Embed Size (px)
Citation preview

UNIVERSIDADE POSITIVO NÚCLEO DE CIÊNCIAS EXATAS E TECNOLÓGICAS
CURSO DE ENGENHARIA DA COMPUTAÇÃO
ALESSANDRO ZITTLAU SONCINI
RICARDO DUARTE RAMLOW
Estimativa de massa corporal por
bioimpedância elétrica
Trabalho de Conclusão de Curso. Prof M.Sc. José Carlos da Cunha Orientador
Curitiba, novembro de 2009.

UNIVERSIDADE POSITIVO Reitor: Prof. Oriovisto Guimarães Vice-Reitor: Prof. José Pio Martins Pró-Reitoria de Graduação: Prof. Renato Casagrande Diretor do Núcleo de Ciências Exatas e Tecnológicas: Prof. Marcos José Tozzi Coordenador do Curso de Engenharia da Computação: Prof. Edson Pedro Ferlin

TERMO DE APROVAÇÃO
Alessandro Zittlau Soncini
Ricardo Duarte Ramlow
Estimativa de massa corporal por bioimpedância elétrica
Monografia aprovada como requisito parcial à conclusão do curso Engenharia da Computação da Universidade Positivo, pela seguinte banca examinadora:
Prof. M. Sc. José Carlos da Cunha (Orientador) Prof. M. Sc. Maristela Maristela Regina Weinfurter Teixeira (Membro) Prof. M. Sc. Valfredo Pilla Jr. (Membro)
Curitiba, novembro de 2009

Agradecimentos
Gostaríamos de agradecer aos nossos pais, pela educação a qual nos foi dada, os valores a nós ensinados e pela oportunidade de estudo e conclusão dessa monografia e do projeto em si. Nossas irmãs que por mais que mesmo não tendo grande influência no projeto, ajudaram na construção de nosso caráter.
Também devemos grande gratidão à Janice de Fatima Gonçalves, pela idéia de desenvolver algo no sentido de auxiliar na mensuração da massa corporal em âmbito hospitalar.
Agradecemos aos voluntários, que em parte foram constituídos por familiares e agregados muito receptivos além dos congregantes da Comunidade Alcance, e dos alunos e alunas graduandos em fisioterapia pela Universidade Positivo, os quais aceitaram a nossa causa em prol da dificuldade semelhante que tiveram em encontrar pessoas dispostas a ajudar em vossos projetos.
Devemos gratidão a nossos amigos e colegas que estavam sempre lá em época de gripe suína compartilhando espirros e também populando a universidade em época de férias. Esses mesmos amigos que colocavam o dedo no projeto alheio a fim de auxiliar na resolução dos problemas, muitas vezes abandonando seus próprios projetos.
Agradecemos a Doutora Estela Iraci Rabito pelo fornecimento de material de consulta de seu próprio trabalho.
A todos aqueles que não foram citados, mas que ajudaram de alguma forma no desenvolvimento do projeto. A todos vocês, o nosso muito obrigado.

SUMÁRIO
LISTA DE ABREVIATURAS E SIGLAS............................................................ 8
LISTA DE FIGURAS.......................................................................................... 9
LISTA DE TABELAS ....................................................................................... 11
1 INTRODUÇÃO......................................................................................... 14
2 FUNDAMENTAÇÃO TEÓRICA............................................................... 15
2.1 Bioimpedância............................................................................................................................... 15
2.1.1 Histórico da bioimpedância.................................................................................................... 15
2.1.2 Impedância Elétrica................................................................................................................ 16
2.1.2.1 Impedância aplicada aos tecidos biológicos .................................................................. 16
2.1.3 Obtenção da bioimpedância ................................................................................................... 17
2.1.4 Variação das características elétricas em função da freqüência ............................................. 17
2.2 Filtros ............................................................................................................................................. 18
2.2.1 Filtro Passa-Baixa .................................................................................................................. 22
2.2.2 Filtros Passa-Faixa ................................................................................................................. 25
2.3 Amplificador de instrumentação ................................................................................................. 25
2.4 Bateria............................................................................................................................................ 27
2.5 Circuito oscilador.......................................................................................................................... 28
2.6 Detector de pico............................................................................................................................. 29
2.7 Microcontrolador.......................................................................................................................... 30
2.8 Reguladores de tensão .................................................................................................................. 31
2.9 Amplificadores operacionais ........................................................................................................ 33
2.10 Display ....................................................................................................................................... 36
3 ESPECIFICAÇÃO DO PROJETO ........................................................... 37
3.1 Funcionamento do sistema ........................................................................................................... 38
3.1.1 Módulo do Hardware ............................................................................................................. 39

3.1.2 Componentes do Hardware .................................................................................................... 39
3.1.2.1 Microcontrolador PIC.................................................................................................... 39
3.1.2.2 Gerador de ondas........................................................................................................... 40
3.1.2.3 Reguladores de tensão: .................................................................................................. 41
3.1.2.4 Filtros ............................................................................................................................ 42
3.1.2.5 Detector de pico............................................................................................................. 42
3.1.2.6 Display .......................................................................................................................... 43
3.1.2.7 Amplificador de instrumentação ................................................................................... 44
3.1.2.8 Baterias.......................................................................................................................... 45
4 DESENVOLVIMENTO E IMPLEMENTAÇÃO ......................................... 47
4.1 Hardware....................................................................................................................................... 47
4.1.1 Alimentação ........................................................................................................................... 47
4.1.2 Osciladores............................................................................................................................. 48
4.1.3 Aquisição ............................................................................................................................... 49
4.1.4 Amplificação .......................................................................................................................... 50
4.1.5 Filtros ..................................................................................................................................... 51
4.1.6 Detector de pico ..................................................................................................................... 53
4.1.7 Microcontrolador.................................................................................................................... 54
4.1.8 Display ................................................................................................................................... 55
4.1.9 Interface ................................................................................................................................. 55
4.2 Modulo do Software...................................................................................................................... 57
4.2.1 Diagrama de caso de uso:....................................................................................................... 58
4.2.2 Fluxogramas:.......................................................................................................................... 59
4.2.2.1 Menu inicial................................................................................................................... 59
4.2.2.2 Cadastro......................................................................................................................... 60
4.2.2.3 Alteração ....................................................................................................................... 61
4.2.2.4 Busca ............................................................................................................................. 62
4.2.2.5 Deleção.......................................................................................................................... 63
4.2.2.6 Gravação........................................................................................................................ 64
4.2.2.7 Medição ......................................................................................................................... 65
4.2.3 Bibliotecas.............................................................................................................................. 66
4.3 Tabela de componentes................................................................................................................. 66
5 VALIDAÇÃO E RESULTADOS............................................................... 67
5.1 Calibração...................................................................................................................................... 67
5.1.1 Teste ....................................................................................................................................... 67
5.1.2 Colocação dos eletrodos e medidas antropométricas ............................................................. 67
5.1.2.1 Tríceps........................................................................................................................... 67
5.1.2.2 Abdômen ....................................................................................................................... 69
5.1.2.3 Panturrilha ..................................................................................................................... 70
5.1.2.4 Acionamento do sistema................................................................................................ 71
5.1.2.5 Pesagem......................................................................................................................... 72
5.1.2.6 Materiais para medição.................................................................................................. 72
5.1.3 Tamanho da amostra .............................................................................................................. 72
5.1.4 Regressão linear ..................................................................................................................... 75
5.1.5 Cálculo da estimativa da massa corporal................................................................................ 76
5.2 Resultados encontrados ................................................................................................................ 80
6 CONCLUSÃO .......................................................................................... 84

REFERÊNCIAS BIBLIOGRÁFICAS................................................................ 85
ANEXO A - ARTIGO........................................................................................ 87
ANEXO B - MANUAL ...................................................................................... 91

LISTA DE ABREVIATURAS E SIGLAS
Hz – Hertz
Amp. Op – Amplificador Operacional
k – Kilo
M – Mega
EEPROM – Electrically-Erasable Programmable Read-Only Memory
B – Byte
A/D – Analógico/Digital
RAM – Random Access Memory
I/O – Input/Output (Entrada/Saída)
Vpp – Volts pico a pico
V – Volt
A – Ampère
CI – Circuito Integrado
µ – Micro
s – Segundos
dB – Decibel
CMRR – Common-Mode Rejection Ratio
MFB – Multiple Feedback
m – Mili
Ah – Ampére hora
n – Nano
F – Faraday
p – Pico

LISTA DE FIGURAS
Figura 2.1 – Medida Assimétrica – GRIMNES e MARTINSEN, 2000)............................................................ 16 Figura 2.2 – Corrente em tecidos para baixas e altas freqüências (THOMASSET, 1997) .............................. 18 Figura 2.3 – [A] Gráfico ideal de atenuação do filtro passa-baixa; [B] Gráfico de atenuação de um filtro
passa baixa....................................................................................................................................................... 19 Figura 2.4 – Gráfico de atenuação do filtro passa-alta................................................................................... 19 Figura 2.5 - Gráfico de atenuação do filtro passa-faixa.................................................................................. 20 Figura 2.6 - Gráfico de atenuação do filtro rejeita-faixa. ............................................................................... 20 Figura 2.7 – Gráfico da atenuação da função-resposta de diferentes tipos de filtro....................................... 21 Figura 2.8 – Exemplo de filtro VCVS............................................................................................................... 22 Figura 2.9 – Exemplo de filtro MFB ................................................................................................................ 22 Figura 2.10 - Passa-Baixa MFB de segunda ordem (Pertence, 2003)............................................................. 22 Figura 2.11 - Filtro Passa-Faixa (Pertence, 2003).......................................................................................... 25 Figura 2.12 – Exemplo de circuito de um amplificador de instrumentação .................................................... 26 Figura 2.13 – Exemplo de montagem do resistor para calculo do ganho........................................................ 26 Figura 2.14 – Exemplo de um sinal antes e depois do tratamento de um amplificador de instrumentação .... 27 Figura 2.16 – Circuito oscilador composto por capacitor e indutor ............................................................... 28 Figura 2.17 – Gráfico da relação sinal de entrada x sinal de saída de um detector de pico........................... 29 Figura 2.18 – Circuito detector de pico ........................................................................................................... 29 Figura 2.19 – Microcontrolador PIC18F452 .................................................................................................. 31 Figura 2.20 - Diagrama de blocos de regulador de tensão de três terminais.................................................. 32 Figura 2.21 - Regulador de tensão positiva da série 78XX.............................................................................. 32 Figura 2.22 - Regulador de tensão negativa da série 79XX............................................................................. 32 Figura 2.23 – representação de um amplificador operacional ........................................................................ 33 Figura 2.24 – Representação de um amplificador operacional com realimentação negativa......................... 35 Figura 2.25 – Display gráfico por pixels de 128 x 64. ..................................................................................... 36 Figura 3.1 - Diagrama de blocos do hardware................................................................................................ 37 Figura 3.1: Microcontrolador PIC18F452. ..................................................................................................... 40 Figura 3.3: Diagrama de blocos do MAX038. ................................................................................................ 41 Figura 3.4: Amplificador operacional LF351.................................................................................................. 42 Figura 3.5: Amplificador operacional duplo LF353........................................................................................ 43 Figura 3.6: Diagrama de blocos do display gráfico SSC12A64DNLW-E. ...................................................... 44 Figura 3.7: Amplificador de instrumentação INA118P. .................................................................................. 45 Figura 3.8: Baterias de 7,2V e 1300mAh. ........................................................................................................ 46 Figura 4.1: Esquema da montagem do circuito de alimentação do sistema. A) Mostra a configuração das
baterias para fornecimento de tensão negativa e positiva. B) Mostra a configuração dos CIs LM7805 e
LM7905 para e regulagem da tensão em 5V e -5V. ......................................................................................... 48 Figura 4.2: Esquema da montagem do MAX038 com a ligação dos eletrodos. A “Carga” representa a
bioimpedância da região corpórea a ser medida............................................................................................. 49 Figura 4.3: Circuito série equivalente formado entre a fonte e a impedância da região. ............................... 49 Figura 4.4: Esquemático da montagem do circuito de aquisição do sinal. A fonte osciladora representada
pela abreviação “OSC” representa o sinal senoidal gerado pelo oscilador. .................................................. 50 Figura 4.5: Esquemático da montagem da malha de amplificação do sistema. .............................................. 51 Figura 4.6: Filtro passa-baixa. ........................................................................................................................ 52 Figura 4.7: Gráfico da atenuação do filtro passa-baixa.................................................................................. 52 Figura 4.8: Esquemático da montagem do filtro passa-alta. ........................................................................... 52 Figura 4.9: Gráfico de atenuação do filtro passa-alta. ................................................................................... 53

Figura 4.10: Esquemático da montagem do detector de pico utilizando o amplificador operacional LF353. 54 Figura 4.11: Esquemático da montagem do microcontrolador, interface de botões e display. ....................... 56 Figura 4.12: Foto dos botões que constituem a interface com o usuário. ....................................................... 57 Figura 4.14: Diagrama de caso de uso. ........................................................................................................... 58 Figura 4.14: Fluxograma do menu inicial. ...................................................................................................... 59 Figura 4.15: Fluxograma da função de cadastro............................................................................................. 60 Figura 4.16: Fluxograma da função de alteração. .......................................................................................... 61 Figura 4.17: Fluxograma da função de busca do sistema. .............................................................................. 62 Figura 4.18: Fluxograma da função de deleção. ............................................................................................. 63 Figura 4.19: Fluxograma da função de gravação dos dados na EEPROM do microcontrolador. ................. 64 Figura 4.20: Fluxograma da função de medição da estimativa da massa corporal. ....................................... 65 Figura 5.1: Posicionamento dos eletrodos na região tricipital. 1) Posição do primeiro eletrodo. 2) Posição
do segundo eletrodo. ........................................................................................................................................ 68 Figura 5.2: Posição da fita antropométrica para a medição perimétrica do tríceps (PETROSKI, 1999)....... 68 Figura 5.3: Posicionamento dos eletrodos na região abdominal. 1) Posição do primeiro eletrodo. 2) Posição
do segundo eletrodo. ........................................................................................................................................ 69 Figura 5.4: Posição da fita antropométrica para medição da circunferência abdominal (PETROSKI, 1999).
.......................................................................................................................................................................... 70 Figura 5.5: Posicionamento dos eletrodos na região da panturrilha. 1) Posição do primeiro eletrodo. 2)
Posição do segundo eletrodo............................................................................................................................ 70 Figura 5.6: Posicionamento da fita antropométrica e posição do avaliado para a medição perimetral da
panturrilha (PETROSKI, 1999)........................................................................................................................ 71 Figura 5.7: Exemplificação do calculo da circunferência do tríceps por meio da equação da regressão,
juntamente com o calculo da estimativa da massa corporal utilizando-se desses valores............................... 80 Figura 5.8: Gráfico da relação entre a massa corporal real e a massa corporal estimado pelo cálculo
utilizado no aparelho, nos quais os parâmetros de entrada são os valores convertidos pelo conversor A/D. 81 Figura 5.9: Gráfico da relação entre a massa corporal real e a massa corporal estimado, nos quais os
parâmetros de entrada da equação da estimativa da massa corporal são os valores dos perímetros das
regiões medidas com a fita antropométrica. .................................................................................................... 81 Figura 5.10: Gráfico da relação entre a massa corporal estimado pelo aparelho, tendo como entrada os
valores do conversor A/D, a massa corporal real e a massa corporal estimado calculado, tendo como entrada
os valores das circunferências das regiões medidas com a fita antropométrica. ............................................ 83 Figura 5.11: Gráfico das relações dos percentuais de erro das duas formas da estimativa da massa corporal.
% Erro (aparelho) refere-se aos valores provenientes do conversor A/D para estimar a massa corporal
enquanto que o % Erro (calculado) refere-se aos valores das circunferências medidas com a fita
antropométrica. O eixo da esquerda representa a escala da massa corporal em quilogramas e a escala da
direita representa o % do erro. ........................................................................................................................ 83

