandes amplitudes. Esse movimento de excitação indireta, denominado
“movimento excitado auto-parametricamente” e usualmente conhecido como
“jogo paramétrico”, é causado por uma excitação interna devido às variações
periódicas de certos parâmetros do sistema oscilatório. Froude (1863) foi um dos
primeiros a notar a existência do fenômeno da ressonância paramétrica.
O Jogo Paramétrico deriva da variação periódica do momento de
restauração como resultado da modificação da forma submersa produzida pelas
ondas, principalmente quando o navio navega em ondas longitudinais. Este tipo
de fenômeno dá origem a uma excitação interna do sistema navio-onda, que para
2

Capítulo 1.- Introdução
alguns valores de freqüência de encontro induz ângulos de jogo que aumentam
progressivamente. Dependendo da amplitude da excitação interna, esse processo
de amplificação do jogo pode provocar o emborcamento do navio em poucas
oscilações (Pérez, 1985, Valério, 1994). No caso de navios de pequeno porte,
como é o caso de um grande número de pesqueiros que operam no litoral do
Brasil e do Peru, a instabilidade paramétrica se torna potencialmente bem mais
perigosa, com a agravante de que pode desenvolver-se em condições de mar
moderadas (Neves, 2002). Com a intenção de analisar a ressonância paramétrica,
(Pérez e Sanguinetti, 1995) realizaram ensaios experimentais com modelos de
navios pesqueiros. Os resultados desses ensaios mostram que a instabilidade
paramétrica pode ocorrer para valores de altura metacêntrica transversal dentro
dos valores exigidos pelos regulamentos internacionais.
Por outro lado, com a finalidade de estudar a estabilidade da equação de
jogo e reproduzir as características dinâmicas da ressonância paramétrica, foram
desenvolvidos vários modelos matemáticos (analíticos e numéricos). Um estudo
analítico da equação de jogo permite analisar sistematicamente vários parâmetros
do sistema dinâmico que influem no comportamento do navio em jogo.
Usando estes modelos matemáticos podem ser obtidos limites de
estabilidade, geralmente por meio da equação variacional linear desenvolvida a
partir da equação não linear de jogo. Sanguinetti (1985) estuda analiticamente a
estabilidade do jogo paramétrico, para o navio sem velocidade e com três graus de
liberdade (afundamento, jogo e arfagem), utilizando um modelo não linear de
segunda ordem, nesse trabalho foram utilizados dois navios pesqueiros
semelhantes com forma de popa diferentes. Posteriormente, Pernambuco (1990)
aprimora o modelo anterior considerando seis graus de liberdade e incorporando o
amortecimento não linear em jogo assim como a velocidade de avanço em mar de
popa. Salas (1991) analisa os limites de estabilidade dos mesmos navios utilizados
por Sanguinetti (1985), confirmando a existência de jogo paramétrico em zonas de
baixas freqüências, característica da condição de mar de popa.
3

Capítulo 1.- Introdução
Seguindo com a mesma linha de pesquisa, Valério (1994) estuda a
estabilidade desses navios pesqueiros incorporando termos de restauração devido
ao efeito da passagem da onda, aprimorando assim o modelo analítico
desenvolvido anteriormente. Posteriormente, Neves et al. (1999) estudaram
analítica, numérica e experimentalmente a estabilidade desses navios pesqueiros,
analisando a influência das formas da popa na estabilidade paramétrica de jogo. O
estudo analítico foi baseado na equação de Mathieu utilizando um modelo de
segunda ordem. Valério (2000) aprimora o modelo de Valério (1994) adicionando
não linearidades nas equações de afundamento e arfagem e analisando os limites
de estabilidade, compara os resultados numéricos obtidos com os experimentais,
obtendo limitação nos resultados para grandes ângulos de jogo. Lorca (2001)
estuda analítica e experimentalmente a influência da velocidade do navio sobre a
ressonância paramétrica em jogo em mar de proa, obtendo os respectivos limites
de estabilidade baseado na equação de Mathieu.
A desvantagem de fazer uma análise de estabilidade a partir da equação de
Mathieu (modelo com termos de segunda ordem na restauração) é que no caso de
movimentos de jogo intensos este modelo no reproduz eficientemente a dinâmica
da ressonância paramétrica (Rodrigues, 2004). Por este motivo Rodrigues (2004)
desenvolve um modelo não linear de terceira ordem para o navio com três graus
de liberdade. Os resultados obtidos reproduzem eficientemente a dinâmica da
ressonância paramétrica, obtendo respostas numéricas de jogo que apresentam boa
concordância com os resultados experimentais. A existência de termos de terceira
ordem dá origem a termos bi-harmônicos na equação variacional de jogo, fazendo
inaplicável a equação de Mathieu para a análise de estabilidade, caindo esta
análise agora na equação de Hill, com características próprias do modelo de
terceira ordem. O modelo de terceira ordem é capaz de reproduzir adequadamente
as respostas do navio quando atinge grandes ângulos de jogo paramétrico (Neves
e Rodrigues, 2004), em mar de proa.
Outros trabalhos relativos ao desenvolvimento de modelos matemáticos e
testes experimentais para reproduzir a ressonância paramétrica podem encontrar-
se em Skomedal (1982), Dallinga et al. (1998), Spyrou (2000), Bulian et al.
4

Capítulo 1.- Introdução
(2003), ABS (2004), Munif et al.(2006), Ahmed et al. (2006), Harukuni et al.
(2006).
1.2 Estabilização do Movimento de Jogo
Para reduzir os movimentos que se produzem no navio, são comumente
empregados mecanismos estabilizadores. Com a ajuda destes estabilizadores, as
amplitudes dos movimentos, em geral o movimento de jogo, podem ser reduzidas
consideravelmente. No estudo da estabilização de navios é importante saber o tipo
e magnitude das forças que deveriam ser aplicadas para obter uma redução
significativa nas amplitudes e nas acelerações dos movimentos. Alguns
estabilizadores e outros meios usualmente empregados no controle do movimento
de jogo são apresentados a seguir:
A bolina pode ser o dispositivo mais simples empregado para diminuir o
movimento de jogo. Ela atua gerando forças de arrasto, incrementando
consideravelmente a dissipação de energia devido ao fluxo viscoso. Essas forças
de arrasto se opõem ao movimento de jogo, aumentando o amortecimento e
consequentemente diminuindo esse movimento. No entanto, a eficiência da bolina
pode ser limitada por razões de tamanho e fixação na parte externa do casco,
aumentando a resistência ao avanço.
Aletas de estabilização ativas. Este sistema de estabilização trabalha fora
do casco e geralmente é composto por pelo menos um par de aletas móveis na
parte submersa, uma de cada lado do navio. O ângulo de incidência das aletas é
continuamente ajustado por um sistema de controle que é governado pelos
movimentos do navio. As aletas exercem forças de sustentação que fornecem
momentos em jogo. Esses momentos são arranjados para se opor ao momento de
excitação das ondas, consequentemente diminuindo o movimento de jogo. A
grande desvantagem da bolina e das aletas de estabilização é que a eficiência delas
depende da velocidade de avanço do navio e no caso das aletas de estabilização, a
instalação e a manutenção têm custos elevados.
5

Capítulo 1.- Introdução
O giroscópio é um mecanismo que, em geral, consiste em um pesado anel
que gira em torno de seu próprio eixo, confinado por um marco externo que
novamente gira livre sobre um eixo perpendicular ao eixo do anel. Esta massa
giratória produz uma maior oposição contra as excitações externas, trabalhando
para alterar a direção do movimento. A desvantagem do giroscópio é que ele
precisa de uma grande massa para ter um desempenho aceitável, o que pode
ocupar um grande espaço dentro do navio, diminuindo a capacidade de carga.
Além disso, é importante notar que os cascos dos navios, na maioria, não são
construídos para alojar cargas altamente concentradas. Essas cargas pesadas e
concentradas tendem a causar grandes esforços de torção no casco durante os
movimentos de afundamento, jogo e/ou arfagem.
Movimentação de peso transversalmente, em geral no convés do navio. É
um sistema dinâmico que produz um momento que, sintonizado devidamente, se
opõe ao momento externo exercido pelas ondas. As desvantagens são que a
resposta do sistema pode não ser suficientemente rápida, o grande peso no convés
diminui a estabilidade do navio e problemas mecânicos são produzidos pela
montagem e operação dos grandes pesos a bordo. Treakle et al (2000) apresenta
um método, usando um controlador ativo, para avaliar o movimento de pesos a
bordo na redução do movimento de jogo.
Ação do leme. Quando o plano diametral do leme está fora da linha de
centro do navio, o leme exerce uma força de sustentação que geralmente atua num
ponto situado abaixo do centro de gravidade do navio. Essa força fornece
momentos em jogo e guinada. Esse momento em jogo, devido ao leme, pode ser
empregado para contra-arrestar o momento devido às forças externas. As
desvantagens são que os momentos fornecidos pelo leme são relativamente
pequenos e o movimento do leme pode mudar a rota estabelecida para o navio.
Baitis (1989) reporta os resultados que obteve a Marinha Americana utilizando
um sistema de estabilização de jogo por ação do leme.
6

Capítulo 1.- Introdução
Tanques de estabilização. É um sistema dinâmico que consiste em
reservatórios que contêm uma quantidade determinada de fluido, geralmente água.
As oscilações do fluido dentro dos reservatórios podem causar momentos que,
sintonizados devidamente, podem opor-se à excitação aplicada pelas ondas ou
pela excitação interna (excitação paramétrica). Vantagens:
a) Reduz o movimento de jogo, diminuindo a resistência ao avanço.
b) Podem trabalhar eficientemente em baixa ou sem velocidade.
c) Fácil instalação e funcionamento simples, quase não precisam de
manutenção (no caso de tanques passivos).
d) O espaço dentro dos tanques pode ser utilizado para levar fluidos
consumíveis.
Em Sellars e Martin (1992) se pode encontrar uma comparação de vários
sistemas de estabilização de jogo onde bolinas, tanques passivos, aletas ativas, e a
ação do leme foram consideradas. Nesse trabalho se descrevem e discutem
procedimentos para a seleção e avaliação da eficiência de diferentes sistemas de
estabilização com o objetivo de diminuir o movimento.
Outros detalhes com respeito a esses estabilizadores são apresentados por
Vasta et al. (1961), Parker (1965), Bhattacharyya (1978).
1.3 Classificação dos Tanques de Estabilização
1.3.1 Segundo a Natureza de Trabalho:
a) Passivos: quando o fluido dentro do tanque pode movimentar-se
livremente.
b) Passivos controlados: quando o movimento do fluido é controlado
pelo uso de obstrutores de fluxo (chicanas) ou pela limitação do fluxo
7
Capítulo 1.- Introdução
utilizando pressão de ar, isto para aumentar o amortecimento interno
do tanque.
c) Ativos: quando é fornecida energia para movimentar o fluido dentro do
tanque, com a finalidade de obter uma resposta mais rápida, aumentar
o amortecimento e/ou modificar a freqüência natural do tanque.
Em geral tem-se como referência que os tanques de estabilização passivos
trabalham bem em navios com baixas velocidades embora, em geral, eles não
sejam tão efetivos como os tanques de estabilização ativos trabalhando em navios
com altas velocidades, Lloyds (1989).
1.3.2 Segundo a Geometria:
a) Superfície Livre ou Flume: comumente constituído de reservatórios de
água na parte superior dos navios. A característica principal desse
tanque é o amortecimento que produz contra o movimento de jogo. Em
geral não é muito eficiente em baixas freqüências de onda, (ondas
compridas de grande período), além do que reduz consideravelmente a
altura metacêntrica, e conseqüentemente, a estabilidade do navio.
b) Tipo U: geralmente consiste em dois reservatórios, colocados nas duas
bandas do navio e conectados entre si, na parte inferior, por um duto
horizontal transversal. A parte superior dos reservatórios pode estar
aberta à atmosfera ou conectada por um duto horizontal de ar que pode
controlar a freqüência natural do tanque.
Esta geometria é mais eficiente, devido à menor perda de estabilidade
por superfície livre e à grande capacidade de mudar seus parâmetros
geométricos na fase de projeto. É sempre desejável incorporar ao
projeto algum nível de controle sobre a freqüência natural do tanque,
de maneira de atingir as faixas de freqüências que o navio encontra ao
8

Capítulo 1.- Introdução
longo de seu percurso. A Figura 1.1 mostra os diferentes tipos de
tanques segundo a classificação apresentada neste trabalho.
(a) Superfície livre ou Flume Simples (b) Superfície Livre com chicanas
(bafles)
(c) Tipo U Simples (d) Tipo U com duto e válvula de ar
(e) Tipo U com válvula reguladora (f) Tipo U Ativo com bomba
Figura 1.1 Classificação dos Tanques de Estabilização
Devemos assinalar que segundo a natureza do trabalho: as
Figuras 1.1 (a) e (c) são tanques passivos, as Figuras 1.1 (b), (d) e (e)
são tanques passivos controlados e a Figura 1.1 (f) é tanque ativo.
Segundo a geometria: as Figuras 1.1 (a) e (b) são tanques de superfície
livre ou Flume, as Figuras 1.1 (c), (d), (e) e (f) são tanques tipo U.
1.4 Antecedentes e Cenário Atual
9

Capítulo 1.- Introdução
A idéia de utilizar tanques de superfície livre para estabilizar o movimento
de jogo foi introduzida pela primeira vez por William Froude em 1862, seguida de
uma aplicação pratica de P. Watts em 1880. O tanque utilizado foi de seção
transversal retangular e ocupava toda a boca de um navio de guerra. Obstrutores
de fluxo longitudinais dentro do tanque forneciam amortecimento interno ao
fluido. Esses tanques de superfície livre, com diferentes geometrias, estão ainda
em uso.
Em 1910, H. Frahm propôs o uso de um tanque com forma de U para a
estabilização de jogo e demonstrou que essa geometria é mais eficiente do que o
sistema do tanque com superfície livre.
Vasta et al. (1961) apresentam um resumo de vários sistemas de
estabilização e desenvolve um sistema de equações, no domínio da freqüência,
para descrever a dinâmica de um navio com tanque de estabilização passivo em
forma de U. A derivação começa a partir das equações de Lagrange e o sistema
tanque navio é considerado como um pêndulo duplo. A principal desvantagem
desse trabalho é que foram utilizadas técnicas de aproximação e simplificação
para resolver diretamente a equação do movimento no domínio da freqüência,
considerando os movimentos do navio como movimentos desacoplados.
Webster et al. (1967) investigaram um sistema de controle ativo de um
tanque em U para estabilizar o movimento de jogo. Nesse trabalho os autores
formulam as equações do movimento do navio, do tanque, e da bomba que
fornece energia ao fluido. As respostas lineares para o movimento do navio foram
formuladas e resolvidas no domínio da freqüência. Os autores descrevem a
modelagem do controle da bomba utilizando um tipo de controlador retro-
alimentado com a aceleração de jogo. As equações do tanque ativo foram
formuladas com efeitos de saturação e resolvidas no domínio do tempo usando o
método de integração de Runge Kutta. Devido a que a resposta do navio foi
calculada no domínio da freqüência, teve-se que calcular a resposta do tanque,
acoplado com jogo, desvio e guinada, para cada freqüência. Como conclusão
10

Capítulo 1.- Introdução
desse trabalho o tanque ativo mostra resultados mais favoráveis na redução do
movimento de jogo, quando comparado com o tanque passivo.
Webster et al. (1988) discutem um método para avaliar o desempenho de
tanques de estabilização externos de livre inundação. Um estudo da eficiência
desses tanques de livre inundação foi realizado no navio USS Midway. Esses
tanques externos se compõem de dois reservatórios, um a boreste e outro a
bombordo, e têm a principal característica de ter contato direto com o mar. O
modelo analítico utilizado é simplificado, e o amortecimento dentro do tanque é
controlado utilizando dutos de ventilação, livres à atmosfera ou pressurizados.
Nesse trabalho se conclui que essa forma de tanque não precisa ter um duto que
comunique os reservatórios para diminuir o movimento de jogo. No entanto, na
prática, tem-se a desvantagem de que esse tanque aumenta a resistência ao
avanço, além de precisar de maior manutenção devido a que os reservatórios
externos estão em contínuo contato com a água de mar altamente corrosiva.
Francescutto e Armenio (1990) estudam os limites de estabilidade para os
movimentos anti-simétricos de desvio, jogo e guinada, além do movimento da
água no tanque. Para este estudo consideram os autovalores e autovetores de um
sistema de equações diferenciais acopladas em forma linear. Nesse trabalho é
utilizado um modelo com tanque de estabilização passivo tipo U, em uma
determinada condição de carga e velocidade em mar de través. Como conclusão
desse trabalho se mostra que o movimento da água dentro do tanque não tem
influência considerável sobre os movimentos de desvio e guinada.
Bass (1998) apresenta um trabalho na qual compara experimentalmente e
em escala real a eficiência de dois sistemas de estabilização diferentes, utilizando
paravanes1 e tanque de estabilização passivo, em três embarcações pesqueiras
similares e de pequeno porte. A principal conclusão desse trabalho é que o tanque
passivo é mais eficiente para este tipo de embarcações.
1. Sistema de estabilização utilizado em embarcações de pesca por arrasto, para reduzir o
movimento de jogo.
11

Capítulo 1.- Introdução
Balcer (2001) analisa a resposta do navio utilizando um tanque passivo
com superfície livre. Nesse trabalho se deduz e compara um modelo analítico,
desenvolvido a partir das equações de Lagrange de segunda ordem, e um modelo
físico do sistema navio-tanque baseado na idéia de dois pêndulos acoplados
matematicamente com dois graus de liberdade. Concluí-se que nesse tipo de
tanque a eficiência será maior quanto maior seja o raio metacêntrico, ou seja, que
se encontre localizado mais acima do centro de gravidade do navio.
Gawad et al. (2001) utilizam a teoria do tanque de estabilização passivo
tipo U, similar à Lloyd (1989), para estudar a influência da freqüência, do
amortecimento, dos parâmetros geométricos e da massa do fluido na diminuição
do movimento de jogo. Para obter os resultados numéricos assume-se que as
respostas de jogo e do tanque como harmônicas resolvendo as equações do
movimento a nível linear. Como resultado desse trabalho obtém uma metodologia
para a o projeto do tanque escolhendo os parâmetros mais adequados, priorizando
a sintonização do tanque em função da altura da coluna de água dentro dos
reservatórios. Os resultados apresentados mostram que o tanque tipo U é um
amortecedor eficiente do movimento de jogo para um navio navegando em mar de
través.
Youssef et al. (2002) utilizam a teoria do tanque de estabilização passivo
tipo U apresentada por Lloyds (1989), sendo que a equação do movimento da
água dentro do tanque é apresentada em forma linear. Para obter resultados
numéricos utilizam um navio cargueiro da Série 60 (Cb=0.7) navegando em mar
de través com velocidade constante. Utilizam a teoria do fluido-potencial
incompressível para resolver as equações do movimento, e integram estas
equações no domínio do tempo. Os resultados apresentados forem calculados para
diferentes ângulos de incidências de onda. Como parte desse trabalho se analisa o
amortecimento, a quantidade da massa da água e o efeito da freqüência natural do
tanque na diminuição do movimento de jogo. Os resultados mostram que se pode
atingir ate 95% da redução do movimento de jogo. Posteriormente, Youssef et al.
(2003) aprimoram esse modelo matemático e modelam o movimento da água
12
Capítulo 1.- Introdução
dentro de tanque a nível não linear, tomando em consideração as perdas de
energia devido às uniões internas do tanque. Nesse trabalho são utilizados vários
tubos em forma U para distribuir estes simetricamente ao longo do comprimento
do navio. São obtidos resultados aceitáveis tanto para mar regular como irregular.
Iglesias et al. (2003) realizaram ensaios experimentais em um tanque
retangular, para avaliar a deformação da superfície livre e calcular os momentos
que a água exerce neste tanque. Os resultados foram comparados com resultados
numéricos. O amortecimento é mudado utilizando obstrutores de fluxo (chicanas)
tanto nos resultados experimentais como numéricos. Os resultados numéricos são
obtidos utilizando o método de malha-partícula SPH (Smoothed Particle
Hydrodynamics) para resolver a equação de Navier-Stokes, obtendo resultados
quantitativos aceitáveis quando comparados com os experimentais.
Harukuni et al. (2003) investigam numérica e experimentalmente o
movimento do jogo de um pequeno navio pesqueiro com tanque de estabilização
passivo tipo U. O ensaio experimental é realizado em condições normais e de
baixa estabilidade com ondas regulares em mar de través. No modelo numérico,
não linearidades são apresentadas no momento de restauração do navio. Utiliza-se
uma expressão aproximada para definir a curva de estabilidade; esta expressão é
incluída nas equações acopladas entre o jogo e o movimento da água dentro do
tanque. Finalmente apresenta-se uma análise utilizando diagramas de Bifurcação
para encontrar as zonas de instabilidade em função da freqüência e inclinação
(steepness) da onda.
O trabalho de Jones et al. (2003) compara resultados numéricos e
experimentais, utilizando um tanque em forma de U e outro de superfície livre,
respectivamente; ambos em um navio pesqueiro de arraste (Forever Grateful).
Nos testes experimentais, estuda a influência do amortecimento do tanque
utilizando diferentes formas de obstrutores de fluxo, testados a diferentes ângulos
de incidência em relação à linha de fluxo da água dentro do tanque. Para obter os
resultados numéricos é utilizado um sistema de equações diferenciais acopladas
linearmente com dois graus de liberdade. Nesse trabalho se demonstra a maior
13
Capítulo 1.- Introdução
eficiência do tanque tipo U comparado com o de superfície livre, ambos passivos,
podendo-se alcançar uma maior eficiência utilizando um tanque de estabilização
de superfície livre com obstrutores de fluxo controláveis. Webster et al. (2003)
apresentam uma análise estatística baseada no monitoramento, feito no mesmo
navio pesqueiro em escala real, para avaliar as respostas do navio com e sem
tanque de estabilização.
Shin et al. (2004) apresentam critérios para análise da existência da
ressonância paramétrica em mar de proa e popa e utiliza um tanque de
estabilização passivo tipo tubo em U para diminuir o movimento de jogo
paramétrico. Para obter a equação do movimento e as forças e momentos que a
água do tanque gera no navio, utilizam a teoria apresentada por Youssef et al.
(2003). Nesse trabalho se analisa a influência da massa da água dentro do tanque
para obter a resposta de jogo em um navio porta-container. Os resultados são
apresentados em função da freqüência de encontro. Adicionalmente, apresentam
diagramas polares para analisar a eficiência do tanque passivo, obtendo resultados
satisfatórios para diferentes ângulos de incidência de onda e várias velocidades.
No intuito de melhorar a rapidez da resposta em jogo, do navio em mar de
través, com tanque de estabilização, Phairoh e Huang (2005) utilizam um tanque
de estabilização ativo tipo tubo em U. Para isto fornece-se energia ao fluido
utilizando uma bomba de água. Posteriormente estudam o efeito dos parâmetros
do tanque e da bomba sobre o movimento de jogo. Apresentam a derivação de um
modelo não linear para representar o movimento da água dentro do tanque, assim
como as forças e momentos que esse movimento exerce sobre o navio. Para obter
os resultados numéricos o modelo matemático é linearizado. O autor amostra que
o sistema ativo é mais eficiente no que concerne à rapidez de resposta, comparado
com o sistema passivo. Assim como também mostram a importância da sintonia e
amortecimento do tanque para diminuir o movimento de jogo.
Como se pode apreciar, muitas pesquisas estão sendo feitas na análise da
estabilização de movimentos na área naval e oceânica. Vale a pena mencionar que
uma área relativa à estabilização de movimentos é o controle de movimento de
14
Capítulo 1.- Introdução
edifícios. Nos últimos anos, se tem utilizado a movimentação de pesos e sistemas
tanque-fluido para a estabilização do movimento de edifícios devido ao vento,
terremotos e vibrações de tráfego. Tamura et al. (1995) apresentam um estudo
sobre o controle do movimento de uma torre no aeroporto de Nagasaki, onde é
utilizada uma coluna amortecedora sintonizada com líquido, para reduzir a
vibração induzida por vento sobre a torre. O autor mostra que os movimentos na
parte superior da torre diminuem em 35-50%, dependendo da velocidade e direção
do vento.
1.5 Objetivo e Conteúdo da Tese
Dando continuidade a esta linha de pesquisa sobre tanques estabilizadores
e ressonância paramétrica, se trata nesta tese de unir as duas teorias, para
desenvolver um modelo matemático que nos permita eliminar a ressonância
paramétrica e em geral estabilizar o movimento de jogo do navio.
É assim que este trabalho tem como objetivo eliminar numericamente o
jogo paramétrico utilizando a teoria do tanque de estabilização passivo tipo U,
estudando a influência da posição e da geometria do tanque sobre a ressonância
paramétrica. Os parâmetros de onda serão modificados para estudar a influência
destes sobre a resposta do navio.
Para obter os resultados numéricos serão utilizados dois navios pesqueiros
de pequeno porte e propensos a forte ressonância paramétrica, ambos similares,
com a diferença de ter a forma da popa diferente. Se analisará a influência desta
forma do navio sobre a estabilização do movimento de jogo.
Neste Capítulo 1, como parte da motivação deste trabalho, se definem e
explicam a dinâmica do Jogo Ressonante Clássico e do Jogo Paramétrico,
apresentou-se um resumo sobre os principais sistemas de estabilização em navios,
assim como também apresentou-se uma definição e classificação dos tanques de
15

Capítulo 1.- Introdução
estabilização. Faz-se um resumo de alguns trabalhos realizados sobre os tanques
de estabilização em navios no intuito de estabilizar o movimento de jogo.
No Capítulo 2 desenvolve-se o modelo matemático utilizado para definir o
movimento do fluido dentro do tanque e as forças e momentos que este
movimento fornece ao navio. Apresentam-se as equações do movimento do navio
a nível linear e não linear. São introduzidos os termos de acoplamentos entre os
movimentos de afundamento, arfagem e jogo no navio sem tanque.
Posteriormente, apresenta-se o sistema navio-tanque, onde mostram-se os termos
de acoplamento entre os três graus de liberdade do navio e o movimento do fluido
dentro do tanque.
No Capítulo 3, aplica-se um procedimento para o projeto do tanque, no
qual são escolhidos os parâmetros geométricos mais adequados a serem utilizados
para atingir a máxima eficiência do tanque. Apresentam-se os resultados
numéricos das respostas do navio com e sem tanque de estabilização utilizando
diagramas de estabilidade 4/e nω ω vs. , e respostas em função do tempo e da
freqüência. Também se apresentam as respostas do movimento de jogo em função
da amplitude de onda, do amortecimento, da geometria e da posição do tanque
dentro do navio.
wA
No Capítulo 4, apresentam-se as conclusões e observações obtidas no
desenvolvimento deste trabalho. Analisa-se a importância da freqüência do tanque
passivo tipo U na estabilização do movimento de jogo, especificamente sobre o
Jogo Paramétrico. Ao final são feitas as recomendações para trabalhos posteriores
na continuação a esta linha de pesquisa.
16

