Embed Size (px)
DESCRIPTION
Controle e automação é uma das raras áreas do conhecimento que, simultaneamente, apresenta grandes desafios tanto teóricos, quanto práticos. Nas últimas décadas, essa área tem atraído grande atenção tanto na academia, quanto no setor produtivo, gerando muitas demandas por seu conhecimento e experiência. Enfim, hoje não é mais possível desassociar o desenvolvimento científico, tecnológico e industrial da área de Controle e Automação. O alvo a ser atingido na edição dos três primeiros volumes da Enciclopédia de Automática é disponibilizar uma obra que seja verdadeiramente útil para quem, pela primeira vez, deseja estudar um assunto da área de Controle e Automação; para quem desenvolve pesquisa na área e para aqueles que precisam aplicar conceitos e técnicas de Controle e Automação na solução de problemas reais. Assim, a presente obra tem como público-alvo alunos de graduação, alunos de pós-graduação e pesquisadores, bem como profissionais do setor produtivo.
Citation preview




Sumário
Prefácio ..................................................................................................................................7
Apresentação ........................................................................................................................9
I Sistemas lineares .........................................................................................................201 Defi nições e exemplos de sistemas lineares ....................................................221.1 Linearidade ........................................................................................................231.2 Causalidade e memória .....................................................................................241.3 Estado de um sistema .......................................................................................251.4 Resposta temporal ............................................................................................261.5 Parâmetros concentrados e parâmetros distribuídos .....................................271.6 Sistemas mono e multivariáveis .......................................................................271.7 Tempo contínuo e tempo discreto ...................................................................281.8 Sistemas variantes e invariantes no tempo .....................................................301.9 Sistemas determinísticos e estocásticos ..........................................................321.10 Exemplos de modelos matemáticos ...........................................................321.11 Outros trabalhos na área .............................................................................39
2 Descrição matemática de sistemas lineares ...........................................................402.1 Defi nições ..........................................................................................................40
2.1.1 Transformada de Laplace .....................................................................412.1.2 Sistemas lineares monovariáveis – função de transferência ..............422.1.3 Sistemas lineares multivariáveis – matriz de transferência ................422.1.4 Representação por variáveis de estado ...............................................442.1.5 Relação entre a representação de estados e função
de transferência ....................................................................................462.2 Análise temporal via função de transferência .................................................46
2.2.1 Resposta ao impulso utilizando frações parciais .................................472.2.2 Índices de desempenho ........................................................................48
2.3 Análise temporal via representação de estados ..............................................512.3.1 Resposta à entrada nula .......................................................................522.3.2 Solução geral para a representação de estado ....................................532.3.3 Análise modal ........................................................................................53
2.4 Resposta em freqüência ...................................................................................602.5 Outros trabalhos na área ..................................................................................66
3 Estabilidade de Sistemas Dinâmicos Lineares .......................................................673.1 Introdução informal à estabilidade ..................................................................673.2 Estabilidade no sentido de Liapunov ...............................................................693.3 Estabilidade de sistemas lineares invariantes no tempo ................................72
3.3.1 Análise de estabilidade via a equação de Liapunov ............................733.3.2 Testes clássicos de estabilidade ...........................................................763.3.3 O critério de Nyquist ..........................................................................83
3.4 Estabilidade no sentido de entrada-saída (BIBO) ..........................................853.5 Estabilidade de sistemas lineares variantes no tempo ...................................883.6 Da estabilidade à estabilização .........................................................................903.7 Panorama de pesquisa sobre estabilidade no Brasil .......................................91
4 Controlabilidade e Observabilidade .........................................................................924.1 Sistemas contínuos ...........................................................................................93
4.1.1 Controlabilidade ....................................................................................94

16 Enciclopédia de Automática
4.1.2 Observabilidade ....................................................................................954.1.3 Formas canônicas .................................................................................974.1.4 Realizações monovariáveis não estritamente próprias .......................994.1.5 Decomposição de Kalman e realizações minimais ..............................994.1.6 Teoria da realização ............................................................................1024.1.7 Equivalência ........................................................................................103
4.2 Sistemas discretos ..........................................................................................1044.2.1 Controlabilidade ..................................................................................1044.2.2 Observabilidade ..................................................................................1044.2.3 Realizações e equivalências ................................................................105
4.3 Controlabilidade e observabilidade de sistemas variantes no tempo ...........1064.4 Bibliografi a comentada ...................................................................................107
5 Sistemas lineares com atrasos de tempo ...............................................................1085.1 Introdução .......................................................................................................1085.2 Defi nições básicas e classifi cações .................................................................111
5.2.1 Sistemas com atrasos × sistemas neutros .........................................1115.2.2 Atrasos discretos × atrasos distribuídos ............................................1115.2.3 Atrasos invariantes × atrasos variantes .............................................1125.2.4 O estado em sistemas com atraso ......................................................1125.2.5 Estabilidade .........................................................................................112
5.3 Abordagem freqüencial ..................................................................................1145.3.1 Equações características ....................................................................1145.3.2 Critérios de estabilidade .....................................................................1155.3.3 Aproximações racionais para atrasos ................................................116
5.4 Abordagem no espaço de estados ..................................................................1175.4.1 Análise de estabilidade: abordagem
de Lyapunov – Krasovskii ...................................................................1175.4.2 Análise de estabilidade: abordagem
de Lyapunov – Razumikhin ................................................................1195.4.3 Sistemas em tempo discreto ..............................................................120
5.5 Exemplos .........................................................................................................1215.5.1 Outros trabalhos na área ....................................................................123
II Sistemas não-lineares ................................................................................................125
6 Equilíbrio e estabilidade ..........................................................................................1296.1 Existência e unicidade das soluções ..............................................................1296.2 Conjuntos limites ............................................................................................1326.3 Estabilidade .....................................................................................................1336.4 Estabilidade para sistemas autônomos ..........................................................1366.5 Estabilidade para sistemas não-autônomos ..................................................147
7 Análise de sistemas não-lineares ............................................................................1487.1 Comportamentos dinâmicos de sistemas não-lineares .................................148
7.1.1 A importância dos campos vetoriais ..................................................1497.2 Análise qualitativa de fl uxos ...........................................................................152
7.2.1 Pontos de equilíbrio e comportamento linear local ..........................1527.2.2 Índice de curvas no espaço de estados ..............................................1577.2.3 Existência de soluções periódicas .....................................................159
7.3 Determinação aproximada de trajetórias ......................................................1627.3.1 O Método das Isóclinas .......................................................................1627.3.2 O Método de expansão em série de potências ..................................164

17SUMÁRIO
7.3.3 O Método de Krylov-Boguliubov-Mitropowsky .................................165
7.3.4 O Método da função descritiva ...........................................................167
7.4 Considerações fi nais .......................................................................................172
8 Variedade central e bifurcações locais ..................................................................1748.1 Introdução .......................................................................................................174
8.2 Teoria da variedade central ............................................................................175
8.3 Bifurcações de codimensão um ......................................................................178
8.3.1 Bifurcação transcrítica .......................................................................179
8.3.2 Bifurcação de forquilha ......................................................................181
8.3.3 Bifurcação sela nó ...............................................................................182
8.3.4 Bifurcação de Hopf .............................................................................185
8.4 Outros trabalhos .............................................................................................186
9 Síntese de sistemas não-lineares ............................................................................1889.0.1 Defi nições prévias ...............................................................................189
9.0.2 Controlabilidade, estabilidade e região de atração ...........................190
9.1 Projeto baseado em funções de Lyapunov ....................................................192
9.2 Projeto por estrutura variável ........................................................................197
9.2.1 Resultados prévios sobre SEV ............................................................198
9.2.2 Projeto por estrutura variável baseado em Lyapunov ......................199
9.3 Método de Backstepping ...............................................................................212
9.4 Outros trabalhos .............................................................................................216
10 Controle de caos .......................................................................................................21710.1 Dinâmica caótica .......................................................................................219
10.2 Propriedades da dinâmica caótica ............................................................222
10.2.1 O Circuito a Diodo ..............................................................................222
10.3 Controle de caos por OGY .........................................................................230
10.3.1 Controle OGY ......................................................................................23110.4 Exemplo de aplicação ...............................................................................235
III Controle de processos e redes industriais ..............................................................240
11 Controle preditivo baseado em modelo .................................................................24211.1 Introdução ..................................................................................................242
11.1.1 Conceitos básicos de CPBM ...............................................................244
11.1.2 Perspectiva histórica ..........................................................................248
11.2 Controle preditivo generalizado ...............................................................249
11.2.1 O algoritmo GPC monovariável ..........................................................250
11.2.2 O GPC multivariável ...........................................................................252
11.3 Estudo de caso ..........................................................................................254
11.3.1 A planta-piloto ....................................................................................254
11.3.2 Formulação e ajuste do controlador ..................................................255
11.3.3 Resultados ...........................................................................................256
11.4 Problemas avançados e outros trabalhos .................................................257
11.4.1 Tratamento de restrições ...................................................................257
11.4.2 Controle preditivo não-linear .............................................................258
11.5 Outros trabalhos de CPBM .......................................................................259
11.6 Conclusões .................................................................................................259

