Embed Size (px)
Citation preview

5/16/2018 geradores de indu o auto excitados - slidepdf.com
http://slidepdf.com/reader/full/geradores-de-inducao-auto-excitados 1/11
IMPACTO DE MÉTODOS DE SINCRONISMO NO DESEMPENHO DEGERADORES DE INDUÇÃO AUTO-EXCITADOS
Cassiano Rech∗
Robinson F. de Camargo†
Maurício de Campos†
Fabiano Salvadori†
Gideon V. Leandro†
Julio C. O. Bolacell†
∗Núcleo de Processamento de Energia Elétrica - Universidade do Estado de Santa CatarinaCEP 89223-100, Joinville, SC, BRASIL, +55-47-4009-7845
†Grupo de Automação Industrial e Controle - Universidade Regional do Noroeste do Estado do Rio Grande do SuCEP 98700-000, Ijuí, RS, BRASIL, +55-55-3332-0250
RESUMO
Este artigo analisa sistemas de controle digital, sem senso-res mecânicos, usados para regular as tensões de saída de umgerador de indução com rotor gaiola de esquilo. Diferentesmétodos de sincronismo são avaliados e seus desempenhossão comparados sob condições de carga distintas, incluindocargas desequilibradas e não lineares. Resultados de simula-ção e experimentais são obtidos para demonstrar o impactode sistemas de controle digitais distintos na distorção e nofator de desbalanço das tensões de saída.
PALAVRAS-CHAVE: Gerador de indução, método de sincro-nismo, regulação de tensão.
ABSTRACT
This paper analyzes digital sensorless control systems usedto regulate the output voltages of a self-excited squirrel-cageinduction generator. Different mechanical sensorless syn-
Artigo submetido em 05/12/20071a. Revisão em 29/07/20082a. Revisão em 10/10/2008Aceito sob recomendação do Editor Associado
Prof. Enes Gonçalves Marra
chronization methods are evaluated and their performare compared under several load conditions, includinbalanced and nonlinear loads. Simulation and experim
results are included to demonstrate the impact of distinital control systems on the output voltages distortion aunbalance factor.
KEYWORDS: Induction generator, synchronization mvoltage regulation.
1 INTRODUÇÃO
Máquinas de indução podem gerar energia quando a vdade do rotor é maior que a velocidade do campo maggirante produzido pelo estator, e quando são conectuma fonte externa de energia reativa. Em sistemas iso
a energia reativa necessária para criar o campo magdo estator pode ser fornecida por um banco de capac(Basset e Potter, 1935). Uma máquina de indução comgaiola de esquilo é atrativa para sistemas de geração dee média potência devido ao seu baixo custo, robustezproteção contra sobrecarga e pela sua elevada densidpotência (W/kg). Por outro lado, a amplitude e a freqüdas tensões de saída de um gerador de indução auto-ex
Revista Controle & Automação/Vol.19 no.4/Outubro, Novembro e Dezembro 2008
5/16/2018 geradores de indu o auto excitados - slidepdf.com
http://slidepdf.com/reader/full/geradores-de-inducao-auto-excitados 2/11
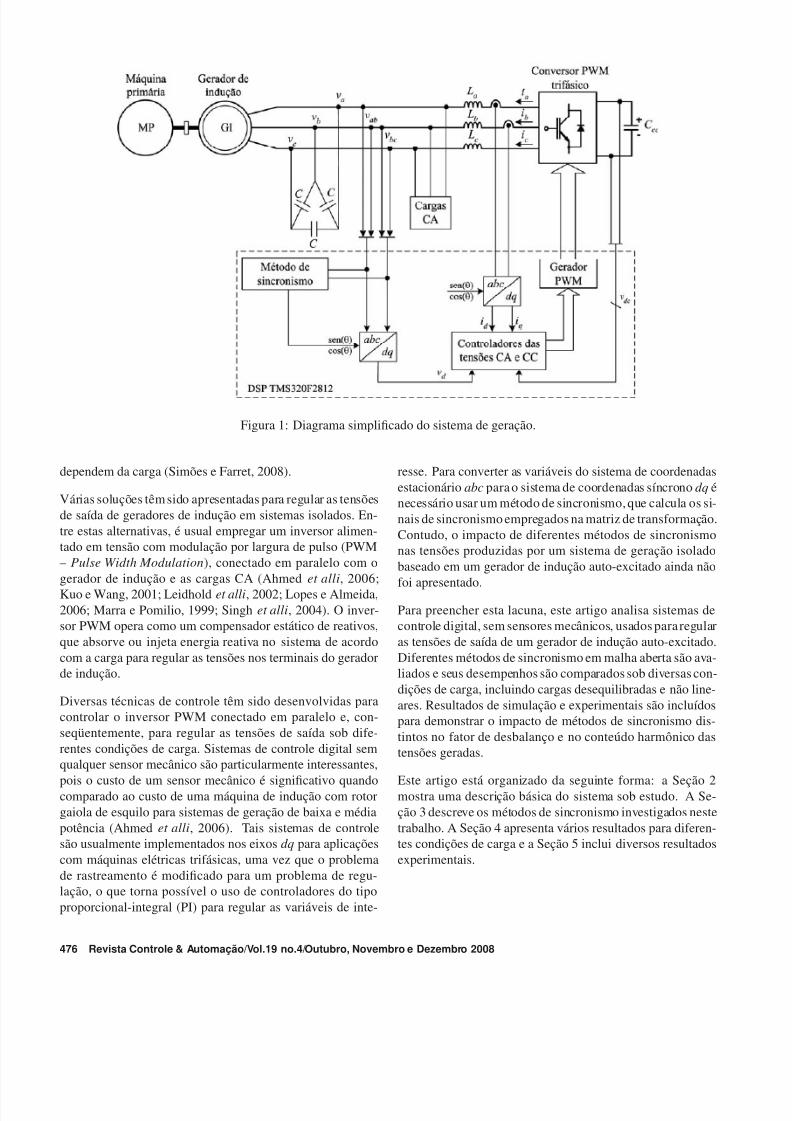
Figura 1: Diagrama simplificado do sistema de geração.
dependem da carga (Simões e Farret, 2008).
Várias soluções têmsido apresentadas para regular as tensõesde saída de geradores de indução em sistemas isolados. En-tre estas alternativas, é usual empregar um inversor alimen-tado em tensão com modulação por largura de pulso (PWM– Pulse Width Modulation), conectado em paralelo com ogerador de indução e as cargas CA (Ahmed et alli, 2006;Kuo e Wang, 2001; Leidhold et alli, 2002; Lopes e Almeida,2006; Marra e Pomilio, 1999; Singh et alli, 2004). O inver-sor PWM opera como um compensador estático de reativos,que absorve ou injeta energia reativa no sistema de acordocom a carga para regular as tensões nos terminais do geradorde indução.
