Embed Size (px)
Citation preview

CHAPTER 5Hydrostatic Transmissions (Hydrostatic Drives)
�Hydrostatic transmission� is the name given to a hydraulic system consisting of apositive displacement pump and a positive displacement motor. A wider de�nitionof hydrostatic transmissions includes hydraulic systems consisting of several pumpsand/or motors and even systems in which the output devices are actuators.
The purpose of hydrostatic transmission is to convert mechanical power into hy-draulic power then to transmit and convert it back into mechanical output power ina form which matches speed and torque demands of a driven mechanism or machine.
In the previous chapter we discussed two main methods of speed control, namely:
² Resistive (valve speed control) - where the control of �ow, thus the speed of outputunits, is achieved by �ow control valves. The pump and motor are �xed (constant)displacement units.
² Volumetric (pump/motor control) - where speed is controlled by varying the dis-placement parameters of a pump, motor or both.
Valve speed control of hydrostatic transmissions, which has associated signi�cantpower losses, has limited application in the control of rotary, especially high power,hydrostatic transmissions. Its main application is in drives employing actuators asoutput units, in which continuous control of velocity is usually not required. Asvalve speed control was discussed in some detail in Section 4.2, we will discuss onlyvolumetric control (pump/motor control) of rotary hydrostatic transmissions.
In hydrostatic transmissions control of the direction of rotation of a motor its speedof rotation is accomplished by adjusting displacement of pumps, motors or both. Wemay also control the direction of rotation of a motor, and to some extent its speed,by a directional control valve interposed between a pump and a motor.
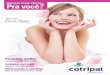
Hydrostatic transmissions may operate in either open or closed circuits. An opencircuit, shown in �g. 129, consists of a variable displacement pump 1, a variabledisplacement motor 2 and a directional control valve 3 which controls the directionof �uid �ow and thus direction of rotation of the motor. The speed of the motor iscontrolled either by changing displacements of rotary units. The return �ow fromthe motor is directed by a directional control valve to the reservoir.
A closed circuit consists of a variable displacement pump 1 and a variable or �xeddisplacement motor 2, the return �ow from the motor is supplied to the inlet port ofthe pump. In this system change of the direction of rotation of motor 2 is obtainedby using an over the centre pump 1 capable of reversing the �ow direction, �g.130. Control of speed of the motor is accomplished by changing displacement of the
193

194 Hydrostatic Transmissions (Hydrostatic Drives)
ωp
Tp
Qp pp
1
2
3Qm
pm
Tm
ωm
Fig. 129. Open circuit hydrostatic transmission
pump or the motor or both. �Cross-line� relief valves 6 and 7 protect the systemagainst excessive pressure. The volumetric losses in the system (internal and externalleakages) are replenished by an additional charge pump 3, which is protected by a lowpressure relief valve 8, or by an accumulator. The replenishing �ow is directed, viacheck valves 4 or 5, to this branch of the system which, depending on the directionof �ow, is operating at low pressure.
Tp Tm
ωmωp
1 3
5
27641
1
23
4
Fig. 130. Closed circuit hydrostatic transmission
Transformation of power transmitted by a hydrostatic transmission is described bytwo relations; dynamic ratio or kinematic ratio. Dynamic ratio id de�nes how thetransmission changes torque:
id =T2T1
(5.1)

Characteristics of an ideal hydrostatic transmission 195
where:T1; T2 - are correspondingly input and output torques.
Kinematic ratio ik de�nes how the transmission transforms input to output speed:
ik =n2n1=!2!1
(5.2)
where:!1; n1 - angular or rotation speed of input shaft!2; n2 - angular or rotation speed of input shaft
As the e¢ciency of transmission is a ratio of output power P2 on the motor shaft toinput power P1 delivered to the pump shaft, then:
´ =P2P1=T2!2T1!1
= idik (5.3)
thus, the e¢ciency of the transmission can be expressed as a product of dynamicand kinematic ratios.
For a transmission in which the above ratios are variable, it is important to de�nethe transmission range, i.e. a permissible range of dynamic ratio id and a range ofkinematic ratio ik. In practice, permissible ranges of id and ik ratios are de�nedusing criteria that over full range of these transmission ratios the transmission willoperate with e¢ciency above ´ = 0:8.
5.1 Characteristics of an ideal hydrostatic transmission
Analysis of operating parameters of a hydrostatic transmission, when the transmis-sion works under varying load and various control strategies are employed, is di¢cultdue to a large number of variable parameters and their interaction. However, if weassume that the transmission operates without losses (´ = 1), then using basic rela-tions which describe the operation of a pump and a motor we may investigate withrelative ease the e¤ect of various parameters on the performance of the transmission.
If we assume that a hydraulic system operates without losses, basic parameters of thesystem can be calculated using equations given in chapter 2. Pressure di¤erential¢ptm across the motor, under assumption of no pump/motor or line losses andsteady-state operating conditions, is the result of load torque Tload:
¢ptm =2¼Tload"mqm
(5.4)
or
¢ptm =Tload"mVÁm
(5.5)

196 Hydrostatic Transmissions (Hydrostatic Drives)
where:qm; VÁm - stroke and unit displacements of the motor
"m - displacement parameter
In a steady-state, torque Ttm is equal to load torque Tload and as we have ignoredline losses then ¢ptp = ¢ptm and thus pump torque Ttp is equal to:
Ttp ="pqp2¼
¢ptp (5.6)
or
Ttp = "pVÁp¢ptp (5.7)
and using eq. (5.4) (or eq. (5.5)) and ¢ptp = ¢ptm, Ttm = Tload the relation betweenpump and motor torques is expressed by:
Ttp ="pVÁp"mVÁm
Ttm (5.8)
Pump delivery �ow Qtp, under assumption of no leakages, is described by equation:
Qtp = "pqpnp (5.9)
or
Qtp = "pVÁp!p (5.10)
this �ow will be delivered to the motor, thus Qtm = Qtp. As the theoretical �owdemand of the motor is described by equation:
Qtm = "mqmnm = "mVÁm!m (5.11)
then using eq. (5.9) (or eq. (5.10)) the rotation speed of the motor is de�ned by therelation:
nm ="pqp"mqm
np (5.12)
or
!m ="pV'p"mV'm
!p (5.13)
We may di¤erentiate between the following types of controls for hydrostatic trans-missions:
² Constant torque, variable power
² Constant power, variable torque
² Variable power, variable torque

Characteristics of an ideal hydrostatic transmission 197
ωp ωm
-1
1
+ωmmax
−ωmmax
ω
εp
a.
b.
Fig. 131. Hydrostatic transmission with a �xed displacement motor: a. graphicsymbol, b. speed characteristic of the motor
5.1.1 Constant torque, variable power ("p varying, "m = constant)
In this type of control of a hydrostatic transmission, a variable displacement pumpsupplies �uid to a �xed displacement motor. The speed of the motor is controlled bychanging the displacement of the pump. In most cases displacement parameter "pvaries between ¡1 � "p � 1 but motor displacement parameter "m = 1. The angularspeed of the motor when all parameters, with the exception of "m, are constant isde�ned as:
!m = K"p where K = const: (5.14)
and is thus a linear function of "p, �g. 131b.
5.1.2 Constant power, variable torque ("p constant, "m variable)
In this type of transmission the pump has a �xed displacement, i.e. "p = 1 butdisplacement of a hydraulic motor varies in range ¡1 � "m � 1 and thus the angularspeed of the motor, assuming that all parameters with the exception of "m areconstant, can be expressed as:
!m =K
"mwhere K = const: (5.15)
thus the speed of the motor is a hyperbolic function of "m, as shown in �g. 132b.
5.1.3 Variable power, variable torque ("p and "m variable)
Transmissions in which displacements of both pump and motor may take any value,�g. 133, can be controlled sequentially or simultaneously. In simultaneously con-trolled transmissions both "p and "m are varied according to some program, usually

198 Hydrostatic Transmissions (Hydrostatic Drives)
-1
1
+ωmmax
−ωmmax
ω
a.
b.
ωp ωm
Fig. 132. Hydrostatic transmission with a �xed displacement pump: a. graphicsymbol, b. speed characteristic of the motor
ωp ωm
Fig. 133. Hydrostatic transmission with a variable displacement pump and a variabledisplacement motor - graphic symbol
pump displacement parameter "p is controlled �rst and then motor displacement pa-rameter "m. The sequential control of a transmission is shown in �g. 134, and toillustrate its operation we will discuss three control cases:
² The motor is initially set at its maximum displacement ("m = 1) and the pumpat its minimum displacement ("p = 0). The straight line OA represents change ofmotor speed !m with an increase of parameter "p from zero to "p = 1. When thepump is at its maximum displacement (point A), further control of motor speedis achieved by reducing motor displacement parameter "m. Curve AG shows thechange of motor speed with variation of displacement parameter "m.
² The motor is set at "m = 0:5 (i.e. at half displacement) and the pump is set atzero displacement, "p = 0. The motor speed as a function of pump displacement,when it increases from "p = 0 to "p = 1, is represented by straight line OE.When the pump reaches it maximum displacement "p = 1, i.e. its maximum�ow, further variation of motor speed !m is obtained by decreasing the motordisplacement, by curve FG.
² When the motor is set at maximum displacement ("m = 1) and the pump dis-placement increases from "p = 0 to "p = 0:5, then straight line OB represents thechange of motor speed. In this case reduction of motor displacement "m and thecorresponding increase of motor speed is represented by curve CD.

