Embed Size (px)
Citation preview

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
I
Trabalho de Graduação
Aluno: Marcela Antunes Galhardi
Orientador: Prof. Dr. Vicente Lopes Junior
Ilha Solteira, julho de 2010
Avenida Brasil Centro, 56 - Caixa Postal 31 - CEP 15385-000 - Ilha Solteira - SP – BRASIL
Fone: 18 3743-1000 Fax: +55 18 3742-2735
GUIA DE POWER HARVESTING :
HISTÓRIA, EVOLUÇÃO E FUNDAMENTOS

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
II
DEDICATÓRIA
Dedico esse trabalho aos meus amados pais, Ivonete e Maurício e a meu querido João Fábio, que são meu alicerce e minha força.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
III
AGRADECIMENTOS
Agradeço primeiramente ao Prof. Dr. Vicente Lopes Júnior, pela oportunidade
de fazer parte do Grupo GMSINT, por depositar tanta confiança em seus orientados,
pela paciência e maestria e pelo sempre bom humor.
A meus amigos, que compartilharam comigo tão bons momentos e que sempre
estiveram ao meu lado nos maus momentos.
À minha banca examinadora pela imensa paciência, disponibilidade e atenção, e
pelas contribuições enriquecedoras.
Agradeço a cada um de meus professores cujos ensinamentos técnicos e pessoais
guardarei sempre na memória. Graças a vocês hoje posso iniciar minha carreira com
confiança e determinação.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
IV
Sumário
OBJETIVOS E MOTIVAÇÃO ......................................................................................................... 1
RESUMO ............................................................................................................................................ 2
1.1 Definição de energia ............................................................................... 3
1.1.1 Energia potencial ............................................................................... 4
1.1.2 Energia cinética ................................................................................. 4
1.2 A transformação de energia ................................................................... 4
1.3 A Conservação de energia ...................................................................... 6
1.4 Transdutores de energia ......................................................................... 6
1.4.1 Transdutores resistivos ...................................................................... 8
1.4.2 Transdutores capacitivos ................................................................... 8
1.4.3 Transdutores Indutivos ...................................................................... 8
1.5 A Transdução Piezelétrica ...................................................................... 9
1.5.1 Aplicações de materiais piezelétricos ................................................ 13
CAPÍTULO 2 – FUNDAMENTOS DE POWER HARVESTING................................................. 14
2.1 Definição e Motivação .......................................................................... 14
2.2 Comparação entre diferentes transdutores de energia para Power
Harvesting 15
2.3 Histórico dos estudos sobre Power Harvesting .................................... 17
2.3.1 Aplicação de Power Harversting em atividades do ser humano ..... 17
2.3.2 Geradores piezelétricos baseados em estruturas engastadas ......... 19
2.4 Entendendo o Processo Power Harvesting .......................................... 22
CAPITULO 3 – FERRAMENTAS PARA A MODELAGEM E ESTUDO
EXPERIMENTAL DE ESTRUTURAS INTELIGENTES E PARA POWER HARVESTING. .............. 25
3.1 O Método dos Elementos finitos ........................................................... 26
3.2 Dinâmica de sistemas mecânicos.......................................................... 27
3.2.1 Conceitos básicos de vibração ........................................................... 27

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
V
3.2.2 Dedução das equações de movimento via Segunda lei de Newton ... 31
3.2.3 Dedução das equações de movimento via Equações de Lagrange .... 34
3.2.4 Problema do autovalor ...................................................................... 37
3.2.5 Transformadas de Laplace ................................................................. 40
3.2.6 Resposta de um sistema amortecido a movimento harmônico de base
................................................................................................................................ 44
3.3 Dinâmica de sistemas elétricos ................................................................ 47
3.3.1 Relações constitutivas para elementos de um circuito....................... 47
3.3.2 Fontes de potencial e corrente ........................................................... 48
3.3.3 As Leis de Kirchhoff ......................................................................... 49
3.4 Dinâmica de sistemas eletromecânicos – piezelétricos ............................ 50
3.4.1 Transdutor eletromecânico geral ....................................................... 51
3.4.2 Modelo de viga de Euller-Bernoulli .................................................. 53
3.4.3 Elemento de Placa de Kirchoff .......................................................... 59
3.4.4 Método de Newmark ......................................................................... 71
3.4.5 Métodos Experimentais ..................................................................... 76
CAPÍTULO 4 – MODELAGEM DE ESTRUTURAS INTELIGENTES . .................................. 78
4.1 – Relações constitutivas ............................................................................ 78
4.1.1 Relações constitutivas da estrutura .................................................... 78
4.1.2 Relações constitutivas dos materiais piezelétricos ............................ 82
4.2 – Acoplamento eletromecânico ................................................................. 84
4.3 - Elementos de Placa de Kirchoff e Viga de Euler-Bernoulli
Eletromecanicamente Acoplados ............................................................................... 91
CAPÍTULO 5 – ESTUDO COMPARATIVO DE DIFERENTES MODEL OS
PROPOSTOS “NA LITERATURA” ............................................................................................................ 92
5.1 Alguns exemplos de modelagens atuais ................................................ 92
5.2 Modelagem de uma viga piezelétrica ................................................... 97

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
VI
5.3 Modelagem de uma viga eletromecânica engastada .......................... 101
CAPÍTULO 6 – SIMULAÇÕES NUMÉRICAS .......................................................................... 109
6.1 Modelagem de uma viga engastada com PZTs acoplados no programa
SmartSys ........................................................................................................... 109
6.2 – Aplicações numéricas e validações experimentais .............................. 114
CAPÍTULO 7 – CONSIDERAÇÕES FINAIS ............................................................................. 124
8- REFERÊNCIAS BIBLIOGRÁFICAS ..................................................................................... 125
ANEXO I – MANUAL DO PROGRAMA SMARTSYS ............................................................. 129
III.1 Motivação .......................................................................................... 130
III.2 Estudos teóricos para compreender o funcionamento do programa.
............................................................................................................ 130
III.3 Investigação ao Programa Smartsys ............................................... 134
O PROGRAMA SMARTSYS ....................................................................................................... 135
III.4 Mapeamento do programa Smartsys .............................................. 136
III.4.1 – Pré processamento ..................................................................... 136
A.4.2 – Solução ........................................................................................ 144
III.4.3 – Pós processamento ..................................................................... 156

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
1
OBJETIVOS E MOTIVAÇÃO
O assunto discutido nesse guia, o Power Harvesting, é um assunto novo e que
vem ganhando muita popularidade nos últimos anos. Por ser recente, muito se pode
trabalhar para obter avanços na área. Porém, cada um que inicia seus estudos sobre o
assunto deve iniciar de um ponto avançado da pesquisa para que a pesquisa caminhe
sempre mais e mais passos a frente. Para facilitar a inserção de um novo pesquisador no
mundo do Power Harvesting, um guia contendo os conceitos iniciais, um pouco de
história e fundamentos seria uma solução.
O objetivo deste trabalho é a criação de um guia sobre Power Harvesting. Este
guia servirá como uma ferramenta para os futuros pesquisadores na área iniciarem seus
estudos a respeito do assunto.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
2
RESUMO
O guia elaborado contém um pouco da história do Power Harvesting, aplicações
na Engenharia, modelagens matemáticas envolvidas e como vem se desenvolvendo essa
pesquisa, que cresce cada vez mais na área da engenharia. Conceitos fundamentais
relacionados com os componentes dos quais um sistema de Power Harvesting é
composto serão descritos, como a dinâmica de sistemas mecânicos e elétricos, tipos de
análises e avaliação de parâmetros comportamentais do sistema. Serão ilustrados alguns
exemplos de simulações numéricas com estruturas inteligentes para o estudo do
potencial elétrico do PZT e das suas influências da dinâmica da estrutura.
ABSTRACT
The guide produced has some of the history of Power Harvesting, applications in
engineering, mathematical modeling involved and how this research is evolving,
growing increasingly in engineering. Fundamental concepts related to the components
of a harvester will be described, as the dynamics of mechanical and electrical systems,
types of analysis and evaluation of behavioral parameters of the system. Some examples
of simulations using smart structures are illustrated to study the electrical potential of
the PZT and its influences on the dynamics of the structure.
Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
3
CAPÍTULO 1 – INTRODUÇÃO
Analisando-se todo o esqueleto do processo de Power Harvesting, a variável
mais importante por trás de todas as análises e estudos é a energia. É importante
preparar a mente para tantas outras variáveis que virão. Vamos, então começar com
Energia!!
1.1 Definição de energia
Energia, um conceito mágico e tão cotidiano na vida terrena, não tem definição.
Segundo a Wikipédia, “A etimologia da palavra tem origem no idioma grego, onde
εργος (ergos) significa trabalho”. A geração de trabalho é proveniente da transferência
de energia. Energia em movimento gera trabalho. Todos os conceitos criados até hoje
em torno de energia giram em torno dessas dessa relação cíclica entre energia e
trabalho.
Inerente à energia estão duas propriedades: A transformação e a conservação.
As sociedades humanas dependem cada vez mais de um elevado consumo
energético para sua subsistência. Para isso, foram desenvolvidos, ao longo da história,
diversos processos de transformação, transporte e armazenamento de energia.
A energia está presente em tudo que existe no mundo e que está vivo, a vida e
tudo que é modificado, gerado e destruído por ela requer energia. Tudo que morre perde
sua energia, ou tudo que perde sua energia, morre. Ela se encontra nas mais diversas
formas e agindo das mais distintas maneiras. De uma maneira mais didática e
abrangente, enxergamos a energia em nosso mundo cotidiano em diversas formas:
elétrica, magnética, mecânica, hidráulica, nuclear, eólica, solar, geotérmica. Na
realidade todas elas podem ser divididas em duas modalidades de energia: a potencial e
a cinética.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
4
1.1.1 Energia potencial
Quando existe energia potencial, existe a capacidade de se modificar energia.
Quando existe uma diferença de potencial entre cargas, realiza-se trabalho. Assim,
quando existe diferença de potencial elétrico, por exemplo, existe a possibilidade de
ocorrer fluxo de cargas elétricas. “Se uma substância é rica em energia potencial e está
puder ser libertada com facilidade, dita substância recebe o nome de combustível”
(NETTO). Destacam-se entre as energias potenciais mais usuais: a elástica, a
gravitacional e a elétrica.
1.1.2 Energia cinética
Uma velha locomotiva a vapor transforma energia química em energia cinética.
A combustão de madeira ou carvão na caldeira é uma reação química que transfere a
energia potencial do combustível (calor = transferência de energia), proporcionando à
água potencial (mudança de fase de líquido para vapor) para fornecer energia à
locomotiva, que adquire movimento.
Isto significa que quanto mais rapidamente um objeto se move, maior o nível de
energia cinética. Além disso, quanto mais massa tiver um objeto, maior é a quantidade
de energia cinética necessária para movê-lo.
1.2 A transformação de energia
“Na natureza nada se perde e nada se cria, tudo se transforma”.
Lavoisier
Participando da extraordinária variedade do universo, a matéria e a energia
podem apresentar-se sob as mais diversas formas: um corpo em movimento está
animado de energia cinética, enquanto uma mola distendida tem energia potencial; uma
dinamite possui energia química; já um corpo eletricamente carregado armazena energia
elétrica.
Essas formas de energia podem se transformar umas nas outras: a mola
distendida, ao ser liberada, ganha movimento, o que significa que sua energia potencial

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
5
se converte em energia cinética. Analogamente, a energia química contida na gasolina
pode ser transformada, através da queima do combustível, em energia cinética,
aproveitada para movimentar um veículo. E a produção de energia elétrica nas usinas
hidrelétricas aproveita a energia das quedas de água.
Quando Albert Einstein formulou a Teoria da Relatividade, mostrou que a massa
(portanto a matéria) pode se transformar em energia e que a energia pode se transformar
em massa (matéria). A relação entre essas duas grandezas é dada pela equação:
E=m.c²
sendo:
c = velocidade da luz no vácuo (3,0x108m/s)
E = energia que corresponde à massa m.
A partir daí elaborou-se um conceito mais avançado de matéria:
Matéria é energia condensada. – surgindo assim as primeiras idéias que
alavancaram as teorias contemporâneas hoje existentes.
Quando os nossos antepassados migravam seguindo o sol em busca de
sobrevivência, para se alimentar melhor e se proteger, inconscientemente eles
descobriam sua dependência da energia e adquiriam a habilidade de transformar
energia. Não é por acaso que a mais importante descoberta da história foi o fogo. Uma
fonte mágica de energia térmica que consolidou a sobrevivência da espécie humana na
Terra. O homem sempre foi impulsionado a buscar energia e a adaptá-la às suas
necessidades. Dessa forma, são inventadas maneiras de transformar energia desde o
início da nossa vida na Terra até hoje. Essa impulsão ganhou força no inicio da
Revolução Industrial, com a invenção do motor a vapor. A partir daí, a industrialização,
o domínio tecnológico e a globalização mundial nos tornaram cada vez mais
dependentes de energia, principalmente elétrica, eletromagnética e mecânica. A
conseqüência é a enorme quantidade de mecanismos de transformação de energia nessas
três formas principais. Podem-se citar usinas hidrelétricas, nucleares, eólicas, solares
(produção de energia elétrica), o carvão e o petróleo e outros incontáveis tipos de
combustível, muitos dos quais surgidos após o inicio da crise energética no mundo por
escassez de petróleo e ameaça de esgotamento das jazidas (produção de energia
mecânica).

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
6
1.3 A Conservação de energia
Como a energia não pode ser criada ou destruída.
A Lei da Conservação da Energia diz: “Sempre que desaparece uma quantidade
de uma classe de energia, uma quantidade exatamente igual de outra(s) classe(s) de
energia é (são) produzida(s)”.
Trata-se de uma lei criada durante anos de pesquisas e descobertas de grandes
pesquisadores como: Antoine Lavoisier (1743-1794), que descobriu que, em reações
químicas em sistema fechado, a massa dos reagentes era igual à massa dos produtos de
reação; Christian Huyghens (1629-1695), que verificou que o produto da massa pelo
quadrado do valor da velocidade, se conservava em algumas colisões, ditas elásticas,
dando posteriormente origem àquilo que conhecemos como energia cinética, ( );
Julius Robert Mayer (1814-1878) cujo ensaio defendia que "Quando uma quantidade de
energia de qualquer natureza desaparece numa transformação, então produz-se uma
quantidade igual em grandeza de uma energia de outra natureza"; Max Planck (1858-
1947), primeiro físico que exprimiu a lei matematicamente, em termos rigorosos e mais
gerais.
1.4 Transdutores de energia
Transdutor é qualquer aparelho que transforma uma informação.
O transdutor é qualquer dispositivo capaz de transformar um tipo de sinal em
outro para permitir o controle de processos físicos, ou realizar uma medição (tabela 1.1).
Na análise experimental de estruturas, normalmente, são empregados aparelhos
mecânicos (relógios comparadores e extensômetros), elétricos (resistivos, indutivos),
acústicos (transdutores de corda vibrante) e ópticos (mira telescópica, interferometria a
laser) para medida dos movimentos.
Transdutores passivos são aqueles cuja energia de saída é proveniente
unicamente (ou quase unicamente) da energia de entrada (Resistência, Capacidade,
Indutância).

