Embed Size (px)
DESCRIPTION
apostila mec geral
Citation preview

Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
www.aprendermais.net.br
1
Notas de aula de
MÊCANICA GERAL
Prof. Alessandro Leonardo da Silva
Prof. Luiz Elpídio de Melo Machado
Divinópolis - Minas Gerais
2015

Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
www.aprendermais.net.br
2
LISTA DE SÍMBOLOS
letras maiúsculas
A área
E módulo de elasticidade
F força
I momento de inércia
L comprimento
M momento, momento fletor
Ms momento estático
N força normal
P carga concentrada
R resultante de forças, esforço
resistente
S esforço solicitante
V força cortante
letras minúsculas
a aceleração
b largura
g aceleração da gravidade
h dimensão, altura
l comprimento
m metro, massa
max máximo
min mínimo
q carga distribuída
s segundo
v deslocamento vertical
x distância da linha neutra ao ponto de
maior encurtamento na seção
transversal de uma peça fletida
letras gregas
α, θ ângulo, coeficiente
δ deslocamento
θ diâmetro
ε deformação específica
γ f coeficiente de majoração das ações
ζ tensão normal
tensão normal admissível
η tensão tangencial
tensão tangencial admissível
υ coeficiente de Poisson
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
www.aprendermais.net.br
3
1 Introdução
1.1 Conceito
As estruturas e as máquinas nunca são absolutamente rígidas, deformando-se sob a ação
das cargas a que estão submetidas. Estas deformações são geralmente pequenas e não alteram
apreciavelmente as condições de equilíbrio ou de movimento da estrutura considerada.
No entanto, essas deformações terão importância quando houver riscos de ruptura do
material.
A Mecânica é uma ciência física aplicada que trata dos estudos das forças e dos
movimentos. A Mecânica descreve e prediz as condições de repouso ou movimento de corpos
sob a ação de forças.
A finalidade da Mecânica é explicar e prever fenômenos físicos, fornecendo, assim, os
fundamentos para as aplicações da Engenharia.
No projeto de qualquer estrutura ou máquina é necessário primeiro usar os princípios da
estática para determinar as forças que atuam tanto sobre como no interior de seus membros.
As dimensões dos elementos, sua deflexão e sua estabilidade dependem não só das
cargas internas como também do tipo de material do qual esses elementos são feitos.
1.2 Sistema Internacional de Unidades
O Sistema Internacional de Unidades (SI) é subdividido em unidades básicas e unidades
derivadas.
As unidades básicas são: metro (m), quilograma (kg) e segundo (s). As unidades
derivadas são, entre outras, força, trabalho, pressão, etc.
As unidades do SI formam um sistema absoluto de unidades. Isto significa que as três
unidades básicas escolhidas são independentes dos locais onde são feitas as medições.
O comprimento é necessário para localizar a posição de um ponto no espaço e, por
meio dele, descrever a dimensão de um sistema físico. O conceito de espaço é associado à
noção de posição de um ponto material, o qual pode ser definido por três comprimentos,
medidos a partir de um certo ponto de referência, ou de origem, segundo três direções dadas.
Estes comprimentos são conhecidos como as coordenadas do ponto.
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
www.aprendermais.net.br
4
A massa é uma propriedade da matéria pela qual se pode comparar a ação de um
corpo com a de outro. Dois corpos de mesma massa, por exemplo, serão atraídos pela Terra
de modo idêntico; e também irão oferecer a mesma resistência a uma variação de movimento
de translação.
O tempo é concebido como uma sucessão de eventos. Os princípios da estática são
independentes do tempo. O tempo desempenha papel importante no estudo da dinâmica.
A força é medida em Newton (N) que é definido como a força que imprime a
aceleração de 1 m/s2 à massa de 1 kg. A partir da Equação F=m.a (segunda Lei de Newton),
escreve-se: 1 N = 1 kg × 1 m/s2.
As medidas estáticas de forças são efetuadas por meio de instrumentos chamados
dinamômetros.
O peso de um corpo também é uma força e é expresso em Newton (N). Da Equação
P=m.g (terceira Lei de Newton ou Lei da Gravitação) segue-se que o peso de um corpo de
massa 1 kg é = (1 kg)×(9,81 m/s2) = 9,81 N, onde g=9,81m/s2 é a aceleração da gravidade.
A pressão é medida no SI em Pascal (Pa) que é definido como a pressão exercida por
uma força de 1 Newton uniformemente distribuída sobre uma superfície plana de 1 metro
quadrado de área, perpendicular à direção da força Pa = N /m2. Pascal é também unidade de
tensões normais (compressão ou tração) ou tensões tangenciais (cisalhamento).
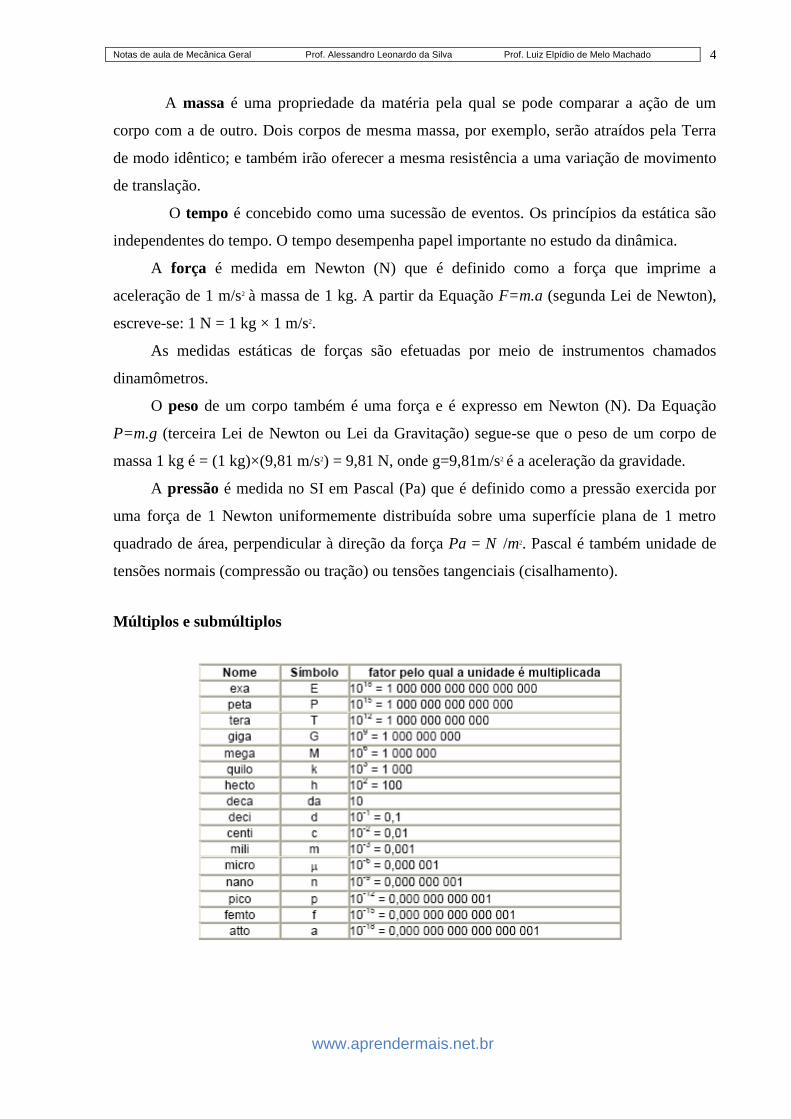
Múltiplos e submúltiplos
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
www.aprendermais.net.br
5
Conversão de Unidades
COMPRIMENTO MASSA
Unidade SI Multiplicar por Unidade SI Multiplicar por
n(nano) .m 10-9
.g kg 0,001
(micro) .m 10-6
Ton kg 1000
Dm .m 0,1 lbm kg 0,45359237
Cm .m
0,01 Slug kg 14,594
.mm .m 0,001 oz (onça)avoirdupois kg 28,35.10-3
Km .m 1000 Grão kg 6,48.10-6
Ft .m 0,3048 Tonelada (inglesa) kg 1016
In .m 0,0254 Utm kg 9,80665
yd (jarda) .m 0,9144 Arroba kg 14,688
ÁREA Força
Unidade SI Multiplicar
por
Unidade SI Multiplicar por
Are .m2 4,047.10
3 Kgf N 9,8
Acre .m2 100 Libra força(lbf) N 4,45
Hectare .m2 10000
km2 .m
2 10
6
Pé2 (ft
2) .m
2 0,06451
Polegada quadrada (in2) .m
2 9,290304
1.3 Trigonometria
Para o estudo da Matéria da Mecânica Geral necessitam-se dos conceitos fundamentais
da trigonometria. A palavra trigonometria significa medida dos três ângulos de um triângulo e
determina um ramo da matemática que estuda as relações entre as medidas dos lados e dos
ângulos de um triângulo.
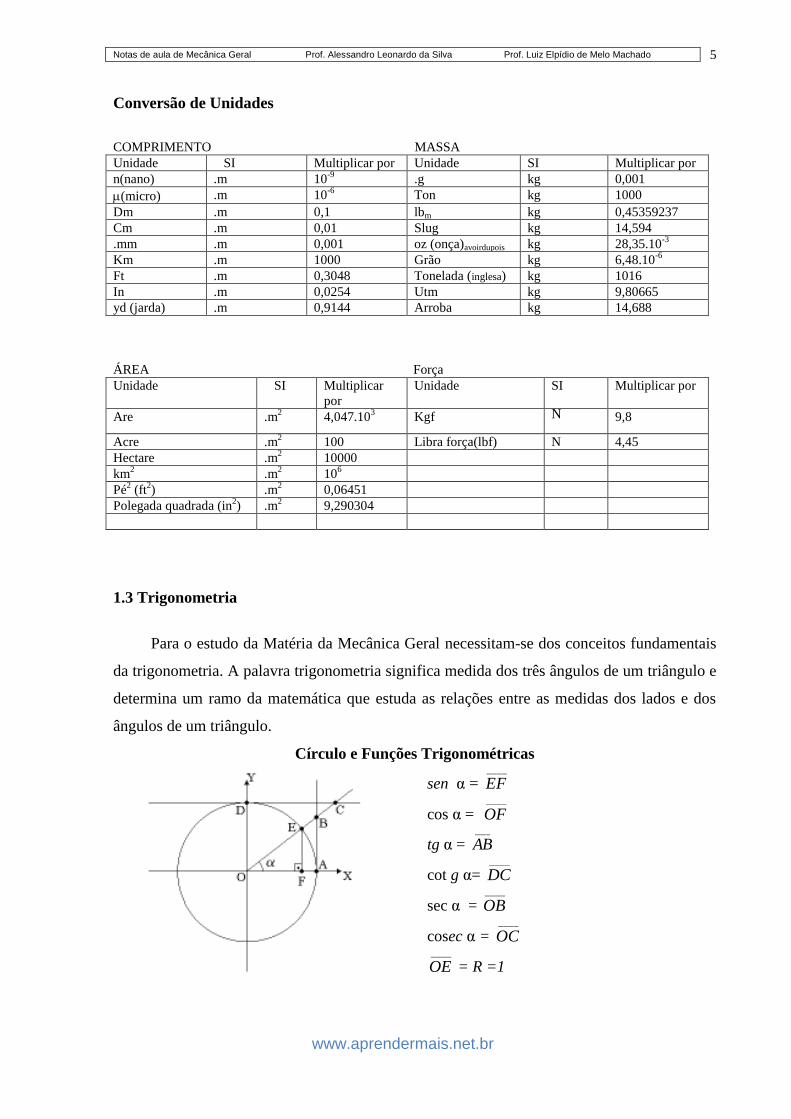
Círculo e Funções Trigonométricas
sen α = ____
EF
cos α = ____
OF
tg α = ___
AB
cot g α= ____
DC
sec α = ____
OB
cosec α = ____
OC ____
OE = R =1
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
www.aprendermais.net.br
6
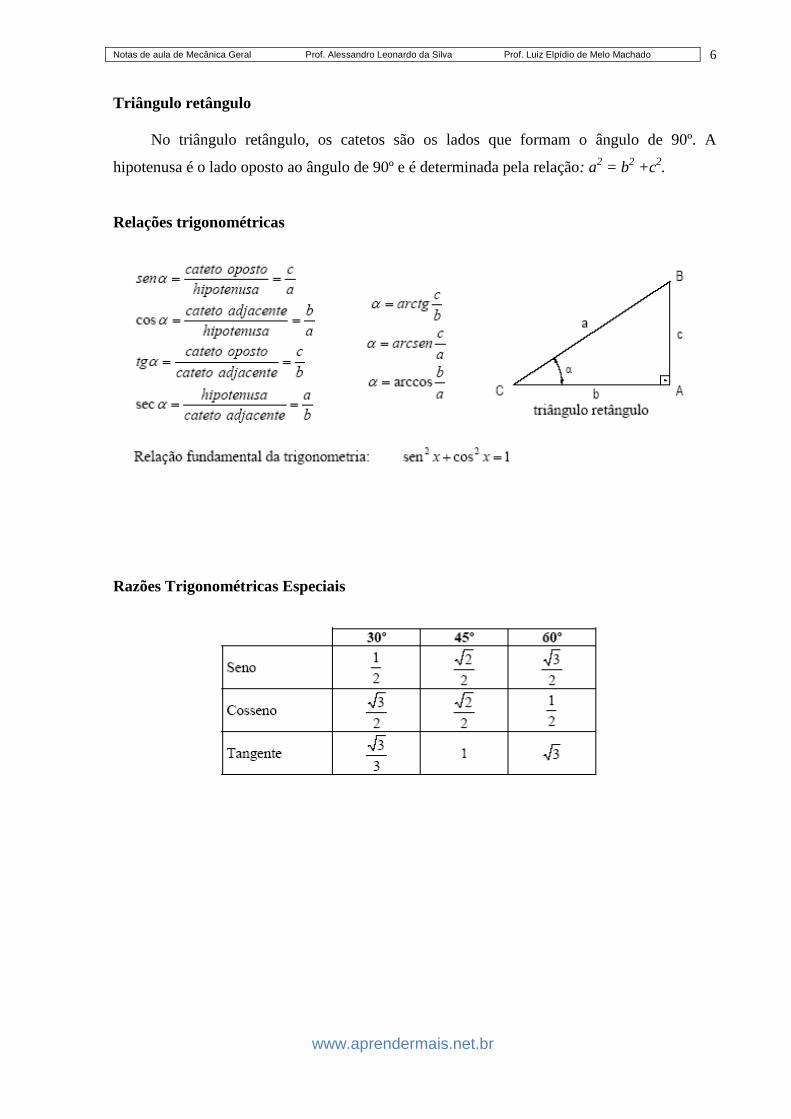
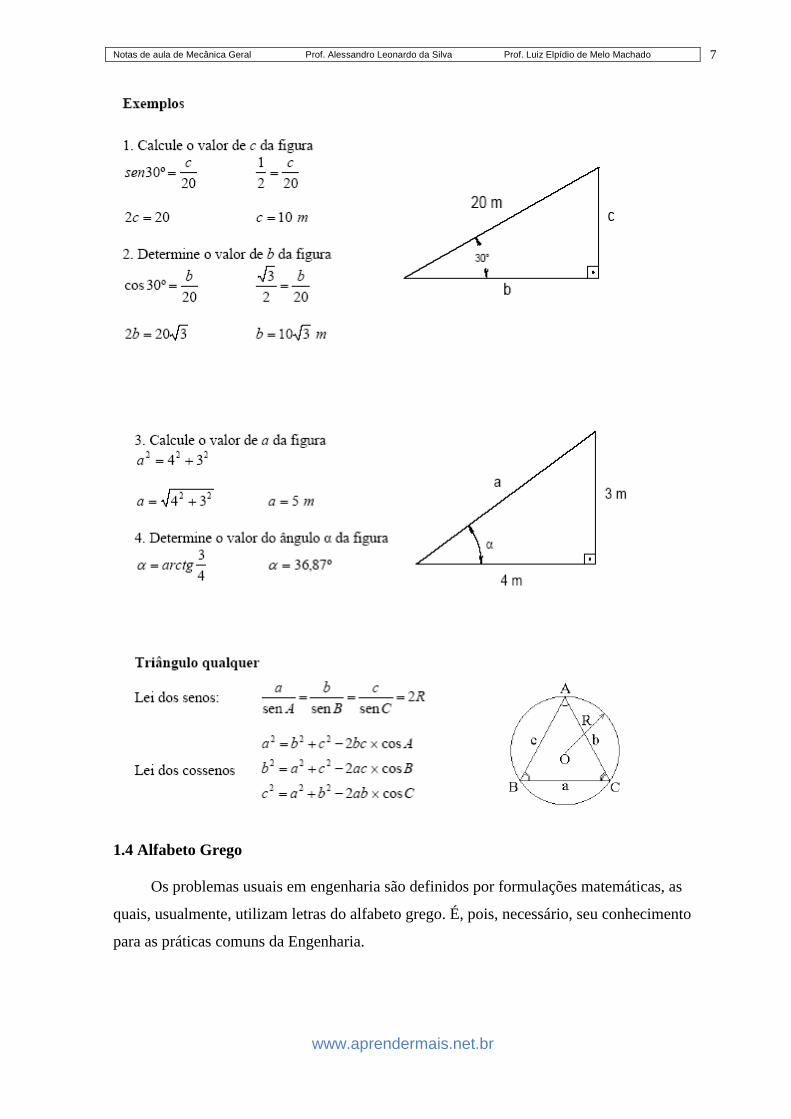
Triângulo retângulo
No triângulo retângulo, os catetos são os lados que formam o ângulo de 90º. A
hipotenusa é o lado oposto ao ângulo de 90º e é determinada pela relação: a2 = b
2 +c
2.
Relações trigonométricas
Razões Trigonométricas Especiais
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
www.aprendermais.net.br
7
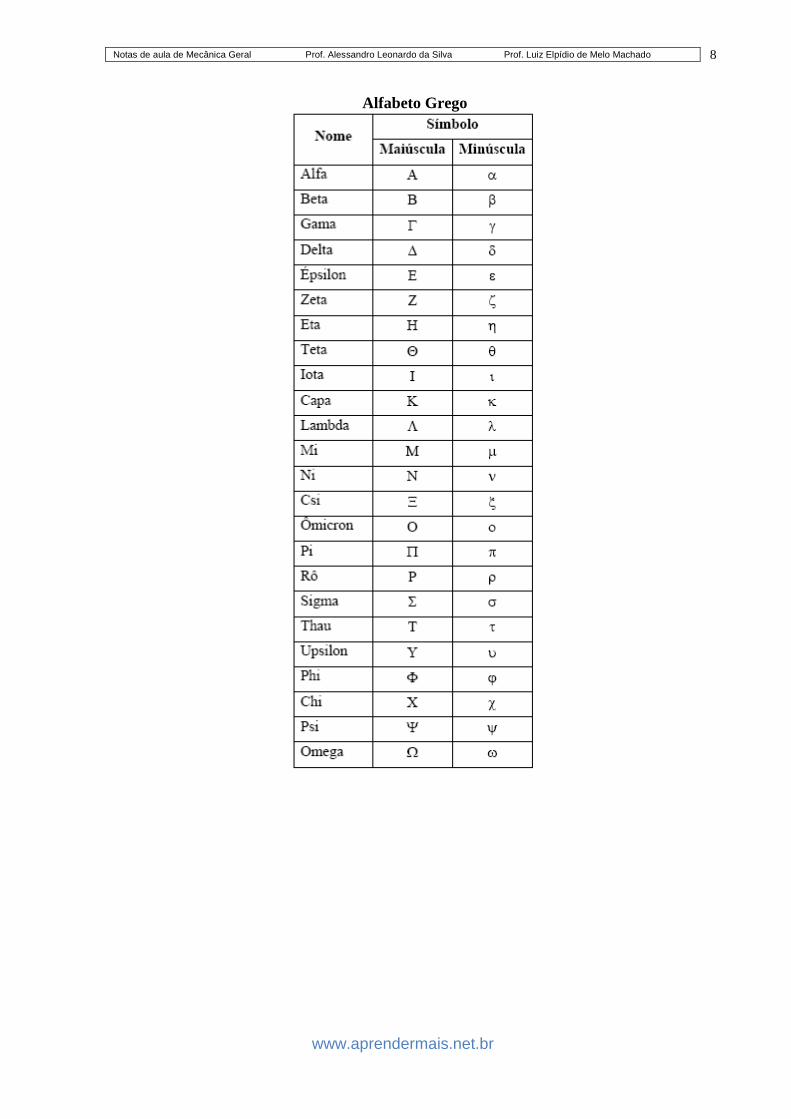
1.4 Alfabeto Grego
Os problemas usuais em engenharia são definidos por formulações matemáticas, as
quais, usualmente, utilizam letras do alfabeto grego. É, pois, necessário, seu conhecimento
para as práticas comuns da Engenharia.
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
www.aprendermais.net.br
8
Alfabeto Grego

Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
www.aprendermais.net.br
9
2 Estática
A Estática se refere aos corpos em repouso ou em movimento, com velocidade
constante e estuda as forças em equilíbrio, independentemente do movimento por elas
produzido. Na Estática, os corpos analisados são considerados rígidos, conseqüentemente,
os resultados obtidos independem das propriedades do material.
2.1 Forças no plano
A Força representa a ação de um corpo sobre o outro e é caracterizada pelo seu ponto
de aplicação, sua intensidade, direção e sentido. A intensidade de uma força é expressa em
Newton (N) no Sistema Internacional de Unidades (SI). A direção de uma força é definida
por sua linha de ação, ou seja, é a reta ao longo da qual a força atua, sendo caracterizada
pelo ângulo que forma com algum eixo fixo, como indicado na Figura 2.1.
O sentido da força é indicado por uma seta (vetor).
Denomina-se Grupo de forças, o conjunto de forças aplicadas em um único ponto de
um corpo. Sistema de forças é o conjunto de forças aplicadas simultaneamente em pontos
diversos de um mesmo corpo.
2.2 Equilíbrio de um ponto material
Ponto material é uma pequena porção de matéria que pode ser considerada como se
ocupasse um ponto no espaço.
Quando a resultante de todas as forças que atuam sobre um ponto material é nula, este
ponto está em equilíbrio. Este princípio é conseqüência da primeira lei de Newton: “se a
força resultante que atua sobre um ponto material é zero, este ponto permanece em repouso
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
www.aprendermais.net.br
10
(se estava originalmente em repouso) ou move-se ao longo de uma reta com velocidade
constante (se originalmente estava em movimento)”.
Para exprimir algebricamente as condições de equilíbrio de um ponto material,
escreve-se:
0RF
F = força
R = resultante das forças
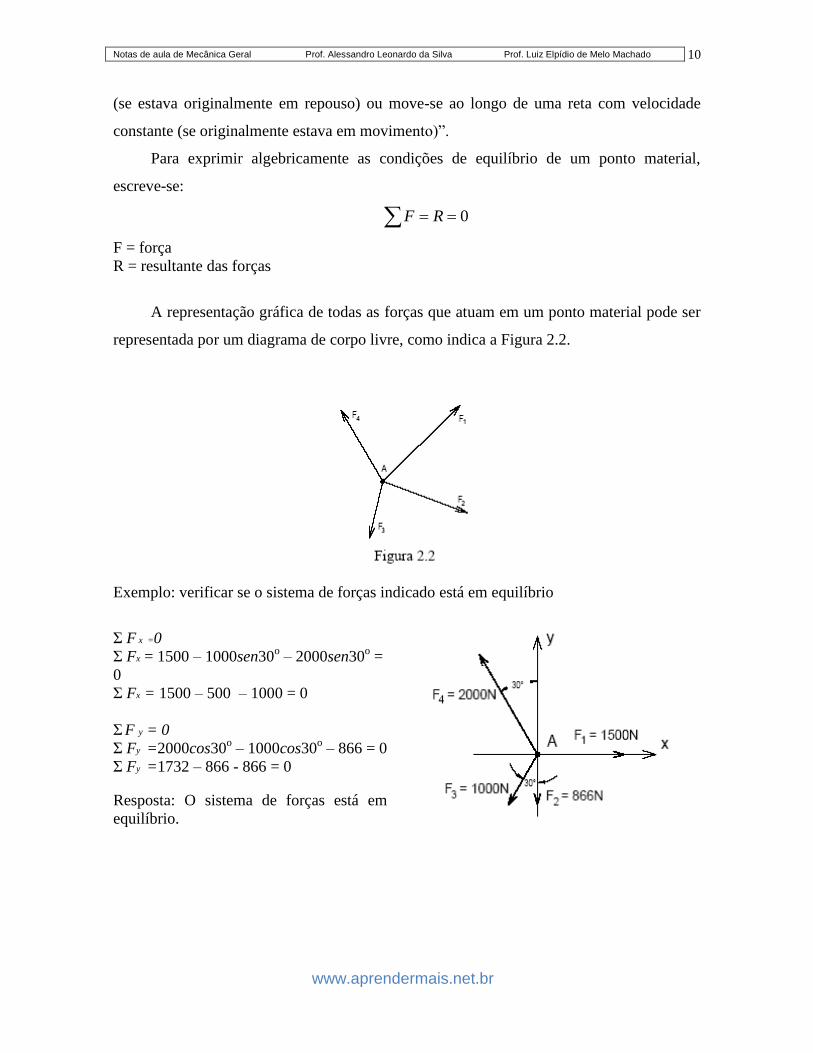
A representação gráfica de todas as forças que atuam em um ponto material pode ser
representada por um diagrama de corpo livre, como indica a Figura 2.2.
Exemplo: verificar se o sistema de forças indicado está em equilíbrio
Σ F x =0
Σ Fx = 1500 – 1000sen30o – 2000sen30
o =
0
Σ Fx = 1500 – 500 – 1000 = 0
Σ F y = 0
Σ Fy =2000cos30o – 1000cos30
o – 866 = 0
Σ Fy =1732 – 866 - 866 = 0
Resposta: O sistema de forças está em
equilíbrio.
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
www.aprendermais.net.br
11
2.3 Resultante de uma força
Constata-se experimentalmente que duas forças P e Q que atuam sobre um ponto
material podem ser substituídas por uma única força R que tenha o mesmo efeito sobre esse
ponto material. Essa força é chamada de resultante de P e Q. Portanto, a resultante de um
grupo de forças é a força que, atuando sozinha, produz ação idêntica à produzida pelo
grupo ou sistema de forças. A resultante pode ser determinada por soluções gráficas ou
analíticas.
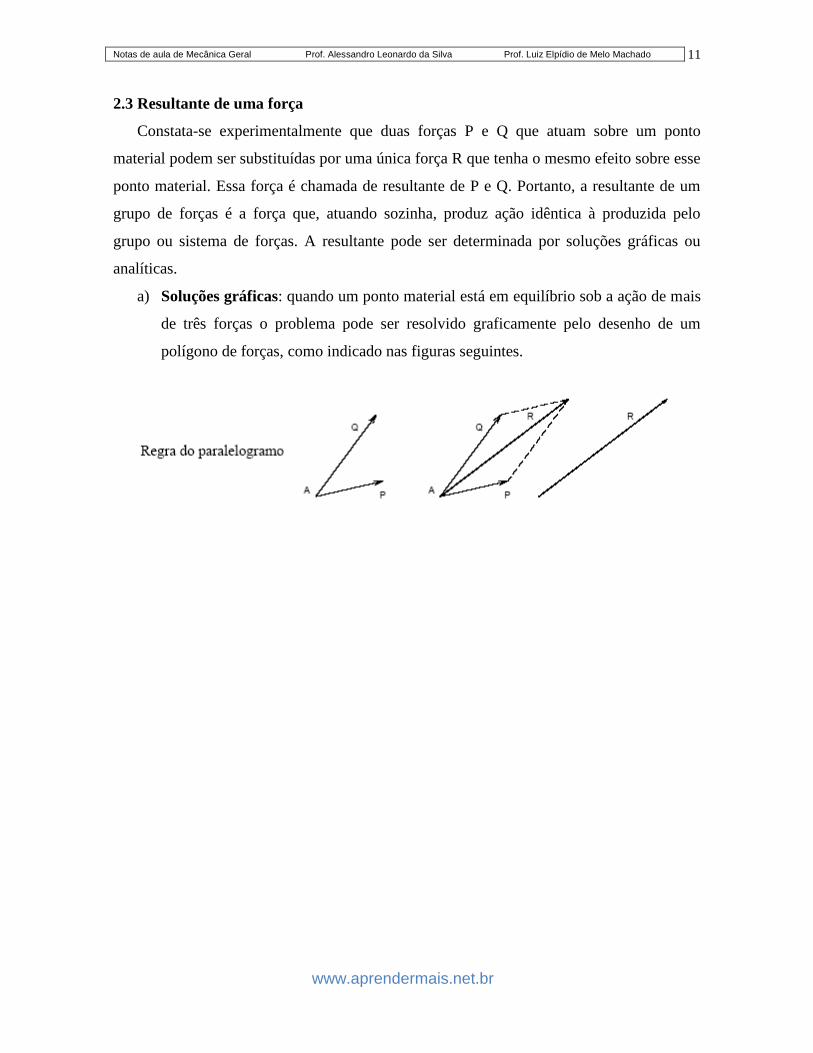
a) Soluções gráficas: quando um ponto material está em equilíbrio sob a ação de mais
de três forças o problema pode ser resolvido graficamente pelo desenho de um
polígono de forças, como indicado nas figuras seguintes.

Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
www.aprendermais.net.br
12
b) Soluções analíticas: os métodos analíticos utilizam a trigonometria e as equações
de equilíbrio.

Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
www.aprendermais.net.br
13
Exemplos:
1. O parafuso tipo gancho da figura, está
sujeito a duas forças F1 e F2. determine a
intensidade (módulo) e a direção da força
resultante.
2. O parafuso na forma de gancho
mostrado abaixo está sujeito a uma força de
200N. Decomponha essa força em
componentes nas direções mostradas na
figura.
3. Um caso particular da terceira lei de Newton é a lei da gravitação que trata da atração da
Terra sobre um ponto material localizado em sua superfície. A força de atração exercida
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
www.aprendermais.net.br
14
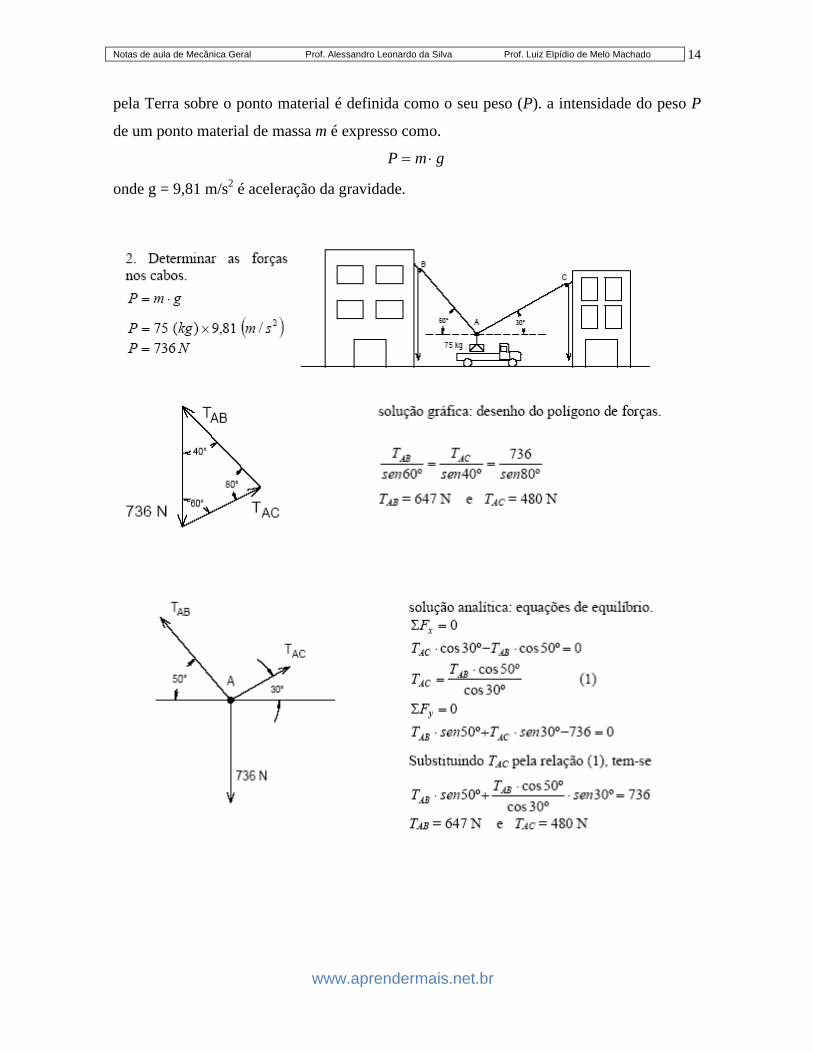
pela Terra sobre o ponto material é definida como o seu peso (P). a intensidade do peso P
de um ponto material de massa m é expresso como.
gmP
onde g = 9,81 m/s2 é aceleração da gravidade.
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
www.aprendermais.net.br
15
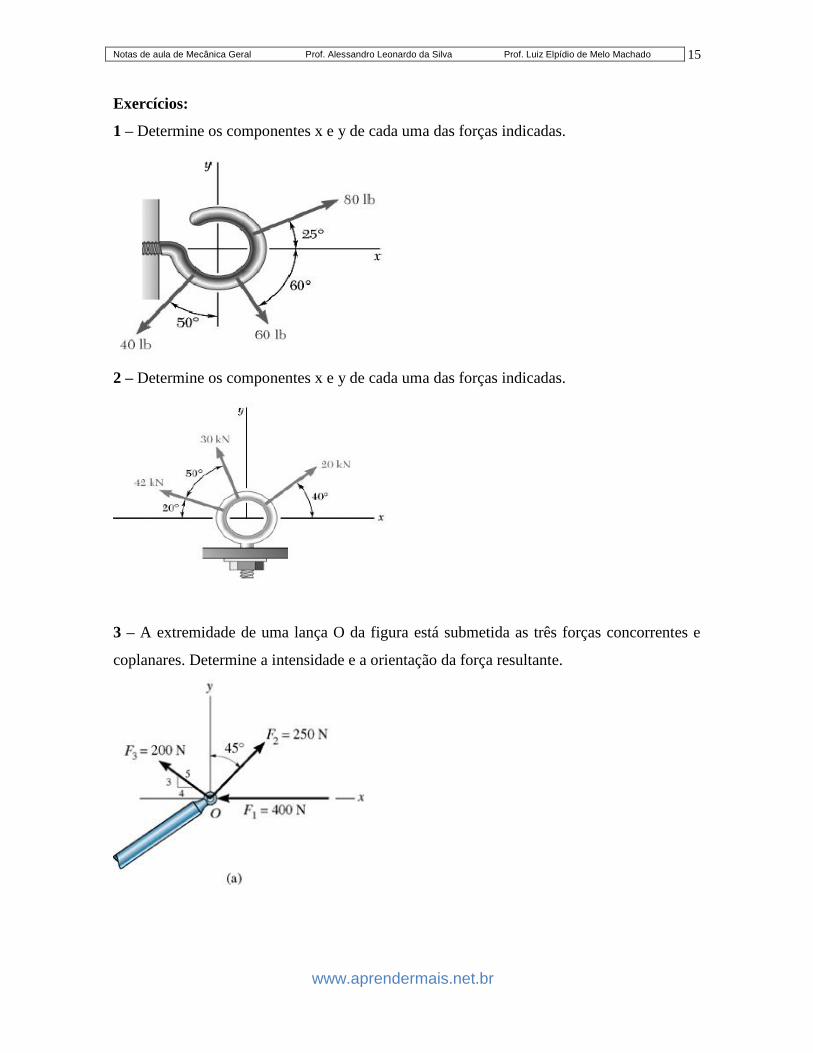
Exercícios:
1 – Determine os componentes x e y de cada uma das forças indicadas.
2 – Determine os componentes x e y de cada uma das forças indicadas.
3 – A extremidade de uma lança O da figura está submetida as três forças concorrentes e
coplanares. Determine a intensidade e a orientação da força resultante.

Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
www.aprendermais.net.br
16
4 – O elo da figura está submetido a duas forças F1 e F2. Determine a intensidade e a
orientação da força resultante.
2.4 Vetores Cartesianos
Componentes retangulares de um vetor
Um vetor A pode ter um, dois ou três componentes ao longo dos eixos de coordenadas
x, y, z, dependendo de como está orientado em relação aos eixos.
Em geral, quando A está orientado em um oitante do sistema x, y, z, com duas
aplicações sucessivas da lei do paralelogramo pode-se decompô-lo em componentes, como
A = A‟ + Az e depois A‟ = Ax + A.
Combinando essas equações, A é representado pela soma vetorial de seus três
componentes retangulares;
A = Ax + Ay + Az
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
www.aprendermais.net.br
17
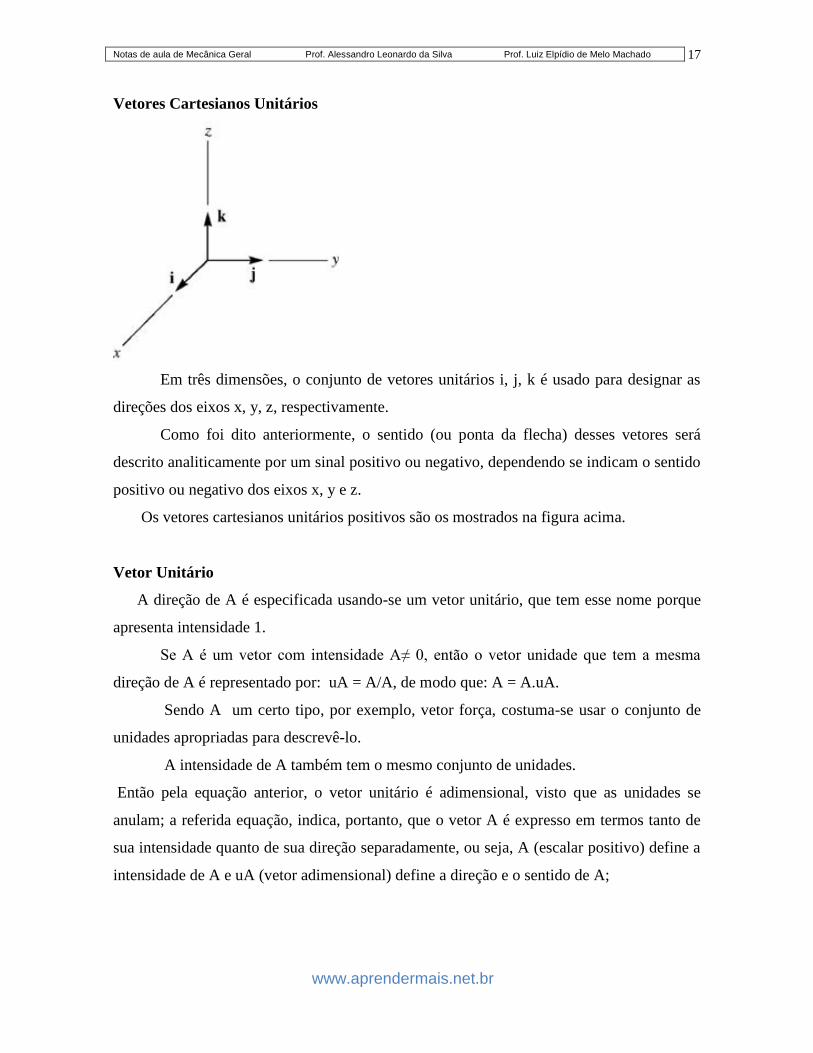
Vetores Cartesianos Unitários
Em três dimensões, o conjunto de vetores unitários i, j, k é usado para designar as
direções dos eixos x, y, z, respectivamente.
Como foi dito anteriormente, o sentido (ou ponta da flecha) desses vetores será
descrito analiticamente por um sinal positivo ou negativo, dependendo se indicam o sentido
positivo ou negativo dos eixos x, y e z.
Os vetores cartesianos unitários positivos são os mostrados na figura acima.
Vetor Unitário
A direção de A é especificada usando-se um vetor unitário, que tem esse nome porque
apresenta intensidade 1.
Se A é um vetor com intensidade A≠ 0, então o vetor unidade que tem a mesma
direção de A é representado por: uA = A/A, de modo que: A = A.uA.
Sendo A um certo tipo, por exemplo, vetor força, costuma-se usar o conjunto de
unidades apropriadas para descrevê-lo.
A intensidade de A também tem o mesmo conjunto de unidades.
Então pela equação anterior, o vetor unitário é adimensional, visto que as unidades se
anulam; a referida equação, indica, portanto, que o vetor A é expresso em termos tanto de
sua intensidade quanto de sua direção separadamente, ou seja, A (escalar positivo) define a
intensidade de A e uA (vetor adimensional) define a direção e o sentido de A;

Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
www.aprendermais.net.br
18
Representação de um Vetor Cartesiano
Como os tres componentes de A, atuam nas direções positivas i, j, k, pode-se escrever
A sob a forma de vetor cartesiano como:
A = Axi + Ayj + Azk
Há uma vantagem em escrever os vetores dessa maneira.
Note que a intensidade e a direção de cada componente do vetor estão separadas e,
como resultado, simplificam-se as operações de álgebra vetorial, particularmente em três
dimensões.
Módulo de um Vetor Cartesiano
É sempre possível obter a intensidade de A, desde que ele esteja expresso sob a forma
vetorial cartesiana;
Como mostra a figura ao lado, temos, pelo triângulo retângulo cinza-claro;
Pelo triângulo retângulo cinza-escuro;
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
www.aprendermais.net.br
19
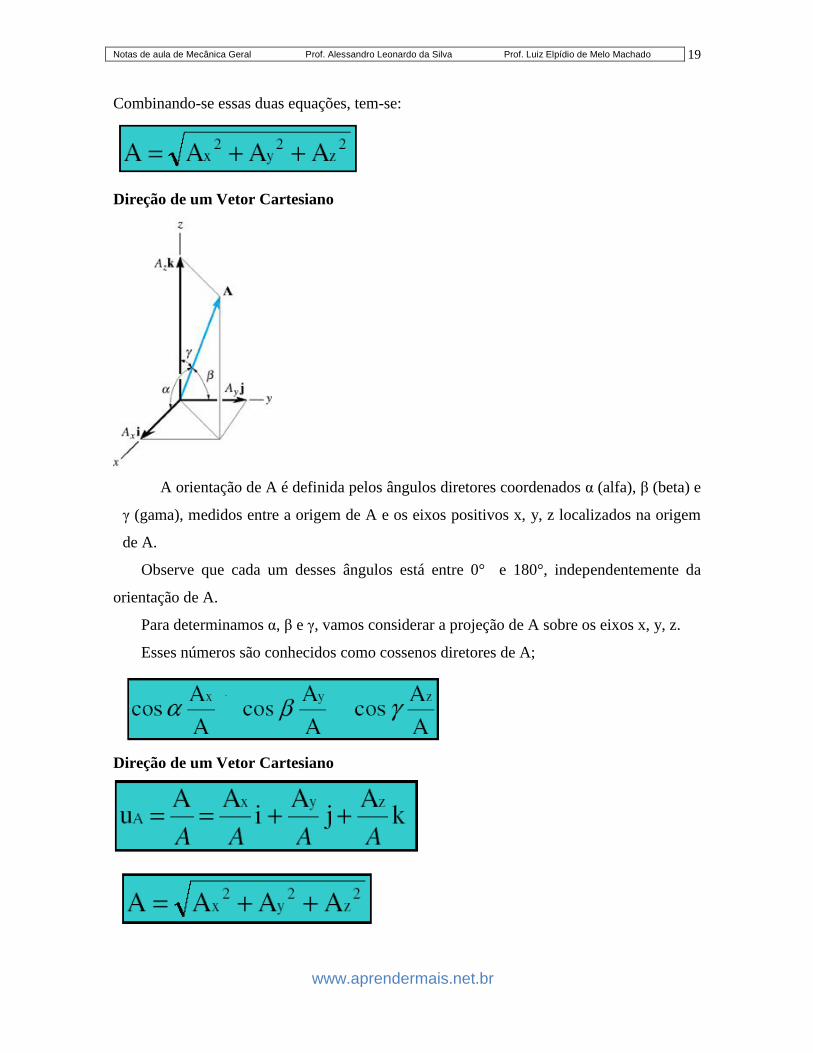
Combinando-se essas duas equações, tem-se:
Direção de um Vetor Cartesiano
A orientação de A é definida pelos ângulos diretores coordenados α (alfa), β (beta) e
γ (gama), medidos entre a origem de A e os eixos positivos x, y, z localizados na origem
de A.
Observe que cada um desses ângulos está entre 0° e 180°, independentemente da
orientação de A.
Para determinamos α, β e γ, vamos considerar a projeção de A sobre os eixos x, y, z.
Esses números são conhecidos como cossenos diretores de A;
Direção de um Vetor Cartesiano
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
www.aprendermais.net.br
20
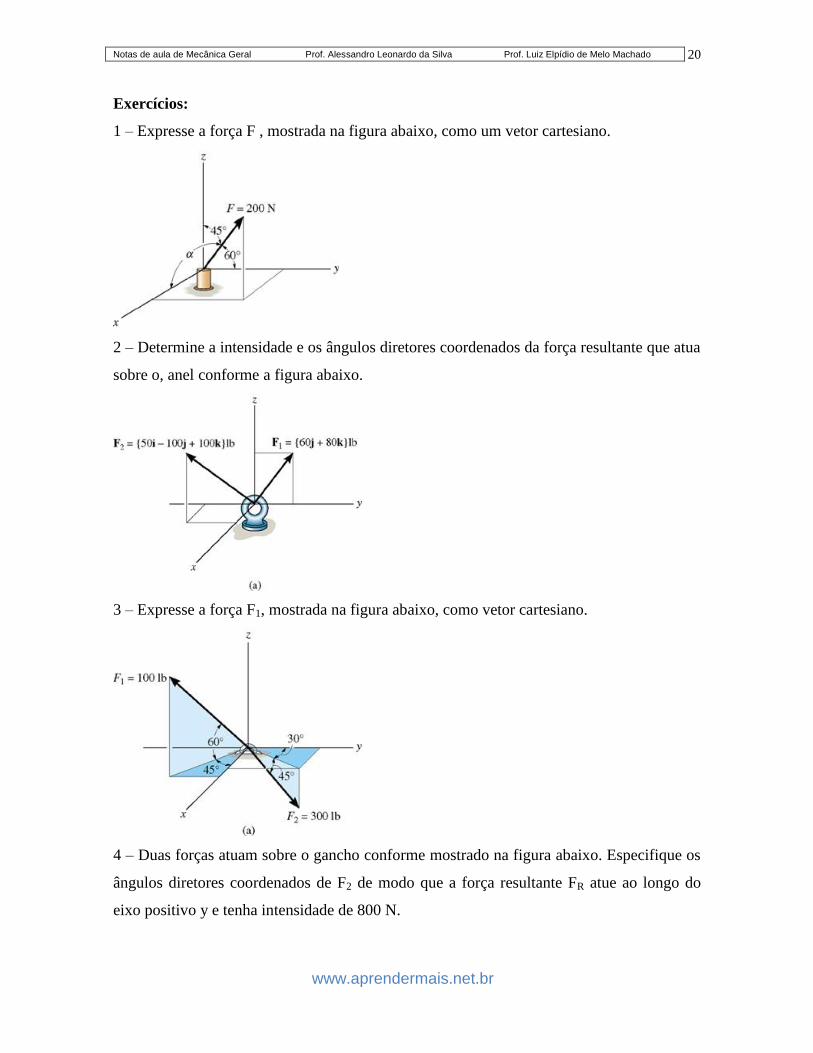
Exercícios:
1 – Expresse a força F , mostrada na figura abaixo, como um vetor cartesiano.
2 – Determine a intensidade e os ângulos diretores coordenados da força resultante que atua
sobre o, anel conforme a figura abaixo.
3 – Expresse a força F1, mostrada na figura abaixo, como vetor cartesiano.
4 – Duas forças atuam sobre o gancho conforme mostrado na figura abaixo. Especifique os
ângulos diretores coordenados de F2 de modo que a força resultante FR atue ao longo do
eixo positivo y e tenha intensidade de 800 N.
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
www.aprendermais.net.br
21
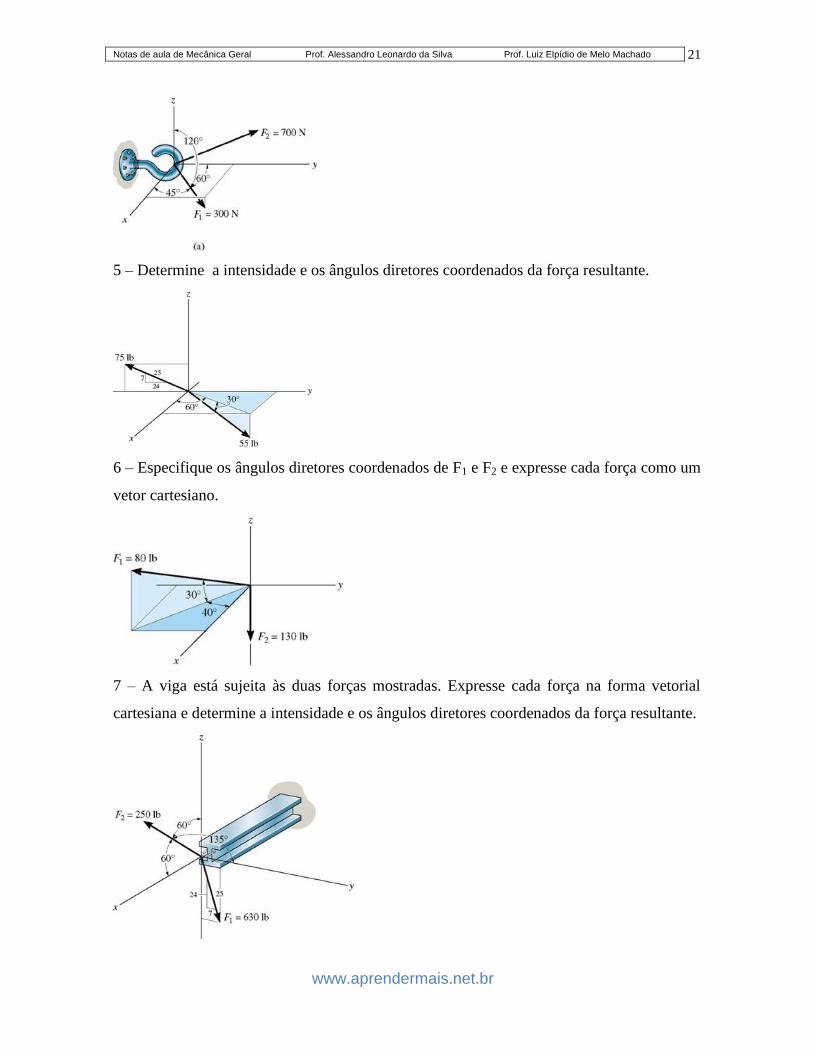
5 – Determine a intensidade e os ângulos diretores coordenados da força resultante.
6 – Especifique os ângulos diretores coordenados de F1 e F2 e expresse cada força como um
vetor cartesiano.
7 – A viga está sujeita às duas forças mostradas. Expresse cada força na forma vetorial
cartesiana e determine a intensidade e os ângulos diretores coordenados da força resultante.
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
www.aprendermais.net.br
22
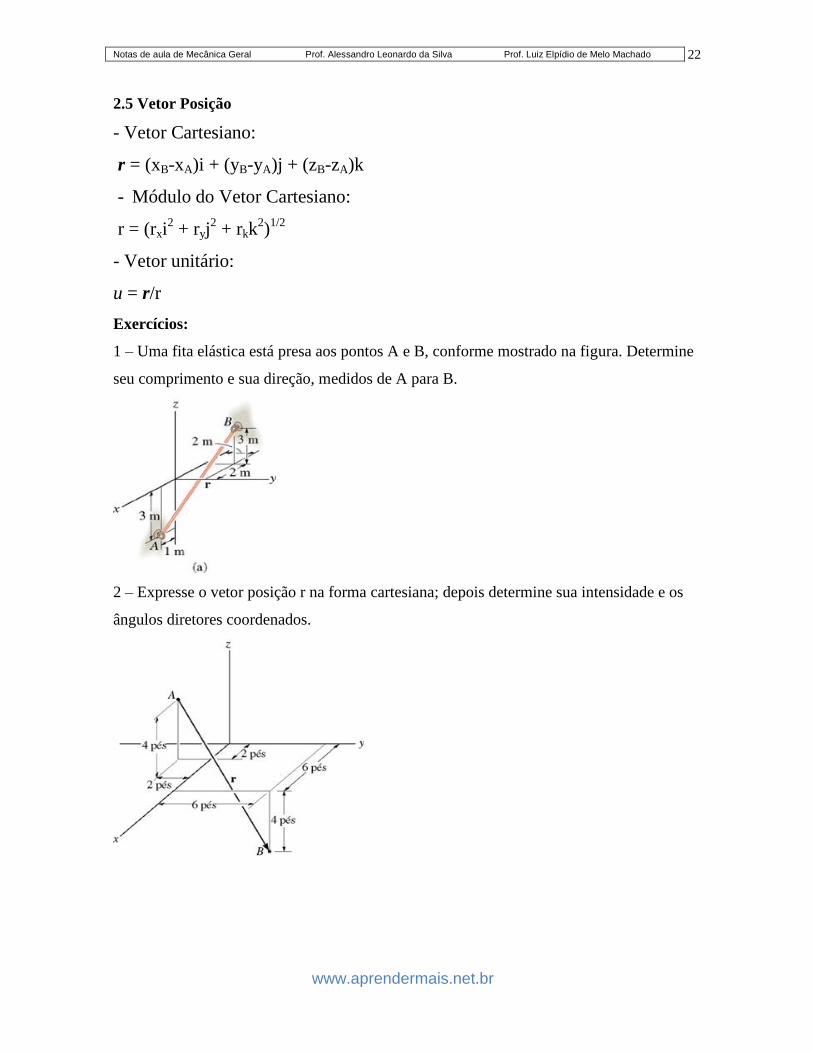
2.5 Vetor Posição
- Vetor Cartesiano:
r = (xB-xA)i + (yB-yA)j + (zB-zA)k
- Módulo do Vetor Cartesiano:
r = (rxi2 + ryj
2 + rkk
2)
1/2
- Vetor unitário:
u = r/r
Exercícios:
1 – Uma fita elástica está presa aos pontos A e B, conforme mostrado na figura. Determine
seu comprimento e sua direção, medidos de A para B.
2 – Expresse o vetor posição r na forma cartesiana; depois determine sua intensidade e os
ângulos diretores coordenados.

Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
www.aprendermais.net.br
23
3– O homem mostrado na figura puxa uma corda com uma força de 70 lb. Represente essa
força, que atua sobre o suporte A, como vetor cartesiano e determine sua direção.
4 – Uma marquise é suportada por cabos conforme mostrado na figura. Se os cabos
exercem forças FAB = 100 N e FAC = 120 N sobre o gancho colocado na parede em A,
determine o módulo da força resultante atuante em A.
5 – Uma torre de transmissão é sustentada por três cabos de sustentação ancorados por
parafusos B, C e D. Se a tração no cabo AB é de 2100 N, determine os componentes da
força exercida pelo cabo no parafuso B.
6 – Uma torre de transmissão é sustentada por três cabos de sustentação ancorados por
parafusos B, C e D. Se a tração no cabo AD é de 1260 N, determine os componentes da
força exercida pelo cabo no parafuso D.

Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
www.aprendermais.net.br
24
Exercícios de Revisão:
1 – Determine a intensidade, a direção e o sentido da força resultante sabendo que θ = 50º.
2 – Determinar a intensidade e a direção da força resultante sabendo que F1 = 500 N e θ =
20º.
3 – O olhal da figura está sujeito às duas forças mostradas. Encontre o módulo e os ângulos
coordenados diretores da força resultante.
4 – Os cabos da figura são usados para sustentar a antena. Determine a intensidade e os
ângulos diretores coordenados α, β, γ da força F1.
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
www.aprendermais.net.br
25
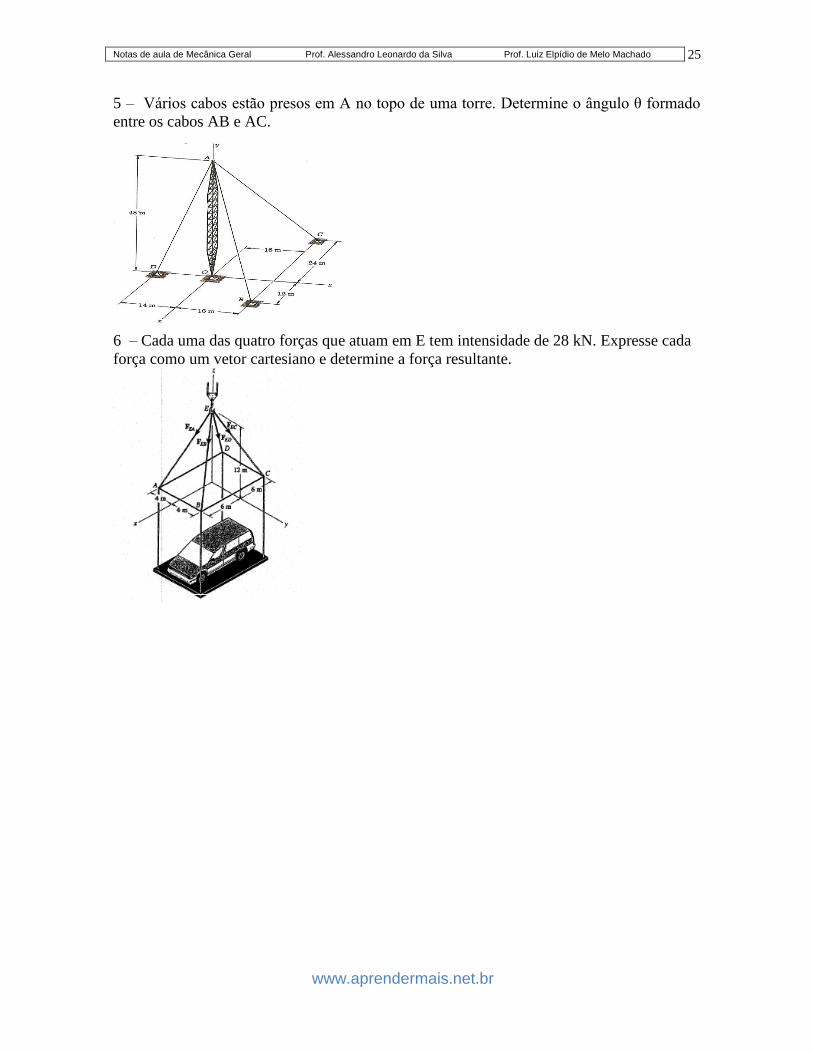
5 – Vários cabos estão presos em A no topo de uma torre. Determine o ângulo θ formado
entre os cabos AB e AC.
6 – Cada uma das quatro forças que atuam em E tem intensidade de 28 kN. Expresse cada
força como um vetor cartesiano e determine a força resultante.
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
26
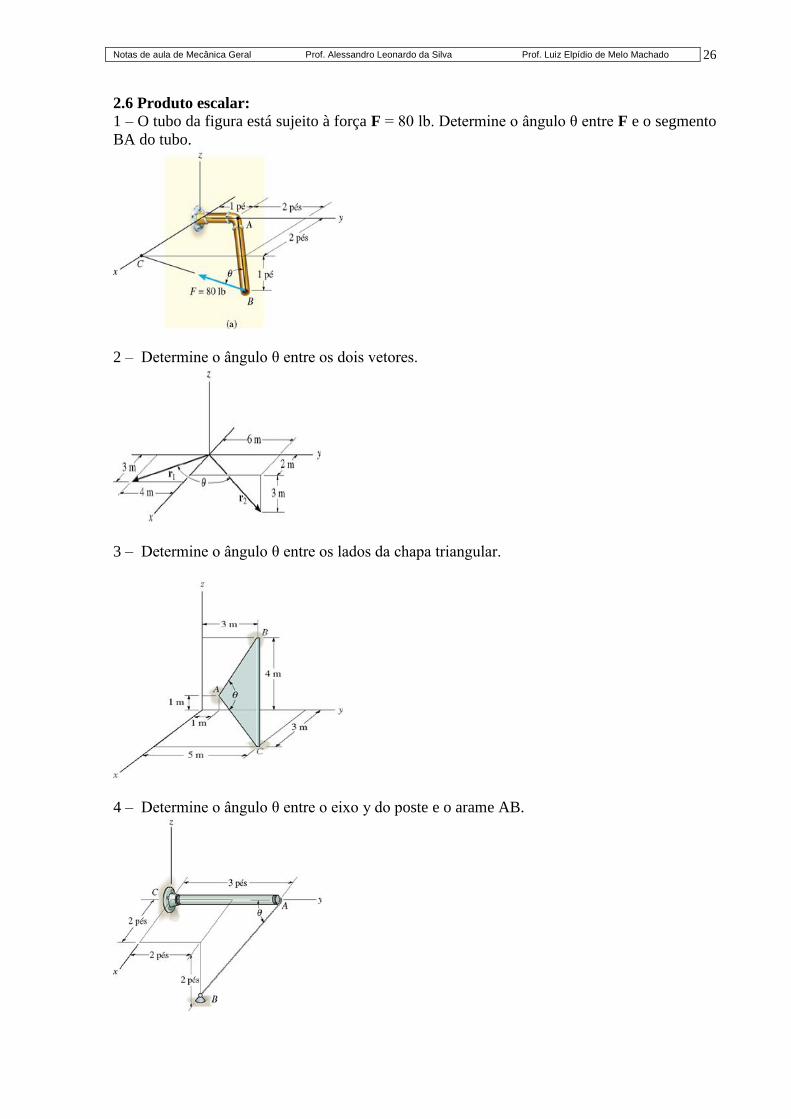
2.6 Produto escalar:
1 – O tubo da figura está sujeito à força F = 80 lb. Determine o ângulo θ entre F e o segmento
BA do tubo.
2 – Determine o ângulo θ entre os dois vetores.
3 – Determine o ângulo θ entre os lados da chapa triangular.
4 – Determine o ângulo θ entre o eixo y do poste e o arame AB.
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
27
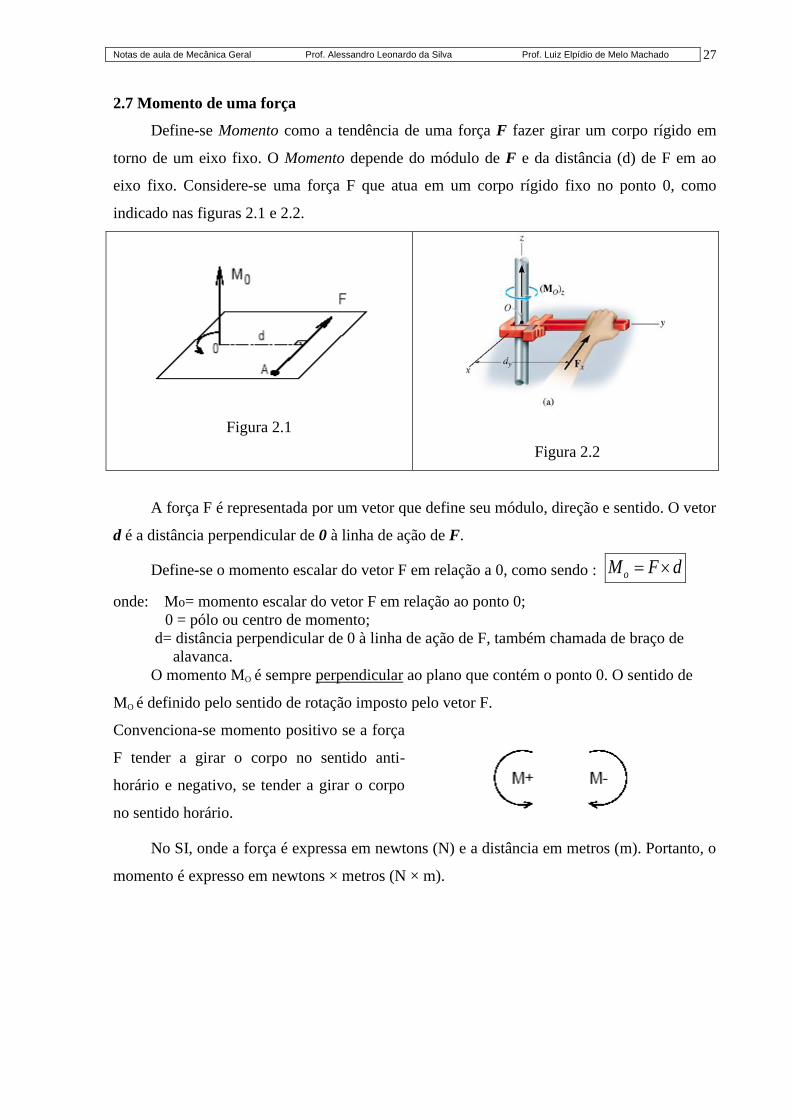
2.7 Momento de uma força
Define-se Momento como a tendência de uma força F fazer girar um corpo rígido em
torno de um eixo fixo. O Momento depende do módulo de F e da distância (d) de F em ao
eixo fixo. Considere-se uma força F que atua em um corpo rígido fixo no ponto 0, como
indicado nas figuras 2.1 e 2.2.
Figura 2.1
Figura 2.2
A força F é representada por um vetor que define seu módulo, direção e sentido. O vetor
d é a distância perpendicular de 0 à linha de ação de F.
Define-se o momento escalar do vetor F em relação a 0, como sendo : dFMo
onde: Mo= momento escalar do vetor F em relação ao ponto 0;
0 = pólo ou centro de momento;
d= distância perpendicular de 0 à linha de ação de F, também chamada de braço de
alavanca.
O momento MO é sempre perpendicular ao plano que contém o ponto 0. O sentido de
MO é definido pelo sentido de rotação imposto pelo vetor F.
Convenciona-se momento positivo se a força
F tender a girar o corpo no sentido anti-
horário e negativo, se tender a girar o corpo
no sentido horário.
No SI, onde a força é expressa em newtons (N) e a distância em metros (m). Portanto, o
momento é expresso em newtons × metros (N × m).
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
28
2.7.1 Momento de um sistema de forças coplanares
Chama-se Momento de um sistema de forças coplanares S={(F1,A1),....,(Fn,An)} em
relação ao ponto 0, à soma algébrica dos Momentos de cada força em relação ao mesmo ponto
0.
2.7.2 Teorema de Varignon
Seja R a resultante do sistema de forças S. “O Momento da resultante de um sistema de
forças em relação a um ponto é igual ao momento do sistema ou seja, a soma algébrica dos
Momentos de todas as forças componentes em relação ao mesmo ponto O”.
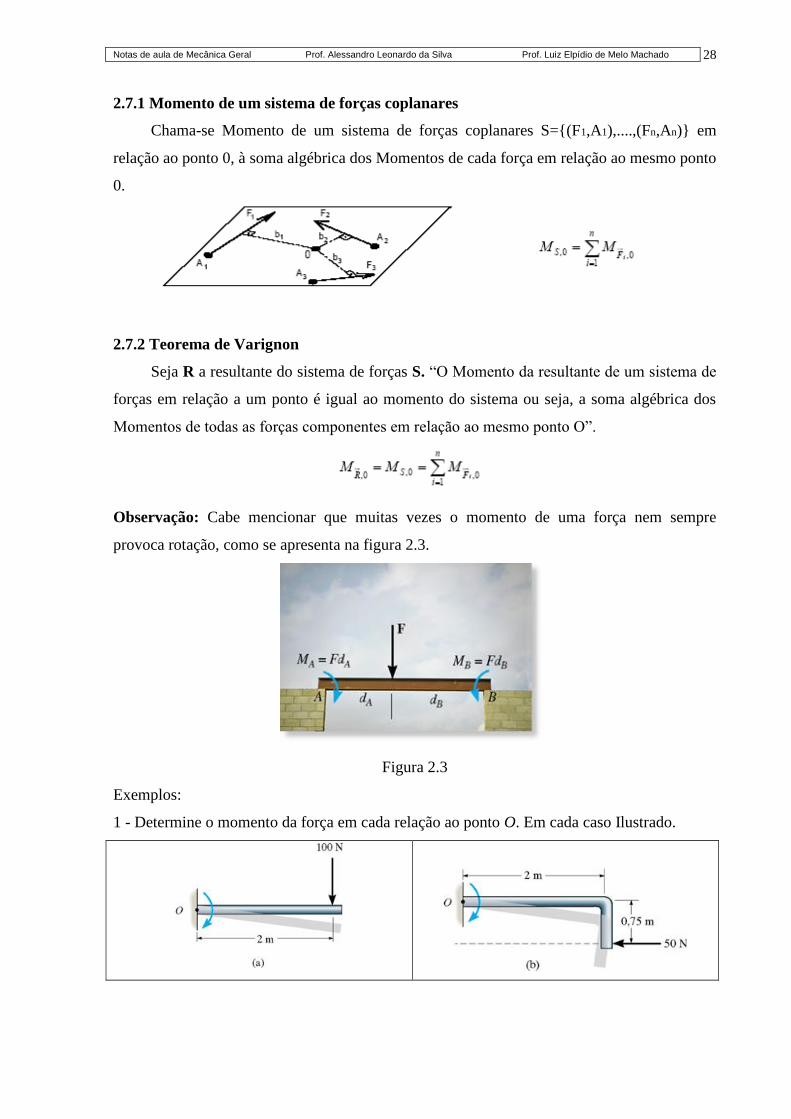
Observação: Cabe mencionar que muitas vezes o momento de uma força nem sempre
provoca rotação, como se apresenta na figura 2.3.
Figura 2.3
Exemplos:
1 - Determine o momento da força em cada relação ao ponto O. Em cada caso Ilustrado.
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
29
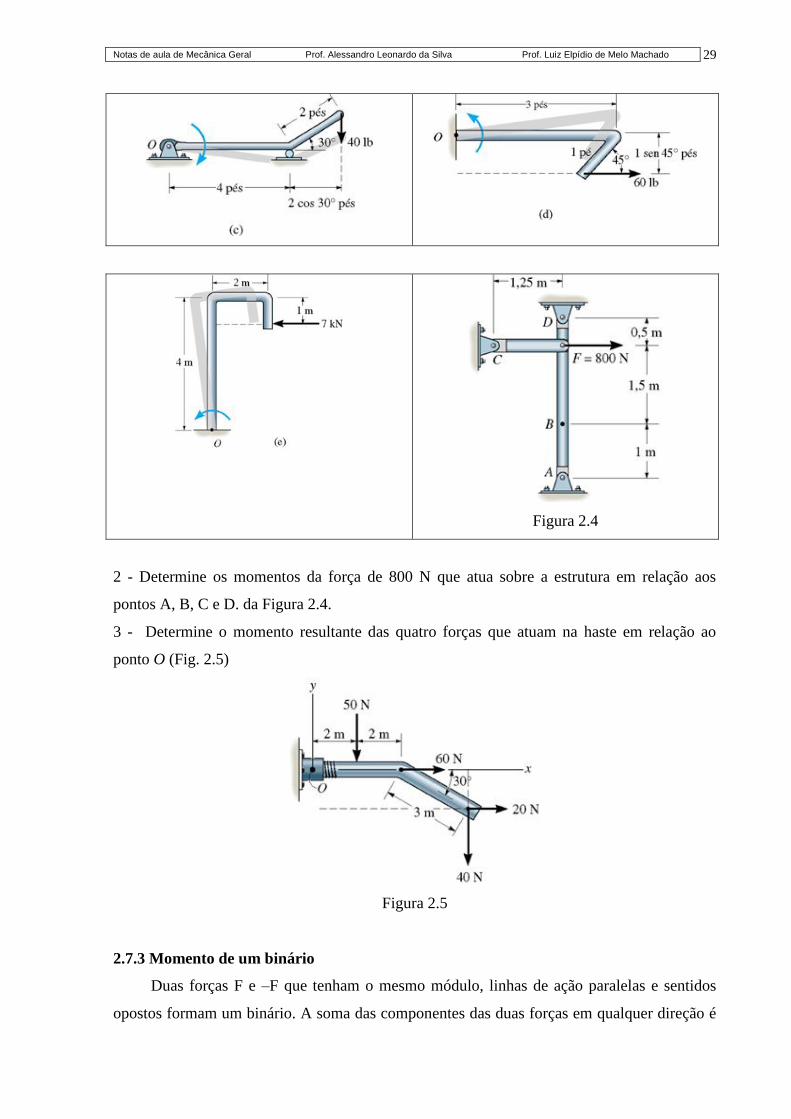
Figura 2.4
2 - Determine os momentos da força de 800 N que atua sobre a estrutura em relação aos
pontos A, B, C e D. da Figura 2.4.
3 - Determine o momento resultante das quatro forças que atuam na haste em relação ao
ponto O (Fig. 2.5)
Figura 2.5
2.7.3 Momento de um binário
Duas forças F e –F que tenham o mesmo módulo, linhas de ação paralelas e sentidos
opostos formam um binário. A soma das componentes das duas forças em qualquer direção é

Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
30
zero. Entretanto, a soma dos momentos das duas forças em relação a um dado ponto não é
zero. Apesar de as duas forças não transladarem o corpo no qual atuam, tendem a fazê-lo
girar.
Exemplos:
1- Um binário atua nos dentes da engrenagem mostrada na Figura 2.6 substitua esse binário
por um equivalente, composto por um par de forças que agem nos pontos A e B.
Figura 2.6
2- Um momento torsor de 4 N.m é aplicado ao cabo de uma chave de fenda. Decomponha
esse momento de binário em um par de binários F exercido no cabo P atuando na lámina da
ferramenta (Figura 2.8).
3- O sistema de rodízio é submetido a dois binários. Determine as forças F que os dois
mancais criam no eixo, de modo que o momento de binário resultante no rodízio seja nulo
(Figura 2.9).

Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
31
Figura 2.8
Figura 2.9
Exercícios:
1 - O poste da figura esta sujeito a uma força de 60 N na direção de C para B. Determine a
intensidade do momento criado pela força em relação ao suporte em A.
2 - Antes que o tronco de uma grande árvore venha a cair, são amarrados cabos AB e BC,
como mostra a ilustração. Sabendo que as forças de tração nos cabos AB e BC são de 777 N e
990 N, respectivamente, determine o momento em relação a O da força resultante exercida
sobre a árvore pelos cabos em B.
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
32
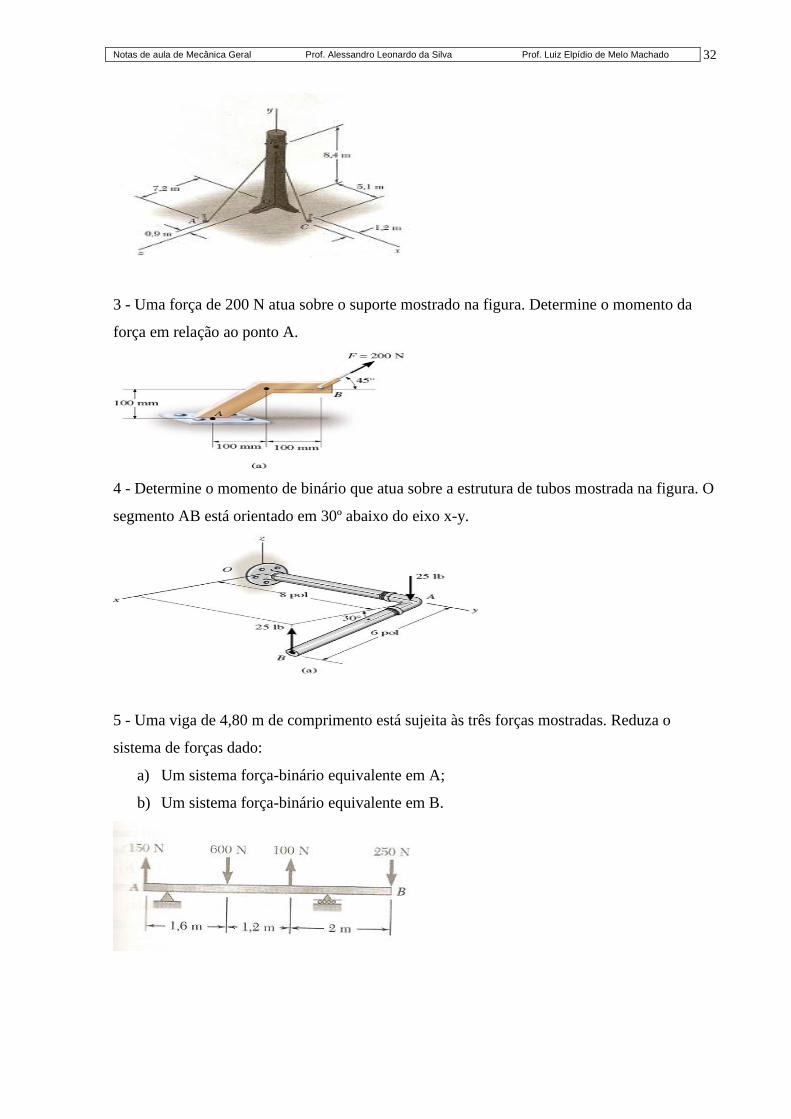
3 - Uma força de 200 N atua sobre o suporte mostrado na figura. Determine o momento da
força em relação ao ponto A.
4 - Determine o momento de binário que atua sobre a estrutura de tubos mostrada na figura. O
segmento AB está orientado em 30º abaixo do eixo x-y.
5 - Uma viga de 4,80 m de comprimento está sujeita às três forças mostradas. Reduza o
sistema de forças dado:
a) Um sistema força-binário equivalente em A;
b) Um sistema força-binário equivalente em B.

Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
33
3. Equilíbrio de um Corpo Rígido
Nesta seção vamos a conhecer as condições necessárias e suficientes para o equilíbrio
de um corpo rígido. Para isso considere o corpo rígido da Figura 3.1.
Figura 3.1
Um corpo rígido está em equilíbrio quando todas as forças externas que atuam sobre ele
formam um sistema de forças equivalente a zero, isto é, quando todas as forças externas
podem ser reduzidas a uma força nula e a um binário nulo.
0 M 0 0F
As expressões acima definem as equações fundamentais de Estática.
Decompondo cada força e cada momento em suas componentes cartesianas, encontram-se as
condições necessárias e suficientes para o equilíbrio de um corpo rígido o espaço.
3.1 Equilíbrio em duas dimensões
Para uma aplicação bem-sucedida das equações de equilíbrio, é preciso uma completa
especificação de todas as forças externas conhecidas e desconhecidas que atuam no corpo. A
melhor maneira de fazer isso é construindo o diagrama de corpo livre (DCL) para esse corpo.
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
34
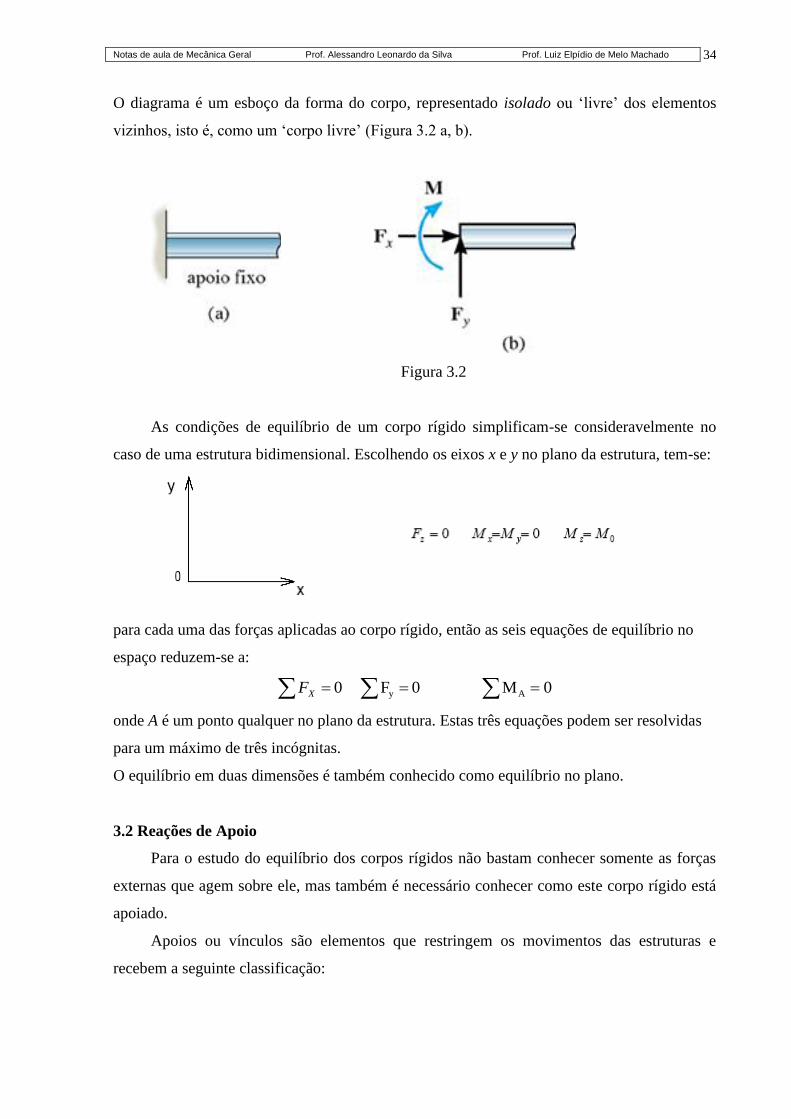
O diagrama é um esboço da forma do corpo, representado isolado ou „livre‟ dos elementos
vizinhos, isto é, como um „corpo livre‟ (Figura 3.2 a, b).
Figura 3.2
As condições de equilíbrio de um corpo rígido simplificam-se consideravelmente no
caso de uma estrutura bidimensional. Escolhendo os eixos x e y no plano da estrutura, tem-se:
para cada uma das forças aplicadas ao corpo rígido, então as seis equações de equilíbrio no
espaço reduzem-se a:
0 M 0F 0 AyXF
onde A é um ponto qualquer no plano da estrutura. Estas três equações podem ser resolvidas
para um máximo de três incógnitas.
O equilíbrio em duas dimensões é também conhecido como equilíbrio no plano.
3.2 Reações de Apoio
Para o estudo do equilíbrio dos corpos rígidos não bastam conhecer somente as forças
externas que agem sobre ele, mas também é necessário conhecer como este corpo rígido está
apoiado.
Apoios ou vínculos são elementos que restringem os movimentos das estruturas e
recebem a seguinte classificação:
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
35
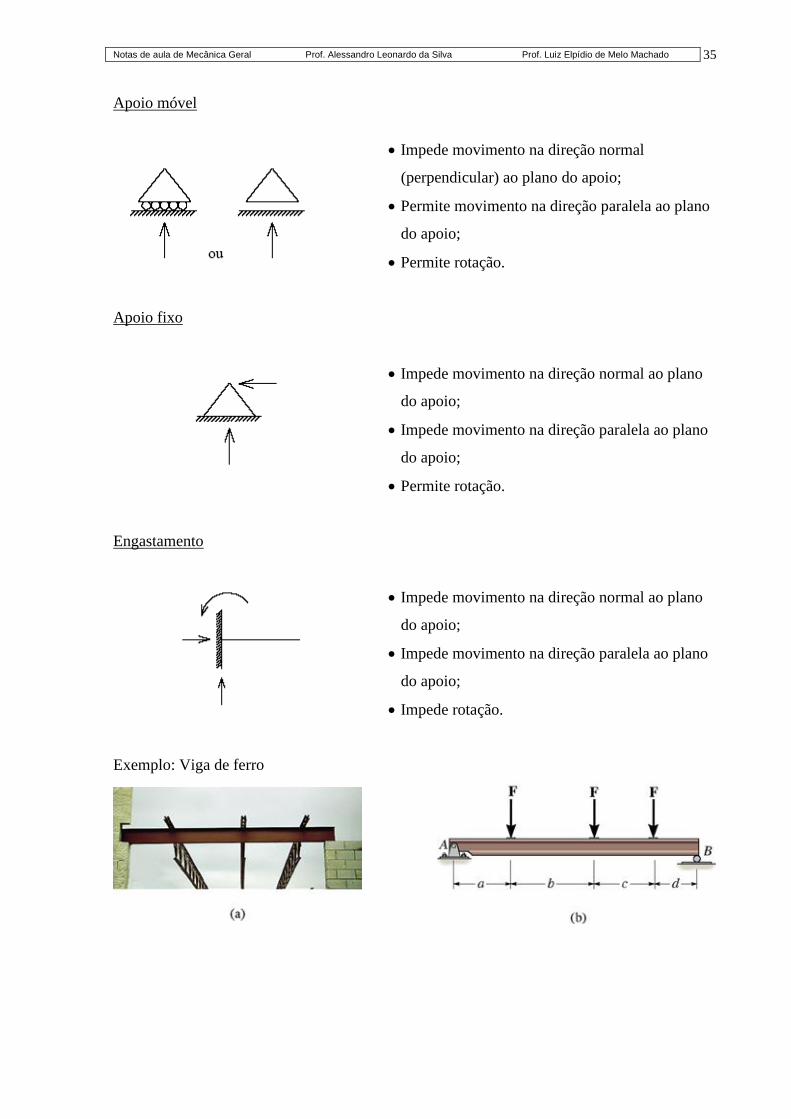
Apoio móvel
Impede movimento na direção normal
(perpendicular) ao plano do apoio;
Permite movimento na direção paralela ao plano
do apoio;
Permite rotação.
Apoio fixo
Impede movimento na direção normal ao plano
do apoio;
Impede movimento na direção paralela ao plano
do apoio;
Permite rotação.
Engastamento
Impede movimento na direção normal ao plano
do apoio;
Impede movimento na direção paralela ao plano
do apoio;
Impede rotação.
Exemplo: Viga de ferro
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
36
3.3 Tipos de Estruturas
As estruturas são classificadas em função do número de reações de apoio ou vínculos
que possuem. Cada reação constitui uma incógnita a ser determinada.
Para as estruturas planas, a Estática fornece três equações fundamentais:
0 M 0F 0 AyXF
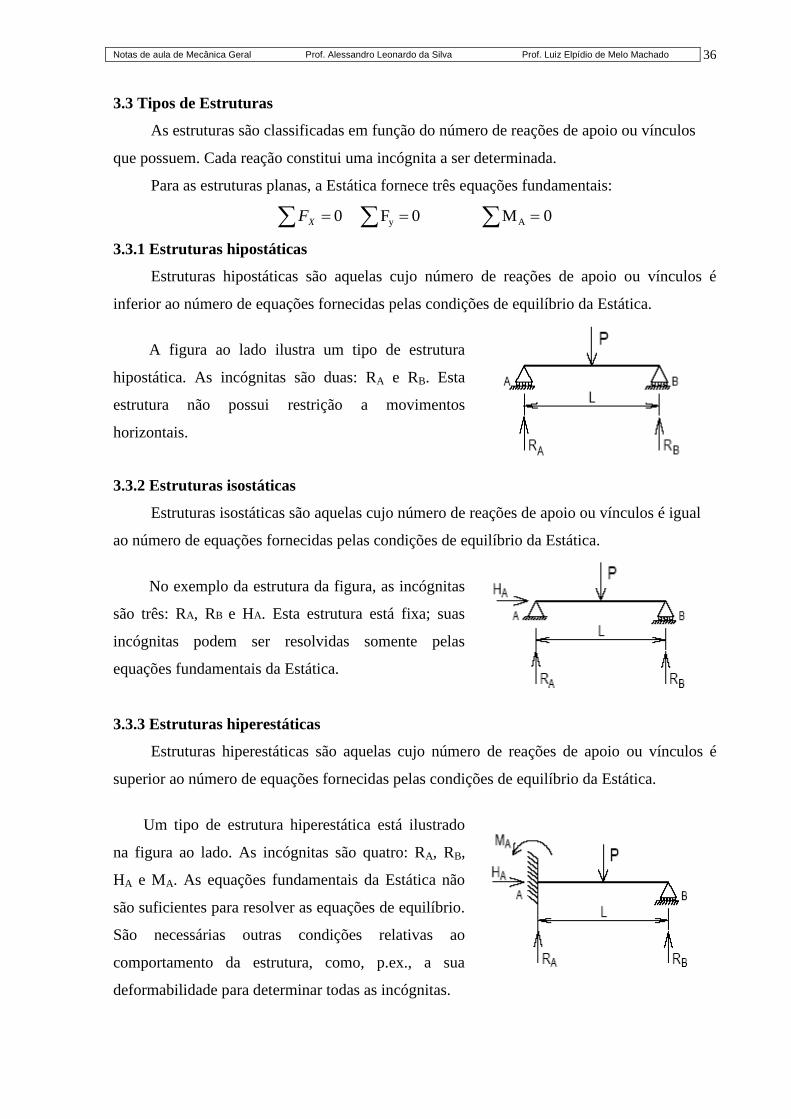
3.3.1 Estruturas hipostáticas
Estruturas hipostáticas são aquelas cujo número de reações de apoio ou vínculos é
inferior ao número de equações fornecidas pelas condições de equilíbrio da Estática.
A figura ao lado ilustra um tipo de estrutura
hipostática. As incógnitas são duas: RA e RB. Esta
estrutura não possui restrição a movimentos
horizontais.
3.3.2 Estruturas isostáticas
Estruturas isostáticas são aquelas cujo número de reações de apoio ou vínculos é igual
ao número de equações fornecidas pelas condições de equilíbrio da Estática.
No exemplo da estrutura da figura, as incógnitas
são três: RA, RB e HA. Esta estrutura está fixa; suas
incógnitas podem ser resolvidas somente pelas
equações fundamentais da Estática.
3.3.3 Estruturas hiperestáticas
Estruturas hiperestáticas são aquelas cujo número de reações de apoio ou vínculos é
superior ao número de equações fornecidas pelas condições de equilíbrio da Estática.
Um tipo de estrutura hiperestática está ilustrado
na figura ao lado. As incógnitas são quatro: RA, RB,
HA e MA. As equações fundamentais da Estática não
são suficientes para resolver as equações de equilíbrio.
São necessárias outras condições relativas ao
comportamento da estrutura, como, p.ex., a sua
deformabilidade para determinar todas as incógnitas.
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
37
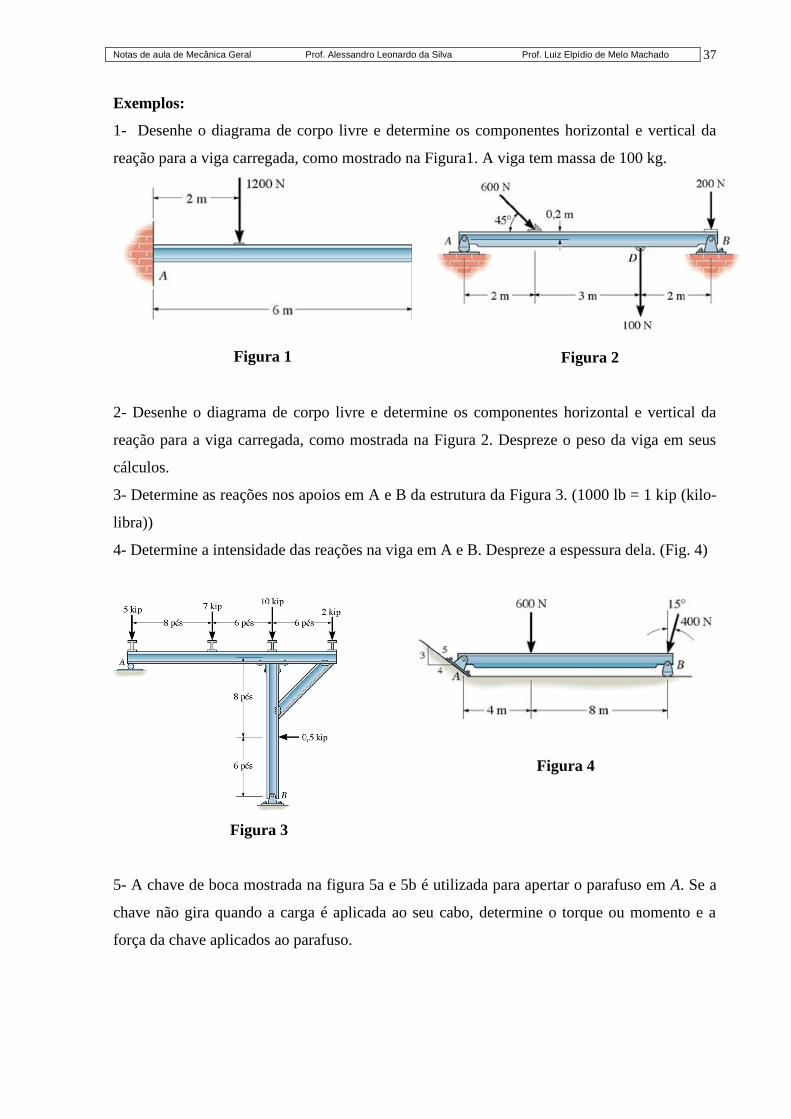
Exemplos:
1- Desenhe o diagrama de corpo livre e determine os componentes horizontal e vertical da
reação para a viga carregada, como mostrado na Figura1. A viga tem massa de 100 kg.
Figura 1
Figura 2
2- Desenhe o diagrama de corpo livre e determine os componentes horizontal e vertical da
reação para a viga carregada, como mostrada na Figura 2. Despreze o peso da viga em seus
cálculos.
3- Determine as reações nos apoios em A e B da estrutura da Figura 3. (1000 lb = 1 kip (kilo-
libra))
4- Determine a intensidade das reações na viga em A e B. Despreze a espessura dela. (Fig. 4)
Figura 3
Figura 4
5- A chave de boca mostrada na figura 5a e 5b é utilizada para apertar o parafuso em A. Se a
chave não gira quando a carga é aplicada ao seu cabo, determine o torque ou momento e a
força da chave aplicados ao parafuso.
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
38
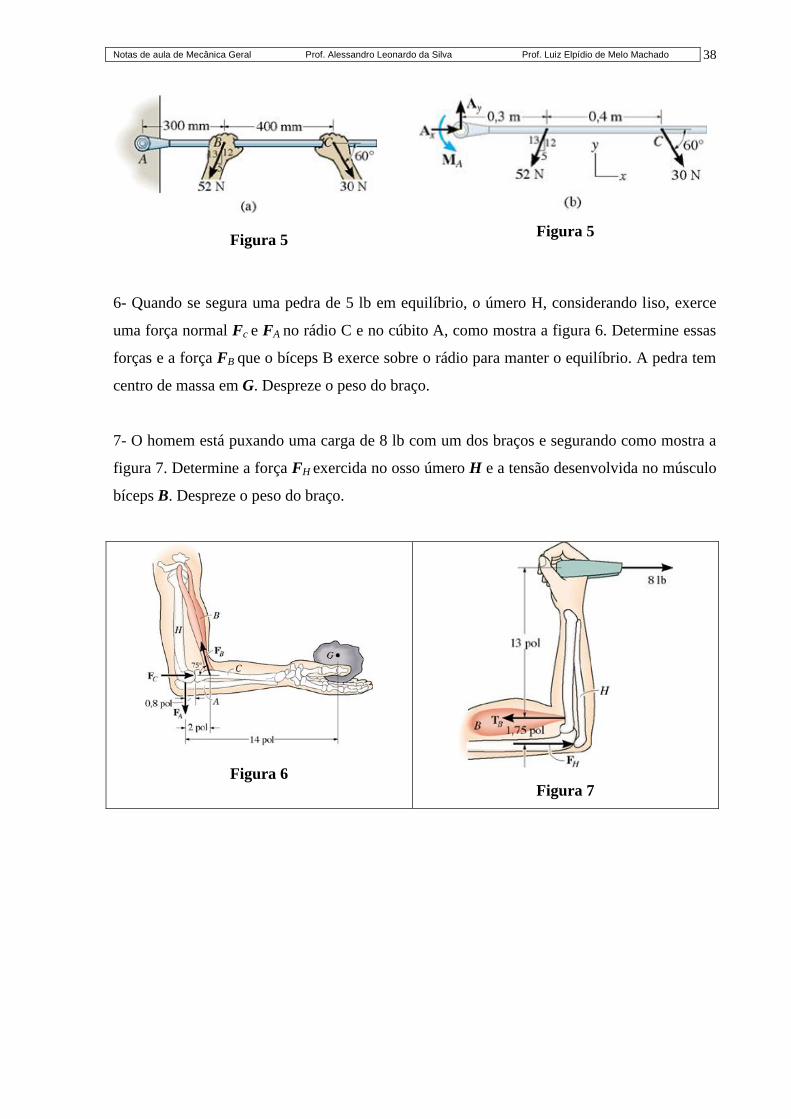
Figura 5
Figura 5
6- Quando se segura uma pedra de 5 lb em equilíbrio, o úmero H, considerando liso, exerce
uma força normal Fc e FA no rádio C e no cúbito A, como mostra a figura 6. Determine essas
forças e a força FB que o bíceps B exerce sobre o rádio para manter o equilíbrio. A pedra tem
centro de massa em G. Despreze o peso do braço.
7- O homem está puxando uma carga de 8 lb com um dos braços e segurando como mostra a
figura 7. Determine a força FH exercida no osso úmero H e a tensão desenvolvida no músculo
bíceps B. Despreze o peso do braço.
Figura 6
Figura 7

Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
39
Exercícios de revisão:
1 – A estrutura da plataforma tem peso de 250 lb e centro de gravidade G1 e deve ser capaz
de sustentar uma carga máxima de 400 lb colocada no ponto G2. Determine o menor
contrapeso W que deve ser colocado em B para evitar que a plataforma tombe.
2 – Determine os componentes horizontais e verticais das reações nos apoios.
3 – Substitua o sistema de forças que atua sobre a viga por uma força e momento equivalentes
no ponto A.
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
40
4. Análise Estrutural
4.1 Treliças
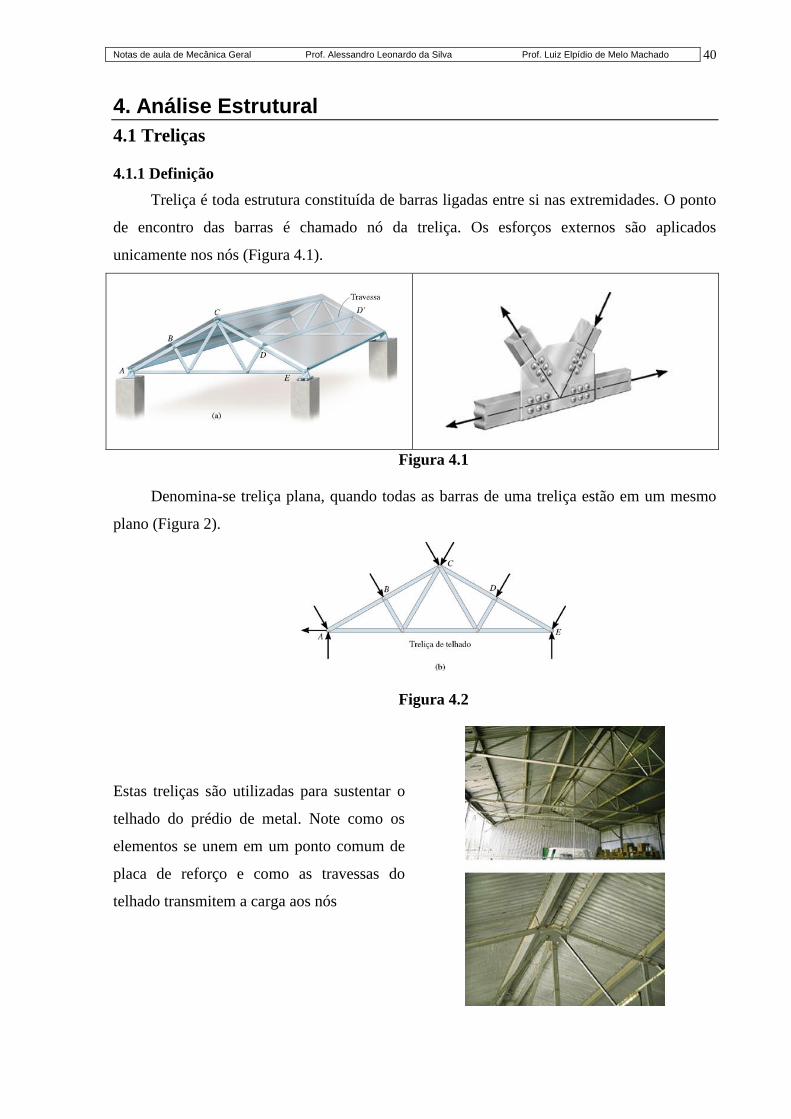
4.1.1 Definição
Treliça é toda estrutura constituída de barras ligadas entre si nas extremidades. O ponto
de encontro das barras é chamado nó da treliça. Os esforços externos são aplicados
unicamente nos nós (Figura 4.1).
Figura 4.1
Denomina-se treliça plana, quando todas as barras de uma treliça estão em um mesmo
plano (Figura 2).
Figura 4.2
Estas treliças são utilizadas para sustentar o
telhado do prédio de metal. Note como os
elementos se unem em um ponto comum de
placa de reforço e como as travessas do
telhado transmitem a carga aos nós

Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
41
Para se calcular uma treliça deve-se:
a) determinar as reações de apoio;
b) determinar as forças nas barras.
A condição para que uma treliça de malhas triangulares seja isostática é:
2n = b +v
onde:
b = número de barras
n = número de nós
v = número de reações de apoio
Adota-se como convenção de sinais:
Positivo negativo
barras tracionadas:
barras comprimidas:
setas saindo do nó
setas entrando no nó
Os esforços nas barras das treliças podem ser resolvidos por métodos gráficos e
analíticos.
Um dos vários processos analíticos usuais é o Método do Equilíbrio dos Nós, abaixo
exemplificado.
4.1.2 Método do equilíbrio dos nós
Para analisarmos ou projetarmos uma treliça, devemos obter a força em cada um de seus
elementos. Ao utilizar o método dos nós, é necessário primeiro desenhar o diagrama de corpo
livre dos nós antes de aplicar as equações de equilíbrio.
Exemplos:
1 - Determine a força em cada elemento da
treliça mostrada na figura ao lado, e indique
se os elementos estão sob tração ou
compressão.

Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
42
Solução:
a) Diagrama de corpo livre
b) Cálculo das reações de apoio
Equação de equilíbrio das forças: ΣFx= 0; ΣFy = 0
c) Cálculo das forças nas barras
Iniciar a resolução pelo nó que tiver no máximo duas forças incógnitas. As forças
devem estar tracionando o nó (seta saindo). Como não se sabe a priori se as forças nas barras
são de tração ou de compressão, adotam-se como se fossem tracionadas. Se o valor
determinado for negativo, significa que a barra está comprimida, portanto, o sentido da seta
deve ser mudado.
Nó B :
Nó C :
Nó A :
2- Determine a força em cada elemento da treliça mostrada na figura 4.3. Indique se os
elementos estão sob tração ou compressão.
Figura 4.3
DCL (Diagrama de Corpo Livre)
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
43
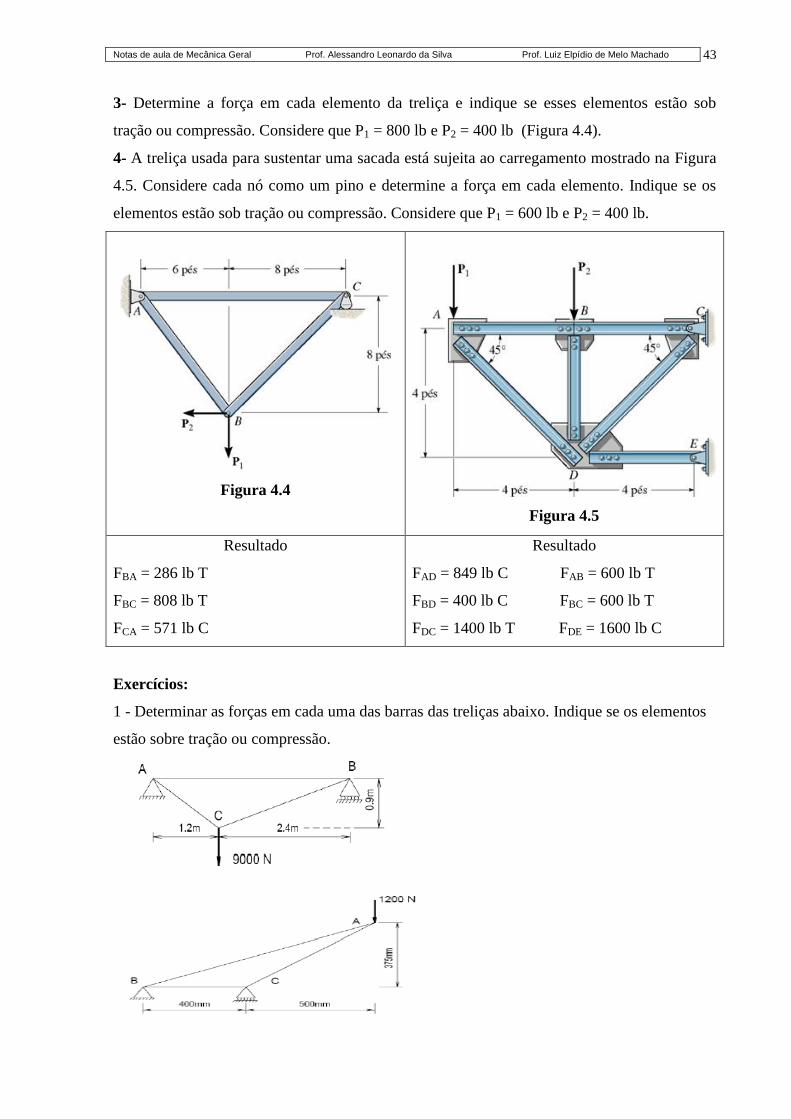
3- Determine a força em cada elemento da treliça e indique se esses elementos estão sob
tração ou compressão. Considere que P1 = 800 lb e P2 = 400 lb (Figura 4.4).
4- A treliça usada para sustentar uma sacada está sujeita ao carregamento mostrado na Figura
4.5. Considere cada nó como um pino e determine a força em cada elemento. Indique se os
elementos estão sob tração ou compressão. Considere que P1 = 600 lb e P2 = 400 lb.
Figura 4.4
Figura 4.5
Resultado
FBA = 286 lb T
FBC = 808 lb T
FCA = 571 lb C
Resultado
FAD = 849 lb C FAB = 600 lb T
FBD = 400 lb C FBC = 600 lb T
FDC = 1400 lb T FDE = 1600 lb C
Exercícios:
1 - Determinar as forças em cada uma das barras das treliças abaixo. Indique se os elementos
estão sobre tração ou compressão.
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
44
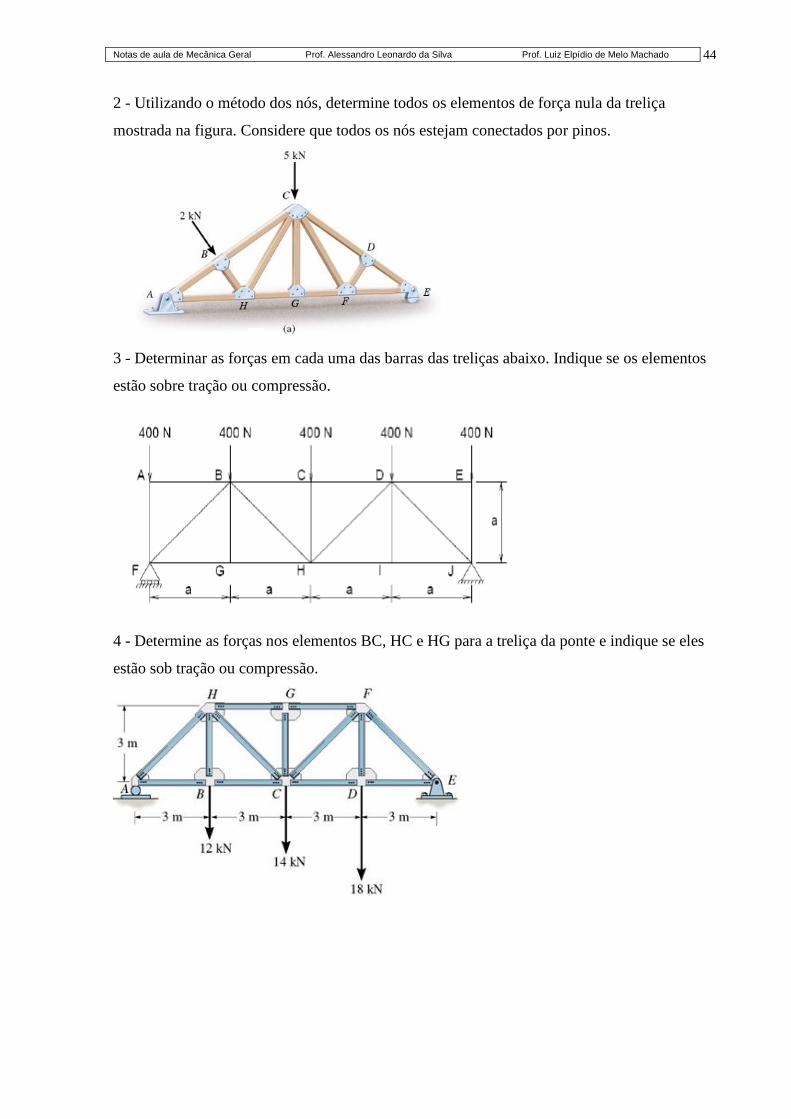
2 - Utilizando o método dos nós, determine todos os elementos de força nula da treliça
mostrada na figura. Considere que todos os nós estejam conectados por pinos.
3 - Determinar as forças em cada uma das barras das treliças abaixo. Indique se os elementos
estão sobre tração ou compressão.
4 - Determine as forças nos elementos BC, HC e HG para a treliça da ponte e indique se eles
estão sob tração ou compressão.
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
45
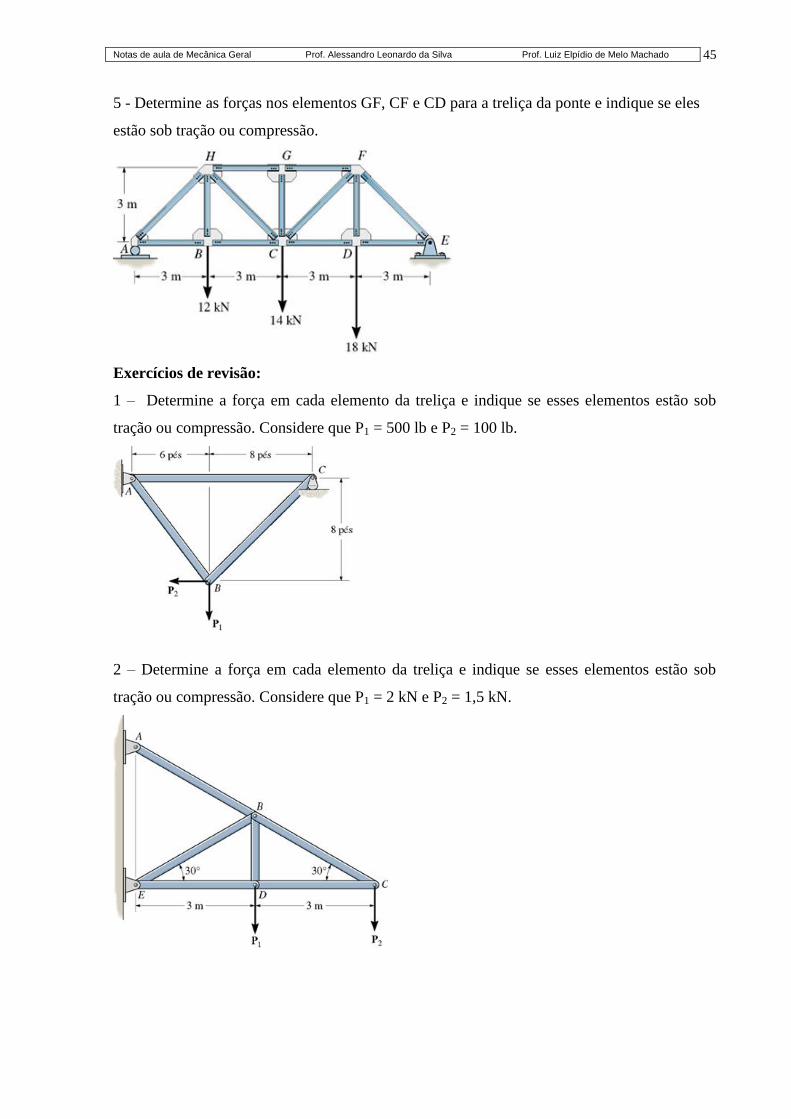
5 - Determine as forças nos elementos GF, CF e CD para a treliça da ponte e indique se eles
estão sob tração ou compressão.
Exercícios de revisão:
1 – Determine a força em cada elemento da treliça e indique se esses elementos estão sob
tração ou compressão. Considere que P1 = 500 lb e P2 = 100 lb.
2 – Determine a força em cada elemento da treliça e indique se esses elementos estão sob
tração ou compressão. Considere que P1 = 2 kN e P2 = 1,5 kN.
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
46
5. Características Geométricas de Figuras Planas
O dimensionamento e a verificação da capacidade resistente de barras, como de
qualquer elemento estrutural dependem de grandezas chamadas tensões, as quais se
distribuem ao longo das seções transversais de um corpo. Daí vem a necessidade de se
conhecer claramente as características ou propriedades das figuras geométricas que formam
essas seções transversais.
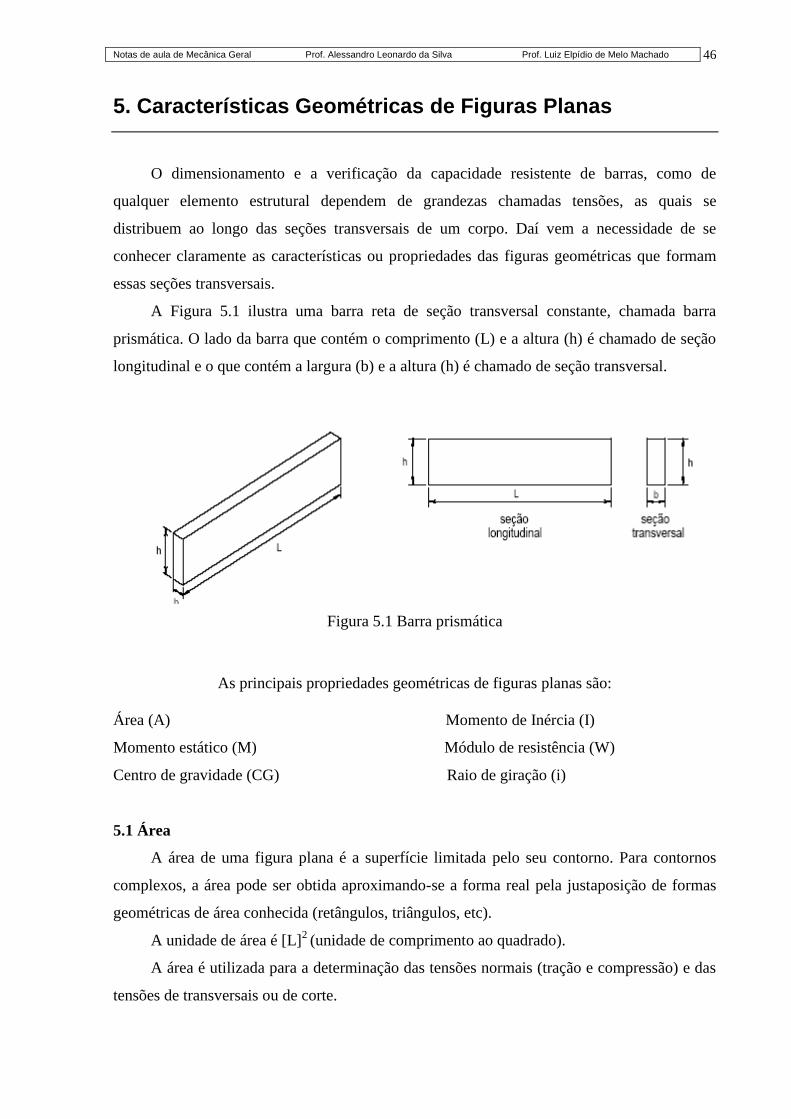
A Figura 5.1 ilustra uma barra reta de seção transversal constante, chamada barra
prismática. O lado da barra que contém o comprimento (L) e a altura (h) é chamado de seção
longitudinal e o que contém a largura (b) e a altura (h) é chamado de seção transversal.
Figura 5.1 Barra prismática
As principais propriedades geométricas de figuras planas são:
Área (A) Momento de Inércia (I)
Momento estático (M) Módulo de resistência (W)
Centro de gravidade (CG) Raio de giração (i)
5.1 Área
A área de uma figura plana é a superfície limitada pelo seu contorno. Para contornos
complexos, a área pode ser obtida aproximando-se a forma real pela justaposição de formas
geométricas de área conhecida (retângulos, triângulos, etc).
A unidade de área é [L]2
(unidade de comprimento ao quadrado).
A área é utilizada para a determinação das tensões normais (tração e compressão) e das
tensões de transversais ou de corte.
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
47
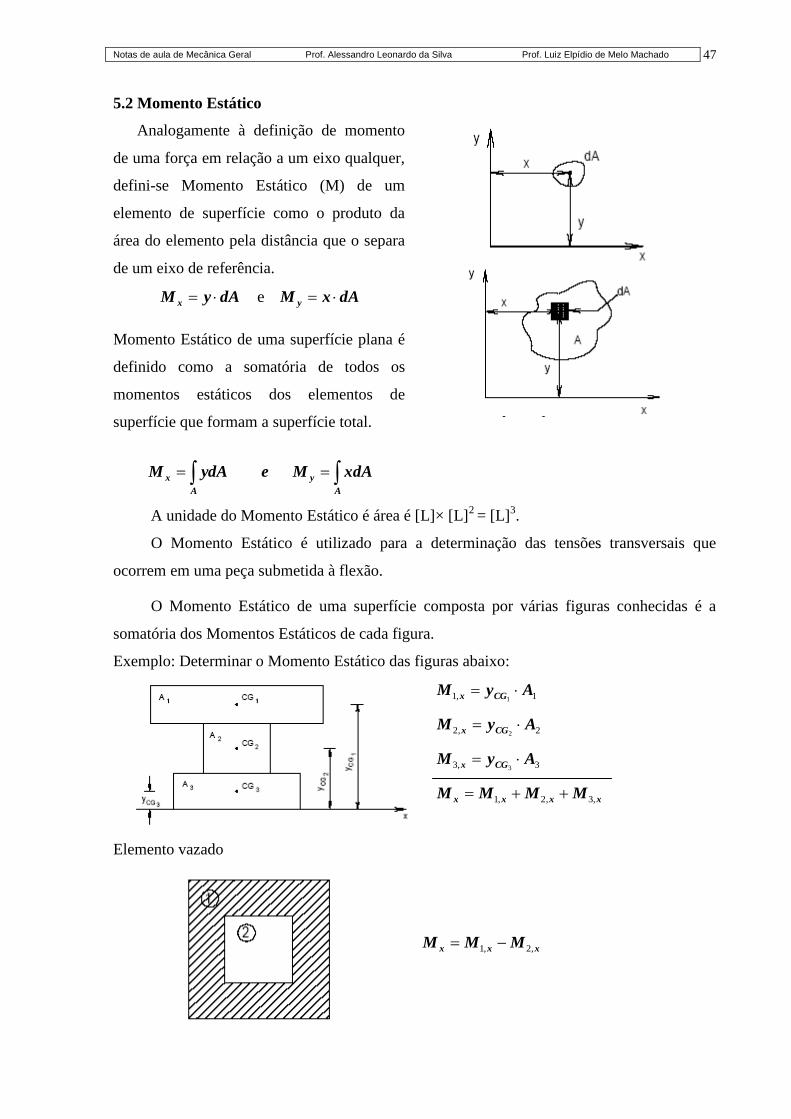
5.2 Momento Estático
Analogamente à definição de momento
de uma força em relação a um eixo qualquer,
defini-se Momento Estático (M) de um
elemento de superfície como o produto da
área do elemento pela distância que o separa
de um eixo de referência.
dAxMdAyM yx e
Momento Estático de uma superfície plana é
definido como a somatória de todos os
momentos estáticos dos elementos de
superfície que formam a superfície total.
A
y
A
x xdAMeydAM
A unidade do Momento Estático é área é [L]× [L]2
= [L]3.
O Momento Estático é utilizado para a determinação das tensões transversais que
ocorrem em uma peça submetida à flexão.
O Momento Estático de uma superfície composta por várias figuras conhecidas é a
somatória dos Momentos Estáticos de cada figura.
Exemplo: Determinar o Momento Estático das figuras abaixo:
1,1 1AyM CGx
2,2 2AyM CGx
3,3 3AyM CGx
xxxx MMMM ,3,2,1
Elemento vazado
xxx MMM ,2,1
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
48
5.3 Centro de Gravidade
Se um corpo for dividido em partículas mínimas, estas ficam sujeitas à ação da
gravidade, isto é, em todas estas partículas está aplicada uma força vertical atuando de cima
para baixo. A resultante de todas estas forças verticais e paralelas entre si, constitui o peso do
corpo.
Mesmo mudando a posição do corpo aplicando-lhe uma rotação, ele permanecerá
sempre sujeito à ação da gravidade. Isto significa que as forças verticais girarão em relação ao
corpo, mas continuaram sempre paralelas e verticais. O ponto onde se cruzam as resultantes
dessas forças paralelas, qualquer que seja a posição do corpo, chama-se Centro de Gravidade
(CG).
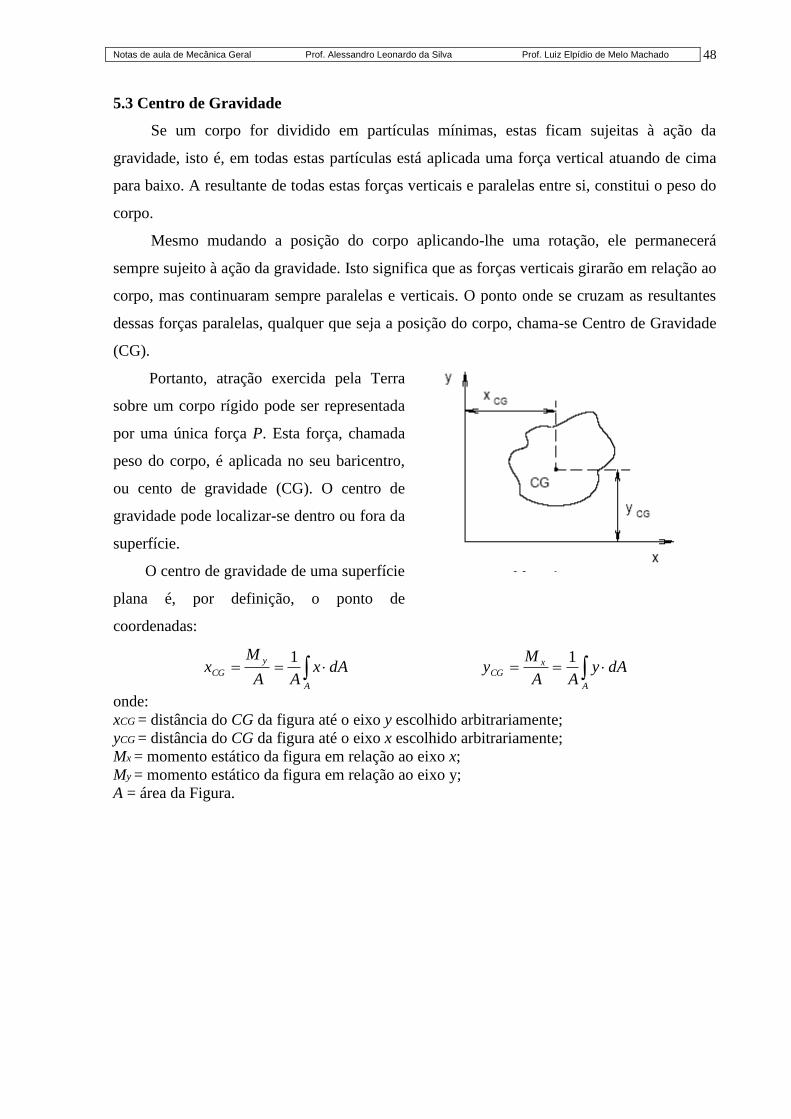
Portanto, atração exercida pela Terra
sobre um corpo rígido pode ser representada
por uma única força P. Esta força, chamada
peso do corpo, é aplicada no seu baricentro,
ou cento de gravidade (CG). O centro de
gravidade pode localizar-se dentro ou fora da
superfície.
O centro de gravidade de uma superfície
plana é, por definição, o ponto de
coordenadas:
A
xCG
A
y
CG dAyAA
MydAx
AA
Mx
1
1
onde:
xCG = distância do CG da figura até o eixo y escolhido arbitrariamente;
yCG = distância do CG da figura até o eixo x escolhido arbitrariamente;
Mx = momento estático da figura em relação ao eixo x;
My = momento estático da figura em relação ao eixo y;
A = área da Figura.
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
49
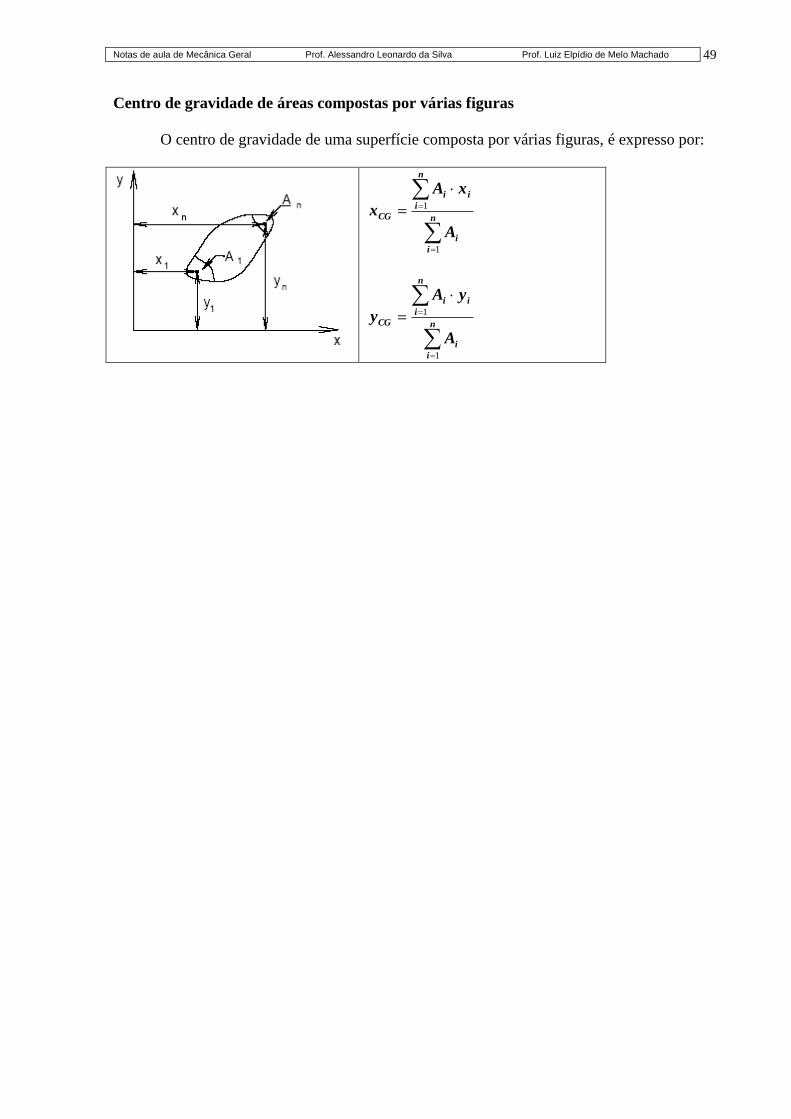
Centro de gravidade de áreas compostas por várias figuras
O centro de gravidade de uma superfície composta por várias figuras, é expresso por:
n
i
i
n
i
ii
CG
A
xA
x
1
1
n
i
i
n
i
ii
CG
A
yA
y
1
1
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
50
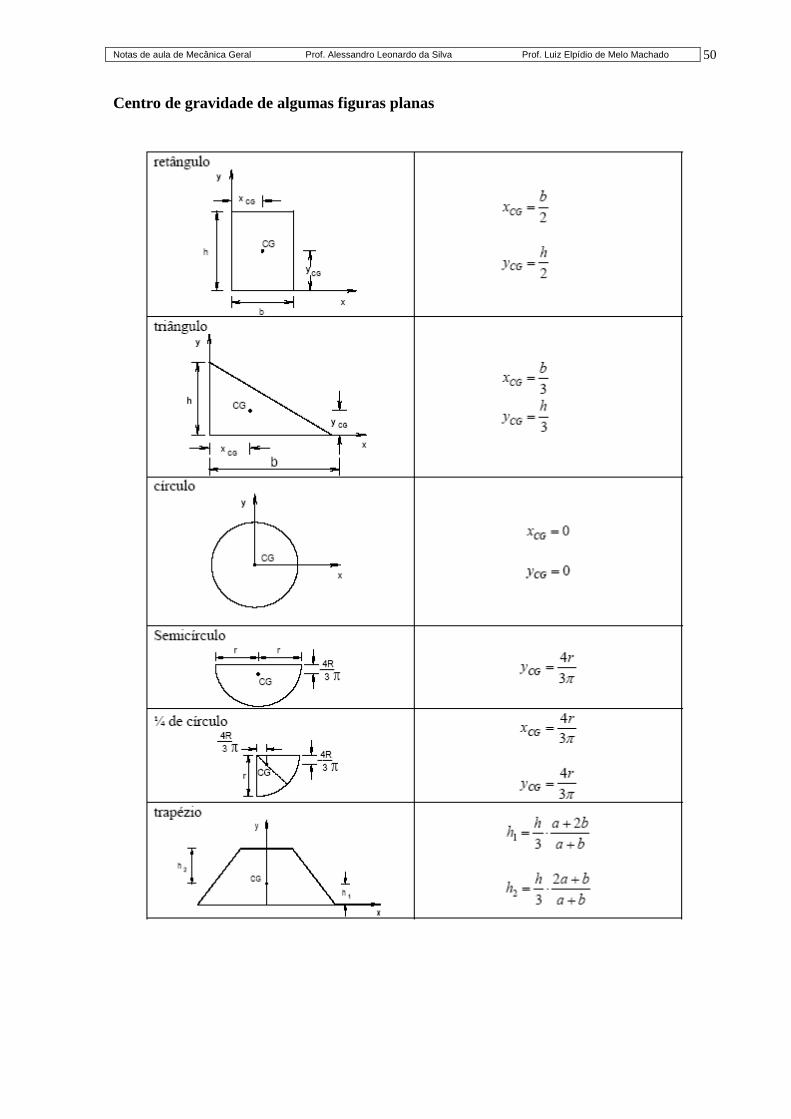
Centro de gravidade de algumas figuras planas

Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
51
Exemplos:
1 – Determine o centro de gravidade da figura composta abaixo:
2 – Para a superfície plana mostrada, determine os momentos de primeira ordem em relação
aos eixos x e y e a localização do centróide.
3 – Determine o centróide das superfícies planas mostradas:
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
52
5.4 Forças Distribuídas
Generalidades
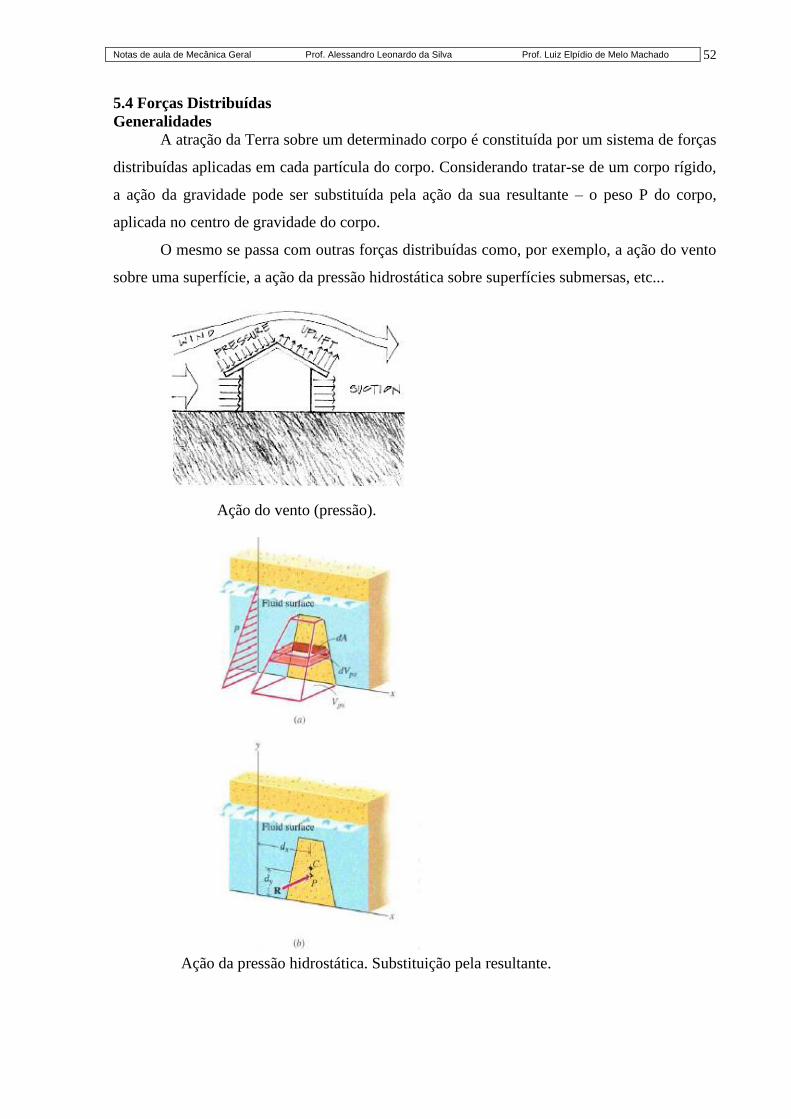
A atração da Terra sobre um determinado corpo é constituída por um sistema de forças
distribuídas aplicadas em cada partícula do corpo. Considerando tratar-se de um corpo rígido,
a ação da gravidade pode ser substituída pela ação da sua resultante – o peso P do corpo,
aplicada no centro de gravidade do corpo.
O mesmo se passa com outras forças distribuídas como, por exemplo, a ação do vento
sobre uma superfície, a ação da pressão hidrostática sobre superfícies submersas, etc...
Ação do vento (pressão).
Ação da pressão hidrostática. Substituição pela resultante.
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
53
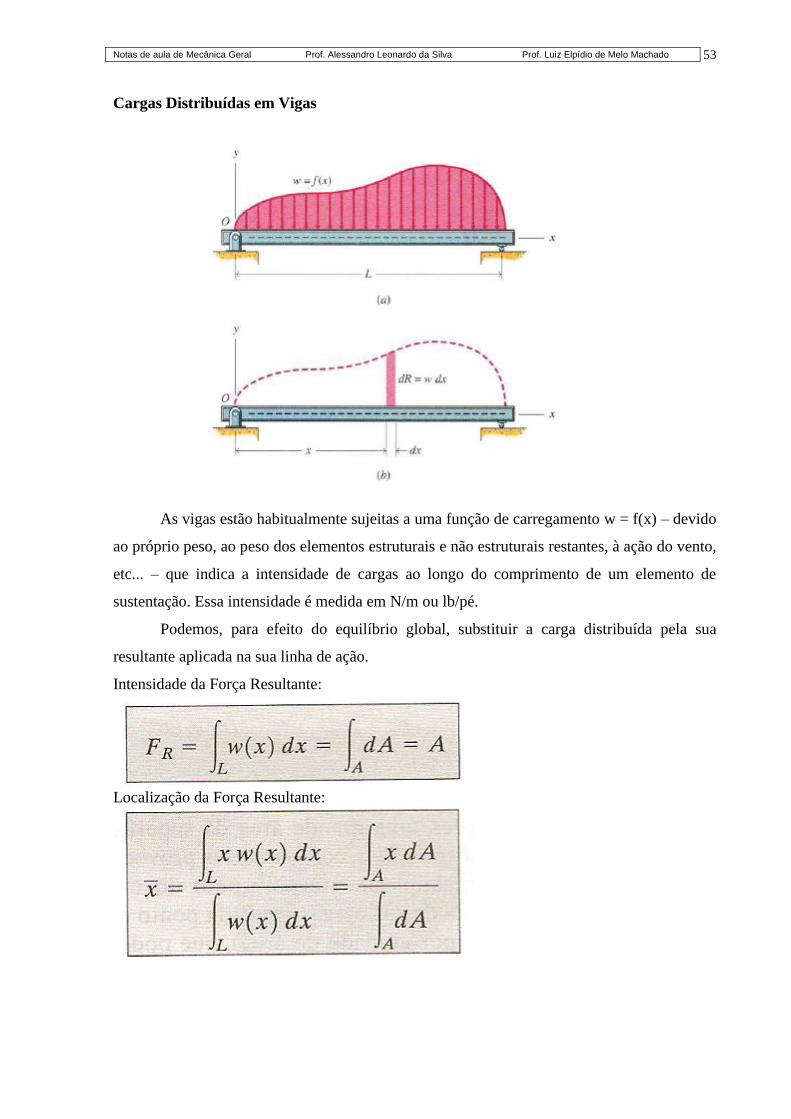
Cargas Distribuídas em Vigas
As vigas estão habitualmente sujeitas a uma função de carregamento w = f(x) – devido
ao próprio peso, ao peso dos elementos estruturais e não estruturais restantes, à ação do vento,
etc... – que indica a intensidade de cargas ao longo do comprimento de um elemento de
sustentação. Essa intensidade é medida em N/m ou lb/pé.
Podemos, para efeito do equilíbrio global, substituir a carga distribuída pela sua
resultante aplicada na sua linha de ação.
Intensidade da Força Resultante:
Localização da Força Resultante:
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
54
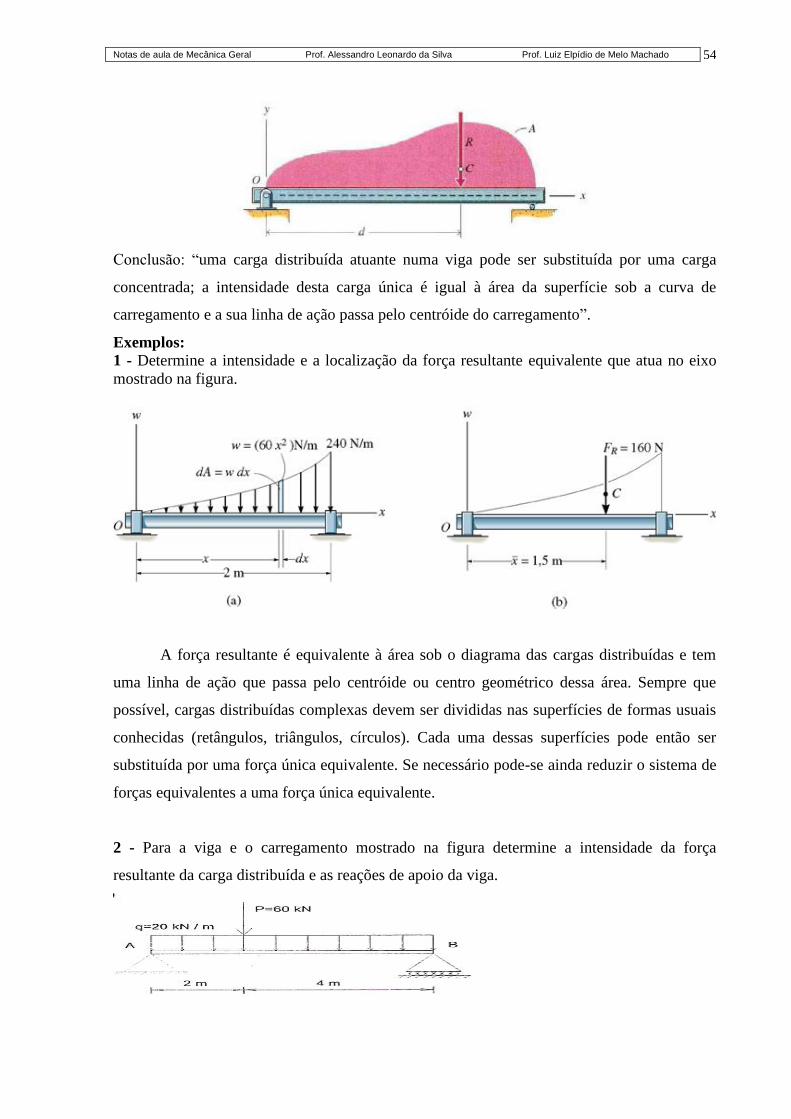
Conclusão: “uma carga distribuída atuante numa viga pode ser substituída por uma carga
concentrada; a intensidade desta carga única é igual à área da superfície sob a curva de
carregamento e a sua linha de ação passa pelo centróide do carregamento”.
Exemplos: 1 - Determine a intensidade e a localização da força resultante equivalente que atua no eixo
mostrado na figura.
A força resultante é equivalente à área sob o diagrama das cargas distribuídas e tem
uma linha de ação que passa pelo centróide ou centro geométrico dessa área. Sempre que
possível, cargas distribuídas complexas devem ser divididas nas superfícies de formas usuais
conhecidas (retângulos, triângulos, círculos). Cada uma dessas superfícies pode então ser
substituída por uma força única equivalente. Se necessário pode-se ainda reduzir o sistema de
forças equivalentes a uma força única equivalente.
2 - Para a viga e o carregamento mostrado na figura determine a intensidade da força
resultante da carga distribuída e as reações de apoio da viga.

Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
55
3 - Para a viga e o carregamento mostrado na figura determine a intensidade da força
resultante da carga distribuída e as reações de apoio da viga.
Exercícios: 1 – Determine a intensidade e a localização da força resultante equivalente que atua no eixo
mostrado na figura.
2 – Para a viga e o carregamento mostrado na figura determine a intensidade da força
resultante da carga distribuída e as reações de apoio da viga.
3 – Para a viga e o carregamento mostrado na figura determine a intensidade da força
resultante da carga distribuída e as reações de apoio da viga.
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
56
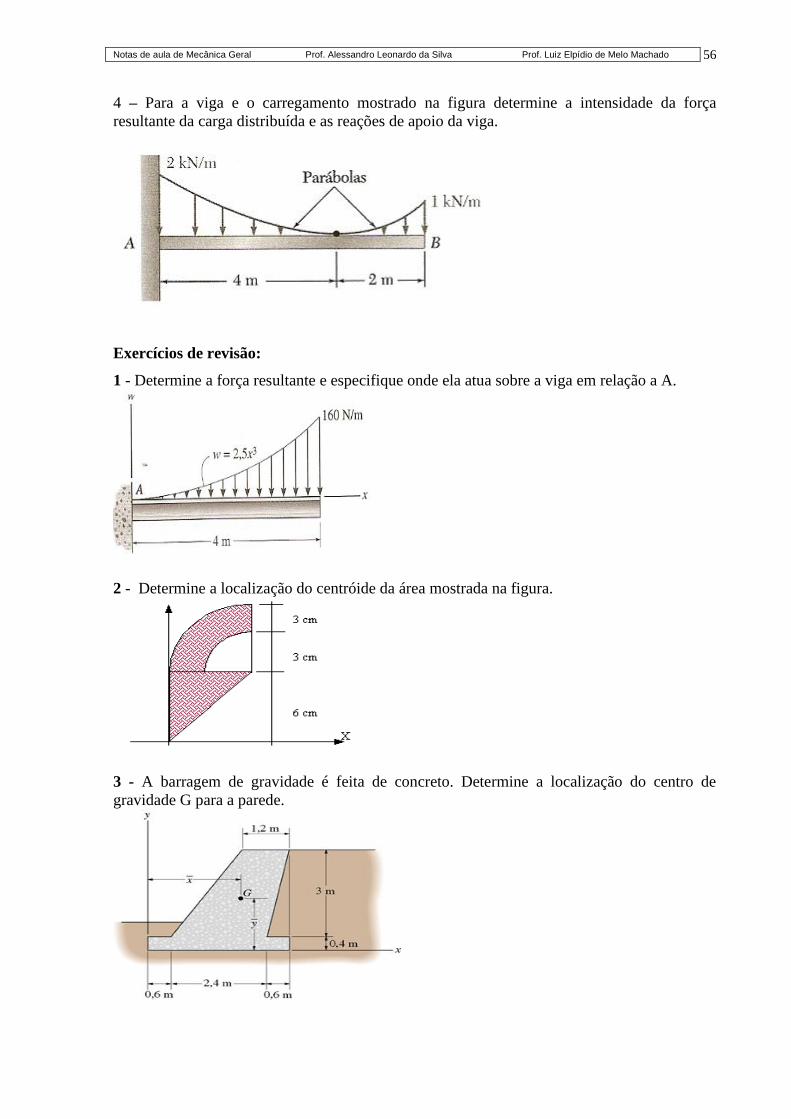
4 – Para a viga e o carregamento mostrado na figura determine a intensidade da força
resultante da carga distribuída e as reações de apoio da viga.
Exercícios de revisão:
1 - Determine a força resultante e especifique onde ela atua sobre a viga em relação a A.
2 - Determine a localização do centróide da área mostrada na figura.
3 - A barragem de gravidade é feita de concreto. Determine a localização do centro de
gravidade G para a parede.

Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
57
5.5 Momento de Inércia
O momento de inércia de uma superfície plana em relação a um eixo de referência é
definido como sendo a integral de área dos produtos dos elementos de área que compõem a
superfície pelas suas respectivas distâncias ao eixo de referência, elevadas ao quadrado.
y
x
dA
x
y
A
x dAyI 2
A
y dAxI 2
A unidade do momento de inércia é [L]2×[L]
2=[L]
4 .
O momento de inércia é uma característica geométrica importantíssima no
dimensionamento dos elementos estruturais, pois fornece, em valores numéricos, a
resistência da peça. Quanto maior for o momento de inércia da seção transversal de uma
peça, maior a sua resistência.
Propriedade:
O momento de inércia total de uma
superfície é a somatória dos momentos de
inércia das figuras que a compõe.
xxxx IIII ,3,2,1
Exemplo 1:
Determinar o momento de inércia da superfície em relação ao eixo x.
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
58
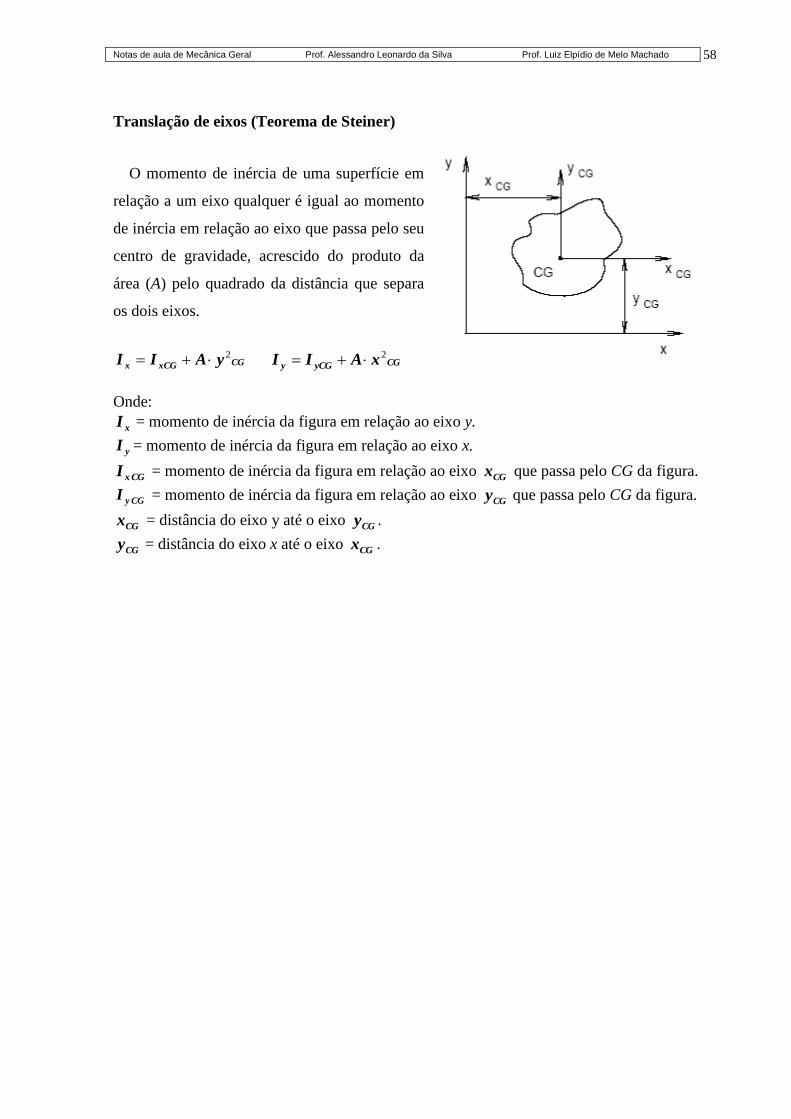
Translação de eixos (Teorema de Steiner)
O momento de inércia de uma superfície em
relação a um eixo qualquer é igual ao momento
de inércia em relação ao eixo que passa pelo seu
centro de gravidade, acrescido do produto da
área (A) pelo quadrado da distância que separa
os dois eixos.
2
CGxCGx yAII 2
CGyCGy xAII
Onde:
xI = momento de inércia da figura em relação ao eixo y.
yI = momento de inércia da figura em relação ao eixo x.
CGxI = momento de inércia da figura em relação ao eixo CGx que passa pelo CG da figura.
CGyI = momento de inércia da figura em relação ao eixo CGy que passa pelo CG da figura.
CGx = distância do eixo y até o eixo CGy .
CGy = distância do eixo x até o eixo CGx .
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
59
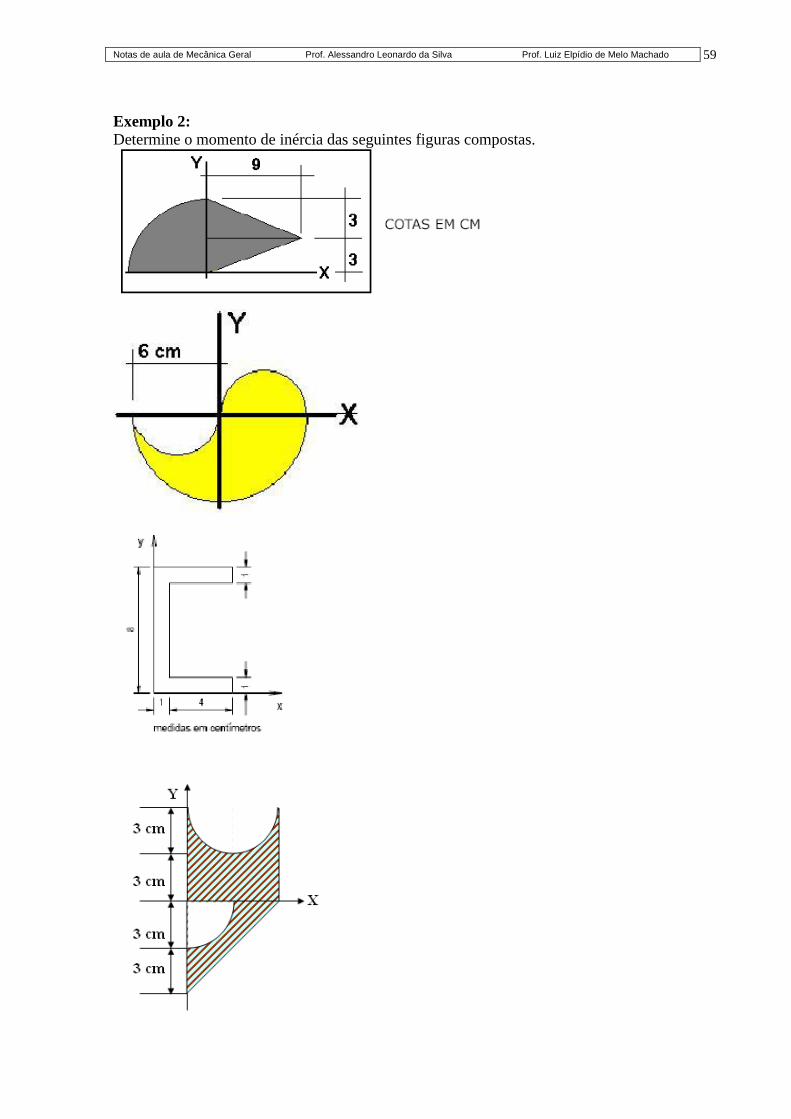
Exemplo 2:
Determine o momento de inércia das seguintes figuras compostas.

Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
60
Momentos de Inércia das figuras básicas
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
61
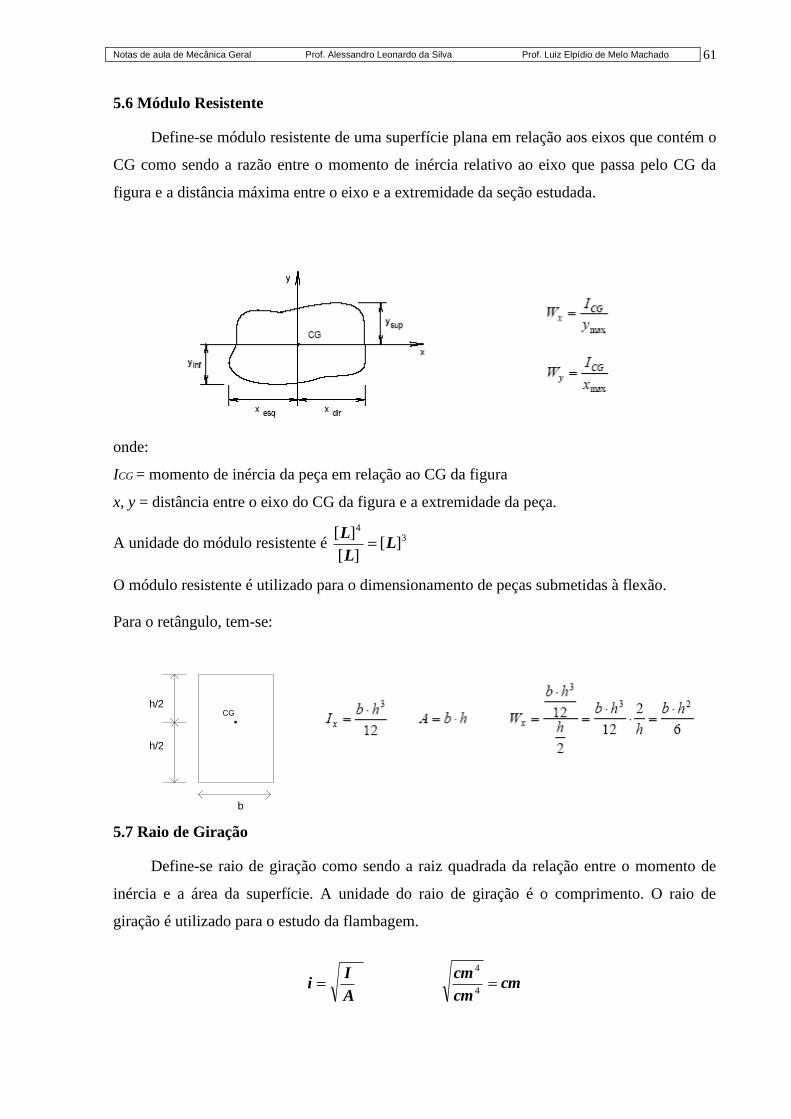
5.6 Módulo Resistente
Define-se módulo resistente de uma superfície plana em relação aos eixos que contém o
CG como sendo a razão entre o momento de inércia relativo ao eixo que passa pelo CG da
figura e a distância máxima entre o eixo e a extremidade da seção estudada.
onde:
ICG = momento de inércia da peça em relação ao CG da figura
x, y = distância entre o eixo do CG da figura e a extremidade da peça.
A unidade do módulo resistente é 34
][][
][L
L
L
O módulo resistente é utilizado para o dimensionamento de peças submetidas à flexão.
Para o retângulo, tem-se:
h/2
h/2
.CG
b
5.7 Raio de Giração
Define-se raio de giração como sendo a raiz quadrada da relação entre o momento de
inércia e a área da superfície. A unidade do raio de giração é o comprimento. O raio de
giração é utilizado para o estudo da flambagem.
A
Ii cm
cm
cm
4
4

Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
62
Características Geométricas de algumas figuras conhecidas
Notas de aula de Mecânica Geral Prof. Alessandro Leonardo da Silva Prof. Luiz Elpídio de Melo Machado
63
6. REFERÊNCIAS BIBLIOGRÁFICAS
BEER, Ferdinand. Mecânica vetorial para engenheiros: Estática. 5. ed. Editora McGraw-Hill,
2006 v. 1.
HIBBELER, R.C. Mecânica: Estática. 8. ed. Rio de Janeiro: LTC, 1999. v. 1
GASPAR, R. - Mecânica dos Materiais - Apostila.



![Apostila Mecanica Fluidos[1]](https://img.document.onl/doc/110x75/577c7e851a28abe054a18430/apostila-mecanica-fluidos1.jpg)
























