Embed Size (px)
Citation preview

Departamento de Matemática Pura e Aplicada - UFRGSLista de Exercícios de MAT01032 - Área 2
Prof. João Batista Carvalho
7 de junho de 2016

2
Principais funções nativas no Scilab para uso em Cálculo Numérico (use help nomepara saber mais)
abs valor absoluto para reais e módulo para complexosacos arcocosseno em radianos
acosh arcocosseno hiperbólicoasin arcosseno em radianos
asinh arcoseno hiperbólicoatan arcotangente em radianos
atan2 arcotangente de 4 quadrantes, em radianosceil menor inteiro maior ou igual a um número real
conj conjugado de um número complexocontour plota curvas de nível em janela gráfica
cos cosseno de arco em radianoscosh cosseno hiperbólicocotg cotangente de arco em radianosexp exponencial com base de Eulerexp exponencial matricial
feval avalia uma função sobre os elementos de um arrayfloor maior inteiro menor ou igual a um número real
interp avalia splines cúbicos e suas derivadasintg integração numérica (técnica desconhecida)log logaritmo natural
log10 logaritmo decimallog2 logaritmo bináriomax valor máximo de um array
maxi posição onde max ocorre pela primeira vezmesh plota superfícies em janela gráfica
min valor mínimo de um arraymini posição onde min ocorre pela primeira vez
modulo resto da divisão inteiraplot plota arrays em janela gráfica
plot2d plota arrays em janela gráfica, com opçõespoly define polinômio literal
power potência real
round arredonda para inteiro mais próximosign função sinal (derivada da função módulo)sin seno de arco em radianos
sinh seno hiperbólicosqrt raiz quadrada
splin calcula inclinações de spline cúbicotan tangente de arco em radianos
tanh tangente hiperbólica
unid Planeje/registre aqui seu trabalho nesta lista
4
4.1.1 4.1.2 4.1.3 4.1.4 4.1.5 4.1.6 4.1.7 4.1.8 4.1.94.2.1 4.2.2 4.2.3 4.2.4 4.2.5 4.2.6 4.2.7 4.2.8 4.2.9 4.2.10
4.2.11 4.2.12 4.2.13 4.2.14 4.2.15 4.2.164.3.1 4.3.2 4.3.3 4.3.4 4.3.5 4.3.6 4.3.7 4.3.8
55.1.1 5.1.2 5.1.3 5.1.4 5.1.5 5.1.6 5.2.1 5.2.2 5.2.3 5.2.45.2.5 5.2.6 5.2.7 5.3.1 5.3.2 5.3.3 5.3.4 5.3.55.4.1 5.4.2 5.4.3 5.4.4 5.4.5
66.1.1 6.1.2 6.1.3 6.1.4 6.1.5 6.1.6 6.1.7 6.1.8 6.1.9 6.1.106.2.1 6.2.2 6.2.3 6.2.4 6.2.5 6.2.6 6.2.7 6.2.8 6.2.9 6.2.106.3.1 6.3.2 6.3.3 6.3.4 6.3.5 6.3.6 6.3.7
77.1.1 7.1.2 7.1.3 7.1.4 7.1.5 7.1.6 7.1.7 7.1.8 7.1.9 7.1.10
7.1.11 7.1.12 7.1.13 7.1.14 7.1.15 7.1.16

Capítulo 4
Interpolação e Ajuste de Curvas - UFRGS
4.1 Interpolação Polinomial Clássica
Exercício 4.1.1 : Polinômio Interpolador no formato de LagrangeDado um conjunto de dados {(x0, y0), . . . , (xn, yn)}, o polinômio de Lagrange é um
interpolador que pertence ao espaço vetorial Pn dos polinômios de grau menor ou igual an, e é representado por
φ(x) =
n∑
i=0
yiLi(x), onde Li(x) =∏
0≤j≤n,j 6=i
x− xj
xi − xj.
Resolve, com unicidade, o problema de interpolação em Pn1, desde que os valores {xi}
sejam distintos. PEDE-SE: interpole a tabela abaixo em x = 2.5, usando polinômio deLagrange.
x 2.0 2.2 2.4 2.6 2.8f(x) .5104 .5208 .5104 .4813 .4359
Exercício 4.1.2 Interpole a tabela abaixo em x = 1.09, usando a interpoladora Lagrange-ana
x 1.00 1.05 1.10 1.15f(x) .1924 .2414 .2933 .2033
Exercício 4.1.3 : Interpole a tabela abaixo (onde y é função de x), para x = 1.22, usandoseu respectivo polinômio de Lagrange.
x 1.0 1.1 1.2 1.3 1.4y 1.0000 1.23368 1.55271 1.99372 2.61170
1existe um único polinômio em Pn, isto é, de grau ≤ n que interpola cada tabela dada
Exercício 4.1.4 Em um processo de solubilização, os valores de variáveis t (em minutos) ec (concentração em gramas por litro), onde c = f(t), são mostrados na tabela abaixo.
t 0 1 2 3 4 5 6c 0.582 0.781 1.381 2.782 1.583 1.550 1.552
Aproxime f(3.5) usando a interpoladora Lagrangeana.
Exercício 4.1.5 : Diferenças Divididas e a forma de NewtonDada a amostragem, ou tabela, (xi, f(xi)), i = 0, 1, . . . , n de uma função desconhecida
f , definimos a diferença dividida (de primeira ordem) de f entre xi e xi+1 por f [xi, xi+1] =f(xi+1)− f(xi)
xi+1 − xi, quantidade esta que fundamenta-se na noção de variação média de uma
função em um intervalo. A seguir, usamos as diferenças de primeira ordem para gerar
diferenças divididas de segunda ordem: f [xi, xi+1, xi+2] =f [xi+1, xi+2]− f [xi, xi+1]
xi+2 − xi, e
assim por diante, para ordens mais altas. A forma de Newton via diferenças divididas parao polinômio interpolador de grau ≤ n sobre (xi, f(xi)), k = 0, . . . , n é dada por
φ(x) = f(x0) + f [x0, x1](x− x0) + f [x0, x1, x2](x− x0)(x− x1) +f [x0, x1, x2, x3](x− x0)(x− x1)(x− x2)++ . . .+ f [x0, . . . , xn](x− x0) . . . (x− xn−1).
Interpole a tabela abaixo em x = 1.09, usando e apresentando a tabela de diferençasdivididas.
x 1.00 1.05 1.10 1.15f(x) .1924 .2414 .2933 .2033
Compare com a resposta do Exercicio 4.1.2.
3

4 CAPÍTULO 4. INTERPOLAÇÃO E AJUSTE DE CURVAS - UFRGS
Exercício 4.1.6 : Interpole a tabela abaixo para x = 1.2, usando diferenças divididas.
x 1.00 1.10 1.25 1.3 1.35 1.40f(x) -1.0000 -1.0515 -0.8545 -0.6811 -0.4367 -0.1098
Exercício 4.1.7 : A tabela abaixo mostra a população recenseada (P ) de um certo país,em milhões, durante certo período do século passado.
t 1920 1930 1940 1950 1960 1970P 105.711 123.203 131.669 150.697 179.323 203.212
(a) Usando o polinômio interpolador de Lagrange na forma de Newton, usando diferençasdivididas, interpole a população nos anos 1925, 1955 e 1965;
(b) Estime a população nos anos 1910 e 2000. Têm algum sentido essas respostas ?
Exercício 4.1.8 Abaixo relacionamos a temperatura T (Celsius) com a pressão de vaporP (Psig) do gás R134-A:
T -12 -9 -6 -3 0P 12.21 15.59 19.31 23.37 27.79
PEDE-SE: interpolar P para T = −5 graus Celsius, usando diferenças divididas. Apre-sente a respectiva tabela de diferenças.
Exercício 4.1.9 : A figura ao lado mostra os resultadosde um exercício de tiro ao alvo, onde 100 pessoas tenta-ram acertar o centro de um conjunto de círculos de raiosmúltiplos de 1 dm.A tabela abaixo relaciona distância máxima ao centro (x)com probabidade acumulada P :
7203020107
x 1 2 3 4 5 6P 0.07 0.27 0.57 0.77 0.87 0.94
PEDE-SE aproximar P para x = 2.2dm, usando diferenças divididas de Newton. Apresentea tabela de diferenças usada.
4.2 Interpolação Segmentada
Exercício 4.2.1 Uma interpoladora linear segmentada φ(x) sobre um conjunto de dados{(x0, y0), . . . , (xn, yn)} é uma função definida como um segmento de reta em cada inter-valo [xi−1, xi], i = 1, 2, . . . , n. Por simplicidade, definimos
φi(x) =(x− xi)yi−1
xi−1 − xi+
(x− xi−1)yixi − xi−1
. (4.1)
PEDE-SE: Resolva o exercício 4.1.1 usando interpolação segmentada linear.
Exercício 4.2.2 Uma interpoladora cúbica segmentada φ(x) sobre um conjunto de dados{(x0, y0), . . . , (xn, yn)} é uma função definida como um polinômio de grau menor ou iguala três (cúbica) em cada intervalo [xi−1, xi], i = 1, 2, . . . , n. A estratégia de Hermite define
φi(x) = f(xi−1)si(x) + f(xi)ri(x) + di−1si(x) + diri(x)
onde
si(x) =2
h3i
(x− xi)2
(
x− xi−1 +hi
2
)
, si(x) =1
h2i
(x− xi−1)(x− xi)2 (4.2)
ri(x) =−2h3i
(x− xi−1)2
(
x− xi −hi
2
)
, ri(x) =1
h2i
(x− xi−1)2(x− xi) (4.3)
e onde os parâmetros di, i = 0, 1, 2, . . . , n, que estão livres, podem ser escolhidos usandodiferenças divididas sobre os dados. A escolha mais comum é
d0 =y1 − y0
h1, dn =
yn − yn−1
hn(4.4)
di =yi+1 − yi−1
hi+1 + hi, i = 1, 2, . . . , n− 1 (4.5)
embora outras aproximações, como
d0 =y1 − y0
h1, dn =
yn − yn−1
hn(4.6)
di =
yi+1 − yihi+1/hi
+yi − yi−1
hi/hi+1
hi + hi+1, i = 1, 2, . . . , n− 1 (4.7)
sejam usadas. PEDE-SE: Resolva o exercício 4.1.1 usando interpolação segmentadacúbica com parâmetros de inclinação satisfazendo (4.4) e (4.5).
Exercício 4.2.3 : Resolva o exercício 4.1.3 usando (a) interpolação segmentada linear, (b)interpolação segmentada cúbica com parâmetros de inclinação satisfazendo (4.4) e (4.5).
Exercício 4.2.4 : Resolva o exercício 4.1.5 usando (a) interpolação segmentada linear, (b)interpolação segmentada cúbica com parâmetros de inclinação satisfazendo (4.4) e (4.5).
Exercício 4.2.5 : Resolva o exercício 4.1.6 usando (a) interpolação segmentada linear, (b)interpolação segmentada cúbica com parâmetros de inclinação satisfazendo (4.6) e (4.7).

4.3. AJUSTE DISCRETO VIA MÍNIMOS QUADRADOS 5
Exercício 4.2.6 : Resolva o exercício 4.1.7 usando (a) interpolação segmentada linear, (b)interpolação segmentada cúbica com parâmetros de inclinação satisfazendo (4.4) e (4.5).
Exercício 4.2.7 : A tabela abaixo mostra a evolução no tempo da posição de um automóvelao longo de uma rodovia aproximadamente reta. Posição e velocidade são medidas pormeio de um radar.
tempo (min) 0 10 25 30 42 50 60posição (Km) 8 20 27 30 45 69 78
velocidade (Km/h) 15 35 20 55 48 45 48
Qual a posição do automóvel 37 minutos após a partida, quando foi visualmente avistadopor uma testemunha ?
Exercício 4.2.8 : A tabela abaixo mostra a evolução no tempo da quantidade de um gásque toma parte de uma reação química. O gás, que é consumido pela reação, e é reposto auma taxa constante, tem concentração e respectiva taxa de variação medidos por meio deequipamentos.
tempo (s) 0 1 2 4 6 7 8concentração (mol/ℓ) 1.0 1.8 2.3 1.1 0.3 1.2 1.0
Encontre a concentração de gás no instante 3s usando interpolação cúbica segmentada, e asequações (4.6) e (4.7).
Exercício 4.2.9 : Splines Cúbicos Naturais. Um caso particular da interpolação cúbicasegmentada de Hermite atenta para determinar as inclinações di, i = 0, 1, . . . , n que ga-rantam continuidade na derivada segunda da interpoladora, isto é, φ′′
i (xi) = φ′′i+1(xi),
i = 1, 2, . . . , n− 1. Neste caso, a interpoladora é chamada de Spline, e resulta um sistemalinear com n − 1 equações nas n + 1 incógnitas d0, d1, . . . , dn. Portanto 2 equações de-vem ser adicionadas para definir cada tipo de Spline. Splines Cúbicos Naturais satisfazemφ′′(x0) = 0 e φ′′(xn) = 0.
O vetor das incógnitas d0, . . . , dn pode ser calculado em Scilab viavd = splin([x0, x1, . . . , xn], [y0, y1, . . . , yn],
′ natural′);PEDE-SE: Encontre a concentração de gás, no instante 3s, do Exercício 4.2.8, usando
interpolação por splines cúbicos naturais.
Exercício 4.2.10 : Resolva o exercício 4.1.1 usando interpolação por splines cúbicos na-turais.
Exercício 4.2.11 : Resolva o exercício 4.1.3 usando interpolação por splines cúbicos na-turais.
Exercício 4.2.12 : Resolva o exercício 4.1.5 usando interpolação por splines cúbicos na-turais.
Exercício 4.2.13 : Splines Cúbicos Armados. São curvas spline que satisfazem as 2 condi-ções adicionais d0 = α e dn = β, onde α e β são dados.
O vetor das incógnitas d0, . . . , dn pode ser calculado em Scilab viavd = splin([x0, x1, . . . , xn], [y0, y1, . . . , yn],
′ clamped′, [α, β]);PEDE-SE: Encontre a concentração de gás, no instante 3s, do Exercício 4.2.8, usando
interpolação por splines cúbicos armados com derivadas nos extremos dados por diferençasdivididas de primeira ordem.
Exercício 4.2.14 : Resolva o exercício 4.1.4 usando interpolação segmentada via SplineCúbico Armado, com α e β dados por diferenças divididas.
Exercício 4.2.15 : Splines Cúbicos Periódicos. Quando a tabela de dados verifica y0 =yn, splines cúbicos periódicos são curvas spline que satisfazem as 2 condições adicionaisperiódicas d0 = dn e φ′
1(x0) = φ′n(xn).
O vetor das incógnitas d0, . . . , dn pode ser calculado em Scilab viavd = splin([x0, x1, . . . , xn], [y0, y1, . . . , yn],
′ periodic′);PEDE-SE: Encontre a concentração de gás, no instante 3s, do Exercício 4.2.8, usando
interpolação por splines cúbicos periódicos.
Exercício 4.2.16 Em um processo de solubilização, os valores de variáveis t (em minutos)e c (concentração em gramas por litro), são mostrados na tabela abaixo.
t 0 1 2 4 5 6c 0.58 0.78 1.38 0.98 0.68 0.58
Encontre c para t = 3 usando splines cúbicos periódicos.
4.3 Ajuste Discreto via Mínimos Quadrados
Exercício 4.3.1 : Regressão Linear via Mínimos Quadrados. Dado um conjunto de dados(xi, yi), i = 0, 1, . . . , n, e um modelo de dependência y = ax+b, podemos obter um sistemalinear Ax = b com n equações e 2 incógnitas, que normalmente, por ser sobredeterminado,não possui soluções. Sendo A = QR a decomposição QR magra2 (econômica) da matrizde coeficientes A (A deve ter posto máximo), então
Ax = b⇔ QRx = b⇒ QTQRx = QT b⇔ Rx = QT b (4.8)
2Q tem a mesma dimensão de A, QTQ = I , enquanto R é quadrada e triangular superior.