Capítulo 2.- Modelo Matemático
CAPÍTULO 2
MODELO MATEMÁTICO
No presente capitulo será desenvolvida a equação diferencial não linear que governa o
movimento do fluido dentro do tanque, assim como as forças e momentos que este movimento gera
no navio nos seis graus de liberdade. Também será apresentado o sistema de equações não
lineares, até terceira ordem, que governa o movimento do navio em mar regular. Finalmente, se
apresentará o sistema acoplado navio-tanque com quatro graus de liberdade, três para os
movimentos do navio em afundamento, jogo e arfagem, e o movimento do fluido dentro do tanque.
2.1 Sistemas de Referência
Para descrever o movimento do fluido dentro do tanque e os movimentos
do navio usaremos dois sistemas de referência. Um sistema inercial CXYZ
deslocando-se com a mesma velocidade de avanço do navio (U), tal que no
instante t=0, o plano XY coincide com a superfície livre em águas calmas, com o
ponto C na mesma vertical que o centro de gravidade G do navio. O segundo
sistema de referência é o sistema móvel Oxyz , utilizado para definir o
movimento do fluido dentro do tanque. Este sistema móvel está fixo no casco e o
plano xy coincide inicialmente com o plano de flutuação do navio em águas
calmas, o eixo Ox pertence ao plano diametral, sendo positivo no sentido do
avanço, o eixo Oy aponta na direção de bombordo e o eixo Oz passa sempre
pelo centro de gravidade G do navio com sentido positivo para cima.
17
Capítulo 2.- Modelo Matemático
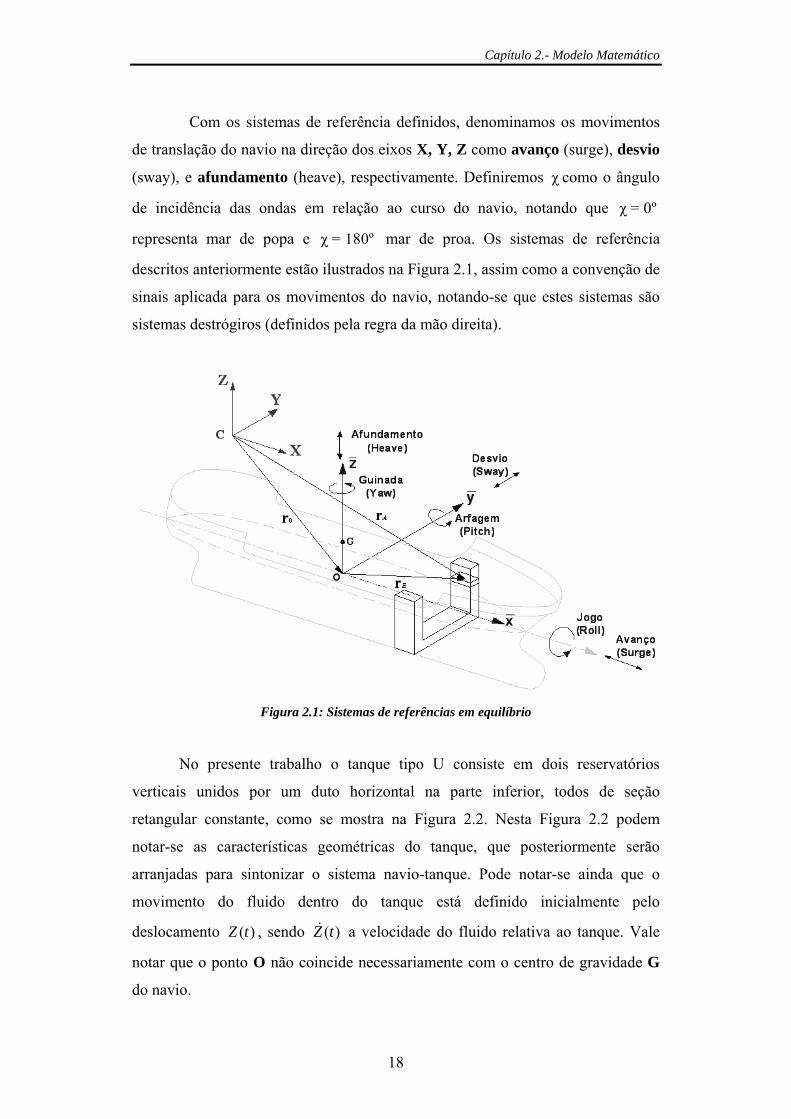
Com os sistemas de referência definidos, denominamos os movimentos
de translação do navio na direção dos eixos X, Y, Z como avanço (surge), desvio
(sway), e afundamento (heave), respectivamente. Definiremos como o ângulo
de incidência das ondas em relação ao curso do navio, notando que
representa mar de popa e mar de proa. Os sistemas de referência
descritos anteriormente estão ilustrados na Figura 2.1, assim como a convenção de
sinais aplicada para os movimentos do navio, notando-se que estes sistemas são
sistemas destrógiros (definidos pela regra da mão direita).
χ
χ = 0º
χ = 180º
Figura 2.1: Sistemas de referências em equilíbrio
No presente trabalho o tanque tipo U consiste em dois reservatórios
verticais unidos por um duto horizontal na parte inferior, todos de seção
retangular constante, como se mostra na Figura 2.2. Nesta Figura 2.2 podem
notar-se as características geométricas do tanque, que posteriormente serão
arranjadas para sintonizar o sistema navio-tanque. Pode notar-se ainda que o
movimento do fluido dentro do tanque está definido inicialmente pelo
deslocamento ( )Z t , sendo ( )Z t& a velocidade do fluido relativa ao tanque. Vale
notar que o ponto O não coincide necessariamente com o centro de gravidade G
do navio.
18

Capítulo 2.- Modelo Matemático
Figura 2.2: Representação esquemática do tanque em forma de U
É importante indicar que na derivação das equações do tanque será
apresentado o movimento do fluido em função do deslocamento Z(t), como se
mostra na Figura 2.2. Já na apresentação final da equação do tanque e obtenção
dos resultados no Capítulo 3, será utilizado o deslocamento angular τ , ao qual
chamaremos ângulo do tanque. Da Figura 2.3 pode notar-se que as variáveis estão
relacionadas geometricamente pela expressão:
tan( )w
ZB
τ = (2.1)
Figura 2.3: Definição do movimento do fluido dentro do tanque
19
Capítulo 2.- Modelo Matemático
2.2 Equação do Movimento do Fluido dentro do Tanque.
A seguir desenvolvemos a equação que governa o movimento do fluido
dentro do tanque, sendo que este, por sua vez, é influenciado pelos movimentos
do navio. Com o intuito de organizar o desenvolvimento dessa equação,
consideramos o tanque em três partes individualmente (os dois reservatórios
verticais e o duto horizontal na parte inferior).
2.2.1 Reservatório de Bombordo
Como se pode ver na Figura 2.2, consideramos que o fluido dentro
do tanque se movimenta desde o reservatório de boreste até o reservatório
de bombordo. Assim podemos definir um diferencial de volume (dVol)
localizado no reservatório de bombordo que é um paralelepípedo de
dimensões por com altura , onde é o comprimento longitudinal
do tanque na direção do eixo x. Este parâmetro geométrico terá grande
importância quando buscarmos definir a quantidade do fluido dentro do
tanque. Por outro lado, devido a que a largura do reservatório ( ) é muito
menor comparada com os comprimentos
rW tL dh tL
rW
wB e , trataremos o diferencial
de volume como um ponto e consideraremos o fluxo dentro do reservatório
como unidimensional. Assim, o diferencial de volume nos reservatórios é
definido como:
2H
d dr r t rVol W L h A hd= = (2.2)
Definido o diferencial de volume podemos construir o diagrama de
corpo livre deste, como se mostra na Figura 2.4. Aqui vemos que as forças
que atuam no diferencial de volume são: a força da gravidade (peso), a força
da pressão e a força que as paredes do tanque exercem sobre o fluido. Deve
notar-se que haverá um diferencial de pressão ( ) na parte inferior do dP
20
Capítulo 2.- Modelo Matemático
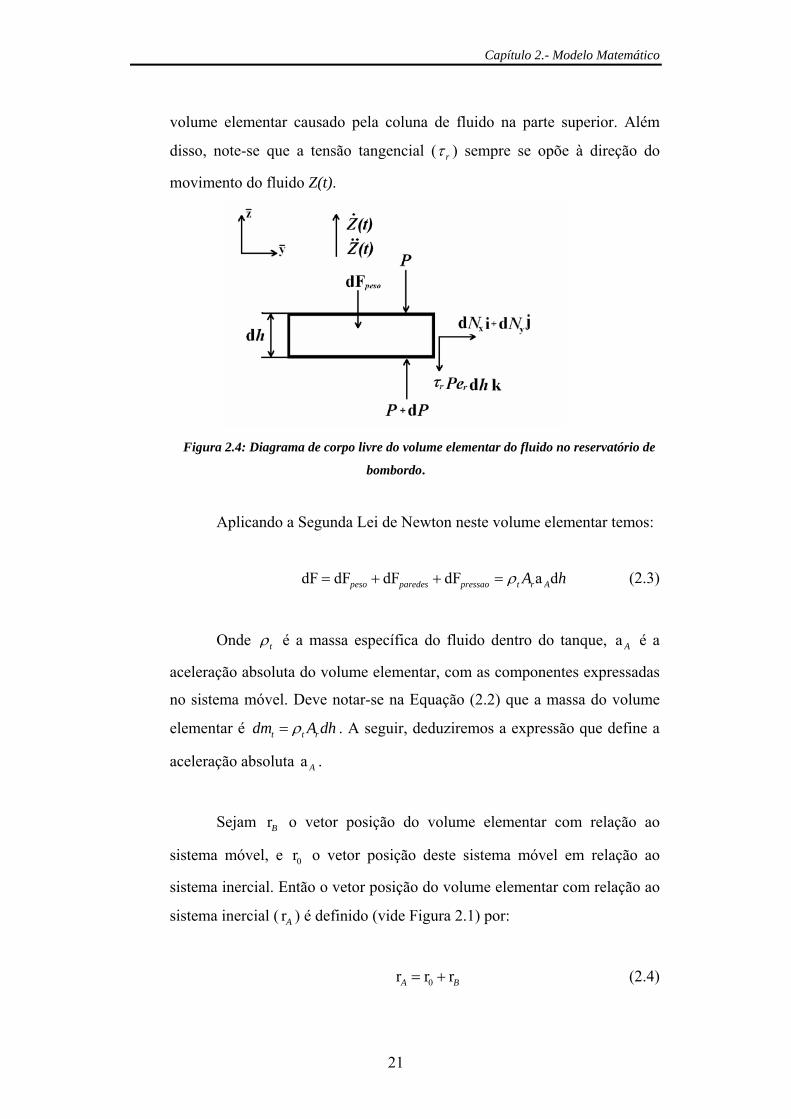
volume elementar causado pela coluna de fluido na parte superior. Além
disso, note-se que a tensão tangencial ( rτ ) sempre se opõe à direção do
movimento do fluido Z(t).
Figura 2.4: Diagrama de corpo livre do volume elementar do fluido no reservatório de
bombordo.
Aplicando a Segunda Lei de Newton neste volume elementar temos:
dF dF dF dF a dpeso paredes pressao t r AA hρ= + + = (2.3)
Onde tρ é a massa específica do fluido dentro do tanque, a é a
aceleração absoluta do volume elementar, com as componentes expressadas
no sistema móvel. Deve notar-se na Equação (2.2) que a massa do volume
elementar é
A
t t rdm A dhρ= . A seguir, deduziremos a expressão que define a
aceleração absoluta a . A
Sejam o vetor posição do volume elementar com relação ao
sistema móvel, e o vetor posição deste sistema móvel em relação ao
sistema inercial. Então o vetor posição do volume elementar com relação ao
sistema inercial ( ) é definido (vide Figura 2.1) por:
rB
0r
rA
0r r rA B= + (2.4)
21
Capítulo 2.- Modelo Matemático
Seja a velocidade absoluta da origem do sistema móvel (O), em
relação ao sistema inercial, definida por:
0v
00
rv i jt
d u v wd
= = + + k (2.5)
Derivando a Equação (2.5) podemos encontrar a aceleração absoluta
do ponto O, expressada por:
00
va i j kt
d u v wd
= = + + +Ω×& & & 0v (2.6)
Onde, definimos a velocidade e a aceleração angular do navio como:
i j kp q rΩ = + + (2.7)
i j kp q rΩ = + +& & & & (2.8)
A seguir derivamos o vetor posição do volume elementar
definido na Equação (2.4), encontrando a velocidade absoluta: (r )A
00
rr rv v vA BA
dd ddt dt dt
= = + = + + Ω×( r )B B (2.9)
Derivando , encontramos a aceleração absoluta do volume
elementar:
vA
0vv v [(a A BA
dd d ddt dt dt dt
r )]BΩ×= = + + (2.10)
Operando a Equação (2.10), a aceleração absoluta é definida pela
seguinte expressão:
22
Capítulo 2.- Modelo Matemático
( )0a a r r 2 v aA B B B= +Ω× Ω× +Ω× + Ω× +&B (2.11)
Seguindo com a análise e com ajuda da Figura 2.2, o vetor posição
do volume elementar localizado no reservatório de bombordo é definido
por:
( )1 2r i+ jB x wL B H h= − + k (2.12)
Onde xL é a posição longitudinal do tanque com respeito à origem
do sistema móvel O, na direção do eixo x (positivo à proa).
A velocidade e aceleração relativa do volume elementar localizado
no reservatório do bombordo, com as componentes expressadas no
sistema móvel, são definidas por:
1v (B )kZ t= & (2.13)
1a (B )kZ t= && (2.14)
Substituindo as Equações (2.12) à (2.14) na equação (2.11) obtemos
a aceleração absoluta do volume elementar no reservatório de bombordo:
1
2 22
2 22
2 22
a ( ) ( ) 2 ( ) ( )(
( ) ( ) 2 ( ) ( )( )
( ) ( ) ( ) ( )( ) k
A x w
x w
x w
u qw rv q r L r pq B qZ t q pr H h
v ru pw r pq L p r B pZ t p qr H h
w pv qu q pr L p qr B Z t p q H h
⎡ ⎤= + − − + − − + − + +⎣ ⎦⎡ ⎤+ + − + + − + − + − +⎣ ⎦⎡ ⎤+ + − − − + + + + + +⎣ ⎦
&& & &
&& & &
&&& & &
) i
j (2.15)
Deve notar-se na Equação (2.15) que para facilitar nos passos da
integração, colocamos por último as parcelas que dependem da posição
vertical do volume diferencial (h), o qual será integrado ao longo do
reservatório. As outras parcelas são constantes ao longo da integração.
23

Capítulo 2.- Modelo Matemático
A seguir serão definidas vetorialmente as componentes de cada uma
das forças representadas na Equação (2.3). A força peso com as
componentes expressadas no sistema móvel é definida por:
1dF d
( sen i sen cos j cos cos k)dpeso t r u
t r
gA g h
gA h
ρ
ρ θ φ θ φ θ
= − =
− − + +
r
(2.16)
Onde:
sen i sen cos j cos cos kug θ φ θ φ θ= − + +r é o vetor unitário, na direção da
força de gravidade, com as componentes expressadas no sistema móvel.
A força exercida pelas paredes do tanque será (vide Figura 2.4):
1dF d i+d j d kparedes x y r rN N Pe hτ= − (2.17)
Onde:
rτ é a tensão tangencial nas paredes do reservatório.
2( )r rPe W L= + t é o perímetro da seção transversal dos reservatórios.
,x yN N são as componentes normais das ações que as paredes exercem
sobre o fluido.
Finalmente, tem-se a força da pressão que a coluna de fluido exerce
sobre o volume elementar; a pressão é sobre a parte superior da
superfície e na superfície inferior (vide Figura 2.4). A força da
pressão resultante fica dada como:
P
dP P+
1dF d kpressao rA P= (2.18)
24

Capítulo 2.- Modelo Matemático
Substituindo as Equações (2.15), (2.16), (2.17) e (2.18) na Equação
(2.3), obteremos as expressões para d ,dx yN N e . dP
Antes de integrar podemos indicar que uma integral notável, para
este reservatório, que ajudará a simplificar as operações, é:
22
1( ) ( )2
rH
zZH h dh L H Z 2
2⎡ ⎤+ = − +⎣ ⎦∫ (2.19)
As integrações serão feitas separadamente, primeiramente com as
componentes relacionadas ao vetor unitário i. Assim vemos na Equação
(2.15) que podemos mudar a parcela da aceleração absoluta com relação a i
e independente de h por:
(2.20) 1
2 2a ( ) ( )iA xu qw rv q r L r pq B qZ t⎡ ⎤= + − − + − − +⎣ ⎦
&& & 2 ( )w
Fazendo esta mudança de variável, substituímos as componentes
relacionadas ao i das Equações (2.16), (2.17), (2.18) e (2.15) na Equação
(2.3), obtendo:
1 1 2sen a ( )( )it r x t r AgA dh dN A q pr H h dhρ θ ρ ⎡ ⎤+ = − + +⎣ ⎦& (2.21)
Logo, tomando como referência a posição de equilíbrio, integramos
desde até : h Z= rh H=
1 1
2
sen a
( ) ( )
r r r
i
r
H H H
t r x t r AZ Z ZH
t r Z
gA dh dN A dh
A q pr H h dh
ρ θ ρ
ρ
+ = −
+ +
∫ ∫ ∫∫&
(2.22)
Notamos na Equação (2.22), que as primeiras três integrais são
simples de ser resolvidas e ademais na última parcela se encontra a integral
25

Capítulo 2.- Modelo Matemático
notável, mostrada na Equação (2.19). Depois de resolver as integrais e
substituir a Equação (2.20), obtemos a componente normal 1xN :
1
2 2
2 22
{[ sen ( ) ( )
12 ]( ) ( )[ ( ) ]}2
x t r x w
r z
N A g u qw rv q r L r pq B
qZ H Z q pr L H Z
ρ θ= − + + − − + − −
+ − − + − +
& &
& &(2.23)
Repetindo o procedimento anterior, agora para as componentes
relacionadas com j e k, obtemos 1yN e a diferença de pressão ,
respectivamente:
1pP P−
1
2 2
2 22
{[ sen cos ( ) ( )
12 ]( ) ( )[ ( ) ]}2
y t r w
r z
N A g v ru pw p r B r pq L
pZ H Z p qr L H Z
ρ θ φ= + + − − + +
− − + − − +
& &
& &
x+ (2.24)
1
2 2 2 22
{[ cos cos ( ) ( )
1]( ) ( )[ ( ) ]}2
r rp t x w
t r
r z
PeP P g w pv qu q pr L p qr BA
Z H Z p q L H Z
τρ φ θρ
− = − + + + − − − + +
+ − + + − +
& & &
&&
(2.25)
Deve notar-se que g é a magnitude da aceleração devido à gravidade
e é a distância vertical entre o duto e o ponto O, como
mostrado na Figura 2.2.
2z rL H H= +
2.2.2 Duto de Conexão Horizontal
O passo seguinte é considerar o duto transversal que conecta os
reservatórios, como mostrado na Figura 2.2. A altura do duto é e a área
da seção transversal . Deve notar-se que o volume elementar no duto é
definido por:
dH
dA
26

Capítulo 2.- Modelo Matemático
d dd d t dVol H L b A bd= = (2.26)
A seguir integramos por separado primeiro a parcela do lado de
bombordo e posteriormente a parcela de boreste, do duto.
Na parcela de bombordo, o vetor posição do volume elementar fica
definido por (Vide Figura 2.2):
2r i+ jB x zkL b L= − (2.27)
Quando assumimos que o movimento do fluido dentro do tanque é
unidimensional, podemos concluir que a vazão de fluido dentro dos
reservatórios e do duto são iguais. Assim, a velocidade e a aceleração
relativa do fluido dentro do duto são definidas por:
2v (B RZ t= & ) j
) j
(2.28)
2a (B RZ t= && (2.29)
Onde:
r
d d
rA WRA H
= = (2.30)
Substituindo as Equações (2.27) até (2.29) dentro da equação (2.11),
obtemos a aceleração absoluta para o duto na parcela de bombordo:
2
2 2
2 2
2 2
a ( ) ( ) 2 ( ) (
( ) ( ) ( ) ( ) j
( ) ( ) 2 ( ) ( )
A x z
x z
x z
u qw rv q r L q pr L rRZ t r pq b
v ru pw r pq L p qr L RZ t p r b
w pv qu q pr L p q L pRZ t p qr b
⎡ ⎤= + − − + − + − − −⎣ ⎦⎡ ⎤+ + − + + + − + − +⎣ ⎦⎡ ⎤+ + − − − + + + + +⎣ ⎦
&& & &
&&& & &
&& & &
) i
k
(2.31)
27

Capítulo 2.- Modelo Matemático
Pode notar-se na Equação (2.31) que na última parcela de cada
componente se encontra a variável b que muda ao longo da integração.
Com ajuda da Figura 2.2 fazemos o diagrama de corpo livre do
volume elementar dentro do duto, como mostrado na Figura 2.5:
Figura 2.5: Diagrama de corpo livre do volume elementar no duto horizontal.
A seguir definimos vetorialmente as forças que atuam neste volume
elementar:
2dF d i d j+d kparedes x d d zN Pe b Nτ= − (2.32)
2dF d jpressao dA P= (2.33)
2dF d
d ( sen i sen cos j cos cos k)peso t d u
t d
gA bg
gA b
ρ
ρ θ φ θ φ θ
= −
= − − + +
r
(2.34)
Aplicando a Segunda Lei de Newton sobre o volume elementar, ou
seja, substituindo a Equação (2.32), (2.33) e (2.34) na Equação (2.3),
podemos obter as expressões para d ,dx zN N e . Para realizar a integração
seguimos o mesmo procedimento apresentado anteriormente para obter a
dP
28

Capítulo 2.- Modelo Matemático
Equação (2.23) no Item 2.2.1. Deve notar-se que agora os limites de
integração vão desde até 0b = wb B= , (observar que estamos integrando só
a parcela de bombordo do duto). Ademais, observa-se na Equação (2.31)
que não será necessário utilizar a integral notável. Assim, depois da
integração obtemos:
2
2 2
2
{[ sen ( ) ( )
12 ] ( ) }2
rx t x
w w
AN g u qw rv q r L qR
rRZ B r pq B
ρ θ= − + + − − + − +
− − −
& &
& &
zpr L (2.35)
2 3
2 2 2
{[ sen cos ( ) ( )
1] ( ) }2
d dt x z
t d
w w
PeP P g v ru pw r pq L p qr LA
RZ B p r B
τρ φ θρ
− = + + + − + + + −
+ − +
& & &
&& (2.36)
2
2 2
2
{[ cos cos ( ) ( )
12 ] ( ) }2
rz t x
w w
AN g w pv qu q pr L pR
pRZ B p qr B
ρ φ θ= + + − − − +
+ + +
& &
& &
zq L+
t
k
(2.37)
Onde é o perímetro da seção transversal do duto. 2( )d dPe H L= +
Agora, na parcela de boreste, com ajuda da Figura 2.2, podemos
observar que o vetor posição é:
3r i jB x zL b L= − − (2.38)
Fazendo o mesmo procedimento que na parcela de bombordo,
encontramos a aceleração absoluta para este volume elementar na parcela
de boreste, ficando assim:
29
Capítulo 2.- Modelo Matemático
3
2 2
2 2
2 2
a ( ) ( ) 2 ( ) ( ) i
( ) ( ) ( ) ( ) j
( ) ( ) 2 ( ) ( )
A x z
x z
x z
u qw rv q r L q pr L rRZ t r pq b
v ru pw r pq L p qr L RZ t p r b
w pv qu q pr L p q L pRZ t p qr b
⎡ ⎤= + − − + − + − + −⎣ ⎦⎡ ⎤+ + − + + + − + + +⎣ ⎦⎡ ⎤+ + − − − + + + − +⎣ ⎦
&& & &
&&& & &
&& & & k
(2.39)
Podemos observar que comparando esta aceleração absoluta de
boreste, Equação (2.39), com a aceleração absoluta de bombordo, Equação
(2.31), as componentes que multiplicam a posição b trocam de sinal, tanto
no vetor posição como na aceleração. Com as mesmas forças consideradas
na parcela de bombordo podemos utilizar a Segunda Lei de Newton na
parcela de boreste. Para a integração se utiliza o mesmo procedimento
utilizado na parcela de bombordo com os mesmos limites de integração
desde até , obtemos assim as componentes normais e a
diferença de pressão:
0b = wb B=
3
2 2
2
{[ sen ( ) ( )
12 ] ( ) }2
rx t x
w w
AN g u qw rv q r L qR
rRZ B r pq B
ρ θ= − + + − − + − +
− + −
& &
& &
zpr L (2.40)
4 5
2 2 2
{[ sen cos ( ) ( )
1] ( ) }2
d dt x z
t d
w w
PeP P g v ru pw r pq L p qr LA
RZ B p r B
τρ φ θρ
− = + + + − + + + −
+ + +
& & &
&& (2.41)
3
2 2
2
{[ cos cos ( ) ( )
12 ] ( ) }2
rz t x
w w
AN g w pv qu q pr L pR
pRZ B p qr B
ρ φ θ= + + − − − +
+ − +
& &
& &
zq L+ (2.42)
2.2.3 Reservatório de Boreste
30
Capítulo 2.- Modelo Matemático
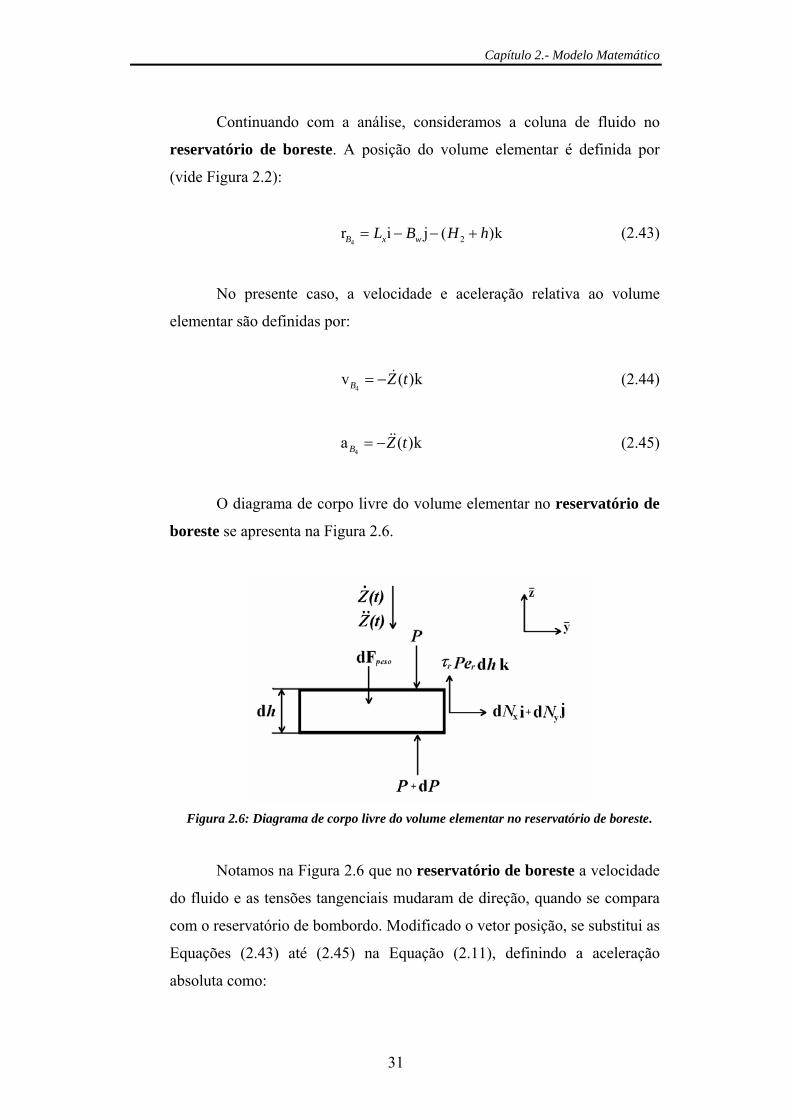
Continuando com a análise, consideramos a coluna de fluido no
reservatório de boreste. A posição do volume elementar é definida por
(vide Figura 2.2):
4 2r i j (B x w )kL B H h= − − + (2.43)
No presente caso, a velocidade e aceleração relativa ao volume
elementar são definidas por:
4v (B )kZ t= − & (2.44)
4a (B )kZ t= − && (2.45)
O diagrama de corpo livre do volume elementar no reservatório de
boreste se apresenta na Figura 2.6.
Figura 2.6: Diagrama de corpo livre do volume elementar no reservatório de boreste.
Notamos na Figura 2.6 que no reservatório de boreste a velocidade
do fluido e as tensões tangenciais mudaram de direção, quando se compara
com o reservatório de bombordo. Modificado o vetor posição, se substitui as
Equações (2.43) até (2.45) na Equação (2.11), definindo a aceleração
absoluta como:
31

Capítulo 2.- Modelo Matemático
4
2 22
2 22
2 22
a ( ) ( ) 2 ( ) ( )(
( ) ( ) 2 ( ) ( )( )
( ) ( ) ( ) ( )( ) k
A x w
x w
x w
u qw rv q r L r pq B qZ t q pr H h
v ru pw r pq L p r B pZ t p qr H h
w pv qu q pr L p qr B Z t p q H h
⎡ ⎤= + − − + + − − − + +⎣ ⎦⎡ ⎤+ + − + + + + + + − +⎣ ⎦⎡ ⎤+ + − − − − + − + + +⎣ ⎦
&& & &
&& & &
&&& & &
) i
j (2.46)
Comparando a Equação (2.46) com a Equação (2.15) se observa que
trocam de sinal tanto o parâmetro wB como a velocidade ( )Z t& e a
aceleração ( )Z t&& .
A seguir calculamos a força exercida pelas paredes do reservatório
sobre este volume elementar, assim:
4dF d i d j+ d kparedes x y r rN N Pe hτ= + (2.47)
As forças restantes mostradas nas Equações (2.16) e (2.18) não
mudam. Logo, aplicamos a Segunda Lei de Newton, substituindo as
Equações (2.16), (2.18) e (2.47) na Equação (2.3), obtemos as expressões
para d ,dx yN N , e integramos seguindo o mesmo procedimento
apresentado para obter a Equação (2.23), com a diferença de que os limites
de integração agora são desde
dP
h Z= − até rh H= . Por conseguinte, muda a
integral notável para:
22
1( ) ( )2
rH
zZH h dh L H Z
−
22⎡ ⎤+ = − −⎣ ⎦∫ (2.48)
Depois de realizar as integrações, obtemos:
4
2 2
2 22
{[ sen ( ) ( )
12 ]( ) ( )[ ( ) ]}2
x t r x w
r z
N A g u qw rv q r L r pq B
qZ H Z q pr L H Z
ρ θ= − + + − − + + −
− + − + − −
& &
& & (2.49)
32

