Embed Size (px)
Citation preview
Curso de Engenharia Mecânica Automação e Sistemas
AUTOMAÇÃO DE UM SISTEMA PARA A ELABORAÇÃO DE
COQUETEL DE VINHO
Alexandre Teixeira Doria
Itatiba – São Paulo – Brasil
Julho de 2009
ii
Curso de Engenharia Mecânica Automação e Sistemas
AUTOMAÇÃO DE UM SISTEMA PARA A ELABORAÇÃO DE
COQUETEL DE VINHO
Alexandre Teixeira Doria
Monografia apresentada à disciplina Trabalho de Conclusão de Curso, do Curso de Engenharia Mecânica Automação e Sistemas da Universidade São Francisco, sob a orientação do Prof. Guilherme Bezzon, como exigência parcial para conclusão do curso de graduação. Orientador: Prof. Guilherme Bezzon Co-Orientador:Prof. Eduardo Balster
Itatiba – São Paulo – Brasil Julho de 2009
iii
Automação de um Sistema para a Elaboração de Coquetel de Vinho
Alexandre Teixeira Doria
Monografia defendida e aprovada em 13 de junho de 2009 pela Banca
Examinadora assim constituída:
Prof Dr. Guilherme Bezzon (Orientador)
USF – Universidade São Francisco – Itatiba – SP.
Prof Ms. Paulo Eduardo Silveira (Membro Interno)
USF – Universidade São Francisco – Itatiba – SP.
Prof Carlos Rodrigo Davelli (Membro Interno)
USF – Universidade São Francisco – Itatiba – SP.

iv
É melhor arriscar coisas grandiosas, alcançar triunfos e glorias, mesmo expondo-se a derrota, do que formar fila com os pobres de espírito que nem gozam nem sofrem muito, porque vivem nessa penumbra cinzenta que não conhece vitória nem derrota.
(Theodore Roosevelt)

v
Dedico este trabalho à minha família e
amigos, que estiveram presentes nos momentos
de dificuldades e desilusões me apoiando,
estendendo a mão e me motivando de várias
maneiras, a eles sou eternamente grato.
vi
.Agradecimentos
Agradeço ao Professor Guilherme Bezzon, meu orientador, que acompanhou de perto
o andamento deste trabalho e incansavelmente mostrou-me os caminhos á seguir quando eu
estava perdido.
Agradeço também ao professor Eduardo Balster, que dividiu seu grande conhecimento
comigo nas horas de dúvidas.
E agradeço também a todos colegas de trabalho que as vezes até involuntariamente
contribuíram com este projeto.
Obrigado a todos.

vii
Sumário
Resumo ..................................................................................................................................... ix
1 Introdução .... ......................................................................................................................1 1.1 Objetivos.........................................................................................................................2 1.2 Justificativa....................................................................................................................2
2 RevisãoBibliográfica..........................................................................................................3 2.1 Bombas e instalações de bombeamento .. ......................................................................3 2.1.1 Bombas centrífugas ................................................................................................4
2.2 Válvulas .... .....................................................................................................................5 2.3 Sensores de nível ...........................................................................................................5 2.4 Controlador lógico programável....................................................................................6
3 Metodologia .... ....................................................................................................................7 3.1 Montagem.... ..................................................................................................................9 3.1.1 Bombas..................................................................................................................10
3.1.2 Válvulas de controle..............................................................................................10 3.1.3 Sensores de nível ..................................................................................................12 3.1.4 Batedor de pás ......................................................................................................13 3.1.5 Interfaces elétricas ...............................................................................................14 3.1.6 Programa ladder para CLP ...................................................................................16
4 Conclusão .... ......................................................................................................................19
5 Referências Bibliográficas ..............................................................................................19
viii
Lista de Figuras
FIGURA 2.1 – EXEMPLO DE GRÁFICO CARGA X VAZÃO PARA UMA BOMBA CENTRÍFUGA.............4
FIGURA 2.2 – ILUSTRAÇÃO DE UM MODELO DE BOMBA CENTRÍFUGA...........................................4
FIGURA 2.3 – EXEMPLO DE POSICIONAMENTO DE UM ROTOR NO INTERIOR DE UMA BOMBA.........4
FIGURA 2.4 – MODELO DE UM ROTOR ABERTO UTILIZADO EM BOMBAS CENTRÍFUGAS.................4
FIGURA 2.5 – MODELO DE UM ROTOR FECHADO UTILIZADO EM BOMBAS CENTRÍFUGAS ..............4
FIGURA 2.6 – SENSOR NÍVEL COM ACIONAMENTO MAGNÉTICO....................................................6
FIGURA 3.1 – DIAGRAMA DA PLANTA DE ELABORAÇÃO DE COQUETEL DE VINHO........................8
FIGURA 3.2 – PLANTA DE ELABORAÇÃO DE COQUETEL DE VINHO..............................................10
FIGURA 3.3 – BOMBA CENTRÍFUGA UTILIZADA NA CONSTRUÇÃO DO PROJETO...........................10
FIGURA 3.4 – VÁLVULA SOLENÓIDE DE DIAFRAGMA ACIONADA ELETRICAMENTE.....................11
FIGURA 3.5 – CONJUNTO ÊMBOLO/DIAFRAGMA ORIGINAL.........................................................12
FIGURA 3.6 – CONJUNTO ÊMBOLO/DIAFRAGMA MODIFICADO...................................................12
FIGURA 3.7 – ELETRODOS DE NÍVEL POSICIONADOS NOS TANQUES DE MATÉRIA-PRIMA............12
FIGURA 3.8 – CIRCUITO ELETRÔNICO PARA SENSORIAMENTO DE NÍVEL.....................................13
FIGURA 3.9 – BATEDOR DE PÁS PARA MISTURA DO PRODUTO PRONTO.......................................14
FIGURA 3.10 – DIAGRAMA ELÉTRICO DA INTERFACE 12 VOLTS..................................................15
FIGURA 3.11 – DIAGRAMA ELÉTRICO DA INTERFACE 220 VOLTS................................................15
FIGURA 3.12 – DIAGRAMA ELÉTRICO DE ENTRADAS E SAÍDAS DO CLP......................................16
FIGURA 3.13 – TABELA DE MAPEAMENTO DE ENTRADAS E SAÍDAS DO CLP...............................17
FIGURA 3.14 – PROGRAMA EM LINGUAGEM LADDER PARA CONTROLE DO PROCESSO................18
ix
Resumo
Um processo de elaboração de coquetel de vinho se resume na mistura dos
ingredientes de sua receita, no caso, vinho, suco de fruta, e adoçante. Tendo como objetivo
projetar e construir um sistema automático para elaboração de coquetel de vinho, deu-se
inicio o trabalho. Utilizando materiais e equipamentos de fácil acesso, foi construída uma
estante de madeira para acomodar sete reservatórios, três tanques onde estarão estocadas as
matérias-primas, três tanques de dosagem, e um tanque onde ficará armazenado o produto
pronto. Esses reservatórios foram equipados com bombas centrífugas, válvulas de controle e
sensores de nível, que conectados a um CLP, são responsáveis pelo controle do sistema.
Obedecendo as etapas de elaboração do produto, foi projetado o circuito elétrico, e o
programa de controle do CLP, e assim concluída a fase de construção do sistema. Para efetuar
testes de funcionamento, foram simuladas situações reais de elaboração do produto, o projeto
apresentou o funcionamento desejado para o processo, e o sistema de controle foi posto à
prova, mostrando que pode ser utilizado em situações reais de produção.
1
1 – INTRODUÇÃO
O processo de elaboração de uma bebida, mais especificamente o coquetel de vinho, se
resume na mistura dos ingredientes de sua receita nas proporções corretas, matérias-primas
como o vinho, suco de fruta, álcool, adoçante e outros. Esses ingredientes ficam armazenados
em tanques separados e conforme a necessidade, são transferidos para tanques de elaboração
com o auxilio de bombas centrífugas. O processo se inicia com o posicionamento e conexão
de uma bomba centrífuga entre o tanque de matéria-prima e o tanque de elaboração de
produto, as válvulas de admissão do produto são abertas e a bomba acionada. O controle da
quantidade de matéria-prima transferida é feito visualmente com o auxílio de uma escala
fixada no exterior do tanque de elaboração, quando o líquido que está sendo transferido atinge
a quantidade necessária, manualmente a bomba é desligada e as válvulas são fechadas. A
bomba é deslocada para a próxima matéria-prima e o processo se repete o número de vezes
necessárias. Em uma empresa de bebidas de pequeno porte são identificadas dificuldades de
operação durante a elaboração dos produtos a serem envasados, por tratar-se de um processo
inteiramente manual que requer supervisão permanente.