6 CAPÍTULO 4. INTERPOLAÇÃO E AJUSTE DE CURVAS - UFRGS
permite o cálculo computacional da solução x∗, no sentido dos Mínimos Quadrados, deAx = b. A essa solução, no sentido generalizado, x∗ corresponde a melhor reta y = ax+ bque se ajusta ao conjunto de dados dado, no sentido dos Mínimos Quadrados.
PEDE-SE: Aproxime y para x = 3.5, usando a tabela abaixo, e a reta que melhoraproxima essa tabela no sentido dos Mínimos Quadrados.
x 1 2 3 4 5 6 7 8 9 10 11y 1.3 3.5 4.2 5.0 7.0 8.8 10.1 12.5 13.0 15.6 16.1
Exercício 4.3.2 : Ajuste quadrático. Neste caso, seguindo a estratégia do Exercício an-terior, o modelo y = ax2 + bx + c conduz a um sistema linear sobredeterminado com nequações e 3 incógnitas. Novamente sua melhor solução é encontrada via fatoração QRmagra da matriz de coeficientes A. PEDE-SE: Aproxime y para x = 0.33, usando a tabelaabaixo e o polinômio de grau menor ou igual a 2 que melhor aproxima essa tabela segundoo critério dos mínimos quadrados.
x 0 .25 .50 .75 1.00y 1.00 1.2840 1.6487 2.1170 2.7183
Exercício 4.3.3 : Ajuste exponencial. Quando o modelo desejado para ajuste é y = beax,aplicamos logaritmo natural para obter uma relação linear ln(y) = ax + ln(b), e entãoaplicar regressão linear. PEDE-SE: Suspeita-se que as variáveis x e y cuja amostragem éapresentada na tabela abaixo
x 1.00 1.25 1.50 1.75 2.00y 5.10 5.79 6.53 7.45 8.47
estejam relacionadas por y = beax, a, b ∈ R. Encontre os parâmetros a e b que ajustam atabela segundo o critério dos mínimos quadrados.
Exercício 4.3.4 : Ajuste exponencial. Resolva o Exercício 4.1.7 usando ajuste exponencialP = beat.
Exercício 4.3.5 : Resolva o exercício 4.1.9 usando a curva
P = A+B cos(πx
7
)
+ Csen(πx
7
)
que melhor aproxima a tabela no sentido dos mínimos quadrados. Mostre e use fatoraçãoQR.
Exercício 4.3.6 : Resolva o exercício 4.1.9 supondo
P =1
A+Be−x + Ce−x2
e fazendo mudança de variáveis que lineariza o problema, e então calculando a solução demínimos quadrados. Mostre e use fatoração QR.
Exercício 4.3.7 : Em um artigo tratando da eficiência da utilização de energia por umalarva (Pachysphinx modesta), L. Schroeder (1973) usou a tabela seguinte para determinara relação entre W , o peso da larva em gramas, e R, a taxa de consumo de oxigênio emml/h.
W 0.025 0.233 0.783 1.35 1.69 2.75 4.83 5.53R 0.234 0.537 1.47 2.48 1.44 1.84 4.66 6.94
Por razões de biologia molecular, é assumida uma relação entre W e R da forma R = bW a
(e então ln(R) = ln(b) + a ln(W )). Encontre os parâmetros a e b que melhor ajustam essatabela.
Exercício 4.3.8 : A tabela abaixo apresenta valores de variáveis x e y, onde assumimosque y = αxβe−γx2
, e então que log(y) = log(α) + β log(x)− γx2,x 1.0 1.25 1.5 1.75 2.0y 0.571 0.293 0.123 0.0427 0.0123
(a) Encontre os valores de α, β e γ usando ajuste de dados via critério dos MínimosQuadrados.
(b) Interpole a tabela dada para x = 1.4, USANDO a resposta obtida na parte (a).

Capítulo 5
Derivação e Integração Numérica - UFRGS
5.1 Derivação Numérica
Exercício 5.1.1 Em uma máquina digital podemos aproximar a derivada de uma função fem um ponto u de seu domínio usando diferenças finitas de primeira ordem em intervaloscada vez menores contendo u. Uma abordagem bastante intuitiva consiste em definir umasequência {hn} convergindo para 0, e então aproximar f ′(u) avaliando uma sequência{dn} definida via diferenças finitas ascendentes
dn =f(u+ hn)− f(u)
hn
até a exatidão desejada. Tipicamente, usamos hn = 2−n, n = 1, 2, 3, . . . PEDE-SE: usandoessa estratégia, encontre aproximação numérica para f ′(u) com 3 algaristmos significati-vos corretos, nos casos abaixo, apresente as sequências de aproximações para sua resposta.
(a) f(x) = xsen (x), u = π (b) f(x) = (sen (x))sen (x), u = π/4
(c) u = 2, y = f(x), onde
x2 1 0−1 2 x0 x 1
zvy
=
101
Exercício 5.1.2 Uma abordagem bastante competitiva para aproximar uma derivada f ′(u)consiste em definir quantidades {hn} convergindo para 0, e então avaliar sequência {sn}definida via diferenças finitas simétricas (ou centrais)
sn =f(u+ hn)− f(u− hn)
2hn
até a exatidão desejada. Tipicamente, usamos hn = 2−n, n = 1, 2, 3, . . . PEDE-SE: usandoessa estratégia, encontre aproximação numérica para f ′(u) com 3 algaristmos significati-vos corretos, no casos do Exercício 5.1.1. Apresente suas sequências de aproximações.
Exercício 5.1.3 Mostre que o erro de truncamento da sequência {sn} definida no Exercício5.1.2 é de ordem 2. A técnica de Extrapolação no Limite (Richardson) sugere uma sequênciaacelerada un = (4sn − sn−1)/3, u0 = s0. Mostre que o erro de truncamento de {un} temordem 4 e aplique em cada um dos casos já solicitados no Exercício 5.1.1.
Exercício 5.1.4 Derivação de tabelas usando interpoladora segmentada. Uma estratégiabastante competitiva para derivação numérica em tabelas com espaçamento quaisquer tratade usar a interpoladora segmentada (ex.:Hermite, splines cúbicos). Essencialmente, usa-mos a(s) derivada(s) dessas interpoladoras em nossa aproximação. PEDE-SE: em Scilab,descubra como interp pode ser usado para também calcular as derivadas até ordem 3. Va-riáveis x e y, onde y = f(x), estão amostradas no Exercício 4.1.4. Aproxime dy/dx parax = 1.09 usando splines cúbicos naturais.
Exercício 5.1.5 A temperatura T (Celsius) do gás R134-A e sua pressão de vapor P (Psig)estão relacionados no Exercício 4.1.8. Aproxime a taxa de variação dP/dT quando T =−5 usando splines cúbicos armados com inclinações no extremos dadas por diferenças deprimeira ordem sobre os dados.
Exercício 5.1.6 A tabela abaixo amostra duas quantidades t e c = c(t). (a) Usando splinescúbicos periódicos, aproxime dc/dt quando t = 0.9. (b) Faça um gráfico de dc/dt e estimeo instante t∗ que tem maior taxa dc/dt, com 2 casas significativas corretas.
t 0 0.3 0.7 1.1 1.4 1.7 2.0c 0.81 0.98 1.03 0.82 0.73 0.75 0.81
5.2 Quadratura Newtoniana Composta
Exercício 5.2.1 : A Quadratura Composta do Trapézio é uma estratégia que divide umintervalo de integração [a, b] em n sub-intervalos [xi−1, xi], i = 1, 2, . . . , n e emprega a
7

8 CAPÍTULO 5. DERIVAÇÃO E INTEGRAÇÃO NUMÉRICA - UFRGS
Regra do Trapézio
Ii =f(xi−1) + f(xi)
2· h
em cada um deles. Sendo h = (b − a)/n, definimos xi = a + i · h, i = 0, 1, 2, . . . , n.
PEDE-SE: Aproxime numericamente I =
∫ 2
0
tan
(
πx2
16
)
dx usando a regra:
(a) Composta do Trapézio e 3 intervalos; (b) Composta do Trapézio e 4 intervalos.
Exercício 5.2.2 : A Quadratura Composta de Simpson é uma estratégia que divide umintervalo de integração [a, b] em n sub-intervalos [xi−1, xi], i = 1, 2, . . . , n e emprega aRegra de Simpson
Ii =f(xi−1) + 4f(xi−1/2) + f(xi)
6· h, onde xi−1/2 =
xi−1 + xi
2em cada um deles. Sendo h = (b − a)/n, definimos xi = a + i · h, i = 0, 1, 2, . . . , n.
PEDE-SE: Aproxime numericamente I =
∫ 2
−2
exp(−x2)
3 + xdx usando a regra:
(a) Composta de Simpson e 3 intervalos; (b) Composta de Simpson e 4 intervalos.
Exercício 5.2.3 : Aproxime numericamente I =
∫ π
0
sin(x)
1 + x2dx usando quadratura:
(a) Composta do Trapézio e 4 intervalos; (b) Composta de Simpson e 3 intervalos.
Exercício 5.2.4 : Aproxime numericamente I =
∫ 3
1
√
x2 +2
3xdx usando quadratura:
(a) Composta do Trapézio e 5 intervalos; (b) Composta de Simpson e 4 intervalos.
Exercício 5.2.5 : A tabela abaixo mostra os valores de duas variáveis x e y, onde presume-se y = f(x).
x 1.00 1.25 1.50 1.75 2.00y 5.10 5.79 6.53 7.45 8.47
Sem criar (usar) novos pontos para essa tabela, aproxime∫ 2
1
f(x)dx usando:
(a) Regra Composta do Trapézio; (b) Regra Composta de Simpson.
Exercício 5.2.6 : Uma barra, com comprimento de 1 metro e secção de área unitária, econstituída por uma material de densidade não uniforme, tem sua densidade µ (g/cm3)medida, através do uso técnicas de tomografia, em secções localizadas a x centímetros deuma das extremidades. Estime, numericamente, a massa dessa barra.
x (cm) 0 20 40 60 80 100µ 2.5 2.9 3.1 3.1 2.9 2.5
Exercício 5.2.7 : A tabela abaixo mostra os valores da taxa de variação no tempo (t) damassa m de um reagente que inicialmente é de 100 g. Estime a massa do reagente ao finaldo experimento. Explique por quê não podemos usar a Regra Composta de Simpson aqui.
t (s) 0 13 23 29 36 47 60dm/dt (g/s) -1.5 -0.9 -0.4 -0.1 0.4 0.7 0.9
5.3 Quadratura Newtoniana Composta Recursiva
Exercício 5.3.1 : Uma estratégia recursiva de quadratura numérica, proposta por Rom-berg e baseada na Regra do Trapézio, é apresentada no seu formulário para uso em prova,na forma algorítmica. Avalie numericamente, com 5 casas significativas corretas,
I =
∫ 2
1
ex
ln(1 + x)dx
usando a Regra Recursiva do Trapézio. (e = número de Euler). Apresente uma tabela(n, sn, digse(sn−1, sn)) e classifique a convergência quanto ao aumento da exatidão.
Exercício 5.3.2 : Avalie numericamente, com 5 casas significativas corretas,
I =
∫ e2
0
ln (1 +√x)
1 + x2dx
usando a Regra Recursiva do Trapézio. (e = número de Euler) Por quê essa iteração nãoconverge com a velocidade prevista ?
Exercício 5.3.3 : O erro de truncamento da Regra do Trapézio é dado por
eRT =h2(b− a)
12M , onde M = max
x∈[a,b]|f ′′(x)|;
e portanto tem ordem 2 em h = hn =(b− a)
2n, no contexto da quadratura recursiva1. A
técnica de Aceleração de Richardson2 estabelece que a sequência {un}, onde un = (4sn−sn−1)/3 tem erro de truncamento de ordem mais alta3, e portanto sua convergência seráMUITO mais rápida. PEDE-SE: revisite o Exercício 5.3.1, aplicando em {sn} a técnica deaceleração de Richardson para construir uma sequência acelerada {un}.
Exercício 5.3.4 : Avalie numericamente, com 5 casas significativas exatas,
I =
∫ π
π/2
sin(x)
cos(x) + ln(x)dx
usando a Regra Recursiva do Trapézio com a técnica de aceleração de Richardson.
1eTR(hn) = O(h2
n) ao n → ∞.2ou extrapolação no limite. Veja http://en.wikipedia.org/wiki/Richardson_extrapolation3exercício: mostre que essa ordem é 4.

5.4. QUADRATURA GAUSSIANA 9
Exercício 5.3.5 : Avalie numericamente, com 6 casas significativas exatas,
I =
∫ 3π/2
π/2
sin(
x+ |x|1/2)
dx
usando Quadratura Recursiva do Trapézio com aceleração de Richardson.
5.4 Quadratura Gaussiana
Exercício 5.4.1 : a fórmula de quadratura de Gauss-Legendre para n+ 1 pontos é∫ 1
−1
f(x)dx ≈n∑
k=0
wkf(xk)
onde x0, x1, x2, . . . , xn são definidos conforme tabela:n xk wk
1−√
1/3√
1/3
11
2−√
3/50√
3/5
5/98/95/9
3
−0.861136312−0.3399810440.3399810440.861136312
0.3478548450.6521451550.6521451550.347854845
PEDE-SE: aproxime numericamente I =
∫ 1
0
sin(πx)
1− x2dx usando quadratura:
(a) de Gauss-Legendre em 2 pontos; (b) de Gauss-Legendre em 3 pontos;
Exercício 5.4.2 : a fórmula de Quadratura de Gauss-TChebyshev para n+ 1 pontos é:∫ 1
−1
f(x)√1− x2
dx ≈ π
n+ 1
n∑
k=0
f(xk)
onde x0, x1, . . . , xn são definidos por xk = cos
(
π(2k + 1)
2(n+ 1)
)
, k = 0, 1, . . . , n .
PEDE-SE: aproxime numericamente I =
∫
√2
1
ln(3− x2) dx usando quadratura:
(a) de Gauss-Tchebyshev em 4 pontos; (b) de Gauss-Tchebyshev em 5 pontos.
Exercício 5.4.3 : a fórmula de Quadratura de Gauss-Laguerre para n+1 pontos é escrita∫ ∞
0
f(x)e−xdx ≈n∑
k=0
wkf(xk)
onde x0, x1, x2, . . . , xn são definidos conforme tabela.
n xk wk
10.5857864376273.414213562373
0.8535533905930.14644669407
20.4157745567832.2942803602796.289945082937
0.7110930099290.2785177335690.103892565016
3
0.3225476896191.7457611011584.5366202969219.395070912301
0.6031541043420.3574186924380.388879085150 · 10−1
0.539294705561 · 10−3
4
0.26356031971.4134030593.596425777.085810005912.64080084423
0.52175561060.398666811080.75942244868 · 10−1
0.36117586799 · 10−2
0.23369972386 · 10−4
PEDE-SE: aproxime∫ ∞
1
x2
1 + 2x4dx usando Gauss-Laguerre e 4 pontos.
Exercício 5.4.4 : a fórmula de Quadratura de Gauss-Hermite para n+ 1 pontos é:∫ ∞
−∞f(x)e−x2
dx ≈n∑
k=0
wkf(xk)
onde x0, x1, x2, . . . , xn, w0, w1, . . . , wn são definidos conforme tabela.n xk wk
1−0.70710678110.7071067811
0.88622692550.8862269255
2−1.224474487140.000000000001.22447448714
0.29540897521.18163590060.2954089752
3
−1.6506801239−0.52464762330.52464762331.6506801239
0.08131283540.80491409000.80491409000.0813128354
4
−2.021828705−0.9585724646
00.95857246462.021828705
0.01995324210.39361932320.94530872050.39361932320.0199532421
PEDE-SE: aproxime numericamente I =
∫ ∞
−∞
e−π√
|x|
2 + x2dx usando quadratura:

10 CAPÍTULO 5. DERIVAÇÃO E INTEGRAÇÃO NUMÉRICA - UFRGS
(a) de Gauss-Hermite em 4 pontos; (b) recursiva do Trapézio em [−20, 20].
Exercício 5.4.5 Aproxime numericamente I =
∫ ∞
0
e−√
|x|
1 + x2dx usando quadratura:
(a) de Gauss-Laguerre em 4 pontos; (b) de Gauss-Hermite em 4 pontos (use a simetria).

