Embed Size (px)
Citation preview

Capıtulo 2
Vibracao simples de partıculas
Agora, aplicaremos os conceitos do capıtulo anterior para resolver o pro-blema de um sistema massa-mola simples sob vibracao livre e forcada. Alemde realizamos as simulacoes numericas, serao apresentados os passos basicospara a criacao de uma animacao simples para o problema. Em muitas si-tuacoes, os resultados numericos nao sao capazes de elucidar, por completo,o comportamento fısico de um determinado problema, sendo necessaria autilizacao de ferramentas que consigam repassar alguma informacao visualsobre o fenomeno.
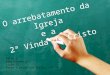
Considere um corpo de massa m sobre uma superfıcie sem atrito e presona extremidade de uma mola com constante elastica k. A outra extremidadeda mola esta presa em uma parede rıgida, conforme mostra a figura 2.1. Pelasegunda lei de Newton, a equacao do movimento sera:
md2x
dt2= F (t)− kx (2.1)
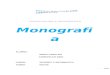
em que F (t) e uma forca externa responsavel pela vibracao do sistema. Otermo −kx representa a forca elastica para pequenas deformacoes [1]. Seraconsiderado que o corpo esta inicialmente em repouso e na origem (posicaode relaxamento da mola). A equacao 2.1 representa uma EDO de segundaordem. Para obter a solucao, vamos representa-la em um diagrama de blocos,conforme mostra a figura 2.2.
Para simular o movimento, serao considerados os valores arbitrarios: m =1,0 kg e k = 25 N/m. O sistema sera analisado de duas formas: (i) emvibracao livre e (ii) em vibracao forcada. A vibracao livre e representadapela aplicacao de uma forca que atuara sobre o corpo apenas no inıcio domovimento (impulso). A vibracao forcada sera representada por uma forcaque acompanhara o corpo em todo movimento. Como a equacao 2.1 e umaEDO de segunda ordem, vamos resolver o diagrama com o metodo de Runge-
1

2 CAPITULO 2. VIBRACAO SIMPLES
3. Vibração de uma partícula
Nesta seção aplicaremos os conceitos das seções anteriores para estudar a
vibração livre e forçada de uma partícula. Para isso, considere um corpo de massa m
sobre uma superfície sem atrito e preso na extremidade de uma mola com constante
elástica k. A outra extremidade da mola está presa em uma parede rígida, conforme
mostra a figura 13. Pela segunda lei de Newton, a equação do movimento será:
𝑚𝑑2𝑥
𝑑𝑡2= 𝐹(𝑡) − 𝑘𝑥 (1)
em que F(t) é uma força externa responsável pela vibração do sistema. O termo – kx
representa a força elástica. Será considerado que o corpo está inicialmente em repouso
e na origem (posição de relaxamento da mola). A equação (1) representa uma EDO de
segunda ordem. Para obter a solução, vamos representá-la em um diagrama de blocos,
conforme mostra a figura 14.
FIGURA 13. SISTEMA MASSA-MOLA.
FIGURA 14. DIAGRAMA DE BLOCOS NA FORMA DIRETA 1 PARA O SISTEMA MASSA-MOLA.
Para simular o movimento, serão considerados os valores arbitrários: m = 1,0
kg e k = 25 N.m. O sistema será analisado de duas formas: (i) em vibração livre e (ii)
em vibração forçada. A vibração livre é representada pela aplicação de uma força que
atuará sobre o corpo apenas no início do movimento (impulso). A vibração forçada
será representada por uma força que acompanhará o corpo em todo movimento. Como
a equação (1) é uma EDO de segunda ordem, vamos resolver o diagrama com o
método de Runge-Kutta de 4a ordem (ode4) com passo fixo de 0,001.
∫ ∫ Σ m-1
∫
∫
k-1
F(0) F(0) x(0)
x(0)
- x(t) F(t)
m
k Parede
fixa
F(t)
Figura 2.1: Sistema massa-mola.
3. Vibração de uma partícula
Nesta seção aplicaremos os conceitos das seções anteriores para estudar a
vibração livre e forçada de uma partícula. Para isso, considere um corpo de massa m
sobre uma superfície sem atrito e preso na extremidade de uma mola com constante
elástica k. A outra extremidade da mola está presa em uma parede rígida, conforme
mostra a figura 13. Pela segunda lei de Newton, a equação do movimento será:
𝑚𝑑2𝑥
𝑑𝑡2= 𝐹(𝑡) − 𝑘𝑥 (1)
em que F(t) é uma força externa responsável pela vibração do sistema. O termo – kx
representa a força elástica. Será considerado que o corpo está inicialmente em repouso
e na origem (posição de relaxamento da mola). A equação (1) representa uma EDO de
segunda ordem. Para obter a solução, vamos representá-la em um diagrama de blocos,
conforme mostra a figura 14.
FIGURA 13. SISTEMA MASSA-MOLA.
FIGURA 14. DIAGRAMA DE BLOCOS NA FORMA DIRETA 1 PARA O SISTEMA MASSA-MOLA.
Para simular o movimento, serão considerados os valores arbitrários: m = 1,0
kg e k = 25 N.m. O sistema será analisado de duas formas: (i) em vibração livre e (ii)
em vibração forçada. A vibração livre é representada pela aplicação de uma força que
atuará sobre o corpo apenas no início do movimento (impulso). A vibração forçada
será representada por uma força que acompanhará o corpo em todo movimento. Como
a equação (1) é uma EDO de segunda ordem, vamos resolver o diagrama com o
método de Runge-Kutta de 4a ordem (ode4) com passo fixo de 0,001.
∫ ∫ Σ m-1
∫
∫
k-1
F(0) F(0) x(0)
x(0)
- x(t) F(t)
m
k Parede
fixa
F(t)
Figura 2.2: Diagrama de blocos na forma direta 1 para o sistema massa-mola.
Kutta de quarta ordem (ode4) com passo fixo de 0,001.
2.1 Vibracao livre
A figura 2.3 mostra o diagrama de blocos no Simulink. Para representar oimpulso de uma forca, usamos o bloco “Step” que esta na pasta “Sources” dabiblioteca de blocos. Conforme mostra a figura 2.4(a), este bloco aplica umafuncao de Heaviside no sinal (funcao degrau). Para acessar as configuracoesda funcao, basta clicar duas vezes no bloco.
Para aplicar o impulso sobre o corpo, vamos utilizar dois blocos da funcaodegrau e um bloco somador. Configure os dois primeiros blocos para inicia-rem o degrau em t e t+∆t, respectivamente. Em seguida, conecte-os no blocosomador e configure para negativo a entrada do degrau que inicia em t+ ∆t(figura 2.3). Desta forma, o bloco somador ira subtrair o primeiro degrau(figura 2.4(a)) do segundo (figura 2.4(b)) e o sinal resultante sera um pulsoretangular com largura ∆t (figura 2.4(c)). Para aumentar a intensidade do

