Embed Size (px)
Citation preview

Folhas de Apoio à unidade curricular Elementos de Máquinas II
ENGRENAGENS
Engenharia Mecânica – Ramo Produção
Prof. Dr.ª Rosa Marat-Mendes
Departamento de Engenharia Mecânica
Área Científica de Mecânica dos Meios Sólidos
2012


Folhas de Apoio à unidade curricular Elementos de Máquinas II Engrenagens
ESTSetúbal/IPS -‐ Rosa Marat-‐Mendes -‐ 2012
Índice
7. Transmissões Rígidas -‐ Engrenagens (Gears) ...................................................................................................... 1
7.1. Introdução. ......................................................................................................................................................... 1
7.2. Tipos de Engrenagens. ........................................................................................................................................ 3
7.2.1. Engrenagens Cilíndricas. ............................................................................................................................. 3
7.2.2. Engrenagens Cónicas (Bevel Gear). ............................................................................................................ 4
7.2.3. Engrenagem parafuso sem-‐fim. ................................................................................................................. 5
7.2.4. Cremalheira. ............................................................................................................................................... 6
7.3. Fabrico das rodas dentadas. ............................................................................................................................... 6
7.4. Nomenclatura e Geometria. ............................................................................................................................... 8
7.5. Relação de transmissão. ................................................................................................................................... 11
7.6. Geometria das engrenagens cilíndricas de dentes helicoidais. ........................................................................ 12
7.7. Geometria das engrenagens cónicas de dentes rectos. .................................................................................... 14
7.8. Geometria das engrenagens parafuso sem-‐fim. .............................................................................................. 14
7.9. Interferência. .................................................................................................................................................... 15
7.10. Sentido da rotação das engrenagens. .......................................................................................................... 16
7.11. Trens de engrenagens. ................................................................................................................................. 17
7.12. Relação de transmissão nos trens de engrenagens simples. ........................................................................ 19
7.13. Relação de transmissão nos trens de engrenagens compostos. ................................................................... 20
7.14. Relação de transmissão nos trens de engrenagens planetários. .................................................................. 21
7.15. Análise de Forças. ......................................................................................................................................... 23
7.15.1. Engrenagens cilíndricas de dentes rectos. ................................................................................................ 23
7.15.2. Engrenagens cilíndricas de dentes helicoidais. ......................................................................................... 25
7.15.3. Engrenagens cónicas de dentes rectos. .................................................................................................... 26
7.15.4. Engrenagem parafuso sem-‐fim. ............................................................................................................... 27
7.16. Cálculo de engrenagens cilíndricas para mecânica geral. ............................................................................ 28
7.16.1. Tipo de ruína. ............................................................................................................................................ 28
7.16.2. Equação de flexão de Lewis. ..................................................................................................................... 29
7.16.3. Dureza da superfície. ................................................................................................................................ 31

Folhas de Apoio à unidade curricular Elementos de Máquinas II Engrenagens
ESTSetúbal/IPS -‐ Rosa Marat-‐Mendes -‐ 2012

Folhas de Apoio à unidade curricular Elementos de Máquinas II Engrenagens
ESTSetúbal/IPS -‐ Rosa Marat-‐Mendes -‐ 2012 Página G-‐1
7. Transmissões Rígidas - Engrenagens (Gears)
7.1. Introdução.
As engrenagens primitivas (Figura 7.1a) foram inicialmente utilizadas pelos chineses. Este tipo de
engrenagem era até à algum tempo atrás utilizado no nosso País nas máquinas simples de accionamento
animal, tais como as “noras” (Figura 7.1b).
a) b)
Figura 7.1 – a) Engrenagens primitivas (2600 A.C.) [1]; b) Engrenagens de uma “nora” [8].
As engrenagens são portanto um dos tipos de transmissão mecânica de maior aplicação prática, são órgãos
de máquinas que transmitem movimento de um veio motor a um veio movido, por meio de dentes que
entram sucessivamente em contacto uns com os outros.
À menor das duas rodas em contacto é designada de Pinhão ou Carreto (Pinion), à maior das duas é
chamada de Roda (Gear).
As principais vantagens e características das transmissões por engrenagens são:
• Permitem distâncias entre eixos pequenas;
• Rendimentos muito elevados;
• Longa duração;
• Relação de transmissão constante;
• Transmissão de pequenas a elevadas potências.
Nas figuras seguintes estão representadas várias aplicações de engrenagens, desde aparelhos domésticos,
brinquedos até aplicações automóveis (Figura 7.2 e Figura 7.3).

Folhas de Apoio à unidade curricular Elementos de Máquinas II Engrenagens
ESTSetúbal/IPS -‐ Rosa Marat-‐Mendes -‐ 2012 Página G-‐2
a) b)
c) d)
Figura 7.2 – Aplicações de engrenagens: a) Misturadora [2]; b) Relógio de brincar [9]; c) Caixa
redutora de velocidades [1]; d) Caixa redutora de velocidades manual de um automóvel [7].
Figura 7.3 – Diferencial de um automóvel.

Folhas de Apoio à unidade curricular Elementos de Máquinas II Engrenagens
ESTSetúbal/IPS -‐ Rosa Marat-‐Mendes -‐ 2012 Página G-‐3
7.2. Tipos de Engrenagens.
7.2.1. Engrenagens Cilíndricas.
As engrenagens cilíndricas podem-se apresentar de duas formas: de Dentes Rectos (Figura 7.4) e de
Dentes helicoidais (Figura 7.5).
As engrenagens Cilíndricas de dentes rectos (Spur Gear) caracterizam-se pelo tipo de engrenagem mais
simples, mais comum, mais económico, possuem dentes paralelos ao eixo de rotação e só transmitem
movimento entre eixos paralelos.
Figura 7.4 – Engrenagens cilíndricas de Dentes Rectos [2].
Nas engrenagens Cilíndricas de Dentes Helicoidais (Helical Gear) o movimento transmite-se de modo
igual que nas cilíndricas de dentes rectos, mas com maiores vantagens. Possuem dentes inclinados em
relação ao eixo de rotação e podem transmitir movimento entre eixos paralelos (Figura 7.6 a) ou cruzados
(Figura 7.6 b), geralmente a 90º.
As engrenagens cilíndricas de dentes helicoidais têm a vantagem de transmitirem mais potência do que as
de dentes rectos, podem transmitir mais velocidade e são mais silenciosas. Quanto aos inconvenientes,
pode-se dizer que se desgastam mais do que as de dentes rectos, são mais dispendiosas e precisam
geralmente de mais lubrificação do que as de dentes rectos.
Figura 7.5 – Engrenagens cilíndricas de Dentes Helicoidais [2].

