Embed Size (px)
Citation preview

1
CAPÍTULO 1
INTRODUÇÃO
Existem muitos problemas (com periculosidade ou não) em que o homem almeja
que a máquina controle e execute funções com a máxima exatidão. A Engenharia de
Controle e Automação tem como objetivo principal substituir o homem pela máquina na
resolução destes problemas. Com o surgimento do computador digital, esta área tornou-se
ainda mais importante, pois ficou mais fácil construir controladores, sendo possível até
dotá-los de inteligência artificial.
Qualquer que seja a área (química, mecânica, biológica e outras) em que
determinada “máquina” irá atuar, devemos fazer um estudo prévio do processo e modelá-lo.
Cada processo deve ser modelado matematicamente de forma que o modelo represente suas
principais características e com simplicidade o bastante para que o problema seja solúvel de
acordo com a tecnologia atual [12].
Este processo, o objeto a ser controlado, é denominado planta. Após a
modelagem de uma planta, deve-se projetar um controlador, ou compensador, de forma
que, sem alterar os parâmetros internos da planta, o controlador possa ser ajustado
automaticamente para exercer funções pré-determinadas, buscando sempre uma ótima
precisão.

2
As plantas de interesse, bem como os atuadores (transdutores) e os sensores, são
sistemas a tempo contínuo. Porém, devido à confiabilidade, flexibilidade, custos mais baixos
e precisão, os compensadores digitais estão sendo amplamente utilizados para controlar
plantas a tempo contínuo.
Nesta dissertação, o sistema de controle (caracterizado basicamente pela planta e
controlador) será sempre considerado um sistema linear invariante no tempo (LTI),
monovariável e que deverá satisfazer às condições de estabilidade [15].
Existem várias técnicas para projetar um sistema de controle digital. Neste trabalho
serão analisadas duas destas:
I) Na primeira técnica aplicam-se os métodos de discretização no controlador,
sendo feito da seguinte forma:
Primeiro: Com a planta modelada, projeta-se o controlador (ambos a tempo
contínuo) através de métodos gráficos (no domínio do tempo ou da freqüência) [03,05] ou
métodos algébricos lineares [02,03,11]. Estes métodos atendem às especificações em
regime transitório, buscando resolver o problema da estabilização com imposição dos
pólos. O controlador também deve impor as especificações em regime permanente ou
estacionário. Estas especificações garantem o comportamento assintótico e preciso do
sistema como um todo.
Segundo: Tendo o controlador projetado a tempo contínuo, deve-se discretizá-lo,
isto é, aplicar um dos métodos de discretização. Neste trabalho são considerados cinco
métodos [05]:
1) Método por invariância ao impulso;

3
2) Método por invariância ao degrau;
3) Método por aproximação backward;
4) Método por mapeamento de pólos e zeros;
5) Método por transformação bilinear.
II) Nesta segunda técnica, já não se trata mais de uma aproximação, pois os
métodos de discretização estarão sendo aplicados à planta modelada. Então, obtém-se o
sistema controlado digital da seguinte forma:
Discretiza-se primeiro a planta a tempo contínuo, o que é feito considerando os
métodos de discretização já citados. Depois projeta-se o compensador digital, tanto sob as
especificações em regime transitório como em regime estacionário.
Os pólos do sistema de controle estabilizado que, a tempo contínuo tinham sua
parte real menor que zero, serão lançados pelos métodos de discretização dentro do círculo
unitário (discretização) [03,12,15,17]. Na discretização, a escolha do período de
amostragem “T” é de fundamental importância para encontrar o controlador digital ideal
(que melhor se aproxima do controlador a tempo contínuo) [17].
A robustez do sistema realimentado em relação a perturbações em seus parâmetros
depende da estrutura do controlador [05]. Dessa forma, faz parte do projeto de um
controlador a escolha de um tipo adequado de estrutura de controle, considerando a
robustez. Esta escolha irá depender, em particular, da planta utilizada. Neste trabalho serão
estudados seis tipos de estruturas para os controladores, que são:
1) Controlador com dois graus de liberdade;
2) Controlador com um grau de liberdade;

4
3) Controlador de Wolovich;
4) Controlador Proporcional Integral Derivativo (PID);
5) Controlador Integral Proporcional Derivativo (IPD);
6) Controlador de Landau.
1.1 - Objetivo
O problema a ser tratado nesta dissertação pode ser descrito como o da escolha da
maneira de projetar um controlador digital. O projeto deverá ser de tal forma que o sistema
controlado atenda às especificações já citadas (tanto transitórias como estacionárias) em
relação a sinais de referência e distúrbios. Além disso, o controlador será escolhido dentro
de uma classe de controladores realizáveis e de acordo com a planta típica usada. Todos
esses parâmetros para projetar um controlador digital (incluindo a escolha de um adequado
período de amostragem “T”) são descritos na literatura por vários autores [02,03,08,11,15],
mas sem que haja uma comparação entre eles.
O objetivo principal deste trabalho é comparar os métodos de projeto de
controladores amostrados, citados anteriormente, sobre plantas típicas, considerando o
conjunto de especificações e as diferentes estruturas de controle citadas. A comparação será
feita por simulação digital, buscando representar com precisão os fenômenos ligados às
amostragens. Através da realização do sistema fica mais fácil verificar o comportamento dos
controladores sobre as plantas típicas (dependendo da estrutura, “T”, método de
discretização usado e especificações), possibilitando a comparação.