2.1. VIBRACAO LIVRE 3
To Workspace2
F
To Workspace
xStep1
Step
ScopeIntegrator3
1s
Integrator2
1s
Integrator11s
Integrator1s
Gain2
10
Gain1
1
Gain
25
Figura 2.3: Diagrama de blocos na forma direta 1 para o sistema massa-molacom impulso unitario (versao Simulink).
0 , 0
0 , 5
1 , 0
0 , 0
0 , 5
1 , 0
0 2 4 6 8 1 00 , 0
0 , 5
1 , 0( c )
( b )
S i n a l 1( a )
S i n a l 1 - S i n a l 2
S i n a l 2
Inten
sidad
e do s
inal
T e m p o ( s )
Figura 2.4: Geracao de um pulso unitario com duas funcoes de Heaviside.
sinal resultante, coloque um bloco amplificador apos o bloco somador. Noexemplo da figura 2.3, a amplificacao e 10 N e ∆t = 0,1 s com t = 1,0 s. Facatambem a conexao de um bloco “To Workspace” no sinal de entrada e outrono sinal de saıda. Usaremos estes dados para programar a animacao do sis-

4 CAPITULO 2. VIBRACAO SIMPLES
tema massa-mola. A solucao e apresentada na figura 2.5. Observe que, aposa aplicacao do impulso, o sistema oscila indefinidamente com uma amplitudede 0,2 m.
0 , 0 0 , 5 1 , 0 1 , 5 2 , 0 2 , 5 3 , 0 3 , 5 4 , 0 4 , 5 5 , 002468
1 0
T e m p o ( s )
��� �
����
I = F x ∆t = �r e a = 1 0 x 0 , 1 = 1 N s
- 0 , 2- 0 , 10 , 00 , 10 , 2
( b )
�
���
���
� ( a )
Figura 2.5: (a) Amplitude do sistema de massa-mola devido a aplicacao deum (b) impulso unitario.
Durante a aplicacao da forca, o sistema adquire energia cinetica e energiapotencial elastica. No entanto, apos a forca ser retirada do sistema, a energiamecanica e conservada:
1
2mv2
max =1
2kx2
max
e a amplitude de oscilacao sera:
xmax = ± 1
ω0
vmax (2.2)
em que ω0 =√
km
= 5 rad/s e a frequencia natural de oscilacao e a velocidade
vmax pode ser calculada pela definicao de impulso:
F∆t = mvmax
em que ∆t = 0,1 s e F = 10 N. Logo, vmax = 1,0 m/s. Substituindo esteresultado na equacao 2.2, obtemos xmax = ± 0,2 m. Com a frequencia natural