18 Enciclopédia de Automática
12 Controlador PID: estruturas e métodos de sintonia ............................................26112.1 Estrutura do controlador PID ...................................................................262
12.1.1 Ação proporcional ...............................................................................262
12.1.2 Ação integral .......................................................................................263
12.1.3 Ação derivativa ....................................................................................264
12.1.4 Banda proporcional .............................................................................265
12.2 Implementação ..........................................................................................265
12.2.1 Implementação analógica ...................................................................266
12.2.2 Implementação digital ........................................................................268
12.3 Ajuste de controladores PID baseado em dados .....................................271
12.3.1 Método da resposta ao salto ...............................................................271
12.3.2 Método do ponto crítico .....................................................................275
12.4 Aplicação ....................................................................................................278
13 Controle adaptativo ..................................................................................................28113.1 Paradigmas para controle adaptativo .......................................................282
13.1.1 Escalonamento de ganho ....................................................................282
13.1.2 Controle adaptativo por modelo de referência ..................................283
13.1.3 Controle adaptativo auto-sintonizado ................................................285
13.2 Controle adaptativo auto-sintonizado ......................................................287
13.2.1 Controle adaptativo de variância mínima ..........................................287
13.2.2 Predição ótima de y(t) k passos à frente ..........................................289
13.2.3 Minimização do custo .........................................................................290
13.2.4 Controle adaptativo de variância mínima generalizada ....................294
13.3 Controle adaptativo de sistemas não-lineares .........................................297
13.4 Exemplo de aplicação ...............................................................................301
14 Sistemas de medição: terminologia e incerteza ....................................................31114.1 Sistemas de medição .................................................................................311
14.1.1 Princípio de medição e tipos de medição ..........................................312
14.1.2 Representação de um sistema de medição simples ..........................313
14.1.3 Grandezas e sensores .........................................................................317
14.1.4 Modos de operação de instrumentos de medição .............................320
14.1.5 Representação de geral de um sistema de medição digital ..............321
14.2 Incerteza e erros em sistemas de medição ..............................................323
14.2.1 Algumas defi nições .............................................................................323
14.2.2 Categorias de erros .............................................................................324
14.2.3 Propagação de erro .............................................................................325
14.2.4 Incerteza de medição ..........................................................................330
15 Redes de transdutores inteligentes ........................................................................33215.1 Sensor/atuador inteligente ........................................................................333
15.2 Redes de sensores/atuadores inteligentes ...............................................335
15.2.1 Rede ASI ..............................................................................................335
15.2.2 Rede CAN ............................................................................................341
15.3 Redes de sensores sem fi o ........................................................................350
15.3.1 O Padrão IEEE 802.11 (Wi-Fi) ...........................................................352
15.3.2 O padrão IEEE 802.15.4 (ZigBee) .....................................................354
15.3.3 O padrão IEEE 802.16 (WiMax) ........................................................356
15.3.4 O padrão IEEE 802.11 (Bluetooth) ...................................................359

19SUMÁRIO
15.4 Padrão para sensores/atuadores inteligentes ..........................................36015.4.1 O padrão IEEE 1451.1 ........................................................................36215.4.2 O padrão IEEE 1451.2 ........................................................................36415.4.3 O padrão IEEE 1451.3 ........................................................................36515.4.4 O padrão IEEE 1451.4 ........................................................................36515.4.5 O padrão IEEE 1451.5 ........................................................................36615.4.6 O padrão IEEE 1451.6 ........................................................................36715.4.7 Situação atual e perspectivas .............................................................367
15.5 Conclusões .................................................................................................369
16 Protocolos de comunicação industriais ................................................................37016.1 Evolução da arquitetura dos sistemas de automação ..............................371
16.1.1 Arquitetura local .................................................................................37116.1.2 Arquitetura centralizada .....................................................................37116.1.3 Arquitetura distribuída nos controladores ........................................37216.1.4 Arquitetura distribuída interconectada por rede
de comunicação entre controladores .................................................37216.1.5 Arquitetura distribuída nos sensores e atuadores ............................37216.1.6 Vantagens da arquitetura do fi eldbus ................................................37316.1.7 Arquiteturas intermediárias do fi eldbus ............................................375
16.2 Diferentes protocolos para o fi eldbus .......................................................37716.3 A robustez dos sistemas industriais .........................................................37816.4 Equipamentos industriais e o fi eldbuspara outras áreas
de aplicação .....................................................................................................37916.5 Conceitos de redes industriais ..................................................................379
16.5.1 Modelo de referência OSI da ISO .......................................................37916.6 A norma IEC 61158 ...................................................................................38216.7 Visão geral – principais protocolos industriais .........................................383
16.7.1 ModBus ................................................................................................38316.7.2 DeviceNet ............................................................................................38316.7.3 Profi bus DP .........................................................................................38416.7.4 Foundation Fieldbus ...........................................................................38516.7.5 ASI – Actuator Sensor Interface ........................................................38516.7.6 InterBus ...............................................................................................38616.7.7 LonWorks .............................................................................................38616.7.8 ADAM – exemplo de protocolo aberto para arquitetura
intermediária .......................................................................................38616.7.9 Protocolos Ethernet Industrial ...........................................................38716.7.10 Vantagens da Ethernet Industrial ...................................................38816.7.11 Problemas da Ethernet Industrial ..................................................38816.7.12 Soluções a caminho .........................................................................388
16.8 Outros protocolos digitais .........................................................................38916.9 A arquitetura para Inter/Intranet .............................................................39016.10 Barramento automobilístico ......................................................................39116.11 Barramentos residenciais e prediais .........................................................39116.12 Considerações entre sistemas disponíveisno mercado ...........................392
Referências bibliográfi cas ...............................................................................................393
Índice remissivo ................................................................................................................411

Capıtulo 1
Definicoes e exemplos desistemas lineares
Carlos Eduardo Trabuco Dorea
Um sistema pode ser representado por uma relacao causa-e-efeito, como in-dicado na Figura 1.1. A reacao do sistema as entradas (excitacoes) u1, u2,...,um
e indicada pelas saıdas (respostas) y1, y2,...,yp. Note-se que os conjuntos deentradas e saıdas podem ser representados na forma de vetores:
u =
⎡⎢⎢⎢⎣u1
u2...
um
⎤⎥⎥⎥⎦ , y =
⎡⎢⎢⎢⎣y1
y2...yp
⎤⎥⎥⎥⎦ .
Figura 1.1: Representacao de um sistema.
Neste capıtulo sao apresentadas definicoes basicas, exemplos e modelosmatematicos de sistemas lineares.

30 Enciclopedia de Automatica
Exemplo 1.8 Discretizacao de sistema contınuo: amostragem
Consideremos novamente o sistema (1.6) e sua resposta temporal:
y(t) = e−2(t−t0)y(t0) +(∫ t
t0
e2λu(λ)dλ
)3e−2t. (1.9)
Trata-se claramente de um sistema de tempo contınuo.Suponhamos agora que o sinal de entrada deste sistema seja amostrado a
cada T unidades de tempo e passado por um segurador de ordem zero. Taldispositivo mantem o valor do sinal de entrada constante dentro do perıodo deamostragem kT ≤ t < (k+1)T , k ∈ ZZ, de modo que, na saıda deste segurador,tenhamos o sinal:
u∗(t) = u(kT ), para kT ≤ t < (k + 1)T.
Se o sinal u∗(t) for aplicado ao sistema (1.6), pode-se verificar a partir de(1.9) que a saıda no intervalo kT ≤ t < (k + 1)T e dada por:
y(t) = e−2(t−kT )y(kT ) +(∫ t
kTe2λu(kT )dλ
)3e−2t.
Assim, para t = (k + 1)T ter-se-ia:
y((k + 1)T ) = e−2T y(kT ) +
(∫ (k+1)T
kTe2λu(kT )dλ
)3e−2(k+1)T
= e−2T y(kT ) +(∫ T
0e2(τ+kT )u(kT )dτ
)3e−2(k+1)T
= e−2T y(kT ) +(∫ T
0e2τdτ
)3e−2T u(kT ).
Desse modo, se o perıodo de amostragem T e conhecido, a evolucao dosistema nos instantes de amostragem kT , com k ∈ ZZ e dada pelo seguintemodelo de tempo discreto (equacao a diferencas):
y(k + 1) + ay(k) = bu(k), (1.10)
em que: a = −e−2T , b =(∫ T
0e2τdτ
)3e−2T , y(k) = y(kT ), u(k) = u(kT ).
1.8 Sistemas variantes e invariantes no tempo
Definicao 1.14 Considerem-se o estado de um sistema no instante t0 e umaentrada aplicada a partir de t0, gerando uma certa resposta. Um sistema edito invariante no tempo se, dado o mesmo estado e aplicando-se a mesmaentrada a partir do instante t0 + ∆t, a mesma resposta e obtida a partir det0 + ∆t. Caso contrario, o sistema e dito. variante no tempo

