Embed Size (px)
Citation preview
Função de TransferênciaProcessos de Primeira e
Segunda Ordem
Profa Ninoska Bojorge
Departamento de Engenharia Química e de Petróleo – UFF
Disciplina: TEQ102- CONTROLE DE PROCESSOS
1
Função de Transferência1. Introdução
DefiniçãoVantagensPropriedadesGanho da Função de Transferência Exemplos de Entradas
2. Função de transferência de Primeira Ordem3. Resposta de Unidades de Processo de Integração 4. Resposta de Sistemas de Segunda Ordem
Sumário 2
Transformada de Laplace
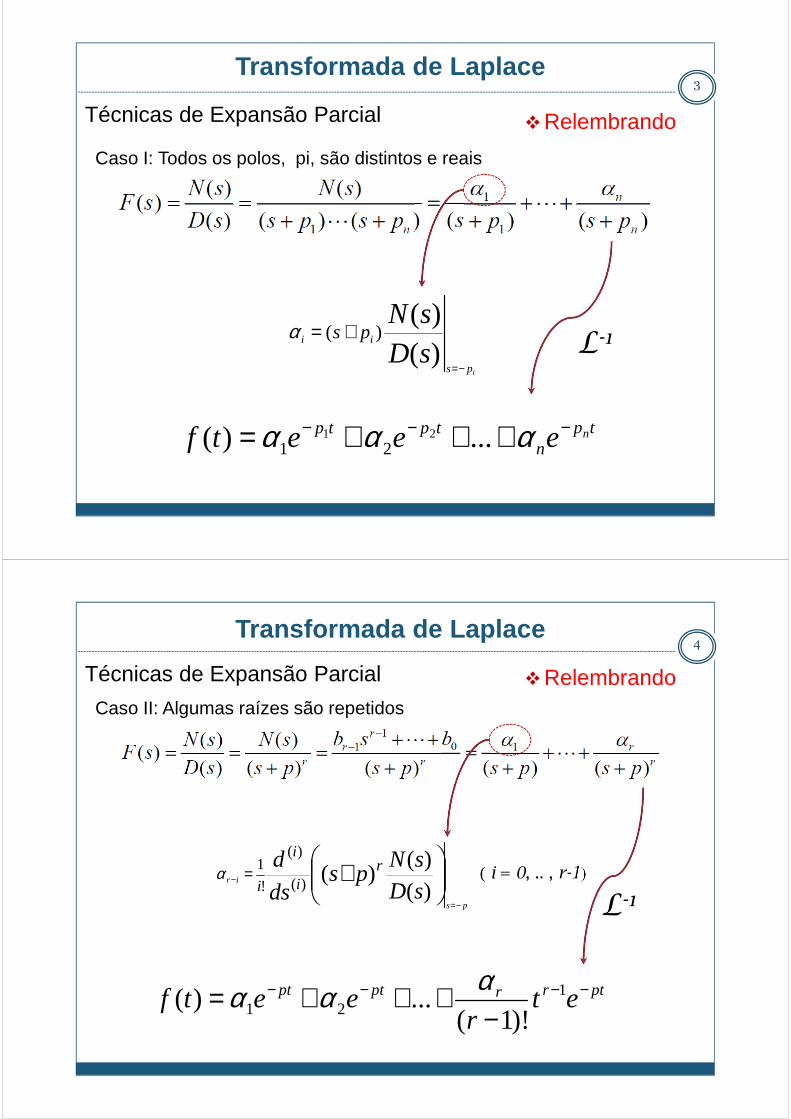
�RelembrandoTécnicas de Expansão Parcial
Caso I: Todos os polos, pi, são distintos e reais
)()(
)(sDsN
ips
ii ps
−=
+=α
tpn
tptp neeetf −−− +++= ααα ...)( 2121
L-1
3
Transformada de Laplace
�RelembrandoTécnicas de Expansão Parcial
+−=
− =)()(
)()(
)(
!
1
sDsN
psds
d ri
i
ips
irα ( i = 0, .. , r-1)
L-1
ptrrptpt etr
eetf −−−−
−+++= 1
21 )!1(...)(
ααα
Caso II: Algumas raízes são repetidos
4
Transformada de Laplace
�RelembrandoTécnicas de Expansão Parcial
2212212211
)()(
)(
)(
)(
ωωβ
ωα
ωωβα
+++
+++=
++++
bsbs
bs
bs
bs
onde:
L-1:tsenetetf btbt ωβωα −− += 11 cos)(
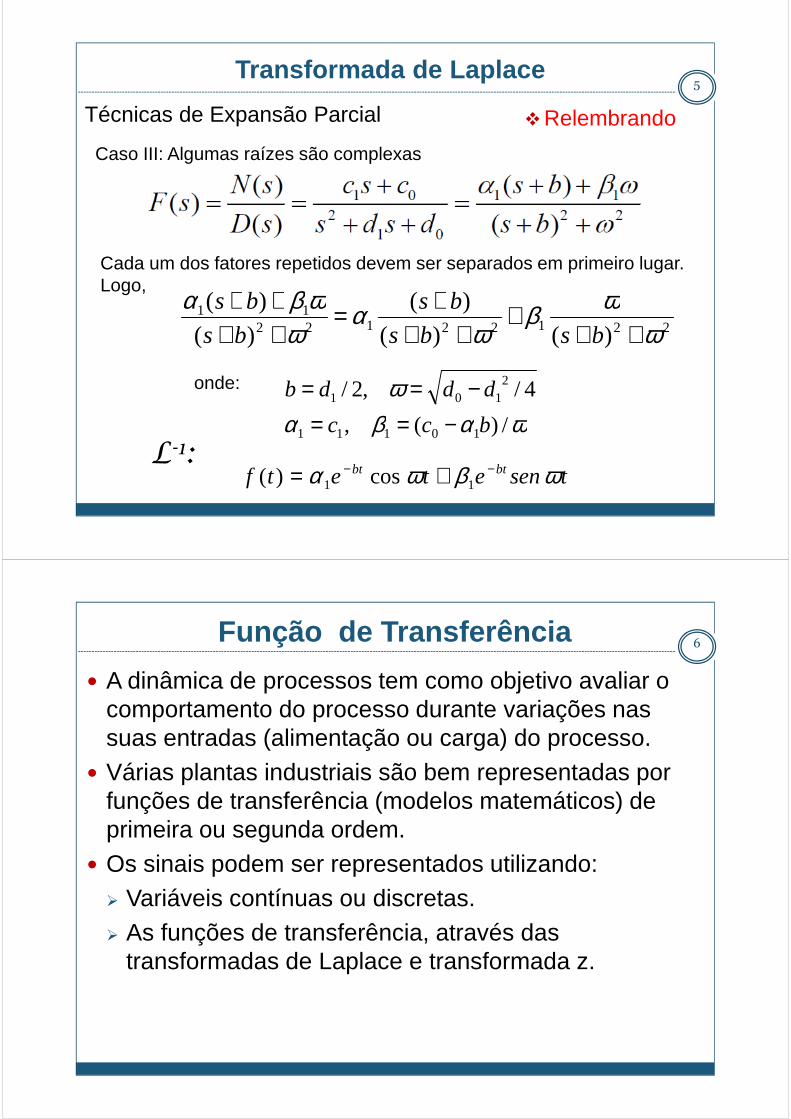
Caso III: Algumas raízes são complexas
Cada um dos fatores repetidos devem ser separados em primeiro lugar. Logo,
4/,2/ 2101 dddb −== ω
ωαβα /)(, 10111 bcc −==
5
Função de Transferência 6
� A dinâmica de processos tem como objetivo avaliar o comportamento do processo durante variações nas suas entradas (alimentação ou carga) do processo.
� Várias plantas industriais são bem representadas por funções de transferência (modelos matemáticos) de primeira ou segunda ordem.
� Os sinais podem ser representados utilizando:� Variáveis contínuas ou discretas.� As funções de transferência, através das
transformadas de Laplace e transformada z.
Função de Transferência 7
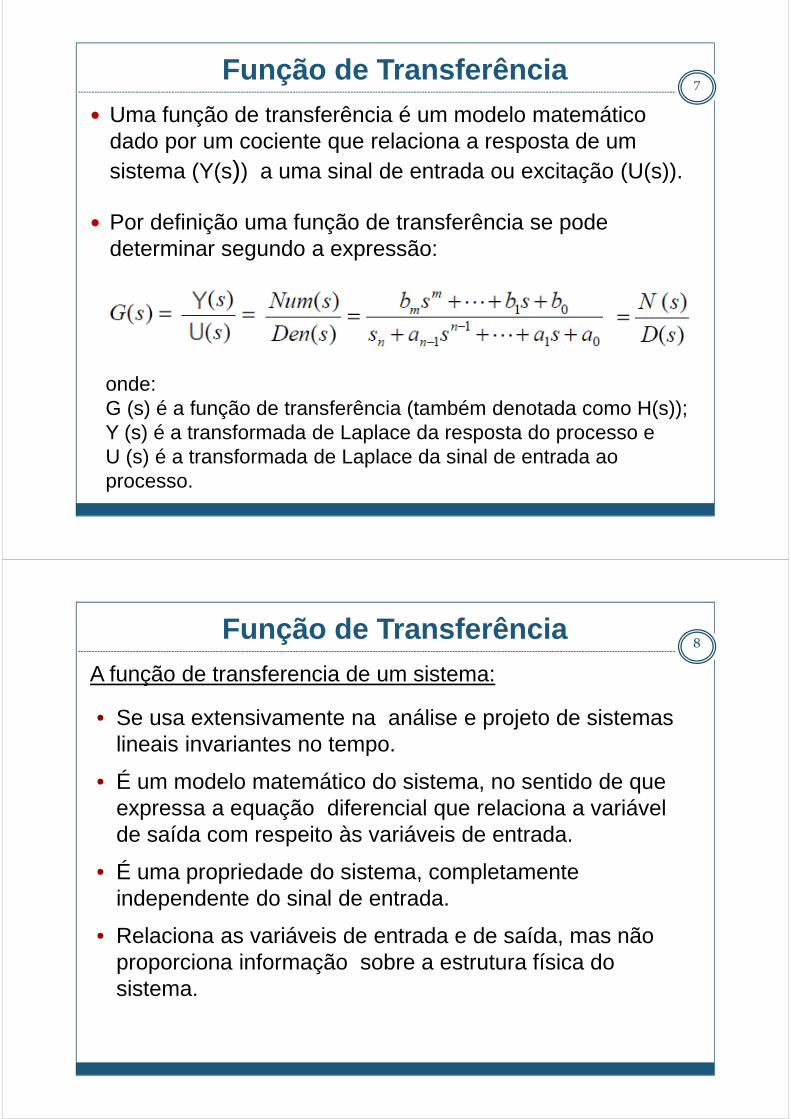
� Uma função de transferência é um modelo matemáticodado por um cociente que relaciona a resposta de um sistema (Y(s)) a uma sinal de entrada ou excitação (U(s)).