2.1. VIBRACAO LIVRE 5
de oscilacao podemos calcular tambem a frequencia (f ≈ 0,8 Hz) e o perıodo(T ≈ 1,26 s) de oscilacao.
Podemos estudar tambem o comportamento da energia com os blocos“Derivative” (disponıvel na pasta “Continous”) e “To Workspace”. Comestes blocos posicionados no formato da figura 2.6, obtemos o comportamentoda velocidade do corpo. Para calcular as energias potencial elastica, cineticae mecanica, basta digitar o comando da figura 2.7 em um arquivo .m.
To Workspace2
F
To Workspace1
v
To Workspace
xStep1
Step
ScopeIntegrator3
1s
Integrator2
1s
Integrator11s
Integrator1s
Gain2
10
Gain1
1
Gain
25
Derivative
du/dt
Figura 2.6: Diagrama de blocos na forma direta 1 para o sistema massa-molacom a implementacao do calculo da velocidade (versao Simulink).
Figura 2.7: Codigo para calcular as energias cinetica e potencial elastica dosistema massa-mola. Os dados sao salvos em um arquivo de texto dados.txt.
O comportamento da energia cinetica, potencial elastica e mecanica estarepresentado na figura 2.8. Devido ao impulso, o sistema adquire, inicial-mente, energia cinetica e energia potencial elastica. Apos a forca externaser retirada, a energia mecanica e conservada (U + K = constante). Noteque a funcao que descreve a forca na figura 2.8(b) poderia ter os mais va-riados formatos. Considerando que a area abaixo da curva seja unitaria emqualquer situacao, o impulso sera sempre o mesmo, podendo, inclusive, serrepresentado por uma funcao delta de Dirac.

6 CAPITULO 2. VIBRACAO SIMPLES
0 , 0 0 , 5 1 , 0 1 , 5 2 , 0 2 , 5 3 , 002468
1 0 ���
�� ���
����
�
�
����������
������ ���� �
������∆������� ������������������
0 , 0
0 , 2
0 , 4
0 , 6
�
������ �������� ����������������
������ �������� ���
����
���
�
�
� �
Figura 2.8: (a) Energia do sistema devido a aplicacao de um (b) impulsomecanico de 1 Ns.
2.2 Vibracao forcada
Para estudar a vibracao forcada, aplicamos os mesmos procedimentos. Aunica diferenca esta no sinal de entrada. Para forcar a vibracao, podemosusar os blocos da pasta “Sources”. Na secao anterior usamos o bloco “SineWave”; desta vez usaremos o bloco “Repeating Sequence” que define o sinalno formato de uma onda dente de serra. O diagrama para a vibracao forcadaesta na figura 2.9. Com criatividade, voce pode montar o seu proprio sinalde entrada assim como fizemos para montar um pulso com dois degraus. Operıodo de cada “dente” da serra foi definido como 2,0 s. O comportamentoda energia do sistema, amplitude de oscilacao e a forca externa estao re-presentados na figura 2.10. Como o sistema nao e conservativo, a energiamecanica e funcao do tempo. Repare que a frequencia natural de vibracaonao esta em fase com a frequencia de excitacao.
2.3 Animacao
Nesta secao, estudaremos a animacao de um sistema massa-mola comos dados obtidos no Simulink. A animacao sera criada com um loop devarios graficos. Cada figura possui apenas um ponto que representa a posicao

2.3. ANIMACAO 7
To Workspace2
F
To Workspace1
v
To Workspace
x
ScopeRepeatingSequence
Integrator3
1s
Integrator2
1s
Integrator11s
Integrator1s
Gain2
10
Gain1
1
Gain
25
Derivative
du/dt
Figura 2.9: Diagrama de blocos na forma direta 1 para a vibracao forcadade uma partıcula (versao Simulink).
0 2 4 6 8 1 00 , 0
5 , 0
1 0 , 0
- 0 , 5
0 , 0
0 , 50 , 0
2 , 0
4 , 0
6 , 0
T e m p o ( s )
�
����
����
�
���������� �
( c )
( b )
UK �
����
����� E m e c = K + U( a )
Figura 2.10: (a) Energia e (b) posicao da partıcula em um sistema massa-mola excitado por uma (c) forca externa periodica no formato de dente deserra.
instantanea da partıcula. Assim, se a simulacao e realizada em um intervalode tempo de 10 s com passo de 0,1 s, havera um loop com 100 graficos. Noteque para criar a animacao, nao e recomendado usar um passo de integracao

