Embed Size (px)
Citation preview

b UM-TS01∗∗∗-E033
CONTROLADOR PROGRAMÁVEL
PROSEC T1-16S
MANUAL DO USUÁRIO −−−− Funções de Comunicação −−−−
TOSHIBA CORPORATION

Informação Importante
O mau uso deste equipamento pode resultar em estrago de propriedade ou ferimento humano. Devido a grande variedade de aplicações de sistemas controlados, o usuário deve estar satisfeito com a aceitação deste equipamento para o propósito desejado.A Toshiba Corporation não será responsável por dano indireto ou conseqüência ou ferimento que poderiam resultar do uso deste equipamento.
Nenhuma responsabilidade de patente é assumida pela Toshiba Corporation a respeito do uso da informação, ilustrações, circuitos, equipamento ou exemplos de aplicação desta publicação.
A Toshiba Corporation reserve o direito de fazer mudanças e melhorias a esta publicação e;ou produtos relacionados em qualquer momento sem notificação. Nenhuma obrigação pode incidir exceto as apresentadas nesta publicação.
Esta publicação possui direitos autorais e contém material proprietário. Nenhuma parte deste manual pode ser reproduzida, armazenada em sistema recuperável, ou transmitido, em nenhuma forma ou por nenhum meio - elétrico, mecânico, fotocópia, gravação, ou outros – sem obter antecipadamente permissão escrita da Toshiba Corporation.
© TOSHIBA Corporation 2001. Todos os direitos reservados
Número da publicação: UM-TS01∗∗∗-E033 1ª edição Dezembro 2001

Funções de Comunicação 1
Precauções de Segurança
Este manual é preparado para usuários do controlador programável T1-16S da Toshiba. Ler este manual completamente antes de usar o T1-16S. Também, manter este manual e manuais relacionados de modo que você possa os ler sempre que o T1-16S estiver em operação. Classificações de Perigo
Nos manuais relacionados ao T1-16S, as seguintes duas classificações do perigo são usadas explicar as precauções de segurança.
Indica uma situação potencial perigosa que, se não evitada, poderia resultar na morte ou em ferimento sério.
Indica uma situação potencial perigosa que, se não evitada, possa resultar em ferimento menor ou moderado. Pode também ser usada alertar de encontro às práticas inseguras.
Mesmo uma precaução seja classificada como CUIDADO, ela pode causar resultados sérios dependendo da situação. Observar todas as precauções de segurança descritas neste manual.
Precauções de Segurança
• Ler as precauções de segurança descritas de no “T1-16S manual do usuário” - − Hardware básico e funções −” antes de usar o T1-16S.
• Conectar com cuidado o cabo de. A conexão errada pode causar os danos ao produto.
• Conectar a entrada de parada de emergência diretamente ao inversor quando a função da conexão do inversor de T1-16S é usada.
! AVISO
! CUIDADO
! CUIDADO

2 T1-16S Manual do Usuário
Sobre Este Manual
Sobre este manual
Este manual fornece toda a informação que você necessita para fiação, set-up e operar as funções de comunicação seriais do T1 16S. Este manual é dividido em duas partes como segue.
Parte 1 T1-16S Funções de Programação da Porta A porta do programador T1-16S pode ser usada para comunicação com um computador mestre, ou uma unidade de interface com o operador usando o protocolo de ligação do computador das séries -T, bem como comunicar-se com a ferramenta de programação das séries-T (T-PDS ou HP911A). A interface da porta do programador é RS-232C. A parte 1 descreve as funções da porta do programador T1-16S.
Parte 2 T1-16S Funções da Porta RS-485 A versão melhorada do T1-16S tem um segunda porta de comunicação de série. A interface desta porta é RS-485. Esta porta RS-485 e a porta do programador podem trabalhar independentemente. Uma dos seguintes quatro modos de operação pode ser selecionado para a porta RS-485. A parte 2 descreve como usar estas funções. •Computer link mode: Usado para comunicar com um computador mestre, uma unidade de
interface com o operador, etc. para configurar sistema SCADA/MMI, usando o protocolo de conexão com o computador T-series. Neste modo, o programador T-series (T-PDS) pode também ser conectado a porta RS-485 para propósito de programação/monitoração remota.
• Modo link de dados: Usado para configurar um sistema de link de dados entre dois T1-16Ss ou entre T1-16S e T1-40S/T2E/T2N. É um sistema fácil e barato de link de dados. Nenhum programa especial para esta ligação de dados é Pedido.
• Modo livre ASCII: Esta é uma função de comunicação ativa usada para comunicar com outros dispositivos de interface serial, usando caracteres ASCII. Usando este modo, o T1-16S pode agir como mestre de uma comunicação para conectar com o leitor de barra, impressora, balança, outros PLCs série-T, etc.
• Modo conexão com inversor: Esta é uma função especial de comunicação para conectar com os inversores da Toshiba (drive de velocidade ajustável) VF-A7, VF-G7 ou VF-S9. Usando este modo, o T1-16S pode monitorar e controlar os inversores conectados à linha RS-485. Nenhum programa especial de comunicação é Pedido. (apenas a instrução XFER é usada)
Para uma melhor compreensão do T1-16S, leia primeiramente o manual seguinte para compreender o sistema do T1-16S, e então leia este manual.
T1-16S Manual do usuário−−−− Hardware Básico e Funções −−−− UM-TS01∗∗∗-E031

Funções de comunicação 3
Conteúdo
Terminologia
A seguir, uma lista de abreviações e símbolos usados neste manual.
µµµµ s microsegundo ASCII Código padrão americano para intercâmbio de informação ASD Drive de velocidade ajustável (= Inversor) bps bit por segundo (velocidade de transmissão) CCITT Consultative Committee in International Telegraphy and Telephony CPU Unidade de processamento central EIA Associação das Industrias Eletrônicas H hexadecimal (quando aparece na frente de uma string alfanumérica) I/O Entrada/Saída LED Diodo Emissor de Luz MMI Interface Homem Máquina ms milissegundos RS-232C Um padrão EIA para transmissão de dados menores que 15 m em comprimento RS-485 Um padrão EIA para transmissão de dados menores que 1 km em comprimento SCADA Controle Supervisório e Aquisição de Dados Vac Tensão AC
Vdc Tensão DC

4 T1-16S Manual do Usuário
Conteúdo
Conteúdo
Precauções de Segurança ....................................................................................... 1
Sobre Este Manual ....................................................................................... 2
PARTE 1 T1-16S Funções da Porta de Programação
1. Visão Geral das Funções ........................................................................ 7
1.1 Função link com computador .............................................................. 8 1.2 Configuração do sistema ....................................................................... 8 1.3 Visão geral da comunicação ................................................................. 10
2. Especificações ................................................................................ 11
2.1 Especificações de transmissão ............................................................ 12 2.2 Cabo opcional para link com computador ........................................... 13
3. Cabeamento ........................................................................ 15
3.1 Configuração um-para-um ................................................................. 16 3.2 Configuração um-para-N ................................................................... 18
4. Ajuste dos Parâmetros de Comunicação ............................................. 21
4.1 Ajuste do número de estação .............................................................. 22 4.2 Ajuste da paridade .................................................................................... 22 4.3 Ajuste do tempo de atraso da resposta ............................................................ 23 4.4 Modo periférico de suporte de prioridade ....................................................... 23
5. Protocolo de link com computador ....................................................... 25
5.1 formato de mensagem ........................................................................ 26 5.2 Regras de transmissão ....................................................................... 27 5.3 Criação do checksum ......................................................................... 28 5.4 Fluxo de processamento interno ......................................................... 29
6. Comandos ..................................................................................... 31
6.1 Lista de Comandos ............................................................................. 32 6.2 Erro de resposta de link com computador (CE) ................................ 33 6.3 Erro de resposta PLC (EE) ................................................................. 34 6.4 Teste (TS) .......................................................................................... 36 6.5 Ler status do PLC (ST) ...................................................................... 37 6.6 Ler status de erro do PLC (ER) ............................................................. 39 6.7 Ler dado (DR) ............................................................................... 42 6.8 Escrever dado (DW) .............................................................................. 45

Funções de comunicação5
Conteúdo
6.9 Ler relógio/calendário (RT) ................................................................ 48 6.10 Escrever no relógio/calendário (WT) .................................................... 49 6.11 Ler informação do sistema 1 (SR) ...................................................... 50 6.12 Ler informação do sistema 2 (S2) ...................................................... 52 6.13 Controle do PLC (EC) ......................................................................... 54 6.14 Ler bloco de informação do sistema (BR) .............................................. 56 6.15 Ler bloco do programa (RB) ............................................................... 58 6.16 Escrever no bloco de informação do sistema (BW) ............................. 60 6.17 Escrever no bloco do programa (WB) .................................................. 61
PARTE 2 T1-16S Funções da Porta RS-485
1. Generalidades ..................................................................................... 63
1.1 Visão geral das funções ...................................................................... 64 1.2 Seleção do modo de operação ............................................................ 69
2. Especificações ................................................................................ 71
2.1 Modo link com computador ................................................................ 72 2.2 Modo link de dados ................................................................................. 72 2.3 Modo livre ASCII .............................................................................. 73 2.4 Modo conexão com inversor ................................................................ 73
3. Modo Link com Computador ................................................................ 75
3.1 Função link com computador ............................................................... 76 3.2 Configuração do sistema .................................................................... 78 3.3 Procedimento para setup .................................................................... 79 3.4 Cabeamento ............................................................................. 80 3.5 Ajuste de modo ................................................................................... 82 3.6 Ajuste dos parâmetros de comunicação .............................................. 83 3.6.1 Parâmetros de transmissão ............................................................ 83 3.6.2 Ajuste do tempo de atraso de resposta .......................................... 84 3.6.3 Modo prioridade de comunicação ...................................................... 84 3.7 Protocolo de link com computador ...................................................... 85
4. Modo Link de Dados ............................................................................. 89
4.1 Função link de dados .......................................................................... 90 4.2 Configuração do sistema ..................................................................... 90 4.3 Procedimento para setup .................................................................... 91 4.4 Cabeamento ............................................................................. 92 4.5 Ajuste de modo ................................................................................. 93 4.6 Ajuste dos parâmetros do sistema ................................................... 94 4.7 Informação RAS ............................................................................... 95 4.8 Programa amostra paraT1-16S .......................................................... 96

6 T1-16S Manual do Usuário
Conteúdo
5. Modo Livre ASCII ............................................................................. 97
5.1 Função de comunicação livre ASCII ................................................. 98 5.2 Configuração do sistema ....................................................................... 100 5.3 Procedimento para setup ..................................................................... 101 5.4 Cabeamento ............................................................................. 102 5.5 Ajuste de modo ................................................................................... 105 5.6 Ajuste dos parâmetros de comunicação ................................................... 106 5.7 Formato de mensagem ........................................................................ 107 5.8 Instruções relacionadas ........................................................................ 108 5.8.1 Transferência de dados expandida (XFER) ..................................... 108 5.8.2 Conversão de HEX para ASCII HTOA) ........................................... 111 5.8.3 Conversão de ASCII para HEX (ATOH) .......................................... 112 5.9 Programando ................................................................................... 113 5.9.1 Mudando o código de carregamento ............................................... 113 5.9.2 Operação de recepção de dados .................................................... 114 5.9.3 Operação de envio de dados .......................................................... 116 5.9.4 Operação reset ........................................................................... 118 5.10 Exemplo de aplicação T1-16S ............................................................ 119
6. Modo Conexão com Inversor ........................................................... 125
6.1 Função conexão com inversor ............................................................ 126 6.2 Configuração do sistema ..................................................................... 127 6.3 Procedimento para setup ..................................................................... 128 6.4 Cabeamento ............................................................................. 129 6.5 Modo ajuste ................................................................................... 131 6.6 Ajuste dos parâmetros de comunicação ................................................... 132 6.6.1 Ajuste dos parâmetros de transmissão ........................................... 132 6.6.2 Acessando o ajuste de tempo de atraso ......................................... 133 6.7 Ajuste do inversor ................................................................................ 133 6.8 Instruções relacionadas ........................................................................ 134 6.8.1 Transferência de dados expandida(XFER) ..................................... 134 6.9 Programando ................................................................................... 142 6.9.1 Modo troca de dados ................................................................. 142 6.9.2 Modo monitoração .......................................................................... 144 6.9.3 Modo ler comando ................................................................. 146 6.9.4 Modo escrever comando ................................................................. 148 6.9.5 Modo transmissão ......................................................................... 150 6.10 Exemplo de aplicação T1-16S ............................................................ 152

Funções de comunicação7
PARTE 1 T1-16S Funções da Porta de Programação
Capítulo 1 Generalidades
1.1 Funções de link do computador , 8 1.2 Configuração do Sistema, 8 1.3 Vista geral da comunicação , 10

8 T1-16S Manual do Usuário
1. Generalidades PARTE 1
1.1 Funções de link com computador
A porta de programação do T1-16S suporta funções de link com computador bem como comunicação com as ferramentas de programação.
O Porta de Programação pode aceitar comandos (série- T) de link com computador. Preparando o software de comunicação baseado no protocolo descrito neste manual no computador mestre (computador, IHM, etc.), as seguintes funções tornam-se disponíveis pelo computador mestre. • Dados de leitura (valor de registro/dispositivo) do T1-16S
• Dados da escrita (valor de registro/dispositivo) no T1-16S • Monitorar o estado da operação de T1-16S's (RUN/HALT/ERROR) • Ler o código de erro do T1-16S • Ler os dados de relógio/calendário do T1-16S • Escrever os dados de relógio/calendário no T1-16S
• Controlar o modo de operação de T1-16S
• Programar upload do T1-16S • Programar download no T1-16S Usando a função de link com computador, você pode conectar um computador mestre ou uma IHM com o T1-16S, e pode configurar um sistema de SCADA/MMI .
1.2 Configuração do Sistema
A interface da porta de programação do T1-16S é RS-232C. Assim usando um adaptador para conversão, a porta serial RS-232C do computador mestre pode ser conectada com a porta de programação T1-16S diretamente. (Configuração um para um). Configuração um para um:
NOTA Um cabo de 2 m de comprimento para link entre o computador e a porta de programação é opcionalmente disponível(tipo: PT16S). Veja a seção 2.2.
Computador mestre
RS-232C (15 m max.)
T1
T1-16S

Funções de comunicação9
PARTE 1 1. Generalidades
Por outro lado, quando dois ou mais T1-16S conectados com um computador mestre, adaptador multi-porta (CU111) podem ser usado. (One- to -N configuration)
Configuração um p/ N:
Computador mestre
(conversor RS-232C/RS-485)
RS-485 (total 1 km max.)
CU111 CU111 CU111
ADP-6237B
T1 T1 T1
(32 T1-16Ss max.)
• O CU111 é um conversor RS-232C/RS-485 dedicado ao PLC série T1.
• Se o computador mestre tem interface RS-232C mas não RS- 485, um conversor RS-232C/RS-485 (ADP-6237B) pode ser usado.
CU111

10 T1-16S Manual do Usuário
1. Generalidades PARTE 1
1.3 Vista geral da comunicação
No sistema de link com computador, o T1-16S espera a recepção de uma mensagem pedido emitida pelo computador Mestre . Quando uma mensagem pedido é emitida, o T1-16S verifica o número da estação contido na mensagem de requerimento. E quando a designação do número da estação combina com número de estação atribuído ao T1-16S, o T1-16S processa o Pedido e retorna o resposta . Isto é porque cada T1-16S deve ter um único número de estação na configuração um para N. Caso contrário, mais que um T1-16S pode tentar processar o requerimento, tendo resultando em falha na resposta. . A figura seguinte ilustra a seqüência de processos executada quando um requerimento para a estação número 3 é emitido.
T1S T1S T1S T1S T1S T1S T1S T1S
Computador mestre
#32 #7 #6 #5 #4 #3 #2 #1
Resposta (Mestre ← T1-16S)
Pedido (Mestre → T1-16S)
A mensagem pedido é enviada pelo mestre para todos aqueles conectados ao T1-16S. (requerimento para a estação #3 neste exemplo)
A mensagem pedido é interpretada e processada no T1-16S, o qual tem o mesmo número de estação que o requerimento. (a posição #3 do T1-16S neste exemplo)
Os resultados do processamento é retornado como resposta para o mestre.
NOTA O faixa disponível como de estação é de 1 a 32. O número da estação é ajustado no registro especial SW36. Consulte às seções 4.1.

Funções de comunicação 11
PARTE 1 T1-16S Funções da Porta de Programação
Parte 2 Especificações
2.1 Especificações de transmissão, 12
2.2 Cabo opcional de link com computador, 13
12 T1-16S Manual do Usuário
2. ESPECIFICAÇÕES
PARTE 1
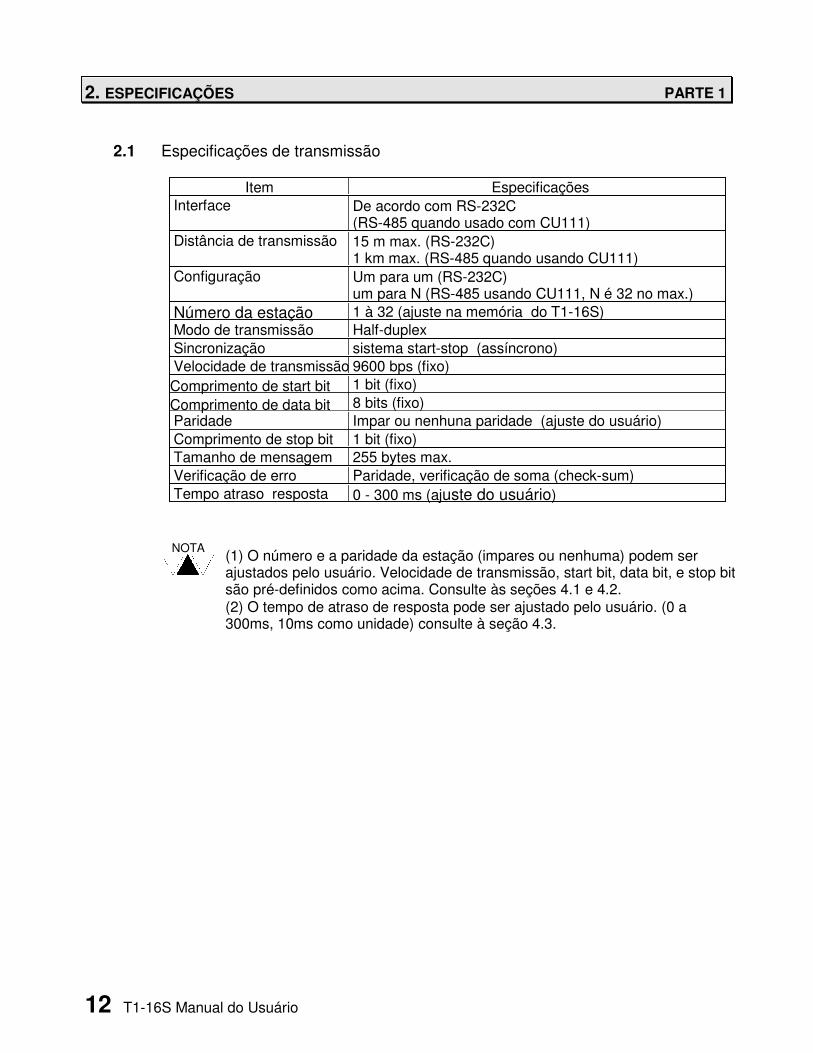
2.1 Especificações de transmissão
Item Especificações Interface De acordo com RS-232C
(RS-485 quando usado com CU111) Distância de transmissão 15 m max. (RS-232C)
1 km max. (RS-485 quando usando CU111) Configuração Um para um (RS-232C)
um para N (RS-485 usando CU111, N é 32 no max.) Número da estação
1 à 32 (ajuste na memória do T1-16S) Modo de transmissão Half-duplex Sincronização sistema start-stop (assíncrono) Velocidade de transmissão 9600 bps (fixo) Comprimento de start bit 1 bit (fixo) Comprimento de data bit 8 bits (fixo) Paridade Impar ou nenhuna paridade (ajuste do usuário) Comprimento de stop bit 1 bit (fixo) Tamanho de mensagem 255 bytes max. Verificação de erro Paridade, verificação de soma (check-sum) Tempo atraso resposta 0 - 300 ms (ajuste do usuário)
NOTA (1) O número e a paridade da estação (impares ou nenhuma) podem ser ajustados pelo usuário. Velocidade de transmissão, start bit, data bit, e stop bit são pré-definidos como acima. Consulte às seções 4.1 e 4.2. (2) O tempo de atraso de resposta pode ser ajustado pelo usuário. (0 a 300ms, 10ms como unidade) consulte à seção 4.3.
Funções de comunicação13
PARTE 1 2. ESPECIFICAÇÕES
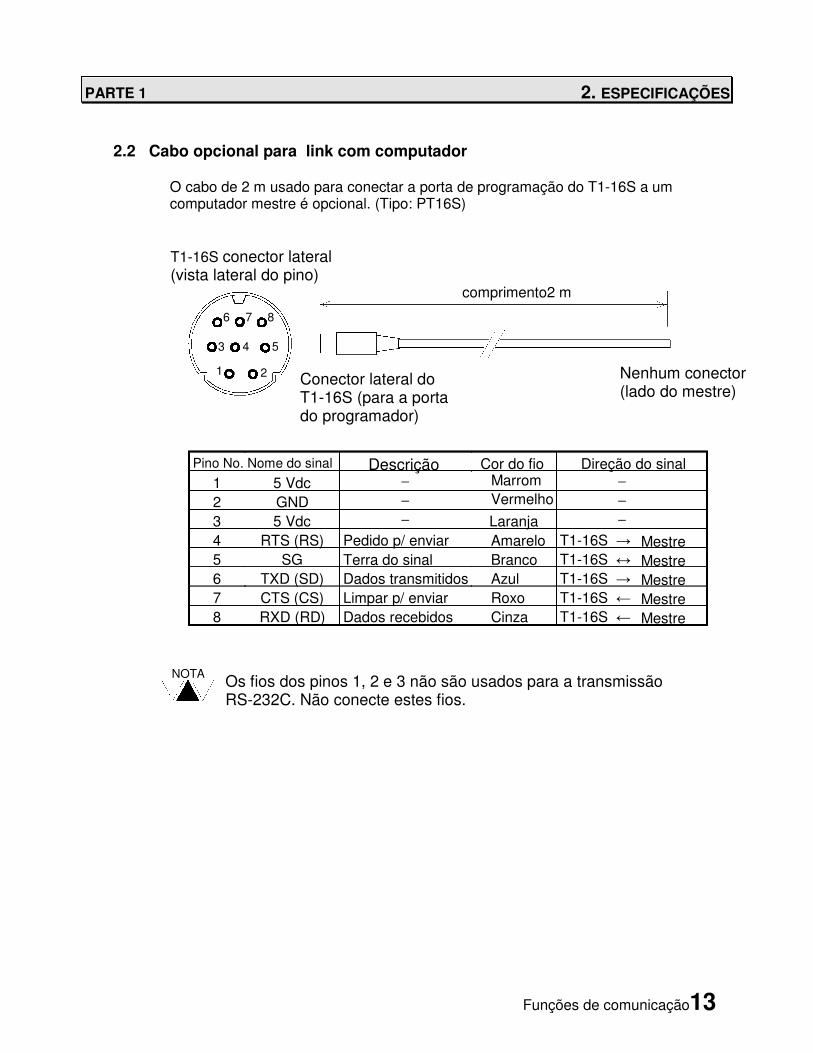
2.2 Cabo opcional para link com computador
O cabo de 2 m usado para conectar a porta de programação do T1-16S a um computador mestre é opcional. (Tipo: PT16S)
T1-16S conector lateral (vista lateral do pino)
Pino No. Nome do sinal
Descrição
Cor do fio Direção do sinal 1 5 Vdc − Marrom −
2 GND − Vermelho −
3 5 Vdc − Laranja −
4 RTS (RS) Pedido p/ enviar Amarelo T1-16S → Mestre 5 SG Terra do sinal
Branco T1-16S ↔ Mestre
6 TXD (SD) Dados transmitidos
Azul T1-16S → Mestre 7 CTS (CS) Limpar p/ enviar Roxo T1-16S ← Mestre 8 RXD (RD) Dados recebidos
Cinza T1-16S ← Mestre
NOTA Os fios dos pinos 1, 2 e 3 não são usados para a transmissão RS-232C. Não conecte estes fios.
8 7 6
5 4 3
1 2
comprimento2 m
Conector lateral do T1-16S (para a porta do programador)
Nenhum conector (lado do mestre)

14 T1-16S Manual do Usuário

Funções de comunicação15
PARTE 1 T1-16S Funções da Porta de Comunicação
Capítulo 3 Cabeamento
3.1 Configuração ponto à ponto, 16 3.2 Configuração um-para-N, 18

16 T1-16S Manual do Usuário
3. CABEAMENTO
PARTE 1
3.1 Configuração Ponto à Ponto
Quando um T1-16S é conectado a um computador mestre, as conexões de cabo deve ser como mostrado a seguir. O cabo opcional para link com computador (PT16S) é usado para este tipo de conexão.
Mestre PT16S T1-16S
Marrom 5 Vdc
DTR (ER) Vermelho GND
DSR (DR) Laranja 5 Vdc
CTS (CS) Amarelo RTS (RS)
SG Branco SG
RXD (RD) Azul TXD (SD)
RTS (RS) Roxo CTS (CS)
TXD (SD) Cinza RXD (RD)
FG
RS-232C
• Os fios do marrom, do vermelho e do laranja não devem ser conectados. Estes fios devem ser terminados sem conexão com qualquer outro. . •
O sinal RTS do T1-16S é sempre ON. . •
O T1-16S pode transmitir dados quando o sinal CTS é ON.

Funções de comunicação 17
PARTE 1 3. CABEAMENTO
Usando o adaptador CU111, a conexão ponto à ponto via RS-485 está também disponível. Neste caso, o conversor (RS-232C/RS-485) ADP-6237B pode ser usado.
Mestre ADP-6237B CU111
TXD 3 RXD TXA RXA RXD 2 TXD TXB RXB RTS 5 CTS RXA TXA T1- CTS 4 RTS RXB TXB 16S SG 7 SG SG SG
DTR 6 DSR TERM TRM DSR 20 DTR FG CD 8 CD RS-485
RS-232C Bloco de Cabo 25-pino Bloco de terminal dedicado
conector terminal
•
Conecte os terminais RXA e TERM (TRM) no CU111 e no ADP-6237B. . •
Use cabo par-trançado protegido para imunizar contra ruído. O cabo protetor deve ser conectado à terra. .
18 T1-16S Manual do Usuário
3. CABEAMENTO
PARTE 1
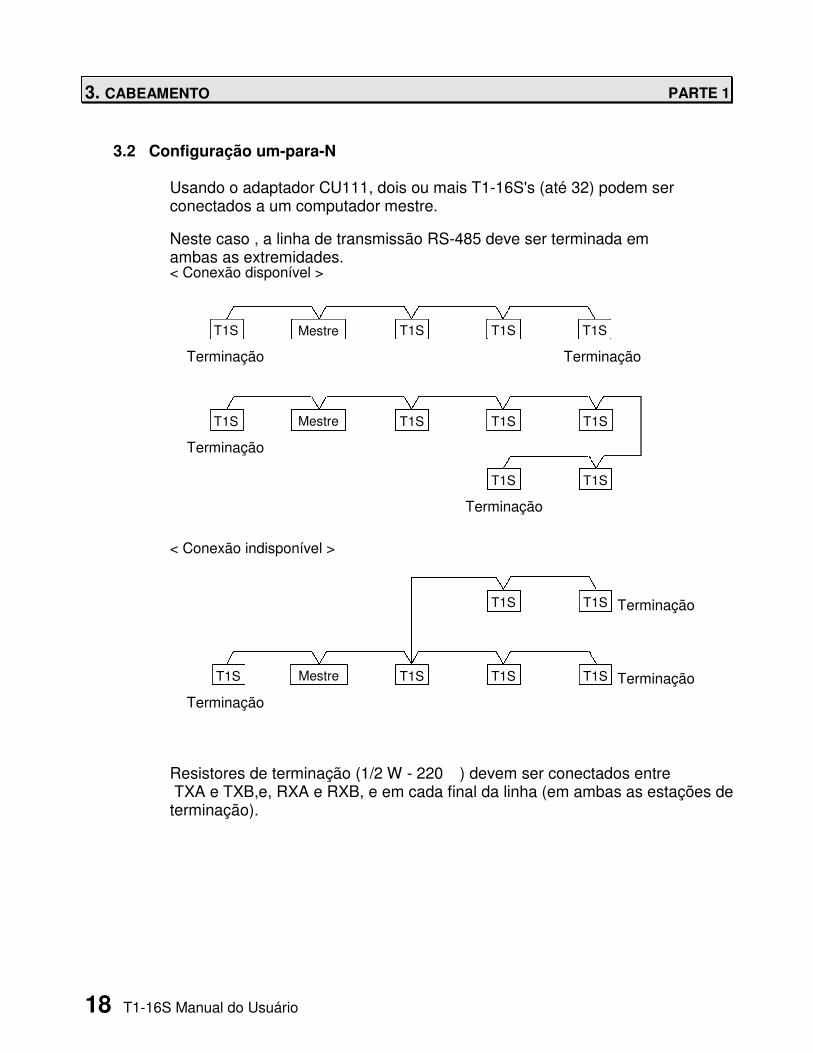
3.2 Configuração um-para-N
Usando o adaptador CU111, dois ou mais T1-16S's (até 32) podem ser conectados a um computador mestre.
Neste caso , a linha de transmissão RS-485 deve ser terminada em ambas as extremidades. < Conexão disponível >
< Conexão indisponível >
Resistores de terminação (1/2 W - 220 ) devem ser conectados entre TXA e TXB,e, RXA e RXB, e em cada final da linha (em ambas as estações de terminação).
Mestre T1S
Terminação Terminação
T1S T1S T1S
Mestre
Terminação
Terminação
T1S T1S T1S T1S
T1S T1S
Mestre
Terminação
Terminação
Terminação
T1S T1S
T1S T1S T1S T1S

Funções de comunicação 19
PARTE 1 3. CABEAMENTO
• Conecte os resistores de Terminação (1/2 W - 220 O) entre TXA e TXB, e RXA e RXB, e em cada extremidade da linha (em ambas as estações de terminação). •
Use cabo par trançado protegido para imunizar contra ruído. Conecte o cabo protetor um ao outro, e conecte-o à terra. (único ponto que aterra)
•
Quando um bloco terminal é usado para ramificar a saída, a ramificação não deve exceder o comprimento de cabo de 3 m, do bloco terminal ao CU111 ou ao computador mestre . •
Para conexões laterais de RS-232C, consulte à seção 3.1 .
RXA RXB
TXA TXB
SG
FG TXA TXB RXA
TERM
RXB SG
CU111
Comprimento do cabo: 1 km max. (total)
Cabo par-trançado protegido
Conversor RS-232C/RS-485
(ADP-6237B)
Resistores de terminação 220 Ω
Resistores de terminação
220 Ω
RXA RXB TXA TXB
SG
CU111

