Embed Size (px)
Citation preview

45
• Capítulo 3- Sistemas Vibratórios Excitados por Fonte de Potência Limitada
Pesquisando-se a vasta bibliografia disponível, consta-se, contudo que é usual
desconsiderar-se, no modelo matemático, a influência do movimento do próprio sistema em sua excitação. Todavia, em muitos casos, esta simplificação, no modelo matemático, não é razoável, devendo-se levar em conta que a excitação ou sua fonte, é influenciada pela própria resposta do sistema.
Este fato prejudica a formulação dos modelos matemáticos da Teoria de
Vibrações tradicional, necessitando-se de estabelecer uma formulação mais realística que leve em conta a interação entre as variáveis de controle, e as de estado, da excitação, com as de estado do sistema físico estrutural.
Tem-se assim, um sistema vibratório não-ideal, ou um sistema com fonte de
excitação, não-ideal. O sistema ideal é o tradicional onde não existe este fenômeno. Note que o sistema não-ideal, tem sempre um grau de liberdade a mais do que seu ideal, correspondente.
Entenda-se, que a máquina não-ideal é uma conceituação que depende
fundamentalmente da estrutura que a suporta. Um exemplo clássico de um sistema não-ideal é o de uma estrutura flexível (por
exemplo uma viga em balanço)sobre o qual um motor elétrico de corrente contínua desbalanceado, com fonte de potência limitado, está montado.
Nestes casos, mencionados, o movimento do sistema devido a sua própria flexibilidade, afeta o desempenho da máquina. Notam-se, características ,importantes, deste tipo de modelo matemático de sistema dinâmico, provenientes da interação da estrutura com a fonte de excitação, tais como:
• Variações bruscas ( saltos ou “jumps” ) da amplitude de deslocamento da estrutura e da freqüência de excitação, no caso particular em que considera-se as condições estacionárias do movimento;
• Descontinuidade da curva “amplitude versus freqüência “;
• Influência do perfil da curva “amplitude versus freqüência “ quando o operador
altera a velocidade do motor elétrico, em acréscimos e/ou decréscimos;
• Dependência destes efeitos com as características eletromecânicas do motor.
Portanto, percebe-se que os sistemas dinâmicos, modelados matematicamente, como sendo não-ideais, possui um grau de liberdade(ou mais dependendo do número de motores presentes ,no sistema) ,superior ao sistema ideal correspondente.

46
O fenômeno, em tela, é conhecido, na literatura como efeito Sommerfeld, em homenagem ao primeiro pesquisador, a observar estes fatos, experimentalmente(Sommerfeld,1903). Recentemente este problema foi analisado por nós, constatando que as não-linearidades quadráticas e cubicas, deste problema, tinham a mesma ordem de grandeza( De Mattos et al., 1997). Tal fato foi importante na modelagem segura deste problema de vibrações não-lineares. Recentemente, demonstrou-se haver boa concordância entre os resultados numéricos e experimentais(De Mattos et al., 1999). Estes 2 trabalhos, deram a este problema, avanço significativo, na literatura. Nota-se que as equações governantes do movimento, representativa do sistema dinâmico não-ideal de vibrações, podem se esquematizadas, modelados matematicamente, da seguinte forma:
1-“ primeiro conjunto de equações ”:
equações dinâmicas da “estrutura vibratória ”em x + termos interação ( termos em x e
em ϕ ) = equações da excitação externa.
2-“ segundo conjunto de equações”:
equações de rotação do eixo do motor ( termos em 2
2
d
td
ϕ ) + equações características do
motor ( termos em L ( d
d t
ϕ ) )+ outros termos de interação( em x e em ϕ ) = 0.
onde
• d
d t
ϕ é a velocidade angular do eixo do rotor e,
• 2
2
d
td
ϕ a aceleração correspondente ,onde supôs-se a existência de um único
motor. Note o fato importante de que as linearidades ou não-linearidades vem da
modelagem matemática da estrutura, no caso do problema ideal; a presença de por exemplo, uma única fonte de energia, em geral contribui com a ação de não-linearidades do tipo quadráticas, presente no termo de energia cinética, devido o desbalanceamento do motor de corrente contínua (Nayfeh e Mook, 1979).
Ressaltam-se que as vibrações oriundas dos movimentos de aceleração (partida) e
desaceleração (desligamento) de motores elétricos são representados pela função L, ou seja ela representa o torque desenvolvido pelo motor elétrico e a curva característica do motor