8 CAPITULO 2. VIBRACAO SIMPLES
pequeno, exceto se a configuracao do computador for adequada. Apos realizara simulacao no Simulink e exportar os dados para a janela de comando noMatLab, abra um arquivo .m e salve-o. Nele, digite o codigo da figura 2.11.
Figura 2.11: Codigo para animar o movimento de uma partıcula sob atuacaode uma forca elastica.
O comando length(tout) mede o comprimento da matriz tout. Assim,se este vetor possui 100 linhas (100 instantes de tempo), o comando for rea-lizara um loop com 100 ciclos e, portanto, 100 graficos. O comando plot estarepresentando a coordenada x(i) da partıcula no eixo horizontal e a coorde-nada y(i)=0 no eixo vertical. As demais funcoes deste comando representama forma geometrica do ponto ('o') com diametro de 40 unidades relativas('MarkerSize',40) e face na cor vermelha ('MarkerFaceColor','r'). Ocomando axis([x0,x,y0,y]) trava os eixos horizontal e vertical nos valo-res declarados. Observe que no eixo horizontal, foram utilizados os comandosmin(x) e max(x). Estes comandos encontram o menor e o maior valor davariavel x. Os comandos xlabel e ylabel permitem nomear os eixos dografico. O codigo responsavel por capturar as figuras e transforma-las emuma animacao e o getframe. Dentro deste comando, a funcao gcf signi-fica “get current figure” e ela e a responsavel por gravar as informacoes dafigura atual. Os detalhes de cada figura e armazenada na variavel mov(i)que sera utilizada para produzir a animacao. Para gerar o vıdeo, utilizamoso comando movie2avi. Este comando convertera o conjunto de graficos emum vıdeo com extensao avi. No primeiro campo deste comando, deve serinformado o vetor que armazena os graficos do loop (mov). Em seguida, deveser informado o nome do arquivo ('myfirstmovie.avi') e o metodo decompressao do vıdeo ('compression','None'). Se voce nao possui umaboa placa de vıdeo e a animacao possui muita informacao, e sugerido compri-mir os arquivos (visite a pagina oficial do MatLab para maiores informacoes).No meu computador, o vıdeo gerado possui 70 Mb (um notebook velhinho).Em versoes mais atuais do MatLab, o comando movie2avi foi substituıdopor VideoWriter que permite a conversao para, tambem, MP4. A figura

2.3. ANIMACAO 9
2.12 mostram dois quadros da animacao. Nao foi necessario utilizar com-pressor, pois a animacao possui apenas um ponto. Para deixa-la mais real,precisamos colocar a mola.
-0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 0.6-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Posição x (m)
Pos
ição
y (
m)
-0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 0.6-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Posição x (m)
Pos
ição
y (
m)
Figura 2.12: Partıcula sob atuacao de uma forca elastica. As figuras mostram2/100 quadros gerados na animacao.
Cada espira da mola sera representada por tres segmentos de reta (seg-mentos s2, s3 e s4) conforme mostra a figura 2.13 com a mola na posicao derelaxamento (xi = 0). Se a mola possui uma unica espira, serao utilizadosmais dois segmentos horizontais para fixacao (segmentos s1 e s5). As coor-denadas x5 e x4 sao fixas, pois a coordenada x5 esta presa em uma superfıcieimovel. A partıcula esta na posicao xi e conectada ao segmento s1. As co-ordenadas dos segmentos s1 ate s4 sao moveis, pois deverao acompanhar omovimento da partıcula durante a animacao. Os comprimentos de todos ossegmentos sao constantes.
FIGURA 22. POSIÇÕES DE UMA PARTÍCULA EM UM SISTEMA MASSA-MOLA. AS FIGURAS MOSTRAM 2/100 QUADROS GERADOS NA ANIMAÇÃO.
Cada espira da mola será representada por três segmentos de reta (segmentos
s2, s3 e s4) conforme mostra a figura 23 com a mola na posição de relaxamento (xi =
0). Se a mola possui uma única espira, serão utilizados mais dois segmentos
horizontais para fixação (segmentos s1 e s5). As coordenadas x5 e x4 são fixas, pois a
coordenada x5 está presa em uma superfície imóvel. A partícula está na posição xi e
conectada no segmento s1. As coordenadas dos segmentos s1 até s4 são móveis, pois
deverão acompanhar o movimento da partícula durante a animação. Os comprimentos
de todos os segmentos são constantes.
FIGURA 23. ESPIRA DE UMA MOLA PROJETADA EM DUAS DIMENSÕES.
As coordenadas x e y dos pontos da figura 23 serão obtidas com o auxílio da
figura 24. Considerando uma deformação xi ≠ 0 na mola, o seu comprimento total será
D + xi = 2d + 4w. Assim, a cateto horizontal w dos segmentos s2, s3 e s4 é dado por:
𝑤 =1
4(𝐷 − 2𝑑 + 𝑥𝑖) (1)
e o cateto vertical será:
ℎ = √𝐻2 − 𝑤2 (2)
em que H é a comprimento do segmento. Para calcular h devemos definir um valor
mínimo para H que será obtido quando a partícula atingir sua posição xi(máx). Quando
a mola estiver completamente tracionada (que será considerado, por ora, quando todos
os segmentos estão na horizontal), Hmin será dado pela equação D + xi(máx) = 2d +
4Hmin ou4:
4 A equação (3) foi obtida a partir da equação (1), pois quando todos os segmentos estão na horizontal, w = Hmin.
x (xi, 0)
(-x1, 0)
(-x2, -y2)
(-x3, y3)
(-x4, 0)
y
(-x5, 0)
Parede
fixa s1
s2
s5 s3 s4
Figura 2.13: Espira de uma mola projetada em duas dimensoes.
As coordenadas x e y dos pontos da figura 2.13 serao obtidas com o auxılioda figura 2.14. Considerando uma deformacao xi 6= 0, o seu comprimentototal sera D+ xi = 2d+ 4w. Assim, a cateto horizontal w dos segmentos s2,

