Embed Size (px)
Citation preview

P R O F . D R . D I O L I N O J . S A N T O S F I L H O
PMR-3305 C04

FASE 3
Projeto do Sistema de Controle: definição das arquiteturas lógica e física.
1. Definição de CP.
2. Scan time
3. Metodologia PFS/MFG – revisão.
4. Transcrição isomórfica RdP-LD.
5. Metodologia PFS/MFG - aplicação.

Modelo Estrutural
Interação entre os dispositivos
• A partir de agora adotaremos como modelo estrutural padrão o diagrama a seguir.
Fonte: Miyagi, 1996
Operador/
Usuário
Dispositivo de
Comando
Dispositivo de
Monitoração
Dispositivo de
Controle
Dispositivo de
Atuação
Dispositivo de
Detecção
Objeto de
Controle
Realização do Instalações
Máquinas
Recursos
Produtos
Dispositivo de Controle
Sistema de Controle

CPs – Arquitetura Básica
Fonte de Alimentação
• Converte corrente alternada em contínua para alimentar o CP.
• Interrompendo a energia, há uma bateria interna que mantém o programa do usuário
que se reinicia assim que se restabelece o fornecimento da mesma.
•Há dois tipos de fontes:
• Fonte de energia interna ao controlador – SOURCE.
• Fonte de energia externa ao controlador – SINK.
CPU
• Responsável pela execução do programa de controle conforme descrito pelo usuário.
• Responsável pela atualização da memória de dados (RAM).
• São os dados referentes ao processamento do programa de controle na forma de
uma tabela a ser manipulada (Select e Update).

CPs – Arquitetura Básica
CPU
• Responsável pela atualização da memória de arquivo correspondente ao mapeamento
lógica das entradas e saídas físicas (Memória-imagem).
• Memória que reproduz o estado dos periféricos de entrada e saída.
Memória do usuário
• Armazena o programa de controle conforme descrito pelo usuário.
• A CPU processa o programa em questão
•Atualiza a memória de dados internos
•Atualiza a memória-imagem das I/Os.
•Retorna novamente para essa área de memória
• Esta memória possui dois estados:
• Em operação com varredura cíclica – RUN.
• Parado no momento em que se carrego o programa no CP - PROG
•

CPs – Arquitetura Básica
Memória EPROM
• Possui o programa residente de acordo com o fabricante:
• Responsável pelo start-up do controlador.
• Armazena dados e gerencia a seqüência de operações.
• Memória de acesso restrito não visível para o usuário.
Módulos de saída do CP
•Existem 3 tipos de acionamento:
•Módulo de saída a relé.
•Módulo de saída a triac.
•Módulo de saída a transistor.

CPs – Arquitetura Básica
Tempo de Varredura (Scan Time)
• Uma vez que o CP foi concebido para controlar o sistema, ele deve:
reagir a estímulos do mesmo em tempo suficiente,
que não supere um atraso máximo permitido,
para realizar o controle em tempo real.
• Os CPs típicos podem operar em dois modos básicos:
• Modo Programação: destinado a carga, elaboração ou alteração de programas
aplicativos.
• Modo Execução: estará executando o programa residente em sua memória,
operando em tempo real.
• O termo tempo de varredura ou scan time corresponde:
• é um ciclo fechado que se repete ciclicamente;
• em que o CP realiza um set de operações básicas para processar seu programa
aplicativo residente.

CPs – Arquitetura Básica
Tempo de Varredura (Scan Time)
1. Leitura das entradas
• obtido a partir das entradas físicas mapeadas na memória-imagem.
2. Processamento
• corresponde à execução das instruções do programa aplicativo que faz uso
da memória-imagem:
• carrega as informações das entradas da memória-imagem e
• atualiza os valores das saídas mapeadas na memória-imagem.
3. Atualização das saídas
• os valores das saídas mapeadas na memória-imagem são enviados para os
respectivos módulos de saída.

