Embed Size (px)
Citation preview
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 1/211
Comandos Elétricos
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 2/211
2
Comandos Elétricos
SENAI-SP, 2004
Trabalho editorado a partir de conteúdos extraídos da Intranet por MeiosEducacionais da Gerência de Educação da Diretoria Técnica do SENAI-SP.
Coordenação Geral Antonio Carlos Lago Machado
Coordenação Eduardo dos Reis CavalcanteEliacy Edington dos SantosMarcelo Miranda
Elaboração e Organização Edson Kazuo Inode Conteúdos Geraldo Tressoldi Filho
João Carlos Gonzaga de Jesus – CFP 2.02
Escola SENAI “Hessel Horácio Cherkassky”Praça da Bíblia nº 1 – Centro – Cubatão – SPCEP 11.510-300
Tel.: (13) 3361-6633Email: [email protected]
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 3/211
3
Sumário
Parte l: Teoria de Comandos
Dispositivo de proteção e segurança 6
Relês como dispositivos de segurança 12
Seletividade 19
Contatores 26
Chaves auxiliares tipo botoeira 40
Sinalizadores luminosos 42
Relês temporizadores 45
Transformadores para comando 49
Sensores de proximidade 52
Termistores 66
Diagramas de comandos elétricos 70
Significado e simbologia 77
Parte ll: Informações tecnológicas
Reversão de rotação de motores trifásicos 90Sistemas de partida de motores trifásicos 94
Partida de motor trifásico estrela-triângulo 104
Partida de motor trifásico tipo Dahlander 108
Reversão de motor trifásico tipo Dahlander 112
Partida de motor trifásico de rotor bobinado 116
Partida de motor trifásico com chave compensadora automática 121
Partida consecutiva de motores trifásicos 123
Frenagem de motor trifásico 127
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 4/211
4
Parte lll: Ensaios
Verificar o funcionamento de dispositivos de segurança 129
Verificar o funcionamento do comando de motor trifásico por contator 132
Verificar o comando para inversão de rotação do motor trifásico 135
Verificar motor trifásico com comando para partida estrela-triângulo 139
Verificar reversão de motor trifásico estrela-triângulo 144
Verificar partida de motor trifásico com autotransformador 147
Verificar o funcionamento de motor com partida automática 151
Verificar o funcionamento de motor Dahlander 154
Verificar o funcionamento de motor Dahlander com reversão de rotação 157
Verificar o funcionamento de motor Dahlander com temporizados 161
Verificar o funcionamento de motor trifásico com rotor bobinado 165
Verificar o funcionamento de motor trifásico com rotor com comutação automática 169
Verificar o funcionamento de motor trifásico com frenagem eletromagnética 172
Dimensionamento de componentes 175
Multímetros Digitais 200
Comandos Elétricos – SOFT STARTER 204
Referências bibliográficas 211
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 5/211
5
Comandos ElétricosTeorias de Comandos
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 6/211
6
Dispositivo de proteçãoe segurança
Os dispositivos de segurança e proteção são componentes que, inseridos nos circuitoselétricos, servem para interrompê-los quando alguma anomalia acontece.
Neste capítulo, veremos os dispositivos empregados para proteção dos motores.
Para aprender esse conteúdo com mais facilidade, é necessário ter conhecimentosanteriores sobre corrente elétrica, picos de correntes dos motores e sistemas departida.
Seguranças fusíveis
As seguranças fusíveis são elementos inseridos nos circuitos para interrompê-los em
situações anormais de corrente, como curto-circuito ou sobrecargas de longa duração.
De modo geral, as seguranças fusíveis são classificadas segundo a tensão dealimentação em alta ou baixa tensão; e, também, segundo as características dedesligamento em efeito rápido ou retardado.
Fusíveis de efeito rápido
Os fusíveis de efeito rápido são empregados em circuitos em que não há variaçãoconsiderável de corrente entre a fase de partida e a de regime normal defuncionamento.
Esses fusíveis são ideais para a proteção de circuitos com semicondutores (diodos etiristores).
Fusíveis de efeito retardado
Os fusíveis de efeito retardado são apropriados para uso em circuitos cuja corrente departida atinge valores muitas vezes superiores ao valor da corrente nominal e emcircuitos que estejam sujeitos a sobrecargas de curta duração.
Como exemplo desses circuitos podemos citar motores elétricos, as cargas indutivas eas cargas capacitivas em geral.
Os seguranças fusíveis de efeito retardado mais comumente usados são os NH eDIAZED
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 7/211
7
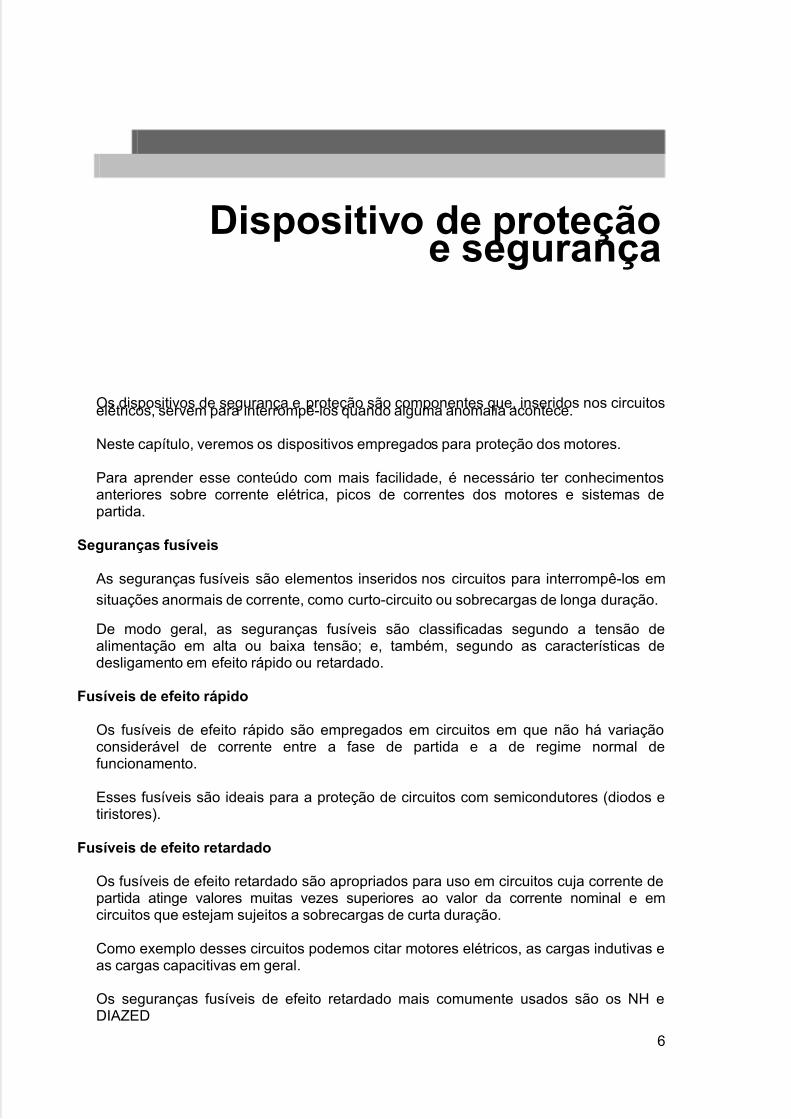
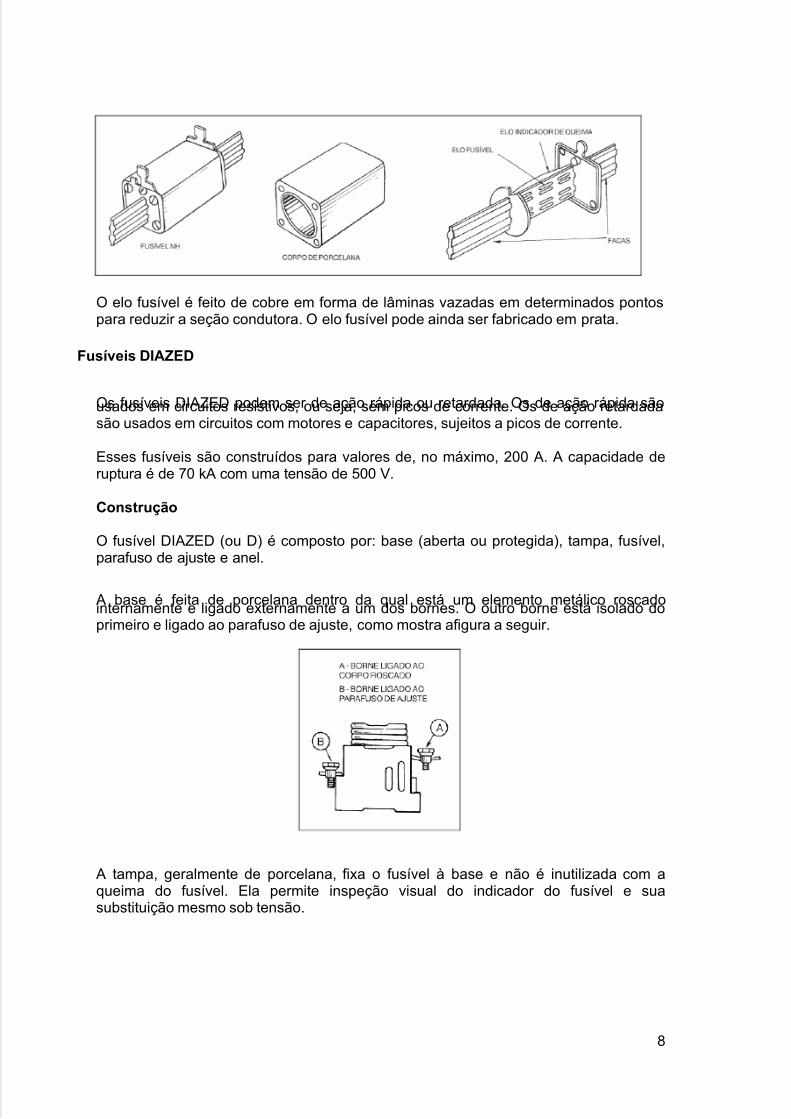
Fusíveis NH
Os fusíveis NH suportam elevações de tensão durante um certo tempo sem que ocorrafusão.
Eles são empregados em circuitos sujeitos a picos de corrente e onde existam cargasindutivas e capacitivas.
Sua construção permite valores padronizados de corrente que variam de 6 a 1000 A.Sua capacidade de ruptura é sempre superior a 70 kA com uma tensão máxima de500 V.
Construção
Os fusíveis NH são constituídos por duas partes: base e fusível.
A base é fabricada de material isolante como a esteatita, o plástico ou o termofixo. Nelasão fixados os contatos em forma de garras às quais estão acopladas molas queaumentam a pressão de contato.
O fusível possui corpo de porcelana de seção retangular. Dentro desse corpo, estão oelo fusível e o elo indicador de queima imersos em areia especial.
Nas duas extremidades do corpo de porcelana existem duas facas de metal que seencaixam perfeitamente nas garras da base.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 8/211
8
O elo fusível é feito de cobre em forma de lâminas vazadas em determinados pontospara reduzir a seção condutora. O elo fusível pode ainda ser fabricado em prata.
Fusíveis DIAZED
Os fusíveis DIAZED podem ser de ação rápida ou retardada. Os de ação rápida sãousados em circuitos resistivos, ou seja, sem picos de corrente. Os de ação retardadasão usados em circuitos com motores e capacitores, sujeitos a picos de corrente.
Esses fusíveis são construídos para valores de, no máximo, 200 A. A capacidade deruptura é de 70 kA com uma tensão de 500 V.
Construção
O fusível DIAZED (ou D) é composto por: base (aberta ou protegida), tampa, fusível,parafuso de ajuste e anel.
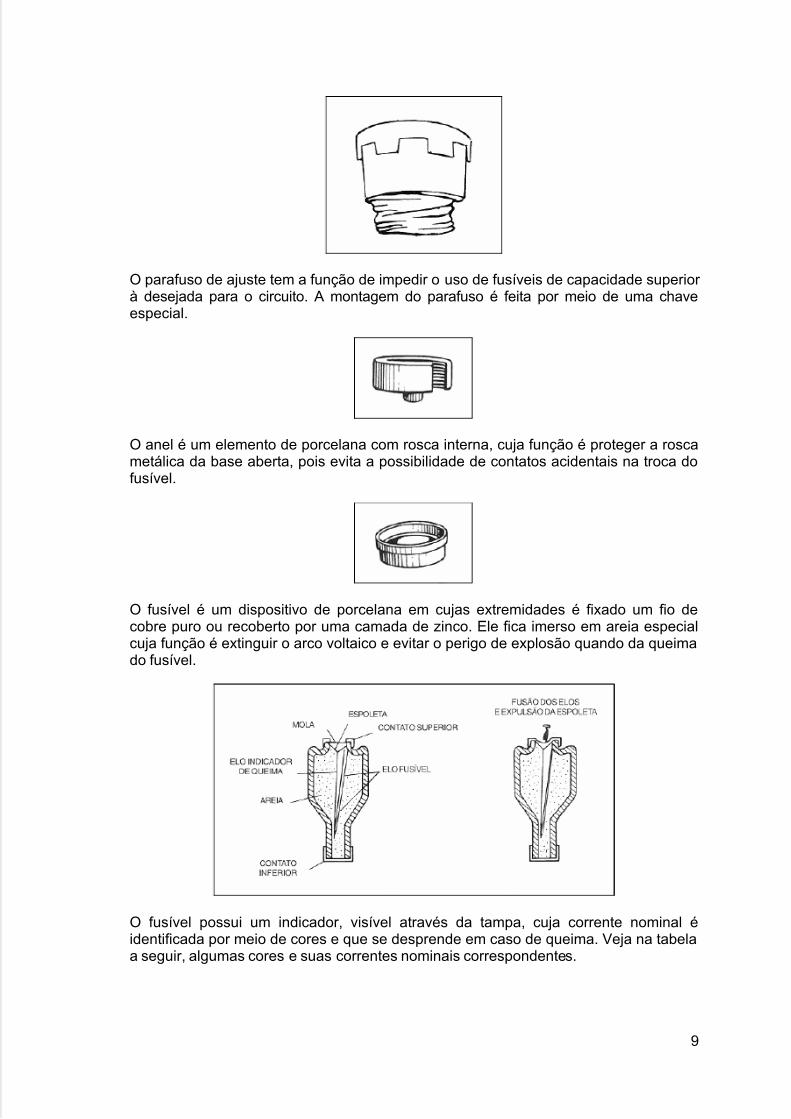
A base é feita de porcelana dentro da qual está um elemento metálico roscadointernamente e ligado externamente a um dos bornes. O outro borne está isolado doprimeiro e ligado ao parafuso de ajuste, como mostra afigura a seguir.
A tampa, geralmente de porcelana, fixa o fusível à base e não é inutilizada com aqueima do fusível. Ela permite inspeção visual do indicador do fusível e suasubstituição mesmo sob tensão.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 9/211
9
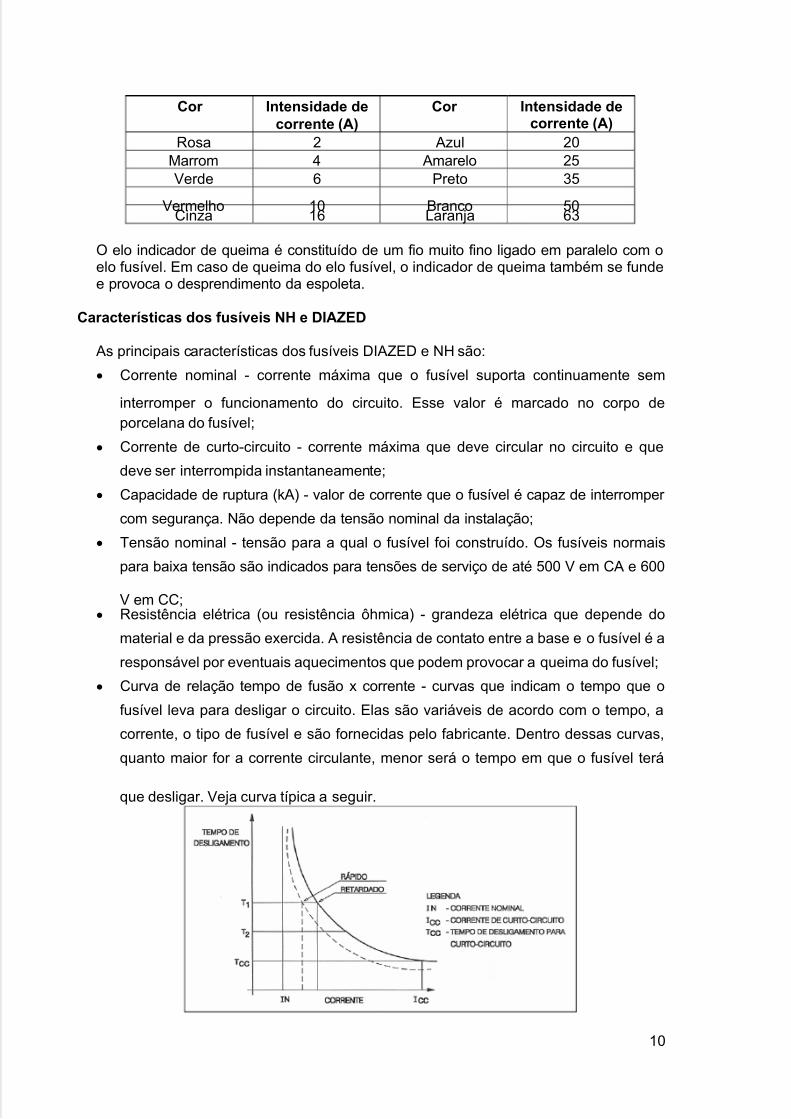
O parafuso de ajuste tem a função de impedir o uso de fusíveis de capacidade superior à desejada para o circuito. A montagem do parafuso é feita por meio de uma chaveespecial.
O anel é um elemento de porcelana com rosca interna, cuja função é proteger a roscametálica da base aberta, pois evita a possibilidade de contatos acidentais na troca dofusível.
O fusível é um dispositivo de porcelana em cujas extremidades é fixado um fio decobre puro ou recoberto por uma camada de zinco. Ele fica imerso em areia especialcuja função é extinguir o arco voltaico e evitar o perigo de explosão quando da queimado fusível.
O fusível possui um indicador, visível através da tampa, cuja corrente nominal éidentificada por meio de cores e que se desprende em caso de queima. Veja na tabelaa seguir, algumas cores e suas correntes nominais correspondentes.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 10/211
10
Cor Intensidade decorrente (A)
Cor Intensidade decorrente (A)
Rosa 2 Azul 20Marrom 4 Amarelo 25Verde 6 Preto 35
Vermelho 10 Branco 50Cinza 16 Laranja 63
O elo indicador de queima é constituído de um fio muito fino ligado em paralelo com oelo fusível. Em caso de queima do elo fusível, o indicador de queima também se fundee provoca o desprendimento da espoleta.
Características dos fusíveis NH e DIAZED
As principais características dos fusíveis DIAZED e NH são:
• Corrente nominal - corrente máxima que o fusível suporta continuamente sem
interromper o funcionamento do circuito. Esse valor é marcado no corpo deporcelana do fusível;
• Corrente de curto-circuito - corrente máxima que deve circular no circuito e que
deve ser interrompida instantaneamente;
• Capacidade de ruptura (kA) - valor de corrente que o fusível é capaz de interromper
com segurança. Não depende da tensão nominal da instalação;
• Tensão nominal - tensão para a qual o fusível foi construído. Os fusíveis normais
para baixa tensão são indicados para tensões de serviço de até 500 V em CA e 600
V em CC;• Resistência elétrica (ou resistência ôhmica) - grandeza elétrica que depende do
material e da pressão exercida. A resistência de contato entre a base e o fusível é a
responsável por eventuais aquecimentos que podem provocar a queima do fusível;
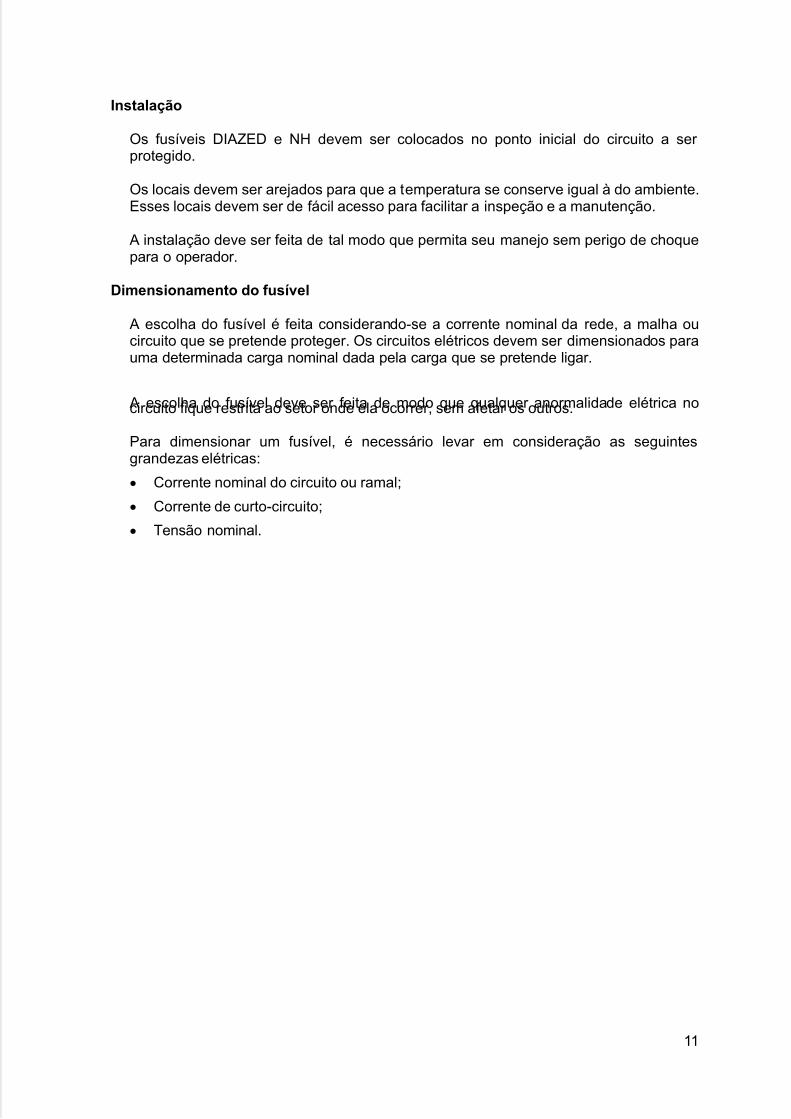
• Curva de relação tempo de fusão x corrente - curvas que indicam o tempo que o
fusível leva para desligar o circuito. Elas são variáveis de acordo com o tempo, a
corrente, o tipo de fusível e são fornecidas pelo fabricante. Dentro dessas curvas,
quanto maior for a corrente circulante, menor será o tempo em que o fusível terá
que desligar. Veja curva típica a seguir.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 11/211
11
Instalação
Os fusíveis DIAZED e NH devem ser colocados no ponto inicial do circuito a ser protegido.
Os locais devem ser arejados para que a temperatura se conserve igual à do ambiente.Esses locais devem ser de fácil acesso para facilitar a inspeção e a manutenção.
A instalação deve ser feita de tal modo que permita seu manejo sem perigo de choquepara o operador.
Dimensionamento do fusível
A escolha do fusível é feita considerando-se a corrente nominal da rede, a malha oucircuito que se pretende proteger. Os circuitos elétricos devem ser dimensionados parauma determinada carga nominal dada pela carga que se pretende ligar.
A escolha do fusível deve ser feita de modo que qualquer anormalidade elétrica nocircuito fique restrita ao setor onde ela ocorrer, sem afetar os outros.
Para dimensionar um fusível, é necessário levar em consideração as seguintesgrandezas elétricas:
• Corrente nominal do circuito ou ramal;
• Corrente de curto-circuito;
• Tensão nominal.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 12/211
12
Relês como dispositivosde segurança
O relê é um dispositivo de comando, ou seja, é empregado na partida de motores, noprocessamento de solda de ponto, no comando de laminadoras e prensas e no
controle de iluminação de edifícios.
Neste capítulo, estudaremos os relês como dispositivos de segurança.
Para compreender com mais facilidade o funcionamento desse dispositivo, é
necessário ter conhecimentos anteriores sobre eletromagnetismo.
Relês
Diferentemente dos fusíveis, que se auto destroem, os relês abrem os circuitos em
presença de sobrecarga, por exemplo, e continuam a ser usados após sanada a
irregularidade.
Em relação aos fusíveis, os relês apresentam as seguintes vantagens:
• Ação mais segura;
• Possibilidade de modificação do estado ligado para desligado (e vice-versa);
• Proteção do usuário contra sobrecargas mínimas dos limites predeterminados;• Retardamento natural que permite picos de corrente próprios às partidas de
motores.
Tipos de relês
Os relês que são usados como dispositivos de segurança podem ser:
• Eletromagnéticos;
• Térmicos.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 13/211
13
Relês eletromagnéticos
Os relês eletromagnéticos funcionam com base na ação do eletromagnetismo por meio
do qual um núcleo de ferro próximo de uma bobina é atraído quando esta é percorrida
por uma corrente elétrica.
Os relês eletromagnéticos mais comuns são de dois tipos:
• Relê de mínima tensão;
• Relê de máxima corrente.
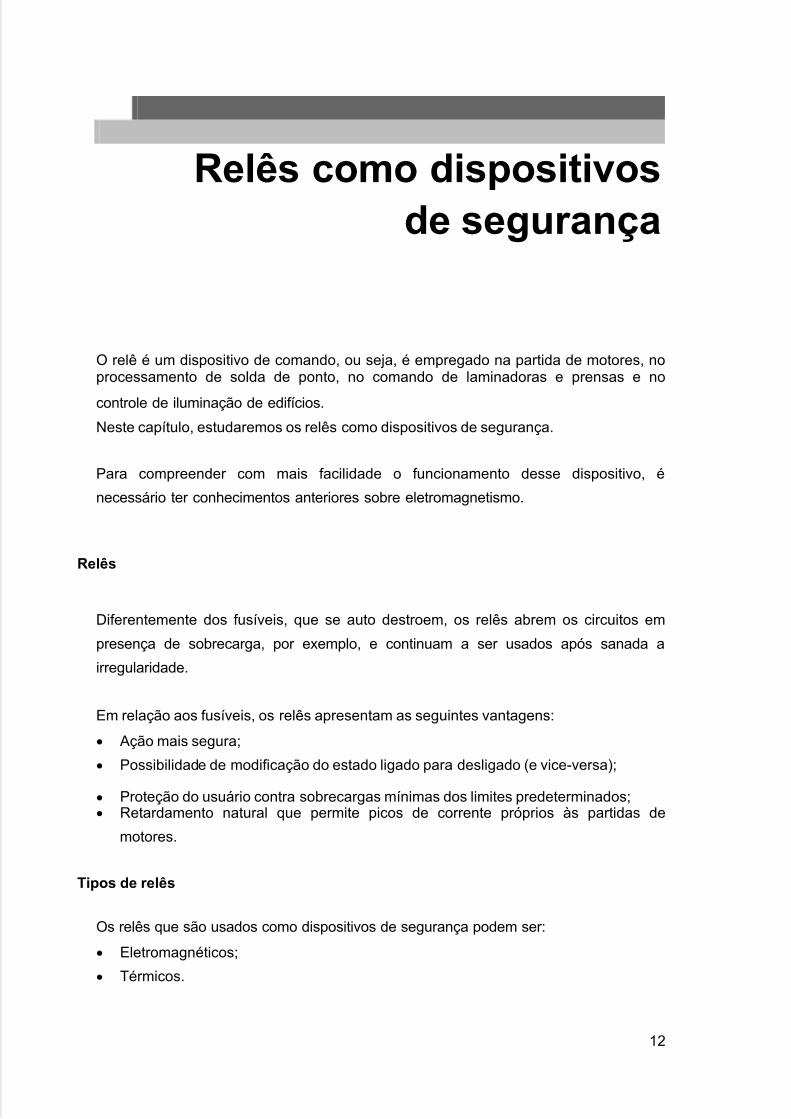
O relê de mínima tensão recebe uma regulagem aproximadamente 20% menor do que
a tensão nominal. Se a tensão abaixar a um valor prejudicial, o relê interrompe o
circuito de comando da chave principal e, consequentemente, abre os contatos dessa
chave.
Os relês de mínima tensão são aplicados principalmente em contatores e disjuntores.
Veja na ilustração a seguir o esquema simplificado de um relê de mínima tensão.
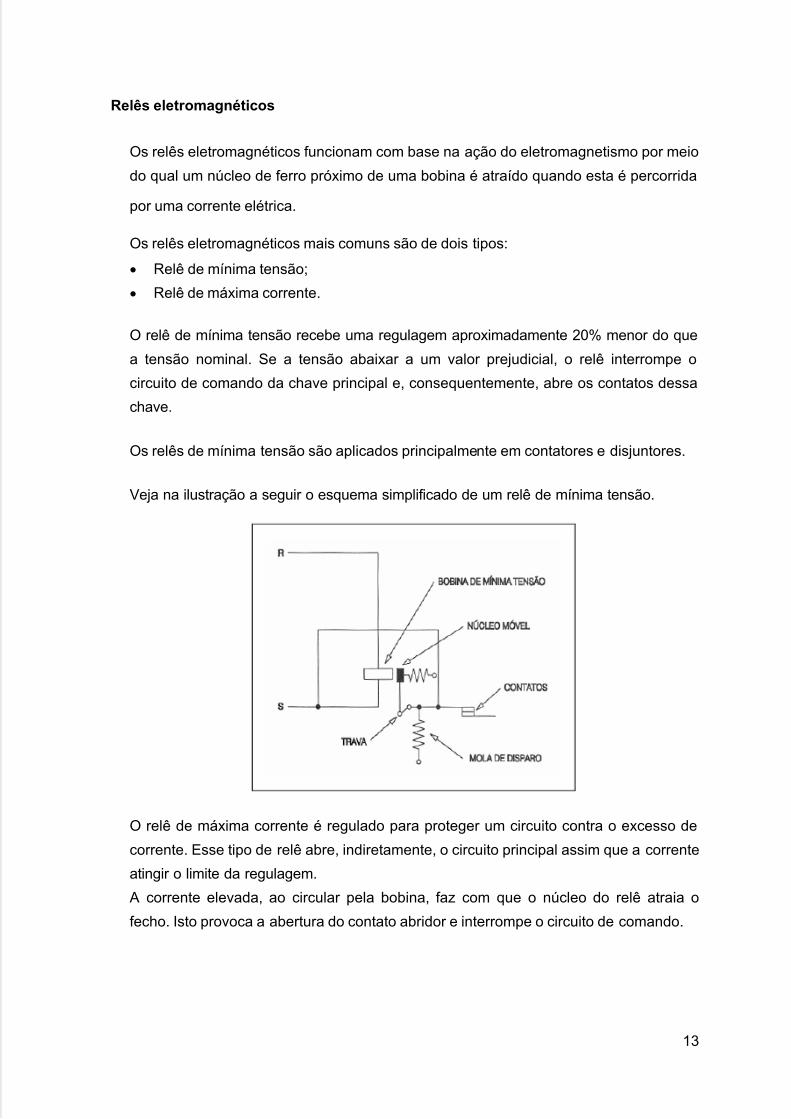
O relê de máxima corrente é regulado para proteger um circuito contra o excesso de
corrente. Esse tipo de relê abre, indiretamente, o circuito principal assim que a corrente
atingir o limite da regulagem.
A corrente elevada, ao circular pela bobina, faz com que o núcleo do relê atraia o
fecho. Isto provoca a abertura do contato abridor e interrompe o circuito de comando.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 14/211
14
A regulagem desse tipo de relê é feita aproximando-se ou afastando-se o fecho donúcleo. Quando o fecho é afastado, uma corrente mais elevada é necessária para
acionar o relê.
Veja na figura a seguir o esquema simplificado de um relê de máxima corrente.
Relês térmicos
Esse tipo de relê, como dispositivo de proteção, controle ou comando do circuito
elétrico, atua por efeito térmico provocado pela corrente elétrica.
O elemento básico dos relês térmicos é o bimetal.
O bimetal é um conjunto formado por duas lâminas de metais diferentes (normalmente
ferro e níquel), sobrepostas e soldadas.
Esses dois metais, de coeficientes de dilatação diferentes, formam um para metálico.
Por causa da diferença de coeficiente de dilatação, se o par metálico for submetido auma temperatura elevada, um dos metais do par vai se dilatar mais que o outro.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 15/211
15
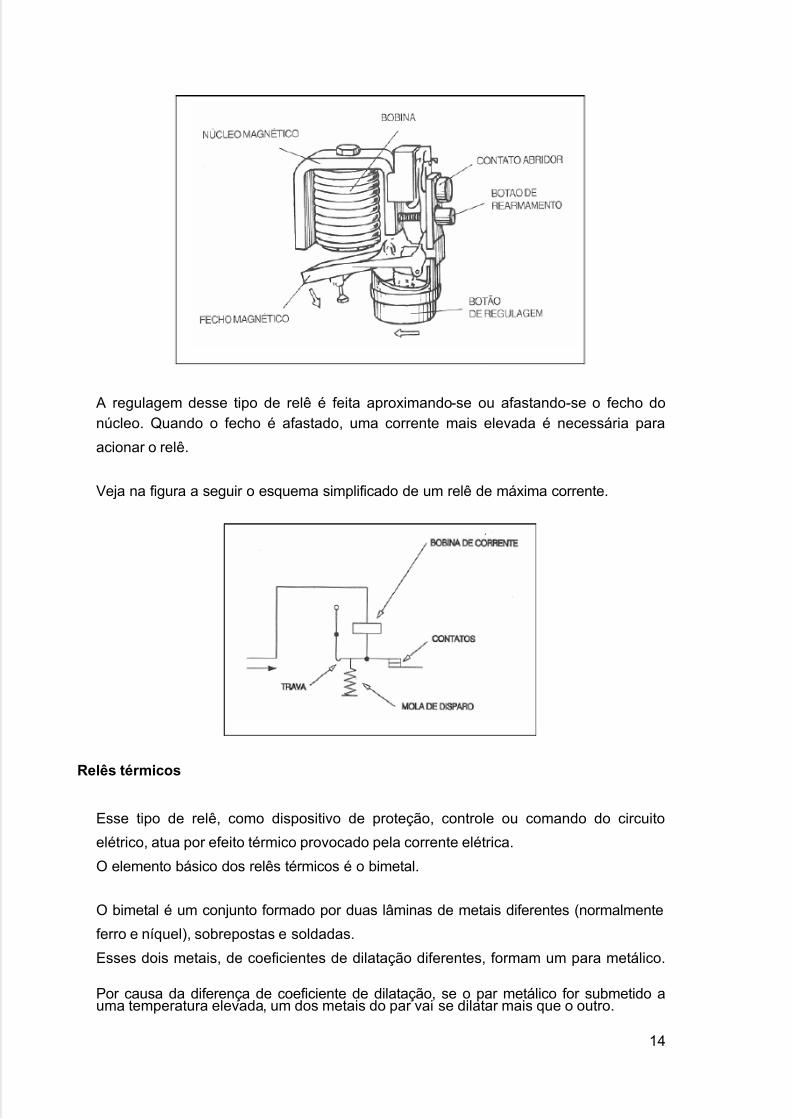
Por estarem fortemente unidos, o metal de menor coeficiente de dilatação provoca o
encurvamento do conjunto para o seu lado, afastando o conjunto de um ponto
determinado.
Veja representação esquemática desse fenômeno a seguir.
Esse movimento é usado para disparar um gatilho ou abrir um circuito, por exemplo.
Portanto, essa característica do bimetal permite que o relê exerça o controle de
sobrecarga para proteção dos motores.
Os relês térmicos para proteção de sobrecarga são:• Diretos;
• Indiretos;
• Com retenção.
Os relês térmicos diretos são aquecidos pela passagem da corrente de carga pelo
bimetal. Havendo sobrecarga, o relê desarma o disjuntor.
Embora a ação do bimetal seja lenta, o desligamento dos contatos é brusco devido àação do gatilho. Essa abertura rápida impede a danificação ou soldagem dos contatos.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 16/211
16
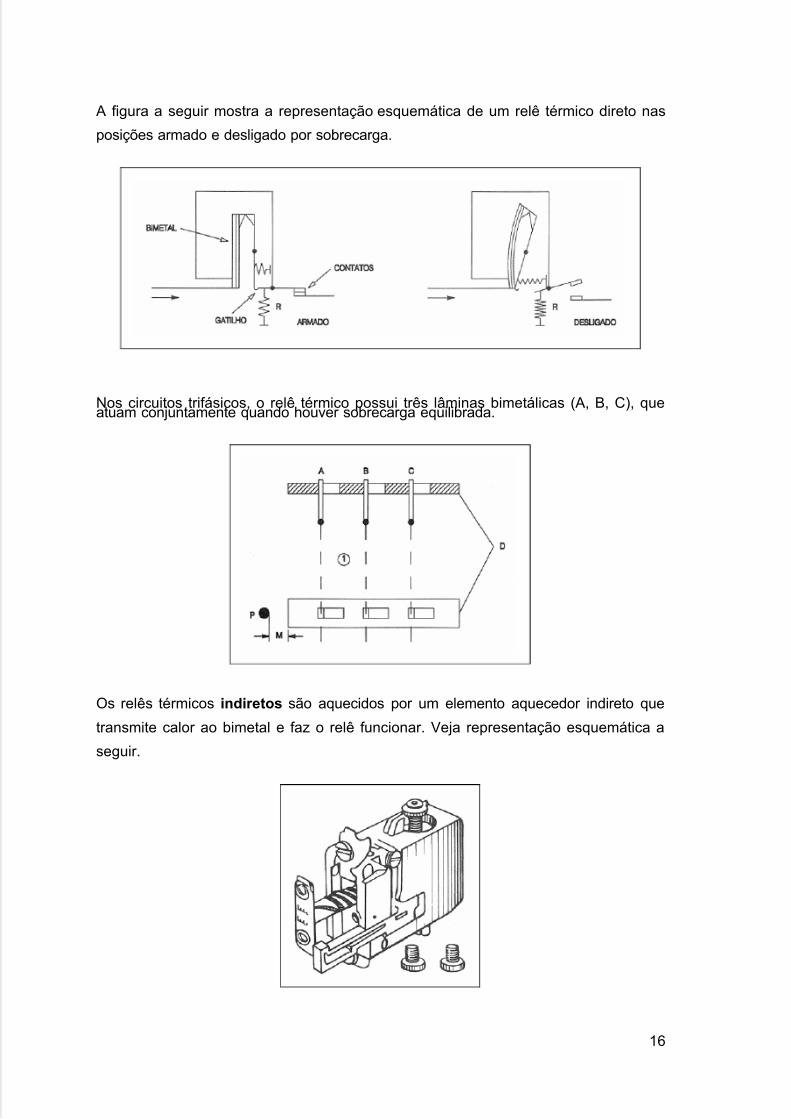
A figura a seguir mostra a representação esquemática de um relê térmico direto nas
posições armado e desligado por sobrecarga.
Nos circuitos trifásicos, o relê térmico possui três lâminas bimetálicas (A, B, C), queatuam conjuntamente quando houver sobrecarga equilibrada.
Os relês térmicos indiretos são aquecidos por um elemento aquecedor indireto que
transmite calor ao bimetal e faz o relê funcionar. Veja representação esquemática a
seguir.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 17/211
17
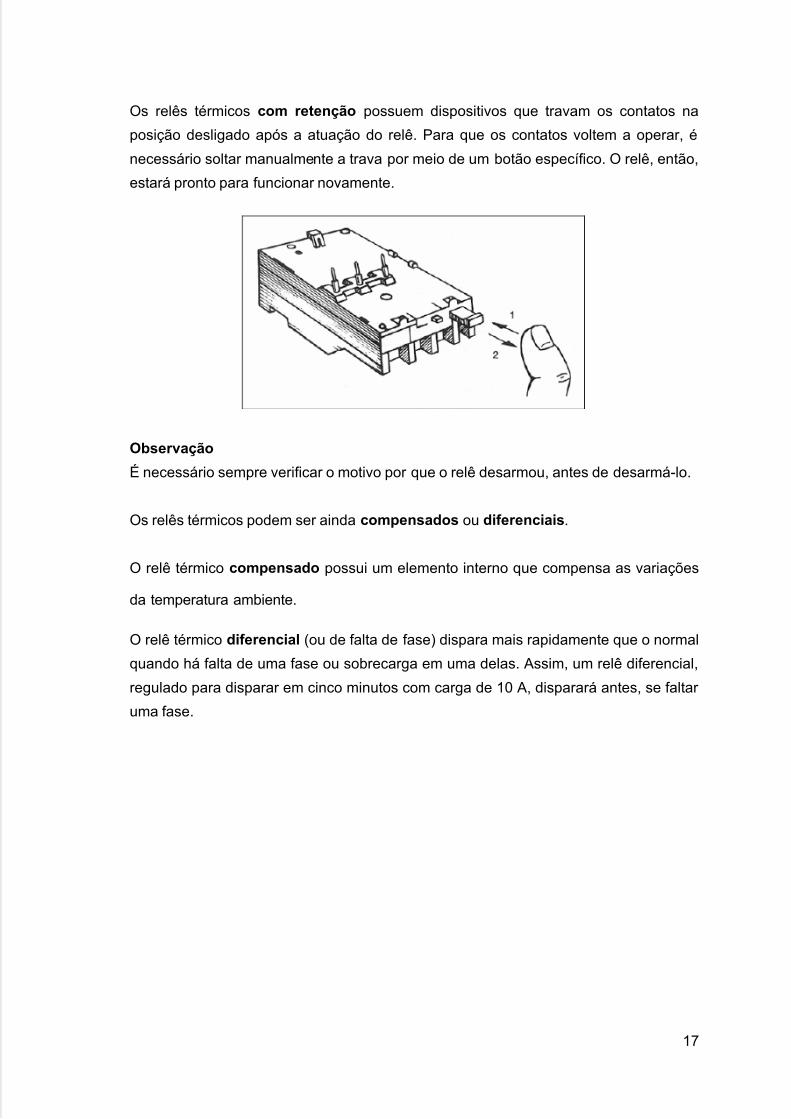
Os relês térmicos com retenção possuem dispositivos que travam os contatos na
posição desligado após a atuação do relê. Para que os contatos voltem a operar, é
necessário soltar manualmente a trava por meio de um botão específico. O relê, então,
estará pronto para funcionar novamente.
Observação
É necessário sempre verificar o motivo por que o relê desarmou, antes de desarmá-lo.
Os relês térmicos podem ser ainda compensados ou diferenciais.
O relê térmico compensado possui um elemento interno que compensa as variações
da temperatura ambiente.
O relê térmico diferencial (ou de falta de fase) dispara mais rapidamente que o normal
quando há falta de uma fase ou sobrecarga em uma delas. Assim, um relê diferencial,
regulado para disparar em cinco minutos com carga de 10 A, disparará antes, se faltar
uma fase.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 18/211
18
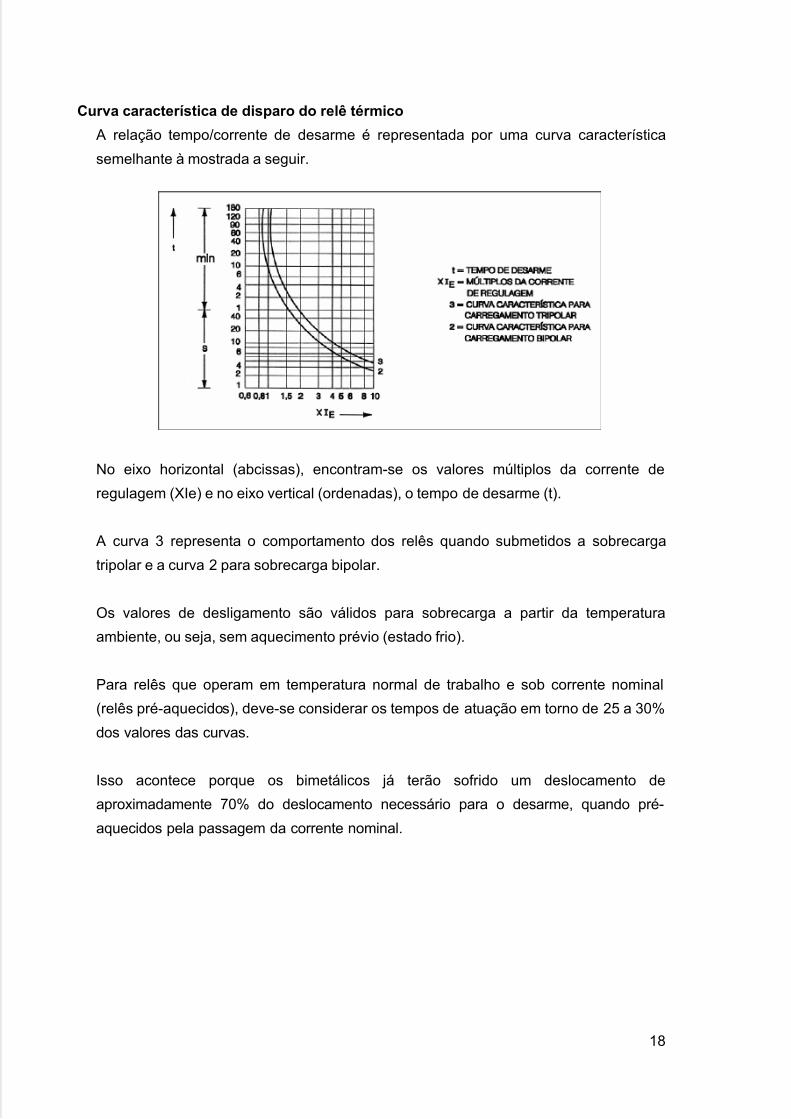
Curva característica de disparo do relê térmico
A relação tempo/corrente de desarme é representada por uma curva característica
semelhante à mostrada a seguir.
No eixo horizontal (abcissas), encontram-se os valores múltiplos da corrente de
regulagem (XIe) e no eixo vertical (ordenadas), o tempo de desarme (t).
A curva 3 representa o comportamento dos relês quando submetidos a sobrecarga
tripolar e a curva 2 para sobrecarga bipolar.
Os valores de desligamento são válidos para sobrecarga a partir da temperatura
ambiente, ou seja, sem aquecimento prévio (estado frio).
Para relês que operam em temperatura normal de trabalho e sob corrente nominal
(relês pré-aquecidos), deve-se considerar os tempos de atuação em torno de 25 a 30%
dos valores das curvas.
Isso acontece porque os bimetálicos já terão sofrido um deslocamento de
aproximadamente 70% do deslocamento necessário para o desarme, quando pré-
aquecidos pela passagem da corrente nominal.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 19/211
19
Seletividade
É a operação conjunta de dispositivos de proteção, que atuam sobre os de manobraligados em série, para a interrupção escalonada de correntes anormais (por exemplode curto-circuito).
Um dispositivo de manobra deve interromper a parte do circuito conectadaimediatamente após ele próprio, e os demais dispositivos de manobra devempermanecer ligados.
Funcionamento
Nos circuitos de baixa-tensão os fusíveis e relés de disjuntores podem ser encontradosnas seguintes combinações:
• Fusíveis em série com fusíveis;
• Relés eletromagnéticos de disjuntores em série entre si;
• Relés eletromagnéticos de disjuntores em série com fusíveis;• Fusíveis em série com relés térmicos de disjuntores;
• Relés térmicos de disjuntor em série com fusíveis.
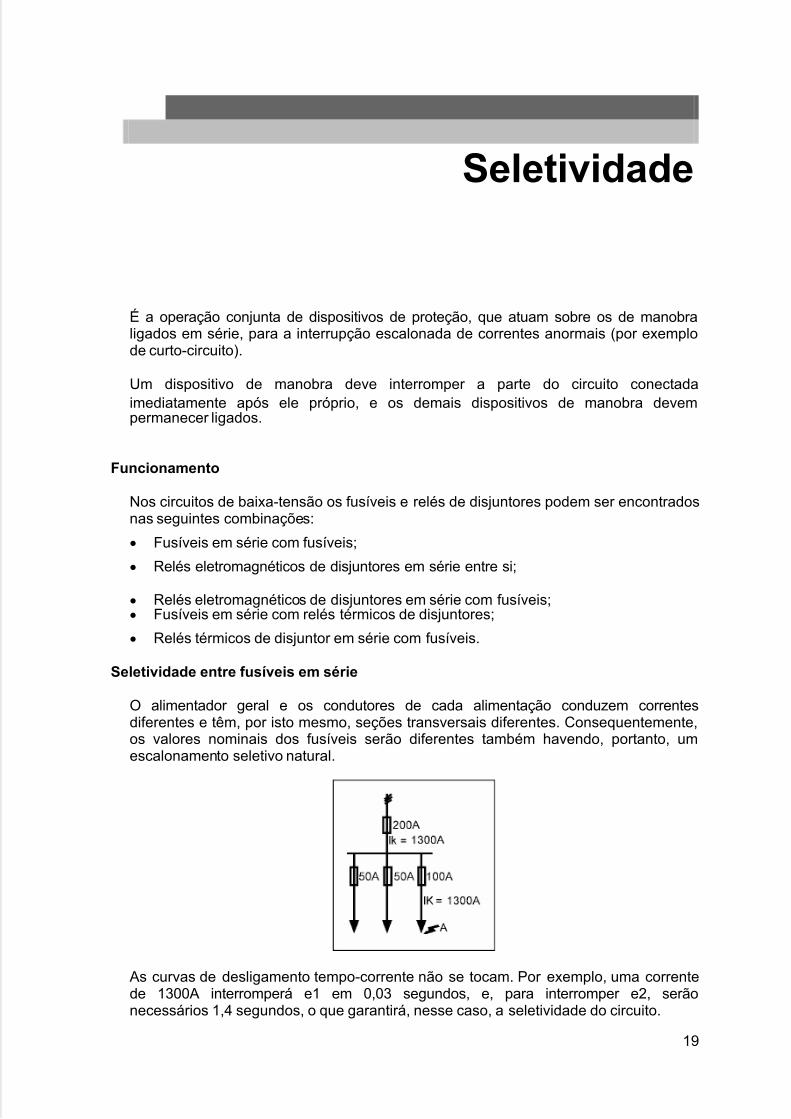
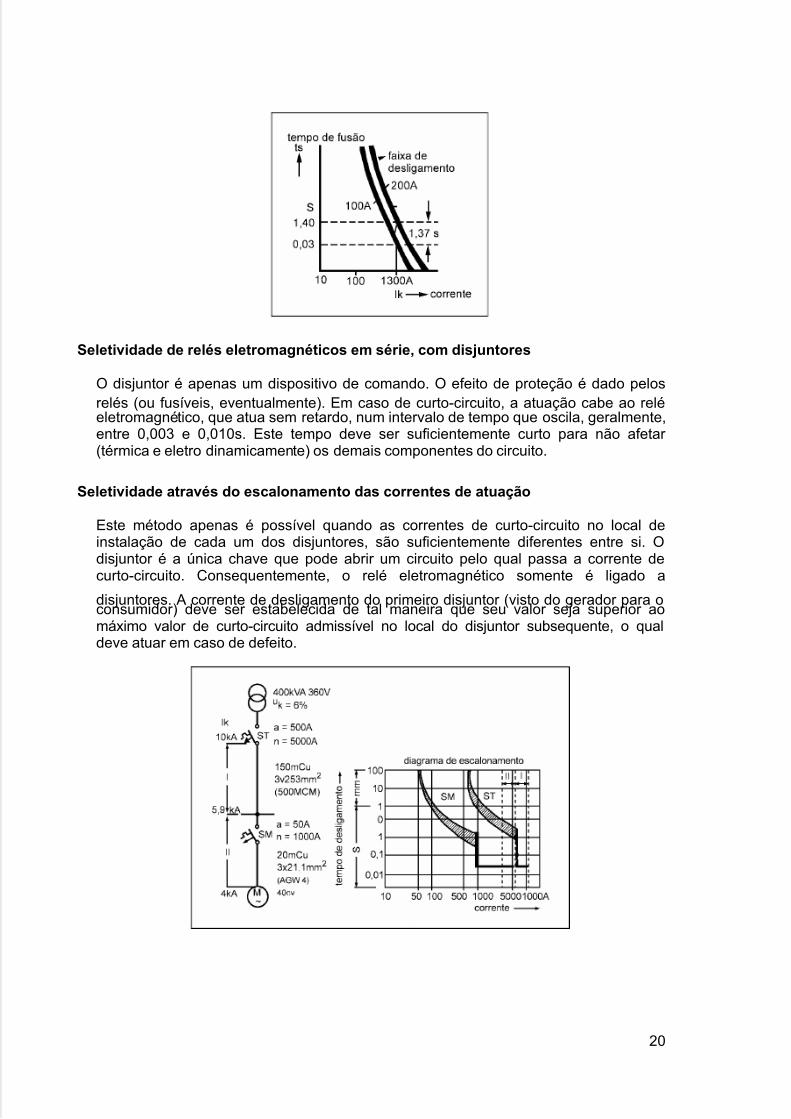
Seletividade entre fusíveis em série
O alimentador geral e os condutores de cada alimentação conduzem correntesdiferentes e têm, por isto mesmo, seções transversais diferentes. Consequentemente,os valores nominais dos fusíveis serão diferentes também havendo, portanto, umescalonamento seletivo natural.
As curvas de desligamento tempo-corrente não se tocam. Por exemplo, uma correntede 1300A interromperá e1 em 0,03 segundos, e, para interromper e2, serãonecessários 1,4 segundos, o que garantirá, nesse caso, a seletividade do circuito.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 20/211
20
Seletividade de relés eletromagnéticos em série, com disjuntores
O disjuntor é apenas um dispositivo de comando. O efeito de proteção é dado pelosrelés (ou fusíveis, eventualmente). Em caso de curto-circuito, a atuação cabe ao reléeletromagnético, que atua sem retardo, num intervalo de tempo que oscila, geralmente,entre 0,003 e 0,010s. Este tempo deve ser suficientemente curto para não afetar (térmica e eletro dinamicamente) os demais componentes do circuito.
Seletividade através do escalonamento das correntes de atuação
Este método apenas é possível quando as correntes de curto-circuito no local deinstalação de cada um dos disjuntores, são suficientemente diferentes entre si. Odisjuntor é a única chave que pode abrir um circuito pelo qual passa a corrente decurto-circuito. Consequentemente, o relé eletromagnético somente é ligado a
disjuntores. A corrente de desligamento do primeiro disjuntor (visto do gerador para oconsumidor) deve ser estabelecida de tal maneira que seu valor seja superior aomáximo valor de curto-circuito admissível no local do disjuntor subsequente, o qualdeve atuar em caso de defeito.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 21/211
21
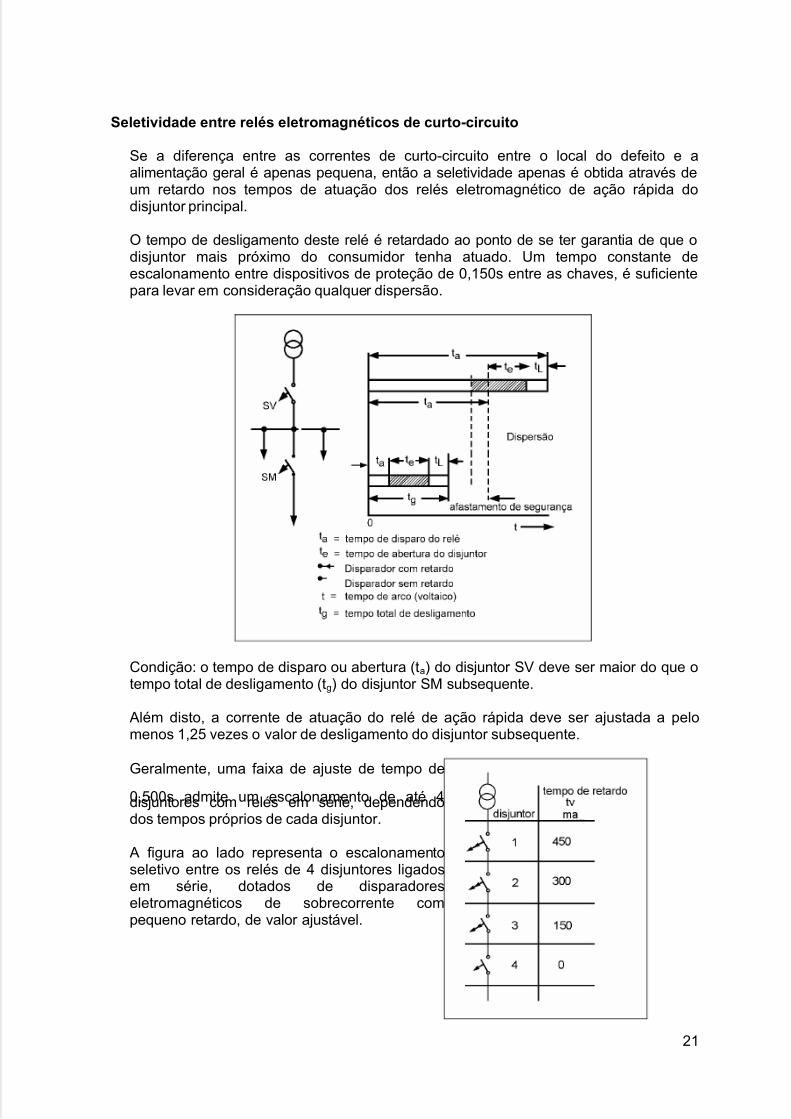
Seletividade entre relés eletromagnéticos de curto-circuito
Se a diferença entre as correntes de curto-circuito entre o local do defeito e aalimentação geral é apenas pequena, então a seletividade apenas é obtida através deum retardo nos tempos de atuação dos relés eletromagnético de ação rápida dodisjuntor principal.
O tempo de desligamento deste relé é retardado ao ponto de se ter garantia de que odisjuntor mais próximo do consumidor tenha atuado. Um tempo constante deescalonamento entre dispositivos de proteção de 0,150s entre as chaves, é suficientepara levar em consideração qualquer dispersão.
Condição: o tempo de disparo ou abertura (ta) do disjuntor SV deve ser maior do que otempo total de desligamento (tg) do disjuntor SM subsequente.
Além disto, a corrente de atuação do relé de ação rápida deve ser ajustada a pelomenos 1,25 vezes o valor de desligamento do disjuntor subsequente.
Geralmente, uma faixa de ajuste de tempo de
0,500s admite um escalonamento de até 4disjuntores com relés em série, dependendodos tempos próprios de cada disjuntor.
A figura ao lado representa o escalonamentoseletivo entre os relés de 4 disjuntores ligadosem série, dotados de disparadoreseletromagnéticos de sobrecorrente compequeno retardo, de valor ajustável.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 22/211
22
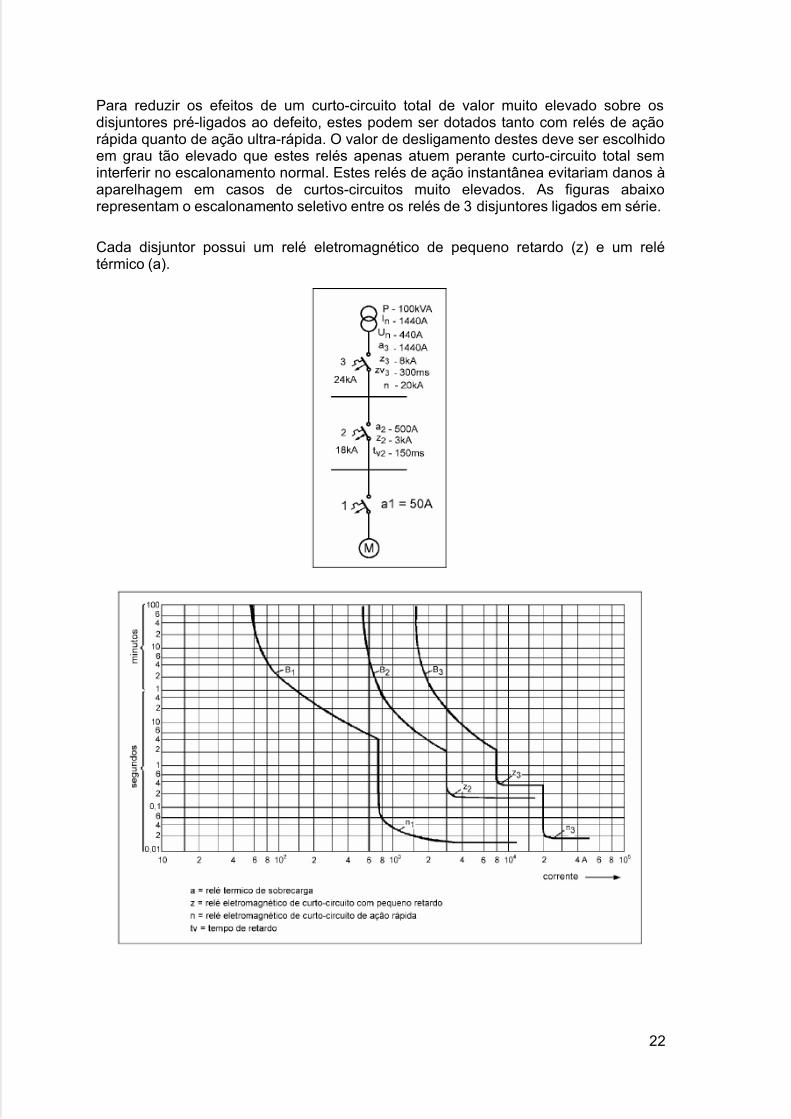
Para reduzir os efeitos de um curto-circuito total de valor muito elevado sobre osdisjuntores pré-ligados ao defeito, estes podem ser dotados tanto com relés de açãorápida quanto de ação ultra-rápida. O valor de desligamento destes deve ser escolhidoem grau tão elevado que estes relés apenas atuem perante curto-circuito total seminterferir no escalonamento normal. Estes relés de ação instantânea evitariam danos àaparelhagem em casos de curtos-circuitos muito elevados. As figuras abaixorepresentam o escalonamento seletivo entre os relés de 3 disjuntores ligados em série.
Cada disjuntor possui um relé eletromagnético de pequeno retardo (z) e um relétérmico (a).
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 23/211
23
Dessa forma, um curto-circuito entre a1 e a2 afetará a2 e a3.
Se a corrente presumível de curto-circuito for da ordem de 103.4, por exemplo, não faráatuar o relé eletromagnético ultra-rápido (n3), e sim o relé eletromagnético (z2).
Porém, se as proporções de um curto-circuito franco no mesmo ponto entre a1 e a2atingirem presumivelmente valores até 104.2, os disjuntores afetados serão também a2e a3, porém, ao contrário do caso anterior, o relé eletromagnético de a2 não atuará, esim o do disjuntor a3 que se abrirá pelo relé eletromagnético ultra-rápido (n3).Dessa forma, a2 será resguardado porque a corrente de curto-circuito ultrapassou asua capacidade de ruptura.
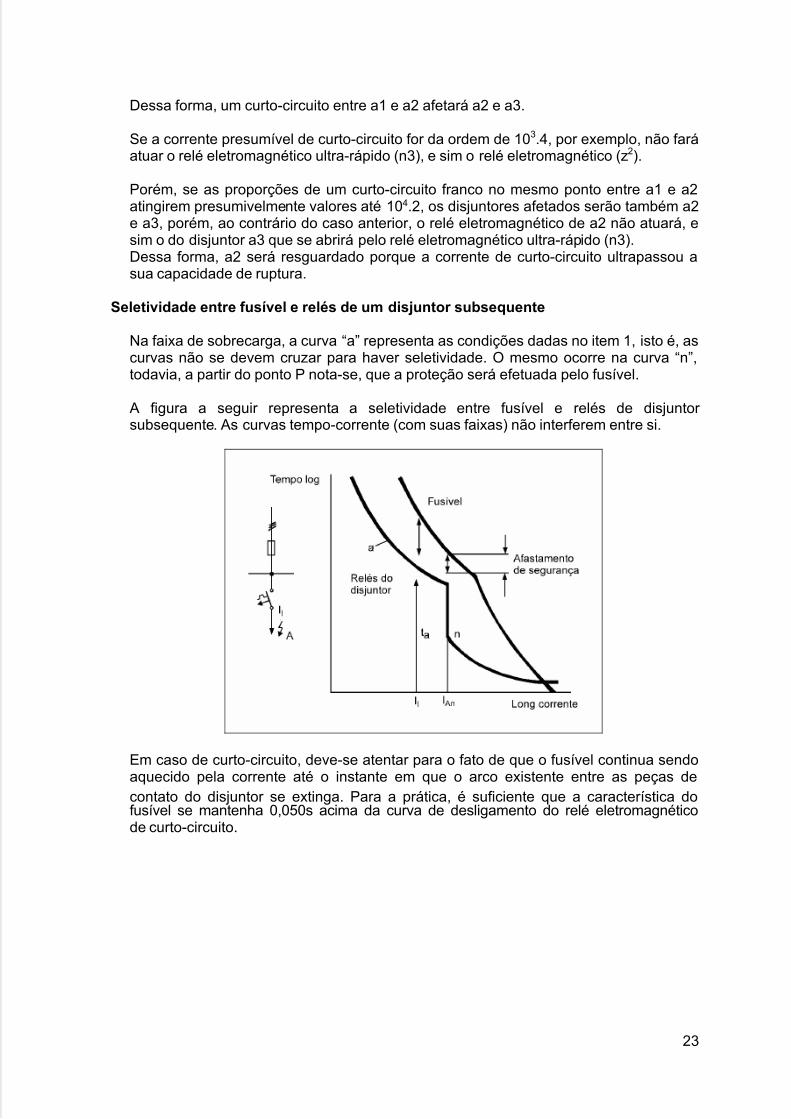
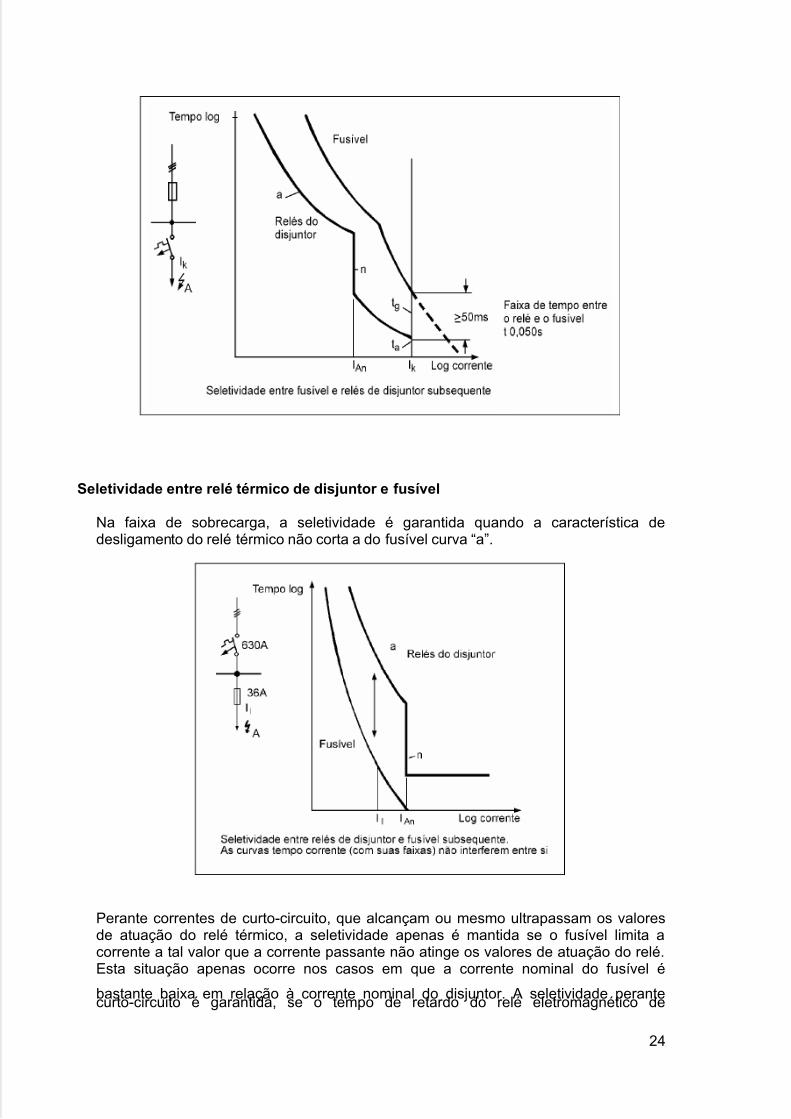
Seletividade entre fusível e relés de um disjuntor subsequente
Na faixa de sobrecarga, a curva “a” representa as condições dadas no item 1, isto é, ascurvas não se devem cruzar para haver seletividade. O mesmo ocorre na curva “n”,todavia, a partir do ponto P nota-se, que a proteção será efetuada pelo fusível.
A figura a seguir representa a seletividade entre fusível e relés de disjuntor subsequente. As curvas tempo-corrente (com suas faixas) não interferem entre si.
Em caso de curto-circuito, deve-se atentar para o fato de que o fusível continua sendoaquecido pela corrente até o instante em que o arco existente entre as peças decontato do disjuntor se extinga. Para a prática, é suficiente que a característica dofusível se mantenha 0,050s acima da curva de desligamento do relé eletromagnéticode curto-circuito.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 24/211
24
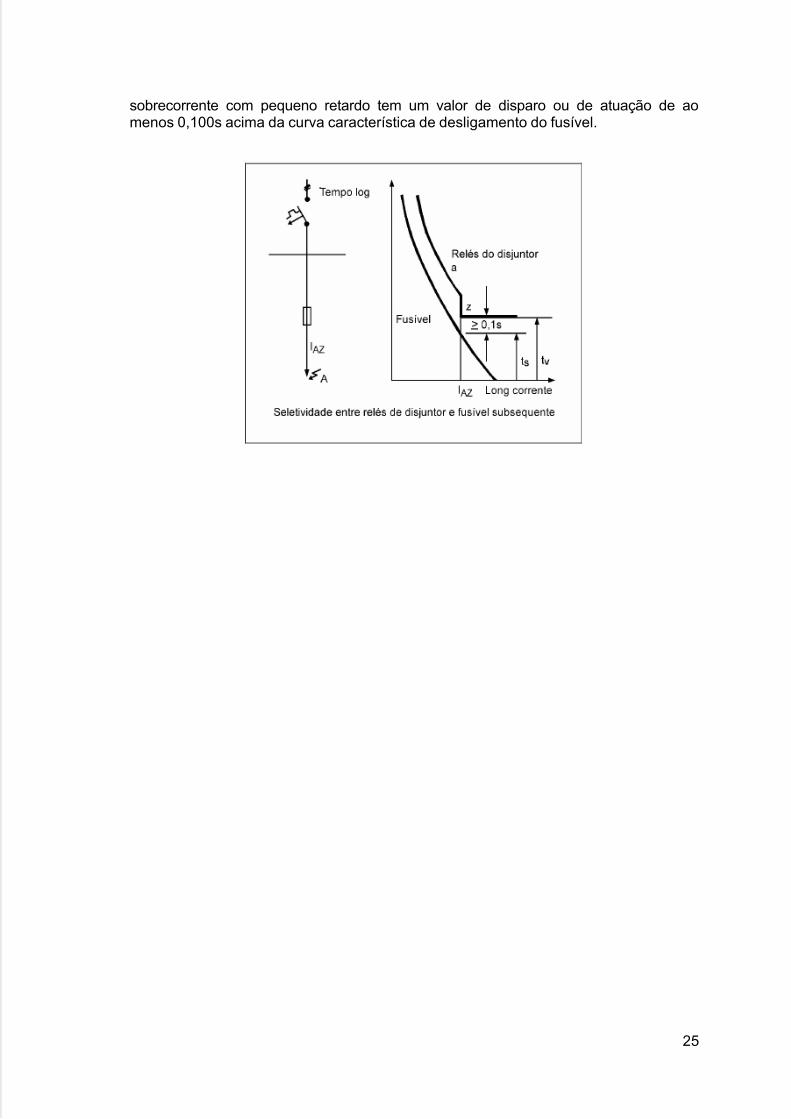
Seletividade entre relé térmico de disjuntor e fusível
Na faixa de sobrecarga, a seletividade é garantida quando a característica dedesligamento do relé térmico não corta a do fusível curva “a”.
Perante correntes de curto-circuito, que alcançam ou mesmo ultrapassam os valoresde atuação do relé térmico, a seletividade apenas é mantida se o fusível limita acorrente a tal valor que a corrente passante não atinge os valores de atuação do relé.Esta situação apenas ocorre nos casos em que a corrente nominal do fusível é
bastante baixa em relação à corrente nominal do disjuntor. A seletividade perantecurto-circuito é garantida, se o tempo de retardo do relé eletromagnético de
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 25/211
25
sobrecorrente com pequeno retardo tem um valor de disparo ou de atuação de aomenos 0,100s acima da curva característica de desligamento do fusível.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 26/211
26
Contatores
Neste capítulo, estudaremos um dispositivo de manobra mecânica usado no comandode motores e na proteção contra sobrecorrente, quando acoplado a relês desobrecarga.
Esse dispositivo chama-se contator. Suas características, utilização e funcionamentosão aqui apresentados para que você possa utilizá-lo corretamente.
Contatores
Contatores são dispositivos de manobra mecânica, acionados eletromagneticamente,construídos para uma elevada freqüência de operação.
De acordo com a potência (carga), o contator é um dispositivo de comando do motor epode ser usado individualmente, acoplado a relês de sobrecarga, na proteção desobrecorrente. Há certos tipos de contatores com capacidade de estabelecer e
interromper correntes de curto-circuito.
Tipos de contatores
Basicamente, existem dois tipos de contatores:
• Contatores para motores;
• Contatores auxiliares.
Esses dois tipos de contatores são semelhantes. O que os diferencia são algumascaracterísticas mecânicas e elétricas.
