Embed Size (px)
Citation preview
ESTUDO PARA PROJETO DE MÓDULO DISCRIMINADOR DE UM PIG MFL
Evelyn Vieira Curvelo
Projeto de Graduação apresentado ao Curso de
Engenharia Mecânica da Escola Politécnica,
Universidade Federal do Rio de Janeiro, como
parte dos requisitos necessários à obtenção do
título de Engenheiro.
Orientador: José Stockler Canabrava Filho
Rio de Janeiro
Abril de 2016
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
Departamento de Engenharia Mecânica
DEM/POLI/UFRJ
ESTUDO PARA PROJETO DE MÓDULO DISCRIMINADOR DE UM PIG MFL
Evelyn Vieira Curvelo
PROJETO FINAL SUBMETIDO AO CORPO DOCENTE DO DEPARTAMENTO
DE ENGENHARIA MECÂNICA DA ESCOLA POLITÉCNICA DA
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS
REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE
ENGENHEIRO MECÂNICO.
Aprovado por:
________________________________________________
Prof. José Stockler Canabrava Filho, Ph.D
________________________________________________
Prof. Flávio de Marco Filho, D.Sc.
________________________________________________
Prof. Sérgio Exel Gonçalves, D.Sc.
RIO DE JANEIRO, RJ - BRASIL
ABRIL DE 2016

iii
Vieira Curvelo, Evelyn
Estudo para projeto de módulo discriminador de um
pig MFL/ Evelyn Vieira Curvelo. – Rio de Janeiro: UFRJ/
Escola Politécnica, 2016.
XII, 44 p.: il.; 29,7 cm.
Orientador: José Stockler Canabrava Filho
Projeto de Graduação – UFRJ/ Escola Politécnica/
Curso de Engenharia Mecânica, 2016.
Referência Bibliográficas: p. 44
1. Pig. 2. Técnica MFL. 3.Inspeção de Dutos. I.
Stockler Canabrava Filho, José. II. Universidade Federal
do Rio de Janeiro, Escola Politécnica, Curso de
Engenharia Mecânica. III. Estudo para projeto de módulo
discriminador de um pig MFL

iv
Dedico este trabalho aos meus
pais, sem eles eu nada seria.
v
Agradecimentos
Em primeiro lugar, agradeço a Deus por ter me permitido chegar até aqui.
Aos meus pais, Edna e Eliezer, por tudo que fizeram e continuam fazendo por
mim. Obrigada por terem me dado a melhor educação possível, que me permitiu chegar
aonde cheguei. Vocês são o meu orgulho e verdadeiros amigos, meu amor e gratidão
por vocês não conseguem ser expressos em palavras. Essa conquista não é minha, é
nossa. Ao meu irmão Erick, um grande exemplo pra mim, me mostrando que para
conquistarmos nossos objetivos só dependemos de nós mesmos. A sua busca constante
por conhecimento me inspira e sou muito grata por sermos, além de irmãos, verdadeiros
amigos.
Ao meu amor, Diego, que esteve ao meu lado desde o início da faculdade, sempre
me incentivando e acreditando no meu potencial, muito mais do que eu mesma. Seu
apoio, sua amizade e seu amor foram essenciais durante essa jornada, obrigada por
todas as vezes que foi meu ombro amigo, sempre com muita paciência e compreensão.
Te ter ao meu lado me dá sempre forças para seguir adiante e tenha certeza que essa foi
apenas a primeira de muitas conquistas que irei dividir com você.
A toda a minha família, que sempre torceu e continuará torcendo pelo meu
sucesso. Vó, obrigada pelas orações para que tudo desse certo. Aos meus sogros, que sei
que estão muito felizes com essa minha conquista.
Ao professor José Stockler, não só meu orientador, mas um dos melhores
professores que tive o grande prazer de ter. Obrigada por toda a ajuda e ensinamentos
não apenas durante a orientação do projeto, mas ao longo de toda a faculdade.
Aos meus grandes amigos Bruna, Camila, Elisa, Thaís, Isabela, Paloma, Gil,
Pedro, Maria, Tati, Vini, Luciano, Adolpho, Henrique e Julianna. Agradeço todos os
dias pela amizade de vocês, obrigada por todos os momentos de diversão e
companheirismo antes e durante a faculdade, momentos esses que sei que jamais
acabarão.
A todos os amigos e colegas que tive o prazer de conviver na UFRJ. Um obrigada
especial àqueles que estiveram muito presente durante os últimos anos, amigos que
quero levar para a vida, Paulo Henrique, Cecília e Larissa.
Ao Rodrigo da Pipeway e aos queridos Iane e Lucas, por toda a ajuda.
Por fim, agradeço a todos os professores da UFRJ que contribuíram para minha
formação, obrigada por me tornar uma engenheira mecânica.
vi
Resumo do projeto de graduação apresentado ao DEM/UFRJ como parte dos requisitos
necessários para obtenção do grau de Engenheiro Mecânico.
ESTUDO PARA PROJETO DE MÓDULO DISCRIMINADOR DE UM PIG MFL
Evelyn Vieira Curvelo
Abril/2016
Orientador: José Stockler Canabrava Filho
Curso: Engenharia Mecânica
Manter a integridade de um duto é extremamente importante para que o transporte de
petróleo e seus derivados seja mantido sem nenhum comprometimento. A tecnologia de
pig tem sido cada vez mais utilizada no Brasil e, no entanto, muitos ainda desconhecem
esse tipo de ferramenta de inspeção. Neste trabalho, serão abordados os diferentes tipos
de pig, assim como suas diversas finalidades. Será explicada a técnica MFL – Magnetic
Flux Leakage de detecção da corrosão, assim como os diferentes tipos de técnicas
utilizadas para o módulo discriminador do pig, responsável pela distinção entre corrosão
externa e interna do duto. Após, será explicado quais os dados do duto e de operação
devem ser conhecidos para que se possa começar o projeto de um pig. Será
desenvolvido então um módulo discriminador utilizando a técnica de sensores para
detecção da corrosão interna previamente desenvolvidos em pesquisa.
Palavras-chave: Pig, Técnica MFL, Inspeção de Dutos

vii
Abstract of Undergraduate Project presented to POLI/UFRJ as a partial fulfillment of
the requirements for the degree of Engineer.
STUDY FOR A PROJECT OF A DISCRIMINATING MODULE OF A MFL PIG
Evelyn Vieira Curvelo
April/2016
Advisor: José Stockler Canabrava Filho
Course: Mechanical Engineering
Guaranteeing pipelines’ good conditions is extremely important for the safe and
effective transport of petroleum and its derivatives. Although Pig’s technology has been
largely used in Brazil, there is still a lack of knowledge about this inspection tool in the
country. This work will approach to the different kinds of Pigs, as well as their use. The
MFL – Magnetic Flux Leakage – technique of corrosion detect will be explained, as
well as the different kinds of techniques applied to the discriminating module of the pig,
responsible for the distinction between pipelines external and internal corrosion.
Afterwards, will be explained which are the data about the pipeline and operation that
need to be known to start a Pig project. Then, a discriminating module will be
developed using an internal corrosion detection technique that have been developed in a
research.
Keyword: Pig, MFL technique, Pipeline Inspection
viii
SUMÁRIO
1. Introdução.................................................................................................................. 1
1.1. Estrutura do trabalho ............................................................................................. 2
2. Pig.............................................................................................................................. 4
2.1. Pigs de limpeza ...................................................................................................... 5
2.1.1. Pigs espuma ....................................................................................................... 5
2.1.2. Pigs raspadores .................................................................................................. 6
2.1.3. Flexpigs .............................................................................................................. 6
2.1.4. Pigs esfera .......................................................................................................... 7
2.1.5. Pigs de limpeza magnética ................................................................................. 7
2.2. Pigs para verificação da geometria do duto ........................................................... 8
2.2.1. Pig com placa calibradora .................................................................................. 8
2.2.2. Pig geométrico ................................................................................................... 8
2.3. Pigs para detecção de corrosão .............................................................................. 9
2.3.1. Pig magnético de corrosão ................................................................................. 9
2.3.2. Pig ultrassônico ................................................................................................ 10
2.3.3. Pig palito .......................................................................................................... 11
2.4. Pigs especiais ....................................................................................................... 12
2.4.1. Pig inercial ....................................................................................................... 12
2.4.2. Pigs de bloqueio ............................................................................................... 13
2.4.3. Smart ball ......................................................................................................... 13
2.4.4. Pig de perfilagem ............................................................................................. 14
3. Pig magnético de corrosão ...................................................................................... 18
3.1. Técnica “MFL” .................................................................................................... 18
3.2. Sensor discriminador ........................................................................................... 19
3.3. Módulo magnetizador .......................................................................................... 21
3.4. Formatos para copo do pig .................................................................................. 22
3.4.1. Copo pistão ...................................................................................................... 22
3.4.2. Disco ................................................................................................................ 22
3.4.3. Copo Cônico .................................................................................................... 23
3.5. Premissas para projeto ......................................................................................... 24
3.5.1. Diâmetro .......................................................................................................... 24
ix
3.5.2. Pressão ............................................................................................................. 25
3.5.3. Raio de curvatura ............................................................................................. 25
3.5.4. Derivações ....................................................................................................... 26
3.5.5. Extensão do duto .............................................................................................. 26
4. Projeto do módulo ................................................................................................... 27
4.1. Características do duto......................................................................................... 27
4.2. Análise das forças ................................................................................................ 28
4.3. Seleção de materiais ............................................................................................ 30
4.3.1. Disco ................................................................................................................ 30
4.3.2. Corpo, flanges e hastes sensoras ...................................................................... 31
4.4. Premissas ............................................................................................................. 31
4.4.1. Disco ................................................................................................................ 32
4.4.2. Sensor discriminador ....................................................................................... 35
4.4.3. Corpo ............................................................................................................... 39
4.4.4. Flange ............................................................................................................... 40
4.4.5. Módulo discriminador ...................................................................................... 42
5. Conclusão ................................................................................................................ 43
6. Referências Bibliográficas ...................................................................................... 44
x
Lista de Figuras
Figura 1 - Pig Espuma ...................................................................................................... 5
Figura 2 - Pig Raspador .................................................................................................... 6
Figura 3 - Flexpig ............................................................................................................. 6
Figura 4 - Pig Esfera ......................................................................................................... 7
Figura 5 - Pig de Limpeza Magnética .............................................................................. 7
Figura 6 - Pig com Placa Calibradora ............................................................................... 8
Figura 7 - Pig Geométrico ................................................................................................ 9
Figura 8 – Pig MFL ........................................................................................................ 10
Figura 9 - Pig Ultrassônico ............................................................................................. 11
Figura 10 - Transdutores de pig ultrassônico ................................................................. 11
Figura 11 - Pig Palito ...................................................................................................... 12
Figura 12 - Pig Inercial ................................................................................................... 13
Figura 13 - Pig de Bloqueio ............................................................................................ 13
Figura 14 - Small Ball .................................................................................................... 14
Figura 15 - Small Ball com capa de espuma .................................................................. 14
Figura 16 - Gráfico dos resultados de um Pig de Perfilagem ......................................... 15
Figura 17 - Sistema de magnetização utilizado .............................................................. 19
Figura 18 - Comparação entre o sinal de um sensor hall e um sensor discriminador .... 19
Figura 19 - Técnica de correntes parasitas ..................................................................... 20
Figura 20 - Sensor DMC ................................................................................................ 21
Figura 21 - Copo pistão .................................................................................................. 22
Figura 22 – Disco ........................................................................................................... 23
Figura 23 - Copo cônico ................................................................................................. 24
Figura 24 - Diferentes tamanhos de pig em uma curva 1,5 D ........................................ 26
Figura 25 - Forças atuando sobre o pig .......................................................................... 29
Figura 26 - Disco selador ............................................................................................... 34
Figura 27 - Sensor hall ................................................................................................... 36
Figura 28 - Hastes Sensoras ........................................................................................... 37
Figura 29 - Tensão sobre haste ....................................................................................... 37
Figura 30 - Tensão sobre enxaixe para sensor ................................................................ 38
Figura 31 - Deslocamento devido à flexão ..................................................................... 38

xi
Figura 32 - Corpo do módulo ......................................................................................... 40
Figura 33 - Análise de tensão sobre corpo do pig .......................................................... 40
Figura 34 - Furação para encaixe de junta cardan .......................................................... 41
Figura 35 - Flange .......................................................................................................... 41
Figura 36 - Flange de ligação ......................................................................................... 42
Figura 37 - Módulo Discriminador ................................................................................. 42
xii
Lista de Tabelas
Tabela 1 - Características do Duto ................................................................................. 27
Tabela 2 - Espessura do duto para diferentes trechos ..................................................... 28
Tabela 3 - Condições operacionais ................................................................................. 28
1
1. Introdução
O método mais seguro de transporte de gás, petróleo e derivados é através de
dutos metálicos que são responsáveis por levar esses produtos da região de extração à
região de refino e dela para os terminais de armazenamento. Eles podem ser aéreos,
enterrados ou submarinos. Independente do tipo de duto, eles estão sempre sujeitos a
ações externas e do próprio produto que podem vir a causar defeitos em sua estrutura ou
simplesmente acúmulo de resíduos indesejáveis em seu interior.
Os defeitos considerados mais importantes são [1]:
Corrosão interna e externa: Ocorrem devido à ação de agentes orgânicos,
químicos e eletroquímicos. A corrosão interna tem como causa os agentes
presentes no produto sendo transportado, caso da água salgada que é
carregada juntamente com o petróleo extraído.
Amassamentos: As causas para o amassamento podem ser por
deslizamentos de terra, rocha, trânsito de máquinas pesadas sobre a faixa
de dutos, etc. Eles prejudicam o escoamento e fragilizam a parede da
tubulação por gerar tensões concentradas.
Defeitos de soldagem: Deixam as juntas soldadas fragilizadas, atuando
como ponto concentrador de tensão.
É de suma importância que os possíveis danos causados à sua estrutura sejam
corretamente detectados para que possa se averiguar a necessidade de reparo e, caso seja
necessário, que ele seja feito corretamente. O método mais eficaz, e na maioria dos
casos o único, é a utilização da tecnologia de pigs instrumentados para detecção da
integridade do duto. Pigs são também utilizados para remoção de resíduos e outros fins.
O primeiro pig instrumentado comercial foi criado em 1964 pela empresa norte
americana Tuboscope e utilizava a técnica MFL de inspeção. Ele inspecionava apenas a
geratriz inferior do duto. Em 1966, ela construiu o primeiro pig do tipo MFL para
inspecionar toda a circunferência da tubulação e em 1971 outras empresas introduziram
no mercado o pig do tip MFL [2].
Por alguns anos, a utilização de pig para inspeção de dutos ainda não havia
chegado ao Brasil. A Petrobras, empresa responsável pelo transporte desses produtos
aqui, desconhecia qualquer técnica capaz de inspecionar seus dutos. Esse cenário foi
modificado devido a um acidente em fevereiro de 1984, na comunidade de Vila Socó,
Cubatão – São Paulo. Um oleoduto da Petrobras que transportava gasolina apresentou
2
vazamento em torno de 700 m³, provocando um grande incêndio na comunidade. O
laudo técnico da perícia indicou que a ruptura foi resultado de uma corrosão externa
severa que o mesmo apresentava.
A partir daí, a Petrobras passou a buscar no mercado internacional técnicas
capazes de inspecionar seus dutos. Em 1998 foi criada a Pipeway, empresa originada
por um grupo de pesquisadores da PUC-Rio, com uso da tecnologia do CENPES da
Petrobras, sendo até hoje a única empresa do Hemisfério Sul que fabrica esse tipo de
ferramenta.
Embora em 2000 a tecnologia de pig já fosse bastante utilizada, o maior uso se
dava para detecção de corrosão ou amassamentos. O acidente da Baía de Guanabara, em
18 de janeiro de 2000, em que o duto PE-II que transportava óleo combustível flambou
e rompeu, ocasionando um vazamento de 1.293 m³, não teve corrosão e nem
amassamento como causa. Inclusive, aproximadamente 3 meses antes do acidente, um
pig magnético de corrosão inspecionou o duto, deixando em evidência que o mesmo
não apresentava esse problema. Nesse caso, um pig que pudesse inspecionar o traçado
da tubulação poderia ter alertado que o oleoduto estava enfrentando problemas de
dilatação térmica devido ao transporte de produto aquecido, causando flambagem no
duto.
Hoje, a Petrobras utiliza diversos tipos de pigs para inspecionar seus dutos,
mostrando cada vez mais a importância de uma ferramenta de inspeção capaz de
inspecionar os mais diversos defeitos de uma tubulação.
1.1. Estrutura do trabalho
O objetivo desse trabalho é, após apresentar todas as funcionalidades de um pig e
todas as informações que devem ser conhecidas para iniciar o seu projeto, desenvolver
um módulo discriminador para acoplamento de sensores que utilizam uma técnica para
a detecção de corrosão interna em dutos previamente desenvolvidos em uma pesquisa.
Ele será dividido em 5 capítulos, sendo o primeiro deles a introdução.