Características do Sistema de Controle
Modelagem do Dispositivo de Controle
• Recordando como é o ciclo de processamento de um CP.
aquisição das entradas processamento saídas
1 ciclo com período de T segundos

Características do Sistema de Controle
Modelagem do Dispositivo de Controle
• Recordando em detalhes os instantes de amostragem.
variável
de entrada
variável
de estado
variável
de saída
processamento saída processamentoaquisição
das entradas
aquisição
das entradas
u(k)
x(k)
y(k) y(k+1)
x(k+1)
u(k+1)
k k+1tempo

L D

CLP ou PLC ou CP
Hardware
L I0
= Q0
24V
CH
L
I0 I1 I2 I3 I4 I5 I6 I7 GND
PLC
Q0 Q1 Q2 Q3 Q4 Q5 Q6 Q7 GND

Programando em Ladder
Lógica Negativa LN I0
= Q0
L I0
=N Q0
Programando em Ladder
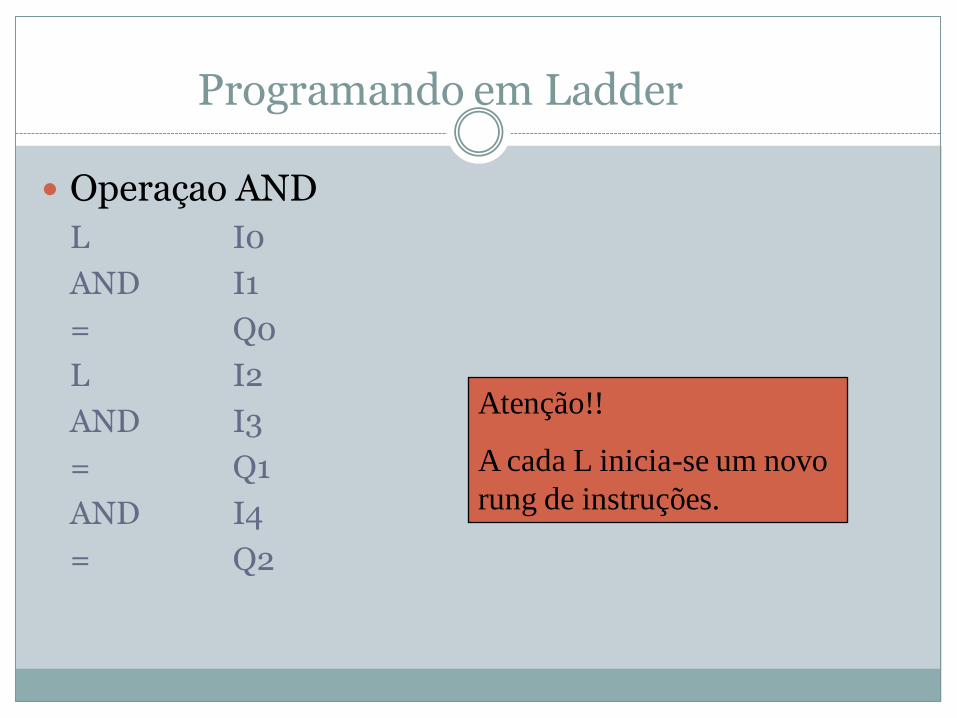
Operaçao AND
L I0
AND I1
= Q0
L I2
AND I3
= Q1
AND I4
= Q2
Atenção!!
A cada L inicia-se um novo
rung de instruções.

Programando em Ladder
Operação AN
L I0
AN I1
= Q0
L I2
AN I3
= Q1
AN I4
= Q2
Programando em Ladder
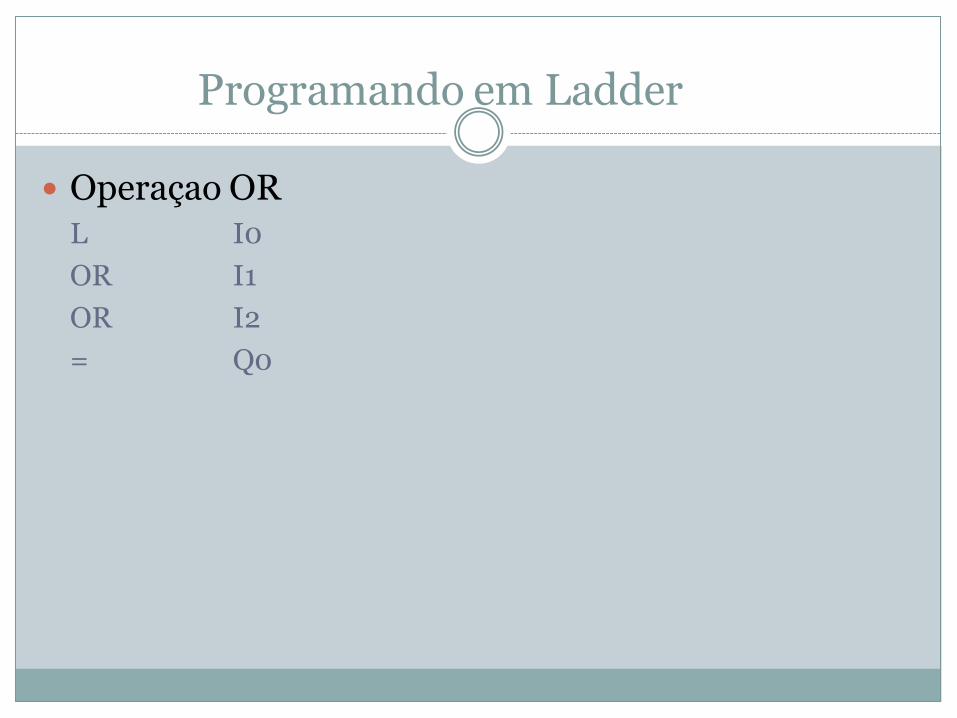
Operaçao OR L I0
OR I1
OR I2
= Q0