Capítulo 6
Solução Numérica de Equações Diferenciais Ordinárias - UFRGS
6.1 Método de Euler
Exercício 6.1.1 : O esquema de Euler para solução de um PVI y′ = f(t, y); y(t0) = y0usa a diferença mais simples na aproximação (discretização) da derivada y′:
yi+1 = yi +△t f(ti, yi)para i = 0, 1, 2, . . .; onde y0 é o valor dado pela condição inicial.
PEDE-SE : Duas variáveis x e y, onde sabemos y = f(x), estão relacionadas pordy
dt=
y(t−y). Sabendo que f(0) = 2, aproxime f(2) usando o método de Euler e h = △t = 0.1.
Exercício 6.1.2 : Uma quantidade y evolui no tempo t segundo equaçãody
dt= t − y2.
Sabendo que y(0) = 2, aproxime y(2) usando o método de Euler e h = △t = 0.1.
Exercício 6.1.3 : Uma quantidade y evolui no tempo segundo equaçãody
dt= cos(ty).
Sabendo que y(0) = 1, aproxime y(π) usando o método de Euler e h = π/20.
Exercício 6.1.4 : (existência e unicidade) O Teorema de Picard-Lindelöf garante 1 que umPVI y′ = f(t, y), t > t0; y(t0) = y0 possui solução única enquanto f(t, y) for contínua emt e Lipschitz contínua em y 2.
PEDE-SE: em cada caso, procure encontrar solução numérica em algum intervalo após acondição inicial e, não encontrando, explique o por quê.
1veja http://en.wikipedia.org/wiki/Initial_value_problem2existe K > 0 tal que |f(t, y1) − f(t, y2)| ≤ K|y1 − y2|, ∀ y1, y2 ∈ D(f). Tal é sempre verdade nos
domínios onde ∂f/∂y for limitada.
(a):
{
y′ = −√
1− y2, t > 0y(0) = 1
É verdade que y = cos(t) é solução ?
(b):
{
y′ =√
1− y2, t > 0y(0) = 0
É verdade que y = sen (t) é solução ?
(c):
{
y′ = t√
1− y2, t > 0y(0) = 0
É verdade que y = sen (t2/2) é solução ?
(d):
{
y′ = −(t− 1)√
1− y2, t > 1y(1) = 1
É verdade que y = cos
(
(t− 1)2
2
)
é solução ?
(e):
{
y′ = y2/3, t > 1y(1) = 0
É verdade que y =(t− 1)3
27é solução ?
(f):
{
y′ =√
y − t2, t > 0y(0) = 1
Exercício 6.1.5 : Se Tc é a temperatura corporal de um paciente (em graus absolutos), umtermômetro é capaz de revelar essa temperatura segundo
dT
dt= β(Tc − T )
onde β = 10−3/seg e t (medido em seg) é o tempo trancorrido na medição. Usandoo método de Euler, responda: Assumindo T (0) = 293 (temperatura ambiente), e umatemperatura febril (Tc = 313), qual o tempo mínimo (em minutos) necessário para umaaferição com 95 % de exatidão ? Você pode comprovar isso usando a solução exata ?
Exercício 6.1.6 : Ajuste de dados sugere que a população N(t) de uma certa cultura ani-mal cresce segundo
dN
dt= α(L1/2 −N1/2),
11

12 CAPÍTULO 6. SOLUÇÃO NUMÉRICA DE EQUAÇÕES DIFERENCIAIS ORDINÁRIAS - UFRGS
onde α = 5 × 102, L = 107 e t é o tempo medido em horas. Usando o método de Euler,responda: supondo tal lei de crescimento, em quanto tempo uma amostra de 104 indivíduosatingiria 97% de seu valor de equilíbrio ?
Exercício 6.1.7 : Em um processo de decaimento da massa m (Kg) de uma certa amostraradioativa, a análise de dados obtidos por experimentação sugere
dm
dt= −ρm2/3,
onde ρ = 5×10−2 e t é o tempo medido em minutos. Usando o método de Euler, responda:Se isso for verdade, em quanto tempo uma amostra de 2Kg é reduzida pela metade ? Vocêpoderia validar o resultado numérico usando a solução exata ?
Exercício 6.1.8 : A população de uma micro-cultura de bactérias evolui conforme equaçãody
dt= α√y
L− y√
|L− y|onde α = 10−1 e L = 103 são parâmetros intrinsecos desse processo, y(0) = 102, e té o tempo em minutos. Usando o método de Euler, e △t = 0.05, responda: Existe umasaturação para essa população ? Em quê instante 90 % dessa quantidade é alcançada ?
Exercício 6.1.9 : Uma bola de neve que desce pela montanha tem forma esférica e raior, que inicialmente era de 1cm. Sendo V seu volume, e A a área de sua superfície, a bolacresce segundo
dV
dt= 4π ln(A)
onde t mede o tempo em segundos. Resolva a EDO satisfeita pelo raio r usando o métodode Euler, e responda: Em que instante o raio será de 2cm ? Em que instante o raio será de4cm ? Em que instante o raio será de 6cm ?
Exercício 6.1.10 : Resolva o exercicio 6.1.1 usando o esquema Central:yi+1 = yi−1 + 2△t f(ti, yi)
para i = 1, 2, 3, . . .; onde y0 é dado pelas C.I. e y1 = y0 +△t f(t0, y0). Plote os dadose compare com a solução do Exercício 6.1.1. Resolva novamente com h = 0.01 e plote osdados. O desempenho desse esquema parece satisfatório ?
6.2 Métodos de Passo Múltiplo de Adams
Exercício 6.2.1 Encontre a solução numérica do PVI
dy
dt=
0.1y
1 + t2, t > 0
y(0) = π.
no intervalo [0, 10], usando△t = 0.1 e o esquema Previsor de ordem 2 de Adams.
Complete a tabela abaixo:ti yi ti yi ti yi
0.0 3.5 7.00.5 4.0 7.51.0 4.5 8.01.5 5.0 8.52.0 5.5 9.02.5 6.0 9.53.0 6.5 10.0
Exercício 6.2.2 : Resolva o ex. 6.1.3 usando o esquema Previsor de ordem 2 de Adams.
Exercício 6.2.3 : Resolva o ex. 6.1.2 usando o esquema Corretor de ordem 2 de Adams.
Exercício 6.2.4 : Resolva o ex. 6.1.8 usando o esquema Previsor-Corretor de ordem 2 deAdams.
Exercício 6.2.5 : Uma quantidade y evolui no tempo segundo equação diferencialdy
dt=
cos(t)y
1 + t3.
Sabendo que y(0.5) = 1.5, aproxime y(4) usando o método Previsor-Corretor de ordem 2de Adams e h = 0.1. Apresente uma tabela com os valores (ti, yi) calculados.
Exercício 6.2.6 : Com o objetivo de resolver numericamente a equação diferencial y′ +ay = 0 , onde a > 0, propomos o esquema numérico
{
y1 = y0 + ahy0
yi+1 =(1− 3ah)yi
2+
yi−1
2, i = 1, 2, 3, . . .
onde h é o parâmetro de discretização. Sendo a =√3 , y(0) = 1/2 e h = 0.05, use esse
esquema para aproximar y(1); encontre o valor exato e compare (encontre o erro relativo).Apresente uma tabela com os valores (ti, yi) calculados.
Exercício 6.2.7 : Com o objetivo de resolver numericamente a equação diferencial y′ +ay = 0 , onde a > 0, propomos o esquema numérico
{
y1 = y0 + ahy0yi+1 = (−2− 4ah)yi + 3yi−1, i = 1, 2, 3, . . .
onde h é o parâmetro de discretização. Sendo a =√3 , y(0) = 1/2 e h = 0.05, use esse
esquema para aproximar y(1); encontre o valor exato e compare (encontre o erro relativo).Apresente uma tabela com os valores (ti, yi) calculados.
Exercício 6.2.8 : Usando o Método Preditor de ordem 2 de Adams, (a) proponha um es-quema numérico para a solução do PVI

6.4. EQUAÇÕES DIFERENCIAIS DE SEGUNDA ORDEM 13
{
y′ + ay = b cos(t), t > 0y(0) = 1
onde a, b ∈ R, a > 0. (b) Para determinar y(1), resolva esse PVI para a = b = 2 et ∈ [0, 1]. A presente uma tabela com os valores (ti, yi) calculados.
Exercício 6.2.9 : Usando o Método Corretor de ordem 2 de Adams, proponha um esquemanumérico para a solução do PVI do Exercício 6.2.7. Usando esse esquema numérico, apre-sente uma tabela com os valores (ti, yi) calculados.
Exercício 6.2.10 : Usando o Método Previsor-Corretor de ordem 2 de Adams, proponhaum esquema geral para a solução do PVI do Exercício 6.2.7. Usando esse esquema numé-rico, apresente uma tabela com os valores (ti, yi) calculados.
6.3 Métodos de Runge-Kutta
Exercício 6.3.1 Resolva o Exercício 6.1.2 usando o esquema de Runge-Kutta de segundaordem, ou método de Heun:
k1 = f(ti, yi)k2 = f(ti + h, yi + hk1)
yi+1 = yi +h(k1+k2)
2 , i = 0, 1, 2, 3, . . .
Exercício 6.3.2 Resolva o Exercício 6.1.3 usando o esquema de Runge-Kutta de segundaordem.
Exercício 6.3.3 Resolva o Exercício 6.2.5 usando o esquema de Runge-Kutta de segundaordem.
Exercício 6.3.4 Resolva o Exercício 6.1.2 usando o esquema de Runge-Kutta de quartaordem:
k1 = f(ti, yi)
k2 = f(
ti +h2 , yi +
hk1
2
)
k3 = f(
ti +h2 , yi +
hk2
2
)
k4 = f (ti + h, yi + hk3)
yi+1 = yi +h(k1 + 2k2 + 2k3 + k4)
6, i = 0, 1, 2, 3, . . .
Exercício 6.3.5 Resolva o Exercício 6.2.5 usando o esquema de Runge-Kutta de quartaordem.
6.4 Equações Diferenciais de segunda ordem
Exercício 6.4.1 : Dentre as estratégias que resolvem PVI de segunda ordem y′′ =f(t, y, y′), y(0) = y0, y
′(0) = v0, SEM reduzir a sistema de primeira ordem, o esquemaconceitualmente mais simples é o de Euler-Cromer:
{
yi+1 = yi +△t vi + (△t)2f(ti, yi, vi)/2vi+1 = vi +△tf(ti, yi, vi)
para i = 0, 1, 2, . . .; que usa expansão de Taylor na atualização de posições e velocidades(no sentido generalizado). PEDE-SE: resolva
{
u′′ + euu′ + cos(u) = t, t > 0u(0) = 1, u′(0) = −1
no intervalo [0, 2], com△t = 1/10, usando esse esquema.
Exercício 6.4.2 : Dentre as estratégias que resolvem PVI de segunda ordem y′′ = f(t, y),y(0) = y0, y
′(0) = v0, SEM reduzir a sistema de primeira ordem, muito conhecidos são osesquemas de Verlet, dentre os quais apresentamos o método de Verlet nas velocidades
{
yi+1 = yi +△t vi + (△t)2ai/2
vi+1 = vi +△tai + ai+1
2, i = 0, 1, 2, . . .
onde ai = f(ti, yi). PEDE-SE: Usando esse esquema, encontre uma solução para o PVI{
y′′ + 2y1/3 = 3 sin(t), t > 0y(0) = 1, y′(0) = −1,
no intervalo [0, 2], usando△t = 0.1. Apresente tabela (ti, yi) com os valores calculados.
Exercício 6.4.3 : Uma situação que limita a aplicação do método de Verlet nas velocidadesé o caso mais geral y′′ = f(t, y, y′), pois então o termo ai+1 não pode ser calculado antesde vi+1. O método de Verlet Corrigido (ou Adaptado) usa uma estratégia do tipo previsão-correção para resolver este impasse:
yi+1 = yi +△t vi + (△t)2ai/2vp = vi +△tai
vi+1 = vi +△tai + f(ti+1, yi+1, vp)
2para i = 0, 1, 2, . . .; onde ai = f(ti, yi, vi). PEDE-SE: usando esse esquema, encontresolução numérica para o PVI
{
y′′ + 2y′ + y2 = 1 + sin(t), t > 0y(1) = 1, y′(1) = 2,
no intervalo [1, 3], usando△t = 0.1. Apresente tabela (ti, yi) com os valores calculados.
Exercício 6.4.4 : Usando o método de Verlet, encontre solução numérica para o PVI{
y′′ = −t2(1 + e−y) , t > 0y(1) = 3 , y′(1) = 2