Assim, a movimentação da bomba centrífuga se torna, de certa forma, um grande
inconveniente no processo do ponto de vista de confiabilidade. Outro fator bastante crítico é o
posicionamento dos tanques, dependendo da distância entre tanque de matéria-prima e tanque
de elaboração é praticamente impossível um operador controlar o nível visualmente e desligar
a bomba centrífuga na hora certa, necessitando da intervenção de mais um operador. Um
operador deve monitorar a quantidade de matéria-prima e avisar ao outro quando deverá ser
desligada a bomba.
Tendo em vista essas dificuldades do processo, esse projeto vem propor algumas
modificações para que a operação se torne mais prática e confiável, diminuindo assim o
tempo de elaboração.
Como exemplo de elaboração será utilizado o produto coquetel de vinho, que é uma
bebida composta por três ingredientes: o vinho, suco de fruta e adoçante. E todos
componentes referente ao processo, agrupados em um único módulo de elaboração,
independente de equipamentos externos.
2
1.1 – Objetivos
Desenvolver e construir o protótipo de uma planta em pequena escala para realizar a
elaboração de coquetel de vinho, utilizando componentes de fácil acesso compatíveis com
uma aplicação real, controlados por um conjunto de sensores de nível e um CLP (Controlador
Lógico Programável). A programação deste CLP deve ser executada de modo que possa
controlar uma planta em escala real.
1.2 – Justificativa
Este projeto fornecerá base para avaliação do processo de elaboração de coquetel de
vinho, podendo ser usado como base de estudo e ferramenta de auxílio para uma aplicação em
escala real de produção, agregando ao processo aumento da confiabilidade, eficiência e
qualidade.
3
2 – REVISÃO BIBLIOGRÁFICA
Para execução desse trabalho, fez-se necessário o estudo de alguns dispositivos e
equipamentos, sendo eles divididos em tópicos separados neste capítulo.
Apresentam-se as características e singularidades dos componentes a serem utilizados na
montagem do projeto, entre eles, bombas e instalações de bombeamento, válvulas de controle,
tanques de armazenamento e controladores lógicos programáveis.
2.1 – Bombas e instalações de bombeamento
Para transferir grandes quantidades de líquido de um recipiente para outro, uma das
alternativas é a utilização de sistemas de bombeamento por meio de tubulações. Estas devem
ser dimensionadas de acordo com o líquido a ser utilizado, altura de elevação, comprimento e
disposição do circuito de tubulações que interligam um recipiente ao outro, além do tempo
necessário para realizar o processo [1].
As bombas são máquinas que fornecem energia ao líquido com a finalidade de
transportá-lo de um ponto para outro. Elas recebem energia de uma fonte motora qualquer, e
cedem parte desta energia ao fluido sob forma de pressão, cinética, ou ambas [2].
Existem vários tipos de bombas, e estas são classificadas de acordo com sua aplicação
ou pela forma como a energia é cedida para o líquido.
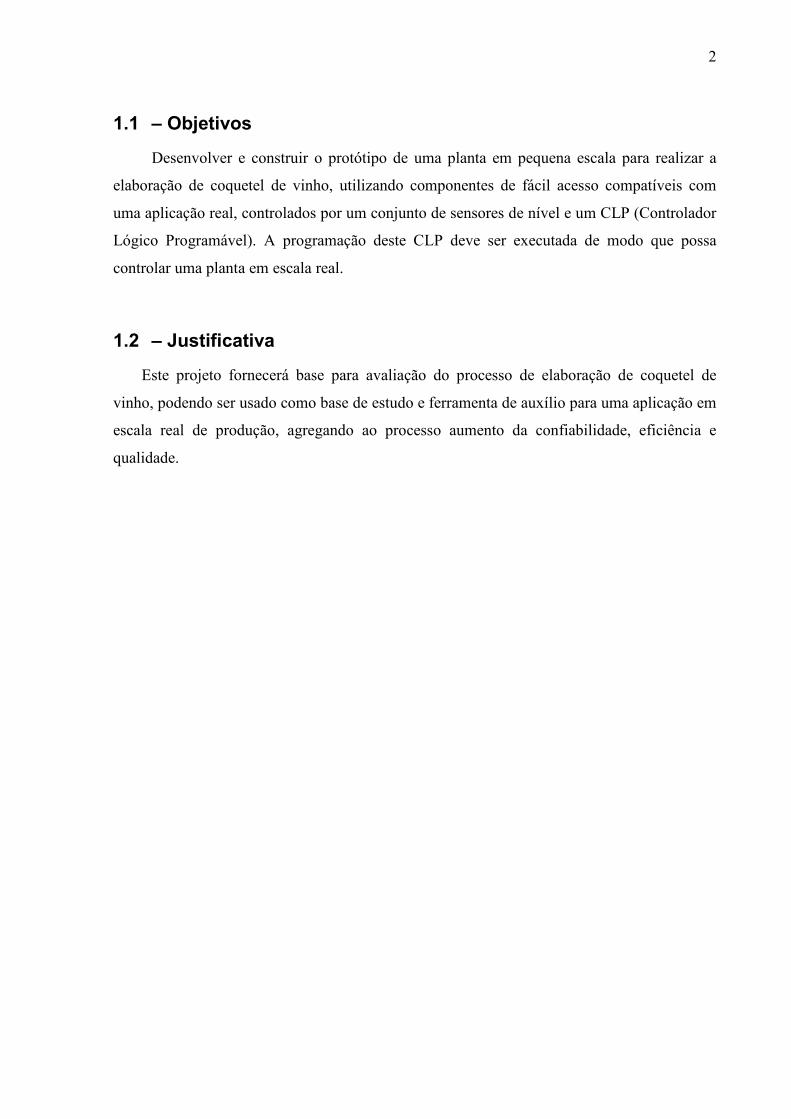
Cada bomba possui uma curva característica própria de carga (H) X vazão (Q). Para
cada valor de vazão há um respectivo valor de carga, e é em cima desta curva que se deve
traçar a curva característica do sistema, regida por todos os fatores que possam influenciar nas
perdas de carga do processo, como, comprimento e diâmetro da tubulação, quantidade de
conexões (válvulas, curvas, tes, etc..), características do líquido, altura de elevação e pressão
manométrica dos reservatórios. O ponto de trabalho da instalação fica definido pelo
cruzamento da curva característica da instalação com acurva característica da bomba [2]. Na
figura 2.1 pode-se visualizar um exemplo gráfico das curvas características da bomba e da
instalação, onde elas se encontram temos o ponto de operação, e as linhas tracejadas
determinam os valores de carga(H) e vazão(Q), para o sistema em questão.
