Embed Size (px)
Citation preview

Licenciatura em ciências · USP/ Univesp
9.1 Introdução9.2 Tangentes e perpendiculares a Curvas
9.2.1 Vetores Normais a uma Curva e Raio de Curvatura9.3 Diferencial total de uma função escalar9.4 Derivada numa Direção e Máxima Derivada Direcional9.5 Perpendicular a uma superfície9.6 Plano tangente a uma superfície por um ponto9.7 Direções Normais a Superfícies e Tangenciais a Curvas 9.8 Elementos de volume e de superfície
9.8.1 Exemplo: Coordenadas Esféricas9.9 Bases de Vetores
Fund
amen
tos
de M
atem
átic
a II
Gil da Costa Marques
9APLICAÇÕES À GEOMETRIA DIFERENCIAL

167
Fundamentos de Matemática II
Licenciatura em Ciências · USP/Univesp · Módulo 2
9.1 IntroduçãoA geometria diferencial é o ramo da matemática que se ocupa de utilizar o cálculo diferencial
e a geometria analítica para entender propriedades de curvas e superfícies.
Entre as propriedades interessantes, do ponto de vista das curvas, podemos mencionar a
curvatura, a torção, a direção tangente e a direção normal, em cada ponto de uma curva.
Dada uma superfície, podemos estar interessados na sua curvatura, na direção normal e no
plano tangente em cada ponto ao longo da mesma.
Neste texto discutiremos algumas dessas questões, especialmente como inferi-las utilizando
as derivadas parciais de funções escalares ou derivadas de funções vetoriais.
Por ser de grande aplicação prática, introduziremos uma forma de efetuar integrais de super-
fícies ou de volumes, quando introduzimos coordenadas generalizadas.
Vale recordar que uma superfície - ou parte dela - pode ser descrita por meio de uma função
de três variáveis W(x, y, z) e isto se deve ao fato de que os valores constantes de tal função
descrevem uma superfície.
9.1
A seguir, consideraremos três superfícies caracterizadas pelas funções: Q1(x, y, z), Q2(x, y, z), Q3(x, y, z). Elas definem algo que, usualmente, denominamos coordenadas generalizadas e isso
porque um ponto no espaço pode ser especificado a partir de valores das coordenadas (Q1, Q2, Q3). Por exemplo, ao ponto P0 corresponde o valor das coordenadas:
onde Qi0 é o valor assumido pela coordenada Qi, 1 ≤ i ≤ 3, no ponto P0.
Assim, pontos do espaço estão associados a valores fixos das coordenadas (Q1, Q2, Q3). É importante lembrar, no entanto, que a condição para que uma particular coordenada do
espaço tenha um valor fixo se escreve como:
9.2
W W x y z0 = ( ), ,
P Q Q Q0 10 20 30⇔ ( ), ,
Q x y z Qi , ,( ) = =10 constante

168
9 Aplicações à Geometria Diferencial
Licenciatura em Ciências · USP/Univesp · Módulo 2
e, consequentemente, essa condição descreve o lugar geométrico dos pontos do espaço perten-
centes a uma superfície.
O conjunto de duas condições para valores constantes das coor-
denadas generalizadas do espaço, quando impostas simultaneamente,
como, por exemplo, as condições:
9.3
descreve a intersecção de duas superfícies. Assim, o lugar geo-
métrico dos pontos do espaço tais que duas coordenadas gene-
ralizadas tenham um valor fixo descreve uma curva no espaço.
Com a superfície Q3 definida em 9.2, leva a um ponto.
9.2 Tangentes e perpendiculares a CurvasUma curva é descrita por meio de um vetor dependente de um parâmetro λ, isto é, o vetor
associado a um ponto da curva é dado pela função vetorial:
9.4
e a cada valor de λ corresponde um - e apenas um - ponto da curva.
A seguir, adotaremos o parâmetro λ como se fosse o comprimento de arco da curva. O ideal,
nesses casos, é adotar a coordenada espaço. Assim, a cada valor da coordenada espaço, fica
assegurado que existe apenas um ponto da curva. Escrevemos:
9.5
E, portanto, em termos da coordenada espaço, o vetor posição será escrito como:
9.6
Figura 9.1: Superfícies podem ser utilizadas para determinar pontos no espaço ou curvas.
Q x y z Q
Q x y z Q1 10
2 20
, ,
, ,( ) =( ) =
r x i y j z kλ λ λ λ( ) = ( ) + ( ) + ( )
λ = s
r s x s i y s j z s k( ) = ( ) + ( ) + ( )