14 CAPÍTULO 6. SOLUÇÃO NUMÉRICA DE EQUAÇÕES DIFERENCIAIS ORDINÁRIAS - UFRGS
usando△t = 0.1 e preenchendo a tabela
ti yi ti yi ti yi1.0 1.7 2.41.1 1.8 2.51.2 1.9 2.61.3 2.0 2.71.4 2.1 2.81.5 2.2 2.91.6 2.3 3.0
Exercício 6.4.5 : Outra estratégia muito conhecida que resolve PVI de segunda ordemy′′ = f(t, y), y(0) = y0, y
′(0) = v0, SEM reduzir a sistema de primeira ordem, é oesquema de Leapfrog3
{
yi = yi−1 +△t vi−1/2
vi+1/2 = vi−1/2 +△tf(ti, yi)para i = 1, 2, . . .; onde v1/2 = v0 +△t f(t0, y0)/2.
PEDE-SE: use esse esquema para resolver o Exercício 6.4.4.
Exercício 6.4.6 : O método do Disparo (Shooting) para resolver um PVCy′′ = f(t, y, y′), y(ta) = ya, y(tb) = yb
consiste em resolver, para α ∈ R variável, os PVIy′′ = f(t, y, y′), y(ta) = ya, y
′(ta) = αusando métodos próprios para isso, e então encontrar α tal que a solução numérica yn (quedepende de α) em t = tb verifica o problema de raízes F (α) = yn − yb = 0.
PEDE-SE: usando o Método do Disparo, associado a Verlet e Secante,△t = π/20, encontreuma solução numérica para o PVC
{
y′′ + 2y1/3 = 3 cos(t), t ∈ (π, 2π)y(π) = 1, y(2π) = π,
procurando α ∈ [0, 10]. Faça o gráfico de α 7→ F (α) neste intervalo. Apresente uma tabela(ti, yi) com todos os valores calculados.
Exercício 6.4.7 : Usando o Método do Disparo, associado a Euler-Cromer e a Secante,encontre uma solução numérica para o PVC
{
y′′ + 2y′ey = 3 cos(t), t ∈ (0, 2)y(0) = 1, y(2) = 0,
3veja http://en.wikipedia.org/wiki/Leapfrog_integration

Capítulo 7
Métodos de Otimização - UFRGS
7.1 Funções Convexas e Otimização Unidimensional
Exercício 7.1.1 : Uma função f : S → R, onde S ⊆R, é estritamente convexa em um intervalo [a, b] se
f(λx1 + (1− λ)x2) < λf(x1) + (1− λ)f(x2)para todo x1, x2 ∈ [a, b] e para todo λ ∈ (0, 1).
PEDE-SE: investigue, qualitativamente, em quais in-tervalos abaixo a função f(x) = x(2 − x)2 é estrita-mente convexa.(a) [−2, 0] (b) [ 32 , 3] (c) [1, 2] (d)[2, 3]
Exercício 7.1.2 : Uma função f : S → R, ondeS ⊆ R, é estritamente quasi-convexa em um inter-valo [a, b] se
f(λx1 + (1− λ)x2) < max{f(x1), f(x2)}para todo x1, x2 ∈ [a, b] e para todo λ ∈ (0, 1).
PEDE-SE: investigue, qualitativamente, em quais in-tervalos abaixo a função
f(x) =
{
2− 2|x| x < 1min{2, x} x ≥ 1
é estritamente quasi-convexa.(a) [−2, 1] (b) [0, 3] (c) [0, 2] (d)[1, 3]
Exercício 7.1.3 : Intervalo de Incerteza [a, b] é o intervalo onde sabemos que existe umponto objetivo a encontrar, apesar de não sabermos onde. Considere o objetivo de encon-trar um ponto de mínimo absoluto de uma função dada f no intervalo [a, b].
Diminuindo intervalos de incerteza de pontos de mínimo: seja f : R → R estritamentequasi-convexa em um intervalo [a, b]. Sejam σ, µ ∈ (a, b) tais que σ < µ.
(i) Se f(σ) > f(µ) então f(z) > f(µ) ∀z ∈ [a, σ), e assim nosso intervalo de incertezapode ser reduzido a [σ, b].
(ii) Se f(σ) ≤ f(µ) então f(z) > f(σ) ∀z ∈ (µ, b], e assim nosso intervalo de incertezapode ser reduzido a [a, µ].
PEDE-SE: considere a = 0, b = 2, σ = 0.5, µ = 1.5 e a função
f(x) =
{
2− 2|x| x < 1min{2, x} x ≥ 1
Use o resultado acima para determinar um novo intervalo de incerteza para o mínimo abso-luto de f em [a, b].
Exercício 7.1.4 : Método da Busca Dicotônoma para min[a,b]
f(x). Sendo ǫ pequeno, define
σ =a+ b
2− ǫ, µ =
a+ b
2+ ǫ onde σ,µ e f(σ), f(µ) são distinguíveis em aritmética de
máquina.
15

16 CAPÍTULO 7. MÉTODOS DE OTIMIZAÇÃO - UFRGS
Algoritmo: Busca DicotônomaEntrada: [a1, b1] intervalo inicial (deve enquadrar a solução); parâmetro ǫ; parâmetro TOLpara critério de parada; função f estritamente quase-convexa em [a1, b1]Saída: aproximação xk para o mínimoP1: k = 1Enquanto TOL ainda não foi alcançado, faça
P2: σk =ak + bk
2− ǫ, µk =
ak + bk2
+ ǫ
P3: Se f(σk)− f(µk) < 0 então ak+1 = ak, bk+1 = µk
P4: Senão ak+1 = σk , bk+1 = bkP5: k ← k + 1
Fim-Enquanto
Retorne xk =ak + bk
2PEDE-SE: aplique 6 iterações do algoritmo acima, usando ǫ = 10−7 para a função f do
Exercício 7.1.3, no intervalo [0, 2], completando a tabela abaixo, sendo zk = sign(f(σk)−f(µk)).k ak bk σk µk zk1 0 223456
Exercício 7.1.5 : Considere a função f(x) = 4x2 − 4x3 + x4.(a) Investigue graficamente se essa função atende a definição de estritamente quasi-
convexa em cada um dos intervalos abaixo:(i)[−1, 1] (ii) [1, 3] (iii)[1.6, 3] (iv) [0, 3].(b) Aplique 6 iterações do algoritmo da Busca Dicotônoma, com ǫ = 10−7, naqueles
intervalos da parte (a) onde f é estritamente quasi-convexa, preenchendo a tabela abaixo,sendo zk = sign(f(σk)− f(µk)).
k ak bk σk µk zk123456
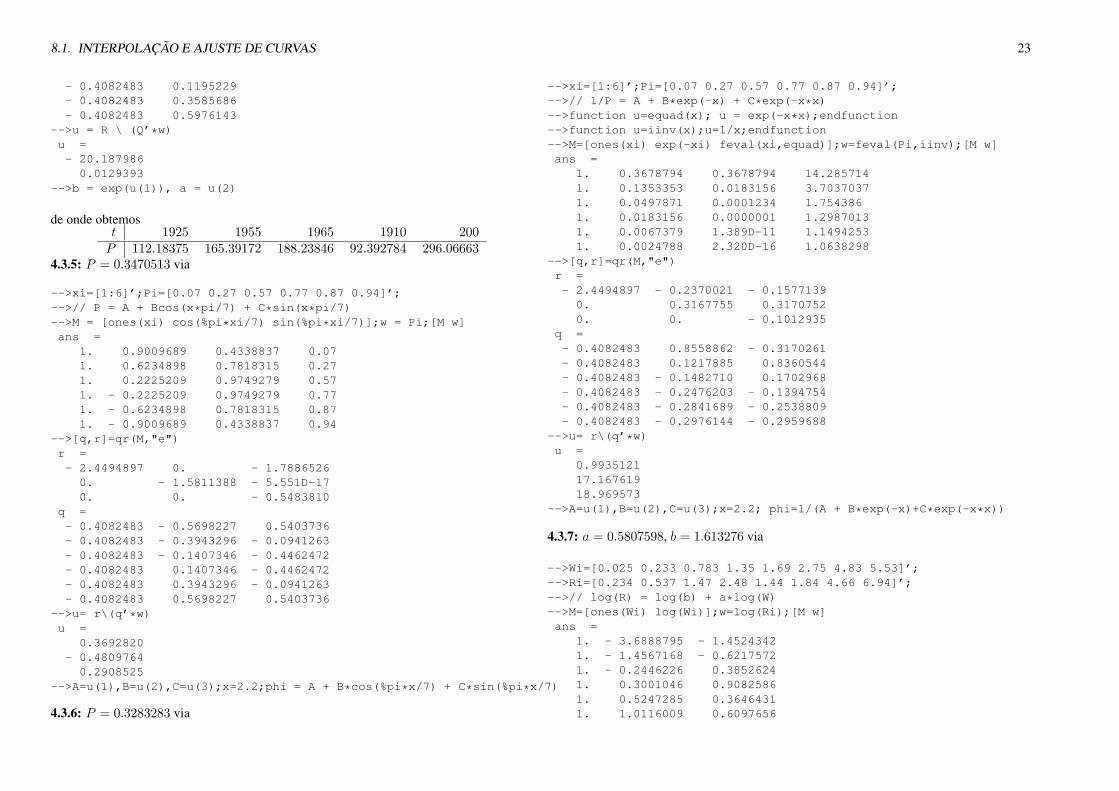
Exercício 7.1.6 : Queremos encontrar a distância doponto P (3, 1) à trajetória T = {(x, 1
x ), x > 0}; na fi-gura ao lado vemos a plotagem da trajetoria, do ponto Pe da função objetivo f(x), isto é, a função a ser minimi-zada no intervalo (0,∞).Determine um intervalo de incerteza adequado paraesse problema. Aplique 6 iterações do método daBusca Dicotônoma, completando a tabela, sendo zk =sign(f(σk) − f(µk)). Finalmente, apresente f(x6), aaproximação para a distância procurada.
k ak bk σk µk zk123456
Exercício 7.1.7 : Queremos encontrar a distância doponto P (2, 4) à trajetória T = {(x, 1
x ), x > 0}; na fi-gura ao lado vemos a plotagem da trajetoria, do ponto Pe da função objetivo f(x), isto é, a função a ser minimi-zada no intervalo (0,∞).Determine um intervalo de incerteza adequado paraesse problema. Aplique 6 iterações do método daBusca Dicotônoma, completando a tabela, sendo zk =sign(f(σk) − f(µk)). Finalmente, apresente f(x6), aaproximação para a distância procurada.
k ak bk σk µk zk123456
Exercício 7.1.8 : Queremos encontrar a distância de P (1, 4) à trajetória T =

7.1. FUNÇÕES CONVEXAS E OTIMIZAÇÃO UNIDIMENSIONAL 17
{(x, x4), x ∈ R}; plote a função objetivo e determine um intervalo de incerteza ade-quado. Aplique 6 iterações do método da Busca Dicotônoma, completando a tabela, sendozk = sign(f(σk) − f(µk)). Finalmente, apresente f(x6), a aproximação para a distânciaprocurada.
k ak bk σk µk zk123456
Exercício 7.1.9 : Encontre b tal que a reta y = x+ b melhor seajusta a tabela ao lado, no sentido dos mínimos quadrados, istoé, tal que f(b) =
∑
i
(yi − (xi + b))2 é minimo.
x 0 2 3 5y 1 2 4 5
Determine um intervalo de incerteza adequado. Aplique 6 iterações do método da BuscaDicotônoma, completando a tabela, sendo zk = sign(f(σk)− f(µk)).k ak bk σk µk zk123456
Exercício 7.1.10 Encontre p tal que a curva y = xp melhor seajusta a tabela ao lado, no sentido dos mínimos quadrados, istoé, tal que f(p) =
∑
i
(yi − xpi )
2 é minimo.
x 1 2 3 4y 1 1.6 2 2.5
Determine um intervalo de incerteza adequado. Aplique 6 iterações do método da BuscaDicotônoma, completando a tabela, sendo zk = sign(f(σk)− f(µk)).k ak bk σk µk zk123456
Exercício 7.1.11 : Método da Razão Áurea. Seja α =
√5− 1
2, que satisfaz α2 = 1 − α.
Dado um intervalo de incerteza [ak, bk], definimos{
σ = σk = ak + (1− α)(bk − ak)µ = µk = ak + α(bk − ak)
.
Assim, se f(σk) < f(µk), então, pelo resultado apresentado no Exercício 7.1.3, definimosbk+1 = µk, ak+1 = ak e então bk+1 − ak+1 = µk − ak = α(bk − ak)
Caso contrário, isto é, se f(σk) ≥ f(µk), então definimosbk+1 = bk, ak+1 = σk e então
bk+1−ak+1 = bk−σk = bk−ak−(1−α)(bk−ak) = bk−ak+ak−bk+α(bk−ak) =α(bk − ak)
Assim, em qualquer caso, temos bk+1 − ak+1 = α(bk − ak), onde α =
√5− 1
2≈ 0.618.
Outra importante propriedade é que algum dos pontos do novo intervalo de incerteza sem-pre coincide com algum dos pontos do intervalo antigo, de maneira que apenas 1 avaliaçãofuncional é necessária a cada iteração.
Algoritmo: Razão Áurea (versão simplificada para sala-de-aula)Entrada: [a1, b1] intervalo inicial (deve enquadrar a solução); parâmetro TOL para critériode parada; função f estritamente quase-convexa em [a1, b1], α = (
√5− 1)/2.
Saída: aproximação xk para o mínimoP1: k = 1
Enquanto TOL ainda não foi alcançado, façaP2: σk = ak + (1− α)(bk − ak); µk = ak + α(bk − ak);P3: Se f(σk)− f(µk) < 0 então ak+1 = ak; bk+1 = µk;P4: Senão ak+1 = σk ; bk+1 = bk;P5: k ← k + 1
Fim-Enquanto
Retorne xk =ak + bk
2PEDE-SE: aplique 6 iterações do algoritmo acima para a função f do Exercício 7.1.3, no
intervalo [0, 2], completando a tabela abaixo, sendo zk = sign(f(σk)− f(µk)).k ak bk σk µk zk1 0 223456

18 CAPÍTULO 7. MÉTODOS DE OTIMIZAÇÃO - UFRGS
Exercício 7.1.12 : Queremos encontrar a distância doponto P (2, 4) à trajetória T = {(x, 1
x ), x > 0}; na fi-gura ao lado vemos a plotagem da trajetoria, do ponto Pe da função objetivo f(x), isto é, a função a ser minimi-zada no intervalo (0,∞).Determine um intervalo de incerteza adequado para esseproblema. Aplique 6 iterações do método da Razão Áu-rea, completando a tabela, sendo zk = sign(f(σk) −f(µk)). Finalmente, apresente f(x6), a aproximaçãopara a distância procurada.
k ak bk σk µk zk123456
Compare com a resposta do Exercício 7.1.7.
Exercício 7.1.13 : Queremos encontrar a distância de P (1, 4) à trajetória T ={(x, x4), x ∈ R}; plote a função objetivo e determine um intervalo de incerteza ade-quado. Aplique 6 iterações do método da Razão Áurea, completando a tabela, sendozk = sign(f(σk) − f(µk)). Finalmente, apresente f(x6), a aproximação para a distân-cia procurada.
k ak bk σk µk zk123456
Compare com a resposta do Exercício 7.1.8.
Exercício 7.1.14 : Queremos encontrar a distância de P (−1,−10) à curva y = x3−4x+2, x ∈ R. Determine um intervalo de incerteza adequado. Aplique 6 iterações do métododa Razão Áurea, completando a tabela, sendo zk = sign(f(σk) − f(µk)). Finalmente,apresente f(x6), a aproximação para a distância procurada.
k ak bk σk µk zk123456
Exercício 7.1.15 : Encontre b tal que a reta y = x + b melhorse ajusta a tabela ao lado, no sentido dos mínimos quadrados,isto é, tal que f(b) =
∑
i
(yi − (xi + b))2 é minimo.
x 0 2 3 5y 1 2 4 5
Plote a função objetivo e determine um intervalo de incerteza adequado. Aplique 6 itera-ções do método da Razão Áurea, completando a tabela, sendo zk = sign(f(σk)− f(µk)).k ak bk σk µk zk123456
Compare com a resposta do Exercício 7.1.9.Exercício 7.1.16 Encontre p tal que a curva y = xp melhor seajusta a tabela ao lado, no sentido dos mínimos quadrados, istoé, tal que f(p) =
∑
i
(yi − xpi )
2 é minimo.
x 1 2 3 4y 1 1.6 2 2.5
Determine um intervalo de incerteza adequado. Aplique 6 iterações do método da RazãoÁurea, completando a tabela, sendo zk = sign(f(σk)− f(µk)).k ak bk σk µk zk123456
Compare com a resposta do Exercício 7.1.10.