Characteristics of an ideal hydrostatic transmission 199
εp =1/2
εm =1
εm =1/3
εm =1/2
εm =1/4
0 1/3 1/21/4 1
5
4
3
2
1
ωp /ωp=ιk
ωp, ωm
B C
A
E
E2
E1
F
F2
F1
GD
Fig. 134. Sequential control of an ideal hydrostatic drive
If we assume that a hydrostatic transmission should operate in the range for whichits e¢ciency is above ´ = 0:8 the sequential control of the transmission is preferableas it allows obtaining the widest control range, kinematic ratio ik and dynamic ratioid is 6¥ 7. When only the pump displacement is controlled, the maximum range ofdynamic ratio is id = 4:5 and the range of kinematic ratio is id = 4:0.
To derive operational parameters of an ideal transmission (no losses) we use equa-tions for pump input power Pp and motor output torque Tm:
Pp = "pVÁp!p¢p (5.16)
Tm = "mVÁm¢p (5.17)
Equation (5.17) shows that for a given motor, output torque depends on displacementparameter "m and pressure di¤erential across the motor ¢p. Thus when the motordisplacement is set, i.e. "m = const:, the motor output torque is proportional topressure di¤erential ¢p across the motor, �g. 135a. The straight lines for variousvalues of "m = const: pass through the origin. Plotted in logarithmic coordinatesthese lines become parallel to each other, �g. 135b.
When we reduce parameter "m but maintain a constant torque (Tm = const:) thenpressure di¤erential ¢p across the motor will increase, arrow 1 in �g. 135b. On the

200 Hydrostatic Transmissions (Hydrostatic Drives)
other hand, we may increase the output torque at a set pressure di¤erential (¢p =const:) by increasing displacement parameter "m, arrow 2 in �g 135b.
∆p
Tmε
m=1.
0
∆pmax ∆p∆pmax
log Tm
εm=1.0
εm=const
εm=const
a. b.
2
1
Fig. 135. Characteristics of a variable displacement motor Tm = f(¢p; "m). a.Linear co-ordinates, b. Logarithmic co-ordinates.
If we consider eq. (5.16) we can see that pump input power Pp is proportional topump parameter "p and pressure di¤erence ¢p. Thus plots of Pp = const. in ¢p; "pcoordinates are hyperbolas �g. 136a., and in logarithmic coordinates these curvesare straight lines, �g. 136b.
log ∆p
∆pmax
2
1
∆p
∆pmax
Pp=const
Pp=const
εp εp1.0 1.00 0
a. b.
Fig. 136. Characteristics of a variable displacement pump Pp = f(¢p; "p). a. linearco-ordinates, b. logarithmic co-ordinates.
However, when we maintain parameter "p = const:, then pump input power Pp willincrease with an increase in pressure di¤erential ¢p, arrow 1 in �g. 136b. On theother hand, if pressure di¤erential¢p is maintained constant then the required pump

Volumetric and hydro-mechanical losses 201
input power Pp will increase with an increase of parameter "p , i.e. with an increaseof the pump �ow Qp, as shown by arrow 2 in �g. 136b.
To �nd pressure di¤erential ¢p for an ideal hydrostatic transmission, we assumethat ¢p = ¢p12 = ¢p34 and use the equation for motor output torque:
¢p =Tm!m"pVÁp!p
(5.18)
From the above equation we can see that for a transmission operating at a setpressure di¤erential (¢p = const:) and a set value of the motor output torque (Tm =const:), the pressure di¤erential¢p is proportional to the angular speed of motor !m.Thus at constant pump delivery, in !m, ¢p coordinates, plots of the output torqueare straight lines crossing the origin, �g. 137a. For other displacement settings ofthe pump, straight lines Tm = const: are rotated in relation to the previous lines byan angle corresponding to the change of parameter "p.
At a constant setting of pump displacement parameter "p and a constant value oftorque Tm, the increase of the angular speed of motor !m, obtained by reducingmotor displacement "m, is accompanied by the increased pressure di¤erence ¢pacross the motor, arrow 1 - �g. 137b. On the other hand, increasing the angularspeed !m, at constant values of ¢p and "p, causes a decrease of the torque whichcan be developed by the motor, arrow 2 - �g. 137b.
a. b.
Tm = const
Tm = co
nst
log ∆p
∆pmax
2
1
∆p
ω m0 0
εp'
εp''
∆pmax
ω m
Fig. 137. Characteristics of hydrostatic transmission ¢p = f(!m,Tm,"m). Lines Tm= const (at ¢p = const). a. linear co-ordinates, b. logarithmic co-ordinates.
It must be stated, however, that the operational parameters of a real transmissiondi¤er from the parameters derived for an ideal transmission. This is specially thecase when the system is operating with the pump set at a small displacement, largemotor speed or when the system operates at either very high or very low pressures.

202 Hydrostatic Transmissions (Hydrostatic Drives)
5.2 Volumetric and hydro-mechanical losses
5.2.1 Volumetric losses
Hydrostatic transmissions su¤er volumetric losses Qv which occur both in pump andmotor units. Volumetric losses (discussed in Chapter 2) are for a given speed mainlya function of load, i.e. pressure ¢p, in a system:
Qv = Kv¢p (5.19)
and are expressed in terms of the volumetric e¢ciencies of pump ´p and motor ´m,which were de�ned by equations:
´vp =QpQtp
=Qp
"p!pVÁp(5.20)
and
´vm =QtmQm
="m!mVÁmQm
(5.21)
The above equations show that displacement settings "p and "m have in�uence one¢ciencies of both the pump and the motor. In addition, some volumetric losses alsooccur in control mechanisms of the hydrostatic units. These losses are taken intoconsideration when calculating transmission e¢ciency only if the control elementsare supplied from the main circuit of the transmission, e.g. displacement or pressurecontrols, by de�ning e¢ciency ´vz of the control system. The volumetric e¢ciencyof the transmission lines for correctly manufactured systems is ´vl = 1:0 i.e. there isno line leakage. Comparing actual demand of motor Qm with pump delivery Qp weobtain expression for the angular speed of the motor:
!m ="pVÁp"mVÁm
!p´vp´vm´vz (5.22)
We can see that motor speed is lower than the speed of an ideal transmission operat-ing without volumetric losses. Kinematic ratio ik for a transmission with volumetriclosses is equal to:
ik =!m!p
="pVÁp´vm´vz´vp
"mVÁm(5.23)
ik =´vm´vz´vp
i(5.24)

Volumetric and hydro-mechanical losses 203
where i is transmission ratio equal to:
i ="mVÁm"pVÁp
(5.25)
Thus the kinematic ratio of the transmission will diminish when volumetric losses ofthe hydrostatic units increase.
5.2.2 Hydro-mechanical losses
Hydro-mechanical losses are de�ned by hydro-mechanical e¢ciencies of the individ-ual elements of the transmission. The e¢ciency of pump ´hmp and the e¢ciency ofmotor ´hmm were de�ned as:
´hmp =TtpTp
and ´hmm =TmTtm
(5.26)
Additional hydro-mechanical losses are due to pressure losses ¢pc in the controlelements of the transmission and pressure losses ¢pl due to friction in the deliveryand return lines of the transmission.
Hydraulic e¢ciency ´hl of the hydraulic line is de�ned as a ratio of pressure di¤erence(p3 ¡ p4) at the motor ports 3 and 4 to pressure di¤erence (p2 ¡ p1) at the pumpports 1 and 2, �g. 130:
´hl =p3 ¡ p4p2 ¡ p1
=¢p34¢p21
(5.27)
where pressure p3includes pressure loss ¢pl in the hydraulic line and losses ¢pc in
the control elements:
p3 = p2 ¡¢pl ¡¢pc (5.28)
Thus, the hydraulic e¢ciency of the line is:
´hl =p2 ¡¢pl ¡¢pc ¡ p4
p2 ¡ p1(5.29)
Pressure loss ¢pl is a function of the �ow rate Q and �uid viscosity ¹, thus ¢pl =f(Q;¹).
Dynamic ratio id of the transmission can now be de�ned as:
id =TmTp
=Ttm´hmm´hmp
Ttp(5.30)
substituting for Tm and Tp, we obtain:
id ="mVÁm¢p34"pVÁp¢p21
´hmp´hmm (5.31)

204 Hydrostatic Transmissions (Hydrostatic Drives)
or:
id = i´hmp´hmm´hl (5.32)
Thus the hydro-mechanical e¢ciencies of the pump and motor, control elements andhydraulic lines decrease the dynamic ratio of a transmission.
5.2.3 E¤ect of load
In general, steady-state analysis of hydraulic systems is carried out under the as-sumption of incompressibility of working �uid, which is re�ected in an instant andexact reaction of a system to parametric changes. The real hydraulic �uid is, how-ever, non-homogeneous - it contains free air and a mixture of liquid and air, thus itis necessary to consider the e¤ects of �uid compressibility on system performance.This is especially important in the case of systems which must provide exact loadpositioning and fast response to control signals.
12.0
10.0
8.0
6.0
4.0
2.0
0 15.010.05.01.0
14.0
p [MPa]
B [MPa]
m = (Vp/V)100%
1 - m = 0.001
2 - m = 0.01
3 - m = 0.1
4 - m = 0.3
5 - m = 0.5
6 - m = 1.0
Fig. 138. Dependence of bulk modulus on amount of air and operating pressure. m- air content (%) , Vp - air volume, V -liquid volume.
Compressibility of �uid is characterized by its bulk modulus. Bulk modulus dependson many factors, e.g. the type of hydraulic �uid, temperature, pressure and degreeof aeration. The e¤ect of aeration on the value of bulk modulus can be quite drastic.Fig. 138 shows how bulk modulus varies with pressure and the content of air in

Volumetric and hydro-mechanical losses 205
a typical hydraulic �uid. Bulk modulus B of the �uid allows the determination ofsti¤ness coe¢cient C of a hydraulic system.
The sti¤ness of a hydraulic system is expressed as a ratio of load change ¢F (or¢T ) to the corresponding position change ¢x (or ¢®) of the loaded element:
C =¢F
¢x(5.33)
or
C =¢T
¢®(5.34)
High hydraulic sti¤ness is very important in systems driving machine tools, robotsetc. The sti¤ness of a system is a function of the changes in �uid volume in the systemwhich are due to the variation of system pressure. The change in �uid volume dueto a change in pressure is de�ned by the relation:
V = V0
µ1¡
p
Ba
¶(5.35)
where:V0; V - �uid volume at atmospheric pressure and at pressure pBa - apparent bulk modulus of the �uid
Apparent bulk modulus Ba combines ideal bulk modulus B with the e¤ects of aer-ation and compliance of hydraulic lines and system elements (e.g. actuators). Ininitial design calculations we may assume the value of apparent bulk modulus of amineral oil to be Ba = 1200 MPa. The compressibility of �uid and the complianceof the system (mainly of transmission lines) change the e¤ective �ow rate in thesystem. Thus, the e¤ective �ow rate in a hydrostatic system can be expressed byequation:
"p!pVÁp ¡Kvp¢p¡V0Ba
d¢p
dt= "m!mVÁm +Kvm¢p = Q (5.36)
where:Kvp - coe¢cients of volumetric loss in pumpKvm - coe¢cients of volumetric loss in motor¢p - load pressure, ¢p = f(Tload)
This is a basic equation for a hydrostatic transmission, it includes the e¤ects ofthe compressibility of �uid and the volumetric losses in the pump and motor. Thisequation is true, regardless of the type of transmission and the type of loading,as long as the volumetric losses in the transmission line can be ignored. To allowanalysis of the e¤ect of load on the speed of the motor the above equation can bewritten in the form:

206 Hydrostatic Transmissions (Hydrostatic Drives)
!m ="pVÁp"mVÁm
!p ¡(Kvp +Kvm)
"mVÁm¢p¡
V0Ba"mVÁm
d¢p
dt(5.37)
5.2.4 Constant torque loading
We will analyse the characteristics of a transmission which is controlled by variationof pump �ow delivery and which is subjected to constant torque Tm = Tload = const.
When we vary "p and maintain "m = const:, the pressure in the system is:
Tm = Ttm´hmm = "mVÁm¢p34´hmm (5.38)
¢p34 =Tm
´hmmVÁm"m(5.39)
If we assume that hydro-mechanical e¢ciency ´hmm of the motor is independent ofmotor speed !m, then pressure ¢p is constant:
d¢p
dt= 0 (5.40)
Thus the last term in the equation for !m; eq. (5.37), is equal zero and substitutingeq. (5.40) into eq. ((5.37)) we obtain:
!m ="pVÁp"mVÁm
!p ¡(Kvp +Kvm)Tm"2mV
2Ám´hmm
(5.41)
Looking at this equation we can see that as torque Tm increases the speed of themotor decreases due to volumetric losses in the pump and the motor. Fig. 139shows the e¤ect of volumetric losses on the speed of the motor when displacementparameter "p is varied, a represents system volumetric loss when !p = 0 and b is adecrease of motor speed due to volumetric losses.
5.2.5 Inertial Loading
The following two cases are considered:
Case a. Inertial loading - compressibility of �uid and viscous friction are ignored
Case b. Inertial loading - compressibility of �uid is taken into account
Case c. Inertial loading - compressibility of �uid and viscous friction are included
The input in each case is a step change in pump displacement parameter "p: Pumpangular speed !p is assumed to be constant. We assume that the load on the motoris in the form:
Tload = Tm = Jd!mdt
(5.42)

Volumetric and hydro-mechanical losses 207
and using the de�nition for hydro-mechanical e¢ciency of the motor we obtain:
¢p34 =Tm
´hmm"mVÁm=
J
´hmm"mVÁm
d!mdt
(5.43)
when we introduce this relation into the equation for !m, eq. (5.37), the followingequation for motor speed is obtained:
!m =!pVÁp"mVÁm
"p ¡J(Kvp +Kvm)
"2mV2Ám´hmm
d!mdt
¡V0J
Ba"2mV2Ám´hmm
d2!mdt2
(5.44)
1.0
b
a
ωm
εm
Actual c
haract
eristic
Idea
l cha
ract
eristic
Fig. 139. E¤ect of volumetric losses on the speed of the motor when the displacementparameter "p is varied
Case a. As in this analysis compressibility of the �uid is ignored (Ba =1), theabove equation takes the following form:
J(Kvp +Kvm)
"2mV2Ám´hmm
d!mdt
+ !m =!pVÁp"mVÁm
"p (5.45)
We can de�ne time constant ¿ :
¿ =J(Kvp +Kvm)
"2mV2Ám´hmm
(5.46)
We can observe that if a system has large inertial load J and large volumetric lossescharacterised by coe¢cients Kvp and Kvm this will result in large time constant ¿and thus in slow response of the system.

208 Hydrostatic Transmissions (Hydrostatic Drives)
Constant k:
k =!pVÁp"mVÁm
(5.47)
and we can now rewrite eq. (5.45) as:
¿d!mdt
+ !m = k"p (5.48)
which is a �rst order di¤erential equation. With step change in pump displacement
parameter ep and with initial values of !m(0) = 0 andd!mdt
= 0 the above equation
after transformation into Laplace domain becomes:
!m(s) =kep
s (¿s+ 1)=
kep=¿
s (s+ 1=¿)(5.49)
which after expansion into partial fractions and transformation back into time do-main yields expression for time response of the motor to step change in e.g. "p):
!m(t) = !o
h1¡ e¡t=¿
i(5.50)
where !o is a steady-state speed of the motor:
!o =!pVÁp"mVÁm
"p (5.51)
Case b. We will use again eq. (5.44) and this time compressibility of the �uid isincluded in the analysis. Eq. (5.44) after some rearranging becomes:
d2!mdt2
+Ba(Kvp +Kvm)
V0
d!mdt
+Ba"
2mV
2Áp´hmm
JV0!m =
Ba"2mV
2Ám´hmm
JV0
!pVÁp"mVÁm
"p
(5.52)we notice that this equation is a second order di¤erential equation and thus it canbe written as follows:
¢¢
!m +2»!n¢
!m +!2n!m = k"p (5.53)
where:!n - natural frequency of the system³ - damping ratio
Comparing eq. (5.52) with eq. (5.53) we �nd that natural frequency !n of thesystem is equal to:

Volumetric and hydro-mechanical losses 209
!n = "mVÁm
r´hmmBaJV0
(5.54)
and the damping ratio ³ is expressed by:
³ =Ba(Kvp +Kvm)
2V0
1
!n=Ba(Kvp +Kvm)
2V0"mVÁm
sJV0
´hmmBa(5.55)
which after rearranging becomes:
³ =J (Kvp +Kvm)
"2mV2Ám´hmm
"mVÁm2
r´hmmBaJV0
(5.56)
and �nally, constant k is equal to:
k =Ba"
2mV
2Ám´hmm
JV0
!pVÁp"mVÁm
The equation for damping ratio ³ shows that its value will increase as volumetriclosses Kvp and Kvm in transmission units and load moment of inertia J increase.Thus amplitudes of damped oscillations of the motor speed will be reduced duringthe transient state. The frequency of damped oscillations is expressed by:
!d = !n
q1¡ ³2 (5.57)
The solution of equation (5.52) is in the form:
!m = !0
�1¡ e¡³!nt
½cos(!dt) +
³!n!d
sin(!dt)
¾¸(5.58)
and it represents time response of speed !m of the motor. Steady-state speed of themotor !0 is equal to:
!0 =k"p!2n
=
´hmmBa"2mV
2Ám
JV0
VÁp"mVÁm
µ"mVÁm
r´hmmBaJV0
¶2 =!pVÁp"mVÁm
(5.59)
Case c. Solving a more general loading case, i.e. assuming that the load on themotor includes viscous friction, then load equation is:
Tload = Tm = Jd!mdt
+ f!m (5.60)

210 Hydrostatic Transmissions (Hydrostatic Drives)
where f is viscous friction coe¢cient. Pressure di¤erential across the motor is thenrepresented by:
¢p34 =Tm
´hmm"mVÁm=
J
"mVÁm´hmm
d!mdt
+f
"mVÁm´hmm!m (5.61)
and its derivative by:
d¢p34dt
=J
"mVÁm´hmm
d2!mdt2
+f
"mVÁm´hmm
d!mdt
(5.62)
We substitute the above equations into eq. (5.37) and obtain:
!m =!pVÁp"mVÁm
"p ¡(Kvp +Kvm)
"mVÁm
µJ
"mVÁm´hmm
d!mdt
+f
"mVÁm´hmm!m
¶¡
¡V0
Ba"mVÁm
µJ
"mVÁm´hmm
d2!m(t)
dt2+
f
"mVÁm´hmm
d!m(t)
dt
¶(5.63)
which after rearranging becomes:
k1d2!mdt2
+ k2d!mdt
+ k3!m = k4ep (5.64)
where constant k1:
k1=V0J
Ba"2mV2Ám´hmm
(5.65)
constant k2:
k2=
(Kvp +Kvm)J +V0f
Ba´hmm"
2mV
2Ám
(5.66)
constant k3:
k3 = 1 +(Kvp +Kvm) f
"2mV2Ám´hmm
(5.67)
and �nally coe¢cient k4 is equal to:
k4 =!pVÁp"mVÁm
(5.68)

Volumetric and hydro-mechanical losses 211
As eq. (5.64) represents again a second order di¤erential equation, we can againwrite it as:
¢¢
!m(t) +2»!n¢
!m(t) +!2n!m(t) = kep(t) (5.69)
then natural frequency !n is equal to:
!n =
rk3k1=
2
66664
Ã
1:0 +(Kvp +Kvm)f
´hmm"2mV
2Ám
!
V0Ba"2mV
2Ám
J
´hmm
3
77775
1=2
=
=
vuut³"2mV
2Ám´hmm + fKvp + fKvm
´Ba
V0J(5.70)
damping ³ is expressed by equation:
³ =k2pk1
2k1pk3= :5
k2pk1k3
=
0:5
0
BB@
(Kvp +Kvm)J +V0f
Ba"2mV
2Ám´hmm
1
CCA
vuutÃ
V0J
Ba"2mV2Ám´hmm
!Ã
1:0 +(Kvp +Kvm) f
"2mV2Ám´hmm
!
=1
2
JBaKvp + JBaKvm + V0fr³"2mV
2Ám´hmm + fKvp + fKvm
´BaV0J
(5.71)
and k is expressed by:
k =k4k1=
!pVÁp"mVÁmV0J
Ba"2mV2Ám´hmm
=!pVÁp"mVÁmBa´hmm
V0J(5.72)
Finally, time response of motor speed !m to step input ep is described by equation:
!m = !0
�1¡ e¡³!nt
½cos(!dt) +
³!n!d
sin(!dt)
¾¸(5.73)
where steady-state speed of the motor !0 is equal to:

212 Hydrostatic Transmissions (Hydrostatic Drives)
!0 =k"p!2n
=
!pVÁp"mVÁmBa´hmm
V0J
("2mV 2
Ám´hmm+fKvp+fKvm)Ba
V0J
=
!pVÁp"mVÁm
1 +(Kvp +Kvm) f
"2mV2Ám´hmm
"p (5.74)
and damped frequency as before is calculated using:
!d = !n
q1¡ ³2 (5.75)
The values of !d, !n and ³ are de�ned by modi�ed expressions which re�ect the e¤ectof friction coe¢cient f . Time responses of motor speed in a hydraulic transmissionsubjected to various loading conditions are shown in �g. 140.
t
ωm
inertia loading
inertia load and fluid compressibility
resistive load
π/ωd 3π/ωd
Fig. 140. Time responses of motor speed in a hydraulic transmission
Further, a more realistic analysis of hydrostatic transmissions and their dynamics,taking into consideration non-linearities in the system, requires application of digitalsimulation techniques.