169
Fundamentos de Matemática II
Licenciatura em Ciências · USP/Univesp · Módulo 2
O elemento de comprimento da curva, ds, é dado por:
9.7
O vetor
t definido por:
9.8
tem propriedades interessantes. Em primeiro lugar, sua direção é tangente à curva em cada
ponto. Seu sentido indica valores crescentes das coordenadas e, finalmente, ele tem um módulo
unitário. De fato, de 9.7, temos:
9.9
e, portanto, o vetor
t é um versor (isto é, tem módulo unitário).
Exemplos
• ExEmplo 1Escreva uma expressão para o vetor velocidade ao longo de uma curva.
→ REsolução:Lembrando que a velocidade vetorial é definida por
9.10
e levando em conta que, agora, estamos considerando as coordenadas como dependentes do parâ-metro s, podemos escrever a velocidade sob a forma:
9.11
Lembrando a definição 9.10, vemos que a velocidade, de acordo com 9.6, é dada por:
9.12
donde se infere que a velocidade é tangente à curva e o módulo dela é a velocidade escalar.
ds dx dy dz= + +2 2 2
t s drds
dx sds
idy sds
jdz sds
k( ) = =( )
+( )
+( )
t s drds
22
2 1( ) = =
v drdt
dx sdt
idy sdt
jdz sdt
k= =( )
+( )
+( )
vdx sds
idy sds
jdz sds
k dsdt
=( )
+( )
+( )
v dsdtt=

170
9 Aplicações à Geometria Diferencial
Licenciatura em Ciências · USP/Univesp · Módulo 2
9.2.1 Vetores Normais a uma Curva e Raio de Curvatura
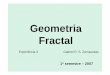
No espaço tridimensional, existem infinitos vetores normais a uma curva passando por um ponto
dessa curva. No entanto, a seguir estaremos interessados pelo vetor normal que passa pelo
centro da circunferência osculadora. Uma circunferência osculadora de uma curva, na geometria
diferencial, é uma circunferência que tangencia a curva por aquele ponto. Ósculo é quase um
sinônimo para beijo. Assim, a circunferência osculadora toca - ou beija - a curva em um deter-
minado ponto. Daí a razão para o termo.
Para construir tal circunferência consideramos, primeiramente,
três pontos suficientemente próximos e por eles traçamos uma
circunferência. Ela sempre existe e é univocamente determinada.
Em seguida, tomamos o limite em que os três pontos coincidam.
O vetor tangente à circunferência osculadora é igual ao vetor
tangente à curva por aquele ponto.
O raio de curvatura num determinado ponto da curva é igual ao
raio da circunferência osculadora.
Introduzimos agora o conceito de vetor normal à curva por um
ponto dessa curva. É um vetor tal que aponta para o centro da circun-
ferência osculadora. Naturalmente, esse vetor será perpendicular ao
vetor tangente à curva.
Um vetor normal é obtido a partir do vetor
t (s) derivando-o mais uma vez com respeito ao
parâmetro s. Efetuando tal derivada obtemos o vetor
N (s), o qual é dado por:
9.13
Tendo em vista que o versor
t (s) tem módulo igual a 1, obtém-se:
9.14
Figura 9.2: A circunferência osculadora no ponto P.
N sdt sds
d x sds
id y sds
jd z sds
k( ) = ( )=
( )+
( )+
( )2
2
2
2
2
2
d t tds
.( )= 0

171
Fundamentos de Matemática II
Licenciatura em Ciências · USP/Univesp · Módulo 2
Consequentemente, de 9.14 obtemos:
9.15
daí ficando constatado que o vetor
N (s) definido por:
9.16
é um vetor perpendicular ao vetor
t (s). Assim, o versor n(s) indicando a direção normal à curva
é dado por:
9.17
Define-se a curvatura (κ(s)) de uma curva como igual ao módulo do vetor
N (s). Dessa forma,
podemos verificar que a curvatura se escreve como:
9.18
O raio de curvatura da circunferência osculadora (R(s)) é dado pelo inverso da curvatura:
9.19
e, portanto, uma vez conhecida a forma da curva dada pela funções x, y e z como funções do
parâmetro s, podemos determinar o raio de curvatura em cada ponto. De 9.18 resulta que:
9.20
Os centros das circunferências oscu-
ladoras formam a evoluta da curva.
d tds
t N t
( )⋅ = ⋅ = 0
N sd tds
( ) = ( )
n sN sN s
s N s( ) = ( )( )
= ( ) ( )κ
Figura 9.3: Vetores tangente e normal a uma curva em cada ponto.
κ s N sd x sds
d y sds
d z sds
( ) = ( ) = ( )
+
( )
+ +
( )
2
2
2 2
2
2 2
2
2
R ss
( ) = ( )1
κ
1 2
2
2 2
2
2 2
2R sd x sds
d y sds
d z sds( )
=( )
+
( )
+
( )
2

172
9 Aplicações à Geometria Diferencial
Licenciatura em Ciências · USP/Univesp · Módulo 2
• ExEmplo 2Determine os vetores tangente e normal a uma circunferência. Determine também a sua curvatura.
→ REsolução:Uma circunferência é tal que todos os pontos ao longo dela podem ser escritos em termos de uma função vetorial da variável espaço, s, da forma:
9.21
onde R é o raio da circunferência.Portanto, o vetor cuja direção é a da tangente a cada ponto da circunferência é
9.22
enquanto o vetor normal a ela, em cada ponto, é:
9.23
O vetor normal sempre aponta para o centro da circunferência osculadora. No caso em apreço, ele aponta para o centro da circunferência considerada. A curvatura da circunferência é constante e, de acordo com 9.18 e 9.23, ela é dada pelo inverso do raio dessa circunferência:
9.24
9.3 Diferencial total de uma função escalarA diferencial total de uma função de três variáveis V = V(x,y,z) é definida como
9.25
r s R sRi s
Rj( ) =
+
cos sen
t sdr sds
sRi s
Rj( ) = ( )
= −
+
sen cos
N sd r sds R
sRi s
Rj( ) = ( )
= −
+
2
2
1 cos sen
κ sR
( ) = 1
dVV x y z
xdx
V x y zy
dyV x y z
zdz=
∂ ( )∂
+∂ ( )
∂+∂ ( )
∂, , , , , ,