� Por definição uma função de transferência se pode determinar segundo a expressão:
onde:G (s) é a função de transferência (também denotada como H(s)); Y (s) é a transformada de Laplace da resposta do processo e U (s) é a transformada de Laplace da sinal de entrada ao processo.
8
• Se usa extensivamente na análise e projeto de sistemas lineais invariantes no tempo.
• É um modelo matemático do sistema, no sentido de que expressa a equação diferencial que relaciona a variável de saída com respeito às variáveis de entrada.
• É uma propriedade do sistema, completamente independente do sinal de entrada.
• Relaciona as variáveis de entrada e de saída, mas não proporciona informação sobre a estrutura física do sistema.
A função de transferencia de um sistema:
Função de Transferência
9
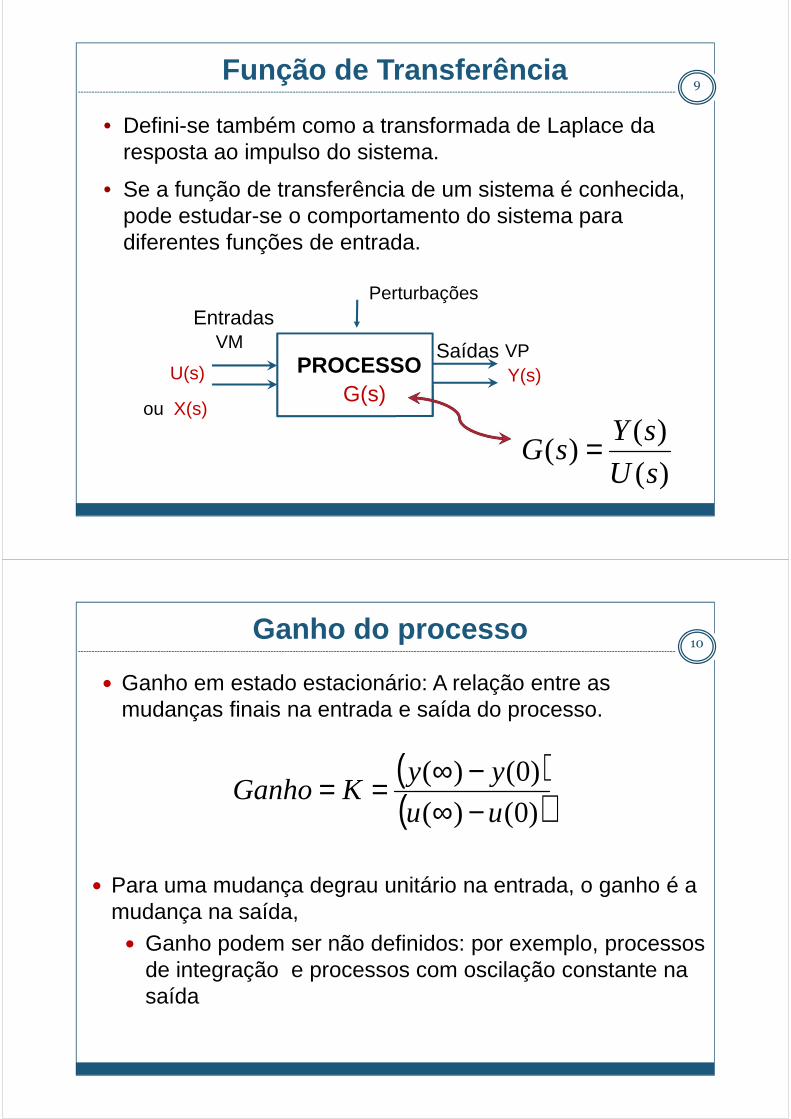
• Defini-se também como a transformada de Laplace da resposta ao impulso do sistema.
• Se a função de transferência de um sistema é conhecida, pode estudar-se o comportamento do sistema para diferentes funções de entrada.
Função de Transferência
Entradas
Saídas
Perturbações
VM VPY(s)U(s) PROCESSO
G(s)ou X(s)
)(
)()(
sU
sYsG =
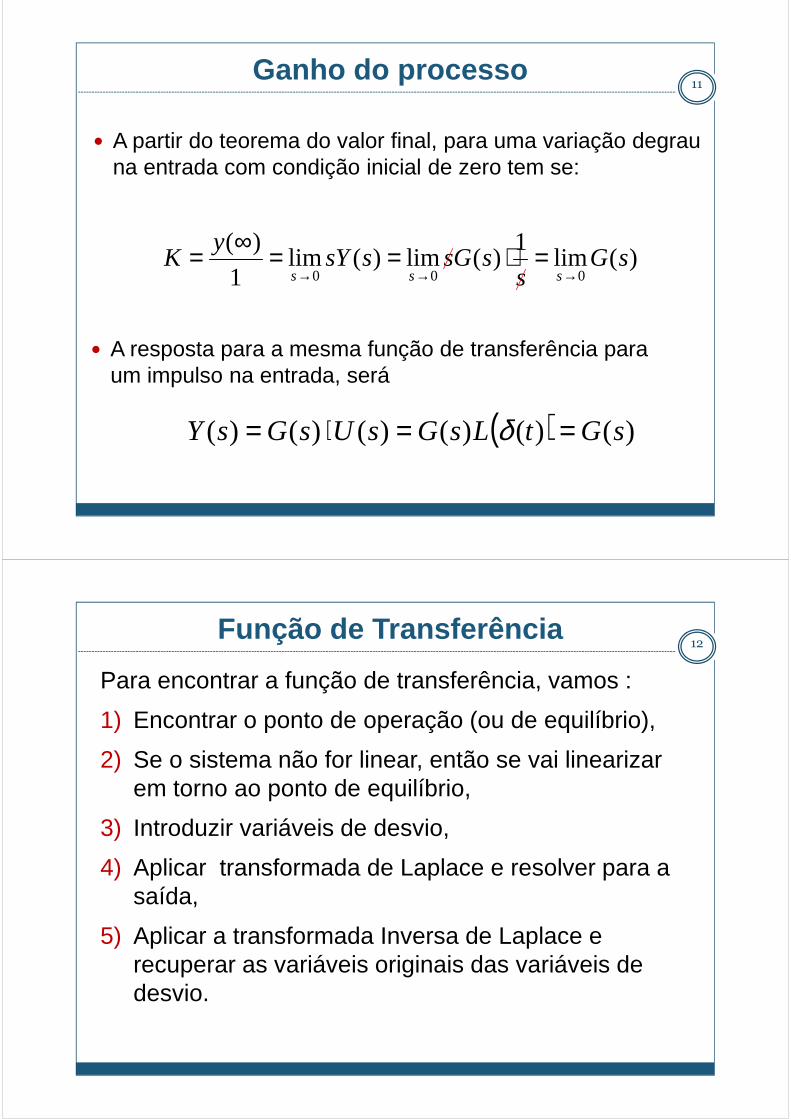
Ganho do processo
� Ganho em estado estacionário: A relação entre as mudanças finais na entrada e saída do processo.
10
� Para uma mudança degrau unitário na entrada, o ganho é a mudança na saída, � Ganho podem ser não definidos: por exemplo, processos
de integração e processos com oscilação constante na saída
( )( ))0()(
)0()(
uu
yyKGanho
−∞−∞==
Ganho do processo 11
� A partir do teorema do valor final, para uma variação degrau na entrada com condição inicial de zero tem se:
)(lim1
)(lim)(lim1
)(000
sGs
ssGssYy
Ksss →→→
=⋅==∞=
( ) )()()()()()( sGtLsGsUsGsY ==⋅= δ
� A resposta para a mesma função de transferência para um impulso na entrada, será
Função de Transferência12
Para encontrar a função de transferência, vamos :
1) Encontrar o ponto de operação (ou de equilíbrio),
2) Se o sistema não for linear, então se vai linearizar em torno ao ponto de equilíbrio,
3) Introduzir variáveis de desvio,
4) Aplicar transformada de Laplace e resolver para a saída,
5) Aplicar a transformada Inversa de Laplace e recuperar as variáveis originais das variáveis de desvio.
Função de Transferência13
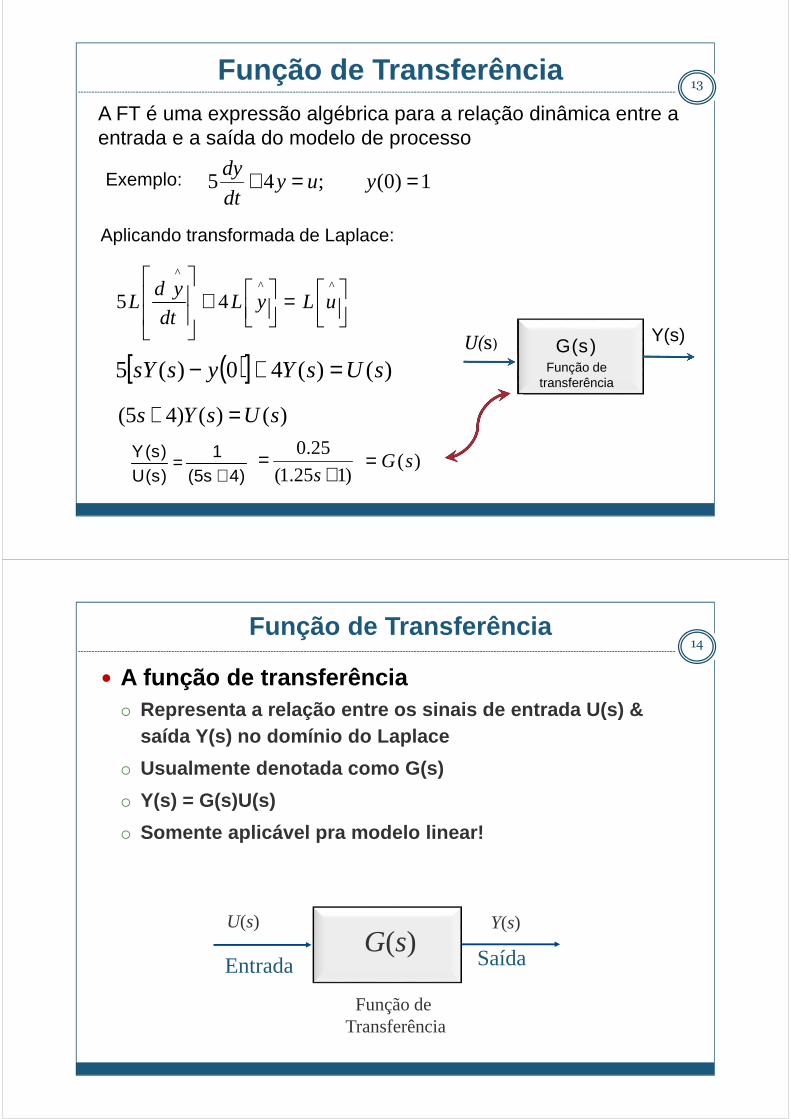
A FT é uma expressão algébrica para a relação dinâmica entre a entrada e a saída do modelo de processo
1)0(;45 ==+ yuydt
dy
=
+
^^^
45 uLyLdt
ydL
( )[ ] )()(40)(5 sUsYyssY =+−
)()()45( sUsYs =+
)45(1
)()(
+=
ssUsY
)125.1(
25.0
+=
s
)(sGU(s) Y(s)
Função de transferência
)(sG=
Exemplo:
Aplicando transformada de Laplace:
Função de Transferência
� A função de transferência � Representa a relação entre os sinais de entrada U(s) &
saída Y(s) no domínio do Laplace
� Usualmente denotada como G(s)
� Y(s) = G(s)U(s)
� Somente aplicável pra modelo linear!
