Embed Size (px)
Citation preview

Eduardo Manuel da Silva Machado
Modem Acústico Subaquático a 1 Mbit/s
Edua
rdo
Man
uel d
a Si
lva M
acha
do
maio de 2016UMin
ho |
201
6M
odem
Acú
stic
o Su
baqu
átic
o a
1 M
bit/
s
Universidade do MinhoEscola de Engenharia

maio de 2016
Dissertação de MestradoCiclo de Estudos Integrados Conducentes ao Grau de Mestreem Engenharia de Telecomunicações e Informática
Trabalho efetuado sob a orientação doProfessor Doutor Marcos Silva Martins
e co-orientação doProfessor Doutor José Manuel Tavares Viera Cabral
Eduardo Manuel da Silva Machado
Modem Acústico Subaquático a 1 Mbit/s
Universidade do MinhoEscola de Engenharia

Agradecimentos
III
Agradecimentos
Emprimeiro lugar, querodeixarduaspalavrasemespecial, umanapessoado
meuorientador,ProfessorDoutorMarcosMartins,pelapaciênciaecalmaemtodos
osmomentosmaisdifíceis,pelasabedoriapartilhadaeajudaincondicional.
Outra, na pessoa domeu co-orientador, o Professor Doutor José Cabral, que
tantoestimo,sempreprontoapartilharoseuconhecimentoeassuasexperiências
aolongodesteprocesso.
Atodososmeuscompanheirosdeturmadesdeaentradanafaculdade,aeleso
meuobrigadaportodososmomentosdereflexão,descontraçãoediversão.
E finalmente queria agradecer aos meus pais, por toda a ajuda mesmo em
alturasmaisdifíceis.Ajudaram-meaalcançarosobjetivosaquemepropus,eacima
detudoaconstruiraquiloquesou.Portodooapoio,obrigado.

IV

Abstract
V
Resumo
Oobjetivodestadissertaçãoéaimplementaçãodeummodemdecomunicação
acústica subaquática com alto débito binário de baixo consumo. Este modem é
constituído por ummódulo emissor e ummódulo recetor que permite comunicar
numambientesubaquáticoemtemporealatravésdesinaisacústicos.Asprincipais
dificuldades neste tipo de comunicação são as características do ambiente
subaquáticoqueatenuamedegradambastanteosinalaolongodasuapropagação.
Apósodesenvolvimentodomodem, foramfeitosváriostestesemcenáriorealaos
diferentesmóduloseemdiferentescondições.
Omodem acústicoéconstituídopordoismódulos (emissore recetor)evários
blocosassociados.Emrelaçãoaomóduloemissor,fazemparteosseguintesblocos:
interface do utilizador, modulador baseado em FPGA, conversor digital-analógico,
amplificadordesinaletransdutoracústico.Omódulorecetoréconstituídoporum
hidrofone, amplificador/filtro, desmodulador baseado também em FPGA e
finalmente, a interface comoutilizador.Oprincipal fatorquepermitiu aomodem
atingir elevados débitos, foi a técnica demodulação implementada. Omodulador
OOK de dois canais, possui duas ondas portadoras de 1 MHz e 0.5 MHz que
permitemumatransmissãocomumdébitomáximode1Mbps.
Oambienteaquáticoacrescentoubastantesdificuldadesaestetrabalhodevido
àssuascaracterísticas:elevadasatenuaçõesalongasdistâncias,existênciadegrande
diversidade de ruído, fenómeno do multi-percurso, reduzida velocidade de
propagaçãoacústicanaágua(cercade1500m/s)eoefeitodeDoppler.
Porfim,ostestesrealizadosapósodesenvolvimentodomodem,revelaramque
os objetivos iniciais foram cumpridos. O sistema foi capaz de transmitir sinais
modulados e proceder à sua desmodulação de forma a serem corretamente
interpretadospelorecetor.

VI

Abstract
VII
Abstract
Thegoalof this thesis is thedevelopmentofahighdatarateand lowpower
ultrasonicwirelessbroadbandcommunicationsystem.Thissystemiscomposedbya
transmitter and a receivermodule that enable underwater communication in real
time through acousticwaves. Themain difficulties to develop this type of system
are: the features of the underwater environment that attenuate and degrade the
signal along its spread. Once developed, tests weremade in a real scenario with
differentmodulesandunderdifferentconditions.
The system is divided in two main modules (transmitter and receiver). The
transmitter module, is composed by the following blocks: a user interface, a
modulatorimplementedinFPGA,adigitaltoanalogconverter,asignalamplifierand
atransducer.Ontheotherhand,thereceivermoduleisformedbyahydrophone,an
amplifier / filter, a demodulator also implemented in a FPGA and, finally, a user
interface. The factor that allowed this system to achieve high data rate, was the
selectedmodulationscheme.TheOOKmodulatorwithtwodatachannels,hastwo
carriersof1MHzand0.5MHzthatallowstoachieveamaximumbitrateof1Mbps.
Theaquaticenvironmentincreasedthelevelofdifficultyonthisworkdueits
characteristics,which includes factors such as: large attenuation in long distances,
theexistenceofgreatdiversityofnoise,themultipathphenomenon,thelowspeed
ofacousticpropagationinwater(about1500m/s)andtheDopplereffect.
Finally,thetestscarriedoutafterthedevelopmentofthesystemrevealedthat
the initial objectives were accomplished. The system is capable of transmitting
modulated signals and perform their demodulation in order to be correctly
interpretedbythereceiver.

VIII

Conteúdo
IX
Conteúdo
Agradecimentos....................................................................................................iii
Resumo...................................................................................................................v
Abstract................................................................................................................vii
Conteúdo..............................................................................................................ix
ListasdeFiguras....................................................................................................xii
Listadetabelas....................................................................................................xiv
ListadeAcrónimos................................................................................................xv
1. Introdução..............................................................................................1
1.1 EnquadramentoeMotivação..................................................................2
1.2 Objetivos.................................................................................................5
1.3 EstruturadaDissertação.........................................................................5
2. Estadodaarte.........................................................................................2
2.1.1 Sistemadecomunicaçãoótica.........................................................2
2.1.2 SistemadeComunicaçãoporondaseletromagnéticas...................3
2.1.3 SistemadeComunicaçãoAcústica...................................................4
2.1.4 SumáriodosSistemasdeComunicaçãoSubaquáticos.....................5
2.2 Característicasdocanal...........................................................................5
2.2.1 EfeitoDoppler..................................................................................5
2.2.2 RuídoAmbiente...............................................................................6
X
2.2.3 Atenuação........................................................................................7
2.2.4 Spreadingloss..................................................................................8
2.2.4.1 Espalhamentoesférico................................................................8
2.2.4.2 EspalhamentoCilíndrico..............................................................9
2.2.4.3 EspalhamentoDirecional...........................................................10
2.2.5 Absorptionloss...............................................................................11
2.2.6 AtrasodePropagação....................................................................12
2.2.7 Multi-percurso...............................................................................13
2.2.8 Bolhas.............................................................................................15
3. TécnicasdeModulaçãoDigital................................................................2
3.1 ComunicaçãoAnalógicaversusDigital....................................................3
3.2 VantagensdaComunicaçãoDigital.........................................................4
3.2.1 DesvantagensdaComunicaçãoDigital............................................5
3.3 TécnicasdeModulaçãoDigital................................................................6
3.3.1 ASK...................................................................................................6
3.3.2 BPSK.................................................................................................7
3.3.3 FSK....................................................................................................8
3.3.4 OOK..................................................................................................9
3.3.5 QPSK...............................................................................................10
3.4 SistemasExistentes...............................................................................11
4. ArquiteturadoSistema.........................................................................14
4.1 Hardware...............................................................................................14
4.1.1 Arquiteturadosistema..................................................................15

Conteúdo
XI
4.1.2 FPGA...............................................................................................18
4.1.3 EletrónicadeInstrumentação........................................................20
4.1.3.1 ConversorDigital-Analógico......................................................20
4.1.3.2 ConversorAnalógico-Digital(ADC)...........................................21
4.1.4 AmplificadordePotência...............................................................21
4.1.5 Transdutoremissor........................................................................22
4.1.6 Transdutorhidrofonerecetor........................................................23
4.1.7 FiltroeAmplificadorRecetor.........................................................24
4.2 Software................................................................................................24
4.2.1 Matlab/Simulink.............................................................................24
4.2.2 ISEDesignSuiteEvalution..............................................................25
4.3 Implementação.....................................................................................25
4.4 Modulador.............................................................................................26
4.5 Desmodulador.......................................................................................30
4.5.1 DesmoduladorCanal1MHz...........................................................32
4.5.2 Desmoduladorcanal0.5MHz........................................................35
5. Resultadosediscussão..........................................................................39
5.1 ArquiteturadoSistemadeTeste...........................................................39
5.2 Cenáriodetestes...................................................................................41
5.3 Resultadosexperimentais.....................................................................43
5.4 AnálisesdosResultadosObtidos...........................................................47
6. Conclusões............................................................................................49
7. Referências...........................................................................................51
Listadefiguras
XII
Listadefiguras
Figura1-1-Sistemadecomunicaçãoacústica[4]..........................................................3
Figura2-1-Densidadeespectraldepotênciadoruídoambiente.[12]..........................7
Figura2-2Espalhamentoesférico.................................................................................8
Figura2-3Espalhamentocilíndrico...............................................................................9
Figura2-4Espalhamentodirecional............................................................................10
Figura2-5Absorçãoemáguadosalgada....................................................................12
Figura2-6VelocidadedosomdeacordocomaequaçãodeMackenzie[20]............13
Figura2-7Efeitomulti-percurso[21]..........................................................................14
Figura3-1Modelodeumsistemademodulação.........................................................2
Figura3-2ModulaçãoASK............................................................................................6
Figura3-3ModulaçãoBPSK..........................................................................................7
Figura3-4ModulaçãoFSK.............................................................................................8
Figura3-5ModulaçãoOOK...........................................................................................9
Figura3-6ModulaçãoQPSK........................................................................................10
Figura4-1Diagramadeblocoshardware..................................................................15
Figura4-2Arquiteturadosistema..............................................................................16
Figura4-3EstruturabásicaFPGA................................................................................18
Figura4-4FPGASpartan-6..........................................................................................19
Figura4-5:Placadeinstrumentação...........................................................................20

Listadefiguras
XIII
Figura4-6Amplificadoremissor.................................................................................22
Figura4-7TransdutoremissorPVDF[30][31]............................................................22
Figura4-8Hidrofone...................................................................................................23
Figura4-10ModuladorOOKdedoiscanais................................................................27
Figura4-11Geradordeondasinusoidalde1MHze0.5MHz....................................28
Figura4-12SaídaModuladorOOKdedoiscanaisdedados......................................29
Figura4-13DesmoduladorOOKdedoiscanais..........................................................31
Figura4-14Interfacegráficafiltro..............................................................................32
Figura4-15Filtropassa-alto........................................................................................33
Figura4-16Filtropassa-baixo.....................................................................................34
Figura4-17Filtropassa-baixo.....................................................................................70
Figura4-18Filtropassa-baixo.....................................................................................37
Figura5-1Arquiteturadosistemaemtestesexperimentais......................................40
Figura5-2Aquáriodeteste.........................................................................................41
Figura5-3PicoScope2000.........................................................................................42
Figura5-4Entradadefluxodedadosemodulaçãodosinal......................................43
Figura5-5SinalmoduladoásaídadoDAC..................................................................44
Figura5-6Saídadohidrofone.....................................................................................45
Figura5-7Desmodulaçãodosinal..............................................................................46
Listadetabelas
XIV
Listadetabelas
Tabela2-1-2-Tabeladetaxadedadosconsoanteadistância[4].................................4
Tabela3-3-Correspondênciaentrebitsefase............................................................10
Tabela3-4-Modemsacústicossubaquáticos...............................................................12
Tabela4-1-2-EspecificaçõesFPGASpartan6XC6SLX9................................................49
Tabela4-1-3-Saídadacorrenteanalógica...................................................................21

Listadeacrónimos
XV
Listadeacrónimos
ADC Analog-to-DigitalConverter
AGC AutomaticGainControl
ASK AmplitudeShiftKeying
BASK BinaryAmplitudeShiftKeying
BER BitErrorDate
BFSK BinaryFrequency
BPSF BinaryPhaseShiftKeying
DAC Digital-to-AnalogConverter
DSP DigitalSignalProcessor
FIR FiniteImpulseResponse
FPGA FieldProgrammableGateArray
FSK FrequencyShiftKeing
OOK On-OffKeying
PSK PhaseShiftKeying
QPSK QuadraturePhaseShiftKeying
SSB SingleSideBand
SNR SignaltoNoiseRatio
USB UniversalSerialBus


Introdução
1
1. Introdução
Aideiadetransmitirereceberinformaçãodebaixodeáguaprovémjádotempo
de Leonardo da Vinci quando descobriu que através da extremidade de um tubo
colocadodebaixodeáguasepoderiaescutarnaviosalongasdistâncias.Noentanto,
a grande evolução da comunicação subaquática teve lugar nos EUA durante a
segundaguerramundialcomainvençãodeumtelefonecapazdecomunicarcomos
seussubmarinos[1].EstetelefonefaziausodeumamodulaçãoSSBcomfrequências
entreos8-11kHzepermitiaenviarsinaisacústicosaolongodemuitosquilómetros.
Mais tarde, com o desenvolvimento de circuitos integrados foram criadas
ferramentas de processamento digital de sinal com grande eficiência energética.
Seguidamente surgiram sistemas complexos de processamento de sinal com
algoritmos de compressão de dados. Este avanço tecnológico aumentou
significativamenteaeficáciadascomunicaçõessubaquáticassemfios,queatéentão,
eramexclusivasparafinsmilitareseagoraganhavamespaçonosetorcomercial.
Atualmente os sistemas de comunicação subaquática sem fios são
imprescindíveis para aplicações de controlo remoto em plataformas petrolíferas,
monotorização de poluição em sistemas ambientais, recolha de dados em
localizações inacessíveis para a comunidade científica, comunicações entre
mergulhadores, mapeamento do fundo do oceano para deteção de objetos e
descoberta de novos recursos. Este tipo de tecnologia no sector comercial está a
crescer exponencialmente e existe a necessidade de tornar esta tecnologia mais
competitiva através da redução dos custos dos equipamentos e aumento o seu
desempenho. Esta tarefa não é fácil porque o meio aquático é um meio onde é
bastante difícil de comunicar devido às suas características que dificultam todo o
processamento do sinal envolvido. Entre estas destacam-se o ruído, absorções do
sinal, efeitos multi-percurso e efeito Doppler. Neste sentido, as investigações
realizadas nesta área passam pelo desenvolvimento de comunicações mais
Capítulo1
2
eficientes, com novos algoritmos de processamento de sinal, métodos de acesso
múltiploeimplementaçõesdemodulaçõesmaiseficazes.
1.1 Enquadramentoemotivação
Nos últimos anos os oceanos têm vindo a ganhar cada vez mais importância
juntodetodosospaíses,principalmentenospaísescosteiros.Istoaconteceporque
osrecursosnaturaisexistentessãocadavezmaisescassoseacompetiçãopelasua
buscaeexploraçãoécadavezmaioroqueaumentaconsideravelmenteoseuvalor.
Portugalocupaa11ªposiçãodospaísescommaioráreadeáguasjurisdicionais,
ficandoàfrentedepaísescomoaIndonésiaeChina.Atualmenteaáreajurisdicional
exclusivaportuguesaéaproximadamentede3.9milhõesde𝑘𝑚$oquesignificaque
97%dopaísémar.AimportânciaqueomartematualmenteparaPortugalequivale
a11%doPIBe12%doemprego[2].Omarportuguêséumativocríticonocontexto
económicoenacriaçãodeemprego.
Segundoa EstratégiaNacional paraoMar2013-2020, emPortugal existeuma
vasta área geográfica marítima amplamente inexplorada, dotada de elevados
recursosvivosenãovivos.Entreosrecursosvivosexisteumsectorcompotencialde
crescimento referente ao desenvolvimento de biotecnologia marinha através da
utilização de organismos marinhos em aplicações farmacêuticas, médicas e
cosméticas. Entre os recursos não vivos existe um potencial elevadíssimo na
exploraçãodoshidratosdemetanoondeforamjáconfirmadasváriasocorrênciasa
suleasudoestedePortugalContinental[3].
Por todas as razões enumeradas anteriormente, é necessário investir no
desenvolvimento de tecnologia de forma a acelerar e otimizar o processo do
conhecimento e monitorização da nossa áreamarítima, recolhendo o máximo de
informaçãopossívelsobreosrecursosexistentesafimdeganharanotoriedadeda
comunidade internacional e atrair investidores. No contexto desta dissertação foi
desenvolvidoumsistemacomunicaçãosemfiosqueservedeapoioàmonitorização