20 T1-16S Manual do Usuário
Funções de comunicação 21
PARTE 1 T1-16SFunções da Porta de Programação
Seção 4 Ajustes dos Parâmetros de Comunicação
4.1 Ajuste do número da estação, 22 4.2 Ajuste da paridade, 22 4.3 Ajusto do tempo de atraso de resposta, 23 4.4 Modo periférico de prioridade de sustentação, 23
22 T1-16S Manual do Usuário
4. AJUSTE DOS PARÂMETROS DE COMUNICAÇÃO
PARTE 1
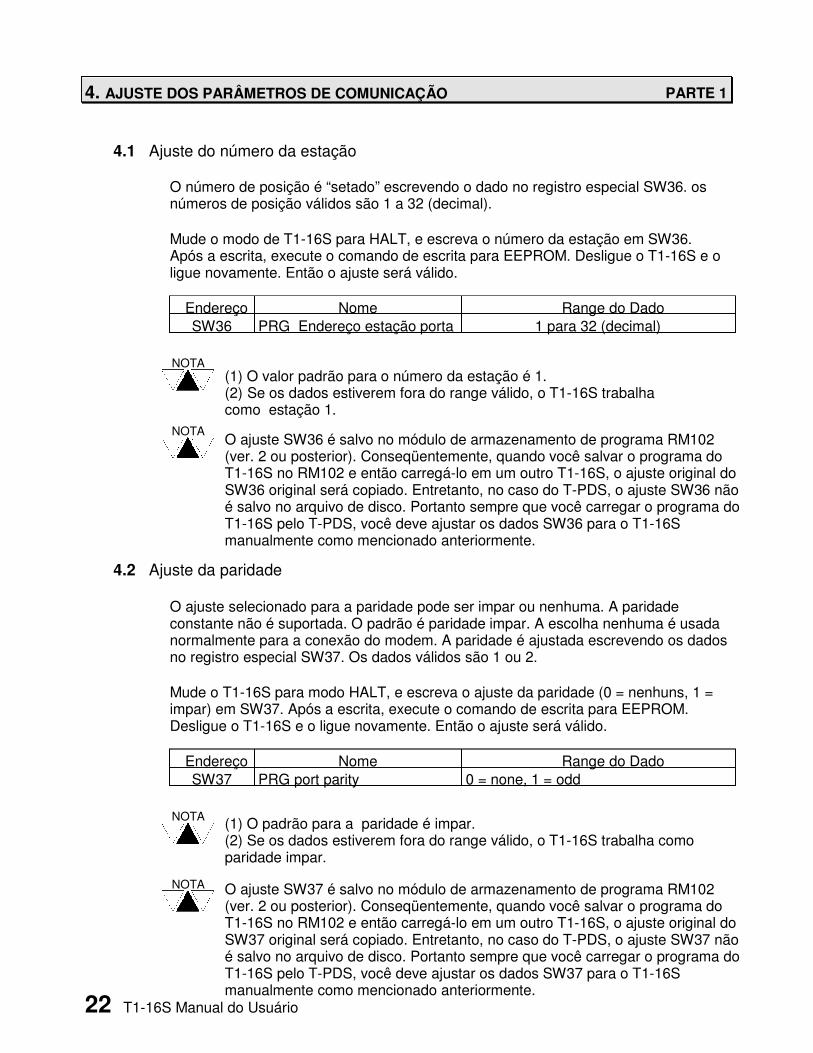
4.1 Ajuste do número da estação
O número de posição é “setado” escrevendo o dado no registro especial SW36. os números de posição válidos são 1 a 32 (decimal).
Mude o modo de T1-16S para HALT, e escreva o número da estação em SW36. Após a escrita, execute o comando de escrita para EEPROM. Desligue o T1-16S e o ligue novamente. Então o ajuste será válido.
Endereço Nome Range do Dado SW36 PRG Endereço estação porta
1 para 32 (decimal)
4.2 Ajuste da paridade
O ajuste selecionado para a paridade pode ser impar ou nenhuma. A paridade constante não é suportada. O padrão é paridade impar. A escolha nenhuma é usada normalmente para a conexão do modem. A paridade é ajustada escrevendo os dados no registro especial SW37. Os dados válidos são 1 ou 2. Mude o T1-16S para modo HALT, e escreva o ajuste da paridade (0 = nenhuns, 1 = impar) em SW37. Após a escrita, execute o comando de escrita para EEPROM. Desligue o T1-16S e o ligue novamente. Então o ajuste será válido. Endereço Nome Range do Dado
SW37 PRG port parity 0 = none, 1 = odd
NOTA
NOTA
NOTA
NOTA
(1) O valor padrão para o número da estação é 1. (2) Se os dados estiverem fora do range válido, o T1-16S trabalha como estação 1. O ajuste SW36 é salvo no módulo de armazenamento de programa RM102 (ver. 2 ou posterior). Conseqüentemente, quando você salvar o programa do T1-16S no RM102 e então carregá-lo em um outro T1-16S, o ajuste original do SW36 original será copiado. Entretanto, no caso do T-PDS, o ajuste SW36 não é salvo no arquivo de disco. Portanto sempre que você carregar o programa do T1-16S pelo T-PDS, você deve ajustar os dados SW36 para o T1-16S manualmente como mencionado anteriormente.
(1) O padrão para a paridade é impar. (2) Se os dados estiverem fora do range válido, o T1-16S trabalha como paridade impar.
O ajuste SW37 é salvo no módulo de armazenamento de programa RM102 (ver. 2 ou posterior). Conseqüentemente, quando você salvar o programa do T1-16S no RM102 e então carregá-lo em um outro T1-16S, o ajuste original do SW37 original será copiado. Entretanto, no caso do T-PDS, o ajuste SW37 não é salvo no arquivo de disco. Portanto sempre que você carregar o programa do T1-16S pelo T-PDS, você deve ajustar os dados SW37 para o T1-16S manualmente como mencionado anteriormente.
Funções de comunicação 23
PARTE 1 4. AJUSTE DOS PARÂMETROS DE COMUNICAÇÃO
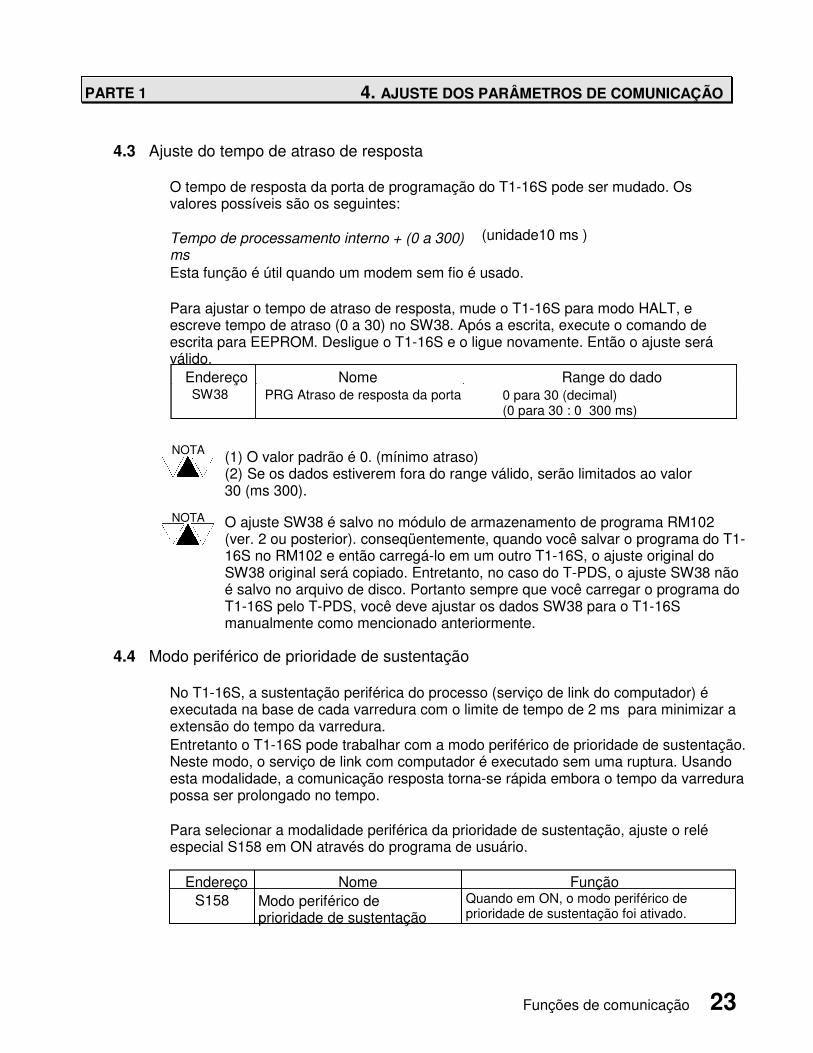
4.3 Ajuste do tempo de atraso de resposta
O tempo de resposta da porta de programação do T1-16S pode ser mudado. Os valores possíveis são os seguintes:
Tempo de processamento interno + (0 a 300) ms
(unidade10 ms )
Esta função é útil quando um modem sem fio é usado.
Para ajustar o tempo de atraso de resposta, mude o T1-16S para modo HALT, e escreve tempo de atraso (0 a 30) no SW38. Após a escrita, execute o comando de escrita para EEPROM. Desligue o T1-16S e o ligue novamente. Então o ajuste será válido. Endereço Nome Range do dado
SW38 PRG Atraso de resposta da porta 0 para 30 (decimal) (0 para 30 : 0 300 ms)
4.4 Modo periférico de prioridade de sustentação
No T1-16S, a sustentação periférica do processo (serviço de link do computador) é executada na base de cada varredura com o limite de tempo de 2 ms para minimizar a extensão do tempo da varredura. Entretanto o T1-16S pode trabalhar com a modo periférico de prioridade de sustentação. Neste modo, o serviço de link com computador é executado sem uma ruptura. Usando esta modalidade, a comunicação resposta torna-se rápida embora o tempo da varredura possa ser prolongado no tempo. Para selecionar a modalidade periférica da prioridade de sustentação, ajuste o relé especial S158 em ON através do programa de usuário.
Endereço Nome Função S158 Modo periférico de
prioridade de sustentação Quando em ON, o modo periférico de prioridade de sustentação foi ativado.
NOTA
NOTA
(1) O valor padrão é 0. (mínimo atraso) (2) Se os dados estiverem fora do range válido, serão limitados ao valor 30 (ms 300). O ajuste SW38 é salvo no módulo de armazenamento de programa RM102 (ver. 2 ou posterior). conseqüentemente, quando você salvar o programa do T1-16S no RM102 e então carregá-lo em um outro T1-16S, o ajuste original do SW38 original será copiado. Entretanto, no caso do T-PDS, o ajuste SW38 não é salvo no arquivo de disco. Portanto sempre que você carregar o programa do T1-16S pelo T-PDS, você deve ajustar os dados SW38 para o T1-16S manualmente como mencionado anteriormente.

24 T1-16S Manual do Usuário

Funções de comunicação 25
PARTE 1 T1-16S Funções da Porta de Programação
Capítulo 5
Protocolo de Link com Computador
5.1 Formato de mensagem, 26 5.2 Regras de transmissão, 27 5.3 Criação do Checksum, 28 5.4 Fluxo de processamento interno, 29

26 T1-16S Manual do Usuário
5. PROTOCOLO DE LINK COM COMPUTADOR
PARTE 1
5.1 Formato de Mensagem
O T1-16S suporta o subconjunto de Comandos de link com computador da PLC da série-T. O formato geral da mensagem da link com computador do PLC da série-T é mostrado abaixo . Número de bytes Max. 255 bytes
1 2 3 4 5 6 7
( A ADR CMD DADO & SUM )/; CR
Conteúdo do texto
( .......... Código de início (H28) − 1 byte A ......... Código de identificação de formato (H41) − 1 byte ADR .... Número da estação − 2 bytes
01 (H3031) até 32 (H3332) CMD .... Comando − 2 bytes DATA ...Campo de dado − dependendo do comando(max. 244 bytes) & ......... delimitador do Checksum (H26) − 1 byte SUM .... Checksum − 2 bytes
Código do ASCII do byte mais baixo da soma obtida adicionando o código de início ‘(‘ para o delimitador checksum ‘&’). Consultar a seção 5.3.
) ......... Código do fim (H29) − 1 byte Caso normal
; ......... Código do fim (H3B) − 1 byte No caso de dados incompletos para Comandos BR, RB, BW, e WB
CR ...... Código de retorno de transporte (H0D) − 1 byte
Escala da criação do checksum

Funções de comunicação 27
PARTE 1 5. PROTOCOLO DE LINK COM COMPUTADOR
5.2 Regras de transmissão
As regras de transmissão seguintes são aplicáveis para link de comunicação com computador. (1)O T1-16S está sempre esperado por um comando emitido pelo computador
mestre. O T1-16S não transmitirá qualquer mensagem sem haver recebido um requerimento.
(2) o ASCII 8-bit é usado como o código da transmissão . (3)A velocidade de transmissão e estrutura de formatação são as
seguintes: 9600 bps 1 start bit 8 data bits Impar ou nenhuns paridade (ajuste do usuário) 1 stop bit
(4)Se algum código de espaço (H20) é incluído na mensagem de requerimento, ele será ignorado. No entanto , os códigos de espaço são incluídos no cálculo do checksum .
( A 0 1 T S 1 2 3 & 6 D ) CR
Códigos de espaço Códigos de espaço são incluídos são ignorados no cálculo do checksum
(5) O checksum pode ser omitido na mensagem pedido emitida pelo computador de mestre. No mensagem resposta emitida pelo T1-16S, o checksum é adicionado sempre. Mensagem pedido
( A 0 1 T S 5 5 ) CR
Mensagem resposta
( A 0 1 T S 5 5 & 0 1 ) CR
A mensagem resposta inclui sempre a soma de controle(checksum) e o código de delimitador (&).

28 T1-16S Manual do Usuário
5. PROTOCOLO DE LINK COM COMPUTADOR
PARTE 1
(6) O T1-16S ignora todos os dados recebidos antes do código de início ' ('. (7) A recepção da mensagem é terminada somente após o do código do fim') ' e o CR haver sido recebido. Se o código do fim sem CR, ou o versa vice, forem recebidos, ocorrerá um erro da transmissão. .
5.3 Criação do checksum
O checksum é um código da verificação de erro para verificar a validade da mensagem recebida. O checksum é o código ASCII dos dois dígitos mais baixos da soma obtida adicionando os dados hexadecimais do código de início '(' ao do delimitador da checksum '&'. Exemplo:
( A 0 1 T S 5 5 & 0 1 ) CR
‘(‘ = H28 ‘A’ = H41 ‘0’ = H30 ‘1’ = H31 ‘T’ = H54 ‘S’ = H53 ‘5’ = H35 ‘5’ = H35 ‘&’ = H26
H201
NOTA (1) O T1-16S verifica a mensagem pedido que recebe o tempo. Se o tempo de recepção do código do início '(' para o CR excede 3 segundos, o T1 16S julga como um erro da transmissão. Neste caso, nenhum Resposta será retornada do T1-16S
. (2) Na configuração um-para-N, quando um T1-16S termina de emitir uma mensagem resposta, o T1-16S libera a linha da transmissão em 10ms (max.). Até que a linha da transmissão esteja liberada, o outro T1-16S não pode emitir nenhuma mensagem. Conseqüentemente, o computador mestre deve esperar para emitir a mensagem seguinte de requerimento pelo menos 10 ms após a recepção precedente de resposta. .
Soma
Dois dígitos mais baixos

Funções de comunicação 29
PARTE 1 5. PROTOCOLO DE LINK COM COMPUTADOR
5.4 Fluxo de processamento interno
O seguinte diagrama ilustra o fluxo de processamento interno do T1-16S para a função de link com computador.
Mestre T1-16S
Mensagem pedido Receptor Processando
pedido Verificação No. da estação
Verificação formato
Sem resposta
Mensagem resposta
Resposta(CE) Erro de link c/ comp
Transmissor
Resposta Erro do PLC (EE)
Resposta normal
Normal Compatível Normal
Erro
Incompatível
Ilegal
Pedido rejeitado
Normal

30 T1-16S Manual do Usuário

Funções de comunicação 31
PARTE 1 T1-16S Funções de Programação da Porta
Seção 6
Comandos
6.1 Lista dos Comandos, 32 6.2 Erro de Resposta (CE), 33 6.3 Resposta Erro do PLC(EE), 34 6.4 Teste (TS), 36 6.5 Status de Leitura do PLC(ST), 37 6.6 Resposta Erro do PLC(ER), 39 6.7 Leitura de Dado (DR), 42 6.8 Escrita de Dado(DW), 45 6.9 Leitura do Relógio/calendário (RT), 48 6.10 Escrita no Relógio/calendário(WT), 49
6.11 Leitura da Informação do Sistema 1 (SR), 50 6.12 Leitura da Informação do Sistema 1 (S2), 52 6.13 Controle do PLC(EC), 54
6.14 Ler informação do sistema em bloco (BR), 56 6.15 Ler programa em bloco (RB), 58
6.16 Escrever informação do sistema em bloco (BW), 60 6.17 Escrever programa em bloco (WB), 61

32 T1-16S Manual do Usuário
6. Comandos PARTE 1
6.1 Lista dos Comandos
O seguintes Comandos de link com computador são disponíveis para o T1-16S.
Comando pedido
Nome da função Descrição Comando resposta
Obs.
− Resposta erro link com computador
Erro de formato na mensagem pedido
CE Resposta somente
− Resposta erro PLC
O comando pedido foi rejeitado pelo T1-16S
EE Resposta somente
TS Teste teste loop de retorno -- T1-16S retorna o mesmo texto
TS
ST Ler estado do PLC Leitura do estado de operação do T1-16S
ST
ER Ler estado de erro do PLC
Leia código de erro registrado no T1-16S
ER
DR Ler dados Leitura dos dados de registros/ dispositivos do T1-16S
DR
DW Escrever dados
Escrita nos dados de registros/ dispositivos do T1-16S
ST
RT Ler relógio/ calendário
Leitura dos dados do relógio/ calendário (data & tempo) do T1-16S
RT
WT Escrever no relógio/calendário
Escrita de dados no relógio/ calendário (data & tempo) do T1-16S
ST
SR Ler informação do sistema
Leitura das informações do sistema 1 do T1-16S
SR
S2 Ler informação do sistema 2
Leitura das informações do sistema 2 do T1-16S
S2
EC Controle do PLC
Muda o modo de operação do T1-16S
ST
BR Ler bloco de informação do sistema
Leitura das informações do sistema do T1-16S bloco por bloco
BR
RB Ler bloco do programa
Leitura do programa do T1-16S bloco por bloco
RB
BW Escrever no bloco de informação do sistema
Escrita nas informações do sistema do T1-16S bloco por bloco
ST
WB Escrever no bloco do programa
Escrita do programa no T1- 16S bloco por bloco
ST
NOTA Os comandos acima são subconjuntos dos comandos link com computador série-T.

Funções de comunicação 33
PARTE 1 6. Comandos
6.2 Resposta Erro de Link com Computador(CE)
Quando o T1-16S detectar um erro de paridade, erro de checksum, erro de formato, etc., ele responderá ‘CE’ com o índice do erro . Mensagem pedido − Qualquer comando
Mensagem resposta
1 2 3 4 5 6 7 8 9 10 11 12 13
( A ADR C E Error & SUM ) CR
Os códigos de erro são listados a seguir:
Erro Nome do erro Descrição 01 Erro de comando O comando recebido é ilegal 02 Erro de formato Formato da mensagem recebida inválido 03 Checksum error Checksum mismatch is detected
Exemplo de execução Exemplo1)
Pedido (A01SS&96)
Resposta (A01CE01&D9)
Erro de comando (01) ... Comando ilegal (SS)
Exemplo2)
Pedido (A01DRRW,5&90)
Resposta (A01CE02&DA)
Erro de formato (02) ... Faltando os endereços de registro de iniciação

6. Comandos PARTE 1
6.3 Resposta Erro do PLC (EE)
Quando o T1-16S recebe um comando inaceitável, o T1-16S responderá ‘EE’ com o conteúdo do erro.
Mensagem pedido − Qualquer comando
Mensagem resposta
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
( A ADR E E Código de erro & SUM ) CR
Os códigos de erro são listados a seguir
Código de erro
Nome do erro Descrição
0040 Erro no barr. de I/O Um erro no barramento de I/O foi detectado 0041 I/O diferente A tabela de alocação de I/O registrada e a
atual não são idênticas 0042 I/O não responde Nenhuma resposta do módulo de I/O foi
recebida 0043 Erro paridade de I/O Erro de paridade no barramento foi detectado 0046 Registro de I/O ilegal Um excesso de registros de I/O foi detectado 0051 Comunicação
ocupada O T1-16S está ocupado processando para outra comunicação periférica
0052 Erro de formato Pedido recebido é inválido (detectado pelo T1- 16S)
0080 Erro de ausência Instrução END ou IRET não foi programada De END/IRET
0081 Erro de instrução em par
Combinação ilegal de instruções em par foi programada
0082 Erro de operação Operação ilegal foi detectada 0083 Programa inválido Anormalidade no programa foi detectada 0086 Nenhuma subrotina
entrada Subrotina chamada na instrução CALL não foi programada
0087 Erro de ausência de RET
Instrução RET (subrotina return) não foi programada na subrotina
0088 Erro de alojamento de subrotina
O número de subrotinas alojadas excedeu o limite
0089 Erro de alojamento de loop
Alojamento de loop FOR-NEXT foi programado
0098 Instrução de função inválida
Uma função que não é suportada pelo T1-16S foi programada
Funções de comunicação 35
PARTE 1 6. Comandos
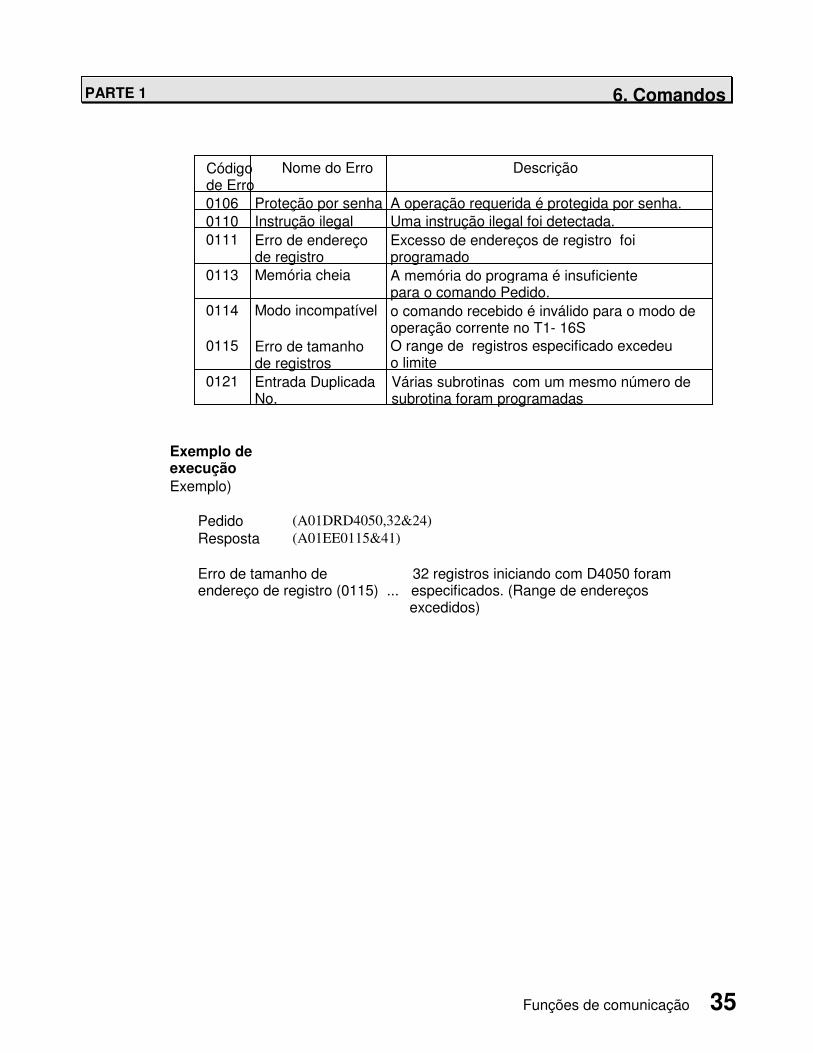
Código de Erro
Nome do Erro Descrição
0106 Proteção por senha
A operação requerida é protegida por senha. 0110 Instrução ilegal
Uma instrução ilegal foi detectada.
0111 Erro de endereço de registro
Excesso de endereços de registro foi programado
0113 Memória cheia A memória do programa é insuficiente para o comando Pedido.
0114 Modo incompatível o comando recebido é inválido para o modo de operação corrente no T1- 16S
0115 Erro de tamanho de registros
O range de registros especificado excedeu o limite
0121 Entrada Duplicada Várias subrotinas com um mesmo número de No. subrotina foram programadas
Exemplo de execução Exemplo)
Pedido (A01DRD4050,32&24)
Resposta (A01EE0115&41)
Erro de tamanho de 32 registros iniciando com D4050 foram endereço de registro (0115) ... especificados. (Range de endereços excedidos)

36 T1-16S Manual do Usuário
6. Comandos PARTE 1
6.4 Teste (TS)
Este comando é usado para testar a comunicação entre o computador mestre e o T1-16S. Quando o T1-16S recebe o comando Teste ‘TS’, o T1-16S retornará a mesma mensagem para o mestre.
Mensagem requerimento
1 2 3 4 5 6 7
( A ADR T S Test dados & SUM ) CR
Pode ser omitido
Mensagem resposta
1 2 3 4 5 6 7
( A ADR T S Test data & SUM ) CR
‘CE’ ou ‘EE’ é retornado se um erro de comunicação ocorreu.
• O tamanho máximo do campo de dados Teste é 244 bytes. • Qualquer caractere ASCII , exceto os seguintes, podem ser usados.
‘(’ H28 ‘&’ H26 Erro (CE) é retornado ‘)’ H29 CR H0D ‘ ’ H20 (código para espaço) Omitido
Exemplo de execução
Exemplo1)
Pedido (A01TS123456789&74)
Resposta (A01TS123456789&74)
Exemplo2)
Pedido (A01TSABC def&AC)
Resposta (A01TSABCdef&8C)
O código para espaço (H20) é omitido.

Funções de comunicação37
PARTE 1 6. Comandos
6.5 Ler Status do PLC (ST)
Este comando é usado para leitura dos estado de operação do T1-6S.
Mensagem de requerimento
1 2 3 4 5 6 7 8 9 10 11
( A ADR S T & SUM ) CR
Pode ser omitido
Mensagem resposta
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
( A ADR S T Status & SUM ) CR
Os status de operação do T1-16S são mostrados abaixo
‘CE’ ou ‘EE’ é retornado se um erro de comunicação ocorreu.
• O campo Status mostra o estado de operação do T1-16S.
7 8 9 10
a cd e g Modo
a = 1 : Alarme da bateria Modo: modo de operação do T1-16S c = 1 : Erro TOSLINE-F10 1 = HALT d = 1 : Erro de link com computador 2 = RUN e = 1 : Estouro do tempo constante de scan 3 = RUN-F g = 1 : Programa realizando dowload 4 = HOLD
6 = ERROR
Os outros bits não são usados. (Reservados)

38 T1-16S Manual do Usuário
6. Comandos PARTE 1
Exemplo de execução
Exemplo1)
Pedido (A01ST&97)
Resposta (A01ST0001&58)
7 8 9 10
0 0 0 1
modo doT1-16S = HALT
Exemplo2)
Pedido (A01ST&97)
Resposta (A01ST2002&5B)
7 8 9 10
2 0 0 2
modo doT1-16S = RUN erro TOSLINE-F10 (c = 1)
Exemplo3)
Pedido (A01ST&97)
Resposta (A01ST0006&5D)
7 8 9 10
0 0 0 6
modo doT1-16S = ERROR

PARTE 1 6. Comandos
Funções de comunicação 39
6.6 Ler Status de Erro do PLC (ER)
Se ocorreu um erro no T1-16S, este comando pode ser usado para ler a causa do erro.
Mensagem pedido
1 2 3 4 5 6 7 8 9 10 11
( A ADR E R & SUM ) CR
Pode ser omitido
Mensagem resposta
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
( A ADR E R Código do erro
& SUM ) CR
Os códigos de erro são listados a seguir
‘CE’ ou ‘EE’ é retornado se um erro de comunicação ocorreu.
• O campo código de erro mostra os mais recentes status de erro gravados na tabela de evento histórico do T1-16S.
Código do erro
Nome do erro
Descrição
0000 − Nenhum erro gravado 0010 Sistema energizado Energizado (nenhum erro) 0011 Sist. desenergizado Desenergizado (nenhum erro) 0020 Erro de verif. RAM Erro de leitura/escrita na RAM foi detectado 0021 Erro BCC no programa Erro BCC no programa (código de
verificação de memória) foi detectado
0022 Voltagem de bateria baixa
Dados inválidos para RAM (área de backup) foram detectados
0023 Erro EEPROM BCC
Erro BCC da EEPROM interna foi detectado
0026 Aviso EEPROM Operação de escrita na EEPROM excedeu 100,000 tempos
0030 Erro de verificação do sistema RAM
Erro de leitura/escrita no sistema RAM foi detectado
0031 Erro BCC do sistema ROM
Erro BCC do sistema ROM foi detectado

40 T1-16S Manual do Usuário
6. Comandos PARTE 1
Código de erro
Nome do erro Descrição
0032 Erro periférico LSI
Erro de hardware da CPU foi detectado
0033 Erro verificação relógio/calendário
Dados inválidos para relógio/calendário foram detectados
0034 Interrupção ilegal do sistema
Uma interrupção não registrada ocorreu
0035 Erro de tempo WD Um erro de tempo de Watchdog ocorreu 0040 Erro barr. I/O Erro no barramento de I/O foi detectado 0041 I/O diferente Tabela de alocação de I/O registrada e atual
configuração de I/O não são idênticas 0042 I/O não responde Resposta do módulo de I/O não foi
recebida 0043 Erro paridade I/O Erro de paridade do barramento de I/O ocorreu 0046 Ilegal I/O registro Alocação de registros de I/O excedeu o permitido 0064 Scan time over Tempo de scan excedeu 200 ms 0080 Erro ausência de Instrução END ou IRET não foi programada
END/IRET 0081 Erro de instrução
em par Uma combinação ilegal de instrução em par foi detectada
0082 Erro de operação Uma operação ilegal foi detectada 0083 Programa inválida Anormalidade no programa foi detectada 0086 Nenhuma
subrotina entrada Subrotina chamada na instrução CALL não foi programada
0087 Erro de ausência de RET
Instrução RET (subrotina return) não foi programada na subrotina
0088 Erro de alojamento de subrotina
Uma instrução CALL foi programada em subrotina
0089 Erro de alojamento de loop
Alojamento de loop FOR-NEXT foi programado
0098 Instrução de função inválida
Uma instrução de função não suportada pelo T1-16S foi programada
0110 Instrução ilegal Uma instrução ilegal foi detectada 0111 Erro de endereço
de registro Range de endereço de registro excessivo foi detectado
0112 Erro de contorno
Endereço de registro ilegal foi designado por índice de modificação
0121 Entrada duplicada Múltiplas subrotinas com um mesmo número de No. subrotina foram detectadas

Funções de comunicação 41
PARTE 1 6. Comandos
Exemplo de execução
Exemplo 1)
Pedido (A01ST&97)
Resposta (A01ST0002&59) − modo RUN
Pedido (A01ER&87)
Resposta (A01ER0010&48)
7 8 9 10
0 0 1 0
Exemplo 2)
Pedido (A01ST&97)
Resposta (A01ST0006&5D) − modo ERROR
Pedido (A01ER&87)
Resposta (A01ER0064&51)
7 8 9 10
0 0 6 4
Sistema energizado (normal)
Tempo de scan excedido
42 T1-16S Manual do Usuário
6. Comandos PARTE 1
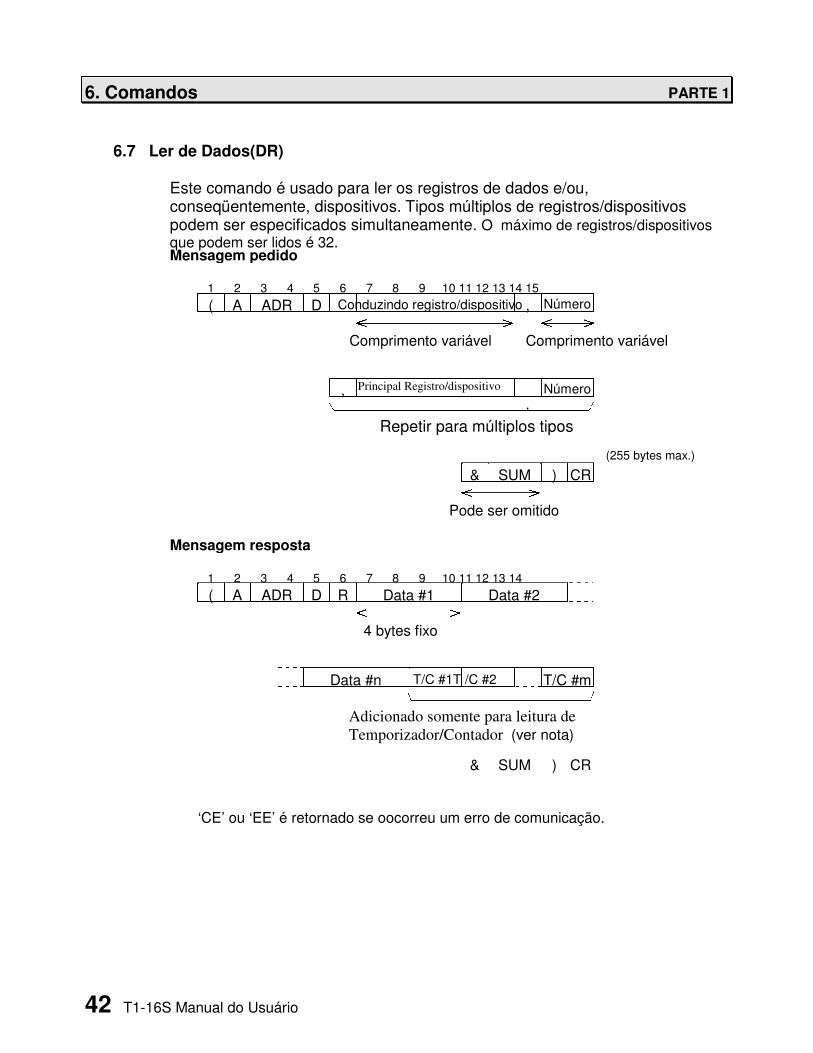
6.7 Ler de Dados(DR)
Este comando é usado para ler os registros de dados e/ou, conseqüentemente, dispositivos. Tipos múltiplos de registros/dispositivos podem ser especificados simultaneamente. O máximo de registros/dispositivos que podem ser lidos é 32. Mensagem pedido
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
( A ADR D Conduzindo registro/dispositivo , Número
Comprimento variável Comprimento variável
, Principal Registro/dispositivo ,
Número
Repetir para múltiplos tipos
& SUM ) CR
Pode ser omitido
Mensagem resposta
1 2 3 4 5 6 7 8 9 10 11 12 13 14
( A ADR D R Data #1 Data #2
4 bytes fixo
Data #n T/C #1T /C #2 T/C #m
Adicionado somente para leitura de
Temporizador/Contador (ver nota)
& SUM ) CR
‘CE’ ou ‘EE’ é retornado se oocorreu um erro de comunicação.
(255 bytes max.)

Funções de comunicação 43
PARTE 1 6. Comandos
• Este comando lê os dados de um número determinado de registros/dispositivos iniciados por um endereço específico.
• Vários tipos de registros/dispositivos podem ser especificados ao mesmo tempo. • No máximo 32 registros/dispositivos podem ser especificados ao mesmo tempo. No entanto, o comprimento máximo da mensagem pedido é limitada a 255 bytes. • Acima de 0 pode ser omitido para o endereço principal de registro/dispositivo e o número E.g., R0009 → R9, 05 → 5 • Se o número é 1,o campo número pode ser omitido. • O primeiro registro/dispositivo e o número é separado por ‘,’ (vírgula). • Na mensagem retornada , os dados são retornados na ordem especificada. • Cada dado é expresso em 4 dígitos no formato hexadecimal. Para um dispositivo, ‘0000’ e ‘0001’ representam Desligado e Ligado, respectivamente.
NOTA (1)No caso da leitura de registros do tipo Temporizador/Contador, os dados do dispositivo (2 bytes cada) correspondentes ao registro são adicionados. Quando o Temporizador/Contador é tempo-crescente/contagem-crescente, os dados do dispositivo são '01'. Se não, é '00'. (2)Os tipos de registros/dispositivos que podem ser definidos são os
seguintes. Registros: XW, YW, SW, RW, T, C, e D (Índices de registro I, J, K não podem ser especificados)
Dispositivos: X, Y, S, e R (dispositivos do tipo temporizadores/contadores (T./C.) não podem ser definidos)

44 T1-16S Manual do Usuário
6. Comandos PARTE 1
Exemplo de execução
Exemplo 1)
Pedido (A01DRRW1,3&BF)
Resposta (A01DR1EB922F122A8&2F)
3 registros iniciando com RW01 RW01 = H1EB9, RW02 = H22F1, RW03 = H22A8
Exemplo 2)
Pedido (A01DRRW4&63)
Resposta (A01DR004E&5F)
RW04 (O campo número foi omitido) RW04 = H004E
Exemplo 3)
Pedido (A01DRX4,3,D100,2&D0)
Resposta (A01DR00010000000102A30508&6B)
X004 até X006 e D0100 e D0101 X004 =Ligado, X005 = Desligado, X006 = Ligado, D0100 = H02A3, D0101 = H0508
Exemplo 4)
Pedido (A01DRT0,2,D0,1&65)
Resposta (A01DR005B00330100E054&C2)
T000, T001 e D0000 T000 = H005B, T.000 = Ligado .... tempo-crescente
T001 = H0033, T.001 = Desligado D0000 = HE054

Funções de comunicação 45
PARTEE 1 6. Comandos
6.8 Escrita de Dados (DW)
Este comando é usado para escrever nos registros/dispositivos do T1-16S. Vários tipos de registros/dispositivos podem ser definidos ao mesmo tempo. Um máximo de 32 dados de registro/dispositivo pode ser definido.
Mensagem de requerimento
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
( A ADR
D WLeading registro/dispositivo , Número
Comprimento da variável
Comprimento da variável
16 17 18 19 20 21 i j
, Data #1 , Data #n , T/C #1 , T/C #n
4 bytes repararam
Adicionado somente para Timer/Counter (see OTA)
, Leading registro/dispositivo
, Number , Data #1 T/C #n
Repetir de 7 a i ou a j para múltiplos tipos
& SUM ) CR
Pode ser omitido
Mensagem resposta
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
( A ADR S T Status & SUM ) CR
Status de operação do T1-16S(veja o comando do ST)
‘CE’ ou ‘EE’ é retornado se ocorrer um erro de comunicação
(255 bytes max.)