Diversas técnicas de controle têm sido desenvolvidas paracontrolar o inversor PWM conectado em paralelo e, con-seqüentemente, para regular as tensões de saída sob dife-rentes condições de carga. Sistemas de controle digital semqualquer sensor mecânico são particularmente interessantes,
pois o custo de um sensor mecânico é significativo quandocomparado ao custo de uma máquina de indução com rotorgaiola de esquilo para sistemas de geração de baixa e médiapotência (Ahmed et alli, 2006). Tais sistemas de controlesão usualmente implementados nos eixos dq para aplicaçõescom máquinas elétricas trifásicas, uma vez que o problemade rastreamento é modificado para um problema de regu-lação, o que torna possível o uso de controladores do tipoproporcional-integral (PI) para regular as variáveis de inte-
resse. Para converter as variáveis do sistema de coordenadestacionário abc parao sistema de coordenadas síncrono d
necessário usar um método de sincronismo,que calcula osnais de sincronismo empregados na matriz de transformaçContudo, o impacto de diferentes métodos de sincronismnas tensões produzidas por um sistema de geração isolabaseado em um gerador de indução auto-excitado ainda n
foi apresentado.Para preencher esta lacuna, este artigo analisa sistemas controle digital, sem sensores mecânicos, usados parareguas tensões de saída de um gerador de indução auto-excitaDiferentes métodos de sincronismo em malha aberta são aliados e seus desempenhos são comparados sob diversas codições de carga, incluindo cargas desequilibradas e não linares. Resultados de simulação e experimentais são incluídpara demonstrar o impacto de métodos de sincronismo dtintos no fator de desbalanço e no conteúdo harmônico dtensões geradas.
Este artigo está organizado da seguinte forma: a Seçãomostra uma descrição básica do sistema sob estudo. A Sção 3 descreve os métodos de sincronismo investigados netrabalho. A Seção 4 apresenta vários resultados para diferetes condições de carga e a Seção 5 inclui diversos resultadexperimentais.
476 Revista Controle & Automação/Vol.19 no.4/Outubro, Novembro e Dezembro 2008

5/16/2018 geradores de indu o auto excitados - slidepdf.com
http://slidepdf.com/reader/full/geradores-de-inducao-auto-excitados 3/11
Figura 2: Diagrama de blocos dos controladores.
2 DESCRIÇÃO DO SISTEMA DE GERA-ÇÃO
Um diagrama simplificado do sistema sob estudo é mostradona Figura 1. O sistema é composto por um gerador de in-dução com rotor gaiola de esquilo, excitado por um bancode capacitores trifásico, e por um inversor PWM alimen-tado em tensão. O barramento CC do inversor é composto
por capacitores eletrolíticos, que atuam como fonte de ten-são contínua. O gerador de indução é conectado ao lado CAdo inversor através de indutores, que compõem um filtro desegunda-ordem trifásico com o mesmo banco de capacitorespara reduzir harmônicos de alta freqüência produzidos peloinversor.
O inversor PWM deve injetar ou absorver energia reativapara regular as tensões de saída do gerador de indução, in-dependente das cargas conectadas no sistema. O inversorcomporta-se como um banco de capacitores e injeta energiareativa no sistema quando as tensões de saída do gerador de
indução são menores que a tensão de referência. Por outrolado, o inversor PWM absorve energia reativa do sistema degeração quando as tensões nos terminais do gerador são mai-ores que o valor desejado.
O sistema de controle digital sem sensores mecânicos em-pregado neste artigo usa o sistema de coordenadas síncronodq. Portanto, as variáveis de realimentação no sistema abc
devem ser transformadas para os eixos dq, usando a seguintetransformação:
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
6 6 2 6 2cos
cos
sen
cos
sen
3 6 2 6 2
6 6 2 6 2sen
sen
cos
sen
cos
3 6 2 6 2
dq
¡ ¢
− + − −
£ ¤
£ ¤
= £ ¤
− + −
£ ¤
¥ ¦
T
(1)
De acordo com (1), um método de sincronismo deve ser uti-lizado para obter o ângulo de sincronismo θ ou os sinais senoe cosseno empregados na transformação abc para dq.
A Figura 2 apresenta um diagrama de blocos simplificsistema de controle do inversor PWM. O erro entre a tCC do barramento e seu valor de referência é a entraum controlador PI, que gera a corrente de referência nd (i∗d). A corrente do inversor no eixo d (id) controla ode energia ativa através do inversor PWM e, portantomalha de controle afeta diretamente o nível de tensão dramento CC. De forma similar, o erro entre a tensão dedo gerador no eixo d e seu valor de referência é o sientrada de outro controlador PI, gerando a corrente derência no eixo q (i∗q). A corrente do inversor no eixocontrola o fluxo de energia reativa através do inversor Pafetando a amplitude das tensões produzidas pelo sistegeração. Os sinais de erro entre as referências de coobtidas das malhas externas de tensão e as correntes msão os sinais de entrada de controladores PI de correntgeram os sinais de controle no sistema de coordenadas
Este artigo contribui com a análise de métodos de snismo usados na transformação abc para dq e vice-
Portanto, como os mesmos controladores são emprepara todos os métodos de sincronismo apresentados a sa análise e o projeto dos controladores não são apresenneste artigo (Camargo e Pinheiro, 2005; Cichowlas e Kerkowski, 2002; Dai et alli, 2003; Erickson e Maksim2001).
3 MÉTODOS DE SINCRONISMO
Os métodos de sincronismo podem ser classificadosmétodos em malha fechada (Deckmann et alli, 2003; KGhartemani e Iravani, 2004; Lee et alli, 1999; Sasso
2002) ou em malha aberta (Camargo e Pinheiro, 2006nel et alli, 2003; Marques, 1998; Svensson, 2001). Notodos em malha fechada, o ângulo de sincronismo é através de uma estrutura em malha fechada para sinzar o valor estimado do ângulo de fase com seu valoPor outro lado, métodos de sincronismo em malha abersimples, uma vez que eles não usam sensores mecânimétodos de estimação de posição ou velocidade. O ângsincronismo ou o vetor normalizado de sincronismo é diretamente das tensões alternadas (Marques, 1998; Sson, 2001) ou das tensões estimadas (Kennel et alli, Uma vez que geradores de indução com rotor em gaiesquilo são economicamente recomendados para aplic
de baixa potência em locais isolados (Simões et alli,Simões e Farret, 2008), o método de sincronismo desimples e não deve onerar o custo do sistema de geAssim, este artigo analisa quatro métodosde sincronismmalha aberta que empregam apenas dois sensores pardir as tensões de linha nos terminais do gerador de indque já são medidas pelo sistema de controle para regutensões geradas.