Introdução
3
eexploraçãodomeiosubaquático.Omodemacústicodecomunicaçãosubaquática
apresentaaltodesempenhonoquedizrespeitoaodébitodedadoseaoseubaixo
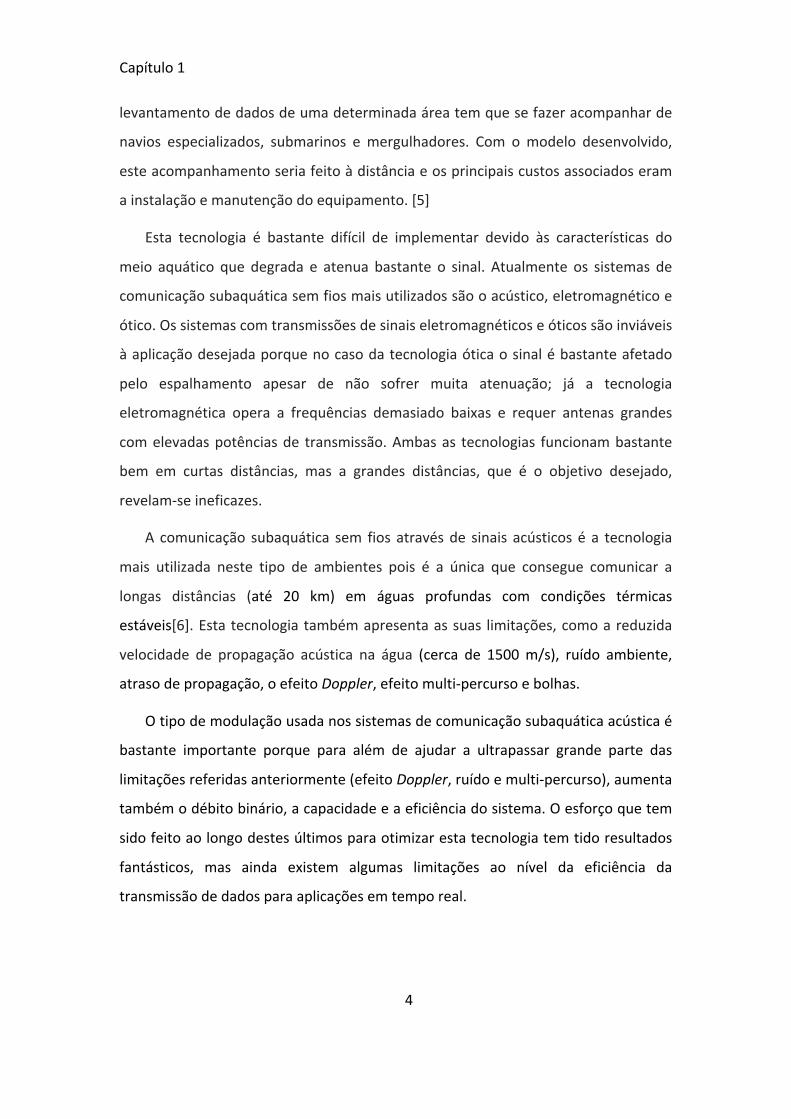
consumo,permitindoestabelecercomunicaçãosemfiosemtemporeal.AFigura1-1
apresentaumdospossíveiscenáriospráticos.Épossívelobservarváriosdispositivos
móveis subaquáticos a comunicar sem fios entre si, com routers atravésdeondas
acústicas.Osroutersservemcomoelodeligaçãoabasesterrestres.Acomunicação
é feita através do ar entre as bases terrestres e routers colocados à superfície
marítimaparaqueacomunicaçãosejamaisrápida(altavelocidadedepropagação).
Posteriormenteosrouterstransmitemainformaçãoaosdispositivosmóveisatravés
deondasacústicas.
Figura1-1-Sistemadecomunicaçãoacústica[4].
Os dispositivos móveis também poderão comunicar entre si através de ondas
acústicas. Istopermitecriarumarededemonotorizaçãoecontrolodedispositivos
subaquáticosmóveiscomamissãoderecolhadedadosdanossacostamarítima.Os
modelos atuais são muito dispendiosos. Uma equipa de pesquisa para fazer o
Capítulo1
4
levantamentodedadosdeumadeterminadaáreatemquesefazeracompanharde
navios especializados, submarinos e mergulhadores. Com omodelo desenvolvido,
esteacompanhamentoseriafeitoàdistânciaeosprincipaiscustosassociadoseram
ainstalaçãoemanutençãodoequipamento.[5]
Esta tecnologia é bastante difícil de implementar devido às características do
meio aquático que degrada e atenua bastante o sinal. Atualmente os sistemas de
comunicaçãosubaquáticasemfiosmaisutilizadossãooacústico,eletromagnéticoe
ótico.Ossistemascomtransmissõesdesinaiseletromagnéticoseóticossãoinviáveis
àaplicaçãodesejadaporquenocasodatecnologiaóticaosinalébastanteafetado
pelo espalhamento apesar de não sofrer muita atenuação; já a tecnologia
eletromagnética opera a frequências demasiado baixas e requer antenas grandes
comelevadaspotênciasde transmissão.Ambasas tecnologias funcionambastante
bem em curtas distâncias, mas a grandes distâncias, que é o objetivo desejado,
revelam-seineficazes.
A comunicação subaquática sem fios atravésde sinais acústicosé a tecnologia
mais utilizada neste tipo de ambientes pois é a única que consegue comunicar a
longas distâncias (até 20 km) em águas profundas com condições térmicas
estáveis[6].Estatecnologiatambémapresentaassuas limitações,comoareduzida
velocidade de propagação acústica na água (cerca de 1500m/s), ruído ambiente,
atrasodepropagação,oefeitoDoppler,efeitomulti-percursoebolhas.
Otipodemodulaçãousadanossistemasdecomunicaçãosubaquáticaacústicaé
bastante importante porque para além de ajudar a ultrapassar grande parte das
limitaçõesreferidasanteriormente(efeitoDoppler,ruídoemulti-percurso),aumenta
tambémodébitobinário,acapacidadeeaeficiênciadosistema.Oesforçoquetem
sidofeitoaolongodestesúltimosparaotimizarestatecnologiatemtidoresultados
fantásticos, mas ainda existem algumas limitações ao nível da eficiência da
transmissãodedadosparaaplicaçõesemtemporeal.
Introdução
5
1.2 Objetivos
O modem de comunicação acústica subaquática que se encontra em
desenvolvimento é a consequência de vários projetos anteriores.O objetivo desta
dissertaçãoédarcontinuidadeaesteprojeto,aumentandoarobustezeaeficiência
domodem.Paraquesejapossívelutilizarestemodememaplicaçõesdetemporeal,
énecessáriogarantirelevadosdébitosdedados,aumentaracapacidadedosistema
easuarobustezcontraerros.Nestecontexto,surgiuanecessidadedesenvolverum
esquema de modulação/desmodulação para cumprir todas as exigências
enumeradasacima.Assim,seráimplementandooesquemademodelaçãoOOK(On
Off Keying) com dois canais de dados e ondas portadoras de 1 MHz e 0.5 MHz
respetivamente. Inicialmente será feito o estudo das características do meio
aquático, como o efeito da absorção, multipercurso e Doppler, pesquisa sobre
sistemasdemodulaçãoexistenteseobtençãodeumconhecimentosólidodetudo
aquiloquejáfoifeitonesteprojetoeassuaslimitações.
Numa fase posterior serão realizados testes em ambientes reais e simulações
comrecursoaferramentasdesoftware,quepermitamotimizarosistemaepoupar
tempoerecursosnostestesemambientereais.
1.3 Estruturadadissertação
Estedocumentoencontra-seestruturadoem7capítulos:
• Capítulo1,Introdução,
• Capítulo2,Estadodaarte,
• Capítulo3,Modulaçõesexistentes,
• Capítulo4,Arquiteturadosistema,
• Capítulo5,Resultadosediscussão,
• Capítulo6,Conclusões.

Capítulo1
6
Estadodaarte
2
2. Estadodaarte
As tecnologias que permitem comunicar sem fios debaixo de água estão a
crescer exponencialmente no sector comercial. Existem inúmeras atividades e
diferentes aplicações para estas tecnologias. O aumento da sua procura levou os
engenheiros a investigarem sobre novos métodos de transmissão de sinal
subaquáticosemfios.Atualmenteossistemasdecomunicaçãosemfiosquemaisse
destacamsãoos sistemasde comunicaçãoótica, eletromagnéticaeacústica. Estes
sistemas têm características únicas que lhe conferem diferentes propósitos. De
seguida,serãoanalisadostodosestessistemaseassuascaracterísticas.
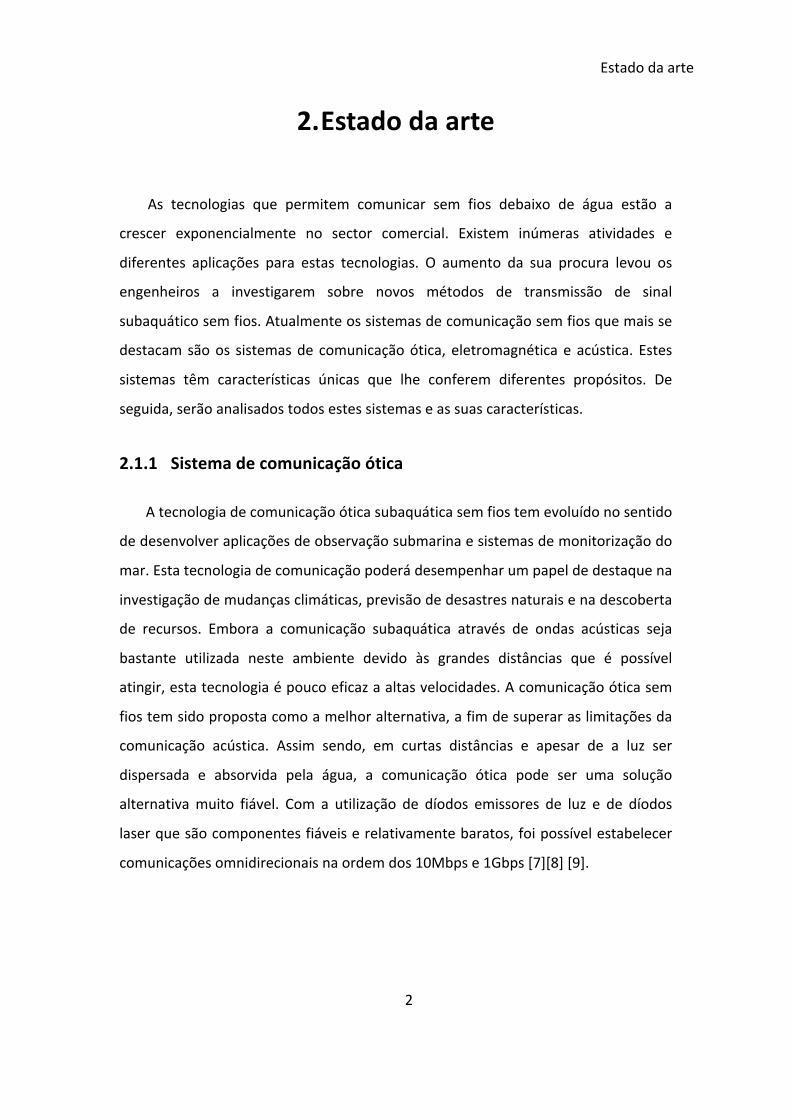
2.1.1 Sistemadecomunicaçãoótica
Atecnologiadecomunicaçãoóticasubaquáticasemfiostemevoluídonosentido
dedesenvolveraplicaçõesdeobservaçãosubmarinaesistemasdemonitorizaçãodo
mar.Estatecnologiadecomunicaçãopoderádesempenharumpapeldedestaquena
investigaçãodemudançasclimáticas,previsãodedesastresnaturaisenadescoberta
de recursos. Embora a comunicação subaquática através de ondas acústicas seja
bastante utilizada neste ambiente devido às grandes distâncias que é possível
atingir,estatecnologiaépoucoeficazaaltasvelocidades.Acomunicaçãoóticasem
fiostemsidopropostacomoamelhoralternativa,afimdesuperaraslimitaçõesda
comunicação acústica. Assim sendo, em curtas distâncias e apesar de a luz ser
dispersada e absorvida pela água, a comunicação ótica pode ser uma solução
alternativamuito fiável. Com a utilização de díodos emissores de luz e de díodos
laserquesãocomponentesfiáveiserelativamentebaratos,foipossívelestabelecer
comunicaçõesomnidirecionaisnaordemdos10Mbpse1Gbps[7][8][9].

Capítulo2
3
2.1.2 Sistemadecomunicaçãoporondaseletromagnéticas
As comunicações através de sinais eletromagnéticos subaquáticos foram
investigadas desde os primeiros dias do rádio, e só voltou a receber atenção
considerávelduranteadécadade1970.Naverdade,aúnicaaplicaçãoimplementada
comêxito foio sistemade comunicação subaquáticade frequênciaextremamente
baixa.Estesistemaoperadoa76Hznosistemanorte-americanoe82Hznosistema
russopermitiuatransmissãodealgunscaracteresporminutoadistânciasnaordem
dosmilharesdequilómetros.[10]
As ondas eletromagnéticas são caracterizadas principalmente por quatro
parâmetros:permeabilidade,permissividade,condutividadeevolumededensidade
decarga.Estesfatoresinfluenciambastanteapropagaçãoeletromagnéticanaágua
porque esta é caracterizada pela alta permissividade e condutividade elétrica. A
atenuação tambéméelevadacomparadacomoareaumenta rapidamentecoma
frequência.
Aspossíveisaplicaçõesparaascomunicaçõesatravésdesinaiseletromagnéticosem
ambientes subaquáticos são as comunicações de curto alcance (<100m) com
velocidadesdecomunicaçõesrelativamentealtas[11].
NaTabela2-1-2resume-searelaçãoentreoalcanceeodébitoparasistemasde
comunicaçãosubaquáticosporondaseletromagnéticas.