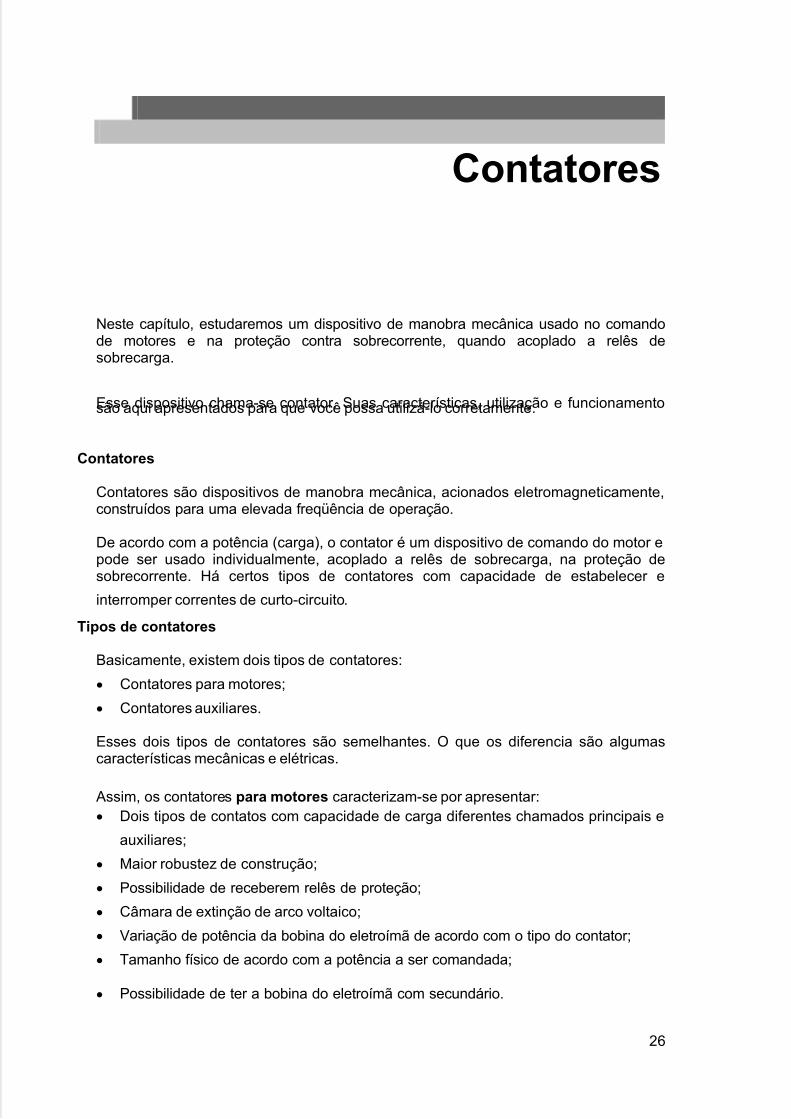
Assim, os contatores para motores caracterizam-se por apresentar:• Dois tipos de contatos com capacidade de carga diferentes chamados principais e
auxiliares;
• Maior robustez de construção;
• Possibilidade de receberem relês de proteção;
• Câmara de extinção de arco voltaico;
• Variação de potência da bobina do eletroímã de acordo com o tipo do contator;
• Tamanho físico de acordo com a potência a ser comandada;
• Possibilidade de ter a bobina do eletroímã com secundário.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 27/211
27
Veja um contator para motor na ilustração a seguir.
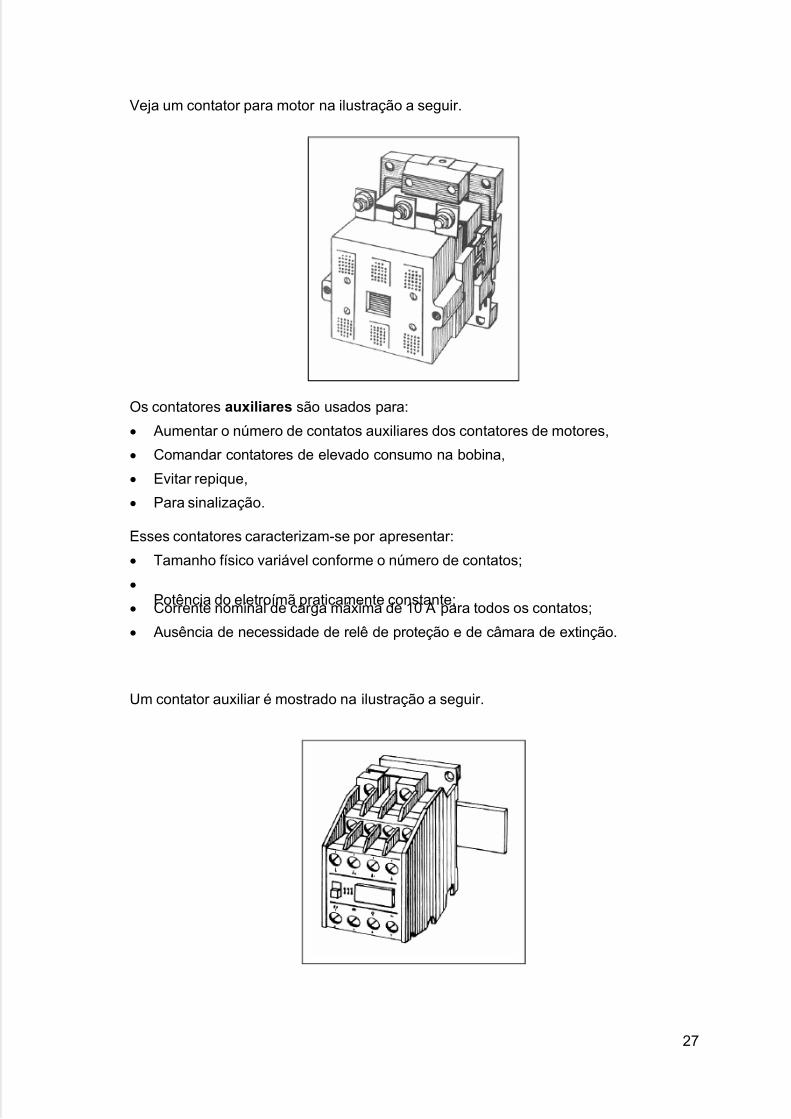
Os contatores auxiliares são usados para:
• Aumentar o número de contatos auxiliares dos contatores de motores,
• Comandar contatores de elevado consumo na bobina,
• Evitar repique,
• Para sinalização.
Esses contatores caracterizam-se por apresentar:
• Tamanho físico variável conforme o número de contatos;
•Potência do eletroímã praticamente constante;
• Corrente nominal de carga máxima de 10 A para todos os contatos;
• Ausência de necessidade de relê de proteção e de câmara de extinção.
Um contator auxiliar é mostrado na ilustração a seguir.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 28/211
28
Construção
Os principais elementos construtivos de um contator são:
• Contatos;
• Sistema da acionamento;
• Carcaça;
• Câmara de extinção de arco-voltaico.
Contatos dos contatores e pastilhas
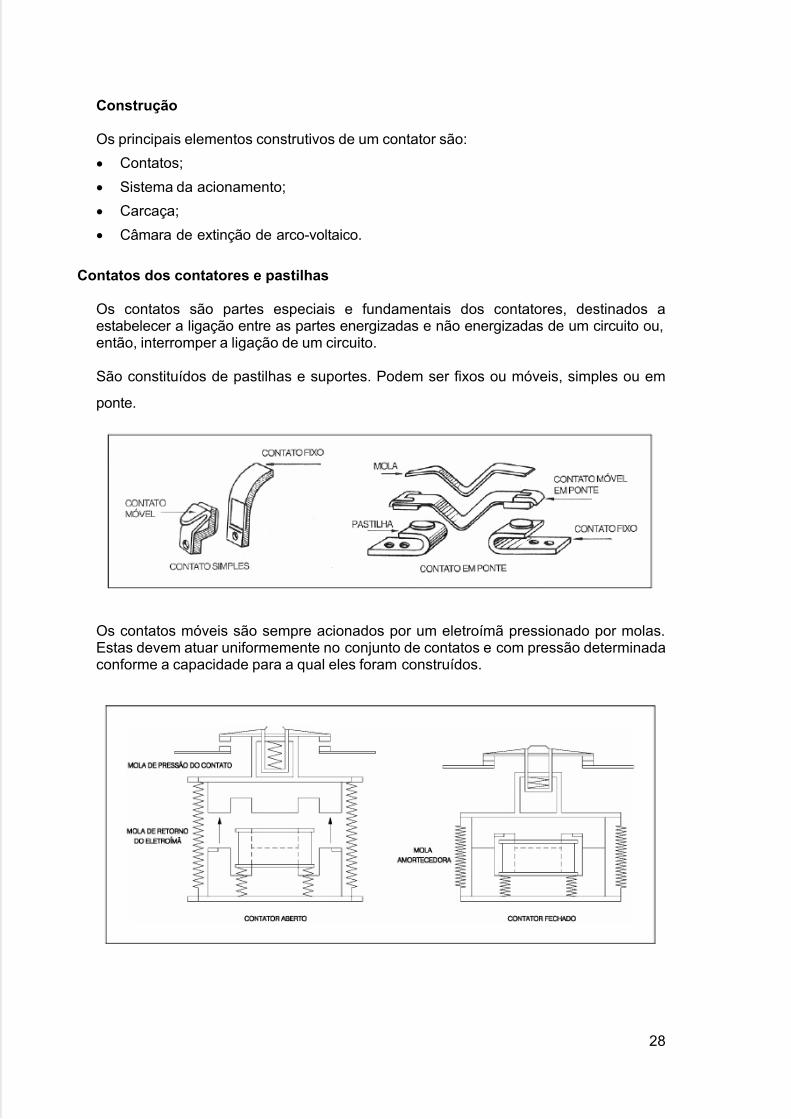
Os contatos são partes especiais e fundamentais dos contatores, destinados aestabelecer a ligação entre as partes energizadas e não energizadas de um circuito ou,então, interromper a ligação de um circuito.
São constituídos de pastilhas e suportes. Podem ser fixos ou móveis, simples ou em
ponte.
Os contatos móveis são sempre acionados por um eletroímã pressionado por molas.Estas devem atuar uniformemente no conjunto de contatos e com pressão determinadaconforme a capacidade para a qual eles foram construídos.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 29/211
29
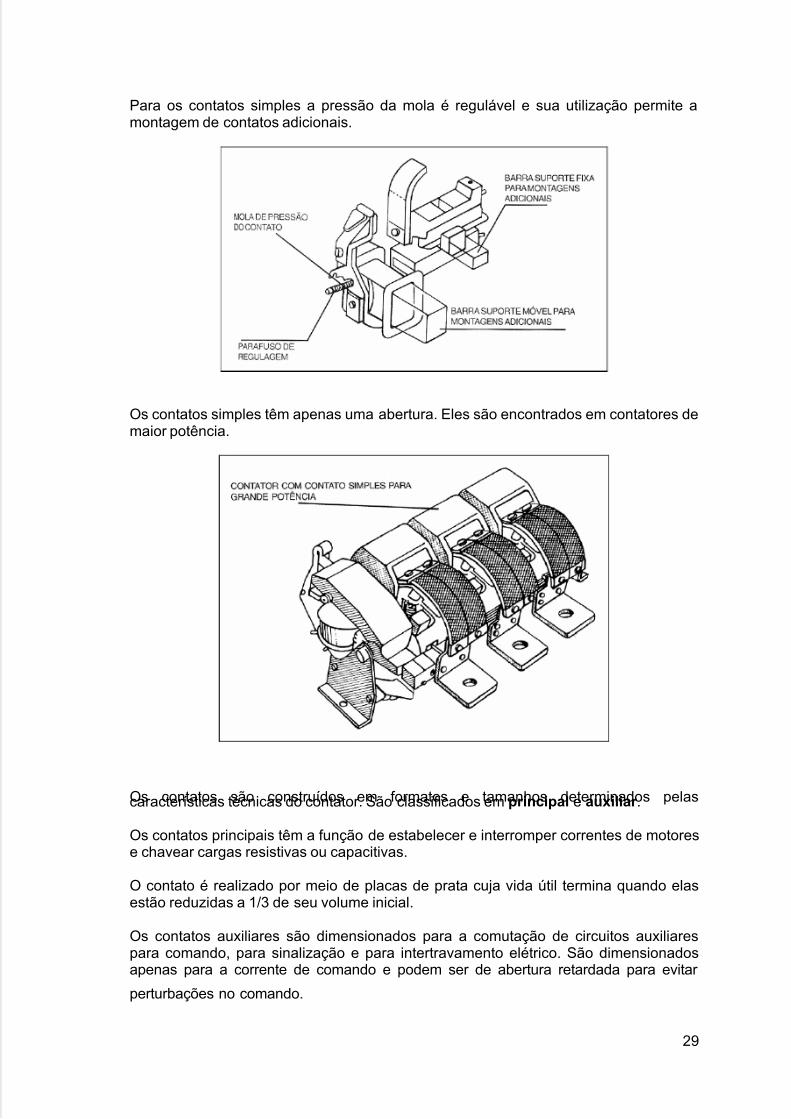
Para os contatos simples a pressão da mola é regulável e sua utilização permite amontagem de contatos adicionais.
Os contatos simples têm apenas uma abertura. Eles são encontrados em contatores demaior potência.
Os contatos são construídos em formatos e tamanhos determinados pelascaracterísticas técnicas do contator. São classificados em principal e auxiliar .
Os contatos principais têm a função de estabelecer e interromper correntes de motorese chavear cargas resistivas ou capacitivas.
O contato é realizado por meio de placas de prata cuja vida útil termina quando elasestão reduzidas a 1/3 de seu volume inicial.
Os contatos auxiliares são dimensionados para a comutação de circuitos auxiliarespara comando, para sinalização e para intertravamento elétrico. São dimensionadosapenas para a corrente de comando e podem ser de abertura retardada para evitar
perturbações no comando.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 30/211
30
Eles podem ser do tipo NA (normalmente aberto) ou NF (normalmente fechado) deacordo com sua função.
Sistema de acionamento
O acionamento dos contatores pode ser feito com corrente alternada ou com correntecontínua.
Para o acionamento com CA, existem anéis de curto-circuito que se situam sobre onúcleo fixo do contator e evitam o ruído por meio da passagem da CA por zero.
Um entreferro reduz a remanência após a interrupção da tensão de comando e evita ocolamento do núcleo.
Após a desenergização da bobina de acionamento, o retorno dos contatos principais(bem como dos auxiliares) para a posição original de repouso é garantido pelas molasde compressão.
O acionamento com CC não possui anéis de curto-circuito. Além disso, possui umabobina de enrolamento com derivação na qual uma das derivações serve para oatracamento e a outra para manutenção.
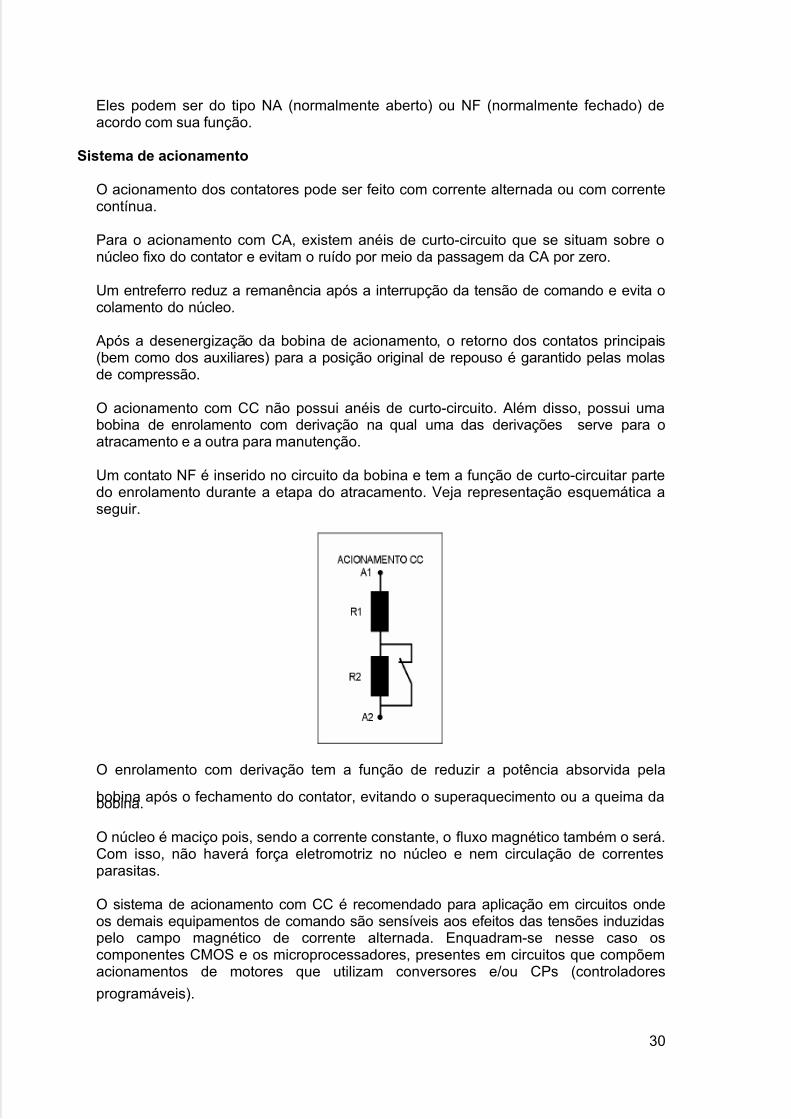
Um contato NF é inserido no circuito da bobina e tem a função de curto-circuitar partedo enrolamento durante a etapa do atracamento. Veja representação esquemática aseguir.
O enrolamento com derivação tem a função de reduzir a potência absorvida pela
bobina após o fechamento do contator, evitando o superaquecimento ou a queima dabobina.
O núcleo é maciço pois, sendo a corrente constante, o fluxo magnético também o será.Com isso, não haverá força eletromotriz no núcleo e nem circulação de correntesparasitas.
O sistema de acionamento com CC é recomendado para aplicação em circuitos ondeos demais equipamentos de comando são sensíveis aos efeitos das tensões induzidaspelo campo magnético de corrente alternada. Enquadram-se nesse caso oscomponentes CMOS e os microprocessadores, presentes em circuitos que compõemacionamentos de motores que utilizam conversores e/ou CPs (controladores
programáveis).
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 31/211
31
Carcaça
É constituída de duas partes simétricas (tipo macho e fêmea) unidas por meio degrampos.
Retirando-se os grampos de fechamento a tampa frontal do contator, é possível abri-loe inspecionar seu interior, bem como substituir os contatos principais e os da bobina.
A substituição da bobina é feita pela parte superior do contator, através da retirada dequatro parafusos de fixação para o suporte do núcleo.
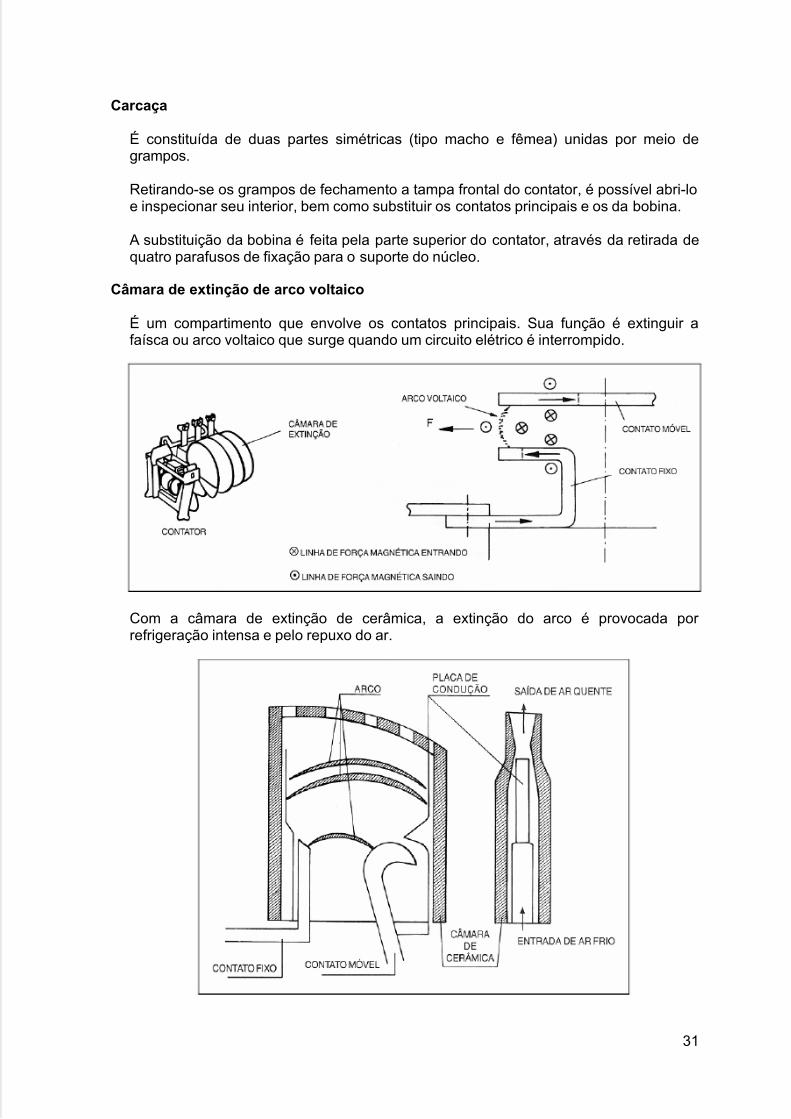
Câmara de extinção de arco voltaico
É um compartimento que envolve os contatos principais. Sua função é extinguir afaísca ou arco voltaico que surge quando um circuito elétrico é interrompido.
Com a câmara de extinção de cerâmica, a extinção do arco é provocada por refrigeração intensa e pelo repuxo do ar.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 32/211
32
Funcionamento do contator
Como já sabemos, uma bobina eletromagnética quando alimentada por uma correnteelétrica, forma um campo magnético. No contator, ele se concentra no núcleo fixo eatrai o núcleo móvel.
Como os contatos móveis estão acoplados mecanicamente com o núcleo móvel, odeslocamento deste no sentido do núcleo fixo movimenta os contatos móveis.
Quando o núcleo móvel se aproxima do fixo, os contatos móveis também devem seaproximar dos fixos de tal forma que, no fim do curso do núcleo móvel, as peças fixas emóveis do sistema de comando elétrico estejam em contato e sob pressão suficiente.
O comando da bobina é efetuado por meio de uma botoeira ou chave-bóia com duasposições, cujos elementos de comando estão ligados em série com as bobina.
A velocidade de fechamento dos contatores é resultado da força proveniente da bobina
e da força mecânica das molas de separação que atuam em sentido contrário.
As molas são também as únicas responsáveis pela velocidade de abertura do contator,o que ocorre quando a bobina magnética não estiver sendo alimentada ou quando ovalor da força magnética for inferior à força das molas.
Vantagens do emprego de contatores
Os contatores apresentam as seguintes vantagens:
• Comando à distância;
• Elevado número de manobras;
• Grande vida útil mecânica;
• Pequeno espaço para montagem;
• Garantia de contato imediato;
• Tensão de operação de 85 a 110% da tensão nominal prevista para o contator.
Montagem dos contatores
Os contatores devem ser montados de preferência verticalmente em local que nãoesteja sujeito a trepidação.
Em geral, é permitida uma inclinação máxima do plano de montagem de 22,5o emrelação à vertical, o que permite a instalação em navios.
Na instalação de contatores abertos, o espaço livre em frente à câmara deve ser de, nomínimo, 45 mm.
Intertravamento de contatores
O intertravamento é um sistema de segurança elétrico ou mecânico destinado a evitar que dois ou mais contatores se fechem acidentalmente ao mesmo tempo provocandocurto-circuito ou mudança na seqüência de funcionamento de um determinado circuito.
O intertravamento elétrico é feito por meio de contatos auxiliares do contator e por botões conjugados.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 33/211
33
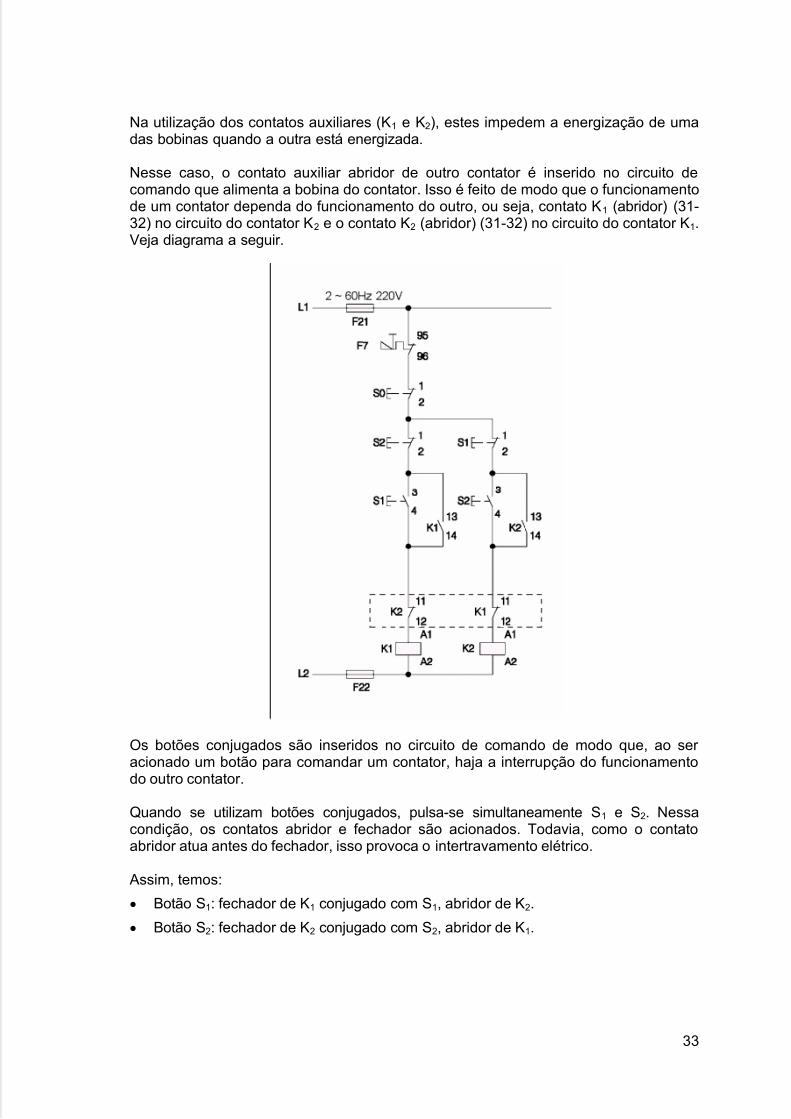
Na utilização dos contatos auxiliares (K1 e K2), estes impedem a energização de umadas bobinas quando a outra está energizada.
Nesse caso, o contato auxiliar abridor de outro contator é inserido no circuito decomando que alimenta a bobina do contator. Isso é feito de modo que o funcionamentode um contator dependa do funcionamento do outro, ou seja, contato K1 (abridor) (31-32) no circuito do contator K2 e o contato K2 (abridor) (31-32) no circuito do contator K1.Veja diagrama a seguir.
Os botões conjugados são inseridos no circuito de comando de modo que, ao ser acionado um botão para comandar um contator, haja a interrupção do funcionamentodo outro contator.
Quando se utilizam botões conjugados, pulsa-se simultaneamente S1 e S2. Nessacondição, os contatos abridor e fechador são acionados. Todavia, como o contatoabridor atua antes do fechador, isso provoca o intertravamento elétrico.
Assim, temos:
• Botão S1: fechador de K1 conjugado com S1, abridor de K2.
• Botão S2: fechador de K2 conjugado com S2, abridor de K1.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 34/211
34
Observação
Quando possível, no intertravamento elétrico, devemos usar essas duas modalidades.
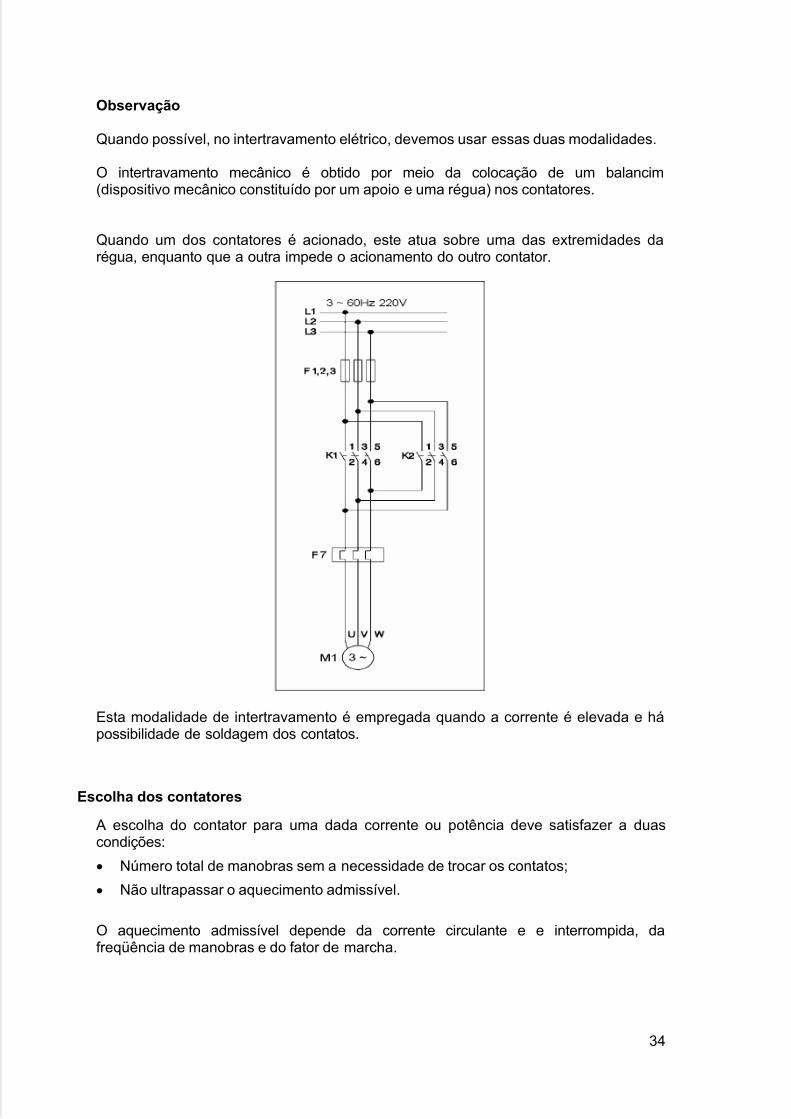
O intertravamento mecânico é obtido por meio da colocação de um balancim(dispositivo mecânico constituído por um apoio e uma régua) nos contatores.
Quando um dos contatores é acionado, este atua sobre uma das extremidades darégua, enquanto que a outra impede o acionamento do outro contator.
Esta modalidade de intertravamento é empregada quando a corrente é elevada e hápossibilidade de soldagem dos contatos.
Escolha dos contatores
A escolha do contator para uma dada corrente ou potência deve satisfazer a duascondições:
• Número total de manobras sem a necessidade de trocar os contatos;
• Não ultrapassar o aquecimento admissível.
O aquecimento admissível depende da corrente circulante e e interrompida, dafreqüência de manobras e do fator de marcha.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 35/211
35
O número total de manobras é expresso em manobras por hora (man/h), mascorresponde à cadência máxima medida num período qualquer que não exceda 10minutos.
O fator de marcha (fdm) é a relação percentual entre o tempo de passagem da correntee a duração total de um ciclo de manobra.
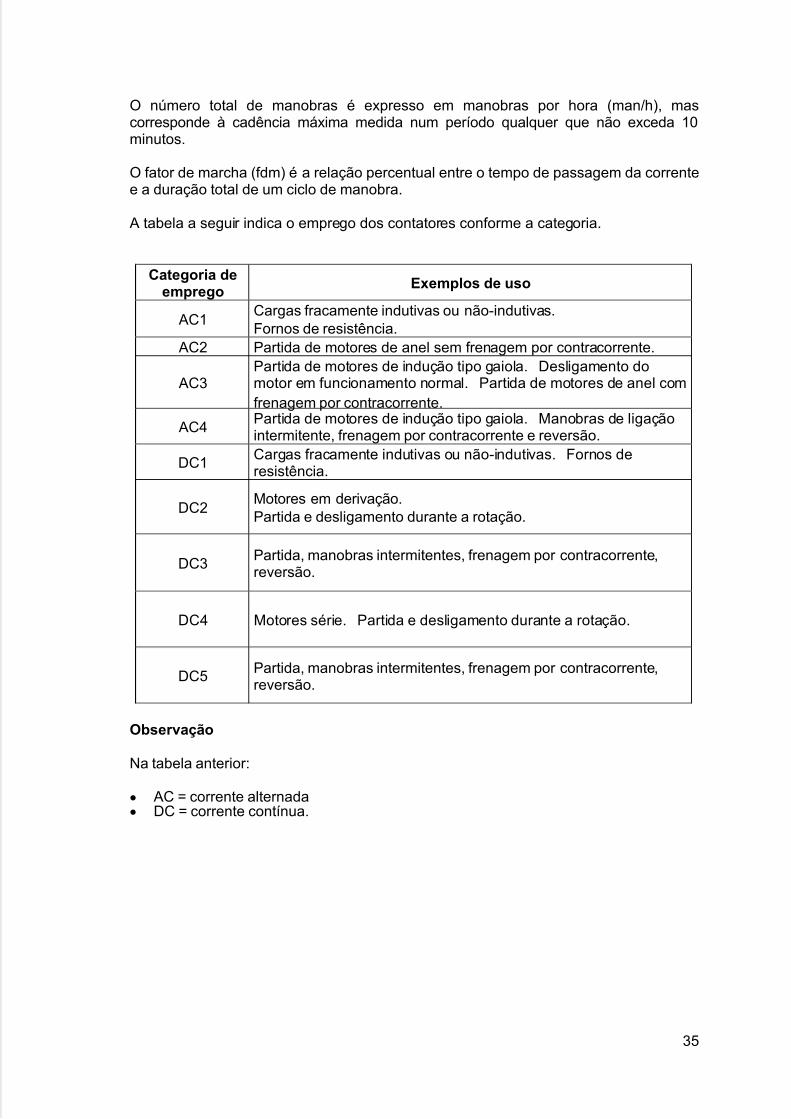
A tabela a seguir indica o emprego dos contatores conforme a categoria.
Categoria deemprego
Exemplos de uso
AC1Cargas fracamente indutivas ou não-indutivas.Fornos de resistência.
AC2 Partida de motores de anel sem frenagem por contracorrente.
AC3Partida de motores de indução tipo gaiola. Desligamento domotor em funcionamento normal. Partida de motores de anel comfrenagem por contracorrente.
AC4Partida de motores de indução tipo gaiola. Manobras de ligaçãointermitente, frenagem por contracorrente e reversão.
DC1Cargas fracamente indutivas ou não-indutivas. Fornos deresistência.
DC2Motores em derivação.Partida e desligamento durante a rotação.
DC3Partida, manobras intermitentes, frenagem por contracorrente,reversão.
DC4 Motores série. Partida e desligamento durante a rotação.
DC5Partida, manobras intermitentes, frenagem por contracorrente,reversão.
Observação
Na tabela anterior:
• AC = corrente alternada• DC = corrente contínua.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 36/211
36
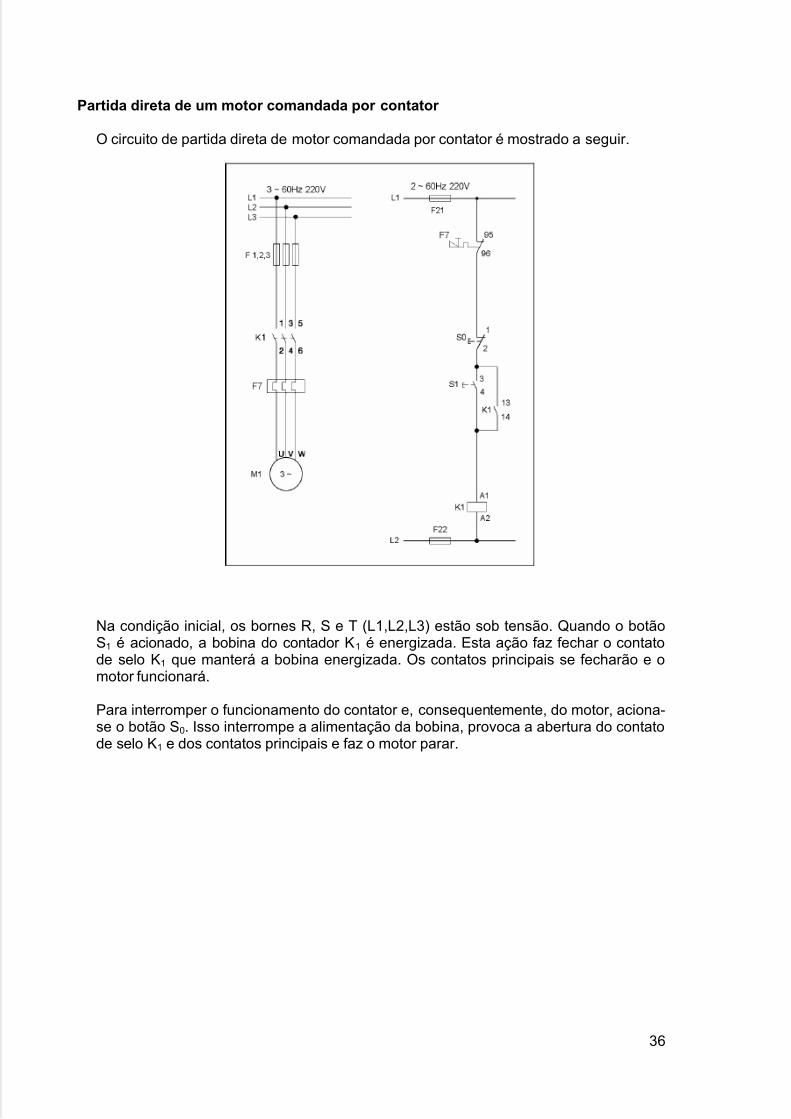
Partida direta de um motor comandada por contator
O circuito de partida direta de motor comandada por contator é mostrado a seguir.
Na condição inicial, os bornes R, S e T (L1,L2,L3) estão sob tensão. Quando o botãoS1 é acionado, a bobina do contador K1 é energizada. Esta ação faz fechar o contatode selo K1 que manterá a bobina energizada. Os contatos principais se fecharão e omotor funcionará.
Para interromper o funcionamento do contator e, consequentemente, do motor, aciona-se o botão S0. Isso interrompe a alimentação da bobina, provoca a abertura do contatode selo K1 e dos contatos principais e faz o motor parar.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 37/211
37
Observação
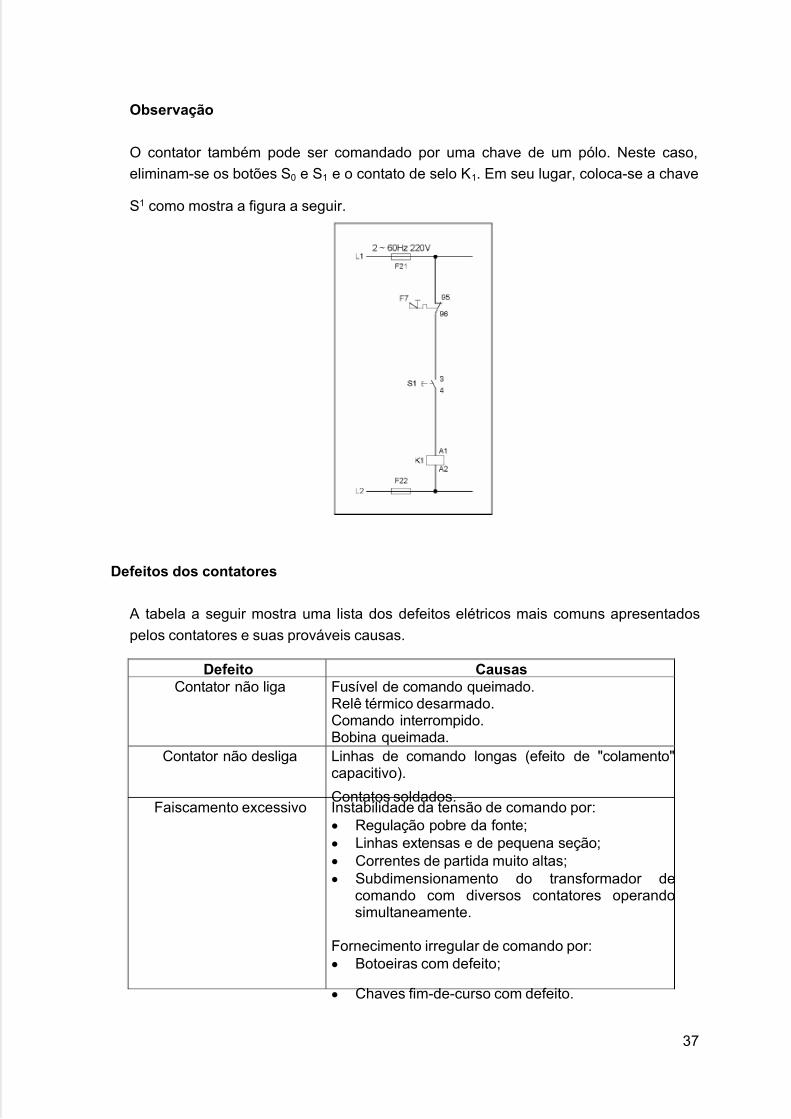
O contator também pode ser comandado por uma chave de um pólo. Neste caso,
eliminam-se os botões S0 e S1 e o contato de selo K1. Em seu lugar, coloca-se a chave
S1 como mostra a figura a seguir.
Defeitos dos contatores
A tabela a seguir mostra uma lista dos defeitos elétricos mais comuns apresentados
pelos contatores e suas prováveis causas.
Defeito CausasContator não liga Fusível de comando queimado.
Relê térmico desarmado.Comando interrompido.Bobina queimada.
Contator não desliga Linhas de comando longas (efeito de "colamento"capacitivo).
Contatos soldados.Faiscamento excessivo Instabilidade da tensão de comando por:
• Regulação pobre da fonte;• Linhas extensas e de pequena seção;• Correntes de partida muito altas;• Subdimensionamento do transformador de
comando com diversos contatores operandosimultaneamente.
Fornecimento irregular de comando por:• Botoeiras com defeito;
• Chaves fim-de-curso com defeito.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 38/211
38
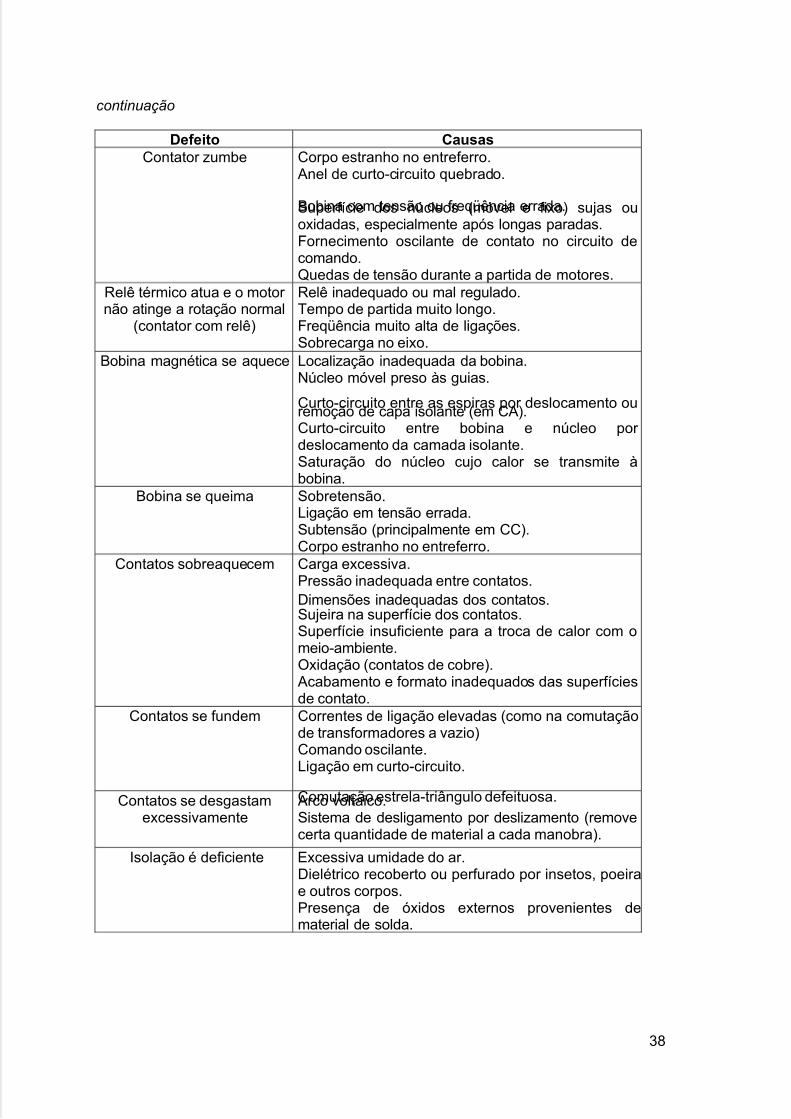
continuação
Defeito CausasContator zumbe Corpo estranho no entreferro.
Anel de curto-circuito quebrado.
Bobina com tensão ou freqüência errada.Superfície dos núcleos (móvel e fixo) sujas ouoxidadas, especialmente após longas paradas.Fornecimento oscilante de contato no circuito decomando.Quedas de tensão durante a partida de motores.
Relê térmico atua e o motor não atinge a rotação normal
(contator com relê)
Relê inadequado ou mal regulado.Tempo de partida muito longo.Freqüência muito alta de ligações.Sobrecarga no eixo.
Bobina magnética se aquece Localização inadequada da bobina.Núcleo móvel preso às guias.
Curto-circuito entre as espiras por deslocamento ouremoção de capa isolante (em CA).Curto-circuito entre bobina e núcleo por deslocamento da camada isolante.Saturação do núcleo cujo calor se transmite àbobina.
Bobina se queima Sobretensão.Ligação em tensão errada.Subtensão (principalmente em CC).Corpo estranho no entreferro.
Contatos sobreaquecem Carga excessiva.Pressão inadequada entre contatos.Dimensões inadequadas dos contatos.Sujeira na superfície dos contatos.Superfície insuficiente para a troca de calor com omeio-ambiente.Oxidação (contatos de cobre). Acabamento e formato inadequados das superfíciesde contato.
Contatos se fundem Correntes de ligação elevadas (como na comutaçãode transformadores a vazio)Comando oscilante.Ligação em curto-circuito.
Comutação estrela-triângulo defeituosa.Contatos se desgastamexcessivamente
Arco voltaico.Sistema de desligamento por deslizamento (removecerta quantidade de material a cada manobra).
Isolação é deficiente Excessiva umidade do ar.Dielétrico recoberto ou perfurado por insetos, poeirae outros corpos.Presença de óxidos externos provenientes dematerial de solda.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 39/211
39
Defeitos mecânicos
Os defeitos mecânicos são provenientes da própria construção do dispositivo, dascondições de serviço e do envelhecimento do material.
Salientam-se nesse particular:
• Lubrificação deficiente;
• Formação de ferrugem;
• Temperaturas muito elevadas;
• Molas inadequadas;
• Trepidações no local da montagem.
Ricochete entre contatos
Ricochete é a abertura ou afastamento entre contatos após o choque no momento daligação. Isso é conseqüência da energia cinética presente em um dos contatos.
O ricochete reduz sensivelmente a durabilidade das peças de contato, especialmenteno caso de cargas com altas correntes de partida. Isso acontece porque o arco que seestabelece a cada separação sucessiva dos contatos vaporiza o material das pastilhas.
Com vistas a redução de custos, o tempo de ricochete deve ser reduzido para 0,5 ms.Baixa velocidade de manobra, reduzida massa de contato móvel e forte pressão nasmolas são algumas condições que diminuem o tempo do ricochete.
Os contatores modernos são praticamente livres de ricochete. Na ligação, eles acusam
um desgaste de material de contato equivalente a 1/10 do desgaste para desligamentosob corrente nominal. Assim, a corrente de partida de motores não tem influência nadurabilidade dos contatos.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 40/211
40
Chaves auxiliarestipo botoeira
Neste capítulo, estudaremos um tipo de chave que comanda circuitos por meio depulsos. Ela é usada em equipamentos industriais em processos de automação.
Chaves auxiliares tipo botoeira
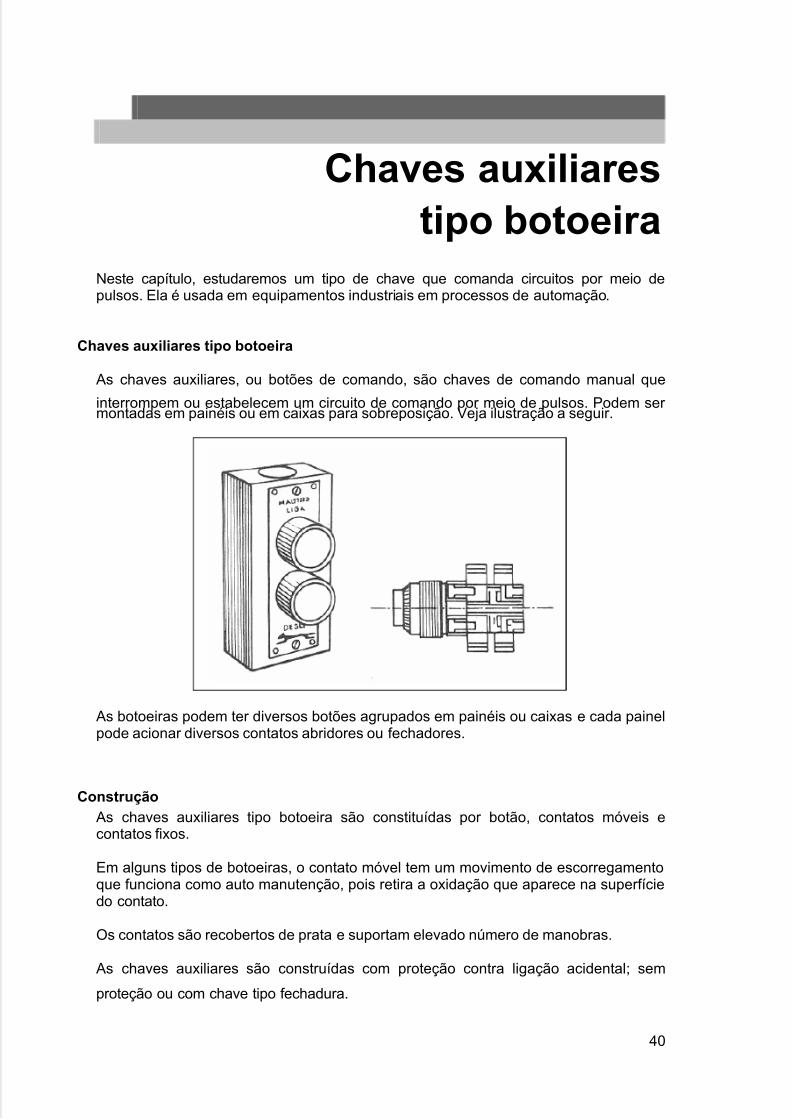
As chaves auxiliares, ou botões de comando, são chaves de comando manual que
interrompem ou estabelecem um circuito de comando por meio de pulsos. Podem ser montadas em painéis ou em caixas para sobreposição. Veja ilustração a seguir.
As botoeiras podem ter diversos botões agrupados em painéis ou caixas e cada painelpode acionar diversos contatos abridores ou fechadores.
Construção
As chaves auxiliares tipo botoeira são constituídas por botão, contatos móveis econtatos fixos.
Em alguns tipos de botoeiras, o contato móvel tem um movimento de escorregamentoque funciona como auto manutenção, pois retira a oxidação que aparece na superfíciedo contato.
Os contatos são recobertos de prata e suportam elevado número de manobras.
As chaves auxiliares são construídas com proteção contra ligação acidental; sem
proteção ou com chave tipo fechadura.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 41/211
41
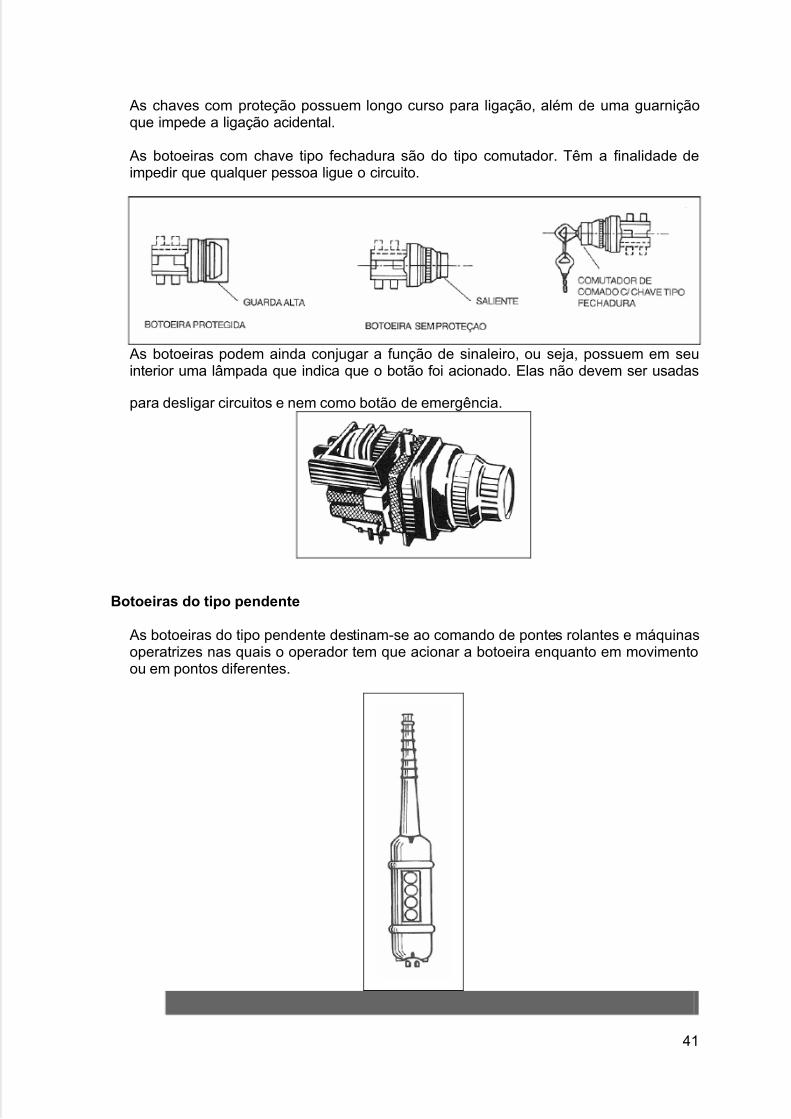
As chaves com proteção possuem longo curso para ligação, além de uma guarniçãoque impede a ligação acidental.
As botoeiras com chave tipo fechadura são do tipo comutador. Têm a finalidade deimpedir que qualquer pessoa ligue o circuito.
As botoeiras podem ainda conjugar a função de sinaleiro, ou seja, possuem em seuinterior uma lâmpada que indica que o botão foi acionado. Elas não devem ser usadas
para desligar circuitos e nem como botão de emergência.
Botoeiras do tipo pendente
As botoeiras do tipo pendente destinam-se ao comando de pontes rolantes e máquinasoperatrizes nas quais o operador tem que acionar a botoeira enquanto em movimentoou em pontos diferentes.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 42/211
42
Sinalizadores luminosos
Para que um operador saiba o que está acontecendo com o equipamento que ele estáoperando, é necessário que ele possa visualizar rápida e facilmente mensagens queindiquem que a operação está se realizando dentro dos padrões esperados.
Isso é feito por meio da sinalização, que é o assunto deste capítulo.
Sinalização
Sinalização é a forma visual ou sonora de se chamar a atenção do operador para umasituação determinada em um circuito, máquina ou conjunto de máquinas.
Ela é realizada por meio de buzinas e campainhas ou por sinalizadores luminosos comcores determinadas por normas.
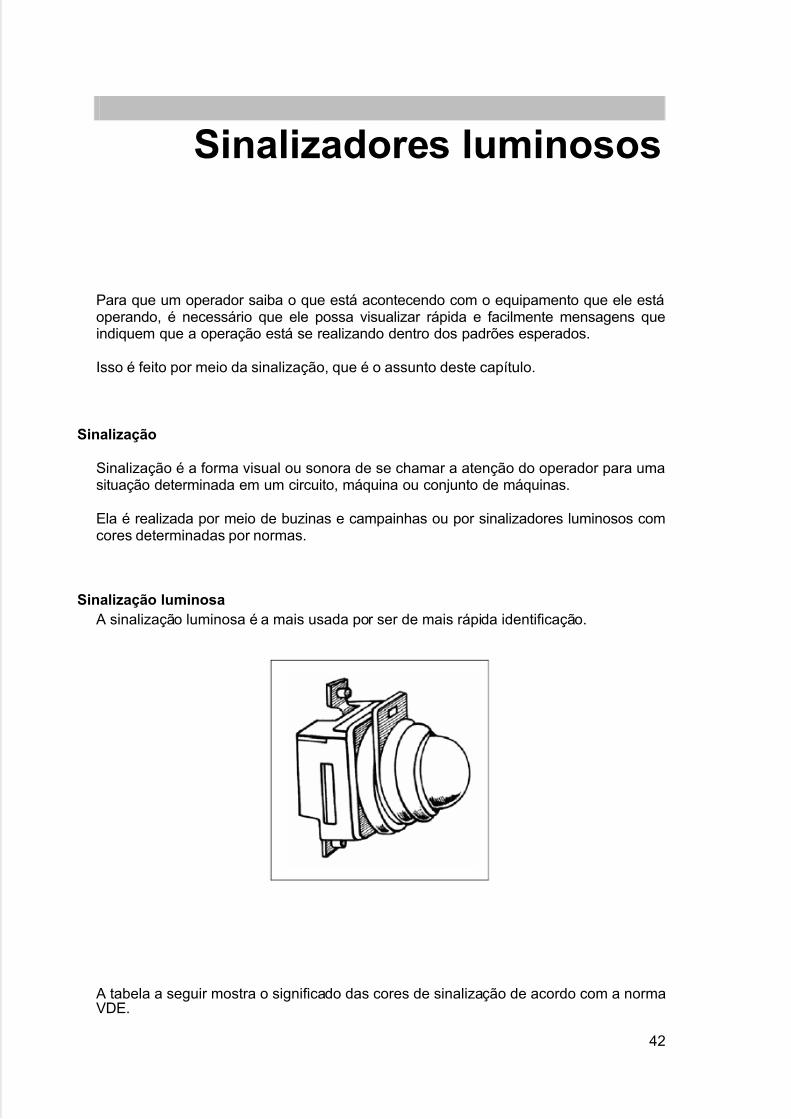
Sinalização luminosa A sinalização luminosa é a mais usada por ser de mais rápida identificação.
A tabela a seguir mostra o significado das cores de sinalização de acordo com a normaVDE.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 43/211
43
Cor Condição de operação Exemplos de aplicação
Vermelho Condição anormal
Indicação de que a máquina está
paralisada por atuação de umdispositivo de proteção.
Aviso para a paralisação da máquinadevido a sobrecarga, por exemplo.
Amarelo Atenção ou cuidadoO valor de uma grandeza (corrente,temperatura) aproxima-se de seu valor-limite.
Verde Máquina pronta para operar
Partida normal: todos os dispositivosauxiliares funcionam e estão prontospara operar. A pressão hidráulica ou atensão estão nos valores especificados.
O ciclo de operação está concluído e amáquina está pronta para operar novamente.
Branco(incolor)
Circuitos sob tensão emoperação normal
Circuitos sob tensão Chave principal na
posição LIGA.
Escolha da velocidade ou do sentido derotação.
Acionamentos individuais e dispositivosauxiliares estão operando.
Máquina em movimento. Azul Todas as funções para as quais não se aplicam a cores acima.
A sinalização intermitente é usada para indicar situações que exigem atenção maisurgente.
A lente do sinalizador deve propiciar bom brilho e, quando a lâmpada está apagada,deve apresentar-se completamente opaca em relação à luz ambiente.
Sinalização sonora
A sinalização sonora pode ser feita por meio de buzinas ou campainhas.
As buzinas são usadas para indicar o início de funcionamento de uma máquina ou paraficar à disposição do operador, quando seu uso for necessário. Elas são usadas, por exemplo, na sinalização de pontes rolantes.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 44/211
44
O som deve estar entre 1000 e 3000Hz. Deve conter harmônicos que o tornarãodistinto do ruído local.
As campainhas são usadas para indicar anomalias em máquinas. Assim, se um motor com sobrecarga não puder parar de imediato, o alarme chamará a atenção dooperador para as providências necessárias.
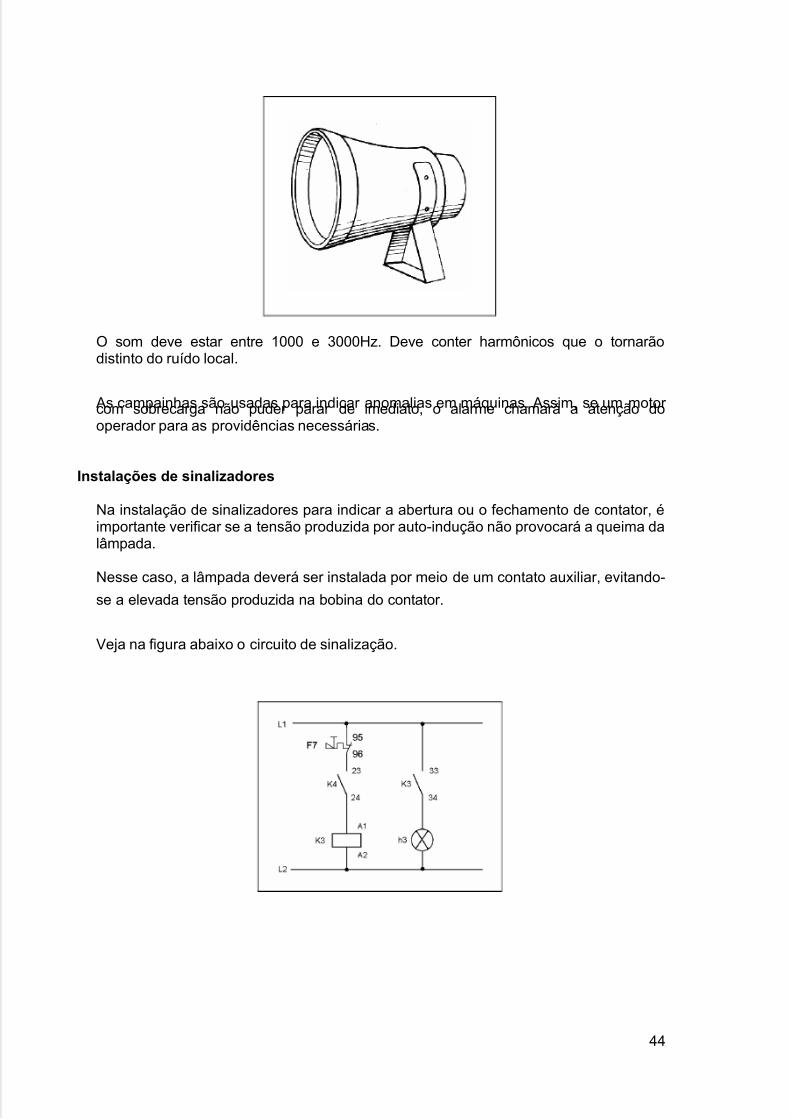
Instalações de sinalizadores
Na instalação de sinalizadores para indicar a abertura ou o fechamento de contator, éimportante verificar se a tensão produzida por auto-indução não provocará a queima dalâmpada.
Nesse caso, a lâmpada deverá ser instalada por meio de um contato auxiliar, evitando-
se a elevada tensão produzida na bobina do contator.
Veja na figura abaixo o circuito de sinalização.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 45/211
45
Relês temporizadores
Neste capítulo estudaremos os relês de tempo ou relês temporizadores que atuam em
circuitos de comando para a comutação de dispositivos de acionamento de motores,
chaves estrela-triângulo, partidas em seqüência e outros circuitos que necessitem de
temporização para seu funcionamento.
Conhecer esse componente é muito importante para a manutenção de equipamentos
industriais.
Relês temporizadores
Nos relês temporizadores, a comutação dos contatos não ocorre instantaneamente. O
período de tempo (ou retardo) entre a excitação ou a desexcitação da bobina e acomutação pode ser ajustado.
Essa possibilidade de ajuste cria dois tipos de relês temporizadores:
• Relê de ação retardada por atração (ou relê de excitação);
• Relê de ação retardada por repulsão (ou relê de desexcitação).
Os retardos, por sua vez, podem ser obtidos por meio de:
• Relê pneumático de tempo;
• Relê mecânico de tempo;• Relê eletrônico de tempo.
Relê pneumático de tempo
O relê pneumático de tempo é um dispositivo temporizador que funciona pela ação de
um eletroímã que aciona uma válvula pneumática.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 46/211
46
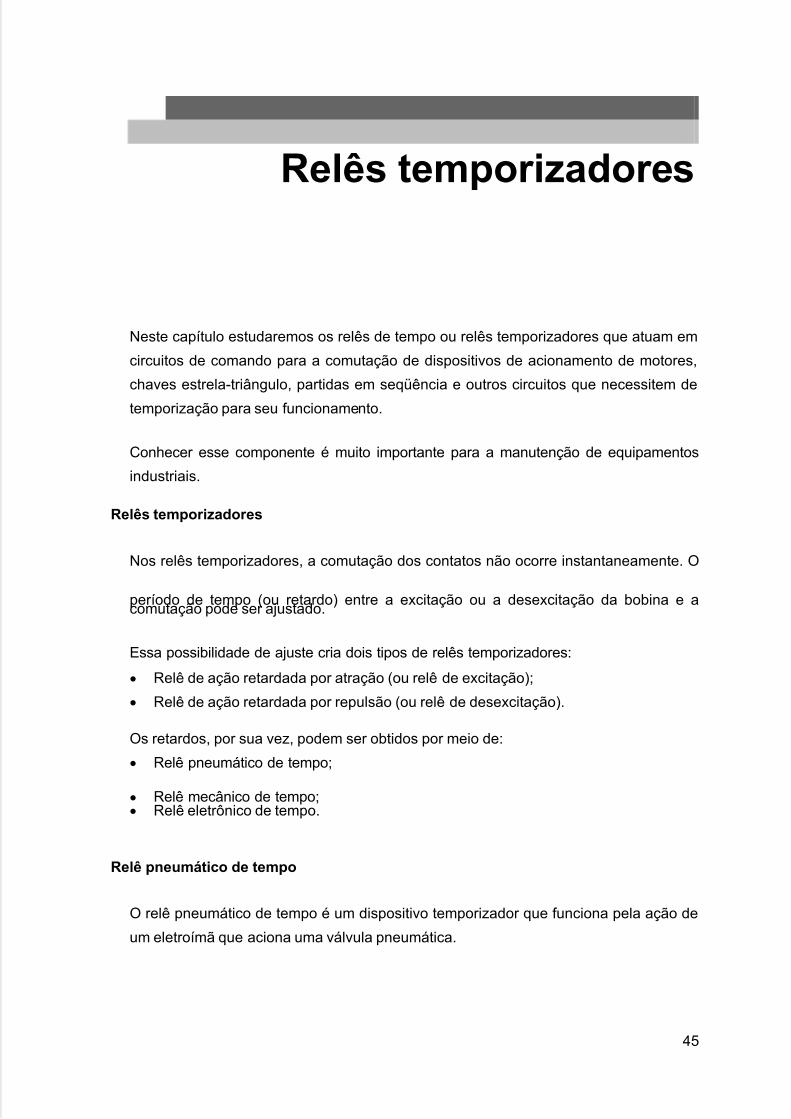
O retardo é determinado pela passagem de uma certa quantidade de ar através de um
orifício regulável. O ar entra no dispositivo pneumático que puxa o balancim para cima,
fornecendo corrente para os contatos.
Veja ilustração a seguir.
Esse tipo de relê é usado em chaves de partida estrela-triângulo ou compensadoras,
na comutação de contatores ou na temporização em circuitos seqüenciais. O retardo
fornecido varia de um a sessenta segundos, porém não é muito preciso.
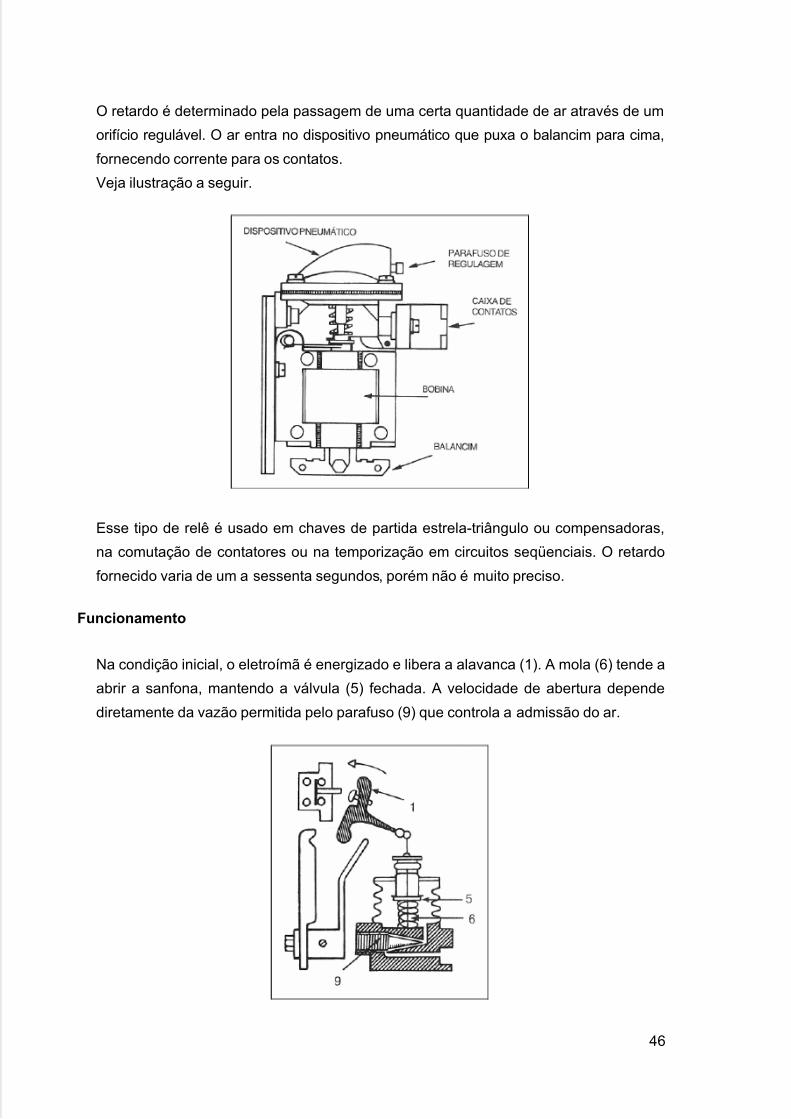
Funcionamento
Na condição inicial, o eletroímã é energizado e libera a alavanca (1). A mola (6) tende a
abrir a sanfona, mantendo a válvula (5) fechada. A velocidade de abertura depende
diretamente da vazão permitida pelo parafuso (9) que controla a admissão do ar.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 47/211
47
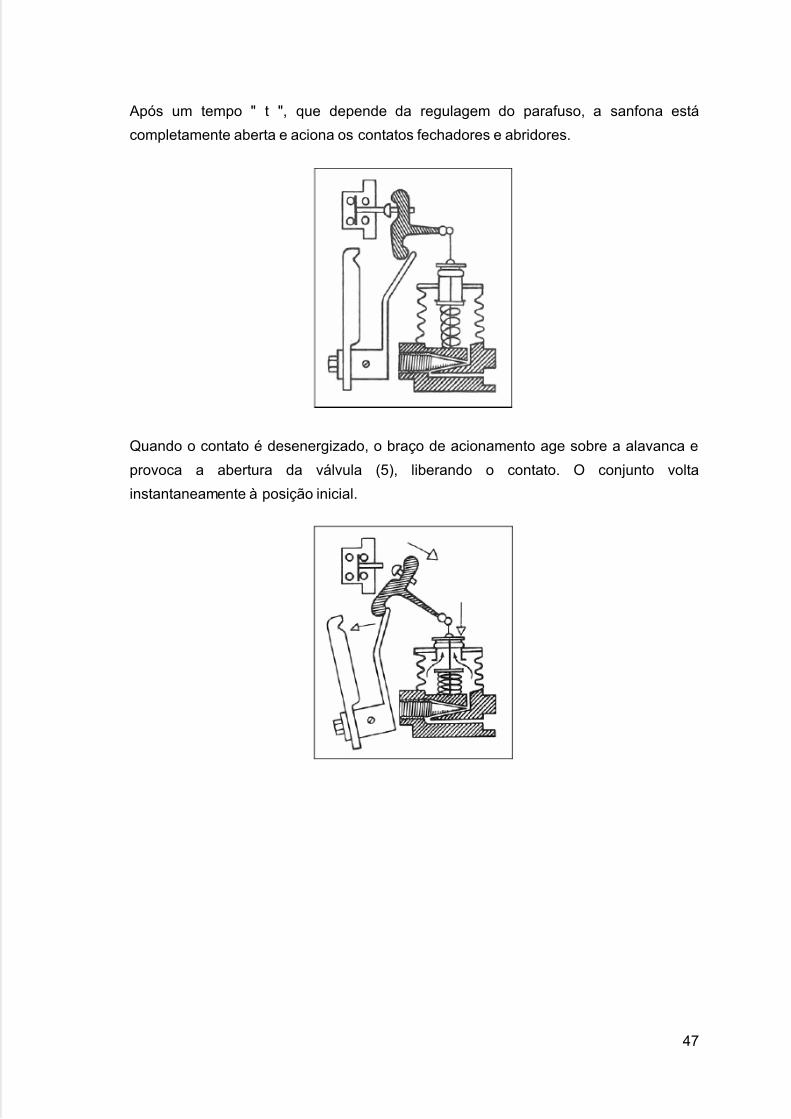
Após um tempo " t ", que depende da regulagem do parafuso, a sanfona está
completamente aberta e aciona os contatos fechadores e abridores.
Quando o contato é desenergizado, o braço de acionamento age sobre a alavanca e
provoca a abertura da válvula (5), liberando o contato. O conjunto volta
instantaneamente à posição inicial.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 48/211
48
Relê mecânico de tempo
O relê mecânico de tempo é constituído por um pequeno motor, um jogo de
engrenagens de redução, um dispositivo de regulagem, contatos comutadores e mola
de retorno. Veja ilustração a seguir.
Funcionamento
No relê de retardo mecânico, um came regulável é acionado pelo redutor de um motor.
Após um tempo determinado, o came abre ou fecha o contato.
Se for necessário, o motor poderá permanecer ligado e os contatos do relê ficarão na
posição inversa à da posição normal.
Os relês de tempo motorizados podem ser regulados para fornecer retardo desde 0 a
15 segundos até 30 horas.