10 CAPITULO 2. VIBRACAO SIMPLES
s3 e s4 e dado por:
w =1
4(D − 2d+ xi) (2.3)
e o cateto vertical sera:h =√H2 − w2 (2.4)
em que H e a comprimento do segmento. Para calcular h devemos definirum valor mınimo para H que sera obtido quando a partıcula atingir suaposicao xi(max). Quando a mola estiver completamente tracionada (que seraconsiderado, por ora, quando todos os segmentos estiverem na horizontal),Hmin sera dado pela equacao D + xi(max) = 2d+ 4Hmin ou:
Hmin =1
4(D − 2d+ xi(max)) (2.5)
que e obtida a partir da equacao 2.3, pois quando todos os segmentos estaona horizontal, w = Hmin.
𝐻min =1
4(𝐷 − 2𝑑 + 𝑥𝑖(máx)) (3)
FIGURA 24. DIMENSÕES DA ESPIRA DE UMA MOLA PROJETADA EM DUAS DIMENSÕES.
A equação (3) não simula a condição de uma mola real, pois a mola, neste
caso, terá a aparência de uma deformação plástica quando todos os segmentos
estiverem na horizontal. Para corrigir o problema, a equação (3) deve ser:
𝐻 = 𝐶1
4(𝐷 − 2𝑑 + 𝑥𝑖(máx)) (4)
em que C é um fator de correção que trataremos mais adiante. Logo, com as equações
(1), (2) e (4) e a declaração inicial das variáveis D, d e o fator de correção C, podemos
calcular as coordenadas dos segmentos s1 até s5 em função da posição xi da partícula
(veja a tabela 1). Com estes dados é possível inserir a mola com uma espira na
animação:
clc
figure
for i=1:length(tout)
% Parâmetros de construção da mola
D=1.5; % Comprimento total (m)
d=0.5; % Comprimento dos conectores (m)
C=1.2; % Fator de correção
w=0.25*(D-2*d+x(i)); % Cateto horizontal de um segmento da espira
H=C*0.25*(D-2*d+max(x));% Comprimento de um segmento da espira
h=sqrt(H^2-w^2); % Cateto vertical de um cateto da espira
% Coordenadas dos segmentos da mola
x1=x(i)-d; y1=0;
x2=x1-w; y2=-h;
x3=x2-2*w; y3=h;
x4=-D+d; y4=0;
x5=-D; y5=0;
% Representação gráfica da mola
plot([x(i),x1],[0,0],'k','LineWidth',2); hold on; % s1
plot([x1,x2],[y1,y2],'k','LineWidth',2); % s2
plot([x2,x3],[y2,y3],'k','LineWidth',2); % s3
plot([x3,x4],[y3,y4],'k','LineWidth',2); % s4
plot([x4,x5],[y4,y5],'k','LineWidth',2); % s5
% Representação gráfica da partícula
plot(x(i),0,'o','MarkerSize',40,'MarkerFaceColor','r'); hold off;
% Definição dos eixos horizontal e vertical
axis([-D,max(x),-2,2]);
xlabel('Posição x (m)');
ylabel('Posição y (m)');
% Captura da imagem
mov(i)=getframe(gcf);
end
% Conversão das imagens no filme
x
y
Parede
fixa
D
d d w 2w w
xi
h
2h
Figura 2.14: Dimensoes da espira de uma mola projetada em duas dimensoes.
A equacao 2.5 nao simula a condicao de uma mola real, pois a mola,neste caso, tera a aparencia de uma deformacao plastica quando todos ossegmentos estiverem na horizontal. Para corrigir o problema, a equacao 2.5deve ser:
Hmin = C1
4(D − 2d+ xi(max)) (2.6)
em que C e um fator de correcao que trataremos mais adiante. Logo, comas equacoes 2.3, 2.4 e 2.6 e a declaracao inicial das variaveis D, d e o fatorde correcao C, podemos calcular as coordenadas dos segmentos s1 ate s5
em funcao da posicao xi da partıcula (veja a tabela 2.1). Com estes dadose possıvel inserir a mola com uma espira na animacao. O codigo e algunsquadros da animacao estao representados nas figuras 2.15 e 2.16.