G(s)
Função de Transferência
Entrada Saída
U(s) Y(s)
14
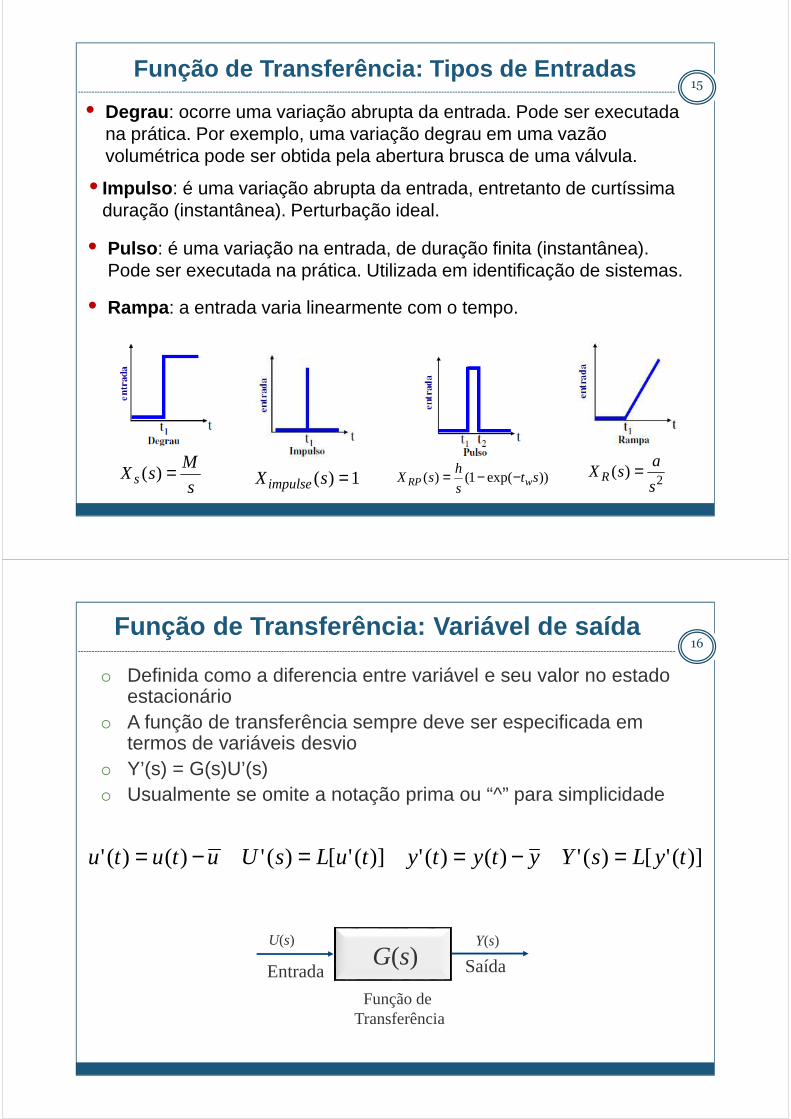
• Degrau : ocorre uma variação abrupta da entrada. Pode ser executada na prática. Por exemplo, uma variação degrau em uma vazão volumétrica pode ser obtida pela abertura brusca de uma válvula.
Função de Transferência: Tipos de Entradas
• Impulso : é uma variação abrupta da entrada, entretanto de curtíssima duração (instantânea). Perturbação ideal.
15
• Pulso : é uma variação na entrada, de duração finita (instantânea). Pode ser executada na prática. Utilizada em identificação de sistemas.
• Rampa : a entrada varia linearmente com o tempo.
s
MsX s =)( ))exp(1()( st
s
hsX wRP −−= 2
)(s
asX R =1)( =sX impulse
Função de Transferência: Variável de saída
� Definida como a diferencia entre variável e seu valor no estado estacionário
� A função de transferência sempre deve ser especificada em termos de variáveis desvio
� Y’(s) = G(s)U’(s)� Usualmente se omite a notação prima ou “^” para simplicidade
)]('[)(')()(')]('[)(')()(' tyLsYytytytuLsUututu =−==−=
16
G(s)
Função de Transferência
Entrada Saída
U(s) Y(s)
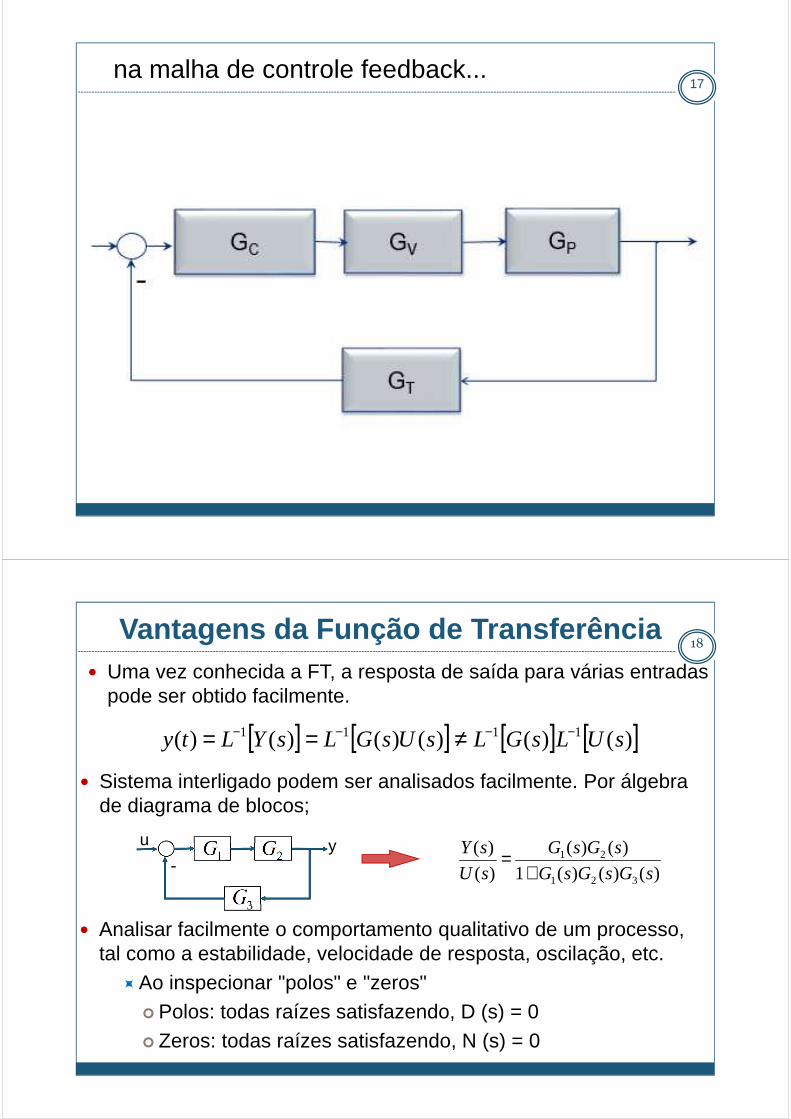
na malha de controle feedback...17
Controlador Atuador Processo
Sensor
-
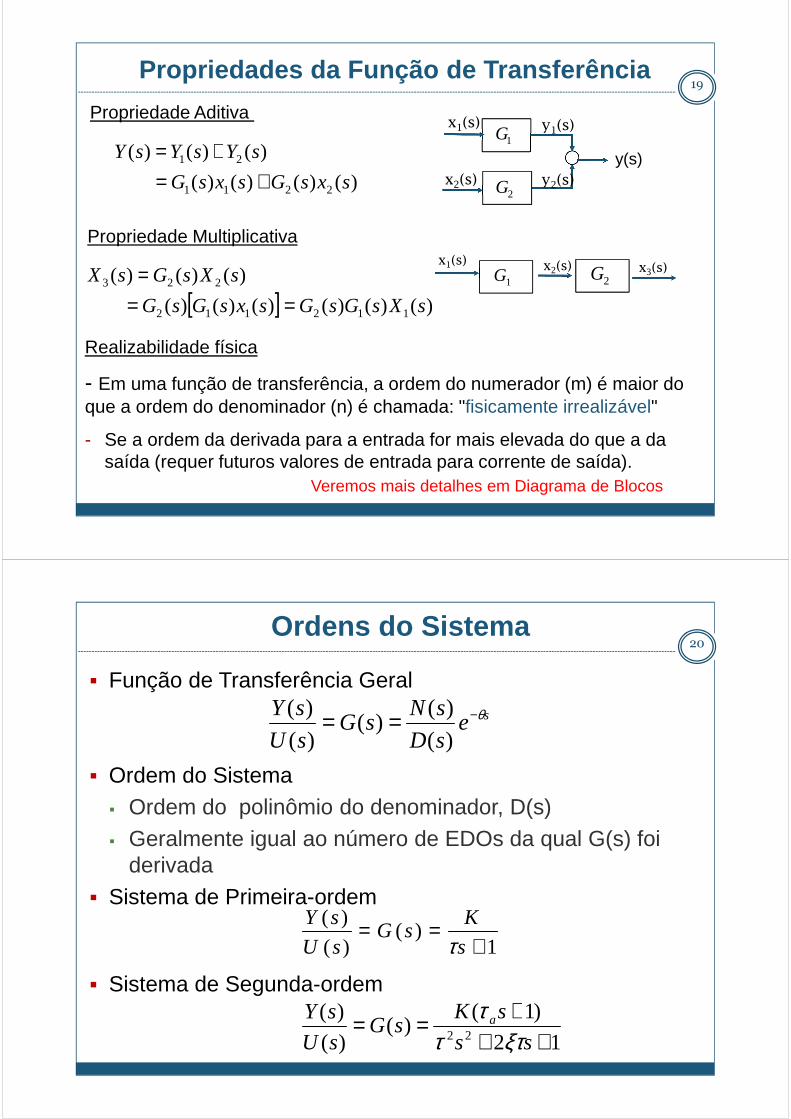
� Uma vez conhecida a FT, a resposta de saída para várias entradas pode ser obtido facilmente.
18Vantagens da Função de Transferência
� Sistema interligado podem ser analisados facilmente. Por álgebra de diagrama de blocos;
� Analisar facilmente o comportamento qualitativo de um processo, tal como a estabilidade, velocidade de resposta, oscilação, etc.