LISTA DE TABELAS
Tabela 2.1 - Valores de a e b até ordem 8 para montagens de filtros Butterworth.......................................... 24 Tabela 2.2 - Valores de a e b até ordem 6 para montagens de filtros Chebyshev............................................ 24 Tabela 2.3 - CIs reguladores de tensão positiva série 78XX............................................................................ 33 Tabela 2.4 - CIs Reguladores de tensão negativa fixada série 79XX............................................................... 33 Tabela 4.1: Lista de componentes utilizados no projeto. ................................................................................. 66 Tabela 5.2: Média dos valores amostrados e calculados................................................................................. 72 Tabela 5.3: Estudo dos dados amostrados e calculados organizados em ordem crescente do peso. * Números
correspondentes ao valor convertido pelo aparelho variando entre 0 e 1024. ** medidas em centímetros
efetuadas usando a fita antropométrica. *** Peso em Kg. .............................................................................. 74 Tabela 5.4: Tabela com os 5 primeiros valores amostrados, relacionando o valor do conversor A/D, a
medida real do perímetro do músculo e o valor perimetral calculado do tríceps............................................ 75 Tabela 5.5: Tabela com os 5 primeiros valores amostrados, relacionando o valor do conversor A/D, a
medida real do perímetro do músculo e o valor perimetral calculado do abdômen. ....................................... 76 Tabela 5.6: Tabela com os 5 primeiros valores amostrados, relacionando o valor do conversor A/D, a
medida real do perímetro do músculo e o valor perimetral calculado da panturrilha. ................................... 76 Tabela 5.7: Relação entre peso real, peso calculado usando os parâmetros do conversor A/D e percentual de
erro junto com o percentual médio do erro...................................................................................................... 78 Tabela 5.8: Relação entre peso real, peso calculado usando as circunferências das regiões medidas com a
fita antropométrica e o percentual de erro de cada amostra junto com o percentual médio do erro. ............. 79

RESUMO
O projeto tem por objetivo auxiliar profissionais da área da saúde na estimativa de massa corporal de pacientes que se encontram na UTI, tanto para a alimentação correta do paciente quanto para a medicação do mesmo. O projeto foi desenvolvido com base em uma dissertação de mestrado que consiste na estimativa de peso a partir dos valores da circunferência de três músculos específicos: tríceps, abdômen e panturrilha.
A partir dessa dissertação, foi utilizado o conceito de bioimpedância, sendo este aplicado por meio de pares de eletrodos conectados nos músculos citados, gerando assim um circuito equivalente e, após uma calibração com alguns testes, foi possível estimar a massa corporal do paciente com um erro de 10% do seu peso real.
O dispositivo é uma caixa de metal, seguindo o principio de gaiola de Faraday, ou seja, os circuitos do dispositivo não sofrerão interferência de ondas eletromagnéticas ou qualquer outro tipo de interferência externa. Na caixa estão conectados três pares de fios que serão conectados aos eletrodos para que a mensuração seja realizada. Na parte superior do dispositivo existe um display gráfico responsável por mostrar o menu do sistema e dados obtidos da medida e o cadastro do paciente que pode ser realizado e em seguida realizada a medição ou apenas a visualização dos cadastros já realizados. O dispositivo possui também um sistema de navegação por meio de cinco botões que possuem função de acordo com o que é mostrado no display.
O software é responsável pela navegação do menu na parte de medição e de cadastro do paciente, além claro de realizar a ponderação e aplicação da fórmula a partir da qual o sistema foi desenvolvido. Ele realiza o cálculo com as variáveis obtidas na medição e mostra no display.
Palavras chave: bioimpedância, estimativa de peso, circunferência do músculo.
ABSTRACT
The Project has the objective to help health professionals with the weight estimate of patients that are in the ICU for much the correct source of the patient that medicaid him. The project was developed based on a Master Thesis that is about estimate weight with values of the circumference of three specific muscles: Triceps, Abdomen and Calf.
Based on this thesis, was used the concept of bioimpedance, that is applied through pairs electrodes connected in the specificated muscles, creating an equivalent circuit and, after an calibration with some tests, it already possible estimate the weight of the patient with an error of 10% in relation with the patient real weight.
The device is a metal case, according with the Faraday’s cage, ie the circuits of the dispositive will not be interfered for electromagnetic waves or another type of extern interference. In the box are connected three wired pairs that will plugged at electrodes for measurement begins. Upon the dispositive, it has an graphic display that show the menu of the system and all data from the measurement and the register of the patient that can be done after the register and all the information of the register patients can be viewed. The dispositive has an navigator system with five buttons that have an specific function according of what shows up in display.
The software is responsible by the navigation of the menu, the register and the measurement of the patient and the calculation and application of the equation. It performs the calculation with all the variables obtained in measurement e shows up on display.
Key words: bioimpedance, weight estimate, muscles circumference.

14
1 INTRODUÇÃO
Sabe-se, a partir de pesquisas, que a bioimpedância é de grande ajuda para todas as áreas médicas, sendo cada vez mais utilizada como uma solução em diversos problemas e alternativas mais eficientes em muitos tratamentos. O histórico da bioimpedância se inicia com a descoberta da dispersão de corrente B (beta) correspondente ao comportamento elétrico de tecidos em médias freqüências. Essa descoberta foi realizada por Hoeber, em 1911. A partir de então, muitos outros fatores influenciaram para o conceito e utilização da bioimpedância, dentre os mais importantes, pode-se citar Nyoebr, em 1940, com a noção de resistividade do sangue (ohm.m), a atividade elétrica do cérebro, em 1960 por Thomasset através da Lei de Ohm que se pode determinar a resistência do tecido de todo o corpo.
O objetivo deste projeto foi o de desenvolver um sistema capaz de estimar a massa corporal de um determinado paciente que se encontra na UTI. O dispositivo proposto foi idealizado obtendo-se informações a respeito da forma da estimativa da massa corporal dos pacientes acamados em hospitais. Utiliza-se principalmente a antropometria para a estimativa, assim como camas-balança, entretanto o método mais utilizado é o menos parametrizado, sendo a massa corpórea do paciente estimada a partir da experiência profissional em que o paciente é avaliado somente por contato visual.
O conceito de bioimpedância utilizado neste projeto foi adaptado a uma dissertação de mestrado elaborada pela Doutora Estela Iraci Rabito. A dissertação em questão consiste em estimar a massa corporal de uma determinada pessoa utilizando-se dos valores da circunferência tricipital, abdominal e da panturrilha. Por meio desses dados, utilizando-se da equação de regressão linear múltipla conforme a equação 1.1, é obtida a massa corporal.
Peso estimado(Kg) = 0.5759*(AC)+0.5263*(AbC)+1.2452*(CC)-4.8689*(S)-32.9241 (1.1)
A equação 1.1 é a equação da estimativa da massa corporal em Kg. (AC) = circunferência tricipital, medido em centímetros. (AbC) = circunferência abdominal, medido em centímetros. (CC) = circunferência da panturrilha, medida em centímetros. (S) = sexo do avaliado, sendo 1 para masculino e 2 para feminino (RABITO, 2008).
O funcionamento do projeto consiste na adaptação do conceito de bioimpedância à dissertação de mestrado. São colocados na pessoa três pares de eletrodos, dispostos nos músculos acima especificados. Estes eletrodos são responsáveis por juntamente com o músculo realizar um circuito equivalente de modo que um determinado valor seja recebido pelo sistema. O valor recebido é ponderado, seguindo uma calibração para que se aproxime do valor de circunferência do músculo e então ponderado de acordo com a equação da estimativa da massa corporal formulada na dissertação.

15
2 FUNDAMENTAÇÃO TEÓRICA
Neste capítulo é apresentada a teoria necessária para o entendimento do projeto. São abordadas todas as áreas, desde a parte médica até a parte de engenharia.
2.1 Bioimpedância A bioimpedância, também chamada de biorresistência, consiste na resposta ou na
capacidade do organismo em resistir (atrasar) a passagem de uma corrente elétrica (alternada). A bioimpedância é injetada no organismo do paciente e a passagem dos sinais elétricos pela gordura, tecido magro e pela água retorna uma medida confiável e precisa da quantidade de cada um destes componentes que formam a massa corporal total.
2.1.1 Histórico da bioimpedância
A bioimpedância é uma aplicação da área médica que cresce a cada dia. Seu estudo iniciou-se por volta de 1911 quando Hoeber descobriu a dispersão de corrente B que consiste no comportamento elétrico de tecidos em freqüências de caráter médio. Em 1940, um estudo realizado por Nyober, apresentou como resultado a resistividade do sangue, medida em (Ohm.m).
Com a crescente utilização desses conceitos e a evolução da pesquisa na área de biomédica, Thomasset utilizou-se da Lei de Ohm, para determinar a resistência do tecido cerebral e, conseqüentemente a resistência de todo o corpo, ao mesmo tempo em que observava a atividade elétrica do cérebro. (THOMASSET, 1997).
Segundo Geddes e Baker (1989), a descoberta entre a bioimpedância e a quantidade total de água no corpo foi encontrada por Thomasset, no ano de 1962. A partir dessa descoberta, diversos outros estudos puderam ser realizados e desenvolvidos chegando até os dias de hoje, sendo a bioimpedância elétrica (BIA) utilizada para diversos tipos de medições.
De acordo com o posicionamento dos eletrodos, a impedância entre eles pode ser capaz de refletir valores proporcionais ao fluxo sanguíneo, atividade cardíaca, freqüência respiratória, volume renal, estado da bexiga, contrações uterinas, atividades nervosas e pressão arterial (GEDDES e BAKER, 1989).

16
2.1.2 Impedância Elétrica
A impedância elétrica ou simplesmente impedância, em circuitos elétricos, é a relação entre o valor da diferença de potencial entre dois pontos do circuito em consideração, e o valor da corrente resultante no circuito. É expresso por um fasor (um vetor bidimensional utilizado para representar uma onda em movimento harmônico simples), que na forma de número complexo possui uma parte real, equivalente à resistência R, e uma parte imaginária, dada pela reatância X.
Os circuitos elétricos, quando formados pela associação de resistores, capacitores e indutores, a oposição total a corrente é dada pela impedância. Ela é expressa em ohms, e designada pelo símbolo Z. Um circuito em geral possuirá uma resposta em freqüência, no qual a impedância varia de acordo com a freqüência. Para um sinal genérico, partindo para uma decomposição em ondas senoidais (como por transformadas de Fourier), a resposta do circuito será a soma das respostas de cada parcela senoidal. Esta hipótese somente é válida para circuitos lineares.
2.1.2.1 Impedância aplicada aos tecidos biológicos
Em metais puros, o movimento dos elétrons corresponde ao valor da corrente. Nas soluções, como por exemplo, ácidos e sais, são os íons os responsáveis por realizar o transporte de cargas elétricas. Entretanto, estas substâncias podem ser influenciadas por fatores externos como temperatura e concentração. A corrente dos organismos é predominantemente iônica, tanto dentro quanto fora das células (GEDDES e BAKER, 1989). Caso seja aplicada uma corrente contínua nestas soluções, haverá o efeito de polarização, onde uma camada de íons é formada em cada eletrodo, dificultando a passagem de corrente. Portanto, somente sinais alternados podem ser utilizados na bioimpedanciometria (GRIMNES e MARTINSEN, 2000).
Enquanto os músculos (que são os responsáveis pela maior parte dos valores que são medidos em grandeza de impedância) e o sangue são bons condutores, a pele, gordura e ossos atuam como isolantes. Esses tecidos isolados, podem mudar de característica elétrica de acordo com o posicionamento do eletrodo, conforme a Figura 2.1. Na Figura 2.1, para o mesmo órgão, encontra-se uma menor resistência usando os eletrodos 3 e 4, do que através dos eletrodos 1 e 2.
Figura 2.1 – Medida Assimétrica (GRIMNES e MARTINSEN, 2000).

17
2.1.3 Obtenção da bioimpedância
Os dados obtidos por meio da análise da bioimpedância elétrica é a tensão produzida com a passagem de uma corrente de amplitude constante na região do corpo humano em que o estudo esteja sendo realizado. Mesmo com variações dos estudos realizados, as ondas senoidais são as mais utilizadas na área de bioimpedância, devido a sua facilidade na geração do sinal e no tratamento das respectivas informações. Conforme a Lei de Ohm, a impedância é obtida através da razão entre a tensão medida e a corrente aplicada, conforme a equação 2.1:
V = Z*I
Onde,
V é a tensão, V (Volt);
Z é a impedância, O (Ohm);
I é a corrente elétrica, A (Ampère).
Para obter-se a bioimpedância deve-se levar em consideração um fator importante que, é o posicionamento dos eletrodos, pois eles de acordo com sua posição podem obter valores de diversos órgãos, fluxo sanguíneo ou atividade cardíaca por exemplo. A vantagem dos eletrodos é que, ao contrário dos transdutores, eles não sofrem influencias externas (temperatura e pressão) e devido ao tamanho físico, seu funcionamento não interfere em eventos fisiológicos.
2.1.4 Variação das características elétricas em função da freqüência
Os tecidos são formados por várias células semelhantes entre si ligadas e envoltas por meio de um líquido eletrolítico. Cada célula é revestida por uma membrana que é composta por lipídios, com características isolantes e proteínas, responsáveis pelo transporte de água, íons e outras substâncias químicas que atravessam sua estrutura por osmose. Esse comportamento é semelhante ao de um capacitor.
Em correntes alternadas de baixa freqüência, consideradas as freqüências até 5 kHz, as células apresentam alta reatância capacitiva e, por isto, em baixas freqüências a corrente apenas tangencia o fluído extracelular do órgão, contornando as células. Ao contrário, nas altas freqüências ao corrente atravessa essa membrana.
A figura 2.2, mostra a corrente quando aplicada em um tecido, para baixas freqüências (BF) e altas freqüências (AF):
(2.1)

18
Figura 2.2 – Corrente em tecidos para baixas e altas freqüências (THOMASSET, 1997)
2.2 Filtros O objetivo na implementação dos filtros é limpar o sinal que passa pelo sistema. Todo
sinal gerado possui um ruído que interfere diretamente na medida realizada em cima do mesmo, sendo assim, é de fundamental importância que projetos que trabalhem com sinais possuam esse tipo de tratamento de sinal. Os filtros podem ser classificados a partir de três características:
• Quanto à função executada;
• Quanto à função-resposta utilizada.
• Quanto à tecnologia empregada;
A primeira característica permite a seguinte classificação:
• Passa-Baixa (PB): apenas freqüências inferiores a um valor de freqüência específico pré-determinado (fc – Freqüência de corte) não recebem atenuação. As demais são atenuadas.