Capítulo 8
Respostas parciais de todos os exercícios - UFRGS
8.1 Interpolação e Ajuste de Curvas
4.1.1: φ(2.5) = 0.498045, viaL0 L1 L2 L3 L4
0.023438 -0.15625 0.70313 0.4688 -0.0390634.1.2: φ(1.09) = 0.2896384, via
L0 L1 L2 L3
-0.032 0.216 0.864 -0.0484.1.3: φ(1.22) = 1.6296583, via
L0 L1 L2 L3 L4
0.0144 - 0.1056 0.9504 0.1584 -0.01764.1.4: φ(3.5) = 2.4111875 via
L0 L1 L2 L3 L4 L5 L6
- 0.00488 0.04102 - 0.17090 0.68359 0.51270 - 0.06836 0.006844.1.5: via tabela de diferenças
1. 0.19240.98
1.05 0.2414 0.581.038 -193.06667
1.1 0.2933 -28.38-1.8
1.15 0.2033obtemos, para x = 1.09,φ(1.09) = 0.1914 + 0.98(x− 1) + 0.58(x− 1)(x− 1.05)+
−193.066667(x− 1)(x− 1.05)(x− 1.1) = 0.2896384
4.1.6: φ(1.2) = −0.967616 via tabela de diferenças divididas
1. -1.-0.515
1.1 -1.0515 7.31331.3133 11.53333
1.25 -0.8545 10.7733 6.20953.468 13.7066 -1.968254
1.3 -0.6811 14.2 5.42224.888 15.3333
1.35 -0.4367 16.56.538
1.4 -0.10984.1.7: abaixo segue a tabela de diferenças divididas:
1920 105.7111.7492
1930 123.203 -0.045130.8466 3.2647E-3
1940 131.669 0.05281 -8.5634E-51.9028 1.6067E-4 5.984E-7
1950 150.697 0.04799 -5.5713E-52.8626 -2.389E-3
1960 179.323 -0.023692.3889
1970 203.212
(a) φ(1925) = 117.80867, φ(1955) = 164.47696, φ(1965) = 193.08151
(b) φ(1910) = 31.875, φ(2000) = 53.343. Valores são irrealísticos; mostram que essasfórmulas não resolvem bem o problema de extrapolação.
19
20 CAPÍTULO 8. RESPOSTAS PARCIAIS DE TODOS OS EXERCÍCIOS - UFRGS
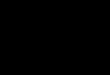
4.1.8: φ(−12) = 20.624979 via tabela de diferenças divididas-12 12.21
1.12666-9 15.59 0.018888
1.24 2.467D-17-6 19.31 0.018888 0.1028D-4
1.353333 0.00012345-3 23.37 0.02
1.4733330 27.79
4.1.9:φ(2.2) = 0.332328 via tabela de diferenças divididas1 0.07
0.22 0.27 0.05
0.3 -0.0333333 0.57 -0.05 0.008333
0.2 - 0.0333D-17 -0.00108334 0.77 -0.05 0.0029166
0.1 0.011665 0.87 -0.015
0.076 0.94
4.2.1: o ponto para interpolação está no terceiro intervalo: i = 3
φa(2.5) = y2x− x3
x2 − x3+ y3
x− x2
x3 − x2= 0.49585
4.2.2: φ(2.5) = 0.4980375, viad0 d1 d2 d3 d4
0.052 0. -0.09875 -0.18625 -0.227
xi=[x0 x1 x2 x3 x4];yi=[y0 y1 y2 y3 y4];
phib=interp(2.5,xi,yi,[d0 d1 d2 d3 d4])
4.2.3: (a) como o ponto de interpolação está no terceiro intervalo:
φa(1.22) = y2x− x3
x2 − x3+ y3
x− x2
x3 − x2= 1.640912
(b) φb(1.22) = 1.6302738 viad0 d1 d2 d3 d4
2.3368 2.76355 3.8002 5.29495 6.1798
xi=[x0 x1 x2 x3 x4];yi=[y0 y1 y2 y3 y4];
phib=interp(1.22,xi,yi,[d0 d1 d2 d3 d4])
4.2.4: (a) como o ponto de interpolação está no segundo intervalo:
φa(1.09) = y1x− x2
x1 − x2+ y2
x− x1
x2 − x1= 0.28292
(b) φb(1.09) = 0.2919552 viad0 d1 d2 d3
0.98 1.009 -0.381 0.1409697
phib=interp(1.09,[x0 x1 x2 x3],[y0 y1 y2 y3],[d0 d1 d2 d3])
4.2.5: (a) como x está no segundo intervalo:φ(1.2) = y1(x− x2)/(x1 − x2) + y2(x− x1)/(x2 − x1) = −0.9201667(b) φ(1.2) = −0.9682667 via
d0 d1 d2 d3 d4 d5- 0.515 0.2163333 2.9293333 4.178 5.713 6.538
xi=[x0 x1 x2 x3 x4 x5];yi=[y0 y1 y2 y3 y4 y5];
phib=interp(x,xi,yi,[d0 d1 d2 d3 d4 d5])
4.2.6: (a) P (1935) = 127.436, P (1955) = 165.01, P (1965) = 191.2675
(b) P (1925) = 115.02112, P (1955) = 164.70619, P (1965) = 191.53356 viad0 d1 d2 d3 d4 d5
1.7492 1.2979 1.3747 2.3827 2.62575 2.38894.2.7: (a) A posição é de 39.11 m , via
d0 d1 d2 d3 d4 d5 d615/60 35/60 20/60 55/60 48/60 45/60 48/60
ti=[0 10 25 30 42 50 60];yi=[8 20 27 30 45 69 78];
phia=interp(x,ti,yi,[d0 d1 d2 d3 d4 d5 d6])
4.2.8: c(3) = 1.8583333, viad0 d1 d2 d3 d4 d5 d60.8 0.65 0.133333 -0.5 0.466667 0.35 -0.2
4.2.9: c(3) = 1.9661041, via
-->ti=[0 1 2 4 6 7 8],ci=[1.0 1.8 2.3 1.1 0.3 1.2 1.0]
-->di=splin(ti,ci,’natural’)
-->phi=interp(3,ti,ci,di)
d0 d1 d2 d3 d4 d5 d60.830320 0.739359 0.112243 -0.952174 0.696453 0.486728 -0.543364
4.2.10: φ(2.5) = 0.4981355 via

8.1. INTERPOLAÇÃO E AJUSTE DE CURVAS 21
-->xi=[2.0 2.2 2.4 2.6 2.8];yi=[.5104 .5208 .5104 .4813 .4359];
-->di=splin(xi,yi,’natural’)
di =
0.0746339 0.0067321 - 0.1015625 - 0.1929821 - 0.2440089
-->phi=interp(2.5,xi,yi,di)
4.2.11: φ(1.22) = 1.62855 via
-->xi=[1.0 1.1 1.2 1.3 1.4];yi=[1 1.23368 1.55271 1.99372 2.61170];
-->di=splin(xi,yi,’natural’)
di =
2.1637107 2.6829786 3.685675 5.3755214 6.5819393
-->phi=interp(1.22,xi,yi,di)
4.2.12: φ(1.09) = 0.2919088 via
-->xi=[1.0 1.05 1.1 1.15];yi=[.1924 .2414 .2933 .2033];
-->di=splin(xi,yi,’natural’)
di =
0.7753333 1.3893333 - 0.2786667 - 2.5606667
-->phi=interp(1.09,xi,yi,di)
4.2.13: φ(3) = 1.967727 via
-->ti=[0 1 2 4 6 7 8],ci=[1.0 1.8 2.3 1.1 0.3 1.2 1.0]
-->al=(1.8-1.0)/(1-0)
al =
0.8
-->be=(1.0-1.2)/(8-7)
be =
- 0.2
-->di=splin(ti,ci,’clamped’,[al,be])
di =
0.8 0.74727 0.11090 - 0.96 0.7290 0.3927 - 0.2
-->phi=interp(3,ti,ci,di)
4.2.14: c(3.5) = 2.3108915, via
-->ti=[0 1 2 3 4 5 6],ci=[.582 .781 1.381 2.782 1.583 1.55 1.552]
-->al=(0.781-0.582)/(1-0);be=(1.552-1.55)/(6-5);[al be]
ans =
0.199 0.002
-->di=splin(ti,ci,’clamped’,[al,be])
di =
0.199 0.18845 1.44419 0.03779 -0.98934 0.22359 0.002
-->phi=interp(3.5,ti,ci,di)
4.2.15: c(3) = 1.9504941, via
->ti=[0 1 2 4 6 7 8],ci=[1.0 1.8 2.3 1.1 0.3 1.2 1.0]
-->di=splin(ti,ci,’periodic’)
-->phi=interp(3,ti,ci,di)
d0 d1 d2 d3 d4 d5 d60.143478 0.926680 0.049802 -0.952174 0.758893 0.299407 0.143478
4.2.16: c(3) = 1.38, via
-->ti=[0 1 2 4 5 6],ci=[0.58 0.78 1.38 0.98 0.68 0.58]
-->di=splin(ti,ci,’periodic’)
di =
4.163D-17 0.5 0.4 - 0.4 - 0.2 4.163D-17
-->phi=interp(3,ti,ci,di)
4.3.1: φ(3.5) = 5.0340909 via
-->xi=[1 2 3 4 5 6 7 8 9 10 11]’;
-->yi=[1.3 3.5 4.2 5.0 7.0 8.8 10.1 12.5 13.0 15.6 16.1]’;
-->// y = a*x + b :::
-->M = [xi ones(xi)]; w=yi;[M w]
ans =
1. 1. 1.3
2. 1. 3.5
3. 1. 4.2
4. 1. 5.
5. 1. 7.
6. 1. 8.8
7. 1. 10.1
8. 1. 12.5
9. 1. 13.
10. 1. 15.6
11. 1. 16.1
-->[Q,R]=qr(M,"e")
R =
- 22.494444 - 2.9340579
0. - 1.5463843
Q =
- 0.0444554 - 0.5623216
- 0.0889108 - 0.4779733
- 0.1333663 - 0.3936251
- 0.1778217 - 0.3092769
- 0.2222771 - 0.2249286
- 0.2667325 - 0.1405804