47
relaciona o torque L com a velocidade de rotação angular. Cada ponto ,desta curva,
considerada, pode ser obtida da seguinte maneira: Mantém-se a velocidade angular d
d t
ϕ
constante, enquanto se determina o torque no eixo do motor. Como cada ponto gira a uma velocidade angular constante, essa curva é chamada de característica estática, determinando seu funcionamento em estado estacionário. Na realidade, todo motor possui uma família destas curvas, em discussão, e todas elas representam a mesma relação de grandezas, mas a cada uma corresponde um certo valor de Regulagem.
Imagine-se, por exemplo, que um motor possua uma família de curvas, as quais são diferenciadas variando-se a tensão elétrica U que é aplicada aos seus terminais. Cada posição de controle de regulagem com o qual se aumenta ou se diminui a tensão elétrica, produz uma correspondente curva característica, relacionadas, cada uma delas, a um valor de potência constante, mas diferentes entre si.
As Figura 1 e 2, ilustram duas possibilidades destes gráficos, no plano torque
versus freqüência de rotação.
• A primeira delas sendo do tipo exponencial(mais realística dt
dE
eEL
ϕ2
1
−
= ) e;
• A segunda sendo do tipo linear(dt
dbaL
ϕ+= ) para cada valor da tensão U.
U será o parâmetro de controle do problema. A seguir, mostra-se a dedução das
Retas características; as curvas características, tem determinação experimental.
Figura 1-Curvas características Figura 2-Retas características A seguir, explicita-se a obtenção das retas características, desde que as curvas
características tem determinação exclusivamente, experimental. Admite-se motores de corrente contínua esquematizado, através da Figura 3, cujas
equações de controle representativas de seus circuitos elétricos, são dadas pela equação, clássica:
U-ea=Raia+Laia
Onde:

48
• U é tensão elétrica aplicada aos terminais do motor;
• ea, a fôrça contra-eletromotriz;
• Ra a resistência elétrica do motor;
• ia sua corrente elétrica e;
• La sua indutância elétrica.
Figura 3: Modelo de Armadura do Motor
Tem-se:
ea = ke &ψ e TE = kmia
com (ke, km, TE, &ψ ): constante de tensão do motor, constante do torque, torque eletrotromecânico e velocidade angular.
A lei que vincula variação do torque, torque aplicado, tensão elétrica no motor e a
velocidade angular é da forma:
Uke &ψ =(Ra/km)TE+ (La / km) TE
Em Regime Estacionário, a variação temporal do torque TE é zero(ouLa é
desprezível), logo tem-se:
TE=U(km/Ra)-ke(km/Ra) &ψ
Nota-se, então se a tensão U for mantida constante, a relação existente entre o
torque e a velocidade angular é do tipo linear, portanto as curvas características deste motor, são retas interceptando os dois eixos, como mostrado na Figura 1.
Pode-se modelar matematicamente os torques, em questão, por:
TE=Tm+I &ψ
com
49
• TE sendo o torque eletro-mecânico e;
• Tm o torque mecânico e I o momento de inércia do eixo do motor.
O torque mecânico Tm pode ser modelado como sendo da forma (Hindmarsh, 1981):
Tm=k1+k2 &ψ +k3( &ψ )2+T(t)
Onde:
• O primeiro termo está ligado ao atrito constante do tipo Coulomb devido ao atrito dos mancais;
• O segundo termo é o atrito viscoso associado a não turbulências e;
• O terceiro termo é devido a turbulência, i.e., a ação da propulsão ou dos
ventiladores refrescantes e o último é o carregamento da estrutura que suporta o motor.
Por conveniência e por facilidade de comparações com a literatura, adota-se daqui para
frente, a notação:
{ TE=L, &ψ =x4, M(x4)=L(x4)-H(x4),
onde
H=g1 x4 e ψϕ = }
Nos próximos capítulos, definem-se os modelos matemáticos, que serão objetos de
estudo deste trabalho.
Finalmente, mencionam-se ,algum conceitos ,que valem tanto para sistemas dinâmicos ideais e não-ideais, na região de ressonância, isto é, definida por:
d
d t
ϕ - ω = Ο ( ε1 )
onde: ε1 é um pequeno parâmetro e, ω é a freqüência natural do sistema dinâmico vibratório. Supondo-se que o sistema dinâmico, em questão, partisse do repouso, a velocidade
angular d
d t
ϕ do eixo do rotor cresceria até atingir a região de ressonância.
Assim, dependendo das condições iniciais e dos parâmetros físicos, tais como;

50
• Massa desbalanceada;
• Massa do motor;
• Momento de inércia do rotor;
• Excentricidade da massa desbalanceada;
• Constantes de torque desenvolvido pelo motor:
A tensão aplicada nos terminais do motor, d
d t
ϕ continuaria crescendo além da
região de ressonância(Fenômeno da Passagem pela Ressonância)ou, Permaneceria próximo a freqüência natural ω do sistema(Fenômeno da Captura pela Ressonância). O tempo de passagem pela ressonância, dependerá, também das condições iniciais do sistema.
O primeiro autor a sistematizar estas propriedades dos modelos matemáticos , não-ideais, foi( Kononenko, 1969). Atualmente, um Completo e compreensível revisão deste assunto, considerando o período de 1904-1999, pode ser encontrado em (Balthazar et al., 1999). O fenômeno de Salto e o aumento de potência exigido pela fonte de energia, operando na região da ressonância são manifestações do fenômeno, conhecido como SOMMERFELD.
Nota-se também uma característica importante existente em sistemas não-ideais: a maioria das máquinas rotativas mostram características de decréscimo de torque quando é operada com acréscimos de velocidades de rotação.
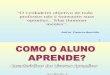
Finalmente, com o objetivo, de esclarecimento final, exibe-se, na Figura 3 , um
exemplo típico da relação existente entre a velocidade de rotação o torque atuante(Yamakaswa e Murami, 1989).
Na Figura 4, notam-se as características do torque atribuído à máquina, mostrado
por TS e a relação existente entre a velocidade de rotação e sua aceleração, gerando a curva mostrada na Figura 1(curva esta gerada pelas características do Torque aplicado).
Supondo-se que a operação, mencionada, logo acima é realizada com aceleração
constante a0, pode-se continuar a operação dentro da região denotada por A e C, porém com dificuldades na região B, desde que nesta região, o valor de as é menor do que o de a0 , desta forma, dificultando a execução desta tarefa nesta região (isto é, Ts é menor do que T0 , implicando uma diminuição no Torque).
Como conseqüência deste fato, a operação, discutida, seria seguida por as .To.