Capıtulo 2
Descricao matematica desistemas lineares
Edson Roberto De Pieri
Eugenio B. Castelan
Ubirajara Franco Moreno
A analise e o projeto de sistemas de controle normalmente sao baseados emum modelo matematico que descreve convenientemente o sistema considerado.Esses modelos podem ser eletricos, mecanicos, biologicos, economicos, entreoutros. Sob a suposicao de se tratarem de sistemas lineares ou linearizadoscom parametros concentrados, conforme definido no capıtulo anterior, o com-portamento dinamico desses sistemas e descrito por equacoes diferenciais nocaso contınuo ou equacoes a diferencas no caso discreto.
Os principais metodos de analise e de projeto de controladores baseiam-seem diferentes descricoes matematicas do sistema: as principais sao as relacoesdo tipo entrada e saıda, em particular, funcoes ou matrizes de transferencia eas relacoes que descrevem, alem do comportamento entrada e saıda, tambemo comportamento interno do sistema na forma de uma descricao por variaveisde estado do sistema.
O sistema considerado e aquele representado na Figura 1.1. As entradasou excitacoes u sao aplicadas nos terminais de entrada e supoe-se que as res-postas y podem ser medidas nos terminais de saıda.
2.1 Definicoes
Consideramos os sistemas lineares descritos por equacoes diferenciais, cujadefinicao para o caso monovariavel e dada a seguir:

66 Enciclopedia de Automatica
102
101
100
101
102
103
80
60
40
20
0
20
40
60
80
H(j
)
(dB)
(rad/s)
H2
H1
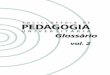
H3
Figura 2.9: Grafico de modulo correspondente a cada termo padronizado.
102
101
100
101
102
103
15
10
5
0
5
10
15
20
25
30
35
H(j
)
(dB)
(rad/s)10
210
110
010
110
210
3100
80
60
40
20
0
20
40
60
80
arg(
H(j
))(g
raus
)
(rad/s)
Figura 2.10: Grafico de modulo de H(jω).
2.5 Outros trabalhos na area
Sistemas lineares, variantes e invariantes no tempo, sao tratados em deta-lhes em diversos livros. Alguns dos livros-textos da area sao: (Ogata, 2003;Franklin, Powell e Emami-Naeini, 1994; Dorf e Bishop, 2001; Nise, 2002; Kuo,1992; Stefani, Jr., Shahian e Hostetter, 1994; D’Azzo e Houpis, 1988), livroscom abordagem um pouco mais avancada, incluindo projeto de controladores,problemas de desempenho e projeto de observadores: (Chen, 1993; Chen, 1999;Kailath, 1980; Wolovich, 1995).

Capıtulo 3
Estabilidade de SistemasDinamicos Lineares
Amit Bhaya
3.1 Introducao informal a estabilidade
Estabilidade e um dos temas mais antigos nas ciencias basicas e aplicadas.Pode-se dizer que a preocupacao com o estudo sistematico de estabilidade deum sistema dinamico comecou logo apos a descoberta das leis de mecanicacelestial por Copernicus, Galileo, Kepler e Newton: a questao fundamental,formalizada matematicamente por Newton, era a estabilidade do Sistema So-lar1 (veja o Capıtulo 6 para a analise de estabilidade de sistemas nao-lineares).Este problema permaneceu sem solucao definitiva ate o final do seculo XIXquando o rei Oscar II da Suecia ofereceu, em 1887, um premio para quemconseguisse provar a estabilidade do Sistema Solar. O premio foi outorgadoao grande matematico Henri Poincare, cujo trabalho, embora nao resolvesseo problema definitivamente, deu inıcio a moderna teoria de caos (Barrow-Green, 1997). Ha evidencias que apontam comportamento caotico do SistemaSolar (Laskar, 1990; Sussman e Wisdom, 1992).
Muitos matematicos e fısicos do seculo 18 estudaram a questao de esta-bilidade de um sistema dinamico, e Routh, Maxwell, Liapunov, Hurwitz eSchur sao alguns dos nomes mais frequentemente associado com este tema.Alguns destes cientistas tambem estudaram questoes de estabilidade oriundosde astronomia e uma das primeiras aplicacoes espetaculares da entao incipienteteoria de estabilidade foi a demonstracao, por Maxwell (1859), descobridor dasequacoes de campos eletromagneticos, de que os aneis de Saturno nao pode-
1A rigor, estabilidade do Sistema Solar e uma questao de estabilidade orbital, nao tratadaneste capıtulo. Entretanto, o estudo de estabilidade de um ponto de equilıbrio, assunto destecapıtulo, esta ligado ao tema de estabilidade orbital (Leonov, Burkin e Shepeljavyi, 1996).

3 Estabilidade de Sistemas Dinamicos Lineares 71
Definicao 3.2 Um estado de equilıbrio xeq e denominado convergente ouatrativo, se, para qualquer t0, existe δ1 = δ1(t0) tal que se ‖x0 − xeq‖ < δ1
entao
limt→∞x(x0,t) = xeq.
Definicao 3.3 Um estado de equilıbrio xeq e denominado assintoticamenteestavel se for estavel e atrativo.
Se δ nas definicoes acima pode ser escolhido independente do tempo inicialt0, acrescenta-se o adjetivo uniforme ao tipo de estabilidade correspondente.
Finalmente, um estado de equilıbrio que nao seja estavel e denominadoinstavel. Portanto, pela negacao logica da definicao 3.1, chega-se a seguintedefinicao.
Definicao 3.4 Um estado de equilıbrio xeq e denominado instavel se existeε > 0 tal que para qualquer δ > 0, existe x0 tal que se ‖x0 − xeq‖ < δ, entao‖x(t1)− xeq‖ ≥ ε para algum t1 > t0.
A ilustracao geometrica destas definicoes no plano (veja Figura 3.2) mostraque, se a origem for estavel, dada um cırculo de raio ε, existe um outro cırculode raio δ tal que trajetorias que se iniciam dentro do δ-cırculo jamais saemdo ε-cırculo. Se a origem for assintoticamente estavel, entao as trajetoriastendem a solucao nula. Se a origem for instavel, entao existe um ε-cırculo talque, para todo δ-cırculo existe uma trajetoria iniciando-se nele e saindo doε-cırculo em algum instante posterior.
x2
x1 x1
x2 x2
x1
x0 x0x0
C
A B
Figura 3.2: Ilustracao dos conceitos de estabilidade no plano: (A) Origem(solucao nula) estavel no sentido de Liapunov; (B) origem assintoticamenteestavel; (C) origem instavel.

Capıtulo 4
Controlabilidade eObservabilidade
Paulo Sergio Pereira da Silva
Neste capıtulo, trataremos os problemas de controlabilidade e de observa-bilidade em sistemas lineares discretos e contınuos. A controlabidade e umaquestao fundamental da teoria de controle. Varias nocoes de controlabilidadesao encontradas na literatura. A mais comum e considerada neste capıtulo,sendo denominada controlabilidade ponto a ponto, e considera que um sistemae controlavel se pudermos leva-lo de uma condicao inicial qualquer para umacondicao final qualquer, atraves da aplicacao de uma entrada adequada. Nestecapıtulo iremos apresentar varios criterios equivalentes de controlabilidade.
A observabilidade de um sistema e a capacidade de deduzirmos o estado deum sistema a partir da informacao de sua saıda e da entrada aplicada. Varioscriterios de observabilidade serao apresentados neste capıtulo.
Consideraremos as principais formas canonicas e apresentaremos a teoriada realizacao para sistemas contınuos (que e absolutamente analoga a teoriacorrespondente para sistemas discretos).
Dada uma matriz de transferencia G(s), uma realizacao de G(s) e umsistema linear (A, B, C, D):
x(t) = Ax(t) + Bu(t) (4.1a)y(t) = Cx(t) + Du(t) (4.1b)
x(t0) = x0, t ≤ t0 (4.1c)
tal que a sua matriz de transferencia coincida com G(s). Tal problema eevidentemente um problema de sıntese, sendo motivado pelas tecnicas de im-plementacao de filtros e sistemas de controle analogicos. A teoria que estudaos problemas de realizacao e denominada de Teoria da Realizacao.
Intimamente ligada com o problema da realizacao, esta a Decomposicaode Kalman, que sera estudada neste capıtulo. Por outro lado, o problema de

Cap. 4 Controlabilidade e Observabilidade 107
Teorema 4.7 O sistema (4.20) e controlavel no sentido acima se e somentese o Gramiano Gc for nao singular.
A observabilidade de (4.20) tambem pode ser tratada atraves de um Gramiano,denominado Gramiano de observabilidade, e dado por:
Go =∫ tf
t0
Φ(τ,t0)TC(τ)TC(τ)Φ(τ,t0)dτ.
De fato, considerando uma definicao de observabilidade analoga a definicao 4.2(que e equivalente a dizer que o estado inicial pode ser determinado a partirdo conhecimento da entrada e da saıda num intervalo [t0, tf ]), pode-se mostrarque:
Teorema 4.8 O sistema (4.20) e observavel no sentido acima se e somentese o Gramiano Go for nao singular.
4.4 Bibliografia comentada
Controlabilidade, observabilidade e teoria da realizacao sao assuntos muitoantigos da teoria de sistemas. As obras (Chen, 1970; Kailath, 1980) sao ex-celentes referencias como textos basicos sobre esses assuntos para sistemaslineares invariantes no tempo. Outras formas canonicas (de controlabilidadee observabilidade) tambem sao estudadas em (Kailath, 1980). A abordagemde estado e uma forma particular de modelar sistemas. A descricao polino-mial de um sistema e uma forma muito mais geral de representa-lo, e a teoriada realizacao e equivalencia e tambem desenvolvida na abordagem polinomial(Rosenbrock, 1970; Kailath, 1980). A equivalencia (interna) de dois sistemasdescritos na forma de estado e bem mais simples do que a equivalencia dedois sistemas descritos na forma polinomial. O leitor interessado na nocaode equivalencia polinomial deve consultar (Kailath, 1980, sec. 8.2) ou ainda(Fuhrmann, 1977). Controlabilidade e observabilidade sao tratadas de umponto de vista geometrico em (Wonham, 1985) onde a deducao dos criterios efeita a partir dos Gramianos. Um tratamento moderno para sistemas linearesvariantes no tempo pode ser visto em (Rugh, 1996). O conceito de controlabi-lidade pode ser definido independentemente da escolha do estado, das entradase das saıdas na abordagen comportamental de (Willems, 1992) e na abordagemvia teoria de modulos de (Fliess, 1990). Controlabilidade, observabilidade eteoria da realizacao para sistemas nao-lineares sao tratadas em (Nijmeijer evan der Schaft, 1990; Isidori, 1995).