Quando um contator tiver elevado consumo e a corrente de sua bobina for superior à
capacidade nominal do relê, é necessário usar um contator para o temporizador.
Relê eletrônico de tempo
O relê eletrônico de tempo é acionado por meio de circuitos eletrônicos. Esses circuitos
podem ser constituídos por transistores, por circuitos integrados como o CI 555 ou por
um UJT. Estes funcionam como um monoestável e comandam um relê que acionará
seus contatos no circuito de comando.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 49/211
49
Transformadorespara comando
Quando é necessário reduzir a corrente de linha e a tensão a valores que possibilitema utilização de relês de pequena capacidade em circuitos de comando de motores,usam-se transformadores.
Transformadores também são usados junto a chaves compensadoras para evitar oarranque direto.
Este é o assunto deste capítulo. Para aprendê-lo com mais facilidade, é necessário quevocê tenha conhecimentos anteriores sobre tensão, corrente e transformadores.
Transformadores para comando
Transformadores para comando são dispositivos empregados em comandos demáquinas elétricas para modificar valores de tensão e corrente em uma determinadarelação de transformação.
Sua instalação transformadores exige que se considere algumas característicaselétricas. Elas são:
• Tipo de transformador;
• Índice de saturação para relês temporizados;
• Relação de transformação;
• Tensões de serviço;
• Tensões de prova;
• classe de precisão;
• Freqüência.
Os transformadores de comando podem ser de vários tipos, a saber:
• Transformadores de tensão;
• Transformadores para chaves compensadoras;
• Transformadores de corrente.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 50/211
50
Transformadores de tensão
Os transformadores de tensão são usados para:
• Reduzir a tensão a níveis compatíveis com a tensão dos componentes do comando
(relês, bobinas);
• Fornecer proteção nas manobras e nas correções de defeitos;
• Separar o circuito principal do circuito de comando, restringindo e limitando
possíveis curto-circuito a valores que não afetem o circuito de comando;
• Amortecer as variações de tensões, evitando possíveis ricochetes e prolongando,
portanto, a vida útil do equipamento.
Um transformador de tensão é mostrado a seguir:
Transformadores para chaves compensadoras
Esse tipo de transformador é usado para evitar o arranque direto do motor.
Suas derivações permitem partidas com 65 a 80% da tensão nominal, conforme otorque necessário para a partida.
São construídos com duas colunas com ligações em triângulo; ou com três colunascom ligação em estrela.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 51/211
51
Um único transformador pode ser usado para a partida em seqüência de váriosmotores. Nesse caso, a partida será automática, realizada por meio de relêstemporizadores e contatores.
Transformador de corrente
O transformador de corrente atua com relês térmicos de proteção contra sobrecarga.Ele é associado a relês térmicos cuja corrente nominal é inferior à da rede.
Sua relação de transformação é indicada na placa. Por exemplo, uma indicação 200/5indica que, quando houver uma corrente de 200 A na rede principal, a corrente do relêserá de 5 A.
Na proteção contra sobrecarga, esse transformador permite longos picos de correntede partida dos motores de grande porte. Nesse caso, ele estabiliza a correntesecundária pela saturação do núcleo o que permite um controle mais efetivo.
Além disso, o tamanho reduzido do relê torna possível uma regulagem mais eficientecom a redução dos esforços dinâmicos produzidos pela corrente elétrica.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 52/211
52
Sensores de proximidade
Os sofisticados comandos de processos de automatização e robotização de máquinasindustriais exigem confiabilidade nas informações do posicionamento mecânico damáquina que são enviadas ao painel de comando, seja ele eletrônico tradicional oumicroprocessado.
Para fornecer esse tipo de informação, utilizam-se ou chaves fim de curso ou sensoresde proximidade que atuam por aproximação e proporcionam qualidade, precisão econfiabilidade pois não possuem contatos mecânicos e atuadores desgastáveis.
Neste capítulo, estudaremos os sensores de proximidade mais utilizados nosprocessos de automatização.
Sensores de proximidade
O sensor de proximidade é uma chave eletrônica semelhante a uma chave fim decurso mecânica com a vantagem de não possuir nem contatos nem atuadoresmecânicos. Além de terem comutação estática, esses sensores apresentam precisãomilimétrica de acionamento e podem ser usados em máquinas operatrizes onde seexige precisão na repetição do ponto de acionamento e deslizamento.
Os sensores de proximidade podem ser: indutivos, capacitivos e óticos.
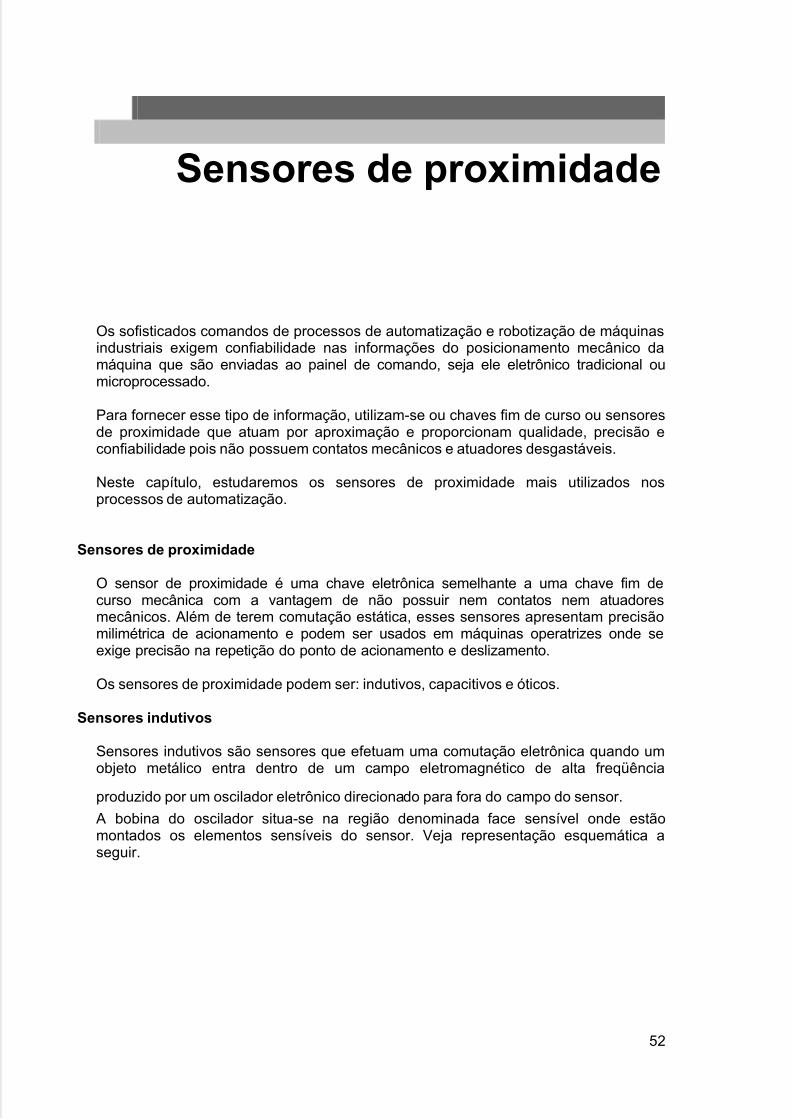
Sensores indutivos
Sensores indutivos são sensores que efetuam uma comutação eletrônica quando umobjeto metálico entra dentro de um campo eletromagnético de alta freqüência
produzido por um oscilador eletrônico direcionado para fora do campo do sensor.
A bobina do oscilador situa-se na região denominada face sensível onde estãomontados os elementos sensíveis do sensor. Veja representação esquemática aseguir.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 53/211
53
Quando o corpo metálico está diante da face sensível, dentro da faixa denominadadistância de comutação, este amortece a oscilação, provocando, através de diversosestágios eletrônicos, a comutação, ou seja, a mudança do estágio lógico do sensor.
Observação
Distância de comutação (S) é a distância registrada quando ocorre uma comutação aose aproximar o atuador padrão (elemento que determina a distância de comutação deum sensor) da face sensível do sensor.
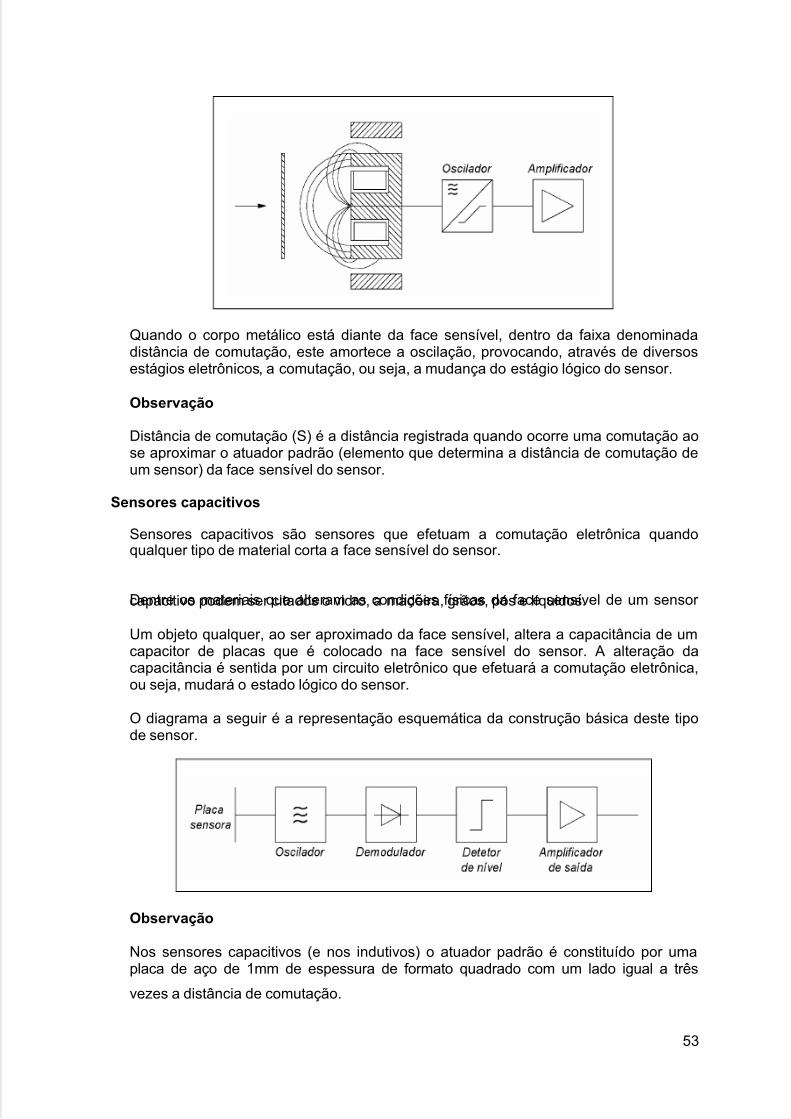
Sensores capacitivos
Sensores capacitivos são sensores que efetuam a comutação eletrônica quandoqualquer tipo de material corta a face sensível do sensor.
Dentre os materiais que alteram as condições físicas da face sensível de um sensor capacitivo podem ser citados o vidro, a madeira, grãos, pós e líquidos.
Um objeto qualquer, ao ser aproximado da face sensível, altera a capacitância de umcapacitor de placas que é colocado na face sensível do sensor. A alteração dacapacitância é sentida por um circuito eletrônico que efetuará a comutação eletrônica,ou seja, mudará o estado lógico do sensor.
O diagrama a seguir é a representação esquemática da construção básica deste tipode sensor.
Observação
Nos sensores capacitivos (e nos indutivos) o atuador padrão é constituído por umaplaca de aço de 1mm de espessura de formato quadrado com um lado igual a três
vezes a distância de comutação.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 54/211
54
Distância de comutação efetiva
Pelo fato de os sensores capacitivos funcionarem pela alteração da capacitância de umcapacitor, a distância efetiva de comutação depende do tipo de material bem como damassa a ser detectada.
Assim, é necessário considerar fatores de redução para diversos tipos de materiais comopor exemplo: PVC . AS = 0,4 x SN; madeira . AS = 0,5 x SN; cobre . AS = 1,0 x SN.
Devido a tais características, os sensores capacitivos podem ser utilizados paradetectar certos materiais através de outros como por exemplo, água dentro de um tubode PVC.
Configuração elétrica de alimentação e saídas dos sensores
Os sensores podem ser alimentados em CA ou CC. Podem ser interligados em série
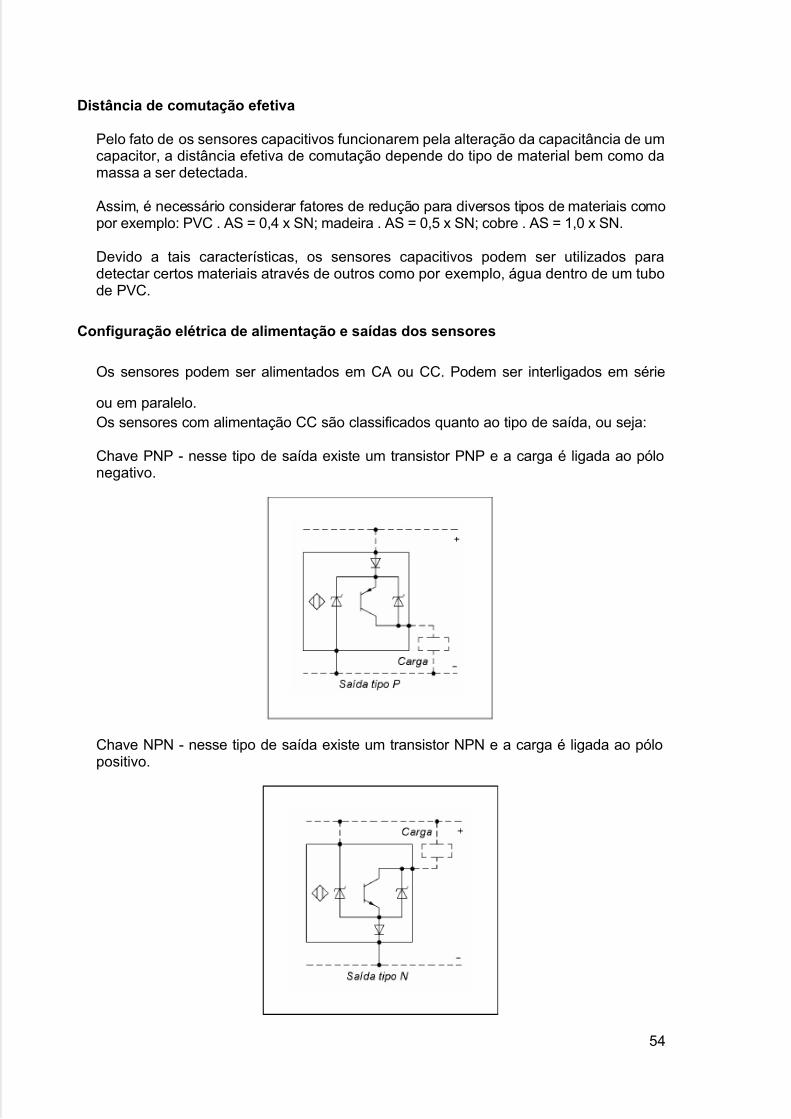
ou em paralelo.Os sensores com alimentação CC são classificados quanto ao tipo de saída, ou seja:
Chave PNP - nesse tipo de saída existe um transistor PNP e a carga é ligada ao pólonegativo.
Chave NPN - nesse tipo de saída existe um transistor NPN e a carga é ligada ao pólopositivo.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 55/211
55
Chave NPN e PNP - nesse tipo de saída existem dois transistores, um NPN e um PNP. Assim, uma saída é positiva e a outra é negativa.
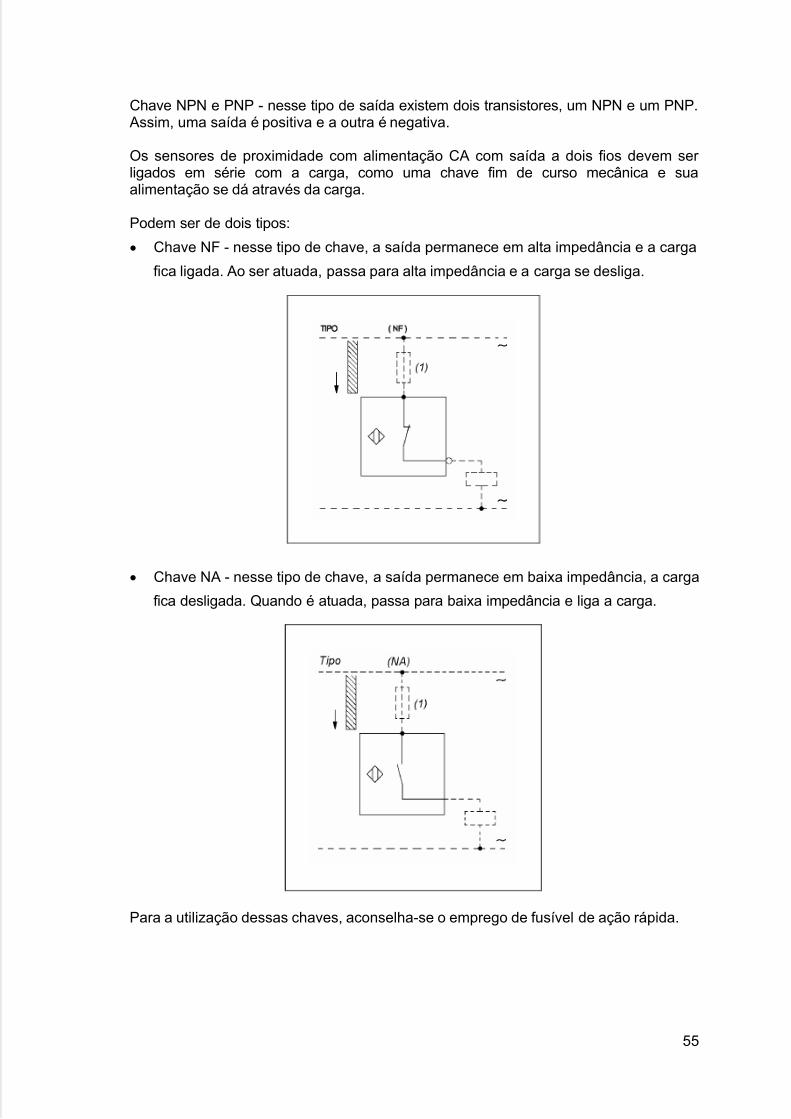
Os sensores de proximidade com alimentação CA com saída a dois fios devem ser ligados em série com a carga, como uma chave fim de curso mecânica e suaalimentação se dá através da carga.
Podem ser de dois tipos:
• Chave NF - nesse tipo de chave, a saída permanece em alta impedância e a carga
fica ligada. Ao ser atuada, passa para alta impedância e a carga se desliga.
• Chave NA - nesse tipo de chave, a saída permanece em baixa impedância, a carga
fica desligada. Quando é atuada, passa para baixa impedância e liga a carga.
Para a utilização dessas chaves, aconselha-se o emprego de fusível de ação rápida.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 56/211
56
Observação
Uma pequena corrente flui através da carga para alimentar o sensor com alimentaçãoCA quando este está na condição aberto (tiristor bloqueado). Esta corrente, porém, nãoé suficiente para energizar a carga.
Na condição fechado (tiristor em condução), ocorre uma pequena queda de tensão nosensor. A diferença entre a alimentação e esta queda de tensão fica sobre a carga.
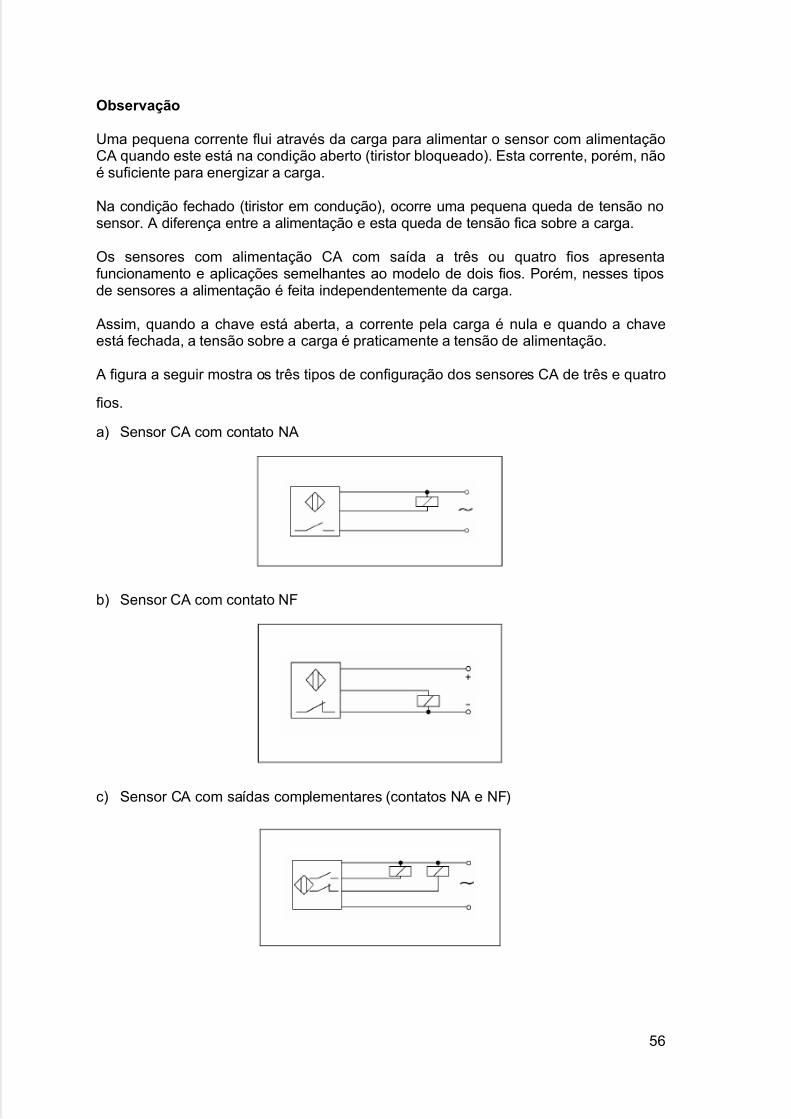
Os sensores com alimentação CA com saída a três ou quatro fios apresentafuncionamento e aplicações semelhantes ao modelo de dois fios. Porém, nesses tiposde sensores a alimentação é feita independentemente da carga.
Assim, quando a chave está aberta, a corrente pela carga é nula e quando a chaveestá fechada, a tensão sobre a carga é praticamente a tensão de alimentação.
A figura a seguir mostra os três tipos de configuração dos sensores CA de três e quatro
fios.
a) Sensor CA com contato NA
b) Sensor CA com contato NF
c) Sensor CA com saídas complementares (contatos NA e NF)
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 57/211
57
Método de ligação dos sensores
A ligação dos sensores pode ser de dois tipos: série e paralela.
Ligação série dos sensores CC
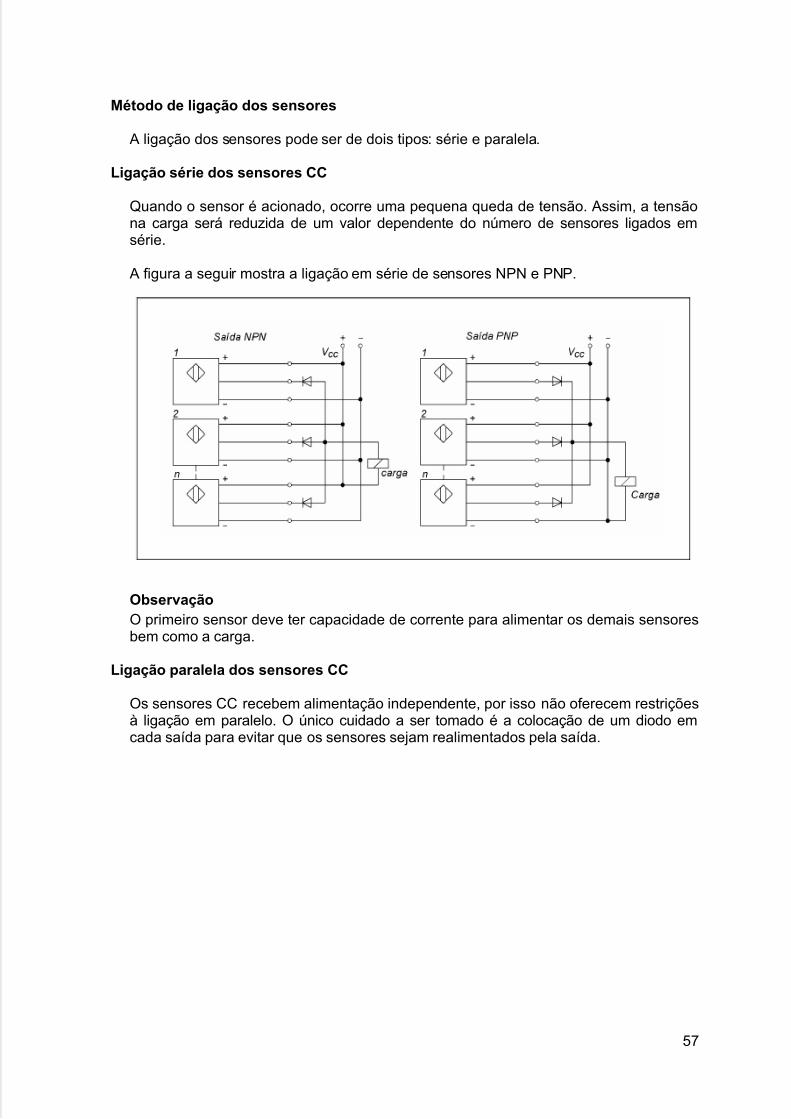
Quando o sensor é acionado, ocorre uma pequena queda de tensão. Assim, a tensãona carga será reduzida de um valor dependente do número de sensores ligados emsérie.
A figura a seguir mostra a ligação em série de sensores NPN e PNP.
ObservaçãoO primeiro sensor deve ter capacidade de corrente para alimentar os demais sensoresbem como a carga.
Ligação paralela dos sensores CC
Os sensores CC recebem alimentação independente, por isso não oferecem restriçõesà ligação em paralelo. O único cuidado a ser tomado é a colocação de um diodo emcada saída para evitar que os sensores sejam realimentados pela saída.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 58/211
58
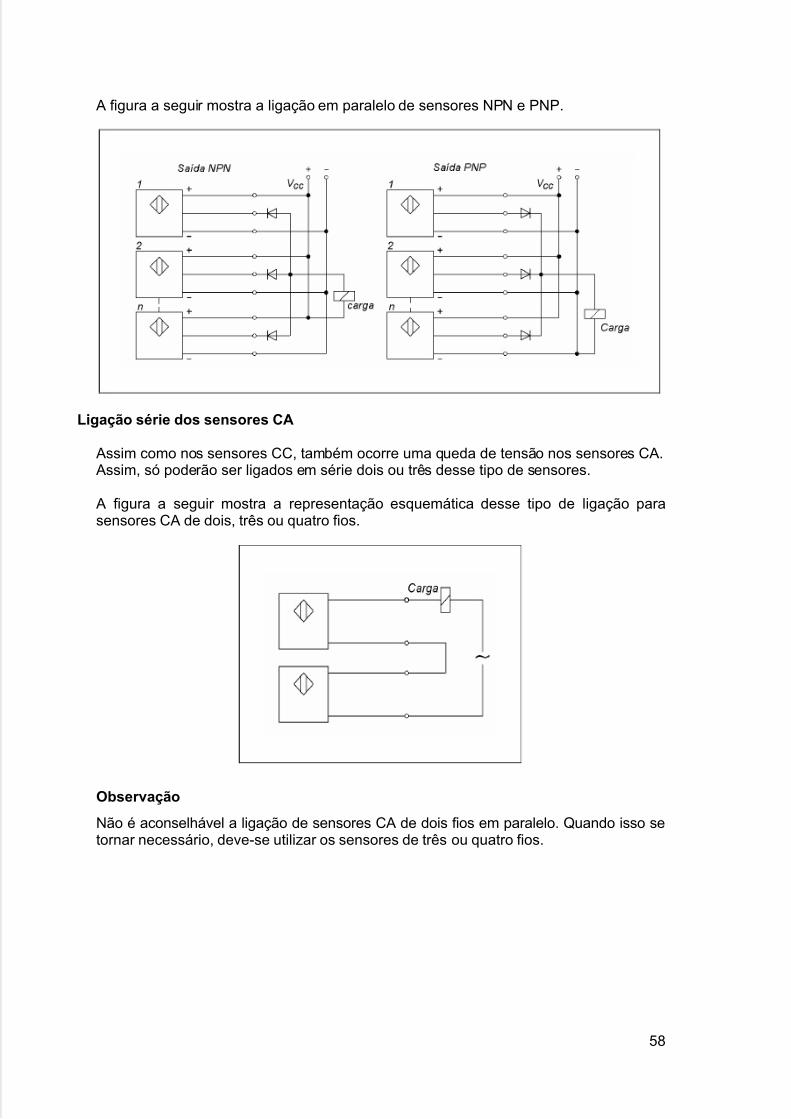
A figura a seguir mostra a ligação em paralelo de sensores NPN e PNP.
Ligação série dos sensores CA
Assim como nos sensores CC, também ocorre uma queda de tensão nos sensores CA. Assim, só poderão ser ligados em série dois ou três desse tipo de sensores.
A figura a seguir mostra a representação esquemática desse tipo de ligação parasensores CA de dois, três ou quatro fios.
Observação
Não é aconselhável a ligação de sensores CA de dois fios em paralelo. Quando isso setornar necessário, deve-se utilizar os sensores de três ou quatro fios.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 59/211
59
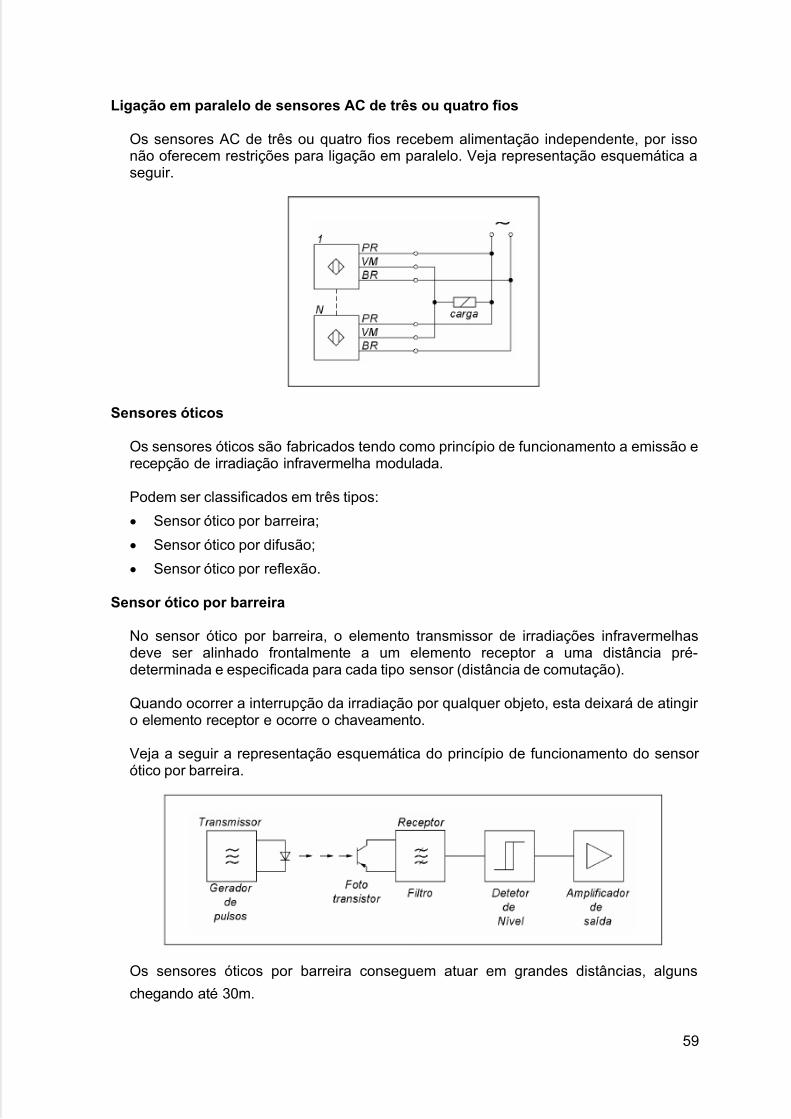
Ligação em paralelo de sensores AC de três ou quatro fios
Os sensores AC de três ou quatro fios recebem alimentação independente, por issonão oferecem restrições para ligação em paralelo. Veja representação esquemática aseguir.
Sensores óticos
Os sensores óticos são fabricados tendo como princípio de funcionamento a emissão erecepção de irradiação infravermelha modulada.
Podem ser classificados em três tipos:
• Sensor ótico por barreira;
• Sensor ótico por difusão;
• Sensor ótico por reflexão.
Sensor ótico por barreira
No sensor ótico por barreira, o elemento transmissor de irradiações infravermelhasdeve ser alinhado frontalmente a um elemento receptor a uma distância pré-determinada e especificada para cada tipo sensor (distância de comutação).
Quando ocorrer a interrupção da irradiação por qualquer objeto, esta deixará de atingir o elemento receptor e ocorre o chaveamento.
Veja a seguir a representação esquemática do princípio de funcionamento do sensor ótico por barreira.
Os sensores óticos por barreira conseguem atuar em grandes distâncias, alguns
chegando até 30m.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 60/211
60
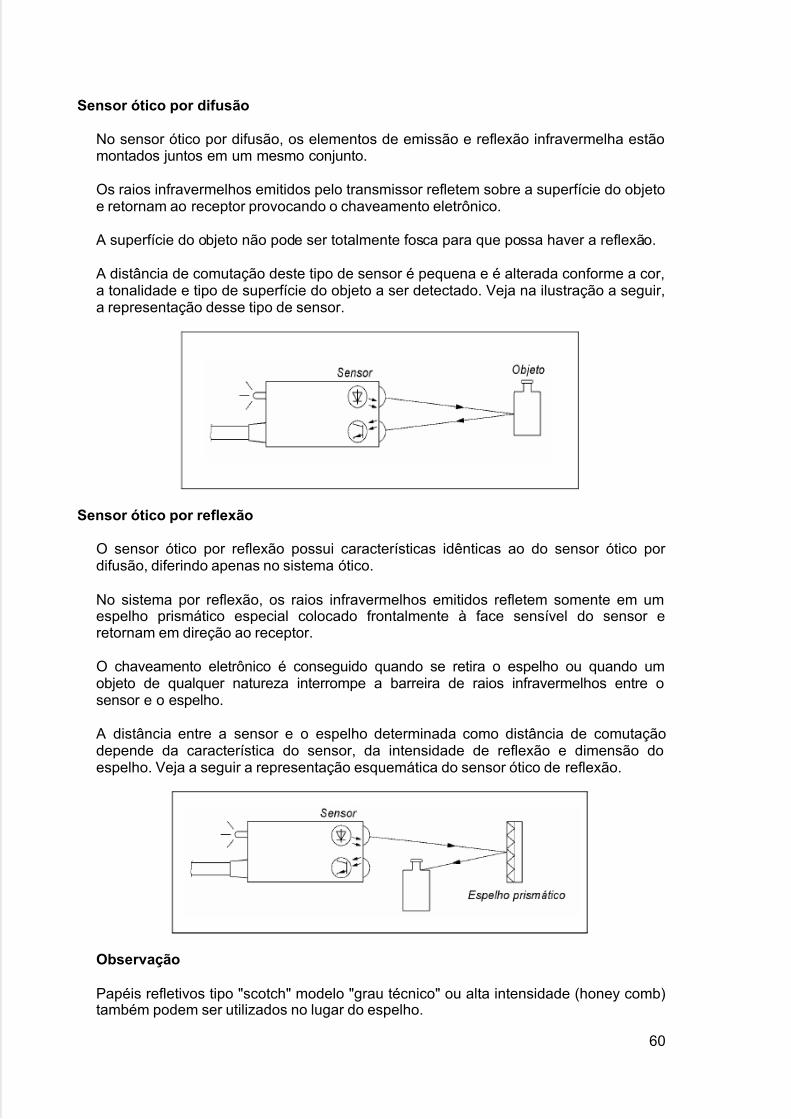
Sensor ótico por difusão
No sensor ótico por difusão, os elementos de emissão e reflexão infravermelha estãomontados juntos em um mesmo conjunto.
Os raios infravermelhos emitidos pelo transmissor refletem sobre a superfície do objetoe retornam ao receptor provocando o chaveamento eletrônico.
A superfície do objeto não pode ser totalmente fosca para que possa haver a reflexão.
A distância de comutação deste tipo de sensor é pequena e é alterada conforme a cor,a tonalidade e tipo de superfície do objeto a ser detectado. Veja na ilustração a seguir,a representação desse tipo de sensor.
Sensor ótico por reflexão
O sensor ótico por reflexão possui características idênticas ao do sensor ótico por difusão, diferindo apenas no sistema ótico.
No sistema por reflexão, os raios infravermelhos emitidos refletem somente em umespelho prismático especial colocado frontalmente à face sensível do sensor eretornam em direção ao receptor.
O chaveamento eletrônico é conseguido quando se retira o espelho ou quando umobjeto de qualquer natureza interrompe a barreira de raios infravermelhos entre osensor e o espelho.
A distância entre a sensor e o espelho determinada como distância de comutaçãodepende da característica do sensor, da intensidade de reflexão e dimensão doespelho. Veja a seguir a representação esquemática do sensor ótico de reflexão.
Observação
Papéis refletivos tipo "scotch" modelo "grau técnico" ou alta intensidade (honey comb)também podem ser utilizados no lugar do espelho.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 61/211
61
Independentemente do sensor ótico usado, ele é totalmente imune à iluminaçãoambiente natural ou artificial pelo fato do receptor ser sintonizado na mesma freqüênciade modulação do emissor.
Sensor fotoelétrico com fibra ótica
As fibras óticas apresentam a vantagem de detectar objetos com dimensões reduzidas,tais como: terminais de componentes eletrônicos, furos de centralização em placas,marcas em materiais de embalagens, etc. Podem ser também aplicadas em locaisonde fisicamente seria impossível alojar um sensor fotoelétrico comum, ou ainda, emlocais onde a temperatura de operação não permite a instalação dos fotoelétricos.
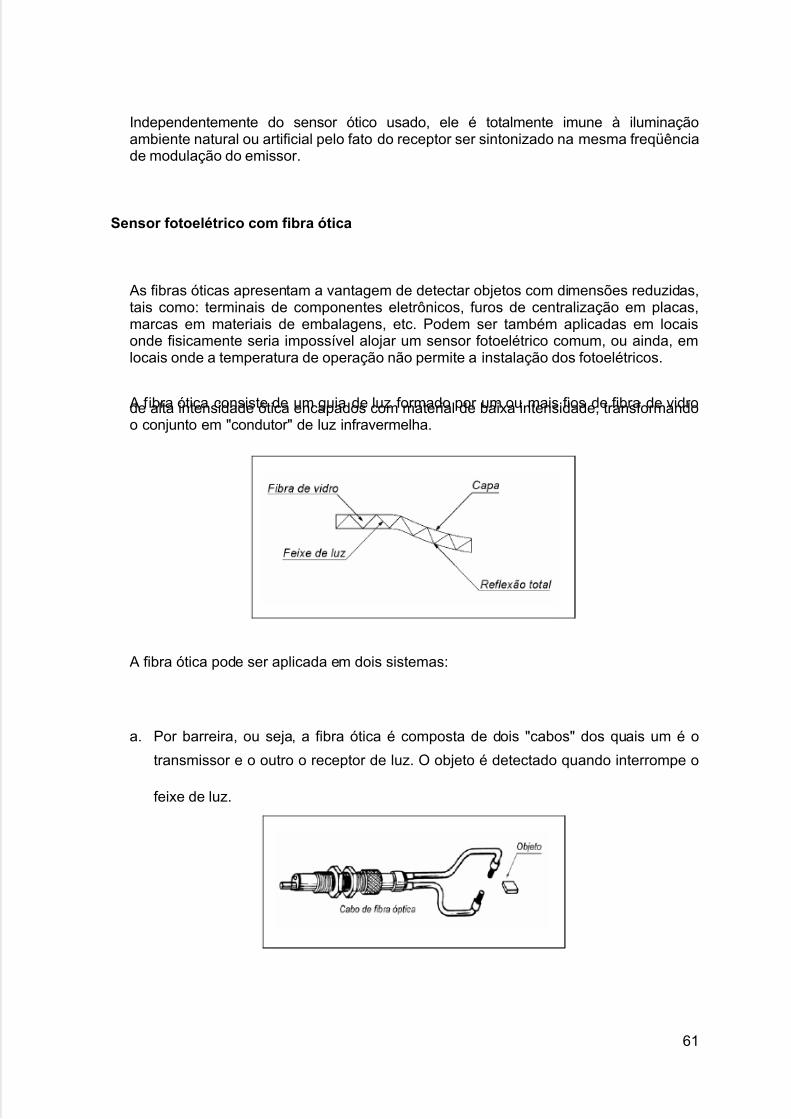
A fibra ótica consiste de um guia de luz formado por um ou mais fios de fibra de vidrode alta intensidade ótica encapados com material de baixa intensidade, transformandoo conjunto em "condutor" de luz infravermelha.
A fibra ótica pode ser aplicada em dois sistemas:
a. Por barreira, ou seja, a fibra ótica é composta de dois "cabos" dos quais um é o
transmissor e o outro o receptor de luz. O objeto é detectado quando interrompe o
feixe de luz.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 62/211
62
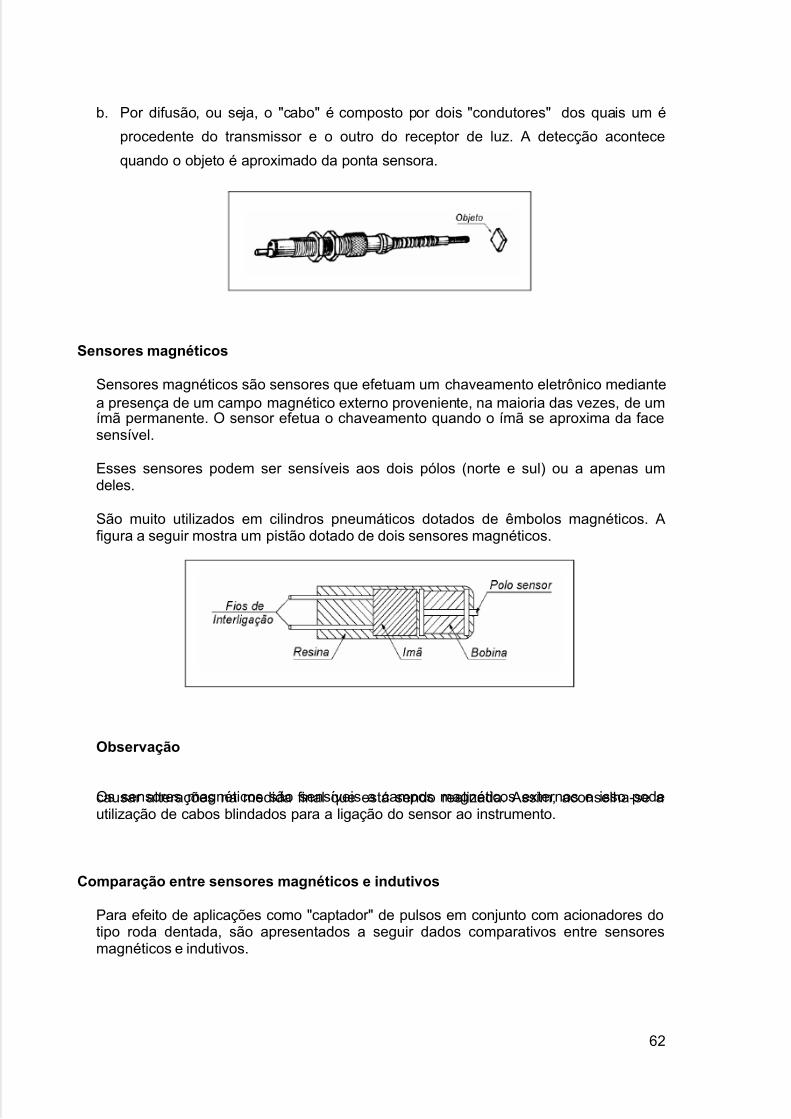
b. Por difusão, ou seja, o "cabo" é composto por dois "condutores" dos quais um é
procedente do transmissor e o outro do receptor de luz. A detecção acontece
quando o objeto é aproximado da ponta sensora.
Sensores magnéticos
Sensores magnéticos são sensores que efetuam um chaveamento eletrônico mediantea presença de um campo magnético externo proveniente, na maioria das vezes, de umímã permanente. O sensor efetua o chaveamento quando o ímã se aproxima da facesensível.
Esses sensores podem ser sensíveis aos dois pólos (norte e sul) ou a apenas umdeles.
São muito utilizados em cilindros pneumáticos dotados de êmbolos magnéticos. Afigura a seguir mostra um pistão dotado de dois sensores magnéticos.
Observação
Os sensores magnéticos são sensíveis a campos magnéticos externos e isso podecausar alterações na medida final que está sendo realizada. Assim, aconselha-se autilização de cabos blindados para a ligação do sensor ao instrumento.
Comparação entre sensores magnéticos e indutivos
Para efeito de aplicações como "captador" de pulsos em conjunto com acionadores dotipo roda dentada, são apresentados a seguir dados comparativos entre sensoresmagnéticos e indutivos.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 63/211
63
Características Indutivo Magnético
Resposta de freqüência mínima(pulsos/min)
0 +100
Resposta de freqüência máxima(pulsos/min)
+30 x 10 +400 x 10
Faixa de temperatura de operação 20°C a +70°C -20°C a 10°C
Metal do elemento acionador Qualquer Ferro
Forma do sinal de saída Onda quadrada Senoidal
Amplitude do sinal de saída Função da tensão dealimentação do
acionador
Função da velocidadee da distância
Distância entre dentes do acionador Função do diâmetrodo sensor
Função do diâmetro do"pólo sensor"
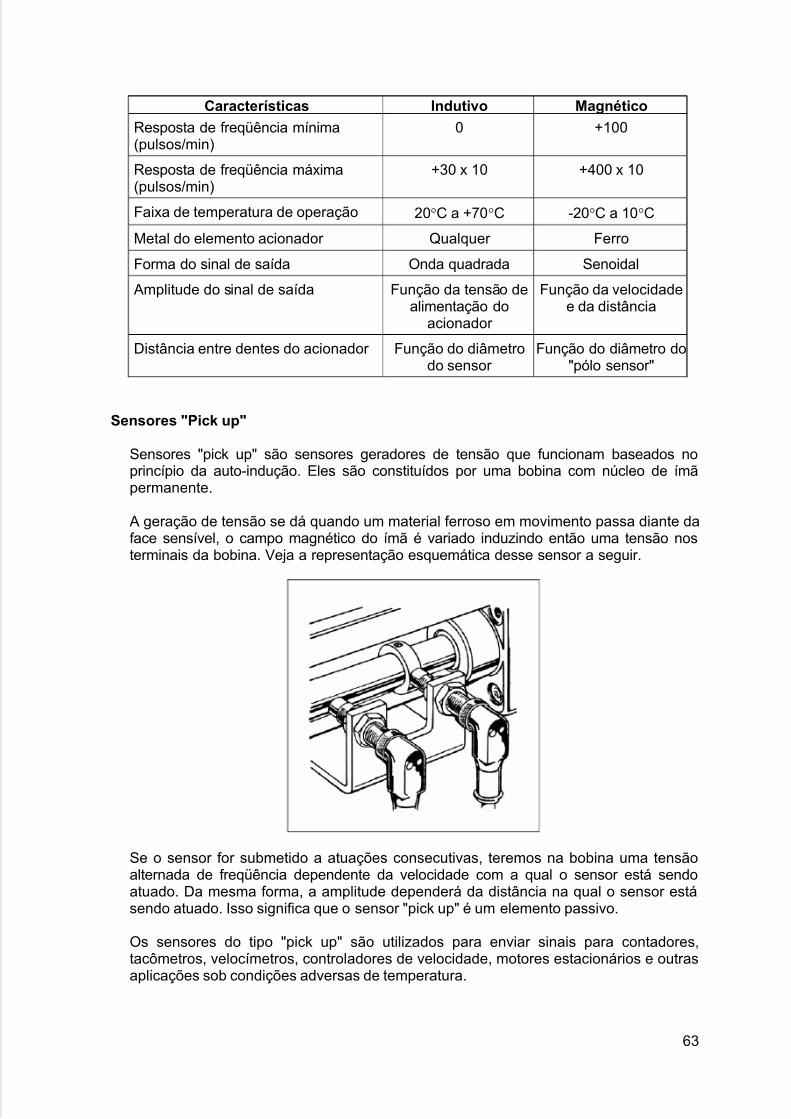
Sensores "Pick up"
Sensores "pick up" são sensores geradores de tensão que funcionam baseados noprincípio da auto-indução. Eles são constituídos por uma bobina com núcleo de ímãpermanente.
A geração de tensão se dá quando um material ferroso em movimento passa diante daface sensível, o campo magnético do ímã é variado induzindo então uma tensão nosterminais da bobina. Veja a representação esquemática desse sensor a seguir.
Se o sensor for submetido a atuações consecutivas, teremos na bobina uma tensãoalternada de freqüência dependente da velocidade com a qual o sensor está sendoatuado. Da mesma forma, a amplitude dependerá da distância na qual o sensor estásendo atuado. Isso significa que o sensor "pick up" é um elemento passivo.
Os sensores do tipo "pick up" são utilizados para enviar sinais para contadores,tacômetros, velocímetros, controladores de velocidade, motores estacionários e outrasaplicações sob condições adversas de temperatura.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 64/211
64
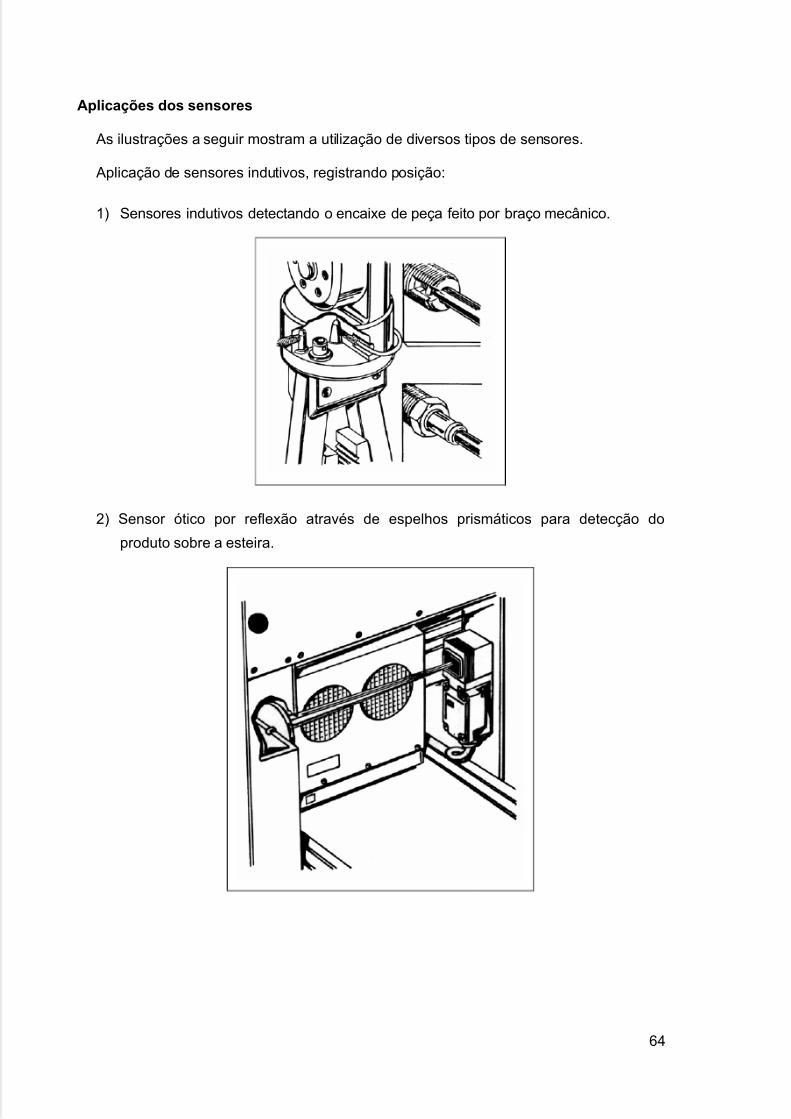
Aplicações dos sensores
As ilustrações a seguir mostram a utilização de diversos tipos de sensores.
Aplicação de sensores indutivos, registrando posição:
1) Sensores indutivos detectando o encaixe de peça feito por braço mecânico.
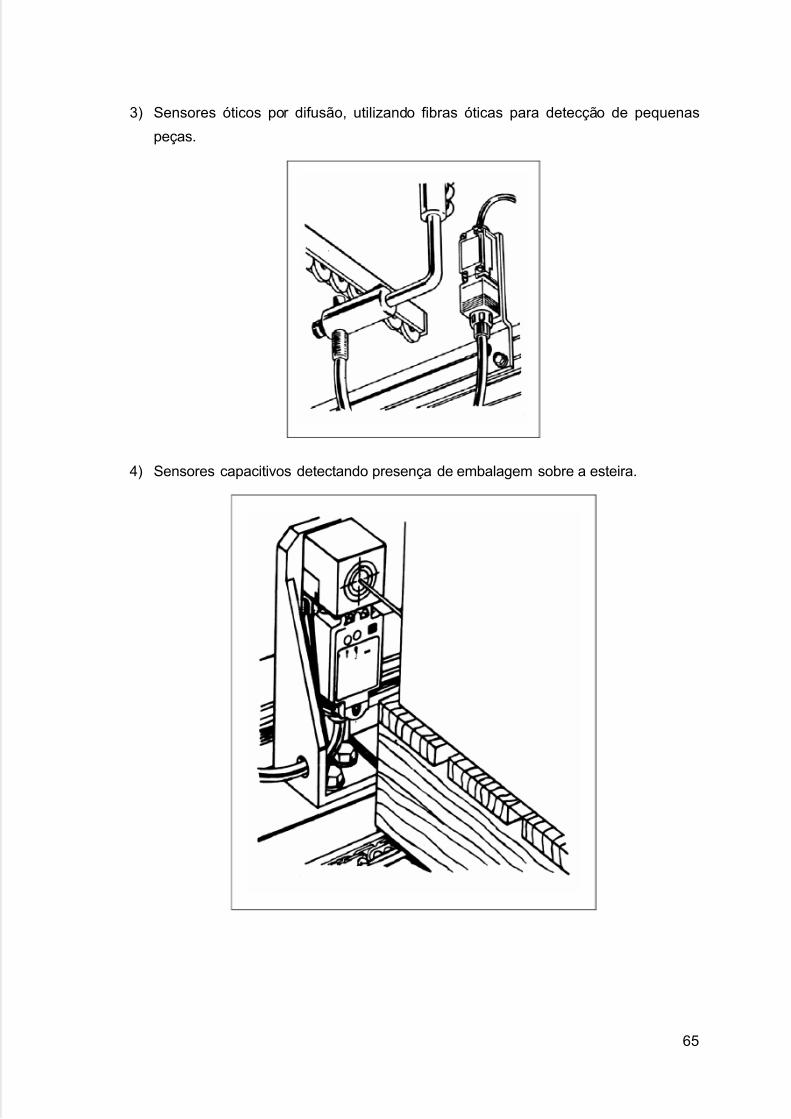
2) Sensor ótico por reflexão através de espelhos prismáticos para detecção do
produto sobre a esteira.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 65/211
65
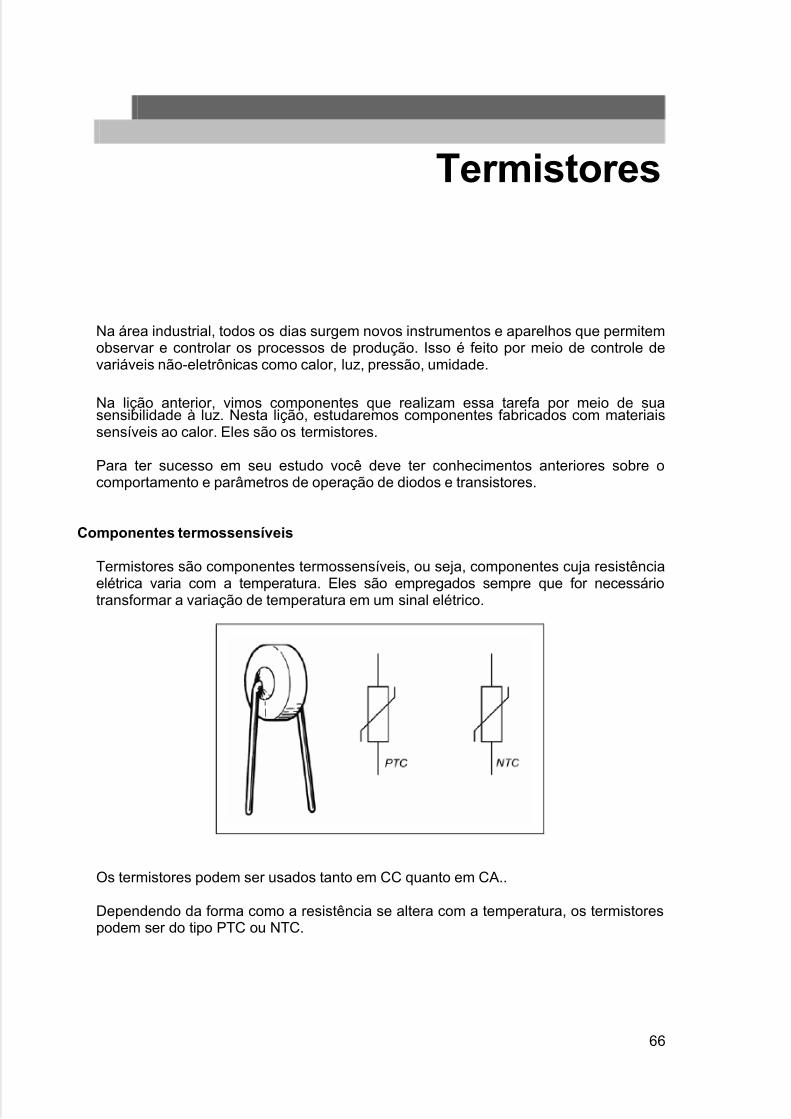
3) Sensores óticos por difusão, utilizando fibras óticas para detecção de pequenas
peças.
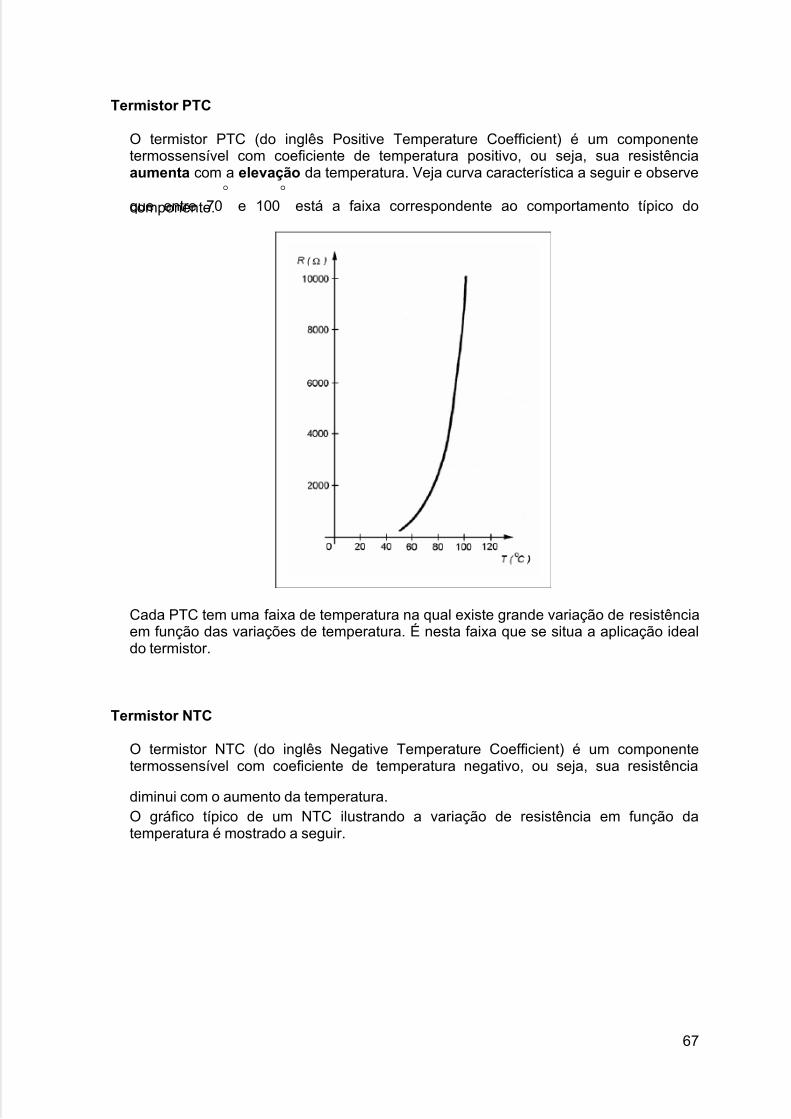
4) Sensores capacitivos detectando presença de embalagem sobre a esteira.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 66/211
66
Termistores
Na área industrial, todos os dias surgem novos instrumentos e aparelhos que permitemobservar e controlar os processos de produção. Isso é feito por meio de controle devariáveis não-eletrônicas como calor, luz, pressão, umidade.
Na lição anterior, vimos componentes que realizam essa tarefa por meio de suasensibilidade à luz. Nesta lição, estudaremos componentes fabricados com materiaissensíveis ao calor. Eles são os termistores.
Para ter sucesso em seu estudo você deve ter conhecimentos anteriores sobre ocomportamento e parâmetros de operação de diodos e transistores.
Componentes termossensíveis
Termistores são componentes termossensíveis, ou seja, componentes cuja resistênciaelétrica varia com a temperatura. Eles são empregados sempre que for necessáriotransformar a variação de temperatura em um sinal elétrico.
Os termistores podem ser usados tanto em CC quanto em CA..
Dependendo da forma como a resistência se altera com a temperatura, os termistorespodem ser do tipo PTC ou NTC.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 67/211
67
Termistor PTC
O termistor PTC (do inglês Positive Temperature Coefficient) é um componentetermossensível com coeficiente de temperatura positivo, ou seja, sua resistênciaaumenta com a elevação da temperatura. Veja curva característica a seguir e observe
que entre 70°
e 100°
está a faixa correspondente ao comportamento típico docomponente.
Cada PTC tem uma faixa de temperatura na qual existe grande variação de resistênciaem função das variações de temperatura. É nesta faixa que se situa a aplicação idealdo termistor.
Termistor NTC
O termistor NTC (do inglês Negative Temperature Coefficient) é um componentetermossensível com coeficiente de temperatura negativo, ou seja, sua resistência
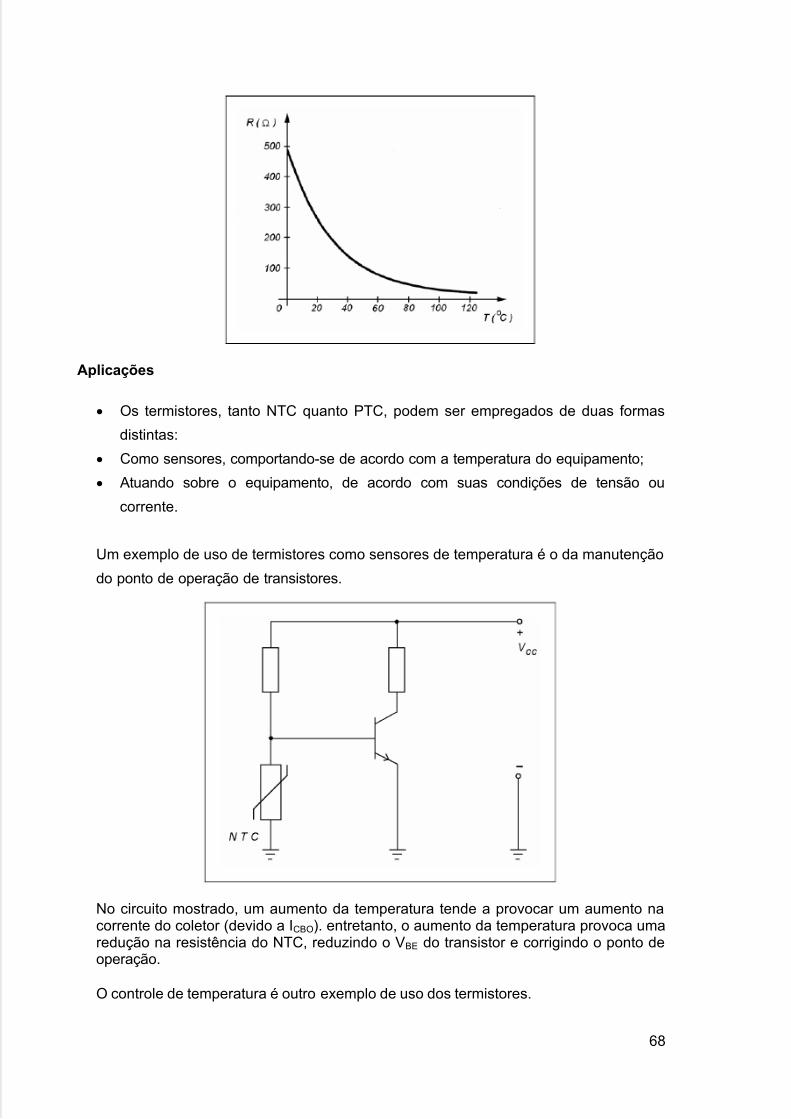
diminui com o aumento da temperatura.O gráfico típico de um NTC ilustrando a variação de resistência em função datemperatura é mostrado a seguir.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 68/211
68
Aplicações
• Os termistores, tanto NTC quanto PTC, podem ser empregados de duas formas
distintas:
• Como sensores, comportando-se de acordo com a temperatura do equipamento;
• Atuando sobre o equipamento, de acordo com suas condições de tensão ou
corrente.
Um exemplo de uso de termistores como sensores de temperatura é o da manutenção
do ponto de operação de transistores.
No circuito mostrado, um aumento da temperatura tende a provocar um aumento nacorrente do coletor (devido a ICBO). entretanto, o aumento da temperatura provoca umaredução na resistência do NTC, reduzindo o VBE do transistor e corrigindo o ponto deoperação.
O controle de temperatura é outro exemplo de uso dos termistores.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 69/211
69
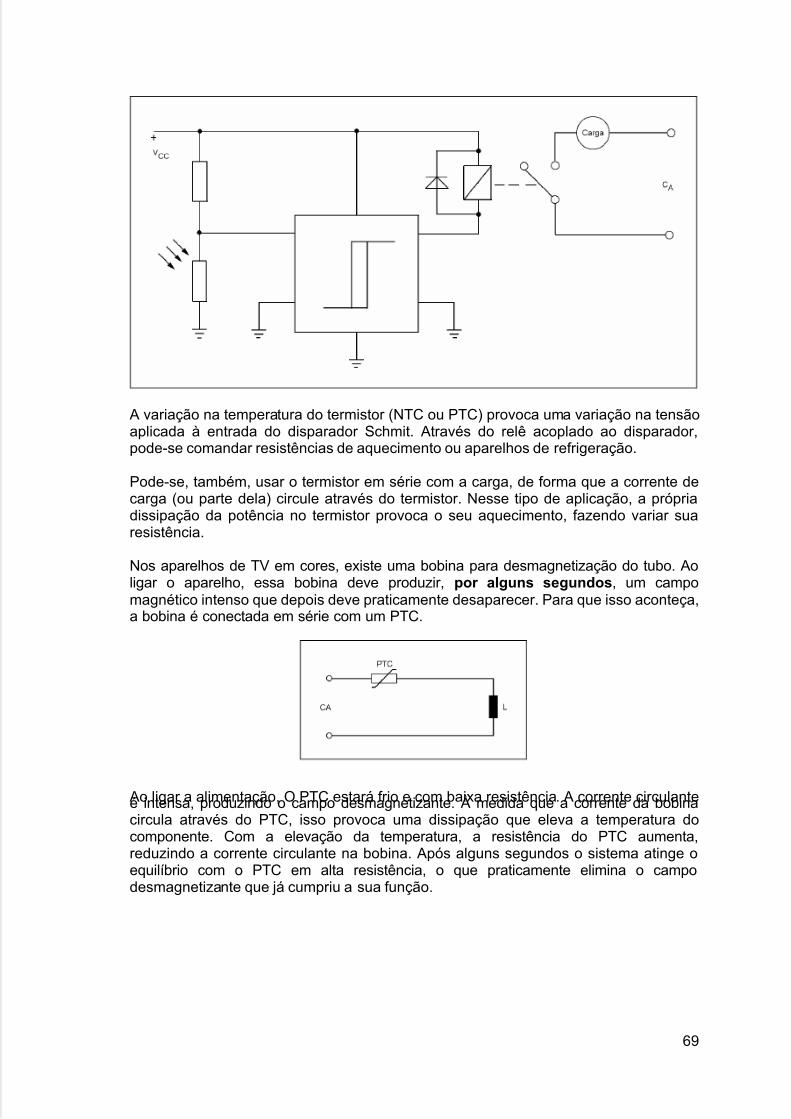
A variação na temperatura do termistor (NTC ou PTC) provoca uma variação na tensãoaplicada à entrada do disparador Schmit. Através do relê acoplado ao disparador,pode-se comandar resistências de aquecimento ou aparelhos de refrigeração.
Pode-se, também, usar o termistor em série com a carga, de forma que a corrente decarga (ou parte dela) circule através do termistor. Nesse tipo de aplicação, a própriadissipação da potência no termistor provoca o seu aquecimento, fazendo variar suaresistência.
Nos aparelhos de TV em cores, existe uma bobina para desmagnetização do tubo. Aoligar o aparelho, essa bobina deve produzir, por alguns segundos, um campomagnético intenso que depois deve praticamente desaparecer. Para que isso aconteça,a bobina é conectada em série com um PTC.
Ao ligar a alimentação, O PTC estará frio e com baixa resistência. A corrente circulanteé intensa, produzindo o campo desmagnetizante. À medida que a corrente da bobinacircula através do PTC, isso provoca uma dissipação que eleva a temperatura docomponente. Com a elevação da temperatura, a resistência do PTC aumenta,reduzindo a corrente circulante na bobina. Após alguns segundos o sistema atinge oequilíbrio com o PTC em alta resistência, o que praticamente elimina o campodesmagnetizante que já cumpriu a sua função.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 70/211
70
Diagramas de comandoselétricos
Seja qual for o tipo de projeto da área eletroeletrônica que se queira realizar, seja
instalação, montagem ou reparo, a maneira adequada de representar a disposição doscomponentes e o modo como eles se relacionam entre si é por meio do diagrama esquemático.
Neste capítulo, estudaremos os diagramas de comando cuja finalidade é representar os circuitos elétricos. Esse conhecimento é importante quando se necessita analisar oesquema de uma máquina desconhecida para realizar sua manutenção. Essa análisepermite solucionar problemas "difíceis" e essa experiência é indispensável para oprofissional de manutenção eletroeletrônica.
Diagrama elétrico
O diagrama elétrico é um desenho que mostra a maneira como as várias partes de umdispositivo, rede, instalação, grupo de aparelhos ou itens de um aparelho sãointerrelacionados e/ou interconectados. É a representação de uma instalação elétricaou parte dela por meio de símbolos gráficos, definidos nas normas NBR 5259, NBR5280, NBR 5444, NBR 12519, NBR 12520 e NBR 12523.
Diagrama de comando
O diagrama de comando faz a representação esquemática dos circuitos elétricos. Ele
mostra os seguintes aspectos:• Funcionamento seqüencial dos circuitos;
• Representação dos elementos, suas funções e as interligações, conforme as
normas estabelecidas;
• Visão analítica das partes ou do conjunto;
• Possibilidade de rápida localização física dos componentes.
Para que o profissional da área eletroeletrônica possa “ler” o esquema, ele tem quesaber reconhecer os símbolos e os modos de dispô-los dentro do esquema.
Essas informações estão padronizadas por normas técnicas que estabelecem amaneira pela qual devem ser elaborados os desenhos técnicos para a eletroeletrônica.
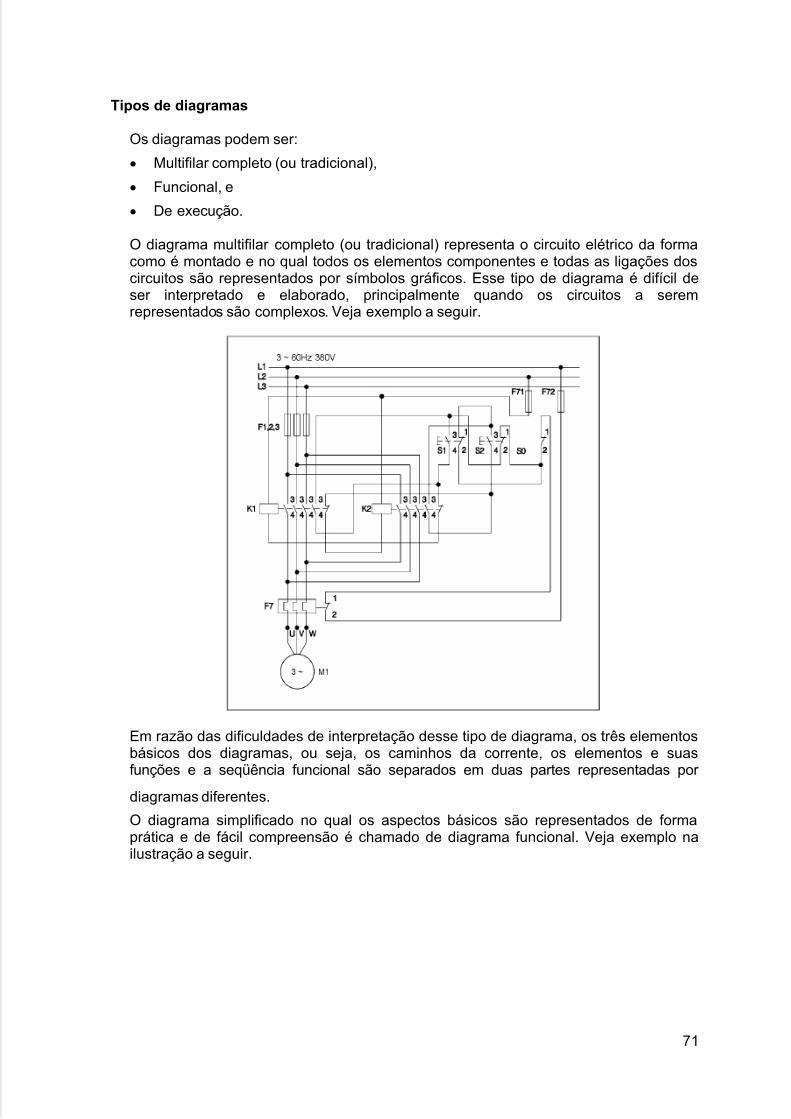
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 71/211
71
Tipos de diagramas
Os diagramas podem ser:
• Multifilar completo (ou tradicional),
• Funcional, e
• De execução.