Revista Controle & Automação/Vol.19 no.4/Outubro, Novembro e Dezembro 2008

5/16/2018 geradores de indu o auto excitados - slidepdf.com
http://slidepdf.com/reader/full/geradores-de-inducao-auto-excitados 4/11
Figura 3: Diagrama de blocos do método de sincronismo I.
3.1 Método I
Para sistemas trifásicos a três fios, um vetor de sincronismopode ser obtido a partir da medição de apenas duas tensõesde linha (Marques, 1998). Usualmente, conversores PWMsão analisados e controlados a partir de quantidades de fase(Camargo e Pinheiro, 2006), então, o vetor de tensões de li-nha, vl, é transformado em um vetor de tensões de fase, vf ,como ilustrado na Figura 3. Considerando que a soma dastensões de fase é zero para sistemas a três fios, então:
vf = Tl−f vl (2)
onde:
vf =
va
vbvc
, Tl−f = 1
3
2 1−1 1−1 −2
,
vl =
vabvbc
. (3)
Além disso, as tensões de fase são transformadas em coorde-nadas αβ , isto é:
vαβ = Tαβvf (4)
onde:
vαβ = vαvβ ; Tαβ =
2
3
1 −1/2 −1/2
0√
32 −
√3
2
. (5)
Um vetor normalizado de sincronismo pode ser obtido divi-dindo vαβ por sua norma, isto é:
vαβn =vαβ
vαβ2(6)
onde a norma Euclidiana do vetor é dada por:
Figura 4: Diagrama de blocos do método de sincronismo
vαβ2 =
(vα)
2+ (vβ)
2.
Os dois componentes do vetor vαβn , obtidos a partir de (podem ser os sinais cosseno e seno usados para sincronizo inversor PWM com as tensões produzidas nos terminais gerador:
cos(θ) = vαn e sen (θ) = vβn
3.2 Método II
As tensões de saída de um gerador de indução auto-excitapodem apresentar harmônicos, que podem distorcer os sinde sincronismo (Lee et alli, 1999) e também as tensões pduzidas pelo sistema de geração. Para evitar esta distorção vetor das tensões de fase (vf ) é filtrado por filtros pasbanda (BPF – Band-Pass Filters) sintonizados na freqüênfundamental, como mostrado na Figura 4. Para estes casos filtros passa-banda devem possuir ganho unitário e npodem defasar os sinais filtrados na freqüência fundament
O vetor das tensões de fase filtradas (vBPF ) é transformaem um vetor de tensões filtradas no sistema de coordenadαβ (v
f αβ), usando (4) e (5). Um vetor de sincronismo norm
lizado vf αβn é obtido ao dividir v
f αβ por sua norma Euclidia
(7). Os componentes do vetor vf αβn são os sinais cossen
seno para sincronizar o inversor PWM. Devido a filtragrealizada pelos filtros passa-banda, os sinais de sincronismnormalizados apresentam apenas a freqüência fundamenta
3.3 Método III
Cargas desequilibradas podem produzir tensões desbalanadas nos terminais do gerador. Estas tensões desbalanceadpodem distorcer os sinais de sincronismo e, portanto, podafetar o desempenho do sistema de controle digital.
Para evitar distorções nos sinais de sincronismo devido a tesões desbalanceadas, o vetor de sincronismo vαβ+ é alinhacom o vetor das tensões de seqüência positiva, que pode obtido a partir da seguinte matriz de transformação:
478 Revista Controle & Automação/Vol.19 no.4/Outubro, Novembro e Dezembro 2008

5/16/2018 geradores de indu o auto excitados - slidepdf.com
http://slidepdf.com/reader/full/geradores-de-inducao-auto-excitados 5/11
T+ =1
3
1 a a2
a2 1 a
a a2 1
(9)
onde a é ooperador de defasagem de 120o, representado peloseguinte número imaginário:
a = −1
2+ j
√3
2. (10)
Então, para obter o vetor das tensões de seqüência positivano sistema de coordenadas αβ , deve-se pré-multiplicar tantoa parte real quanto a parte imaginária da matriz de seqüênciapositiva pela matriz de transformação Tαβ , de tal forma que:
vαβ+ = [TαβRe (T + ) + j TαβIm (T + )]vf . (11)
Para implementar o operador j pode-se empregar um con- junto de filtros passa-tudo (APF – All-Pass Filters) de 1a or-dem, como mostrado na Figura 5, projetados para possuirganho unitário e defasagem de 90o na freqüência fundamen-tal (Lee et alli, 1999; Karimi-Ghartemani e Iravani, 2004).Então, de acordo com a Figura 5, o vetor vαβ+ é dado por:
vαβ+ = M2vf +M1vfil_f (12)
onde as matrizes M1 e M2 são:
M1 = TαβIm(T+) =
0
√2
4−√2
4
−√6
6
√6
12
√6
12
(13)
M2 = TαβRe(T+) =
√6
6−√6
12−√6
12
0√2
4−√2
4
Um vetor de sincronismo normalizado vαβ+n pode ser ob-tido ao dividir vαβ+, obtido a partir de (12), pela sua normaEuclidiana (7). Novamente, os componentes do vetor vαβ+nsão os sinais cosseno e seno necessários para sincronizar oinversor PWM.
É importante destacar que os sinais de sincronismo são cal-culados a partir das tensões de seqüência positiva e, então,as tensões de seqüência negativa produzidas por cargas dese-quilibradas não afetam os sinais de sincronismo.
Figura 5: Diagrama de blocos do método de sincronism
Figura 6: Diagrama de blocos do método de sincronism
3.4 Método IV
Outro método de sincronismo, chamado neste trabamétodo IV, pode ser usado para obter sinais de sincrocom baixa distorção harmônica total (THD – Total H
nic Distortion), mesmo com distorções harmônicas e desequilibradas (Camargo e Pinheiro, 2006). No métosincronismo IV, apresentado na Figura 6, o vetor das tede fase é filtrado por um conjunto de filtros passa-baixa– Low-Pass Filters) de 2a ordem, LPF1, projetados parsuir ganho unitário e defasagem de -90o na freqüêncidamental.