22 CAPÍTULO 8. RESPOSTAS PARCIAIS DE TODOS OS EXERCÍCIOS - UFRGS
- 0.3111880 - 0.0562322
- 0.3556434 0.0281161
- 0.4000988 0.1124643
- 0.4445542 0.1968125
- 0.4890096 0.2811608
-->u = R \ (Q’*w)
u =
1.5172727
- 0.2763636
-->a=u(1);b=u(2);x=3.5; phi=a*x+b
4.3.2: φ(0.33) = 1.3821917 via
-->xi=[0 .25 .50 .75 1.00]’;yi=[1.00 1.2840 1.6487 2.1170 2.7183]’;
-->// y=a*x^2 + b*x + c
-->M=[xi.*xi xi ones(xi)];w = yi;[M w]
ans =
0. 0. 1. 1.
0.0625 0.25 1. 1.284
0.25 0.5 1. 1.6487
0.5625 0.75 1. 2.117
1. 1. 1. 2.7183
-->[Q,R]=qr(M,"e")
R =
- 1.1759305 - 1.328735 - 1.594482
0. - 0.3308523 - 1.1526469
0. 0. 1.0625593
Q =
0. - 8.882D-16 0.9411239
- 0.0531494 - 0.5421709 0.2732295
- 0.2125976 - 0.6574356 - 0.0910765
- 0.4783446 - 0.3457941 - 0.1517942
- 0.8503904 0.3927538 0.0910765
-->u = R \ (Q’*w)
u =
0.8436571
0.8641829
1.0051371
-->a=u(1);b=u(2);c=u(3); x=0.33; phi=a*x*x+b*x+c
4.3.3: a = 0.5066647, b = 3.0688652 via
-->xi=[1.00 1.25 1.5 1.75 2]’;yi=[5.1 5.79 6.53 7.45 8.47]’;
-->// log(y)=log(b)*1 + a*x
-->M=[ones(xi) xi];w = log(yi);[M w]
ans =
1. 1. 1.6292405
1. 1.25 1.7561323
1. 1.5 1.8764069
1. 1.75 2.008214
1. 2. 2.1365305
-->[Q,R]=qr(M,"e")
R =
- 2.236068 - 3.354102
0. 0.7905694
Q =
- 0.4472136 - 0.6324555
- 0.4472136 - 0.3162278
- 0.4472136 2.776D-16
- 0.4472136 0.3162278
- 0.4472136 0.6324555
-->u = R \ (Q’*w)
u =
1.1213079
0.5066647
-->b=exp(u(1)),a=u(2)
4.3.4: a = 0.0129393, b = 1.708 · 10−9 via
-->ti=[1920 1930 1940 1950 1960 1970]’;
-->Pi=[105.711 123.203 131.669 150.697 179.323 203.212]’;
-->// log(P) = log(b) + a*t
-->M=[ones(ti) ti]; w=log(Pi);[M w]
ans =
1. 1920. 4.660709
1. 1930. 4.8138334
1. 1940. 4.8802912
1. 1950. 5.0152712
1. 1960. 5.1891886
1. 1970. 5.3142498
-->[Q,R]=qr(M,"e")
R =
- 2.4494897 - 4764.2575
0. 41.833001
Q =
- 0.4082483 - 0.5976143
- 0.4082483 - 0.3585686
- 0.4082483 - 0.1195229
8.1. INTERPOLAÇÃO E AJUSTE DE CURVAS 23
- 0.4082483 0.1195229
- 0.4082483 0.3585686
- 0.4082483 0.5976143
-->u = R \ (Q’*w)
u =
- 20.187986
0.0129393
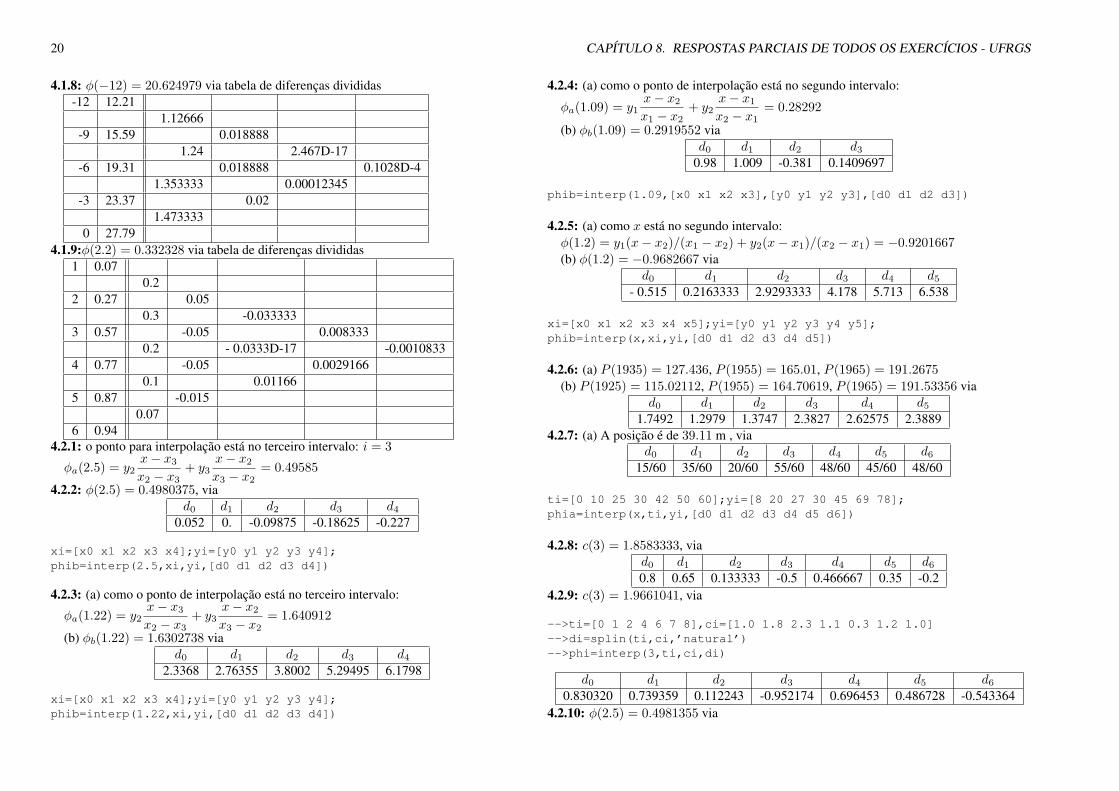
-->b = exp(u(1)), a = u(2)
de onde obtemost 1925 1955 1965 1910 200P 112.18375 165.39172 188.23846 92.392784 296.06663
4.3.5: P = 0.3470513 via
-->xi=[1:6]’;Pi=[0.07 0.27 0.57 0.77 0.87 0.94]’;
-->// P = A + Bcos(x*pi/7) + C*sin(x*pi/7)
-->M = [ones(xi) cos(%pi*xi/7) sin(%pi*xi/7)];w = Pi;[M w]
ans =
1. 0.9009689 0.4338837 0.07
1. 0.6234898 0.7818315 0.27
1. 0.2225209 0.9749279 0.57
1. - 0.2225209 0.9749279 0.77
1. - 0.6234898 0.7818315 0.87
1. - 0.9009689 0.4338837 0.94
-->[q,r]=qr(M,"e")
r =
- 2.4494897 0. - 1.7886526
0. - 1.5811388 - 5.551D-17
0. 0. - 0.5483810
q =
- 0.4082483 - 0.5698227 0.5403736
- 0.4082483 - 0.3943296 - 0.0941263
- 0.4082483 - 0.1407346 - 0.4462472
- 0.4082483 0.1407346 - 0.4462472
- 0.4082483 0.3943296 - 0.0941263
- 0.4082483 0.5698227 0.5403736
-->u= r\(q’*w)
u =
0.3692820
- 0.4809764
0.2908525
-->A=u(1),B=u(2),C=u(3);x=2.2;phi = A + B*cos(%pi*x/7) + C*sin(%pi*x/7)
4.3.6: P = 0.3283283 via
-->xi=[1:6]’;Pi=[0.07 0.27 0.57 0.77 0.87 0.94]’;
-->// 1/P = A + B*exp(-x) + C*exp(-x*x)
-->function u=equad(x); u = exp(-x*x);endfunction
-->function u=iinv(x);u=1/x;endfunction
-->M=[ones(xi) exp(-xi) feval(xi,equad)];w=feval(Pi,iinv);[M w]
ans =
1. 0.3678794 0.3678794 14.285714
1. 0.1353353 0.0183156 3.7037037
1. 0.0497871 0.0001234 1.754386
1. 0.0183156 0.0000001 1.2987013
1. 0.0067379 1.389D-11 1.1494253
1. 0.0024788 2.320D-16 1.0638298
-->[q,r]=qr(M,"e")
r =
- 2.4494897 - 0.2370021 - 0.1577139
0. 0.3167755 0.3170752
0. 0. - 0.1012935
q =
- 0.4082483 0.8558862 - 0.3170261
- 0.4082483 0.1217885 0.8360544
- 0.4082483 - 0.1482710 0.1702968
- 0.4082483 - 0.2476203 - 0.1394754
- 0.4082483 - 0.2841689 - 0.2538809
- 0.4082483 - 0.2976144 - 0.2959688
-->u= r\(q’*w)
u =
0.9935121
17.167619
18.969573
-->A=u(1),B=u(2),C=u(3);x=2.2; phi=1/(A + B*exp(-x)+C*exp(-x*x))
4.3.7: a = 0.5807598, b = 1.613276 via
-->Wi=[0.025 0.233 0.783 1.35 1.69 2.75 4.83 5.53]’;
-->Ri=[0.234 0.537 1.47 2.48 1.44 1.84 4.66 6.94]’;
-->// log(R) = log(b) + a*log(W)
-->M=[ones(Wi) log(Wi)];w=log(Ri);[M w]
ans =
1. - 3.6888795 - 1.4524342
1. - 1.4567168 - 0.6217572
1. - 0.2446226 0.3852624
1. 0.3001046 0.9082586
1. 0.5247285 0.3646431
1. 1.0116009 0.6097656

24 CAPÍTULO 8. RESPOSTAS PARCIAIS DE TODOS OS EXERCÍCIOS - UFRGS
1. 1.5748465 1.5390154
1. 1.7101878 1.9373018
-->[Q,R]=qr(M,"e")
R =
- 2.8284271 0.0950177
0. 4.7512409
Q =
- 0.3535534 - 0.7693328
- 0.3535534 - 0.2995266
- 0.3535534 - 0.0444155
- 0.3535534 0.0702339
- 0.3535534 0.1175108
- 0.3535534 0.2199835
- 0.3535534 0.3385306
- 0.3535534 0.3670160
-->u = R \ (Q’*w)
u =
0.4782669
0.5807598
-->b=exp(u(1)), a=u(2)
4.3.8: φ(1.4) = 0.1781380 via
-->xi=[1.0:0.25:2.0]’;yi=[0.571 0.293 0.123 0.0427 0.0123]’;
-->// log(alfa) + beta*log(x)+gama*(-x^2) = log(y)
-->function u=mquad(x); u=-x*x; endfunction
-->M=[ones(xi) log(xi) feval(xi,mquad)];w=log(yi);[M w]
ans =
1. 0. - 1. - 0.5603661
1. 0.2231436 - 1.5625 - 1.2275827
1. 0.4054651 - 2.25 - 2.0955709
1. 0.5596158 - 3.0625 - 3.1535564
1. 0.6931472 - 4. - 4.398156
->[Q,R]=qr(M,"e")
R =
- 2.236068 - 0.8413750 5.3106614
0. 0.5476367 - 2.3356956
0. 0. - 0.4735118
Q =
- 0.4472136 - 0.6870874 0.4853673
- 0.4472136 - 0.2796211 - 0.3366131
- 0.4472136 0.0533032 - 0.5269141
- 0.4472136 0.3347866 - 0.1994875
- 0.4472136 0.5786187 0.5776474
-->u = R \ (Q’*w)
u =
0.8466179
0.550476
1.4066502
-->alfa=exp(u(1));beta=u(2);gama=u(3);[alfa beta gama]
ans =
2.3317473 0.550476 1.4066502
-->x=1.4; phi=alfa*x**beta*exp(-gama*x*x)
8.2 Derivação e Integração Numérica
5.1.1(a): f(x) = xsin(x), u = π, hn = 2−n
n dn n dn n dn n dn1 - 0.9237019 5 - 1.1338642 9 - 1.1440705 13 - 1.14468882 - 1.0431042 6 - 1.1393803 10 - 1.1444005 14 - 1.14470933 - 1.0976761 7 - 1.1420763 11 - 1.1445653 15 - 1.14471964 - 1.1223619 8 - 1.1434085 12 - 1.1446476 16 - 1.1447247
5.1.1(b): f(x) = sin(x)sin(x), u = π/4. hn = 2−n
n dn n dn n dn n dn1 0.3569993 5 0.3668633 9 0.3619683 13 0.36164112 0.3829881 6 0.3643322 10 0.3617941 14 0.36163023 0.3782128 7 0.3629984 11 0.3617068 15 0.36162474 0.3713789 8 0.3623145 12 0.3616630 16 0.3616220
5.1.1(c): y é função implícita de x, u = 2, hn = 2−n
-->function y=f(x)
--> vu=[x*x,1,0;-1,2,x;0,x,1]\[1;0;1]; y=vu(3); endfunction
n dn n dn n dn n dn1 1.1393643 5 2.2688442 9 2.4179356 13 2.4279042 1.5523835 6 2.3460047 10 2.4232419 14 2.42823763 1.8945632 7 2.3865774 11 2.4259037 15 2.42840454 2.1287488 8 2.4073921 12 2.4272369 16 2.428488
5.1.2(a): f(x) = xsin(x), u = π, hn = 2−n
n sn n sn n sn n sn1 -1.0549884 3 -1.1391649 5 -1.1443824 7 -1.14470822 -1.1224131 4 -1.1433396 6 -1.144643 8 -1.1447245
5.1.2(b): f(x) = sin(x)sin(x), u = π/4, hn = 2−n

8.2. DERIVAÇÃO E INTEGRAÇÃO NUMÉRICA 25
n sn n sn n sn1 0.2612737 4 0.3601647 7 0.36159652 0.3380163 5 0.3612558 8 0.36161353 0.3557854 6 0.3615284 9 0.3616178
5.1.2(c): y é função implícita de x, u = 2, hn = 2−n
n sn n sn n sn n sn1 - 9.573175 4 2.4774302 7 2.4293201 10 2.42858312 3.5456892 5 2.4406055 8 2.4287586 11 2.42857443 2.6364914 6 2.4315689 9 2.4286182 12 2.4285722
5.1.3: aplicando a definição dada no Exercício 5.1.2,
sn − f ′(u) =f(u+ hn)− f(u− hn)
2hn− f ′(u) =
=1
2hn
[
2hnf′(u) +
2h3nf
(3)(u)
3!+
2h5nf
(5)(u)
5!+ . . .
]
− f ′(u) =h2nf
(3)(u)
6+
h4nf
(5)(u)
120+ . . .
e então o erro de truncamento tem ordem 2. Além disso, lembrando que hn−1 = 2hn,
un − f ′(u) =4sn − sn−1
3− f ′(u) =
4
3(sn − f ′(u))− 1
3(sn−1 − f ′(u)) =
=4
3
(
h2nf
(3)(u)
6+
h4nf
(5)(u)
120
)
− 1
3
(
4h2nf
(3)(u)
6+
16h4nf
(5)(u)
120
)
= −h4nf
(3)(u)
30+O(h6
n)
o que mostra que o erro de truncamento de {un} tem ordem 4.As aproximações aceleradas para cada um dos casos (a), (b) e (c): hn = 2−n
n un un un
1 -1.0549884 0.2612737 -9.5731752 -1.1448880 0.3635972 7.91864393 -1.1447488 0.3617084 2.33342544 -1.1447312 0.3616244 2.42440985 -1.1447300 0.3616195 2.42833066 2.42855677 2.4285705
5.1.4: em x = 1.09, dy/dx = 0.5182933, usando interp e inclinações (via splin)d0 d1 d2 d3
0.7753333 1.3893333 -0.2786667 -2.56066675.1.5: em T = −5, dP/dT = 1.3285317, usando interp e inclinações (via splin)
α = 1.1266667, β = 1.4733333d0 d1 d2 d3 d4
1.1266667 1.1694048 1.2957143 1.4277381 1.47333335.1.6(a): em t = 0.9, dc/dt = −0.5852534, usando interp e inclinações (via splin)
d0 d1 d2 d3 d4 d5 d60.418665 0.510873 -0.300629 -0.508358 -0.076527 0.114465 0.418665
5.1.6(b): gráfico (t, dc/dt) sugere t∗ = 0.17
5.2.1: f(x) = tan(πx2/16),
(a) n = 3, x0 = 0, Ia = 0.6343059 e aindax1 x2 x3
0.6666667 1.3333333 2.
I1 I2 I30.0291629 0.1504863 0.4546567
(b) n = 4, x0 = 0, Ib = 0.610502 e aindax1 x2 x3 x4
0.5 1. 1.5 2.
I1 I2 I3 I40.0122817 0.0620098 0.1679693 0.3682412
5.2.2: f(x) = exp(−x2)/(3 + x)
(a) n = 3, x0 = −2, Ia = 0.6258387 e aindax1/2 x3/2 x5/2
-1.3333333 0.0 1.3333333
x1 x2 x3
-0.6666667 0.6666667 2.
I1 I2 I30.1552754 0.3962205 0.0743428
(b) n = 4, x0 = −2, Ib = 0.6252261 e ainda

