Embed Size (px)
Citation preview

Universidade Federal de Minas GeraisCurso de Graduação em Engenharia de Controle e AutomaçãoProjeto de Fim de Curso IIArquitetura de Projetos de Automação emSistemas de Geração de Energia - PequenaCentral HidrelétricaGiselle Moreira MoraisOrientador: Carlos Andrey MaiaSupervisor: Pedro Baptista Soares LopesDezembro de 2009

Monogra�aArquitetura de Projetos de Automação em Sistemas de Geraçãode Energia - Pequena Central HidrelétricaMonogra�a submetida à banca examinadora para avaliação curri-cular da disciplina PFCIIBelo Horizonte, Dezembro de 2009

1ResumoUma das principais fontes de energia renovável no Brasil é a hidrelétrica,e grandes esforços para a construção de usinas e centrais hidrelétricas são in-vestidos na busca de uma geração e�ciente, segura e com menores impactosambientais. A automação de usinas se torna um fator fundamental para al-cançar tais resultados, visto que sistemas automatizados conferem segurança,con�abilidade, qualidade, viabilidade técnica e e�ciência na geração. Alémdisso, o processo de automação é muito �exível e permite diversas con�gura-ções de projeto, seguindo as exigências dos clientes. Por isso, em um mercadocompetitivo com processos que podem adotar soluções distintas para alcançaro objetivo, o custo do projeto de automação pode ser um diferencial.O trabalho descreve o estudo da arquitetura de um projeto de automaçãoaplicável a Pequenas Centrais Hidrelétricas - PCHs, avaliando-se os equipa-mentos e as técnicas de integração necessários ao funcionamento exigido emtais projetos.Portanto, o estudo de uma arquitetura que proporcione uma melhor solu-ção técnica com menor custo em projetos de automação de PCHs é o objetivodesse trabalho. Nele são apresentadas as tecnologias envolvidas, suas carac-terísticas e um comparativo dos custos relativos às arquiteturas descritas,além de novas perspectivas para tais projetos.A análise da arquitetura de um projeto de uma PCH foi baseada em doiscenários que contemplam unidades de controle distintas. O cenário 1 utilizao CLP como unidade de controle e o cenário 2 a UTR. Portanto analisou-seas características particulares do CLP e da UTR, avaliando as vantagens efuncionalidades de cada dispositivo para a aplicação em questão.As UTRs são dispositivos desenvolvidos para a aplicação em subestações eusinas, portanto atendem facilmente as exigências do projeto. Mas os CLPs,que são dispositivos voltados para processos industriais, são muito �exíveis eapresentam todos os recursos necessários à implementação e com custo 15%menor.Portanto, chegou-se a conclusão que ambos os cenários atendem aos re-quisitos exigidos em projetos de automação de PCHs. Mas para decidir quala melhor solução, todas as informações técnicas, as exigências e escolhas docliente e os custos relativos são importantes.Palavras-chaves: Pequena Central Hidrelétrica, sistemas de proteção econtrole, arquitetura de projetos automação, CLP, UTR.

AbstractThe hydroelectric power is one of the main renewable energy sources inBrazil, and a great share of the e�ort invested on the construction of bigand small hydroelectric plants is in research for an e�cient, safe and envi-ronment friendly energy generation. Plant automation then becomes a maincomponent to reach those results, since automated systems provide safety,reliability, quality,technical viability and generation e�ciency. In addition,the automation process is very �exible and many project con�gurations canbe made according to customer's requirements. Therefore, in a competitivebusiness, where di�erent solutions can be used to reach the process goals,the cost of the automation project can be a di�erential.This undergraduate degree project studies the automation project archi-tecture on Small Hydroelectric Plants - SHPs, while it evaluates the equip-ment and integration techniques required by such projects.The study of an architecture that provides a better technical solutionwith lower costs in automation projects on the SHPs is, therefore, the goalof this work. The technologies involved, their characteristics and a costcomparison between the is presented described architectures, in addition tonew perspectives for those projects.The SHP project architecture analysis was based on two scenarios, whichconsider distinct control units. The �rst scenario uses the PLC as the controlunit and second one uses RTU. Characteristics of the PLC and the RTU, wereanalyzed, evaluating the advantages and functionalities of each device for thepresented application.The UTRs are devices designed for substations and hydroelectric plants,meeting project requirements easily. PLCs, on the other hand, are industryoriented, with higher �exibility and all the resources needed for implementa-tion with a cost 15% lower.The conclusion reached is that both scenarios meet the requirements forSHPs automation projects. To decide which solution is best, all the technicalinformation, client's demands and choices, and costs are important.Keywords: Small Hydroelectric Plants, Protection and Control Systems,architecture of an automation project, PLC, RTU.

AgradecimentosÀ minha família pela estrutura, apoio, compreensão e amor.Aos professores, grandes mestres, pelos ensinamentos e orientação.Aos pro�ssionais da Orteng pelos conhecimentos e orientação para arealização desse trabalho.

NomenclaturaANA - Agência Nacional de ÁguasANEEL - Agência Nacional de Energia ElétricaCA/CC Corrente Alternada/Corrente ContinuaCLP - Controlador Lógico ProgramávelCPU - Unidade Central de ProcessamentoDNP - Distributed Network ProtocolE/S - Entrada/SaídaEOP - Estação de OperaçãoEPA - Enhanced Performance ArchitectureFBD - Function block dataGPS - Sistema de Posicionamento GlobalHH - Custo Homem-HoraIEC - International Electric CommissionIED - Intelligent Electronic DevicesIHM - Interface Homem MáquinaIL - Instruction listIO - Input/OutputIRIG - Inter Range Instrumentation GroupLAN - Local Area NetworkLD - Ladder diagramLT - Linha de TransmissãoMME - Ministério de Minas e EnergiaMTBF - Mean Time Between FailuresONS - Operador Nacional do Sistema ElétricoOSI - Open Systems InterconnectionPCH - Pequena Central HidrelétricaPID - Proporcional Integral DerivativoPROINFA - Programa de Incentivo às fontes alternativas de EnergiaElétricaRT - Regulador de TurbinaRV - Regulador de VelocidadeSCADA - System Control and Data AquisitionSDSCP - Sistema Sistema Digital de Supervisão, Controle e ProteçãoSE - SubestaçãoSFC - Sequential function chart

5SNTP - Simple Network Time ProtocolSOE - Sequence of EventsST - Sequential TextTCP/IP - Transmission Control Protocol/Internet ProtocolUC - Unidade de ControleUDP/IP - User Datagram Protocol/Internet ProtocolUG - Unidade GeradoraUR - Universal RelayUTR - Unidade Terminal Remota

SumárioResumo 1Abstract 2Agradecimentos 3Nomenclatura 4Lista de Figuras 8Lista de Tabelas 91 Introdução 101.1 Objetivo e Motivação . . . . . . . . . . . . . . . . . . . . . . . 111.2 A Empresa . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.3 Revisão Bibliográ�ca . . . . . . . . . . . . . . . . . . . . . . . 131.4 Organização do Trabalho . . . . . . . . . . . . . . . . . . . . . 162 Sistemas de Geração de Energia 172.1 Usinas Hidrelétricas . . . . . . . . . . . . . . . . . . . . . . . . 172.1.1 Barragem . . . . . . . . . . . . . . . . . . . . . . . . . 172.1.2 Conduto Forçado . . . . . . . . . . . . . . . . . . . . . 172.1.3 Casa de Máquinas . . . . . . . . . . . . . . . . . . . . 182.1.4 Vertedouro . . . . . . . . . . . . . . . . . . . . . . . . 192.2 Pequenas Centrais Hidrelétricas . . . . . . . . . . . . . . . . . 202.3 Histórico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212.4 Projeto de Automação . . . . . . . . . . . . . . . . . . . . . . 233 Descrição dos Componentes do Projeto 273.1 Estação de Operação - EOP . . . . . . . . . . . . . . . . . . . 273.2 Switch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283.3 GPS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 296

SUMÁRIO 73.4 Relés Digitais . . . . . . . . . . . . . . . . . . . . . . . . . . . 313.5 Unidade de Controle - UC . . . . . . . . . . . . . . . . . . . . 313.5.1 Controlador Lógico Programável - CLP . . . . . . . . . 313.5.2 Unidade Terminal Remota - UTR . . . . . . . . . . . . 353.6 Protocolos de Comunicação . . . . . . . . . . . . . . . . . . . 363.6.1 DNP3.0 . . . . . . . . . . . . . . . . . . . . . . . . . . 363.6.2 IEC 60870-5-101 / IEC 60870-5-104 . . . . . . . . . . . 383.6.3 Modbus . . . . . . . . . . . . . . . . . . . . . . . . . . 384 Proposta do Projeto 404.1 Arquitetura Proposta . . . . . . . . . . . . . . . . . . . . . . . 404.1.1 Cenário 1 - CLP . . . . . . . . . . . . . . . . . . . . . 464.1.2 Cenário 2 - UTR . . . . . . . . . . . . . . . . . . . . . 504.1.3 Análise de Custos . . . . . . . . . . . . . . . . . . . . . 545 Conclusão 585.1 Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 585.2 Considerações Finais . . . . . . . . . . . . . . . . . . . . . . . 595.3 Propostas de Continuidade . . . . . . . . . . . . . . . . . . . . 60Anexo 62Anexo II 65Referências Bibliográ�cas 67

Lista de Figuras2.1 Esquema Geral de uma Usina Hidrelétrica - Fonte: [22] . . . . 182.2 Vertedouro com comportas abertas - Usina de Três Marias -MG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.3 Décadas de Instalação de PCHs - Fonte [3] . . . . . . . . . . . 222.4 Mapa de PCHs em Operação . . . . . . . . . . . . . . . . . . 233.1 Constelação de Satélites GPS . . . . . . . . . . . . . . . . . . 303.2 Ciclo de Varredura de um CLP . . . . . . . . . . . . . . . . . 333.3 Componentes de um CLP . . . . . . . . . . . . . . . . . . . . 343.4 DNP3.0 - Arquitetura EPA . . . . . . . . . . . . . . . . . . . 374.1 Arquitetura Proposta . . . . . . . . . . . . . . . . . . . . . . . 414.2 Vista Frontal e Traseira do RT420 . . . . . . . . . . . . . . . . 434.3 Cenário 1 - CLP . . . . . . . . . . . . . . . . . . . . . . . . . 474.4 Cenário 2 - UTR . . . . . . . . . . . . . . . . . . . . . . . . . 508

Lista de Tabelas2.1 Condições de Operação da Turbina - Fonte: [9] . . . . . . . . . 194.1 Redes e Protocolos - CLP . . . . . . . . . . . . . . . . . . . . 494.2 Redes e Protocolos - UTR . . . . . . . . . . . . . . . . . . . . 544.3 Pontos de E/S necessários para uma Unidade Geradora . . . . 544.4 Pontos de E/S necessários para os Serviços Auxiliares . . . . . 544.5 Número de cartões para a solução apresentada no cenário 1 . . 554.6 Número de cartões para a solução apresentada no cenário 2 . . 554.7 Material e Serviços . . . . . . . . . . . . . . . . . . . . . . . . 569

Capítulo 1
IntroduçãoUma das principais fontes de energia limpa e renovável do nosso país é aenergia hidráulica. As usinas hidrelétricas são responsáveis por transformaressa energia hidráulica em energia elétrica. O potencial hidráulico é propor-cionado pela vazão de água e por um desnível hidráulico natural ou devidoa uma barragem para captação e condução, sobre pressão, da água até aturbina. A pressão da água produz um movimento giratório do eixo da tur-bina e do gerador, o movimento do rotor induz uma tensão que é conduzida,através de cabos ou barras condutoras, do gerador para os transformadoreselevadores. Assim, temos a energia hidráulica transformada em mecânica,que por sua vez é transformada em energia elétrica.Uma usina é composta, basicamente, de reservatório, casa de máquinas,vertedouro e subestação elevadora. O reservatório é formado pelo represa-mento da água por uma barragem, onde o vertedouro é construído, paraliberar a água nos casos em que o reservatório estiver cheio, evitando, assim,o comprometimento da barragem. Na casa de máquinas estão localizadasas turbinas, os geradores, os painéis de comando e a sala de controle. Nasubestação elevadora são instalados os transformadores elevadores em que aenergia elétrica tem suas características transformadas para serem transpor-tadas pelas linhas de transmissão com qualidade e segurança.A grande vantagem desse processo é a transformação limpa do recursoenergético natural e o Brasil é um país com grande potencial hidráulico e,conseqüentemente, grande potencial energético.Atualmente, os sistemas geradores de energia elétrica a partir da energiahidráulica estão organizados da seguinte forma:• Centrais Geradoras Hidrelétricas - CGHs (Potência ≤ 1 MW)• Pequenas Centrais Hidrelétricas - PCHs (1 MW < Potência < 30 MW)10

1.1 Objetivo e Motivação 11• Usinas Hidrelétricas - UHEs (Potência > 3 MW)Segundo o site da ANEEL, existem 320 PCH's em operação no Brasil,gerando 2.339.404kW, 67 PCH's em construção, com capacidade de 1.090.070kW e 166 PCH's outorgadas entre 1998 e 2008 com capacidade de 2.432.568kW.A automação de usinas de geração de energia elétrica é fundamental paraa otimização do processo, para garantir melhor desempenho, melhores con-dições de controle e funcionamento. E, conseqüentemente, aumenta a con�-abilidade, a segurança, a produtividade e a lucratividade do processo.Este trabalho aborda uma Pequena Central Hidrelétrica, no qual serãoanalisadas todas as etapas do processo de sua construção, com foco no sistemade automação.1.1 Objetivo e MotivaçãoA implantação de Pequenas Centrais Hidrelétricas é bastante vantajosa,pois não gera poluição, não apresenta resíduo poluente, a água dos reservató-rios é devolvida para seus cursos d'água naturais e os reservatórios possuemdimensões menores, diminuindo assim os impactos ambientais, como a des-truição ou distúrbio da fauna e �ora locais. Ela diminui também impactossociais, devido a possíveis deslocamentos de pessoas e cidades e aproveitandoem menor escala o potencial hidráulico de pequenos cursos d'água.Se distribuídas estrategicamente no território nacional, permitem a dis-tribuição da energia elétrica para pequenos centros urbanos e regiões rurais,caracterizando o abastecimento local, e lembrando que a distribuição da ener-gia para longas distâncias, às vezes, pode ser complicada. Considerando umamenor estrutura existente, podemos destacar, também, a redução considerá-vel dos custos de engenharia civil.O PROINFA - Programa de Incentivo às Fontes Alternativas de EnergiaElétrica, coordenado pelo Ministério de Minas e Energia (MME) - estabelecea contratação de 3.300 MW de energia do Sistema Interligado Nacional, pro-duzidos por fontes eólica, biomassa e pequenas centrais hidrelétricas - PCHs,sendo que cada fonte responsável pela geração de 1.100 MW. O programa,instituído pela Lei 10.438, de abril de 2002, prevê 1.191,24 MW provenientesde 63 PCHs. Atualmente existem 29 PCHs, incentivadas pelo PROINFA, emoperação.O Brasil possui um alto potencial energético baseado em centrais hidre-létricas, por possuir uma grande extensão territorial com cursos d'água dis-tribuídos. De acordo com o projeto do PROINFA, a implantação das PCHsse concentra na região sudeste.