173
Fundamentos de Matemática II
Licenciatura em Ciências · USP/Univesp · Módulo 2
• ExEmplo 3:
Seja V x y x y,( ) = 13
2 2. Utilizando a diferencial da função V, vamos encontrar um valor aproximado
para a variação ΔV quando passamos do ponto (1, 2) para o ponto (1,03; 2,01); em seguida, vamos
avaliar o erro cometido nessa aproximação. Temos:
9.26
e, portanto,
9.27
Fazendo x = 1, y = 2, dx = 0,03 e dy = 0,01, temos
9.28
Por outro lado,
9.29
Fazendo x = 1, y = 2, dx = 0,03 e dy = 0,01, obtemos
9.30
o que nos leva à conclusão de que se trata de uma boa aproximação quando dizemos que ΔV é bem aproximado por dV.
• ExEmplo 4:Vamos calcular um valor aproximado para (1,02)2,01. Em primeiro lugar, consideremos a função V(x, y) = xy e então temos:
9.31
e
9.32
e, portanto,
9.33
∂∂
=∂∂
=Vx
xy Vy
x y23
23
2 2 e
dV xy dx x ydy= +23
23
2 2
dV ≅ 0 09,
∆ = + + −V x dx x dy x y13
13
2 2 2 2( ) ( )
∆ ≅V 0 09,
∂∂
= −Vx
y x y. 1 (fazendo y constante)
∂∂
=Vy
x xy ln (fazendo x constante)
dV y x dx x x dyy y= +−. ln1

174
9 Aplicações à Geometria Diferencial
Licenciatura em Ciências · USP/Univesp · Módulo 2
Fazendo x = 1, y = 2, dx = 0,02 e dy = 0,01, temos
9.34
Por outro lado,
9.35
• ExEmplo 5: Calcule aproximadamente 2 01 4 02 1 97, . , . , .
Vamos considerar a função V x y z xyz( , , ) = e suas derivadas parciais:
9.36
9.37
9.38
e, portanto,
9.39
Fazendo x = 1, y = 4, z = 2, dx = 0,01, dy = 0,02 e dz = −0,03 temos
9.40
(Verifique!)Logo,
9.41
dV ≅ 0 04,
∆ = − ≅ − =V ( , ) , ,,1 02 1 1 0406 1 0 04062 01 2
∂∂
=Vx
yzxyz2
∂∂
=Vy
xzxyz2
∂∂
=Vz
xyxyz2
dV yzxyz
dx xzxyz
dy xyxyz
dz= + +2 2 2
dV ≅ −0 01,
2 01 4 02 1 97 3 99, . , . , ,≅

175
Fundamentos de Matemática II
Licenciatura em Ciências · USP/Univesp · Módulo 2
9.4 Derivada numa Direção e Máxima Derivada Direcional
Consideremos uma direção e sentido especificados pelo versor:
9.42
isto é, um vetor que tem módulo unitário (para esses vetores colocamos um acento circunflexo
a fim de denotar tal fato). Assim,
9.43
Um vetor derivado desse mediante a multiplicação por uma constante h,
9.44
tem a mesma direção e sentido do versor a, se h > 0, e tem sentido contrário se h < 0.
O módulo desse vetor é, evidentemente, igual a |h|, uma vez que |a| = 1.
Sendo V = V(x, y, z), (x0, y0, z0) um ponto do domínio de V, e h tal que os pontos
(x0 + axh, y0 + ayh, z0 + azh) também pertencem ao domínio de V, definimos a derivada
direcional de V, no ponto (x0, y0, z0) e na direção de
9.45
como
9.46
se tal limite existe e é finito.
Denotamos a derivada direcional definida acima como
9.47
x y za a i a j a k= + +
�� ��a a a a ax y z⋅ = ⇒ ( ) + ( ) + ( ) =1 12 2 2
ha ha i ha j ha kx y z
= + +
x y za a i a j a k= + +
lim, , , ,
h
x y zV x a h y a h z a h V x y zh→
+ + +( ) − ( )0
0 0 0 0 0 0
D V x y zV x a h y a h z a h V x y z
ha h
x y z ( , , ) lim
( , , ) ( , , )0 0 0 0
0 0 0 0 0 0=+ + + −
→