No segundo capítulo será abordado um pouco melhor pig em geral, detalhando
melhor os diferentes tipos existentes e suas funções.
O terceiro capítulo fala um pouco mais sobre o pig MFL, explicando suas técnicas
de medição da corrosão e estrutura do módulo magnetizador. Ele especifica também as
3
premissas de projeto que devem ser levadas em consideração antes de se iniciar o
projeto não apenas de um pig MFL, mas de qualquer pig.
O quarto capítulo contém o estudo para projeto de um módulo discriminador,
utilizando os sensores desenvolvidos em pesquisa e ainda não utilizados na indústria,
com análise de forças e seleção de material, em que são utilizadas as premissas de
projeto para um duto da Petrobras.
O quinto e último capítulo contém a conclusão desse trabalho.
4
2. Pig
Conforme dito, pigs são ferramentas utilizadas na inspeção e manutenção de
dutos, embora essas não sejam suas únicas funções, pois existem também pigs que são
utilizados na interface de produtos, fazendo sua separação, quando se trata de um
poliduto. Uma característica muito importante desse tipo de mecanismo dutos é que não
é necessário parar o bombeamento do produto, pelo contrário, ele depende do fluido
para ser deslocado. Funcionam da seguinte forma: o pig é colocado na câmara lançadora
– que possui diâmetro interno superior ao da tubulação, com redução para o diâmetro
interno da mesma – e levado adiante pelo fluxo pressurizado do próprio produto, sendo
assim transportado ao longo do duto até chegar na câmara recebedora. A origem do
nome pig (porco em inglês) é muito controversa. Uns dizem que assim são chamados
pois os primeiros pigs de limpeza utilizados nos EUA, formados por chumaços de pano,
ainda na primeira metade do século passado, ao percorrer o duto, emitiam sons
semelhantes ao grunhido de um porco. Outros dizem que esse nome se deve ao fato de
que chegam em um estado tão sujo que se assemelham a um porco. Alguns, ainda,
consideram que pig é assim chamado por ser as iniciais de “Pipeline Inspection Gauge”.
As quatro principais funções de um pig são: limpeza, inspeção das condições das
paredes do duto, separação de diferentes produtos sendo transportados e detecção das
características geométricas dos dutos. Na limpeza das tubulações são utilizados pig
espuma, pigs raspadores, pigs de limpeza magnética e pig esfera. Existem também os
flexpigs que, como o próprio nome já diz, são utilizados tanto para limpeza quanto para
separação de produtos. Pig geométrico e pig com placa calibradora são utilizados para
verificação da geometria do duto. Para inspeção de corrosão em dutos temos o pig
magnético de corrosão, pig de ultrassom e pig palito. Existem também alguns outros
tipos de pigs especiais como o pig de bloqueio, pig inercial e o pig de perfilagem [3].
A grande vantagem da utilização de pigs é a capacidade desses de detectar
defeitos e anomalias sem que haja a necessidade de parar o transporte do fluido para que
isso ocorra, o que é de grande valia para a indústria visto que uma parada de produção
para inspeção de dutos custaria muito tempo e dinheiro.
5
2.1. Pigs de limpeza
Pigs de limpeza são utilizados para remoção de particulados sólidos, detritos,
condensado e parafina do interior de dutos. Essas sujeiras podem ter sido originadas
durante a fase de construção e montagem do duto, causada pelo processo de corrosão
interna ou até mesmo serem consequências do processo a que foi submetido o fluido a
ser bombeado.
2.1.1. Pigs espuma
Pig espuma é o mais simples e mais utilizado durante a fase de construção e
montagem do duto. Durante essa fase é comum acumular no interior do duto detritos
como: areia, pedra, pontas de eletrodo, etc. A densidade da espuma do pig a ser
utilizado varia de acordo com sua função. Para limpezas iniciais, o pig escolhido é o de
baixa densidade, que varia entre 20 e 60 kg/m³. Pigs espuma de média densidade tem
aproximadamente 150 kg/m³. Já os de alta densidade, acima de 200 kg/m³.
Como podemos ver na figura 1, esses pigs de espuma podem ainda ser revestidos
com materiais plásticos de alta resistência, materiais abrasivos e escovas de aço aderidas
nas superfícies da espuma em contato com o duto, dependendo do tipo de sujeira a que
está submetido o duto. Os pigs espuma são utilizados de forma gradativa: primeiro
utiliza-se um com diâmetro menor que o do duto para a primeira parte da limpeza e
depois vai aumentando esse diâmetro até chegar no diâmetro do duto ou até mesmo
excedê-lo, nos casos de limpeza avançada. Esse pig possui uma grande flexibilidade, o
que permite sua passagem em diferentes obstáculos geométricos, além de poder ser
usado em dutos com diferentes diâmetros.
Figura 1 - Pig Espuma
6
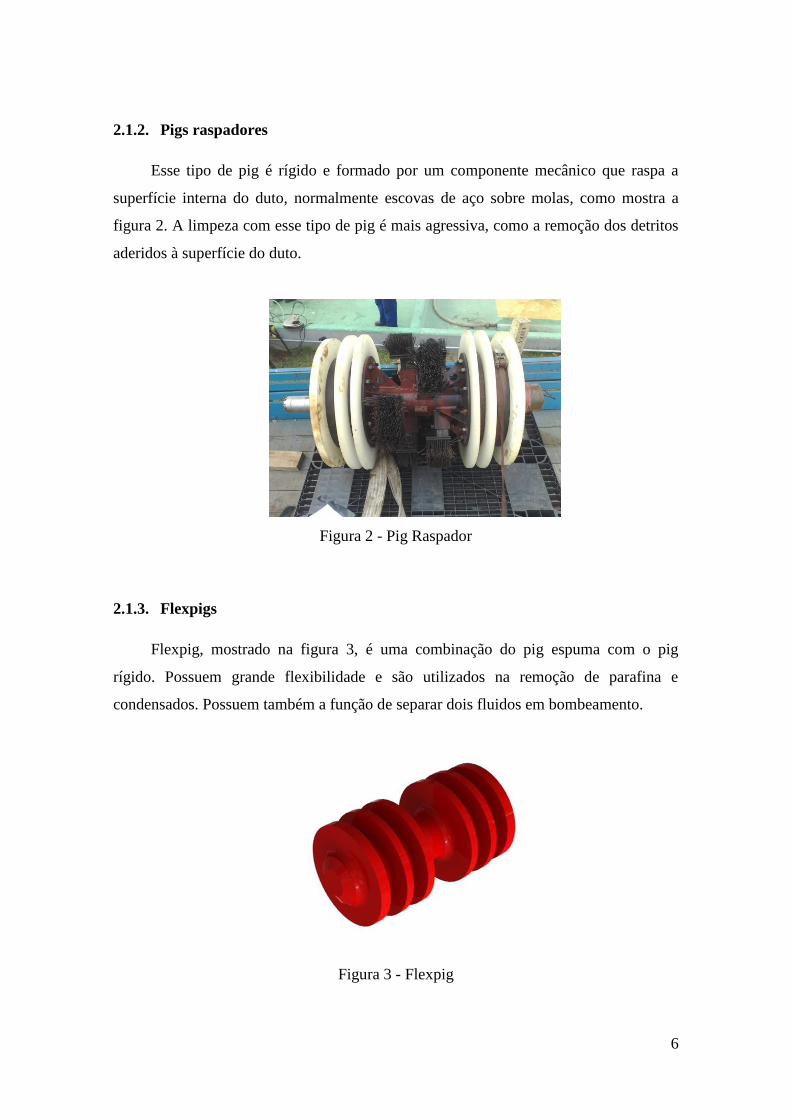
2.1.2. Pigs raspadores
Esse tipo de pig é rígido e formado por um componente mecânico que raspa a
superfície interna do duto, normalmente escovas de aço sobre molas, como mostra a
figura 2. A limpeza com esse tipo de pig é mais agressiva, como a remoção dos detritos
aderidos à superfície do duto.
Figura 2 - Pig Raspador
2.1.3. Flexpigs
Flexpig, mostrado na figura 3, é uma combinação do pig espuma com o pig
rígido. Possuem grande flexibilidade e são utilizados na remoção de parafina e
condensados. Possuem também a função de separar dois fluidos em bombeamento.
Figura 3 - Flexpig

7
2.1.4. Pigs esfera
Pigs esfera são muito usados na remoção de condensados em gasodutos,
diminuindo a perda de carga. Como mostra a figura 4, são fabricadas em material
plástico, normalmente poliuretano, podendo ser rígidas ou infláveis (nesse caso
possuem uma válvula para injeção do fluido).
Figura 4 - Pig Esfera
2.1.5. Pigs de limpeza magnética
Na figura 5 podemos ver que esse tipo de pig possui imãs em sua superfície que
tem por finalidade atrair partículas ferrosas. São utilizados logo após a construção e
montagem, retirando partículas ferro magnéticas, como pontas de eletrodo. São também
utilizados em dutos que, após anos de operação, apresentam o surgimento de produtos
de corrosão devido ao fato de operarem com produtos corrosivos.
Figura 5 - Pig de Limpeza Magnética

8
2.2. Pigs para verificação da geometria do duto
Esse tipo de pig serve para identificar problemas referentes à geometria do duto
tais como amassamentos, mossas, válvulas parcialmente fechadas, dentre outros. Esses
pigs são de grande importância pois através deles podemos detectar problemas na
geometria do duto que poderiam aprisionar os pigs de inspeção, o que causaria grandes
danos. São muito utilizados também na construção e montagem de dutos novos.
2.2.1. Pig com placa calibradora
A placa calibradora, normalmente feita em alumínio, consiste em um disco de
diâmetro menor que o do duto, que é montada num pig antes do seu lançamento. Caso a
placa contenha amassamentos na retirada do pig, temos a evidência de obstruções
geométricas no mesmo. Esse tipo de pig habilita o duto para a passagem do pig
geométrico, que só é lançado caso a redução de diâmetro do duto seja inferior a 10%.
Na figura 6 podemos ver exemplo de um pig com placa calibradora de alumínio.
Figura 6 - Pig com Placa Calibradora
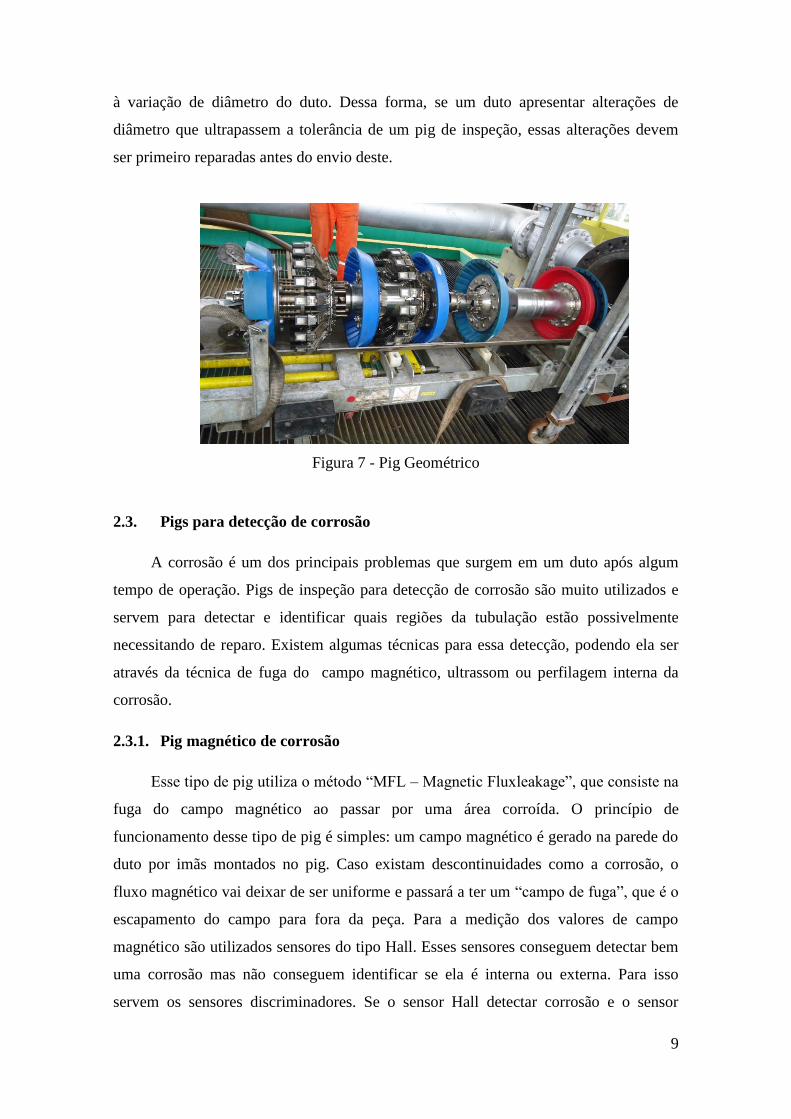
2.2.2. Pig geométrico
Pig geométrico é um pig instrumentado que contém sensores que registram os
ângulos das diversas hastes que tocam a superfície interna do duto. Na figura 7 vemos
que as hastes possuem uma certa angulação e as variações desses ângulos evidenciam a
geometria interna do duto. Assim como o pig de placa calibradora, esse tipo de pig é
muito utilizado na construção e montagem de um duto novo para verificar a qualidade
da montagem. São também muito utilizados como uma etapa anterior à passagem de
pigs de inspeção de corrosão, visto que esses são muito pesados e com pouca tolerância
9
à variação de diâmetro do duto. Dessa forma, se um duto apresentar alterações de
diâmetro que ultrapassem a tolerância de um pig de inspeção, essas alterações devem
ser primeiro reparadas antes do envio deste.
Figura 7 - Pig Geométrico
2.3. Pigs para detecção de corrosão
A corrosão é um dos principais problemas que surgem em um duto após algum
tempo de operação. Pigs de inspeção para detecção de corrosão são muito utilizados e
servem para detectar e identificar quais regiões da tubulação estão possivelmente
necessitando de reparo. Existem algumas técnicas para essa detecção, podendo ela ser
através da técnica de fuga do campo magnético, ultrassom ou perfilagem interna da
corrosão.
2.3.1. Pig magnético de corrosão
Esse tipo de pig utiliza o método “MFL – Magnetic Fluxleakage”, que consiste na
fuga do campo magnético ao passar por uma área corroída. O princípio de
funcionamento desse tipo de pig é simples: um campo magnético é gerado na parede do
duto por imãs montados no pig. Caso existam descontinuidades como a corrosão, o
fluxo magnético vai deixar de ser uniforme e passará a ter um “campo de fuga”, que é o
escapamento do campo para fora da peça. Para a medição dos valores de campo
magnético são utilizados sensores do tipo Hall. Esses sensores conseguem detectar bem
uma corrosão mas não conseguem identificar se ela é interna ou externa. Para isso
servem os sensores discriminadores. Se o sensor Hall detectar corrosão e o sensor
10
discriminador não detectar nada, então trata-se de uma corrosão externa. Caso o sensor
discriminador também detecte a corrosão, então se trata de uma corrosão interna.
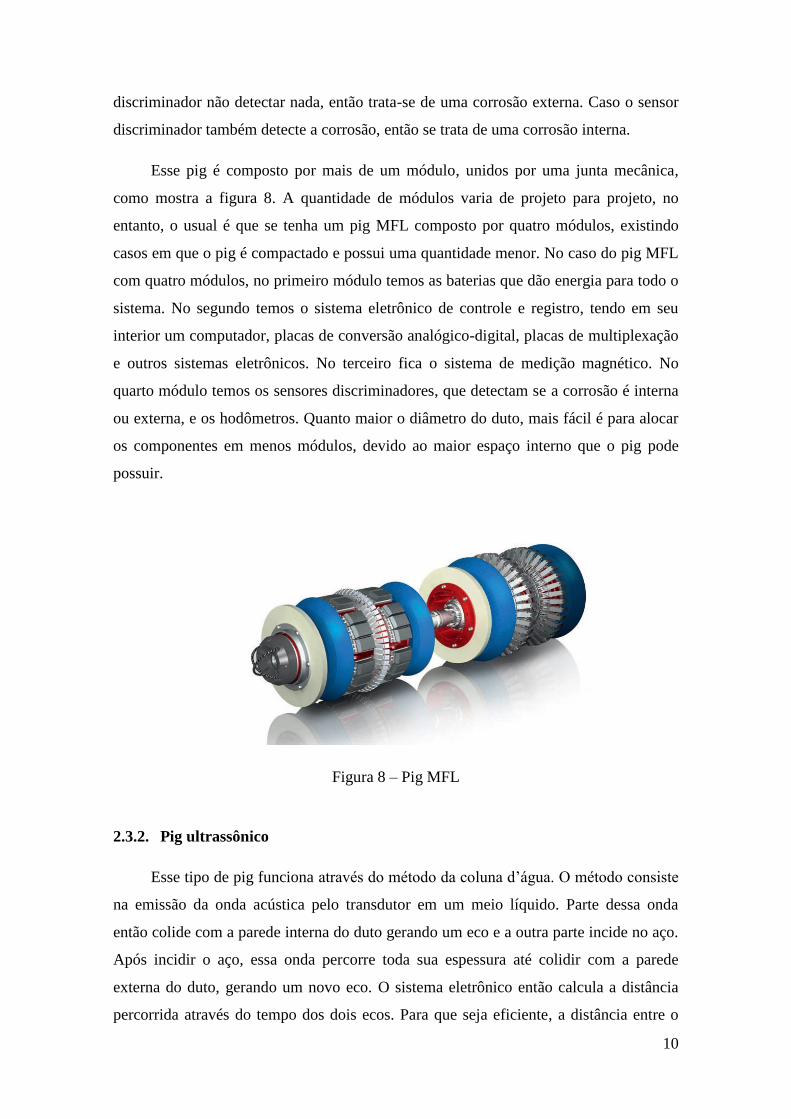
Esse pig é composto por mais de um módulo, unidos por uma junta mecânica,
como mostra a figura 8. A quantidade de módulos varia de projeto para projeto, no
entanto, o usual é que se tenha um pig MFL composto por quatro módulos, existindo
casos em que o pig é compactado e possui uma quantidade menor. No caso do pig MFL
com quatro módulos, no primeiro módulo temos as baterias que dão energia para todo o
sistema. No segundo temos o sistema eletrônico de controle e registro, tendo em seu
interior um computador, placas de conversão analógico-digital, placas de multiplexação
e outros sistemas eletrônicos. No terceiro fica o sistema de medição magnético. No
quarto módulo temos os sensores discriminadores, que detectam se a corrosão é interna
ou externa, e os hodômetros. Quanto maior o diâmetro do duto, mais fácil é para alocar
os componentes em menos módulos, devido ao maior espaço interno que o pig pode
possuir.