1.2 A Empresa 12Portanto, visto o grande potencial energético no Brasil, as grandes van-tagens da geração de energia a partir de pequenas centrais hidrelétricas, obaixo custo de implantação, o programa de incentivo do governo e, principal-mente, a realização do estágio na área de automação de sistemas de geraçãode energia; este trabalho terá o objetivo de analisar em detalhes o sistemadigital responsável pela automação do processo, agregando conhecimentostécnicos aliados com os conhecimentos teóricos adquiridos durante o cursode Engenharia de Controle e Automação, tentando ao máximo me enriquecercomo pro�ssional.1.2 A EmpresaO projeto de �m de curso foi realizado na empresa Orteng Equipamentose Sistemas, no Departamento de Automação - DTA, responsável pelo projetoe execução dos sistemas de automação.A empresa está localizada na Via Expressa de Contagem, 3850 Cincão -Contagem/MG, onde funciona a sede e a Unidade 1 de Produção. A empresapossui a Unidade 2 de Produção, também localizada em Contagem e aindapossui �liais em Macaé, Rio de Janeiro, Espírito Santo, São Paulo e Manaus.Fundada em 11 de Novembro de 1977, a Orteng Equipamentos e Siste-mas vem consolidando-se como um dos maiores fornecedores nacionais desistemas, equipamentos eletromecânicos e elétricos.A empresa apresenta ao mercado soluções em sistemas de energia e au-tomação, fornecendo serviços, produtos e sistemas, tais como:• Assistência técnica;• Centro de controle de motores;• Cubículo blindado de tensão;• Fonte de corrente contínua (Padrão Telebrás), chaveadas ou convenci-onais;• Painéis com inversores de frequência;• Painéis de Comando e Proteção;• Painel de controle para processos industriais;• Quadro de distribuição em baixa tensão;• Reti�cador carregador de baterias;

1.3 Revisão Bibliográ�ca 13• Reti�cador industrial 16000A;• Sistema de automação de redes de distribuição;• Sistema de automação e gerenciamento de energia;• Sistema de supervisão de energia;• Sistema digital integrado de supervisão, controle e proteção de subes-tação;• Solução Turn Key para Hidrelétrica;• Soluções Turn-key para Subestações;• Subestação móvel 15Kv sobre rodas;• Subestação unitária de arraste;• Supervisão de montagem e colocação em serviço;• Unidades remotas para sistemas de automação de energia;• USCA - Unidade de supervisão de corrente alternada e grupos motorgerador.A Orteng possui atuação nas áreas de mercado de telecomunicações, si-derurgia, oléo e gás (re�no, prospecção, transporte e produção), mineração,infraestrutura (portos, aeroportos, estradas e saneamento básico) e energia.1.3 Revisão Bibliográ�caUm trabalho de revisão bibliográ�ca foi feito neste projeto a �m de levan-tar, cienti�camente, como foram e como estão, atualmente, sendo projetadosos sistemas de automação em centrais hidrelétricas. Portanto, vamos deta-lhar um pouco a evolução dos dispositivos e tecnologias fundamentais paraa automação.O controle discreto, voltado aos processos digitais, teve seu início mar-cado pela utilização de dispositivos eletromecânicos do tipo a relés. E até oinício da década de 60, esta era praticamente a única opção possível. Como advento dos dispositivos microprocessados, vieram os Controladores Lógi-cos Programáveis (CLPs), onde a forma básica de programação é oriunda dalógica de programação dos diagramas elétricos a relé. Próprio para ambien-tes industriais, os controladores realizam uma rotina cíclica de operação, o

1.3 Revisão Bibliográ�ca 14que caracteriza seu princípio de funcionamento, e operam apenas variáveisdigitais, efetuando controle discreto[23].O CLP surgiu no �nal dos anos 50 e ao longo dos anos 60 e 70. Taismáquinas vieram, aproximadamente, substituir cremalheiras dos relés quetinham sido desenvolvidos nos anos 20 aos anos 40 para governar o controleseqüencial de operações complexas, tais como a linha interruptora telefônica,sinalização de estrada de ferro, e algum equipamento adiantado da automa-tização. O desenvolvimento do CLP foi estimulado por diversos problemasda con�ança com cremalheiras dos relés[25]:• Os relés falhariam mecanicamente após 30.000 ou 40.000 operações;• Reprogramação exige conhecimento da lógica original;• Os grandes sistemas tornaram-se limitados pela con�abilidade de com-ponentes individuais e da �ação.Após o desenvolvimento do CLP e sua facilidade de programação, deslo-cando funções de hardware para software, sistemas mais complexos começa-ram a ser desenvolvidos e tecnologias subsequentes começaram a surgir, comoas LANs industriais, inicialmente para transmitir dados em tempo real entrediferentes CLPs, e o nível de supervisão, baseado em computadores mainfra-mes, adicionada acima da camada do CLP para suportar o descarregamentodo programa e a sincronização com o nível de fábrica e coletagem de dadosde performance. Era o início do controle distribuído.Juntamente com o aparecimento das técnicas digitais oriundas da revo-lução eletrônica em meados do século XX, a técnica de controle distribuídopropicia o aparecimento de uma �loso�a de controle: o Sistema Digital deControle Distribuído - SDCD. Cada processo com suas unidades de controlese constituem em verdadeiros "nós", que além de integrar todo sistema desupervisão com interfaces homemmáquina, abre caminho para a intercomuni-cabilidade e futura padronização de todos os equipamentos de sensoriamento,controle e atuação nos mais diferentes níveis[23].Um SDCD pode ser representado por uma sala central, gerenciadora decontrole e supervisão global, microprocessada em rede com vários outros con-troladores de responsabilidade local, caracterizando-se pela transformação deprocessos automatizados em verdadeiros sistemas de automação supervisio-nados com a capacidade e rastreamento de todas as etapas do processo pro-dutivo, bem como a �exibilização e aumento da capacidade de integração deseus componentes, prevendo, portanto, um aumento do processo e do nívelde automação de forma natural e continuada[23].

1.3 Revisão Bibliográ�ca 15Os controladores dos sistemas distribuídos, conhecidos por sua robustez,alta velocidade e grande capacidade de processamento, passaram a ter umcusto mais acessível e comunicação aberta com sistemas de fabricantes dife-rentes. Redes de comunicação de campo, como HART, Foundation Fieldbuse Pro�bus permitiram que esses sistemas integrassem toda a instrumenta-ção. Enquanto os sistemas SCADA modernos se especializaram em realizarsupervisão e controle de grandes áreas e sistemas geogra�camente distan-tes, os sistemas distribuídos são os indicados para automação e controle degrandes processos, como hidrelétricas[24].As vantagens observadas em sistemas digitais e a sua evolução tecnológicademonstram a tendência à integração de sistemas de controle e automaçãoem um único hardware, e os resultados positivos obtidos desses a�rmam asua qualidade. Como por exemplo, a integração dos sistemas de regulação detensão e de velocidade, que apresenta vantagens para a e�ciência de máquinasde pequeno ou grande porte[1].O que se observou foi que os sistemas de controle tradicionais eram in-dependentes uns dos outros e com o advento do controle distribuído e suafacilidade de integração, os diversos subsistemas passaram a compor um únicosistema de supervisão, controle e proteção.Em [2] observou-se que a automação se divide em subsistema de proteção,subsistema de regulação e subsistema de automação de funcionalidades, osquais foram integrados num projeto único para PCHs de até 2 MW. Parausinas maiores utiliza-se subsistemas de proteção e regulação de outros fa-bricantes, que são integrados e de fácil conexão no sistema. Para os autoresos três subsistemas são intimamente interligados e interdependentes tanto doponto de vista conceitual e de lógica quanto do ponto de vista operacional efísico.Em [1] encontrou-se uma análise comparativa entre a con�guração tradi-cional dos sistemas de controle e a utilização de sistemas digitais integradosde controle. Na con�guração tradicional utilizava-se equipamentos dedica-dos para o regulador de velocidade da turbina, para o regulador de tensãodo gerador, para o automatismo de partida e parada e para a proteção. Nossistemas digitais integrados utilizando-se das mesmas plataformas de hard-ware e software permite-se integrar e otimizar os sistemas de regulação. Otrabalho propôs o regulador de turbina, o regulador de tensão e o comandoe controle do grupo (automação, partida, parada e supervisão) num únicoprocessador, incorporando também algumas funções de proteção.O que se observou no trabalho descrito em [1] foi que com a reduçãode componentes, interfaces, conexões e fontes, ou seja, redução do númerode componentes susceptíveis a falha, houve um aumento da con�abilidade.Juntamente com a simpli�cação do hardware, que implicou em menor custo

1.4 Organização do Trabalho 16e maior facilidade de localização de falhas.Podemos concluir que, atualmente, os projetos de automação de PCHs sãocaracterizados por sistemas digitais integrados de controle distribuído, quecontam com dispositivos como os relés digitais, capazes de realizar funçõesde controle, monitoramento e proteção, proporcionando essa tendência deintegração, observada nas pesquisas.Devido a variedade de equipamentos e tecnologias em paralelo aos requi-sitos do projeto e a busca pelo menor custo, a de�nição da solução ideal éalgo bem complexo, portanto tornando-se um desa�o para os engenheiros epro�ssionais da área.1.4 Organização do TrabalhoO trabalho está dividido em cinco capítulos. Este Capítulo apresentouuma introdução ao projeto a ser descrito nesta monogra�a, motivação e ob-jetivo, assim como uma revisão bibliográ�ca sobre o histórico, como atual-mente estão organizados os projetos de automação em Pequenas CentraisHidrelétricas e a empresa onde o trabalho foi realizado. O Capítulo 2 des-creve o processo de geração de energia baseado em PCHs e abrange todosos conceitos necessários para um melhor entendimento do projeto, além deuma rápida descrição do projeto de automação. O Capítulo 3 descreverá ametodologia para a de�nição da arquitetura adotada para o projeto, deta-lhando as características dos dispositivos que compõem a rede e protocolos decomunicação. No Capítulo 4 apresenta-se a arquitetura adotada e um com-parativo da mesma envolvendo unidades de controle diferentes, avaliandocustos e solução técnica. O Capítulo 5 apresenta as conclusões da monogra-�a, as sugestões de continuidade e di�culdades encontradas na realização doprojeto.

Capítulo 2
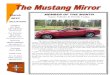
Sistemas de Geração de Energia2.1 Usinas HidrelétricasExistem diversas formas de geração de energia, e como o foco deste tra-balho é a geração de energia elétrica a partir da energia hidráulica, a seguirtem-se uma breve descrição das estruturas de uma instalação hidrelétrica, quesão, basicamente, barragem, tomada d'água, conduto forçado, casa de força,subestação, turbina, gerador e vertedouro. Na �gura 2.1 estão detalhadasalgumas estruturas de uma Usina:2.1.1 BarragemA barragem é uma estrutura construída no leito de um rio, permitindoacumular água para gerar um desnível entre a captação da água e a turbina,aumentando o potencial hidráulico. A água represada pela barragem formaum reservatório e pode ser de terra, enrocamento, alvenaria ou concreto.Como benefícios secundários das barragens sobre os rios podem ser men-cionadas a melhora das condições de navegabilidade e o controle dos efeitosdas secas prolongadas sobre as atividades agropecuárias nas terras adjacen-tes[22].2.1.2 Conduto ForçadoA captação da água levada às turbinas inicia-se com a tomada d'água,equipada com comportas de fechamento e grades de proteção. O condutoforçado é a canalização que conduz água, sob pressão, para as turbinas.Podem apresentar-se sob a forma de canais abertos, tubulações, túneis ougalerias escavadas na rocha. Os condutos de alta pressão são tubos fechados,embutidos na rocha, no concreto ou construídos a céu aberto[22].17

2.0 Sistemas de Geração de Energia 18Figura 2.1: Esquema Geral de uma Usina Hidrelétrica - Fonte: [22]2.1.3 Casa de MáquinasA casa de máquinas, também conhecida como casa de força, é o localde onde se opera a usina, onde estão localizados os painéis do sistema deproteção e controle, os grupos turbina-geradores, os serviços auxiliares, en�m,os equipamentos necessários à operação central.Nas centrais com reservatório de regularização, a casa de máquinas égeralmente localizada ao pé da barragem. Em centrais de baixa queda, acasa de máquinas costuma estar incorporada à barragem[22].A turbina é uma roda com pás. A água faz a turbina girar ao atingi-la,transformando energia hidráulica em energia mecânica. A energia potencial,existente entre o nível do reservatório antes da barragem e o nível do rio apósa barragem, transforma-se em energia cinética, através da água que faz girara turbina. Ao girar a turbina uma corrente elétrica é induzida pelo gerador.Nesse projeto vamos considerar três Unidade Geradoras, com três turbi-nas hidráulicas Francis de eixo horizontal, com o rotor da turbina acopladodiretamento ao eixo do gerador. A tabela 2.1 mostra as condições de operaçãodas turbinas:

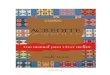
2.0 Sistemas de Geração de Energia 19Queda Líquida (m) Potência da Turbina (kW)Referência 46,30 9300Máxima Operativa 52,20 9300Mínima Operativa 43,60 8523Tabela 2.1: Condições de Operação da Turbina - Fonte: [9]O gerador está acoplado mecanicamente à turbina. A energia mecânicadisponível no eixo da turbina é transformada em energia elétrica pelo gerador.O gerador é composto de um rotor (imã), que gira no interior de uma bobina(estator), provocando o aparecimento de uma corrente elétrica.A subestação recebe a energia elétrica gerada na usina, transformando-aem alta tensão, para que possa ser transportada pelas linhas de transmissãoa grandes distâncias.2.1.4 VertedouroO vertedouro permite o controle do nível da água do reservatório, princi-palmente em períodos de cheias, deixando escoar a água em excesso, evitandoque a barragem transborde ou que as terras vizinhas seja indevidamente ala-gadas, além de ser uma medida de segurança para preservar a estabilidade dabarragem. Podem ou não ser dotados de comportas com controle de vazão.Figura 2.2: Vertedouro com comportas abertas - Usina de Três Marias - MG

2.2 Pequenas Centrais Hidrelétricas 202.2 Pequenas Centrais HidrelétricasAs Pequenas Centrais Hidrelétricas foram de�nidas através da portaria doDNAEE no. 109, de 24 de novembro de 1982, pelas seguintes características:• Operação em regime de �o d'água ou de regularização diária;• Provisão de barragens e vertedouros com altura máxima de 10 m;• Sistema adutor formado apenas por canais a céu aberto e/ou tubula-ções, não utilizando túneis;• Suas estruturas hidráulicas de geração devem prever, no máximo, umavazão turbinável de 20m3/s;• Dotação de unidades geradoras com potência individual de até 5MW;• Potência total instalada de até 10MW.Em 1984, o DNAEE por meio da Portaria no. 125 tratou de atenuar esteenquadramento e em 1987, pela Portaria DNAEE no. 136, de 06 de outubro,as PCHs passaram a ter apenas duas condicionantes: a potência deveria serinferior a 10 MW, com unidades geradoras de, no máximo, 5 MW.Com a criação da Agência Nacional de Energia Elétrica (ANEEL), em1996, a regulamentação do setor passa a ser uma atribuição da ANEEL. Quepor meio da Resolução no. 394, de 04 de dezembro de 1998, revogou as Porta-rias 125 e 136 do DNAEE e estabeleceu novos critérios para o enquadramentode empreendimentos hidrelétricos na condição de Pequenas Centrais Hidre-létricas. Desse modo, passaram a ser consideradas PCHs os aproveitamentoshidrelétricos com as seguintes características:• Potência igual ou superior a 1,0 MW e igual ou inferior a 30,0 MW;• Área total de reservatório igual ou inferior a 3,0 km2;• Cota d'água associada à vazão de cheia com tempo de recorrência de100 anos1.Em 2003 a ANEEL através da Resolução 652 altera a área do reserva-tório. Caso o limite de 3,0 km2 seja excedido, o aproveitamento ainda seráconsiderado com características de PCH se forem atendidas pelo menos duascondições:
1Através de estudos hidrológicos obtém-se as vazões de cheias associadas às precipita-ções de 100 anos, visto que a análise de vazão do curso d'água é muito importante para oprojeto

2.3 Histórico 21• Fórmula: que a inequação abaixo seja satisfeita: A≤ 14, 3P/Hbonde A = Área do reservatório em [km2]P = Potência elétrica instalada em [MW]
Hb = Queda bruta do aproveitamento em [m]Nessa expressão a área não poderá exceder 13,0 km2, área máximada maior parte dos reservatórios das PCH da região norte/nordeste,sendo agora de�nida pelo nível d'água máximo normal à montante dobarramento. A queda bruta é dada pela diferença entre os níveis d'águamáximo normal de montante e normal de jusante.• Reservatório: cujo dimensionamento, comprovadamente, foi baseadoem outros objetivos que não o de geração de energia elétrica deverá teressa condição comprovada junto a Agência Nacional de Águas - ANA,aos Comitês de Bacias Hidrográ�cas, aos órgãos de gestão de recursoshídricos e ambientais junto aos Estados; de acordo com suas respectivascompetências.2.3 HistóricoA inserção das Pequenas Centrais Hidrelétricas - PCH no Brasil se deu no�nal do século passado, onde pode-se citar como marcos históricos o ano de1883 quando se deu a instalação do primeiro aproveitamento hidrelétrico namineração Santa Maria em Diamantina, denominado "Ribeirão do Inferno",e o ano de 1889, quando foi instalada a Usina Marmelos, pelo industrialBernardo Mascarenhas: primeira hidrelétrica de porte, com 250 kW paraatender à sua indústria têxtil e alimentar a iluminação residencial de Juiz deFora, constituindo o que poderia ser denominado como a primeira empresade energia elétrica para serviço público[1].Na primeira metade do século XX, as PCHs instaladas visavam, principal-mente, atender sistemas isolados nos Estados e foram construídas por peque-nos empresários da época ou pelas prefeituras municipais. Este processo teveuma rápida expansão no período 1920/1930, onde o número de empresas pas-sou de 306 para 1.009, todas em geral, operando pequenos aproveitamentoshidrelétricos[7].Este crescimento continuou até a década de 40, porém em taxas menoresque nas décadas anteriores. Em 1941, existiam milhares de empresas de ener-gia elétrica, e centenas de pequenas centrais, entretanto, tirando os gruposestrangeiros existentes, somente oito empresas possuíam potência instaladasuperior a 3.000 kW (Central Elétrica de Rio Claro, Companhia Força e Luz

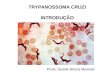
2.3 Histórico 22Santa Cruz, Companhia Sul Mineira de Eletricidade, Companhia Força eLuz Cataguases - Leopoldina, Companhia Sul Americana de Serviços Pú-blicos, Companhia Paulista de Eletricidade e Sociedade Anônima ElétricaBragantina). Desta forma, até esta época, excetuando alguns casos especi-ais, quase a totalidade das instalações eram compostas de pequenas centraishidrelétricas[7].A partir da década de 1940, com a criação das empresas estaduais de ener-gia elétrica, resultou na encampação das pequenas empresas dispersas pelosestados e o início do investimento em grandes obras de geração, buscandoeconomia de escala. A partir dessa época, estas empresas estaduais prati-camente abandonaram as pequenas plantas, mantendo em operação aquelasjulgadas mais interessantes na época[7].Na região Sudeste, as PCHs começaram a ser construídas no �nal doséculo XIX e início do século XX, com um ápice na década de 1910, porémperdurando com uma boa média até a década de 1950. Este esforço deconstrução atendeu, de início, às cargas de iluminação, e logo em seguidasupriu as cargas resultantes da industrialização. A partir da década de 1960,com a estatização do sistema elétrico e com a concentração de esforços einvestimentos na construção de grandes centrais, houve uma queda acentuadano uso e exploração das PCHs. A situação só veio a mudar a partir dadécada de 1990, o que resultou do aparecimento de incentivos à implantaçãode PCHs, tanto no que diz respeito a �nanciamentos como no que diz respeitoa condições de comercialização[3].Figura 2.3: Décadas de Instalação de PCHs - Fonte [3]Segundo [4], o Brasil é um país que possui uma das matrizes energéticasmais limpas do mundo, com a participação de 43,8% das energias renováveisno total de energia consumida. Como uma grande quantidade de PCHs foiconstruída entre 1930/1940, o que coloca a média de idade das instalações

2.4 Projeto de Automação 23por volta de 57 anos, novas formas de empreendimentos são necessárias como:modernização, recapacitação de PCHs em operação e reativação de PCHs.Em 1980 o Governo Federal iniciou programas de incentivo à implanta-ção de PCHs através do Programa Nacional de Pequenas Centrais Hidrelé-tricas (PNPCH) do Ministério de Minas e Energia - MME e, atualmente, oPROINFA é o programa que incentiva, dentre outras fontes alternativas, aprodução de energia elétrica por Pequenas Centrais Hidrelétricas.Atualmente, 29 PCHs, incentivadas pelo PROINFA, já estão em operação,como podemos avaliar na �gura 2.4:Figura 2.4: Mapa de PCHs em Operação2.4 Projeto de AutomaçãoO Sistema Digital Integrado de Supervisão, Controle, Medição e Proteçãopara usinas e PCHs deve atender às mais rigorosas especi�cações e normas

2.4 Projeto de Automação 24técnicas para sistemas elétricos, tanto para nível de aquisição de dados quantopara o nível de supervisão, controle e comunicação de dados.A transmissão de dados em tempo real utiliza-se de mensagens curtas comalta frequência de transmissão, sendo uma característica fundamental parasistemas de supervisão, controle e proteção. O autor em [21] relata que em umsistema de tempo real, todas as ações devem se dar num intervalo de tempo.Como todo sistema útil precisa interagir com pessoas ou fenômenos externos edar respostas adequadas a eventos que ocorrem e que não estão sincronizadoscom as operações internas do sistema, esse intervalo é importante.Cada tarefa em um sistema de tempo real tem uma data limite associadacom ela e deve completar obedecendo a esta restrição de tempo. Um retardono término teria conseqüências indesejáveis[20].O sistema de comunicação deve entregar dados con�áveis mesmo na pre-sença de erros de transmissão, variação nos tempos de entrega e falhas deequipamentos. Portanto, para garantir a integridade dos dados deve-se:• Detectar a transmissão de erros em ambiente ruidoso;• Recuperar dados de link congestionado;• Sustentar opcionalmente - redundância do equipamento.Para sistemas, como o que será descrito nesse trabalho, algumas caracte-rísticas são importantes e estão listadas a seguir:• Base de dados em tempo real;• Banco de dados de alarmes históricos, eventos e medições;• Rápido acesso às informações do processo via telas sinóticas animadas;• Integração total com o sistema de proteção;• Relatórios de produção;• Servidores de dados redundantes;• Arquitetura cliente/servidor;• Integração com dispositivos microprocessados via protocolos de mer-cado;• Estrutura modular - fáceis atualizações e expansões futuras;• SOE - eventos 1ms;

2.4 Projeto de Automação 25• Compatibilidade com os procedimentos de rede da ONS.O Sistema Digital de Supervisão, Controle e Proteção (SDSCP) visa aforma operativa de usina digitalizada, sendo a con�guração assistida, exis-tindo a possibilidade de operação convencional.Na con�guração assistida, em condições normais a PCH e sua subestação(SE) serão controladas a partir de sua sala de controle. Em condições degra-dadas do SDSCP, a PCH poderá ser operada através de controle convencionala partir dos painéis de controle das unidades.Os Sistemas de Proteção são independentes e providos de portas de comu-nicação para a total integração ao Sistema Digital de Supervisão e Controleda PCH.O sistema digital apresenta funções como:• Sequência de Partida automática e passo-a-passo;• Sequência de Parada automática e passo-a-passo;• Interface com os reguladores de tensão e velocidade;• Rodízio de bombas (lubri�cação e regulação);• Controle da unidade de freios;• Controle da unidade de refrigeração;• Controle das bombas de lubri�cação;• Controle das bombas de regulação;• Controle das válvulas de isolamento das unidades;O SDSCP deve ser um sistema seguro, que evite condições de risco parao processo, evitando, por exemplo, ações indesejadas dadas pelo operador.A arquitetura do projeto apresenta um sistema de controle distribuído. Umsistema distribuído é composto por diversos elementos (por exemplo: senso-res, atuadores, malhas de controle, computadores, etc.) que trabalham deforma simultânea e independente para controlar e monitorar um processo.Para simpli�car esse sistema distribuído, organizamos a PCH em blocos:• Unidade Geradora (Unidade de Controle, Unidade de Proteção, RT,RV)• Serviços Auxiliares (Poços de Esgotamento/Esvaziamento, Gerencia-mento das Fontes, gerador de emergência, Nível Montante, Nível Ju-sante, etc.)

2.4 Projeto de Automação 26• SE (Unidade de Proteção)• Supervisão (EOPs, IHMs)A Unidade Geradora compreende o conjunto turbina-gerador, portandoa unidade de aquisição e controle, que é composta pela unidade de controle,unidade de proteção, regulador de velocidade - RV e regulador de turbina -RT.Os serviços auxiliares são responsáveis por monitorar e controlar algunsserviços fundamentais para o funcionamento seguro da PCH, tais como ossistemas de drenagem e esgotamento, monitoramento dos níveis montante ejusante, gerador de emergência, banco de baterias, etc.O sistema de drenagem da Casa de Força tem por �nalidade coletar eencaminhar por gravidade, para o poço coletor, as águas provenientes dein�ltração no concreto, drenos e vazamentos de equipamentos, limpeza elavagem de pisos.O sistema de esgotamento é responsável pelo esvaziamento da caixa es-piral, tubulação de adução e poço de sucção das unidades de inspeção emanutenção.Um medidor de nível montante da Tomada d'água e a jusante da Casade Força são instalados. Os sinais do medidor de nível da barragem deverãoser levados até os reguladores de velocidade das turbinas para possibilitar ocontrole e administração das águas.O reti�cador carregador de baterias alimenta o consumidor e carrega si-multaneamente a bateria; quando da falta de energia, continua alimentandoo consumidor até que a rede comercial retorne e recarregue novamente abateria.Na falta de energia o gerador de emergência também é fundamental paramanter o funcionamento dos serviços auxiliares.A subestação é responsável por elevar a tensão gerada na PCH para sertransportada por longas distâncias, através das linhas de transmissão e aUnidade de Proteção é responsável pela segurança do sistema diante de dis-túrbios de energia.A supervisão é realizada pelas EOPs. Elas são responsáveis pela interfacedo processo com os operadores, disponibilizando telas sinóticas e informaçõesem tempo real e histórica para a operação da usina. O software aplicativoda EOP disponibiliza todos os recursos de segurança e janelas de operaçãoexigidas para o controle de sistemas de energia. As IHMs são estações desupervisão presentes nos painéis de controle, tem as mesma função das EOPs,porém são mais restritas, para a operação somente do painel correspondente.