Capítulo 2.- Modelo Matemático
4
2 2
2 22
{[ sen cos ( ) ( )
12 ]( ) ( )[ ( ) ]}2
y t r w
r z
N A g v ru pw p r B r pq L
pZ H Z p qr L H Z
ρ θ φ= + + − + + +
+ + + − − −
& &
& &
x+ (2.50)
6
2 2 2 22
{[ cos cos ( ) ( )
1]( ) ( )[ ( ) ]}2
r rs t x w
t r
r z
PeP P g w pv qu q pr L p qr BA
Z H Z p q L H Z
τρ φ θρ
− = − + + + − − − − +
− + + + − −
& & &
&& (2.51)
Nas uniões entre os reservatórios e o duto há perdas menores que
podem ser aproximadas por:
2
1 2 tP P KZρ− = & (2.52)
2
5 6 tP P KZρ− = & (2.53)
Onde K é o coeficiente de perda de carga nas uniões.
De maneira geral, se desenvolverá uma equação do movimento para
um tanque ativo, colocando uma bomba de água na parte central do duto,
isto para fornecer energia ao fluido e aumentar a rapidez da resposta.
Consideramos que no centro do duto, a bomba aplica um diferencial de
pressão, dado por:
3 4r
EP PA Z
− = −&
(2.54)
Onde E é a potência entregue pela bomba ao fluido.
2.2.4 Equação Não-Linear do Tanque
33

Capítulo 2.- Modelo Matemático
Com o intuito de simplificar as operações, notamos nas Equações
(2.25), (2.36), (2.41) e (2.51) que podemos fazer a seguinte mudança de
variáveis:
2 2
*
*
*
sen ( )sen cos ( )cos cos ( )
x
x
x
X g u qw rv q r LY g v ru pw r pq LZ g w pv qu q pr L
θθ φθ φ
= − + + − − +
= + + − + +
= + + − − −
&
& &
& &
(2.55)
Assim, podemos somar de uma maneira mais simples a Equação
(2.25) com (2.51), obtendo-se para os reservatórios:
1 6
2 2* 2
{ 2 [ ( ) ]
2 2 ( )}
r rp s t r w
t r
PeP P P P H p qr B ZA
Z Z H Z p q
τρρ
− + − = − + + + +
+ +
&&& (2.56)
Da mesma maneira se soma a Equação (2.36) com (2.41), obtendo-se
para o duto horizontal:
2 3 4 5 *2 [ ( )d dt w z
t d
PeP P P P B Y p qr L RZA
]τρρ
− + − = + + − + &&& (2.57)
Usando o procedimento anterior se soma a Equação (2.52) com
(2.53), obtendo:
2
1 2 5 6 2 tP P P P KZρ− + − = & (2.58)
Finalmente, somamos as Equações (2.54), (2.56), (2.57) e (2.58),
eliminamos as pressões de sinal oposto do lado esquerdo e substituímos a
Equação (2.55), obtendo a equação que governa o movimento do fluido
dentro do tanque em função de Z(t):
34
Capítulo 2.- Modelo Matemático
2
2 22
( )2
[ cos cos ( ) ( ) ]
[ sen cos ( ) ( )2
( ) ]
w dr rr w d r r
d r t d t r t r
x
p sx z
t
r w
B PeH Pe EW Z B H KZH W A A A Z
g w pv qu q pr L p q H ZP P
g v ru pw r pq L p
p qr H B
τ τρ ρ ρ
φ θ
φ θρ
− + − + −
+ + + − − − + +−
= − + + − + + + −
− +
&& &&
& &
& & &
&
qr L (2.59)
Onde e pP sP são as pressões internas nos reservatórios de
bombordo e boreste, respectivamente. Em geral a diferença de pressão e a
potência entregada à bomba tomam lugar como ação externa seja para
aumentar o amortecimento ou entregar energia ao fluido. Tendo estas
considerações, vamos representar estas ações externas como . extT
É importante destacar que uma das maneiras de avaliar as forças de
amortecimento interiores ao tanque, que estão diretamente relacionadas com
as tensões tangenciais ( ,r dτ τ ) e mostradas na Equação (2.59), é usando
fórmulas semi-empíricas da mecânica dos fluidos. Assim, as tensões
tangenciais podem ser relacionadas com o fator de atrito f utilizando a
relação (vide White, 1999):
2
, 8r dZfg
γτ =&
(2.60)
Aqui se pode notar que as tensões tangenciais são proporcionais à
velocidade do fluido ao quadrado, e o fator de atrito f depende do Número
de Reynolds (Re). Para avaliar Re utilizamos a seguinte expressão:
,r dZDRe
ν=&
(2.61)
35

Capítulo 2.- Modelo Matemático
Onde D é a largura do reservatório ( ) ou a altura do duto ( ),
dependendo em que lugar do tanque se esteja avaliando Re,
rW dH
ν é a
viscosidade cinemática do fluido. Com a avaliação de Re podem utilizar-se
fórmulas para dutos circulares com o intuito de avaliar o fator de atrito f. A
fórmula a ser utilizada depende do regime na qual se encontre o fluido,
como se mostra a seguir:
a) Se (Regime Laminar) 2000Re <
64fRe
= (2.62)
b) Se 2000 (Regime Transiente) 4000 5000Re< < −
Fórmula de Colebrook
1 1.14 2log ef D
9.35Re f
⎛ ⎞= − +⎜⎜
⎝ ⎠⎟⎟ (2.63)
c) Se (Regime Turbulento ) 85000 10Re< <
(Swamee and Jain, 1976)
2
0.9
0.255.74log
3.7
feD Re
=⎡ ⎤⎛ ⎞ +⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦
(2.64)
Aqui e representa a rugosidade das paredes internas ao tanque.
Como notamos na Equação (2.59) temos outra parcela do
amortecimento quadrático relacionado com a perda de energia nas uniões
entre os reservatórios e o duto, os quais são proporcionais ao coeficiente de
perda K, sendo determinado experimentalmente.
36

Capítulo 2.- Modelo Matemático
No presente trabalho, supomos que as forças de amortecimento são
proporcionais à velocidade Z& e que existe um coeficiente de amortecimento
equivalente ( Bττ ). Ou seja, fazemos a seguinte aproximação:
2d rw d r r
t d t r
Pe PeB H KZ BA A τττ τ
ρ ρ− + ≈& Z& (2.65)
Por outro lado, com o intuito de apreciar melhor os acoplamentos na
Equação (2.59) e obter uma nomenclatura compatível com as equações do
navio, assumimos a hipótese de pequenos ângulos para o movimento de
fluido ( tanτ τ≈ ). Então, podemos definir a partir de agora o movimento
fluido em função do ângulo do tanque (τ ), substituindo wZ B τ= (vide
Equação 2.1).
Além disso, substituímos a Equação (2.65) em (2.59) e fazemos as
seguintes mudanças de variáveis para os movimentos do navio:
u xu xv yv yw zw z
======
&
& &&
&
& &&
&
& &&
ppq
qrr
φ
φ
θ
θψψ
=
=
=
===
&
&&&
&
&&&
&
&&&
(2.66)
Pode definir-se uma nova nomenclatura para os coeficientes do
tanque, transformando a Equação (2.59) para:
37

Capítulo 2.- Modelo Matemático
2 2
cos cos
[ sen cos ]
z x y
ext
y x z
T T T z T T x T y T
T T T T
T T y T x T z T T T T
τ τ τ φθτθτ θτ φτ
φφτ θθτ φψτ
φθ ψ ψφ φθ φ θ
τ τ τ θτ θτ φτ φ θτ
φ τ θ τ φψτ
ψφ θ ψ φ ψ φθ φ
+ + + + + + +
+ + =
− + + + + + + +
&& & &&& & && & &
& & & & & &
& & & && && &&&& & &&
&& & &&& & & &&&
& & & &
& & & &&& &&&& & & θψ& &
(2.67)
No presente trabalho se considera que os reservatórios estejam
abertos na parte superior, sendo as pressões iguais à pressão atmosférica.
Além disso, se considera a bomba como desligada (E = 0), trabalhando o
tanque de estabilização como passivo, então 0extT = .
A definição de cada coeficiente da Equação (2.67) mostra-se na Tabela 3.1
Tabela 3.1 Coeficientes da Equação do Tanque.
Primeira Ordem
22 w rt r w r
d r
B HT A B WH Wτ ρ
⎛ ⎞= −⎜ ⎟
⎝ ⎠&& 22T A Bt r wBτ ττ& wBρ= 22y t rT Aρ=&&
22 (t r w z rT A B L Hφ ρ=&& )− L 22 t r w xT A Bψ ρ=&&
Segunda Ordem
22x t r wT Aψ ρ=&& B wB φ ρ= −&&
g 22z t rT Aτ ρ=&& 22 t r wzT A B
22 t r wT A Bφθ ρ=*
22T A Bt r w xθτ ρ= −&&22 (t r w z rT A B Lθψ ρ= − +& &
22 t r w xT A B Lφθ ρ=& &L
)H
Terceira Ordem
22 t r wxT Aθτ ρ= −&&B B g 22 t r wyT Aφτ ρ=&& * 22 t r wT A Bφθτ ρ=
222 t r wT A Bφφτ ρ=& & H H L 2
22 t r wT A Bθθτ ρ=& & 22 t r w xT A Bφψτ ρ=& &
* Estes coeficientes mudam para primeira ordem quando a equação do tanque é linearizada.
Deve notar-se que a Equação (2.67) é uma equação com não
linearidades de até de terceira ordem, na qual se aprecia melhor os
acoplamentos entre o movimento do tanque e os seis graus de liberdade do
38

Capítulo 2.- Modelo Matemático
navio. Deve assinalar-se que para obter os resultados numéricos no presente
trabalho se considerará que o navio pode movimentar-se em afundamento,
jogo e arfagem, sendo eliminados os coeficientes relacionados aos outros
três graus de liberdade.
2.2.5 Forças e Momentos exercidos sobre o Navio devido ao
Movimento do Fluido dentro do Tanque
Depois de desenvolver a equação que governa o movimento do
fluido dentro do tanque é necessário avaliar as forças e momentos que o
tanque exerce sobre o navio. Estas forças e momentos serão inseridos dentro
das equações do navio e trabalharão como ações externas, as quais poderão
estabilizar os movimentos do navio. A seguir apresentamos o procedimento
para avaliar estas forças e momentos devido ao tanque.
Da Segunda Lei de Newton (vide Equação 2.3), a força exercida
sobre qualquer volume elementar do fluido devido às forças superficiais
(forças devido à pressão e às paredes do tanque) será igual à força devida à
aceleração absoluta menos a força do peso:
pressao paredes aceldF +dF =dF (a +g )dA ug mt=r (2.68)
Onde, recordemos (conforme a Equação 2.16)
sen i sen cos j cos cos kug θ φ θ φ θ= − + +r .
Deve notar-se que na Equação (2.68) a força do peso passa para o
outro lado da igualdade com sinal trocado. Da Terceira Lei de Newton, a
força exercida sobre o navio devido ao volume elementar será dada por:
tanque aceldF dF= − (2.69)
39

Capítulo 2.- Modelo Matemático
tanquedF = (a +g )dA ug mt−r (2.70)
Onde d t tm dVolρ= é a massa do volume elementar. Integrando a
equação (2.70) ao longo dos reservatórios e do duto, da mesma forma como
feito nos itens 2.2.1, 2.2.2 e 2.2.3, se obtém a força exercida sobre o navio:
tanqueF i+ j+ta ta takX Y Z= (2.71)
Onde:
2 2
1
2
{ [ sen ( )] 2 ( )
( ) 4( ) }ta t r x w
w
X A C g u qw rv L q r B r pq Z
C q pr B r qZ Z
ρ θ= − − + + − − + + −
− + − +
& &
&&(2.72)
1
2 22
{ [ sen cos ( )] 4
( ) 2 ( ) 2 }ta t r x
w w
Y A C g v ru pw L r pq p
C p qr B p r Z B Z
ρ φ θ= − + + − + + +
+ − + + +
&& &
&&&
ZZ (2.73)
1
2 22
{ [ cos cos ( )] 4
( ) 2 ( ) 2 }ta t r x w
w
Z A C g w pv qu L q pr B pZ
C p q B p qr Z ZZ
ρ φ θ= − + + − − − +
+ + − + −
&& &
&&& (2.74)
Onde:
ww
BBR
=% , e . (2.75) 1 2( )r wC H B= + % 2 2 22 2 2zC L H Z L B= − − + %
z w
Em seguida calculamos o momento exercido pela força elementar
em relação ao ponto O:
tanque tanquedM r dFB= × (2.76)
tanquedM r (a +g )dB A ug mt= − ×r (2.77)
40

Capítulo 2.- Modelo Matemático
Em seguida, integra-se a Equação (2.77) ao longo dos reservatórios e
do duto. Assim, o momento aplicado ao navio devido ao movimento de
fluido dentro do tanque será:
tanqueM i+ j+ta ta takK M N= (2.78)
Onde:
2
2 12 2
2
2 2 2 2 32 2 2
2
{2 ( ) 4 1/ 3 ( 4 )( )
2 [ cos cos ( ) ( )]
2 / 3(3 3 3 3 )( )[ sen cos ( )]}
ta t r w r z w r
w x
w z r r r
x
K A B H L Z H pZZ B C H p qr
B g w pv qu L q pr H q r Z
B L H H H Z H H H p qrC g v pw ru L r pq
ρ
φ θ
φ θ
= − + + + + +
− + + − − − +
+ + − + + −+ + − + + +
&& & &
& &
% &
& &
−
(2.79)
2
1
2 2 2 2 32 2 2
2
2 22
{2 4( )[ cos cos ( )]
2 / 3(3 3 3 3 )( )2 ( ) 2 ( )
[ sen ( )]}
ta t r x w z w x
x x
w z r r r
w w x
x
M A L ZZ H qZ B L r B L p ZL C g w qu pv L q pr
B L H H H Z H H H q prB H r pq Z B L p qr Z
C g u rv qw L p r
ρφ θ
θ
= − + + −− + − + − −
+ + − + + +− − + +
− − + − + + −
&& &
& &
% &
& &
&
(2.80)
2
2 22
2 12 2
{2 4( ) 2 / 3 ( 3 )( )
2 [ sen ( ) ( )]( ) 2 [ sen cos ( )]
2 ( ) }
ta t r x w x w r w w r
w x
x x x
w x
N A L B Z L pZ B H q Z B B H r pq
B g u rv qw L p q H q pr ZC L p qr C L g v ru pw L r pq
B L p r Z
ρ
θφ θ
= − + − + + −
+ − + − + + − − +
+ − + + + − + +
+ +
&& & % &
& &
& & &
(2.81)
Aplicando-se a mesma mudança de variáveis utilizada para
desenvolver a Equação (2.67), podemos representar as forças e momentos
devido ao tanque, nos graus de liberdade de afundamento, jogo e arfagem,
da seguinte forma:
41
Capítulo 2.- Modelo Matemático
2 2
2 2 2 2
cos costa zZ Z z Z
Z Z Z Z Z Z
Z Z
τ τθ
τφθ ττφτ τφφ τθθ φτ
φφττ θθττ
θ
φτ φ θ φ θ φτ
φ τ θ τ
= +
+ + + + + +
+ +
&&&&
& & & & & && &&&
& & & &
&&&&
& & & &&& &
& &
ττ& (2.82)
2 2
2 2 2
sen cos
cos cos( )
sen cos( )
ta z z
z
K K K K z K K z K K
K K K K
K K z K
τ τ τφθτφ θτ τ φ τφθ
φθτθθτ φττ φττ
φθττ φττ φθττ
τ φ τ θτ φ φθ φ
θ τ φτ φττ φ θ τ
φ θ τ φτ φθτ
= + + + + + +
+ + + +
+ +
&& && & & &&& && &
& & && & &
& & &&
&& && & & &&& && &
& && & &
& & &&
θ +
(2.83)
2
2
2 2 2
sen
cos cos
sen
ta z
z
z
M M z M M
M M M M z M M
M M M M
M M z
τ τθτθ
τφθ ττφτ φτ τφφ τ θ
θττθττ θττ φθτ
φφττ θ ττ
θ θ
φτ φτ φ θ φ θ τ
θττ θττ θτ φθτ
φ τ θ τ
= + +
+ + + + + +
+ + + +
+ +
&&&&
&& & & & & &&& &
&& & & &&
& & & &
&&&&
&& & & && &&
&& & & &&
& & &
τ& (2.84)
Onde cada coeficiente é definido em função da ordem das variáveis.
Estas variáveis podem ser encontradas nas Tabelas 2.2: (a), (b), (c), (d).
Assim, podemos notar que nas Equações (2.82) a (2.84) encontramos termos
de até quarta ordem. Ademais, deve assinalar-se que nesta nomenclatura,
nos coeficientes que incluem como sub-índice a variável τ à direita das
variáveis ,z φ ou θ , representa-se um grau a mais de liberdade. Se τ estiver
no lado esquerdo, significa que esse coeficiente está relacionado com o
tanque, mas não representa um grau de liberdade adicional.
Tabela 2.2 (a) Coeficientes de Primeira Ordem das Forças e Momentos devido ao
tanque em Afundamento, Jogo e Arfagem.
Afundamento Jogo Arfagem
Primeira Ordem
0Zτ =&& 22 (t r w z r )K A B L Hτ ρ= +&& 0Mτ =&&
42

Capítulo 2.- Modelo Matemático
1z t rZ A Cτ ρ=&& 0zKτ =&& 1z t r xM A L Cτ ρ= −&&
0Zτφ =&&
2
2 2 32 22
1
2 [
3
( 4 ) 6]
t r w z
r r r
w r
K A B L
H H H H H
B C H
τφ ρ= +
+ + +
+
&&%
0Mτφ =&&
0Z =τθ τθ 0K = 2 2
2(
2 )t r z
z w
M A g L H
L Bτθ ρ= − +
%
1t r xZ A C Lτθ ρ= −&& 0Kτθ =&&
2
2 2 32 2
21
2 (
3
2)
t r w z
r r r
x
M A B L
H H H H H
L C
τθ ρ= +
+ + +
&&%
Tabela 2.2 (b) Coeficientes de Segunda Ordem das Forças e Momentos devido ao
tanque em Afundamento, Jogo e Arfagem.
Afundamento Jogo Arfagem
Segunda Ordem
22 t r wZ A Bττ ρ= −&& 0Kττ =&& 22 t r w xM A B Lττ ρ=&&
0zZ τ =&& 22z t r wK A Bτ ρ= −&& 0zM τ =&&
22 t r wZ A Bφτ ρ= −&& 0Kφτ =&& 22 t r w xM A B Lφτ ρ=&&
0Zθτ =&& 22 t r w xK A Bθτ ρ=&& L 0Mθτ =&&
24 t r wZ A Bφτ ρ=& & 0Kφτ =& &
24 t r w xM A B Lφτ ρ= −& &
2 2
2(
2 )t r z
z w
Z A L H
L Bτφφ ρ= − +& &
%0Kτφφ =& &
2 22(
2 )t r z
z w
M A L H
L Bτφφ ρ= − −& &
%
+
2 2
2(
2 )t r z
z w
Z A L H
L Bτθθ ρ= − +& &
%0Kτθθ =& & τθθ 0M =& &
1t rZ A C gτφθ ρ=2 2
2(
2 )t r z
z w
K A g L H
L Bτφθ ρ= − +
% 1t r x** M A L C g ** τφθ ρ= **
0zZτ φ =&& 2 2
2(
2 )t r zz
z w
K A L H
L Bτ φ ρ= − −&&
%
+ 0zMτ φ =&&
0Zτφθ =& & 2 2
2(
2 )t r x z
z w
K A L L H
L Bτφθ ρ= − +& &
% 0Mτφθ =& &
43

Capítulo 2.- Modelo Matemático
0Z =zτ θ&& zτ θ 0K =&& 2 2
2(
2 )t r zz
z w
M A L H
L Bτ θ ρ= − −&&
%
+
** Estes coeficientes viram de primeira ordem quando as forças e momentos são linearizados.
Tabela 2.2 (c) Coeficientes de Terceira Ordem das Forças e Momentos devido ao
tanque em Afundamento, Jogo e Arfagem.
Afundamento Jogo Arfagem
Terceira Ordem
0Zθττ = 0Kθττ = 2t r wM A B gθττ ρ=
0Zθττ =& & 0Kθττ =& &
224 t r wM A B Hθττ ρ=& &
0Zθττ =&& 0Kθττ =&& 222 t r wM A B Hθττ ρ= −&&
0Zθθτ =& & 222 t r wK A B Hθθτ ρ= −& & 0Mθθτ =& &
0Zφττ =& 224 t r wK A Bφττ ρ=& H 0Mφττ =&
0Zφθτ = **22 t r wK A Bφθτ ρ= − 0Mφθτg =
0Zφθτ =& & 0Kφθτ =& & 222 t r wM A B Hφθτ ρ=& &
0Zφττ =&& 222 t r wK A B Hφττ ρ= −&& 0Mφττ =&&
** Este coeficiente vira de primeira ordem quando as forças e momentos são linearizados.
Tabela 2.2 (d) Coeficientes de Quarta Ordem das Forças e Momentos devido ao tanque
em Afundamento, Jogo e Arfagem.
Afundamento Jogo Arfagem
Quarta Ordem
2t r wZ A Bφφττ ρ= −& & 0Kφφττ =& & 2
t r w xM A B Lφφττ ρ=& &
2t r wZ A Bθθττ ρ= −& & 0Kθθττ =& & 0Mθθττ =& &
0zZ φττ =&& 2t r wzK Aφττ ρ=&&
B 0zM φττ =&&
0Zφθττ = **2
t r wK A Bφθττ ρ= − 0Mφθττg =
0Zφθττ =& & 2t r w xK A B Lφθττ ρ= −& & 0Mφθττ =& &
44

Capítulo 2.- Modelo Matemático
0zZθ ττ =& & 0zKθ ττ =& &
2t r wzM A Bθ ττ ρ=& &
** Este coeficiente vira de terceira ordem quando as forças e momentos são linearizados.
2.2.6 Equação Linear do Tanque
Para avaliar as características dinâmicas da equação do tanque
linearizamos a Equação (2.67), tendo em consideração que o navio pode
movimentar-se em afundamento, jogo e arfagem; eliminamos as não
linearidades e assumimos a hipótese de pequenos ângulos, cos cos 1φ θ≈ ≈ ,
senφ φ≈ , obtendo-se a seguinte equação linear:
(T T T T Tτ τ φθτ φθ φ )τ τ τ φ+ + = − + &&&& &&&&& & φ (2.85)
As forças e momentos devidos ao tanque também podem ser
linearizados, de forma similar à equação do tanque, obtendo-se as seguintes
expressões:
ta zZ Z z Z Zτ τφθτθθ= + +&&&&&&&& (2.86)
taK K K K Kτ τφθ φθττφτ φ φ= + + +&&&&&&&& τ (2.87)
ta zM M z M M Mτ τθ τφθτθθ θ= + + +&&&&&&&& (2.88)
Aqui deve-se notar que devido à hipótese de pequenos ângulos, os
coeficientes não-lineares , , ,Z K K Mτφθ τφθ φθτ τφθ passaram a participar de
termos lineares.
45

Capítulo 2.- Modelo Matemático
Um parâmetro importante que será analisado no Capítulo 3 é o
amortecimento do tanque. Para obter uma avaliação comparativa precisamos
adimensionalizar este coeficiente. Assim, a partir da Equação (2.85)
podemos adimensionalizar o coeficiente de amortecimento Bττ , conforme é
apresentado por Lloyd, 1989:
2 2 (t
w rr
d r
T BT T B HgW
H W
τ ττ
τ φθτ
η = =−
&
&& ) (2.89)
Onde tη é também conhecido como coeficiente de decaimento, o
qual pode ser determinado experimentalmente utilizando um modelo do
tanque fixado numa plataforma de testes.
Adicionalmente, outra característica importante a ser analisada é a
freqüência natural do tanque tω . A partir da Equação (2.85) pode aplicar-se
a definição da freqüência natural de um sistema dinâmico encontrando-se
que a freqüência natural do tanque é:
tr w
rd
T gW BT H
H
φθτ
τ
ω = =−&&
(2.90)
Nesta Equação (2.90) é importante notar os parâmetros geométricos
dos quais depende a freqüência natural tω . Assim, na prática, quando o
tanque já esteja construído e se esteja na necessidade de mudar a freqüência
natural do tanque, o único parâmetro que pode ser modificado é a altura do
fluido nos reservatórios ( ). rH
Finalmente, outro parâmetro importante a ser analisado é a massa do
fluido dentro do tanque. Esta massa será avaliada, em forma percentual, em
46
Capítulo 2.- Modelo Matemático
relação à massa do navio (m). Pode notar-se da Figura 2.2 que a massa do
fluido dentro do tanque pode ser definida como:
( )2t t t w d rm L B H H Wρ= + r (2.91)
2.3 Movimento do Navio em Ondas
A resposta do navio movimentando-se num fluido, que ademais tem o
efeito das ondas, é um fenômeno muito complexo devido a que contém a
interação entre a dinâmica do navio, a hidrodinâmica do fluido, a coexistência
entre dois meios diferentes, fluido e ar, e o efeito adicional das ondas. Utilizando
a Teoria das Faixas (vide Lloyd, 1989), podem obter-se os coeficientes
hidrodinâmicos das equações diferenciais, a nível linear, que geram
comportamento muito semelhante ao comportamento real do navio. Porém, é bem
conhecido, o comportamento real do navio é não linear, por isso serão utilizados
termos não lineares no amortecimento de jogo, na restauração entre os modos
acoplados de afundamento, jogo e arfagem e na restauração adicional devido à
passagem da onda.
A formulação apresentada a seguir representa os movimentos do navio
considerando as seguintes hipóteses:
a. Navio intacto.
b. Movimentos do navio como corpo rígido.
c. Navio deslocando-se com velocidade de avanço constante.
d. Ondas incidentes longitudinais regulares correspondentes às
descritas pela Teoria de Ondas Lineares.
e. Emersão da proa e popa associada à ocorrência de cargas de
culapada (slamming) não consideradas.
f. Efeito da água no convés desprezível.
47

Capítulo 2.- Modelo Matemático
A seguir define-se a freqüência de encontro eω como a freqüência com a
qual o navio, deslocando-se a velocidade constante U, encontra as ondas de
freqüência wω e ângulo de incidência χ . Esta freqüência de encontro tem
influência direta sobre os movimentos do navio. A seguinte relação existe entre as
freqüências de encontro e das ondas:
2 (χ)e w wU Cosg
ω ω ω= − (2.92)
No caso de ondas longitudinais e mar de proa ( ), a Equação
(2.92) simplifica-se:
χ = 180º
2e w
Ug wω ω= + ω (2.93)
Outro parâmetro importante a ser definido é a equação da superfície da
onda, que segundo a Teoria Linear de Airy, e definida por:
eζ( , , ,χ) = [ (χ) + (χ) ]wx y t A Cos kxCos kySen tω− (2.94)
Onde:
wA - Amplitude da onda;
k - Número de onda, dado por: 2 2w
w
kg Lω π
= = ;
wL - Comprimento da onda
Para ondas longitudinais e mar de proa, a equação da superfície da onda
ficará sendo:
eζ( , ) = [ + ]wx t A Cos kx tω (2.95)
48

Capítulo 2.- Modelo Matemático
2.3.1 Equações Lineares do Comportamento do Navio em Ondas
A seguir apresentamos o sistema de equações diferenciais que representa
o movimento do navio em ondas com três graus de liberdade; afundamento, jogo e
arfagem respectivamente. A nomenclatura é a mesma empregada por Rodriguez
(2004):
( ) ( )
( ) ( )
( )
z z z w
xx w
z z z yy w
m Z z Z z Z z Z Z Z Z t
J K K K K t
( )M z M z M z J M M M M t
θθ θ
φφ φ
θθ θ
θ θ θ
φ φ φ
θ θ θ
+ + + + + + =
+ + + =
+ + + + + + =
&& &&& &
&& &
&& &&& &
&& &&& &
&& &
&& &&& &
(2.96)
onde:
m: massa do navio
,xx yyJ J : inércias de massa do navio referida aos eixos x e y,
respectivamente.
, , , ,z zZ Z K M Mθ φ θ&& && &&&& && : termos de massa adicional
, , , ,z zZ Z K M Mθ φ θ& & && &
z
: termos de amortecimentos
, , , ,zZ Z K M Mθ φ θ : termos de restauração
,w w wZ K M excitação externa devido à onda, para os movimentos de
afundamento, jogo e arfagem, respectivamente.
Pode notar-se na Equação (2.96) que as equações de afundamento e
arfagem estão mutuamente acopladas, enquanto que a equação de jogo é
independente delas.
É interessante analisar como se modifica a Equação (2.96) quando se
considera o tanque acoplado linearmente. Assim, adicionamos as forças e
momentos devidos ao tanque representados nas Equações (2.86) até (2.88) e
consideramos a Equação (2.85), chegando ao seguinte sistema de equações:
49

