Embed Size (px)
Citation preview
20
14-2
015
M
ecân
ica I
Corpo rígido
2 - 1
Pode definir-se um corpo rígido como sendo o sistema discreto ou contínuo de partículas em que, sob a acção de sistemas de forças arbitrárias, se mantêm constantes as posições relativas entre duas quaisquer partículas.
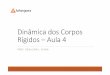
A posição, no espaço, de um dado corpo rígido ou partícula requer a definição das 3 coordenadas cartesianas.
Os corpos rígidos requerem, além disso, informação sobre a “orientação” ou “inclinação” (isto é, os ângulos) face aos eixos cartesianos.
São assim necessários 3+3 parâmetros, ditos graus de liberdade, para definir a posição/orientação de um corpo rígido no espaço.
No plano basta conhecer as duas coordenadas cartesianas e uma “inclinação/ângulo”, 3 graus de liberdade.

20
14-2
015
M
ecân
ica I
Corpos rígidos – restrições ao movimento
2 - 2
Em muitas situações os movimentos dos corpos rígidos não são todos possíveis – há, normalmente, partes do corpo rígido que estão “presas”.
No contexto da Mecânica I as restrições ao movimento dos corpos rígidos são :- criadas pelos e nos “apoios”;-o resultado da interação com outros corpos rígidos.
Por exemplo, e particularizando para o caso plano, veja-se a situação de um corpo rígido, uma barra, pendurada desde o ponto A:
No ponto A existe o que se designa por “apoio fixo”. É um tipo de apoio que restringe os deslocamentos de translação nesse ponto. Apenas permite a rotação do corpo rígido em torno desse ponto.
Se a barra não estivesse “apoiada” então teria 3 graus de liberdade, 3 possibilidades de se deslocar. Assim, tem apenas uma, a rotação.
20
14-2
015
M
ecân
ica I
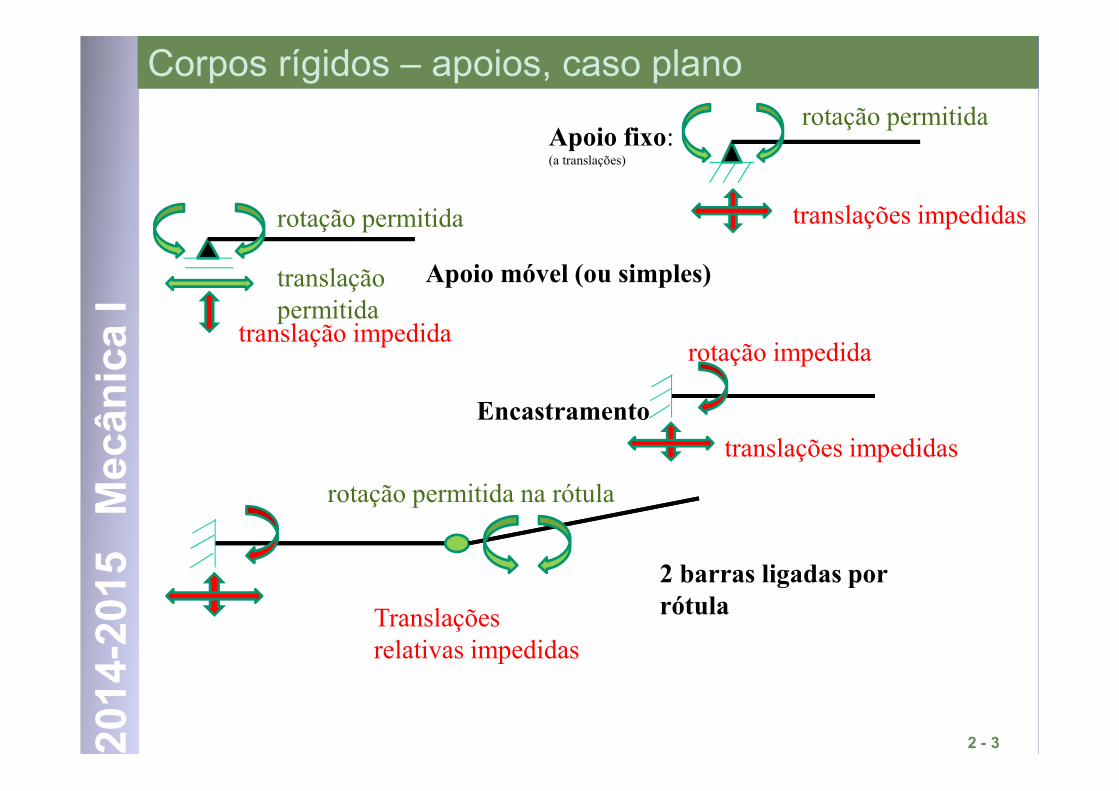
Corpos rígidos – apoios, caso plano
2 - 3
Apoio fixo:(a translações)
Apoio móvel (ou simples)
rotação permitida
translação permitida
translação impedida
Encastramento
translações impedidas
rotação impedida
Translações relativas impedidas
rotação permitida na rótula
2 barras ligadas por rótula
rotação permitida
translações impedidas