4
Figura 2.1 – Gráfico carga X vazão
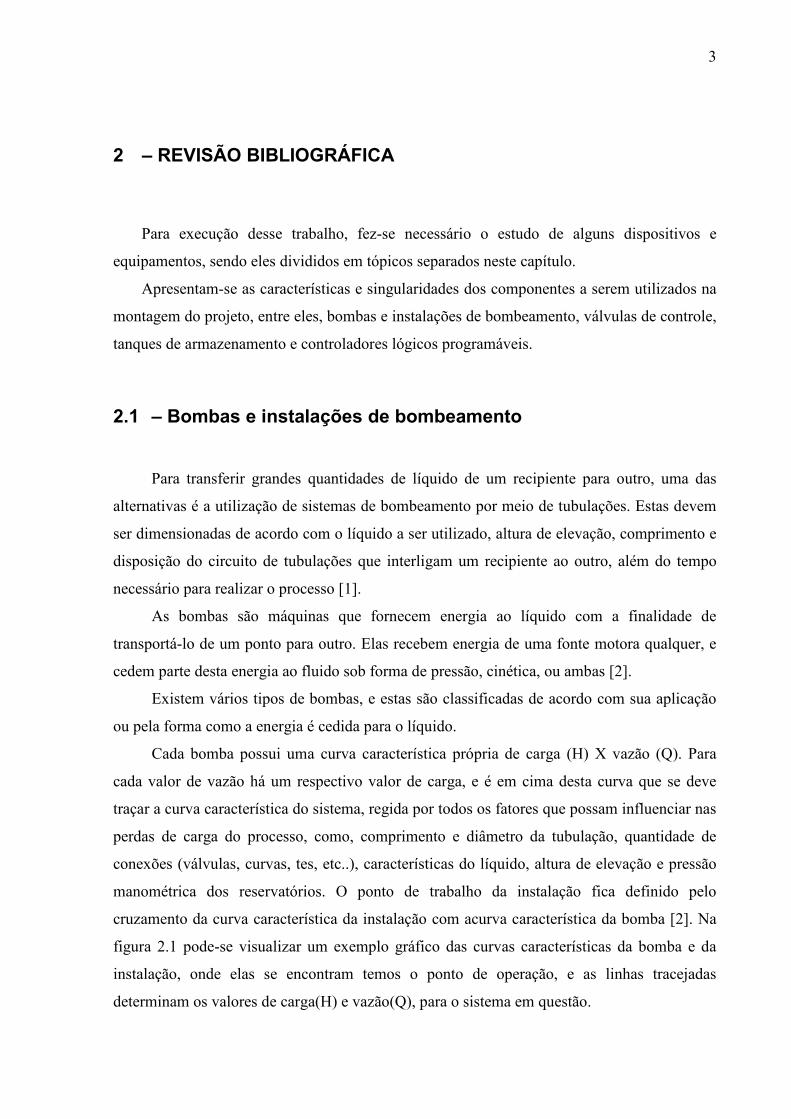
2.1.1 – Bombas centrífugas
A bomba centrífuga é a mais empregada em todos os tipos de transferência de líquidos,
recebe este nome devido à força centrífuga ser responsável pela maior parte da transferência
da energia que o líquido recebe ao atravessar a bomba.
A bomba centrífuga necessita ser previamente preenchida com o líquido a bombear,
todo o ar contido entre eixo, rotor e carcaça deve ser retirado para que ela possa funcionar
corretamente, portanto não se trata de uma bomba auto-aspirante, a não ser que seja instalada
em um nível inferior ao nível do líquido a ser bombeado. Quando este tipo de instalação é
utilizado, é dito que a bomba está “afogada” [1].
Logo que se inicia o movimento do rotor, a força centrífuga decorrente deste
movimento cria uma zona de maior pressão na periferia do rotor, e uma área de baixa pressão
na sua entrada, assim produzindo o deslocamento do líquido em direção ao bocal de recalque.
As figuras 2.2 a 2.5 apresentam exemplos de bombas e rotores centrífugos.
Figura 2.2- Modelo de bomba centrifuga Figura 2.3- Exemplo de posicionamento do rotor
Figura 2.4- Rotor aberto de uma bomba centrifuga Figura 2.5- Rotor fechado de uma bomba centrifuga
5
2.2 – Válvulas
Válvulas são dispositivos de controle do fluxo de um determinado fluído em tubulações.
Existem diversos tipos de válvulas, não só classificadas quanto a sua construção física,
mas também, quanto às características do líquido a controlar: pressão, temperatura,
propriedades químicas, vazão, etc...
Entre os modelos de válvulas mais usadas estão as válvulas de: esfera, gaveta, globo,
retenção, reguladora de pressão, segurança e diafragma, e ainda subdivididas pela natureza de
seu acionamento, que podem ser: manual, hidráulico, elétrico, pneumático e por pressão.
Dependendo das características do fluído a ser controlado ainda pode-se escolher entre
diversos tipos de materiais empregado na construção de válvulas, PVC, aço carbono, aço
inox, bronze etc...
Para o dimensionamento de uma válvula, deve-se levar em conta todas as considerações
citadas anteriormente e também a perda de carga causada por cada uma delas, pois isso
afetará diretamente o cálculo de vazão para o sistema no qual esta será empregada, e se o
controle de abertura e bloqueio tiver que ser feito a distância, será necessária a utilização de
comando elétrico ou pneumático, dependendo do sistema de controle do processo [2].
2.3 – Sensores de nível
Sensores são componentes que captam informações de um determinado processo
automatizado e enviam sinais ao controlador [3]. Um exemplo bem simples pode ser citado:
uma caixa de água abastecida por um sistema de bombeamento elétrico, deve possuir dois
sensores de nível, um superior e um inferior, posicionados em lugares estratégicos. O sensor
inferior indica que o nível de água está muito baixo, podendo comprometer o abastecimento
de água, então envia um sinal ao controle elétrico da bomba que a faz acionar e enviar água
para a caixa, e o sensor superior indicará quando a caixa estiver prestes a transbordar e
enviará um sinal bloqueando o sistema de acionamento da bomba para não haver desperdício
de água.
Os sensores ainda podem ser classificados quanto ao tipo de acionamento:
Sensores de contato com acionamento mecânico: é uma chave elétrica acionada
mecanicamente pelo movimento do objeto ou liquido a ser controlado, através do dispositivo
6
atuador localizado no sensor. Quando o número de atuações do sensor é muito grande, não é
aconselhável seu uso, devido ao desgaste mecânico de seus contatos elétricos.
Sensores de contato com acionamento magnético: É uma chave elétrica acionada pelo
campo magnético de um imã. Este tipo de sensor é utilizado quando se necessita grandes
números de comutações e para aplicação em ambientes com condições ambientais adversas,
como poeira, umidades, óleos, graxa, etc.
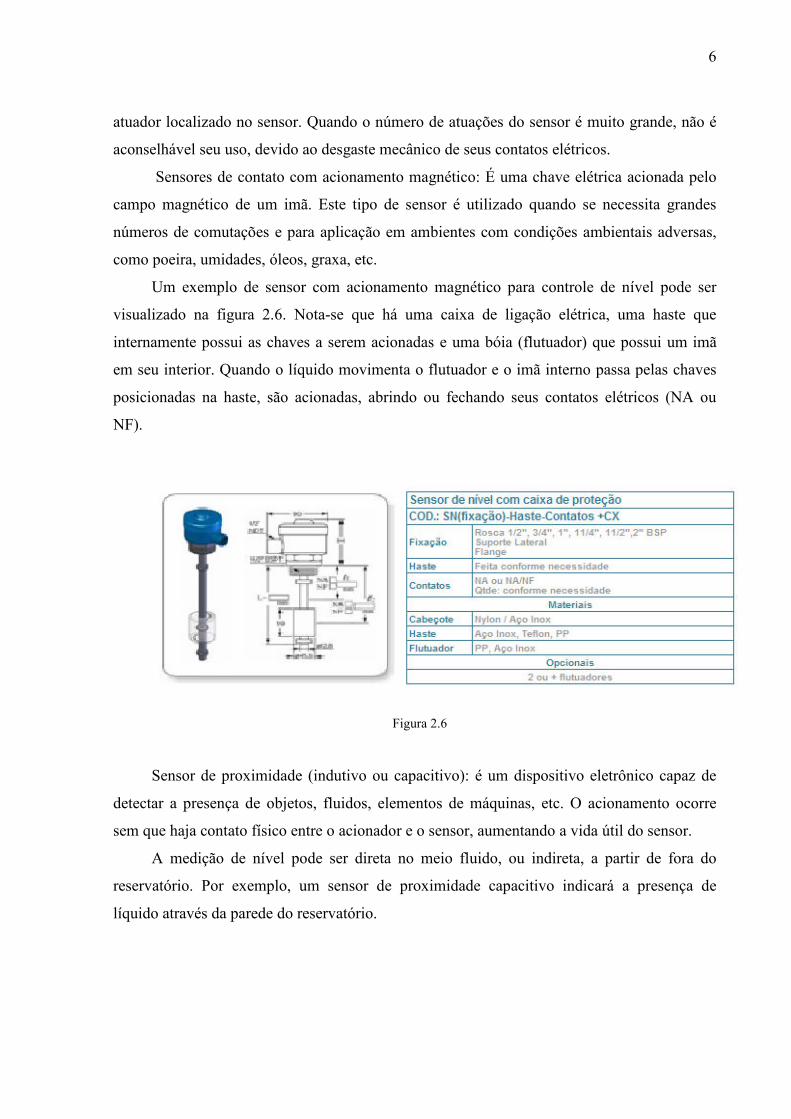
Um exemplo de sensor com acionamento magnético para controle de nível pode ser
visualizado na figura 2.6. Nota-se que há uma caixa de ligação elétrica, uma haste que
internamente possui as chaves a serem acionadas e uma bóia (flutuador) que possui um imã
em seu interior. Quando o líquido movimenta o flutuador e o imã interno passa pelas chaves
posicionadas na haste, são acionadas, abrindo ou fechando seus contatos elétricos (NA ou
NF).