Capítulo 3
Descrição dos Componentes do
ProjetoA metodologia adotada para a realização deste trabalho baseou-se, prin-cipalmente, na pesquisa de artigos, livros, documentos, manuais, pesquisaentre pro�ssionais da área, além outras fontes de informação.Inicialmente, uma pesquisa sobre o processo de geração de energia foifeito, como descrito no capítulo anterior. Arquiteturas de projetos de usinas ePCHs foram analisados e uma descrição das funções e características técnicasdos principais dispositivos e protocolos foi feita, como veremos a seguir nessecapítulo.3.1 Estação de Operação - EOPA Estação de Operação é responsável pela interface processo/operadorem alto nível, permitindo, através das telas customizadas, monitorar e dis-ponibilizar os recursos necessários para que o operador possa atuar de formaprática e e�ciente no processo. A presença de EOPs redundantes é uma me-dida de segurança: na falha da EOP mestre, a escrava assume a supervisãoda planta. A base de dados de cada EOP é sincronizada em tempo real emregime mestre/escravo.Quando existe redundância, ou quando um ponto alternativo de controledo sistema existe, em caso de falha, o sistema continua operando. Isso ga-rante a disponibilidade do sistema, que é uma característica importante parasistemas de automação. Outras formas de garantir essa disponibilidade é a re-cuperação automática de dados, através de sistemas de backup e recuperaçãode erros. As taxas de erro crescentes não devem causar uma indisponibili-dade repentina do sistema, mas resulta numa degradação. Portanto, deve27

3.2 Switch 28haver algum mecanismo que facilite a recuperação do erro para que restaurea operação con�ável.As EOPs disponibilizam em suas telas informações em tempo real e his-tóricas para a operação. As EOPs são reponsáveis pelo tratamento e arqui-vamento de dados de todo o sistema. Dentro das funcionalidade previstastemos os seguintes processos principais:• SOE (Sequence of Events): Gestão e tratamento de eventos armazena-dos nos IEDs, que possuem a funcionalidade de aquisição dos pontosSOE, estampados com a precisão de 1 ms;• Comunicação: para atender as funcionalidades de comunicação como sistema de nível 1 (UCs e relés). As EOPs dispõem de drivers decomunicação que fazem o gerencimento de forma a disponibilizar to-das as informações em uma base de dados uni�cada online, onde serádisponibilizada para todo o sistema numa arquitetura cliente/servidor;• Banco de Dados: para armazenamento de dados históricos com o ob-jetivo de manter a integridade dos dados na eventual falha do servidorprincipal.3.2 SwitchO switch é um equipamento que permite que vários segmentos de rede secomuniquem com outros segmentos ao mesmo tempo, dois a dois. O switchatua no nível de enlace do modelo OSI e funciona fazendo a conexão entreum ponto e outro por uma matriz de comutação de alta velocidade, feita emnível de hardware[12].Segundo [11], os switches são os dispositivos de mais amplo espectro deutilização, para segmentar a rede a baixo custo, sem necessidade de rotea-mento. Sua maior limitação está em não permitir broadcasting entre seg-mentos. Para o autor o switch assegura a criação de uma rede ethernet livrede colisões.Switches são pontes multi-interface de alto desempenho, são capazes derepassar e �ltrar quadros usando endereços de destino de LAN e montamtabelas de repasse automaticamente, utilizando os endereços fonte dos qua-dros que atravessam a rede. Os switches podem ter dezenas de interfaces, quegera uma alta velocidade de transmissão, necessitando, consequentemente, deuma arquitetura de alto desempenho. Muitos operam em modo full-duplex,isto é, podem enviar e receber quadros ao mesmo tempo sobre a mesmainterface[15].

3.3 GPS 29O switch apresenta como vantagens:• Isolamento de trafégo ou segmentação de rede, diminuindo os domíniosde colisões;• Alta performance plug-and-play;• Permite comutação acelerada (cut-through) - um pacote não precisaser completamente armazenado para ser repassado;• Permite a interconexão de redes de padrões diferentes como interfaces10Mbps e 100Mps, por exemplo, garantindo a interoperabilidade entreredes;• Permite a interconexão de redes de padrões físicos diferentes, como porexemplo �bra ótica a par trançado;• Encaminha pacotes de acordo com seus endereços de destino;• Alta velocidade de transmissão;• Podem operar em modo half ou full-duplex.3.3 GPSO GPS (Sistema de Posicionamento Global) é responsável pelo sincro-nismo de todos os dispositivos conectados à ele. Independente da posiçãogeográ�ca, garante-se que todos dispositivos estejam ajustados para a mesmabase de tempo. Ele é constituído por portas de comunicação em IRIG-B1 eporta ethernet para sincronizar os dispositivos via SNTP2.O GPS constitui-se de vinte e quatro satélites orbitando em torno da Terraa uma altura aproximada de 20.200 km acima do nível do mar, permitindoa receptores conhecer sua posição em qualquer lugar sobre a Terra com umanotável precisão[16].Os vinte e quatro satélites que formam o segmento espacial do GPS tra-fegam em torno da Terra em seis órbitas estáveis e predeterminadas comquatro satélites em cada órbita. Os satélites percorrem uma órbita completaa cada 12 horas e cada satélite tem 28◦ de visualização sobre a Terra. Issoassegura que todo ponto da superfície terrestre, em qualquer instante, esteja
1IRIG B é um padrão de sinal recebido via satélite para sincronização de dispositivoscomo relés.
2O SNTP é um protocolo utilizado para a sincronização de dispositivos sobre redeethernet

3.3 GPS 30visualizado por pelo menos quatro satélites[16]. Na �gura 3.1 é possível avisualização da distribuição dos satélites.Figura 3.1: Constelação de Satélites GPSColetando-se sinais emitidos por quatro satélites, o receptor determinaa posição do usuário calculando-a como intersecção das quatro superfíciesesféricas obtidas. A localização é dada, não em coordenadas cartesianas, maspor meio das coordenadas geográ�cas (latitude, longitude e a elevação)[16].Normalmente, os relógios de sincronização fornecem vários tipos de sinaisdiferentes, possibilitando sincronizar os mais diversos tipos de equipamen-tos. Disponibiliza sinais de tempo, freqüência e fase em diversos formatoselétricos, ópticos e lógicos. A informação de tempo é apresentada em umdisplay na parte frontal do equipamento e é disponibilizada numa variedadede formatos, incluindo IRIG-B, datagramas seriais, bem como diversos tiposde pulsos de tempo.Sua principal vantagem é a �exibilidade à interligação em várias interfa-ces, utilizando protocolos diferentes. Permitindo, assim, fácil integração dosistema de sincronização.

3.4 Relés Digitais 313.4 Relés DigitaisOs relés digitais fazem parte do sistema de proteção e são responsáveispela segurança do sistema diante de distúrbios da rede de energia, comosobretensão, sobrecorrente, subtensão, subcorrente, entre outros.A função principal de um sistema de proteção é provocar o desligamentoautomático do equipamento protegido, através da atuação do relé de pro-teção no disjuntor correspondente, com o objetivo de reduzir danos a essesequipamentos e evitar que afete a operação normal do restante do sistema[18].A eliminação de defeitos em equipamentos ou seções de um sistema deproteção deve levar em conta diversos fatores, de forma que minimizem osriscos de instabilidades no sistema e a descontinuidade no fornecimento deenergia, além de protegê-los contra danos que poderiam ser causados pelascorrentes ou tensões de defeito[18].As últimas gerações de relés digitais oferecem vários recursos além da pro-teção. Como por exemplo, entradas e saídas digitais com lógica programável,processadores, medições de grandezas elétricas, contagem inteligente do nú-mero de operações de disjuntores, dentre outras funcionalidades, permitemaprimorar de forma signi�cativa a operação de sistemas elétricos. Os relésdigitais disponibilizam diversas informações, dentre outras, a energia ativa ereativa, monofásica e trifásica, de entrada e de saída [29].Segundo [33], o uso das informações dos relés para alimentar as funções deSCADA, análise de faltas e outras, oferece muitos benefícios, entre os quaisa redução ou eliminação de UTRs, transdutores e multimedidores; melhoriada função de estimação de estado, maior rapidez nas análises de faltas emfunção da maior quantidade de informações disponível; maior rapidez narecomposição do sistema após faltas, possibilidade de geração automática deestatísticas de faltas, complementação das análises de qualidade da energiafornecida e redução do seu custo, além de outros.3.5 Unidade de Controle - UCAs UCs, constituídas por hardware e software, são reponsáveis pelo inter-faceamento de campo, supervisão e controle. A seguir, vamos analisar doisdispositivos ou duas unidades de controle distintas.3.5.1 Controlador Lógico Programável - CLPO Controlador Lógico Programável (CLP) é um dispositivo utilizado namonitoração e controle de processos industriais. Os primeiros dispositivos a

3.5 Controlador Lógico Programável - CLP 32realizarem esse tipo de tarefa surgiram com a Revolução Industrial, no �naldo século XIX. Eram dispositivos mecânicos criados para automatizar tare-fas repetitivas. Eles realizavam funções especí�cas e se desgastavam muitofacilmente. Nos anos 20, esses dispositivos mecânicos foram substituídos porrelés e contatores, dispositivos eletrônicos que possibilitaram a utilização deuma lógica mais complexa[17].A partir dos anos 70, com o desenvolvimento de computadores comerci-ais, estes passaram a ser utilizados nas indústrias, trazendo a possibilidadede se programar a lógica e modi�cá-la sempre que necessário de forma maisfácil. Porém, esses computadores eram grandes, caros, difíceis de programare muito sensíveis à utilização em ambientes "hostis"encontrados em muitasplantas industriais. Então, a demanda por um equipamento mais robusto fezcom que se desenvolvessem os primeiros CLP's. Inicialmente, eles tinhamum conjunto de instruções reduzido, normalmente somente condições lógicase não possuíam entradas analógicas, podendo manipular apenas aplicaçõesde controle digital (discreto). Atualmente, as plantas industriais normal-mente precisam manipular tanto controle digital quanto malhas analógicascom o mesmo sistema de controle. As atuais funções de controle existentesem uma planta industrial são normalmente distribuídas entre um número decontroladores programáveis montados próximos aos equipamentos a seremcontrolados. Esses controladores são conectados a um computador supervi-sório central que gerencia os alarmes, receitas e relatórios[17].Inicialmente, é importante distinguir "Controle Lógico"de "Controle Di-gital". Entende-se por Controle Lógico (ou ainda Controle Discreto) a ope-ração com sinais de processo de natureza binária ("Liga/Desliga", "On/O�",etc.), como por exemplo os provenientes de chaves, botoeiras e relés comosinais de entrada, e comandos de liga/desliga motores, abre/fecha válvulas,etc., como sinais de saída. Quanto ao Controle Digital, opera com sinaisanalógicos de variação contínua e suave (após serem digitalizados por umconversor A/D)[17].Os CLPs foram inicialmente criados para substituir painéis de relés, econsequentemente para a solução de problemas de controle lógico (e seqüen-cial). Atualmente, contudo, são capazes de executar tanto o controle lógicoquanto o controle digital (malhas PID, usualmente). Dentre as operaçõeslógicas vitais para um determinado processo, pode-se citar os procedimentosde partida e parada do sistema (equipamentos) e seqüenciamento de eventos(alguns passos da operação de um processo podem ocorrer em série, e outrosem paralelo)[17].A execução dos programas carregados no CLP é cíclica, como demons-trado na Figura 3.6. O tempo total decorrido em cada ciclo é denominadode ciclo de varredura (ou ainda "período de scan"ou simplesmente "scan"), e

3.5 Controlador Lógico Programável - CLP 33depende do tamanho e complexidade do programa carregado pelo usuário[17].Figura 3.2: Ciclo de Varredura de um CLPO CLP é um computador projetado para trabalhar no ambiente indus-trial. Os transdutores e atuadores são conectados a robustos cartões deinterface. Os primeiros CLPs foram desenvolvidos inicialmente para a subs-tituição dos sistemas de controle baseados em relés. Desde então, os CLPsdesenvolveram e são os controladores mais utilizados em sistemas de controleem todos os tipos plantas industriais, do controle de máquinas até o controlede uma linha completa de manufatura de grandes processos industriais[10].Independentemente do fabricante e do tipo, a maioria dos CLPs pos-sui três parte principais: CPU, memória e a unidade de Entradas e Saídas(E/S), todas comunicando através de um barramento de comunicação. ACPU coordena todas as tarefas do CLP e executa o programa de controlearmazenado na memória. Os estados reais do processo são monitorados eamostrados pela unidade de E/S. Além das instruções lógicas, o CLP atualtambém possui uma grande capacidade aritmética. Portanto, muitos fabri-cantes estão adotando o termo Controlador Programável (CP) ao invés deCLP. A programação de CLPs é feita através de um computador externo,o qual é chamado de estação de engenharia. O programa compilado é car-regado na CPU e depois armazenado na memória utilizando-se uma portaserial ou uma rede local (LAN)[10].

3.5 Controlador Lógico Programável - CLP 34A �gura 3.3 ilustra os componentes de um CLP:Figura 3.3: Componentes de um CLPO propósito da unidade de E/S é de converter os sinais de processo paraos baixos níveis utilizados pelo controlador, além de �ltrar os transienteselétricos provenientes dos equipamentos de processo. Uma vez que existemdiferentes níveis de sinais em um processo industrial, muitas unidades de E/Spermitem intercambiar diferentes módulos de E/S. Assim, uma unidade deE/S poder ser ajustada às características dos níveis de sinais especí�cos daplanta industrial. Os módulos de E/S mais utilizados são os de entradas esaídas digitais, com níveis de sinais que vão desde 24 V e 48V em correntecontínua, até 110 V e 220 V em correntes alternadas[10].Cada vez mais, os CLPs possuem a funcionalidade de processamento arit-mético. Tais sistemas permitem o uso de módulos de E/S analógicos. Muitostransdutores representam a grandeza física através de um sinal de saída de 4a 20 mA, sendo utilizado 4 mA como valor mínimo para permitir a detecçãode cabo partido[10].Segundo [17], atualmente a maioria dos CLPs dispõem de módulos especi-ais para funcionalidades especí�cas. Dentre os módulos disponíveis podemoscitar os módulos de contagem rápida, controladores de movimento, interfacesde comunicação, co-processadores, etc.