20
14-2
015
M
ecân
ica I
Corpos rígidos – apoios
2 - 4
http://ceephotos.karcor.com/2011/09/23/roller-support/
http://nisee.berkeley.edu/elibrary/getpkg?id=GoddenB34-43
http://ceephotos.karcor.com/tag/foundation-footing/

20
14-2
015
M
ecân
ica I
Movimento de um corpo rígido
2 - 5
Focando a atenção no caso bidimensional, a extensão do movimento de partículas aos corpos rígidos no plano não introduz dificuldades.
Se o movimento for circular em relação a um dado ponto O então será circular para todo e qualquer ponto do corpo: a velocidade angular é a mesma para todos os pontos, a velocidade (linear) vai depender da distância ao centro de rotação.
Se o movimento for de translação então todos os pontos do corpo sofrerão a mesma translação.

20
14-2
015
M
ecân
ica I
Movimento de um corpo rígido no plano
2 - 6
• O movimento plano genérico é um movimento que combina uma translação e uma rotação.
• O movimento das partículas A e B para A2 e B2
pode ser decomposto em duas parcelas: - translação para A2 e- rotação de com centro em A2 para B2
1B1B
20
14-2
015
M
ecân
ica I
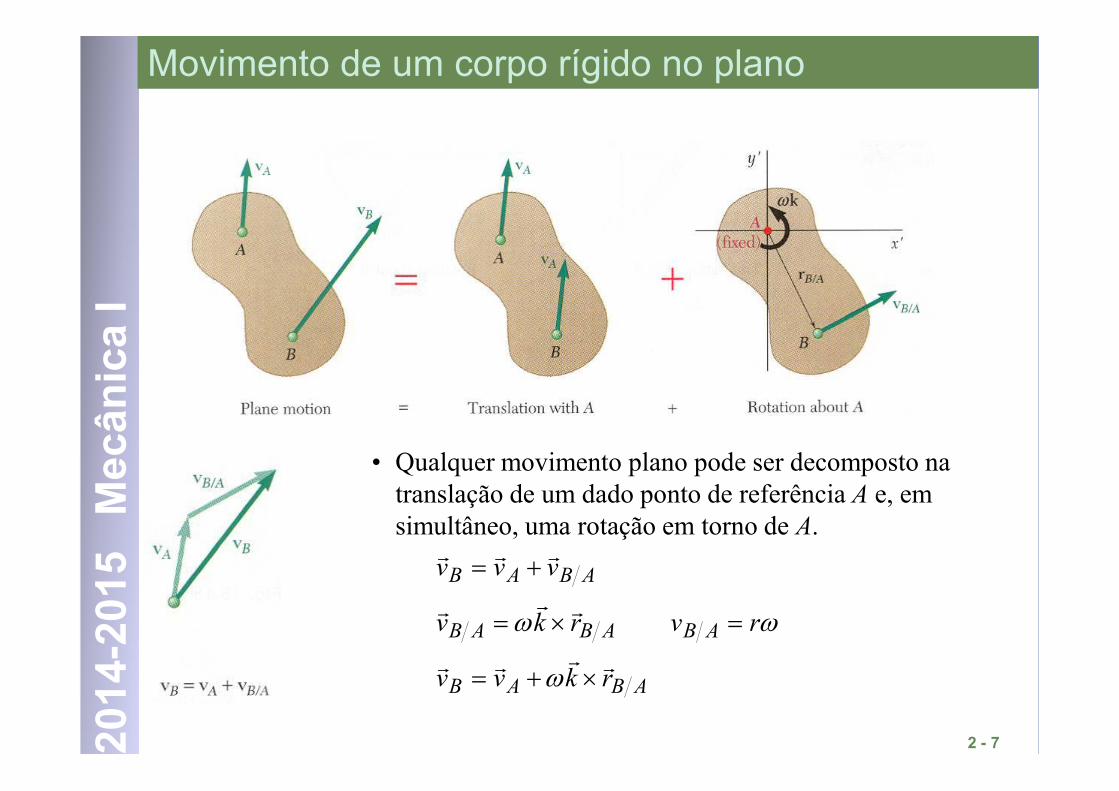
Movimento de um corpo rígido no plano
2 - 7
• Qualquer movimento plano pode ser decomposto na translação de um dado ponto de referência A e, em simultâneo, uma rotação em torno de A.
ABAB vvv
ww rvrkv ABABAB
ABAB rkvv
w