Logo, este vetor está deslocado -90o na freqüência fmental com relação ao vetor v
f . O vetor filtrado v
fil_f vamente filtrado por um conjunto de filtros passa-baixamado de LPF 2, um para cada tensão de fase. Estes pvem um deslocamento de fase adicional de -90o resuno vetor filtrado vfil_f 2, como mostrado na Figura apresenta a mesma amplitude na freqüência fundamenvetor original vf , mas com uma defasagem de -180o. Aas matrizes M1 e M2 devem ser multiplicadas por um unitário negativo. Dessa forma, o vetor de sincronismtará alinhado com o vetor de seqüência positiva das tede fase filtradas.
Então, a partir da Figura 6, o vetor de sincronismo vf αβ+
ser expresso como:
vf αβ+ = −M2vfil_f 2 −M1vfil_f 1.
Um vetor de sincronismo normalizado pode ser obtidividir v
f αβ+
por sua norma Euclidiana (7). Os compodo vetor de sincronismo normalizado são os sinais cosseno usados para sincronizar o inversor PWM.
Revista Controle & Automação/Vol.19 no.4/Outubro, Novembro e Dezembro 2008
5/16/2018 geradores de indu o auto excitados - slidepdf.com
http://slidepdf.com/reader/full/geradores-de-inducao-auto-excitados 6/11
De forma similar ao método III, os sinais de sincronismo sãoobtidos a partir do vetor das componentes de seqüência po-sitiva das tensões de fase filtradas e, portanto, as tensões deseqüêncianegativacausadas porcargas desequilibradase dis-torções harmônicas produzidas por cargas não lineares nãoaumentarão a THD dos sinais de sincronismo.
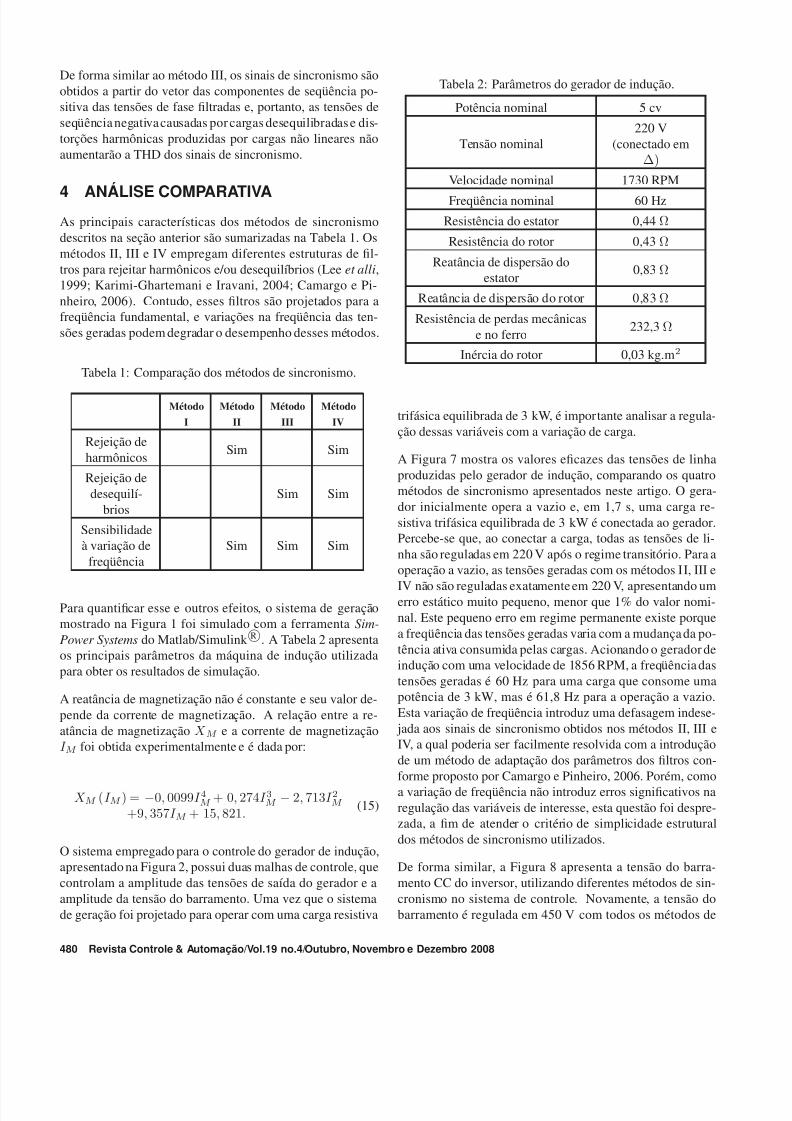
4 ANÁLISE COMPARATIVAAs principais características dos métodos de sincronismodescritos na seção anterior são sumarizadas na Tabela 1. Osmétodos II, III e IV empregam diferentes estruturas de fil-tros para rejeitar harmônicos e/ou desequilíbrios (Lee et alli,1999; Karimi-Ghartemani e Iravani, 2004; Camargo e Pi-nheiro, 2006). Contudo, esses filtros são projetados para afreqüência fundamental, e variações na freqüência das ten-sões geradas podem degradar o desempenho desses métodos.
Tabela 1: Comparação dos métodos de sincronismo.
Método
I
Método
II
Método
III
Método
IV
Rejeição deharmônicos
Sim Sim
Rejeição dedesequilí-
briosSim Sim
Sensibilidadeà variação de
freqüênciaSim Sim Sim
Para quantificar esse e outros efeitos, o sistema de geraçãomostrado na Figura 1 foi simulado com a ferramenta Sim-
Power Systems do Matlab/Simulink R. A Tabela 2 apresentaos principais parâmetros da máquina de indução utilizadapara obter os resultados de simulação.
A reatância de magnetização não é constante e seu valor de-pende da corrente de magnetização. A relação entre a re-atância de magnetização X M e a corrente de magnetizaçãoI M foi obtida experimentalmente e é dada por:
X M (I M ) = −0, 0099I 4M + 0, 274I 3M − 2, 713I 2M
+9, 357I M + 15, 821.(15)
O sistema empregado para o controle do gerador de indução,apresentado na Figura 2, possui duas malhas de controle, quecontrolam a amplitude das tensões de saída do gerador e aamplitude da tensão do barramento. Uma vez que o sistemade geração foi projetado para operar com uma carga resistiva
Tabela 2: Parâmetros do gerador de indução.