Capıtulo 5
Sistemas lineares com atrasosde tempo
Joao Manoel Gomes da Silva Jr.
Valter Junior de Souza Leite
Este capıtulo tem como objetivo apresentar conceitos basicos e proprie-dades de uma classe particular de sistemas lineares: sistemas com atrasos detempo. Tal classe de sistemas pode ser utilizada na modelagem de uma amplagama de sistemas fısicos. Alem disto, a compreensao dos efeitos do atraso sobrea estabilidade e o desempenho desses sistemas e de fundamental importanciaem sistemas de controle.
O capıtulo divide-se basicamente em duas abordagens de modelagem: afrequencial e a por espaco de estados. Na abordagem frequencial apresenta-se a modelagem por funcoes de transferencia, com um enfoque direcionado aanalise de estabilidade de sistemas monovariaveis realimentados apresentandoatrasos invariantes no tempo. Na abordagem por variaveis de estado, saoconsideradas duas classes particulares: sistemas com atraso e sistemas neutros.Criterios de estabilidade baseados na Teoria de Lyapunov (ver Capıtulo 6), saoentao apresentados tanto para sistemas multivariaveis com atrasos nos estadose/ou entradas, podendo ser variantes ou invariantes no tempo.
5.1 Introducao
O estudo de atrasos de tempo em sistemas deve-se, certamente, as conse-quencias importantes que sao produzidas pelo atraso sobre o comportamentodos mesmos. No caso de processos industriais, os efeitos negativos do atraso,tambem chamado de atraso de transporte ou tempo morto, sobre o desem-penho de variaveis controladas ja sao bastante conhecidos. Em sistemas decontrole, existem casos nos quais um pequeno valor de atraso nos estados, na

122 Enciclopedia de Automatica
lor e aproximado ante a utilizacao da aproximacao de Pade para representaro termo e−τs.
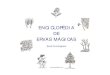
Lugar das raízes para K Lugar das raízes para τ
Diagrama de Nyquist Detalhe do diagrama de Nyquist
(c) (d)
ImIm
ImIm
(b)(a)−0.2 0 0.2 0.4 0.6
−0.4
−0.2
0
0.2
0.4
−3 −2 −1 0 1−2
−1
0
1
2
−2 0 2 4 6 8 10−6
−4
−2
0
2
4
6
−1.5 −1 −0.5 0 0.5 1 1.5−4
−2
0
2
4
Figura 5.1: (a) lugar das raızes para variacoes de K com τ = 10s, (b) lugardas raızes para variacoes de τ com K = 10, (c) o diagrama de Nyquist para0 ≤ τ ≤ 2 e (d) detalhe do diagrama de Nyquist em torno do ponto −1 + 0j.
Considere agora uma analise atraves do criterio de Nyquist sem usar aaproximacao de Pade. Para K = 10, na Figura 5.1.(c) os diagramas de Nyquistpara alguns valores de τ ∈ [0, 2] sao mostrados. O detalhe desses diagramas emtorno do ponto−1+0j e apresentado na Figura 5.1.(d). Observe que o aumentono valor de τ faz com que o diagrama correspondente passe, eventualmente, aenglobar o ponto −1 + j0 (duas vezes no sentido horario), ou seja, o sistemarealimentado torna-se instavel. O maximo valor de τ para o qual a estabilidadee garantida pode ser determinado a partir da margem de fase (MF ) do sistemasem atraso. Neste caso obtem-se que a frequencia de cruzamento de ganho eigual a wg ≈ 0,995rad/s e MF ≈ 95,74o. Como o atraso influencia apenas afase da funcao de laco, o maximo atraso para o qual a estabilidade e garantida(a margem de fase continua positiva) pode ser obtido a partir da equacao
τwg180π
= MF
que resulta em um valor maximo de atraso τmax = 1,678. Observe que ovalor obtido a partir da analise por lugar das raızes difere deste ultimo (que

Capıtulo 6
Equilıbrio e estabilidade
Newton Geraldo Bretas
Luis Fernando Costa Alberto
Andre Cristovao Pio Martins
No estudo de sistemas dinamicos, os conceitos de equilıbrio e estabilidadepossuem um papel fundamental. Embora esses conceitos sejam naturais nalinguagem informal, e preciso que definamos de maneira precisa, usando lin-guagem matematica, o que se entende por equilıbrio e estabilidade. Entre-tanto, antes de mais nada, e preciso definir o que se entende por sistemasdinamicos.
De maneira geral, qualquer processo ou conjunto de processos que evoluamno tempo e cuja evolucao seja governada por algum conjunto de leis e deno-minado sistema dinamico. O nome sistema dinamico tambem e utilizado paradesignar os modelos matematicos que evoluem no tempo e que, em geral,procuram descrever sistemas fısicos reais. Muitos sistemas dinamicos sao nao-lineares, sendo assim, o estudo de sistemas nao-lineares e fundamental parao entendimento do comportamento dos sistemas fısicos por parte dos enge-nheiros. O estudo de sistemas dinamicos nao-lineares e particularmente im-portante, pois diversos fenomenos observados em sistemas nao-lineares naoocorrem em sistemas lineares nem podem ser analisados com as ferramentasdisponıveis para estes. Entre esses fenomenos, podemos citar os ciclos-limites(Capıtulo 7), os pontos fixos multiplos e isolados e os comportamentos caoticos(Capıtulo 10). Finalmente, menciona-se que o uso das ferramentas abordadasneste capıtulo na sıntese de sistemas nao-lineares sera abordado no Capıtulo 9.
6.1 Existencia e unicidade das solucoes
Sistemas dinamicos nao-lineares estao presentes em varios campos da en-genharia. Eles surgem naturalmente devido as caracterısticas inerentemente

140 Enciclopedia de Automatica
5
0
5
5
0
50
10
20
30
40
50
Ener
gia
Ângulo [rad]Velo
cidade
[rad/s
]
Figura 6.1: Funcao energia para o pendulo, m = l = 1,0 e g = 10,0.
Os pontos de equilıbrio sao os mesmos do Exemplo 6.2, x∗ = [±kπ,0]T ,onde k ∈ Z. Nesse caso, a matriz Jacobiana calculada nesses pontos resultaem:
J =[
0 1−g
l cos(±kπ) − dm
], (6.16)
cujos autovalores sao λ1,2 = −d/2m±√d2/4m2 − gcos(±kπ)/l, isto e, λ1,2 =
−d/2m±√d2/4m2 − g/l para k par e λ1,2 = −d/2m±√
d2/4m2 + g/l parak ımpar. Portanto, os pontos de equilıbrio com k ımpar continuam instaveis,mas agora os pontos de equilıbrio com k par sao assintoticamente estaveis.Entretanto, a funcao energia dada no Exemplo 6.2, equacao (6.12), nao permiteessa conclusao, pois a derivada da funcao energia ainda e localmente semi-definida negativa:
V (x) = ml2x2
(−g
lsen(x1)− d
mx2
)+ mgl (sen(x1)x2) = −d(lx2)2. (6.17)
Nesse caso, com essa funcao energia, o maximo que podemos afirmar e queos pontos de equilıbrio com k par sao estaveis.
O Exemplo 6.3 mostra que o Teorema de Lyapunov e um resultado apenassuficiente, ou seja, a funcao de Lyapunov pode ser semidefinida negativa e aorigem ainda pode ser assintoticamente estavel. Utilizando outra funcao de

Capıtulo 7
Analise de sistemasnao-lineares
Leonardo A. B. Torres
7.1 Comportamentos dinamicos de sistemasnao-lineares
Considere o sistema dinamico nao-linear descrito pela seguinte equacaodiferencial:
x = f(t,x); (7.1)
sendo x ∈ IRn o vetor de estados; cujos valores x(t) ao longo do tempo tconstituem a trajetoria do sistema, partindo da condicao incial x(t0) = x0; ef(t,x) : IR+ × IRn → IRn uma funcao nao-linear1, neste contexto chamada decampo vetorial do sistema dinamico.
Um questionamento valido e saber se e viavel determinar-se qualitativa-mente todo o conjunto de possıveis trajetorias do sistema (7.1) no espaco deestados, para diferentes condicoes iniciais. Ou seja, evitando-se ao maximoo emprego de metodos numericos para integracao direta de equacoes diferen-ciais, de que forma um esboco do fluxo do sistema dinamico (7.1) no espaco deestados pode ser obtido? E importante notar que um tal esboco seria instru-mental em uma analise preliminar para revelar os possıveis comportamentostemporais esperados para o sistema.
Para responder a esta pergunta, e preciso observar que os comportamentosdinamicos exibidos por sistemas nao-lineares caracterizam-se justamente pelamultitude de possibilidades. Ou seja, para sistemas nao-lineares, as catego-rias usualmente empregadas para classificar as trajetorias correspondentes saobastante amplas e pouco descritivas, tais como:
1Assume-se que a funcao f(t,x) satisfaz criterios adequados para a existencia e unicidadedas trajetorias do sistema no espaco de estados (Capıtulo 6).