Estadodaarte
4
Tabela2-1-2débitobinárioemfunçãodadistância[4].
2.1.3 Sistemadecomunicaçãoacústica
Nos últimos anos a comunicação acústica subaquática tem recebido muita
atenção e as suas aplicações, que até agora eram maioritariamente militares,
começaram a convergir na direção das aplicações comerciais. O investimento
financeiroetecnológiconestaáreatemcrescidosubstancialmentenosúltimosanos.
Este investimento justifica-se pela eficácia da comunicação acústica, sobretudo a
longasdistânciasemrelaçãoàsdemais.
Oprocessoquepermitegerarultrassonsbaseia-seemmateriaispiezoelétricos.
Estematerialconverteossinaiselétricosemvibraçõescriandoassimondassonoras.
Oprocessoinversotambémépossível,ouseja,receberondassonoraseconvertê-las
em sinais elétricos. O grande problema destas tecnologias é a dificuldade de
comunicar nomeio aquático. A propagação do sinal é afetada por efeitos como a
refração, absorção e o espalhamento sobre a água, mas a atenuação do sinal, à
semelhança das tecnologias descritas anteriormente, é o maior obstáculo. A
atenuaçãosignificaaperdagradualda intensidadedosinalàmedidaquesemove
sobre ummeio. Nos sistemas de comunicação acústicos a atenuação dos sinais é
Alcance <1m 10m 50m 200m 2km 10km
Em
oceano
Acimados
100Mbps
100kbps 5kbps 100bps 10bps 1bps
Emágua
doce
Acimados
100Mbps
1Mbps 100kbps 1kbps 10bps 1bps
Capítulo2
5
muitomaiornaáguadoquenoar.Tambémexistemproblemascomoaselevadas
reflexõesdosinalnaágua.
O caminho a seguir para combater todas estas barreiras e alcançar débitos
binárioselevadospassapelaotimizaçãodealgoritmosdeprocessamentodesinalea
implementaçãodemodulaçõescomesquemasdecodificaçãomaiseficazes.
2.1.4 Sumáriodossistemasdecomunicaçãosubaquáticos
Nos capítulos anteriores foramabordadas as características dos três principais
sistemasdecomunicaçãosubaquática.Cadasistemaapresentaassuasvantagense
desvantagens que lhes conferem características únicas.Não se podedistinguir um
sistemacomoomelhordependedocenáriodeaplicação.Ocusto,acomplexidade
do sistema, os consumos, as distâncias de comunicação e as características do
própriomeioaquáticosãoosprincipaisfatoresquepodeminfluenciaraescolhade
cadatecnologia.
2.2 Característicasdocanal
Acomunicaçãoacústica subaquática temumagrandevariedadedeaplicações.
Entre elas encontram-se a recolha de dados oceânicos, controlo sobre veículos
submarinos ou até mesmo a exploração oceânica por parte da indústria
farmacêuticaoupetrolífera.Estasaplicaçõesrequeremcomunicaçõeseficazescom
altosdébitosequeoperementregrandesdistâncias.Estesobjetivossãodifíceisde
atingir devido às características do canal aquático como o ruído, a elevada
atenuação,oefeitomulti-percursoeoefeitoDoppler.
2.2.1 EfeitoDoppler
OefeitoDopplerconsistenodesvioda frequênciado sinal recebidodevidoao
movimento das estruturas subaquáticas. Este desvio provoca imensas dificuldades
Estadodaarte
6
nacomunicaçãoprincipalmenteemmodelosquesebaseiamnafrequênciadosinal
comométododedescodificaçãoeinterpretaçãodomesmo.
Este desvio pode ser definido como a razão entre a velocidade da fonte
relativamenteàvelocidadedepropagaçãodaondanaágua,∆= ±()±(
.Traduz-seentão
numdesvionafrequênciadosinalcomo:
𝑤, = 𝑤,- 1 + ∆ 𝑟𝑎𝑑/𝑠,
Onde:
𝑤,-=Frequênciaoriginal(rad/s)
𝑤,=FrequênciaalteradapeloefeitodeDoppler(rad/s)
Noentanto,seestasestruturassemoveremaumavelocidadeinferiora2m/s,
asconsequênciasdevariaçãodefrequênciadossinaisrecebidosdevidoaoefeitode
Dopplernãosãorelevantesparaosprocessosdedeteçãoacústica[12].
2.2.2 Ruídoambiente
Apropagaçãodo sinal acústico émuito eficaz a baixas frequências, contudo a
sualarguradebandaéextremamentelimitada.
O ruído é um dos fatores que mais influência a comunicação acústica
subaquática.Acaracterísticadoruídodependedecadaambienteaquáticoefatores
externosaesseambientecomoporexemplo,apassagemdeumnavioouogeloa
quebrar-se.Tudoistoprovocaruídos.Oruídodoambienteprovémdefontescomoa
turbulênciadaágua,arebentaçãodeondaseachuva.
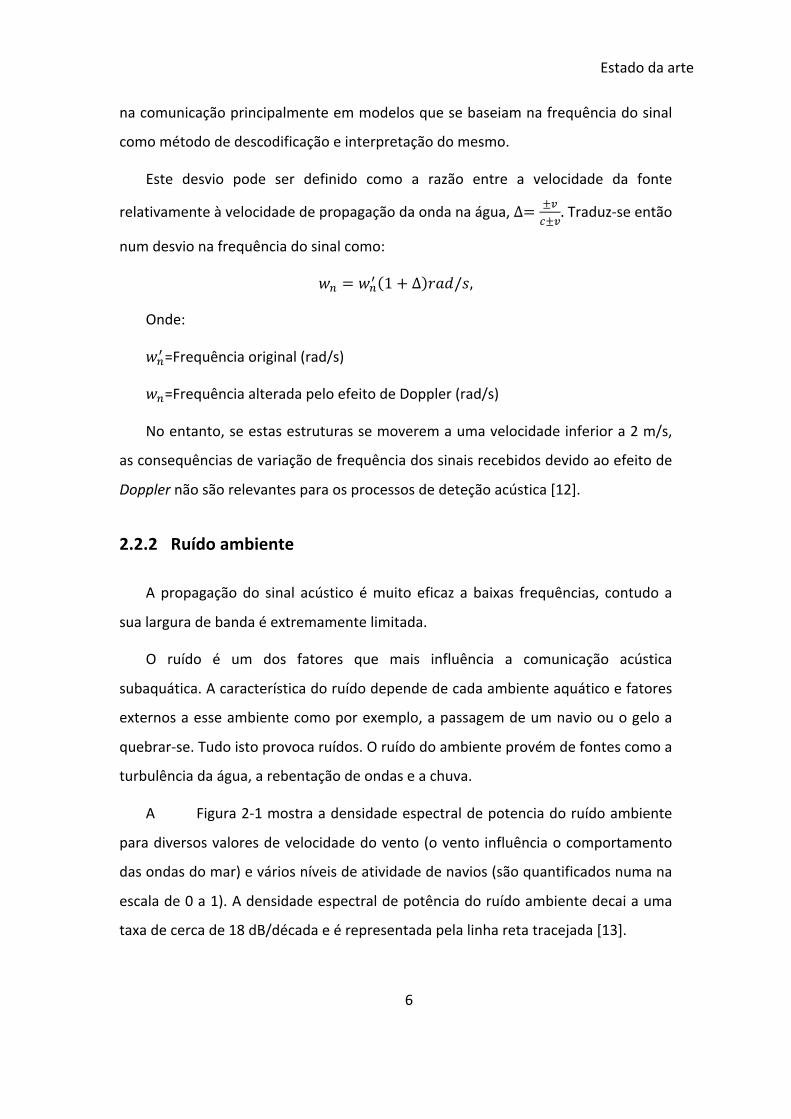
A Figura2-1mostraadensidadeespectraldepotenciadoruídoambiente
paradiversosvaloresdevelocidadedovento(oventoinfluênciaocomportamento
dasondasdomar)eváriosníveisdeatividadedenavios(sãoquantificadosnumana
escalade0a1).Adensidadeespectraldepotênciadoruídoambientedecaiauma
taxadecercade18dB/décadaeérepresentadapelalinharetatracejada[13].

Capítulo2
7
Figura2-1-Densidadeespectraldepotênciadoruídoambiente[12].
2.2.3 Atenuação
Aatenuaçãoconsistenumareduçãodapotênciadosinalao longodomeiode
transmissão e aumenta com a distância e frequência. Nomeio subaquático, se os
níveis de atenuação acústica forem relativamente baixos, podem-se atingir
comunicaçõesnaordemdedezenasdequilómetros[15].
Assim sendo é importante perceber os fatores que provocam a atenuação do
sinalacústicosubaquáticodeformaapoder-seestudareestipularumalcanceque
permitaaoemissorerecetorestabeleceremumacomunicaçãoeficaz.Aatenuaçãoé
caracterizada principalmente por três fatores: spreading loss, absorption loss e
scatteringloss.
Estadodaarte
8
Contudo,existemoutrosfatoresquetambématenuamosinalemboradeuma
formamaisreduzida.
2.2.4 Spreadingloss
Spreading lossouperdaporespalhamento,éaperdadeenergiaquesofreum
sinalquandosepropagaporumaáreacadavezmaior.Estaperdadeenergiacresce
comoaumentodaáreaqueosinalatravessa.Existemtrêstiposdeespalhamento:
esférico, cilíndrico e direcional. Neste trabalho será analisado commais detalhe o
espalhamentodirecional, umavezque foi oúnico a serusadona fasede testes e
simulações.Aseguir,serãoestudadasassuascaracterísticasassimcomooscálculos
paradeterminaraperdaportransmissãoexpressaemdecibéisdetodosostiposde
espalhamentos.
2.2.4.1 Espalhamentoesférico
Espalhamentoesférico,ocorrequandoafonteseencontranomeiodooceanoe
transmiteumsinalqueédistribuídouniformementesobretodasasdireções,comoé
demonstradonaFigura2-2.
A perda por transmissão pode ser expressa em Decibéis através da seguinte
equação:
Figura2-2Espalhamentoesférico

Capítulo2
9
𝑇𝐿 = −10𝐿𝑜𝑔<=>>?
= 10𝐿𝑜𝑔<= 𝑟$ = 20𝐿𝑜𝑔<=(r)dB
Onde 𝐼= é a intensidade acústica referente à distância 𝑟= e 𝐼 corresponde à
intensidadeacústicareferenteàdistânciar.
2.2.4.2 Espalhamentocilíndrico
Noespalhamentocilíndrico,osomnãosepropagauniformementeemtodaas
direções porque é limitado pela superfície e o fundo do oceano. Isto acontece
quando a fonte de transmissão se encontra num meio aquático com pouca
profundidade.Embaixo,naFigura2-3pode-seobservarqueaondaacústicacomeça
porespalhar-sesobaformaesféricaatéaatingirasuperfícieeofundodooceano.
Quando a onda acústica atinge a superfície e o fundo oceânico, esta começa
gradualmente a espalhar-se sob a forma cilíndrica com o som a propagar-se
horizontalmenteemrelaçãoàfontedetransmissão.
A perda por transmissão pode ser expressa em decibéis através da seguinte
equação:
𝑇𝐿 = 10𝐿𝑜𝑔<=𝐼𝐼=
= 10𝐿𝑜𝑔<= 𝑟 𝑑𝐵
Figura2-3Espalhamentocilíndrico
Estadodaarte
10
Onde 𝐼= é a intensidade acústica referente à distância 𝑟= e 𝐼corresponde à
intensidadeacústicareferenteàdistânciar.
2.2.4.3 Espalhamentodirecional
O espalhamento direcional acontece em situações em que a fonte de
transmissão emite somente um sinal numa determinada direção ao contrário do
espalhamentocilíndricoeesféricoqueépropagadoemtodasasdireções.Quando
isto acontece, a onda sonora é propagada sob a forma de um feixe com um
determinadoângulo.AFigura2-4mostraumexemplodoespalhamentodirecional.
Para se calcular a perda por transmissão é necessário de calcular o valor do
ângulodedivergênciadofeixe(δ)queédadopor[16]:
𝛿 = 2arcsin(𝜆𝐷)
Onde,Déodiâmetrodotransdutore𝜆éocomprimentodeonda.
Aperdaportransmissãoéexpressaatravésdaseguinteequação:
Figura2-4Espalhamentodirecional.

Capítulo2
11
𝑇𝐵 = 10𝐿𝑜𝑔𝐼=𝐼 = 10𝐿𝑜𝑔(
𝛿𝑟$
𝜋𝑟=$)
Onde TB é expresso em dB, 𝐼= é a intensidade acústica referente à distância 𝑟= e
𝐼correspondeàintensidadeacústicareferenteàdistânciar.
2.2.5 Absorptionloss
Quandoumaondaacústicasepropaganomeiosubaquáticoéinevitávelocorrer
umaperdagradualdosinalporabsorção.Aperdaporabsorçãosignificaaconversão
deenergiaacústicaemcalordevidoàviscosidade,areaçõesquímicasqueenvolvem
iõesnaáguadomareàcondutividade térmica [17].Estaperdapodeserexpressa
emdecibéisatravésdaequaçãodeAinslie&McColm,querelacionaatemperatura,
a profundidade, as reações químicas do ácido bórico e sulfato de magnésio e
finalmenteaacidezdaágua(pH)[18].
𝑎 𝑓 =0.106 𝑓<𝑓$ 𝑒 RSTU =.VW
𝑓<$𝑓$+0.52 1 + 𝑇
43𝑆35 𝑓$𝑓$ 𝑒
T\W
𝑓$$𝑓$
+ 0.00049𝑓$𝑒T^$_`
\<_
𝑇 representaovalordatemperaturaemgrausCelsius,Ssimbolizaasalinidade
em ppt, D é a profundidade em metros, pH é acidez da água, f1 e f2 são as
frequênciasintroduzidaspeloacidobóricoeosulfatodemagnésiorespetivamente.
Deumaformamaisespecífica,oefeitodaviscosidadeésignificativoacimados
100kHz;jáoefeitodasreaçõesiónicassãounicamentesentidasentreos10kHzaté
os 100 kHz. De uma forma geral o coeficiente de absorção𝛼 aumenta com o
aumentodefrequênciaedecrescecomoaumentodaprofundidade[19].
Ocoeficientedeabsorçãoé tambémsignificativamentemaiornaáguadomar
relativamenteàáguadocedevidoàsreaçõesiónicas.

Estadodaarte
12
Figura2-1-absorçãoemáguadomar[29]
AFigura2-5mostrasegundoomodelodeAinslie&McColm,acontribuiçãodas
diferentesfontesdeabsorçãoemfunçãodafrequência.
2.2.6 Atrasodepropagação
Avelocidadetípicadeondasacústicaspertodasuperfíciedooceanoécercade
1500m/s, mais de quatro vezes mais rápido que a velocidade do som no ar. No
entanto, a velocidade do som no meio subaquático é bastante afetada pela
temperatura,profundidadeesalinidade.Estesparâmetrossãovariáveisediferemde
lugarparalugarnaágua,logoavelocidadetambémévariável[20].
Avelocidadedosomnaágua𝜈 podesercalculadadeacordocomaequaçãode
Mackenzie[21].
Figura2-5Absorçãoemáguadosalgada.

Capítulo2
13
𝑣 = 1448.96 + 4.591T − 5.304x10T$𝑇$ + 2.374x10Th𝑇i + 1.340(S − 35)
+ 1.630x10T$D + 1.675x10T_𝐷$ − 1.025x10T$T(S − 35)
− 7.139x10T<i𝑇𝐷i
Onde:
T,D e S correspondem à Temperatura (2-30l𝐶), Profundidade (0-8000m) e
Salinidade(25-40PPT),respetivamente.
AFigura2-6representaumestudorealizadosobreoperfildavelocidadedosom
até200mdeprofundidade.Épossívelverificarqueaprofundidadeeatemperatura
têmmuitainfluênciasobreavelocidadedosomnomeioaquático.
Figura2-6VelocidadedosomdeacordocomaequaçãodeMackenzie[20].
2.2.7 Multi-percurso
O efeito multi-percurso é um problema bastante comum na comunicação
acústicasubaquática.Quandoumsinalétransmitido,váriasréplicasdessesinalirão
atingir o recetor através de diferentes caminhos, com diferentes atenuações e
atrasos. Este efeito resulta na interferência inter-simbólica e tem origem em dois

Estadodaarte
14
acontecimentos: a reflexão e a refração do som no oceano. A reflexão acontece
quandoasondasatingemasuperfície,ofundoouequalquerobjetoqueestejano
seucaminho.Normalmenteesteefeitoestámaisassociadoaambientescomáguas
rasas. A refração das ondas acústicas estámais relacionada comáguas profundas,
ondeavelocidadedosomvariacomaprofundidade[22].
Destaformaosinaltransmitidovaichegaraorecetorcomumasériedeecos,e
quantomaiorforonúmerodereflexõesmenorvaiseraamplitudedecadaumdeles
[23].Emtermospráticos,esteefeitovaicriarproblemasnoprocessamentodosinal
nodomíniodostemposeodesempenhodosistemapodeserbastanteafetado.Nos
melhores dos cenários podem-se ter dezenas de multi-percursos ou centenas no
casodelongasdistâncias.
A Figura 2-7 representa o efeito multi-percurso no domínio dos tempos. O
cenário tem as seguintes características: profundidade da água igual a 90 m,
distânciahorizontal1000m,profundidadedotransmissorde15m,profundidadedo
recetor83m.
Figura2-7Efeitomulti-percurso[21].

Capítulo2
15
ÉdenotarqueasondascommenosreflecçõesnomeadamenteaAeBchegam
ao recetor commenos atenuação. O grau das reflecções também influenciam os
caminhosa serempercorridospor cadaonda, variandoo tempode receção como
por exemplooprimeiro grupoquedemora cercade4mseo segundogrupoque
chega20msmaistarde.
2.2.8 Bolhas
Asbolhasgeradaspelorebentamentodasondasnasuperfíciedomartêmuma
grande influêncianapropagaçãodasondas acústicasde alta frequência, tantoem
locaiscosteiroscomoemaltomar.Ascamadasdebolhasjuntoàsuperfíciepodem
provocaratenuaçõessignificativasdossinaisdispersosporestazona[14].Masnão
existemsomentebolhasnanatureza,ostransdutorespodemtambémcriarbolhase
apesardenãoseremtãosignificativaspodeminfluenciaroprocessamentodosinal
acústico.
Experiências realizadas sobrea influênciadasbolhasnumsinalacústicoauma
frequênciade30Hz,revelaramumaatenuaçãodecercade3dBs[24].