176
9 Aplicações à Geometria Diferencial
Licenciatura em Ciências · USP/Univesp · Módulo 2
Se a função V e suas derivadas parciais forem contínuas então a derivada direcional definida
em 9.47 é dada por:
9.48
9.49
Observamos assim que a derivada direcional de V, no ponto (x0, y0, z0) e na direção de a, é igual ao produto escalar do vetor ˆ
x y za a i a j a k= + +
pelo vetor cujas componentes são as
derivadas parciais da função V no ponto (x0, y0, z0). Este último vetor é denominado vetor
gradiente da função V no ponto (x0, y0, z0) e é indicado com a seguinte notação:
9.50
Assim, escrevemos
9.51
Consequentemente, a derivada direcional de uma função pode ser escrita em função do
ângulo θ entre o vetor unitário a e o gradiente da função (definido em 9.51), como:
9.52
E, assim, a direção e sentido, para os quais a deri-
vada direcional de uma função V é máxima, são os do
vetor gradiente de V, pois nesse caso cosθ = 1.
Lembrando que a variação infinitesimal do vetor de
posição ou, ainda, o vetor deslocamento infinitesimal
é dado pela expressão:
9.53
D V a Vx
a Vy
a Vz
a Va x y z
=∂∂
+∂∂
+∂∂
= ⋅∇
0 0 0 0 0 0 0 0 0 0 0 0ˆ( , , ) ( , , ) ( , , ) ( , , )a x y z
V V VD V x y z a x y z a x y z a x y z a Vx y z
∂ ∂ ∂= + + = ⋅∇
∂ ∂ ∂
∇ =∂∂
+∂∂
+∂∂
V x y z Vxx y z i V
yx y z j V
zx( , , ) ( , , ). ( , , ). ( ,0 0 0 0 0 0 0 0 0 0 yy z k0 0, ).
ˆ 0 0 0 0 0 0ˆ( , , ) ( , , )aD V x y z a V x y z= ⋅∇
Figura 9.4: O gradiente de uma função determina a normal à superfície associada a valores constantes da mesma.
cosa
D V V a V= ∇ ⋅ = ∇ θ
dr dxi dyj dzk
= + +

177
Fundamentos de Matemática II
Licenciatura em Ciências · USP/Univesp · Módulo 2
podemos observar que a variação infinitesimal de uma função escalar V, sua diferencial, pode
ser escrita sob a forma do produto escalar de dois vetores:
9.54
pois o vetor gradiente
∇V é, por definição,
9.55
• ExEmplo 6: Encontre o vetor
∇u no ponto (5,3,−1), sendo u(x, y, z) = 3x2 − 3y2 + z2.Temos
9.56
Como
9.57
obtemos
9.58
• ExEmplo 7:Sendo V(x, y, z) = x2 + y2 + z2, vamos encontrar a derivada direcional D V x y za ( , , )0 0 0 em (x0, y0, z0) = (1, 2, 3) na direção do vetor
u i j k= + −2 2 2 13 .Sabemos que
9.59
Temos
9.60
dV x y z V dr, ,( ) = ∇ ⋅
∇ =∂∂
+∂∂
+∂∂
V Vxi V
yj V
zk
∂∂
=∂∂
= −∂∂
=ux
x uy
y uz
z6 6 2, e
∇ =∂∂
+∂∂
+∂∂
u x y z uxx y z i u
yx y z j u
zx( , , ) ( , , ). ( , , ). ( ,0 0 0 0 0 0 0 0 0 0 yy z k0 0, ).
∇ − =∂∂
− +∂∂
− +∂∂
−u ux
i uy
j uz
( , , ) ( , , ). ( , , ). ( , , ).5 3 1 5 3 1 5 3 1 5 3 1 kk i j k= − −30 18 2
D V x y z a Vxx y z a V
yx y z a V
zxa x y z ( , , ) ( , , ) ( , , ) (0 0 0 0 0 0 0 0 0 0=
∂∂
+∂∂
+∂∂
,, , )y z0 0
∂∂
=∂∂
=∂∂
=Vx
x Vy
y Vz
z2 2 2, e

178
9 Aplicações à Geometria Diferencial
Licenciatura em Ciências · USP/Univesp · Módulo 2
Logo,
9.61
Como a é um vetor unitário, versor do vetor u dado, vamos encontrar o módulo do vetor
u:
9.62
Assim,
9.63
Logo,
9.64
• ExEmplo 8: Sendo
9.65
determine o vetor em que a derivada direcional no ponto (1,1,1) é máxima e encontre esse valor máximo.Em primeiro lugar, temos o vetor gradiente
9.66
e, portanto, como
9.67
9.68
A direção e sentido, segundo os quais a derivada direcional da função V é máxima, são os do vetor gradiente de V; logo, segundo o versor,
9.69
Como
9.70
o valor máximo procurado da derivada direcional é 6.
∂∂
=∂∂
=∂∂
=Vx
Vy
Vx
( , , ) ( , , ) ( , , )1 2 3 2 1 2 3 4 1 2 3 6, e
| |u = + + =4 8 13 5
2 2 2 13ˆ 5 5 5
a i j k= + −
ˆ2 2 2 13 4 8 2 6 13(1,2,3) 2 4 65 5 5 5aD V + −
= ⋅ + ⋅ − ⋅ =
V x y z xyz( , , ) = 2
∇ =∂∂
+∂∂
+∂∂
= + +V Vxi V
yj V
zk yz i xz j xyz k2 2 2
∇ =∂∂
+∂∂
+∂∂
V x y z Vxx y z i V
yx y z j V
zx( , , ) ( , , ). ( , , ). ( ,0 0 0 0 0 0 0 0 0 0 yy z k0 0, ).
∇ = + +V i j k( , , )1 1 1 2
(1,1,1) 1 1 2ˆ6 6 6 6
Va i j k∇= = + +
ˆˆ ˆ| | . | | | |aD V V a V a V= ∇ ⋅ = ∇ = ∇

