Embed Size (px)
Citation preview

Departamento de Engenharia Mecânica
Desenvolvimento de uma Metodologia para a Implementação de Curvas
Cônicas na Elaboração de Trajetórias Ótimas de um Veículo
Aluno: Ramon Felipe Brandão do Nascimento
Orientador: Mauro Speranza Neto
Introdução
Uma das maiores dificuldades da engenharia de corridas é a descoberta do melhor
traçado em uma pista para que um veículo possa percorrê-la em menor tempo. Um dos fatos
que tornam essa tarefa difícil é a concatenação de traçados ótimos isolados em diferentes curvas
consecutivas, uma vez que na maioria das vezes as trajetórias estipuladas nas diferentes curvas
não são contínuas. Isso se deve aos diferentes formatos de trajetórias possíveis, visto que a
trajetória ótima para uma curva deve estar diretamente relacionada às curvas seguintes.
Diante dessa dificuldade, para que seja possível obter o melhor percurso de um veículo
em um circuito, podem ser feitas algumas aproximações quanto as curvas que irão unir os
melhores traçados isolados. Isso se deve ao fato de, muitas vezes, essas curvas possuírem
modelos difíceis de serem trabalhados, como a Clotóide, por exemplo, que é um é uma curva
de curvatura variável.
A partir da tentativa de se obter esses traçados, percebeu-se que para facilitar esse
processo, algumas curvas complexas poderiam ser substituídas por curvas cônicas (parábolas,
hipérboles e elipses), tentando obter assim uma boa aproximação. O motivo de serem
escolhidas cônicas é o fato delas possuírem seus parâmetros bem definidos, o que permite, após
a elaboração de um modelo, obter analiticamente todas as variáveis do veículo na curva, como
suas acelerações normal e tangencial, velocidades e acelerações em relação aos referenciais
globais.
Objetivo
Uma vez que a tarefa de se encontrar trajetórias ótimas não é um processo muito
simples, esse trabalho se concentrou no estudo das curvas cônicas e na elaboração de um
programa em “Matlab” que reconhece a curva em sua forma paramétrica e fornece todos os
parâmetros de uma partícula orientada que a utiliza como trajetória. Entretanto, tem-se como
objetivo a continuação desse trabalho no próximo ano para que, com isso, possam ser feitas
análises de traçados ideais de pistas reais a partir de trechos de curvas cônicas.

Departamento de Engenharia Mecânica
Metodologia
Foi desenvolvido um modelo para cada curva cônica separadamente, os quais serão
analisados a seguir:
1) Círculo
Dentre as curvas analisadas, o círculo é o modelo mais simples, uma vez que seu raio de
curvatura permanece constante ao longo da trajetória. Por esse fato, iniciar-se-á a análise por
ele.
A equação cartesiana característica de uma curva cônica é dada pela expressão:
A partir dessa equação, é possível descobrir qual das cônicas ela descreve a partir das
relações:
{𝐵2 = 4𝐴𝐶 → 𝑃𝑎𝑟á𝑏𝑜𝑙𝑎𝐵2 > 4𝐴𝐶 → 𝐻𝑖𝑝é𝑟𝑏𝑜𝑙𝑒
𝐵2 < 4𝐴𝐶 → 𝐶í𝑟𝑐𝑢𝑙𝑜 𝑜𝑢 𝐸𝑙𝑖𝑝𝑠𝑒
Para o círculo, além de 𝐵2 < 4𝐴𝐶, o valor de B deve ser nulo e A=C.
A partir de um sistema de mudança de coordenadas de translação e exercícios de álgebra é
possível se determinar os parâmetros característicos do círculo. A posição de seu centro no eixo
X e Y é dada por 𝑋0 =−𝐷
2𝐴 e 𝑌0 =
−𝐸
2𝐴. Além disso, o valor do Raio de Curvatura é dado pela
expressão √−𝐹′
𝐴, onde 𝐹′ é dado por 𝐴(𝑋0 + 𝑌0) + 𝐷𝑋0 + 𝐸𝑌0 + 𝐹. Com isso a mudança de
coordenadas a equação cartesiana fica 𝑋′2 + 𝑌′2 = |𝐹′
𝐴|.
Simulação
Para se analisar o círculo como a trajetória de uma partícula orientada são dados como
parâmetros iniciais sua Velocidade Inicial (𝑉0), a variação de sua Aceleração Tangencial ao
longo do tempo, permanecendo constante a cada intervalo de tempo até que assuma outro valor,
e a sua respectiva equação cartesiana.
A parametrização do círculo utilizada é dada por 𝛼(𝜃) = (𝑅𝑐𝑜𝑠(𝜃), 𝑅𝑠𝑖𝑛(𝜃)), fornecendo
assim as coordenadas X e Y do círculo nas coordenadas locais. Utilizando a equação de
Movimento Circular Uniformemente Acelerado 𝜃(𝑡) = 𝜃0 + 𝜔0𝑡 +𝛼𝑡2
2, no qual 𝛼 =
𝐴𝑡
𝑅 e
𝜔0 = 𝑉0
𝑅, é possível determinar a posição da partícula em função do tempo. Além disso, ao
derivar a equação 𝑉.𝛼(𝜃)
𝑅, encontra-se 𝑉(𝑡) = (−𝑉𝑠𝑖𝑛(𝑡), 𝑉𝑐𝑜𝑠(𝑡)), onde 𝑉 = 𝑉0 + 𝐴𝑡𝑡.
Depois, ao aplicar o sistema de transformação de coordenadas de translação {𝑋 = 𝑋′ + 𝑋0
𝑌 = 𝑌′ + 𝑌0 ,
determina-se a posição do círculo no sistema de coordenadas global.
Departamento de Engenharia Mecânica
Abaixo segue um exemplo de uma simulação em “Matlab” de um círculo utilizando a
equação cartesiana 10𝑋2 + 10𝑌2 + 5𝑋 + 7𝑌 + 100.
clear; clc;
%Coeficientes
A=10;
B=0;
C=10;
D=5;
E=7;
F=100;
%Variaveis Iniciais
V0=0; %Velocidade Inicial
(m/s)
X0= -D/2*A; %Posição do
centro no eixo X
Y0= -E/2*A; %Posição do
centro no eixo Y
Fl = A*X0^2 + A*Y0^2 + D*X0
+ E*Y0 + F;
R= sqrt(Fl/A); %Raio de
Curvatura
ti=0; Tempo Inicial (s)
theta0=0; %Angulo Inicial
(rad)
w0=V0/R; %Velocidade Angular
Inicial
theta(1)=theta0;
w(1)=w0;
At(1)=1;
%Aceleracao
Tangencial
(m/s^2)
Xl(1)= R;
Yl(1)=0;
Vx(1)=0;
Vy(1)=V0;
V(1)=V0;
X(1)= X0 + Xl(1);
Y(1) = Y0 + Yl(1);
An(1)= V(1)^2/R; %Aceleracao
Normal (m/s^2)
t(1)=ti; %Tempo Inicial
tf = 50; %Tempo Final (s)
dt = .01; %Intervalo de
Simulacao
for i=1:tf/dt
t(i+1)= i*dt;
if t(i+1)<20
At(i+1) = 1;
else
At(i+1) = 0;
end
V(i+1)=V(i) + At(i)*dt;
alfa = At(i)/R;
w(i+1)=V(i+1)/R;
if At(i)==0
theta(i+1)=theta(i)
+ w(i)*dt;
theta0=theta(i+1);
w0=w(i+1);
ti = t(i+1);
else
theta(i+1)=theta0 +
w0*(t(i+1)-ti) +
alfa/2*(t(i+1)-ti)^2;
end
An(i+1) = (V(i+1)^2)/R;
%m/s^2
Xl(i+1) =
R*cos(theta(i+1));
Yl(i+1) =
R*sin(theta(i+1));
Vx(i+1) = -
V(i+1)*sin(theta(i+1));
Vy(i+1)=V(i+1)*cos(theta(i+1
));
X(i+1)= Xl(i+1) + X0;
Y(i+1) = Yl(i+1)+ Y0;
End
Departamento de Engenharia Mecânica
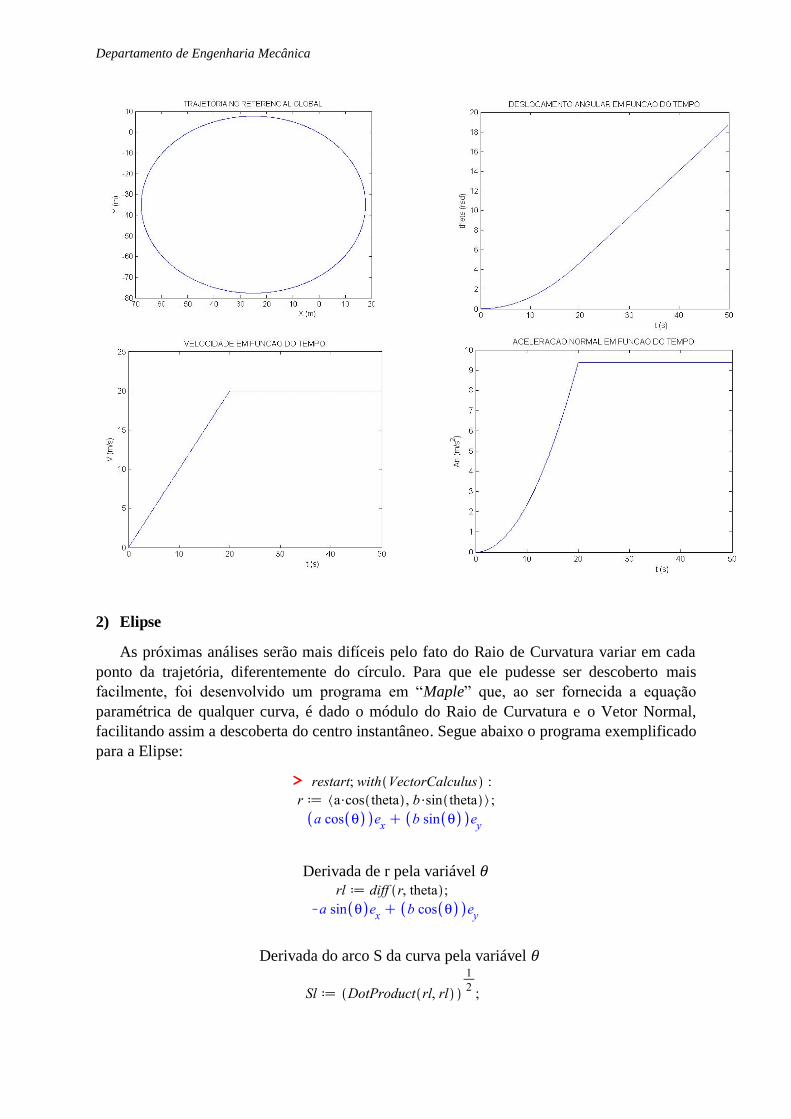
2) Elipse
As próximas análises serão mais difíceis pelo fato do Raio de Curvatura variar em cada
ponto da trajetória, diferentemente do círculo. Para que ele pudesse ser descoberto mais
facilmente, foi desenvolvido um programa em “Maple” que, ao ser fornecida a equação
paramétrica de qualquer curva, é dado o módulo do Raio de Curvatura e o Vetor Normal,
facilitando assim a descoberta do centro instantâneo. Segue abaixo o programa exemplificado
para a Elipse:
>
Derivada de r pela variável 𝜃
Derivada do arco S da curva pela variável 𝜃