�Ao inspecionar "polos" e "zeros" � Polos: todas raízes satisfazendo, D (s) = 0 � Zeros: todas raízes satisfazendo, N (s) = 0
[ ] [ ] [ ] [ ])()()()()()( 1111 sULsGLsUsGLsYLty −−−− ≠==
)()()(1
)()(
)(
)(
321
21
sGsGsG
sGsG
sU
sY
+=1G 2G
3G
u y-
19
Realizabilidade física
- Em uma função de transferência, a ordem do numerador (m) é maior do que a ordem do denominador (n) é chamada: "fisicamente irrealizável"
- Se a ordem da derivada para a entrada for mais elevada do que a da saída (requer futuros valores de entrada para corrente de saída).
Propriedade Aditiva
Propriedades da Função de Transferência
Propriedade Multiplicativa
)()()()(
)()()(
2211
21
sxsGsxsG
sYsYsY
+=+=
1Gx1(s)
y(s)x2(s)
y1(s)
y2(s)2G
1Gx1(s) x2(s) x3(s)
2G
[ ] )()()()()()(
)()()(
112112
223
sXsGsGsxsGsG
sXsGsX
===
Veremos mais detalhes em Diagrama de Blocos
Ordens do Sistema
� Função de Transferência Geral
� Ordem do Sistema� Ordem do polinômio do denominador, D(s)� Geralmente igual ao número de EDOs da qual G(s) foi
derivada� Sistema de Primeira-ordem
� Sistema de Segunda-ordem
sesD
sNsG
sU
sY θ−==)(
)()(
)(
)(
1)(
)(
)(
+==
s
KsG
sU
sY
τ
12
)1()(
)(
)(22 ++
+==ss
sKsG
sU
sY a
ξτττ
20
21
Função de Transferência de Primeira Ordem
Função de Transferência de Primeira Ordem
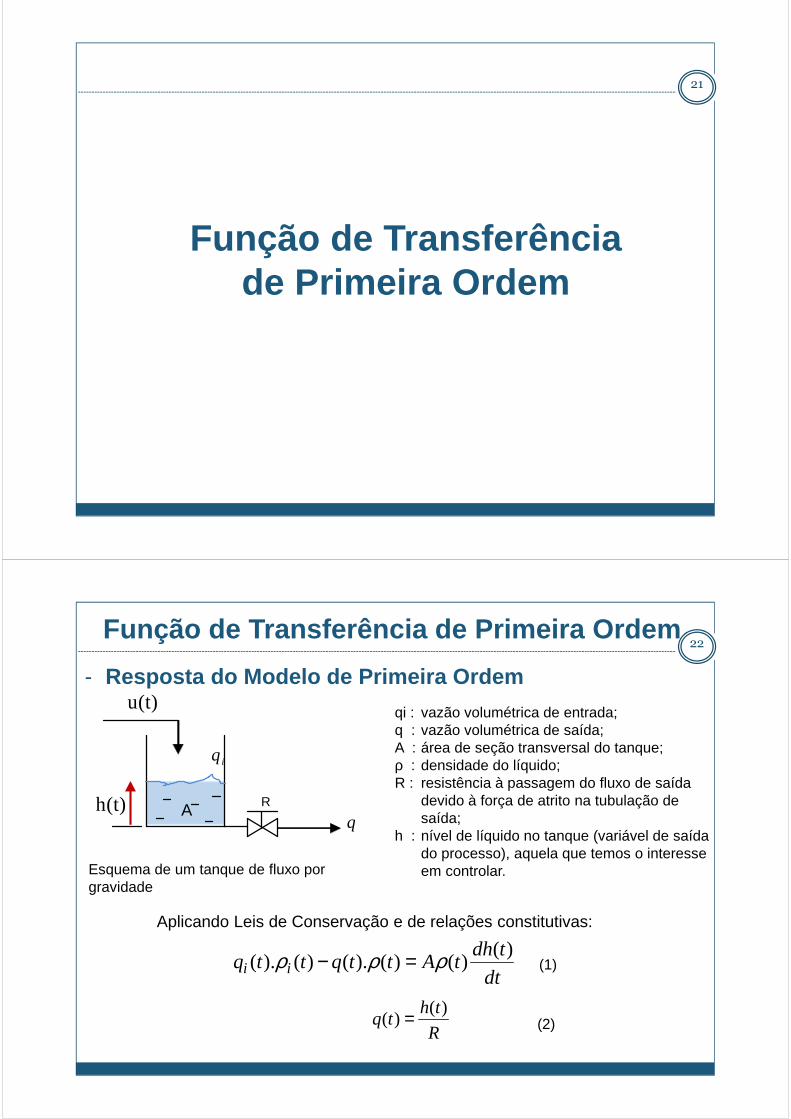
- Resposta do Modelo de Primeira Ordem
22
h(t)
u(t)
iq
qA
qi : vazão volumétrica de entrada;q : vazão volumétrica de saída;A : área de seção transversal do tanque;ρ : densidade do líquido;R : resistência à passagem do fluxo de saída
devido à força de atrito na tubulação de saída;
h : nível de líquido no tanque (variável de saída do processo), aquela que temos o interesse em controlar.Esquema de um tanque de fluxo por
gravidade
R
dt
tdhtAttqttq ii
)()()().()().( ρρρ =−
Aplicando Leis de Conservação e de relações constitutivas:
R
thtq
)()( =
(1)
(2)
h(t)
u(t)
23
)()()(
tRqthdt
tdhRA i=+
Subst. (2) em (1) e reordenando:
)(..1
)( sqsAR
Rsh i+
=
L
L-1
)1()( /τti eRqth −−=
Função de Transferência de Primeira Ordem
)().()(.)()(
)( ttqtR
th
dt
tdhtA ii ρρρ =+
τ
iq
qA
Esquema de um tanque de fluxo por gravidade
R
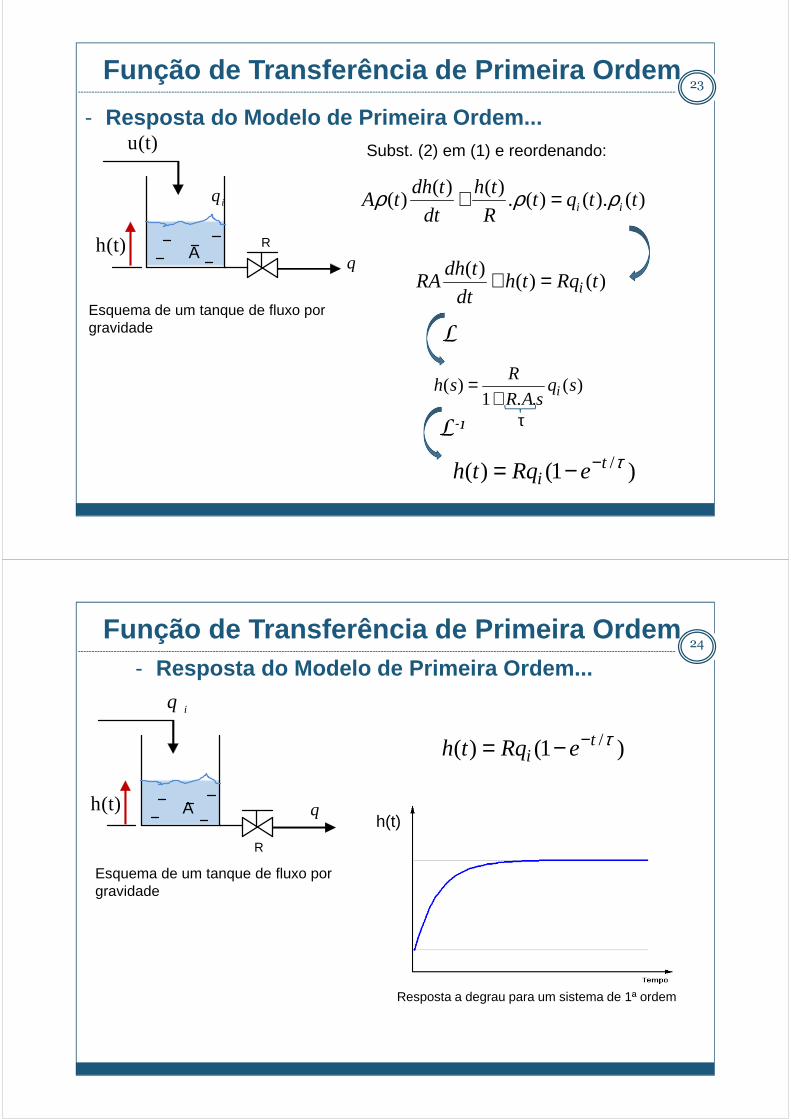
- Resposta do Modelo de Primeira Ordem...
h(t)
u(t)
24
Resposta a degrau para um sistema de 1ª ordem
h(t)
Função de Transferência de Primeira Ordem
iq
qA
Esquema de um tanque de fluxo por gravidade
R
- Resposta do Modelo de Primeira Ordem...
)1()( /τti eRqth −−=
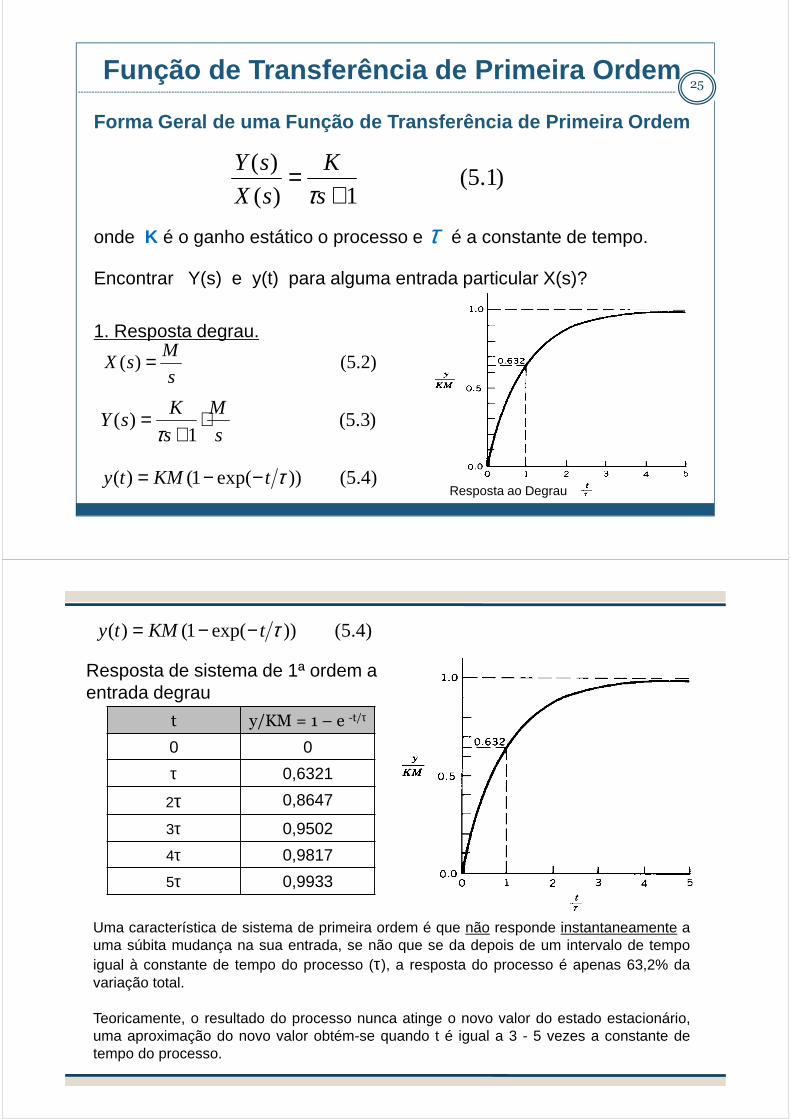
Forma Geral de uma Função de Transferência de Prime ira Ordem
onde K é o ganho estático o processo e τ é a constante de tempo.