46 T1-16S Manual do Usuário
6. Comandos PARTE 1
• Este comando escreve dados dentro de um número pré-definido de registros/dispositivos iniciando com um endereço específico. • Múltiplos tipos de registros/dispositivos podem ser especificados simultaneamente. • No máximo 32 dados de registros/dispositivos podem ser especificados simultaneamente. Entretanto, o comprimento máximo de Mensagem pedido é limitado a 255 bytes. • Acima de 0 pode ser omitido para o endereço principal de registro/dispositivo e o número. E.g., R0009 → R9, 05 → 5 • O registro/dispositivo principal, o número, e os campos de cada dados da escrita são separado pelo ', ' (vírgula). • Cada dado é expresso por 4 dígitos no formato hexadecimal. (comprimento fixo)
Para um dispositivo, ‘0000’ e ‘0001’ representam Desligado e Ligado, respectivamente.
NOTA (1) No caso da escrita em registros de Temporizador/Contador os dados de dispositivo do Temporizador/Contador (2 bytes cada um) deve ser adicionado. Se o dispositivo Temporizador/Contador for setado em On, ele deve ser '01'. Se não, deve ser '00'. (2) Os tipos de registro/dispositivo que podem ser especificados são: Registros:
XW, YW, SW, RW, T, C, e D (os registros de índice I, J, K não podem ser especificados) Dispositivos: X, Y, S, e R (Os dispositivos T./C. de Temporizador/Contador não podem ser especificados)

Funções de comunicação 47
PARTE 1 6. Comandos
Exemplo de execução
Exemplo1)
Pedido (A01DWRW1,3,FFFF,5A5A,0011&0E)
Resposta (A01ST0002&59)
Escreve HFFFF, H5A5A e H0011 em RW01, em RW02, e em RW03 respectivamente Pedido (A01DRRW1,3&BF)
Resposta (A01DRFFFF5A5A0011&4C)
Confirmação do leitura de retorno usando o comando DR
Exemplo2)
Pedido (A01DWD100,2,FFFF,EFFF,R20,5,0001,0001,0000,0000,0001&25)
Resposta (A01ST0002&59)
Escreve HFFFF e HEFFF em D0100 e em D0101, e escreve ON, ON, OFF, OFF, ON em R020 R021, R022, R023, R024 respectivamente Pedido (A01DRD100,2,R20,5&FA)
Resposta (A01DRFFFFEFFF00010001000000000001&78)
Confirmação do leitura de retorno usando o comando DR
NOTA (1) A supressão acima de 0, para o campo de dados não é possível. O campo de dados deve ter 4 dígitos .

48 T1-16S Manual do Usuário
6. Comandos PARTE 1
6.9 Ler Relógio/Calendário (RT)
Este comando é usado para ler dados do relógio/calendário interno do T1-16S.
Mensagem pedido
1 2 3 4 5 6 7 8 9 10 11
( A ADR R T & SUM ) CR
Pode ser omitido
Mensagem resposta
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
( A ADR R T Status Ano Mês Dia
Status de operação do T1-16S(ver o comando ST)
17 18 19 20 21 22 23 24 25 26 27
Hora Minuto Segundo & SUM ) CR
‘CE’ ou ‘EE’ é retornado se ocorrer um erro de comunicação .
• Os dados do relógio/calendário são expressos no formato decimal com 2 dígitos . Exemplo de execução
Exemplo1)
Pedido (A01RT&96)
Resposta (A01RT0002010414115723&B5)
April, 14, 2001 11:57:23 PLC status = H0002 (RUN)

Funções de comunicação 49
PARTE 1 6. Comandos
6.10 Escrever no Relógio/Calendário
Este comando e usado para ajustar o relógio/calendário interno do T1-16S.
Mensagem de requerimento
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18
( A ADR W T Ano Mês Dia Hora Minuto Segundo
19 20 21 22 23
& SUM ) CR
Pode ser omitido
Mensagem resposta
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
( A ADR S T Status & SUM ) CR
Status de operação do T1-16S(veja o comando do ST)
‘CE’ ou7 ‘EE’ é retornado se um erro de comunicação ocorreu.
• Os dados do relógio/calendário são expressos por 2 dígitos em formato decimal.
Exemplos de Execução
Exemplo 1)
Pedido (A01WT010414120000&E8)
Resposta (A01ST0002&59)
Normal complete − April, 14, 2001 12:00:00
Exemplo 2)
Pedido (A01WT010414120080&F0)
Resposta (A01EE0052&41)
PLC Error Resposta (Error 0052: erro de formato)

50 T1-16S Manual do Usuário
6. Comandos PARTE 1
6.11 Ler Informações( 1) do Sistema(SR)
Este comando é usado para ler as informações de sistema do T1-16S’s (PARTE1).
Mensagem pedido
1 2 3 4 5 6 7 8 9 10 11
( A ADR S R & SUM ) CR
Pode ser omitido
Mensagem resposta
1 2 3 4 5 6 7 8 9 10 11 12
( A ADR S R Passos usados (6 bytes)
13 14 15 16 17 18 19 20 21 22
ID do programa (10 bytes)
23 52
Comentários do programa (30 bytes)
53 54 55 56 57 58 59 60 61 62 63 64
Tipo de memória (4)
Tipo PLC (8 bytes)
65 66 67 68 69 70 71 72 73 74 75 76 77 78 79
PLC OS version (10 bytes) & SUM ) CR
‘CE’ ou ‘EE’é retornado se ocorrer um erro de comunicação.
• Etapas consumidas: Etapas do programa consumidas no programa do usuário (formato decimal) • Identificação do programador: Nome registrado do usuário do programa • Comentário do programa: Comentário registrado pelo usuário do programa • Memory type: Memory capacity type of the T1-16S
53 54 55 56
8 4 Registro de dados 4 k palavras memória do programa 8 k etapas
• Tipo do PLC: modelo do PLC (T1S) • Versão OS do PLC : T1-16S número de revisão do firmware
(A01SR&95)

Funçoes Comunicação 51
Tipo de PLC = T1S Versão OS doPLC = Ver. 1.01
Exemplo de execução
6. Comandos
(A01SR&95)
PARTE 1
(A01SR000208SAMPLE programa amostra 4/14/01 8 4T1S
Ver. 1.01 &52) Resposta Pedido
Exemplo 1)
52 T1-16S Manual do Usuário
6. Comandos PARTE 1
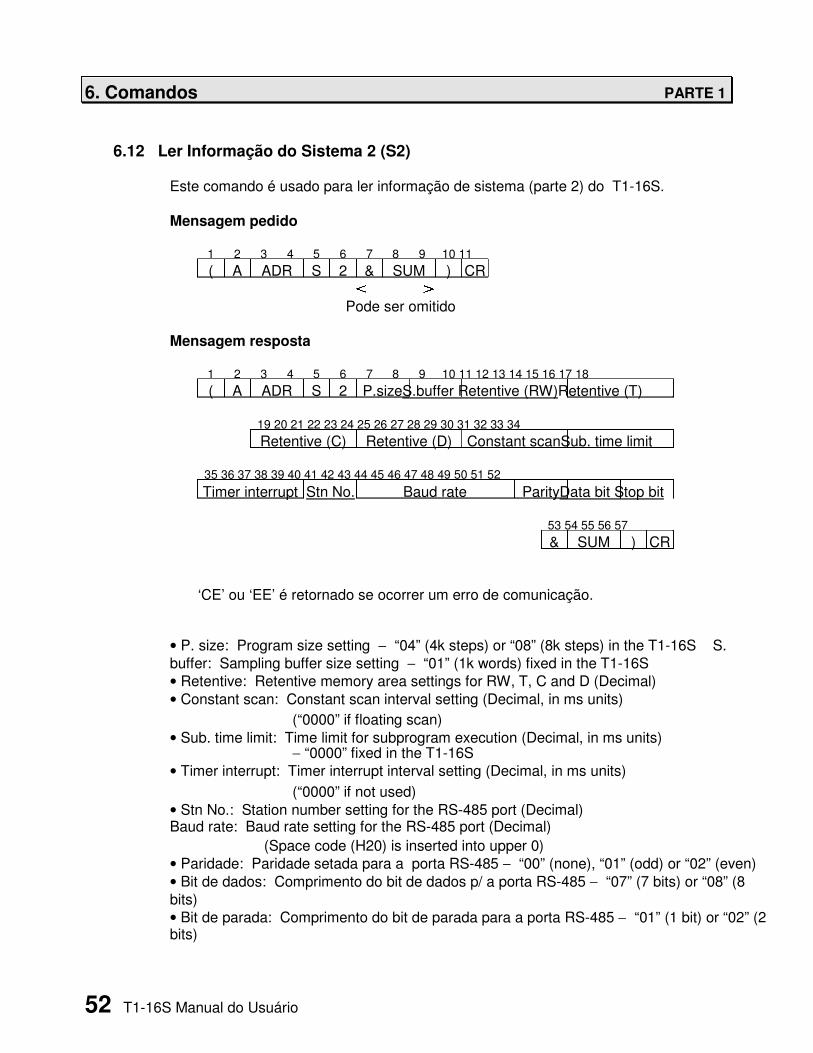
6.12 Ler Informação do Sistema 2 (S2)
Este comando é usado para ler informação de sistema (parte 2) do T1-16S.
Mensagem pedido
1 2 3 4 5 6 7 8 9 10 11
( A ADR S 2 & SUM ) CR
Pode ser omitido
Mensagem resposta
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18
( A ADR S 2 P.sizeS.buffer Retentive (RW)Retentive (T)
19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34
Retentive (C) Retentive (D) Constant scanSub. time limit
35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52
Timer interrupt Stn No. Baud rate ParityData bit Stop bit
53 54 55 56 57
& SUM ) CR
‘CE’ ou ‘EE’ é retornado se ocorrer um erro de comunicação.
• P. size: Program size setting − “04” (4k steps) or “08” (8k steps) in the T1-16S S. buffer: Sampling buffer size setting − “01” (1k words) fixed in the T1-16S • Retentive: Retentive memory area settings for RW, T, C and D (Decimal) • Constant scan: Constant scan interval setting (Decimal, in ms units)
(“0000” if floating scan) • Sub. time limit: Time limit for subprogram execution (Decimal, in ms units)
− “0000” fixed in the T1-16S • Timer interrupt: Timer interrupt interval setting (Decimal, in ms units)
(“0000” if not used) • Stn No.: Station number setting for the RS-485 port (Decimal) Baud rate: Baud rate setting for the RS-485 port (Decimal)
(Space code (H20) is inserted into upper 0) • Paridade: Paridade setada para a porta RS-485 − “00” (none), “01” (odd) or “02” (even) • Bit de dados: Comprimento do bit de dados p/ a porta RS-485 − “07” (7 bits) or “08” (8 bits) • Bit de parada: Comprimento do bit de parada para a porta RS-485 − “01” (1 bit) or “02” (2 bits)

Funções de Comunicação 53
PARTE 1 6. Comandos
Exemplo de execução
Exemplo 1)
Pedido (A01S2&75)
Resposta (A01S20801012700310031051100500000001002 9600000801&B5)
Ajuste do tamanho do programa = 8 k steps Ajuste do tamanho do buffer de amostragem = 1 k palavras (fixo) Área de memória retentiva (RW) = RW000 até RW127 Área de memória retentiva (T) = T000 até T031 Área de memória retentiva (C) = C000 até C031 Área de memória retentiva (D) = D0000 até D0511 Constante intervalo de scan = 50 ms Tempo limite de execução de subprograma = 0 ms (fixo) Temporização de intervalo ininterrupto = 10 ms Número de estação = 2 Baud rate = 9600 bps Paridade = Nenhuma Comprimento dos bits de dados = 8 bits Comprimento dos bits de parada = 1 bit

54 T1-16S Manual do Usuário
6. Comandos PARTE 1
6.13 Controle do PLC (EC)
Este comando é usado para controlar o modo de operação do T1-16S.
Mensagem Pedido
1 2 3 4 5 6 7 8 9 10 11 12 13
( A ADR E C Modo & SUM ) CR
Pode ser omitido
Mensagem resposta
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
( A ADR S T Status & SUM ) CR
Status de operação doT1-16S (Ver comando ST)
‘CE’ ou ‘EE’ é retornado se ocorrer um erro.
• O campo modo da mensagem pedido especifica o modo do T1-16S para ser mudado. 01 ... HALT 02 ... RUN 03 ... RUN-F 04 ... HOLD 06 ... Error reset 07 ... HOLD reset
• O status na resposta mostra o modo do T1-16S modo após mudado por um pedido.
• Este comando não é válido quando a chave de modo de operação do T1-16S está em HALT. (exceto no caso de reset de erro)
Exemplo de execução
Exemplo 1)
Pedido (A01EC02&DA)
Resposta (A01ST0002&59)
Mudando de HALT para RUN − Completo normalmente

Funções de comunicação 55
PARTE 1 6. Comandos
Pedido (A01EC04&DC)
Resposta (A01ST0004&5B)
Mudando de RUN para HOLD − Completado normalmente
(A01EC02&DA)
Resposta (A01ER0041&4C)
Pedido (A01EC06&DE)
Resposta (A01ST0001&58)
6.14 Ler informação do Sistema em Bloco(BR)
Pedido
Mensagem Pedido
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
A ADR & SUM ) CR
4 bytes fixo Pode ser omitido
Mensagem Resposta
1 2 3 4 5 6 7 8 9 10
ADR B R Block No.
11
Bloco de dados (128 bytes fixo)
139 140 141 142 143
& SUM )/;CR
‘CE’ ou ‘EE’ é retornado se ocorrer um erro de comunicação.
• Os índices da memória da informação do sistema do T1-16S são lidos especificando o número de bloco. • O tamanho de um bloco é 128 bytes. • O número de bloco é 0000 a 0015 (16 blocos). Este comando deve ser usado do bloco 0000 até 0015 consecutivamente. • O código de fim “;” (H3B) é retornado para o bloco 0000 até 0014 para mostrar

Funções de Comunicação 56
incompletamente o bloco. E o código normal de fim “)” (H29) é retornado para o bloco 0015 para mostrar o bloco final.
6.14 Ler informação do Sistema em Bloco(BR)
Este comando é usado ler a informação do sistema do T1-16S bloco-à- bloco. O comando BR e o comando RB são usados em combinação para upload do programa.
6. Comandos PARTE 1
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
A ADR B R Block No. & SUM ) CR
4 bytes fixo Pode ser omitido
Mensagem resposta
1 2 3 4 5 6 7 8 9 10
( A ADR B R Block No.
11 138
Bloco de dados (128 bytes fixo)
139 140 141 142 143
& SUM )/; CR
CE’ ou ‘EE’ é retornado se ocorrer um erro.
• O conteúdo da memória de informação de sistema do T1-16S é escrito em um número específico de blocos.
• O tamanho dos blocos é 128 bytes. • Os números de vão de 0000 até 0015 (16 blocos). Este comando deve ser usado do bloco 0000 até 0015 consecutivamente. • O código de fim “;” (H3B) é retornado para o bloco 0000 até 0014 para mostrar
Mensagem pedido
(
Funções de Comunicação 57
PARTE 1 6. Comandos
Exemplo de execução
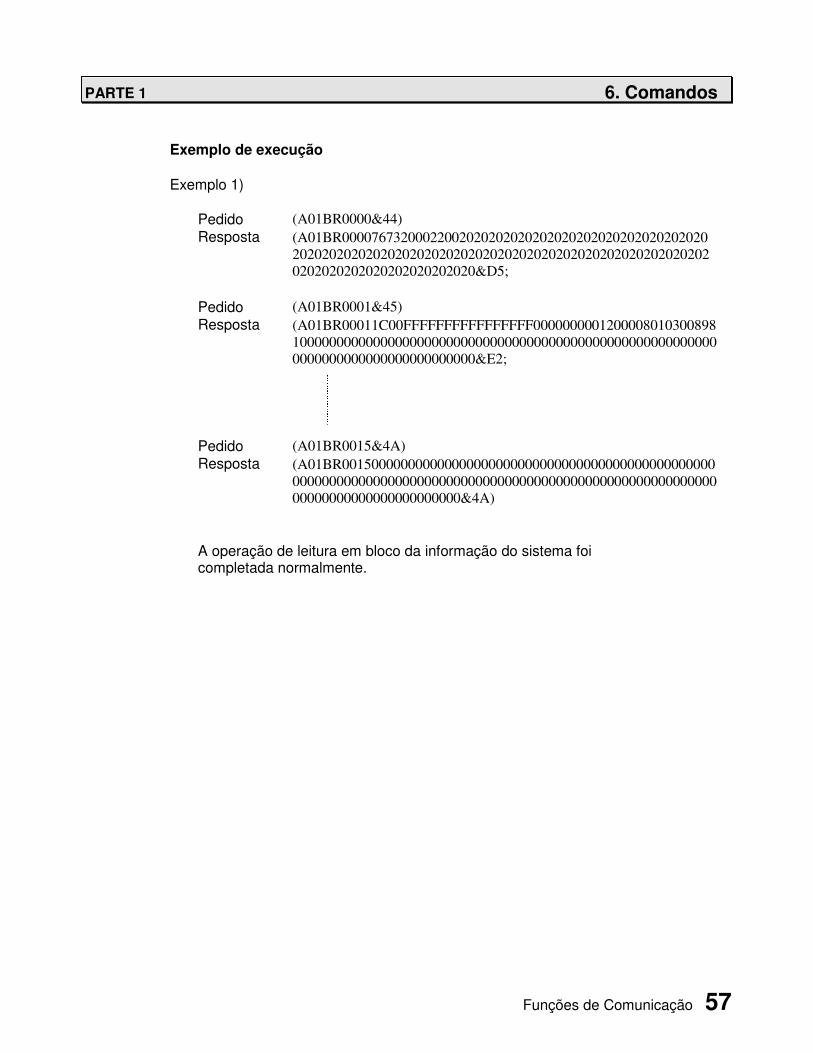
Exemplo 1)
Pedido (A01BR0000&44)
Resposta (A01BR00007673200022002020202020202020202020202020202020
202020202020202020202020202020202020202020202020202020202
0202020202020202020202020&D5;
Pedido (A01BR0001&45)
Resposta (A01BR00011C00FFFFFFFFFFFFFFFF0000000001200008010300898
1000000000000000000000000000000000000000000000000000000000
0000000000000000000000000&E2;
Pedido (A01BR0015&4A)
Resposta (A01BR001500000000000000000000000000000000000000000000000
0000000000000000000000000000000000000000000000000000000000
00000000000000000000000&4A)
A operação de leitura em bloco da informação do sistema foi completada normalmente.
58 T1-16S Manual do Usuário
6. Comandos PARTE 1
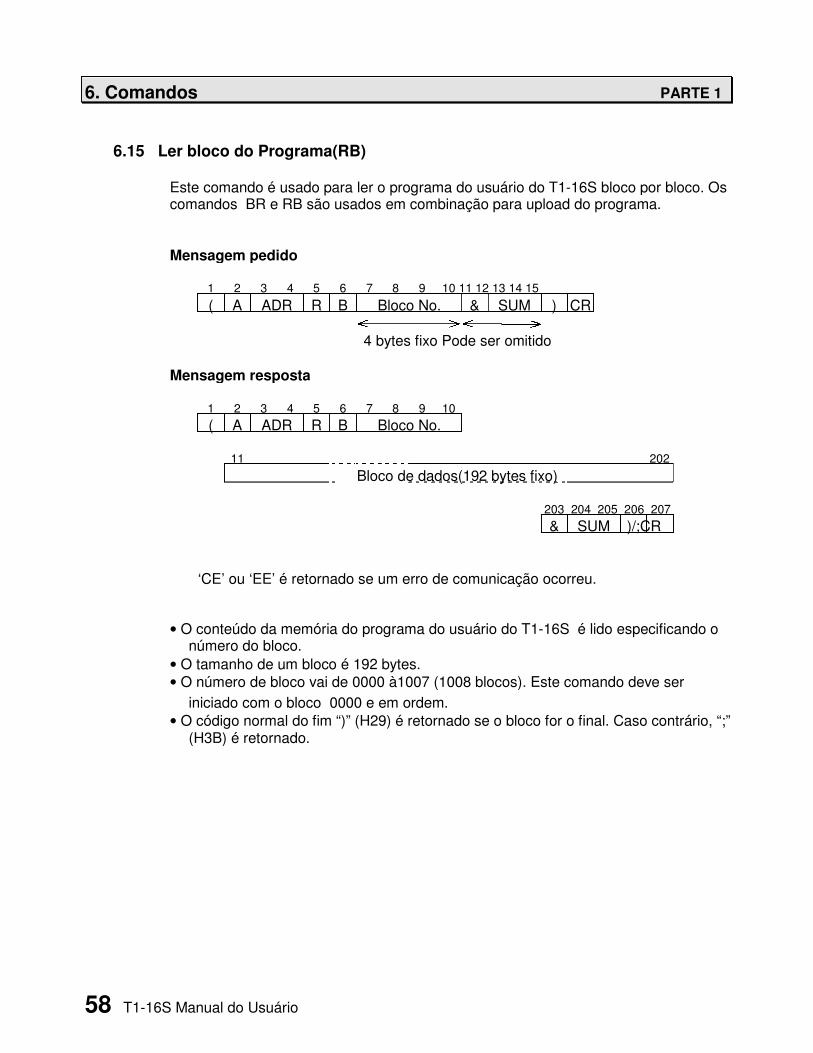
6.15 Ler bloco do Programa(RB)
Este comando é usado para ler o programa do usuário do T1-16S bloco por bloco. Os comandos BR e RB são usados em combinação para upload do programa.
Mensagem pedido
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
( A ADR R B Bloco No. & SUM ) CR
4 bytes fixo Pode ser omitido
Mensagem resposta
1 2 3 4 5 6 7 8 9 10
( A ADR R B Bloco No.
11 202
Bloco de dados(192 bytes fixo)
203 204 205 206 207
& SUM )/;CR
‘CE’ ou ‘EE’ é retornado se um erro de comunicação ocorreu.
• O conteúdo da memória do programa do usuário do T1-16S é lido especificando o número do bloco.
• O tamanho de um bloco é 192 bytes. • O número de bloco vai de 0000 à1007 (1008 blocos). Este comando deve ser
iniciado com o bloco 0000 e em ordem. • O código normal do fim “)” (H29) é retornado se o bloco for o final. Caso contrário, “;”
(H3B) é retornado.

Funções de Comunicação 59
PARTE 1 6. Comandos
Exemplo de execução
Exemplo 1)
Pedido (A01RB0000&44)
Resposta (A01RB00002C0000032200380008052B00080204300254F000181
F00030300083802F4C002E4C002D4C002C48002B48002A48002
948002848002748002640573000802043800281C00020364000502
800800160804043800381C008203640005BE00080404&2F;
Pedido (A01RB0001&45)
Resposta (A01RB000108030407000000000000000000000000000000000000
0000000000000000000000000000000000000000000000000000000
0000000000000000000000000000000000000000000000000000000
00000000000000000000000000000000000000&5B)
A operação de leitura de bloco foi completada normalmente. (O número de blocos é 2)

60 T1-16S Manual do Usuário
6. Comandos PARTE 1
6.16 Escrever informação do Sistema em Bloco(BW)
Este comando é usado escrever os dados da informação do sistema obtidos usando o comando BR na memória do T1-16S bloco por bloco. O comando BW e o comando WB são usados em combinação pAra download do programa.
Mensagem pedido
1 2 3 4 5 6 7 8 9 10
( A ADR B W Block No.
4 bytes fixo 11 138
Bloco de dados(128 bytes fixo)
139 140 141 142 143
& SUM )/;CR
Pode ser omitido
Mensagem resposta
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
( A ADR S T Status & SUM ) CR
T1-16S status de operação(ver comando ST)
‘CE’ ou ‘EE’ é retornado se um erro de comunicação ocorreu.
• O conteúdo de informação do sistema é escrito na memória do T1-16S especificando o número do bloco.
• O tamanho de um bloco é128 bytes. • O número de bloco vai de 0000 à 0015 (16 blocos). Este comando deve ser usado
do bloco 0000 até 0015 consecutivamente. • o Código de fim “;” (H3B) deve ser usado para o bloco 0000 até 0014 para mostrar
incompletamente um bloco. E o código normal do fim “)” (H29) deve ser usado para o bloco 0015 para mostrar o bloco final.
Funções de Comunicação 61
PARTE 1 6. Comandos
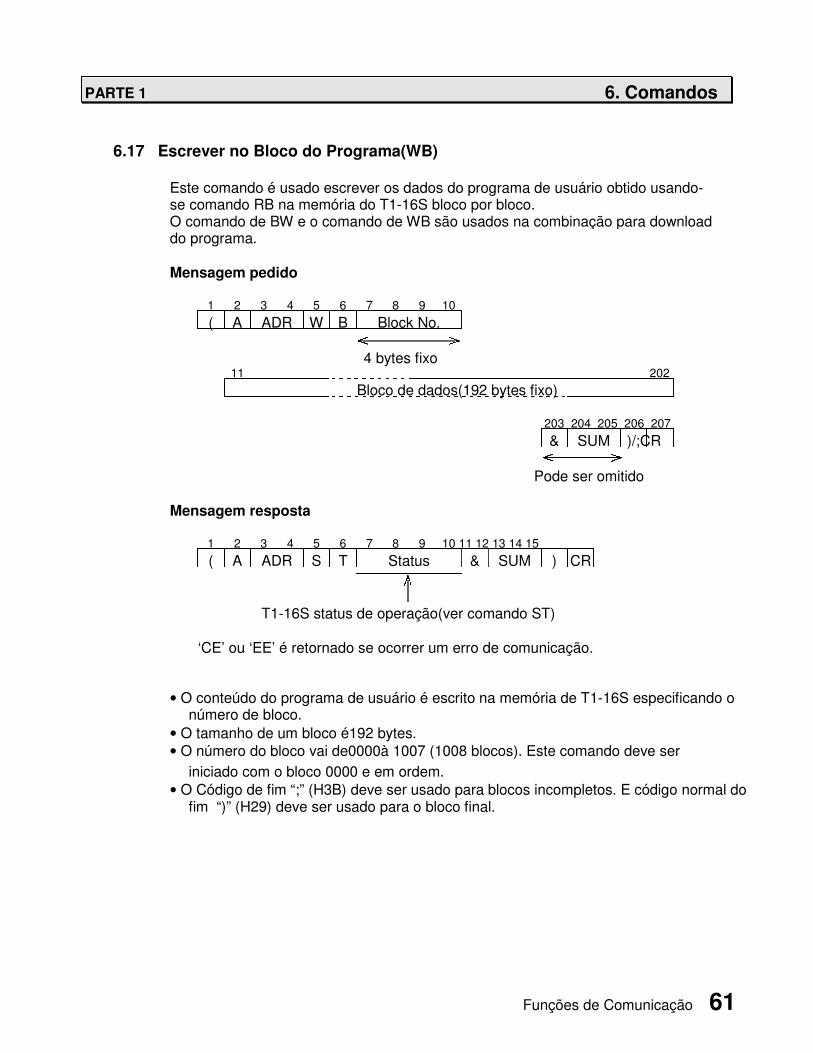
6.17 Escrever no Bloco do Programa(WB)
Este comando é usado escrever os dados do programa de usuário obtido usando-se comando RB na memória do T1-16S bloco por bloco. O comando de BW e o comando de WB são usados na combinação para download do programa.
Mensagem pedido
1 2 3 4 5 6 7 8 9 10
( A ADR W B Block No.
4 bytes fixo 11 202
Bloco de dados(192 bytes fixo)
203 204 205 206 207
& SUM )/;CR
Pode ser omitido
Mensagem resposta
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
( A ADR S T Status & SUM ) CR
T1-16S status de operação(ver comando ST)
‘CE’ ou ‘EE’ é retornado se ocorrer um erro de comunicação.
• O conteúdo do programa de usuário é escrito na memória de T1-16S especificando o número de bloco.
• O tamanho de um bloco é192 bytes. • O número do bloco vai de0000à 1007 (1008 blocos). Este comando deve ser
iniciado com o bloco 0000 e em ordem. • O Código de fim “;” (H3B) deve ser usado para blocos incompletos. E código normal do
fim “)” (H29) deve ser usado para o bloco final.

62 T1-16S Manual do Usuário

Funções de Comunicação 63
PARTE 2 T1-16S Funções da Porta RS-485
Seção 1 Generalidades
1.1 Visão geral das funções, 64 1.2 Seleção do modo de operação, 69

64 T1-16S Manual do Usuário
1. Generalidades PARTE 2
1.1 Visão Geral das Funções
A versão melhorada do T1-16S tem uma porta RS-485. Este porta RS-485 e a porta do programador podem trabalhar independentemente..
T1-16S melhorou a característica externa da versão
Arranjo terminal da porta RS-485
Usando esta porta RS-485, uma das seguintes funções de comunicação pode ser usado.
• Comunicação com um computador mestre (Modo link com computador) • Enlace de dados entre dois T1-16Ss (Modo link de dados) • Comunicação ativa com os dispositivos de série do ASCII (modo livre ASCII) • Monitoração e controle dos inversores Toshiba (modo conexão com inversor)
O modo de operação é selecionado setando o dado no SW56. Consultar à seção 1.2.
NOTA
Porta RS-485
O T1-16S padrão não tem a porta RS-485.
TOSHIBA
MDR16S
T1 PROSEC
TXA TXB
RXB RXA SG TRM
LINK

Funções de Comunicação 65
PARTE 2 1. Generalidades
Modo link com computador
O modo link com computador é usado para conectar entre o T1-16S e um computador mestre. Até 32 T1-16Ss podem ser conectados ao computador mestre na linha de comunicação RS- 485. Preparando o software de comunicação baseado no protocolo de ligação do computador Toshiba ao computador mestre, as seguintes funções tornam-se disponíveis pelo computador mestre. O protocolo de ligação do computador é um sistema de comunicação simples dw mensagem do ASCII.
• Dados de leitura (valor do registro/dispositivo) do T1-16S • Dados da escrita (valor do registro/dispositivo) no T1-16S • Monitorando o status de operação de T1-16S (RUN/HALT/ERROR) • Lendo o código de erro do T1-16S • Lendo os dados do relógio/calendário do T1-16S • Escrevendo nos dados do relógio/calendário do T1-16S • Controlando o modo de operação do T1-16S (RUN/HALT) • Upload do programa do T1-16S • Download do programa no T1-16S
Computador Mestre
RS-485 (1 km max.)
T1-16S T1-16S T1-16S
Max. 32 T1-16Ss
T1-16S
Naturalmente, a ferramenta de programação do PLC da série-T (T-PDS) pode também ser usada neste sistema da ligação do computador.

66 T1-16S Manual do Usuário
1. Generalidades PARTE 2
Modo link de dados
A modo link de dados é usado para conectar dois T1-16Ss. Cada 16 palavras de dados é automaticamente trocada entre estes dois T1-16Ss. Nenhum programa de usuário para este link de dados é Pedido.
Para esta função, um T1-16S deve ser ajustado para estação número 1, e o outro deve ser ajustado a 2.
Os registros de dados D0000 à D0031 (32 palavras) são usados para este link de dados.
RS-485 (1 km max.)
Estação No. 1
D0000
D0015 D0016
D0031
D0000
D0015 D0016
D0031
Estação No. 2
T1-16S T1-16S
NOTA Usando esta função, o link de dados entre T1-16S e T1-40S/T2E/T2N estão também disponíveis.

Funções de Comunicação 67
PARTE 2 1. Generalidades
Modo livre ASCII
O modo livre ASCII é usado para conectar entre o T1-16S e vários dispositivos seriais ASCII, como um micro computador, leitor de código da barra, impressora, display, etc. Usando este modo, o T1-16S pode trabalhar como um mestre de uma comunicação. Conseqüentemente, o T1-16S pode comunicar-se com o outro PLCs usando o protocolo de ligação do computador.
Bar-code reader ID system Weigh scale Power meter Printer Others
RS-485 (1 km max.)
T1-16S
Neste modo, mensagens ”user defined” do ASCII podem ser transmitidas e/ou recebidas através da porta RS-485.
A mensagem do ASCII (um conjunto de caracteres da transmissão) significa uma string de caracteres de ASCII que seja terminada por um código de carregamento especificado. O ajuste padrão do código de carregamento é o CR (código do retorno do carro = H0D).
Formato aplicável da mensagem (código de carregamento padrão):
1 2 3 4 N-1 N CR
N: comprimento da mensagem = 512 bytes max.
Em outras palavras, T1-16S não pode ser usado para a transmissão de dados em que o código de carregamento pode aparecer no meio da mensagem (transmissão binária) ou a mensagem é terminada por dois ou mais tipos de código de carregamento.

68 T1-16S Manual do Usuário
1. Generalidades PARTE 2
Modo conexão com inversor
O modo conexão com inversor do T1-16S é uma função especial para monitorar/controlar os inversores da Toshiba (ASDs) VF-A7/G7/S9 através da linha RS-485. Usando este modo, o T1-16S pode executar as seguintes funções para os inversores conectados na linha RS-485 sem nenhum programa especial de comunicação. • Monitoração - freqüência de operação e status do terminal • Controle − Run/Stop/Jog, Forward/Reverse, Frequency reference, etc. • Leitura/escrita de parâmetros • Comando de transmissão
NOTA Este modo de conexão do inversor está usando a função de série padrão de comunicação dos inversores a fim de configurar monitorar/controlar sistemas economicamente. Para o controle firmemente integrado da velocidade e de seqüência, Toshiba recomenda o uso de um T2 ou de um PLC T3 com uma DeviceNet ou com um módulo de rede TOSLINE no PLC e nos inversores.
RS-485 (1 km max.)
VF-A7 VF-S9 VF-A7
Adaptador RS485
888
VF-S9
888
888 888
T1-16S
VF-S9 VF-S9
888 888
(Max. 64 Inversores)
Funções de Comunicação 69
PARTE 2 1. Generalidades
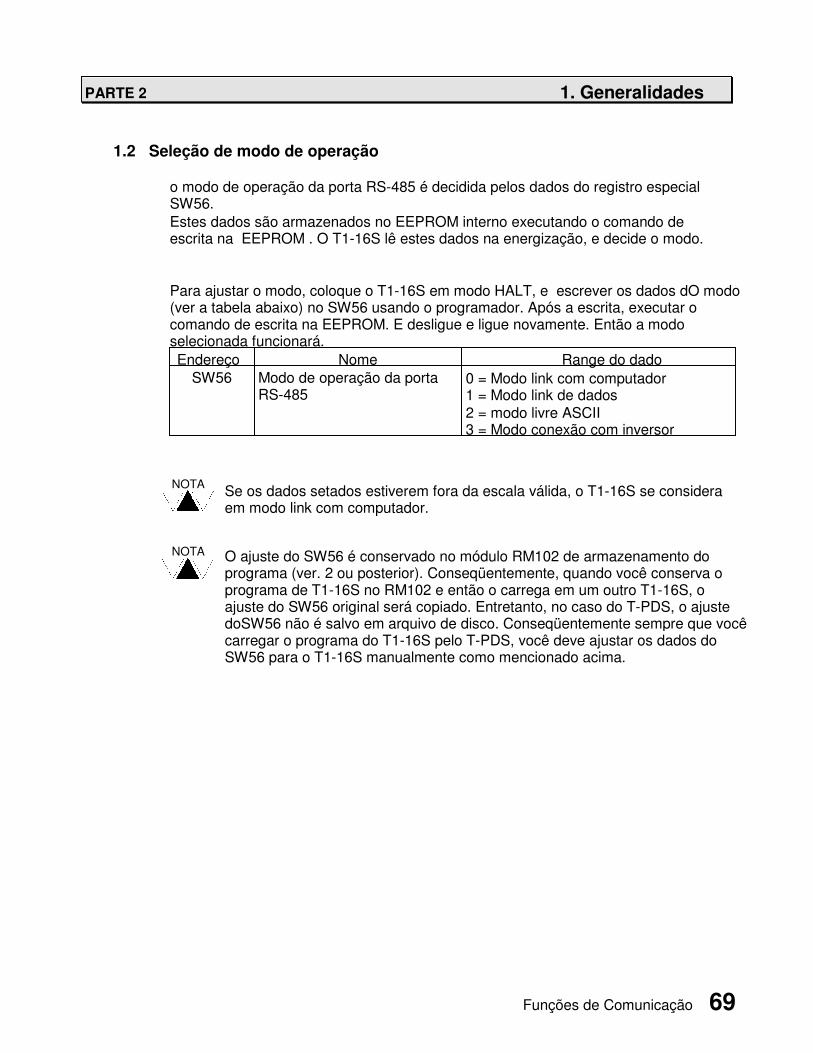
1.2 Seleção de modo de operação
o modo de operação da porta RS-485 é decidida pelos dados do registro especial SW56. Estes dados são armazenados no EEPROM interno executando o comando de escrita na EEPROM . O T1-16S lê estes dados na energização, e decide o modo.
Para ajustar o modo, coloque o T1-16S em modo HALT, e escrever os dados dO modo (ver a tabela abaixo) no SW56 usando o programador. Após a escrita, executar o comando de escrita na EEPROM. E desligue e ligue novamente. Então a modo selecionada funcionará. Endereço Nome Range do dado
SW56 Modo de operação da porta RS-485
0 = Modo link com computador 1 = Modo link de dados 2 = modo livre ASCII 3 = Modo conexão com inversor
NOTA
NOTA
Se os dados setados estiverem fora da escala válida, o T1-16S se considera em modo link com computador.
O ajuste do SW56 é conservado no módulo RM102 de armazenamento do programa (ver. 2 ou posterior). Conseqüentemente, quando você conserva o programa de T1-16S no RM102 e então o carrega em um outro T1-16S, o ajuste do SW56 original será copiado. Entretanto, no caso do T-PDS, o ajuste doSW56 não é salvo em arquivo de disco. Conseqüentemente sempre que você carregar o programa do T1-16S pelo T-PDS, você deve ajustar os dados do SW56 para o T1-16S manualmente como mencionado acima.