O diagrama multifilar completo (ou tradicional) representa o circuito elétrico da formacomo é montado e no qual todos os elementos componentes e todas as ligações doscircuitos são representados por símbolos gráficos. Esse tipo de diagrama é difícil deser interpretado e elaborado, principalmente quando os circuitos a seremrepresentados são complexos. Veja exemplo a seguir.
Em razão das dificuldades de interpretação desse tipo de diagrama, os três elementosbásicos dos diagramas, ou seja, os caminhos da corrente, os elementos e suasfunções e a seqüência funcional são separados em duas partes representadas por
diagramas diferentes.
O diagrama simplificado no qual os aspectos básicos são representados de formaprática e de fácil compreensão é chamado de diagrama funcional. Veja exemplo nailustração a seguir.
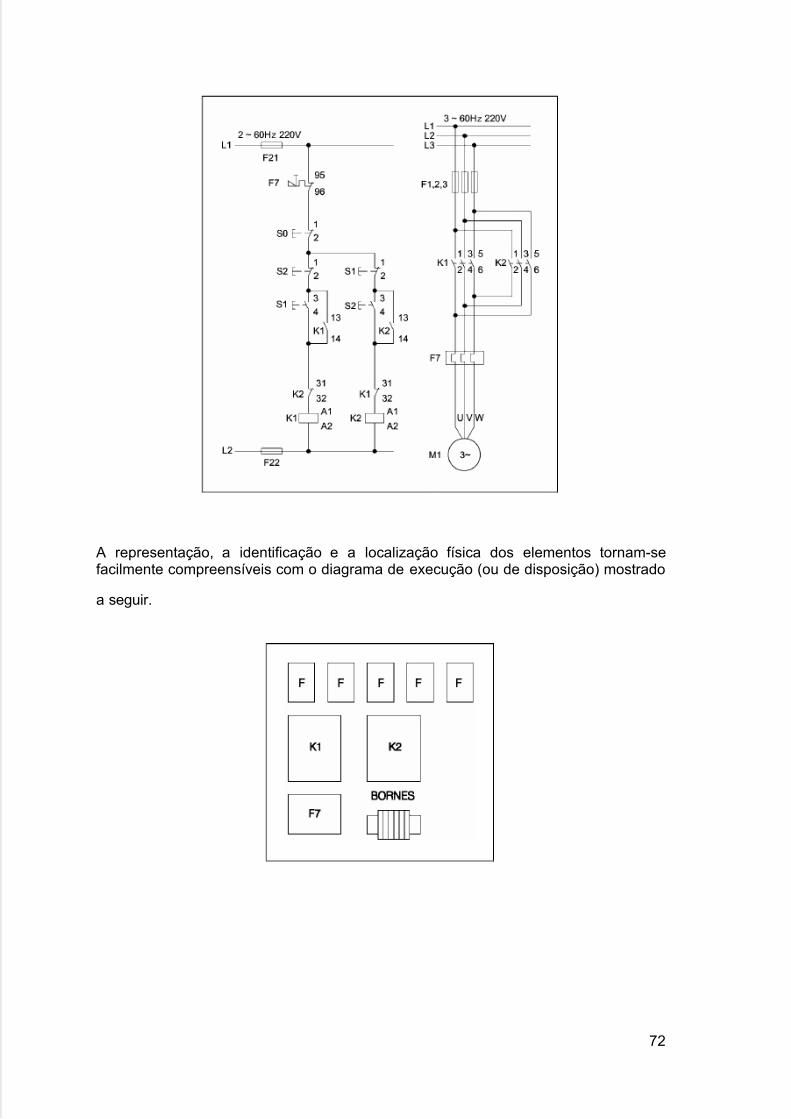
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 72/211
72
A representação, a identificação e a localização física dos elementos tornam-sefacilmente compreensíveis com o diagrama de execução (ou de disposição) mostrado
a seguir.
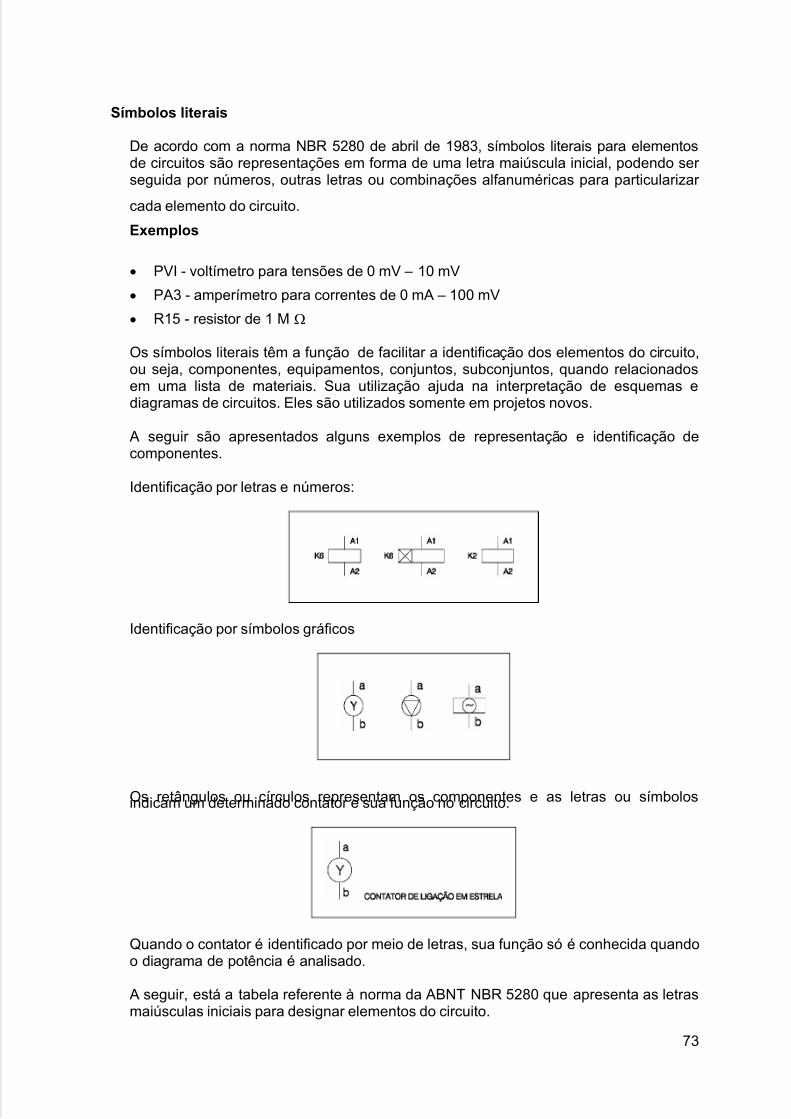
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 73/211
73
Símbolos literais
De acordo com a norma NBR 5280 de abril de 1983, símbolos literais para elementosde circuitos são representações em forma de uma letra maiúscula inicial, podendo ser seguida por números, outras letras ou combinações alfanuméricas para particularizar
cada elemento do circuito.
Exemplos
• PVI - voltímetro para tensões de 0 mV – 10 mV
• PA3 - amperímetro para correntes de 0 mA – 100 mV
• R15 - resistor de 1 M Ω
Os símbolos literais têm a função de facilitar a identificação dos elementos do circuito,ou seja, componentes, equipamentos, conjuntos, subconjuntos, quando relacionadosem uma lista de materiais. Sua utilização ajuda na interpretação de esquemas ediagramas de circuitos. Eles são utilizados somente em projetos novos.
A seguir são apresentados alguns exemplos de representação e identificação decomponentes.
Identificação por letras e números:
Identificação por símbolos gráficos
Os retângulos ou círculos representam os componentes e as letras ou símbolosindicam um determinado contator e sua função no circuito.
Quando o contator é identificado por meio de letras, sua função só é conhecida quandoo diagrama de potência é analisado.
A seguir, está a tabela referente à norma da ABNT NBR 5280 que apresenta as letrasmaiúsculas iniciais para designar elementos do circuito.
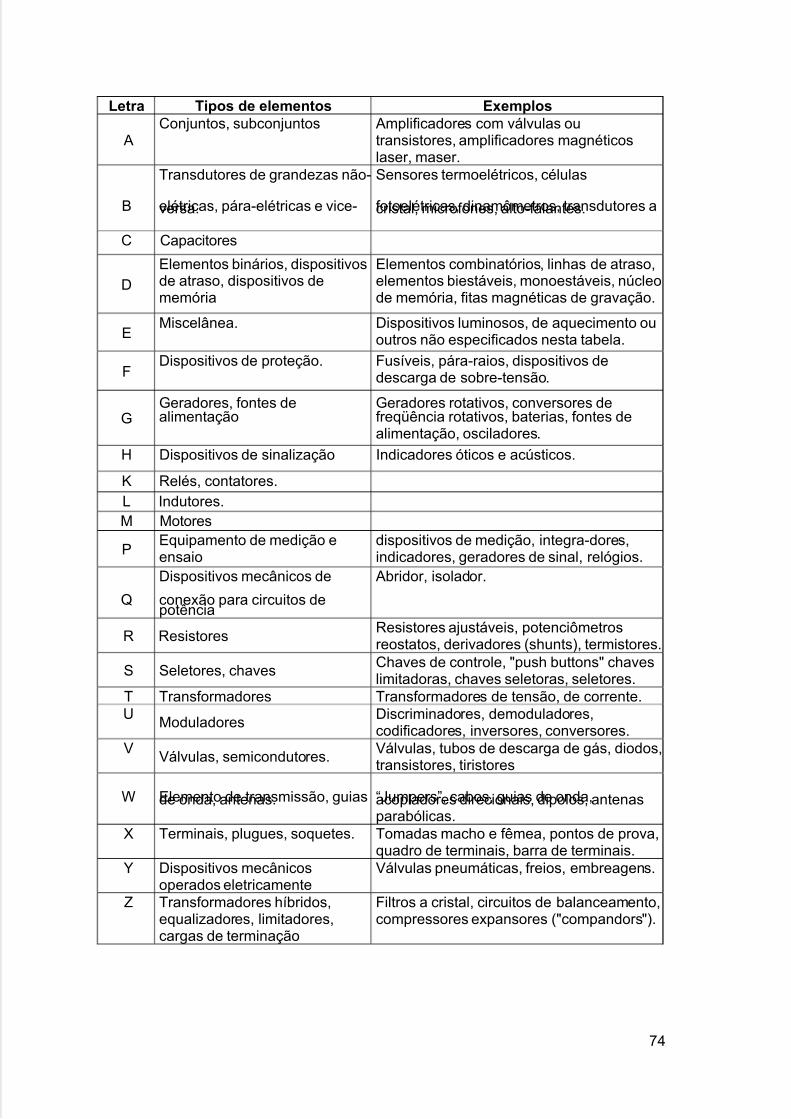
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 74/211
74
Letra Tipos de elementos Exemplos
AConjuntos, subconjuntos Amplificadores com válvulas ou
transistores, amplificadores magnéticoslaser, maser.
B
Transdutores de grandezas não-
elétricas, pára-elétricas e vice-versa.
Sensores termoelétricos, células
fotoelétricas, dinamômetros, transdutores acristal, microfones, alto-falantes.
C Capacitores
D
Elementos binários, dispositivosde atraso, dispositivos dememória
Elementos combinatórios, linhas de atraso,elementos biestáveis, monoestáveis, núcleode memória, fitas magnéticas de gravação.
EMiscelânea. Dispositivos luminosos, de aquecimento ou
outros não especificados nesta tabela.
FDispositivos de proteção. Fusíveis, pára-raios, dispositivos de
descarga de sobre-tensão.
GGeradores, fontes dealimentação
Geradores rotativos, conversores defreqüência rotativos, baterias, fontes dealimentação, osciladores.
H Dispositivos de sinalização Indicadores óticos e acústicos.
K Relés, contatores.L Indutores.M Motores
PEquipamento de medição eensaio
dispositivos de medição, integra-dores,indicadores, geradores de sinal, relógios.
Q
Dispositivos mecânicos de
conexão para circuitos depotência
Abridor, isolador.
R ResistoresResistores ajustáveis, potenciômetrosreostatos, derivadores (shunts), termistores.
S Seletores, chavesChaves de controle, "push buttons" chaveslimitadoras, chaves seletoras, seletores.
T Transformadores Transformadores de tensão, de corrente.U
ModuladoresDiscriminadores, demoduladores,codificadores, inversores, conversores.
VVálvulas, semicondutores.
Válvulas, tubos de descarga de gás, diodos,transistores, tiristores
W Elemento de transmissão, guiasde onda, antenas. “Jumpers”, cabos, guias de onda,acopladores direcionais, dipolos, antenasparabólicas.
X Terminais, plugues, soquetes. Tomadas macho e fêmea, pontos de prova,quadro de terminais, barra de terminais.
Y Dispositivos mecânicosoperados eletricamente
Válvulas pneumáticas, freios, embreagens.
Z Transformadores híbridos,equalizadores, limitadores,cargas de terminação
Filtros a cristal, circuitos de balanceamento,compressores expansores ("compandors").
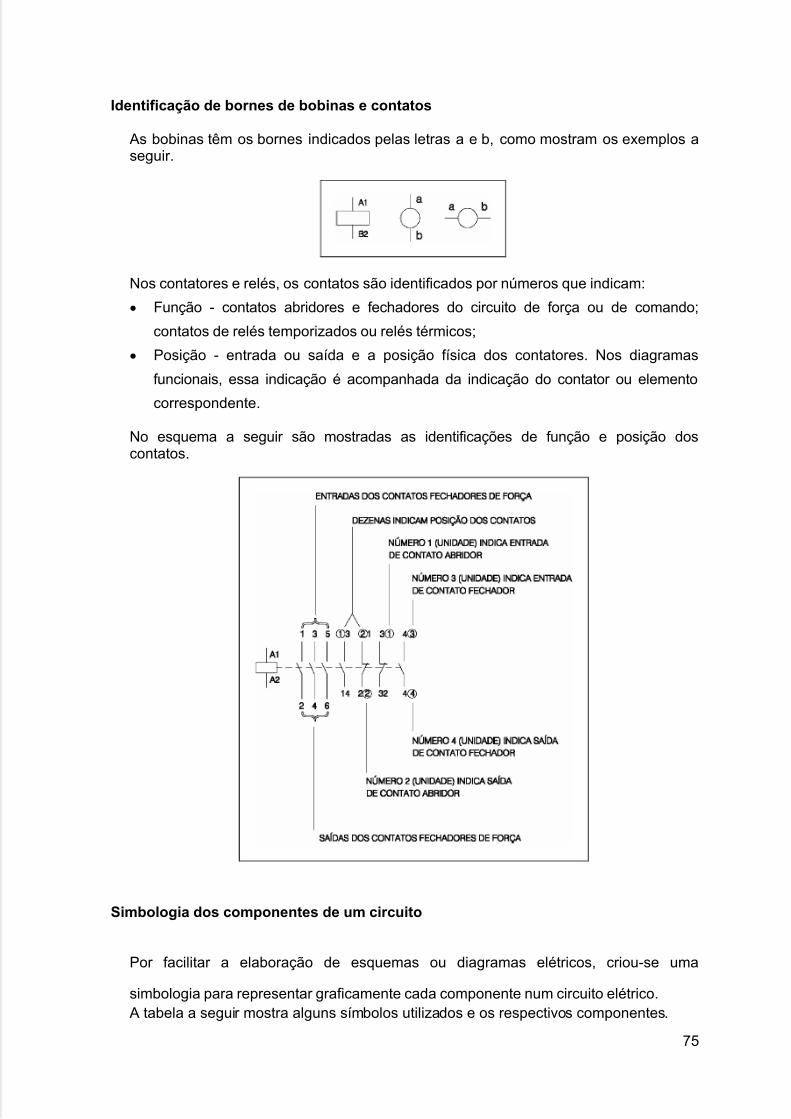
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 75/211
75
Identificação de bornes de bobinas e contatos
As bobinas têm os bornes indicados pelas letras a e b, como mostram os exemplos aseguir.
Nos contatores e relés, os contatos são identificados por números que indicam:
• Função - contatos abridores e fechadores do circuito de força ou de comando;
contatos de relés temporizados ou relés térmicos;
• Posição - entrada ou saída e a posição física dos contatores. Nos diagramas
funcionais, essa indicação é acompanhada da indicação do contator ou elemento
correspondente.
No esquema a seguir são mostradas as identificações de função e posição doscontatos.
Simbologia dos componentes de um circuito
Por facilitar a elaboração de esquemas ou diagramas elétricos, criou-se uma
simbologia para representar graficamente cada componente num circuito elétrico. A tabela a seguir mostra alguns símbolos utilizados e os respectivos componentes.
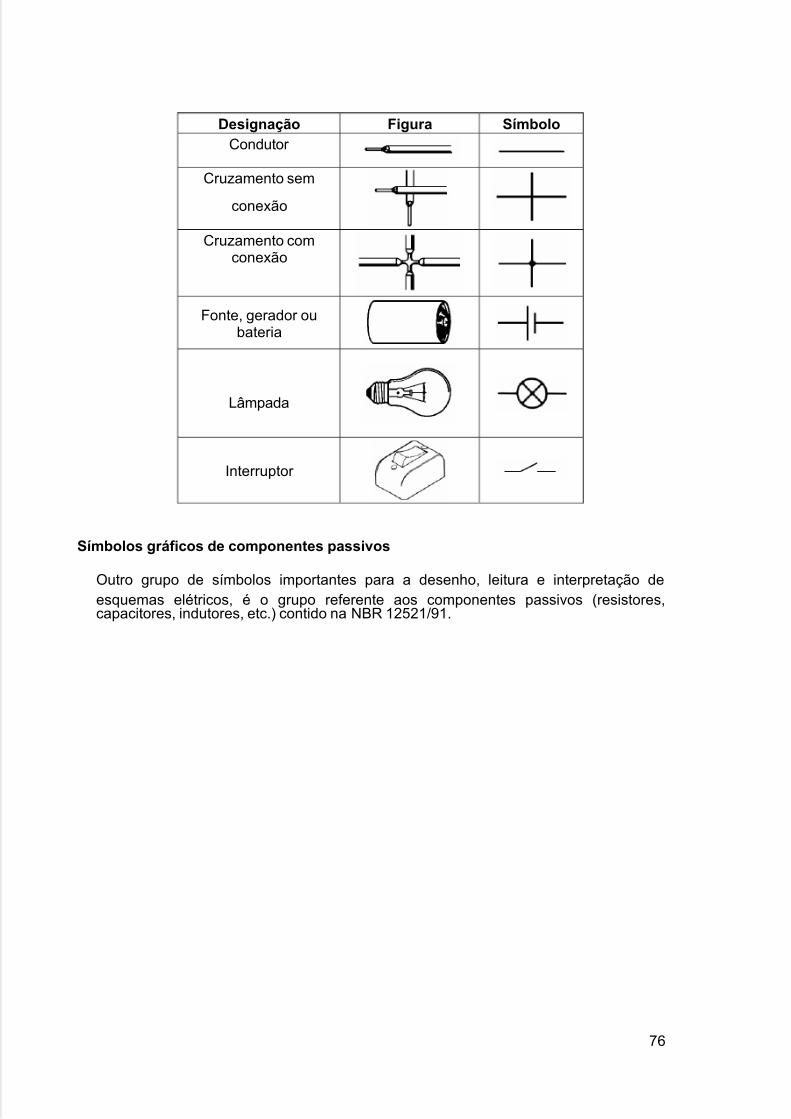
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 76/211
76
Designação Figura Símbolo
Condutor
Cruzamento sem
conexão
Cruzamento comconexão
Fonte, gerador oubateria
Lâmpada
Interruptor
Símbolos gráficos de componentes passivos
Outro grupo de símbolos importantes para a desenho, leitura e interpretação deesquemas elétricos, é o grupo referente aos componentes passivos (resistores,capacitores, indutores, etc.) contido na NBR 12521/91.
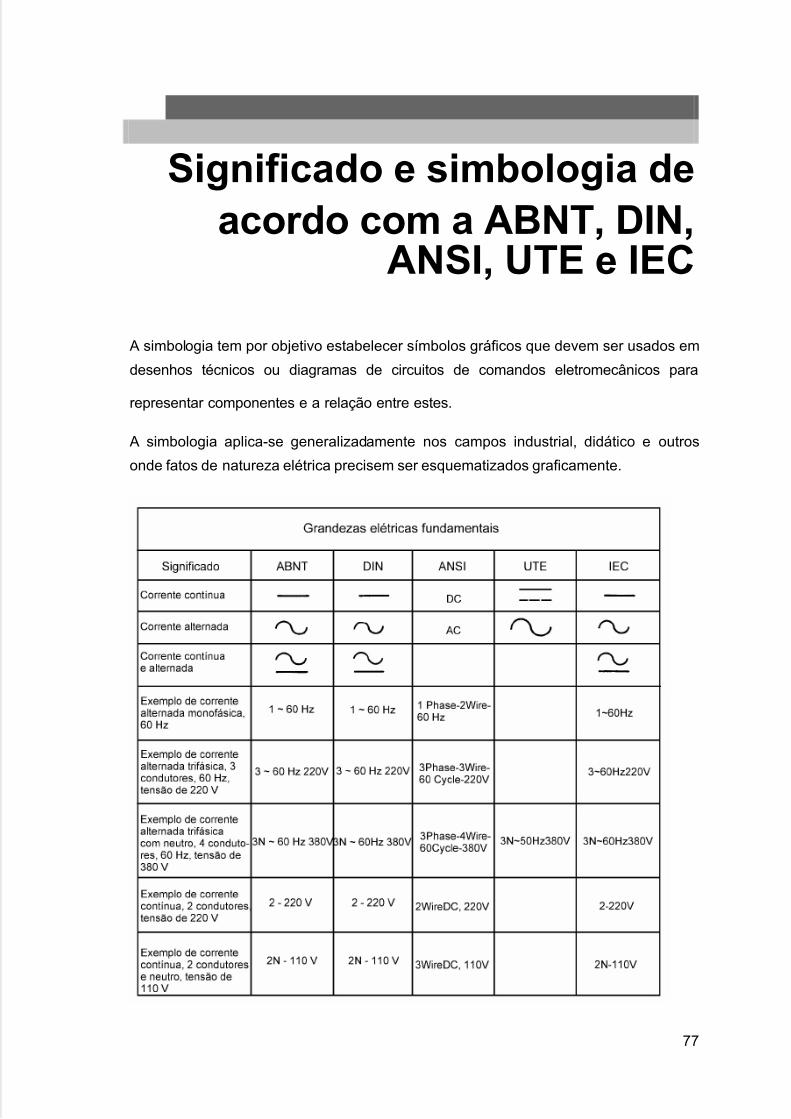
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 77/211
77
Significado e simbologia deacordo com a ABNT, DIN,
ANSI, UTE e IEC
A simbologia tem por objetivo estabelecer símbolos gráficos que devem ser usados em
desenhos técnicos ou diagramas de circuitos de comandos eletromecânicos para
representar componentes e a relação entre estes.
A simbologia aplica-se generalizadamente nos campos industrial, didático e outros
onde fatos de natureza elétrica precisem ser esquematizados graficamente.
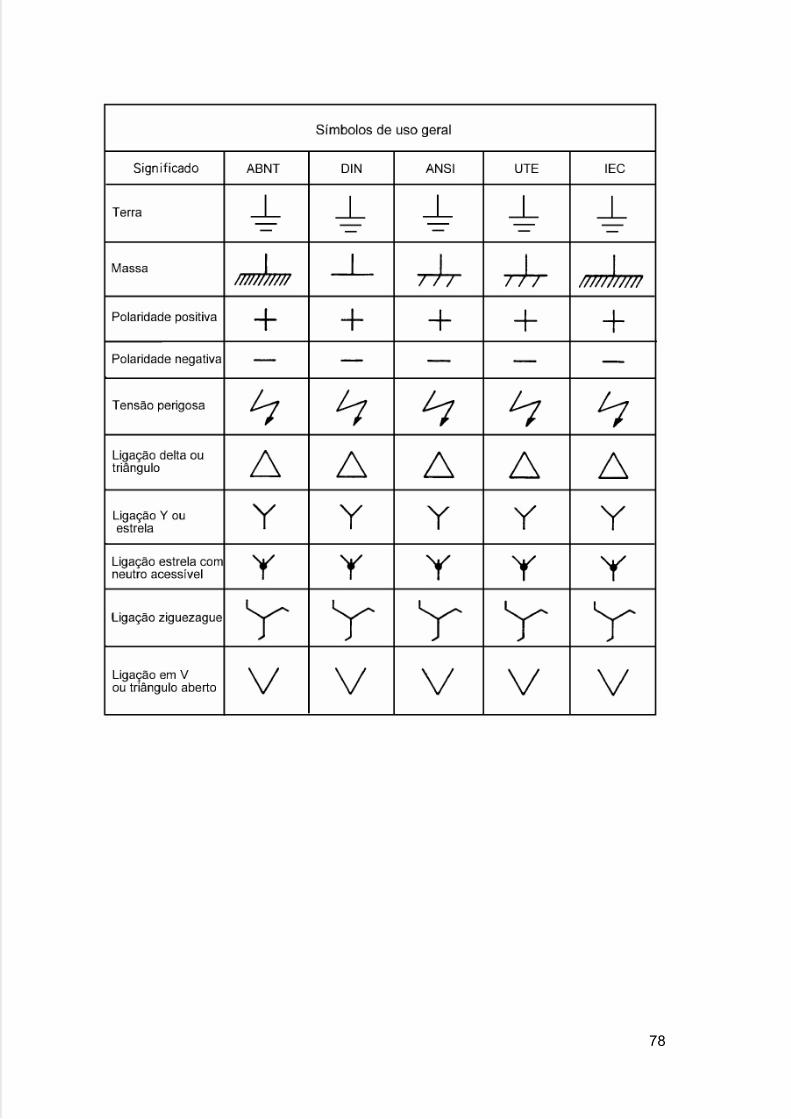
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 78/211
78
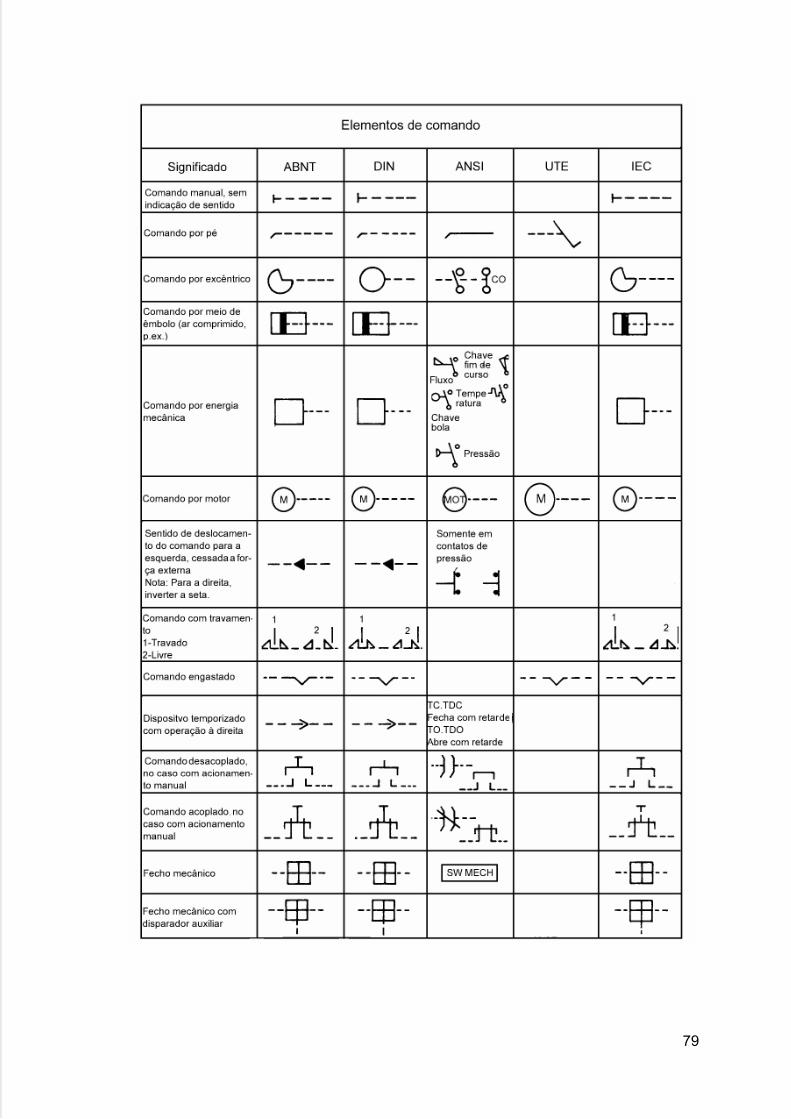
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 79/211
79
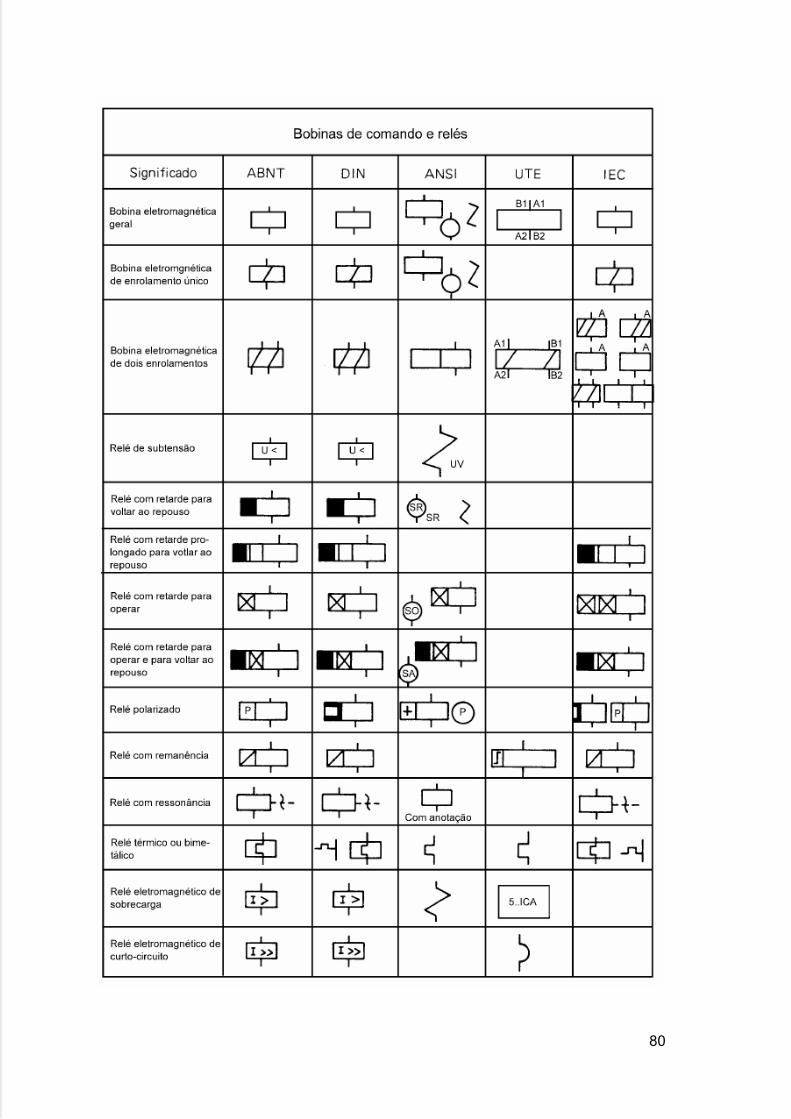
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 80/211
80
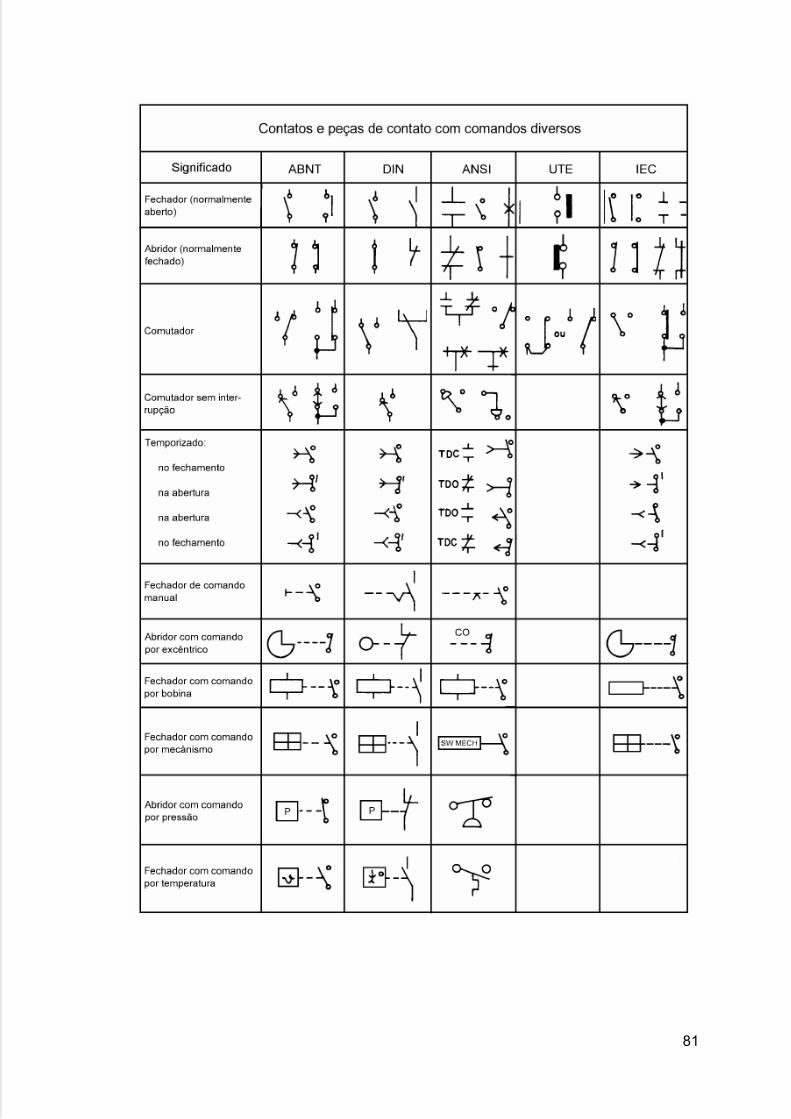
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 81/211
81
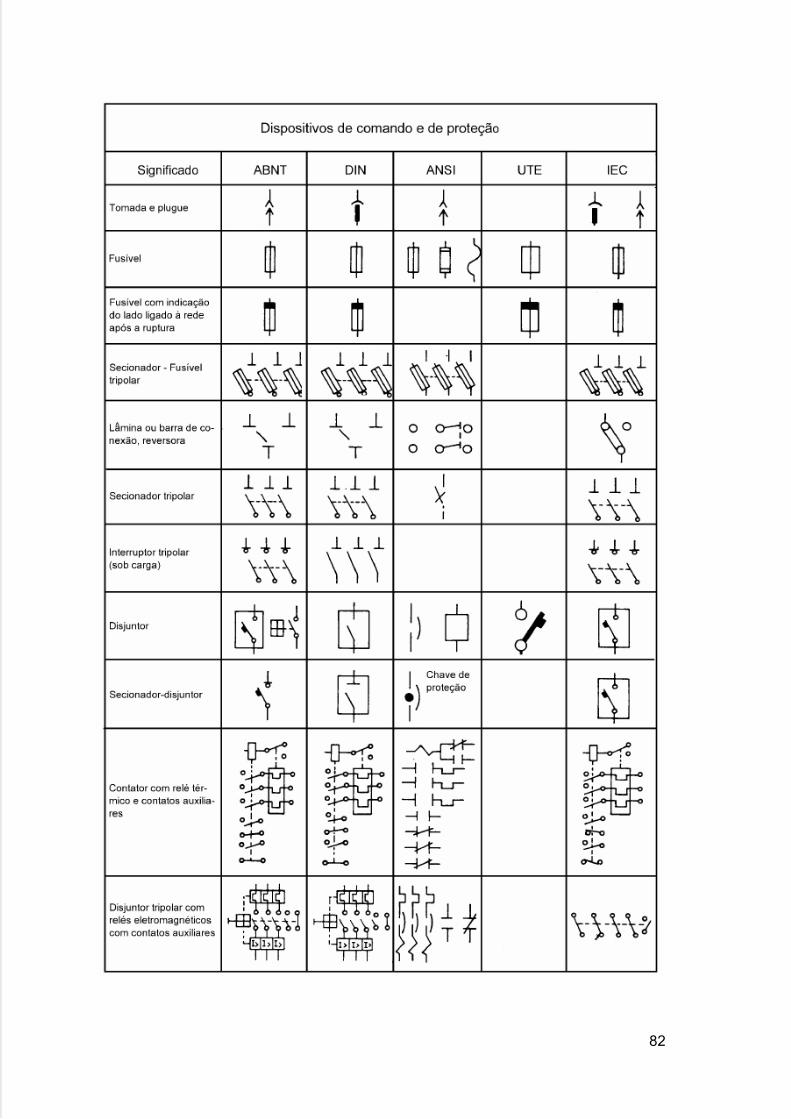
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 82/211
82
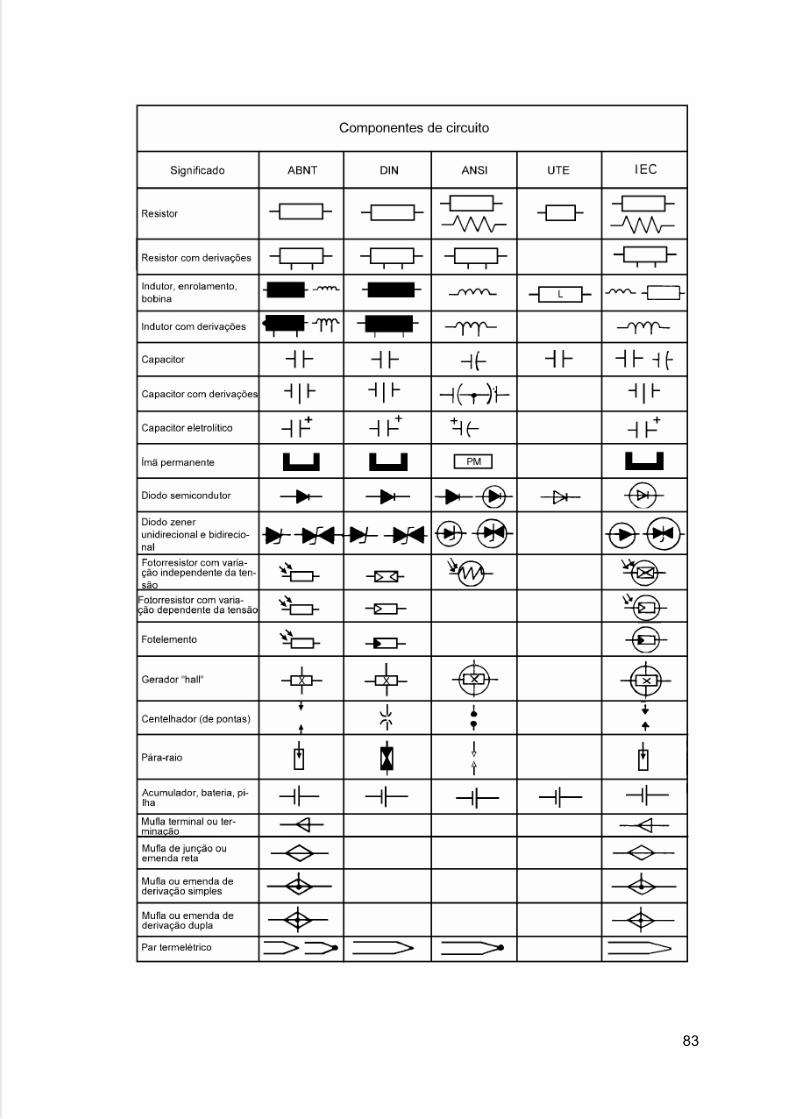
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 83/211
83
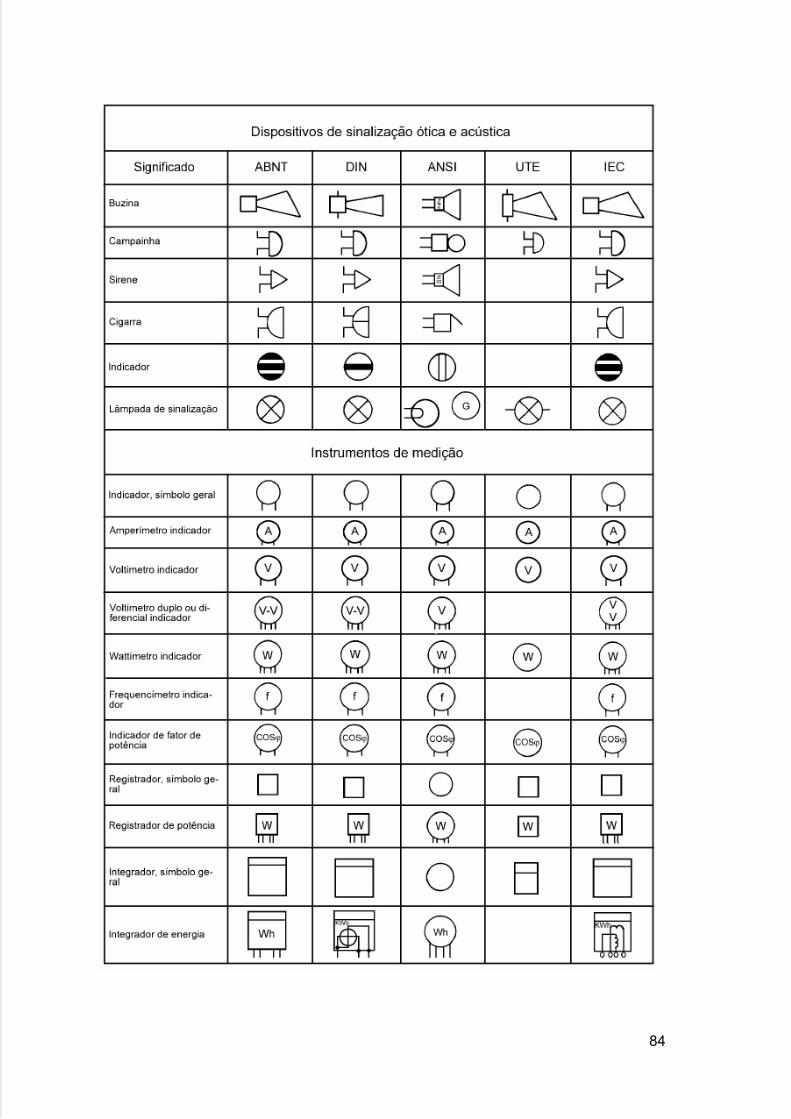
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 84/211
84
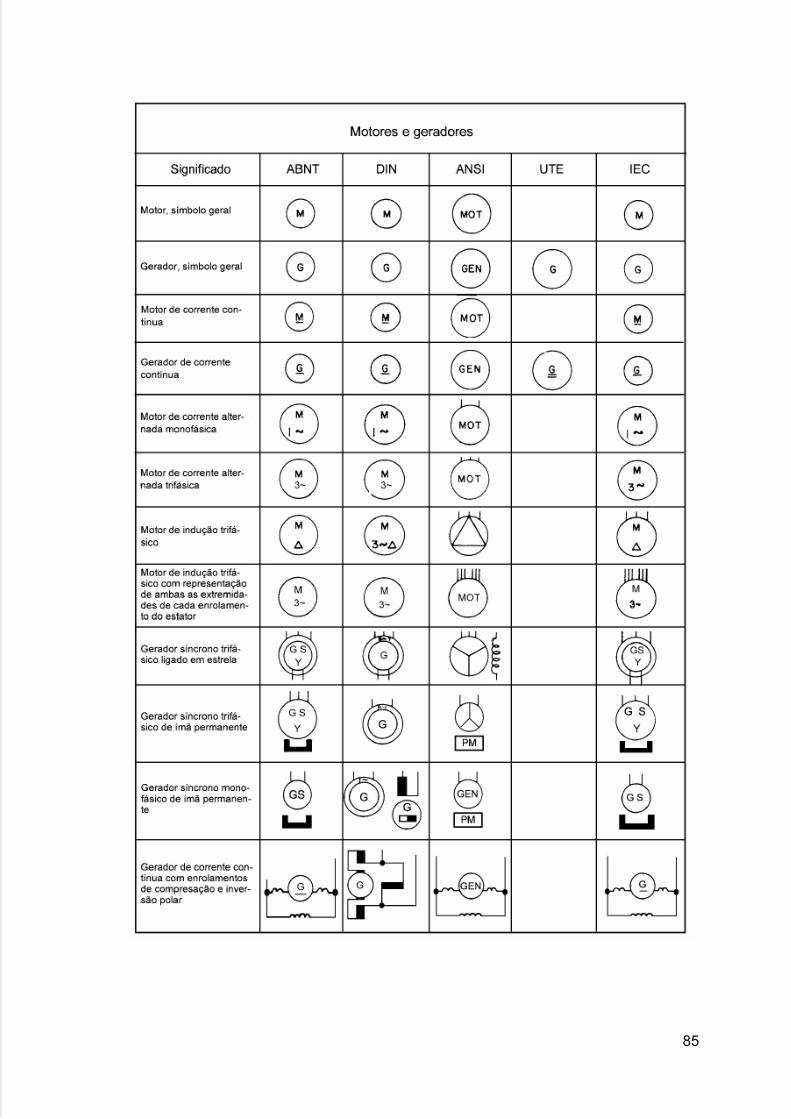
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 85/211
85
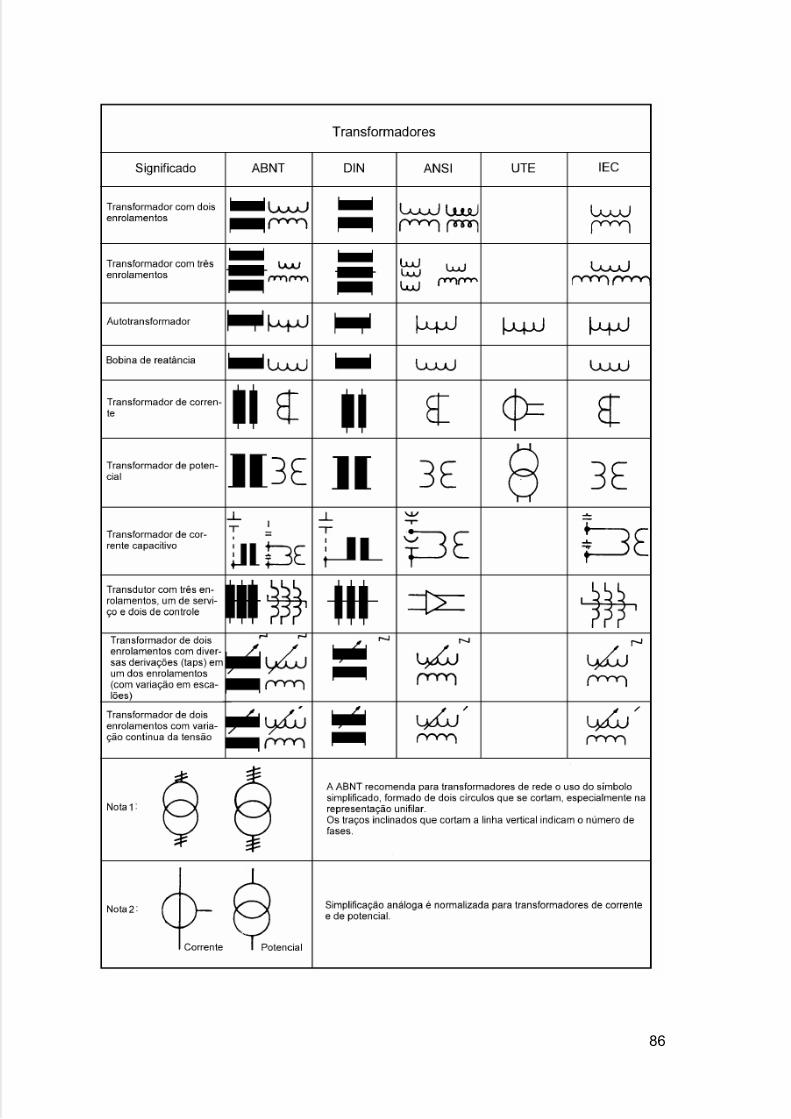
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 86/211
86
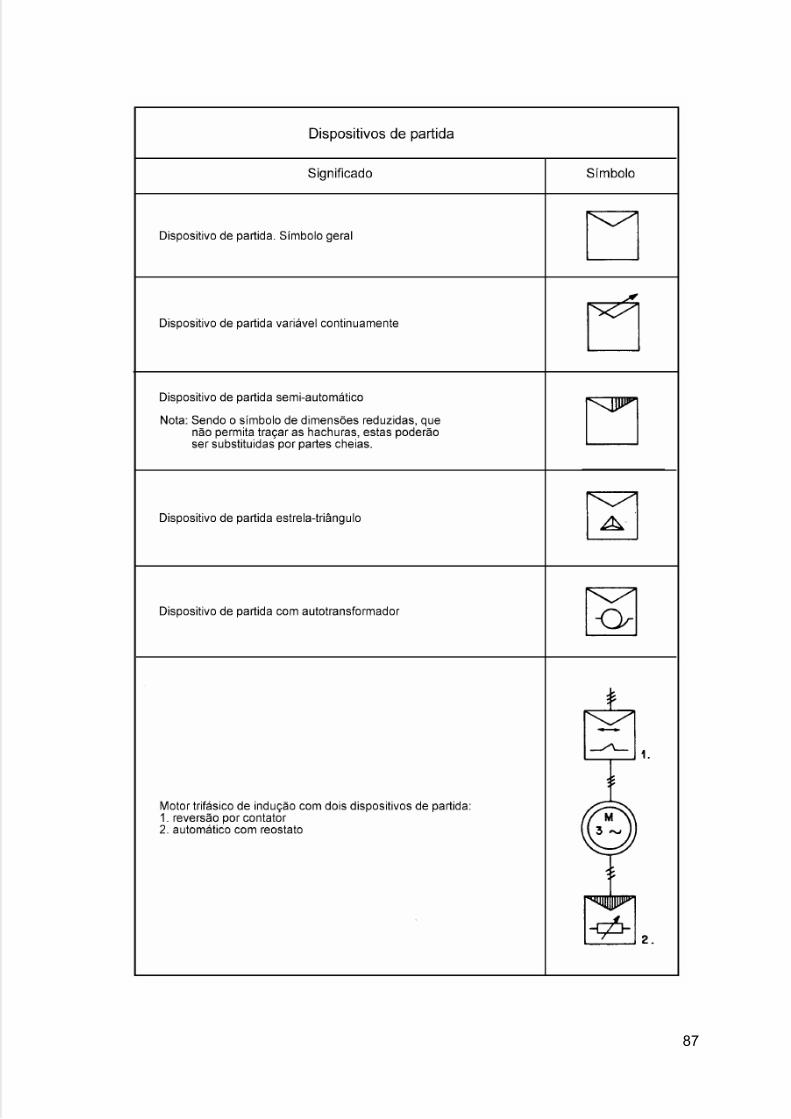
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 87/211
87
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 88/211
88
Conclusão
Nosso assunto, praticamente, termina neste ponto, que corresponde às etapas teóricas
e experimentações.
Com o estudo desta unidade, sobre simbologia, estamos encerrando sua participação
na preparação básica para o curso que você optou.
Você está pronto para aplicar os conhecimentos agora adquiridos durante o estudo do
curso a que você se dedicar.
Portanto, resta-nos somente sugerir a você que, se for preciso, recapitule os pontos
que eventualmente tenham deixado dúvidas e reforce seus conceitos, para, depois,
seguir em frente e encarar suas próximas atividades com a mesma vontade de sempre.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 89/211
89
Comandos ElétricosInformações Tecnológicas
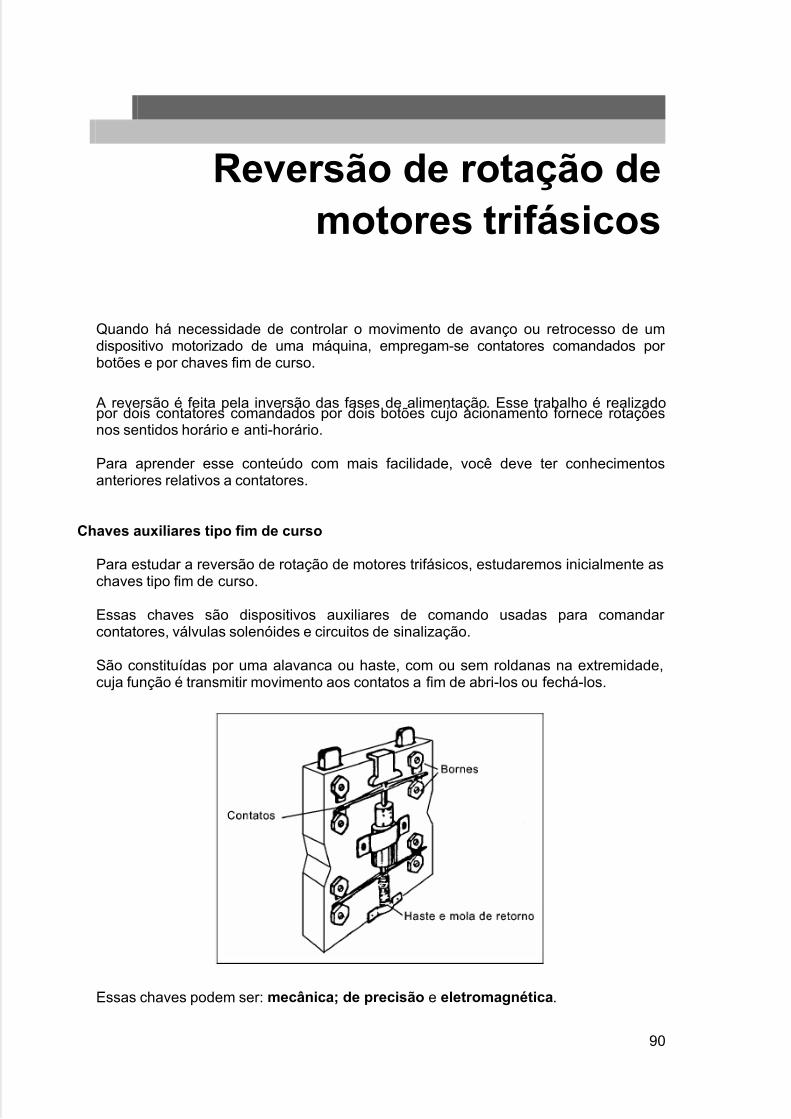
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 90/211
90
Reversão de rotação demotores trifásicos
Quando há necessidade de controlar o movimento de avanço ou retrocesso de umdispositivo motorizado de uma máquina, empregam-se contatores comandados por botões e por chaves fim de curso.
A reversão é feita pela inversão das fases de alimentação. Esse trabalho é realizadopor dois contatores comandados por dois botões cujo acionamento fornece rotaçõesnos sentidos horário e anti-horário.
Para aprender esse conteúdo com mais facilidade, você deve ter conhecimentosanteriores relativos a contatores.
Chaves auxiliares tipo fim de curso
Para estudar a reversão de rotação de motores trifásicos, estudaremos inicialmente aschaves tipo fim de curso.
Essas chaves são dispositivos auxiliares de comando usadas para comandar contatores, válvulas solenóides e circuitos de sinalização.
São constituídas por uma alavanca ou haste, com ou sem roldanas na extremidade,cuja função é transmitir movimento aos contatos a fim de abri-los ou fechá-los.
Essas chaves podem ser: mecânica; de precisão e eletromagnética.
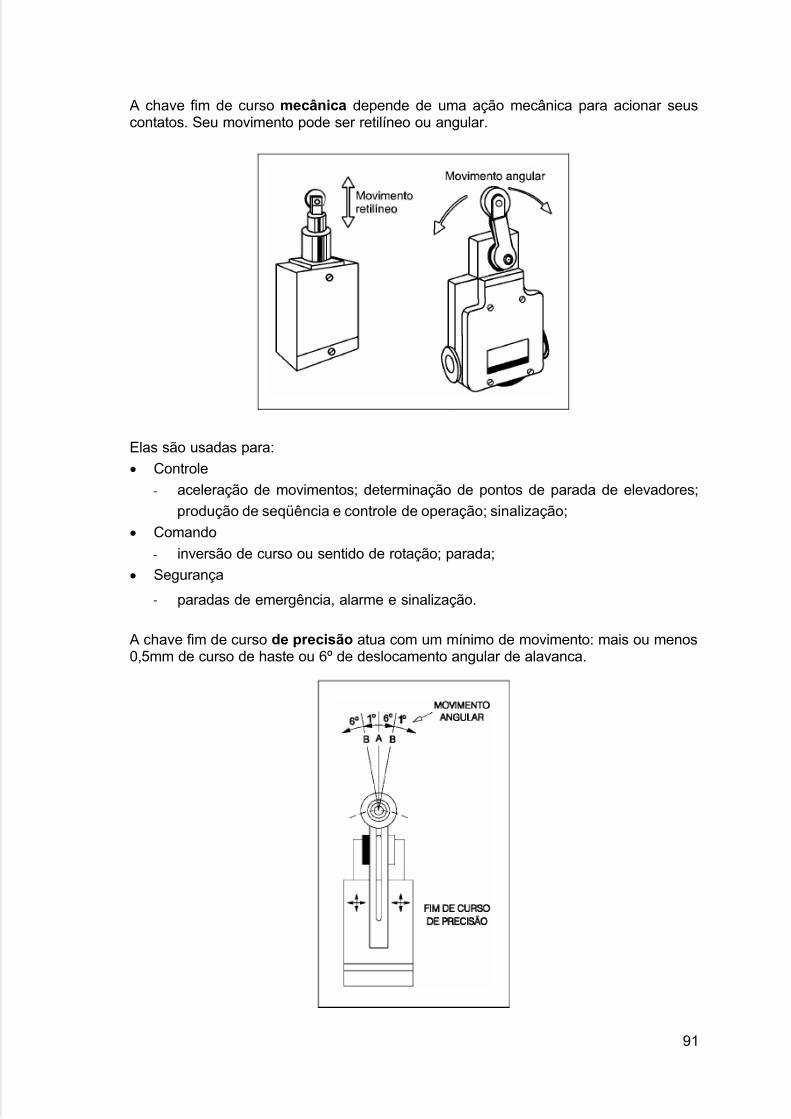
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 91/211
91
A chave fim de curso mecânica depende de uma ação mecânica para acionar seuscontatos. Seu movimento pode ser retilíneo ou angular.
Elas são usadas para:
• Controle
- aceleração de movimentos; determinação de pontos de parada de elevadores;
produção de seqüência e controle de operação; sinalização;
• Comando
- inversão de curso ou sentido de rotação; parada;
• Segurança
- paradas de emergência, alarme e sinalização.
A chave fim de curso de precisão atua com um mínimo de movimento: mais ou menos0,5mm de curso de haste ou 6º de deslocamento angular de alavanca.
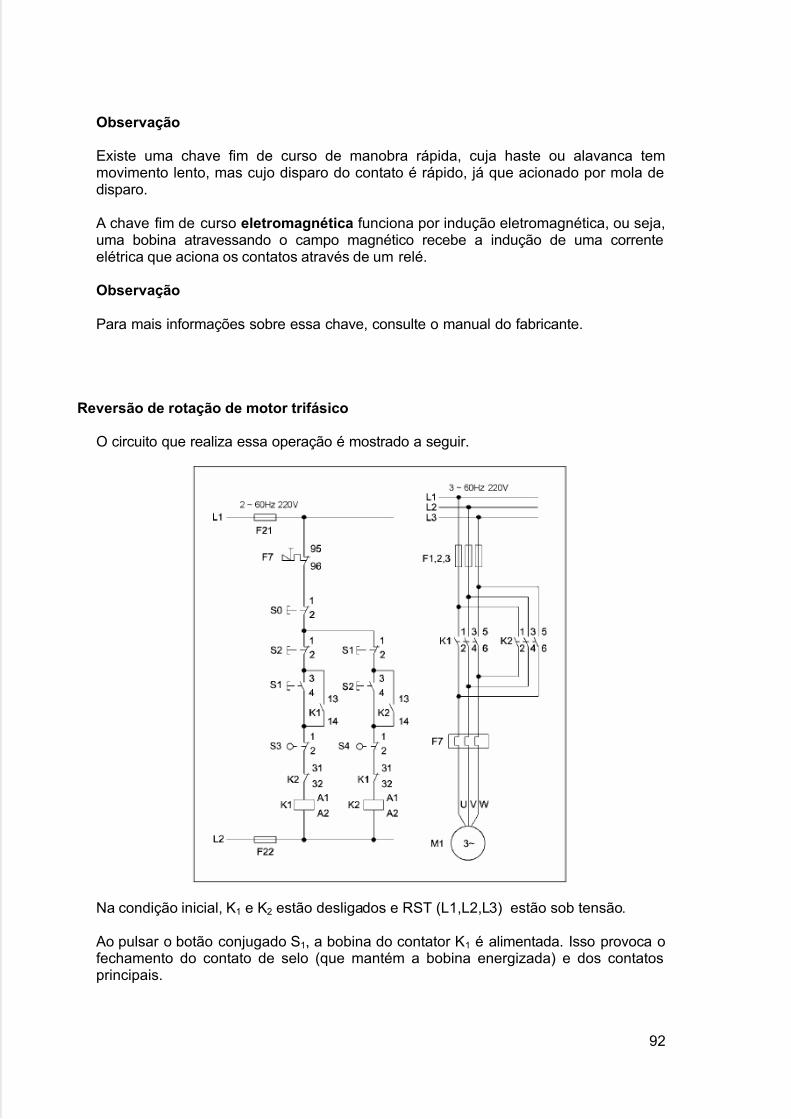
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 92/211
92
Observação
Existe uma chave fim de curso de manobra rápida, cuja haste ou alavanca temmovimento lento, mas cujo disparo do contato é rápido, já que acionado por mola dedisparo.
A chave fim de curso eletromagnética funciona por indução eletromagnética, ou seja,uma bobina atravessando o campo magnético recebe a indução de uma correnteelétrica que aciona os contatos através de um relé.
Observação
Para mais informações sobre essa chave, consulte o manual do fabricante.
Reversão de rotação de motor trifásico
O circuito que realiza essa operação é mostrado a seguir.
Na condição inicial, K1 e K2 estão desligados e RST (L1,L2,L3) estão sob tensão.
Ao pulsar o botão conjugado S1, a bobina do contator K1 é alimentada. Isso provoca ofechamento do contato de selo (que mantém a bobina energizada) e dos contatosprincipais.
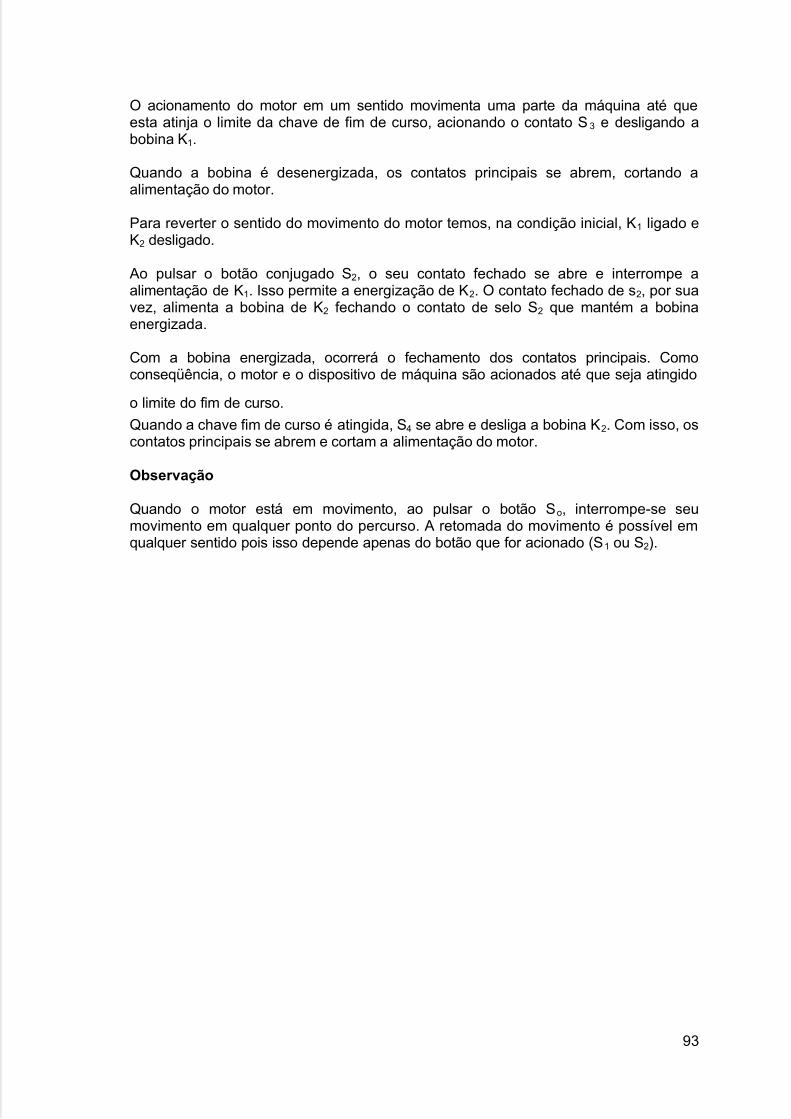
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 93/211
93
O acionamento do motor em um sentido movimenta uma parte da máquina até queesta atinja o limite da chave de fim de curso, acionando o contato S 3 e desligando abobina K1.
Quando a bobina é desenergizada, os contatos principais se abrem, cortando aalimentação do motor.
Para reverter o sentido do movimento do motor temos, na condição inicial, K1 ligado eK2 desligado.
Ao pulsar o botão conjugado S2, o seu contato fechado se abre e interrompe aalimentação de K1. Isso permite a energização de K2. O contato fechado de s2, por suavez, alimenta a bobina de K2 fechando o contato de selo S2 que mantém a bobinaenergizada.
Com a bobina energizada, ocorrerá o fechamento dos contatos principais. Comoconseqüência, o motor e o dispositivo de máquina são acionados até que seja atingido
o limite do fim de curso.
Quando a chave fim de curso é atingida, S4 se abre e desliga a bobina K2. Com isso, oscontatos principais se abrem e cortam a alimentação do motor.
Observação
Quando o motor está em movimento, ao pulsar o botão So, interrompe-se seumovimento em qualquer ponto do percurso. A retomada do movimento é possível emqualquer sentido pois isso depende apenas do botão que for acionado (S1 ou S2).
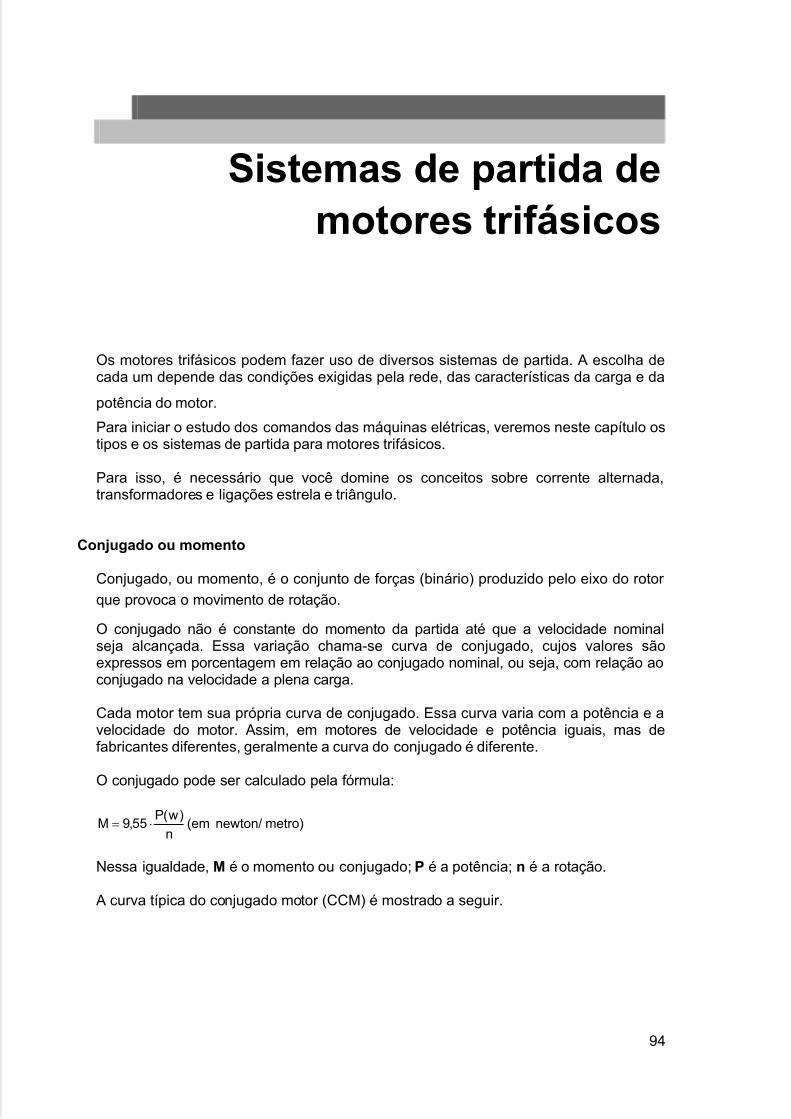
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 94/211
94
Sistemas de partida demotores trifásicos
Os motores trifásicos podem fazer uso de diversos sistemas de partida. A escolha decada um depende das condições exigidas pela rede, das características da carga e da
potência do motor.
Para iniciar o estudo dos comandos das máquinas elétricas, veremos neste capítulo ostipos e os sistemas de partida para motores trifásicos.
Para isso, é necessário que você domine os conceitos sobre corrente alternada,transformadores e ligações estrela e triângulo.
Conjugado ou momento
Conjugado, ou momento, é o conjunto de forças (binário) produzido pelo eixo do rotor
que provoca o movimento de rotação.
O conjugado não é constante do momento da partida até que a velocidade nominalseja alcançada. Essa variação chama-se curva de conjugado, cujos valores sãoexpressos em porcentagem em relação ao conjugado nominal, ou seja, com relação aoconjugado na velocidade a plena carga.
Cada motor tem sua própria curva de conjugado. Essa curva varia com a potência e avelocidade do motor. Assim, em motores de velocidade e potência iguais, mas defabricantes diferentes, geralmente a curva do conjugado é diferente.
O conjugado pode ser calculado pela fórmula:
metro)newton/(emn
)w(P55,9M ⋅=
Nessa igualdade, M é o momento ou conjugado; P é a potência; n é a rotação.
A curva típica do conjugado motor (CCM) é mostrado a seguir.
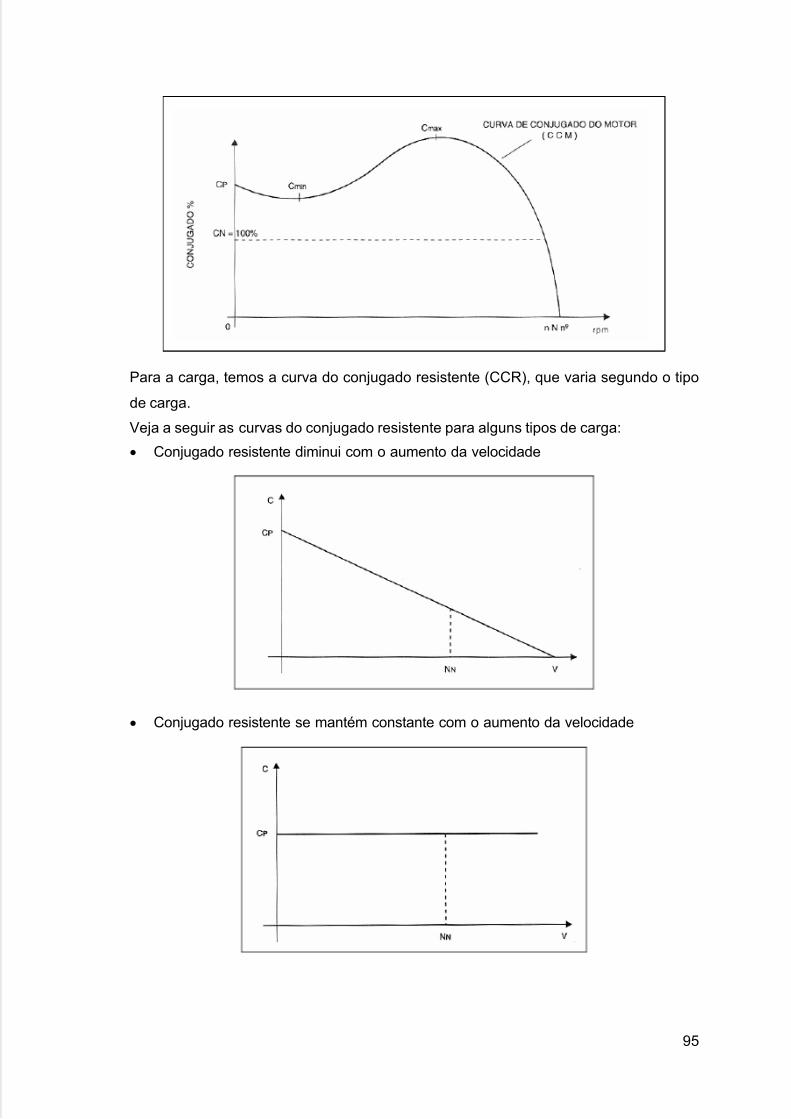
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 95/211
95
Para a carga, temos a curva do conjugado resistente (CCR), que varia segundo o tipo
de carga.