TécnicasdemodulaçãoDigital
2
3. Técnicasdemodulaçãodigital
A comunicação é o processo de transmissão de dados através do espaço e
tempo.Ainformaçãotransmitidapodeservídeo,imagem,áudioouqualqueroutra
informaçãoquepossa serdigitalizadae enviada soba formade sinais elétricos.O
desafio que se vive atualmente na era das comunicações é a investigação e
desenvolvimento de sistemas capazes de ultrapassar problemas como congestão
espectral, interferênciasouruídosdoscanaisdecomunicaçãoe,aomesmotempo,
garantir elevados débitos binários de forma segura e eficaz. Isto é um processo
extremamente complexoqueenvolve a criaçãodenovas técnicasde codificação r
modulação[25].
A modulação, assume desta forma um papel crucial nas comunicações.
Modularéamodificaçãodeumsinaleletromagnéticoinicialmentegerado,antesde
ser radiado, para que este transporte informação sob uma onda portadora.
Normalmente,sobrepõe-seumaondaportadoraaosinalquesepretendetransmitir,
comopodeservistonaFigura3-1.
Assim,atravésdautilizaçãodeumaondaportadoraquegeralmenteéumaonda
sinusoidal de alta frequência, obtêm-se as propriedades mais adequadas do sinal
paraoscanaisdetransmissão.Nestepropósito,seavariaçãodaondaportadoraé
contínuanodomíniodotempo,tem-seumamodulaçãoanalógica,casosejadiscreta
tem-seumamodulaçãodigital.
Figura3-1Modelodeumsistemademodulação.
Capítulo3
3
Éaindaimportantereferirquegeralmenteaondaportadoraéumasinusoidede
acordocomaseguinteexpressão:
𝑉) 𝑡 = 𝐶𝑜𝑠(2𝜋𝑓)𝑡 + 𝜙)
Ondeosparâmetros𝐴,𝑓) e𝜙podemvariarcomopropósitodastransmissãode
dados,sendoelesaamplitude,afrequênciaeafasedamodulaçãorespetivamente.
Independentementedamodulaçãoescolhidaseranalógicaoudigital,ésempre
necessário reverter todo este processo para que o recetor possa recuperar a
informaçãodosinaloriginal,esteprocessodesigna-sepordesmodulação.
Ainda neste capítulo serão estudadas as diferentes técnicas de modulação que
existem para os sistemas de comunicação analógico e digital. Além disso, serão
discutidasassuasvantagensedesvantagenseasdevidascomparaçõesentreelas.
3.1 Comunicaçãoanalógicaversusdigital
Quandose iniciaramascomunicaçõessemfios,acomunicaçãoanalógicaeraa
tecnologia predominante. Atualmente, os sistemas de rádio ainda funcionam com
modulaçãoanalógica,contudoatecnologiadigitalganhoumaiornotoriedadecomos
seus progressos, conferindo cada vez mais vantagens em relação à tecnologia
analógica.
Pode-se também afirmar, que o facto de a comunicação analógica existir há
tanto tempo, levou à sua estagnação em termos de inovação. Ao invés, as
plataformasdigitaistêmvindoaevoluirexponencialmentenosseusdesempenhose
aplicações, nomeadamente no setor das telecomunicações. Grande parte dos
sistemasutilizadosatualmentesãodigitaiseoimpactofinanceiroeeconómiconeste
setor é elevadíssimo. A escolha entre estes dois tipos de comunicações face às
necessidadesdeumsistemanãoé fácil,acomunicaçãoanalógicatemumpassado
histórico muito forte e longo o suficiente para que as suas funcionalidades e
característicasfossemmelhoradas.Asuaprincipalvantageméquesefornecessário
implementarumsistemadecomunicaçãoanalógicapararealizarumadeterminada

TécnicasdemodulaçãoDigital
4
tarefa, émuito provável que a solução já se encontre disponível nomercado. Por
outrolado,acomunicaçãodigitalconfereumlequebastanteelevadodevantagens
sobre a comunicação analógica no setor das telecomunicações, sendo por isso a
eleitaaserusadanestetrabalho.
3.2 Vantagensdacomunicaçãodigital
Ossistemasdecomunicaçãodigitaisrepresentamumaumentonacomplexidade
em relação aos sistemas de comunicação analógicos. Por isso, em baixo serão
apresentadas algumas das razões que levaram à substituição dos sistemas de
comunicaçãoanalógicospelossistemascomunicaçãodigitais.
• Simplesebaratos
Devido aos avanços nas tecnologias de circuitos integrados digitais e
computadoresdealtavelocidade,ossistemasdecomunicaçãodigitaissãomais
simples de construir e apresentamum customais baixo.Nomercado existem
muitassoluçõesdesistemasnumchipquepodemserfacilmenteintegradasem
novosprojetos,sendopossívelreprogramarhardwareeatualizarosistema,sem
qualquercusto.
• Maisseguro
Comutilizaçãodaencriptaçãodedados,apenasos recetoresadmitidossão
autorizados a detetar os dados transmitidos. É muito útil em aplicações
militares.
• MaioralcanceOs sinais conseguem atingir um maior alcance desde que os dados sejam
convertidosemformatodigital.

Capítulo3
5
• CapacidadedemultiplexagemUsandomultiplexagem, os dados de áudio, vídeo e até outros, podem ser
incorporadosetransmitidosatravésdomesmocanal.
• MaiortolerânciaaoruídoNaamplificaçãodosinal,oruídonãoéamplificado.
• DeteçãoecorreçãodeerrosComautilizaçãodacodificaçãodocanal,épossíveldetetarecorrigiroserros
nosrecetores.Resultandonumamelhoriadataxaglobaldeerrodebit.
3.2.1 DesvantagensdaComunicaçãoDigital
Apesar da comunicação digital ser uma tecnologia apontada como bastante
superior à comunicação analógica, devido às suas inúmeras vantagens, existem
algumasdesvantagensquepodemporemcausaasuaescolha.Asdesvantagenssão:
• Eficiênciaenergética
A eficiência energética é a capacidade de preservar com fidelidade uma
mensagem digital a baixos níveis de energia. O problema é que para
combateroruído,énecessárioaumentarapotênciadosinal.
• Eficiênciadelarguradebanda
Aeficiênciade larguradebandarefere-seàeficiênciacomquea largura
debandaalocadaéusada.Oaumentodataxadedadosimplicaareduçãodo
pulsodecadasímbolodigital,queprovocaoaumentodalarguradebandado
sinal.
• Compensações
Seadicionarmoscódigosdecontrolodeerros,reduzaeficiênciadalargura
debanda,masaumentaaeficiênciaenergética.

TécnicasdemodulaçãoDigital
6
• Custoecomplexidadedosrecetores.
O custo e a complexidade dos recetores em relação à comunicação
digitalsãomaiores.
3.3 Técnicasdemodulaçãodigital
3.3.1 ASK
Neste tipo demodulação a amplitude do sinal varia com a sequência binária,
mantendoasua faseea frequência inalteradas.Quandoumbité“1”aamplitude
aumentaparaumvalorespecífico,quandoobité“0”aamplitudedosinaldecresce
para outro valor. Na Figura 3-2 pode-se observar o resultado desta técnica de
modulação.
Avantagemeadesvantagemdestamodulaçãosão:
• Vantagem:
Figura3-2ModulaçãoASK.

Capítulo3
7
o Simplicidade.
• Desvantagem:
o Muitosuscetívelainterferênciaderuído.
3.3.2 BPSK
Na modulação BPSK, o sinal transmitido é uma sinusoide de amplitude e
frequênciafixa.Estesinaltemumafasefixaquandoobitdedadosé“1”,quandoo
bit de dados é “0”, a fase é alterada em 180 graus. A Figura 3-3 representa o
resultadodamodulaçãoBPSK.
Asvantagensedesvantagenssão:
• Vantagens:
o AmodulaçãoBPSKémenossuscetívelaerrosdoqueamodulação
ASKerequeramesmalarguradebanda.
o É mais eficiente no uso da largura de banda em relação à
modulaçãoFSK.
• Desvantagens:
Figura3-3ModulaçãoBPSK.

TécnicasdemodulaçãoDigital
8
o Os processos de recuperação e deteção de sinal são mais
complexos.
3.3.3 FSK
Nestatécnicademodulação,oprincípioévariarafrequênciaconsoanteovalor
binário.Quandoseencontranasequênciabináriaumbita“1”,afrequênciadosinal
tem um determinado valor, quando o bitmuda para “0” a frequênciamuda para
outrovalorespecífico.Oresultadodestatécnicademodulaçãopodeserobservado
naFigura3-4.
Figura3-4ModulaçãoFSK.

Capítulo3
9
Asvantagensedesvantagensdestamodulaçãosão:
• Vantagens:
o AmodulaçãoFSKémenossuscetívelaerrosdoqueamodulação
ASK,umavezqueorecetorprocuraumaalteraçãodefrequência
sobreintervalosdetempo,permitequeoruídosejaeliminado.
• Desvantagens:
o O espectro da modulação FSK é duas vezes maior que o da
modulaçãoASK.
3.3.4 OOK
EstatécnicademodulaçãoéumcasoparticulardatécnicademodulaçãoASK.A
diferença é que quando o bit “0” é transmitido a amplitude fica a zero no sinal
modulado. Na Figura 3-5 pode ser observado o resultado desta técnica de
modulação.
Figura3-5ModulaçãoOOK.
TécnicasdemodulaçãoDigital
10
Asvantagensedesvantagensdestatécnicasão:
• Vantagens:
o Esta técnica permite ao transmissor ficar inativo durante a
transmissãodobit“0”,aumentandoapoupançadeenergia.
o Simplicidadeecustodeimplementação.
• Desvantagens:
o Muito sensível a ruído e interferências pois um sinal indesejado
podeserdetetadocomoumfalsobita“1”.
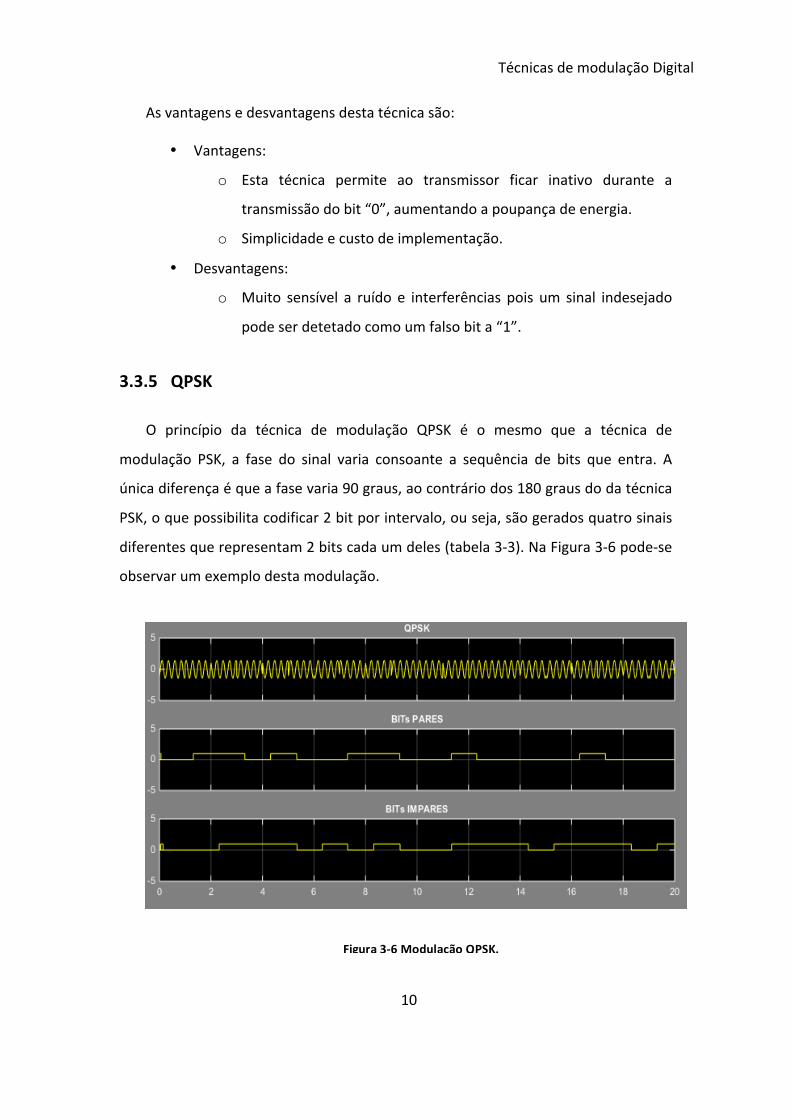
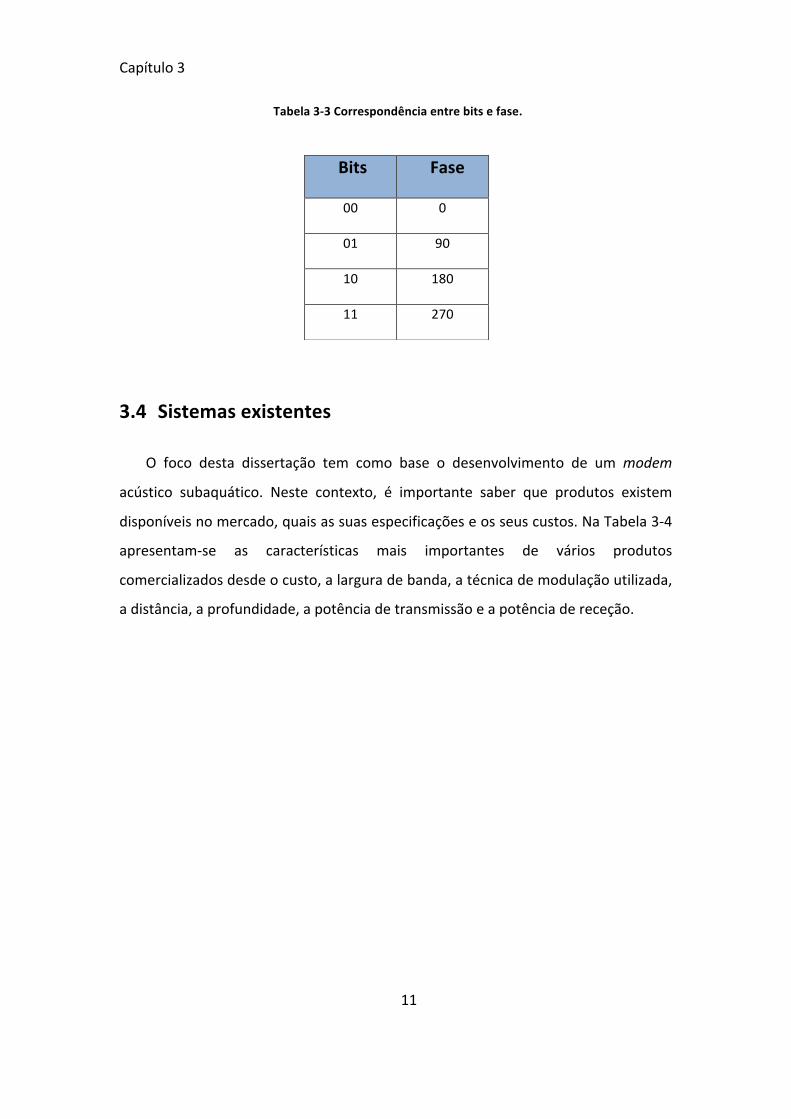
3.3.5 QPSK
O princípio da técnica de modulação QPSK é o mesmo que a técnica de
modulação PSK, a fase do sinal varia consoante a sequência de bits que entra. A
únicadiferençaéqueafasevaria90graus,aocontráriodos180grausdodatécnica
PSK,oquepossibilitacodificar2bitporintervalo,ouseja,sãogeradosquatrosinais
diferentesquerepresentam2bitscadaumdeles(tabela3-3).NaFigura3-6pode-se
observarumexemplodestamodulação.
Figura3-6ModulaçãoQPSK.
Capítulo3
11
Tabela3-3Correspondênciaentrebitsefase.
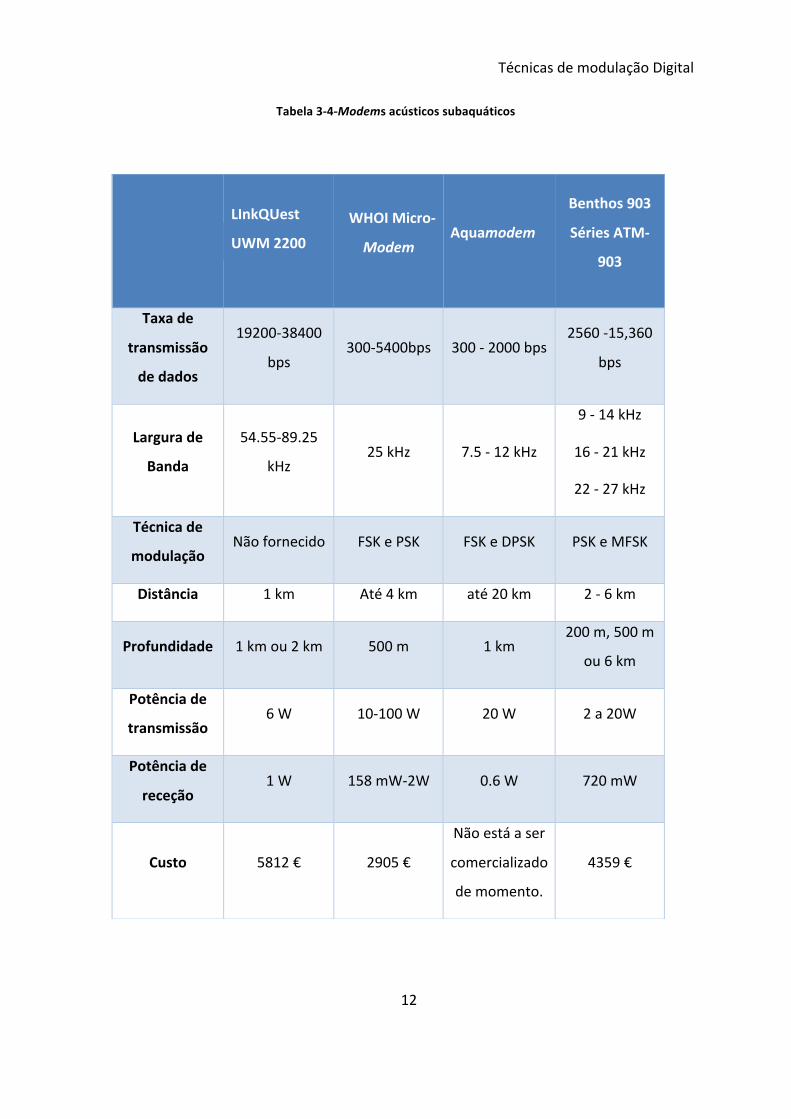
3.4 Sistemasexistentes
O foco desta dissertação tem como base o desenvolvimento de ummodem
acústico subaquático. Neste contexto, é importante saber que produtos existem
disponíveisnomercado,quaisassuasespecificaçõeseosseuscustos.NaTabela3-4
apresentam-se as características mais importantes de vários produtos
comercializadosdesdeocusto,alarguradebanda,atécnicademodulaçãoutilizada,
adistância,aprofundidade,apotênciadetransmissãoeapotênciadereceção.
Bits Fase
00 0
01 90
10 180
11 270
TécnicasdemodulaçãoDigital
12
Tabela3-4-Modemsacústicossubaquáticos
LInkQUest
UWM2200
WHOIMicro-
ModemAquamodem
Benthos903
SériesATM-
903
Taxade
transmissão
dedados
19200-38400
bps300-5400bps 300-2000bps
2560-15,360
bps
Largurade
Banda
54.55-89.25
kHz25kHz 7.5-12kHz
9-14kHz
16-21kHz
22-27kHz
Técnicade
modulaçãoNãofornecido FSKePSK FSKeDPSK PSKeMFSK
Distância 1km Até4km até20km 2-6km
Profundidade 1kmou2km 500m 1km200m,500m
ou6km
Potênciade
transmissão6W 10-100W 20W 2a20W
Potênciade
receção1W 158mW-2W 0.6W 720mW
Custo 5812€ 2905€
Nãoestáaser
comercializado
demomento.
4359€