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
7
Transdutores ativos são aqueles que dispõem de uma alimentação de energia.
Neles, a maior parte da energia de saída é provida pela alimentação (Termoelétricos,
Piezelétricos).
Em Preumont (2006), o capítulo 3 traz exemplos de modelagens de transdutores
eletromecânicos.
Tabela 1.1: Exemplo de transdutores
ENTRADA SAÍDA TRANSDUTOR
Temperatura Deslocamento (de coluna de líquido) Termômetros
Temperatura Tensão Termopar
Temperatura Variação da resistência Termistor
Força Deslocamento Balanças de mola
Pressão Movimento (de coluna de líquido) Manômetro
Deslocamento Variação de resistência Potenciômetros
Luz Tensão Célula fotoelétrica
Som Variação da capacidade Microfone
Em princípio, os movimentos de choques e vibrações são medidos com
referência a um ponto fixo no espaço por dois tipos de transdutores:
I- Transdutores de referência fixa. Uma extremidade do transdutor é fixada
num sistema de referência no espaço e a outra extremidade (terminal) é fixada na parte
móvel, na qual o movimento deve ser medido. Esta fixação pode ser feita por meios
mecânicos, elétricos, ou no caso de sistema óptico deve-se tomar uma “marca” de
referência que não seja alterada ao longo da medição;
II- Transdutor massa-mola (também denominado de transdutor sísmico).
Neste caso, uma extremidade (terminal) do transdutor é a base do sistema massa mola,
que normalmente está fixada na peça que está em movimento, ou onde a vibração está
sendo investigada. A grandeza a ser medida é baseada no movimento relativo entre o
movimento inercial da massa e a carcaça (invólucro) do transdutor. Esses transdutores
podem medir movimentos de rotação, movimentos lineares, tais como acelerações,
velocidades e deslocamentos. A vantagem desses transdutores está baseada no fato de
não ser necessário um sistema de referência fixa para a determinação dos movimentos,

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
8
portanto, esses transdutores também podem ser embarcados em sistemas móveis, tais
como acelerômetros para medida de aceleração em veículos terrestres, aéreos, etc.
Para as aplicações desejadas no estudo de Power Harvesting, os transdutores
sísmicos de referência são mais interessantes. Esses transdutores são divididos em três
categorias:
1.4.1 Transdutores resistivos
Normalmente estes transdutores empregam os seguintes dispositivos elétricos:
potenciômetro e extensômetros elétricos. São aparelhos que utilizam extensômetros
elétricos de resistência (EER) para transformar a deformação em um sinal elétrico.
É possível relacionar diretamente um deslocamento medido na extremidade de
uma viga, por exemplo, com as deformações específicas em qualquer seção transversal,
com distância conhecida, possibilitando assim a indicação imediata, além do registro
dos deslocamentos proporcionais, ou seja, um transdutor de deslocamento.
1.4.2 Transdutores capacitivos
O movimento de rotação ou de translação pode ser usado de diversas formas
para alterar a capacidade de um equipamento. Esta variação de capacidade pode ser
convertida num sinal elétrico utilizável através de um circuito apropriado.
A vantagem destes transdutores reside na sua simplicidade mecânica, no seu
peso ligeiro e grande sensibilidade.
1.4.3 Transdutores Indutivos
De modo análogo aos transdutores resistivos e capacitivos, os transdutores
indutivos são transdutores ativos que requerem uma fonte de excitação externa para
proporcionar uma tensão de saída.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
9
1.5 A Transdução Piezelétrica
Diferente da maioria dos transdutores existentes, o transdutor piezelétrico não
converte energia mecânica em elétrica por meio do movimento de algum mecanismo em
seu interior ou exterior. O material piezelétrico contido no transdutor possui a
capacidade inerente de converter energia mecânica em elétrica e vice-versa. Devido a
essa propriedade, ele é caracterizado como um Material Inteligente,ou seja, capaz de se
modificar em reação as mudanças no ambiente.
Alguns outros exemplos de materiais inteligentes são os eletro-resistivos e
magneto-resistivos, fluidos e sólidos eletro-reológicos, ligas de memória de forma ou
fibras óticas.
A figura 1.1 (Preumont, 2006) esquematiza propriedades de materiais de acordo
com sua reação a diversos tipos de entrada, localizando os materiais inteligentes e
destacando os materiais piezelétricos.
Figura 1.1: Indicação de efeitos nos materiais devido a diversas entradas. Os
materiais inteligentes correspondem às células não-diagonais (Preumont, 2006).
A descoberta do efeito piezelétrico ocorreu em 1880 com os irmãos Pierre e
Jacques Curie. Ao analisarem determinados minerais cristalinos (como quartzo e
titanato de bário), descobriram uma característica incomum: quando sujeitos a uma
força mecânica, os cristais se tornaram polarizados eletricamente. A tensão e a
compressão geraram tensões de polaridade oposta e, proporcional à força aplicada.
Subseqüentemente, o inverso deste relacionamento foi confirmado: quando um destes

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
10
cristais foi exposto a um campo elétrico se observou que o mesmo alongou ou encurtou
de acordo com a polaridade do campo e, proporcionalmente à força do campo. A esse
fenômeno foi dado o nome de Piezeletricidade, relacionado à ferroeletricidade.
Os materiais piezelétricos mais populares para transdução de energia são as
cerâmicas PZT (Lead Zirconate Titanate) e os filmes plásticos PVDF (PolyVinyliDene
Fluoride). Preumont (2006) comparou por meio dos gráficos mostrados na figura 1.2 as
características de diversos materiais inteligentes referentes à relação tensão x
deformação.
Figura 1.2: Comparação entre diversos materiais com relação à tensão x
deformação (Preumont,2006).
Descobertos por Jaffet et al.em1954 (CLARK, SAUNDERS E GIBBS, 1998),
os PZTs são constituídos principalmente de óxido de chumbo, zircônio e titânio. Uma
das vantagens do PZT reside no fato de apresentar grande rigidez, da ordem de 70 GPa,
sendo idealmente indicado na confecção de atuadores.
Já o PVDF, cujas propriedades piezelétricas foram descobertas por Kawai após
1960 (TSENG ET AL, 1989), é um polímero piezelétrico robusto e maleável, que pode
ser produzido em geometrias complexas e extremamente delgadas. Com todas essas
propriedades, o PVDF é altamente indicado para sensoriamento distribuído.
Estes materiais piezelétricos sintéticos (cerâmicas e polímeros, por exemplo)
podem ser produzidos através de polarização de um substrato apropriado mediante

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
11
aplicação de um forte campo elétrico a temperaturas elevadas. A polarização destes
materiais tem por efeito alinhar parcialmente os dipolos elétricos dos domínios
microscópicos, o que resulta em uma polarização macroscópica que favorece o
acoplamento eletromecânico. Como resultado deste acoplamento, o material se
deformará em resposta a um campo elétrico externo, o que confere ao material
capacidade de atuação (efeito inverso). A capacidade de sensoriamento resulta do efeito
piezelétrico direto, segundo o qual a aplicação de solicitações mecânicas externas ao
material provoca rotações dos dipolos originalmente alinhados, provocando o
surgimento de uma distribuição de cargas elétricas.
Esta reciprocidade entre a energia mecânica e elétrica propicia aos materiais
piezelétricos grande aplicabilidade em várias áreas. A figura 1.3 apresenta uma
ilustração do efeito piezelétrico direto e inverso.
Figura 1.3: Ilustração do efeito direto e inverso
A relação campo elétrico - deformação é aproximadamente linear para baixas
intensidades do campo elétrico, o que é uma característica vantajosa quando se utiliza o
efeito piezelétrico em sistemas de controle. Entretanto, para maiores intensidades do
campo elétrico, ocorre um fenômeno de saturação da polarização, com a inversão dos
dipolos elétricos. Isto leva à significativa histerese e relações não lineares entre o campo
elétrico e a deformação, fato que pode causar dificuldades quando do uso de atuadores
piezelétricos em procedimentos de controle que requerem elevadas intensidades de
campo elétrico. Todavia, a maioria das aplicações práticas limita-se ao regime linear.
Um dos cuidados a serem tomados quando da utilização de materiais
piezelétricos é o de que a temperatura não deve ultrapassar um valor limite, denominado
temperatura de Curie, a partir do qual há uma despolarização espontânea do material e a
conseqüente perda das características piezelétricas. Todavia, para temperaturas
inferiores à temperatura de Curie, há relativa insensibilidade das características do
material em relação às variações de temperatura, fato que constitui uma das principais

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
12
vantagens do uso de elementos piezelétricos para o controle e a detecção de falhas
estruturais.
A primeira aplicação tecnológica de um elemento piezelétrico pode ser atribuída
a Paul Langevin (1872-1946), que desenvolveu um sonar utilizando o quartzo como
elemento piezelétrico. O descobrimento, por Roberts [2], que cerâmicas ferroelétricas
de titanato de bário (BaTiO3) polarizadas apresentam o efeito piezelétrico marcou o
início da geração das piezo cerâmicas.
Em aplicações estruturais (para o controle de vibrações e ruído, por exemplo) os
elementos piezelétricos são colados sobre a superfície ou inseridos no volume da
estrutura. Em ambos os casos, os esforços de controle (forças e/ou momentos fletores)
são gerados pela aplicação de voltagens aos atuadores piezelétricos. O objetivo da
modelagem é determinar a resposta do sistema a um dado sinal de voltagem aplicado,
enquanto o projeto de sistemas de controle consiste na determinação do sinal de
voltagem a ser aplicado para se obter a autoridade de controle adequada.
A integração de sensores, atuadores e controladores habilitam uma estrutura a
responder de modo controlado a excitações externas, procurando compensar os efeitos
que levariam sua resposta a se afastar de patamares aceitáveis. Estes sistemas, que
integram sensores, atuadores e controladores, são comumente chamados de Estruturas
Inteligentes. Nesta concepção, papel fundamental é desempenhado pelos materiais
inteligentes, capazes de sofrer alterações controláveis de suas características físicas
(mecânicas, elétricas, ópticas, etc.). Esta capacidade de adaptação tem possibilitado a
proposição de tipos inovadores de sensores e atuadores.
Dentre as características citadas, destaque especial é dado aos materiais com
alterações mecânicas e elétricas, ou seja, materiais piezelétricos.
A figura 1.4 mostra, de maneira esquemática, os principais elementos de uma
estrutura inteligente.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
13
Atuador Sensor
Estrutura
Controlador
Figura 1.4: Principais elementos de uma estrutura inteligente
O capítulo 4 de Preumont (2006) descreve todas as relações constitutivas dos
transdutores piezelétricos. Parte delas será explicada no guia.
1.5.1 Aplicações de materiais piezelétricos
O uso dos materiais inteligentes em sistemas de monitoramento das condições de
máquinas e estruturas já possui grande impacto nos setores aeroespacial e da construção
civil.
Atuando como parte de uma estrutura inteligente, os materiais piezelétricos têm
sido largamente empregados para o controle de vibrações e supressão de ruídos em
aeronaves, no espaço e em estruturas convencionais.
Materiais piezelétricos têm sido também empregados no desenvolvimento de
músculos artificiais que simulam movimentos humanos para aplicações em robótica,
University of Alberta (2001). Pesquisadores do Illinois Institute of Technology
implantaram um sensor piezelétrico no músculo de um paciente. O dispositivo transmite
informações sobre a atividade do nervo local via rádio para um sistema de
monitoramento externo. O dispositivo, pode, também receber sinais e estimular a ação
do músculo, (TROYK ET AL. 1991).
Além de toda essa variedade de aplicações, outras áreas de pesquisa têm grande
interesse pelos materiais piezelétricos. Uma delas, o motivo desse guia, é o Power
Harvesting, ou “colheita de energia”, que será discutido a partir de agora.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
14
CAPÍTULO 2 – FUNDAMENTOS DE POWER HARVESTING
2.1 Definição e Motivação
O avanço da tecnologia das últimas décadas e o conseqüente desenvolvimento
da tecnologia microeletromecânica (MEMS) (sensores de baixa potência, dispositivos
de comunicação sem fio e processadores de sinal digital) incentivou as pesquisas por
fontes alternativas de energia para manter esses equipamentos trabalhando,
principalmente em condições de ausência ou dificuldades de fornecimento de energia
para seu funcionamento. A engenharia busca com essa investigação, métodos para a
criação de dispositivos com auto-alimentação. Uma alternativa é captar a energia do
ambiente, oriunda na maioria das vezes de vibração mecânica, transformá-la em energia
elétrica, armazenar e depois utilizá-la para recarregar ou manter o dispositivo em
funcionamento. Este método é chamado Power Harvesting. Os equipamentos
destinados à realização de Power Harvesting são chamados de “harvesters” ou
“colhedores”. Esse tipo de equipamento é caracterizado por converter, armazenar e/ou
redirecionar a energia coletada para outras aplicações.
O fenômeno da vibração está presente em todos os lugares e, em muitos casos,
afeta grandemente a natureza dos dispositivos de engenharia (INMAN, DJ, 2001). Cada
estrutura tem sua própria freqüência natural. Quase sempre algum tipo de vibração
mecânica ocorre no ambiente. Essas vibrações nada mais são do que energia fornecida
ao sistema vibrando que não é aproveitada e é dissipada no ambiente. Essa energia pode
ser aproveitada por dispositivos eletrônicos. A utilização de vibrações mecânicas para
deformar um material piezelétrico ou deslocar uma bobina eletromagnética é, hoje em
dia, um dos métodos mais eficazes de implementação de um sistema de Power
Harvesting.
Dispositivos que realizam Power Harvesting atualmente não produzem energia
suficiente para realizar trabalho mecânico, mas sim fornecer uma quantidade muito
pequena de energia para alimentar eletrônicos de baixa potência. Tradicionalmente, a