158 Enciclopedia de Automatica
(a)
8 6 4 2 0 2 4 6 88
6
4
2
0
2
4
6
8
x1
x 2
(b)
2 2.5 3 3.5 4 4.52
1.5
1
0.5
0
0.5
1
1.5
2
x 1
x 2
Figura 7.6: Plano de fase para um pendulo simples com amortecimentoviscoso (m = 1kg, l = 1m, g = 10m/s2 e b = 0,7958Nms). (a) Visao geralonde se destaca a presenca de 5 pontos de equilıbrio, para os quais x∗
1 ∈−2π; −π; 0; π; 2π e x∗
2 = 0. (b) (−) Detalhe do fluxo em torno do pontode equilıbrio x∗ = [π 0]T. (−·) Fluxo exibido por um sistema linear descritopela equacao (7.10).

Capıtulo 8
Variedade central ebifurcacoes locais
Luiz Henrique Alves Monteiro
8.1 Introducao
Seja o sistema nao-linear autonomo dx/dt = fµ(x), sendo x = (x1,x2,...,xn)∈ IRn o vetor formado pelas n variaveis de estado, fµ = (f1(µ),f2(µ),...,fn(µ)) ∈IRn o campo vetorial e µ ∈ IR o parametro de controle. Admita que essesistema possua um ponto de equilıbrio dado por x = x∗, de modo que sex(0) = x∗, entao x(t) = x∗ para todo t. A estabilidade de x∗ determina atopologia das trajetorias no espaco de estados, ao menos em torno desse ponto.Analiticamente, pode-se tentar precisar a estabilidade de x∗ linearizando fµ
em torno dessa solucao de equilıbrio (veja 7, 6). Assim, obtem-se a matrizjacobiana
↔A ≡ Dfµ(x)|x=x∗ de dimensao n× n, formada pelas derivadas par-
ciais de f1(µ),f2(µ),...,fn(µ) em relacao a x1,x2,...,xn calculadas no ponto de
equilıbrio em questao. Desse modo, para x x∗, entao dx/dt ↔Ax.
O teorema de Hartman-Grobman estabelece que se todos os autovaloresda matriz
↔A tem parte real nao-nula, entao o retrato de estados do sistema
nao-linear original dx/dt = fµ(x) e topologicamente orbitalmente equivalente
ao retrato de estados da versao linearizada dx/dt =↔A x, em torno de x∗.
Assim, ha um homeomorfismo (ou seja, existe uma funcao contınua e cominversa contınua) que converte, numa vizinhanca de x∗, todas as trajetoriasdo sistema linear naquelas do sistema original, preservando suas orientacoes.Quando a linearizacao “falha”, isto e, quando
↔A possui pelo menos um auto-
valor com parte real nula, costuma-se tentar determinar a estabilidade de x∗
empregando-se o metodo direto de Lyapunov ou a teoria da variedade cen-tral. Neste capıtulo, trata-se da teoria da variedade central e apresenta-se,

Cap. 8 Variedade central e bifurcacoes locais 183
DF FPB
OCT
V (t) V (t)
V (t)V (t)
i
oc
d
Figura 8.6: Diagrama de blocos de um PLL.
O detector de fases e um multiplicador de sinais, de modo que sua tensaoda saıda vd(t) vale:
vd(t) = kdvi(t)vo(t)
sendo kd o ganho do detector, vi(t) = Vi sen(ω0t+θi(t)) a tensao de entrada, evo(t) = Vo cos(ω0t+θo(t)) a tensao de saıda do oscilador local, com Vi, Vo e ω0
constantes. Sincronismo implica que a fase do sinal de entrada e a fase do sinalde saıda variam com a mesma velocidade, ou seja: dθi/dt = dθo/dt. Definindoϕ(t) ≡ θi(t)− θo(t), entao ha sincronismo se existe solucao com dϕ(t)/dt = 0e ϕ(t) = constante.
Assuma que o FPB seja caracterizado pela seguinte funcao de transferencia:
Vc(s)Vd(s)
=1
s2/(µ1µ2) + s [(1/µ1) + (1/µ3)] + 1
sendo µ1, µ2 e µ3 parametros positivos.O OCT e um integrador, de modo que a tensao vc(t), que e a saıda do
filtro, controla sua fase θo(t) de acordo com a expressao:
θo(t) = ko
∫vc(t)dt .
A constante ko representa o ganho do OCT.Combinando essas expressoes, mostra-se que a variacao temporal da dife-
renca de fases ϕ(t) e governada pela equacao diferencial nao-linear de terceiraordem:
d3ϕ(t)dt3
+(
µ2 +µ1µ2
µ3
)d2ϕ(t)
dt2+ µ1µ2
dϕ
dt+ µ0µ1µ2 sen ϕ(t)
=d3θi(t)
dt3+
(µ2 +
µ1µ2
µ3
)d2θi(t)
dt2+ µ1µ2
dθi(t)dt
≡ g(t)
sendo µ0 ≡ kdkoViVo/2.Assuma que a fase do sinal de entrada θi(t), gerada por um relogio-mestre,
apresente uma variacao linear com o tempo, dada por θi(t) = Ωt + c, com

Capıtulo 9
Sıntese de sistemasnao-lineares
Daniel Juan Pagano
A principal metodologia utilizada na sıntese de sistemas de controle temsido, e ainda e, baseada na teoria dos sistemas lineares. A aplicacao destateoria a modelos nao-lineares conduz a aproximacoes lineares obtidas por li-nearizacao em torno de um equilıbrio (ponto de operacao). Desta forma, osprincipais metodos sao a aproximacao por linearizacao e a sıntese de leis decontrole linear. Esta claro que quando se trata com sistemas nao-lineares, osresultados tem uma validade somente local e na medida em que as trajetoriasse afastam do equilıbrio, eles podem ser muito diferentes dos esperados. Napratica, existem muitos sistemas que sao nao-lineares e cada vez mais os en-genheiros tem que enfrenta-los.
Por outro lado, se para os sistemas lineares contamos com um corpo teoricobem desenvolvido que permite a realizacao de estudos basicos e aplicados comgrande rigor e elegancia, para os nao-lineares nao se dispoe de um corpo dedoutrina similar. Os sistemas dinamicos nao-lineares carecem de uma teoriaunitaria, ao menos com alcance pratico. E difıcil conceber uma teoria geral(unificada) dos sistemas nao-lineares. Tanto o processo de analise como desıntese devem adequar-se ao tipo de problema nao-linear encontrado e parao qual existe uma variedade de metodos e tecnicas, a serem selecionados emfuncao do proprio sistema nao-linear considerado.
No entanto, ainda que seja improvavel encontrar um marco formal que per-mita representar todos os sistemas nao-lineares, existem algumas propriedadesgerais do comportamento dinamico desses sistemas. Para estudar estas carac-terısticas gerais do comportamento dos sistemas nao-lineares pode-se utilizara Teoria Qualitativa dos Sistemas Nao-Lineares apresentada nos Capıtulos 6,7 e 8, bem como em livros-texto no assunto (Guckenheimer e Holmes, 1983),(Monteiro, 2002).