Capítulo3
13
Existem investigadores como Wills [26] e Nam [27] que apostaram no
desenvolvimento de modems menos complexos. No caso de Wills, o modem é
baseado numa técnica de modulação FSK; já Nam baseou-se na técnica de
modulação ASK. Ambos os sistemas apresentam baixos consumos energéticos e
elevadosdébitosbinários.Contudograndepartedos trabalhosexistentesainda se
encontraemdesenvolvimentoouemfasedetestes.
Uma das grandes motivações desta dissertação advém no sentido desta
tecnologia de comunicação subaquática ainda se encontrar numa fase muito
prematura em termos de desenvolvimento e com informação pouco disponível.
Assim,espera-sedarmaisumcontributoparaacomunidadecientíficaecriaruma
oportunidadeparaacomercializaçãodeumprodutoquevisaajudaramonitorização
eexploraçãosubaquáticadetodaáreaeconómicamarítimaportuguesa.

ArquiteturadoSistema
14
4. Arquiteturadosistema
Esta dissertação é o seguimento de outras envolvidas no projeto domodem
acústicosubaquático.Paraquesejapossívelatingirosobjetivosdestadissertaçãoé
necessário conhecer todo o trabalho desenvolvido até agora. Este capítulo será
divido em duas partes, as secções hardware e software. Na secção hardware é
abordadotudooquefoifeitoatéagora,desdeasdecisõestécnicas,acaracterização
detodososcomponentesenvolvidose,finalmente,aestruturadosistemadividida
em blocos. A secção software aborda todas as ferramentas utilizadas para a
implementaçãodomodulador/desmodulador.
4.1 Hardware
Omodemacústicoéumsistemaconstituídopordoismódulosinterligadosentre
si:omódulodecomunicaçãoeomóduloacústico.
Omódulodecomunicaçãoéumcomputadorpessoalqueinteragecomomódulo
acústico sob a formadeemissorou recetordedados. Em casosparticularespode
exercerumacomunicaçãobilateralousejarecebereenviardados.
Omóduloacústicoédivididoemdois:ummóduloresponsávelpelamodulaçãoe
transmissãodedadosparaomeioaquáticosobaformadeumsinalacústico,eoutro
móduloresponsávelpelareceçãoedesmodulaçãodessesinalacústico.Énomódulo
acústicoqueseencontramtodososcomponenteseletrónicos,quesãodivididosem
blocoseserãoestudadoscommaisdetalhenasecção“Arquiteturadosistema”.Na
Figura4-1épossívelobservarodiagramadeblocosdehardware.

Capítulo4
15
Figura4-1Diagramadeblocoshardware.
4.1.1 Arquiteturadosistema
Para uma melhor compreensão do sistema de comunicação acústico
subaquático é necessário analisar commais detalhe o módulo acústico e os seus
componenteseletrónicos.Deseguida,comoapoiodaFigura4-2,seráexplicado,de
uma forma geral, a arquitetura e funcionamento do sistema. Ainda neste capítulo
será analisado individualmente cada componente eletrónico do módulo acústico
devidoasuacomplexidade.

ArquiteturadoSistema
16
Figura4-2Arquiteturadosistema.
Oprocessodetransmissãodosinalparaomeioaquáticoéefetuadodaseguinte
forma:umcomputadorpessoalenviadadossobaformadeumsinalelétricoparao
móduloacústico.Este sinalelétricoéprocessadoemoduladodigitalmenteatravés
deumaFPGA.De seguidaumconversordigital - analógico (DAC) converteo sinal.
Antes de transmitir o sinal para o meio aquático, através de um transdutor, é
necessárioamplificarosinalparaqueatinjaasdistânciasdesejadas.sendoparatal
usado um amplificador de potência. O transdutor, através das suas vibrações,
transforma o sinal elétrico em ondas acústicas que são emitidas para o meio
aquático.
Para receber as ondas acústicas propagadas no meio aquático é usado um
hidrofone.Contudo,énecessárioaplicarumfiltropassa-banda(BPF)comumganho

Capítulo4
17
associado,parafiltrarasfrequências indesejadaseamplificarosinal.Paraqueseja
possível desmodular o sinal através da FPGA, este não pode chegar no formato
analógico,sendoporissousadoumconversorADCparaconverterosinalanalógico
emdigital.Depoisdeconverterosinalnoformatodigital,esteédesmoduladopela
FPGA e, uma vez recuperados os dados originais, estes são enviados para um
computador.
Todos os componentes eletrónicos enunciados em cima, que fazem parte do
móduloacústico,serãoanalisadosindividualmenteparaquesepossamconheceras
suascaracterísticasefunções.
ArquiteturadoSistema
18
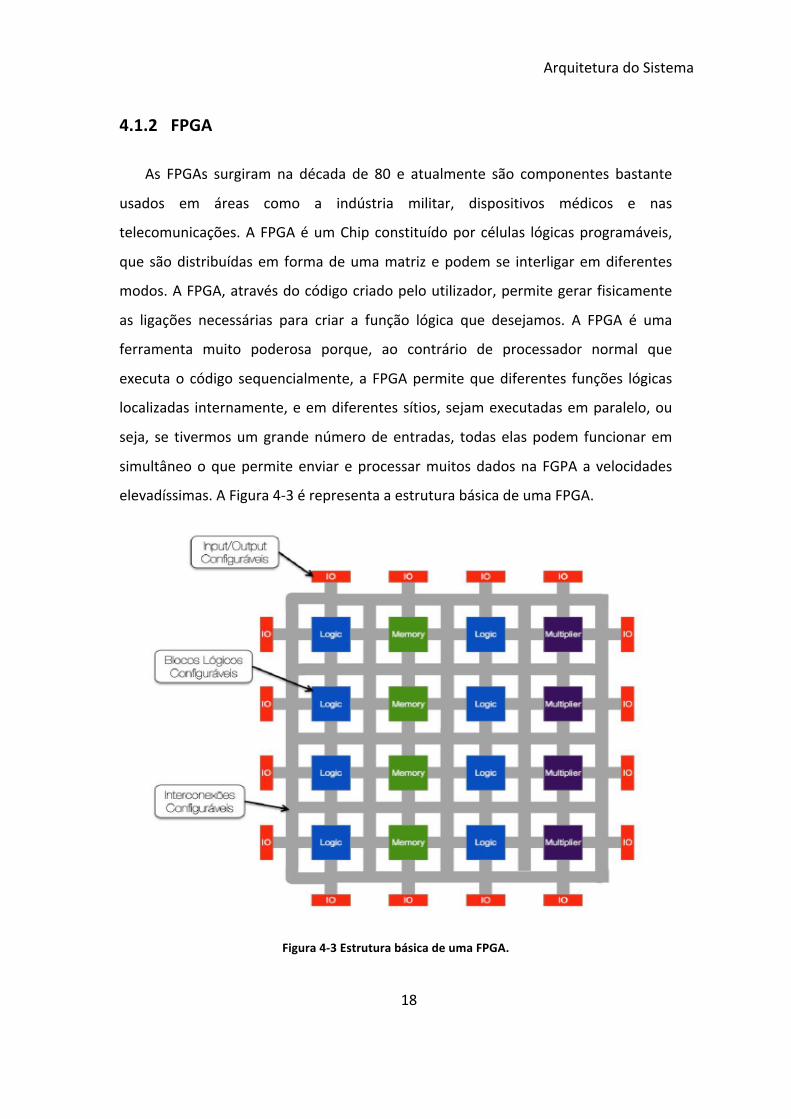
4.1.2 FPGA
As FPGAs surgiram na década de 80 e atualmente são componentes bastante
usados em áreas como a indústria militar, dispositivos médicos e nas
telecomunicações.AFPGAéumChipconstituídoporcélulas lógicasprogramáveis,
quesãodistribuídasem formadeumamatrizepodemse interligaremdiferentes
modos.AFPGA,atravésdocódigocriadopeloutilizador,permitegerarfisicamente
as ligações necessárias para criar a função lógica que desejamos. A FPGA é uma
ferramenta muito poderosa porque, ao contrário de processador normal que
executao código sequencialmente, a FPGApermitequediferentes funções lógicas
localizadas internamente,eemdiferentessítios,sejamexecutadasemparalelo,ou
seja, se tivermosumgrandenúmerodeentradas, todaselaspodem funcionarem
simultâneooquepermiteenviareprocessarmuitosdadosnaFGPAa velocidades
elevadíssimas.AFigura4-3érepresentaaestruturabásicadeumaFPGA.
Figura4-3EstruturabásicadeumaFPGA.

Capítulo4
19
No sistemaproposto a FPGAé responsável pelas funçõesdeprocessamentoe
controlo.A tarefaprincipaléprocessarossinaisdigitaisatravésda implementação
domoduladoredodesmodulador.Étambémresponsávelpelocontrolodoscircuitos
eletrónicosdoDACedoADC.
AFPGAutilizadanestesistemapertenceàfamíliaSpartan-6XC6SLX9epodeser
visualizadanaFigura4-4.
NaTabela4-1-2encontram-seassuasprincipaisespecificações.
Tabela4-1-2-EspecificaçõesFPGASpartan6XC6SLX9.
FPGASpartan-6XC6SLX9
Célulaslógicas 9152
Memória(Kb) 576
BlocosDSP 16
I/Omáximos 200
Figura4-4FPGASpartan-6.
ArquiteturadoSistema
20
4.1.3 EletrónicadeInstrumentação
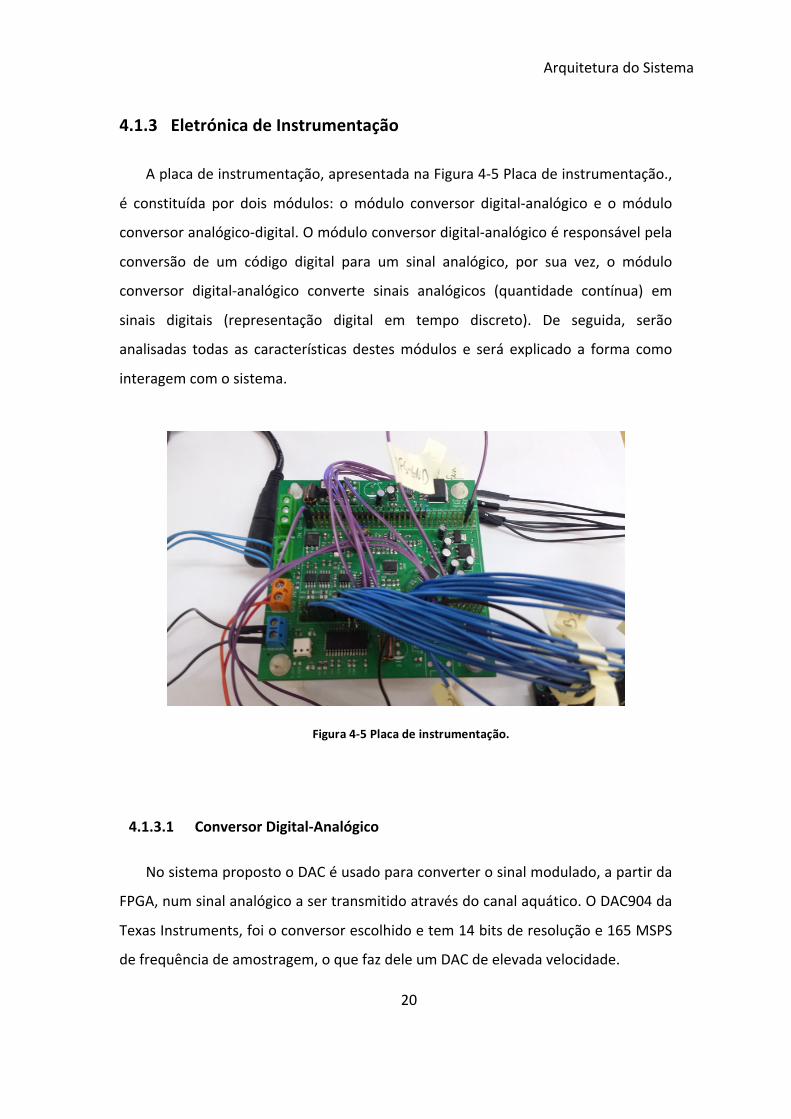
Aplacadeinstrumentação,apresentadanaFigura4-5Placadeinstrumentação.,
é constituída por doismódulos: omódulo conversor digital-analógico e omódulo
conversoranalógico-digital.Omóduloconversordigital-analógicoéresponsávelpela
conversão de um código digital para um sinal analógico, por sua vez, o módulo
conversor digital-analógico converte sinais analógicos (quantidade contínua) em
sinais digitais (representação digital em tempo discreto). De seguida, serão
analisadas todas as características destesmódulos e será explicado a forma como
interagemcomosistema.
4.1.3.1 ConversorDigital-Analógico
NosistemapropostooDACéusadoparaconverterosinalmodulado,apartirda
FPGA,numsinalanalógicoasertransmitidoatravésdocanalaquático.ODAC904da
TexasInstruments,foioconversorescolhidoetem14bitsderesoluçãoe165MSPS
defrequênciadeamostragem,oquefazdeleumDACdeelevadavelocidade.
Figura4-5Placadeinstrumentação.

Capítulo4
21
AcorrentedesaídadoDACvariacomosdadosbináriosdaentradaetemuma
gamaentreos0eos20mAeoperaentre+2.7Ve+5Vcomosepodeobservarna
Tabela4-1-3.
Tabela4-1-3SaídadacorrentedoDAC.
InputCode(D13-D0) 𝐼lrs
11111111111111 20mA 0mA
10000000000000 10mA 10mA
00000000000000 0mA 20mA
4.1.3.2 ConversorAnalógico-Digital(ADC)
O ADC foi implementado numa placa perfurada com um circuito integrado
AD9244 que é responsável pela parte da conversão e alguns componentes com
outrasfunçõescomooajustedeoffseteoganhodosistema.Aimplementaçãodo
sistemanumaplacaperfurada,nãopermitequeosistemasejamuitorobusto,mas
permitedesenharealterarosistemadeumaformamaisrápidaeeconomizartempo
nodesenvolvimento.
A placa ADC conecta-se com a placa FPGA através de um conector de 14 bits
paraqueosinaldigitalpossaserprocessado(desmodulado).
4.1.4 Amplificadordepotência.
Para que os sinais sonoros enviados alcancem distâncias mais elevadas é
necessário que a potência do sinal seja amplificada. O amplificador de potência
utilizadonoemissoréapresentadonaFigura4-6econverteumsinalde+/-5Vem
+/-16Vcomumapotênciadesaídade120Weumpicode240W.

ArquiteturadoSistema
22
4.1.5 Transdutoremissor
OtransdutorutilizadonestetrabalhofoiumprojetorultrassónicoPVDF.Este
dispositivo,quepodeservistonaFigura4-7,converteosinalelétricorecebidopelo
amplificadoremondassonoras.Aescolhadotransdutor foi feitadeacordocomo
trabalhodepesquisadesenvolvidopeloalunodedoutoramentoMarcosMartins[5],
talcomoaimplementaçãodomesmo,correspondendoaotransdutordefluoretode
polivinilideno(PVDF).
Figura4-6Amplificadoremissor.
Figura4-7TransdutoremissorPVDF[30][31].