Folhas de Apoio à unidade curricular Elementos de Máquinas II Engrenagens
ESTSetúbal/IPS -‐ Rosa Marat-‐Mendes -‐ 2012 Página G-‐4
a) b)
Figura 7.6 – Engrenagens cilíndricas de Dentes Helicoidais: a) com eixos paralelos; b) com eixos
cruzados [3].
7.2.2. Engrenagens Cónicas (Bevel Gear).
As engrenagens cónicas são montadas em eixos que se intersectam entre si excepto as Hipóides e podem
ser ou não perpendiculares (Figura 7.7). Os dentes das engrenagens cónicas estão localizados nas
superfícies cónicas e podem ser Rectos, Inclinados (helicoidais), em Espiral e Hipóide.
Figura 7.7 – Engrenagens cónicas de Dentes Rectos [2].
As Engrenagens Cónicas de Dentes Rectos (straight bevel gear) (Figura 7.8 a) têm elementos cónicos
com a mesma direcção da geratriz do cone primitivo. As engrenagens cónicas de dentes rectos são as mais
simples e mais usadas na família das engrenagens cónicas. Estas engrenagens geram mais ruído do que
as engrenagens cónicas helicoidais e são usadas para transmitir movimento entre eixos que se cruzam em
variados ângulos.
As Engrenagens Cónicas de Dentes helicoidais (helical bevel gear) (Figura 7.8 b) são praticamente
iguais às de dentes rectos, mas possuem um ângulo de inclinação da hélice e usadas para transmitir
movimento entre eixos que se cruzam em ângulo recto.
As Engrenagens Cónicas de Dentes em Espiral (spiral bevel gear) (Figura 7.8 c) são constituídas por
rodas cónicas de dentes com um ângulo de hélice dos dentes espirais. São rodas mais complexas de obter
mas apresentam maior capacidade de carga e menor ruído. A diferença com o cónico recto é que possui
uma maior superfície de contacto nos dentes e possui um funcionamento relativamente silencioso.

Folhas de Apoio à unidade curricular Elementos de Máquinas II Engrenagens
ESTSetúbal/IPS -‐ Rosa Marat-‐Mendes -‐ 2012 Página G-‐5
As Engrenagens Cónicas Hipóides (hypoid bevel gear) (Figura 7.8 d) são formadas por um pinhão
redutor de poucos dentes e uma roda de muitos dentes. A principal aplicação de uma engrenagem hipóide
está na unidade diferencial de um automóvel em que a montagem exige posicionamentos descentralizados
dos eixos. Os dentes helicoidais numa engrenagem hipóide produzem menos vibrações do que
uma engrenagem com dentes rectos. A disposição em espiral do dentado permite um maior contacto dos
dentes do pinhão com os da coroa, obtendo-se maior robustez na transmissão.
a) b)
c) d)
Figura 7.8 – Engrenagens cónicas: a) de Dentes Rectos; b) de Dentes Inclinados; c) em Espiral; d) Hipóide.
7.2.3. Engrenagem parafuso sem-fim.
Engrenagens sem-fim são usadas quando grandes reduções de transmissão são necessárias. É constituída
por uma rosca de um parafuso com uma roda dentada especial e tal como os parafusos podem possuir
mais do que uma rosca. Possui uma eficiência de transmissão elevada e transmite movimento entre veios
que não sejam paralelos nem se intersectem.
a) b) Figura 7.9 – Engrenagem parafuso sem-fim: a) esquema [2]; b) aplicação num redutor [10].

Folhas de Apoio à unidade curricular Elementos de Máquinas II Engrenagens
ESTSetúbal/IPS -‐ Rosa Marat-‐Mendes -‐ 2012 Página G-‐6
7.2.4. Cremalheira.
Cremalheira é uma barra provida de dentes, destinada a engrenar numa engrenagem cilíndrica de dentes
rectos ou helicoidais. Com esse sistema, pode-se transformar movimento de rotação em movimento
rectilíneo e vice-versa. (Figura 7.10).
A cremalheira pode ser considerada como sendo uma roda de raio infinito. Nesse caso, a circunferência da
roda pode ser imaginada como um segmento de recta. Desse modo, a circunferência primitiva da
engrenagem é tangente à linha primitiva da cremalheira.
Figura 7.10 – Cremalheira.
7.3. Fabrico das rodas dentadas.
As rodas dentadas podem ser obtidas por processos de:
• fundição (em areia, por injecção, etc.);
• prensagem de moldes;
• extrusão.
No entanto o processo mais utilizado e usual é o de maquinagem (corte por arranque de apara), designado
por talhe do dente.
Figura 7.11 – Fabrico das rodas dentadas [1].

Folhas de Apoio à unidade curricular Elementos de Máquinas II Engrenagens
ESTSetúbal/IPS -‐ Rosa Marat-‐Mendes -‐ 2012 Página G-‐7
Normalmente após a fundição ou a maquinagem, que deixam um acabamento superficial grosseiro, é
realizado um processo de acabamento mais fino, tais como:
• rectificação;
• rectificação fina;
• navalhagem.
Os materiais utilizados no fabrico das rodas dentadas podem ser:
• Ferro Fundido: Menos ruidosas que as de aço inox. Alta resistência à flexão. Boa durabilidade
superficial. Mais barato.
• Aços Inox com ligas de:
o Níquel – Facilita a execução da tempera e aumenta a resistência à tracção e à fadiga, sem
reduzir a plasticidade e a resiliência.
o Crómio – Facilita a execução da tempera, aumentando a dureza, ou seja, a resistência aos
esforços e ao desgaste, mas dá-lhe mais fragilidade.
o Molibdénio – Concede aos aços uma textura fina, pelo que também lhes aumenta a
dureza, mantendo a plasticidade.
o Níquel + Crómio + Molibdénio – melhores resultados.
• Bronze: Material não ferroso.
• Plásticos:
o Nylon – Resistência ao desgaste. Baixo coeficiente de atrito. Baixo ruído. Não necessitam
de lubrificação quando a baixas cargas.
• Compósito:
o Fibra de carbono com resina epóxida – Grande resistência mecânica aliada ao baixo
peso.
Na Tabela 7.1 pode-se ter uma ideia, a título informativo, das combinações possíveis dos materiais para os
principais tipos de engrenagens.
Tabela 7.1 – Combinação de materiais adequados para os principais tipos de engrenagem [5].
Funcionamento da engrenagem Combinação de materiais
Apenas movimento - Plásticos, bronze, aço macio, aço inox em qualquer percentagem;
Esforços ligeiros
- Aço carbono com bronze; - Plásticos e compósitos; - Ferro fundido; - Aço.
Esforços elevados (aplicações industriais e marítimas)
- Aços de liga com aço carbono; - Aços de liga com aço de liga; - Aços de liga nitrudados com aços de liga nitrudados ou aços de liga.
Automóveis - Aços cementados ou temperados com aços cementados ou temperados.
Aeronáutica e esforços elevados - Aços cementados ou temperados com aços cementados ou temperados.

Folhas de Apoio à unidade curricular Elementos de Máquinas II Engrenagens
ESTSetúbal/IPS -‐ Rosa Marat-‐Mendes -‐ 2012 Página G-‐8
7.4. Nomenclatura e Geometria.
A Figura 7.12 mostra dois dentes de uma engrenagem de dentes rectos e as principais designações
utilizadas na sua especificação e dimensionamento.
Figura 7.12 – Nomenclatura dos dentes de uma engrenagem de dentes rectos.
Figura 7.13 – Nomenclatura do pinhão e da roda acoplados.
Círculo Primitivo (pitch circle) – é o círculo teórico, sobre o qual os cálculos são normalmente efectuados.
Os círculos de duas engrenagens acopladas são tangentes;
Círculo da cabeça (addendum circle) – é o círculo exterior da engrenagem;
Círculo do pé (deddendum circle) – é o círculo da raiz (base) do dente;
𝒅 𝑚𝑚 - Diâmetro Primitivo (pitch diameter) – diâmetro do círculo primitivo;
𝒁 - Número de dentes;
dente
φ
C
dG
dp rG
rppinhão roda
círculo do pé
círculo primitivo
rbp
rbG
linha de acção
𝜔! 𝜔!
b
círculo de folga
espess
ura