19
Figura 2.3 – [A] Gráfico ideal de atenuação do filtro passa-baixa; [B] Gráfico de atenuação de um filtro passa baixa
Fonte: Adaptado de (NOVAELETRONICA, 2009)
• Passa-Alta (PA): apenas freqüências superiores a um valor de freqüência específico pré-determinado (fc – Freqüência de corte) não recebem atenuação. As demais são atenuadas.
Figura 2.4 – Gráfico de atenuação do filtro passa-alta.
Fonte: Adaptado de (NOVAELETRONICA, 2009)
• Passa-Faixa (PF): são estabelecidas duas freqüências fc1 e fc2 que representam a freqüência de corte inferior e superior, respectivamente, onde apenas as freqüências contidas nessa faixa passam pelo filtro. As demais são atenuadas.

20
Figura 2.5 - Gráfico de atenuação do filtro passa-faixa.
Fonte: Adaptado de (NOVAELETRONICA, 2009)
• Rejeita-Faixa (RF): são estabelecidas duas freqüências fc1 e fc2 que representam a freqüência de corte inferior e superior, respectivamente, onde apenas as freqüências contidas fora dessa faixa passam pelo filtro. As demais são atenuadas.
Figura 2.6 - Gráfico de atenuação do filtro rejeita-faixa.
Fonte: Adaptado de (NOVAELETRONICA, 2009)
A segunda característica refere-se à função-resposta, o que classifica o filtro em:
• Butterworth
• Chebyshev
• Bessel
• Entre outros.

21
Figura 2.7 – Gráfico da atenuação da função-resposta de diferentes tipos de filtro.
Fonte: Adaptado de (CIRCUITSTODAY, 2009)
A terceira característica para classificação é quando a tecnologia utilizada para a montagem do filtro. Sendo assim, os filtros podem ser:
• Filtros Passivos: são construídos apenas com elementos passivos, tais como: resistores, capacitores e indutores.
• Filtros Ativos: são construídos com elementos passivos associados a elementos ativos, tais como válvulas, transistores ou amplificadores operacionais.
• Filtros Digitais: utilizam componentes digitais, onde o sinal é convertido por um conversor analógico-digital, filtrado e reconvertido para analógico.
Os filtros podem ser de estrutura VCVS ou MFB. A diferença entre elas é quanto ao sistema re alimentação delas. A estrutura MFB (multiple-feedback) é uma estrutura que possui realimentação múltipla. A VCVS (voltage-controlled voltage source) é uma estrutura de fonte de tensão controlada por tensão.
Para ambos os casos, sua utilização é definida de acordo com a necessidade do projeto. Dentre suas vantagens, pode-se citar a baixa impedância de saída, estabilidade, facilidade de ajuste de freqüência, facilidade de ajustes com relação ao ganho e a não obrigatoriedade de muitos componentes externos.
Dentre as desvantagens, cabe citar que o valor máximo da ordem dos filtros é 10.
VCVS – Fonte de tensão controlada por tensão

22
Figura 2.8 – Exemplo de filtro VCVS
MFB – Realimentação múltipla.
Figura 2.9 – Exemplo de filtro MFB
2.2.1 Filtro Passa-Baixa
A Figura 2.10 mostra um filtro Passa-Baixa de segunda ordem utilizando a estrutura MFB.
Figura 2.10 - Passa-Baixa MFB de segunda ordem (PERTENCE, 2003).
Os resistores R1 e R2 controlam o ganho do filtro, conforme a equação 2.2. Essa estrutura possui fase invertida, o que explica o sinal negativo na fórmula do ganho:

23
Os cálculos de R1, R2, R3, R4, C1 e C2 estão indicados nas equações 2.3, 2.4, 2.5, 2.6 e 2.7, respectivamente:
Por definição, o valor de C2 é pré-determinado. Este valor escolhido é um em geral comercial, pois é mais simples realizar uma associação de resistores para se chegar ao valor calculado ao invés de uma associação de capacitores. A partir da escolha de C2 os demais valores dos outros componentes podem ser calculados seguindo as fórmulas acima apresentadas.
As variáveis a e b são valores pré-determinados de acordo com a tabela x, onde n corresponde à ordem do filtro. Para a montagem de filtros Butterworth, utiliza-se os valores da Tabela 2.1.
(2.3)
(2.4)
(2.5)
(2.6)
(2.7)
(2.2)

24
Tabela 2.1 - Valores de a e b até ordem 8 para montagens de filtros Butterworth
Quando a montagem é do tipo Chebyshev, utilizam-se os valores da Tabela 2.2. PR corresponde às amplitudes dos RIPPLES.
Tabela 2.2 - Valores de a e b até ordem 6 para montagens de filtros Chebyshev

25
2.2.2 Filtros Passa-Faixa
Os filtros Passa-Faixa, podem ser implementados utilizando-se de ambas as estruturas MFB ou VCVS e podem ser ativos ou passivos variando, portanto, de acordo com a necessidade do projeto.
Para projetar filtros Passa-Faixa, em geral utiliza-se uma associação em cascata de filtros Passa-Baixa e Passa-Alta. A Figura 2.11 ilustra essa forma de elaboração do filtro. (Pertence, 2003)
Figura 2.11 - Filtro Passa-Faixa (PERTENCE, 2003).
Em um filtro Passa-Faixa, apenas freqüências entre a fc1 e fc2 que são as freqüências de corte inferior e superior, respectivamente, são permitidas a passagem. Todas as freqüências fora dessa faixa são atenuadas. Para determinar a freqüência de corte central do filtro, f0, utilizamos a equação 2.8:
2.3 Amplificador de instrumentação Os amplificadores de instrumentação são freqüentemente utilizados em diversas
aplicações na área de processamento de sinais. Essa grande utilização se dá devido ao fato desses amplificadores possuírem como detalhes principais, dentre outros: uma alta taxa de rejeição a sinais de modo comum (CMRR), baixa tensão de offset e baixo ruído. Essas características permitem que eles sejam facilmente utilizados em sistemas de aquisição de dados, sistemas industriais e sistemas biomédicos.
É um dos mais úteis e versáteis circuitos implementáveis, pois utiliza-se apenas de amplificadores operacionais e resistores. É conhecido basicamente por ser uma extensão do amplificador diferencial que amplifica a diferença entre os sinais de entrada, ou seja, ele aumenta a diferença dos sinais de tensão superpostos a grandes tensões de modo comum. Devido às tensões de modo comum serem iguais, elas se anulam.
(2.8)

26
Figura 2.12 – Exemplo de circuito de um amplificador de instrumentação
Fonte: Adaptado de (EE.PUCRS, 2009)
O Amplificador de instrumentação possui três características
1. O ganho de tensão é ajustado por um resistor externo RG.
Figura 2.13 – Exemplo de montagem do resistor para calculo do ganho
Fonte: Adaptado de (EE.PUCRS, 2009)
Equação 2.9 – Fórmula para o cálculo de ganho do Amplificador de instrumentação
2. A impedância de entrada dos dois terminais é muito alta e não varia quando o ganho é ajustado.
3. A tensão de saída vo depende da diferença entre as entradas v1 e v2 e não da tensão comum entre elas (tensão de modo comum).
(2.9)

27
Figura 2.14 – Exemplo de um sinal antes e depois do tratamento de um amplificador de instrumentação
Fonte: Adaptado de (EE.PUCRS, 2009)
2.4 Bateria Uma bateria é um dispositivo composto por elementos eletroquímicos que
são transformados em energia elétrica. Basicamente, ocorrem dois processos químicos opostos, a redução e a oxidação. Enquanto um dos materiais químicos perde elétrons, ou seja, vai oxidando, o outro recebe elétrons. Esse processo é chamado de REDOX. Se a bateria é colocada na tomada, a fim de que a mesma seja recarregada, o carregador inverte o processo acima, ou seja, ele reduz o material oxidado. Isto se dá devido à tecnologia utilizada em baterias que é capaz de realizar essa inversão do processo e conseqüentemente realizar o mesmo processo diversas vezes, o que não é possível em uma pilha comum, por exemplo.
Principalmente por se tratar de um processo químico, à medida que o mesmo processo é repetido diversas vezes, a capacidade total da bateria é reduzida e ela perde potência devido a não mais conseguir perder e ganhar elétrons como antes.
A capacidade de uma bateria é expressa em ampère-hora que, representa a quantidade de carga que ela possui. Os elementos químicos que a compõe que também são chamados de eletrólitos determinam a capacidade da bateria, ou seja, são eles que determinam o quanto à bateria dura.
Um ampère-hora equivale a 3600 coulombs. Uma bateria que fornece 10 ampères (10A) de corrente (fluxo) por hora, ela possui uma capacidade de 10 Ah, considerando-se que a descarga dessa carga é de 1h (C1). Se ela for capaz de fornecer 10 A por 100 horas, sua capacidade é de 100 Ah, considerando-se a descarga de 100h (C100).
Sendo assim, podemos dizer que quanto maior a capacidade de uma bateria, maior é a sua vida útil, considerando-se as condições normais de descargas que são: temperatura, valor da corrente elétrica, a tensão máxima que a bateria fornece, entre outros.
Ao descarregar uma bateria em correntes menores, a energia que a mesma fornece é mais eficiente do que quando a mesma é solicitada utilizando-se correntes maiores. Esse processo que acarreta uma maior eficiência da bateria é conhecido como lei de Peukert.

28
Uma bateria normal possui duas saídas: uma referência e uma positiva. Quando existe a necessidade de utilização de uma tensão negativa, existem dois métodos para utilização. O primeiro consiste em um circuito inversor de tensão e o segundo consiste na ligação de duas baterias iguais em série. Para realizar essa ligação em série, basta liga a referência de uma das baterias na saída positiva da segunda. Tem-se assim, a partir das outras duas saídas uma positiva e uma negativa.
2.5 Circuito oscilador Os circuitos osciladores têm a função de gerar ondas ajustáveis em amplitude, forma
e freqüência. São responsáveis pela geração do sinal utilizado para um determinado objetivo. Os osciladores são amplamente utilizados no cotidiano como, por exemplo, um transmissor de rádio AM usa um oscilador para estabelecer a onda portadora da estação, assim como detectores de metal e até armas de defesa pessoal também se utilizam de osciladores como principio básico de funcionamento.
Os osciladores mecânicos necessitam da transformação de energia potencial em energia cinética que, é o princípio de funcionamento de um pêndulo. Os osciladores eletrônicos, ou seja, os circuitos integrados, também precisam passar de uma forma de energia para outra. Essa transformação, porém se dá utilizando-se de maneira mais simples apenas um capacitor e um indutor juntos. Devido a ambos os componentes armazenarem energia, o primeiro a armazena na forma de um campo eletrostático, enquanto o segundo utiliza uma forma de campo magnético.
Temos o seguinte circuito:
Figura 2.16 – Circuito oscilador composto por capacitor e indutor
Fonte: Adaptado de (HOWSTUFFWORKS, 2009)
Se você carregar ao capacitor com uma bateria e, então, inserir o indutor dentro do circuito, verifica-se que:
O capacitor começará a descarregar através do indutor, que produzirá um campo magnético;
Assim que o capacitor se descarregar, o indutor tentará manter o fluxo de corrente no circuito carregando a outra placa do capacitor;
Quando o campo do indutor é nulo, o capacitor foi recarregado, mas com polaridade oposta. Sendo assim, ele se descarregará novamente através do indutor.

29
A oscilação continua até que o circuito fique sem energia devido à resistência no fio. Ele oscilará em uma freqüência que depende dos valores do indutor e do capacitor.
Entendendo a necessidade de osciladores nos dispositivos eletrônicos, algumas empresas desenvolveram circuitos integrados que realizam a mesma função do circuito na figura 2.16. Esses circuitos possuem a necessidade de outros componentes externos, entretanto, essa necessidade se dá devido à configuração do sinal de saída desejado.
Alguns circuitos osciladores possuem capacidade de geral três tipos diferentes de ondas - senoidal, triangular e quadrada – uma vasta faixa de freqüência funcional e sua utilização é em maior quantidade, em relação a circuitos convencionais, devido ao espaço que utilizam, pois um circuito integrado mesmo com os componentes externos, ocupa uma menor quantidade de espaço na montagem, menor consumo de energia e a possibilidade de problemas eletrônicos comuns acontecerem é mais reduzida, gerando uma maior garantia de vida útil estendida do equipamento.
2.6 Detector de pico Um detector de pico é utilizado sempre que houver a necessidade de manter-
se a tensão de pico da entrada (Vi) na saída, ou seja, Vo = Vpico. Para que este objetivo seja alcançado, o circuito em questão acompanha a tensão de entrada até que a tensão de pico seja alcançada. Assim que esta tensão é detectada, o valor é mantido indefinidamente (idealmente), até que um novo valor de pico superior ao primeiro seja detectado pelo circuito e, caso isto aconteça, o valor de saída é atualizado para o novo valor.
A figura 2.17 demonstra de maneira gráfica a saída (vo) de um detector de pico de acordo com o sinal de entrada (Vi):
Figura 2.17 – Gráfico da relação sinal de entrada x sinal de saída de um detector de pico
A figura 2.18 apresenta um circuito básico de um detector de pico. O capacitor é carregado quando S1 está fechado e, descarregado quando S2 está fechado.
Figura 2.18 – Circuito detector de pico

30
2.7 Microcontrolador Os microcontroladores são circuitos integrados conhecidos por chips que possuem em
seu interior outros circuitos integrados, como por exemplo uma memória e um conversor A/D, entre outros.
O PIC18F452, fabricado com a tecnologia CMOS pela Microchip dispõe de:
Processador RISC (Reduce Instrution Set Computer)
* 75 instruções de 18 bits;
* Freqüência máxima de funcionamento - 40Mhz (freqüência do cristal);
* Cada ciclo de relógio corresponde à freqüência do cristal / 4 = 10Mhz, efetuando a cada segundo 10 MIPS (milhões de instruções por segundo);
* Tempo de execução das instruções normais: 1 ciclo de relógio;
* Tempo de execução das instruções de salto condicional (decfsz, incfsz, btfss, btfsc), quando a executada a instrução de salto: 2 ciclos de relógio;
* Tempo de execução de instruções de salto incondicional (goto): 2 ciclos de relógio.
As seguintes características da memória;
* Memória de programa (FLASH) de 32K (words) de 14 bits;
* Cada instrução é codificada numa word de 14 bits;
* Memória de dados RAM de 1536 bytes;
* Memória de dados EEPROM de 256 bytes;
* Stack de 31 níveis.
As seguintes características de periféricos:
* 33 pinos de entrada/saída, agrupadas em 5 portas (PORTA com 6 pinos, PORTB, PORTC e PORTD com 8 pinos e PORTE com 3 pinos);
* 4 timers, 2 de 8 bits(Timer0 e Timer 2) e 1 de 16 bits (Timer1);
* Conversor analógico/digital de 10 bits, com 8 canais de entrada analógica;
* USART (Universal Synchronous Asynchronous Receiver Transmitter);

31
* 13 tipos de interrupções.
Figura 2.19 – Microcontrolador PIC18F452
Fonte: Adaptado de (MICROCHIP, 2009)
2.8 Reguladores de tensão
Equipamentos eletrônicos possuem uma característica básica que é a necessidade de uma fonte de alimentação. Sendo assim, é explícita a necessidade e a importância de um regulador de tensão com circuito integrado para o bom funcionamento do equipamento, evitando danos aos circuitos internos e demais componentes do próprio aparelho.
A função deste circuito integrado regulador de tensão é receber uma determinada tensão corrente-contínua de entrada e gerar uma tensão corrente-contínua de saída com uma boa estabilidade e principalmente sem as ondulações da fonte de alimentação. Ao conectar um aparelho qualquer a uma bateria, por exemplo, assim que o mesmo seja ligado e devido ao consumo aumentar, a tendência é a de que a tensão baixe. Neste caso, o regulador de tensão atua de modo a garantir que a tensão de saída seja sempre a mesma dentro de uma variação esperada, ou seja, com a diminuição da tensão de entrada, ele irá aumentar a tensão de saída ou o contrário caso o consumo diminua e a tensão aumente caso o aparelho esteja desligado.
Muitas vezes, o regulador de tensão possui um limite de corrente a fim de proteger não apenas o dispositivo, mas também o próprio regulador de tensão contra excessos e ondulações possíveis.