5
Em [03], Chen mostra como usar a função de transferência para realizar um
sistema através das equações de variáveis de estado [03,04,07]. A realização dos sistemas
de controle em estudo foram feitas através de programas de simulação em linguagem C.
Estes programas são baseados na solução das equações de variáveis de estado utilizando o
método numérico Runge-Kutta de quarta ordem para as aproximações. No emprego dos
métodos de discretização e formulação de gráficos, foi utilizado o MATLAB.
Muitos trabalhos já foram feitos através do estudo de comparações. Alguns
comparando estruturas de controle [10], outros, métodos de discretização [13,14,18].
Nesta dissertação, serão apresentadas seis estruturas de controle, cinco métodos de
discretização aplicados a três plantas típicas, variando o período de amostragem “T” e a
posição dos pólos. Estes são os parâmetros de comparação para o projeto de um sistema de
controle digital; porém, nem todos serão considerados no experimento (simulações).
1.2 - Descrição do Trabalho
O estudo de comparação desenvolvido nesta tese busca analisar o melhor
comportamento de um sistema de controle linear amostrado, através de técnicas de
discretização e figuras de mérito.
Esta dissertação foi dividida em 7 capítulos que abrangem o projeto dos
controladores, as técnicas utilizadas para se discretizar um sistema controlado, as
simulações feitas com plantas típicas, a avaliação do experimento de comparação e as
conclusões.

6
No capítulo 2 é feita a análise do projeto das estruturas dos controladores
consideradas nesta tese, de acordo com a imposição de especificações em regime transitório
e estacionário.
O capítulo 3 descreve as técnicas aplicadas ao sistema controlado a tempo
contínuo, para se obter um sistema de controle digital. Também são citados os métodos
utilizados para fazer a discretização de um sinal a tempo contínuo e a importância da
escolha do período de amostragem neste processo.
O experimento de comparação é feito no capítulo 4, sendo citadas a forma como
foram feitas as montagens dos programas de simulação e as figuras de mérito consideradas
de acordo com cada estrutura de controle e técnica de discretização utilizada.
Já o capítulo 5 retrata as tabelas indicando os resultados obtidos com as
simulações. A apresentação das tabelas especifica o quanto cada experimento projetado a
tempo discreto se aproximou do que foi feito a tempo contínuo. Isto de acordo com cada
estrutura de controle, técnica de discretização e figuras de mérito, considerada no capítulo
anterior.
No capítulo 6 são apresentadas as conclusões dos resultados obtidos, em relação
aos métodos utilizados na discretização dos sistemas controlados e sugestões para outros
trabalhos de pesquisa.
O apêndice A apresenta os gráficos das simulações e o apêndice B os programas
desenvolvidos em linguagem C.

7
CAPÍTULO 2
O PROJETO DOS CONTROLADORES
Como foi citado antes, após a escolha e modelagem de uma planta, o próximo
passo é projetar um compensador ou controlador de tal modo que a saída do sistema total
seja capaz de atender às especificações desejadas em regimes estacionário e transitório. Este
capítulo trata do projeto de seis tipos diferentes de controladores.
Com esta finalidade, as estruturas de controle consideradas nesta dissertação são:
2.1) Controlador com dois graus de liberdade;
2.2) Controlador com um grau de liberdade;
2.3) Controlador de Wolovich;
sendo analisados em especial os seguintes casos particulares:
2.4) Controlador PID;
2.5) Controlador IPD;
2.6) Controlador de Landau.
Estas estruturas de controle são apresentadas a seguir, com seus algoritmos de
projeto correspondentes via técnicas polinomiais, considerando todas as especificações
estacionárias do tipo de servomecanismo e especificações transitórias via escolha dos pólos.

8
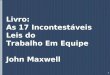
2.1 - Controlador com dois graus de liberdade:
Este controlador é o controlador linear que possui a estrutura mais geral [02]; a
figura 2.1 descreve o seu diagrama de blocos.
Figura 2.1 - Diagrama de blocos do Controlador com dois graus de liberdade.
A função de transferência C1(s) caracteriza um compensador no caminho direto de
referência1 (feedforward), C2(s) um compensador realimentando a saída (feedback) e P(s) a
planta a ser controlada [03]. Tem-se ainda que: P(s) = n(s)/d(s), C1(s) = n1c(s)/d1c(s),
C2(s) = n2c(s)/d2c(s); r(s) é o sinal de referência, u(s) é o sinal de controle e y(s) é o sinal
que representa a saída do sistema controlado.
Uma maneira de simplificar a estrutura do controlador é considerar os
denominadores de C1(s) e C2(s) como apenas um fator comum às duas funções, isto é,
d1c(s) = d2c(s) = dc(s). Demonstra-se que é possível realizar a fatoração mantendo dc(s) e
n2(s) coprimos2 [02]. Por simplicidade, para todos os projetos daqui por diante, será
abolida a indicação da dependência da variável “s” ou “z” nas funções de transferência e nas
transformações dos sinais. Portanto, de acordo com a figura 2.2, o controlador com dois
graus de liberdade terá a seguinte configuração [06]:
C1(s)
C2(s)
+− P(s)r(s) u(s) y(s)
1. As letras maiúsculas indicam as funções e as minúsculas indicam polinômios ou sinais.2. Dois polinômios são COPRIMOS (ou primos entre si) se não tiverem divisores comuns [02,06].

9
Figura 2.2 - Diagrama de blocos do Controlador com dois graus de liberdade, caracterizado por polinômios.
Determinam-se as variáveis do controlador impondo as especificações desejadas e
utilizando a parametrização de todos os controladores estabilizantes através do método
algébrico [02]. Esta parametrização exigirá a resolução de equações diofantinas de acordo
com as funções de transferência, que deverão ser funções racionais próprias e estáveis. Para
isto, será citado o problema do servomecanismo, o qual se baseia no cumprimento de três
tipos de especificações em regime estacionário.
1 - Rastreamento assintótico do sinal de referência pela saída controlada:
Do sistema linear representado na figura 2.2, calcula-se: y = Hry · r, onde:
Hry = n.n1 / (d.dc+n.n2) (2.1).
Sendo Hry a função de transferência em malha fechada do sinal de referência à
saída do sistema, o problema consiste em verificar se: lim e(t) = lim[r(t)-y(t)] = 0 para
t→∞, onde o sinal e = r - y é denominado erro de rastreamento.
Determina-se a função de transferência Hre em malha fechada do sinal de erro para
o sinal de referência fazendo:
e = r - (Hry· r) = Hre· r (2.2).
n1
n2
+−
n/d 1/dcr e u y