3.5 Unidade Terminal Remota - UTR 35O meio de comunicação entre vários dispositivos inteligentes, como osCLPs, é denominado Rede Local de Comunicação. Essa rede deve possuir acapacidade de suportar controle em tempo real, integridade dos dados atravésde detecção de erro, imunidade a ruído, alta con�abilidade em ambientedesfavorável e adequação a grandes instalações. O meio físico de comunicaçãode uma rede pode ser �bra óptica, cabo par trançado ou cabo coaxial.3.5.2 Unidade Terminal Remota - UTROs primeiros equipamentos digitais instalados em subestações e usinas naárea de supervisão e controle foram as UTRs. Inicialmente, estas unidadeseram meros equipamentos de aquisição de dados e execução de comandos econstituíam a interface entre o processo elétrico e os sistemas SCADA. Toda ainteligência para processamento das informações e para supervisão e controledo processo elétrico �cava localizada nos centros de operação e controle. Estescentros eram dotados de computadores de grande porte e de interface homem-máquina (IHM) poderosa, uma vez que, durante perturbações envolvendodesligamentos múltiplos, era necessário processar e apresentar ao operadoruma grande massa de informações[35].Posteriormente, as UTRs passaram a ser dotadas de inteligência própria,sendo capazes de executar diversas funções acessórias como autoteste e auto-diagnose, validação de medidas e estado de equipamentos, datação (registrodo instante de ocorrência) e armazenamento de alarmes e eventos, assimcomo pré-processamento da medição e dos dados de alarmes e eventos antesde seu envio ao nível hierárquico superior[35].A UTR é um dispositivo desenvolvido para subestações e usinas elétricas,responsável pelo controle e supervisão dos subsistemas de uma usina/PCH.Existem diversos fabricantes de UTRs, porém tais dispositivos não são tãopopulares no meio acadêmico como os CLPs. Portanto, as informações con-tidas nesta seção foram retiradas, principalmente, de manuais técnicos e co-nhecimentos coletados entre pro�ssionais da área.As principais características da UTR são:• Suporte à protocolos de comunicação para sistemas elétricos;• Realiza medições elétricas e sincronismo;• Possui suportabilidade à interferências eletromagnéticas e campos elé-tricos característicos;• Permite a realização da função SOE(Sequence of Events);

3.6 Protocolos de Comunicação 36• Possui isolamento para atender a norma IEC 255 (suporta 2,5kV nospontos dos cartões);• Possui sincronismo de GPS (sinal IRIG-B).Suas aplicações mais comuns são como concentrador de dados, unidadede controle e conversor de protocolo ou gateway.Como concentrador de dados, o processador principal obtém os dados dosmódulos periféricos de entrada/saída e das portas de comunicação seriais,processa esses dados e os transmite para o computador host.Como unidade de controle o módulo também obtém os dados dos módulosperiféricos de entrada/saída e das portas de comunicação seriais. A partirdaí, utilizando-se de um software de programação, os dados são tratados demaneira a atender a lógica de controle especi�cada para o sistema da PCH.Como conversor de protocolo tem a função de fazer a interface com dis-positivos que usam protocolos síncronos, possibilitando integrar sistemasIEDsIntelligent Electronic Devices, CLPs e múltiplos centros de controle.3.6 Protocolos de ComunicaçãoA comunicação entre os dispostivos depende de um protocolo, que é umconjunto de procedimentos padrões que permite a troca de informações viarede. Porém, diversos padrões de protocolos foram criados ao longo do tempopara permitir a troca de informações de diversos dispositivos disponíveis nomercado para as mais diversas aplicações.Portanto, devido a diversidade de protocolos, a interoperabilidade entre osdispositivos em um projeto de automação é um grande desa�o, e os protocolostem um papel fundamental nesse processo.Segundo [27], os protocolos DNP3.0 e o IEC 60870-5-101 são protocolospadronizados, que trouxeram um primeiro nível de interoperabilidade aossistemas de automação de energia, porém ainda é necessário um considerávelesforço de engenharia no sentido de integração dessas informações.A seguir vamos detalhar alguns protocolos utilizados na área de energia.3.6.1 DNP3.0O DNP3.0 (Distributed Network Protocol) é um protocolo de comunicaçãobaseado nos padrões de comunicação IEC 870-5, designado para a indústriaem aplicações de telecontrole. É um protocolo aberto e sem proprietáriodesignado, baseado em um modelo que inclui três camadas do modelo OSI(Open Systems Interconnection), denominadas EPA (Enhanced Performance

3.6 DNP3.0 37Architecture): Camada de Aplicação; Camada de Enlace de Dados e CamadaFísica[28]. Uma pseudo-camada de transporte junto à camada de aplicaçãofaz a separação de mensagens maiores que 249 octetos[27]. As camadas domodelo OSI estão detalhadas no Anexo II e a �gura 3.4 ilustra o modelo:Figura 3.4: DNP3.0 - Arquitetura EPASegundo os autores de [28], é um protocolo muito e�ciente assegurandoalta integridade de dados. Adequado para aplicações em ambiente SCADAcompleto. Possui as seguintes características principais:• Podem existir mais de 65 mil dispositivos com direções diferentes emum mesmo enlace de dados;• Permite mensagens em Broadcast ;• Con�rmações na camada de Enlace e/ou na camada de Aplicação;• Solicitação e respostas com múltiplos tipos de dados em uma únicamensagem;• Permite objetos de�nidos pelo usuário incluindo transferência de ar-quivo;• Segmentação das mensagens em múltiplas partes para garantir umaexcelente detecção de erros e recuperação de partes com erros;• Assegura prioridade a um grupo de dados;• Os dispositivos escravos podem enviar respostas sem serem solicitados;• Suportam uma sincronização temporal com um formato de tempo pa-drão.

3.6 IEC 60870-5-101 / IEC 60870-5-104 383.6.2 IEC 60870-5-101 / IEC 60870-5-104Quando o conjunto de padrões IEC 870-5 foi inicialmente completadoem 1995 com a publicação do per�l IEC 60870-5-101, ele cobriu somentetransmissões sobre comunicação serial com relativamente baixas taxas detransmissão. Com o avanço da tecnologia de comunicação sobre redes, anorma IEC 60870-5 também previu a comunicações sobre redes TCP/IPgerando o protocolo IEC 60870-5-104[27].O IEC 60870-5-101 ou T101 suporta comunicações ponto-a-ponto e mul-tidrop (multiponto) através de canais seriais com baixas velocidades. Elepermite o uso de modo balanceado ou desbalanceado no nível de enlace. Nomodo desbalanceado, somente o mestre pode iniciar a comunicação, transmi-tindo pacotes primários. Isso simpli�ca o projeto do sistema, porque não hánecessidade de suportar controle de colisões, pois todas as requisições são ini-ciadas pela estação mestre. A comunicação balanceada é disponível, mas estálimitada somente a conexões ponto-a-ponto. Embora o T101 possa suportarmensagens não-solicitadas provenientes do escravo, ele não pode fazê-la natopologia multidrop e deve ser empregado um esquema de varredura cíclicapara interrogar as estações secundárias[27].O IEC 60870-5-104 é igual ao IEC 60870-5-101 no nível de aplicação, setrasmite a mesma informação com a mesma condição. Mas substitui o nívelde enlace mestre escravo do T101 pelo protocolo TCP/IP, portanto, ao invésde ter um mestre que pergunta de forma cíclica às UCs se houve evento, essasno momento em que houver um evento o transmitem ao SCADA, em temporeal.3.6.3 ModbusO Modbus é um protocolo desenvolvido pela Modicon Inc.. Sua comuni-cação utiliza a técnica mestre/escravo, em que apenas o dispositivo mestrepode iniciar a comunicação, os dispositivos escravos respondem à solicitaçãode dados do mestre ou realiza a ação solicitada.Suas principais características são:• Comunicação mestre/escravo;• Integridade checada pelo método CRC3;• Conexão serial (RS-232 ou RS-485) com conexão de até 31 módulos;• Permite mensagens em Broadcast ;
3Pequenos blocos de códigos de detecção de erros

3.6 Modbus 39• Conexão TCP/IP sobre ethernet.Os dispositivos podem ser con�gurados para transmitir de dois modos detransmissão serial: ASCII ou RTU. O modo de transmissão de�ne como serãoempacotados os dados na mensagem. No Modbus RTU (Remote Terminal
Unit), para cada palavra de dados da mensagem é enviado apenas um carac-ter no padrão hexadecimal. A principal vantagem do modo RTU em relaçãoao ASCII é a maior densidade de caracteres que é enviada numa mensagem,aumentando o desempenho da comunicação.O Ethernet Modbus ou Modbus TCP/IP fornece um serviço de comu-nicação cliente/servidor entre dispositivos conectados em uma rede ethernetTCP/IP. Tal protocolo é usado para troca de informações em tempo real,fundamental para aplicações de automação.

Capítulo 4
Proposta do Projeto4.1 Arquitetura PropostaDiante de tanta �exibilidade, o projeto poderia ser avaliado abordandoarquiteturas diferentes, mas para manter seus requisitos, não haveria mu-danças radicais e tais não representariam variações signi�cativas no custo doprojeto.Projetos de PCHs são muito importantes para Orteng e a análise com-parativa entre dispositivos pode contribuir para melhor compreensão das ca-racterísticas e funcionalidades dos mesmos, facilitando a decisão, quanto autilização de determinado equipamento, junto aos clientes da empresa.Portanto, o objetivo principal dessa pesquisa é avaliar as vantagens téc-nicas e custos envolvidos numa mesma arquitetura, focando apenas na trocada unidade de controle.A arquitetura apresentada compreende um projeto de uma PCH compotência de 27 MW e LT de 69 kV, composta por três Unidades Geradorasde 9MW cada. A arquitetura proposta pode ser vista na �gura 4.1:Podemos observar na �gura os blocos que compõem o sistema distribuídoda PCH, citados anteriormente.Analisando a arquitetura, pode-se dizer que a rede pode ser subdivididaem três níveis:• Nível 0 - Campo: reguladores, medidores de nível;• Nível 1 - Controle/Proteção: controladores, relés de proteção e switch;• Nível 2 - Supervisão: estações de operação, splitter, switch.40

4.1 Arquitetura Proposta 41Figura 4.1: Arquitetura PropostaA arquitetura proposta apresenta duas hierarquias de rede, denominadas:• Rede de Supervisão;• Rede de Controle.A rede de supervisão é uma rede padrão TCP/IP 100 Mbps, responsávelpor disponibilizar todos os dados importantes para operação do processo nastelas das EOPS's e essa rede compreende as estações de operação, switch,impressora. Na rede de supervisão os dispositivos nível 2 estão interligadosatravés de um switch numa topologia estrela.O splitter é um dispositivo responsável por disponibilizar todos os da-dos de supervisão para um centro de operação remoto através de um sinalproveniente do �o de telefone.Como observado na arquitetura, o projeto tem duas EOPs, tais são re-dundantes e trabalham em regime operacional simultâneo, localizadas dasala de controle da PCH. O software aplicativo da EOP disponibiliza todos

4.1 Arquitetura Proposta 42os recursos de segurança e janelas de operação exigidas para o controle desistemas de energia.A rede de controle é uma rede padrão TCP/IP 100 Mbps, responsávelpor receber os sinais de campo e enviar os sinais de comando ao mesmo, deacordo com lógicas internas das unidades de controle (UCs), ou comandosvindos da EOP. Essa rede compreende as estações de operação, UCs, relésde proteção, switch. Para a rede de controle estão previstos um switch porunidade geradora, um para o serviço auxiliar e um para subestação/LT, quesão responsáveis pela comunicação de alta performance Ethernet, via �braótica.Do ponto de vista de segurança, é interessante isolar o tráfego de controledo tráfego de supervisão através de equipamentos de rede, pois o tráfegode controle é de natureza diversa, caracterizando-se por mensagens curtase muito freqüentes, enquanto na rede de supervisão podem haver arquivosmaiores com menor frequência[11].No projeto foram utilizados 8 switches, de três modelos diferentes. Oswitch modelo ML2400 da GE-Multilin possui 4 portas 10/100 RJ45 e 6portas 100BaseFX-ST multimode e atua como backbone da rede.O backbone é responsável pela interface entre o nível 1 e o nível 2 darede, ou entre a Rede de Supervisão e a Rede de Controle, interconectandoredes de padrões diferentes, visto que interliga uma rede via cabo STP1 àoutra rede via �bra ótica. Esse switch é o equipamento que centraliza todaa comunicação, pois ele interliga todos os blocos ao sistema de supervisão ouEOPs.O switch modelo DES-1226G da D-Link - 24 portas 10/100 RJ45 é res-ponsável por interligar as EOP's ao GPS e à impressora, via cabo STP. Esseswitch é responsável pela interligação da rede de supervisão.Existem também os switches ML600 que possuem 4 portas 10/100 RJ45e 2 portas 100BaseF-ST multimode e estão presentes nos blocos, que repre-sentam os painéis das unidades geradoras, serviços auxiliares e subestação.Tais switches são responsáveis pela conexão entre o backbone, via �bra ótica,às UCs e relés de proteção, via cabo STP. Portanto, o switch garante a in-terconexão de redes de padrões diferentes.Os switches da família Multilin são equipamentos robustos para aplicaçõesem subestações e usinas/PCHs. São dispositivos �exíveis, em que se pode1Um cabo STP é um tipo de cabo par trançado que além de possuir uma malha
blindada global que confere uma maior imunidade às inteferências externas eletromag-nética/radiofrequência, possui uma blindagem interna envolvendo cada par trançado com-ponente do cabo cujo objetivo é reduzir a diafonia. Um cabo STP geralmente possui doispares trançados blindados, uma impedância característica de 150 Ohms e pode alcançaruma largura de banda de 300 MHz em 100 metros de cabo.