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
15
energia elétrica tem sido gerada em grandes instalações centralizadas movidas a
combustíveis fósseis, fissão nuclear ou água corrente. Em larga escala a energia do
ambiente, como sol, vento e marés, é amplamente disponível, mas não existem
tecnologias para capturá-la com grande eficiência. Enquanto a obtenção de combustível
para geração em larga escala custa dinheiro (petróleo, carvão, etc), o "combustível" para
Power Harvesting está presente na natureza e por isso é considerado livre. Por exemplo,
existem gradientes de temperatura provenientes do funcionamento de um motor de
combustão e nas áreas urbanas, existe também uma grande quantidade de energia
eletromagnética no ambiente por causa de rádio e televisão. Com o avanço dos estudos
sobre essa técnica, vem aplicando-se a idéia em outros sistemas além dos MEMs e
utilizando-se harvesters para retirar a energia de um sistema vibrando e carregar
dispositivos independentes.
2.2 Comparação entre diferentes transdutores de energia para Power
Harvesting
No capítulo 1, foi enunciado o grande interesse dos pesquisadores de Power
Harvesting por materiais piezelétricos. O porquê da preferência por esse e não outros
tantos tipos de transdutores eletromecânicos encontrados por aí vem de alguns fatores.
Um deles é justamente sua maneira de converter energia, explicada anteriormente.
Como já dito, a conversão é uma propriedade do material e não uma ação ocasionada
pelo trabalho de algum mecanismo. Mas para saber que o material piezelétrico é o mais
conveniente a ser utilizado para Power Harvesting e qual material piezelétrico é mais
eficiente, muitos testes foram realizados e materiais estudados.
O tipo mais comum de piezelétrico utilizado em aplicações de Power Harvesting
é o PZT. No entanto, a natureza extremamente frágil da piezocerâmica provoca
limitações na tensão que pode absorver com segurança sem ser danificada. Lee et al
(2005) nota que piezocerâmicas são mais suscetíveis à fratura devido à fadiga quando
submetidas a um carregamento com alta freqüência cíclica. Para eliminar este
inconveniente, melhorando a sua eficiência, uma alternativa é a de desenvolver e testar
materiais piezelétricos mais flexíveis. Por exemplo, o PVDF, um polímero piezelétrico
que apresenta grande flexibilidade quando comparado ao PZT.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
16
Sodano et al. (2002) investigaram e compararam dois tipos de materiais
piezelétricos, o monolítico piezelétrico (PZT) e Compósitos de Macro Fibra (MFC),
enfatizando a sua eficácia e a viabilidade de sua utilização em aplicações no mundo
real.
Os resultados do teste de eficiência mostraram que, devido à sua composição, o
MFC teve uma tensão muito maior do que o PZT, porém a corrente gerada, mais
importante no processo de armazenagem de energia, foi muito menor.
Assim, tanto em ressonância como com sinal chirp e aleatórios, o PZT produziu
mais energia.
Quando ambos os materiais foram comparados enquanto algumas baterias eram
recarregadas, o MFC não foi capaz de carregar uma bateria, a menos que o sinal
perturbador fosse muito grande, devido à sua dificuldade de produção de corrente alta.
A capacidade do PZT para carregar pilhas com vários tamanhos foi identificada assim
como o tempo necessário para carregar estas baterias em cerca de 90% de sua
capacidade.
Poulin G. et al. (2004) apresentaram o estudo comparativo dos dois mais
utilizados sistemas eletromecânicos. Um sistema eletromagnético, composto por um
ímã em movimento dentro de uma bobina, e um sistema piezelétrico, formado por uma
barra de cerâmica PZT, polarizada longitudinalmente, com uma extremidade engastada
e a outra restrita.
Depois de um estudo quantitativo utilizando valores indicativos reais de
parâmetros físicos e geométricos, os dois sistemas demonstraram completa dualidade
em: tensão, corrente, força e níveis de deslocamento, impedância de saída e frequência
de ressonância.
Com uma alta densidade de potência elétrica, o sistema piezelétrico se mostrou
eficiente para micro sistemas, em comparação com o sistema eletromagnético que foi
recomendado para aplicações de média escala.
Até hoje são efetuadas comparações entre diferentes tipos de transdutores
eletromecânicos para Power Harvesting, mas o PZT é mais amplamente utilizado.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
17
2.3 Histórico dos estudos sobre Power Harvesting
Pouquíssimos anos atrás, era muito difícil encontrar notícias sobre pesquisas e
estudos relacionados a Power Harvesting. O repentino aumento de material disponível,
incluindo Journals, livros e muitíssimos artigos de toda parte do mundo refletem a
popularidade que o assunto ganhou.
A concepção Power Harvesting é simples de se cogitar e entender. Muitos
poderiam ter pensado nisso e iniciado as investigações sobre o tema há tempos
utilizando materiais inteligentes ou outros tipos de transdutores existentes desde muitas
décadas atrás. Porém, como a capacidade de conversão e armazenamento de energia dos
harvesters é pequena, tal energia capturada do ambiente não seria de maneira nenhuma
útil já que nenhum equipamento de algumas décadas atrás poderia trabalhar com tão
pouca energia. Surge então, na década de 70, a tecnologia Micro eletromecânica
(MEMs). Normalmente não maior que um grão de areia, os dispositivos MEMs são
complexas máquinas que habilitam chips a tornarem-se inteligentes. Estes dispositivos
atuam como a mais estreita ligação entre a eletrônica digital e o mundo físico,
permitindo a integração de sistemas eletrônicos e mecânicos em um único chipset. A
aplicação dos MEMs é conveniente para sistemas de todos os tipos por serem menores,
mais rápidos, mais eficientes em termos energéticos e menos dispendiosos. Em uma
configuração típica, circuitos integrados (CI) fornecem a parte "pensante" do sistema,
enquanto MEMs complementam esta informação com a percepção ativa e comando.
A partir dos MEMs a busca por fontes alternativas de energia se torna cada vez
mais necessária para assegurar o êxito do funcionamento desses dispositivos. Entra em
cena o Power Harvesting.
2.3.1 Aplicação de Power Harversting em atividades do ser humano
A idéia cativante de captar energia de tantos lugares diferentes chama cada vez
mais atenção dos pesquisadores pelo mundo. Um exemplo interessante é tirar proveito
da energia dissipada durante a rotina humana, que tem incentivado o rápido crescimento
do campo do Power Harvesting.
Häusler et al. desenvolveu possivelmente a primeira investigação sobre sistemas
de captura de energia incorporados em um sistema biológico, em 1984. Ele propôs a

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
18
utilização de um conversor de filme PVDF fixado nas costelas de um cachorro,
acreditando que a energia gasta na respiração poderia ser convertida em energia elétrica.
A respiração espontânea conduziu a um pico de tensão de 18V, o que corresponde a
uma potência de cerca de 17µW.
González et al (2002) classificou as atividades humanas em duas categorias:
atividades contínuas, como respiração e fluxo sangüíneo, e atividades descontínuas
como uma caminhada e movimentos dos membros superiores. Eles descobriram que o
movimento dos dedos digitando em um teclado pode gerar até 19 mW de potência,
movimentos do membro superior podem gerar 3 W de potência durante atividade
normal, e andar a pé pode gerar 67 W de potência com a união dos movimentos do
corpo a um ritmo de dois passos por segundo. Atividades contínuas, por outro lado,
geram muito menos potência.
Niu et al (2004) também investigou a energia disponível no corpo humano
devido a diferentes movimentos, como o movimento das juntas, por exemplo, tornozelo,
joelho, quadril, cotovelo e ombro (geração de 69.8 W, 49.5 W, 39.2 W, 2.1 W e 2.2 W,
respectivamente), o movimento da massa central do organismo, e o impacto do
calcanhar, o melhor candidato quando se avaliou a energia potencial (2 W a um ritmo de
dois passos por segundo), principalmente por causa da facilidade de integração dos
conversores piezelétricos em um sapato.
Muitos outros pesquisadores têm estudado a captura de energia perdida com o
impacto do calcanhar. Shenck e Paradiso (2001) utilizaram PZTs unimorfos (figura
2.1). Sua investigação priorizou o design e conforto do calçado.
Figura 2.1 Esquema da disposição do PZT bimorfo e do filme de PVDF.
(SHENCK AND PARADISO (2001)).

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
19
Um filme de PVDF foi implantado na parte da frente de um sapato atlético, onde
ocorre o maior deslocamento. O PZT bimorfo, inicialmente constituído por dois PZTs
em uma configuração clam Shell, era ativado pela energia do impacto do calcanhar. A
potência média fornecida pelo filme para 250 kΩ de carga a um passo de 0.9 Hz foi de
1.3 mW. O PZT produziu 8.4 mW de potência para 500 kΩ de carga. Quando instalado
no sapato, um tag de rádio freqüência auto carregável (RF) foi capaz de transmitir um
código de identificação sem fio (ID) de curto alcance de 12 bits durante a caminhada.
2.3.2 Geradores piezelétricos baseados em estruturas engastadas
Uma simples análise por elementos finitos em uma estrutura engastada pode
indicar claramente que é possível ter grandes resultados para a captura de energia a
partir de vibrações com materiais piezelétricos acoplados a sua superfície. Segundo S.P.
Beeby (2006), um engaste prevê uma freqüência baixa de ressonância, que se reduz
ainda mais pela adição de uma massa na extremidade livre da viga, em uma estrutura de
baixo volume e com altos níveis de tensão aplicada às camadas piezelétricas.
Lu et al (2004), projetaram e testaram um sistema captador de energia composto
por uma viga engastada em micro escala (com micro gerador piezelétrico de modo
transversal '31’ de polarização como mostram as figuras 2.2 e 2.3 ), com PZTs fixos em
cima e embaixo da viga e uma massa presa na sua extremidade. Eles verificaram sua
capacidade de fornecimento de energia para aplicação em MEMs.
Para aplicações típicas em MEMs, que trabalham continuamente, um sistema de
Power Harvesting deve fornecer cerca de 0.1 mW de potência. Um PZT com uma
espessura de 0.1 mm, largura de 1 mm, e de 5 mm de comprimento foi criado.
Verificou-se que uma amplitude de vibração 15 µm seria necessária para que o sistema
fornecesse energia suficiente para uma aplicação contínua. Quando testado
experimentalmente, o sistema gerou cerca de 1.6 mW de potência a uma excitação de 7
kHz, fornecendo capacidade suficiente para aplicações em MEMs.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
20
Figura 2.2 Protótipo do gerador piezelétrico. (LU ET AL (2004)).
Figura 2.3 Modo ‘31’ de acoplamento para materiais piezelétricos. (LU ET AL
(2004)).
Fang HP et al (2006) investigaram micro geradores piezelétricos, incluindo a
concepção da estrutura, micro fabricação para aplicação em MEMs e ensaios de
performance (figura 2.4). A figura 2.5 descreve seu processo de fabricação.
O protótipo fabricado através de tecnologia MEMs alcançou um nível de tensão
de 898 mV e 2.16 mW de potência sob excitação de ressonância com força de 1 g
aceleração (figura 2.6). Para ampliar o potencial de sua aplicação em várias condições,
parâmetros como a freqüência natural da estrutura podem ser adaptados. Uma vantagem
é que o dispositivo era mais compacto e seu processo de fabricação dividido em várias
etapas sujeitas a implementações por parte da tecnologia MEMs, o que gera custo
benefício.
Figura 2.4 Esquema da secção transversal do gerador. (HUA-BIN FANG ET
AL, 2006).

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
21
Figura 2.5 Processo de fabricação do micro gerador piezelétrico. (1) Preparação
do filmes: SiO2/Ti/Pt/PZT/Ti/Pt, (2) estipulação do padrão nos filmes, (3) inserção no
substrato de silicone por RIE, (4) profunda inserção na parte inferior do silicone através
de uma solução de KOH, (5) rompimento da estrutura por RIE, e (6) micro fabricação e
acoplamento da massa de metal à estrutura. (HUA-BIN FANG ET AL, 2006).
Figura 2.6: Arranjo experimental dos testes realizados por HUA-BIN FANG ET
AL (2006).
O mesmo dispositivo foi testado por Liu JQ et al. em 2007.
Ensaios de desempenho no gerador de potência piezelétrico foram desenvolvidos
para uma frequência natural cuja tensão alternada de saída era entregue a um resistor
ajustável, retificada através de uma ponte de diodos, carregando posteriormente um
capacitor (figura 2.7). O protótipo gerou 3.98 mW de energia elétrica e tensão de saída
eficaz contínua de 3.93 V. Os resultados experimentais mostraram que um potencial
desenvolvido no gerador atende às necessidades das redes de sensores sem fio e
embutidos.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
22
Figura 2.7: Teste de desempenho do gerador de energia piezelétrico: (1)
frequência natural e tensão de saída alternada, (2) sinal de saída alternada entregue ao
potenciômero, (3) voltagem depois da retificação através da ponte, (4) carregamento do
capacitor. (JING-QUAN LIU (2007)).
Ferrari M. et al. (2007) desenvolveram e testaram um arranjo de conversores
piezelétricos de multifrequências (MFCA), composto por múltiplos bimorfos
engastados cujas tensões de saída retificadas alimentavam um único capacitor
armazenador.
Ferrari et al. enfatizam a possibilidade de fabricar um sistema em miniatura
constituído por um conjunto de conversores engastados capazes de trabalhar em
diferentes faixas de freqüência.
O estudo mostrou que, para um único conversor seguido de um retificador
dobrador de tensões, sob regime senoidal, quando as perdas são desprezadas, o ângulo
de carregamento do capacitor armazenador só era dependente do período e
independente da freqüência e amplitude de excitação. Já com o MFCA com conversores
diferentes, observou-se qualitativamente que o conversor carregou o capacitor com um
nível mais alto de saída instantânea, dependendo da freqüência de excitação.
2.4 Entendendo o Processo Power Harvesting
Para entender o funcionamento de dispositivos que realizam Power Harvesting,
é necessário conhecer a dinâmica de suas partes. Preumont A. (2006) dividiu os estudos
sobre a conversão de energia mecânica em energia elétrica em duas vertentes: a
dinâmica de sistemas mecânicos e da dinâmica da rede elétrica.
Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
23
A dinâmica de sistemas mecânicos consiste na investigação do seu
comportamento, do acoplamento piezelétrico e da voltagem de saída do material
piezelétrico.
Ao dissecar o processo de Power Harvesting são realizados experimentos com
os harvesters em funcionamento e/ou criados modelos. Segundo Rao (2009), uma
modelagem matemática representa todos os aspectos importantes do sistema, com o
propósito de obter as equações matemáticas (ou analíticas) que governam seu
comportamento.
Ambos, experimento e modelagem têm suas vantagens e desvantagens. Por
exemplo, a acurácia da modelagem nunca se comparará à de um experimento bem
realizado, já que durante o equacionamento de um sistema são feitas muitas
aproximações que minimizam a veracidade do seu comportamento. Porém, para a
realização de um experimento, existe dispêndio de tempo, custos com equipamentos e
demanda de habilidade por parte do operador, ao passo que para efetuar uma
modelagem a única ferramenta necessária é um bom computador, além de claro, um
modelo robusto.
A modelagem matemática é o primeiro de três passos em que pode ser dividida a
análise de uma estrutura eletromecânica. São elas o pré processamento, a solução, e o
pós processamento. Em softwares comerciais como o Ansys® essa divisão é bem clara.
No pré processamento, a primeira questão que se coloca é a sua classificação
quanto à geometria, modelo do material constituinte e ações e restrições aplicadas.
Nesse momento todos os dados iniciais a respeito da estrutura e influências sobre ela
afim de que seja montado posteriormente o equacionamento que governa seu
comportamento.
Segundo Azevedo (2003), as estruturas podem ser classificadas quanto à sua
geometria como reticuladas (dimensões transversais são muito menores do que o
comprimento do respectivo eixo), laminares (espessura é muito inferior às restantes
dimensões) ou sólidas. Estas últimas são as mais genéricas, sendo classificadas como
sólidas as que não apresentarem características que as permitam enquadrar no grupo das
laminares ou das reticuladas.
Na solução, o modelo matemático, ou seja, as equações regentes do sistema, são
construídas e resolvidas, e os resultados são levantados. Podem ser utilizadas várias
dinâmicas para a construção do equacionamento como a dinâmica Lagrangiana, o