Veja a seguir as curvas do conjugado resistente para alguns tipos de carga:
• Conjugado resistente diminui com o aumento da velocidade
• Conjugado resistente se mantém constante com o aumento da velocidade
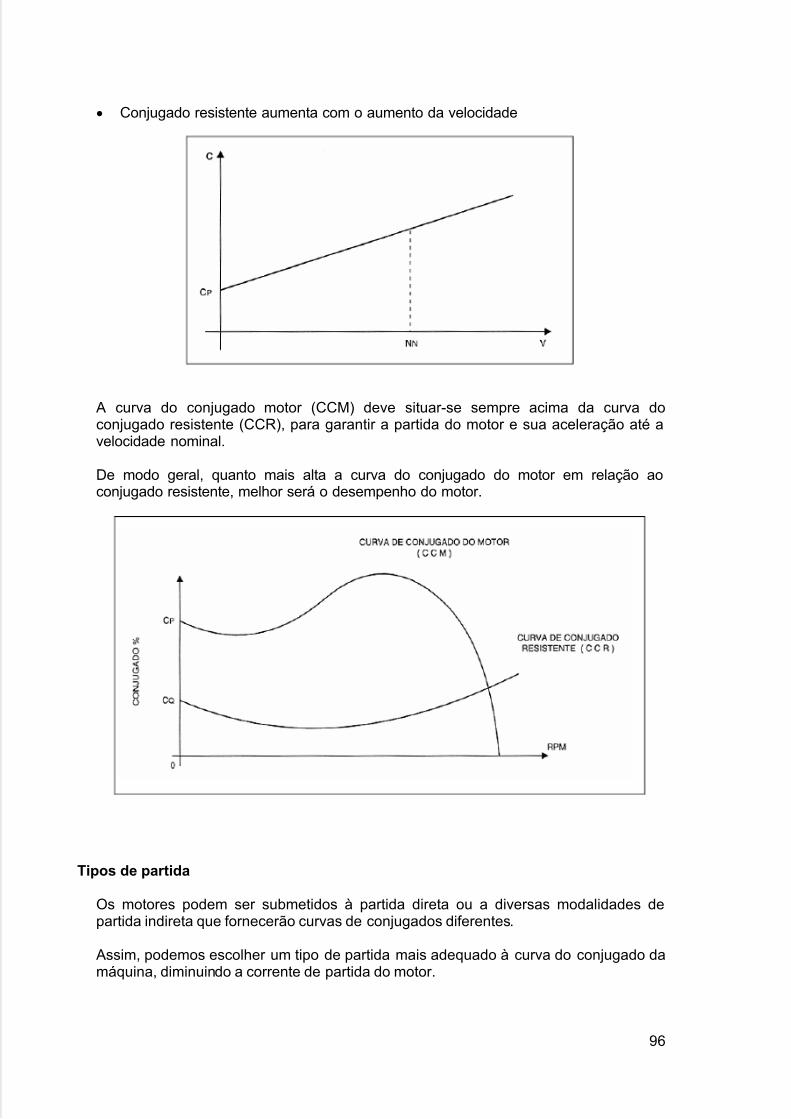
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 96/211
96
• Conjugado resistente aumenta com o aumento da velocidade
A curva do conjugado motor (CCM) deve situar-se sempre acima da curva doconjugado resistente (CCR), para garantir a partida do motor e sua aceleração até avelocidade nominal.
De modo geral, quanto mais alta a curva do conjugado do motor em relação aoconjugado resistente, melhor será o desempenho do motor.
Tipos de partida
Os motores podem ser submetidos à partida direta ou a diversas modalidades departida indireta que fornecerão curvas de conjugados diferentes.
Assim, podemos escolher um tipo de partida mais adequado à curva do conjugado damáquina, diminuindo a corrente de partida do motor.
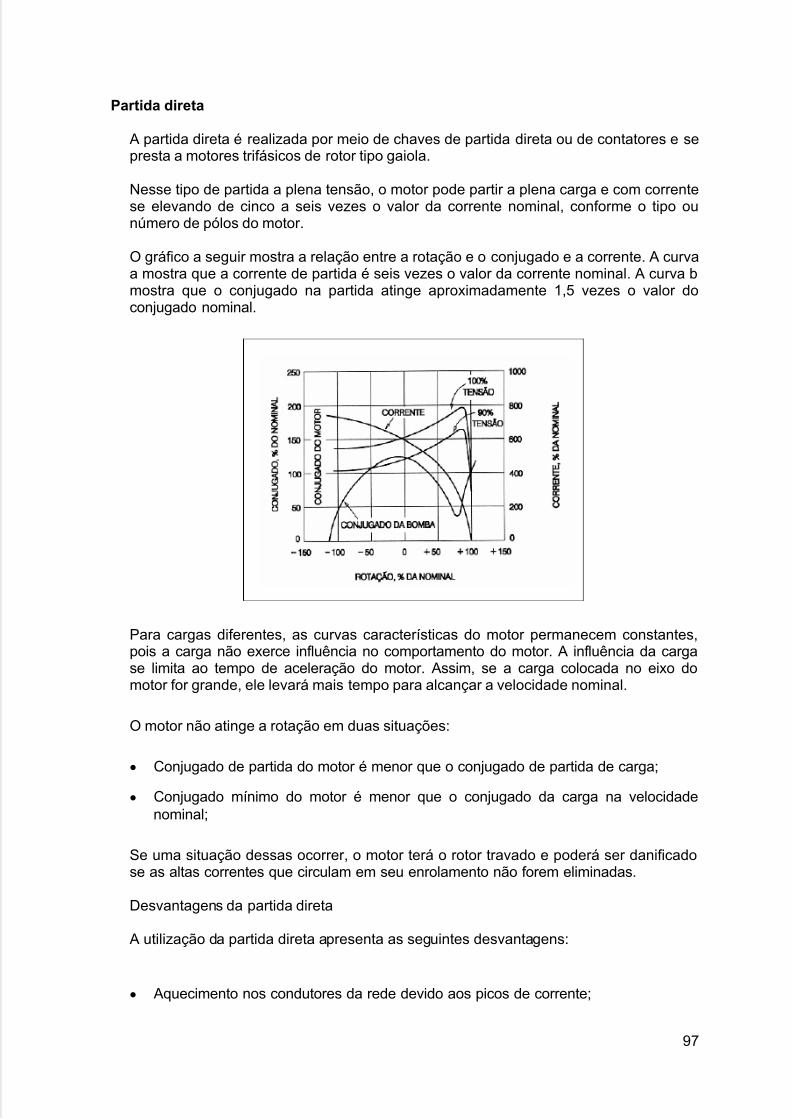
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 97/211
97
Partida direta
A partida direta é realizada por meio de chaves de partida direta ou de contatores e sepresta a motores trifásicos de rotor tipo gaiola.
Nesse tipo de partida a plena tensão, o motor pode partir a plena carga e com correntese elevando de cinco a seis vezes o valor da corrente nominal, conforme o tipo ounúmero de pólos do motor.
O gráfico a seguir mostra a relação entre a rotação e o conjugado e a corrente. A curvaa mostra que a corrente de partida é seis vezes o valor da corrente nominal. A curva bmostra que o conjugado na partida atinge aproximadamente 1,5 vezes o valor doconjugado nominal.
Para cargas diferentes, as curvas características do motor permanecem constantes,pois a carga não exerce influência no comportamento do motor. A influência da cargase limita ao tempo de aceleração do motor. Assim, se a carga colocada no eixo domotor for grande, ele levará mais tempo para alcançar a velocidade nominal.
O motor não atinge a rotação em duas situações:
• Conjugado de partida do motor é menor que o conjugado de partida de carga;
• Conjugado mínimo do motor é menor que o conjugado da carga na velocidadenominal;
Se uma situação dessas ocorrer, o motor terá o rotor travado e poderá ser danificadose as altas correntes que circulam em seu enrolamento não forem eliminadas.
Desvantagens da partida direta
A utilização da partida direta apresenta as seguintes desvantagens:
• Aquecimento nos condutores da rede devido aos picos de corrente;
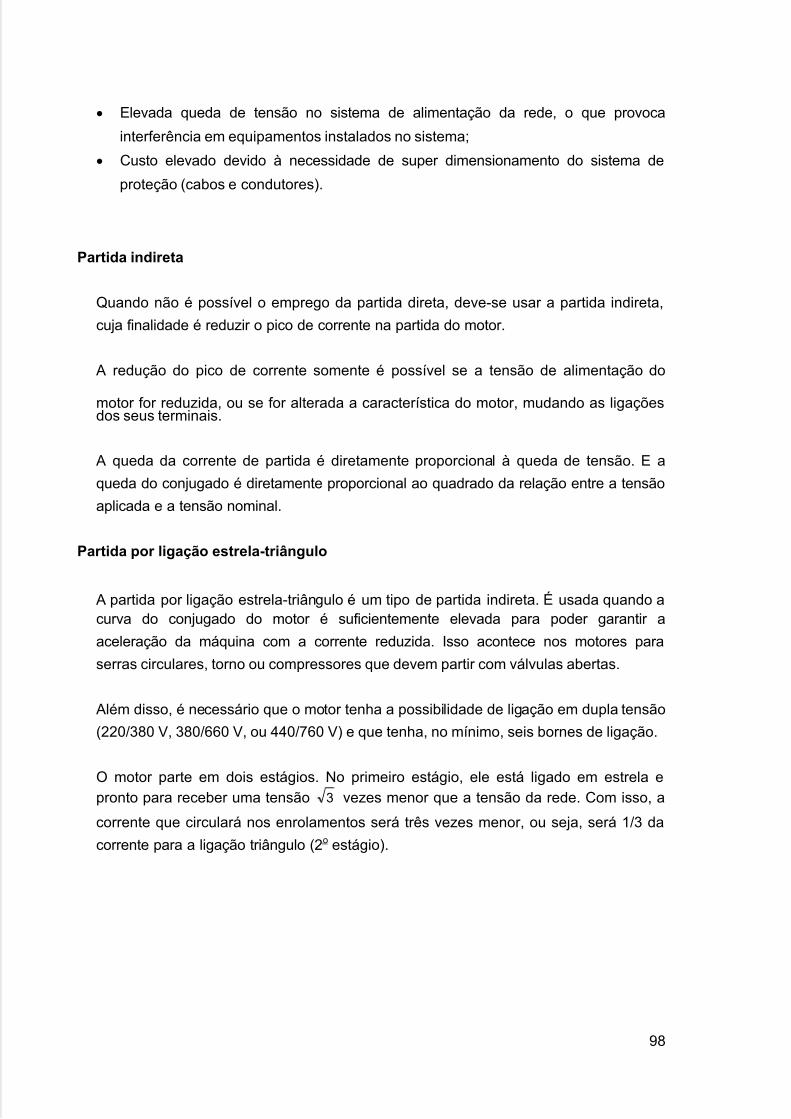
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 98/211
98
• Elevada queda de tensão no sistema de alimentação da rede, o que provoca
interferência em equipamentos instalados no sistema;
• Custo elevado devido à necessidade de super dimensionamento do sistema de
proteção (cabos e condutores).
Partida indireta
Quando não é possível o emprego da partida direta, deve-se usar a partida indireta,
cuja finalidade é reduzir o pico de corrente na partida do motor.
A redução do pico de corrente somente é possível se a tensão de alimentação do
motor for reduzida, ou se for alterada a característica do motor, mudando as ligaçõesdos seus terminais.
A queda da corrente de partida é diretamente proporcional à queda de tensão. E a
queda do conjugado é diretamente proporcional ao quadrado da relação entre a tensão
aplicada e a tensão nominal.
Partida por ligação estrela-triângulo
A partida por ligação estrela-triângulo é um tipo de partida indireta. É usada quando acurva do conjugado do motor é suficientemente elevada para poder garantir a
aceleração da máquina com a corrente reduzida. Isso acontece nos motores para
serras circulares, torno ou compressores que devem partir com válvulas abertas.
Além disso, é necessário que o motor tenha a possibilidade de ligação em dupla tensão
(220/380 V, 380/660 V, ou 440/760 V) e que tenha, no mínimo, seis bornes de ligação.
O motor parte em dois estágios. No primeiro estágio, ele está ligado em estrela e
pronto para receber uma tensão 3 vezes menor que a tensão da rede. Com isso, a
corrente que circulará nos enrolamentos será três vezes menor, ou seja, será 1/3 da
corrente para a ligação triângulo (2o estágio).
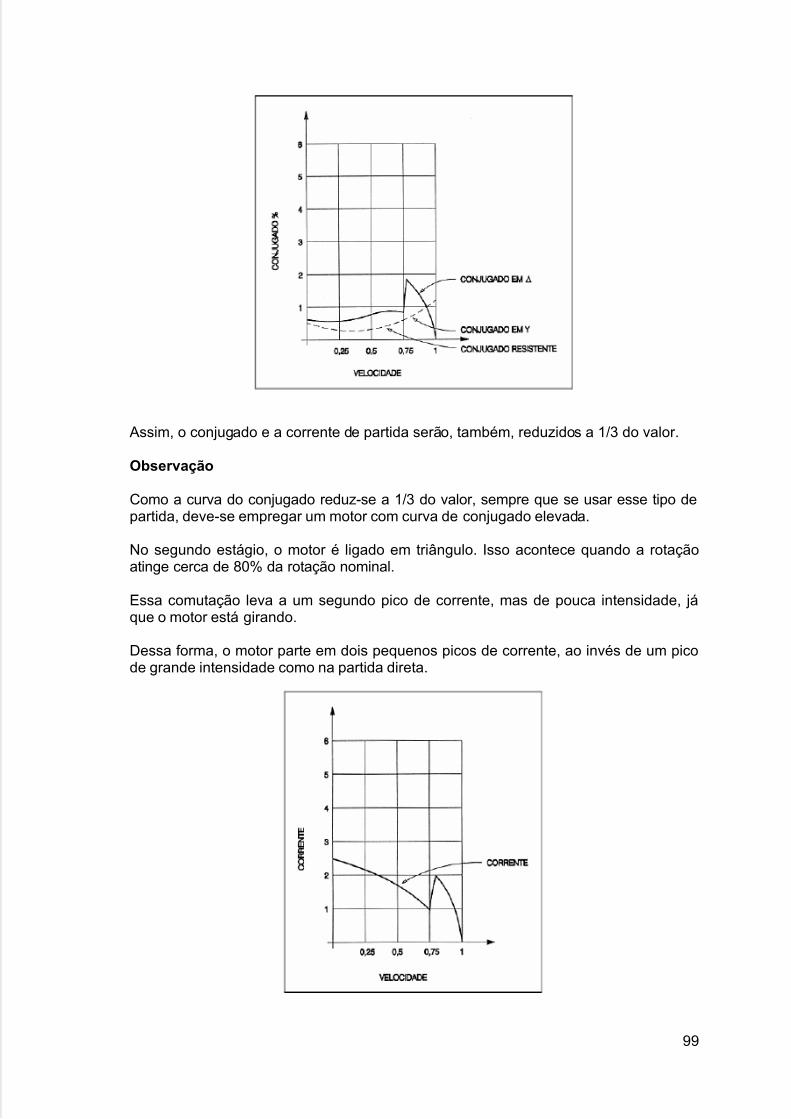
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 99/211
99
Assim, o conjugado e a corrente de partida serão, também, reduzidos a 1/3 do valor.
Observação
Como a curva do conjugado reduz-se a 1/3 do valor, sempre que se usar esse tipo departida, deve-se empregar um motor com curva de conjugado elevada.
No segundo estágio, o motor é ligado em triângulo. Isso acontece quando a rotaçãoatinge cerca de 80% da rotação nominal.
Essa comutação leva a um segundo pico de corrente, mas de pouca intensidade, jáque o motor está girando.
Dessa forma, o motor parte em dois pequenos picos de corrente, ao invés de um picode grande intensidade como na partida direta.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 100/211
100
Vantagens da partida estrela-triângulo
As vantagens da partida estrela-triângulo são:
• Custo reduzido;
• Ilimitado número de manobras;
• Componentes de tamanho compacto;
• Redução da corrente de partida para aproximadamente 1/3 da corrente de partida
da ligação triângulo.
Desvantagens
As desvantagens da partida estrela-triângulo são:
• Necessidade da existência de seis bornes ou terminais acessíveis para a ligação da
chave;
• Necessidade de coincidência da tensão da rede com a tensão em triângulo domotor;
• Redução do momento de partida para 1/3 como conseqüência da redução da
corrente de partida para 1/3;
• Pico de corrente na comutação quase correspondente a uma partida direta caso o
motor não atinja pelo menos 85% de sua velocidade nominal. Como conseqüência,
aparecem problemas nos contatos dos contatores bem como na rede elétrica.
Em geral, esse tipo de partida só pode ser empregado em partidas de máquinas emvazio, ou seja, sem carga. Somente depois de o motor atingir 95% da rotação, a cargapoderá ser ligada.
Partida por autotransformador
Esse sistema de partida é usado para dar partida em motores sob carga, como por exemplo, motores para calandras, bombas, britadores.
Ele reduz a corrente de partida e, por isso, evita a sobrecarga na rede de alimentação,embora deixe o motor com um conjugado suficiente para a partida e a aceleração.
A partida efetua-se em dois estágios. No primeiro, a alimentação do motor é feita sobtensão reduzida por meio do autotransformador.
Na partida, o pico de corrente e o conjugado são reduzidos proporcionalmente aoquadrado da relação de transformação. Conforme o "tap" do transformador, estarelação de transformação pode ser 65 ou 85%.
Desse modo, o conjugado do motor atinge, ainda no primeiro estágio, maior velocidadedo que a atingida no sistema de ligação estrela-triângulo.
No segundo estágio, decorrido o tempo inicial da partida, o ponto neutro doautotransformador é aberto, o motor é ligado sob plena tensão, retomando suas
características nominais.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 101/211
101
A tensão no motor é reduzida através dos "taps" de 65% ou de 80% doautotransformador.
No "tap" de 65%, a corrente de linha é aproximadamente igual à do sistema de partidaestrela-triângulo. Entretanto, na passagem da tensão reduzida para a plena tensão, omotor não é desligado.
O segundo pico de corrente é bastante reduzido porque o autotransformador, por umcurto período de tempo, se torna uma reatância ligada em série com o motor.
Ao utilizar um autotransformador para um motor ligado a uma rede 220 V e queabsorva 100 A, observamos que:
• Se o autotransformador for ligado no "tap" de 65%, a tensão aplicada nos bornes
do motor será de: 0,65 ⋅ 220 = 143 V;
• Com a tensão reduzida em 65%, a corrente nos bornes do motor também será
reduzida de 65%, e será de: 0,65 ⋅ 100 A = 65 A;
• Como o produto da tensão pela corrente na entrada do autotransformador é igual
ao produto da tensão pela corrente na saída, a corrente na rede será de 42,25 A,
conforme é demonstrado a seguir:
220 V ⋅ IE = 143 V ⋅ 65 A
A42,25V220
A65V143IE =
⋅=
• Conjugado no "tap" de 65% será então de 42%, ou seja:M = V2M = 0,65 ⋅ 0,65 = 0,42
Calculando da mesma maneira, encontraremos que o conjugado no "tap" de 80% seráde aproximadamente 64% do conjugado nominal, ou seja: M = 0,80 ⋅ 0,80 = 0,64
Vantagens da partida com autotransformador
As vantagens desse tipo de partida são:
• Corrente de linha semelhante à da partida estrela-triângulo no "tap" de 65%;
• Possibilidade de variação do "tap" de 65% para 80% ou até 90% da tensão da rede.
Desvantagens
As desvantagens desse sistema de partida são as seguintes:
• Limitação da freqüência de manobra;
• Custo mais elevado quando comparado ao da partida estrela-triângulo;
• Necessidade de quadros maiores devido ao tamanho do autotransformador.
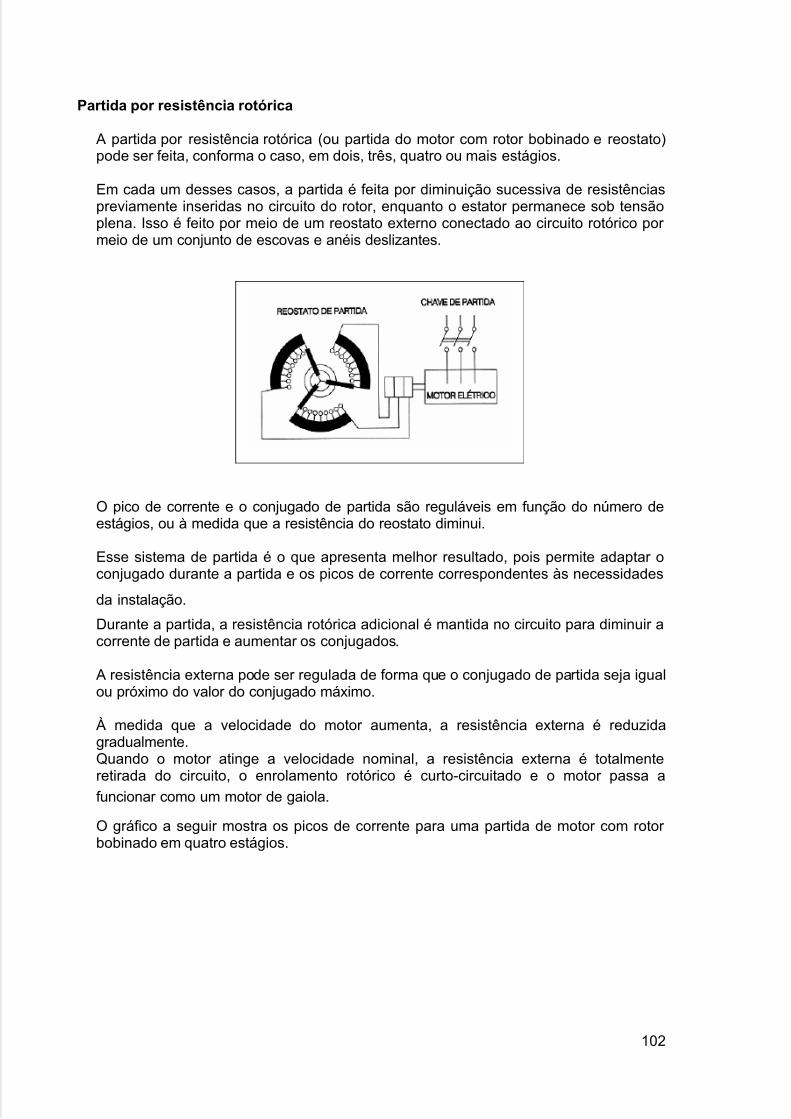
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 102/211
102
Partida por resistência rotórica
A partida por resistência rotórica (ou partida do motor com rotor bobinado e reostato)pode ser feita, conforma o caso, em dois, três, quatro ou mais estágios.
Em cada um desses casos, a partida é feita por diminuição sucessiva de resistênciaspreviamente inseridas no circuito do rotor, enquanto o estator permanece sob tensãoplena. Isso é feito por meio de um reostato externo conectado ao circuito rotórico por meio de um conjunto de escovas e anéis deslizantes.
O pico de corrente e o conjugado de partida são reguláveis em função do número deestágios, ou à medida que a resistência do reostato diminui.
Esse sistema de partida é o que apresenta melhor resultado, pois permite adaptar oconjugado durante a partida e os picos de corrente correspondentes às necessidades
da instalação.
Durante a partida, a resistência rotórica adicional é mantida no circuito para diminuir acorrente de partida e aumentar os conjugados.
A resistência externa pode ser regulada de forma que o conjugado de partida seja igualou próximo do valor do conjugado máximo.
À medida que a velocidade do motor aumenta, a resistência externa é reduzidagradualmente.Quando o motor atinge a velocidade nominal, a resistência externa é totalmenteretirada do circuito, o enrolamento rotórico é curto-circuitado e o motor passa a
funcionar como um motor de gaiola.
O gráfico a seguir mostra os picos de corrente para uma partida de motor com rotor bobinado em quatro estágios.
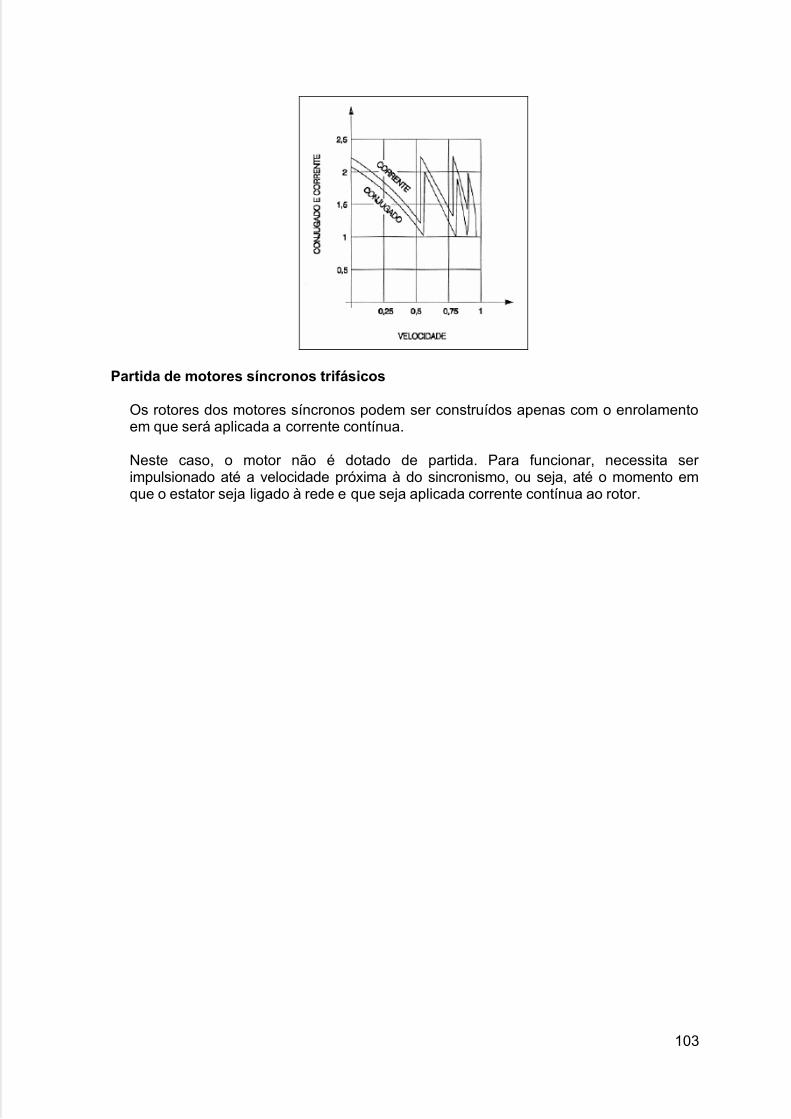
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 103/211
103
Partida de motores síncronos trifásicos
Os rotores dos motores síncronos podem ser construídos apenas com o enrolamentoem que será aplicada a corrente contínua.
Neste caso, o motor não é dotado de partida. Para funcionar, necessita ser impulsionado até a velocidade próxima à do sincronismo, ou seja, até o momento emque o estator seja ligado à rede e que seja aplicada corrente contínua ao rotor.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 104/211
104
Partida de motor trifásicoestrela-triângulo
Nesta unidade, estudaremos o sistema de partida para motor trifásico com comutaçãoautomática estrela-triângulo com contatores e com relé de proteção conjugado a umtransformador de corrente.
Partida de motor trifásico
Este sistema permite a comutação da ligação estrela para triângulo. Possibilita tambéma inversão do sentido de rotação do motor.
A partida é feita por meio de três contatores comandados por botões. O sistema éusado para reduzir a tensão de fase do motor durante a partida.
Observação
A tensão de fase do motor é:
Seqüência operacional
Observe a seguir os diagramas referentes ao circuito principal e ao circuito decomando.
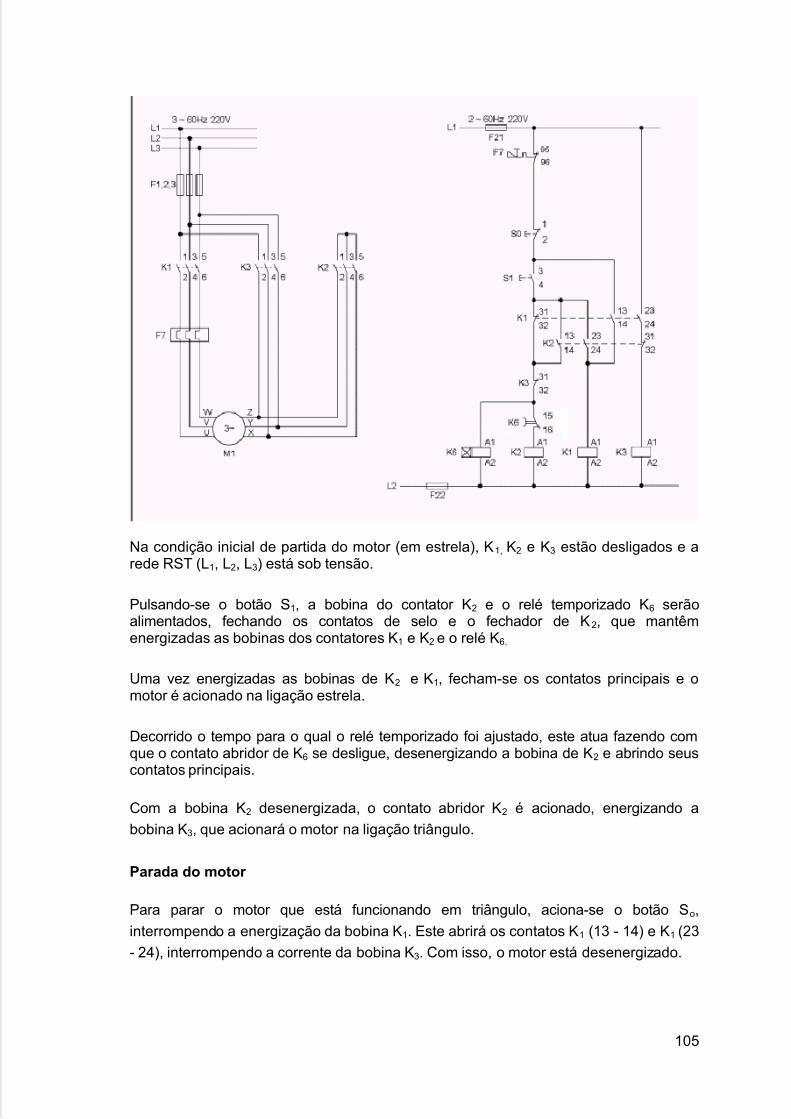
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 105/211
105
Na condição inicial de partida do motor (em estrela), K1, K2 e K3 estão desligados e arede RST (L1, L2, L3) está sob tensão.
Pulsando-se o botão S1, a bobina do contator K2 e o relé temporizado K6 serãoalimentados, fechando os contatos de selo e o fechador de K 2, que mantêmenergizadas as bobinas dos contatores K1 e K2 e o relé K6.
Uma vez energizadas as bobinas de K2 e K1, fecham-se os contatos principais e omotor é acionado na ligação estrela.
Decorrido o tempo para o qual o relé temporizado foi ajustado, este atua fazendo comque o contato abridor de K6 se desligue, desenergizando a bobina de K2 e abrindo seuscontatos principais.
Com a bobina K2 desenergizada, o contato abridor K2 é acionado, energizando a
bobina K3, que acionará o motor na ligação triângulo.
Parada do motor
Para parar o motor que está funcionando em triângulo, aciona-se o botão So,
interrompendo a energização da bobina K1. Este abrirá os contatos K1 (13 - 14) e K1 (23
- 24), interrompendo a corrente da bobina K3. Com isso, o motor está desenergizado.
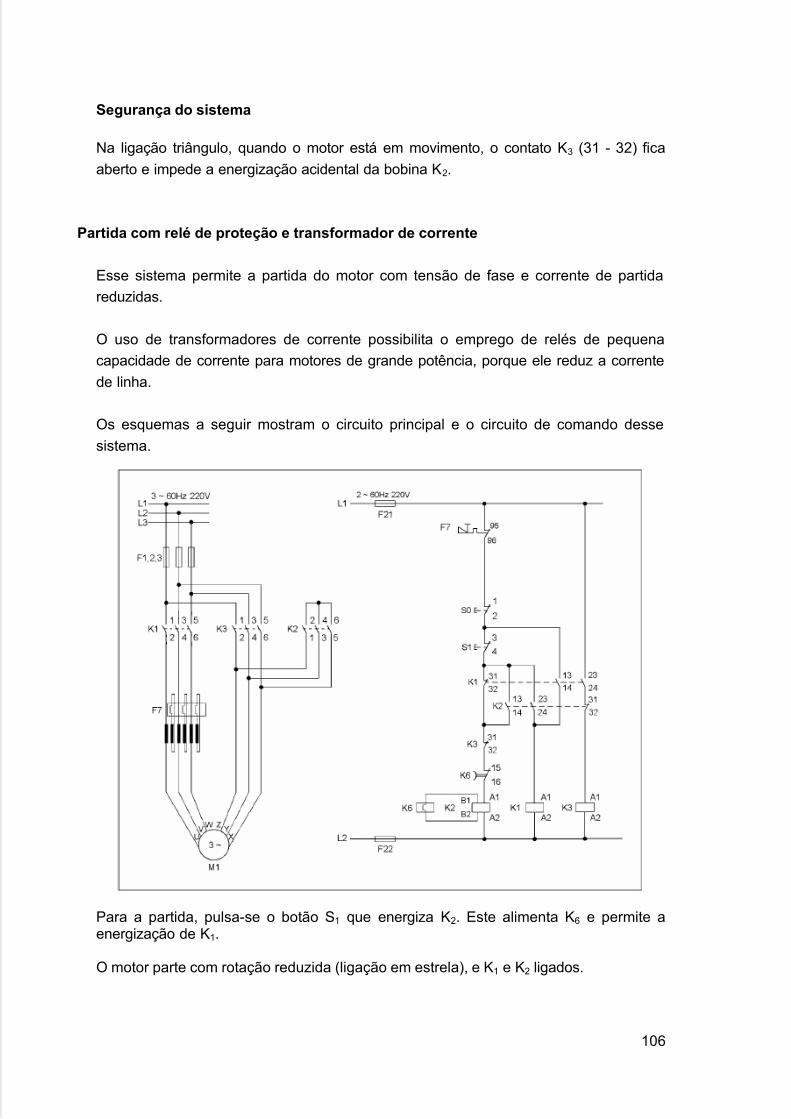
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 106/211
106
Segurança do sistema
Na ligação triângulo, quando o motor está em movimento, o contato K3 (31 - 32) fica
aberto e impede a energização acidental da bobina K2.
Partida com relé de proteção e transformador de corrente
Esse sistema permite a partida do motor com tensão de fase e corrente de partida
reduzidas.
O uso de transformadores de corrente possibilita o emprego de relés de pequena
capacidade de corrente para motores de grande potência, porque ele reduz a corrente
de linha.
Os esquemas a seguir mostram o circuito principal e o circuito de comando desse
sistema.
Para a partida, pulsa-se o botão S1 que energiza K2. Este alimenta K6 e permite aenergização de K1.
O motor parte com rotação reduzida (ligação em estrela), e K1 e K2 ligados.

5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 107/211
107
Decorrido o tempo de ajuste do relé temporizado, K6 dispara, desligando K2 eenergizando K3.
O motor está ligado a plena tensão e velocidade normal (ligação em triângulo), com K 1 e K3 ligados.
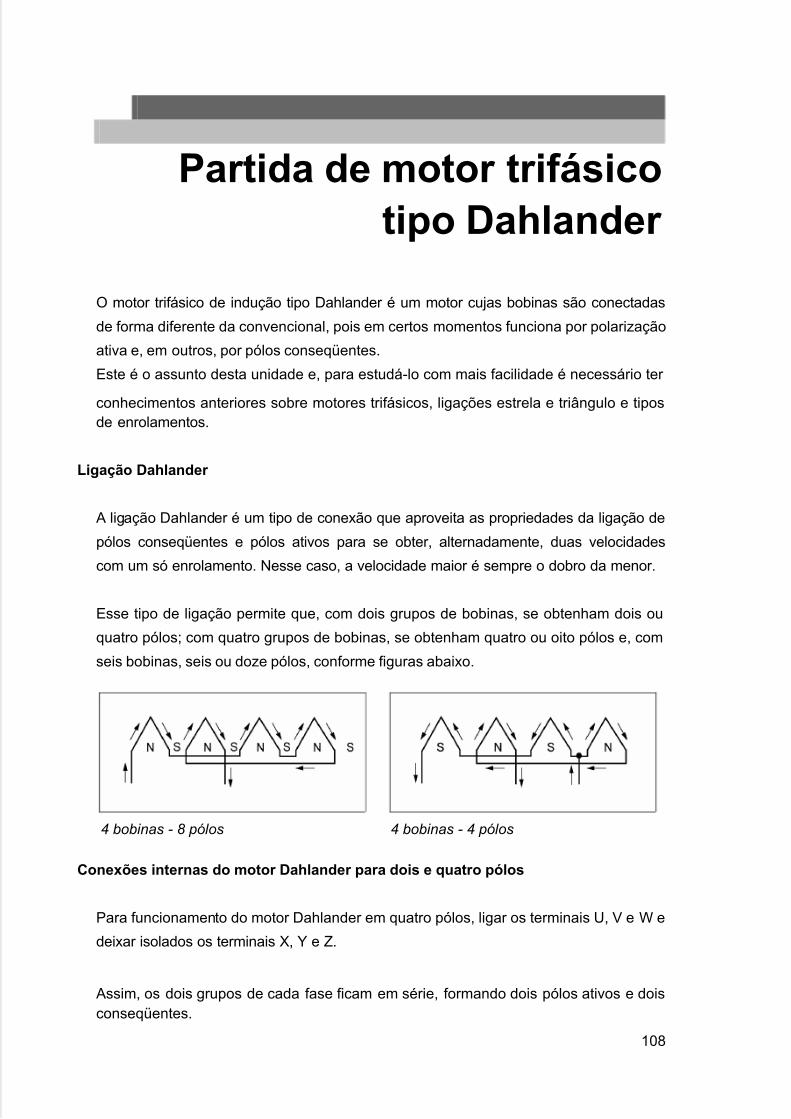
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 108/211
108
Partida de motor trifásicotipo Dahlander
O motor trifásico de indução tipo Dahlander é um motor cujas bobinas são conectadas
de forma diferente da convencional, pois em certos momentos funciona por polarização
ativa e, em outros, por pólos conseqüentes.
Este é o assunto desta unidade e, para estudá-lo com mais facilidade é necessário ter
conhecimentos anteriores sobre motores trifásicos, ligações estrela e triângulo e tiposde enrolamentos.
Ligação Dahlander
A ligação Dahlander é um tipo de conexão que aproveita as propriedades da ligação de
pólos conseqüentes e pólos ativos para se obter, alternadamente, duas velocidades
com um só enrolamento. Nesse caso, a velocidade maior é sempre o dobro da menor.
Esse tipo de ligação permite que, com dois grupos de bobinas, se obtenham dois ou
quatro pólos; com quatro grupos de bobinas, se obtenham quatro ou oito pólos e, com
seis bobinas, seis ou doze pólos, conforme figuras abaixo.
4 bobinas - 8 pólos 4 bobinas - 4 pólos
Conexões internas do motor Dahlander para dois e quatro pólos
Para funcionamento do motor Dahlander em quatro pólos, ligar os terminais U, V e W e
deixar isolados os terminais X, Y e Z.
Assim, os dois grupos de cada fase ficam em série, formando dois pólos ativos e doisconseqüentes.
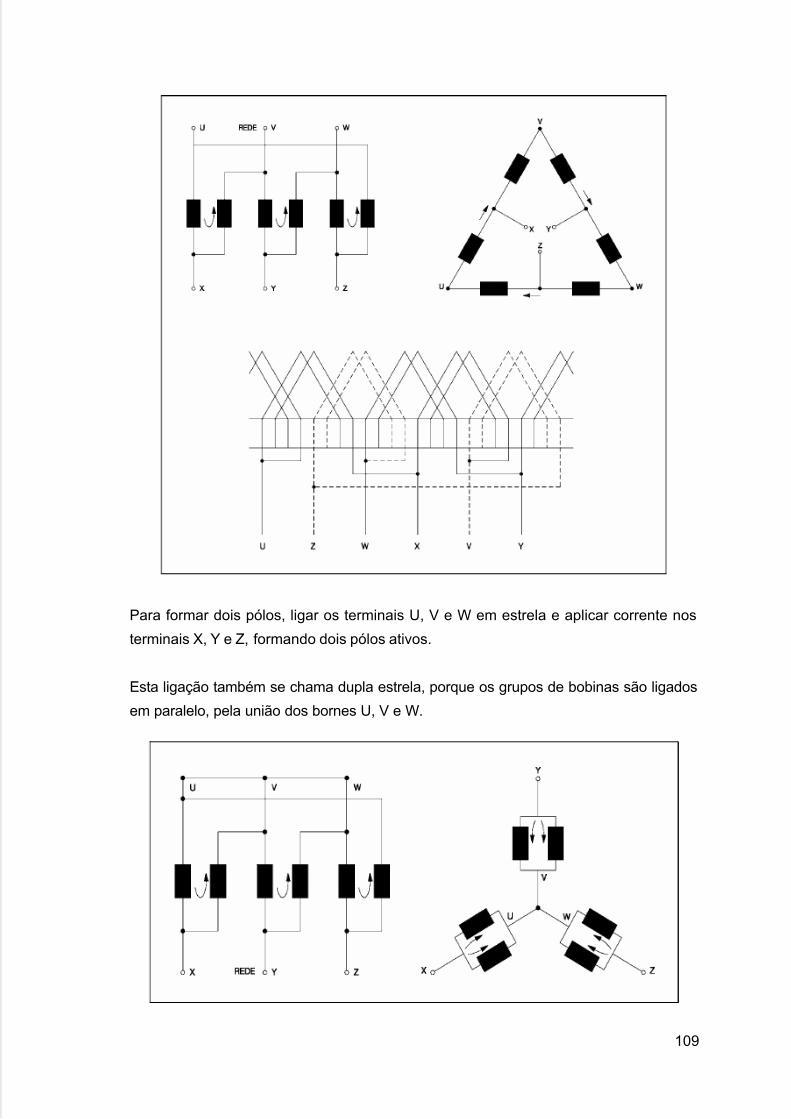
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 109/211
109
Para formar dois pólos, ligar os terminais U, V e W em estrela e aplicar corrente nos
terminais X, Y e Z, formando dois pólos ativos.
Esta ligação também se chama dupla estrela, porque os grupos de bobinas são ligados
em paralelo, pela união dos bornes U, V e W.
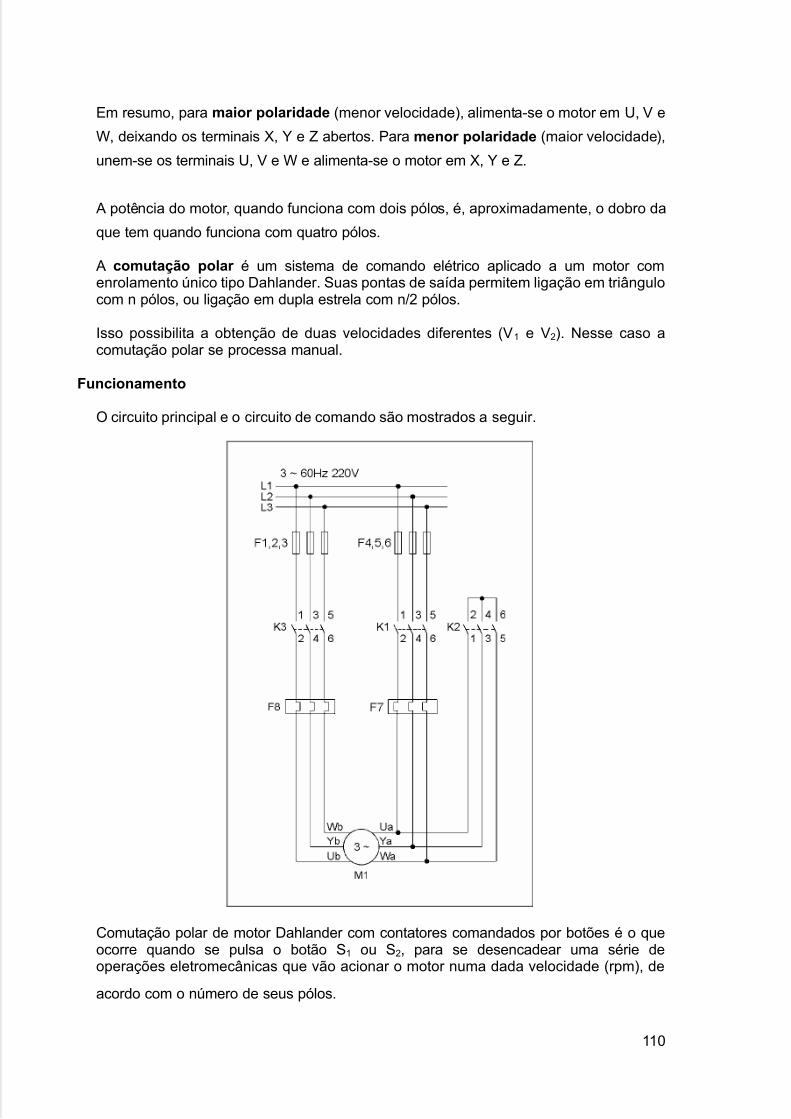
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 110/211
110
Em resumo, para maior polaridade (menor velocidade), alimenta-se o motor em U, V e
W, deixando os terminais X, Y e Z abertos. Para menor polaridade (maior velocidade),
unem-se os terminais U, V e W e alimenta-se o motor em X, Y e Z.
A potência do motor, quando funciona com dois pólos, é, aproximadamente, o dobro da
que tem quando funciona com quatro pólos.
A comutação polar é um sistema de comando elétrico aplicado a um motor comenrolamento único tipo Dahlander. Suas pontas de saída permitem ligação em triângulocom n pólos, ou ligação em dupla estrela com n/2 pólos.
Isso possibilita a obtenção de duas velocidades diferentes (V1 e V2). Nesse caso acomutação polar se processa manual.
Funcionamento
O circuito principal e o circuito de comando são mostrados a seguir.
Comutação polar de motor Dahlander com contatores comandados por botões é o queocorre quando se pulsa o botão S1 ou S2, para se desencadear uma série deoperações eletromecânicas que vão acionar o motor numa dada velocidade (rpm), de
acordo com o número de seus pólos.
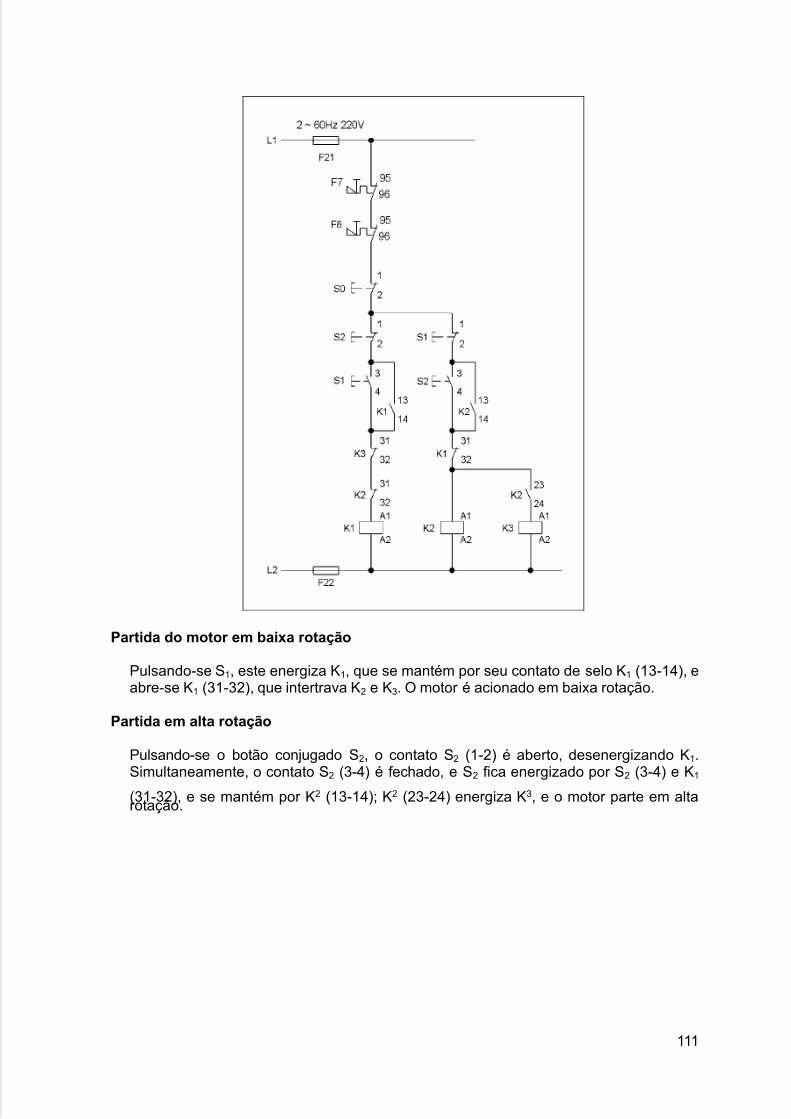
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 111/211
111
Partida do motor em baixa rotação
Pulsando-se S1, este energiza K1, que se mantém por seu contato de selo K1 (13-14), eabre-se K1 (31-32), que intertrava K2 e K3. O motor é acionado em baixa rotação.
Partida em alta rotação
Pulsando-se o botão conjugado S2, o contato S2 (1-2) é aberto, desenergizando K1.Simultaneamente, o contato S2 (3-4) é fechado, e S2 fica energizado por S2 (3-4) e K1
(31-32), e se mantém por K2 (13-14); K2 (23-24) energiza K3, e o motor parte em altarotação.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 112/211
112
Reversão de motor trifásicotipo Dahlander
Nesta unidade veremos que há duas maneiras de se fazer a reversão de motor trifásicotipo Dahlander : por comutação automática e por botões.
Para aprender esse conteúdo com facilidade, você deverá ter conhecimentosanteriores sobre ligação de motores tipo Dahlander.
Reversão de motor trifásico tipo Dahlander
Existem dois sistemas de reversão de motor trifásico tipo Dahlander:
• Comutação polar automática;
• Comutação polar por botões.
Comutação polar automática
A comutação polar automática é um sistema de comando elétrico aplicado a um motor com enrolamento único tipo Dahlander.
Suas pontas de saída permitem ligação em triângulo com n pólos, ou ligação em duplaestrela com n/2 pólos.
Isso possibilita a obtenção de duas velocidades diferentes (V1 e V2). Nesse caso acomutação polar processa-se automaticamente.
Permite também duplo sentido de rotação tanto para V1 quanto para V2. Para ainversão de rotação, é necessário pulsar o botão correspondente ao sentido de rotaçãodesejado.
Funcionamento
O circuito principal e o circuito de comando são mostrados a seguir.
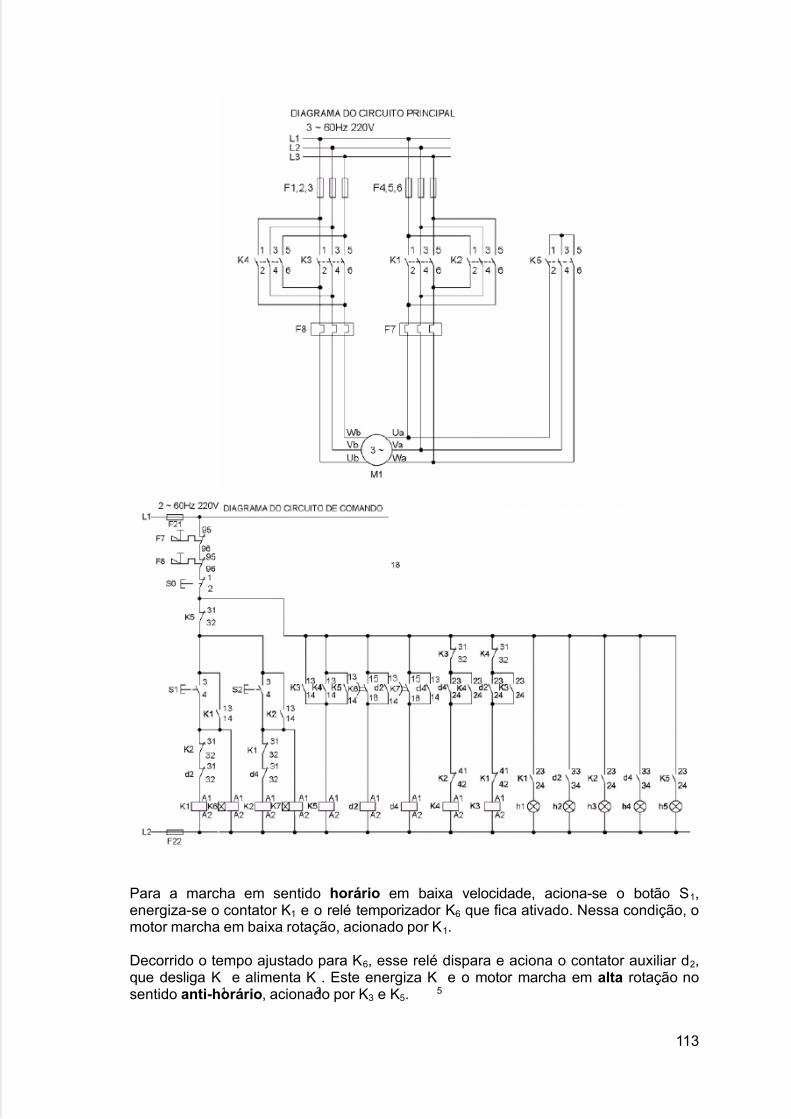
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 113/211
113
Para a marcha em sentido horário em baixa velocidade, aciona-se o botão S1,energiza-se o contator K1 e o relé temporizador K6 que fica ativado. Nessa condição, omotor marcha em baixa rotação, acionado por K1.
Decorrido o tempo ajustado para K6, esse relé dispara e aciona o contator auxiliar d2,que desliga K
1e alimenta K
3. Este energiza K
5e o motor marcha em alta rotação no
sentido anti-horário, acionado por K3 e K5.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 114/211
114
O circuito é interrompido acionando-se S0.
Para a marcha no sentido anti-horário, em baixa velocidade, aciona-se o botão S2 queenergiza o contator K2 e o relé temporizador K7 que fica ativado. O motor marcha embaixa rotação acionado por K2.Decorrido o tempo ajustado para K
7, este dispara e aciona o contator auxiliar d
4que
desliga K2 e alimenta K4 que, por sua vez, energiza K5. O motor marcha no sentidoanti-horário em alta rotação, acionado por K4 e K5.
Observações
• O contator K5 (31-32) bloqueia os contatores K1, K6, K2 e K7.
• Os contatores K1-K2-K4 se intertravam por K1 (31-32), K1 (41-42), K2 (31-32), K2 (41-
42), K5 (31-32) e K4 (31-32).
• Os sinalizadores indicam:
- V1 - marcha à direita, em baixa rotação;
- V2 - disparo do relé K6;
- V3 - marcha à esquerda, em baixa rotação;
- V4 - disparo do relé K6;
- V5 - marcha em alta rotação, em ambos os sentidos.
Comutação polar para duas velocidades e reversão comandadas por botões
Nesse sistema, é necessário pulsar o botão de comando específico para cada uma dasoperações.
Funcionamento
Observe a seguir os diagramas dos circuitos principal e de comando com esse sistemade reversão.
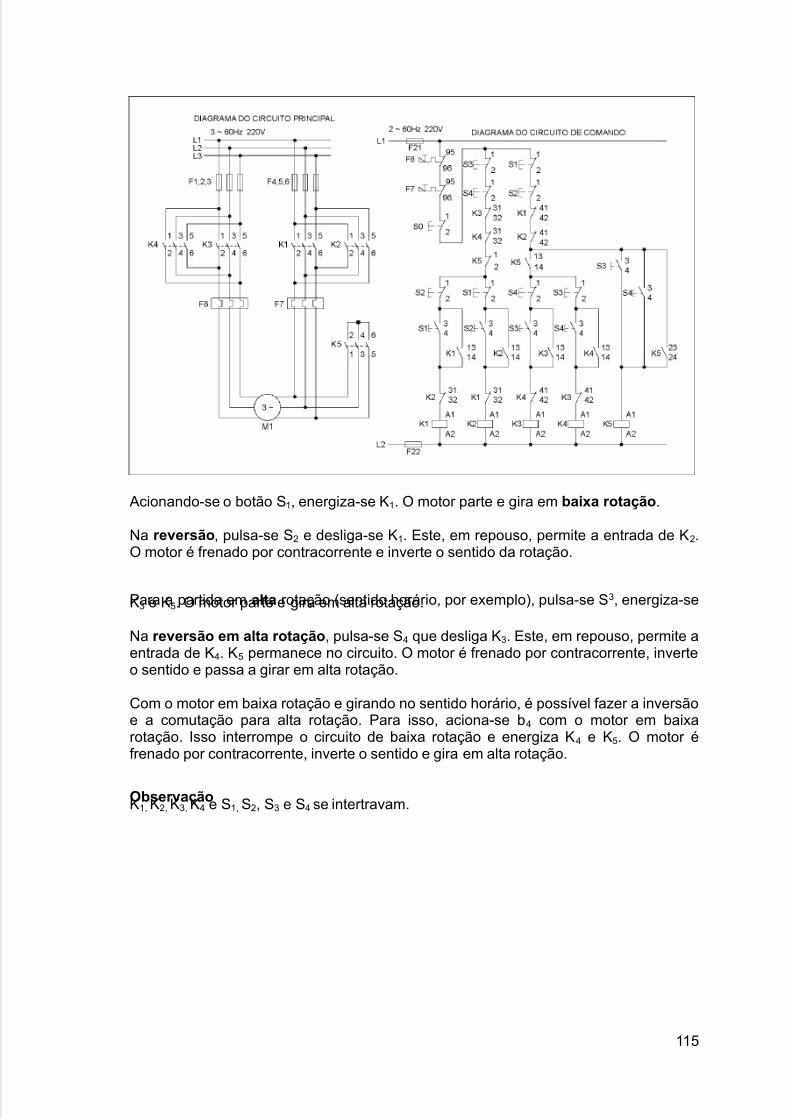
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 115/211
115
Acionando-se o botão S1, energiza-se K1. O motor parte e gira em baixa rotação.
Na reversão, pulsa-se S2 e desliga-se K1. Este, em repouso, permite a entrada de K2.O motor é frenado por contracorrente e inverte o sentido da rotação.
Para a partida em alta rotação (sentido horário, por exemplo), pulsa-se S3, energiza-seK3 e K5. O motor parte e gira em alta rotação.
Na reversão em alta rotação, pulsa-se S4 que desliga K3. Este, em repouso, permite aentrada de K4. K5 permanece no circuito. O motor é frenado por contracorrente, inverteo sentido e passa a girar em alta rotação.
Com o motor em baixa rotação e girando no sentido horário, é possível fazer a inversãoe a comutação para alta rotação. Para isso, aciona-se b4 com o motor em baixarotação. Isso interrompe o circuito de baixa rotação e energiza K4 e K5. O motor éfrenado por contracorrente, inverte o sentido e gira em alta rotação.
ObservaçãoK1, K2, K3, K4 e S1, S2, S3 e S4 se intertravam.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 116/211
116
Partida de motor trifásicode rotor bobinado
Dentre os sistemas de partida para motor trifásico está o sistema de partida de motor trifásico de rotor bobinado. Esse tipo de motor, como já vimos, mantém o torque
constante mesmo com rotação reduzida e é utilizado em elevadores e pontes rolantes.Neste capítulo estudaremos os circuitos de comando eletromagnético que executam apartida para esse motor de forma semi-automática e automática.
Partida de motor trifásico de rotor bobinado
O motor trifásico de rotor bobinado pode ter dois tipos de partida:
• Com comutação semi-automática de resistores;
• Com comutação automática de resistores.
O sistema de partida de motor trifásico de rotor bobinado com comutação semi-automática é um sistema de partida cuja instalação de comando proporciona aeliminação gradativa (seqüencial) dos resistores inicialmente inseridos no circuito dorotor bobinado.
A eliminação é feita por estágios sucessivos dos resistores até que o motor fiquetotalmente em curto-circuito.
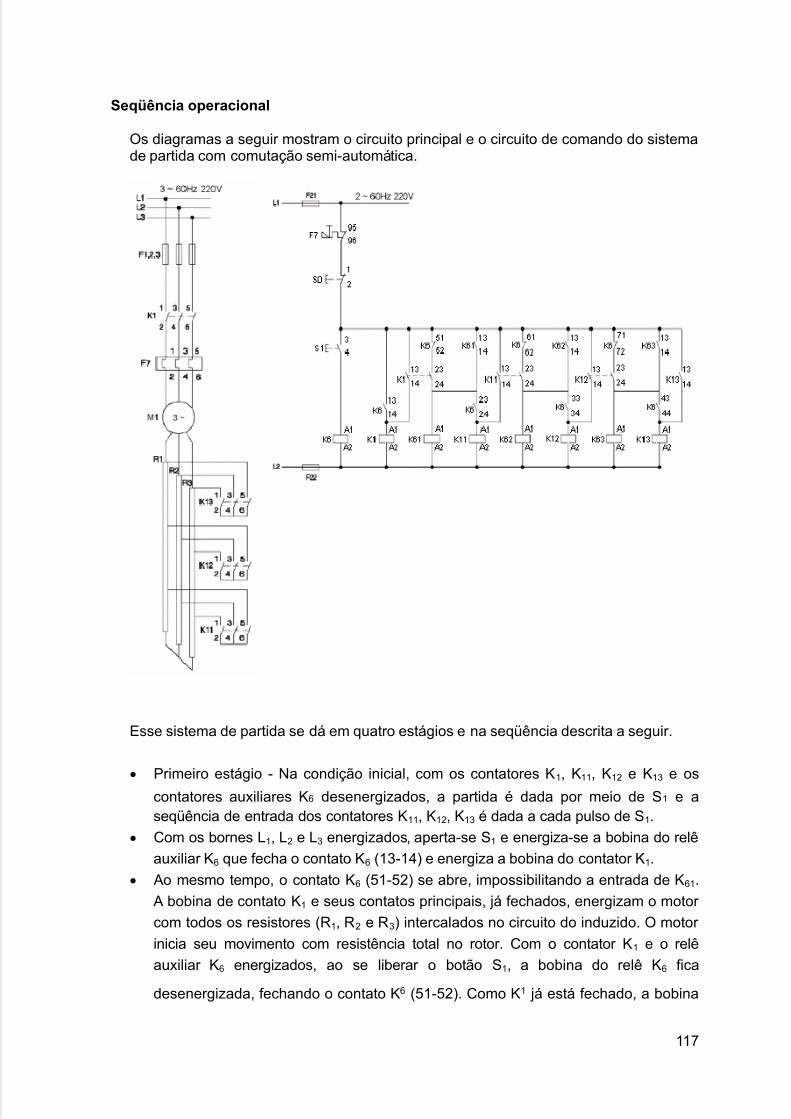
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 117/211
117
Seqüência operacional
Os diagramas a seguir mostram o circuito principal e o circuito de comando do sistemade partida com comutação semi-automática.
Esse sistema de partida se dá em quatro estágios e na seqüência descrita a seguir.
• Primeiro estágio - Na condição inicial, com os contatores K1, K11, K12 e K13 e os
contatores auxiliares K6 desenergizados, a partida é dada por meio de S1 e aseqüência de entrada dos contatores K11, K12, K13 é dada a cada pulso de S1.
• Com os bornes L1, L2 e L3 energizados, aperta-se S1 e energiza-se a bobina do relê
auxiliar K6 que fecha o contato K6 (13-14) e energiza a bobina do contator K1.
• Ao mesmo tempo, o contato K6 (51-52) se abre, impossibilitando a entrada de K61.
A bobina de contato K1 e seus contatos principais, já fechados, energizam o motor
com todos os resistores (R1, R2 e R3) intercalados no circuito do induzido. O motor
inicia seu movimento com resistência total no rotor. Com o contator K1 e o relê
auxiliar K6 energizados, ao se liberar o botão S1, a bobina do relê K6 fica
desenergizada, fechando o contato K6 (51-52). Como K1 já está fechado, a bobina
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 118/211
118
do relê auxiliar K61 se energiza e se mantém nessa condição por meio do contato
de selo K6 (13-14).
• Segundo estágio - Quando S1 é acionado novamente, a bobina do relê K6 energiza-
se e fecha o contato K6 (23-24). Esse contato alimenta a bobina do contator K11,
que fecha o contato de selo K11 (23-24). A bobina do contator K11 permanece
energizada e seus contatos principais se fecham, retirando o estágio R1 da
resistência total. O motor aumenta sua velocidade, ficando os resistores R2 e R3
intercalados no rotor. Ao se liberar novamente o botão S1, cessa a alimentação da
bobina do relê K6 e seu contato K6 (61-62) se fecha. Como K11 (23-24) já está
fechado, K62 fica energizado através de K6 (61-62) e de K11 (23-24) e permanece
nessa condição através de K62 (13-14).
• Terceiro estágio - Apertando-se novamente o botão S1, a bobina do contator K6 se
energiza e seu contato K6 (33-34) energiza a bobina do contator K12, que seconserva energizada através de K12 (13-14), fechando K12 para energizar K63. A
bobina do contato K12 permanece energizada e seus contatos principais dão novo
impulso ao motor, fazendo sua velocidade crescer com a retirada do estágio R2 da
resistência total. O rotor permanece somente com R3. Liberando-se o botão S1, a
bobina K6 se desenergiza e K6 (71-72) energiza a bobina K63 (13-14), deixando-a
energizada.
• Quarto estágio - Quando S1 é pulsado, energiza-se novamente a bobina K6 e o
contato K6 (43-44) energiza a bobina K13. Esta fecha o contato de selo K13 (13-14),fechando então seus contatos principais. O motor atinge a rotação nominal com a
eliminação dos resistores e, através das ligações dos bornes do contator K13, o
rotor fica curto-circuitado.
No sistema de partida de motor trifásico de rotor bobinado com comutaçãoautomática de resistores, o circuito de comando faz, automaticamente, a eliminaçãoseqüencial dos estágios de resistores.
O tempo necessário entre a partida e as sucessivas retiradas dos resistores do circuitodo rotor bobinado até que este seja curto-circuitado, é determinado por relêstemporizados. Veja diagrama a seguir.
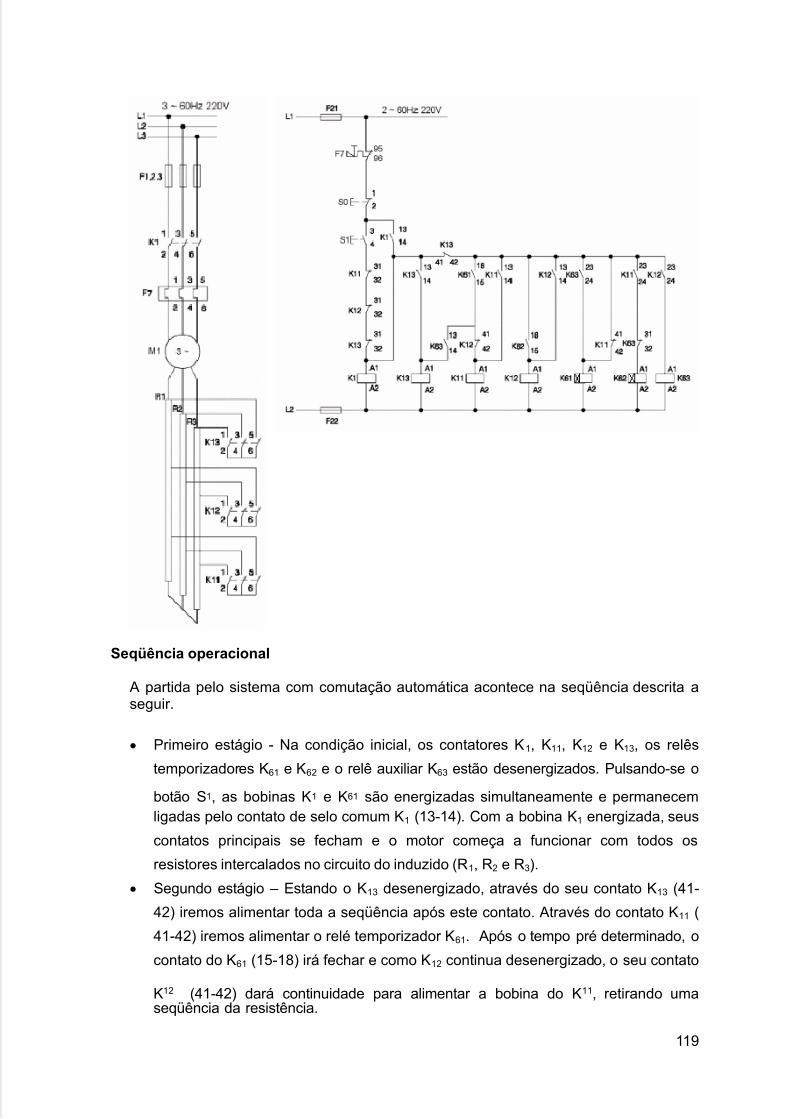
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 119/211
119
Seqüência operacional
A partida pelo sistema com comutação automática acontece na seqüência descrita aseguir.
• Primeiro estágio - Na condição inicial, os contatores K1, K11, K12 e K13, os relês
temporizadores K61 e K62 e o relê auxiliar K63 estão desenergizados. Pulsando-se o
botão S1, as bobinas K1 e K61 são energizadas simultaneamente e permanecemligadas pelo contato de selo comum K1 (13-14). Com a bobina K1 energizada, seus
contatos principais se fecham e o motor começa a funcionar com todos os
resistores intercalados no circuito do induzido (R1, R2 e R3).
• Segundo estágio – Estando o K13 desenergizado, através do seu contato K13 (41-
42) iremos alimentar toda a seqüência após este contato. Através do contato K11 (
41-42) iremos alimentar o relé temporizador K61. Após o tempo pré determinado, o
contato do K61 (15-18) irá fechar e como K12 continua desenergizado, o seu contato
K12 (41-42) dará continuidade para alimentar a bobina do K11, retirando umaseqüência da resistência.

5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 120/211
120
• Terceiro estágio – Colocando o K11, o contato K11 (23-24) irá fechar e estando o K63
desenergizado, através do contato K63 (31-32) irá energizar o relé temporizador K62.
Depois de um certo tempo, o fechará o contato K62 (15-18) e energiza K12. Este
permanece nessa condição por meio de seu contato de selo K12 (13-14). Nesse
instante, K11 é desenergizado e tem seus contatos de volta à posição de repouso. O
contato K12 (23-24) se fecha e alimenta K63 que fechará K63 (23-24) e energizará
novamente K61. Uma vez energizada a bobina K12, seus contatos principais de
fecham e retiram do circuito o resistor R2.
• Quarto estágio - Decorrido o tempo ajustado para K61, ocorre o disparo e seu
contato K61 (15-18) se fecha, alimentando K13 que permanece energizado por seu
contato de selo e abre o contato K13 (41-42). Este anula os demais. K13, uma vez
energizado, tem seus contatos principais fechados o que elimina o resistor R 3 e
curto-circuita o rotor.
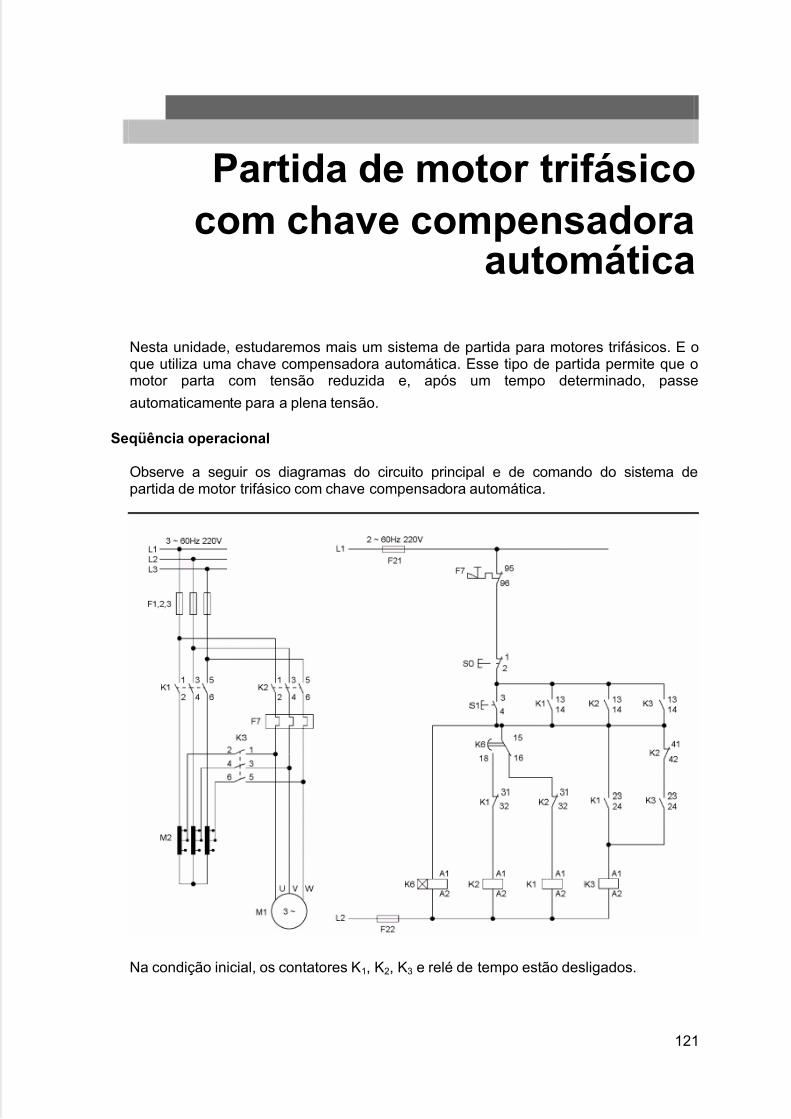
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 121/211
121
Partida de motor trifásicocom chave compensadora
automática
Nesta unidade, estudaremos mais um sistema de partida para motores trifásicos. E oque utiliza uma chave compensadora automática. Esse tipo de partida permite que omotor parta com tensão reduzida e, após um tempo determinado, passe
automaticamente para a plena tensão.
Seqüência operacional
Observe a seguir os diagramas do circuito principal e de comando do sistema departida de motor trifásico com chave compensadora automática.
Na condição inicial, os contatores K1, K2, K3 e relé de tempo estão desligados.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 122/211
122
Quando pulsamos S1, o contator K1 é acionado ao mesmo tempo que o relé de tempoK6. Estando K1 (13-14) e K1 (23-24) fechados, o contator K3 será acionado.