546
H{dpsohv ri Fdofxodwlrqv 0 K|gurvwdwlf wudqvplvvlrqv
Sureohp 814 K|gurvwdwlf wudqvplvvlrq 0 rshq flufxlwWkh iroorzlqj gdwd lv dydlodeoh iru d k|gudxolf v|vwhp vkrzq lq �j1 474=� sxps yroxphwulf h!flhqf| ��R @ 3=<8� sxps k|gur0phfkdqlfdo h!flhqf| ��6R @ 3=<:� olqh yroxphwulf h!flhqf| ��, @ 4� olqh k|gudxolf h!flhqf| ��, @ 3=<3� prwru yroxphwulf h!flhqf| ��6 @ 3=<8� prwru k|gur0phfkdqlfdo h!flhqf| ��66 @ 3=<9� sxps urwdwlrqdo vshhg qR @ 47:8 usp� sxps lqsxw wrutxh WR @ 433 QpDvvxph wkdw sxps dqg prwru glvsodfhphqwv duh wkh vdph/ l1h1 Y�6 @ Y�R/ dqgxvlqj wkh deryh gdwd fdofxodwh=� yroxphwulf h!flhqf| �� dqg k|gur0phfkdqlfdo h!flhqf| ��6 ri wkh v|vwhp� v|vwhp ryhudoo h!flhqf| �� urwdwlrq vshhg q6 dqg wrutxh W6 ri wkh prwru� nlqhpdwlf l& dqg g|qdplf l_ wudqvplvvlrq udwlrv ri wkh v|vwhp
VφmVφp
np nm
Tmηvl
ηhl
Ilj1 4741 Rshq flufxlw k|gurvwdwlf gulyh +Sureohp 814,
Dqvzhu= Zh �qg wkh yroxphwulf h!flhqf| ri wkh v|vwhp iurp htxdwlrq=�� @ ��R��,��6 @ 3=<8� 4=3� 3=<8 @ 3=<35 dqvzhu$
dqg wkh k|gur0phfkdqlfdo h!flhqf|=
��6 @ ��6R��,��66 @ 3=<:� 3=<� 3=<9 @ 3=;6; dqvzhu$wkxv/ wkh ryhudoo v|vwhp h!flhqf| lv=

547 H{dpsohv ri Fdofxodwlrqv 0 K|gurvwdwlf wudqvplvvlrqv
� @ ����6 @ 3=<35� 3=;6; @ 3=:89 dqvzhu$Dv zh dvvxphg wkdw wkh yroxphwulf h!flhqf| ri wkh k|gudxolf olqh lv ��, @ 4/ wkhqT6 @ TR dqg wkh urwdwlrq vshhg ri wkh prwru lv=
q6 @ ��6��RqR Y�RY�6q6 @ 3=<8� 3=<8� 47:8� 4=3 @ 4664 usp dqvzhu$
Zh xvh wkh iroorzlqj htxdwlrq wr fdofxodwh prwru wrutxh=
��6R @ W|RWR @ �s�2Y�R
WRvr suhvvxuh gl�huhqwldo dfurvv wkh sxps lv htxdo wr=
�s�2 @ ��6RWRY�R
rq wkh rwkhu kdqg=��66 @ W6
W|6 @ W6Y �6�s�e
dqg dovr=��, @ �s�e
�s�2Vr/ wkh prwru wrutxh lv htxdo wr=
W6 @ ��66�s�eY�6 @ ��66��,��6RWRY�6Y�RW6 @ 3=<9� 3=<� 3=<:� 4=33 @ ;6=; Qp dqvzhu$
Wkh nlqhpdwlf wudqvplvvlrq udwlr lv gh�qhg e| wkh uhodwlrq=
l& @ q6qR @
��6��RqR Y�RY�6qR @ ��6��R Y�RY�6
l& @ 3=<8� 3=<8� 4 @ 3=<3 dqvzhu$zkhuhdv wkh g|qdplf wudqvplvvlrq udwlr lv htxdo wr=

Ydoyh frqwuro ri k|gurvwdwlf wudqvplvvlrq 0 rshq flufxlw 548
l_ @ W6WR
wkhuhiruh=
l_ @ ;6=;433 @ 3=;7 dqvzhu$
Sureohp 815 Ydoyh frqwuro ri k|gurvwdwlf wudqvplvvlrq 0 rshq flufxlwWkh iroorzlqj gdwd lv dydlodeoh iru d k|gudxolf v|vwhp vkrzq lq �j1 475=� sxps yroxphwulf h!flhqf| ��R @ 3=<8� sxps k|gur0phfkdqlfdo h!flhqf| ��6R @ 3=<97� prwru yroxphwulf h!flhqf| ��6 @ 3=<8� prwru k|gur0phfkdqlfdo h!flhqf| ��66 @ 3=<6� Suhvvxuh orvvhv lq wkh v|vwhp duh=
� suhvvxuh orvv �s� lq wkh olqh frqqhfwlqj wkh sxps wr wkh prwru/ �s� @3=6 PSd
� suhvvxuh orvv �s2 lq wkh olqh frqqhfwlqj wkh prwru wr wkh uhvhuyrlu/ �s2 @3=4 PSd
� suhvvxuh orvv �s� lq wkh uhwxuq olqh �owhu/ �s� @ 3=38 PSd� suhvvxuh orvv �se lq wkh vxfwlrq olqh �owhu/ �s2 @ 3=34 PSd
� urwdwlrq vshhg ri wkh hohfwulf prwru gulylqj sxps lv frqvwdqw dw qR @ 5<33 usp� ordg wrutxh rq wkh prwru lv 5;3 Qp dw urwdwlrq vshhg q6 @ 933 usp� wkh uholhi ydoyh lv vhw dw sf @ 48 PSd1Fdofxodwh xqlw glvsodfhphqwv ri wkh sxps dqg wkh prwru dv zhoo dv wkh srzhu ri wkhhohfwulf prwru1Dqvzhu= Wkh xqlw glvsodfhphqw Y�6 ri d prwru pd| eh fdofxodwhg iurp htxdwlrq=
Y�6 @ W6��66�s�e
Zkhq zh doorz wkh prwru wr zrun zlwk wkh pd{lpxp doorzdeoh suhvvxuh gl�huhqfh�s�e zh rewdlq wkh plqlpxp ydoxh ri wkh prwru glvsodfhphqw/ l1h1 wkh vpdoohvwprwru vl}h1 Dv wkh uholhi ydoyh lv vhw dw 48 PSd wkh pd{lpxp ydoxh ri �s�e lvrewdlqhg iurp htxdwlrq=
�s�e @ sf ��s� ��s2 ��s��s�e @ 48� 3=6� 3=4� 3=38 @ 47=88 PSd
wkxv=

549 H{dpsohv ri Fdofxodwlrqv 0 K|gurvwdwlf wudqvplvvlrqv
p - ∆p1
M
p
nm
p0
∆p4
Tm
Load
∆p2 + ∆p3
∆p3
Ilj1 4751 Ydoyh frqwuroohg k|gurvwdwlf gulyh +Sureohp 815,
Y�6 @ W6��66�s�e @ 5;3
3=<6� 47=88� 43S @ 53=:� 433S p�udg3� dqvzhu$
Li zh dvvxph wkdw wkh uholhi ydoyh lv forvhg wkhq wkh prwru ghpdqg rz lv htxdo wrwkh sxps gholyhu| rz=
Y�R5�qR93 ��R @ Y�6��6
5�q693
dqg wkh xqlw glvsodfhphqw ri wkh sxps lv wkhq htxdo wr=
Y�R @ q6qR
Y�6��6��R @ 933
5<33 �53=:� 433S3=<8� 3=<8 @ 7= :7� 433S p�udg3� dqvzhu$
Wkh srzhu ri wkh hohfwulf prwru lv htxdo wr=
Se, @ WR$R @ Y�R�s�2��6R
5�qR93
zkhuh suhvvxuh gl�huhqfh �s�2 lv htxdo wr=
�s�2 @ sf .�se�s�2 @ 48 . 3=34 @ 48=34 PSd
wkxv wkh srzhu ri wkh hohfwulf prwru lv=
Se, @ 7=:7� 433S � 48=34� 43S � 5<333=<79 � 5�
93 �4
4333 @ 55=;nZ dqvzhu$