179
Fundamentos de Matemática II
Licenciatura em Ciências · USP/Univesp · Módulo 2
• ExEmplo 9: Seja f(x,y) = 3x2 − 2y2. Encontre a derivada direcional de f no ponto (1,1) na direção que forma um ângulo de 120° com o eixo horizontal.Sendo f(x,y) = 3x2 − 2y2, temos:
9.71
Logo,
9.72
O vetor unitário que tenha a direção que forma um ângulo de 120° com o eixo horizontal é
9.73
Logo,
9.74
e, portanto, como
9.75
9.76
9.5 Perpendicular a uma superfícieConsideremos uma função escalar de três variáveis
9.77
A equação
9.78
onde wi é uma constante, para cada i é a equação de uma superfície.
∇ =∂∂
+∂∂
= −f fxi f
yj x i y j6 4
∇ = −f i j( , )1 1 6 4
ˆ cos120 sen120a i j= ° + °
1 3ˆ2 2
a i j= − +
ˆˆ
aD f f a= ∇ ⋅
ˆ1 3ˆ(1,1) (1,1) 6. ( 4). 3 2 32 2aD f f a
= ∇ ⋅ = − + − = − −
W W x y z= ( , , )
w W x y zi = ( , , )

180
9 Aplicações à Geometria Diferencial
Licenciatura em Ciências · USP/Univesp · Módulo 2
Sendo wi uma constante, sua diferencial é nula. Escrevemos:
9.79
Tendo em vista que o vetor deslocamento pertence à superfície aludida, definida por 9.78
concluímos, de 9.79, que o gradiente de uma função escalar da forma 9.77 é tal que ele é
perpendicular à superfície definida em 9.78.
Assim, podemos dizer que a normal tem a direção do vetor
9.80
Em cada ponto P0 = (x0, y0, z0) pertencente a uma superfície,
podemos determinar o vetor normal a ela passando pelo ponto P0.
Esse vetor é dado por:
9.81
9.6 Plano tangente a uma superfície por um pontoDada a função
9.82
que admite derivadas parciais contínuas no ponto P0 = (x0, y0), o plano de equação
9.83
é denominado plano tangente à superfície, que é o gráfico de f, no ponto (x0, y0, f(x0, y0)).
dw W dri W wi= ∇ ⋅ =
=
0
Figura 9.5: Direção da normal em pontos de uma superfície.
n WW wi
= ∇=
n x y z W x y zW wi
0 0 0 0 0 0, , , ,( ) = ∇ ( )=
z f x y= ( , )
z f x y fxx y x x f
yx y y y− =
∂∂
− +∂∂
−( , ) ( , )( ) ( , )( )0 0 0 0 0 0 0 0

181
Fundamentos de Matemática II
Licenciatura em Ciências · USP/Univesp · Módulo 2
Convém observar que a equação do plano tangente acima pode ser entendida como o
resultado do produto escalar
9.84
onde o vetor ∂∂
+∂∂
−
fxx y i f
yx y j k( , ). ( , ).0 0 0 0
é o vetor normal à superfície no ponto
(x0, y0, f(x0, y0)).No caso de W = W(x, y, z), já vimos que
∇W x y z( , , )0 0 0 é normal à superfície de nível
9.85
no ponto (x0, y0, z0). O plano que passa por esse ponto e é perpen-
dicular ao vetor
∇W x y z( , , )0 0 0 denomina-se plano tangente à
superfície W(x, y, z) = wi no ponto (x0, y0, z0).A equação desse plano é obtida tomando o produto escalar
9.86
• ExEmplo 10: A equação do plano tangente à superfície dada por z = f(x, y) = x2 − y2 no ponto (x0, y0, f(x0, y0)) = (1, 2, −3) é:
9.87
isto é,
9.88
Agora
9.89
∂∂
+∂∂
−
⋅ − + −
fxx y i f
yx y j k x x i y y j( , ). ( , ). ( ). ( ).0 0 0 0 0 0
++ −( ) =( ( , ).z f x y k0 0 0
Figura 9.6: Plano tangente a uma superfície.
W x y z wi( , , ) =
∇ ⋅ −( ) =W x y z x y z x y z( , , ) ( , , ) ( , , )0 0 0 0 0 0 0
z f x y fxx y x x f
yx y y y− =
∂∂
− +∂∂
−( , ) ( , )( ) ( , )( )0 0 0 0 0 0 0 0
z fx
x fy
y+ =∂∂
− +∂∂
−3 1 2 1 1 2 2( , ).( ) ( , ).( )
∂∂
=∂∂
= −fx
fy
( , ) ( , )1 2 2 1 2 4 e