70 T1-16S Manual do Usuário

Funções de Comunicação71
PARTE 2 T1-16S Funções da Porta RS-485
Seção 2 Especificações
2.1 Modo link com computador, 72 2.2 Modo link de dados, 72 2.3 Modo livre ASCII, 73 2.4 Modo conexão con inversor, 73
72 T1-16S Manual do Usuário
2. Especificações PARTE 2
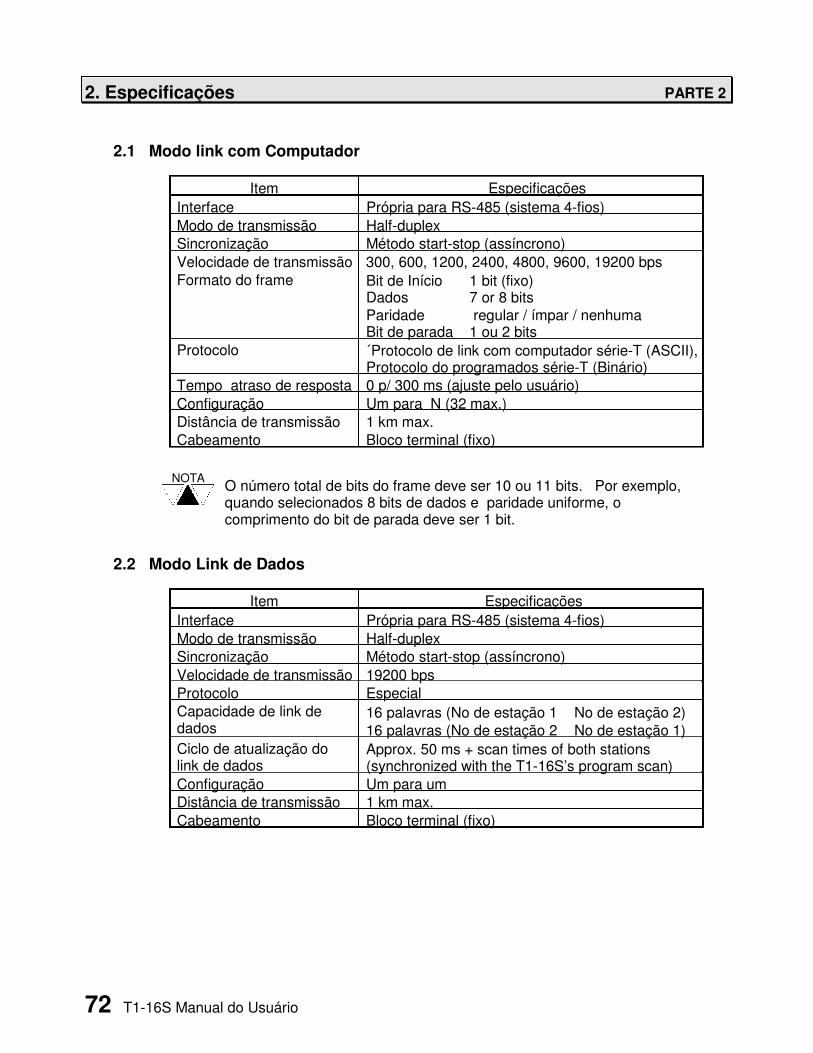
2.1 Modo link com Computador
Item Especificações Interface Própria para RS-485 (sistema 4-fios) Modo de transmissão Half-duplex Sincronização Método start-stop (assíncrono) Velocidade de transmissão 300, 600, 1200, 2400, 4800, 9600, 19200 bps Formato do frame Bit de Início
Dados Paridade Bit de parada
1 bit (fixo) 7 or 8 bits regular / ímpar / nenhuma 1 ou 2 bits
Protocolo ´Protocolo de link com computador série-T (ASCII), Protocolo do programados série-T (Binário)
Tempo atraso de resposta 0 p/ 300 ms (ajuste pelo usuário) Configuração Um para N (32 max.) Distância de transmissão 1 km max. Cabeamento Bloco terminal (fixo)
2.2 Modo Link de Dados
Item Especificações Interface Própria para RS-485 (sistema 4-fios) Modo de transmissão Half-duplex Sincronização Método start-stop (assíncrono) Velocidade de transmissão 19200 bps Protocolo Especial Capacidade de link de dados
16 palavras (No de estação 1 No de estação 2) 16 palavras (No de estação 2 No de estação 1)
Ciclo de atualização do link de dados
Approx. 50 ms + scan times of both stations (synchronized with the T1-16S’s program scan)
Configuração Um para um Distância de transmissão 1 km max. Cabeamento Bloco terminal (fixo)
NOTA O número total de bits do frame deve ser 10 ou 11 bits. Por exemplo, quando selecionados 8 bits de dados e paridade uniforme, o comprimento do bit de parada deve ser 1 bit.
Funções de Comunicação 73
PARTE 2 2. Especificações
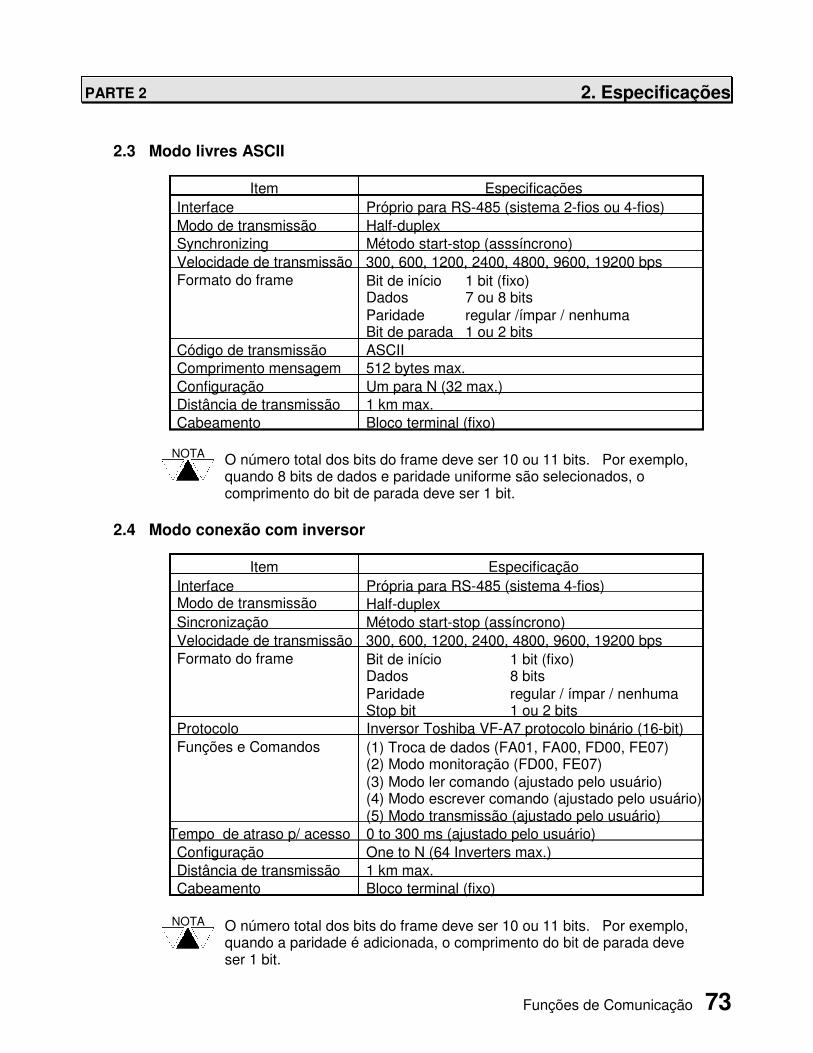
2.3 Modo livres ASCII
Item Especificações Interface Próprio para RS-485 (sistema 2-fios ou 4-fios) Modo de transmissão Half-duplex Synchronizing Método start-stop (asssíncrono) Velocidade de transmissão 300, 600, 1200, 2400, 4800, 9600, 19200 bps Formato do frame Bit de início
Dados Paridade Bit de parada
1 bit (fixo) 7 ou 8 bits regular /ímpar / nenhuma 1 ou 2 bits
Código de transmissão ASCII Comprimento mensagem 512 bytes max. Configuração Um para N (32 max.) Distância de transmissão 1 km max. Cabeamento Bloco terminal (fixo)
2.4 Modo conexão com inversor
Item Especificação Interface Própria para RS-485 (sistema 4-fios) Modo de transmissão Half-duplex Sincronização Método start-stop (assíncrono) Velocidade de transmissão 300, 600, 1200, 2400, 4800, 9600, 19200 bps Formato do frame Bit de início
Dados Paridade Stop bit
1 bit (fixo) 8 bits regular / ímpar / nenhuma 1 ou 2 bits
Protocolo Inversor Toshiba VF-A7 protocolo binário (16-bit) Funções e Comandos (1) Troca de dados (FA01, FA00, FD00, FE07)
(2) Modo monitoração (FD00, FE07) (3) Modo ler comando (ajustado pelo usuário) (4) Modo escrever comando (ajustado pelo usuário) (5) Modo transmissão (ajustado pelo usuário)
Tempo de atraso p/ acesso 0 to 300 ms (ajustado pelo usuário) Configuração One to N (64 Inverters max.) Distância de transmissão 1 km max. Cabeamento Bloco terminal (fixo)
NOTA
NOTA
O número total dos bits do frame deve ser 10 ou 11 bits. Por exemplo, quando 8 bits de dados e paridade uniforme são selecionados, o comprimento do bit de parada deve ser 1 bit.
O número total dos bits do frame deve ser 10 ou 11 bits. Por exemplo, quando a paridade é adicionada, o comprimento do bit de parada deve ser 1 bit.

74 T1-16S Manual do Usuário

Funções de Comunicação 75
PARTE 2 T1-16S Funções da Porta RS-485
Seção 3 Modo Link com Computador
3.1 Função de link com computador, 76 3.2 Configuração do sistema, 78 3.3 Procedimento para setup, 79 3.4 Cabeamento, 80 3.5 Ajuste do modo, 82
3.6 Ajuste dos parâmetros de comunicação, 83 3.7 Protocolo de link com computador, 85

76 T1-16S Manual do Usuário
3. Modo Link com Computador PARTE 2
3.1 Função link com computador
A modo link com computador é usado para conectar o T1-16S a um computador mestre. Preparando o software de comunicação baseado no protocolo de link com computador Toshiba a um computador mestre, as seguintes funções tornam-se disponíveis pelo computador mestre. O protocolo de link com computador é um sistema de comunicação simples através de mensagem ASCII.
• Dados de leitura (valor do registro/dispositivo) do T1-16S • Dados da escrita (valor do registro/dispositivo) no T1-16S • Monitoração do estado de operação do T1-16S (RUN/HALT/ERROR) • Leitura do código de erro do T1/T1-16S • Leitura dos dados do relógio/calendário do T1-16S • Escrita nos dados do relógio/calendário do T1-16S • Controle do modo de operação do T1-16S (RUN/HALT) • Upload do programa do T1-16S • Download do programa no T1-16S
Até 32 T1-16Ss podem ser conectados a um computador mestre na linha de comunicação RS-485. (configuração um-para-N)

Funções de Comunicação 77
PARTE 2 3. Modo Link com Computador
No sistema de link com computado, o T1-16S espera a recepção de um mensagem pedido emitida pelo computador mestre. Quando um mensagem pedido é emitida, o T1-16S verifica o número da estação contido na mensagem. E quando a designação do número da estação combina com o número de estação setado no T1-16S, o T1-16S processa o pedido e retorna a resposta.
Isto porque cada T1-16S deve ter um número original de estação na configuração um-para-N. Caso contrário, mais de um T1-16Ss pode tentar processar o pedido, tendo por resultado falha de resposta.
A seguinte figura ilustra a seqüência de processamento quando um pedido para estação número 3 é emitido.
T1S T1S T1S T1S T1S T1S T1S T1S
Computador mestre
#32 #7 #6 #5 #4 #3 #2 #1
Resposta (Mestre T1S)
Pedido (Mestre T1S)
A mensagem pedido é emitida do mestre a todos os T1-16Ss conectados. (Pedido para a estação #3 neste exemplo)
A mensagem pedido é interpretada e processada no T1-16S que tem o mesmo número da estação que o pedido. (estação #3 T1-16S neste exemplo)
Processando resultado é retornado como resposta ao mestre.
NOTA O número disponível de estação é 1 a 32. O número da estação é ajustado na memória de informação do sistema do T1 16S's.

78 T1-16S Manual do Usuário
3. Modo Link com Computador PARTE 2
3.2 Configuração do sistema
A seguinte figura mostra a configuração do sistema.
Na linha de comunicação RS-485, até 32 T1-16Ss podem ser conectados. Se o computador mestre tiver a interface RS-232C somente, um conversor RS-232C/RS-485 (ADP-6237B) pode ser usado.
T1S T1S T1S
Configuração um-para-N
Computador mestre
Max. 32 T1-16Ss
RS-485 (1 km max.)
ADP-6237B
Conversor RS-232C/RS-485
T1 T1 T1
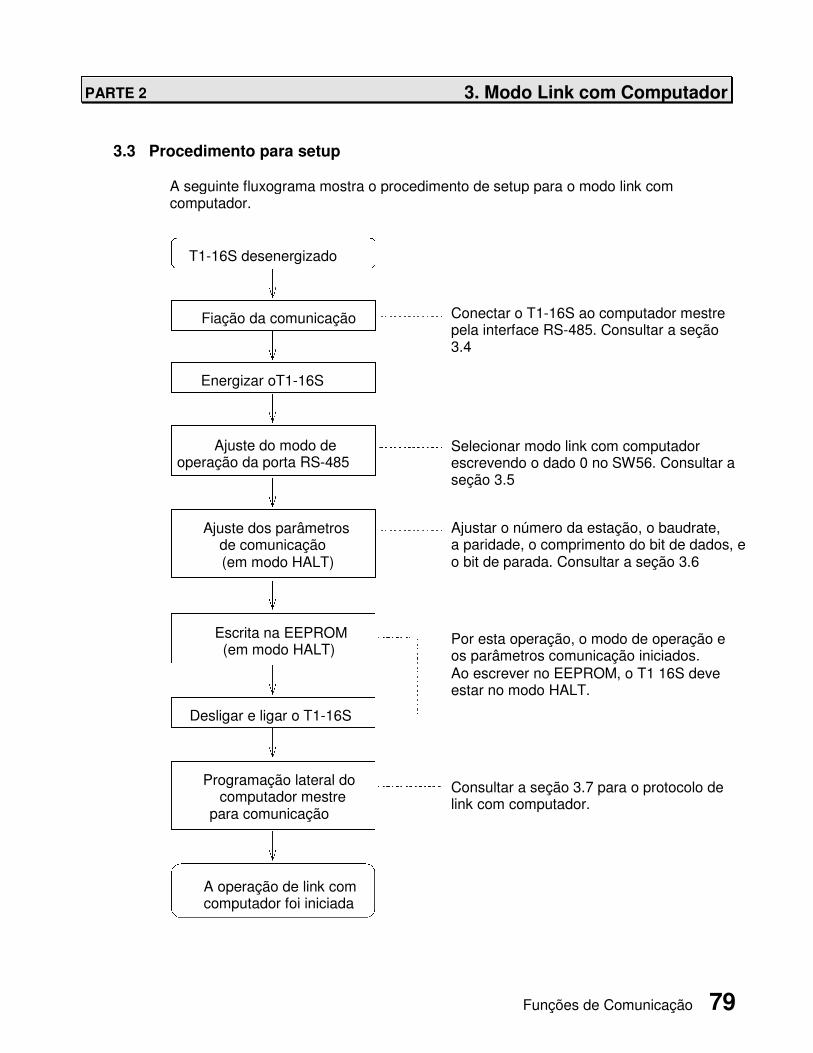
Funções de Comunicação 79
PARTE 2 3. Modo Link com Computador
3.3 Procedimento para setup
A seguinte fluxograma mostra o procedimento de setup para o modo link com computador.
Conectar o T1-16S ao computador mestre pela interface RS-485. Consultar a seção 3.4
Selecionar modo link com computador escrevendo o dado 0 no SW56. Consultar a seção 3.5
Ajustar o número da estação, o baudrate, a paridade, o comprimento do bit de dados, e o bit de parada. Consultar a seção 3.6
Consultar a seção 3.7 para o protocolo de link com computador.
T1-16S desenergizado
Fiação da comunicação
Ajuste do modo de operação da porta RS-485
Energizar oT1-16S
Programação lateral do computador mestre
para comunicação
Escrita na EEPROM (em modo HALT)
A operação de link com computador foi iniciada
Ajuste dos parâmetros de comunicação
(em modo HALT)
Desligar e ligar o T1-16S
Por esta operação, o modo de operação e os parâmetros comunicação iniciados. Ao escrever no EEPROM, o T1 16S deve estar no modo HALT.

80 T1-16S Manual do Usuário
3. Modo Link com Computador PARTE 2
3.4 Cabeamento
Configuração um para um
Computador Conversor RS-232C/RS-485 T1-16S Mestre (ADP-6237B)
TXD 3 RXD TXA RXA RXD 2 TXD TXB RXB RTS 5 CTS RXA TXA CTS 4 RTS RXB TXB SG 7 SG SG SG
DTR 6 DSR TERM TRM DSR 20 DTR FG CD 8 CD RS-485
1 FG (1 km max.) RS-232C Bloco
(15 m max.) terminal
25-pino Bloco conector terminal
• A figura acima mostra um exemplo de conexão de cabo usando o conversor RS-232C/RS-485 (ADP-6237B).
• Curto entre RXA e TRM para a terminação no T1-16S. • Curto entre RXA e TERMO para a terminação no ADP-6237B. • Se o mestre tiver a interface RS-485 (ou RS-422) e o T1-16S estiver conectado ao
mestre diretamente, conectar o resistor de terminação 1/2 W - 120 Ο entre RXA e RXB na extremidade do mestre.
• O cabo par-trançado protegido para a transmissão de dados segundo o padrão RS-485. O protetor de cabo deve ser conectado à terra.
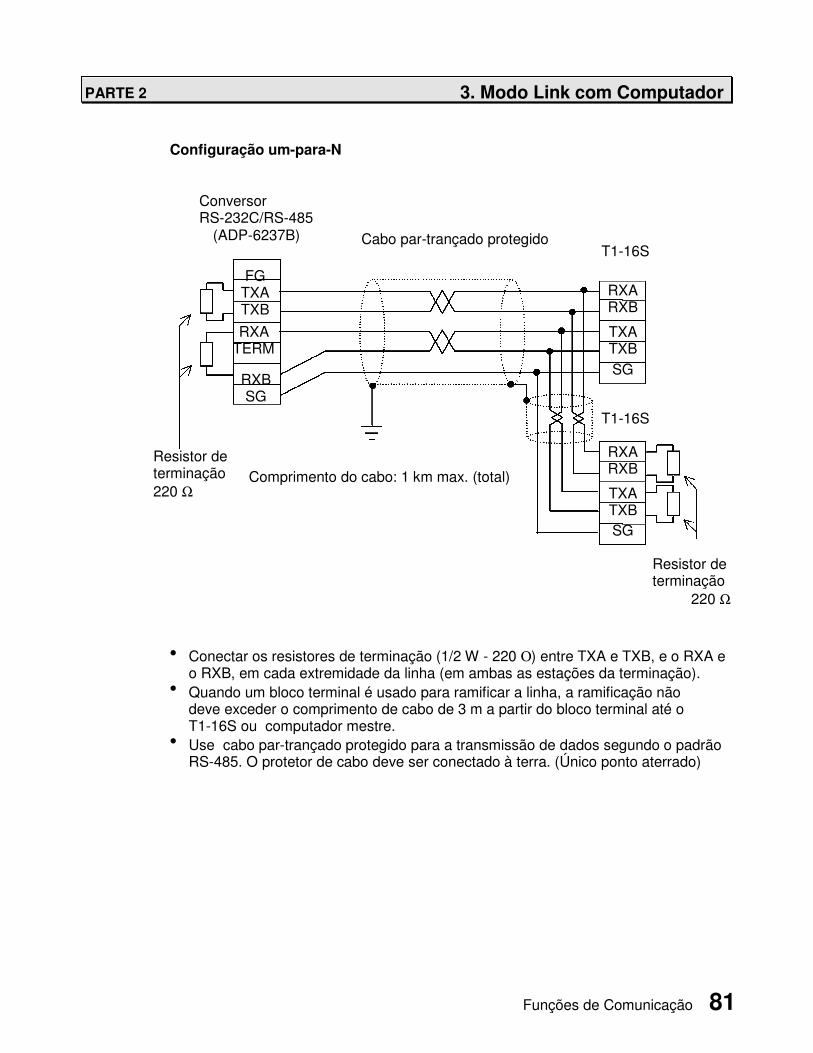
Funções de Comunicação 81
PARTE 2 3. Modo Link com Computador
Configuração um-para-N
• Conectar os resistores de terminação (1/2 W - 220 Ο) entre TXA e TXB, e o RXA e o RXB, em cada extremidade da linha (em ambas as estações da terminação).
• Quando um bloco terminal é usado para ramificar a linha, a ramificação não deve exceder o comprimento de cabo de 3 m a partir do bloco terminal até o T1-16S ou computador mestre.
• Use cabo par-trançado protegido para a transmissão de dados segundo o padrão RS-485. O protetor de cabo deve ser conectado à terra. (Único ponto aterrado)
RXA RXB
TXA TXB SG
FG TXA TXB
RXA TERM
RXB SG
T1-16S
Comprimento do cabo: 1 km max. (total)
Cabo par-trançado protegido
Conversor RS-232C/RS-485
(ADP-6237B)
Resistor de terminação 220 Ω
Resistor de terminação
220 Ω
RXA RXB
TXA TXB SG
T1-16S
82 T1-16S Manual do Usuário
3. Modo Link com Computador PARTE 2
3.5 Ajuste do modo
A modo da operação da porta RS-485 é decidida pelos dados do registro especial SW56. Estes dados são armazenados na EEPROM interna executando o comando escrever para EEPROM. O T1-16S lê estes dados na energização, e decide a modo.
Para selecionar o modo link com computador, seguir o procedimento abaixo.
(1)Turn the T1-16S to HALT mode (2)Escreva 0 no SW56 usando o programador (3)Execute o comando escrever para EEPROM (4)Desligue o T1-16S (5)Ligue novamente
Então as funções da porta RS-485 do T1-16S com o modo de link com computador.
NOTA
NOTA
O valor padrão para o SW56 é 0. (modo Link com computador)
O ajuste do SW56 é salvo no módulo RM102 de armazenamento do programa (ver. 2 ou posterior). Conseqüentemente, quando você salva o programa do T1-16S no RM102 e então o carrega em um outro T1-16S, o ajuste SW56 original será copiado. Entretanto, no caso do T-PDS, o ajuste SW56 não é salvo em arquivo de disco. Conseqüentemente sempre que você carregar o programa do T1-16S pelo T-PDS, você deve ajustar os dados SW56 para o T1-16S manualmente como mencionado acima.
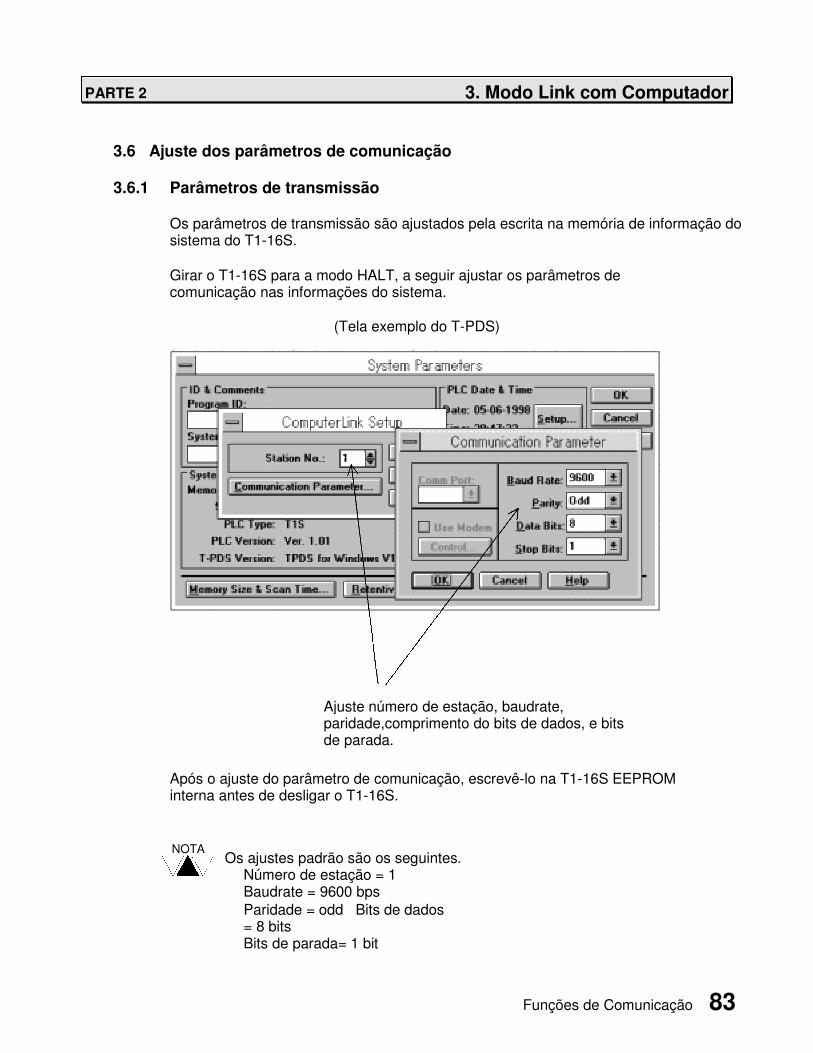
Funções de Comunicação 83
PARTE 2 3. Modo Link com Computador
3.6 Ajuste dos parâmetros de comunicação
3.6.1 Parâmetros de transmissão
Os parâmetros de transmissão são ajustados pela escrita na memória de informação do sistema do T1-16S.
Girar o T1-16S para a modo HALT, a seguir ajustar os parâmetros de comunicação nas informações do sistema.
(Tela exemplo do T-PDS)
Após o ajuste do parâmetro de comunicação, escrevê-lo na T1-16S EEPROM interna antes de desligar o T1-16S.
NOTA Os ajustes padrão são os seguintes.
Número de estação = 1 Baudrate = 9600 bps Paridade = odd Bits de dados = 8 bits Bits de parada= 1 bit
Ajuste número de estação, baudrate, paridade,comprimento do bits de dados, e bits de parada.
84 T1-16S Manual do Usuário
3. Modo Link com Computador PARTE 2
3.6.2 Resposta delay time setting
O tempo de Resposta da porta RS-485 em Modo link com computador pode ser mudado. O ajuste possível é como segue.
Tempo de processamento interno + (0 à 300) ms (unidade: 10 ms)
Esta função é útil quando um modem wireless é usado.
Para ajustar o tempo de atraso de resposta, modifique o T1-16S para a modo HALT, e escreve o tempo de atraso (0 30) no SW57. Após a escrita, executar o comando escrever para EEPROM. Desligue e ligue novamente. Então o ajuste será válido.
Endereço Nome Range do dado SW57 Atraso de resposta da porta
RS-485 0 p/ 30 (decimal) (0 p/ 30 : 0 to 300 ms)
3.6.3 Modo prioridade de comunicação
No T1-16S, a sustentação periférica que processa (serviço de link com computador) é executada no fundo de cada varredura com o limite de tempo de 2 ms para minimizar a extensão do tempo da varredura. Entretanto o T1-16S pode trabalhar com o modo periférica de prioridade de sustentação. Neste modo, o serviço de link com computador é executado sem uma ruptura. Usando esta modo, a comunicação resposta torna-se rápida embora o tempo da varredura seja prolongado naquele tempo.
Para selecionar a modo periférico de prioridade de sustentação, ajustar o relé especial S158 como ON pelo programa de usuário.
Endereço Nome Função S158 Modo periférico de
prioridade de sustentação ON, o modo periférico de prioridade de sustentação é selecionado.
NOTA
NOTA
NOTA
Se os dados estiverem fora da escala válida, serão limitados à 30 (300 ms).
Este ajuste da modo é eficaz geralmente para ambas, a porta do programador e a porta RS-485.
O ajuste SW57 é conservado no módulo RM102 do armazenamento do programa (ver. 2 ou posterior). Conseqüentemente, quando você salva o programa do T1-16S no RM102 e então o carrega em um outro T1-16S, o ajuste SW57 original será copiado. Entretanto, no caso do T-PDS, o ajuste SW57 não é salvo em arquivo de disco. Conseqüentemente sempre que você carregar o programa do T1-16S pelo T-PDS, você deve ajustar os dados SW57 para o T1-16S manualmente como mencionado acima.

Funções de Comunicação 85
PARTE 2 3. Modo Link com Computador
3.7 Protocolo de link com computador
Formato geral da mensagem
Número de bytes Max. 255 bytes 1 2 3 4 5 6 7
( A ADR CMD DATA & SUM )/; CR
Conteúdo do texto
( .......... Código de início (H28) − 1 byte A ......... Formato do código de identificação (H41) − 1 byte ADR .... Número da estação − 2 bytes
01 (H3031) até 32 (H3332) CMD .... Comando − 2 bytes DATA ...Campo de dados − dependendo do comando (max. 244 bytes) &
......... delimitador de checksum (H26) − 1 byte SUM .... Checksum − 2 bytes
Código ASCII do bit mais baixo da soma obtida do código de inicio ‘(‘ para o delimitador de checksum ‘&’. Ver NOTA abaixo.
) ......... Código de fim(H29) − 1 byte ; ......... Código de fim (H3B) − 1 byte
em caso de incompletamente de dados inteiros CR ...... Código do retorno do carro (H0D) − 1 byte
Exemplo de criação do Checksum:
( A 0 1 S T & 9 7 ) CR
NOTA
Escala de criação do checksum
Sum Dois dígitos mais baixos
‘(‘ = H28 ‘A’ = H41 ‘0’ = H30 ‘1’ = H31 ‘S’ = H53 ‘T’ = H54 ‘&’ = H26
H197

86 T1-16S Manual do Usuário
3. Modo Link com Computador PARTE 2
Regras de transmissão
As seguintes regras da transmissão são aplicadas à comunicação link com computador RS-485.
(1) O T1-16S está esperando sempre um comando de pedido emitido pelo computador mestre. O T1-16S não transmitirá nenhuma mensagem sem receber um pedido.
(2) ASCII 7 ou 8- bits é usado como o código da transmissão..
(3) Se alguns códigos de espaço (H20) forem incluídos no mensagem pedido, estes serão ignorados. Entretanto, os códigos de espaço são inclusos no cálculo da soma de controle (checksum).
( A 0 1 T S 1 2 3 & 6 D ) CR
Códigos de espaço Códigos de espaço são inclusos São ignorados no cálculo do checksum
(4) O checksum pode ser omitido na mensagem pedido emitida pelo computador mestre. Na mensagem resposta emitida do T1/T1-16S, o checksum é adicionado sempre.
Mensagem pedido
( A 0 1 T S 5 5 ) CR
Mensagem resposta
( A 0 1 T S 5 5 & 0 1 ) CR
O mensagem resposta inclui sempre a soma de controle e o código de delimitador (&).
(5) O T1-16S ignora todos os dados recebidos antes do código de início ‘('.
(6) A recepção da mensagem é terminada somente após o código de fim ‘)' e o CR ter sido recebido. Se forem recebidos o código de fim sem CR, ou vice-versa, isto resultará em erro de transmissão.

Funções de Comunicação 87
PARTE 2 3. Modo Link com Computador
(7) O T1-16S verifica o tempo de recebimento da mensagem pedido . Se o tempo de recepção do código de início ’(' ao CR excede o limite de tempo abaixo, o T1-16S considera erro da transmissão. Neste caso, nenhum resposta será retornado do T1-16S.
Baudrate Tempo limite 300 bps 96 s 600 bps 48 s
1200 bps 24 s 2400 bps 12 s 4800 bps 6 s 9600 bps 3 s
19200 bps 1.5 s
(8) Na configuração um-para-N, quando um T1-16S termina de emitir uma mensagem de resposta, este libera a linha de transmissão em 10 ms (máximo.). Até que a linha da transmissão esteja liberada, outro T1-16S não pode emitir nenhuma mensagem. Conseqüentemente, o computador mestre deve esperar para emitir a Mensagem seguinte um mínimo de 10 ms após a recepção da resposta precedente.

88 T1-16S Manual do Usuário
3. Modo Link com Computador PARTE 2
Lista dos comandos link com computador
Os seguinte comandos de link com computador estão disponíveis para o T1-16S.
Comando pedido
Nome da função Descrição Comando resposta
Obs.
− Computer Link Error Resposta
O erro do formato foi detectado no mensagem pedido
CE Resposta somente
− PLC Error Resposta
The Pedido command was rejected by T1/T1-16S
EE Resposta somente
TS Test Loop back test -- T1/T1-16S returns the same text
TS
ST PLC Status Read Reads T1/T1-16S operation status
ST
ER PLC Error Status Read
Reads error code registered in the T1/T1-16S
ER
DR Data Read Reads registers/devices data from the T1/T1-16S
DR
DW Data Write Writes registers/devices data into the T1/T1-16S
ST
RT Clock/calendar Read
Reads clock/calendar data (date & time) from the T1- 16S
RT
WT Clock/calendar Write
Writes clock/calendar data (date & time) into the T1- 16S
ST
SR System Information 1 Read
Reads system information 1 from the T1-16S
SR
S2 System Information 2 Read
Reads system information 2 from the T1-16S
S2
EC PLC Control Changes the T1-16S operation mode
ST
BR System Information Block Read
Reads system information from the T1-16S block-by- block
BR
RB Program Block Read
Reads program from the T1-16S block-by-block
RB
BW System Information Block Write
Writes system information into the T1-16S block-by- block
ST
WB Program Block Write
Writes program into the T1- 16S block-by-block
ST
Para detalhes de cada comando, ver a seção 6 da PARTE 1 deste manual.

