Embed Size (px)
Citation preview

CARGAS DE COLAPSO DE SISTEMAS DE ALVENARIA
Por:
Nuno André Martins Deusdado
Dissertação apresentada na Faculdade de Ciências e Tecnologia da Universidade Nova de Lisboa
para obtenção do grau de Mestre em Engenharia Civil na especialidade de Estruturas
Orientador: Professor Doutor Armando Manuel Sequeira Nunes Antão
Monte de Caparica, 2011


i
Agradecimentos Dedico este espaço a todos os que contribuíram para que esta dissertação fosse realizada. Aos
meus colegas, professores, amigos e familiares, em especial:
Ao meu avô, por transmitir os princípios da família Deusdado;
Aos meus pais, pela compreensão, carinho, apoio, paciência, orientação pessoal e pelos valores que me transmitiram;
Ao meu irmão, por responder às inúmeras questões que lhe coloco.
À minha namorada, por todo o amor, por aturar todos os disparates que faço e por estar sempre do meu lado;
Um agradecimento especial ao meu orientador, Professor Doutor Armando Nunes Antão, pela forma como orientou o meu trabalho. As notas dominantes da sua orientação foram a utilidade das suas recomendações e a cordialidade com que sempre me recebeu. Estou grato por ambas e pela oportunidade de realizar este trabalho sob sua orientação, que foi decisivo para que este trabalho contribuísse para o meu desenvolvimento pessoal.
Agradeço também ao Professor Doutor Mário Vicente da Silva, pela paciência e disponibilidade apresentada para solucionar todas as propostas que lhe foram colocadas com o desenvolvimento deste trabalho.
Agradece‐se ao projecto de investigação PTDC/ECM/70368/2006, por possibilitar a plataforma informática que tornou possível a realização de alguns cálculos desta dissertação.
Sem todos vós, este trabalho não seria possível.
Aqui deixo o meu agradecimento simples, mas muito sincero: Muito Obrigado!!!

ii

iii
Resumo Esta dissertação é baseada na ferramenta SUBLIM3d que é fundamentada no teorema
cinemático da análise limite, que visa o cálculo de limites superiores estritos de cargas de colapso de estruturas [1]. A utilização desta ferramenta deve‐se à análise limite ter vindo a demonstrar um vasto potencial para o desenvolvimento de modelos numéricos, que permitem a determinação da máxima carga suportada por uma estrutura caracterizada por um comportamento perfeitamente plástico.
No presente documento, pretende‐se validar a ferramenta SUBLIM3d para um caso particular das estruturas, por isso, limita‐se este estudo a paredes de alvenaria não reforçada. Adoptou‐se neste estudo condições de deformação plana e considerou‐se apenas carregamentos no plano.
O comportamento da alvenaria é controlado pelas propriedades mecânicas das unidades e das juntas, bem como pela orientação e posição relativa destas. Por isso, trata‐se a alvenaria como um material anisotrópico e heterogéneo.
A modelação da alvenaria baseou‐se na modelação micro simplificada, em que resumidamente, as unidades são representadas por elementos contínuos e o comportamento das juntas e dos interfaces unidade/junta são substituídos por uma única superfície que é constituída por elementos de junta. Para cada elemento considerou‐se que se podia associar a superfície de cedência de Mohr‐Coulomb ou as duas superfícies de cedência propostas (Armando Nunes Antão e Mário Vicente da Silva).
Com o objectivo de validar e aferir a capacidade das formulações propostas, a solução obtida pelo SUBLIM3d para os vários exemplos numéricos é comparada com os resultados experimentais e teóricos disponíveis na literatura.

iv

v
Abstract This dissertation is based on SUBLIM3d tool which is grounded on the kinematic theorem of limit
analysis, that aims to calculate the strict upper bounds of collapse loads of structures[1]. The use of this tool was due to the fact that the limit analysis has come to show a great potential for development of numerical models, which allows the determination of the maximum load supported by a structure characterized with a perfectly plastic behavior.
This document intends to validate the SUBLIM3d tool for the particular case of non‐reinforced masonry walls structures. Plane strain conditions were adopted only loads in the plan of the wall were considered.
The behavior of masonry is controlled by the mechanical properties of the units and joints as well as by their relative position and orientation. Due to these reasons, the masonry is treated as an anisotropic and heterogeneous material.
The shaping of the masonry was based on simplified micro modeling, in which the units are represented by continuous elements and the behavior of joints and interfaces unit/joint are replaced by a single surface that consists of joint elements. For each element was considered that could be associate the yield surface of Mohr‐Coulomb or the two yield surfaces proposed (Armando Nunes Antão and Mário Vicente da Silva).
In order to validate and assess the capacity of the proposed formulations the solution obtained by SUBLIM3d for several numerical examples is compared with experimental and theoretical results available in literature.

vi

vii
Simbologia e Notações Maiúsculas latinas
B Operador padrão de compatibilidade diferencial C Matriz de amortecimento C Carregamento tangencial
Cc Espaço auxiliar que confina a taxa do tensor da deformação plástica admissível Cd Espaço que confina as descontinuidades do campo de velocidade D Matriz flexibilidade D Taxa da dissipação da energia plástica interna total por unidade de volume E Módulo de Young F Força aplicada no corpo F Vector das cargas nodais
Forças de contacto entre as partículas Forças geradas através dos elementos lineares de vínculo entre duas partículas Acções externas Esforços internos
Fs Resistência limite ao corte Ft Resistência limite à tracção F1 Tensão principal horizontal aplicada ao painel F2 Tensão principal vertical aplicada ao painel G Módulo de distorção H Carregamento normal H Força horizontal de cedência K Matriz de rigidez
Coeficiente de impulso activo Coeficiente de impulso passivo
L Função Lagrangiana aumentada na cedênciaL Largura do corpoL Largura do tijolo
L* Função que define o problema de minimização local M Matriz de massa
Ni Matriz que reúne as funções de aproximação da forma nodal convencional do elemento i
O Ponto de origem do sistema de coordenadas OC Distância desde a origem do sistema de coordenadas ao centro do círculo de Mohr
Conjunto genérico de carregamento Conjunto genérico de carregamento
R Raio do círculo de Mohr Rc Raio do círculo de Mohr no estado de tensão no colapso Rt Raio do círculo de Mohr no estado de tensão que origina a truncatura T Matriz de transformação Truncatura à compressão Truncatura à tracção
Matriz que reúne as funções de aproximação ao campo das velocidades relativas na fronteira dos elementos
V Carregamento normal V Força vertical total aplicada à alvenaria
Volume considerado da viga de betão reforçado
Volume real da viga de betão reforçado
WD Taxa de dissipação da energia plástica interna We Taxa do trabalho das forças exteriores aplicada ao sistema
Welástico Trabalho elástico Wλ Taxa do trabalho das forças variáveis

viii
;;
;
Tax Tax Tax
Yi Ma Mi
a Altb Larb Forb Larbj Com
Forc Coed Vecd Grad Vecdi Vec
Gracon
; Com; Com
; Comcon
e Esp
ei Vecplá
Vecdef
Sol; … ; Can
f Funass
fc Res
g Funnão
h Alt
i Dir
i Nú
i Núrígi
i Núj Dirk Conk Núk Rigl Lar
m Nú
m Pardo
m Bas
n Vern Comn Nú
nE Nú Vec
r Par
xa do trabalhoxa do trabalhoxa do trabalhoatriz formada
núsculas latinura dos tijolosrgura dos tijolrças de massargura da paredmponente na rças de massaesão do matector dos desloaus de liberdactor das velocctor que agruaus de liberdnstituem o componentes da
mponentes damponentes danstituem o copessura da junctor que juntstica ctor que guarformação ução sem resndidatos que nção que defisociadas sistência médnção que defio associadas ura da parederecção
mero do elemmero do nó ido mero do interrecção nstante mero da iteragidez rgura da pared
mero de ciclorâmetro adimtijolo se do leque rsor da normamponente nomero de candmero da malhctor que agrurâmetro de pe
o das forças fio elástico o plástico pelos valores
nas s os a constantes pde direcção j do
a constantes prial ocamentos noade de um nó cidades nodaispa a velocidaddade de um rpo rígido a velocidade d
a velocidade aa velocidade drpo rígido nta ta os valores
rda as compo
trições para aminimizam a ne o critério/
ia à compressne o critério/
e de alvenaria
mento finito genérico que
r – elemento
ação
de de alvenar
os de relaxaçãmensional que
al exterior à frrmal didatos que mha dos elemenpa a velocidadenalidade par
CARGAS D
xas
próprios norm
por unidade de
vector das fopor unidade de
odaisvirtual s de nodal do enó genérico
do nó virtual
angular do nóde um nó gen
aproximados
onentes princ
a qual a funçãofunção objectsuperfície de
são dos tijolossuperfície de
a
e pertence a
ia
o interior corresponde
ronteira
minimizam a funtos de relativa noa os elemento
DE COLAPSO
malizados da
e volume (afe
orças de massae volume não
elemento i o que perten
ó virtual nérico que per
s das compon
cipais da apro
o objectivo attivo cedência, no
s cedência, no
um dos elem
a duas vezes
unção objectiv
odal do inter –os regulares
O DE SISTEMA
matriz Si
ectadas pelo m
a o afectadas pe
nce a um do
rtence a um d
nentes da tax
oximação do
tinge o seu va
caso das regr
caso das regr
mentos que co
o rácio entre
vo
– elemento i
AS DE ALVEN
multiplicador)
elo multiplicad
os elementos
dos elementos
xa de deform
tensor da tax
lor mínimo
ras de escoam
ras de escoam
onstituem o c
e a altura e la
NARIA
dor
que
s que
mação
xa de
mento
mento
corpo
rgura

Simbologia e Notações
ix
rp Parâmetro de penalidade para os elementos degenerados r0 Parâmetro de penalidade inicial Vector que contem as componentes do tensor Si Vector que reúne os valores próprios do tensor Si
t Forças de superfície externas (afectadas pelo multiplicador) t Componente tangencialt Espessura da parede
t0 Forças de superfície externas iniciais Forças de superfície externas não afectadas pelo multiplicador
u Campo de deslocamentos Campo de deslocamentos inicial Tensor da taxa dos deslocamentos Campo das velocidades
; Campo das velocidades das duas regiões delimitadas pela fronteira Γd Campo das acelerações x Ponto de tensão x Ponto do interior do corpo Maiúsculas gregas
Ω Domínio do corpo Ω Volume do corpo Γ Superfície do corpo Γd Região da superfície Γ onde ocorrem as descontinuidades do campo de velocidade Γu Região da superfície Γ, representada pelas condições de fronteira cinemática Γσ Região da superfície Γ, representada pelas condições de fronteira estáticas Δp Volume do elemento degenerado Ψ Ângulo que a superfície de deslizamento faz com a horizontal Ψ Ângulo que relaciona a F2 com a F1
Minúsculas gregas λ Multiplicador λ Parâmetro de carregamento não dimensional λc Mínimo valor da região superior do multiplicador da carga de colapso (cedência)
Valor experimental do λ no colapso Ultimo valor de λ Valor da região superior de ε (Campo das) Deformação εe Deformação elástica εp Deformação plástica εT Deformação total plástica
Componentes contínuas da deformação plástica Taxa das deformações Tensor de deformação plástica Campos da taxa de deformação plástica Tensor da taxa de deformação elástica Taxa de deformação plástica
, , Tensores principais da taxa de deformação (elástica)
, , Tensores principais da taxa de deformação plástica μ Vectores colectores dos multiplicadores de Lagrange μk Valor do vector μ na iteração K μλ Vectores colectores dos multiplicadores de Lagrange na cedência α Multiplicador plástico σ Tensão (normal) σ Estado de tensão finalσ Tensor de tensão σc Ponto de tensão principal no estado de colapso

x
,
Collapmu
Con
CP
σi Ponσt Pon
σAVg Ten Ten Ten
Tenσn Tenσt Ten Ten Ten
Tenσx Tenσy Tenσy Ten
, Tenσ1 Tenσ2 Ten
Est, Ten
τ Tenτ Ten
á Ten
á Tentru
τxy Tenυ Coe Com Camγ Disγ Pes
γB.R. PesγE.B.R. Pes
γ1 Plaγ2 Pla
Velρ Parφ Ângθ Ângθ Ângθ Âng
Ângδ Esp Ab
ACI Amalt Alt
CEN Compse load ultiplier Mu
comp Larnvert -n Pro
CPU CenPU Time Tem
DEC DeUn
nto de tensãonto de tensãonsão média (cnsão horizont
nsão horizont
nsão horizontnsão normal nnsão de tracçãnsão vertical t
nsão vertical f
nsão vertical vnsão na direcçnsão de cedênnsão na direcçnsores principnsão principalnsão principaltado de tensãonsores principnsão de corte nsão de corte
nsão de corte
nsão de cortncatura ao consão de corte eficiente de Pmponentes dempo das velocstorção so específico dso específico dso específico eno de carregano de carregalocidade do prâmetro adimgulo de atritogulo de inclinagulo de inclinagulo entre a jugulo θ limite epessura do ele
reviaturas/Trmerican Concreura dos tijolosmité Europeu
ultiplicador de
rgura dos tijolograma que pentral Processimpo de cálculpartamento iversidade No
o principal no o principal no centro do círcual total equiva
al fixa equiva
al variável eqna junta; ão aplicada à total equivale
fixa equivalen
variável equivção x ncia ção y pais da tensãol vertical aplicl horizontal apo inicial pais da tensão(na junta) total equivale
máxima do c
e máxima doorte
Poisson escontínuas dcidades relativ
dos blocos do betão refoequivalente damento verticamento horizoonto O ensional que interno do mação do planoação da gravidunta horizontem que o colaemento degen
raduções ete Institute (s de Normaliza
e colapso
os ermite a convng Unit (Unidlo despendidode Engenharova de Lisboa
CARGAS D
estado inicialestado que orulo de Mohr)alente aplicad
lente aplicada
uivalente apli
alvenaria nte aplicada n
te aplicada na
valente aplicad
o cada ao painelplicada ao pai
o no estado de
ente aplicada
ritério de Már
o círculo de
da deformaçãovas na frontei
orçado o betão reforcal ontal
corresponde material o de suporte ddade tal e a tensão apso da parednerado
Instituto de B
ação
versão do formade de proceso pelo CPU ria Civil, da (http://www.
DE COLAPSO
rigina a trunca
da na estrutur
a na estrutura
cada na estru
na estrutura d
a estrutura da
da na estrutur
l nel
e colapso
na estrutura
rio Vicente da
Mohr no est
o plástica ira dos eleme
rçado
ao rácio entre
da parede
vertical e foi observad
Betão America
mato Ansys passamento cen
Faculdade .dec.fct.unl.pt
O DE SISTEMA
atura
ra da alvenaria
a da alvenaria
utura da alven
da alvenaria co
a alvenaria co
ra da alvenari
da alvenaria c
a Silva
tado de tens
ntos
e a altura e a
do
ano)
ara o formatontral)
de Ciências t/)
AS DE ALVEN
a com θ=90° com θ=90°
naria com θ=90
om θ=90° m θ=90° a com θ=90°
com θ=90°
são que origi
largura da par
SUBLIM3d
e Tecnologi
NARIA
0°
ina a
rede
a da

Simbologia e Notações
xi
Dismesh Programa que permite a criação da malha das juntas no formato Ansys DOF Degrees of freedom (Graus de liberdade)
Elapsed Time Duração total do cálculo Elem_altura Número de elementos existentes na altura de cada tijolo Elem_comp Número de elementos existentes na largura de cada tijolo
erro Erro de compatibilidade esp Espessura dos tijolos
FASE 1 Minimização global FASE 2 Minimização local
FRP Fiber‐Reinforced Polymer (Polímero reforçado por fibras) Geocluster Sistema de processamento em paralelo
máx. Máximo Max. Compatibility
error Maximum compatibility error (Erro de compatibilidade máximo)
MED Método de Elementos Discretos ou Método de Elementos Distintos MEF Método de Elementos Finitos
nº fiadas Número de fiadas nº tijolos por fiada Número de tijolos que constituem cada fiada
nrblocosi Número de tijolos inteiros existentes em cada fiada nrlinhasi Número de fiadas ímpar nrlinhasp Número de fiadas par
nr. of total iter. Number of total iteration (Número total de iterações) offseti Largura do primeiro tijolo da fiada ímpar offsetp Largura do primeiro tijolo da fiada par
p.e.e.d.v.b.r Peso específico equivalente e distribuído da viga de betão reforçado Prep_calc3d Comando final que permite a conclusão do ficheiro gerador de malhas
Script_masonry_2d Programa que permite a criação da malha dos tijolos no formato Ansys
SUBLIM3d Strict Upper Bound Limit analysis code (http://www.dec.fct.unl.pt/projectos/SUBLIM3d/)
SW Shear Wall (Parede de corte) TOL Tolerância
2D Bidimensional 3D Tridimensional
Símbolos matemáticos Domínio real de uma função com duas variáveis Reais positivos Reais positivos incluindo o zero · Produto contraído (ou contracção dupla) entre dois tensores da mesma ordem: Produto interno : Que verifique : Resulta
A equação A simplifica‐se na equação B, através da condição C
Congruente |…| Módulo Mínimo da função A
tr(…) Traço - Vector [-] Matriz -T Transposta de uma matriz
--1 Inverso de uma matriz
A(x,…,y) Função A que depende das variáveis x, …, y … , Derivada parcial da componente i de um vector em função da j‐ésima variável
Derivada parcial da componente i de um vector em função da j‐ésima variável

xii
, Na
Inte
Som
Sist
bla ‐ Gradient
egral no corpo
matório de i a
tema de equa
te da função e
o i em ordem
até f
ações, formad
CARGAS D
escalar A: A
a x
o pelas equaç
DE COLAPSO
x, y
ções A e B
O DE SISTEMA
,
AS DE ALVENNARIA

xiii
Índice Agradecimentos ............................................................................................................................... i
Resumo .......................................................................................................................................... iii
Abstract .......................................................................................................................................... v
Simbologia e Notações .................................................................................................................. vii
Índice de Figuras .......................................................................................................................... xvii
Índice de Tabelas .......................................................................................................................... xxi
1 Introdução ............................................................................................................................... 1
1.1 Motivação ................................................................................................................................ 1
1.2 Objectivo ................................................................................................................................. 2
1.3 Metodologia ............................................................................................................................ 3
1.4 Organização do documento .................................................................................................... 6
2 Definição do Problema ............................................................................................................. 7
2.1 Considerações iniciais ............................................................................................................. 7
2.2 Caracterização dos Sistemas de alvenaria .............................................................................. 7
2.3 Comportamento do Material ................................................................................................ 12
2.3.1 Fundamentos da teoria da elasto‐plasticidade ................................................................. 12
2.3.1.1 Parcela elástica .................................................................................................................. 12
2.3.1.1.1 Definição/Solução do tipo de problema ....................................................................... 13
2.3.1.2 Parcela plástica .................................................................................................................. 15
2.3.2 Leis constitutivas ............................................................................................................... 20
2.3.2.1 Definição/Considerações do tipo de problema ................................................................ 20
2.3.3 Estados planos ................................................................................................................... 21
2.4 Métodos de Resolução do problema .................................................................................... 22
2.4.1 Análise Limite .................................................................................................................... 24
2.4.1.1 Teorema da região inferior (Teorema Estático) ................................................................ 25
2.4.1.2 Teorema da região superior (Teorema Cinemático) ......................................................... 26
2.5 Funções de dissipação ........................................................................................................... 27
2.5.1 Critério de Mohr‐Coulomb ................................................................................................ 28
2.5.2 Critério de Armando Nunes Antão .................................................................................... 29
2.5.3 Critério de Mário Vicente da Silva ..................................................................................... 31
3 Ferramenta de cálculo ........................................................................................................... 35
3.1 Formulação numérica ........................................................................................................... 35
3.1.1 Modelação das descontinuidades (Elementos de junta) .................................................. 37

xiv
3.1.2
3.2 A
3.2.1
3.2.2
3.2.2.1
3.2.2.2
3.2.2.3
4 Valida
4.1 Cr
4.2 Cr
5 Aplicaç
5.1 Pr
5.1.1
5.1.2
5.1.3
5.2 Ex
5.2.1
5.2.1.1
5.2.1.1.1
5.2.1.1.2
5.2.1.1.3
5.2.1.1.4
5.2.1.1.5
5.2.1.2
5.2.1.2.1
5.2.1.2.2
5.2.1.2.3
5.2.1.2.4
5.2.1.2.5
5.2.2
5.2.2.1
5.2.2.2
5.2.2.3
5.2.2.4
5.2.2.5
Elementos
lgoritmo de
Minimizaçã
Minimizaçã
Critério de
Critério de
Critério de
ção .............
ritério de Ar
ritério de Má
ções Numér
rogramas .....
Bases SUBL
Desenvolvim
Criação do
xemplos .......
Exemplos d
Exemplo 1 .
Definição
Resultad
Simplifica
Resultad
Discussão
Exemplo 2 .
Definição
Resultad
Simplifica
Resultad
Discussão
Exemplo de
Definição ...
Resultados
Simplificaçõ
Resultados
Discussão d
de Corpo Ríg
programaçã
ão global (FA
ão local (FASE
Mohr – Coul
Armando Nu
Mário Vicen
..................
mando Nune
ário Vicente
icas ............
....................
LIM3d ..........
mento do pr
ficheiro de c
....................
de aplicação
....................
o ..................
os experime
ações/Consi
os SUBLIM3
o dos resulta
....................
o ..................
os experime
ações/Consi
os SUBLIM3
o dos resulta
e aplicação d
....................
experiment
ões/Conside
SUBLIM3d ..
dos resultado
gido .............
o matemátic
SE 1) ............
E 2) ..............
lomb [25] ....
unes Antão ..
te da Silva ...
...................
es Antão ......
da Silva .......
...................
....................
....................
rograma gera
comandos po
....................
de critérios s
....................
....................
entais/Propo
derações .....
d ..................
ados .............
....................
....................
entais/Propo
derações .....
d ..................
ados .............
de critérios co
....................
ais/Proposta
rações .........
....................
os .................
CARGAS D
....................
co ................
....................
....................
....................
....................
....................
...................
....................
....................
...................
....................
....................
ador da malh
ossibilitando
....................
sem truncatu
....................
....................
stas .............
....................
....................
....................
....................
....................
stas .............
....................
....................
....................
om truncatu
....................
as .................
....................
....................
....................
DE COLAPSO
....................
....................
....................
....................
....................
....................
....................
...................
....................
....................
...................
....................
....................
ha ................
a geração d
....................
ura ...............
....................
....................
....................
....................
....................
....................
....................
....................
....................
....................
....................
....................
ura (Exemplo
....................
....................
....................
....................
....................
O DE SISTEMA
....................
....................
....................
....................
....................
....................
....................
...................
....................
....................
...................
....................
....................
....................
e malhas .....
....................
....................
....................
....................
....................
....................
....................
....................
....................
....................
....................
....................
....................
....................
o 3) ...............
....................
....................
....................
....................
....................
AS DE ALVEN
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
NARIA
..... 39
..... 40
..... 41
..... 43
..... 44
..... 45
..... 47
..... 51
..... 53
..... 58
..... 63
..... 63
..... 63
..... 64
..... 66
..... 67
..... 67
..... 68
..... 68
..... 69
..... 71
..... 75
..... 78
..... 80
..... 80
..... 82
..... 85
..... 88
..... 93
..... 96
..... 96
..... 98
... 101
... 105
... 118

Índice
xv
5.2.3 Considerações finais ........................................................................................................ 121
6 Conclusões e Desenvolvimentos futuros .............................................................................. 123
6.1 Conclusão ............................................................................................................................ 123
6.2 Desenvolvimentos futuros .................................................................................................. 124
Bibliografia .................................................................................................................................. 125

xvi

xvii
Índice de Figuras Figura 2.1 – Sistemas de alvenaria: Exemplos de alvenaria (a) Simples (b) Armada (c) Pré‐esforçada (d) Confinada (adaptada de [20]) ............................................................................................................ 8 Figura 2.2 – Classificação das unidades em relação às características geométricas da respectiva furação: Unidades (a) Maciças; (b) com Furação Horizontal; (c) com Furação Vertical [20] .................. 9 Figura 2.3 – Tipos de alvenaria de pedra: Alvenaria de (a) Cascalho; (b) Blocos sem alinhamento; (c) Blocos com alinhamento [21] .......................................................................................................... 10 Figura 2.4 – Tipos de disposição da alvenaria de tijolos/blocos: Ligação (a) Americana; (b) Inglesa (ou cruzada); (c) Flamengo; (d) Tipo monte; (e) Alternada (ou comum) [21] ..................... 10 Figura 2.5 – Tipos de secção transversal da alvenaria [21] ................................................................... 10 Figura 2.6 – Estratégias de modelação para alvenarias simples: (a) Amostra de alvenaria; (b) Modelação micro detalhada; (c) Modelação micro simplificada; (d) Modelação macro (adaptada de [6]) ............................................................................................... 11 Figura 2.7 – Diagrama tensão‐deformação típico em condições uniaxiais ........................................... 12 Figura 2.8 – Domínio elástico definido pela superfície de Coulomb – Hipótese de tensão plana ........ 13 Figura 2.9 – Definição do tipo de problema .......................................................................................... 14 Figura 2.10 – Fase de descarregamento, no regime plástico ................................................................ 16 Figura 2.11 – Domínio plástico definido pela superfície de cedência de Coulomb – Hipótese de tensão plana ..................................................................................................................................... 17 Figura 2.12 – Caso particular da normalidade (superfície de Cedência de Coulomb) – Hipótese de tensão plana ..................................................................................................................................... 17 Figura 2.13 – Consequência do trabalho plástico máximo: Convexidade [1] ....................................... 18 Figura 2.14 – Dissipação numa superfície de cedência não estritamente convexa [1] ........................ 19 Figura 2.15 – Diagrama tensão‐deformação de um corpo rígido perfeitamente plástico ................... 20 Figura 2.16 – Domínio dos carregamentos admissíveis [1] ................................................................... 25 Figura 2.17 – Critério de cedência de Mohr ‐ Coulomb ........................................................................ 28 Figura 2.18 – Representação gráfica da superfície de cedência de Mohr‐Coulomb [1] ....................... 28 Figura 2.19 – Superfície de cedência de Mohr‐Coulomb em duas dimensões – Hipótese de tensão plana ..................................................................................................................................... 29 Figura 2.20 – Critério de cedência proposto em [4] ............................................................................. 30 Figura 2.21 – Comparação do modelo de interface composto[6] com o critério de Armando Nunes Antão[4] ..................................................................................................................... 31 Figura 2.22 – Critério de cedência proposto em [5] ............................................................................. 32 Figura 2.23 – Comparação do critério de Armando Nunes Antão com o critério de Mário Vicente da Silva ........................................................................................................................... 33 Figura 3.1 – Interface de dois elementos 2D formado por elementos degenerados [1] ...................... 37 Figura 3.2 – Fronteira com descontinuidades entre dois elementos adjacentes [1] ............................ 38 Figura 3.3 – Graus de liberdade de um corpo rígido [1] ....................................................................... 39 Figura 3.4 – Implementação do algoritmo de minimização de Uzawa [1] ........................................... 41 Figura 3.5 – Zonas que definem o espaço auxiliar, Cc, no critério de Armando Nunes Antão ............. 46 Figura 3.6 – Zonas que definem o espaço auxiliar, Cc, no critério de Mário Vicente da Silva .............. 48 Figura 4.1 – Exemplo de validação nº1: Corpo sujeito a cargas uniformemente distribuídas normais à superfície (H e V) ................................................................................................................................... 51 Figura 4.2 – Exemplo de validação nº2: Corpo sujeito a cargas normais (H e V) e tangenciais (C) uniformemente distribuídas ................................................................................................................. 52

xviii
Figura 4.3 –aplicadas noFigura 4.4 –Figura 4.5 –Figura 4.6 –Figura 4.7 –Figura 4.8 –Figura 4.9 –Figura 4.10 Figura 4.11 Figura 4.12 Figura 4.13 Figura 5.1 –uma paredeFigura 5.2 –Figura 5.3 –Figura 5.4 –Figura 5.5 –Figura 5.6 –Figura 5.7 –Figura 5.8 –Figura 5.9 –pelos resultFigura 5.10 Figura 5.11 Figura 5.12 por [12] e pFigura 5.13 por [12] e pFigura 5.14 m=0.4375 nFigura 5.15 m=0.875 noFigura 5.16 Figura 5.17 Figura 5.18 a) Análise liFigura 5.19 Figura 5.20 cedência [3Figura 5.21 Figura 5.22 Figura 5.23 carregamenFigura 5.24 carregamen
– Exemplo deo tijolo supe– Discretizaçã– Resultado o– Resultados – Representa– Representa– Discretizaçã– Resultado– Resultado– Represent– Represent
– Tipo de eleme de alvenari– Ficheiro de – Etapas que – Dados nece– Estrutura d– Tipo de car– Domínio de– Proposta ap– Representatados experim– Represent– Determina– Comparaç
pelos ensaios– Comparaç
pelos ensaios– Dissipaçãonos pontos ρ– Dissipaçãoos pontos ρ=– Geometria– Mecanism– Modos demite 1 b) An– Modo de r– Modelo pr0] ................– Superfície – Parâmetro– Comparaçnto ‐deslocam– Comparaçnto – desloca
e validação nrior (V e C) ..ão do corpo obtido pelo Scomplemen
ação do exemação gráfica dão do corpo obtido pelos complemetação do exetação gráficamentos que ia .................leitura do pdefinem o fiessários pela a alvenaria dregamento de estabilidadepresenta no ação gráfica dmentais, partação gráficaação do númção dos mults experimentção dos mults experimento plástica e m=0.25 e 2.8 do plástica e m0.25 e 2.8 doa da alvenarimos de rotura rotura obtidnálise limite 2rotura obtidoroposto pelo....................de cedênciaos do critérioção dos resulmento experção dos resulamento expe
nº3: Provete ........................................SUBLIM3d ....tares obtidomplo no diagdo critério de.................... SUBLIM3d ..ntares obtidemplo no diaa do critério ddefinem os t....................rograma gericheiro de co1º etapa dodo exemplo 1do exemplo 1e do exemplartigo (adapdos resultadora o caso de ρa da tendêncmero de prociplicadores dtais, para o ciplicadores dtais, para o cmalha deformdo exemplo malha deformo exemplo 1ia de pedra ea experimentdos para par2 [17] ...........o para a pareo método sim....................a hiperbólicao de cedêncialtados obtidorimentais da ltados obtidoerimentais da
CARGAS D
de dois tijolo............................................................os pelo SUBLIrama de Moe cedência d........................................dos pelo SUBgrama de Mde cedência tijolos, as jun....................rador de malomandos queo processo de1 [12] ..........1 (adaptado o 1 no planoptado de [12]os obtidos pρ=1 e m=0.8ia do multipessadores mde cedência ocaso de m=0.de cedência ocaso de m=0.mada obtidas1 .................mada obtidas...................e esquema dtal [27] ........ede SW200 p....................ede SW30 pemplificado de.................... ...................a de Mohr ‐os pelas estimparede de cos pelas estima parede SW
DE COLAPSO
os com junta............................................................IM3d ...........hr ................do exemplo ..........................................LIM3d .........ohr ..............do exemplontas e o linte....................has ..............e permite a ge criação de ....................de [12]) ......o de carregam]) ..................elo SUBLIM3875 ...............licador de co
mais eficienteobtidos pelo.4375 ...........obtidos pelo.875 .............s pelo SUBLI....................s pelo SUBLI....................e carregame....................pela: ....................ela Análise Me análise des........................................Coulomb .....mativas teórcorte SW30 ..mativas teór
W100 .............
O DE SISTEMA
a sujeito a ca...........................................................................................................................................................................................................................el do modelo........................................geração de mmalhas ................................................mento (γ1,γ2)....................3d, pela prop....................olapso ..........e para o exemo SUBLIM3d c....................o SUBLIM3d c....................M3d, para o....................M3d, para o....................ento (adapta.................... ....................MEF [31] ......crevendo o e............................................................ricas com as ....................ricas com as ....................
AS DE ALVEN
argas .................................................................................................................................................................................................................o de ......................................malhas .................................................................) [12] ..............................posta [12] e ......................................mplo 1 .........com os obtid...................com os obtid................... caso de ................... caso de ...................ado de [27]) ................... ......................................equilíbrio na.........................................................curvas de ...................curvas de ...................
NARIA
..... 52
..... 53
..... 54
..... 54
..... 55
..... 57
..... 58
..... 58
..... 59
..... 60
..... 61 ..... 64 ..... 65 ..... 66 ..... 66 ..... 68 ..... 69 ..... 69 ..... 70 ..... 73 ..... 74 ..... 75 dos ..... 75 dos ..... 76
..... 77
..... 78
..... 81
..... 82 ..... 83 ..... 84 a ..... 84 ..... 85 ..... 86
..... 88
..... 89