K|gurvwdwlf wudqvplvvlrq iru plqlqj oliw 54:
Srzhu ri wkh hohfwulf prwru fdq eh dovr fdofxodwhg iurp htxdwlrq=
Se, @ S,J@_� @ W,J@_q6
��R��6R��,��6��665�93
zkhuh k|gudxolf olqh h!flhqf| ��, lv htxdo wr=
��, @ �s�e�s�2 @
47=8848=34 @ 3=<9<
wkxv djdlq wkh hohfwulf srzhu uhtxluhg wr gulyh wkh sxps lv=
Se, @ 5;3� 9333=<8� 3=<79� 3=<9<� 3=<8� 3=<6 �
5�93
44333 @ 55=;nZ dqvzhu$
Sureohp 816 K|gurvwdwlf wudqvplvvlrq iru plqlqj oliwD vlpsol�hg gldjudp ri d k|gudxolf v|vwhp gulylqj d plqlqj oliw lv vkrzq lq �j1 4761Wkh iroorzlqj gdwd lv dydlodeoh=� pd{lpxp whqvlrq lq wkh oliwlqj ursh lv V6@% @ 73333 Q� udglxv ri wkh guxp lv u @ 3=7p� pd{lpxp oliw yhorflw| lv y6@% @ 5 pv3�� urwdwlrq vshhg ri wkh sxps lv qR @ 63 uhyv3�� pd{lpxp shuplvvleoh suhvvxuh gl�huhqwldo dfurvv wkh sxps lv �s�2 @ 56=5PSd1Wkh iroorzlqj gdwd rq h!flhqflhv lv dydlodeoh=� sxps yroxphwulf h!flhqf| ��R @ 3=<9� sxps k|gur0phfkdqlfdo h!flhqf| ��6R @ 3=<6� olqh yroxphwulf h!flhqf| ��, @ 3=<;� olqh k|gud0phfkdqlfdo h!flhqf| ��, @ 3=<8� prwru yroxphwulf h!flhqf| ��6 @ 3=<7� prwru k|gur0phfkdqlfdo h!flhqf| ��66 @ 3=<4Xvlqj deryh gdwd fdofxodwh=� xqlw glvsodfhphqw ri wkh prwru Y�R� srzhu ri hohfwulf prwru Se,Dqvzhu= Wkh xqlw glvsodfhphqw ri wkh prwru lv gh�qhg e| htxdwlrq=
Y�6 @ W6�s�e��66
dqg wkh prwru ordg wrutxh lv=W6 @ W,J@_ @ V6@% � u @ 7� 43e � 3=7 @ 4=9� 43e Qp

54; H{dpsohv ri Fdofxodwlrqv 0 K|gurvwdwlf wudqvplvvlrqv
M
np nm
Tm
v
Fmax
Ilj1 4761 K|gudxolf plqlqj oliw +Sureohp 816,
Wkh suhvvxuh gl�huhqfh dfurvv wkh k|gudxolf prwru lv fdofxodwhg wdnlqj k|gur0phfkdqlfdoh!flhqf| ri wkh k|gudxolf olqh lqwr dffrxqw=
�s�e @ �s�2��, @ 56=5� 3=<8 @ 55 PSdwkxv prwru glvsodfhphqw lv=
Y�6 @ 4=9� 43e55� 43S � 3=<4 @ :=<<� 433e p�udg3�
Wkh pd{lpxp xqlw glvsodfhphqw ri wkh sxps lv fdofxodwhg xvlqj wkh uhodwlrq ehwzhhqwkh sxps dqg prwru rzv dqg wdnlqj lqwr frqvlghudwlrq wkh yroxphwulf h!flhqf| riwkh k|gudxolf olqh=
TR @ T6��,
dqg dv wkh htxdwlrq iru prwru rz ghpdqg lv=
T6 @ $6Y�6��6
dqg wkh sxps rz gholyhu| lv htxdo wr=TR @ $RY�R��R
wkhq wkh htxdwlrq iru xqlw glvsodfhphqw ri wkh sxps lv=
Y�R @ Y�6��6��,��R
$6$R
+d,

K|gudxolf wudqvplvvlrq iru vqrzpreloh 54<
Wkh prwru urwdwlrq vshhg lv htxdo wr=
$6 @ y6@%u @ 5
3=7 @ 8 udgv3�
dqg wkh sxps urwdwlrq vshhg lv htxdo wr=$R @ 5�qR @ 5� � 63 @ 4;;=8 udgv3�
Wkxv xvlqj ht1 +d, zh rewdlq xqlw glvsodfhphqw ri wkh sxps=
Y�R @ :=<<� 433e3=<7� 3=<;� 3=<9 �
84;;=8 @ 5=7� 433D p�udg3� dqvzhu$
Zh fdofxodwh srzhu ri wkh hohfwulf prwru xvlqj htxdwlrq=Se, @ W,J@_$6
� @ W,J@_$6��6R��R��,��,��66��6 @
@ 4=9� 43e � 83=<6� 3=<9� 3=<8� 3=<;� 3=<4� 3=<7� 43� @ 445=8 nZ dqvzhu$
Sureohp 817 K|gudxolf wudqvplvvlrq iru vqrzprelohD vlpsol�hg gldjudp ri d k|gudxolf wudqvplvvlrq iru d vqrzpreloh lv vkrzq lq �j14771 Hdfk fudzohu lv gulyhq e| d vhsdudwh k|gudxolf prwru1 Wkh iroorzlqj gdwd lvdydlodeoh=� pdvv ri wkh yhklfoh lv P @ 7� 43� nj� udglxv ri gulyh zkhhov lv u @ 3=5p� wkh sulph pryhu lv d glhvho hqjlqh zklfk gholyhuv pd{lpxp srzhu dw q @ 6933 usp� wkh pd{lpxp suhvvxuh gl�huhqfh dfurvv wkh sxps lv �s6@% @ 48 PSd� pd{lpxp vshhg ri yhklfoh lv y� @ 69 nsk rq dw whuudlq dqg y2 @ :=5 nsk rq 63(
judglhqw� wrwdo gulylqj uhvlvwdqfh IA lv dvvxphg frqvwdqw ryhu wkh udqjh ri gulylqj frqgl0
wlrqv/ IA @ 7� 43� QFdofxodwh/ ljqrulqj orvvhv=� xqlw glvsodfhphqw ri k|gudxolf prwru Y�6� pd{lpxp xqlw glvsodfhphqw ri k|gudxolf sxps Y�R� srzhu ri glhvho hqjlqh Se?Fduu| rxw wkh vdph fdofxodwlrqv iru wkh fdvh zkhq wkh k|gudxolf v|vwhp h!flhqflhvduh=� sxps yroxphwulf h!flhqf| ��R @ 3=<9� sxps k|gur0phfkdqlfdo h!flhqf| ��6R @ 3=<5� prwru yroxphwulf h!flhqf| ��6R @ 3=<8

553 H{dpsohv ri Fdofxodwlrqv 0 K|gurvwdwlf wudqvplvvlrqv
� prwru k|gur0phfkdqlfdo h!flhqf| ��66 @ 3=<3Ydoxhv ri suhvvxuh orvvhv lq k|gudxolf olqhv dqg lq wkh gluhfwlrqdo frqwuro ydoyh vkrxogeh wdnhq iurp wkh flufxlw gldjudp1
∆p1 = 0.05 MPa
∆p3 = 0.05 MPa
∆p2 = 0.1 MPa
∆p5 = 0.1 MPa
∆p4 = 0.05 MPa
Ilj1 4771 K|gudxolf gulyh ri d vqrzpreloh +Sureohp 817,
Dqvzhu= Wkh pd{lpxp xqlw glvsodfhphqw ri wkh prwru lv fdofxodwhg zkhq wkhpd{lpxp ordg wrutxh dqg wkh suhvvxuh gl�huhqfh dfurvv wkh prwru duh nqrzq xvlqjhtxdwlrq=
�s�e @ W6Y�6
Wkh pd{lpxp ordg wrutxh rffxuv zkhq wkh yhklfoh wudyhov wkh 63( judglhqw/ wkxvpd{lpxp wrwdo irufh rssrvlqj prwlrq ri wkh vqrzpreloh lv htxdo wr=
I @Pj vlq�. IA +d,dqg vlq� � wdq� @ 3=6 +judglhqw 63(,1 Dv gulyh prwruv zrun lq sdudooho wkhq wkhwrutxh uhtxluhg wr gulyh wkh vqrzpreloh lv=
5W6 @ Iudqg xvlqj ht1 +d, zh rewdlq=
W6 @ u5 +Pj vlq�. IA , @
@ 3=55 � +7333� <=;4� 3=6 . 7333, @ 48:: Qp

K|gudxolf wudqvplvvlrq iru vqrzpreloh 554
wkxv wkh uhtxluhg prwru xqlw glvsodfhphqw lv htxdo wr=
Y�6 @ W6�s�e @
48::483� 43D @ 4=38� 433e p�udg3� dqvzhu$
Zkhq wkh pd{lpxp sxps gholyhu| dw pd{lpxp vshhg ri wkh yhklfoh lv nqrzq/ wkhpd{lpxp xqlw glvsodfhphqw ri wkh sxps fdq eh fdofxodwhg xvlqj=
Y�R @ TR$R
@ 93TR5�qR
dqg dv pd{lpxp urwdwlrq vshhg ri wkh prwruv lv htxdo wr=
$6 @ y�u @ 69� 43�
6933� 3=5 @ 83 udgv3�
wkhq wkh uhtxluhg rz gholyhu| fdsdflw| ri wkh sxps lv=TR @ 5T6 @ 5$6Y�6 @ 5� 83� 4=38� 433e @ 3=3438 p�v3�
wkxv wkh uhtxluhg xqlw glvsodfhphqw ri wkh sxps dw pd{lpxp lqsxw vshhg ri q @6933 usp lv=
Y�R @ 93� 3=34385� � 6933 @ 5:=;8� 433D p�udg3� dqvzhu$
Wkh srzhu uhtxluhg wr sursho wkh yhklfoh dw pd{lpxp vshhg rq dw jurxqg lv=
S� @ IA y� @ 7� 43� � 69� 43�6933� 4333 @ 73nZ
dqg wkh srzhu uhtxluhg zkhq wudyhoolqj wkh 63( judglhqw lv htxdo wr=S2 @ +Pj vlq�. IA ,y2 @
@ +7� 43� � <=;4� 3=6 . 7� 43�,� :=5� 43�6933 @ 64=87 nZ
Iurp wkh deryh fdofxodwlrqv zh vhh wkdw/ zkhq orvvhv lq wkh v|vwhp duh qrw wdnhqlqwr frqvlghudwlrq/ wkh srzhu ghyhorshg e| wkh glhvho hqjlqh vkrxog eh=
Se? A S� @ 73=3nZ dqvzhu$Zkhq zh wdnh wkh v|vwhp suhvvxuh orvvhv lqwr frqvlghudwlrq wkhq wkh pd{lpxpsuhvvxuh gl�huhqwldo rq wkh k|gudxolf prwru lv htxdo wr=
�s�e @ 48� +3=38 . 3=4 . 3=38 . 3=38 . 3=4, @ 47=98 PSd