Funções de Comunicação 89
PARTE 2 T1-16S Funções da Porta RS-485
Seção 4 Modo Link de Dados
4.1 Função link de dados, 90 4.2 Configuração do sistema, 90 4.3 Procedimento para setup, 91 4.4 Cabeamento, 92 4.5 Ajuste de modo, 93
4.6 Ajuste dos parâmetros de comunicação, 94 4.7 Informação RAS, 95 4.8 Programa amostra para o T1-16S, 96

90 T1-16S Manual do Usuário
4. Modo Link de Dados PARTE 2
4.1 Função link de dados
A função link de dados executa um link de dados entre dois T1-16Ss. Nenhum programa de usuário é necessário para isso. Usando esta função, o sistema de link de dados das estações pode ser configurado facilmente. Para esta função, um T1-16S deve ser ajustado como estação No. 1, e o outro deve ser ajustado como estação No. 2. O número da estação é ajustado escrevendo a na memória de informação do sistema do T1-16S, bem como os ajustes de link com computador. Os registros de dados D0000 a D0031 (32 palavras) são usados para link de dados. A estação No. 1 T1-16S emite os dados de D0000 a D0015 ao T1 16S da estação No. 2.
A estação No. 2 T1-16S emite os dados do D0016 a D0031 ao T1 16S da estação No. 1.
No. de estação. 2 No. de estação. 1
D0031
D0016 D0015
D0000
D0031
D0016 D0015
D0000
O ciclo de update de dados destas 32 palavras é aproximadamente 50 ms + tempos de varredura de ambos os T1 16Ss. O sincronismo do update do link de dados é sincronizado com a varredura do programa do T1-16S.
4.2 Configuração do sistema
NOTA A modo link de dados do T1-16S é compatível com aquele do T2E/T2N. Conseqüentemente usando este modo link de dados, o link de dados entre T1-16S e T2E ou T2N são possíveis. Neste caso, a atribuição do link de dados está como segue. T1-16S (estação 2) T2E/T2N (estação 1)
D0000 :
D0015
F0000 :
F0015 D0016
: D0031
F0016 :
F0031
RS-485 (1 km max.)
T1-16S T1-16S

Funções de Comunicação 91
PARTE 2 4. Modo Link de Dados
4.3 Procedimento para setup
O seguinte fluxograma mostra o procedimento para setup da função link de dados.
Seguir o procedimento acima para a estação No. 1 e a estação No. 2 T1-16Ss.
T1-16S desenergizado
Fiação da comunicação
Ajuste do modo de operação da porta RS485
Energização do T1-16S
Ajuste do número de estação (em modo HALT)
Escrita na EEPROM (em modo HALT)
Modo RUN
Operação link de dados iniciada
Conectar os dois T1-16Ss pela interface RS-485. Consultar à seção 4.4
Selecionar o modo link de dados escrevendo o dado 1 no SW56. Consultar à seção 4.5
Ajustar o número da estação para 1 ou 2. Consultar à seção 4.6
Desligar e ligar o T1-16S
Por esta operação, o modo de operação e o número da estação serão gravados. Ao escrever no EEPROM, o T1 16S deve estar EM modo HALT.
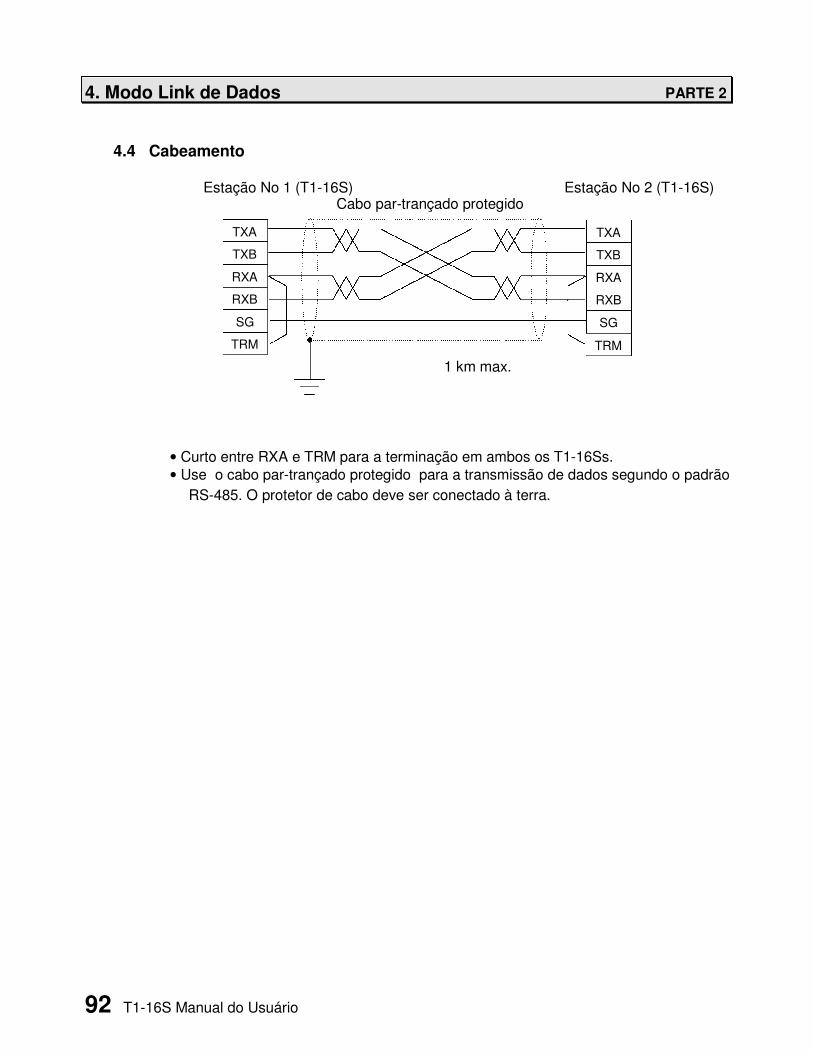
92 T1-16S Manual do Usuário
4. Modo Link de Dados PARTE 2
4.4 Cabeamento
SG
RXB
RXA
TXB
TXA
SG
RXB
RXA
TXB
TXA
1 km max.
Cabo par-trançado protegido Estação No 2 (T1-16S) Estação No 1 (T1-16S)
TRM TRM
• Curto entre RXA e TRM para a terminação em ambos os T1-16Ss. • Use o cabo par-trançado protegido para a transmissão de dados segundo o padrão
RS-485. O protetor de cabo deve ser conectado à terra.

Funções de Comunicação93
PARTE 2 4. Modo Link de Dados
4.5 Ajuste do modo
O modo de operação da porta RS-485 é definida pelos dados do registro especial SW56. Estes dados são armazenados na EEPROM interna executando o comando escrever para EEPROM. O T1-16S lê estes dados na energização, e decide a modo.
Para selecionar o modo link de dados, siga o procedimento abaixo.
(1)Modifique o T1-16S para modo HALT. (2)Escreva no SW56 usando o programador (3)Execute o comando escrever para EEPROM (4)Desligue (5)Ligue novamente
Então as funções da porta RS-485 do T1-16S esta como modo link de dados.
NOTA
NOTA
O ajuste padrão do SW56 é 0. (Modo link com computador)
O ajuste do SW56 é salvo no módulo RM102 de armazenamento de programa (ver. 2 ou posterior). Conseqüentemente, quando você salvar o programa de T1-16S no RM102 e então o carregar em um outro T1-16S, o ajuste SW56 original será copiado. Entretanto, no caso do T-PDS, o ajuste SW56 não é salvo em arquivo de disco. Conseqüentemente sempre que você carregar o programa do T1-16S pelo T-PDS, você deve ajustar os dados SW56 para o T1-16S manualmente como mencionado acima.

94 T1-16S Manual do Usuário
4. Modo Link de Dados PARTE 2
4.6 Ajuste dos parâmetros de comunicação
Para usar o modo link de dados, um T1-16S deve ser ajustado como estação No. 1, e o outro deve ser ajustado como estação No. 2. O número da estação é ajustado pela escrita na memória de informação do sistema do T1-16S. Colocar o T1-16S em modo HALT, a seguir ajustar o número da estação (1 ou 2) na informação do sistema. (Tela exemplo do T-PDS)
Após o ajuste do número da estação, escrevê-la na EEPROM interna do T1-16S antes de desligar.
Set o número de estação aqui. Os outros parâmetros são ignorados.
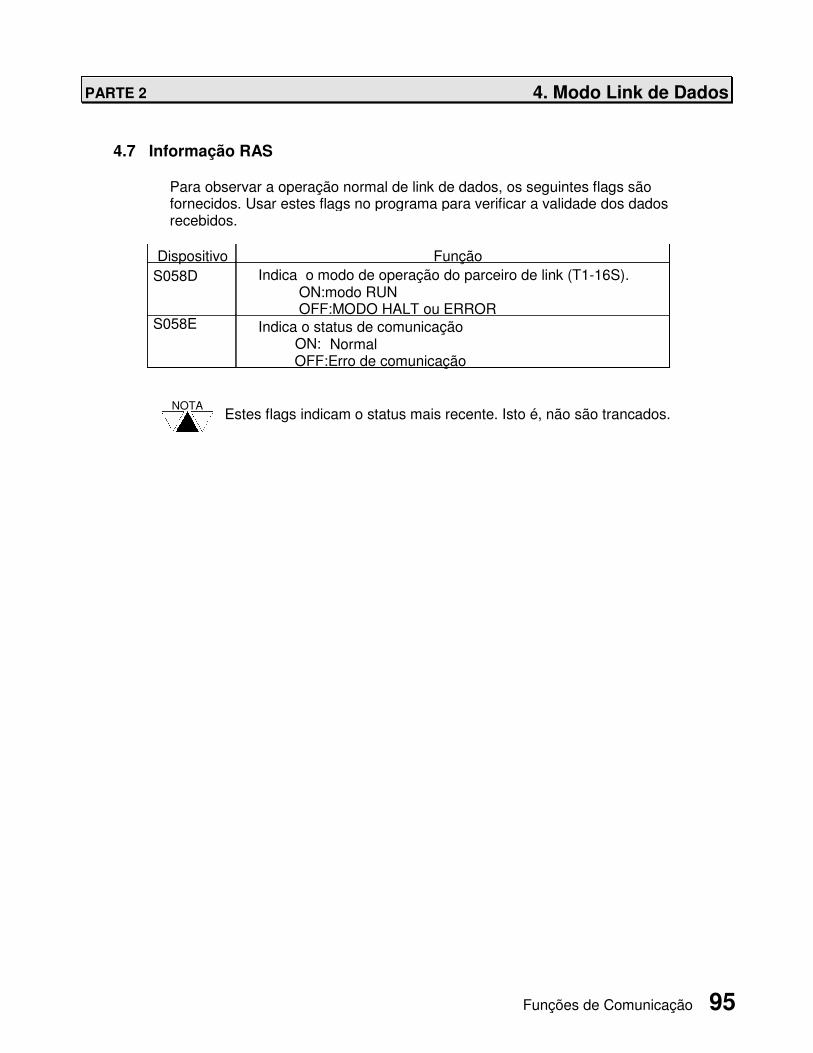
Funções de Comunicação 95
PARTE 2 4. Modo Link de Dados
4.7 Informação RAS
Para observar a operação normal de link de dados, os seguintes flags são fornecidos. Usar estes flags no programa para verificar a validade dos dados recebidos.
Dispositivo Função S058D Indica o modo de operação do parceiro de link (T1-16S).
ON:modo RUN OFF:MODO HALT ou ERROR
S058E Indica o status de comunicação ON: Normal
OFF:Erro de comunicação
NOTA Estes flags indicam o status mais recente. Isto é, não são trancados.
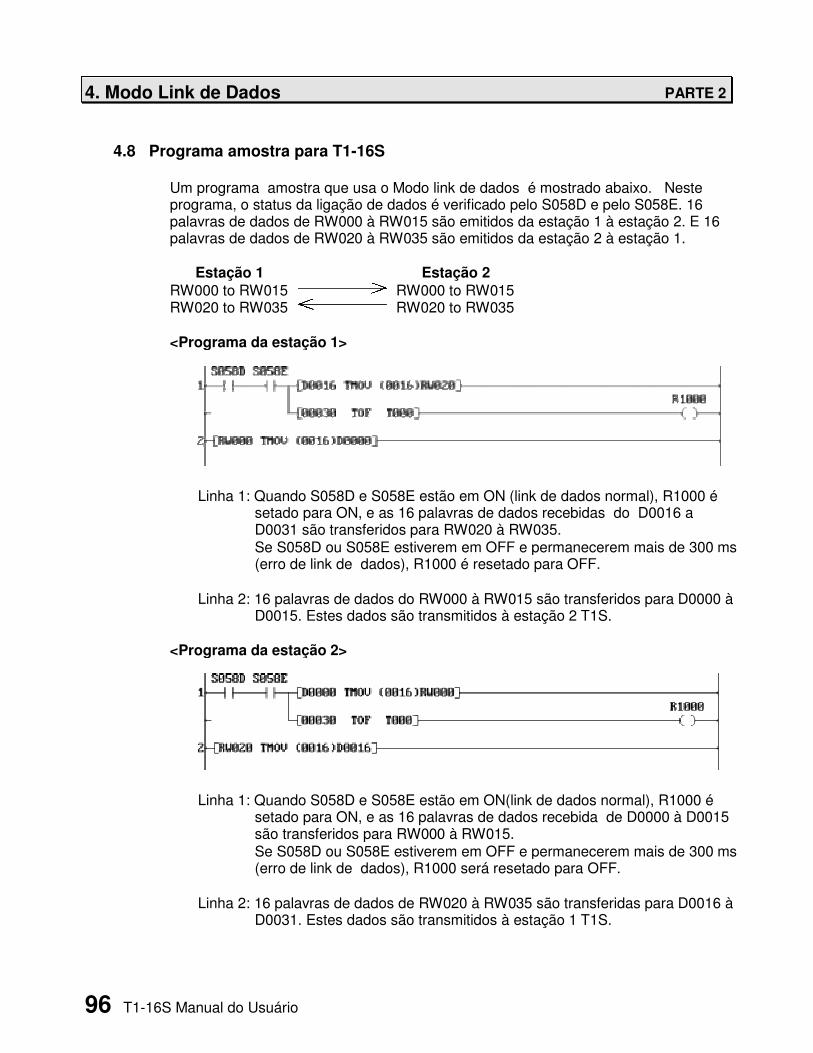
96 T1-16S Manual do Usuário
4. Modo Link de Dados PARTE 2
4.8 Programa amostra para T1-16S
Um programa amostra que usa o Modo link de dados é mostrado abaixo. Neste programa, o status da ligação de dados é verificado pelo S058D e pelo S058E. 16 palavras de dados de RW000 à RW015 são emitidos da estação 1 à estação 2. E 16 palavras de dados de RW020 à RW035 são emitidos da estação 2 à estação 1.
Estação 1 Estação 2 RW000 to RW015 RW000 to RW015 RW020 to RW035 RW020 to RW035
<Programa da estação 1>
Linha 1: Quando S058D e S058E estão em ON (link de dados normal), R1000 é setado para ON, e as 16 palavras de dados recebidas do D0016 a D0031 são transferidos para RW020 à RW035. Se S058D ou S058E estiverem em OFF e permanecerem mais de 300 ms (erro de link de dados), R1000 é resetado para OFF.
Linha 2: 16 palavras de dados do RW000 à RW015 são transferidos para D0000 à D0015. Estes dados são transmitidos à estação 2 T1S.
<Programa da estação 2>
Linha 1: Quando S058D e S058E estão em ON(link de dados normal), R1000 é setado para ON, e as 16 palavras de dados recebida de D0000 à D0015 são transferidos para RW000 à RW015. Se S058D ou S058E estiverem em OFF e permanecerem mais de 300 ms (erro de link de dados), R1000 será resetado para OFF.
Linha 2: 16 palavras de dados de RW020 à RW035 são transferidas para D0016 à D0031. Estes dados são transmitidos à estação 1 T1S.

Funções de Comunicação 97
PARTE 2 T1-16S Funções da Porta RS-485
Seção 5 Modo Livre ASCII
5.1 Função de comunicação livre ASCII, 98 5.2 Configuração do sistema, 100 5.3 Procedimento para setup, 101 5.4 Cabeamento, 102 5.5 Ajuste do modo, 105
5.6 Ajuste dos parâmetros de comunicação, 106 5.7 Formato da mensagem, 107 5.8 Instruções relacionadas, 108 5.9 Programando, 113 5.10 Exemplo de aplicação, 119
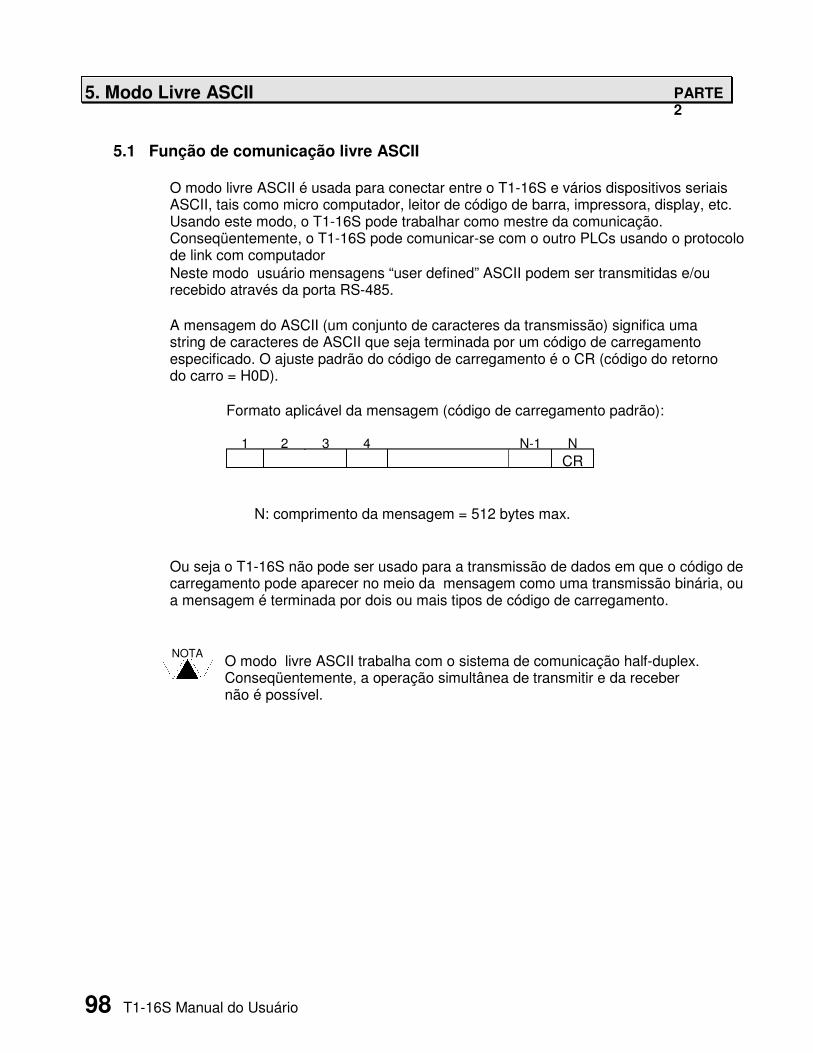
98 T1-16S Manual do Usuário
5. Modo Livre ASCII PARTE 2
5.1 Função de comunicação livre ASCII
O modo livre ASCII é usada para conectar entre o T1-16S e vários dispositivos seriais ASCII, tais como micro computador, leitor de código de barra, impressora, display, etc. Usando este modo, o T1-16S pode trabalhar como mestre da comunicação. Conseqüentemente, o T1-16S pode comunicar-se com o outro PLCs usando o protocolo de link com computador Neste modo usuário mensagens “user defined” ASCII podem ser transmitidas e/ou recebido através da porta RS-485.
A mensagem do ASCII (um conjunto de caracteres da transmissão) significa uma string de caracteres de ASCII que seja terminada por um código de carregamento especificado. O ajuste padrão do código de carregamento é o CR (código do retorno do carro = H0D).
Formato aplicável da mensagem (código de carregamento padrão):
1 2 3 4 N-1 N CR
N: comprimento da mensagem = 512 bytes max.
Ou seja o T1-16S não pode ser usado para a transmissão de dados em que o código de carregamento pode aparecer no meio da mensagem como uma transmissão binária, ou a mensagem é terminada por dois ou mais tipos de código de carregamento.
NOTA O modo livre ASCII trabalha com o sistema de comunicação half-duplex. Conseqüentemente, a operação simultânea de transmitir e da receber não é possível.

Funções de Comunicação99
PARTE 2 5. Modo Livre ASCII
No modo livre ASCII, uma comunicação (transmissão ou recepção de mensagem) é controlada pelo programa do usuário do T1-16S. A instrução expandida de transferência (XFER) é usada para transmitir e receber mensagens.
Transmitir:
Para transmitir, o usuário prepara a mensagem nos registros do T1-16S no formato de caractere do ASCII. A mensagem deve ser terminada por um código de carregamento especificado. Executar então a instrução XFER para começar a transmissão.
Receber:
Quando uma mensagem é recebida, ela é armazenada no buffer de recepção. Então, usando a instrução XFER, a mensagem é lida e armazenada nos registros designados do T1-16S no formato de caractere do ASCII.
O T1-16S suporta a conversão de hexadecimal para ASCII (HTOA) e a conversão de ASCII para hexadecimal (ATOH). Estas instruções são úteis para trabalhar com caracteres ASCII. Consultar a Seção 5.8.
Registro do T1-16S
MSB LSB
“B” “A” “D” “C” “F” “E” “H” “G”
CR
Buffer de transmissão
E transmissor
Instrução XFER
n n-1 2 1 CR “H” “B” “A”
RS-485
T1-16S
Registro do T1-16S
MSB LSB
“1” “0” “3” “2” “5” “4” CR “6”
Receptor e
Buffer de recepção Instrução
XFER
1 2 n-1 n
“0”“1” “6” CR
RS-485
T1-16S

100 T1-16S Manual do Usuário
5. Modo Livre ASCII PARTE 2
5.2 Configuração do sistema
A seguinte figura mostra que a configuração do sistema. O T1-16S é conectado aos dispositivos seriais ASCII através da interface RS-485.
Max. 32 dispositivos
RS-485 (1 km max.)
T1S
Disp. serial ASCII
Disp. serial ASCII
Disp. serial ASCII
Disp. serial ASCII

Funções de Comunicação 101
PARTE 2 5. Modo Livre ASCII
5.3 Procedimento para setup
O seguinte fluxograma mostra o procedimento de setup de comunicação pela função ASCII.
T1-16S desenergizado
Fiação da comunicação
Ajuste do modo de operação da porta RS485
Energização do T1-16S
Programa do usuário fazendo a comunicação
(em modo HALT)
Escrita na EEPROM (em modo HALT)
Modo RUN
Conectar oT1-16S ao dispositivo(s) serial ASCII usando a interface RS-485 Ver Seção 5.4
Operação livre ASCII foi iniciada
Selecionar o modo livre ASCII escrevendo o dado 2 no SW56. Consultar a Seção 5.5
Ajuste o baudrate, Paridade, comprimento dos bits de dados, e bits de parada. Ver Seção 5.6
Ajuste do número de estação (em modo HALT)
Consultar a Seção 5.9 para comunicação (transmitir e receber mensagens)
Desligar e ligar o T1-16S
Com operação, o modo de operação e os parâmetros de comunicação serão gravados . Ao escrever na EEPROM, o T1 16S deve estar no modo HALT.
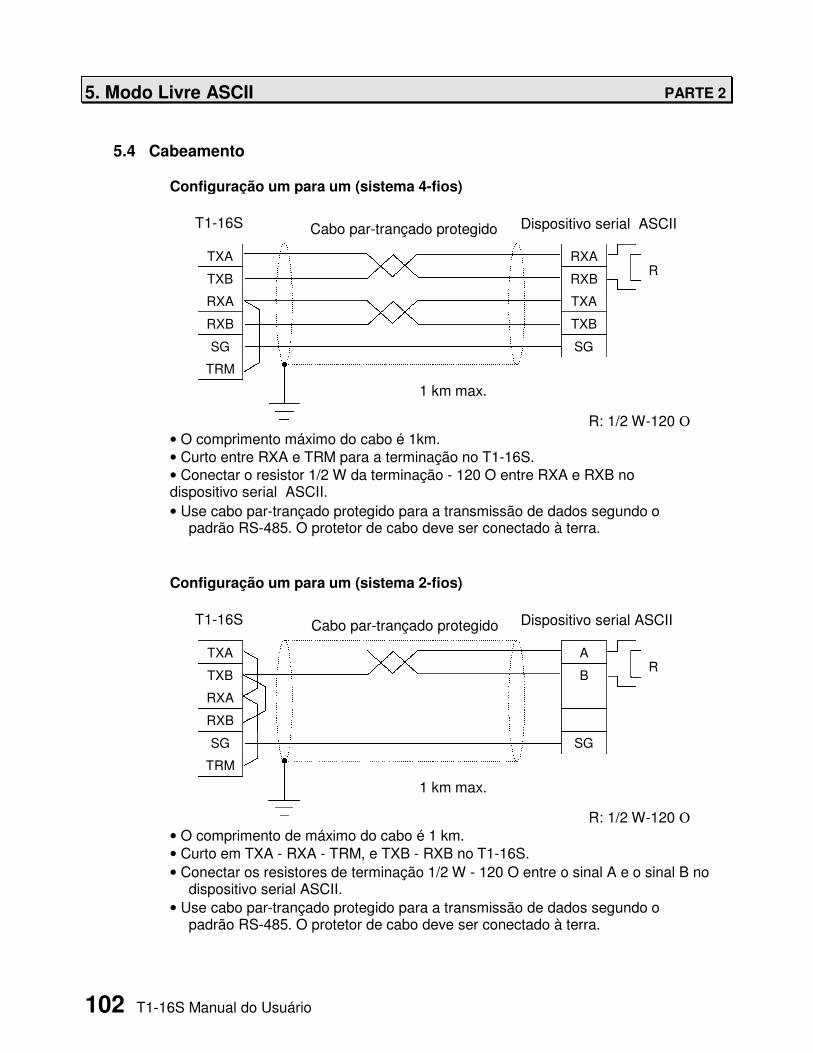
102 T1-16S Manual do Usuário
5. Modo Livre ASCII PARTE 2
5.4 Cabeamento
Configuração um para um (sistema 4-fios)
SG
RXB
RXA
TXB
TXA
SG
TXB
TXA
RXB
RXA
1 km max.
Cabo par-trançado protegido Dispositivo serial ASCII T1-16S
R
R: 1/2 W-120 Ο
TRM
• O comprimento máximo do cabo é 1km. • Curto entre RXA e TRM para a terminação no T1-16S. • Conectar o resistor 1/2 W da terminação - 120 O entre RXA e RXB no dispositivo serial ASCII. • Use cabo par-trançado protegido para a transmissão de dados segundo o
padrão RS-485. O protetor de cabo deve ser conectado à terra.
Configuração um para um (sistema 2-fios)
SG
RXB
RXA
TXB
TXA
SG
B
A
1 km max.
Cabo par-trançado protegido Dispositivo serial ASCII T1-16S
R
R: 1/2 W-120 Ο
TRM
• O comprimento de máximo do cabo é 1 km. • Curto em TXA - RXA - TRM, e TXB - RXB no T1-16S. • Conectar os resistores de terminação 1/2 W - 120 O entre o sinal A e o sinal B no
dispositivo serial ASCII. • Use cabo par-trançado protegido para a transmissão de dados segundo o
padrão RS-485. O protetor de cabo deve ser conectado à terra.
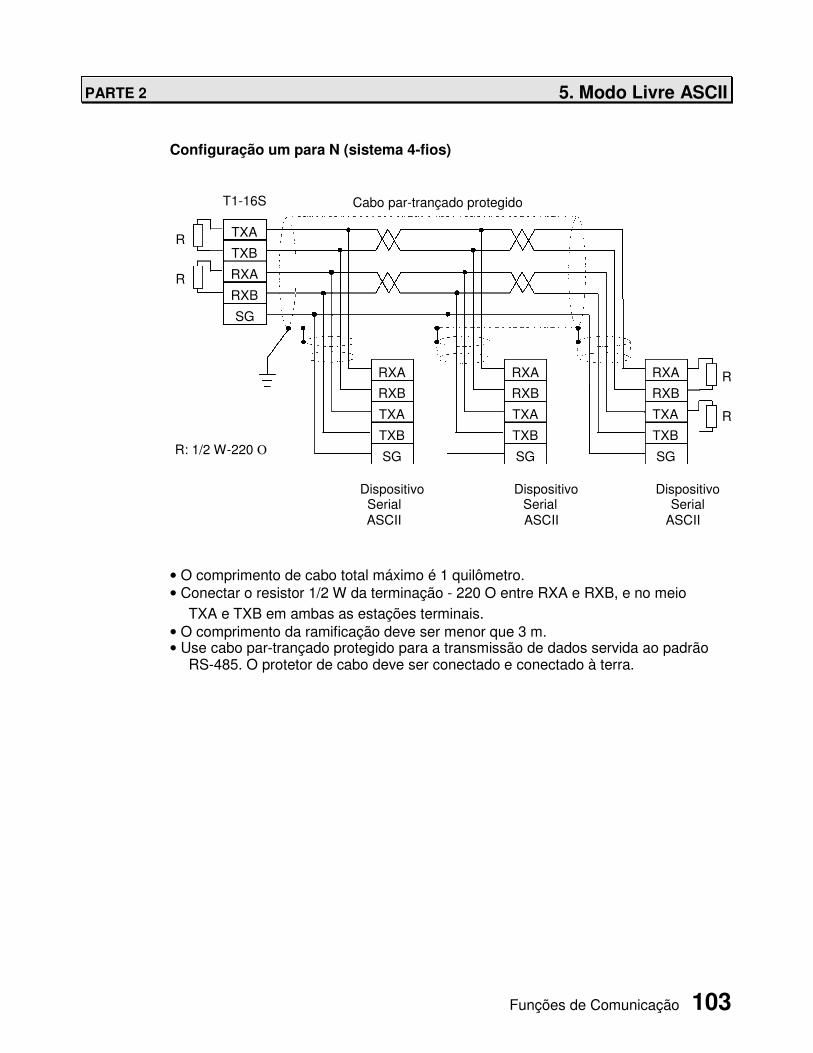
Funções de Comunicação 103
PARTE 2 5. Modo Livre ASCII
Configuração um para N (sistema 4-fios)
SG
RXB
RXA
TXB
TXA
SG
TXB
TXA
RXB
RXA
SG
TXB
TXA
RXB
RXA
SG
TXB
TXA
RXB
RXA
Dispositivo Serial
ASCII
Dispositivo Serial
ASCII
Dispositivo Serial
ASCII
R
R
T1-16S Cabo par-trançado protegido
R
R
R: 1/2 W-220 Ο
• O comprimento de cabo total máximo é 1 quilômetro. • Conectar o resistor 1/2 W da terminação - 220 O entre RXA e RXB, e no meio
TXA e TXB em ambas as estações terminais. • O comprimento da ramificação deve ser menor que 3 m. • Use cabo par-trançado protegido para a transmissão de dados servida ao padrão
RS-485. O protetor de cabo deve ser conectado e conectado à terra.

104 T1-16S Manual do Usuário
5. Modo Livre ASCII PARTE 2
Configuração um para N(sistema 2-fios)
SG
RXB
RXA
TXB
TXA
SG B
A
SG
B
A
SG
B
A
Dispositivo Serial ASCII
Dispositivo Serial ASCII
Dispositivo Serial ASCII
T1-16S
Cabo par-trançado protegido
R
R: 1/2 W-120 Ο
TRM
• Comprimento total do cabo: 1 km. • Curto em TXA e RXA, e TXB e RXB no T1-16S. • Conecte resistores de terminação 1/2 W - 120 Ο entre a linha A e linha B em ambas
estações terminais. Se o T1-16S é terminal, curto RXA e TRM para inserir resistores de terminação.
• O comprimento da ramificação deve ser menor que 3 m. • Use cabo par-trançado protegido para transmissão de dados segundo o padrão
RS-485. O protetor de cabo deve ser conectado aos outros e conectado à terra.

Funções de Comunicação 105
PARTE 2 5. Modo Livre ASCII
5.5 Ajuste do Modo
O modo de operação da porta RS-485 é decidida pelos dados do registro especial SW56. Estes dados são armazenados na EEPROM interna executando o Comando escrever para EEPROM. O T1-16S lê estes dados na energização, e decide o modo.
Para selecionar o modo livre ASCII, seguir o procedimento abaixo.
(1)Modifique oT1-16S para o modo HALT (2)Escreva 2 em SW56 usando o programador (3)Execute o comando escrever para EEPROM (4)Desligue (5)Ligue novamente
Então as funções da porta RS-485 do T1-16S estão configuradas como modo livre ASCII.
NOTA
NOTA
O padrão para SW56 é 0. (modo link com computador)
O ajuste do SW56 é salvo no módulo RM102 de armazenamento de programa (ver. 2 ou posterior). Conseqüentemente, quando você salvar o programa de T1-16S no RM102 e então o carregar em um outro T1-16S, o ajuste SW56 original será copiado. Entretanto, no caso do T-PDS, o ajuste SW56 não é salvo em arquivo de disco. Conseqüentemente sempre que você carregar o programa do T1-16S pelo T-PDS, você deve ajustar os dados SW56 para o T1-16S manualmente como mencionado acima.

106 T1-16S Manual do Usuário
5. Modo Livre ASCII PARTE 2
5.6 Ajuste dos parâmetros de comunicação
Os parâmetros de comunicação são setados escrevendo-se na memória de informação do sistema do T1-16S.
Altere o T1-16S para modo HALT, então ajuste os parâmetros de comunicação nas informações do sistema.
(Tela exemplo do T-PDS)
Depois do ajuste dos parâmetros de comunicação, escreve na memória interna EEPROM antes de desligar o T1-16S.
Ajuste baudrate, paridade, comprimento de bit de dados, e bits de parada. O número de estação é ignorado.