192 Enciclopedia de Automatica
−4 −3 −2 −1 0 1 2 3 4
−4
−3
−2
−1
0
1
2
3
4
x1
x 2
xe1xe0
xe2
separatrizes
separatrizes
região de atração
Figura 9.1: Domınios de controlabilidade e de estabilidade no espaco deestados (x1,x2) para o sistema (9.5) com k1 = 2, k2 = 1 e r(t) = 0.
9.1 Projeto baseado em funcoes de Lyapunov
As funcoes de Lyapunov (Lyapunov, 1892) (ver, tambem, Capıtulo 6) saoutilizadas basicamente como uma ferramenta para estudar a estabilidade dossistemas nao-lineares. Permitem determinar a estabilidade de um certo pontode equilıbrio x de um dado sistema, dispensando a linearizacao do mesmo emtorno do equilıbrio e o calculo dos autovalores da matriz jacobiana associada.Sem perda de generalidades podemos supor que x = 0.
Uma funcao de Lyapunov V (x) e uma funcao real continuamente diferen-ciavel que depende dos estados do sistema e que verifica as seguintes duascondicoes: (i) e localmente (ou globalmente) definida positiva, isto e V (x) > 0para x = 0, V (0) = 0; e (ii) sua derivada V (x) = dV
dt = ∂V∂x
dxdt e localmente
(ou globalmente) semidefinida negativa, isto e V (x) ≤ 0. Isto implica que Vnao aumentara conforme o sistema evolui atraves das suas trajetorias x(t).Observe-se que x = 0 representa um mınimo da funcao V (x). Se, alem disso,V (x) < 0 para x = 0, entao x = 0 e assintoticamente estavel. Pode-se provarque se um dado ponto de equilıbrio x e estavel, entao existe uma funcao deLyapunov. Entretanto, nao existe um procedimento sistematico para encon-trar uma funcao de Lyapunov. Em geral, define-se como funcao de Lyapunovpara um equilibrio uma funcao que e uma soma dos quadrados dos estados dosistema.
O uso destas funcoes pode ser estendido para o estudo da estabilidadede outros tipos de atratores, como por exemplo ciclos limites (Gomez-Estern,Barreiro, Aracil e Gordillo, 2005). Uma outra aplicacao consiste na estimacaoda regiao de atracao de um ponto de equilıbrio de um sistema nao linear(Barreiro, Pagano e Aracil, 2002).

Capıtulo 10
Controle de caos
Luiz Felipe Ramos Turci
Elbert Einstein Nehrer Macau
Henri Poincare, atraves de seu grandioso trabalho em astrodinamica(Poincare, 1899), foi o pioneiro no trilhar de um caminho que levaria ao en-tendimento da Dinamica Caotica. No final do seculo XIX, ele introduziu eanalisou o agora famoso Problema Circular Restrito dos Tres Corpos, com oobjetivo de entender a estabilidade do nosso Sistema Solar. A analise desteproblema deu a Poincare um vislumbre do movimento caotico, que entaoaparecia nas vizinhancas das orbitas periodicas, na forma de trajetorias com-plexas e aparentemente imprevisıveis e que se espalhavam por regioes fechadasdo espaco de fase. Apesar de contribuicoes importantes proporcionadas pormatematicos que continuaram os estudos de Poincare, apenas em temposhodiernos, gracas sobretudo a difusao do uso do computador e seus recursosgraficos e que os conhecimentos acerca da Dinamica Caotica se consolidaram,abrindo caminho para diversas e importantes aplicacoes. Por conseguinte,sabe-se hoje que a evolucao caotica e prevalente na Natureza e tem importanciafundamental em numerosos fenomenos que ocorrem na fısica (Arecchi, Meucci,Puccioni e Tredicce, 1982), na biologia (Schiff, Jerger, Duong, Chang, Spanoe Ditto, 1994), na quımica (Hudson e Mankin, 1981), entre outras areas.
Em tempos recentes, o desejo de se controlar os fenomenos naturais quesao mediados pela dinamica caotica trouxe para o ambito da comunidade cien-tıfica acirradas discussoes acerca da possibilidade de se controlar a evolucaocaotica. Em 1990, um trabalho revolucionario, denominado controlando o caos(Ott, Grebogi, C. e Yorke, 1990), mostrou que a evolucao caotica nao so eracontrolavel, como tambem a complexidade inerente a evolucao caotica poderiaser explorada de forma a proporcionar nıveis unicos de flexibilidade e eficien-cia no uso da dinamica caotica em aplicacoes tecnologicas. As consequenciasdeste trabalho podem ser avaliadas pelo numero subsequente e crescente depublicacoes que se baseiam neste trabalho original. Controle de caos continua

Cap. 10 Controle de caos 225
Espaço de Estados
Carga q
Corr
ente
1
6
4
2
1
2
2
4
6
x 10 A3
x 10 C90 1 2 3 4 5 6
0
Figura 10.3: Orbita de Perıodo 2: Espaco de Estados mostrando orbita deperıodo 2 do circuito a diodo quando f = 333kHz e V0 = 0,8V .
Espaço de Estados
Carga q
Corr
ente
1
20
10
5
0
5
5
10
15
20
x 10 A3
x 10 C35 10 15 20 25 30
0
Figura 10.4: Orbita Caotica: Espaco de Estados mostrando orbita caoticado circuito a diodo quando f = 333kHz e V0 = 2,3V .

Capıtulo 11
Controle preditivo baseadoem modelo
Julio Elias Normey Rico
Este capıtulo apresenta as ideias e conceitos fundamentais de um con-junto de estrategias de controle agrupadas com o nome de Controle PreditivoBaseado em Modelo ou apenas Controle Preditivo. A introducao aos conceitosbasicos utilizados por estes algoritmos assim como uma perspectiva historicasao abordadas na primeira secao. Posteriormente apresenta-se a formulacaodo problema de controle preditivo, discutindo em detalhes o caso linear, que esem duvida o mais utilizado no meio industrial. A terceira secao apresenta umestudo de caso onde o Controle Preditivo Generalizado Multivariavel e usadopara o controle de uma planta-piloto. A seguir estudam-se outros problemasmais avancados de controle preditivo relacionados com o tratamento de res-tricoes, com o uso de modelos nao-lineares, assim como sao citados outrostrabalhos na area que servem de guia ao leitor para aprofundar na pesquisado tema deste capıtulo. Finalmente sao apresentadas as conclusoes.
11.1 Introducao
O controle preditivo baseado em modelo (cpbm) e uma das tecnicas decontrole moderno mais potentes e provavelmente a que teve mais exito nasaplicacoes na industria (Takatsu, Itoh e Araki, 1998). As principais causasdeste exito devem-se, como se vera neste capıtulo, a que as estrategias decpbm podem ser aplicadas tanto a sistemas monovariaveis como a multivaria-veis lineares ou nao-lineares, as restricoes nas saıdas e nas acoes de controlepodem ser consideradas no projeto da lei de controle em tempo real e, pelapropria definicao dos algoritmos, podem ser usadas para controlar processoscom atrasos.

250 Enciclopedia de Automatica
11.2.1 O algoritmo GPC monovariavel
Para o calculo das predicoes, o gpc utiliza um modelo que combina adescricao da planta por funcao de transferencia com o das perturbacoes detipo arima. Aqui se considera o caso C = 1 e D = = 1 − z−1 (Clarkeet al., 1987).
A(z−1)y(k) = z−dB(z−1)u(k − 1) +e(k) (11.4)
onde u(k) e y(k) sao respectivamente os controles aplicados e as saıdas obtidas,e(k) e um ruıdo branco de media nula, d e o atraso do sistema, e A e B saopolinomios no operador atraso z−1 :
A(z−1) = 1 + a1z−1 + a2z
−2 + ... + anaz−na (11.5)
B(z−1) = b0 + b1z−1 + b2z
−2 + ... + bnbz−nb, b0 = 0 (11.6)
Este modelo e conhecido na literatura como carima (do ingles “ControllerAuto-Regressive Integrated Moving-Average” model)(Clarke et al., 1987).
Para o calculo do controle o gpc minimiza a funcao de custo 11.3 comhorizontes de predicao: N1 = d + 1, N2 = N + d e horizonte de controle Nu
(Camacho e Bordons, 2004).Para calcular a predicao otima da saıda do sistema em um tempo t + j
com a informacao conhecida em t o gpc utiliza o valor esperado da variavel,y(k + j | k) = E (y(k + j )) e os conceitos de resposta livre e forcada. Paraencontrar o valor de y(k + j | k) como funcao dos valores das saıdas passadase os controles escreve-se o modelo 11.4 como:
A(z−1)y(k) = z−dB(z−1) u(k − 1) + e(k) (11.7)
com A = A(1− z−1) = 1− a1z−1− · · ·− ana+1z
−na−1, o que permite escrever:
y(k + 1) =na+1∑i=1
aiy(k + 1− i) +nb+1∑i=1
bi−1 u(k − d− i + 1) + e(k) (11.8)
Ao se calcular o valor esperado da expressao (11.8), o melhor valor para y(k+1 |k) (no sentido estocastico) e aquele que considera ruıdo futuro nulo e portanto:
y(k + 1 | k) =na+1∑i=1
aiy(k + 1− i) +nb+1∑i=1
bi−1 u(k − d− i + 1) (11.9)
Esta equacao pode ser utilizada recursivamente de forma tal que y(k + 1 | k)seja usada para o calculo de y(k + 2 | k) e assim sucessivamente todas aspredicoes possam ser escritas como funcao das saıdas passadas y(k+1−i), i ≥ 1e da sequencia de controles. A dependencia com os sinais de controle futuros u(k+j | k), j ≥ 0 aparece a partir de y(k+d+1 | k), o que permite escrever:
y(k + d + 1 | k) =na+1∑i=1
αiy(k + 1− i) +nb+1∑i=2
βi−1 u(k− i + 1) + b0 u(k | k),
(11.10)