Potência nominal 5 cv
Tensão nominal220 V
(conectado em∆)
Velocidade nominal 1730 RPM
Freqüência nominal 60 HzResistência do estator 0,44 Ω
Resistência do rotor 0,43 Ω
Reatância de dispersão doestator
0,83 Ω
Reatância de dispersão do rotor 0,83 Ω
Resistência de perdas mecânicase no ferro
232,3 Ω
Inércia do rotor 0,03 kg.m2
trifásica equilibrada de 3 kW, é importante analisar a regução dessas variáveis com a variação de carga.
A Figura 7 mostra os valores eficazes das tensões de linproduzidas pelo gerador de indução, comparando os quamétodos de sincronismo apresentados neste artigo. O gedor inicialmente opera a vazio e, em 1,7 s, uma carga rsistiva trifásica equilibrada de 3 kW é conectada ao geradPercebe-se que, ao conectar a carga, todas as tensões de nha são reguladas em 220 V após o regime transitório. Paroperação a vazio, as tensões geradas com os métodos II, II
IV não são reguladas exatamenteem 220 V, apresentando uerro estático muito pequeno, menor que 1% do valor nomnal. Este pequeno erro em regime permanente existe porqa freqüência das tensões geradas varia com a mudançada ptência ativa consumida pelas cargas. Acionando o geradorindução com uma velocidade de 1856 RPM, a freqüênciadtensões geradas é 60 Hz para uma carga que consome upotência de 3 kW, mas é 61,8 Hz para a operação a vazEsta variação de freqüência introduz uma defasagem inde
jada aos sinais de sincronismo obtidos nos métodos II, IIIV, a qual poderia ser facilmente resolvida com a introduçde um método de adaptação dos parâmetros dos filtros coforme proposto por Camargo e Pinheiro, 2006. Porém, coma variação de freqüência não introduz erros significativos regulação das variáveis de interesse, esta questão foi despzada, a fim de atender o critério de simplicidade estrutudos métodos de sincronismo utilizados.
De forma similar, a Figura 8 apresenta a tensão do barmento CC do inversor, utilizando diferentes métodos de scronismo no sistema de controle. Novamente, a tensão barramento é regulada em 450 V com todos os métodos
480 Revista Controle & Automação/Vol.19 no.4/Outubro, Novembro e Dezembro 2008
5/16/2018 geradores de indu o auto excitados - slidepdf.com
http://slidepdf.com/reader/full/geradores-de-inducao-auto-excitados 7/11
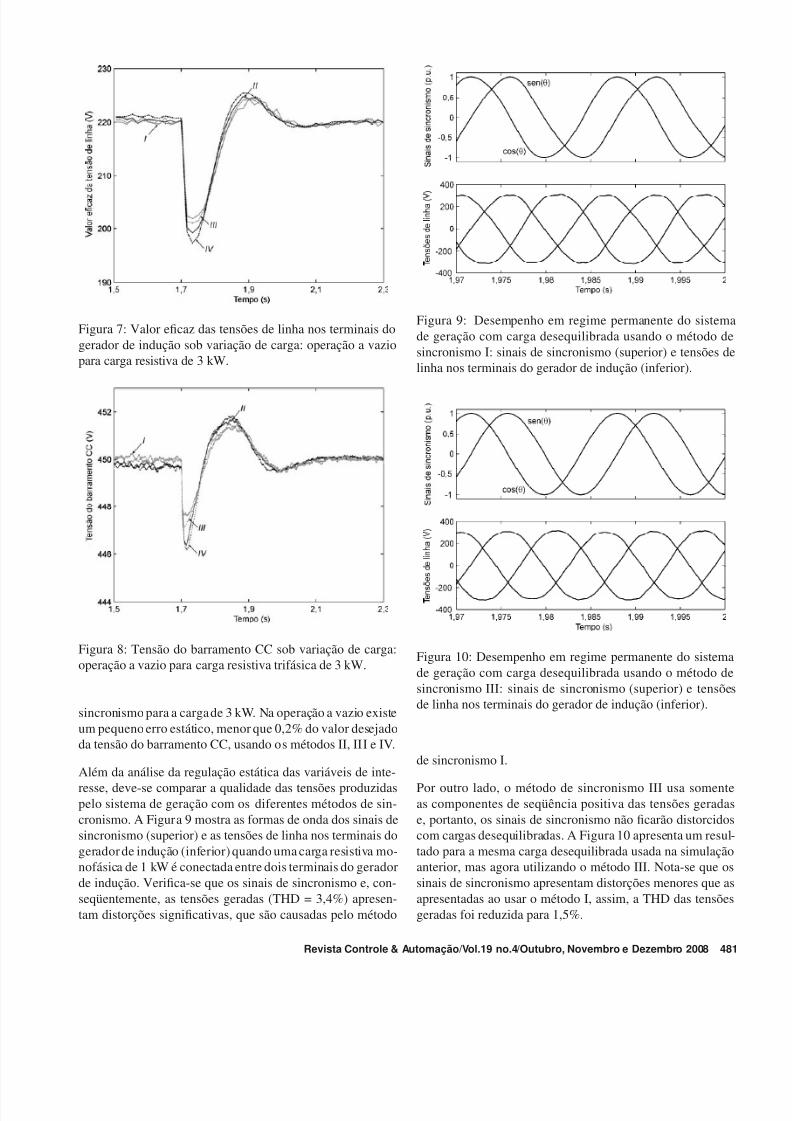
Figura 7: Valor eficaz das tensões de linha nos terminais dogerador de indução sob variação de carga: operação a vaziopara carga resistiva de 3 kW.
Figura 8: Tensão do barramento CC sob variação de carga:operação a vazio para carga resistiva trifásica de 3 kW.
sincronismo para a cargade 3 kW. Na operação a vazio existeum pequeno erro estático, menor que 0,2% do valor desejadoda tensão do barramento CC, usando os métodos II, III e IV.
Além da análise da regulação estática das variáveis de inte-
resse, deve-se comparar a qualidade das tensões produzidaspelo sistema de geração com os diferentes métodos de sin-cronismo. A Figura 9 mostra as formas de onda dos sinais desincronismo (superior) e as tensões de linha nos terminais dogeradorde indução (inferior) quando uma carga resistiva mo-nofásica de 1 kW é conectada entre dois terminais do geradorde indução. Verifica-se que os sinais de sincronismo e, con-seqüentemente, as tensões geradas (THD = 3,4%) apresen-tam distorções significativas, que são causadas pelo método
Figura 9: Desempenho em regime permanente do sde geração com carga desequilibrada usando o métosincronismo I: sinais de sincronismo (superior) e tenslinha nos terminais do gerador de indução (inferior).