Figura 2.6
Sensor de proximidade (indutivo ou capacitivo): é um dispositivo eletrônico capaz de
detectar a presença de objetos, fluidos, elementos de máquinas, etc. O acionamento ocorre
sem que haja contato físico entre o acionador e o sensor, aumentando a vida útil do sensor.
A medição de nível pode ser direta no meio fluido, ou indireta, a partir de fora do
reservatório. Por exemplo, um sensor de proximidade capacitivo indicará a presença de
líquido através da parede do reservatório.
7
2.4 – Controlador Lógico Programável (CLP)
De acordo com a ABNT (Associação Brasileira de Normas Técnicas), controlador
lógico programável ou simplesmente CLP, é um equipamento eletrônico digital com hardware
e software compatíveis com aplicações industriais.
O CLP revolucionou os comandos e controles industriais desde seu surgimento, que
ocorreu dentro da indústria automobilística na década de 70, substituindo relés
eletromagnéticos destinados ao controle de operações seqüenciadas e repetitivas [4].
Basicamente um CLP apresenta as seguintes características:
• Hardware e dispositivo de controle de rápida programação, com mínima interrupção
da produção.
• Capacidade de operação em ambientes industriais.
• Possibilidade de monitoração da operação do processo, através da comunicação com
computadores.
• Compatibilidade com diferentes tipos de sinais de entrada e saída.
• Hardware de controle que permite a expansão dos diversos tipos de módulos, de
acordo com a necessidade.
• Custos de compra e instalação competitivos em relação aos sistemas de controle
convencionais.
• Possibilidade de expansão de memória.
• Conexão com outros CLP’s através de redes de comunicação.
O CLP é um controlador indicado para lidar com sistemas caracterizados por eventos
discretos, ou seja, com processos em que as variáveis assumem valores zero ou um (variáveis
digitais), podem ainda lidar com variáveis analógicas definidas por intervalos de valores de
corrente ou tensão elétrica.
Num sistema típico, toda a informação dos sensores é concentrada no controlador
(CLP), que de acordo com o programa em memória, define o estado dos pontos de saída
conectados a atuadores [5].
8
3 – METODOLOGIA
A elaboração de coquetel de vinho consiste na mistura de três ingredientes, vinho,
suco de fruta e açúcar invertido (adoçante), nas proporções ideais.
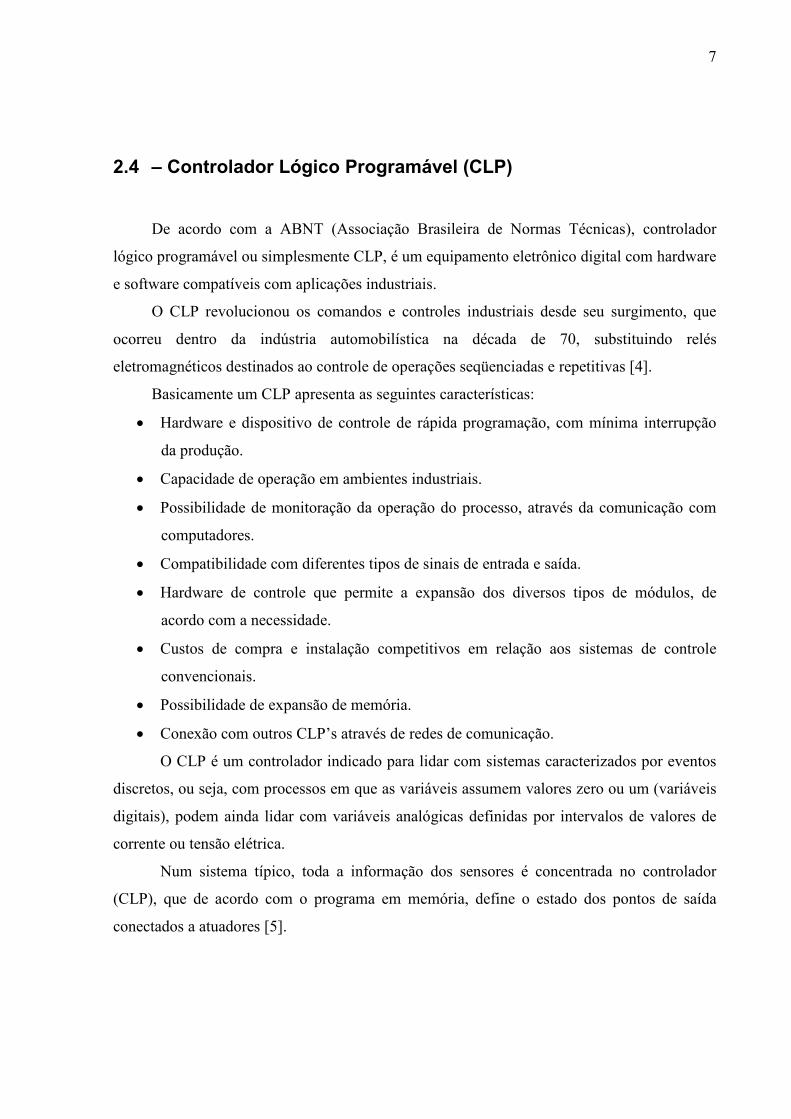
Na planta, é necessário o uso de sete reservatórios, três onde ficarão estocadas as
matérias-primas, três tanques onde é medida a quantidade de cada produto que será dosado, e
um reservatório que armazena o produto final. A figura 3.1 apresenta o diagrama da planta de
coquetel de vinho.
Figura 3.1 - Diagrama da planta para elaboração de coquetel de vinho
Como pode ser visto na figura 3.1, os reservatórios são equipados com dispositivos de
controle (válvulas e sensores) e atuadores (bombas centrifugas e um misturador de pás), que
atuam conforme descritivo a seguir:
Os tanques 1, 2 e 3 são tanques de armazenagem de matéria-prima, onde estocam-se
o vinho, o suco de fruta e o adoçante, respectivamente. Cada um desses reservatórios está
equipado com um sensor de nível, uma válvula solenóide e uma bomba centrífuga. Os
9
sensores s1, s2 e s3 compõem um sistema de segurança. Enquanto eles estiverem indicando
nível satisfatório de matéria prima, o sistema pode ser acionado normalmente, porém caso um
dos sensores acuse nível baixo, o sistema não pode ser iniciado, sendo necessário ser feito um
reabastecimento de matéria-prima para regularizar o processo. Uma lâmpada indica o nível
baixo de produto. Uma vez que o nível de matéria-prima seja suficiente, o processo pode ser
iniciado através de um botão de início, que aciona as válvulas so1, so2, e so3 liberando os
ingredientes do coquetel até as entradas das bombas de recalque. As bombas são acionadas
pelo controlador alguns segundos após o início do processo, e enviam os líquidos para os
tanques 4, 5 e 6 .
Os tanques 4, 5 e 6 são encarregados da medição do volume correto de cada
ingrediente do coquetel. São equipados com sensores de nível alto, s4, s6 e s8, posicionados
estrategicamente nos locais onde o seu acionamento ocorra no instante exato em que o líquido
atingir o volume necessário ao processo. Esses mesmos sensores, quando todos estiverem
acionados, irão bloquear o funcionamento das bombas fechando so1, so2 e so3, e após essa
rotina, abrem as válvulas de saída, so4, so5 e so6, dos tanques dosadores, deixando os fluídos
escoarem pela força da gravidade para o tanque de produto final. Os tanques de dosagem
também possuem sensores de nível baixo, s5, s7 e s9, que indicam quando o escoamento dos
fluidos tiver terminado, quando então o controlador aciona m1, que é o motor de tração do
misturador de pás, que agitará o produto por um tempo determinado, garantindo uma mistura
homogênea, e então desligará, indicando o final do processo. O controle de todo processo é
executado por um CLP (Controlador Lógico Programável).