32
Os reguladores de tensão que produzem uma tensão regulada positiva para uma faixa fixa de corrente de carga estão representados esquematicamente na fig.x. O regulador de tensão possui uma tensão não regulada, Vin, aplicada a um termina. É realizada a entrega de uma tensão de saída regulada, V0, em um segundo terminal, e possui ainda um terceiro terminal conectado à terra. Para uma unidade CI particular, as especificações do dispositivo ou uma faixa de tensão sobre a qual a tensão de entrada pode variar para manter a tensão de saída regulada V0 ou ainda para uma faixa de corrente de carga, I0, deve-se manter uma diferença de tensão de saída-entrada, o que significa que a tensão de entrada variante deve sempre ser mantida suficientemente grande para manter a queda de tensão nos terminais do CI a fim de permitir a operação adequada do circuito interno.
Figura 2.20 - Diagrama de blocos de regulador de tensão de três terminais.
Fonte: Adaptado de (CEFETERIO, 2009)
Um grupo de reguladores de tensão positiva é a série 78, que produz tensões fixadas entre 5V e 24V. A figura 2.20 mostra como muitos desses reguladores são conectados. A entrada Vin, é uma tensão corrente-contínua não regulada retificada e filtrada, aplicada ao pino 1 do regulador CI. Os capacitores conectados da entrada ou saída para o terra ajudam a manter a tensão cc e, além disso, filtrar qualquer variação de tensão de freqüência alta. A tensão de saída do pino 2 é então disponível para a conexão da carga. O pino 3 é a referência do circuito CI ou terra.
Figura 2.21 - Regulador de tensão positiva da série 78XX.
Fonte: Adaptado de (CEFETERIO, 2009)
Figura 2.22 - Regulador de tensão negativa da série 79XX.
Fonte: Adaptado de (CEFETERIO, 2009)

33
Para a seleção da tensão de saída regulada desejada, deve-se ter em mente que os dois dígitos após o prefixo 78XX indicam a tensão de saída do regulador. A tabela 2.3 dá alguns dados típicos. Na série 79(ver figura 2.22 – anterior a este texto) são CIs reguladores de tensão negativa, que constituem uma série de CIs semelhante à série 78, porém que operam com tensões negativas produzindo uma tensão de saída negativa regulada. A tabela 2.4 apresenta a série 79XX dos reguladores de tensão negativa e suas tensões reguladas correspondentes.
Tabela 2.3 - CIs reguladores de tensão positiva série 78XX.
Fonte: Adaptado de (CEFETERIO, 2009)
Tabela 2.4 - CIs Reguladores de tensão negativa fixada série 79XX.
Fonte: Adaptado de (CEFETERIO, 2009)
2.9 Amplificadores operacionais São componentes eletrônicos largamente utilizados em instrumentação analógica,
pois permitem diversos tipos de operações lógicas e matemáticas e recentemente, passaram a ser implementados nos circuitos integrados.
Um amplificador operacional é representado na figura 2.23:
Figura 2.23 – representação de um amplificador operacional
Fonte: Adaptado de (MSPC, 2009)

34
De acordo com a figura 2.21, temos:
• uma saída vo.
• uma entrada não inversora (+) v1.
• uma entrada inversora ( ) v2.
A relação entre entradas e saída é:
vo = a ( v1 v2 )
O “a” na equação 2.10 representa o ganho do amplificador. Sendo assim, temos um
amplificador linear, cuja tensão de saída é proporcional à diferença entre as tensões
aplicadas nas entradas.
Um amplificador operacional possui muitas características, das quais a grande maioria
deveria ser ou infinita ou zero. Devido ao fato de isto não ser possível, os valores quanto
mais próximos do ideal, classificam a qualidade do componente. Dentre as características,
temos:
Ganho (a): no ideal, seria infinito. Na prática, valores tão altos como 200000 são
possíveis.
Impedância de entrada: infinita no ideal. Na prática, valores como 10 M são
possíveis (impedância de entrada infinita seria o amplificador não consumir corrente
pelas entradas).
Impedância de saída: nula no ideal. Valores como 75 são encontrados na prática,
significando ausência de queda de tensão interna na saída.
Resposta de freqüência: de 0 ao infinito no ideal. Na prática escolhem-se tipos com
resposta bastante acima da freqüência na qual irão operar para dar uma aproximação
do ideal.
Relação de rejeição em modo comum: conhecido por CMRR (common mode rejection
ratio). Conforme igualdade da equação 2.9 do tópico anterior, um amplificador operacional
ideal tem saída nula se as entradas são iguais. Nos circuitos práticos, há sempre uma
pequena saída com as entradas iguais, condição esta chamada de modo comum. A condição
usual, isto é, com tensões de entrada diferentes, é denominado modo diferencial. E o
parâmetro é definido pela relação, expressa em decibéis, dos ganhos em ambas as
condições:
ganho no modo diferencial
CMRR = 20 log
ganho no modo comum
(2.10)

35
Um circuito ideal teria CMRR infinito.
No circuito da Figura 2.24, uma tensão Vi é aplicada à entrada inversora através de uma resistência R1, e esta última recebe uma realimentação da saída através de R2. A entrada não inversora é levada a um potencial nulo.
Considerando que a impedância das entradas é muito alta, pode-se supor que nenhuma corrente será drenada pela entrada inversora. Assim, segundo a lei das correntes de Kirchhoff aplicada ao nó S, a corrente em R1 deve ser igual à corrente em R2:
Figura 2.24 – Representação de um amplificador operacional com realimentação negativa.
Fonte: Adaptado de (MSPC, 2009)
Sendo assim, temos que:
i (vi v2) / R1 = (v2 vo) / R2.
ii R2 (vi v2) = R1 (v2 vo).
Da relação básica, temos que:
iii vo = a (v1 v2) = a v2 , pois v1=0. Substituindo na anterior,
iv R2vi + R2vo/a = R1vo/a R1vo.
Desde que o ganho (a) é muito alto, pode-se considerar nulas as parcelas que têm esse valor como divisor e, portanto, R2 vi = R1 vo ou
R2
vo = R1
vi
(2.11)

36
Ou seja, a tensão de saída é igual ao inverso da tensão de entrada multiplicada pelo fator dado pela relação entre R2 e R1.
2.10 Display Os displays gráficos são muito utilizados principalmente devido ao fato de eles
funcionarem por pixels ao invés de caracteres definidos, ou seja, pode ser formado qualquer caractere de qualquer fonte ou ainda um desenho de diferentes tamanhos. Os displays mais utilizados são os conforme a figura 2.25, composto de 128 x 64 pixels, ou seja, possui comprimento de 128 pixels e altura de 64 pixels.
Figura 2.25 – Display gráfico por pixels de 128 x 64.
O principio de todos os displays LCD’s que funcionam a partir de pixels são os mesmos, ou seja, todos possuem um controlador que controla cada pixel de maneira independente como se cada pixel fosse uma unidade de uma matriz, deixando esse ponto aceso ou apagado de acordo com a programação realizada.

37
3 ESPECIFICAÇÃO DO PROJETO
O medidor de massa corpórea por bioimpedância foi desenvolvido para ser um aparelho portátil, de fácil manuseio e que seja possível colocá-lo próximo ao paciente, minimizando a movimentação do mesmo que encontra-se acamado.
Atualmente existem opções no mercado para a medição de massa corpórea, utilizando-se da técnica de bioimpedância, porém, em forma de balanças convencionais inviabilizando o seu uso para pacientes em situações de repouso em uma cama.
A medição de somente três músculos para a estimativa da massa corporal torna viável o uso do sistema sem necessidade de grandes transtornos ao repouso do paciente.
Na Figura 3.1 é possível observar o diagrama de blocos do hardware.
Figura 3.1 - Diagrama de blocos do hardware.

38
3.1 Funcionamento do sistema
O sistema proposto está dividido em dois módulos: software e hardware.
O software tem a função de efetuar os cálculos para a estimativa da massa corporal, assim como controlar as informações que são mostradas no display e a interface de cadastro dos pacientes num banco de dados. Já o hardware é responsável pela geração da senoide que será injetada no paciente, bem como a recepção do sinal de resposta, conversão dos dados para serem trabalhados pelo software, armazenamento dos dados do cadastro e indicação dos dados por meio de um display.
O hardware foi dividido nas seguintes categorias:
Geração do sinal: Utilizando-se um gerador de onda senoidal, em que esse sinal senoidal será injetado no avaliado.
Injeção do sinal: Ocorrendo por intermédio de eletrodos, ligados aos pares nos respectivos músculos a serem mensurados.
Aquisição do sinal: Em que o sinal proveniente da bioimpedância é recebido em forma de corrente circulante no circuito e é convertido em tensão.
Amplificação: Nessa etapa, o sinal na ordem de mV ou até µV é amplificado em mil e duzentas vezes, eliminando boa parte do ruído em modo comum.
Filtros: Acontece a filtragem do sinal, atenuando as tensões nas freqüências diferentes a de 50KHz.
Detector de pico: A senoide é transformada numa tensão contínua em relação ao tempo, ficando possível a conversão dessa tensão em um valor digital.
Microcontrolador: Efetua a conversão da tensão em um valor digital entre 0 e 1024. É responsável por efetuar os cálculos e por responder aos comandos do usuário, alem do controle do display.
Interface: Responsável por possibilitar a interação do usuário com o sistema.
Display: Dispositivo que possibilita a visualização das informações.
O software foi dividido em:
Calculo da massa corporal: Utilizando-se três equações de regressão linear para conversão de valores e mais uma equação de regressão linear múltipla para estimativa da massa corporal.
Cadastro: Em que o usuário alimenta o sistema com informações do avaliado e esses dados são salvos em um banco de dados.

39
3.1.1 Módulo do Hardware
Descritos abaixo, estão os componentes usados para a elaboração do hardware.
3.1.2 Componentes do Hardware
PIC18F452A: Microcontrolador utilizado para efetuar o controle geral do sistema, bem como o processamento dos dados, conversão do sinal analógico em digital, armazenagem dos dados cadastrados, controle do display e controle da interface com o usuário.
MAX038: Circuito integrado utilizado para gerar sinais senoidais na ordem de 2V pico a pico com freqüência de 50KHz, que serão injetados no músculo do paciente.
INA118P: Circuito integrado amplificador de instrumentação usado para amplificar o sinal recebido do eletrodo e eliminação do ruído em modo comum.
LF351: Circuito integrado amplificador operacional utilizado para confecção dos filtros
LF353: Circuito integrado amplificador operacional duplo utilizado para a confecção do detector de pico.
LM7805: Circuito integrado que possui a característica de regulador de tensão positiva.
LM7905: Circuito integrado que possui a característica de regulador de tensão negativa.
SSC12A64DLNW-E: Display gráfico usado para a visualização dos dados e interação visual com o usuário.
Eletrodo: Utilizado para a injeção e aquisição do sinal.
3.1.2.1 Microcontrolador PIC
O microcontrolador utilizado foi o PIC18F452A da Microchiop. Possui as seguintes características:
Espaço para código de 32KB;
Memória EEPROM de 256 bytes;
8 canais A/D de 10bits;
Memória RAM de 1536 bytes;
Clock máximo de 40MHz;
33 pinos de I/O.

40
Figura 3.1: Microcontrolador PIC18F452.
Fonte: Adaptado de (MICROCHIP, 2009)
A escolha do microcontrolador deve-se principalmente pelo seu espaço de código, pelo espaço disponível na memória EEPROM e pela resolução de 10 bits no conversor A/D. É responsável pela conversão do sinal analógico em digital, calculo da estimativa da massa corporal, controle do display e interface com o usuário. Na Figura 3.1 é possível observar a estrutura externa do microcontrolador PIC18F452.
3.1.2.2 Gerador de ondas
O gerador de onda senoidal escolhido foi o MAX038 da Maxim/Dallas. O circuito integrado possui as características:
Opera nas faixas de freqüência entre 0,1 Hz e 20 MHz;
Gera ondas senoidais, triangulares e quadradas;
Ajustes de freqüência e Duty-Cicle independentes.

41
Figura 3.3: Diagrama de blocos do MAX038.
Fonte: Adaptado de (MAXIM-IC, 2009)
Esse CI foi escolhido pela sua vasta faixa de freqüência operacional, pela possibilidade de aquisição do componente por meio de amostra grátis e pela facilidade de seleção do tipo de onda. Entretanto, esse componente encontra-se atualmente obsoleto e sua produção descontinuada.
Tem a função de gerar uma senoide com freqüência de 50KHz com amplitude de 2Vpp, de forma a ser injetada no paciente por meio de eletrodos. A Figura 3.3 mostra a estrutura externa do MAX038.
3.1.2.3 Reguladores de tensão:
Para manter a tensão do sistema em 5V, foram utilizados os CIs LM7805 e LM7905 da fairchild. Tem como características:
Corrente máxima de 1A;
Proteção contra superaquecimento.
Os CIs foram escolhidos por seu baixo custo e confiabilidade, além da facilidade de encontrá-los em mercados nacionais.

42
Os reguladores de tensão objetivam a limitar a tensão da fonte em 5V. Em função das baterias utilizadas que possuem 7,2V e por todos os componentes do sistema funcionar com 5V, optou-se pelo uso desses componentes. Em virtude do uso da tensão negativa para o funcionamento adequado do display, utilizou-se o LM7905 que possui funcionamento semelhante ao LM7805, porém, para tensões negativas.
3.1.2.4 Filtros
A confecção dos filtros foi efetuada utilizando-se o CI LF351 da ST Microelectronics.
O LF351 possui as seguintes características:
Slew Rate de 16V/us;
CMRR de 86dB;
Rise time de 0,1us.
Figura 3.4: Amplificador operacional LF351.
Fonte: Adaptado de (ST, 2009)
Esse amplificador operacional foi escolhido pelo seu baixo custo, fácil implementação e por atender as necessidades de tensão de saída na freqüência de 50KHz.
Os filtros do sistema consistem num filtro passa-baixa com freqüência de corte em 50KHz na configuração Butterworth MFB e um filtro passa-alta com freqüência de corte em 50KHz também na configuração Butterworth MFB. A Figura 3.4 mostra a estrutura externa do LF351.
3.1.2.5 Detector de pico
Para configurar o detector de pico, optamos pela utilização do CI LF353 da ST Microeletronics. Possui características iguais ao LF351 descrito no item “1.1.2.4 Filtros”,

43
com o adicional que possui dois amplificadores operacionais LF351 em uma estrutura unificada.
Figura 3.5: Amplificador operacional duplo LF353.
Fonte: Adaptado de (ST, 2009)
A montagem do detector de pico necessitava de uma composição com dois amplificadores operacionais, por esse motivo, com a finalidade de reduzir o tamanho da montagem, optou-se por esse componente, além da facilidade de implementação. Na Figura 3.5 podemos observar a estrutura externa do LF353.
3.1.2.6 Display
Para a visualização dos dados, usaremos o display gráfico SSC12A64DLNW-E da Lumatronic. Possui as seguintes características:
Consumo de corrente de 9mA;
Tensão de alimentação de 5V;
Controlador KS107/108;
Display gráfico de 128x64 pontos.