Índice de Figuras
xix
Figura 5.25 – Comparação dos resultados obtidos pelas estimativas teóricas com as curvas de carregamento – deslocamento experimentais da parede de corte SW200 ......................................... 89 Figura 5.26 – Comparação dos resultados obtidos pelas estimativas teóricas com a curva de carregamento – deslocamento experimental da parede de corte SW250 ........................................... 90 Figura 5.27 – Dissipação plástica e malha deformada obtida pelo SUBLIM3d para a parede de corte SW30 do exemplo2 ............................................................................................................................... 91 Figura 5.28 – Dissipação plástica e malha deformada obtida pelo SUBLIM3d para a parede de corte SW100 do exemplo2 ............................................................................................................................. 92 Figura 5.29 – Dissipação plástica e malha deformada obtida pelo SUBLIM3d para a parede de corte SW200 do exemplo2 ............................................................................................................................. 92 Figura 5.30 – Dissipação plástica e malha deformada obtida pelo SUBLIM3d para a parede de corte SW250 do exemplo2 ............................................................................................................................. 93 Figura 5.31 – Estrutura da alvenaria do exemplo 3 (adaptado de [10]) ............................................... 96 Figura 5.32 – Critério de cedência dos elementos de junta (adaptado de [10]) .................................. 97 Figura 5.33 – Critério de cedência da junta para o caso de tracção uniaxial (adaptado de [10]) ......... 98 Figura 5.34 – Mecanismos de rotura experimentais típicos para os ensaios de compressão biaxial: Compressão (a) uniaxial; (b) biaxial (adaptado de [36]) ....................................................................... 99 Figura 5.35 – Resumo dos modos de rotura para a tracção‐compressão biaxial (adaptado de [37]) 100 Figura 5.36 – Estado de tensão aplicado à alvenaria (círculo de Mohr) ............................................. 102 Figura 5.37 – Carregamento equivalente aplicado na estrutura da alvenaria com θ=90°.................. 103 Figura 5.38 – Comparação dos resultados obtidos pelas estimativas teóricas (SUBLIM3d e [10]) para o painel com θ=90° no ensaio de tracção biaxial ................................................................................... 105 Figura 5.39 – Comparação dos resultados obtidos pelas estimativas teóricas (SUBLIM3d e [10]) para o painel com θ=67.5° no ensaio de tracção biaxial ................................................................................ 105 Figura 5.40 – Comparação dos resultados obtidos pelas estimativas teóricas (SUBLIM3d e [10]) para o painel com θ=45° no ensaio de tracção biaxial ................................................................................... 106 Figura 5.41 – Comparação dos resultados obtidos pelas estimativas teóricas (SUBLIM3d e [10]) para o painel com θ=22.5° no ensaio de tracção biaxial ................................................................................ 106 Figura 5.42 – Comparação dos resultados obtidos pelas estimativas teóricas (SUBLIM3d e [10]) para o painel com θ=0° no ensaio de tracção biaxial ..................................................................................... 107 Figura 5.43 – Comparação dos resultados obtidos pelo SUBLIM3d com os experimentais [36] para o painel com θ=90° no ensaio de compressão biaxial ........................................................................... 108 Figura 5.44 – Comparação dos resultados obtidos pelo SUBLIM3d com os experimentais [36] para o painel com θ=67.5° no ensaio de compressão biaxial ........................................................................ 108 Figura 5.45 – Comparação dos resultados obtidos pelo SUBLIM3d com os experimentais [36] para o painel com θ=45° no ensaio de compressão biaxial ........................................................................... 109 Figura 5.46 – Comparação dos resultados obtidos pelo SUBLIM3d com os experimentais [36] para o painel com θ=22.5° no ensaio de compressão biaxial ........................................................................ 109 Figura 5.47 – Comparação dos resultados obtidos pelo SUBLIM3d com os experimentais [36] para o painel com θ=0° no ensaio de compressão biaxial ............................................................................. 110 Figura 5.48 – Comparação dos resultados obtidos pelo SUBLIM3d com os experimentais [37] para o painel com θ=90° no ensaio de tracção – compressão biaxial ............................................................ 111 Figura 5.49 – Comparação dos resultados obtidos pelo SUBLIM3d com os experimentais [37] para o painel com θ=67.5° no ensaio de tracção – compressão biaxial ......................................................... 111 Figura 5.50 – Comparação dos resultados obtidos pelo SUBLIM3d com os experimentais [37] para o painel com θ=45° no ensaio de tracção – compressão biaxial ............................................................ 112

xx
Figura 5.51 painel com Figura 5.52 painel com Figura 5.53 do exemploFigura 5.54 do exemploFigura 5.55 do exemploFigura 5.56 do exemploFigura 5.57 do exemploFigura 5.58 do exemploFigura 5.59 exemplo 3 cFigura 5.60 exemplo 3 cFigura 5.61 exemplo 3 cFigura 5.62 exemplo 3 cFigura 5.63 exemplo 3 cFigura 5.64
– Comparaçθ=22.5° no e– Comparaçθ=0° no ensa– Dissipaçãoo 3, referente– Dissipaçãoo 3, referente– Dissipaçãoo 3, referente– Dissipaçãoo 3 com θ=0°– Dissipaçãoo 3 com θ=22– Dissipaçãoo 3 com θ=90– Dissipaçãocom θ=0°, re– Dissipaçãocom θ=22.5°– Dissipaçãocom θ=45°, r– Dissipaçãocom θ=67.5°– Dissipaçãocom θ=90°, r– Ensaio de
ção dos resulensaio de tração dos resulaio de tracção plástica e me ao ensaio do plástica e me ao ensaio do plástica e me ao ensaio do plástica e m e σ2=0, refeo plástica e m2.5° e σ2=0, ro plástica e m0° e σ2=0, refo plástica e meferente ao eo plástica e m, referente ao plástica e mreferente ao o plástica e m, referente ao plástica e mreferente ao compressão
ltados obtidoacção – compltados obtidoão ‐ compresmalha deformde tracção bimalha deformde tracção bimalha deformde tracção bimalha deformerente ao ensmalha deformreferente ao malha deformferente ao enmalha deformensaio de tramalha deformao ensaio de malha deformensaio de tr
malha deformao ensaio de malha deformensaio de tr
o sob provete
CARGAS D
os pelos SUBpressão biaxos pelo SUBLssão biaxial ..mada típicas iaxial – Partemada típicas iaxial – Partemada típicas iaxial – Partemada típicas saio de compmada típicas ensaio de comada típicas nsaio de commada obtidasacção – compmada obtidastracção – comada obtidasracção – commada obtidastracção – comada obtidoracção ‐ comes de alvena
DE COLAPSO
BLIM3d com ial ................LIM3d com o....................obtidas peloe I .................obtidas peloe II ................obtidas peloe III ...............obtidas pelopressão biaxobtidas peloompressão bobtidas pelo
mpressão bias pelo SUBLIpressão biaxis pelo SUBLIompressão bs pelo SUBLImpressão biaxs pelo SUBLIompressão bs pelo SUBLIpressão biaxria e suas co
O DE SISTEMA
os experime....................os experimen....................o SUBLIM3d ....................o SUBLIM3d ....................o SUBLIM3d ....................o SUBLIM3d xial ...............o SUBLIM3d biaxial ..........o SUBLIM3d axial .............M3d para osial ................M3d para osiaxial ...........M3d para osxial ..............M3d para osiaxial ...........M3d para osxial ...............nsequências
AS DE ALVEN
entais [37] pa...................ntais [37] par...................para os pain...................para os pain...................para os pain...................para os pain...................para os pain...................para os pain...................s painéis do ...................s painéis do ...................s painéis do ...................s painéis do ...................s painéis do ...................s ..................
NARIA
ara o ... 112 ra o ... 113 néis ... 114 néis ... 114 néis ... 115 néis ... 115 néis ... 116 néis ... 116
... 117
... 117
... 117
... 118
... 118
... 122

xxi
Índice de Tabelas Tabela 2.1 – Função da taxa de dissipação da energia plástica para o critério de Mohr ‐ Coulomb .... 29 Tabela 2.2 – Função da taxa de dissipação da energia plástica para o critério [4] ............................... 30 Tabela 2.3 – Função da taxa de dissipação da energia plástica para o critério [5] ............................... 32 Tabela 4.1 – Principais características da malha ................................................................................... 54 Tabela 4.2 – Tensões aplicadas no corpo e propriedades do círculo de Mohr ..................................... 55 Tabela 4.3 – Principais características da malha ................................................................................... 58 Tabela 4.4 – Tensões principais aplicadas no corpo e propriedade do círculo de Mohr ...................... 59 Tabela 5.1 – Multiplicador de colapso para as várias proporções da alvenaria dos cálculos efectuados ............................................................................................................................... 73 Tabela 5.2 – Erro obtido ao considerar cada multiplicador de colapso ................................................ 74 Tabela 5.3 –Principais características da malha do exemplo 1 para os casos de m=0.4375 e 0.875 nos pontos ρ=0.25 e 2.8 ........................................................................................................................ 76 Tabela 5.4 – Multiplicadores de cedência obtidos pelo SUBLIM3d para os casos de m=0.4375 e 0.875 nos pontos ρ=0.25 e 2.8 do exemplo 1 ................................................................................................. 76 Tabela 5.5 – Carregamento vertical aplicado a cada parede modelo do exemplo 2 ............................ 81 Tabela 5.6 – Comparação da carga de colapso[KN] obtida experimentalmente com a obtida pelas estimativas teóricas............................................................................................................................... 90 Tabela 5.7 – Principais características da malha de cada parede do exemplo 2 .................................. 91 Tabela 5.8 – Principais características das malhas utilizados no exemplo 3 ...................................... 114

xxii

1
Capítulo 1
1 Introdução
1.1 Motivação A motivação para realizar a presente dissertação pode ser enquadrada em duas vertentes
distintas: a pessoal e a científica.
As razões pessoais pelas quais aceitei a proposta de realizar a presente dissertação foram:
• O interesse e a vontade em continuar a contribuir para o desenvolvimento do SUBLIM3d, nomeadamente no tema cargas de colapso de sistemas de alvenaria;
• A transversalidade do tema, da determinação das cargas de colapso, em relação a diferentes áreas da Engenharia Civil (por exemplo: Estruturas, Geotecnia e Construção);
• O gosto e interesse pela programação associada à utilização de métodos de elementos finitos.
No que concerne à vertente científica, o tema apresenta ainda alguns pontos por esclarecer, apresentando assim a possibilidade de conduzir a trabalho inovador e aliciante. Destacam‐se, nomeadamente:
• A dificuldade em simular numericamente a alvenaria, devido a este tipo de estrutura ser um material complexo (composto por unidades, juntas e interfaces unidade/junta) que exibe diferentes propriedades direccionais (resistência e rigidez). Estas propriedades são influenciadas principalmente pelas propriedades dos materiais (unidades e juntas), pela resistência dos interfaces unidade/junta (que assume normalmente um valor muito inferior quando comparado com as unidades e as juntas, assim a presença destes interfaces cria planos de fragilidade ao longo do qual a falha pode iniciar‐se e propagar‐se) e da sua orientação e pelo modo de execução da alvenaria;
• O insucesso dos métodos existentes para estimar a carga de colapso dos sistemas de alvenaria, revelando que se trata de uma área de investigação não concluída, havendo ainda possibilidade para explorar soluções alternativas que permitam ultrapassar as limitações observadas actualmente. Em particular, a utilização dos teoremas da análise limite permitem obter métodos com elevadas potencialidades, mas que têm sido até agora razoavelmente negligenciados;
• A consideração da resistência à compressão da alvenaria na direcção normal à junta horizontal como sendo a única propriedade relevante do material, conduzindo a um estado de compressão triaxial na junta e a um estado de compressão biaxial na unidade. Por isso as estruturas de alvenaria ainda nos dias de hoje, apenas são usadas em compressão, a menos que se use alvenarias reforçadas ou pré‐esforçadas;
• O desprezo da capacidade resistente das paredes não estruturais no cálculo estrutural;
• A inexistência de novas aplicações da alvenaria estrutural, que se deve: o Às razões económicas ‐ Em países desenvolvidos, a alvenaria parece ter perdido
quase completamente a sua função estrutural, para serem usados como um sistema de revestimento ou para preencher paredes não resistentes. Em países em desenvolvimento e países do terceiro mundo a situação é bastante diferente, com a alvenaria estrutural ainda a ser largamente usada;

2
Aprhojesísm
1.2 ObjeDe form
proposto viDEC, SUBLIalvenaria”. determinaç
Para se
• A feque
• O Sse mopodrocond
• Os refodirecon
• O edas
o À falta em reladimensconfirmaceitar
o À educao À falta d
resentam‐se e são compemicas e do ve
ectivo ma sucinta oisa o desenvM3d, com vAssim, nes
ção das carga
compreende
erramenta ne visa o cálcu
UBLIM3d já pretende codelos propodendo resolvhosos, dos cde a ligação,
sistemas deorçada que secção consinforme a dire
estudo ficou‐ paredes no
de desenvolação às regraionamento d
mada pelo faqualquer teoação dos engde conhecim
agora as apetitivas: as paento, os núcl
o objectivo volvimento dvista à sua aste trabalhoas de colapso
er melhor o
umérica SUBulo de limites
permitia o com este trastos apresenver tambémcontactos ena coesão e o
e alvenaria são um meioderada) e ecção consid
‐se pelos casplano, sujeit
lvimento dasas do betão da alvenaria acto que cóoria simplificgenheiros Civmento do com
plicações da aredes resistleos de alven
deste trabade uma ferraplicação na o pretende‐o de sistema
objectivo ap
BLIM3d é funs superiores
álculo de limbalho é desntam uma mm problemasntre corpos, o atrito entre
em que se o não homoganisotrópicoerada);
sos bidimenstando‐as a ca
CARGAS D
s regras de de do aço ‐ Aconduz a umdigos modecativa; vis; mportamento
alvenaria estentes, os panaria pré‐esf
lho encontrramenta numdeterminaç
‐se contribus de alvenar
presentado s
ndamentadaprecisos de c
mites superiosenvolver fumaior aplicabs nas áreas:isto é, todo
e os constitu
foca este egéneo (apreso (apresent
sionais, logoargas estátic
DE COLAPSO
dimensionamA falta de dema necessidarnos, CEN [
o deste tipo
strutural exisainéis de encforçada e os
ra‐se na desmérica de elção de cargauir para a ia.
erão feitos a
a no teoremacargas de co
ores para sistunções de dbilidade do q dos adesivo o tipo de intes formem
estudo são asenta diferenta diferente
o apenas se ccas de peque
O DE SISTEMA
mento deste esenvolvimeade de nova[2] e ACI [3
de estrutura
stentes que chimento paredifícios de
scrição do telementos finas de colapsresolução
alguns esclar
a cinemáticoolapso de est
temas de alvissipação mque os sistevos, das juncomportamm acções me
as paredes ntes propriedes caracterí
considerou oena duração.
AS DE ALVEN
tipo de estrnto das regras pesquisas ] se recusar
a.
ainda nos dra resistir a cpequena altu
ema: “O tranitos existenso de sistemdo problem
recimentos:
o da análise ltruturas;
venaria, mas mais eficientemas de alvetas em matento de inteecânicas bási
de alvenariadades confoísticas mecâ
o comportam
NARIA
rutura ras de que é rem a
ias de cargas ura.
abalho nte no mas de ma da
imite,
o que es (os enaria, teriais erface icas);
a não rme a ânicas
mento

Capítulo 1. Introdução
3
Para se alcançar o objectivo global, é necessário atingir os seguintes sub‐objectivos que o constituem:
• Desenvolvimento da ferramenta numérica, através da introdução de duas novas superfícies de cedência propostas pelos professores Armando Nunes Antão[4] e Mário Vicente da Silva[5] que tentaram incorporar os diferentes mecanismos de rotura, nomeadamente, rotura por tracção, por corte e por compressão. A superfície de cedência proposta pelo professor Armando Nunes Antão é baseada na superfície de cedência considerada por Lourenço[6], em que a recta vertical apresentada na truncatura em tracção é substituída por um círculo. Por outro lado, a superfície de cedência proposta pelo professor Mário Vicente da Silva é também uma superfície de cedência composta, mas neste caso é constituída pelo critério de Mohr‐Coulomb e por uma truncatura horizontal na zona de compressão. Através da utilização destes dois critérios pretende‐se obter melhores resultados do que os apresentados na literatura, porque os critérios existentes não consideram na sua maioria truncatura em compressão e em tracção, e os que consideram apresentam uma forma que não é mecanicamente possível;
• Implementar numericamente as duas funções na ferramenta numérica SUBLIM3d, permitindo assim o cálculo da dissipação de energia das alvenarias;
• Validar a correcta programação dos critérios, através de exemplos simples em que a carga de colapso real seja de fácil determinação;
• Uma vez dispondo da ferramenta de cálculo totalmente operacional, torna‐se imprescindível proceder à análise de um número variado de exemplos numéricos, que permitem avaliar a robustez (garantir a convergência para a maioria das situações), precisão (apresentar o menor desvio possível à solução real), eficiência (apresentar um tempo de cálculo reduzido), desempenho (obter pelo menos tão bons resultados quanto os existentes na literatura) e capacidade dos modelos propostos. Os resultados previstos pelos modelos são comparados com os resultados obtidos numericamente por outros autores e com os resultados experimentais.
1.3 Metodologia Neste subcapítulo apresentam‐se os métodos existentes para as ferramentas de cálculo e para as
suas características: modelação da alvenaria, comportamento do material, resolução do problema da simulação numérica da alvenaria e superfície de cedência.
No que refere às estratégias de modelação da alvenaria, são conhecidos a modelação micro detalhada, onde as unidades e as juntas são representadas por elementos contínuos e onde os interfaces unidade/junta são representados por elementos descontínuos, a modelação micro simplificada, onde as unidades são expandidas, mas continuam a ser representadas por elementos contínuos, enquanto que o comportamento das juntas e dos interfaces é substituído por uma única superfície que é constituída por elementos de junta e a modelação macro ou homogeneização ou modelação contínua (para se obter esta modelação existem dois processos: a homogeneização xy ou a homogeneização yx, que conduzem à obtenção de diferentes resultados), em que o conjunto das unidades, das juntas e dos interfaces é substituído por um compósito [6].

4
Os matexternas o externas, dprimeira facomportam
Os métem análisestais como:
• O mcine
• A aexig
• O mA. C
Por últicedência decritério de csuperfície dcritério de Mproposta poMohr‐CouloW. Page [10superfície dcedência prAntão[4] e critérios deCoulomb.
As falvenaria sã
• A pcinenumunidmomucrít
• A pexeincrjunt
teriais podemcorpo volta deforma‐se ease, até at
mento plástic
odos de resos lineares e n
método da aemático e da
nálise elastoge um custo
método de eCundall [7], q
imo, as supee Drucker ‐ Pcedência de de cedênciaMohr‐Coulomor W. F. Cheomb com um0] que correde cedência hropostas nea superfície
e cedência
ferramentas ão:
proposta apemático do mérica da adades são todelar as juntltiplicadoresicas) e é mai
roposta apreecuta a resoluremental no tas e os inter
m exibir umà forma orie não retortingir a cedo até atingir
olução do prnão lineares.
análise limitea unicidade)
o‐plástica inccomputacio
lementos disque exige um
erfícies de cPrager propoMohr‐Coulo composta mb e um ramen e D. C. Dma pequena sponde a umhiperbólica psta dissertaçe de cedênccompostos
de cálculo m
resentada pmétodo delvenaria, moomadas comtas. Esta pro limite, os mis eficiente n
esentada poução do probqual as unidrfaces aprese
m comportamiginal, ou inerna mais aodência, exib a rotura.
roblema da sNeste traba
e, que é base utiliza técn
cremental, qnal significat
scretos ou mm elevado esf
cedência exissto por D. C.omb, o modepor três ramo vertical prucker [9] cotruncatura e
ma superfícieproposta poção são a sucia propostae apresenta
mais actuais
por P. DeBue análise limodelando a mo rígidas e posta permimecanismos na análise de
or A. W. Pageblema da simdades apresentam um co
CARGAS D
mento elástielástico, em estágio inibe comport
simulação nulho evidenci
seado nos tenicas de opti
que apresenttivo;
método de eforço compu
stentes com. Drucker et elo de truncamos: uma tpara a truncaorresponde em tracção, e de cedêncir H. R. Lotfi uperfície dea por Mário am como b
descritas na
uhan e G. Dmite para aalvenaria cusa a superte obter infode colapso alvenarias d
e (análise demulação numentam um comportamen
DE COLAPSO
ico, em que que o corpcial e ou eltamento elá
umérica da aia‐se a utiliza
eoremas funmização par
ta um proble
lementos disutacional.
m relevância al.[8], o critéatura do intetruncatura eatura em traa um critéria superfíciea composta e P. B. Shing cedência pVicente da ase a super
a literatura p
DeFelice [12a resolução omo um mfície de cedêormações ime a distribu
de grande es
e elementos mérica da alvcomportamento plástico;
O DE SISTEMA
e após a rempo ao ser sulasto‐plásticoástico, e d
alvenaria poação de méto
damentais (a a sua imple
ema de acum
stintos (MED
nesta área ério de cedênerface [6] coesférica em cção, a supeio de cedênce de cedêncipor dois ramg [11]. As noproposta porSilva[5], emrfície de ce
ara a análise
2], que consdo problematerial homência de Mo
mportantes nuição de tencala [13];
finitos não lenaria atravento elástico
AS DE ALVEN
moção das fbmetido a ao, em que depois exibe
odem ser divodos não line
teorema estementação;
mulação de e
D) proposto
são, o critérncia de Ranknstituído pocompressão
erfície de cedcia modificaa proposta pmos inclinadvas superfícr Armando Nm que ambadência de M
e de estrutur
sidera o teoma da simumogéneo, onohr‐Coulomba rotura (comnsões nas se
ineares) [14vés de uma a enquanto q
NARIA
forças acções numa e um
ididos eares,
tático,
erro e
por P.
rio de kine, o r uma o, um dência do de por A. os e a ies de Nunes as são Mohr‐
ras de
orema ulação de as b para mo os ecções
], que nálise que as

Capítulo 1. Introdução
5
• A proposta apresentada por D. J. Sutcliffe et al. [15], que considera a superfície de cedência de Mohr‐Coulomb para as unidades e o modelo de truncatura do interface para as juntas e para os interfaces unidade/junta, sendo que a resolução do problema da simulação numérica da alvenaria é baseada no teorema estático do método de análise limite;
• A proposta apresentada por G. Milani et al. [16], que considera como estratégia de modelação a homogeneização onde o comportamento do corpo é admitido como rígido plástico e o método de resolução do problema da simulação numérica da alvenaria foi a análise limite tanto recorrendo ao teorema cinemático como ao teorema estático;
• A proposta apresentada por A. Orduna e P. B. Lourenço [17], que considera como método de resolução do problema da simulação numérica da alvenaria a análise limite e opta por considerar as unidades como rígidas e as juntas como plásticas sendo que para os interfaces unidade/junta o critério de cedência escolhido foi o de Mohr‐Coulomb;
• A proposta apresentada por A. Zucchini e P. B. Lourenço [18], que escolhe a homogeneização como a estratégia de modelação, executa a resolução do problema da simulação numérica da alvenaria através de uma análise não linear, considerando o material como elástico e os modelos de cedências adoptados foram o de Rankine em tracção e o de Drucker ‐ Prager em compressão;
• A proposta apresentada por P. B. Lourenço [6], que considera a modelação micro simplificada e a homogeneização (com diferentes propriedades direccionais) como as estratégias de modelação da alvenaria, propõe uma superfície de cedência para os interfaces e considera que os materiais apresentam um comportamento plástico;
A ferramenta de cálculo considerada no presente trabalho é o SUBLIM3d [1] que considera a modelação micro simplificada para a modelação da alvenaria, que opta por considerar os materiais como rígido‐plásticos, que se baseia no teorema cinemático do método da análise limite para a resolução do problema da simulação numérica da alvenaria e que considera as seguintes superfícies de cedência: Mohr‐Coulomb, a proposta apresentada por Armando Nunes Antão e a proposta apresentada por Mário Vicente da Silva.

6
1.4 OrgO prese
onde foram‐se os capít
Capítuloem primeiroem seguidauma revisãmétodos detrabalhos mabordagem
Capítuloestudo (SUmatemáticocálculo. Excedência pr
Capítuloexemplos n
Capítuloneste capítude cedêncianumérico etruncatura e teóricos malhadores
Capítulojuntamente
anização ente documem apresentadulos centrais
o 2. Neste cao lugar proc são revistoso bibliográfe resolução dmais relevan).
o 3. O capítUBLIM3d), ino escolhido epõe‐se tamropostas.
o 4. Com o uméricos sim
o 5. Com oulo três exema de Mohr‐Cem que se no resultadodisponíveis
s criados par
o 6. O capíe com algum
do documento encontrdos a motivas da dissertaç
apítulo apresede‐se à cars alguns concfica, na quado problemates no cont
tulo apresenncluindo a fe o modo debém neste
intuito de vmples em qu
o intuito de mplos numéCoulomb, poconsidera oo) em que asna literatu
ra gerar o fich
ítulo apreseas sugestões
mento ra‐se estrutuação, o objecção, cujo con
senta‐se umracterização ceitos sobrel se pretena da simulaçtexto deste
nta resumidformulação incorporar ccapítulo, a
validar os moue a determin
aferir a capricos (dois eorque a influs dois crités soluções oura. Inclui‐sheiro de dad
enta por fims de desenvo
CARGAS D
urado em 6 cctivo e a metnteúdo é sum
a definição rda alvenariao comportade enquadrção numéricatema, desta
amente a fenumérica acorpos rígidoimplementa
odelos propnação da car
pacidade daxemplos numuência da trrios de cedbtidas são coe também dos necessár
m as principolvimentos fu
DE COLAPSO
capítulos. Aptodologia admarizado em
rigorosa do pa (estratégiasamento do mar o leitor a da alvenaracando‐se os
erramenta dadoptada, oos e elementação numér
ostos, apresrga de colaps
s formulaçõméricos, emuncatura nãência propoomparadas cneste tópicio pelo SUBL
ais conclusõuturos.
O DE SISTEMA
pós este capídoptada no tm seguida:
problema ems de modelamaterial e posobre o estria (sendo aps aspectos p
de cálculo uso algoritmo tos de junta rica das dua
sentam‐se neso é fácil.
ões proposta que se consão é relevanostos, devidocom resultadco, a estrutLIM3d.
ões retirada
AS DE ALVEN
ítulo introdutrabalho, seg
m análise. Pação da alvenr último, segtado da artpenas referidprincipais de
sada no prede programna ferramenas superfície
este capítulo
as, apresentasidera a supete e um exeo à influêncdos experimeturação dos
s deste trab
NARIA
utório, guem‐
ra tal, naria), gue‐se e dos dos os e cada
esente mação nta de es de
o dois
am‐se erfície emplo cia da entais s dois
balho,

7
Capítulo 2
2 Definição do Problema
2.1 Considerações iniciais A convenção de sinais geralmente adoptada ao longo deste documento, tanto para as tensões
como para as deformações, será a da geomecânica. Esta convenção considera que a compressão é positiva e que os esforços de corte (tangenciais) são positivos quando provocam a rotação do elemento no sentido horário (para ver as implicações desta convenção consultar [19]). Considerou‐se por outro lado a convenção de sinais da mecânica dos sólidos no capítulo 3, devido a se tratar da convenção utilizada na formulação do SUBLIM3d.
O presente trabalho focou‐se na análise do problema em duas dimensões (2D), por isso as informações contidas em todos os capítulos restringem‐se quase na totalidade ao caso bidimensional.
2.2 Caracterização dos Sistemas de alvenaria Os principais sistemas de alvenaria existentes são: Alvenaria simples (ou não reforçada),
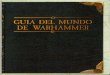
Alvenaria armada (ou reforçada), Alvenaria pré‐esforçada e Alvenaria confinada (ver Figura 2.1). Nos países desenvolvidos, os sistemas de alvenaria perderam quase totalmente a sua função estrutural, porque o betão reforçado e as estruturas de aço tornaram‐se mais competitivas, sendo a resistência o principal factor de concorrência. Assim, nos dias de hoje, o sistema de alvenaria mais usado é o da alvenaria simples aplicada tanto aos sistemas de revestimento, como ao preenchimento de paredes não resistentes. Excepções são os painéis de enchimento para resistir às cargas sísmicas e do vento, os núcleos de alvenaria pré‐esforçada e a alvenaria estrutural usada em edifícios de reduzida altura.

8
FIGURA 2.
A alvenexistindo sesão: as unidou blocos, unidades ircom furaçãunidades cagregados natural, pedas juntas poargamassa‐etc. Por últunidade/unplano de froutros comrotura da al
.1 – Sistemas d
naria simplesempre um indades, as junestas podemregulares), eo horizontalom reduzidacorrentes, bdra artificial,odem ser clacola e argamtimo, neste nidade, consoaqueza na apostos. É aolvenaria.
(a)
(c)
e alvenaria: Ex
s correspondterface entrntas e os intem ser classiem relação à, de unidadea furação, vbetão de ag, argamassa,assificadas emmassa leve), tipo de alveoante as unialvenaria, deo longo deste
xemplos de alve(adap
de a uma soe estes comerfaces. No cificadas em às característes com furaçver Figura 2gregados lev argila, silicam relação aoargila, betumenaria os intdades sejamevido à muites planos qu
CARGAS D
enaria (a) Simpptada de [20])
obreposiçãopostos, assimcaso das unidrelação à sticas geoméção vertical 2.2) e em reves, betão cato de cálcio,os seus constme, cal, relaterfaces pod
m ou não ligao menor rese se podem
DE COLAPSO(b)
(d
ples (b) Armada
de unidadem os materiadades corrensua forma (dtricas da resou de unidaelação aos celular autoc, produtos cetituintes: argção volumétdem ser de das por juntsistência queiniciar e pro
O DE SISTEMA
)
a (c) Pré‐esforç
es ligadas ouais que constntemente chde unidadesspectiva furades maciçasseus constitclavado, adoerâmicos e egamassa (argtrica cimentodois tipos, as, mas actue apresentamopagar as falh
AS DE ALVEN
ada (d) Confina
u não por jutituem a alvehamadas de ts regulares oação (de unis onde se inctuintes (betãobe, vidro, etc.). Por seugamassa coro/cal/areia, unidade/junuam sempre m em relaçãhas, conduzi
NARIA
ada
untas, enaria tijolos ou de dades clui as ão de pedra u lado, rente, cola e nta ou como ão aos indo à

Capítulo 2. Definição do Problema
9
(a) (b)
(c)
FIGURA 2.2 – Classificação das unidades em relação às características geométricas da respectiva furação: Unidades (a) Maciças; (b) com Furação Horizontal; (c) com Furação Vertical [20]
As características globais deste material composto são:
• A simplicidade de execução;
• A estética;
• A solidez;
• A durabilidade;
• A necessidade de pouca manutenção;
• A versatilidade;
• A absorção de som;
• A protecção ao fogo;
• O isolamento térmico;
• A exibição de comportamento heterogéneo e anisotrópico (devido aos interfaces que funcionam como potenciais superfícies de rotura);
• A reduzida resistência à tracção;
• A boa resistência à compressão na direcção normal às juntas horizontais (característica mais relevante), que conduz a um estado de compressão triaxial nas juntas e a um estado de compressão biaxial na unidades.
Os principais factores que influenciam estas características são:
• As características das unidades: Tipo de furação, constituintes, geometria, dimensões e sua relação, e grau de cozedura;
• As características das juntas: Anisotropia, heterogeneidade, porosidade, constituintes, largura, espessura e grau de cura;
• As características dos interfaces: Relação entre as características das unidades e das juntas;
• A relação entre as dimensões das unidades e da alvenaria;
• A existência ou não de preenchimento da junta entre as unidades;
• As diferentes inclinações e orientações das juntas/interfaces;

10
• Os t(ver
FI
FIGU
• Os depunidgraintealve
• A q
• O a
• A id
tipos de dispr Figura 2.3)
GURA 2.3 – Tip
URA 2.4 – Tipos
tipos de spendem da dades estennde espessuerior preencenaria (ver F
ualidade do
mbiente em
dade da Alve
posição da ae alvenaria d
pos de alvenari
s de disposição(c) Flam
ecção transespessura dndem‐se em ra, as unidadchido com pigura 2.5).
FIGUR
trabalho e o
que a alven
naria.
lvenaria, qude tijolos/blo
a de pedra: Alvco
o da alvenaria dmengo; (d) Tipo
sversal da aa parede, istoda a espdes podem spedras irregu
RA 2.5 – Tipos d
o modo de ex
aria se enco
CARGAS D
e dependemocos (ver Fig
venaria de (a) Cm alinhamento
de tijolos/blocoo monte; (e) Alt
alvenaria trasto é, quandessura, peloser usadas apulares, ou c
de secção trans
xecução da a
ntra inserida
DE COLAPSO
m do tipo de gura 2.4);
Cascalho; (b) Blo [21]
os: Ligação (a) Aternada (ou com
adicional (ndo a espesso contrário, penas para acom cascalh
versal da alven
alvenaria;
a;
O DE SISTEMA
alvenaria: A
locos sem alinh
Americana; (b)mum) [21]
no caso tridura da parese a paredeas camadas eo ou com m
naria [21]
AS DE ALVEN
Alvenaria de
hamento; (c) Bl
Inglesa (ou cru
dimensional)ede é reduzie apresentarexteriores semais camad
NARIA
pedra
locos
uzada);
, que ida as r uma endo o as de

Capítulo 2. Definição do Problema
11
Devido às características das alvenarias não reforçadas e aos inúmeros factores que as afectam, torna‐se difícil tanto a simulação do comportamento da alvenaria, bem como a modelação numérica da alvenaria. Sendo a maior exigência, definir o correcto comportamento da alvenaria, através das propriedades individuais dos compostos.
Dependendo do nível de precisão, do campo de aplicação e da simplicidade desejada é possível usar as seguintes estratégias de modelação, ver Figura 2.6:
FIGURA 2.6 – Estratégias de modelação para alvenarias simples: (a) Amostra de alvenaria; (b) Modelação micro detalhada; (c) Modelação micro simplificada; (d) Modelação macro (adaptada de [6])
• Modelação micro detalhada, onde as unidades e as juntas são representadas por elementos contínuos, enquanto que os interfaces unidade/junta são representados por elementos descontínuos e, por isso, corresponde à modelação existente mais detalhada. O objectivo de representar detalhadamente a alvenaria é alcançado através de testes laboratoriais nos materiais e em pequenas amostras de alvenaria, que permitem obter as propriedades de cada composto. Esta modelação necessita tanto para as unidades como para as juntas, das seguintes propriedades: Módulo de Young, Coeficiente de Poisson e opcionalmente propriedades inelásticas. Por outro lado, os interfaces representam um potencial plano de deslizamento/rotura. Esta aproximação é mais eficiente para alvenarias de pequena dimensão, para detalhes de estruturas de alvenaria, para regiões onde haja aberturas de janelas ou de portas, isto é, para zonas onde exista uma forte heterogeneidade de tensões e de deformações;
• Modelação micro simplificada, onde o comportamento das juntas e dos interfaces unidade/junta são colocados em superfícies médias (cada superfície média é constituída por uma junta e por dois interfaces unidade/junta) com espessuras nulas, sendo estas superfícies constituídas por elementos de junta, devido a corresponderem a potenciais linhas de fractura/deslizamento. Por outro lado, as unidades são expandidas (para manter a geometria global inalterada), mas continuam a ser representadas por elementos contínuos. Este tipo de modelação apresenta o mesmo campo de aplicação que a modelação micro detalhada;
• Modelação macro, ou homogeneização ou modelação contínua, onde as unidades, as juntas e os interfaces unidade/junta são substituídos por um compósito anisotrópico (sendo as relações estabelecidas em termos de tensões e deformações médias). Corresponde à modelação que apresenta maior rapidez de obtenção de resultados (devido em primeiro lugar, aos requisitos de memória serem reduzidos e segundo lugar, à fácil geração da malha). Esta modelação deve ser capaz de reproduzir um material ortotrópico, com diferentes

12
resicomimpcomdime de
2.3 ComPara a r
necessário d
2.3.1 FuO comp
exibir componde o corp
2.3.1.1 PA teoria
tensão‐defodeformaçõeresposta deaplicação dde tensão/d
O trabalho equação (2.zero. Basicatensão‐defoconsiderar
istências à tmportamentoplementada mportamentomensões e see deformaçã
mportameresolução dodefinir o com
ndamentportamento dportamento po exibe um
FIGU
arcela eláa da elasticidormação (Fies permaneneste compoa tensão ocodeformação
produzido p.1), onde o vamente a fóormação do todas as co
racção e à co inelásticoem reduzido ortotrópicm aberturasão.
ento do Mo problema dmportamento
tos da teorde um corpoelástico, atécomportam
URA 2.7 – Diagr
ástica dade correspgura 2.7). Ontes (estas dortamento éorre a recupinicial.
pela tensão nvalor nulo apórmula do tmaterial (Figmponentes
compressão o. Não é sdo número, o. Esta apros, isto é, para
aterial da determinao de cada co
ria da elao que respeité atingir a ceento plástico
rama tensão‐d
ponde à teorO comportaeformações reversível, peração total
na fase de cpenas é assurabalho, equgura 2.7), emda tensão e
CARGAS D
ao longo desurpreendendevido à c
oximação é ma zonas onde
ação das caromposto da a
astoplastita esta teoriedência. A pao até atingir
eformação típi
ria que se apamento elássão chamaddado quel das deform
carregamentomido quanduação (2.1),mbora seja lie da deform
DE COLAPSO
e cada eixo dnte que estcomplexidadmais eficiente exista um e
rgas de colapalvenaria sim
icidade a é caracteriartir da cedêa sua rotura
ico em condiçõ
plica no ramstico é caradas de defornum mater
mações, volta
o deve ser so a tensão erepresenta
igeiramente mação. O tra
O DE SISTEMA
do material, ta aproximae intrínsecate para alvenestado homo
pso de sistemmples.
izado por nuência inicia‐s, ver Figura 2
ões uniaxiais
o elástico decterizado pmações elásial elástico ando simples
sempre maioe a deformaça área debmais comple
abalho produ
AS DE ALVEN
bem como ação tenha a de introdunarias de grogéneo de t
mas de alven
uma primeirase a segunda2.7.
e um diagramor não existicas, ), istquando cessmente ao e
or ou igual ação forem igbaixo da curexo no caso uzido pela t
NARIA
o seu sido
uzir o andes ensão
naria é
a fase, a fase,
ma de stirem to é, a ssar a estado
zero, guais a rva de de se ensão

Capítulo 2. Definição do Problema
13
quando o corpo foi inicialmente carregado, vai ser totalmente recuperado na fase de descarregamento, porque o corpo durante esta fase liberta a mesma quantidade de energia mas com sentido oposto.
á d 0 (2.1)
Olhando agora para o que acontece no espaço das tensões principais, onde um ponto de tensão no regime elástico, , é caracterizado por nunca tocar na superfície de cedência do material, como se mostra na Figura 2.8,
FIGURA 2.8 – Domínio elástico definido pela superfície de Coulomb – Hipótese de tensão plana
logo em termos numéricos esta restrição é traduzida pela equação (2.2),
0 (2.2)
isto é, o valor do tensor de tensão, σ, deve cumprir no ponto de tensão com a restrição imposta à função que define o critério de cedência, f. Como se pode observar pela Figura 2.8, o tensor da taxa de deformação elástica, , pode apresentar qualquer orientação, não sendo necessário obedecer à regra da normalidade. Tendo como base a equação (2.1) e a informação contida na Figura 2.8 pode‐
se definir uma nova grandeza, a taxa do trabalho elástico, , que é definida pela seguinte fórmula,
d (2.3)
2.3.1.1.1 Definição/Solução do tipo de problema Um corpo homogéneo, isotrópico e elástico linear ocupa um volume, Ω, com fronteira definida
pela superfície Γ, que o envolve. A superfície Γ é constituída por duas partes complementares (Γu e Γσ), isto é, ˄ . A região Γu, corresponde aos requisitos de fronteira cinemática e a região Γσ é representada pelas condições de fronteira estáticas, onde as forças de superfície externas, t, são definidas. O corpo é sujeito a forças de massa constantes por unidade de volume (distribuídas no interior do corpo), b, e a forças de superfície externas (ver Figura 2.9).