182
9 Aplicações à Geometria Diferencial
Licenciatura em Ciências · USP/Univesp · Módulo 2
Logo,
9.90
de onde z − 2x + 4y − 3 = 0 é a equação do plano tangente à superfície dada no ponto (1,2,−3).Por outro lado,
n i j k= − −2 4 é o vetor normal à superfície no ponto (1, 2, -3). Logo, a equação da reta normal é:
9.91
ou seja,
9.92
que são as equações paramétricas da reta normal procurada.
• ExEmplo 11:
Suponha que z = z(x, y) é uma função contínua que admite derivadas parciais contínuas e que é
dada implicitamente pela equação xa
yb
zc
2
2
2
2
2
2 1+ + = . Mostre que x xa
y yb
z zc
02
02
02 1+ + = é a equação
do plano tangente no ponto (x0, y0, z0), z0 ≠ 0.Vejamos:
9.93
acarreta, por derivação implícita, que:
9.94
derivando implicitamente com relação a x. Por outro lado,
9.95
derivando, agora, implicitamente com relação a y.Mas, então,
9.96
z x y+ = − − −3 2 1 4 2.( ) .( )
( , , ) ( , , ) ( , , )x y z = − + − −1 2 3 2 4 1λ
xyz
= += −= − −
1 22 43
λλλ
xa
yb
zc
2
2
2
2
2
2 1+ + =
2 2 02 2
xa
zc
zx
+ ⋅∂∂
=
2 2 02 2
yb
zc
zy
+ ⋅∂∂
=
∂∂
= − ⋅ = − ⋅∂∂
= − ⋅ = − ⋅zx
xa
cz
ca
xz
zy
yb
cz
cb
yz
22
222
2 2
2 2
2 2
2 e

183
Fundamentos de Matemática II
Licenciatura em Ciências · USP/Univesp · Módulo 2
Logo, a equação do plano tangente no ponto (x0, y0, z0) é:
9.97
de onde
9.98
isto é,
9.99
e, portanto,
9.100
9.7 Direções Normais a Superfícies e Tangenciais a Curvas
Tomando um conjunto de três coordenadas Q1(x, y, z), Q2(x, y, z) e Q3(x, y, z) adotadas aqui
como se fossem as mais gerais possíveis, consideremos o problema de determinar vetores normais
a cada uma delas. Para cada superfície associada a um valor constante das coordenadas generalizadas,
dada pela condição 9.2, podemos introduzir um vetor indicando a direção
normal a essas superfícies. Temos, portanto, três direções normais a cada super-
fície passando por um determinado ponto do espaço.
9.101
z z ca
xz
x x cb
yz
y y− = − ⋅ ⋅ − − ⋅ ⋅ −0
2
20
00
2
20
00( ) ( )
z zc
zc
xa
x x yb
y y. ( ) ( )02
02
202 0
02 0− = − − − −
z zc
zc
x xa
xa
y yb
yb
. . .02
02
20
20
2
20
20
2
2− = − + − +
z zc
x xa
y yb
xa
yb
zb
. . .02
02
02
02
20
2
20
2
21 1+ + = + + = pois
Figura 9.7: Vetores
b1,
b2 e
b3 normais
às três superfícies.
b x y z Q x y z
b x y z Q x y z
b x y z Q
1 1
2 2
3
, , , ,
, , , ,
, ,
( ) = ∇ ( )( ) = ∇ ( )( ) = ∇ 33
1 1
x y z
b x y z ix
jy
kzQ x y z
, ,
, , , ,
( )
⇔
( ) = ∂∂
+∂∂
+∂∂
(( )
( ) = ∂∂
+∂∂
+∂∂
( )
( ) =
b x y z ix
jy
kzQ x y z
b x y z
2 2
3
, , , ,
, , iix
jy
kzQ x y z∂
∂+
∂∂
+∂∂
( )
3 , ,

184
9 Aplicações à Geometria Diferencial
Licenciatura em Ciências · USP/Univesp · Módulo 2
A curva representada pelo encontro de duas superfícies tem vetores tangentes a ela em cada
ponto, vetores esses dados por:
9.102
onde fica subentendida pela notação, que, por exemplo,
b∗1(x, y, z) é um vetor tangente às curvas
definidas pelas condições:
9.103
e que, ademais, esse vetor indica a direção de valores crescentes, ao longo da curva, da coordenada Q1.
De acordo com as definições acima, verificamos que os vetores normais a superfícies são
perpendiculares aos vetores tangentes e isso porque, como se pode verificar, a seguinte identi-
dade é satisfeita:
9.104
Cada direção indica, por outro lado, a direção de máxima variação de cada coordenada.
Tais vetores normais, no entanto, não são vetores unitários. Escrevemos, geralmente:
9.105
donde inferimos que os fatores hi são dados por:
9.106
b x y z xQi y
Qj z
Qk r
Q
b x y z xQ
11 1 1 1
2
*
*
, ,
, ,
( ) = ∂∂
+∂∂
+∂∂
=∂∂
( ) = ∂∂ 22 2 2 2
33 3
i yQj z
Qk r
Q
b x y z xQi y
Qj z
+∂∂
+∂∂
=∂∂
( ) = ∂∂
+∂∂
+∂∂
* , ,QQk r
Q3 3
=∂∂
Q x y z Q
Q x y z Q2 20
3 30
, ,
, ,( ) =( ) =
b b QQi ji
jij⋅ =
∂∂
=* δ
b h e
b h e
b h e
1 1 1
2 2 2
3 3 3
*
*
*
=
=
=
h bi i=
* para i = 1,2,3.