26 CAPÍTULO 8. RESPOSTAS PARCIAIS DE TODOS OS EXERCÍCIOS - UFRGS
x1/2 x3/2 x5/2 x7/2
-1.5 -0.5 0.5 1.5
x1 x2 x3 x4
-1. 0. 1. 2.
I1 I2 I3 I40.0805533 0.2938924 0.2192269 0.0315535
5.2.3: f(x) = sin(x)/(1 + x2)(a) n = 4, x0 = 0 , Ia = 0.6547585 e ainda
x1 x2 x3 x4
0.7853982 1.5707963 2.3561945 3.1415927
I1 I2 I3 I40.1717414 0.2849960 0.1556378 0.0423832
(b) n = 3, x0 = 0, Ib = 0.7200511 e aindax1/2 x3/2 x5/2
0.5235988 1.5707963 2.6179939
x1 x2 x3
1.0471976 2.0943951 3.1415927
I1 I2 I30.3460507 0.3014945 0.0725059
5.2.4: f(x) =√
x2 + 2/(3x)(a) n = 5, x0 = 1, Ia = 4.2166024 e ainda
x1 x2 x3 x4 x5
1.4 1.8 2.2 2.6 3
I1 I2 I3 I4 I50.5703649 0.6921855 0.8335845 0.9833352 1.1371324
(b) n = 4, x0 = 1, Ib = 4.2106337 e aindax1/2 x3/2 x5/2 x7/2
1.25 1.75 2.25 2.75
x1 x2 x3 x4
1.5 2. 2.5 3.
I1 I2 I3 I40.726939 0.9288132 1.1578393 1.3970421
5.2.5: (a) n = 4, x0 = 1, Ia = 6.63875 e aindax1 x2 x3 x4
1.25 1.5 1.75 2.
I1 I2 I3 I41.36125 1.54 1.7475 1.99
(b) n = 2, x0 = 1, Ib = 6.6325 e ainda
x1/2 x1 x3/2 x2
1.25 1.5 1.75 2.I1 I2
0.726939 0.9288132
5.2.6: m = 290 g (usando somente trapézios)
5.2.7: m = 100− 6.1 = 93.9 g
5.3.1: f(x) = ex/ ln(1 + x), a = 1, b = 2,n sn δn n sn δn0 5.3237302 —- 6 5.0333013 4.0598861 5.1074257 1.072 7 5.0332465 4.6622 5.0518959 1.658 8 5.0332328 5.2643 5.0379031 2.255 9 5.0332294 5.8664 5.0343974 2.856 10 5.0332285 6.4685 5.0335206 3.458
assim I = 5.0332285 com aumento linear da exatidão, de aproximadamente 0.6 digse poriteração.
5.3.2: f(x) = ln(1 +√x)/(1 + x2), a = 0, b = e2
n sn δn n sn δn0 0.0872670 —- 8 0.9665166 2.4371 0.3140633 0. 9 0.9671509 2.8822 0.5868576 0.032 10 0.9673776 3.3293 0.8081711 0.261 11 0.9674584 3.7774 0.9094303 0.652 12 0.9674871 4.2265 0.9463820 1.107 13 0.9674973 4.6766 0.9598554 1.552 14 0.9675009 5.1267 0.9647499 1.994 15 0.9675022 5.577
obtemosI = 0.9675022 com 5 casas corretas. O aumento da exatidão é mais lento que oesperado, e ainda gradualmente diminui. Esse fenômeno ocorre porque a derivada segundado integrando não é limitada em qualquer vizinhança de x = 0, por causa do termo
√x.
5.3.3: f(x) = ex/ ln(1 + x), a = 1, b = 2, δn = digse(un−1, un)n un δn n un δn0 5.3237302 —— 3 5.0332388 4.2331 5.0353242 0.941 4 5.0332289 5.4062 5.0333859 3.113 5 5.0332283 6.601
converge a I = 5.0332283 linearmente, a aprox. 1.2 digse/iteração.
5.3.4: f(x) = sin(x)/(cos(x) + ln(x)), a = π/2, b = π

8.3. SOLUÇÃO NUMÉRICA DE EQUAÇÕES DIFERENCIAIS ORDINÁRIAS 27
n un n un
0 1.7392122 4 5.34667081 5.5182154 5 5.3467122 5.4756167 6 5.34671423 5.3419181 7 5.3467143
assim I = 5.3467143, com cerca de 6 casas corretas.5.3.5: f(x) = sin(x+ |x|1/2), a = π/2, b = 3π/2, Q.C.R.T + Richardson:
n un n un n un
0 1.37731221 3 -1.37090726 6 -1.370347701 -1.59285007 4 -1.3703819 7 -1.370347582 -1.38003668 5 -1.37034971 8 -1.37034757
e assim Ia = −1.37034757.5.4.1: x = (1/2) + (1/2)u⇒ dx = du/2 e
∫ 1
0
f(x)dx =
∫ 1
−1
f
(
u+ 1
2
)
du
2=
∫ 1
−1
g(u)du
onde g(u) =1
2f
(
u+ 1
2
)
, e assim, para f(x) =πx
1− x2,
(a) Ia = g(
−√
1/3)
+ g(
√
1/3)
= 1.1375825
(b) Ib = (5/9) · g(
−√
3/5)
+ (8/9) · g (0) + (5/9) · g(
√
3/5)
= 1.1429281
5.4.2: x =1 +√2
2+
(√2− 1
2
)
u⇒ dx =
√2− 1
2du e
∫
√2
1
f(x)dx =
∫ 1
−1
f
(
1 +√2
2+
(√2− 1)u
2
) √2− 1
2du =
∫ 1
−1
g(u)√1− u2
du
onde g(u) =√
1− u2
√2− 1
2f
(
1 +√2
2+
(√2− 1)u
2
)
,
(a) n = 3 , f(x) = ln(3− x2)u0 u1 u2 u3
0.9238795 0.3826834 -0.3826834 -0.9238795Ia = π
4 (g(u0) + g(u1) + g(u2) + g(u3)) = 0.1716162
(b) n = 4 , f(x) = ln(3− x2)u0 u1 u2 u3 u4
0.9510565 0.5877853 6.123D-17 -0.5877853 -0.9510565Ib =
π5 (g(u0) + g(u1) + g(u2) + g(u3) + g(u4)) = 0.1703336
5.4.3: temos, para u = x− 1, du = dx:∫ ∞
1
f(x)dx =
∫ ∞
0
f(u+ 1)du =
∫ 1
−1
g(u)e−udu
onde g(u) = euf(u+ 1). Assimu0 u1 u2 u3
0.322547689619 1.745761101158 4.536620296921 9.395070912301
w0 w1 w2 w3
0.603154104342 0.357418692438 0.388879085150E-1 0.539294705561E-3
e então I = w0g(u0) + w1g(u1) + w2g(u2) + w3g(u3) = 0.4284630.
5.4.4: (a) temos f(x) =ex
2
e−π√
|x|
2 + x2, Ia = 0.1050008 e
x0 x1 x2 x3
-1.6506801239 -0.5246476233 0.5246476233 1.6506801239
w0 w1 w2 w3
0.0813128354 0.8049140900 0.8049140900 0.0813128354
(b) para f(x) =e−π√
|x|
2 + x2, temos Ib = 0.1708675
n sn n sn n sn0 7.873D-08 7 0.2518000 14 0.17094371 10. 8 0.2024194 15 0.17089462 5.0000095 9 0.182842 16 0.17087703 2.5003344 10 0.1753216 17 0.17087084 1.2544028 11 0.1725001 18 0.17086855 0.6485133 12 0.1714596 19 0.17086776 0.3714807 13 0.1710806 20 0.1708675
5.4.5: (a) Ia =
∫ ∞
0
f(x)e−xdx, onde f(x) =ex · e−
√|x|
1 + x2. Assim,
Ia = w0f(u0)+w1f(u1)+w2f(u3)+w4f(u4) = 0.5858235 usando os pontos e pesosmostrados no Exercício 5.4.3.
(b) Ib =1
2
∫ ∞
−∞
e−√
|x|
1 + x2dx =
∫ ∞
0
f(x)e−x2
dx, onde f(x) =1
2· e
x2 · e−√
|x|
1 + x2e assim,
usando pontos e pesos do Exercício 5.4.4(a),
Ib = w0f(x0) + w1f(x1) + w2f(x2) + w3f(x3) = 0.4949674.
8.3 Solução Numérica de Equações Diferenciais Ordiná-
rias
6.1.1: f(2) = 1.3470457 , obtido na tabela abaixo

28 CAPÍTULO 8. RESPOSTAS PARCIAIS DE TODOS OS EXERCÍCIOS - UFRGS
ti yi ti yi ti yi0.0 2.0 0.7 0.9299264 1.4 0.98395840.1 1.6 0.8 0.9085450 1.5 1.02489520.2 1.36 0.9 0.8986832 1.6 1.07358840.3 1.20224 1.0 0.8988015 1.7 1.13010340.4 1.0937691 1.1 0.9078972 1.8 1.19450760.5 1.0178868 1.2 0.9253382 1.9 1.26683410.6 0.9651718 1.3 0.9507537 2.0 1.3470457
6.1.2: y(2) = 1.258422 , obtido na tabela abaixoti yi ti yi ti yi0.0 2.0 0.7 0.9213671 1.4 1.01565030.1 1.6 0.8 0.9064754 1.5 1.05249570.2 1.354 0.9 0.9043056 1.6 1.0917210.3 1.1906684 1.0 0.9125287 1.7 1.13253550.4 1.0788993 1.1 0.9292579 1.8 1.17427190.5 1.0024969 1.2 0.9529059 1.9 1.21638040.6 0.9519969 1.3 0.9821029 2.0 1.2584223
6.1.3: y(π) = 0.5833852, obtido na tabela abaixoti yi ti yi ti yi0.0 1.0 1.0995574 1.6986514 2.1991149 1.0374050.1570796 1.1570796 1.2566371 1.6526864 2.3561945 0.93494660.3141593 1.3115719 1.4137167 1.5765484 2.5132741 0.84213510.4712389 1.4555047 1.5707963 1.4804891 2.6703538 0.76060550.6283185 1.5770616 1.727876 1.3728727 2.8274334 0.69082960.7853982 1.6631318 1.8849556 1.2600422 2.984513 0.63220420.9424778 1.7042081 2.0420352 1.1468877 3.1415927 0.5833852
6.1.5: tempo mínimo = 245.25 segundos (4.08 min). Usando solução exata: 245.26136 seg6.1.6: tempo mínimo = 40.4 horas6.1.7: 15.59 minutos6.1.8: 18.55 minutos6.1.9: em 0.7 segundos, 4.5 segundos e 13.2 segundos, respectivamente6.1.10: f(2) = 1.787827 , obtido na tabela abaixo
ti yi ti yi ti yi0. 2. 0.7 0.8131121 1.4 1.3655930.1 1.6 0.8 1.1970489 1.5 0.65207410.2 1.52 0.9 0.7180548 1.6 1.47617510.3 1.19872 1. 1.2231782 1.7 0.68863160.4 1.3045373 1.1 0.6634574 1.8 1.61546710.5 0.9627195 1.2 1.2811037 1.9 0.74825300.6 1.2154435 1.3 0.6426770 2.0 1.7878268
Essa solução é muito ruim comparada com a do Exercício 6.1.1. Usando h = 0.01 (grá-fico abaixo) temos uma resposta f(2) = 1.419755, mais próxima com a daquele exercício.
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.00.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
1.8
2.0
6.2.1: f(t, y) = 0.1y/(1 + t2)ti yi ti yi ti yi0. 3.1415927 3.5 3.5751447 7. 3.62419160.5 3.2914141 4. 3.5870586 7.5 3.62757861. 3.399002 4.5 3.5964965 8. 3.6305521.5 3.4664768 5. 3.6041477 8.5 3.63318282. 3.5096711 5.5 3.6104703 9. 3.63552672.5 3.5388745 6. 3.6157795 9.5 3.63762823. 3.5596749 6.5 3.620299 10. 3.6395228
6.2.2: y(π) = 0.5910251 obtido na tabela abaixoti yi ti yi ti yi0. 1. 1.0995574 1.6341896 2.1991149 1.00642580.1570796 1.1570796 1.2566371 1.5804218 2.3561945 0.91493440.3141593 1.3102782 1.4137167 1.502981 2.5132741 0.83188980.4712389 1.4489696 1.5707963 1.4107069 2.6703538 0.75818860.6283185 1.5597845 1.727876 1.3103459 2.8274334 0.69391220.7853982 1.6300904 1.8849556 1.2069897 2.984513 0.63850530.9424778 1.6538394 2.0420352 1.1046156 3.1415927 0.5910251
6.2.3: hy2i+1 + 2yi+1 + ci = 0, onde ci = −2yi − h(ti+1 + ti − y2i )
a única escolha estável é yi+1 = (−1 +√1− hci)/h, que implica y(2) = 1.2666478,
obtido na tabela abaixo

8.3. SOLUÇÃO NUMÉRICA DE EQUAÇÕES DIFERENCIAIS ORDINÁRIAS 29
ti yi ti yi ti yi0.0 2.0 0.7 0.9897777 1.4 1.04536220.1 1.6661905 0.8 0.9688602 1.5 1.0776560.2 1.4388644 0.9 0.9607716 1.6 1.11268540.3 1.2786062 1.0 0.9632272 1.7 1.14969240.4 1.1641072 1.1 0.9743673 1.8 1.18803180.5 1.0827343 1.2 0.9926318 1.9 1.22716420.6 1.0264397 1.3 1.0166836 2.0 1.2666478
6.2.4: método previsor-corretor de ordem 2 forneceti yi ti yi ti yi18. 883.02861 18.35 894.04023 18.7 904.569218.05 884.63074 18.4 895.57422 18.75 906.0331718.1 886.22326 18.45 897.09833 18.8 907.48718.15 887.80612 18.5 898.61251 18.85 908.9306418.2 889.37929 18.55 900.11672 18.9 910.3640618.25 890.94272 18.6 901.61093 18.95 911.7872218.3 892.49638 18.65 903.0951 19. 913.20009
e então t = 18.55 segundos é o instante em que 90 % do valor de saturação é atingido.
6.2.5: método previsor-corretor de ordem 2 forneceti yi ti yi ti yi0.5 1.5 1.7 2.0660354 2.9 1.95943280.6 1.617011 1.8 2.0603594 3.0 1.95223480.7 1.7209531 1.9 2.0527122 3.1 1.94562690.8 1.8117297 2.0 2.0437658 3.2 1.93960310.9 1.8874084 2.1 2.0340375 3.3 1.93415061.0 1.9476417 2.2 2.0239214 3.4 1.92925131.1 1.9933373 2.3 2.013714 3.5 1.92488321.2 2.0261821 2.4 2.003636 3.6 1.92102161.3 2.0482034 2.5 1.9938487 3.7 1.91763981.4 2.0614492 2.6 1.9844676 3.8 1.91471021.5 2.0677993 2.7 1.975573 3.9 1.91220421.6 2.0688785 2.8 1.9672174 4.0 1.9100932
6.2.6: Para a =√3, y(0) = 1/2, h = 0.05, esse esquema produz
ti yi ti yi ti yi0. 0.5 0.35 0.3028912 0.7 0.16338180.05 0.5433013 0.4 0.2762063 0.75 0.14967020.1 0.4510737 0.45 0.2536685 0.8 0.13708330.15 0.4385913 0.5 0.2319849 0.85 0.12556910.2 0.3878578 0.55 0.2126910 0.9 0.11501430.25 0.3628404 0.6 0.1947085 0.95 0.10535090.3 0.3282148 0.65 0.1784064 1. 0.0964971
e portanto o valor aproximado para y(1) é y21 = 0.0964971. A solução exata y(t) =0.5 exp
(
−√3t)
fornece y(1) = 0.0884606, e portanto temos um erro relativo de aproxi-madamente 9 %.6.2.7: Para a =
√3, y(0) = 1/2, h = 0.05, esse esquema produz
ti yi ti yi ti yi0. 0.5 0.35 79.6448 0.7 - 314013.480.05 0.5433013 0.4 - 258.85297 0.75 1025315.0.1 0.2251924 0.45 846.30963 0.8 - 3347850.10.15 1.1015101 0.5 - 2762.3484 0.85 10931374.0.2 - 1.9090174 0.55 9020.5313 0.9 - 35693038.0.25 7.7838682 0.6 - 29452.911 0.95 1.165E+080.3 - 23.9912 0.65 96170.205 1.0 - 3.805E+08
e portanto y(1) é aproximado com erro de 4.3× 107% !!6.4.1: Método de Euler-Cromer, f(t, y, v) = t− cos(y)− vey ,
ti yi ti yi ti yi0. 1. 0.7 0.6181722 1.4 0.51594380.1 0.9108899 0.8 0.5903272 1.5 0.51997390.2 0.8398293 0.9 0.5668552 1.6 0.52913840.3 0.7809901 1. 0.5477025 1.7 0.54359690.4 0.7310330 1.1 0.5329108 1.8 0.56348450.5 0.6879657 1.2 0.5225858 1.9 0.58890160.6 0.6505843 1.3 0.5168737 2. 0.619905
6.4.2: Método de Verlet (nas velocidades), f(t, y) = 3 cos(t)− 2 cbrt(y),ti yi ti yi ti yi0. 1. 0.7 0.0330025 1.4 -0.13182040.1 0.89 0.8 -0.0985510 1.5 0.00255450.2 0.763757 0.9 -0.1993456 1.6 0.16412030.3 0.6251924 1. -0.2649572 1.7 0.34472320.4 0.4783920 1.1 -0.2924790 1.8 0.54105270.5 0.3276321 1.2 -0.2799887 1.9 0.75030050.6 0.1774673 1.3 -0.2264532 2. 0.9697637