Departamento de Engenharia Mecânica
`
Vetor Tangente
Segunda derivada de r pela variável 𝜃
Segunda derivada do arco S da curva pela variável 𝜃
Raio de Curvatura
Vetor Normal

Departamento de Engenharia Mecânica
Para se descobrir o centro de curvatura instantâneo, basta fazer �̅� + 𝜌𝑒𝑛̅̅ ̅, onde �̅� é a curva
parametrizada, 𝜌 é o raio de curvatura e 𝑒𝑛̅̅ ̅ o vetor normal a curva
Utilizando sistemas de transformação de coordenadas de translação e rotação,
respectivamente, e utilizando alguns artifícios algébricos na equação cartesiana da elipse é
possível determinar seus parâmetros e sua equação em novas coordenadas. A posição de seu
centro nas coordenadas X e Y é dada por e .
Além disso, o ângulo de rotação utilizado na transformação é dado por
ou , caso A=C. Sua equação em coordenadas locais fica 𝑋′′2
𝑎+
𝑌′′2
𝑏= 1, onde 𝑎 =
𝐹′
𝑢 e 𝑏 =
𝐹′
𝑣. 𝐹′ = 𝐴𝑋0 + 𝐵𝑋0𝑌0 + 𝐶𝑌0 + 𝐷𝑋0 + 𝐸𝑌0 + 𝐹, 𝑢 =
𝐴𝑐𝑜𝑠2(𝜑) + 𝐵𝑠𝑖𝑛(𝜑) cos(𝜑) + 𝐶𝑠𝑖𝑛2(𝜑) e 𝑣 = 𝐴𝑠𝑖𝑛2(𝜑) − 𝐵𝑠𝑖𝑛(𝜑) cos(𝜑) + 𝐶𝑐𝑜𝑠2(𝜑).
Simulação
Os parâmetros iniciais de simulação são os mesmos fornecidos no caso do círculo.
Entretanto, como o Raio de Curvatura varia ao longo da trajetória, o algoritmo utilizado nesse
caso será diferente do caso do círculo. Todavia, há o benefício desse modelo poder ser
reutilizado no modelo das outras curvas analisadas. O diagrama a seguir representa o modelo
que foi implementado em “Matlab”:
Onde:
𝐴𝑡 → Aceleração Tangencial