Funções de Comunicação 107
PARTE 2 5. Modo Livre ASCII
5.7 Formato de mensagem
A mensagem de transmissão é composta por caracteres de ASCII e por um código de carregamento especificado. O ajuste padrão do código de carregamento é CR (código do retorno do carro = H0D). Consultar a Seção 5.9.1 para ajustar o código de carregamento para outros valores senão CR. O comprimento máximo de uma mensagem é 512 bytes. Um exemplo da mensagem é mostrado abaixo. .
1 2 3 4 5 6 7 8 9
“0” “1” “2” “A” “B” “7” “8” “9” CR
Na figura acima, “x” significa um caractere ASCII. Por exemplo, “0” é H30. O número (1 9) mostrado em cada caractere significa a ordem de transmissão ou de recepção.
Quando a mensagem acima é recebida ou transmitida, os arranjos dos dados nos registros de T1-16S são como segue.
Registro F 8 7 0
n “1” “0” n+1 “A” “2” n+2 “7” “B” n+3 “9” “8” n+4 CR
Mensagem da transmissão “0” “1”
“2” “A” “B” “7”
“8” “9”
CR

108 T1-16S Manual do Usuário
5. Modo Livre ASCII PARTE 2
5.8 Instruções relacionadas
5.8.1 Transferência de dados expandida (XFER)
FUN 236 XFER Transferência de dados expandida (Modo Livre ASCII)
Expressão
Entrada −[ A XFER B → C ]− Saída
Função Quando a entrada é ON, a transferência de bloco dos dados será executada entre a fonte que é designada indiretamente por A e A+1 e o destino que é designado indiretamente por C e por C+1. O tamanho de transferência (número das palavras) é designado pelo B. Quando o registro do processador central (RW ou D) é designado como a fonte e a porta RS-485 é designada como o destino, ela opera transmitindo. Quando a porta RS-485 está designada como a fonte e o registro do processador central (RW ou D) está designado como o destino, ela opera transmitindo.
Condição de execução Entrada Operação Saída ERF
OFF Nenhuma execução OFF −
ON Execução normal ON −
Quando um erro ocorreu (ver nota) ON Set
Operando Nome Dispositivo Registro Índice const
X Y R S T. C. XW YW RW SW T C D I J K A Parâmetro
Fonte √ √ √ √ √ √ √
B Tam. Transf. √ √ √ √ √ √ √
C Parâmetro Destino
√ √ √ √ √ √
Parâmetros Parâmetro fonte Tamanho de transf. e status Parâmetro destino
A Tipo B Tamanho da transferência C Tipo A+1 Endereço principal B+1 Flag de status para a porta C+1 Endereço principal
B+2 RS-485 (max. 2 palavras)
Tipo registro Tipo do código Endereço principal Tamanho da transferência registro RW (RAM) H0003 0 p/ 255 1 p/ 256 registro D (RAM) H0004 0 p/ 4095 1 p/ 256 porta RS-485 - T1-16S H0030 0 (fixed) 1 p/ 256
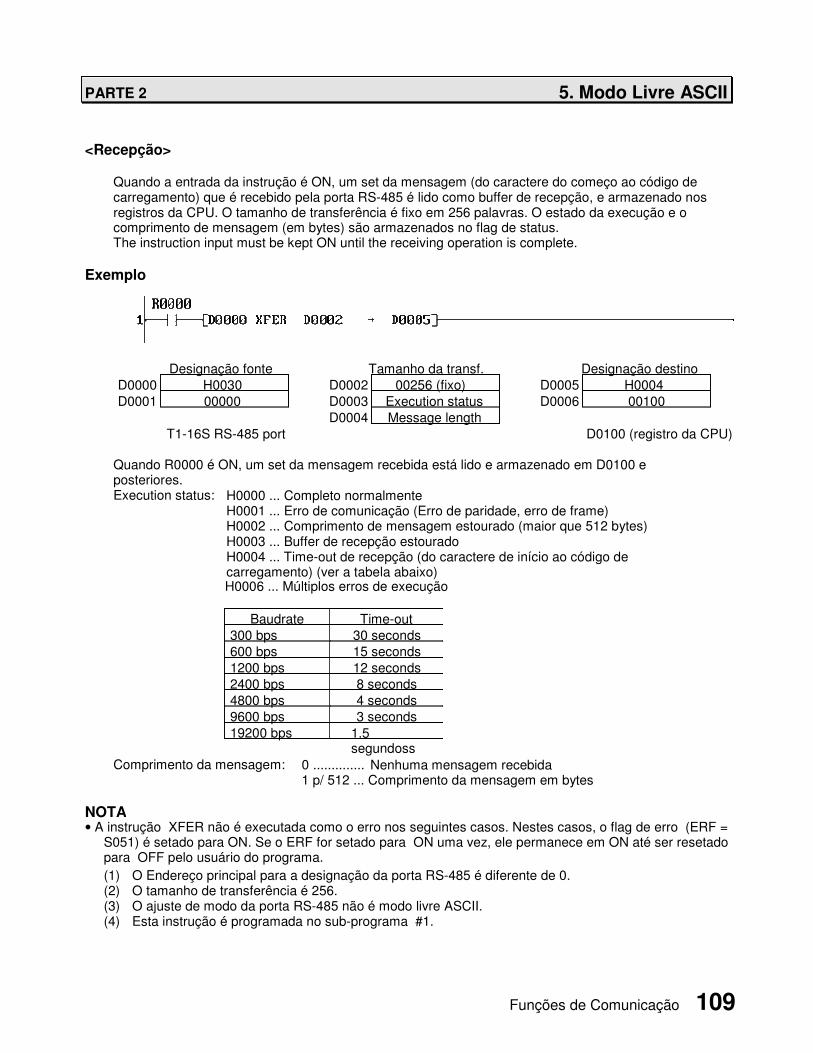
Funções de Comunicação 109
PARTE 2 5. Modo Livre ASCII
<Recepção>
Quando a entrada da instrução é ON, um set da mensagem (do caractere do começo ao código de carregamento) que é recebido pela porta RS-485 é lido como buffer de recepção, e armazenado nos registros da CPU. O tamanho de transferência é fixo em 256 palavras. O estado da execução e o comprimento de mensagem (em bytes) são armazenados no flag de status. The instruction input must be kept ON until the receiving operation is complete.
Exemplo
Designação fonte Tamanho da transf. Designação destino D0000 H0030 D0002 00256 (fixo) D0005 H0004 D0001 00000 D0003 Execution status D0006 00100
D0004 Message length T1-16S RS-485 port D0100 (registro da CPU)
Quando R0000 é ON, um set da mensagem recebida está lido e armazenado em D0100 e posteriores. Execution status: H0000 ... Completo normalmente
H0001 ... Erro de comunicação (Erro de paridade, erro de frame) H0002 ... Comprimento de mensagem estourado (maior que 512 bytes) H0003 ... Buffer de recepção estourado H0004 ... Time-out de recepção (do caractere de início ao código de carregamento) (ver a tabela abaixo) H0006 ... Múltiplos erros de execução
Baudrate Time-out 300 bps 30 seconds 600 bps 15 seconds 1200 bps 12 seconds 2400 bps 8 seconds 4800 bps 4 seconds 9600 bps 3 seconds 19200 bps 1.5
segundoss Comprimento da mensagem: 0 .............. Nenhuma mensagem recebida
1 p/ 512 ... Comprimento da mensagem em bytes
NOTA • A instrução XFER não é executada como o erro nos seguintes casos. Nestes casos, o flag de erro (ERF =
S051) é setado para ON. Se o ERF for setado para ON uma vez, ele permanece em ON até ser resetado para OFF pelo usuário do programa. (1) O Endereço principal para a designação da porta RS-485 é diferente de 0. (2) O tamanho de transferência é 256. (3) O ajuste de modo da porta RS-485 não é modo livre ASCII. (4) Esta instrução é programada no sub-programa #1.

110 T1-16S Manual do Usuário
5. Modo Livre ASCII PARTE 2
<Transmissão>
Quando a entrada da instrução é ON, um set da mensagem o qual é armazenado na tabela da fonte (do caractere de inicio ao código de carregamento) está transmitido através da porta RS-485. O status da execução é armazenado no flag. Quando a entrada da instrução é ON, o set da entrada da instrução deve ser mantido em ON até que a operação de transmissão esteja completa.
Exemplo
Source designation Transfer size Destination designation D0010 H00 H04 D0012 00012 D0015 H00 H30 D0011 00500 D0013 Execution status D0016 00000
D0500 (registro da CPU ) T1-16S RS-485 port
Quando R0001 é On, um set da mensagem (terminada pelo código de carregamento) é armazenado no range de D0500 a D0511 (12 palavras) e transmitido através da porta RS-485.
Status de execução:
H0000 ... Completo normalmente H0001 ... Durante transmissão a mensagem H0002 ... Comunicação ocupada H0003 ... Durante reset de operação H0004 ... Time-out de envio (do caractere de início ao código de carregamento) (ver a tabela abaixo) H0005 ... Erro de emissão por comprimento de mensagem (nenhum código de carregamento na tabela da fonte)
Baudrate Time-out 300 bps 30 segundos 600 bps 15 segundos 1200 bps 12 segundos 2400 bps 8 segundos 4800 bps 4 segundos 9600 bps 3 segundos 19200 bps 1.5 segundos
NOTA • A instrução XFER não é executada como erro nos seguintes casos. Nestes casos, o flag de erro da instrução
(ERF = S051) é ajustado como ON. Se o ERF for ajustado como ON uma vez, permanece assim até ser resetado para OFF pelo usuário do programa. (1) O Endereço principal para designação da porta RS-485 é diferente de 0. (2) O tamanho de transferência é fora do range de 1 à 256. (3) O ajuste de modo da porta RS-485 não é modo livre ASCII. (4) Esta instrução é programada no sub-programa #1.

Funções de Comunicação 111
PARTE 2 5. Modo Livre ASCII
5.8.2 Conversão de HEX para ASCII (HTOA)
FUN 062 HTOA Conversão de Hex para ASCII
Expressão
Entrada −[ A HTOA (n) B ]− Saída
Função Quando a entrada é On, os dados hexadecimais dos n registros começando com A serão convertidos em caracteres de ASCII e armazenados em B em seguida. O dígito mais alto da fonte A é armazenado em um byte mais baixo do destino B, e seguido nesta ordem. O range permissível de n é 1 a 32.
Condição de execução Entrada Operação Saída
OFF Nenhuma execução OFF ON Execução ON
Operando Nome Dispositivo Registro Índex const
X Y R S T. C. XW YW RW SW T C D I J K A Fonte √ √ √ √ √ √ √ √ √ √ √ n Tamanho dados 1 - 32
B Destino √ √ √ √ √ √
Exemplo
Quando R010 é SOBRE, 4 dados das palavras de D0100 a D0103 estão convertidos em caracteres de ASCII, e armazenados em 8 registros das palavras que começam com D0200.
F 0 F 8 7 0
D0100 H0123 D0220 “1” (H31) “0” (H30) D0101 H4567 Convertido D0221 “3” (H33) “2” (H32) D0102 H89AB D0222 “5” (H35) “4” (H34) D0103 HCDEF D0223 “7” (H37) “6” (H36)
D0224 “9” (H39) “8” (H38) D0225 “B” (H42) “A” (H41) D0226 “D” (H44) “C” (H43) D0227 “F” (H46) “E” (H45)
NOTA • Se índice Registro (I, J or K) é usado para o operando A, somente n = 1 é permitido. Senão, um erro de
limite ocorrerá..

112 T1-16S Manual do Usuário
5. Modo Livre ASCII PARTE 2
5.8.3 Conversão de ASCII para HEX (ATOH)
FUN 063 ATOH Conversão de ASCII para Hex
Expressão
Entrada −[ A ATOH (n) B ]− Saída
Função Quando a entrada esta em ON, os caracteres ASCII armazenados nos n registros que começam com A serão convertidos em dados hexadecimais e armazenado em B em seguida. O byte mais baixo da fonte A é armazenado como o dígito mais alto do destino B, e seguido nesta ordem. O caractere ASCII permissível na tabela fonte é “0” (H30) “9” (H39) e “A” (H41) “F” (H46). O range permissível é vai de 1 até 64.
Condição de execução
Entrada Operação Saída ERF OFF Nenhuma execução OFF −
ON Execução normal ON −
Erro de conversão de dados(Nenhuma execução) OFF Set
Operando Nome Dispositivo Registro Índice const
X Y R S T. C. XW YW RW SW T C D I J K A Fonte √ √ √ √ √ √ √ √ √ √ √
n Tamanho dados 1 - 64 B Destino √ √ √ √ √ √
Exemplo
Quando R011 está em ON, os caracteres ASCII armazenados em 8 palavras de D0300 a D0307 serão convertidos em dados hexadecimais, e armazenados em 4 palavras de registro que iniciam com RW040.
F 8 7 0 F 0
D0300 “1” (H31) “0” (H30) RW040 H0123 D0301 “3” (H33) “2” (H32) Convertido RW041 H4567 D0302 “5” (H35) “4” (H34) RW042 H89AB D0303 “7” (H37) “6” (H36) RW043 HCDEF D0304 “9” (H39) “8” (H38) D0305 “B” (H42) “A” (H41) D0306 “D” (H44) “C” (H43) D0307 “F” (H46) “E” (H45)
NOTA • Se o índice de registro (I, J ou K) for usado para o Operando A, somente n = 1 será permitido. • Se n for número impar, os 2 dígitos mais baixos dos últimos dados convertidos não serão fixos, use sempre n par.
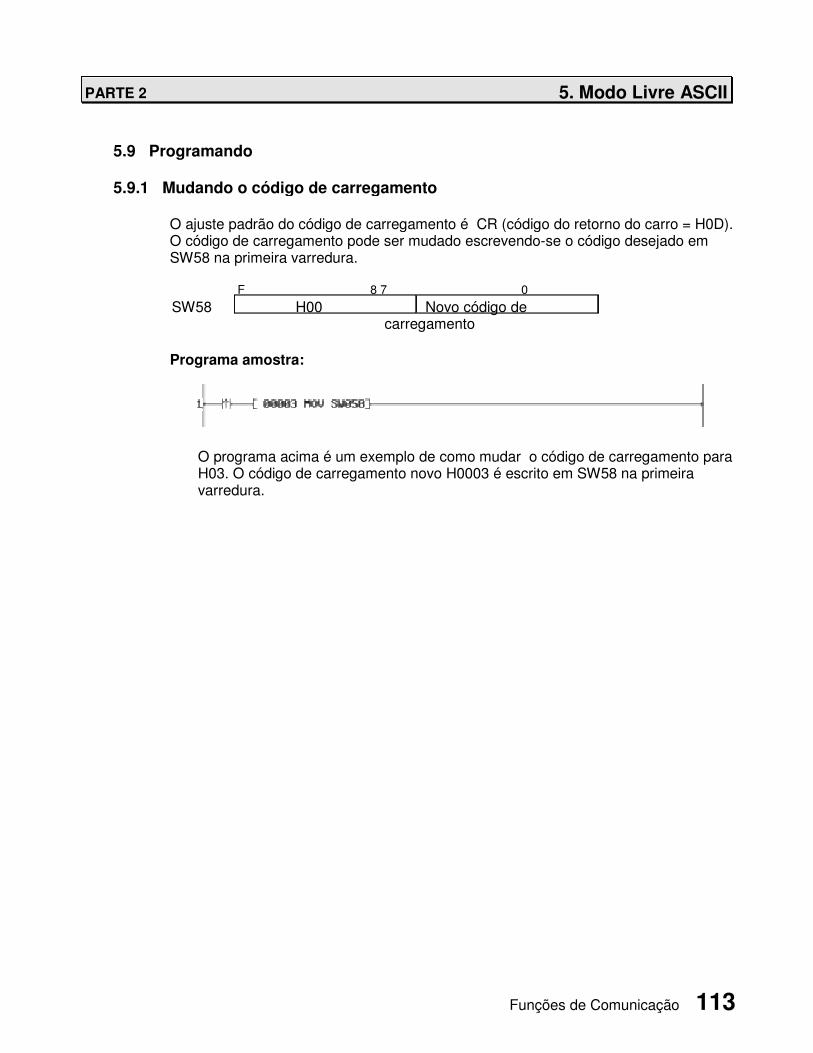
Funções de Comunicação 113
PARTE 2 5. Modo Livre ASCII
5.9 Programando
5.9.1 Mudando o código de carregamento
O ajuste padrão do código de carregamento é CR (código do retorno do carro = H0D). O código de carregamento pode ser mudado escrevendo-se o código desejado em SW58 na primeira varredura.
F 8 7 0
SW58 H00 Novo código de carregamento
Programa amostra:
O programa acima é um exemplo de como mudar o código de carregamento para H03. O código de carregamento novo H0003 é escrito em SW58 na primeira varredura.

114 T1-16S Manual do Usuário
5. Modo Livre ASCII PARTE 2
5.9.2 Recepção de dados de Operação
Quando uma mensagem é recebida, será armazenada no buffer da recepção. O buffer de recepção é uma memória temporária, que tem uma capacidade de 512 bytes. A instrução expandida de transferência (XFER) é usada para ler a mensagem do buffer de recepção e armazená-la no registro de usuário.
Instrução XFER (mensagem recebida):
Entrada [ A XFER B → C ] Saída
Operando A: Fonte
F 8 7 0
A H00 H30 A+1 H0000
Operando B: Parâmetro
F 0
B Comprimento da transferência B+1 Status de execução B+2 Comp. da mens. recebida (bytes)
Operando C: Registro destino
F 8 7 0
C H00 Registro tipo C+1 Endereço do registro de início
Operação:
Quando a condição da entrada da instrução XFER vai para ON, a operação de leitura é iniciada . O status de execução é monitorado por B+1 como segue.
B+1 (Status de execução): H0000 ... Completo normalmente H0001 ... Erro de comunicação (erro de paridade, erro de frame) H0002 ... Estouro do comprimento de mensagem (maior que 512 bytes) H0003 ... Estouro do buffer de recepção H0004 ... Time-out de recepção (ver abaixo) H0006 ... Erros múltiplos de execução (outra rotina de recepção)
porta RS-485 (recepção)
256 (256 palavras) fixo
Registro indiretamente designado H03: RW H04: D

Funções de Comunicação 115
PARTE 2 5. Modo Livre ASCII
O time-out de recepção é detectado quando o tempo de início de caractere até o código de carregamento excede o seguinte tempo.
Baudrate Time-out Baudrate Time-out 300 bps 30 s 4800 bps 4 s 600 bps 15 s 9600 bps 3 s 1200 bps 12 s 19200 bps 1.5 s 2400 bps 8 s
Programa amostra:
(H0030)
Linha 1: Ajusta os parâmetros para a instrução XFER. Os registros de 256 palavras que iniciam em D1100 são reservados para armazenar a mensagem recebida.
Linha 2: Quando R0100 é ajustado em ON, a operação de leitura será iniciada. Se a operação for terminada normalmente, a mensagem recebida será armazenada em D1100 e posteriores, e R0101 muda para ON. Se a mensagem não foi recebida
Normalmente devido algum erro, R0102 é setado para ON.
Linha 3: Quando R0100 é resetado para OFF, o status resultante (R0101 e R0102) são resetados para OFF.
Ao usar o programa amostra acima como uma parte do programa de aplicação inteiro, ajustar R0100 em ON na parte processando principal no início. Quando uma mensagem é recebida, R0101 (no normal) ou R0102 (no erro) vão para ON. Então reset R0100 e realizar processamento necessário para a mensagem recebida. Quando o status do resultado mostrar completo normalmente (R0101 está em ON), a mensagem recebida será armazenada em D1100 em seguida. Quando estiver pronto para receber a mensagem seguinte, ajustar R0100 para ON outra vez.

116 T1-16S Manual do Usuário
5. Modo Livre ASCII PARTE 2
5.9.3 Operação de envio de dados
A instrução expandida de transferência (XFER) é usada para emitir a mensagem através da porta RS-485.
Instrução XFER (mensagem enviada):
Entrada [ A XFER B → C ] Saída
Operando A: Fonte Registro
F 8 7 0
A H00 Registro tipo A+1 Endereço do registro de início
Operando B: Parâmetro
F 0
B Comprimento da transferência B+1 Status de execução
Operando C: Destino
F 8 7 0
C H00 H30 C+1 H0000
Operação:
Quando a condição da entrada da instrução XFER estiver em ON, a mensagem preparada nos registros que iniciam com A será transmitida. O status da execução é monitorado por B+1 como segue. B+1 (Status de execução): H0000 ... Completo normalmente
H0001 ... Durante transmissão de mensagem H0002 ... Comunicação ocupada (outra rotina de
transmissão ou operação está em execução) H0003 ... Durante a operação de reset H0004 ... Time-out de envio (ver abaixo) H0005 ... Erro de envio de mensagem (nenhum código de carregamento na tabela de Fonte)
Porta RS-485 (enviando)
Palavras: 1 até 256
Registro designado indiretamente H03: RW H04: D

Funções de Comunicação 117
PARTE 2 5. Modo Livre ASCII
O time-out de envio é detectado quando o tempo do caractere início ao código de carregamento excede o seguinte tempo.
Baudrate Time-out Baudrate Time-out 300 bps 30 s 4800 bps 4 s 600 bps 15 s 9600 bps 3 s 1200 bps 12 s 19200 bps 1.5 s 2400 bps 8 s
Programa amostra:
(H0030)
Linha 1: Ajuste os parâmetros para a instrução XFER. Os registros da 256 palavras iniciando com D1500 são reservadas para armazenar a
mensagem de transmissão
Linha 2: Quando R0200 é ajustado como ON, a mensagem armazenada no D1500 e posteriores será transmitida. Se a operação for concluída normalmente, R0201 irá pra ON. Se algum erro ocorrer durante a operação, R0202 irá para ON.
Linha 3: Quando R0200 é resetado para OFF, o status do resultado (R0201 e R0202) será resetado para OFF.
Ao usar o programa amostra acima como uma parte do programa de aplicação inteiro, escrever a mensagem transmissora (incluindo o código de carregamento) em D1500 e posteriores, e cear R0200 para ON na parte principal do processamento. Por esta operação, a transmissão de mensagem é iniciada. Quando a transmissão estiver terminada, R0201 (no normal) ou R0202 (no erro) vão para ON. Confirmar estes status de resultado e rebitar R0200.
118 T1-16S Manual do Usuário
5. Modo Livre ASCII PARTE 2
5.9.4 Reset de operação
Ajustando S58F em ON, o reset de operação do modo livre ASCII está disponível. Durante o reset, a seguinte reinicialização é processada. • Inicializa a porta serial RS-485 • Inicializa o buffer de transmissão e recepção, e informação de erro • Restaura o código de carregamento baseado nos dados de um byte mais baixo de SW58
Quando a operação de reset é terminada, S58F está resetado automaticamente em OFF. A operação modo livre ASCII deve ser reiniciada depois de confirmado que S58F está em OFF.
NOTA Se S58F for ajustado em ON durante o recebimento de mensagem, a operação de reset será iniciada depois que a recepção da mensagem é concluída.

Funções de Comunicação 119
PARTE 2 5. Modo Livre ASCII
5.10 Exemplo de aplicação T1-16S
Link de dados entre o T1-16S e outros três T1s
Este é um Exemplo de link de dados entre o T1-16S e o T1s padrão. Neste Exemplo, T1-16S (M) trabalha como uma comunicação mestre usando o modo livre ASCII. Os outros T1s trabalham como escravos que usam o CU111 (função de link com computador).
Nesta configuração, somente T1-16S (M) requer um programa de comunicação. Outros T1s, S1, S2 e S3, não requerem nenhum programa de comunicação.
Neste programa amostra, a seguinte atribuição de link de dados é usada.
T1-16S (M)
T1 (S1)
D0000
D0015 16 palavras
D0000
D0015 D0016
D0031 16 palavras
D0016
D0031 T1 (S2)
D0032
D0047 16 palavras
D0000
D0015 D0048
D0063 16 palavras
D0016
D0031 T1 (S3)
D0064
D0079 16 palavras
D0000
D0015 D0080
D0095 16 palavras
D0016
D0031
Estação 3 Estação 2 Estação 1
T1 (S3) (link com computador)
T1 (S2) (link com computador)
T1 (S1) (link com computador)
T1-16S (M) (livre ASCII)
CU111 CU111 CU111
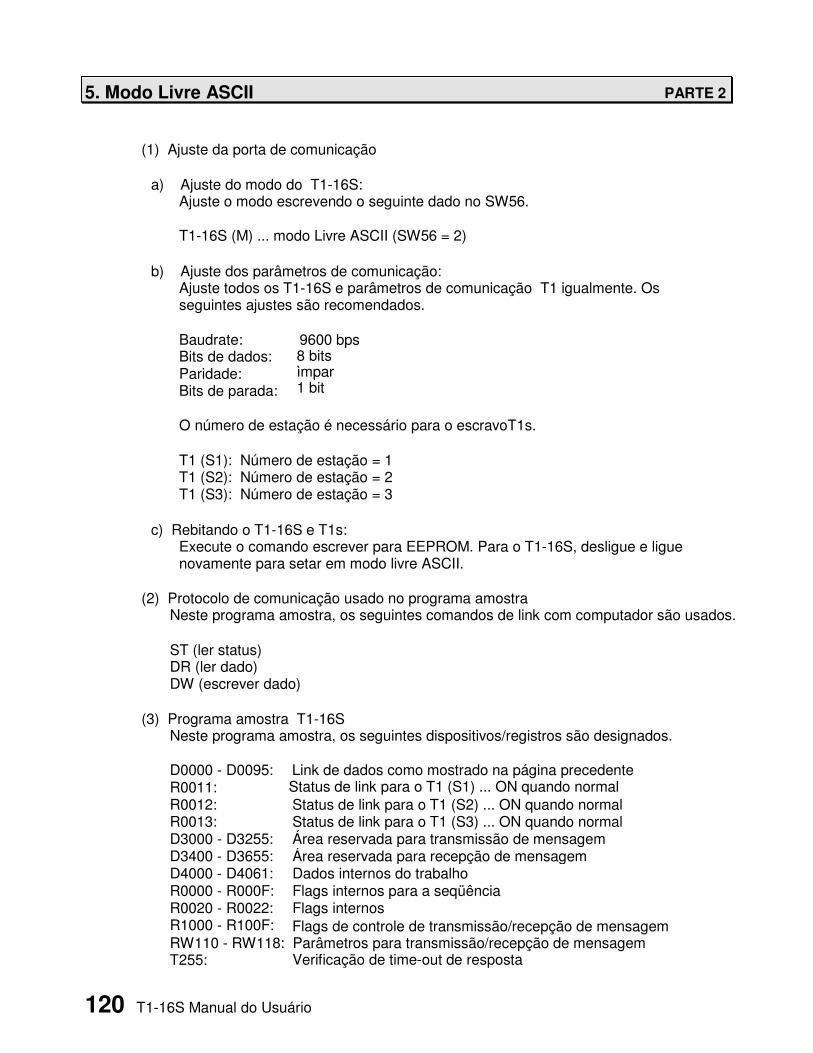
120 T1-16S Manual do Usuário
5. Modo Livre ASCII PARTE 2
(1) Ajuste da porta de comunicação
a) Ajuste do modo do T1-16S: Ajuste o modo escrevendo o seguinte dado no SW56.
T1-16S (M) ... modo Livre ASCII (SW56 = 2)
b) Ajuste dos parâmetros de comunicação: Ajuste todos os T1-16S e parâmetros de comunicação T1 igualmente. Os seguintes ajustes são recomendados.
Baudrate: 9600 bps Bits de dados: 8 bits Paridade: ìmpar Bits de parada: 1 bit
O número de estação é necessário para o escravoT1s.
T1 (S1): Número de estação = 1 T1 (S2): Número de estação = 2 T1 (S3): Número de estação = 3
c) Rebitando o T1-16S e T1s: Execute o comando escrever para EEPROM. Para o T1-16S, desligue e ligue novamente para setar em modo livre ASCII.
(2) Protocolo de comunicação usado no programa amostra Neste programa amostra, os seguintes comandos de link com computador são usados.
ST (ler status) DR (ler dado) DW (escrever dado)
(3) Programa amostra T1-16S Neste programa amostra, os seguintes dispositivos/registros são designados.
D0000 - D0095: Link de dados como mostrado na página precedente R0011: Status de link para o T1 (S1) ... ON quando normal R0012: Status de link para o T1 (S2) ... ON quando normal R0013: Status de link para o T1 (S3) ... ON quando normal D3000 - D3255: Área reservada para transmissão de mensagem D3400 - D3655: Área reservada para recepção de mensagem D4000 - D4061: Dados internos do trabalho R0000 - R000F: Flags internos para a seqüência R0020 - R0022: Flags internos R1000 - R100F: Flags de controle de transmissão/recepção de mensagem RW110 - RW118: Parâmetros para transmissão/recepção de mensagem T255: Verificação de time-out de resposta

Funções de Comunicação 121
PARTE 2 5. Modo Livre ASCII
T1-16S (M) Program:
Main program Block 1 | |
1|-|^|-+[ STIZ (16) R0000] ------------------------------------------------ | | | | | | | | +[ 00001 MOV D4000] ------------------------------------------------ | | | | |
2|[STIN R0000] ----- +-|^|--[ SET S058F] ------------------------------------ | | | | | | | | +[RW100 <> 00000][ RST R1000] ------------------------ | | | | | |S058F | | +-|/|--[RW100 = 00000] ------------------ [STOT R0001]| | | | |
3|[STIN R0001] ----- +[D4000 = 00001] ----- +[ 12592 MOV D4001] ------------ | | | | | | | | | | + +[D0016 TMOV (0016)D4010] ------ | | | | | | | | +[D4000 = 00002] ----- +[ 12848 MOV D4001] ------------ | | | | | | | | | | + +[D0048 TMOV (0016)D4010] ------ | | | | | | | | +[D4000 = 00003] ----- +[ 13104 MOV D4001] ------------ | | | | | | | | | | + +[D0080 TMOV (0016)D4010] ------ | | | | | | | | + ------------------------------------------ [STOT R0002]| | | | |
4|[STIN R0002] ----- +-|^|-+['(A00ST ' ASC D3000] ------------ | | | | | | | | | | + +[D4001 MOV D3001][ 03369 MOV D3003] ------------ | | | | | | | | | | + +[ SET R1000] ------------------------------------ | | | | | |R1001 | | +-| | -------------------------------------- [STOT R0003]| | | | | |R1002 | | +-| |--[ RST R0010] ------------------------ [STOT R000A]| | | | R0020 |
5|[STIN R0003] ----- +[D3001 = D3401][D3002 = D3402] ------------- ( )--| | | | | | R0021 | | +[D3404 AND HFF00 -> D4004][D4004 = 12800]-( )--| | | | | |R0020 R0021 | | +-| | --- | |--[ SET R0010] ------------------ [STOT R0004]| | | | | |R0020 | | +-|/|-+[ RST R0010] ------------------------ [STOT R000A]| | | | | | |R0021| | | +-|/|-+ | | | | |
6|[STIN R0004] ----- +[RW100 <> 00000][ RST R1000] ------------------------ | | | | | | | | +[RW100 = 00000] ------------------------ [STOT R0005]| | |
Inicializa a seqüência de passo No. de estação inicial =1 Inicialização da Porta RS-485 e flags
D4001 = No. de estação no ASCII
D4010 - D4025 = escrevendo dados (16 w)
ST (ler status)
3369 = H0D29 = CR, “)”
Normal (R1001=ON)
Erro de comunicação (R1002=ON)
Seta o R0010 se a comunicação é normal e o PLC está em RUN
12800 = H3200 = (RUN)
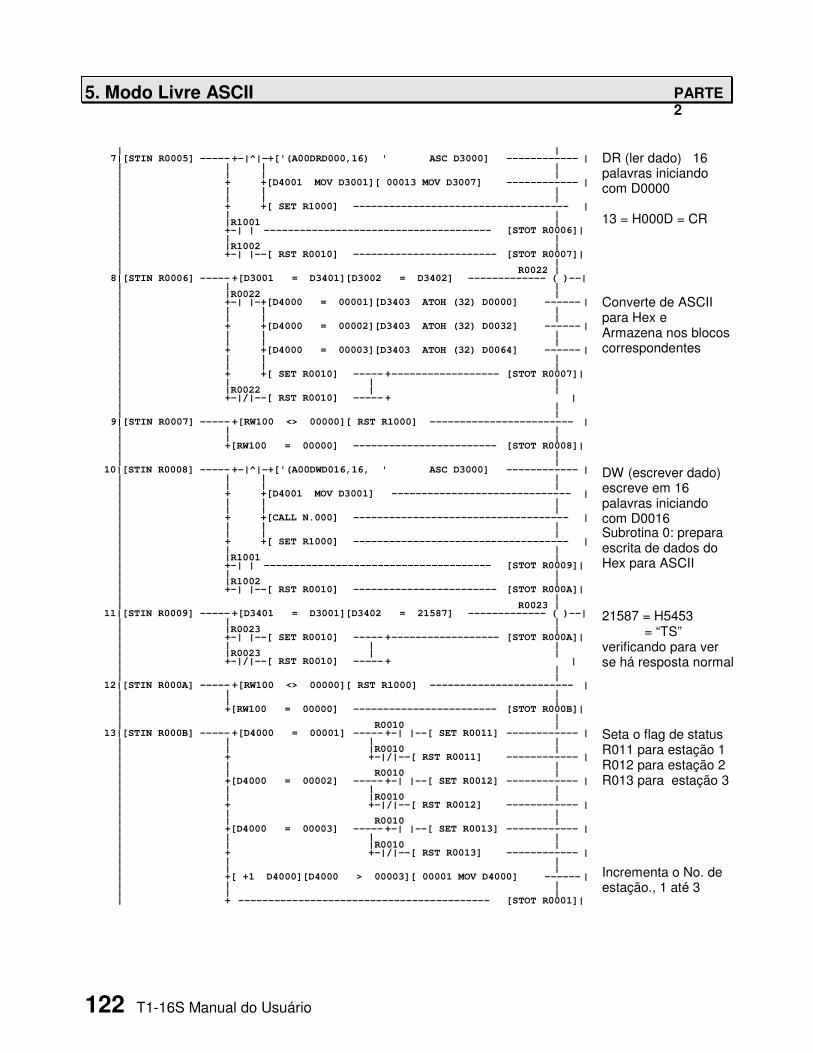
122 T1-16S Manual do Usuário
5. Modo Livre ASCII PARTE 2
| | 7|[STIN R0005] ----- +-|^|-+['(A00DRD000,16) ' ASC D3000] ------------ | | | | | | | | | | + +[D4001 MOV D3001][ 00013 MOV D3007] ------------ | | | | | | | | | | + +[ SET R1000] ------------------------------------ | | | | | |R1001 | | +-| | -------------------------------------- [STOT R0006]| | | | | |R1002 | | +-| |--[ RST R0010] ------------------------ [STOT R0007]| | | | R0022 |
8|[STIN R0006] ----- +[D3001 = D3401][D3002 = D3402] ------------- ( )--| | | | | |R0022 | | +-| |-+[D4000 = 00001][D3403 ATOH (32) D0000] ------ | | | | | | | | | | + +[D4000 = 00002][D3403 ATOH (32) D0032] ------ | | | | | | | | | | + +[D4000 = 00003][D3403 ATOH (32) D0064] ------ | | | | | | | | | | + +[ SET R0010] ----- + ------------------ [STOT R0007]| | | | | | |R0022 | | | +-|/|--[ RST R0010] ----- + | | | | |
9|[STIN R0007] ----- +[RW100 <> 00000][ RST R1000] ------------------------ | | | | | | | | +[RW100 = 00000] ------------------------ [STOT R0008]| | | | |
10|[STIN R0008] ----- +-|^|-+['(A00DWD016,16, ' ASC D3000] ------------ | | | | | | | | | | + +[D4001 MOV D3001] ------------------------------ | | | | | | | | | | + +[CALL N.000] ------------------------------------ | | | | | | | | | | + +[ SET R1000] ------------------------------------ | | | | | |R1001 | | +-| | -------------------------------------- [STOT R0009]| | | | | |R1002 | | +-| |--[ RST R0010] ------------------------ [STOT R000A]| | | | R0023 |
11|[STIN R0009] ----- +[D3401 = D3001][D3402 = 21587] ------------- ( )--| | | | | |R0023 | | +-| |--[ SET R0010] ----- + ------------------ [STOT R000A]| | | | | | |R0023 | | | +-|/|--[ RST R0010] ----- + | | | | |
12|[STIN R000A] ----- +[RW100 <> 00000][ RST R1000] ------------------------ | | | | | | | | +[RW100 = 00000] ------------------------ [STOT R000B]| | | | R0010 |
13|[STIN R000B] ----- +[D4000 = 00001] ----- +-| |--[ SET R0011] ------------ | | | | | | | |R0010 | | + +-|/|--[ RST R0011] ------------ | | | | | | R0010 | | +[D4000 = 00002] ----- +-| |--[ SET R0012] ------------ | | | | | | | |R0010 | | + +-|/|--[ RST R0012] ------------ | | | | | | R0010 | | +[D4000 = 00003] ----- +-| |--[ SET R0013] ------------ | | | | | | | |R0010 | | + +-|/|--[ RST R0013] ------------ | | | | | | | | +[ +1 D4000][D4000 > 00003][ 00001 MOV D4000] ------ | | | | | | | | + ------------------------------------------ [STOT R0001]|
DR (ler dado) 16 palavras iniciando com D0000
13 = H000D = CR
Converte de ASCII para Hex e Armazena nos blocos correspondentes
DW (escrever dado) escreve em 16 palavras iniciando com D0016 Subrotina 0: prepara escrita de dados do Hex para ASCII
21587 = H5453 = “TS”
verificando para ver se há resposta normal
Seta o flag de status R011 para estação 1 R012 para estação 2 R013 para estação 3
Incrementa o No. de estação., 1 até 3