Capítulo 2.- Modelo Matemático
( ) ( )
( ) ( )
( )
z z z z w
xx w
yy z z z z w
m Z z Z z Z z Z Z Z Z z Z Z Z t
J K K K K K K K K t
J M M M M z M z M z M M M z M M t
θ τ τφθθ θ τθ
φ τ φθτ τφθφ φ τφ
θ τθ τθ θ τθ
θ θ θ θ
φ φ φ τ τ φ φ
θ θ θ θ θ
+ + + + + + + + + =
+ + + + + + + =
+ + + + + + + + + + =
&& & &&&& & &&
&& & &&&&
&& & &&&& & &&
&& & &&&& & &&
&& & &&&&
&& & &&&& & && )
0T T T T Tτ τ φθτ φθφτ τ τ φ φ+ + + + =&&&& &&&&& &
(τφθ
(2.97)
Notamos na Equação (2.97) que a equação do tanque está diretamente
acoplada com o jogo e que devido ao tanque aparecem termos inerciais nos modos
de afundamento jogo e arfagem. Note-se também que o tanque introduz nas
equações de afundamento e arfagem termos constantes devido ao peso do fluido
dentro do tanque ( ,Z Mτφθ τφθ ).
Os acoplamentos lineares entre o jogo e o tanque podem ser observados na
forma matricial abaixo:
000
xx wJ K K K K K K K K
T TT T Kτφ τφ φ τφθ φθτφ
φθ φθττφ τ
φφ φττ τ
+ +⎡ ⎤ +⎡ ⎤⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤+ + =⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦⎣ ⎦⎣ ⎦
&& && && &
&& && &
&& &
&& &
(2.98)
Aqui as matrizes de inércia e restauração evidenciam os acoplamentos
entre jogo e o tanque.
2.3.2 Coeficientes Hidrodinâmicos e as Forças de Excitação:
A avaliação dos coeficientes de massa adicionada e amortecimento,
assim como as forças e momentos de excitação devido às ondas podem ser
obtidos utilizando a Teoria Potencial bidimensional. Assume-se que o
potencial de velocidade que caracteriza o campo de velocidades no entorno
do navio está dividido em uma parcela permanente associada à velocidade de
avanço do navio e outra parcela não permanente (em função do tempo)
50
Capítulo 2.- Modelo Matemático
associada às ondas incidentes e ao movimento permanente do navio. Para a
análise de comportamento em ondas este potencial não permanente é mais
importante e pode ser dividido em três componentes: potencial de onda
incidente, potencial de onda de difração e potencial de irradiação, sendo um
potencial para cada grau de liberdade do navio. Com a solução numérica dos
correspondentes problemas de valor de contorno (PVC) pode obter-se o
potencial total, para logo aplicar a equação de Bernoulli e obter as pressões na
superfície do casco, e com isto, as forças atuando no navio. As ações que
derivam do potencial incidente e difratado correspondem às forças e
momentos de excitação e as ações associadas ao potencial de irradiação
fornecerão as forças e momentos hidrodinâmicos.
As forças e momentos hidrodinâmicos são decompostas em parcelas
proporcionais à aceleração e à velocidade, onde definem-se os coeficientes de
massa adicional e amortecimento. Para obtenção desses coeficientes se utiliza
a Teoria das Faixas definida por Salvesen, Tuck e Faltinsen (1971), que
modela o problema tridimensional complexo como se fora a integração de
problemas bidimensionais. Ainda mediante a Teoria das Faixas podem ser
também calculadas as forças e momentos de excitação, as quais são
decompostas em duas parcelas: forças de Froude-Krilov e de difração.
Para o caso de ondas regulares, as forças de excitação para os
movimentos de afundamento, jogo e arfagem são expressas da seguinte
maneira:
)tcos(Z)t,(Z 3wewo αωχ +=
)tcos(K)t,(K 4wewo αωχ += (2.99) )tcos(M)t,(M 5wewo αωχ +=
2.3.3 Coeficientes de Amortecimento em Jogo
51
Capítulo 2.- Modelo Matemático
Como foi mencionado anteriormente, a Teoria Potencial é incapaz
de representar adequadamente os fenômenos de origem viscosa,
reconhecidamente relevantes no caso do amortecimento em jogo.
Conhecidas essas limitações, os efeitos viscosos foram tratados
separadamente, com a utilização de métodos semi-empíricos, que foram
obtidos a partir de experimentos com modelos em escala reduzida e alguns
resultados analíticos.
A formulação de Ikeda, apresentada por Himeno (1981), pode
adequar-se a uma grande variedade de formas de navios, além de levar em
conta o efeito de bolina e de velocidade de avanço. Levando em conta os
fenômenos físicos envolvidos no amortecimento de jogo ligados às
propriedades do escoamento fluido em torno do casco, o amortecimento em
jogo pode ser subdividido em cinco componentes principais, que são
expressas da seguinte maneira:
D F E L BKB B B B B Bφ = + + + + (2.100)
onde:
φB : Amortecimento total em jogo
DB : Amortecimento de onda do casco sem bolinas (wave damping).
FB : Amortecimento de fricção.
EB : Amortecimento por formação de vórtices (eddy damping).
LB : Amortecimento devido à sustentação (lift damping).
BKB : Amortecimento devido às bolinas (bilge keel damping)
O amortecimento devido à presença de bolinas não será avaliado,
devido a que está fora do objetivo deste trabalho.
As diferentes componentes do amortecimento possibilitam a
determinação de um coeficiente de amortecimento para um movimento
52
Capítulo 2.- Modelo Matemático
oscilatório forçado de jogo para uma dada freqüência e amplitude máxima
de jogo
O momento de amortecimento não linear em jogo é definido como
sendo do tipo:
φφφφ&&&
21 BBB += (2.101)
No Apêndice I são apresentados os coeficientes 1B e 2B , obtidos
pelo Método de Ikeda, para os navios analisados neste trabalho.
2.3.4 Equações Não-Lineares do Comportamento do Navio em
Ondas
Devido a que o modelo linear clássico representado na equação
(2.100) tem limitações para reproduzir alguns fenômenos físicos da
ressonância paramétrica, foram desenvolvidos vários modelos matemáticos
para reproduzir eficientemente estes fenômenos. Um desses modelos, que se
compara satisfatoriamente com resultados experimentais, é apresentado por
Rodríguez (2004), que desenvolve equações não-lineares para descrever os
acoplamentos entre afundamento, jogo e arfagem, incorporando termos não-
lineares até a terceira ordem. A seguir apresenta-se este sistema de equações
não lineares incluindo-se, no lado direito das equações, as forças e
momentos devido ao movimento do fluido dentro do tanque , ,ta ta taZ K M ,
assim:
( ) +++++++++++ θθφθθθ θθθφφθθθ zZZZzZZzZZZzZzZm zzzzzz222
21
21
21&&&&&& &&&&&&
++++++ 322223
61
21
21
21
21
61 θθθφφθ θθθθθφφθφφθ ZzZZzZzZzZ zzzzzzz
( ) ( ) ( ) ( ) ( ) ( ) ( ) +++++++ 22 φθθθ φφζθζζζθζζζζθζ tZztZtZztZztZtZztZ zzzzz
53

Capítulo 2.- Modelo Matemático
( ) taw ZtZtZ +=2)( θθθζ (2.102)
( ) +++++++ φθφφφφφφ φθφφφφφφ KzKKKKKJ zxx&&&&&
&&&&&
++++ φθφθφφ φθθθφφφφφ zKKKzK zzz 21
61
21 232
( ) ( ) ( ) ( ) tawz KtKtKztKtKtK +=+++ )( φθφφφ ζφθφζζζφζφ (2.103)
( ) +θ+θ+φ++θ++++θ+θ+ θθθφφθθθ zMMMzMMzMzMzMMMJ zzzzzzyy222
21
21
21
&&&&&&&&&&&&
++++++ 322223
61
21
21
21
21
61 θθθφφθ θθθθθφφθφφθ MzMMzMzMzM zzzzzzz
( ) ( ) ( ) ( ) ( ) ( ) ( ) +++++++ 22 φθθθ φφζθζζζθζζζζθζ tMztMtMztMztMtMztM zzzzz
( ) taw MtMtM +=2)( θθθζ
(2.104)
Nas Equações (2.102), (2.103) e (2.104) pode notar-se, além dos
termos lineares, o termo quadrático no amortecimento de jogo, o qual ajuda
a reproduzir eficientemente o amortecimento devido aos efeitos viscosos.
Os termos de segunda e terceira ordem na restauração, assim como
os termos de restauração devido à passagem da onda, incorporam os
acoplamentos dinâmicos do jogo com afundamento e arfagem, os quais são
fundamentais para reproduzir os efeitos da ressonância paramétrica (Neves e
Rodriguez, 2004, Neves e Rodriguez, 2005).
2.4 Equações Acopladas do Sistema Navio-Tanque com Coeficientes de
Quarta Ordem
Substituímos as Equações (2.82), (2.83) e (2.84) dentro das Equações
(2.102), (2.103) e (2.104), respectivamente. Ademais, consideramos o navio em
54

Capítulo 2.- Modelo Matemático
mar de proa. Então, para o movimento de jogo, a excitação devido às ondas é nula
. ( ) 0wK t =
Finalmente, com estas considerações o sistema de quatro equações não
lineares que representa o sistema dinâmico navio-tanque com quatro graus de
liberdade fica assim:
( ) +++++++++++ θθφθθθ θθθφφθθθ zZZZzZZzZZZzZzZm zzzzzz222
21
21
21&&&&&& &&&&&&
++++++ 322223
61
21
21
21
21
61 θθθφφθ θθθθθφφθφφθ ZzZZzZzZzZ zzzzzzz
( ) ( ) ( )z zZ t z Z t Z t zζ ζθ ζζθ+ + + (2.105)
( ) ( ) ( ) ( )2 2 ( )zz zZ t z Z t Z t z Z t Z tζ ζζθ ζ θ φφζ θθζ2θ θ φ+ + + + θ +
ττ
2 2 cos coszZ z Z Z Z Z Z Z Zτ τφθτθ φτ τφφ τθθ φτθ φτ φ θ φ θ φτ ττ+ + + + + + +&& & & & & & && &&&& &
&& & & & &&& &&& +& 2 2 2 2 ( )wZ Z Zφφττ θθττφ τ θ τ+ =& & & && & t
( ) +++++++ φθφφφφφφ φθφφφφφφ KzKKKKKJ zxx&&&&&
&&&&&
++++ φθφθφφ φθθθφφφφφ zKKKzK zzz 21
61
21 232
( ) ( ) ( ) ( ) ++++ φθφφφ ζφθφζζζφζφ tKztKtKtK z (2.106)
sen cosz zK K K z K K z K Kτ τ τφθτφ θτ τ φ τφθτ φ τ θτ φ φθ φ θ+ + + + + +&& && & & &&& && &&& && & & &&& && & +
2 2 cos cos( )K K K Kφθτθθτ φττ φττθ τ φτ φττ φ θ τ+ + +& & && & && && & & +
2 =
2 2sen cos( ) 0zK K z Kφθττ φττ φθττφ θ τ φτ φθτ+ +& & &&
& & &&
( ) +θ+θ+φ++θ++++θ+θ+ θθθφφθθθ zMMMzMMzMzMzMMMJ zzzzzzyy222
21
21
21
&&&&&&&&&&&&
++++++ 322223
61
21
21
21
21
61 θθθφφθ θθθθθφφθφφθ MzMMzMzMzM zzzzzzz
( ) ( ) ( )z zM t z M t M t zζ ζθ ζζθ+ + +
55
Capítulo 2.- Modelo Matemático
( ) ( ) ( ) ( )2 2 ( )zz zM t z M t M t z M t M tζ ζζθ ζ θ φφζ θθζ2θ θ φ+ + + +
2
2
2 2 2
sen
cos cos
sen( )
( )
z
z
wz
M z M M
M M M M z M M
M M M M
M M z M t
τ τθτθ
τφθ ττφτ φτ τφφ τ θ
θττθττ θττ φθτ
φφττ θ ττ
θ θ
θ +
φτ φτ φ θ φ θ ττ
θττ θττ θ τ φθτ
φ τ θ τ
+ + +
+ + + + +
+ + + +
+ =
&&&&
&& & & & & &&& &
&& & & &&
& & & &
&&&&
&& & & && &&
&& & & &&
& & &
+& (2.107)
2 2
sen cos
cos cos( ) 0z zT T T T z T T T z T
T T Tτ τ τ φθφ θτ φ φθ
φθτφφτ θθτ
τ τ φ τ θτ φ θ φ φθ
φ τ θ τ φ θ τ
+ + + + + + +
+ + =
&& && & & &&& & && &
& & & &
&& && & & &&& & && &
& &
+ (2.108)
Deve notar-se que os coeficientes , , , , ,Z K K K M Mτφθ τφθ φθτ φθττ τθ τφθ e Mθττ
representam as influências do peso do fluido dentro do tanque. Além disso,
notamos que este sistema não linear inclui termos de até quarta ordem devido aos
acoplamentos do tanque com os outros movimentos. Este sistema será resolvido
numericamente e se apresentará os resultados no Capitulo 3.
56

Capítulo 3.- Análises e Resultados
CAPÍTULO 3
ANÁLISES E RESULTADOS
Neste capítulo apresentam-se os resultados numéricos obtidos no presente trabalho. Dois
navios pesqueiros similares, Round - Stern (RS) e Transom Stern (TS) são utilizados para obter as
respostas numéricas. Foi mostrado experimental e numericamente que os dois navios são
propensos à ressonância paramétrica, (Pérez et al., 2000, Neves et al., 2002). Inicialmente serão
apresentadas as respostas de jogo sem tanque de estabilização. Em seguida será projetado o
tanque capaz de proporcionar uma eficiente sintonia com o navio. Posteriormente, serão
apresentadas as respostas dos navios com tanque de estabilização e estas serão comparadas com
as respostas dos navios sem tanque. Serão variados os diferentes parâmetros do tanque com o
objetivo de verificar suas influências sobre a ressonância paramétrica. As respostas serão
apresentadas para o movimento de jogo com as ondas incidindo sobre o navio pela proa.
3.1 Generalidades
Como foi apresentado no Capítulo 1, o objetivo do presente trabalho é
analisar a influência do tanque estabilizador passivo tipo U sobre a ressonância
paramétrica. Para atingir este objetivo precisamos inicialmente determinar e
analisar as respostas dos navios sem tanque de estabilização, para diferentes
condições de mar e velocidade de avanço.
Sabemos que em geral os movimentos do navio podem ser definidos
linearmente por equações diferenciais ordinárias, sendo facilmente resolvidas em
forma analítica, obtendo os resultados em função da freqüência. No entanto, para
57

Capítulo 3.- Análises e Resultados
n
reproduzir a dinâmica da ressonância paramétrica precisamos usar equações não
lineares. Uma dessas equações não lineares, comparadas satisfatoriamente com
resultados experimentais, foi desenvolvida por Rodríguez (2004) e apresentadas
no Capítulo 2. Estas equações não lineares NÃO têm soluções analíticas
conhecidas, e para serem solucionadas devemos integrá-las numericamente em
função do tempo. Assim, no presente trabalho foi utilizado um algoritmo de
integração, baseado no método de Runge Kutta de 4a ordem, para solucionar o
sistema de equações diferencias não lineares que representa os movimentos do
navio em afundamento, jogo e arfagem, obtendo as soluções em função do tempo.
Assim podem obter-se as respostas para uma faixa de freqüências, a partir do
regime permanente de cada série temporal. Uma das principais vantagens de obter
resultados numéricos, que representam os movimentos do navio, é que podem ser
analisadas outras zonas de instabilidade para diferentes sintonias, com tempo e
custos muito menores ao serem comparados com testes experimentais.
3.2 Testes Experimentais – Resultados
É importante ressaltar que os navios RS e TS já foram testados
experimentalmente com modelos reduzidos no Canal de Experiências
Hidrodinâmicas da Universidade Austral do Chile, com o objetivo de identificar
algumas características dinâmicas relacionadas com a ressonância paramétrica.
Serão considerados aqui estes resultados experimentais para tê-los por referência
ao obter os resultados numéricos quando consideramos o navio trabalhando sem
tanque de estabilização. Deve notar-se que os resultados experimentais foram
realizados somente para a sintonia 42eω ω= , que é a primeira região de
instabilidade, onde se mostrou grande possibilidade de encontrar ressonância
paramétrica. Informações adicionais referentes a estes testes podem ser
encontradas em Pérez et al. (2000) e Neves et al. (2002). A seguir apresentam-se
os resultados dos testes experimentais para os dois navios em duas condições de
carregamento, para diferentes velocidades e amplitudes de onda.
58
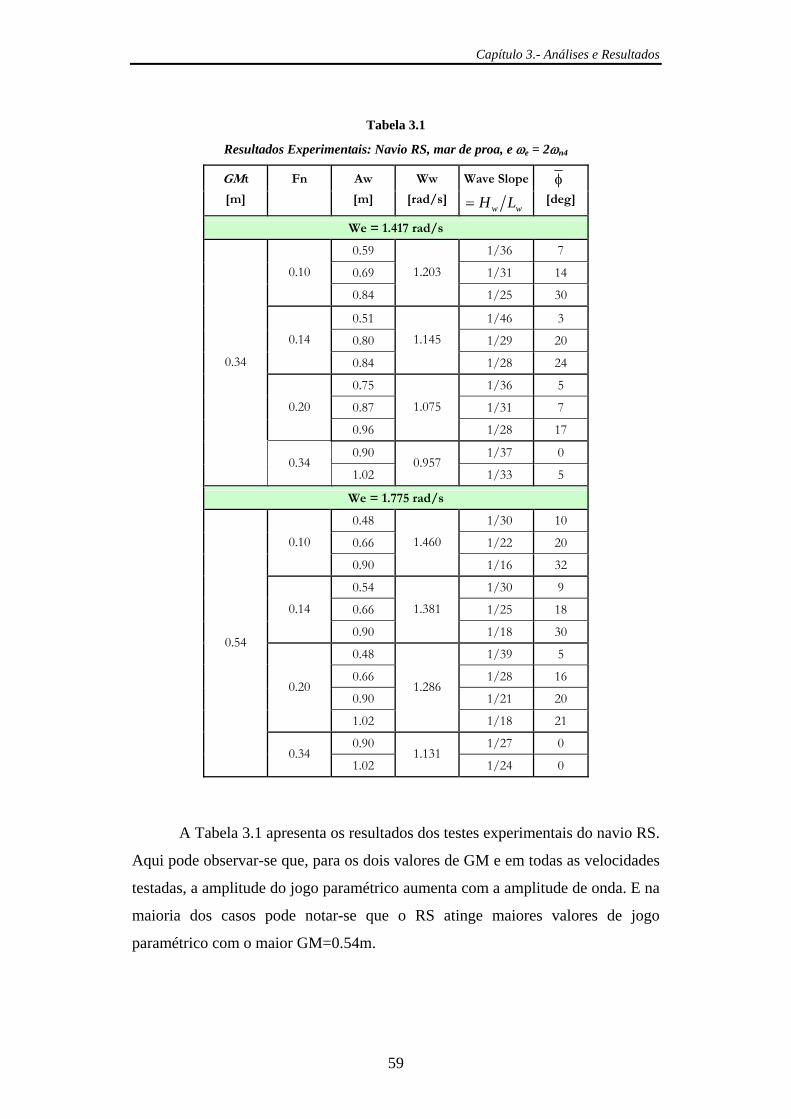
Capítulo 3.- Análises e Resultados
Tabela 3.1
Resultados Experimentais: Navio RS, mar de proa, e ωe = 2ωn4
GMt Fn Aw Ww Wave Slope φ [m] [m] [rad/s] Hw wL= [deg]
We = 1.417 rad/s 0.59 1/36 7
0.69 1/31 14 0.10
0.84
1.203
1/25 30
0.51 1/46 3
0.80 1/29 20 0.14
0.84
1.145
1/28 24
0.75 1/36 5
0.87 1/31 7 0.20
0.96
1.075
1/28 17
0.90 1/37 0
0.34
0.34 1.02
0.957 1/33 5
We = 1.775 rad/s 0.48 1/30 10
0.66 1/22 20 0.10
0.90
1.460
1/16 32
0.54 1/30 9
0.66 1/25 18 0.14
0.90
1.381
1/18 30
0.48 1/39 5
0.66 1/28 16
0.90 1/21 20 0.20
1.02
1.286
1/18 21
0.90 1/27 0
0.54
0.34 1.02
1.131 1/24 0
A Tabela 3.1 apresenta os resultados dos testes experimentais do navio RS.
Aqui pode observar-se que, para os dois valores de GM e em todas as velocidades
testadas, a amplitude do jogo paramétrico aumenta com a amplitude de onda. E na
maioria dos casos pode notar-se que o RS atinge maiores valores de jogo
paramétrico com o maior GM=0.54m.
59

Capítulo 3.- Análises e Resultados
Tabela 3.2
Resultados Experimentais: Navio TS, mar de proa, e ωe = 2ωn4
GMt Fn Aw Ww Wave Slope φ [m] [m] [rad/s]
w wH L= [deg]
We = 1.717 rad/s
0.30 1/53 15 0.11
0.66 1.396
1/24 27
0.45 1/39 18 0.15
1.02 1.323
1/17 28
0.45 1/44 4 0.20
0.60 1.249
1/33 19
0.60 1/40 5
0.37
0.30 0.78
1.136 1/31 38
We = 1.968 rad/s
0.39 1/32 19
0.63 1/20 22 0.11
1.02
1.564
1/12 27
0.39 1/36 2
0.60 1/24 13 0.15
1.08
1.477
1/13 16.5
0.20 1.02 1.389 1/16 0
0.50
0.30 1.02 1.257 1/19 0
Ondeφ é o regime permanente das respostas temporais em jogo.
Considerando os resultados experimentais do TS (Tabela 3.2) pode
observar-se as mesmas tendências das respostas, quando são comparados o
aumento do jogo paramétrico com a amplitude de onda.
Para obter um melhor estudo da ressonância paramétrica em função da
velocidade do navio, da Tabela 3.1 podemos analisar as respostas experimentais
do RS para as duas condições de carregamento, mantendo a amplitude da onda
constante.
60

Capítulo 3.- Análises e Resultados
Navio RS: Jogo (We=2Wn4,experimental)
0
10
20
30
40
0,00 0,10 0,20 0,30Fn
Âng
ulo
de J
ogo
(gra
us)
GM=0.34m, Aw=0.84mGM=0.54m, Aw=0.90m
Figura 3.1 Navio RS: Resposta em Jogo (experimental), sintonia ( 42e nω ω= ).
Da Figura 3.1 podemos notar que para uma amplitude de onda constante, a
amplitude do jogo paramétrico diminui com a velocidade. Esta tendência é
mantida para as duas condições de carregamento. Isto possivelmente é devido ao
amortecimento linear ( Kφ& ) que aumenta com a velocidade, aumentando a
dissipação de energia. A dependência deste coeficiente com a velocidade e
freqüência é apresentada no Apêndice I. Outra característica importante a notar-se
é que numa mesma velocidade, a resposta de jogo incrementa para o maior GM.
Com ajuda da Tabela 3.2 repetimos o procedimento anterior, agora para o
TS. Assim, apresentamos as respostas experimentais em duas condições de
carregamento mantendo a amplitude de onda constante e para diferentes números
de Froude. Devemos assinalar que com o objetivo de manter a amplitude
constante para diferentes velocidades e supondo que o jogo paramétrico aumenta
com a amplitude da onda, foram interpoladas algumas amplitudes de jogo. Esta
interpolação pode trazer erros nas respostas reais, por isso estas respostas
experimentais serão comparadas posteriormente com as respostas numéricas
obtidas no presente trabalho.
61

Capítulo 3.- Análises e Resultados
Navio TS: Jogo (We=2Wn4, experimental)
0
10
20
30
40
0,00 0,10 0,20 0,30Fn
Âng
ulo
de J
ogo
(gra
us)
GM=0.37m, Aw=0.78mGM=0.50m, Aw=1.02m
Figura 3.2 Navio TS: Resposta em Jogo (experimental), sintonia ( 42e nω ω= ).
Na Figura 3.2 deve notar-se que com GM e amplitude de onda menor, se
atinge maiores amplitudes de jogo, esta tendência é contraria ao RS. Assim
também deve notar-se, para o GM= 0.50m (maior), que a amplitude de jogo
diminui com o aumento da velocidade. Esta tendência pode notar-se para todas as
velocidades testadas. Já para o GM=0.37m (menor) mantém-se a mesma
tendência para baixas velocidades ( 0.15Fn ≤ ) e pelo contrario, para altas
velocidades o jogo paramétrico aumenta. Como veremos mais adiante, esta
configuração nem sempre acontece em todas as sintonias e as respostas dependem
de outros parâmetros do sistema.
3.3 Respostas em Jogo SEM Tanque de Estabilização
Em seqüência são apresentados os resultados numéricos para os navios
sem tanque de estabilização. Com a intenção de comparar as respostas em iguais
condições, começamos as simulações numéricas para os navios avançando com
. 0.20Fn =
3.3.1 Efeito da Freqüência Natural de Jogo 4( )nω
62

Capítulo 3.- Análises e Resultados
Quando o navio muda de massa, seja pelo consumo de
combustível ou mudança da carga, varia a posição do centro de
gravidade do navio, varia o GM e consequentemente varia a freqüência
natural de jogo. Daí a importância de analisar as respostas dos navios
para diferentes condições de carregamento.
Para o navio RS obtemos as respostas, para amplitude de onda
0.69wA m= , mostradas na Figura 3.3 para diferentes GMs e
freqüências naturais de jogo.
Figura 3.3 Respostas em Jogo SEM tanque Navio RS: Fn=0.20, Onda: Aw=0.69m, ksi=18
É interessante observar na Figura 3.3 que as máximas respostas
não oco
0º
rrem sempre para o menor GM, embora a região de freqüências
que excitam o jogo paramétrico seja mais ampla (ver resposta para
GM=0.34m). Pelo contrário, as maiores amplificações ocorrem para o
maior GM em uma região de freqüências menor.
63

Capítulo 3.- Análises e Resultados
A seguir são apresentadas as respostas de jogo para o navio TS
para as mesmas condições de carregamento para uma amplitude de
onda de 0.60wA m= , estas respostas são apresentadas na Figura 3.4.
Figura 3.4 Respostas em Jogo SEM tanque Navio TS: Fn=0.20, Onda: Aw=0.60m, ksi=180º
No caso do navio TS (Figura 3.4) as variações não são tão
marcan
Outra característica importante a ser notada é que
compro
tes, mas as mesmas tendências são mantidas, obtendo-se em
geral respostas menores para o navio TS com uma maior região de
freqüências. Deve lembrar-se que estas respostas de jogo são obtidas
para 0.20Fn = .
vamos o inicio do jogo paramétrico sempre próximo à sintonia
de ressonância 42e nω ω= , para todas as condições de carregamento
analisadas. Poré os que o jogo paramétrico não se limita
somente a esta sintonia de ressonância, senão que atinge outras
sintonias maiores; estas características de instabilidade não foram
m, notam
64

Capítulo 3.- Análises e Resultados
observadas nos testes experimentais devido a que a sintonia testada foi
limitada a um único valor.
3.3.2 Efeito da Velocidade de Avanço, Número de Froude ( ) nF
Como notamos nas Figuras 3.1 e 3.2, outro parâmetro
importante a ser analisado é a velocidade de avanço do navio (número
de Froude). Paralelamente, depois de analisar as respostas do navio
para diferentes condições de carregamento, se decide prosseguir com a
análise utilizando um GM alto para o navio RS (GM=0.50m) e um GM
baixo para o TS (GM=0.37m), isto com a intenção de obter maiores
amplitudes de jogo e ao mesmo tempo obter uma mesma freqüência
natural ( 4 0.858nω = rad/s), permitindo sintonizar-se um mesmo
tanque para os dois navios.
Figura 3.5 Respostas em Jogo SEM tanque,
Navio RS: GM=0.50m, Onda: Aw=0.69m, ksi=180º
65

Capítulo 3.- Análises e Resultados
A Figura 3.5 mostra a resposta do RS para diferentes números
de Froude. A tendência é que a amplitude do jogo aumenta com a
velocidade em toda a faixa de freqüências, à exceção das respostas
para , que atinge amplitudes de jogo maiores quando se
compara com e
0.00Fn =
0.10Fn = 0.14Fn = . É interessante notar que este
comportamento é diferente dos resultados dos testes experimentais
mostrados na Figura 3.1, onde a amplitude de jogo diminui com o
aumento do número de Froude. Isto é devido a que analisamos as
respostas para outro GM e com amplitude de onda menor
( 0.69wA m= ).
A seguir repetimos a mesma análise para o TS, chegando aos
resultados da Figura 3.6.
Figura 3.6 Respostas em Jogo SEM tanque, Navio TS: GM=0.37m, Onda: Aw=0.60m, ksi=180º
66