Programando em Ladder
Operação ON L I0
OR I1
ON I2
= Q0

Programando em Ladder
Aplicando o conceito de pilha (LIFO) L I0
OR I2
L I1
OR I3
AND
= Q0

Programando em Ladder
Usando flags L I0 L I1 L F2
AND I1 OR I6 OR F5
= F0 = F3 AND I5
L I2 L I2 = Q0
AND I3 OR I7
= F1 = F4
L F0 L F3
OR F1 AND F4
AND I4 = F5
= F2
Uso
maior de
memória!

Programando em Ladder
Auto-retenção L I0
OR Q0
= Q0

Programando em Ladder
Máquinas acionadas por botoeiras L (I0) e D (I1) Prioridade desliga
L I0
OR Q0
AN I1
= Q0
Prioridade Liga L Q0
AN I1
OR I0
= Q0
O que ocorre se
você aperta L e D
simultaneamente?
Programando em Ladder
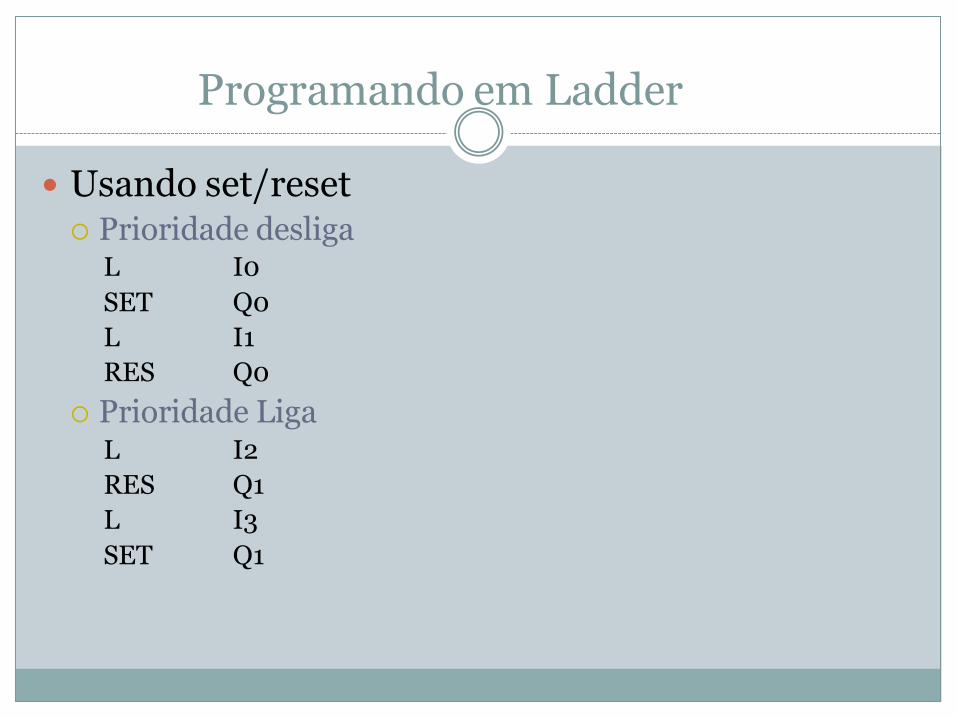
Usando set/reset Prioridade desliga
L I0
SET Q0
L I1
RES Q0
Prioridade Liga L I2
RES Q1
L I3
SET Q1