Departamento de Engenharia Mecânica
𝛼 → Aceleração Rotacional
𝐴𝑛 → Aceleração Normal
𝑉 𝑒 𝑉0 → Velocidades Instantânea e Inicial
𝜌 → Raio de Curvatura Instantâneo
𝜔 → Velocidade Angular
𝜃 → Posição Angular
𝑋′′𝑒 𝑌′′ → Coordenadas no Referencial Local
𝑉′′𝑥 𝑒 𝑉′′𝑦 → Velocidades no Referencial Local
Abaixo segue um exemplo de uma simulação em “Matlab” de uma elipse utilizando a
equação cartesiana 90𝑋2 + 30𝑋𝑌 + 60𝑌2 − 4000𝑋 − 3000𝑌 + 7000:
clear; clc;
%Coeficientes
A=90;
B=30;
C=60;
D=-4000;
E=-3000;
F=7000;
%Variaveis Iniciais
V0=3; %Velocidade Inicial em m/s
V(1)=V0;
X0= -((-B * E + 2 * C * D + B * D)
/ A / (2 * C + B)) /
0.2e1;%Posição do centro no eixo X
Y0= -E / (2 * C + B);%Posição do
centro no eixo Y
Fl = A*X0^2 + B*X0*Y0 + C*Y0^2 +
D*X0 + E*Y0 + F;
if A==C
psi=pi/4;
else
psi= atan((B/(A-
C)))*(1/2);%Angulo de Rotacao
end
u = A*(cos(psi))^2 +
B*sin(psi)*cos(psi) +
C*(sin(psi))^2;
v = A*(sin(psi))^2 -
B*sin(psi)*cos(psi) +
C*(cos(psi))^2;
a= sqrt(-Fl/u);%Coeficiente de Xll
b= sqrt(-Fl/v);%Coeficiente de Yll
theta0=0;%Angulo Inicial
theta(1)=theta0;
w0=0;%Velocidade Angular Inicial
w(1)=w0;
At(1)=1;%Aceleracao Tangencial
Inicial
%Posicoes em direfentes
coordenadas
Xll(1)= a;
Yll(1)=0;
Xl(1) = cos(psi)*Xll(1) -
sin(psi)*Yll(1);
Yl(1) = sin(psi)*Xll(1) +
cos(psi)*Yll(1);
X(1)= X0 + Xl(1);
Y(1) = Y0 + Yl(1);
R(1) = RdCE(0, a, b);%Raio de
Curvatura Instantaneo
N= VNE(0,a,b);%Vetor Normal
NXll(1) = R(1)*N(1,1)+a;
NYll(1) = R(1)*N(2,1);
NXl(1) = cos(psi)*NXll(1) -
sin(psi)*NYll(1);
NYl(1) = sin(psi)*NXll(1) +
cos(psi)*NYll(1);
NX(1)= X0 + NXl(1);
NY(1) = Y0 + NYl(1);
%Velocidades em Diferentes
Coordenadas
Vxll(1) = -
V0*a*sin(theta(1))/(sqrt((a*sin(th
eta(1)))^2 +
(b*cos(theta(1)))^2));
Vyll(1) =
V0*b*cos(theta(1))/(sqrt((a*sin(th
eta(1)))^2 +
(b*cos(theta(1)))^2));
Vx(1)=cos(psi)*Vxll(1) -
sin(psi)*Vyll(1);

Departamento de Engenharia Mecânica
Vy(1)=sin(psi)*Vxll(1) +
cos(psi)*Vyll(1);
An(1)= 0;%Aceleracao Normal
Inicial
t(1)=0;%Tempo Inicial
A(1)=0;%Modulo da Aceleracao
Inicial
tf = 25; %Tempo Final
dt = .005; %Intervalo de Simulacao
for i=1:1:tf/dt
t(i+1)=i*dt;
if t(i+1)<5
At(i+1) = 1;
elseif t(i+1)>=5 && t(i+1)<7
At(i+1) = .5;
else
At(i+1) = 0;
end
V(i+1)=V(i)+At(i)*dt;
An(i+1)=(V(i))^2/R(i);
A(i+1)=sqrt((An(i+1))^2 +
(At(i+1)^2));
w(i+1)=V(i)/R(i);
theta(i+1)=theta(i)+w(i)*dt +
At(i+1)/R(i)*dt^2;
R(i+1) = RdCE(theta(i+1), a,
b);
Xll(i+1) = a*cos(theta(i+1));
Yll(i+1) = b*sin(theta(i+1));
Xl(i+1) = cos(psi)*Xll(i+1) -
sin(psi)*Yll(i+1);
Yl(i+1) = sin(psi)*Xll(i+1) +
cos(psi)*Yll(i+1);
X(i+1)= X0 + Xl(i+1);
Y(i+1) = Y0 + Yl(i+1);
N = VNE(theta(i+1), a, b);
NXll(i+1) = R(i+1)*N(1,1)+
Xll(i+1);
NYll(i+1) = R(i+1)*N(2,1)+
Yll(i+1);
NXl(i+1) = cos(psi)*NXll(i+1)
- sin(psi)*NYll(i+1);
NYl(i+1) = sin(psi)*NXll(i+1)
+ cos(psi)*NYll(i+1);
NX(i+1)= X0 + NXl(i+1);
NY(i+1) = Y0 + NYl(i+1);
Vxll(i+1) = -
V(i+1)*a*sin(theta(i+1))/(sqrt((a*
sin(theta(i+1)))^2 +
(b*cos(theta(i+1)))^2));
Vyll(i+1)=V(i+1)*b*cos(theta(i+1))
/(sqrt((a*sin(theta(i+1)))^2 +
(b*cos(theta(i+1)))^2));
Vx(i+1)=cos(psi)*Vxll(i+1) -
sin(psi)*Vyll(i+1);
Vy(i+1)=sin(psi)*Vxll(i+1) +
cos(psi)*Vyll(i+1);
end