Figura 8 – Pig MFL
2.3.2. Pig ultrassônico
Esse tipo de pig funciona através do método da coluna d’água. O método consiste
na emissão da onda acústica pelo transdutor em um meio líquido. Parte dessa onda
então colide com a parede interna do duto gerando um eco e a outra parte incide no aço.
Após incidir o aço, essa onda percorre toda sua espessura até colidir com a parede
externa do duto, gerando um novo eco. O sistema eletrônico então calcula a distância
percorrida através do tempo dos dois ecos. Para que seja eficiente, a distância entre o
11
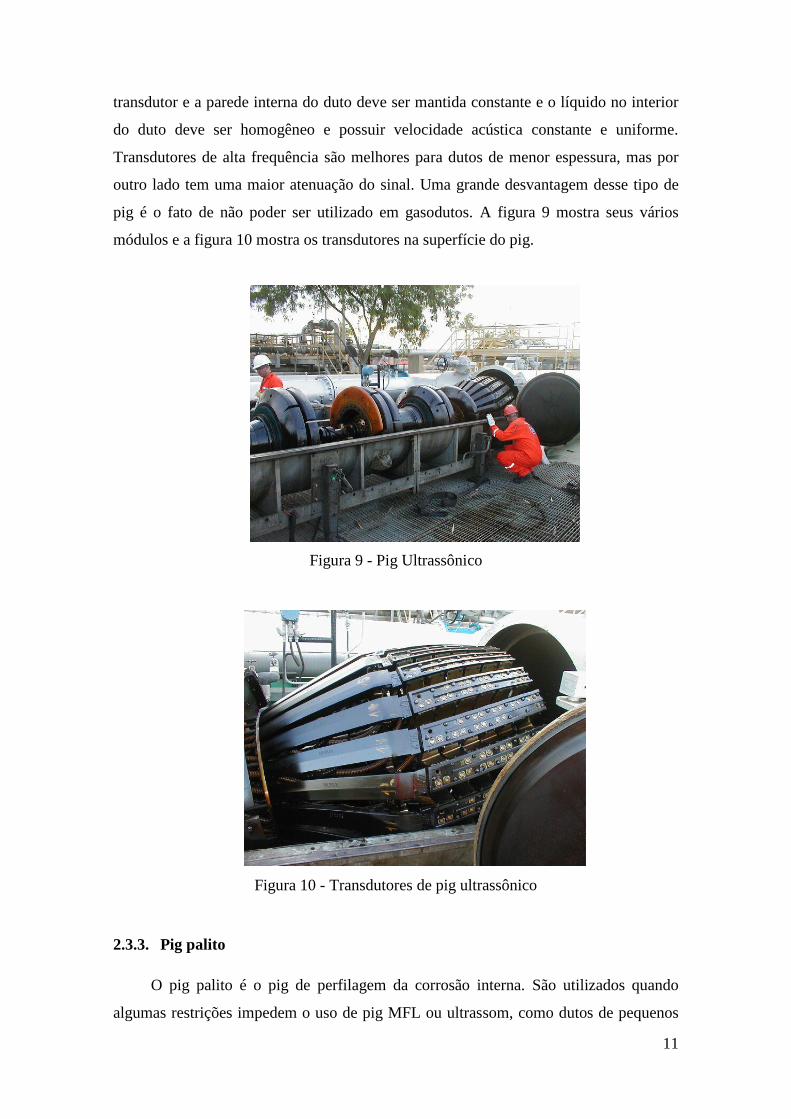
transdutor e a parede interna do duto deve ser mantida constante e o líquido no interior
do duto deve ser homogêneo e possuir velocidade acústica constante e uniforme.
Transdutores de alta frequência são melhores para dutos de menor espessura, mas por
outro lado tem uma maior atenuação do sinal. Uma grande desvantagem desse tipo de
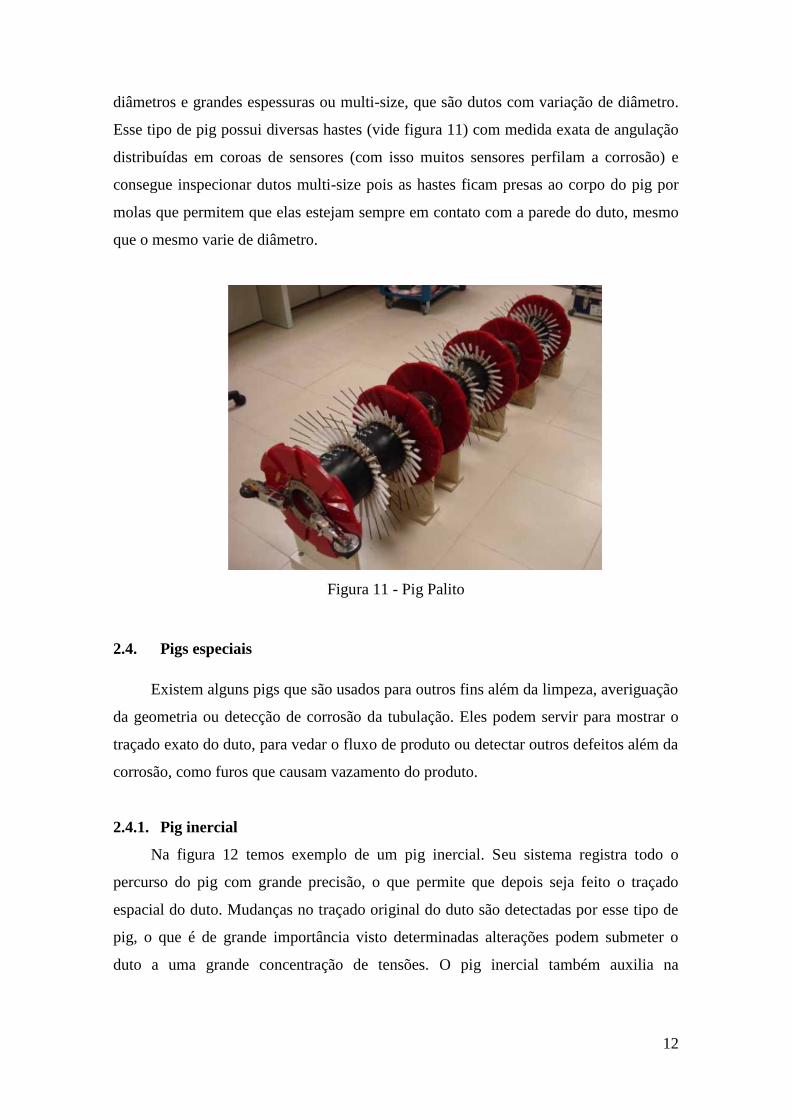
pig é o fato de não poder ser utilizado em gasodutos. A figura 9 mostra seus vários
módulos e a figura 10 mostra os transdutores na superfície do pig.
Figura 9 - Pig Ultrassônico
Figura 10 - Transdutores de pig ultrassônico
2.3.3. Pig palito
O pig palito é o pig de perfilagem da corrosão interna. São utilizados quando
algumas restrições impedem o uso de pig MFL ou ultrassom, como dutos de pequenos
12
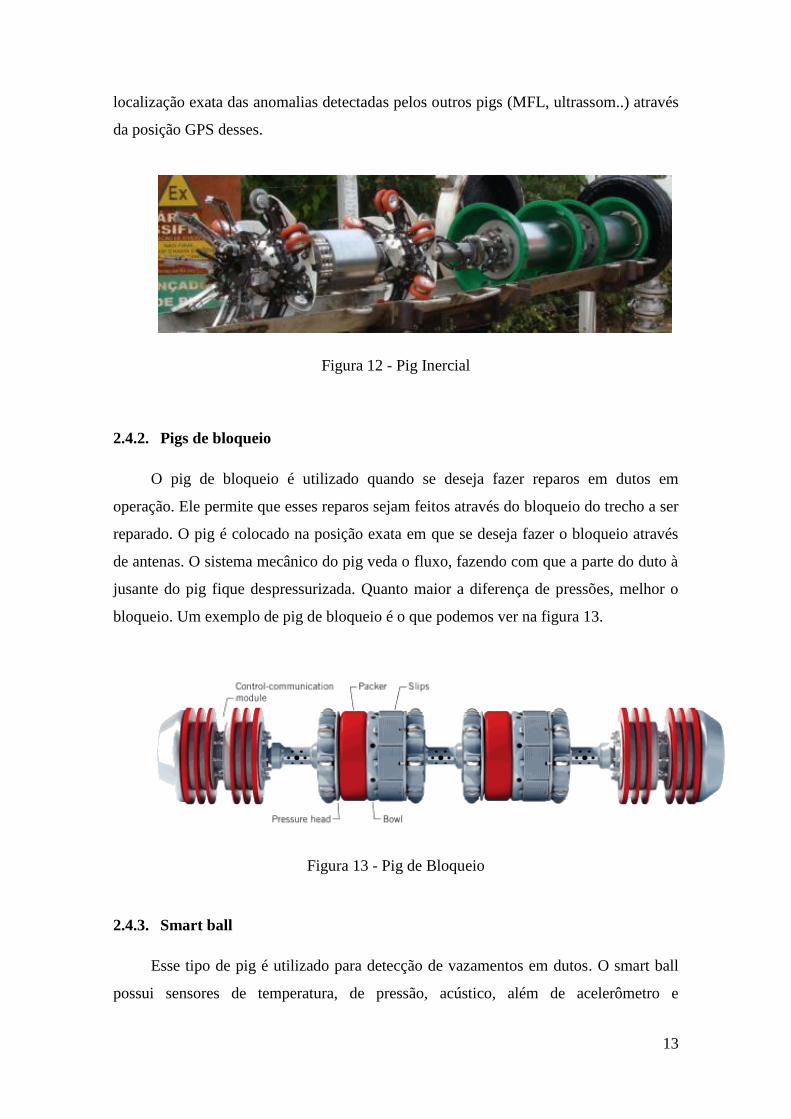
diâmetros e grandes espessuras ou multi-size, que são dutos com variação de diâmetro.
Esse tipo de pig possui diversas hastes (vide figura 11) com medida exata de angulação
distribuídas em coroas de sensores (com isso muitos sensores perfilam a corrosão) e
consegue inspecionar dutos multi-size pois as hastes ficam presas ao corpo do pig por
molas que permitem que elas estejam sempre em contato com a parede do duto, mesmo
que o mesmo varie de diâmetro.
Figura 11 - Pig Palito
2.4. Pigs especiais
Existem alguns pigs que são usados para outros fins além da limpeza, averiguação
da geometria ou detecção de corrosão da tubulação. Eles podem servir para mostrar o
traçado exato do duto, para vedar o fluxo de produto ou detectar outros defeitos além da
corrosão, como furos que causam vazamento do produto.
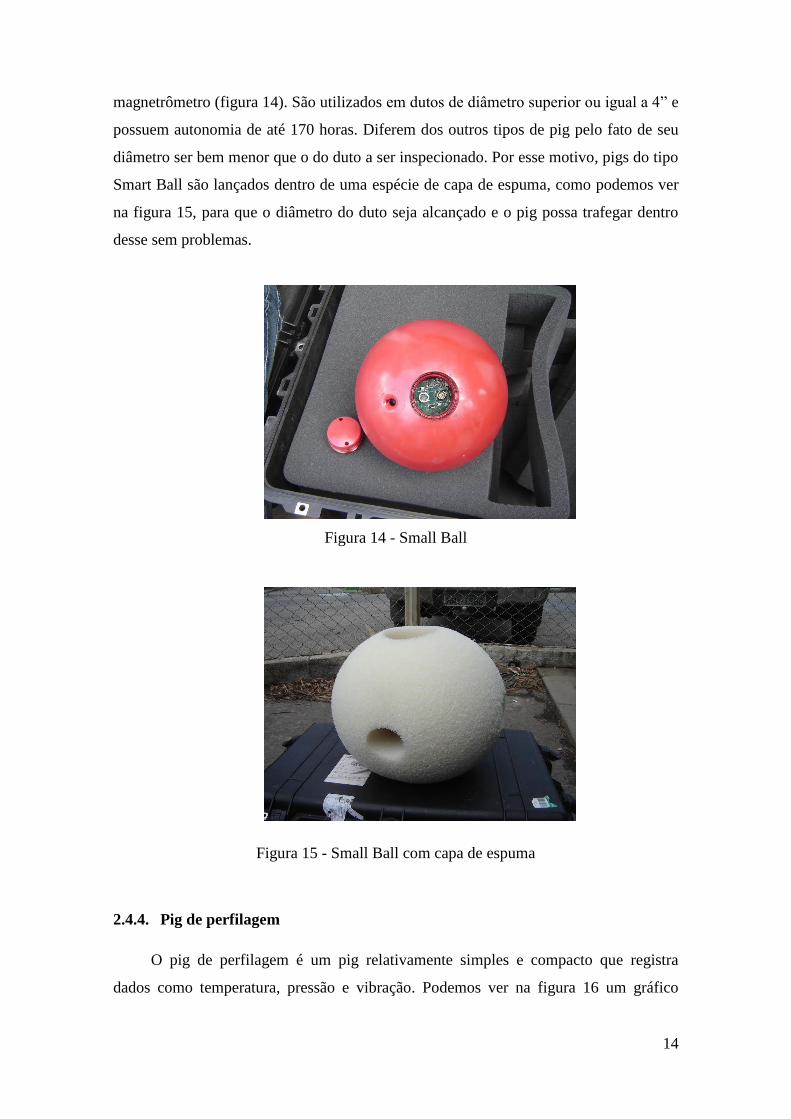
2.4.1. Pig inercial
Na figura 12 temos exemplo de um pig inercial. Seu sistema registra todo o
percurso do pig com grande precisão, o que permite que depois seja feito o traçado
espacial do duto. Mudanças no traçado original do duto são detectadas por esse tipo de
pig, o que é de grande importância visto determinadas alterações podem submeter o
duto a uma grande concentração de tensões. O pig inercial também auxilia na
13
localização exata das anomalias detectadas pelos outros pigs (MFL, ultrassom..) através
da posição GPS desses.
Figura 12 - Pig Inercial
2.4.2. Pigs de bloqueio
O pig de bloqueio é utilizado quando se deseja fazer reparos em dutos em
operação. Ele permite que esses reparos sejam feitos através do bloqueio do trecho a ser
reparado. O pig é colocado na posição exata em que se deseja fazer o bloqueio através
de antenas. O sistema mecânico do pig veda o fluxo, fazendo com que a parte do duto à
jusante do pig fique despressurizada. Quanto maior a diferença de pressões, melhor o
bloqueio. Um exemplo de pig de bloqueio é o que podemos ver na figura 13.
Figura 13 - Pig de Bloqueio
2.4.3. Smart ball
Esse tipo de pig é utilizado para detecção de vazamentos em dutos. O smart ball
possui sensores de temperatura, de pressão, acústico, além de acelerômetro e
14
magnetrômetro (figura 14). São utilizados em dutos de diâmetro superior ou igual a 4” e
possuem autonomia de até 170 horas. Diferem dos outros tipos de pig pelo fato de seu
diâmetro ser bem menor que o do duto a ser inspecionado. Por esse motivo, pigs do tipo
Smart Ball são lançados dentro de uma espécie de capa de espuma, como podemos ver
na figura 15, para que o diâmetro do duto seja alcançado e o pig possa trafegar dentro
desse sem problemas.