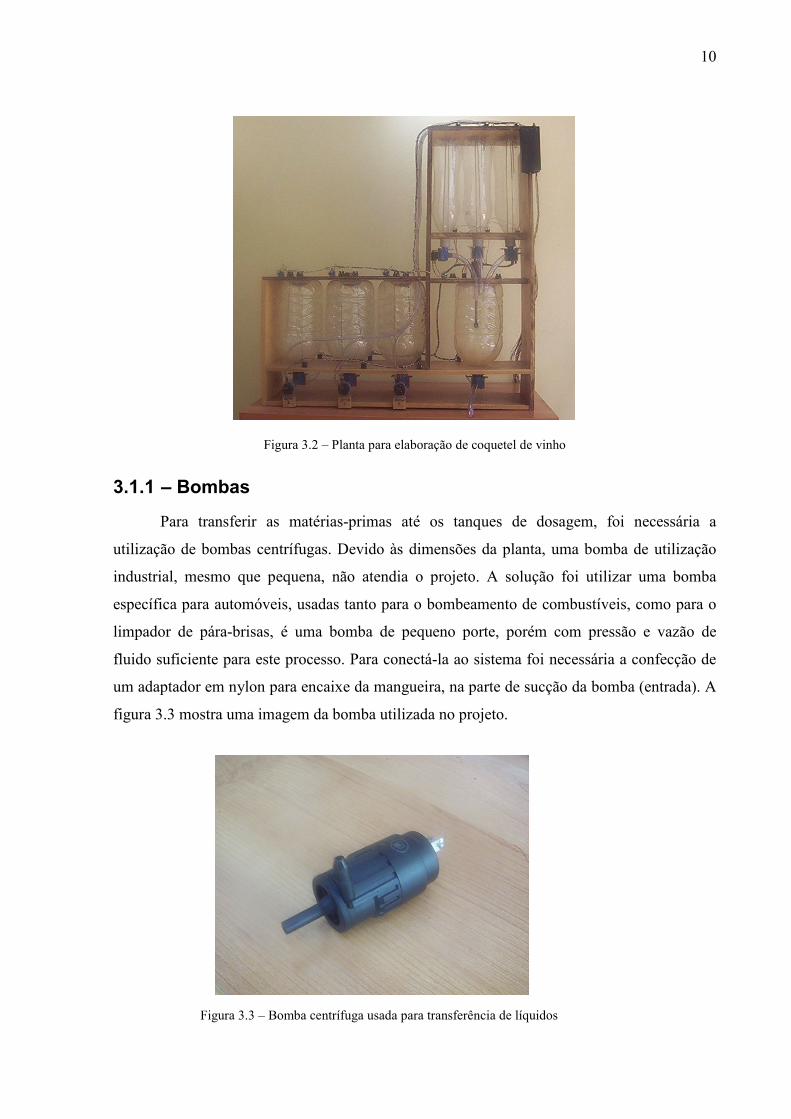
3.1 – Montagem
Para construção do sistema foi montada uma estante de madeira, para acomodar os
reservatórios, de modo que os desníveis entre eles atendessem o projeto, e também para criar
uma estrutura rígida onde foram instalados os componentes de controle, válvulas, bombas,
sensores de nível e batedor de pás, como pode se visto na figura 3.2.
10
Figura 3.2 – Planta para elaboração de coquetel de vinho
3.1.1 – Bombas
Para transferir as matérias-primas até os tanques de dosagem, foi necessária a
utilização de bombas centrífugas. Devido às dimensões da planta, uma bomba de utilização
industrial, mesmo que pequena, não atendia o projeto. A solução foi utilizar uma bomba
específica para automóveis, usadas tanto para o bombeamento de combustíveis, como para o
limpador de pára-brisas, é uma bomba de pequeno porte, porém com pressão e vazão de
fluido suficiente para este processo. Para conectá-la ao sistema foi necessária a confecção de
um adaptador em nylon para encaixe da mangueira, na parte de sucção da bomba (entrada). A
figura 3.3 mostra uma imagem da bomba utilizada no projeto.
Figura 3.3 – Bomba centrífuga usada para transferência de líquidos
11
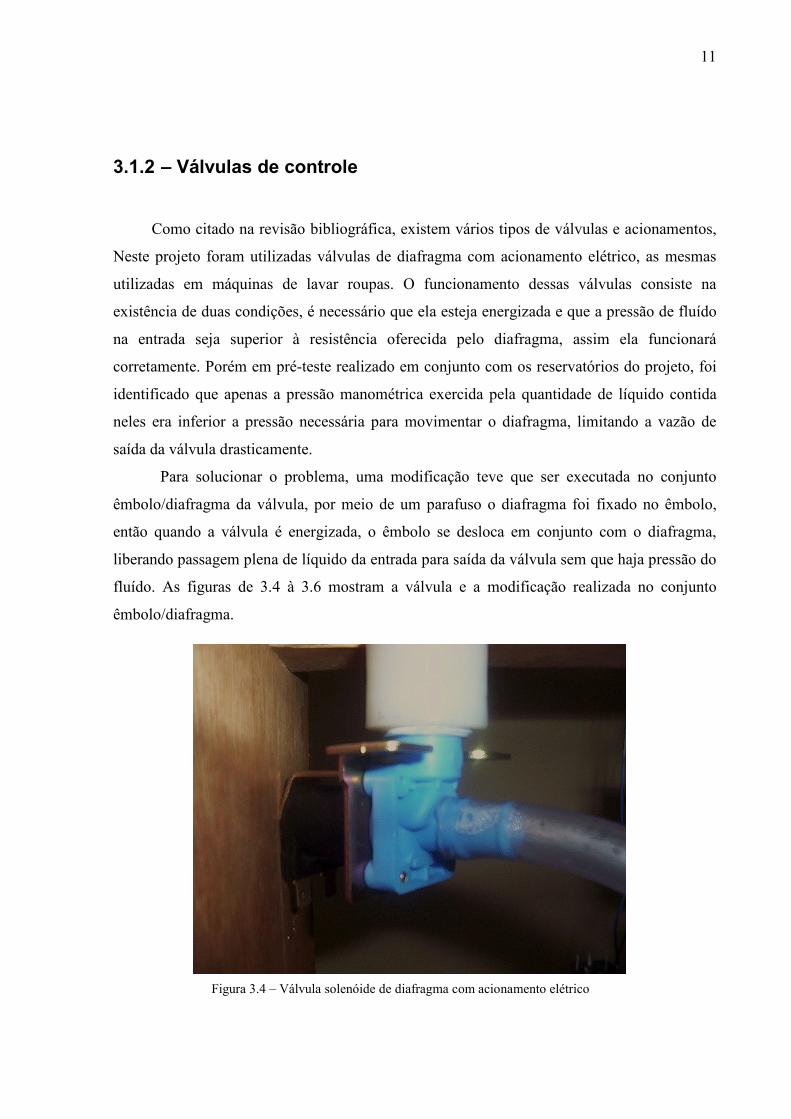
3.1.2 – Válvulas de controle
Como citado na revisão bibliográfica, existem vários tipos de válvulas e acionamentos,
Neste projeto foram utilizadas válvulas de diafragma com acionamento elétrico, as mesmas
utilizadas em máquinas de lavar roupas. O funcionamento dessas válvulas consiste na
existência de duas condições, é necessário que ela esteja energizada e que a pressão de fluído
na entrada seja superior à resistência oferecida pelo diafragma, assim ela funcionará
corretamente. Porém em pré-teste realizado em conjunto com os reservatórios do projeto, foi
identificado que apenas a pressão manométrica exercida pela quantidade de líquido contida
neles era inferior a pressão necessária para movimentar o diafragma, limitando a vazão de
saída da válvula drasticamente.
Para solucionar o problema, uma modificação teve que ser executada no conjunto
êmbolo/diafragma da válvula, por meio de um parafuso o diafragma foi fixado no êmbolo,
então quando a válvula é energizada, o êmbolo se desloca em conjunto com o diafragma,
liberando passagem plena de líquido da entrada para saída da válvula sem que haja pressão do
fluído. As figuras de 3.4 à 3.6 mostram a válvula e a modificação realizada no conjunto
êmbolo/diafragma.