Capítulo 3.- Análises e Resultados
As respostas do navio TS para diferentes números de Froude
(Figura 3.6) mantém as mesmas tendências que o navio RS (Figura
3.5). Mas pode notar-se que algumas respostas não concordam com a
física do problema, atingindo valores de jogo muito acima do
esperado, inclusive indo para o infinito. Isto pode ser visto na Figura
3.6 para as respostas com 0.00Fn = e 0.30Fn = . Esse problema será
discutido no item seguinte.
3.3.3 Efeito da Inclinação da Onda ( )w
w
HsteepnessL
=
Um dos motivos pela qual se atinge grandes amplitudes de
jogo, é que nos resultados analisados a amplitude de onda se mantém
constante para todas as freqüências. Ao manter a amplitude de onda
constante e atingir altas freqüências, o perfil da onda se deforma
consideravelmente, chegando a configurações muito diferentes das
ondas reais.
Para solucionar este problema, se quantifica o perfil da onda em
função do adimensional steepness (ou inclinação da onda), que
relaciona altura ( )wH e comprimento da onda ( )wL . Supondo que o
navio navega em águas profundas, o comprimento de onda pode ser
relacionado facilmente com a freqüência da onda ( )wω . Esta análise é
importante porque ao manter o steepness constante ao longo da
freqüência, se representa melhor o perfil da onda. Assim, para baixas
freqüências haverá altas amplitudes de onda e para altas
freqüências haverá baixas amplitudes de onda mantendo um perfil
de onda proporcional ao longo da freqüência.
Tendo esta consideração fazemos os cálculos anteriores para
diferentes velocidades e mantemos o steepness constante
, obtendo as seguintes respostas em jogo. ( / 1/ 40w wH L = )
67

Capítulo 3.- Análises e Resultados
Figura 3.7 Respostas em Jogo SEM tanque, Navio RS
: GM=0.50m, Onda: / 1/ 40w wH L = , ksi=180º
Na Figura 3.7 são apresentadas as respostas do navio RS. Aqui
pode notar-se com
om o intuito de melhorar as respostas do navio TS, quando
analisam
o diminuem as amplitudes máximas de jogo,
principalmente em altas freqüências. Agora, notamos que o jogo
aumenta proporcionalmente para todas as velocidades. Este fenômeno
não pode ser visto quando se mantém a amplitude de onda constante.
Em geral, comparando a Figura 3.5 com a Figura 3.7, nota-se que
mantendo um stepness constante, ou seja, modificando a amplitude da
onda para cada freqüência, a resposta de jogo é muito melhor
comportada.
C
os a resposta de jogo para diferentes velocidades, se repete o
procedimento anterior mantendo o mesmo steepness constante,
obtendo as respostas apresentadas na Figura 3.8.
68

Capítulo 3.- Análises e Resultados
0Figura 3.8 Respostas em Jogo SEM tanque,
Navio TS: GM=0.37m, Onda: / 1/ 4w wH L = , ksi=180º
Na Figura 3.8 pode notar-se como os resultados concordam
com a física do problema, eliminando os casos em que o jogo tende ao
infinito e suavizando as curvas de resposta.
Comparando as Figuras 3.6 e 3.8 uma vez mais, notamos que a
amplitude do movimento de jogo é proporcional à velocidade do navio,
à exceção da resposta sem velocidade ( 0.00Fn = ), que incrementa a
amplitude de jogo quando se compara com 0.11Fn = . Este fenômeno
é devido a que a componente de amortecimento devido à sustentação
ajuda a uma maior dissipação de energia com o navio avançando. Estas
forças de sustentação estão relacionadas com Kφ& . Este fenômeno
também pode notar-se nos resultados experimentais (Figura 3.1).
3.3.4 Efeito da Amplitude de Onda ( )wA
69
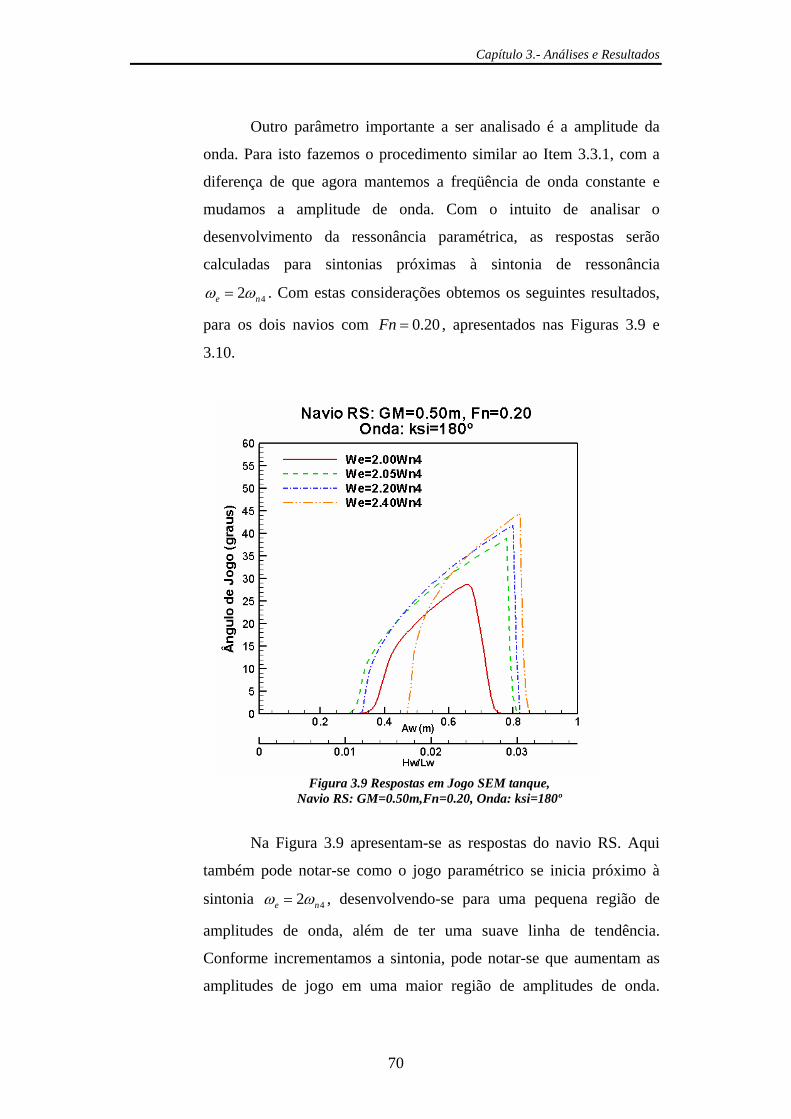
Capítulo 3.- Análises e Resultados
n
Outro parâmetro importante a ser analisado é a amplitude da
onda. Para isto fazemos o procedimento similar ao Item 3.3.1, com a
diferença de que agora mantemos a freqüência de onda constante e
mudamos a amplitude de onda. Com o intuito de analisar o
desenvolvimento da ressonância paramétrica, as respostas serão
calculadas para sintonias próximas à sintonia de ressonância
42eω ω= . Com estas considerações obtemos os seguintes resultados,
para os dois navios com 0.20Fn = , apresentados nas Figuras 3.9 e
3.10.
Figura 3.9 Respostas em Jogo SEM tanque, Navio RS: GM=0.50m,Fn=0.20, Onda: ksi=180º
Na Figura 3.9 apresentam-se as respostas do navio RS. Aqui
também pode notar-se como o jogo paramétrico se inicia próximo à
sintonia 42e nω ω= , desenvolvendo-se para uma pequena região de
amplitudes de onda, além de ter uma suave linha de tendência.
Conforme incrementamos a sintonia, pode notar-se que aumentam as
amplitudes de jogo em uma maior região de amplitudes de onda.
70

Capítulo 3.- Análises e Resultados
Assim comprovamos novamente que a ressonância paramétrica não se
limita à sintonia 42e nω ω= .
Figura 3.10 Respostas em Jogo SEM tanque, Navio TS: GM=0.37m, Fn=0.20, Onda: ksi=180º
Notamos nas Figuras 3.9 e 3.10 que na maioria das respostas, a
amplitude do movimento de jogo incrementa-se com a amplitude da
onda (esta tendência foi notada nos testes experimentais), chegando a
um valor de amplitude onde as respostas decrescem muito
rapidamente. Esta característica é própria do modelo de terceira ordem
presente na primeira zona de instabilidade, onde a amplitude de jogo
tende a estabilizar-se para altas amplitudes de onda (Neves e
Rodriguez, 2006). Isto será analisado posteriormente utilizando o
diagrama 4/e nω ω vs. wA .
Deve notar-se que nestas últimas respostas se apresentam, no
eixo das abscissas, os diferentes steepness atingidos para cada
amplitude de onda. Cabe assinalar que as faixas de steepness
71
Capítulo 3.- Análises e Resultados
encontrados num mar real estão na ordem de 0.016 (1/60) até 0.05
(1/20), os quais são mostrados nos resultados anteriores.
3.3.5 Mapeamento no plano 4/e nω ω vs. wA
Como foi notado nos Itens 3.3.1 até 3.3.4 os parâmetros mais
importantes a serem analisados com respeito à onda são amplitude e
freqüência. Para uma análise mais detalhada da influência destes
parâmetros construímos os gráficos 4/e nω ω vs. wA , onde as
amplitudes de jogo são apresentadas em função de cores conforme as
legendas mostradas. Esses gráficos representam as zonas de
instabilidade em jogo. Os limites de sintonia ( 4/e nω ω ) e amplitude de
onda ( wA ) foram escolhidos tratando de não atingir valores de
steepness onde a onda quebra ( / 1/w wH L 11≤ ).
Estas zonas de instabilidade foram analisadas por Valério
(1994), que mostrou que os limites de estabilidade da equação não
linear de segunda ordem de jogo podem ser obtidos por expansão da
equação de Mathieu utilizando o método das perturbações. Desse
trabalho podemos ressaltar que da equação não linear de jogo (de
segunda ordem) podemos encontrar duas zonas marcantes de
instabilidade: a primeira zona de instabilidade próxima à sintonia
42e nω ω= com uma maior região instável, e a segunda zona de
instabilidade próxima à sintonia 4e nω ω= . O autor concluiu que a
segunda zona de instabilidade é mais sensível ao amortecimento
comparado com a primeira zona.
O modelo anterior foi aprimorado por Rodrigues (2004), que
apresentou o modelo não linear de terceira ordem e mostrou que este
modelo tem melhor concordância com os testes experimentais.
Também analisou os limites de estabilidade analiticamente, baseado na
72

Capítulo 3.- Análises e Resultados
Figura 3.11 Respostas em Jogo SEM tanque,
Notamos na Figura 3.11 a existência das duas regiões de
instabil
metodologia apresentada por Hsu (1963). O autor concluiu que, neste
novo modelo, não pode ser aplicada a equação de Mathieu para a
análise da estabilidade, devido aos termos bi-harmônicos associados ao
modelo de terceira ordem, sendo a alternativa mais adequada a
Equação de Hill. Posteriormente, Neves e Rodriguez (2006)
propuseram uma metodologia numérica para o levantamento dos
limites de estabilidade do sistema de terceira ordem, que é a
sistemática que será empregada aqui.
Com o intuito de comparar as respostas para duas condições de
carregamento, se realizam os cálculos no RS com GM=0.34m e
GM=0.50m, para dois números de Froude diferentes.
idade, a primeira zona de instabilidade próxima à sintonia
42e nω ω= e a segunda zona de instabilidade, próxima à sintonia
4e nω ω= .
73

Capítulo 3.- Análises e Resultados
otamos uma maior região na primeira zona de instabilidade,
atingin
N
do ângulos de jogo de até 48ºφ = . Também pode conferir-se
que a primeira zona de instabilida icia na sintonia próxima a
42e n
de se in
ω ω= (esta característica pode ser notada nos resultados
tais da Tabela 3.1) e continua para freqüências e amplitudes
de onda maiores.
experimen
ode notar-se, na primeira zona de instabilidade (pela diferença
de core
om a intenção de analisar a influência da velocidade do navio,
repetim
P
s), que em uma mesma sintonia o jogo paramétrico aumenta
progressivamente com a amplitude de onda, existindo um limite
superior onde o jogo decresce rapidamente até estabilizar-se. Esta
característica é própria do modelo de terceira ordem onde os
parâmetros do sistema dinâmico estabilizam o movimento de jogo para
amplitude de ondas maiores. Deve apontar-se que está característica
não é reproduzida pelo modelo de segunda ordem, como apontado por
Neves e Rodrigues (2005).
C
os os cálculos anteriores para uma velocidade maior com
0.34Fn = . Segundo os testes experimentais, pode esperar-se que na
42e nsintonia ω ω= diminua a resposta de jogo, numa mesma amplitude
de onda 0.900.84wA m− . ≈
74

Capítulo 3.- Análises e Resultados
Figura 3.12 Respostas em Jogo SEM tanque,
Efetivamente, comparando as Figuras 3.11 e 3.12, pode notar-
se que o jogo paramétrico diminui de amplitude na sintonia 42e nω ω= ,
embora aumente para sintonias maiores. Com o aumento da
velocidade, no início da primeira zona de instabilidade, é mais difícil
encontrar ressonância paramétrica para pequenas amplitudes de onda
( 0.75wA m≤ ), embora tendo uma maior região de instabilidade para
mais altas sintonias. A tendência para este GM é que com o aumento
da velocidade a primeira zona de instabilidade se desloca para cima da
sintonia 42e nω ω= , e no entorno da segunda zona de instabilidade
tende a desaparecer. Estas características foram encontradas por
Valério (1994), que são atribuídas ao amortecimento linear que
incrementa com a velocidade.
A seguir apresentamos na Figura 3.13 as respostas do navio RS
para um GM maior (GM=0.50m) com 0.20Fn = .
75

Capítulo 3.- Análises e Resultados
n
Figura 3.13 Respostas em Jogo SEM tanque,
Comparando as Figuras 3.11 e 3.13, mesma velocidade com
GM diferentes, notamos que o aumento do GM diminui
consideravelmente a regiao da primeira zona de instabilidade, embora
fique mais instável devido a que se atinge jogo paramétrico em baixas
amplitude de onda, sobretudo em sintonias proximas a 42eω ω= . Pode
conferir-se que estas tendências forem notadas claramente nos ensaios
experimentais (Figura 3.1). Devido a isto, é mais interessante escolher
o GM=0.50m para testar o tanque de estabilização.
A seguir mantemos o mesmo GM=0.50 e aumentamos a
velocidade ( ), obtendo os seguintes resultados para o navio
RS, apresentados na Figura 3.14.
0.34Fn =
76

Capítulo 3.- Análises e Resultados
Figura 3.14 Respostas em Jogo SEM tanque,
Comparando as Figuras 3.13 e 3.14, notamos que com uma
maior velocidade se elimina completamente a segunda zona de
instabilidade e aumenta ligeiramente a região da primeira zona de
instabilidade, mostrando-se ainda a presença de ressonância
paramétrica em baixas amplitudes de onda e em sintonias maiores.
Devido a que atingimos a zona de instabilidade com baixas amplitudes
de onda, decide-se aqui por calcular as respostas do navio com tanque
considerando o GM=0.50m e 0.34Fn = . Assim estaremos verificando
a aplicação do tanque estabilizador para a pior condição desse navio.
Comparando as Figuras 3.12 e 3.14, mesma velocidade com
diferentes GM, pode observar-se a mesma tendência do caso de
, ficando mais instável para o maior GM=0.50m, atingindo
jogo paramétrico a partir de
0.20Fn =
0.33wA m= na sintonia 42.25e nω ω= . Já
77

Capítulo 3.- Análises e Resultados
no menor GM=0.34m, começa a aparecer o jogo paramétrico em uma
amplitude de onda maior com 0.50wA m= e sintonia 42.50e nω ω= .
A seguir repetimos o procedimento anterior agora para o navio
TS. Devido a resultados numéricos anteriores, se esperam obter
respostas menores em uma região maior de freqüências (Figura 3.4),
quando se compara com o RS (Figura 3.3).
Assim, obtemos as respostas para um baixo GM=0.37m e
, obtendo os seguintes resultados apresentados na Figura
3.15.
0.20Fn =
Figura 3.15 Respostas em Jogo SEM tanque,
Comparando a Figura 3.11 com a Figura 3.15, navios RS e TS
com baixos GM e mesma velocidade, pode notar-se que o TS atinge
menores amplitudes de jogo embora seja mais instável devido a que
atinge o jogo paramétrico para menores amplitudes de onda, sobretudo
na primeira zona de instabilidade. Estas características das respostas
são atribuídas à diferença da forma do casco que influencia
direitamente os coeficientes de restauração estáticos e devidos à
78

Capítulo 3.- Análises e Resultados
passagem da onda. Ou seja, a forma da popa Transom é mais instável
do ponto de vista dinâmico. Esta forma da popa influencia diretamente
a distribuição longitudinal de “flare” (inclinação do casco na linha de
flutuação), que por sua vez determina todos os coeficientes
restaurativos. Como podemos notar no Apêndice I, Item I.4., estes
coeficientes são maiores no TS para todas as freqüências de onda.
Deve observar-se na Figura 3.15 que a primeira zona de
instabilidade apresenta novamente limite superior. Estas características
dinâmicas não foram percebidas durante os testes experimentais,
devido ao fato de que estes foram realizados para uma única sintonia.
A seguir mantemos o GM=0.37m e aumentamos a velocidade
para . Os resultados são apresentados na Figura 3.16. 0.30Fn =
Figura 3.16 Respostas em Jogo SEM tanque,
Pode notar-se da Figura 3.16, que para uma maior velocidade e
0.60wA m< se atinge aproximadamente os mesmos ângulos de jogo.
Para valores maiores notamos um aumento rápido de jogo passando de
79

Capítulo 3.- Análises e Resultados
35ºφ = a 90ºφ = (emborcamento), para um pequeno incremento na
amplitude de onda, sendo esta a configuração mais perigosa até o
momento. Pode conferir-se da Tabela 3.2, GM=0.37m, , que
a resposta para
0.30Fn =
0.60wA m= é 5ºφ = . Depois de um pequeno
incremento da amplitude de onda atingimos 38ºφ = . Estas respostas
experimentais são bem reproduzidas nas respostas numéricas da Figura
3.16.
Nesta última figura pode notar-se que dentro da primeira zona
de instabilidade existe uma zona instável crítica bem marcante (região
vermelha). Esta zona pode ser atingida para sintonias 42e nω ω≥ e
amplitudes de onda entre 0.57 0.87wm A m≤ ≤ . Se comparamos as
Figuras 3.12 e 3.16, RS e TS com GM baixos e altas velocidades,
notamos que em condições semelhantes o TS é novamente mais
instável, atribuindo-se esta característica à diferencia na forma da
popa, como discutimos anteriormente.
Repetimos aqui o procedimento anterior para GM=0.50m, para
duas velocidades diferentes.
Figura 3.17 Respostas em Jogo SEM tanque,
80

Capítulo 3.- Análises e Resultados
Comparando as Figuras 3.15 e 3.17, notamos para uma mesma
velocidade, que o aumento do GM diminui a região da primeira zona
de instabilidade, embora sejam atingidos maiores amplitudes de jogo
em amplitudes de onda e freqüências altas. Para estes dois casos inicia-
se a zona de instabilidade para baixas amplitudes de onda
( 0.25wA m≈ ). A segunda zona de instabilidade só aparece para
amplitudes de onda 0.75wA m> . De forma geral podemos afirmar que
o aumento do GM estabiliza o movimento de jogo para este número de
Froude. Na segunda zona de instabilidade podemos notar aumentos
violentos do jogo paramétrico, sendo possível chegar facilmente ao
emborcamento com uma pequena mudança na amplitude de onda.
Devemos lembrar que ao aumentar o GM, os parâmetros que influem
no comportamento do navio são os coeficientes de restauração estática
que ajustam a curva de estabilidade estática.
Agora, para analisar a influência da velocidade mantemos o
GM=0.50m e aumentamos velocidade ( 0.30Fn = ).
Figura 3.18 Respostas em Jogo SEM tanque,
81

Capítulo 3.- Análises e Resultados
n
Comparando as Figuras 3.17 com 3.18, mesmo GM e diferentes
velocidades, notamos que o aumento da velocidade aumenta a região
da primeira zona de instabilidades. Pelo contrário, a região da segunda
zona de instabilidade tende a diminuir, sendo que esta tendência pode
notar-se nos casos anteriores com o aumento da velocidade.
Igualmente, ao comparar as Figuras 3.16 com 3.18 notamos que
para uma mesma velocidade o GM maior mostra menor região das
zonas de instabilidade. Isto confirma que o TS é mais estável para um
maior GM. Além disso, podemos notar na Figura 3.18, na sintonia
42eω ω= , que não aparecem incrementos rápidos da respostas de jogo
(desaparece a zona vermelha nesta sintonia). Esta tendência pode ser
conferida nos resultados experimentais mostrados na Tabela 3.2.
Depois de todos os mapeamentos anteriores, podemos concluir
que com o aumento da velocidade, para um mesmo GM, tende a
diminuir a região da segunda zona de instabilidade. Pelo contrário, a
região da primeira zona de instabilidade tende a aumentar. O aumento
do GM, para uma mesma velocidade, diminui tanto a primeira como a
segunda zona de instabilidade. Além disso, devemos apontar que para
continuar com a análise e utilizar o tanque de estabilização,
escolhemos os casos mais críticos encontrados nos dois navios: para o
RS: GM=0.50m com 0.34Fn = , e para o TS: GM=0.37m com
. 0.30Fn =
3.4 Projeto e Sintonização do Tanque
Analisadas as respostas em jogo e escolhidos os casos mais críticos, nosso
passo seguinte é projetar o tanque de estabilização para atingir uma máxima
eficiência e verificar a possibilidade de eliminar o jogo paramétrico em todas as
amplitudes e freqüências de onda.
82
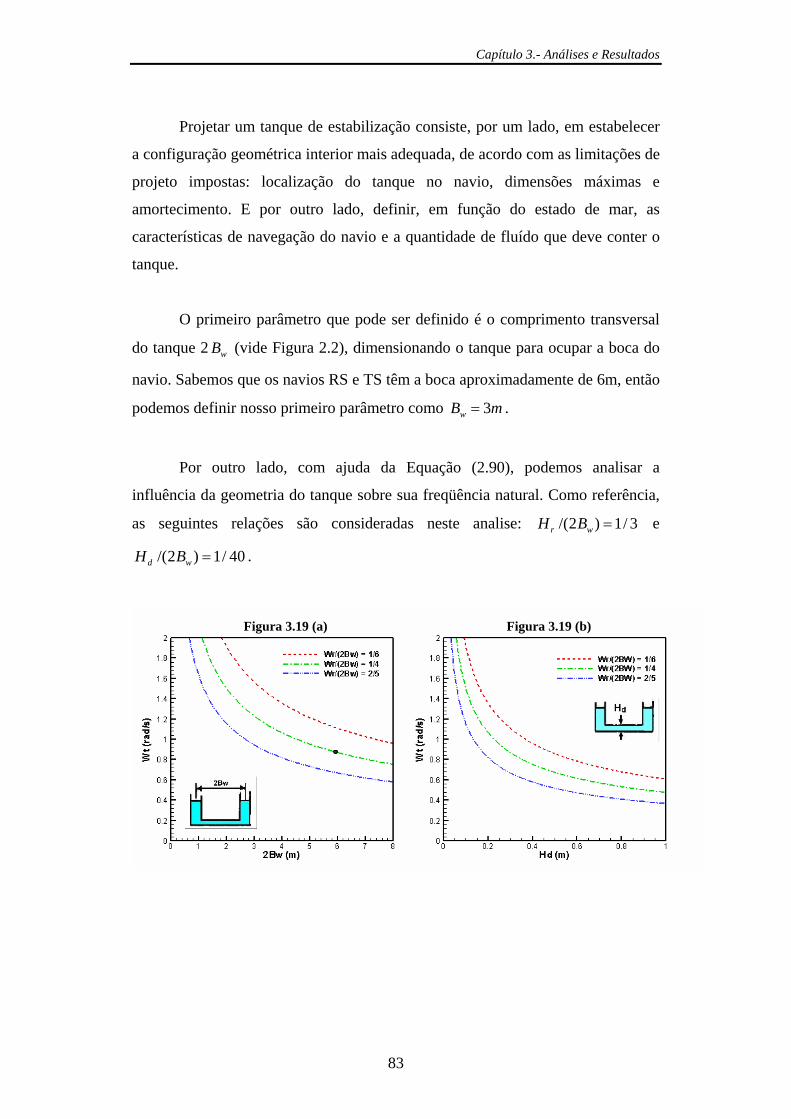
Capítulo 3.- Análises e Resultados
Projetar um tanque de estabilização consiste, por um lado, em estabelecer
a configuração geométrica interior mais adequada, de acordo com as limitações de
projeto impostas: localização do tanque no navio, dimensões máximas e
amortecimento. E por outro lado, definir, em função do estado de mar, as
características de navegação do navio e a quantidade de fluído que deve conter o
tanque.
O primeiro parâmetro que pode ser definido é o comprimento transversal
do tanque 2 wB (vide Figura 2.2), dimensionando o tanque para ocupar a boca do
navio. Sabemos que os navios RS e TS têm a boca aproximadamente de 6m, então
podemos definir nosso primeiro parâmetro como 3wB m= .
Por outro lado, com ajuda da Equação (2.90), podemos analisar a
influência da geometria do tanque sobre sua freqüência natural. Como referência,
as seguintes relações são consideradas neste analise: e
.
/(2 ) 1/ 3r wH B =
/(2 ) 1/ 40d wH B =
Figura 3.19 (a) Figura 3.19 (b)
83

Capítulo 3.- Análises e Resultados
)
Figura 3.19 (c) Figura 3.19 (d)
Figura 3.19 Influência da geometria do tanque sobre sua freqüência natural ( tω para Hr/(2Bw)=1/3 e Hd/(2Bw)=1/40
Notamos na Figura 3.19(a), que ao avaliar 2 6wB m= , utilizando a relação
de , atingimos aproximadamente a freqüência natural dos navios /(2 ) 1/ 4r wW B =
4( 0.858)nω = . Com esta última relação, também atingimos a mesma freqüência
natural para as demais geometrias [vide Figura 3.19(b), 3.19(c), 3.19(d)]. Deve-se
lembrar que as geometrias selecionadas estão dentro de valores reais a serem
utilizados. Assim, dos valores anteriores podemos encontrar a seguinte geometria
do tanque, . 1.5rW m=
Por outro lado, sabemos que durante a rota o navio sofre mudanças na sua
freqüência natural. Este aspecto é mais notório em navios petroleiros e cargueiros,
onde a carga está mudando de um porto a outro, pelo que o GM se modifica,
mudando com este a freqüência natural de jogo. Tendo esta consideração, os
seguintes parâmetros geométricos deverão ser definidos com a intenção de poder
modificar a freqüência do tanque. Do ponto de vista prático podemos notar na
Equação (2.90) que o único parâmetro que pode ser alterado quando o tanque já
esteja construído é a altura da água dentro dos reservatórios ( )rH , então o
objetivo é atingir diferentes freqüências naturais mudando só este parâmetro.
84

Capítulo 3.- Análises e Resultados
Depois de determinar os valores de wB e , construímos a Figura 3.20
para analisar a influência de
rW
rH sobre a freqüência do tanque, obtendo:
Figura 3.20 Influência da altura do fluído ( )rH sobre
a freqüência natural do tanque ( )tω , quando 3wB m=
Notamos da Figura 3.20 que a altura rH não influencia consideravelmente
a freqüência do tanque, sendo necessário mudar o último parâmetro dH para
atingir varias freqüências. Agora nos vemos na necessidade de fixar a freqüência
natural do tanque para uma única freqüência natural de jogo. No presente
trabalho, pode considerar-se que não muda consideravelmente a freqüência
natural de jogo para os dois navios, sendo esta 4 0.858nω = . Assim pode-se fixar
1.5rH m= mudando agora a freqüência do tanque com dH .
A Tabela 3.3 mostra as características geométricas do tanque, utilizadas
nos navios RS e TS, para diferentes sintonias 4/t nω ω .
rW rH dH tω 4/t nω ω1 1,50 1,50 0,251 0,773 0,900 2 1,50 1,50 0,304 0,859 1,000 3 1,50 1,50 0,360 0,944 1,100 4 1,50 1,50 0,419 1,030 1,200
85