Funções de Comunicação 123
PARTE 2 5. Modo Livre ASCII
Main program Block 255 | |
1|-|^|-+[ 00048 MOV RW110][ 00000 MOV RW111] ------------------------------ | | | | | | | | +[ 00004 MOV RW112][ 03000 MOV RW113] ------------------------------ | | | | | | | | +[ 00004 MOV RW114][ 03400 MOV RW115] ------------------------------ | | | | | | | | +[ 00256 MOV RW116][ 00000 MOV RW117][ 00000 MOV RW118] ------------ | | | |R1000 R1008 R1009 |
2|-| | --- |/| --- |/|-+[ RST S0051][RW112 XFER RW116 -> RW110] ------------ | | | | | |S0051 | | +-|/|-+[RW117 = 00000][ SET R1008] ------------------ | | | | | | | |R1008 | | + +-|/|--[RW117 <> 00001] ----- +[ SET R1009] ------ | | | | | | |S0051 | | | +-| | ------------------------------- + | | | |R1008 R1001 R100A |
3|-| | --- |/| --- |/|-+[ RST S0051][RW110 XFER RW116 -> RW114] ------------ | | | | | |S0051 | | +-|/|-+[RW117 = 00000][RW118 <> 00000][ SET R1001]| | | | | | | | | | + +[RW117 <> 00000] ----- +[ SET R100A] ------------ | | | | | | |S0051 | | | +-| | ------------------------- + | | | | | | | | +[00010 TON T255][ SET R100B] ------------------------ | | | |R1009 |
4|-| |-+[ SET R1002] ------------------------------------------------------ | | | | |R100A| | |-| |-+ | | | | |R100B| | |-| |-+ | | | |R1000 |
5|-|/|--[ 00000 MOV RW100] ------------------------------------------------ |
Main program Block 256 | |
1|[END ] ------------------------------------------------------------------ |
Subroutine Block 1 | |
1|[ SUBR(000)] ------------------------------------------------------------ | | | | |
2|[ 00000 MOV I ][ 00000 MOV J ] ------------------------------------ | | | | |
3|[D4010 HTOA (16) D4030] ------------------------------------------------ | | | | |
4|[ FOR 00016] ------------------------------------------------------------ | | | | I J I J J |
5|[D4030 MOV D3007][D4031 MOV D3008][ 08236 MOV D3009] ------------------ | | | | |
6|[ I + 00002 -> I ] ------------------------------------------ | | | | |
7|[ J + 00003 -> J ] ------------------------------------------ | | | | |
8|[NEXT] ------------------------------------------------------------------ | | | | J |
9|[ 03369 MOV D3006] ------------------------------------------------------ | | | | |
10| ------------------------------------------------------------------ [ RET]|
Rotina de comunicação com drive
Ajuste de parâmetro
Rotina de recepção de mensagem Time-out = 1 sec.
Normal:R1001=ON Erro: R1002=ON
Subrotina 0: Prepara o texto de dados para escrita
Converte de Hex para ASCII
8236 = H202C = “,” (vírgula)
3369 = H0D29 = CR, “)”
Rotina de transmissão de mensagem

124 T1-16S Manual do Usuário

Funções de Comunicação 125
PARTE 2 T1-16S Funções da Porta RS-485
Seção 6 Modo conexão com inversor
6.1 Função conexão com inversor, 126 6.2 Configuração do sistema, 127 6.3 Procedimento para setup, 128 6.4 Cabeamento, 129 6.5 Ajuste de modo, 131
6.6 Ajuste dos parâmetros de comunicação, 132 6.7 Ajuste do inversor, 133 6.8 Instruções relacionadas, 134 6.9 Programação, 142 6.10 Exemplo de aplicação no T1-16S, 152

126 T1-16S Manual do Usuário
6. Modo conexão com inversor PARTE 2
6.1 Função conexão com inversor
O modo conexão com inversor é útil para comunicação com os inversores de Toshiba (ASDs) VF-A7, G7, e/ou S9 através da linha RS-485. Usando este modo, o T1-16S pode monitorar/controlar os inversores conectados na linha RS-485 sem nenhum programa especial de comunicação. O número máximo dos inversores conectados a um único T1-16S é 64. Note que o número máximo dos nós em uma linha RS-485 é 32. Entretanto o adaptador RS-485 que é o dispositivo periférico do inversor Toshiba suporta 2 portas de comunicação com os inversores. Conseqüentemente mais de 32 inversores podem ser conectados ao T1-16S ao usar os adaptadores RS-485.
No modo conexão com inversor, os seguintes 5 modos de operação são disponíveis.
(1) Modo troca de dados: Esta modo é usado para controlar e monitorar os inversores. O T1-16S faz a varredura cíclica de todos os inversores conectados. O comando comunicação com inversores é gerado automaticamente pelo T1-16S. Este é o modo básico de operação do modo conexão com inversor.
As seguintes instruções são disponíveis para cada inversor: • Controle: Envio de comandos (Run, Stop, Jog, etc.) e mudança de freqüência
(Os comandos de inversor FA00 e FA01 são usados) • Monitoração: Monitorar a freqüência de operação e status de saída do terminal
(Os comandos de inversor FD00 e FE07 são usados)
(2) Modo de monitoração: Esta modo é usado para monitorar os inversores. O T1-16S faz a varredura cíclica de todos os inversores conectados. O comando comunicação com inversor é gerado automaticamente pelo T1-16S. Diferente da modo acima, somente monitorar está disponível nesta modo.
As seguintes funções estão disponíveis para cada inversor. • Monitoração: Monitorar a freqüência de operação e status de saída do terminal
(Os comandos de inversor FD00 e FE07 são usados)
(3) Modo ler comando: Esta modo é usado para ler alguns dados ou parâmetros do inversor especificado. O usuário deve especificar o comando do inversor e o número do inversor alvo. Esta modo é usado ler a tensão de saída, corrente do inversor, etc..
NOTA Este modo comunicação com inversor está usando a função de comunicação serial padrão dos inversores a fim configurar monitorar/controlar sistemas de forma barata. Para o controle firmemente integrado da velocidade e da seqüência, a Toshiba recomenda o uso de um T2 ou de um PLC T3 com uma DeviceNet ou com um módulo de rede TOSLINE no PLC e nos inversores.
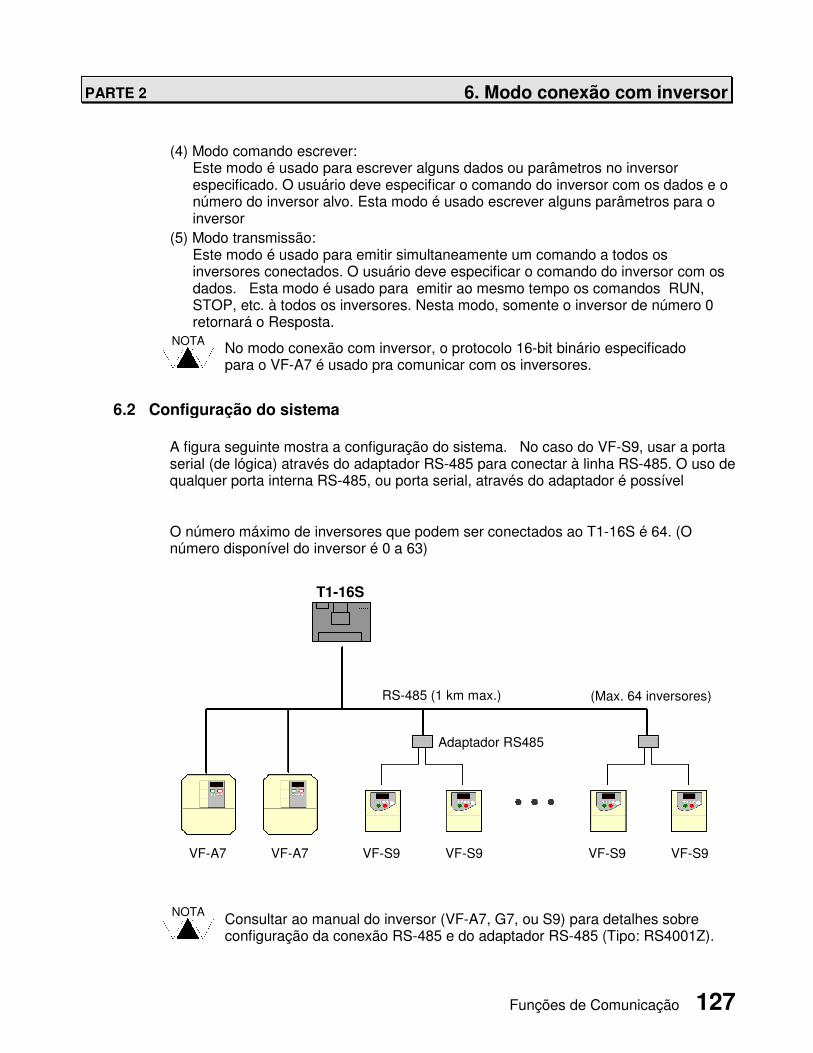
Funções de Comunicação 127
PARTE 2 6. Modo conexão com inversor
(4) Modo comando escrever: Este modo é usado para escrever alguns dados ou parâmetros no inversor especificado. O usuário deve especificar o comando do inversor com os dados e o número do inversor alvo. Esta modo é usado escrever alguns parâmetros para o inversor
(5) Modo transmissão: Este modo é usado para emitir simultaneamente um comando a todos os inversores conectados. O usuário deve especificar o comando do inversor com os dados. Esta modo é usado para emitir ao mesmo tempo os comandos RUN, STOP, etc. à todos os inversores. Nesta modo, somente o inversor de número 0 retornará o Resposta.
6.2 Configuração do sistema
A figura seguinte mostra a configuração do sistema. No caso do VF-S9, usar a porta serial (de lógica) através do adaptador RS-485 para conectar à linha RS-485. O uso de qualquer porta interna RS-485, ou porta serial, através do adaptador é possível
O número máximo de inversores que podem ser conectados ao T1-16S é 64. (O número disponível do inversor é 0 a 63)
NOTA
NOTA
RS-485 (1 km max.)
VF-A7 VF-S9 VF-A7
Adaptador RS485
888
VF-S9
888
888 888
T1-16S
VF-S9 VF-S9
888 888
(Max. 64 inversores)
Consultar ao manual do inversor (VF-A7, G7, ou S9) para detalhes sobre configuração da conexão RS-485 e do adaptador RS-485 (Tipo: RS4001Z).
No modo conexão com inversor, o protocolo 16-bit binário especificado para o VF-A7 é usado pra comunicar com os inversores.

128 T1-16S Manual do Usuário
6. Modo conexão com inversor PARTE 2
6.3 Procedimento de setup
O seguinte fluxograma mostra o procedimento para a função conexão com inversor.
T1-16S desenergizado
Fiação da comunicação
Ajuste do modo de operação da porta RS485
Energização do T1-16S
Programa do usuário faz a inclusão da comunicação
(em modo HALT)
Escrita na EEPROM (em modo HALT)
Modo RUN
Conecte o T1-16S ao inversor(s) usando a interface RS-485. Consultar à seção 6.4
A função conexão com inversor foi iniciada
Selecionar o modo link de dados escrevendo o dado 3 no SW56. Ver seção 6.5.
Ajuste o baudrate, Paridade, comprimento do bit de dados, e bit de parada. Ver seção 6.6. Para inversores, ajuste o número de inversor, baudrate e paridade par cada inversor. Ver seção 6.7.
Ajuste dos parâmetros de comunicação
(em modo HALT)
Ver seção 6.8 para projetar o programa de comunicação.
Desligar e ligar o T1-16S
Por este Operação, o modo de operação e os parâmetros de comunicação foram escritos. Ao escrever no EEPROM, o T1 16S deve estar em modo HALT. Para inversores, desligar e ligar é Pedido após ter ajustado os parâmetros de comunicação.

Funções de Comunicação 129
PARTE 2 6. Modo conexão com inversor
6.4 Cabeamento
Conexão um para um
SG
RXB
RXA
TXB
TXA
SG
TXB
TXA
RXB
RXA
1 km max.
Cabo par-trançado protegido
Inversor (VF-A7/G7) Adaptador RS-485 T1-16S
R
R: 1/2 W-120 Ω
TRM
• O comprimento máximo do cabo é 1 km. • Curto entre RXA e TRM para terminação no T1-16S. • Conecte os resistores de terminação 1/2 W - 120 Ο entre RXA e RXB no lado do
inversor. • Use cabo par-trançado protegido para comunicação de dados segundo o
padrão RS-485. O cabo protegido deve ser conectado à terra.
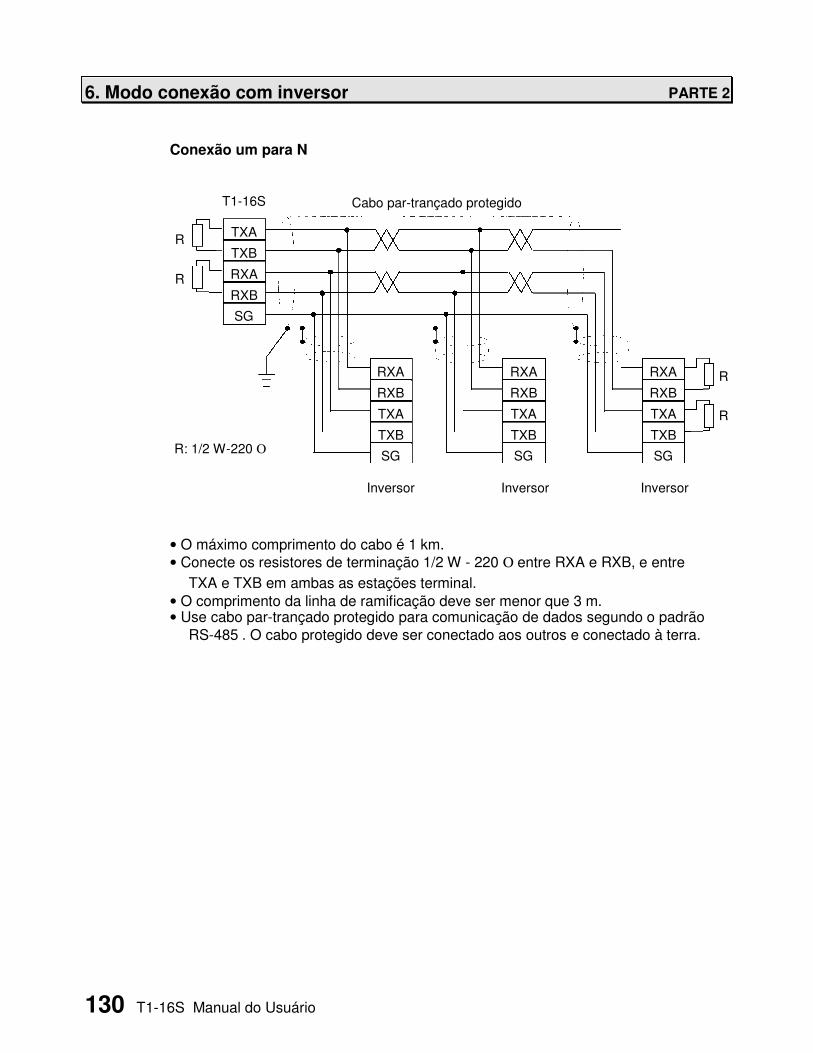
130 T1-16S Manual do Usuário
6. Modo conexão com inversor PARTE 2
Conexão um para N
SG
RXB
RXA
TXB
TXA
SG
TXB
TXA
RXB
RXA
SG
TXB
TXA
RXB
RXA
SG
TXB
TXA
RXB
RXA
Inversor
R
R
T1-16S Cabo par-trançado protegido
R
R
R: 1/2 W-220 Ο
Inversor Inversor
• O máximo comprimento do cabo é 1 km. • Conecte os resistores de terminação 1/2 W - 220 Ο entre RXA e RXB, e entre
TXA e TXB em ambas as estações terminal. • O comprimento da linha de ramificação deve ser menor que 3 m. • Use cabo par-trançado protegido para comunicação de dados segundo o padrão
RS-485 . O cabo protegido deve ser conectado aos outros e conectado à terra.

Funções de Comunicação 131
PARTE 2 6. Modo conexão com inversor
6.5 Ajuste de modo
O modo de operação da porta RS-485 é decidido pelo dado do registro especial SW56.
Este dado é armazenado na memória interna EEPROM pela execução do comando escrever para EEPROM. O T1-16S lê este dado na energização, e decide o modo.
Para selecionar o modo conexão com inversor, siga o procedimento abaixo.
(1)Alterne o T1-16S para modo HALT (2)Escreva 3 no SW56 usando o programador (3)Execute o comando escrever para EEPROM (4)Desligue (5)Ligue novamente
Então a porta RS-485 do T1-16S’s estará em modo conexão com inversor.
NOTA
NOTA
O padrão para o SW56 é 0. (Modo link com computador)
O ajuste do SW56 é salvo no módulo RM102 de armazenamento do programa (ver. 2 ou posterior). Conseqüentemente, quando você salva o programa do T1-16S no RM102 e então o carrega em um outro T1-16S, o ajuste SW56 original será copiado. Entretanto, no caso do T-PDS, o ajuste SW56 não é salvo em arquivo de disco. Conseqüentemente sempre que você carregar o programa do T1-16S pelo T-PDS, você deve ajustar os dados SW56 para o T1-16S manualmente como mencionado acima.

132 T1-16S Manual do Usuário
6. Modo conexão com inversor PARTE 2
6.6 Ajuste dos parâmetros de comunicação
6.6.1 Parâmetros de transmissão
Os parâmetros de transmissão são ajustados escrevendo na memória de informação de sistema do T1-16S.
Altere o T1-16S para modo HALT, então ajuste os parâmetros de comunicação na informação do sistema.
(Tela exemplo do T-PDS)
Baudrate ... 9600 or 19200 bps é o recomendado. Comprimento de bit de dados ... Deve ser 8 bits. Bit de parada... 1 bit é o recomendado
Depois do ajuste dos parâmetros de comunicação, escreva na memória interna EEPROM antes de desligar o T1-16S.
Ajuste baudrate, paridade, comprimento de bit de dados , e bit de parada para ser combinado com o ajuste do inversor. O número de estação é ignorado.
Funções de Comunicação 133
PARTE 2 6. Modo conexão com inversor
6.6.2 Ajuste do tempo de atraso para acesso
O tempo de atraso para acesso é o intervalo entre a recepção da resposta do #n inversor e a emissão de resposta pelo #n+1 inversor. Este tempo de atraso para acesso pode ser mudado dentro do range de 0 a 300 ms. Quanto mais curto o ajuste, mais rápido o ciclo de comunicação. Normalmente o ajustem em 1 (10 ms) é recomendado.
Para ajustar o tempo de atraso para acesso, alterar o T1-16S para o modo HALT, e escreve o tempo (0 até 30) em SW57. Após a escrita, executar o comando escrever para EEPROM. Desligar e ligar novamente. Então o ajuste será eficaz.
Endereço Nome Range do dado SW57 Modo conexão com inversor:
Tempo de atraso para acesso 0 p/ 30 (decimal) (0 p/ 30 : 0 p/ 300 ms)
6.7 Ajuste do inversor
Em cada inversor, ajustar os seguintes parâmetros de comunicação. Para saber como ajustá-los, consultar a seu manual de comunicação serial com inversor (VF-A7/G7/S9).
• Baudrate ... Mesmo que o ajustado no T1-16S • RS-485 2-fios ou 4-fios... Ajuste para o sistema 4-fios • Paridade ... Mesma que ajustada no T1-16S • Número do inversor ... Coloque números consecutivos a partir de 0
NOTA
NOTA
NOTA
Se os dados estão fora do range válido, eles serão considerados 0.
O ajuste do SW57 é salvo no módulo RM102 de armazenamento de programa (ver. 2 ou posterior). Conseqüentemente, quando você salvar o programa de T1-16S no RM102 e então o carregar em um outro T1-16S, o ajuste SW57 original será copiado. Entretanto, no caso do T-PDS, o ajuste SW57 não é salvo em arquivo de disco. Conseqüentemente sempre que você carregar o programa do T1-16S pelo T-PDS, você deve ajustar os dados SW57 para o T1-16S manualmente como mencionado acima.
No modo troca de dados e no modo monitoração (ver a página 126), os inversores são varridos pelo T1 16S de #0 até #n (n: ajuste do usuário). Conseqüentemente, se o número do inversor for saltado, um acesso desnecessário ocorrerá. Resulta em um ciclo de varredura mais longo.

134 T1-16S Manual do Usuário
6. Modo conexão com inversor PARTE 2
6.8 Instruções relacionadas
6.8.1 Transferência de dados expandida (XFER)
FUN 236 XFER Transferência de dados expandida (Modo conexão com inversor)
Expressão
Entrada −[ A XFER B C ]− Saída
Função Esta função é usada para controle dos inversores VF-A7/G7/S9 da Toshiba conectados na linha RS-485. Quando o modo de operação da porta RS-485 estiver ajustada como conexão com inversor(SW56 = 3), o T1-16S pode executar as seguintes funções para até 64 inversores: (1) Varredura cíclica dos inversores e emitir/receber os seguintes dados para/do cada inversor.
• Emitir ao inversor: Escrever freqüência de referência e comando de Operação (Run, Stop, Jog, etc.) • Receber do inversor: Monitorar o status do terminal de saída e freqüência de operação.
(2) Varredura cíclica dos inversores e recebe os seguintes dados de cada inversor. • Receber do inversor: Monitoração da freqüência de operação e Status do terminal de saída.
(3) Emite um comando ler especificado a um inversor especificado e armazena os dados da resposta. (4) Emite um comando escrever específico para um inversor específico. (5) Emite um comando escrever específico com dados para todos os inversores conectados à transmissão.
Condição de execução Entrada Operação Saída ERF
OFF Nenhuma execução OFF −
ON Execução normal ON −
Quando um erro ocorreu (ver NOTA) ON Set
Operando Nome Dispositivo Registro Índice const
X Y R S T. C. XW YW RW SW T C D I J K A Tabela de dado √ √ √ √ √ √ √
B No. do Inversor √ √ √ √ √ √ √
C Porta RS-485 √ √ √ √ √ √
Parâmetros Designação da tabela de dados Parâmetro e status Designação da porta RS-485
A Código do tipo de registro B Número do inversor C Fixo em H0030 A+1 Endereço principal B+1 Modo de operação C+1 Fixo em 0
B+2 Status de execução B+3 Código de erro de comunicação
B+4 Comunicação do inversor B+5 Mapa de status B+6 (cada bit mostra o status B+7 de cada inversor)

Funções de Comunicação 135
PARTE 2 6. Modo conexão com inversor
Designação da tabela dos dados (A, A+1):
Registro Código de erro (A) Endereço principal (A+1) Registro RW H0003 0 P/ 255
Registro D H0004 0 P/ 4095
Designação do modo de operação (B+1):
B+1 Modo de operação Descrição 0 Modo troca de dados
(Modo 0) Scans cíclicos para os inversores conectados (Controle & Monitoração) (Comando para o inversor: P+FA01&FA00 e R+FD00&FE07)
1 Modo monitoração (Modo 1)
Scans cíclicos para os inversores conectados (Monitoração somente) (Comando para o inversor: R+FD00&FE07)
2 Modo comando ler (Modo 2)
Envia um comando ler para um inversor específico (Comando para o inversor: R+ designação do usuário)
3 Modo comando escrever (Modo 3)
Envia um comando escrever para um inversor específico (Comando para o inversor: P+ designação do usuário)
4 Modo transmissão (Modo 4)
Envia um comando escrever para todos os inversores conectados à transmissão (Comando para o inversor: P+ designação do usuário)
Número do inversor (B):
Para os modos de operação 0 e 1: Especifica o número máximo do inversor. Por exemplo, se for 5, as varreduras do T1-16S do #0 até #5 se repetirão. O range vai de 0 à 63.
Para os modos de operação 2 e 3: Especifica o número do inversor alvo para enviar os comandos. O range vai de 0 até 63.
Para o modo de operação 4: Este ajuste é ignorado. O endereço de transmissão (HFF) é usado como número de inversor.
Status de execução (B+2):
Este Registro mostra a contagem da varredura. Durante operação normal, ele é incrementado de 0 até 32767 . Quando os seguintes erros são detectados, o bit-F do registro vai para 1. • Porta RS-485 ocupada(comunicação com outro inversor em andamento) • Erro de dado de parâmetro
Código de erro de comunicação (B+3):
O código de erro de comunicação do inversor é mostrado aqui. Se 2 ou os mais inversores estiverem em erro, o erro de número menor será armazenado. Consultar ao manual do inversor para código de erro.
B+3 Meaning 0 Sem erro (Normal) ou time-out de resposta (sem resposta)
Outros Erro de resposta do inversor (Consultar o manual do inversor)
Mapa de status de comunicação do inversor (B+4 até B+7):
Esta tabela mostra o mapa de comunicação do inversor. (1: Normal / 0: Erro ou ausência de resposta)
F E D C B A 9 8 7 6 5 4 3 2 1 0
B+4 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0 B+5 31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 B+6 47 46 45 44 43 42 41 40 39 38 37 36 35 34 33 32 B+7 63 62 61 60 59 58 57 56 55 54 53 52 51 50 49 48

136 T1-16S Manual do Usuário
6. Modo conexão com inversor PARTE 2
< Modo troca de dados (Modo 0) >
Quando a instrução Entrada está em ON e o Operando B+1 é o, o modo troca de dados (modo o) é selecionado. Neste modo, o T1-16S emite o comando troca de dados especificado pelo usuário para o inversor pelo operando B, e repete..
#0 Escreve referência de freqüência (FA01) #0 Escreve comando de operação (FA00) #1 Escreve referência de freqüência (FA01) #1 Escreve comando de operação (FA00) : #n Escreve referência de freqüência (FA01) #n Escreve comando de operação (FA00)
#0 Monitora freqüência de operação (FD00) #0 Monitora status do terminal de saída (FE07) #1 Monitora freqüência de operação (FD00) #1 Monitora status do terminal de saída (FE07) : #n Monitora freqüência de operação (FD00) #n Monitora status do terminal de saída (FE07)
O número do inversor alvo é especificado pelo operando B. O status de execução da varredura e o status de comunicação do inversor são armazenados no Operando B+2 a B+7..
O código de comando e os dados do comando que ajustam registros são especificados indiretamente pelo operando A e A+1. Se A for 4 e A+1 for 1000, o Registro D1000 está especificado como o principal Endereço da tabela. Command data table (if D1000 is specified):
Registro Conteúdo do dado Direção do sinal D1000 #0 freqüência de operação ← Ler D1001 #0 Status do terminal de saída ← Ler D1002 #0 Referência de freqüência → Escrever D1003 #0 Comando de operação → Escrever D1004 #1 freqüência de operação ← Ler D1005 #1 Status do terminal de saída ← Ler D1006 #1 Referência de freqüência → Escrever D1007 #1 Comando de operação → Escrever
D(1000+n*4) #n freqüência de operação ← Ler D(1001+n*4) #n Status do terminal de saída ← Ler D(1002+n*4) #n Referência de freqüência → Escrever D(1003+n*4) #n Comando de operação → Escrever
Quando a instrução Entrada é resetada, o operação é parada após ter recebido a resposta do inversor.
Scan

Funções de Comunicação 137
PARTE 2 6. Modo conexão com inversor
NOTA) Comando de comunicação do inversor e formato de dados de monitoração
• O formato de dados para a freqüência de operação e registros de referência de freqüência é de 0.01 hertz (unidade). Por exemplo, se forem 60 hertz, os dados correspondentes de Registro serão 6000.
• A atribuição de bit para registro de operação do comando é como segue. (VF-A7)
F E D C B A 9 8 7 6 5 4 3 2 1 0
Seleção da velocidade de programação 0000 = Nenhuma
0001 = Velocidade 1 0010 = Velocidade 2
: 1111 = Velocidade 15
PI Operação (0=Normal / 1=Off) DC braking (0=Off / 1=On) Jog de operação (0=off / 1=On) Seleção F/R (0=Forward / 1=Reverse) Run/Stop (0=Stop / 1=Run) Free run (0=Normal / 1=Free run) Parada de emerg. (0=Normal / 1=EMS) Comando reset (0=Normal / 1=Reset) freqüência habilitada (0=Desabilitado / 1=Habilitado) Comando habilitado (0=Desabilitado / 1=Habilitado)
• A atribuição de bits de status do registro de terminal de saída é como segue. (VF-A7)
F E D C B A 9 8 7 6 5 4 3 2 1 0
OUT1 (f130) OUT2 (f131)
FL (f132) R1 (f133)
R2 (f134) OUT3 (f135) OUT4 (f136)
ALM0 ALM1
ALM2 ALM3
Para detalhes de função de comunicação com inversor, consultar o seu manual de comunicação serial com inversor.