Capítulo4
23
OtransdutorPVDFtemasseguintescaracterísticas:
• 2X110µmdeespessura;
• 2cmdediâmetro;
• Focodirecionalcomumângulodedivergência.
4.1.6 Transdutorhidrofonerecetor
Otransdutorhidrofoneéumdispositivoelétricoquecaptaasvibraçõessonoras
e transformaessasvibraçõesnovamentenumsinalelétrico.Ohidrofoneescolhido
foioC304XRquepodeserobservadonaFigura4-8.
OhidrofoneC304XRtemasseguintesespecificações:
• Bandadefrequênciaentre0.012e1000kHz.
• Sensibilidadeeficazde-181dBe1V/μPa.
Figura4-8Hidrofone.

ArquiteturadoSistema
24
4.1.7 Filtroeamplificadorrecetor
Quando o sinal é recebido pelo hidrofone, este necessita de ser filtrado e
amplificadodevidoaoruídoeàsatenuaçõesquesofrecomadistânciapercorrida.O
hidrofoneusadonosistemafuncionacomfrequênciasnumintervaloentreos50Hz
e os 2MHz e devolve um sinal comumoffset de 2V. Para eliminar o offset e as
componentes de interferências eletromagnéticas com frequências superiores a 2
Mhz,foiutilizadoumfiltroativopassa-bandadesegundaordemde1kHzaté2000
kHz.
Oamplificadorrecetortemumganhovariávelde106dBa-21dB[5].Paraeste
trabalhofoidefinidoumganhode20dB,demodoagarantirumaamplitudedesinal
noADCde200mV.
4.2 Software
As ferramentas de softwareMatlab/Simulink com recurso a blocos específicos
do Xilinx foram as ferramentas utilizadas para programar o Modulador /
Desmodulador na FPGA. Estas ferramentas, para além de tornar todo
processamentodosinalrelativamentesimples,permitemtambémfazersimulações,
o que poupa tempo e recursos em eventuais testes em cenários reais.
Posteriormente,omodelodevesertestadoemambienterealafimdeavaliaroseu
desempenho. Ao longo deste capítulo, serão analisadas detalhadamente as
ferramentasMatlab/SimulinkeISEDesignSuiteEvalution.
4.2.1 Matlab/Simulink
MatLabéumambientedeprogramaçãoparaodesenvolvimentodealgoritmos,
análise de dados, visualização e computação numérica. Este software pode ser
utilizadonumavastagamadeaplicações, incluindooprocessamentode sinalede
imagem,comunicações,biologiacomputacional,mediçõesetestesentreoutros.
Capítulo4
25
O ambienteMatLab/Simulink, em conjunto com blocos específicos do Xilinx
foramasferramentasfundamentaisparaimplementarosblocosdehardwareneste
sistema.Simulinkéum software queestá fortemente interligado comoMatLabe
que é usado na simulação, implementação, modelação e análise de uma grande
variedadedesistemas,incluindosistemasdecomunicação.
Apresenta um ambiente gráfico muito interativo e um extenso conjunto de
bibliotecasprontasausar (MathWorks).Estesoftwarepermitesimularvários tipos
de modulações e ver os resultados num ambiente gráfico. Através do System
Generator, o algoritmo simulado pode ser implementado na FPGA, utilizando
linguagemVHDLnoXilinxISE12.2[28].
4.2.2 ISEDesignSuiteEvalution
EsteprodutodaXilinxfornecepoderosasferramentasdeprocessamentodigital
de sinal com elevados rendimentos, baixos custos e altas eficiências energéticas.
Estas ferramentas são compatíveis com a FPGA Spartan-6 usada neste trabalho.
Entreelas,destaca-seoSystemGeneratorquepermiteimplementarferramentasde
processamentodigital de sinal na FPGAgerandoautomaticamenteumcódigoHDL
atravésdeummodeloSimulink,semanecessidadedeescrevercódigoparaoefeito.
OSystemGenerator incluiblocoscomfunçõesdeprocessamentodesinal,deteção
de erros, memórias, registos e filtros. O System Generator integrado com o
Matlab/Simulink torna bastante simples o processo de testar as propriedades e
condiçõesdoscanaisdecomunicação.
4.3 Implementação
O objetivo desta dissertação é implementar uma técnica de modulação que
permitaatingirelevadosdébitosbináriosequesejarobustaaerrosprovenientesde
efeitoscomoomulti-percursoeoefeitodeDoppler.

ArquiteturadoSistema
26
Os circuitos lógicos domodulador e do desmodulador foram otimizados para
reduzirosconsumosetornarpossívelainclusãodenovasfunçõesnofuturo.
OesquemademodulaçãoimplementadoédotipoOOKdedoiscanais:1MHze
0.5MHz.Ousodedoiscanaistemcomoobjetivoaumentaracapacidadeedébito
bináriodosistema,comumbitratemáximode1Mbps.Estadescriçãoserádividida
emduassecções:omoduladoreodesmodulador.Omodulador temcomofunção
receberosinalnoformatodigital(comorigemnumcomputadorpessoal),modularo
sinalcomumaondaportadoraetransmiti-loparaomeioaquáticoatravésdeondas
acústicas. O desmodulador funciona como um recetor e tem como objetivo
recuperar o sinal original, ou seja, fazer todo o processo inverso do modulador.
Assim, deverá receber o sinal acústico que foi emitido, desmodular o sinal, e
converterosinalanalógicoemdigital.
Os circuitos lógicos do modulador e desmodulador foram implementados em
paralelo sem qualquer interconexão entre eles. Assim é possível assegurar uma
comunicaçãoFullDuplexotimizadaseminterferênciaseatrasos.
De seguida, será analisado detalhadamente a função de cada bloco utilizado
tantonomoduladorcomonodesmodulador.
4.4 Modulador
Omodulador OOK com dois canais de dados, implementado no âmbito desta
dissertação, está dividido em vários blocos. Inicialmente omodulador recebeuma
sequênciadedadosbináriosemcadacanal.Deseguida,atravésdeumblocogerador
deonda,éinjetadaumaondaportadoranocasodeseridentificadoosímbolo“1”da
sequência binária. Posteriormente, os sinais de cada canal são somados e
convertidos num só canal através de um bloco somador. Este bloco também é
responsável por alterar o valor da amplitude do sinal para que possa ser enviado
paraoDACdeacordocomassuasespecificações.AFigura4-9apresentatodosos
módulosconstituintesdomoduladorOOKdedoiscanaisdedados.

Capítulo4
27
Oprocessodemodulaçãoinicia-secomoblocoDados,queéespecíficodaXilinx
parasimularosfluxosdedadosdeentrada.Paratestaromodulador,foiintroduzido
noscanaisocaracterhexadecimal55(sequênciabinária1010101).Nocasodocanal
de0.5MHzfoiutilizadaumperíododeamostragemde3200×10Tu𝑠eparacanalde
1 MHz foi utilizada um período de amostragem de 6400×10Tu𝑠 para facilitar a
filtragem no desmodulador devido aos poucos recursos da FPGA. É importante
salientarquefoidefinidoumclockparaaFPGAde50MHz.
Posteriormente o fluxo de dados é recebido pelos blocos Porta série que
funcionamcomo Inputsparaosdoiscanais.Estesdadosencontram-seemformato
binárioesãoenviadosparaoblocosincronizadordefase.Paraseperceberafunção
desteblocoénecessárioexplicaroblocoGeradordeondaea sua importânciano
sistema.Paracadacanaldedadosexisteumblocogeradordeondacomafunçãode
injetarumaondaportadorade1MHzou0.5MHzdependendodocanal.
A onda portadora, é uma onda sinusoidal com uma função 𝐴 𝑠𝑖𝑛(2𝜋𝑓 + 𝜃)
sendoqueAcorrespondeàamplitudedosinalqueéde1V,θcorrespondeàfasedo
sinalqueé0grause,finalmente,𝑓quecorrespondeàfrequênciadecadacanal(1
MHz ou 0.5MHz). A onda portadora é injetada quando o bloco gerador de onda
recebe como entrada o símbolo lógico “1”. No caso do símbolo lógico “0” é
associado um valor nulo. Assim sendo, os dados que entram em cada canal são
Figura4-9ModuladorOOKdedoiscanais.

ArquiteturadoSistema
28
modulados com uma onda portadora predefinida que servirá como ponto de
referênciaparaoprocessodedesmodulação.
O bloco Sincronizador de fase interage diretamente com o bloco Gerador de
ondapara assegurar a sincronizaçãodo fluxo de dados coma frequência da onda
portadora,ouseja,quandoéiniciadaatransmissãodedadosoblocoSincronizador
de fase ativa oReset do bloco gerador de onda. Assim é garantido que a fase da
ondaportadoraseencontraa0graus.NaFigura4-10pode-seobservarasaídado
Geradordeondacorrespondenteaocanalde0.5MHze1MHzrespetivamente.
Figura4-10Geradordeondasinusoidalde1MHze0.5MHz.
Atéestaetapaosdoiscanaisforamprocessadosdeformaindependente.Agora
énecessárioconverterosdoiscanaisnumsócanalparaqueosinalresultanteseja
interpretado pelo DAC e de seguida transmitido para omeio aquático através do
transdutor.Paraisso,foiutilizadoumblocosomador,comafinalidadedesomaros
sinais do canal de 1 MHz e do canal de 0.5 MHz. Para que o sinal possa ser
interpretadopeloDACénecessárioquepreenchadeterminadosrequisitos.
0 5 10 15
-240
0
240
480
-230
0
230
460
0 5 10 15
Sinal w
ave Ge
nerator
1Mhz (
mV)
Time (us)
Sinal wave Generator 1Mhz
Sinal W
ave Ge
nerator
500 Kh
z (mV) Sinal Wave Generator 500 Khz
Capítulo4
29
ODACutilizadonosistematem14bitsderesolução,oquesignificaqueaceita
valoresentreum intervalode0a16384.Neste sentido,ao sinal foimultiplicadaa
constante8192paraqueseencontrenointervaloentre-8192e8192.Paraquese
encontre no intervalo de 0 e 16384, adiciona-se ao sinal uma constante de 8192.
Posteriormentena fasedadesmodulação será recuperadaa componentenegativa
dosinal.
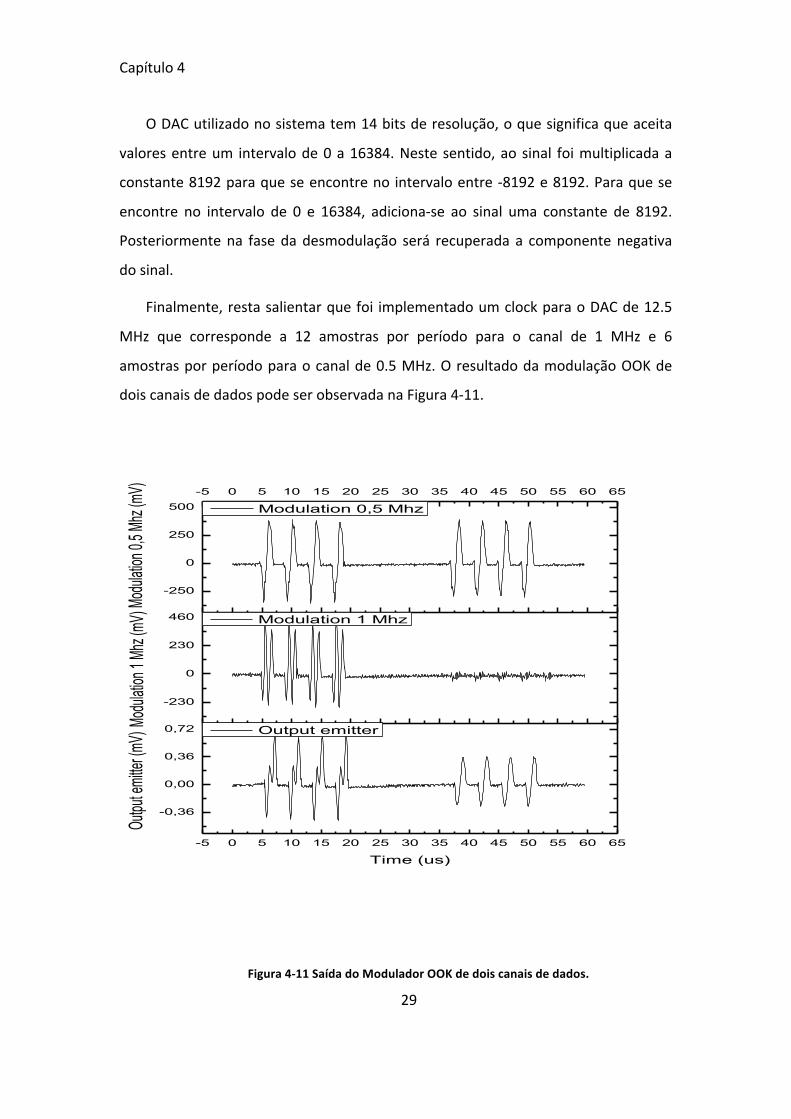
Finalmente,restasalientarquefoi implementadoumclockparaoDACde12.5
MHz que corresponde a 12 amostras por período para o canal de 1 MHz e 6
amostrasporperíodoparaocanalde0.5MHz.OresultadodamodulaçãoOOKde
doiscanaisdedadospodeserobservadanaFigura4-11.
Figura4-11SaídadoModuladorOOKdedoiscanaisdedados.
-5 0 5 10 15 20 25 30 35 40 45 50 55 60 65
-0,36
0,00
0,36
0,72
-230
0
230
460
-250
0
250
500-5 0 5 10 15 20 25 30 35 40 45 50 55 60 65
Outpu
t emitte
r (mV)
Time (us)
Output emitter
Modul
ation 1
Mhz (m
V) Modulation 1 Mhz
Modul
ation 0
,5 Mhz
(mV)
Modulation 0,5 Mhz
ArquiteturadoSistema
30
4.5 Desmodulador
Oobjetivododesmoduladorédevolverascaracterísticasoriginaisdosinalantes
da sua modulação. Inicialmente será feita uma explicação geral do seu
funcionamento e, posteriormente, e a semelhança da secção anterior serão
analisadosindividualmentetodososblocosqueoconstituem.
Opassoinicialnoprocessodedesmodulaçãoédevolveracomponentenegativa
dosinalquelhefoiretiradaduranteafasedemodulação.Posteriormente,segue-se
afiltragemdoruído(meioaquáticoecomponenteseletrónicos)quesefazsentirsob
a forma da presença de sinais de alta frequência no sinal recebido. Nesta fase, o
desmodulador divide-se em dois blocos. O propósito destes blocos são filtrar
individualmente os sinais correspondentes aos canais de 1 MHz e 0.5 MHz e
convertê-losemformatobinárioparaquepossamserinterpretadospelorecetor.Os
componentesutilizadosemambososblocos foramosmesmos,mas comalgumas
configuraçõesdiferentes.
Assim sendo, primeiramente foi utilizado um filtro para filtar a frequência da
portadoracorrepondenteacadacanal.Emseguidafoiimplementadoumblococom
afunçãodeeliminaracomponentenegativadosinal.Nestafase,osinalencontra-se
apenascomcomponentepositiva.Contudofaltaeliminaracomponentepulsantedo
sinalparaquepossapassarporumblocodedecisão.
Acomponentepulsantedosinaléeliminadaatravésdeumfiltropassa-baixoeo
bloco de decisão irá comparar o nível de amplitude do sinal com um valor de
amplitudedereferência.Casosejamaiorqueovalordereferênciaserácolocadona
saídaonívellógico“1”,casosejainferiorserácolocadoonívellógico“0”.
Para garantir que o sinal possa ser interpretado sem erros pelo recetor, é
necessáriodefinironúmerodebitsquecorrespondeaoperíododecadanívellógico
encontrado.ParaissofoiimplementadoumblocoSincronizadordebitque,através
dumafunção,defineconsoanteoperíododecadanívellógicodeentrada,onúmero
enível lógicodosbitsnasuasaída.NaFigura4-12podemserobservadostodosos
Capítulo4
31
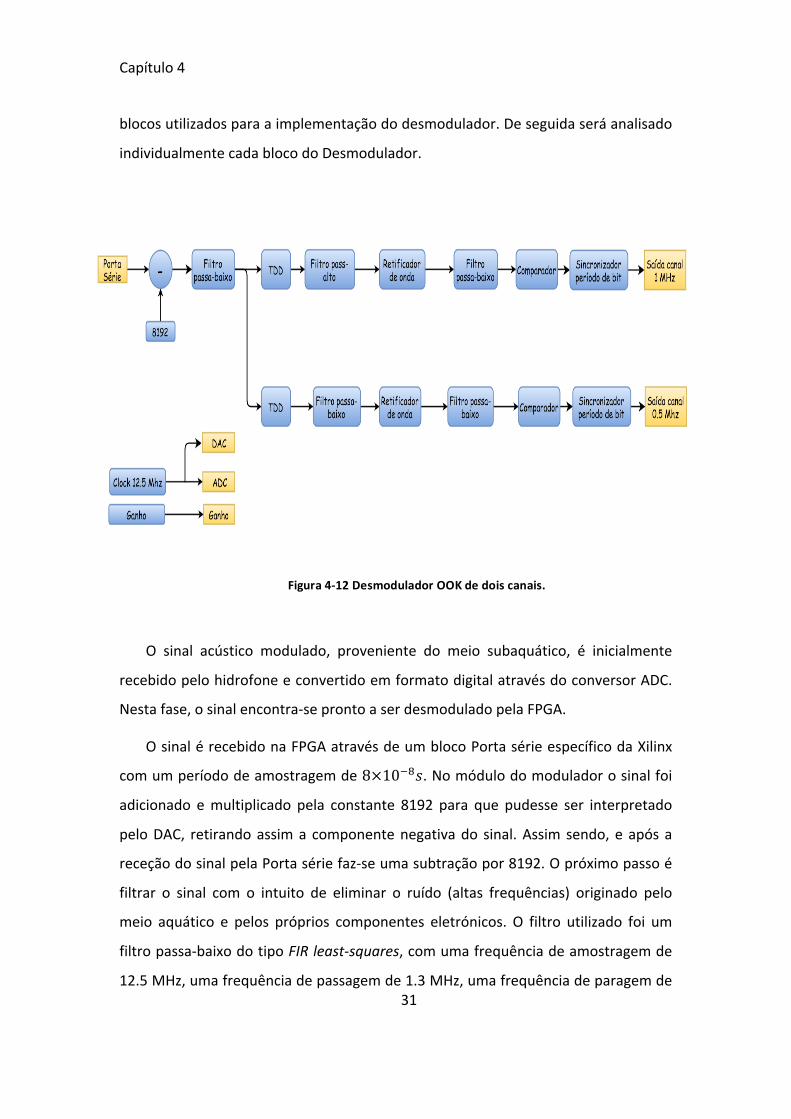
blocosutilizadosparaaimplementaçãododesmodulador.Deseguidaseráanalisado
individualmentecadablocodoDesmodulador.
O sinal acústico modulado, proveniente do meio subaquático, é inicialmente
recebidopelohidrofoneeconvertidoemformatodigitalatravésdoconversorADC.
Nestafase,osinalencontra-seprontoaserdesmoduladopelaFPGA.
OsinalérecebidonaFPGAatravésdeumblocoPortasérieespecíficodaXilinx
comumperíododeamostragemde8×10Tu𝑠.Nomódulodomoduladorosinalfoi
adicionado emultiplicado pela constante 8192 para que pudesse ser interpretado
peloDAC, retirandoassima componentenegativado sinal.Assim sendo,eapósa
receçãodosinalpelaPortasériefaz-seumasubtraçãopor8192.Opróximopassoé
filtrar o sinal com o intuito de eliminar o ruído (altas frequências) originado pelo
meio aquático e pelos próprios componentes eletrónicos. O filtro utilizado foi um
filtropassa-baixodotipoFIRleast-squares,comumafrequênciadeamostragemde
12.5MHz,umafrequênciadepassagemde1.3MHz,umafrequênciadeparagemde
Figura4-12DesmoduladorOOKdedoiscanais.