44
Figura 3.6: Diagrama de blocos do display gráfico SSC12A64DNLW-E.
Fonte: Adaptado de (LUMATRONIC, 2009)
O baixo consumo de corrente desse display foi de grande relevância para a sua escolha, assim como o seu controlador KS107/108 que é bem difundido o que facilita a busca de informações a respeito das funcionalidades e bibliotecas de controle. O preço em relação aos outros displays gráficos também foi um requisito analisado. A Figura 3.6 mostra o diagrama de blocos do display.
3.1.2.7 Amplificador de instrumentação
O amplificador de instrumentação escolhido foi o INA118P da Burr-Brown, possuindo as características a seguir:
CMRR de 110dB;
Ganho do sinal de 100V/V a 70KHz;
Tensão de alimentação entre ±1.35 e ±18V.

45
Figura 3.7: Amplificador de instrumentação INA118P.
Fonte: Adaptado de (TI, 2009)
Esse componente foi escolhido pela sua disponibilidade no mercado brasileiro, pela facilidade na implementação e por possuir um bom CMRR mesmo na freqüência de 50KHz.
O uso desse componente vem da necessidade de se amplificar o sinal e eliminar os ruídos provenientes da aquisição. A Figura 3.7 mostra a estrutura do INA118.
3.1.2.8 Baterias
Em se tratando de um dispositivo portátil, surge a necessidade de uso de baterias. Para o desenvolvimento do projeto, optamos pela utilização de duas baterias, uma para a tensão positiva e uma para a tensão negativa. A bateria escolhida é a AN1300SC da Vinnic e possui as seguintes características:
Tensão de 7,2V;
Composição de Níquel-Cadmio (Ni-Cd);
Corrente de 1300mAh.
A escolha dessa bateria deve-se a forma de aquisição da mesma, uma vez que não houveram custos envolvidos. Contribuíram também para a escolha, a tensão de 7,2V e a
46
corrente de 1300mAh, fornecendo tensão e corrente suficientes para suprir a demanda do dispositivo.
A Figura 3.8 ilustra as baterias usadas na alimentação do dispositivo.
Figura 3.8: Baterias de 7,2V e 1300mAh.

47
4 DESENVOLVIMENTO E IMPLEMENTAÇÃO
Nesse tópico, serão detalhadas cada uma das etapas de desenvolvimento do software e do hardware.
4.1 Hardware Para o hardware, será utilizada a estrutura de tópicos que segue:
Alimentação, osciladores, aquisição, amplificação, filtros, detector de pico, microcontrolador, display e interface.
4.1.1 Alimentação
A alimentação de todos os componentes do projeto foi feita utilizando duas baterias de 7,2V e 1300mAh. Entretanto, houve a necessidade de reduzir essa tensão em virtude alguns componentes que eram alimentados com 5V. Para isso, foram utilizados os CIs reguladores de tensão LM7805 e LM7905.
Para fornecer tensão negativa ao circuito, utilizamos duas baterias iguais ligadas em série.
A Figura 4.1 item “A” mostra a configuração da montagem das baterias.
A tensão positiva é regulada para 5V por meio do LM7805 enquanto que a tensão
negativa é regulada para -5V pelo LM7905. Os detalhes da montagem aparecem na Figura
4.1.

48
Figura 4.1: Esquema da montagem do circuito de alimentação do sistema. A) Mostra a configuração das baterias para fornecimento de tensão negativa e positiva. B) Mostra a
configuração dos CIs LM7805 e LM7905 para e regulagem da tensão em 5V e -5V.
4.1.2 Osciladores
Conforme destacado anteriormente, a implementação dos osciladores foi feita a partir do CI MAX038, gerando uma onda senoidal com amplitude de 2Vpp e com freqüência de 50KHz.
A seleção da freqüência é feita por meio de um capacitor cerâmico de 2,2nF.
Os ajustes finos da onda ficam por conta dos três trimpots de 50 k alimentados pela tensão de referência do próprio CI.
A seleção do tipo de onda ocorre quando o nível lógico alto é enviado para a entrada “A0”, dessa forma, o sinal de saída contida no pino “out” é uma senoide de 50KHz de
amplitude igual a 2Vpp. Um dos eletrodos é ligado a essa saída.
Na Figura 4.2 é possível observar o esquema da montagem do MAX038, já ligado aos
eletrodos.
A)
B)

49
Figura 4.2: Esquema da montagem do MAX038 com a ligação dos eletrodos. A “Carga” representa a bioimpedância da região corpórea a ser medida.
4.1.3 Aquisição
A aquisição do sinal é feita a partir da colocação de um par de eletrodos no músculo
indicado. Dessa forma, podemos considerar a região entre os eletrodos como uma carga
possuindo uma impedância.
Um dos eletrodos contém o sinal senoidal de 50KHz que é injetado no músculo do
paciente, enquanto que o segundo eletrodo tem a função de receptor do sinal.
A configuração dos eletrodos junto à impedância da região medida pode ser considerada
equivalente a um circuito de um resistor em série com a fonte conforme mostra a Figura
4.3.
Figura 4.3: Circuito série equivalente formado entre a fonte e a impedância da região.
Fonte: Adaptado de (DAVIDDARLING, 2009)
Carga
Carga

50
Como a impedância é a oposição ao fluxo de elétrons, a corrente que circula no circuito série, é o valor da resposta a essa oposição. Portanto, a corrente circulante no circuito incide também no resistor de shunt de 1ohm, em que a corrente que circula por esse resistor é igual à tensão encontrada nesse resistor.
Segundo a primeira lei de ohm, a tensão é proporcional à intensidade de corrente conforme a Equação 4.1 (LOURENÇO, 1998).
V = R x I
Equação que relaciona a tensão, a resistência e a corrente. Conhecida como “Lei de
Ohm”.
Ao fixarmos a resistência em 1 ohm, temos uma relação de um para um entre a corrente
e a tensão, ou seja, o valor da tensão é igual ao valor da corrente circulante no resistor de
shunt.
O amplificador de instrumentação então é colocado sobre esse resistor de forma que a
tensão incidente no resistor seja amplificada. A Figura 4.4 mostra o esquemático do circuito
de aquisição juntamente com o amplificador de instrumentação.
Figura 4.4: Esquemático da montagem do circuito de aquisição do sinal. A fonte
osciladora representada pela abreviação “OSC” representa o sinal senoidal gerado pelo
oscilador.
4.1.4 Amplificação
O sinal proveniente do eletrodo receptor encontra-se na ordem de 800uV e, para ser
trabalhado adequadamente e convertido em um sinal digital, a tensão precisa ser elevada. O
amplificador de instrumentação INA118 eleva a tensão na ordem de cem vezes para um,
além de eliminar boa parte do ruído incidente no sinal aquisicionado. O ganho do
amplificador é dado a partir da colocação de um resistor de 500 ohms entre os pinos 1 e 8.
Para elevarmos ainda mais a tensão, usou-se um outro circuito de ganho construído
utilizando-se de um amplificador operacional LF351.
(4.1)

51
A opção de utilizar um segundo circuito para a amplificação do sinal ocorreu pelo fato de que ao aumentar o ganho no amplificador de instrumentação, conseqüentemente se esta dando um ganho ao ruído incidente no sinal.
A configuração do segundo amplificador corresponde a um amplificador inversor com ganho igual a 12 vezes o sinal de entrada.
Na Figura 4.5 são observadas as montagens dos dois amplificadores responsáveis pela elevação da tensão do sinal aquisicionado.
Figura 4.5: Esquemático da montagem da malha de amplificação do sistema.
4.1.5 Filtros
A etapa de filtragem do sinal sucede a de amplificação. Em decorrência de ruídos e freqüências parasitas no sinal aquisicionado, utiliza-se então um filtro passa faixa, atenuando as freqüências acima e abaixo de 50KHz.
O filtro confeccionado portanto é um passa faixa de 2ª ordem na configuração butterworth MFB. O filtro passa faixa é composto por um filtro passa baixa de 2ª ordem e um filtro passa alta também de 2ª ordem.
A seguir constam as figuras: Figura 4.6 e Figura 4.7 onde se pode observar o esquemático da montagem, juntamente com o gráfico da atenuação do filtro passa-baixa. Nas Figuras 4.8 e 4.9, observa-se o esquemático da montagem e o gráfico de atenuação do filtro passa-alta.

52
Figura 4.6: Filtro passa-baixa.
Figura 4.7: Gráfico da atenuação do filtro passa-baixa.
Figura 4.8: Esquemático da montagem do filtro passa-alta.

53
Figura 4.9: Gráfico de atenuação do filtro passa-alta.
4.1.6 Detector de pico
Mesmo depois da passagem do sinal pelos filtros, continua-se com uma senoide. Entretanto, para que haja a conversão desse sinal analógico em digital, deve-se converter tal senoide em uma tensão constante no tempo. Uma forma simplificada de se conseguir um sinal constante no tempo pode ser conseguida confeccionando um detector de pico.
O detector de pico mantém o valor da tensão de maior amplitude da senoide. Ao alcançar a tensão equivalente à amplitude máxima da senoide, qualquer outro valor de amplitude menor que o máximo detectado, não afetará a medida.
Por motivos de minimização da montagem, preferiu-se usar um LF353 a dois LF351.
A Figura 4.10 mostra o esquemático da montagem do detector de pico utilizando o amplificador operacional LF353.

54
Figura 4.10: Esquemático da montagem do detector de pico utilizando o amplificador operacional LF353.
4.1.7 Microcontrolador
É nesse estágio que o sinal é convertido para uma grandeza digital, gerando um valor entre 0 e 1024, possibilitando que o cálculo seja efetuado pelo microcontrolador.
De acordo com a Figura 3.1 que mostra a estrutura externa do PIC18F452A, é possível perceber que o dispositivo possui 8 portas de conversão A/D, sendo que somente 3 serão utilizadas.
O microcontrolador também é responsável pelo controle do display gráfico.
A configuração da resolução do conversor A/D é dada codificando-se no cabeçalho o seguinte comando:
#DEVICE ADC=10
Para se configurar as porta A como portas de entrada, usamos o comando:
set_tris_a(0xff);
Ao se definir a porta A como analógica e a taxa de amostragem, utilizamos os comandos:
setup_adc(ADC_CLOCK_INTERNAL);
setup_adc_ports(ALL_ANALOG);

55
4.1.8 Display
O display tem como funções principais a interface de navegação entre o usuário e as funções executadas pelo sistema, assim como mostrar os resultados para os usuários.
O dispositivo é ligado independentemente da parte de aquisição, ficando dependente somente do microcontrolador que faz todo o controle das funções do display.
Houve a necessidade de efetuar a sua alimentação utilizando tanto tensão positiva quanto negativa, assim como para o controle do contraste. O controle do contraste é feito usando um trimpot ligado à tensão negativa e ao display. Conforme a resistência ajustada no trimpot deixa-se o display com mais brilho ou com brilho menor.
O brilho do display também é influenciado pela tensão da bateria, quando a mesma encontra-se com carga baixa e necessitando de recarga, percebe-se uma diminuição do brilho.
4.1.9 Interface
Para que o usuário pudesse navegar e cadastrar os usuários com maior facilidade, confeccionou-se uma interface composta de cinco botões que interagem diretamente com o display e consequentemente com o microcontrolador. Para cada função executada pelo microcontrolador, são mostradas no display as opções disponíveis sendo a seleção dessas opções feita mediante o pressionamento dos botões presentes na interface.
Conforme as Figura 4.11 e Figura 4.12, observa-se respectivamente o esquemático da montagem do display, microcontrolador e interface, e a foto dos botões da interface com o usuário.

56
Figura 4.11: Esquemático da montagem do microcontrolador, interface de botões e display.

57
Figura 4.12: Foto dos botões que constituem a interface com o usuário.
4.2 Modulo do Software Nesse projeto optou-se pela utilização de linguagem C estruturada. Tal escolha vem da
possibilidade de programação do microcontrolador em C e levando em consideração que o projeto é portátil e, portanto, não sofrerá mudanças de grande porte após sua finalização.
Para o software usaremos a seguinte estrutura de tópicos:
Diagrama de caso de uso, fluxogramas e bibliotecas.

58
4.2.1 Diagrama de caso de uso:
Visando esclarecer o funcionamento do software do dispositivo, na Figura 4.13 é possível visualizar o diagrama de caso de uso do sistema.
Figura 4.14: Diagrama de caso de uso.

59
4.2.2 Fluxogramas:
Dividiram-se os fluxogramas em relação às funções executadas pelo dispositivo, dessa forma, pode-se visualizar e entender mais facilmente os detalhes da implementação do software.
4.2.2.1 Menu inicial
Referente às funções disponíveis ao usuário assim que o aparelho é ligado. O fluxograma das opções desse menu é apresentado na Figura 4.14.
Figura 4.14: Fluxograma do menu inicial.

60
4.2.2.2 Cadastro
Foi desenvolvida uma interface de cadastro para o armazenamento dos dados do paciente. Dessa forma, utilizando-se dos botões de navegação, é possível selecionar a letra, passar para o próximo caractere, voltar para o caractere anterior e concluir o cadastramento.
Na Figura 4.15 é possível visualizar o fluxograma da função de cadastro.
Figura 4.15: Fluxograma da função de cadastro.
sim
não

61
4.2.2.3 Alteração
Em função da necessidade de alteração dos dados armazenados, uma função de alteração do cadastro foi implementada. A Figura 4.16 mostra o fluxograma da função de edição dos dados cadastrados.
Figura 4.16: Fluxograma da função de alteração.

62
4.2.2.4 Busca
Foi implementada uma função de busca, fazendo a interação com a EEPROM onde os dados ficam armazenados. Para a seleção dos cadastros a serem alterados ou deletados, há a chamada da função de busca. Segundo consta na Figura 4.17, observa-se o fluxograma dessa função.
Figura 4.17: Fluxograma da função de busca do sistema.

63
4.2.2.5 Deleção
A função de deleção é chamada quando há o comando do usuário para retirada de um cadastro armazenado na EEPROM. Na Figura 4.18 é possível observar o fluxograma da função de deleção.
Figura 4.18: Fluxograma da função de deleção.

64
4.2.2.6 Gravação
Assim que o usuário conclui a etapa de cadastro, o sistema chama a função de gravação para que os dados sejam armazenados na EEPROM. O fluxograma da função de gravação é observado na Figura 4.19.
Figura 4.19: Fluxograma da função de gravação dos dados na EEPROM do microcontrolador.

65
4.2.2.7 Medição
Assim como já foi visualizado na Figura 4.14 (MENU), existem duas opções no menu inicial, sendo uma delas e de medição. A função de medição executa os procedimentos para recepção do sinal, conversão dos valores analógicos em digitais e calculo da massa corporal.
Essa função pode ser chamada em três momentos. O primeiro momento ocorre já no menu inicial, no caso de o usuário necessitar estimar a massa corporal do paciente sem efetuar o cadastro. O segundo momento ocorre assim que o usuário conclui o cadastro, para que o valor da massa corpórea do paciente também fique armazenado na EEPROM. O terceiro momento acontece logo após a conclusão da alteração do cadastro, necessitando da confirmação do usuário para que a função seja chamada, senão, os dados serão atualizados conforme a edição do usuário, com exceção da massa corporal que continuará com seu valor intacto.
Na Figura 4.20 é possível observar o fluxograma da função de medição.
Figura 4.20: Fluxograma da função de medição da estimativa da massa corporal.