Folhas de Apoio à unidade curricular Elementos de Máquinas II Engrenagens
ESTSetúbal/IPS -‐ Rosa Marat-‐Mendes -‐ 2012 Página G-‐9
𝒅𝒑 [𝑚𝑚] - Diâmetro primitivo do pinhão;
𝒅𝑮 [𝑚𝑚] - Diâmetro primitivo da roda;
𝒓𝒑 [𝑚𝑚] - Raio primitivo do pinhão;
𝒓𝑮 [𝑚𝑚] - Raio primitivo da roda;
𝒁𝒑 - Número de dentes do pinhão;
𝒁𝑮 - Número de dentes da roda;
𝝎𝒑 – Velocidade angular do pinhão;
𝝎𝑮 – Velocidade angular da roda;
𝑪 [𝑚𝑚] – Distância entre os eixos das duas rodas;
𝐶 = 𝑑! + 𝑑!
2= 𝑟! + 𝑟! (7.1)
𝒎 𝑚𝑚 - Módulo (module) – é a relação entre o diâmetro primitivo e o número de dentes de uma
engrenagem. O módulo é a base do dimensionamento das engrenagens no sistema internacional. Duas
engrenagens acopladas possuem sempre o mesmo módulo;
𝑚 = 𝑑𝑁=𝑑!𝑁!
=𝑑!𝑁! (7.2)
𝑷 𝑑𝑒𝑛𝑡𝑒𝑠 𝑝𝑜𝑙𝑒𝑔𝑎𝑑𝑎 𝑠𝑒 𝑑 [𝑖𝑛] – Passo Diametral (diametral Pitch) – é a razão entre o número de dentes da
engrenagem e o diâmetro primitivo, ou seja o inverso do módulo. O passo diametral é a grandeza
correspondente ao módulo no sistema inglês (Figura 7.14);
𝑃 = 𝑁𝑑=𝑁!𝑑!
=𝑁!𝑑! ⟺ 𝑃 =
1𝑚 (7.3)
Figura 7.14 – Relação entre o Passo diametral e o tamanho do dente [2].
Na Tabela 7.2 apresentam-se os valores normalmente utilizados para o módulo, 𝑚, e para o passo
diametral, 𝑃.
Tabela 7.2 – Tamanho dos dentes em usos gerais.
Passo diametral 𝑷 [𝒅𝒆𝒏𝒕𝒆𝒔 𝒑𝒐𝒍𝒆𝒈𝒂𝒅𝒂]
Grosso 2, 2!!, 2!!, 3, 4, 6, 8, 10, 12, 16
Fino 20, 24, 32, 40, 48, 64, 80, 96, 120, 150, 200
módulo, 𝒎 [𝒎𝒎]
Preferidos 1, 1.25, 1.5, 2, 2.5, 3, 4, 5, 6, 8, 10, 12, 16, 20, 25, 32, 40, 50
Próxima escolha 1.125, 1.375, 1.75, 2.25, 2.75, 3.5, 4.5, 5.5, 7, 9, 11, 14, 18, 22, 28, 36, 45

Folhas de Apoio à unidade curricular Elementos de Máquinas II Engrenagens
ESTSetúbal/IPS -‐ Rosa Marat-‐Mendes -‐ 2012 Página G-‐10
𝒑 [𝑚𝑚] - Passo Primitivo (circular pitch) – é a distância, medida no círculo primitivo, de um ponto num dente,
até ao ponto correspondente no dente adjacente. O passo primitivo é igual à soma da largura do dente com
o espaço entre dentes;
𝑝 = 𝜋𝑑𝑁= 𝜋𝑚 𝑜𝑢 𝑝 =
𝜋𝑃 (7.4)
𝒕 [𝑚𝑚] – Espessura do dente – é medida no círculo primitivo e é metade do passo primitivo.
𝑡 = 𝑝2 (7.5)
𝒂 [𝑚𝑚] – Altura da cabeça do dente ou Saliência (addendum) – é a distância radial entre a superfície da
coroa (cabeça) e o diâmetro primitivo;
𝒃 [𝑚𝑚] – Altura do pé ou Reentrância (dedendum) – é a distância radial entre a superfície da raiz (pé) e o
diâmetro primitivo;
𝒉𝒕 [𝑚𝑚] - Altura do dente (whole depth) – é a soma da saliência com a reentrância;
ℎ! = 𝑎 + 𝑏 (7.6)
Círculo de folga (clearance circle) – é o círculo tangente ao círculo da saliência da engrenagem acoplada,
ou seja é o círculo tangente à superfície do dente da outra roda;
𝒄 𝑚𝑚 - Folga (clearance) – é a saliência subtraída da reentrância;
𝑐 = 𝑏 − 𝑎 (7.7)
Recuo (Backlash) – é a quantidade que o espaço entre dentes que excede a largura do dente engrenado
no círculo primitivo;
𝝓 [𝑔𝑟𝑎𝑢𝑠] – Ângulo de pressão.
𝒓𝒃𝒑 [𝑚𝑚] - Raio do círculo de base do pinhão;
𝑟!" = 𝑟! cos∅ (7.8)
𝒓𝒃𝑮 [𝑚𝑚] - Raio do círculo de base da roda;
𝑟!" = 𝑟! cos∅ (7.9)
𝒑𝒃𝒑 [𝑚𝑚] - Passo do círculo de base do pinhão;
𝑝!" = 𝑝! cos∅ (7.10)
𝒑𝒃𝑮 [𝑚𝑚] - Passo do círculo de base da roda;
𝑝!" = 𝑝! cos∅ (7.11)
Na Tabela 7.3 apresentam-se os sistemas de dentes padronizados para as engrenagens cilíndricas de
dentes rectos.

Folhas de Apoio à unidade curricular Elementos de Máquinas II Engrenagens
ESTSetúbal/IPS -‐ Rosa Marat-‐Mendes -‐ 2012 Página G-‐11
Tabela 7.3 – Sistemas de dentes padronizados e usados normalmente nas engrenagens cilíndricas de
dentes rectos [4].
Sistema de dente Ângulo de pressão, 𝝓 [𝒎𝒎] Saliência, 𝒂 [𝒎𝒎] Reentrância, 𝒃 [𝒎𝒎]
Profundidade
completa
20 1𝑃 ou 1𝑚
1.25𝑃 ou 1.25𝑚
1.35𝑃 ou 1.35𝑚
22!! 1
𝑃 ou 1𝑚
25 1𝑃 ou 1𝑚
Curto 20 0.8𝑃 ou 0.8𝑚 1
𝑃 ou 1𝑚
7.5. Relação de transmissão.
A relação de transmissão é a relação entre velocidades de rotação de dois corpos, relativamente a outro
(fixe), que transmitem movimento de um para o outro.
Sendo a velocidade linear do círculo primitivo a mesma em rodas que estejam em contacto (pinhão e roda),
vem que:
𝒗 [𝑚/𝑠] – Velocidade linear dos círculos primitivos;
𝑣 = 𝜔!. 𝑟! = 𝜔! . 𝑟! (7.12)
Logo a relação entre raios e velocidades angulares é designada por relação de transmissão, 𝒊, dada por:
𝑖 =𝜔!𝜔!
=𝑟!𝑟! (7.13)
ou também:
𝑖 =𝜔!𝜔!
=𝑑!𝑑!
=𝑍!𝑍! (7.14)
A relação de transmissão diz-se:
Redutora se: 𝜔! > 𝜔!
Multiplicadora se: 𝜔! > 𝜔!
e é constante, 𝑖 = 𝑐𝑜𝑛𝑠𝑡. entre duas rodas em contacto.