185
Fundamentos de Matemática II
Licenciatura em Ciências · USP/Univesp · Módulo 2
E os versores ei são definidos, portanto, como:
9.107
9.8 Elementos de volume e de superfícieO vetor deslocamento infinitesimal, escrito em termos das coordenadas generalizadas, é
dado pela soma:
9.108
Assim, o vetor deslocamento infinitesimal para a curva associada à intersecção das superfícies
de valores constantes das variáveis Q1 e Q2 constantes é dado por:
9.109
Portanto, o elemento de comprimento infinitesimal ao longo dessa curva será dado por:
9.110
Temos, assim, três elementos de comprimento infinitesimais:
9.111
e bh
bbi
i
i
i
i
= =* *
*
Figura 9.8: Vetores tangentes a curvas resultantes da intersecção de três superfícies.
dr rQdQ b dQii
i ii
i
=∂∂
== =∑ ∑
1
3
1
3*
dr b dQ
3 3 3= *
dl dr b dQ h dQ3 3 3 3 3 3= = =
*
dl h dQdl h dQdl h dQ
1 1 1
2 2 2
3 3 3
===

186
9 Aplicações à Geometria Diferencial
Licenciatura em Ciências · USP/Univesp · Módulo 2
O elemento de volume infinitesimal, associado a volumes nos quais as coordenadas variam dQ,
é dado por:
9.112
O elemento de superfície quando esta se encontra inteiramente na superfície Q3 = Q30 é:
9.113
Analogamente, podemos introduzir os elementos de superfície associados às superfícies Q1 = Q10
e Q2 = Q20. Eles são dados, respectivamente, por:
9.114
9.115
Assim, temos formas simples de determinar áreas contidas em superfícies e integrar sobre
volumes delimitados por superfícies cujas formas são conhecidas.
9.8.1 Exemplo: Coordenadas Esféricas
Definimos as coordenadas esféricas a partir das expressões:
9.116
Invertendo as relações acima, obtemos:
9.117
dV dl dl dl h h h dQ dQ dQ= =1 2 3 1 2 3 1 2 3
dS dl dl h h dQ dQ3 1 2 1 2 1 2= =
dS dl dl h h dQ dQ1 2 3 3 2 3 2= =
dS dl dl h h dQ dQ2 1 3 3 1 3 1= =
x ry rz r
===
sen cossen sencos
θ ϕθ ϕθ
r x y z= + +2 2 2
ϕ
θ
=
=+
arctg
arctg
yx
x yz
2 2

187
Fundamentos de Matemática II
Licenciatura em Ciências · USP/Univesp · Módulo 2
A superfície
r = R (constante)
Ou, equivalentemente,
9.118
corresponde a uma esfera de raio R.
A superfície descrita por
9.119
Ou, equivalentemente,
9.120
descreve um semiplano, enquanto a equação
9.121
que implica a relação
9.122
descreve um cone de ângulo θ0.
O encontro das três superfícies determina um ponto no espaço especificado pelas coorde-
nadas (r0, θ0, φ0).
x y z R2 2 2+ + =
ϕ ϕ= 0
y x= tan ϕ0
θ θ= 0
x y z2 20+ = tgθ
Figura 9.9: Superfícies associadas a valores constantes das coordenadas esféricas. Figura 9.10: Normais às superfícies esférica, cônica e semiplana.

188
9 Aplicações à Geometria Diferencial
Licenciatura em Ciências · USP/Univesp · Módulo 2
Os vetores
bi(x, y, z), em coordenadas esféricas, são dados por:
9.123
Os vetores tangentes à curva determinada pela intersecção de duas superfícies são:
9.124
Donde inferimos que:
9.125
Nesse caso, os vetores normais e tangentes são vetores paralelos. Diferem apenas no valor
do módulo. Por essa razão, é muito mais prático fazer uso de apenas um conjunto de vetores
ortonormalizados. A esse conjunto de vetores denominamos er, eθ, eϕ.
9.126
b x y z r x y z i j k
b x y z
r , , , , sen cos sen sen cos
, ,
( ) = ∇ ( ) = + +θ ϕ θ ϕ θ
θ (( ) = ∇ ( ) = + −( )( ) =
θ θ ϕ θ ϕ θ
ϕ
x y zr
i j k
b x y z
, , cos cos cos sen sen
, ,
1
∇ ( ) = − +( )ϕθ
θ ϕ θ ϕx y zr
i j, ,sen
sen sen sen cos1
Figura 9.11: Tangentes a curvas determinadas pela intersecção de duas superfícies.
b x y z rr
i j k
b x y z
r*
*
, , sen cos sen sen cos
, ,
( ) = ∂∂
= + +
( ) =
θ ϕ θ ϕ θ
θ∂∂∂
= + −
( ) = ∂∂
= −
r r i r j r k
b x y z r r
θθ ϕ θ ϕ θ
ϕϕ
cos cos cos sen sen
, ,* ssen sen sen cosθ ϕ θ ϕ
i r j+
hh rh r
r ==
=
1
θ
ϕ θsen
ebb
i j k
ebb
rr
r
= = + +
= = +
sen cos sen cos
cos cos cos
θ ϕ θ θ
θ ϕθθ
θ
θθ ϕ θ
θ ϕ θ ϕϕϕ
ϕ
sen sen
sen sen sen cos
j k
eb
bi j
−( )
= = − +( )