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
24
princípio do trabalho virtual, o princípio de Hamilton e as regras de Kirchoff KCR e
KVR (regra atual e regra de tensão) que serão discutidas em capítulos posteriores. Essas
metodologias aplicadas promovem a descrição do comportamento da estrutura, o
mecanismo do acoplamento piezelétrico, a descoberta da quantidade de energia retirada
do sistema oriunda da conversão da energia de vibração mecânica em energia elétrica
pelo material piezelétrico e a energia armazenada no circuito do harvester.
As equações de movimento de um sistema vibratório estão normalmente na
forma de um conjunto de equações diferenciais ordinárias para um sistema discreto e
equações diferenciais parciais para um sistema contínuo. Podem ser lineares ou não.
Nessa etapa são utilizados muitos métodos matemáticos que serão investigados a seguir.
As equações de movimento devem ser resolvidas para determinar a resposta do
sistema vibratório. Dependendo da natureza do problema, pode-se usar uma das
seguintes técnicas para determinar a solução: métodos padronizados para resolver
equações diferenciais, métodos que utilizam transformadas de Laplace, métodos
matriciais e numéricos.
No pós processamento,todos os resultados são combinados e são realizadas as
análises da estrutura. É nesse momento que seu comportamento será evidenciado.
Podem ser realizados diferentes tipos de análises. A solução das equações governantes
fornece os deslocamentos, velocidades e acelerações das várias partes do sistema.
Os tipos de análise realizadas para a avaliação do comportamento da estrutura
podem ser: Análise modal, estática e dinâmica (no domínio do tempo e da frequência)
Na área da engenharia mecânica os sistemas mecânicos são mais analisados e
desenvolvem-se mais trabalhos sobre seu funcionamento. A incorporação dos sistemas
elétricos na modelagem dos harvesters tem sido feita mais frequentemente nos últimos
anos.
A base para o avanço do Power Harvesting é, certamente, o bom entendimento
de todas as partes do processo de conversão e armazenamento.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
25
CAPITULO 3 – FERRAMENTAS PARA A MODELAGEM E ESTUDO EXPERIMENTAL DE ESTRUTURAS INTELIGENTES E PARA POWER HARVESTING.
Quando desejamos analisar qualquer sistema mecânico, o modo mais eficiente
para descrever, estudar e entender o seu funcionamento é o desenvolvimento do seu
modelo matemático.
Para obterem-se as equações que representem a dinâmica do sistema, a
modelagem matemática comumente o transforma de contínuo a discreto. Dessa forma o
comportamento de cada uma dessas partes e do conjunto é descrito por meio de
equacionamentos. Quanto menor o número de fragmentos em que o sistema é
discretizado, mais informações são perdidas e mais grosseiro ou elementar é o modelo.
Quando se trata de discretizar um sistema, quanto mais fina a malha de elementos, mais
próximo o modelo se encontra da sua realidade contínua.
Outro aspecto crucial, além do número de elementos da malha, é o tipo de
equacionamento que deve ser realizado. “O modelo matemático deve incluir detalhes
suficientes para conseguir descrever o sistema por meio de equações sem torná-lo muito
complexo” (Rao 2009).
O processo de obtenção de modelos para descrever estruturas inteligentes requer
a integração de elementos piezelétricos na modelagem. Para descrever harvesters, além
dos elementos piezelétricos devem-se integrar os elementos do circuito armazenador de
energia ou da carga recarregável na modelagem. A tecnologia associada a esses
elementos encontra-se em desenvolvimento. O método dos Elementos Finitos é um dos
métodos mais utilizados para a obtenção de modelos, permitindo obter soluções
aproximadas para equações diferenciais que descrevem a dinâmica do sistema, além da
modelagem de estruturas com geometria complexa.
As equações de equilíbrio dos sistemas eletromecanicamente acoplados são
encontradas por meio de soluções como a 2a Lei do Movimento de Newton e as
Equações de Lagrange. Na discretização, os elementos podem ser de vários tipos. Tipos
muito frequentemente utilizados são os elementos de Viga de Euler-Bernoulli e de Placa
de Kirchoff.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
26
A seguir serão discutidos alguns métodos e ferramentas utilizadas na modelagem
de estruturas inteligentes e para Power Harvesting. Além disso, algumas informações
sobre os procedimentos experimentais serão relacionadas. As deduções feitas nesse
capítulo foram baseadas em Rao (2009) e Preumont (2006).
3.1 O Método dos Elementos finitos
Os Métodos Analíticos Clássicos permitiam calcular, a partir da solução das
equações diferenciais, a resposta exata dos deslocamentos, tensões e deformações na
estrutura em todos os seus pontos. Porém, essas soluções eram válidas apenas para
geometrias simples, com condições de carregamento e apoio muito bem comportados. O
Método dos Elementos Finitos (MEF) tem como objetivo a determinação do estado de
tensão e de deformação de um sólido de geometria arbitrária sujeito a ações exteriores.
Primeiramente são utilizadas as técnicas de “Discretização de Sistemas
Contínuos” (Alves, 2005). No sistema discreto construído pelo MEF, as equações são
elaboradas com base no comportamento dos chamados “nós”. Assim, somente os
deslocamentos de alguns pontos da estrutura, os nós, são calculados, ou seja, o modelo
dinâmico da estrutura é descrito em coordenadas nodais. Entre os nós do modelo
encontram-se os elementos finitos, que descrevem trecho a trecho o comportamento da
estrutura. A partir do conhecimento dos deslocamentos nodais, os deslocamentos e as
deformações dentro dos elementos são calculados por interpolação. Desse modo, os
deslocamentos da estrutura podem ser expressos em função dos deslocamentos dos
pontos nodais por meio das funções interpoladoras. Via de regra, tais funções podem
descrever qualquer curva que seja internamente contínua e que satisfaça as condições de
deslocamento geométrico impostas pelos deslocamentos nodais.
Efetuando-se tal procedimento, os deslocamentos “u” de um elemento finito
podem ser escritos em função dos deslocamentos nodais ui utilizando as funções de
interpolação apropriadas. Essa relação é dada na forma matricial por:
u = Nu ui ; iuuNu && = ; iuuNu &&&& = (3.1)
na qual Nu é a matriz que contém as funções de interpolação que relacionam os
deslocamentos que ocorrem ao longo do eixo longitudinal com os deslocamentos nodais
do elemento. Para casos dos harvesters, onde se pretende modelar o acoplamento
eletromecânico entre estrutura base e o elemento piezelétrico, além dos deslocamentos

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
27
ui, também devem ser considerados os potenciais elétricos φ i como variáveis nodais.
Portanto, pode-se escrever de forma análoga ao deslocamento, a seguinte relação
matricial.
iN φφ φ= (3.2)
na qual φN é a matriz que contém as funções de interpolação que relacionam os
potenciais elétricos que ocorrem ao longo do PZT com os potenciais nodais do
elemento.
Durante a modelagem com o MEF, alguns conceitos devem estar claros, como
noções de grau de liberdade, deslocamento generalizado, força generalizada, equilíbrio,
matriz de rigidez, vetor solicitação e introdução de condições de apoio. A maioria
desses conceitos é introduzida junto com outros conceitos em vibrações mecânicas.
3.2 Dinâmica de sistemas mecânicos
O comportamento das estruturas inteligentes e dos harvesters pode ser entendido
por meio de um estudo detalhado de toda sua estrutura, seus movimentos, influência de
agentes externos. Sem enxergar claramente esses parâmetros, não é possível construir
modelos condizentes com a realidade.
O movimento dessas estruturas é causado pelo fenômeno da Vibração. O sistema
é submetido a uma “entrada”, que pode ser impulsiva (impacto), harmônica ou
randômica (aleatória). Em resposta, o sistema vibra, se tornando o ambiente ideal para
iniciar o processo de conversão de energia mecânica da vibração em energia elétrica
pelo material piezelétrico acoplado.
Todo o processo de Power Harvesting tem origem no fenômeno das vibrações
mecânicas da estrutura. Por isso seu estudo é essencial para o desenvolvimento de
qualquer modelagem matemática de estruturas inteligentes.
3.2.1 Conceitos básicos de vibração
A teoria de vibração trata do estudo de movimentos oscilatórios de corpos e as
forças associadas a eles.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
28
Partes elementares de sistemas vibratórios:
Meio para armazenar energia potencial (mola ou elasticidade);
Meio para armazenar energia cinética (massa ou inércia);
Meio de perda gradual de energia (amortecedor).
“A vibração de um sistema envolve a transferência alternada de sua energia
potencial para energia cinética e de energia cinética para potencial. Se o sistema for
amortecido, certa quantidade de energia é dissipada em cada ciclo de vibração.” (RAO,
2009).
Grau de liberdade
Trata-se do número mínimo de coordenadas independentes que são necessárias
para que o movimento de todas as partes de um sistema num instante qualquer possam
ser determinados.
Por exemplo, a figura 3.1 mostra alguns exemplos de sistemas com diferentes graus de
liberdade.
(a) (b) (c)
Figura 3.1: (a) Pêndulo Simples (um grau de liberdade); (b) Modelo físico para tratar
desbalanceamento de motores acoplados a uma estrutura (dois graus de liberdade); (c)
Sistema massa-mola-amortecedor (três graus de liberdade).
Freqüência natural
A freqüência com a qual um corpo oscila sem a influência de forças externas,
após um distúrbio inicial, é conhecida como sua freqüência natural ou fundamental. Um
sistema vibratório com n graus de liberdade terá, em geral, n freqüências naturais
distintas.
Para que sejam encontradas as freqüências naturais de um sistema vibrando,
primeiramente esse sistema deve ser considerado não amortecido, ou seja, após uma

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
29
entrada, haverá conservação de energia e o sistema vibrará de forma intermitente. Em
sua equação de movimento não estarão presentes forças não conservativas.
Dessa forma, para um sistema massa mola com um grau de liberdade, por
exemplo, tem-se a equação de movimento: + = 0 (3.3)
Admitindo-se que: () = (3.4)
Sendo C e s constantes a determinar, a eq. 3.2 fica: ( + ) = 0 (3.5)
Já que ≠ 0, + = 0 (3.6)
= ± − (3.7)
Sabendo-se que = ± ! são os chamados autovalores do problema e que !
fica:
! = (3.8)
É claro que dependendo do sistema, ! mudará com os valores relativos de
rigidez e massa. Porém pode-se admitir que a freqüência natural de um sistema é
encontrada em função da sua rigidez e da sua massa.
Vibração livre com amortecimento viscoso
Muitos parâmetros importantes na análise de sistemas dinâmicos mecânicos são
encontrados por meio do estudo da vibração livre de um sistema com amortecimento
viscoso.
Para um sistema com um grau de liberdade amortecido, acrescenta-se na eq. 3.3
o termo referente às perdas de energia devido ao amortecimento viscoso. Então a
equação governante do sistema fica: + #$ + = 0 (3.9)
Solucionando-se a equação pelo mesmo método anterior, a eq. 3.7 torna-se: + # + = 0 (3.10)
As raízes da equação característica são:

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
30
, = # ± √# − 42 = − #2 ± *+ #2, − (3.11)
Quando o amortecimento do sistema provoca a anulação do radical da eq. 3.11,
esse amortecimento é chamado crítico (cc). Seu valor é encontrado por:
+ #-2, − = 0 (3.12)
#- = 2 ! (3.13)
Para qualquer sistema amortecido, o fator de amortecimento é definido como:
. = ##- . ! = ##-#-2 = #2 (3.14)
Substituindo-se na eq. 3.9: , = −. ± /. − 1 ! (3.15)
A partir da análise das relações encontradas, para um sistema subamortecido, sua
freqüência angular é dada por: 0 = /1 − . ! (3.16)
Essa freqüência é denominada freqüência de vibração amortecida, e é sempre
menor do que a freqüência natural não amortecida !.
Decibel
O decibel (dB) é uma medida da razão entre duas quantidades, utilizado
em acústica, física e eletrônica. É muito usado na medida da intensidade de sons. É uma
unidade de medida adimensional, semelhante à percentagem. A definição do dB é
obtida com o uso do logaritmo. Trata-se de uma escala baseada no sentido auditivo
humano. Como o ouvido humano é sensível à uma faixa extensa de freqüências sonoras
(do menor som audível até um trilhão de vezes seu valor), a escala decibel é
logarítmica, para abranger todos esses valores de maneira mais conveniente. “Na escala
decibel, o menor som audível (quase que silêncio total) é de 0 dB. Um som 10 vezes
mais forte tem 10 dB, um som 100 vezes mais forte tem 20 dB e conseqüentemente, um
som mil vezes mais forte do que o próximo ao silêncio total tem 30 dB” [1]. Alguns
sons comuns e seus índices de decibéis [1]:
próximo ao silêncio total - 0 dB
um sussurro - 15 dB
conversa normal - 60 dB

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
31
uma máquina de cortar grama -90 dB
uma buzina de automóvel - 110 dB
um show de rock ou um motor a jato - 120 dB
um tiro ou um rojão - 140 dB
3.2.2 Dedução das equações de movimento via Segunda lei de Newton
Segundo Rao (2009), as equações de movimento de uma estrutura vibrando
podem ser obtidas pela 2a Lei do Movimento de Newton se seguidos os seguintes
passos:
1- Seleção do sistema de coordenadas lineares e angulares para descrever respectivamente os movimentos lineares e angulares de uma massa pontual ou do centróide de um corpo rígido; 2- Determinação da configuração de equilíbrio estático do sistema e do deslocamento da massa ou corpo rígido em relação à sua posição de equilíbrio; 3- Desenho do diagrama de corpo livre da massa ou corpo rígido sendo submetido a um deslocamento positivo e a uma velocidade. Indicação de todas as forças ativas e reativas agindo sobre o sistema; 4- Aplicação da segunda lei de Newton, enunciada como: 12() = 00 + 032()0 , (3.17)
Sendo m a massa e x(t) o descolamento da estrutura.
Para exemplificar, considera-se uma caixa d’água, como a de Ilha Solteira.
Figura 3.2: Caixa d’água da cidade de Ilha Solteira.

Guia
Pode-se representar a caixa d’água por meio de uma idealização, sem levar em
conta o amortecimento, como segue:
Figura 3.3:
Definida a coordenada de deslocamento da estrutura por
rigidez da estrutura é dada por:
Onde E = Módulo de elasticidade do material, I = Momento de inércia e l =
comprimento da coluna. Na modelagem dessa estrutura, é possível aproximá
sistema massa mola equivalente dado por:
Figura 3.4: Sistema massa
O diagrama de corpo livre do sistema é:
Figura 3.5: Diagrama de corpo livre do sistema massa
Grupo de Materiais e Sistemas Inteligentes Guia de Power Harvesting: História, Evolução e Fundamentos
se representar a caixa d’água por meio de uma idealização, sem levar em
mortecimento, como segue:
Figura 3.3: Esquema representativo da caixa dágua.
Definida a coordenada de deslocamento da estrutura por x(t) e s
rigidez da estrutura é dada por: = 45678
Onde E = Módulo de elasticidade do material, I = Momento de inércia e l =
comprimento da coluna. Na modelagem dessa estrutura, é possível aproximá
a mola equivalente dado por:
Sistema massa-mola equivalente da caixa dágua.
O diagrama de corpo livre do sistema é:
Diagrama de corpo livre do sistema massa-mola.
Grupo de Materiais e Sistemas Inteligentes - GMSINT a, Evolução e Fundamentos
32
se representar a caixa d’água por meio de uma idealização, sem levar em
x(t) e sabendo-se que a
(3.18)
Onde E = Módulo de elasticidade do material, I = Momento de inércia e l =
comprimento da coluna. Na modelagem dessa estrutura, é possível aproximá-la de um
mola equivalente da caixa dágua.
mola.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
33
Aplicando-se a segunda lei de Newton, tem-se:
1() = − − 0932()09 = 0 (3.19)
2 + = 0 (3.20)
Eis a equação que define o movimento da estrutura com base na coordenada
fixada x(t).
Para sistemas com mais graus de liberdade, os procedimentos são os mesmos
descritos anteriormente. Assim, considerando sistemas com massas ou momentos de
inércia constantes, a 2a lei de Newton é escrita como:
:: = ∑ 1:< (=>?> > >> @)< (3.21)
Ou A:B: = ∑ C:<(=>?> #D?=D ?íE@FDF @Gé?#@> A@)< (3.22)
Onde ∑ 1:< < denota a soma de todas as forças agindo sobre a massa mi e∑ C:<<
indica a soma dos momentos de todas as forças que agem sobre um corpo rígido de
inércia de massa Ji.
Incluindo-se o amortecimento à modelagem, para o sistema abaixo, tem-se
(RAO 2009):
Figura 3.6: Sistema massa-mola-amortecedor com vários graus de liberdade.
:: = −:(: − :H) − :I(:I − :) − #:(J$ − $:H) + #:IK$:I − $:L + 1: (3.23)
Para i=1, x0 = xn+1 = 0, então:

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
34
= (#+#)$ − #$ + (+) − = 1 (3.24)
Representando as equações na forma matricial, tem-se:
MN2 + M#N$ + MN2 = 12 (3.25)
3.2.3 Dedução das equações de movimento via Equações de Lagrange
Uma maneira simples de deduzir as equações de movimento de um sistema
vibrando é através das Equações de Lagrange.
Na mecânica lagrangiana, a trajetória de um sistema de partículas é obtida
resolvendo as equações de Lagrange. O lema fundamental do cálculo de
variações mostra que resolver as equações de Lagrange é equivalente a encontrar o
caminho que minimiza o funcional ação, uma quantidade que é a integral da função de
Lagrange ℒ no tempo. Contrariamente aos métodos baseados nas leis de Newton, a
mecânica lagrangiana não exige a identificação das forças envolvidas, o que torna a
análise mais abstrata. Contudo, é assim possível simplificar o tratamento de sistemas de
maior complexidade, especialmente quando não é relevante a determinação das forças
associadas às restrições do movimento das suas partículas.
As equações de Lagrange são dadas por:
Fdq
dL
qd
dL
dt
d
ii
=−
& (3.26)
sendo qi é uma coordenada generalizada, F a somatória de forças não conservativas
correspondentes à coordenada qi e L o Lagrangiano, definido como:
WUTL +−= (3.27)
sendo T a energia cinética, U a energia potencial e W o trabalho realizado.
Analisa-se novamente a figura 3.6. Investigando-se dessa vez a energia do
sistema, tem-se:
P = 12 $ + 12 $ + 12 4$4 (3.28)
Q = 12 + 12 ( − ) + 12 4(4 − ) (3.29)

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
35
1() = −#$ − #($ − $) − #4($ − $4) + 1 (3.30)
Da eq. 3.27, tem-se:
R = $ + $ + 4$4 − + ( − 2 + ) + 4(4 +232−22 3.31
Encontrando-se a equação do movimento da massa 1: FRF$ = $ (3.32)
FRF = − + − (3.33)
FF FRF$ = (3.34)
Substituindo-se 3.32 a 3.34 em 3.26, + − + = −#$ − #($ − $) + 1 (3.35)
Rearranjando a eq. 3.35 ela se torna a equação 3.24, encontrada pelo método de
Newton.
Para ilustrar a simplicidade da mecânica lagrangiana em um sistema um pouco
mais complicado, propõe-se um sistema trailer-pêndulo, cuja modelagem é descrita em
Rao (2009), esquematizado na figura 3.7:
Figura 3.7: Sistema pêndulo composto e trailer.
Seu diagrama de corpo livre é dado por:

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
36
Figura 3.8: Diagrama de corpo livre do sistema.
As coordenadas x(t) e y(t) são utilizadas como coordenadas generalizadas para
descrever o movimento linear do trailer e θ(t) o deslocamento angular do pêndulo
composto. Assim, o deslocamento do ponto C pode ser expresso em função dos
componentes: - = + 7 sen B (3.36)
V- = + 7 cos B (3.37)
Encontrando-se $- e V$-: $- = $ + 7 θ$ cos B (3.38)
V$- = − 7 θ$ sen B (3.39)
Assim, a energia cinética do sistema é dada por:
P = 12 C$ + 12 Y$ + ZB$ 4 + $B$ Z#DB[ + 12 YZ12 [ B$
= (C + )$ + +\794 , B$ + (Z #DB)$B$ (3.40)
A energia potencial do sistema é proveniente do esforço de deformação das
molas e do potencial gravitacional. Dessa forma, para a referência situada na posição
mais baixa do ponto C, tem-se:
] = 12 + 12 + E Z2 (1 − #DB) (3.41)
As forças não conservativas referentes às coordenadas x(t) e θ(t), provenientes
da dissipação de energia pelos amortecedores e pelo torque aplicado ao pêndulo
respectivamente, são dadas por: ^() = 1() − #$() − #$() (3.42)

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
37
Θ() = C() (3.43)
O lagrangiano já pode ser calculado pela eq. 3.27: R = (C + )$ + +\794 , B$ + (Z #DB)$B$ + + + E 7 (1 − #DB)
(3;44)
Resolvendo-se 0_03,
0_0`, 0_03$, 0_0 $ , 00 +0_03$, e
00 +0_0 $ ,, e organizando os resultados nas
equações 3.26, 3.34 e 3.35 são obtidas as equações de movimento para o sistema:
Para x: (C + ) + (Z #DB)B − Z GBB$ + + + 1() − #$ − #$ (3.45)
Para θ: +4 Z, B + (Z #DB) − Z GBB$$ + Z GBB$$ + EZ G B = C()
(3.46)
3.2.4 Problema do autovalor
Anteriormente introduzido o conceito de freqüência natural de um sistema.
Partindo-se agora para a solução das equações governantes obtidas para um sistema
qualquer, com n graus de liberdade, considera-se inicialmente um sistema conservativo
cuja equação de movimento é expressa por: MN2 + MN2 = 0a2 (3.47)
Sendo [m] e [k] respectivamente as matrizes de massa e de rigidez da estrutura.
O deslocamento x não é função do tempo já que se trata de um sistema
conservativo e a equação 3.47 pode ser escrita assim: MN 2P () + MN 2P() = 0a2 (348)
O vetor 2() é conhecido como a forma modal do sistema ou o autovetor
(eigenvector) e descreve sua configuração constante. Pa2() é uma função do tempo.
Rearranjando-se a eq. 3.48, fica:
− P ()P() = MN 2MN 2 = #DG>G → (349)
Ou seja: P () + P() = 0 (3.50)
e

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
38
cMN − MNd 2 = 0 (3.51)
A equação representa um conjunto de n equações lineares homogêneas:
ef :<!
<g − f <:<!
<g h f <!
<g = 0 @ = 1,2, G (3.52)
Descarta-se a solução trivial do conjunto de equações (X1= X2=... Xn=0), não
conveniente. Para uma solução não trivial, o determinante da matriz que multiplica 2
deve ser 0, então:
if :<!
<g − f <:<!
<g i = 0 (3.52)
Sendo:
Equação 3.52 equação característica; < autovalor (eigenvalue); ∑ <!<g frequências naturais do sistema.
Assim, de uma maneira simplificada, tem-se: |MN − MN| = 0 (3.53)
Ou
|kMN − MN| = 0 k = 1 (3.54) Algumas manipulações podem ser executadas para tornar as operações
matriciais do conjunto de equações mais fáceis. Por exemplo, na equação 3.33,
dividindo-se os termos do determinante por [k], surge uma matriz identidade, o que
facilita muito os cálculos. Assim:
lkMmN − MNMN l = |kMmN − MnN| = 0 (3.55)
A matriz [D] é chamada matriz dinâmica.
EXEMPLO (RAO 2009):
Considera-se o sistema massa mola com três graus de liberdade mostrado na
figura 3.9.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
39
Figura 3.9: Sistema massa-mola com três graus de liberdade.
Suas matrizes de massa e flexibilidade ([a] = [k]-1) são dadas por:
MN = o1 0 00 1 00 0 1p M>N = 1 o1 1 11 2 21 2 3p (3.56)
Logo:
MnN = o1 1 11 2 21 2 3p (3.57) Substituindo-se na eq. 3.55:
n = qok 0 00 k 00 0 kp − o1 1 11 2 21 2 3p q = 0 (3.58)
Dividindo-se tudo por k:
n = rrk − − − − k − 2 − 2− − 2 k − 3 rr 1k = q1 − s −s −s−s 1 − 2s −2s−s −2s 123sq = 0 (3.59)
Sendo s = \tu = \v9t Assim: Det = α4 − 5α + 6t = m: 0 (3.60)
As raízes da equação 3.60 são:
s = = 0,19806 , = 0,44504* (3.61)
s = = 1,5553, = 1,2471* (3.62)

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
40
s4 = 4 = 3,2490 , 4 = 1,8025* (3.63)
Uma vez descobertos os autovalores, voltando para a eq. 3.52, calcula-se o
autovetor para cada freqüência natural do sistema. Assim, os resultados obtidos são
autovetores que descrevem o comportamento do sistema para cada freqüência natural.
Para a primeira freqüência natural (freqüência fundamental): cMmN − MnNd 2() = 0a2 (3.54)
o1 0 00 1 00 0 1p − 0,44504* . o1 1 11 2 21 2 3p |^()^()^4() = ~000 (3.55)
Os autovetores encontrados foram:
2() = ^() ~ 11,82,3 ; 2() = ^() ~ 10,4−0,8 ; 2 (4) = ^(4) ~ 1−1,20,5 (3.56) A partir desses autovetores é possível traçar as formas modais do sistema, como
por exemplo, para o primeiro modo de vibrar, a estrutura da figura 3.9 se comporta
assim:
Figura 3.10: Forma modal do sistema da figura 3.9.
3.2.5 Transformadas de Laplace
O método da transformada de Laplace pode ser usado para determinar a resposta
de um sistema a qualquer tipo de excitação. Ele soluciona equações diferenciais
lineares. É um método operacional aplicável na solução de equações diferenciais
lineares.
Por meio desse método, muitas funções comuns, tais como senóides e
exponenciais e operações como derivação e integração, podem ser convertidas em

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
41
funções e operações algébricas em função de uma variável complexa jws += σ em um
plano complexo j um p.
Uma vantagem do método é que, ao resolver a equação diferencial, tanto a
componente transitória como a de regime permanente podem ser obtidas
simultaneamente.
Supondo uma função qualquer contínua f(t) para t > 0, sua transformada de
Laplace é definida pela equação:
ℒf(t) = F(s) = eHf(t)dt (3.57)
Baseados nessa relação, os Teoremas de Laplace descrevem a transformada de
acordo com a situação na qual é aplicada, como seguem:
Teorema da Derivação Real
A transformada de Laplace da derivada de uma função f(t) é dada por
ℒ FF () = 1() − (0) (3.58)
onde f(0) é o valor inicial de f(t) calculado em t = 0.
A transformada de Laplace da segunda derivada de uma função f(t) é dada por
ℒ FF () = 1() − (0) − $(0) (3.59)
onde $(0) é o valor de 00 () calculado em t = 0.
Teorema do Valor Final
O teorema do valor final estabelece que o comportamento em regime
estacionário de f(t) é o mesmo que o comportamento de sF(s) nas proximidades de s=0.
Assim é possível obter o valor de f(t) em t=infinito, diretamente a partir de F(s)
)(lim)(lim0
sFstfst →∞→
=
Teorema do Valor Inicial
O teorema do valor inicial estabelece que se f(t) e df(t)/dt são transformáveis
por Laplace se o lim sF(s) exite, então
)(lim)0( sFsfs ∞→
+ =

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
42
Teorema da Integração Real
Se f(t) é de ordem exponencial, a transformada de ()F existe e é dada por
[ ]s
f
s
sF )0()(dt f(t)
1−
+=∫L
Onde 1() = ℒM()N e H(0) = ()F é calculado em t = 0.
Segundo Rao (2009), os passos a serem seguidos para resolver um problema de
vibração com Transformada de Laplace são:
1. Escrever a equação de movimento do sistema; 2. Transformar cada termo da equação usando condições iniciais
conhecidas; 3. Resolver para a resposta transformada do sistema; 4. Obter a solução desejada (resposta) usando transformação
inversa de Laplace. Aplicando-se a transformada de Laplace para resolver a vibração de um sistema
cuja equação de movimento é dada pela eq. 3.60:
mx + cx$ + kx = () (3.60)
ℒx(t) = eHx(t)dt = X(s) (3.61)
x$ (t) = dxdt (t) (3.62)
ℒ dxdt (t) = eH dxdt (t)dt = eHdx(t)| + S eHx(t)dt
(3.63)
= sX(s) − x(0) (3.64)
sendo x(0) = x = deslocamento inicial da massa A transformada de Laplace da derivada de segunda ordem x (t) se resolve
analogamente ao de primeira ordem. Assim:
x (t) = dxdt (t) (3.65)
ℒ dxdt (t) = eH dxdt (t)dt (3.66)
= sX(s) − sx(0) − x$(0) (3.67)

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
43
sendo x$ (0) = x = velocidade inicial da massa.
A transformada de Laplace é dada então por:
F¡(s) = eHF(t)dt = eH(mx + cx$ + kx)dt
(3.68)
Substituindo-se as eqs. 3.61, 3.64 e 3.67 respectivamente nos termos
relacionados à rigidez, ao amortecimento e à massa, tem-se:
(ms + cs + k)X(s) = F(s) + mx$ (0) + (ms + c)x(0) (3.69)
Presumindo-se que tanto o deslocamento quanto a velocidade inicial é nula,
dessa forma: (ms + cs + k)X(s) = F(s) (3.70)
F(s)X(s) = Z(s) = ms + cs + k (3.71)
Z(s) é conhecida como a impedância generalizada do sistema, relacionando o
sinal de entrada com o de saída. Trata-se de uma relação extensamente abordada em
sistemas de controle de vibrações, na solução de equações de movimento de estruturas
inteligentes e de sistemas elétricos.
Denomina-se a função de transferência do sistema a função inversa da
impedância generalizada, denotada por:
£() = 1¤() = 1ms + cs + k = 1m(s + 2sω¦s + ω¦) (3.72)
X(s)F(s) = 1m(s + 2sω¦s + ω¦) (3.73)
X(s) = F(s)m(s + 2. ω¦s + ω¦) (374)
A solução do sistema é encontrada agora pela transformada inversa da eq. 3.74.
Da tabela de Laplace:

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
44
ℒHM1()1()N = (§)( − §) F§ (3.75)
Então, pode-se dividir a equação a ser transformada em duas funções, sendo:
1() = 1() 1() = 1m(s + 2 ω¦s + ω¦) (3.76)
Resolvendo-se para 3.76 em 3.75:
ℒHM1()1()N = 1 0 (§)H¨v©(Hª)G 0 ( − §)F§ = () (3.77)
Para sistemas mais complexos vale a pena consultar os Teoremas de Laplace,
evitando-se o trabalho braçal de integração.
3.2.6 Resposta de um sistema amortecido a movimento harmônico de base
Dentro do processo de Power Harvesting, o que mais se busca sempre é a
otimização da captura de energia pelo transdutor, no caso, piezelétrico do sistema
vibrando. No que diz respeito a sistemas eletromecanicamente acoplados constituídos
por vigas engastadas e material inteligente acoplado, muitos são os autores que optaram
por excitar sua estrutura através da base engastada, como ilustra a figura 3.11.
Figura 3.11: Viga engastada excitada por um movimento harmônico de base.
Por esse motivo, esse tópico do capítulo foi dedicado ao entendimento desse
fenômeno e como representá-lo nas equações de movimento do sistema. O sistema a ser
analisado está ilustrado na figura 3.12.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
45
Figura 3.12: Sistema massa mola amortecedor com um grau de liberdade.
A equação do movimento do sistema é dada por:
+ #($ − V$ ) + ( − V) = 0
A função y(t)=Y sen ω ; + #$ + = V + #V$ = £ G + # £ cos = « G ( − s)
Sendo A=Y/k + (ce) e α tgH ®− ¯° ± Utilizando-se a representação do
movimento harmônico. Usando a solução indicada pela eq. 3.60:
²() = 1³M( − ) + # N/ G ( − µ) = m 1³ |¶(@ )|:(vH·) 1() = 1G ( − µ − s)
²() = Y/k + (cω)M( − ) + (# )N/ G
²() = ^ G ( − µ)
Assim:
£ = P0 + (# )( − ) + # / = 1 + (2.?)(1 − ?) + (2.?)/