Figura 10: Desempenho em regime permanente do side geração com carga desequilibrada usando o métosincronismo III: sinais de sincronismo (superior) e tede linha nos terminais do gerador de indução (inferior
de sincronismo I.
Por outro lado, o método de sincronismo III usa soas componentes de seqüência positiva das tensões ge, portanto, os sinais de sincronismo não ficarão distocom cargas desequilibradas. A Figura 10 apresenta umtado para a mesma carga desequilibrada usada na simuanterior, mas agora utilizando o método III. Nota-se qsinais de sincronismo apresentam distorções menores apresentadas ao usar o método I, assim, a THD das tegeradas foi reduzida para 1,5%.
Revista Controle & Automação/Vol.19 no.4/Outubro, Novembro e Dezembro 2008
5/16/2018 geradores de indu o auto excitados - slidepdf.com
http://slidepdf.com/reader/full/geradores-de-inducao-auto-excitados 8/11
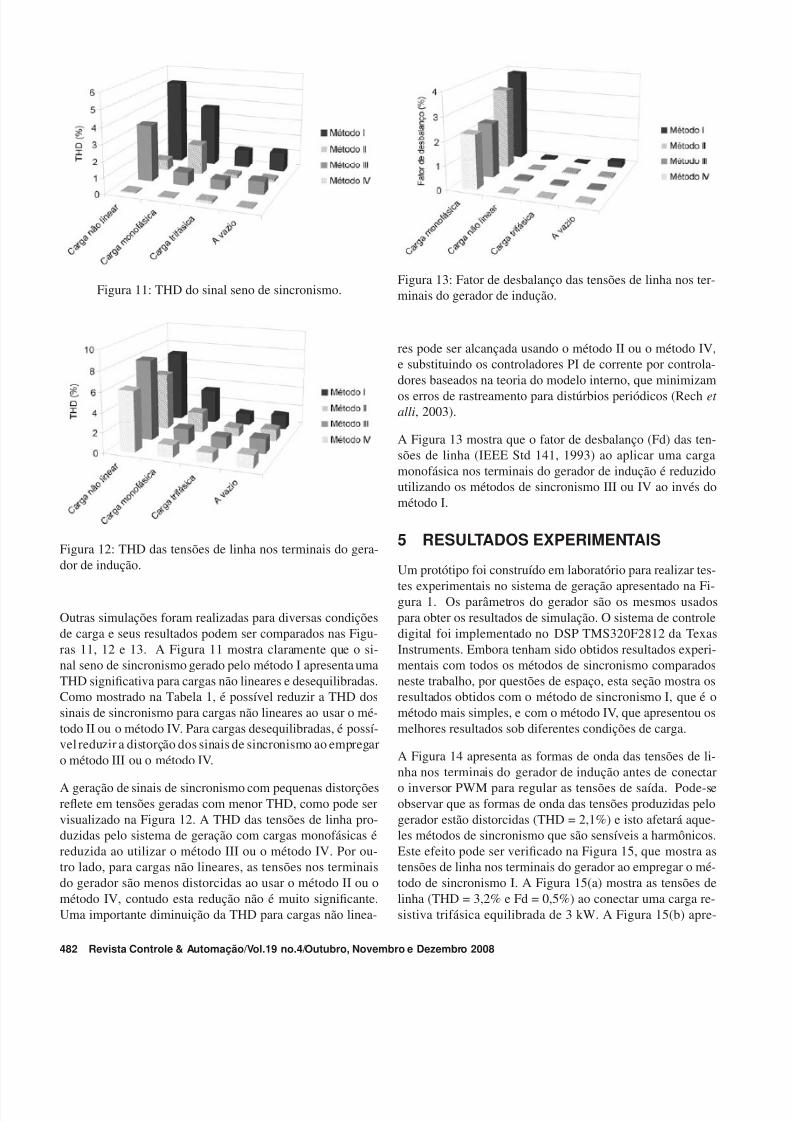
Figura 11: THD do sinal seno de sincronismo.
Figura 12: THD das tensões de linha nos terminais do gera-dor de indução.
Outras simulações foram realizadas para diversas condiçõesde carga e seus resultados podem ser comparados nas Figu-ras 11, 12 e 13. A Figura 11 mostra claramente que o si-nal seno de sincronismo gerado pelo método I apresenta umaTHD significativa para cargas não lineares e desequilibradas.Como mostrado na Tabela 1, é possível reduzir a THD dossinais de sincronismo para cargas não lineares ao usar o mé-todo II ou o método IV. Para cargas desequilibradas, é possí-vel reduzir a distorção dos sinais de sincronismo ao empregaro método III ou o método IV.
A geração de sinais de sincronismo com pequenas distorçõesreflete em tensões geradas com menor THD, como pode servisualizado na Figura 12. A THD das tensões de linha pro-duzidas pelo sistema de geração com cargas monofásicas éreduzida ao utilizar o método III ou o método IV. Por ou-tro lado, para cargas não lineares, as tensões nos terminaisdo gerador são menos distorcidas ao usar o método II ou ométodo IV, contudo esta redução não é muito significante.Uma importante diminuição da THD para cargas não linea-
Figura 13: Fator de desbalanço das tensões de linha nos tminais do gerador de indução.
res pode ser alcançada usando o método II ou o método Ie substituindo os controladores PI de corrente por controdores baseados na teoria do modelo interno, que minimiz
os erros de rastreamento para distúrbios periódicos (Rechalli, 2003).
A Figura 13 mostra que o fator de desbalanço (Fd) das tesões de linha (IEEE Std 141, 1993) ao aplicar uma carmonofásica nos terminais do gerador de indução é reduziutilizando os métodos de sincronismo III ou IV ao invés método I.
5 RESULTADOS EXPERIMENTAIS
Um protótipo foi construído em laboratório para realizar t
tes experimentais no sistema de geração apresentado na Fgura 1. Os parâmetros do gerador são os mesmos usadpara obter os resultados de simulação. O sistema de controdigital foi implementado no DSP TMS320F2812 da TexInstruments. Embora tenham sido obtidos resultados expementais com todos os métodos de sincronismo comparadneste trabalho, por questões de espaço, esta seção mostra resultados obtidos com o método de sincronismo I, que émétodo mais simples, e com o método IV, que apresentoumelhores resultados sob diferentes condições de carga.