Programando em Ladder
Detecção de Borda de Subida L I0
AN F1
= F0
L I0
= F1
F0 SÓ EXISTE DURANTE UM CICLO DE VARREDURA!!
F1
I0
F0

Programando em Ladder
Liga/Desliga só com um botão L I0 OR AN F1 = Q0 = F0 L I0 = F1 L F0 AN Q0 LN F0 AND Q0

Programando em Ladder
Temporizadores On delay
L I0
= T0(6)
L T0
= Q0

Programando em Ladder
Contador L I0
SET C0,5 (define o módulo do contador)
L I1 (evento a ser contado)
= C0
L I2
RES C0 (resseta contador)
L C0
= Q0 (fim da contagem)
Exemplo: Exercício do carretel.

M E T O D O L O G I A P F S / M F G
T R A D U Ç Ã O R D P P A R A L D

Metodologia PFS/MFG
1. Representação dos processos.
2. Detalhamento dos processos em atividades (funções).
3. Detalhamento das atividades introduzindo elementos MFG (operações).
4. Introdução dos elementos de controle de recursos para compartilhamento.
5. Representação dos sinais de controle com a planta.

Metodologia PFS/MFG
• Considere o esquema a seguir:
• Pocessam-se peças tipo A que
passam seqüencialmente pelas
maquinas M1, M4 (ou M6), M5
(ou M3) e M8.
• Processam-se peças tipo B que
passam seqüencialmente pelas
maquinas M7, M6 (ou M5), M3
(ou M4) e M2.
• M1 e M7 possuem dispositivos
especiais para recepção de peças
(1 de cada vez).
• M2 e M8 possuem dispositivos especiais para despacho de peças (1 de cada vez).
M1 M3 M5 M7
M2 M4 M6 M8
R1 R2

Metodologia PFS/MFG
Os robôs R1 e R2 são responsáveis pelo transporte das peças entre as maquinas. Os
robôs só transportam uma peça de cada vez.
• As maquinas tem diferentes capacidades de processamento conforme indicado na tabela
abaixo.
Maquina Processamento
M1 e M8 1 peça por vez
M2 2 peças por vez
M3 3 peças por vez
M4 4 peças por vez
M5 até 2 peças
M6 até 3 peças
M7 até 4 peças

Metodologia PFS/MFG
1 Passo: Identificação dos processos
Proc.A Peça tipo A
Proc.B Peça tipo B

Metodologia PFS/MFG
2 Passo: Detalhamento dos processos em atividades / funções
• Para o Processo A temos:
A .TR/M1-6 &M6
A .TR/M1-4 &M4
A .M1
A .TR/M4-5 A .M5& TR/M5-8
A .M8
A .TR/M4-3
A .TR/M6-3
A .TR/M6-5
A .M3& TR/M3-8

Metodologia PFS/MFG
2 Passo: Detalhamento dos processos em atividades / funções
• Nomenclatura:
•[A.M1]=Atividade de processamento em M1
•[A.TR/M1-4&M4]=Atividade de transporte de M1 p/ M4 e processamento em M4
•[A.TR/M1-6&M6]=Atividade de transporte de M1 p/ M6 e processamento em M6
•[A.TR/M4-5]=Atividade de transporte de para de M4 p/ M5
•[A.TR/M4-3]=Atividade de transporte de para de M4 p/ M3
•[A.TR/M6-5]=Atividade de transporte de para de M6 p/ M5
•[A.TR/M6-3]=Atividade de transporte de para de M6 p/ M3
•[A.M5&TR/M5-8]=Atividade de processamento em M5 e transporte de M5 p/ M8
•[A.M3&TR/M3-8]=Atividade de processamento em M3 e transporte de M3 p/ M8
•[A.M8]=Atividade de processamento em M8
• Analogamente pode-se obter o modelo do Processo B.