Figura 14 - Small Ball
Figura 15 - Small Ball com capa de espuma
2.4.4. Pig de perfilagem
O pig de perfilagem é um pig relativamente simples e compacto que registra
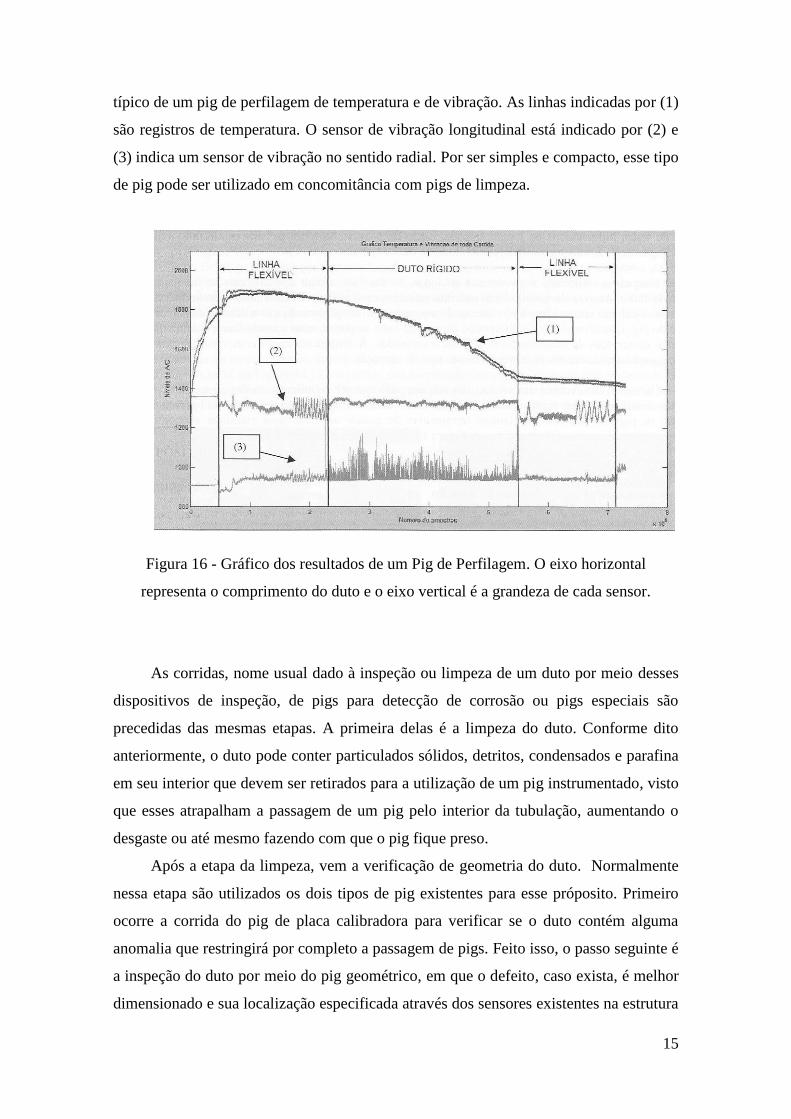
dados como temperatura, pressão e vibração. Podemos ver na figura 16 um gráfico
15
típico de um pig de perfilagem de temperatura e de vibração. As linhas indicadas por (1)
são registros de temperatura. O sensor de vibração longitudinal está indicado por (2) e
(3) indica um sensor de vibração no sentido radial. Por ser simples e compacto, esse tipo
de pig pode ser utilizado em concomitância com pigs de limpeza.
Figura 16 - Gráfico dos resultados de um Pig de Perfilagem. O eixo horizontal
representa o comprimento do duto e o eixo vertical é a grandeza de cada sensor.
As corridas, nome usual dado à inspeção ou limpeza de um duto por meio desses
dispositivos de inspeção, de pigs para detecção de corrosão ou pigs especiais são
precedidas das mesmas etapas. A primeira delas é a limpeza do duto. Conforme dito
anteriormente, o duto pode conter particulados sólidos, detritos, condensados e parafina
em seu interior que devem ser retirados para a utilização de um pig instrumentado, visto
que esses atrapalham a passagem de um pig pelo interior da tubulação, aumentando o
desgaste ou até mesmo fazendo com que o pig fique preso.
Após a etapa da limpeza, vem a verificação de geometria do duto. Normalmente
nessa etapa são utilizados os dois tipos de pig existentes para esse próposito. Primeiro
ocorre a corrida do pig de placa calibradora para verificar se o duto contém alguma
anomalia que restringirá por completo a passagem de pigs. Feito isso, o passo seguinte é
a inspeção do duto por meio do pig geométrico, em que o defeito, caso exista, é melhor
dimensionado e sua localização especificada através dos sensores existentes na estrutura
16
do pig. O pig de placa calibradora deve ser passado primeiro por ser uma ferramenta de
inspeção mais simples que, caso fique presa, não acarretará um prejuízo tão grande
quanto acarretaria caso fosse um pig geométrico. Inclusive esse é o motivo pelo qual
toda corrida possui a etapa de verificação da geometria do duto, pigs instrumentados são
muito mais complexos e caros e é preciso que a tubulação seja verificada para garantir
que quaisquer possíveis variações de diâmetro não impedirão sua passagem.
O produto final da corrida é um relatório de serviços, que possui laudos baseados
em normas internacionais para as principais descontinuidades encontradas no duto. Os
relatórios de todos os pigs de inspeção tendem a seguir as características dos relatórios
dos pigs de corrosão, que tem como principais itens:
Sumário executivo – Resumo das principais atividades realizadas, com
uma visão mais global das descontinuidades encontradas no duto e
declaração da necessidade ou não de reparos.
Dados do duto – São informados, geralmente pelo operador, o diâmetro, a
identificação, material, pressão de operação, tipo de tubo, extensão,
espessura, produto de operação, vazão e temperatura máxima do duto.
Dados da corrida - Contém informações como a data e local do
lançamento e do recebimento, técnico responsável, duração da corrida,
possível ocorrência de quebra dos sensores, etc.
Sistemas de referência – Lista todas as ocorrências identificadas pelo pig
que podem ajudar a encontrar a anomalia identificada como método de
precaução para o caso de existir uma falha na medição dos hodômetros.
Exemplos de referência são: válvulas, vents, drenos, derivações, etc. Em
trechos do duto de longa extensão em que acessórios não se fazem
presente, são utilizados marcadores que induzem um sinal no pig.
Características do pig utilizado – Contém as especificações técnicas da
ferramenta usada para a inspeção
Descontinuidades registradas – Tabela com todas as descontinuidades
registradas, inclusive se foi corrosão, amassamento, erosão e contém
também as dimensões do defeito encontrado.
Gráficos – Apresentação das descontinuidades regristradas, dessa vez na
forma gráfica.
17
Lista de eventos registrados – Por ser muito extensa, a tabela que lista
todos os eventos registrados pelo pig como válvulas, soldas
circunferenciais, reparos, etc., normalmente é adicionada como anexo.
Detalhamento das principais descontinuidades – As descontinuidades
mais relevantes são mostradas em detalhe, junto com a “Folha de
Escavação”, que contém todas as informações necessárias para facilitar a
localização da descontinuidade ao longo do duto.
Software para visualização dos dados brutos da corrida – As empresas
costumam disponibilizar um software que permite a visualização dos
registros.
Após avaliação do relatório, o primeiro passo é avaliar se as anomalias existentes
se encontram dentro do critério de aceitação ou não. Caso sim, o duto não precisa ser
reparado e pode continuar com o transporte de produto normalmente. No entanto, se a
anomalia encontrada estiver acima dos critérios de aceitação, passando a ser um defeito,
começam os planejamentos para reparo do duto em questão.
18
3. Pig magnético de corrosão
Esse capítulo busca explicar melhor o princípio de funcionamento de um pig
magnético de corrosão, abordando as técnicas usadas para medição da corrosão do
módulo magnetizador e do módulo discriminador, além de evidenciar as premissas de
projeto que devem ser levadas em consideração para seu desenvolvimento, que serão
utilizadas no capítulo 4 para dimensionamento de um dos módulos do pig. O pig
magnético é o mais utilizado para detecção de corrosão, principalmente pela limitação
que o ultrassônico apresenta de não poder ser utilizado em gasodutos.
3.1. Técnica “MFL”
A técnica “MFL – Magnetic Flux Leakage”, conforme dito anteriormente,
consiste na detecção da fuga do campo magnético. Um campo magnético contínuo é
aplicado à parede do duto através de imãs permanentes. Caso encontre uma
descontinuidade, como uma corrosão, o fluxo magnético sofre uma distorção e acaba
escapando para fora da peça, o que é denominado “campo de fuga”. Para que isso
aconteça, é necessário que se tenha um sistema de magnetização adequado, capaz de
saturar a parede do duto. Dessa forma, quando passar por uma região com perda de
espessura, a parede já está tão saturada que o campo é obrigado a sair do material. O
conjunto magnetizador em todos os pigs magnéticos atuais são orientados de forma que
as linhas de fluxo sejam produzidas longitudinalmente na parede do duto. Entre os pólos
do módulo magnetizador, ou seja, entre os pólos norte e sul dos imãs permanentes,
encontram-se sensores, usualmente do tipo Hall, responsáveis pela medição dos valores
do campo magnético na superfície sendo inspecionada, conforme podemos ver na figura
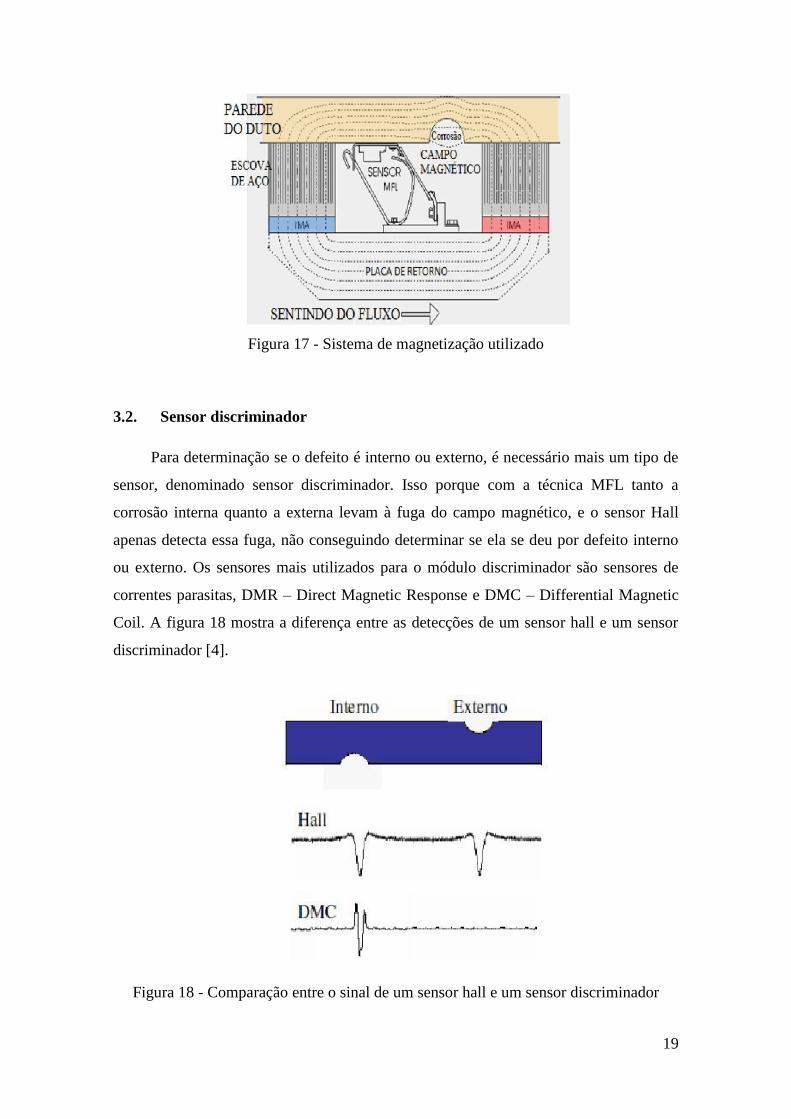
17 [4]. Os sensores Hall detectam tanto a corrosão interna quanto a externa e, devido a
isso, a simples alteração apresentada na medição do campo magnético não é suficiente
para determinar se o problema se encontra na superfície interna ou externa. Motivo esse
pelo qual existe um módulo discriminador, responsável por fazer a distinção entre as
corrosões. Embora seja conhecido apenas como pig de corrosão, ele consegue detectar
ocasionalmente anomalias como inclusões, porosidades e trincas circunferenciais.
Trincas axiais não conseguem ser detectadas com essa ferramenta de inspeção por
serem paralelas às linhas de fluxo, não causando uma quantidade significativa de campo
de fuga [5].
19
Figura 17 - Sistema de magnetização utilizado
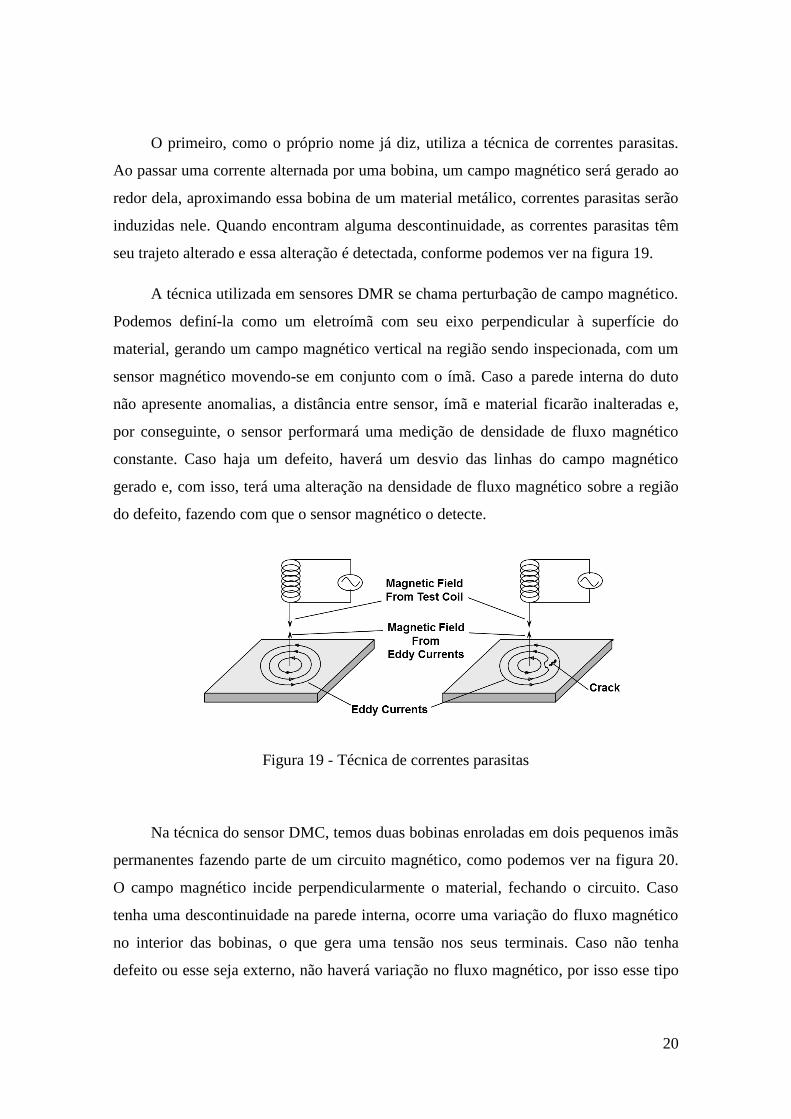
3.2. Sensor discriminador
Para determinação se o defeito é interno ou externo, é necessário mais um tipo de
sensor, denominado sensor discriminador. Isso porque com a técnica MFL tanto a
corrosão interna quanto a externa levam à fuga do campo magnético, e o sensor Hall
apenas detecta essa fuga, não conseguindo determinar se ela se deu por defeito interno
ou externo. Os sensores mais utilizados para o módulo discriminador são sensores de
correntes parasitas, DMR – Direct Magnetic Response e DMC – Differential Magnetic
Coil. A figura 18 mostra a diferença entre as detecções de um sensor hall e um sensor
discriminador [4].
Figura 18 - Comparação entre o sinal de um sensor hall e um sensor discriminador
20
O primeiro, como o próprio nome já diz, utiliza a técnica de correntes parasitas.
Ao passar uma corrente alternada por uma bobina, um campo magnético será gerado ao
redor dela, aproximando essa bobina de um material metálico, correntes parasitas serão
induzidas nele. Quando encontram alguma descontinuidade, as correntes parasitas têm
seu trajeto alterado e essa alteração é detectada, conforme podemos ver na figura 19.
A técnica utilizada em sensores DMR se chama perturbação de campo magnético.
Podemos definí-la como um eletroímã com seu eixo perpendicular à superfície do
material, gerando um campo magnético vertical na região sendo inspecionada, com um
sensor magnético movendo-se em conjunto com o ímã. Caso a parede interna do duto
não apresente anomalias, a distância entre sensor, ímã e material ficarão inalteradas e,
por conseguinte, o sensor performará uma medição de densidade de fluxo magnético
constante. Caso haja um defeito, haverá um desvio das linhas do campo magnético
gerado e, com isso, terá uma alteração na densidade de fluxo magnético sobre a região
do defeito, fazendo com que o sensor magnético o detecte.