10
Condição I: Haverá o rastreamento assintótico do sinal de referência se os zeros
da função de transferência Hre forem cancelados com os pólos da função que representa o
sinal de referência3 (Ψr).
No caso deste controlador, vê-se que os zeros dependem de “n1” e “n2”, pois:
Hre = (d.dc + n.n2 - n.n1) / (d.dc + nn2) (2.3).
Para estabilizar o sistema, calculam-se “dc” e “n2”, o que pode ser feito com a
resolução de equações diofantinas, conforme a metodologia exposta em [04,07,12]. Além
disto, deve-se impor as especificações em regime transitório que determinam o
comportamento transitório desejado, isto é, o tempo de assentamento (ts), ultrapassagem
(Mp) e oscilação do sistema controlado. Este comportamento depende das posições dos
pólos, as quais serão determinadas por um método comumente denominado imposição dos
pólos ou técnica de atribuição dos pólos [20].
Designado de “∆” o polinômio cujas raízes são os pólos a serem impostos, deve-se
igualá-lo ao denominador de Hre, isto é, d.dc+n.n2, visando resolver o problema da
estabilização para o sistema em malha fechada:
d.dc + n.n2 = ∆ (2.4).
A equação (2.4) descreve uma equação diofantina que terá solução para qualquer
“∆”, se e somente se, os polinômios conhecidos “n” e “d” forem polinômios coprimos.
Para a resolução de qualquer equação diofantina, deve-se igualar os coeficientes
dos polinômios grau a grau, obtendo um conjunto de equações lineares. Referindo à
equação (2.4), além de “n” e “d”, tem-se os coeficientes de “dc” e “n2” como incógnitas e os
de “∆” como arbitrários (desde que suas raízes estejam na região de estabilidade). Como
3. O termo “Ψi “ sempre indica os pólos de uma função referente a um sinal que será rastreado ou rejeitado. O índice“i” especifica o tipo de sinal (de referência - r, distúrbio - η ou ruído - w).

11
quer-se impor ∆ arbitrariamente, precisa-se de um número de incógnitas igual ou superior
ao de equações:
# incógnitas4 = ∂dc + ∂n2 + 2 ≥ # equações = ∂d + ∂dc + 1 ⇒ ∂n2 ≥ ∂d - 1.
Escolhe-se o menor grau: ∂n2 = ∂d-1. Para determinar o ∂dc, deve-se considerar
que ∂dc ≥ ∂n2, conseqüência da exigência de um controlador próprio.
Fazendo ∂dc = ∂n2 = ∂d-1, o ∂∆ é dado por: ∂∆ = ∂d+∂dc = 2∂d-1. Com estas
escolhas, o número de equações iguala-se ao número de incógnitas, possibilitando montar
uma matriz quadrada (denominada Matriz de Sylvester) do sistema linear.
As equações serão montadas na seguinte forma matricial: S * C = D, sendo S a
matriz de Sylvester, C um vetor coluna formado por coeficientes dos polinômios dc(s) e
n2(s) e D um vetor coluna com os coeficientes do polinômio ∆(s) (ver a condição II). Um
Teorema conhecido (Sylvester) diz que a matriz S é inversível, se e somente se, os
polinômios n(s) e d(s) são coprimos [02].
Condição II: Definir o grau dos polinômios, como foi mencionado, para a
resolução na forma matricial; então: ∂∆=2∂d-1, ∂dc=∂n2=∂d-1, ∂d1=∂n1-∂dc (se ∂n1>∂dc).
Para explicitar a resolução numérica da equação (2.4), representam-se os
polinômios e demonstra-se como ficará a forma matricial:
d(s) = ansn + an-1s
n-1 ... + a1s + a0 e n(s) = bnsn + bn-1s
n-1 ... + b1s + b0 são os
polinômios que possuem “a” e “b” como seus coeficientes conhecidos;
dc(s) = xmsm + xm-1sm-1... + x1s + x0 e n2(s) = ymsm + ym-1s
m-1... + y1s + y0 são os
polinômios a serem calculados cujos coeficientes são incógnitas;
4. A letra “∂“ refere-se ao grau de um polinômio.

12
e ∆(s) = cpsp + cp-1s
p-1 ... + c1s + c0 é um polinômio arbitrário (já citado). Os
índices dos coeficientes são: n = ∂d; m = ∂d - 1; p = 2∂d - 1. Como S * C = D, tem-se:
an 0 0 .... 0 0 bn 0 0 .... 0 0 an-1 an 0 .... 0 0 bn-1 bn 0 .... 0 0 an-2 an-1 an .... 0 0 bn-2 bn-1 bn .... 0 0 ...........................................................................................S = a2 a3 a4 .... an 0 b2 b3 b4 .... bn 0 ; a1 a2 a3 .... an-1 an b1 b2 b3 .... bn-1 bn
a0 a1 a2 .... an-2 an-1 b0 b1 b2 .... bn-2 bn-1
0 0 a0 .................... 0 0 b0 ................ ............................................................................................ 0 0 0 .... a0 a1 0 0 0 .... b0 b1
0 0 0 .... 0 a0 0 0 0 .... 0 b0
C = [ xm xm-1 xm-2 .... x1 x0 ym ym-1 ym-2 ..... y1 y0]’ (vetor coluna);
D = [ cp cm-1 cm-2 .... ........ ..... c1 c0]’ (vetor coluna).
Observação: Caso a planta seja estritamente própria (bn=0), a primeira equação do
sistema acima garante que o controlador seja realmente próprio, pois xm≠0. Donde a
equação terá solução para qualquer polinômio ∆(s) com o grau dado: este polinômio pode
ser escolhido arbitrariamente. Caso a planta seja biprópria (bn≠0), pode ocorrer, para um
∆(s) específico, por exemplo, que a solução do sistema forneça xm=0 e ym≠0, levando a um
controlador impróprio. A escolha de ∆(s) não é mais arbitrária, devendo se restringir aos
polinômios que permitam um controlador próprio. Por exemplo, limitando-se aos
polinômios tais que o vetor de coeficientes D não pertença ao subespaço linear gerado pelas
últimas 2∂d-1 colunas da matriz S. Este subespaço é um hiperplano passando pela origem,
um conjunto magro no R2∂d: escolhas arbitrárias de ∆(s) com o grau devido dificilmente
cairão dentro deste conjunto. Diz-se que a escolha de ∆(s) terá de ser genérica [02].