Departamento de Engenharia Mecânica
3) Parábola
A Parábola, na sua forma simples com seus eixos característicos locais, pode possuir
simetria no eixo 𝑋′′ ou 𝑌′′ e sua equação assume a forma 𝑌′′2 = 2𝑝𝑋′′ ou 𝑋′′2 = 2𝑝𝑌′′, respectivamente, sendo p o dobro da distância focal da parábola. Se p for positivo, a parábola
pode possuir concavidade para cima ou para a direita e, se for negativo, para baixo ou para a
esquerda. Por esse fato, a parametrização da parábola por coordenadas polares pode assumir
quatro formas distintas, dependendo do valor de p e do seu eixo de simetria. Após serem
introduzidos outros parâmetros dessa curva, serão apresentadas as quatro parametrizações
possíveis.
Aplicando-se o sistema de transformações de rotação e de translação, nessa ordem, na
equação cartesiana da parábola e desenvolvendo alguns cálculos é possível obter a posição do
vértice da parábola (𝑋0 𝑒 𝑌0), o valor de p e descobrir dentre u e v qual é zero, determinando
assim qual o eixo de simetria da parábola.
Caso 𝑢 ≅ 0 o eixo de simetria é 𝑋′′, 𝑝 =−𝑘
2𝑣, 𝑋0 =
−𝐹
𝑘+
𝑗2
4𝑣𝑘 e 𝑌0 =
−𝑗
2𝑣.
1. Se 𝑝 > 0, sua equação polar é 𝜌 =𝑝
1−cos (𝜃).
2. Se 𝑝 < 0, sua equação polar é 𝜌 =𝑝
1+cos (𝜃).
Caso 𝑣 ≅ 0 o eixo de simetria é 𝑌′′, 𝑝 =−𝑗
2𝑢, 𝑋0 =
−𝑘
2𝑢 e 𝑌0 =
−𝐹
𝑗+
𝑘2
4𝑢𝑗
3. Se 𝑝 > 0, sua equação polar é 𝜌 =𝑝
1−sin(𝜃).
4. Se 𝑝 < 0, sua equação polar é 𝜌 =𝑝
1+sin(𝜃).
U e v assumem o mesmo valor que na elipse, 𝑘 = 𝐷𝑐𝑜𝑠(𝜑) + 𝐸𝑠𝑖𝑛(𝜑) e 𝑗 = 𝐸𝑐𝑜𝑠(𝜑) −
𝐷𝑠𝑖𝑛(𝜑).
Pelo fato das equações polares assumirem diferentes valores em cada caso, o vetor normal
e o raio instantâneo de curvatura também serão diferentes. Substituindo a equação paramétrica

Departamento de Engenharia Mecânica
no programa “Maple” apresentado anteriormente, obtém-se o vetor normal e do raio
instantâneo para cada um dos casos apresentados
Simulação
A simulação apresentada a seguir utilizou o algoritmo apresentado em diagrama no caso da
elipse e utilizou como exemplo a equação cartesiana 2𝑋2 − 4𝑋𝑌 + 2𝑌2 − 3400𝑋 − 3800𝑌 ++5100.
clear; clc; %Coeficientes A=2; B=-4; C=2; D=-3400; E=-3800; F=5100;
if A==C psi=pi/4; else psi= atan((B/(A-
C)))*(1/2);%Angulo de Rotacao end
u = A*(cos(psi))^2 +
B*sin(psi)*cos(psi) +
C*(sin(psi))^2; v = A*(sin(psi))^2 -
B*sin(psi)*cos(psi) +
C*(cos(psi))^2; k = D*cos(psi) + E*sin(psi); j = E*cos(psi) - D*sin(psi);
V0=3; %Velocidade Inicial V(1)=V0; w0=0;%Velocidade Angular Inicial w(1)=w0; At(1)=1;%Aceleracao Tangencial
Inicial
An(1)= 0;%Aceleracao Normal
Inicial t(1)=0;%Tempo Inicial A(1)=0;%Aceleracao Inicial
tf = 10; %Tempo Final dt = .005; %Intervalo de Simulacao
%Caso u aprox. 0 if abs(u)<= 0.1 %Posicao do Vertice em
coordenadas locais X0 = -(F/k) + (j^2)/(4*v*k); Y0 = -j/(2*v); p=-k/(2*v);%2x a distancia
focal
if p>0 theta0=pi/4;%Angulo
Inicial Rho(1) =p/((1-
(cos(theta0))));%Equacao Polar else theta0=-pi/4;%Angulo
Inicial Rho(1) =
p/(1+(cos(theta0)));%Equacao Polar end theta(1)=theta0;
%Posicoes em diferentes
coordenadas Xlll(1) = Rho(1)*cos(theta0); if p>=0 Xll(1)= Xlll(1) + p/2; else Xll(1)= Xlll(1) - p/2; end Yll(1)= Rho(1)*sin(theta0); Xl(1) = Xll(1) + X0; Yl(1) = Yll(1) + Y0; X(1) = Xl(1)*cos(psi) -
Yl*sin(psi); Y(1) = Xl*sin(psi) +
Yl*cos(psi);
%Definicao do Raio de
Curvatura Instantaneo e Vetor
Normal if p>0 R(1) = RdCPUP(theta0, k,
v); N= VNPUP(theta0,k,v); else R(1) = RdCPUN(theta0, k,
v); N= VNPUN(theta0,k,v); end
%Centro Instantaneo em
Diferentes Coordenadas NXll(1) = R(1)*N(1,1)+ Xll(1); NYll(1) = R(1)*N(2,1)+ Yll(1); NXl(1) = X0 + NXll(1); NYl(1) =Y0 + NYll(1);

Departamento de Engenharia Mecânica
NX(1)= cos(psi)*NXl(1) -
sin(psi)*NYl(1); NY(1) = sin(psi)*NXl(1) +
cos(psi)*NYl(1);
%Velocidade em Diferentes
Coordenadas if p>0
Modulo0=sqrt(((0.5*k*cos(theta(1))
*sin(theta(1))/(v*((1-
cos(theta(1)))^2)))+(0.5*k*(sin(th
eta(1))/(v*(1-cos(theta(1)))))))^2
+
(((.5*k*(sin(theta(1))^2)/(v*((1-
cos(theta(1)))^2))) +
(.5*k*cos(theta(1))/(v*(1-
cos(theta(1)))))))^2); Vxll(1) =
V0*(((0.5*k*cos(theta(1))*sin(thet
a(1))/(v*((1-
cos(theta(1)))^2)))+(0.5*k*(sin(th
eta(1))/(v*(1-
cos(theta(1))))))))/Modulo0; Vyll(1) =
V0*(((.5*k*(sin(theta(1))^2)/(v*((
1-cos(theta(1)))^2))) +
(.5*k*cos(theta(1))/(v*(1-
cos(theta(1)))))))/Modulo0; else Modulo0=sqrt(((-
0.5*k*cos(theta(1))*sin(theta(1))/
(v*((1+cos(theta(1)))^2)))+(0.5*k(
sin(theta(1))/(v*(1+cos(theta(1)))
))))^2 + (((-
.5*k*(sin(theta(1))^2)/(v*((1+cos(
theta(1)))^2))) -
(.5*k*cos(theta(1))/(v*(1+cos(thet
a(1)))))))^2); Vxll(1) = V0*(((-
0.5*k*cos(theta(1))*sin(theta(1))/
(v*((1+cos(theta(1)))^2)))+(0.5*k(
sin(theta(1))/(v*(1+cos(theta(1)))
)))))/Modulo0; Vyll(1) = V0*(((-
.5*k*(sin(theta(1))^2)/(v*((1+cos(
theta(1)))^2))) -
(.5*k*cos(theta(1))/(v*(1+cos(thet
a(1)))))))/Modulo0; end Vx(1)=cos(psi)*Vxll(1) -
sin(psi)*Vyll(1); Vy(1)=sin(psi)*Vxll(1) +
cos(psi)*Vyll(1);
for i=1:1:tf/dt t(i+1)=i*dt; if t(i+1)<10 At(i+1) = 1; elseif t(i+1)>=10 && t(i+1)<30
At(i+1) = 2; else At(i+1) =0; end
V(i+1)=V(i)+At(i)*dt; An(i+1)=(V(i))^2/R(i); A(i+1)=sqrt((An(i+1))^2 +
(At(i+1)^2)); w(i+1)=V(i)/R(i); theta(i+1)=theta(i)+w(i)*dt +
At(i+1)/R(i)*dt^2; if p>0 R(i+1) =
RdCPUP(theta(i+1), k, v); Rho(i+1) = p/(1-
(cos(theta(i+1)))); else R(i+1) =
RdCPUN(theta(i+1), k, v); Rho(i+1) = -
p/(1+(cos(theta(i+1)))); end
Xlll(i+1) =
Rho(i+1)*cos(theta(i+1)); if p>0 Xll(i+1)= Xlll(i+1) + p/2; else Xll(i+1)= Xlll(i+1) - p/2; end Yll(i+1) =
Rho(i+1)*sin(theta(i+1)); Xl(i+1) = X0 + Xll(i+1); Yl(i+1) = Y0 + Yll(i+1); X(i+1)= cos(psi)*Xl(i+1) -
sin(psi)*Yl(i+1); Y(i+1) = sin(psi)*Xl(i+1) +
cos(psi)*Yl(i+1);
if p>0 N= VNPUP(theta(i+1),k,v); else N= VNPUN(theta(i+1),k,v); end
NXll(i+1) = R(i+1)*N(1,1)+
Xll(i+1); NYll(i+1) = R(i+1)*N(2,1)+
Yll(i+1); NXl(i+1) = X0 + NXll(i+1); NYl(i+1) =Y0 + NYll(i+1); NX(i+1)= cos(psi)*NXl(i+1) -
sin(psi)*NYl(i+1); NY(i+1) = sin(psi)*NXl(i+1) +
cos(psi)*NYl(i+1);
if p>0
ModuloI=sqrt(((0.5*k*cos(theta(i+1