Figura 19 - Técnica de correntes parasitas
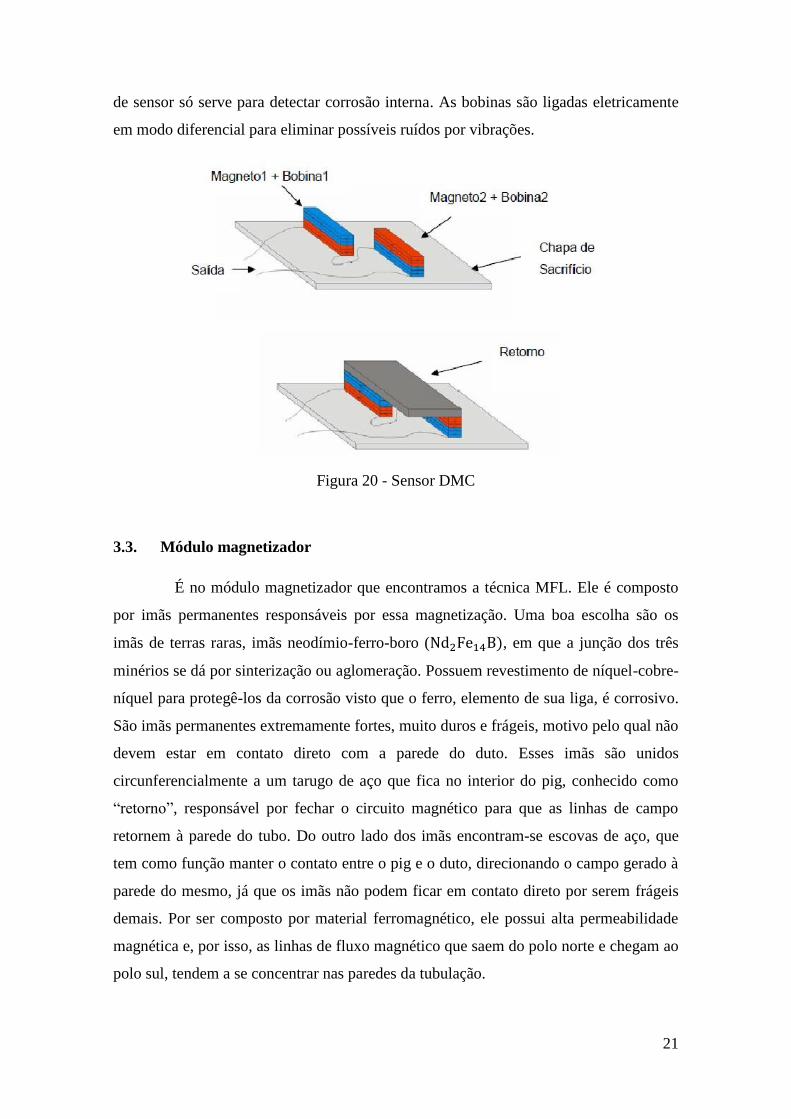
Na técnica do sensor DMC, temos duas bobinas enroladas em dois pequenos imãs
permanentes fazendo parte de um circuito magnético, como podemos ver na figura 20.
O campo magnético incide perpendicularmente o material, fechando o circuito. Caso
tenha uma descontinuidade na parede interna, ocorre uma variação do fluxo magnético
no interior das bobinas, o que gera uma tensão nos seus terminais. Caso não tenha
defeito ou esse seja externo, não haverá variação no fluxo magnético, por isso esse tipo
21
de sensor só serve para detectar corrosão interna. As bobinas são ligadas eletricamente
em modo diferencial para eliminar possíveis ruídos por vibrações.
Figura 20 - Sensor DMC
3.3. Módulo magnetizador
É no módulo magnetizador que encontramos a técnica MFL. Ele é composto
por imãs permanentes responsáveis por essa magnetização. Uma boa escolha são os
imãs de terras raras, imãs neodímio-ferro-boro ( , em que a junção dos três
minérios se dá por sinterização ou aglomeração. Possuem revestimento de níquel-cobre-
níquel para protegê-los da corrosão visto que o ferro, elemento de sua liga, é corrosivo.
São imãs permanentes extremamente fortes, muito duros e frágeis, motivo pelo qual não
devem estar em contato direto com a parede do duto. Esses imãs são unidos
circunferencialmente a um tarugo de aço que fica no interior do pig, conhecido como
“retorno”, responsável por fechar o circuito magnético para que as linhas de campo
retornem à parede do tubo. Do outro lado dos imãs encontram-se escovas de aço, que
tem como função manter o contato entre o pig e o duto, direcionando o campo gerado à
parede do mesmo, já que os imãs não podem ficar em contato direto por serem frágeis
demais. Por ser composto por material ferromagnético, ele possui alta permeabilidade
magnética e, por isso, as linhas de fluxo magnético que saem do polo norte e chegam ao
polo sul, tendem a se concentrar nas paredes da tubulação.
22
3.4. Formatos para copo do pig
Como já foi dito, o deslocamento do pig dentro do duto se dá pelo próprio
fluido sendo transportado. Ele possui copos ou discos seladores que propiciam a
vedação do fluxo de produto. Dessa forma, é criado um diferencial de pressão sobre o
corpo do pig, capaz de vencer a força de atrito causada pelo contato dos copos com a
parede interna do duto, iniciando seu deslocamento. O formato dos copos tem grande
influência sobre as forças de contato entre pig e duto [6] e quanto maior forem essas
forças, mais eficiente é a vedação, maior o diferencial de pressão necessário para movê-
lo e maior o desgaste. São basicamente três os tipos de selador: copo pistão, disco e
copo cônico [7].
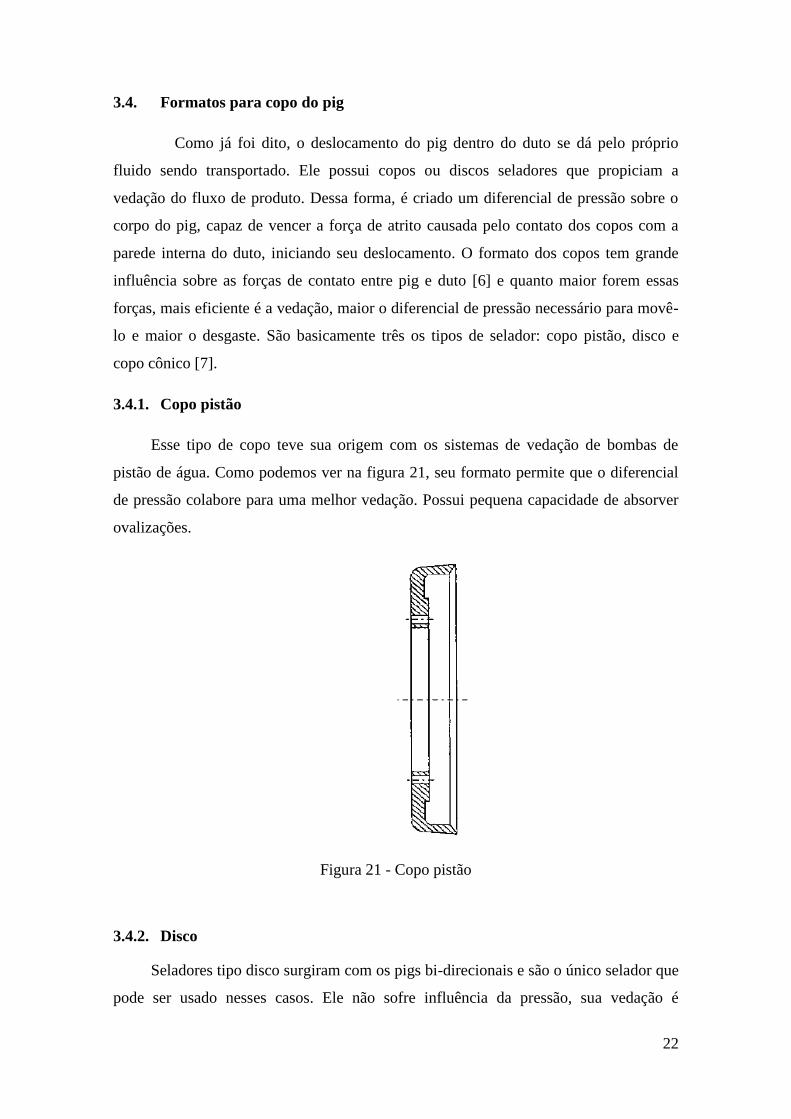
3.4.1. Copo pistão
Esse tipo de copo teve sua origem com os sistemas de vedação de bombas de
pistão de água. Como podemos ver na figura 21, seu formato permite que o diferencial
de pressão colabore para uma melhor vedação. Possui pequena capacidade de absorver
ovalizações.
Figura 21 - Copo pistão
3.4.2. Disco
Seladores tipo disco surgiram com os pigs bi-direcionais e são o único selador que
pode ser usado nesses casos. Ele não sofre influência da pressão, sua vedação é
23
adquirida pela interferência entre os discos e a parede da tubulação. A figura 22 mostra
o desenho de um disco selador. Dos três tipos, ele é o que tem a menor capacidade de
absorver ovalizações.
Figura 22 – Disco
3.4.3. Copo Cônico
Assim como no copo pistão, seu formato, visto na figura 23, permite que o
diferencial de pressão colabore para sua vedação. Essa é a melhor forma para copo
selador quando se trata de capacidade para absorver ovalizações. A força radial
originada pelo diferencial de pressão atuando na parte interna do copo é a responsável
pela ótima vedação, mas pode acabar ocasionando desgaste mais acentuado devido ao
aumento da força de contato entre copo e parede do duto.
24
Figura 23 - Copo cônico
3.5. Premissas para projeto
Para o projeto de um pig, seja ele MFL ou não, existe uma série de premissas que
têm que ser levadas em consideração para que a passagem do instrumento de inspeção
ocorra corretamente, sem ficar aprisionado dentro da tubulação ou com uma velocidade
em que a capacidade de averiguação de defeitos fica reduzida. Costuma-se enviar um
relatório ao solicitante do instrumento de inspeção interna de dutos para que os
seguintes dados sejam corretamente respondidos, podendo se iniciar então o projeto do
pig.
3.5.1. Diâmetro
O diâmetro interno do duto é o primeiro passo para que se possa iniciar o projeto.
Todos os componentes são dimensionados para um valor de raio específico, um mesmo
pig magnético de corrosão não pode ser utilizado para inspecionar tubos com diâmetros
diferentes. Isso se deve principalmente ao fato de que os copos ou discos seladores
ficam em contato direto com a parede interna da tubulação para que ocorra a vedação.
Não ocorrendo essa vedação, a movimentação do pig poderá não ocorrer. Ademais, as
escovas de aço responsáveis por fechar o circuito magnético devem ficar em contato
direto com a parede interna da tubulação, tendo também o fato de que os sensores
precisam estar próximos da superfície a ser inspecionada ou até mesmo em contato com
25
ela, tornando ainda mais indispensável que se conheça, antes de sequer começar a
pensar no projeto, o diâmetro do tubo.
3.5.2. Pressão
A força responsável pelo deslocamento do pig dentro da tubulação é originada
pelo diferencial de pressão na parte traseira e frontal do pig. Na fase de projeto, esse
diferencial vai determinar qual o valor máximo permitido para a força resistente ao
movimento existente entre o pig e a parede interna do duto, já que ele precisa ser
superior a ela para que a movimentação possa ocorrer. Usualmente, para início de
deslocamento de um pig MFL, é exigido um diferencial de pressão em torno de 3
kgf/cm² para que possa ocorrer o movimento do pig MFL projetado pelas empresas. Ele
é alcançado a partir do momento que o pig é introduzido no duto, bloqueando a
passagem de produto e aumentando assim o diferencial de pressão entre suas partes
traseira e frontal. A pressão máxima de operação é também importante tendo em vista
que todo o pig deve ser capaz de suportar essa determinada pressão.
3.5.3. Raio de curvatura
As tubulações de transporte de produto possuem, no geral, grandes extensões,
com diversas curvas ao longo do caminho. Esse é o motivo pelo qual um pig de grande
tamanho, como um pig MFL ou pig ultrassônico, precisa de articulações. Ele precisa ser
divido em módulos, com uma junta entre eles que permita o giro de um módulo em
relação ao outro para que a passagem por uma curva possa ser efetuada com sucesso. As
curvas possuem diferentes valores de raios de curvatura, como 1,5, 3 ou 5 vezes o
diâmetro do duto (1,5 D, 3D, 5D). Para que o pig consiga atravessar toda a extensão do
duto sem ficar preso, é necessário que se dê uma atenção especial ao raio mínimo de
curvatura existente no trecho a ser inspecionado. Isso se deve ao fato de que esse raio
mínimo é o que determina o tamanho máximo que cada módulo pode ter, caso contrário
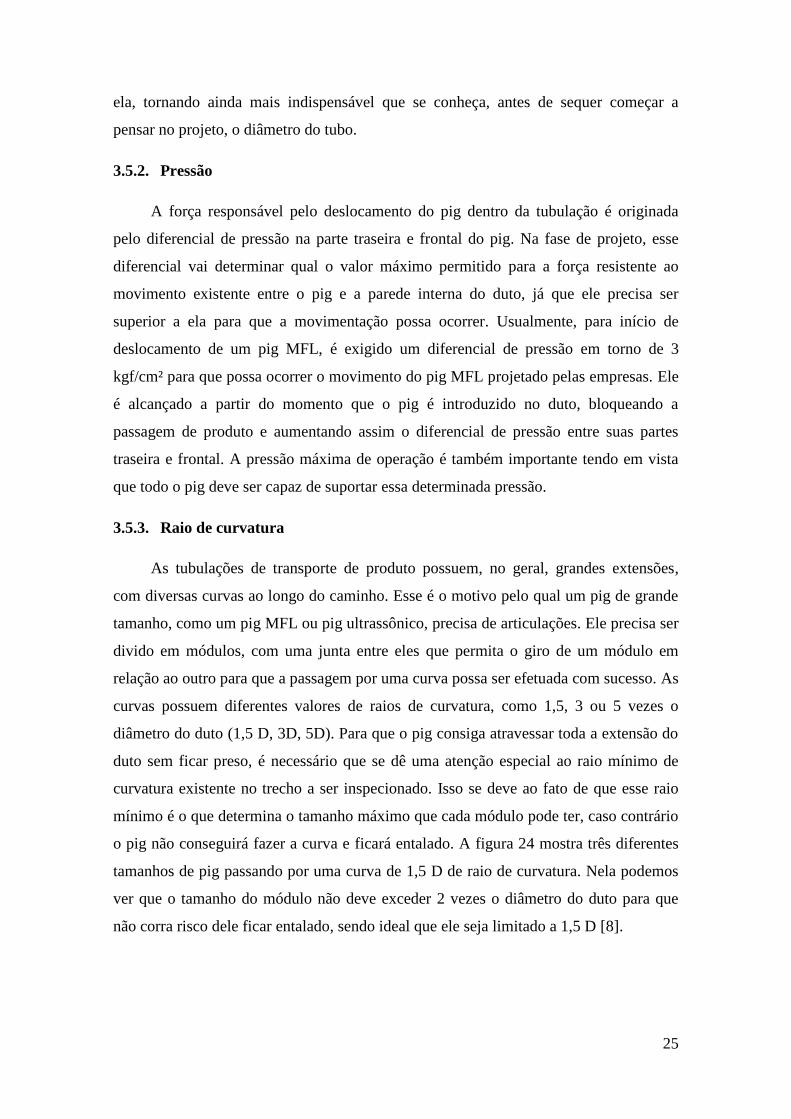
o pig não conseguirá fazer a curva e ficará entalado. A figura 24 mostra três diferentes
tamanhos de pig passando por uma curva de 1,5 D de raio de curvatura. Nela podemos
ver que o tamanho do módulo não deve exceder 2 vezes o diâmetro do duto para que
não corra risco dele ficar entalado, sendo ideal que ele seja limitado a 1,5 D [8].
26
Figura 24 - Diferentes tamanhos de pig em uma curva 1,5 D
3.5.4. Derivações
Saber as especificações das derivações tipo T e Y existentes nos dutos são
importantes por motivo oposto ao raio de curvatura mínimo pois elas determinam o
comprimento mínimo de um pig. Caso um pig possua comprimento menor que o
diâmetro da derivação, vai ocorrer uma quebra no diferencial de pressão, visto que
ambos os lados da sessão do pig estarão sob a ação da mesma pressão. Ao passar por
uma dessas derivações, o corpo do pig deve possuir tamanho suficiente para impedir
que isso ocorra, o que tem que ser levado em consideração no momento do projeto do
instrumento de inspeção, pois é o que impede que ele tenha um comprimento inferior ao
necessário.