30 CAPÍTULO 8. RESPOSTAS PARCIAIS DE TODOS OS EXERCÍCIOS - UFRGS
6.4.3: Método de Verlet Corrigido, f(t, y, v) = 1 + sin(t) − 2v − y2,ti yi ti yi ti yi1. 1. 1.7 1.7507475 2.4 1.67455891.1 1.1842074 1.8 1.7738582 2.5 1.63552971.2 1.3394808 1.9 1.7822048 2.6 1.59386341.3 1.46787 2. 1.7779508 2.7 1.55049881.4 1.571265 2.1 1.7631853 2.8 1.50617391.5 1.6515518 2.2 1.7398702 2.9 1.46144691.6 1.7106925 2.3 1.7097974 3. 1.4167201
6.4.4: Método de Verlet (nas velocidades), f(t, y) = −t2(1 + ey),ti yi ti yi ti yi1. 3. 1.7 4.0113224 2.4 3.53854341.1 3.1947511 1.8 4.0625927 2.5 3.27175041.2 3.3769063 1.9 4.0809055 2.6 2.94008621.3 3.5441698 2. 4.0625086 2.7 2.53724851.4 3.6940449 2.1 4.0034234 2.8 2.05574561.5 3.8238326 2.2 3.8994332 2.9 1.48580771.6 3.9306288 2.3 3.7460628 3. 0.8127364
6.4.4: Método de Leapfrog, f(t, y) = −t2(1 + ey), y0 = 3, v0 = 2,
v1/2 = 2 +△t f(t0, y0)/2 = 1.9475106,ti yi ti yi ti yi1. 3. 1.7 4.0113224 2.4 3.53854341.1 3.1947511 1.8 4.0625927 2.5 3.27175041.2 3.3769063 1.9 4.0809055 2.6 2.94008621.3 3.5441698 2. 4.0625086 2.7 2.53724851.4 3.6940449 2.1 4.0034234 2.8 2.05574561.5 3.8238326 2.2 3.8994332 2.9 1.48580771.6 3.9306288 2.3 3.7460628 3. 0.8127364
6.4.6: Método do disparo, associado a Verlet, f(t, y) = 3 cos(t) − 2 cbrt(y), y0 = 1,v0 = α,
existe raíz simples no intervalo [7.8, 7.9]. Método da Secante:n αn n αn
0. 7.9 3. 7.80986171. 7.8098318 4. 7.80986172. 7.8098616
e assim, para α = 7.8098617,ti yi ti yi ti yi3.1415927 1. 4.2411501 6.1991084 5.3407075 5.60431733.2986723 2.1650852 4.3982297 6.4003369 5.4977871 5.24818013.4557519 3.1932194 4.5553093 6.4870684 5.6548668 4.85862673.6128316 4.078286 4.712389 6.4701854 5.8119464 4.44537743.7699112 4.8185556 4.8694686 6.3613474 5.969026 4.01694143.9269908 5.4155896 5.0265482 6.1726526 6.1261057 3.5804594.0840704 5.8736221 5.1836279 5.9163085 6.2831853 3.1415927
6.4.7: Método do disparo, associado a Euler-Cromer, f(t, y, v) = 3 cos(t) − 2v exp(y),y0 = 1, v0 = α.
Fazendo gráfico de F (α), vemos que existem raízes símples no intervalos [−9.5,−9.0] e[28.0, 28.2]. Qualquer uma delas define solução para o problema. Por exemplo, o métododa secante para a raíz negativa produz α = −9.4001549 em 5 iterações. A correspondentesolução está listada abaixo:

8.4. MÉTODOS DE OTIMIZAÇÃO 31
ti yi ti yi ti yi0. 1. 0.7 -0.5439792 1.4 -0.23323710.1 0.3305072 0.8 -0.5420809 1.5 -0.17143530.2 0.0019858 0.9 -0.5184813 1.6 -0.11611110.3 -0.2155273 1. -0.4778979 1.7 -0.06973180.4 -0.3638864 1.1 -0.4248368 1.8 -0.03415690.5 -0.4615116 1.2 -0.3636444 1.9 -0.01065910.6 -0.5190758 1.3 -0.2984801 2. -1.457D-16
8.4 Métodos de Otimização
7.1.1: gráficos de f = x(2 − x)2 nos intervalos. Função somente atende a definição deestritamente convexa nos intervalos de (b) e (d).
0−2 −1
0
−20
−30
−10
−35
−25
−15
−5
2 31.5 2.5
0
2
1
3
0.5
1.5
2.5
1 21.5
0
1
0.2
0.4
0.6
0.8
0.1
0.3
0.5
0.7
0.9
2 32.5
0
2
1
3
0.5
1.5
2.5
7.1.2: gráficos de f =
{
2− 2|x| , x < 1min{2, x} , x ≥ 1
Função somente atende a definição de estritamente quasi-convexa no intervalo de (c).
0−2 −1 1
0
−2
2
−1
1
−1.5
−0.5
0.5
1.5
0 21 3
0
2
1
0.2
0.4
0.6
0.8
1.2
1.4
1.6
1.8
0 210.5 1.5
0
2
1
0.2
0.4
0.6
0.8
1.2
1.4
1.6
1.8
21 31.5 2.5
1
2
1.2
1.4
1.6
1.8
1.1
1.3
1.5
1.7
1.9
7.1.3: Temos f(σ) = 1 ao passo que f(µ) = 1.5. Portanto f(σ) < f(µ) e então o intervalode incerteza pode ser reduzido para [a, µ] ou seja, [0, 1.5].
7.1.4: Busca Dicotônoma. zk = sign(f(σk)− f(µk))
k ak bk σk µk zk1 0. 2. 0.9999999 1.0000001 -12 0. 1.0000001 0.5000000 0.5000001 13 0.5000000 1.0000001 0.7499999 0.7500001 14 0.7499999 1.0000001 0.8749999 0.8750001 15 0.8749999 1.0000001 0.9374999 0.9375001 16 0.9374999 1.0000001 0.9687499 0.9687501 1
e o algoritmo encerra com x6 = 0.96875.
7.1.5: gráficos de f = 4x2 − 4x3 + x4.
(a) Função somente atende a definição de estritamente quasi-convexa no intervalo de (iii).
0−1 1
0
2
4
6
8
1
3
5
7
9
21 31.5 2.5
0
2
4
6
8
1
3
5
7
9
2 32.5
0
2
4
6
8
1
3
5
7
9
0 21 3
0
2
4
6
8
1
3
5
7
9
(b) Aplicando a busca dicotômica no intervalo [1.6, 3]:
k ak bk σk µk zk1 1.6 3. 2.2999999 2.3000001 -12 1.6 2.3000001 1.9499999 1.9500001 13 1.9499999 2.3000001 2.1249999 2.1250001 -14 1.9499999 2.1250001 2.0374999 2.0375001 -15 1.9499999 2.0375001 1.9937499 1.9937501 16 1.9937499 2.0375001 2.0156249 2.0156251 -1
e o algoritmo encerra com x6 = 2.0046875.
7.1.6: função objetivo (distância) f(x) =√
(3− x)2 + (1− 1/x)2. Intervalo de incertezaadequado, onde f é estritamente quase-convexa: [2.5, 3.5]. Aplicando a busca dicotômicanesse intervalo:k ak bk σk µk zk1 2.5 3.5 2.9999999 3.0000001 - 12 2.5 3.0000001 2.7499999 2.7500001 13 2.7499999 3.0000001 2.8749999 2.8750001 14 2.8749999 3.0000001 2.9374999 2.9375001 -15 2.8749999 2.9375001 2.9062499 2.9062501 16 2.9062499 2.9375001 2.9218749 2.9218751 1
e o algoritmo encerra com x6 = 2.9296875 que implica f(x6) = 0.6624090.
32 CAPÍTULO 8. RESPOSTAS PARCIAIS DE TODOS OS EXERCÍCIOS - UFRGS
7.1.7: função objetivo (distância)f(x) =
√
(2− x)2 + (4− 1/x)2.Gráfico da função objetivo, ao lado,sugere um intervalo de incertezacomo [0.2, 0.4] para o mínimo ab-soluto de f .Aplicando a busca dicotômicanesse intervalo:
0 21 30.2 0.4 0.6 0.8 1.2 1.4 1.6 1.8 2.2 2.4 2.6 2.8
2
4
6
3
5
1.5
2.5
3.5
4.5
5.5
6.5
f(x) = sqrt( (2−x)^2 + (4−1/x)^2 ) , x > 0
k ak bk σk µk zk1 0.2 0.4 0.2999999 0.3000001 -12 0.2 0.3000001 0.2500000 0.2500002 13 0.2500000 0.3000001 0.2749999 0.2750001 -14 0.2500000 0.2750001 0.2624999 0.2625001 -15 0.2500000 0.2625001 0.2562499 0.2562501 16 0.2562499 0.2625001 0.2593749 0.2593751 -1
e o algoritmo encerra com x6 = 0.2578125, f(x6) = 1.7463991, a aproximação desejada.
7.1.8: função objetivo (distância) f(x) =√
(1− x)2 + (4− x4)2. Gráfico da função obje-tivo sugere um intervalo de incerteza como [1.35, 1.45] para o mínimo absoluto
k ak bk σk µk zk1 1.35 1.45 1.3999999 1.4000001 12 1.3999999 1.45 1.4249998 1.425 - 13 1.3999999 1.425 1.4124999 1.4125001 - 14 1.3999999 1.4125001 1.4062499 1.4062501 15 1.4062499 1.4125001 1.4093749 1.4093751 16 1.4093749 1.4125001 1.4109374 1.4109376 1
e o algoritmo encerra com x6 = 1.4109375, f(x6) = 0.4125941, a aproximação desejada.
7.1.9: função objetivo, o erro quadratico, f(b) = (1 − 0 − b)2 + (2 − 2 − b)2 + (4 − 3 −b)2+(5−5−b)2 = b2+b2+(1−b)2+b2. Gráfico da função objetivo sugere um intervalode incerteza como [0.35, 0.7] para o mínimo absoluto de f .
k ak bk σk µk zk1 0.3 0.7 0.4999999 0.5000001 02 0.4999999 0.7 0.5999999 0.6000000 -13 0.4999999 0.6000000 0.5499999 0.5500001 -14 0.4999999 0.5500001 0.5249999 0.5250001 -15 0.4999999 0.5250001 0.5124999 0.5125001 -16 0.4999999 0.5125001 0.5062499 0.5062501 -1
e o algoritmo encerra com x6 = 0.50625, que portanto indica que melhor aproximação parab é 0.50625.7.1.10: função objetivo, o erro quadratico, f(p) = (1 − 1)2 + (1.6 − 2p)2 + (2 − 3p)2 +(2.5 − 4p)2. Gráfico da função objetivo sugere um intervalo de incerteza como [0.6, 0.7]para o mínimo absoluto de f .k ak bk σk µk zk1 0.6 0.7 0.6499999 0.6500001 12 0.6499999 0.7 0.6749998 0.6750000 -13 0.6499999 0.6750000 0.6624999 0.6625001 -14 0.6499999 0.6625001 0.6562499 0.6562501 -15 0.6499999 0.6562501 0.6531249 0.6531251 16 0.6531249 0.6562501 0.6546874 0.6546876 -1
e o algoritmo encerra com x6 = 0.6539062, que portanto indica que melhor aproximaçãopara p é 0.6539062.7.1.11: Razão Aurea. zk = sign(f(σk)− f(µk))
k ak bk σk µk zk1 0. 2. 0.7639320 1.236068 -1.2 0. 1.236068 0.4721360 0.7639320 13 0.4721360 1.236068 0.7639320 0.9442719 14 0.7639320 1.236068 0.9442719 1.0557281 -15 0.7639320 1.0557281 0.8753882 0.9442719 16 0.8753882 1.0557281 0.9442719 0.9868444 1
e o algoritmo encerra com x6 = 0.9655581.7.1.12: Razão Aurea. zk = sign(f(σk) − f(µk)) Como no Exercício 7.1.7, usamos comointervalo de incerteza inicial [0.2, 0.4].k ak bk σk µk zk1 0.2 0.4 0.2763932 0.3236068 -12 0.2 0.3236068 0.2472136 0.2763932 - 13 0.2 0.2763932 0.2291796 0.2472136 14 0.2291796 0.2763932 0.2472136 0.2583592 15 0.2472136 0.2763932 0.2583592 0.2652476 -16 0.2472136 0.2652476 0.2541020 0.2583592 1

8.4. MÉTODOS DE OTIMIZAÇÃO 33
e o algoritmo encerra com x6 = 0.2596748, f(x6) = 1.7466945, a aproximação desejada.7.1.13: função objetivo (distância) f(x) =
√
(1− x)2 + (4− x4)2. Gráfico da funçãoobjetivo sugere um intervalo de incerteza como [1.35, 1.45] para o mínimo absoluto de f .k ak bk σk µk zk1 1.35 1.45 1.3881966 1.4118034 12 1.3881966 1.45 1.4118034 1.4263932 - 13 1.3881966 1.4263932 1.4027864 1.4118034 14 1.4027864 1.4263932 1.4118034 1.4173762 -15 1.4027864 1.4173762 1.4083592 1.4118034 16 1.4083592 1.4173762 1.4118034 1.413932 -1
e o algoritmo encerra com x6 = 1.4111456, f(x6) = 0.4125987.7.1.14: Razão áurea. função objetivo (distância) f(x) =√
(−1− x)2 + (−10− x3 + 4x− 2)2. Gráfico da função objetivo sugere um inter-valo de incerteza como [−3,−2.8] para o mínimo absoluto de f .
0−4 −2 2 4−3 −1 1 3
0
20
40
60
10
30
50
70
distancia do ponto P(−1,−10) a curva y=x^3 −4x+2
k ak bk σk µk zk1 -3. - 2.8 - 2.9236068 - 2.8763932 12 -2.9236068 -2.8 - 2.8763932 -2.8472136 13 -2.8763932 -2.8 - 2.8472136 -2.8291796 -14 -2.8763932 -2.8291796 -2.8583592 -2.8472136 -15 -2.8763932 -2.8472136 -2.8652476 -2.8583592 16 -2.8652476 -2.8472136 -2.8583592 -2.854102 - 1
e o algoritmo encerra com x6 = −2.8596748 , f(x6) = 1.8604305.











![Relatório Semestral de Gestão - impa.br · Relatório Semestral de Gestão ... [1] i Associação Instituto Nacional de Matemática Pura e Aplicada Ministro da Ciência, Tecnologia](https://img.document.onl/doc/110x75/5ba3bed909d3f2a9218bfea2/relatorio-semestral-de-gestao-impabr-relatorio-semestral-de-gestao-.jpg)