14
A soluçpara cada p
• Das
• Das
• Das
Para a o
• As r
ond
• As r
ão do problponto do inte
s component
, ,
s component
, ,
s component
, ,
obtenção de
relações entr
.
de,
0
0
0
relações de e
.
FIGU
ema para o erior do corp
tes de tensão
, , ,
tes de deform
, , ,
tes do desloc
todas estas
re as deform
0 0
0
0
0
0
equilíbrio (tr
0
URA 2.9 – Defin
caso tridimepo ( ),
o:
mação:
camento:
componente
mações‐deslo
ês equações
CARGAS D
nição do tipo d
ensional, ap, das seguint
es, recorre‐s
ocamentos (s
s):
DE COLAPSO
e problema
enas fica cotes compone
se ao uso das
seis equaçõe
O DE SISTEMA
mpleta comentes:
s seguintes r
s):
AS DE ALVEN
o conhecim
elações:
NARIA
mento,
(2.4)
(2.5)
(2.6)
(2.7)
(2.8)
(2.9)

Capítulo 2. Definição do Problema
15
onde,
, , (2.10)
0 0,0,0 (2.11)
• As relações constitutivas (seis equações):
. (2.12)
onde através da lei de Hooke generalizada, a matriz D (matriz flexibilidade) é obtida por,
00 (2.13)
sendo,
11
1,
1 0 00 1 00 0 1
, 00 0 00 0 00 0 0
(2.14)
em que, E corresponde ao módulo de Young, υ representa o coeficiente de Poisson e G trata‐se do módulo de distorção que é obtido por,
(2.15)
Os três valores referidos anteriormente (E, G, υ) correspondem às constantes elásticas do material. Sendo apenas necessário o conhecimentos de duas dessas constantes para a correcta resolução do problema.
Adicionalmente, as componentes da tensão e do deslocamento devem satisfazer as condições de fronteira geométricas ( ) e as condições de fronteira estáticas ( ·
), que tornam a solução específica para um problema em particular.
2.3.1.2 Parcela plástica A teoria da plasticidade corresponde por seu lado à teoria que se aplica no ramo plástico de um
diagrama de tensão‐deformação (Figura 2.7). O ramo plástico tem início na tensão de cedência e prolonga‐se até à tensão de rotura, assim a tensão de cedência corresponde à transição entre o comportamento reversível e o comportamento irreversível. Sempre que se atinge a cedência, a deformação plástica que se gera não será recuperada por simples descarregamento do corpo, isto é, se reduzirmos a tensão para o seu valor inicial vamos recuperar a deformação elástica que ocorreu para obter o estado de tensão, mas a deformação plástica permanecerá no corpo (Figura 2.10).

16
Assim, aobtida, se scom a defor
sendo esta pode‐se estdeslocamenanáloga maa taxa das d
,
Para deuma relaçã
resolve o ptensão, σ, cdeformação
deformação
suposição dda taxa de d
de σ entãoregras da possibilidadde deformaDe notar quas taxas de
Olhandono regime pqualquer covector da ta
a deformaçãse admitir a hrmação plást
decomposiçtabelecer a entos, u, e o cas mais convdeformações
, , ,
escrever o eso entre a ta
roblema de como resolveo plástica sã
o plástica) e
da hipótese ddeformação
o a hipótese álgebra linede de relacioação plásticaue no espaçodeformação
o agora paraplástico é deombinação daxa de defor
FIGURA 2.10
ão total ( ) hipótese dostica ( ),
ção fulcral pequação (2.7campo das deniente no âs, ,
, , ,
scoamento pxa de deform
não existir ue o problemaão arranjada
e que têm
de Saint‐Vense encontra
de Saint‐Veear)[19]. Maonar espacial, imprimindoo de tensõeso, porque a e
a o que aconefinido por sede tensões mação, bem
0 – Fase de des
que se acums pequenos d
para a aplica7), que repredeformaçõesâmbito do pr
plástico (quemação plást
uma relação a da irreversas numa ma
como valore
nant que as dm alinhadas
enant deixa as a conseqmente as coo‐as no mesms principais nescala dos res
ntece no espe encontrar(σI, σII e σIII
m como as su
CARGAS D
scarregamento,
mulou durandeslocament
ação de todosenta a relaçs, ε. Em alteresente trab
e descreve a ica, , e as
directa entrsibilidade. Asatriz quadra
es principais
direcções pris (se o mater
de ser umaquência prinomponentes mo gráfico, cnão estamos spectivos eix
paço das tenssobre a sup) pode‐se taas compone
DE COLAPSO
, no regime plá
nte o processto, pela som
os os teoremção de comprnativa, podalho, entre o
deformaçãocomponent
re as deformssume‐se quda simétrica
s , , .
ncipais da mrial for isotró
suposição pncipal da hidas tensõeschamado de a comparar xos é diferen
sões principaerfície de ceambém impentes, Figura
O DE SISTEMA
ástico
so de carregma da deform
mas de comppatibilidade e‐se estabelo campo das
o a seguir à ces de tensão
mações plástiue as compoa (como as
Considera‐
matriz de tenópico e se
para ser umpótese de S com as comespaço de tdirectament
nte.
ais, onde umedência do mrimir nesse 2.11. Escolh
AS DE ALVEN
amento, podmação elástic
portamento.entre o camlecer uma res velocidades
cedência) uso, porque nã
icas e o tensnentes da tacomponent
se também,
são e as da mdepender a
ma exigência Saint‐Venan
mponentes datensões princte as tensõe
m ponto de tmaterial, logomesmo grá
heu‐se imprim
NARIA
de ser ca ( )
(2.16)
. Logo po de elação s, , e
(2.17)
sou‐se ão só,
sor de axa de tes da
, pela
matriz penas
pelas t é a a taxa cipais. s com
ensão o para fico o mir

Capítulo 2. Definição do Problema
17
no ponto de tensão, porque enfatiza o facto que a sua direcção é normal à superfície de cedência caso obedeça às regras de escoamento associadas. Caso as tensões aplicadas ao corpo diminuam, de modo que o ponto de tensão se mova para dentro da superfície de cedência então a deformação plástica cessa, permanecendo no corpo apenas as deformações plásticas. Se o corpo voltar a ser recarregado e o ponto de tensão tocar novamente na superfície de cedência, a deformação poderá começar novamente e o vector , será novamente normal à superfície de cedência neste novo
ponto. Esta ideia de normalidade do vector da taxa de deformação em relação à superfície de cedência não é muito intuitiva, mas é muito importante.
FIGURA 2.11 – Domínio plástico definido pela superfície de cedência de Coulomb – Hipótese de tensão plana
Quando o ponto de tensão coincidir com uma singularidade da superfície de cedência (vértice), caso existam, estamos num caso particular da normalidade. Sempre que isto acontece o vector da taxa de deformação plástica pode ser definido por qualquer vector apontando para fora da superfície, localizado dentro do cone que é formado por todos os vectores normais na vizinhança desse ponto, ver Figura 2.12.
FIGURA 2.12 – Caso particular da normalidade (superfície de Cedência de Coulomb) – Hipótese de tensão plana

18
Em tertraduzida p
0
isto é, o vafunção que
Os argucom o estados argumenescrever o p
, ,
onde k reprcomo argumque se podtensões priprincipais. C‐se‐á fixa no
De segu
sempre queencontrar a
onde visuacomprimendeformaçãotaxa do trab
normal à strabalho plá
As outr
• A sadmconvec
mos numériela equação
alor do tensdefine o crit
umentos quedo do corpo ntos são as protótipo de
, ,
resenta uma mentos centde recriar asncipais, masCaso não se o espaço.
uida, define‐
e o corpo salinhado com
0,
almente o tto da projeo fosse colocbalho plástic
superfície deástico máxim
ras duas con
superfície dmissíveis. Esndição presetores, confo
F
icos, a cond(2.18),
or de tensãtério/superfí
e definem o c no início doseis compo
e um critério
,
constante, erais. Pode nãs componens para isso adicione qua
‐se a taxa d
se deforma m as direcçõe
d
traço do precção da tecado em ouco, sendo que
e cedência, mo [22], ver F
sequências d
de cedênciasta consequente em (2.2rme ilustrad
FIGURA 2.13 –
dição do po
o deve cumície de cedên
critério de ceo comportamonentes indide cedência
enquanto f cão ser necestes da tensãé necessárioalquer argum
do trabalho
(considerandes principais)
roduto da ensão na ditro ponto qe esta maxim
correspondeFigura 2.11.
da aplicação
a define obência é fac20) como umo na Figura 2
Consequência
CARGAS D
nto de tens
mprir no ponncia, f.
edência, podmento plásticviduais da m como:
corresponde sário conhecão em qualqo conhecer mento à funç
plástico, ,
do o caso p),
tensão comrecção . Cualquer da smização apen
endo a uma
da taxa do t
brigatoriamecilmente coma restrição2.13.
do trabalho pl
DE COLAPSO
são, , per
nto de tensã
dem ser quaco, mas o mamatriz de te
a uma simplcer todas as quer sistemas respectivção, f, a supe
, que repres
particular do
m a taxa donclui‐se qusuperfície denas será atin
a consequên
trabalho plás
ente um enstatada, mo imposta ao
ástico máximo
O DE SISTEMA
rtencer ao r
ão com a re
se todos os ais apropriadensão. Assim
les função qucomponentea de coordevas orientaçõerfície de ce
senta o trab
o sistema de
0
e deformaçue, se o vee cedência nngida quando
ncia da aplic
stico máximo
espaço convmediante a o produto in
o: Convexidade
AS DE ALVEN
regime plást
strição impo
que tenhamdo candidatom sendo, po
ue tem as tees de tensãoenadas usanões das diredência enco
balho das te
e coordenad
ção represeector da taxnão maximizo , for exte
cação da ta
o são:
vexo de teinterpretaçãnterno entre
[1]
NARIA
tico é
(2.18)
osta à
m a ver o para ode‐se
(2.19)
ensões o dado do as ecções ntrar‐
ensões
das se
(2.20)
nta o xa de zaria a erior e
xa do
ensões ão da e dois

Capítulo 2. Definição do Problema
19
• A taxa da dissipação plástica por unidade de volume, D, definida pelo produto interno das tensões pela taxa de deformação plástica,
, (2.21)
que deriva da própria definição da dissipação plástica (2.21) e da normalidade da taxa de deformação face à superfície de cedência. A taxa de dissipação de energia plástica pode ser reformulada, tendo em consideração (2.18), (2.20), (2.22) e (2.23) de forma a depender apenas das taxas de deformação plásticas [23]. É de salientar no entanto que, mesmo para superfícies não estritamente convexas, caracterizadas por múltiplas hipóteses de estados de tensão associados a determinada taxa de deformação plástica, a dissipação conserva‐se ainda como função unívoca da taxa de deformação. Este facto é ilustrado na Figura 2.14 recorrendo ao critério de Mohr‐Coulomb para um estado plano de deformação.
FIGURA 2.14 – Dissipação numa superfície de cedência não estritamente convexa [1]
A forma numérica mais simples de introduzir a condição de normalidade é definir uma regra de escoamento,
, (2.22)
onde a derivada parcial, ⁄ , implica a derivada com respeito a qualquer componente de tensão a partir do qual a expressão da componente respectiva da matriz da taxa de deformação plástica é obtida e o multiplicador plástico (semelhante a um multiplicador de Lagrange), α, representa a magnitude das componentes da taxa de deformação que será indeterminada a menos que mais informação seja fornecida. A equação (2.22) assegura, como já foi dito anteriormente, que é normal à superfície de cedência, mas se o sistema de coordenadas estiver alinhado com as direcções principais do tensor das tensões então a equação (2.22) pode ser reescrita da seguinte forma,
, , , (2.23)
As equações (2.22) e (2.23) são chamadas de regras de escoamento associadas, atendendo ao facto que as deformações plásticas são associadas directamente com a superfície de cedência. Por outro lado, uma regra de escoamento não associada corresponde a substituir nestas mesmas equações a função que define o critério de cedência, f, por outra função, g. Onde as regras de escoamento não associadas vão geralmente negar muitas das vantagens das condições de normalidade, mas podem ser mais desejáveis para certos tipos de materiais ou teorias mais avançadas. Para um maior aprofundamento sobre as regras de escoamento não associado consultar [19].

20
2.3.2 LeiAs leis c
corpo. Comsua implemter no entfundamentapara esta di
O compfase, exibir fase, onde utilizado pecomportamprincipal cainevitavelmnecessariam
2.3.2.1 DUm cor
superfície ΓNa região Γnulo (condiç
u 0
Por outsuperfície e
Suponhque não sãopor meio dcarregamen
is constituconstitutivas
mo o compormentação, potanto em cais na modeissertação.
portamento um comporto corpo exelo SUBLIM3mento rígidoaracterística
mente de fomente o facto
FIGURA 2.1
Definição/rpo rígido pΓ, que o envΓu, exposta pção de front
em
tro lado, Γσ externas, t, sã
ha‐se que o co afectados da introduçnto que não
utivas s correspondrtamento reaor vezes optaconta que lação preten
de um corptamento rígiibe um com3d correspono perfeitame o facto daorma incono de se ter a
15 – Diagrama t
/Considerperfeitamentolve. A supepelo requisiteira de Diric
é represenão definidas
corpo é submpelo multip
ção de um o são afectad
dem a modeal do corpo a‐se pela simessa simplindida. Apres
po que respedo, até ating
mportamentonde a um cente plásticas deformantrolável, o tingindo o co
tensão‐deform
rações do te plástico erfície Γ é coto de frontehlet):
ntada pelas .
metido a doislicador λ til superiordos pelo mu
CARGAS D
elos utilizadoé de difícil omplificação dficação deventa‐se ape
eita este mogir a cedêncio plástico ataso específio, ver Figuções plásticque signif
olapso da es
mação de um co
tipo de pocupa um vonstituída poira cinemáti
condições d
s grupos de R+). Estes
r à letra quultiplicador.
DE COLAPSO
os para simuobtenção, o dessa lei de verá traduzinas a lei rígi
odelo é caraa. A partir daté atingir a co deste mora 2.15. Escas, quandofica que o strutura.
orpo rígido perf
roblema volume, Ω, or duas partca o campo
de fronteira
carregaments dois grupoue define oEm cada gr
O DE SISTEMA
ular o compoque torna acomportamr os aspecdo‐plástica p
acterizado poa cedência inrotura. O modelo, correste modelo ocorreremseu apare
feitamente plás
com fronte
tes complemde deslocam
estáticas, o
tos, os que sos encontramo carregamerupo podem
AS DE ALVEN
ortamento reinda mais dento. Deventos considepor ser a ma
or numa prinicia‐se a segmodelo de cespondendo apresenta se processecimento im
stico
eira definidamentares (Γu mento, u, é
onde as forç
são afectadom‐se diferencento, no casm existir forç
NARIA
eal do ifícil a ndo‐se erados ais útil
meira gunda álculo a um como sarem mplica
a pela e Γσ). fixo e
(2.24)
ças de
os e os ciados so do ças de

Capítulo 2. Definição do Problema
21
massa constantes por unidade de volume (distribuídas no interior do corpo), b, e forças de superfície externas, t (ver Figura 2.9). Considera‐se que as aplicações das forças destes grupos são feitas em condições quase estáticas, permitindo desprezar quaisquer efeitos de inércia.
Para este tipo de materiais, o campo de velocidade não tem de ser contínuo em todo o domínio. Por isso, a taxa da dissipação plástica, pode ser reescrita como,
, , (2.25)
onde, doravante, representa apenas as componentes contínuas da deformação plástica, e simboliza as possíveis componentes descontinuas. Os espaços Cc e Cd são definidos de forma a forçar implicitamente o cumprimento com a regra de escoamento normal, equação (2.22) e (2.23), através do confinamento para esses espaços, da taxa do tensor da deformação plástica admissível e das descontinuidades da velocidade, respectivamente. Do ponto de vista físico, as referidas descontinuidades podem ser observadas como uma variação no campo da taxa das deformações plásticas localizadas numa zona de espessura infinitesimal de material. Deste modo, estas descontinuidades encontram‐se igualmente sujeitas às lei de escoamento (2.22) e (2.23). Em Salençon [23], pode ser encontrado um tratamento matemático rigoroso das descontinuidades no campo das velocidades.
Por último, como os deslocamentos sofridos pelo corpo são muito pequenos quando comparados com a sua menor dimensão, considera‐se como válida a hipótese de linearidade geométrica (sendo igualmente válida a hipótese das pequenas deformações), permitindo assim que as condições de equilíbrio possam ser estabelecidas com base na configuração indeformada da estrutura, isto é, podem‐se desprezar quaisquer efeitos de segunda ordem.
2.3.3 Estados planos Um grande conjunto de problemas é abrangido pelas condições geométricas e mecânicas dos
estados planos de tensão plana e de deformação plana.
As condições de tensão plana correspondem a problemas onde todas as tensões associadas com uma direcção das coordenadas são assumidas como nulas. Se o sistema de coordenadas for arranjado de forma a que a tensão nula da direcção particular seja a direcção z, então a matriz de tensão apresenta o seguinte aspecto:
00
0 0 0 (2.26)
Em contraste, as condições de deformação plana referem‐se a situações onde se assume que todas as componentes de deformação associadas com uma direcção das coordenadas são idênticas a zero. Escolhendo a direcção z para ser a direcção apropriada, a matriz de deformação para as condições de deformação plana pode ser apresenta como:
00
0 0 0 (2.27)
A simplificação para estes estados planos pode ser executada sempre que segundo o eixo escolhido, z, não existe dependência da carga, das propriedades e da geometria do corpo.

22
2.4 MétNo pre
resolução defectuar umtrabalhos co
Começacomplemenanálise nãoprincipais q
O princreduzida, aprocesso dmantém a rhipótese sifundamenta
onde F é o vK é a matrirestrições im
Considealtera, temrelativamen
Tudo sealtera duraprogride na
Emboralineares, a onão linearedevido, prinlinearidade linearidade,caso ocorrao comportanão linearidpermanentelinear matea cedência devida às cdiminuir a r
todos de Resente subcado problemm relato exaonsiderados
a‐se primeirontaridade ser linear atravue a afectam
cípio fundama assumir que deformaçãrigidez que pmplifica mual desta anál
vector das caiz de rigidezmpostas.
erando o pr‐se que a ente rapidame
e altera quante o procesa resolução d
a este proceorigem do coes tendo comncipalmentegeométrica., é o corpo am alteraçõeamento não dade, deve es, como emerial deve ser(encurvamecargas aplicarigidez.
Resoluçãoapítulo aprea da simulaaustivo de tomais marca
o por caractrão descritasvés da sua rigm. Logo, a rig
mental da aue a sua foão. Isto signpossui na suito a formulise a equaçã
argas nodais que depend
incípio fundquação (2.2ente, mesmo
ndo se entrasso de defordo problema,
esso de alteomportamenmo base a o, a alteraçõe. O factor prapresentar ges na rigidez linear é defiser usado t
m casos onder aplicada paento, etc.). Padas, onde
o do problesenta‐se umação numérodos os méntes neste d
terizar a anás em conjuntgidez sendo,gidez não é c
nálise linearrma e as pnifica que, dua forma indlação do proão (2.28),
s, d por seu lade para além
damental da8) apenas éo para grand
a na análisermação. Ass, executada a
ração da rignto não lineaorigem da nes na formaincipal paragrandes defodevido princnido como ntanto em sie as deformaara situaçõesPor último, dependendo
CARGAS D
lema ma revisão rica da alvetodos existeomínio.
álise linear eto. A análise, a forma doconstante à m
r correspondropriedadesdurante todoeformada anoblema bem
ado é o vectm da geome
análise lineé resolvida ues modelos.
não linear, im, a matrizatravés de u
gidez seja coar pode ser dnão linearidaa, o comportreconhecer ormações qucipalmente anão linearidatuações ondções geradas em que se a origem dao da forma
DE COLAPSO
bibliográficaenaria. Esta entes, mas a
e a análise linear distin material e omedida que a
de, no casos do materiao o processntes de se sm como a su
or dos desloetria e das p
ear, de queuma vez. Est
atendendo z K deve ser m processo
omum a toddiferente. Asade. Caso otamento nãoque estamoue são visívea alterações nade materialde o carregs são muito pretenda exa alteração de aplicaçã
O DE SISTEMA
a dos princiapresentaçã
antes fornec
não linear, qngue‐se fundo próprio maa estrutura s
o da alteraçãal não se also de deformujeitar ao caua solução.
camentos nopropriedades
a rigidez dte tipo de a
a que a rigidactualizada iterativo.
dos os tiposssim, classificocorram alteo linear é des neste casoeis a olho nunas propried. Onde este amento origelevadas. Asxplicar o comda rigidez pão, pode ta
AS DE ALVEN
pais métodoão não precer uma idei
que devido amentalmenaterial os facse deforma.
ão da rigidelteram duramação, o marregamentoSendo a eq
odais e por ús do materia
o modelo nnálise é reso
dez neste caà medida q
s de análisecam‐se as anerações na refinido como particular du. Por outrodades do macaso particugine deformssim, a análismportamentopode tambénto aument
NARIA
os de tende ia dos
à sua nte da ctores
ez ser nte o
modelo o. Esta uação
(2.28)
último al, das
não se olvido
aso se que se
es não nálises rigidez o não da não o lado, terial, lar da
mações se não o após m ser tar ou

Capítulo 2. Definição do Problema
23
Como ilação da análise linear e não linear, conclui‐se que a análise linear assume‐se como uma ferramenta mais prática, mas que apenas pode ser aplicada a materiais elásticos e que por seu lado a análise não linear apresenta uma elevada complexidade na formulação do problema e exibe um tempo de solução elevado, razões pelas quais mesmo hoje em dia, os engenheiros se encontram relutantes em usar análises não lineares.
Dentro da análise não linear existe o método de elementos discretos ou método de elementos distintos (MED) proposto por P.A. Cundall [7], que corresponde a modelar o material através de um conjunto de partículas discretas. Estas partículas (podem ser consideradas como rígidas ou deformáveis) são definidas por funções matemáticas e a interacção com as partículas adjacentes são feitas através de forças de contacto. À medida que o conjunto de partículas se deforma, existe a possibilidade de o contacto entre elas ser criado ou extinto, mas movem‐se sempre para posições de equilíbrio de acordo com a lei de Newton.
Os problemas estáticos são resolvidos por uma aproximação dinâmica onde o processo de cálculo é realizado em pequenos intervalos de tempo, para que a perturbação que se gera, não se propague além da vizinhança mais próxima de cada partícula. Esta hipótese optimiza o uso da memória computacional evitando o uso de processos iterativos permitindo, assim, a representação de interacções não lineares entre um grande número de partículas.
Este método apresenta como principal desvantagem o elevado esforço computacional que é exigido, limitando tanto a extensão da simulação como o número de partículas usado. Apresenta como vantagem mais relevante a capacidade de executar um estudo mais detalhado da microdinâmica dos fluxos das partículas que o obtido através de experiências físicas.
De uma forma geral, mas desprezando como simplificação a rotação como grau de liberdade, a formulação deste método resume‐se à aplicação da Segunda Lei de Newton às partículas (que conduz ao cálculo dos deslocamentos) e à aplicação das Leis de força‐deslocamentos aos contactos (que calculam as forças nos nós). Assim cada partícula possui uma equação de movimento descrita da seguinte forma,
, , , (2.29)
onde M e C são respectivamente as matrizes de massa e amortecimento da partícula. A parcela total das forças é composta pelas forças de contacto entre as partículas , pelas forças geradas através dos elementos lineares de vínculo entre duas partículas , pelos esforços internos
que serão nulos caso as partículas sejam consideradas como rígidas e pelas acções externas aplicadas .
Por último, nos métodos das análises não lineares descreve‐se a análise limite, que devido a ser a abordagem que baseia a ferramenta de cálculo proposta para a resolução do problema, será apresentada no seguinte tópico:

24
2.4.1 AnOptou‐s
problema, dseguintes as
• Pos
• Perteo
• Ent
• Sim
• Necpartpar
• Não
Contudlugar, esta materiais geometricaanálise não
A AnálisDeste modoactividade dque conduzcolapso commaioria das
Introdupara o quadomínio a campo de te
,
como tamb
·
onde n reprdo vector d
Assim, cseu colapsoestrutura. Pregião de ca
nálise Limse pela análidado se trataspectos:
ssibilidade da
cepção da rema cinemá
endimento d
mplicidade pa
cessidade deticular impoa as alvenari
o exibe prob
o, o uso da fabordagem perfeitamenmente lineaconsegue pr
se Limite deo, é conveniede determinazirá o sistemm a carga ds situações a
za‐se agora al é possívelcondição deensões que r
0
ém nas front
resenta o veas forças de
considera‐seo, sempre quPara um conarregamento
mite ise limite comar de uma té
a compreens
distribuição ático;
da capacidad
ara ser inseri
e um reduzidortância atenias;
lemas de acu
formulação bapenas podnte plásticoares e apresrever o comp
bruça‐se sobente clarificaação das carma para o ede cedência,cedência oc
o conceito dl obter umae cedência (respeite as c
teiras estátic
rsor da normmassa.
e que um siste para um cnjunto genéos admissíve
mo sendo a écnica promi
são suficiente
da deforma
de de carrega
da numa fer
do número dndendo à dif
umulação de
baseada nese ser aplicados com psentando caportamento
bre a determar o que se ergas de colapestado imine, embora emcorre muito a
de carregamea distribuição(2.18). Entencondições de
cas,
mal exterior à
tema mecânarregamentorico de carris (ver Figura
CARGAS D
abordagem ssora para r
e do mecani
ação última
amento;
rramenta com
e parâmetroficuldade em
e erro;
sta análise tada a materiaplasticidade rregamentosda estrutura
minação das centende compso está totaente de colam alguns caantes do cola
ento admissío de tensõende‐se por de equilíbrio n
à fronteira e
ico atingiu oo admissívelregamentos a 2.16).
DE COLAPSO
escolhida paesolver este
smo de cola
(pelo men
mputacional
os dos materm obter parâ
ambém apreais elásticosassociada,
s monotónica durante o e
cargas de como determinlmente relacapso. Não sesos possam apso do siste
ível, que cores equilibraddistribuição ão só no dom
bj represent
o carregamenpossam oco
, , … .
O DE SISTEMA
ara o métodotipo de prob
pso;
os, nas sec
prática;
riais, aspectoâmetros exp
senta limitaçperfeitameninseridos
cos. Por últiestado pré‐c
olapso de sistação das carcionada come deve confter o mesm
ema.
rresponde a das, que resde tensões mínio,
ta a compon
nto limite, esorrer deform
é possív
AS DE ALVEN
o de resoluçblema, devid
ções criticas
o que se reveerimentais f
ções: Em printe plásticosem prob
imo, este tipolapso.
temas mecârgas de colap
m descobrir a fundir a carmo valor, m
um carregamspeite em toequilibrada
ente na dire
stando imineações plásticvel definir‐se
NARIA
ção do do aos
s), no
ela de fiáveis
meiro s ou a lemas po de
nicos. pso. A carga ga de
mas na
mento odo o s, um
(2.30)
(2.31)
ecção j
ente o cas na e uma

Capítulo 2. Definição do Problema
25
FIGURA 2.16 – Domínio dos carregamentos admissíveis [1]
Como nota da Figura 2.16, observa‐se que a região de carregamentos admissíveis herda as propriedades de convexidade da superfície de cedência e que a carga de colapso do sistema não é influenciada pela trajectória do carregamento, como se pretende ilustrar através das duas trajectórias representadas a tracejado [23].
As três principais ferramentas da análise limite são o teorema estático que conduz à obtenção de um valor inferior ao conjunto das cargas admissíveis, o teorema cinemático que conduz à obtenção de um valor exterior ao conjunto das cargas admissíveis e o teorema da unicidade que leva à obtenção do carregamento limite (sendo que no presente trabalho apenas se irá expor os dois primeiros teoremas). Através destes teoremas pode‐se retirar conclusões sobre a possibilidade de dado carregamento ser passível de ser suportado e consequentemente sobre a carga de colapso de uma estrutura. Deste modo eles constituem uma poderosa ferramenta teórica que permite através de uma forma expedita a obtenção de majorantes/minorantes para as cargas de colapso.
Admite‐se então um sistema mecânico que verifica as limitações e que aceita como válido o princípio do trabalho plástico máximo, logo estas premissas garantem a validade dos teoremas a seguir enunciados:
2.4.1.1 Teorema da região inferior (Teorema Estático) Este teorema diz que se for possível encontrar pelo menos um campo de tensões que seja
admissível, isto é, onde as condições de cedência (2.18) e de equilíbrio (2.30) se verifiquem localmente em todo o domínio e que satisfaça igualmente a condição de equilíbrio (2.31) na fronteira estática, então o carregamento pertence à região dos carregamentos admissíveis (ou suportáveis) e o corpo não colapsará (estas condições permitem considerar campos de tensão que não seriam fisicamente razoáveis em condições normais). Qualquer campo de tensão que satisfaça o critério do teorema da região inferior é chamado de campo de tensão estaticamente admissível. A carga obtida por este teorema, devido a ser um valor interior ao conjunto das cargas admissíveis pelo corpo, será a favor da segurança para motivos de dimensionamento.
A aplicação do teorema estático segue resumidamente as seguintes etapas:
1. Cria‐se como hipótese um campo de tensão estaticamente admissível; 2. Tenta‐se obter os valores particulares da tensão através das condições de equilíbrio, mas
haverá sempre um ou mais destes valores que não serão totalmente especificados; 3. Tenta‐se ajustar as tensões indeterminadas para que a carga aplicada na estrutura seja
maximizada, e a condição de cedência seja satisfeita em todo o domínio; 4. A carga resultante torna‐se na estimativa do teorema da região inferior para a carga de
colapso real da estrutura.

26
2.4.1.2 TPor out
da determiobtenção dum campo potência dis
Assim, trabalho daA deformaçfronteira dopodem ocomecanismosuficientemsatisfaça ocinemáticamcargas adm
No preaplicação de
1. CriaobeDiri
u
e à
onddostrid
2. Calcexp
ond
Teorema dtro lado, esteinação do me um majorade velocidadssipada plast
o colapso das forças exteção plástica cos deslocameorrer lacunasos de deformmente simpleo critério dmente admisissíveis do co
esente docueste teorem
a‐se como hedecer à regchlet (2.24),
0 em
à equação de
em
de represens deslocameimensional (
cula‐se a taxpresso no cap
de,
D
D
da região e modelo promenor carreante da cargdes (não trivticamente e
deve ocorrereriores no cocompatível centos e que s, sobreposiçmação possíves para foro teorema ssível. A cargorpo, será co
mento seráa segue resu
hipótese umgra de esco às condiçõe
m Γ
e compatibili
m Ω
nta o tensorntos e B é (equação (2.
xa do trabalhpítulo 2.3.2.1
D
superior ocura estabeegamento poga de colapsoial) cinemátia potência d
r se, para qorpo for iguacorresponde seja possíveções ou sepaveis, mas o rnecer resulda região
ga obtida poontra a segur
á adoptado umidamente
m campo de oamento noes de compat
dade:
r da taxa deo operador 8));
ho das forças1:
D
D
CARGAS D
(Teoremelecer uma eotencialmeno, logo, o teoicamente addas forças ex
qualquer defal ou superioa uma deforel cinemáticaarações. Meobjectivo cotados úteis.superior é
or este teorerança para m
o teorema as seguintes
velocidadeormal associtibilidade na
e deformaçãpadrão de
s exteriores
DE COLAPSO
a Cinemáestimativa dote não supoorema aqui emissível queteriores.
formação plor à taxa de ermação que amente, isto smo assim, orresponde . Qualquer é chamado ma, devido amotivos de di
aqui exposs etapas:
cinemáticaado (2.23), fronteira cin
o plástica, compatibilid
aplicada ao
O DE SISTEMA
ático) o carregameortável, resuexposto resue minimize a
lástica compenergia de dverifica todaé, nas deforexiste um ga investigarcampo de de campo
a ser exterioimensionam
sto (teorem
mente admà condiçãonemática,
representa dade diferen
sistema, We,
AS DE ALVEN
ento limite atultando assiulta na procu diferença e
patível, a tadissipação intas as condiçõrmações do rande núme aqueles qudeformação de deformor ao conjuntento.
ma cinemátic
issível, logo o de frontei,
o tensor dancial, para o
, de acordo c
NARIA
través im na ura de ntre a
xa do terna. ões de corpo ero de ue são o que mação to das
co). A
deve ra de
(2.32)
(2.33)
a taxa o caso
com o
(2.34)
(2.35)
(2.36)

Capítulo 2. Definição do Problema
27
3. Calcula‐se a taxa de dissipação da energia plástica interna, WD, que dependerá da escolha do campo de velocidade, mas será independente da carga aplicada ao sistema, de acordo com o expresso no capítulo 2.3.2.1:
D D (2.37)
onde D representa a taxa de dissipação de energia plástica interna total por unidade de volume que pode ser expressa apenas em termos de campos cinemáticos e representa a região em que ocorre as descontinuidades do campo de velocidade [23];
4. Relacionam‐se estas duas taxas:
(2.38)
se a equação se verificar então o colapso da estrutura irá ocorrer; 5. Iguala‐se a equação (2.38) e resolve‐se a equação em ordem ao multiplicador; 6. O multiplicador resultante, chamado de multiplicador de colapso (λc), torna‐se na estimativa
do teorema da região superior para a verdadeira carga de colapso da estrutura.
Para compreender a evolução das formulações implementadas no SUBLIM3d basta consultar [1].
2.5 Funções de dissipação Neste tópico são enumeradas todas as funções de dissipação associadas aos critérios de cedência
utilizados neste trabalho, bem como a sua definição do espaço auxiliar, Cc. As expressões aqui adoptadas seguem a definição apresentada por Salençon [23]. As referidas expressões são definidas no espaço das tensões e das deformações principais, pressupondo a seguinte ordenação:
(2.39)
Não se define o espaço Cd (espaço que afecta as descontinuidades no campo de velocidade), porque o modelo numérico proposto impõe‐o implicitamente através dos elementos de junta (elementos colapsados), como será descrito posteriormente.

28
2.5.1 CriA forma
t
onde τ, c respectivamcedência co
Reformtensões prin
em que a transversal
Para o dimensões,
itério de Ma usual do cr
an
e σ repremente e o ânorresponde a
ulando a eqncipais, obtê
1 sin
sua represeequivale a u
FIGURA 2.
presente p exibido na F
MohrCouritério de Mo
sentam a tngulo φ é refea uma linha r
FIGURA 2
quação (2.40êm‐se que,
1 si
entação gráfum hexágono
.18 – Represen
roblema é Figura 2.19.
ulomb ohr‐Coulomb
tensão de cerido como orecta no diag
2.17 – Critério d
0), de forma
n 2 co
fica correspoo irregular, v
tação gráfica d
mais releva
CARGAS D
b é:
corte, a coo ângulo de grama de Mo
de cedência de
a a escrever
os
onde a umaer Figura 2.1
da superfície de
nte a repre
DE COLAPSO
oesão do matrito internohr como se
Mohr ‐ Coulom
r‐se o critéri
a pirâmide e18.
e cedência de M
esentação do
O DE SISTEMA
material e ao do materiapode ver pe
mb
io de cedên
em expansão
Mohr‐Coulomb
o lugar geo
AS DE ALVEN
(
a tensão noal. Este critéla Figura 2.1
ncia em orde
o e a sua s
[1]
métrico em
NARIA
(2.40)
ormal, rio de 17.
em às
(2.41)
secção
duas

Capítulo 2. Definição do Problema
29
FIGURA 2.19 – Superfície de cedência de Mohr‐Coulomb em duas dimensões – Hipótese de tensão plana
Define‐se agora a expressão da dissipação do material em estudo neste tópico bem como a sua definição de espaço auxiliar, usando sempre as componentes das deformações principais (consultar Tabela 2.1).
TABELA 2.1 – Função da taxa de dissipação da energia plástica para o critério de Mohr ‐ Coulomb
Critério D(ε) Cc
Mohr – Coulomb tantr ε tr ε | | | | | |
2.5.2 Critério de Armando Nunes Antão Em comunicação privada [4] foi proposta uma função de cedência constituída por três zonas (em
ordem às tensões principais):
Truncatura à tracção, associado com a rotura por tracção (modo I):
(2.42)
Critério de Mohr – Coulomb, associado com a rotura por corte (modo II):
1 sin 1 sin 2 cos (2.43)
Truncatura à compressão, associado com a rotura por compressão (modo III):
(2.44)
onde e representam a truncatura à compressão e à tracção, respectivamente. Considera‐se que estas truncaturas apenas possuem valores maiores ou iguais a zero, devido a representarem o valor da truncatura em módulo. A representação gráfica deste critério no diagrama de Mohr é representada na Figura 2.20.