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
46
e
µ = EH # 4( − ) + ( #) = EH 2.?41 + (4. − 1)?
Essa razão entre a amplitude de resposta do sistema ²() e de deslocamento da
base y(t) +¹º, = P0 se chama transmissibilidade de deslocamento do sistema. A figura
3.13 mostra dois gráficos com os quais Rao (2009) ilustra a transmissibilidade e o
ângulo de fase do sistema da figura 3.12 em função da razão das freqüências.
(a)
(b)
Figura 3.13: (a) transmissibilidade em função da razão de freqüências; (b) Ângulo de
fase em função da razão de freqüências.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
47
Examinando a figura 3.13, podemos extrair dela algumas conclusões
importantes:
(1) Quanto maior o fator de amortecimento, menor é a transmissibilidade de
movimento da base para o sistema. Em conseqüência, a amplitude da vibração também
é menor, principalmente na freqüência natural do sistema.
(2) Quando a freqüência do sistema é mais que duas vezes maior do que a
freqüência natural do sistema, a magnitude do amortecimento tende a amplificar (ao
invés de reduzir) a amplitude da vibração.
(3) Quando !» = 1 ocorre o fenômeno da ressonância, no qual a freqüência
da excitação iguala a freqüência natural do sistema e grandes amplitudes se observam.
Normalmente, é uma situação indesejável, pois grandes amplitudes de vibração levam a
altos níveis de tensão que podem conduzir ao colapso do material.
3.3 Dinâmica de sistemas elétricos
Até agora foram tratados apenas os aspectos referentes aos sistemas mecânicos.
Para completar os estudos das partes de um harvester deve-se estudar os componentes
elétricos, cuja importância é significativa para um bom desempenho.
Sistemas elétricos são constituídos por elementos passivos como resistores,
capacitores e indutores e ativos, como fontes de corrente e de tensão.
3.3.1 Relações constitutivas para elementos de um circuito
A tabela 3.1 ilustra as relações constitutivas dos elementos de um circuito.
Tabela 3.2: Relações dos elementos de um circuito.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
48
3.3.2 Fontes de potencial e corrente
A figura 3.14 foi baseada no esquema apresentado por Preumont (2006) e
esquematiza modelos de fontes de corrente e de tensão.
(a) (a) (b)
(c)
Figura 3.14: (a) Modelo ideal de uma fonte de tensão; (b) Modelo ideal de uma
fonte de corrente; (c) Fonte real e sua relação potencial-corrente.
Em fontes ideais de potencial e de corrente, potencial e corrente se comportam
independente da existência ou influência um do outro. Em uma fonte real essa relação
existe como mostra o gráfico do item c da figura 3.14. Em uma fonte real, quando os
terminais estão abertos, a diferença de potencial é máxima (Eo) e não há fluxo de carga.
Já quando estão em curto circuito, não há diferença de potencial e a corrente é máxima
(Io).
Essa função pode ser escrita como:
= ¼ − ¼m @
Para modelar fontes reais, são utilizados modelos que combinam fontes ideais de
corrente e de tensão e resistores. As equações que regem esses modelos são:
Para o modelo ideal de fonte de tensão: = ¼ − ½@

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
49
Para o modelo ideal de fonte de corrente: = ½m − ½@
Essas aproximações vêm se mostrando eficientes para representar fontes reais.
3.3.3 As Leis de Kirchhoff
As leis fundamentais que regem os sistemas elétricos são as Leis de Kirchoff.
1ª Lei de Kirchhoff (Lei das Correntes ou Leis dos Nós - KCR)
Em um nó, a soma das correntes elétricas que entram é igual à soma das
correntes que saem, ou seja, um nó não acumula carga.
f mt = 0 GFD > #D??G Zé?@#> m = ¿À¿Á
!g
ou m + m4 − m − m = 0
Isto é devido ao Princípio da Conservação da Carga Elétrica, o qual estabelece
que num ponto qualquer a quantidade de carga elétrica que chega (δQ1) deve ser
exatamente igual à quantidade que sai (δQ2 + δQ3), δQ1 = δQ2 + δQ3. Dividindo por
δt:
2ª Lei de Kirchhoff (Lei das Tensões ou Lei das Malhas - KVR)
A soma algébrica da d.d.p (Diferença de Potencial Elétrico) em um percurso
fechado é nula. Ou seja, a soma de todas as tensões (forças eletromotrizes) no sentido
horário é igual a soma de todas as tensões no sentido anti-horário, ocorridas numa
malha, é igual a zero.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
50
f ¼t = 0 Á!g
Ou ¼ − ¼ − ¼ − ¼4 = 0
As leis de Kirchhoff são baseadas no eletromagnetismo e só são válidas quando
o tamanho da oscilação eletromagnética é muito maior que as dimensões do circuito.
Segundo Preumont (2006), para encontrar as equações governantes de sistemas
elétricos por meio das leis de Kirchhoff, assim como para as leis de Newton em
sistemas mecânicos, por exemplo, devem ser seguidos alguns passos:
1- Expressar todas as correntes e cargas em termos da variável independente de carga qi;
2- Utilizar as equações constitutivas para expressar a voltagem ou corrente através de todos os elementos em termos de qi;
3- Admitir as considerações expressas em KCR e KVR para a obtenção do equacionamento completo.
Além das Leis de Kirchhoff, outros métodos como o das Equações de Lagrange
e de Hamilton são amplamente aplicados para equacionar sistemas elétricos. Os
procedimentos para tal são os mesmos tomados para os sistemas mecânicos. No
Capítulo 2 de Preumont (2006) e de Leo (2007), tais métodos são descritos
detalhadamente com exemplos.
3.4 Dinâmica de sistemas eletromecânicos – piezelétricos
Os sistemas compostos formados pela interconexão de sistemas mecânicos e
elétricos são chamados eletromecânicos. A principal finalidade dessa conexão é a
conversão de energia mecânica em elétrica e vice-versa, realizada pelo transdutor
eletromecânico.
Novamente métodos como as Equações de Lagrange e de Hamilton são
utilizados para a modelagem de sistemas eletromecânicos. A Tabela 3.1 de Preumont

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
51
(2006) relaciona as equações de Lagrange aplicadas a sistemas eletromecânicos (figura
3.15).
Figura 3.15: Equações de Lagrange para sistemas eletromecânicos.
3.4.1 Transdutor eletromecânico geral
Equações constitutivas
O comportamento constitutivo de uma ampla classe de transdutores
eletromecânicos pode ser modelado como na figura 3.16. A caixa-preta representa o
mecanismo de conversão entre energia elétrica e energia mecânica, e vice-versa.
Figura 3.16: Modelo de transdutor eletromecânico.
As equações constitutivas do sistema são:

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
52
= ¤Ã@ + PÃ\ = P\Ã@ + ¤\
onde
e = transformada de Laplace da tensão de entrada nos terminais elétricos;
i = corrente de entrada;
f = força aplicada aos terminais mecânicos;
v = velocidade da parte mecânica;
Ze = Impedância elétrica bloqueada, para v=0
Tem = coeficiente de transdução que representa a força eletromotriz (tensão) que aparece
no circuito elétrico por unidade de velocidade na parte mecânica (em m / volt.s);
Tme =coeficiente de transdução que representa a força que age sobre os terminais
mecânicos para equilibrar a força eletromagnética induzida por unidade de corrente de
entrada do lado elétrico (em N / Amp);
Zm = impedância mecânica quando a porção elétrica do transdutor se encontra aberta (i =
0).
Na ausência de forças externas (f = 0), v pode ser eliminada entre as duas equações
anteriores, levando a
= ¤Ã − PÃ\P\ä\ @ ÄÅÆÄÆÅÇÆ é chamada de impedância dinâmica. O ponto de condução total
impedância elétrica é a soma da impedância bloqueada e da dinâmica.
A equação (3.111) mostra que a queda de tensão elétrica em todos os terminais
de qualquer transdutor eletromecânico é a soma de uma contribuição
proporcional à corrente aplicada e uma contribuição proporcional à velocidade dos
terminais mecânicos.
A modelagem de um sistema eletromecânico com materiais piezelétricos
acoplados será explicada detalhadamente no Capítulo 4. O capítulo 4 de Preumont
(2006) e os capítulos 4, 5, 6 de Leo (2007) descrevem inúmeros métodos para
equacionar o comportamento de estruturas inteligentes. Em Leo, além dos métodos para
encontrar o equacionamento do sistema, são discutidos inúmeros parâmetros e análises

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
53
envolvidas no seu estudo, como por exemplo, análises dinâmica e estática, efeitos de
condições de contorno elétricas e mecânicas, entre outros.
3.4.2 Modelo de viga de Euller-Bernoulli
Na modelagem de uma estrutura via Método dos Elementos Finitos, a escolha do
tipo e tamanho de elemento finito que descreva de forma adequada o comportamento
trecho a trecho da estrutura depende do conhecimento da natureza física do problema a
ser representado, bem como da formulação do elemento escolhido traduzida pela sua
função de interpolação (Alves F. A. 2005).
Os Elemento de Placa de Kirchoff e o Elemento de Viga de Euler-Bernoulli são
amplamente estudados pelo Grupo de Materiais e Sistemas Inteligentes – GMSINT,
como pode ser visto em alguns relatórios de pesquisa de iniciação científica e teses de
membros e ex-membros do grupo como em Marqui (2007) e em Gonsalez (2007).
Nessa e na próxima seção encontram-se as modelagens desses elementos já
levando em conta os graus de liberdade elétricos devido aos elementos piezelétricos
acoplados. Segue uma breve apresentação de ambos os tipos de elemento, suas matrizes
elementares e os respectivos modelos completos de acoplamento mecânico.
O elemento de viga de Euler-Bernoulli pode ser representado pela figura 3.17,
onde é explicito dois nós para cada elemento e dois graus de liberdade por nó, o
deslocamento (zu ) e o de rotação (xθ ). Para cada elemento piezelétrico acoplado a viga
serão considerados ainda dois potenciais elétricos (φ ) como variáveis nodais, conforme
mostra a Figura 3.3. (Rocha, 2004).
uz1
θ x1
uz2
θ x2
21
ξ
, 0ix ξ = , 1jx ξ =
Figura 3.17: Elemento de Viga
sendo xi um ponto localizado no nó i e ξ uma coordenada generalizada em função de x.
As equações da estrutura do tipo viga de Euler-Bernoulli são baseadas na
consideração de que um plano normal ao eixo neutro antes da deformação permanece
normal ao eixo neutro após a deformação, ou seja, os segmentos das normais ficam com
os mesmos comprimentos, não havendo, portanto, variação de espessura durante a

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
54
deformação, conforme mostra Figura 3.18. Esta consideração permite dizer que os
efeitos de inércia de rotação e cisalhamento são desprezíveis.
x
zzu
zx
∂−∂
zu
z
z
u
zx
u
xθ ∂=
∂
Figura 3.18: Deslocamentos de um ponto sobre a normal ao plano neutro
Expressando o deslocamento e o potencial elétrico em termos das variáveis
nodais e das funções de interpolação, tem-se, conforme as Eqs. 3.78 e 3.79:
u = Nu ui (3.80)
sendo
[ ] T2211 xzxzi uuu θθ= (3.81)
e
iN φφ φ= (3.82)
Sendo
Ti ][ 21 φφφ = (3.83)
ou
I- ( ) ( ) ( ) ( ) ( ) 24231211 yuzuyuzu NuNNuNu θξξθξξξ +++= (3.84)
II- ( ) ( ) ( ) 2211 φξφξξφ φφ NN += (3.85)
I- Funções de interpolação dos deslocamentos mecânicos:
O elemento é analisado em apenas uma dimensão ( )ξ e que possui quatro graus
de liberdade. Assim, obtém-se a seguinte função interpoladora para o deslocamento na
direção z.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
55
( ) 34
2321 ξαξαξααξ +++=zu (3.86)
ou
α Pu = (3.87)
na qual
[ ]321 ξ ξ ξ =P (3.88)
[ ]T4321 ααααα = (3.89)
Tem-se que:
( ) ( ) 2432 32 ξαξαα
ξξξθη −−−=
∂∂−= zu
(3.90)
Considerando os valores das coordenadas generalizadas para cada nó do
elemento, pode-se escrever a equação (3.91) e obter a matriz Pn. As colunas da matriz
inversa de Pn contêm os índices das funções de interpolação. Os valores da coordenada
generalizada para o nó 1: 0=ξ e para o nó 2: 1=ξ , então:
3210
1111
001-0
0001
4
3
2
1
2
2
1
1
−−−
=
αααα
θ
θ
η
η
z
z
u
u
(3.91)
ou
αδ Pn= (3.92)
tal que,
[ ] δα Pn -1= (3.93)
Sabe-se que:
yzz
y aax
u
x
u θθ→θξξ
θ ηη ==
∂∂
∂∂
−=∂∂
−= 1 (3.94)
na qual ax
uz 1=∂∂−=
∂∂ ξ ,θ
ξ η , então:
000
0100
000
0001
2
2
1
1
2
2
1
1
=
y
z
y
z
z
z
u
u
a
a
u
u
θ
θ
θ
θ
η
η (3.95)
ou
iu Z=δ (3.96)

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
56
Logo, substituindo a equação (3.96) na equação (3.93) e esta última na equação
(3.87), tem-se que:
[ ] i1 u ZPnPu −= (3.97)
Sabendo que u = Nuui, então:
[ ] ZPnPN 1u
−= (3.98)
Assim:
ξ−ξ
ξ−ξ
ξ+ξ−ξ
ξ+ξ−
=
23
32
32
32
23
22
231
aa
aaaNT
u (3.99)
Para encontrar a matriz Bu é considerada
2
2
2
∂∂−=ξa
zLu (3.100)
então,
2
2
2 ξ∂∂
−=T
uTu
N
a
zB (3.101)
logo:
T
aa
-a
a
zB
−−
+−
−=
ξξξξ
62
126
64
126
2u (3.102)
II- Funções de interpolação do potencial elétrico.
O elemento estudado possui uma única dimensão ( )ξ e dois graus de liberdade
elétricos, logo, obtém-se a seguinte base polinomial para a obtenção das funções de
interpolação.
[ ]ξ 1=P (3.103)
Considerando os valores das coordenadas generalizadas para cada nó do
elemento, pode-se escrever a matriz Pn (equação (3.104)), sendo que as colunas da
matriz inversa de Pn contém os índices das funções de interpolação. Os valores da
coordenada generalizada para o nó 1: 0=ξ e para o nó 2: 1=ξ , então:

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
57
11
01
=Pn (3.104)
e
[ ] 11-
011
=−Pn (3.105)
As funções de interpolação são geradas pela multiplicação da equação (3.103)
pela equação (3.105), então:
[ ]T
PnPN
== −
ξξ−
φ11 (3.106)
Considerando que o campo elétrico pode ser escrito diretamente proporcional à
diferença de potencial elétrico e inversamente proporcional à distância desses
potenciais, então, tem-se:
δφδφ
d
dEE =→= (3.107)
na qual δ é a distância entre os potenciais. Para o caso estudado neste projeto,
tem-se que ( ) ( )xx δδφφ =→= , logo:
xE
∂∂= φ
(3.108)
Reescrevendo a equação (3.109) na forma matricial, tem-se:
)( )( xx
xE φ
∂∂= (3.110)
Comparando a equação (3.110) com a equação ( φφ LE = ), conclui-se que :
∂∂=x
Lφ (3.111)
Considerando a coordenada generalizada ξξ ∂=∂→= axa
x , pode-se reescrever
a equação (3.111) como segue:
∂∂=ξφ a
L1
(3.112)
então:
∂∂
=ξ
φφ
TT
N
aB
1 (3.113)