66
4.2.3 Bibliotecas
Para a implementação do firmware, algumas bibliotecas foram utilizadas. Sendo elas:
18f452.h - Responsável pelo interfaceamento entre o código e o microcontrolador.
HDM64GS12.c - Responsável pelo controle do Display gráfico.
graphics.c - Complementa a biblioteca HDM64GS12.c para controle do display gráfico.
stdlib.h - Possui funções básicas de manipulação de string, conversão de tipos, entrada de dados e saída de dados.
4.3 Tabela de componentes Na Tabela 4.1 são discriminados os componentes usados no projeto.
Tabela 4.1: Lista de componentes utilizados no projeto. Componente Quantidade
18F452A 1
Capacitor 100pF 3
Capacitor 10nF 2
Capacitor 10pF 1
Capacitor 10uF 6
Capacitor 150pF 3
Capacitor 1nF 18
Capacitor 2,2nF 6
Cristal 20MHz 1
Diodo 1N4007 6
INA118 3
LF351 9
LF353 3
LM7805 1
LM7905 1
MAX038 3
Push button 5
Resistor 100 ohm 3
Resistor 100K ohm 12
Resistor 10K ohm 11
Resistor 12K ohm 3
Resistor 1K ohm 15
Resistor 2,2K ohm 6
Resistor 22K ohm 3
Resistor 33K ohm 3
SSC12A64DNLW-E 1
Trimpot 10K ohm 1
Trimpot 50K ohm 6

67
5 VALIDAÇÃO E RESULTADOS
Será abordado nesse capítulo as etapas de calibração e resultados encontrados.
5.1 Calibração Na etapa de calibração foram efetuados testes parametrizados em voluntários.
5.1.1 Teste
O teste consistiu na ligação dos três pares de eletrodos em três músculos específicos do paciente simultaneamente. O sistema é ligado e então é efetuada a medição, os dados do aparelho são anotados e inicia-se a etapa de medição da circunferência dos músculos pré-definidos.
A massa corporal dos voluntários foi medida usando-se uma balança comum digital.
Para obtenção de dados consistentes, efetuou-se então uma parametrização para os testes. Os detalhes das parametrizações encontram-se nos tópicos que seguem.
5.1.2 Colocação dos eletrodos e medidas antropométricas
A colocação dos eletrodos foi padronizada para cada um dos três músculos, sendo colocados sempre no braço direito e na perna direita. Isso ocorre devido ao padrão já existente para se efetuar medidas antropométricas, que diz que as medidas devem ser feitas no lado direito do avaliado.
5.1.2.1 Tríceps
O primeiro eletrodo é colocado na parte posterior, logo acima do cotovelo. O segundo eletrodo é colocado na parte interior do braço, posicionado próximo à axila.
A Figura 5.1 mostra o posicionamento dos eletrodos na região tricipital.
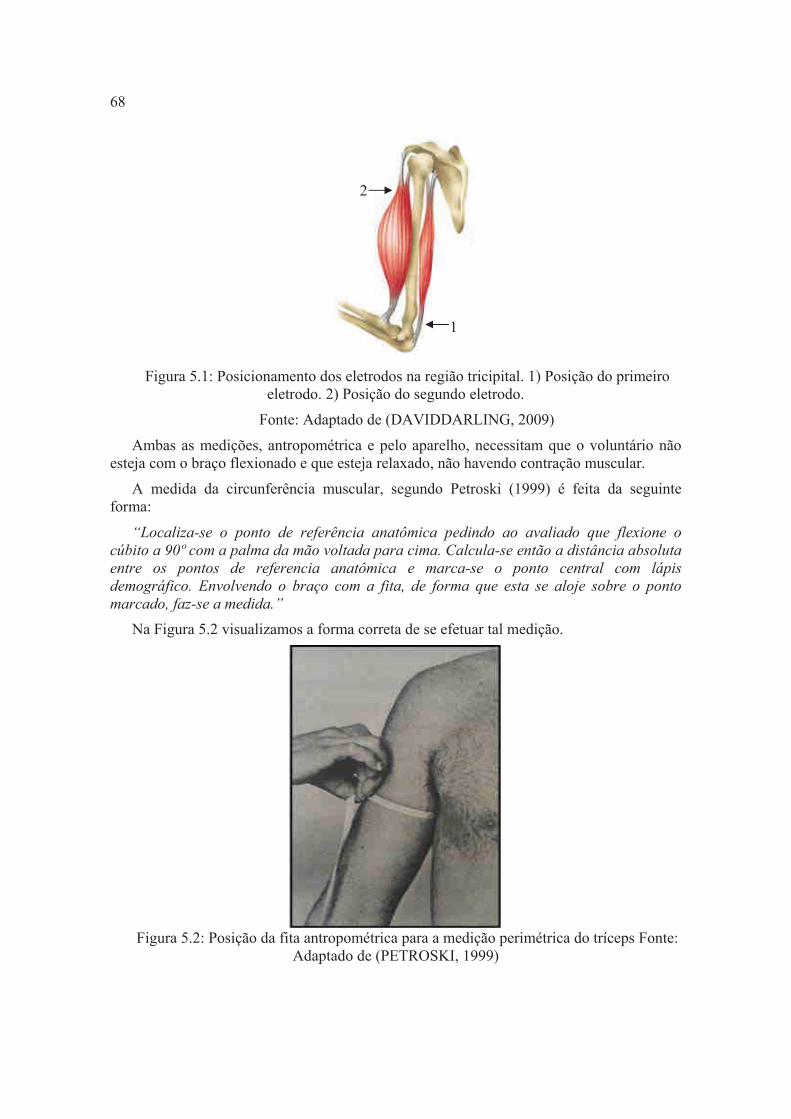
68
Figura 5.1: Posicionamento dos eletrodos na região tricipital. 1) Posição do primeiro eletrodo. 2) Posição do segundo eletrodo.
Fonte: Adaptado de (DAVIDDARLING, 2009)
Ambas as medições, antropométrica e pelo aparelho, necessitam que o voluntário não esteja com o braço flexionado e que esteja relaxado, não havendo contração muscular.
A medida da circunferência muscular, segundo Petroski (1999) é feita da seguinte forma:
“Localiza-se o ponto de referência anatômica pedindo ao avaliado que flexione o
cúbito a 90º com a palma da mão voltada para cima. Calcula-se então a distância absoluta
entre os pontos de referencia anatômica e marca-se o ponto central com lápis
demográfico. Envolvendo o braço com a fita, de forma que esta se aloje sobre o ponto
marcado, faz-se a medida.”
Na Figura 5.2 visualizamos a forma correta de se efetuar tal medição.
Figura 5.2: Posição da fita antropométrica para a medição perimétrica do tríceps Fonte:
Adaptado de (PETROSKI, 1999)
1
2

69
5.1.2.2 Abdômen
No caso do abdômen, os eletrodos são colocados lateralmente na altura da cicatriz umbilical. O primeiro eletrodo é posicionado a direita e o segundo posicionado a esquerda, como mostra a Figura 5.3.
Figura 5.3: Posicionamento dos eletrodos na região abdominal. 1) Posição do primeiro eletrodo. 2) Posição do segundo eletrodo.
Fonte: Adaptado de (A.D.A.M., 2009)
Na região abdominal tanto a medição pelo aparelho quanto a antropométrica devem ser feitas com o abdômen relaxado.
Petroski (1999) nos mostra a forma correta da medição do perímetro abdominal:
“Passa-se a fita em torno do avaliado de trás para frente, tendo-se o cuidado de manter
a mesma no plano horizontal. A seguir faz-se a leitura, após o avaliado realizar uma
expiração normal”.
Conforme a Figura 5.4, observa-se como deve ser posicionada a fita para se efetuar a medição do perímetro abdominal.
2 1

70
Figura 5.4: Posição da fita antropométrica para medição da circunferência abdominal Fonte: Adaptado de (PETROSKI, 1999).
5.1.2.3 Panturrilha
A colocação dos eletrodos na panturrilha acontece de modo que o primeiro eletrodo fique posicionado na parte frontal da perna, próxima a região do tornozelo, enquanto que o segundo eletrodo é posicionado na parte posterior da perna logo abaixo da patela. A Figura 5.5 ilustra o posicionamento dos eletrodos na região da panturrilha.
Figura 5.5: Posicionamento dos eletrodos na região da panturrilha. 1) Posição do primeiro eletrodo. 2) Posição do segundo eletrodo.
Fonte: Adaptado de (MSD-BRAZIL, 2009)
1
2

71
A técnica correta para a medição da circunferência da panturrilha nos é mostrada por Petroski (1999) diz:
“Verifica-se a região correspondente ao maior perímetro da panturrilha movendo-se a
fita métrica em torno da perna e ao longo desta. Faz-se a leitura da medida tenso-se o
cuidado de manter a fita métrica paralela ao chão”.
A perna direita necessita ficar flexionada, formando um ângulo de 90º entre a perna e a coxa, apoiando os pés no chão. Na Figura 5.6, pode-se observar a forma correta de efetuar a medição da circunferência da panturrilha.
Figura 5.6: Posicionamento da fita antropométrica e posição do avaliado para a medição perimetral da panturrilha
Fonte: Adaptado de (PETROSKI, 1999).
5.1.2.4 Acionamento do sistema
A medição efetuada pelo aparelho foi parametrizada da seguinte forma.
Após a colocação correta dos eletrodos e conexão dos cabos nos eletrodos, o dispositivo é ligado e a opção 1 do menu é selecionada, fazendo com que o sistema chame a função de medição retornando os valores já convertidos. O processo de acionamento do equipamento e visualização dos dados na tela não deve demorar mais do que cinco segundos. No caso do procedimento demorar mais do que o tempo definido, a retirada dos cabos faz-se necessária e o acionamento do aparelho sem nenhum cabo ligado, fazendo com que a tensão na saída do detector de pico atinja um valor próximo de zero rapidamente, possibilitando outro teste.
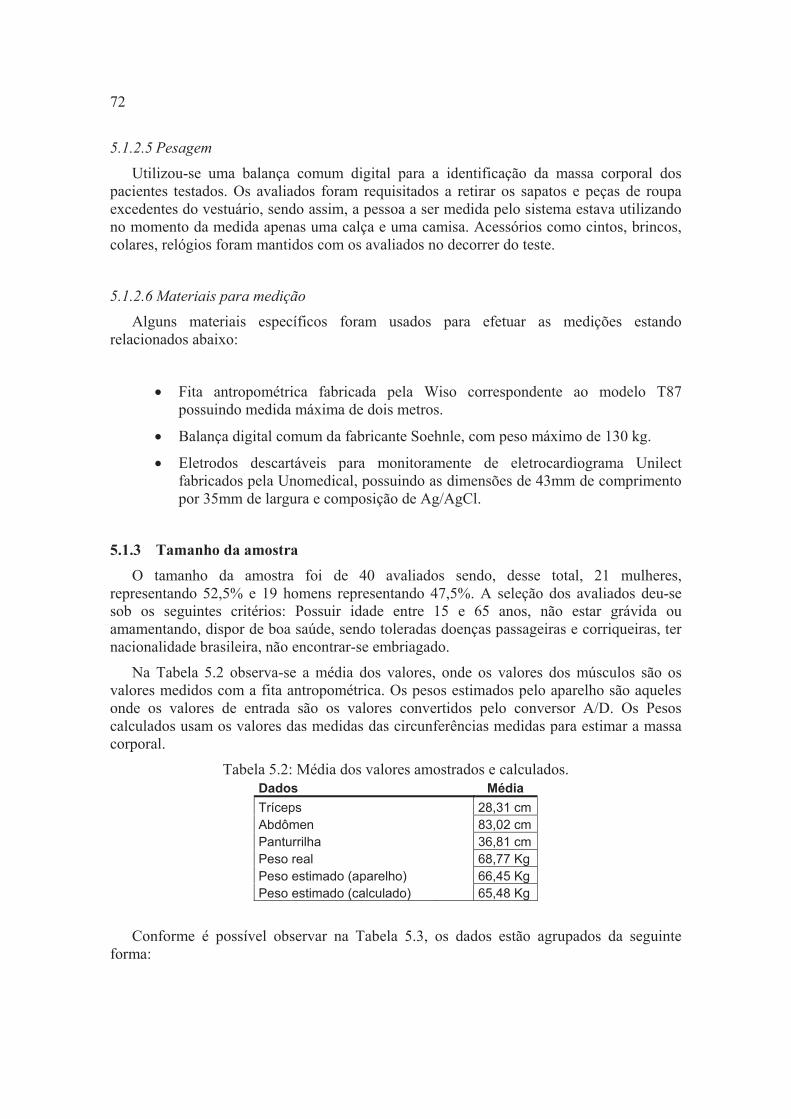
72
5.1.2.5 Pesagem
Utilizou-se uma balança comum digital para a identificação da massa corporal dos pacientes testados. Os avaliados foram requisitados a retirar os sapatos e peças de roupa excedentes do vestuário, sendo assim, a pessoa a ser medida pelo sistema estava utilizando no momento da medida apenas uma calça e uma camisa. Acessórios como cintos, brincos, colares, relógios foram mantidos com os avaliados no decorrer do teste.
5.1.2.6 Materiais para medição
Alguns materiais específicos foram usados para efetuar as medições estando relacionados abaixo:
Fita antropométrica fabricada pela Wiso correspondente ao modelo T87 possuindo medida máxima de dois metros.
Balança digital comum da fabricante Soehnle, com peso máximo de 130 kg.
Eletrodos descartáveis para monitoramente de eletrocardiograma Unilect fabricados pela Unomedical, possuindo as dimensões de 43mm de comprimento por 35mm de largura e composição de Ag/AgCl.
5.1.3 Tamanho da amostra
O tamanho da amostra foi de 40 avaliados sendo, desse total, 21 mulheres, representando 52,5% e 19 homens representando 47,5%. A seleção dos avaliados deu-se sob os seguintes critérios: Possuir idade entre 15 e 65 anos, não estar grávida ou amamentando, dispor de boa saúde, sendo toleradas doenças passageiras e corriqueiras, ter nacionalidade brasileira, não encontrar-se embriagado.
Na Tabela 5.2 observa-se a média dos valores, onde os valores dos músculos são os valores medidos com a fita antropométrica. Os pesos estimados pelo aparelho são aqueles onde os valores de entrada são os valores convertidos pelo conversor A/D. Os Pesos calculados usam os valores das medidas das circunferências medidas para estimar a massa corporal.
Tabela 5.2: Média dos valores amostrados e calculados. Dados Média
Tríceps 28,31 cm
Abdômen 83,02 cm
Panturrilha 36,81 cm
Peso real 68,77 Kg
Peso estimado (aparelho) 66,45 Kg
Peso estimado (calculado) 65,48 Kg
Conforme é possível observar na Tabela 5.3, os dados estão agrupados da seguinte forma:

73
Valores provenientes do aparelho a partir da conversão do sinal analógico em digital.
Valores das medidas dos perímetros dos músculos do avaliado.
Sexo do avaliado, sendo o valor 1 representando o sexo masculino e o valor 2 para representar o sexo feminino.
Valor da massa corporal medido com a balança digital.
Valores dos perímetros dos músculos calculados através do calculo de regressão linear.
Peso calculado utilizando-se a equação de regressão linear múltipla para estimativa da massa corpórea, tendo como parâmetros de calculo os valores dos músculos calculados por regressão linear.
Peso calculado utilizando-se a equação de regressão linear múltipla para estimativa da massa corporal, tendo como parâmetro de cálculos os valores dos perímetros dos músculos.