20
14-2
015
M
ecân
ica I
Movimento de um corpo rígido no plano
2 - 8
• Assumindo que a velocidade vA da extremidade A é conhecida, pretende-se determinar a velocidade vB da extremidade B e a velocidade angular w em função de vA, l, e .
• As direcções de vB e vB/A são conhecidas, pode construir-se o diagrama de velocidades em B e obter-se .
tan
tan
AB
A
B
vv
v
v
w
w
cos
cos
l
v
l
v
v
v
A
A
AB
A

20
14-2
015
M
ecân
ica I
Movimento de um corpo rígido no plano
2 - 9
• Se se escolher o ponto B como a referência e resolvendo para a velocidade vA
da extremidade A obtém-se um triângulo de velocidades equivalente.
• vA/B tem o mesmo módulo mas sentido oposto a vB/A.
• A velocidade angular w é única para um mesmo corpo rígido em qualquerinstante. É a mesma quer se considere rotação em torno de B ou de A, nãodepende do ponto de referência.

20
14-2
015
M
ecân
ica I
Centro instantâneo de rotação
2 - 10
• O movimento de qualquer ponto de um corpo rígido plano pode ser decomposto na soma de uma translação de um qualquer ponto A do corpo e de uma rotação em torno desse ponto, rotação essa que é independente da escolha de A.
• É possível constatar que se obtém as mesmas velocidades de translação e de rotação do ponto A a partir de outro ponto C num determinado ponto na perpendicular à velocidade em A.
• Esse ponto é o centro instantâneo de rotação C. Isto é, qualquer movimento de um corpo rígido no plano pode ser representado como uma rotação, instantânea, em relação a C sempre com a mesma velocidade angular.

20
14-2
015
M
ecân
ica I
Centro instantâneo de rotação
2 - 11
• Para determinar a posição do centro instantâneo de rotação basta conhecer a velocidade em dois pontos A e B do corpo.
• O centro (CIR) está na intersecção das perpendiculares às velocidades em quaisquer dois pontos.
• Se existir um ponto fixo esse é o CIR.
• Se as velocidades são iguais (se só há translação) o CIR está no infinito e a sua velocidade angular é nula.

20
14-2
015
M
ecân
ica I
Determinação do centro instantâneo de rotação
2 - 12
Conhecidas as trajectórias do movimento (ou apenas a direcção das trajectórias)em dois pontos, o centro instantâneo de rotação:• está na intersecção das linhas que passam por esses pontos e que são
ortogonais às suas trajectórias.
se os dois pontos têm trajectórias nulas, isso significa que o corpo está em
repouso instantâneo (todos os pontos têm velocidade nula);
se um dos pontos tem trajectória nula, isso significa que esse ponto é
precisamente o centro instantâneo de rotação;
se as duas linhas referidas são paralelas, encontrando-se o centro instantâneo
de rotação no infinito, significa que o corpo está em translação instantânea
(todos os pontos têm a mesma trajectória);
se as duas linhas são coincidentes a determinação da posição do centro
instantâneo de rotação requer o conhecimento dos valores e sentidos das
trajectórias.