Metodologia PFS/MFG
3 Passo: Detalhamento das atividades em operações
• [A .M1] = Atividade de processamento em M1
• [A .TR/M1-4&M4] = Atividade de transp. de M1p/M4 e processamento em M4.
• [A.TR/M1-6&M6] = Atividade de transp. de M1p/M6 e processamento em M6.
A .M1
TR/M1-4
ROBÔ
4
A .M4
4
TR/M1-6
ROBÔ
3

Metodologia PFS/MFG
• 3 Passo: Detalhamento das atividades em operações
• [A .TR/M4-5] = Atividade de transp. de M4 p/ M5
• [A .TR/M4-3] = Atividade de transp. de M4 p/ M3
• [A .TR/M6-5] = Atividade de transp. de M6 p/ M5
TR/M4-5
ROBÔ
TR/M4-3
ROBÔ
TR/M6-5
ROBÔ

Metodologia PFS/MFG
• 3 Passo: Detalhamento das atividades em operações
• [A .TR/M6-3] = Atividade de transp. de M6 p/ M3
• [A .TR/M6-5] = Atividade de processamento em M5 e transporte de M5 para M8
TR/M6-3
ROBÔ
TR/M5-8
ROBÔ
2
A.M5

Metodologia PFS/MFG
• 3 Passo: Detalhamento das atividades em operações
• [A .M3&TR/M3-8] = Atividade de processamento em M3 para M8
• [A .M8] = Atividade de processamento em M8
Este procedimento pode ser aplicado para a Peça B.
TR/M3-8
ROBÔ
3
A .M3
3
A .M8

Metodologia PFS/MFG
• 4 Passo: Introdução dos elementos de controle de representação dos recursos
• Detalha-se agora o compartilhamento de robôs.
A.TR/M1-4
A.TR/M6-5
A.TR/M4-5
A.TR/M4-3
A.TR/M1-6
A.TR/M6-3
A.TR/M5-8
A.TR/M3-8
Robôs
A.TR/M1-4
A.TR/M6-5
A.TR/M4-5
A.TR/M4-3
A.TR/M1-6
A.TR/M6-3
A.TR/M5-8
A.TR/M3-8

Metodologia PFS/MFG
• 5 Passo: mapeamento dos sinais físicos de controle da planta
• Fecha-se a malha de controle trocando os sinais com os vários dispositivos.
• Com isto nós concluímos a Fase 1 e podemos passar para a Fase 2 de estudo da
metodologia de projeto propriamente dita.
Sinal que vem dos
dispositivos de comando
ou de detecção
Sinal que vai para os
dispositivos de
monitoração ou atuação

Redes de Petri e LD
Conversão de modelos
Será possível estabelecer uma relação entre estes dois modelos?
A resposta é positiva!
•

Redes de Petri e LD
Conversão de modelos
• No caso de se converter o modelo representado em RdP para LD, é possível ser
feito de maneira sistemática.
• Já o inverso é impossível, uma vez que um programa em LD abstrai o
conhecimento de sequenciamento, paralelismo e conflito contidos na representação
em rede.
•Esta abstração impede que se gere um modelo em RdP correspondente a um
programa em LD genérico.