Nestas condições, com K1 e K3 energizados, o motor partirá com a tensão reduzidapelo auto transformador.
Decorrido o tempo pré ajustado, K1 será desenergizado e K2 energizado. Através doscontatos auxiliares K1 (23-24) e K2 (41-42), o contator K3 é retirado de serviço.
Nestas condições, com K2 energizado, o motor passará a receber a tensão nominal darede (tensão plena).
Vantagens do sistema
Esse sistema tem as seguintes vantagens em relação à partida manual:
• Não exige esforço físico do operador;
• Permite comando à distância;• A comutação da tensão reduzida para plena tensão realiza-se no tempo previsto,
independentemente da ação do operador.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 123/211
123
Partida consecutiva demotores trifásicos
Nesta unidade estudaremos um sistema de comando automático de motor que permitea partida de dois ou mais motores obedecendo a uma seqüência pré-estabelecida.
Veremos que há necessidade de uma temporização entre as partidas dos motores paraproteger o circuito contra os altos picos de corrente se todos partissem ao mesmotempo.
Para aprender este conteúdo com mais facilidade, você deve conhecer motorestrifásicos e relés.
Partida consecutiva de motores
A partida consecutiva de motores trifásicos é a série de operações desencadeadas por um sistema de comandos elétricos. Esse sistema introduz no circuito dois ou maismotores com suas partidas em seqüência.
Esse tipo de partida pode ser realizado por meio de comandos elétricos e com o auxíliode relés temporizadores.
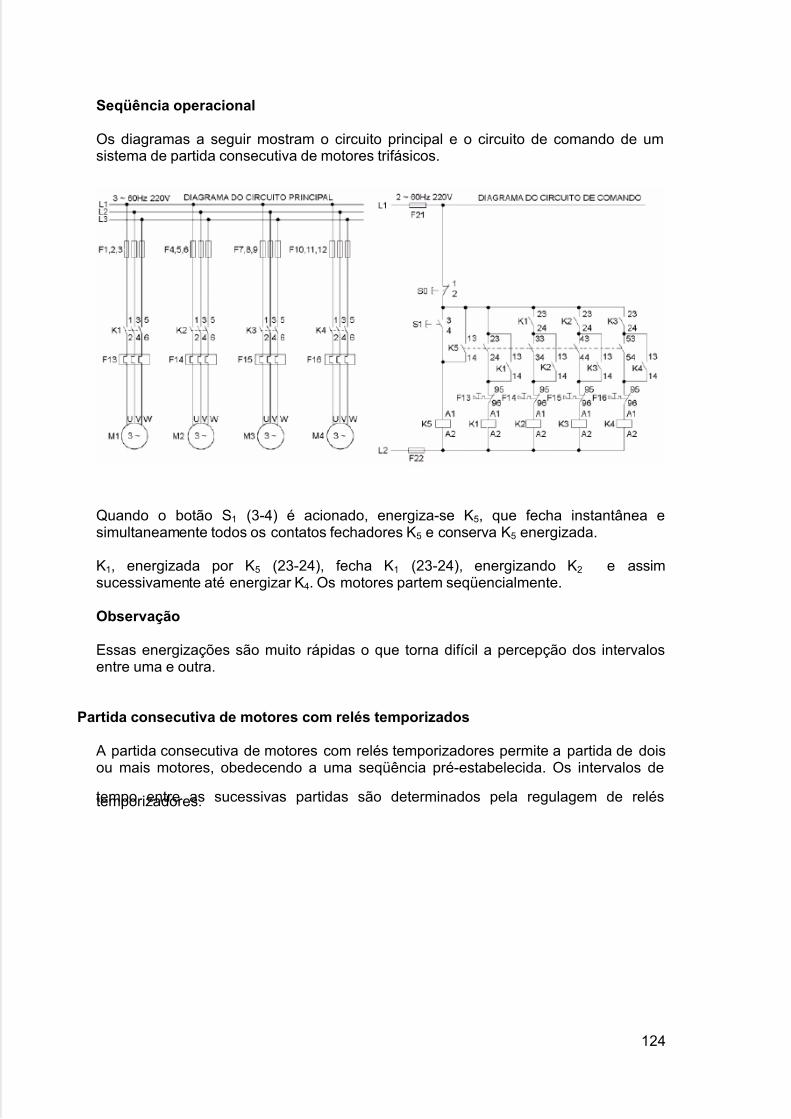
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 124/211
124
Seqüência operacional
Os diagramas a seguir mostram o circuito principal e o circuito de comando de umsistema de partida consecutiva de motores trifásicos.
Quando o botão S1 (3-4) é acionado, energiza-se K5, que fecha instantânea esimultaneamente todos os contatos fechadores K5 e conserva K5 energizada.
K1, energizada por K5 (23-24), fecha K1 (23-24), energizando K2 e assimsucessivamente até energizar K4. Os motores partem seqüencialmente.
Observação
Essas energizações são muito rápidas o que torna difícil a percepção dos intervalosentre uma e outra.
Partida consecutiva de motores com relés temporizados
A partida consecutiva de motores com relés temporizadores permite a partida de doisou mais motores, obedecendo a uma seqüência pré-estabelecida. Os intervalos de
tempo entre as sucessivas partidas são determinados pela regulagem de reléstemporizadores.
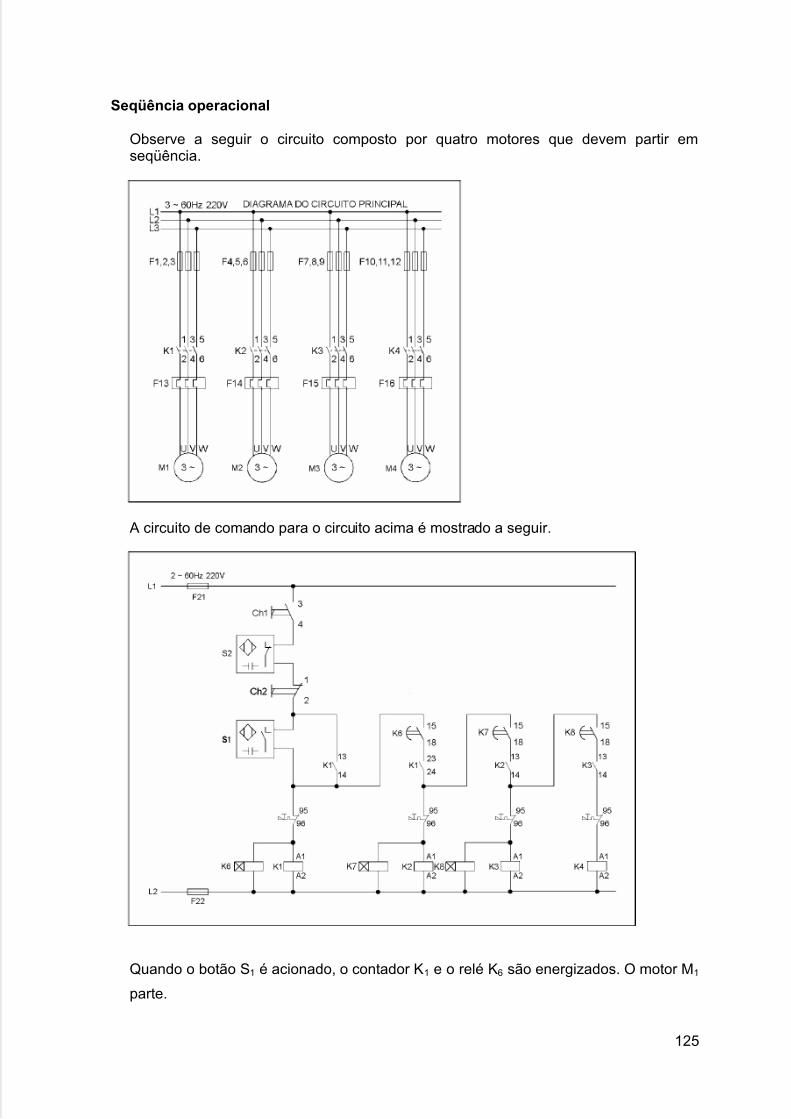
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 125/211
125
Seqüência operacional
Observe a seguir o circuito composto por quatro motores que devem partir emseqüência.
A circuito de comando para o circuito acima é mostrado a seguir.
Quando o botão S1 é acionado, o contador K1 e o relé K6 são energizados. O motor M1
parte.
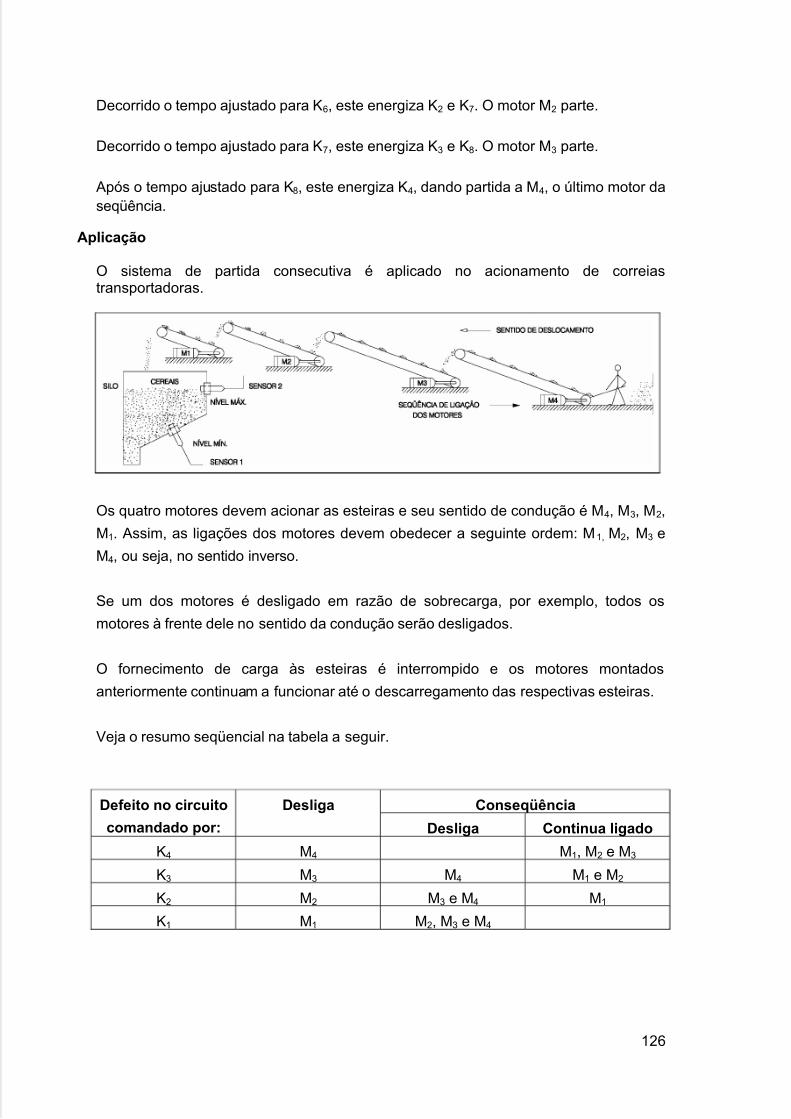
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 126/211
126
Decorrido o tempo ajustado para K6, este energiza K2 e K7. O motor M2 parte.
Decorrido o tempo ajustado para K7, este energiza K3 e K8. O motor M3 parte.
Após o tempo ajustado para K8, este energiza K4, dando partida a M4, o último motor daseqüência.
Aplicação
O sistema de partida consecutiva é aplicado no acionamento de correiastransportadoras.
Os quatro motores devem acionar as esteiras e seu sentido de condução é M4, M3, M2,
M1. Assim, as ligações dos motores devem obedecer a seguinte ordem: M1, M2, M3 e
M4, ou seja, no sentido inverso.
Se um dos motores é desligado em razão de sobrecarga, por exemplo, todos os
motores à frente dele no sentido da condução serão desligados.
O fornecimento de carga às esteiras é interrompido e os motores montados
anteriormente continuam a funcionar até o descarregamento das respectivas esteiras.
Veja o resumo seqüencial na tabela a seguir.
ConseqüênciaDefeito no circuito
comandado por:
Desliga
Desliga Continua ligado
K4 M4 M1, M2 e M3
K3 M3 M4 M1 e M2
K2 M2 M3 e M4 M1
K1 M1 M2, M3 e M4
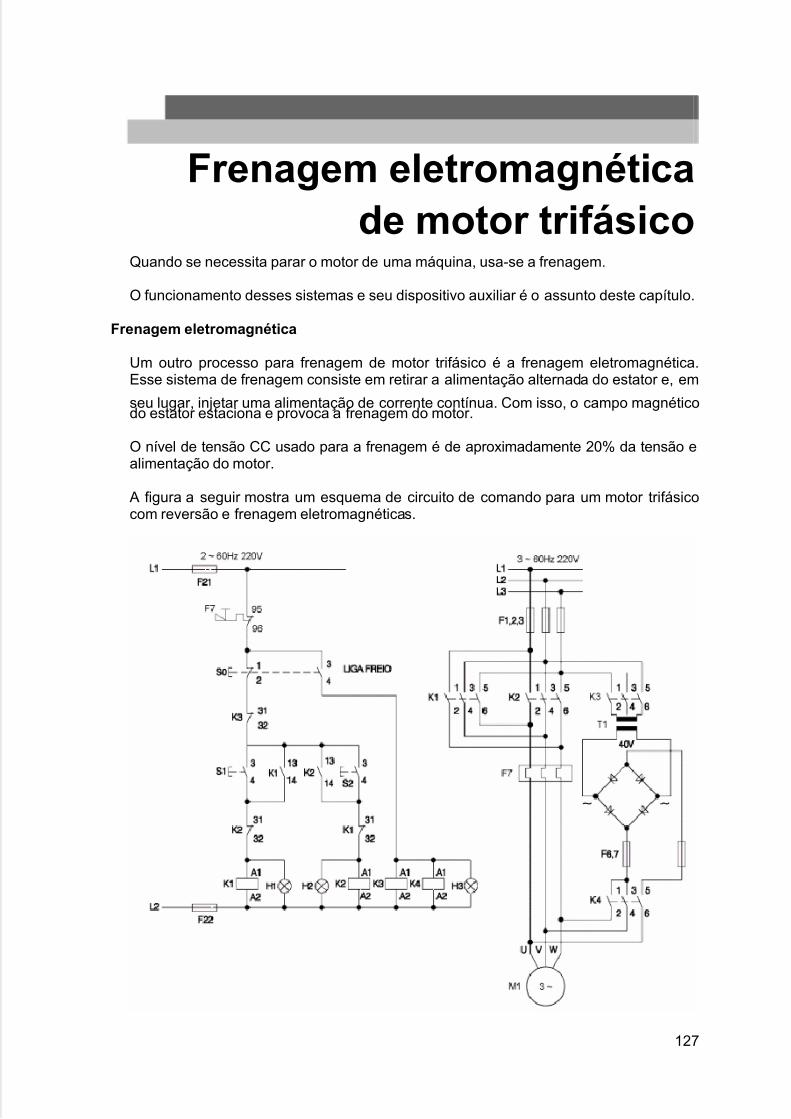
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 127/211
127
Frenagem eletromagnéticade motor trifásico
Quando se necessita parar o motor de uma máquina, usa-se a frenagem.
O funcionamento desses sistemas e seu dispositivo auxiliar é o assunto deste capítulo.
Frenagem eletromagnética
Um outro processo para frenagem de motor trifásico é a frenagem eletromagnética.Esse sistema de frenagem consiste em retirar a alimentação alternada do estator e, em
seu lugar, injetar uma alimentação de corrente contínua. Com isso, o campo magnéticodo estator estaciona e provoca a frenagem do motor.
O nível de tensão CC usado para a frenagem é de aproximadamente 20% da tensão ealimentação do motor.
A figura a seguir mostra um esquema de circuito de comando para um motor trifásicocom reversão e frenagem eletromagnéticas.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 128/211
128
Comandos ElétricosEnsaios
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 129/211
129
Verificar o funcionamento dedispositivos de segurança
Fusíveis e relés são dispositivos de segurança colocados em circuitos elétricos paraprotegê-los dos efeitos de sobrecargas.
Através deste ensaio, você poderá comprovar como se comportam fusíveis e relés emsituações em que a corrente é maior que a corrente nominal para a qual o circuito foi
montado.Equipamento:
• Multímetro ;
• Reostato 200Ω 1kW;
• Cronômetro ou relógio que indique segundos.
Material necessário:
• Chave para parafuso de ajuste;
• Base aberta 2 a 25A;
• Tampa para fusíveis;
• Anel de proteção;
• Parafusos de ajuste (4A e 25A);
• Fusíveis (4A e 25A);
• Relé bimetálico de sobrecarga 3UA 50 ou equivalente, com faixa de regulagem de
0,6 a 1A;
• Chave liga/desliga.
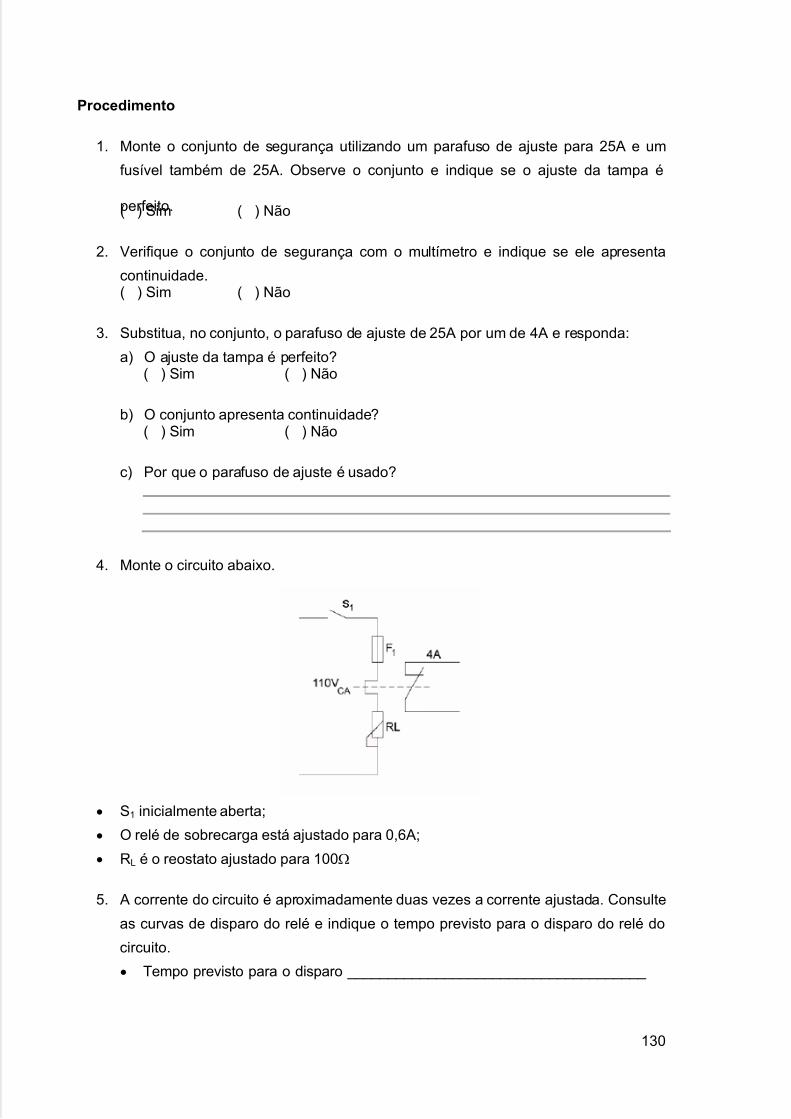
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 130/211
130
Procedimento
1. Monte o conjunto de segurança utilizando um parafuso de ajuste para 25A e um
fusível também de 25A. Observe o conjunto e indique se o ajuste da tampa é
perfeito.( ) Sim ( ) Não
2. Verifique o conjunto de segurança com o multímetro e indique se ele apresenta
continuidade.( ) Sim ( ) Não
3. Substitua, no conjunto, o parafuso de ajuste de 25A por um de 4A e responda:
a) O ajuste da tampa é perfeito?( ) Sim ( ) Não
b) O conjunto apresenta continuidade?( ) Sim ( ) Não
c) Por que o parafuso de ajuste é usado?
4. Monte o circuito abaixo.
• S1 inicialmente aberta;
• O relé de sobrecarga está ajustado para 0,6A;
• RL é o reostato ajustado para 100Ω
5. A corrente do circuito é aproximadamente duas vezes a corrente ajustada. Consulte
as curvas de disparo do relé e indique o tempo previsto para o disparo do relé do
circuito.
• Tempo previsto para o disparo _____________________________________
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 131/211
131
6. Feche S1 e registre o tempo de disparo do relé.
• Tempo de disparo _______________________________________________
7. Abra S1. Espere cerca de 10 minutos, ou seja, até que o relé retorne à temperatura
normal.
8. Ajuste RL para 60Ω. Rearme o relé.
9. Agora a corrente do circuito é cerca de três vezes maior que a corrente
anteriormente ajustada. Consulte as curvas de disparo do relé e indique o tempo
previsto para o disparo.
• Tempo previsto para o disparo ____________________________________
10. Feche S1. Registre o tempo de disparo do relé.
• Tempo de disparo ______________________________________________
11. Abra S1 e espere cerca de 10 minutos até que o relé retorne à temperatura normal.
12. Regule o relé de sobrecarga para 1A.
13. Repita os passos 5 a 10 e anote:
• Tempo previsto para o disparo _____________________________________ • Tempo de disparo _______________________________________________
14. Abra S1. Compare os tempos de disparo medidos com os indicados na curva
tempo/corrente. Como o relé atuou?
15. Ligue os três pólos do relé térmico em série e repita os passos 5 a 14. Consulte acurva para sobrecarga normal.
• tempo previsto para o disparo ______________________________________
• tempo de disparo ________________________________________________
16. Compare os resultados obtidos. Onde o relé térmico atua mais rápido? Por quê?
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 132/211
132
Verificar o funcionamento docomando de motor trifásico
por contator
Num circuito de acionamento eletromagnético, é o contator que comanda a corrente
que coloca em funcionamento as máquinas.
Neste ensaio, você vai verificar o funcionamento do circuito de um motor trifásicocomandado por contator.
Equipamento:
• Motor trifásico 1CV. 220V. 60Hz.
Material necessário:
• 3 fusíveis diazed 16A com base;• 2 fusíveis diazed 4A com base;
• 1 contator;
• 2 botoeiras;
• 1 relé térmico com faixa de regulagem compatível com o motor;
• Cabos de conexão.
Observação:
Verificar se todos os materiais estão compatíveis com a tensão e freqüência da rede ese a capacidade de corrente está de acordo com o motor.
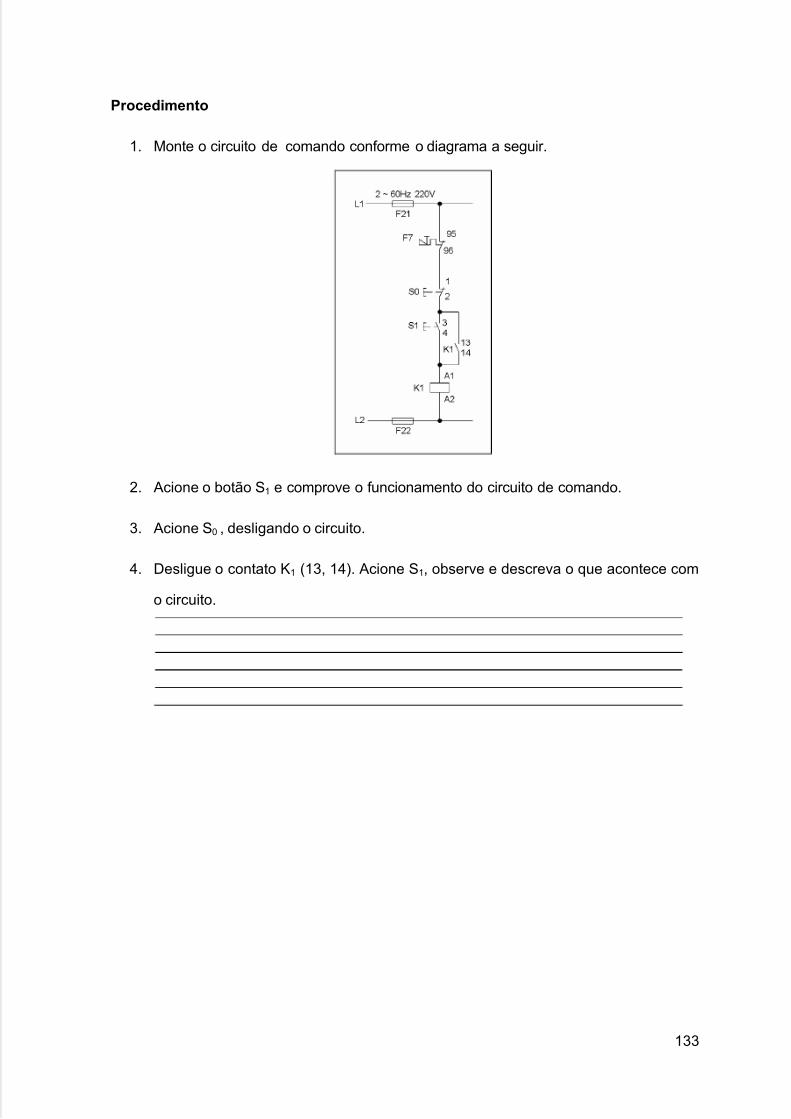
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 133/211
133
Procedimento
1. Monte o circuito de comando conforme o diagrama a seguir.
2. Acione o botão S1 e comprove o funcionamento do circuito de comando.
3. Acione S0 , desligando o circuito.
4. Desligue o contato K1 (13, 14). Acione S1, observe e descreva o que acontece com
o circuito.
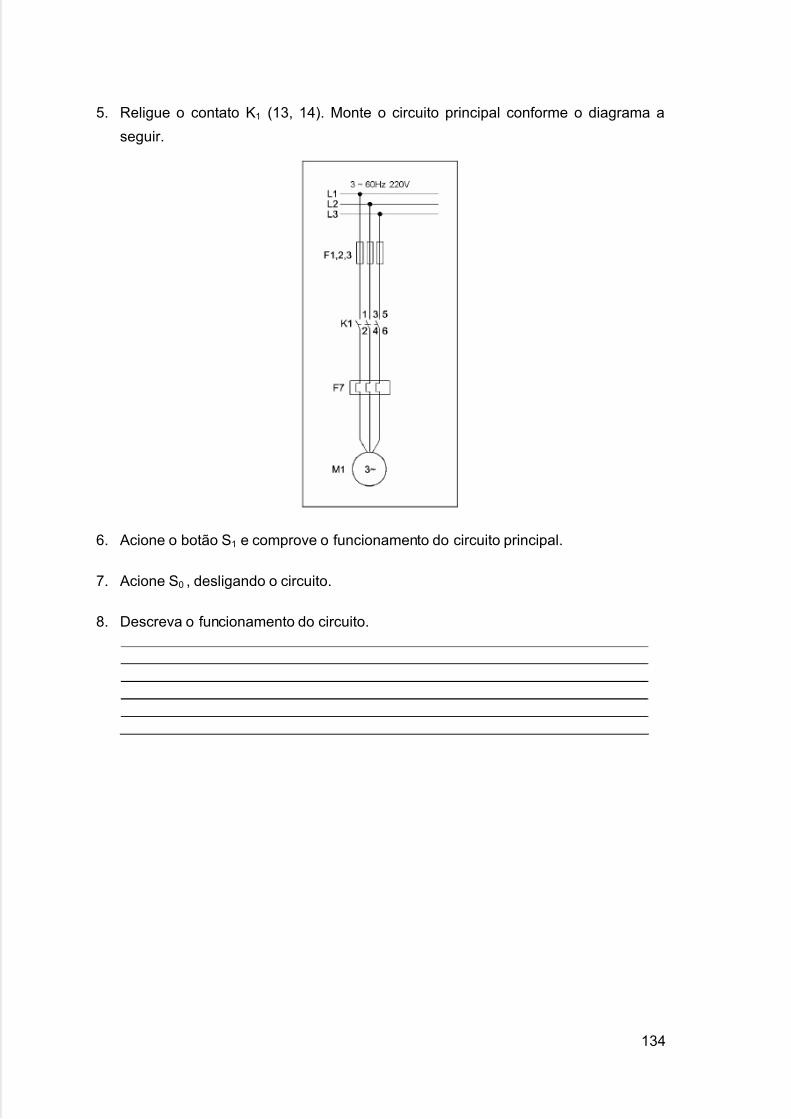
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 134/211
134
5. Religue o contato K1 (13, 14). Monte o circuito principal conforme o diagrama a
seguir.
6. Acione o botão S1 e comprove o funcionamento do circuito principal.
7. Acione S0 , desligando o circuito.
8. Descreva o funcionamento do circuito.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 135/211
135
Verificar o comando parainversão de rotação do motor
trifásico
Neste ensaio você vai montar e verificar o funcionamento de um circuito de comandoque inverterá o sentido da rotação de um motor trifásico utilizando chaves auxiliares fimde curso.
As chaves auxiliares fim de curso comandam os contatores. Estes, por sua vez,comandam as correntes de acionamento dos motores.
Equipamento:
• Motor trifásico, 1CV , 220V, 60Hz.
Material necessário:
• 3 fusíveis diazed 16A com base;
•2 fusíveis diazed 4A com base;
• 2 contatores com bobinas para 220V;
• 3 botoeiras;
• 1 relé térmico com faixa de regulagem compatível com motor;
• 2 chaves fim de curso;
• Cabos de conexão.
Observação:
Verificar se todos os materiais estão compatíveis com a tensão e freqüência da rede e
se a capacidade de corrente está de acordo com o motor.

5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 136/211
136
Procedimento
1. Com auxílio de catálogos de fabricantes, faça a especificação de todos os
componentes necessários à montagem do circuito, simulando a capacidade do
motor indicada por seu instrutor.
2. Monte o circuito de comando conforme diagrama a seguir.
3. Acione S1 . Anote o que acontece.
4. Acione S0 . Anote o que acontece
5. Acione S2 . Anote o que acontece.
6. Desligue o circuito.
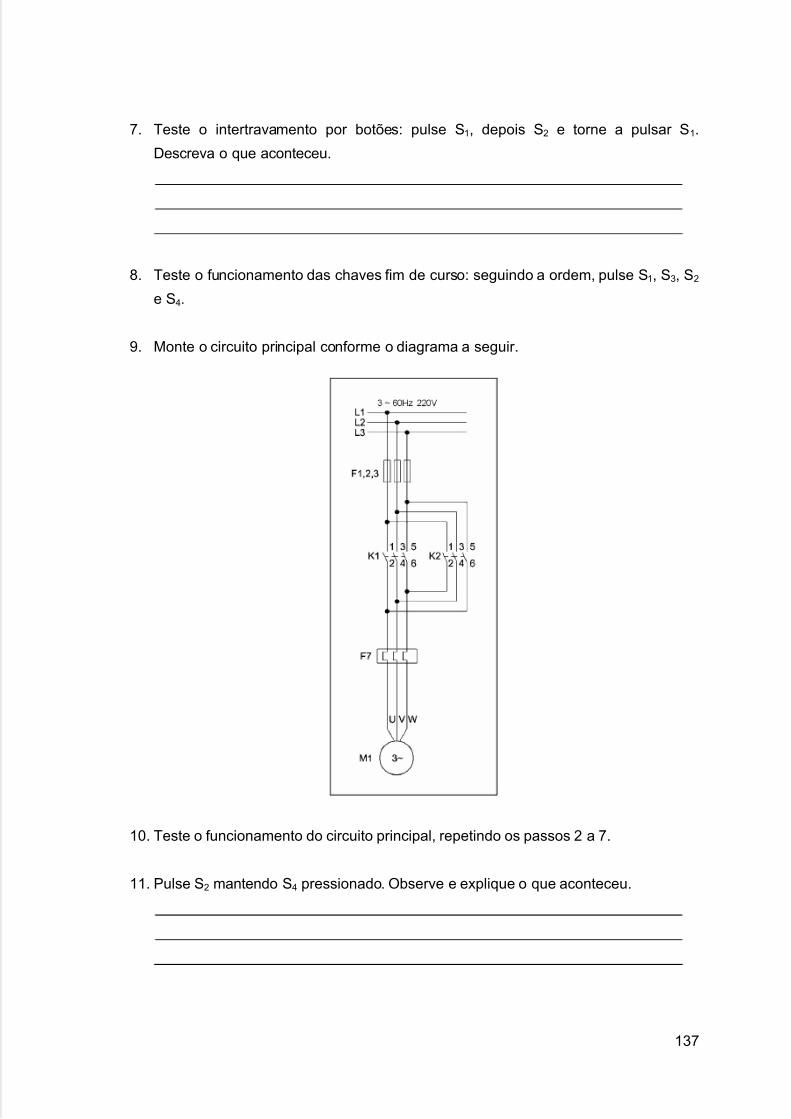
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 137/211
137
7. Teste o intertravamento por botões: pulse S1, depois S2 e torne a pulsar S1.
Descreva o que aconteceu.
8. Teste o funcionamento das chaves fim de curso: seguindo a ordem, pulse S1, S3, S2
e S4.
9. Monte o circuito principal conforme o diagrama a seguir.
10. Teste o funcionamento do circuito principal, repetindo os passos 2 a 7.
11. Pulse S2 mantendo S4 pressionado. Observe e explique o que aconteceu.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 138/211
138
12. Pulse S1 mantendo S4 pressionado. Explique o que aconteceu.
13. Se o contato 13.14 de K1 não ligar quando S1 for acionado, o que acontece com o
funcionamento do circuito? Simule essa situação e explique o que acontece.
14. Meça e anote a corrente de partida, a corrente na reversão e a corrente em
funcionamento normal.
IP ____________________ IR ____________________ I ____________________
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 139/211
139
Verificar motor trifásico comcomando para partida
estrela-triângulo
Neste ensaio, em que você vai instalar um motor trifásico com comando para partida
estrela-triângulo, será possível comprovar as variações das correntes desse sistema departida.
Equipamento:
• Motor trifásico 1CV, 220V, 60Hz;
• Amperímetro 0-30A CA.
Material necessário:
• 3 fusíveis diazed 16A com base;
• 2 fusíveis diazed 4A com base;
• 3 contatores;
• 1 relé temporizador;
• 2 botoeiras;
• 1 relé térmico com faixa de regulagem compatível com o motor;
• Cabos de conexão.
Observação:
Verificar se todos os materiais estão compatíveis com a tensão e freqüência da rede ese a capacidade de corrente está de acordo com o motor.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 140/211
140
Procedimento
1. Ligue o motor trifásico fechado em estrela e coloque o amperímetro em série com
uma das fases de modo a medir a corrente de linha. Não energize o circuito.
2. Faça a representação esquemática do circuito montado.
3. Energize o circuito.
4. Anote os valores de:Corrente de partida ___________________ Corrente do motor sem carga ___________________
5. Indique abaixo quais são os valores de corrente de linha e corrente de fase que o
motor proporciona.IL _________________ IF _________________
6. Desenergize o motor e desfaça as ligações.
7. Ligue o motor trifásico em triângulo e coloque o amperímetro em série com uma
das fases de modo a medir a corrente de linha. Não energize o circuito.
8. Faça a representação esquemática do circuito montado.
9. Energize o circuito.
10. Anote os valores da:Corrente de partida ___________________ Corrente do motor sem carga ___________________
11. Indique abaixo quais são os valores de corrente de linha e de corrente de fase que
o motor proporciona.IL _________________
IF _________________ (calculado)
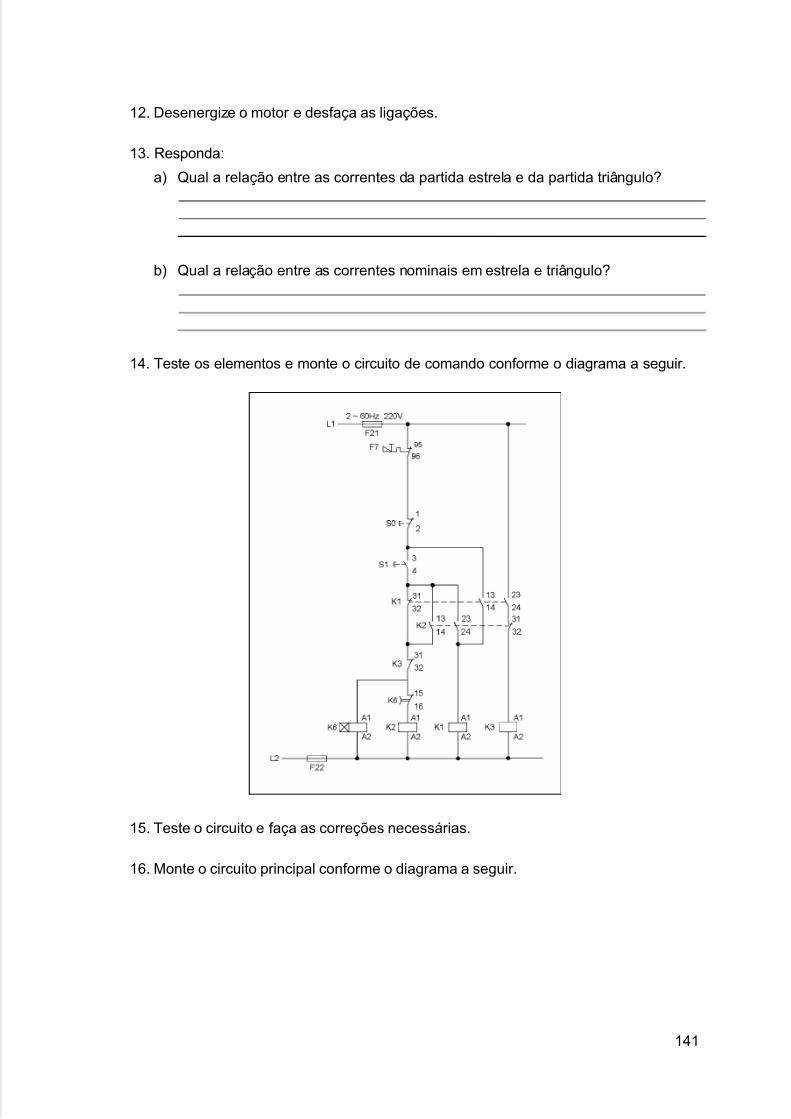
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 141/211
141
12. Desenergize o motor e desfaça as ligações.
13. Responda:
a) Qual a relação entre as correntes da partida estrela e da partida triângulo?
b) Qual a relação entre as correntes nominais em estrela e triângulo?
14. Teste os elementos e monte o circuito de comando conforme o diagrama a seguir.
15. Teste o circuito e faça as correções necessárias.
16. Monte o circuito principal conforme o diagrama a seguir.
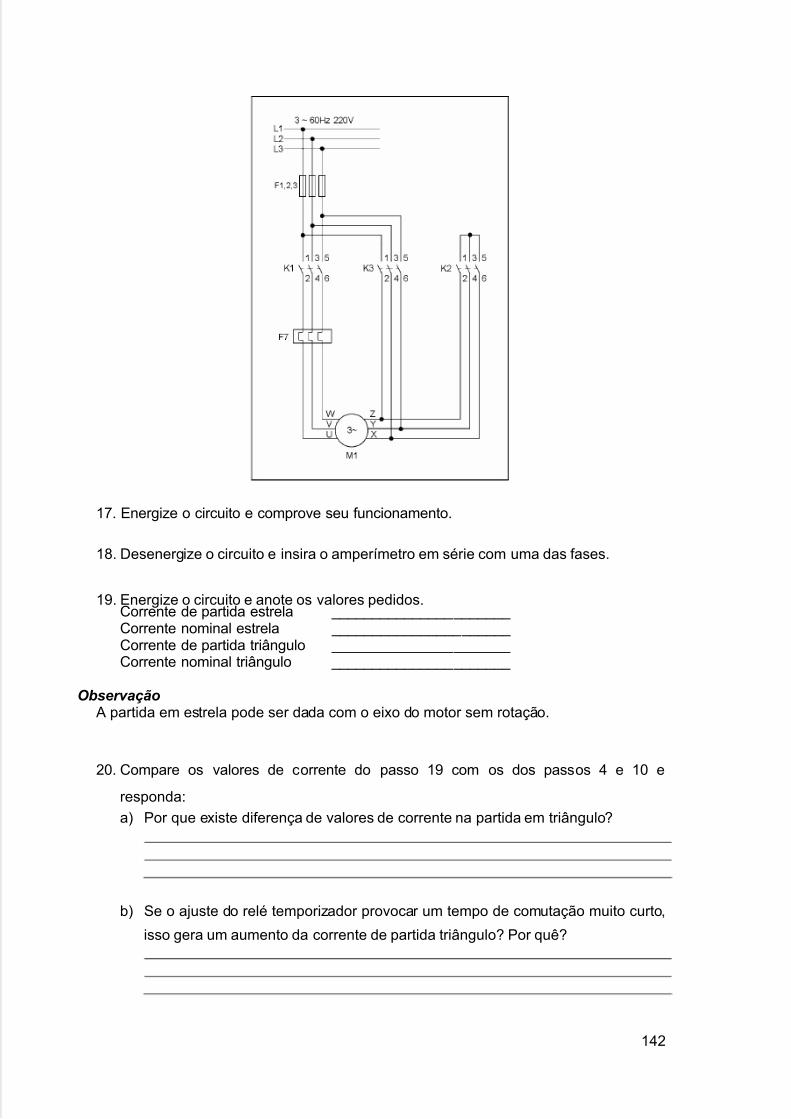
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 142/211
142
17. Energize o circuito e comprove seu funcionamento.
18. Desenergize o circuito e insira o amperímetro em série com uma das fases.
19. Energize o circuito e anote os valores pedidos.Corrente de partida estrela ______________________ Corrente nominal estrela ______________________ Corrente de partida triângulo ______________________ Corrente nominal triângulo ______________________
Observação A partida em estrela pode ser dada com o eixo do motor sem rotação.
20. Compare os valores de corrente do passo 19 com os dos passos 4 e 10 e
responda:
a) Por que existe diferença de valores de corrente na partida em triângulo?
b) Se o ajuste do relé temporizador provocar um tempo de comutação muito curto,
isso gera um aumento da corrente de partida triângulo? Por quê?
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 143/211
143
21. Diminua ao mínimo o valor do temporizador. O que aconteceu?
22. Meça a corrente de linha do motor.IL _________________
23. Meça a corrente que passa pelo relé térmico.IRT _________________
24. Qual a relação que existe entre a corrente de linha e a corrente no relé?
25. Qual a vantagem de se instalar o relé térmico nessa posição?
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 144/211
144
Verificar reversão de rotaçãode motor trifásico estrela-
triângulo
Neste ensaio, você vai comandar a reversão de rotação do motor trifásico por meio debotões e relés temporizadores. A partida desse motor é em estrela-triângulo comcontatores.
Equipamento:
• Motor trifásico 220V, 60Hz,
• Amperímetro 0-30A CA.
Material necessário:
• 3 fusíveis diazed 16A com base;
• 2 fusíveis diazed 4A com base;
• 4 contatores;
• 1 relé temporizador;
• 2 botoeiras;
• 1 relé térmico com faixa de regulagem compatível com o motor;
• Cabos de conexão.
Observação:
Verificar se todos os materiais estão compatíveis com a tensão e freqüência da rede ese a capacidade de corrente está de acordo com o motor.
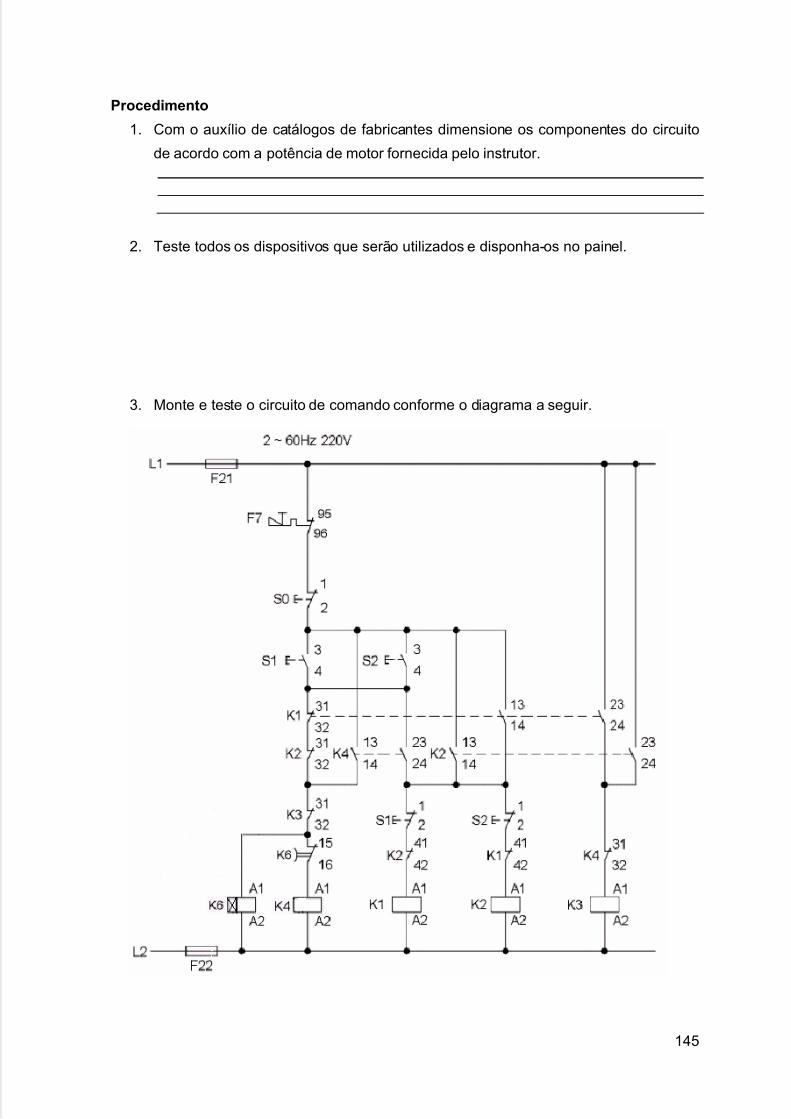
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 145/211
145
Procedimento
1. Com o auxílio de catálogos de fabricantes dimensione os componentes do circuito
de acordo com a potência de motor fornecida pelo instrutor.
2. Teste todos os dispositivos que serão utilizados e disponha-os no painel.
3. Monte e teste o circuito de comando conforme o diagrama a seguir.
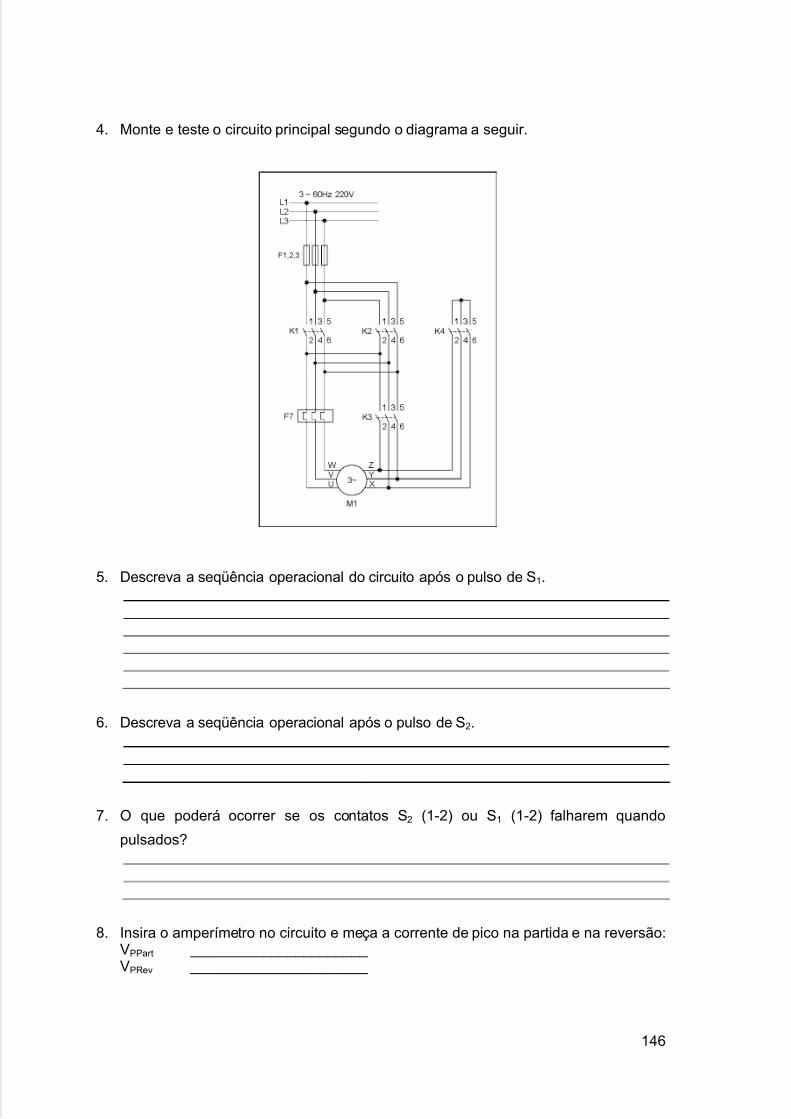
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 146/211
146
4. Monte e teste o circuito principal segundo o diagrama a seguir.
5. Descreva a seqüência operacional do circuito após o pulso de S1.
6. Descreva a seqüência operacional após o pulso de S2.
7. O que poderá ocorrer se os contatos S2 (1-2) ou S1 (1-2) falharem quando
pulsados?
8. Insira o amperímetro no circuito e meça a corrente de pico na partida e na reversão:VPPart ______________________ VPRev ______________________
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 147/211
147
Verificar o funcionamento demotor com partida com
autotransformador
O emprego do autotransformador na partida de motor trifásico é muito difundido, poispossibilita diminuição do pico de corrente e razoável conjugado na partida.
A montagem do circuito de comando de acionamento de motor que você vai fazer, teráum autotransformador que permite a partida de motor trifásico com tensão reduzida.
Equipamento:
• Motor trifásico 1CV, 220V, 60Hz,
• Amperímetro 0-5A e 0-25A CA.
Material necessário:
• 3 fusíveis diazed 16A com base;
• 2 fusíveis diazed 4A com base;
• 3 contatores;
• 1 relé temporizador;
• 2 botoeiras;
• 1 relé térmico com faixa de regulagem compatível com o motor;
• 1 lâmpada sinalizadora
• 1 auto transformador
• Cabos de conexão.
Observação:
Verificar se todos os materiais estão compatíveis com a tensão e freqüência da rede ese a capacidade de corrente está de acordo com o motor.
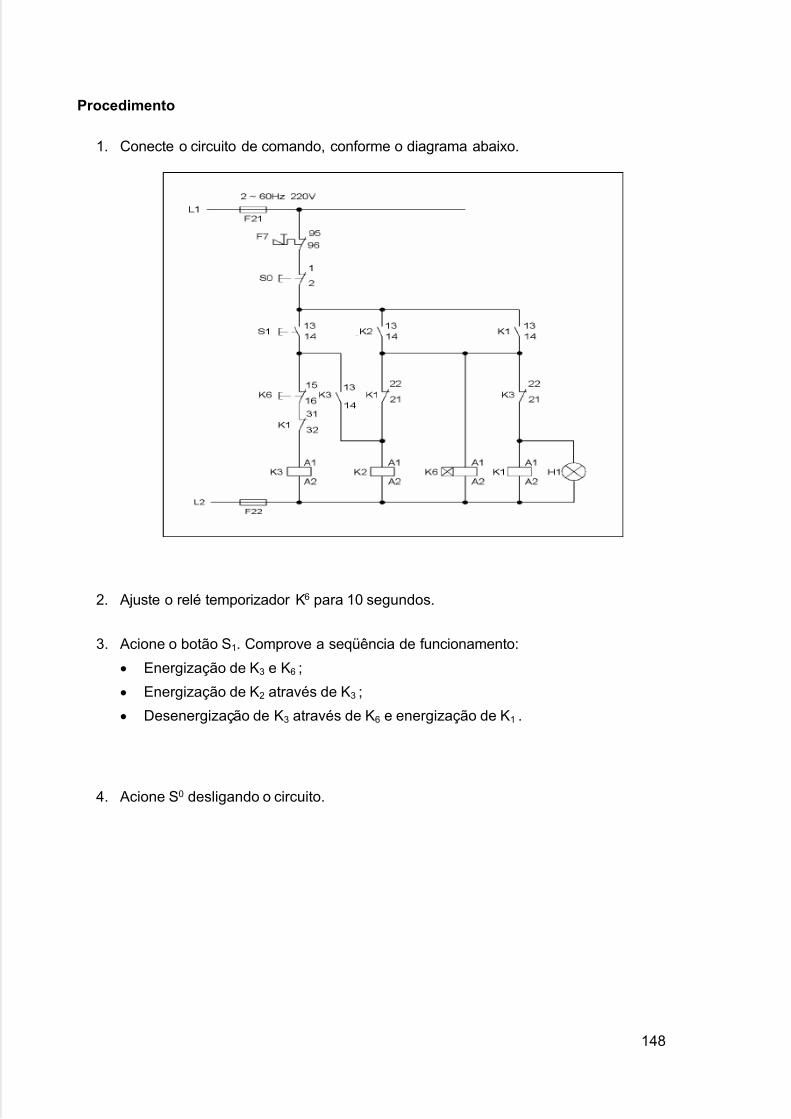
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 148/211
148
Procedimento
1. Conecte o circuito de comando, conforme o diagrama abaixo.
2. Ajuste o relé temporizador K6 para 10 segundos.
3. Acione o botão S1. Comprove a seqüência de funcionamento:
• Energização de K3 e K6 ;
• Energização de K2 através de K3 ;
• Desenergização de K3 através de K6 e energização de K1 .
4. Acione S0 desligando o circuito.
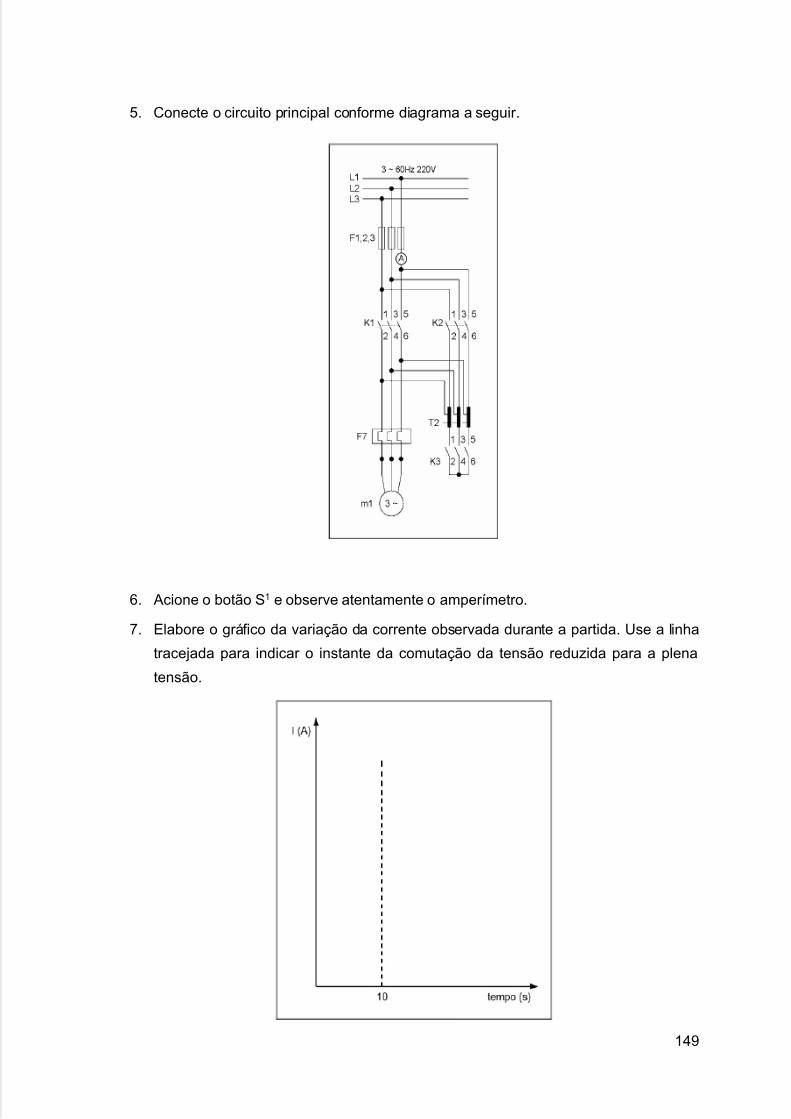
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 149/211
149
5. Conecte o circuito principal conforme diagrama a seguir.
6. Acione o botão S1 e observe atentamente o amperímetro.
7. Elabore o gráfico da variação da corrente observada durante a partida. Use a linha
tracejada para indicar o instante da comutação da tensão reduzida para a plena
tensão.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 150/211
150
8. Desligue o circuito.
9. Como você entendeu o funcionamento desse circuito?
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 151/211
151
Verificar o funcionamento demotor com partida por
autotransformador comreversão
Neste ensaio, você vai montar e testar um circuito de comando de motor trifásico comcontatores para partida por autotransformador.
Você verá que esse circuito também permite a reversão comandada por botões e reléstemporizados.
Equipamento:
• Motor trifásico 1CV, 220V, 60Hz,
• Voltimetro 0-250V.
Material necessário:
• 3 fusíveis diazed 16A com base;
• 2 fusíveis diazed 4A com base;
• 5 contatores;
• 1 relé temporizador;
• 3 botoeiras;• 1 relé térmico com faixa de regulagem compatível com o motor;
• 1 auto transformador
• Cabos de conexão.
Observação:
Verificar se todos os materiais estão compatíveis com a tensão e freqüência da rede ese a capacidade de corrente está de acordo com o motor.
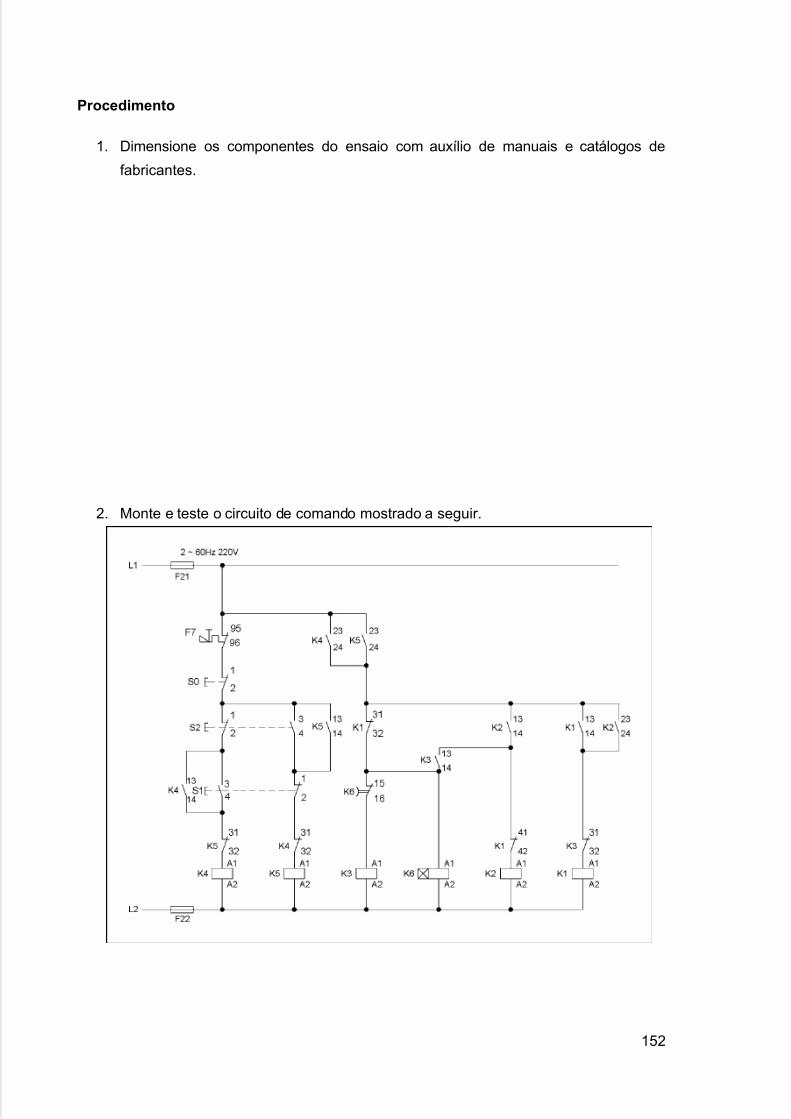
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 152/211
152
Procedimento
1. Dimensione os componentes do ensaio com auxílio de manuais e catálogos de
fabricantes.
2. Monte e teste o circuito de comando mostrado a seguir.
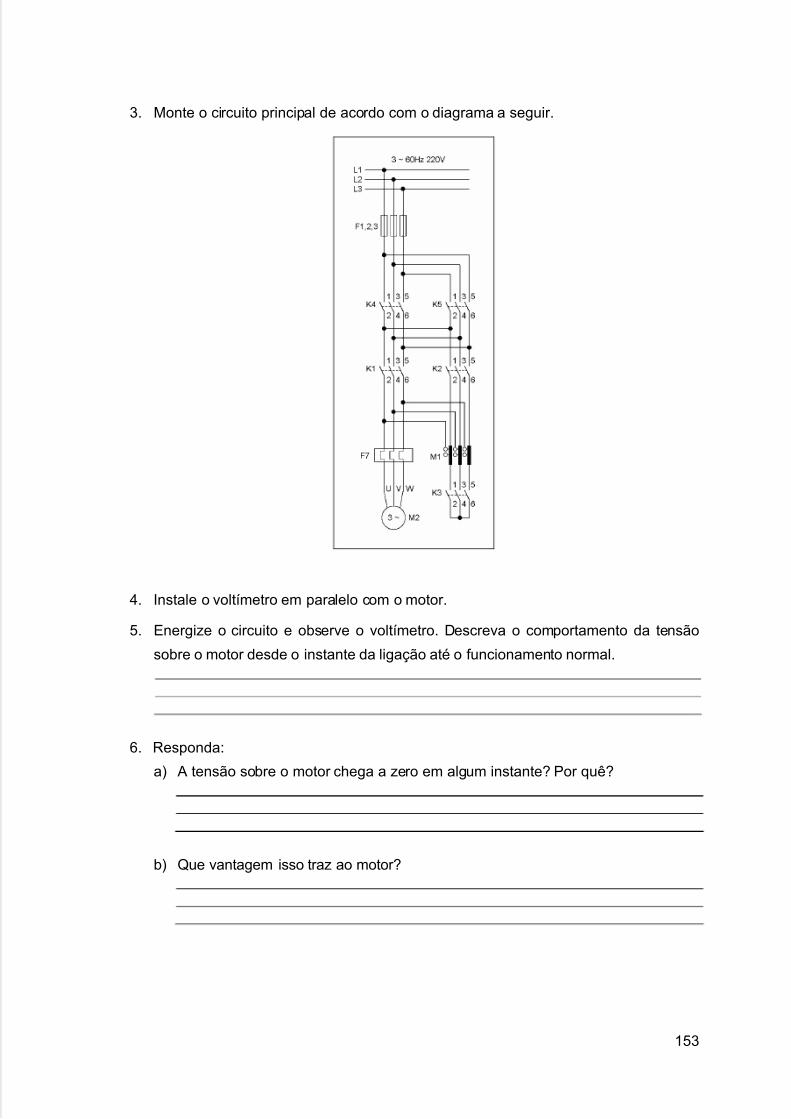
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 153/211
153
3. Monte o circuito principal de acordo com o diagrama a seguir.
4. Instale o voltímetro em paralelo com o motor.
5. Energize o circuito e observe o voltímetro. Descreva o comportamento da tensão
sobre o motor desde o instante da ligação até o funcionamento normal.
6. Responda:
a) A tensão sobre o motor chega a zero em algum instante? Por quê?
b) Que vantagem isso traz ao motor?
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 154/211
154
Verificar o funcionamento demotor Dahlander
Neste ensaio, você vai montar um circuito com contatores para motor Dahlander para
comutação polar comandada por botões.
Equipamento:
• Motor trifásico tipo Dahlander 220V, 60Hz,
• Tacômetro;
• Amperímetro 0-15A.
Material necessário:
• 6 fusíveis diazed 16A com base;
• 2 fusíveis diazed 4A com base;
• 3 contatores;
• 3 botoeiras;
• 2 relé térmico com faixa de regulagem compatível com o motor;
• Cabos de conexão.
Observação:
Verificar se todos os materiais estão compatíveis com a tensão e freqüência da rede ese a capacidade de corrente está de acordo com o motor.
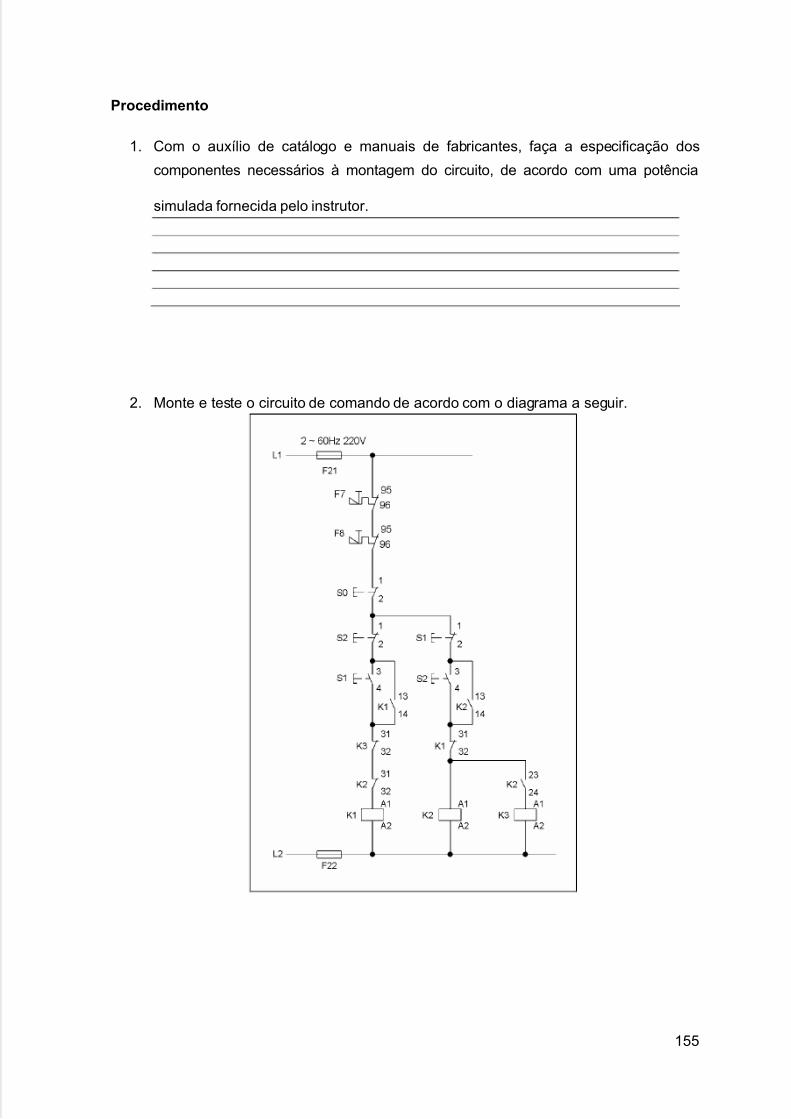
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 155/211
155
Procedimento
1. Com o auxílio de catálogo e manuais de fabricantes, faça a especificação dos
componentes necessários à montagem do circuito, de acordo com uma potência
simulada fornecida pelo instrutor.
2. Monte e teste o circuito de comando de acordo com o diagrama a seguir.
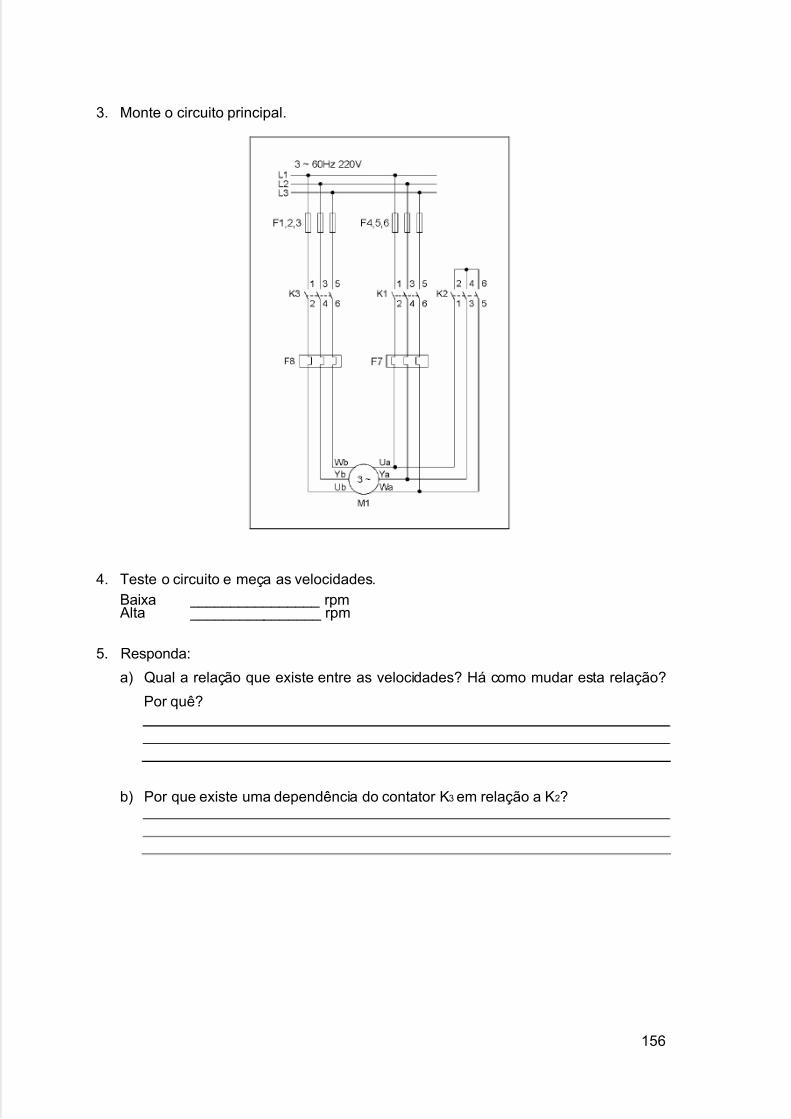
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 156/211
156
3. Monte o circuito principal.
4. Teste o circuito e meça as velocidades.
Baixa ________________ rpm Alta ________________ rpm
5. Responda:
a) Qual a relação que existe entre as velocidades? Há como mudar esta relação?
Por quê?
b) Por que existe uma dependência do contator K3 em relação a K2?
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 157/211
157
Verificar o funcionamento demotor Dahlander com
reversão de rotação
Neste ensaio, você vai montar um circuito para motor tipo Dahlander com contadores.Esse circuito permite a comutação polar e a reversão comandada por botões.
Equipamento:
• Motor trifásico tipo Dahlander 220V, 60Hz,
• Tacômetro;
• Amperímetro 0-15A.
Material necessário:
• 6 fusíveis diazed 16A com base;
• 2 fusíveis diazed 4A com base;
• 5 contatores;
• 5 botoeiras;
• 2 relé térmico com faixa de regulagem compatível com o motor;
• Cabos de conexão.
Observação:
Verificar se todos os materiais estão compatíveis com a tensão e freqüência da rede ese a capacidade de corrente está de acordo com o motor.
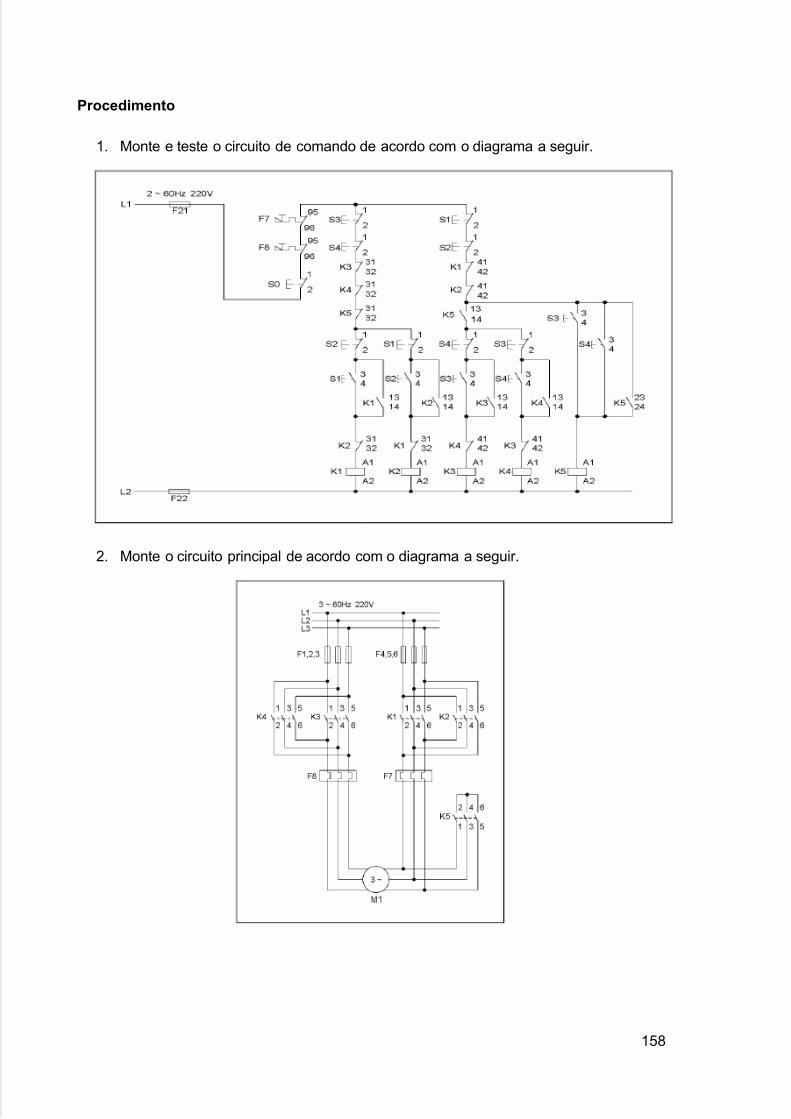
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 158/211
158
Procedimento
1. Monte e teste o circuito de comando de acordo com o diagrama a seguir.
2. Monte o circuito principal de acordo com o diagrama a seguir.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 159/211
159
3. Ligue o motor em velocidade baixa e meça a corrente de pico e a corrente nominal.IP ___________________ IN ___________________
4. Desligue o motor e aguarde sua desaceleração. Ligue-o novamente em alta
velocidade e meça a corrente de pico e a corrente nominal.IP ___________________ IN ___________________
5. Compare os valores de IN. Há necessidade de dois relés térmicos? Por quê?
6. Ligue o motor em velocidade baixa e depois passe para a velocidade alta, nomesmo sentido. Meça a corrente de pico.IP ___________________
7. Compare o valor da corrente de pico do passo 4 e do passo 6. Por que o valor do
passo 4 é maior?