Folhas de Apoio à unidade curricular Elementos de Máquinas II Engrenagens
ESTSetúbal/IPS -‐ Rosa Marat-‐Mendes -‐ 2012 Página G-‐12
7.6. Geometria das engrenagens cilíndricas de dentes helicoidais.
As engrenagens cilíndricas de dentes helicoidais possuem três orientações (axial, transversal e normal)
devido à inclinação dos dentes em relação ao eixo da roda, enquanto que as engrenagens de dentes rectos
só apresentavam uma orientação (axial).
Na Figura 7.15 está representada a nomenclatura utilizada nas engrenagens helicoidais.
Figura 7.15 – Nomenclatura das engrenagens helicoidais [2][4].
𝒑𝒙 [𝑚𝑚] - Passo primitivo axial;
𝒑𝒕 [𝑚𝑚] - Passo primitivo transversal;
𝒑𝒏 [𝑚𝑚] - Passo primitivo normal;
𝑷𝒕 [𝑑𝑒𝑛𝑡𝑒𝑠/𝑖𝑛] - Passo diametral transversal;
𝑷𝒏 [𝑑𝑒𝑛𝑡𝑒𝑠/𝑖𝑛] - Passo diametral normal;
𝒎𝒕 [𝑚𝑚] - Módulo transversal;
𝒎𝒏 [𝑚𝑚] - Módulo normal;
𝝍 [𝑔𝑟𝑎𝑢𝑠] – Ângulo de hélice – ângulo de inclinação
da hélice em relação ao eixo da roda;
𝝓𝒏 [𝑔𝑟𝑎𝑢𝑠] – Ângulo de pressão medido na direcção
normal;
𝝓𝒕 [𝑔𝑟𝑎𝑢𝑠] – Ângulo de pressão medido na direcção
transversal;
Podem-se obter as seguintes relações:
𝑝! = 𝑝! cos𝜓 (7.15)
𝑝! =𝑝!
tan𝜓 (7.16)
cos𝜓 =tan𝜙!tan𝜙!
(7.17)
𝑝!.𝑃! = π (7.18)
angulo de
hélice 𝜓
𝒑𝒕 𝒑𝒙
𝒑 𝒏

Folhas de Apoio à unidade curricular Elementos de Máquinas II Engrenagens
ESTSetúbal/IPS -‐ Rosa Marat-‐Mendes -‐ 2012 Página G-‐13
𝑝! = π.𝑚! (7.19)
𝑃! =𝑃!
cos𝜓 (7.20)
𝑚! = 𝑚! cos𝜓 (7.21)
Na Tabela 7.4 apresentam-se os sistemas de dentes normalmente usados nas engrenagens cilíndricas de
dentes helicoidais.
Tabela 7.4 – Sistemas de dentes padronizados e usados normalmente nas engrenagens cilíndricas de
dentes helicoidais [4].
Quantidade Equação
Saliência, 𝑎 1𝑃!= 1𝑚!
Reentrância, 𝑏 1.25𝑃!
= 1.25𝑚!
Diâmetro primitivo do pinhão, 𝑑! 𝑍!
𝑃! cos𝜓=𝑍!𝑚!
cos𝜓
Diâmetro primitivo da roda, 𝑑! 𝑍!
𝑃! cos𝜓=𝑍!𝑚!
cos𝜓
Diâmetro de base do pinhão, 𝑑!" 𝑑! cos𝜙!
Diâmetro de base da roda, 𝑑!" 𝑑! cos𝜙!
Ângulo de hélice da base, 𝜓! tan!! tan𝜓 cos𝜙!
Engrenagem externa
Distância entre eixos, 𝐶 𝑑! + 𝑑!
2
Diâmetro externo do pinhão, 𝑑!"# ! 𝑑! + 2𝑎
Diâmetro externo da roda, 𝑑!"# ! 𝑑! + 2𝑎
Diâmetro de base do pinhão, 𝑑!" 𝑑! − 2𝑏
Diâmetro de base da roda, 𝑑!" 𝑑! − 2𝑏
Engrenagem interna
Distância entre eixos, 𝐶 𝑑! − 𝑑!
2
Diâmetro interno, 𝑑!"# 𝑑 − 2𝑎
Diâmetro de base, 𝑑! 𝑑 + 2𝑏

Folhas de Apoio à unidade curricular Elementos de Máquinas II Engrenagens
ESTSetúbal/IPS -‐ Rosa Marat-‐Mendes -‐ 2012 Página G-‐14
7.7. Geometria das engrenagens cónicas de dentes rectos.
Quando se pretende utilizar engrenagens em eixos que se interceptam, devem-se usar algum tipo de
engrenagem cónica. Na Figura 7.16 está representada a simbologia usual das engrenagens cónicas para
um ângulo entre eixos de 90º, no entanto pode ser utilizado qualquer ângulo.
Figura 7.16 – Simbologia das engrenagens cónicas [4].
𝜸 [𝑔𝑟𝑎𝑢𝑠] – Ângulo primitivo do pinhão;
𝜞 [𝑔𝑟𝑎𝑢𝑠] – Ângulo primitivo da roda.
Em que as relações podem ser obtidas através dos números de dentes da roda e do pinhão:
tan 𝛾 =𝑍!𝑍!
(7.22)
tan𝛤 =𝑍!𝑍!
(7.23)
7.8. Geometria das engrenagens parafuso sem-fim.
A nomenclatura de um parafuso sem-fim é mostrada na Figura 7.17.
Figura 7.17 – Simbologia das engrenagens parafuso sem-fim [4].

Folhas de Apoio à unidade curricular Elementos de Máquinas II Engrenagens
ESTSetúbal/IPS -‐ Rosa Marat-‐Mendes -‐ 2012 Página G-‐15
em que:
𝒅𝑮 [𝑚𝑚] – Diâmetro primitivo da roda (coroa);
𝒅𝒘 [𝑚𝑚] – Diâmetro primitivo do parafuso;
𝑳 [𝑚𝑚] – Avanço;
𝝀 [𝑔𝑟𝑎𝑢𝑠] – Ângulo do avanço;
𝑪 [𝑚𝑚] – Distância entre eixos;
𝑵𝒘 – Número dentes do parafuso;
𝒑𝒙 [𝑚𝑚] - Passo primitivo axial.
O diâmetro da roda é dado por:
𝑑! =𝑍! . 𝑝!𝜋
(7.24)
O diâmetro do parafuso sem-fim deve ser seleccionado para estar dentro do seguinte intervalo:
𝐶!.!"#
3,0≤ 𝑑! ≤
𝐶!.!"#
1,7 (7.25)
O avanço e o ângulo de avanço são dados por:
𝐿 = 𝑝! .𝑍! (7.26)
tan 𝜆 =𝐿
𝜋.𝑑! (7.27)
7.9. Interferência.
Se as condições de engrenamento entre duas rodas dentadas forem tais que, em algum ponto de
engrenamento, os perfis dos dentes em contacto deixem de ser conjugados, irá ocorrer Interferência de
Funcionamento.
Se houver interferências com folga grande entre os dentes, o contacto dá-se em péssimas condições,
verificando-se vibrações importantes e desgaste rápido. Se a folga for zero, dá-se o encravamento da
transmissão.
Uma forma de eliminar a interferência, é através da adopção de um maior número de dentes nas rodas. No
entanto o aumento do número de dentes implica um aumento do diâmetro primitivo, originando uma solução
mais dispendiosa, menos compacta, maiores velocidades e mais ruído. Deste modo, esta é uma solução
que normalmente não é utilizada.
Uma outra forma de reduzir a interferência, consiste em utilizar um ângulo de pressão maior, que faz com
que o raio de base reduza e haja uma redução do risco de interferência. No entanto, também prejudica a
capacidade de transmissão de potência da engrenagem e aumenta o ruído.
Ainda outro modo de reduzir a interferência é a redução da altura da cabeça do dente, que se designa por
correcção de dentado para evitar interferência [5].