Capıtulo 12
Controlador PID: estruturas emetodos de sintonia
Alexandre Sanfelice Bazanella
Romeu Reginatto
O controlador PID (proporcional-integral-derivativo) e assim chamado de-vido a sua estrutura, composta de 3 acoes elementares ou basicas de controle,denominadas de acao proporcional, acao integral e acao derivativa. Devido aesta estrutura simples e da existencia de ferramentas praticas para ajuste deseus parametros, este controlador ganhou, ao longo do tempo, vasta aplicabi-lidade no controle de processos industriais adquirindo o status de controladorpadrao.
Apesar de sua estrutura relativamente simples, os controladores PID tem-se revelado suficientes para o controle adequado de uma grande gama deprocessos. Pode-se assim dizer que o controlador PID e ainda hoje, apesarda existencia de inumeras tecnicas de controle mais sofisticadas, o mais uti-lizado na industria. Estima-se que mais de 90% das malhas de controle en-contradas em processos industriais operam com controladores PID (Astrom eHagglund, 1995). Os controladores PID sao encontrados no ambiente indus-trial sob a forma de equipamentos single-loop (ou seja, equipamentos dedicadosespecificamente a execucao de um algoritmo PID em uma malha de controle)digitais ou analogicos, como funcoes programadas em controladores logicosprogramaveis (CLPs) ou em blocos funcionais que sao executados em sistemasdigitais de controle distribuıdos (SDCDs) e barramentos industriais.
Ainda que largamente aplicados na industria desde longa data, os contro-ladores PID sao muitas vezes subutilizados. E grande o numero de malhas decontrole que operam em modo manual (ou seja, sao controladas por comandosde um operador) ou que, apesar de operarem em modo automatico, apresentamcomportamentos caracterısticos de ma sintonia. Varias sao as consequencias

Cap. 12 Controlador PID 267
Assim sendo, a implementacao analogica do controlador PID pode em geralser realizada por um filtro ativo, utilizando-se para isso amplificadores ope-racionais. Diferentes estruturas de filtros podem ser empregadas para isto,contudo determinadas estruturas podem ser de maior interesse em funcao darelacao entre componentes fısicos e parametros do controlador PID. Assim, ecomum implementar um controlador PID pela realizacao de operacoes basicascomo soma, integracao e diferenciacao, atraves de amplificadores operacionais.
A forma paralela e uma implementacao do controlador PID baseada na suaestrutura padrao apresentada no diagrama em blocos da Figura 12.1, ou seja,utiliza-se de circuitos que implementam de forma independente as 3 acoesbasicas. Uma possıvel topologia de circuito a ser implementada e dada naFigura 12.3.
e(t) u(t)R1
R2
R3
R4
R5
R6
C2
C1
R3
R7
R7
R7
R7
R7
R7
Figura 12.3: Implementacao analogica de um PID – forma paralela.
O primeiro estagio corresponde ao ganho proporcional do PID:
K =R2
R1
No segundo estagio, tem-se um amplificador de ganho unitario, um circuitointegrador e um circuito diferenciador de alta frequencia. Note que:
Ti = C1R4, Td = R6C2, p =1
C2R5
O terceiro estagio corresponde a um amplificador que soma os sinais prove-nientes dos 3 circuitos do segundo estagio. A variacao dos ganhos K, Ti e Td
pode entao ser feita de forma independente variando-se, respectivamente, osresistores R1, R4 e R6.
Implementacao da acao derivativa – Filtragem em alta frequencia
Como visto na secao 12.1.3, a fim de evitar problemas com ruıdos de altafrequencia, que seriam amplificados em demasia por uma acao derivativa pura,deve-se limitar o ganho desta acao em altas frequencias com a adicao de umpolo p. Entretanto, em controladores PID comerciais, a posicao desse polo

Capıtulo 13
Controle adaptativo
Walter Fetter Lages
Elder Moreira Hemerly
O termo adaptacao e definido na biologia como uma conformacao van-tajosa de um organismo a mudancas no seu ambiente. Inspirados por estadefinicao, Drenick e Shahbender (1957) introduziram o termo sistema adapta-tivo na teoria de controle, para representar sistemas de controle que monitoramo seu proprio desempenho e ajustam seus parametros de forma a melhora-lo.
Esta definicao baseada na biologia e imprecisa e, dependendo da interpreta-cao, engloba sistemas realimentados convencionais. Assim, ao longo do tempodiversas definicoes de controle adaptativo foram propostas (Eveleigh, 1967;Margolis e Leondes, 1959; Bellman e Kalaba, 1959; Zadeh, 1963; Tuxal, 1963).Apesar destas diversas definicoes, e amplamente aceito que um sistema de con-trole adaptativo e uma classe especial de sistemas nao-lineares que surge aose tentar controlar plantas com parametros desconhecidos atraves da variacaoautomatica dos parametros do controlador (Narendra e Annaswamy, 1989),como mostra a Figura 13.1. E importante ressaltar que um sistema de con-trole adaptativo e um sistema nao-linear ainda que tanto a planta quanto ocontrolador sejam sistemas lineares. Ou seja, a adaptacao dos parametros emmalha fechada faz com que o sistema resultante torne-se nao-linear.
A historia dos controladores adaptativos remonta a decada de 1950, es-pecialmente com o objetivo de projetar pilotos automaticos. Como os avioesenfrentam condicoes muito diferentes entre as diversas fases do voo, o controleadaptativo parecia ser uma alternativa atraente. No entanto, na epoca oscomputadores digitais nao estavam tao desenvolvidos e as implementacoes decontroladores adaptativos nao obtiveram muito sucesso. Durante a decada de1960, houver grandes desenvolvimentos na teoria de identificacao de sistemas ena teoria de controle (surgimento do controle moderno), levando a um melhorentendimento do problema de controle adaptativo em geral. Nas decadas de

Cap. 13 Controle adaptativo 295
Adicionalmente, conforme em (13.18):
y0p(t + k|t) = E
[(P (q−1)y(t + k)
) |Ft
]= P (q−1)y(t + k)− F (q−1)w(t + k)
(13.40)ou seja, P (q−1)y(t + k) − F (q−1)w(t + k) e a predicao k passos a frente deP (q−1)y(t).
Logo, de (13.39) e (13.40), tem-se
y0p(t + k|t) =
(1− C(q−1)
)y0
p(t + k|t) + F (q−1)B(q−1)u(t) +G(q−1)Pd(q−1)
y(t)
(13.41)que corresponde a forma generalizada de (13.27).
Finalmente, procedendo como em (13.20)-(13.28), de (13.36) e (13.41)conclui-se que:
Jmin(t + k) = E
⎡⎣minu(t)
⎧⎨⎩k−1∑j=0
f2j σ2 +
((1− C(q−1)
)y0
p(t + k|t)+
+ F (q−1)B(q−1)u(t) +G(q−1)Pd(q−1)
y(t)−R(q−1)yref (t))2
+
+(Q′(q−1)u(t)
)2]
(13.42)
sendo Jmin(t + k) obtido para o valor de u(t) que minimiza
∂∆∂u(t)
= 0
com
∆ =((
1− C(q−1))y0(t + k|t) + F (q−1)B(q−1)u(t) (13.43)
+G(q−1)Pd(q−1)
y(t)−R(q−1)yref (t))2
+(Q′(q−1)u(t)
)2 (13.44)
ou seja:
2(
1− C(q−1))y0
p(t + k|t) + F (q−1)B(q−1)u(t) +G(q−1)Pd(q−1)
y(t)
−R(q−1)yref (t)
f0b1 + 2Q′(q−1)u(t)q′0 = 0 (13.45)
de onde tem-se que(F (q−1)B(q−1) +
q′0f0b1
Q′(q−1))
u(t) = R(q−1)yref (t)− G(q−1)Pd(q−1)
y(t)
+(C(q−1)− 1
)y0
p(t + k|t) (13.46)
que corresponde a versao generalizada de (13.29).

Capıtulo 14
Sistemas de medicao:terminologia e incerteza
Amauri Oliveira
Sebastian Yuri Catunda Cavalcanti
Neste capıtulo faz-se uma descricao geral de um sistema de medicao e dosblocos funcionais que o constituem. Sao apresentados os tipos de medicaoe formas de operacao dos instrumentos de medicao. Apresentam-se algumasdefinicoes essenciais relacionadas a sistemas de medicao, grandezas e caracte-rısticas de sensores. Apresentam-se tambem definicoes de erros e incertezas efundamentos basicos da propagacao de erros em sistemas de medicao.
14.1 Sistemas de medicao
A medicao pode ser definida como um conjunto de operacoes que tem porobjetivo determinar o valor de uma grandeza. Ela e essencial para cienciase tecnologia, e tem o intuito de fornecer informacoes sobre grandezas fısicaspara monitoracao, controle de processos, validacao experimental de modelosteoricos, entre outras.
O conceito de instrumentacao e bastante amplo, entretanto, este textoe restringido a medicao utilizando circuitos eletrico-eletronicos, digitais e/ouanalogicos, que, neste caso, pode ser definida como a utilizacao ou aplicacao deinstrumentos eletricos ou eletronicos com a finalidade de se realizar medicoes.A finalidade de um sistema de medicao e, entao, a de prover informacoessobre uma determinada grandeza com maxima qualidade, de acordo com osrequisitos da aplicacao.
Nesta Secao sao apresentados definicoes e conceitos basicos necessariospara o projeto de um sistema de medicao.