30
Define‐auxiliar, usa
TABELA 2.2 –
Critério
Armando Nunes Antão
onde,
tr ε
tr |ε| |
Este critpor Louren2.21):
• Na circ
• Na trun
Estas a(Figura 2.21
• Elimnat
• Reado e
se agora a eando sempre
Função da taxa
Modo(s)
I
II e III
| | |
tério foi basço [6], mas
truncatura àcular;
truncatura ncatura circu
lterações re1):
mina‐se os vureza;
aliza‐se as truestado de te
FIGURA
expressão dae as compone
a de dissipação
1
tr ε
| |
eado nos coconsiderou‐
à tracção, em
à compressular;
ealizadas co
értices da s
uncaturas seensão de um
A 2.20 – Critério
a dissipação entes das de
o da energia plá
| | tr
tr
1 sin
nceitos de tr‐se no prese
m vez de ser
são, em vez
nduzem a u
uperfície de
empre atravématerial;
CARGAS D
o de cedência p
deste critéreformações p
ástica para o cr
D(ε)
r ε tan4
ε | |
tr ε
runcatura doente critério
um corte re
de ser um
um comport
cedência, q
és de círculo
DE COLAPSO
proposto em [4
rio, bem comprincipais, co
ritério [4]
2
| |
o modelo deo diferentes
ecto vertical
a truncatura
tamento do
que são de d
s de Mohr, q
O DE SISTEMA
4]
mo a sua deonsultar Tabe
tr ε
tr ε
interface comodos de t
optou‐se po
a elíptica co
o material m
difícil realiza
que é a melh
AS DE ALVEN
finição de eela 2.2,
Cc
tr |ε|
tr |ε|
omposto protruncatura (F
or uma trunc
onsiderou‐se
mais real, p
ação por par
hor represen
NARIA
spaço
(2.45)
(2.46)
(2.47)
oposto Figura
catura
e uma
orque
rte da
ntação

Capítulo 2. Definição do Problema
31
FIGURA 2.21 – Comparação do modelo de interface composto[6] com o critério de Armando Nunes Antão[4]
Sendo o comportamento do material mais próximo da realidade obtêm‐se melhores resultados, quando comparados com os existentes na literatura, como será demonstrado mais à frente.
2.5.3 Critério de Mário Vicente da Silva Também em comunicação privada [5] foi proposta pelo professor Mário Vicente da Silva um
critério de cedência constituído por três zonas (em ordem às tensões principais):
Truncatura à tracção, associado com a rotura por tracção (modo I):
(2.48)
Critério de Mohr – Coulomb, associado com a rotura por corte (modo II):
1 sin 1 sin 2 cos (2.49)
Truncatura ao corte, associado também com a rotura por corte (modo III):
(2.50)
onde a sua representação gráfica no diagrama de Mohr é apresentada na Figura 2.22.

32
Define‐auxiliar, usa
TABELA 2.3 –
Critério
Mário Vicente da Silva
Este moFigura 2.23)
• Aum
• Elimatrade M
O intuitde tensão ptensões priMohr a trac
se agora a eando sempre
Função da taxa
Modo(s)
I
II e III
odelo tem s):
mentou‐se o
minou‐se a tavés de um cMohr corres
to deste critépara além dancipais ( cejado, ver F
FIGURA
expressão dae as compone
a de dissipação
1
tan
semelhanças
modo II (ass
truncatura à corte recto hpondente à
ério foi de ca truncatura ) não exigura 2.22.
A 2.22 – Critério
a dissipação entes das de
o da energia plá
D| | tr ε
tr ε
2 sin
s ao critério
sociado com
compressãohorizontal a rotura do en
riar uma supà compressãxceda duas v
CARGAS D
o de cedência p
deste critéreformações p
ástica para o cr
(ε) tan
4| |
tr ε
[4], com as
a rotura por
o e definiu‐spassar pela nsaio de com
perfície queão (como no vezes a tens
DE COLAPSO
proposto em [5
rio, bem comprincipais (co
ritério [5]
2
| |2
s seguintes
r corte);
se em vez dtensão de co
mpressão sim
não fosse ficritério [4]),
são de corte
O DE SISTEMA
]
mo a sua deonsultar Tab
tr ε
0 tr ε
alterações (
disso um truorte máxima
mples (Tc).
nita e que p, desde que máxima,
AS DE ALVEN
finição de eela 2.3).
Cc
tr |ε|
tr |ε|
ver Figura 2
ncatura ao a, á , do c
permitisse esa relação en
á , do círcu
NARIA
spaço
2.22 e
corte, círculo
stados ntre as ulo de

Capítulo 2. Definição do Problema
33
FIGURA 2.23 – Comparação do critério de Armando Nunes Antão com o critério de Mário Vicente da Silva
As alterações enunciadas anteriormente, conduzem à criação de um vértice, mas este vértice é de pouca relevância, porque o ângulo entre o modo II e III é muito grande podendo variar entre 130° (para φ=50°) e 170° (para φ=10°), logo o círculo de Mohr crítico é quase coincidente com o vértice criado.
Aparentemente a utilização do critério de Mário Vicente da Silva em condições de deformação plana poderá fornecer melhores resultados que o critério de Armando Nunes Antão se tivermos em consideração que a rotura ocorrerá por corte e não por limite de compressão.

34
CARGAS DDE COLAPSOO DE SISTEMAAS DE ALVENNARIA

35
Capítulo 3
3 Ferramenta de cálculo
Neste capítulo apresenta‐se a formulação final da ferramenta de cálculo que serve como base ao presente documento, SUBLIM3d (para compreender a evolução das formulações do SUBLIM3d até chegar à formulação final basta consultar [1]).
A formulação do SUBLIM3d resolve o problema através de programação matemática não‐linear, utilizando o modelo de elementos finitos misto que considera uma aproximação global para o campo das velocidades e uma aproximação local ao nível de cada elemento para a taxa das deformações. Recorrendo a um método iterativo baseado no algoritmo de Uzawa, procede‐se à determinação da solução óptima através da resolução sucessiva do problema de minimização, utilizando alternada e independentemente as variáveis de decisão relativas às aproximações utilizadas para os diferentes campos. Assim, a estratégia delineada por esta ferramenta de cálculo permite que a não‐linearidade do problema possa ser tratada de um modo simples e expedito, já que se afectam apenas as grandezas locais dos elementos.
3.1 Formulação numérica Como ponto de partida, escalam‐se todos os mecanismos plásticos, através da imposição da
condição (3.1) que obriga a que o trabalho efectuado pelo carregamento variável seja unitário:
1 (3.1)
Esta medida conduz à reformulação do problema de optimização, permitindo que a solução do novo problema corresponda ao parâmetro da carga de colapso óptimo. Deste modo, evita‐se a necessidade de testar diversos parâmetros de carga, resultantes de um algoritmo auxiliar de pesquisa da carga de colapso.
Para qualquer mecanismo cinemáticamente admissível, pode‐se estabelecer para a expressão do multiplicador a equação (3.2), através da introdução da equação (3.1) num corolário do teorema cinemático (substituindo (2.34) em (2.38)):
. (3.2)
assim, a procura do mínimo valor da região superior do multiplicador da carga de cedência, , pode ser delineada através da resolução de um único e simples problema de programação matemático de minimização,
Min , (3.3)
que se encontra sujeito às condições (2.24), (2.33), (3.1) e
(3.4)
que obrigam a obedecer às condições de admissibilidade cinemática.

36
Note‐sedissipada é
Usandoentre os cade minimiza
• As refo
• A ndo t
Resume‐se da taxa datratadas dirproblema (3
Min
sujeito apeparâmetro Lagrange retensões.
Introducampos da t
•
Ondda velo(2.2
•
Ondplás
na cedência
, , ,
∑
∑
onde nE repde Lagrange
e que o tercancelado, u
o agora o mémpos da taxação (3.3), b
condições dorçando a co
ormalizaçãotermo suplem
assim a mina deformaçãrectamente 3.3) obtido p
, , ,
enas a (3.4).de penalidaepresentam
zindo agora taxa de defo
, ,
de no que diforma nodaocidade nod24) e a comp
, ,
de o vector stica que sãoa da função L
∑
presenta o ne,
rmo da desuma vez que
étodo do Lagxa de deformastando para
de compatibonvergência a
definida pomentar de p
imização a uão. Nesta redurante o a
pela formulaç
μλ e μ são ade (escalara grandeza
duas aproxiormação plás
, , T
iz respeito aal convencioal dos elemepatibilidade e
, , , 2
ei junta os o assumidos Lagrangiana
número da m
continuidade ele é descar
grangiano aumação e os caa isso, impor
bilidade (2.3através de u
r (3.1), usanenalidade.
um problemaeformulaçãoalgoritmo dação do Lagra
1
vectores cor positivo). a dual do ca
mações indestica,
, ,
o elemento onal e o veentos finitosentre elemen
, 2 , 2 ,
valores aprcomo constaobtém‐se,
∑
∑
∑
malha dos ele
CARGAS D
e da velocirtado pela p
umentado, qampos da ver‐se na funçã
33), aplicandm termo de
do a técnica
a com restriç, as restriçõa minimizaçãangiano aum
olectores doDe um ponampo da tax
ependentes
em
finito i, a mector di o s. Assim sendntos são gara
, T
oximados daantes.
ementos, μ c
DE COLAPSO
dade na exresente form
ue permite eelocidade, poão objectivo:
do os multippenalização
anterior, m
ções explícitões impostaão do Lagraentado pode
s multiplicato de vista xa de defor
e simultânea
atriz Ni reúnpeso assocido, as condiantidas.
em
as compone
∑
corresponde
O DE SISTEMA
xpressão da mulação de e
estabelecer ode‐se reform:
plicadores d quadrático;
as neste cas
as afectandoas pela condangiano aume ser express
d |
dores de Lafísico os m
rmação, isto
as para a vel
ne as funçõeado, dado ções de fron
entes da tax
∑
∑
ao vector do
AS DE ALVEN
taxa de enelementos fin
a compatibilmular o prob
de Lagrange,
o sem a utili
o apenas o cdição (3.4)
mentado. Assso:
| d
agrange e r multiplicadoro é, o camp
locidade e pa
es de aproximpelos valorenteira cinem
xa de deform
os multiplica
NARIA
nergia nitos.
lidade blema
, μ, e
ização
campo serão sim, o
(3.5)
é um es de o das
ara os
(3.6)
mação es de áticas
(3.7)
mação
(3.8)
adores

Capítulo 3. Ferramenta de cálculo
37
222
(3.9)
e a matriz A0 assume a seguinte forma,
1 0 0 0 0 00 1 0 0 0 00 0 1 0 0 00 0 0 1
2 0 0
0 0 0 0 12 0
0 0 0 0 0 12
(3.10)
De seguida apresenta‐se de forma sintética o modo de incorporar os elementos de junta e os elementos de corpo rígido na implementação da presente formulação.
3.1.1 Modelação das descontinuidades (Elementos de junta) Na teoria da análise limite o campo das velocidades associado aos mecanismos de colapso não é
necessariamente contínuo. Assim foram estudadas duas estratégias que visam a introdução no modelo proposto de descontinuidades no campo das velocidades, correspondentes a fortes gradientes na taxa de deformação plástica.
A primeira estratégia corresponde na introdução de elementos degenerados. Para se permitir a formação das descontinuidades, deve‐se inserir na malha de elementos finitos um trecho de elementos degenerados, com espessura nula, entre os elementos regulares adjacentes. A principal característica destes elementos degenerados é o facto que dois dos nós do mesmo elemento colapsarem e partilharem assim a mesma coordenada, ver Figura 3.1.
FIGURA 3.1 – Interface de dois elementos 2D formado por elementos degenerados [1]
Para assegurar a consistência do modelo, é necessário modificar o parâmetro de penalidade adoptado para os elementos degenerados na malha de elementos finitos, rp, caso contrário, os termos quadráticos da função Lagrangiana (3.8) destes elementos assumiriam o valor de infinito. Para ultrapassar este problema o parâmetro rp deve ser obtido pela seguinte expressão,
∆ , ∆ 0 (3.11)

38
onde Δp reppara os elecomo princpraticamenespecial cuarbitrária leser usados expectáveis
A seguformulaçãodenominaçãporque tam(mista).
Começa(i‐ésima fro
, ,
onde a mavector crepresenta
Como npartilhados 3.2). Por úlatravés do c
onde + e – de forma al
presenta o vmentos regucipal atractivte nenhumaidado, na ineva a um desmoderadams.
unda estraté uma terceão referida mbém consi
a‐se por apronteira inter‐
, ,
triz agrucontém por a velocidade
FIGURA 3
na primeira epelos elemetimo, estabecampo das v
representameatória (Figu
volume do elulares e δ é vo a grandea alteração ntrodução dsnecessário amente e ape
égia, chamaira aproximporque aprodera duas a
oximar o camelementar),
,
upa as funçõseu lado o
e relativa nod
3.2 – Fronteira
estratégia, naentos, havenelece‐se a covelocidades r
m as duas reura 3.2).
lemento dega espessurae facilidade ao código os elementoaumento de nas em regi
ada de formação na frooxima campaproximaçõe
mpo das velo
,
ões de aproxos pesos dadal.
com descontin
as fronteirasndo uma redompatibilizarelativas,
egiões delimi
CARGAS D
generado, r ca do elementde implemedo modelo os degeneragraus de libeiões delimita
mulação híbonteira dos pos tanto noes independ
ocidades rela
ximação, quas respectiv
nuidades entre
s inter‐elemeundância deção do cam
itadas pela f
DE COLAPSO
correspondeto degeneraentação, nãcontínuo. N
ados na malerdade, portadas onde s
brida/mista,elementos.o domínio cdentes de c
ativas na fro
e podem sevas funções
e dois elemento
entares com e nós com aspo das veloc
fronteira Γd,
O DE SISTEMA
e ao parâmetado. Esta esto sendo neNesta estratha, porque tanto, estes singularidade
consiste eEsta estrat
como na froampos disti
nteira dos e
er constantede aproxim
os adjacentes [
descontinui mesmas coocidades entr
sendo a sua
AS DE ALVEN
tro de penaltratégia apreecessário efetégia deve‐sa sua introdelementos des na soluçã
em introduztégia apreseonteira (híbrintos no do
lementos pa
es ou linearemação, cujo
1]
idades, os nóordenadas (Fre dois elem
a ordem esco
NARIA
lidade esenta ectuar se ter dução devem ão são
zir na enta a ida) e omínio
ara
(3.12)
es e o valor
ós são Figura
mentos
(3.13)
olhida

Capítulo 3. Ferramenta de cálculo
39
3.1.2 Elementos de Corpo Rígido Os elementos de corpo rígido podem ser modelados de duas formas distintas:
• Uma forma mais expedita, que consiste em modelar os elementos através da atribuição de elevadas propriedades mecânicas fictícias. Impossibilita‐se assim a deformação plástica destes elementos na formação do mecanismo de colapso óptimo, por estar, necessariamente associada a dissipações incomportavelmente elevadas. Ainda por cima, no ponto de vista numérico, este procedimento é ineficiente, porque não só durante o processo de minimização local estes elementos seriam desnecessariamente processados, como também haveria uma utilização de graus de liberdade supérfluos no sistema global.
• A forma usada na presente formulação, que consiste em associar a cada corpo rígido um nó virtual localizado na origem do sistema de coordenadas global (Figura 3.3). A este nó são
atribuídos seis graus de liberdade: três correspondem a velocidades , , e os
restantes três correspondem a velocidades angulares , , .
FIGURA 3.3 – Graus de liberdade de um corpo rígido [1]
Pode‐se estabelecer uma relação unívoca entre estes graus de liberdade, d, e os graus de liberdade de velocidade de um nó genérico que pertença a um dos elementos que
constituem o corpo rígido, ,
d TTd d T d (3.14)
onde T corresponde à matriz transformação e é definida por,
T1 0 0 0 z y0 1 0 z 0 x0 0 1 y x 0
(3.15)
em que xi, yi, zi são as coordenadas do nó genérico i e os vectores dos graus de liberdade são representados por,
dddd
, d
dddddd
(3.16)

40
Estado virtcon
graucon
Estecálcnecactu
3.2 AlgoNo pres
matemáticoatingir o caminimizaçãaspectos nãboa aproxmultiplicadodos multiplpartir de (3
A tarefa decusto compminimizadoprimeiro m(d.o.f.), d, erelação à tchamadas drepresentadsimultânea linearidade minimizaçãapresentad
a relação pesistema govual. Para tantribuições e
us de liberdnsiderável no
es elementoculo (na mocessitam de ualização do
oritmo desente tópicoo utilizado pampo cinemo de Uzawa ão lineares dimação à mores, μk), veicadores rec.6) e o forne
e obter o exaputacional sor do Lagrangminimiza‐se ae ao multiplitaxa de defde FASE 1 e Fda por um sde todos odo problemo local (Figuo nas subsec
ermite eliminvernativo gll, é necessáelementares,
dade locais os graus de li
os, na formuontagem da se associar s mesmos.
e programo, procede‐selo SUBLIM3mático óptimque exibe udo problemaminimizaçãor Figura 3.4.correndo à dcido por (3.7
acto minimizsignificativo. giano, realizaa função obcador de Laormação doFASE 2, respeistema lineaos elementoa e é executura 3.4). O dcções seguin
nar todos os lobal, substiário que, an, se proceda
dos nós, . berdade do
ulação nummatriz do smultiplicad
mação mate a uma ap3d para simumo do Lagrauma converga. Este algorio da funçã Seguidamediscrepância7),
zador do LagAlternativamado através bjectivo em grange, , os d.o.f., e, ectivamentear de equaçõos da malhatada ao níveldetalhe nectes.
CARGAS D
graus de libituindo‐os, ates de se rea à transform
Este procedcorpo.
érica do SUsistema govores de Lag
temático presentação ular o compoangiano aumência robustitmo passa po Lagrangiante no fim dentre os ca
grangiano, pmente, optoda minimizarelação aospor outro laassim estas. A FASE 1, tões de fácil a. Por outrl do elementessário para
DE COLAPSO
berdade assoalternativamealizar a opemação das g
dimento pod
UBLIM3d, sãvernativo e grange, abre
detalhada dortamento ementado (3.8ta e permitepela obtençãana (associade cada iterampos da tax
para a iteraçãou‐se por oação sucessivs deslocamedo, a seguns duas miniambém chamresolução e o lado, a Fto, por esta ra executar e
O DE SISTEMA
ociados a nómente, pelaseração de egrandezas c
de represen
o ignoradosna minimizaeviando assi
do algoritmoestrutural. Ne8) aplicou‐see diminuir a cão a cada iteada ao valação, realizaxa de deform
ão k, não é bter uma bva da funçãontos dos grda minimizamizações inmada de minencarrega‐sFASE 2, trabrazão tambéestas duas m
AS DE ALVEN
ós do corpo s variáveis despalhamentalculadas pa
ntar uma red
s no procesação local) em o proces
o de programeste caso, pae o algoritmcomplexidaderação, k, deor corrente‐se a actualimação calcul
trivial e exigboa estimativo objectivo, iraus de libeação realiza‐sdependentenimização glose da contribbalha com aém é designaminimizações
NARIA
rígido do nó to das ara os
dução
so de e não so de
mação ara se mo de de dos e uma e dos ização ado a
(3.17)
ge um va do isto é, rdade se em es são obal é buição a não ada de s será

Capítulo 3. Ferramenta de cálculo
41
FIGURA 3.4 – Implementação do algoritmo de minimização de Uzawa [1]
Como nota, apresenta‐se de seguida algumas características de dois parâmetros muito importantes: número de ciclos de relaxação interior, m, e valor inicial do parâmetro de penalidade, r0. O valor do parâmetro m, ver Figura 3.4, pode ser escolhido livremente, mas deve ter sempre em consideração as experiências numéricas conduzidas pelos autores do artigo [24]. Por outro lado, o parâmetro r0 apresenta um papel importante no ritmo de convergência do método iterativo de Uzawa. O seu valor não pode ser muito elevado, o que origina uma evolução muito rápida no processo iterativo podendo tornar‐se num problema mal formulado e pôr assim em risco a convergência (convergindo para um valor da região superior menos preciso do que aquele que o método é capaz de produzir), nem muito reduzido, que provoca uma evolução muito lenta no processo iterativo podendo assim levar a um significativo decréscimo da taxa de convergência.
3.2.1 Minimização global (FASE 1) O problema de minimização presente na FASE 1 do algoritmo de Uzawa é denominado de
minimização global, porque corresponde a uma minimização em relação ao campo de velocidades, que envolve simultaneamente a contribuição de todos os elementos finitos que definem o domínio. Assim, esta minimização tem como objectivo a procura do ponto estacionário que minimiza a função Lagrangiana aumentada em relação às variáveis d e μλ:
, , , 0, , , 0
(3.18)
resultando num sistema linear de equações que se resolve para cada iteração,
, , Ʌ ,
, 1 (3.19)

42
onde,
∑
∑
∑
Ʌ ∑
,
sendo os ve
A matrilogo todas linear de eqnecessária
equação do
,
multiplicandlinear de eq
,
onde
,
sendo,
Para eliminexpressão c
,
Observadefinições qse procedeu
∑
ectores ei e μ
iz do sistemas modificaquações apruma única
o sistema line
do agora de quações (3.19
,
ar a variávecalculável da
,
ando atentaque se apresu a qualquer
μi constantes
ma governativções afectamresentado anfactorização
ear de equaç
Ʌ
ambos os la9) e, por últi
Ʌ
el μλ, basta es velocidade
amente a esentam nestr alteração/a
,
s durante a m
vo, A, mantm apenas onteriormenteo da matriz,
ções (3.19) e
,
ados por mo, resolven
,
então introdes nodais, d:
,
equação prita dissertaçãcrescento.
CARGAS D
minimização.
têm‐se inaltes restantes e. Assim durpara o cálc
m ordem a
,
, introduzinndo em orde
uzir a equaç
ncipal da mo em nada a
DE COLAPSO
erada durantermos da prante todo oculo dos ter
, , sobre
ndo depois aem a μλ obtê
ção (3.26) em
minimização a influenciam
O DE SISTEMA
te todo o pprimeira equo processo itrmos. Resolv
essai a segui
a segunda eqm‐se:
m (3.25), ob
global (3.3m, logo, na p
AS DE ALVEN
processo iteruação do sisterativo, apevendo a pri
nte condição
quação do sis
btendo‐se as
30) vê‐se qpresente fas
NARIA
(3.20)
(3.21)
(3.22)
(3.23)
(3.24)
rativo, stema enas é meira
o,
(3.25)
stema
(3.26)
(3.27)
(3.28)
(3.29)
ssim a
(3.30)
ue as se não

Capítulo 3. Ferramenta de cálculo
43
3.2.2 Minimização local (FASE 2) O problema de minimização presente na FASE 2 do algoritmo de Uzawa é denominado de
minimização local porque corresponde a uma minimização em relação ao campo da taxa de deformações, que é restrita a cada elemento. Esta fase pode ser realizada elemento a elemento de modo independente. Sem entrar em qualquer comportamento específico do material, começa‐se por eliminar todos os termos afectados apenas pelas variáveis desconhecidas d e μ, que nesta etapa são fixos. Depois pode‐se eliminar o domínio de integração, porque se assume como constante a aproximação executada ao campo da taxa de deformação (3.7) para todos os elementos. Tomando em consideração as hipóteses anteriores, que em nada alteram o ponto óptimo, o problema optimizado local pode ser reformulado para cada elemento finito por:
(3.31)
onde,
, , , 2 , 2 , 2 , T (3.32)
que contem as componentes do tensor Si,
(3.33)
Por fim, para se obter uma redução no espaço das variáveis de decisão e consequentemente na complexidade do problema de minimização, converte‐se‐o num problema de minimização equivalente formulado no espaço das deformações principais,
(3.34)
onde o vector guarda as componentes principais da aproximação do tensor da taxa de deformação do domínio,
, , (3.35)
e o vector reúne os valores próprios do tensor Si, que são ordenados de forma decrescente ,
, , (3.36)
A obtenção das componentes do vector , (3.35), realiza‐se através da decomposição da matriz ortogonal,
0 00 00 0
(3.37)
sendo a matriz Yi formada pelos valores próprios normalizados da matriz Si e que se encontra organizada da mesma forma que os vectores próprios.

44
Como oe no termocoeficientescaracterístic
Como simp
As formcritérios deproblema 3
eIII 0 ˄ s
são explicadMohr – Cocritério de A
3.2.2.1 CTendo c
Coulomb, T
L eI, eII
que correspde desigual
A estramínimo da f
L eI, eII
à equação objectivo at
,
Em seguidaver Tabela 2caso contrálocalizado n
|
como se potermos quadefine supe
o primeiro e o intermédios do vector ca que o vec
lificação, nas
mulações adoe cedência nD, bastando
III 0
dos seguidaulomb já seArmando Nu
ritério decomo base aTabela 2.1, po
eI
ponde a umadade lineare
atégia adoptfunção objec
0
(3.40) indeptinge o seu v
a, a solução a2.1. Em casoário, a soluçãna superfície
| | | si
ode constataadráticos sãoerfícies esfér
o último tero cada comp , logo con
ctor
s expressões
optadas parano caso de para isso im
mente de fo encontra imunes Antão e
e Mohr – Ca função da ode‐se espec
eII sIeI
a função objees.
tada consistctivo,
pendentemevalor mínimo
,
anterior é teo afirmativo, ão consiste do domínio
n
ar pela obsero os mesmoricas centrad
mo da equaponente da clui‐se que a
,
s deste tópico
a resolver o deformação
mpor,
orma detalhamplementad de Mário Vi
Coulomb [taxa de disscificar o prob
sIIeII
ectivo nodal
te primeiram
nte das resto, , é dada
estada verifio ponto óptno ponto mpossível [26
rvação da fuos (r/2), pordas no ponto
CARGAS D
ção (3.34) aptaxa de defa solução óp
o não se incl
problema do plana, qu
ada. Note‐sedo, pretendecente da Silv
[25] sipação de eblema de min
eI eII
quadrática
mente em i
trições. A sopor:
cando se elatimo do probmais próximo6],
unção objectrtanto, a equo óptimo sem
DE COLAPSO
presentam uformação é ptima partilh
luem os índic
de minimizaçe correspon
e que na ferendo‐se nestva.
energia plástnimização lo
em R2, sujei
mpor a con
olução sem r
a pertence ablema de mio do ponto ó
tivo (3.40) osuipotencialidm restrições,
O DE SISTEMA
um comportaafectada diha necessari
ces de iteraç
ção (3.34), pnde a um ca
rramenta SUta dissertaçã
tica para o cocal (3.34) em
ta em cada p
ndição, que
restrições pa
ao domínio pnimização loóptimo sem
s coeficientedade da sup . Como o
AS DE ALVEN
amento isotrrectamente amente a m
ção (k, m).
para os diferaso particul
(
BLIM3d o crão implemen
critério de Mm,
ponto a rest
permite ob
ara qual a fu
possível, ocal foi alcanrestrições (
es que afectaperfície da fuo domínio po
NARIA
rópico pelos
mesma
(3.38)
rentes ar do
(3.39)
ritério ntar o
Mohr –
(3.40)
rições
bter o
(3.41)
unção
(3.42)
, nçado, (3.42),
(3.43)
am os unção ossível

Capítulo 3. Ferramenta de cálculo
45
é convexo, o ponto óptimo é necessariamente o ponto do domínio possível mais próximo do centro. De acordo com a restrição (3.38), apenas os dois pontos seguintes são candidatos admissíveis:
0,0 (3.44)
1 sin
1 sin (3.45)
Por fim, a escolha da solução óptima resume‐se nos seguintes passos:
I. Confirmar se os pontos admissíveis pertencem ao espaço auxiliar que confina a taxa do tensor da deformação, Cc, ver Tabela 2.1;
II. Seleccionar entre todos os pontos que verifiquem a condição anterior, o que minimiza a função objectivo (3.40).
Uma discussão mais detalhada sobre esta minimização pode ser encontrada em [26].
3.2.2.2 Critério de Armando Nunes Antão Tendo como base a função da taxa de dissipação de energia plástica para o critério de Armando
Nunes Antão[4], Tabela 2.2, pode‐se especificar o problema de minimização local (3.34):
Modo I:
L eI, eII | | | | tan | | | | sIeI
sIIeII eI eII (3.46)
sendo a regra de normalidade traduzida pela restrição,
| | | | (3.47)
Modo II e III:
L eI, eII | | | | sIeI sIIeII eI eII (3.48)
onde a constante H é obtida, como já foi dito anteriormente, pela equação (2.45). A regra da normalidade deste modo é traduzida pela seguinte restrição,
| | | | (3.49)
A função objectivo, neste caso, corresponde a uma função por ramos, onde em cada ramo se define uma função nodal quadrática, sujeita em cada ponto a restrições de desigualdade lineares.

46
Começasituações
(iii) 0(vii) Associadas função obje
0,0
0,
onde é d
FIGURA 3.5 –
ando por cona conside
˄ 0 ; ˄
a cada umaectivo, atravé
1,1
,
, 0
, 2 tan
1,
,
1,1
designado po
– Zonas que def
ntrapor a ordrar (ver F
(iv) –0 ; (viii)
a das 10 sités da equaçã
,
or coeficient
finem o espaço
denação (3.3Figura 3.5)
00 ˄
tuações antão (3.41):
e de impulso
CARGAS D
o auxiliar, Cc, no
38) com as r): (i) 0 ; (v)
0 ; (ix) eriores são
o activo, sen
DE COLAPSO
o critério de Ar
restrições (3. ˄ 0
˄ ˄
encontrada
do dado por
O DE SISTEMA
rmando Nunes
.47) e (3.49)0 ; (ii)
0 ; (v0 e (x)
s soluções q
r:
AS DE ALVEN
Antão
, restringem ˄
vi) ˄
que minimiz
NARIA
‐se as 0 ;
0 ; 0 .
zam a
(3.50)
(3.51)
(3.52)
(3.53)
(3.54)
(3.55)
(3.56)
(3.57)
(3.58)
(3.59)
(3.60)

Capítulo 3. Ferramenta de cálculo
47
e por seu lado, é designado por coeficiente de impulso passivo, sendo dado por:
(3.61)
Dos candidatos apresentados são rejeitados liminarmente aqueles que não satisfazem a regra da normalidade (Modo I: equação (3.47); Modo II e III: equação (3.49)). Os restantes são testados, escolhendo‐se, eventualmente, aquele que produz o menor valor para a função objectivo definida por ramos (Modo I: equação (3.46); Modo II e III: equação (3.48)).
Como nota, explica‐se o processo de definição da estratégia de minimização escolhida para este critério: Inicialmente tinha‐se optado por uma estratégia semelhante à apresentada no critério de Mohr‐Coulomb (capítulo 3.2.2.1), mas a solução obtida não correspondia à esperada. Depois de vários testes realizados chegou‐se à conclusão que este facto se devia à perda de precisão com a execução das projecções, sendo mais relevante, nas situações próximas das zonas de transição (zonas (i), (iii), (v), (viii) e (x)), conduzindo assim à redução da qualidade dos candidatos a solução. De modo a ultrapassar esta falha, escolheu‐se a estratégia apresentada neste tópico, devido a definir explicitamente todos os candidatos a solução.
3.2.2.3 Critério de Mário Vicente da Silva Tendo como base a função da taxa de dissipação de energia plástica para o critério de Mário
Vicente da Silva[5], Tabela 2.3, pode‐se especificar o problema de minimização local (3.34):
Modo I:
L eI, eII | | | | tan | | | | sIeI
sIIeII eI eII (3.62)
sendo a regra de normalidade traduzida pela restrição,
| | | | (3.63)
Modo II e III:
L eI, eII | | | | sIeI sIIeII eI eII (3.64)
sendo a regra de normalidade traduzida pela restrição,
0| | | | (3.65)
A função objectivo corresponde a uma função por ramos, onde em cada ramo se define uma função nodal quadrática, sujeita em cada ponto a restrições de desigualdade lineares.

48
Como s(3.63) é semequação (3.raciocínio a
Pelo coMohr‐Couloformado prestringem‐(vii) 0 impõe‐se a
• Par
L e
fica
• Parsolu
dev
FIGURA 3.6 –
se pode obsemelhante ao.46) e restriçpresentado
ontrário, paromb: Começpelas compo‐se as sit˄ 0. Prestrição pro
a a situação
eI, eII
ndo esta zon
a a situação ução (ver Fig
0,0
vido a ser o ú
– Zonas que def
ervar, o primo primeiro rção (3.47), pono critério d
a o Modo Içando por conentes printuações a Para cada umovocada pela
(v) o problem
na limitada p
(vi), o problgura 3.6),
único ponto q
finem o espaço
meiro ramo damo da funor isso para de Armando
I e III optoucontrapor ancipais da considerar
ma das 3 sia regra da no
ma de minim
por (ver Figu
ema de mini
que verifica a
CARGAS D
o auxiliar, Cc, no
da função oção objectivo modo I (zoNunes Antão
u‐se por uma ordenaçãoaproximaçãr: (v) tuações antormalidade (
mização local
ra 3.6),
imização loc
a restrição p
DE COLAPSO
o critério de M
bjectivo (3.6vo do critérionas (i), (ii), (o (ver Figura
a estratégiao (3.38) como do tenso0 ˄ 0
teriores, sim(3.65):
l simplificado
sIeI s
al torna‐se n
provocada pe
O DE SISTEMA
Mário Vicente da
62) bem como de Arman(iii) e (iv)) uti3.6).
semelhantem os quadraor da taxa 0 ; (vi) mplifica‐se a
o fica,
sIIeII eI
num problem
ela regra da n
AS DE ALVEN
a Silva
mo a sua resndo Nunes Ailizou‐se o m
e à do critérantes do grde deform0 ˄
equação (3.
eII (
ma com uma
normalidade
NARIA
strição Antão, mesmo
rio de ráfico, mação, 0 e
.64) e
(3.66)
(3.67)
única
(3.68)
e,
(3.69)

Capítulo 3. Ferramenta de cálculo
49
• Para a situação (vii), o problema de minimização local também se torna num problema com uma única solução (ver Figura 3.6),
0,0 (3.70)
devido a ser o único ponto que verifica a restrição provocada pela regra da normalidade,
(3.71)
Debruçando agora sobre a situação (v), que falta resolver, impõe‐se a condição que permite obter o mínimo da função objectivo (equação (3.41) na equação (3.66)) independentemente das restrições (3.67), logo a solução sem restrições para a qual nesta zona a função objectivo atinge o seu valor mínimo, , é dada por,
, 1 , 1 (3.72)
Em seguida, a solução anterior é testada verificando se ela pertence ao domínio possível, equação (3.67). Em caso afirmativo, o ponto óptimo do problema de minimização local foi alcançado,
, caso contrário, a solução consiste no ponto mais próximo do ponto óptimo sem restrições (3.72), localizado na superfície do domínio possível,
(3.73)
Como se pode constatar pela observação da função objectivo (3.66) os coeficientes que afectam os termos quadráticos são os mesmos (r/2), portanto, a equipotencialidade da superfície da função define superfícies esféricas centradas no ponto óptimo sem restrições, . Como o domínio possível é convexo, o ponto óptimo é necessariamente o ponto do domínio possível mais próximo do centro. De acordo com a restrição (3.38), apenas os três pontos seguintes são candidatos admissíveis:
1, 1 (3.74)
0,0 (3.75)
1, (3.76)
Por fim, a escolha da solução óptima resume‐se nos seguintes passos:
I. Confirmar se os pontos admissíveis, até , pertencem ao espaço auxiliar que confina a taxa do tensor da deformação, Cc, ver Tabela 2.3;
II. Seleccionar entre os pontos que verifiquem a condição anterior, o que minimiza a função objectivo (Modo I: equação (3.62); Modo II e III: equação (3.64)).