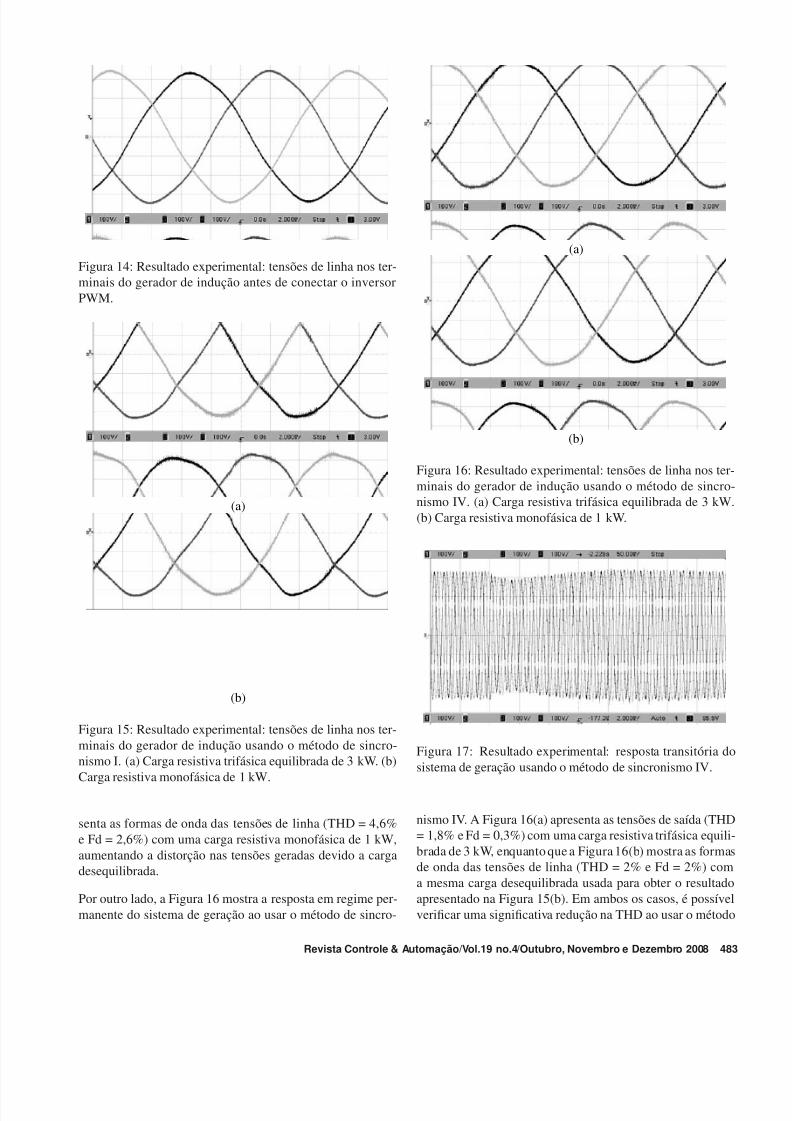
A Figura 14 apresenta as formas de onda das tensões de nha nos terminais do gerador de indução antes de conec
o inversor PWM para regular as tensões de saída. Podeobservar que as formas de onda das tensões produzidas pegerador estão distorcidas (THD = 2,1%) e isto afetará aqules métodos de sincronismo que são sensíveis a harmônicEste efeito pode ser verificado na Figura 15, que mostratensões de linha nos terminais do gerador ao empregar o mtodo de sincronismo I. A Figura 15(a) mostra as tensões linha (THD = 3,2% e Fd = 0,5%) ao conectar uma carga sistiva trifásica equilibrada de 3 kW. A Figura 15(b) ap
482 Revista Controle & Automação/Vol.19 no.4/Outubro, Novembro e Dezembro 2008
5/16/2018 geradores de indu o auto excitados - slidepdf.com
http://slidepdf.com/reader/full/geradores-de-inducao-auto-excitados 9/11
Figura 14: Resultado experimental: tensões de linha nos ter-minais do gerador de indução antes de conectar o inversorPWM.
(a)
(b)
Figura 15: Resultado experimental: tensões de linha nos ter-minais do gerador de indução usando o método de sincro-nismo I. (a) Carga resistiva trifásica equilibrada de 3 kW. (b)Carga resistiva monofásica de 1 kW.
senta as formas de onda das tensões de linha (THD = 4,6%e Fd = 2,6%) com uma carga resistiva monofásica de 1 kW,aumentando a distorção nas tensões geradas devido a cargadesequilibrada.
Por outro lado, a Figura 16 mostra a resposta em regime per-manente do sistema de geração ao usar o método de sincro-
(a)
(b)
Figura 16: Resultado experimental: tensões de linha nminais do gerador de indução usando o método de snismo IV. (a) Carga resistiva trifásica equilibrada de (b) Carga resistiva monofásica de 1 kW.
Figura 17: Resultado experimental: resposta transitósistema de geração usando o método de sincronismo IV
nismo IV. A Figura 16(a) apresenta as tensões de saída= 1,8% e Fd = 0,3%) com uma carga resistiva trifásica brada de 3 kW, enquanto que a Figura16(b) mostra as fde onda das tensões de linha (THD = 2% e Fd = 2%a mesma carga desequilibrada usada para obter o resapresentado na Figura 15(b). Em ambos os casos, é poverificar uma significativa redução na THD ao usar o m
Revista Controle & Automação/Vol.19 no.4/Outubro, Novembro e Dezembro 2008

5/16/2018 geradores de indu o auto excitados - slidepdf.com
http://slidepdf.com/reader/full/geradores-de-inducao-auto-excitados 10/11
IV.
Por fim, a Figura 17 apresenta as formas de onda das tensõesde linha nos terminais do gerador de indução para um degraubrusco de carga de operação a vazio para uma carga resis-tiva trifásica de 3 kW. Observa-se que a resposta transitóriado sistema de controle é satisfatória mesmo com este degrausevero de carga.
6 CONCLUSÕES
Este artigo apresentou uma avaliação de diferentes méto-dos de sincronismo em malha aberta para serem aplicadosem geradores de indução auto-excitados sob diversas condi-ções de carga. Estes métodos de sincronismo foram escolhi-dos porque os mesmos apresentam uma significativa reduçãode custo se comparados com aqueles métodos que empre-gam sensores mecânicos para medir posição ou velocidade.Mesmo com a variação da freqüência, causada pela mudançada potência ativa consumida pelas cargas, os métodos de sin-
cronismo empregados no sistema de geração resultaram emuma boa regulação das tensões de saída e da tensão do barra-mento CC. Contudo, os resultados incluídos no artigo mos-tram que o impacto destes métodos na THD e no fator dedesbalanço das tensões produzidas pelo sistema de geração ésignificativo.