314 Enciclopedia de Automatica
Tabela 14.1: Caracterısticas dos tipos de medicao
Tipo Resultado da medicao Restricao da Exemplofuncao de funcao
Nominal x1 = x2, x1 = x2 Injetora y = exp(−x)Ordinal x1 ≶ x2 Monotonicamente
crescente y = x2, x ≥ 0Intervalar (x1 − x2) ≶ (x3 − x4)) Linearmente
crescente y = ax + b,a > 0Racional x1 ≶ mx2 Linearmente
crescentepassandopela origem y = ax,a > 0
Cardinal x1 = mU Identidade y = x
Na Figura 14.2 apresenta-se um diagrama representando um sistema demedicao, tanto analogico quanto digital. O sistema de medicao analogico ecomposto pelos blocos sensor, condicionamento, e indicador ou registrador. Afuncao de transferencia estatica deste sistema (fSM ) e dada pela composicaodas funcoes de transferencias de cada bloco, por
fSM = fs fc fi, (14.1)
ou seja,
x = fSM (x) = fi(fc(fs(x))). (14.2)
Mensurando
Medidor analógico
Medidor digital
Sensoranalógico
Indicador,registrador
Filtro anti-batimento
ConversorA/D
Processadordigital
Condicionamentox
sf
sycy
dycf
if
x
x
ADf Rf
Figura 14.2: Diagrama representativo de um sistema de medicao analogicoe digital.
O sistema de medicao digital e composto por sensor, condicionamento,filtro antibatimento, conversor A/D e processador digital. A funcao de trans-ferencia estatica deste sistema e dada pela composicao das funcoes de trans-

Capıtulo 15
Redes de transdutoresinteligentes
Jose Sergio da Rocha Neto
Antonio Marcus Nogueira Lima
Um sensor e um dispositivo que detecta a variacao de uma grandeza fısica.Neste capıtulo os tipos de sensores que serao tratados sao aqueles em que adeteccao da grandeza produz um sinal eletrico observavel. Um atuador e umdispositivo que converte um sinal (usualmente eletrico) em alguma acao, usual-mente, termica ou mecanica. Um transdutor e um dispositivo que converte umtipo de energia em outro, aqui nos referiremos aos transdutores, nos quais aenergia eletrica e sempre um destes tipos. Sensores e Atuadores sao, portanto,Transdutores e estas palavras sao algumas vezes usadas como sinonimos.
As diferencas entre sensores e transdutores sao frequentementes sutis. Umsensor efetua uma acao de transducao, e um transdutor deve necessariamentedetectar a variacao de alguma quantidade fısica. A diferenca reside na eficien-cia de conversao de energia. O proposito de um sensor e detectar e medir, eainda que sua eficiencia seja da ordem de 5% ou de 0,1% ela nao e a caracterıs-tica mais relevante, desde que seja conhecida. Um transdutor por contrastee utilizado para converter energia, e sua eficiencia e importante, embora emalguns casos possa nao ser alta. Em resumo, a eficiencia da conversao e im-portante para um transdutor, mas nao e para um sensor (Sinclair, 2001). Osprincıpios basicos que se aplicam a um podem ser aplicados a outro, de formaque trataremos neste capıtulo, igualmente, os sensores e os transdutores, to-davia, em alguns casos um sensor pode nao ser um transdutor (Pallas-Arenye Wesbster, 2001).
Uma descricao das caracterısticas, da tecnologia e do princıpio de funcio-namento dos tipos de sensores/atuadores mais usuais, envolvendo os aspectosde construcao foge do contexto aqui apresentado, todavia, pode ser encontrada

336 Enciclopedia de Automatica
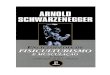
No nıvel mais baixo, o nıvel de campo, tem-se conectados dispositivos, taiscomo chaves de partidas, sensores e atuadores, a palavra de dados e constituıdade alguns bits ou talvez bytes, com uma taxa de transmissao da ordem de ate1 Kbits/s. Este e o nıvel de atuacao de uma rede ASI. No nıvel mais acima,tem-se o nıvel de automacao, tem-se um barramento de campo, considerando-se o tipo de fabricante (Profibus, Devicenet, por exemplo), neste barramentoa informacao e constituıda por bytes ou kbytes, com taxa de transmissao deate 12 Mbits/s. Os nıveis superiores, nıvel de controle e nıvel supervisorio, asinformacoes trocadas entre os dispositivos sao da ordem de kbytes ou Mbytes,chegando-se a taxas de transmissao de ate 100 Mbits/s.
Nível supervisórioSegundos
Computador industrial
CLPs
Aparelhos de baixatensão c/ comunicação
Chaves de partidasensores, atuadores, etc.
Kbytes/Mbytes
bytes/Kbytes
bits/bytes
IndustrialEthernet
Nível de controle10 a 60 ms
Nível de automação
Nível de campoaté 10 ms
100 Mbit/s
12 Mbit/s
5 ou 10ms
Figura 15.1: Piramide de automacao industrial.
No projeto da rede ASI, foi enumerada uma lista de criterios para uma in-terface serial digital para sensores/atuadores, tendo-se como base os seguintespontos:
1. Sensores e Atuadores de diferentes fabricantes podem ser conectados auma interface serial digital padrao;
2. Cabo de dois fios: Tipo padrao ou, se necessario, cabos especiais, faceisde usar, nao blindados e de baixo custo;
3. Rede sem restricoes de topologia (linha, arvore, anel ou combinacoesdestes tipos);
4. Sinais de dados e tensao de alimentacao atraves do mesmo cabo (24VDC);
5. Alto nıvel de confiabilidade operacional em um ambiente industrial severo;
6. Tempo de reacao do sistema de aproximadamente 5 ms;

Capıtulo 16
Protocolos de comunicacaoindustriais
Lucia Regina Horta Rodrigues Franco
O aparecimento da microeletronica e a posterior difusao de diferentes equi-pamentos microprocessados para automacao na industria geraram a necessi-dade da comunicacao entre eles. Deste modo, apareceram os protocolos queinicialmente eram protocolos analogicos simples que ligavam tipicamente doisequipamentos. Mas, logo evoluıram para protocolos digitais que possibilitarammais tarde a constituicao de redes de comunicacao. Esses protocolos nada maissao do que regras de comunicacao entre dois ou mais equipamentos.
No entanto, muitos parametros devem ser levados em consideracao para adefinicao de um protocolo. Alguns deles sao: meio fısico utilizado entre eles,nıveis eletricos utilizados para representar o dıgito“1”ou o dıgito“0”, topologiada rede de equipamentos, regras de permissao de acesso ao meio fısico paratransmissao/recepcao, tamanho e formato das mensagens trocadas, tipos deaplicacao, transmissao paralela ou serial, distancia a ser percorrida, velocidadede transmissao, tipo de identificacao de cada equipamento ou de cada variavel(enderecamento do dispositivo ou identificador da variavel), forma de deteccaode erros, tipos e significados de comandos, entre outros.
Como a combinacao desses parametros pode ser variada, surgiram variosprotocolos digitais no mercado. Inicialmente, apareceram os proprietarios,cujos parametros nao eram divulgados publicamente por serem consideradossegredos estrategicos, obrigando seus usuarios a ficarem presos a um fornecedorou a um grupo restrito de fornecedores. Mais tarde, pela dificuldade impostapor essa restricao, os usuarios buscaram a publicacao da especificacao dosprotocolos e com isto comecaram a surgir os protocolos abertos, possibilitandoo aparecimento de varios fornecedores competindo com nıveis de qualidade,custos e servicos diferentes. De qualquer forma, ainda ha varios protocolos nomercado, mas felizmente dominam gradativamente os abertos.

384 Enciclopedia de Automatica
propria, tornando-os incompatıveis. Sao exemplos: SDS da Honeywell, e di-versos protocolos usados em sistemas embarcados e na area automobilıstica.
Sua comunicacao foi especificada para trabalhar com mestre/escravo, pro-dutor/consumidor, por evento e por polling (inclusive strobe).
PCL5[0]
Fotocel [3]
Redist[10]
Devlink[2]
DriveCA[4]
SMP3[6]
Microinv[8] KFD
[12]
ArmBlock [1] SMC
[5]
Barcode [7]
IHM[9]
Flex10[11]
DeviceNet
Figura 16.14: Rede com DeviceNet.
16.7.3 Profibus DP
O Profibus DP foi desenvolvido pela Siemens e destinou-se, inicialmente,para interligar CLPs. Atualmente, o mercado tem disponibilizado algunspoucos dispositivos de campo Profibus DP.
Seus princıpios basicos vistos na Figura 16.15, conforme (PROFIBUS,2001), sao a comunicacao mestre/escravo entre o CLP e seus escravos e a co-municacao por token (passagem de senha ou bastao) entre os mestres(CLPs)no momento de delegarem o direito de mestre da rede.
Passive station (slave devices) are polled
PLCPCPLC
Active stations, master devices
PROFIBUS
Figura 16.15: Comunicacao do Profibus DP.