50

51
Capítulo 4
4 Validação
O processo de validação utilizado para cada um dos critérios propostos (Armando Nunes Antão e Mário Vicente da Silva) foi semelhante, por isso de seguida expõem‐se e explicam‐se os exemplos que definem o processo de validação do presente trabalho:
I. Corpo sujeito a cargas uniformemente distribuídas normais à superfície (H e V), ver Figura 4.1, o processo de validação iniciou‐se com este exemplo devido a ser o que apresenta o raciocínio de resolução mais simples, porque não só o corpo é sujeito a cargas em todas as faces, como se encontra formulado em tensões principais;
FIGURA 4.1 – Exemplo de validação nº1: Corpo sujeito a cargas uniformemente distribuídas normais à superfície (H e V)
II. Corpo sujeito a cargas normais (H e V) e tangenciais (C) uniformemente distribuídas, ver Figura 4.2. Este exemplo foi realizado em segundo lugar porque o corpo se mantém sujeito a cargas aplicadas em todas as faces, mas desta vez, não se encontra formulado em tensões principais, o que irá dificultar a resolução do exemplo (SUBLIM3d e teórica);

52
FIGU
III. ProFigu
FIG
escodos
URA 4.2 – Exem
vete de doiura 4.3:
GURA 4.3 – Exe
a. Considedos intinteracç
b. Consideintuito alvenaralvenar
olheu‐se ters exemplos e
mplo de validaç
s tijolos com
emplo de valida
erando em perfaces unidção entre os erando nestede verificar
ria, testandoria presentes
minar com em alvenaria.
ão nº2: Corpo
m junta suje
ação nº3: Prove
primeiro lugadade/junta, dois materiae caso para r a incorpoo assim a ests nas aplicaçõ
este tipo de .
CARGAS D
sujeito a cargadistribuídas
ito a cargas
ete de dois tijosuperior (V e
ar, a modelaoptou‐se poais que constestratégia doração dos tratégia conões numérica
exemplo de
DE COLAPSO
s normais (H e s
s aplicadas n
olos com junta sC)
ação micro dor este tipotituem a alvee modelaçãoelementos dsiderada na as (ver capít
forma a faz
O DE SISTEMA
V) e tangencia
no tijolo sup
sujeito a cargas
detalhada seo de estratéenaria (tijoloo a micro simde junta (cmodelação ulo 5);
er a transiçã
AS DE ALVEN
ais (C) uniforme
perior (V e C
s aplicadas no
m a considegia para teso e junta); mplificada, capítulo 3.1.dos exempl
ão para o do
NARIA
emente
C), ver
tijolo
eração star a
com o 1) na los de
omínio

Capítulo 4. Validação
53
De modo a se executar correctamente a validação, isto é, para verificar a correcta implementação dos critérios para cada uma das zonas que os constituem (Critério de Armando Nunes Antão: capítulo 3.2.2.2, Critério de Mário Vicente da Silva: capítulo 3.2.2.3), variou‐se tanto o sentido e a intensidade das cargas aplicadas, como a escolha da carga variável, para cada um dos exemplos atrás enunciados.
De seguida para cada um dos critérios propostos, apresenta‐se como modelo, um dos exemplos simples que definem o processo de validação, onde para cada exemplo se executa uma comparação entre os resultados obtidos pelo SUBLIM3d e os resultados analíticos reais obtidos através de cálculos simples.
4.1 Critério de Armando Nunes Antão Para o presente critério, expõe‐se como modelo o exemplo II (ver Figura 4.2), considerando que
a carga variável corresponde à carga V, aplicada na face superior do corpo. De seguida apresenta‐se uma breve, mas precisa, descrição dos dados necessários para a resolução do problema (SUBLIM3d e teórica):
• DIMENSÃO DO CORPO: o 1
• CARGAS: o 2 çã o 1 çã o 5
• PROPRIEDADES DO CORPO: o 10 o 20° o 10 o 50
FIGURA 4.4 – Discretização do corpo
Em primeiro lugar, apresenta‐se a resolução do problema através do SUBLIM3d. Esta resolução inicia‐se pela geração da malha do corpo. Devido à homogeneidade de solução do exemplo, o resultado obtido por uma malha mais e menos refinada será o mesmo, por isso optou‐se por uma discretização do corpo menos refinada, ver Figura 4.4. Na Tabela 4.1 encontram‐se as principais características da malha utilizada, designadamente, o tipo e o número de elementos associado à malha, bem como o número de graus de liberdade globais e locais.

54
TABELA 4.1 –
Tipo de
L
O próxicorpo e poro ficheiro d
Como comconfiguraçã
Como nseria de escálculos em
Principais cara
e elementos
Linear
imo passo ér último parae dados cria
mplemento, ão do mecan
Dissipação
0
F
nota final daperar devid
m computaçã
cterísticas da m
Núm
é associar asa concluir o fdo, obtendo
FIGU
representa‐sismo de cola
o Plástica
máx.
FIGURA 4.6 – R
Figura 4.5, o à simplicido sequencia
malha
ero de elem
4
restrições aficheiro de do‐se o seguin
RA 4.5 – Result
se a distribapso (Figura
Resultados com
conclui‐se qdade do exel inferior a 1
CARGAS D
entos
ao corpo, deados, aplicate resultado
tado obtido pe
buição da d4.6).
mplementares o
ue a converemplo, o qusegundo.
DE COLAPSO
Globai7
epois definem‐se as carg, ver Figura 4
lo SUBLIM3d
dissipação p
Mecani
obtidos pelo SU
gência da soue conduz a
O DE SISTEMA
DOF
s
‐se o critérigas ao corpo4.5.
plástica nos
smo de Colaps
UBLIM3d
olução foi mum tempo
AS DE ALVEN
Locais 8
o de cedênc. Por fim, co
s elementos
o
uito rápida, de execuçã
NARIA
cia do rre‐se
s e a
como o dos

Capítulo 4. Validação
55
Por último, apresenta‐se a resolução real do problema obtida através de cálculos analíticos simples:
I. Começa‐se por converter as cargas aplicadas no corpo em tensões, ver Tabela 4.2 estado inicial (λ=1);
TABELA 4.2 – Tensões aplicadas no corpo e propriedades do círculo de Mohr
Estado Tensões Inicial (i) Colapso (c) τxy [MPa] ‐5 ‐5 σx [MPa] ‐2 ‐2 σy [MPa] ‐1 ‐6.875
Propriedades do círculo de Mohr R [MPa] 5.025 5.563 OC [MPa] ‐1.500 ‐4.438 σI [MPa] 3.525 1.125 σII [MPa] ‐6.525 ‐10
II. Define‐se o critério de cedência (Figura 2.20) para este exemplo, através das propriedades do corpo, que se encontra representado na Figura 4.7. Expõe‐se também nesta figura o círculo de Mohr no estado de tensão inicial;
FIGURA 4.7 – Representação do exemplo no diagrama de Mohr
III. Obtém‐se a σy no colapso, tendo como base a Figura 4.7. Para isso pensa‐se no processo de carregamento até ocorrer o colapso do corpo. O processo de carregamento corresponde a aumentar o carregamento variável (V) e a manter os restantes carregamento constantes (H e C), isto é, corresponde a diminuir σy, e a manter constante σx e τxy. Deste processo conclui‐se que o círculo de Mohr no estado de tensão no colapso apresenta as seguintes características (ver Tabela 4.2):
• É constituído pelo ponto (σx, τxy), que é comum ao círculo de Mohr no estado de tensão inicial;
• Assume como valor de tensão principal, σII, o valor de ;

56
do c
dep
‐se
e no
Porequ
equcara
IV. Obtesta
V. Precorcor
Mo
Mo
Mo
ond
Para o refecírculo de M
pois define‐se
Como ambigualar as du
4
o caso da dis
último, paruação (4.5) e
Para compuações (4.7),acterísticas d
tém‐se o muado inicial:
6.875
tende‐se, derespondentepo, na expre
do I:
do II:
do III:
de a sua repr
erencial da pohr (OC) no
e as mesmas
bas as grandeuas hipótese
4
stância ao ce
ra obter o varesolver em
pletar a colu (4.6), (4.1) do processo
ultiplicador d
e modo infoe a este exeessão do crité
10
resentação g
primeira caracolapso,
s grandezas p
ezas referidas de cálculo,
entro do círcu
alor objectivm ordem a σy
una de colapou (4.3) e (4de carregam
de colapso (λ
ormativo, detemplo. Paraério de cedê
50
gráfica aprese
CARGAS D
acterística de
para o refere
s são refere, obtendo‐se
ulo de Mohr
vo da σy, ba:
pso da Tabe4.2) ou (4.4)mento.
λc), bastando
terminar nea isso comencia para cad
2.040
enta o seguin
DE COLAPSO
efine‐se o ra
encial da seg
ntes ao círcue no caso do
no colapso
sta apenas i
la 4.2, basta) pelos respe
o apenas divi
ste tópico aça‐se por sda modo (eq
28.563
nte aspecto
O DE SISTEMA
aio (R) e a di
gunda caract
ulo de Mohr Raio (igualar
(igualar (4.2)
introduzir a
a substituir ectivos valor
idir a σy no c
a zona da fuubstituir as quação (2.42
(Figura 4.8):
AS DE ALVEN
istância ao c
erística,
no colapso, r (4.1) a (4.3)
) a (4.4)),
equação (4
as grandezares numérico
colapso pela
nção de cedpropriedad), (2.43) e (2
NARIA
centro
(4.1)
(4.2)
(4.3)
(4.4)
pode‐)),
(4.5)
(4.6)
.6) na
(4.7)
as nas os das
σy no
(4.8)
dência es do 2.44)):
(4.9)
(4.10)
(4.11)

Capítulo 4. Validação
57
FIGURA 4.8 – Representação gráfica do critério de cedência do exemplo
Nesta figura, também se insere:
• O ponto de tensão principal no estado inicial , onde,
(4.12)
(4.13)
onde as grandezas OC e R são calculadas através de (4.2) e (4.1), respectivamente. Os valores numéricos de todas as variáveis definidas neste tópico apresentam‐se na Tabela 4.2;
• O ponto de tensão principal no estado de colapso , , ver Tabela 4.2;
• A direcção e o sentido do carregamento;
• A direcção e o sentido da taxa de deformação (e).
Observando onde o ponto toca na superficie de cedência (Figura 4.8), conclui‐se que este exemplo se encontra na zona (iii) do modo I, através da comparação com a Figura 3.5.
Em nota, refere‐se que a convenção de sinais adoptada neste ponto corresponde à convenção de sinais considerada no capítulo 3 (ver capítulo 2.1).
Comparando os diversos resultados obtidos pelo SUBLIM3d, com os resultados reais analíticos, chega‐se à conclusão que em todos os casos o corpo atinge o colapso onde se estava à espera, o que confere uma grande confiança sobre a correcta implementação do critério de Armando Nunes Antão.

58
4.2 CritPara es
variável corbreve, masteórica):
• DIM
• CAR
• PRO
Como nresolução psolução do Tabela 4.3 enúmero de
TABELA 4.3 –
Tipo d
O próxicorpo e poro ficheiro d
tério de Mte critério exrresponde à precisa, de
MENSÃO DO o 2
RGAS: o 40o 10
OPRIEDADESo 20o 30o 15o 6
no modelo pelo SUBLIMexemplo, oencontram‐selementos a
Principais cara
de elemento
Linear
imo passo ér último parae dados cria
Mário Vicexpõe‐se comà carga H, aescrição dos
CORPO:
0 0 S DO CORPO0 0° 5 5
anterior, coM3d inicia‐se ptou‐se por se as principassociado à m
cterísticas da m
os N
é associar asa concluir o fdo, obtendo
FIGUR
ente da Silmo modelo oplicada na fdados nece
ã ã
:
FIGURA 4.9 – D
omeça‐se pepela geraçãuma discreais caracterímalha, bem c
malha
Número de e
4
restrições aficheiro de do‐se o resulta
RA 4.10 – Resul
CARGAS D
lva o exemplo I (face direita essários para
Discretização d
ela resoluçãoão da malhatização do císticas da macomo o núm
elementos
ao corpo, deados, aplicaado apresent
ltado obtido pe
DE COLAPSO
ver Figura 4do corpo. Da a resoluçã
o corpo
o do problea do corpo.corpo menosalha utilizadamero de graus
Glo6
epois definem‐se as cargtado na Figu
elo SUBLIM3d
O DE SISTEMA
.1), considerDe seguida aão do proble
ma através Devido à hos refinada, va, designadas de liberdad
DOF
obais 6
‐se o critérigas ao corpora 4.10.
AS DE ALVEN
rando que a apresenta‐seema (SUBLIM
do SUBLIMomogeneidaver Figura 4.amente, o tipde globais e l
F
Loca8
o de cedênc. Por fim, co
NARIA
carga e uma M3d e
M3d. A de de .9. Na po e o locais.
is
cia do rre‐se

Capítulo 4. Validação
59
Como complemento, representa‐se a distribuição da dissipação plástica nos elementos e a configuração do mecanismo de colapso (Figura 4.11).
Dissipação Plástica Mecanismo de Colapso
0 máx.
FIGURA 4.11 – Resultados complementares obtidos pelo SUBLIM3d
Como nota final da Figura 4.10, conclui‐se que a convergência da solução foi muito rápida, como seria de esperar devido à simplicidade do exemplo, o que conduz a um tempo de execução dos cálculos em computação sequencial inferior a 1 segundo.
Por último, apresenta‐se a resolução real do problema obtida através de cálculos analíticos simples:
I. Começa‐se por converter as cargas aplicadas no corpo em tensões (tensões principais), ver Tabela 4.4 estado inicial (λ=1);
TABELA 4.4 – Tensões principais aplicadas no corpo e propriedade do círculo de Mohr
Estado Tensões Inicial (i) Colapso (c) Truncatura (t) σI [MPa] 40 75 65 σII [MPa] 10 10 0
Propriedade do círculo de Mohr R [MPa] 15 32.5 32.5
II. Define‐se o critério de cedência (Figura 2.22) para este exemplo, através das propriedades do corpo, que se encontra representado na Figura 4.12. Expõe‐se também nesta figura o círculo de Mohr no estado de tensão inicial e no estado de tensão que origina a truncatura (Tabela 4.4);

60
III. Obtcarraumcorde 4.4)
(4.3
O vcararesp
IV. Obtesta
V. Preantpormo
Mo
Mo
Mo
tém‐se a σI nregamento amentar o caresponde a aMohr no est):
• É consttensão
• Assumede tens
Assim, para3) para o caso
2
valor numériacterística dpectivos valo
tém‐se o muado inicial:
1.875
tende‐se, deerior) a zonar substituir ado (equação
do I:
do II:
do III:
FIGURA 4
no colapso, taté ocorrer oarregamentoaumentar σI tado de tens
tituído pelo inicial;
e como valorão que origi
á
a obter o vao do Raio (R)
co desta eqdo processoores numéric
ultiplicador d
e modo infoa da função as propriedao (2.48), (2.49
15
4.12 – Represen
tendo como o colapso do variável (He a manter são no colap
ponto (σII,
r de raio o mna a truncat
alor objectivo) no colapso
uação (Tabeo de carregcos.
de colapso (λ
ormativo, dde cedência ades do corp9) e (2.50)):
65
CARGAS D
ntação do exem
base a Figuro corpo. O pH) e a mantconstante σpso apresent
0) que é co
mesmo valorura (t):
o de σI, baste resolver e
ela 4.4), obtégamento e
λc), bastando
eterminar ncorrespondpo, na expre
3 69.2
5
DE COLAPSO
mplo no diagram
ra 4.12. Paraprocesso de ter constantσII. Deste prota as seguint
omum ao cír
que o raio d
ta substituir m ordem a σ
ém‐se tendosubstituindo
o apenas div
neste tópicoente a este eessão do cr
82
O DE SISTEMA
ma de Mohr
isso pensa‐scarregamente o carregacesso conclutes caracterí
rculo de Mo
do círculo de
na equaçãoσI:
o em consideo as várias
idir a σI no c
o (à semelhaexemplo. Paitério de ce
AS DE ALVEN
se no procesnto correspoamento V, isui‐se que o císticas (ver T
ohr no estad
e Mohr no e
o (4.14) a eq
eração a prigrandezas
colapso pela
ança do exera isso comedência para
NARIA
sso de nde a sto é, círculo Tabela
do de
estado
(4.14)
uação
(4.15)
meira pelos
a σI no
(4.16)
emplo eça‐se a cada
(4.17)
(4.18)
(4.19)

Capítulo 4. Validação
61
onde a sua representação gráfica apresenta o seguinte aspecto (Figura 4.13):
FIGURA 4.13 – Representação gráfica do critério de cedência do exemplo
Nesta figura, também se insere:
• O ponto de tensão principal no estado inicial , , no estado de colapso
, e no estado que origina a truncatura , , ver Tabela 4.4;
• A direcção e o sentido do carregamento;
• A direcção e o sentido da taxa de deformação (e).
Observando onde o ponto toca na superficie de cedência (Figura 4.13), conclui‐se que este exemplo se encontra na zona (v) do modo III, através da comparação com a Figura 3.6.
Em nota, refere‐se que a convenção de sinais adoptada neste ponto corresponde à convenção de sinais considerada no capítulo 3 (ver capítulo 2.1).
Comparando os diversos resultados obtidos pelo SUBLIM3d, com os resultados reais analíticos, chega‐se à conclusão que em todos os casos o corpo atinge o colapso onde se estava à espera, o que confere uma grande confiança sobre a correcta implementação do critério de Mário Vicente da Silva.

62

63
Capítulo 5
5 Aplicações Numéricas
De forma a ilustrar a execução e versatilidade dos critérios propostos, efectuou‐se uma procura bibliográfica de forma a encontrar um conjunto de exemplos susceptíveis de serem analisados neste capítulo. Depois de se ter seleccionado um conjunto alargado de exemplos, procedeu‐se à sua triagem, excluindo‐se muitos deles devido às seguintes razões:
• Falta de dados geométricos;
• Introdução de particularidades (falhas, etc.) na alvenaria;
• Propriedade(s) desapropriada(s) para os cálculos referentes aos tijolos;
• Falta de alguma(s) propriedade(s) dos tijolos;
• Propriedade(s) desapropriada(s) para os cálculos referentes às juntas;
• Falta de alguma(s) propriedade(s) das juntas;
• Semelhança de carregamento com outro(s) exemplo(s);
ficando assim os três exemplos (correspondendo dois, a casos de critérios sem truncatura e um, a um caso de critérios com truncatura) presentes no subcapítulo 5.2, atendendo a que apresentavam a totalidade dos dados necessários para a resolução do problema ou, alternativamente, caso em que não seja fornecida a totalidade dos dados necessários para a resolução do problema, é possível obter os parâmetros em falta através dos restantes dados. Nesse subcapítulo procede‐se à análise destes exemplos através da comparação dos resultados obtidos pelo SUBLIM3d com as soluções disponíveis na literatura (testes experimentais e outras análises).
Para facilitar a obtenção do ficheiro de dados destes exemplos, criaram‐se programas para acelerar o processo de análise destes exemplos. A principal característica destes programas é a capacidade de gerar a malha para qualquer dimensão da alvenaria/tijolo.
5.1 Programas
5.1.1 Bases SUBLIM3d Neste tópico apresentam‐se algumas bases sobre o SUBLIM3d que são relevante no presente
trabalho:
• Os elementos de junta são definidos considerando negativa a sua numeração;
• Os elementos de corpo rígido são definidos considerando negativo o número do material que os constituem.

64
5.1.2 DeO progr
no capítuloetapas:
I. DefII. LeitIII. CriaIV. Cria
FIGURA 5.
V. Cria
Depois, o au
• A p
• A p
• A p
• A ca
• A pcom
• A pmal
• A ca
Alterou‐se t5.2. Como sno program
• As p
• As p
• As p
• Os v
esenvolvimrama apreseo 5.2. Este p
finição das vatura e associação dos nósação dos elem
.1 – Tipo de ele
a. Os tijolob. As juntac. O Lintel
ação e impre
utor da prese
ossibilidade
ossibilidade
ossibilidade
apacidade de
possibilidademponente co
ossibilidade lha);
apacidade de
também o fise concluiu dma:
propriedade
propriedade
propriedade
valores num
mento dontado nesteprograma já
ariáveis; ação da infos; mentos (ver
ementos que de
os; as; l (caso existaessão do fich
ente disserta
de existênci
de existênci
de existênci
e carregar as
e dos carregonstante e ou
de se observ
e inserir auto
cheiro de leida observaçã
s dos tijolos;
s das juntas;
s do lintel (c
éricos das ca
Jun
programe tópico correá existia ant
rmação forn
Figura 5.1) p
efinem os tijolo
a); eiro de dado
ação reviu o
a de lintel su
a de apoios
a de diferen
s faces da alv
gamentos autra variável
var a numer
omaticamen
itura de dadoão desta figu
;
;
aso exista);
argas aplicad
nta
CARGAS D
ma geradoesponde ao teriormente,
necida pelo fi
para:
os, as juntas e o
os.
programa e
uperior numa
nos extremo
tes tipos de
venaria com
plicados na ;
ração dos ele
te o nome d
os, ficando cura é necessá
das nas faces
DE COLAPSO
r da malhusado na an apresentan
icheiro de le
o lintel do mod
acrescentou
a largura dife
os;
apoios;
diferentes t
alvenaria s
ementos de j
do ficheiro de
com o aspectário introduz
s da alvenaria
L
O DE SISTEMA
ha nálise dos exndo a seguin
itura às variá
delo de uma pa
u várias func
erente da lar
ipos de carre
serem const
junta (atravé
e dados.
to final aprezir manualme
a;
Lintel
AS DE ALVEN
xemplos presnte sequênc
áveis;
arede de alvena
ionalidades:
rgura da par
egamento;
tituídos por
és da distorç
sentado na Fente alguns
Tijo
NARIA
sentes cia de
aria
ede;
r uma
ção da
Figura dados
olo

Capítulo 5. Aplicações Numéricas
65
• Os valores dos parâmetros opcionais (tolerância, número máximo de iterações e alterações ao parâmetro de penalidade inicial).
FIGURA 5.2 – Ficheiro de leitura do programa gerador de malhas
Por último, procedeu‐se à validação do programa para as várias funcionalidades que o constituem, concluindo após este processo de que o programa foi correctamente implementado.
Durante o processo de desenvolvimento deste programa, tomou‐se consciência de algumas limitações:
• Incapacidade de aumentar o grau de refinamento da alvenaria;
• Incapacidade de considerar diferentes tipos de malha;
• Impossibilidade de considerar diferentes larguras para o primeiro bloco da primeira e da segunda fiada;
onde a sua introdução provocaria a reformulação quase completa da programação deste programa, levando a que o trabalho que se teria seria semelhante ao da criação de um novo.

66
5.1.3 CriEmbora
dos elemenprograma fodesenvolvimetapas, ver
De segu
• Eta
Etapa III:
•Definiçã•Def
iação do fa este métodntos de juntoi criado pelmento. QuanFigura 5.3.
FIGURA 5.3 –
uida apresen
pa I: o Ponto
encontr
E
•
Conversão do SUBLIM3
•Abertura do ficão, se for caso disinição dos critéri
•Definição da•Impressão do
ficheiro ddo não tenhata, é capaz lo Professor ndo o progra
– Etapas que de
tam‐se algun
2: As variáram‐se na Fig
FIGURA 5.4 –
Etapa I: Cr
•
••Impressão de t
Etapa II: Criação
•Cri•Re‐impressão de
formato Ansys3d (Convert ‐n)
heiro de dados asso, de elementosos de cedência das cargas distribuficheiro de dado
de comanda sido usado de ultrapasDoutor Márma se encon
efinem o ficheir
ns esclarecim
áveis iniciaisgura 5.4.
– Dados necess
riação da malh(Script_
•Criação do ficDefinição do valo•Criação do lim
•Refinam•Aplicação das
•Aplicação das catoda a informaçã
o da malha das
•Abertura do fiação dos elemene toda a informaç
s para o format)
nterior;s de corpo rígidoos materiais;ídas;s final.
CARGAS D
dos possibno presentessar as limitio Vicente dntrar concluí
ro de comando
mentos sobre
s que preci
sários pela 1º e
ha dos tijolos no_masonry_2d)
heiro de dados ior numérico das vmite exterior dos tmento dos tijolos;restrições à alveargas nodais à alvão relevante no fi
s juntas no form
cheiro de dados ntos de junta entrção relevante no
to
;
DE COLAPSO
bilitando e trabalho, dtações refera Silva, mas ído irá apres
os que permite
e estas etapa
sam de ser
etapa do proces
o formato Ansy
nicial;variáveis;tijolos;;enaria;venaria;cheiro de dados
mato Ansys (Di
inicial;re os tijolos;ficheiro de dado
Etapa IV
•Ordena•Correr o ficheir
O DE SISTEMA
a geraçãodevido ao insidas no ponainda se encentar a segu
a geração de m
as (ver Figur
r introduzid
sso de criação
ys
inicial.
smesh)
os inicial.
V: Conclusão do(Prep_calc3d
ção do ficheiro dro de dados obtid
AS DE ALVEN
o de malhsucesso na crnto anteriorcontra em fauinte sequên
malhas
a 5.3):
das manualm
de malhas
o programa d)
e dados final;do no ponto ante
NARIA
has riação . Este ase de cia de
mente
rior.

Capítulo 5. Aplicações Numéricas
67
o Ponto 3: Depois da criação do limite exterior dos tijolos, define‐se que os tijolos da fiada ímpar são constituídos pelos materiais 1 e 2 de forma alternada e os tijolos da fiada par são constituídos pelos materiais 3 e 4 de forma alternada. Esta disposição é fulcral para a etapa II, porque permite saber onde se deve colocar os elementos de junta (tanto na horizontal como na vertical);
o Ponto 6: Neste ponto associam‐se os nós onde são aplicadas as cargas ao respectivo grupo de carregamento. Para permitir que a alvenaria possa ser carregada com qualquer tipo de carregamento, definiram‐se sete grupos de carregamento: dois carregamentos na face esquerda (normal e tangencial), dois carregamentos no topo (normal e tangencial), dois carregamentos na face direita (normal e tangencial) e um carregamento na base (tangencial);
• Etapa II: Esta etapa corresponde à etapa que se encontra ainda em fase de desenvolvimento;
• Etapa III: o Ponto 2: Neste ponto tem que se definir manualmente se existem elementos de
corpo rígido; o Ponto 3: Aqui define‐se manualmente o critério de cedência dos tijolos (quatro
materiais) e das juntas; o Ponto 4: Neste tópico procede‐se à conversão das cargas nodais em cargas
distribuídas e define‐se manualmente o valor numérico de cada grupo de carregamento;
o Ponto 5: Este ponto engloba a introdução manual dos valores dos parâmetros opcionais (tolerância, número máximo de iterações e alterações ao parâmetro de penalidade inicial).
O autor da presente dissertação tratou da revisão deste programa e da correcção de falhas detectadas.
Como nota final deste método, refere‐se que este se encontra numa fase inicial de desenvolvimento, não tendo merecido uma atenção maior atendendo a que os exemplos apresentados no capítulo 5.2 são gerados facilmente pelo primeiro programa.
5.2 Exemplos O processo de validação da aplicabilidade dos critérios usados propriamente dito inicia‐se neste
subcapítulo, com a análise de dois exemplos de aplicação de critérios sem truncatura e um exemplo de aplicação de critérios com truncatura.
5.2.1 Exemplos de aplicação de critérios sem truncatura As cargas de colapso destes exemplos não são afectadas pelas truncaturas dos critérios
propostos, pelo que se considerou exclusivamente o critério de Mohr‐Coulomb (capítulo 3.2.2.1). Este critério, como foi dito anteriormente, já se encontrava implementado na formulação do SUBLIM3d, servindo o processo de análise, neste caso, para validar a aplicabilidade deste critério à determinação de cargas de colapso de sistemas de alvenaria.

68
5.2.1.1 ExEste pri
uma alvenaanalisar a alvenaria, palvenarias sparedes.
5.2.1.1.1 Para a d
[12], em rel
• Pro
A estrum=0.87
• Pro
As juntatrito d
ta
• Tipo
Estas pestrutu
xemplo 1imeiro exemaria simples aplicabilidadpretende‐se tsimples: ráci
Definidefinição delação a:
opriedades d
utura deste e75) encastra
opriedades d
tas exibem dado por:
an 0.6
o de Carrega
paredes foraura (θ) até oc
1 mplo foi retirasujeita à inde deste crtambém inveo entre a lar
ição ste exemplo
a alvenaria:
exemplo corda na base e
FIGUR
os materiais
propriedade
amento:
am sujeitas correr o seu
ado do trabaclinação do itério na deestigar a inflrgura e a alt
o apresentam
rresponde a em toda a su
RA 5.5 – Estrutu
s:
es de resistê
ao aumentcolapso, ver
CARGAS D
alho de P. Deplano de sueterminaçãouência dos sura dos tijol
m‐se de segu
uma alvenaa largura, ve
ura da alvenaria
ência puram
o do ângulor Figura 5.6.
DE COLAPSO
eBuhan e G.uporte. Nesto de cargas eguintes aspos e o rácio
uida os dado
ria de tijoloser Figura 5.5.
a do exemplo 1
ente atrítica
o de inclina
O DE SISTEMA
DeFelice [1te exemplo,de colapso
pectos no coentre a larg
os fornecidos
s rectangula.
1 [12]
as 0 se
ção do plan
AS DE ALVEN
2]. Correspo para além o de sistemmportamentgura e a altur
s pelos autor
res (m=0.43
endo o ângu
no de supor
NARIA
onde a de se as de to das ra das
res de
75 ou
ulo de
(5.1)
rte da

Capítulo 5. Aplicações Numéricas
69
FIGURA 5.6 – Tipo de carregamento do exemplo 1 (adaptado de [12])
5.2.1.1.2 Resultados experimentais/Propostas Os resultados experimentais existentes foram obtidos em testes realizados no Departamento de
Ingegneria Strutturale e Geotecnica da Universidade de Roma. O ensaio a que foram sujeitas as paredes é equivalente a inclinar a gravidade por um ângulo θ até ocorrer o colapso da alvenaria, isto é, semelhante a considerar as paredes sujeitas tanto ao peso específico dos blocos (γ), que é vertical e constante, como a uma componente horizontal das forças de massa (λγ) que é aumentada gradualmente até ocorrer o colapso da alvenaria (onde λ ≥ 0 é um parâmetro de carregamento não dimensional). Portanto pode‐se representar o domínio de estabilidade da estrutura no seguinte plano de carregamento 0, 0 que se encontra simplesmente limitado por uma semi‐linha de equação , onde corresponde ao último valor de λ, ver Figura 5.7.
FIGURA 5.7 – Domínio de estabilidade do exemplo 1 no plano de carregamento (γ1,γ2) [12]
Na Figura 5.7 representa‐se a trajectória de carregamento do ensaio experimental que segue um esquema circular de carregamento (caminho número 2) definido por:
γ γ cos θ, γ γ sin θ (5.2)
θ

70
O valor exppor:
tan
onde rvalores exppara o caso
Apresenconsidera aum materiacinemático cedência de
Considenula, provomecanismose um movi(ver Figura
relação ao p
Tendo (esta estimapresentam
λ λ
perimental d
representa operimentais de m=0.437
nta‐se agora modelação al perfeitamdo método e Mohr‐Coulo
erando os blocando queo homogeneiimento virtu5.8) e num
ponto O
em atençãoativa, encon
m o sinal nega
do parâmetr
t
o ângulo de obtidos atra75 e na Figur
a resumidammacro para
mente plásticda análise lomb.
ocos como u a deformazado de rotual de corpo a segunda f
0 .
FIGURA 5.8 –
o este mecanntra‐se corrigativo no exp
ro de carreg
tan
inclinação liavés da conva 5.13 para o
mente a ferra modelaçãoco e os tijollimite para a
um materialação nessa ura de corporígido à partfase corresp
– Proposta apre
nismo de rugida em relaoente do pri
se ρ
se ρ
CARGAS D
amento não
imite em quversão (5.3)o caso de m=
ramenta de o da alvenaros como uma resolução
rígido, a vedirecção ta
o rígido, ondte da estrutuponde a orig
esenta no artig
uptura obtémação à apresimeiro ramo
DE COLAPSO
o dimensiona
e o colapso encontram=0.875.
cálculo apria, optando pm material rdo problem
elocidade na ambém sejae, numa primura localizadaginar‐se uma
o (adaptado de
m‐se a estimsentada em do sistema
O DE SISTEMA
al no colaps
da parede f‐se impresso
resentada nopor considerrígido. Basea e conside
direcção pe nula. Assimmeira fase coa acima da lia rotação de
e [12])
mativa obtid[12], porqude equações
AS DE ALVEN
so é o
foi observados na Figura
o artigo [12rar as juntas ia‐se no teora a superfíc
erpendicular m propõe‐sorresponde nha inclinade corpo rígid
da nesta proue os autores):
NARIA
obtido
(5.3)
do. Os a 5.12
2] que como orema cie de
(y3) é e um a dar‐da OO’ do em
oposta es não
(5.4)

Capítulo 5. Aplicações Numéricas
71
onde,
(5.5)
2 (5.6)
levando à determinação de um valor da região superior , que é obtido através do caminho número 1 da Figura 5.7. Conclui‐se da observação da equação (5.4) que o valor extremo do parâmetro de carregamento, λ+, é uma função que não depende do peso específico dos tijolos. A representação gráfica da equação (5.4), para os casos de m=0.4375 e m=0.875 encontra‐se na Figura 5.12 e na Figura 5.13, respectivamente.
5.2.1.1.3 Simplificações/Considerações O primeiro objectivo deste exemplo era a possibilidade de comparar os resultados experimentais
apresentados por P. DeBuhan e G. DeFelice [12] com os resultados obtidos pelo SUBLIM3d, mas tal não foi possível porque a informação apresentada nesse artigo é muito incompleta em relação a vários aspectos que afectam a criação do ficheiro de dados. Em última circunstância, para resolver esta falta de dados, tentou‐se contactar via correio electrónico o professor P. DeBuhan, mas não se obteve qualquer resposta. Assim como forma meramente comparativa resolveu‐se apresentar os resultados experimentais nos mesmos gráficos que os resultados das propostas.
O segundo objectivo deste exemplo era a possibilidade de comparar os resultados obtidos pela proposta apresentada por P. DeBuhan e G. DeFelice [12] com os resultados obtidos pelo SUBLIM3d. Este objectivo já foi possível, mas para ser alcançado correctamente teve‐se que executar um conjunto de hipóteses:
• Em relação às propriedades da alvenaria: o Considerou‐se que os tijolos apresentam uma largura irreal de 1.6 mm, porque é o
primeiro valor com uma casa decimal que origina que a altura dos tijolos tenha no máximo duas casas decimais para os dois casos de m;
o A altura dos tijolos é obtida resolvendo a equação (5.6) em relação a a,
(5.7)
o Considerou‐se que a alvenaria é constituída por 512 fiadas; o O número de tijolos que constituem cada fiada é obtido considerando que,
º (5.8)
º (5.9)
substituindo agora estas equações na equação (5.5) obtém‐se,
º º
(5.10)
tendo agora em consideração a equação (5.6), basta resolver a equação (5.10) em relação ao número de tijolos por fiada,