189
Fundamentos de Matemática II
Licenciatura em Ciências · USP/Univesp · Módulo 2
Esses vetores se constituem numa base ortonormal em coordenadas esféricas.
O elemento de volume em coordenadas esféricas é dado por:
9.127
O elemento de superfície inteiramente contida numa esfera descrita por r = R é
9.128
Analogamente, o elemento infinitesimal de uma superfície contida no cone (superfície θ = θ0) é:
9.129
Assim, temos formas simples de determinar áreas contidas em superfícies planas, cônicas e esféricas.
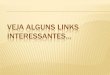
• ExEmplo 12Determinar o volume delimitado pelas superfícies r = r1 e θ = θ1, θ = θ2 e φ = φ1, φ = φ2 (vide Figura 9.12).
→ REsolução:O volume solicitado é obtido a partir do produto de três integrais de funções de uma variável:
9.130
dV h h h drd d r drd dr= =θ ϕ θ ϕ θ θ ϕ2 sen
dS h h d d R d dr = =θ ϕ θ ϕ θ θ ϕ2 sen
dS h h drd r drdrθ ϕ ϕ θ ϕ= = 20sen
Figura 9.12: Volume solicitado no exemplo 12.
V r d d dr r dr dr
r
r
r
= = −( ) =∫∫∫ ∫ ∫22 1
2
1
2
1
2
1
2
1
2
1
2
ϕ
ϕ
θ
θ
θ
θ
θ θ ϕ ϕ ϕ θ θsen sen ϕϕ ϕ θ θθ
θ
2 12
1
2
1
2
−( ) ∫ ∫r dr dr
r
sen

190
9 Aplicações à Geometria Diferencial
Licenciatura em Ciências · USP/Univesp · Módulo 2
Integrando em r e θ entre os limites propostos, encontramos:
9.131
Assim, o volume delimitado por uma superfície esférica de raio R e de abertura θ0 é:
9.132
• ExEmplo 13 Determine a área de uma superfície inteiramente contida numa esfera de raio R delimitada pelas superfícies θ = θ1 e θ = θ2, bem como pelas superfícies φ = φ1 e φ = φ2 (veja Figura 9.13).
→ REsolução:Tal área é dada pelo produto de duas integrais:
9.133
Assim, a área de uma calota delimitada pelo cone descrito pela condição θ = θ0 é:
9.134
Donde concluímos que a área de um hemisfério é A0 = 2πR2 e que a área da superfície esférica é igual a 4πR2, resultados esses bastante conhecidos.
V r r= −( ) −( ) −( )13 2 1 2
313
1 2ϕ ϕ θ θcos cos
V R= ( ) −( )23
130
πθcos
Figura 9.13: Área sobre uma esfera.
A R d d R= = −( ) −( )∫∫ 2 22 1 1 2
1
2
1
2
ϕ
ϕ
θ
θ
θ θ ϕ ϕ ϕ θ θsen cos cos
A R02
02 1= −( )π θcos

191
Fundamentos de Matemática II
Licenciatura em Ciências · USP/Univesp · Módulo 2
9.9 Bases de VetoresOs vetores
bi∗ e
bi, para i variando de 1 a 3, constituem-se em dois referenciais muito úteis.
Assim, um vetor qualquer pode ser expresso em termos dos vetores de uma base - a base
bi - da
seguinte forma:
9.135
Podemos igualmente utilizar outros vetores - a base
bi∗ - denominada base dual. Utilizando
essa base, escrevemos:
9.136
As duas bases definem dois tipos de componentes de um vetor.
As componentes contravariantes (V i) e covariantes (Vi) são obtidas a partir das projeções:
9.137
e
9.138
Observe que os vetores
bi e
bi∗ não são, necessariamente, versores. Podemos construir dois
tipos de versores dividindo cada vetor pelo seu respectivo módulo.
V V bi ii
==∑
1
3
V V bi ii
==∑ *
1
3
V V bii= ⋅
*
V V bi i= ⋅
Agora é a sua vez...Continue explorando os recursos de aprendizagem disponíveis no Ambiente Virtual de Aprendizagem e realize a(s) atividade(s) proposta(s).