ArquiteturadoSistema
32
1.5MHze,finalmente,40deordem.NaFigura4-13épossívelobservartodasestas
configurações.
Figura4-13Interfacegráficafiltro.
Nestemomento, o sinal encontra-se pronto a ser desmodulado.Nas próximas
secçõesserãoanalisados inicialmentetodososblocosrelativosádesmodulaçãodo
canalde1MHze,posteriormente,adesmodulaçãodocanalde0.5MHz.
4.5.1 Desmoduladorcanal1MHz
Adesmodulaçãodocanalde1MHz inicia-secomumblocoTDD(Timedivision
desmultiplexer)afimdereduzira frequênciadeamostragemdosinal.OblocoTDD

Capítulo4
33
foi implementado devido ao facto de os filtros digitais requeremmuitos recursos.
Por isso a frequência de amostragemdo sistema foi reduzida2 vezes, situando-se
nos6.25MHz.Deseguidafoiutilizadoumfiltrocomoobjetivodefiltrarosinalcom
a frequência de 1MHz. O filtro utilizado é um filtro passa-alto do tipo FIR least-
squareseéconfiguradocomumafrequênciadeamostragemde6.25MHz,comuma
frequênciadeparagemde0.6MHz,umafrequênciadepassagemde0.8MHzeuma
ordemde40.NaFigura4-14sãoapresentadasasconfiguraçõesparaestefiltro.
Após filtrar o sinal com a frequência de 1MHz, é necessário retificar o sinal,
convertendo a sua componente negativa em positiva. Para este efeito, foi
Figura4-14Filtropassa-alto.

ArquiteturadoSistema
34
implementadoumblocoMcodecomumafunçãoMatlabincorporadaquemultiplica
o sinal pela constante -1. Como resultado é importante referir que este processo
provocaoaumentodafrequênciadosinalparaodobro.
O sinal apresenta neste ponto apenas componente positiva. Contudo, para
converterosinalemformatobinárioénecessárioeliminaracomponentepulsante
do sinal. A componente pulsante do sinal é eliminada através de um filtro passa-
baixodotipoFIRLeast-squares,comumafrequênciadeamostragemde6.25MHz,
uma frequência de passagemde 0.4MHz, uma frequência de corte de 0.9MHz e
uma ordem de 12. As configurações deste filtro podem ser observadas na Figura
4-15.
Parafinalizaradesmodulaçãorelativaaocanalde1MHz,foramimplementados
doisblocosMcodecomfunçõesMatlab.Oprimeiroblocoanalisaosinaleconverte-
Figura4-15Filtropassa-baixo.

Capítulo4
35
onovamenteparaoformatobinárioparaquepossaser interpretadopelorecetor.
Este bloco funciona como um comparador, ou seja, contém uma função que
compara o nível de amplitude do sinal com um valor de amplitude de referência
(Threshold). Caso este sejamaior que o valor de referência é colocado na saída o
nívellógico“1”,casosejainferiorserácolocadoonívellógico“0”nasaída.
O segundo bloco é o Sincronizador de bit. Este bloco é bastante importante
porquedefine,consoanteoperíododecadanível lógicodeentrada,onúmerobits
que serão apresentados à saída. Esta sincronização permite que o sinal seja
interpretado dentro dos parâmetros do recetor. Em termos práticos este bloco
contémumafunçãoMatlabquedefineumintervalodetempocorrespondentea1
bite,medianteoperíododecadanível lógicodeentrada, serádefinidoonúmero
bits apresentados à saída. Caso o período do nível lógico não esteja dentro do
intervalodetempode1bit,éconsideradoruídoeserádescartado.Istovaipermitir
queorecetorpossainterpretarcorretamentecadabitefiltrareventuaisruídos.
4.5.2 Desmoduladorcanal0.5MHz
A estrutura do desmodulador do canal de 0.5 MHz é muito semelhante à
estruturadodesmoduladordocanal1MHz.Nestesentido,serãoapenasanalisados
commaisdetalheosblocosquesofreramalteraçõesaonívelda suaconfiguração.
Inicialmente também foi utilizadooblocoTDD (TimeDivisionDesmultiplexor) para
diminuir frequência de amostragem do sinal. Neste caso reduziu-se quatro vezes
situando-se nos 3.125MHz. De seguida, foi implementado um filtro para filtrar o
sinal com a frequência de 0.5 MHz. O filtro escolhido, representado na Erro! A
origem da referência não foi encontrada., foi um passa-baixo do tipo FIR Least-
squarescomumafrequênciadeamostragemde3.125MHz,frequênciadepassagem
de0.55MHz,frequênciadecortede0.75MHzeordemde40.

ArquiteturadoSistema
36
Figura4-16Filtropassa-baixo.
O próximo bloco utilizado foi um retificador de onda com o objetivo de
converterapartenegativaempositiva.Àsemelhançadodesmoduladorde1MHzfoi
implementado posteriormente um filtro passa-baixo para remover a componente
pulsantedosinal.NaFigura4-17épossívelobservarofiltropassa-baixoescolhido,
do tipo FIR Least-squares com uma frequência de amostragem de 3.125 MHz,
frequênciadepassagemde250kHzefrequênciadecortede400kHzeordemde14.
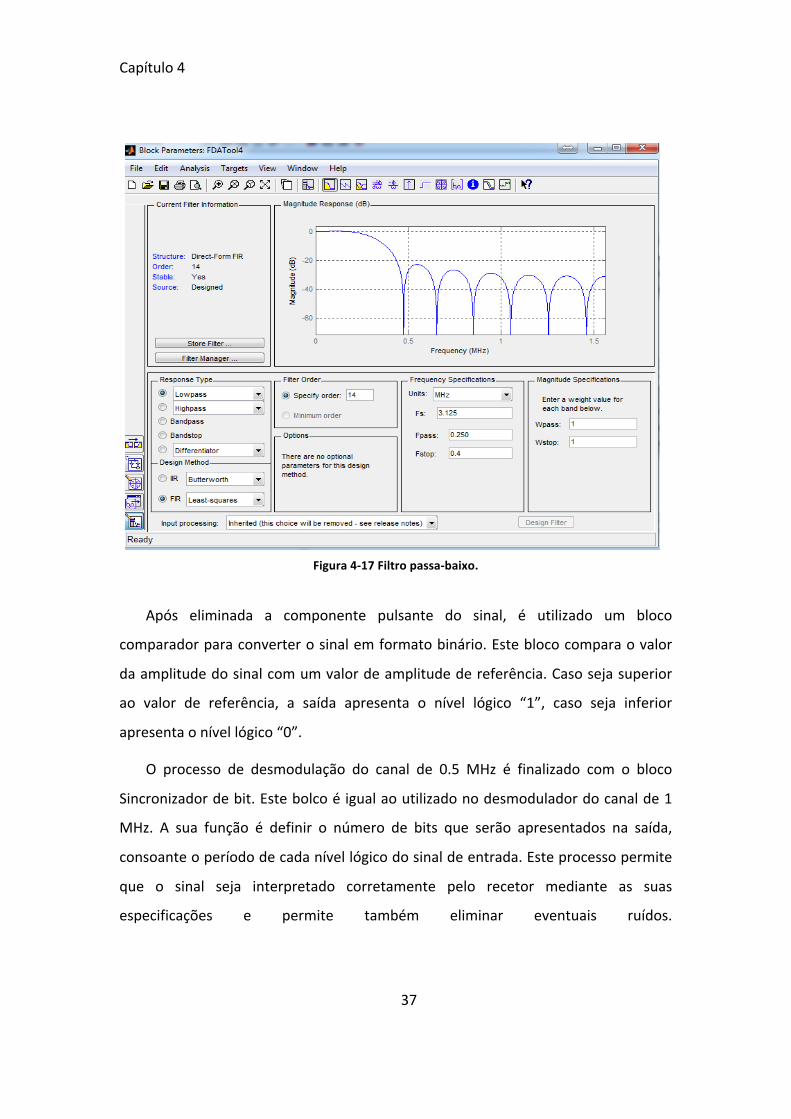
Capítulo4
37
Figura4-17Filtropassa-baixo.
Após eliminada a componente pulsante do sinal, é utilizado um bloco
comparadorparaconverterosinalemformatobinário.Esteblococomparaovalor
daamplitudedosinalcomumvalordeamplitudedereferência.Casosejasuperior
ao valor de referência, a saída apresenta o nível lógico “1”, caso seja inferior
apresentaonívellógico“0”.
O processo de desmodulação do canal de 0.5 MHz é finalizado com o bloco
Sincronizadordebit.Estebolcoéigualaoutilizadonodesmoduladordocanalde1
MHz. A sua função é definir o número de bits que serão apresentados na saída,
consoanteoperíododecadanívellógicodosinaldeentrada.Esteprocessopermite
que o sinal seja interpretado corretamente pelo recetor mediante as suas
especificações e permite também eliminar eventuais ruídos.

ArquiteturadoSistema
38


Resultadosediscussão
39
5. Resultadosediscussão
No capítulo anterior foi analisada toda a estrutura do modulador /
desmodulador OOK de dois canais. O objetivo deste capítulo é apresentar os
resultadosexperimentaisdestemodemacústico.Paraumamelhorcompreensãodo
quefoifeitonestafase,serádemonstradoinicialmenteaarquiteturadosistema,em
que são apresentados todos os módulos envolvidos no teste. De seguida, será
introduzido o ambiente de teste, ou seja, a estrutura física que integra o canal
aquáticoondeoequipamento foi testado.Tambémseráapresentadoodispositivo
que permitiu fazer as medições de desempenho do sistema. Finalmente serão
disponibilizadoseanalisadostodososresultados.
5.1 ArquiteturadoSistemadeTeste
A arquitetura do sistema é bastante importante para se perceber o
funcionamento domodem acústico. Os módulos que estão envolvidos nos testes
experimentaiseosresultadosquesepodemesperaremrelaçãoacadamódulodo
sistema.Odesenhodeumaboaarquiteturadosistemapodesimplificarbastanteum
projeto e poupar recursos. A Figura 5-1 representa a arquitetura do sistema nos
testesexperimentais.

Capítulo5
40
Nestafasedetestesaomodemacústico,acomunicaçãodedadoscomaFPGAé
feita por um computador através de um cabo RS-232 conectado a um
microcontrolador.Omicrocontrolador temcomoobjetivoencaminharosdadosdo
computadorparaomoduladoredodesmoduladorparao computador.Devidoao
facto da FPGA funcionar como modulador e desmodulador, esta encontra-se
diretamente conectada aomódulo emissor e aomódulo recetor. Esta arquitetura
permite medir o desempenho do sistema em vários módulos e em diferentes
condições.
Figura5-1Arquiteturadosistemaemtestesexperimentais.

Discussãoeresultados
41
5.2 Cenáriodetestes
Os testes experimentais foram realizados num aquário desenvolvido
propositadamente no âmbito desta dissertação. O ambiente de teste é bastante
importante porque pode condicionar os resultados obtidos. Neste sentido, serão
apresentadastodasascaracterísticasdesteaquárioea localizaçãodotransdutore
dohidrofonenoseuinterior.NaFigura5-2pode-seobservaroaquárioutilizadona
fasedetestesexperimentais.
Dimensõesdoaquário:
• 50cmdelargura,
• 150cmdecomprimento,
• 42cmdealtura.
Localizaçãodotransdutorehidrofone:
• 25cmdapartelateraldoaquário,
• 15cmdeprofundidade,
• 23cmdapartetraseiradoaquário.
Figura5-2Aquáriodeteste.

Capítulo5
42
Paraefetuarasmedições,foiusadooosciloscópiodigitalPicoScope2000Séries
da Pico Technology que pode ser visto na Figura 5-3. Este osciloscópio tem dois
canais, uma frequência de sinal de 10 MHz e 100 MSPS para cada canal, uma
impedânciadeentradade1MΩeentradaUSB.
Figura5-3PicoScope2000.