51
Figura 4: Torque Aplicado e da Aceleração angular em Problemas Não-Ideal
O objetivo, deste curso é o de estudar tais sistemas que apresentem comportamento dinâmico regular( periódico, quasi-periódico) e irregular( Caos).
A seguir, exibe-se um exemplo de um sistema vibratório, Não-ideal, com o objetivo de exibir algumas das características acima, mencionadas.
Para a análise dinâmica, deste problema, usam-se rotinas computacionais, programas em C++ e MATLAB, apresentadas, logo adiante. O modelo matemático, estudado é definido pela Figura 5 , abaixo
Figura 5- Modelo vibratório Sujeito a Excitação Paramétrica
As equações diferenciais, do movimento vibratório, definido, pela Figura 5, que são o conjunto formado pela: Equação das Vibrações Paramétricas da Haste e pela Equação que descreve o movimento da Fonte de Energia, poderão ser obtidas, fazendo-se as hipóteses:

52
• Assumiu-se que o movimento da haste tem a forma das vibrações paramétricas similares as vibrações livres.
• A mola tem uma deformação estática (fo) em adição à deformação variável:
rsinϕ-π2*y2/(4*l).
• Tomou-se:
)()(),(l
xsintytxy
∏= .
• Desprezou-se a força de inércia de um elemento da haste na direção do eixo x, a
rotação de um elemento da haste em flexão e a massa da mola;
Adotou-se a nomenclatura usual para os parâmetros físicos:
• m1 é a massa por unidade de comprimento da haste;
• Ix é o segundo momento da área de uma seção transversal da haste;
• I é o momento de inércia do rotor e;
• β é coeficiente de amortecimento linear viscoso.
Nestas condições, as equações diferenciais do movimento da haste, poder ser apresentada, como a seguir:
0)()(32 =++++ x
c ySinm
ym
y γϕωβ
&&& (*)
onde:
l
rcc
ml
clmm
EIl
PcfPP
P
m
EI
lx
x
282
1
)()1()(
12
22
41
1
21100
1
042
ππγ
ππω
−===
==−=
Note que a equação acima, descreve as vibrações paramétricas da haste, sem
porém, considerar a equação, que descreve a interação com a Fonte de Energia, no caso um motor elétrico de corrente contínua
• Equação que descreve o movimento da Fonte de Energia

53
A energia potencial V , correspondente ao modo fundamental de flexão das vibrações da haste(a energia de tensão e compressão é desprezada):
yl
Il
fcx
ESinrV
2
3
42
3
2
01)
4(
4(
2
1 ) ππϕ +−+=
A energia cinética, correpondente à ação do motor elétrico de corrente contínua é
dado por:
ϕ&2
2
1IT =
onde I é o momento de inércia do rotor. Usando as equações de Lagrange, obtém-se as equações diferenciais:
ϕϕϕϕ π Cosrl
SinrMI yfc })4
({)(2
2
01−+−= &&& (**)
onde:
• HLM −= ;
• L : é torque característico do motor e;
• H : é o momento das forças resistivas do motor Usando novas variáveis , definidas por
{ ϕϕτ && ===== 4321 ,,,, xxxxxxt }
o problema exibido na Figura 5, tem equações de movimento, na forma de estado ,
dadas por (Konokenko, 1969):
32
14333423414444
43
31241323121222
22
1
coscoscos)(,
,
xxKxsinxKxKxMKd
dxx
d
dx
xKxsinxKxKxKd
dxx
d
dx
+++==
+++==
ττ
ττ
com:

54
γ
ω
β
−=
−=
−=
−=
24
223
221
22
K
m
cK
K
Km
lI
rcK
I
rcK
I
rfcK
4
21
43
21
42
0141
π=
−=
−=
Pesquisou-se exaustivamente as soluções numéricas dos sistemas vibratório, em questão; utilizando-se vários valores dos parâmetros físicos, da fonte de energia (motor CC) e das condições iniciais, diferentes dos mencionados pelo Prof. Konokenko. O principal objetivo é analisar algumas situações topológicas não exploradas por ( Konokenko, 1969). Tomou-se os valores numéricos para os parâmetros, como sendo:
m =0.00334; c1=26; r =0.4;
Ix= 0.049; E=200000; I=0.01; l=125;
fo=0.2; ϒ=10; β=0.0001;
M=4.2- (0.0178626+g1), g1=1
com condições iniciais {x10=1;x20=0;x30=1;x40=1}, obtém-se, as Figuras 6 e 7, onde são exibidos os planos de fase x1 vs. x2 e o mapa de Poincaré associado , logo abaixo:
Figura 6: Retrato de fase x1 vs. x2