Departamento de Engenharia Mecânica
))*sin(theta(i+1))/(v*((1-
cos(theta(i+1)))^2)))+(0.5*k*(sin(
theta(i+1))/(v*(1-
cos(theta(i+1)))))))^2 +
(((.5*k*(sin(theta(i+1))^2)/(v*((1
-cos(theta(i+1)))^2))) +
(.5*k*cos(theta(i+1))/(v*(1-
cos(theta(i+1)))))))^2); Vxll(i+1) =
V(i+1)*(((0.5*k*cos(theta(i+1))*si
n(theta(i+1))/(v*((1-
cos(theta(i+1)))^2)))+(0.5*k*(sin(
theta(i+1))/(v*(1-
cos(theta(i+1))))))))/ModuloI; Vyll(i+1) =
V(i+1)*(((.5*k*(sin(theta(i+1))^2)
/(v*((1-cos(theta(i+1)))^2))) +
(.5*k*cos(theta(i+1))/(v*(1-
cos(theta(i+1)))))))/ModuloI; else ModuloI=sqrt(((-
0.5*k*cos(theta(i+1))*sin(theta(i+
1))/(v*((1+cos(theta(i+1)))^2)))+(
0.5*k(sin(theta(i+1))/(v*(1+cos(th
eta(i+1)))))))^2 + (((-
.5*k*(sin(theta(i+1))^2)/(v*((1+co
s(theta(i+1)))^2))) -
(.5*k*cos(theta(i+1))/(v*(1+cos(th
eta(i+1)))))))^2); Vxll(i+1) = V(i+1)*(((-
0.5*k*cos(theta(i+1))*sin(theta(i+
1))/(v*((1+cos(theta(i+1)))^2)))+(
0.5*k(sin(theta(i+1))/(v*(1+cos(th
eta(i+1))))))))/ModuloI; Vyll(i+1) = V(i+1)*(((-
.5*k*(sin(theta(i+1))^2)/(v*((1+co
s(theta(i+1)))^2))) -
(.5*k*cos(theta(i+1))/(v*(1+cos(th
eta(i+1)))))))/ModuloI; end Vx(i+1)=cos(psi)*Vxll(i+1) -
sin(psi)*Vyll(i+1); Vy(i+1)=sin(psi)*Vxll(i+1) +
cos(psi)*Vyll(i+1);
end
%Caso v aprox. 0 else %Posicao do Vertice em
coordenadas locais X0 = -k/(2*u); Y0 = -(F/j) + (k^2)/(4*u*j); p=-j/(2*u);%2x a distancia
focal
if p>0 theta0=-.7*pi;%Angulo
Inicial Rho(1) = p/(1-
(sin(theta0)));%Equacao Polar
else theta0=-pi/4;%Angulo
Inicial Rho(1) =
p/(1+(sin(theta0)));%Equacao Polar end theta(1)=theta0;
%Posicao em diferentes
coordenadas Ylll(1) = Rho(1)*sin(theta0); if p>=0 Yll(1)= Ylll(1) + p/2; else Yll(1)=Ylll(1) - p/2; end
Xll(1) = Rho(1)*cos(theta0); Xl(1) = Xll(1) + X0; Yl(1) = Yll(1) + Y0; X(1) = Xl(1)*cos(psi) -
Yl*sin(psi); Y(1) = Xl*sin(psi) +
Yl*cos(psi);
%Definicao do Raio de
Curvatura Instantaneo e Vetor
Normal if p>0 R(1) = RdCPVP(theta0, j,
u); N= VNPVP(theta0,j,u); else R(1) = RdCPVN(theta0, j,
u); N= VNPVN(theta0,j,u); end %Centro Instantaneo em
Diferentes Coordenadas NXll(1) = R(1)*N(1,1)+ Xll(1); NYll(1) = R(1)*N(2,1)+ Yll(1); NXl(1) = X0 + NXll(1); NYl(1) =Y0 + NYll(1); NX(1)= cos(psi)*NXl(1) -
sin(psi)*NYl(1); NY(1) = sin(psi)*NXl(1) +
cos(psi)*NYl(1);
%Velocidade em diferentes
coordenadas if p>0 Modulo0=sqrt(((-
0.5*j*cos(theta(1))*sin(theta(1))/
(u*((1-sin(theta(1)))^2)))-
(0.5*j*(cos(theta(1))/(u*(1-
sin(theta(1)))))))^2 +
(((.5*j*(cos(theta(1))^2)/(u*((1-
sin(theta(1)))^2))) +
(.5*j*sin(theta(1))/(u*(1-
sin(theta(1))))))^2));
Departamento de Engenharia Mecânica
Vxll(1) =
V0*(((.5*j*(cos(theta(1))^2)/(u*((
1-sin(theta(1)))^2))) +
(.5*j*sin(theta(1))/(u*(1-
sin(theta(1)))))))/Modulo0; Vyll(1) = V0*(((-
0.5*j*cos(theta(1))*sin(theta(1))/
(u*((1-sin(theta(1)))^2)))-
(0.5*j*(cos(theta(1))/(u*(1-
sin(theta(1))))))))/Modulo0; else
Modulo0=sqrt(((0.5*j*cos(theta(1))
*sin(theta(1))/(u*((1+sin(theta(1)
))^2)))-
(0.5*j*(cos(theta(1))/(u*(1+sin(th
eta(1)))))))^2 +
(((.5*j*(cos(theta(1))^2)/(u*((1+s
in(theta(1)))^2))) +
(.5*j*sin(theta(1))/(u*(1+sin(thet
a(1))))))^2)); Vxll(1) =
V0*(((.5*j*(cos(theta(1))^2)/(u*((
1+sin(theta(1)))^2))) +
(.5*j*sin(theta(1))/(u*(1+sin(thet
a(1)))))))/Modulo0; Vyll(1) =
V0*(((0.5*j*cos(theta(1))*sin(thet
a(1))/(u*((1+sin(theta(1)))^2)))-
(0.5*j*(cos(theta(1))/(u*(1+sin(th
eta(1))))))))/Modulo0; end
Vx(1)=cos(psi)*Vxll(1) -
sin(psi)*Vyll(1); Vy(1)=sin(psi)*Vxll(1) +
cos(psi)*Vyll(1);
for i=1:1:tf/dt t(i+1)=i*dt; if t(i+1)<10 At(i+1) = 5; elseif t(i+1)>=10 && t(i+1)<30 At(i+1) = 4; else At(i+1) = 2; end
V(i+1)=V(i)+At(i)*dt; An(i+1)=(V(i))^2/R(i); A(i+1)=sqrt((An(i+1))^2 +
(At(i+1)^2)); w(i+1)=V(i)/R(i); theta(i+1)=theta(i)+w(i)*dt +
At(i+1)/R(i)*dt^2;
if p>0 R(i+1) = RdCPVP(theta(i+1),
j, u);
Rho(i+1) = p/(1-
(sin(theta(i+1)))); else R(i+1) =
RdCPVN(theta(i+1), j, u); Rho(i+1) = -
p/(1+(sin(theta(i+1)))); end
Ylll(i+1) =
Rho(i+1)*sin(theta(i+1)); if p>=0 Yll(i+1)= Ylll(i+1) +p/2 ; else Yll(i+1)=Ylll(i+1) - p/2; end
Xll(i+1) =
Rho(i+1)*cos(theta(i+1)); Xl(i+1) = X0 + Xll(i+1); Yl(i+1) = Y0 + Yll(i+1); X(i+1)= cos(psi)*Xl(i+1) -
sin(psi)*Yl(i+1); Y(i+1) = sin(psi)*Xl(i+1) +
cos(psi)*Yl(i+1);
if p>0 N= VNPVP(theta(i+1),j,u); else N= VNPVN(theta(i+1),j,u); end
NXll(i+1) = R(i+1)*N(1,1)+
Xll(i+1); NYll(i+1) = R(i+1)*N(2,1)+
Yll(i+1); NXl(i+1) = X0 + NXll(i+1); NYl(i+1) =Y0 + NYll(i+1); NX(i+1)= cos(psi)*NXl(i+1) -
sin(psi)*NYl(i+1); NY(i+1) = sin(psi)*NXl(i+1) +
cos(psi)*NYl(i+1);
if p>0 ModuloI=sqrt(((-
0.5*j*cos(theta(i+1))*sin(theta(i+
1))/(u*((1-sin(theta(i+1)))^2)))-
(0.5*j*(cos(theta(i+1))/(u*(1-
sin(theta(i+1)))))))^2 +
(((.5*j*(cos(theta(i+1))^2)/(u*((1
-sin(theta(i+1)))^2))) +
(.5*j*sin(theta(i+1))/(u*(1-
sin(theta(i+1))))))^2)); Vxll(i+1) =
V(i+1)*(((.5*j*(cos(theta(i+1))^2)
/(u*((1-sin(theta(i+1)))^2))) +
(.5*j*sin(theta(i+1))/(u*(1-
sin(theta(i+1)))))))/ModuloI; Vyll(i+1) = V(i+1)*(((-
0.5*j*cos(theta(i+1))*sin(theta(i+