3.5.5. Extensão do duto
A extensão do duto é outro importante fator a ser considerado. A escolha do
material para os copos de sustentação do pig é dependente desse fator pois, quanto
maior for a extensão, mais desgaste os copos sofrerão. Ele também influencia a escolha
da bateria a ser utilizada já que, quanto maior a extensão, maior deve ser a autonomia da
bateria.
27
4. Projeto do módulo
Projetar um pig é uma tarefa árdua e exige uma série de profissionais trabalhando
em conjunto para tal. Não está no escopo desse trabalho projetar de fato um pig
magnético de corrosão, apenas propor um projeto para um módulo discriminador, para
viabilizar a utilização de sensores para detecção de corrosão interna desenvolvidos em
uma pesquisa, com as devidas análises de força e seleção de material. Para um pig
magnético com todos os outros módulos incluídos, outras considerações devem ser
feitas.
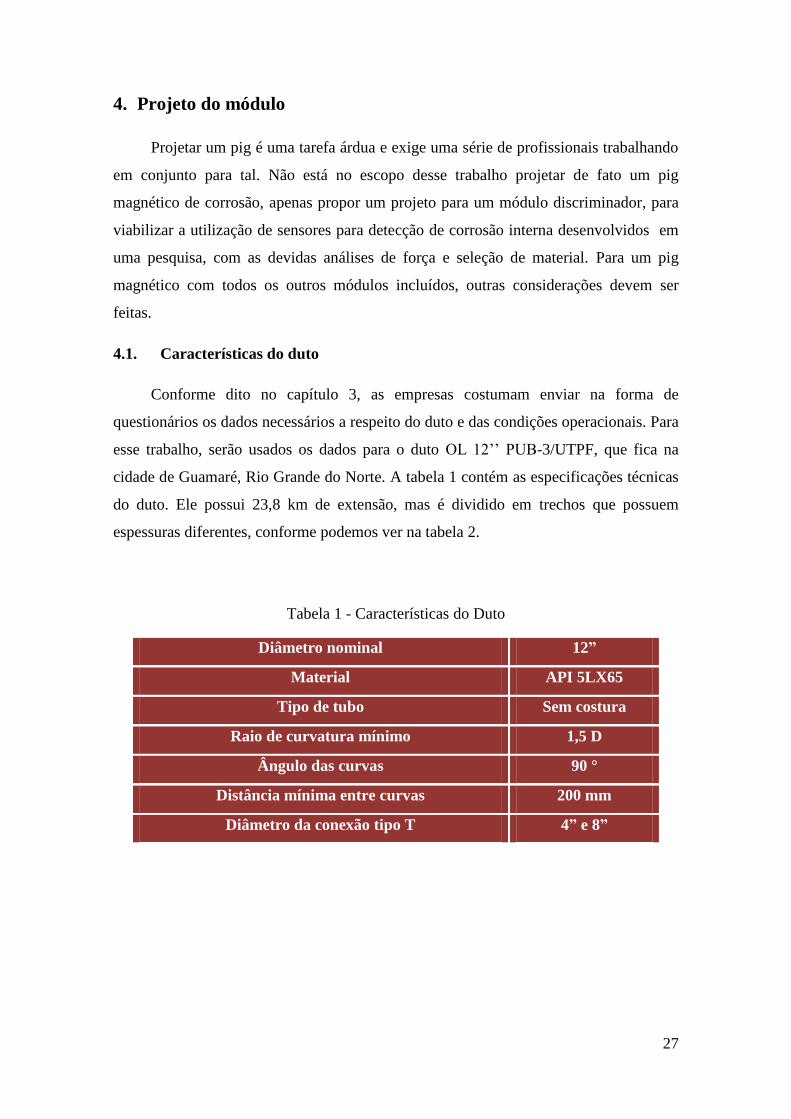
4.1. Características do duto
Conforme dito no capítulo 3, as empresas costumam enviar na forma de
questionários os dados necessários a respeito do duto e das condições operacionais. Para
esse trabalho, serão usados os dados para o duto OL 12’’ PUB-3/UTPF, que fica na
cidade de Guamaré, Rio Grande do Norte. A tabela 1 contém as especificações técnicas
do duto. Ele possui 23,8 km de extensão, mas é dividido em trechos que possuem
espessuras diferentes, conforme podemos ver na tabela 2.
Tabela 1 - Características do Duto
Diâmetro nominal 12”
Material API 5LX65
Tipo de tubo Sem costura
Raio de curvatura mínimo 1,5 D
Ângulo das curvas 90 °
Distância mínima entre curvas 200 mm
Diâmetro da conexão tipo T 4” e 8”
28
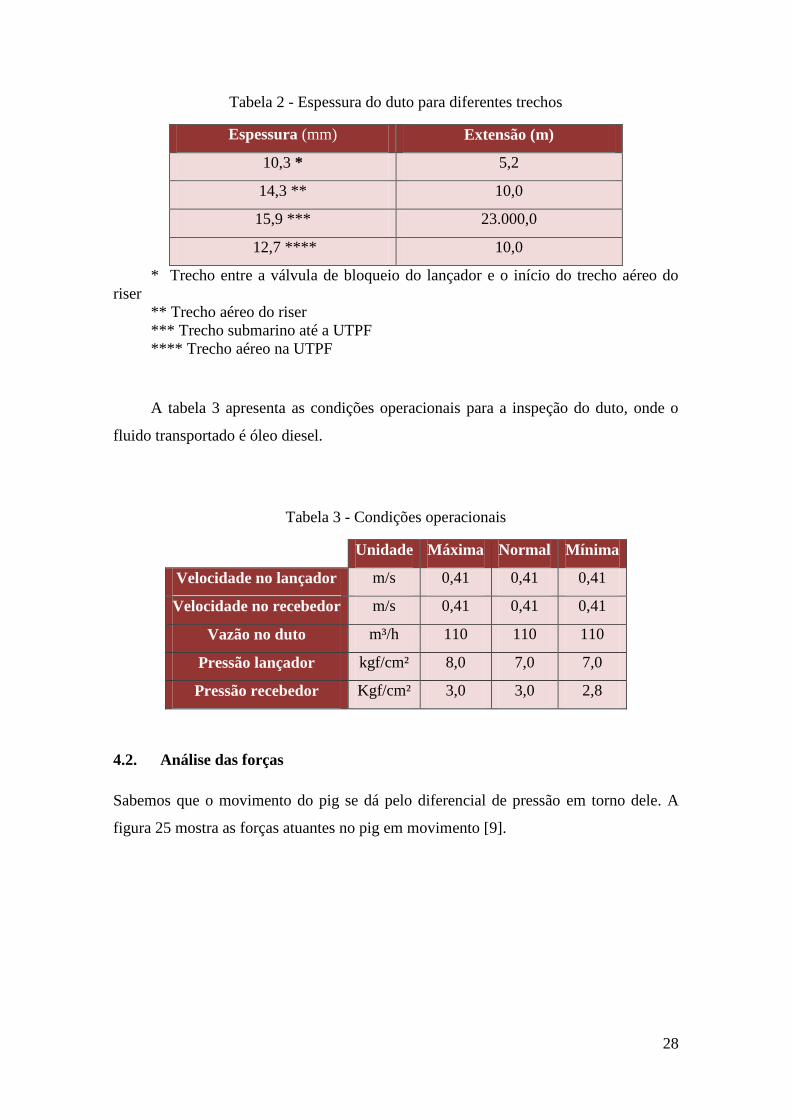
Tabela 2 - Espessura do duto para diferentes trechos
Espessura (mm) Extensão (m)
10,3 * 5,2
14,3 ** 10,0
15,9 *** 23.000,0
12,7 **** 10,0
* Trecho entre a válvula de bloqueio do lançador e o início do trecho aéreo do
riser
** Trecho aéreo do riser
*** Trecho submarino até a UTPF
**** Trecho aéreo na UTPF
A tabela 3 apresenta as condições operacionais para a inspeção do duto, onde o
fluido transportado é óleo diesel.
Tabela 3 - Condições operacionais
Unidade Máxima Normal Mínima
Velocidade no lançador m/s 0,41 0,41 0,41
Velocidade no recebedor m/s 0,41 0,41 0,41
Vazão no duto m³/h 110 110 110
Pressão lançador kgf/cm² 8,0 7,0 7,0
Pressão recebedor Kgf/cm² 3,0 3,0 2,8
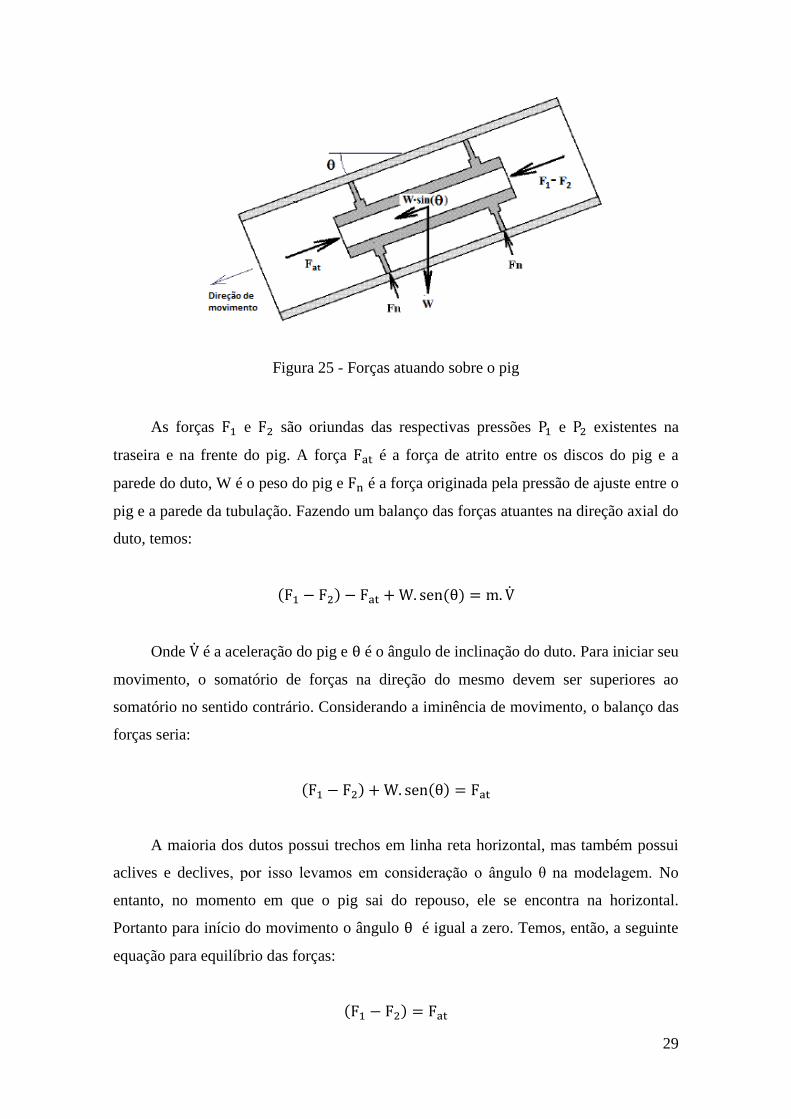
4.2. Análise das forças
Sabemos que o movimento do pig se dá pelo diferencial de pressão em torno dele. A
figura 25 mostra as forças atuantes no pig em movimento [9].
29
Figura 25 - Forças atuando sobre o pig
As forças e são oriundas das respectivas pressões e existentes na
traseira e na frente do pig. A força é a força de atrito entre os discos do pig e a
parede do duto, W é o peso do pig e é a força originada pela pressão de ajuste entre o
pig e a parede da tubulação. Fazendo um balanço das forças atuantes na direção axial do
duto, temos:
( ( ̇
Onde ̇ é a aceleração do pig e é o ângulo de inclinação do duto. Para iniciar seu
movimento, o somatório de forças na direção do mesmo devem ser superiores ao
somatório no sentido contrário. Considerando a iminência de movimento, o balanço das
forças seria:
( (
A maioria dos dutos possui trechos em linha reta horizontal, mas também possui
aclives e declives, por isso levamos em consideração o ângulo θ na modelagem. No
entanto, no momento em que o pig sai do repouso, ele se encontra na horizontal.
Portanto para início do movimento o ângulo é igual a zero. Temos, então, a seguinte
equação para equilíbrio das forças:
(

30
Para que o pig fique na iminência de movimento, basta então que a força
originada pelo diferencial de pressão (força essa responsável pelo deslocamento do pig
dentro do duto) seja igual à força de atrito originada pelo contato dos discos do pig com
a parede interna da tubulação. A força de atrito é proporcional ao coeficiente de atrito
e à força normal, resultante da pressão interna entre os copos do pig e a parede do duto:
4.3. Seleção de materiais
A seleção de materiais será referente apenas ao módulo discriminador, mas os
copos de todos os módulos, assim como seus corpos, são feitos do mesmo material.
4.3.1. Disco
O formato escolhido para os copos seladores foi o da forma de disco. Eles, que
além de sustentação conferem a vedação do pig, devem ser feitos de um material que
seja resiliente para que o mesmo seja capaz de se ajustar a possíveis deformações
encontradas na tubulação. Eles são arrastados por toda a extensão do duto mantendo
sempre contato com a parede interna do mesmo e por isso devem possuir também uma
boa resistência à abrasão e alta resistência ao rasgo, para que seja pequena sua
probabilidade de falha.
Uma boa escolha é, portanto, o poliuretano. Esse material apresenta todas as
características previamente citadas, sendo também bem resistente a hidrocarbonetos, o
que é de suma importância para um instrumento de inspeção que pode vir a ser usado
em dutos com transporte de petróleo. O poliuretano tem boas características vedantes,
devendo ser escolhido para o disco selador uma dureza de 60 a 80 shore A para que
possa se adquirir uma ótima vedação com desgaste moderado. Além dos discos
seladores, serão colocados no corpo do pig um outro tipo de disco, denominado disco
guia, usado para suportar o peso do pig, mantendo o eixo dele concêntrico com o eixo
da tubulação, devendo ser de uma dureza mais elevada, entre 80 e 95 shore A.
31
4.3.2. Corpo, flanges e hastes sensoras
Os corpos dos pigs consistem basicamente de vasos de pressão onde ficam
armazenados bateria e eletrônica, além de terem os sensores fixados neles. O módulo
discriminador no geral possui apenas os sensores fixados, estando bateria e eletrônica
dentro de outro módulo. Os discos seladores são projetados para manter completamente
vedada a passagem de produto em torno da sua circunferência. No entanto, devido ao
grande desgaste sofrido, ocorrem eventuais passagens de fluido para dentro deles, além
delas poderem ocorrer por vazamentos em algumas partes do pig, como os parafusos
que fixam os flanges. Visando uma vida maior ao pig, o ideal é que seja escolhido um
material capaz de resistir a produtos corrosivos e, para isso, devem possuir não apenas
boa resistência mecânica, mas uma boa resistência à corrosão também.
Um material indicado para esse tipo de solicitação é o AISI 304. Sua composição
química consiste de: Carbono (0,08% máx), Silício (0,75% máx), Magnésio (2,00%
máx), Cromo (19,00% máx), Níquel (9,00%), Fósforo (0,045% máx), Enxofre (0,030%
máx) e outros (0,10% máx), possuindo uma elevada resistência à corrosão. É um aço
inoxidável austenítico, o que lhe confere características como excelente ductilidade,
tenacidade e uma boa soldabilidade. Como todo o pig está exposto a esse meio
corrosivo, o mesmo aço será usado para as hastes sensoras e para os flanges que
interligam um módulo ao outro. As características do AISI 304 são boas também para a
haste que precisa resistir aos esforços de flexão sem sofrer grandes deformações.
4.4. Premissas
As premissas para o projeto serão utilizadas para dimensionamento do módulo
discriminador, mas deve ser lembrado que a força de atrito será alterada a partir do
momento que os outros módulos forem incluídos.
O diâmetro do duto, raio de curvatura e diâmetro das derivações estão incluídos
nas características do duto, faltando ser definido apenas o diferencial de pressão
responsável pela movimentação do pig. Pela prática, em dutos de 12” operando na
velocidade especificada no formulário, pigs de menor atrito iniciam seu deslocamento
com um diferencial de pressão de 1,0 kgf/cm², o que faz com que a partida demore
apenas alguns minutos, não comprometendo a operacionalidade do duto. Não está no
escopo desse trabalho analisar o comportamento do fluido dentro do duto para encontrar
esse diferencial em função do tempo ótimo para espera da partida do pig.
32
Conforme usado na especificação API 5L e ANSI B36, um tubo de diâmetro
nominal de 12” possui diâmetro externo de 323,9 mm, mas seu diâmetro interno é
variável de acordo com a sua espessura. Logo, para início da partida do pig, em que o
duto tem uma espessura de 10,3 mm, temos um diâmetro interno de 303,3 mm.
Diâmetro: 303,3 mm
Raio de curvatura mínimo: 1,5 D
Tamanho máximo das conexões: 8”
Diferencial de pressão: 1,0 kgf/cm²
4.4.1. Disco
O diferencial de pressão de 1,0 kgf/cm² é a premissa necessária para o
dimensionamento dos discos seladores de poliuretano. A partir dele temos o valor
permitido para a força de atrito causada pelo contato dos discos com a parede interna da
tubulação. Quando a força devido ao diferencial de pressão consegue vencer essa
fricção, começa então o movimento do pig.