Folhas de Apoio à unidade curricular Elementos de Máquinas II Engrenagens
ESTSetúbal/IPS -‐ Rosa Marat-‐Mendes -‐ 2012 Página G-‐16
7.10. Sentido da rotação das engrenagens.
Normalmente, ao invés de designar “p” para pinhão e “G” para roda, as rodas são numeradas por ordem
numérica crescente, i.e: 1, 2, 3, ...
As engrenagens de dentes rectos podem ser dispostas de dois modos: engrenagens externas e
engrenagens internas. Na Figura 7.18 a) estão representadas duas engrenagens externas e o seu sentido
de rotação, ou seja, as duas rodas rodam em sentidos opostos. Na Figura 7.18 b) estão representadas duas
engrenagens internas em que se verifica que possuem o mesmo sentido de rotação.
a) b)
Figura 7.18 – Engrenagens: a) externas; b) internas [2].
Quanto ao sentido de rotação das engrenagens de dentes helicoidais, já é mais complexo. Há que ter em
atenção a inclinação do dente (Figura 7.19). Note-se que cada par de desenhos corresponde a um único
conjunto de engrenagens.
Figura 7.19 – Engrenagens de dentes helicoidais [4].
pinhão, 𝑍!
roda, 𝑍!

Folhas de Apoio à unidade curricular Elementos de Máquinas II Engrenagens
ESTSetúbal/IPS -‐ Rosa Marat-‐Mendes -‐ 2012 Página G-‐17
7.11. Trens de engrenagens.
Quando se pretende transmitir movimento/potência entre dois veios com ou sem alteração de
velocidade/binário, através de uma engrenagem, a aplicação de duas simples rodas dentadas está
condicionada a um valor limite da relação de transmissão, 𝑖. Ou seja, podem ocorrer interferências de
funcionamento devido à grande diferença de diâmetros entre pinhão e roda, e consequentemente, grande
ocupação de espaço.
Figura 7.20 – Diferença entre a utilização de duas rodas ou de mais rodas [6].
A solução deste problema passa pela utilização de trens de engrenagens: conjunto de rodas dentadas dispostas de forma a permitir a transmissão de movimento de um veio (motor ou de entrada) para outro (movido ou de saída) (Figura 7.20).
Se o trem é usado para reduzir a velocidade, da entrada para a saída, chama-se de redutor; se é utilizado para aumentar a velocidade, é um multiplicador.
Os trens de engrenagens podem-se classificar de duas formas:
Trens normais
(todos os veios que suportam as rodas têm apoios fixos)
Simples
(Figura 7.21a) e Figura 7.22)
(cada roda tem o seu próprio veio)
Compostos
(Figura 7.21b) e Figura 7.23) (há pelo menos duas rodas montadas no mesmo veio)
Trens epicicloidais (planetários)
(pelo menos um veio/eixo de uma roda não é fixo, i.e., tem movimento relativamente ao fixe)
Com uma roda fixa (Figura 7.24) Sem rodas fixas (Figura 7.25)
a) b)
Figura 7.21 – Trem de engrenagem normal: a) simples; b) composto [2].

Folhas de Apoio à unidade curricular Elementos de Máquinas II Engrenagens
ESTSetúbal/IPS -‐ Rosa Marat-‐Mendes -‐ 2012 Página G-‐18
Figura 7.22 – Trens normais, simples [6].
Figura 7.23 – Trens normais compostos [6].
Figura 7.24 – Trem epicicloidal com roda fixa [6].
Figura 7.25 – Trem epicicloidal sem roda fixa [6].

Folhas de Apoio à unidade curricular Elementos de Máquinas II Engrenagens
ESTSetúbal/IPS -‐ Rosa Marat-‐Mendes -‐ 2012 Página G-‐19
7.12. Relação de transmissão nos trens de engrenagens simples.
A Figura 7.26 representa um trem de engrenagem normal simples de dentes rectos. Neste caso, há três
rodas ligadas entre si com veios paralelos.
Figura 7.26 – Trem de engrenagem normal simples.
A relação de transmissão é dada por:
𝑖 =𝜔!𝜔!
=𝜔!− 𝜔!
×− 𝜔!𝜔!
= − 𝑖!× − 𝑖! = 𝑖!×𝑖! 𝑜𝑢 𝑖 =𝜔!𝜔!
(7.28)
onde:
𝝎𝑭 [𝑟𝑝𝑚] – Velocidade angular da primeira roda (First);
𝝎𝑳 [𝑟𝑝𝑚] – Velocidade angular da última roda (Last).
O sinal (−) apenas indica que o movimento da roda considerada é inversa do da roda motora, de referência,
supostamente a roda 1.
• se 𝑖 ⟹ + : significa que a última roda, roda no mesmo sentido da primeira;
• se 𝑖 ⟹ − : significa que a última roda, roda no sentido inverso ao da primeira.
As relações de transmissão 𝑖!, 𝑖!, são relações de transmissão parciais. Cada engrenagem parcial diz-se
um Andar de transmissão.
A relação de transmissão total 𝑖, de um trem de engrenagem é igual ao produto das relações de
transmissão parciais.
A relação de transmissão de um trem simples é independente do número de dentes das rodas intermédias,
essas rodas designam-se de Doidas ou Parasitas.
Ou seja, no caso da Figura 7.26, fica:
𝑖 =𝜔!𝜔!
=𝑍!𝑍!
(7.29)
Z 1
Z 2
Z 3
ω1
ω2ω3