72
• Em
• Em
• Em
• Em
O procforma extraponúmerdesse iatravés
º
conclude exialvenaa varia
º
Como ocom a pm, consdepois resultadnúmerode ρ pel
o Considehipótes
relação às po Embora
enunciacoesão ocorra s
relação ao to Conside
‐se queconstanhorizon
o Considetijolos (um valo
relação aos o Conside
o Consideporque
relação ao n
cesso de alcasimplificativolação para o de tijolos intervalo, cas da equação
º
indo‐se que stirem 7 tijria (mantendr no interval
o SUBLIM3d aproposta (qusiderar valoreuma linha qdo obtido po de tijolos pla equação (5
erou‐se os se apresenta
propriedadesa os tijolos sado no segunde 1000MPsempre nas j
tipo de carreerou‐se o me a parede nante) e na hntal das forçaerou‐se que (que correspor unitário pa
parâmetroserou‐se que a
erou‐se que este valor p
número de f
ançar resultava, apenas os restantespor fiada apalcula‐se o reo (5.11)),
o único valoolos por fiado‐se constalo de 1 a 6), v
º
apenas forneue correspones de ρ a varque passa ppela equaçãor fiada para5.10);
tijolos comda pela prop
s dos materiejam modelndo tópico da e um ângujuntas;
egamento: esmo raciocía vertical se orizontal a as de massa (o multiplica
ponde à concara o peso es
s opcionais: solução obti
a alteraçãoermite que a
fiadas que co
ados que nãopara o ponts casos dessapenas pode vespectivo nú
or inteiro obada. Em segante a relaçãver Tabela 5
CARGAS D
ece resultadonde uma funriar entre 0.0pelos diversoo (5.11) é a o número i
mo elementoposta);
iais: ados por eledo capítulo 5ulo de atrito
ínio do carreencontra suuma carga (λγ); ador de colaclusão da prospecífico (1N
ida pelo SUBL
o ao parâmea solução sej
onstituem a
o se distingato ρ=1 da Fa figura e davariar no intúmero de fia
btido correspguida, para o entre a alt.1.
DE COLAPSO
os pontuais,nção contínu05 e 3 em incos pontos ddecimal, nenteiro mais
os rígidos (
ementos rígi5.1.1, que eso de 45°, par
egamento dajeita ao pesovariável qu
pso não depoposta), optN/m3);
LIM3d é alcan
etro de penja boa e que
alvenaria:
m dos homoFigura 5.13a Figura 5.12tervalo de 1 das, através
ponde a 16 feste caso,tura e a largu
O DE SISTEMA
a única manua) foi, para crementos ddefinidos. Emesses casos,próximo e re
(que corres
idos considestes elementra que o col
a proposta, iso específico ue represent
pende do petando‐se ass
nçada pela pr
nalidade inicconvirja rap
ogeneizados e depois e2. Começa‐sea 10. Depoi
s da seguinte
fiadas que saumenta‐seura) em múlt
AS DE ALVEN
neira de com um determe 0.05, crianm alguns ca, arredondaecalcula‐se o
ponde à m
erou‐se, devitos exibiriamapso da alve
sto é, considdos blocos (ta a compo
eso específicim por cons
recisão (1x10
cial é igual pidamente;
foi executadxecutou‐se e por supor is, para cadae equação (o
e verifica noe a proporçãtiplos de 2n (c
NARIA
(5.11)
mparar minado ndo‐se asos o a‐se o o valor
mesma
do ao m uma enaria
derou‐ (que é nente
co dos iderar
0‐6);
a 0.1,
do, de a sua que o a caso obtida
(5.12)
o caso ão da com n

Capítulo 5. Aplicações Numéricas
73
TABELA 5.1 – Multiplicador de colapso para as várias proporções da alvenaria dos cálculos efectuados
Nº tijolos por fiada Nº fiadas λc 7 16 0.5161 14 32 0.4507 28 64 0.4181 56 128 0.4050 112 256 0.3988 224 512 0.3959 448 1024 0.3946
Depois corre‐se o ficheiro de dados das 7 proporções consideradas, obtendo‐se os resultados apresentados na Tabela 5.1 e na Figura 5.9.
FIGURA 5.9 – Representação gráfica dos resultados obtidos pelo SUBLIM3d, pela proposta [12] e pelos resultados experimentais, para o caso de ρ=1 e m=0.875
Para se ter a noção da capacidade do SUBLIM3d (para o caso de ρ=1 e m=0.875), representam‐ ‐se também nesta figura (Figura 5.9) tanto os resultados obtidos pela proposta [12] como os resultados experimentais. Pela observação da Figura 5.9 conclui‐se que os resultados que não se distinguem dos homogeneizados se atingem para um número de fiadas maior ou igual a 128. Para achar o número de fiadas óptimo (que se supõe neste caso que se atinge quando o erro é inferior ou igual a 2%) representou‐se os resultados na Figura 5.10,
0,35
0,37
0,39
0,41
0,43
0,45
0,47
0,49
0,51
0,53
0 200 400 600 800 1000
λc
Nº Fiadas
SUBLIM3d
Homogenização [12]
Experimental (1)
Experimental (2)

74
de formtende
tende determ
%
para ca
TABELA
Concluverificaalvena
• Núm
Com recapacidneste esurge aresulta
0,
0,
0,
0,
λc
FIGU
ma a que se o multiplica
para infinitmina‐se o err
%
ada uma das
5.2 – Erro obti
ui‐se então pa‐se nas 512ria).
mero de pro
ecurso a umdades compuexemplo reca seguinte qados mais ra
,38
,43
,48
,53
‐1,39E‐17 0,
URA 5.10 – Rep
possa deterador de cola
to), que corro respectivo
100%
s proporções
do ao consider
Nº fiadas 16 32 64 128 256 512 1024
pela observaç2 fiadas (com
ocessadores
m sistema deutacionais, écorreu‐se aoquestão: Quaapidamente)
,01 0,02
presentação grá
rminar, atravapso na hom
rresponde ao,
considerada
rar cada multip
ção da tabemo se tinha
utilizados no
e processamé possível teso Geoclusteral o número para os vá
y = 1
0,03 0Nº Fiada
CARGAS D
áfica da tendên
vés de uma rmogeneizaçã
ao valor de
as, ver Tabel
plicador de cola
la anterior (Tinserido na
os cálculos:
mento em pastar alvenarir para se ex de processarios cálculos
,9828x + 0,39R² = 0,9978
0,04 0,05s‐1
DE COLAPSO
ncia do multipl
regressão lino extrema (
0.3905. Te
a 5.2.
apso
Tabela 5.2), hipótese em
aralelo (Geocas de grandexecutar os cáadores mais s deste exem
905
0,06 0
O DE SISTEMA
icador de colap
near simples,(quando o n
endo este v
Erro (%) 32.2 15.4 7.1 3.7 2.1 1.4 1.1
que o valor m relação às
cluster), quees dimensõeálculos. Depeficiente (qmplo? A res
0,07
S
R
AS DE ALVEN
pso
, o valor parnúmero de
alor limite,
que se prets propriedad
e possui razoes, por isso apois desta deque permite sposta reque
SUBLIM3d
Regressão line
NARIA
ra que fiadas
,
(5.13)
tendia des da
oáveis penas ecisão obter er um
ear

Capítulo 5. Aplicações Numéricas
75
procedimento muito simples, que corresponde a calcular a alvenaria, que apresenta 224 tijolos por cada uma das 512 fiadas com ρ=1 e m=0.875, para os diferentes números de processadores disponíveis (3, 5, 9, 17 e 33) limitando o cálculo às 150000 iterações (nunca atingindo a precisão de 1x10‐7). Chega‐se à conclusão que neste caso o número de processadores mais eficiente corresponde a 17, porque se atinge o multiplicador de colapso no menor espaço de tempo (ver Figura 5.11).
FIGURA 5.11 – Determinação do número de processadores mais eficiente para o exemplo 1
5.2.1.1.4 Resultados SUBLIM3d Os resultados obtidos pelo SUBLIM3d (tendo em consideração o capítulo 5.2.1.1.3) para o caso
de m=0.4375 e m=0.875 apresentam‐se de forma gráfica na Figura 5.12 e Figura 5.13, respectivamente.
FIGURA 5.12 – Comparação dos multiplicadores de cedência obtidos pelo SUBLIM3d com os obtidos por [12] e pelos ensaios experimentais, para o caso de m=0.4375
0dia(s) 00h:00m:00s
0dia(s) 12h:00m:00s
1dia(s) 00h:00m:00s
1dia(s) 12h:00m:00s
2dia(s) 00h:00m:00s
2dia(s) 12h:00m:00s
3dia(s) 00h:00m:00s
1 3 5 9 17 33
Duração
Número de processadores
0,2
0,3
0,4
0,5
0,6
0 0,5 1 1,5 2 2,5 3
λ
ρ
m=0.4375
Experimentais Homogenização [12] Sublim3D

76
FIGURA 5.1
Os resuconvergêncconvergênc(ρ=2.95), po50 minutos
De SUBLIM3d apresentar número de
TABELA 5.3 –P
m
0.4375
0.875
Depois apre
TABELA 5.4 – e 2.8 do exem
13 – Comparaçã
ultados exprcia quase semcia varia entor outro ladoe 23 segund
seguida, cpara o casna Tabela 5.elementos a
Principais carac
ρ Tip
0.25 2.8 0.25 2.8
esenta‐se na
Multiplicadoremplo 1
m
0.4375
0.875
0,25
0,35
0,45
0,55
0
λ
ão dos multipliensai
ressos nestampre decresre 5 horas 2o, para o casdos (ρ=0.05)
omo formao de m=0.4.3, as principassociado à m
cterísticas da m
po de eleme
Linear Linear Linear Linear
Tabela 5.4 o
es de cedência
0 0,5
Experimen
icadores de cedos experiment
s figuras (Fiscente com 22 minutos so de m=0.87a 22 minuto
a exemplific4375 e m=0pais caractermalha, bem c
malha do exemp
ntos
os multiplica
obtidos pelo S
1
ntais H
CARGAS D
dência obtidos ais, para o caso
igura 5.12 eo aumento e 56 segund75 o tempo s e 13 segun
cativa, apre0.875 nos písticas da macomo o núm
plo 1 para os ca
Número de
320828606418572
dores de ced
SUBLIM3d para
ρ 0.25 2.8 0.25 2.8
1,5ρ
Homogenizaç
DE COLAPSO
pelo SUBLIM3do de m=0.875
e Figura 5.13de ρ. No cados (ρ=0.05)de convergêndos (ρ=3).
sentam‐se pontos ρ=0.alha utilizad
mero de graus
asos de m=0.43
elementos
8960 048 8432 608
dência obtid
a os casos de m
2
m=0.8
ão [12]
O DE SISTEMA
d com os obtid
3) apresentaaso de m=0.4) a 6 minutoência varia e
os resultad.25 e ρ=2.8a, designadas de liberdad
375 e 0.875 nos
Globa13777124412754024729
os pelo SUBL
m=0.4375 e 0.87
0.40.20.30.2
2,5 3
875
Sublim3D
AS DE ALVEN
dos por [12] e p
am um temp4375 o temos e 57 seguntre 1 dia 0
dos obtidos 8. Começa‐seamente, o tipde globais e l
s pontos ρ=0.2
DOF ais Loc
792 6417
16 572
048 1283
96 1145
LIM3d.
75 nos pontos
λc 48270 29258 39655 27251
NARIA
pelos
po de po de undos horas
pelo e por po e o locais.
5 e 2.8
cais 7920 096 6864 5216
ρ=0.25

Capítulo 5. Aplicações Numéricas
77
Por fim, representa‐se a distribuição da dissipação plástica nos elementos e a configuração do mecanismo de colapso (Figura 5.14 para o caso de m=0.4375 e Figura 5.15 para o caso de m=0.875).
m=0.4375, ρ=0.25
m=0.4375, ρ=2.8
0 máx.
FIGURA 5.14 – Dissipação plástica e malha deformada obtidas pelo SUBLIM3d, para o caso de m=0.4375 nos pontos ρ=0.25 e 2.8 do exemplo 1

78
FIGURA 5.15 –
5.2.1.1.5 Começa
5.13, bem c
• Tané umse tmac
• Qua
– Dissipação pl
Discusando pela obcomo dos res
nto os resultama função dtorna cada vecroscópicos
anto menor o Maior a
mais pla
ástica e malha
ssão dos rbservação, tasultados apre
ados experimecrescente cez mais fácilde deslizame
o valor da “ea interligaçãoano, o que p
m=0
m=00
deformada obe 2.8 d
resultadoanto do desesentados na
mentais comocom a esbelt de derrubarento para ro
esbelteza” doo entre os tijprovoca o aum
CARGAS D
0.875, ρ=0.25
0.875, ρ=2.8 má
btidas pelo SUBdo exemplo 1
os envolvimenta Figura 5.14
o os teóricosteza (caracter a parede dotação em to
o tijolo (m):jolos, logo a mento da ca
DE COLAPSO
áx.
BLIM3d, para o
to dos gráfic4 e na Figura
s mostram qerizada pelo fevido ao tiporno de um p
fenda de rotrga de colap
O DE SISTEMA
caso de m=0.8
cos da Figura 5.15, conclu
ue a estabilifactor adimeo de rotura mponto;
tura forma‐spso da estrut
AS DE ALVEN
75 nos pontos
a 5.12 e da Fui‐se que:
dade da estrensional ρ) pmudar em te
se para um âtura;
NARIA
ρ=0.25
Figura
rutura orque ermos
ângulo

Capítulo 5. Aplicações Numéricas
79
o Mais sensível será a estrutura à esbelteza global, ρ, (menor será o patamar e maior será o declive do decréscimo da carga de colapso), porque como a estrutura é mais resistente, qualquer alteração da sua forma influenciará significativamente a carga de colapso.
Em seguida comparam‐se os resultados obtidos pelas estimativas teóricas (com maior ênfase para os obtidos pelo SUBLIM3d) com os ensaios experimentais (Figura 5.12 e Figura 5.13):
• Para todos os valores de esbelteza global da Figura 5.12 e apenas para alguns valores de esbelteza global reduzida (ρ ≤ 0.5) da Figura 5.13, observa‐se que os valores teóricos obtidos pelo SUBLIM3d são inferiores aos valores experimentais, esta diferença pode ser justificada pelo "efeito da escala", isto é, quanto menor o modelo ensaiado, menor será o número de juntas por tijolo (menos fragmentado se encontrará a alvenaria), logo maior poderá ser a carga de colapso. Mas este efeito é também consideravelmente acentuado pela consideração dos tijolos como elementos rígidos (como se verifica neste exemplo), logo considerando que os tijolos exibam parâmetros finitos de resistência é esperado que não apresente a mesma relevância [12];
• Em alguns casos, torna‐se questionável a comparação dos resultados teóricos, com os experimentais, devido a que alguns ensaios experimentais foram realizados com um número reduzido de fiadas [12];
• Para o caso de m=0.875, observa‐se que os valores teóricos obtidos pelo SUBLIM3d apresentam uma maior semelhança ao resultados experimentais que os obtidos por [12];
• Do ponto de vista da análise limite, conclui‐se de uma maneira geral que para os dois gráficos os resultados obtidos pelo SUBLIM3d aproximam‐se mais do verdadeiro percurso do multiplicador de colapso de uma alvenaria homogeneizada do que os resultados obtidos por [12], mas continua na mesma a fornecer valores contra a segurança da alvenaria. Este melhoramento conduz às seguintes implicações na solução teórica obtida pelo SUBLIM3d:
o Diminuição do patamar inicial; o Transição mais suave entre o patamar inicial e a zona posterior; o Redução do declive, na fase decrescente; o Diminuição da estabilidade da estrutura.
Apresentam‐se agora os valores principais sobre o melhoramento da solução:
o Para o caso de m=0.4375, o melhoramento da solução apresenta como valor máximo 19.5% (ρ=0.90);
o Para o caso de m=0.875 o melhoramento da solução apresenta como valor máximo 5.2% (ρ=1.35).
De seguida, para se confirmar o erro máximo óptimo adoptado (2%), recalculou‐se para cada caso de m, cinco alvenarias (ρ=0.60, ρ=1.20, ρ=1.81, ρ=2.41, ρ=3.00) com o dobro da proporção, utilizando o mesmo raciocínio que o apresentado no processo de alcançar a homogeneização de resultados (referente ao tópico que trata da determinação do número de fiadas que constituem a alvenaria). Conclui‐se que o erro máximo óptimo deste exemplo, para o caso de m=0.4375 é de 5.4% (ρ=1.81) e para o caso de m=0.875 é de 2.2% (ρ=1.81), não se obtendo erros da mesma ordem de grandeza para qual a geometria da alvenaria foi definida.

80
Por últirígidos:
• As j
• Os conconimpSUB
5.2.1.2 ExEste ex
sujeitando‐horizontal q
5.2.1.2.1 Para a d
pelos artigo
• Pro
A estruem cad‐se o dparedeparedeTabelaelemenos blocbase cox 20 x aplicar
mo, apresen
untas neste
tijolos aprensiderados anseguidos coplica que o aBLIM3d.
xemplo 2xemplo foi ras a difereque é aumen
Definidefinição daos [27], [28] e
opriedades d
utura deste eda uma das 1deslocamente, mas tambée modelo (d 5.5): na printos; na segcos mas coloom a primeir20 cm). Utilir a força vert
ntam‐se algu
exemplo de
esentam apapresentam om apenas oumento do
2 etirado do tentes níveis ntado monot
ição parede de ce [29], em re
a alvenaria (
exemplo cor10 fiadas, coto horizontaém devido a definida peloimeira modaunda modalocaram‐se dra fiada e ouizou‐se esta ical de forma
mas implicaç
sempenham
enas deslocdeslocamenos elementorefinamento
trabalho dede carrega
tonicamente
corte apreseelação a:
(ver Figura 5
responde a orrespondendal na base num calço coo tipo de calidade (.1) idade (.2) nãduas camadautra na ligaçãviga para apa distribuída
CARGAS D
ções devido
m o papel dec
camentos cotos de 1ª oos considerao nas juntas
D. Oliveira amento ver.
entam‐se de
5.16):
uma alvenardo dimensioão só atravéolocado no pcarregamentnão se colocão se colocoas de argamão da últimaplicar a forçaa por toda a l
DE COLAPSO
a se conside
cisivo no cola
onstantes, lordem (consados no prenão iria mel
[27] que tertical consta
seguida os d
ria definida ponalmente a és do encasprimeiro tijolto), definiramcou qualqueu qualquer m
massa de nive fiada com aa vertical malargura da pa
O DE SISTEMA
erar os tijolos
apso da alve
ogo os elestantes ou lesente trabahorar o resu
estou sete aante com u
dados impor
por 5 blocos 100 x 100 x stramento do da primeirm‐se duas er material dmaterial de elamento, ua viga de betãis eficientemarede.
AS DE ALVEN
s como elem
naria;
mentos de lineares) qulho (dois), oultado obtido
alvenarias sium carregam
rtantes forne
(20 x 10 x 220 cm. Reste toda a bara fiada. Paramodalidadesde interligaçinterligação ma na ligação reforçadomente, isto é
NARIA
mentos
junta e são o que o pelo
mples mento
ecidos
20 cm) ringe‐ ase da a cada s (ver ão de entre ão da o (160 é, para

Capítulo 5. Aplicações Numéricas
81
FIGURA 5.16 – Geometria da alvenaria de pedra e esquema de carregamento (adaptado de [27])
• Propriedades dos materiais:
Neste caso a parede de alvenaria é constituída pelos seguintes elementos: Blocos de pedra, Viga de Betão Reforçado, interfaces bloco/bloco e argamassa de nivelamento. Destes elementos são fornecidas as seguintes propriedades: Os blocos apresentam uma resistência à compressão média de 57.1 MPa e uma resistência à tracção média de 3.72 MPa, por outro lado, os interfaces bloco/bloco exibem propriedades de resistência puramente atríticas 0 sendo o ângulo de atrito dado por:
tan 0.62 (5.14)
e por último a argamassa de nivelamento apresenta uma resistência à compressão elevada, cerca de 50 MPa.
• Tipo de carregamento (ver Figura 5.16):
Cada uma das 4 paredes modelo, designadas por SW30, SW100, SW200 e SW250, é sujeita a um carregamento vertical constante (com auxílio de uma viga de aço colocada sobre a viga de betão reforçado o que conduz a uma carga adicional de 1.0 KN), indicado na Tabela 5.5, seguido da aplicação de um carregamento horizontal crescente até à ocorrência do colapso da parede de alvenaria.
TABELA 5.5 – Carregamento vertical aplicado a cada parede modelo do exemplo 2
Parede modelo Modalidade Carregamento vertical (KN) Tensão normal (MPa)
SW30 SW30.1
30 0.15 SW30.2
SW100 SW100.1
100 0.50 SW100.2
SW200 SW200.1
200 1.00 SW200.2
SW250 SW250.1 250 1.25

82
5.2.1.2.2 Os resu
Engenharia modelos de
na Figura 5deslocamenaplicadas à
Apresentamexemplo, oFigura 5.23
Resultultados expeCivil da Un
e parede é ap
.23 à Figura nto horizontestrutura.
m‐se agora nde as repraté à Figura
tados exprimentais exiversidade dpresentado n
FIGURA 5
5.26 apresetal da viga
resumidameesentações 5.26 e os re
perimentaxistentes forado Minho. Ona Figura 5.1
.17 – Mecanism
entam‐se as e na Tabela
ente as várgráficas das spectivos va
CARGAS D
ais/Propoam obtidos O mecanismo17,
mos de rotura e
curvas expea 5.6 aprese
rias propostforças horiz
alores numér
DE COLAPSO
ostas de testes reo de rotura
experimental [2
rimentais deentam‐se as
tas existentzontais de cricos são apr
O DE SISTEMA
alizados no experiment
27]
e carregamens forças hor
tes na literacedência sãoesentados n
AS DE ALVEN
Departamenal para os q
nto em funçrizontais má
atura sobreo apresentada Tabela 5.6
NARIA
nto de quatro
ção do ximas
e este das na .

Capítulo 5. Aplicações Numéricas
83
• Análise limite [17]:
Esta ferramenta de cálculo considera a modelação micro simplificada na modelação da alvenaria, optando por considerar os materiais como perfeitamente plásticos e obedecendo às regras de escoamento não associado (dado para um ângulo de dilatação nulo). Baseia‐se no teorema cinemático do método da análise limite para a resolução do problema e considera uma superfície de cedência composta tanto pelo critério de mecanismo de esmagamento como pelo critério de Mohr‐Coulomb. Esta análise considera duas hipóteses, uma que corresponde a limitar as tensões de compressão nos interfaces bloco/bloco e uma segunda que impõe que a alvenaria não tem qualquer resistência à tracção. Nesta proposta definem‐se dois tipos de análises:
o Análise limite 1 ‐ considera que todos os tijolos são modelados como elementos rígidos;
o Análise limite 2 ‐ considera que todos os tijolos são modelados como elementos rígidos, excepto o tijolo mais à esquerda da 3 fiada (contando o número de fiadas a partir da base). Este tipo de análise foi criado devido à observação dos modos de rotura experimentais da parede SW200, ver Figura 5.17, que levou à consideração da fendilhação no bloco especificado.
Como complemento desta proposta apresentam‐se na Figura 5.18 os modos de rotura obtidos para a parede SW200.
a) b)
FIGURA 5.18 – Modos de rotura obtidos para parede SW200 pela: a) Análise limite 1 b) Análise limite 2 [17]
• Análise MEF ([30] e [31]):
Esta ferramenta de cálculo considera a modelação micro simplificada na modelação da alvenaria, optando por considerar os tijolos como um material rígido e as juntas como um material plástico. Baseia‐se no teorema cinemático do método da análise limite para a resolução do problema e considera a superfície de cedência proposta por P. B. Lourenço e J. G. Rots (modelo de interface composto) [32], ver Figura 2.21. Pela observação experimental da Figura 5.17, considerou‐se impossível a fendilhação dos blocos para as paredes SW30 e SW100, por outro lado para as paredes SW200 e SW250 considerou‐se potenciais falhas no meio dos blocos.
A representação gráfica das forças horizontais de cedência desta proposta é obtida através da convergência assimptótica da solução. Como complemento desta proposta apresenta‐se na Figura 5.19 o modo de rotura obtido para a parede SW30.

84
• Env
Esta feacordocorpo deslizaestáticuma re
que co
• Mé
FIGUR
Esta prconsistparcialdas escompre
FIGU
velope Bi‐line
erramenta deo com o critérígido, por omento, fendos simples (degressão line
2.06 0.5
11.84 0.3
rresponde à
todo simplif
RA 5.20 – Mode
roposta corrtindo num cmente em pscoras é limessão vertic
RA 5.19 – Mod
ear [30]:
e cálculo conério de Manoutro lado, ndilhação e esdevido ao caear, obtendo
2
estimativa d
ficado de an
elo proposto pe
responde à ccontínuo de paralelo, ver mitado pelo al máxima n
do de rotura ob
nsiste num enn e Muller no segundo rsmagamentoarregamento‐se,
da carga de c
álise [30]:
elo método sim
conversão doescoras diaFigura 5.20.ângulo de
na base do
CARGAS D
btido para a par
envelope bi‐l[33]. No priramo, defineo dos blocoso vertical ser
colapso dest
mplificado de a
o exemplo nagonais distr. Neste mecaatrito do leque (dime
DE COLAPSO
rede SW30 pela
inear (equaçmeiro ramoe‐se um mods). O primeirreduzido) e
ta proposta.
nálise descreve
na cedência ribuídas paranismo o máinterface blensão m na
O DE SISTEMA
a Análise MEF
ção (5.15)) q define‐se udo de roturaro ramo é obo segundo r
endo o equilíbr
para um mercialmente cáximo declivloco/bloco, Figura 5.20
AS DE ALVEN
[31]
ue foi definium mecanisma misto (que btido por cáramo é obtid
rio na cedência
ecanismo simcomo um leqve (com a veenquanto q0) é limitada
NARIA
do de mo de inclui lculos do por
(5.15)
a [30]
mples, que e ertical) que a a pela

Capítulo 5. Aplicações Numéricas
85
resistência média à compressão dos tijolos (fc). Pelas condições de equilíbrio obtém‐se a seguinte expressão para a estimativa da força horizontal de cedência (H):
tan 1 tan (5.16)
sendo,
(5.17)
em que V corresponde à força vertical total aplicada à alvenaria e b, h, t correspondem à largura, altura e espessura da parede, respectivamente.
• Modelo de Carol e López [34]:
Nesta proposta as paredes foram simuladas numericamente usando o modelo de análise proposto por Carol e López [35]. Esta ferramenta de cálculo baseia‐se na elasto‐plasticidade (considerando o amolecimento) e encontra‐se formulada em termos de deslocamentos relativos. A superfície de cedência usada por este modelo para os interfaces bloco/bloco foi uma superfície de cedência hiperbólica que tende assimptoticamente para a superfície de cedência de Mohr‐Coulomb (ver Figura 5.21).
FIGURA 5.21 – Superfície de cedência hiperbólica
Nesta proposta inserem‐se juntas verticais nos blocos, para permitir a ocorrência das falhas transversais nestes elementos.
5.2.1.2.3 Simplificações/Considerações O objectivo deste exemplo era a possibilidade de comparar tanto os resultados experimentais
obtidos por D. Oliveira [27] como os resultados obtidos pelas várias propostas encontradas na literatura com os resultados obtidos pelo SUBLIM3d. Este objectivo, para ser alcançado correctamente foi necessário admitir o seguinte conjunto de hipóteses:

86
• Em
• Em
relação às po Apenas
qualqueo Inserirao Conside
assumido Conside
1 x 0.1 x
relação às po Embora
devido foram parâme
I.
II.
III.
IV.
propriedades se executarer material dam‐se as dimeraram‐se oda pela maioera‐se que ax 0.2 m e qu
propriedadesa os blocos ao enunciadefinidos peetros deste c
FIGURA
Representavalores da rDefiniram‐s
1
1
Determinar
Tendo em no ponto III
s da alvenarram as paredde interligaçãensões dos ts tijolos comoria das propa viga de be foi modela
s dos materide pedra sedo no seguelo critério ritério segui
A 5.22 – Parâme
‐se graficamresistência à se as coorden
cos , sin
1 cos ,
ram‐se as coo
,
,
consideraçãoI,
CARGAS D
ia: des modelo pão de elementijolos em mmo elementpostas; betão reforçada por elem
iais: ejam modelando tópico de cedênciaram‐se as se
etros do critéri
mente os encompressãonadas do Po
sin
ordenadas d
o a condição
DE COLAPSO
para a primentos); etros; tos rígidos,
çado (lintel) mentos rígido
ados por eledo capítuloa de Mohr eguintes etap
io de cedência
nsaios que lo e à tracção nto A e B:
dos vectores
o de norma
O DE SISTEMA
ira modalida
que corresp
apresenta os;
ementos rígio 5.1.1, que – Coulomb
pas, ver Figur
de Mohr ‐ Cou
levaram à dmédia.
BA e V1:
lidade dos v
AS DE ALVEN
ade (não se c
ponde à hip
como dime
dos consideestes elem
b. Para definra 5.22:
lomb
determinação
vectores refe
NARIA
coloca
pótese
ensões
era‐se, mentos nir os
o dos
(5.18)
(5.19)
(5.20)
(5.21)
eridos

Capítulo 5. Aplicações Numéricas
87
: 0 0 (5.22)
determina‐se o valor do ângulo α,
28.56° (5.23)
V. Sabendo que,
90° 61.44° (5.24)
determina‐se o valor do ângulo φ.
VI. Substitui‐se as equações (5.24) e (5.18) na equação (2.40) e resolve‐se em ordem à coesão, obtendo‐se,
7.27 (5.25)
o Embora o lintel seja modelado por elementos rígidos considera‐se, devido ao enunciado no segundo tópico do capítulo 5.1.1, que o lintel também foi definido pelo critério de cedência de Mohr ‐ Coulomb sendo definido por c=10 MPa e φ=65° (correspondem a parâmetros irreais, tendo‐se optado por estes valores para que a rotura nunca se dê por este elemento).
• Em relação ao tipo de carregamento: o Converteram‐se as cargas aplicadas em tensões, σ, através da seguinte equação,
(5.26)
o Considera‐se que a força horizontal aplicada na parede de alvenaria corresponde a uma tensão de corte distribuída em toda a largura do lintel;
o Considera‐se que o peso específico equivalente e distribuído da viga de betão reforçado (p.e.e.d.v.b.r.) é obtido pelo seguinte raciocínio:
I. Considera‐se que o . . 25 / (peso especifico do betão reforçado); II. Calcula‐se o peso específico equivalente do betão reforçado:
. . .. . 80 / (5.27)
onde e , correspondem respectivamente ao volume real e
considerado da viga de betão reforçado;
III. Calcula‐se o valor pretendido através da seguinte equação,
. . . . . . . . . . (5.28)
• Em relação aos parâmetros opcionais: o Considera‐se que a solução obtida pelo SUBLIM3d é alcançada pela precisão (1x10‐6);
o Considera‐se que a alteração ao parâmetro de penalidade inicial é igual a 0.01 para a parede SW30 e igual a 0.1 para a parede SW250, porque estes valores permitem que a solução seja boa e que convirja rapidamente.

88
5.2.1.2.4 Os resu
paredes SW5.24, na Fig
FIGURA
Resultultados obtiW30, SW100,ura 5.25 e n
5.23 – Compar
0
5
10
15
20
25
0
Força Horizon
tal [KN
]
ExperimenAnálise limAnálise ME
tados SUBdos pelo SU, SW200 e Sa Figura 5.26
ração dos resuldeslocam
5
Fo
ntal [27]mite 1 [17]EF ([30] e [31]
BLIM3d UBLIM3d (teSW250 apres6, respectiva
L
tados obtidos mento experime
10Deslocame
orça Ver
])
CARGAS D
endo em cosentam‐se dmente.
Legenda:
pelas estimativentais da pared
15ento Horizont
rtical =
SW 3
DE COLAPSO
nsideração e forma grá
vas teóricas comde de corte SW
20tal [mm]
30KN
Sublim3DMétodo simEnvelope B
30.2
O DE SISTEMA
o capítulo 5fica na Figur
m as curvas deW30
25
mplificado de Bi‐linear [30]
SW 30.1
AS DE ALVEN
5.2.1.2.3) para 5.23, na F
carregamento
30
análise [30]
NARIA
ara as Figura
o ‐

Capítulo 5. Aplicações Numéricas
89
Legenda:
FIGURA 5.24 – Comparação dos resultados obtidos pelas estimativas teóricas com as curvas de carregamento – deslocamento experimentais da parede SW100
Legenda:
FIGURA 5.25 – Comparação dos resultados obtidos pelas estimativas teóricas com as curvas de carregamento – deslocamento experimentais da parede de corte SW200
0
10
20
30
40
50
60
0 5 10 15 20 25 30
Força Horizon
tal [KN
]
Deslocamento Horizontal [mm]
Força Vertical= 100KN
Experimental [27] Sublim3DAnálise limite 1 [17] Modelo de Carol e López [34]Método simplificado de análise [30] Análise MEF ([30] e [31])Envelope Bi‐linear [30]
0
15
30
45
60
75
90
105
0 5 10 15 20 25 30
Força Horizon
tal [KN
]
Deslocamento Horizontal [mm]
Força Vertical= 200KN
Experimental [27] Sublim3D
Análise limite 1 [17] Análise limite 2 [17]
Modelo de Carol e López [34] Método simplificado de análise [30]
Análise MEF ([30] e [31]) Envelope Bi‐linear [30]
SW 100.1 SW 100.2
SW 200.2
SW 200.1

90
FIGURA
Na Tabdiversas pa
TABELA 5.6 –
Paredes Ex
. 1
SW30 22
SW100 42
SW200 72
SW250 10
Nota: Os valorelação à méd
Os resuatravés do relação ao t
Observamuito rápida 19 segund
ForçaHorizon
tal[KN
]
A 5.26 – Compa
bela 5.6 apreredes.
Comparação d
xperimental [27
1 . 2 Méd
2 23 22.5
2 49 45.5
2 69 70.5
02 ‐ ‐
ores entre parêdia dos valores
ultados teóricraciocínio itipo de carre
a‐se a partirda, apresentados, que é no
0
20
40
60
80
100
120
140
0
Força Horizon
tal [KN
]
ExperimenModelo dAnálise M
ração dos resudeslocam
esentam‐se
a carga de cola
7]
SUBLIM3dia
5 16.4
(‐27.1%)
5 51.6
(13.4%)
5 101.5 (44%) 126.4 (23.9%)
ntesis represenexperimentais
cos obtidos pnverso apreegamento).
r do ficheiro ando um temotável para u
5
F
ntal [27]e Carol e LópeEF ([30] e [31
L
ultados obtidosmento experime
numericam
apso[KN] obtida
d Análise limi
1
16.5 (‐26.7%) 52.5
(15.4%) 101.4 (43.8%)
‐
ntam o erro (ms (excepto para
pelo SUBLIMesentado no
de cálculo, mpo de execum problema
10Deslocame
orça Ve
ez [34]1])
CARGAS D
Legenda:
s pelas estimatiental da parede
ente os res
a experimenta
Estim
ite [17] ModeCar
Lópe2
‐
‐ 4
(‐1276.9 (9.1%)
7(2.1
‐ 9
(‐6.mesmo raciocína a parede SW2
M3d, apreseno capítulo 5.
que a convecução dos cáa não linear c
15ento Horizont
ertical= 2
DE COLAPSO
ivas teóricas coe de corte SW2
ultados obt
lmente com a o
mativas teórica
elo de rol e z [34]
Mésimplifanális
‐ 13
(‐3840 .1%)
43(‐4
72 1%)
8(2
95 9%)
1(4.
nio da equação250).
ntados nesta2.1.2.3 (na
ergência da lculos em cocom possibil
20al [mm]
250KN
Sublim3DMétodo simEnvelope B
SW
O DE SISTEMA
om a curva de c250
idos pelo S
obtida pelas es
s
todo icado de se [30]
Aná([30
3.9 8.2%) (‐3.7 4%) (86 2%) (1107 .9%) (‐ (5.13)) das est
s figuras e taequação (5
solução paromputação sidades múlti
25
mplificado de Bi‐linear [30]
250.1
AS DE ALVEN
carregamento –
UBLIM3d pa
stimativas teór
álise MEF 0] e [31])
EnvBi‐
17 24.4%)
1(‐
47.5 (4.4%)
4 (‐
81.4 15.5%)
7(7
98 ‐3.9%)
9(‐
timativas teóri
abela, são ob.26), definid
a cada paresequencial iniplas de rotu
30
análise [30]
NARIA
–
ara as
icas
velope ‐linear [30] 17.1 ‐24%) 43.8 ‐3.7%) 75.8 7.5%) 91.8 ‐10%) cas em
btidos da em
de foi nferior ura.