4.1 Arquitetura Proposta 43de�nir o número e tipo de portas, suportando portas par trançado, �bra ótica(conectores ST ou SC) ou Gbit. São dispositivos gerenciáveis que oferecemdiversos recursos como con�guração de VLANs, possibilidade de habilitarprioridade de tráfego, apresentam dados estatísticos do tráfego nas portas, apossibilidade de con�guração de uma rede em anel garantindo um caminhoredundante, entre outras características.O GPS RT420, utilizado no projeto, é um relógio de sincronização queutiliza como referência de tempo satélites GPS. O erro máximo da base detempo é menor que 100 ns (1 sigma). A informação de tempo gerada peloRT420 pode ser referenciada à hora local e pode ser modi�cada por regras dehorário de verão de�nidas pelo usuário. O equipamento pode ser energizadopor fontes AC ou DC. A �gura 4.2 apresenta o GPS RT420:Figura 4.2: Vista Frontal e Traseira do RT420Segundo a ONS2 - Submódulo 2.7, as UCs devem:• ter seus relógios internos ajustados com exatidão melhor ou igual a 1(um) milissegundo, com sincronismo por GPS. Os sistemas que aten-dam exclusivamente à supervisão de equipamentos da rede de supervi-são não integrantes da rede de operação não precisam atender a esserequisito;• ter tempo máximo de reinicialização de 5 (cinco) minutos;• ser dimensionados para não perder eventos da SOE. Se ocorrer uma ava-lanche de eventos, todos os eventos devem ser transferidos para o ONS
2Operador Nacional do Sistema Elétrico

4.1 Arquitetura Proposta 44em até 5 (cinco) minutos. Os sistemas que atendam exclusivamente àsupervisão de equipamentos da rede de supervisão não integrantes darede de operação não precisam atender a esse requisito.O padrão IRIG-B possui dois tipos de sinais:• DC Level Shifted (sinal digital);• Amplitude Modulated (sinal analógico).No projeto a sincronização dos dispositivos da Rede de Controle (relés eUCs) será baseado no padrão IRIG-B DC Level Shifted, que é o mais comume que apresenta uma precisão de 100ns, garantindo as exigências do ONS.O SNTP é um protocolo de sincronismo de tempo que utiliza o padrãoethernet de comunicação e apresenta uma precisão de 1ms - 50ms. Portanto,será responsável por sincronizar a Rede de Supervisão.A sincronização por sinal de GPS torna possível a instalação deste equi-pamento em diferentes posições geográ�cas com plena precisão, o que o tornamuito prático. Sua modularidade e �exibilidade permitem adequar o equi-pamento às necessidades especí�cas de cada aplicação.A análise de eventos de diferentes equipamentos é muito frequente emprojetos de PCHs, principalmento pelo sistema de proteção. Portanto, apresença de um GPS para a sincronização dos relés de proteção é fundamen-tal.Os relés digitais de proteção utilizados são da família Multilin UR - GEPower. A família de Relés Universais (UR) é uma família de relés modula-res construídos em uma plataforma comum. Apresentam proteção de altaperformance em comunicações ponto a ponto. A lógica que determina a in-teração de entradas, características e saídas é recon�gurável através do usode equações lógicas (FlexLogic). As entradas e saídas remotas que podemser enviadas através da rede, quando combinadas com circuitos eletrônicos(hardware) de entrada/saída, permite lógica de esquema complexo, ao mesmotempo em que reduz os componentes auxiliares e a �ação. A capacidade deentrada/saída é expansível.As funções da proteção incluem falha à terra, proteção de fase, a proteçãodiferencial, a perda de excitação, a proteção da sobrecarga, a proteção desobretensão, subtensão, sobrecorrente e subcorrente, a proteção anormal dafreqüência da tensão, a veri�cação de sincronismo. Depende do tipo de reléde proteção a ser utilizado. No projeto serão utilizados três tipos diferentesde relés.• UR G60 - relé digital de proteção de gerador;

4.1 Arquitetura Proposta 45• UR T35 - relé digital de proteção de transformador;• UR D30 - relé digital de proteção de linhas de transmissão.Os relés têm três portas de comunicação que operam independentementee simultaneamente. A porta RS232 é acessível através do frontal do relé.A porta RS485 suporta os protocolos Modbus RTU e DNP 3.0 e permitetaxas de comunicação de até 115 Kbps. A terceira porta de comunicaçãoé uma porta 10/100baseF (ou 10/100baseT) com taxa de comunicação a10/100Mbps e utiliza o protocolo MMS/UCA2, Modbus TCP/IP, DNP 3.0,IEC61850 e IEC870-5-104.O controle via LAN, além de eliminar e�cientemente a necessidade deconversores de protocolo (tanto hardware como software) para integrar dispo-sitivos de diferentes fabricantes, também oferece velocidade de comunicaçãoalta[19].As comunicações ponto a ponto, através de Ethernet, permitem controledistribuído com alguns IEDs e elimina a necessidade de um UTR para umSCADA remoto principal[19].A seguir são apresentadas algumas aplicações e características dos relésde proteção.Aplicações• Automação de subestações/fábricas;• Proteção e controle;• Medição de qualidade de energia;• Registrador de falhas;• Manutenção preventiva.Características• Plataforma modular para substituição/atualização/expansão rápidas;• Esquemas con�guráveis utilizando FlexLogic;• Canais AC expansíveis;• Entradas analógicas expansíveis;• Entradas/Saídas expansíveis;

4.1 Cenário 1 - CLP 46• Entradas/Saídas virtuais (redução do custo de hardware);• Oscilogra�a analógica/digital;• Registro de dados (per�s de carga);• Registro de eventos;• Sincronização do tempo IRIG-B;• Modo de teste para forçar os estados dos contatos de Entrada/Saída;• Flash Memory para atualizações de campo;• Auto-diagnósticos;• Módulos deslizantes para facilitar reparos.Deve-se ressaltar que a solução envolvendo dispositivos GE, em sua mai-oria, se deve ao fato de garantir a interoperabilidade entre os mesmos, vistoque esse é o grande desa�o de grandes projetos de automação.Na sequência, vamos analisar arquiteturas contemplando UCs distintas,lembrando que temos 3 UCs destinadas às Unidades Geradoras e 1 desti-nada aos serviços auxiliares. No primeiro cenário vamos avaliar o projetoutilizando-se CLPs, já no segundo cenário, vamos avaliar o uso de UTRs.4.1.1 Cenário 1 - CLPNum primeiro cenário vamos analisar uma arquitetura que contempla ouso de CLPs como unidades de controle, ilustrada na �gura 4.3:O CLP é um dispositivo que atende a aplicações de automação de subes-tações e usinas/PCHs, porém foi criado para atender à automação de proces-sos industriais. O controlador utilizado no projeto é da família PACSystemsda GE Fanuc, portanto, as características técnicas, descritas a seguir, estãobaseadas neste dispositivo.A CPU suporta dois modos de trabalho, o modo de varredura padrão(Standard Sweep mode), em que cada varredura é executada o mais rápidopossível, com tempos consumidos em cada varredura diferentes. No modo devarredura de tempo constante (Constant Sweep Time mode) a CPU realiza amesma série de ações, mas cada varredura leva exatamente o mesmo tempo.Algumas das principais características do controlador PAC estão listadasabaixo:

4.1 Cenário 1 - CLP 47Figura 4.3: Cenário 1 - CLP• Suporta Linguagens IEC (LD, FBD, ST, SFC, IL), Blocos de Funçõesde�nidos pelo usuário, Blocos C desenvolvidos com Toolkit C e progra-mação Motion para módulos integrados;• 2 portas seriais, uma RS-232 e uma RS-485;• Pode ser sincronizado por um GPS nos padrões exigidos pelo ONS;• 10/100Mbits Half/Full duplex;• Barramento de 16 slots, slots universal;• Expansão através dos racks existentes;• Módulo de comunicação serial com duas portas de comunicação inde-pendentes e isoladas;• Cada porta pode ser con�gurada para MODBUS Master, MODBUSSlave, Serial I/O protocol. Para módulos com versão 1.10 ou posterior,

4.1 Cenário 1 - CLP 48cada porta pode ser con�gurada para CCM Slave protocol. Módu-los com versão 1.20 ou posterior, podem ser con�gurados para DNP3protocol;• Comunicação RS-232, RS-485/422;• Menor custo;• Fácil de programar;• Síncrono e com scan rápido;• Permite alterações e implementações de lógicas online.O serviço de SOE não é uma característica padrão em CLPs, mas oscontroladores PAC apresentam um software, no caso o PACSystems RX3iSoft SOE, responsável pelo sequenciamento de eventos, utilizando um módulode entrada digital especí�co, sincronizado por GPS através do padrão SNTPou IRIG-B. O software funciona bem e está sendo utilizado em usinas emoperação.Outra solução é passar todos os pontos de SOE pelos relés de proteção,que são dispositivos sincronizados no tempo através do padrão IRIG-B. Essaé uma solução bem simples, impactando somente num aumento de cartõesde E/S nos relés.Existem diversos cartões para diversas aplicações industriais para os con-troladores PAC, como RTD I/O Modules3, Strain Gage I/O Modules4, Ther-mocouple I/O Modules5, etc. Mas para o projeto os principais são os cartõesde entrada digital, saída digital e entrada analógica, suas características estãodescritas a seguir.O cartão de entrada digital apresenta: 32 entradas discretas, lógica deentrada Positiva/Negativa, taxa de atualização - possui �ltro selecionável de0,5ms até 100ms e range tensão de entrada 0 a 30 volts DC.O cartão de saída digital apresenta: 32 saídas discretas, lógica de saídapositiva e range tensão de saída 10,2 a 30 volts DC.O cartão de entrada analógica apresenta: 16 entradas analógicas e rangesde entrada: 4 a 20 mA, 0 a 20mA.Os controladores PAC3Xi, suportam os seguintes tipos de rede:• Serial (Ponto-a-Ponto ou Multidrop);
3Permite a conexão direta de sensores RTD(Resistence Temperature Detectors) ao CLP4Entradas de milivolt provenientes de sensores Strain Gauge podem ser conectados
diretamente ao CLP5Sensores de temperatura do tipo Termopar podem ser conectados diretamente ao CLP

4.1 Cenário 1 - CLP 49• Ethernet;• Proprietária (GENIUS);• Pro�bus;• Hart;• DeviceNet.O CLP é um dispositivo que possui a habilidade de adquirir dados deoutros IEDs, mas por ser um dispositivo voltado para automação industrial,sua biblioteca de protocolos garante uma melhor integração de processosindustriais. Oferece suporte à alguns protocolos utilizados na área de energia,porém, mais limitado, se comparado à UTR.A tabela 4.1 detalhe os protocolos utilizados na arquitetura apresentadano cenário 1:Rede Equipamentos Conectados ProtocoloNível 0 Reguladores Modbus RTUMedidores de NívelNível 1 Controladores (CLP) Ethernet ModbusRelés de Proteção (UP)Switchs Nível 1Nível 2 Splitter IEC-60870-5-101Estações de Operação (EOP) IEC-60870-5-104Switch Nível 2Sincronismo Estações de Operação (EOP) Ethernet (SNTP)GPS IRIG B DC ShiftControladores (CLP)Relés de Proteção (UP)Tabela 4.1: Redes e Protocolos - CLP

4.1 Cenário 2 - UTR 504.1.2 Cenário 2 - UTRNo segundo cenário, podemos observar a utilização de UTRs. Veja �gura4.4: Figura 4.4: Cenário 2 - UTRAs UTRs são dispositivos que realizam a interface entre os instrumentosde campo e o SCADA. São utilizadas para aquisição de dados do campo,execução de comandos, execução de funções de autoteste e autodiagnose,registro de timestamp e pré-processamento de alarmes, eventos e medições,e enviar as informações às EOPs.A Unidade de Controle utilizada é a D20 da GE, baseada numa arqui-tetura distribuída de processo que consiste de um ou mais processadores,módulos periféricos de entrada/saída, fontes de alimentação e dispositivos decomunicação.A habilidade de adquirir dados de outros IEDs é fundamental para aautomação e as UTRs D20/D200 tem uma ampla biblioteca de protocolosutilizados na área de energia para comunicação com IEDs, reservando umaintegração rápida e e�ciente entre os seguintes IEDs:

4.1 Cenário 2 - UTR 51• Relés de proteção;• Medidores de Potência;• Gravador digital de faltas;• Monitor da qualidade de energia;• Controlador de banco de capacitores;• Controlador Load Tap Changer (LTC);• CLP.A comunicação entre o processador principal e os periféricos de E/S ocorreatravés de porta serial dedicada e de alta velocidade. Os dados de campocoletados pela D20 são armazenados em valor bruto na base de dados dosistema de modo que qualquer aplicativo pode solicitar e utilizar os mes-mos dados. Depois que o dado de campo é processado, este é armazenadoseparadamente dos dados obtidos em valor bruto.A UTR em questão possui uma biblioteca completa de aplicações emautomação disponível, aumentando a con�abilidade e a e�ciência de sistema,entre elas:• automação de geração, transmissão e distribuição de energia;• serviços de comunicação;• registro/ armazenamento de dados;• redução de dados, compactação;• conversão do formato de dados;• Programação no padrão IEC 61131-3.O controlador D20 está habilitado a conversar com dispositivos de outrosfabricantes devido à grande biblioteca de protocolos que suporta, favorecendoa comunicação com IEDs e estações de operação, entre eles:• DNP 3.0;• IEC 60870-5-101/103/104;• IEC 61850 (Server);

4.1 Cenário 2 - UTR 52• Modbus.O Anexo I apresenta uma lista mais detalhada dos protocolos suportadospela UTR.Para a comunicação ethernet, existem as seguintes placas de interface derede:• 10BASET: RJ-45;• 10BASEFL: Fibra óptica com conector ST;• 10BASE2: Coaxial.Os cartões do E/S da D20 estão disponíveis em versões padrão e de altatensão. As versões de alta tensão dos cartões são eletricamente mais robus-tas do que as versões padrão, e atendem uma escala mais ampla dos padrõesindustriais. Estes padrões, que inclua padrões do IEC para a descarga ele-trostática, a susceptibilidade à radiofrequência (RFI), o esforço elétrico, e avibração.Os cartões de E/S são módulos inteligentes que contém microprocessado-res on-board. Eles são con�gurados como escravos do processador principal.A comunicação com os cartões de IO é em alta velocidade, um link de controlede dados de alto nível, D.20 Link6.Os módulos de entrada e saída são responsáveis pela aquisição dos dadosde campo e dentre eles temos:• D20S com capacidade para 64 entradas digitais;• D20A com capacidade para 32 entradas analógicas;• D20K com capacidade para 32 saídas de controle;• D20C com 16 entradas digitais e 8 saídas digitias. Opcional 16 entradasanalógicas ou 8 entradas analógicas e 8 saídas analógicas;• D20AC até 15 entradas diretas AC e 1 entrada direta DC.A D20 pode suportar até:• 31 cartões de IO sem repetidores e até 120 cartões de IO com repeti-dores;• 7 portas seriais (RS-232 ou RS-485) mais 1 porta serial de manutenção,por processador;
6O Link D.20 é um link serial RS-485, com operação half-duplex à 250 kbps.