Departamento de Engenharia Mecânica
1))/(u*((1-sin(theta(i+1)))^2)))-
(0.5*j*(cos(theta(i+1))/(u*(1-
sin(theta(i+1))))))))/ModuloI; else
ModuloI=sqrt(((0.5*j*cos(theta(i+1
))*sin(theta(i+1))/(u*((1+sin(thet
a(i+1)))^2)))-
(0.5*j*(cos(theta(i+1))/(u*(1+sin(
theta(i+1)))))))^2 +
(((.5*j*(cos(theta(i+1))^2)/(u*((1
+sin(theta(i+1)))^2))) +
(.5*j*sin(theta(i+1))/(u*(1+sin(th
eta(i+1))))))^2)); Vxll(i+1) =
V(i+1)*(((.5*j*(cos(theta(i+1))^2)
/(u*((1+sin(theta(i+1)))^2))) +
(.5*j*sin(theta(i+1))/(u*(1+sin(th
eta(i+1)))))))/ModuloI; Vyll(i+1) =
V(i+1)*(((0.5*j*cos(theta(i+1))*si
n(theta(i+1))/(u*((1+sin(theta(i+1
)))^2)))-
(0.5*j*(cos(theta(i+1))/(u*(1+sin(
theta(i+1))))))))/ModuloI; end
Vx(i+1)=cos(psi)*Vxll(i+1) -
sin(psi)*Vyll(i+1); Vy(i+1)=sin(psi)*Vxll(i+1) +
cos(psi)*Vyll(i+1); end
end

Departamento de Engenharia Mecânica
4) Hipérbole
A Hipérbole é uma curva que possui duas partes espelhadas pelo seu eixo de simetria.
Devido esse fato, para que se pudesse parametrizar essa cônica, foi necessário a escolha de uma
de suas metades para poder descrever a trajetória da partícula orientada. O modelo da hipérbole
é bem semelhante ao da elipse, utilizando a mesma ordem de transformações de coordenadas
e a mesma equação para determinação do centro. Com isso, o modelo da hipérbole é descrito
por dois casos:
Caso 1: 𝑋2
𝑎2 −𝑌2
𝑏2 = 1.
O eixo de simetria para esse caso é paralelo ao eixo Y’’ e a metade escolhida para a
parametrização foi à esquerda, embora não haja problema quanto a escolha da outra parte. A
equação polar obtida é dada por 𝜌(𝜃) =𝑏2
𝑎+𝑐∗𝑐𝑜𝑠(𝜃) , onde 𝑐 = √𝑎2 + 𝑏2. 𝑎 e 𝑏 são os mesmos
da elipse, salvo o sinal de menos, sendo substituído pelo operador módulo, já que a combinação
dessas variáveis com 𝑢 e 𝑣 faz com que haja os dois casos analisados.
Caso 2: −𝑋2
𝑎2 +𝑌2
𝑏2 = 1.
O eixo de simetria para esse caso é paralelo ao eixo X’’ e a metade escolhida para a
parametrização foi a inferior, embora não haja problema quanto a escolha da outra parte. A
equação polar obtida é dada por 𝜌(𝜃) =𝑏2
𝑎+𝑐∗𝑠𝑖𝑛(𝜃). As outras variáveis utilizadas são
semelhantes ao caso 1 e ao caso da elipse.
Simulação
A simulação apresentada a seguir utilizou o algoritmo apresentado em diagrama no caso da
elipse e utilizou como exemplo a equação cartesiana 2𝑋2 + 9𝑋𝑌 + 2𝑌2 − 4000𝑋 − 3000𝑌 ++7000.
clear; clc; %Coeficientes A=2; B=9; C=2; D=-4000; E=-3000; F=7000;
%Variaveis Iniciais V0=3; %Velocidade Inicial em m/s X0= -((-B * E + 2 * C * D + B * D)
/ A / (2 * C + B)) /
0.2e1;%Posição do centro no eixo X Y0= -E / (2 * C + B);%Posição do
centro no eixo Y Fl = A*X0^2 + B*X0*Y0 + C*Y0^2 +
D*X0 + E*Y0 + F;
if A==C psi=pi/4; else psi= atan((B/(A-
C)))*(1/2);%Angulo de Rotacao end
u = A*(cos(psi))^2 +
B*sin(psi)*cos(psi) +
C*(sin(psi))^2; v = A*(sin(psi))^2 -
B*sin(psi)*cos(psi) +
C*(cos(psi))^2; a= sqrt(abs(Fl/u));%Coeficiente de
Xll b= sqrt(abs(Fl/v));%Coeficiente de
Yll