Folhas de Apoio à unidade curricular Elementos de Máquinas II Engrenagens
ESTSetúbal/IPS -‐ Rosa Marat-‐Mendes -‐ 2012 Página G-‐20
7.13. Relação de transmissão nos trens de engrenagens compostos.
A Figura 7.27 representa um trem de engrenagem normal composto, em que a roda 3 e a roda 4 estão
ligadas através do mesmo veio, logo 𝜔! = 𝜔!.
Figura 7.27 – Trem de engrenagem normal composto [4].
A relação de transmissão é dada por:
𝑖 =𝜔!−𝜔!
=𝜔!−𝜔!
×−𝜔!𝜔!
×𝜔! = 𝜔!
𝜔!×𝜔!−𝜔!
= −𝑖! × −𝑖! × −𝑖! 𝑜𝑢 𝑖 =𝜔!𝜔!
(7.30)
A relação de transmissão total de um trem composto é igual ao produto das relações de transmissão
parciais (tal como nos trens simples).
A relação de transmissão de um trem composto depende dos números de dentes de todas as rodas do
trem, ou seja, é o quociente do produto do número de dentes das rodas movidas de cada andar, pelo
produto do número de dentes das rodas motoras de cada andar.
Nota: só entram para o cálculo, as rodas que recebem e transmitem movimento através dos dentes.
𝑖 =𝑛ú𝑚𝑒𝑟𝑜 𝑑𝑒 𝑑𝑒𝑛𝑡𝑒𝑠 𝑑𝑎𝑠 𝑟𝑜𝑑𝑎𝑠 𝑚𝑜𝑣𝑖𝑑𝑎𝑠𝑛ú𝑚𝑒𝑟𝑜 𝑑𝑒 𝑑𝑒𝑛𝑡𝑒𝑠 𝑑𝑎𝑠 𝑟𝑜𝑑𝑎𝑠 𝑚𝑜𝑡𝑜𝑟𝑎𝑠
=𝑍!×𝑍!×𝑍!𝑍!×𝑍!×𝑍!
(7.31)
Ou seja, no caso da Figura 7.27, fica:
𝑖 =𝜔!−𝜔!
=𝑍!×𝑍!×𝑍!𝑍!×𝑍!×𝑍!
(7.32)
A velocidade angular da última roda é obtida através de:
𝜔! = −𝑍!×𝑍!×𝑍!𝑍!×𝑍!×𝑍!
×𝜔! (7.33)
De relembrar, que o sinal − só indica que a roda 5 tem sentido de rotação oposto à roda 1.
𝜔!
𝜔!
𝜔! = 𝜔!
𝜔! 𝑍!
𝑍!
𝑍! 𝑍! 𝑍!

Folhas de Apoio à unidade curricular Elementos de Máquinas II Engrenagens
ESTSetúbal/IPS -‐ Rosa Marat-‐Mendes -‐ 2012 Página G-‐21
7.14. Relação de transmissão nos trens de engrenagens planetários.
A análise da relação de transmissão de um trem epicicloidal (planetário) é mais complexa do que a do trem
normal. No entanto, apresenta vantagens, tais como:
• Para o mesmo número de engrenagens o Trem epicicloidal pode oferecer uma maior relação de
transmissão que o trem normal.
• A disposição das rodas confere coaxialidade e concentração em torno do eixo principal, ou seja,
maior compacidade.
• Pela utilização de vários satélites distribui-se a carga por mais dentes, não alterando o
comportamento cinemático.
Figura 7.28 – Trens de engrenagens planetárias [4][6].
Para o cálculo da relação de transmissão do trem planetário, recorre-se ao método da Fórmula, ou seja,
através da fórmula de Willis.
𝑖 =𝜔! − 𝜔!𝜔! − 𝜔!
(7.34)
em que:
𝝎𝑭 [𝑟𝑝𝑚] – Velocidade angular da primeira roda (First);
Braço Engrenagem interna
𝑍!
1 𝑍!
𝑍!
3
2
4

Folhas de Apoio à unidade curricular Elementos de Máquinas II Engrenagens
ESTSetúbal/IPS -‐ Rosa Marat-‐Mendes -‐ 2012 Página G-‐22
𝝎𝑳 [𝑟𝑝𝑚] – Velocidade angular da última roda (Last);
𝝎𝑨 [𝑟𝑝𝑚] – Velocidade angular do braço (Arm);
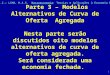
Exemplo: A Figura 7.29 (já apresentada anteriormente) representa um trem de engrenagens planetário.
Nomenclatura
0 – Fixe;
1 – Planetário – engrenagem central;
2 – Braço ou Porta-satélites;
3 – Satélite – engrenagem que se move em torno da planetária;
4 – Coroa (interior);
Figura 7.29 – Trem de engrenagem planetário.
Neste caso, se a entrada se fizer por 1 e a saída por 4, a relação de transmissão é dada por:
𝑖 =𝜔! − 𝜔!𝜔! − 𝜔!
=𝜔!−𝜔!
×𝜔!𝜔!
=−𝑍!𝑍!
×𝑍!𝑍!= −
𝑍!𝑍!
(7.35)
Em que os sinais − 𝑒 + indicam respectivamente, alteração e não-alteração do sentido de rotação.
Se 𝜔! for + significa que roda no sentido de rotação da roda 1, se for − significa que roda no sentido
oposto.
0
1
3 4
ω4
ω1
ω3
2

Folhas de Apoio à unidade curricular Elementos de Máquinas II Engrenagens
ESTSetúbal/IPS -‐ Rosa Marat-‐Mendes -‐ 2012 Página G-‐23
7.15. Análise de Forças.
7.15.1. Engrenagens cilíndricas de dentes rectos.
A Figura 7.30 a) mostra o pinhão 𝟏 montado no veio 𝒂, rodando no sentido horário com uma velocidade
angular 𝝎𝟏. Este transmite rotação à roda 𝟐 (coroa), montada no veio 𝒃 com uma rotação 𝝎𝟐. As reacções
entre os dentes em contacto ocorrem ao longo da linha de acção. Na Figura 7.30 b) as duas rodas foram
separadas para melhor visualização das forças.
Figura 7.30 – Diagrama de corpo livre das forças que actuam sobre duas rodas de uma engrenagem
cilíndrica de dentes rectos.
𝑭𝟐𝟏 [𝑘𝑁] – Força exercida pela roda 2 na roda 1;
𝑭𝟏𝟐 [𝑘𝑁] – Força exercida pela roda 1 na roda 2;
𝑭𝒂𝟏 [𝑘𝑁] – Força exercida pelo veio 𝑎 na roda 1;
𝑭𝒃𝟐 [𝑘𝑁] – Força exercida pelo veio 𝑏 na roda 2;
𝑻𝒂𝟏 [𝑘𝑁] – Binário exercido pelo veio 𝑎 na roda 1;
𝑭𝒃𝟐 [𝑘𝑁] – Binário exercido pelo veio 𝑏 na roda 2;
Na Figura 7.31 está representado o diagrama de corpo livre do pinhão com as forças decompostas segundo
as direcções tangencial e radial.
Figura 7.31 – Decomposição das forças que actuam numa engrenagem
a) b)
𝜔!
𝜔!
𝐹!!
𝐹!!
𝐹!" 𝐹!"
𝑇!!
𝑇!!
𝑇!! 𝜔!
𝐹!"!
𝐹!"!
𝐹!!!
𝐹!!!
𝐹!"
𝐹!!
𝑑!