Figura 3.4 – Válvula solenóide de diafragma com acionamento elétrico
12
Figura 3.5 – Conjunto êmbolo/diafragma original Figura 3.6 – Conjunto êmbolo/diafragma modificado
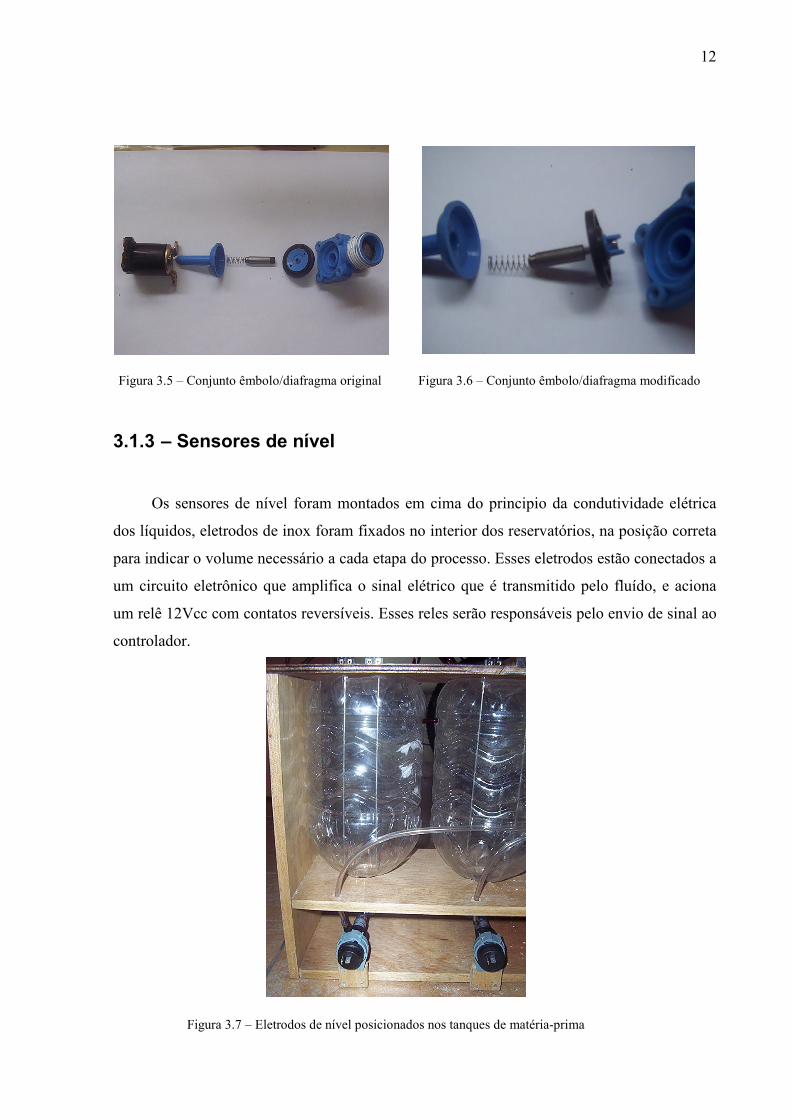
3.1.3 – Sensores de nível
Os sensores de nível foram montados em cima do principio da condutividade elétrica
dos líquidos, eletrodos de inox foram fixados no interior dos reservatórios, na posição correta
para indicar o volume necessário a cada etapa do processo. Esses eletrodos estão conectados a
um circuito eletrônico que amplifica o sinal elétrico que é transmitido pelo fluído, e aciona
um relê 12Vcc com contatos reversíveis. Esses reles serão responsáveis pelo envio de sinal ao
controlador.
Figura 3.7 – Eletrodos de nível posicionados nos tanques de matéria-prima
13
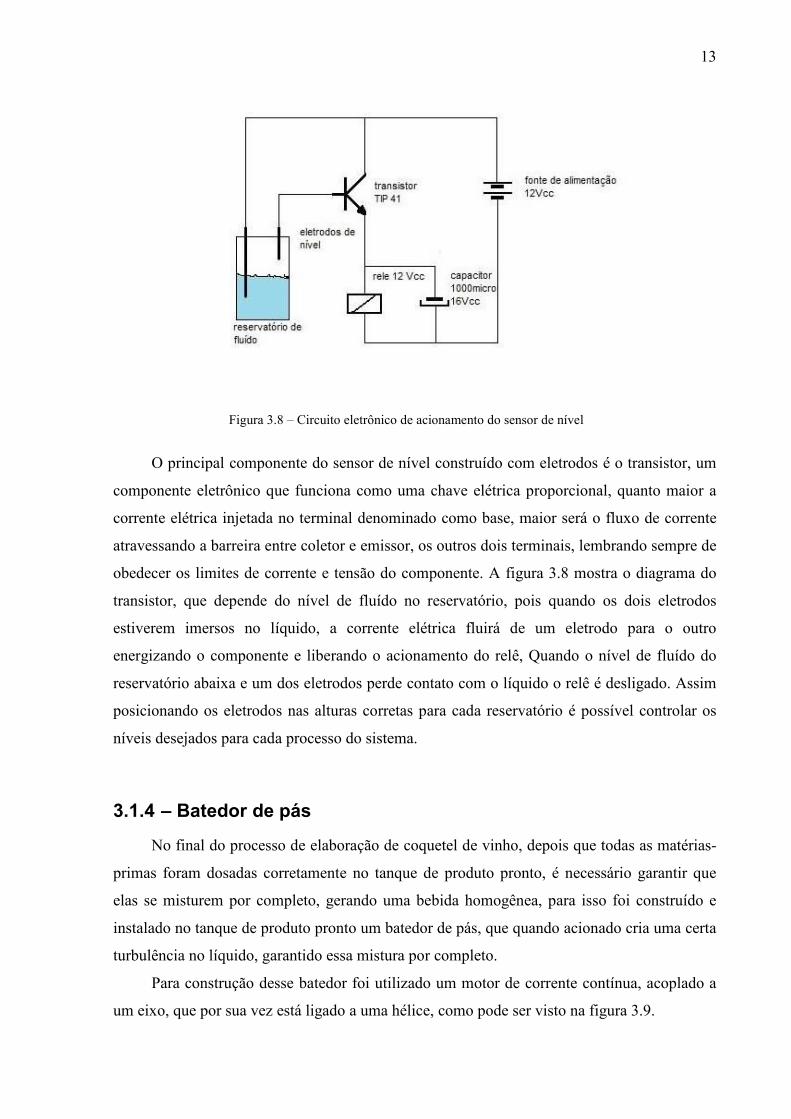
Figura 3.8 – Circuito eletrônico de acionamento do sensor de nível
O principal componente do sensor de nível construído com eletrodos é o transistor, um
componente eletrônico que funciona como uma chave elétrica proporcional, quanto maior a
corrente elétrica injetada no terminal denominado como base, maior será o fluxo de corrente
atravessando a barreira entre coletor e emissor, os outros dois terminais, lembrando sempre de
obedecer os limites de corrente e tensão do componente. A figura 3.8 mostra o diagrama do
transistor, que depende do nível de fluído no reservatório, pois quando os dois eletrodos
estiverem imersos no líquido, a corrente elétrica fluirá de um eletrodo para o outro
energizando o componente e liberando o acionamento do relê, Quando o nível de fluído do
reservatório abaixa e um dos eletrodos perde contato com o líquido o relê é desligado. Assim
posicionando os eletrodos nas alturas corretas para cada reservatório é possível controlar os
níveis desejados para cada processo do sistema.
3.1.4 – Batedor de pás
No final do processo de elaboração de coquetel de vinho, depois que todas as matérias-
primas foram dosadas corretamente no tanque de produto pronto, é necessário garantir que
elas se misturem por completo, gerando uma bebida homogênea, para isso foi construído e
instalado no tanque de produto pronto um batedor de pás, que quando acionado cria uma certa
turbulência no líquido, garantido essa mistura por completo.
Para construção desse batedor foi utilizado um motor de corrente contínua, acoplado a
um eixo, que por sua vez está ligado a uma hélice, como pode ser visto na figura 3.9.