2.3. ANIMACAO 11
Figura 2.15: Codigo para animar o movimento de uma partıcula sob atuacaode uma forca elastica.
Observe que temos seis comandos plot no codigo. Os primeiros cincossao responsaveis por representar a mola e o ultimo e responsavel por repre-sentar a partıcula. Em um loop com apenas um comando plot, o MatLabfaz o grafico solicitado pelo comando atual e apaga a representacao grafica docomando anterior. Foi assim que fizemos a animacao da figura 2.12. Porem,quando ha mais de um comando plot durante um ciclo do loop, o MatLab“enxerga” apenas o ultimo comando plot e ignora os demais. Para evitareste problema, usamos o comando hold on (ou hold all) logo apos o pri-meiro plot (veja o codigo). Com isto, todos os plot serao sobrepostos emum mesmo grafico. Apos o ultimo plot do ciclo e obrigatorio inserir a funcaohold off. Caso contrario, os graficos de todos os ciclos serao sobrepostosem uma unica imagem (Dica do autor: se voce nao tem uma boa placa devıdeo, nao tente fazer isso. Ele se arrependeu.).
Na organizacao das linhas do codigo, e importante que a representacaografica da partıcula esteja apos a representacao grafica da mola. Com isso,parte do segmento de reta s1 sera sobreposto pela partıcula e criara a ilusao

12 CAPITULO 2. VIBRACAO SIMPLES
Tabela 2.1: Coordenadas dos pontos da figura 2.14 e 2.13.Coordenada x Coordenada yx1 = xi − d y1 = 0x2 = x1 − w y2 = −hx3 = x2 − 2w y3 = hx4 = −D + d y4 = 0x5 = −D y5 = 0
de conexao entre estes dois objetos. Alem disso, os eixos do grafico devempossuir aproximadamente a mesma largura para evitar que as espiras mudemo tamanho aparente. Este efeito esta evidente na figura 2.16 (observe amudanca aparente no comprimento dos segmentos s1, s2 e s3).
-1.4 -1.2 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Posição x (m)
Pos
ição
y (
m)
-1.4 -1.2 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Posição x (m)
Pos
ição
y (
m)
Figura 2.16: Partıcula sob atuacao de uma forca elastica. 2/100 quadros saoapresentados. A mola possui uma unica espira.
Para simular uma mola com duas espiras, adicionamos uma espira noponto x4 da figura 2.13 e criamos mais dois pontos (veja a tabela 2.2). Con-siderando que o comprimento da mola e o mesmo e o numero de catetoshorizontais foi duplicado, o comprimento da mola sera D + xi = 2d + 8w.Assim, w e representado por:
w =1
8(D − 2d+ xi) (2.7)
Os parametros h e H permanecem os mesmos. Inserindo a equacao 2.7 eos pontos da tabela 2.2 no modelo, obtemos a animacao ilustrada na figura2.17.
Para criar uma mola com n espiras, a equacao 2.3 deve ser generalizada

2.3. ANIMACAO 13
Tabela 2.2: Coordenadas dos segmentos de uma mola com duas espiras.Coordenada x Coordenada yx1 = xi − d y1 = 0x2 = x1 − w y2 = −hx3 = x2 − 2w y3 = hx4 = x3 − 2w y4 = −hx5 = x4 − 2w y5 = hx6 = −D + d y6 = 0x7 = −D y7 = 0
-1.4 -1.2 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Posição x (m)
Pos
ição
y (
m)
-1.4 -1.2 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Posição x (m)
Pos
ição
y (
m)
Figura 2.17: Posicoes de uma partıcula em um sistema massa-mola. 2/100quadros sao apresentados. A mola possui duas espiras.
para uma mola com 2nw catetos, assim:
w =1
4n(D − 2d+ xi) (2.8)
e a mola sera representada pelo codigo apresentado na figura 2.18. O codigo
Figura 2.18: Codigo para construcao de uma mola com n espiras.
completo esta na figura 2.19 e animacao e ilustrada na figura 2.20.