4.1 Cenário 2 - UTR 53• 2 canais de ethernet.Como podemos observar o dispositivo é bastante �exível, devido às diver-sas combinações entre os módulos disponíveis, facilitando também expansõesquando necessário, devido a sua estrutura modular.Segundo [26], a diferença entre os CLPs e as UTRs está em que os pri-meiros possuem maior �exibilidade na linguagem de programação e controlede entradas e saídas, enquanto as UTRs possuem uma arquitetura mais dis-tribuída entre sua unidade de processamento central e os cartões de entradae saída com maior precisão e sequenciamento de eventos.O autor em [34] destaca que o MTBF7 médio de UTRs e de CLPs é 11 e17 anos respectivamente.Como podemos observar as UTRs são equipamentos mais adequados paraaplicações em sistemas de geração de energia, algumas de suas vantagens são:• Permite fazer a função SOE Sequência de Eventos;• A UTR possui isolamento para atender a norma IEC 255 (suporta2,5kV nos pontos dos cartões);• Possui sincronismo de GPS (sinal IRIG-B);• Possui suportabilidade à interferências eletromagnéticas e campos elé-tricos característicos;• Realiza medições elétricas e sincronismo;• Suporte aos protocolos de comunicação para sistemas elétricos.A tabela 4.2 detalhe os protocolos utilizados na arquitetura apresentadano cenário 2:
7O MTBF(tempo médio entre falhas) do dispositivo pode ser usado para prever comodisponível um sistema da automatização será e como frequentemente a equipe de funcio-nários de manutenção estará substituindo dispositivos falhados.

4.1 Análise de Custos 54Rede Equipamentos Conectados ProtocoloNível 0 Reguladores Modbus RTUMedidores de NívelNível 1 Controladores (UTR) DNP3.0 TCPRelés de Proteção (UP)Switchs Nível 1Nível 2 Splitter IEC-60870-5-101Estações de Operação (EOP) DNP3.0 TCPSwitch Nível 2Sincronismo Estações de Operação (EOP) Ethernet (SNTP)GPS IRIG B DC ShiftControladores (UTR)Relés de Proteção (UP)Tabela 4.2: Redes e Protocolos - UTR4.1.3 Análise de CustosUm levantamento real para a automação de uma PCH de 27MW, com trêsunidades geradoras de 9MW cada, baseado em projetos anteriores da empresafoi feito. Foram de�nidas o número de entradas e saídas, digitais e analógicase, consequentemente, o número de cartões de E/S para cada solução. Astabelas 4.3 e 4.4 apresentam o levantamento de pontos necessários:Tipo de Cartão Número de Pontos NecessáriosSaída Digital 34Entrada Digital 127Entrada analógica 14Tabela 4.3: Pontos de E/S necessários para uma Unidade GeradoraTipo de Cartão Número de Pontos NecessáriosSaída Digital 22Entrada Digital 159Entrada analógica 8Tabela 4.4: Pontos de E/S necessários para os Serviços AuxiliaresPortanto, chegou-se a conclusão que para o cenário 1, são necessáriospara cada Unidade Geradora dois cartões de saídas digitais, quatro cartõesde entradas digitais e um cartão de entradas analógicas. Para o Serviços

4.1 Análise de Custos 55Auxiliares são necessários um cartão de saídas digitais, cinco cartões de en-tradas digitais e um cartão de entradas analógicas. Portanto, visto termostrês Unidades Geradoras, para o projeto temos um total de sete cartões desaídas digitais, dezessete cartões de entradas digitais e quatro cartões de en-tradas analógicas. A tabela 4.5, mostra a distribuição de cartões no cenário1: Tipo de Cartão UG1 UG2 UG3 SAUX TotalSaída Digital 2 2 2 1 7Entrada Digital 4 4 4 5 17Entrada analógica 1 1 1 1 4Tabela 4.5: Número de cartões para a solução apresentada no cenário 1Para o cenário 2, são necessários dois cartões de saídas digitais, doiscartões de entradas digitais e um cartão de entradas analógicas para cadaUnidade Geradora. Para os Serviços Auxiliares são necessários um cartãode saídas digitais, três cartões de entradas digitais e um cartão de entradaanalógica. Portanto, temos um total de sete cartões de saídas digitais, novecartões de entradas digitais e quatro cartões de entradas analógicas. A tabela4.6, mostra a distribuição de cartões no cenário 2:Tipo de Cartão UG1 UG2 UG3 SAUX TotalSaída Digital 2 2 2 1 7Entrada Digital 2 2 2 3 9Entrada analógica 1 1 1 1 4Tabela 4.6: Número de cartões para a solução apresentada no cenário 2Uma especi�cação técnica de todos os equipamentos que compõem as ar-quiteturas propostas nos cenários também foi realizada. Assim, foi repassadoao departamento comercial da empresa a especi�cação e o número de cartõesde E/S necessários, para que o mesmo realizasse o levantamento detalhadodos custos para cada solução. Infelizmente os valores não podem ser divulga-dos por serem dados sigilosos da empresa, portanto não pude ter os dados emmãos para melhor trabalhá-los e realizar minhas próprias análises. Mas con-sidero que as informações de custo contidas nesse trabalho, são importantese re�etem bem a realidade de projetos de PCHs para a empresa.A empresa oferece ao mercado produtos customizados, portanto o pri-meiro projeto desenvolvido na empresa de qualquer produto tem um custode engenharia 20% superior ao custo dos próximos de mesma natureza, porexemplo um painel de aquisição e controle. Hoje, a empresa já apresenta ao

4.1 Análise de Custos 56mercado um projeto sólido de painéis de aquisição e controle que contemplamCLP ou UTR. Podemos dizer que a solução para automação de PCHs é bemsólida e padronizada na empresa.O departamento comercial faz o levantamento de custos do projeto sepa-rando em grupos como unidade de proteção, unidade de aquisição e controle.Ao �nal do levantamento tem-se a porcentagem do custo que cada gruporepresenta. Portanto as informações que tive acesso são resultado dessa dis-tribuição em grupos e a análise dos custos está em porcentagem por grupo.Assim, chegou-se a conclusão que em projetos de automação de PCHscomo a proposta, 60 a 70% dos custos estão relacionados a material e 40 a30% relacionadas a serviços. Além disso as unidade de proteção representam20 a 30% dos custos relacionados a material e as unidades de aquisição econtrole também representam 20 a 30% desses custos. A tabela a seguir listaos materiais e serviços:Material HardwareSoftwarePainéisServiços HH EngenhariaHH TécnicoHH FábricaDespesas de viagemTabela 4.7: Material e ServiçosCom o levantamento �nal do projeto chegou-se a conclusão que a solu-ção apresentada no cenário 1, utilizando o CLP como unidade de controle,apresenta um custo 15% menor que a solução apresentada no cenário 2, queutiliza UTRs.Os custos relacionados a serviços são semelhantes em ambos os cenários.Portanto, a diferença nos custos se re�ete somente aos investimentos emmateriais.Infelizmente, por política de sigilo da empresa, não pude ter acesso aosdados detalhados para análises individuais e mais aprofundadas. Mas dequalquer forma temos a informação mais importante, que é a diferenças decusto entre os dois cenários propostos.Em projetos de automação no mercado de energia a busca por melhordesempenho induzem a redução no custo de manutenção. E como vimos an-teriormente, as unidades de controle são equipamentos robustos com MTBFaltos. Além disso, experiências na Orteng comprovam o fato, visto que ma-nutenções nesses dispositivos não são frequentes.

4.1 Análise de Custos 57A solução utilizando UTR apresenta como vantagem ser um equipamentovoltado para automação de usinas e subestações, portanto contempla todasas características técnicas necessárias para atender aos requisitos do projeto,exigido pelo ONS e pelos clientes. Porém, se mostra uma solução mais cara.Já a solução utilizando CLP, que são equipamentos voltados para a auto-mação industrial, atende à automação de uma PCH, visto sua �exibilidadee disponibilidade de recursos que garantem o atendimento de todos os requi-sitos que uma PCH exige e com menor custo.

Capítulo 5
ConclusãoÉ importante ressaltar que mesmo sendo um trabalho mais teórico, esseilustrou uma arquitetura real que atende aos requisitos do projeto de umaPCH com potência de 27 MW e LT de 69 kV. Portanto, uma pesquisa bemdetalhada e bastante abrangente foi realizada. Neste capítulo são apresen-tados os resultados e as di�culdades encontradas no desenvolvimento dessetrabalho, além de perspectivas futuras e propostas de continuidade.5.1 ResultadosCom esse trabalho observamos que as duas unidades de controle sãobem parecidas e aplicáveis em sistemas de geração de energia, como PCHs.Observou-se, também, que os dispositivos tem muitas caraterísticas comuns,como estrutura modular, suporte a diversas interfaces de comunicação, su-porte a programação de lógicas de controle, entre outras.Os CLPs são dispositivos poderosos com suporte a diversas interfacesindustriais, �exíveis, de baixo custo e fácil de programar, porém voltados paraprocessos industriais. Por não ser um equipamento voltado para processosde geração de energia, alguns recursos devem ser acrescentados para que aUC atenda à aplicação. Mas como observamos nesse trabalho o dispositivo,que apresenta uma estrutura modular, é bastante �exível e oferece suporteàs tecnologias necessárias à projetos de geração de energia, como exemplo osuporte a SOE. Outra observação é o suporte mais limitado aos protocolos deenergia, o que pode di�cultar a integração do sistema, mas como observamosnesse trabalho, com o detalhamento da arquitetura proposta, isso não chegaa ser um problema.As UTRs são dispositivos desenvolvidos para aplicações em subestações,logo é facilmente aplicada a usinas/PCHs, visto o suporte à diversos pro-58

CAPÍTULO 5. CONCLUSÃO 59tocolos, o sincronismo via IRIG-B, o suporte a SOE, a suportabilidade àinterferências eletromagnéticas e campos elétricos característicos e o isola-mento nos pontos dos cartões de 2,5kV, conforme norma IEC 255. En�msão equipamentos mais caros, mas mais adequados para a aplicação, ofere-cendo segurança e con�abilidade, além de facilitar a integração do sistemagarantindo as exigências de projeto.A interrupção no fornecimento de energia pode ter grandes impactos.Analisando o setor industrial, uma interrupção pode trazer enormes prejuí-zos em poucas horas devido à parada de produção. Já a falta de energia nascidades provoca transtornos como caos no transporte, visto que os semáforosse apagam e as linhas de metrô �cam interrompidas; a grande maioria dosserviços �cam interrompidos, como serviços bancários, elevadores, postos degasolina, entre outros. Portanto, sistemas de geração de energia são muitoimportantes no cenário nacional e a con�abilidade, segurança e disponibili-dade do processo são características fundamentais e de primeira necessidade.Visto as características técnicas das UCs em um projeto real, pode-seconcluir que ambos os cenários atendem aos requisitos exigidos em projetos deautomação de PCHs, garantindo a con�abilidade, segurança e disponibilidadedo processo.Conforme a pesquisa, as UTRs apresentam características qua facilitama integração e implementação atendendo aos requitos do sistema. Porém,segundo literatura cientí�ca, os CLPs apresentam MTBF pouco maior queas UTRs, experiências con�rmam que esses dispositivos oferecem todos os re-cursos necessários à automação de PCHs e apresentam um custo 15% inferiorà solução com UTRs.Diante de duas tecnologias que atendem ao projeto em questão, impli-cando em diferenças tão peculiares, podemos dizer que o conhecimento dascaracterísticas técnicas, os custos relativos e as exigências ou escolhas dosclientes são fatores fundamentais para a decisão do cenário a ser implemen-tado.5.2 Considerações FinaisO trabalho apresentado representou um desenvolvimento válido, vistoa grande pesquisa e a aplicação de muitos conhecimentos vistos na teoria,durante o curso de Engenharia de Controle e Automação. Foi um trabalhode pesquisa grande e complexo, visto a in�nidade de informações envolvidase as múltiplas soluções oferecidas no mercado.Atuando como pro�ssional pude acompanhar o desenvolvimento de pro-jetos de automação de PCHs e estudar as diversas tecnologias existentes,

5.3 Propostas de Continuidade 60di�culdades de integração, requisitos do sistema, funcionamento, caracterís-ticas, vantagens e funções dos dispositivos, protocolos de comunicação, espe-ci�cação de material, levantamento de pontos e cartões de E/S, de�nição dearquitetura, etc. A pesquisa envolvida nesse trabalho foi válida e me enri-queceu como pro�ssional, mas me fez perceber que essa área tem muito a serestudada, pois as informações estão distribuídas em manuais, em equipamen-tos e tecnologias diferentes. O cruzamento e a integração dessas informaçõesé o grande desa�o da área. Soluções existem diversas, a di�culdade é de�nirqual é a melhor solução para cada caso.Algumas di�culdades foram encontradas devido a inexperiência e a faltade informações práticas, mas pude contar com pro�ssionais que me ajudaramna busca de informações relevantes para o projeto e para a minha análise. Aunião de todas as informações contidas nesse trabalho, também não foi umatarefa fácil, visto a grande quantidade de informação distribuída em manuais,artigos, além do conhecimentos práticos dos pro�ssionais da área.Quanto aos custos, inicialmente, tentei conseguir os valores diretamentecom fornecedores, mas infelizmente não tive retorno em nenhuma tentativa.A impossibilidade de trabalhar com os dados de custo do projeto impediuanálises mais detalhadas e talvez melhores conclusões para esse trabalho.Mas a política de sigilo da empresa deve ser respeitada e os dados fornecidosjá apresentam as informações fundamentais para a tomada de decisão entreos cenários.Portanto, acredito que o objetivo desse trabalho foi atendido visto a abor-dagem prática de conhecimentos adquidos durante o curso de graduação e aconclusão dos resultados baseados em argumentos técnicos e �nanceiros deuma pesquisa bem abrangente.5.3 Propostas de ContinuidadeObservamos que em projetos de automação o grande desa�o é a comuni-cação entre os diversos dispositivos e a di�culdade de integrar equipamentosde fabricantes e gerações diferentes. Neste trabalho observamos o fato, vistoque a solução em sua maioria é do fornecedor GE, para facilitar e evitar essetipo de problema.Hoje, encontra-se disponível e é bastante utilizada a norma IEC 61850,em que seu principal objetivo é garantir a interoperabilidade entre os IEDs.A mesma padroniza a modelagem e os serviços de transmissão de dados,útilizando protocolos como o MMS (Manufacturing Message Speci�cation), oTCP/IP (Transmission Control Protocol/Internet Protocol) e UDP/IP (UserDatagram Protocol/Internet Protocol).