55
Figura 7: Mapa de Poincaré associado a Figura 6
O comportamento temporal da variável x1(deslocamento) é dado pela Figura 8.
Figura 8: Gráfico de x1 vs t Neste caso, usa-se o calculo da FFT, via MATLAB, para verificação do comportamento caótico, desta estrutura vibratória. Este resultado é mostrado na Figura 9
Figura 9- FFT

56
• Fenômeno do Salto(”Jump”)
O Fenômeno do Salto, foi obtido, via integração numérica, exibido pela Figura 10. Anexa-se, logo adiante, a rotina computacional que produz este resultado.
Figura 10- Resposta em freqüência( freqüência Vs. Am ) –Jump
• Rotinas Computacionais: Confecção do Mapa de Poincaré(MP)
• Rotina 2:
• A rotina em C++ que calcula os pontos para “plotar” o mapa de Poincaré, foi criada baseada na seguinte lógica, descrita no algoritmo, descrito por(Parker e Chuá, 1998).
• programa para calcular o (MP), primeiro integra as equações do sistema
vibratório, através do integrador RK4, e em cada dupla de pontos provenientes desta integração é chamada a rotina Poincaré onde se verifica se houve” furo” no plano escolhido que irá mapear a trajetória no espaço.
• Essa verificação é feita no passo 3 do algoritmo e em caso positivo é feito a
interpolação e, em seguida verifica-se se o valor está dentro de uma faixa de controle para visualização (artifício para visualizar pontos tridimensionais em duas dimensões.
• Tendo estes pontos, eles são armazenados em um arquivo em Formato ASCII e,
o programa prossegue processando os outros pontos no intervalo de integração especificado.

57
• Terminado o programa, é executada uma rotina, no MATLAB, que lê esses pontos do arquivo, disponibilizando-os na memória podendo, ser então, “ plotado” o mapa de Poincaré(MP) quando se deseja, através do comando plot do MATLAB.
• A rotina para o MP escrita, nesta linguagem, tem a mesma lógica, mas não
tem um integrador imbutido nela, o que torna necessário, primeiro efetuar a integração numérica, usando um integrador numérico, no caso RK4 que foi escrito em linguagem de programação C++ armazenando os ponto em arquivo no formato ASCII .
Os Programas usados, na análise do problema, em tela, foram elaborados, a partir
dos algoritmos , logo acima, discutidos e apresentados, a seguir.
Programas feito no MATLAB %**********************************************************************% %Programa 1: Carregar % % Programa para carregar um arquivo ascii (de pontos), que é solução de um sistema de equa- % %ções diferenciais, e plotar o gráfico destes mesmos %%********************************************************************% load (caminho)nomearq.dat t=nomearq(:,1); x1=nomearq(:,2); %CARREGANDO EM VARIÁVEIS AS COLUNAS DO ARQUIVO x2=nomearq(:,3); x3=nomearq(:,4); x4=nomearq(:,5); %Plotando o gráfico t vs x1 plot(t,x1) pause % Plotando o gráfico t vs x2
plot(t,x2) pause % Plotando o gráfico t vs x3 plot(t,x3) pause % Plotando o gráfico t vs x4 plot(t,x4) pause % Plotando o plano de fase x1 vs x2 plot(x1,x2)
//**************************************************************// // Programa 2: Integrador Numérico // //Comentário: // // Programa para integrar um sistema de equações diferenciais, // // devendo este ser um sistema de primeira ordem. As saídas (solução): // // tempo,x1,x2,x3,x4 são salvas em arquivo ascii SOL.DAT para serem usadas // // posteriormente // // Este programa usa integrador de Quarta ordem da família Runge-Kutta // //**************************************************************// #include<stdio.h>#include<conio.h>#include<math.h>#include <stdlib.h>#include <process.h>
//Definição da constante Pi #define PI 3.1415