13
Resolvendo a equação (2.4), encontram-se os polinômios “n2” e “dc”; mas, para
completar o projeto do controlador, deve-se ainda determinar o polinômio “n1”. Este
poderá ser encontrado a partir da função de transferência entrada-saída do sistema para o
sinal de referência Hry (2.1) e da condição I.
Substituindo a equação (2.4) em (2.3) e multiplicando o termo que se refere à
função do sinal de referência “� /Ψr”, conforme a condição I, tem-se:
Hre.( � /Ψr) = (∆-n.n1 / ∆).( � /Ψr) (2.5).
Pode-se encontrar o polinômio “n1” fazendo “∆-n.n1” múltiplo de “Ψr”:
∆-n.n1 = w. Ψr (2.6a).
Rearrumando a equação, tem-se:
n.n1 + w. Ψr = ∆ (2.6b).
onde “w” é um polinômio qualquer, expressando o fato de “∆-n.n1” precisar ser múltiplo de
“Ψr” para que a condição I seja obedecida.
Na resolução da equação diofantina (2.6b), deve-se buscar o menor ∂n1
(∂n1 ≤ ∂dc), mas se ∂n1 > ∂dc, escolhe-se um polinômio “d1” totalmente estável, tal que ∂n1
= ∂dc + ∂d1, tornando C1 = n1 / d1.dc. Da teoria das equações diofantinas [02], a equação
(2.6b) terá solução, se e somente se, “n” e “Ψr” forem polinômios coprimos.
Condição III: “d1” é um polinômio estável, com ∂n1 = ∂dc + ∂d1, e “n” e “Ψr” são
polinômios coprimos.
Assim, o projeto poderá ser realizado, calculando-se “n1”, “n2”, “dc” e “d1”
obedecendo à condição I, com a escolha arbitrária dos pólos (raízes de ∆) desde que as
condições II e III sejam obedecidas e que a planta seja estritamente própria.

14
2 - Rejeição assintótica de distúrbio (η) na saída:
Utilizando o mesmo sistema linear (figura 2.2), verifica-se, neste tipo de
especificação, se o efeito estacionário do distúrbio é nulo. A figura 2.3 mostra o diagrama
indicando um distúrbio ”η” na saída do sistema; faz-se o projeto do controlador para
rejeitar assintoticamente “η”, supondo-o como um sinal não mensurável e constante por
partes.
Figura 2.3 - Diagrama de blocos do Controlador com dois graus de liberdade, com distúrbio na saída do sistema.
A função de transferência de interesse é :
y = Hηy · η (2.7).
Tendo Hηy (função de transferência em malha fechada do sinal do distúrbio para a
saída do sistema) como:
Hηy = d.dc / (d.dc+n.n2), (2.8)
pode-se determinar os novos parâmetros do controlador que fará a rejeição do distúrbio “η”
rastreando assintoticamente o sinal de referência.
Condição IV: Haverá a rejeição assintótica do distúrbio (limt→∞ y(t) = 0) se em
(2.7), os zeros da função de transferência Hηy forem cancelados com os pólos do sinal do
distúrbio (Ψη).
O denominador do controlador deverá ser:
n1
n2
1/dc+− n/d ++r e u
ηy

15
dc = Ψη · dc (2.9)
para que a condição IV seja satisfeita, onde “dc” é um polinômio qualquer; assim, o
numerador de Hry cancelará o denominador do distúrbio, “Ψη”, na equação (2.7).
Para estabilizar o sistema impor-se-ão as especificações em regime transitório
através do método de imposição dos pólos. Isto é feito substituindo (2.9) no denominador
de Hηy (2.8), onde encontra-se um termo que, igualado a um polinômio cujas raízes são
impostas, leva a:
d.(Ψη.dc) + n.n2 = ∆ (2.10).
Esta equação diofantina terá solução para qualquer “∆”, se e somente se, “n” e
“d.Ψη” forem polinômios conhecidos e coprimos, isto é, se for válida a condição a seguir:
Condição V: “n” e “d.Ψη” são coprimos. Neste caso, a condição II deve ser
substituída por [02]: ∂dc = ∂d-1, ∂n2=∂d+∂Ψη-1 e ∂∆=2∂d+∂Ψη-1.
3 - Rejeição assintótica de ruídos (w) no sensor:
Nesta especificação utilizam-se os mesmos passos para a rejeição de distúrbios,
isto é, encontrar a função de transferência em malha fechada do ruído no sensor “w” à saída
do sistema Hwy e montar a equação diofantina. O diagrama de blocos na figura 4 indica a
localização de ruídos no sensor.
n1
n2
1/dc+− n/dr
-+ w
yu

16
Figura 2.4 - Diagrama de blocos do Controlador com dois graus de liberdade com ruído no sensor.
Condição VI: Haverá a rejeição assintótica do ruído no sensor (limt→∞ y(t) = 0) se
em (2.11), os zeros da função de transferência Hwy forem cancelados com os pólos do sinal
do ruído (Ψw).
Determinando a função de transferência Hwy:
Hwy = n.n2 / (d.dc+n.n2), (2.11)
a condição VI será satisfeita se : n2 = Ψw . n2, (2.12)
onde n2 é um polinômio qualquer.
Substituindo (2.12) no denominador de (2.11) a fim de estabilizar o sistema,
considerando a condição VI e igualando a um polinômio cujas raízes são pólos a serem
impostos, a equação diofantina neste caso será:
d.dc + n.(Ψw n2) = ∆ (2.13).
Se quiser rejeitar distúrbios “η” e ruídos no sensor “w” ao mesmo tempo, pode-se
o fazer montando uma única equação diofantina, mas deve-se observar que ambos não
podem ter a mesma freqüência [19], pois:
d.(Ψη.dc) + n.(Ψw.n2) = ∆ (2.14).
Com a equação (2.14) vê-se que se “Ψη” e “Ψw” têm raízes em comum na região
de instabilidade (“η” e “w” sinais “estáveis”, não interessam pois não afetam o regime