14
Figura 3.9 – Batedor de pás para mistura do produto pronto
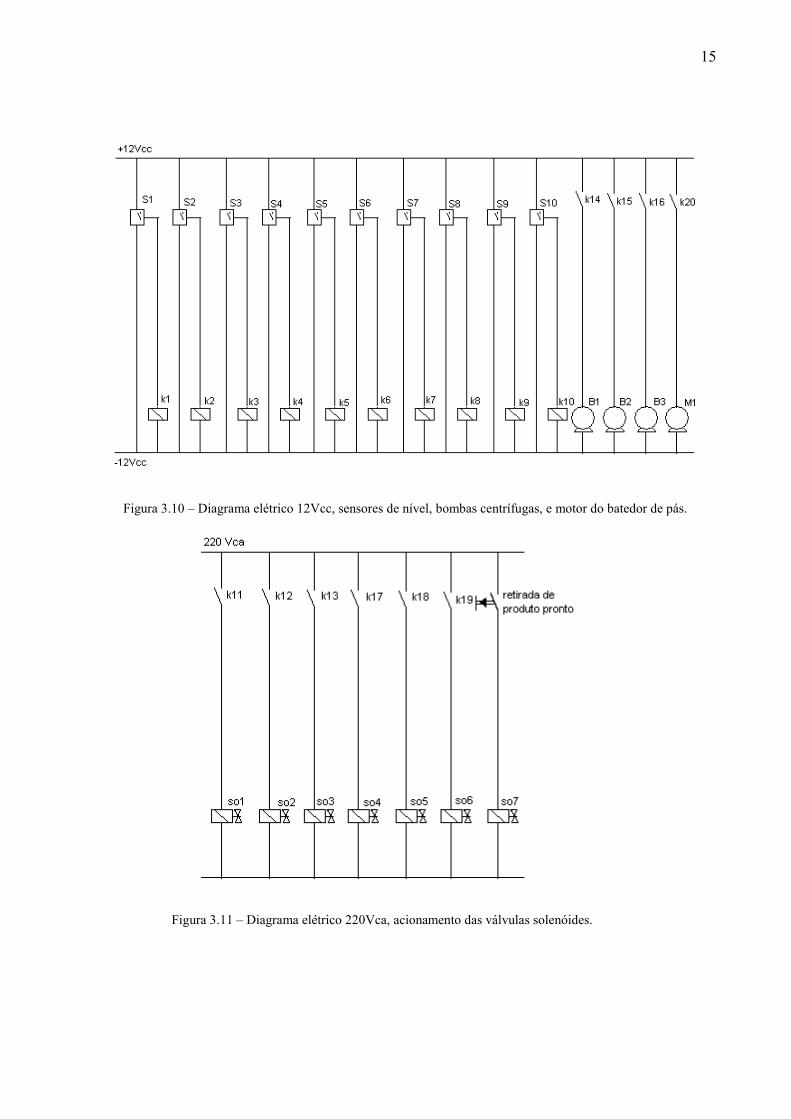
3.1.5 – Interfaces elétricas
Os equipamentos utilizados no projeto, não possuem um padrão de alimentação elétrica,
os sensores de nível funcionam com 12 Vcc, as bombas centrífugas e o motor do batedor de
pás, também são alimentados com 12 Vcc, porém, as válvulas solenóides têm acionamento
elétrico de 220 Vca. O CLP utilizado na montagem trabalha com entradas e saídas no valor de
24 Vcc “NPN”, então para realizar as ligações elétricas foram necessários a utilização de
relés. O sistema de sensoriamento foi montado individualmente, alimentado por 12 volts,
acionando os relés, e o contato desses relés que, alimentado por 24 volts, acionam as entradas
digitais do controlador. As saídas do CLP também foram acopladas ao sistema por meio de
relés, estes alimentados por 24 volts, e o contato do mesmo alimentando os atuadores com o
valor de tensão correspondente. A figura 3.10 mostra o diagrama de ligação para o circuito 12
Vcc que alimenta o sistema de sensores, as bombas centrífugas, e o motor do batedor de pás.
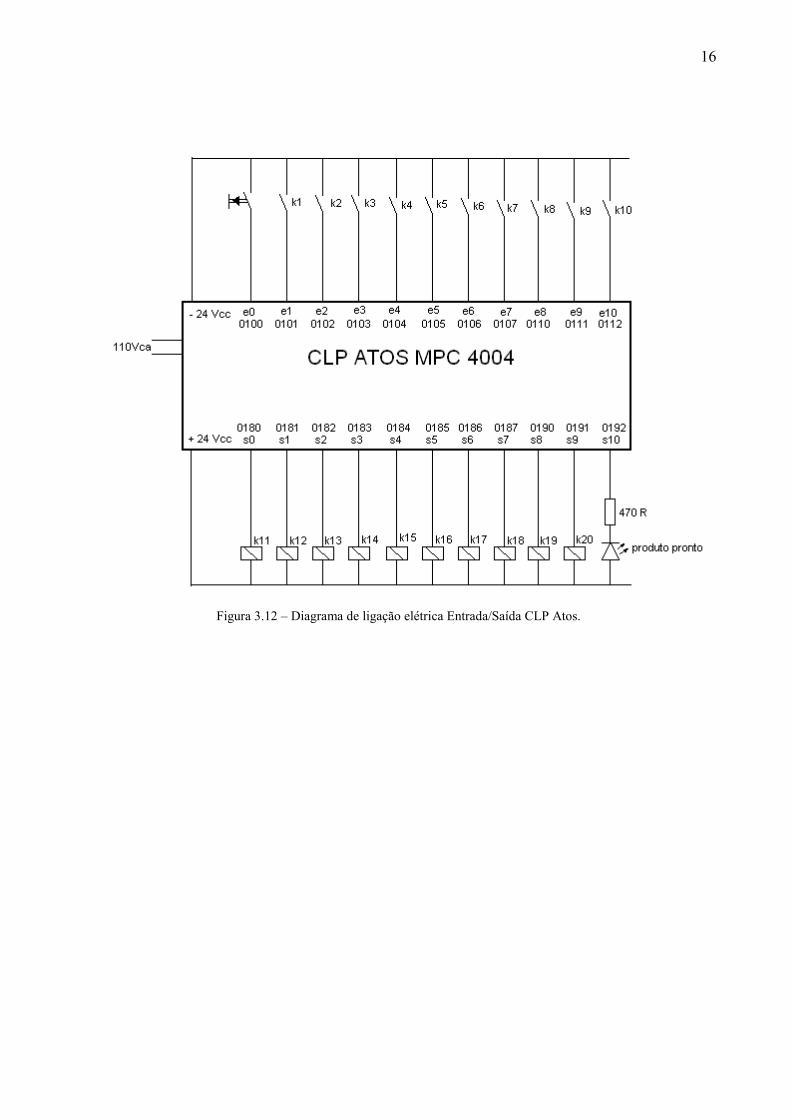
Na figura 3.11 está representado o circuito elétrico 220 Vca, responsável pelo funcionamento
das válvulas solenóides, e na figura 3.12 o acoplamento dos relés de interface entre todo o
sistema e o controlador lógico programável.
15
Figura 3.10 – Diagrama elétrico 12Vcc, sensores de nível, bombas centrífugas, e motor do batedor de pás.
Figura 3.11 – Diagrama elétrico 220Vca, acionamento das válvulas solenóides.
16
Figura 3.12 – Diagrama de ligação elétrica Entrada/Saída CLP Atos.