Encontrar Y(s) e y(t) para alguma entrada particular X(s)?
1. Resposta degrau.
)1.5(1)(
)(
+=
s
K
sX
sY
τ
)2.5()(s
MsX =
)3.5(1
)(s
M
s
KsY ⋅
+=
τ
)4.5())exp(1()( τtKMty −−=Resposta ao Degrau
25Função de Transferência de Primeira Ordem
Uma característica de sistema de primeira ordem é que não responde instantaneamente auma súbita mudança na sua entrada, se não que se da depois de um intervalo de tempoigual à constante de tempo do processo (τ), a resposta do processo é apenas 63,2% davariação total.
Teoricamente, o resultado do processo nunca atinge o novo valor do estado estacionário,uma aproximação do novo valor obtém-se quando t é igual a 3 - 5 vezes a constante detempo do processo.
t y/KM = 1 – e -t/τ
0 0
τ 0,6321
2τ 0,8647
3τ 0,9502
4τ 0,9817
5τ 0,9933
Resposta de sistema de 1ª ordem a entrada degrau
)4.5())exp(1()( τtKMty −−=
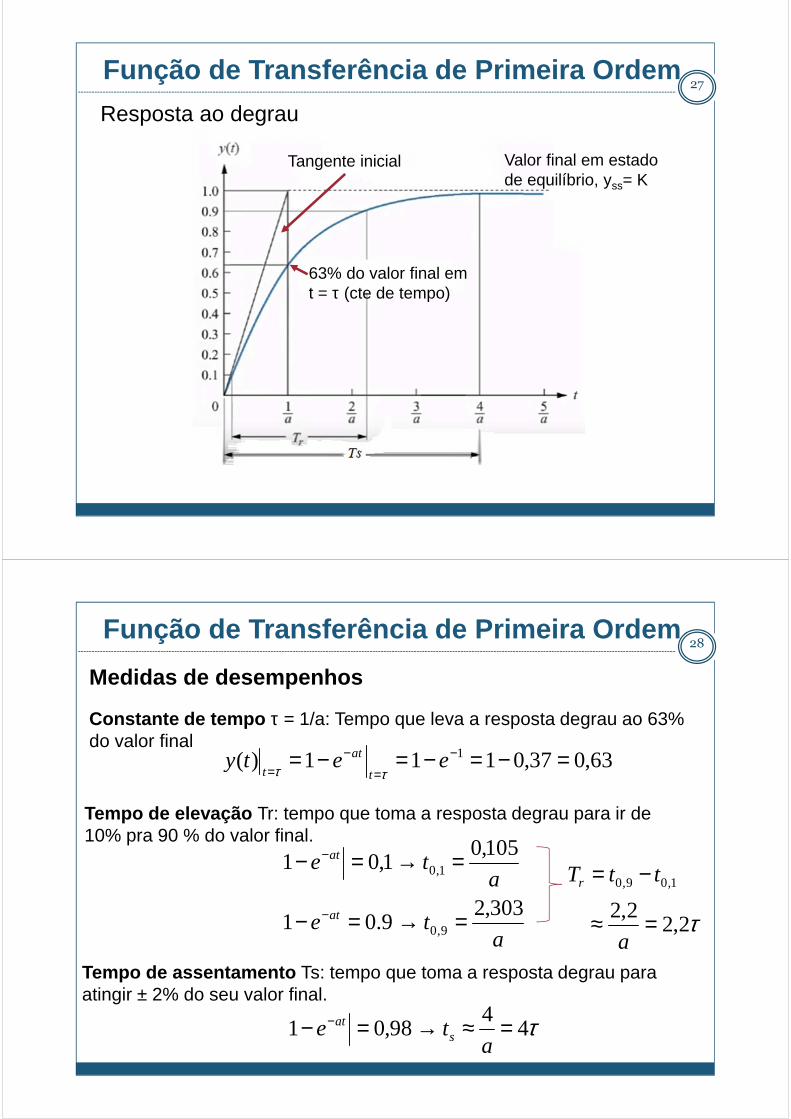
27Função de Transferência de Primeira Ordem
Resposta ao degrau
Tangente inicial
63% do valor final em t = τ (cte de tempo)
Valor final em estado de equilíbrio, yss= K
Medidas de desempenhos
Constante de tempo τ = 1/a: Tempo que leva a resposta degrau ao 63% do valor final
28Função de Transferência de Primeira Ordem
63,037,0111)( 1 =−=−=−= −
=
−=
eetyt
at
t ττ
Tempo de elevação Tr: tempo que toma a resposta degrau para ir de 10% pra 90 % do valor final.
ate
ate
at
at
303,29.01
105,01,01
9,0
1,0
=→=−
=→=−
−
−
τ2,22,2
1,09,0
=≈
−=
a
ttTr
Tempo de assentamento Ts: tempo que toma a resposta degrau para atingir ± 2% do seu valor final.
τ4498,01 =≈→=− −
ate s
at
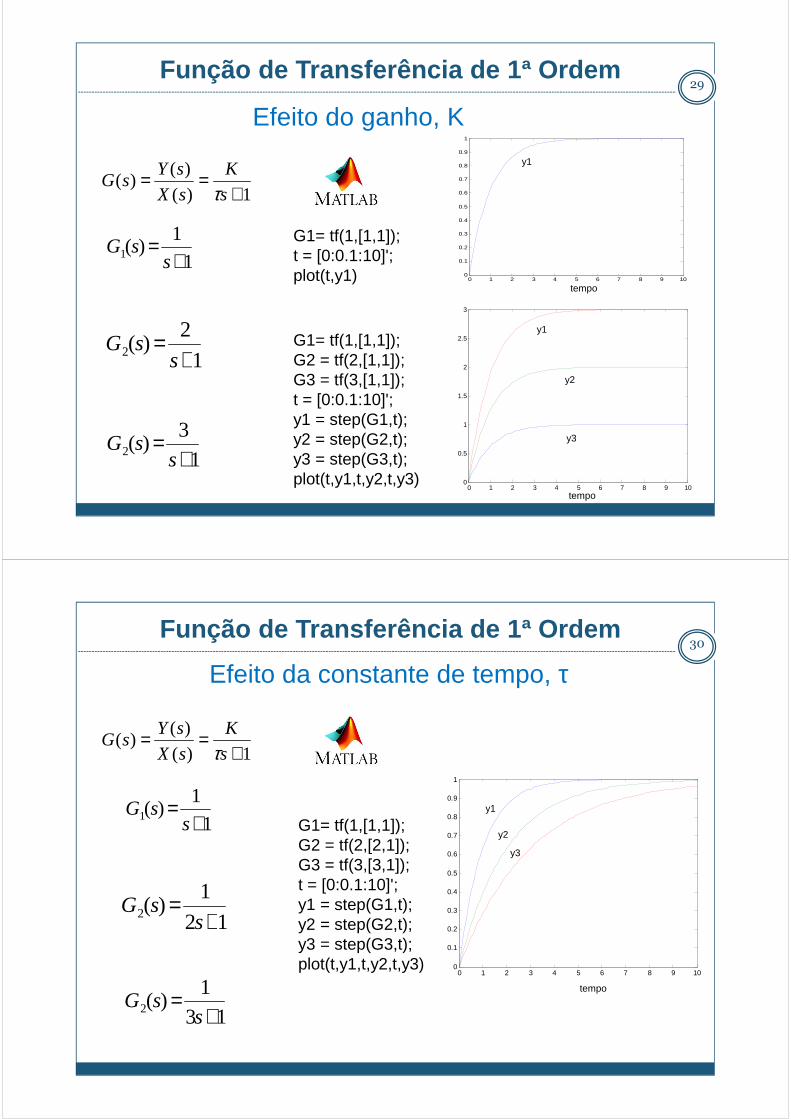
Função de Transferência de 1ª Ordem29
1)(
)()(
+==
s
K
sX
sYsG
τ
1
1)(1 +=
ssG
G1= tf(1,[1,1]);t = [0:0.1:10]';plot(t,y1)
G1= tf(1,[1,1]);G2 = tf(2,[1,1]);G3 = tf(3,[1,1]);t = [0:0.1:10]';y1 = step(G1,t);y2 = step(G2,t);y3 = step(G3,t);plot(t,y1,t,y2,t,y3)
1
2)(2 +=
ssG
1
3)(2 +=
ssG
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
tempo
y1
0 1 2 3 4 5 6 7 8 9 100
0.5
1
1.5
2
2.5
3
tempo
y1
y2
y3
Efeito do ganho, K
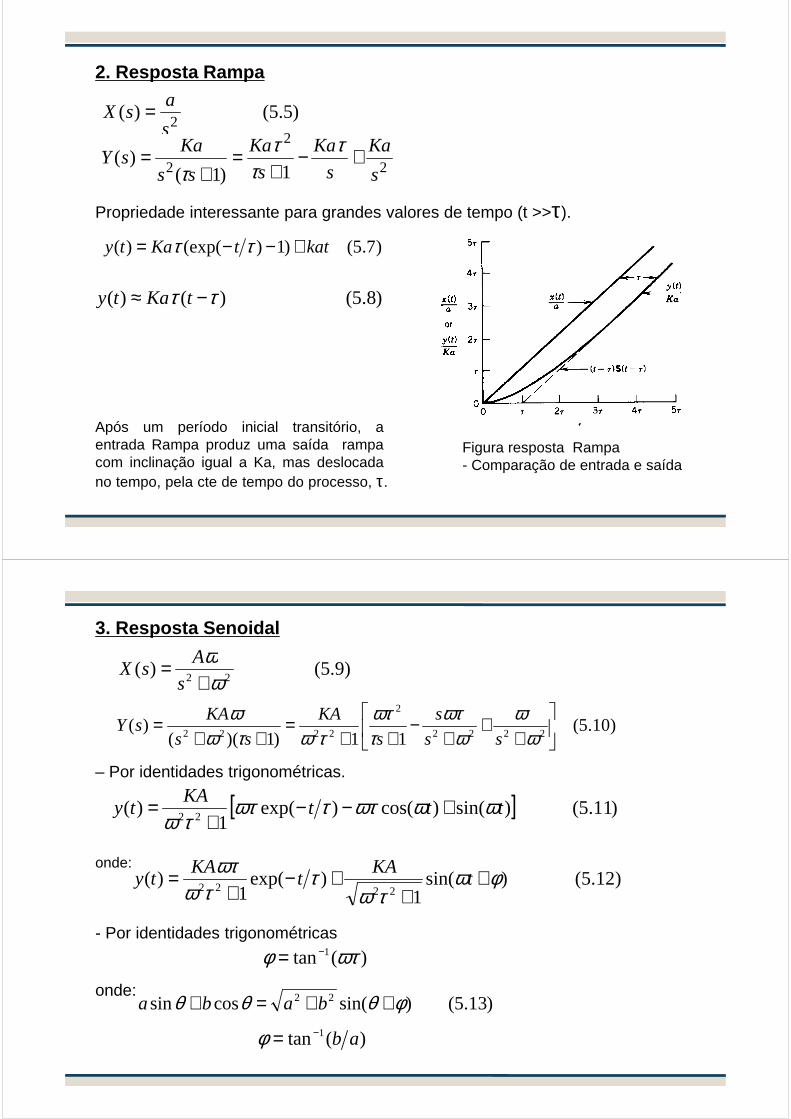
Função de Transferência de 1ª Ordem30
1
1)(1 +=
ssG
G1= tf(1,[1,1]);G2 = tf(2,[2,1]);G3 = tf(3,[3,1]);t = [0:0.1:10]';y1 = step(G1,t);y2 = step(G2,t);y3 = step(G3,t);plot(t,y1,t,y2,t,y3)
12
1)(2 +=
ssG
13
1)(2 +=
ssG
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
y1
y2
y3
tempo
Efeito da constante de tempo, τ
1)(
)()(
+==
s
K
sX
sYsG
τ
2. Resposta Rampa
Propriedade interessante para grandes valores de tempo (t >>τ).