138 T1-16S Manual do Usuário
6. Modo conexão com inversor PARTE 2
< Modo monitoração (Modo 1) >
Quando a instrução Entrada está em ON e o Operando B+1 é 1, o modo monitoração (modo 1) é selecionado. Neste modo, o T1-16S emite o comando l monitorar especificado pelo usuário para o inversor pelo operando B, e repete.
#0 Monitoração da freqüência de operação (FD00) #0 Monitoração do status do terminal de saída (FE07) #1 Monitoração da freqüência de operação (FD00) #1 Monitoração do Status do terminal de saída (FE07) : #n Monitoração da freqüência de operação (FD00) #n Monitoração do status do terminal de saída (FE07)
O número do inversor alvo é especificado pelo operando B. O status de execução da varredura e o status de comunicação do inversor são armazenados no Operando B+2 a B+7.
O dado da tabela de monitoração é especificado pelo operando A e A+1. Se A é 3 e A+1 é 20, o registro RW020 é especificado como o principal endereço da tabela.
Tabela de dados do comando (se RW020 é especificado):
Registro Conteúdo dos dados Direção do sinal RW020 #0 freqüência de operação ← Ler RW021 #0 Status do terminal de saída ← Ler RW022 Sem uso RW023 Sem uso RW024 #1 freqüência de operação ← Ler RW025 #1 Status do terminal de saída ← Ler RW026 Sem uso RW027 Sem uso
RW(20+n*4) #n freqüência de operação ← Ler RW(21+n*4) #n Status do terminal de saída ← Ler RW(22+n*4) Sem uso RW(23+n*4) Sem uso
Quando a instrução Entrada é resetada, o operação é parada após ter recebido a resposta do inversor.
NOTA) Para formato de dados, consultar à página precedente.
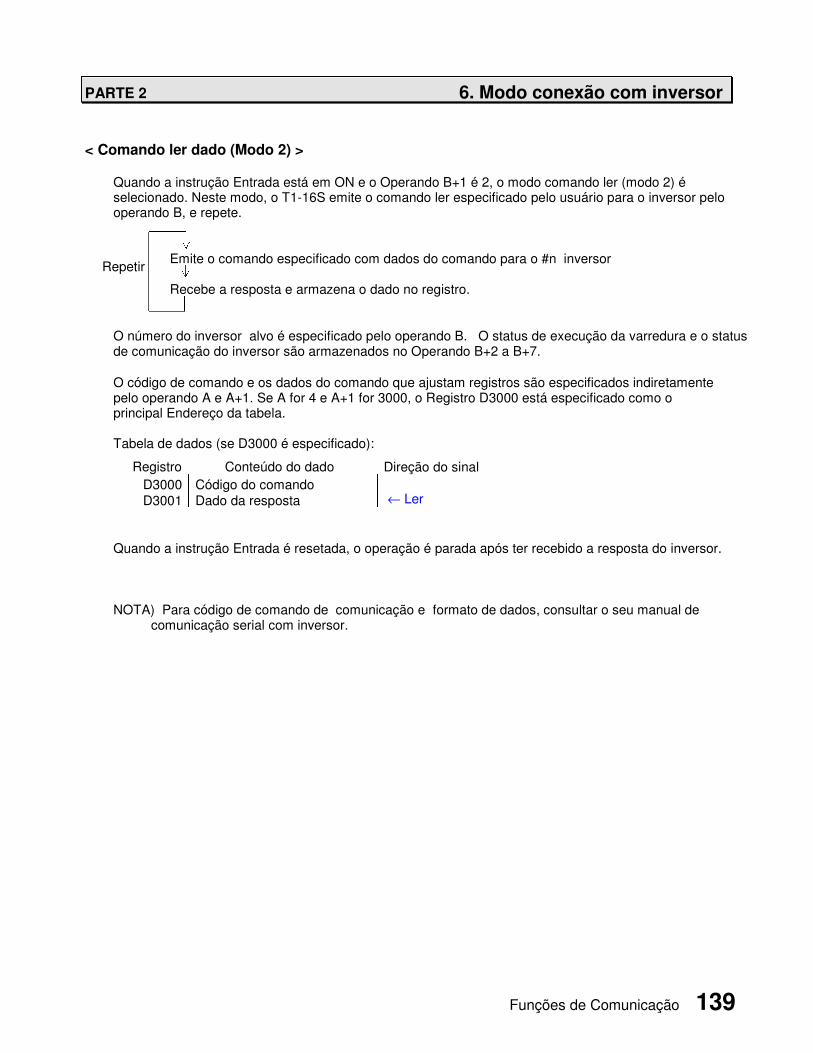
Funções de Comunicação 139
PARTE 2 6. Modo conexão com inversor
< Comando ler dado (Modo 2) >
Quando a instrução Entrada está em ON e o Operando B+1 é 2, o modo comando ler (modo 2) é selecionado. Neste modo, o T1-16S emite o comando ler especificado pelo usuário para o inversor pelo operando B, e repete.
Emite o comando especificado com dados do comando para o #n inversor
Recebe a resposta e armazena o dado no registro.
O número do inversor alvo é especificado pelo operando B. O status de execução da varredura e o status de comunicação do inversor são armazenados no Operando B+2 a B+7. O código de comando e os dados do comando que ajustam registros são especificados indiretamente pelo operando A e A+1. Se A for 4 e A+1 for 3000, o Registro D3000 está especificado como o principal Endereço da tabela.
Tabela de dados (se D3000 é especificado):
Registro Conteúdo do dado Direção do sinal D3000 Código do comando
D3001 Dado da resposta ← Ler
Quando a instrução Entrada é resetada, o operação é parada após ter recebido a resposta do inversor.
NOTA) Para código de comando de comunicação e formato de dados, consultar o seu manual de comunicação serial com inversor.
Repetir
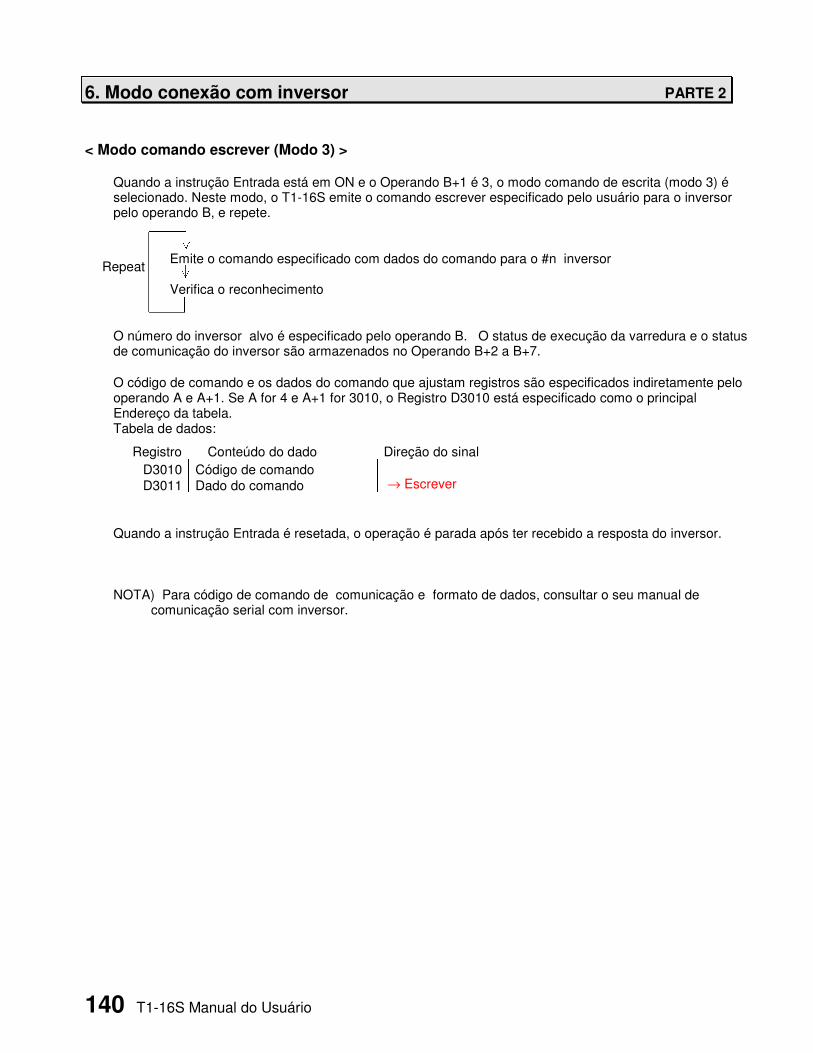
140 T1-16S Manual do Usuário
6. Modo conexão com inversor PARTE 2
< Modo comando escrever (Modo 3) >
Quando a instrução Entrada está em ON e o Operando B+1 é 3, o modo comando de escrita (modo 3) é selecionado. Neste modo, o T1-16S emite o comando escrever especificado pelo usuário para o inversor pelo operando B, e repete.
Emite o comando especificado com dados do comando para o #n inversor
Verifica o reconhecimento
O número do inversor alvo é especificado pelo operando B. O status de execução da varredura e o status de comunicação do inversor são armazenados no Operando B+2 a B+7.
O código de comando e os dados do comando que ajustam registros são especificados indiretamente pelo operando A e A+1. Se A for 4 e A+1 for 3010, o Registro D3010 está especificado como o principal Endereço da tabela. Tabela de dados:
Registro Conteúdo do dado Direção do sinal D3010 Código de comando D3011 Dado do comando → Escrever
Quando a instrução Entrada é resetada, o operação é parada após ter recebido a resposta do inversor.
NOTA) Para código de comando de comunicação e formato de dados, consultar o seu manual de comunicação serial com inversor.
Repeat
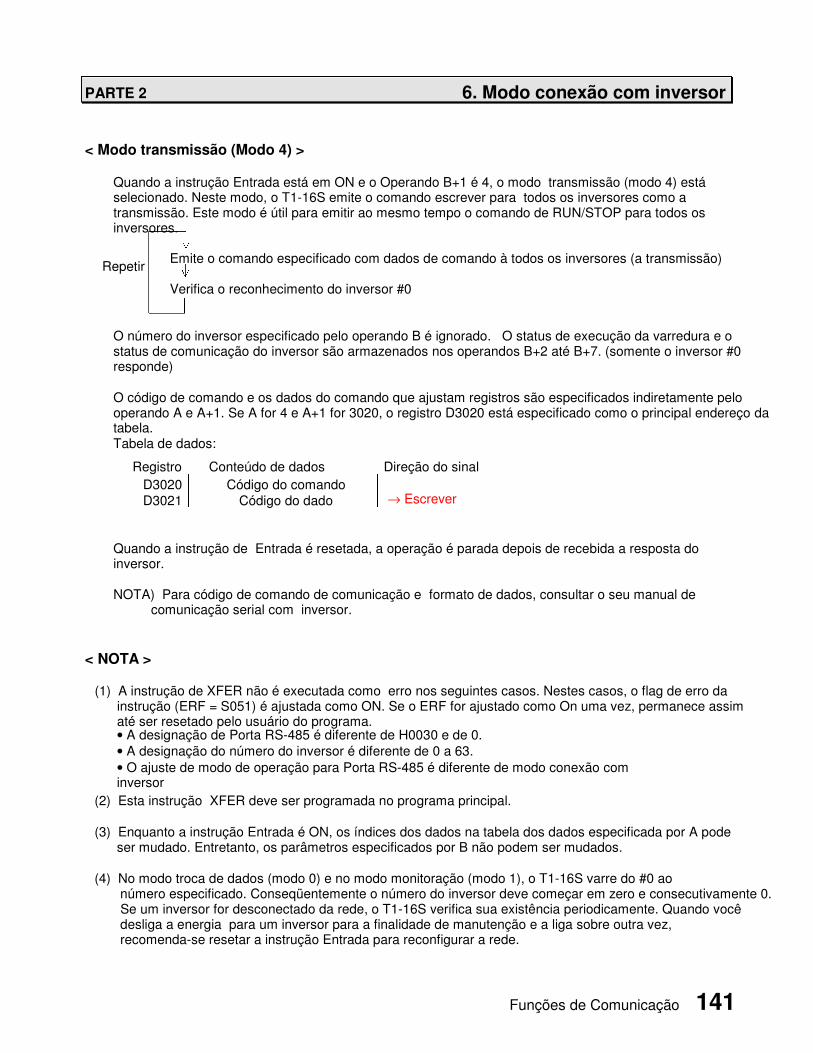
Funções de Comunicação 141
PARTE 2 6. Modo conexão com inversor
< Modo transmissão (Modo 4) >
Quando a instrução Entrada está em ON e o Operando B+1 é 4, o modo transmissão (modo 4) está selecionado. Neste modo, o T1-16S emite o comando escrever para todos os inversores como a transmissão. Este modo é útil para emitir ao mesmo tempo o comando de RUN/STOP para todos os inversores.
Emite o comando especificado com dados de comando à todos os inversores (a transmissão)
Verifica o reconhecimento do inversor #0
O número do inversor especificado pelo operando B é ignorado. O status de execução da varredura e o status de comunicação do inversor são armazenados nos operandos B+2 até B+7. (somente o inversor #0 responde)
O código de comando e os dados do comando que ajustam registros são especificados indiretamente pelo operando A e A+1. Se A for 4 e A+1 for 3020, o registro D3020 está especificado como o principal endereço da tabela. Tabela de dados:
Registro Conteúdo de dados Direção do sinal D3020 Código do comando D3021 Código do dado → Escrever
Quando a instrução de Entrada é resetada, a operação é parada depois de recebida a resposta do inversor.
NOTA) Para código de comando de comunicação e formato de dados, consultar o seu manual de comunicação serial com inversor.
< NOTA >
(1) A instrução de XFER não é executada como erro nos seguintes casos. Nestes casos, o flag de erro da instrução (ERF = S051) é ajustada como ON. Se o ERF for ajustado como On uma vez, permanece assim até ser resetado pelo usuário do programa. • A designação de Porta RS-485 é diferente de H0030 e de 0. • A designação do número do inversor é diferente de 0 a 63. • O ajuste de modo de operação para Porta RS-485 é diferente de modo conexão com inversor
(2) Esta instrução XFER deve ser programada no programa principal.
(3) Enquanto a instrução Entrada é ON, os índices dos dados na tabela dos dados especificada por A pode ser mudado. Entretanto, os parâmetros especificados por B não podem ser mudados.
(4) No modo troca de dados (modo 0) e no modo monitoração (modo 1), o T1-16S varre do #0 ao número especificado. Conseqüentemente o número do inversor deve começar em zero e consecutivamente 0. Se um inversor for desconectado da rede, o T1-16S verifica sua existência periodicamente. Quando você desliga a energia para um inversor para a finalidade de manutenção e a liga sobre outra vez, recomenda-se resetar a instrução Entrada para reconfigurar a rede.
Repetir

142 T1-16S Manual do Usuário
6. Modo conexão com inversor PARTE 2
6.9 Programação
6.9.1 Modo troca de dados
No modo troca de dados, o T1-16S pode comunicar-se com múltiplos inversores (até 64). Para cada inversor, T1-16S pode emitir o comando (RUN, STOP, etc.) e referência de freqüência, e pode monitorar a freqüência de operação atual e o status do terminal de saída.
Exemplo:
A seguir um exemplo de operação usando o modo troca de dados. • 6 inversores estão conectados. (Números dos inversores de 0 até 5) • A tabela de Registro que inicia com D2000 é usada para troca dados.
Registro Conteúdo do dado Direção do sinal D2000 #0 freqüência de operação ← Ler D2001 #0 Status do terminal de saída ← Ler D2002 #0 Referência de freqüência → Escrever D2003 #0 Comando de operação → Escrever D2004 #1 freqüência de operação ← Ler D2005 #1 Status do terminal de saída ← Ler D2006 #1 Referência de freqüência → Escrever D2007 #1 Comando de operação → Escrever
D2020 #5 freqüência de operação ← Ler D2021 #5 Status do terminal de saída ← Ler D2022 #5 Referência de freqüência → Escrever D2023 #5 Comando de operação → Escrever
Programa Exemplo:

Funções de Comunicação 143
PARTE 2 6. Modo conexão com inversor
Quando R0100 está em ON, os parâmetros para a instrução XFER serão ajustados como segue. Linha 1: Designa a tabela dos dados. Neste Exemplo, D2000 é designado como a tabela dos dados de endereço de início. Porque 4 é setado para D1000 e 2000, é setado para D1001. Linha 2: Designa o número máximo do inversor e o modo de operação. RW200=5 ... O número máximo do inversor é 5 RW201=0 ... Modo troca de dados
Linha 3: Inicializa o status dos registros RW202 até RW207.
Linha 4: Estes dados são fixados para usar a função conexão com inversor. D1010=48 (H30) e D1011=0
Designação da tabela de dados Parâmetro & status Porta RS-485 D1000 4 RW200 5 D1010 H0030 (fixo) D1001 2000 RW201 0 (modo 0) D1011 0 (fixo)
RW202 Status de execução RW203 Cód. de erro de comunicação
RW204 RW205 Comunicação inversor RW206 Mapa de status RW207
Então, enquanto oR100 está em ON, o T1-16S executa a comunicação com os 6 inversores ciclicamente. (Varredura)
Quando a comunicação com todos os 6 inversores é normal, o bit 0 5 de RW204 estará em ON. (Mapa do status de comunicação do inversor) E o valor do RW202 será incrementado. (Contagem da varredura)
O status de operação de cada inversor é monitorado na tabela de dados (D2000 à D2023). Quando a freqüência pretendida e os dados dos comandos nos registros correspondentes da tabela de dados é ajustada na tabela de dados, o ajuste será transmitido ao inversor automaticamente. Por exemplo, para operar o inversor #0 em 30 hertz enviar a rotação, escrever o valor 3000 em D2002 e em HC400 em D2003. (HC400 = os bits F, E, A são 1, e os outros Bits são 0)
NOTA) Para formato de dados dos dados trocados pelo inversor, consultar à página 137.
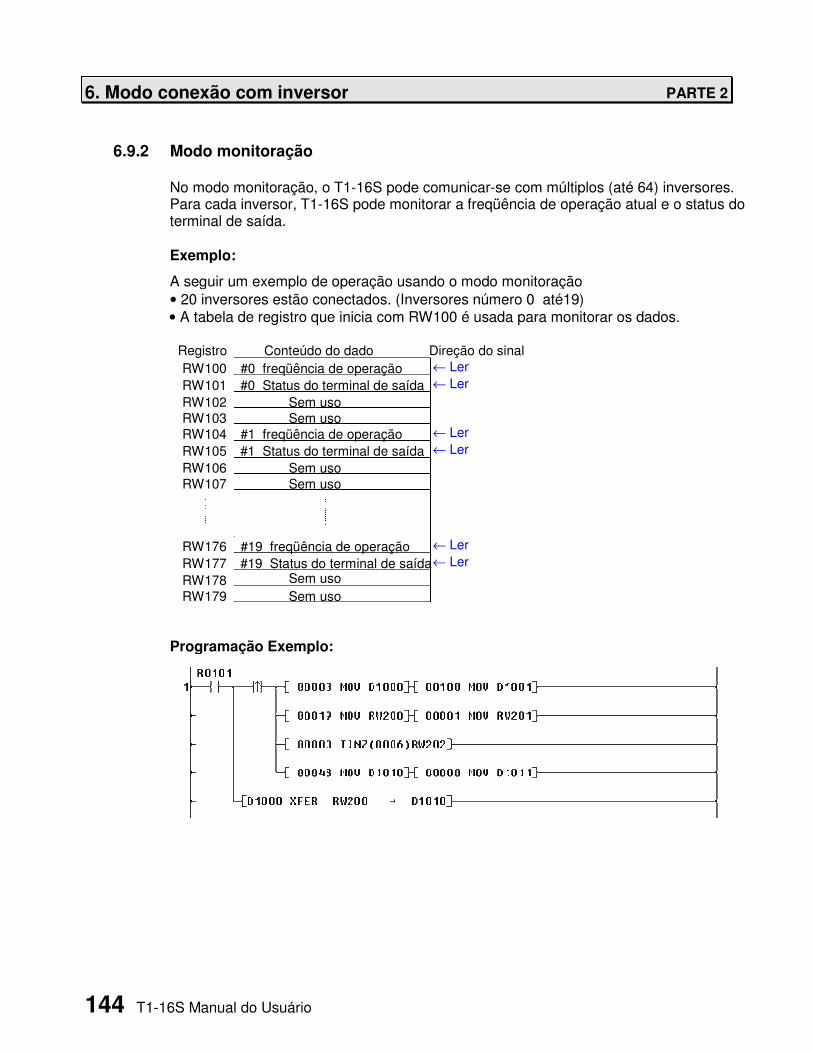
144 T1-16S Manual do Usuário
6. Modo conexão com inversor PARTE 2
6.9.2 Modo monitoração
No modo monitoração, o T1-16S pode comunicar-se com múltiplos (até 64) inversores. Para cada inversor, T1-16S pode monitorar a freqüência de operação atual e o status do terminal de saída.
Exemplo:
A seguir um exemplo de operação usando o modo monitoração • 20 inversores estão conectados. (Inversores número 0 até19) • A tabela de registro que inicia com RW100 é usada para monitorar os dados.
Registro Conteúdo do dado Direção do sinal RW100 #0 freqüência de operação ← Ler RW101 #0 Status do terminal de saída ← Ler RW102 Sem uso RW103 Sem uso RW104 #1 freqüência de operação ← Ler RW105 #1 Status do terminal de saída ← Ler RW106 Sem uso RW107 Sem uso
RW176 #19 freqüência de operação ← Ler RW177 #19 Status do terminal de saída ← Ler RW178 Sem uso RW179 Sem uso
Programação Exemplo:

Funções de Comunicação 145
PARTE 2 6. Modo conexão com inversor
Quando R0101 está em ON, os parâmetros para a instrução XFER serão ajustados como segue. Linha 1: Designa a tabela dos dados. Neste Exemplo, RW100 é designado como a tabela dos dados dos endereços de início. Porque 3 é setado para D1000 e 100 é setado para D1001. Linha 2: Designa o número máximo do inversor e a modalidade de Operação. RW200=19 ... O número máximo do inversor é 19 RW201=1 ... Modo monitoração
Linha 3: Inicializa os registros de status RW202 to RW207.
Linha 4: Estes dados são fixados para usar a função conexão com inversor. D1010=48 (H30) e D1011=0
Designação da tabela de dados Parâmetros & status Porta RS-485
D1000 3 RW200 19 D1010 H0030 (fixo) D1001 100 RW201 1 (modo 1) D1011 0 (fixo)
RW202 Status de execução RW203 Cód. de erro de comunicação. RW204 RW205 Comunica inversor
RW206 Mapa de status RW207
Então, enquanto R101 está em ON, o T1-16S executa a comunicação com os 20 inversores ciclicamente. (Varredura)
Quando a comunicação com todos os 20 inversores é normal, todos os bits do RW204 e bit 0 até 3 do RW205 estarão em ON. (Mapa do status de comunicação do inversor) e o valor de RW202 aumentará. (Contagem da varredura)
O status de operação de cada inversor é monitorado na tabela de dados (RW100 à RW179). Por exemplo, se o inversor #1 estiver operando com 50 hertz, os dados RW104 serão 5000.
NOTA) Para o formato de dados de monitoração do inversor, consultar à página 137.
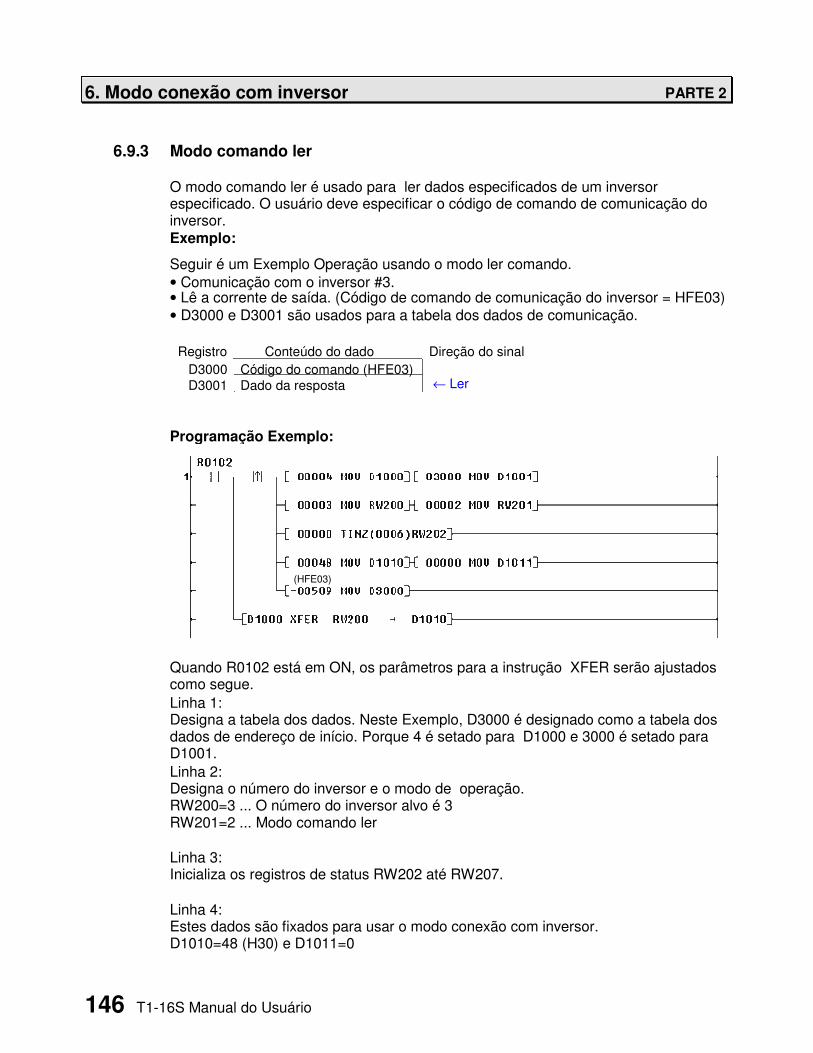
146 T1-16S Manual do Usuário
6. Modo conexão com inversor PARTE 2
6.9.3 Modo comando ler
O modo comando ler é usado para ler dados especificados de um inversor especificado. O usuário deve especificar o código de comando de comunicação do inversor. Exemplo:
Seguir é um Exemplo Operação usando o modo ler comando. • Comunicação com o inversor #3. • Lê a corrente de saída. (Código de comando de comunicação do inversor = HFE03) • D3000 e D3001 são usados para a tabela dos dados de comunicação.
Registro Conteúdo do dado Direção do sinal D3000 Código do comando (HFE03) D3001 Dado da resposta ← Ler
Programação Exemplo:
Quando R0102 está em ON, os parâmetros para a instrução XFER serão ajustados como segue. Linha 1: Designa a tabela dos dados. Neste Exemplo, D3000 é designado como a tabela dos dados de endereço de início. Porque 4 é setado para D1000 e 3000 é setado para D1001. Linha 2: Designa o número do inversor e o modo de operação. RW200=3 ... O número do inversor alvo é 3 RW201=2 ... Modo comando ler
Linha 3: Inicializa os registros de status RW202 até RW207.
Linha 4: Estes dados são fixados para usar o modo conexão com inversor. D1010=48 (H30) e D1011=0
(HFE03)

Funções de Comunicação 147
PARTE 2 6. Modo conexão com inversor
Linha 5: Designação do comando de comunicação do inversor. O código de comando HFE03 (- 509) é monitoração atual da saída.
Designação da tabela de dados Parâmetros & status Porta RS-485 D1000 4 RW200 3 D1010 H0030 (fixo) D1001 3000 RW201 2 (modo 2) D1011 0 (fixo)
RW202 Status de execução RW203 Código de erro de com. RW204 RW205 Com inversor RW206 Mapa de status RW207
Então, enquanto R102 está em OM, o T1-16S executa a comunicação com o inversor #3 para monitorar a corrente de saída. Os dados de resposta são armazenados em D3001. Se os dados de resposta forem 1915, significam 19.15%.
Quando a comunicação com o inversor #3 é normal, o bit 3 do RW204 estará em ON. (Mapa de status de comunicação do inversor) E o valor do RW202 será incrementado. (Contagem da varredura)
Enquanto R102 está em ON, o código de comando de comunicação do inversor pode ser mudado. Neste caso, verificar os incrementos de contagem de varredura no RW202 para confirmar a resposta. NOTA) Para código de comando de comunicação do inversor e formato de dados
de resposta, consultar o seu manual do inversor.

148 T1-16S Manual do Usuário
6. Modo conexão com inversor PARTE 2
6.9.4 Modo comando escrever
O modo comando escrever é usado para escrever dados/parâmetros especificados em um inversor especificado. O usuário deve especificar o código de comando de comunicação do inversor e os dados a ser escritos.
Exemplo:
A seguir um exemplo de operação usando o modo comando escrever. • Comunica-se com o inversor #5. • Escreve o parâmetro aceleração no tempo (código de comando de inversor = H0009)
com os dados 10 segundos (valor 100 em 0.1 segundos unidades) • D3010 e D3011 são usados para a tabela de dados de comunicação.
Registro Conteúdo dos dados Direção do sinal D3010 Código do comando (H0009) D3011 Dado do comando (100) → Escrever
Programação Exemplo:
Quando R0103 é setado em ON, os parâmetros para a instrução XFER serão ajustados como segue.
Linha 1: Designa a tabela dos dados. Neste exemplo, D3010 é designado como tabela de dados dos endereços de início. Porque 4 é setado para D1000 e 3010 é setado para D1001. Linha 2: Designa o número do inversor e modo do inversor. RW200=5 ... O número do inversor do alvo é 5 RW201=3 ... Modo comando escrever
Linha 3: Inicializa os registros de status RW202 até RW207.
(HFE03) (H0009)

Funções de Comunicação 149
PARTE 2 6. Modo conexão com inversor
Linha 4: Estes dados são fixados usando a função conexão com inversor. D1010=48 (H30) e D1011=0
Linha 5: Designação do comando de comunicação do inversor. O código de comando H0009 é parâmetro de aceleração no tempo. Foi mudado para 10 segundos.
Designação da tabela de dados Parâmetros & status Porta RS-485 D1000 4 RW200 5 D1010 H0030 (fixo) D1001 3010 RW201 3 (modo 3) D1011 0 (fixo)
RW202 Status de execução RW203 Código de erro de com. RW204 RW205 Com. inversor RW206 Mapa de status RW207
Então, o T1-16S executa a comunicação com o inversor #5 modificando o parâmetro de aceleração para 10 segundos.
Neste programa amostra, R103 será resetado para OFF quando a contagem de varredura do RW202 for atualizada.
Quando a comunicação com o inversor #5 é normal, o bit 5 do RW204 estará em ON. (Mapa do status de comunicação do inversor)
NOTA) Para código de comando de comunicação do inversor e formato de dados, consultar o seu manual do inversor.
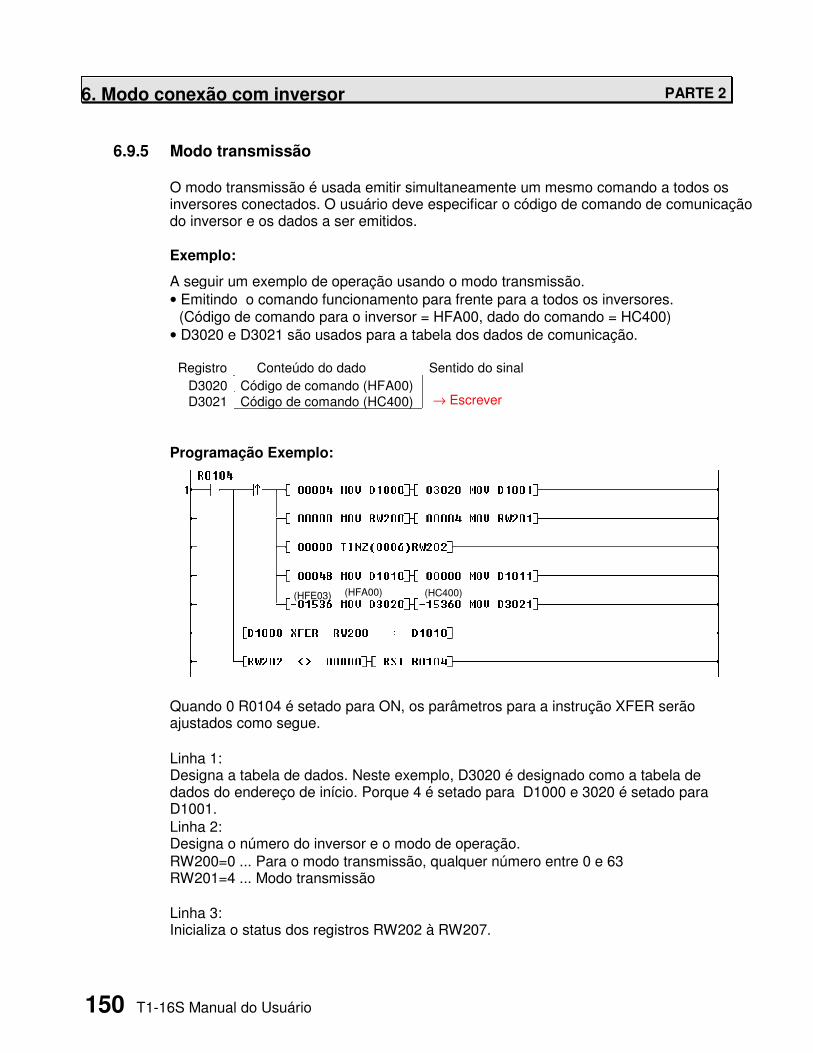
150 T1-16S Manual do Usuário
6. Modo conexão com inversor PARTE 2
6.9.5 Modo transmissão
O modo transmissão é usada emitir simultaneamente um mesmo comando a todos os inversores conectados. O usuário deve especificar o código de comando de comunicação do inversor e os dados a ser emitidos.
Exemplo:
A seguir um exemplo de operação usando o modo transmissão. • Emitindo o comando funcionamento para frente para a todos os inversores.
(Código de comando para o inversor = HFA00, dado do comando = HC400) • D3020 e D3021 são usados para a tabela dos dados de comunicação.
Registro Conteúdo do dado Sentido do sinal D3020 Código de comando (HFA00) D3021 Código de comando (HC400) → Escrever
Programação Exemplo:
Quando 0 R0104 é setado para ON, os parâmetros para a instrução XFER serão ajustados como segue.
Linha 1: Designa a tabela de dados. Neste exemplo, D3020 é designado como a tabela de dados do endereço de início. Porque 4 é setado para D1000 e 3020 é setado para D1001. Linha 2: Designa o número do inversor e o modo de operação. RW200=0 ... Para o modo transmissão, qualquer número entre 0 e 63 RW201=4 ... Modo transmissão
Linha 3: Inicializa o status dos registros RW202 à RW207.
(HFE03) (HFA00) (HC400)
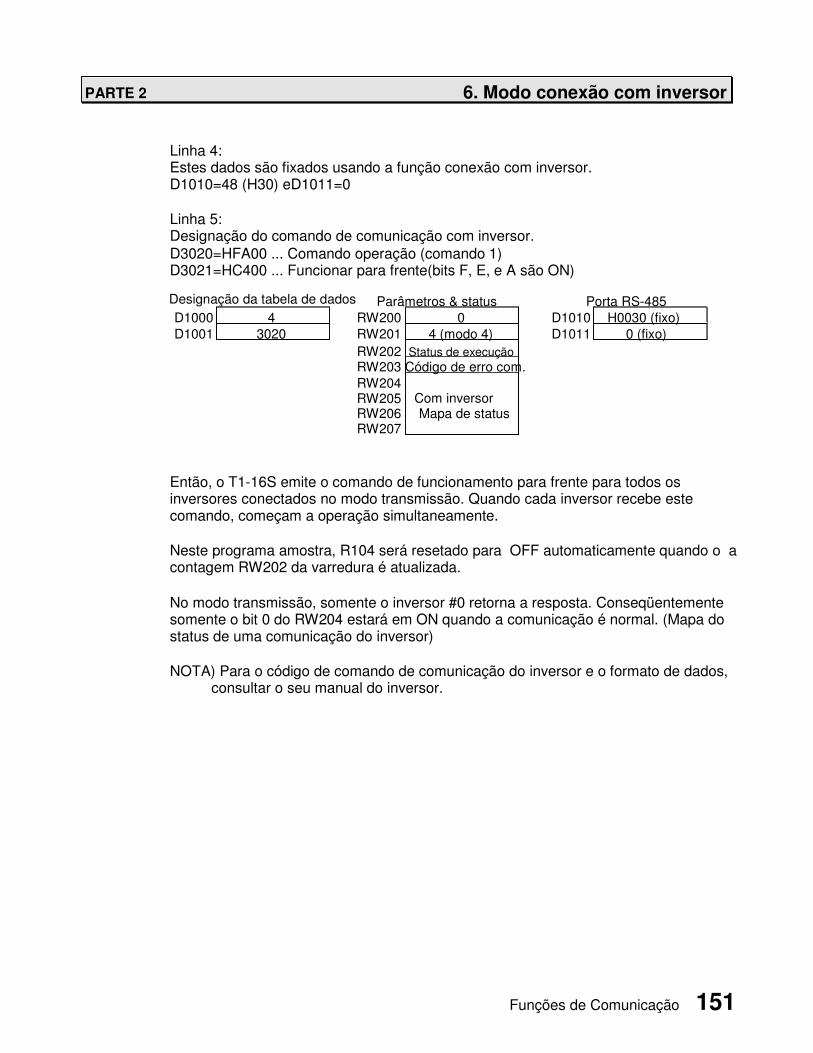
Funções de Comunicação 151
PARTE 2 6. Modo conexão com inversor
Linha 4: Estes dados são fixados usando a função conexão com inversor. D1010=48 (H30) eD1011=0
Linha 5: Designação do comando de comunicação com inversor. D3020=HFA00 ... Comando operação (comando 1) D3021=HC400 ... Funcionar para frente(bits F, E, e A são ON)
Designação da tabela de dados Parâmetros & status Porta RS-485 D1000 4 RW200 0 D1010 H0030 (fixo) D1001 3020 RW201 4 (modo 4) D1011 0 (fixo)
RW202 Status de execução RW203 Código de erro com. RW204 RW205 Com inversor RW206 Mapa de status RW207
Então, o T1-16S emite o comando de funcionamento para frente para todos os inversores conectados no modo transmissão. Quando cada inversor recebe este comando, começam a operação simultaneamente.
Neste programa amostra, R104 será resetado para OFF automaticamente quando o a contagem RW202 da varredura é atualizada.
No modo transmissão, somente o inversor #0 retorna a resposta. Conseqüentemente somente o bit 0 do RW204 estará em ON quando a comunicação é normal. (Mapa do status de uma comunicação do inversor)
NOTA) Para o código de comando de comunicação do inversor e o formato de dados, consultar o seu manual do inversor.

152 T1-16S Manual do Usuário
6. Modo conexão com inversor PARTE 2
6.10 Exemplo de aplicação no T1-16S
Exemplo 1 (Simples HMI - PLC – sistema Drive)
Configuração do sistema:
Operação:
Cinco inversores (VF-A7) são controlados pelo T1-16S. O operador de máquina instrui a operação de cada inversor (início/fim & freqüência de Operação) com a IHM (interface homem-máquina). A freqüência de operação de cada inversor pode ser monitorada na IHM. Atribuindo os alarmes do inversor no sinal terminal de saída, este status dw alarme pode também ser monitorado na IHM. Para esta configuração, o T1-16S usa o modo troca de dados. Nenhum programa especial à exceção XFER é requerida na T1-16S para o controle de comunicação destes inversores.
VF- A7
VF- A7
VF- A7
VF- A7
VF- A7
T1-16S
HMI
RS-232C
Porta de programação
Sinal de I/O para o controle da máquina
RS-485
#0 #1 #2 #3 #4
M M M M M

Funções de Comunicação 153
PARTE 2 6. Modo conexão com inversor
Exemplo 2 (Monitorando/controlando o sistema para drivers distribuídos)
Configuração do sistema:
Operação:
Esta é uma aplicação exemplo das movimentações múltiplas que monitoram e do sistema controlando. Neste sistema, 20 inversores (VF-S9) são usados. Cada status de operação do inversor pode ser monitorado no computador. O popular Excel é usado para monitorar o status de Operação (a freqüência de operação do inversor pode ser indicada no gráfico do Excel bem como em célula). O software DDE server Toshiba (T-PSV) é usado para link entre o Excel e os dados do T1-16S. Para a operação do Excel, a freqüência de operação de cada inversor pode ser mudada individualmente. Para esta configuração, o T1-16S usa o modo troca de dados. Nenhum programa especial, à exceção da instrução XFER é requerida no T1-16S para o controle de comunicação destes inversores.
T1-16S
Computador
RS-232C
Porta de programação
M VF- S9
M VF- S9
M VF- S9
M VF- S9
M VF- S9
#0
#1
#2
#18
#19
AdaptadorRS-485 RS4002Z
RS-485
Excel

154 T1-16S Manual do Usuário

TOSHIBA CORPORATION Departamento de Equipamento Industrial
1-1, Shibaura 1-chome, Minato-ku Tokyo 105-8001, JAPAN
Tel: 03-3457-4900 Fax: 03-5444-9268


![Valtra Canal Rural. [Modo de Compatibilidade]api.ning.com/files/OcxvxG4wHxa2ivlvs9YLocfkBtdRbkQRHZI-cI*t1...2 Por que ler o manual é um hábito tão necessário? • Muitas vezes,](https://img.document.onl/doc/110x75/5c1616f109d3f28f1e8bffa6/valtra-canal-rural-modo-de-compatibilidadeapiningcomfilesocxvxg4whxa2ivlvs9ylocfkbtdrbkqrhzi-cit12.jpg)