Discussãoeresultados
43
5.3 Resultadosexperimentais
Este teste experimental foi realizado com o modulador OOK de dois canais
integradonomodemacústico.Estemoduladorfoiprojetadoparaumatransmissão
máximadedadosde1Mbps,comondasportadorasde1MHze0.5MHz.
Paratestaromodemacústico,foienviadoocaracterASCII“85”paraoscanaisde
1 MHz e 0.5 MHz do modulador. Este caracter corresponde à sequência binária
“1010101”, que é uma das mais difíceis de desmodular devido à constante
alternânciadeestado.NaFigura5-4épossívelobservarofluxodedadosdeentrada
decadaumdoscanaiseamodulaçãodosinalcomasondasportadorasde1MHze
0.5MHz.
0 10
-240
0
240
480-2
0
2
4
-230
0
230
460
0,0
1,4
2,8
4,20 10
Modu
lation
1Mhz
(mV)
Time (us)
Modulation 1Mhz
Seria
l In 1M
Hz (m
V) Serial In 1MHz
Modu
lation
500 K
hz (m
V)
Modulation 500 Khz
Seria
l In 50
0 KHz
(mV)
Serial In 500 KHz
Figura5-4Entradadofluxodedadosemodulaçãodosinal.
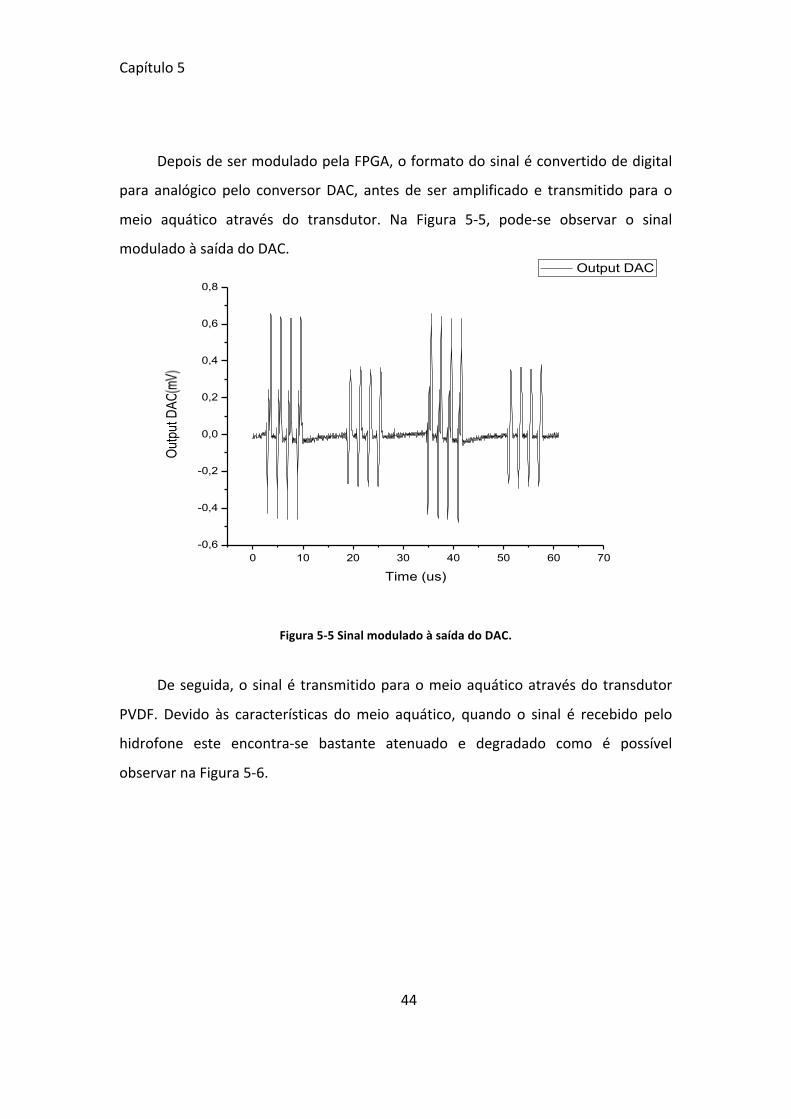
Capítulo5
44
DepoisdesermoduladopelaFPGA,oformatodosinaléconvertidodedigital
para analógico pelo conversorDAC, antes de ser amplificado e transmitido para o
meio aquático através do transdutor. Na Figura 5-5, pode-se observar o sinal
moduladoàsaídadoDAC.
Figura5-5SinalmoduladoàsaídadoDAC.
Deseguida,osinalé transmitidoparaomeioaquáticoatravésdotransdutor
PVDF. Devido às características domeio aquático, quando o sinal é recebido pelo
hidrofone este encontra-se bastante atenuado e degradado como é possível
observarnaFigura5-6.
0 10 20 30 40 50 60 70-0,6
-0,4
-0,2
0,0
0,2
0,4
0,6
0,8
Outp
ut D
AC (V
)
Time (us)
Output DAC
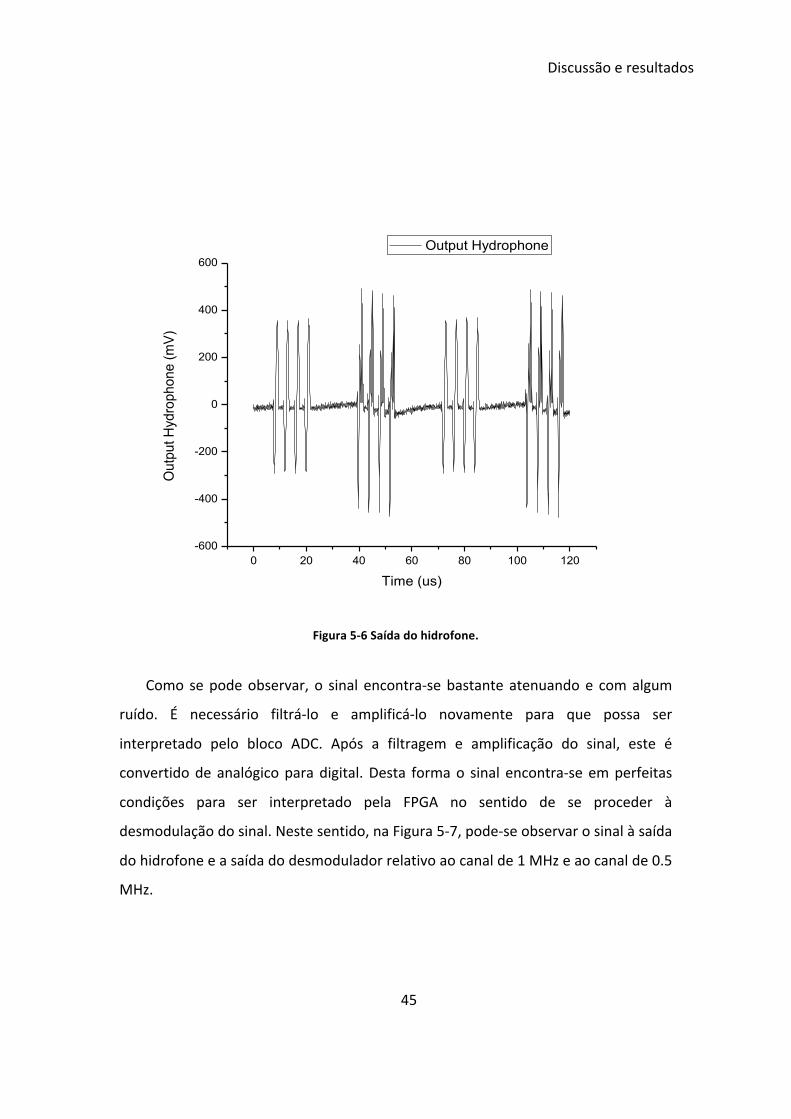
Discussãoeresultados
45
Figura5-6Saídadohidrofone.
Como sepodeobservar, o sinal encontra-sebastante atenuandoe comalgum
ruído. É necessário filtrá-lo e amplificá-lo novamente para que possa ser
interpretado pelo bloco ADC. Após a filtragem e amplificação do sinal, este é
convertidodeanalógicoparadigital.Desta formao sinal encontra-seemperfeitas
condições para ser interpretado pela FPGA no sentido de se proceder à
desmodulaçãodosinal.Nestesentido,naFigura5-7,pode-seobservarosinalàsaída
dohidrofoneeasaídadodesmoduladorrelativoaocanalde1MHzeaocanalde0.5
MHz.
0 20 40 60 80 100 120-600
-400
-200
0
200
400
600
Out
put H
ydro
phon
e (m
V)
Time (us)
Output Hydrophone

Capítulo5
46
Figura5-7Desmodulaçãodosinal.
-5 0 5 10 15 20 25 30 35 40 45 50 55 60 65 70 75
-2
0
2
4
-2
0
2
4
-320
0
320
640-5 0 5 10 15 20 25 30 35 40 45 50 55 60 65 70 75
Desm
odula
tion 1
Mhz
(mV)
Time (us)
Desmodulation 1 Mhz
Desm
odula
tion 0
.5 Mh
z (mV
)
Desmodulation 0.5 Mhz
Outpu
t Hyd
ropho
ne (m
V) Output Hydrophone

Discussãoeresultados
47
5.4 Análisesdosresultadosobtidos
Analisando os resultados obtidos no teste experimental, pode-se afirmar que
estesestãoemconformidade.Épossívelobservarna figura5-4queoprocessode
modulação foi bem conseguido, o fluxo de dados de entrada em cada canal é
devidamente modulado com as ondas portadoras de 1 MHz e de 0.5 MHz.
Analisandoafigura5-7pode-seobservarque,apesardeexistiralgumruídonosinal
à saída do hidrofone fruto do meio aquático e dos próprios componentes
eletrónicos,adesmodulaçãofoirealizadacomsucesso,existindoumaconcordância
entreosdadosnaentradadomoduladorcomosdadosnasaídadodesmodulador.
As maiores dificuldades encontradas neste trabalho tiveram lugar no
desenvolvimentododesmodulador,nomeadamentenasconfiguraçõesdosfiltrosdo
canal de 0.5MHZ e 1MHz. Os filtros tiveram que ser ajustadosminuciosamente
devidoaospoucosrecursosdaFPGA.Aindaassim,apesardosinaltersidofiltradoà
frequênciadesejada,haviampicosderuídoquenãoerameliminados.Esteruídoera
frutodospróprioscomponenteseletrónicosesófoieliminadocomaimplementação
doblocoSincronizadordebit,descritonocapítulo4.5.
Nafigura5-8épossívelobservarumexemplodopicoderuído(entreos53µse
os55µs)nosinalàentradadoblocoSincronizadordebitdocanalde0.5MHzeo
sinalàsaídaperfeitamentedesmodulado.

Capítulo5
48
Figura5-8Picoderuído.
0 5 10 15 20 25 30 35 40 45 50 55
0,0
1,3
2,6
3,9
0,0
1,2
2,4
3,6
0 5 10 15 20 25 30 35 40 45 50 55
Entrad
a Sinc
roniza
dor de
bit 0.5
MHz (V
)
Time (us)
Entrada Sincronizador de bit 0.5 MHz
Saída
Desm
odulad
or 0.5 M
Hz (V
) Saída Desmodulador 0.5 MHz

Conclusão
49
6. Conclusões
Oobjetivoprincipaldestetrabalhoeraimplementarumatécnicademodulação
digitalparaumsistemadecomunicaçãoacústicasubaquáticasemfios.Estatécnica
deveriapossibilitaraosistemaaumentarasuacapacidadeeaumentaroseudébito
binárioaté1Mbps.
Apósoestudodasváriastécnicasdemodulaçãoexistentes,aquelaquemaisse
apropriavamedianteosrecursosdisponíveiseascaracterísticasdetodoosistema,
eratécnicademodulaçãoOOKdedoiscanais.
Paraqueoobjetivofossecumprido,foinecessáriorealizarasseguintestarefas:
• Estudarascaracterísticasdocanalaquático,
• Estudaraarquiteturadomodemacústico,
• ImplementarumatécnicademodulaçãoOOKde2canais,
• Testaremedirodesempenhodomodememambientereal(aquário).
Comparandoosresultadosobtidosporoutrosmodems(secção3.4),estemodem
apresentadébitosmuitosuperioresàsdosexistentesnomercado.Atéaomomento,
amaiortaxadetransmissãoregistadaporummodemacústicosubaquáticosemfios
comercialéde38.4kbps,sendoqueonossoregistadébitosnaordemde1Mbps.
Contudo, futuramente existem alguns aspetos que podem ser melhorados e
acrescentados,taiscomo:
• SubstituiçãodaFPGAporumaversãoatualizadaecommaisrecursos,
• Implementação de um novo PCB de instrumentação com conectores
adequadosparaligaçãoàFPGA,

50
• Implementação de um algoritmo de calibração do threshold de
desmodulaçãoautomático,
• Implementação de um bloco de controlo automático de ganho para o
ADC,
• MediçãodoBERedoSNRemtestesdelaboratórioecampo,
• Otimizaçãodosfiltrosdigitais,
• Aumentarastaxasdetransmissão,
• Implementar e testar diferentes modulações digitais de forma a
aumentaraqualidadedatransmissão.
51
Referências
[1] E.Engineering,UnderwaterAcousticCommunicationMilicaStojanovic,(n.d.).
[2] http://www.publico.pt/ciencia/noticia/mapa-que-mostra-que-97-de-portugal-e-mar-chega-as-escolas-1630635,(n.d.).
[3] GovernodePortugal,EstratégiaNacionalparaoMar2013-2020,Gov.Port.(2013)1–73.
[4] J. Elias,V.De Jesus,D.Marcos, S.Martins, FPGABasedUltrasoundWirelessCommunication SystemEstrutura IntroduçãoeMotivaçãoEnquadramentoeObjetivos,(n.d.).
[5] M.S.Martins,M.S.Martins, UltrasonicWirelesss Broadband CommunicationSystemforUnderwaterApplications,2013.
[6] R.F.Busby,Underwaterinspection/testing/monitoringofoffshorestructures,OceanEng.6(n.d.)355–491.
[7] C.P.D.JimA.Simpson,BrianL.Hughes,BrianL.Hughes,Anunderwateropticalcommunicationsystemimplementingreed-solomonchannelcoding.,(n.d.).
[8] F. Hanson, S. Radic, High bandwidth underwater optical communication, 47(2008)277–283.
[9] N.Farr,A.Bowen,J.Ware,C.Pontbriand,Anintegrated,underwateroptical/acousticcommunicationssystem,(n.d.).
[10] O. In, Re-Evaluation of RF Electromagnetic Communication in UnderwaterSensorNetworks,(2010)143–151.
[11] W.Lothian,ElectromagneticPropagationinSeaWateranditsvalueinMilitarySystems,(2007)1–6.
[12] M.Antenor,A.Soares,Deteçãocoerentedesinaisacústicospara localizaçãorobustadeveículossubaquáticos,(2013).
[13] M. Stojanovic, J. Preisig, W. Hole, Underwater Acoustic CommunicationChannels :PropagationModelsandStatisticalCharacterization,(2009)84–89.
[14] J. Preisig, Acoustic propagation considerations for underwater acousticcommunications network development, ACM SIGMOBILE Mob. Comput.Commun.Rev.11(2007)2.doi:10.1145/1347364.1347370.
[15] S.Z. e J.C. L. Liu, NProspects and Problems of Wireless Communication forUnderwaterSensorNetworksoTitle,WileyWCMCSpec. IssueUnderw.Sens.Networks.(2008).
[16] J.Y. G. Marani, S. K. Choi, Underwater autonomous manipulation forinterventionmissionsAUVs,OceanEng.36(n.d.).

52
[17] D.E.W. Cheney, R. E., Distribution and Classification of Ocean Fronts,NAVOCEANO.(1976).
[18] M. Stojanovic, J. Preisig, Underwater acoustic communication channels:Propagationmodels and statistical characterization, Commun.Mag. IEEE. 47(2009)84–89.doi:10.1109/MCOM.2009.4752682.
[19] MariCarmenDomingo,Overviewofchannelmodelsforunderwaterwirelesscommunicationnetworks,Phys.Commun.1(3):163–1(n.d.).
[20] A. Rahman, V. Muthukkumarasamy, E. Sithirasenan, The analysis oftemperature, depth, salinity effect on acoustic speed for a vertical watercolumn,Proc.-IEEEInt.Conf.Distrib.Comput.Sens.Syst.DCoSS2013.(2013)310–312.doi:10.1109/DCOSS.2013.63.
[21] K.V.Mackenzie,Nineϋtermequationforsoundspeedintheoceans,J.Acoust.Soc.Am.70(1981)807.
[22] X.Lurton,AnintroductiontounderwaterAcoustics,(n.d.).
[23] J. Diogo,M. Xavier,Modulation Analysis for anUnderwater CommunicationChannel,(2012).
[24] P.H. Dahl, High-frequency forward scattering from the sea surface: thecharacteristic scales of time and angle spreading, IEEE J. Ocean. Eng. 26(1)(2001)141–151.
[25] J.C.R.A.B.Carlson,P.B.Crilly,CommunicationSystems,Int.Ed.(2002).
[26] J.Wills,W.Ye,J.Heidemann,M.Rey,Low-PowerAcousticModemforDenseUnderwaterSensor,WUWNet.(2006)79–85.doi:10.1145/1161039.1161055.
[27] H. Nam, S. An, AnUltrasonic Sensor Based Low-Power AcousticModem forUnderwaterCommunicationin,(2007)494–504.
[28] C. Alexandre, P. Oliveira, M.S. Martins, César Alexandre Pinheiro OliveiraModemdeUltrassonsparaComunicaçãoSubaquáticaa1Mbit/s,(2011).
[29] M.J.G.AinslieM.A.,Asimplifiedformulaforviscousandchemicalabsorptioninseawater,J.Acoust.Soc.Am.103(3)(1998)1671–1672.
[30] M.Martins,V.Correia, J.M.Cabral, J.G.Rocha,Optimizationofpiezoelectricultrasound emitter transducers for underwater communications, SensorsActuatorsA.Phys.(2012).doi:10.1016/j.sna.2012.06.008.
[31] G.R. and S.L.-M.M.Martins, J. Cabral, Effect of the Acoustic Impedance inUltrasonic Emitter Transducers using Digital Modulations, Ocean Eng. 100(2015)107–116.











![PVCPR11 Edital 3.5 GHz v03.ppt [Modo de Compatibilidade]...2011/06/09 · 35 MHz 35 MHz 10 MHz 10 MHz 10 MHz 10 MHz 10 MHz 10 MHz 3.400,00 MHz 3.600,00 MHz 10 MHz 35 MHz 10 MHz 10](https://img.document.onl/doc/110x75/5f7286506e7f433bb4685297/pvcpr11-edital-35-ghz-v03ppt-modo-de-compatibilidade-20110609-35-mhz.jpg)












![Leah Braemel [0.5 Proteção Hauberk] Primeira Noite](https://img.document.onl/doc/110x75/55cf9212550346f57b933867/leah-braemel-05-protecao-hauberk-primeira-noite.jpg)