)5.5()(2s
asX =
)7.5()1)(exp()( kattKaty +−−= ττ
)8.5()()( ττ −≈ tKaty
Após um período inicial transitório, aentrada Rampa produz uma saída rampacom inclinação igual a Ka, mas deslocadano tempo, pela cte de tempo do processo, τ.
Figura resposta Rampa- Comparação de entrada e saída
τ12
−==
ss
KaA
01 =+=
ss
KaC
τ
τA
B −=22 1)1(
)(s
C
s
B
s
A
ss
KasY ++
+=
+=
ττ 2
2
2 1)1()(
s
Ka
s
Ka
s
Ka
ss
KasY +−
+=
+= τ
ττ
τ
3. Resposta Senoidal
– Por identidades trigonométricas.
onde:
- Por identidades trigonométricas
onde:
)10.5(11)1)((
)(2222
2
2222
++
+−
++=
++=
ωω
ωωτ
τωτ
τωτωω
ss
s
s
KA
ss
KAsY
[ ] )11.5()sin()cos()exp(1
)(22
tttKA
ty ωωωττωττω
+−−+
=
)9.5()(22 ω
ω+
=s
AsX
)12.5()sin(1
)exp(1
)(2222
φωτω
ττω
ωτ ++
+−+
= tKA
tKA
ty
)(tan 1 ωτφ −=
)13.5()sin(cossin 22 φθθθ ++=+ baba
)(tan 1 ab−=φ
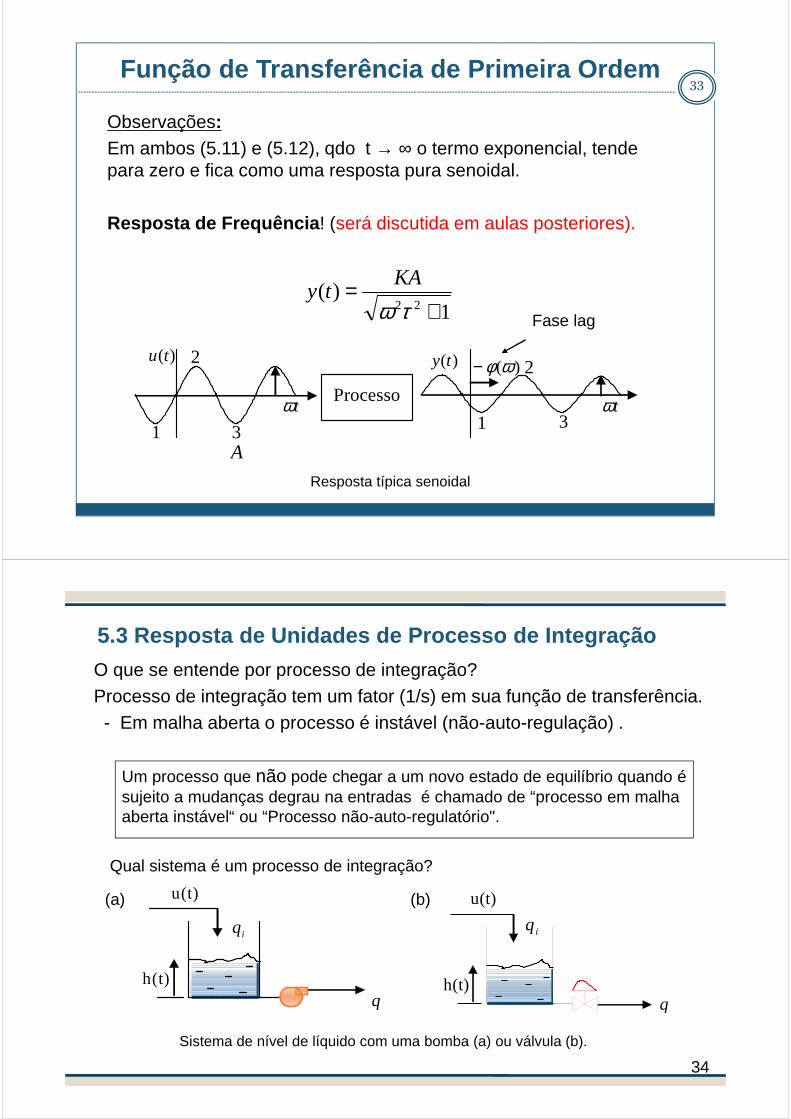
Observações:Em ambos (5.11) e (5.12), qdo t → ∞ o termo exponencial, tende para zero e fica como uma resposta pura senoidal.
Resposta de Frequência ! (será discutida em aulas posteriores).
Resposta típica senoidal
Processo
1 1
2 2
3 3
)(tu )(ty
tω tω
)(ωφ−
Fase lag
A
1)(
22 +=
τωKA
ty
33Função de Transferência de Primeira Ordem
5.3 Resposta de Unidades de Processo de Integração
O que se entende por processo de integração? Processo de integração tem um fator (1/s) em sua função de transferência.- Em malha aberta o processo é instável (não-auto-regulação) .
Sistema de nível de líquido com uma bomba (a) ou válvula (b).
h(t)
u(t)
iq
q
h(t)
u(t)
iq
q
Um processo que não pode chegar a um novo estado de equilíbrio quando é sujeito a mudanças degrau na entradas é chamado de “processo em malha aberta instável“ ou “Processo não-auto-regulatório".
(a) (b)
Qual sistema é um processo de integração?
34

Resposta: (a) é o processo de integração!
A vazão do efluente em (b) aumenta automaticamente se o nível aumenta . Portanto, se o nível no reservatório é maior, então a vazão do efluente aumentará. Se a vazão de efluentes aumenta também a vazão afluente aumentará, até o nível convergir.◊ Sistema de nível de líquido com uma válvula é um processo estável (ou
processo auto regulatório).
Mas, no sistema (a), independentemente do nível, a vazão do efluente é constante devido à bomba. Assim, se a vazão do afluente é maior que a vazão do efluente o nível sempre aumentará, e vice-versa. ou seja, a diferença entre a vazão do afluente e a vazão de efluente é integrado ao processo de saída (o nível).
◊ Sistema de nível de líquido com uma bomba é um processo instável (ou processo não-auto-regulatório).
35
• Exemplo (para o caso A)
A
)14.5(qqdt
dhA i −=
)15.5()()()( sQsQsAsH i −=
)16.5()(11
)(11
)( sQsA
sQsA
SH i −=
onde q é independente do h
Processo de Integração
Figura – Sistema de Nível de Liquido com um bomba 36
h(t)
u(t)
iq
q
[ ]∫∫ −=−=⇒−=t
i
th
hi dttqtqA
hthdhtqtqdt
dhA
0
)(**)(*)(
1)()()(
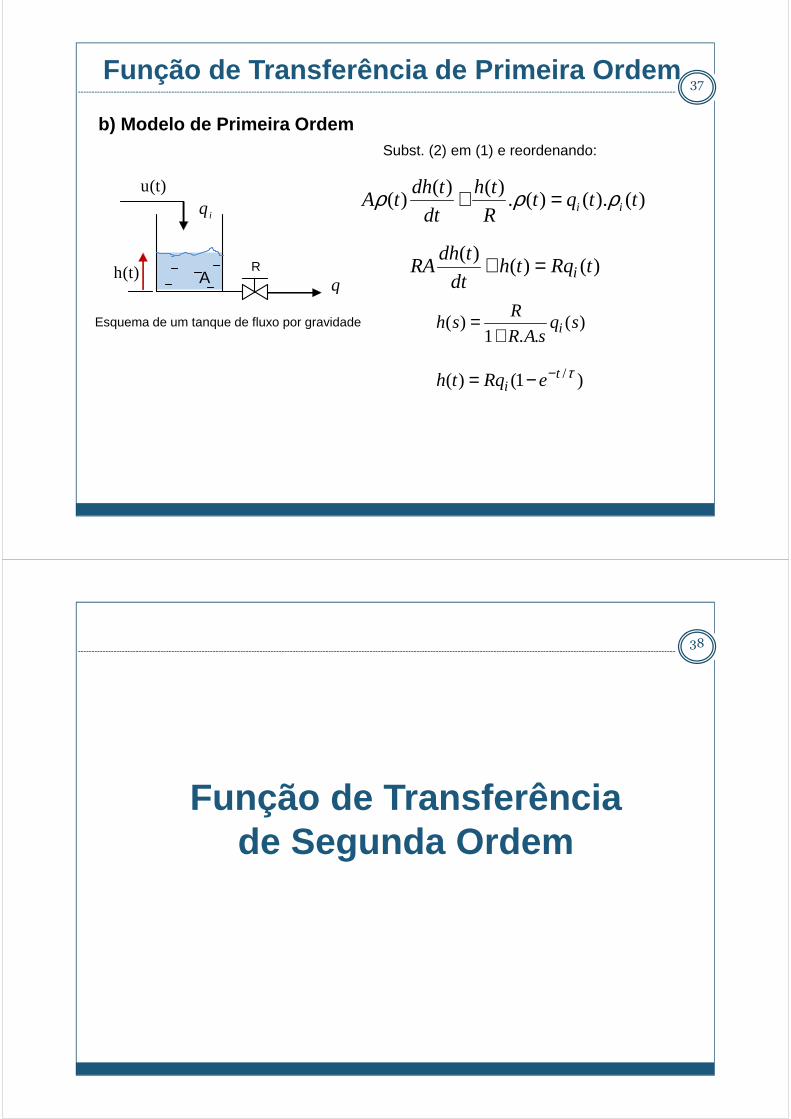
37
)()()(
tRqthdt
tdhRA i=+
Subst. (2) em (1) e reordenando:
)(..1
)( sqsAR
Rsh i+
=
)1()( /τti eRqth −−=
Função de Transferência de Primeira Ordem
b) Modelo de Primeira Ordem
Esquema de um tanque de fluxo por gravidade
)().()(.)()(
)( ttqtR
th
dt
tdhtA ii ρρρ =+
h(t)
u(t)
iq
qAR
38
Função de Transferência de Segunda Ordem

1. Definição de sistema de segunda ordem
Um sistema de segunda ordem é aquele cuja saída y(t) é descrita pelasolução de uma equação diferencial de segunda ordem.
onde u(t) é a entrada (ou função força).