17
estacionário), “∆” terá de possuir as mesmas raízes, sendo necessariamente instável,
tornando o problema, neste caso, sem solução.
Para a citação posterior, formalizam-se as condições suficientes de existência de
controlador rejeitando assintoticamente ruídos:
Condição VII: “d” e “n.Ψw” são coprimos conforme (2.13).
Condição VIII: “n.Ψw” e “d.Ψη” são coprimos conforme (2.14).
Nesta tese, nas simulações, não serão considerados sistemas controlados contendo
distúrbios na saída do sistema ou ruídos no sensor.
2.2 - Controlador com um grau de liberdade:
Como visto, o controlador com dois graus de liberdade é composto por C1 e C2
(figura 2.1). Para encontrar a estrutura do controlador com um grau de liberdade, faz-se
C = C1 = C2. A figura 2.5 mostra o diagrama de blocos deste controlador, onde C será uma
função de transferência de ordem n, isto é, seus polinômios não terão grau limitado,
dependendo apenas da ordem da planta.
Figura 2.5 - Diagrama de blocos do Controlador com um grau de liberdade.
O projeto deste controlador seguirá praticamente os mesmos passos que os do
controlador anterior; dessa forma, deve-se impor as especificações em regime permanente e
em regime transitório. Em regime permanente, tem-se:
+− P=n/dC=nc/dc
r yue

18
1 - Rastreamento assintótico do sinal de referência pela saída controlada:
O sistema linear visto na figura 2.5, é definido por:
y = [n.nc / (d.dc+n.nc)] · r (2.15).
Como já foi citado, o problema do rastreamento consiste em verificar se:
lim e(t) = lim[r(t)-y(t)] = 0 para t→∞, para isto deve-se encontrar a função de transferência
Hre em malha fechada do sinal de erro para o sinal de referência que deverá satisfazer a
condição I.
Sendo: Hre = d.dc / (d.dc + nnc), (2.16)
se as raízes do denominador da planta “d” não satisfizerem a condição I, para garantir o
rastreamento assintótico, o denominador do controlador “dc” deverá ser:
dc = Ψr · dc (2.17).
Para a estabilização do sistema, deve-se determinar as especificações em regime
transitório [04,07,12]. Utilizando o método de imposição dos pólos [20], as especificações
como oscilação, ultrapassagem e tempo de assentamento dependerão da localização dos
pólos de malha fechada.
Designando “∆” como um polinômio cujas raízes são os pólos a serem impostos,
pode-se igualá-lo ao denominador de Hre, isto é, (d.dc+n.nc), visando resolver o problema da
estabilização para o sistema em malha fechada:
d.(Ψr.dc) + n.nc = ∆ (2.18).
A equação acima (2.18) descreve uma equação diofantina que terá solução, se e
somente se, “n” e “d.Ψr” forem polinômios conhecidos e coprimos [02] (conforme condição
V) - ver equação (2.10).

19
2 - Rejeição assintótica de distúrbios na saída e ruídos no sensor:
Neste caso vamos projetar um controlador que, além de rastrear assintoticamente o
sinal de referência, seja capaz também de rejeitar assintoticamente um distúrbio na saída do
sistema e um ruído no sensor (figura 2.6). Pode-se reunir estas duas especificações em uma
única equação diofantina, desde que os sinais não tenham a mesma freqüência (os mesmos
pólos) [19].
Figura 2.6 - Diagrama de blocos do Controlador com um grau de liberdade, com distúrbio e ruído no sistema.
Pode-se assegurar que o controlador irá rejeitar sinais de distúrbios na saída do
sistema e ruídos no sensor, obedecidas as condições de IV a VIII, fazendo:
dc = Ψη· dc e nc = Ψw· nc (2.19)
onde “Ψη” e “Ψw” são os pólos dos sinais a serem rejeitados e “dc” e “nc” são polinômios
quaisquer. Com a imposição dos pólos, pode-se projetar o controlador, garantindo a
estabilização, fazendo “∆” ser um polinômio com raízes dentro da região de estabilidade.
A equação diofantina será:
d.(Ψη.dc) + n.(Ψw.nc) = ∆ (2.20).
Com a resolução da equação (2.20), encontram-se os parâmetros do controlador
com um grau de liberdade, desde que “d.Ψη” e “n.Ψw” sejam polinômios conhecidos e
+−C=nc/dc P=n/d +
+
+ +
η
w
yuer

20
coprimos (conforme a condição VIII) - ver a equação (2.14), e a condição II deve ser
substituída aqui por: ∂dc = ∂d+∂Ψw-1, ∂nc=∂d+∂Ψη-1 e ∂∆=2∂d+∂Ψw+∂Ψη-1.
Observação: Caso se queira rejeitar assintoticamente distúrbios do tipo “ � /Ψw” e
rastrear assintoticamente sinais do tipo “ � /Ψr”, as equações (2.17) e (2.19) podem ser
reunidas fazendo-se dc = Ψ· dc e nc = Ψw· nc, sendo Ψ = MMC{Ψr,Ψη}.
2.3 - Controlador de Wolovich:
O controlador geral de Wolovich [08], além do bloco que possui a função de
transferência referente ao controlador (C), usa uma malha interna ligada à realimentação do
sistema (parte pontilhada na figura 2.7).
Figura 2.7 - Diagrama de blocos do Controlador de Wolovich.
No projeto deste controlador, determinam-se primeiro os parâmetros em relação à
malha interna, definindo Huv (função de transferência do sinal “v” para o sinal de controle
“u”), como:
u =[Ψ.d / (Ψ.d + d.m + k.n)] · v (2.21).
C=nc/dc P=n/d+−
k
m
1/Ψ
+−
++
r e v u y