Folhas de Apoio à unidade curricular Elementos de Máquinas II Engrenagens
ESTSetúbal/IPS -‐ Rosa Marat-‐Mendes -‐ 2012 Página G-‐24
𝑭𝒂𝟏𝒕 [𝑘𝑁] – Componente tangencial da força exercida pelo veio 𝑎 na roda 1;
𝑭𝒂𝟏𝒓 [𝑘𝑁] – Componente radial da força exercida pelo veio 𝑎 na roda 1;
𝑭𝟐𝟏𝒕 [𝑘𝑁] – Componente tangencial da força exercida pela roda 2 na roda 1;
𝑭𝟐𝟏𝒓 [𝑘𝑁] – Componente radial da força exercida pela roda 2 na roda 1;
A carga transmitida é dada pela componente tangencial da força, 𝐹!"! , ou seja:
𝑊! = 𝐹!"! =60.000×𝐻𝜋𝑑𝜔
(7.36)
Se não houver perdas de potência entre rodas, 𝐹!"! = 𝐹!"! .
em que:
𝑯 [𝑘𝑊] – Potência transmitida;
𝒅 [𝑚𝑚] – Diâmetro primitivo da roda;
𝝎 [𝑟𝑝𝑚] – Velocidade angular da roda.
logo, por geometria:
𝐹!"! = 𝐹!"! 𝑡𝑎𝑛𝜙 (7.37)
𝐹!" =𝐹!"!
𝑐𝑜𝑠𝜙= 𝐹!"!
! + 𝐹!"!! (7.38)
O binário aplicado é dado por:
𝑇!! = 𝐹!"!𝑑2
(7.39)
De relembrar que:
𝐻 = 𝑇.𝜔 (7.40)
𝐻 = 𝐹! . 𝑣 (7.41)
𝑣 = 𝜋𝑑𝜔 (7.42)

Folhas de Apoio à unidade curricular Elementos de Máquinas II Engrenagens
ESTSetúbal/IPS -‐ Rosa Marat-‐Mendes -‐ 2012 Página G-‐25
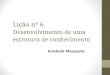
7.15.2. Engrenagens cilíndricas de dentes helicoidais.
A Figura 7.32 representa uma vista tridimensional das forças que actuam nos dentes de uma roda cilíndrica
de dentes helicoidais. O ponto de aplicação das forças situa-se no cilindro primitivo e no centro da
espessura da roda.
Figura 7.32 – Forças entre engrenagens cilíndricas de dentes helicoidais [4].
A partir da geometria da figura podem-se estabelecer as seguintes relações:
𝑊! =60.000×𝐻𝜋𝑑𝜔
(7.43)
𝑊! = 𝑊 sin𝜙! = 𝑊! tan𝜙! (7.44)
𝑊! = 𝑊 cos𝜙! sin𝜓 = 𝑊! tan𝜓 (7.45)
𝑊! = 𝑊 cos𝜙! cos𝜓⇔𝑊 =𝑊!
cos𝜙! cos𝜓 (7.46)
em que:
𝑾 [𝑘𝑁] – Força total;
𝑾𝒓 [𝑘𝑁] – Componente radial da força;
𝑾𝒕 [𝑘𝑁] – Componente tangencial da força, também designada por força transmitida;
𝑾𝒂 [𝑘𝑁] – Componente axial da força.

Folhas de Apoio à unidade curricular Elementos de Máquinas II Engrenagens
ESTSetúbal/IPS -‐ Rosa Marat-‐Mendes -‐ 2012 Página G-‐26
7.15.3. Engrenagens cónicas de dentes rectos.
Na análise das forças transmitidas, utiliza-se a aproximação de considerar que as forças são aplicadas no
ponto médio do dente, tal como se pode verificar na Figura 7.33.
Figura 7.33 – Forças actuando nos dentes de uma roda cónica [4].
A foça transmitida é a força tangencial, ou seja:
𝑊! =𝑇𝑟!"
(7.47)
Em que o raio 𝑟!" é dado por:
𝑟!" =𝑑 − 𝑏 sin 𝛾
2 (7.48)
onde:
𝑻 [𝑁.𝑚] – Binário transmitido;
𝒓𝒂𝒗[𝑚]- Raio até ao ponto médio da roda;
𝒅 [𝑚] – Diâmetro primitivo da roda;
𝒃 [𝑚] – Espessura da roda.
por geometria, podem-se retirar as outras componentes da força:
𝑊! = 𝑊! tan𝜙 cos 𝛾 (7.49)
𝑊! = 𝑊! tan𝜙 sin 𝛾 (7.50)

Folhas de Apoio à unidade curricular Elementos de Máquinas II Engrenagens
ESTSetúbal/IPS -‐ Rosa Marat-‐Mendes -‐ 2012 Página G-‐27
7.15.4. Engrenagem parafuso sem-fim.
Se o atrito não for considerado, a única força a actuar no parafuso é a força 𝑊, mostrada na Figura 7.34.
Esta força, possui as três componentes ortogonais, 𝑊!, 𝑊!, 𝑊!.
Figura 7.34 – Desenho do cilindro primitivo de um parafuso sem-fim mostrando as forças exercidas pela
roda sem-fim.
Da geometria da figura tira-se que:
𝑊! = 𝑊 cos𝜙! sin 𝜆 (7.51)
𝑊! = 𝑊 sin𝜙! (7.52)
𝑊! = 𝑊 cos𝜙! cos 𝜆 (7.53)
Entrando em conta com o atrito, as expressões anteriores vêm dadas por:
𝑊! = 𝑊 cos𝜙! sin 𝜆 + 𝑓 cos 𝜆 (7.54)
𝑊! = 𝑊 sin𝜙! (7.55)
𝑊! = 𝑊 cos𝜙! cos 𝜆 − 𝑓 sin 𝜆 (7.56)
sendo:
𝒇 – Coeficiente de atrito entre o parafuso e a roda.
A eficiência de um parafuso sem-fim é obtida através de uma relação dos ângulos 𝜙! e 𝜆 e o coeficiente de
atrito 𝑓:
𝜂 =cos𝜙! − 𝑓 tan 𝜆cos𝜙! + 𝑓 cotan 𝜆
(7.57)

Folhas de Apoio à unidade curricular Elementos de Máquinas II Engrenagens
ESTSetúbal/IPS -‐ Rosa Marat-‐Mendes -‐ 2012 Página G-‐28
7.16. Cálculo de engrenagens cilíndricas para mecânica geral.
7.16.1. Tipo de ruína.
A ruína de engrenagens pode ocorrer devido ao aparecimento de picadas na superfície dos dentes, devido
a uma pressão de contacto excessiva, também denominado de pitting (Figura 7.35 a) ou devido à rotura dos
dentes por excesso da tensão máxima de flexão na secção crítica (pé do dente) (Figura 7.35 b).
a) b)
Figura 7.35 – Ruína de engrenagens: a) pitting; b) rotura do dente.
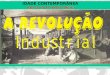
Na Figura 7.36 pode-se visualizar uma imagem obtida através de um ensaio de fotoelasticidade onde se
observam as franjas de tensões. Pode-se então concluir que a maior concentração ocorre em duas zonas:
(1) ponto de contacto entre os dentes; (2) na base do dente (raio da curvatura).
Figura 7.36 - Ensaio de fotoelasticidade a uma engrenagem [1].
(1) (2)