Capítulo 3.- Análises e Resultados
5 1,50 1,50 0,480 1,116 1,300 Tabela 3.3 Geometrias do Tanque: Bw=3m
Deve assinalar-se que o comprimento longitudinal do tanque ( tL ) será
calculado com ajuda da Equação (2.91) depois de escolher a porcentagem de
massa do fluido dentro do tanque com respeito à massa do navio ( ). /tm m
3.5 Respostas em Jogo COM Tanque de Estabilização
Como foram apontados anteriormente, os casos mais críticos em que
atingimos ressonância paramétrica e grandes amplitudes de jogo paramétrico são
RS: GM=0.50m com , e TS: GM=0.37m com 0.34Fn = 0.30Fn = . A idéia aqui é
de buscarmos demonstrar a eficiência do tanque estabilizador passivo mesmo nos
casos mais críticos.
Com o intuito de analisar diferentes configurações do tanque verificando-
se as influências dos principais parâmetros, foram obtidas diferentes respostas
para variações sistemáticas de sintonias, massas e amortecimentos do tanque.
Foram obtidas e analisadas cinco sintonias ( 4/t nω ω = 0.9, 1.0, 1.1, 1.2 e 1.3), cada
sintonia com três amortecimentos ( tη = 0.3, 0.4 e 0.5).
Para o navio TS foram analisadas as sintonias e amortecimentos definidas
acima, cada uma com três relações de massa ( /tm m = 3%, 4% e 5%), obtendo-se
um total de 45 gráficos de estabilidade com tanque. Devido a que a ressonância
paramétrica tem menor influência no navio RS, foram analisadas duas relações de
massa ( 2% e 3%), obtendo-se 30 gráficos de estabilidade com tanque
para as diferentes sintonias, massas e amortecimentos.
/tm m =
Todos esses gráficos de estabilidade obtidos para o RS e TS, para
diferentes sintonias, massas e amortecimentos, são apresentadas no Apêndice II.
Neste Capitulo serão apresentados e analisados os gráficos mais relevantes.
86
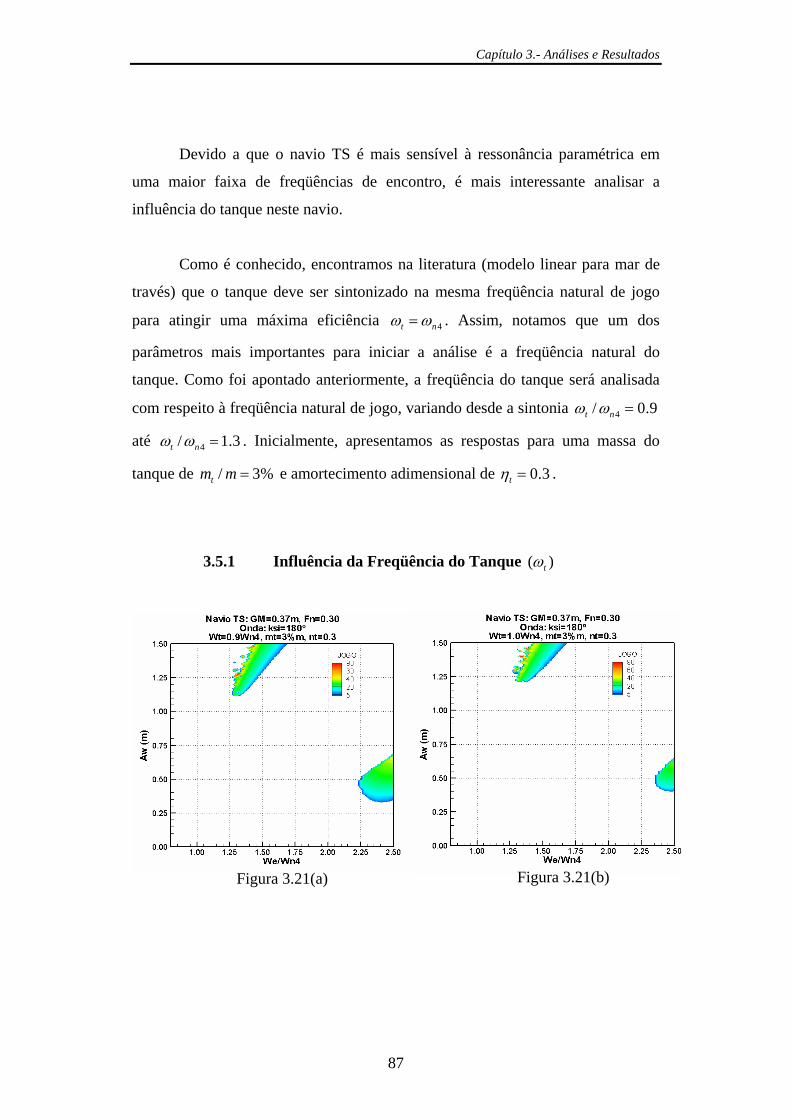
Capítulo 3.- Análises e Resultados
Devido a que o navio TS é mais sensível à ressonância paramétrica em
uma maior faixa de freqüências de encontro, é mais interessante analisar a
influência do tanque neste navio.
Como é conhecido, encontramos na literatura (modelo linear para mar de
través) que o tanque deve ser sintonizado na mesma freqüência natural de jogo
para atingir uma máxima eficiência 4t nω ω= . Assim, notamos que um dos
parâmetros mais importantes para iniciar a análise é a freqüência natural do
tanque. Como foi apontado anteriormente, a freqüência do tanque será analisada
com respeito à freqüência natural de jogo, variando desde a sintonia 4/ 0t n .9ω ω =
até 4/ 1t n .3ω ω = . Inicialmente, apresentamos as respostas para uma massa do
tanque de / 3tm m %= e amortecimento adimensional de 0.3tη = .
3.5.1 Influência da Freqüência do Tanque ( )tω
Figura 3.21(b) Figura 3.21(a)
87

Capítulo 3.- Análises e Resultados
Figura 3.21 Respostas de Jogo COM tanque.
S: GM=0.37m,
Figura 3.21(c) Figura 3.21(d)
Figura 3.21(e)
Navio T 0.30Fn = , Tanque: t / 3%m m = 0.3, tη =
as Figuras 3.21 (a),(b),(c),(d) e (e) apresentam-se as respostas
de jogo
N
para o TS, trabalhando com o tanque de estabilização passivo.
Nesta figura são apresentadas diferentes sintonias do tanque. As
configurações para atingir as diferentes sintonias do tanque são
mostradas na Tabela 3.3.
88

Capítulo 3.- Análises e Resultados
Uma observação que podemos apontar, comparando a Figura
3.16 com as Figuras 3.21, é que o jogo paramétrico diminui
consideravelmente para uma grande parte das sintonias analisadas, e
inclusive se mantém a tendência de estabilizar o jogo paramétrico na
região com altas amplitudes de onda. É notório que o tanque de
estabilização é eficiente para quase todas as regiões de instabilidade.
Outra característica a notar é que com o aumento da freqüência do
tanque (sintonia do tanque), tende a diminuir a segunda zona de
instabilidade.
A principal característica desta análise é que existe uma
freqüência ( tω ) na qual o navio sintoniza com o tanque e atinge uma
máxima eficiência, eliminando uma grande parte da região da primeira
zona de instabilidade. Quando se comparam as Figuras 3.21: (a), (b),
(c), (d) e (e), pode observar-se que a sintonia que elimina a maior parte
da primeira zona de instabilidade é 4/ 1t n .1ω ω = . Nas outras figuras
pode observar-se como a região de instabilidade tende a desaparecer
com uma declividade positiva (inclinada à direita) para baixas
sintonias do tanque ( 4/ 1t n .1ω ω < ), chegando a desaparecer totalmente,
e logo aumenta com uma declividade negativa (inclinada à esquerda)
para maiores sintonias ( 4/ 1t n .1ω ω > ).
3.5.2 Influência da Massa do Fluído Dentro do Tanque ( )tm
Após definir a sintonia mais eficiente entre o tanque e o navio,
o seguinte parâmetro a ser analisado é a massa do fluido dentro do
tanque. Para esta análise mantemos constante a sintonia do tanque
4/ 1t n .1ω ω = e o amortecimento 0.3tη = , mudando os valores de
massa: 3%, 4% e 5%, obtendo os seguintes resultados,
apresentados na Figura 3.22.
/tm m =
89

Capítulo 3.- Análises e Resultados
Figura 3.22(a) Figura 3.22(b)
Figura 3.22 (c)
Figura 3.22 Respostas de Jogo COM tanque.
Navio TS: GM=0.37m, 0.30Fn = , Tanque: 4/ 1.1 0.3tt nω ω = , η =
Uma vez que o tanque esteja bem sintonizado, pode notar-se
como a massa do fluido não influi consideravelmente sobre as
respostas em jogo (Figuras 3.22). Nestas figuras deve observar-se
como a sintonia do tanque é o parâmetro mais importante a ser
definido no início do projeto.
90

Capítulo 3.- Análises e Resultados
A recomendação geral é ter a menor quantidade de massa do
fluido possível, mas por outro lado notamos que para massa
3% ainda temos algumas pequenas regiões na primeira zona
de instabilidade [Figura 3.22(a)], por isso se decide seguir a análise do
amortecimento com uma massa de
/tm m =
/tm m = 4%.
3.5.3 Influência do Amortecimento do Tanque ( )tη
A última característica do tanque a ser analisada é o
amortecimento (adimensional tη ). Mantendo a sintonia e a massa
constantes, se muda o amortecimento desde 0.3tη = até 0.5tη = ,
assim são obtidos os resultados apresentados na Figura 3.23.
Figura 3.23(a) Figura 3.23(b)
91

Capítulo 3.- Análises e Resultados
Figura 3.23 (c)
Figura 3.23 Respostas de Jogo COM tanque Navio TS: GM=0.37m, 0.30Fn = ,
Tanque: 4/ 1.1t n = , m m/ 4%tω ω =
Podemos notar nas Figuras 3.23(a) e 3.23(b) que para
amortecimentos 0.4tη ≤ , as regiões de instabilidade não são
influenciadas consideravelmente. Já para valores maiores, Figura
3.23(c), começa a aparecer a região da primeira zona de instabilidade.
Uma conclusão prévia que podemos apontar é que para um
determinado tanque, com uma determinada freqüência e massa, existe
uma faixa de amortecimentos onde o tanque trabalha eficientemente.
Como apontamos anteriormente, na prática este amortecimento pode
ser controlado utilizando chicanas na parte interna do duto.
3.5.4 Influência da Posição Vertical ( )zL do Tanque
Outro parâmetro importante que deve ser analisado é a posição
do tanque dentro do navio, para isto fazemos coincidir a origem do
sistema móvel (O) mostrado na Figura 2.1 com o centro de gravidade
do navio (CG). O ponto de referência do tanque será o centro do duto,
como pode ver-se na Figura 2.2. Devemos assinalar que em toda a
92

Capítulo 3.- Análises e Resultados
análise do tanque feita anteriormente teve-se em consideração que a
origem do sistema móvel estava no CG.
Por outro lado, a condição que nos apresenta a resposta mais
crítica entre os dois navios é a da Figura 3.16, onde podemos notar
como atingimos ângulos de emborcamento para uma grande região de
amplitudes de onda e sintonia. Desta Figura 3.16 escolhemos as
condições de mar para o navio TS com amplitude de onda 0.70wA m=
e analisamos a influência da posição vertical do tanque para várias
freqüências de encontro. Da Figura 3.21(e) escolhemos as
características do tanque menos eficiente (dessintonizado), isto para
fazer notória a influência da posição vertical do tanque sobre as
respostas de jogo.
Com estas últimas condições podemos fazer um mapeamento
detalhado da melhor posição que deve ter o tanque dentro do navio
para atingir uma máxima eficiência. Para isto construímos o gráfico
4/e nω ω vs. zL . Devemos lembrar que o sinal negativo de zL significa
que o centro do duto (do tanque) se localiza acima do CG do navio e o
sinal positivo o contrario. Tendo estas considerações, apresentamos as
respostas para o navio TS com tanque em diferentes posições verticais,
estas respostas são mostrados na Figura 3.24.
93
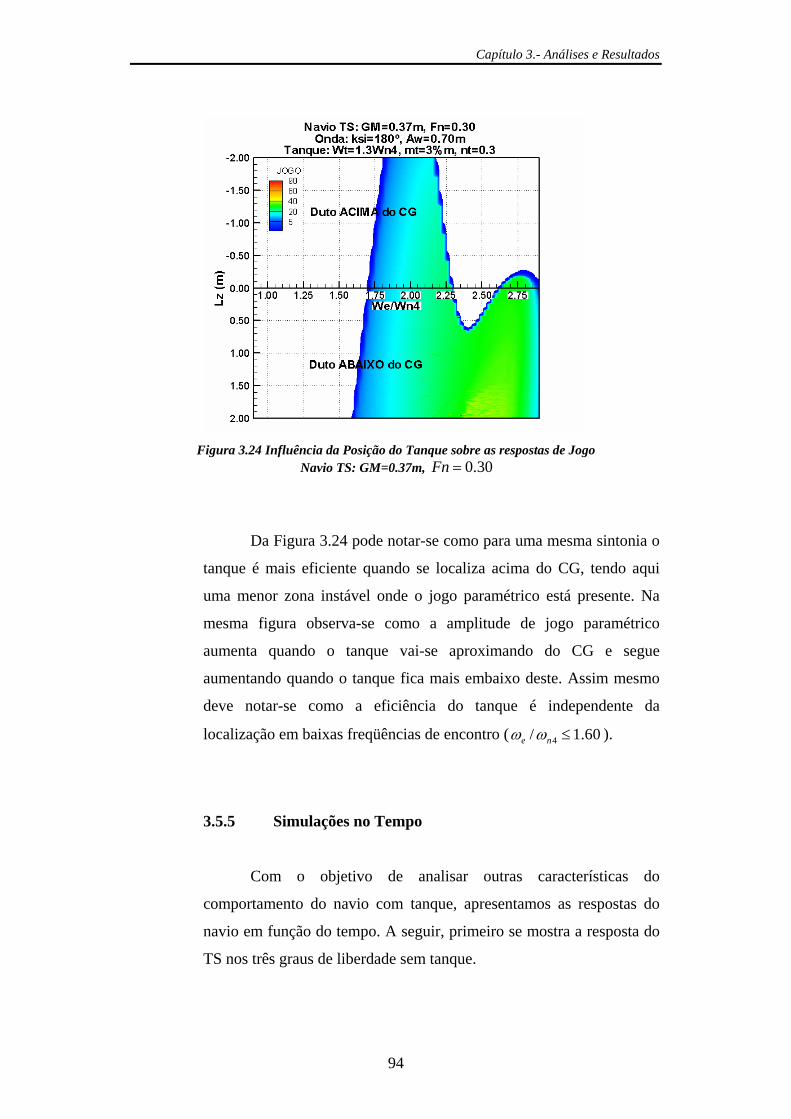
Capítulo 3.- Análises e Resultados
Figura 3.24 Influência da Posição do Tanque sobre as respostas de Jogo
Navio TS: GM=0.37m, 0.30Fn =
Da Figura 3.24 pode notar-se como para uma mesma sintonia o
tanque é mais eficiente quando se localiza acima do CG, tendo aqui
uma menor zona instável onde o jogo paramétrico está presente. Na
mesma figura observa-se como a amplitude de jogo paramétrico
aumenta quando o tanque vai-se aproximando do CG e segue
aumentando quando o tanque fica mais embaixo deste. Assim mesmo
deve notar-se como a eficiência do tanque é independente da
localização em baixas freqüências de encontro ( 4/ 1.e n 60ω ω ≤ ).
3.5.5 Simulações no Tempo
Com o objetivo de analisar outras características do
comportamento do navio com tanque, apresentamos as respostas do
navio em função do tempo. A seguir, primeiro se mostra a resposta do
TS nos três graus de liberdade sem tanque.
94

Capítulo 3.- Análises e Resultados
Figura 3.25 Respostas do Navio TS SEM tanque em Afundamento, Jogo e Arfagem
Notamos na Figura 3.25 que a amplitude máxima do jogo
paramétrico é atingida em menos de 40 segundos no quinto ciclo,
chegando a uma amplitude máxima de 20.4º. Do ponto de vista prático
esta amplitude é potencialmente perigosa. A seguir se apresenta na
Figura 3.25 a série temporal anterior, agora utilizando o tanque de
estabilização projetado.
Figura 3.26 Respostas do Navio TS COM tanque em Afundamento, Jogo e Arfagem
Pode notar-se na Figura 3.26 como o tanque elimina
completamente o jogo paramétrico. Para os movimentos de
afundamento e arfagem, a influência do tanque não é significativa.
95

Capítulo 3.- Análises e Resultados
Para apreciar melhor o comportamento do jogo com e sem tanque de
estabilização apresenta-se a seguinte série temporal, vide a Figura 3.27.
Figura 3.27 Respostas em Jogo do Navio TS, COM e SEM tanque
Pode notar-se claramente na Figura 3.27 a eficiência do tanque
para eliminar o jogo paramétrico: a amplitude de jogo é eliminada
antes dos 60 segundos de iniciado o movimento, aproximadamente no
quinto ciclo. Para entender melhor a dinâmica das respostas de jogo e
do tanque se apresenta a Figura 3.28.
Figura 3.28 Resposta em Jogo com Tanque em regime permanente
96

Capítulo 3.- Análises e Resultados
Uma característica interessante a notar-se na dinâmica do
controle do jogo paramétrico por meio de tanques estabilizadores é a
defasagem entre o movimento de jogo e o movimento do fluido, que
devem opor-se ao longo do tempo. Ou seja, quando o tanque é bem
sintonizado com massa e amortecimento adequados, o movimento do
fluido deverá estar em defasagem com jogo em cerca de 180º.
Movimentos angulares acoplados em sentidos opostos tendem a
eliminar-se ao longo do tempo, este fenômeno é o principio do tanque
de estabilização. A Figura 3.28 ilustra um caso de quase anti-fase.
Deve apontar-se que na Figura 3.28 utilizou-se um amortecimento
maior, isto para obter respostas de jogo que não se eliminem ao longo
do tempo e poder assim apreciar melhor as respostas do tanque e do
navio.
Outro caso interessante a ser explorado é quando a respostas de
jogo são correspondentes a emborcamento, para isto podemos notar da
Figura 3.16 que este caso acontece com o navio TS com .
Assim escolhemos uma sintonia de
0.30Fn =
4/e nω ω = 2.45 com amplitude de
onda de 0.70wA m= e comparamos as séries temporais com e sem
tanque de estabilização, obtendo as respostas mostradas na Figura
3.29.
Figura 3.29 Respostas em Jogo do Navio TS COM e SEM tanque em mar crítico
97
Capítulo 3.- Análises e Resultados
Pode notar-se da Figura 3.29 que neste caso crítico o navio sem
tanque chega a atingir o emborcamento em menos de 85 seg. Assim
mesmo pode observar-se claramente a eficiência do tanque de
estabilização quando está bem sintonizado, eliminando rapidamente as
amplitudes do jogo paramétrico, não deixando que a ressonância
paramétrica desenvolva-se completamente.
98
Capítulo 4.- Conclusões
CAPÍTULO 4
CONCLUSÕES E RECOMENDAÇÕES
No presente trabalho foi utilizada a teoria do tanque de estabilização passivo tipo U para
desenvolver um modelo matemático que descreve o movimento do fluido, assim como as forças e
momentos que o tanque fornece ao navio. Posteriormente, acopla-se o tanque a um modelo
dinâmico de um navio com três graus de liberdade, com a finalidade de eliminar o jogo
paramétrico em mar de proa. Foram comparados os resultados para dois navios com
características semelhantes com diferentes formas de popa, ambos os navios propensos a forte
ressonância paramétrica. No presente capítulo se apresenta as conclusões e recomendações com
base nos resultados obtidos. Finalmente são feitas recomendações para trabalhos futuros.
4.1 Conclusões e Recomendações Gerais
• O modelo proposto desenvolve uma equação não linear de terceira ordem
para descrever o movimento do fluido dentro do tanque com um grau de
liberdade. As ações (forças e momentos) do tanque são de até quarta
ordem. Acoplando este modelo do tanque a um modelo não linear de
terceira ordem, que representa eficientemente as respostas do navio em
mar de proa, podemos mostrar que o tanque atenua e elimina o jogo
paramétrico em diferentes regiões de instabilidade.
• O modelo aqui proposto foi desenvolvido tendo-se em mente tanques em
U com seções retangulares / quadradas. No entanto, a adaptação para
seções tubulares pode ser feita sem dificuldades.
99

Capítulo 4.- Conclusões
• Pode concluir-se que o modelo aqui proposto reproduz eficientemente as
respostas do navio sem tanque de estabilização. Para conseguir isto foram
anuladas as forças e momentos que o tanque impõe ao navio. Nestas
respostas pode notar-se as características das zonas de instabilidade
próprias do modelo de terceira ordem.
• A principal contribuição deste trabalho é a demonstração de que,
numericamente, o tanque de estabilização passivo tipo U elimina a
ressonância paramétrica diminuindo consideravelmente as zonas instáveis.
• A freqüência natural do tanque deve ser o primeiro e mais importante
parâmetro a ser definido, com o objetivo de sintonizar o tanque com o
navio, obtendo-se assim a geometria do tanque. De acordo com as
condições de projeto o parâmetro seguinte que deve ser definido é a massa
do fluido dentro do tanque. Finalmente, o amortecimento é o último
refinamento na diminuição do jogo paramétrico. No presente trabalho,
encontrou-se a melhor resposta do navio com tanque na sintonia
4/ 1.1t nω ω = , massa / 4%tm m = e amortecimento 0.3tη = . Comprova-se
que o tanque NÃO necessariamente deve estar na sintonia 41.0t nω ω= ,
como muitos autores indicam na análise do tanque de estabilização tipo U
com o navio em mar de través (Lloyd, 1989, Gawad et al., 2001, Yousset,
et al., 2003, Phairoh et al., 2005).
• Analisando as simulações numéricas em função do tempo, concluímos que
pode eliminar-se totalmente o jogo paramétrico em quase sessenta
segundos (60 seg.) depois de iniciar-se o movimento, como mostra a
Figura 3.27, dependendo o tempo das condições iniciais do movimento do
navio. Isso evidencia que a ação do tanque é de evitar a amplificação
progressiva de jogo, que é característica essencial de jogo paramétrico sem
estabilização.
100

Capítulo 4.- Conclusões
• O tanque passivo tipo U é mais eficiente quando o duto horizontal do
tanque se localiza mais acima do centro de gravidade (CG), como mostra a
Figura 3.24. Quando o tanque é bem sintonizado não é relevante a
localização vertical, mas na maioria dos casos o navio chega a atingir
diferentes freqüências naturais numa mesma viagem, nestes casos quando
o tanque é dessintonizado será mais eficiente quando esteja mais acima do
CG. As amplitudes de jogo atingidas com o tanque dessintonizado
aumentam progressivamente quando o tanque fica mais embaixo do CG. O
tanque dessintonizado pode ser eficiente para baixas freqüências de onda
(vide Figura 3.24).
• Comparando os navios, podemos conferir que o TS é mais sensível a
atingir ressonância paramétrica, necessitando uma massa e amortecimento
maior que o RS. Esta característica pode trazer limitações na prática,
necessitando possivelmente de um tanque ativo para diminuir a massa do
tanque e aumentar a rapidez da resposta.
• O fato de que a sintonia navio-tanque, favorável para cancelar a
amplificação paramétrica, não coincide com aquela usualmente definida
para a atuação de tanques em mar de través, impõe a conclusão de que
tanques projetados para atuar eficientemente em ambas condições deverão
ser dotados de algum mecanismo de controle.
4.2 Trabalhos Futuros
• Vemos a necessidade de comparar e validar os resultados numéricos,
obtidos no presente trabalho, com resultados experimentais feitos com
modelos em escala reduzida.
• Tentar eliminar outras zonas de instabilidade utilizando um tanque ativo
tipo U, por meio de uma bomba de água no duto e/ou pressão interna nos
101
Capítulo 4.- Conclusões
reservatórios, isto para diminuir a massa do fluido dentro do tanque. O
tanque ativo pode ser governado por sistemas de controle que podem ser
alimentados pelos movimentos do navio, especificamente jogo.
• Estudar os efeitos do tanque tipo U trabalhando paralelamente com outros
sistemas de estabilização, como bolinas ou aletas de estabilização.
• Considerar o movimento do fluido dentro do tanque com seis graus de
liberdade acoplados com os seis graus de liberdade do navio, analisando
a influência dos acoplamentos do tanque com os movimentos de avanço
(surge), desvio (sway) e guinada (yaw).
• Investigar a influência do tanque sobre o navio em diferentes ângulos de
incidência da onda, estudando os limites de estabilidade correspondentes,
sobretudo em mar de popa, onde podem iniciar-se outros tipos de
instabilidades dinâmicas.
• Estudar as respostas do navio com vários tanques em forma de tubo em
U, colocados ao longo do comprimento do navio, isto com o intuito de
diminuir a massa do fluido e aumentar a eficiência do tanque.
• Analisar a influência do tanque em U sobre outras formas de navios
propensos à ressonância paramétrica, como porta-contentores. Pode
analisar-se, também, a influência do tanque tipo U sobre outros sistemas
flutuantes.
102

Referências Bibliográficas
REFERÊNCIAS BIBLIOGRÁFICAS
ABKOWITZ, M. A., 1969, Stability and Motion Control of Ocean Vehicles.
Massachusetts, The United States of America, The M. I. T. Press.
ABS, 2004, Guide for the Assessment of Parametric Roll Resonance in the Design
of Container Carriers, American Bureau of Shipping, Houston, USA.
AHMED, T. M., BALLARD, E. J., HUDSON, D. A. and TEMAREL P., 2006,
“Prediction of Parametric Roll Resonance in Regular Waves using a Non-Linear
Method”. In: Proceeding of the 9th International Conference on Stability of Ships
and Ocean Vehicles, STAB2006, Rio de Janeiro, Brazil, Vol. 1, pp. 89-97.
BAITIS, A. E., SCHMIDT, L. V., 1989. “Ship Roll Stabilization in the U.S.
Navy”, Naval Engineers Journal, 101(3), pp. 43-53.
BALCER, L., 2004, “Roll Response of Ship Fitted with Passive Stabilizing
Tank”, Polish Maritime Research, vol. 11, no. 3(41), pp. 12-20.
BARR, R. A., ANKUDINOV, V., 1977, “Ship Rolling, its Prediction and
Reduction using Roll Stabilization”, Marine Technology, vol. 14, no. 1 (Jan), pp.
19-41.
BASS, D. W., 1998, “Roll Stabilization for Small Fishing Vessels using
Paravanes and Anti-Roll Tanks”, Marine Technology, vol. 35, no. 2 (April), pp.
74-84.
103

Referências Bibliográficas
BHATTACHARYYA, R., 1978, Dynamics of Marine Vehicles. 1 ed. New York,
John Wiley & Sons Inc.
BULIAN, G., FRANCESCUTTO, A. LUGNI, C., 2003, “On the Non-Linear
Modeling of Parametric Rolling in Regular and Irregular Waves”. In: Proceedings
of 8th International Conference on the Stability of Ships and Ocean Vehicles
(STAB 2003), Madrid, Espanha, pp. 305-323.
DALLINGA, R. P., BLOK J. J., LUTH, H. R., 1998, “Excessive Rolling of
Cruise Ships in Head and Following Waves”. In: RINA International Conference
on Ship Motions & Manoeuvrability, Royal Institute of Naval Architects, London.
FRANCE, W. N., LEVADOU, M., TREAKLE, T. W., PAULING, J. R.,
MICHEL, R. K., MOORE, C., 2003, “An Investigation of Head-Sea Parametric
Rolling and its Influence on Container Lashing Systems”, Marine technology, vol.
40, no. 1 (Jan), pp. 1-19.
FRANCESCUTTO, A., ARMENIO, V., 1990, “On the Stability of Antisymmetric
Motions of a Ship Equipped with Passive Antirolling Tanks”. In: Proceeding of
4th International Conference on the Stability if Ships and Ocean Vehicles
(STAB’90), Naples, Italy, pp. 401- 408.
FROUDE, W., 1863, “Remarks on Mr. Scott-Russel’s Paper on Rolling”, The
Papers of William Froude, Transsactions INA, no. 4, pp. 232-275.
GAWAD, A.F.A., RAGAB, S.A., NAYFEH, A.H., MOOK, D.T., 2001, “Roll
Stabilization by Anti-Roll Passive Tanks”, Ocean Engineering, Vol. 28, pp. 457.
HARUKUNI, T., HIROSHI, S., KATSUJI T., 2003, “A Study on Complicated
Roll Motion of a Ship Equipped with an Anti-rolling Tank”. In: Proceedings of 8th
International Conference on the Stability of Ships and Ocean Vehicles
(STAB’2003), Madrid, Spain, pp. 607-616.
104

Referências Bibliográficas
HARUKUNI, T., SHIGESUKE, I., HIROSHI, S., and MAKIKO, M., 2006,
“Model Experiment on Parametric Rolling of a Post-Panamax Containership en
Head Waves”. In: Proceeding of the 9th International Conference on Stability of
Ships and Ocean Vehicles, STAB2006, Rio de Janeiro, Brazil, Vol. 1, pp. 147-
156.
HIMENO, Y., 1981, Prediction of Ship Roll Damping – State of the Art. Dept.
Naval Architecture and Marine Engineering, The University of Michigan, Report
no. 239.
HOOFT, J. P., 1982, Advanced Dynamics of Marine Structures. New York, The
United States of America, John Wiley & Sons, Inc.
HSU, C. S., 1963, “On the Parametric Excitation of a Dynamic System Having
Multiple Degrees of Freedom”, Transactions of the ASME: Journal of Applied
Mechanics, vol. 30, no. 3 (Sep), pp. 367-372.
IGLESIAS, A. S., PÉREZ, L. R., DELARME, L., 2003, “Investigation of Anti-
Roll Tanks using a Particle Method”. In: Proceedings of 8th International
Conference on the Stability of Ships and Ocean Vehicles (STAB’2003), Madrid,
Spain, pp. 617-631.
KORVIN-KROUKOVSKY, B. V., JACOBS, W. R., 1957, “Pitching and Heaving
Motions of a Ship in Regular Waves”, Transactions of SNAME, vol. 65, pp.590-
632.
LEVADOU, M., PALAZZI, L., 2003, “Assessment of Operational Risks of
Parametric Roll”, In: Proceeding of World Maritime Technology Conference
(WMTC’2003), Society of Naval Architects and Marine Engineers, San Francisco,
United States.
105