14 CAPITULO 2. VIBRACAO SIMPLES
Figura 2.19: Codigo para animacao de um sistema massa-mola simples.
O fator de correcao na equacao 2.6 depende do numero de espiras damola. Para obter uma relacao direta entre estes dois parametros, igualamos2.6 com 2.8 quando w = H. Assim:
Cmin =1
n(2.9)
Observe que nos codigos anteriores, usamos C = 1,2, para a mola comuma espira (n = 1), e C = 0,3 para a mola com dez espiras (n = 10).Nestas duas situacoes, Cmin = 1 e 0,1, respectivamente. Quando estes valoressao usados, a mola adquire a aparencia de deformacao plastica. Logo, parasimular condicoes mais realısticas:
C >1
n(2.10)
Com o sistema massa-mola inserido, podemos adicionar mais itens e tor-nar a animacao mais informativa. Alem da representacao grafica do mo-vimento, podemos inserir o comportamento dos graficos de forca, posicao

2.3. ANIMACAO 15
-2.5 -2 -1.5 -1 -0.5 0 0.5-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Posição x (m)
Pos
ição
y (
m)
-2.5 -2 -1.5 -1 -0.5 0 0.5-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Posição x (m)
Pos
ição
y (
m)
Figura 2.20: 2/100 quadros da animacao de um sistema massa-mola. A molapossui dez espiras.
ou energia e os vetores de forca. O codigo da figura 2.21, ilustrado na fi-gura figura 2.22, apresenta o sistema massa-mola, os vetores de forca, aevolucao temporal da forca externa, responsavel pela vibracao forcada, ea forca elastica. O leitor podera complementar o codigo conforme desejar.Tudo dependera da imaginacao!
Para inserir os graficos, usamos o comando subplot(m,n,p) em que m
e o numero de linhas, n o numero de colunas e p a posicao de um grafico namatriz m×n. Os vetores de forca foram programados para mudar o tamanhode acordo com a sua intensidade no grafico forca versus tempo. O compri-mento dos vetores foram normalizados em relacao a forca externa. Com estaanimacao, podemos estudar situacoes particulares como a ressonancia e obatimento, conforme apresentam os exemplos a seguir. Outros exemplos devibracao livre e forcada podem ser acessadas nas refs. [2] e [3].
(Exemplo 1) Ressonancia: A ressonancia e o aumento gradativo e des-controlado da amplitude de vibracao. Para que isso ocorra, o sistema naodeve ter nenhum mecanismo de amortecimento e ser excitado por uma forcaexterna periodica cuja frequencia deve ser igual a frequencia natural de vi-bracao. Em um sistema massa-mola com vibracao forcada, a amplitude devibracao A no regime estacionario, e dada por [4]:
A =F0
k
[1−
(ωω0
)2] , (2.11)
em que ω e a frequencia da excitacao externa, representada por F = F0 sin(ωt),e ω0 e a frequencia natural de vibracao. Observe que A aumenta subitamente

16 CAPITULO 2. VIBRACAO SIMPLES
Figura 2.21: Codigo para animacao de um sistema massa-mola simples.
quando ω → ω0, podendo deformar a mola plasticamente. Para simular aressonancia no Simulink, usaremos o bloco “Sine Wave” como excitacao ex-