Folhas de Apoio à unidade curricular Elementos de Máquinas II Engrenagens
ESTSetúbal/IPS -‐ Rosa Marat-‐Mendes -‐ 2012 Página G-‐29
7.16.2. Equação de flexão de Lewis.
O cálculo da resistência do dentado é baseado na determinação da tensão máxima de flexão que ocorre na
secção mais crítica do dente (base do dente). Esta análise deverá ser feita tanto para o pinhão como para a
roda.
a) b)
Figura 7.37 – Forças aplicadas num dente de uma engrenagem cilíndrica de dentes helicoidais [4].
Para a análise há que calcular a tensão máxima de flexão na base do dente. Esta tensão é calculada
através da fórmula de Lewis e supondo o dente como sendo uma viga (Figura 7.37 a) [4]:
𝜎 =𝑀𝑐𝐼=
𝑊! . 𝑙𝑡2
112 𝑏𝑡
!⇔ 𝜎 =
6𝑊!𝑙𝑏𝑡!
(7.58)
em que:
𝝈 [𝑀𝑃𝑎] – Tensão máxima de flexão;
𝑾𝒕 [𝑘𝑁] – Componente tangencial da força;
𝒍 [𝑚𝑚] – Distância da base do dente até à zona de aplicação da força;
𝒕 [𝑚𝑚] – Largura da base do dente;
𝒃 [𝑚𝑚] – Espessura da base do dente (perpendicuar ao papel);
A equação (7.58) pode ser transformada para se adaptar aos dentes da engrenagem, podendo ser dada em
função do passo diametral ou em função do módulo (S.I.). A fórmula de Lewis vem então dada por:
𝜎 =𝑊!𝑃𝑏𝑌
⇔ 𝜎 =𝑊!
𝑚𝑏𝑌 (7.59)
onde:
𝒀 – Factor de Lewis;
𝑷 [𝑑𝑒𝑛𝑡𝑒𝑠/𝑚𝑚] – Passo diametral (diametral pitch);
𝒎 [𝑚𝑚] – módulo.
𝑏

Folhas de Apoio à unidade curricular Elementos de Máquinas II Engrenagens
ESTSetúbal/IPS -‐ Rosa Marat-‐Mendes -‐ 2012 Página G-‐30
O factor de Lewis, 𝑌, é função da geometria do dente e pode ser obtido através da equação (7.60) ou
através da Tabela 7.5
𝑌 =2𝑥𝑃3
𝑜𝑢 𝑌 =2𝑥3𝑚
(7.60)
com:
𝑥 =𝑡!
4𝑙 (7.61)
Tabela 7.5 – Valores do factor de Lewis
(para uma engrenagem com angulo de pressão normal de 𝜙 = 20°).
Número de Dentes 𝒀 Número de Dentes 𝒀 12 0.245 28 0.353 13 0.261 30 0.359 14 0.277 34 0.371 15 0.290 38 0.384 16 0.296 43 0.397 17 0.303 50 0.409 18 0.309 60 0.422 19 0.314 75 0.435 20 0.322 100 0.447 21 0.328 150 0.460 22 0.331 300 0.472 24 0.337 400 0.480 26 0.346 Cremalheira 0.485
Quando um par de engrenagens roda a uma velocidade moderada ou elevada e há ruído, vão ocorrer os
efeitos dinâmicos, logo a equação de flexão de Lewis toma a seguinte forma [4]:
𝜎 =𝑊!𝑃𝑏𝑌
.𝐾! ⇔ 𝜎 =𝑊!
𝑚𝑏𝑌.𝐾! (7.62)
em que:
𝑲𝒗 – Factor de velocidade ou efeito dinâmico (Tabela 7.6).
Esta equação é importante, pois forma a base do procedimento AGMA (American Gear Manufacturers
Association) para a resistência à flexão de dentes de engrenagens. Ela é a base do cálculo de
engrenagens, quando a vida e a fiabilidade não são importantantes. Deste modo, pode-se usar esta
equação para uma estimativa preliminar do tamanho das engrenagens necessárias para várias aplicações.
O factor de velocidade pode ser dado através das relações expressas na Tabela 7.6, consoante o tipo de
acabamento das engrenagens e a velocidade linear.
Tabela 7.6 – Factor de velocidade ou efeito dinâmico, 𝐾!.
𝑲𝒗 Tipo de fabrico da engrenagem 𝑲𝒗 Tipo de fabrico da
engrenagem
𝐾! =3.05 + 𝑣3.05
Fundição 𝐾! =3.56 + 𝑣3.56
Fresado
𝐾! =6.1 + 𝑣6.1
Cortado 𝐾! =5.56 + 𝑣5.56
Rectificado
𝒗 [𝑚/𝑠] – Velocidade linear da roda no círculo primitivo.

Folhas de Apoio à unidade curricular Elementos de Máquinas II Engrenagens
ESTSetúbal/IPS -‐ Rosa Marat-‐Mendes -‐ 2012 Página G-‐31
7.16.3. Dureza da superfície.
Podem ocorrer vários tipos de desgaste na superfície de uma engrenagem, ou seja:
• Pitting – Falha por fadiga devido a tensões repetidas;
• Adesivo – Falha devido à lubrificação:
• Abrasivo – Falha devido a presença de impurezas.
A Máxima pressão de contacto superficial, ou seja a tensão hertziana vem dada por:
𝑝!"# = 𝜎! =𝑊!
𝜋𝑏 cos𝜙
1𝑟!
+ 1𝑟!
1 − 𝜈!!𝐸!
+ 1 − 𝜈!!𝐸!
!/!
(7.63)
com:
𝑟! =𝑑! sin𝜙
2 (7.64)
𝑟! =𝑑! sin𝜙
2 (7.65)
em que:
𝒓𝟏, 𝒓𝟐 ,𝒅𝒑,𝒅𝑮 [𝑚] – Raios e diâmetros dos círculos primitivos do pinhão e da roda;
𝝓 - Ângulo de pressão;
𝝂𝟏, 𝝂𝟐 – Coeficiente de poisson do pinhão e da roda;
𝑬𝟏,𝑬𝟐 [𝑃𝑎] – Módulo de elasticidade;
𝒃 [𝑚] – Espessura da base do dente (perpendicuar ao papel).
Sabendo que a AGMA define o coeficiente elástico, 𝐶! dado pelo denominado do segundo grupo da
equação (7.63) por:
𝐶! =1
𝜋. 1 − 𝜈!!𝐸!
+ 1 − 𝜈!!𝐸!
!/!
(7.66)
Logo, a equação que define a tensão hertziana vem dada por:
𝑝!"# = 𝜎! = −𝐶!.𝑊! .𝐾!𝑏 cos𝜙
1𝑟!
+1𝑟!
!/!
(7.67)
em que o sinal negativo, significa que é uma tensão de compressão.

Folhas de Apoio à unidade curricular Elementos de Máquinas II Engrenagens
ESTSetúbal/IPS -‐ Rosa Marat-‐Mendes -‐ 2012 Página G-‐32
Referências Bibliográficas:
[1] Juvinal, R. Marshek, K. Machine Component Design. 5th Edition, Wiley, 2012.
[2] Hamrock, B.J. Jacobson, B. Schmid, S.R. Fundamentals of Machine Elements. McGra-Hill. 1999.
[3] Gordo, N. Ferreira, J. Telecurso 2000, Brasil.
[4] Budynas, R. Nisbett, J.K. Elementos de máquinas de Shigley. 8ª Editção, McGraw Hill, 2011.
[5] Moura Branco, C. Martins Ferreira, J. Domingos da Costa, J. Silva Ribeiro, A. Projecto de Órgãos de
Máquinas. Fundação Calouste Gulbenkian. 2005.
[6] Faria, L. Folhas de Órgãos de Máquinas. Instituto Superior Técnico. 1959.
Páginas de catálogos:
[7] Inter-Matic Portugal. http://caixasdevelocidades.com/index.html, acedido em Julho 2012.
[8] http://algarvepontosdevista.blogspot.pt, acedido em Julho 2012.
[9] Think Geek, http://www.thinkgeek.com/product/c1de/, acedido em Julho 2012.
[10] Rexnord Corporate Headquarters http://www.rexnord.com, acedido em Julho 2012.