58
//Declaração das variáveisdouble a,b,n,h,t;double ci[5], w[5], k1[5], k2[5], k3[5], k4[5],acumula[5],xp[5],normal[5];unsigned long i,j,equa,x,saida;FILE *fptr,*ind; //Declaração das constantesdouble m =0.0034; double c1 =26; double r =0.4; double Ix =0.049; double E =200000; double I =0.01; double l =125; double g1 =1; double fo =0.2; double beta=0.0001; double P1 =powl(PI/l,2)*E*Ix; double Po =fo*c1; double m1=2*m/l; double c2 =-((powl(PI,2)*r*c1) /(2*l)) ; double gama=powl(PI,4)*c1/(8*l*l*m); double omega2=powl(PI/l,4)*E*(Ix/m1)*(1-(Po/P1)); double k21 = -omega2; double k22 = -beta/m; double k23 = -c2/m; double k24 = -gama; double k41 = -(c1*fo*r)/I; double k42= -(c1*r*r)/I; double k43= c1*(powl(PI,2)*r)/(4*l*I); double k44= 1/I; // Definição das equações diferenciais em 1º ordem do problema estudado.double f(int indice,double t,double x1,double x2,double x3,double x4){ double resp,aux; //sistema de equacoes diferencias de 1 ordem if(indice==1) resp = x2; if(indice==2) resp = k22*x2 + k21*x1 + k23*sin(x3)*x1 +k24*powl(x1,3); if(indice==3) resp = x4; if(indice==4) resp = k44*(4.2-(0.0178626+g1)*x4) + +k41*cos(x3)+k42*sin(x3)*cos(x3)+ +k43*powl(x1,2)*cos(x3); return(resp);
} void main(void) { equa =4; a =0; b =10; n =3000; h = (b-a)/n; t = a; // condicoes iniciais de x1,x2,x3,x4, respectivamente. ci[1] =1; ci[2] =0; ci[3] =1; ci[4] =1; for(j=1;j<=equa;j++) w[j] = ci[j]; printf("\n%f %f",t,w[1]); //Abrindo o arquivo que conterá a solução fptr = fopen("C:\\Osmar\\pemc\\sol.dat","w+"); fprintf(fptr,"%f %f %f %f %f\n",t,w[1],w[2],w[3],w[4]); for(i=1;i<=n;i++) { for(j=1;j<=equa;j++) k1[j] = h * f( j, t, w[1], w[2], w[3], w[4]); for(j=1;j<=equa;j++) k2[j] = h * f( j, t+h/2, w[1]+k1[1]/2, w[2]+k1[2]/2, w[3]+k1[3]/2, w[4]+k1[4]/2); for(j=1;j<=equa;j++) k3[j] = h * f( j, t+h/2, w[1]+k2[1]/2, w[2]+k2[2]/2, w[3]+k2[3]/2, w[4]+k2[4]/2); for(j=1;j<=equa;j++) k4[j] = h * f( j, t+h, w[1]+k3[1], w[2]+k3[2], w[3]+k3[3], w[4]+k3[4]); for(j=1;j<=equa;j++) w[j] = w[j] + (k1[j] + 2*k2[j] + 2*k3[j] + k4[j])/6; t = a + i*h; //comando para ver em tela a solução encontrada printf("\n%f %f ",t,w[1]); fprintf(fptr,"%f %f %f %f %f\n",t,w[1],w[2],w[3],w[4]); } //Fechando o arquivo fclose(fptr);getch();}

59
//**************************************************************// // Programa 3: Mapa de Poincaré // //Programa em C, que tem como saída, pontos em um arquivo ascii // // POINCAR.DAT para elaboração do Mapa de Poincaré. O integrador (RK4) // //fornece quatro saídas e a função poincare faz a projeção destas saídas em // //em plano tridimensional, podendo posteriormente ser plotado o mapa. // //**************************************************************// #include<stdio.h> #include<conio.h> #include<math.h> #include <stdlib.h> #include <process.h> //Definição da constante π #define PI 3.1415 //Declaração das variáveis double a,b,n,h,t; double ci[5], w[5], k1[5], k2[5], k3[5], k4[5],acumula[5],xp[5],normal[5]; unsigned long i,j,equa,x,saida; FILE *fptr,*ind; // Definicao das constantes double m =0.00334; double c1 = 26; double r = 0.2; double Ix =0.049; double E =200000; double I =0.01; double l =125; double g1 =1; double fo =0.2; double beta=0.0001; double P1 =powl(PI/l,2)*E*Ix; double Po =fo*c1; double c2 =-((powl(PI,2)*r*c1) /(2*l)) ; double gama=powl(PI,4)*c1/(8*l*l*m); double omega2=powl(PI/l,4)*E*(Ix/m)*(1-(Po/P1)); double k21 = -omega2; double k22 = -beta/m; double k23 = -c2/m; double k24 = -gama; double k41 = -(c1*fo*r)/I; double k42= -(c1*r*r)/I; double k43= c1*(powl(PI,2)*r)/(4*l*I); double k44= 1/I; //rotina para calcular o Mapa de poincare
void poincare() { int o,k; double alf1=0; double alf2=0; double xmed1[5]; double xmed2[5]; double xmed[5]; for (o=1;o<=equa;o++) { alf1=alf1+(normal[o] * (acumula[o]-xp[o])); } for (o=1;o<=equa;o++) { alf2=alf2+normal[o]*(w[o]-xp[o]); } if (alf1>0) { if (alf1*alf2<0) { saida=saida+1; for(o=1;o<=equa;o++) { xmed1[o]=(alf2/(alf2-alf1))*acumula[o]; xmed2[o]=(alf1/(alf1-alf2))*w[o]; xmed[o]=xmed1[o]+xmed2[o]; } fprintf(ind,"%f %f %f %f\n",xmed[1],xmed[2],xmed[3],xmed[4]); } } if(saida>200000) exit(0); } // Definicao das equacoes diferenciais do problema estudado. double f(int indice,double t,double x1,double x2,double x3,double x4) {