2.3. ANIMACAO 17
0 1 2 3 4 5 6 7 8 9 10-20
-15
-10
-5
0
5
10
Tempo (s)
For
ça (
N)
-2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5-2
-1
0
1
2
Fext Fe
Posição x (m)
Pos
ição
y (
m)
Externa - Fext
Elástica - Fe
0 1 2 3 4 5 6 7 8 9 10-20
-15
-10
-5
0
5
10
Tempo (s)
For
ça (
N)
-2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5-2
-1
0
1
2
Fext Fe
Posição x (m)
Pos
ição
y (
m)
Externa - Fext
Elástica - Fe
Figura 2.22: 2/100 quadros da animacao de um sistema massa-mola emressonancia. As curvas em azul representam a forca externa as curvas empreto representam a forca elastica.
terna no diagrama da figura 2.9. A frequencia angular e igual a frequencianatural de vibracao (ω = 5 rad/s). O resultado e apresentado na figura 2.23 emostra que a forca elastica aumenta continuamente e sem controle, enquantoa excitacao externa atua de forma periodica no corpo. A animacao com-pleta e apresentada na ref. [5]. O aumento linear da amplitude de vibracao,durante a ressonancia, obedece a relacao [6]:
A =F0t
2mω0
,
em que t e um instante de tempo qualquer.
(Exemplo 2) Batimento: Quando a frequencia da excitacao externa e dife-rente, mas proxima da frequencia natural de vibracao, ocorre um fenomenochamado batimento [6]. Devido a diferenca de frequencia angular, haverainstantes em que as ondas estarao em fase e momentos em que estarao πradianos fora de fase. Quando estiverem π radianos fora de fase, havera ainterferencia destrutiva e a onda resultante tera amplitude nula. Quantoestiverem em fase, ocorrera a interferencia construtiva e as amplitudes se so-mam. Neste momento, a onda resultante atinge sua maior amplitude. Esteponto e chamado de batimento e e um efeito comum em aparelhos musicais.A frequencia de batimento, i.e., a frequencia de amplitudes maximas da ondaresultante e dada por [7]:
ωbatimento = |ω − ω0|,
em que ω0 e ω sao as frequencias natural e de excitacao, respectivamente.O sistema massa-mola operando em regime de batimento foi simulado com

18 CAPITULO 2. VIBRACAO SIMPLES
0 1 2 3 4 5 6 7 8 9 10
-200
-100
0
100
200
Tempo (s)
For
ça (
N)
-20 -15 -10 -5 0 5 10-2
-1
0
1
2
Fext Fe
Posição x (m)
Pos
ição
y (
m)
0 1 2 3 4 5 6 7 8 9 10
-200
-100
0
100
200
Tempo (s)
For
ça (
N)
-20 -15 -10 -5 0 5 10-2
-1
0
1
2
Fext Fe
Posição x (m)
Pos
ição
y (
m)
Figura 2.23: 2/100 quadros da animacao de um sistema massa-mola emressonancia. As curvas em azul representam a forca externa as curvas empreto representam a forca elastica.
ω = 6, 0, ω0 = 5, 0 rad/s e 0 ≤ t ≤ 50 s. A forca periodica externa e dadapor F = F0 sin(ωt). O diagrama de blocos e o mesmo utilizado na simulacaoda ressonancia. Assim, a frequencia de batimento permaneceu em 1,0 rad/s.Isto significa que a amplitude maxima de vibracao (batimento) e obtida emintervalos de 2π segundos, conforme mostra a figura 2.24.
0 5 10 15 20 25 30 35 40 45 50
-40
-20
0
20
40
Tempo (s)
For
ça (
N)
-5 -4 -3 -2 -1 0 1 2-2
-1
0
1
2
Fext Fe
Posição x (m)
Pos
ição
y (
m)
0 5 10 15 20 25 30 35 40 45 50
-40
-20
0
20
40
Tempo (s)
For
ça (
N)
-5 -4 -3 -2 -1 0 1 2-2
-1
0
1
2
Fext Fe
Posição x (m)
Pos
ição
y (
m)
Figura 2.24: 2/100 quadros da animacao de um sistema massa-mola emregime de batimento. As curvas em azul representam a forca externa ascurvas em preto representam a forca elastica.

Referencias Bibliograficas
[1] S. T. Thornton, J. B. Marion, Dinamica Classica de Partıculas e Siste-mas (Cengage Learning, Sao Paulo, 2011).
[2] Diego Duarte, Vibracao livre de uma partıcula, Canal no YouTube,https://youtu.be/ePnd5l0LOUI.
[3] Diego Duarte, Vibracao forcada de uma partıcula (Simulink/MATLAB),Canal no YouTube, https://youtu.be/WJNCUOMMWaE.
[4] J. L. Meriam L. G. Kraige, Mecanica para Engenharia - Dinamica (LTC,Rio de Janeiro, 2013).
[5] Diego Duarte, Ressonancia durante a vibracao de uma partıcula, Canalno YouTube, https://youtu.be/I4jis4ms-RQ.
[6] J. B. Neto, Mecanica: Newtoniana, Lagrangiana e Hamiltoniana (Edi-tora Livraria da Fısica, Sao Paulo, 2013).
[7] P. A. Tipler, G. Mosca, Fısica para Cientıstas e Engenheiros (LTC, Riode Janeiro, 2014).
19