8. Ligue o motor em alta velocidade em um sentido e inverta a rotação, medindo o
pico de corrente.IPRev ___________________
9. Por que o pico de corrente na reversão é maior?
10. Que modificações devem ser feitas no circuito de comando que impeçam que a
reversão seja feita sem que o circuito seja desligado antes?

5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 160/211
160
11. Implemente sua modificação no circuito e veja se funciona.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 161/211
161
Verificar o funcionamento deDahlander com relés
temporizados
Neste ensaio, você vai montar um circuito de comando de motor trifásico Dahlander,
com contatores para comutação polar e reversão comandada por botões e relétemporizadores.
Equipamento:
• Motor trifásico tipo Dahlander 220V, 60Hz,
• Tacômetro;
• Amperímetro 0-15A.
Material necessário:
• 6 fusíveis diazed 16A com base;
• 2 fusíveis diazed 4A com base;
• 5 contatores;
• 2 contatores auxiliares;
• 3 botoeiras;
• 2 relé térmico com faixa de regulagem compatível com o motor;
• 2 relé temporizador;
• 5 sinalizadores;
• Cabos de conexão.
Observação:
Verificar se todos os materiais estão compatíveis com a tensão e freqüência da rede ese a capacidade de corrente está de acordo com o motor.
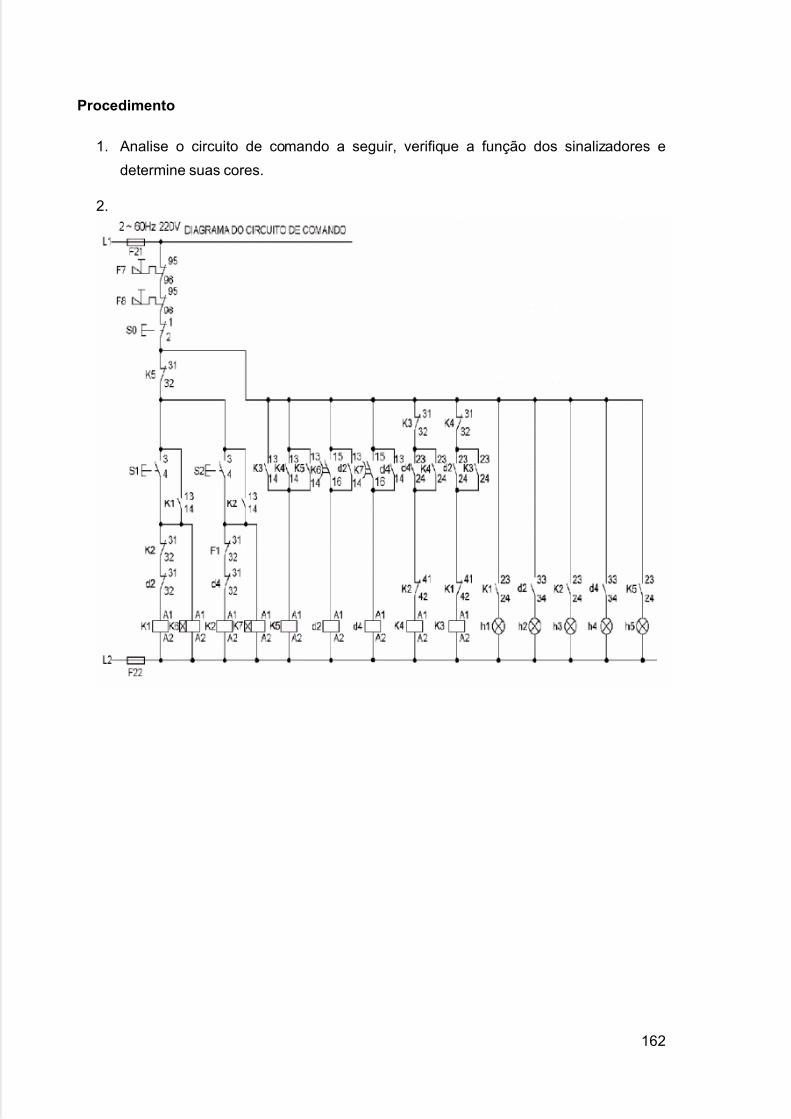
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 162/211
162
Procedimento
1. Analise o circuito de comando a seguir, verifique a função dos sinalizadores e
determine suas cores.
2.
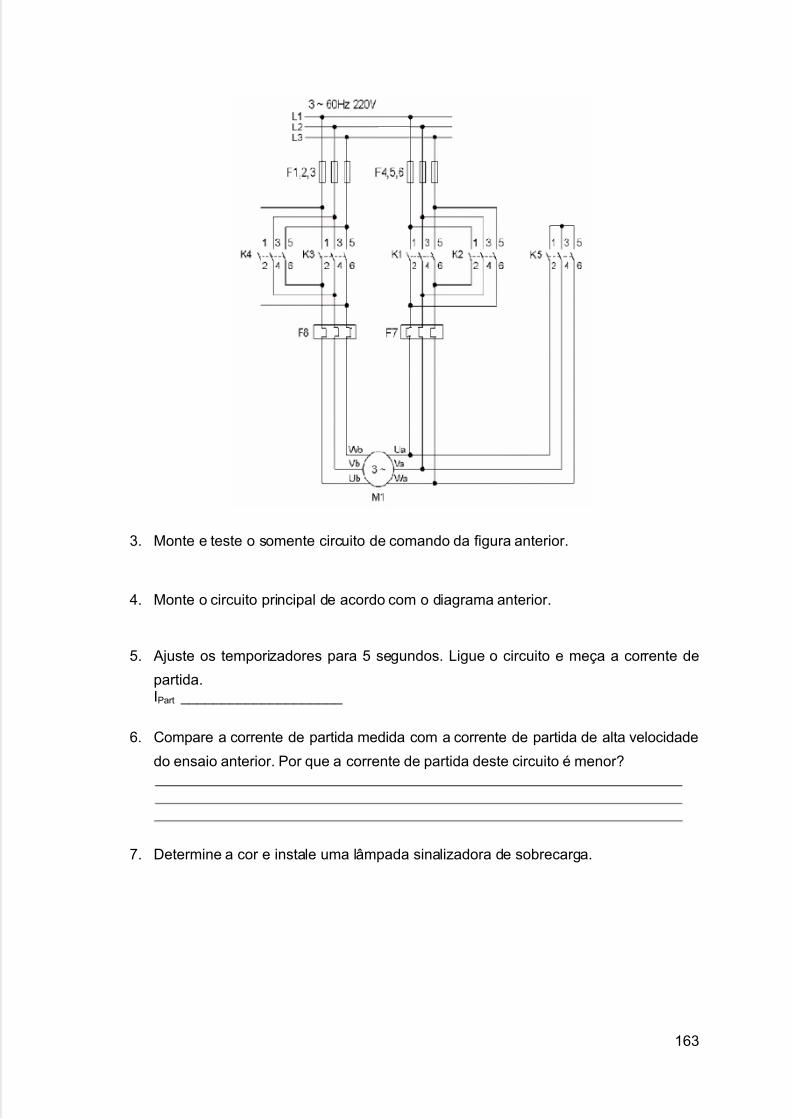
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 163/211
163
3. Monte e teste o somente circuito de comando da figura anterior.
4. Monte o circuito principal de acordo com o diagrama anterior.
5. Ajuste os temporizadores para 5 segundos. Ligue o circuito e meça a corrente de
partida.IPart ____________________
6. Compare a corrente de partida medida com a corrente de partida de alta velocidade
do ensaio anterior. Por que a corrente de partida deste circuito é menor?
7. Determine a cor e instale uma lâmpada sinalizadora de sobrecarga.

5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 164/211
164
8. Faça um novo diagrama de comando utilizando a programação de contatos.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 165/211
165
Verificar o funcionamento demotor trifásico com rotor
bobinado
Neste ensaio, você vai instalar um motor trifásico de rotor bobinado com comutação
semi-automática de resistores comandada por botões.
Equipamento:
• Motor trifásico rotor bobinado 220V, 60Hz,
• Tacômetro;• Amperímetro 0-15A.
Material necessário:
• 6 fusíveis diazed 16A com base;
• 2 fusíveis diazed 4A com base;
• 4 contatores;
• 4 contatores auxiliares;
• 2 botoeiras;• 1 relé térmico com faixa de regulagem compatível com o motor;
• Cabos de conexão.
Observação:
Verificar se todos os materiais estão compatíveis com a tensão e freqüência da rede ese a capacidade de corrente está de acordo com o motor.
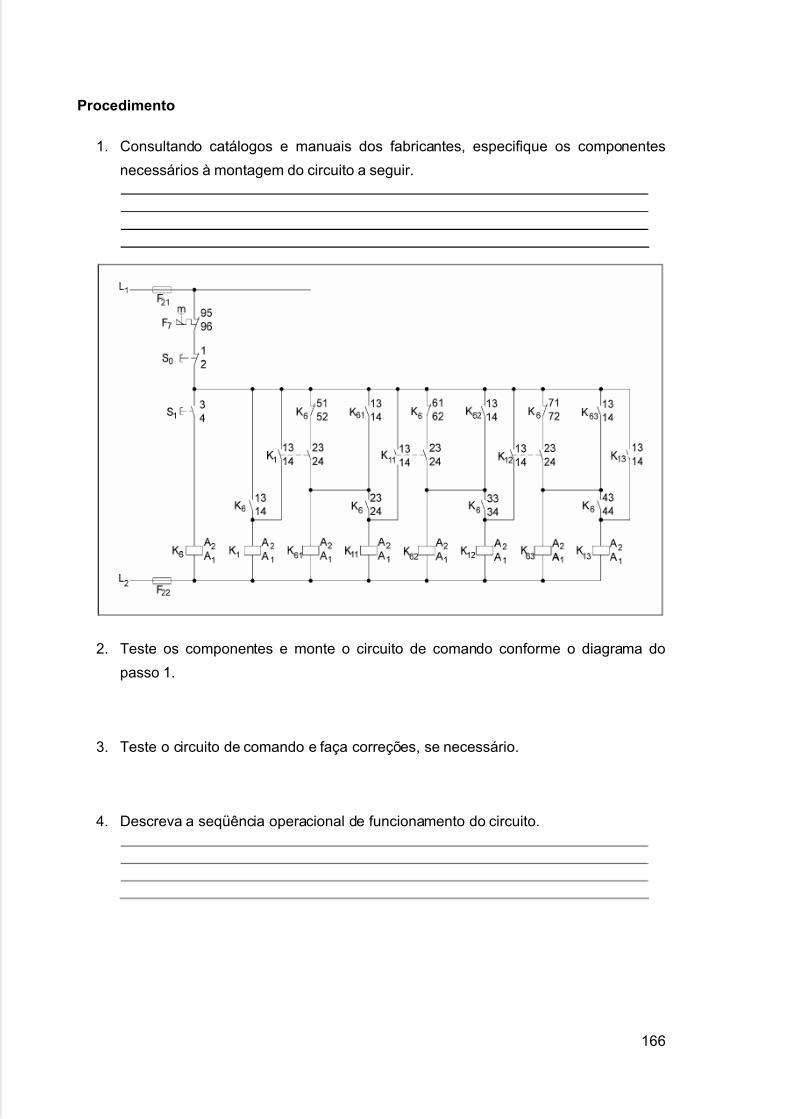
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 166/211
166
Procedimento
1. Consultando catálogos e manuais dos fabricantes, especifique os componentes
necessários à montagem do circuito a seguir.
2. Teste os componentes e monte o circuito de comando conforme o diagrama do
passo 1.
3. Teste o circuito de comando e faça correções, se necessário.
4. Descreva a seqüência operacional de funcionamento do circuito.
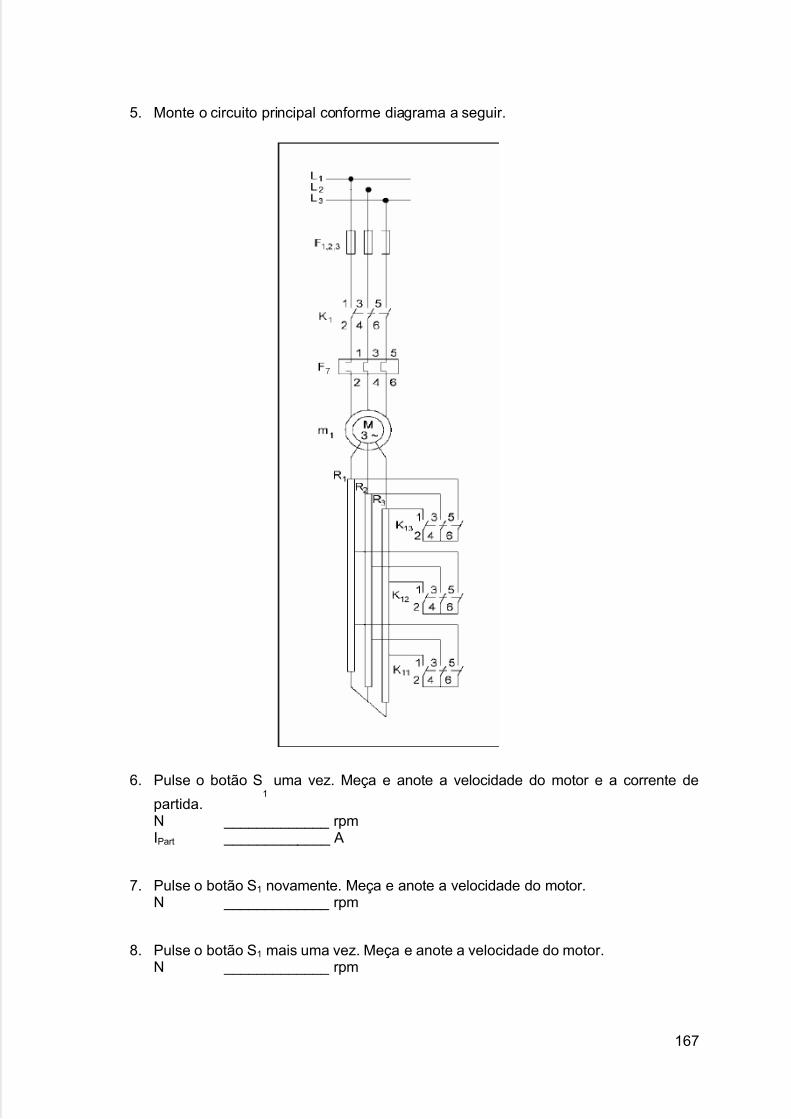
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 167/211
167
5. Monte o circuito principal conforme diagrama a seguir.
6. Pulse o botão S1
uma vez. Meça e anote a velocidade do motor e a corrente de
partida.N _____________ rpmIPart _____________ A
7. Pulse o botão S1 novamente. Meça e anote a velocidade do motor.N _____________ rpm
8. Pulse o botão S1 mais uma vez. Meça e anote a velocidade do motor.N _____________ rpm
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 168/211
168
9. Pulse o botão S1. Meça e anote a velocidade do motor e a corrente nominal.N _____________ rpmIN _____________ A
10. Verifique quantas vezes a corrente de partida do passo 6 é maior que a corrente
nominal (passo 9).IPart _____________ x IN
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 169/211
169
Verificar o funcionamento demotor trifásico com rotor
com comutação automática
Neste ensaio, você vai instalar um motor trifásico de rotor bobinado com comutaçãoautomática de resistores.
Equipamento:
• Motor trifásico rotor bobinado 220V, 60Hz,
• Tacômetro;
Material necessário:
• 6 fusíveis diazed 16A com base;
• 2 fusíveis diazed 4A com base;
• 4 contatores;
• 2 contatores auxiliares;
• 2 relés temporizador;
• 2 botoeiras;
• 1 relé térmico com faixa de regulagem compatível com o motor;• Cabos de conexão.
Observação:
Verificar se todos os materiais estão compatíveis com a tensão e freqüência da rede ese a capacidade de corrente está de acordo com o motor.
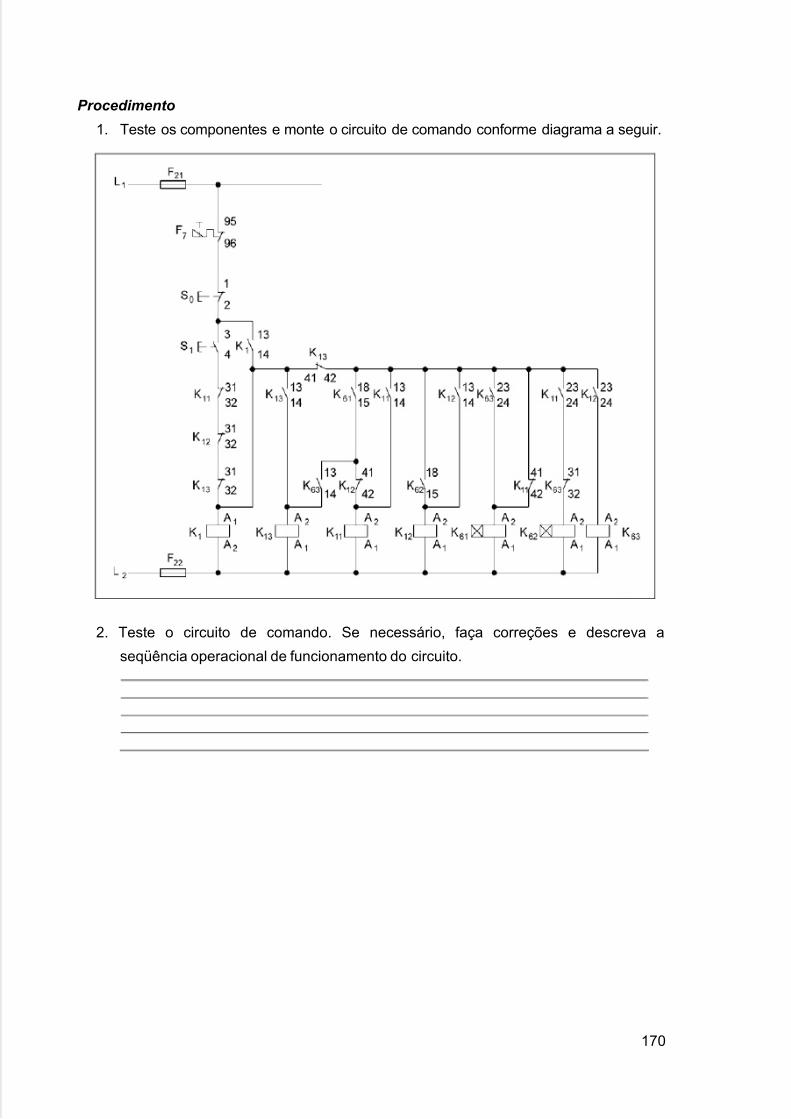
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 170/211
170
Procedimento
1. Teste os componentes e monte o circuito de comando conforme diagrama a seguir.
2. Teste o circuito de comando. Se necessário, faça correções e descreva a
seqüência operacional de funcionamento do circuito.
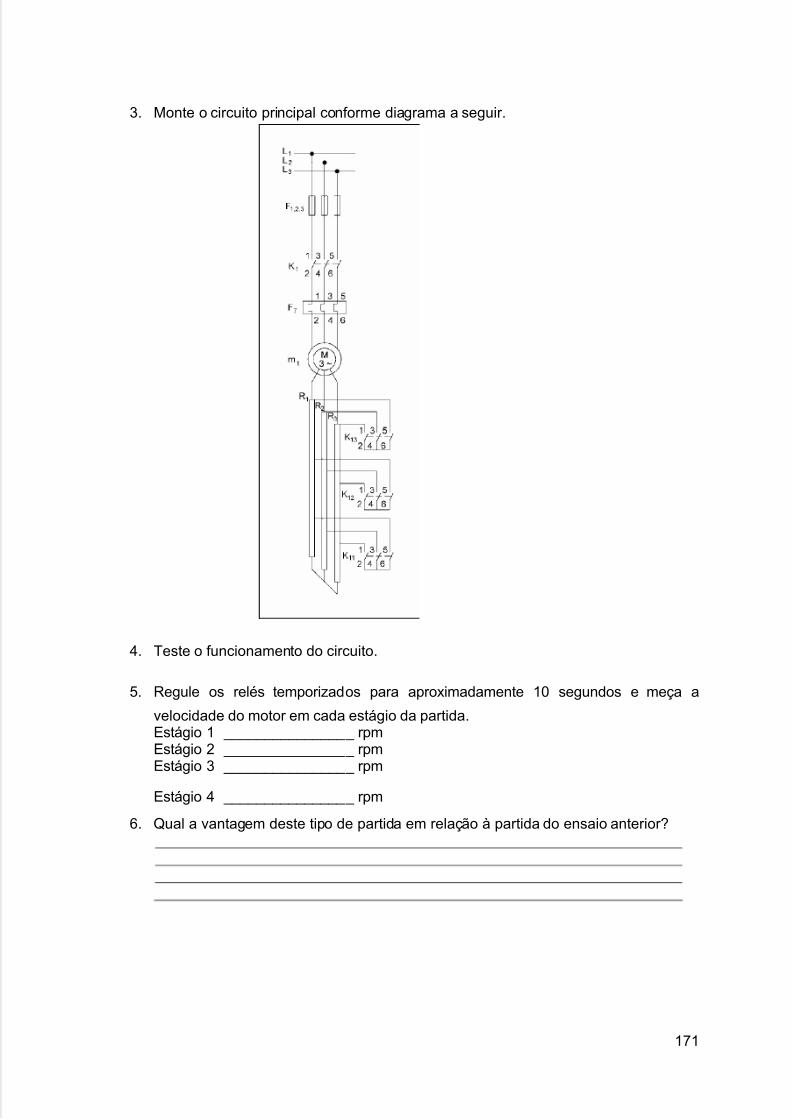
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 171/211
171
3. Monte o circuito principal conforme diagrama a seguir.
4. Teste o funcionamento do circuito.
5. Regule os relés temporizados para aproximadamente 10 segundos e meça a
velocidade do motor em cada estágio da partida.Estágio 1 ________________ rpmEstágio 2 ________________ rpmEstágio 3 ________________ rpm
Estágio 4 ________________ rpm
6. Qual a vantagem deste tipo de partida em relação à partida do ensaio anterior?
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 172/211
172
Verificar o funcionamento defrenagem eletromagnética de
motor trifásico
Neste ensaio, você vai montar e verificar o funcionamento de um circuito de frenagemeletromagnética.
Equipamento:
• Motor trifásico 220V, 60Hz,
• Amperímetro;
• Transformador 220/40V
Material necessário:
• 5 fusíveis diazed 16A com base;
• 2 fusíveis diazed 4A com base;
• 4 contatores;
• 3 sinalizadores;
• 3 botoeiras;
• 1 ponte retificadora a diodo de onda completa;• 1 relé térmico com faixa de regulagem compatível com o motor;
• Cabos de conexão.
Observação:
Verificar se todos os materiais estão compatíveis com a tensão e freqüência da rede ese a capacidade de corrente está de acordo com o motor.
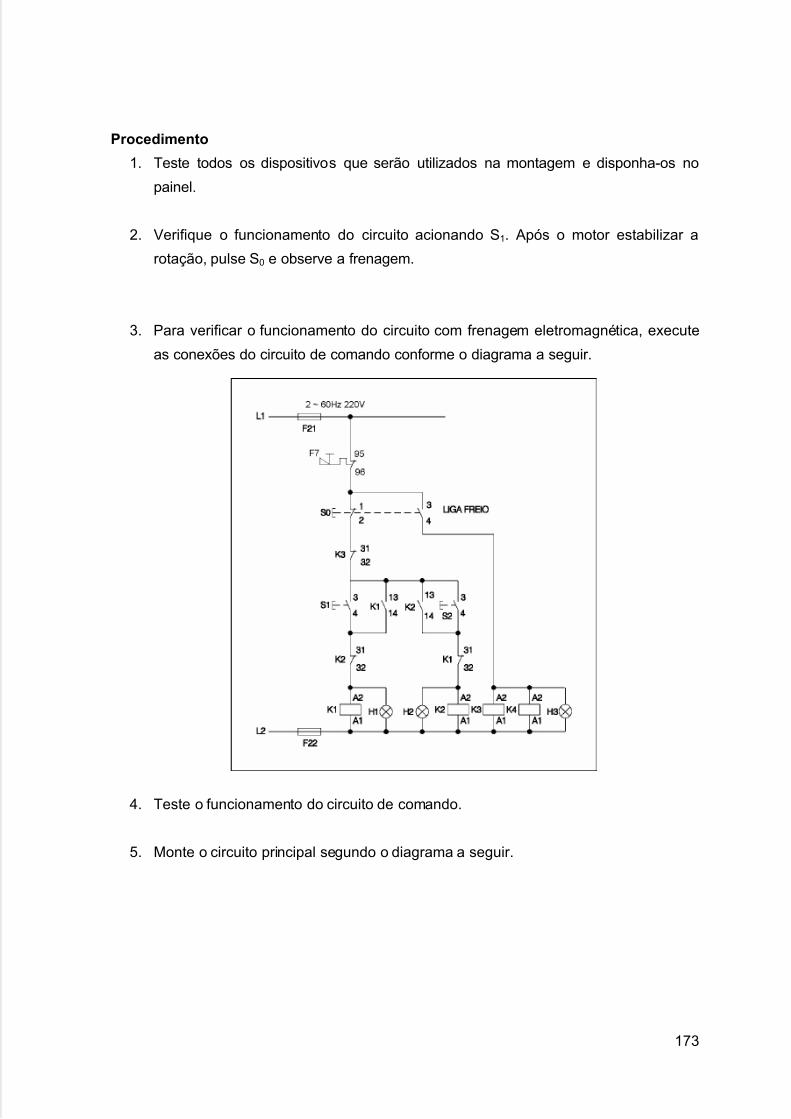
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 173/211
173
Procedimento
1. Teste todos os dispositivos que serão utilizados na montagem e disponha-os no
painel.
2. Verifique o funcionamento do circuito acionando S1. Após o motor estabilizar a
rotação, pulse S0 e observe a frenagem.
3. Para verificar o funcionamento do circuito com frenagem eletromagnética, execute
as conexões do circuito de comando conforme o diagrama a seguir.
4. Teste o funcionamento do circuito de comando.
5. Monte o circuito principal segundo o diagrama a seguir.
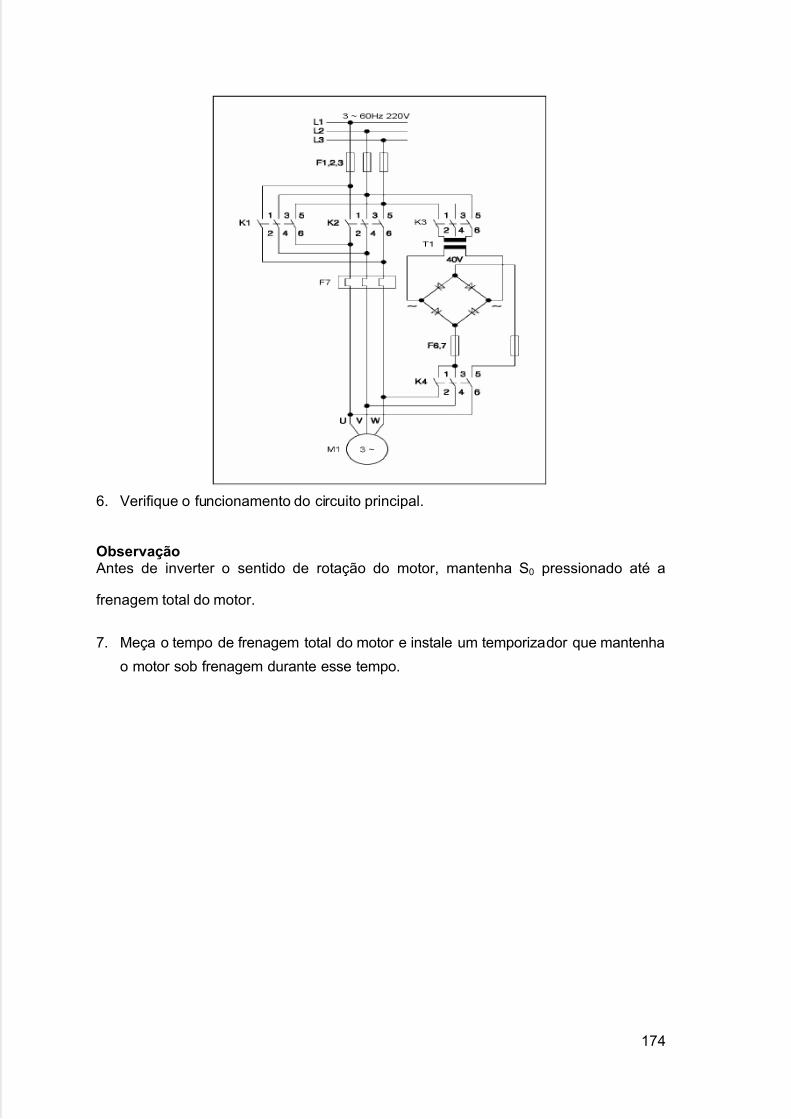
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 174/211
174
6. Verifique o funcionamento do circuito principal.
Observação Antes de inverter o sentido de rotação do motor, mantenha S0 pressionado até a
frenagem total do motor.
7. Meça o tempo de frenagem total do motor e instale um temporizador que mantenha
o motor sob frenagem durante esse tempo.
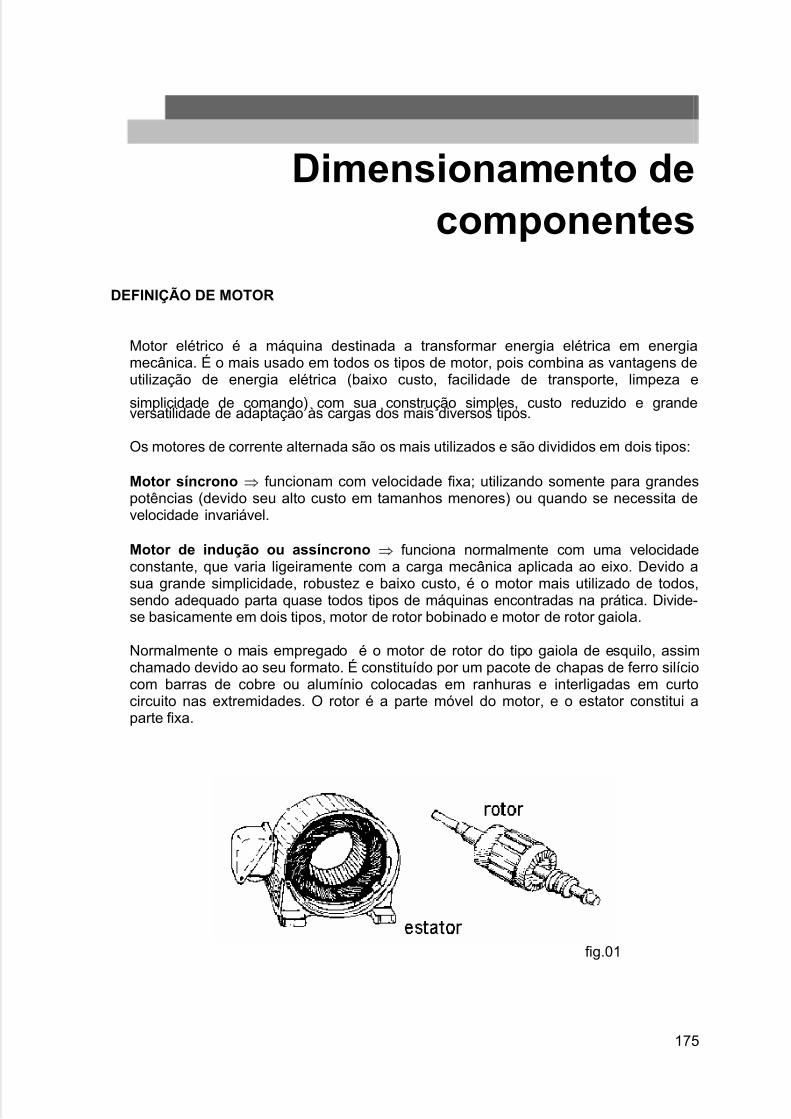
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 175/211
175
Dimensionamento decomponentes
DEFINIÇÃO DE MOTOR
Motor elétrico é a máquina destinada a transformar energia elétrica em energiamecânica. É o mais usado em todos os tipos de motor, pois combina as vantagens deutilização de energia elétrica (baixo custo, facilidade de transporte, limpeza e
simplicidade de comando) com sua construção simples, custo reduzido e grandeversatilidade de adaptação às cargas dos mais diversos tipos.
Os motores de corrente alternada são os mais utilizados e são divididos em dois tipos:
Motor síncrono ⇒ funcionam com velocidade fixa; utilizando somente para grandespotências (devido seu alto custo em tamanhos menores) ou quando se necessita develocidade invariável.
Motor de indução ou assíncrono ⇒ funciona normalmente com uma velocidadeconstante, que varia ligeiramente com a carga mecânica aplicada ao eixo. Devido asua grande simplicidade, robustez e baixo custo, é o motor mais utilizado de todos,sendo adequado parta quase todos tipos de máquinas encontradas na prática. Divide-se basicamente em dois tipos, motor de rotor bobinado e motor de rotor gaiola.
Normalmente o mais empregado é o motor de rotor do tipo gaiola de esquilo, assimchamado devido ao seu formato. É constituído por um pacote de chapas de ferro silíciocom barras de cobre ou alumínio colocadas em ranhuras e interligadas em curtocircuito nas extremidades. O rotor é a parte móvel do motor, e o estator constitui aparte fixa.
fig.01
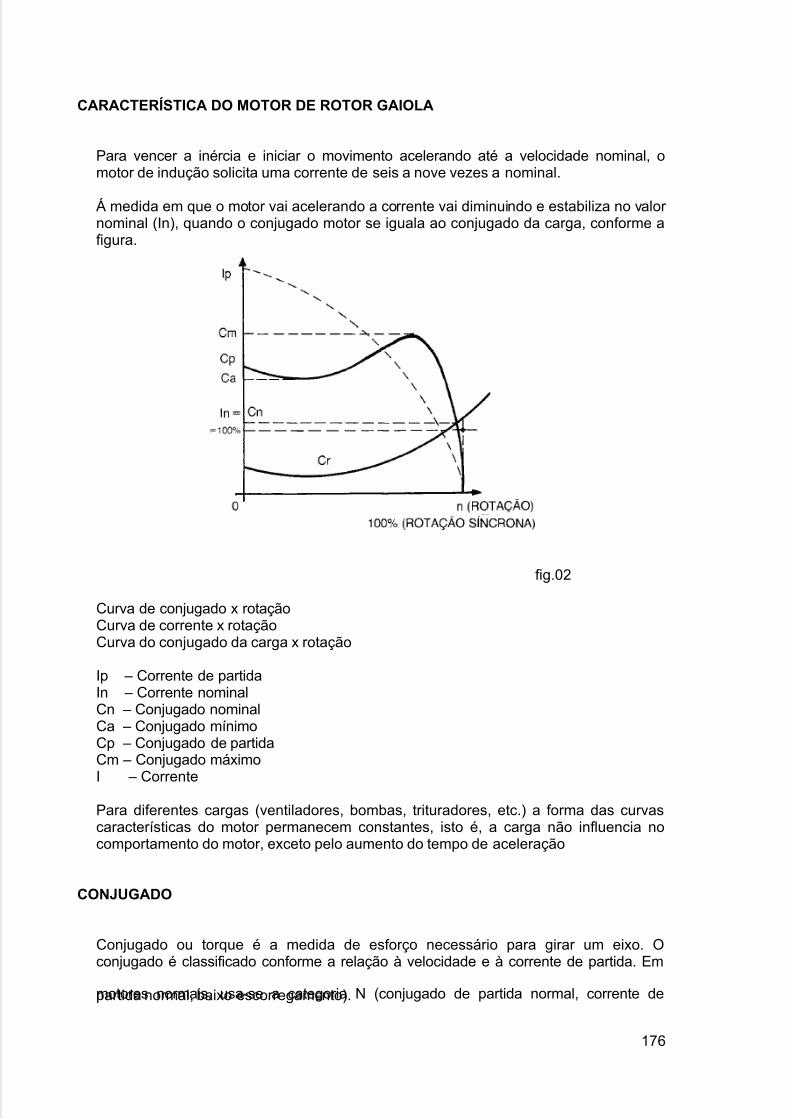
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 176/211
176
CARACTERÍSTICA DO MOTOR DE ROTOR GAIOLA
Para vencer a inércia e iniciar o movimento acelerando até a velocidade nominal, omotor de indução solicita uma corrente de seis a nove vezes a nominal.
Á medida em que o motor vai acelerando a corrente vai diminuindo e estabiliza no valor nominal (In), quando o conjugado motor se iguala ao conjugado da carga, conforme afigura.
fig.02
Curva de conjugado x rotaçãoCurva de corrente x rotaçãoCurva do conjugado da carga x rotação
Ip – Corrente de partidaIn – Corrente nominalCn – Conjugado nominalCa – Conjugado mínimoCp – Conjugado de partidaCm – Conjugado máximoI – Corrente
Para diferentes cargas (ventiladores, bombas, trituradores, etc.) a forma das curvascaracterísticas do motor permanecem constantes, isto é, a carga não influencia nocomportamento do motor, exceto pelo aumento do tempo de aceleração
CONJUGADO
Conjugado ou torque é a medida de esforço necessário para girar um eixo. Oconjugado é classificado conforme a relação à velocidade e à corrente de partida. Em
motores normais, usa-se a categoria N (conjugado de partida normal, corrente departida normal, baixo escorregamento).
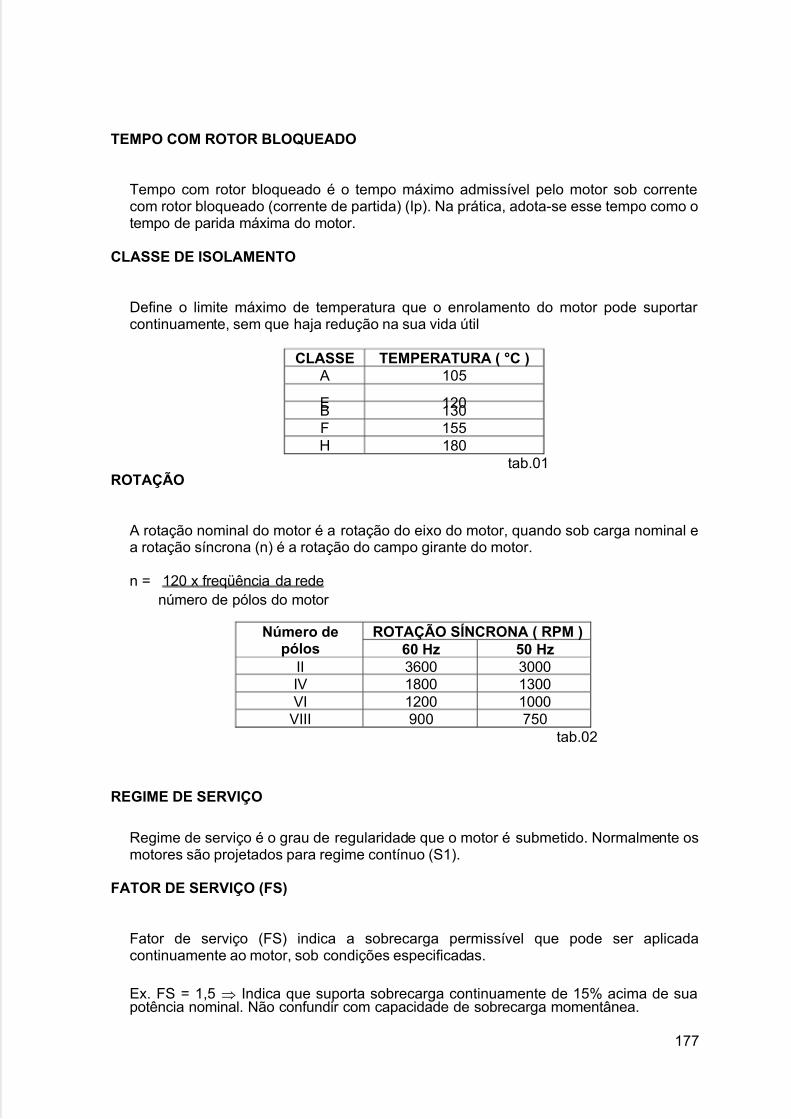
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 177/211
177
TEMPO COM ROTOR BLOQUEADO
Tempo com rotor bloqueado é o tempo máximo admissível pelo motor sob correntecom rotor bloqueado (corrente de partida) (Ip). Na prática, adota-se esse tempo como otempo de parida máxima do motor.
CLASSE DE ISOLAMENTO
Define o limite máximo de temperatura que o enrolamento do motor pode suportar continuamente, sem que haja redução na sua vida útil
CLASSE TEMPERATURA ( °C ) A 105
E 120B 130F 155H 180
tab.01ROTAÇÃO
A rotação nominal do motor é a rotação do eixo do motor, quando sob carga nominal ea rotação síncrona (n) é a rotação do campo girante do motor.
n = 120 x freqüência da redenúmero de pólos do motor
ROTAÇÃO SÍNCRONA ( RPM )Número depólos 60 Hz 50 Hz
II 3600 3000IV 1800 1300VI 1200 1000
VIII 900 750tab.02
REGIME DE SERVIÇO
Regime de serviço é o grau de regularidade que o motor é submetido. Normalmente osmotores são projetados para regime contínuo (S1).
FATOR DE SERVIÇO (FS)
Fator de serviço (FS) indica a sobrecarga permissível que pode ser aplicadacontinuamente ao motor, sob condições especificadas.
Ex. FS = 1,5 ⇒ Indica que suporta sobrecarga continuamente de 15% acima de suapotência nominal. Não confundir com capacidade de sobrecarga momentânea.
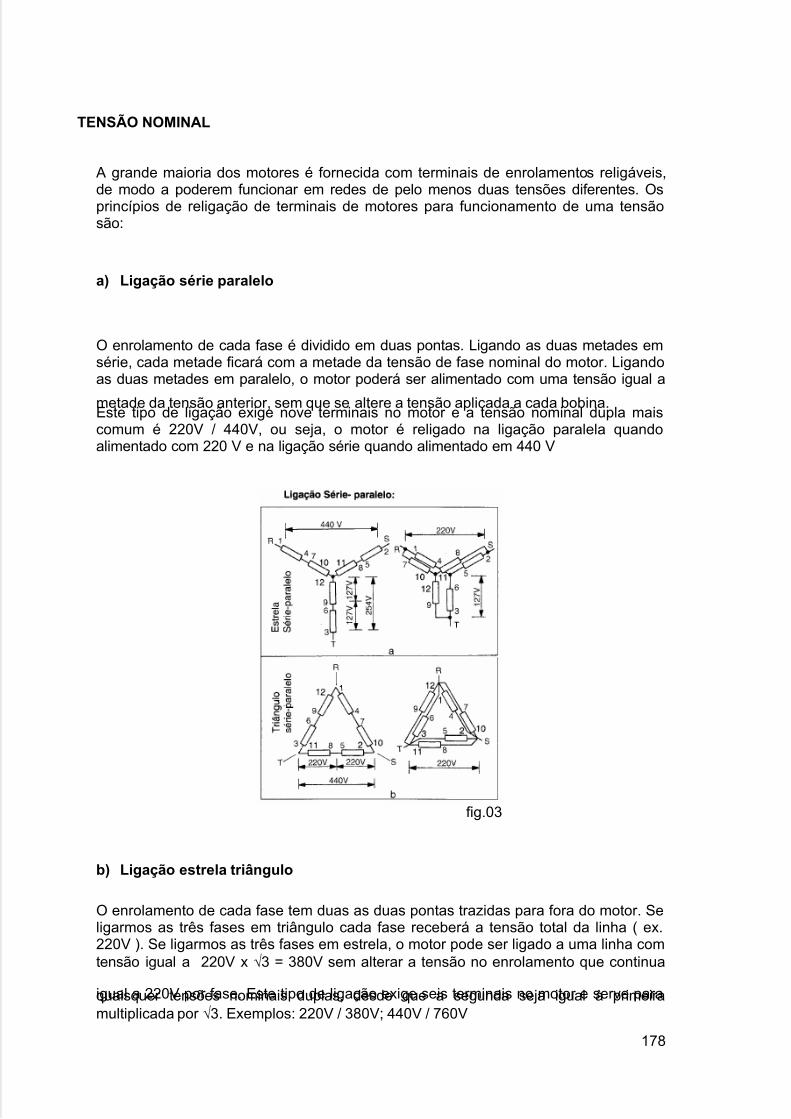
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 178/211
178
TENSÃO NOMINAL
A grande maioria dos motores é fornecida com terminais de enrolamentos religáveis,de modo a poderem funcionar em redes de pelo menos duas tensões diferentes. Osprincípios de religação de terminais de motores para funcionamento de uma tensãosão:
a) Ligação série paralelo
O enrolamento de cada fase é dividido em duas pontas. Ligando as duas metades emsérie, cada metade ficará com a metade da tensão de fase nominal do motor. Ligandoas duas metades em paralelo, o motor poderá ser alimentado com uma tensão igual a
metade da tensão anterior, sem que se altere a tensão aplicada a cada bobina.Este tipo de ligação exige nove terminais no motor e a tensão nominal dupla maiscomum é 220V / 440V, ou seja, o motor é religado na ligação paralela quandoalimentado com 220 V e na ligação série quando alimentado em 440 V
fig.03
b) Ligação estrela triângulo
O enrolamento de cada fase tem duas as duas pontas trazidas para fora do motor. Seligarmos as três fases em triângulo cada fase receberá a tensão total da linha ( ex.220V ). Se ligarmos as três fases em estrela, o motor pode ser ligado a uma linha comtensão igual a 220V x √3 = 380V sem alterar a tensão no enrolamento que continua
igual a 220V por fase. Este tipo de ligação exige seis terminais no motor e serve paraquaisquer tensões nominais duplas, desde que a segunda seja igual à primeiramultiplicada por √3. Exemplos: 220V / 380V; 440V / 760V
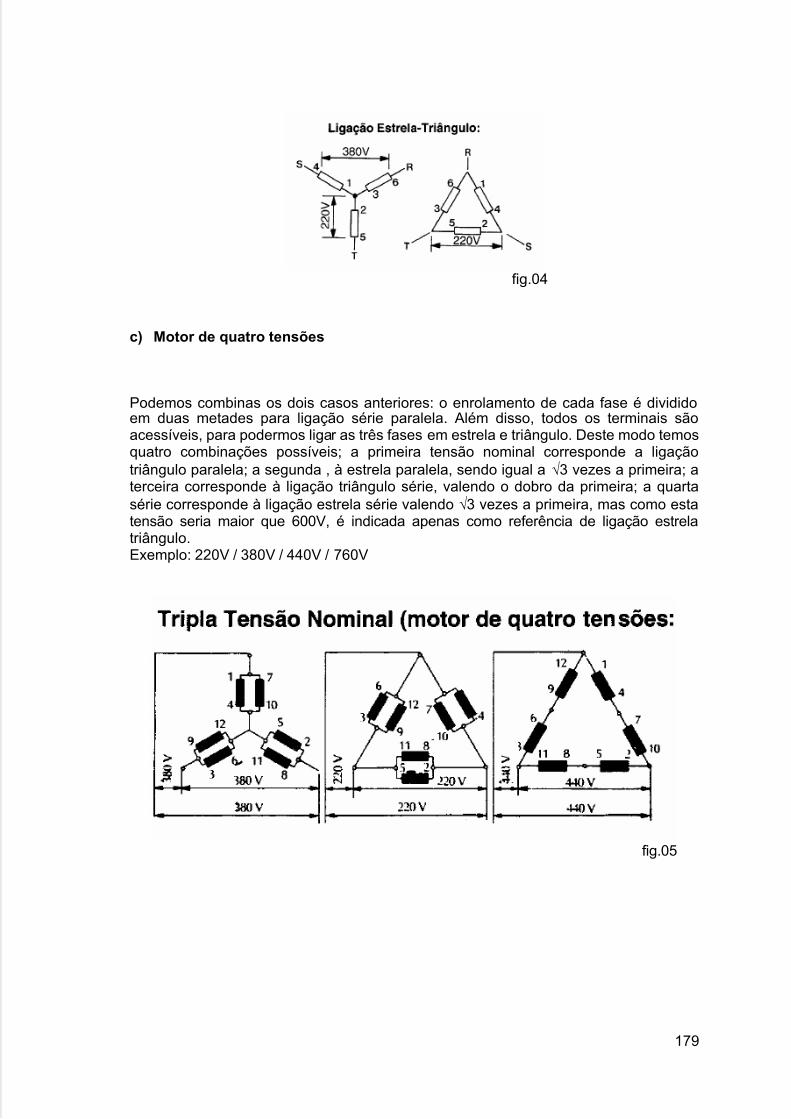
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 179/211
179
fig.04
c) Motor de quatro tensões
Podemos combinas os dois casos anteriores: o enrolamento de cada fase é divididoem duas metades para ligação série paralela. Além disso, todos os terminais sãoacessíveis, para podermos ligar as três fases em estrela e triângulo. Deste modo temosquatro combinações possíveis; a primeira tensão nominal corresponde a ligaçãotriângulo paralela; a segunda , à estrela paralela, sendo igual a √3 vezes a primeira; aterceira corresponde à ligação triângulo série, valendo o dobro da primeira; a quartasérie corresponde à ligação estrela série valendo √3 vezes a primeira, mas como estatensão seria maior que 600V, é indicada apenas como referência de ligação estrelatriângulo.Exemplo: 220V / 380V / 440V / 760V
fig.05
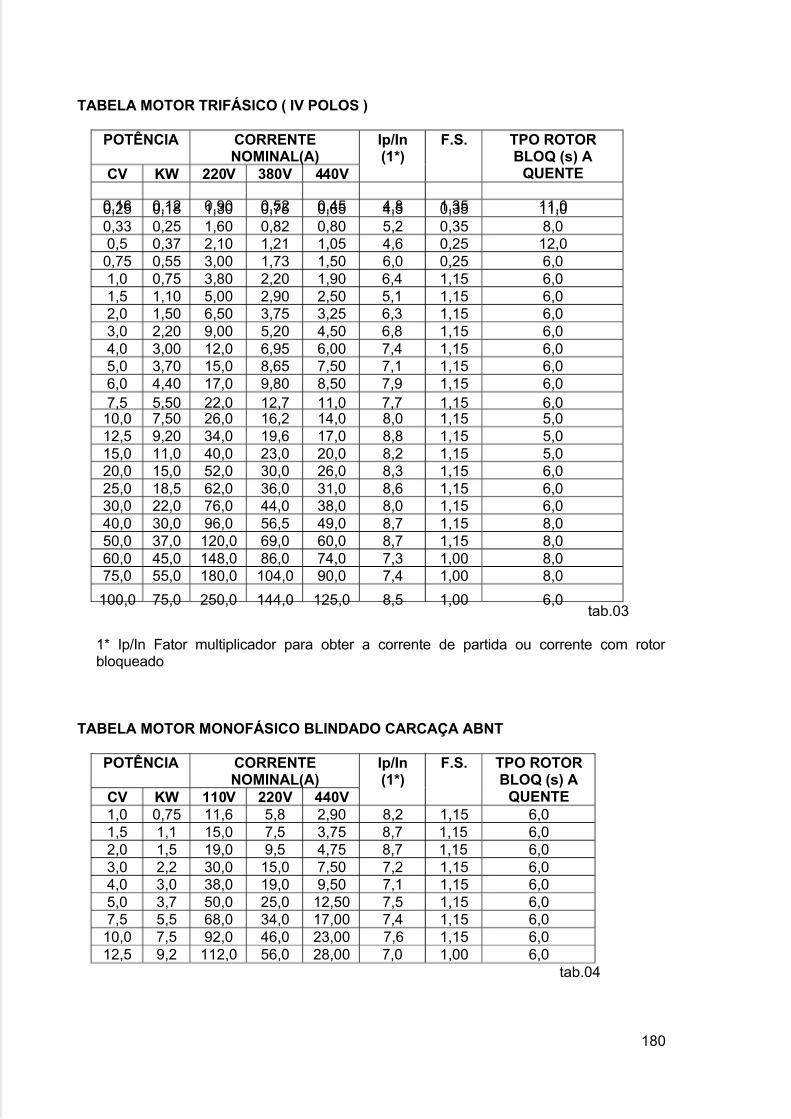
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 180/211
180
TABELA MOTOR TRIFÁSICO ( IV POLOS )
POTÊNCIA CORRENTENOMINAL(A)
CV KW 220V 380V 440V
Ip/In(1*)
F.S. TPO ROTORBLOQ (s) A
QUENTE
0,16 0,12 0,90 0,52 0,45 4,8 1,35 11,00,25 0,18 1,30 0,75 0,65 4,5 0,35 11,00,33 0,25 1,60 0,82 0,80 5,2 0,35 8,00,5 0,37 2,10 1,21 1,05 4,6 0,25 12,00,75 0,55 3,00 1,73 1,50 6,0 0,25 6,01,0 0,75 3,80 2,20 1,90 6,4 1,15 6,01,5 1,10 5,00 2,90 2,50 5,1 1,15 6,02,0 1,50 6,50 3,75 3,25 6,3 1,15 6,03,0 2,20 9,00 5,20 4,50 6,8 1,15 6,04,0 3,00 12,0 6,95 6,00 7,4 1,15 6,05,0 3,70 15,0 8,65 7,50 7,1 1,15 6,06,0 4,40 17,0 9,80 8,50 7,9 1,15 6,07,5 5,50 22,0 12,7 11,0 7,7 1,15 6,010,0 7,50 26,0 16,2 14,0 8,0 1,15 5,012,5 9,20 34,0 19,6 17,0 8,8 1,15 5,015,0 11,0 40,0 23,0 20,0 8,2 1,15 5,020,0 15,0 52,0 30,0 26,0 8,3 1,15 6,025,0 18,5 62,0 36,0 31,0 8,6 1,15 6,030,0 22,0 76,0 44,0 38,0 8,0 1,15 6,040,0 30,0 96,0 56,5 49,0 8,7 1,15 8,050,0 37,0 120,0 69,0 60,0 8,7 1,15 8,060,0 45,0 148,0 86,0 74,0 7,3 1,00 8,075,0 55,0 180,0 104,0 90,0 7,4 1,00 8,0
100,0 75,0 250,0 144,0 125,0 8,5 1,00 6,0tab.03
1* Ip/In Fator multiplicador para obter a corrente de partida ou corrente com rotor bloqueado
TABELA MOTOR MONOFÁSICO BLINDADO CARCAÇA ABNT
POTÊNCIA CORRENTENOMINAL(A)
CV KW 110V 220V 440V
Ip/In(1*)
F.S. TPO ROTORBLOQ (s) A
QUENTE1,0 0,75 11,6 5,8 2,90 8,2 1,15 6,01,5 1,1 15,0 7,5 3,75 8,7 1,15 6,02,0 1,5 19,0 9,5 4,75 8,7 1,15 6,03,0 2,2 30,0 15,0 7,50 7,2 1,15 6,04,0 3,0 38,0 19,0 9,50 7,1 1,15 6,05,0 3,7 50,0 25,0 12,50 7,5 1,15 6,07,5 5,5 68,0 34,0 17,00 7,4 1,15 6,010,0 7,5 92,0 46,0 23,00 7,6 1,15 6,012,5 9,2 112,0 56,0 28,00 7,0 1,00 6,0
tab.04
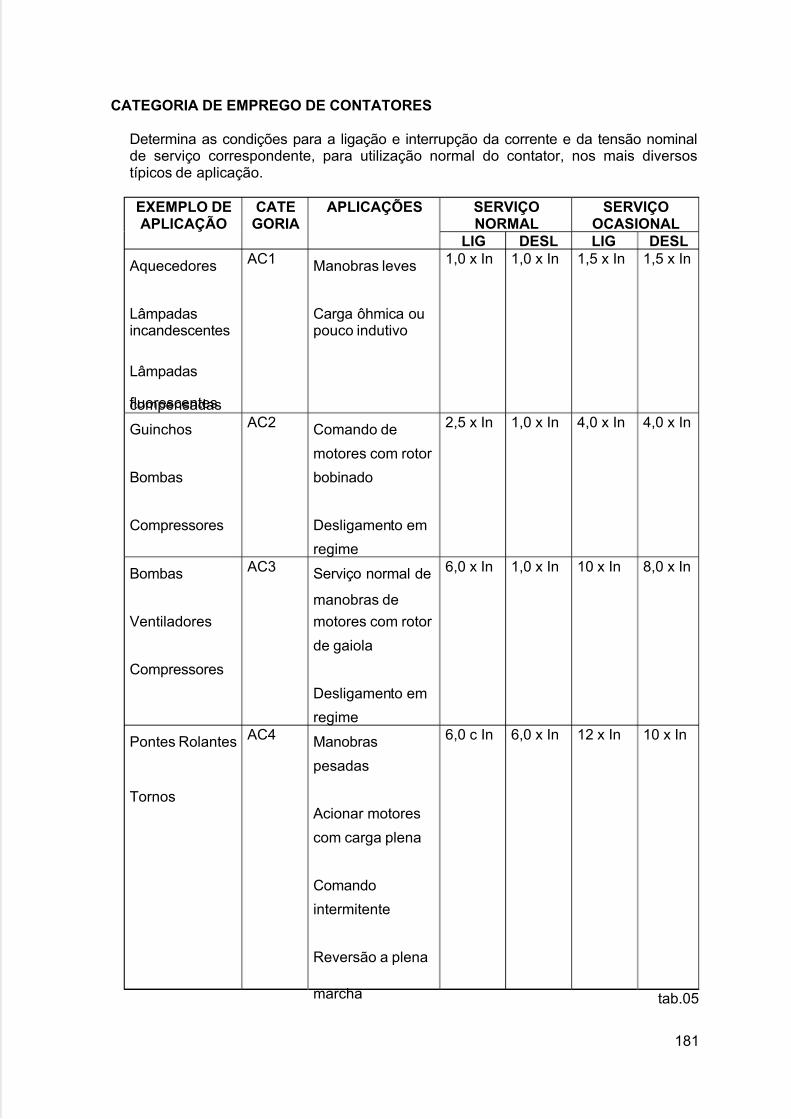
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 181/211
181
CATEGORIA DE EMPREGO DE CONTATORES
Determina as condições para a ligação e interrupção da corrente e da tensão nominalde serviço correspondente, para utilização normal do contator, nos mais diversostípicos de aplicação.
SERVIÇONORMAL
SERVIÇOOCASIONAL
EXEMPLO DEAPLICAÇÃO
CATEGORIA
APLICAÇÕES
LIG DESL LIG DESL
Aquecedores
Lâmpadasincandescentes
Lâmpadas
fluorescentescompensadas
AC1 Manobras leves
Carga ôhmica oupouco indutivo
1,0 x In 1,0 x In 1,5 x In 1,5 x In
Guinchos
Bombas
Compressores
AC2 Comando de
motores com rotor
bobinado
Desligamento em
regime
2,5 x In 1,0 x In 4,0 x In 4,0 x In
Bombas
Ventiladores
Compressores
AC3 Serviço normal de
manobras de
motores com rotor
de gaiola
Desligamento em
regime
6,0 x In 1,0 x In 10 x In 8,0 x In
Pontes Rolantes
Tornos
AC4 Manobras
pesadas
Acionar motores
com carga plena
Comando
intermitente
Reversão a plena
marcha
6,0 c In 6,0 x In 12 x In 10 x In
tab.05
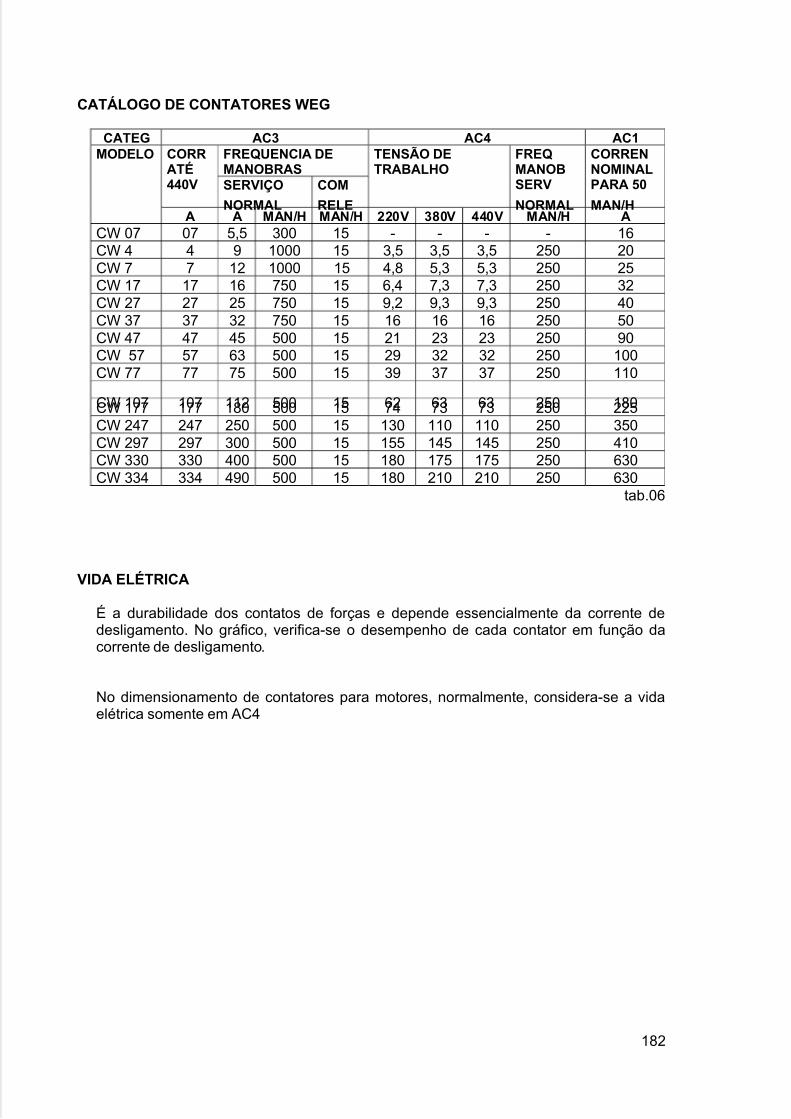
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 182/211
182
CATÁLOGO DE CONTATORES WEG
CATEG AC3 AC4 AC1FREQUENCIA DEMANOBRAS
CORRATÉ440V SERVIÇO
NORMAL
COM
RELE
TENSÃO DETRABALHO
FREQMANOBSERV
NORMAL
CORRENNOMINALPARA 50
MAN/H
MODELO
A A MAN/H MAN/H 220V 380V 440V MAN/H ACW 07 07 5,5 300 15 - - - - 16CW 4 4 9 1000 15 3,5 3,5 3,5 250 20CW 7 7 12 1000 15 4,8 5,3 5,3 250 25CW 17 17 16 750 15 6,4 7,3 7,3 250 32CW 27 27 25 750 15 9,2 9,3 9,3 250 40CW 37 37 32 750 15 16 16 16 250 50CW 47 47 45 500 15 21 23 23 250 90CW 57 57 63 500 15 29 32 32 250 100CW 77 77 75 500 15 39 37 37 250 110
CW 107 107 112 500 15 62 63 63 250 180CW 177 177 180 500 15 74 73 73 250 225CW 247 247 250 500 15 130 110 110 250 350CW 297 297 300 500 15 155 145 145 250 410CW 330 330 400 500 15 180 175 175 250 630CW 334 334 490 500 15 180 210 210 250 630
tab.06
VIDA ELÉTRICA
É a durabilidade dos contatos de forças e depende essencialmente da corrente dedesligamento. No gráfico, verifica-se o desempenho de cada contator em função dacorrente de desligamento.
No dimensionamento de contatores para motores, normalmente, considera-se a vidaelétrica somente em AC4
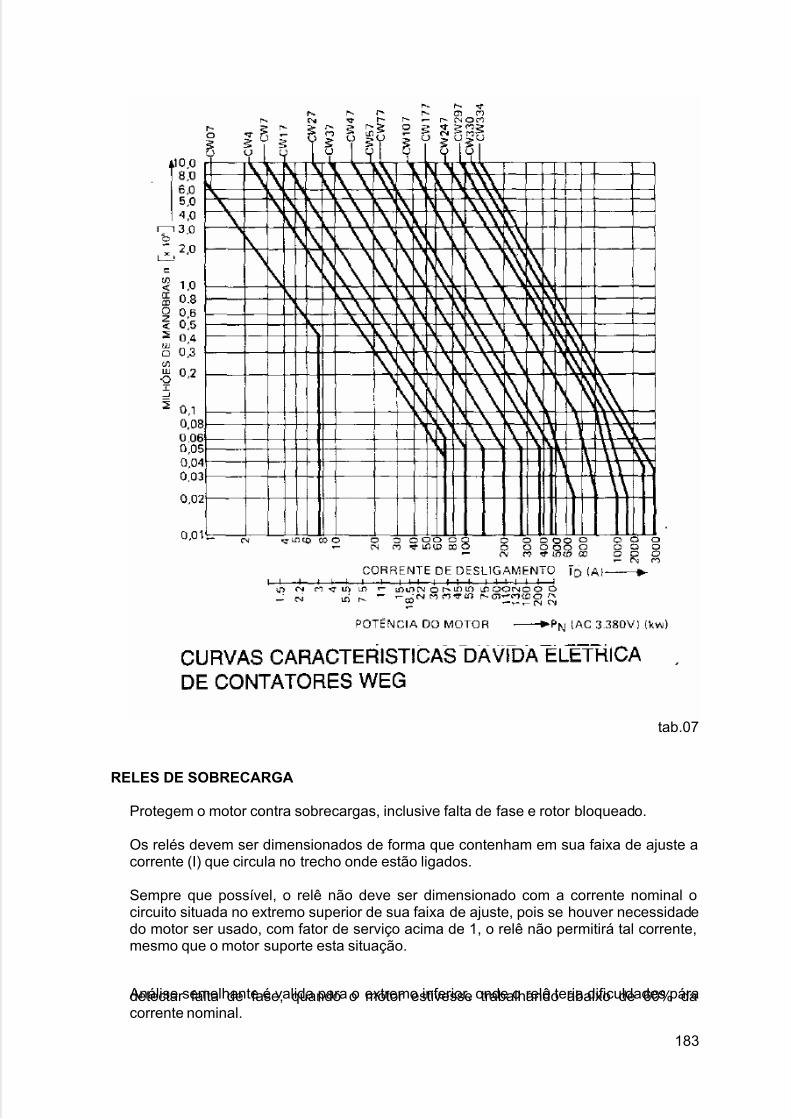
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 183/211
183
tab.07
RELES DE SOBRECARGA
Protegem o motor contra sobrecargas, inclusive falta de fase e rotor bloqueado.
Os relés devem ser dimensionados de forma que contenham em sua faixa de ajuste acorrente (I) que circula no trecho onde estão ligados.
Sempre que possível, o relê não deve ser dimensionado com a corrente nominal ocircuito situada no extremo superior de sua faixa de ajuste, pois se houver necessidadedo motor ser usado, com fator de serviço acima de 1, o relê não permitirá tal corrente,mesmo que o motor suporte esta situação.
Análise semelhante é valida para o extremo inferior, onde o relê teria dificuldades páradetectar falta de fase, quando o motor estivesse trabalhando abaixo de 60% dacorrente nominal.