A força de atrito leva em consideração a força normal atuando sobre o pig e o
coeficiente de atrito, que é estático quando o pig está parado e dinâmico quando ele já
iniciou o movimento, podendo ser escrita da seguinte forma:
Como são dois discos iguais presos ao corpo do pig, devemos levar em
consideração a força de atrito causada por ambos. Para sair da inércia, a força causada
pelo diferencial de pressão agindo sobre o pig deve ser maior ou igual à soma das forças
de atrito causada pelo contato dos discos com a parede. Temos, então, o seguinte
balanço de forças:
A força normal presente na equação da força de atrito é originada pela pressão
entre os discos e a parede da tubulação. Os discos terão um diâmetro superior ao
diâmetro interno do duto para garantir a total vedação, esse superdimensionamento tem
grande influência sobre a pressão exercida pela parede interna do duto sobre eles. No

33
entanto, a área sobre a qual a força causada pelo diferencial de pressão exerce fica
restrita ao diâmetro interno da tubulação, já que os discos são comprimidos para
encaixar na mesma. Para o coeficiente de atrito estático será adotado o valor para aço
carbono e poliuretano utilizado normalmente em pigs, . Temos então:
Através dessa força normal, podemos calcular o valor da pressão exercida sobre o
disco de poliuretano pela tubulação de aço. Projetos de pigs existentes mostram que
uma largura de 15 mm para o disco de poliuretano em um duto de 12” sujeito a esse
diferencial de pressão é suficiente para suportar bem. Essa será a escolha da largura para
o disco e seu diâmetro será calculado para ter essa pressão calculada:
Onde L é a largura do disco de poliuretano.
Considerando o poliuretano em questão como um material elástico linear
homogêneo em que as propriedades físicas são iguais em todas as direções podendo
então ser chamado de isotrópico, ele terá um coeficiente de poisson. Os valores
utilizados para as propriedades do poliuretano foram retirados de uma tese de mestrado
utilizando pigs com discos de poliuretano [10].
Para o cálculo do diâmetro necessário para a pressão calculada, será utilizada a
equação de interferência em que o diâmetro do eixo é maior que o diâmetro do furo
[11].
(
(

34
Onde I é a interferência causada pelo diâmetro do pig maior que o diâmetro
interno D da tubulação, é o módulo de elasticidade do duto, é o módulo de
elasticidade do poliuretano, é o coeficiente de poisson do duto e é o coeficiente de
poisson do poliuretano. A interferência I e podem ser escritos da seguinte forma:
(
(
Sendo o diâmetro do pig antes de entrar na tubulação e α a razão entre o
diâmetro externo do duto e o diâmetro interno.
Para resolução do problema, temos Mpa, Mpa,
e . Com isso encontramos um valor para o diâmetro do disco de poliuretano
equivalente a 321,9 mm.
A figura 26 mostra o disco de poliuretano com os devidos furos que servirão para
fixá-lo aos flanges e o corpo do pig.
Figura 26 - Disco selador
Além desses discos seladores, o pig terá discos guia também de poliuretano. Seu
diâmetro é aproximadamente igual ao menor diâmetro interno da tubulação, não
havendo atrito entre ele e a parede interna da mesma no início do movimento. Os discos
35
guia foram projetados com uma dureza e espessura maior que os discos seladores,
tornando-os mais resistentes à flexão.
4.4.2. Sensor discriminador
As hastes são projetadas para o sensor ficar em contato com a parede interna do
duto. SANTOS [5] realizou uma pesquisa para um sensor ICS (Internal Corrosion
Sensor) que consistia de um imã, sensores Hall e uma pequena chapa de proteção
abaixo dos sensores Hall. Ele utiliza esses elementos resinados na haste. O princípio de
funcionamento é o de que, quando na presença de um defeito, as linhas de campo
magnético sofrerão deformações. O estudo para projeto do módulo discriminador visa
possibilitar a utilização desses sensores em um pig magnético de corrosão.
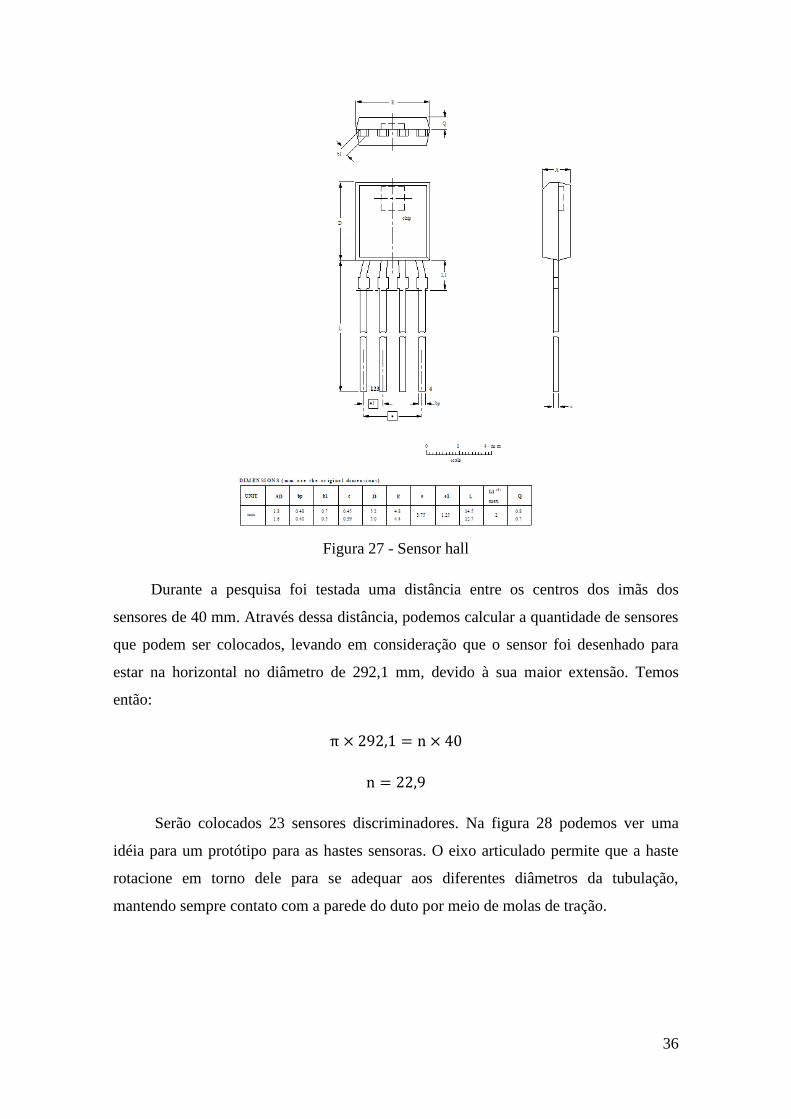
Através das dimensões presentes no estudo para tamanho do imã, distância entre
imã e sensor hall e espaçamento entre os suportes dos sensores adjacentes, foi
desenhada a haste, que é fixada no corpo do pig através de parafusos. O imã a ser
utilizado possui 17 mm de largura e 4 mm de altura. O sensor discriminador foi
desenhado para um sensor hall como o KMZ10A da Phillips, que pode ser visto na
figura 27. Serão utilizados dois sensores em cada montagem. O imã deve ficar distante
8 mm do sensor hall que dista 2 mm do material a ser inspecionado devido à presença
da chapa de proteção e da resina. O lugar onde ficarão resinados os componentes possui
24 mm de largura, 18 mm de comprimento e 18 mm de altura.
36
Figura 27 - Sensor hall
Durante a pesquisa foi testada uma distância entre os centros dos imãs dos
sensores de 40 mm. Através dessa distância, podemos calcular a quantidade de sensores
que podem ser colocados, levando em consideração que o sensor foi desenhado para
estar na horizontal no diâmetro de 292,1 mm, devido à sua maior extensão. Temos
então:
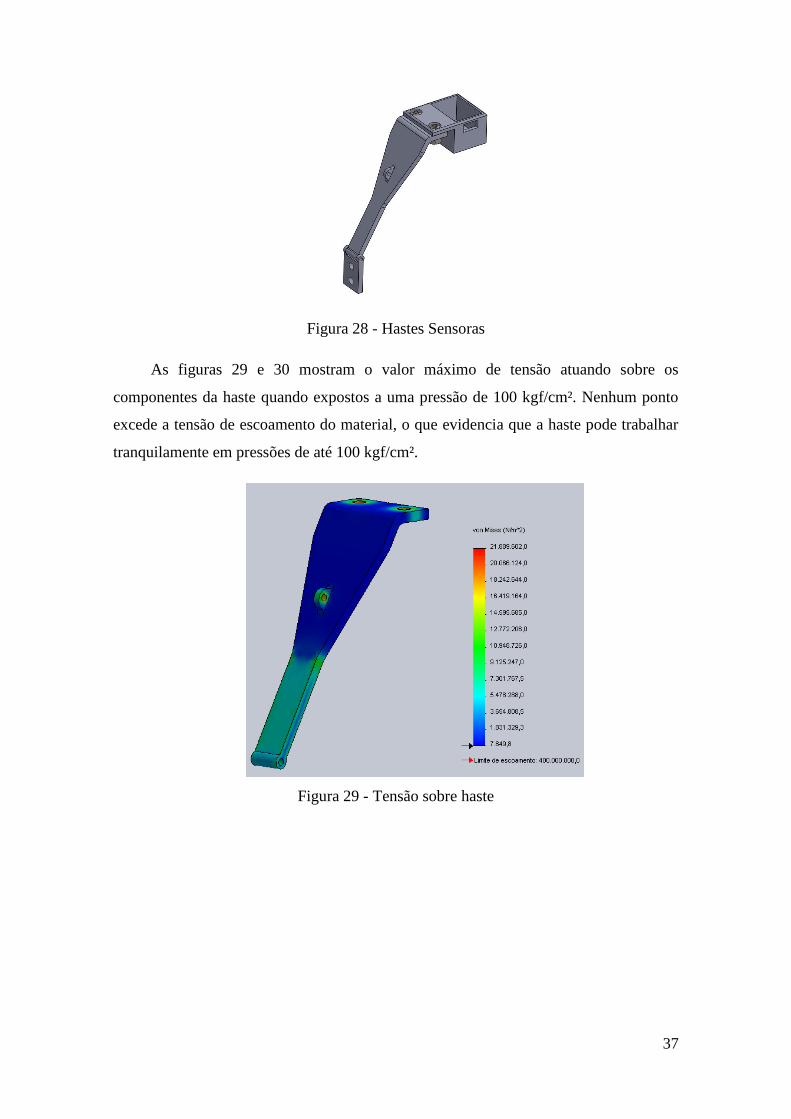
Serão colocados 23 sensores discriminadores. Na figura 28 podemos ver uma
idéia para um protótipo para as hastes sensoras. O eixo articulado permite que a haste
rotacione em torno dele para se adequar aos diferentes diâmetros da tubulação,
mantendo sempre contato com a parede do duto por meio de molas de tração.
37
Figura 28 - Hastes Sensoras
As figuras 29 e 30 mostram o valor máximo de tensão atuando sobre os
componentes da haste quando expostos a uma pressão de 100 kgf/cm². Nenhum ponto
excede a tensão de escoamento do material, o que evidencia que a haste pode trabalhar
tranquilamente em pressões de até 100 kgf/cm².
Figura 29 - Tensão sobre haste
38
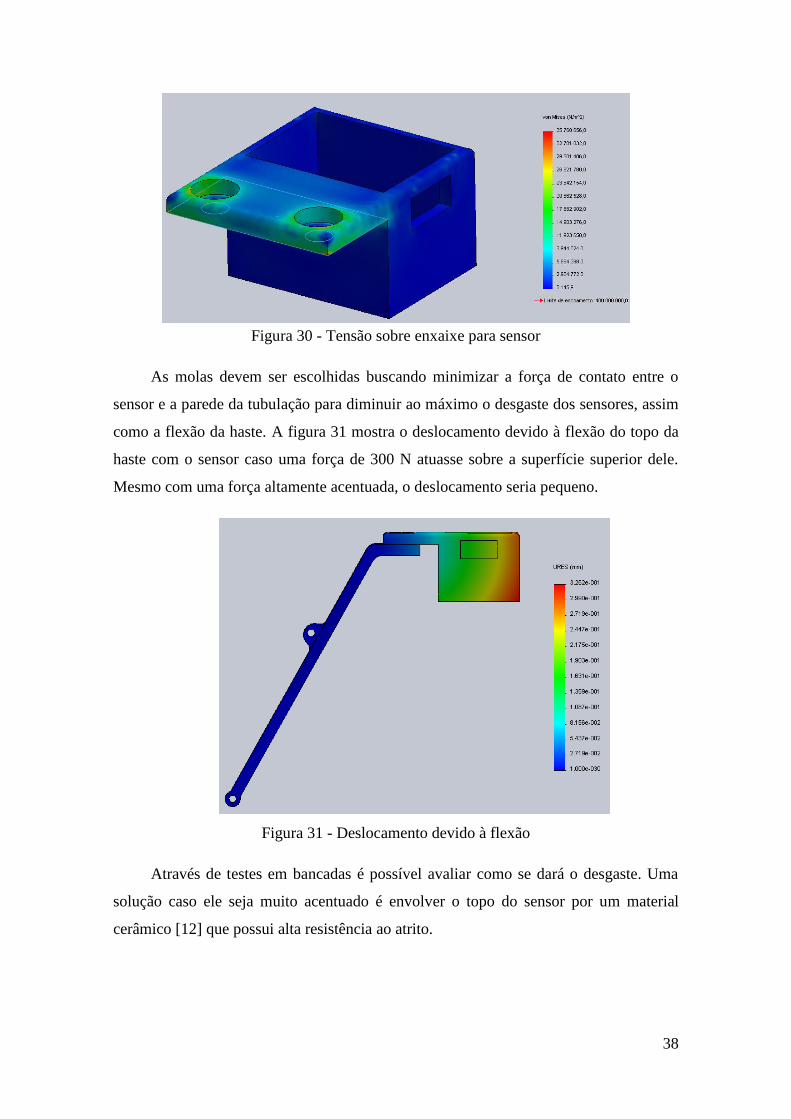
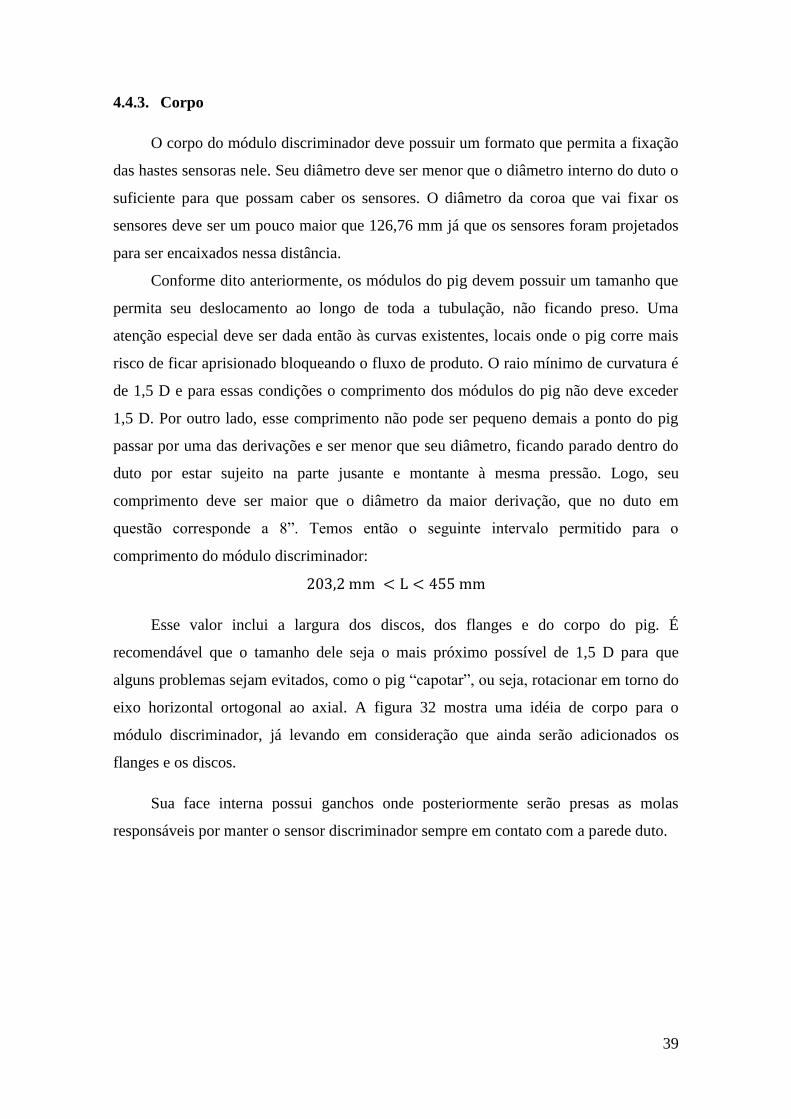
Figura 30 - Tensão sobre enxaixe para sensor
As molas devem ser escolhidas buscando minimizar a força de contato entre o
sensor e a parede da tubulação para diminuir ao máximo o desgaste dos sensores, assim
como a flexão da haste. A figura 31 mostra o deslocamento devido à flexão do topo da
haste com o sensor caso uma força de 300 N atuasse sobre a superfície superior dele.