555 H{dpsohv ri Fdofxodwlrqv 0 K|gurvwdwlf wudqvplvvlrqv
dqg/ dv prwru k|gur0phfkdqlfdo h!flhqf| lv ��66 @ 3=<3/ wkhq wkh uhtxluhg xqlwglvsodfhphqw ri hdfk prwru lv htxdo wr=
Y�6 @ W6�s�e��66
@ 48::47=98� 43S � 3=< @ 453� 433S p�udg3� dqvzhu$
Wkh sxps xqlw glvsodfhphqw lv fdofxodwhg iurp htxdwlrq=Y�R @ TR
$R��Rzkhuh=
TR @ 5T6 @ 5$6Y�6��6
wkxv=
Y�R @ 5$6Y�6$R��R��6 @ 5� 83� 453� 433S
6933� 5�93 � 3=<9� 3=<8
@ 67=<� 433S p�udg3� dqzhu$
Ryhudoo h!flhqf| ri wkh wudqvplvvlrq lv h{suhvvhg e|=
� @ ��R��6R��6��66�s�e�s6@%
+e,wkxv/ wdnlqj orvvhv lqwr frqvlghudwlrq/ wkh uhtxluhg hqjlqh srzhu vkrxog eh dw ohdvwhtxdo wr=
Se? @ S�� @ 7=3� 43e
3=<9� 3=<5� 3=<8� 3=<3� 47=9848=3 � 4333
@ 87=56 nZ dqvzhu$
Sureohp 818 Forvhg flufxlw k|gurvwdwlf wudqvplvvlrqD forvhg flufxlw k|gurvwdwlf wudqvplvvlrq vkrzq lq �j1 478 lv dvvhpeohg xvlqj wkhiroorzlqj pdmru frpsrqhqwv=� d yduldeoh glvsodfhphqw k|gudxolf sxps zlwk vwurnh glvsodfhphqw tR @ 3=3; Ouhy3�� dq hohfwulf prwru zklfk kdv urwdwlrq vshhg qR @ 4333 usp� d yduldeoh glvsodfhphqw k|gudxolf prwru vxemhfwhg wr frqvwdqw ordg S,J@_ @ 45nZ� d uholhi ydoyh vhw dw sf @ 5: PSdH!flhqflhv dqg suhvvxuh orvvhv lq wkh v|vwhp duh dv iroorzv=� sxps yroxphwulf h!flhqf| lv ��R @ 3=<3� hohfwulf prwru h!flhqf| lv �e, @ 3=<:

Forvhg flufxlw k|gurvwdwlf wudqvplvvlrq 556
� v|vwhp ryhudoo h!flhqf| lv � @ 3=93� prwru yroxphwulf h!flhqf| lv ��6 @ 3=<6� prwru k|gur0phfkdqlfdo h!flhqf| lv ��66 @ 3=<:� suhvvxuh orvv lq wkh olqh frqqhfwlqj wkh sxps zlwk wkh prwru lv �,Jrr @ 3=; PSd=
M
np
p3
nm
p2
p1p4
Q1
Qvm
Qvp
Q2
Load
Ilj1 4781 Forvhg flufxlw k|gurvwdwlf gulyh +Sureohp 818,Dvvxplqj wkdw wkh deryh h!flhqflhv duh frqvwdqw ryhu wkh ixoo rshudwlqj udqjh dqgwkdw sxps glvsodfhphqw sdudphwhu lv %@ 3=8/ fdofxodwh=� gholyhu| rz T� ri wkh fkdujh sxps/ qhfhvvdu| wr dyrlg v|vwhp fdylwdwlrq1� wkh shufhqwdjh lqfuhdvh lq v|vwhp srzhu sulru wr wkh rshqlqj ri wkh uholhi ydoyh1� wkh pd{lpxp vwurnh glvsodfhphqw ri wkh k|gudxolf prwru li lwv plqlpxp urwdwlrq
vshhg lv q6 @ 533 usp� srzhu ri wkh hohfwulf prwru Se,� k|gur0phfkdqlfdo h!flhqf| ri wkh sxps ��66Dqvzhu= Wkh dfwxdo rz gholyhu| ri wkh pdlq sxps lv=
T2 @ %RqRtR��RT2 @ 3=8� 4333� ;3� 433� � 3=<� 4
93 @ 3=9 Ov3�
Li zh dvvxph wkdw prwru uhwxuq suhvvxuh s� @ 3 dqg wkdw/ lqlwldoo|/ wkh uholhi ydoyh lvforvhg l1h1 prwru rz ghpdqg T6 @ T2/ wkhq wkh prwru gholyhu| suhvvxuh s�e lv=
s� @ S,J@_T6��66��6 @ 45
3=9� 3=<6� 3=<: @ 57=: PSd
dqg wkh uhtxluhg sxps suhvvxuh s2 lv htxdo wr=s2 @ s� .�s,Jrr @ 57=: . 3=; @ 58=8 PSd ? sf @ 5: PSd
Wkh fdofxodwhg ydoxh ri suhvvxuh s2 lv orzhu wkdq wkh uholhi ydoyh vhwwlqj/ wkxv wkhdvvxpswlrq wkdw wkh uholhi ydoyh lv forvhg zdv fruuhfw1 Zh dvvxph wkdw yroxphwulf

557 H{dpsohv ri Fdofxodwlrqv 0 K|gurvwdwlf wudqvplvvlrqv
h!flhqf| ri wkh sxps lv frqvwdqw ryhu lwv ixoo rshudwlqj udqjh/ wkhq sxps yroxphwulforvvhv duh=
T�R @ +4� ��R,T|R
zkhuh T|R lv wkhruhwlfdo sxps rz=T|R @ %RqRtR
wkxv=T�R @ +4� ��R,%RqRtR @ +4� 3=<,� 3=8� 4333� ;3� 433�
93 @ 99=:� 433� Ov3�
Lq d vlplodu zd| zh pd| fdofxodwh wkh yroxphwulf orvvhv lq wkh k|gudxolf prwru=T�6 @ +4� ��6,T6 @ +4� 3=<6,� 3=9 @ 75=3� 433� Ov3�
Zh pd| ixuwkhu dvvxph wkdw yroxphwulf orvvhv gxh wr lqwhuqdo ohdndjhv lq wkh sxpsdqg prwru duh gudlqhg wr wkh uhvhuyrlu/ wkxv d fkdujh sxps pxvw surylgh d rz dwohdvw htxdo wr=
T� @ T�R .T�6 @ 99=:� 433� . 75=3� 433� @ 43;=:� 433� Ov3� dqvzhu$Wkh pd{lpxp sxps suhvvxuh/ vhw e| wkh uholhi ydoyh/ lv sf @ 5: PSd dqg li zhfrqvlghu suhvvxuh orvv lq wkh gholyhu| olqh wkhq wkh pd{lpxp suhvvxuh dw wkh k|gudxolfprwru lv=
s�6@% @ sf ��s,Jrrs�6@% @ 5:� 3=; @ 59=5PSd
wkxv wkh pd{lpxp srzhu zklfk prwru fdq gholyhu lv=
S6@% @ s�6@%s� S,J@_ @ 59=5
57=: � 45 @ 45=:6 nZ
dqg wkh shufhqwdjh srzhu ryhuordg fdxvlqj rshqlqj ri wkh uholhi ydoyh lv=
S @ S6@% � S,J@_S,J@_
� 433S( @ 45=:6� 45
45 � 433 @ 9=4( dqvzhu$
Wkh pd{lpxp vwurnh glvsodfhphqw ri wkh k|gudxolf prwru/ dw plqlpxp prwru vshhgq6 @ 533 usp dqg %6 @ 4/ lv htxdo wr=
t6 @ T2��6q6 @ 3=9� 3=<6� 93
533 @ 49:� 433� Ouhy3� dqvzhu$

Dffhohudwlrq ri k|gurvwdwlf wudqvplvvlrq 558
Lqsxw sxps srzhu lv htxdo wr=SR @ S,J@_
� @ 453=9 @ 53=3 nZ
wkxv wkh uhtxluhg srzhu ri wkh hohfwulf prwru lv=Se, @ SR
�e, @53=33=;< @ 55=8 nZ dqvzhu$
Ilqdoo|/ wkh k|gur0phfkdqlfdo h!flhqf| ri wkh sxps lv gh�qhg e| htxdwlrq=��6R @ s2%RY�R
WR @ s2%RqRtRSR
��6R @58=8� 43S � 3=8� 4333
93 � 3=3;53� 43� � 43� @ 3=;8 dqvzhu$
Sureohp 819 Dffhohudwlrq ri k|gurvwdwlf wudqvplvvlrqD k|gurvwdwlf wudqvplvvlrq frqvlvwv ri d yduldeoh glvsodfhphqw sxps dqg d �{hgglvsodfhphqw k|gudxolf prwru1 Iroorzlqj gdwd lv dydlodeoh=� vwurnh glvsodfhphqw ri wkh sxps lv tR @ 497� 433� Ouhy3�� wkh sxps lv gulyhq e| dq hohfwulf prwru dw d frqvwdqw urwdwlrq vshhg qR @
58 uhyv3�� sxps ohdndjh frh!flhqw lv N�R @ <� 433� Ov3�PSd3�� sxps k|gur0phfkdqlfdo h!flhqf| lv ��6R @ 3=;8� prwru lqhuwldo ordg lv M @ 4=3 njp2� k|gudxolf prwru kdv vwurnh glvsodfhphqw t6 @ 98� 433� Ouhy3�� prwru ohdndjh frh!flhqw lv N�6 @ ;�433� Ov3�PSd3�dqg lwv k|gur0phfkdqlfdo
h!flhqf| lv ��66 @ 3=;81Ljqruh yroxphwulf dqg k|gur0phfkdqlfdo orvvhv lq wkh k|gudxolf olqhv dqg wkh frp0suhvvlelolw| ri wkh xlg dqg fdofxodwh wkh iroorzlqj=� wkh dffhohudwlrq ri wkh k|gudxolf prwru/ zkhq lwv urwdwlrq vshhg q6 @ 66 uhyv3�dqg
sxps rz uhdfkhv 93( ri ixoo rz� uhtxluhg rxwsxw srzhu ri wkh hohfwulf prwru1� wkh wlph wdnhq e| wkh k|gudxolf prwru wr uhdfk 96( ri lwv wrs vshhg zkhq sxps
glvsodfhphqw sdudphwhu kdv d vwhs fkdqjh iurp %R @ 3 wr %R @ 3=81Dqvzhu= Zlwk wkh dvvxpswlrq/ wkdw yroxphwulf orvvhv lq wkh k|gudxolf olqhv dqgfrpsuhvvlelolw| ri wkh xlg fdq eh ljqruhg/ wkh iroorzlqj htxdwlrq lv ydolg=
T @ %RqRtR �N�R�s�2 @ q6t6 .N�6�s�edqg li zh ljqruh suhvvxuh orvvhv wkhq=