21
Para forçar o cancelamento de “Ψ” (denominador da malha interna) será obedecida
a seguinte igualdade:
Ψ.d + d.m + k.n = Ψ.δ (2.22).
Substituindo (2.22) em (2.21), Huv se reduz a “d/δ”; o que impõe ∂δ = ∂d, pois Huv
deve ser uma função própria e estável. Com esta substituição, a função de transferência Huv
reduzida (parte pontilhada na figura 2.7) será cancelada com a função que representa a
planta, resultando no sistema indicado na figura 2.8.
Figura 2.8 - Diagrama de blocos do Controlador de Wolovich, com malha interna e planta reduzidas a um único bloco.
Para determinar-se os parâmetros referentes ao controlador de Wolovich, devem-
se estabelecer as especificações em regime estacionário e transitório.
Rastreamento assintótico do sinal de referência na saída:
Como já foi citado nos outros controladores, o problema do rastreamento
assintótico consiste em verificar se: lim e(t) = lim[r(t)-y(t)] = 0 para t→∞; para isto, devem-
se encontrar a função de transferência Hre.
Esta especificação em regime permanente será estabelecida se, conforme figura
2.8, a função de transferência do sinal de erro para o sinal de referência for:
Hre = dc.δ / (dc.δ + nnc), (2.23)
e satisfizer a condição I. Para garantir isto, faz-se o denominador do controlador ser:
dc = Ψr (2.24).
+− nc/dc n/δ
r e u y

22
As especificações em regime transitório (oscilação, ultrapassagem e tempo de
assentamento) serão definidas aplicando o método de imposição dos pólos, fixando “∆”
como o polinômio cujas as raízes serão impostas. Substituindo (2.24) no denominador de
(2.23), resolve-se o problema da estabilização [02], igualando “∆” a este “novo”
denominador, formando a seguinte equação diofantina:
Ψr.δ + n.nc = ∆ (2.25).
A equação (2.25) terá solução, se e somente se, “Ψr” e “n” forem polinômios
conhecidos e coprimos (conforme condição II) - como ocorre na equação (2.4).
Analisando-se os graus dos polinômios, como foi feito na seção 2.1, chega-se a
∂δ = ∂d, ∂nc = ∂Ψr - 1 e ∂∆ = ∂d+∂Ψr.
Voltando à figura 2.7, deve-se encontrar as incógnitas para a malha interna.
Resolvendo a equação (2.25), encontra-se o polinômio “δ” e o substitui na equação (2.22),
levando à nova equação:
d.m + n.k = Ψ(δ-d) (2.26).
A equação (2.26) é uma equação diofantina, onde “Ψ” é um polinômio com raízes
a serem impostas (dentro da região de estabilidade), “m” e “k” são polinômios cujos
coeficientes são incógnitas e “d” e “n” devem ser polinômios conhecidos e coprimos para
que a equação (2.26) seja solúvel, o que ocorre por definição. Este regulador tem como
vantagens, como pode ser visto em seu projeto, menor ordem aparente em seus parâmetros
e menos zeros, ocasionando menos oscilações na saída do sistema e diminuindo a tendência
a ultrapassagens no regime transitório (casos serão mostrados no capítulo 04).

23
Nesta dissertação, não serão consideradas as perturbações no sistema controlado
pelo controlador de Wolovich [08].
2.4 - Controlador PID:
O diagrama de blocos deste controlador é idêntico ao do controlador com um grau
de liberdade, porém a aplicação deste controlador fica restrita a sistemas de segunda ordem
próprios. Caso a planta seja de ordem maior que dois, esta deverá ser reduzida à segunda
ordem por algum método, para que o PID possa ser calculado com imposição dos pólos ou
com o método do Lugar das Raízes [03,04,20]. No domínio da freqüência, de acordo com a
Transformada de Laplace, tem-se o seguinte sistema linear:
Figura 2.9 - Diagrama de blocos do Controlador PID com um distúrbio na saída.
Na figura 2.9 tem-se o diagrama de blocos de um sistema controlado pelo
controlador PID, onde r(s) é o sinal de referência e η(s) o sinal do distúrbio, ambos
supostos, na situação típica de aplicação deste controlador, como sinais do tipo degrau. Vê-
se que o controlador PID proposto é realizável concretamente, pois é caracterizado pelos
parâmetros “a” - ganho derivativo, “b” - ganho proporcional, “c” - ganho integral e o pólo
“p”, o qual impede que a função de transferência “C(s)” seja imprópria. Passa-se às
+−
r(s) e(s) u(s) y(s) a.s2+b.s+c s(s+p)
C(s)= x2.s
2+x1.s+x0
y2.s2+y1.s+y0
P(s)= ++
η(s)

24
especificações para o projeto tanto em regime permanente como em regime transitório. Em
regime permanente, tem-se:
1 - Rastreamento assintótico do sinal de referência pela saída controlada:
Para o controlador rastrear assintoticamente o sinal de referência, deve-se
considerar, como já foi citado para outros controladores, que o lim e(t) = lim[r(t)-y(t)] = 0
para t→∞; isto quer dizer que no domínio da freqüência, deve-se encontrar a função de
transferência Hre em malha fechada do sinal de erro para o sinal de referência que deverá
satisfazer a condição I.
Tem-se Hry(s) como a função de transferência do sinal de referência para a saída do
sistema, a qual é dada por:
(a.s2+b.s+c).(x2s2+x1s+x0)
(y2.s2+y1.s+y0).s(s+p) + (x2s
2+x1.s+x0)( a.s2+b.s+c)
Como e(s) = r(s) - y(s) e sendo r(s) um sinal do tipo degrau, Hre(s) será:
(y2.s2+y1.s+y0).s(s+p)
(y2.s2+y1.s+y0).s(s+p) + (x2s
2+x1.s+x0)( a.s2+b.s+c)
Na função de transferência do controlador PID, o integrador resultará, conforme a
equação 2.28, no zero “s” que será sempre capaz de ser cancelado com sinais do tipo
degrau sendo possível satisfazer a condição I sem maiores preocupações. A raiz “-p” foi
implementada para que o sistema controlado tenha sempre funções próprias, tornando o
sistema realizável através de equações de variáveis de estado (ver a seção 4.3).
O controlador ideal tem a seguinte função de transferência:
C(s) = (Kds2+Kps+Ki) / s, (2.29)
e(s) = · r(s) (2.28).
y(s) = · r(s) (2.27).