Referências Bibliográficas
LEWIS, E., 1989, Principles of Naval Architecture – Vol. III: Motion in Waves
and Controllability. 2nd revision. New Jersey, The United States of America,
SNAME.
LLOYD, A.R.J.M., 1989, “Roll Stabilization”. In: Paffett, J., Seakeeping: Ship
Behavior in Rough Weather, 1 ed., chapter 18, Chichester, England, Ellis
Horwood Limited.
LORCA, O., 2001, Ressonância Paramétrica de Navios – Influência da
Velocidade. Tese de M.Sc., COPPE - Eng. Oceânica, Universidade Federal do Rio
de Janeiro, Rio de Janeiro, RJ, Brasil.
MEYERS, W. G., SHERIDAN, D. J., SALVESEN, N., 1975, Manual – NSRDC
Ship-Motion and Sea-Load Computer Program, Naval Ship Research and
Development Center. Maryland, The United States of America, Report no. 3376.
MUNIF, A., IKEDA, Y., FUJIWARA, T. and TAKAWARA, T., 2006,
“Parametric Roll Resonance of a Large Passenger Ship in Dead Ship Condition in
all Heading Angles”. In: Proceeding of the 9th International Conference on
Stability of Ships and Ocean Vehicles, STAB2006, Rio de Janeiro, Brazil, Vol. 1,
pp. 81-87.
NEVES, M. A. S., VALERIO, L., 1994, “Parametric Stability of Fishing
Vessels”. In: Proceedings of 5th International Conference on the Stability of Ships
and Ocean Vehicles (STAB’94), Florida, United States.
NEVES, M. A. S., SALAS, M., VALERIO, L., 1997, “An Investigation on the
Influence of Stern Hull Shape on the Roll Motion and Stability of Small Fishing
Vessels”. In: Proceedings of 6th International Conference on the Stability of Ships
and Ocean Vehicles (STAB’97), Varna, Bulgaria, pp. 259-269.
106
Referências Bibliográficas
NEVES, M. A. S., PÉREZ, N. A., VALERIO, L., 1999, “Stability of Small
Fishing Vessels in Longitudinal Waves”, Ocean Engineering, vol. 26, no. 12
(Dec), pp. 1389-1419.
NEVES, M. A. S., VALERIO, L., 2000, “Parametric Resonance in Waves of
Arbitrary Heading”. In: Proceedings of 7th International Conference on Ship
Stability and Ocean Vehicles (STAB’2000), Launceston, Australia, pp. 680-687.
NEVES, M. A. S., 2002, “On the Excitation of Combination Modes Associated
with Parametric Resonance in Waves”. In: Proceedings of 6th International Ship
Stability Workshop, Webb Institute, New York.
NEVES, M.A.S., RODRIGUEZ, C., 2004, “A non-Linear Mathematical Model of
Higher Order for Strong Parametric Resonance of the Roll Motion of Ship in
Waves”, In: Proceeding of International Maritime Conference on Design for
Safety, Osaka, pp. 139-145.
NEVES, M.A.S., RODRIGUEZ, C., 2005, “A non-Linear Mathematical Model of
Higher Order for Strong Parametric Resonance of the Roll Motion of Ship in
Waves”, Marine Systems & Ocean Technology – Journal of SOBENA, Vol. 1 No.
2, pp. 69-81.
NEVES, M.A.S., RODRIGUEZ C., 2006, “An Investigation on Roll Parametric
Resonance in Regular Waves”. In: Proceeding of the 9th International Conference
on Stability of Ships and Ocean Vehicles, STAB2006, Rio de Janeiro, Brazil, Vol.
1, pp. 99-108.
PARKER, M.N., 1965, “Brief Review of Ship Stabilization Systems”, Naval
Engineers Journal, vol. 77, no. 4, pp. 640-646.
PÉREZ, N. A., 1985, Desenvolvimento de Algumas Técnicas Experimentais em
Ondas Regulares. Tese de M.Sc., COPPE – Eng. Oceânica, Universidade Federal
do Rio de Janeiro, Rio de Janeiro, RJ, Brasil.
107
Referências Bibliográficas
PÉREZ, N., SANGUINETTI, C., 1995, Experimental Results of Parametric
Resonance Phenomenon of Roll Motion in Longitudinal Waves for Small Fishing
Vessels”. International Shipbuilding Progress, vol. 42, no. 431 (Sep), pp. 221-
234.
PÉREZ, N., SANGUINETTI, C., LORCA, O., 2000, “Resonancia Paramétrica del
Balance Transversal en el Dominio de la Velocidad. (Resultados
Experimentales)”, Revista Ingeniería Naval, año LXVII, no. 770 (Abr), pp. 98-
102.
PERNAMBUCO, T.A.M., 1990, Estabilidade de Navios em Ondas Obliquas.
Tese de M.Sc., COPPE - Eng. Oceânica, Universidade Federal do Rio de Janeiro,
Rio de Janeiro, RJ, Brasil.
PHAIROH, T., HUANG J.K., 2005, “Modeling and Analysis of Ship Roll Tank
Stimulator Systems”, Ocean Engineering, vol. 32, pp. 1037-1053.
RAO, S., 1995, Mechanical Vibrations. 3rd Ed. New York, The United States of
America, Addison-Wesley Publishing Company, Inc.
RODRIGUEZ, C. A., 2004, “Estabilidade Dinâmica de Navios: Um Modelo Não
Linear de Terceira Ordem”, M. Sc. Tese, COPPE-Universidade Federal de Rio de
Janeiro, Brasil.
SANGUINETTI, C. F. O., 1985, Estabilidade Dinâmica de Navios Pesqueiros em
Ondas Regulares. Tese de M.Sc., COPPE - Eng. Oceânica, Universidade Federal
do Rio de Janeiro, Rio de Janeiro, RJ, Brasil.
SALAS, M., 1991, Limites de Estabilidade de Navios Pesqueiros em Freqüências
Ressonantes. Tese de M.Sc., COPPE - Eng. Oceânica, Universidade Federal do
Rio de Janeiro, Rio de Janeiro, RJ, Brasil.
108

Referências Bibliográficas
SALVESEN, N., TUCK, O.E., FALTINSEN, O., 1970, “Ship Motions and Sea
Loads”, Transactions of SNAME, vol. 78, pp. 250-287.
SELLARS, F.H., MARTIN, J.P, 1992, “Selection and Evaluation of Ship Roll
Stabilization Systems”, Marine Technology, vol. 29, no. 2, pp. 84-101.
SHIN, Y.S., BELENKY, V.L., PAULLING, J.R., WEEMS, K.M., LIN, W.N.,
2004, “Criteria for Parametric Roll of Large Containerships in Longitudinal
Seas”. In: The Society of Naval Architects & Marine Engineers Annual Meeting,
pp. 117-147, United States, Sep.
SKOMEDAL, N, 1982, “Parametric Excitation of Roll Motion and its Influence
on Stability”. In: Proceeding of the 2nd International Conference on Stability of
Ships and Ocean Vehicles, STAB 82, Tokyo, Japan, pp. 113-125.
SPYROU, K. J., 2000, “Designing Against Parametric Instability in Following
Seas”, Ocean Engineering, vol. 27, no. 6 (Jun), pp. 625-653.
SWAMEE, P.K. AND JAIN, A. K., 1976. “Explicit Equations for pipe-flow
Problems”, Journal of Hydraulic Division Proceedings, ASCE, pp. 657-664.
TAMURA, Y., FUJII, K., OHATSUKI, T., WAKAHARA, T., KOSHAKA, R.,
1995, “Effectiveness of Tuned Liquid Dampers under Wind Excitations”,
Engineering Structures, vol. 17, no. 9, pp. 609-621.
TREAKLE, T.W., MOOK, D.T., LIAPIS, S.I., NAYFEH, A.H., 2000, “A Time
Domain Method to Evaluate the Use the Moving Weights to Reduce the Roll
Motion of a Ship”, Ocean Engineering, vol. 27, pp. 1321-1343.
VALERIO, L., 1994, Estabilidade Paramétrica de Navios em Ondas
Longitudinais. Tese de M.Sc., COPPE – Eng. Oceânica, Universidade Federal do
Rio de Janeiro, Rio de Janeiro, RJ, Brasil.
109
Referências Bibliográficas
VALERIO, L., 2000, Sobre a Estabilidade Dinâmica de Navios em Ondas. Tese
de D.Sc., COPPE - Eng. Oceânica, Universidade Federal do Rio de Janeiro, Rio
de Janeiro, RJ, Brasil.
VASTA, J., GIDDINGS, A.J., TAPLIN, A., STILWELL, J.J., 1961, “Roll
Stabilizations by Mean of Passive Tanks”, Transactions of SNAME, vol. 69, pp.
411-439.
WEBSTER, W.C., 1967, “Analysis of the Control of Activated Anti-Roll Tanks”,
Transactions of SNAME, vol. 75, pp. 296-326.
WEBSTER, W.C., DALZELL, J. F., BARR, R. A., 1988, “Prediction and
Measurement of the Performance of Free-Flooding Ship Anti-rolling Tanks”,
Transactions of SNAME, vol. 96, pp. 333-364.
WEBSTER, B.N., BIRMINGHAM, R., JONES, E., ROSKILLY, T., 2003,
“Developing an Artificially Intelligent Roll Stabilization System for use on
Fishing Vessels”. In: Proceeding of 8th International Conference on the Stability
of Ships and Ocean Vehicles (STAB’2003), Madrid, Spain, pp. 757-778.
WHITE, FRANK M., 1999, “Escoamentos Viscoso em Dutos”. In: Herszterg,
C.A., Mecânica dos Fluidos, 4 ed., capítulo 6, Rio de Janeiro, Brasil, Mc Graw
Hill.
YOUSSEF, K. S., RAGAB, S. A., NAYFEH, A. H., MOOK, D. T., 2002,
“Design of Passive Anti-Roll Tanks for Roll Stabilization in the Nonlinear
Range”. Ocean Engineering, vol. 29, no. 2, pp. 177-192.
YOUSSEF, K. S., MOOK, D. T., NAYFEH, A. H., RAGAB, S. A., 2003, “Roll
Stabilization by Passive Anti-Roll Tanks Using an Improved Model of the Tank-
Liquid Motion”, Journal Vibration and Control, vol. 9, no. 7 (July), pp. 839-862.
110
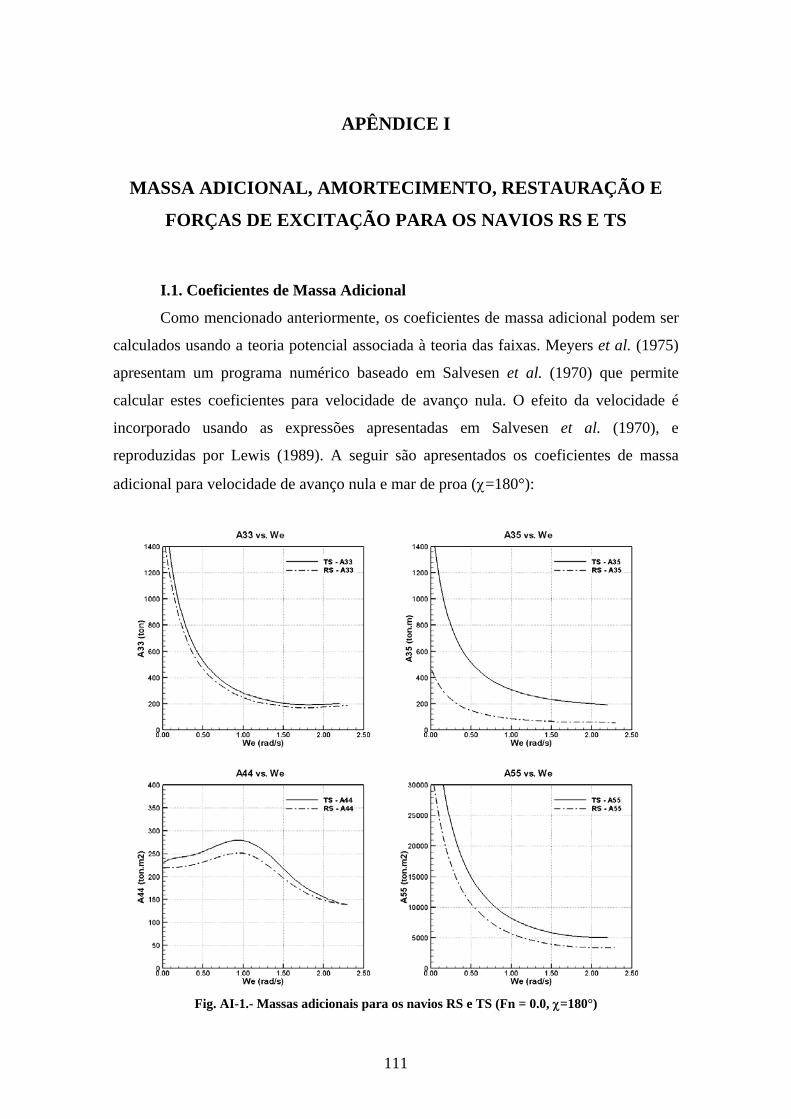
APÊNDICE I
MASSA ADICIONAL, AMORTECIMENTO, RESTAURAÇÃO E
FORÇAS DE EXCITAÇÃO PARA OS NAVIOS RS E TS
I.1. Coeficientes de Massa Adicional
Como mencionado anteriormente, os coeficientes de massa adicional podem ser
calculados usando a teoria potencial associada à teoria das faixas. Meyers et al. (1975)
apresentam um programa numérico baseado em Salvesen et al. (1970) que permite
calcular estes coeficientes para velocidade de avanço nula. O efeito da velocidade é
incorporado usando as expressões apresentadas em Salvesen et al. (1970), e
reproduzidas por Lewis (1989). A seguir são apresentados os coeficientes de massa
adicional para velocidade de avanço nula e mar de proa (χ=180°):
Fig. AI-1.- Massas adicionais para os navios RS e TS (Fn = 0.0, χ=180°)
111
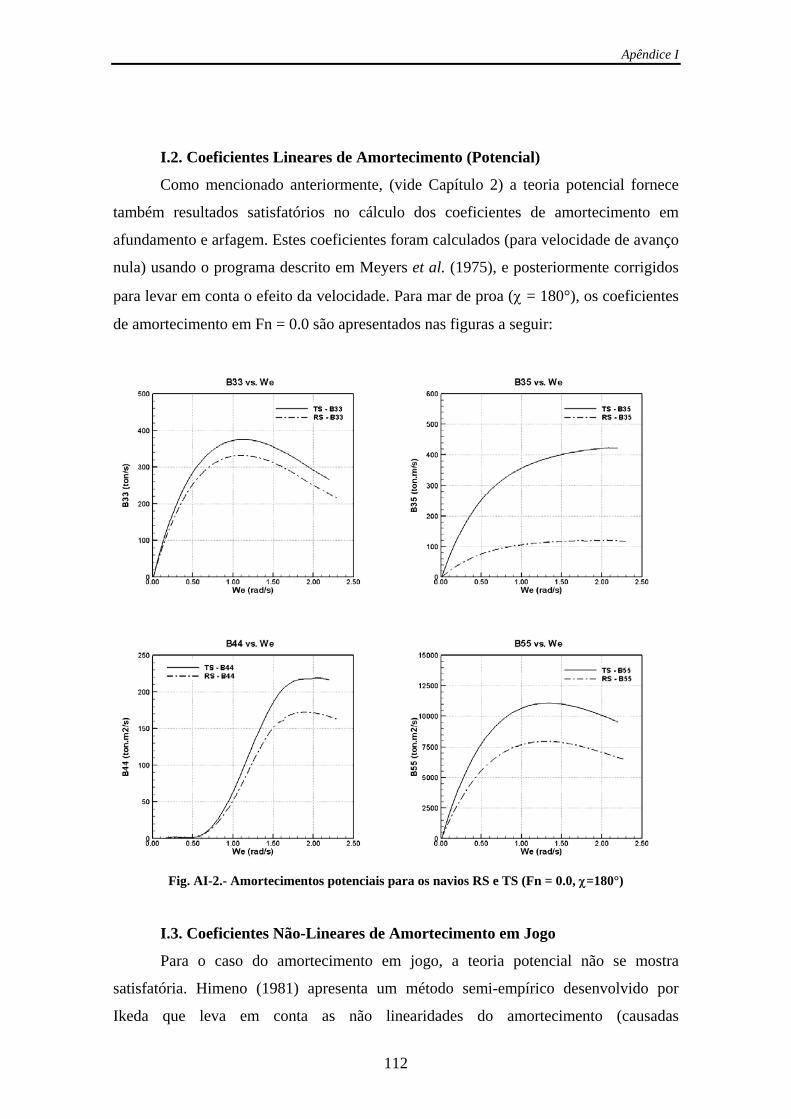
Apêndice I
I.2. Coeficientes Lineares de Amortecimento (Potencial)
Como mencionado anteriormente, (vide Capítulo 2) a teoria potencial fornece
também resultados satisfatórios no cálculo dos coeficientes de amortecimento em
afundamento e arfagem. Estes coeficientes foram calculados (para velocidade de avanço
nula) usando o programa descrito em Meyers et al. (1975), e posteriormente corrigidos
para levar em conta o efeito da velocidade. Para mar de proa (χ = 180°), os coeficientes
de amortecimento em Fn = 0.0 são apresentados nas figuras a seguir:
Fig. AI-2.- Amortecimentos potenciais para os navios RS e TS (Fn = 0.0, χ=180°)
I.3. Coeficientes Não-Lineares de Amortecimento em Jogo
Para o caso do amortecimento em jogo, a teoria potencial não se mostra
satisfatória. Himeno (1981) apresenta um método semi-empírico desenvolvido por
Ikeda que leva em conta as não linearidades do amortecimento (causadas
112
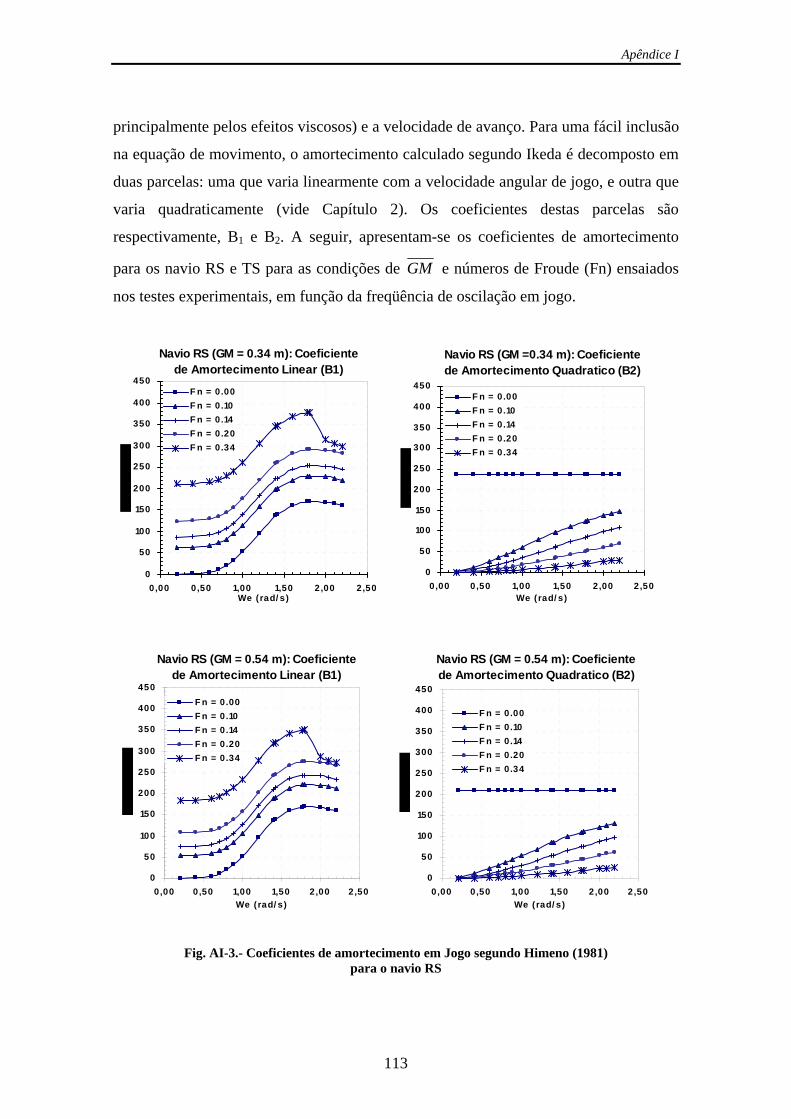
Apêndice I principalmente pelos efeitos viscosos) e a velocidade de avanço. Para uma fácil inclusão
na equação de movimento, o amortecimento calculado segundo Ikeda é decomposto em
duas parcelas: uma que varia linearmente com a velocidade angular de jogo, e outra que
varia quadraticamente (vide Capítulo 2). Os coeficientes destas parcelas são
respectivamente, B1 e B2. A seguir, apresentam-se os coeficientes de amortecimento
para os navio RS e TS para as condições de GM e números de Froude (Fn) ensaiados
nos testes experimentais, em função da freqüência de oscilação em jogo.
Navio RS (GM = 0.34 m): Coeficiente de Amortecimento Linear (B1)
0
50
100
150
200
250
300
350
400
450
0,00 0,50 1,00 1,50 2,00 2,50We (rad/ s)
F n = 0.00F n = 0.10F n = 0.14F n = 0.20F n = 0.34
Navio RS (GM =0.34 m): Coeficiente de Amortecimento Quadratico (B2)
0
50
100
150
200
250
300
350
400
450
0,00 0,50 1,00 1,50 2,00 2,50We (rad/ s)
F n = 0.00F n = 0.10F n = 0.14F n = 0.20F n = 0.34
Navio RS (GM = 0.54 m): Coeficiente de Amortecimento Linear (B1)
0
50
100
150
200
250
300
350
400
450
0,00 0,50 1,00 1,50 2,00 2,50We (rad/ s)
F n = 0.00F n = 0.10F n = 0.14F n = 0.20F n = 0.34
Navio RS (GM = 0.54 m): Coeficiente de Amortecimento Quadratico (B2)
0
50
100
150
200
250
300
350
400
450
0,00 0,50 1,00 1,50 2,00 2,50We (rad/ s)
F n = 0.00F n = 0.10F n = 0.14F n = 0.20F n = 0.34
Fig. AI-3.- Coeficientes de amortecimento em Jogo segundo Himeno (1981) para o navio RS
113

Apêndice I
Navio TS (GM = 0.37 m): Coeficiente de Amortecimento Linear (B1)
0
50
100
150
200
250
300
350
400
450
0,00 0,50 1,00 1,50 2,00 2,50We (rad/ s)
F n = 0.00F n = 0.11F n = 0.15F n = 0.20F n = 0.30
Navio TS (GM =0.37 m): Coeficiente de Amortecimento Quadratico (B2)
0
50
100
150
200
250
300
350
400
450
0,00 0,50 1,00 1,50 2,00 2,50We (rad/ s)
F n = 0.00F n = 0.11F n = 0.15F n = 0.20F n = 0.30
Navio TS (GM = 0.50 m): Coeficiente de Amortecimento Linear (B1)
0
50
100
150
200
250
300
350
400
450
0,00 0,50 1,00 1,50 2,00 2,50We (rad/ s)
F n = 0.00F n = 0.11F n = 0.15F n = 0.20F n = 0.30
Navio TS (GM = 0.50 m): Coeficiente de Amortecimento Quadratico (B2)
0
50
100
150
200
250
300
350
400
450
0,00 0,50 1,00 1,50 2,00 2,50We (rad/ s)
F n = 0.00F n = 0.11F n = 0.15F n = 0.20F n = 0.30
Fig. AI-4.- Coeficientes de amortecimento em Jogo segundo Himeno (1981) para o navio TS
I.4. Coeficientes de Restauração devido à Passagem da Onda para mar de
proa.
I.4.1 Em Afundamento
114
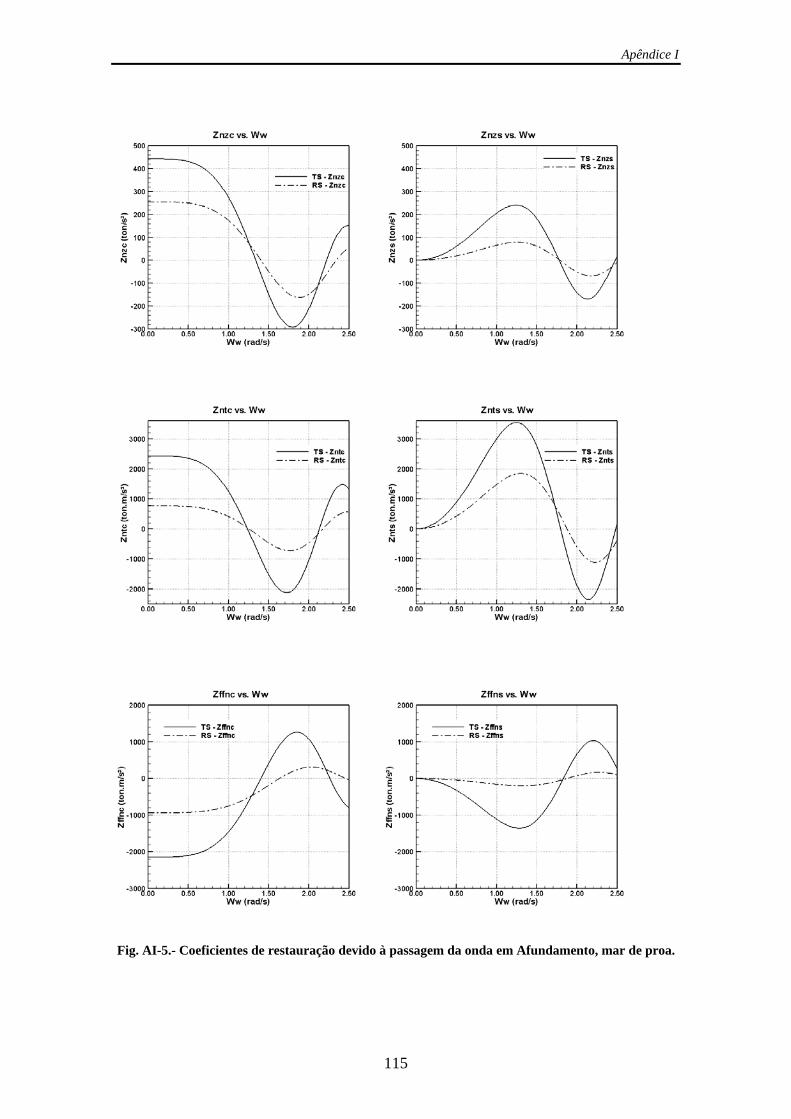
Apêndice I
Fig. AI-5.- Coeficientes de restauração devido à passagem da onda em Afundamento, mar de proa.
115

Apêndice I
I.4.2 Em Jogo
Fig. AI-6.- Coeficientes de restauração devido à passagem da onda em Jogo, mar de proa.
116