Capítulo 5. Aplicações Numéricas
91
De seguida, apresentam‐se na Tabela 5.7 as principais características da malha utilizada para as paredes do exemplo 2, designadamente, o tipo e o número de elementos associado à malha, bem como o número de graus de liberdade globais e locais.
TABELA 5.7 – Principais características da malha de cada parede do exemplo 2
Paredes Tipo de elementos Número de elementos DOF
Globais Locais SW30, SW100, SW200, SW250 Linear 730 794 1460
Como complemento, para as paredes de corte SW30, SW100, SW200 e SW250 representa‐se respectivamente na Figura 5.27, na Figura 5.28, na Figura 5.29 e na Figura 5.30 a distribuição da dissipação plástica nos elementos e a configuração do mecanismo de colapso.
0 máx.
FIGURA 5.27 – Dissipação plástica e malha deformada obtida pelo SUBLIM3d para a parede de corte SW30 do exemplo2

92
FIGURA 5.28 –
FIGURA 5.29 –
– Dissipação pl
– Dissipação pl
ástica e malha
ástica e malha
0
deformada ob
0
deformada ob
CARGAS D
má
btida pelo SUBL
má
btida pelo SUBL
DE COLAPSO
áx.
LIM3d para a p
áx.
LIM3d para a p
O DE SISTEMA
arede de corte
arede de corte
AS DE ALVEN
e SW100 do exe
e SW200 do exe
NARIA
emplo2
emplo2

Capítulo 5. Aplicações Numéricas
93
0 máx.
FIGURA 5.30 – Dissipação plástica e malha deformada obtida pelo SUBLIM3d para a parede de corte SW250 do exemplo2
5.2.1.2.5 Discussão dos resultados Começa‐se pela a análise dos resultados apresentados (experimentais e teóricos) para cada uma
das paredes estudadas:
• Parede SW30: o Pela observação da Figura 5.23 e da Tabela 5.6, conclui‐se que a proposta que mais
se aproxima da média dos resultados experimentais é o envelope Bi‐linear [30]. A proposta do SUBLIM3d aparece em quarto lugar, com uma diferença em relação à melhor solução de 0.7KN (3.1%), correspondendo a uma diferença pouco significativa, o que leva a dizer que o resultado obtido pelo SUBLIM3d corresponde a uma boa estimativa da carga de colapso experimental. Nesta parede todas as propostas apresentadas exibem valores inferiores aos observados experimentalmente, conduzindo assim à obtenção de valores a favor da segurança;
o Pela observação da Figura 5.17, da Figura 5.19 e da Figura 5.27, conclui‐se que o mecanismo de colapso obtido experimentalmente é muito semelhante ao obtido pela aproximação numérica (Análise de MEF [31]), nomeadamente, uma progressão gradual de separação dos blocos ao longo da diagonal de compressão, provocada pela rotação da parte superior em relação à base da parede, não se observando praticamente qualquer tipo de esmagamento ou fendilhação dos blocos. Por outro lado, o mecanismo de rotura obtido pelo SUBLIM3d também é semelhante ao verificado experimentalmente, contudo também apresenta uma separação dos tijolos na parte inferior decrescente com o aumento da altura.

94
• Par
• Par
ede SW100:o Pela ob
se apro([30] e diferença uma dSUBLIMNesta pinferior
o Pela obcolapsosemelhafendilhatambémo mecados tijo
o Os resestimatdos tijoreduzidpedra (v
ede SW200:o Pela ob
se aproCarol ediferençdiferençcorresptodas aexperim
o Pela obmecanipela apconstandeslizamesmagada diagSUBLIMexperim
o Os resucorrespconsidesignificafendilha
: bservação daoxima da mé [31]). A pça em relaçãdiferença po
M3d correspoparede existres aos valorebservação dao obtido exante ao descação dos blom que existeanismo de rolos na parte ultados obttiva da cargaolos. A diferea proporçãover Figura 5.
: bservação daoxima da mé López [34]ça em relaçãça significatponde a umaas propostasmentalmentebservação dasmo de colaproximação nnte dos blomento da amento sevegonal de comM3d (semelhmentalmenteultados obtidponder a umerassem as ativa devidoação nos blo
a Figura 5.24édia dos resuproposta do ão à melhor souco significonde a umatem tanto pes observadoa Figura 5.1perimentalmcrito para a ocos de pedram duas diagotura obtidoinferior dectidos pelo Sa de colapsoença obtida o de fenóme17).
a Figura 5.25édia dos res. A propostaão à melhoriva, o que la má estimats apresentae; a Figura 5.17apso obtido numérica (Anocos ao lonparte supeero dos blocompressão. Pante ao dae; dos (carga ema melhor e
deformaçõo à elevadocos de pedra
CARGAS D
4 e da Tabelaultados expeSUBLIM3d
solução de 4ativa, o quea boa estimapropostas quos experime17 e da Figumente e o parede SW3a foram nestgonais de como pelo SUBLrescente comSUBLIM3d pexperimentnão seria prenos de esm
5 e da Tabelaultados expea do SUBLIMr solução deleva a dizer tiva da cargdas apresen
7, da Figuraexperimentnálise limitengo da diagrior sobre os de pedra,Por outro lad Análise lim
e mecanismstimativa daões dos tijoa proporçãa (ver Figura
DE COLAPSO
a 5.6, concluerimentais, maparece em
4.1KN (9%), c leva a dizerativa da carue apresentntalmente;ura 5.28 conobtido pelo30, mas os fete caso obsempressão. CoIM3d também o aumentopoderiam cal caso se corovavelmentmagamento
a 5.6, concluerimentais, M3d aparecee 29.5KN (41que o resua de colapsontam valore
5.18 e da talmente é 2 [17]), nomgonal de cas juntas acompanhado, o mecamite 1 [17])
o de colapsa carga de colos. A difo de fenó 5.17).
O DE SISTEMA
ui‐se que a pmajorando‐am segundo corresponder que o resurga de colaptam valores
nclui‐se que o SUBLIM3d enómenos dervados no teomo no casoém apresento da altura; orresponderonsiderasseme muito signe fendilhaçã
ui‐se que a pmajorando‐oe em último1.9%), corresultado obtidoo experimens superiores
Figura 5.29, muito sememeadamentecompressão, horizontais,
ado com fennismo de ronão corres
so) pelo SUBcolapso expeferença obtmenos de
AS DE ALVEN
proposta que, é a Análiselugar, comndo mesmo ultado obtidopso experimsuperiores
o mecanismé relativam
e esmagameeste e observo da parede ta uma sepa
r a uma mm as deformnificativa devão nos bloc
proposta queo, é o Modeo lugar, comspondendo ao pelo SUBLntal. Nesta ps aos obser
conclui‐se qelhante ao oe, uma sepaprovocada
, ocorrendodilhação ao otura obtidosponde ao o
BLIM3d poderimental catida poderiaesmagamen
NARIA
e mais e MEF uma assim o pelo mental. como
mo de mente ento e vou‐se SW30 aração
melhor mações vido à cos de
e mais elo de m uma a uma LIM3d parede rvados
que o obtido aração pelo
o um longo o pelo obtido
eriam aso se a ser nto e

Capítulo 5. Aplicações Numéricas
95
• Parede SW250: o Pela observação da Figura 5.26 e da Tabela 5.6, conclui‐se que a proposta que mais
se aproxima do resultado experimental, majorando‐o, é o Método simplificado de análise [30]. A proposta do SUBLIM3d aparece em segundo lugar, com uma diferença em relação à melhor solução de 19.4KN (19%), correspondendo a uma diferença significativa, o que leva a dizer que o resultado obtido pelo SUBLIM3d corresponde a uma média estimativa da carga de colapso experimental. Nesta parede existem tanto propostas que apresentam valores superiores como inferiores aos valores observados experimentalmente;
o Pela observação da Figura 5.17 e da Figura 5.30 conclui‐se que o mecanismo de colapso obtido experimentalmente é semelhante ao descrito para a parede SW200, mas os fenómenos de esmagamento e fendilhação foram neste caso mais severos e também se observou que existe encurvadura da parede. Logo conclui‐se que este mecanismo de colapso não é de todo semelhante ao obtido pela aproximação numérica (SUBLIM3d);
o Os resultados obtidos (carga e mecanismo de colapso) pelo SUBLIM3d poderiam corresponder a uma melhor estimativa da carga de colapso experimental caso se considerassem as deformações dos tijolos. A diferença obtida não seria tão significativa como na parede SW200 porque surgem nesta parede fenómenos de encurvadura lateral (que não se implementaram) embora exista uma elevada proporção de fenómenos de esmagamento e fendilhação nos blocos de pedra (ver Figura 5.17).
Por último, apresentam‐se alguns comentários da interpretação do comportamento geral das quatro paredes modelo ensaiadas:
• Comparando as duas modalidades (.1 e .2) chega‐se à conclusão que não existe nenhuma diferença significativa. Este resultado era esperado porque o comportamento experimental observado é praticamente controlado pelos fenómenos que acontecem tanto na parte central como na parte superior das paredes (ver Figura 5.17);
• A falta de material de interligação promove concentrações de tensões em alguns pontos de contacto, levando à fendilhação vertical dos blocos. Este processo é mais relevante quanto maior o carregamento vertical aplicado (ver Figura 5.17);
• Pela observação da Tabela 5.6, conclui‐se que a força horizontal máxima aumenta com a força vertical aplicada, como seria de esperar devido ao aumento do confinamento da parede, conduzindo também a um aumento da fragilidade da parede;
• Os diagramas que se apresentam na Figura 5.23 até à Figura 5.26 são caracterizados por dois comportamentos distintos globais. Inicialmente, as curvas exibem grande rigidez e comportamento elástico (até aproximadamente 30% da carga de pico), depois para pequenas deformações existe uma degradação contínua da tangente da rigidez. A segunda parte dos diagramas é caracterizada por uma oscilação da força horizontal provocada pelos movimentos relativos dos blocos, devido à ausência de material de interligação.

96
5.2.2 ExPor fim
determinaçapresentadimplementaa capacidadeterminaç
Este exempsujeitando‐obtendo‐se
5.2.2.1 DPara a d
fornecidos p
• Pro
As alveângulo
De seg
emplo dem, o procesção das caros no capítados na formde dos moção de cargas
plo foi propos a difere o mais com
Definição definição dopelos artigos
opriedades d
enarias, que os entre a jun
uida apresen
o Ensaio dOs painéis o Ensaio dOs painéisrectangulauma das 8 O ensaio dexecutado
e aplicaçãosso de validgas de colatulo 3.2.2.2mulação do Sodelos propos de colapso
osto por A. ntes níveis pleto conjun
s vários pains [10, 36, 37]
a alvenaria (
apresentam nta horizonta
FIGURA 5.31 –
ntam‐se as p
de tracção bsão formadode compresss foram enres (que aprfiadas, corree tracção‐coutilizando u
o de critédação termapso são af2 e no capSUBLIM3d, seostos comode sistemas
W. Page [1de tracção,
nto de dados
néis de alven], em relação
(Figura 5.31)
a forma de al e a tensão
– Estrutura da a
propriedades
biaxial: os por 4 tijolosão e tracçãosaiados a mresentam umespondendo ompressão bm painel ma
CARGAS D
érios com ina com a fectadas pepítulo 3.2.2.3ervindo assimo para valid de alvenaria
10, 36, 37] , de comprs de resistênc
naria apreseno a:
):
painéis quad vertical, θ (0
alvenaria do ex
s específicas
os rectangulo‐compressãmetade da m rácio entredimensionabiaxial no casais esbelto.
DE COLAPSO
truncaturanálise do las truncatu3. Estes crim o processodar a aplicaa.
que analisouessão e de cia de alvena
ntam‐se de s
drangulares, 0°, 22.5°, 45°
xemplo 3 (adap
da alvenaria
ares em cadão biaxial: escala, sen
e a largura elmente a 360so de σ2=0 (t
O DE SISTEMA
ra (Exempexemplo s
uras dos critérios não o de análise abilidade de
u vários paitracção‐co
aria carregad
seguida os d
são ensaiad°, 67.5°, 90°)
ptado de [10])
a para cada e
a uma das 1
ndo formade a espessura0 x 360 x 50 tracção unia
AS DE ALVEN
plo 3) seguinte, onritérios propse encontrnão só para estes critério
néis de alvempressão bda biaxialme
dados import
as para difer.
ensaio:
0 fiadas.
dos por 3 ta de 2.2) emmm. axial) e θ=22
NARIA
nde a postos ravam aferir os na
enaria biaxial, nte.
tantes
rentes
tijolos m cada
.5° foi

Capít
•
D
•
OFp
tulo 5. Aplica
Proprieda
De seguida a
o EAs jucedêcorte
o E
A junconfforne
o E
Os mcomassu
Tipo de C
Os painéis sF1(σ2). De separa cada en
o E
Este inve
o E
Este apre(com
ações Numé
ades dos ma
apresentam‐
Ensaio de trauntas são mência apresee(Fs) é igual a
FIGUR
Ensaio de com
nta é constifere uma resecida uma re
Ensaio de tra
materiais depressão biaxme o valor d
Carregament
são carregadeguida aprensaio:
Ensaio de tra
tipo de ensrso ao apres
Ensaio de com
tipo de ensesentado nampressão uni
ricas
ateriais:
se as proprie
acção biaxialmodeladas pentado na Fa 0.29 MPa e
RA 5.32 – Critér
mpressão bi
tuída por umistência médesistência mé
acção‐compr
este ensaioxial, exceptode 5.08 MPa.
to (Figura 5.3
dos proporcsentam‐se a
acção biaxial
saio é realizaentado na Fi
mpressão bi
saio é realizaa Figura 5.3axial segund
edades espe
: or elementoFigura 5.32, e 0.24 MPa,
rio de cedência
axial:
m traço voludia à compreédia à comp
ressão biaxia
apresentamo no caso da.
31):
cionalmente algumas info
:
ado aplicandigura 5.31.
axial:
ado aplicand31. Os paindo a σ1), 10, 4
cíficas dos m
os de junta onde a resrespectivam
a dos elemento
umétrico de essão de 5.55ressão de 15
al:
m as mesmaa resistência
nas direcçõormações es
do as tensõe
do as tensõenéis são suj4, 2 e 1.
materiais para
que são desistência limente.
os de junta (ada
1:1:6 (cime5 MPa. No ca5.41 MPa.
as proprieda média à co
ões das tensspecíficas do
es principais,
es principais,jeitos a rác
a cada ensai
efinidos pelomite à tracçã
aptado de [10])
ento:cal:areiaaso dos tijolo
ades que noompressão d
sões principo tipo de ca
, F2 e F1, co
, σ1 e σ2, cocios (σ1/σ2)
97
o:
o critério deão (Ft) e ao
)
a) o que lheos, apenas é
o ensaio deda junta que
ais, F2(σ1) earregamento
m o sentido
m o sentidode infinito
7
e o
e é
e e
e o
o
o o

98
5.2.2.2 RNo caso
programa permanecetracção uni5.33 se inte
sendo a corte na jurotura para
Para o enDepartameexperimentapresentad
o Ensaio d
Este tipo dcom o sentensão prinsujeitos a runiaxial).
Resultadoso do ensaiode computam em regimaxial, a cedêersectam, isto
·
FIGURA 5.33 –
tensão de trunta, respect cada ângulo
nsaio de cnto de Engtais típicos oos na Figura
de tracção‐c
de ensaio é ntido inversoncipal horizorácios (|σ2|/
s experimo de tracçãoador iteratie elástico e qência da junto é, quando,
Critério de ced
racção aplicativamente. Do (entre a jun
compressão genharia Civobtidos nest5.34:
compressão
realizado apo ao apreseontal, σ2, com/|σ1|) de inf
mentais/Po biaxial, A.vo de elemque as juntata ocorre qu,
dência da junta
ada à alvenaDesde a Fignta horizonta
biaxial, avil da Univetes ensaios,
CARGAS D
biaxial:
plicando, porntado na Fim o sentido finito (comp
Propostas W. Page sim
mentos finits apresentamuando as du
a para o caso de
aria e onde ura 5.38 à Fal e a tensão
nalisaram‐seersidade de que depend
DE COLAPSO
r um lado, agura 5.31 eapresentadoressão uniax
mulou uma tos [10] qum uma respoas rectas (τ1
e tracção uniax
e τ represFigura 5.42, o vertical) con
e experimeNewcastle.
dem do ráci
O DE SISTEMA
a tensão prin por outro o nessa figuxial), 30, 10,
série de paue consideraosta não line
1 e τ2) aprese
xial (adaptado
sentam a teexpõem‐se nsiderado.
ntalmente . Os mecano das tensõ
AS DE ALVEN
ncipal verticlado aplicanra. Os painé, 5, 2 e 0 (tr
ainéis usanda que os tear. Para o caentadas na F
de [10])
nsão normaos envelop
102 painéinismos de rões principai
NARIA
al, σ1, ndo, a éis são racção
do um tijolos aso de Figura
(5.29)
l e de pes de
is no rotura s, são

Capít
FIG
Desdenvehorizuniaxdos p
Por fno Dexperverticplano
tulo 5. Aplica
GURA 5.34 – Me
e a Figura lopes de rotontal e a texial segundo painéis e do c
im, para o eDepartamentrimentais típcal e para oo do painel e
ações Numé
ecanismos de r
5.43 à Figuura (obtidosnsão verticaσ2), 0.1, 0.2carregament
nsaio de trao de Engenpicos obtidoss diferentes e são sumariz
ricas
rotura experimuniaxial
ura 5.47 aps através da il. Nestas fig25 e 0.5 forato.
cção‐comprenharia Civil ds nestes ensarácios das t
zados na Figu
mentais típicos pl; (b) biaxial (ad
presentam‐seimpressão duras, os resuam obtidos d
essão biaxiada Universidaios, para os tensões prinura 5.35.
para os ensaiosdaptado de [36
e os resultae curvas méultados parados resultad
l, analisaramdade de Newvários ângu
ncipais, ocor
s de compressã6])
ados experidias) para caa os rácios (σos experime
m‐se experimwcastle. Os los da junta rem num pl
ão biaxial: Com
mentais bemada ângulo eσ1/σ2) de 0 (entais usand
mentalmentemecanismohorizontal colano (planos
99
mpressão (a)
m como osentre a junta(compressãoo a simetria
106 painéisos de roturaom a tensãos) normal ao
9
s a o a
s a o o

100
FIG
A. W. Page restantes phorizontais
Desde a Fienvelopes dhorizontal e
GURA 5.35 – Re
ensaiou o paainéis. Esta intersectem
igura 5.48 àde rotura (obe a tensão ve
esumo dos mo
ainel θ=22.5°alteração ge
m as extremid
à Figura 5.5btidos atravéertical.
odos de rotura p
° referente àeométrica sedades livres d
52, apresenés da impres
CARGAS D
para a tracção‐
à tracção unierve para asdo painel (Fig
tam‐se os rssão de curva
DE COLAPSO
‐compressão bi
axial, com ussegurar quegura 5.35).
resultados eas médias) p
O DE SISTEMA
iaxial (adaptad
ma esbelteze um maior n
experimentapara cada ân
AS DE ALVEN
do de [37])
a maior do qnúmero de j
is bem comgulo entre a
NARIA
que os juntas
mo os junta

Capítulo 5. Aplicações Numéricas
101
5.2.2.3 Simplificações/Considerações O objectivo deste exemplo era permitir a comparação entre a proposta, referente ao ensaio de
tracção biaxial, e os resultados experimentais, referentes aos ensaios de compressão e de tracção‐compressão biaxial, obtidos por A. W. Page [10, 36, 37] com os resultados obtidos pelo SUBLIM3d. Para se alcançar este objectivo foi necessário executar um conjunto de hipóteses:
• Em relação às propriedades da alvenaria: o Inseriu‐se as dimensões dos tijolos em metros; o Considerou‐se que para simular este painéis, toda a base da alvenaria se encontrava
simplesmente apoiada (ver Figura 4.2); o Para a determinação das dimensões dos tijolos no caso do ensaio de tracção biaxial
considerou‐se que: I. A espessura dos painéis e o rácio entre a largura e a espessura dos tijolos são
os mesmos que os apresentados pelo ensaios de compressão e tracção‐compressão biaxial;
II. A junta apresenta uma espessura de 0.015 m (espessura existente nos ensaios de compressão e tracção‐compressão biaxial);
Através de cálculos simples, usando as propriedades da alvenaria, obtém‐se as dimensões pretendidas: 0.11 x 0.035 m. No caso do ensaio de compressão e tracção‐compressão biaxial:
I. As dimensões dos tijolos foram obtidas através de cálculos simples, usando as propriedades da alvenaria, resultando dimensionalmente em 0.11 x 0.031875 m;
II. Considerou‐se que o painel no ensaio de tracção uniaxial para o caso de θ=22.5° também apresenta a mesma secção que os restantes painéis.
• Em relação às propriedades dos materiais: o Para definir os parâmetros do critério da junta seguiram‐se as seguintes etapas:
I. Considerou‐se que o Ft do ensaio de tracção biaxial corresponde à resistência média à tracção da junta;
II. Considerou‐se que a resistência média à compressão assume o valor de 8.01 MPa (valor apresentado em [38]);
III. Para a obtenção dos restantes parâmetros seguiu‐se o mesmo raciocínio presente no capítulo 5.2.1.2.3 em relação às propriedades dos blocos de pedra (considerando para esta determinação que a resistência média à compressão assume o valor apresentado no ensaio de tracção‐compressão biaxial), obtendo‐se neste caso c=0.607 MPa e φ = 63.125°. Observou‐se que o ângulo de atrito obtido é muito elevado, por isso optou‐se por um valor médio (que corresponde a sensivelmente metade do obtido), isto é, considerou‐se φ = 30°.
o Para definir os parâmetros do critério do tijolo seguiram‐se as seguintes etapas: I. Considerou‐se que a resistência média à compressão dos tijolos é de
15.41 MPa (valor fornecido para os ensaios de compressão e de tracção‐compressão biaxial);
II. Considerou‐se que a resistência média à tracção dos tijolos é de 1 MPa; III. Considerou‐se que ângulo de atrito exibe o mesmo valor que o apresentado
pela junta inicialmente, isto é, φ = 63.125°.

102
Para o ensà tracção de 2.95M
• Em
IV.
saio de tracçdo tijolo e dPa e 0.2MPa
relação ao to De seguReformularmalhador d
I.
II.
III.
Pela relação
tan
obtendo‐se
ção‐compresda junta, em a, respectivam
tipo de carreuida apresenram‐se as cadescrito no cRepresentaconsiderand(porque pasimetria do
FIG
Representoalvenaria qu
90°
equivale a d
Pela visualizocorrer o co
o dos triângu
e, c = 1.841 M
ssão biaxial cvez dos valomente.
egamento: tam‐se as hiargas aplicadcapítulo 5.1.2‐se no círculdo que o ráara os restas painéis e d
GURA 5.36 – Est
ou‐se na Figuuando θ=90°
dizer quando
zação da Figolapso do pa
CARGAS D
ulos presente
1
MPa.
considerou‐sores apresen
ipóteses espdas na estrut2, através dolo de Mohr, cio de |F2(σantes rácios o carregame
tado de tensão
ura 5.36 o e°, isto é, com
o α=0°;
gura 5.36, imainel;
DE COLAPSO
es na Figura
e que os parntados anteri
ecíficas do etura da alveno seguinte rao estado de
σ1)|/|F1(σ2)|os resultad
ento), ver Fig
o aplicado à alv
estado de temo
magina‐se o p
O DE SISTEMA
5.22, determ
râmetros de iormente, ap
ensaio de comnaria de formciocínio: tensão aplicé sempre mdos foram ogura 5.36:
venaria (círculo
ensão equiv
processo de
AS DE ALVEN
mina‐se a coe
resistência mpresentam o
mpressão biama a aprove
cado na alvemaior ou iguobtidos usan
o de Mohr)
valente aplic
carregament
NARIA
esão,
(5.30)
média o valor
axial: eitar o
enaria, al a 1 ndo a
ado à
(5.31)
to até

Capíttulo 5. Aplica
V
ações Numé
IV. Supõque provoduas 5.37:
FIGU
V. Supo
obtêm
τ t
VI. Para anulasubst
na ex
á
obten
VII. Por fcompprese
ricas
e‐se inicialma rotura ococa que o ccomponent
URA 5.37 – Car
ndo que,
1
m‐se as resta
an
tan
representarar a suposiçtituiu‐se a te
pressão do r
ndo‐se (reso
á
im, substituiponentes vaente na Figur
mente que oorre por aucarregamenttes (compon
rregamento eq
antes compo
r correctameção executaensão vertica
1 tan
rácio,
lvendo em o
indo a equaçariáveis quera 5.37):
o carregameumento do co aplicado ànente fixa e
uivalente aplic
onentes (atra
ente o proceda no pontal (ver Figura
n
ordem a
ção (5.38) na se aplicam
ento F1(σ2) scarregamentà alvenaria variável), v
cado na estrutu
avés da Figur
esso de carrto IV (comp5.36),
),
a equação (5m ao painel
se mantém to F2(σ1). Espara α=0° sever Figura 5.
ura da alvenaria
ra 5.36),
regamento, ponente fixa
5.33), obtêml com α=0°
103
constante esta hipótesee divida em.36 e Figura
a com θ=90°
(5.32)
(5.33)
(5.34)
(5.35)
teve‐se que). Para isso
(5.36)
(5.37)
(5.38)
‐se as várias (ver soma
3
e e m a
)
)
)
)
e o
)
)
)
s a

104
• Em
o De seguReformularraciocínio aas várias seguintes e
Equação (5
sendo o Rá
á ta
onde o âng
o De segubiaxial:
Reformularraciocínio anão se cona mesma componenequações:
á
á
τ tan
sendo o Rá
á ||
relação aos o Conside
o Não se valor st
τ tan
uida apresenram‐se as capresentadocomponenteequações:
á1
átan
5.41)
ácio neste ca
an
gulo ψ aprese
uida apresen
ram‐se as capresentadosidera a hipórelação detes variávei
á
á
ácio neste ca
||
parâmetroserou‐se que a
executou qandard perm
á
á
tam‐se as hicargas aplicao para o ensaes variáveis
n
so dado tam
enta os valor
ntam‐se as h
cargas aplicao para o ensótese apresee grandeza s que se a
1
tan
so dado ape
s opcionais: solução obti
ualquer altemitem que a
CARGAS D
1
tan
ipóteses espadas na estaio de compque se ap
mbém pela fó
res de 90°, 8
ipóteses esp
adas na estaio de compentada no po(σ2≥σ1). O
aplicam ao
enas pela fór
ida pelo SUBL
eração ao pasolução seja
DE COLAPSO
ecíficas do erutura da apressão biaxiplicam ao p
órmula,
81°, 72°, 63°,
pecíficas do e
rutura da apressão biaxonto I, porquObtiveram‐sepainel com
mula,
LIM3d é alcan
arâmetro dea boa e que c
O DE SISTEMA
ensaio de traalvenaria, atal, obtendo‐ainel com α
54° e 45°.
ensaio de tra
alvenaria, atxial. Note‐se ue as tensõese para esteα=0° atrav
nçada pela pr
e penalidadeconvirja rapid
AS DE ALVEN
cção biaxial:través do m‐se para esteα=0° atravé
acção‐compr
través do mque neste es mantêm see caso as vés das segu
recisão (1x10
e inicial, pordamente.
NARIA
(5.39)
(5.40)
(5.41)
mesmo e caso és das
(5.42)
(5.43)
(5.44)
ressão
mesmo ensaio empre várias uintes
(5.45)
(5.46)
(5.47)
(5.48)
0‐6);
que o

Capít
5.2.2O
de tra
FIGUR
FIG
F 2/F
tF 2/F
t
tulo 5. Aplica
2.4 ResulOs resultadosacção biaxia
RA 5.38 – Comp
GURA 5.39 – Co
0
0,5
1
1,5
0
2/t
0
0,5
1
1,5
0
2/t
ações Numé
tados SUBs obtidos pel são apresen
paração dos res
omparação dos
0,5 1
0,5 1
θ=
ricas
BLIM3d elo SUBLIM3ntados desde
sultados obtidono
s resultados obθ=67.5
1,5
F1/Ft
θ=90⁰
1,5
F1/Ft
=67.5⁰
d (tendo eme a Figura 5.
os pelas estimao ensaio de trac
btidos pelas est5° no ensaio de
2 2,5
2 2,5
m consideraç38 à Figura 5
ativas teóricas cção biaxial
imativas teóric tracção biaxia
3 3,
5 3
ão o capítul5.42.
(SUBLIM3d e [1
cas (SUBLIM3d l
5SU
SU
Ele
SUBL
SUBL
Elem
o 5.2.2.3) pa
Legenda:
10]) para o pai
Legenda:
e [10]) para o
UBLIM3d ‐ Arm
UBLIM3d ‐Má
ementos Finit
LIM3d ‐ Arma
LIM3d ‐Mário
mentos Finitos
105
ara o ensaio
nel com θ=90°
painel com
mando Antão
ário Silva
tos [10]
ndo Antão
o Silva
[10]
5
o

106
FIGURA 5.40
FIGURA 5.
– Comparação
.41 – Comparaç
0
0,5
1
1,5
2
0
F 2/F
t
0
0,5
1
1,5
2
2,5
3
F 2/F
t
dos resultados
ção dos resulta
0,5
F1
θ=45⁰
0 0,5
F1
θ=22.5
s obtidos pelasno ensaio
ados obtidos peθ=22.5° no ens
1 1,5
1/Ft
⁰
1 1,
1/Ft
5⁰
CARGAS D
s estimativas tede tracção biax
elas estimativasaio de tracção
2
5
DE COLAPSO
eóricas (SUBLIMxial
s teóricas (SUBo biaxial
O DE SISTEMA
Legen
M3d e [10]) par
Legen
BLIM3d e [10])
SUBLIM3d ‐
SUBLIM3d ‐
Elementos F
SUBLIM3d ‐
SUBLIM3d ‐
Elementos F
AS DE ALVEN
nda:
ra o painel com
nda:
para o painel c
‐ Armando An
‐Mário Silva
Finitos [10]
‐ Armando An
‐Mário Silva
Finitos [10]
NARIA
m θ=45°
com
tão
tão

Capít
FIGU
Pdesde
tulo 5. Aplica
RA 5.42 – Com
Para o ensaie a Figura 5.4
F 2/F
t
ações Numé
paração dos re
o de compr43 à Figura 5
0
0,5
1
1,5
2
2,5
3
3,5
0
F 2/F
t
θ
ricas
esultados obtidno
ressão biaxia5.47.
0,5 1
F1/Ft
θ=0⁰
dos pelas estimo ensaio de trac
al os resulta
1,5
ativas teóricascção biaxial
ados obtidos
s (SUBLIM3d e [
s pelo SUBL
SUBL
SUBL
Elem
Legenda:
[10]) para o pa
IM3d são a
LIM3d ‐ Arma
LIM3d ‐Mário
mentos Finitos
107
inel com θ=0°
presentados
ndo Antão
o Silva
[10]
7
s

108
FIGURA 5.43 –
FIGURA 5.44
0
2
4
6
8
10
12
14
16
18
20
22
24
26
28
30
32
0
σ 2 [M
Pa]
[MP
]
– Comparação
– Comparação
0 2 4 6
0
2
4
6
8
10
12
14
16
18
20
22
24
0 2
σ 2[M
Pa]
dos resultados
o dos resultados
6 8 10 12
θ
2 4 6 8
θ=
s obtidos pelo Sensaio de c
s obtidos pelo no ensaio de
2 14 16 18
σ1 [MPa]
θ=90⁰
8 10 12 14
σ1 [MPa]
=67.5⁰
CARGAS D
SUBLIM3d comcompressão bia
SUBLIM3d come compressão b
8 20 22 24
4 16 18 20
DE COLAPSO
m os experimentaxial
m os experimenbiaxial
4 26 28 30
0 22 24
O DE SISTEMA
tais [36] para o
ntais [36] para o
0 32
AS DE ALVEN
Legenda:
o painel com θ=
Legenda:
o painel com θ
SUBLIM3d ‐Armando ASUBLIM3d ‐Mário Silva
Experiment[36]Envelope drotura [36]
SUBLIM3d ‐Armando A
SUBLIM3d ‐Mário SilvaExperiment[36]Envelope drotura [36]
NARIA
=90° no
θ=67.5°
‐Antão‐
tais
e
‐Antão
‐
tais
e

Capít
FIGUR
FIGUR
tulo 5. Aplica
RA 5.45 – Comp
RA 5.46 – Comp
0
2
4
6
8
10
12
14
16
18
20
22
24
σ 2[M
Pa]
ações Numé
paração dos res
paração dos re
0
2
4
6
8
10
12
14
16
18
0 2
σ 2 [M
Pa]
0
2
4
6
8
0
2
4
6
8
0
2
4
0 2 4
ricas
sultados obtidoens
sultados obtidono en
2 4 6 8
σ1
θ=45
6 8 10
σ1
θ=22
os pelo SUBLIMsaio de compre
os pelo SUBLIMnsaio de compr
8 10 12 1
[MPa]
5⁰
12 14 16
[MPa]
.5⁰
M3d com os expessão biaxial
M3d com os expressão biaxial
4 16 18
18 20 22
perimentais [36
perimentais [36
24
Lege
6] para o painel
Lege
6] para o paine
SUBArmSUBMárExpe[36]
Enverotu
SUBArm
SUBMárExpe[36]Enverotu
109
enda:
l com θ=45° no
enda:
el com θ=22.5°
LIM3d ‐ando AntãoLIM3d ‐io Silvaerimentais
elope de ra [36]
LIM3d ‐ando Antão
LIM3d ‐io Silvaerimentais
elope de ra [36]
9
o

110
FIGURA 5.47
Para o apresentad
0
2
4
6
8
10
12
14
16
18
20
22
24
26
28
30
32
0
σ 2 [M
Pa]
– Comparação
ensaio de os desde a F
0 2 4 6
dos resultados
tracção – Figura 5.48 à
6 8 10 12
s obtidos pelo ensaio de c
compressãoFigura 5.52.
2 14 16 18
σ1 [MPa]
θ=0⁰
CARGAS D
SUBLIM3d comcompressão bia
biaxial os
8 20 22 24
DE COLAPSO
m os experimenaxial
resultados
4 26 28 30
O DE SISTEMA
ntais [36] para o
obtidos pel
0 32
AS DE ALVEN
Legenda:
o painel com θ
lo SUBLIM3d
SUBLIM3d ‐Armando ASUBLIM3d ‐Mário Silva
Experiment[36]Envelope drotura [36]
NARIA
θ=0° no
d são
‐Antão‐
tais
e

Capít
FIGUR
FIGUR
[MP
]T
ã
tulo 5. Aplica
RA 5.48 – Comp
RA 5.49 – Comp
0
0,1
0,2
0,3
0,4
0
σ 1[M
Pa]‐
Tracção
SUBLIM
Experim
0
0,1
0,2
0,3
0
σ 1[M
Pa]‐
Tracção
ações Numé
paração dos res
paração dos re
1 2 3
M3d ‐ Armando
mentais [37]
0 1
σ2 [
θ=
ricas
Legend
sultados obtidoensaio d
sultados obtidono ensaio
3 4 5
o Antão
2
[MPa] ‐ Comp
=67.5⁰
da:
os pelo SUBLIMde tracção – com
os pelo SUBLIMo de tracção – c
6 7
σ2 [MPa] ‐
θ=90
SUBL
Envel
3
pressão
M3d com os expmpressão biaxi
M3d com os expompressão bia
8 9 1
‐ Compressão
0⁰
IM3d ‐Mário
ope de rotura
4
perimentais [37ial
perimentais [37axial
10 11 12
o
Silva
a [37]
SUBL
SUBL
Expe
Enve
7] para o painel
Legenda:
7] para o paine
13 14
LIM3d ‐ Arman
LIM3d ‐Mário
rimentais [37]
lope de rotura
111
l com θ=90° no
el com θ=67.5°
15 16
ndo Antão
Silva
]
a [37]
1
o

112
FIGURA 5.50 –
FIGURA 5.51 –
0
0,1
0,2
0,3
0,4
0,5
0,6
σ 1[M
Pa]‐
Tracção
0,
0,
0,
0,
0,
0,
0,
0,
0,
1,
1,
1,
1,
1,
σ 1[M
Pa]‐
Tracção
– Comparação
– Comparação
0 1
0
,1
,2
,3
,4
,5
,6
,7
,8
,9
1
,1
,2
,3
,4
,5
0 1 2
dos resultadose
dos resultadosno
2
σ2 [MPa] ‐
θ=45
3 4 5
σ2 [MPa] ‐
θ=22.5
s obtidos pelo Snsaio de tracçã
s obtidos pelos ensaio de trac
3 4
Compressão
⁰
6 7 8 9
Compressão
5⁰
CARGAS D
SUBLIM3d comão – compressã
SUBLIM3d comção – compres
5
9 10 11 12
DE COLAPSO
m os experimentão biaxial
m os experimensão biaxial
6
O DE SISTEMA
Legen
tais [37] para o
Legen
ntais [37] para
SUBLIM3d ‐
SUBLIM3d ‐
Experimenta
Envelope de
SUBLIM3d ‐
SUBLIM3d ‐
Experimenta
Envelope de
AS DE ALVEN
nda:
o painel com θ=
nda:
o painel com θ
Armando Ant
Mário Silva
ais [37]
e rotura [37]
Armando Ant
Mário Silva
ais [37]
e rotura [37]
NARIA
=45° no
θ=22.5°
tão
tão