25
onde a escolha das constantes Kd (de derivação), Kp (de proporcionalidade) e Ki (de
integração) determinarão o sistema dinâmico. Vários livros citam métodos para obtenção
destas variáveis [03,04,11,20,21], mas neste trabalho aplica-se o método de imposição de
pólos, utilizando o PID acrescido do pólo em “-p”.
Na estabilização do sistema deve-se determinar as especificações em regime
transitório (ultrapassagem, oscilação e tempo de assentamento) e para isto utiliza-se o
método de imposição dos pólos. Isto permitirá determinar os parâmetros do controlador,
pois iguala-se o denominador de (2.28) a um polinômio “∆” cujas raízes serão impostas,
formando a seguinte equação:
(y2.s2+y1.s+y0).s.(s+p) + (x2s
2+x1.s+x0).( a.s2+b.s+c) = ∆ (2.30).
Para resolver esta equação (2.30), deve-se considerar o seguinte:
Observação: Introduzindo um parâmetro a mais na equação (2.30) - no lugar de
“(s2+ps)” coloca-se “(gs2+hs)”, sendo “p = h/g”, tem-se, em termos das equações lineares
associadas (ver a condição II), cinco equações com cinco incógnitas. Por uma variante do
Teorema de Sylvester, a matriz é inversível, se e somente se, os polinômios n(s) e d(s)
forem coprimos. Se a planta for estritamente própria (x2 = 0), o sistema leva a “g≠0”, isto é,
a um controlador próprio. Se a planta for biprópria, cabe a mesma observação feita na seção
2.1, em seqüência à condição II. A função de transferência do controlador obtida desta
forma é: C(s) = [(a/g)s2+(b/g)s+(c/g)]/[s(s+h/g)], desaparecendo assim o parâmetro auxiliar
“g”.

26
2 - Rejeição assintótica de distúrbios na saída:
Para o controlador citado na figura 2.9, a rejeição do sinal de distúrbio “η(s)” do
tipo degrau, será feita conforme a condição IV, sendo Hηy (ver equação 2.7) dada por:
(y2.s2+y1.s+y0).s.(s+p)
(y2.s2+y1.s+y0).s.(s+p) + (x2s
2+x1.s+x0)( a.s2+b.s+c)
Observa-se que o zero em “s” garante a rejeição assintótica do distúrbio,
conseqüência do pólo do controlador na origem e, com isto, pode-se estabelecer as
especificações em regime transitório através do método de imposição dos pólos sem
maiores preocupações. Conforme este método, vai-se igualar o denominador de (2.31) a um
polinômio cujas raízes serão impostas (∆), obtendo-se uma equação idêntica a (2.30), a ser
resolvida como foi citado anteriormente.
2.5 - Controlador IPD:
A figura 2.10 mostra um diagrama de bloco de um sistema controlado em que o
sinal de erro é integrado e os controles proporcional e derivativo atuam sobre o sinal
realimentado [03,20]. Assim, considera-se na configuração deste controlador: γ como o
ganho integral, α como ganho derivativo, β como o proporcional e o polo “-p” no ramo
interno de realimentação. Este pólo torna a função de transferência do controlador própria,
designando o controlador como IPD real, sendo o sistema realizável por equações de
variáveis de estado. Este controlador atuará em sistemas com funções próprias
P(s)=x(s)/y(s) e de segunda ordem.
y(s) = · η(s) (2.31).

27
Figura 2.10 - Diagrama de blocos do Controlador IPD
Para o projeto deste controlador, devem ser determinadas as especificações em
regime permanente e transitório. Considera-se primeiro a seguinte especificação em regime
estacionário: rastreamento assintótico de sinais do tipo degrau.
Para o controlador atender a esta especificação, é preciso que a função de
transferência em malha fechada do sinal de erro para o sinal de referência Hre(s) satisfaça a
condição I. Isto fará com que o limt→∞e(t) = 0.
Primeiro determina-se Hry(s):
(x2s2+x1s+x0).γ.(s+p)
s[(y2.s2+y1.s+y0).(s+p) + (x2s
2+x1s+x0).(αs+β)] + (x2s2+x1s+x0).γ.(s+p)
Sendo e(s) = r(s) - y(s), pode-se encontrar Hre(s) fazendo “1-Hry(s)”:
s[(y2.s2+y1.s+y0).(s+p) + (x2s
2+x1s+x0).(αs+β)]
s[(y2.s2+y1.s+y0).(s+p) + (x2s
2+x1s+x0).(αs+β)] + (x2s2+x1s+x0).γ.(s+p)
Como r(s) é um sinal do tipo degrau, o controlador IPD irá rastrear
assintoticamente este sinal conforme a condição I. Análise semelhante pode ser feita para o
efeito de distúrbios constantes, mostrando que o controlador IPD, assim como o PID,
rejeita-os assintoticamente devido ao pólo na origem.
y(s) = · r(s) (2.32).
e(s) = · r(s) (2.33).
+−
+−
r e u y γs
αs+βs+p
x(s)
y(s)P(s)=