559 H{dpsohv ri Fdofxodwlrqv 0 K|gurvwdwlf wudqvplvvlrqv
�s�2 @ �s�e @ �swkxv zkhq sxps glvsodfhphqw vhwwlqj lv %R @ 3=9 +93( ixoo wkhruhwlfdo rz, dqgprwru vshhg lv 66 uhyv3�wkh suhvvxuh gl�huhqwldo dfurvv wkh prwru lv htxdo wr=
�s @ %RqRtR � q6t6N�R .N�6
+d,
�s @ 3=9� 58� 497� 433� � 66� 98� 433�+<� 433� . ;� 433�, @ 4;=8 PSd
Wrutxh ri wkh prwru gxh wr lqhuwldo ordg lv htxdo=
W,J@_ @ W6 @ M g$6gw
dqg dovr=W6 @ ��66t6�s
5�li zh frpsduh wkhvh htxdwlrqv zh rewdlq wkh htxdwlrq iru dffhohudwlrq ri wkh prwru=
M g$6gw @ ��66t6�s
5�g$6gw @ ��66t6�s
5�M +e,dqg
g$6+w,gw @ 3=;8� 4:=8� 43S � 98� 433S
5� � 4 @ 487 udgv32 dqvzhu$Wkh uhtxluhg rxwsxw srzhu ri wkh hohfwulf prwru lv=
Se, @ SR @ �sTR�R @ �s%RqRtR��R
��6R��R @ �s%RqRtR��6R
Se, @ 4;=8� 43S � 3=9� 58� 497� 433S3=;8� 4333 @ 86=8nZ dqvzhu$
Frqvlghulqj htxdwlrqv +d, dqg +e,> wkh htxdwlrq iru prwru prwlrq lv=g$6gw @ ��66t6
5�M%RqRtR � q6t6N�R .N�6

Dffhohudwlrq ri k|gurvwdwlf wudqvplvvlrq 55:
uhduudqjlqj zh rewdlq=M+N�R .N�6,5�
��66t6g$6+w,gw @ %RqRtR � q6t6
zklfk diwhu iroorzlqj vxevwlwxwlrqv=tR @ 5�Y�Rt6 @ 5�Y�6qR @ $R
5�q6 @ $6
5�dqg glylvlrq e| ri Y�6 ehfrphv=
M+N�R .N�6,��66Y 2�6
g$6+w,gw . $6+w, @ %R Y�RY�6$R
zklfk lv d �uvw rughu gl�huhqwldo htxdwlrq1 Xvlqj Odsodfh wudqvirupdwlrqv/ zlwklqlwldo frqglwlrqv htxdo wr }hur/ zh rewdlq wkh iroorzlqj htxdwlrq=
�v$6+v, . $6+v, @ %R$RY�RY�R
zkhuh wlph frqvwdqw � > lv htxdo wr=
� @ M+N�R .N�6,��66Y 2�6
@ 4� +<� 433S . ;� 433S,� 433S� +5�, 23=;8� +98� 433S,2 @ 3=4;: v
Wkxv wkh htxdwlrq iru prwru vshhg lq Odsodfh grpdlq lv=
$6+v, @ %R$RY�RY�6
4+�v. 4,
zklfk/ diwhu wudqvirupdwlrq edfn lqwr wkh wlph grpdlq/ |lhogv wkh htxdwlrq iru prwruvshhg=
$6+w, @ %R$RY�RY�6
3C4� h3
w�4D
Wkh pd{lpxp/ vwhdg|0vwdwh/ prwru vshhg lv rewdlqhg vhwwlqj w @4
$6E6@%� @ $6+4, @ %R$RY�RY�6
wkxv/ iru vwhs fkdqjh ri %R iurp 3 �$ 3=8> vwhdg|0vwdwh vshhg ri wkh prwru lv=

55; H{dpsohv ri Fdofxodwlrqv 0 K|gurvwdwlf wudqvplvvlrqv
$6E6@%� @ %R$RY�RY�6 @ 3=8� 58� 497� 433S
98� 433S @ 64=8 uhyv3�
Wkh wlph lq zklfk wkh prwru uhdfkhv 96( ri lwv pd{lpxp vshhg lv rewdlqhg e|htxdwlqj wkh h{suhvvlrqv=
$6+w, @ 3=96$6E6@%�
%R$RY�RY�6 +4� h3
w� , @ 3=96%R$R
Y�RY�6
+4� h3w� , @ 3=96 �$ h3
w� @ 3=6:
wkhuhiruh w r � dqg �qdoo|/ wkh wlph lq zklfk wkh prwru zloo uhdfk 96( ri lwv pd{l0pxp vshhg lv=
w @ � @ M+N�R.N�6,��6RY 2�6
@ 3=4;: v dqvzhu$
Sureohp 81: Qdwxudo iuhtxhqf| ri k|gurvwdwlf wudqvplvvlrqD k|gurvwdwlf wudqvplvvlrq frqvlvwv ri d yduldeoh glvsodfhphqw sxps dqg d �{hgglvsodfhphqw k|gudxolf prwru1 Iroorzlqj gdwd lv dydlodeoh=� xqlw glvsodfhphqw ri wkh sxps lv Y�R @ 4;� 433� Oudg3�� sxps lv gulyhq e| dq hohfwulf prwru dw frqvwdqw urwdwlrq vshhg $s @ 45 udgv3�� sxps ohdndjh frh!flhqw N�R @ 7� 433� Ov3�PSd3�� sxps k|gur0phfkdqlfdo h!flhqf| ��6R @ 4=3� prwru lqhuwldo ordg M @ 5 njp2� k|gudxolf prwru kdv d xqlw glvsodfhphqw Y�6 @ 45� 433� Oudg3�/ ohdndjh frhi0
�flhqw iru sxps dqg prwru duh N�R @ N�6 @ 7 � 433� Ov3�PSd3�dqg k|gur0phfkdqlfdo h!flhqf| ��66 @ 3=<3
� frpsuhvvlelolw| ri wkh xlg E @ 4=:� 43� PSd1� wrwdo xlg yroxph lq wkh v|vwhp Yf @ 5 O> yroxphwulf dqg k|gudxolf orvvhv lq wkh
k|gudxolf olqhv duh ljqruhg1Xvlqj deryh gdwd fdofxodwh=� v|vwhp qdwxudo iuhtxhqf| i� gdpslqj frh!flhqw �� pdjqlwxgh ri prphqw ri lqhuwld M dw zklfk gdpslqj frh!flhqw zloo eh � @ 41

Gdpslqj lq k|gurvwdwlf wudqvplvvlrq 55<
Dqvzhu= Prwlrq ri wkh prwru lq wklv v|vwhp lv uhsuhvhqwhg e| ht1 +8185, zklfkwdnhv lqwr frqvlghudwlrq yroxphwulf orvvhv lq wkh sxps dqg wkh prwru dqg wkh frp0suhvvlelolw| ri xlg1 Wklv htxdwlrq/ zlwk %6 @ 4 ehfrphv=g2$6gw2 . E@+N�R .N�6,
Yfg$6gw . E@%26Y 2�R��66
MYf $6 @ E@%26Y 2�6��66MYf
$RY�RY�6 %R +d,
Wkh v|vwhp*v qdwxudo iuhtxhqf| lv=
$? @ Y�6u��66E
MYf +e,
$? @ 45� 433Sv3=<� 4=:� 43b5� 5� 433� @ :=75 udgv3� +dqvzhu$,
dqg gdpslqj frh!flhqw � lv htxdo wr=� @ E+N�R .N�6,
5Yf$?+f,
� @ 4=:� 43� � +7 . 7,� 433�5� 5� :=75 @ 3=78;
Gdpshg qdwxudo iuhtxhqf| ri wkh v|vwhp lv htxdo wr=$_ @ $?
t4� �2 @ :=75s4� 3=78;2 @ 9=9 udgv3� +dqvzhu$,
ru=i @ $_
5� @ 4=38K}Zh dvvxph wkdw � @ 4 wkxv xvlqj ht1 +f, dqg ht1 +e, zh rewdlq=
� @ E+N�R .N�6,5Yf$?
@ E+N�R .N�6,5YfY�6
vMYf
��66E @ 4
wkxv wkh uhtxluhg ydoxh ri prphqw ri lqhuwld M lv=
M @ 7YfY 2�6��66E+N�R .N�6,2
M @ 7� 5� 433� � �45� 433S�2 � 3=<4=:� 43b � +7� 433S . 7� 433S,2 @ <=8 njp2 dqvzhu$
Sureohp 81; Gdpslqj lq k|gurvwdwlf wudqvplvvlrqD k|gudxolf v|vwhp lq zklfk wkh vshhg uhvsrqvh ri wkh k|gudxolf prwru wr d vwhsfkdqjh lq wkh sxps glvsodfhphqw sdudphwhu %R +iurp 3 wr 4, lv ghvfulehg e| ht1