Departamento de Engenharia Mecânica
c=sqrt(a^2 + b^2);
%Caso (X^2/a^2)-(Y^2/b^2)=1 if (u>0 && v<0 && Fl<0) || (u<0 &&
v>0 && Fl>0) theta0= -pi/4;%Angulo Inicial theta(1)=theta0; w0=0;%Velocidade Angular
Inicial w(1)=w0; At(1)=1;%Aceleracao Tangencial
Inicial
Rho(1)=(b^2)/(a+c*cos(theta(1)));
%Posicoes em direfentes
coordenadas Xlll(1)=Rho(1)*cos(theta(1)); Xll(1)= Xlll(1)-c; Yll(1)= Rho(1)*sin(theta(1)); Xl(1) = cos(psi)*Xll(1) -
sin(psi)*Yll(1); Yl(1) = sin(psi)*Xll(1) +
cos(psi)*Yll(1); X(1)= X0 + Xl(1); Y(1) = Y0 + Yl(1);
R(1) = RdCHP(theta(1), a,
b,c);%Raio de Curvatura
Instantaneo N= VNHP(theta(1),a,b,c);%Vetor
Normal NXll(1) = R(1)*N(1,1)+ Xll(1); NYll(1) = R(1)*N(2,1)+ Yll(1); NXl(1) = cos(psi)*NXll(1) -
sin(psi)*NYll(1); NYl(1) = sin(psi)*NXll(1) +
cos(psi)*NYll(1); NX(1)= X0 + NXl(1); NY(1) = Y0 + NYl(1);
%Velocidades em Diferentes
Coordenadas Modulo0=(a + c *
cos(theta(1))) *
sin(theta(1))/sqrt((b ^ 2 / (a + c
* cos(theta(1))) ^ 2 *
cos(theta(1)) * c * sin(theta(1))
- b ^ 2 / (a + c * cos(theta(1)))
* sin(theta(1)))^2 + (b ^ 2 / (a +
c * cos(theta(1))) ^ 2 *
sin(theta(1)) ^ 2 * c + b ^ 2 / (a
+ c * cos(theta(1))) *
cos(theta(1)))^2); Vxll(1) = V0*(b ^ 2 / (a + c *
cos(theta(1))) ^ 2 * cos(theta(1))
* c * sin(theta(1)) - b ^
2)/Modulo0;
Vyll(1) = V0*(b ^ 2 / (a + c *
cos(theta(1))) ^ 2 * sin(theta(1))
^ 2 * c + b ^ 2)/Modulo0; Vx(1)=cos(psi)*Vxll(1) -
sin(psi)*Vyll(1); Vy(1)=sin(psi)*Vxll(1) +
cos(psi)*Vyll(1); V(1)=sqrt(Vx^2 + Vy^2);
An(1)= 0;%Aceleracao Normal
Inicial t(1)=0;%Tempo Inicial A(1)=0;%Modulo da Aceleracao
Inicial
tf = 60; %Tempo Final dt = .005; %Intervalo de
Simulacao
for i=1:1:tf/dt t(i+1)=i*dt; if t(i+1)<5 At(i+1) = 1; elseif t(i+1)>=5 &&
t(i+1)<7 At(i+1) = .5; else At(i+1) = 0; end
V(i+1)= V(i)+At(i)*dt; An(i+1)=(V(i))^2/R(i); A(i+1)= sqrt((An(i+1))^2 +
(At(i+1)^2)); w(i+1)= V(i)/R(i); theta(i+1)=
theta(i)+w(i)*dt +
At(i+1)/R(i)*dt^2; Rho(i+1)=
(b^2)/(a+c*cos(theta(i+1))); R(i+1) = RdCHP(theta(i+1),
a, b,c);
Xlll(i+1)=Rho(i+1)*cos(theta(i+1))
; Xll(i+1)= Xlll(i+1)-c; Yll(i+1)=
Rho(i+1)*sin(theta(i+1)); Xl(i+1) =
cos(psi)*Xll(i+1) -
sin(psi)*Yll(i+1); Yl(i+1) =
sin(psi)*Xll(i+1) +
cos(psi)*Yll(i+1); X(i+1)= X0 + Xl(i+1); Y(i+1) = Y0 + Yl(i+1);
N = VNHP(theta(i+1), a,
b,c);
Departamento de Engenharia Mecânica
NXll(i+1) = R(i+1)*N(1,1)+
Xll(i+1); NYll(i+1) = R(i+1)*N(2,1)+
Yll(i+1); NXl(i+1) =
cos(psi)*NXll(i+1) -
sin(psi)*NYll(i+1); NYl(i+1) =
sin(psi)*NXll(i+1) +
cos(psi)*NYll(i+1); NX(i+1)= X0 + NXl(i+1); NY(i+1) = Y0 + NYl(i+1);
ModuloI= (a + c *
cos(theta(i+1))) *
sin(theta(i+1))/ sqrt((b ^ 2 / (a
+ c * cos(theta(i+1))) ^ 2 *
cos(theta(i+1)) * c *
sin(theta(i+1)) - b ^ 2 / (a + c *
cos(theta(i+1))) *
sin(theta(i+1)))^2 + (b ^ 2 / (a +
c * cos(theta(i+1))) ^ 2 *
sin(theta(i+1)) ^ 2 * c + b ^ 2 /
(a + c * cos(theta(i+1))) *
cos(theta(i+1)))^2); Vxll(i+1) = V(i+1)*(b ^ 2
/ (a + c * cos(theta(i+1))) ^ 2 *
cos(theta(i+1)) * c *
sin(theta(i+1)) - b ^ 2)/ModuloI; Vyll(i+1) = V(i+1)*(b ^ 2
/ (a + c * cos(theta(i+1))) ^ 2 *
sin(theta(i+1)) ^ 2 * c + b ^
2)/ModuloI; Vx(i+1)=cos(psi)*Vxll(1) -
sin(psi)*Vyll(1); Vy(i+1)=sin(psi)*Vxll(1) +
cos(psi)*Vyll(1);
end
%Caso -(X^2/a^2)+(Y^2/b^2)=1 else theta0= 0; %Angulo Inicial theta(1)=theta0; w0=0;%Velocidade Angular
Inicial w(1)=w0; At(1)=1;%Aceleracao Tangencial
Inicial
Rho(1)=b^2/(a+c*sin(theta(1)));
%Posicoes em direfentes
coordenadas Xll(1)=Rho(1)*cos(theta(1)); Ylll(1)= Rho(1)*sin(theta(1)); Yll(1)= Ylll(1)-c; Xl(1) = cos(psi)*Xll(1) -
sin(psi)*Yll(1);
Yl(1) = sin(psi)*Xll(1) +
cos(psi)*Yll(1); X(1)= X0 + Xl(1); Y(1) = Y0 + Yl(1);
R(1) = RdCHS(theta(1), a,
b,c);%Raio de Curvatura
Instantaneo N= VNHS(theta(1),a,b,c);%Vetor
Normal NXll(1) = R(1)*N(1,1)+ Xll(1); NYll(1) = R(1)*N(2,1) +
Yll(1); NXl(1) = cos(psi)*NXll(1) -
sin(psi)*NYll(1); NYl(1) = sin(psi)*NXll(1) +
cos(psi)*NYll(1); NX(1)= X0 + NXl(1); NY(1) = Y0 + NYl(1);
%Velocidades em Diferentes
Coordenadas Modulo0=sqrt((-
(b^2)*(cos(theta(1))^2)*c/((a+c*si
n(theta(1)))^2)-
(b^2*sin(theta(1))/(a+c*sin(theta(
1)))))^2 + (((-
(b^2)*sin(theta(1))*c*cos(theta(1)
))/((a+c*sin(theta(1)))^2)) +
b^2*cos(theta(1))/(a+c*sin(theta(1
))))^2); Vxll(1) = V0*(-
(b^2)*(cos(theta(1))^2)*c/((a+c*si
n(theta(1)))^2)-
(b^2*sin(theta(1))/(a+c*sin(theta(
1)))))/Modulo0; Vyll(1) = V0*(-
(b^2)*sin(theta(1))*c*cos(theta(1)
)/((a+c*sin(theta(1)))^2) +
b^2*cos(theta(1))/(a+c*sin(theta(1
))))/Modulo0; Vx(1)=cos(psi)*Vxll(1) -
sin(psi)*Vyll(1); Vy(1)=sin(psi)*Vxll(1) +
cos(psi)*Vyll(1);
An(1)= 0;%Aceleracao Normal
Inicial t(1)=0;%Tempo Inicial A(1)=0;%Modulo da Aceleracao
Inicial
tf = 60; %Tempo Final dt = .005; %Intervalo de
Simulacao
for i=1:1:tf/dt t(i+1)=i*dt; if t(i+1)<5 At(i+1) = 1;