Mesmo com uma força altamente acentuada, o deslocamento seria pequeno.
Figura 31 - Deslocamento devido à flexão
Através de testes em bancadas é possível avaliar como se dará o desgaste. Uma
solução caso ele seja muito acentuado é envolver o topo do sensor por um material
cerâmico [12] que possui alta resistência ao atrito.
39
4.4.3. Corpo
O corpo do módulo discriminador deve possuir um formato que permita a fixação
das hastes sensoras nele. Seu diâmetro deve ser menor que o diâmetro interno do duto o
suficiente para que possam caber os sensores. O diâmetro da coroa que vai fixar os
sensores deve ser um pouco maior que 126,76 mm já que os sensores foram projetados
para ser encaixados nessa distância.
Conforme dito anteriormente, os módulos do pig devem possuir um tamanho que
permita seu deslocamento ao longo de toda a tubulação, não ficando preso. Uma
atenção especial deve ser dada então às curvas existentes, locais onde o pig corre mais
risco de ficar aprisionado bloqueando o fluxo de produto. O raio mínimo de curvatura é
de 1,5 D e para essas condições o comprimento dos módulos do pig não deve exceder
1,5 D. Por outro lado, esse comprimento não pode ser pequeno demais a ponto do pig
passar por uma das derivações e ser menor que seu diâmetro, ficando parado dentro do
duto por estar sujeito na parte jusante e montante à mesma pressão. Logo, seu
comprimento deve ser maior que o diâmetro da maior derivação, que no duto em
questão corresponde a 8”. Temos então o seguinte intervalo permitido para o
comprimento do módulo discriminador:
Esse valor inclui a largura dos discos, dos flanges e do corpo do pig. É
recomendável que o tamanho dele seja o mais próximo possível de 1,5 D para que
alguns problemas sejam evitados, como o pig “capotar”, ou seja, rotacionar em torno do
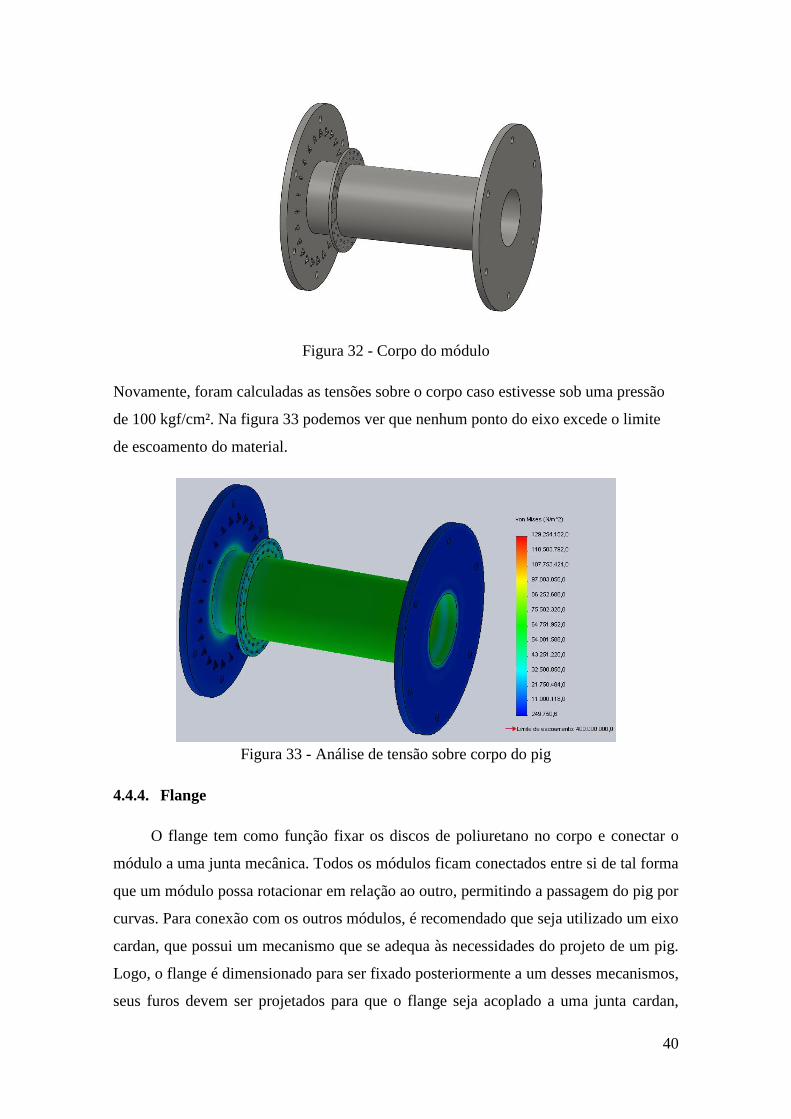
eixo horizontal ortogonal ao axial. A figura 32 mostra uma idéia de corpo para o
módulo discriminador, já levando em consideração que ainda serão adicionados os
flanges e os discos.
Sua face interna possui ganchos onde posteriormente serão presas as molas
responsáveis por manter o sensor discriminador sempre em contato com a parede duto.
40
Figura 32 - Corpo do módulo
Novamente, foram calculadas as tensões sobre o corpo caso estivesse sob uma pressão
de 100 kgf/cm². Na figura 33 podemos ver que nenhum ponto do eixo excede o limite
de escoamento do material.
Figura 33 - Análise de tensão sobre corpo do pig
4.4.4. Flange
O flange tem como função fixar os discos de poliuretano no corpo e conectar o
módulo a uma junta mecânica. Todos os módulos ficam conectados entre si de tal forma
que um módulo possa rotacionar em relação ao outro, permitindo a passagem do pig por
curvas. Para conexão com os outros módulos, é recomendado que seja utilizado um eixo
cardan, que possui um mecanismo que se adequa às necessidades do projeto de um pig.
Logo, o flange é dimensionado para ser fixado posteriormente a um desses mecanismos,
seus furos devem ser projetados para que o flange seja acoplado a uma junta cardan,
41
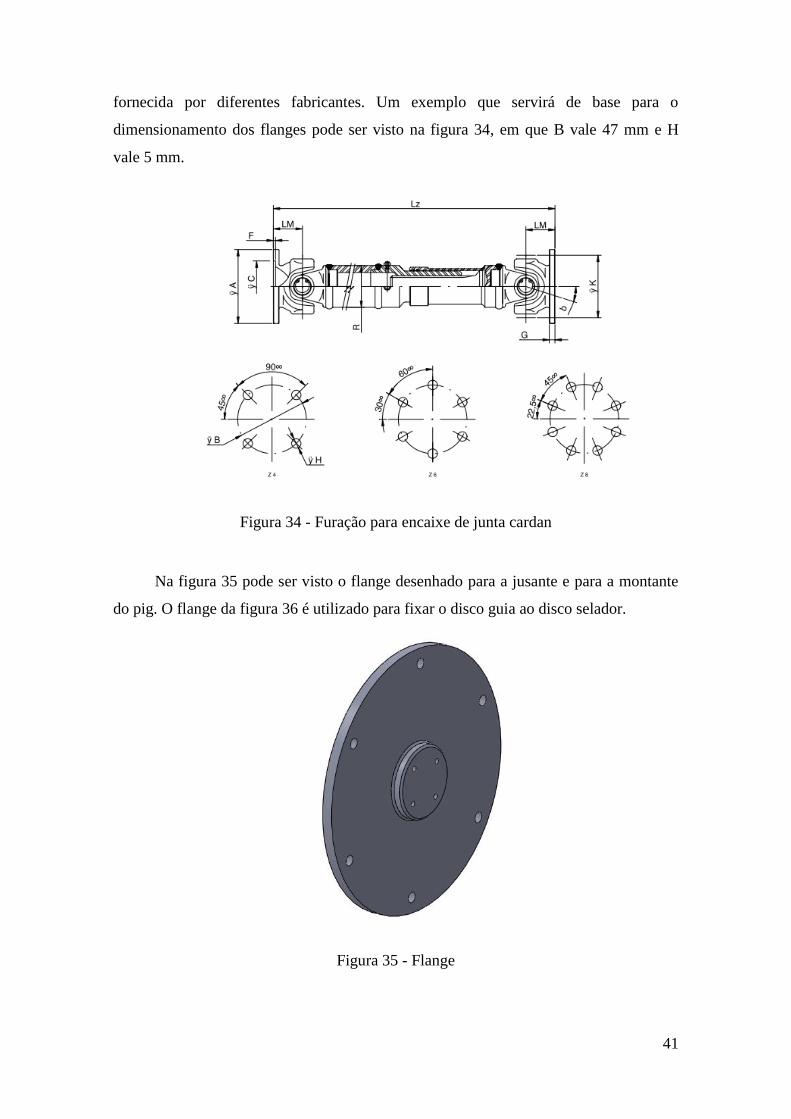
fornecida por diferentes fabricantes. Um exemplo que servirá de base para o
dimensionamento dos flanges pode ser visto na figura 34, em que B vale 47 mm e H
vale 5 mm.
Figura 34 - Furação para encaixe de junta cardan
Na figura 35 pode ser visto o flange desenhado para a jusante e para a montante
do pig. O flange da figura 36 é utilizado para fixar o disco guia ao disco selador.
Figura 35 - Flange
42
Figura 36 - Flange de ligação
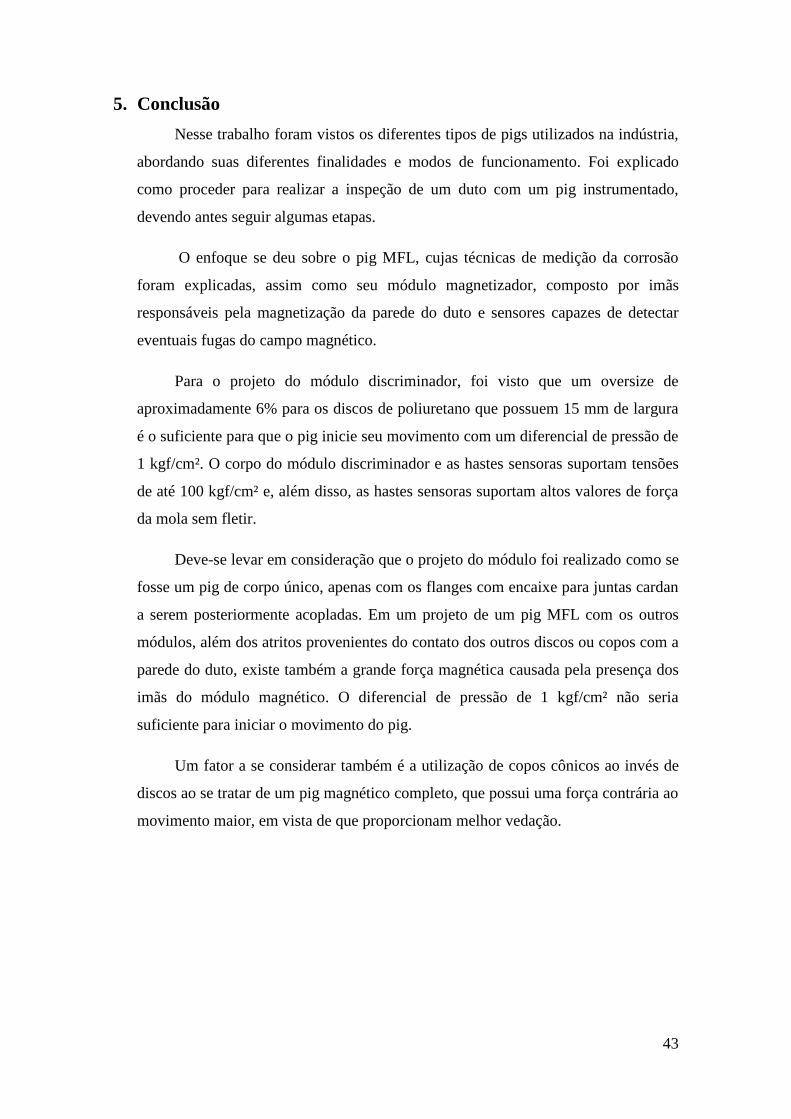
4.4.5. Módulo discriminador
Montando sensores, eixo, flanges e discos temos o módulo discriminador visto na
figura 37. As molas de tração devem ser selecionadas para manter o sensor sempre em
contato com a parede do duto mas sem exercer uma força excessiva para que o atrito
entre sensor e parede interna da tubulação não seja muito acentuado.
Figura 37 - Módulo Discriminador
43
5. Conclusão
Nesse trabalho foram vistos os diferentes tipos de pigs utilizados na indústria,
abordando suas diferentes finalidades e modos de funcionamento. Foi explicado
como proceder para realizar a inspeção de um duto com um pig instrumentado,
devendo antes seguir algumas etapas.
O enfoque se deu sobre o pig MFL, cujas técnicas de medição da corrosão
foram explicadas, assim como seu módulo magnetizador, composto por imãs
responsáveis pela magnetização da parede do duto e sensores capazes de detectar
eventuais fugas do campo magnético.
Para o projeto do módulo discriminador, foi visto que um oversize de
aproximadamente 6% para os discos de poliuretano que possuem 15 mm de largura
é o suficiente para que o pig inicie seu movimento com um diferencial de pressão de
1 kgf/cm². O corpo do módulo discriminador e as hastes sensoras suportam tensões
de até 100 kgf/cm² e, além disso, as hastes sensoras suportam altos valores de força
da mola sem fletir.
Deve-se levar em consideração que o projeto do módulo foi realizado como se
fosse um pig de corpo único, apenas com os flanges com encaixe para juntas cardan
a serem posteriormente acopladas. Em um projeto de um pig MFL com os outros
módulos, além dos atritos provenientes do contato dos outros discos ou copos com a
parede do duto, existe também a grande força magnética causada pela presença dos
imãs do módulo magnético. O diferencial de pressão de 1 kgf/cm² não seria
suficiente para iniciar o movimento do pig.
Um fator a se considerar também é a utilização de copos cônicos ao invés de
discos ao se tratar de um pig magnético completo, que possui uma força contrária ao
movimento maior, em vista de que proporcionam melhor vedação.

44
6. Referências Bibliográficas
[1] BUSCHINELLI, P. D. V., Desenvolvimento de um Sistema Óptico por
Triangulação Cônica para Inspeção do Perfil Interno de Dutos. Tese de M.Sc.
Universidade Federal de Santa Catarina, Florianópolis, SC, Brasil, 2007.
[2] SOUZA, R. D., Avaliação Estrutural de Dutos com Defeitos de Corrosão Reais.
Tese de M.Sc. PUC – RJ, Rio de Janeiro, RJ, Brasil, 2003.
[3] CAMERINI, C.; SOUZA, H. A., “Inspeção de Dutos”. In: Freire, J. L. F.,
Engenharia de Dutos, 1 ed, capítulo 14, Rio de Janeiro, ABCM, 2009.
[4] ALMEIDA, M.S., Pigs Instrumentados, CEFET – RJ, Nova Iguaçu, RJ, Brasil,
2014.
[5] SANTOS, N. B., Desenvolvimento de Sensores Magnéticos para a Detecção e
Dimensionamento de Corrosão Interna em Situação de Baixa Saturação. Universidade
Federal do Rio de Janeiro, Rio de Janeiro, RJ, Brasil, 2006.
[6] GOMES, M. G. F. F., Análise de copos de pigs para limpeza interna de tubulações
pelo método dos elementos finitos. Tese de M.Sc. Universidade Federal do Rio de
Janeiro, Rio de Janeiro, RJ, Brasil, 1994.
[7] CORDELL, J.; VANZANT, H., All About Pigging. 3 ed, Oklahoma, 2000.
[8] WINT, D., Difficult to Pig Pipelines. Disponível em: <Difficult to Pig Pipelines>.
Acesso em: 22 jan. 2016.
[9] DUTRA, M. S.; RAMÍREZ, R. E., Theoretical Evaluation of the Hydrodynamic
Forces Acting on a Bypass Pig Inside an Active Pipeline. In: International Congress of
Mechanical Engineering, 20., 2009, Gramado, RS, Brasil.
[10] SOUZA, R. O., Avaliação de Modelos para a Remoção de Depósitos de Parafina
em Dutos Utilizando Pigs. Tese de M.Sc. PUC – RJ, Rio de Janeiro, RJ, Brasil, 2005.
[11] CANABRAVA FILHO, J. S.; MARCO FILHO, F., Apostila de Metrologia. Rio de
Janeiro, RJ, Brasil, 1996.
[12] SALCEDO, T., Análise do Sensor de um Pig Instrumentado do Tipo Palito. Tese
de M.Sc. Rio de Janeiro, RJ, Brasil, 2009.





