Apêndice I
I.4.3 Em Arfagem
117
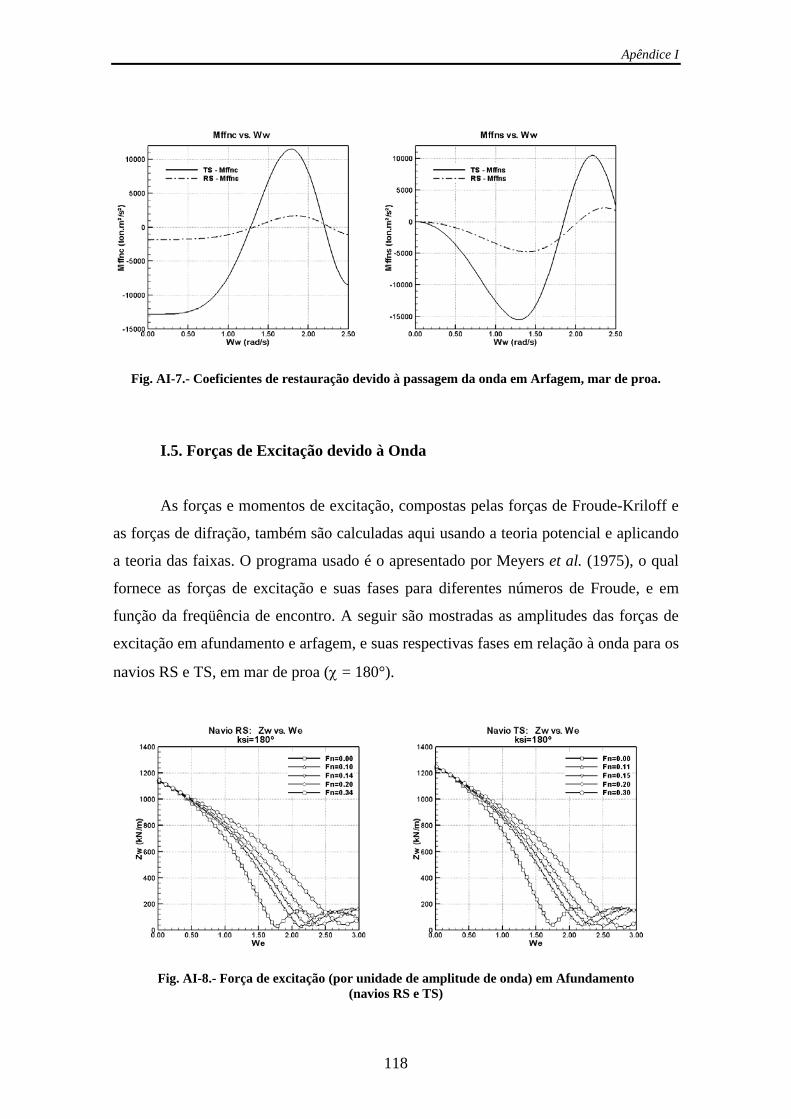
Apêndice I
Fig. AI-7.- Coeficientes de restauração devido à passagem da onda em Arfagem, mar de proa.
I.5. Forças de Excitação devido à Onda
As forças e momentos de excitação, compostas pelas forças de Froude-Kriloff e
as forças de difração, também são calculadas aqui usando a teoria potencial e aplicando
a teoria das faixas. O programa usado é o apresentado por Meyers et al. (1975), o qual
fornece as forças de excitação e suas fases para diferentes números de Froude, e em
função da freqüência de encontro. A seguir são mostradas as amplitudes das forças de
excitação em afundamento e arfagem, e suas respectivas fases em relação à onda para os
navios RS e TS, em mar de proa (χ = 180°).
Fig. AI-8.- Força de excitação (por unidade de amplitude de onda) em Afundamento (navios RS e TS)
118
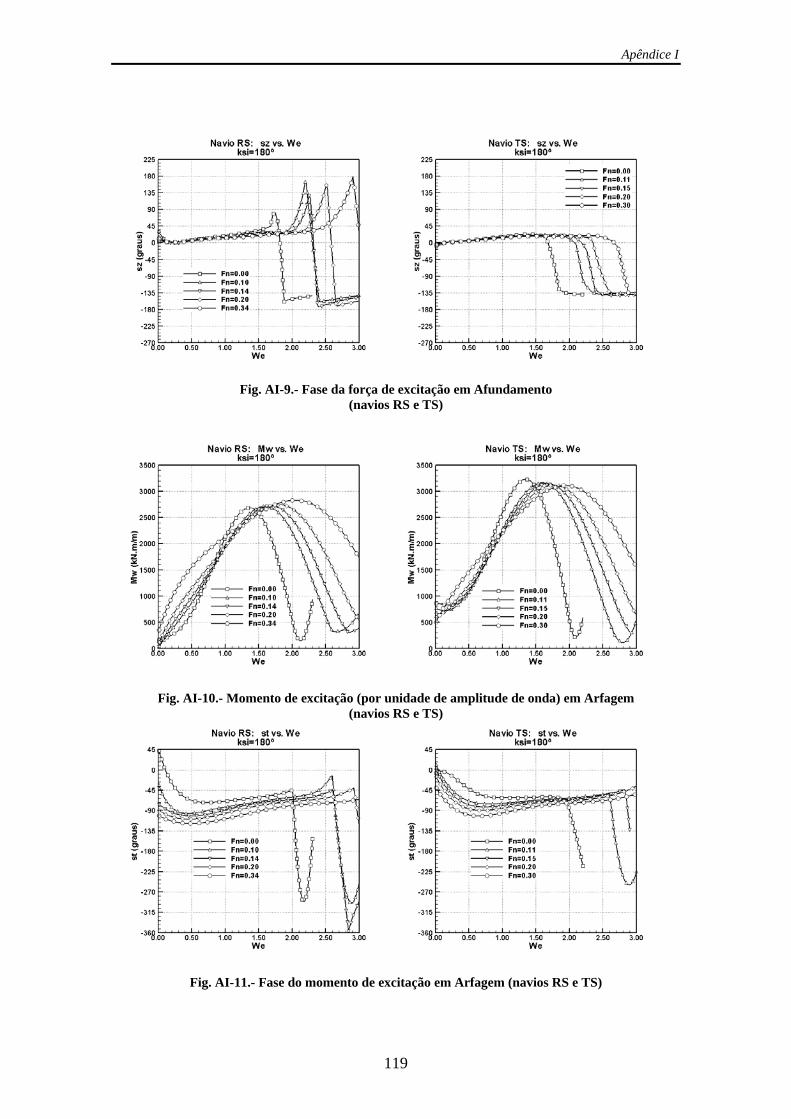
Apêndice I
Fig. AI-9.- Fase da força de excitação em Afundamento (navios RS e TS)
Fig. AI-10.- Momento de excitação (por unidade de amplitude de onda) em Arfagem (navios RS e TS)
Fig. AI-11.- Fase do momento de excitação em Arfagem (navios RS e TS)
119

Apêndice I
I.5 Coeficientes de Restauração Hidrostática em Jogo
Coef. Jogo RS TS Puro GM = 0.34 m GM = 0.48 m GM = 0.37 m GM = 0.50 m
Kφ 574.0 810.4 669.8 905.2
Kφφφ 287.2 228.9 -728.9 -860.1
5K φ -936.2 -888.8 330.2 493.8
7K φ 337.0 310.9 -206.7 -288.8
Tabela AI.1 Coeficientes de Restauração Hidrostática em Jogo devido ao jogo puro
(Navio RS e TS)
120

APÊNDICE II
RESPOSTAS DOS NAVIOS RS E TS:
COM E SEM TANQUE DE ESTABILIZAÇÃO
II.1. Navio RS: Respostas Sem Tanque de Estabilização
Navio RS: GM=0.34m, wn4= 0.708 rad/s Sem Tanque
121
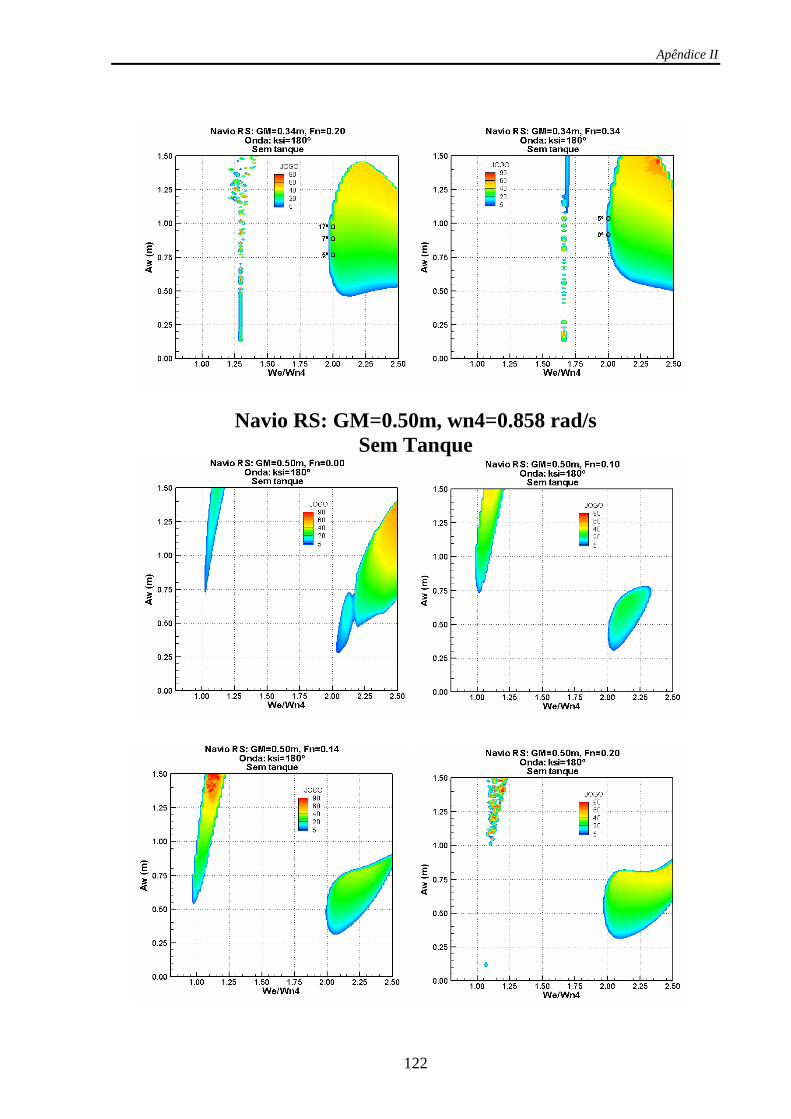
Apêndice II
Navio RS: GM=0.50m, wn4=0.858 rad/s
Sem Tanque
122

Apêndice II
II.2. Navio TS: Respostas Sem Tanque de Estabilização
Navio TS: GM=0.37m, wn4=0.858 rad/s Sem Tanque
123

Apêndice II
Navio TS: GM=0.50m, wn4=0.984 rad/s
Sem Tanque
124
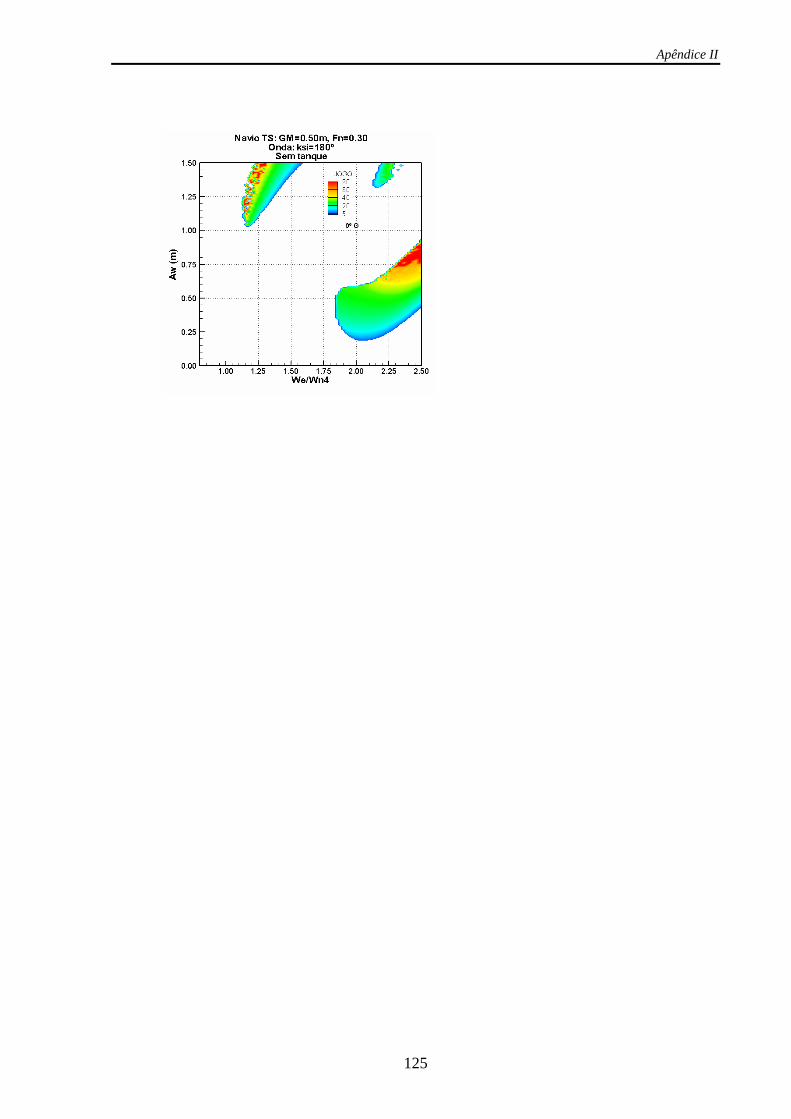
Apêndice II
125

Apêndice II
II.3. Navio RS: Respostas Com Tanque de Estabilização
Navio RS: GM=0.50, Fn=0.34 mt=2%m, nt=0.3
126
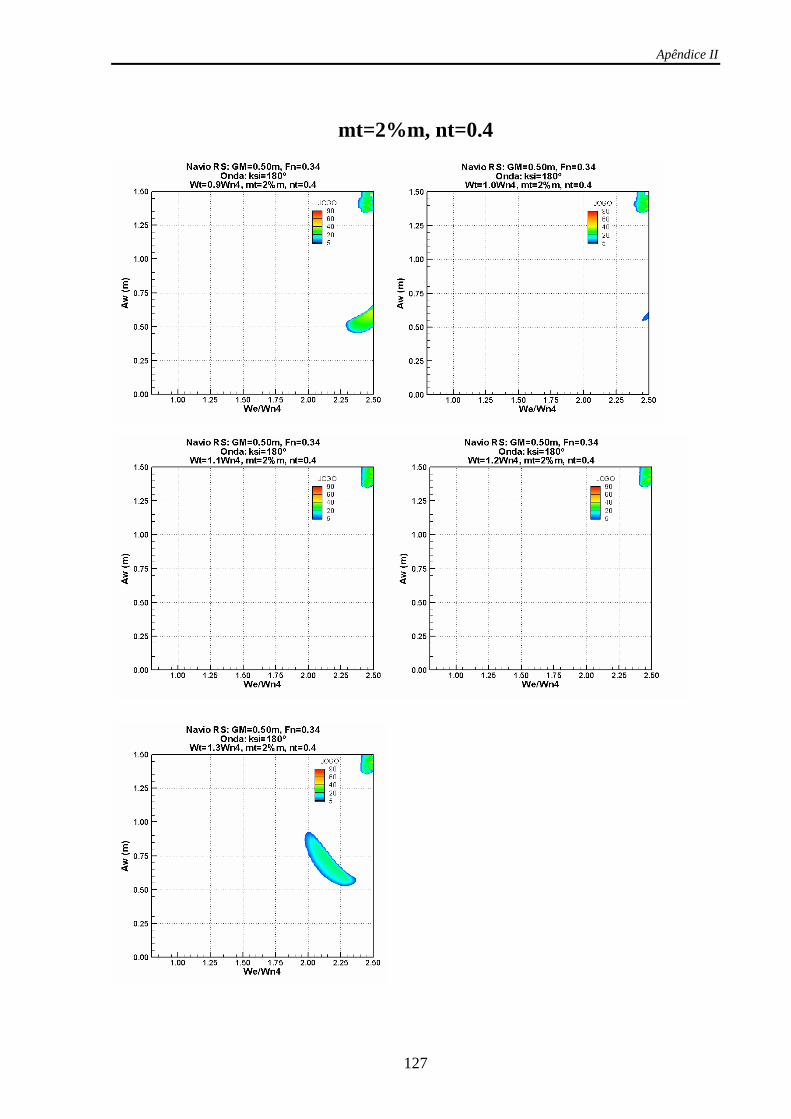
Apêndice II
mt=2%m, nt=0.4
127

Apêndice II
mt=2%m, nt=0.5
128
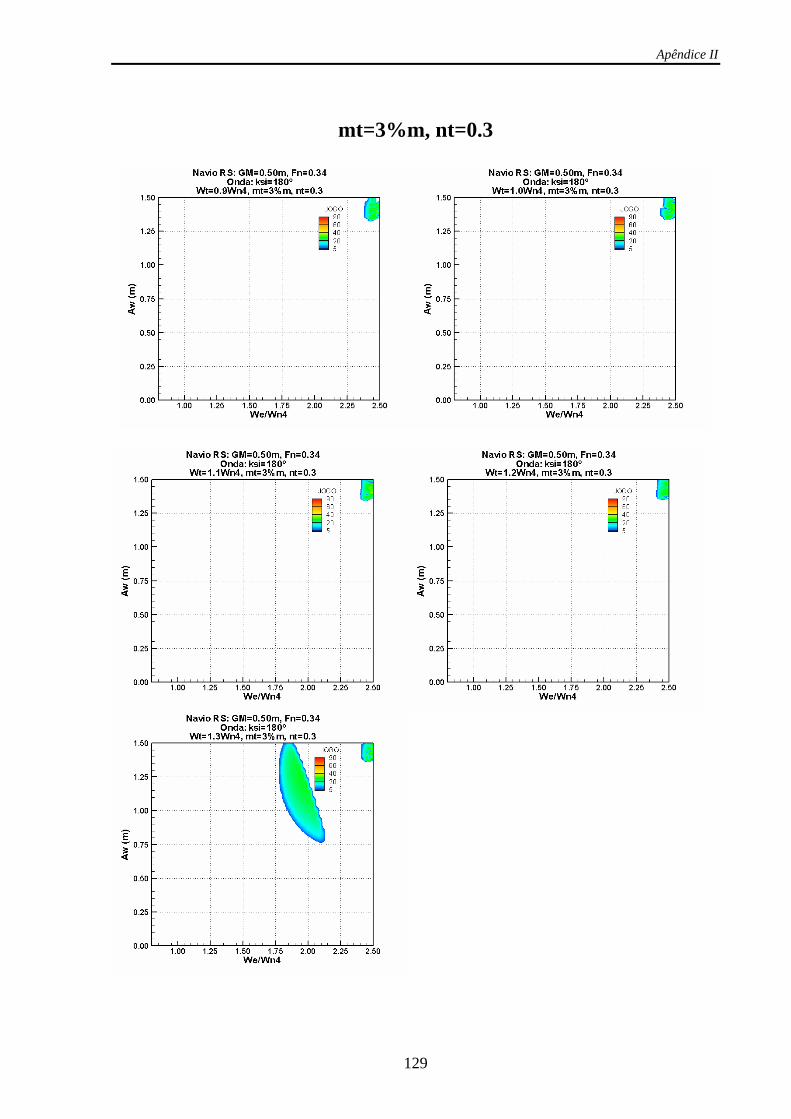
Apêndice II
mt=3%m, nt=0.3
129

Apêndice II
mt=3%m, nt=0.4
130
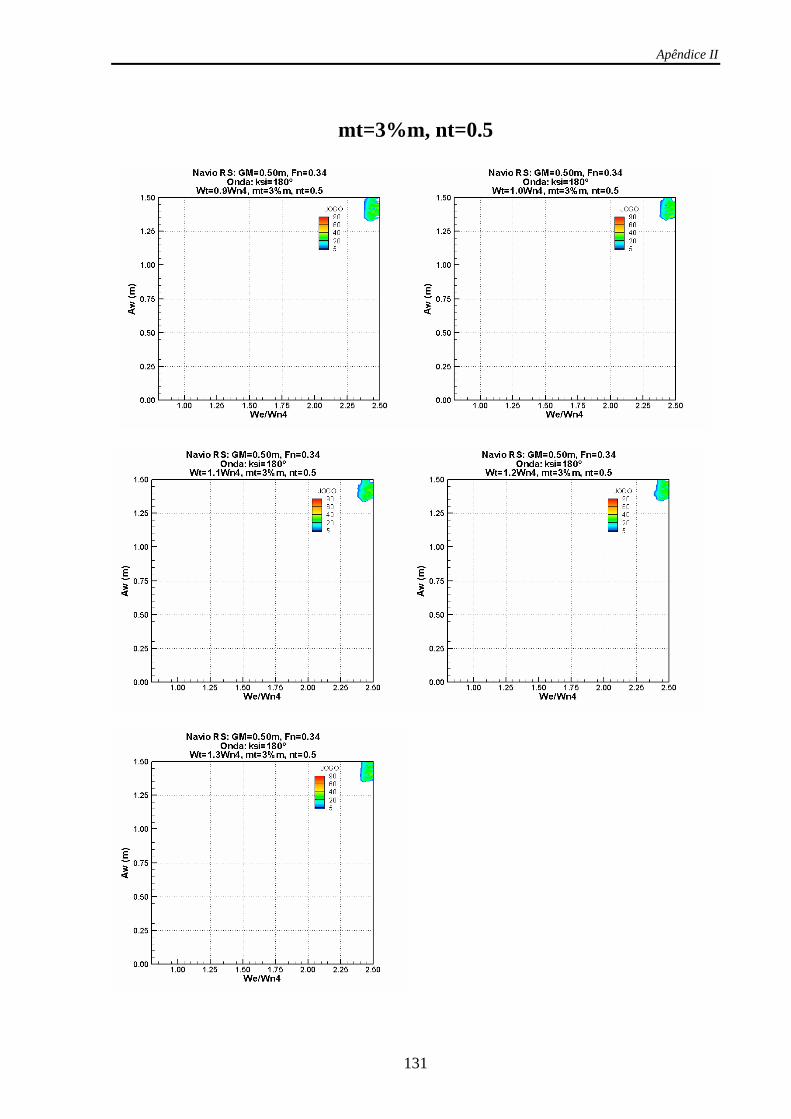
Apêndice II
mt=3%m, nt=0.5
131

Apêndice II
II.4. Navio TS: Respostas Com Tanque de Estabilização
Navio TS: GM=0.37, Fn=0.30 mt=3%m, nt=0.3
132

Apêndice II
mt=3%m, nt=0.4
133
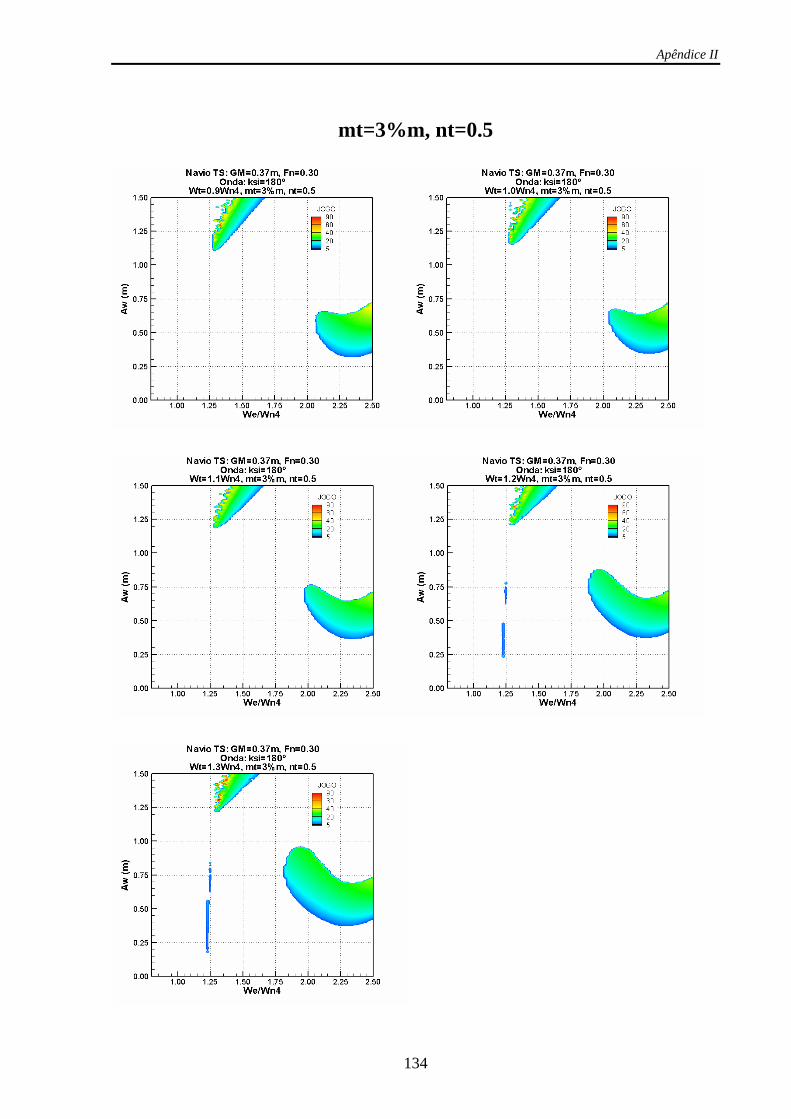
Apêndice II
mt=3%m, nt=0.5
134

Apêndice II
mt=4%m, nt=0.3
135

Apêndice II
mt=4%m, nt=0.4
136
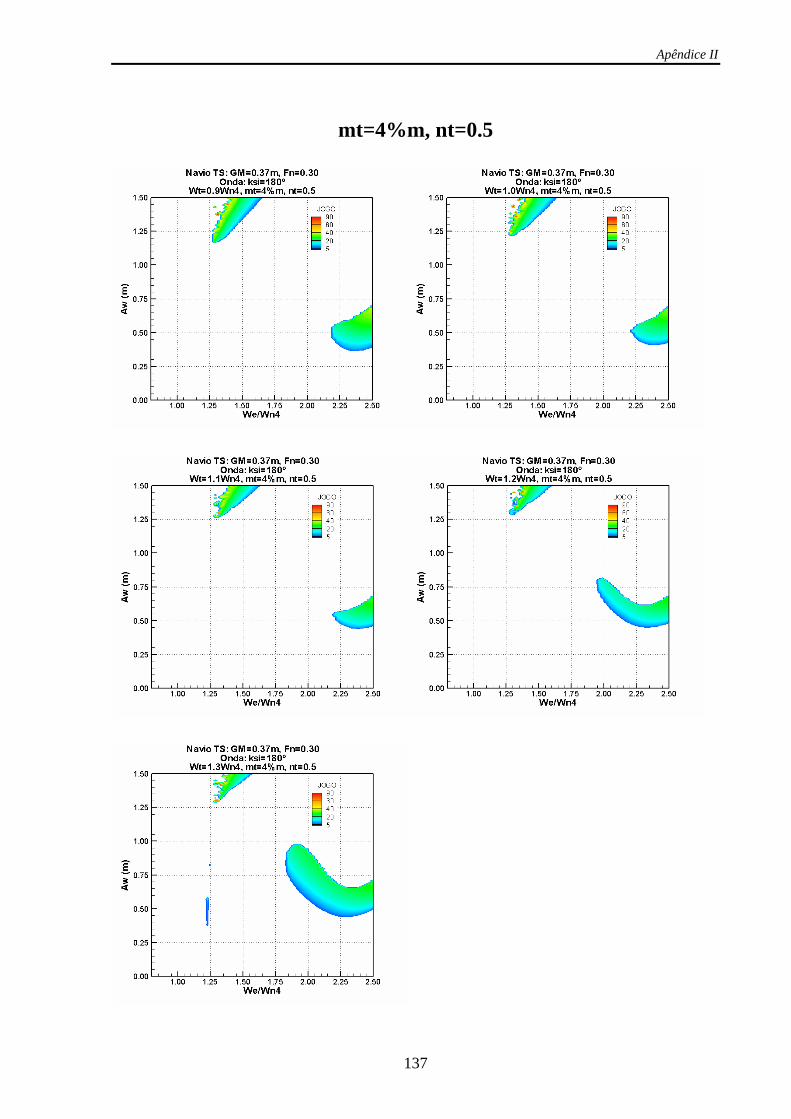
Apêndice II
mt=4%m, nt=0.5
137

Apêndice II
mt=5%m, nt=0.3
138

Apêndice II
mt=5%m, nt=0.4
139

Apêndice II
mt=5%m, nt=0.5
140
Livros Grátis( http://www.livrosgratis.com.br )
Milhares de Livros para Download: Baixar livros de AdministraçãoBaixar livros de AgronomiaBaixar livros de ArquiteturaBaixar livros de ArtesBaixar livros de AstronomiaBaixar livros de Biologia GeralBaixar livros de Ciência da ComputaçãoBaixar livros de Ciência da InformaçãoBaixar livros de Ciência PolíticaBaixar livros de Ciências da SaúdeBaixar livros de ComunicaçãoBaixar livros do Conselho Nacional de Educação - CNEBaixar livros de Defesa civilBaixar livros de DireitoBaixar livros de Direitos humanosBaixar livros de EconomiaBaixar livros de Economia DomésticaBaixar livros de EducaçãoBaixar livros de Educação - TrânsitoBaixar livros de Educação FísicaBaixar livros de Engenharia AeroespacialBaixar livros de FarmáciaBaixar livros de FilosofiaBaixar livros de FísicaBaixar livros de GeociênciasBaixar livros de GeografiaBaixar livros de HistóriaBaixar livros de Línguas

Baixar livros de LiteraturaBaixar livros de Literatura de CordelBaixar livros de Literatura InfantilBaixar livros de MatemáticaBaixar livros de MedicinaBaixar livros de Medicina VeterináriaBaixar livros de Meio AmbienteBaixar livros de MeteorologiaBaixar Monografias e TCCBaixar livros MultidisciplinarBaixar livros de MúsicaBaixar livros de PsicologiaBaixar livros de QuímicaBaixar livros de Saúde ColetivaBaixar livros de Serviço SocialBaixar livros de SociologiaBaixar livros de TeologiaBaixar livros de TrabalhoBaixar livros de Turismo