Se a0 é diferente de zero, a equação anterior se escreverá:
5.17( )tbuyadt
dya
dt
yda =++ 12
2
2
( )tuKydt
dy
dt
ydP=++ ξττ 2
2
22 5.18
5.4 Resposta de Sistemas de Segunda Ordem
39
onde:
a equação (5.18) é a forma normal de um sistema de segunda ordem, onde
a
bKe
a
a
a
aP === 122 2, ξττ
( ) ( )( ) 1222 ++
==ss
K
su
sysG P
ξττ5.19
40
( )tuKydt
dy
dt
ydP=++ ξττ 2
2
22 5.18
τ
pKξ
: período de oscilação normal do sistema,
: fator de amortecimento
: ganho estacionário, ou ganho simples do processo.
A função de transferência padrão de um sistema de segundo ordem:
5.4 Resposta de Sistemas de Segunda Ordem ...cont.
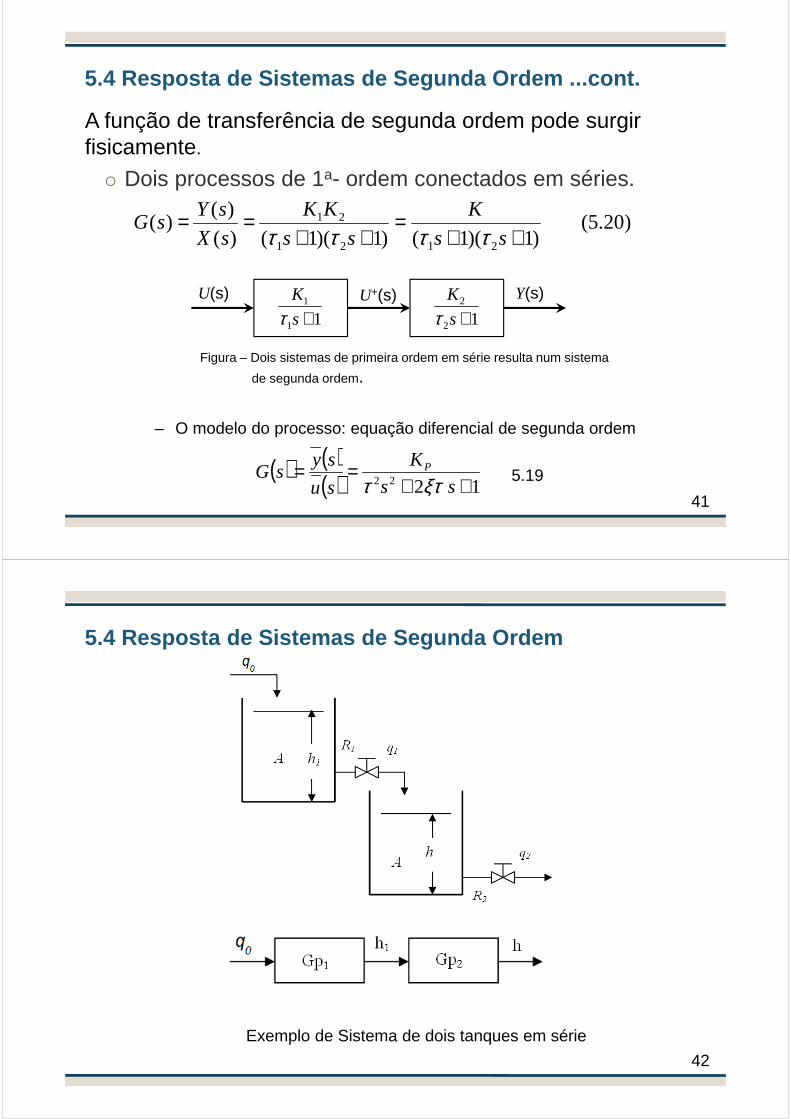
A função de transferência de segunda ordem pode surgir fisicamente.
� Dois processos de 1a- ordem conectados em séries.
Figura – Dois sistemas de primeira ordem em série resulta num sistema
de segunda ordem.
– O modelo do processo: equação diferencial de segunda ordem
)20.5()1)(1()1)(1()(
)()(
2121
21
++=
++==
ss
K
ss
KK
sX
sYsG
ττττ
( ) ( )( ) 1222 ++
==ss
K
su
sysG P
ξττ 5.19
41
11
1
+s
K
τ 12
2
+s
K
τU(s) U+(s) Y(s)
5.4 Resposta de Sistemas de Segunda Ordem ...cont.
5.4 Resposta de Sistemas de Segunda Ordem
42
Exemplo de Sistema de dois tanques em série
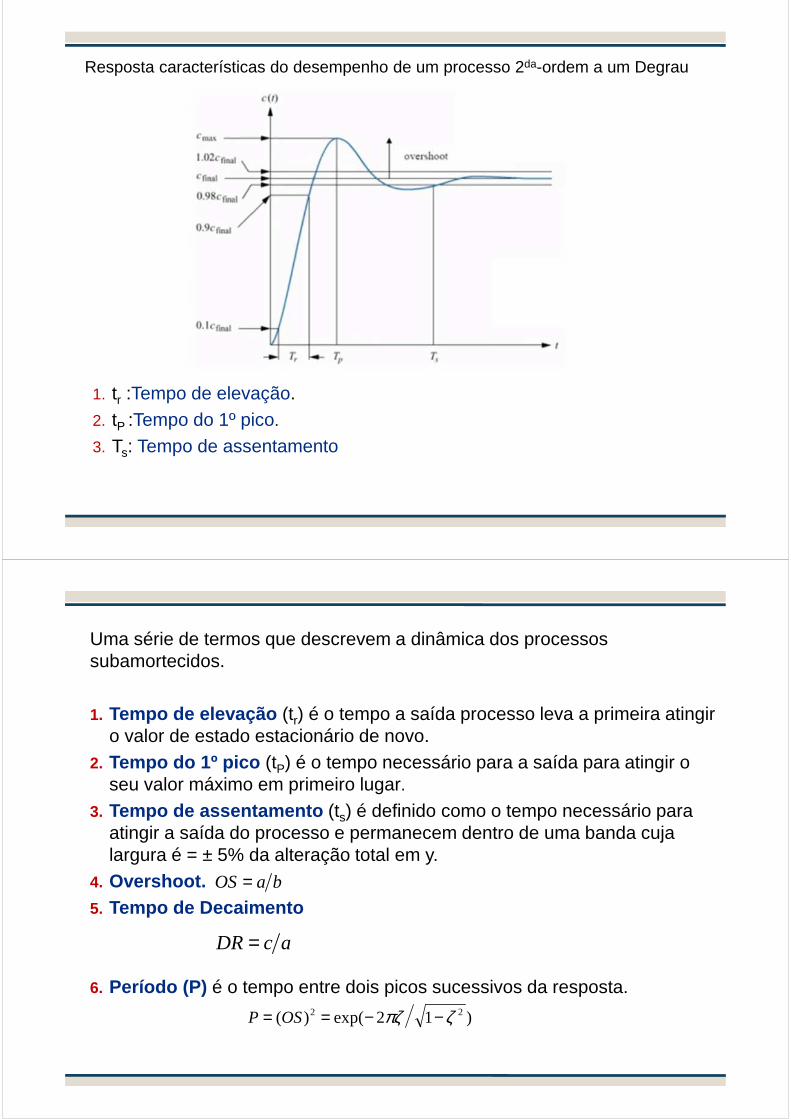
1. tr :Tempo de elevação.2. tP :Tempo do 1º pico.
3. Ts: Tempo de assentamento
Resposta características do desempenho de um processo 2da-ordem a um Degrau
Uma série de termos que descrevem a dinâmica dos processos subamortecidos.
1. Tempo de elevação (tr) é o tempo a saída processo leva a primeira atingir o valor de estado estacionário de novo.
2. Tempo do 1º pico (tP) é o tempo necessário para a saída para atingir o seu valor máximo em primeiro lugar.
3. Tempo de assentamento (ts) é definido como o tempo necessário para atingir a saída do processo e permanecem dentro de uma banda cuja largura é = ± 5% da alteração total em y.
4. Overshoot.5. Tempo de Decaimento
6. Período ( P) é o tempo entre dois picos sucessivos da resposta.
baOS =
acDR =
)12exp()( 22 ζπζ −−== OSP

� Tempo de subida.)36.5()(
1 2ψπ
ζτ −−
=rt
=+−
+−−−
−=
0)1sin(
)1sin()exp(1
111
2
2
2
ψτ
ζ
ψτ
ζτζ
ζt
tt
• Tempo do 1 ro pico
)37.5(1 2ζτπ−
=pt
[ ]0=dtdy
• Overshoot.)38.5()1exp( 2ζπζ −−=OS
])1exp()([ 2ζπζ −−=−== KMbttya p
• Razão de decaimento )12exp()( 22 ζπζ −−== OSDR
])13exp()13([ 22 ζπζζτπ −−=−−== KMbtyc
• Período de oscilação 21
2
ζτπ−
=P
� Três subcasos importantes.Denominador de eq.(5.19):
)21.5()11
)(11
(1222
22 +−+
+−−
=++ζζ
τζζ
τζττ ssss
)22.5(121
−−=
ζζττ )23.5(
122−+
=ζζττ
– Raízes ;
4 ; sistema de segunda ordem instável que teria uma resposta sem limites para qualquer entrada.