563 H{dpsohv ri Fdofxodwlrqv 0 K|gurvwdwlf wudqvplvvlrqv
+818;,1 Fdofxodwh wkh udwlrv ehwzhhq vxffhvvlyh vshhg dpsolwxghv $f$�
> $�$2
> ===> $&$&n�
dvixqfwlrqv ri gdpslqj frh!flhqw � 1 Dvvxph dqjxodu vshhg ri wkh sxps $R dqg xqlwglvsodfhphqw Y�6 ri wkh prwru wr eh frqvwdqw1 Vwhdg| vwdwh vshhg ri wkh prwru lv$f1
t
ωm
π/ωd
2π/ωd
3π/ωd
4π/ωd
ω1
ω4
ω3
ω2
ω0
Ilj1 4791 Uhodwlrqv ehwzhhq vxffhvvlyh rvfloodwlrqv ri prwru vshhg +Sureohp 81;,
Dqvzhu= Zh xvh htxdwlrqv +d, dqg +f, iurp wkh suhylrxv sureohp lq +e, dqgzulwh wkh iroorzlqj htxdwlrq iru prwru vshhg $6=
g2$6gw2 . 5�$?
g$6gw . $2?$6+w, @ $2?$R
Y�RY�6 %R
zkhuh=$? 0 qdwxudo iuhtxhqf| ri wkh v|vwhp� 0 gdpslqj frh!flhqw1
Zh dvvxph d xqlw vwhs fkdqjh lq wkh sxps glvsodfhphqw %R/ wkxv=
%R @ 4 iru w A 33 iru w � 3
Iru w @ 3/ $6+3, @ 3 dqg g$6gw @ 31 Wudqviruplqj lqwr wkh Odsodfh grpdlq zh
rewdlq=
+v2 . 5�$?v. $2?,$6+v, @ $2?$RY�RY�6
4v
zh zulwh=

Gdpslqj lq k|gurvwdwlf wudqvplvvlrq 564
$RY�RY�6 @ $f
dqg diwhu uhduudqjlqj zh rewdlq wkh htxdwlrq iru prwru vshhg +lq v0grpdlq,=
$6+v, @ $f$2?v+v2 . 5�$?v. $2?,
Diwhu shuiruplqj sduwldo iudfwlrq h{sdqvlrq zh rewdlq=
$6+v, @ $f�4v �
v. 5�$?v2 . 5�$? . $2?
�
ru lq d gl�huhqw irup=$6+v, @ $f
�4v �
v. 5�$?+v. �$?,2 . $2_
�
zkhuh gdpshg qdwxudo iuhtxhqf| lv htxdo wr=$_ @ $?
t4� �2
Diwhu idfwrulvlqj zh rewdlq=
$6+v, @ $f�4v �
v. �$?+v. �$?,2 . $2_
� �$?+v. �$?,2 . $2_
�
zklfk diwhu wudqviruplqj edfn lqwr wkh wlph grpdlq xvlqj iroorzlqj wudqvirupv=
4v
A@, 44
+v� d,2 . e2A@, 4
e h@| vlq+ew,
v� d+v� d,2 . e2
A@, h@| frv+ew,
zh �qdoo| rewdlq wkh htxdwlrq iru prwru vshhg lq wkh wlph grpdlq=
$6 +w, @ $f�4� h3l/q|
�frv +$_w, . �$?
$_vlq +$_w,
��
Wklv htxdwlrq ghvfulehv wkh fkdqjh ri prwru vshhg lq uhvsrqvh wr vwhs fkdqjh lqsxps glvsodfhphqw sdudphwhu %R iurp 3 wr 4/ �j1 4791 Wkh vxffhvvlyh dpsolwxghv riprwru vshhg $& iru n @ 4> 5===q fdq eh rewdlqhg iurp wkh deryh htxdwlrq e| lqvhuwlqjw @ n�
$_

565 H{dpsohv ri Fdofxodwlrqv 0 K|gurvwdwlf wudqvplvvlrqv
$& @����$6
�n �$_
�� $f
����dqg dv prwru vshhg iru hdfk n lv=
$6�n �$_
�@ $f
;A?A=4� h3l/q
n�$_�frv�$_
n�$_
�. �$?
$_vlq�$_
n�$_
��<A@A>
dqg qrwlqj wkdw=
frv�$_
n�$_
�@
� �4 iru n rgg lqwhjhu.4 iru n hyhq lqwhjhu
vlq�$_
n�$_
�@ 3
zh rewdlq=$& @
����$f�4� h3&Zl /q/g
�� $f
���� @ h3&Zl /q/g
dq �qdoo|/ wkh udwlr ri dpsolwxghv lv=����$&$&n�
���� @ hZl /q/g @ hZlI�3l5 dqvzhu$
Sureohp 81< K|gudxolf vwl�qhvv ri f|olqghu gulyh v|vwhpFdofxodwh k|gudxolf vwl�qhvv F ri d v|vwhp vkrzq lq �j1 47: dqg ghwhuplqh wkhsrvlwlrq ri wkh slvwrq iru zklfk vwl�qhvv F lv plqlpxp1 Dvvxph wkdw exon prgxoxvE ri wkh xlg lv frqvwdqw dqg wkdw wkh f|olqghu zdoov dqg k|gudxolf olqhv duh shuihfwo|uljlg1Dqvzhu= Wkh vwl�qhvv ri d k|gudxolf v|vwhp lv gh�qhg e| htxdwlrq=
F @ �I�{ +d,
zkhuh=�I>�{ 0 fkdqjh lq irufh pdjqlwxgh dqg srvlwlrqWkh fkdqjh lq irufh pdjqlwxgh lv htxdo wr=
�I @ D��s� .D2�s2 +e,

K|gudxolf vwl�qhvv ri f|olqghu gulyh v|vwhp 566
x1 x2
φd
∆p2∆p1
φD
∆F
∆x
l1, d1 l2, d2
A1 A2
Ilj1 47:1 K|gudxolf v|vwhp +Sureohp 81<,zkhuh=D�>D2 0 slvwrq duhdvDv zh dvvxphg wkdw wkh frpsoldqfh ri wkh f|olqghu dqg k|gudxolf olqhv duh wr ehljqruhg/ fkdqjhv ri suhvvxuh s� lq wkh slvwrq khdg yroxph dqg suhvvxuh s2 lq wkhdqqxoxv yroxph duh gh�qhg e| wkh htxdwlrqv=
�s� @ E�Y�Y� . Y,� �s2 @ E �Y2
Y2 . Y,2 +f,
zkhuh=E 0
Y�> Y2 0 slvwrq khdg dqg dqqxoxv yroxphvY,�> Y,2 0 yroxphv ri k|gudxolf olqhvo�> o2 0 ohqjwk ri k|gudxolf olqhvg�> g2 0 lqwhuqdo gldphwhuv ri k|gudxolf olqhv
Yroxphv ri wkh f|olqghu dqg k|gudxolf olqhv duh=
Y� @ D�{� Y,� @ �g2�7 o�
Y2 @ D2{2 Y,2 @ �g227 o2
Dv duhdv D� dqg D2 duh frqvwdqw/ wkhq=

567 H{dpsohv ri Fdofxodwlrqv 0 K|gurvwdwlf wudqvplvvlrqv
�Y� @ D��{ �Y2 @ D2�{dqg xvlqj ht1 +d, / +e, dqg +f, zh rewdlq=
F @ �I�{ @ E
� D2�Y� . Y,� .
D22Y2 . Y,2
�
Ohw xv dvvxph wkdw=
D� @ 5D2>g� @ g2o� @ o2
wkhq yroxphv ri k|gudxolf olqhv duh=Y,� @ Y,2 @ Y,
dqg zh dovr ghqrwh Y,D�
@ e dqg {� . {2 @ k1 Wkhq diwhu vxevwlwxwlrq lq ht1 zhrewdlq=
F @ E
3EEC
D2�D�{� .D�e .
D2�7�D�+k� {�,
5 .D�e�
4FFD @
F @ ED�5
5k� {� . 8e+{� . e,+k� {� . 5e, +g,
Plqlpxp vwl�qhvv ri wkh v|vwhp rffxuv zkhq=
gFg{� @ 3gFg{� @ g
g{��ED�
55k� {� . 8e
{�+k. e,� {2� . e+k. 5e,�@ 3
gFg{� @ �45ED�
�7{�k� 43{�e. {2� . ;ek. :e2 . 5k2�{�k. {�e� {2� . ek. 5e2�2 @ 3
dqg diwhu uhduudqjlqj zh rewdlq htxdwlrq={2� � {�+7k. 43e, . 5k2 . ;ke. :e2 @ 3
wklv lv d txdgudwlf htxdwlrq/ d glvfulplqdqw � lv htxdo wr=� @ +7k. 43e,2 � 7+5k2 . ;ke. :e2, @ ;k2 . 7;ek. :5e2

K|gudxolf vwl�qhvv ri f|olqghu gulyh v|vwhp 568
vtxduh urrw ri � lv htxdo wr=s� @s;k2 . 7;ek. :5e2 @ 5s5
u�+6e. k,2
�
ru lq vlpsohu irup=s� @ s;k.s:5e
wkxv=
{� @ +5�s5,k. +8� 6s5,e{�k @ 5�s5 . +8� 6s5, ek @ 3=8;8� 3=:8: ek +h,
li xlg yroxph lq k|gudxolf olqhv lv pxfk vpdoohu wkdq xlg yroxph lq wkh f|olqghu=Y,D�k � 4
wkhq=ek � 4 �$ e� k
dqg xvlqj ht1 +h, zh rewdlq={,k � 3=8;8
wkxv plqlpxp vwl�qhvv ri wkh v|vwhp zloo rffxu zkhq {� � 3=8;8k= Yroxph glvsodfhge| wkh slvwrq ryhu ixoo vwurnh k @ {� . {2� zloo eh ghqrwhg dv Y / wkhq=
k @ YD�
�qdoo|/ v|vwhp vwl�qhvv F6�? kdv lwv plqlpxp ydoxh=
F4�? @ ED�5
5k� {� . 8e+{� . e,+k� {� . 5e, @
ED�5
+5k� 3=8;8k,3=8;8k+k� 3=8;8k,
@ ED�5
+5� 3=8;8,D�3=8;8+4� 3=8;8,Y @ 5=<ED
2�Y dqvzhu$



![N Boletim Informativo de ¿ C~X MÙçĨç [Ô H ø Edição N º112 ... · Boletim Informativo de Fukuroi > ~X ª M F sm m 2 \O` æ 1 o ]X 'FTUJWBMEF7FSÄPEF'VLVSPJ F sm b s S \](https://img.document.onl/doc/110x75/60893eb8206a71030968f212/n-boletim-informativo-de-cx-m-h-edio-n-112-boletim.jpg)