Departamento de Engenharia Mecânica
elseif t(i+1)>=5 &&
t(i+1)<7 At(i+1) = .5; else At(i+1) = 0; end
V(i+1)= V(i)+At(i)*dt; An(i+1)=(V(i))^2/R(i); A(i+1)= sqrt((An(i+1))^2 +
(At(i+1)^2)); w(i+1)= V(i)/R(i); theta(i+1)=
theta(i)+w(i)*dt +
At(i+1)/R(i)*dt^2; Rho(i+1)=
b^2/(a+c*sin(theta(i+1))); R(i+1) = RdCHS(theta(i+1),
a, b,c);
Xll(i+1)=Rho(i+1)*cos(theta(i+1)); Ylll(i+1)=
Rho(i+1)*sin(theta(i+1)); Yll(i+1)= Ylll(i+1) -c; Xl(i+1) =
cos(psi)*Xll(i+1) -
sin(psi)*Yll(i+1); Yl(i+1) =
sin(psi)*Xll(i+1) +
cos(psi)*Yll(i+1); X(i+1)= X0 + Xl(i+1); Y(i+1) = Y0 + Yl(i+1);
N = VNHS(theta(i+1), a,
b,c); NXll(i+1) = R(i+1)*N(1,1)+
Xll(i+1);
NYll(i+1) =
R(i+1)*N(2,1)+Yll(i+1); NXl(i+1) =
cos(psi)*NXll(i+1) -
sin(psi)*NYll(i+1); NYl(i+1) =
sin(psi)*NXll(i+1) +
cos(psi)*NYll(i+1); NX(i+1)= X0 + NXl(i+1); NY(i+1) = Y0 + NYl(i+1);
ModuloI=sqrt((-
(b^2)*(cos(theta(i+1))^2)*c/((a+c*
sin(theta(i+1)))^2)-
(b^2*sin(theta(i+1))/(a+c*sin(thet
a(i+1)))))^2 + (((-
(b^2)*sin(theta(i+1))*c*cos(theta(
i+1)))/((a+c*sin(theta(i+1)))^2))
+
b^2*cos(theta(i+1))/(a+c*sin(theta
(i+1))))^2); Vxll(i+1) =V(1+1)*(-
(b^2)*(cos(theta(i+1))^2)*c/((a+c*
sin(theta(i+1)))^2)-
(b^2*sin(theta(i+1))/(a+c*sin(thet
a(i+1)))))/ModuloI; Vyll(i+1) = V(i+1)*(-
(b^2)*sin(theta(i+1))*c*cos(theta(
i+1))/((a+c*sin(theta(i+1)))^2) +
b^2*cos(theta(i+1))/(a+c*sin(theta
(i+1))))/ModuloI; Vx(i+1)=cos(psi)*Vxll(1) -
sin(psi)*Vyll(1); Vy(i+1)=sin(psi)*Vxll(1) +
cos(psi)*Vyll(1); end end

Departamento de Engenharia Mecânica
Conclusão
A obtenção de todas as informações necessárias para o futuro estudo das trajetórias
ótimas aproximadas por trechos de curvas cônicas foram encontradas com sucesso. Além disso,
o programa foi testado para diferentes equações paramétricas, obtendo resultados esperados.
Diante do sucesso dessa primeira etapa, tem-se como objetivo o avanço do projeto na
elaboração de trajetórias ótimas a partir do material desenvolvido nesse trabalho.
Bibliografia
1. VENTURI, Jacir J., Cônicas e Quádricas 5.a edição, páginas 23-135.
2. GINSBERG, Jerry, Engineering Dynamics, Cambridge, cap 2.1 – 2.1.2.
3. da CRUZ, Luiz Francisco, Cálculo Vetorial e Geometria Analítica, Departamento de
Matemática – Unesp/Bauru, cap 9.





