0<ζ
47
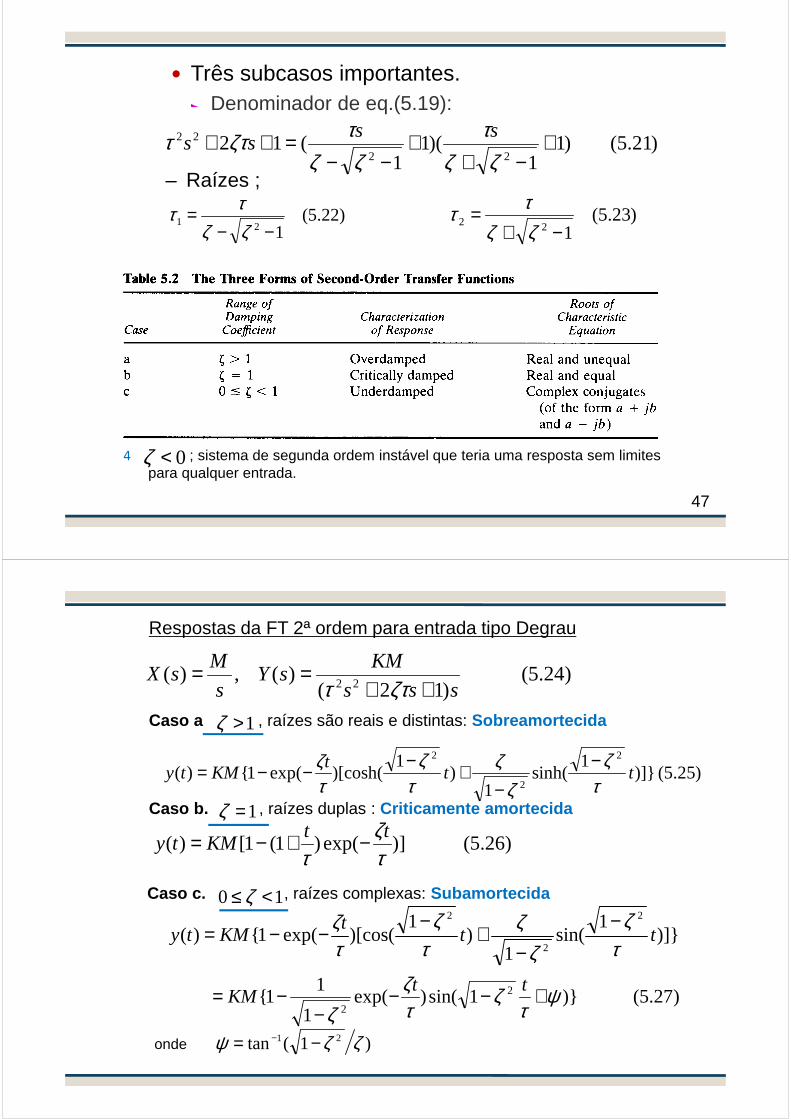
Respostas da FT 2ª ordem para entrada tipo Degrau
)24.5()12(
)(,)(22 sss
KMsY
s
MsX
++==
ζττ
1=ζ)26.5()]exp()1(1[)(
τζ
τtt
KMty −+−=
Caso b. , raízes duplas : Criticamente amortecida
1>ζ
)25.5()]}1
sinh(1
)1
)[cosh(exp(1{)(2
2
2
ttt
KMtyτ
ζζ
ζτ
ζτζ −
−+
−−−=
Caso a , raízes são reais e distintas: Sobreamortecida
Caso c. , raízes complexas: Subamortecida
)]}1
sin(1
)1
)[cos(exp(1{)(2
2
2
ttt
KMtyτ
ζζ
ζτ
ζτζ −
−+
−−−=
10 <≤ ζ
)27.5()}1sin()exp(1
11{ 2
2ψ
τζ
τζ
ζ+−−
−−= tt
KM
onde )1(tan 21 ζζψ −= −
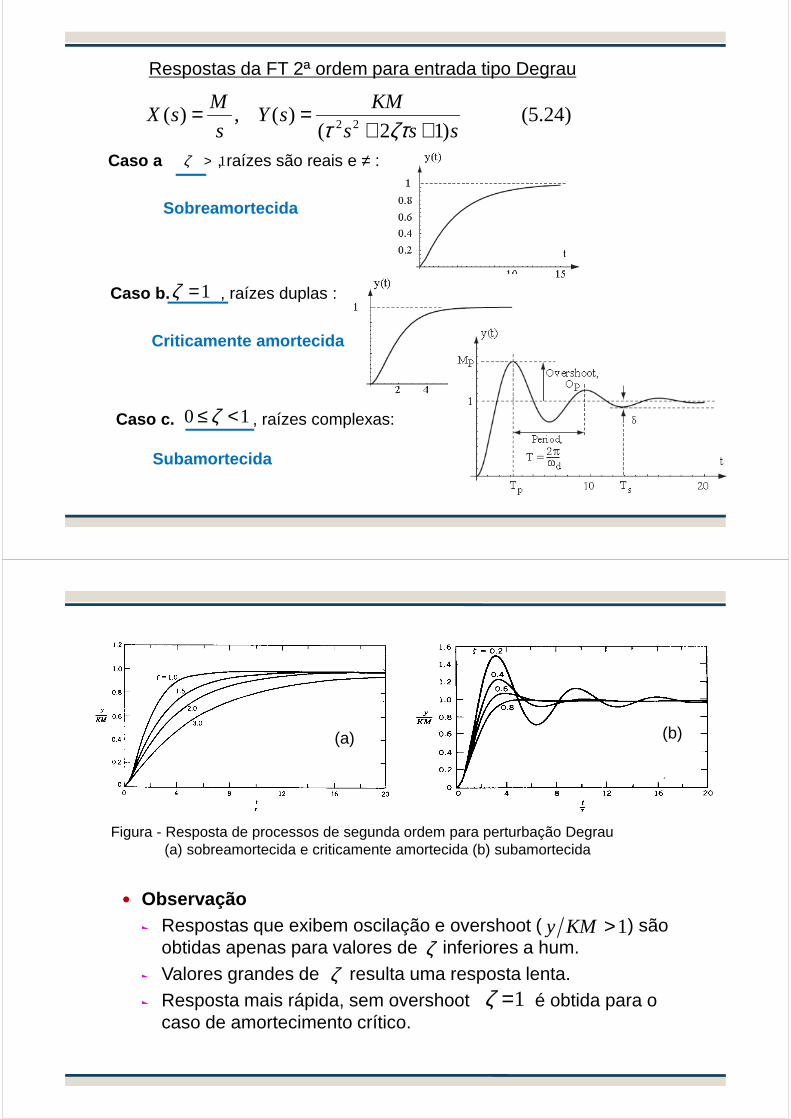
Respostas da FT 2ª ordem para entrada tipo Degrau
)24.5()12(
)(,)(22 sss
KMsY
s
MsX
++==
ζττ
1=ζCaso b. , raízes duplas :
Criticamente amortecida
1>ζCaso a , raízes são reais e ≠ :
Sobreamortecida
Caso c. , raízes complexas:
Subamortecida
10 <≤ ζ
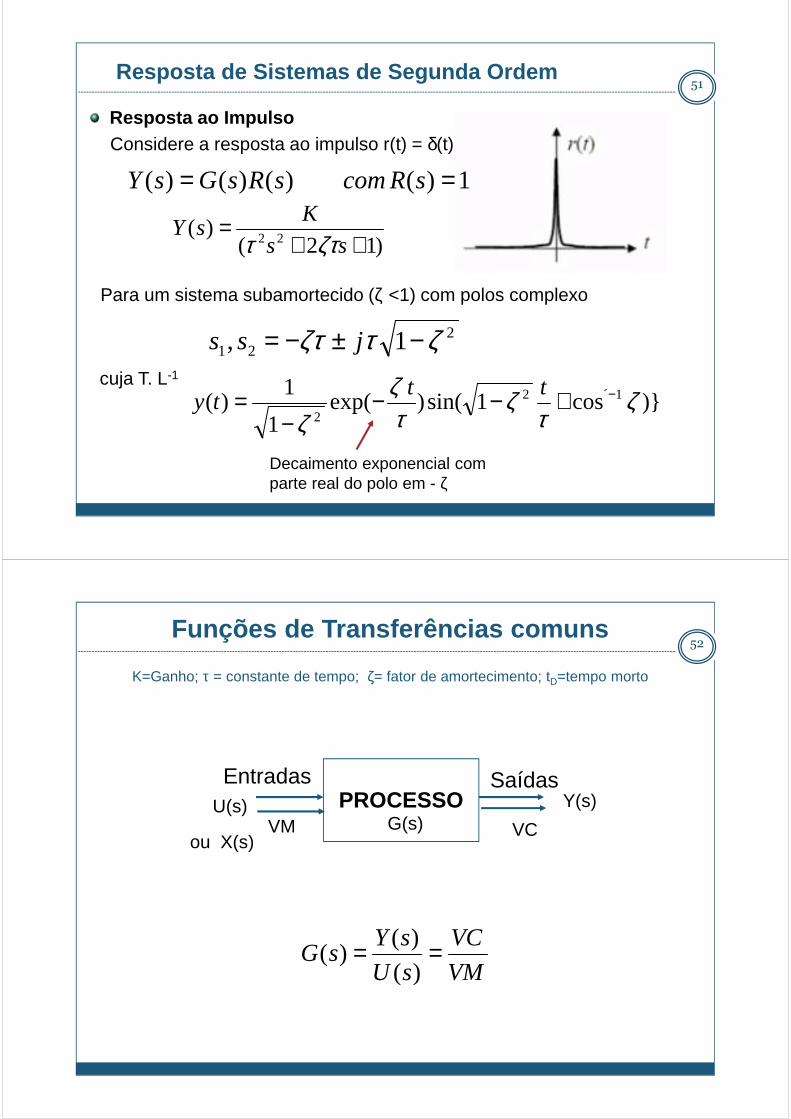
Figura - Resposta de processos de segunda ordem para perturbação Degrau (a) sobreamortecida e criticamente amortecida (b) subamortecida
� ObservaçãoRespostas que exibem oscilação e overshoot ( ) são obtidas apenas para valores de inferiores a hum.Valores grandes de resulta uma resposta lenta.Resposta mais rápida, sem overshoot é obtida para o caso de amortecimento crítico.
1>KMy
ζζ
1=ζ
(a) (b)
Resposta de Sistemas de Segunda Ordem
Resposta ao ImpulsoConsidere a resposta ao impulso r(t) = δ(t):
1)()()()( == sRcomsRsGsY
)12()(
22 ++=
ss
KsY
ζττ
Para um sistema subamortecido (ζ <1) com polos complexo
221 1, ζτζτ −±−= jss
cuja T. L-1
)}cos1sin()exp(1
1)( 1´2
2ζ
τζ
τζ
ζ−+−−
−= tt
ty
Decaimento exponencial com parte real do polo em - ζ
51
Funções de Transferências comuns52
Entradas Saídas
VM VC
Y(s)U(s) PROCESSOG(s)
ou X(s)
K=Ganho; τ = constante de tempo; ζ= fator de amortecimento; tD=tempo morto
VM
VC
sU
sYsG ==
)(
)()(
Funções de Transferências comuns53
�Sistema de primeira ordem
�Sistema de segunda ordem
�Primeira ordem mais tempo morto
�Segunda ordem mais tempo morto
( ) 1
)(
+=
s
K
sVM
sVC
τ
( )stDe
ss
K
sVM
sVC −
++=
12
)(22 τζτ
( )stDe
s
K
sVM
sVC −
+=
1
)(
τ
( ) 12
)(22 ++
=ss
K
sVM
sVC
τζτ
K=Ganho; τ = constante de tempo; ζ= fator de amortecimento; tD=tempo morto


















![Revista Outras Farpas [segunda edição]segunda edição](https://img.document.onl/doc/110x75/559ba8341a28abf7658b472a/revista-outras-farpas-segunda-edicaosegunda-edicao.jpg)