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
58
T
aB
−=
1
11φ (3.114)
Sendo a o comprimento do elemento e ξ a coordenada generalizada.
A partir daí, utilizando-se as funções de interpolação e as relações acima
descritas e manipulando-as juntamente com as matrizes elementares de rigidez e massa
dos elementos estruturais e piezelétricos obtêm-se as matrizes de massa e de rigidez do
elemento estrutural e do elemento piezelétrico e as matrizes do acoplamento
eletromecânico e de capacitância piezelétrica da viga de Euler-Bernoulli:
ξdNNtbaρM uTussss
es ∫=
1
0
−−−−−−
=
22
22
422313
221561354
313422
135422156
420
aaaa
aa
aaaa
aa
tbaM sssse
s
ρ (3.115)
∫=1
03
ξdBBa
IEK u
Tu
s
sses
−−−−
−−
=
222
2
22
3
4626
612612
2646
612612
aaaa
aa
aaaa
aa
a
IEK
s
sses (3.116)
∫=1
0
ξdNNAaρM uTuppp
ep
−−−−−−
=
22
22
422313
221561354
313422
135422156
420
pppp
pp
pppp
pp
pppep
aaa
aa
aaaa
aa
AaM
ρ (3.117)
ξdBBa
IcK u
Tu
p
pep ∫=
1
03
E11
−−−−
−−
=
222
2
22
3
E11
4626
612612
2646
612612
pppp
pp
pppp
pp
p
pep
aaaa
aa
aaaa
aa
a
IcK
(3.118)
( )∫+−=1
0
231 22
ξφφ dBBtttabe
K Tupps
ppeu ( )
−
−+−=
p
p
p
p
p
ppsppe
u
a
a
a
a
attt
abeK
0
0
0
22
231φ (3.119)
∫−
=1
02
33 ξφφ
σ
φφ dBBt
aAkK T
p
ppe
−−
−=1
1
1
12
33
p
ppe
t
aAkK
σ
φφ (3.120)

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
59
Onde sE é o módulo de Young da viga, sI é o momento de inércia da área de
sessão transversal da viga ssIEG = é a rigidez estrutural (viga), Ip é o momento de
inércia do par de elementos piezelétricos, definido através do teorema da translação de
eixos pela equação:
23
212 2p p s p
p p p
b t t tI b t
+ = +
(3.120)
A área total da seção transversal do par de PZTs deve ser escrita como ppp tbA 2= .
Nota-se que, para o elemento de viga de Euler-Bernoulli, somente a tensão
normal 11σ , a deformação 11S e o campo elétrico transversal E3 são considerados. Logo,
as equações piezelétricas ficam:
33311313 ESeD S∈+= (3.121)
331111111 EeScE −=σ (3.122)
3.4.3 Elemento de Placa de Kirchoff
Placas são elementos estruturais simétricos em relação a um plano médio, cujas
dimensões laterais são caracterizadas por serem bem maiores comparadas com a
dimenção normal a esse plano, a espessura. As placas têm a particularidade de serem
solicitadas por esforços externos normais ao plano médio (Waidemam, 2004). Algumas
considerações devem ser seguidas quando se trata de placas. São elas:
1. A espessura da placa é pequena em comparação com as dimensões laterais;
2. A deflexão da placa é pequena em comparação com a espessura da mesma e a
inclinação do plano médio defletido é pequena em comparação com a unidade;
3. A deformação da placa é tal que, linhas retas que são inicialmente normais à
superfície média, permanecem retas e normais à superfície média na estrutura com
carregamento. Esta é a Hipótese de Kirchoff;
4. Não há tensões na superfície média da placa, ou seja, o problema elástico é
tratado bidimensionalmente.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
60
As placas podem ser classificadas com base na relação “t/a”, onde “t” é a
espessura e “a” é o menor dos vãos da placa. Nos estudos realizados pelo grupo até
então foi utilizada a teoria clássica aplicável no estudo da flexão de placas delgadas
usuais com relação “t/a” da ordem de 1/5 a 1/100 (Martinelli et al. (1986)).
No caso de placas moderadamente espessas, é preciso recorrer à formulação da
placa Reissner-Mindlin que permitem considerar efeitos rotacionais e deformações por
cisalhamento (Lima Jr., 1999).
As equações que descrevem o movimento da placa de Kirchhoff são obtidas a
partir da equação geral do movimento das cascas em coordenadas curvilíneas com a
escolha apropriada dos parâmetros de Lamé e dos raios de curvaturas (Timoshenko e
Goodier, 1970).
A Figura 3.19 ilustra o deslocamento de um ponto situado sobre uma normal ao
plano médio da placa e distante de “z” desse plano.
P
x
zuz
P'O'
ux
z
z
ϕ
O
Figura 3.19 Deslocamento de um ponto situado sobre uma normal ao plano
médio da placa
Pela teoria clássica de flexão de placas delgadas, tem-se que pontos situados na
superfície média (z = 0) movem-se apenas na direção “z” quando a placa se deforma.
Uma linha reta perpendicular à superfície média antes do carregamento permanece reta
e perpendicular à mesma após o carregamento (linhas OP e O’P’).
Um ponto “P” situado a uma distância “z” da superfície média possui
deslocamentos “ux” e “uy” nas direções “x” e “y”, respectivamente.
Admitindo-se essa consideração, é possível adaptar as equações previamente
demonstradas para a placa, com todas as deformações escritas em função do
deslocamento uz, como segue.
Para o estado de tensões em questão, como já visto anteriormente na Eq. 3.123:

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
61
SGss =σ (3.123)
Desse modo:
( )( )
−−
−
−+=
xy
y
x
xy
y
x
S
S
SE
2
2100
01
01
211 υυυ
υυ
υυτσσ
(3.124)
com
( )( )
−−
−
−+=
2
2100
01
01
211s
ss
ss
ss
ss
EG
υυυ
υυ
υυ (3.125)
Para o deslocamento:
zu u LS = (3.126)
ou
z
2
2
2
2
2
xy
y
x
u
yxz2
yz
xz
S
S
S
∂∂∂−
∂∂−
∂∂−
=
(3.127)
com
yxz2
yz
xz
L
2
2
2
2
2
u
∂∂∂−
∂∂−
∂∂−
= (3.128)
Adaptando-se agora o material piezelétrico como elemento de placa de Kirchoff,
tem-se:

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
62
[ ] 333
12
22
11
23313 Ε
2
0 S
S
S
S
eeD ∈+
= (3.129)
Equação do sensor: Efeito direto
323
31
12
22
11
E66
E22
E12
E12
E11
12
22
11
E
0200
0
0
−
=
e
e
S
S
S
c
cc
cc
σσσ
(3.130)
Equação do atuador: Efeito inverso
com
=023
31
e
e
e e
=E66
E22
E12
E12
E11
Ε
00
0
0
c
cc
cc
c (3.131)
A matriz de rigidez elástica piezelétrica (cE) pode ser escrita de forma análoga à
matriz Gs da Eq. 3.125 já que os coeficientes da matriz cE estão em função do módulo
de elasticidade (Ep) e do coeficiente de Poisson (pυ ) do PZT. Assim:
( )( )
−−
−
−+==
2
2100
01
01
211Ε
p
pp
pp
pp
pp
EGc
υυυ
υυ
υυ (3.132)
Para obterem-se as funções de interpolação em função de coordenadas
generalizadas para os graus de liberdade de deslocamento e potencial elétrico,
considera-se inicialmente o elemento estrutural acoplado eletromecanicamente
representado pela Figura 3.20 e o elemento finito retangular plano da Figura 3.21 que
representa o acoplamento eletromecânico na formulação em Elementos Finitos.
De posse dessas funções, pode-se, então determinar as matrizes locais do sistema
eletromecanicamente acoplado.

Guia
Figura 3.20
Figura 3.
O elemento é composto por quatro nós, com três graus de liberdade por nó,
sendo uma translação (“uzi
denotada por “xθ ” e em torno de “
base e da cerâmica piezelétrica, respectivamente. Além dos graus de liberdade
mecânicos (deslocamentos), ainda serão considerados em cada nó do elemento um
potencial elétrico “ iφ ” como variáveis nodais.
Os graus de liberdade estão representados em termos das coordenadas
adimensionais generalizadas “
Pode-se escrever o vetor campo de deslocamentos
na Eq. 3.134:
[ 1y1x1zi uu θθ=
Grupo de Materiais e Sistemas Inteligentes Guia de Power Harvesting: História, Evolução e Fundamentos
20: Elemento estrutural acoplado eletromecanicamente.
Figura 3.21: Elemento finito retangular de placa.
O elemento é composto por quatro nós, com três graus de liberdade por nó,
zi” na direção “z”), e duas rotações (em torno do eixo “
” e em torno de “y” , “ yθ ”). Sendo St e Pt as espessuras da estrutura
base e da cerâmica piezelétrica, respectivamente. Além dos graus de liberdade
mecânicos (deslocamentos), ainda serão considerados em cada nó do elemento um
” como variáveis nodais.
Os graus de liberdade estão representados em termos das coordenadas
adimensionais generalizadas “( )ηξ , ”, que podem ser definidas como sendo:
b
y ;
a
x == ηξ
se escrever o vetor campo de deslocamentos ui do i-ésimo elemento como
4y4x4zy33x3z2y2x2z u θ u u θθθθθ
Grupo de Materiais e Sistemas Inteligentes - GMSINT a, Evolução e Fundamentos
63
Elemento estrutural acoplado eletromecanicamente.
a.
O elemento é composto por quatro nós, com três graus de liberdade por nó,
”), e duas rotações (em torno do eixo “x”,
as espessuras da estrutura
base e da cerâmica piezelétrica, respectivamente. Além dos graus de liberdade
mecânicos (deslocamentos), ainda serão considerados em cada nó do elemento um
Os graus de liberdade estão representados em termos das coordenadas
”, que podem ser definidas como sendo:
(3.133)
ésimo elemento como
]T4 (3.134)

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
64
e o vetor de potencial elétrico:
[ ]T4321i φφφφφ = (3.135)
Escrevendo-se os vetores em função das coordenadas nodais utilizando as
funções de interpolação Nu (para o deslocamento) eφN (para o potencial elétrico):
( ) ( ) iu u,N,u ηξηξ = (3.136)
( ) ( ) i,N, φηξηξφ φ= (3.137)
ou
( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 41241141039
38372625
24131211
, ,,,
,,,,
,,,,,
yuxuzuyu
xuzuyuxu
zuyuxuzu
NNuNN
NuNNN
uNNNuNu
θηξθηξηξθηξθηξηξθηξθηξ
ηξθηξθηξηξηξ
+++
++++
++++=
(3.138)
e
( ) ( ) ( ) ( ) ( ) 44332211 ,,,,, φηξφηξφηξφηξηξφ φφφφ NNNN +++=
(3.139)
Considerando-se os deslocamentos mecânicos do elemento de duas dimensões
( )ηξ , e doze graus de liberdade, obtém-se a seguinte função interpoladora para o
deslocamento na direção z.
( )3
123
113
102
92
8
37
265
24321,
ξηαηξαηαξηαηξαξαηαξηαξαηαξααηξ
++++
+++++++=zu (3.140)
ou
α Pu = (3.141)
com
[ ]33322322 1P ξηηξηξηηξξηξηξηξ= (3.142)
[ ]T121110987654321 ααααααααααααα = (3.143)

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
65
As relações em torno dos eixos ( )ηξ , são dadas por:
( ) ( ) 212
311
2109
28653 3322 ξηαξαηαξηαξαηαξαα
ηηξηξθξ +++++++=
∂∂
=,u
, z (3.144)
( ) ( ) 312
211
298
27542 3232
,, ηαηξαηαξηαξαηαξαα
ξηξηξθη −−−−−−−−=
∂∂−= zu
(3.145)
Rearranjando os deslocamento na forma matricial para cada nó, tem-se:
−−−−−−−−=
12
11
10
9
8
7
6
5
4
3
2
1
3222
2322
33322322
302302010
332020100
1
αααααααααααα
ηηξηξηξηξξηξηξηξηξξηηξηξηηξξηξηξηξ
θθ
η
ξ
zu
(3.146)
ou
αφ=δ (3.147)
Considerando os 4 nós e os 12 graus de liberdade de deslocamento, tem-se:
1º nó 0,0
1
1
1
==→
= ηξθθδ
η
ξ
zu
(3.148)
2º nó 1,0
2
2
2
==→
= ηξθθδ
η
ξ
zu
(3.149)
3º nó 1,1
3
3
3
==→
= ηξθθδ
η
ξ
zu
(3.150)
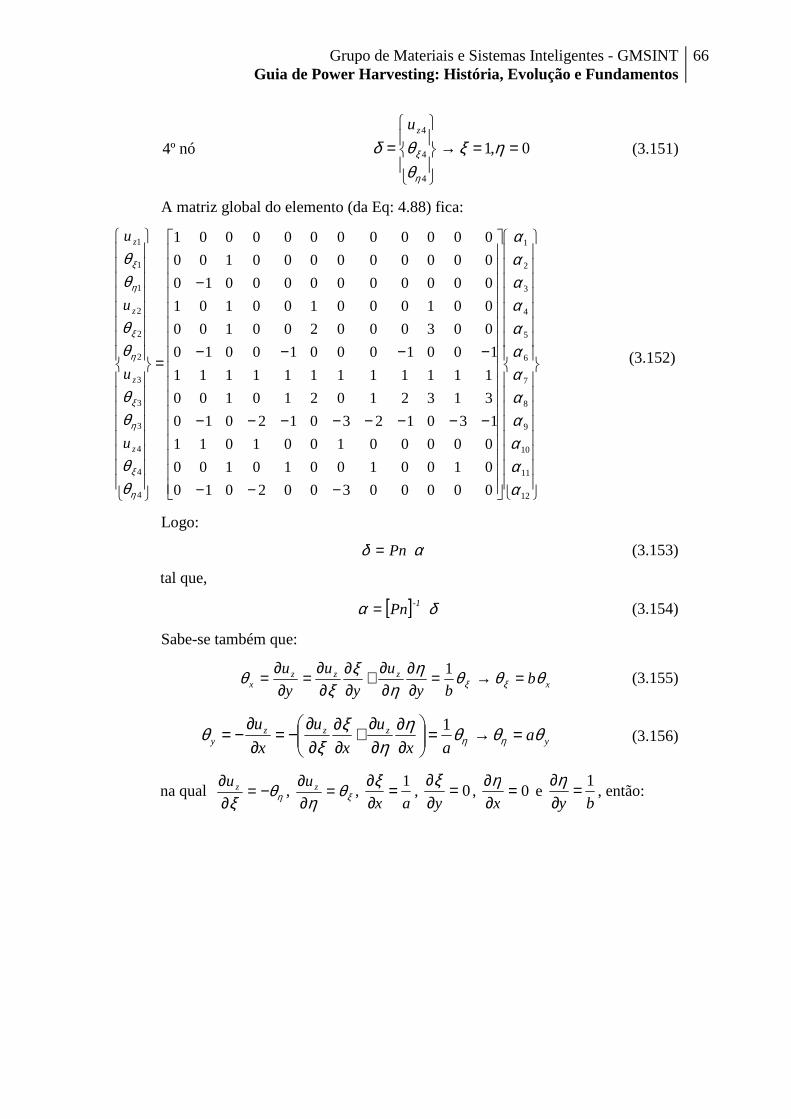
Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
66
4º nó 0,1
4
4
4
==→
= ηξθθδ
η
ξ
zu
(3.151)
A matriz global do elemento (da Eq: 4.88) fica:
−−−
−−−−−−−−
−−−−
−
=
12
11
10
9
8
7
6
5
4
3
2
1
4
4
4
3
3
3
2
2
2
1
1
1
000003002010
010010010100
000001001011
130123012010
313210210100
111111111111
100100010010
003000200100
001000100101
000000000010
000000000100
000000000001
αααααααααααα
θθ
θθ
θθ
θθ
η
ξ
η
ξ
η
ξ
η
ξ
z
z
z
z
u
u
u
u
(3.152)
Logo:
αδ Pn= (3.153)
tal que,
[ ] δα Pn -1= (3.154)
Sabe-se também que:
xzzz
x bby
u
y
u
y
u θθθηη
ξξ
θ ξξ =→=∂∂
∂∂+
∂∂
∂∂=
∂∂= 1
(3.155)
yzzz
y aax
u
x
u
x
u θθθηη
ξξ
θ ηη =→=
∂∂
∂∂
+∂∂
∂∂
−=∂∂
−= 1 (3.156)
na qual ηθξ
−=∂∂ zu
, ξθη
=∂∂ zu
, ax
1=∂∂ξ
, 0=∂∂
y
ξ, 0=
∂∂
x
η e
by
1=∂∂η
, então:

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
67
00000000000
00000000000
001000000000
00000000000
00000000000
000001000000
00000000000
00000000000
000000001000
00000000000
00000000000
000000000001
4
4
4
3
3
3
2
2
2
1
1
1
4
4
4
3
3
3
2
2
2
1
1
1
=
y
x
z
y
x
z
y
x
z
y
x
z
z
z
z
z
u
u
u
u
a
b
a
b
a
b
a
b
u
u
u
u
θθ
θθ
θθ
θθ
θθ
θθ
θθ
θθ
η
ξ
η
ξ
η
ξ
η
ξ
(3.157)
ou
iu Z=δ (3.158)
[ ] i1 u ZPnPu −= (3.159)
Sabendo que u = Nuui, então:
[ ] ZPnPN 1−=u (3.160)
então:
[ ]TuN =
−−
−
−−+−−
−
−−
−−−−
−−
−−−
−−+−−
−−−
−−
−−−−−−−
a
b
a
b
a
b
a
b
)1()1(
)1(
)21)(1()1()23(
)1(
)1(
)21)(1()23(
)1(
)1)(1(
)21)(1()23)(1(
)1()1(
)1()1(
)23)(1()1()23(1
2
2
2
2
2
2
2
2
2
2
2
22
ηξξ
ηξη
ηηξηηξξ
ηξξ
ηηξ
ηηξηηξξ
ηξξ
ηηξ
ηξξξηηξ
ηξξ
ηηξ
ηηξηξξξη
(3.161)
Reescrevem-se as matrizes Bu e Lu :

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
68
ab
z2b
za
z
L
2
2
2
2
2
2
2
u
∂∂∂−
∂∂−
∂∂−
=
ηξ
η
ξ
(3.161)
e
∂∂∂
−∂
∂−
∂∂
−=ηξηξ
Tu
2
2
Tu
2
22
Tu
2
2Tu
N
ab
z2N
b
zN
a
zB (3.162)
Uma vez resolvido o problema para os deslocamentos mecânicos, serão
encontradas as funções de interpolação . A Figura 3.22 mostra o elemento finito
retangular apenas com quatro graus de liberdade de potencial elétrico em duas
dimensões ( )ηξ , .
Figura 3.22 – Graus de liberdade de potencial elétrico.
Obtém-se a seguinte base polinomial para a obtenção das funções de
interpolação.
[ ]ξηηξ 1=P (3.163)
Considerando os valores das coordenadas generalizadas para cada nó do
elemento, pode-se escrever a matriz Pn, , sendo que as colunas da matriz inversa de Pn
contém os índices das funções de interpolação.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
69
Os valores das coordenadas generalizadas para o nó 1 são: 0,0 == ηξ ; para o
nó 2 são: 1,0 == ηξ ; nó 3 são: 1,1 == ηξ e nó 4 são: 0,1 == ηξ , então:
=
0011
1111
0101
0001
Pn (3.164)
e
−−−−
=−
1111
0011
1001
0001
][ 1Pn (3.165)
Multiplicando-se a Eq. 3.163 pela Eq. 3.165, tem-se:
[ ]
T
1
1
PnPN
−
−+−−
== −
ξηξξη
ξηηξηηξ
φ (3.166)
Para encontrar a matriz φB é preciso resolver a Eq.φB = φφ NL . Considerando
que o campo elétrico pode ser escrito diretamente proporcional à diferença de potencial
elétrico e inversamente proporcional à distância desses potenciais, então, tem-se:
δφδφ
d
d=→= ΕΕ (3.167)
onde δ é a distância entre os potenciais. Para o caso estudado neste projeto,
tem-se que ( ) ( )yxyx ,, δδφφ =→= , logo:
φφφ ∇=∂∂+
∂∂=
yxΕ (3.168)
onde ∇ é o operador gradiente.
Reescrevendo a Eq. 3.168 na forma matricial, tem-se:

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
70
)y,x( yx
)y,x( φ
∂∂+
∂∂=Ε (3.169)
Comparando a Eq. 3.169 com a Eq. φφ L=Ε , conclui-se que :
∂∂+
∂∂=
yxLφ (3.170)
Considerando as coordenadas generalizadas:
; ηηξξ ∂=∂→=∂=∂→= byb
yax
a
x, pode-se reescrever a Eq. 3.170
como segue:
∂∂+
∂∂=
ηξφ b
1
a
1L (3.171)
então:
∂∂
+∂
∂=
ηξφφ
φ
TT
T N
b
1N
a
1B (3.172)
De posse das funções de interpolação dos deslocamentos mecânicos e potenciais
elétricos, pode-se agora encontrar as matrizes elementares do sistema
eletromecanicamente acoplado.
Sabe-se que o diferencial de volume do elemento da estrutura base (dVs) pode
ser escrito da seguinte forma:
dVs = dz dAs (3.173)
sendo dAs o diferencial de área do elemento, então:
dVs = dzdxdy (3.174)
logo
ηξ ddabdzdVs = (3.175)

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
71
Então:
∫ ∫ ∫−=1
0
1
0
2t
2t u
Tus
es
s
sddNN abρ dzM ηξ Matriz de massa da estrutura (3.176)
integrando na direção z, tem-se:
∫ ∫=1
0
1
0 uTuss
es ddNNabtρM ηξ (3.177)
De forma análoga,
∫ ∫=1
0
1
0 uTupp
ep ddNNabtρM ηξ Matriz de massa do PZT (3.178)
∫ ∫=1
0
1
0 usTu
3se
s ddBGB12
abtK ηξ Matriz de rigidez da estrutura (3.179)
∫ ∫=1
0
1
0 upTu
3pe
p ddBGB12
abtK ηξ Matriz de rigidez do PZT (3.180)
∫ ∫=1
0
1
0
Tu
2pe
u dd e BB2
abtK ηξφφ Matriz do acoplamento eletromecânico (3.181)
com[ ] eu
Teu KK φφ = .
∫ ∫=∈1
0
1
0
Tp
S33
e ddBBabtK ηξφφφφ Matriz de capacitância piezelétrica (3.182)
Desta forma, tem-se o modelo completo do acoplamento eletromecânico
modelado com o elemento de placa de Kirchoff via elementos finitos.
3.4.4 Método de Newmark
O sistema de equações diferenciais de segunda ordem em dinâmica estrutural
pode ser resolvido por qualquer método considerando a existência de alguma excitação
F externa sendo aplicado no sistema ou mesmo condição inicial de deslocamento e
velocidade em algum nó. Entre estes, o método de Newmark é um dos mais versátil e
popular para a solução de grandes sistemas de equações diferenciais de segunda ordem.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
72
A premissa na qual o método de integração de Newmark se baseia é a de que a
aceleração do sistema varia linearmente entre dois instantes de tempo. Os vetores de
velocidade ( 1+iu&r
) e deslocamento ( 1+iur
) são representados pelas expressões (Rao e
Singiresu , 2009).
( )[ ] tuuuu iiii ∆+−+= ++ 11 1 &&r&&r&r&r ββ (3.183)
211 2
1. tuuutxu iiiii ∆
+
−+∆+= ++&&r&&r&rrr αα (3.184)
sendo α e β os parâmetros que obtêm as características de precisão e estabilidade da
integração. Por exemplo, quando 6
1=α e 2
1=β , o método de Newmark coincide com
o método da aproximação da aceleração linear.
O valor da aceleração 1+iu&&r
é calculado através da Eq. 3.185:
[ ] [ ] [ ] 1111 ++++ =++ iiii uKuDuM Fa
rr&r&& (3.185)
Isolando-se 1+iu&&r
na Eq. 4.2, obtém-se uma expressão em termos de 1+iur
.
iiiii uut
ut
ut
u &&r&rrr&&r
−−∆
−∆
−∆
= ++ 12
11112121 αααα
(3.186)
Substituindo-se o resultado na Eq. 4.1, encontra-se uma expressão de 1+iu&r
em
termos de 1+iu&&r
.
( )
∆
−−−∆
−∆
+∆−+= ++ i
a
a
ii
a
ii
a
ii utuut
ut
utuu &&r
43421
&rrr&&r
43421&r&r
7
31
6
12
11 11 β
ααβ
αβ
αββ
(3.187)

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
73
Finalmente, substituindo-se a Eq. 3.187 na Eq. 3.185, encontra-se uma equação
que determinar 1+iur
:
[ ] [ ] [ ]
[ ]
[ ]
∆
−+
−+∆
+
−+∆
−∆
+
×
+∆
+∆
=
+−
+
i
a
i
a
ia
ii
a
ii
a
a
i
ut
uut
D
uut
ut
KF
KDt
Mt
u
&&r
43421
&r
43421
r
&&r&rrr
321
r
54
2
0
221
12
111
1
211
21
αβ
αβ
αβ
ααα
αβ
α
(3.188)
Ou, substituindo-se os coeficientes das equações pelas constastes de integração,
tem-se:
( ) iiiii uauauuau &&r&rrr&&r31101 −−−= ++
(3.189)
( )[ ]iiiiiii uaautauuauauu &&r&rrr&&r&r&r7311161 .. −∆−−++= ++
(3.190)
[ ] [ ] [ ][ ] [ ]( ) [ ]( ) iiiaiiiiai uauauaDuauauaMFKDaMau &&r&rr&&r&rrrr5413201
1101 ++++−+×++= +
−+
(3.191)
O algoritmo completo utilizando o esquema de integração de Newmark pode ser
dividido nas seguintes etapas:
I- Cálculos Iniciais
i- Obtenção das matrizes de massa, rigidez e amortecimento do sistema;
ii- Início com os parâmetros conhecidos 0ur
e 0u&r
, através dos quais se encontra
0u&&r
(Eq. 3.185 para (i+1) = 0);
iii- Seleção do incremento de tempo ∆t e os parâmetros α e β
iv- Cálculo das constantes de integração ( )76543210 ,,,,,, aeaaaaaaa ;

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
74
v- Cálculo da matriz efetiva de rigidez do sistema;
[ ] [ ] [ ] [ ]aDaMaKK 10ˆ ++= (3.192)
II- Para cada passo de tempo (iteração)
vi- Cálculo das cargas efetivas no instante t+t;
[ ]( ) [ ]( )tttattttttt uauauaDuauauaMFF &&r&rr&&r&rrrr
541320ˆ ++++++= ∆+∆+ (3.193)
vii- Cálculo do vetor deslocamento 1+tur
:
K
Fut ˆ
ˆ1 =+
r (3.194)
viii- Determinação dos vetores de aceleração e velocidade no tempo ti+1 (Eqs.
3.189 e 3.190).
A seguir é ilustrado um exemplo de solução de um sistema utilizando-se o
método de Newmark em linguagem Matlab®.
function [u,v,a] = newmark(K,C,M,f,dt)
% Newmark time-integration scheme % ---------------------------------------------------- % % PROPÓSITO: Integração numérica da equação: % M*a(t) + C*v(t) + K*u(t) = f(t) % % ENTRADA: % K : matriz de rigidez do sistema % C : matriz de amortecimento do sistema % M : matriz de massa do sistema % f : vetor de força aplicada ao sistema % dt : increment de tempo % % SAIDA:

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
75
% a : aceleração nas variáveis nodais % v : velocidade nas variáveis nodais % u : deslocamento nas variáveis nodais % % ---------------------------------------------------- % 27.11.2002 Lars Andersen, AAU % Parâmetros de integração --------------------- gamma = 1/2 ; beta = 1/4 ; % Número de passos de tempo ------------------------------- n = size(f,2) ; % Vetores iniciais u, v e a ------------------ u = zeros(size(f)) ; v = zeros(size(f)) ; a = zeros(size(f)) ; % Cálculo da matriz inversa do sistema ---------------- M1 = inv(M + gamma*C*dt + beta*K*dt^2) ; % Perform loop over the time steps for j = 1 : n-1 % u e v ---------------------- vv = v(:,j) + a(:,j)*dt ; uu = u(:,j) + v(:,j)*dt + 0.5*a(:,j)*dt^2 ; % Valores corrigidos --------------------------------- a(:,j+1) = a(:,j) + M1*(f(:,j+1)-M*a(:,j)-C*vv-K*uu) ; v(:,j+1) = vv + gamma*(a(:,j+1)-a(:,j))*dt ; u(:,j+1) = uu + beta*(a(:,j+1)-a(:,j))*dt^2 ;
end
% End of file ----------------------------------------

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
76
3.4.5 Métodos Experimentais
Para que a modelagem de um sistema seja validada, é necessário que se efetue
um experimento. Quando se comparam experimento e modelagem, muitos têm a falsa
impressão de que o experimento é muito mais simples de se realizar e que seus
resultados são muito mais confiáveis. Esse pensamento é muito perigoso, já que se não
forem tomados todos os cuidados necessários, os resultados de um experimento podem
facilmente estar completamente incompatíveis com a realidade. Como muitos brincam
por aí, dizem que quando se realiza uma modelagem, ninguém acredita nos resultados,
só quem modelou. Já quando se realiza um experimento, todos acreditam nos
resultados, só quem desconfia é o experimentalista. Isso se dá porque somente o
experimentalista tem conhecimento de todas as variáveis envolvidas na operação
robusta de um experimento. Quando se realiza um experimento, tudo deve estar bem
monitorado.
É primordial que a estrutura esteja em ótimo estado para a realização do ensaio.
Isso inclui o acoplamento dos materiais piezelétricos, a soldagem e a integridade de
todos os fios e cabos ligados à estrutura e a própria integridade da estrutura.
As condições onde o sistema será ensaiado deverão estar as mais controladas
possíveis, por exemplo, a temperatura e pressão ambientes e qualquer tipo de
interferência externa que possa alterar os sinais de resposta, como ruídos e correntes de
ar vindos do exterior. Muitos experimentos têm seu melhores resultados coletados
quando realizados a noite devido à menor interferência externa. Uma boa manutenção
das condições de ensaio de uma estrutura não só asseguram resultados mais confiáveis,
mas também permitem que ocasionais anomalias sejam mais facilmente detectadas, já
que serão menores as causas de irregularidades e possibilitam uma boa repetibilidade do
mesmo experimento. Alem das condições ambientais, as condições de apoio ou fixação
do sistema devem estar em ordem. Os ensaios de vibração devem ser efetuados em uma
Mesa Inercial, cuja influência sobre a vibração do sistema é mínima se comparada a
qualquer outra mesa ou bancada.
Estando as condições de ensaio monitoradas e controladas, deve-se dar atenção à
instrumentação, afinal, os instrumentos serão os responsáveis pela aquisição dos sinais
emitidos no experimento e posteriormente estudados. Os instrumentos devem estar
calibrados segundo as curvas de calibração fornecidas pelo fabricante, suas baterias

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
77
devem estar carregadas e os fios que os conectam ao sistema em bom estado. Tais
parecem ser parâmetros óbvios demais e simples de se levar em conta para ser
destacados, porem, quanto mais óbvio parece, mais se esquece de checá-lo quando
ocorre algum problema, e muito tempo é perdido.
É claro que cada experimento demanda cuidados particulares além dos
procedimentos gerais. Para tomar conhecimento de tudo que se deve fazer, vale a pena
consultar pesquisadores e trabalhos relacionados com o experimento que se vai realizar.
No capítulo 6, serão apresentadas simulações numéricas realizadas no programa
SmartSys, criado por membros do grupo de pesquisa GMSINT. Nele, alguns
experimentos realizados para validar as simulações serão relacionados. Os
procedimentos descritos acima foram seguidos para esses experimentos.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
78
CAPÍTULO 4 – MODELAGEM DE ESTRUTURAS INTELIGENTES
4.1 – