Embed Size (px)
Citation preview

UNIVERSIDADE FEDERAL DE JUIZ DE FORA
FACULDADE DE ENGENHARIA
CURSO DE GRADUACAO EM ENGENHARIA CIVIL
APLICACAO DE PROCESSAMENTO DIGITAL DE IMAGENS APROBLEMAS DE ENGENHARIA CIVIL
Leandro Mota Peres
JUIZ DE FORAFACULDADE DE ENGENHARIA DA UFJF
2010

APLICACAO DE PROCESSAMENTO DIGITAL DE IMAGENSA PROBLEMAS DE ENGENHARIA CIVIL
Trabalho Final de Curso apresentado ao Colegiado doCurso de Engenharia Civil da Universidade Federal deJuiz de Fora, como requisito parcial a obtencao do tıtulode Engenheiro Civil.
Area de Conhecimento: Mecanica das Estruturas /Materiais e Componentes da Construcao
Orientador: Prof. Flavio de Souza Barbosa, D.Sc.
Co-orientador: Prof. Fernando Marques de Almeida Nogueira, D. Sc.
JUIZ DE FORAFACULDADE DE ENGENHARIA DA UFJF
2010
i
APLICACAO DE PROCESSAMENTO DIGITAL DE IMAGENSA PROBLEMAS DE ENGENHARIA CIVIL
Leandro Mota Peres
Trabalho Final de Curso submetido a banca examinadora constituıda de acordo com oArtigo 9o do Capıtulo IV das Normas de Trabalho Final de Curso estabelecidas peloColegiado do Curso de Engenharia Civil, como parte dos requisitos necessarios para aobtencao do grau de Engenheiro Civil.
Aprovado em: 8/12/2010
Por:
———————————————————Profo. Flavio de Souza Barbosa, D. Sc.
———————————————————Profo. Fernando Marques de Almeida Nogueira, D. Sc.
———————————————————Profa. Michele Cristina Resende Farage, D. Sc.
———————————————————Profo. Pedro Kopschitz Xavier Bastos, D. Sc.
JUIZ DE FORAFACULDADE DE ENGENHARIA DA UFJF
2010
ii
Agradecimentos
Dedico meus sinceros agradecimentos:
• Ao professor Flavio pelo incentivo, orientacao e acima de tudo pela amizade aolongo destes ultimos tres anos.
• Ao professor Fernando pela orientacao e pelos ensinamentos de processamento deimagens e programacao.
• A professora Michele e ao professor Pedro pela orientacao e pelas sugestoes dadasnos trabalhos publicados no EMC em 2008 e no SIMMEC em 2010.
• Ao Programa de Educacao Tutorial da Engenharia Civil por ter me proporcionadouma formacao mais completa e, alem disso, por me proporcionar trabalhar compessoas tao competentes.
• A Universidade Federal de Juiz de Fora por oferecer formacao superior.
• A Pedra Sul Mineracao pelas amostras cedidas e pelo laboratorio.
• A todos os amigos e familiares que de certa forma contribuıram para que este tra-balho se concretizasse.
iii

Resumo do Trabalho de Final de Curso apresentado a Faculdade de Engenharia - UFJFcomo parte dos requisitos necessarios para a obtencao do grau de Bacharel em EngenhariaCivil
APLICACAO DE PROCESSAMENTO DIGITAL DE IMAGENS A PROBLEMAS DEENGENHARIA CIVIL
Leandro Mota Peres
DEZEMBRO/2010
Orientador: Flavio de Souza BarbosaDepartamento: Mecanica Aplicada e Computacional
Co-orientador: Prof. Fernando Marques de Almeida NogueiraDepartamento: Engenharia de Producao
Nas ultimas decadas, com a evolucao da tecnologia da computacao digital e de novosalgoritmos para processamento de sinais bidimensionais, a area de Processamento Digitalde Imagens (PDI) tem se tornado aplicavel a varios problemas de Engenharia Civil, taiscomo: analise do tamanho e forma de agregados, estudo da microestrutura do concreto,medicao de deformacoes em estruturas, deteccao de fissuras em pavimentos dentre ou-tros. Desta forma, faz-se neste trabalho o estudo e desenvolvimento de alguns algoritmospara o PDI e suas aplicacoes a tres problemas: 1) geracao semi-automatica de malhasde elementos finitos em um meio bifasico; 2) determinacao da curva granulometrica deagregados graudos; 3) avaliacao granulometrica em tempo real de agregados e minerios.Os resultados obtidos mostram que a aplicacao de PDI a problemas de Engenharia Civile uma ferramenta que pode auxiliar de forma efetiva o engenheiro na analise e busca parasolucoes destes problemas.
iv

Sumario
1 Introducao 11.1 Objetivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.2 Escopo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2 Aspectos Gerais Sobre Processamento de Imagens 42.1 Representacao de imagens digitais . . . . . . . . . . . . . . . . . . . . . . . 52.2 Aquisicao de imagens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.3 Digitalizacao de Imagens . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.4 Tecnicas de segmentacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.4.1 Limiarizacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.4.2 Deteccao de bordas . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.4.3 Rotulacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.5 Caracterısticas inerciais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.5.1 Rotacao de objetos . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3 Problema 1: Geracao de Malhas de Elementos Finitos Atraves de Ima-gens de Cortes em Corpos de Prova de Concreto 163.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163.2 Metodologia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.2.1 Processamento da imagem . . . . . . . . . . . . . . . . . . . . . . . 173.2.2 Obtencao dos pontos das bordas que farao parte da malha de ele-
mentos finitos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.2.3 Geracao da malha . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.3 Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233.4 Comentarios Gerais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4 Problema 2: Determinacao da Curva Granulometrica de AgregadosGraudos 274.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 274.2 Agregados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.2.1 Amostragem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 294.2.2 Analise granulometrica de agregados graudos por ensaio de peneira-
mento segundo a NBR NM 248 . . . . . . . . . . . . . . . . . . . . 304.3 Metodologia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.3.1 Obtencao das imagens fotograficas dos agregados . . . . . . . . . . 334.3.2 Processamento da Imagem . . . . . . . . . . . . . . . . . . . . . . . 334.3.3 Transformacao da porcentagem de area para porcentagem de massa 354.3.4 Determinacao do coeficiente de correcao (C ) . . . . . . . . . . . . . 37
4.4 Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
v

4.4.1 Comentarios Gerais . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
5 Problema 3: Avaliacao Granulometrica em Tempo Real de Agregados eMinerios 415.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 415.2 Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 445.3 Comentarios Gerais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
6 Conclusoes e Consideracoes Finais 51
A Anexo 1 54
B Anexo 2 69
vi

Lista de Figuras
2.1 Grandes areas da computacao grafica.(Extraıdo de Conci(2008)). . . . . . . 42.2 Imagem monocromatica e a convencao utilizada para o par de eixos (x, y). 52.3 Aquisicao da imagem(Extraıdo de Conci(2008)). . . . . . . . . . . . . . . . 62.4 Processo de limiarizacao. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.5 Conceitos de vizinhanca 4 e 8 . . . . . . . . . . . . . . . . . . . . . . . . . 102.6 Etapas para obtencao do comprimento de largura de figuras. . . . . . . . . 14
3.1 Imagem sintetica para a qual se deseja gerar uma malha de elementos finitos. 173.2 Imagem apos conversao para escala de cinza. . . . . . . . . . . . . . . . . . 173.3 Bordas detectadas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.4 Imagem mostrando a rotulacao da bordas identificadas. . . . . . . . . . . . 183.5 Etapas para obtencao dos pontos das bordas que farao parte da malha de
elementos finitos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.6 Pontos identificados e usados para a geracao de malhas. . . . . . . . . . . . 203.7 Determinacao dos angulos α usados para determinacao das conectividades
na geometria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213.8 Exemplo do formato de dados de saıda para o Gmsh . . . . . . . . . . . . 223.9 Imagem da geometria exportada para o Gmsh. . . . . . . . . . . . . . . . . 223.10 Malha de Elementos Finitos gerada a partir do Gmsh, auxiliado pela metodolo-
gia proposta. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233.11 Imagem do corpo de prova do concreto estudado. . . . . . . . . . . . . . . 233.12 Imagem com problemas destacados. . . . . . . . . . . . . . . . . . . . . . . 243.13 Imagem com ruıdos eliminados. . . . . . . . . . . . . . . . . . . . . . . . . 243.14 Imagem apos tratamento manual. . . . . . . . . . . . . . . . . . . . . . . . 253.15 Imagem binarizada das bordas. . . . . . . . . . . . . . . . . . . . . . . . . 253.16 Imagem com pontos medios definidos. . . . . . . . . . . . . . . . . . . . . . 253.17 Imagem da geometria exportada para o Gmsh. . . . . . . . . . . . . . . . . 263.18 Malha de Elementos Finitos gerada a partir da metodologia proposta. . . . 26
4.1 Quarteador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 294.2 Quarteamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 304.3 Peneiramento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314.4 Agregado alongado passando pela malha quadrada da peneira(Extraıdo de
Mora et al. (1998)). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 324.5 Corte horizontal em um agregado passando pela malha quadrada da peneira
(Extraıdo de Mora et al. (1998)). . . . . . . . . . . . . . . . . . . . . . . . 32
vii

4.6 Amostra de agregados graudos dispostos sobre a cartolina preta. Na partesuperior esquerda podem ser observados os dois retangulos brancos uti-lizados para a correlacao entre pixels e a escala de comprimento real doobjeto. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.7 Imagem apos ser segmentada. . . . . . . . . . . . . . . . . . . . . . . . . . 344.8 Imagem apos correcoes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 344.9 Imagem com as bordas detectadas. . . . . . . . . . . . . . . . . . . . . . . 354.10 Comparacao entre as curvas obtidas pelo peneiramento e o PDI sem aplicar
nenhum coeficiente de correcao. . . . . . . . . . . . . . . . . . . . . . . . . 364.11 Comparacao entre as curvas obtidas pelo peneiramento e o PDI, sem o
coeficiente de correcao (PDI original) e com um coeficiente de correcao de0,86 (PDI corrigido). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.12 Amostra 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 394.13 Amostra 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 394.14 Amostra 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 394.15 Amostra 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 394.16 Amostra 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5.1 Esquema de Funcionamento do SAGI. . . . . . . . . . . . . . . . . . . . . . 435.2 Areia fina . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 445.3 Areia media . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 445.4 Curvas da areia fina e media obtidas pela metodologia inerente ao SAGI. . 445.5 Brita 0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 455.6 Brita 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 455.7 Curvas da brita 0 e brita 1 obtidas pela metodologia inerente ao SAGI. . . 455.8 Curvas da brita 0 e brita 1 obtidas pela metodologia inerente ao SAGI. . . 465.9 Grupo 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 485.10 Grupo 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 485.11 Grupo 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 485.12 Grupo 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 485.13 Grupo 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 485.14 Grupo 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 485.15 Grupo 7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 495.16 Grupo 8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 495.17 Curvas granulometricas para as amostras dos grupos de 1 a 7 . . . . . . . . 50
viii
Lista de Tabelas
4.1 Fatores de correcao C obtidos no trabalho . . . . . . . . . . . . . . . . . . 384.2 Fatores de correcao C obtidos por (Mora et al., 1998) . . . . . . . . . . . . 38
ix
Capıtulo 1
Introducao
O maior emprego das imagens digitais ate a decada de 1980 consistia em imagens prove-nientes da pesquisa espacial. Atualmente, as imagens digitais encontram-se difundidas emmuitas aplicacoes que podem ser destacadas em diversas areas, tais como: Meteorologia,Medicina, Engenharia, Biologia, Geografia, Astronomia, etc. No campo da EngenhariaCivil foi possıvel solucionar com maior precisao problemas de difıcil solucao e em algunscasos ate mesmo proporcionar uma metodologia alternativa para tecnicas ja existentes.Alguns destes problemas que hoje podem ser resolvidos atraves do processamento e analisede imagens sao: deteccao de fissuras em pavimentos de estradas, medicao de deformacoesestruturais, analise do tamanho, forma e distribuicao espacial de graos e poros do solo;estudo da microestrutura do concreto; (Lee and Chou, 1993). Na Faculdade de Enge-nharia da Universidade Federal de Juiz de Fora (UFJF), dois trabalhos de aplicacao deProcessamento Digital de Imagens (PDI) a problemas de Engenharia merecem destaque.A.Vilela (2008) apresenta uma metodologia para reconstrucao de superfıcies a partir deluz estruturada e Zimmermann (2008) aplica tecnicas de PDI ao monitoramento de com-portamento dinamico de estruturas.
Assim sendo, faz-se neste trabalho o estudo e desenvolvimento de alguns algoritmos dePDI e suas aplicacoes a tres problemas: 1) geracao semi-automatica de malhas de elemen-tos finitos em um meio bifasico; 2) determinacao da curva granulometrica de agregadosgraudos; 3) avaliacao granulometrica em tempo real de agregados e minerios.
Para tal, apos uma abordagem sobre os temas que envolvem o processamento e analisede imagens que foram utilizados neste trabalho, e apresentado o primeiro problema:geracao semi-automatica de malhas de elementos finitos em um meio bifasico. Apresenta-se neste caso uma metodologia que auxilia o programa livre Gmesh (Gmsh, 2008) parageracao de malhas de elementos finitos partindo-se de imagens de cortes em corpos deprova de concreto. Primeiramente a metodologia proposta e apresentada atraves de umaimagem sintetica e posteriormente esta metodologia e aplicada a um problema constituıdode um meio nao homogeneo a partir da fotografia de uma secao transversal de um corpode prova de concreto.
O segundo problema descreve a aplicacao do PDI para analise de distribuicao detamanho de partıculas dos agregados graudos. A metodologia aqui aplicada foi extraıda dotrabalho de Mora et al. (1998) e adaptada para o tipo de agregado da regiao de Juiz de Fora(rocha Gnaisse). As curvas granulometricas obtidas foram confrontadas com as curvasextraıdas pelo ensaio de peneiramento segundo a NBR NM 248 e apresentaram resultadosproximos. O ındice de correcao inerente a metodologia aplicada foi determinado para osagregados analisados, viabilizando entao sua aplicacao a agregados de rocha Gnaisse.
1

Por fim e apresentado o terceiro problema, relativo a avaliacao granulometrica emtempo real de agregados e minerios que sao transportados em correias transportado-ras. Para resolver este tipo de problema, vem sendo desenvolvido na UFJF, atraves doPrograma de Incentivo a Inovacao (PII), o aparelho denominado Sistema de AvaliacaoGranulometrica por Imagem (SAGI). Este equipamento quando acoplado as correias trans-portadoras das pedreiras e mineradoras e capaz de fazer a avaliacao granulometrica emtempo real e de toda a producao do material transportado na correia. Alguns pontos dametodologia aqui aplicada nao serao totalmente ilustrados pois o SAGI espera registrode patente junto ao Instituto Nacional da Propriedade Privada (INPI). Serao apresenta-dos alguns resultados relativos a analise granulometrica de agregados graudos e miudos(areias).
1.1 Objetivo
Ressalta-se aqui o objetivo do presente trabalho: propor solucoes alternativas para proble-mas de Engenharia Civil atraves de processamento e analise de imagens digitais, buscandoresultados mais precisos e de rapida obtencao.
1.2 Escopo
O presente trabalho esta dividido em 6 capıtulos e 2 apendices:
• Capıtulo 1 - Introducao
Este capıtulo procura fazer uma abordagem geral sobre o tema em questao e apre-sentar os objetivos que se desejam alcancar ao longo do trabalho.
• Capıtulo 2 - Aspectos Gerais Sobre Processamento e Analise de Imagens
Neste capıtulo apresenta-se alguns conceitos sobre o processamento e analise deimagens digitais que serao aplicados nas metodologias propostas.
• Capıtulo 3 - Problema 1: Geracao de Malhas de Elementos Finitos Atravesde Imagens de Cortes em Corpos de Prova de Concreto
Este capıtulo apresenta uma metodologia para a geracao de malhas de elementosfinitos atraves de imagens de cortes em corpos de prova de concreto.
• Capıtulo 4 - Problema 2: Determinacao da Curva Granulometrica de AgregadosGraudos
Faz-se aqui uma avalidacao da metodologia desenvolvida por Mora et al. (1998) paraa determinacao da curva granulometrica de agregados graudos atraves de imagensdigitais.
• Capıtulo 5 - Problema 3: Avaliacao Granulometrica em Tempo Real de Agregadose Minerios
Este capıtulo apresenta alguns resultados obtidos pelo SAGI para agregados graudose miudos.
• Capıtulo 6 - Conclusoes e Consideracoes Finais
Aqui sao apresentadas as conclusoes e consideracoes finais.
2
• Apendice A - Algoritmos do problema 1
Este apendice apresenta os algoritmos implementados no MATLAB r© para solucaodo problema 1.
• Apendice B - Algoritmos do problema 2
Este apendice apresenta os algoritmos implementados no MATLAB r© para solucaodo problema 2.
3
Capıtulo 2
Aspectos Gerais SobreProcessamento de Imagens
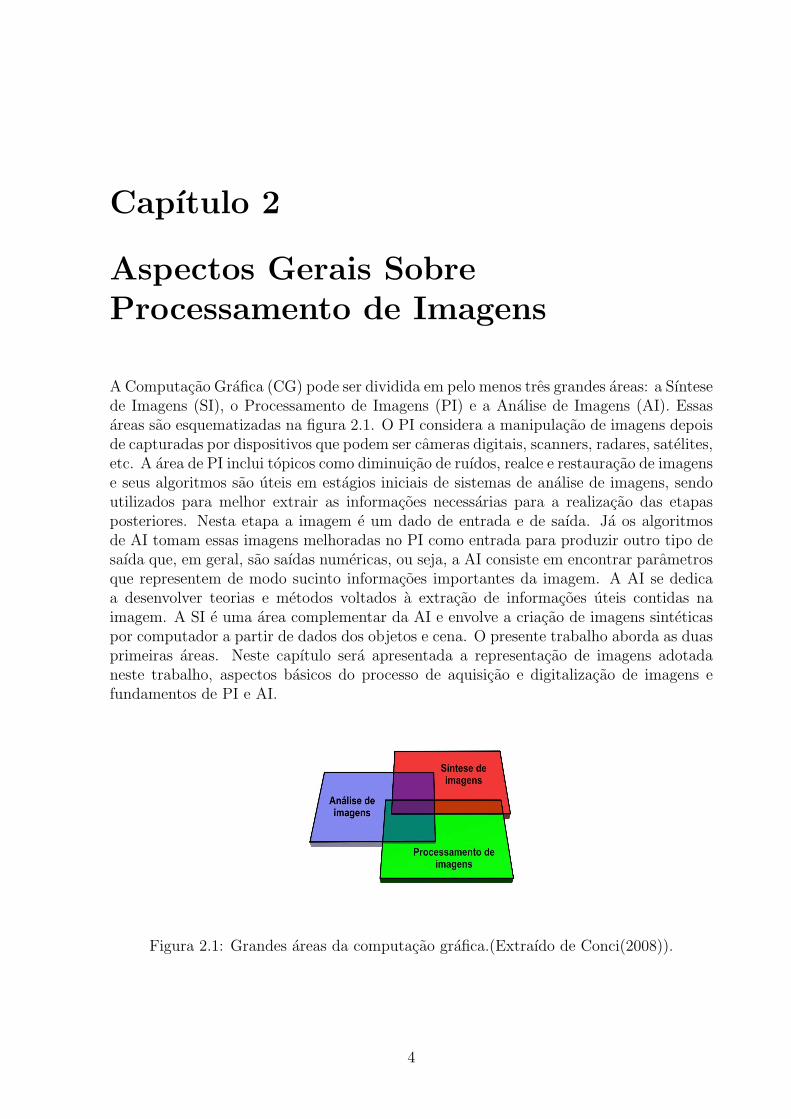
A Computacao Grafica (CG) pode ser dividida em pelo menos tres grandes areas: a Sıntesede Imagens (SI), o Processamento de Imagens (PI) e a Analise de Imagens (AI). Essasareas sao esquematizadas na figura 2.1. O PI considera a manipulacao de imagens depoisde capturadas por dispositivos que podem ser cameras digitais, scanners, radares, satelites,etc. A area de PI inclui topicos como diminuicao de ruıdos, realce e restauracao de imagense seus algoritmos sao uteis em estagios iniciais de sistemas de analise de imagens, sendoutilizados para melhor extrair as informacoes necessarias para a realizacao das etapasposteriores. Nesta etapa a imagem e um dado de entrada e de saıda. Ja os algoritmosde AI tomam essas imagens melhoradas no PI como entrada para produzir outro tipo desaıda que, em geral, sao saıdas numericas, ou seja, a AI consiste em encontrar parametrosque representem de modo sucinto informacoes importantes da imagem. A AI se dedicaa desenvolver teorias e metodos voltados a extracao de informacoes uteis contidas naimagem. A SI e uma area complementar da AI e envolve a criacao de imagens sinteticaspor computador a partir de dados dos objetos e cena. O presente trabalho aborda as duasprimeiras areas. Neste capıtulo sera apresentada a representacao de imagens adotadaneste trabalho, aspectos basicos do processo de aquisicao e digitalizacao de imagens efundamentos de PI e AI.
Figura 2.1: Grandes areas da computacao grafica.(Extraıdo de Conci(2008)).
4
2.1 Representacao de imagens digitais
Uma imagem monocromatica pode ser descrita matematicamente por uma funcao deintensidade luminosa f(x, y), sendo seu valor, em qualquer ponto de coordenadas espaciais(x, y), proporcional a intensidade de luz ou brilho (nıvel de cinza) da imagem naqueleponto.
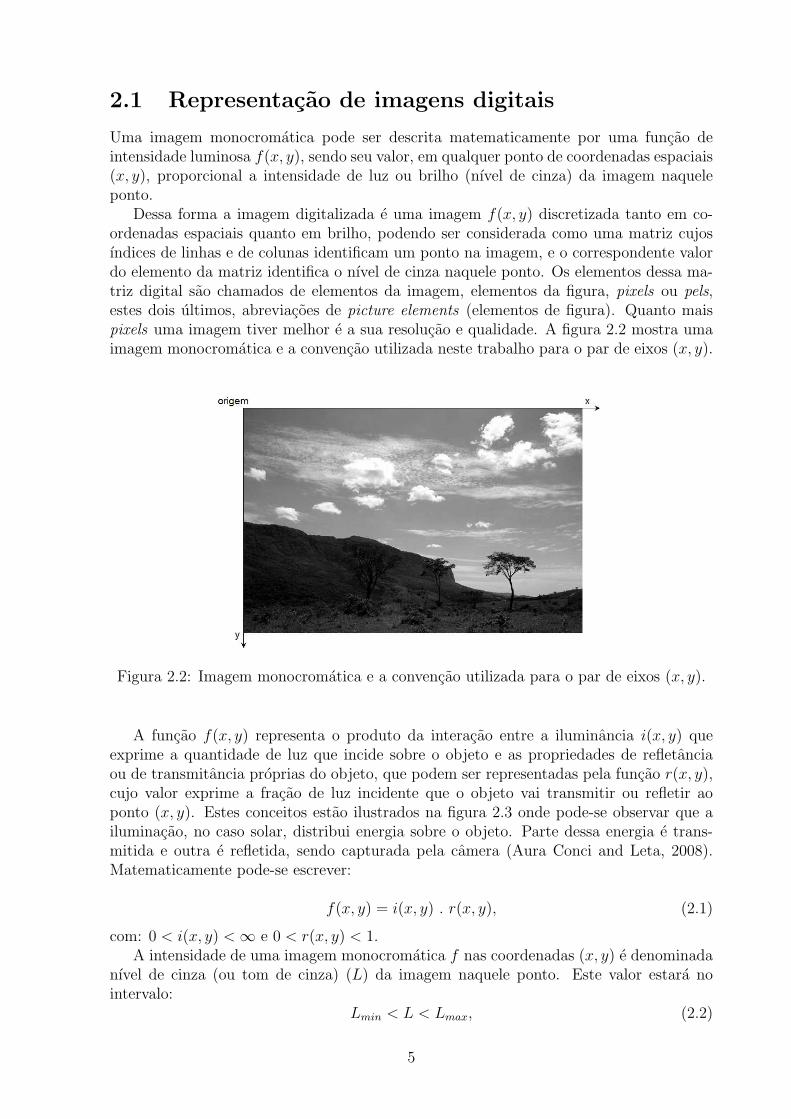
Dessa forma a imagem digitalizada e uma imagem f(x, y) discretizada tanto em co-ordenadas espaciais quanto em brilho, podendo ser considerada como uma matriz cujosındices de linhas e de colunas identificam um ponto na imagem, e o correspondente valordo elemento da matriz identifica o nıvel de cinza naquele ponto. Os elementos dessa ma-triz digital sao chamados de elementos da imagem, elementos da figura, pixels ou pels,estes dois ultimos, abreviacoes de picture elements (elementos de figura). Quanto maispixels uma imagem tiver melhor e a sua resolucao e qualidade. A figura 2.2 mostra umaimagem monocromatica e a convencao utilizada neste trabalho para o par de eixos (x, y).
Figura 2.2: Imagem monocromatica e a convencao utilizada para o par de eixos (x, y).
A funcao f(x, y) representa o produto da interacao entre a iluminancia i(x, y) queexprime a quantidade de luz que incide sobre o objeto e as propriedades de refletanciaou de transmitancia proprias do objeto, que podem ser representadas pela funcao r(x, y),cujo valor exprime a fracao de luz incidente que o objeto vai transmitir ou refletir aoponto (x, y). Estes conceitos estao ilustrados na figura 2.3 onde pode-se observar que ailuminacao, no caso solar, distribui energia sobre o objeto. Parte dessa energia e trans-mitida e outra e refletida, sendo capturada pela camera (Aura Conci and Leta, 2008).Matematicamente pode-se escrever:
f(x, y) = i(x, y) . r(x, y), (2.1)
com: 0 < i(x, y) < ∞ e 0 < r(x, y) < 1.A intensidade de uma imagem monocromatica f nas coordenadas (x, y) e denominada
nıvel de cinza (ou tom de cinza) (L) da imagem naquele ponto. Este valor estara nointervalo:
Lmin < L < Lmax, (2.2)
5
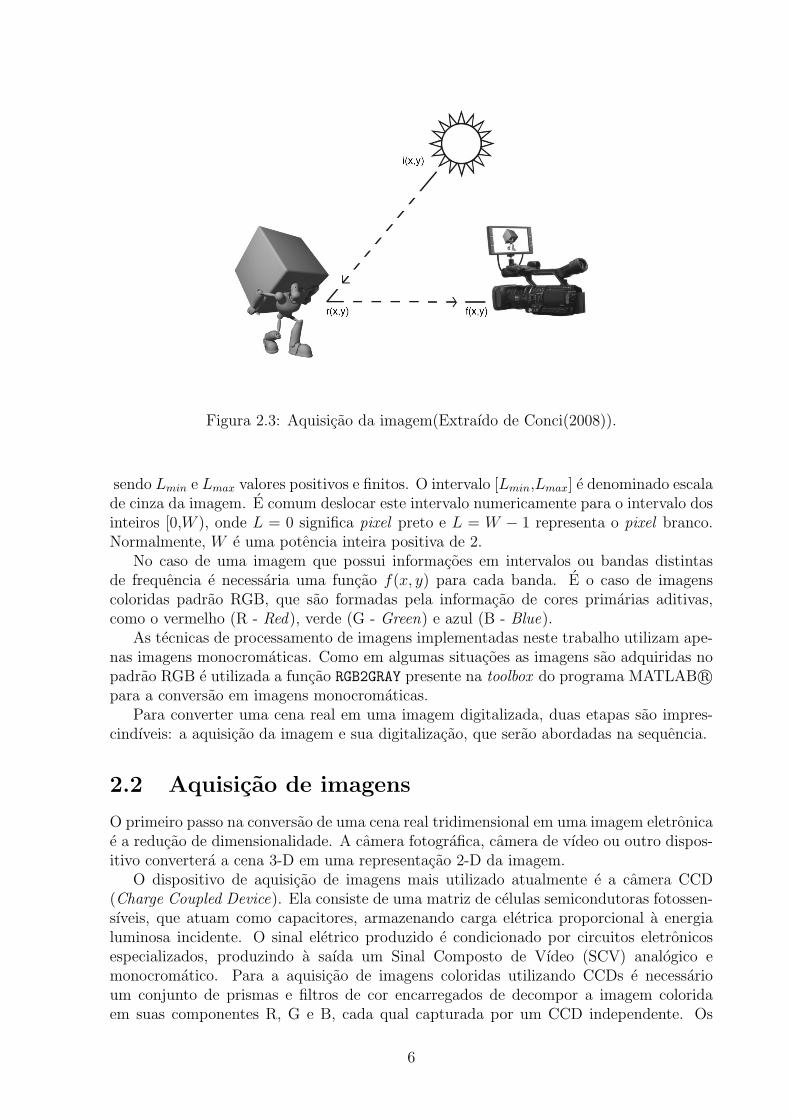
Figura 2.3: Aquisicao da imagem(Extraıdo de Conci(2008)).
sendo Lmin e Lmax valores positivos e finitos. O intervalo [Lmin,Lmax] e denominado escalade cinza da imagem. E comum deslocar este intervalo numericamente para o intervalo dosinteiros [0,W ), onde L = 0 significa pixel preto e L = W − 1 representa o pixel branco.Normalmente, W e uma potencia inteira positiva de 2.
No caso de uma imagem que possui informacoes em intervalos ou bandas distintasde frequencia e necessaria uma funcao f(x, y) para cada banda. E o caso de imagenscoloridas padrao RGB, que sao formadas pela informacao de cores primarias aditivas,como o vermelho (R - Red), verde (G - Green) e azul (B - Blue).
As tecnicas de processamento de imagens implementadas neste trabalho utilizam ape-nas imagens monocromaticas. Como em algumas situacoes as imagens sao adquiridas nopadrao RGB e utilizada a funcao RGB2GRAY presente na toolbox do programa MATLAB r©para a conversao em imagens monocromaticas.
Para converter uma cena real em uma imagem digitalizada, duas etapas sao impres-cindıveis: a aquisicao da imagem e sua digitalizacao, que serao abordadas na sequencia.
2.2 Aquisicao de imagens
O primeiro passo na conversao de uma cena real tridimensional em uma imagem eletronicae a reducao de dimensionalidade. A camera fotografica, camera de vıdeo ou outro dispos-itivo convertera a cena 3-D em uma representacao 2-D da imagem.
O dispositivo de aquisicao de imagens mais utilizado atualmente e a camera CCD(Charge Coupled Device). Ela consiste de uma matriz de celulas semicondutoras fotossen-sıveis, que atuam como capacitores, armazenando carga eletrica proporcional a energialuminosa incidente. O sinal eletrico produzido e condicionado por circuitos eletronicosespecializados, produzindo a saıda um Sinal Composto de Vıdeo (SCV) analogico emonocromatico. Para a aquisicao de imagens coloridas utilizando CCDs e necessarioum conjunto de prismas e filtros de cor encarregados de decompor a imagem coloridaem suas componentes R, G e B, cada qual capturada por um CCD independente. Os
6

sinais eletricos correspondentes a cada componente sao combinados posteriormente con-forme o padrao de cor utilizado (NTSC (National Television Standards Committee) ouPAL (Phase Alternating Line), por exemplo). Uma camera CCD monocromatica simplesconsiste basicamente de um conjunto de lentes que focalizarao a imagem sobre a areafotossensıvel do CCD, o sensor CCD e seus circuitos complementares.
2.3 Digitalizacao de Imagens
O sinal analogico de vıdeo obtido na saıda do dispositivo de aquisicao deve ser submetidoa uma discretizacao espacial e em amplitude para tomar o formato desejavel ao proces-samento computacional.
Segundo Aura Conci and Leta (2008) existem dois conceitos importantes relacionadosa imagem digital: amostragem da imagem (sampling) e quantificacao de cada um dos seuspixels (quantization). Essas propriedades sao relativas ao processamento computacionalde uma imagem, sendo o primeiro referente ao numero de pontos amostrados de uma ima-gem digitalizada e o segundo referente a quantidade de nıveis tons que pode ser atribuıdaa cada ponto digitalizado.
Basicamente, a amostragem converte a imagem analogica em uma matriz de m por npixels, conforme mostrado a seguir:
f =
f(1, 1) f(1, 2) . . . f(1,m)f(2, 1) f(2, 2) . . . f(2,m)
......
......
f(n, 1) f(n, 2) . . . f(n,m)
(2.3)
Maiores valores de m e n implicam em uma imagem de maior resolucao. Por seu lado,a quantizacao faz com que cada um destes pixels assuma um valor inteiro, na faixa de0 a 2t − 1. Quanto maior o valor de t, maior o numero de nıveis de cinza presentes naimagem digitalizada.
Do ponto de vista eletronico, a digitalizacao consiste em uma conversao analogico-digital na qual o numero de amostras do sinal contınuo por unidade de tempo indica ataxa de amostragem e o numero de bits do conversor A/D utilizado determina o numerode tons de cinza resultantes na imagem digitalizada.
Sob uma abordagem matematica formal, o processo de amostragem pode ser vistocomo uma divisao do plano xy em uma grade, com as coordenadas do centro de cadaelemento da grade, sendo uma dupla de elementos do produto cartesiano Z∗,1×Z∗, o qualrepresenta o conjunto de todos os pares ordenados dos elementos (a, b) com a e b sendonumeros pertencentes a Z. Portanto f(x, y) e uma imagem digital se (x, y) forem numerosinteiros de Z∗ × Z∗ e f uma funcao que atribui um valor de nıvel de cinza (isto e, umnumero real - R) para cada par distinto de coordenadas. Se os nıveis de cinza resultantesforem tambem numeros inteiros (como geralmente e o caso), Z∗ substitui R e uma imagemdigital entao se torna uma funcao bidimensional cujas coordenadas e valores de amplitudesao numeros inteiros.
Na especificacao do processo de digitalizacao deve-se decidir que valores de n, m et sao adequados, do ponto de vista de qualidade da imagem e da quantidade de bytesnecessarios para armazena-la.
1Conjunto dos inteiros diferentes de zero.
7
Para obter uma imagem digital de qualidade semelhante a de uma imagem de televisao,sao necessarios 640 x 480 pixels e 128 nıveis de cinza. Em geral, 64 nıveis de cinza saoconsiderados suficientes para o olho humano. Apesar disto, a maioria dos sistemas devisao artificial utiliza imagens com 256 nıveis de cinza.
Os processos de amostragem e quantizacao podem ser aprimorados usando tecnicasadaptativas. Sob o aspecto da amostragem, a ideia basica e utilizar maior numero depontos em regioes de grande detalhe, em detrimento das regioes homogeneas de grandesdimensoes, que poderiam ser amostradas com menor numero de pixels. Sob o angulo daquantizacao, uma vez que o olho humano nao e capaz de perceber sutis diferencas detons de cinza nas imediacoes de variacoes abruptas de intensidade, o objetivo seria uti-lizar poucos nıveis de cinza nestas regioes. O principal obstaculo para a implementacaodestas tecnicas e a necessidade de identificacao previa (ainda que aproximada) das regioespresentes na imagem e das fronteiras entre elas. No caso da quantizacao, entretanto,outra tecnica adaptativa pode ser utilizada. Efetuando um levantamento da frequenciade ocorrencia de todos os nıveis de cinza permitidos, pode-se diminuir os nıveis de quan-tizacao nas regioes da escala de cinza com maior concentracao de ocorrencia de pixels,aumentando-os nas demais regioes (Filho and Neto, 1999).
2.4 Tecnicas de segmentacao
Esse processo tem por objetivo particionar a imagem de modo que seja possıvel explicitarsuas regioes de interesse, agrupando seus pixels de forma que eles se destaquem dos demais.
A segmentacao e um processo muito normal para o ser humano, pois os sistemasbiologicos reconhecem e interpretam os objetos assim que os veem a partir de um conjuntode informacoes que sao combinadas e processadas em paralelo no cerebro. Porem essatarefa e de extrema complexidade para o computador.
As dificuldades inerentes ao processo de segmentacao automatica de imagens existeme por isso deve-se considerar que as fronteiras ou bordas das regioes possam nao ser muitonıtidas e sao muitas vezes irregulares e imprecisas. Na segmentacao em larga escala,especialmente por processos automaticos, existe uma grande necessidade de controlar oambiente de captura. Ambientes bem controlados, com grandes contrastes, tendem afacilitar a interpretacao de imagens. Ambientes externos, em geral, apresentam maisdificuldades, pois estao sujeitos a variacao de iluminacao. Alem disso, a existencia desombras ou movimento muda os aspectos da regiao, tende a dar uma falsa impressaoacerca da regiao a ser segmentada (Melo, 2005).
Existem muitas maneiras de segmentar uma imagem, sendo que cada tecnica e esco-lhida de acordo com o problema a ser resolvido. A segmentacao pode ser baseada nasdescontinuidades ou nas similaridades dos diferentes aspectos da imagem, em limites oubordas e em areas ou regioes.
A seguir e apresentado o tipo de tecnica de segmentacao utilizada no presente trabalho.
2.4.1 Limiarizacao
Uma das operacoes de segmentacao mais utilizadas e a limiarizacao ou separacao por“tom de corte”. Essa operacao e interessante quando a imagem apresenta duas classes:o fundo e o objeto. Se a intensidade dos valores dos pixels do objeto encontra-se emum intervalo diferente do fundo, uma imagem binaria pode ser obtida atraves de umaoperacao de limiarizacao (thresholding) que agrupa os pontos do primeiro intervalo com
8
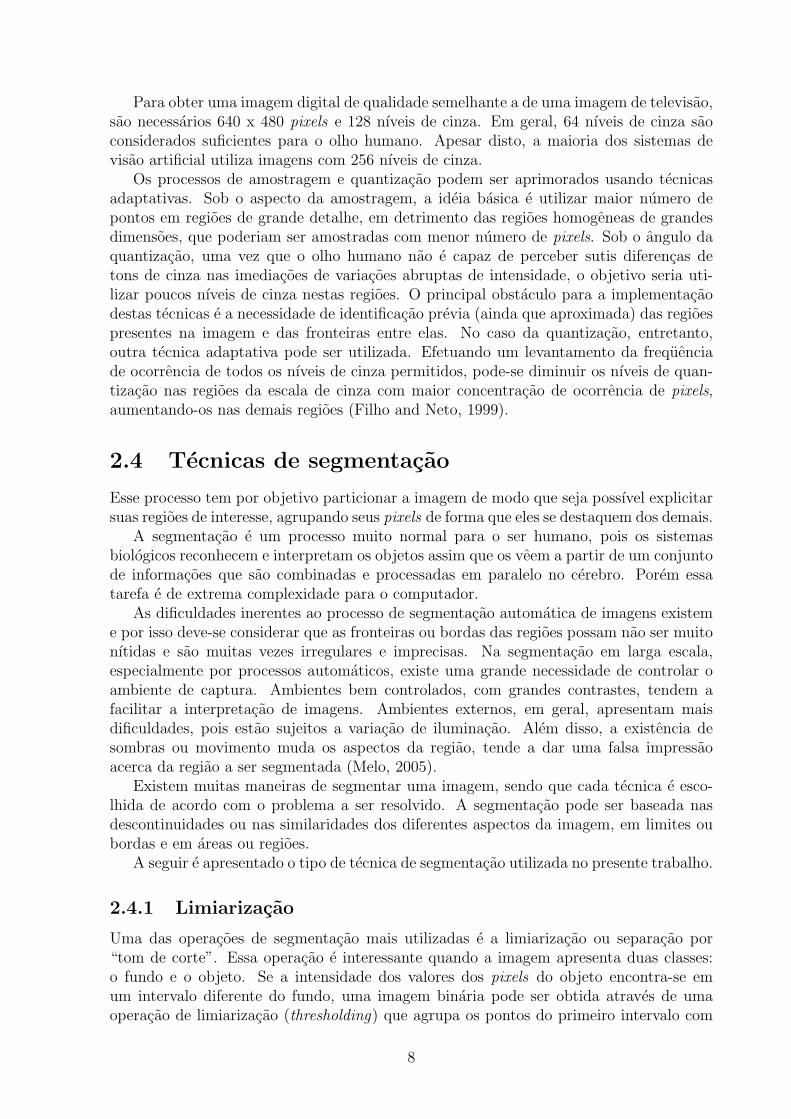
o valor 1 e os demais com valor 0, assim, os pixels que possuem valores maiores que umdeterminado tom e considerado objeto e os pixels que possuem valores menores que estetom e considerado fundo (Aura Conci and Leta, 2008).
Em muitos casos a limiarizacao baseia-se na utilizacao do histograma de tons de cinza,que nada mais e do que um grafico onde o eixo das abscissas representa os valores dastonalidades de cinza que a imagem pode apresentar e o eixo das ordenadas a frequenciacom que essas tonalidades ocorrem.
{f(x, y) = 0, se f(x, y) ≤ L ef(x, y) = 1, se f(x, y) > L,
(2.4)
onde L e um limiar definido de acordo com o histograma da imagem de tons de cinza.Para a figura 2.4a, tem-se o histograma de tons de cinza apresentado na figura 2.4b.
Aplicando-se as Equacoes 2.4 a figura 2.4a, tem-se a imagem binaria apresentada na figura2.4c.
(a) Imagem de graos de ar-roz.
0 50 100 150 200 250
0
200
400
600
800
1000
1200
Níveis de cinza
Núm
ero
de o
corr
ênci
as
(b) Histograma de tons de cinza.
(c) Imagem binaria.
Figura 2.4: Processo de limiarizacao.
2.4.2 Deteccao de bordas
Como em muitos casos o que se deseja extrair da imagem sao caracterısticas geometricas,torna-se mais conveniente, por exigir menor esforco computacional, trabalhar apenas com
9
os contornos dos objetos. Sendo assim, e necessario utilizar um algoritmo para encontrara borda dos objetos representados em uma imagem. Algoritmos que procurem por mu-dancas bruscas de cor ou nıveis de cinza dos pixels vizinhos podem ser empregados, comopor exemplo operadores de Roberts, Prewitt, Canny e Sobel.
No caso especıfico do algoritmo de Sobel, os operadores apresentados na equacao(2.5) sao matrizes cujas convolucoes sobre a imagem resultam em operacoes genericasde derivacao da mesma. Assim sendo, em regioes de baixo contraste, o resultado daconvolucao dos operadores de Sobel sobre a imagem tende a valores proximos a zero.Entretanto, para regioes de contraste elevado esta convolucao produz valores significativospossibilitando, dessa forma, a deteccao de bordas da imagem (J.Rasure, 1992).
Cij =
1 2 10 0 0−1 −2 −1
e Dij =
1 0 −12 0 −21 0 −1
. (2.5)
2.4.3 Rotulacao
Para o entendimento da rotulacao e necessario o conhecimento preliminar de dois con-ceitos: vizinhanca e conectividade entre pixels.
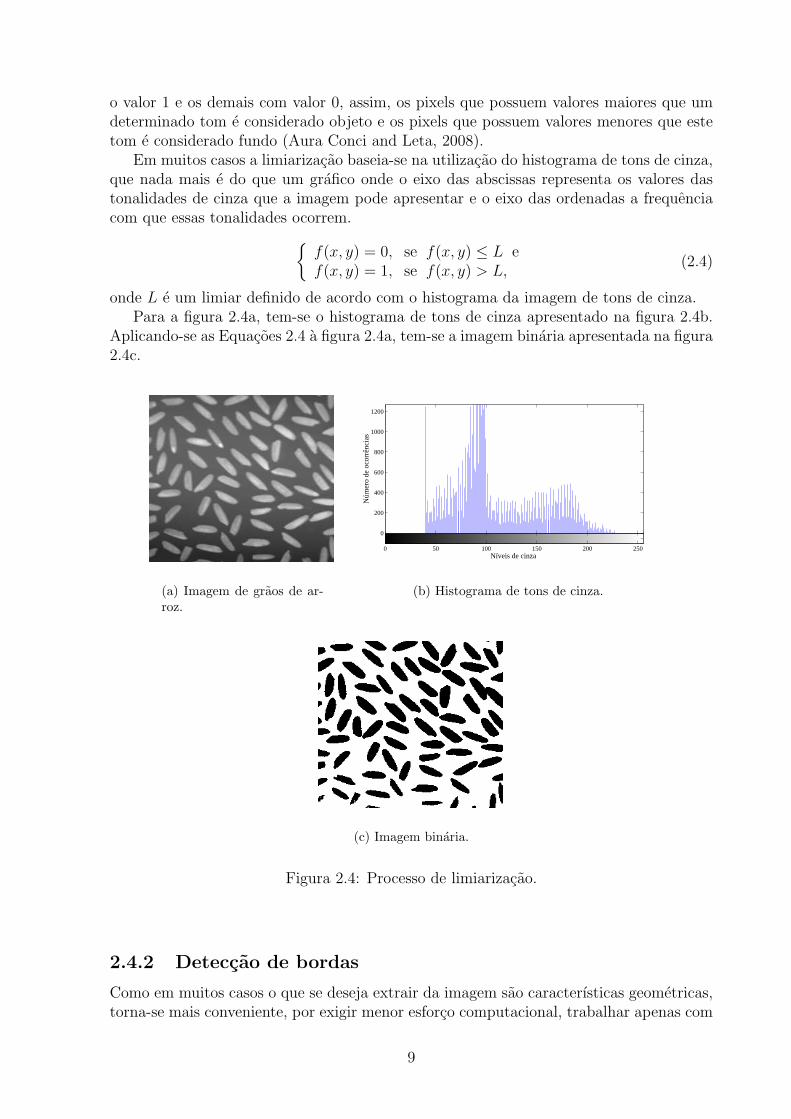
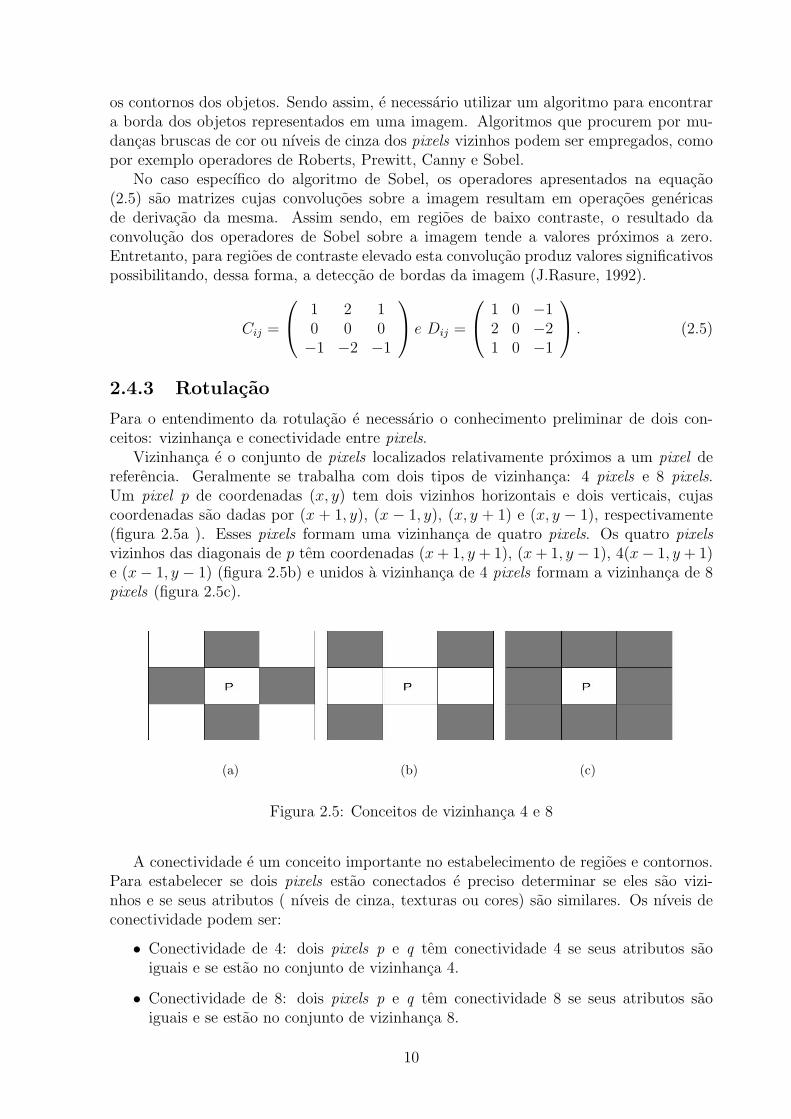
Vizinhanca e o conjunto de pixels localizados relativamente proximos a um pixel dereferencia. Geralmente se trabalha com dois tipos de vizinhanca: 4 pixels e 8 pixels.Um pixel p de coordenadas (x, y) tem dois vizinhos horizontais e dois verticais, cujascoordenadas sao dadas por (x + 1, y), (x − 1, y), (x, y + 1) e (x, y − 1), respectivamente(figura 2.5a ). Esses pixels formam uma vizinhanca de quatro pixels. Os quatro pixelsvizinhos das diagonais de p tem coordenadas (x + 1, y + 1), (x + 1, y − 1), 4(x− 1, y + 1)e (x− 1, y − 1) (figura 2.5b) e unidos a vizinhanca de 4 pixels formam a vizinhanca de 8pixels (figura 2.5c).
(a) (b) (c)
Figura 2.5: Conceitos de vizinhanca 4 e 8
A conectividade e um conceito importante no estabelecimento de regioes e contornos.Para estabelecer se dois pixels estao conectados e preciso determinar se eles sao vizi-nhos e se seus atributos ( nıveis de cinza, texturas ou cores) sao similares. Os nıveis deconectividade podem ser:
• Conectividade de 4: dois pixels p e q tem conectividade 4 se seus atributos saoiguais e se estao no conjunto de vizinhanca 4.
• Conectividade de 8: dois pixels p e q tem conectividade 8 se seus atributos saoiguais e se estao no conjunto de vizinhanca 8.
10

A rotulacao e utilizada na segmentacao para a contagem de regioes ou objetos presentesem uma imagem. A cada regiao ou componente e atribuıdo um valor unico, denominadorotulo (label). A seguir e apresentado um algoritmo que exemplifica a rotulacao, no qualse deseja contar as regioes de valor 1 e considerando a vizinhanca de 4 pixels.
Inıcio- Varrer a imagem da esquerda para a direita e de cima para baixo:
Se valor do pixel = 0mover para o proximo pixel.
SenaoSe valor do pixel = 1
analisar os vizinhos superior e da esquerda:se ambos os vizinhos forem zero,
assinala-se um novo rotulo para o pixel ;fim sese um dos vizinhos for zero;
assinala-se um novo rotulo para o pixel ;fim sese um dos vizinhos for 1 e os dois possuırem o mesmo rotulo
assina- se este rotulo para pixel ;fim sese ambos forem 1 e possuırem rotulos diferentes
substitui-se todos os rotulos iguais aos encontrados pelo valor no menorrotulo, ou seja, pelo que foi atribuıdo na etapa anterior;
fim seFim seFim se
- Termina a varredura da imagem, o numero de regioes e igual ao numero de rotulosatribuıdos para as areas das imagens.Fim
O mesmo pode ser utilizado pra vizinhanca de 8, porem os dois vizinhos das diagonais,de cada pixel, devem ser analisados tambem.
2.5 Caracterısticas inerciais
As caracterısticas inerciais aplicadas na identificacao e reconhecimento de objetos em ima-gens digitais baseiam-se na teoria dos momentos. Para se obter os momentos invariantesde ordem (p + q) de uma imagem de tamanho (m,n) usa-se a equacao 2.6:
Mpq =m∑
x=1
n∑y=1
xpyqf(x, y), p, q = 0, 1, 2, 3, ... (2.6)
onde f(x, y) representa o nıvel de cinza no ponto (x, y).No caso de uma imagem binaria sendo f(x, y) = 1, (x, y) define a posicao de um ponto
do objeto; se f(x, y) = 0 o ponto considerado nao pertence ao mesmo. Os momentos per-mitem definir algumas propriedades de elementos contidos em imagens como por exemplo:area, centroide, momentos de inercia e direcao dos eixos principais de inercia.
11

A area que e uma propriedade comumente usada, corresponde ao momento m00. Essemomento representa o somatorio do numero de pixels que constitui regiao e e obtido pelaequacao 2.7:
Area = m00 =m∑
x=1
n∑y=1
f(x, y). (2.7)
O centroide de um objeto e uma caracterıstica muito importante do objeto e pode serdefinido pela relacao entre os momentos de ordem 0 e 1, descrito na equacao a seguir:
xc =
m∑x=1
n∑y=1
xf(x, y)
m∑x=1
n∑y=1
f(x, y)
=m10
m00
(2.8)
yc =
m∑x=1
n∑y=1
yf(x, y)
m∑x=1
n∑y=1
f(x, y)
=m01
m00
(2.9)
Os momentos invariantes podem ser obtidos em relacao ao centroide do objeto. Paraisso e necessario fazer uma translacao dos sistemas de eixo de coordenadas de forma quea origem desse sistema seja o centroide do objeto. Esta operacao pode ser descrita pelaequacao 2.10
µpq =m∑
x=1
n∑y=1
(x− xc)p(y − yc)
qf(x, y), p, q = 0, 1, 2, 3, ... (2.10)
onde µ e o momento em relacao ao centroide da figura.A partir da equacao 2.10 pode-se obter os momentos centrais mais utilizados:
µ00 = m00 (area) (2.11)
µ0,2 = m0,2 − ycm0,1 (momento de inercia relativo ao eixo x) (2.12)
µ2,0 = m2,0 − xcm1,0 (momento de inercia relativo ao eixo y) (2.13)
µ1,1 = m1,1 − ycm0,1 − xcm1,0 (produto de inercia relativo aos eixos x e y) (2.14)
Alem de calcular os momentos em relacao a um sistema de eixos qualquer que passepelo seu centro de gravidade, pode-se utilizar um sistema de eixos que coincida com oseixos principais do objeto. Os eixos principais de um objeto sao eixos ortogonais entresi em que os momentos de inercia apresentam um valor maximo e mınimo. O produtode inercia, µ1,1, nestes eixos e sempre zero. o angulo que define a orientacao dos eixosprincipais de inercia em relacao ao centroide do objeto e definido pela equacao 2.15:
tan 2θ =2µ1,1
(µ2,0 − µ0,2)(2.15)
12

2.5.1 Rotacao de objetos
Em alguns casos torna-se necessario rotacionar um objeto de forma que seus eixos prin-cipais coincidam com os eixos adotados para um sistema de coordenadas. Uma situacaoem que se aplica este procedimento e aquela onde se deseja encontrar as dimensoes, com-primento e largura, de uma figura qualquer como por exemplo a elipse mostrada na figura2.6a.
Isso pode ser feito aplicando a equacao 2.16 a cada ponto pertencente ao objeto emque se deseja rotacionar (figura 2.6b):
{Xi = xi cos θ + yi sin θYi = −xi sin θ + yi cos θ,
(2.16)
onde θ e o angulo que define a direcao dos eixos principais obtido de acordo com a equacao2.15 e i esta associado ao i-esimo ponto da imagem .
13
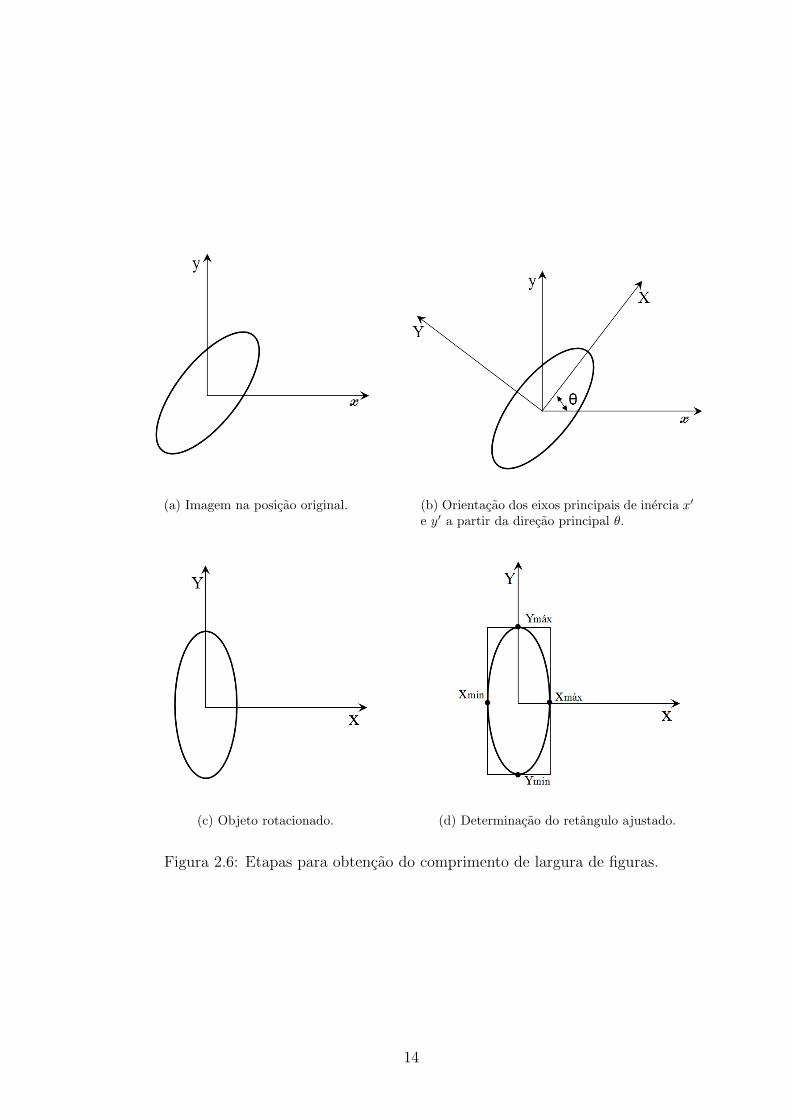
(a) Imagem na posicao original. (b) Orientacao dos eixos principais de inercia x′
e y′ a partir da direcao principal θ.
(c) Objeto rotacionado. (d) Determinacao do retangulo ajustado.
Figura 2.6: Etapas para obtencao do comprimento de largura de figuras.
14

Feito isso, conforme explicado na figura 2.6c, basta encontrar Xmax, Xmin, Ymax, Ymin
(figura2.6, onde:
Xmax = max(Xi), i=1 np, sendo np e o numero de pontos da imagem;
Xmin = min(Xi), i=1 . . .np;
Ymax = max(Yi), i=1 . . .np;
Ymin = min(Yi), i=1 . . .np.
As medidas da elipse podem ser determinadas de acordo com a equacao 2.17.
largura = |Xmax −Xmin|comprimento = |Ymax − Ymin| (2.17)
Uma vez apresentadas as principais ferramentas de PDI utilizadas neste trabalho,passa-se aos capıtulos que seguem para as aplicacoes destas tecnicas a tres problemas deEngenharia Civil; explicados nos capıtulos 3, 4 e 5, respectivamente.
15
Capıtulo 3
Problema 1: Geracao de Malhas deElementos Finitos Atraves deImagens de Cortes em Corpos deProva de Concreto
Neste capıtulo sera apresentado a metodologia que visa a obtencao de dados para a geracaode malhas de elementos finitos. Essa metodologia foi apresentada no artigo: PERES,L.M.; SANABIO, D. S. F.; FARAGE, M. C. R.; BARBOSA, F. S.; NOGUEIRA, F.M. A.. Aplicacao de processamento digital de imagens na geracao semi-automatica demalhas de elementos finitos, publicado no XI Encontro de Modelagem Computacional,2008, Volta Redonda - RJ.
3.1 Introducao
A geracao de malhas consiste em decompor um domınio geometrico qualquer em partesmenores denominadas elementos. Esta tarefa pode se tornar complexa em razao de ca-racterısticas geometricas e fısicas dos domınios e da necessidade de produzir uma malhaque garanta a precisao desejada para o problema em questao.
No intuito de gerar malhas de elementos finitos atraves de imagens, foi desenvolvidouma metodologia para obter um arquivo de saıda escrito de forma que um programagerador de malhas possa interpreta-lo e gerar a malha. Neste trabalho foi utilizado oprograma livre Ghsm.
Primeiramente a metodologia proposta e apresentada detalhadamente usando comoexemplo uma imagem sintetica que representa um meio nao homogeneo. Posteriormenteos algoritmos descritos sao aplicados a um problema real onde se deseja obter a malha deelementos finitos a partir de uma imagem de um corpo de prova de concreto rompido.
3.2 Metodologia
Para tratar cada etapa da metodologia, emprega-se aqui como exemplo a imagem sinteticamostrada na figura 3.1, que apresenta um domınio nao homogeneo para o qual se desejagerar uma malha de elementos finitos. Neste caso, trata-se de um problema plano ondea regiao mais clara esta associada a um certo material e a regiao mais escura a outro.
16
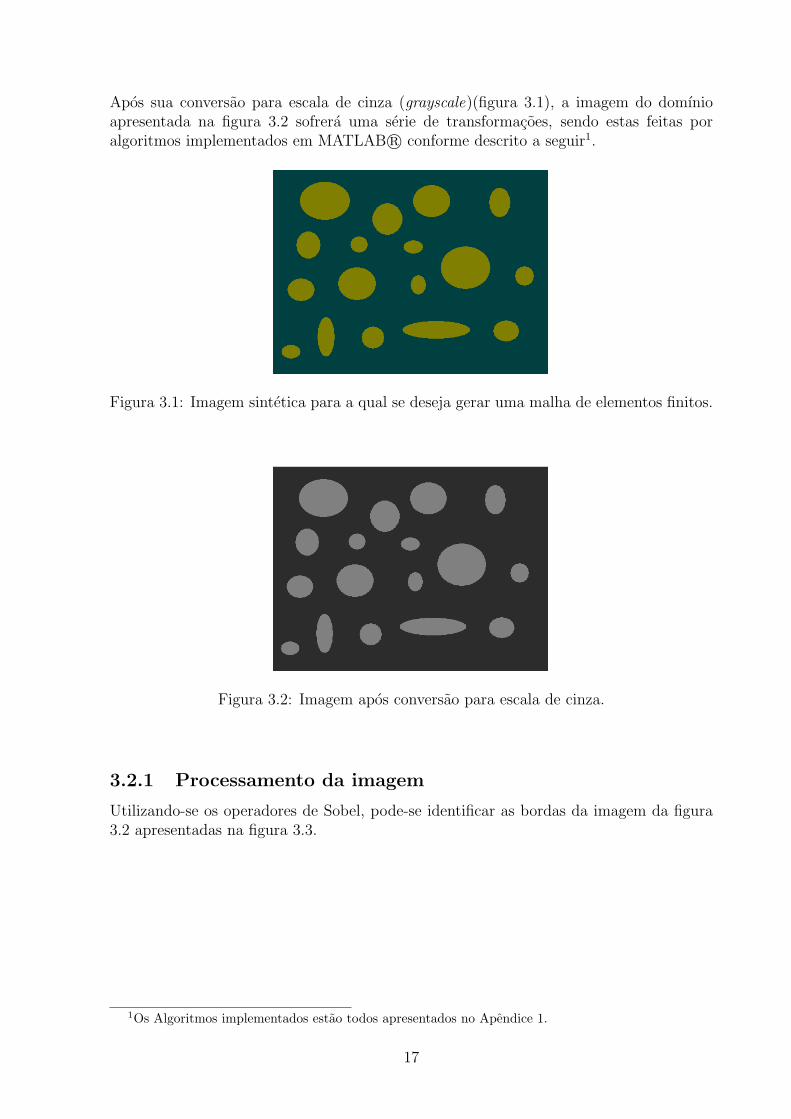
Apos sua conversao para escala de cinza (grayscale)(figura 3.1), a imagem do domınioapresentada na figura 3.2 sofrera uma serie de transformacoes, sendo estas feitas poralgoritmos implementados em MATLAB r© conforme descrito a seguir1.
Figura 3.1: Imagem sintetica para a qual se deseja gerar uma malha de elementos finitos.
Figura 3.2: Imagem apos conversao para escala de cinza.
3.2.1 Processamento da imagem
Utilizando-se os operadores de Sobel, pode-se identificar as bordas da imagem da figura3.2 apresentadas na figura 3.3.
1Os Algoritmos implementados estao todos apresentados no Apendice 1.
17
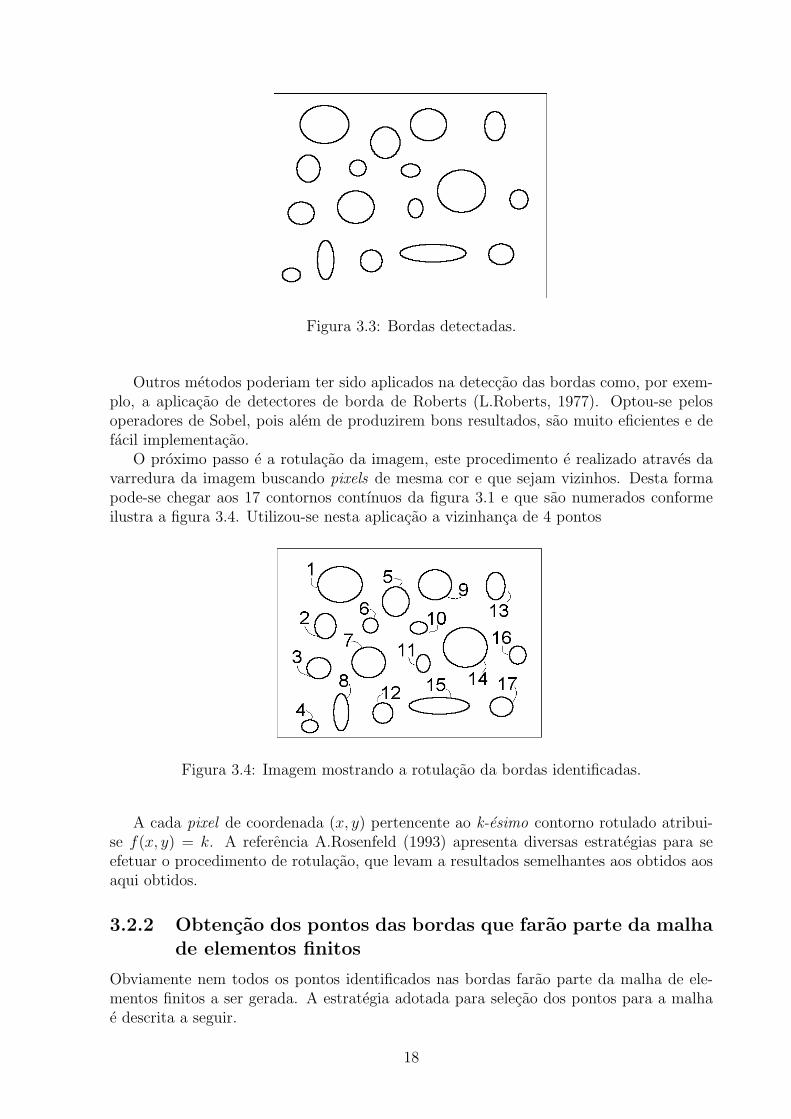
Figura 3.3: Bordas detectadas.
Outros metodos poderiam ter sido aplicados na deteccao das bordas como, por exem-plo, a aplicacao de detectores de borda de Roberts (L.Roberts, 1977). Optou-se pelosoperadores de Sobel, pois alem de produzirem bons resultados, sao muito eficientes e defacil implementacao.
O proximo passo e a rotulacao da imagem, este procedimento e realizado atraves davarredura da imagem buscando pixels de mesma cor e que sejam vizinhos. Desta formapode-se chegar aos 17 contornos contınuos da figura 3.1 e que sao numerados conformeilustra a figura 3.4. Utilizou-se nesta aplicacao a vizinhanca de 4 pontos
Figura 3.4: Imagem mostrando a rotulacao da bordas identificadas.
A cada pixel de coordenada (x, y) pertencente ao k-esimo contorno rotulado atribui-se f(x, y) = k. A referencia A.Rosenfeld (1993) apresenta diversas estrategias para seefetuar o procedimento de rotulacao, que levam a resultados semelhantes aos obtidos aosaqui obtidos.
3.2.2 Obtencao dos pontos das bordas que farao parte da malhade elementos finitos
Obviamente nem todos os pontos identificados nas bordas farao parte da malha de ele-mentos finitos a ser gerada. A estrategia adotada para selecao dos pontos para a malhae descrita a seguir.
18
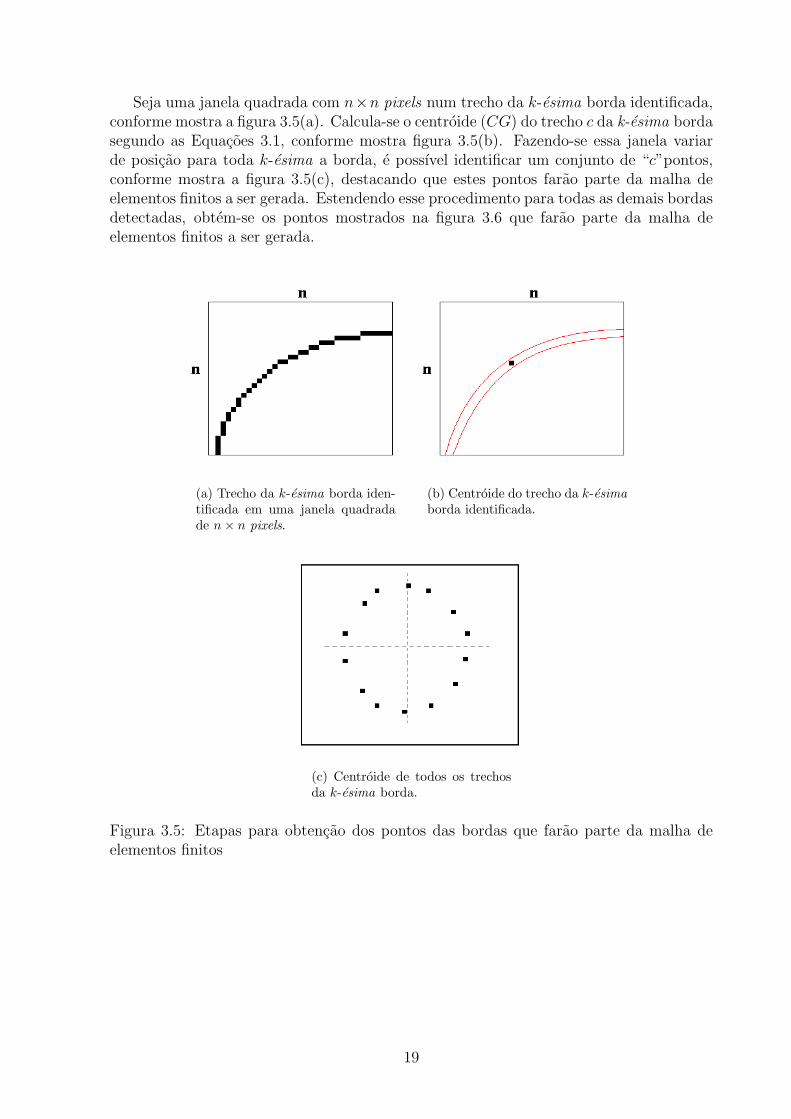
Seja uma janela quadrada com n×n pixels num trecho da k-esima borda identificada,conforme mostra a figura 3.5(a). Calcula-se o centroide (CG) do trecho c da k-esima bordasegundo as Equacoes 3.1, conforme mostra figura 3.5(b). Fazendo-se essa janela variarde posicao para toda k-esima a borda, e possıvel identificar um conjunto de “c”pontos,conforme mostra a figura 3.5(c), destacando que estes pontos farao parte da malha deelementos finitos a ser gerada. Estendendo esse procedimento para todas as demais bordasdetectadas, obtem-se os pontos mostrados na figura 3.6 que farao parte da malha deelementos finitos a ser gerada.
(a) Trecho da k-esima borda iden-tificada em uma janela quadradade n× n pixels.
(b) Centroide do trecho da k-esimaborda identificada.
(c) Centroide de todos os trechosda k-esima borda.
Figura 3.5: Etapas para obtencao dos pontos das bordas que farao parte da malha deelementos finitos
19
xkc =
n∑x=1
n∑y=1
x
Nk
, para fx,y = k, sendo k = 1 . . . 17.
ykc =
n∑x=1
n∑y=1
y
Nk
, para fx,y = k, sendo k = 1 . . . 17. (3.1)
onde Nk e o numero de pixels fx,y = k; e xkc e yk
c sao as coordenadas do centro de gravidadedo trecho “c”da k-esima borda para a janela de n× n pixels na posicao c.
A janela e definida de acordo com o numero de pontos desejados e, consequentemente,com o grau de refinamento da malha que se deseja obter.
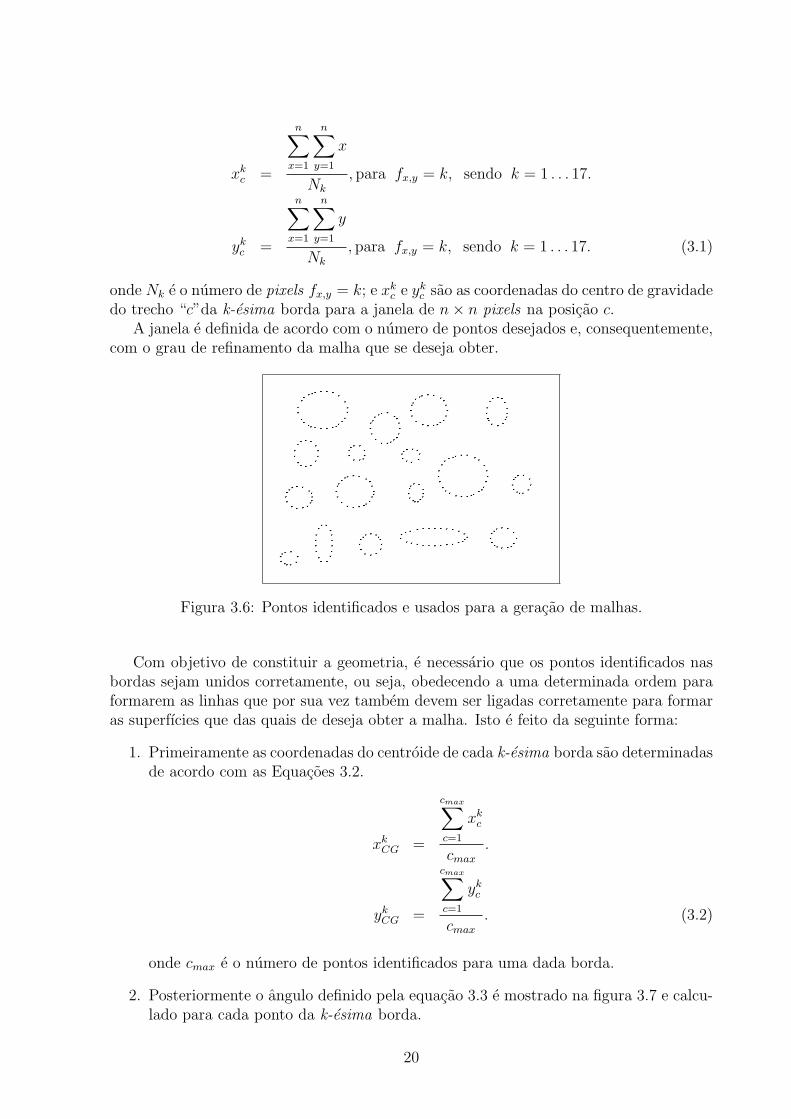
Figura 3.6: Pontos identificados e usados para a geracao de malhas.
Com objetivo de constituir a geometria, e necessario que os pontos identificados nasbordas sejam unidos corretamente, ou seja, obedecendo a uma determinada ordem paraformarem as linhas que por sua vez tambem devem ser ligadas corretamente para formaras superfıcies que das quais de deseja obter a malha. Isto e feito da seguinte forma:
1. Primeiramente as coordenadas do centroide de cada k-esima borda sao determinadasde acordo com as Equacoes 3.2.
xkCG =
cmax∑c=1
xkc
cmax
.
ykCG =
cmax∑c=1
ykc
cmax
. (3.2)
onde cmax e o numero de pontos identificados para uma dada borda.
2. Posteriormente o angulo definido pela equacao 3.3 e mostrado na figura 3.7 e calcu-lado para cada ponto da k-esima borda.
20

Figura 3.7: Determinacao dos angulos α usados para determinacao das conectividades nageometria
αkc = arctan
(yk
c−ykCG
xkc−xk
CG
). (3.3)
3. Os pontos sao unidos, para formar as linhas da geometria, em ordem crescente dosangulos calculados.
3.2.3 Geracao da malha
Conforme citado anteriormente, no presente trabalho a geracao das malhas foi feita atravesdo programa livre Gmsh (Gmsh, 2008). Trata-se de um gerador de malhas que define lin-has, superfıcies e volumes atraves de seus contornos e e capaz de gerar malhas regularese nao regulares uni, bi e tridimensionais, formadas por elementos geometricos de barra,triangulares, quadrangulares e prismaticos. Este estudo, no entanto, visa problemas bidi-mensionais, com geometria descrita por meio de pontos, linhas e superfıcies.
Atraves da manipulacao de dados extraıdos do processamento da imagem da figura3.1, pode-se gerar o arquivo de dados usado como entrada do Gmsh, mostrado na figura3.8.
21
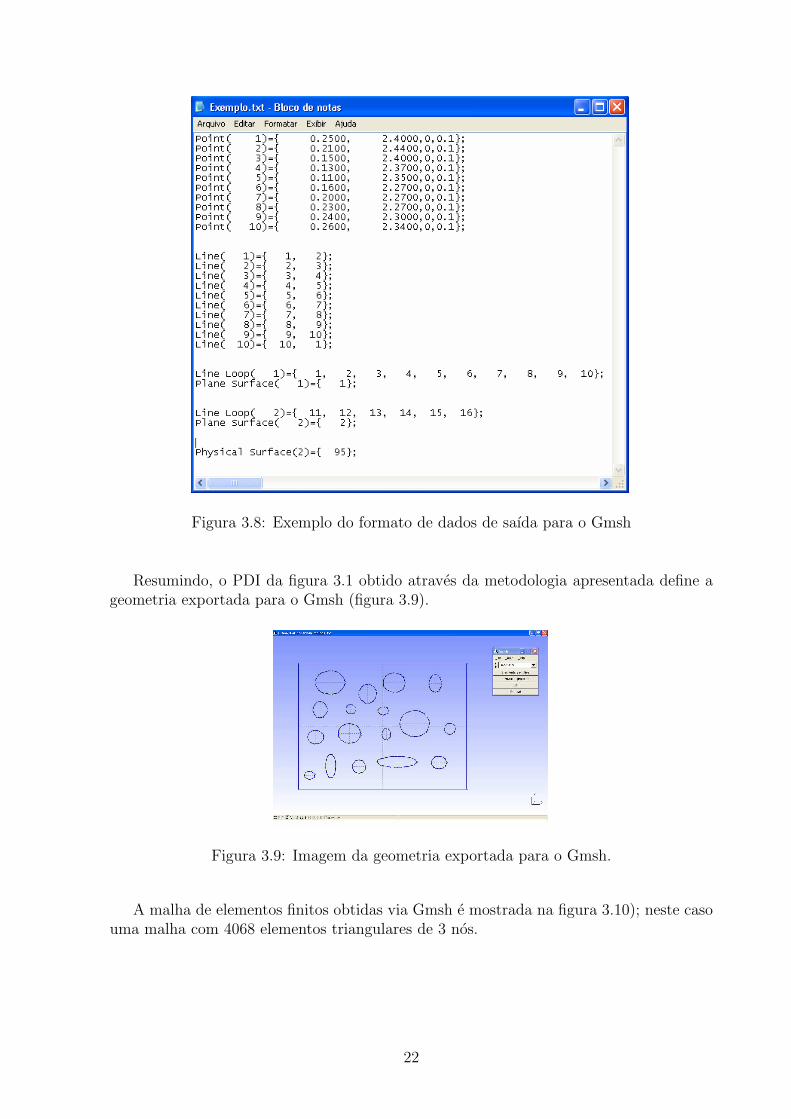
Figura 3.8: Exemplo do formato de dados de saıda para o Gmsh
Resumindo, o PDI da figura 3.1 obtido atraves da metodologia apresentada define ageometria exportada para o Gmsh (figura 3.9).
Figura 3.9: Imagem da geometria exportada para o Gmsh.
A malha de elementos finitos obtidas via Gmsh e mostrada na figura 3.10); neste casouma malha com 4068 elementos triangulares de 3 nos.
22
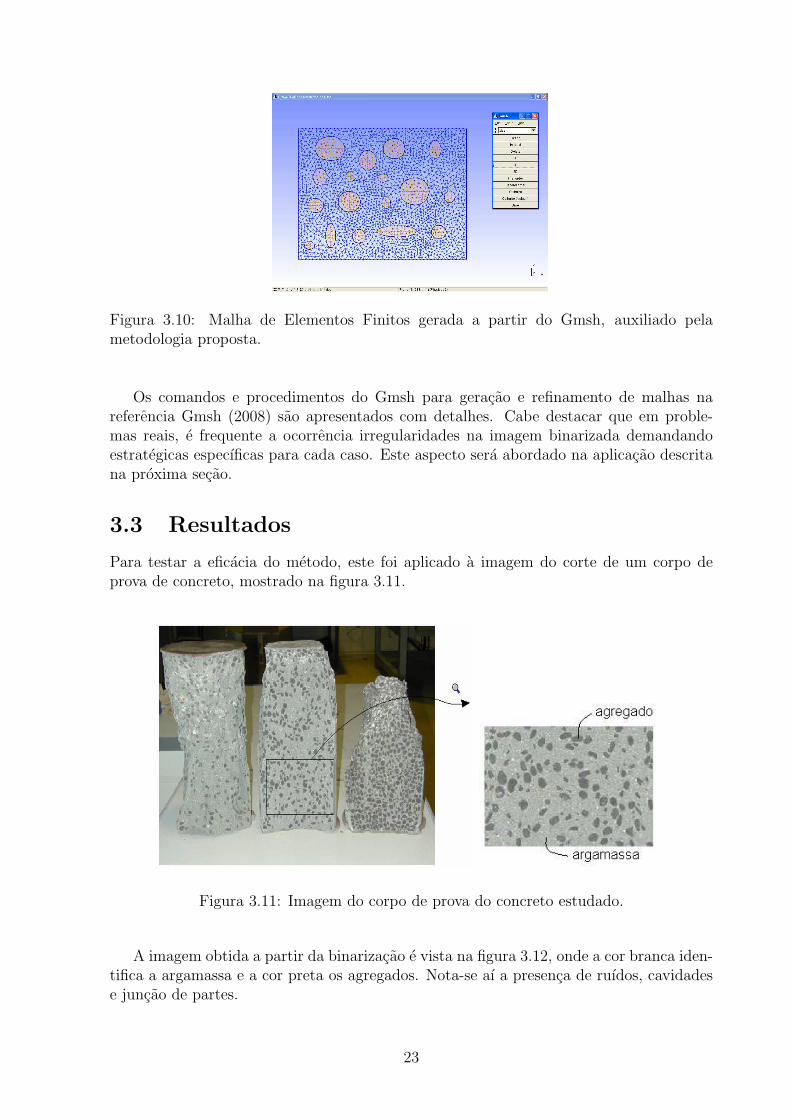
Figura 3.10: Malha de Elementos Finitos gerada a partir do Gmsh, auxiliado pelametodologia proposta.
Os comandos e procedimentos do Gmsh para geracao e refinamento de malhas nareferencia Gmsh (2008) sao apresentados com detalhes. Cabe destacar que em proble-mas reais, e frequente a ocorrencia irregularidades na imagem binarizada demandandoestrategicas especıficas para cada caso. Este aspecto sera abordado na aplicacao descritana proxima secao.
3.3 Resultados
Para testar a eficacia do metodo, este foi aplicado a imagem do corte de um corpo deprova de concreto, mostrado na figura 3.11.
Figura 3.11: Imagem do corpo de prova do concreto estudado.
A imagem obtida a partir da binarizacao e vista na figura 3.12, onde a cor branca iden-tifica a argamassa e a cor preta os agregados. Nota-se aı a presenca de ruıdos, cavidadese juncao de partes.
23

Figura 3.12: Imagem com problemas destacados.
Com o objetivo de eliminar os ruıdos, adotou-se a estrategia de fixar um numeromınimo de pixels para caracterizacao dos agregados, e na aplicacao de um algoritmo paraa contagem do numero de pixels de mesmo rotulo em cada regiao. Uma vez classificadocomo ruıdo o grupo de pixels e removido. A figura 3.13 mostra a imagem resultante aposa eliminacao dos ruıdos.
Figura 3.13: Imagem com ruıdos eliminados.
Os demais problemas identificados, como cavidades e juncoes, foram tratados manu-almente, e a imagem assumiu o aspecto visto na figura 3.14, considerada pronta para aproxima etapa da metodologia, que e a identificacao de bordas.
24
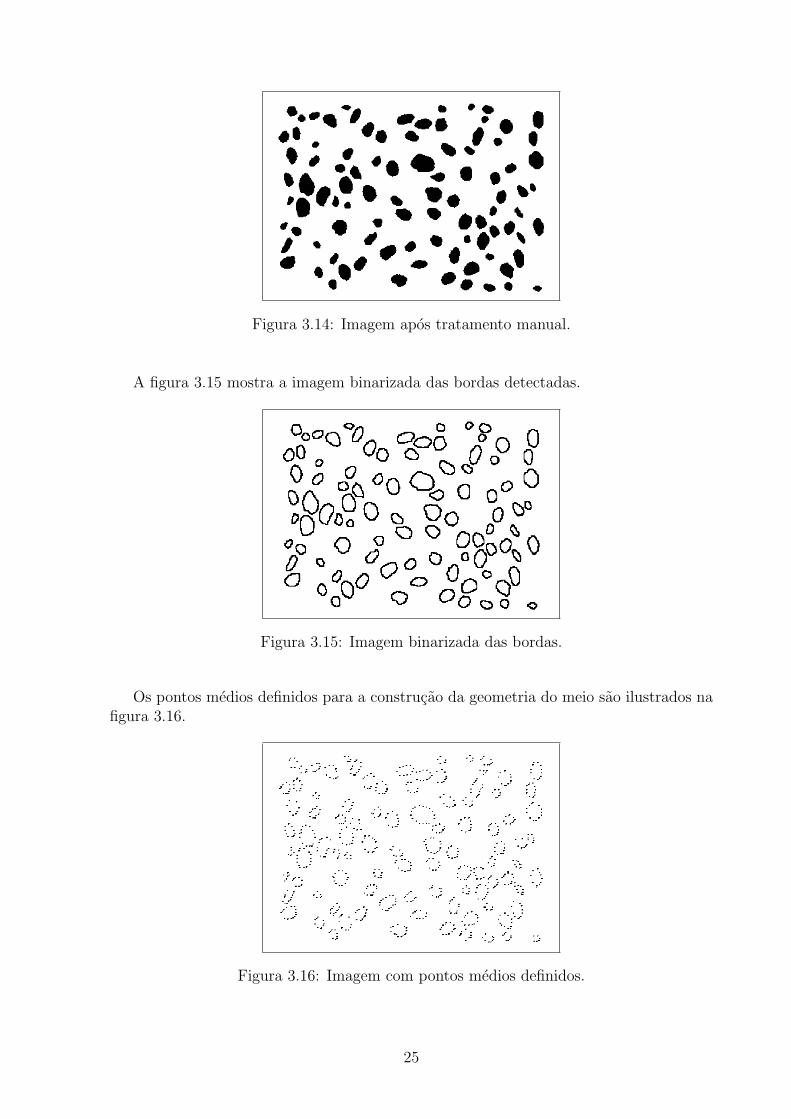
Figura 3.14: Imagem apos tratamento manual.
A figura 3.15 mostra a imagem binarizada das bordas detectadas.
Figura 3.15: Imagem binarizada das bordas.
Os pontos medios definidos para a construcao da geometria do meio sao ilustrados nafigura 3.16.
Figura 3.16: Imagem com pontos medios definidos.
25
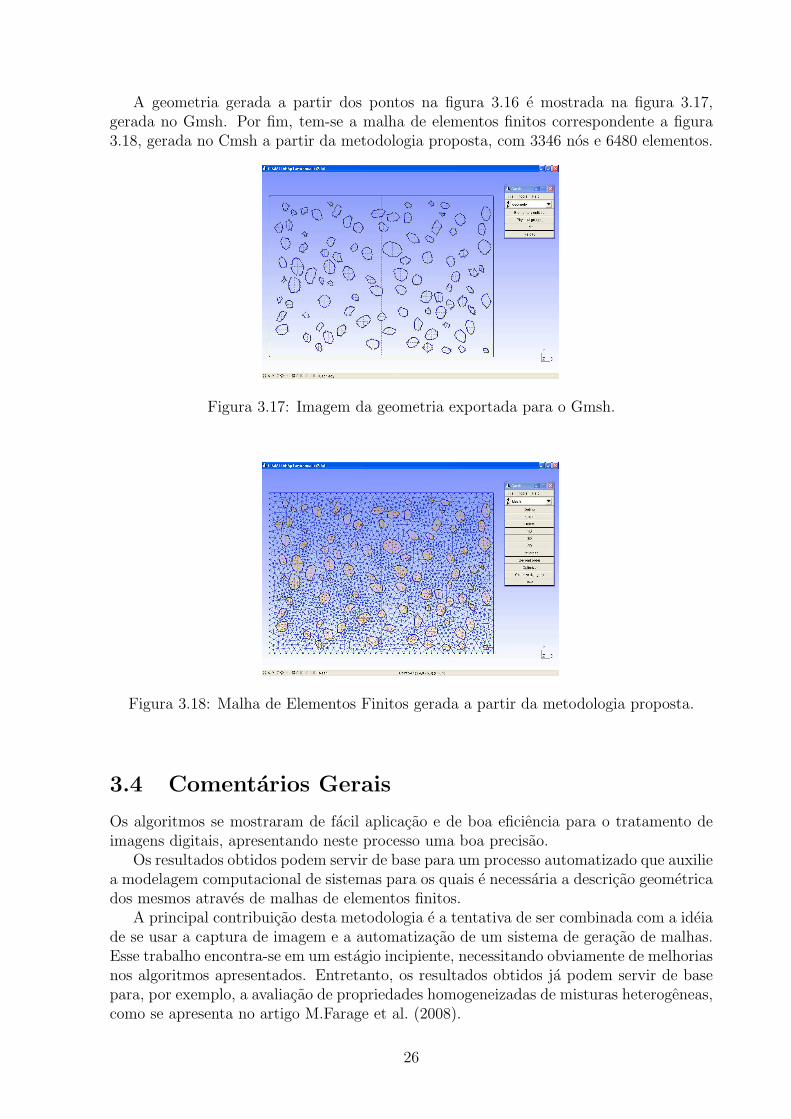
A geometria gerada a partir dos pontos na figura 3.16 e mostrada na figura 3.17,gerada no Gmsh. Por fim, tem-se a malha de elementos finitos correspondente a figura3.18, gerada no Cmsh a partir da metodologia proposta, com 3346 nos e 6480 elementos.
Figura 3.17: Imagem da geometria exportada para o Gmsh.
Figura 3.18: Malha de Elementos Finitos gerada a partir da metodologia proposta.
3.4 Comentarios Gerais
Os algoritmos se mostraram de facil aplicacao e de boa eficiencia para o tratamento deimagens digitais, apresentando neste processo uma boa precisao.
Os resultados obtidos podem servir de base para um processo automatizado que auxiliea modelagem computacional de sistemas para os quais e necessaria a descricao geometricados mesmos atraves de malhas de elementos finitos.
A principal contribuicao desta metodologia e a tentativa de ser combinada com a ideiade se usar a captura de imagem e a automatizacao de um sistema de geracao de malhas.Esse trabalho encontra-se em um estagio incipiente, necessitando obviamente de melhoriasnos algoritmos apresentados. Entretanto, os resultados obtidos ja podem servir de basepara, por exemplo, a avaliacao de propriedades homogeneizadas de misturas heterogeneas,como se apresenta no artigo M.Farage et al. (2008).
26
Capıtulo 4
Problema 2: Determinacao da CurvaGranulometrica de AgregadosGraudos
Neste capıtulo sera apresentado a metodologia para a determinacao da granulometria deagregados graudos atraves de processamento digital de imagens . Essa metodologia foi a-presentada no artigo: PERES, L. M.; BARBOSA, F. S.; BASTOS, P. K. X.; NOGUEIRA,F. M. A. Determinacao da curva granulometrica de agregados graudos via processamentodigital de imagens. Apresentado no Nono Simposio de Modelagem Computacional, 2010,Sao Joao Del Rei - MG.
4.1 Introducao
A granulometria e uma propriedade que determina a porcentagem de massa do mate-rial dentro de certos intervalos de tamanhos diferentes, influenciando diretamente naspropriedades mecanicas das estruturas com que sao fabricados.
Este capıtulo descreve a aplicacao do PDI para analise de distribuicao de tamanho departıculas dos agregados graudos. A metodologia aqui aplicada foi extraıda do trabalhode Mora et al. (1998) e adaptada para o tipo de agregado da regiao de Juiz de Fora (rochaGnaisse). As curvas granulometricas obtidas foram confrontadas com as curvas extraıdaspelo ensaio de peneiramento segundo a norma ABNT NBR NM 248 e apresentaramresultados relativamente proximos. O ındice de correcao inerente a metodologia aplicadafoi determinado para os agregados analisados, viabilizando entao sua aplicacao a agregadosde rocha Gnaisse.
4.2 Agregados
Segundo Woods (1960) agregado e uma mistura de pedregulho, areia, pedra britada,escoria ou outros materiais minerais usado em combinacao com um ligante para formarconcretos e argamassas.
Desta forma pode-se entender agregado como um termo generico para areias, pedre-gulhos e rochas minerais em seu estado natural ou britados em seu estado processado.Estes materiais sao granulares, sem forma e volume definidos, geralmente inertes e dedimensoes e propriedades adequados para uso em obras de engenharia.
27
Sua aplicacao e variada: servem para lastro de vias ferreas, bases para calcamentos,sao adicionados aos solos que constituem a pista de rolamento de estradas, entram na com-posicao de material para revestimentos asfalticos e sao utilizados como material granulare inerte na confeccao de argamassas e concretos.
Os agregados desempenham um importante papel nas argamassas e concretos, querseja do ponto de vista economico, quer seja do ponto de vista tecnico, e exercem influenciabenefica sobre algumas caracterısticas importantes como retracao e aumento da resistenciaao desgaste, sem prejudicar a resistencia aos esforcos mecanicos, pois os agregados deboa qualidade, normalmente, tem resistencia mecanica superior a da pasta aglomerante(Petrucci, 1979).
A classificacao dos agregados pode ser do ponto de vista de sua origem e neste caso,sao divididos em naturais e artificiais; levando em consideracao sua massa especıfica, sesubdividindo em leves, normais e pesados; mas, segundo Petrucci (1979), a classificacaomais importante, em virtude do comportamento bastante diferenciado de ambos os tiposquando aplicados nos concretos, e a que divide os agregados, segundo os tamanhos, emagregados miudos e graudos.
A NBR 7211 de 2009 define agregado graudo e miudo da seguinte forma:
• Agregado miudo: Agregados cujos graos passam pela peneira com abertura de malhade 4,75 mm e ficam retidos na peneira com abertura de malha de 150 µm, em ensaiorealizado de acordo com a Norma ABNT NRR NM 248, com peneiras definidas pelaNBR NM ISO 3310-1.
• Agregado graudo: Agregados cujos graos passam pela peneira com abertura demalha de 75 mm e ficam retidos na peneira com abertura de malha de 4,75 mm,em ensaio realizado de acordo com a Norma ABNT NRR NM 248, com peneirasdefinidas pela NBR NM ISO 3310-1.
Ao classificar os agregados em graudos e miudos, surge a necessidade de quantificaras porcentagens do material dentro de grupos menores de tamanho, contidos no intervaloque define cada tipo do material. Dessa maneira tem-se o conceito de granulometria,denominando-se a composicao granulometrica como as proporcoes relativas, expressas emporcentagens dos diferentes tamanhos de graos, podendo ser expressa pelo material quepassa ou pelo material retido por peneiras.
O inıcio dos estudos de granulometria comecaram com Feret, na Franca, porem, devem-se a Fuller e Thompson, nos Estados Unidos, as primeiras investigacoes em grande escala.
A granulometria tem grande influencia nas propriedades das estruturas produzidas comesses agregados. De acordo com Liedi Bernucci (2006) a distribuicao granulometrica dosagregados e uma de suas principais caracterısticas e efetivamente influi no comportamentodos revestimentos asfalticos. Em misturas asfalticas a distribuicao granulometrica doagregado influencia quase todas as propriedades importantes, incluindo rigidez, estabi-lidade, durabilidade, permeabilidade, trabalhabilidade, resistencia a fadiga, deformacaopermanente e resitencia ao dano por umidade induzida etc.
Ja no caso dos agregados utilizados para fabricacao de concretos, a mudanca de granu-lometria do agregado podera influenciar a resistencia a compressao. Segundo Metha andMonteiro (1994), agregados que nao tem grande falta ou excesso de qualquer tamanho departicula, em especial, produzem misturas de concreto mais trabalhaveis e economicas.Partıculas maiores tendem a produzir mais microfissuras na zona de transicao entre oagregado graudo e a pasta de cimento.
28
Alem destes fatores, a granulometria e um dos criterios para a aceitacao ou rejeicaodo material para uma determinada obra, conforme define a Norma ABNT NBR 7211 de2005 no item oito: aceitacao e rejeicao.
A distribuicao granulometrica dos agregados e determinada usalmente por meio deuma analise de peneiramento, porem existe um processo que precede o peneiramento quee a amostragem, conforme mostrado asseguir.
4.2.1 Amostragem
A amostragem e o processo no qual se procura obter uma pequena parcela do material deforma que essa represente o todo.
Amostras de agregados sao normalmente tomadas em pilhas de estocagem, correiastransportadoras, silos ou as vezes de caminhoes carregados. Os tecnicos responsaveis pelaamostragem devem evitar a coleta de material que esteja segregado, quando obtido depilhas de estocagem, caminhoes ou silos.
Uma amostragem representativa e formada pela combinacao de um numero de amostrasaleatorias obtidas em um perıodo de tempo (um dia em amostras de correias) ou tomandoamostras de varias locacoes em pilhas de estocagem e combinando essas amostras. Asamostras devem ser tomadas atentando-se para o efeito da segregacao nas pilhas de es-tocagem pois agregado no fundo das pilhas e usualmente mais graudo. O metodo maisutilizado para amostragem em uma pilha e escalar seu lado entre seu fundo e seu topo,remover uma camada superficial e obter uma amostra abaixo dessa superfıcie (Marques,2001).
A Norma NBR NM 26 de 2001 - Agregados - Amostragem, fixa as exigencias paraamostragem de agregados em campo.
Depois de tomadas as quantidades requeridas e levadas ao laboratorio, cada amostradeve ser reduzida para o tamanho apropriado para os ensaios especıficos, podendo-se usarpara isso um separador (figura 4.1) ou a um quarteamento. O quateamento basicamenteconsiste em separar a amostra total em quatro partes e eliminar os dois quartos, repetindoo processo ate que se tenha a quantidade necessaria para o ensaio (figura 4.2).
Figura 4.1: Quarteador
29
Figura 4.2: Quarteamento
No caso especıfico para o ensaio com agregados graudos a quantidade e de aproximada-mente 1 kg. A Norma ABNT NM 27 de 2001 - Agregados - Reducao da amostra de campopara ensaios de laboratorio, fixa condicoes exigıveis na reducao de uma amostra de agre-gado formada em campo para ensaios em laboratorio, onde sao indicados procedimentospara essa reducao.
Terminando estes processos passa-se para a etapa de peneiramento.
4.2.2 Analise granulometrica de agregados graudos por ensaiode peneiramento segundo a NBR NM 248
O ensaio de peneiramento e um metodo tradicional utilizado para determinar a dis-tribuicao granulometrica de partıculas, como agregados e solo, por exemplo. Basicamente,a operacao consiste em determinar a porcentagem de massa dentro de diferentes limitesde tamanho para uma determinada amostra. No Brasil, a Norma que rege este ensaiopara agregados e a NBR NM 248 - Agregados para Concreto - Especificacao, da ABNT(Associacao Brasileira de Normas Tecnicas). De posse da amostra preparada, as peneirassao empilhadas em ordem crescente de abertura das malhas, ficando a de maior aberturana parte superior. Um recipiente sem abertura e colocado debaixo daquela de menorabertura para coletar as partıculas que passam por todas as malhas. Para realizar openeiramento, a amostra de 1 kg e colocada na peneira de maior tamanho, coberta e, emseguida, todo o conjunto de peneiras e agitado por um perıodo de tempo especificado.Durante a agitacao, as partıculas passam por aquelas de tamanhos menores sucessiva-mente ate que sejam mantidas em uma malha em que nao seja possıvel passar. A figura4.3 ilustra o processo de peneiramento, apresentando as peneiras, suas diferentes malhase os respectivos agregados retidos em cada uma destas.
30
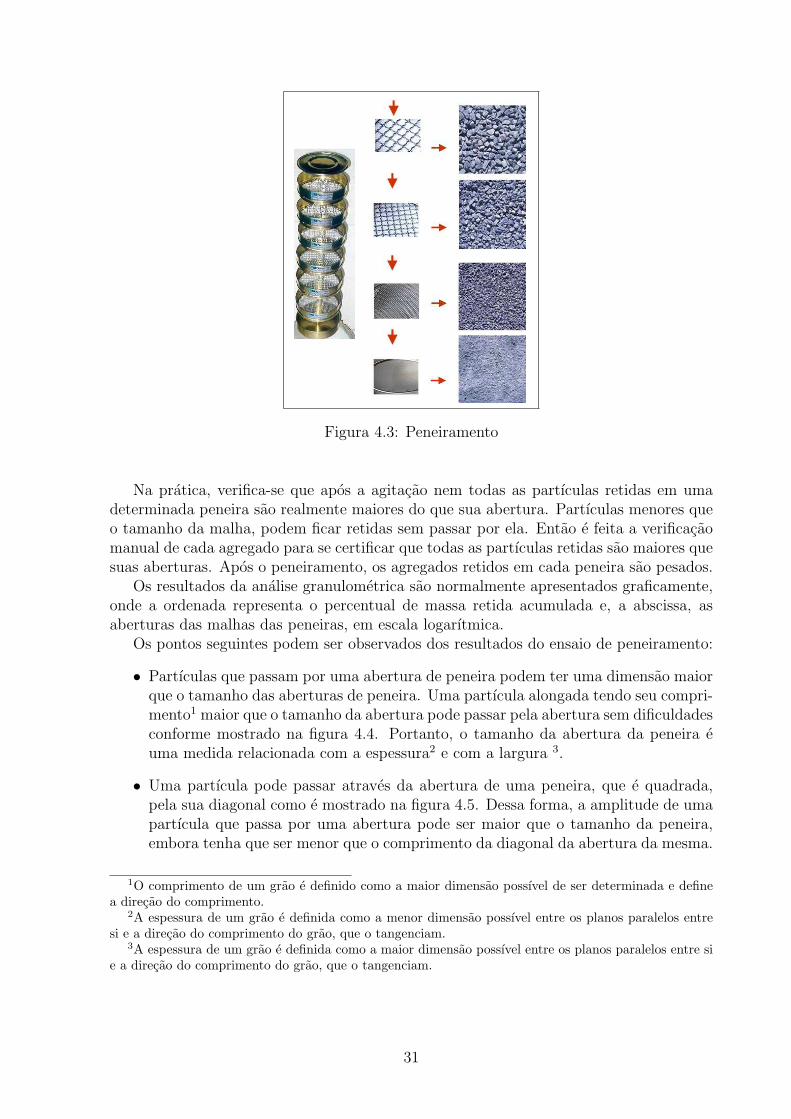
Figura 4.3: Peneiramento
Na pratica, verifica-se que apos a agitacao nem todas as partıculas retidas em umadeterminada peneira sao realmente maiores do que sua abertura. Partıculas menores queo tamanho da malha, podem ficar retidas sem passar por ela. Entao e feita a verificacaomanual de cada agregado para se certificar que todas as partıculas retidas sao maiores quesuas aberturas. Apos o peneiramento, os agregados retidos em cada peneira sao pesados.
Os resultados da analise granulometrica sao normalmente apresentados graficamente,onde a ordenada representa o percentual de massa retida acumulada e, a abscissa, asaberturas das malhas das peneiras, em escala logarıtmica.
Os pontos seguintes podem ser observados dos resultados do ensaio de peneiramento:
• Partıculas que passam por uma abertura de peneira podem ter uma dimensao maiorque o tamanho das aberturas de peneira. Uma partıcula alongada tendo seu compri-mento1 maior que o tamanho da abertura pode passar pela abertura sem dificuldadesconforme mostrado na figura 4.4. Portanto, o tamanho da abertura da peneira euma medida relacionada com a espessura2 e com a largura 3.
• Uma partıcula pode passar atraves da abertura de uma peneira, que e quadrada,pela sua diagonal como e mostrado na figura 4.5. Dessa forma, a amplitude de umapartıcula que passa por uma abertura pode ser maior que o tamanho da peneira,embora tenha que ser menor que o comprimento da diagonal da abertura da mesma.
1O comprimento de um grao e definido como a maior dimensao possıvel de ser determinada e definea direcao do comprimento.
2A espessura de um grao e definida como a menor dimensao possıvel entre os planos paralelos entresi e a direcao do comprimento do grao, que o tangenciam.
3A espessura de um grao e definida como a maior dimensao possıvel entre os planos paralelos entre sie a direcao do comprimento do grao, que o tangenciam.
31
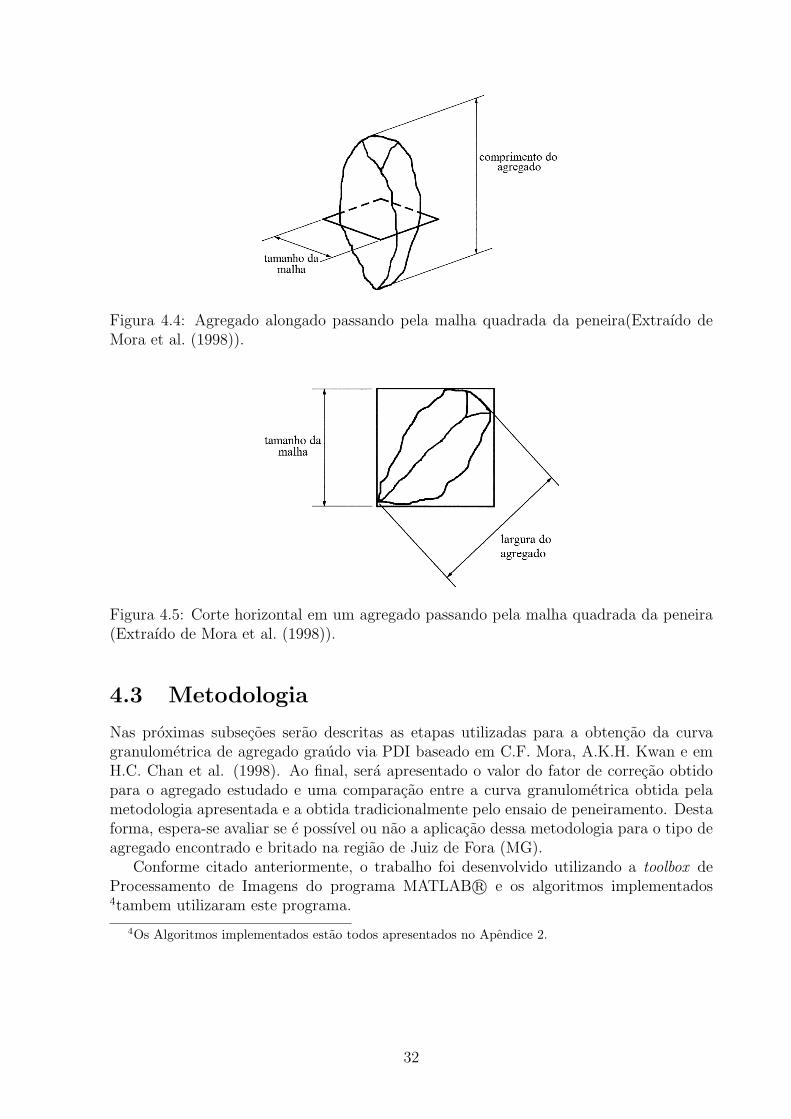
Figura 4.4: Agregado alongado passando pela malha quadrada da peneira(Extraıdo deMora et al. (1998)).
Figura 4.5: Corte horizontal em um agregado passando pela malha quadrada da peneira(Extraıdo de Mora et al. (1998)).
4.3 Metodologia
Nas proximas subsecoes serao descritas as etapas utilizadas para a obtencao da curvagranulometrica de agregado graudo via PDI baseado em C.F. Mora, A.K.H. Kwan e emH.C. Chan et al. (1998). Ao final, sera apresentado o valor do fator de correcao obtidopara o agregado estudado e uma comparacao entre a curva granulometrica obtida pelametodologia apresentada e a obtida tradicionalmente pelo ensaio de peneiramento. Destaforma, espera-se avaliar se e possıvel ou nao a aplicacao dessa metodologia para o tipo deagregado encontrado e britado na regiao de Juiz de Fora (MG).
Conforme citado anteriormente, o trabalho foi desenvolvido utilizando a toolbox deProcessamento de Imagens do programa MATLAB r© e os algoritmos implementados4tambem utilizaram este programa.
4Os Algoritmos implementados estao todos apresentados no Apendice 2.
32

4.3.1 Obtencao das imagens fotograficas dos agregados
O primeiro passo e a obtencao das imagens digitais dos agregados. Para isso, foi utilizadauma camera digital SONY HD.
Os agregados foram colocados sobre uma folha de cartolina de cor preta, onde foramcuidadosamente espalhados para que nao se tocassem ou se sobrepusessem. Uma fontede luz foi ajustada para que nao houvesse sombra. Dois retangulos de cor branca e dedimensoes conhecidas foram colocados junto aos agregados para que fosse possıvel rela-cionar a escala de pixels com a escala de comprimento real do objeto. A imagem obtidae apresentada na figura (4.6).
Figura 4.6: Amostra de agregados graudos dispostos sobre a cartolina preta. Na partesuperior esquerda podem ser observados os dois retangulos brancos utilizados para acorrelacao entre pixels e a escala de comprimento real do objeto.
4.3.2 Processamento da Imagem
Tendo adquirido a imagem da amostra global, passou-se a fase de processamento queconsistiu na segmentacao, eliminacao de ruıdos e deteccao das bordas, ou seja, a imagemfoi modificada de tal forma que as informacoes de interesse que sao a area, largura eespessura de cada pedra, pudessem ser extraıdas da imagem.
Primeiramente, a imagem foi segmentada atraves de uma operacao de limiarizacao.Conforme pode ser observado na figura (4.7), apos a imagem ser segmentada, surgiramalguns ruıdos, que em sua maior parte foram corrigidos automaticamente. Porem, algunsproblemas ainda poderiam surgir, o que tornou necessaria uma correcao via programasde tratamento de imagens.
33
Figura 4.7: Imagem apos ser segmentada.
A figura (4.8) apresenta a imagem apos as correcoes citadas anteriormente. Pode-seobservar que os retangulos utilizados para a conversao de pixel para milımetros nao estaomais na imagem. Isso ocorre porque na etapa anterior ja foi possıvel fazer a conversaoapenas com a imagem segmentada.
Figura 4.8: Imagem apos correcoes.
A etapa seguinte foi a obtencao das bordas de cada agregado, utilizando o operadorde Sobel, a figura (4.9) apresenta a imagem apos a deteccao de suas bordas.
Ao chegar a esta etapa, a analise das imagens foi feita para extrair as seguintes in-formacoes dos agregados, area, comprimento e largura de cada partıcula. A area e definidacomo a area projetada da partıcula e isso envolve contar o numero de pixels dentro docontorno fechado da imagem de partıculas e converter esse numero em dimensoes reaisde acordo com o fator de escala determinado pela calibracao (descrita no item “obtencaodas imagens fotograficas dos agregados”).
O comprimento e a largura de uma partıcula sao definidos como o comprimento ea largura do retangulo que limita a area das partıculas que estao sendo analisadas. Atecnica utilizada aqui para obter essas medidas e analoga aquela descrita anteriormentepara a obtencao do comprimento e da largura de uma elıpse. A referencia (Fernlund,1998) apresenta um estudo detalhado sobre metodologias alternativas a adotada aqui
34
Figura 4.9: Imagem com as bordas detectadas.
para a obtencao do comprimento e largura de agregados.
4.3.3 Transformacao da porcentagem de area para porcentagemde massa
No ensaio de peneiramento, as quantidades dos tamanhos de agregados sao medidas porpesagem, portanto, a porcentagem e expressa em relacao a massa total da amostra. NoPDI, no entanto, o volume ou a massa das partıculas do agregado nao sao medidos. Naverdade, isso ocorre porque a imagem adquirida e apenas uma projecao bidimensionalde partıculas e a espessura das partıculas nao e medida. Assim, fracoes de agregadosobtidos por PDI so podem ser apresentados em termos de porcentagens da area total dasuperfıcie.
A seguir e apresentado o metodo para converter a porcentagem de area obtida peloPDI em porcentagem de massa, para que os resultados possam ser comparados com osresultados do ensaio de peneiramento e interpretados mais facilmente.
Acredita-se que as partıculas de agregados da mesma origem tem mais ou menos amesma forma caracterıstica. Assim, a espessura media de uma partıcula pode ser estimadaa partir de outras dimensoes da partıcula como segue:
espessura media = λ× largura, (4.1)
onde λ e um parametro que depende da forma de cada agregado e e obtido atraves daseguinte equacao:
λ =M
ρ×n∑
i=1
(area× largura)
, (4.2)
sendo M a massa total da amostra analisada, ρ a massa especifica do agregado 5 e n e onumero total de agregados.
Com a equacao(4.1) o volume de cada partıcula pode ser estimado como:
volume = area× espessura media = area× λ× largura. (4.3)
5O valor de ρ para o tipo de agregado utilizado no trabalho (rocha gnaisse) e de 2, 63g/cm3 e deter-minado segundo a NBR NM 53 de 2003
35
Usando a equacao (4.3) para determinar o volume de cada agregado, a porcentagemde massa passante em cada peneira e determinada da seguinte forma:
porcentagem de massa passante na peneira =
ρ× λ×p∑
i=1
(area× largura)
ρ× λ×n∑
i=1
(area× largura)
, (4.4)
simplificando ρ e λ tem-se:
porcentagem de massa passante na peneira =
p∑i=1
(area× largura)
n∑i=1
(area× largura)
, (4.5)
onde o somatorio do denominador e para todos os agregados da amostra, enquanto osomatorio do numerador e para os agregados menores que a malha da p-esima peneiraconsiderada.
Tendo convertido a porcentagem de area para a porcentagem de massa, os resultadosobtidos pela classificacao de PDI podem entao ser comparados com aqueles obtidos porpeneiramento.
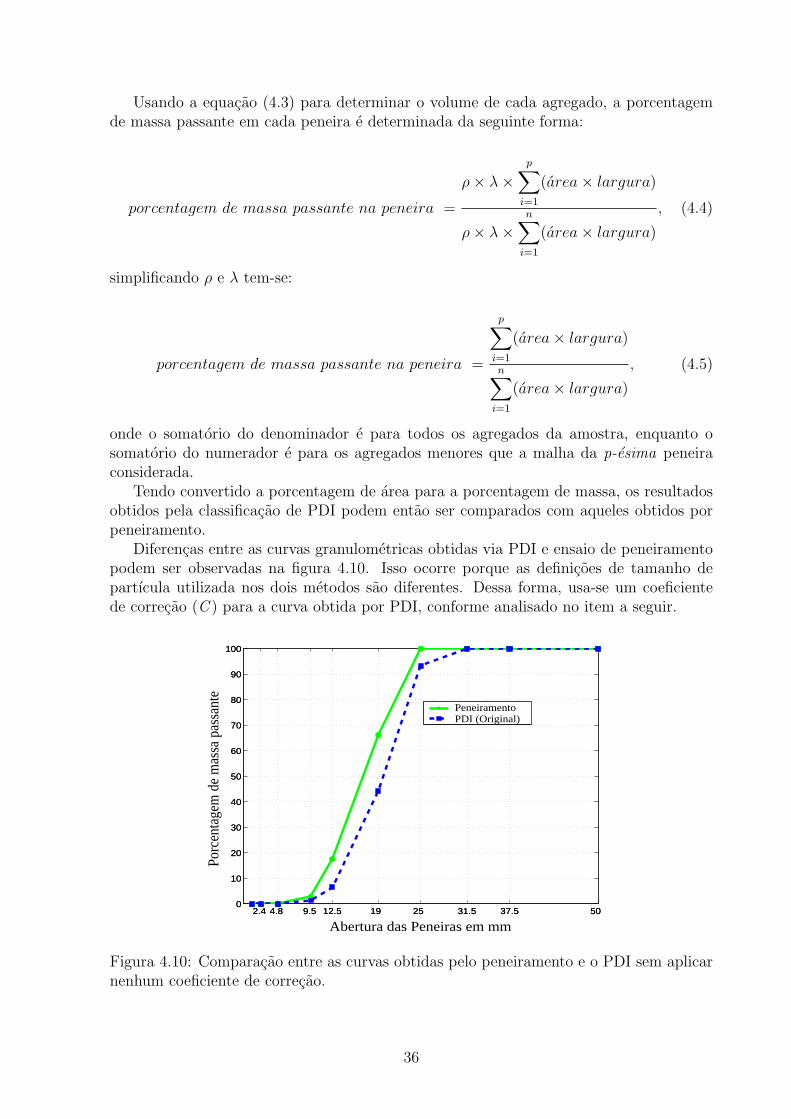
Diferencas entre as curvas granulometricas obtidas via PDI e ensaio de peneiramentopodem ser observadas na figura 4.10. Isso ocorre porque as definicoes de tamanho departıcula utilizada nos dois metodos sao diferentes. Dessa forma, usa-se um coeficientede correcao (C ) para a curva obtida por PDI, conforme analisado no item a seguir.
50 37.531.525 19 12.59.5 4.8 2.4 0
10
20
30
40
50
60
70
80
90
100
Abertura das Peneiras em mm
Porc
enta
gem
de
mas
sa p
assa
nte
50 37.531.525 19 12.59.5 4.8 2.4 0
10
20
30
40
50
60
70
80
90
100
PeneiramentoPDI (Original)
Figura 4.10: Comparacao entre as curvas obtidas pelo peneiramento e o PDI sem aplicarnenhum coeficiente de correcao.
36
4.3.4 Determinacao do coeficiente de correcao (C )
No peneiramento mecanico, os tamanhos das partıculas sao medidos em termos de di-mensao das aberturas de peneira, de modo que as partıculas passam ou sao retidas. Ostamanhos de partıculas assim determinados nao correspondem a largura das partıculasmedida pelo DIP.
A medida do tamanho das partıculas obtida por peneiramento depende da forma dasaberturas das peneiras utilizadas. Como as aberturas de peneira sao quadradas, entaoo tamanho da abertura da peneira pela qual uma partıcula pode simplesmente passar, eapenas, em geral, cerca de 0,8 vez a largura da partıcula.
Desta forma apresenta-se o coeficiente de correcao C expresso na equacao (4.6)
tamanho equivalente = C × largura (4.6)
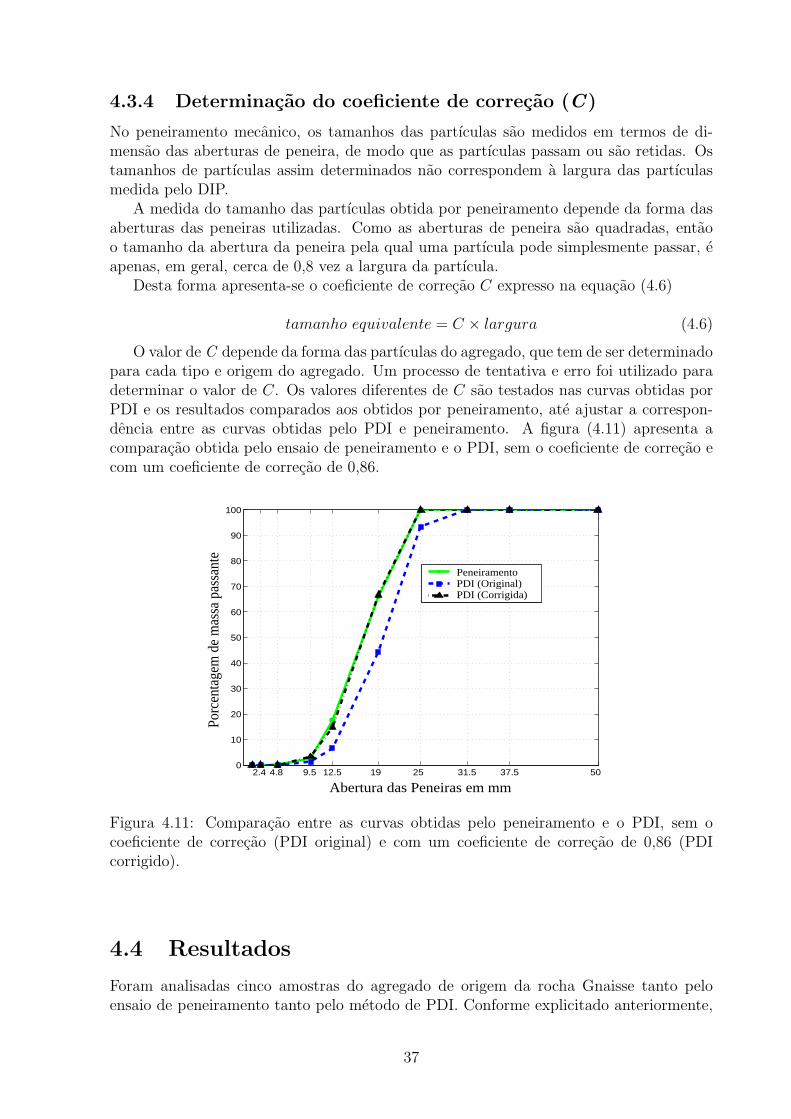
O valor de C depende da forma das partıculas do agregado, que tem de ser determinadopara cada tipo e origem do agregado. Um processo de tentativa e erro foi utilizado paradeterminar o valor de C. Os valores diferentes de C sao testados nas curvas obtidas porPDI e os resultados comparados aos obtidos por peneiramento, ate ajustar a correspon-dencia entre as curvas obtidas pelo PDI e peneiramento. A figura (4.11) apresenta acomparacao obtida pelo ensaio de peneiramento e o PDI, sem o coeficiente de correcao ecom um coeficiente de correcao de 0,86.
50 37.531.525 19 12.59.5 4.8 2.4 0
10
20
30
40
50
60
70
80
90
100
Abertura das Peneiras em mm
Porc
enta
gem
de
mas
sa p
assa
nte
Peneiramento PDI (Original) PDI (Corrigida)
Figura 4.11: Comparacao entre as curvas obtidas pelo peneiramento e o PDI, sem ocoeficiente de correcao (PDI original) e com um coeficiente de correcao de 0,86 (PDIcorrigido).
4.4 Resultados
Foram analisadas cinco amostras do agregado de origem da rocha Gnaisse tanto peloensaio de peneiramento tanto pelo metodo de PDI. Conforme explicitado anteriormente,
37
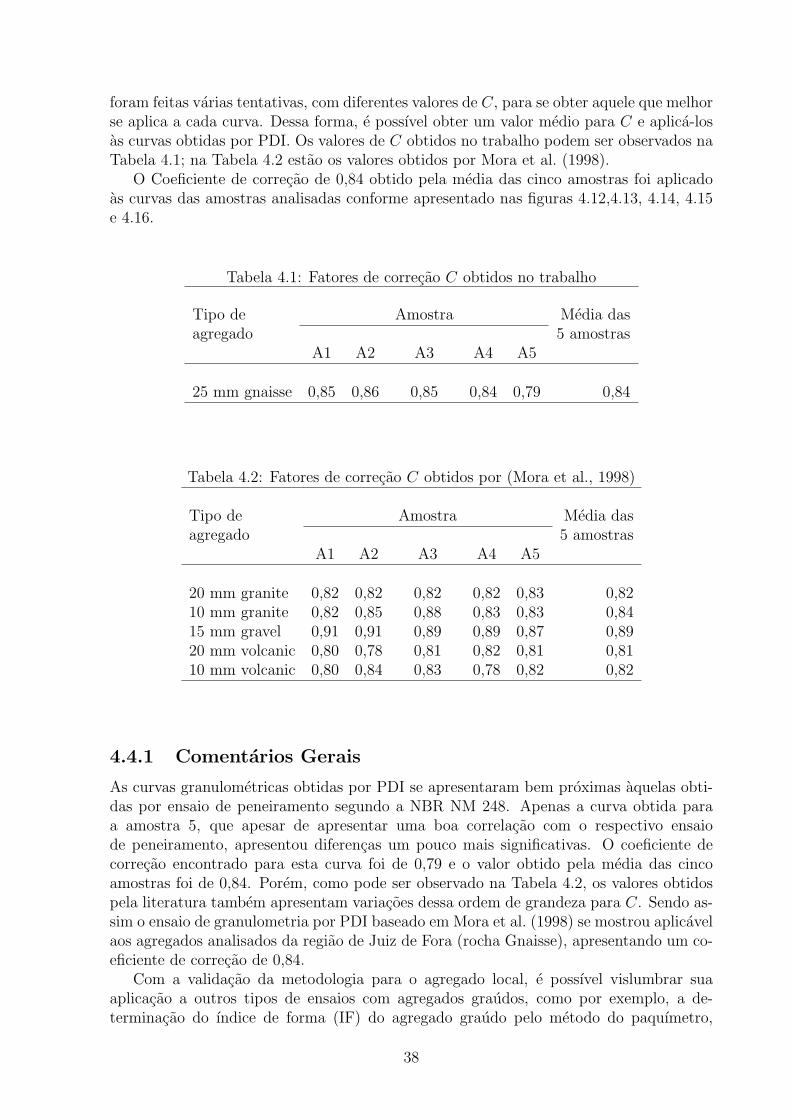
foram feitas varias tentativas, com diferentes valores de C, para se obter aquele que melhorse aplica a cada curva. Dessa forma, e possıvel obter um valor medio para C e aplica-losas curvas obtidas por PDI. Os valores de C obtidos no trabalho podem ser observados naTabela 4.1; na Tabela 4.2 estao os valores obtidos por Mora et al. (1998).
O Coeficiente de correcao de 0,84 obtido pela media das cinco amostras foi aplicadoas curvas das amostras analisadas conforme apresentado nas figuras 4.12,4.13, 4.14, 4.15e 4.16.
Tabela 4.1: Fatores de correcao C obtidos no trabalho
Tipo de Amostra Media dasagregado 5 amostras
A1 A2 A3 A4 A5
25 mm gnaisse 0,85 0,86 0,85 0,84 0,79 0,84
Tabela 4.2: Fatores de correcao C obtidos por (Mora et al., 1998)
Tipo de Amostra Media dasagregado 5 amostras
A1 A2 A3 A4 A5
20 mm granite 0,82 0,82 0,82 0,82 0,83 0,8210 mm granite 0,82 0,85 0,88 0,83 0,83 0,8415 mm gravel 0,91 0,91 0,89 0,89 0,87 0,8920 mm volcanic 0,80 0,78 0,81 0,82 0,81 0,8110 mm volcanic 0,80 0,84 0,83 0,78 0,82 0,82
4.4.1 Comentarios Gerais
As curvas granulometricas obtidas por PDI se apresentaram bem proximas aquelas obti-das por ensaio de peneiramento segundo a NBR NM 248. Apenas a curva obtida paraa amostra 5, que apesar de apresentar uma boa correlacao com o respectivo ensaiode peneiramento, apresentou diferencas um pouco mais significativas. O coeficiente decorrecao encontrado para esta curva foi de 0,79 e o valor obtido pela media das cincoamostras foi de 0,84. Porem, como pode ser observado na Tabela 4.2, os valores obtidospela literatura tambem apresentam variacoes dessa ordem de grandeza para C. Sendo as-sim o ensaio de granulometria por PDI baseado em Mora et al. (1998) se mostrou aplicavelaos agregados analisados da regiao de Juiz de Fora (rocha Gnaisse), apresentando um co-eficiente de correcao de 0,84.
Com a validacao da metodologia para o agregado local, e possıvel vislumbrar suaaplicacao a outros tipos de ensaios com agregados graudos, como por exemplo, a de-terminacao do ındice de forma (IF) do agregado graudo pelo metodo do paquımetro,
38

50 37.531.525 19 12.59.5 6.34.8 2.4 0
10
20
30
40
50
60
70
80
90
100
Abertura das Peneiras em mm
Porc
enta
gem
de
mas
sa p
assa
nte
Peneiramento PDI (Original) PDI (Corrigida)
Figura 4.12: Amostra 1
50 37.531.525 19 12.59.5 4.8 2.4 0
10
20
30
40
50
60
70
80
90
100
Abertura das Peneiras em mm
Porc
enta
gem
de
mas
sa p
assa
nte
Peneiramento PDI (Original) PDI (Corrigida)
Figura 4.13: Amostra 2
5037.531.5251912.59.54.82.40
10
20
30
40
50
60
70
80
90
100
Abertura das Peneiras em mm
Porc
enta
gem
de
mas
sa p
assa
nte
Peneiramento PDI (Original) PDI (Corrigida)
Figura 4.14: Amostra 3
50 37.531.525 19 12.59.5 4.8 2.4 0
10
20
30
40
50
60
70
80
90
100
Abertura das Peneiras em mm
Porc
enta
gem
de
mas
sa p
assa
nte
Peneiramento PDI (Original) PDI (Corrigida)
Figura 4.15: Amostra 4
5037.531.5251912.59.54.82.40
10
20
30
40
50
60
70
80
90
100
Abertura das Peneiras em mm
Porc
enta
gem
de
mas
sa p
assa
nte
Peneiramento PDI (Original) PDI (Corrigida)
Figura 4.16: Amostra 5
39

normalizado pela NBR MB 1776 de 2006 e a avaliacao da granulometria de agregadosgraudos obtidas por imagens de testemunhos extraıdos de estruturas e concreto. Essametodologia poderia complementar um ensaio de reconstituicao de traco de concreto porexemplo, fornecendo alem das porcentagens de cada material constituinte do traco deconcreto, a curva granulometrica do agregado graudo.
40
Capıtulo 5
Problema 3: AvaliacaoGranulometrica em Tempo Real deAgregados e Minerios
Este capıtulo apresenta o Sistema de Avaliacao Granulometrica por Imagem (SAGI).Este equipamento vem sendo desenvolvido por Leandro Mota, Flavio Barbosa, FernandoNogueira e Pedro Kopschitz, no ambito do Programa de Incentivo a Inovacao (PII) daUniversidade Federal de Juiz de Fora (UFJF), gerido pela Secretaria de DesenvolvimentoTecnologico (Sedetec) e pelo Centro Regional de Inovacao e Transferencia de Tecnologia(Critt), contando ainda com a consultoria tecnica do Nucleo de Tecnologia da Qualidadee da Inovacao da Universidade Federal de Minas e do Sebrae MG. Alem disso, o SAGI foiapresentado no concurso Idea to Product (I2P) Competetition Latin America(classificadoentre os seis primeiros produtos apresentados em um total de trinta e seis). Esse concursofoi realizado pela Fundacao Getulio Vargas em Sao Paulo de 2 a 4 de Setembro de 2010.Um pedido de registro de patente junto ao Instituto Nacional da Propriedade Privada(INPI) em nome de Leandro Mota, Flavio Barbosa, Fernando Nogueira e Pedro Kopschitz(protocolo de pedido de patente numero 221003129549).
5.1 Introducao
As pedreiras, mineradoras e siderurgicas tem a necessidade de avaliar a granulometria dosagregados e minerios pois estes materiais sao comercializados de acordo com o seu peso egranulometria, sendo que a granulometria interfere no tipo de aplicacao do material.
As mineradoras necessitam fazer a analise granulometrica para classificar o minerio deferro em granulado, finos, ultrafinos e pelotas, comercializando-os como produtos distin-tos. Alem disso, as mineradoras necessitam atender as requisicoes tecnicas dos pedidosquanto a granulometria das siderurgicas. Na siderurgia, ha a necessidade tecnica de serealizar a analise granulometrica do minerio, objetivando garantir que se use apenas ominerio granulado (12,5 mm a 200 mm) ou as pelotas como carga de auto forno, ja queas partıculas de minerio menores que 12,5 mm (finos e ultrafinos) nao sao adequadaspara esse uso, pois tendem a se compactar nao permitindo a circulacao de ar no inte-rior do auto forno, podendo ocasionar a solidificacao do material e, consequentemente,acarretar a sua inutilizacao definitiva. Ja as pedreiras necessitam fazer a analise granu-lometrica para atender as requisicoes tecnicas da construcao civil, pois as propriedadesfısicas dos agregados graudos sao essenciais para a performance e a durabilidade das es-
41
truturas construıdas. Estudos apontaram que o uso de agregados inadequados podemser os responsaveis pela falencia de estruturas, como por exemplo, o material ligante empavimento asfaltico, que pode se descolar das partıculas dos agregados, provocando rapidadeterioracao do pavimento e a rapida deterioracao de concreto de cimento Portland .
O metodo utilizado tradicionalmente por estes segmentos para a determinacao dagranulometria e o peneiramento. Trata-se de um processo moroso e realizado em geralpara apenas um conjunto de amostras dos agregados a serem analisados, ocasionando asvezes um descompasso entre o controle de qualidade do material e o produto comercia-lizado. Assim, quando se detectada alguma falha na producao pelo sistema de controletradicional, o produto normalmente ja foi expedido para o cliente.
Pode ocorrer uma nova analise para verificar a qualidade do material recebido por partedo cliente, podendo haver devolucao do material quando ha diferencas granulometricasfora do limite de erro tolerado, gerando assim, perda de tempo e recursos financeiros comtransporte, alem de prejudicar a imagem da empresa fornecedora do material.
Para solucionar esses problemas recorrentes na cadeia produtiva da construcao civile da siderurgia, a equipe do projeto supracitado iniciou o desenvolvimento da tecnologiade um avaliador qualitativo e quantitativo de agregados graudos e/ou minerios baseadoem analise de imagens do material dispostos em uma correia transportadora. O produtoem desenvolvimento deve ser alocado nas correias transportadoras, a fim de obter asimagens para analise do material, estas serao processadas por um programa especıfico,que irao gerar as informacoes a respeito da granulometria e do volume de todo o material,buscando evitar os problemas apresentados anteriormente. Sendo assim, o produto buscapenetrar na base da cadeia produtiva, ou seja, nas pedreiras, siderurgicas e mineradoras,possibilitando uma vantagem competitiva acerca do controle de qualidade das empresas.
A figura 5.1 apresenta um esquema de funcionamento. O equipamento fica acopladona correia que transporta o material, na parte superior do equipamento fica a camera queatraves de sistema sem fio envia a foto dos agregados capturada para um computadorque munido do programa de processamento e analise da imagem extrai as informacoespresentes na mesma e apresenta a curva granulometrica do agregado passante na esteiranaquele momento, avaliando se este encontra-se dentro dos padroes granulometricos preestabelecidos. Alem disso existe a possibilidade de se fazer uma estimativa do volumepassante pela correia.
Por motivos relacionados as exigencias de sigilo para pedido de patente junto ao INPI,o detalhamento da metodologia aqui aplicada nao sera apresentado neste trabalho.
42
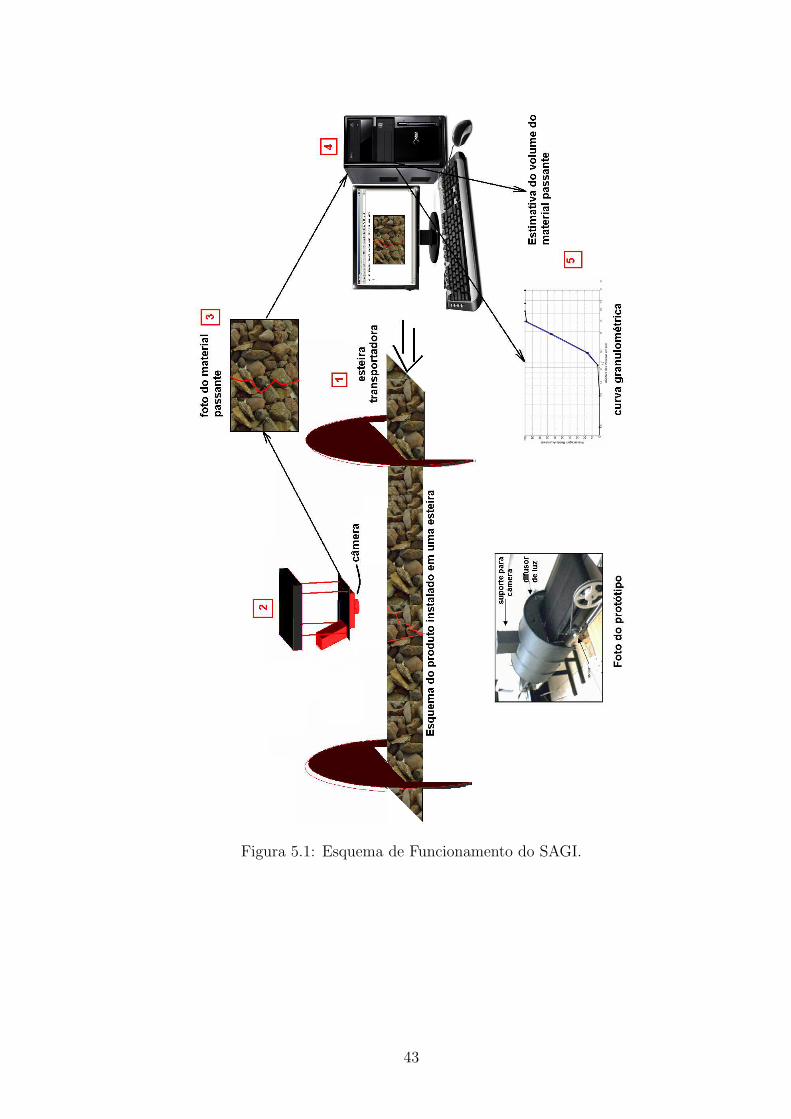
Figura 5.1: Esquema de Funcionamento do SAGI.
43
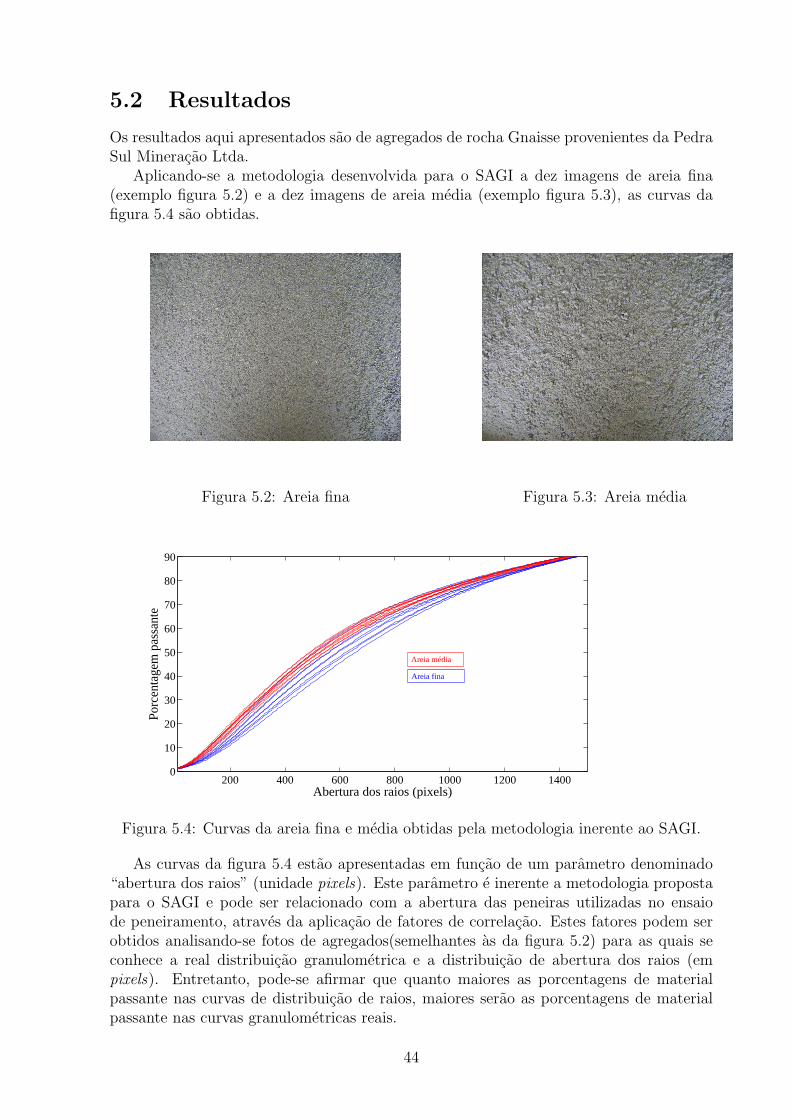
5.2 Resultados
Os resultados aqui apresentados sao de agregados de rocha Gnaisse provenientes da PedraSul Mineracao Ltda.
Aplicando-se a metodologia desenvolvida para o SAGI a dez imagens de areia fina(exemplo figura 5.2) e a dez imagens de areia media (exemplo figura 5.3), as curvas dafigura 5.4 sao obtidas.
Figura 5.2: Areia fina Figura 5.3: Areia media
200 400 600 800 1000 1200 14000
10
20
30
40
50
60
70
80
90
Abertura dos raios (pixels)
Por
cent
agem
pas
sant
e
Areia média
Areia fina
Figura 5.4: Curvas da areia fina e media obtidas pela metodologia inerente ao SAGI.
As curvas da figura 5.4 estao apresentadas em funcao de um parametro denominado“abertura dos raios” (unidade pixels). Este parametro e inerente a metodologia propostapara o SAGI e pode ser relacionado com a abertura das peneiras utilizadas no ensaiode peneiramento, atraves da aplicacao de fatores de correlacao. Estes fatores podem serobtidos analisando-se fotos de agregados(semelhantes as da figura 5.2) para as quais seconhece a real distribuicao granulometrica e a distribuicao de abertura dos raios (empixels). Entretanto, pode-se afirmar que quanto maiores as porcentagens de materialpassante nas curvas de distribuicao de raios, maiores serao as porcentagens de materialpassante nas curvas granulometricas reais.
44
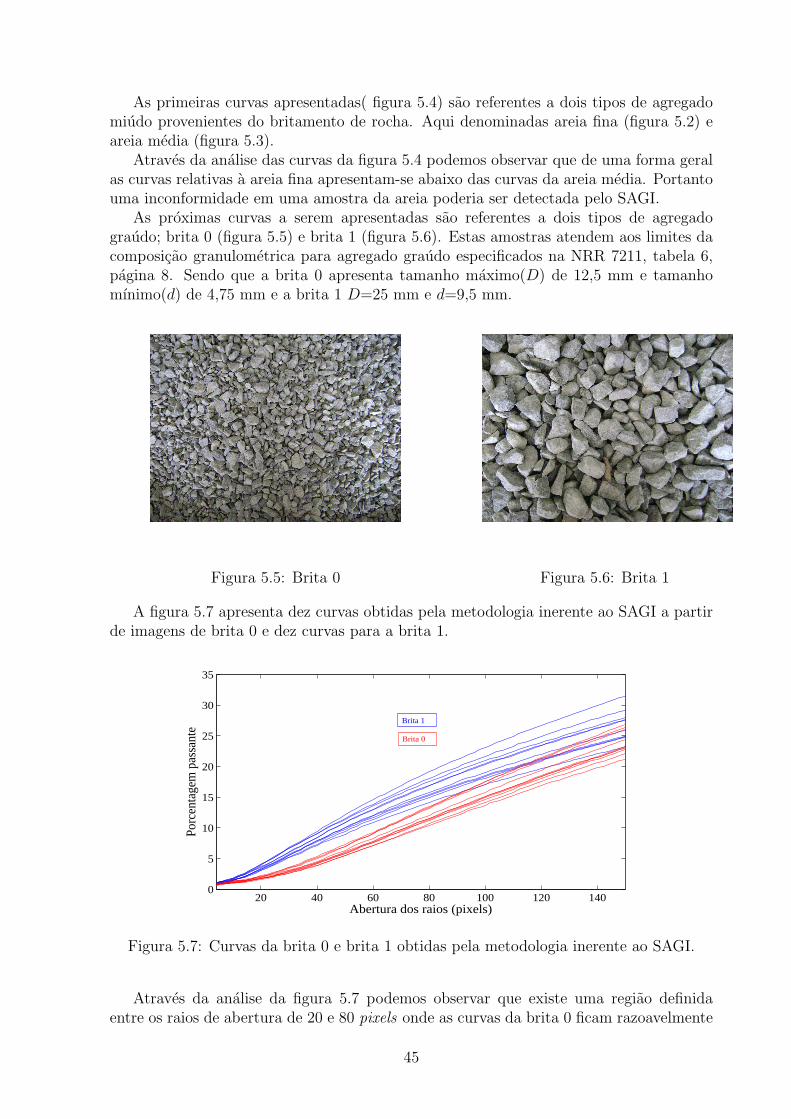
As primeiras curvas apresentadas( figura 5.4) sao referentes a dois tipos de agregadomiudo provenientes do britamento de rocha. Aqui denominadas areia fina (figura 5.2) eareia media (figura 5.3).
Atraves da analise das curvas da figura 5.4 podemos observar que de uma forma geralas curvas relativas a areia fina apresentam-se abaixo das curvas da areia media. Portantouma inconformidade em uma amostra da areia poderia ser detectada pelo SAGI.
As proximas curvas a serem apresentadas sao referentes a dois tipos de agregadograudo; brita 0 (figura 5.5) e brita 1 (figura 5.6). Estas amostras atendem aos limites dacomposicao granulometrica para agregado graudo especificados na NRR 7211, tabela 6,pagina 8. Sendo que a brita 0 apresenta tamanho maximo(D) de 12,5 mm e tamanhomınimo(d) de 4,75 mm e a brita 1 D=25 mm e d=9,5 mm.
Figura 5.5: Brita 0 Figura 5.6: Brita 1
A figura 5.7 apresenta dez curvas obtidas pela metodologia inerente ao SAGI a partirde imagens de brita 0 e dez curvas para a brita 1.
20 40 60 80 100 120 1400
5
10
15
20
25
30
35
Abertura dos raios (pixels)
Porc
enta
gem
pas
sant
e
Brita 1
Brita 0
Figura 5.7: Curvas da brita 0 e brita 1 obtidas pela metodologia inerente ao SAGI.
Atraves da analise da figura 5.7 podemos observar que existe uma regiao definidaentre os raios de abertura de 20 e 80 pixels onde as curvas da brita 0 ficam razoavelmente
45
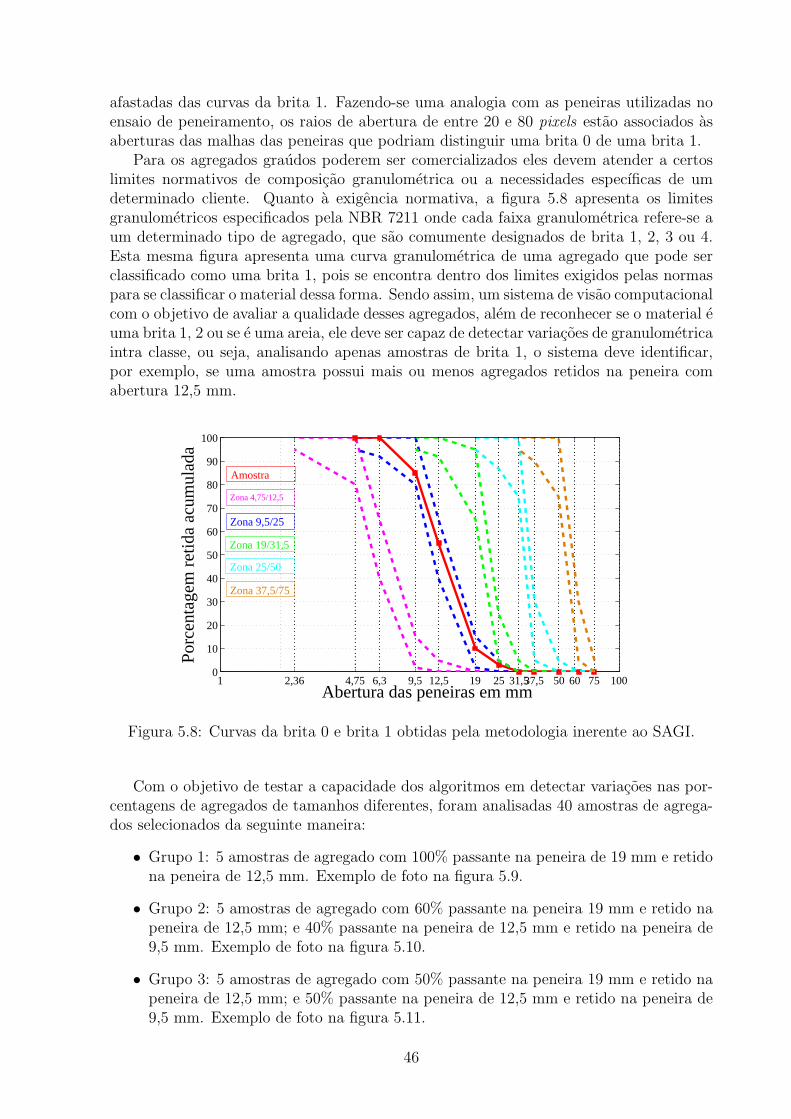
afastadas das curvas da brita 1. Fazendo-se uma analogia com as peneiras utilizadas noensaio de peneiramento, os raios de abertura de entre 20 e 80 pixels estao associados asaberturas das malhas das peneiras que podriam distinguir uma brita 0 de uma brita 1.
Para os agregados graudos poderem ser comercializados eles devem atender a certoslimites normativos de composicao granulometrica ou a necessidades especıficas de umdeterminado cliente. Quanto a exigencia normativa, a figura 5.8 apresenta os limitesgranulometricos especificados pela NBR 7211 onde cada faixa granulometrica refere-se aum determinado tipo de agregado, que sao comumente designados de brita 1, 2, 3 ou 4.Esta mesma figura apresenta uma curva granulometrica de uma agregado que pode serclassificado como uma brita 1, pois se encontra dentro dos limites exigidos pelas normaspara se classificar o material dessa forma. Sendo assim, um sistema de visao computacionalcom o objetivo de avaliar a qualidade desses agregados, alem de reconhecer se o material euma brita 1, 2 ou se e uma areia, ele deve ser capaz de detectar variacoes de granulometricaintra classe, ou seja, analisando apenas amostras de brita 1, o sistema deve identificar,por exemplo, se uma amostra possui mais ou menos agregados retidos na peneira comabertura 12,5 mm.
1 2,36 4,75 6,3 9,5 12,5 19 25 31,537,5 50 60 75 1000
10
20
30
40
50
60
70
80
90
100
Abertura das peneiras em mm
Porc
enta
gem
ret
ida
acum
ulad
a
Zona 9,5/25
Zona 19/31,5
Zona 25/50
Zona 37,5/75
Amostra
Zona 4,75/12,5
Figura 5.8: Curvas da brita 0 e brita 1 obtidas pela metodologia inerente ao SAGI.
Com o objetivo de testar a capacidade dos algoritmos em detectar variacoes nas por-centagens de agregados de tamanhos diferentes, foram analisadas 40 amostras de agrega-dos selecionados da seguinte maneira:
• Grupo 1: 5 amostras de agregado com 100% passante na peneira de 19 mm e retidona peneira de 12,5 mm. Exemplo de foto na figura 5.9.
• Grupo 2: 5 amostras de agregado com 60% passante na peneira 19 mm e retido napeneira de 12,5 mm; e 40% passante na peneira de 12,5 mm e retido na peneira de9,5 mm. Exemplo de foto na figura 5.10.
• Grupo 3: 5 amostras de agregado com 50% passante na peneira 19 mm e retido napeneira de 12,5 mm; e 50% passante na peneira de 12,5 mm e retido na peneira de9,5 mm. Exemplo de foto na figura 5.11.
46
• Grupo 4: 5 amostras de agregado com 40% passante na peneira 19 mm e retido napeneira de 12,5 mm; e 60% passante na peneira de 12,5 mm e retido na peneira de9,5 mm. Exemplo de foto na figura 5.12.
• Grupo 5: 5 amostras de agregado com 30% passante na peneira 19 mm e retido napeneira de 12,5 mm; e 70% passante na peneira de 12,5 mm e retido na peneira de9,5 mm. Exemplo de foto na figura 5.13.
• Grupo 6: 5 amostras de agregado com 20% passante na peneira 19 mm e retido napeneira de 12,5 mm; e 80% passante na peneira de 12,5 mm e retido na peneira de9,5 mm. Exemplo de foto na figura 5.14.
• Grupo 7: 5 amostras de agregado com 10% passante na peneira 19 mm e retido napeneira de 12,5 mm; e 90% passante na peneira de 12,5 mm e retido na peneira de9,5 mm. Exemplo de foto na figura 5.15.
• Grupo 8: 5 amostras de agregado com 100% passante na peneira de 12,5 mm eretido na peneira de 9,5 mm. Exemplo de foto na figura 5.16.
A figura 5.17 apresenta as curvas Obtidas pelo SAGI para as medias dos resultadosobtidos para as cinco amostras de cada grupo. Atraves da analise desta figura pode-seobservar a coerencia dos resultados. As curvas que apresentam valores de porcentageminferiores, quando se analisa um determinado raio de abertura, estao associadas aos gruposcom maior quantidade de graos finos. Em todos os grupos analisados esta caracterısticafoi observada.
5.3 Comentarios Gerais
Os resultados apresentados aqui ainda sao preliminares e os algoritmos ainda estao emfase de testes, porem, ja foi possıvel obter avancos na avaliacao granulometrica, uma fezque ja e possıvel distinguir diferentes tipos de agregados graudos e miudos e alem dissofazer avaliacoes dentro de intervalos de diferenca de ate 3 mm. Ainda ha muito a ser feitoate que o sistema possa ser implementado em uma pedreira ou uma mineradora, mas osresultados obtidos ate o momento indicam que e possıvel fazer a avaliacao granulometricade agregados em tempo real.
47
Figura 5.9: Grupo 1 Figura 5.10: Grupo 2
Figura 5.11: Grupo 3 Figura 5.12: Grupo 4
Figura 5.13: Grupo 5 Figura 5.14: Grupo 6
48
Figura 5.15: Grupo 7 Figura 5.16: Grupo 8
49
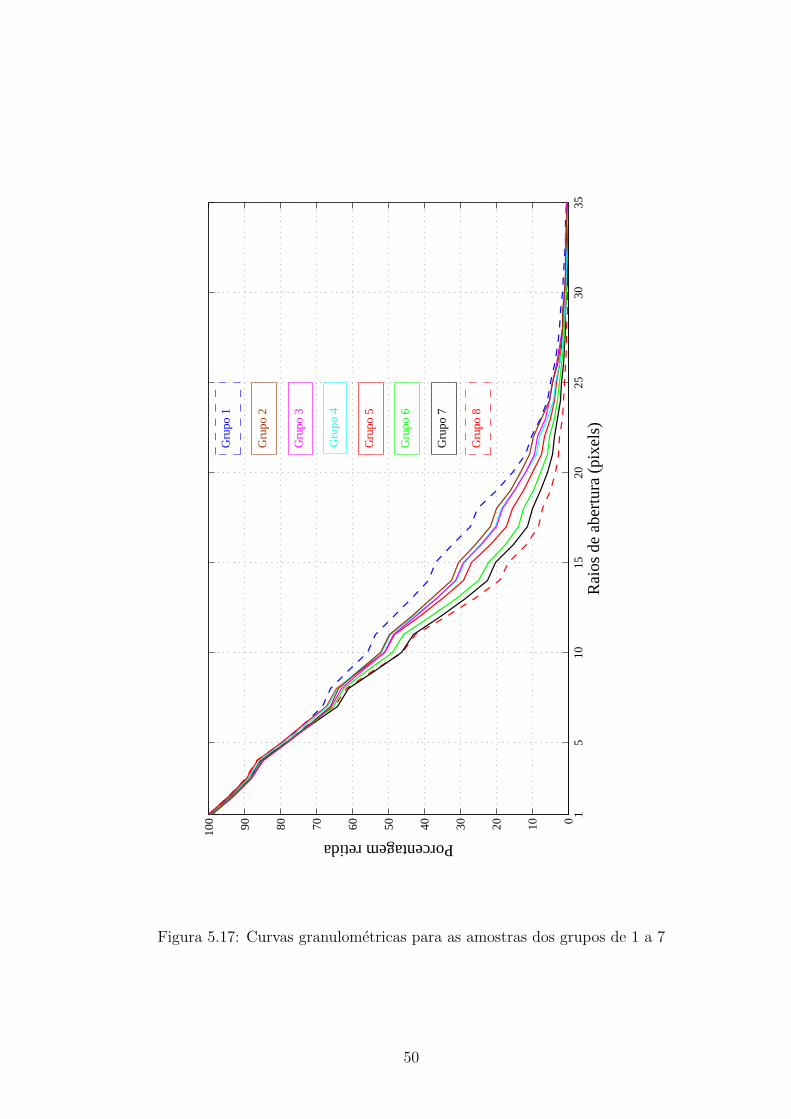
15
1015
2025
3035
0102030405060708090100
Rai
os d
e ab
ertu
ra (
pixe
ls)
Porcentagem retida
Gru
po 1
Gru
po 2
Gru
po 3
Gru
po 4
Gru
po 5
Gru
po 6
Gru
po 7
Gru
po 8
Figura 5.17: Curvas granulometricas para as amostras dos grupos de 1 a 7
50
Capıtulo 6
Conclusoes e Consideracoes Finais
Neste trabalho foi apresentado o estudo e desenvolvimento de algoritmos de Processa-mento Digital de Imagens e suas aplicacoes a problemas de Engenharia. A abordageminicial sobre os temas que envolvem o processamento e analise de imagens possibilitou queas metodologias desenvolvidas no trabalho, fossem apresentadas de forma clara e objetiva.
A metodologia utilizada para a geracao de malhas de elementos finitos atraves deimagens, tornou possıvel vislumbrar a criacao de um sistema automatizado que combinea captura de imagem com a geracao de malhas, entretanto, os algoritmos apresentadosprecisam passar por melhorias.
O ensaio de granulometria de agregados graudos por imagem apresentou curvas bemproximas aquelas obtidas por ensaio de peneiramento tradicional e o coeficiente de correcaoencontrado foi de 0,84, mostrando que a metodologia e aplicavel aos agregados da regiaode Juiz de Fora. Alem disso, com a validacao da metodologia, sua aplicacao pode vir serutilizada para outros ensaios, com o do ındice de forma e a avaliacao da granulometria deagregados por imagens de testemunhos.
Os resultados preliminares obtidos atraves do Sistema de Avaliacao Granulometricapor Imagem (SAGI) indicaram que e possıvel desenvolver um sistema que avalie a granu-lometria de agregados ou minerios em tempo real, porem, ainda a muito a ser feito ateque o sistema possa ser implementado em uma pedreira ou mineradora.
Como e possıvel observar, as metodologias desenvolvidas buscaram por solucoes queapresentaram resultados precisos e de rapida obtencao e alem dessas vantagens, elas po-dem contribuir para a automatizacao de sistemas de controle e analise de materiais usadosna construcao civil e possibilitar o desenvolvimento de novas tecnologias e ensaios em ma-teriais.
51
Referencias Bibliograficas
ABNT, 1997. Associacao Brasileira de Normas Tecnicas. NBR NM ISO 3310-1 - Peneirasde ensaio - Requisitos tecnicos e verificacao Parte 1: Peneiras de ensaio com tela detecido metalico.
ABNT, 2003. Associacao Brasileira de Normas Tecnicas. NBR NM 248 - Agregados -Determinacao da composicao granulometrica.
ABNT, 2006. Associacao Brasileira de Normas Tecnicas. MB 1776 - Determinacao doındice de forma pelo metodo do paquımetro.
ABNT, 2009a. Associacao Brasileira de Normas Tecnicas. NBR 7211 - Agregados paraconcreto - Especificacao.
ABNT, 2009b. Associacao Brasileira de Normas Tecnicas. NBR NM 53 - Agregados -Determinacao da absorcao de agua e da massa especıfica do agregado graudo.
ABNT, 2009c. Associacao Brasileira de Normas Tecnicas. NBR NM 26 - Agregados -Amostragem.
ABNT, 2009d. Associacao Brasileira de Normas Tecnicas. NBR NM 27:2001 Agregados- Reducao da amostra de campo para ensaios de laboratorio.
A.Rosenfeld, 1993. Image Analysis and Computer Vision. Computer Vision Graphics andImage Processing.
Aura Conci, E. A. & Leta, F. R., 2008. Computacao grafica. Elsevier, 2 edition.
A.Vilela, 2008. Uma metodologia para reconstrucao de superfıcies a partir de luz estru-turada. Tese de mestrado, Universidade Federal de Juiz de Fora.
Fernlund, J. M., 1998. The effect of particle form on sieve analysis: a test by imageanalysis.
Filho, O. M. & Neto, H. V., 1999. Processamento Digital de Imagens. Brasport.
Gmsh, 2008. Version 2.2.3 disponıvel para downloads em www.geuz.org/gmsh/ (site aces-sado em 26/07/08).
J.Rasure, D.Argiro, T. . C., 1992. Visual language and software development environmentfor image processing. Journal of Imaging System and Technology.
Lee, H. & Chou, E., 1993. Techniques and applications in civil engineering. EF/NSFConference on Digital Image Processing, pp. 203–210,ASCE, Hawaii, March.
52
Liedi Bernucci, Laura Motta, J. C. e. J. S., 2006. Pavimentacao asfaltica - Formacaobasica para engenheiros. Rio de Janeiro, PETROBRAS, ABEDA.
L.Roberts, 1977. Machine Perception of Three-Dimensional Solids. In J.k.Aggarwal,R.O.Duda, and A.Rosenfeld, Ed., Computer Methodes in Inage Analysis, LA, IEEEComputer Society.
Marques, G., 2001. Procedimentos de avaliacao e caracterizacao de agregados mineraisusados na pavimentacao asfaltica. Seminario de qualificacao ao doutorado - Coor-denacao dos Programas de Pos-graduacao em Engenharia, Universidade Federal doRio de Janeiro.
Melo, R. H. C., 2005. Using Fractal Characteristics such as Fractal Dimension, Lacunarityand Succolaruty to Characterize Texture Patterns on Images. PhD thesis, UniversidadeFederal Fluminense, Niteroi.
Metha, P. K. & Monteiro, P. J. M., 1994. Concreto estrutural, propriedades e materiais.Sao Paulo, Pini.
M.Farage, D.Sanabio, L.Barra, & A.Beaucour, 2008. Multiscale modelling of cementbased materials. CILAMCE2008, vol. .
Mora, C., Kwan, A., & Chan, H., 1998. Particle size distribution analysis of coarseaggregate using digital image processing. Cem Concr Res 286, pp. 921–932.
Petrucci, E. G., 1979. Concreto de Cimento Portland. Globo.
Woods, H. B., 1960. Highway engineering handbook. New York: McGraw Hill.
Zimmermann, M. H., 2008. Aplicacao de tecnicas de processamento digital de imagensao monitoramento de comportamento dinamico de estruturas. Trabalho final de curso,Universidade Federal de Juiz de Fora.
53
Apendice A
Anexo 1
%%%%%%%%%%%%%%%UNIVERSIDADE FEDERAL DE JUIZ DE FORA%%%%%%%%%%%%%%%%%%%%%%%%%%%%% PET Engenharia Civil %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% Leandro Mota Peres %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 08/07/09 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%ROTINA PRINCIPAL %%%%%%%%%%%%%%%%%%%%%%%%%%%____________________________________________________________________________%%
%% Essa eh a rotina principal do programa. Suas nove sub rotinas%% ( filto_sobel; binario; eliminaB; eliminaA; limites; media2; coord_f;%% ordem;) devem sempre estar salvas na mesma pasta, assim como as imagens%% que se desejam processar.
%% para rodar o programa basta carregar o comando abaixo
%% T=faz_tudo(’ena21.tif’,10,10,10,100);
%%_______________________ dados de entrada sao _______________________________%%
%% 1- imagem: para colocar outra figura, coloque seu nome.extensao entre aspas%% simples; como no exemplo abaixo.%% T=faz_tudo(’imagem.bmp’,10,10,10,100);
%% 2 - limite: eh uma variavel de entrada que para este algoritmo deverah%% ser 10, porem se alguma informacao se perder%% com o uso desse limite ele poderah ser alterado. O dado de saida eh a matriz C%% que contem a imagem com as bordas detectadas e binarizada.
%% 3 e 4 - jx e jy sao variaveis de entrada para o algoritmo limites e deverao%% ser modificada de acordo com a "precisao" que se deseja reconstruir os objetos,%% quanto maior o numero de pontos que se deseja obter para cada objeto menor%% deverah ser o valor desssa variavel.
%% 5- elimina: eh o numero maximo de pixels que contem cada%% objeto que se deseja eliminar, para as imagem trabalhadas o valor que elimina%% uma quantidade suficiente de ruidos eh 100, porem esse valor poderah ser alterado%% conforme o tamanho dos ruidos que se deseja eliminar.
54
%%______________________________dado de saida _____________________%%
%% o dado de saida eh o arquivo de texto saida.txt escrito da forma como o software%% livre Gmsh aceita como dado de entra.
%% OBS.: os elemententos dos quais se quer obter as coordenadas nao devem estar%% "juntos" um do outro, deve haver um espaco minimo entre eles; o que se pode obter%% com um processo manual, em um editor de imagens.
%%_________________________________inicio __________________________%%
function T=faz_tudo(imagem,limite,jx,jy,elimina)
%% funcao do matlab - le arquivo de imagem. %%%%%%%%%%%%%%%%%%%A=imread(imagem);
%% funcao do matlab - transforma imagem armazenada na matriz A (rgb-matriz tri%% dimensional) para a matriz A(grayscale-matriz bri bimensional). %%%%%%%A=RGB2GRAY(A);
%% comando matlab - carrega "local" para mostrar a imagem. %%%%%%%%%%%figure(1)
%% mostra a imagem armazenada na variavel ’A’. %%%%%%%%%%%%%%%%%%imshow(A)
%% filtro_x, filtro_y e janela sao dados de entrada para o algoritmo%% ’filtro_sobel’ e para este programa deverah sempre ser definido da%% forma como apresentado abaixo %%
filtro_x = [ 1 0 -1 ; 2 0 -2 ; 1 0 -1 ];
filtro_y = [ 1 2 1 ; 0 0 0 ; -1 -2 -1 ] ;
janela = 2 ;
%% esta linha executa o algoritmo filtro sobel, o dado de entrada alem dos citados%% na linha anterior eh a matriz A (grayscale-matriz bri bimensional). O dado de%% saida eh a matriz B que contem a imagem com as bordas detectadas. %%%%%B = filtro_sobel(A,janela,filtro_x,filtro_y);
%% esta linha executa o algoritmo binario, os dados de entrada sao%% a matriz B que contem a imagem com as bordas detectadas e a variavel limite, que%% para este algoritmo deverah ser 10, porem se alguma informacao se perder
%% com o uso desse limite ele poderah ser alterado. O dado de saida eh a matriz C%% que contem a imagem com as bordas detectadas e binarizada.C = binario(B,limite);
55
%% comando matlab - carrega "local" para mostrar a imagem. %%%%%%%%%%%figure(2)
%% mostra a imagem armazenada na variavel ’C’. %%%%%%%%%%%%%%%%%%imshow(C)
%% funcao do matlab - rotula a imagem. Os dados de entrada entrada s~ao a matriz C%% que contem a imagem com as bordas detectadas e binarizada e a conectividade que%% poderah ser 4 ou 8, dependendo da proximidade dos objetos que se deseja rotular%% na imagem. Os dados de saida sao a matriz obj_Rot que contem a imagem rotulada%% e Lobj que contem o numero de objetos identificados na imagem( esse dado nao%% serah utilizado para nenhuma funcao neste programa.[obj_Rot, Lobj] = bwLabel(C,8);
%% esta linha executa o algoritmo eliminaB, os dados de entrada sao a matriz obj_Rot%% que contem a imagem rotulada e o numero maximo de pixels que contem cada%% objeto que se deseja eliminar, para as imagem trabalhadas o valor que elimina%% uma quantidade suficiente de ruidos eh 100, porem esse valor poderah ser alterado%% conforme o tamaho dos ruidos que se deseja eliminar. O dado de saida eh a matriz%% G com os ruidos eliminados.%% OBS. esse algoritmo possui uma sub rotina no algoritmo eliminaA, mais%% informac~oes no algorimo eliminaA e eliminaB.G = eliminaB(obj_Rot,elimina);
%% funcao do matlab - rotula a imagem.O dado de saida de interesse eh a matriz%% obj_Rot com os ruidos eliminados.[obj_Rot, Lobj] = bwLabel(G,8);
%% comando matlab - carrega "local" para mostrar a imagem. %%%%%%%%%%%%figure(3)
%% mostra a imagem armazenada na variavel ’G’. %%%%%%%%%%%%%%%%%%imshow(G)
%% esta linha executa o algoritmo limites, os dados de entrada sao a matriz%% obj_Rot com os ruidos eliminados e jx e jy que para as imagens testadas%% o valor 10 obteve boa precisao. O dado de saida eh a matriz imagem_out1 que%% contem a imagem que apresenta apenas os pontos medios das bordas de cada%% objeto.%% OBS. esse algoritmo possui uma sub rotina no algoritmo media2, mais informacoes%% no algorimo limites e media2.imagem_out1 = limites(obj_Rot,Lobj,jx,jy);
%% comando matlab - carrega "local" para mostrar a imagem. %%%%%%%%%%%%figure(4)
%% mostra a imagem armazenada na variavel ’imagem_out1’. %%%%%%%%%%%%imshow(imagem_out1)
%% esta linha executa o algoritmo coord_f, os dados de entrada sao a matriz
56
%% imagem_out1 que contem a imagem que apresenta apenas os pontos medios das%% bordas de cada objeto e Lobj que eh o numero de objetos que estao contidos na%% imagem e que ja foi obtido anteriormente atraves do comando matlab%% ’[obj_Rot, Lobj] = bwLabel(G,8)’; Os dados de saida sao%% os vetores Nx e Ny, que contem as coordenadas dos pontos em x e em y%% respectivamente.[Nx,Ny] = coord_f(imagem_out1,Lobj);
%% esta linha executa o algoritmo gmsh_in, os dados de entrada sao os vetores%% Nx e Ny, que contem as coordenadas dos pontos em x e em y respectivamente.%% O dado de saida eh o arquivo de texto ’saida.txt’ escrito da forma como o software%% livre Gmsh aceita como dado de entra.gmsh_in
%% Abre o arquivo de texto%% point - define os pontos%% line - liga dois pontos e define uma linha%% line loop - liga todas as linhas que petencem a um mesmo objeto%% plane surface - a partir das linhas ligadas anteriormente de fine a superficie%% OBS. os pequenos quadrados que aparecem no arquivo devem ser retirados.%% para isso faca :%% 1◦ - selecione o "quadradinho"%% 2◦ - na mesma tela do editor de programas do mat lab vah em ’edit’, depois em%% find and replace, selecione a opcao ’replace all’ e em seguida close, para sair.T=open(’saida.txt’)
%% esse arqivo deve ser salvo e em seguida jah podera ser utilizado para gerar%% a malha.
%%____________________________________fim ________________________%%
%%%%%%%%%%%%%%%UNIVERSIDADE FEDERAL DE JUIZ DE FORA%%%%%%%%%%%%%%%%%%%%%%%%%%%%% PET Engenharia Civil %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% Leandro Mota Peres %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 08/07/09 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% filto_sobel %%%%%%%%%%%%%%%%%%%%%%%%%%%%%____________________________________________________________________________%%%
%% Essa eh a primeira sub rotina do programa, alem disso pode ser usada%% separadamente para obter as bordas de uma imagem atraves do operador de Sobel.
%% para roda-la basta carregar o comando abaixo
%% B = filtro_sobel(A,janela,filtro_x,filtro_y);
%%_______________________ dados de entrada sao ______________________%%
57
%% 1 - ’A’ eh a variavel e comtem a matriz da imagem.%%OBS. se esse algoritmo for utilizado separadamente do programa, para detectar a%% borda de uma imagem qualquer, primiramente devem ser utilizados os comandos:%% A=imread(imagem);%% e%% A=RGB2GRAY(A); este comando so devera ser usado se a matris da imagem for%% tridimensional.
%% 2 - filtro_x, filtro_y e janela sao variaveis para esse tipo de filtro e%% deverah sempre ser definido da forma como apresentado abaixo %%%%% filtro_x = [ 1 0 -1 ; 2 0 -2 ; 1 0 -1 ];%% filtro_y = [ 1 2 1 ; 0 0 0 ; -1 -2 -1 ] ;%% janela = 2 ;
%%______________________________dado de saida _____________________%%
%% O dado de saida eh a matriz B que contem a imagem com as bordas detectadas
%%_________________________________inicio_________________________%%
function B = filtro_sobel(A,janela,filtro_x,filtro_y) A=double(A);B=A; [n, m]=size(A); for j=1:m-janela
for i=1:n-janelasA=A(i:i+janela,j:j+janela);X = (sA.*filtro_x);X = mean(X(:));Y = (sA.*filtro_y);
Y = mean(Y(:));C = (X^2 + Y^2)^0.5;B(i+1,j+1)=mean(C(:));end
end
B = uint8 (B);
%%____________________________________fim ________________________%%
%%%%%%%%%%%%%%%UNIVERSIDADE FEDERAL DE JUIZ DE FORA%%%%%%%%%%%%%%%%%%%%%%%%%%%%% PET Engenharia Civil %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% Leandro Mota Peres %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 08/07/09 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% binario %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%____________________________________________________________________________%%%
%% Essa eh a segunda sub rotina do programa, alem disso pode ser usada separadamente%% para binarizar uma imagem.
58
%% para roda-la basta carregar o comando abaixo
%% C = binario(B,limite);
%%_______________________ dados de entrada sao _______________________%%
%% 1 - ’B’ eh a variavel e comtem a matriz da imagem.%% OBS. se esse algoritmo for utilizado separadamente do programa, para binarizar%% uma imagem qualquer, primiramente devem ser utilizados os comandos:%% B=imread(imagem);%% e%% B=RGB2GRAY(B); este comando so deverah ser usado se a matriz da imagem for%% tridimensional.
%% limite: eh uma variavel de entrada que para este algoritmo e deverah%% ser 10 para binarizar uma imagem com as bordas pelo operador de sobel%% porem se alguma informacao se perder%% com o uso desse limite ele poderah ser alterado.
%%______________________________dado de saıda ______________________%%
%% O dado de saida eh a matriz C que contem a imagem com as bordas detectadas%% e binarizada.
%%_________________________________ inicio _________________________%%
function C = binario(B,limite) [m, n]=size(B); for i = 1 : mfor j = 1 : n
if (B(i,j)<limite)C(i,j)=0;elseC(i,j)=1;end;
endend
%%____________________________________fim ________________________%%
%%%%%%%%%%%%%%%UNIVERSIDADE FEDERAL DE JUIZ DE FORA%%%%%%%%%%%%%%%%%%%%%%%%%%%%% PET Engenharia Civil %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% Leandro Mota Peres %%%%%%%%%%%%%%%%%%%%
59
%%%%%%%%%%%%%%%%%%%%%% 08/07/09 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% eliminaB %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%____________________________________________________________________________%%%
%% Essa eh a terceira sub rotina do programa, alem disso pode ser usada%% separadamente para eliminar os ruidos de uma imagem.%% Esse algoritmo possui uma sub rotina denominada ’eliminaA’ que jamais devera ser%% modificada, as informacoes sobre esse algoritmos estao devidadmente informadas%% nele.%% A sub rotina eliminaA deve estar na mesma pasta de eliminaB para que seja usada%% separadamente.
%% para roda-la basta carregar o comando abaixo
%% G = eliminaB(E,100);
%%_______________________ dados de entrada sao ______________________%%
%% 1 - ’E’ eh a variavel que comtem a matriz obj_Rot com a imagem rotulada e o%% numero maximo de pixels que contem cada objeto que se deseja eliminar os ruidos%%OBS. se esse algoritmo for utilizado separadamente do programa, para detectar a%% de uma imagem qualquer, primiramente devem ser utilizados os comandos:%% E=imread(imagem);%%%% E=RGB2GRAY(E); este comando so devera ser usado se a matris da imagem for%% tridimensional.%% e%% C = binario(B,limite);
%% elimina: eh uma variavel de entrada relativa ao numero maximo de pixels que%% se deseja eliminar e para este algoritmo deverah ser 100.
%%______________________________dado de saida _____________________%%
%% O dado de saida eh a matriz G que contem a imagem com os ruidos eliminados.
%%_________________________________inicio _________________________%%
function G = eliminaB(E,elimina) [obj_Rot, Lobj] = bwLabel(E,8); F= eliminaA(obj_Rot, Lobj); [m,n] = size(obj_Rot); G=E; for j=1:n
for i=1:mif obj_Rot(i,j)~=0
if F(obj_Rot(i,j))<eliminaG(i,j)=0;end
endend
end
60
%%____________________________________fim ________________________%%
%%%%%%%%%%%%%%%UNIVERSIDADE FEDERAL DE JUIZ DE FORA%%%%%%%%%%%%%%%%%%%%%%%%%%%%% PET Engenharia Civil %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% Leandro Mota Peres %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 08/07/09 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% eliminaA %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%____________________________________________________________________________%%%
%% Essa eh a sub rotina do algoritmo eliminaB, o objetivo dela eh contar o numero de%% pixels que cada objeto rotulado contem. Esses numeros sao utilizados no%% algoritmo eliminaB para serem comparados com o limite de pixels de cada objeto%% que se deseja eliminar.
%%_______________________ dados de entrada sao ______________________%%
%% 1 - A matriz obj_rot
%% 2 - a variavel Lobj
%%______________________________dado de saıda _____________________%%
%% O dado de saida eh o vetor F que contem em cada linha o numero total de rotulos%% que possui cada objeto da imagem.
%%_________________________________ inicio ________________________%%
function F = eliminaA(obj_Rot, Lobj) [m,n] = size(obj_Rot);F(Lobj)=[0]; for j=1:n
for i=1:mif obj_Rot(i,j)~=0
F(obj_Rot(i,j))=F(obj_Rot(i,j))+1;end
endend
%%____________________________________fim ________________________%%
%%%%%%%%%%%%%%%UNIVERSIDADE FEDERAL DE JUIZ DE FORA%%%%%%%%%%%%%%%%%%%%%%%%%%%%% PET Engenharia Civil %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% Leandro Mota Peres %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 08/07/09 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% limites %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%____________________________________________________________________________%%%
61
%% Essa eh a quarta sub rotina do programa.%% Esse algoritmo possui uma sub rotina denominada ’media2’ que jamais devera ser%% modificada, as informacoes sobre esse algoritmos estao devidamente informadas%% nele.%% para roda-la basta carregar o comando abaixo
%imagem_out1 = limites(obj_Rot,Lobj,10,10);
%%_______________________ dados de entrada s~ao ______________________%%
%% 1 - ’imagem_in’ eh a primeira variavel de entrada e devera ser igual a ’obj_Rot’.
%% 2 - ’Lobj’, coforme encontrado anteriormente.
%% 3 e 4 - jx e jy sao variaveis de entrada e deverao%% ser modificadas de acordo com a "precisao" que se deseja reconstruir os objetos,%% quanto maior o numero de pontos que se deseja obter para cada objeto menor deverah%% ser o valor desssa variavel.%%______________________________dado de saıda ______________________%%
%% dado de saida eh a matriz ’imagem_out1’ que contem%% a imagem que apresenta apenas os pontos medios das bordas de cada objeto.
%%_________________________________ inicio _________________________%%
function imagem_out1 = limites(imagem_in,Lobj,jx,jy)for rot = 1 : Lobj[mx,my]=find(imagem_in==rot);% vetor contendo todas as coordenads de um determinado rotulo.lim_x(rot,:)=[min(mx) max(mx)];% vetor contendo as coordenadas em ’x’, maximas e minimas para cada rotulo.lim_y(rot,:)=[min(my) max(my)];% vetor contendo as coordenadas em ’y’, maximas e minimas para cada rotulo.imagem_out1=media2(imagem_in,jx,jy,lim_x,lim_y,rot); % "chama" a sub rotina media2.imagem_in=imagem_out1;
end
%%____________________________________fim ________________________%%
%%%%%%%%%%%%%%%UNIVERSIDADE FEDERAL DE JUIZ DE FORA%%%%%%%%%%%%%%%%%%%%%%%%%%%%% PET Engenharia Civil %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% Leandro Mota Peres %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 08/07/09 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% media2 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%____________________________________________________________________________%%%
%% Essa eh a sub rotina ’media2’ do algoritmos limites.
62
%%_______________________ dados de entrada sao ____________________%%
%% Esse algoritmo jamais deverah ser modificado.
%% Os dados de entrada sao definidos na rotina ’limites’
%%______________________________dado de saida_______________________%%
%% dado de saida eh a matriz ’imagem_out1’ que contem%% a imagem que apresenta apenas os pontos medios das bordas de cada objeto.
%%_________________________________inicio__________________________%%
function imagem_out=media2(imagem_in,jx,jy,lim_x,lim_y,rot);imagem_out=imagem_in;
for i=(lim_x(rot,1)-(jx/2)):jx:lim_x(rot,2)for j=(lim_y(rot,1) - (jy/2)):jy:lim_y(rot,2)
aux=imagem_in(i:i+jx,j:j+jy);[x y] = find(aux==rot);dx=length(x);dy=length(y);
if (dx~=0 & dy~=0)xm=round(sum(x)/dx);ym=round(sum(y)/dy);imagem_out(i:i+jx,j:j+jy)=0;imagem_out(i+xm,j+ym)=rot;end
endend
%%____________________________________fim _______________________%%
%%%%%%%%%%%%%%%UNIVERSIDADE FEDERAL DE JUIZ DE FORA%%%%%%%%%%%%%%%%%%%%%%%%%%%%% PET Engenharia Civil %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% Leandro Mota Peres %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 08/07/09 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%coord_f %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%____________________________________________________________________________%%%
%% Essa eh a quinta sub rotina do programa.
%% para roda-la basta carregar o comando abaixo apos definir o valor das variaveis.
%% [Nx,Ny] = coord_f(imagem_out1,Lobj)
%%_______________________ dados de entrada sao ______________________%%
63
%% 1- matriz ’imagem_out1’, denominada aqui de A, que contem a imagem que apresenta%% apenas os pontos medios das bordas de cada objeto e Lobj que eh o numero de%% objetos que estao continos na imagem e que ja foi obtido%% anteriormente atraves do comando matlab%% ’[obj_Rot, Lobj] = bwLabel(G,8)’.%%______________________________dado de saıda _____________________%%
%% os vetores Nx e Ny, que contem as coordenadas dos pontos em x e em y respectivamente.
%%_________________________________inicio _________________________%%
function [Nx,Ny] = coord_f(A,Lobj) [m, n]=size(A);for rot = 1 : Lobjh = 1;g = 1;
for i = 1 : mfor j = 1 : n
if (A(i,j) == rot)Nx (rot,g) = j;Ny (rot,h)= m-i+1;g = g +1;h = h +1;end
endend
endNx(Lobj+1,1)=1; Nx(Lobj+1,2)=n; Nx(Lobj+1,3)=n; Nx(Lobj+1,4)=1;
Ny(Lobj+1,1)=1; Ny(Lobj+1,2)=1; Ny(Lobj+1,3)=m; Ny(Lobj+1,4)=m;
%%____________________________________fim ________________________%%
%%%%%%%%%%%%%%%UNIVERSIDADE FEDERAL DE JUIZ DE FORA%%%%%%%%%%%%%%%%%%%%%%%%%%%%% PET Engenharia Civil %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% Leandro Mota Peres %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 08/07/09 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% gmsh_in %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%____________________________________________________________________________%%%
%% Essa eh a sexta sub rotina do programa, e ela possui uma sub rotina denominada%% ’ordem’, cujas informacoes estao no proprio algoritmos .
%%_______________________ dados de entrada sao ______________________%%
%% os vetores Nx e Ny, que contem as coordenadas dos pontos em x e em y%% respectivamente.
64
%%______________________________dado de saida _____________________%%
%% O dado de saida eh o arquivo de texto ’saida.txt’ escrito da forma como%% o software livre Gmsh aceita como dado de entra.
%%_________________________________inicio__________________________%%% diary(’gmshin.txt’)% diary on
t0=clock;fid = fopen(’saida.txt’,’w’); %cria um arquivo de texto para armazenar as dados de
%%saida.c=0;k=1;aux=0;
for n=1:(Lobj+1)Nxr=Nx(n,1:length(find(Nx(n,:)~=0)));Nyr=Ny(n,1:length(find(Ny(n,:)~=0)));[ord]=ordem(Nxr,Nyr); % "chama" a sub rotina ’ordem’.
for i=1:length(find(Nx(n,:)~=0))c=c+1;Point1(c,1:2)=[Nx(n,ord(i)),Ny(n,ord(i))];fprintf(fid,’Point( \f’);fprintf(fid,’%4.0f’,c);fprintf(fid,’)={ \f’);fprintf(fid,’%10.4f’,Point1(c,1)/100);fprintf(fid,’, \f’);fprintf(fid,’%10.4f’,Point1(c,2)/100);fprintf(fid,’,0,0.1}; \f\n’);
end
for j=1+aux:1+aux + (length(ord)-2)fprintf(fid,’Line(\f’);fprintf(fid,’%4.0f’,k);fprintf(fid,’)={\f’);fprintf(fid,’%4.0f’,j);fprintf(fid,’,\f’);fprintf(fid,’%4.0f’,j+1);fprintf(fid,’};\f\n’);k=k+1;s(n,k)=k;end
fprintf(fid,’Line(\f’);fprintf(fid,’%4.0f’,k);fprintf(fid,’)={\f’);fprintf(fid,’%4.0f’,aux + (length(ord)));fprintf(fid,’,\f’);fprintf(fid,’%4.0f’,aux+1);
65
fprintf(fid,’};\f\n’);k=k+1;s(n,k)=k;aux=aux+length(ord);end
aux2=1;for m=1:Lobj+1
if m==Lobj+1fprintf(fid,’Line Loop(\f’);fprintf(fid,’%4.0f’,m);
for q=aux2:(max(s(m,:))-1)if q==aux2fprintf(fid,’)={\f’);endfprintf(fid,’%4.0f’,q);if q~=(max(s(m,:))-1)fprintf(fid,’,\f’);end
endfprintf(fid,’};\f\n’);fprintf(fid,’Plane Surface(\f’);fprintf(fid,’%4.0f’,m);fprintf(fid,’)={’);fprintf(fid,’%4.0f’,m);fprintf(fid,’,\f’);
for li=1:Lobjfprintf(fid,’%4.0f’,li);
if li~=Lobjfprintf(fid,’,\f’);endif li==Lobjfprintf(fid,’};\f\n’);end
endelsefprintf(fid,’Line Loop(\f’);fprintf(fid,’%4.0f’,m);for q=aux2:(max(s(m,:))-1)
if q==aux2fprintf(fid,’)={\f’);
endfprintf(fid,’%4.0f’,q);if q~=(max(s(m,:))-1)
fprintf(fid,’,\f’);end
endaux2=max(s(m,:));fprintf(fid,’};\f\n’);fprintf(fid,’Plane Surface(\f’);fprintf(fid,’%4.0f’,m);
66
fprintf(fid,’)={\f’);fprintf(fid,’%4.0f’,m);fprintf(fid,’};\f\n’);
endendfprintf(fid,’Physical Surface(1)={’);for b=1:Lobjif b~=Lobj
fprintf(fid,’%4.0f’,b);fprintf(fid,’,\f’);
elsefprintf(fid,’%4.0f’,b);fprintf(fid,’};\f\n’);
endendfprintf(fid,’Physical Surface(2)={’);fprintf(fid,’%4.0f’,Lobj+1);fprintf(fid,’};\f\n’);
fclose(fid);etime(clock,t0)
%%____________________________________fim _____________________%%
%%%%%%%%%%%%%%%UNIVERSIDADE FEDERAL DE JUIZ DE FORA%%%%%%%%%%%%%%%%%%%%%%%%%%%%% PET Engenharia Civil %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% Leandro Mota Peres %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 08/07/09 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% ordem %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%____________________________________________________________________________%%%
%% Essa eh rotina do algoritmo gmsh_in. O objetivo desse algoritmo eh ordenar%% os pontos da forma como eles serao ligados, e para que sejam ligados apenas%% pontos de um mesmo objeto. Para isso eh calculado o centroide de cada objeto%% e os angulos que cada ponto forma com o centoide, de posse desses angulos%% que sao ordenados de forma crescente, pode-se informar ao programa a ordem%% como a ligacao serah feita.
%%_______________________ dados de entrada sao _____________________%%
%% Os vetores Nrx e Nry calculados conforme apresentado no algoritmos ’gmsh_in’
%%______________________________dado de saida ______________________%%
%% o vetor ’ord’ com a ordem de ligacao de determinado objeto.
%%_________________________________inicio _________________________%%
67
function [ord]=ordem(Nxr,Nyr);cx=sum(Nxr)/length(Nxr); % coordenada do centoide em ’x’cy=sum(Nyr)/length(Nyr); % coordenada do centoide em ’y’
for i=1:length(Nxr)dx=(Nxr(i)-cx);dy=(Nyr(i)-cy);
if (dx>0 & dy>0)alpha(i)=atan((Nyr(i)-cy)/(Nxr(i)-cx));end
if (dx<0 & dy>0)alpha(i)=atan((Nyr(i)-cy)/(Nxr(i)-cx))+pi;end
if (dx<0 & dy<0)alpha(i)=atan((Nyr(i)-cy)/(Nxr(i)-cx))+pi;end
if (dx>0 & dy<0)alpha(i)=atan((Nyr(i)-cy)/(Nxr(i)-cx))+2*pi;end
if (dx==0 & sign(dy)>0)alpha(i)=pi/2;end
if (dx==0 & sign(dy)<0)alpha(i)=3*pi/2;end
if (dy==0 & sign(dx)>0)alpha(i)=0;end
if (dy==0 & sign(dx)>0)alpha(i)=pi;end
end
[saida ord]=sort(alpha);
%%____________________________________fim ________________________%%
68
Apendice B
Anexo 2
%%%%%%%%%%%%%%%%%%%%UNIVERSIDADE FEDERAL DE JUIZ DE FORA%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% PET Engenharia Civil %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% Leandro Mota Peres %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 08/07/09 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%ROTINA PRINCIPAL %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Essa eh a rotina principal do programa. Suas cinco sub rotinas sao:%( coord_g, coord_b, eliminaB, eliminaA,, larguras, peneiramento_correcao).
clear all clc
% DADOS DE ENTRADA:
% - Convers~ao de pixels para milimetros.f=((205*46) / (12208));% - Fator de correc~ao.c=0.86;% - Massa total da amostra em gramas.massa_total=(1131.65);% - Massa especıfica do agregado em gramas por cm^3.ro = 2.63;% - Curva granulometrica do ensaio de peneiramento.p_p = [ 100 100 100 100 100 100 66.18 17.59 2.75 0.06 0 0 ];% - Malhas das peneirasx = [ 75 63 50 37.5 31.5 25 19 12.5 9.5 4.8 2.4 1.2];% obs: os valores das malhas das peneiras alterados aqui nao% interferem nas sub rotinas.[name,path]=uigetfile(’*.jpg’,’entre com o nome da imagem’)a=imread([path name]); aa=rgb2gray(a); bin=aa<120; [obj_Rot, Lobj]= bwLabel(bin,8);G = eliminaB(obj_Rot,350); %% elimina ruido dentro do agregado - area 100GG = G<1; %% elimina ruidos externos - area 100G = eliminaB(GG,10);G=double(G);
[obj_Rot, Lobj] = bwLabel(G,8);
69
% COORDENADAS DAS PEDRAS[Nx,Ny] = coord_g(obj_Rot,Lobj); obj_Rot=0; Lobj=0;
% COORDENADAS DAS BORDAS DAS PEDRASB = EDGE(G,’sobel’); bin_b=B>0; [obj_Rot, Lobj] =bwLabel(bin_b,8); [Nx_b,Ny_b] = coord_b(obj_Rot,Lobj);
% LARGURASlarguras M_larguras=M_larguras.*( f ) ; M_areas= M_areas.*( f );
% PENEIRAMENTOpeneiramento_correcao Pc=P; c=1; peneiramento_correcao
hold on semilogx(x,p_p,’b’) hold on semilogx(x,P,’r ’) hold onsemilogx(x,Pc,’k’) h = legend(’Peneiramento’,’PDI (Original)’,’PDI(Corrigida)’,3);
%%%%%%%%%%%%%%%%%%%%UNIVERSIDADE FEDERAL DE JUIZ DE FORA%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% PET Engenharia Civil %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% Leandro Mota Peres %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 08/07/09 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%Coordenas gerais%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
function [Nx,Ny] = coord_g(A,Lobj) [m, n]=size(A); for rot = 1 :Lobj
roth = 1;g = 1;for i = 1 : m
for j = 1 : nif (A(i,j) == rot)
Nx (rot,g) = j;Ny (rot,h)= m-i+1;g = g +1;h = h +1;
endend
endend
%%%%%%%%%%%%%%%%%%%%UNIVERSIDADE FEDERAL DE JUIZ DE FORA%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% PET Engenharia Civil %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% Leandro Mota Peres %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 08/07/09 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
70
%%%%%%%%%%%%%%%%%%%%%%%%%%%Coordenas locais%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
function [Nx_b,Ny_b] = coord_b(A,Lobj) [m, n]=size(A); for rot = 1: Lobj
roth = 1;g = 1;for i = 1 : m
for j = 1 : nif A(i,j) == rot
Nx_b (rot,g) = j;Ny_b (rot,h)= m-i+1;g = g +1;h = h +1;
endend
endend
%%%%%%%%%%%%%%%%%%%%UNIVERSIDADE FEDERAL DE JUIZ DE FORA%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% PET Engenharia Civil %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% Leandro Mota Peres %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 08/07/09 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% ELIMINA B %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
function G = eliminaB(E,min_elem) [obj_Rot, Lobj] = bwLabel(E,8);F = eliminaA(obj_Rot, Lobj); [m,n] = size(obj_Rot); G=E; for j=1:n
for i=1:mif obj_Rot(i,j)~=0
if F(obj_Rot(i,j))<min_elemG(i,j)=0;
endend
endend
%%%%%%%%%%%%%%%%%%%%UNIVERSIDADE FEDERAL DE JUIZ DE FORA%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% PET Engenharia Civil %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% Leandro Mota Peres %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 08/07/09 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% ELIMINA B %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% [obj_Rot, Lobj] = bwLabel(E,8);% F = eliminaA(obj_Rot, Lobj);function F = eliminaA(obj_Rot, Lobj) [m,n] = size(obj_Rot);
71
F(Lobj)=[0]; for j=1:nfor i=1:m
if obj_Rot(i,j)~=0F(obj_Rot(i,j))=F(obj_Rot(i,j))+1;
endend
end
%%%%%%%%%%%%%%%%%%%%UNIVERSIDADE FEDERAL DE JUIZ DE FORA %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% PET Engenharia Civil %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% Leandro Mota Peres %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 18/04/10 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% LARGURA %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% calcula a largura e espessura de cada pedra.% dado de entrada - matriz de coordenadas da pedra e de suas bordas.% dados de saida - matriz M_larguras contendo as larguras de cada pedra.
for n= 1: Lobj% calculos usando todas os coordenadas da pedra.Nxr=0;Nyr=0;Nxr=Nx(n,1:length(find(Nx(n,:)~=0)));Nyr=Ny(n,1:length(find(Ny(n,:)~=0)));cx=sum(Nxr)/length(Nxr);cy=sum(Nyr)/length(Nyr);M_areas(n)=length(Nxr);% coordenadas em relacao ao C.G. da pedraNx_origem_cg= Nxr-(cx*(ones(1,length(Nxr))));Ny_origem_cg= Nyr-(cy*(ones(1,length(Nyr))));% momentos de inerciaIx_coord_img=sum( (Nx_origem_cg).*(Nx_origem_cg ) );Iy_coord_img=sum( ( Ny_origem_cg).*(Ny_origem_cg ) );Ixy_coord_img=sum( (Ny_origem_cg).*(Nx_origem_cg ) );
if Ixy_coord_img ~= 0
% direcao do eixo principalteta_1__rad(n)=((atan((-Ixy_coord_img)/((Ix_coord_img - Iy_coord_img)/2)))/2);if teta_1__rad(n)>0 % o angulo precisa ser negativo para rotacionar
% da forma corretateta_1__rad(n)=-(teta_1__rad(n)+(pi/2));
end
% calculos usando apenas as coordenadas das bordas da imagem.Nxr_b=0;Nyr_b=0;Nxr_b=Nx_b(n,1:length(find(Nx_b(n,:)~=0)));Nyr_b=Ny_b(n,1:length(find(Ny_b(n,:)~=0)));
72

u=0;v=0;
for w=1:length(Nxr_b)%coordenads da pedra em relac~ao aos eixos principais.u(w) = Nxr_b(w)*cos(teta_1__rad(n)) + Nyr_b(w)*sin(teta_1__rad(n));v(w) = Nyr_b(w)*cos(teta_1__rad(n)) - Nxr_b(w)*sin(teta_1__rad(n));
end
% obtencao dos tamanhosmax_x=max(u);min_x=min(u);max_y=max(v);min_y=min(v);d_1 = max_x - min_x;d_2 = max_y - min_y;
if d_1 > d_2M_larguras(n)=d_2;
elseM_larguras(n)=d_1;
end
elsemax_x=max( Nxr);min_x=min( Nxr);max_y=max( Nyr);min_y=min( Nyr);d_1 = max_x - min_x;d_2 = max_y - min_y;
if d_1 > d_2M_larguras(n)=d_2;
elseM_larguras(n)=d_1;
end
end
end
massa_passante_75=0;massa_passante_63=0;massa_passante_50=0;massa_passante_37_5=0;massa_passante_31_5=0;massa_passante_25=0;massa_passante_19=0;
73
massa_passante_12_5=0;massa_passante_9_5=0;massa_passante_4_8=0;massa_passante_2_4=0;massa_passante_1_2=0;
% ESPESSURASt=sum(M_larguras.*M_areas);delta= massa_total/(ro*sum(c*M_larguras.*M_areas));
for n =1 : LobjM_espessuras_media(n)=delta*M_larguras(n);
end
%PENEIRA 75for m =1 : Lobj
if M_espessuras_media(m) & (M_larguras(m)*c) <= 75p_75 = M_larguras(m)* M_areas(m);massa_passante_75 = massa_passante_75 + p_75;
endend massa_passante_75= massa_passante_75/t;
%PENEIRA 63for m =1 : Lobj
if M_espessuras_media(m) & (M_larguras(m)*c) <= 63p_63 = M_larguras(m)*M_areas(m);massa_passante_63 = massa_passante_63 + p_63;
endend massa_passante_63= massa_passante_63/t;
%PENEIRA 50for m =1 : Lobj
if M_espessuras_media(m) & (M_larguras(m)*c) <= 50p_50 = M_larguras(m)*M_areas(m);massa_passante_50= massa_passante_50 + p_50 ;
endend massa_passante_50= massa_passante_50/t;
%PENEIRA 37.5for m =1 : Lobj
if M_espessuras_media(m) & (M_larguras(m)*c) <= 37.5p_37_5 = M_larguras(m)*M_areas(m);massa_passante_37_5 = massa_passante_37_5 + p_37_5;
endendmassa_passante_37_5= massa_passante_37_5/t;
%PENEIRA 31.5for m =1 : Lobj
if M_espessuras_media(m) & (M_larguras(m)*c) <= 31.5p_31_5 = M_larguras(m)*M_areas(m);
74
massa_passante_31_5= massa_passante_31_5 + p_31_5 ;end
end massa_passante_31_5= massa_passante_31_5/t;
%PENEIRA 25for m =1 : Lobj
if M_espessuras_media(m) & (M_larguras(m)*c) <= 25p_25 = M_larguras(m)*M_areas(m);massa_passante_25= massa_passante_25 + p_25 ;
endend massa_passante_25= massa_passante_25/t;
%PENEIRA 19for m =1 : Lobj
if M_espessuras_media(m) & (M_larguras(m)*c) <= 19p_19 = M_larguras(m)*M_areas(m);massa_passante_19= massa_passante_19 + p_19 ;
endend massa_passante_19= massa_passante_19/t;
%PENEIRA 12.5for m =1 : Lobj
if M_espessuras_media(m) & (M_larguras(m)*c) <= 12.5p_12_5 = M_larguras(m)*M_areas(m);
massa_passante_12_5= massa_passante_12_5 + p_12_5 ;end
end massa_passante_12_5= massa_passante_12_5/t;
%PENEIRA 9.5for m =1 : Lobj
if M_espessuras_media(m) & (M_larguras(m)*c) <= 9.5p_9_5 = M_larguras(m)*M_areas(m);massa_passante_9_5= massa_passante_9_5 + p_9_5 ;
endend massa_passante_9_5= massa_passante_9_5/t;
%PENEIRA 4.8for m =1 : Lobj
if M_espessuras_media(m) & (M_larguras(m)*c) <= 4.8p_4_8 = M_larguras(m)*M_areas(m);massa_passante_4_8= massa_passante_4_8 + p_4_8 ;
endend massa_passante_4_8= massa_passante_4_8/t;
%PENEIRA 2.4for m =1 : Lobj
if M_espessuras_media(m) & (M_larguras(m)*c) <= 2.4p_2_4 = M_larguras(m)*M_areas(m);massa_passante_2_4= massa_passante_2_4 + p_2_4 ;
endend massa_passante_2_4= massa_passante_2_4/t;
75
%PENEIRA 1.2for m =1 : Lobj
if M_espessuras_media(m) & (M_larguras(m)*c) <= 1.2p_1_2 = M_larguras(m)*M_areas(m);massa_passante_1_2= massa_passante_1_2 + p_1_2 ;
endend massa_passante_1_2= massa_passante_1_2/t;
% PORCENTACEM DE MASSA PASSANTEP(1)=massa_passante_75;
P(2)=massa_passante_63;
P(3)=massa_passante_50;
P(4)=massa_passante_37_5;
P(5)=massa_passante_31_5;
P(6)=massa_passante_25;
P(7)=massa_passante_19;
P(8)=massa_passante_12_5;
P(9)=massa_passante_9_5;
P(10)=massa_passante_4_8;
P(11)=massa_passante_2_4;
P(12)=massa_passante_1_2;
P= P*100;
%%____________________________________fim ________________________%%
76