60
double resp; //Sistema de equações diferencias de 1º ordem if(indice==1) resp = x2; if(indice==2) resp = k22*x2 + k21*x1 + k23*sin(x3)*x1 +k24*powl(x1,3); if(indice==3) resp = x4; if(indice==4) resp = k44*(4.2-(0.0178626+g1)*x4) + +k41*cos(x3)+k42*sin(x3)*cos(x3)+ +k43*powl(x1,2)*cos(x3); return(resp); } void main(void) { clrscr(); ldiv_t x; //Declaração das constantes equa =4; a =0; b =10000000; n =1000000000; h = (b-a)/n; t = a; // Condições iniciais de x1,x2,x3,x4, respectivamente. ci[1] =1; ci[2] =0; ci[3] =1; ci[4] =1; //Tomando um ponto no plano desejado (xp) e declarando seu vetor normal // ao plano escolhido xp[1]=-0.2; xp[2]=0; xp[3]=0; xp[4]=3.5; normal[1]=0; normal[2]=0; normal[3]=0; normal[4]=1; for(j=1;j<=equa;j++) w[j] = ci[j]; //Abrindo o arquivo para escrita ind = fopen("C:\\Osmar\\pemc\\poincar.dat","w+"); for(i=1;i<=n;i++) { for (j=1;j<=equa;j++) acumula[j]=w[j];
for(j=1;j<=equa;j++) k1[j] = h * f( j, t, w[1], w[2], w[3], w[4]); for(j=1;j<=equa;j++) k2[j] = h * f( j, t+h/2, w[1]+k1[1]/2, w[2]+k1[2]/2, w[3]+k1[3]/2, w[4]+k1[4]/2); for(j=1;j<=equa;j++) k3[j] = h * f( j, t+h/2, w[1]+k2[1]/2, w[2]+k2[2]/2, w[3]+k2[3]/2, w[4]+k2[4]/2); for(j=1;j<=equa;j++) k4[j] = h * f( j, t+h, w[1]+k3[1], w[2]+k3[2], w[3]+k3[3], w[4]+k3[4]); for(j=1;j<=equa;j++) w[j] = w[j] + (k1[j] + 2*k2[j] + 2*k3[j] + k4[j])/6; t = a + i*h; x=ldiv(i,2); if (x.rem==0) poincare(); } //Fechando o arquivo fclose(ind); getch(); }