28
As especificações em regime transitório (ultrapassagem, oscilação e tempo de
assentamento) serão estabelecidas com a aplicação do método de imposição dos pólos. Para
isto, iguala-se o polinômio “∆”, cujas raízes serão impostas, ao denominador da equação
(2.33), formando a seguinte equação:
s[(y2.s2+y1.s+y0).(s+p) + (x2s
2+x1s+x0).(αs+β)] + (x2s2+x1s+x0).γ.(s+p) = ∆ (2.34a).
Para resolver a equação (2.34a) é necessário criar coeficientes extras, como na
equação (2.30): trocar (s+p) por (gs+h), com p = h/g, e chamar γp = χ, escondendo a não-
linearidade de (2.34a), mas criando seis incógnitas para cinco equações. Definindo uma
nova variável µ = β+γ, pode-se rescrever a equação na forma:
s[(y2.s2+y1.s+y0).(gs+h)] + (x2s
2+x1s+x0).(αs2+µs+χ) = ∆, (2.34b)
que possui solução única pelo sistema de Sylvester associado. Calculada a solução, pode-se
recuperar as variáveis originais por: p = h/g, γ = gχ/h, β = µ - gχ/h, fornecendo os dois
blocos do controlador IPD: γ/s = (gχ/h)/s e o segundo bloco sendo [(α/g)s+(β/g)]/(s+p),
desde que h≠0 e g≠0. Esta última condição ocorre para uma escolha genérica do polinômio
∆, no mesmo sentido já exposto acima.
Comparando a equação (2.27) com a (2.32) verifica-se que o controlador IPD cria
menos zeros no sistema controlado que o controlador PID, diminuindo, assim a tendência à
ultrapassagem no regime transitório.
Encontra-se na literatura o estudo do controlador IPD ideal, onde não há o termo
(s+p), havendo uma realimentação derivativa. Neste caso a planta deve ser estritamente
própria (x2 = 0) para que não apareçam impulsos na saída. O IPD ideal, embora não
realizável na prática, é usado como aproximação do IPD real para p>>>0.

29
2.6 - Controlador de Landau:
A configuração do controlador de Landau, vista na figura 2.11, é idêntica à da
figura 2.1, tornando este controlador um caso particular do controlador com dois graus de
liberdade [09]. Mas a aplicação deste controlador está restrita a sistemas de segunda ordem
próprios.
Figura 2.11 - Diagrama de blocos do Controlador de Landau
Do mesmo modo que o controlador mencionado na seção anterior, o projeto do
controlador de Landau foi feito para atender as mesmas especificações estacionárias e
transitórias exigidas pelo controlador PID.
Rastreamento assintótico do sinal de referência pela saída controlada:
Conforme a condição I, para o controlador atender a esta especificação, primeiro
determina-se a função de transferência em malha fechada do sinal de erro para o sinal de
referência Hre(s). Isto fará com que o limt→∞e(t) = 0.
Tem-se que Hry(s) é dado por:
(x2s2+x1s+x0).γ
s.(s+p).(y2.s2+y1.s+y0) + (x2s
2+x1s+x0).(αs2+βs+γ)y(s) = · r(s) (2.35).
α.s2+β.s+γ
1+−
r u y γ s(s+p)
x(s)
y(s)P(s)=

30
Sendo e(s) = r(s) - y(s), pode-se encontrar Hre(s) fazendo “1-Hry(s)”:
s[(s+p).(y2.s2+y1.s+y0) + (x2s
2+x1s+x0).(αs+β)]
s.(s+p).(y2.s2+y1.s+y0) + (x2s
2+x1s+x0).(αs2+βs+γ)
Como r(s) é um sinal do tipo degrau, o controlador de Landau irá rastrear
assintoticamente este sinal devido ao seu polo na origem, conforme a condição I. Da mesma
forma e pela mesma razão rejeitará assintoticamente distúrbios constantes.
Estabelece-se as especificações em regime transitório com a aplicação do método
de imposição dos pólos. Para isto, iguala-se o polinômio “∆”, cujas raízes serão impostas ao
denominador da equação (2.36), formando a seguinte equação:
s.(s+p).(y2.s2+y1.s+y0) + (x2s
2+x1s+x0).(αs2+βs+γ) = ∆ (2.37).
A equação (2.37) é resolvida exatamente da mesma forma que a equação (2.30).
Comparando a equação (2.27), (2.32) e (2.37) verifica-se que o controlador de Landau gera
menos zeros que o controlador PID e IPD, diminuindo a tendência à ultrapassagem no
regime transitório. Esta é a principal vantagem deste controlador, o número mínimo de
zeros em Hry(s); observando ainda que, para haver rastreamento assintótico a sinais de
referência do tipo degrau (ver figura 2.2), a existência do polo na origem leva a
n1(0)=n2(0)=“γ”; por isso tem-se o mesmo coeficiente “γ” aparecendo nos dois ramos do
sistema (figura 2.11). No capítulo 04 ver-se-á como foram aplicados os algoritmos citados
anteriormente para cada tipo de controlador e os programas desenvolvidos para executarem
a realização de cada sistema a tempo contínuo, dependendo da estrutura de controle e das
especificações impostas, estão no apêndice B.
2.7 - Projeto de controladores para sistemas a tempo discreto:
e(s) = · r(s) (2.36).

31
Para projetar-se os controladores a tempo discreto, basta:
• passar da variável “s” para a variável “z”, da Transformada de Laplace para a
Transformada Z;
• adaptar as condições de rastreamento e rejeição assintóticos fazendo, por
exemplo, o rastreamento assintótico de sinais do tipo degrau, que no lugar de s=0, levará a
zeros em z=1;
• impor as raízes que formarão o polinômio “∆”, dentro do círculo unitário,
passando à resolução das equações diofantinas conseqüentes, usando os mesmos algoritmos
já expostos.








![Como Conquistar Clientes e Fechar Negocios Richard Maxwell Robert Dickman[1]](https://img.document.onl/doc/110x75/55cf9414550346f57b9f79f6/como-conquistar-clientes-e-fechar-negocios-richard-maxwell-robert-dickman1.jpg)