17
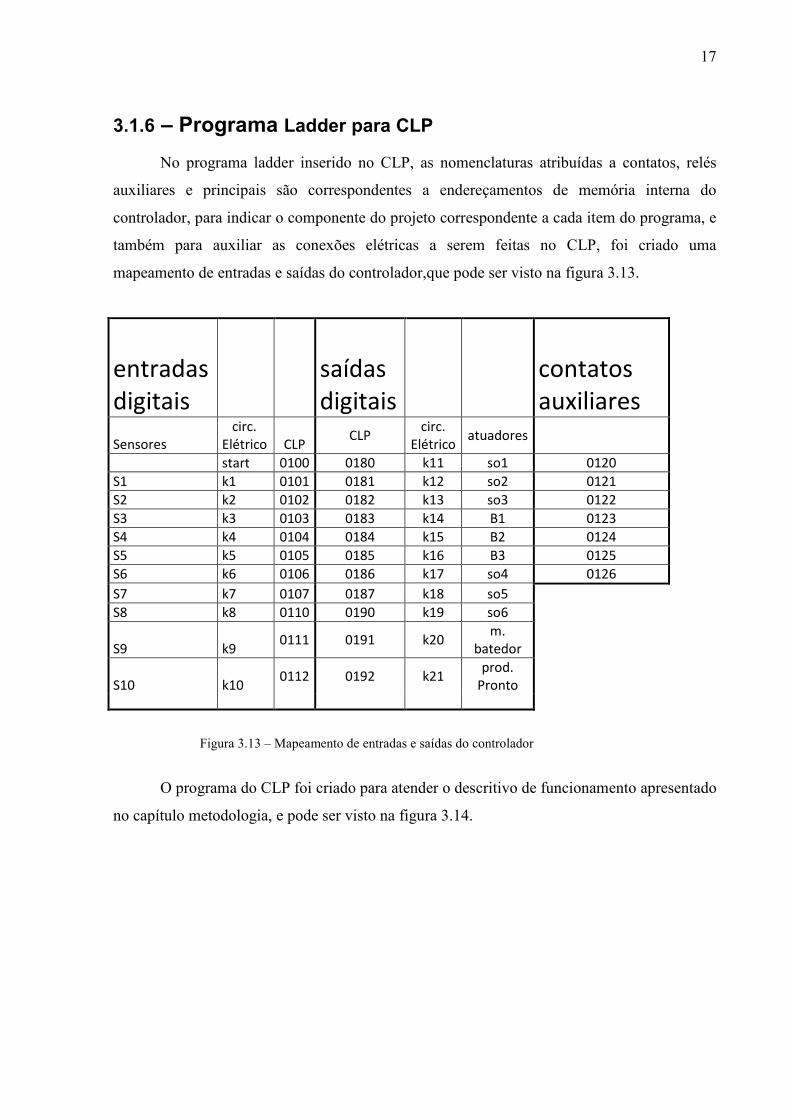
3.1.6 – Programa Ladder para CLP
No programa ladder inserido no CLP, as nomenclaturas atribuídas a contatos, relés
auxiliares e principais são correspondentes a endereçamentos de memória interna do
controlador, para indicar o componente do projeto correspondente a cada item do programa, e
também para auxiliar as conexões elétricas a serem feitas no CLP, foi criado uma
mapeamento de entradas e saídas do controlador,que pode ser visto na figura 3.13.
Figura 3.13 – Mapeamento de entradas e saídas do controlador
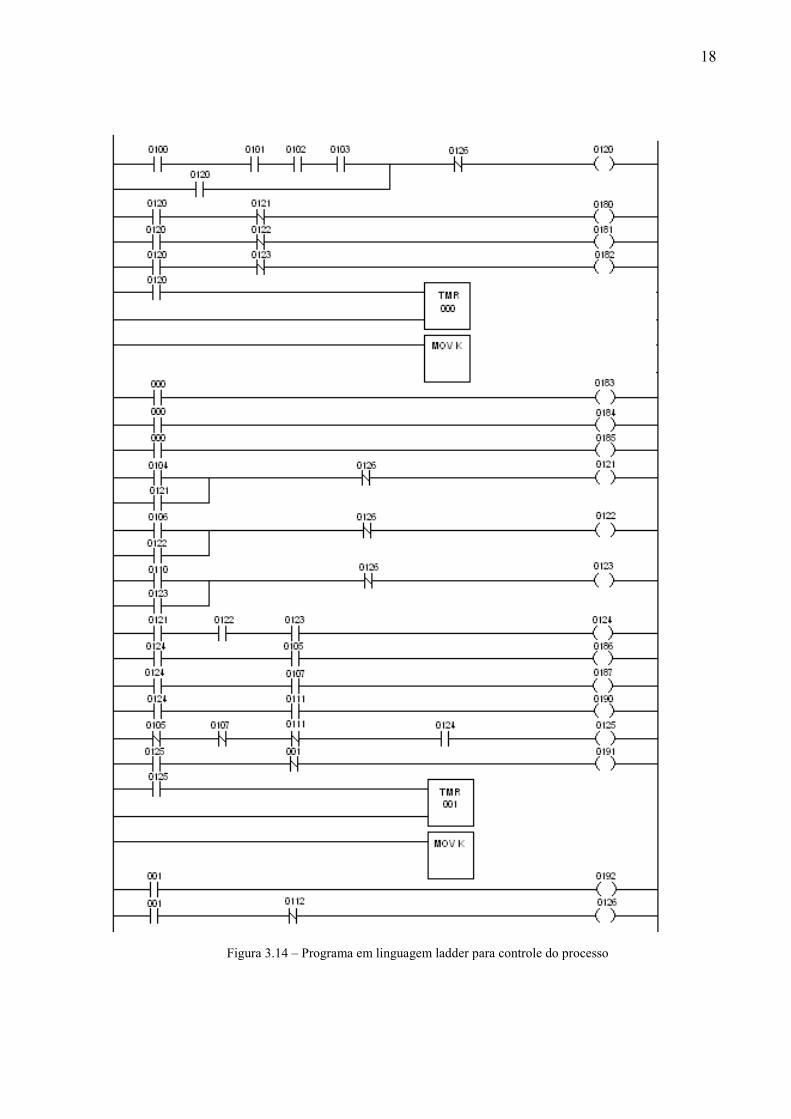
O programa do CLP foi criado para atender o descritivo de funcionamento apresentado
no capítulo metodologia, e pode ser visto na figura 3.14.
entradas
digitais
saídas
digitais
contatos
auxiliares
Sensores
circ.
Elétrico
CLP CLP
circ.
Elétrico atuadores
start 0100 0180 k11 so1 0120
S1 k1 0101 0181 k12 so2 0121
S2 k2 0102 0182 k13 so3 0122
S3 k3 0103 0183 k14 B1 0123
S4 k4 0104 0184 k15 B2 0124
S5 k5 0105 0185 k16 B3 0125
S6 k6 0106 0186 k17 so4 0126
S7 k7 0107 0187 k18 so5
S8 k8 0110 0190 k19 so6
S9 k9 0111 0191 k20
m.
batedor
S10 k10 0112 0192 k21
prod.
Pronto
18
Figura 3.14 – Programa em linguagem ladder para controle do processo
19
4 – CONCLUSÃO
Após realizar a construção física do projeto, deu-se inicio a etapa de testes, foram
inspecionados componentes por componentes individualmente, simulando uma situação de
funcionamento real, realizando acionamentos e verificando itens como atuação, vazamentos e
funcionamento em geral. Depois de constatado o perfeito funcionamento dos componentes, a
planta foi conectada ao CLP, este, com o programa de controle já inserido.
Realizando o teste por completo foi possível verificar que objetivo do projeto foi
alcançado, pois automaticamente a planta de elaboração de coquetel de vinho misturou os três
ingredientes necessários, bombas, válvulas, sensores de nível e batedor de pás, realizaram o
trabalho desejado em toda etapa do processo.
Para verificar o funcionamento do programa, quanto às suas lógicas de controle, foram
simuladas situações em que ele deveria restringir o funcionamento do sistema, e em algumas
ocasiões alarmar o painel de controle com um sinal luminoso, e este funcionou corretamente.
Analisando os resultados desses testes é possível afirmar que o sistema de controle
utilizado nessa pequena planta pode ser utilizado em escalas industriais, somente sendo
necessária a implantação de sensores, bombas e válvulas compatíveis com o volume
necessário e tempo de elaboração que se deseja no processo.
Nestes testes realizados foram identificados alguns pontos que devem sofrer
modificação para melhorar o sistema, o que pode servir de assunto para uma extensão de
projeto, como por exemplo:
• Para evitar desperdícios de matéria prima é possível construir um sistema de
redundância de sensores, caso ocorra a falha de um sensor, um sensor “reserva”
cuidará para que o processo não seja prejudicado por isso.
• No painel de controle deve ser inserido um botão de emergência para que seja possível
pausar e reiniciar o processo em qualquer momento de funcionamento, auxiliando
caso seja necessário efetuar pequenas correções na elaboração.
• Um sistema de limpeza deve ser incluído na planta, utilizando um processo de controle
manual do esgotamento de cada tanque, para que seja possível efetuar a limpeza dos
componentes e tanques, enxaguar até retirar todo resíduo de produtos de limpeza e
iniciar um processo de elaboração de coquetel de vinho.
20
5 - REFERÊNCIAS BIBLIOGRÁFICAS
1- FALCO, Reinaldo de. MATTOS, Edson Ezequiel de. Bombas industriais. 2ª edição,
editora Interciência, 1998.
2- MACINTYRE, Archibald Joseph. Bombas e instalações de bombeamento. 2ª
edição, editora LTC, 1997.
3- GEORGINI, Marcelo. Automação aplicada. Editora Érica, 2000.
4- NATALE, Ferdinando. Automação industrial. Editora Érica, 1995.
5- UNIVERSIDADE FEDERAL DE MINAS GERAIS. Endereço. www.demec.ufmg.br.
Acessado em 13/03/2009