Redes de Petri e LD
Conversão de modelos
Sistemática para conversão RdP → LD
1.Atribuir variáveis internas para as transições.
2.Atribuir variáveis internas para os lugares.
3.Associar os eventos internos às variáveis de saída de monitoração e atuação.
4.Associar os eventos externos às variáveis de entrada de comando e sensoriamento.
5.Gerar o LD correspondente a habilitação de cada uma das transições:
a) Um rung para cada transição
b) Em cada rung uma operação AND entre as pré-condições da transição e as
condições de restrição adicionais (eventos externos vermelhos).
Redes de Petri e LD
Conversão de modelos
Sistemática para conversão RdP → LD
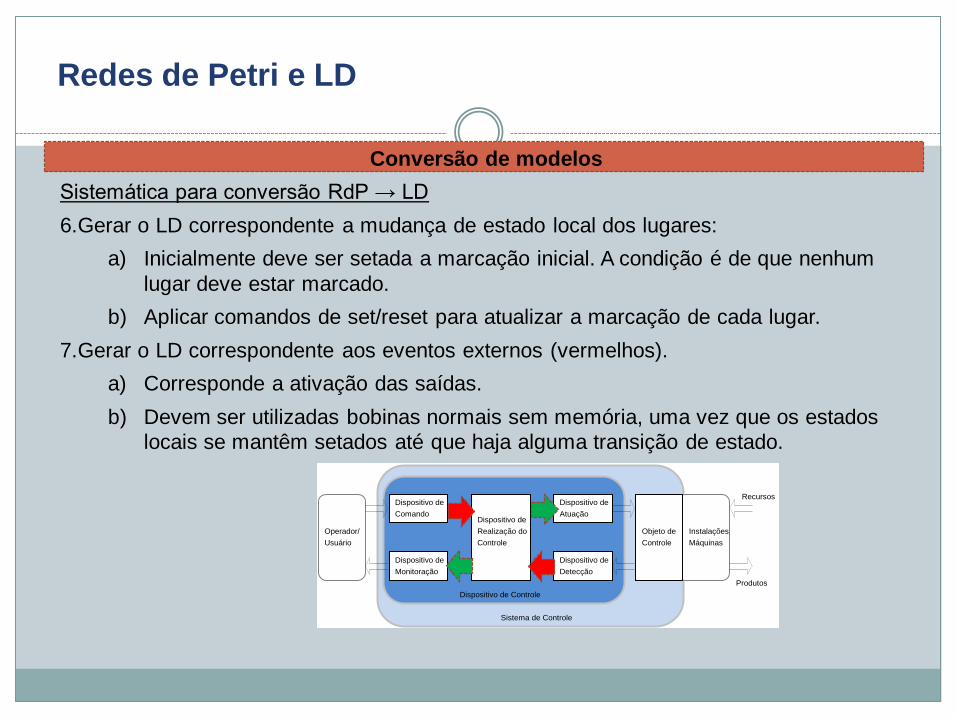
6.Gerar o LD correspondente a mudança de estado local dos lugares:
a) Inicialmente deve ser setada a marcação inicial. A condição é de que nenhum
lugar deve estar marcado.
b) Aplicar comandos de set/reset para atualizar a marcação de cada lugar.
7.Gerar o LD correspondente aos eventos externos (vermelhos).
a) Corresponde a ativação das saídas.
b) Devem ser utilizadas bobinas normais sem memória, uma vez que os estados
locais se mantêm setados até que haja alguma transição de estado.
Operador/
Usuário
Dispositivo de
Comando
Dispositivo de
Monitoração
Dispositivo de
Controle
Dispositivo de
Atuação
Dispositivo de
Detecção
Objeto de
Controle
Realização do Instalações
Máquinas
Recursos
Produtos
Dispositivo de Controle
Sistema de Controle

Redes de Petri e LD
Conversão de modelos
• Como resultado teremos um LD composto de três blocos fundamentais que facilita a
manutenção:
Transições
Lugares
Saídas
Processamento

Redes de Petri e LD
Conversão de modelos - Exemplo
• Vamos fazer um exemplo inicial de aplicação da sistemática.
• Considere a RdP a seguir:
Bomba_1
Ligada Bomba_2
Ligada
B1 B2 B2.B3
Stand_by
BM1 BM2

Redes de Petri e LD
Conversão de modelos - Exemplo
1. Atribuir variáveis internas para as
transições.
Bomba_1
Ligada Bomba_2
Ligada
B1 B2 B2.B3
Stand_by
BM1 BM2
FT01 FT02 FT03
Redes de Petri e LD
Conversão de modelos - Exemplo
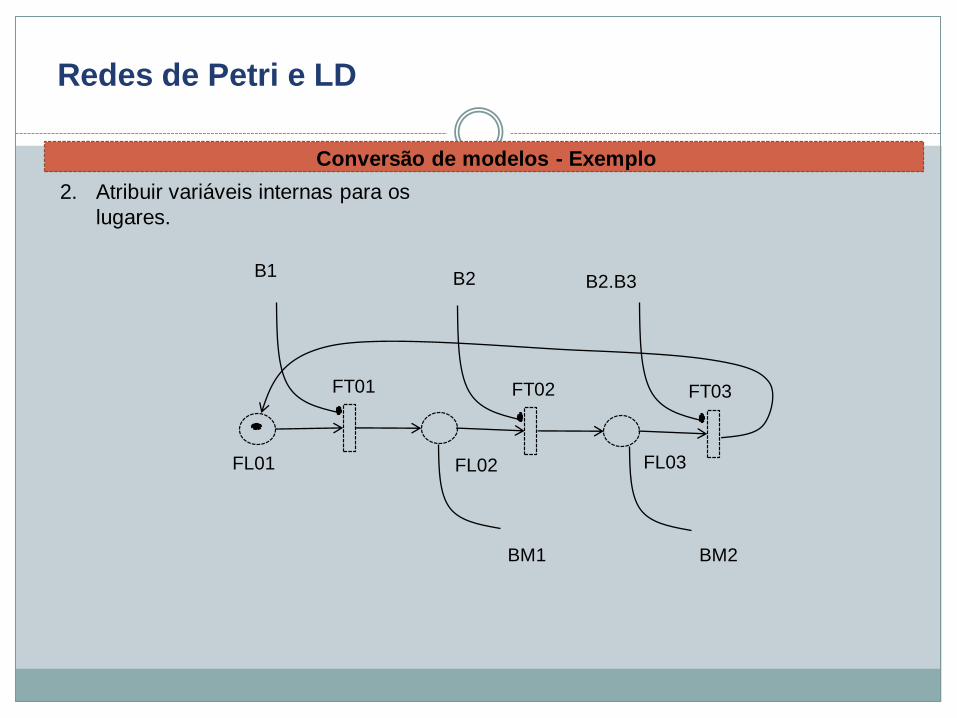
2. Atribuir variáveis internas para os
lugares.
B1 B2 B2.B3
BM1 BM2
FT01 FT02 FT03
FL01 FL02 FL03