5.3 Propostas de Continuidade 61Uma forma de transmissão de dados entre diferentes IEDs é através dasmensagens GOOSE. As mensagens GOOSE são de�nidas no IEC 61850 paraa transmissão de informações de alta prioridade entre equipamentos, comocomandos de trip, ou informações de intertravamento. O GOOSE é baseadono envio assíncrono de variáveis binárias, orientado a eventos e direcionadaàs aplicações de proteção em subestações[27].O autor [30] diz que o padrão IEC 61850 com sua abrangência no nívelde subestação, nível de vão e nível de processo de um sistema de automaçãode subestação esta se tornado um padrão de comunicação mundial. Elepossibilita a interoperabilidade sem utilização de conversores e isso asseguraos investimentos das empresas contra mudanças tecnológicas no futuro.O padrão apresenta ainda como vantagens o uso de comunicação de altavelocidade e elevada con�abilidade, baseada em redes Ethernet; a reduçãode cabos utilizados, que facilita o comissionamento e reduz a probabilidadede falhas; �exibilidade e facilidade de expansão do sistema.Segundo [31], testes realizados previamente no laboratório propiciam umaredução de 40% no tempo de comissionamento do sistema de automação decada subestação. O uso de mensagens GOOSE via protocolo IEC 61850reduziu o volume de cabos de cobre utilizados no projeto de modernizaçãoem 50%, quando comparado às soluções tradicionais.Porém, o padrão se aplica a subestações e não à usinas e PCHs. Mas em2003, iniciou-se um estudo que se refere à comunicação para monitoramentoe controle de plantas hidrelétricas, hoje nomeada IEC 61850 Parte 7-410. Oobjetivo principal dessa parte da norma é o de especi�car a modelagem quepermita a aplicação integral da norma IEC 61850 em usinas. Em julho de2007 foi emitido o FDIS (Final Draft International Standad) que contemplaessa parte da norma sobre desenvolvimento de projetos de automação deusinas hidrelétricas.A parte 7-410 da norma IEC 61850 traz para o ambiente das usinashidrelétricas a vantagem de se ter um único protocolo de comunicação entredispositivos eletrônicos inteligentes[32].Podemos concluir que as vantagens do uso da norma são inúmeras e a suautilização em projetos de usinas hidrelétricas possível. Portanto, a normaaliada aos relés digitais, pode representar um ganho signi�cativo, visto osbenefícios em e�ciência, con�abilidade e �exibilidade oferecidos pelo padrão,além de um custo reduzido na implementação dos projetos.

Anexo I
Protocolos - UTR D20A lista abaixo mostra uma pequena amostra de protocolos suportadopelas UTRs D20/D200 da GE Enery.A lista seguinte sumariza os protocolos de comunicação Sub-mestres su-portados pela D20/D200:• 8979• ACCUSONIC FLOW METER62

Anexo 63• Allen Bradley ANSI X3.28 DCA• BECO 2200• BOEING 3050• CDC TYPE II• COOPER 2179• DNP V1.00 (QUANTUM METERS)• DNP V3.00• DPU• ENVIC DMCP-20A• FLUKE R© TEMPERATURE RECORDER• GE R© DGP• GEC COURIER PROTOCOL• GEC SCADA PACKET• HARLEY LTC-MAP• HARRIS 6000• HNZ• IEC R© 870-5-101• IEC 870-5-103• INCOM• INDACTIC 33• JEM 2• LEEDEX DTMF• LILCO ASCII• MD3000• MICRO II

Anexo 64• MODBUS• POWER MEASUREMENT LIMITED 3710• ACM METER• Procontrol P14• PROGRAMMABLE SYNCROCHECK• RELAY (PSR)• PSI QUAD 4+• QUANTUM METERS SCANNER• ROCKWELL• RUGBY CLOCK• SAG R© PROTECTIVE DEVICE• SC1801• SEL GATEWAY• SINAUT 8-FW 512/1024• SINAUT 8FW-512-PCM• SPA BUS• SUNDAS RMS• SYPROTEC HYDRAN• UCA 2.0• VANCOM

Anexo II
Camadas do Modelo OSIPara facilitar o processo de padronização e obter interconectividade entredispositivos e redes diferentes foi desenvolvido pelo ISO (International Stan-dards Organization), no início da década de 1980, um modelo de 7 camadasdestinado a servir de referência para o desenvolvimento de protocolos padro-nizados. Esse modelo foi denominado OSI(Open System Interconnection) eas 7 camadas estão descritas a seguir:1. Camada Física: - de�ne as características físicas (nível de tensão, cor-rente, dispositivos de conexão etc.) e é responsável pelo envio de bitspara o meio físico. Trabalha basicamente com as características mecâ-nicas e elétricas do meio físico, como por exemplo: número de volts quedevem representar os níveis lógicos "1"e "0"; velocidade máxima datransmissão; transmissão simplex, half duplex ou full duplex; númerode pinos do conector e utilidade de cada um; diâmetro dos condutores.Como exemplos de padrões relacionados com à camada física temoso padrão RS-232, que permite comunicação até 15 metros e o padrãoRS-485, que pode alcançar 1200 metros com 32 equipamentos no bar-ramento.2. Camada de Enlace: - é responsável por receber/transmitir uma seqüên-cia de bits para a camada física e pelo controle e detecção de erros.Estabelece o início da mensagem e o seu comprimento. Indica o desti-natário e o remetente da mensagem. Uma característica desta camadaé habilitar a transmissão dos frames (pacotes).Esta camada requer acon�rmação dos dados enviados. Se uma con�rmação não é recebida,o dado é enviado novamente.3. Camada de Rede: - reconhece a topologia e distribuição da rede, bemcomo os equipamento de origem e destino e faz o roteamento da in-formação. Também é função dessa camada o controle de congestiona-65

Anexo II 66mento e a contabilização do número de pacotes ou bytes utilizados pelousuário, para �ns de tarifação.4. Camada de Transporte: - Fornece os meios para que os nós local eremoto possam trocar dados. Mantém e termina a comunicação entreduas máquinas. Comprova se os dados enviados coincidem com osrecebidos. Multiplexa as várias requisições vindas da camada superiorem uma única conexão de rede e divide as mensagens em tamanhosmenores, a �m de que possam ser tratadas pelo nível de rede.5. Camada de Sessão: - É responsável pelo estabelecimento da conexãoentre os dois IEDs que estão se comunicando. Controla o diálogo entreas aplicações locais e remotas. Este nível oferece dois tipos principaisde diálogo: half duplex e full duplex. Agrupa dados em blocos e osmarca após envio. Assim, se a mensagem for longa e a comunicaçãotiver sido perdida depois que parte dos blocos foi enviada, será possívelrecomeçar a transmissão a partir do ponto em que foi perdida.6. Camada de Apresentação: - é responsável por assegurar que a infor-mação seja transmitida de tal forma que possa ser entendida e usadapelo receptor. Converte os dados da aplicação em um formato comumà rede. Alguns exemplos de representação de dados são criptogra�a ecompressão de dados.7. Camada de Aplicação: - é a camada que é visível ao usuário. Corres-ponde aos programas que estiverem sendo utilizados e para os quais asdiversas camadas da comunicação são transparentes. Esta camada for-nece ao usuário uma interface que permite acesso a diversos serviços deaplicação, convertendo as diferenças entre diferentes fabricantes paraum denominador comum.

Referências Bibliográ�cas[1] MIBIELLI, A.; FASSINA M.; PAIVA P. M. P.; ZENI N. Integração deSistemas na Pequena Central Hidrelétrica. VI Simpósio Brasileiro sobrePequenas e Médias Centrais Hidrelétricas, 2008, Belo Horizonte.[2] BOZZETTO, J. L.; BIANCHI F. C. Sistema Integrado para o Controle dePCHs COACH.. VI Simpósio Brasileiro sobre Pequenas e Médias CentraisHidrelétricas, 2008, Belo Horizonte.[3] FILHO, G. L. T.; JÚNIOR A. S.; CAMPOS B. T. L. C.; SILVA, E. S.O Panorama Atual das PCHs na Região Sudeste e Nordeste do Brasil..AGRENER GD, 2006[4] FILHO, G. L. T.; GALHARDO, C. R.; FERRARI, J. T. Um Panoramadas Pequenas Centrais no Brasil.. Tecnical Articles 2006-2007.[5] Site do PROINFA, acessado em setembro de 2008:<http://www.mme.gov.br/programsdisplay.do?prg=5>.[6] Site do CERPCH, acessado em setembro de 2008:<http://www.cerpch.unifei.edu.br>.[7] TIAGO, G. L.; GALHARDO,C. R.; ANTLOGA, J. G.; FERRARI, J.T. A Evolução Histórica do Conceito das Pequenas Centrais Hidrelétri-cas no Brasil. V Simpósio Brasileiro sobre Pequenas e Médias CentraisHidrelétricas Florianópolis SC, 03 A 06 DE Abril DE 2006[8] Documentação ORTENG: WORKSTATEMENT.[9] Documentação ORTENG: Proposta Técnica.[10] FILHO, C. S. Evolução dos Sistemas de Controle. Acessado em dezem-bro de 2008: <http://www.cpdee.ufmg.br/ seixas/PaginaII/Download>.13/08/2002 67

REFERÊNCIAS BIBLIOGRÁFICAS 68[11] FILHO, C. S. Arquiteturas de Sistemas de Automação - Uma Introdu-ção. Acessado em dezembro de 2008: <http://www.cpdee.ufmg.br/ sei-xas/PaginaII/Download>.[12] SOUSA, L. B. Redes de Computadores - Dados, Voz e Imagem. Página255. Editora Érica. 2a Edição - 1999[13] Reason Tecnologia S.A. Manual de Referência - RT420.[14] Reason Tecnologia S.A. Manual de Referência - RT2000.[15] KUROSE, J. F; ROSS, K. W. Redes de Computadores e a Internet -Uma Nova Abordagem. Edição 2003[16] ALVES, S. A matemática do GPS. Revista do Professor de Matemática- Página 17. 2006[17] MENDES, L. T. S.; SANTOS, M. M. Notas de Aula Informática Indus-trial. Acessado em março de 2009: <http://www.cpdee.ufmg.br/ luizt>[18] ULYSSÉA, M. S. De�nição da Periodicidade Ótima da ManutençãoPreventiva de Relés de Proteção. Florianópolis 2002[19] Manual GE Power Management: UR Família de Relés Universais GE[20] FILHO, C. S. TCP/IP em Aplicações de Tempo Real Um estudode caso. Acessado em março de 2009: <http://www.cpdee.ufmg.br/ sei-xas/PaginaSDA/Download/DownloadFiles/RealTimeTCPIP.PDF>.[21] FILHO, C. S.; Szuster, M. Programação Concorrente em AmbienteWindows - Uma Visão de Automação Editora UFMG 2003[22] PELLEGRINI, C. C.; SCOLA, L. A. Geração de Potência. UniversidadeFederal de São João Del-Rei. 2005[23] JÚNIOR, F. G. F. Metodologia para Re-Sintonia de Controladores PIDIndustriais. Universidade Federal do Rio Grande do Norte - Dissertaçãode Mestrado. Fevereiro de 2006[24] GUZELLA, M. S. Supervisão e Controle de Partida e Parada das Unida-des Geradoras de uma Usina Hidrelétrica. Universidade Federal de MinasGerais - Monogra�a de Graduação. 2008[25] JOHNSON, T. L. Improving automation software dependability: A rolefor formal methods?. ScienceDirect. Editora Elsevier. 2007

REFERÊNCIAS BIBLIOGRÁFICAS 69[26] PINHEIRO,J. M. S. Introdução às Redes de Supervisão e Controle. Aces-sado em Outubro de 2009: <http://www.projetoderedes.com.br/artigos>.2006[27] SIQUEIRA, R. P.; FONSECA,K. V. O. Protocolos abertos em sistemasde automação de energia: uma análise comparativa entre o DNP3.0, o IEC60870-5-101 e o novo protocolo IEC 61850. VII Simpósio de Automaçãode Sistemas Elétricos - SIMPASE. 2008[28] SILVA, C. E. G; ROSSI, R.; REIS, L. O. M.; LAMAS, W. Q. Digitaliza-ção de Subestação de Energia - Parte 1. Mecatrônica Atual - AutomaçãoIndustrial de Processos e Manufatura, no 27. Abril-Maio/2006[29] SILVA, S. E. L. Exploração de Recursos de Automação de Subestações.VII Simpósio de Automação de Sistemas Elétricos - SIMPASE. 2008[30] RODRIGUES, J. R. M.;HOGA, C. Tendências Técnológicas em Auto-mação de Energia. VII Simpósio de Automação de Sistemas Elétricos -SIMPASE. 2008[31] KIMURA, S.; ROTTA, A.; ABBOUD, R.; MORAES, R.; ZANIRATO,E.; BAHIA, J. Aplicação do IEC 61850 no Mundo Real: Projeto de Mo-dernização de 30 Subestações Elétricas. Acessado em Outubro de 2009:<http://www.selinc.com.br/arttecnicos/IEC618506308.pdf >[32] MALAFAIA, M. T. IEC 61850 Parte 7-410: Principais modi�cações in-cluídas e seus impactos. VII Simpósio de Automação de Sistemas Elétricos- SIMPASE. 2009[33] PEREIRA, A. C.; FILHO, J. M. O.; CORREIA, J. R. G.; CÁCERES,D.; PELLIZZONI, R. Automação de Subestações e Usinas Estado da Artee Tendências Utilizando a Norma IEC 61850. VII Simpósio de Automaçãode Sistemas Elétricos - SIMPASE[34] DOLEZILEK, D. J. Choosing Between Communications Processors,RTUS and PLCS as Substation Automation Controllers. VII SCHWEIT-ZER ENGINEERING LABORATORIES, INC. PULLMAN, WASHING-TON USA . 17/10/2000[35] PEREIRA, A. C. Integração dos Sistemas de Proteção, Controle e Au-tomação de Subestações e Usinas - Estado da Arte e Tendências. Teseapresentada à COPPE/UFRJ. Rio de Janeiro. ABRIL DE 2005