Os métodos de sincronismo apresentados neste artigo dife-rem em termos de complexidade e desempenho. O métodoI é muito simples, resultando em um reduzido tempo com-putacional para a sua implementação, mas os sinais de sin-cronismo são distorcidos para cargas não lineares ou dese-quilibradas. Assim, não é possível gerar tensões com baixaTHD, mesmo empregando controladores com ótimo desem-penho. Por outro lado, o método IV requer um maior tempode cálculo que os tempos gastos pelos demais métodos inves-tigados neste artigo, mas os sinais de sincronismo e, portanto,as tensões geradas apresentam uma menor THD, mesmo napresença de cargas desequilibradas e não lineares.
AGRADECIMENTOS
Os autores agradecem o Departamento Municipal de Ener-gia de Ijuí (DEMEI) e o Conselho Nacional de Desenvolvi-mento Científico e Tecnológico (CNPq) pelo suporte finan-
ceiro. Agradecimentos especiais a Metalcorte Motores e aEPCOS pelas doações de equipamentos. Por fim, os auto-res agradecem os acadêmicos Andressa Regina Feyh e Gui-lherme Sebastião da Silva pela ajuda na implementação doprotótipo.
REFERÊNCIAS
Ahmed, T., Nishida, K., Nakaoka, M. (2006). Advanced cotrol of PWM converter with variable-speed inductgenerator. IEEE Trans. Ind. Applicat., 42(4): 934–94
Basset, D. E., Potter, M. F. (1935). Capacitive excitation induction generators. AIEE Transactions, 54: 540–54
Camargo, R. F., Pinheiro, H. (2005). Comparison of six dital current control techniques for three-phase voltagfed PWM converters connected to the utility grid. IEE
PESC Conf. Rec.: 1422–1428.
Camargo, R. F., Pinheiro, H. (2006). Synchronizatimethod for three-phase PWM converters under unblanced and distorted grid. IEE Proc. – Electr. Pow
Appl., 153(5): 763–772.
Cichowlas M., Kazmierkowski, M. (2002). Comparisoncurrent control techniques for PWM rectifiers. IEE
ISIE Proc.: 1259-1263.
Dai, K., Liu, P., Xiong, J., Chen, J. (2003). Compative study on current control, for three-phase SVPWvoltage-source converter in synchronous rotating frausing complex vector method. IEEE PESC Conf. Re
695-700.
Deckmann, S. M., Marafão, F. P., Pádua, M. S. (2003).Singand three-phase digital PLL structures based on instataneous power theory. Anais do COBEP: 225-230.
Erickson, R. W., Maksimovic, D. (2001). Fundamentals
Power Electronics, Segunda Edição, Kluwer Academ
Publishers.IEEE Std 141-1993(1993). IEEE Recommended Practice f
Electric Power Distribution for Industrial Plants (R
Book), IEEE.
Karimi-Ghartemani, M., Iravani, M. R. (2004). A methfor synchronization of power electronic converterspolluted and variable-frequency environments. IEE
Trans. Power Systems, 19(3): 1263–1270.
Kennel, R., Linke, M., Szczupak, P. (2003). Sensorless cotrol of 4 quadrant-rectifiers for voltage source invert(VSI). IEEE PESC Conf. Rec.: 1057-1062.
Kuo, S.-C., Wang, L. (2001). Analysis of voltage contfor a self-excited induction generator using a currecontrolled voltage source inverter (CC-VSI). IEE Pr
– Gener., Transm., Distrib., 148(5): 431–438.
Lee, S.-J., Kang, J.-K., Sul, S.-K. (1999). A new phase detting method for power conversion systems consideridistorted conditions in power system. Conf. Rec. IEE
IAS Annual Meeting: 2167-2172.
484 Revista Controle & Automação/Vol.19 no.4/Outubro, Novembro e Dezembro 2008

5/16/2018 geradores de indu o auto excitados - slidepdf.com
http://slidepdf.com/reader/full/geradores-de-inducao-auto-excitados 11/11
Leidhold, R., Garcia, G., Valla, M. I. (2002). Induction ge-nerator controller based on the instantaneous reactivepower theory. IEEE Trans. Energy Conv., 17(3): 368–373.
Lopes, L. A. C., Almeida, R. G. (2006). Wind-driven self-excited induction generator with voltage and frequencyregulated by a reduced rating voltage source inverter.
IEEE Trans. Energy Conv., 21(2): 297–304.
Marques, G. D. (1998). A comparison of active power fil-ter control methods in unbalanced and non-sinusoidalconditions. Proc. IEEE IECON’98: 444–449.
Marra, E. G., Pomilio, J. A. (1999). Self-excited inductiongenerator controlled by a VS-PWM bidirectional con-verter for rural applications. IEEE Trans. Ind. Applicat.,35(4): 877–883.
Rech, C., Pinheiro, H., Gründling, H. A., Hey, H. L., Pi-nheiro, J. R. (2003). Comparison of digital control tech-
niques for low cost PWM inverters. IEEE Trans. Power Electr., 18(1): 401–410.
Sasso, E., Sotelo, G., Ferreira, A., Watanabe, E., Aredes,M., Barbosa, P. G. (2002). Investigação dos modelosde circuitos de sincronismo trifásicos baseados na teo-ria de potências real e imaginária instantâneas (p-PLLe q-PLL). Anais do CBA: CD-ROM.
Simões, M. G., Chakraborty, S., Wood, R. (2006). Inductiongenerators for small wind energy systems. IEEE Power
Electronics Society Newsletter , 18(3): 19–23.
Simões, M. G., Farret, F. A. (2007). Alternative Energy Sys-
tems: Design and Analysis with Induction Generators,Segunda Edição, CRC Press.
Singh, B., Murphy, S. S., Gupta, S. (2004). Analysisand design of STATCOM-based voltage regulator forself-excited induction generators. IEEE Trans. Energy
Conv., 19(4): 783–790.
Svensson, J. (2001). Synchronization methods for grid-connected voltage source converters. IEE Proc. – Ge-
ner., Transm., Distrib., 148(3): 229–235.
Revista Controle & Automação/Vol.19 no.4/Outubro, Novembro e Dezembro 2008