Redes de Petri e LD
Conversão de modelos - Exemplo
3. Associar os eventos internos às
variáveis de saída de monitoração e atuação.
B1 B2 B2.B3
Q.01 Q.02
FT01 FT02 FT03
FL01 FL02 FL03
Q.01 = BM1
Q.02 = BM2

Redes de Petri e LD
Conversão de modelos - Exemplo
4. Associar os eventos externos às variáveis de entrada de comando e sensoriamento.
I.01 I.02 (I.02).(I.03)
Q.01 Q.02
FT01 FT02 FT03
FL01 FL02 FL03
I.01 = B1
I.02 = B2
I.03 = B3

Redes de Petri e LD
Conversão de modelos - Exemplo
5. Gerar o LD correspondente a habilitação de cada uma das transições:
I.01 I.02 (I.02).(I.03)
Q.01 Q.02
FT01 FT02 FT03
FL01 FL02 FL03
FT01 FL01 I.01
FT02 FL02 I.02
FT03 FL03 I.02 I.03

Redes de Petri e LD
Conversão de modelos - Exemplo
6. Gerar o LD correspondente a mudança de estado local dos lugares.
I.01 I.02 (I.02).(I.03)
Q.01 Q.02
FT01 FT02 FT03
FL01 FL02 FL03
FL01 FL01 FL02 FL03
S
FT03
FL01 FT01
R
FL02 FT01
S
FL02 FT02
R
FL03 FT02
S
FL03 FT03
R

Redes de Petri e LD
Conversão de modelos - Exemplo
7. Gerar o LD correspondente aos eventos externos (vermelhos).
I.01 I.02 (I.02).(I.03)
Q.01 Q.02
FT01 FT02 FT03
FL01 FL02 FL03
Q.01 FL02
Q.02 FL03

Redes de Petri e LD
Conversão de modelos – Exemplo LD Final
I.01 I.02 (I.02).(I.03)
Q.01 Q.02
FT01 FT02 FT03
FL01 FL02 FL03
Q.01 FL02
Q.02 FL03
FL01 FL01 FL02 FL03
S
FT03
FL01 FT01
R
FL02 FT01
S
FL02 FT02
R
FL03 FT02
S
FL03 FT03
R
FT01 FL01 I.01
FT02 FL02 I.02
FT03 FL03 I.02 I.03

Atividade para c05
Preparar o desenvolvimento do SFC das estações MPS em CodeSys.
Startup das estações.

Projeto para entregar hoje
Retome a automação do processo a seguir e faça:
Modelo MFG do processo aplicando a metodologia PFS/MFG em 5 passos.
Obter o programa em LD de forma isomórfica.

Estudo do objeto de controle, equipamento e instalações
Exemplo de diagrama esquemático do objeto de controle (fonte: Miyagi, 1996)
VB VA
VC
WA
WA+WB
Liquido A Liquido B
balança
misturador
Material sólido
Esteira alimentadora
Motor da esteira MT
Detector de passagem de
material
d
P0
P1
Chave limite: vertical MR motor do misturador
MP
Chave limite: horizontal motor para
inclinação do
misturador