Capít
FIGUR
Os reraciopara enco
Orápidminurotur
Aprestipo ee loca
tulo 5. Aplica
RA 5.52 – Comp
esultados teócínio inversoo ensaio de ntram‐se em
Observa‐se aa, apresentato e 5 segunra.
sentam‐se ne o número dais.
000000000
σ 1[M
Pa]‐
Tracção
ações Numé
paração dos re
óricos obtidoo apresentadtracção e de
m módulo.
a partir do fando um temndos, que é
na Tabela 5.8de elemento
00,10,20,30,40,50,60,70,80,91
1,11,21,31,41,51,61,71,81,92
2,12,22,32,42,5
0 2 4
σ2 [M
θ
ricas
sultados obtidoensaio d
os pelo SUBdo no capítule tracção – co
ficheiro de cmpo de exenotável par
8, as principaos associado
4 6 8 10
MPa] ‐ Compr
θ=0⁰
os pelo SUBLIMde tracção ‐ com
LIM3d, aprelo 5.2.2.3 (emompressão b
cálculo, que cução dos cra um proble
ais caracteríà malha, be
12 14 16
ressão
M3d com os expmpressão biaxi
sentados nem relação aobiaxial os res
a convergêncálculos em ema não line
sticas das mm como o nú
perimentais [37ial
estas figuras,o tipo de carrsultados apre
ncia da soluçcomputaçãoear com pos
malhas utilizaúmero de gr
SUBL
SUBL
Exper
Envel
Legenda:
7] para o paine
, são obtidosregamento).esentados ne
ção para cado sequencial ssibilidades m
das, designaraus de liberd
LIM3d ‐ Arman
LIM3d ‐Mário
rimentais [37]
lope de rotura
113
el com θ=0° no
s através do Além disso,estas figuras
da painel foiinferior a 1múltiplas de
adamente, odade globais
ndo Antão
Silva
]
a [37]
3
o , s
i 1 e
o s

114
TABELA 5.8 –
TraComp
Tracção –
Por últi
• Ens
A distrmecan5.55,
FIGURA 5.5
FIGURA 5.5
Principais cara
Ensaio
acção biaxialpressão biaxCompressão
mo, para cad
saio de tracçã
ribuição típicismo de col
53 – Dissipação
54 – Dissipação
cterísticas das
ial o Biaxial
da ensaio ap
ão biaxial:
ca da dissipaapso obtido
o plástica e marefer
o plástica e marefere
malhas utilizad
Tipo de elem
LinearLinearLinear
resentam‐se
ação plásticas pelo SUBL
θ = 0
lha deformadaente ao ensaio
θ = 0
lha deformadaente ao ensaio
CARGAS Ddos no exemplo
mentos N
r r r
e algumas inf
a nos elemenLIM3d são ap
90°, ψ = 72° má
a típicas obtidaso de tracção bia
90°, ψ = 18° má
a típicas obtidasde tracção bia
DE COLAPSOo 3
Número de e
534316316
formações c
ntos do painpresentados
áx.
s pelo SUBLIM3axial – Parte I
áx.
s pelo SUBLIM3xial – Parte II
O DE SISTEMA
lementos
omplementa
nel e a confidesde a Fig
3d para os pain
3d para os pain
AS DE ALVEN
DOF Globais L647 390 390
ares:
iguração típigura 5.53 à F
néis do exempl
néis do exempl
NARIA
Locais 1068 632 632
ica do Figura
o 3,
o 3,

Capítulo 5. Aplicações Numéricas
115
θ = 67.5°, ψ = 72°
0 máx.
FIGURA 5.55 – Dissipação plástica e malha deformada típicas obtidas pelo SUBLIM3d para os painéis do exemplo 3, referente ao ensaio de tracção biaxial – Parte III
• Ensaio de compressão biaxial:
A distribuição típica da dissipação plástica nos elementos do painel e a configuração típica do mecanismo de colapso obtidos pelo SUBLIM3d são apresentados desde a Figura 5.56 à Figura 5.58,
θ Critério Compressão uniaxial (σ2=0)
0°
Armando Nunes Antão
Mário Vicente da Silva
0 máx.
FIGURA 5.56 – Dissipação plástica e malha deformada típicas obtidas pelo SUBLIM3d para os painéis do exemplo 3 com
θ=0° e σ2=0, referente ao ensaio de compressão biaxial

116
θ Cr
22.5°
ArmNA
MVida
FIGURA 5.57
θ Cr
90°
ArmNA
MVida
FIGURA 5.58
• Ens
A distrcolapsoe para 5.63,
ritério
mando Nunes Antão
/ Mário icente a Silva
7 – Dissipação p
ritério
mando Nunes Antão
Mário icente a Silva
8 – Dissipação p
saio de tracçã
ibuição da do obtidos peos diferente
plástica e malhaθ=22.5° e σ
plástica e malhaθ=90° e σ2
ão ‐ compre
issipação pláelo SUBLIM3des rácios das
a deformada tíσ2=0, referente
a deformada tí
2=0, referente a
ssão biaxial:
ástica nos eled, para os vás tensões pri
CARGAS D
Compressão
0
ípicas obtidas p ao ensaio de c
Compressão
0
ípicas obtidas pao ensaio de co
:
ementos do ários ângulosncipais, são
DE COLAPSO
uniaxial (σ2=0)
máx.
pelo SUBLIM3dcompressão bia
uniaxial (σ2=0)
máx.
pelo SUBLIM3dompressão biax
painel e a cos da junta hosumarizados
O DE SISTEMA
d para os painéiaxial
d para os painéixial
onfiguração orizontal coms desde a Fig
AS DE ALVEN
is do exemplo 3
is do exemplo 3
do mecanismm a tensão vegura 5.59 à F
NARIA
3 com
3 com
mo de ertical Figura

Capítulo 5. Aplicações Numéricas
117
θ Critério Tracção uniaxial (σ2=0) Outros Rácios (σ1/σ2) Compressão uniaxial (σ1=0)
0°
Armando Nunes Antão
Mário Vicente da Silva
0 máx.
FIGURA 5.59 – Dissipação plástica e malha deformada obtidas pelo SUBLIM3d para os painéis do exemplo 3 com θ=0°,
referente ao ensaio de tracção – compressão biaxial
θ Critério Tracção uniaxial (σ2=0) Outros Rácios (σ1/σ2) Compressão uniaxial (σ1=0)
22.5°
Armando Nunes Antão
Mário Vicente da Silva
0 máx.
FIGURA 5.60 – Dissipação plástica e malha deformada obtidas pelo SUBLIM3d para os painéis do exemplo 3 com θ=22.5°,
referente ao ensaio de tracção – compressão biaxial
θ Critério Tracção uniaxial (σ2=0) Outros Rácios (σ1/σ2) Compressão uniaxial (σ1=0)
45°
Armando Nunes Antão
/ Mário Vicente da Silva
0 máx.
FIGURA 5.61 – Dissipação plástica e malha deformada obtidas pelo SUBLIM3d para os painéis do exemplo 3 com θ=45°,
referente ao ensaio de tracção – compressão biaxial

118
θ Critéri
67.5°
ArmandNuneAntão
/ MárioVicentda Silv
FIGURA 5.62 –
θ Critéri
90°
ArmandNuneAntão
MárioVicentda Silv
FIGURA 5.63
5.2.2.5 DComeça
cada um do
• Ens
io Tracç
do s o
o te va
– Dissipação pl
io Tracç
do s o
o te va
3 – Dissipação p
Discussão a‐se por apreos ensaios es
saio de Tracço Pela ob
ção uniaxial (σ2
lástica e malhareferent
ção uniaxial (σ2
plástica e malhareferen
dos resulesentar a antudados:
ção biaxial: servação da Os resultado critério detipo de trunOs resultada estimativ[10], provavutilizados; Para a maioresistência
2=0)
0
deformada obte ao ensaio de
2=0)
0
a deformada ote ao ensaio de
ltados álise dos res
Figura 5.38os obtidos sãe [5], como sncatura à traos obtidos pa obtida atrvelmente de
oria dos ângdos painéis.
CARGAS D
Outros Rácio
btidas pelo SUBe tracção – com
Outros Rácio
btidos pelo SUe tracção ‐ com
sultados apre
à Figura 5.42ão semelhanseria de especção; pelos critérioravés da aplevido aos di
gulos ψ, o ân
DE COLAPSO
os (σ1/σ2)
máx.
BLIM3d para osmpressão biaxia
os (σ1/σ2)
máx.
BLIM3d para ompressão biaxia
esentados (e
2, conclui‐sentes tanto paerar, porque
os propostosicação do mferentes crit
ngulo θ exer
O DE SISTEMA
Compress
s painéis do exeal
Compress
os painéis do exal
experimenta
que: ara o critérioe ambos apre
s majoram ométodo dos térios de ce
rce uma gra
AS DE ALVEN
ão uniaxial (σ1=
emplo 3 com θ=
ão uniaxial (σ1=
xemplo 3 com θ
is e teóricos
o de [4] comoesentam o m
u igualam seelementos fdência das j
ande influênc
NARIA
=0)
=67.5°,
=0)
θ=90°,
) para
o para mesmo
empre finitos juntas
cia na

Capítulo 5. Aplicações Numéricas
119
o Pela observação da Figura 5.53 à Figura 5.55, conclui‐se que: Para θ=90°, o aumento do ângulo ψ provoca a alteração do tipo de rotura, isto é, passa de uma rotura progressiva através de um número de juntas horizontais e verticais em padrões intensificados (θ = 90°, ψ = 18°), para uma rotura ao longo dos planos das juntas horizontais (θ = 90°, ψ=72°);
Com a diminuição do ângulo θ (para o mesmo ψ), mantêm‐se o mesmo tipo de rotura mas aumenta‐se a componente de corte.
• Ensaio de Compressão biaxial: o Pela observação da Figura 5.43 à Figura 5.47, conclui‐se que:
Os resultados obtidos pelo critério do Mário Vicente da Silva majoram bastante a grande maioria dos resultados experimentais. A excepção a esta afirmação verifica‐se quando a σ1=σ2, porque nestes casos não se consegue atingir a convergência da solução;
Os resultados obtidos pelo critério de Armando Nunes Antão demonstram uma boa semelhança em relação aos resultados experimentais;
Para a maioria dos rácios (σ1/σ2), o ângulo θ exerce uma pequena influência na resistência dos painéis, excepto quando uma das tensões principais é predominante;
o Pela observação tanto da Figura 5.34 como da Figura 5.56 à Figura 5.58, conclui‐se que:
Os modos de rotura obtidos pelo critério do Mário Vicente da Silva, para a compressão uniaxial, são semelhantes aos obtidos experimentalmente, excepto quando θ=0° e σ2=0;
Os modos de rotura obtidos pelo critério de Armando Nunes Antão, para a compressão uniaxial, são semelhantes aos obtidos experimentalmente, excepto quando θ=90° e σ2=0;
Para a compressão uniaxial, a rotura ocorre sempre num plano normal ao plano do painel. O aumento do ângulo θ provoca a alteração do tipo de rotura, isto é, passa de uma rotura que ocorre por fendilhação e deslizamento ao longo da junta horizontal e/ou vertical, para um mecanismo combinado envolvendo tanto a fendilhação dos tijolos como das juntas;
Para a compressão biaxial, a rotura ocorre tipicamente por divisão da amostra a metade da espessura (num plano paralelo à sua superfície livre), independentemente do ângulo θ. Para níveis elevados dos rácios (cerca de 10), a orientação da junta desempenha um papel importante e a rotura ocorre num mecanismo combinado envolvendo tanto a rotura da junta como a divisão lateral.
o Por fim, apresentam‐se alguns comentários: Os efeitos da escala produzidos pelo uso da alvenaria a metade da escala não afectaram os resultados obtidos numericamente, porque a comparação é feita com um modelo teórico (SUBLIM3d) derivado de testes a metade da escala;
Quando não existe a possibilidade de rotura do tijolo num plano paralelo ao plano da parede da alvenaria, existe uma boa concordância entre os resultados obtidos experimentalmente e os resultados obtidos pelo SUBLIM3d. Caso contrário, quando existe a possibilidade de rotura do tijolo num plano paralelo ao plano da parede de alvenaria, existe uma maior

120
• Ens
saio de Tracço Pela ob
o Pela obque:
o Por fimde com
discrepânciobtidos exp
ção – Comprservação da Os resultaduma boa cocasos em qσ2/σ1=∞;30alguns casoOs resultaduma muitoexcepto node σ2/σ1=∞Para o paicritérios pralteração daPara a maioresistência com o aume
bservação ta
Para os casmodos de robtidos expPara os resVicente da para θ=0° coPara todos do painel pou num me, apresentampressão biaxPara θ=45° valor de traocorre semdeve‐se ao Para θ=90°,mas neste cnenhum quPara θ=0° evárias vezejuntas horizestá presendeve‐se à reforçado pnum planotijolos como
a entre os perimentalm
essão biaxiaFigura 5.48
dos obtidos oncordância que o ângu0), de 22.5°os, devido à idos obtidos o boa concos casos em q∞;30), de 22nel θ=22.5° ropostos e a geometria oria dos ráciodos painéisento do ângunto da Figur
os de θ=22.5rotura obtidperimentalmstantes casoSilva são seom σ1=0 e paos casos, a r
por fendilhaçecanismo comm‐se alguns cxial): e θ=67.5°,
ansição. Estempre nas juninício do apa, verifica‐se acaso como aeda correspe 22.5°, a rots tanto os tzontais refornte na junta alteração d
pela resistêno transversao as juntas.
CARGAS D
resultados ente;
al: à Figura 5.52pelo critériocom o enve
ulo θ assum° e de 0°. Esncapacidadepelo critérioordância coque o ângul2.5° e de 0°;sujeito a tos resultadodo painel; os (σ2/σ1), o s, onde estaulo θ. ra 5.35 como
5° (outros ráos pelos critente; s o critério emelhantes ara θ=90° corotura ocorrção apenas dmbinado envcomentários
verifica‐se qe facto deventas, onde aarecimento da mesma cona junta horizondente da tura é mais ctijolos como rçam os painvertical. A q
do modo decia atrítica dl ao painel,Por outro la
DE COLAPSO
obtidos pelo
2, conclui‐seo do Mário lope de rotue os valoresta afirmaçãe de convergo de Armanm o enveloo θ assume
tracção uniaos experime
ângulo θ exa resistência
o da Figura
cios e σ1=0) térios propo
de Armandoaos obtidosom σ1=0, respe num planodas juntas (tvolvendo tans (adicionais
que os picoe‐se porque a queda na da tensão denstatação apontal está seresistência;complexa coas juntas, onéis mesmoqueda para oe rotura. Qda junta hori num mecaado, quando
O DE SISTEMA
o SUBLIM3d
que: Vicente da ura experimees de 90° (po é justificaência da soludo Nunes Aope de rotuos valores 9
axial, a diveentais é de
xerce um papa decresce s
5.59 à Figur
e de θ=45° (ostos não se
o Nunes Antexperimentpectivamento (ou planosipo de roturnto os tijolos aos apresen
s encontrama rotura emresistência
e tracção naspresentada nempre em tr
om o plano donde os efe quando a to envelope d
Quando existzontal, logo anismo envoσ2=0, não e
AS DE ALVEN
d e os resul
Silva apreseental, exceptpara os casda em parteução; Antão apreseura experim90° (para os
ergência entvido em pa
pel importansignificativam
ra 5.63, conc
(outros rácioe assemelham
tão e o de talmente, exe; ) normal ao ra predomincomo as jun
ntados pelo e
m‐se próximm ambos os para altos s juntas [37];no tópico antracção não o
de rotura a iitos do atrittensão de trde rotura dete σ2 o paia rotura ocoolvendo tanexiste este ti
NARIA
ltados
entam to nos os de e para
entam mental, casos
tre os arte à
nte na mente
clui‐se
os), os m aos
Mário xcepto
plano ante), ntas. ensaio
os do casos rácios ; terior, ocorre
incluir to nas racção e θ=0° inel é orrerá nto os po de

Capítulo 5. Aplicações Numéricas
121
reforço ocorrendo a rotura apenas nas juntas em forma de padrão, envolvendo tanto as juntas horizontais como as verticais.
Por fim, apresentam‐se alguns comentários sobre as decisões tomadas:
o Tipo de apoio considerado (ver Figura 4.2): a visualização das deformadas apresentadas pelos diversos painéis (deformação quase nula na base e deformações significativas no topo), levou a questionar se o tipo de apoio seria o correcto, por isso executaram‐se diversos testes (com mais e menos fiadas do que o considerado nos cálculos). Obtiveram‐se nestes testes diferenças mínimas, permitindo assim afirmar que se optou pelo sistema de apoio correcto, que não tem qualquer influência no resultado;
o Propriedades dos materiais considerados: para chegar a estas propriedades passou‐se por um vasto processo de discussão/interpretação/comparação de resultados que se apresenta sumarizado de seguida. Inicialmente, optando‐se pelas propriedades fornecidas por A. W. Page, observou‐se que não havia uma boa semelhança entre os resultados obtidos pelo SUBLIM3d e os resultados obtidos experimentalmente. Por isso, para se obter um maior ajustamento global aos resultados obtidos experimentalmente, procedeu‐se à optimização dessas propriedades. Essa optimização foi alcançada primeiro, através da compreensão da influência dos diversos parâmetros que definem a influência do comportamento dos materiais que constituem a alvenaria no comportamento global desta e, depois, pela escolha dos parâmetros que melhor reproduzem esse comportamento;
o Critérios que definem os materiais: apesar de neste exemplo ser possível existir deformação no sentido perpendicular ao plano da parede, continuou‐se a supor a deformação plana nos critérios utilizados para simular o comportamento da alvenaria;
o Resultados experimentais/Propostas (capítulo 5.2.2.2): apenas se apresentaram os resultados (experimentais e teóricos) obtidos por A. W. Page, porque as restantes estimativas teóricas existentes na literatura baseiam‐se no comportamento ortotrópico dos materiais;
5.2.3 Considerações finais Em todos os exemplos analisados no capítulo 5.2, verifica‐se que os resultados experimentais das
alvenarias mostram tipicamente uma larga dispersão, o que dificulta a correcta comparação com os modelos teóricos.
No presente trabalho pretendeu‐se comparar os resultados existentes (tanto experimentais como teóricos) com os regulamentos existentes, CEN [2], mas tal não foi possível devido não só à complexidade dos exemplos estudados como também devido a este regulamento ser mais específico para edifícios.
Poder‐se‐ia, eventualmente, chegar a um melhor acordo entre os resultados obtidos experimentalmente e os obtidos pelo SUBLIM3d caso estivessem disponíveis as propriedades dos materiais (tijolos e juntas) necessárias à utilização dos critérios propostos. Muitas das vezes, não há ensaios suficientes para a completa caracterização dos materiais que constituem a alvenaria. Outras das vezes, existindo esses ensaios, são de natureza de tal forma dispersa que não se coadunam com a análise determinística do problema.

122
Adicionpode ser ccondição deobservandoensaio, o mdevido à ligunidade/junna junta evertical (vepodem con
almente, o caracterizadoe tensão plao o ensaio dematerial da jugação com esnta, resultannquanto nor Figura 5.64duzir à rotur
FIGURA 5.
comportamo com umaana é tambée compressãunta tem tenstes fica conndo assim, nus tijolos se 4). Este estara do prisma
.64 – Ensaio de
ento mecân condição dém discutíveão uniaxial sndência paranfinada. Esteum estado informa tens
ado de tensã.[39]
e compressão so
CARGAS D
nico das alvede deformael. Esta afirmobre um pri se expandir confinamennterno de tensão no planoão provoca o
ob provetes de
DE COLAPSO
enarias comção plana.
mação pode sma de alver lateralmentnto provoca nsão, que coo horizontao início de fa
e alvenaria e su
O DE SISTEMA
elementos No entantoser compreeenaria (ver Fite mais do qtensões de consiste em col associada alhas de div
uas consequênc
AS DE ALVEN
deformáveio, a utilizaçãendida facilmigura 5.64). que os tijoloscorte na inteompressão tcom compr
visão verticai
cias
NARIA
s não ão da mente Neste s, mas erface riaxial ressão is que

123
Capítulo 6
6 Conclusões e Desenvolvimentos futuros Nesta dissertação efectuou‐se inicialmente a definição do problema que originou este trabalho,
através do seu enquadramento nos sistemas de alvenaria, no comportamento do material e nos métodos de resolução. De seguida caracterizou‐se a ferramenta de cálculo utilizada no presente trabalho, SUBLIM3d, bem como se procedeu à implementação de dois critérios de cedência (propostos ao autor). Depois, procedeu‐se à validação da implementação numérica destes critérios. Por fim, através da aplicação da ferramenta numérica desenvolvida a três exemplos numéricos, aferiu‐se a capacidade do SUBLIM3d na determinação de cargas de colapso de sistemas de alvenaria.
6.1 Conclusão Os dois exemplos de aplicação de critérios sem truncatura analisados serviram para validar a
aplicabilidade do critério de Mohr – Coulomb na determinação de cargas de colapso de sistemas de alvenaria, apresentando ambos bons resultados, tanto em relação aos resultados experimentais como em relação aos resultados obtidos por outras estimativas teóricas.
Por outro lado, o exemplo de aplicação de critérios com truncatura analisado serve não só para aferir a capacidade dos modelos propostos como serve para validar a aplicabilidade dos critérios propostos, captando no exemplo a forma dos envelopes de rotura. O critério presente em [4] revelou‐se ser aquele que apresenta melhores resultados, isto é, aquele que se aproxima mais dos valores obtidos experimentalmente.
Este exemplo demonstra que a escolha de critérios baseados na deformação plana não corresponde à melhor forma de representar o correcto comportamento da alvenaria. Contudo, a opção pela realização dos cálculos em condições de tensão plana poderá também não ser a mais representativa do comportamento da alvenaria. Assim sendo será necessário a efectivação de cálculos em condições tridimensionais de forma a verificar a capacidade do SUBLIM3d em representar o colapso da alvenaria nas mais diversas condições.
Mesmo assim, conclui‐se por todos os exemplos analisados, da robustez, da precisão, da eficiência, do desempenho e da capacidade dos critérios analisados na determinação de cargas de colapso de sistemas de alvenaria.
Em retrospectiva final, conclui‐se que o presente trabalho atingiu globalmente os objectivos definidos no início do trabalho, isto é, desenvolveu‐se eficientemente a ferramenta numérica de elementos finitos existente no DEC, com vista à sua aplicação na determinação de cargas de colapso de sistemas de alvenaria. Com a inclusão destes dois novos critérios de cedência, a ferramenta numérica de elementos finitos existente no DEC apresenta também um aumento de capacidade para se tornar numa ferramenta poderosa para a avaliação de estruturas de alvenaria, na prática da engenharia, sendo possível oferecê‐la no futuro aos analistas da alvenaria e aos projectistas ao nível micro.

124
6.2 DesEm jeito
ferramenta pretendend
I. Em
II. Em
envolvimo de conclusde cálculo
do‐se explorá
relação à fe
• Implem
• Desenvinferior
• Definir critério
• Definir relação aos
• Paredes
• Paredes
• Paredes
• Paredes
• Alvenar
• Edifício
• Pontes
• Túneis a
• Reforço
• Sistema
mentos futsão enuncia‐se em seguná‐los em trab
rramenta de
mentar uma a
olver a ferrar);
a utilizaçãode Mohr – C
tridimensionexemplos a
s com abertu
s de alvenari
s de adobe r
s de alvenari
rias curvas em
s de alvenar
de alvenaria
antigos de al
o de sistemas
as de alvenar
turos se um conjudo com os balhos futuro
e cálculo:
análise dinâm
amenta de
o de critérioCoulomb;
nalmente os analisar:
uras (Janelas
ia em 3D [41
eforçadas ou
ia sujeitas a
m 3D reforça
ia (incluindo
a em 2D e em
lvenaria [50]
s de alvenari
ria com outr
CARGAS D
nto de tópicexemplos a os.
mica [40];
cálculo para
s em condiç
critérios apr
s e portas)[6]
1];
u não [42];
momentos d
adas ou não
o catedrais)[1
m 3D [17, 48,
];
ia [17];
o tipo de em
DE COLAPSO
cos, relacionaanalisar, qu
a o teorema
ções de ten
resentados n
];
de flexão e d
com FRP [45
16, 47];
, 49];
mparelhamen
O DE SISTEMA
ados em primue se conside
estático (te
são plana, n
no presente t
e torção [43
5, 46];
nto de pedra
AS DE ALVEN
meiro lugar cera interessa
eorema da r
nomeadame
trabalho;
, 44];
s [51, 52].
NARIA
com a antes,
região
ente o

125
Bibliografia [1] M. V. D. Silva, "Implementação Numérica Tridimensional do Teorema Cinemático da Análise
Limite," Tese de Doutoramento, Departamento de Engenharia Civil, Faculdade De Ciências e Tecnologia ‐ Universidade Nova De Lisboa, Monte da Caparica, 2009.
[2] Eurocode 6 ‐ Design of masonry structures, B. CEN EN 1996‐3, 2006. [3] Commentary on specification for masonry structures, USA ACI 530.1‐02, 2004. [4] A. N. Antão, "Proposta da superfície de cedência para utilização no cálculo de cargas de
colapso de sistemas de alvenaria." Almada: Comunicação particular, 2010. [5] M. Vicente da Silva, "Proposta da superfície de cedência para utilização no cálculo de cargas
de colapso de sistemas de alvenaria." Almada: Comunicação particular, 2010. [6] P. J. B. B. Lourenço, "Computational strategies for masonry structures," Thesis (Ph.D.) ‐ Delft
University of Technology, 1996., Delft University Press, Delft, The Netherlands, 1996. [7] P. A. Cundall, "A computer model for simulating progressive large‐scale movements in blocky
rock systems," in Proceedings of the International Symposium on Rock Fracture, Nancy, France, 1971.
[8] D. C. Drucker, et al., "Soil mechanics and work hardening theories of plasticity," Transactions ASCE, vol. 122, pp. 338 ‐ 346, 1957.
[9] W.‐F. Chen and D. C. Drucker, "Bearing capacity of concrete blocks or rock," Journal of Engineering Mechanics, vol. 95, pp. 955‐978, 1969.
[10] A. W. Page, "A biaxial failure criterion for brick masonry in the tension ‐ tension range," International Journal of Masonry Construction, vol. 1, pp. 26 ‐ 29, 1980.
[11] H. R. Lotfi and P. B. Shing, "INTERFACE MODEL APPLIED TO FRACTURE OF MASONRY STRUCTURES," Journal of Structural Engineering‐Asce, vol. 120, pp. 63‐80, 1994.
[12] P. DeBuhan and G. DeFelice, "A homogenization approach to the ultimate strength of brick masonry," Journal of the Mechanics and Physics of Solids, vol. 45, pp. 1085‐1104, 1997.
[13] A. Orduña, "Seismic Assessment of Ancient Masonry Structures by Rigid Blocks Limit Analysis," Doctor of Philosophy, Department of Civil Engineering, University of Minho, Portugal, 2003.
[14] A. W. Page, "FINITE‐ELEMENT MODEL FOR MASONRY," Journal of the Structural Division‐Asce, vol. 104, pp. 1267‐1285, 1978.
[15] D. J. Sutcliffe, et al., "Lower bound limit analysis of unreinforced masonry shear walls," Computers & Structures, vol. 79, pp. 1295‐1312, 2001.
[16] G. Milani, et al., "Homogenised limit analysis of masonry walls, Part II: Structural examples," Computers & Structures, vol. 84, pp. 181‐195, 2006.
[17] A. Orduna and P. B. Lourenco, "Cap model for limit analysis and strengthening of masonry structures," Journal of Structural Engineering‐Asce, vol. 129, pp. 1367‐1375, 2003.
[18] A. Zucchini and P. B. Lourenco, "Mechanics of masonry in compression: Results from a homogenisation approach," Computers & Structures, vol. 85, pp. 193‐204, 2007.
[19] R. O. Davis and A. P. S. Selvadurai, Plasticity and geomechanics. Cambridge: Cambridge University Press, 2002.
[20] S. P. dos Santos, "O contexto normativo recente dos eurocódigos sobre estruturas de alvenaria," presented at the Paredes de Alvenaria: Inovação e Possiblidades Actuais, Lisboa, Portugal, 2007.
[21] P. B. Lourenço, "Experimental and numerical issues in the modelling of the mechanical behaviour of masonry," in Structural analysis of historical constructions II, P. Roca et. al. ed Barcelona: CIMNE, 1998, pp. 57‐91.
[22] J. Lubliner, The Theory of Plasticity. New York: Macmillan Publishing Company, 1990. [23] J. Salençon, De l'élasto‐plasticité au calcul à la rupture, 1ª ed. Paris: Les éditions de l'École
Polytechnique, 2002. [24] M. Vicente da Silva and A. N. Antão, "Upper bound limit analysis with a parallel mixed finite
element formulation," International Journal of Solids and Structures, vol. 45, pp. 5788‐5804, 2008.

126
[25] M. boupp.
[26] A. ArégCha
[27] D. Min
[28] L. Fde Por
[29] D. VcycMin
[30] P. load
[31] A. OParand
[32] P. stru
[33] W. TES223
[34] P. RMe
[35] I. Cinte200
[36] A. WInst
[37] A. Inte
[38] G. Com
[39] W. Stru
[40] C. Qinfi200
[41] G. Mof M
[42] T. BstruandPre
[43] N. Stru
[44] G. collMe
[45] G. strupp.
V. da Silva und limit ana1192‐1218, Antão, "Anaularisée," Thaussées, PariOliveira, "Mnho, 2000. F. Ramos, "AMestrado,
rtugal, 2002. V. Oliveira, lic loading," nho, 2003. B. Lourencoding," JournaOrduna and t II: Load‐patd Structures, B. Lourencouctures," JouMann and HSTS AND APP3‐235, 1982. Roca, et al.,thods in StruCarol, et al.,erface eleme01. W. Page, "THtitution of CiW. Page, "ernational JoMilani, et amputers & StS. McNary auctural EnginQ. Wu, et al.,lled RC fram05. Milani, "3D uMechanical SBakeer and Wuctures unded Maintenanss/ComputaMojsilovic auctural JournMilani, et aapse of out‐ccanica TeorMilani, et auctures. Part1516‐1533,
and A. N. Aalysis," InterDec 2007. lyse de la sthèse de Docs, 1997.
Mechanical C
Análise ExperDepartamen
"ExperimenDoctor of P
o, et al., "Dal of StructurP. B. Lourenth following vol. 42, pp. o and J. G. urnal of EnginH. Muller, "FPLICATION T
, "Mechanicuctural Maso, "Micromecents," Intern
HE BIAXIAL Cvil Engineers"The Strengournal of Masal., "Homogetructures, voand D. P. Abneering‐Asce, "Dynamic r
mes to blast g
upper boundSciences, vol.W. Jager, "Cer earthquaknce of Heritational Mechand P. Martnal, vol. 94, pl., "A simple‐of‐plane loarica e Applicaal., "Upper Bt I: UnreinfoDec 2009.
Antão, "A nrnational Jou
tabilité des ctorat, Dépa
Characterizat
rimental e Nnto de Eng
tal and numPhilosophy, D
Dry joint storal Engineerinco, "Three‐dsolution pro5161‐5180, 2Rots, "Mu
neering MecFAILURE OF SO SHEAR WA
al response onry ‐ 5, U.K.chanical ananational Jou
OMPRESSIVEs Part 2‐Resegth of bricksonry Constrenised limit l. 84, pp. 166brams, "MECe, vol. 111, ppresponse andground moti
d limit analy. 50, pp. 817Collapse anake actions ‐ cage Architectanics Publicati, "Strengthpp. 633‐642, e homogenizaded masonata, Firenze,Bound limit orced mason
CARGAS D
on‐linear prurnal for Nu
ouvrages sortement de
tion of Ston
Numérica de genharia Civ
merical analyDepartment
one masonrying‐Asce, voldimensional ocedure and 2005. ltisurface inchanics‐Asce,SHEAR‐STRESALLS," Proce
of dry join, 2001. alysis of quaurnal of Num
E STRENGTHearch and Thk masonry ruction, vol. 3analysis of 6‐180, 2006.CHANICS OF p. 857‐870, 1d damage anon," Enginee
sis of multi‐‐836, 2008.alysis of reincase study: Bture X. vol. 9ations, 2007,h of mason1997. zed micro mry walls," prItália, 2005.analysis mory failure su
DE COLAPSO
rogramming umerical Met
outerrains pagénie civil,
ne and Brick
Estruturas Hvil, Universid
ysis of blockof Civil Engi
y walls subj. 131, pp. 16limit analysivalidation,"
nterface mo, vol. 123, ppSSED MASONeedings of th
t masonry,"
asi‐brittle mmerical Meth
H OF BRICK Meory, vol. 71under biax3, pp. 26 ‐ 31masonry wa MASONRY I1985. nalysis of maering Structu
leaf masonry
forced and Bam Citadel,"95, C. A. Bre, pp. 577‐586ry subjected
mechanical mesented at t odel for FRPurfaces," Com
O DE SISTEMA
method apthods in Eng
ar une méthÉcole Nation
k Masonry,"
Históricas dedade do M
ky masonry neering, Un
jected to in665‐1673, 20is of rigid bloInternationa
del for anap. 660‐668, 1NRY ‐ AN ENhe British Cer
presented
materials usinhods in Eng
MASONRY," P1, pp. 893‐90xial compres1, 1983. alls, Part I:
N COMPRES
sonry structures, vol. 27,
y walls," Inte
unreinforced" in Structuraebbia, Ed., S6. d to combin
model for ththe XVII Con
P‐reinforcedmputers & S
AS DE ALVEN
proach for gineering, vo
hode cinémanale des Po
Universidad
e Alvenaria,"inho, Guim
structures iversity of M
n‐plane com005. ocks assembal Journal of
alysis of ma1997. NLARGED THramic Societ
at the Com
ng fracture‐gineering, vo
Proceedings 6, 1981. ssion ‐ ten
Failure surfa
SSION," Jour
ures and ma pp. 323‐333
ernational Jo
d adobe maal Studies, ReSouthampton
ned actions
he analysis agresso AIME
masonry ctructures, vo
NARIA
upper ol. 72,
atique nts et
de do
" Tese arães,
under Minho,
mbined
blages. Solids
asonry
EORY, ty, pp.
mputer
based ol. 52,
of the
nsion,"
aces,"
rnal of
asonry 3, Feb
ournal
asonry epairs n: Wit
," Aci
at the ETA di
curved ol. 87,

Bibliografia
127
[46] G. Milani, et al., "Upper bound limit analysis model for FRP‐reinforced masonry curved structures. Part II: Structural analyses," Computers & Structures, vol. 87, pp. 1534‐1558, Dec 2009.
[47] G. Milani, et al., "3D homogenized limit analysis of masonry buildings under horizontal loads," Engineering Structures, vol. 29, pp. 3134‐3148, 2007.
[48] A. Cavicchi and L. Gambarotta, "Two‐dimensional finite element upper bound limit analysis of masonry bridges," Computers & Structures, vol. 84, pp. 2316‐2328, Dec 2006.
[49] M. Gilbert and C. Melbourne, "Rigid‐block analysis of masonry structures," The structural Engineer, vol. 72, pp. 356‐361, 1994.
[50] J. Dris, et al., "Numerical modelling and mechanical behaviour analysis of ancient tunnel masonry structures," Tunnelling and Underground Space Technology, vol. 23, pp. 251‐263, May 2008.
[51] J. Pina‐Henriques, "Masonry under compression: Failure Analysis and Long‐Term Effects," Doctoral Thesis, Department of Civil Engineering, University of Minho, 2005.
[52] G. Vasconcelos, "Experimental investigations on the mechanics of stone masonry: Characterization of granites and behavior of ancient masonry shear walls," Doctoral thesis, Department of Civil Engineering, University of Minho, 2005.