61
//**************************************************************// // Programa 4 : Resposta em Frêquencia // //Programa em C que obtém, através do integrador RK4, valores da amplitude // //e da frequência em um determinado intervalo, variando E1, e armazena-os // // em um arquivo de nome RESP.DAT. Com este resultado, torna-se possível a// //construção um gráfico para visualizar a resposta em frequência. As saídas // // armazenadas são ml(curva característica do motor),amplitude e frequência //// salvas em arquivo ascii para serem usadas posteriormente //// //**************************************************************// #include<stdio.h> #include<conio.h> #include<math.h> //Definição da constante π #define PI 3.1415 //Definição das variáveisdouble a,b,ml1,ml,n,h,t; double ci[5], w[5], k1[5], k2[5], k3[5], k4[5]; long int i,j,k,equa,count; FILE *fptr; //Definição das constantes double m =0.0034; double c1 =26; double r = 0.4;double Ix =0.049; double E =200000; double I =0.01; double l =125; double g1 =1; double fo =0.2; double beta=0.001; double P1 =powl(PI/l,2)*E*Ix; double Po =fo*c1; double m1=2*m/l; double c2 =-((powl(PI,2)*r*c1) /(2*l)) ; double gama=powl(PI,4)*c1/(8*l*l*m); double omega2=powl(PI/l,4)*E*(Ix/m1)*(1-(Po/P1)); double k21 = -omega2; double k22 = -beta/m; double k23 = -c2/m; double k24 = -gama; double k41 = -(c1*fo*r)/I;
double k42= -(c1*r*r)/I; double k43= c1*(powl(PI,2)*r)/(4*l*I); double k44= 1/I; // Definição das equações diferenciais do problema estudado. double f(int indice,double t,double x1,double x2,double x3,double x4) { double resp; //double ml=ml1*(1-0.00425233*x4); ml=ml1*(1 -0.00425233*x4); //sistema de equações diferencias de 1 ordem if(indice==1) resp = x2; if(indice==2) resp = k22*x2 + k21*x1 + k23*sin(x3)*x1 +k24*powl(x1,3); if(indice==3) resp = x4; if(indice==4) resp = k44*(ml-(g1*x4)) + +k41*cos(x3)+k42*sin(x3)*cos(x3)+ +k43*powl(x1,2)*cos(x3); return(resp); } void main(void) { //Declaração de variáveis double tempo,tempo_max,vw,maximo; double t1,t2,t3,t4; double df1,df2,df3; double periodo,frequencia,amplitude; clrscr();
62
// Definição das constantes equa=4; a = 0; b =30; n =11400; h = (b-a)/n; t = a; fptr = fopen("C:\\osmar\\pemc\\resp.dat","w+"); for(k=0;k<=40;k++) { ml1 =2 + k*0.021; // condições iniciais de x1,x2,x3,x4, respectivamente. ci[1] =1; ci[2] =0; ci[3] =1; ci[4] = 1; for(j=1;j<=equa;j++) w[j] = ci[j]; tempo = 0; tempo_max = 0; maximo = 0; t = 0; t1=t2=t3=t4=0; for(i=1;i<=n;i++) { for(j=1;j<=equa;j++) k1[j] = h * f( j, t, w[1], w[2], w[3], w[4]); for(j=1;j<=equa;j++) k2[j] = h * f( j, t+h/2, w[1]+k1[1]/2, w[2]+k1[2]/2,w[3]+k1[3]/2, w[4]+k1[4]/2); for(j=1;j<=equa;j++) k3[j] = h * f( j, t+h/2, w[1]+k2[1]/2, w[2]+k2[2]/2, w[3]+k2[3]/2, w[4]+k2[4]/2); for(j=1;j<=equa;j++) k4[j] = h * f( j, t+h, w[1]+k3[1], w[2]+k3[2],