74 Tabela 5.3: Estudo dos dados amostrados e calculados organizados em ordem crescente do peso. * Números correspondentes ao valor
convertido pelo aparelho variando entre 0 e 1024. ** medidas em centímetros efetuadas usando a fita antropométrica. *** Peso em Kg.
Tríceps* Abdômen* Panturrilha*Tríceps** (medido )
Abdômen** (medido)
Panturrilha** (medido) Sexo
Peso real***
Tríceps** (calculado)
Abdômen** (calculado)
Panturrilha** (calculado)
Peso estimado (aparelho)***
Peso estimado (calculado)***
1 477,00 582,00 359,00 25,00 65,60 34,60 2,00 51,10 27,740431 84,792760 35,79007 62,50603896 49,3448
2 408,00 417,00 395,00 25,60 75,00 31,90 2,00 51,40 27,421444 86,064910 36,05791 63,32538126 51,27552
3 431,00 460,00 472,00 24,00 68,70 34,50 2,00 54,90 27,527773 85,733380 36,63079 63,92548207 50,27591
4 215,00 690,00 317,00 26,10 72,20 33,50 2,00 55,00 26,529205 83,960080 35,47759 60,98115433 52,08215
5 402,00 500,00 507,00 26,50 78,00 34,00 2,00 56,00 27,393706 85,424980 36,89119 64,01021205 55,98765
6 453,00 553,00 448,00 26,10 79,50 33,20 2,00 57,80 27,629479 85,016350 36,45223 63,38433876 55,55058
7 523,00 352,00 393,00 26,70 75,10 37,70 2,00 58,00 27,953089 86,566060 36,04303 63,87678229 59,1838
8 165,00 112,00 286,00 26,50 81,50 35,70 2,00 58,30 26,298055 88,416460 35,24695 62,90623491 59,94654
9 271,00 301,00 403,00 28,00 78,70 37,60 2,00 58,50 26,788093 86,959270 36,11743 63,5054504 61,70263
10 415,00 232,00 285,00 27,00 76,60 36,00 2,00 58,80 27,453805 87,491260 35,23951 63,07563429 58,02918
11 333,00 183,00 407,00 24,80 84,30 36,40 2,00 59,80 27,074719 87,869050 36,14719 64,18639268 61,31279
12 481,00 412,00 510,00 24,00 68,70 34,80 2,00 59,90 27,758923 86,103460 36,91351 64,60541741 50,64947
13 529,00 361,00 401,00 28,60 73,80 37,50 2,00 62,20 27,980827 86,496670 36,10255 63,93035095 59,34478
14 504,00 194,00 435,00 27,00 78,00 36,90 2,00 62,40 27,865252 87,784240 36,35551 64,85642519 59,88668
15 579,00 369,00 425,00 27,90 73,10 37,80 2,00 63,30 28,211977 86,434990 36,28111 64,25335096 58,9468
16 404,00 263,00 418,00 29,00 74,90 34,40 1,00 64,30 27,402952 87,252250 36,22903 69,02160739 61,16285
17 620,00 619,00 558,00 28,60 77,00 32,50 1,00 64,60 28,40152 84,507490 37,27063 69,44911583 59,67184
18 359,00 264,00 358,00 28,00 76,50 40,00 2,00 65,80 27,194917 87,244540 35,78263 63,47298498 63,53325
19 327,00 316,00 503,00 28,50 79,00 38,60 2,00 65,90 27,046981 86,843620 36,86143 64,5201062 63,39367
20 389,00 544,00 556,00 28,00 81,00 37,00 2,00 66,30 27,333607 85,085740 37,25575 64,25100913 62,166
21 553,00 495,00 526,00 24,20 76,60 36,50 1,00 67,90 28,091779 85,463530 37,03255 69,47744263 61,90816
22 542,00 481,00 361,00 26,90 79,60 36,40 1,00 68,40 28,040926 85,571470 35,80495 67,97635768 64,91747
23 428,00 343,00 593,00 27,60 88,00 35,00 1,00 69,50 27,513904 86,635450 37,53103 70,3821332 67,99824
24 572,00 470,00 596,00 24,20 76,60 36,50 1,00 70,00 28,179616 85,656280 37,55335 70,27797244 61,90816
25 501,00 430,00 395,00 26,90 79,60 36,40 1,00 70,10 27,851383 85,964680 36,05791 68,38913209 64,91747
26 378,00 256,00 307,00 30,00 87,50 42,00 2,00 70,10 27,282754 87,306220 35,40319 63,0835538 72,96475
27 382,00 299,00 482,00 30,00 92,60 36,70 1,00 72,40 27,301246 86,974690 36,70519 69,40986951 73,91822
28 451,00 343,00 578,00 30,40 98,60 38,10 1,00 73,10 27,620233 86,635450 37,41943 70,30440376 79,04966
29 453,00 145,00 378,00 34,60 89,70 40,00 2,00 74,00 27,629479 88,162030 35,93143 64,39140998 74,28135
30 567,00 344,00 443,00 28,10 93,30 36,40 1,00 74,40 28,156501 86,627740 36,41503 69,35850384 72,81886
31 444,00 372,00 525,00 30,00 91,30 36,40 1,00 75,90 27,587872 86,411860 37,02511 69,67708437 72,86047
32 536,00 660,00 603,00 32,20 92,70 39,00 2,00 77,90 28,013188 84,191380 37,60543 64,6070997 73,23289
33 297,00 275,00 463,00 30,60 78,40 36,80 1,00 79,00 26,908291 87,159730 36,56383 69,1049318 66,91482
34 567,00 670,00 596,00 29,20 91,40 38,00 1,00 79,50 28,156501 84,114280 37,55335 69,45310591 74,4447
35 370,00 161,00 420,00 31,50 90,00 41,00 1,00 79,90 27,24577 88,038670 36,24391 69,3635077 78,76805
36 423,00 327,00 493,00 29,00 96,50 36,60 1,00 81,50 27,490789 86,758810 36,78703 69,50731684 75,27037
37 627,00 309,00 608,00 34,00 95,00 38,80 1,00 87,60 28,433881 86,897590 37,64263 71,18887656 80,09986
38 531,00 336,00 482,00 34,40 108,20 41,60 1,00 93,10 27,990073 86,689420 36,70519 69,65642737 90,76394
39 410,00 427,00 451,00 29,40 94,50 35,40 1,00 94,50 27,43069 85,987810 36,47455 68,67782843 72,95389
40 567,00 585,00 575,00 33,30 103,40 40,00 1,00 97,70 28,156501 84,769630 37,39711 69,60346657 85,61189
Legenda: 1,00 - Sexo masculino. 2,00 - Sexo feminino

75
5.1.4 Regressão linear
Para a transformação dos dados referentes ao valor convertido em valores antropométricos dos perímetros dos músculos, utiliza-se o cálculo de regressão linear.
No caso do tríceps, a reta de regressão linear encontrada é dada pela Equação 5.1. A equação 5.1 é a equação da regressão linear correlacionada com o valor do tríceps proveniente do conversor A/D, resultando no valor do perímetro do músculo. TR É a variável que possui o valor do conversor A/D referente ao tríceps.
Perímetro do tríceps = TR * 0,004623 + 25,53526 (5.1)
A tabela 5.4 ilustra os 5 primeiros valores da amostra dos dados, mostrando o valor do conversor A/D, o valor medido com a fita antropométrica e finalmente o valor calculado utilizando a Equação 5.1.
Tabela 5.4: Tabela com os 5 primeiros valores amostrados, relacionando o valor do conversor A/D, a medida real do perímetro do músculo e o valor perimetral calculado do
tríceps.
Tríceps (TR) Tríceps
medido (cm)(Perímetro do tríceps) Tríceps calculado (cm)
1 477,00 25,00 27,740431
2 408,00 25,60 27,421444
3 431,00 24,00 27,527773
4 215,00 26,10 26,529205
5 402,00 26,50 27,393706
O abdômen possui também uma equação de regressão linear como mostra a Equação 5.2. A equação 5.2 é a equação da regressão linear correlacionada com o valor do abdômen proveniente do conversor A/D, resultando no valor do perímetro do músculo. AB É a variável que possui o valor do conversor A/D referente ao abdômen.
Perímetro do abdômen = AB * -0,00771 + 89,27998 (5.2)
É possível observar na tabela 5.5 os 5 primeiros valores da amostra referente ao abdômen, onde se observa o valor convertido pelo conversor A/D, o valor do abdômen medido com a fita antropométrica e por último o valor calculado da circunferência abdominal utilizando a Equação 5.2.

76
Tabela 5.5: Tabela com os 5 primeiros valores amostrados, relacionando o valor do conversor A/D, a medida real do perímetro do músculo e o valor perimetral calculado do
abdômen.
Abdômen (AB) Abdômen
medido (cm) (Perímetro abdominal) Abdômen calculado (cm)
1 582,00 65,60 84,792760
2 417,00 75,00 86,064910
3 460,00 68,70 85,733380
4 690,00 72,20 83,960080
5 500,00 78,00 85,424980
Para a panturrilha, a Equação 5.3 mostra a equação de regressão linear que diz respeito a esse músculo. A equação 5.3 é a equação da regressão linear correlacionada com o valor da panturrilha proveniente do conversor A/D, resultando no valor do perímetro do músculo. PT É a variável que possui o valor do conversor A/D referente à panturrilha.
Perímetro da panturrilha = PT * 0,00744 +33,11911 (5.3)
Na tabela 5.6 encontram-se as 5 primeiras amostras referentes à panturrilha. É possível observar o valor convertido pelo dispositivo, o valor da circunferência da panturrilha medida com a fita antropométrica e o valor do perímetro da panturrilha calculado segundo a Equação 5.3.
Tabela 5.6: Tabela com os 5 primeiros valores amostrados, relacionando o valor do conversor A/D, a medida real do perímetro do músculo e o valor perimetral calculado da
panturrilha.
Panturrilha (PT) Panturrilha
medida (cm)(Perímetro da panturrilha) Panturrilha calculada (cm)
1 359,00 34,60 35,79007
2 395,00 31,90 36,05791
3 472,00 34,50 36,63079
4 317,00 33,50 35,47759
5 507,00 34,00 36,89119
5.1.5 Cálculo da estimativa da massa corporal
O cálculo da estimativa da massa corporal é feita por meio de uma equação de regressão linear múltipla, relacionando os parâmetros referentes às medidas perimétricas da região tricipital, região abdominal e região da panturrilha. Outro fator considerado no calculo da estimativa da massa corporal é o sexo do avaliado, sendo ponderado com o valor 1 o avaliado do sexo masculino e com valor 2 o avaliado de sexo feminino.
A Equação 5.4 nos mostra os parâmetros necessários para a estimativa da massa corporal. Sendo que todos os valores das circunferências das regiões devem ser medidas em centímetros, fazendo com que a massa corporal estimado seja dada em quilogramas.

77
A equação 5.4 é a equação estimativa da massa corporal em Kg. (AC) = circunferência tricipital, medido em centímetros. (AbC) = circunferência abdominal, medido em centímetros. (CC) = circunferência da panturrilha, medida em centímetros. (S) = sexo do avaliado, sendo 1 para masculino e 2 para feminino (RABITO, 2008).
Peso estimado(Kg) = 0.5759*(AC)+0.5263*(AbC)+1.2452*(CC)-4.8689*(S)-32.9241
(5.4)
Para efeitos de comparação, foram efetuadas duas estimativas da massa corporal. Uma delas utilizando-se os valores das circunferências calculadas por meio das equações de regressão linear, tendo como valores de entradas os valores convertidos pelo conversor A/D do aparelho. A outra foi efetuada usando os valores das circunferências medidas com a fita antropométrica, correspondendo ao valor real do perímetro das regiões medidas.
Na Tabela 5.7 é possível acompanhar a massa corporal real dos avaliados juntamente com a massa corporal calculado pelo aparelho e a margem de erro para cada um dos avaliados e o erro médio das medidas.

78
Tabela 5.7: Relação entre peso real, peso calculado usando os parâmetros do conversor A/D e percentual de erro junto com o percentual médio do erro.
Peso real
(Kg) Peso estimado (aparelho) (Kg)
Módulo do percentual
de erro
1 51,10 62,50603896 22,32101559
2 51,40 63,32538126 23,20113086
3 54,90 63,92548207 16,43985806
4 55,00 60,98115433 10,87482606
5 56,00 64,01021205 14,30395008
6 57,80 63,38433876 9,661485739
7 58,00 63,87678229 10,13238326
8 58,30 62,90623491 7,900917517
9 58,50 63,5054504 8,556325463
10 58,80 63,07563429 7,271486887
11 59,80 64,18639268 7,335104808
12 59,90 64,60541741 7,855454767
13 62,20 63,93035095 2,781914711
14 62,40 64,85642519 3,936578831
15 63,30 64,25335096 1,50608367
16 64,30 69,02160739 7,343090805
17 64,60 69,44911583 7,506371255
18 65,80 63,47298498 3,536496993
19 65,90 64,5201062 2,093920789
20 66,30 64,25100913 3,090483962
21 67,90 69,47744263 2,323185015
22 68,40 67,97635768 0,619360111
23 69,50 70,3821332 1,269256409
24 70,00 70,27797244 0,397103483
25 70,10 68,38913209 2,440610434
26 70,10 63,0835538 10,00919572
27 72,40 69,40986951 4,130014494
28 73,10 70,30440376 3,824345067
29 74,00 64,39140998 12,98458111
30 74,40 69,35850384 6,776204511
31 75,90 69,67708437 8,198834816
32 77,90 64,6070997 17,06405687
33 79,00 69,1049318 12,52540278
34 79,50 69,45310591 12,63760263
35 79,90 69,3635077 13,18709925
36 81,50 69,50731684 14,71494866
37 87,60 71,18887656 18,73415918
38 93,10 69,65642737 25,18106619
39 94,50 68,67782843 27,32504928
40 97,70 69,60346657 28,75796667
Percentual de erro médio: 10,01872307
Encontrou-se para a amostra avaliada, um erro percentual médio de aproximadamente 10%.