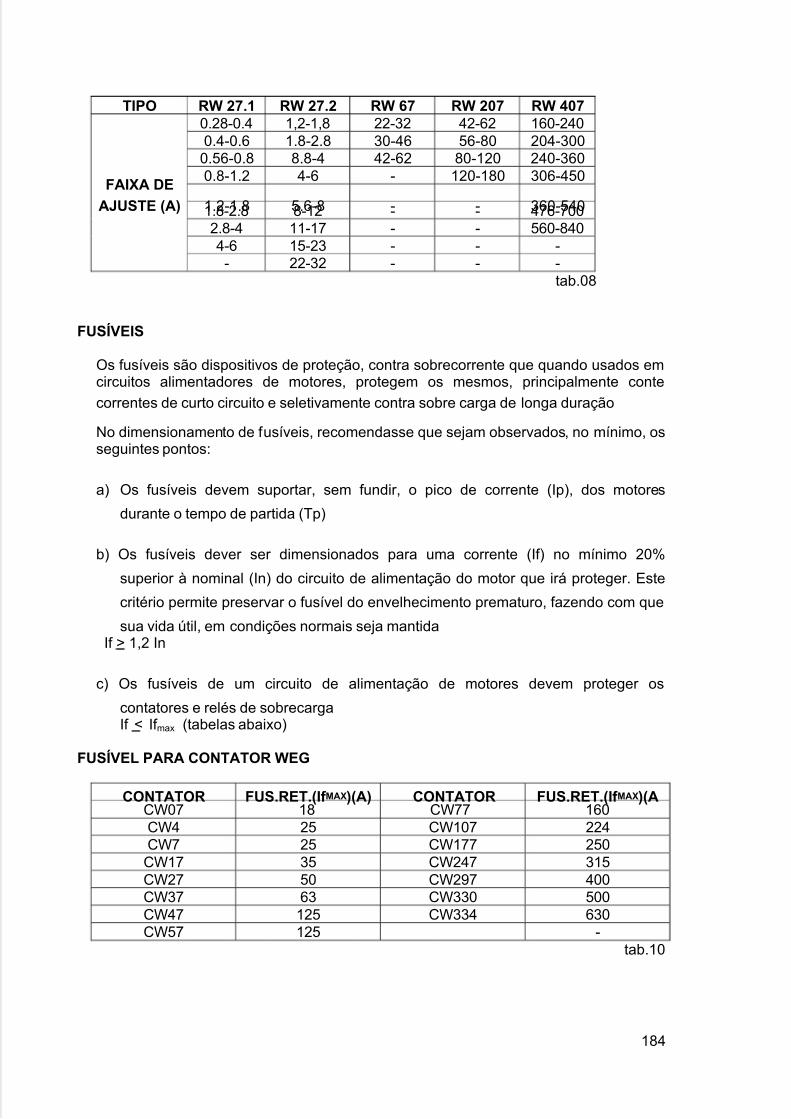
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 184/211
184
TIPO RW 27.1 RW 27.2 RW 67 RW 207 RW 4070.28-0.4 1,2-1,8 22-32 42-62 160-2400.4-0.6 1.8-2.8 30-46 56-80 204-3000.56-0.8 8.8-4 42-62 80-120 240-3600.8-1.2 4-6 - 120-180 306-450
1.2-1.8 5.6-8 - - 360-5401.8-2.8 8-12 - - 476-7002.8-4 11-17 - - 560-8404-6 15-23 - - -
FAIXA DE
AJUSTE (A)
- 22-32 - - -tab.08
FUSÍVEIS
Os fusíveis são dispositivos de proteção, contra sobrecorrente que quando usados emcircuitos alimentadores de motores, protegem os mesmos, principalmente conte
correntes de curto circuito e seletivamente contra sobre carga de longa duração
No dimensionamento de fusíveis, recomendasse que sejam observados, no mínimo, osseguintes pontos:
a) Os fusíveis devem suportar, sem fundir, o pico de corrente (Ip), dos motores
durante o tempo de partida (Tp)
b) Os fusíveis dever ser dimensionados para uma corrente (If) no mínimo 20%
superior à nominal (In) do circuito de alimentação do motor que irá proteger. Este
critério permite preservar o fusível do envelhecimento prematuro, fazendo com que
sua vida útil, em condições normais seja mantidaIf > 1,2 In
c) Os fusíveis de um circuito de alimentação de motores devem proteger os
contatores e relés de sobrecargaIf < If max (tabelas abaixo)
FUSÍVEL PARA CONTATOR WEG
CONTATOR FUS.RET.(If MAX)(A) CONTATOR FUS.RET.(If MAX)(ACW07 18 CW77 160CW4 25 CW107 224CW7 25 CW177 250CW17 35 CW247 315CW27 50 CW297 400CW37 63 CW330 500CW47 125 CW334 630CW57 125 -
tab.10
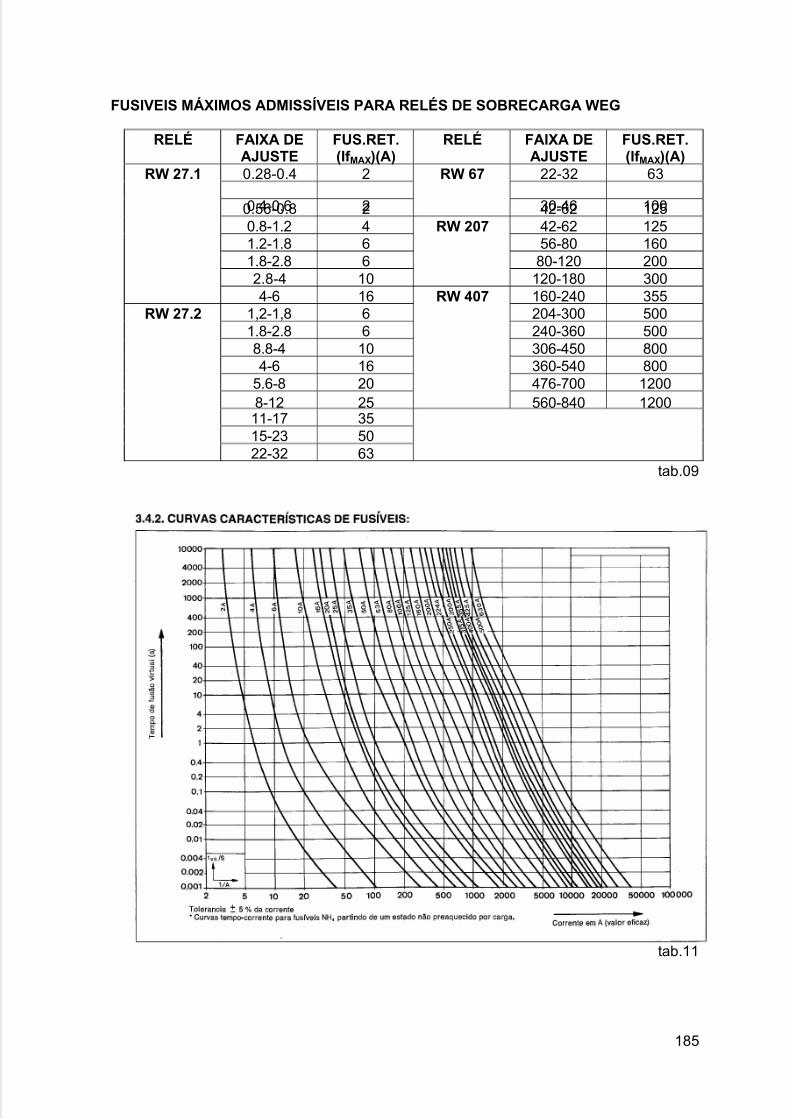
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 185/211
185
FUSIVEIS MÁXIMOS ADMISSÍVEIS PARA RELÉS DE SOBRECARGA WEG
RELÉ FAIXA DEAJUSTE
FUS.RET.(If MAX)(A)
RELÉ FAIXA DEAJUSTE
FUS.RET.(If MAX)(A)
0.28-0.4 2 22-32 63
0.4-0.6 2 30-46 1000.56-0.8 2
RW 67
42-62 1250.8-1.2 4 42-62 1251.2-1.8 6 56-80 1601.8-2.8 6 80-120 2002.8-4 10
RW 207
120-180 300
RW 27.1
4-6 16 160-240 3551,2-1,8 6 204-300 5001.8-2.8 6 240-360 5008.8-4 10 306-450 8004-6 16 360-540 800
5.6-8 20 476-700 12008-12 25
RW 407
560-840 120011-17 3515-23 50
RW 27.2
22-32 63tab.09
tab.11
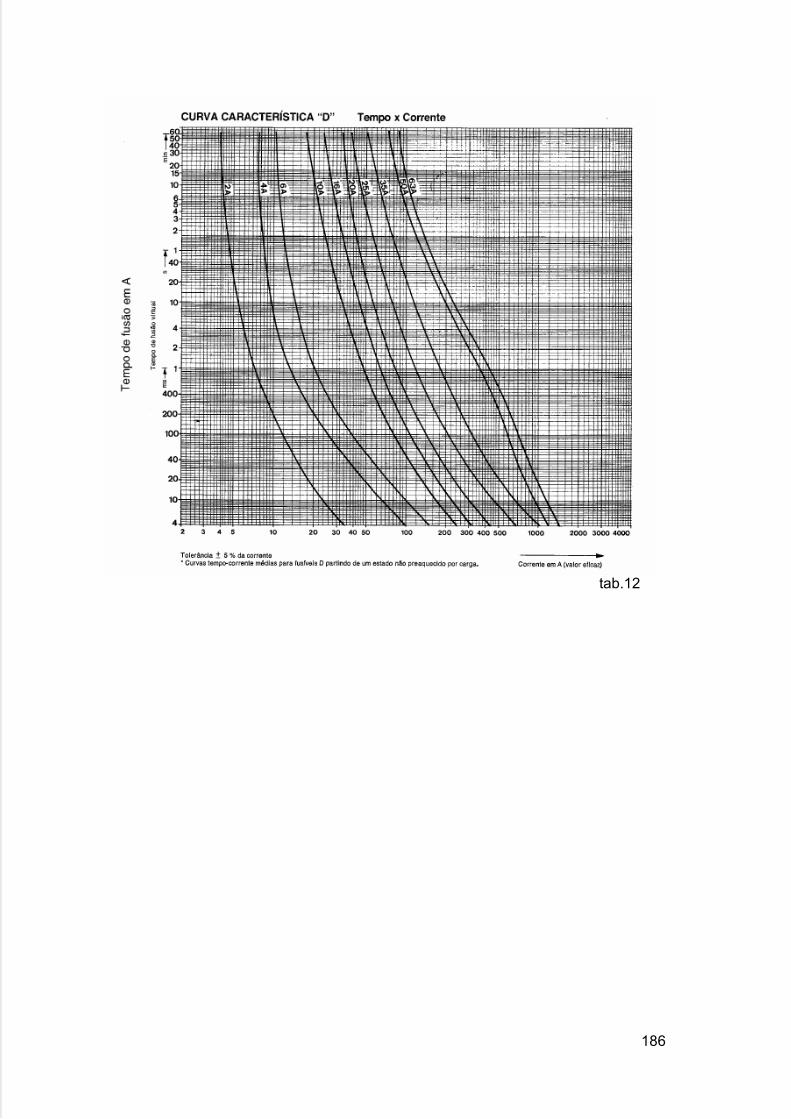
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 186/211
186
tab.12
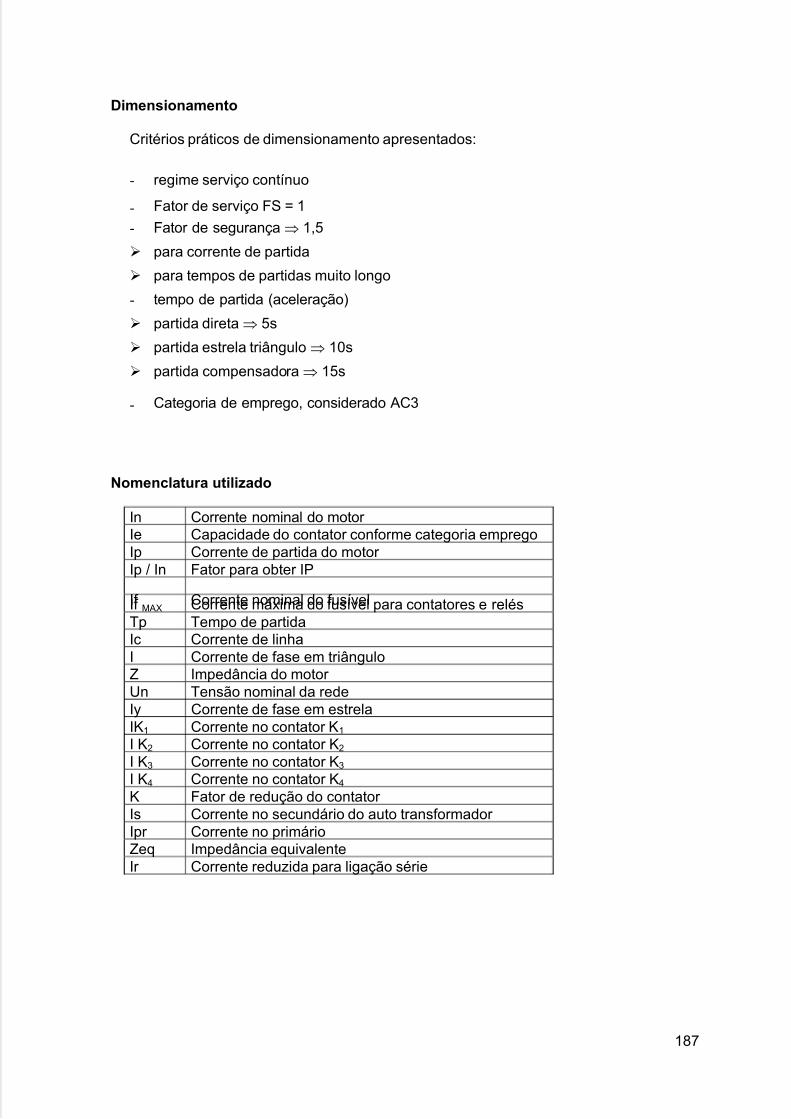
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 187/211
187
Dimensionamento
Critérios práticos de dimensionamento apresentados:
- regime serviço contínuo
- Fator de serviço FS = 1
- Fator de segurança ⇒ 1,5
para corrente de partida
para tempos de partidas muito longo
- tempo de partida (aceleração)
partida direta ⇒ 5s
partida estrela triângulo ⇒ 10s
partida compensadora ⇒ 15s
- Categoria de emprego, considerado AC3
Nomenclatura utilizado
In Corrente nominal do motor Ie Capacidade do contator conforme categoria empregoIp Corrente de partida do motor Ip / In Fator para obter IP
If Corrente nominal do fusívelIf MAX Corrente máxima do fusível para contatores e relésTp Tempo de partidaIc Corrente de linhaI Corrente de fase em triânguloZ Impedância do motor Un Tensão nominal da redeIy Corrente de fase em estrelaIK1 Corrente no contator K1 I K2 Corrente no contator K2 I K3 Corrente no contator K3 I K4 Corrente no contator K4 K Fator de redução do contator Is Corrente no secundário do auto transformador Ipr Corrente no primárioZeq Impedância equivalenteIr Corrente reduzida para ligação série
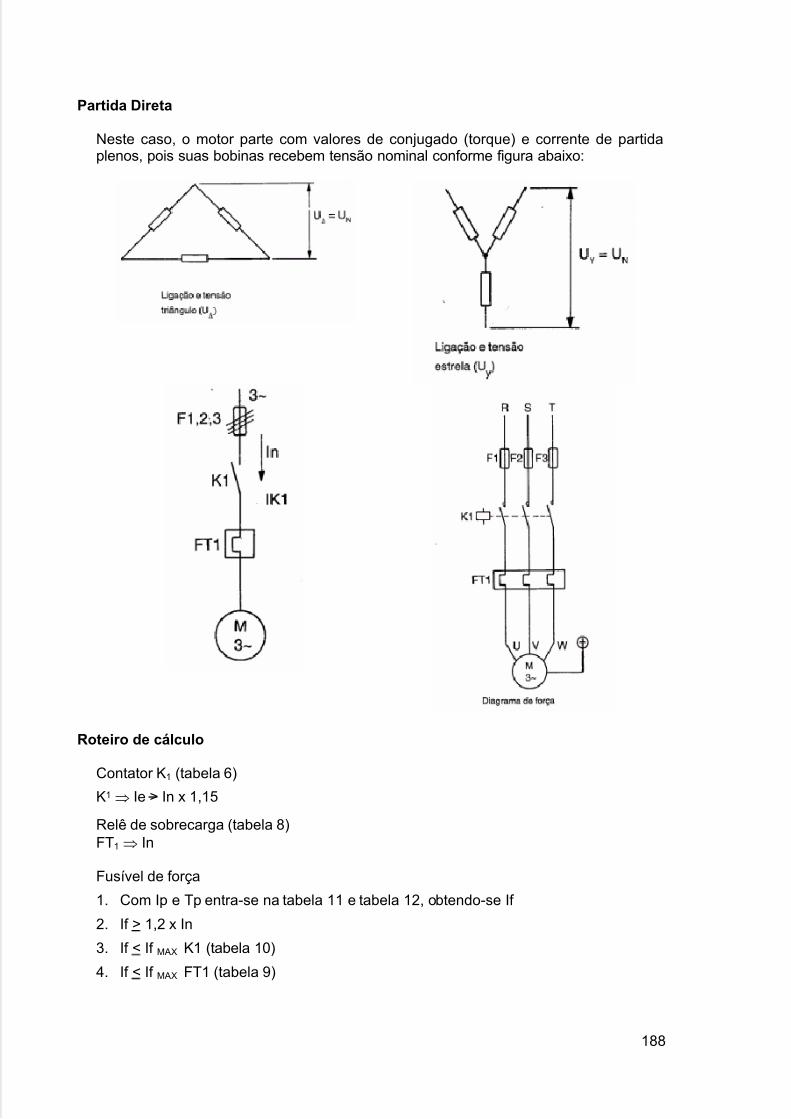
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 188/211
188
Partida Direta
Neste caso, o motor parte com valores de conjugado (torque) e corrente de partidaplenos, pois suas bobinas recebem tensão nominal conforme figura abaixo:
Roteiro de cálculo
Contator K1 (tabela 6)
K1 ⇒ Ie > In x 1,15
Relê de sobrecarga (tabela 8)FT1 ⇒ In
Fusível de força
1. Com Ip e Tp entra-se na tabela 11 e tabela 12, obtendo-se If
2. If > 1,2 x In
3. If < If MAX K1 (tabela 10)
4. If < If MAX FT1 (tabela 9)
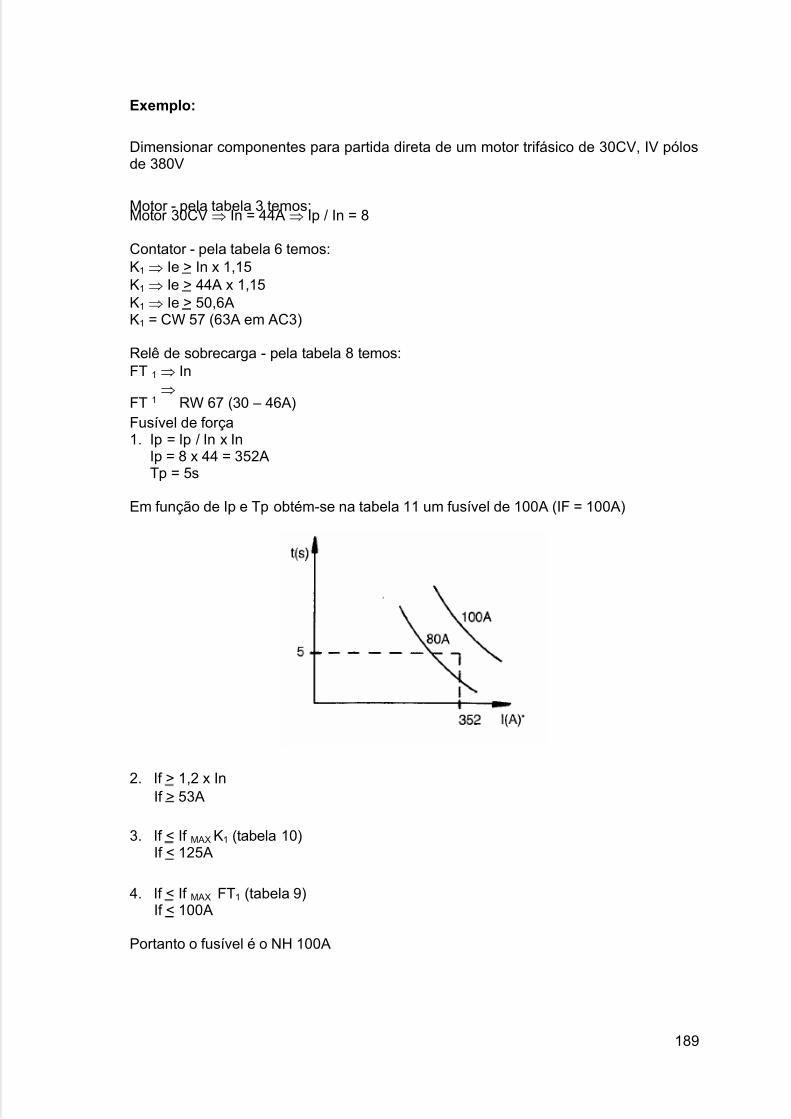
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 189/211
189
Exemplo:
Dimensionar componentes para partida direta de um motor trifásico de 30CV, IV pólosde 380V
Motor - pela tabela 3 temos:Motor 30CV ⇒ In = 44A ⇒ Ip / In = 8
Contator - pela tabela 6 temos:K1 ⇒ Ie > In x 1,15K1 ⇒ Ie > 44A x 1,15K1 ⇒ Ie > 50,6AK1 = CW 57 (63A em AC3)
Relê de sobrecarga - pela tabela 8 temos:FT 1 ⇒ In
FT 1 ⇒
RW 67 (30 – 46A)Fusível de força1. Ip = Ip / In x In
Ip = 8 x 44 = 352ATp = 5s
Em função de Ip e Tp obtém-se na tabela 11 um fusível de 100A (IF = 100A)
2. If > 1,2 x InIf > 53A
3. If < If MAX K1 (tabela 10)If < 125A
4. If < If MAX FT1 (tabela 9)If < 100A
Portanto o fusível é o NH 100A
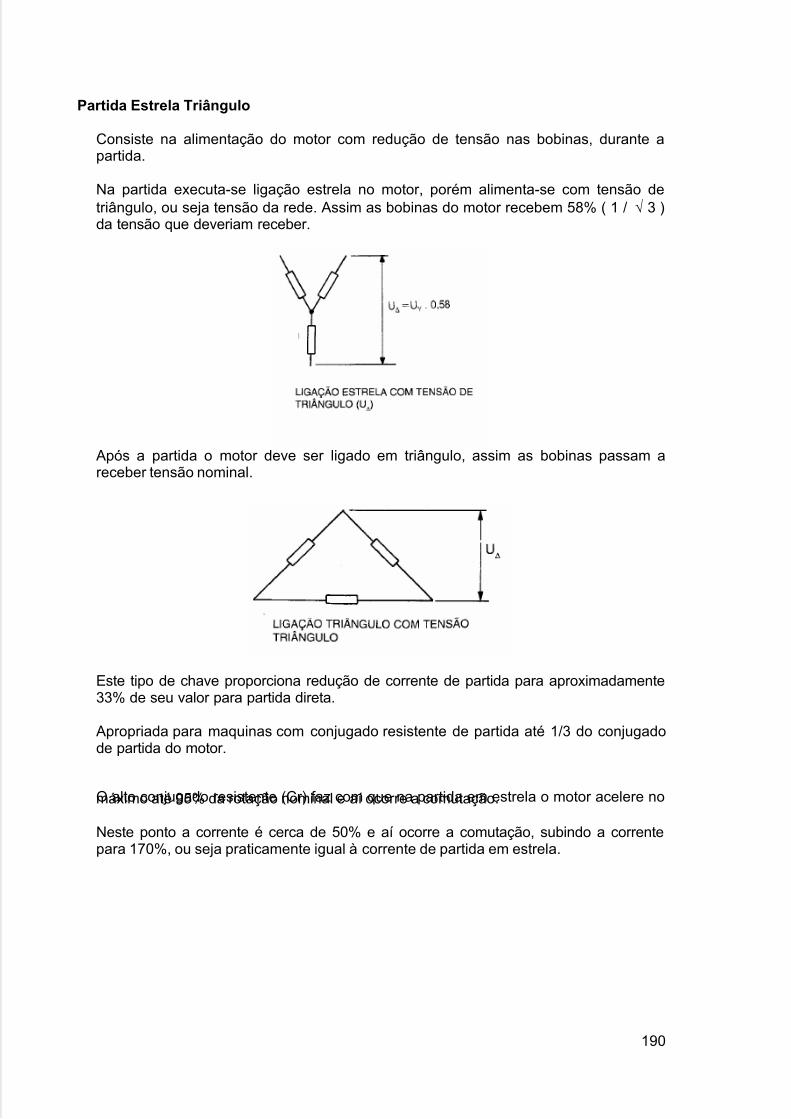
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 190/211
190
Partida Estrela Triângulo
Consiste na alimentação do motor com redução de tensão nas bobinas, durante apartida.
Na partida executa-se ligação estrela no motor, porém alimenta-se com tensão detriângulo, ou seja tensão da rede. Assim as bobinas do motor recebem 58% ( 1 / √ 3 )da tensão que deveriam receber.
Após a partida o motor deve ser ligado em triângulo, assim as bobinas passam areceber tensão nominal.
Este tipo de chave proporciona redução de corrente de partida para aproximadamente33% de seu valor para partida direta.
Apropriada para maquinas com conjugado resistente de partida até 1/3 do conjugadode partida do motor.
O alto conjugado resistente (Cr) faz com que na partida em estrela o motor acelere nomáximo até 95% da rotação nominal e aí ocorre a comutação.
Neste ponto a corrente é cerca de 50% e aí ocorre a comutação, subindo a correntepara 170%, ou seja praticamente igual à corrente de partida em estrela.
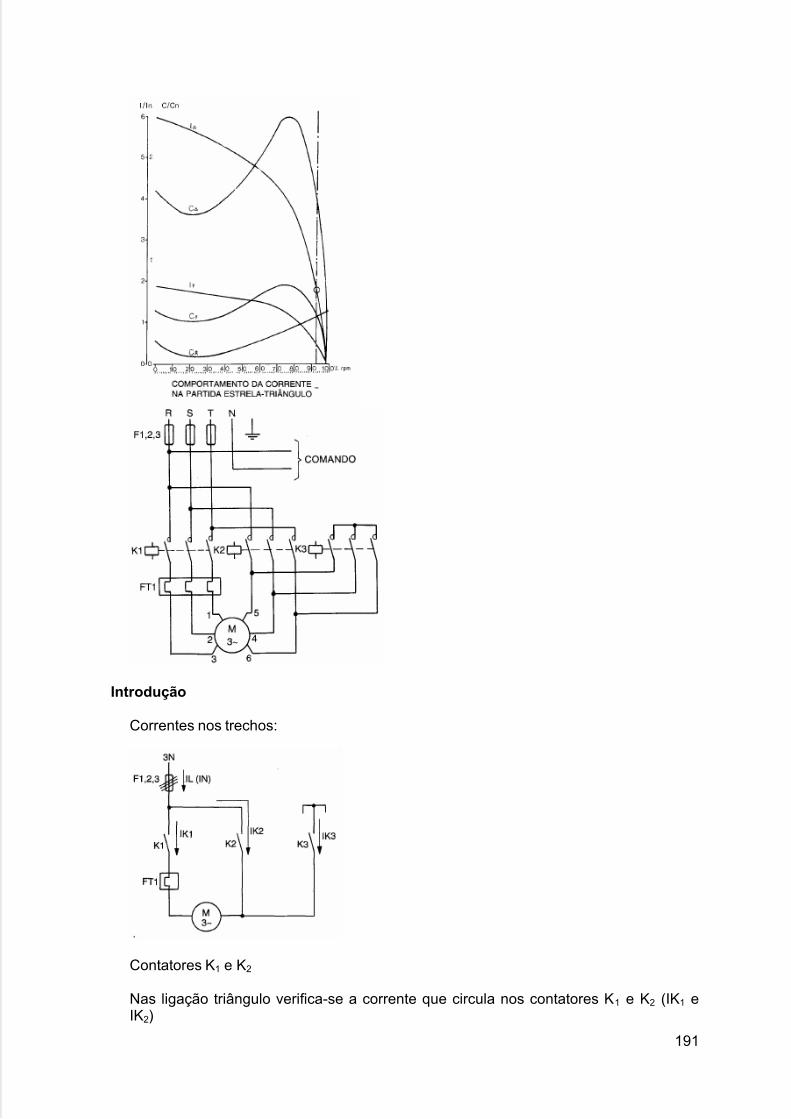
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 191/211
191
Introdução
Correntes nos trechos:
Contatores K1 e K2
Nas ligação triângulo verifica-se a corrente que circula nos contatores K1 e K2 (IK1 eIK2)
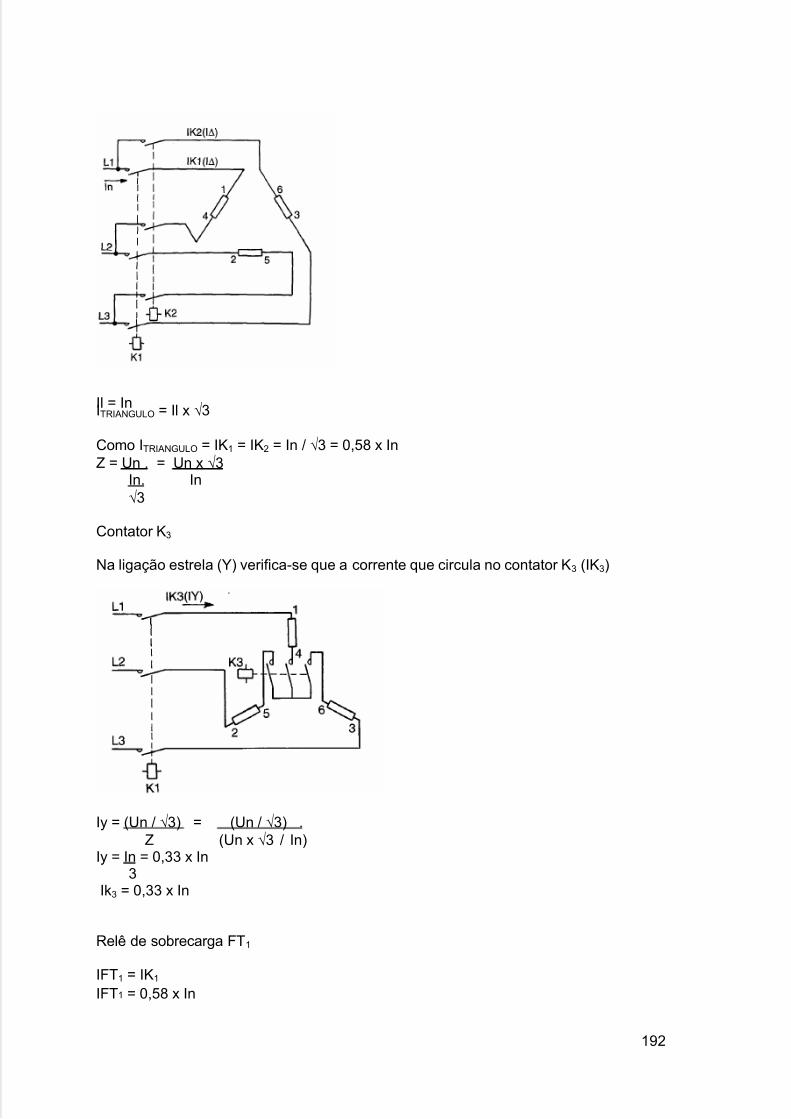
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 192/211
192
Il = InITRIANGULO = Il x √3
Como ITRIANGULO = IK1 = IK2 = In / √3 = 0,58 x InZ = Un . = Un x √3
In. In√3
Contator K3
Na ligação estrela (Y) verifica-se que a corrente que circula no contator K3 (IK3)
Iy = (Un / √3) = (Un / √3) .Z (Un x √3 / In)
Iy = In = 0,33 x In3
Ik3 = 0,33 x In
Relê de sobrecarga FT1
IFT1 = IK1 IFT1 = 0,58 x In
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 193/211
193
Então : IK1 = IK2 = 0,58 x InIK3 = 0,33 x In
IFT1 = 0,58 x In
Corrente de partida (Ip)
A corrente na partida é reduzida para 33% da corrente de partida sob ligação nominal(partida direta).
Esta relação é verdadeira pelas mesmas razões do dimensionamento do contator K3.
Então: Ip = ( (Ip / In ) x In ) x 0,33
Roteiro de cálculo
Contator (tabela 6)K1 = K2 ⇒ Ie > ( 0,58 x In ) x 1,15
K3 ⇒ Ie > ( 0,33 x In ) x 1,15
Relê de sobrecarga (tabela 8)FT1 ⇒ 0,58 x In
Fusível de força
1. Com Ip e TP entra-se na tabela 11 e tabela 12, obtendo-se IF
2. IF > 1,2 x In
3. IF < IF MAX K1, K2 (tabela 10)
4. IF < IF MAX FT1 (tabela 9)
Exemplo:
Dimensionar componentes para partida direta de um motor trifásico de 30CV, IV pólosde 380V
Motor - pela tabela 3 temos:Motor 30CV ⇒ In = 44A ⇒ Ip / In = 8
Contator - pela tabela 6 temos:
K1 = K2 ⇒ Ie > (0,58 x In) x 1,15⇒ Ie > 29,3A
K1 = K2 = CW 37 (32A em AC3)
K3 ⇒ Ie > (0,33 x In) x 1,15⇒ Ie > 16,5A
K3 = CW 17 (16A em AC3)
Relê de sobrecarga - pela tabela 8 temos:FT1 ⇒ 0,58 x In = 25,5AFT1 ⇒ RW 27.2 (22-32A)
Fusível de força1. Ip = Ip / In x In
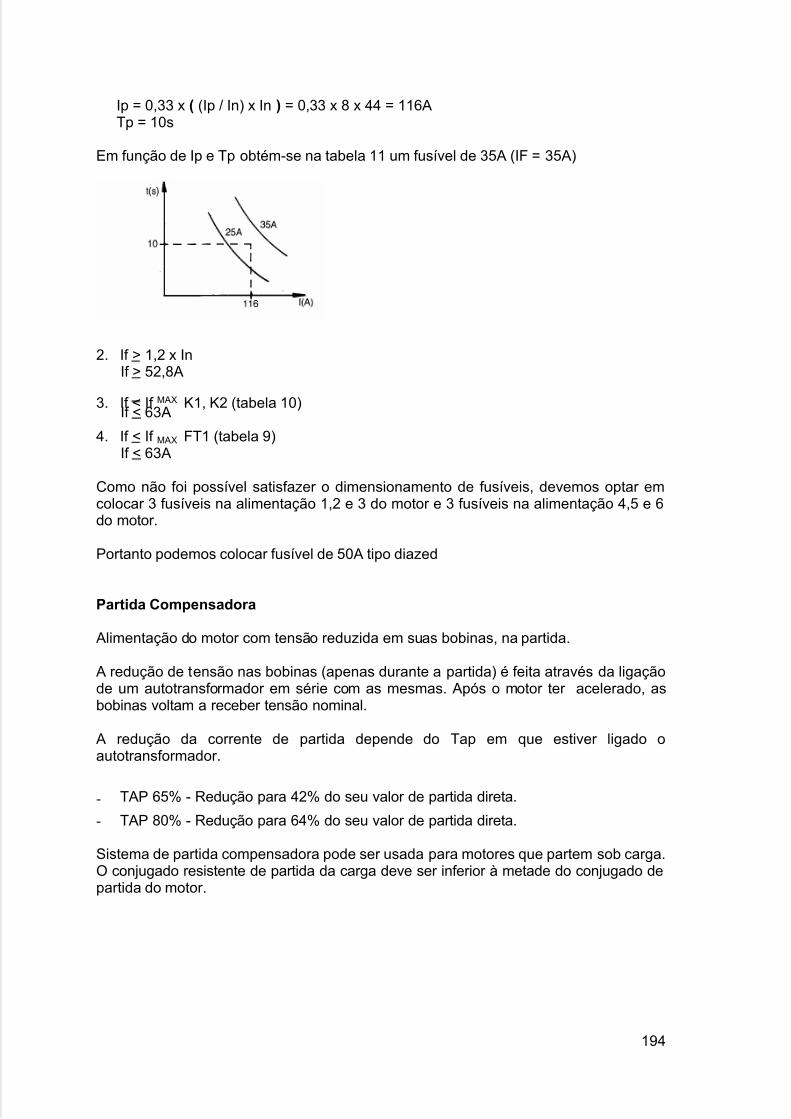
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 194/211
194
Ip = 0,33 x ( (Ip / In) x In ) = 0,33 x 8 x 44 = 116ATp = 10s
Em função de Ip e Tp obtém-se na tabela 11 um fusível de 35A (IF = 35A)
2. If > 1,2 x InIf > 52,8A
3. If < If MAX K1, K2 (tabela 10)If < 63A
4. If < If MAX FT1 (tabela 9)If < 63A
Como não foi possível satisfazer o dimensionamento de fusíveis, devemos optar emcolocar 3 fusíveis na alimentação 1,2 e 3 do motor e 3 fusíveis na alimentação 4,5 e 6do motor.
Portanto podemos colocar fusível de 50A tipo diazed
Partida Compensadora
Alimentação do motor com tensão reduzida em suas bobinas, na partida.
A redução de tensão nas bobinas (apenas durante a partida) é feita através da ligaçãode um autotransformador em série com as mesmas. Após o motor ter acelerado, asbobinas voltam a receber tensão nominal.
A redução da corrente de partida depende do Tap em que estiver ligado oautotransformador.
- TAP 65% - Redução para 42% do seu valor de partida direta.
- TAP 80% - Redução para 64% do seu valor de partida direta.
Sistema de partida compensadora pode ser usada para motores que partem sob carga.O conjugado resistente de partida da carga deve ser inferior à metade do conjugado departida do motor.
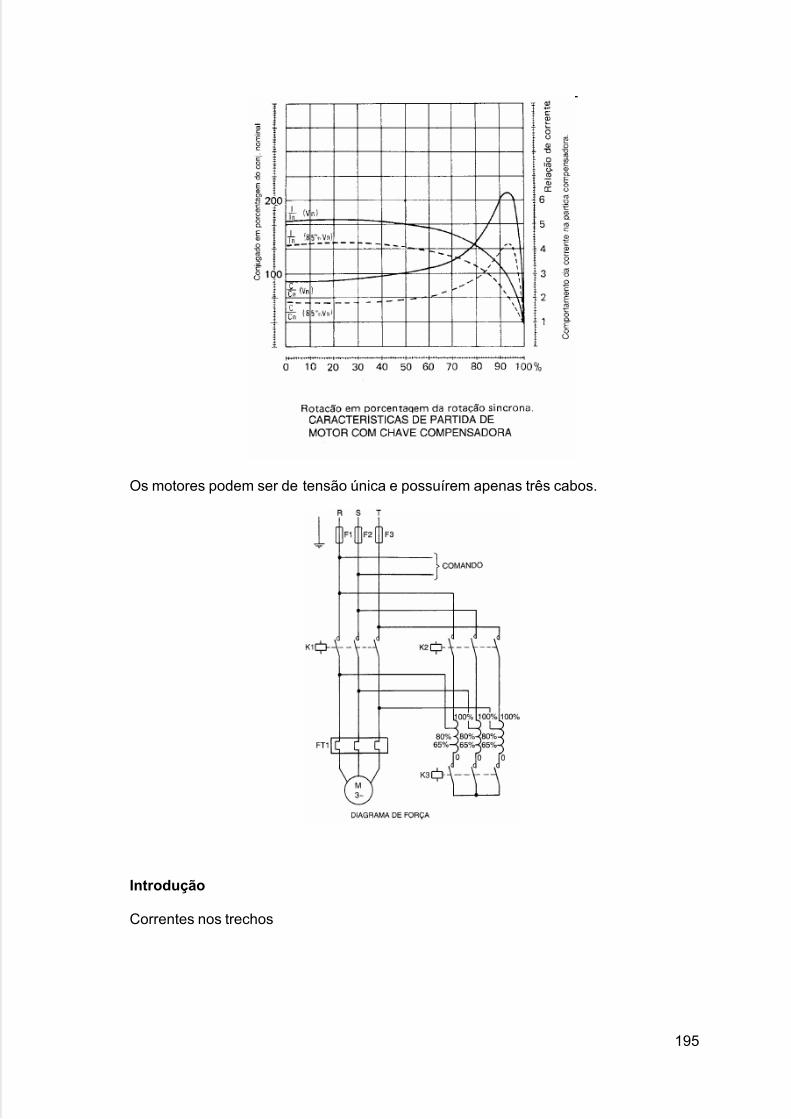
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 195/211
195
Os motores podem ser de tensão única e possuírem apenas três cabos.
Introdução
Correntes nos trechos
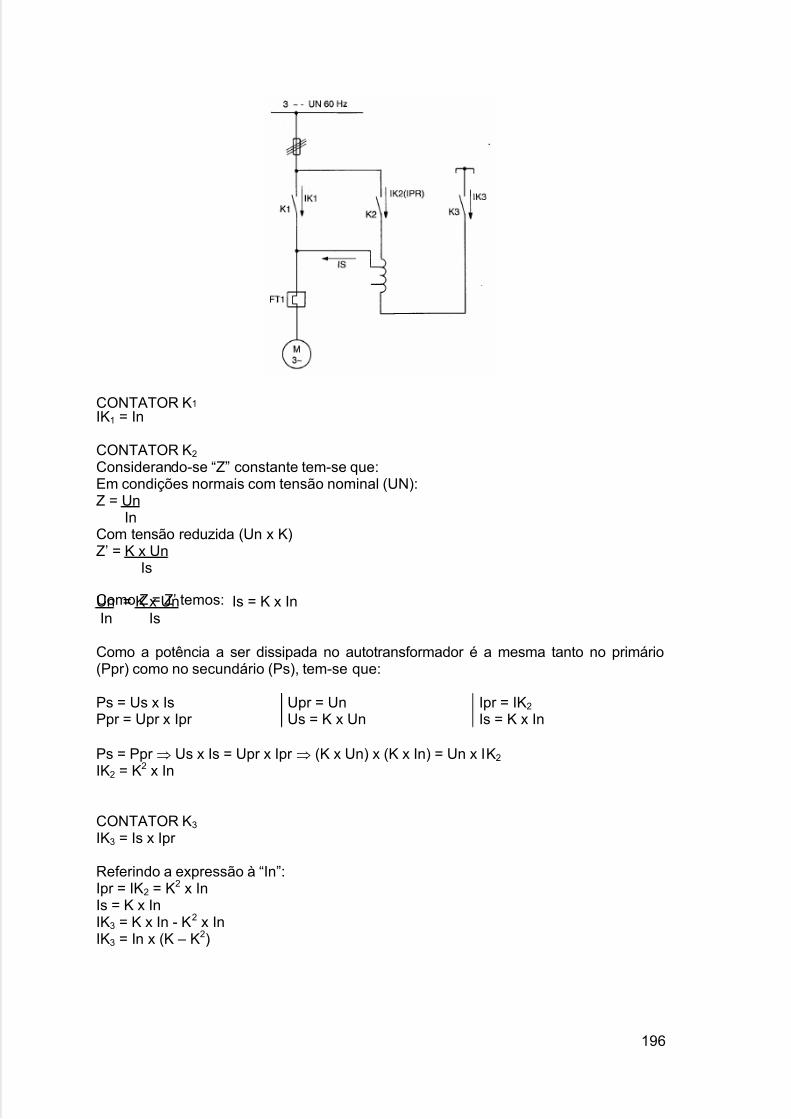
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 196/211
196
CONTATOR K1 IK1 = In
CONTATOR K2 Considerando-se “Z” constante tem-se que:Em condições normais com tensão nominal (UN):Z = Un
InCom tensão reduzida (Un x K)Z’ = K x Un
Is
Como Z = Z’ temos:Un = K x Un Is = K x InIn Is
Como a potência a ser dissipada no autotransformador é a mesma tanto no primário(Ppr) como no secundário (Ps), tem-se que:
Ps = Us x Is Upr = Un Ipr = IK2 Ppr = Upr x Ipr Us = K x Un Is = K x In
Ps = Ppr ⇒ Us x Is = Upr x Ipr ⇒ (K x Un) x (K x In) = Un x IK2 IK2 = K2 x In
CONTATOR K3 IK3 = Is x Ipr
Referindo a expressão à “In”:Ipr = IK2 = K2 x InIs = K x InIK3 = K x In - K2 x InIK3 = In x (K – K2)
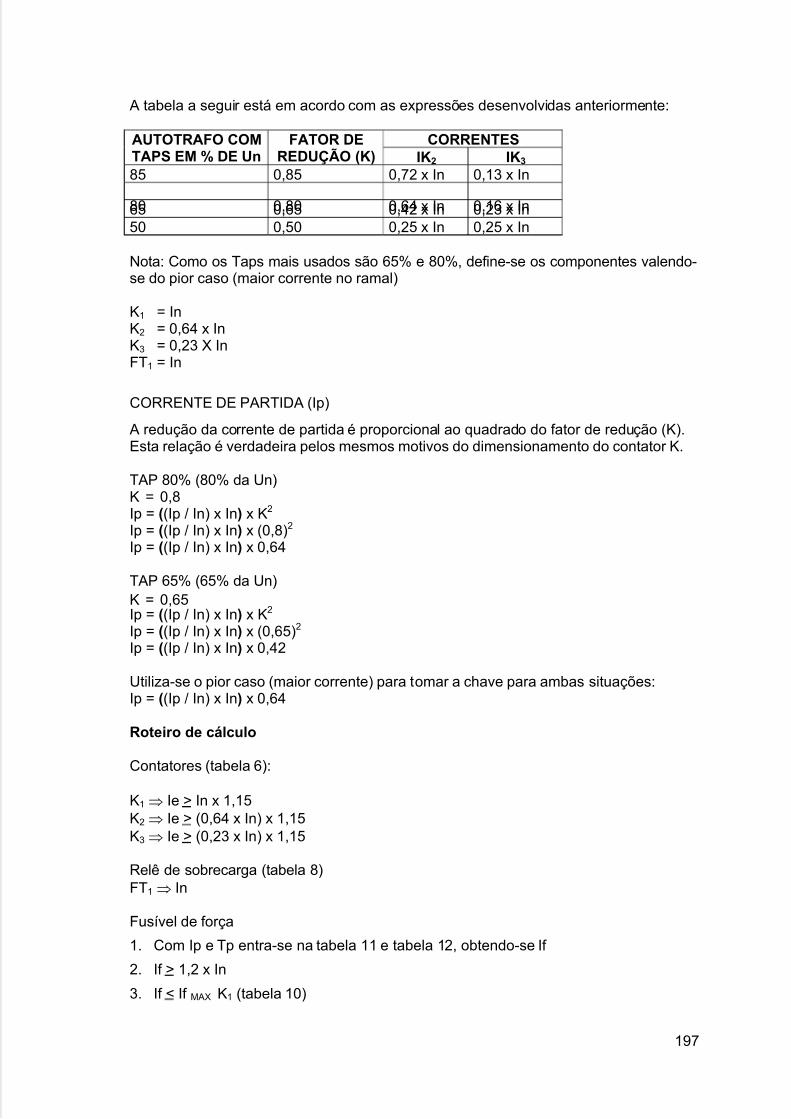
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 197/211
197
A tabela a seguir está em acordo com as expressões desenvolvidas anteriormente:
CORRENTESAUTOTRAFO COMTAPS EM % DE Un
FATOR DEREDUÇÃO (K) IK2 IK3
85 0,85 0,72 x In 0,13 x In
80 0,80 0,64 x In 0,16 x In65 0,65 0,42 x In 0,23 x In50 0,50 0,25 x In 0,25 x In
Nota: Como os Taps mais usados são 65% e 80%, define-se os componentes valendo-se do pior caso (maior corrente no ramal)
K1 = InK2 = 0,64 x InK3 = 0,23 X InFT1 = In
CORRENTE DE PARTIDA (Ip)
A redução da corrente de partida é proporcional ao quadrado do fator de redução (K).Esta relação é verdadeira pelos mesmos motivos do dimensionamento do contator K.
TAP 80% (80% da Un)K = 0,8Ip = ((Ip / In) x In) x K2 Ip = ((Ip / In) x In) x (0,8)2 Ip = ((Ip / In) x In) x 0,64
TAP 65% (65% da Un)K = 0,65Ip = ((Ip / In) x In) x K2 Ip = ((Ip / In) x In) x (0,65)2 Ip = ((Ip / In) x In) x 0,42
Utiliza-se o pior caso (maior corrente) para tomar a chave para ambas situações:Ip = ((Ip / In) x In) x 0,64
Roteiro de cálculo
Contatores (tabela 6):
K1 ⇒ Ie > In x 1,15K2 ⇒ Ie > (0,64 x In) x 1,15K3 ⇒ Ie > (0,23 x In) x 1,15
Relê de sobrecarga (tabela 8)FT1 ⇒ In
Fusível de força
1. Com Ip e Tp entra-se na tabela 11 e tabela 12, obtendo-se If
2. If > 1,2 x In
3. If < If MAX K1 (tabela 10)
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 198/211
198
4. If < If MAX FT1 (tabela 9)
Auto transformador de partida
Para definir a potência do autotransformador deve-se considerar:
- potência do motor
- freqüência de partida (número de partidas por hora)
Limitações:
- 5 P/H – podendo ser duas consecutivas com intervalo mínimo de 0,5 minutos entre
elas ou cinco com intervalo aproximadamente doze minutos.
- 10 P/H – podendo ser três consecutivas com intervalo mínimo de 0,5 minutos entre
elas ou dez com intervalo aproximadamente seis minutos.- 20 P/H – podendo ser seis consecutivas com intervalo mínimo de 0,5 minutos entre
elas ou vinte com intervalo aproximadamente três minutos.
Tempo de partida do motor – normalmente suporta uma duração de 20 segundos
Exemplo:
Dimensionar componentes para partida direta de um motor trifásico de 30CV, IV pólos
de 380V
Motor - pela tabela 3 temos:Motor 30CV ⇒ In = 44A ⇒ Ip / In = 8
Contator - pela tabela 6 temos:K1 ⇒ Ie > In x 1,15K1 ⇒ Ie > 44A x 1,15K1 ⇒ Ie > 50,6AK1 = CW 57 (63A em AC3)
K2 ⇒ Ie > (0,64 x In) x 1,15K2 ⇒ Ie > (0,64 x 44A) x 1,15K2 ⇒ Ie > 32,3AK2 = CW 37 (32A em AC3)
K3 ⇒ Ie > (0,23 x In) x 1,15K3 ⇒ Ie > (0,23 x 44A) x 1,15K3 ⇒ Ie > 11,6AK3 = CW 7 (12A em AC3)
Relê de sobrecarga - pela tabela 8 temos:FT1 ⇒ InFT1 ⇒ RW 67 (30 – 46A)
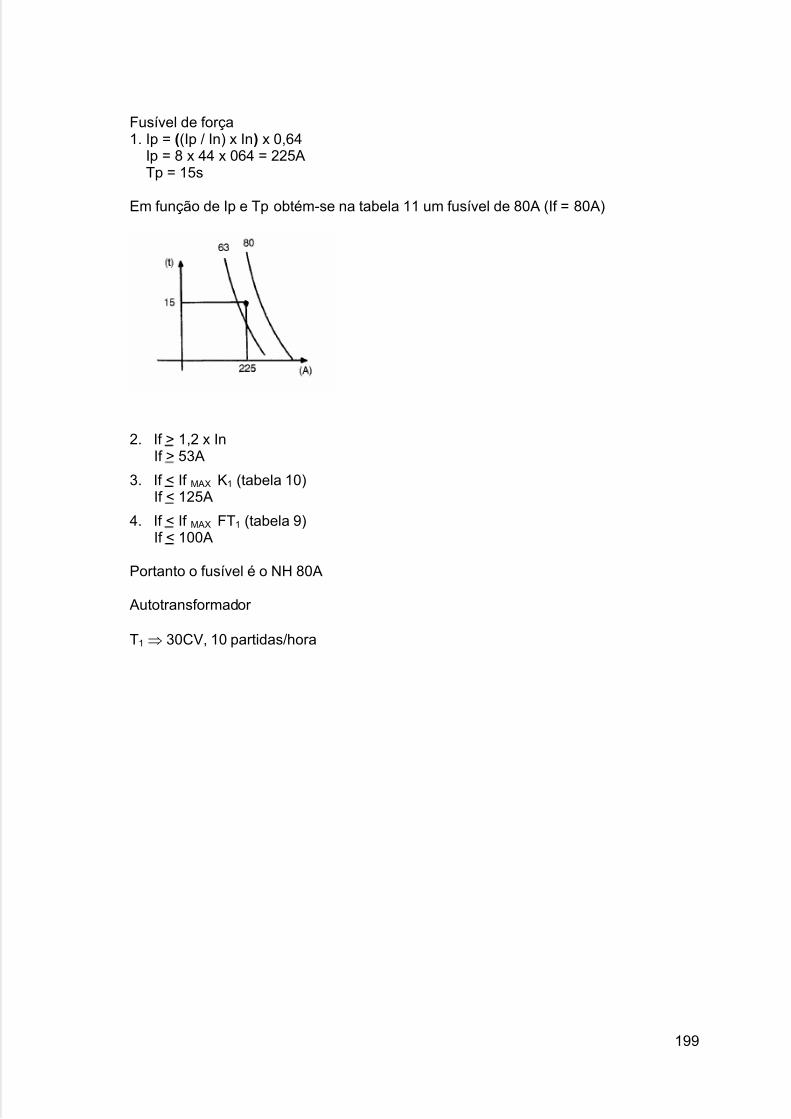
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 199/211
199
Fusível de força1. Ip = ((Ip / In) x In) x 0,64
Ip = 8 x 44 x 064 = 225ATp = 15s
Em função de Ip e Tp obtém-se na tabela 11 um fusível de 80A (If = 80A)
2. If > 1,2 x InIf > 53A
3. If < If MAX K1 (tabela 10)If < 125A
4. If < If MAX FT1 (tabela 9)If < 100A
Portanto o fusível é o NH 80A
Autotransformador
T1 ⇒ 30CV, 10 partidas/hora
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 200/211
200
Multímetros Digitais
A ocorrência cada vez maior de sobretensões transitórias nos sistemas de energiaatuais fez com que surgisse a necessidade de se estabelecerem padrões maisrigorosos de segurança para equipamentos de medição elétrica. Distúrbios transientesque passam sobre as fontes de alimentação (circuito geral de alimentação, circuitosalimentadores ou auxiliares) podem disparar uma seqüência de eventos com risco decausar lesões físicas graves. O equipamento de teste deve ser projetado para proteger quem trabalha nesses ambientes de alta tensão e altas correntes.
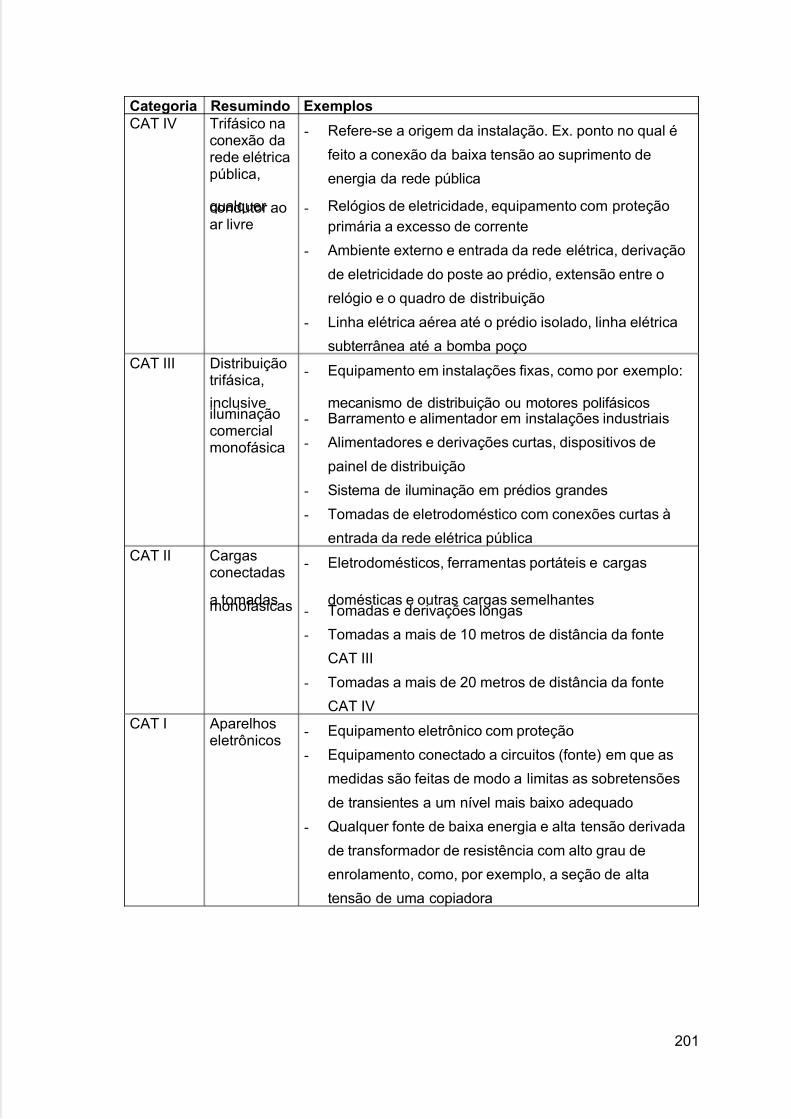
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 201/211
201
Categoria Resumindo ExemplosCAT IV Trifásico na
conexão darede elétricapública,
qualquer condutor aoar livre
- Refere-se a origem da instalação. Ex. ponto no qual é
feito a conexão da baixa tensão ao suprimento de
energia da rede pública
- Relógios de eletricidade, equipamento com proteção
primária a excesso de corrente
- Ambiente externo e entrada da rede elétrica, derivação
de eletricidade do poste ao prédio, extensão entre o
relógio e o quadro de distribuição
- Linha elétrica aérea até o prédio isolado, linha elétrica
subterrânea até a bomba poçoCAT III Distribuição
trifásica,
inclusiveiluminaçãocomercialmonofásica
- Equipamento em instalações fixas, como por exemplo:
mecanismo de distribuição ou motores polifásicos- Barramento e alimentador em instalações industriais
- Alimentadores e derivações curtas, dispositivos de
painel de distribuição
- Sistema de iluminação em prédios grandes
- Tomadas de eletrodoméstico com conexões curtas à
entrada da rede elétrica públicaCAT II Cargas
conectadas
a tomadasmonofásicas
- Eletrodomésticos, ferramentas portáteis e cargas
domésticas e outras cargas semelhantes- Tomadas e derivações longas
- Tomadas a mais de 10 metros de distância da fonte
CAT III
- Tomadas a mais de 20 metros de distância da fonte
CAT IVCAT I Aparelhos
eletrônicos- Equipamento eletrônico com proteção
- Equipamento conectado a circuitos (fonte) em que as
medidas são feitas de modo a limitas as sobretensões
de transientes a um nível mais baixo adequado
- Qualquer fonte de baixa energia e alta tensão derivada
de transformador de resistência com alto grau de
enrolamento, como, por exemplo, a seção de alta
tensão de uma copiadora
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 202/211
202
Quem elabora os padrões de segurança?
A IEC (International Eletronics Comission - Comissão eletrônica internacional)desenvolve padrões internacionais gerais para a segurança de equipamentos elétricosde medição, controle e uso em laboratórios. Em 1988, a IEC substituiu um padrãoantigo, o IEC-348, por um padrão mais rigoroso, o IEC-61010-1. O padrão IEC-61010-1é usado como base para os seguintes padrões nacionais: ANSI/ISA-S82.01-94, no E.U.A.CAN C22.2 N² 1010-92, no CanadáEN61010-1:1993, na Europa
O que é diferente no padrão IEC-61010-1 comparado ao IEC 348?
O padrão IEC-61010-1 especifica categorias de sobretensão baseadas na distância dapeça do equipamento à fonte de alimentação (veja a figura ao lado) e à diminuiçãonatural da energia transiente que ocorre no sistema de distribuição elétrica. As
categorias mais altas estão mais próximas à fonte de alimentação e exigem maior proteção. A Categoria IV, reconhecida como o nível principal de alimentação, refere-se aofornecimento do serviço de utilidade pública por cabos aéreos ou subterrâneos atédeterminadas instalações, e atualmente não é abrangida pelo padrão IEC61010-1 A Categoria III, reconhecida como o nível de distribuição, refere-se aos circuitos deenergia principais ou auxiliares. Os circuitos da CAT III são, normalmente, separadosda rede pública por pelo menos um nível de isolamento de transformador. Oequipamento consistem de instalações fixas. Esta é a categoria que mais preocupa osusuários dos medidores Fluke. A Categoria II refere-se ao nível local, a eletrodomésticos, equipamentos portátil, etc. A Categoria I refere-se ao nível de sinal, à telecomunicações, equipamentos
eletrônicos, etc.Cada categoria de instalação contém classificações de tensão. A combinação decategorias de instalação com a classificação de tensão determina a capacidademáxima de tolerância a transientes do instrumento em questão.
Os instrumentos são testados da seguinte forma:CAT II 600 V - transiente de impulso com pico de 4000 V fonte de 12 OhmCAT II 1000 V - transiente de impulso com pico de 6000 V fonte de 12 OhmCAT III 600 V - transiente de impulso com pico de 6000 V fonte de 2 OhmCAT III 1000 V - transiente de impulso com pico de 8000 V fonte de 2 Ohm
Que alterações são necessárias no desenho do instrumento para atender aos padrõesIEC-61010-1?
Uma das diferenças principais diz respeito aos requisitos de espaçamento dentro doinstrumento. Refere-se ao espaçamento em termos de distância ao longo da superfície(creepage) e de distância pelo ar (clearance). O padrão IEC-61010-1 aumenta osrequisitos de espaçamento para uma dada sobretensão máxima. Maiores distânciaspelo ar fazem com que o medidor consiga tolerar transientes de sobretensão mais alta.
O que significa ser certificado pelo UI, certificado pela CSA, TÜV ou VDE?
O Underwrites Laboratories (UL), a Canadian Standards Association (CSA), TÜV e VDE
(organizações de padrões alemães) são órgãos de aprovação/homologação. São
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 203/211
203
laboratórios independentes de testes que testam os produtos quanto ao cumprimento
de padrões internacionais e nacionais, ou seus próprios padrões, os quais são
baseados nos padrões nacionais e internacionais. Por exemplo, os padrões UL3111,
CSA C22.2 N² 1010-1092 e EN61010 são baseados no padrão IEC-61010-1. Para ser
certificado por órgãos como UL, CSA, TÜV ou VDE, é necessário que o fabricante
contrate os serviços desses órgãos para realmente testar a conformidade do produto
de acordo com os padrões do próprio órgão. Esse processo pode ser demorado e
dispendioso. Após a conclusão satisfatória dos testes independentes, feitos pelo órgão
certificador, o fabricante pode usar a marca do respectivo órgão no produto.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 204/211
204
Comandos ElétricosSOFT STARTER
PREFÁCIO
A eletrônica de potência tem se difundido cada vez mais nas indústrias principalmenteatravés dos inversores de freqüência e dos sofstarters.
Quando necessitamos que a velocidade do motor de indução seja variada, utilizamosos inversores de freqüência e quando necessitarmos que apenas a partida do motor deindução seja controlada, utilizamos o softstarter.
Assim, o sofstarter pode substituir os diversos tipos de partida vistos anteriormente,
agregando ainda outras facilidades que verificaremos adiante.
OBJETIVO
Prover uma partida suave para o motor de indução associado ao controle da correntede partida
PRINCÍPIOS DE FUNCIONAMENTO
O softstarter é constituído basicamente de tiristores, que são dispositivossemicondutores controlados capazes de conduzir a corrente elétrica em umdeterminado sentido quando aplicamos uma corrente em um dos seus terminaischamado “gate” (gatilho). O catodo e o anodo correspondem ao circuito de potência e ogate ao circuito de controle.
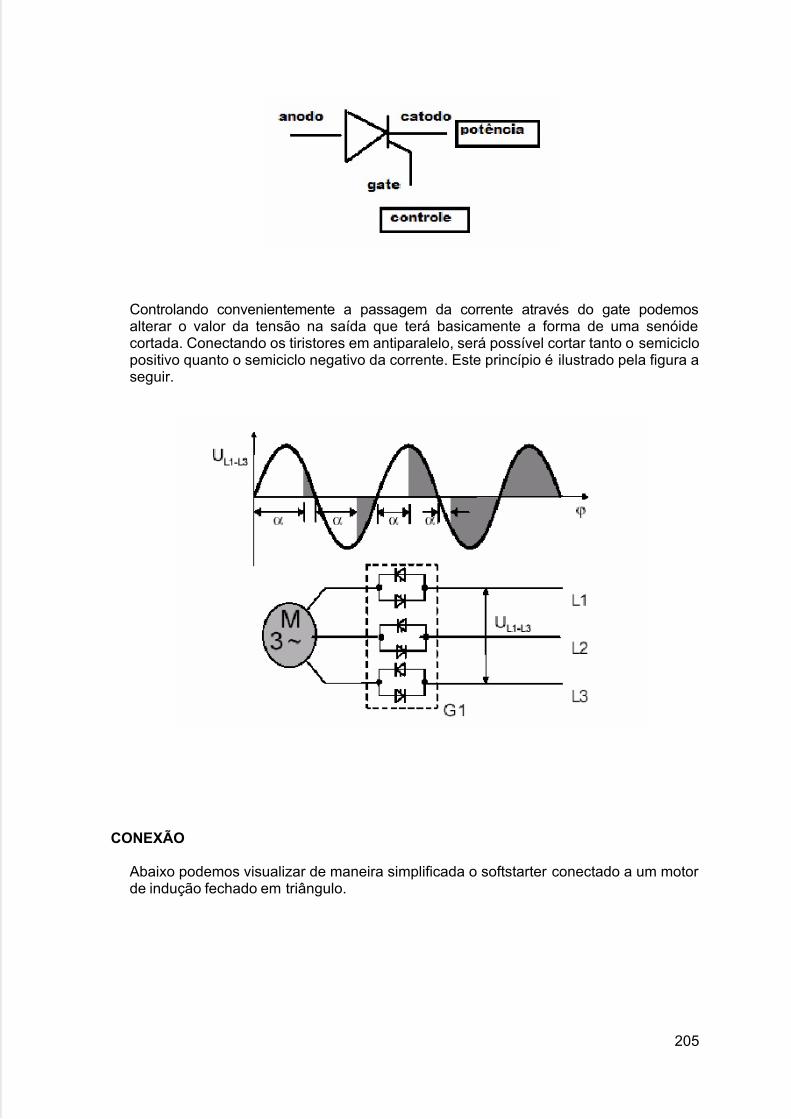
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 205/211
205
Controlando convenientemente a passagem da corrente através do gate podemosalterar o valor da tensão na saída que terá basicamente a forma de uma senóidecortada. Conectando os tiristores em antiparalelo, será possível cortar tanto o semiciclopositivo quanto o semiciclo negativo da corrente. Este princípio é ilustrado pela figura aseguir.
CONEXÃO
Abaixo podemos visualizar de maneira simplificada o softstarter conectado a um motor de indução fechado em triângulo.
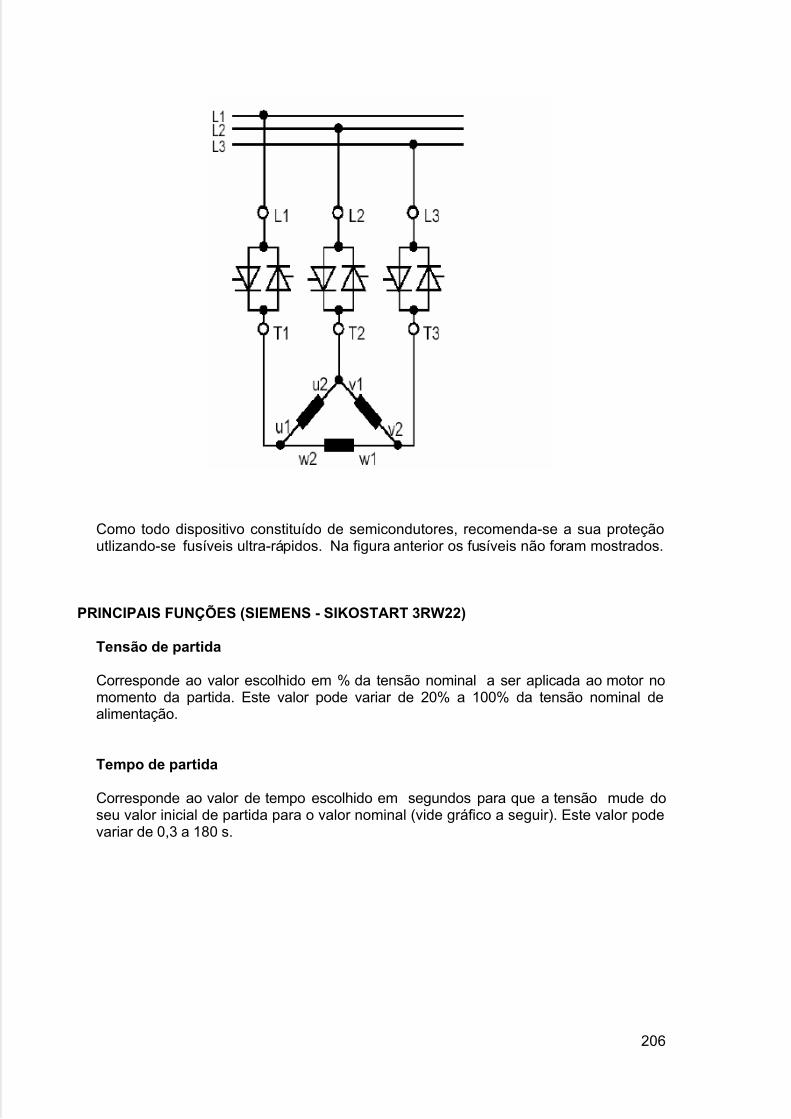
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 206/211
206
Como todo dispositivo constituído de semicondutores, recomenda-se a sua proteçãoutlizando-se fusíveis ultra-rápidos. Na figura anterior os fusíveis não foram mostrados.
PRINCIPAIS FUNÇÕES (SIEMENS - SIKOSTART 3RW22)
Tensão de partida
Corresponde ao valor escolhido em % da tensão nominal a ser aplicada ao motor nomomento da partida. Este valor pode variar de 20% a 100% da tensão nominal dealimentação.
Tempo de partida
Corresponde ao valor de tempo escolhido em segundos para que a tensão mude doseu valor inicial de partida para o valor nominal (vide gráfico a seguir). Este valor podevariar de 0,3 a 180 s.
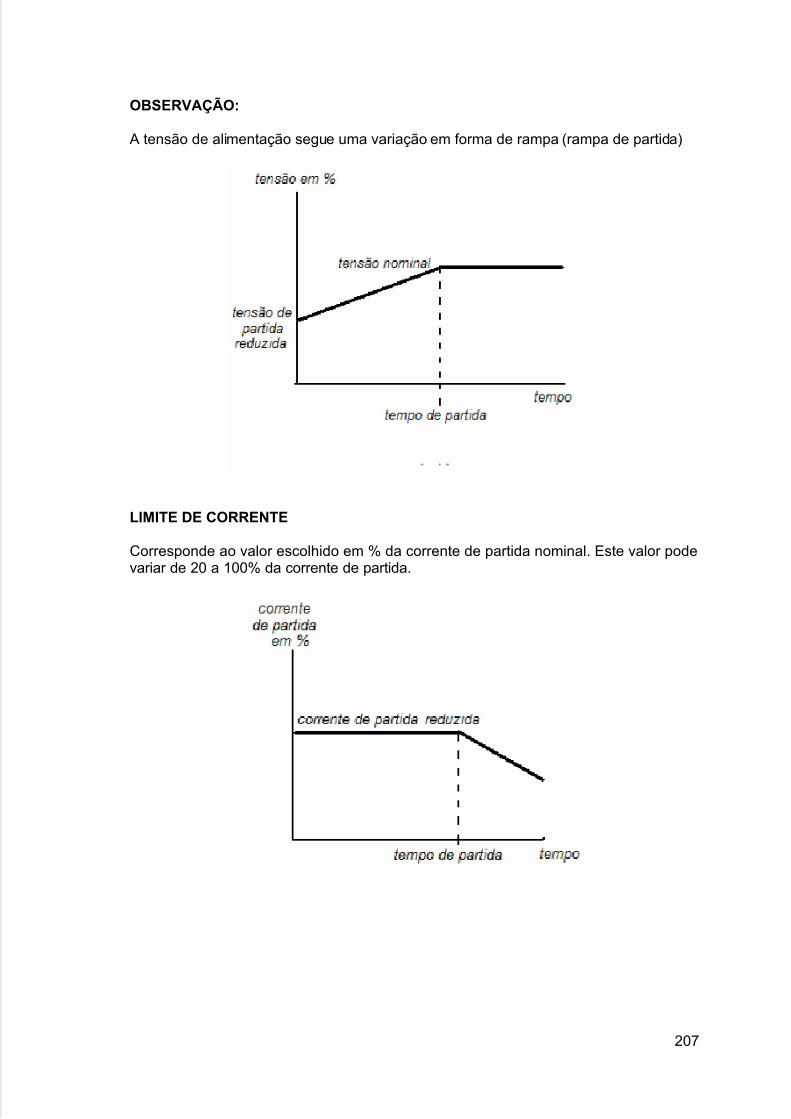
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 207/211
207
OBSERVAÇÃO:
A tensão de alimentação segue uma variação em forma de rampa (rampa de partida)
LIMITE DE CORRENTE
Corresponde ao valor escolhido em % da corrente de partida nominal. Este valor podevariar de 20 a 100% da corrente de partida.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 208/211
208
Bornes (Siemens - Sikostart 3RW22)
Circuito de potência
Entrada : L1, L2 e L3Saída : T1, T2, e T3
Alimentação auxiliar
12 – neutro13 – 100 a 120 Vac14 – 200 a 240 Vac15 – 380 a 415 Vac
Comando
11 - fonte 24 Vdc
10 – liga (alimentação momentânea)09 – Desliga( interrupção momentânea)08 – Reset do alarme
Grupo de alarme
07 – NF06 – Comum05 - NA
Sinalização
4 e 3 - NA (motor rodando)
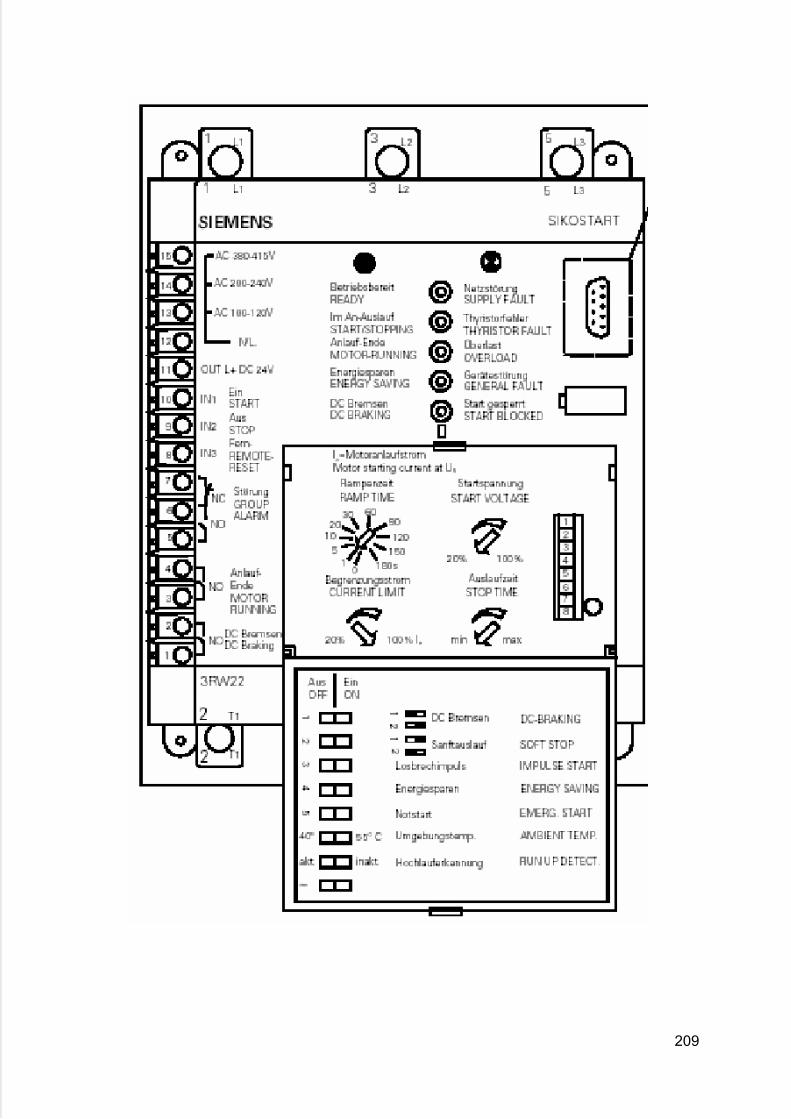
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 209/211
209
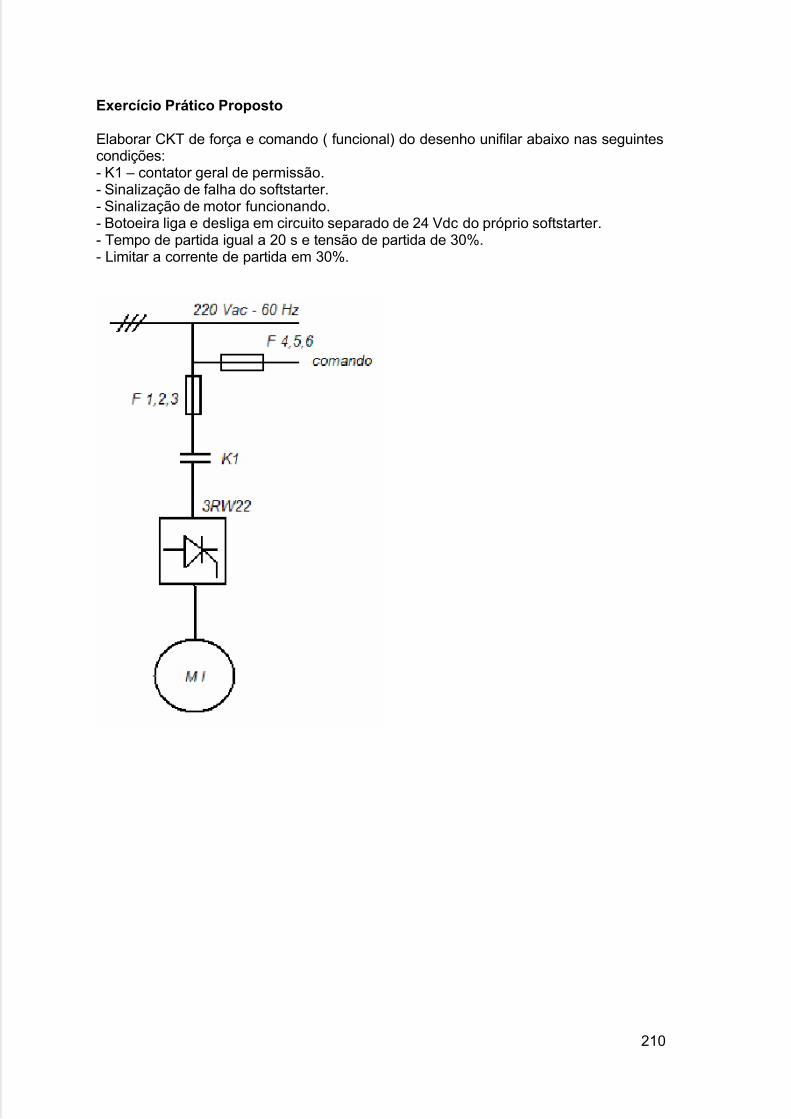
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 210/211
210
Exercício Prático Proposto
Elaborar CKT de força e comando ( funcional) do desenho unifilar abaixo nas seguintescondições:- K1 – contator geral de permissão.- Sinalização de falha do softstarter.- Sinalização de motor funcionando.- Botoeira liga e desliga em circuito separado de 24 Vdc do próprio softstarter.- Tempo de partida igual a 20 s e tensão de partida de 30%.- Limitar a corrente de partida em 30%.
5/17/2018 Comandos Elétricos - slidepdf.com
http://slidepdf.com/reader/full/comandos-eletricos-55b07dfcdc2d1 211/211
Referências bibliográficas
SENAI-SP. Eletricista de manutenção Ill - Comandos eletroeletrônicos. Por Regina Célia Roland Novaes. São Paulo, 1994.
SENAI-SP. Comandos Eletroeletrônicos – Apostila de Teoria - Intranet
Comandos Eletroeletrônicos – Apostila de Prática - Intranet
WEG - Manual de chave de partidasEspecificações de motores elétricos
Fluke - Manual de multímetro