w[3]+k3[3], w[4]+k3[4]); for(j=1;j<=equa;j++) w[j] = w[j] + (k1[j] + 2*k2[j] + 2*k3[j] + k4[j])/6; t = a + i*h; if(w[1]>=0) { //Encontrando a amplitude if((vw < maximo) && (maximo > w[1])) { t4=t3; t3=t2; t2=t1; t1 = tempo_max; amplitude = maximo; } } vw = maximo; maximo = w[1]; tempo = tempo_max; tempo_max = t; }//fim do for ate n //Calcula a frequencia df1 = t1-t2; df2 = t2-t3; df3 = t3-t4; periodo = (df1+df2+df3)/3; frequencia = 2*acos(-1)/periodo; //saida para o arquivo fprintf(fptr,"%f %f %f\n",ml1, frequencia,amplitude); //saida para a tela printf("\n %f %f %f",ml1,amplitude,frequencia); } fclose(fptr); getch(); }
63
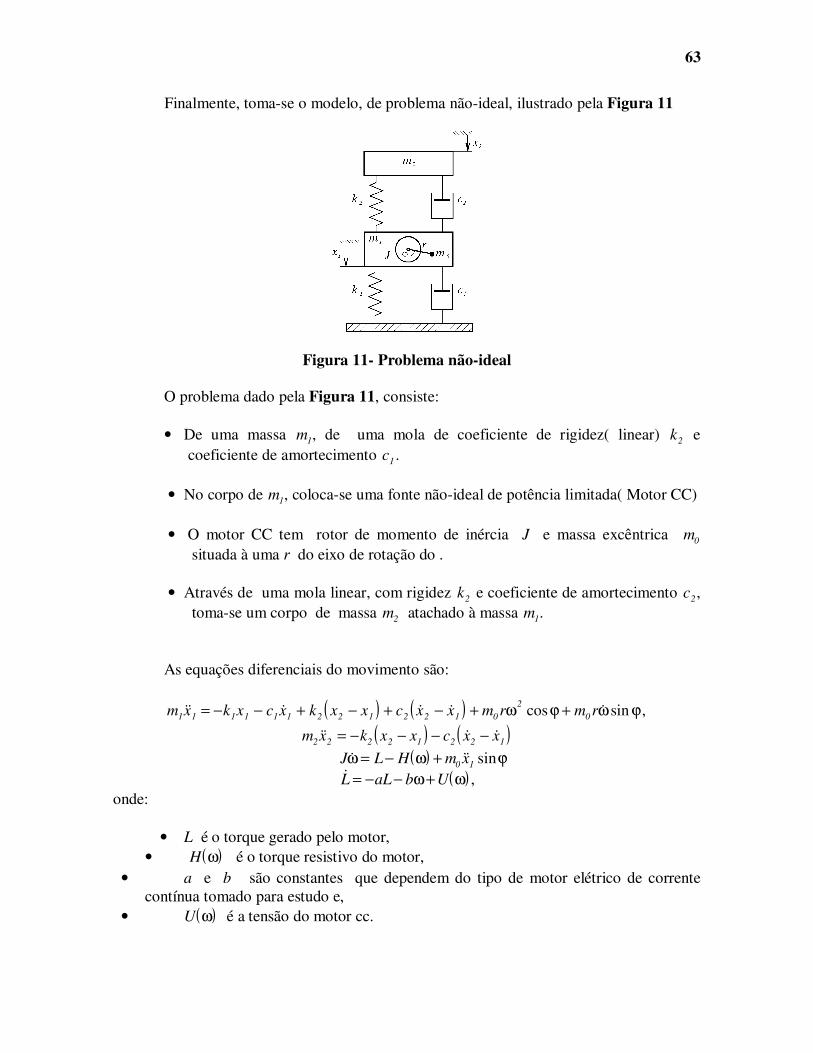
Finalmente, toma-se o modelo, de problema não-ideal, ilustrado pela Figura 11
Figura 11- Problema não-ideal
O problema dado pela Figura 11, consiste: • De uma massa m1, de uma mola de coeficiente de rigidez( linear) k2 e
coeficiente de amortecimento c1 . • No corpo de m1, coloca-se uma fonte não-ideal de potência limitada( Motor CC)
• O motor CC tem rotor de momento de inércia J e massa excêntrica m0
situada à uma r do eixo de rotação do .
• Através de uma mola linear, com rigidez k2 e coeficiente de amortecimento c2, toma-se um corpo de massa m2 atachado à massa m1.
As equações diferenciais do movimento são:
( ) ( )m x k x c x k x x c x x m r m r1 1 1 1 1 1 2 2 1 2 2 1 0
2
0&& & & & cos & sin ,= − − + − + − + +ω ϕ ω ϕ
( ) ( )m x k x x c x x2 2 2 2 1 2 2 1&& & &= − − − −
( )J L H m x& && sinω ω ϕ= − + 0 1 ( )&L aL b U= − − +ω ω ,
onde:
• L é o torque gerado pelo motor, • ( )H ω é o torque resistivo do motor,
• a e b são constantes que dependem do tipo de motor elétrico de corrente contínua tomado para estudo e,
• ( )U ω é a tensão do motor cc.
64
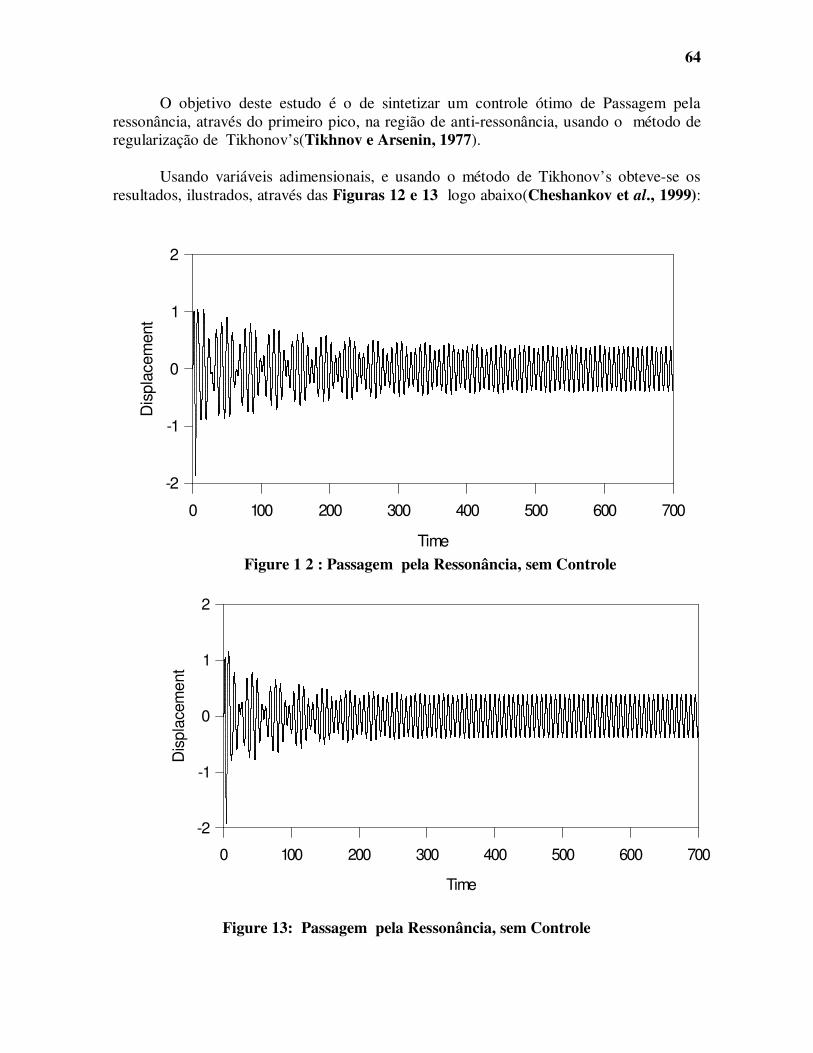
O objetivo deste estudo é o de sintetizar um controle ótimo de Passagem pela ressonância, através do primeiro pico, na região de anti-ressonância, usando o método de regularização de Tikhonov’s(Tikhnov e Arsenin, 1977).
Usando variáveis adimensionais, e usando o método de Tikhonov’s obteve-se os resultados, ilustrados, através das Figuras 12 e 13 logo abaixo(Cheshankov et al., 1999):
Time
0 100 200 300 400 500 600 700
Dis
pla
cem
ent
-2
-1
0
1
2
Figure 1 2 : Passagem pela Ressonância, sem Controle
Time
0 100 200 300 400 500 600 700
Dis
pla
cem
ent
-2
-1
0
1
2
Figure 13: Passagem pela Ressonância, sem Controle

65

66
• Cheshankov, B. I. , D.T. Ruschev, J.M. Balthazar, H.I. Weber. A Synthesis of an Optimal Control of a Nonideal Energy Source by Use of Tichonov’s Method of Regularization. IN: ICONNE 2000, to be held in Campos do Jordão, July 31- August4, 2000, 2000, aceito para publicação.