79
Na Tabela 5.8 observa-se o segundo método, usando os valores das circunferências dos músculos medidos. Estão relacionados na tabela, a massa corporal real, a massa corporal calculada usando as medidas da fita antropométrica e o percentual de erro.
Tabela 5.8: Relação entre peso real, peso calculado usando as circunferências das regiões medidas com a fita antropométrica e o percentual de erro de cada amostra junto com o
percentual médio do erro.
Peso real
(Kg) Peso estimado (calculado) (Kg)
Módulo do percentual de erro
1 51,10 49,3448 3,434833659
2 51,40 51,27552 0,242178988
3 54,90 50,27591 8,422750455
4 55,00 52,08215 5,305181818
5 56,00 55,98765 0,022053571
6 57,80 55,55058 3,891730104
7 58,00 59,1838 2,041034483
8 58,30 59,94654 2,824253859
9 58,50 61,70263 5,474581197
10 58,80 58,02918 1,310918367
11 59,80 61,31279 2,529749164
12 59,90 50,64947 15,44328881
13 62,20 59,34478 4,590385852
14 62,40 59,88668 4,02775641
15 63,30 58,9468 6,877093207
16 64,30 61,16285 4,878926905
17 64,60 59,67184 7,62873065
18 65,80 63,53325 3,444908815
19 65,90 63,39367 3,80323217
20 66,30 62,166 6,235294118
21 67,90 61,90816 8,824506627
22 68,40 64,91747 5,091418129
23 69,50 67,99824 2,160805755
24 70,00 61,90816 11,55977143
25 70,10 64,91747 7,393052782
26 70,10 72,96475 4,086661912
27 72,40 73,91822 2,09698895
28 73,10 79,04966 8,139069767
29 74,00 74,28135 0,380202703
30 74,40 72,81886 2,125188172
31 75,90 72,86047 4,004650856
32 77,90 73,23289 5,991155327
33 79,00 66,91482 15,2976962
34 79,50 74,4447 6,358867925
35 79,90 78,76805 1,416708385
36 81,50 75,27037 7,643717791
37 87,60 80,09986 8,561803653
38 93,10 90,76394 2,509194415
39 94,50 72,95389 22,8001164
40 97,70 85,61189 12,37268168
Percentual de erro médio: 5,781078537

80
A estimativa da massa corporal quando calculada utilizando-se dos valores das medições usando a fita para medidas de antropometria, resultou num erro médio de aproximadamente 5,7%.
Com a finalidade explicativa, a Figura 5.7 mostra os passos para obtenção das circunferências dos músculos e do uso desses valores para se estimar a massa corporal.
Figura 5.7: Exemplificação do calculo da circunferência do tríceps por meio da equação da regressão, juntamente com o calculo da estimativa da massa corporal utilizando-se
desses valores.
5.2 Resultados encontrados Comparando-se as duas formas de cálculo, encontrou-se um erro médio para a medição
feita pelo aparelho de 10% enquanto que o erro médio para o calculo usando as medidas reais das circunferências das regiões, aproxima-se de 5,7%.
As figuras a seguir, mostram graficamente a relação entre os dados encontrados. No caso da Figura 5.8, temos o gráfico que compara os valores da massa corporal real com a massa corporal calculado pelo aparelho.

81
Figura 5.8: Gráfico da relação entre a massa corporal real e a massa corporal estimado pelo cálculo utilizado no aparelho, nos quais os parâmetros de entrada são os valores
convertidos pelo conversor A/D.
Na Figura 5.9 observa-se a relação entre a massa corporal real e a massa corporal
calculado utilizando os valores das circunferências das regiões medidos com a fita antropométrica.
Figura 5.9: Gráfico da relação entre a massa corporal real e a massa corporal estimado, nos quais os parâmetros de entrada da equação da estimativa da massa corporal são os
valores dos perímetros das regiões medidas com a fita antropométrica.
Peso real x Peso estimado (aparelho)
40,00
50,00
60,00
70,00
80,00
90,00
100,00
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39
Peso (kg)
Peso real
Peso estimado (aparelho)
Peso real x Peso estimado (calculado)
40,00
50,00
60,00
70,00
80,00
90,00
100,00
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39
Peso (Kg)
Peso real Peso estimado (calculado)

82
Observa-se na Figura 5.10 a relação entre os valores encontrados pelas duas formas de estimativa da massa corporal e a massa corporal real do avaliado.
Na Figura 5.11 é possível visualizar a massa corporal real do avaliado juntamente com o percentual de erro encontrado em cada amostra em relação à massa corporal real. O eixo da esquerda representa os valores da massa corporal medido em quilogramas enquanto que o eixo da direita representa os valores percentuais do erro.

83
Peso estimado (aparelho) x Peso real x Peso estimado (calculado)
40
50
60
70
80
90
100
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39
Peso (K
g)
Peso estimado (aparelho)
Peso real
Peso estimado (calculado)
Figura 5.10: Gráfico da relação entre a massa corporal estimado pelo aparelho, tendo como entrada os valores do conversor A/D, a massa corporal real e a massa corporal estimado calculado, tendo como entrada os valores das circunferências das regiões medidas
com a fita antropométrica.
% do Erro (aparelho) x Peso real x % do Erro (calculado)
0,00
10,00
20,00
30,00
40,00
50,00
60,00
70,00
80,00
90,00
100,00
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39
Pes
o (kg
)
0
5
10
15
20
25
30
% d
e er
ro
Peso real
% Erro (aparelho)
% Erro (calculado)
Figura 5.11: Gráfico das relações dos percentuais de erro das duas formas da estimativa da massa corporal. % Erro (aparelho) refere-se aos valores provenientes do conversor A/D para estimar a massa corporal enquanto que o % Erro (calculado) refere-se aos
valores das circunferências medidas com a fita antropométrica. O eixo da esquerda representa a escala da massa corporal em quilogramas e a escala da direita representa o % do erro.

84
6 CONCLUSÃO
Concluída a parte de testes e analisando os resultados a partir das tabelas e gráficos, constatamos que equação desenvolvida pela doutora Estela Iraci Rabito para a estimativa da massa corporal a partir das circunferências das regiões tricipital, abdominal e da panturrilha, somadas ao sexo do paciente, consegue efetuar essa predição com um nível de precisão bastante aceitável, possuindo erro médio de 6%.
Contudo ao relacionar a bioimpedância dessas regiões com as suas respectivas circunferências, encontramos valores muitas vezes defasados, gerando um percentual de erro para cada uma das medias. Com isso, era esperado que a margem de erro em relação à massa corporal real dos avaliados também tivesse uma defasagem o que de fato aconteceu, gerando valores com erro médio de 10,01%.
De acordo com a amostra de 40 avaliados com peso médio de 68,77 Kg, e ao organizar esses dados de forma a mostrar a massa corporal real em ordem crescente, observamos que a predição da massa corporal utilizando o aparelho, teve uma margem de erro abaixo da esperada nos intervalos entre 59,90 Kg e 73,10 Kg, possuindo erro médio de 3,8%. Os valores da massa corporal dentro desse intervalo utilizando-se a equação usando os valores das circunferências medidas com a fita antropométrica mantiveram a margem de erro próxima de 6% atingindo o valor de 6,2%.
Ao que foge desse intervalo, ou seja, valores menores que 59,90 Kg e maiores que 73,10 Kg, a margem de erro das estimativas feitas com o aparelho sobe substancialmente marcando 14,52% de erro médio, enquanto que o erro médio para os valores calculados com as medidas das circunferências é de 5,34%.
Percebemos que a margem erro para ambas as medições é maior à medida que temos valores de pesos mais altos.
Acreditamos que a proposta de estimativa de peso por bioimpedância é viável e ainda teria uma viabilidade maior se os parâmetros de teste fossem mais rígidos, efetuando os testes com o avaliado despido, deitado e com as condições recomendadas para a medição de um sinal de bioimpedância, resultando em medidas mais precisas. No âmbito hospitalar, o uso do aparelho teria sua utilidade no que tange a um distúrbio menor do repouso do paciente, pois ao se utilizar a medição da circunferência das regiões, há a necessidade de disturbar o paciente usando a fita antropométrica.

85
REFERÊNCIAS BIBLIOGRÁFICAS
GEDDES, L.A.; BAKER, L.E. Principles of Applied Biomedical Instrumentation. Hardcover, 1989.
PETROSKI L.; Edio. Antropometria: técnicas e padronizações. Porto Alegre. Pallotti, 1999.
GILLEANES T. A. GUEDES, UML: uma Abordagem Prática. Novatec.
THOMASSET, A.L. Bio-electrical impedance analysis. 1997.
RABITO I.; Estela. Validation of predictive equations for weight and height using a metric tape. Nutrición Hospitalaria [s.l], 2008.
PERTENCE, Antônio. Amplificadores Operacionais e Filtros Ativos. Porto Alegre: Bookman, 2003, 6ª Edição.
HALKIAS, Christos C.; MILLMAN, Jacob. Eletrônica: Dispositivos e Circuitos. São Paulo: McGraw-Hill do Brasil, 1981.
PEREIRA, F.; Microcontroladores PIC Programação Em C. Editora Érica. São Paulo. 2003.
LOURENCO,A.C. et al.; Circuitos em Corrente Continua. Editora Érica. São Paulo. 2001.
BUZZELI, Paul; PINTAURO, Stephen. Bioeletric Impedance Analysis: Table of contents. Disponível em: <http://nutrition.uvm.edu/bodycomp/bia/bia-toc.html> Acesso em: abril 2009.
GRIMNES, Sverre; MARTINSEN, Orjan. Bioimpedance And Bioelectricity Basics. San Diego, 2000.
NOVAELETRONICA <http://www.novaeletronica.net> Acessado em: Novembro de 2009

86
CIRCUITOSTODAY <http://www.circuitstoday.com> Acessado em: Novembro de 2009
EE-PUCRS <http://www.ee.pucrs.br> Acessado em: Novembro de 2009
HOWSTUFFWORKS <http://www.howstuffworks.com> Acessado em: Novembro de 2009
MICROCHIP <http://www.microchip.com> Acessado em: Novembro de 2009
CEFETERIO <http://www.cefetrio.hpg.ig.com.br> Acessado em: Novembro de 2009
MSPC <http://www.mspc.eng.br> Acessado em: Novembro de 2009
MAXIM-IC <http://www.maxim-ic.com> Acessado em: Novembro de 2009
ST <http://www.st.com> Acessado em: Novembro de 2009
LUMATRONIC <http://www.lumatronic.com.br> Acessado em: Novembro de 2009
TI <www.ti.com> Acessado em: Novembro de 2009
DAVIDDARLING <www.daviddarling.info> Acessado em: Novembro de 2009
A.D.A.M <http://www.adam.com> Acessado em: Novembro de 2009
MSD-BRAZIL <http://www.msd-brazil.com> Acessado em: Novembro de 2009

87
ANEXO A - ARTIGO

88

89

90

91
ANEXO B - MANUAL

92
Descrito abaixo o manual de funcionamento do aparelho.
Manual
O presente manual tem o objetivo de auxiliar o usuário na utilização do sistema. Ligando o aparelho
Na lateral direita do dispositivo, encontramos a chave para ligar e desligar o sistema. Empurre a alavanca para iniciar o sistema. Menu Principal

93
Ao ser iniciado, o sistema mostrará as duas opções disponíveis, e ao clicar no botão 1, o sistema entrará em modo de medição enquanto que o botão 2 entrará no modo de cadastro. 1 - Medir
Ao se pressionar a opção 1, espera-se que os cabos já estejam conectados aos eletrodos.
Logo acima da saída dos cabos, esta escrita a letra inicial de cada região a ser medida. (T) para Tríceps, (A) para Abdômen e (P) para Panturrilha.
Após a ligação dos cabos nos eletrodos, o botão 1 para entrar em modo de medição pode ser acionado.

94
Ao entrar em modo de medição, o sistema fará a leitura dos valores da bioimpedância do avaliado. Ao concluir as medições, é requisitado ao usuário que pressione o botão 1 para prosseguir com processo de medição.
É requisitado ao usuário que selecione o sexo do avaliado. Pressione o botão 1 para o sexo masculino ou botão 2 para o sexo feminino. Nessa etapa não há como retornar imediatamente ao menu, necessitando a conclusão do procedimento.

95
Após seleção do sexo, o resultado da massa corporal é dado na tela. O valor fica visível até que o botão 1 seja pressionado.
É possível após a medição, entrar na interface de cadastro para que o paciente que esta sendo medido seja cadastrado no sistema. O usuário é levado para a interface de cadastro apertando o botão 1 e levado ao menu principal apertando o botão 5. 2 - Cadastro

96
Ao selecionar a opção 2 do menu principal, o usuário é levado até ao menu de cadastro, onde pode selecionar as opções de Cadastrar, Buscar e Voltar ao Menu. Cadastro >> 1 - Cadastrar
Ao apertar o botão 1 dentro do menu de cadastro, o usuário é levado até a tela de cadastramento do paciente.
Os dados a serem cadastrados são: Nome, Sobrenome, Idade e Sexo. O Nome e Sobernome tem tamanho máximo de 10 letras cada um, sendo que ao
extrapolar o tamanho máximo, o sistema automaticamente passa para o próximo item a ser cadastrado.
Para navegar pela interface de cadastro, utiliza-se os botões 1 e 3 para fazer a seleção das letras. O botão 1 caminha pelo alfabeto de forma crescente enquanto que o botão 3 caminha pelo alfabeto de forma decrescente.

97
Para passar para a próxima letra do nome ou sobrenome, utiliza-se o botão 4 enquanto que o botão 2 é responsável por retroceder uma letra possibilitando sua edição.
Ao concluir o cadastro do nome, é necessário pressionar o botão 5 para que o sistema então habilite o cadastramento do próximo campo.
Após cadastramento de todos os itens, uma mensagem de confirmação surgira na tela.,
Ao pressionar qualquer um dos botões 3,4 ou 5, fará com que o sistema retorno ao cadastro para que os dados sejam modificados.
Pressionando o botão 2, há o cancelamento do cadastro e o sistema retorna ao menu de cadastro.
Confirmando o cadastro por meio do botão 1, iniciará o processo de medição ocorrendo os passos semelhantes aos descritos no item “1 - Medir” come exceção do passo
de escolha do sexo.

98
Cadastro >> 2 - Buscar
No menu de cadastro ao pressionar o botão 2, o usuário é levado a tela de busca, onde o primeiro cadastro é visualizado na tela.
É possível identificar todos os campos cadastrados, além da massa corporal medido pelo sistema. No canto superior direito, consta o número do cadastro que está sendo visualizado e ao lado, o numero total de pacientes cadastrados.
Para navegar pela interface de busca, utilize os botões 1 e 3, onde o botão 1 fará a seleção do próximo cadastro enquanto que o botão 3 faz a seleção do cadastro anterior.
Ficam disponíveis ao usuário as opções de alteração, deleção e retorno ao menu. Para retornar ao menu de cadastro, pressione o botão 5. Apertando o botão 2, o usuário é levado ao sistema de cadastro novamente,
possibilitando que os dados do paciente sejam modificados com exceção da massa corporal.
Ao finalizar a edição o sistema requisita ao usuário se há necessidade de novo cadastramento da massa corporal.
Se sim, o sistema entra em modo de medição, senão, faz as modificações mantendo a massa corporal do paciente já cadastrado.
Apertando o botão 4, é possível deletar o cadastro selecionado, surgindo uma tela de confirmação de exclusão.

99
O botão 1 deleta os dados do paciente selecionado e o botão 5 retorno ao modo de
busca. Desligamento
Para desligamento do sistema, basta puxar a chave, cortando a alimentação do sistema. Os dados cadastrados se mantêm armazenados mesmo depois do desligamento do aparelho. Soluções e Problemas:
1 - Valores convertidos estão muito baixos, em torno de 30.
R: Verificar conexão dos cabos aos eletrodos.
2 - Aperto no botão 5 uma vez e o sistema pula várias etapas.
R: Diminuir o tempo que se mantém segurado o botão.
3 - Mesmo soltando o botão rapidamente, o sistema continua a pular etapas.
R: Desligar o aparelho e desconectá-lo da bateria, religar as baterias após 1 minuto e ligar o aparelho. Obs: se não for possível desconectar a bateria, deixar desligado por cerca de 10 a 15 minutos.
4 - Display liga rapidamente, fica inteiro branco e depois apaga.
R: Verificar se os cabos da bateria não estão encostados entre si.
5 - Ao ligar o aparelho, o display perde o brilho até apagar.
R: Retirar as baterias e carregá-las.
6 - Algumas letras aparecem mal formadas no display.
R: Desligar e religar o aparelho. Ao persistir, considerar a hipótese da recarga das baterias.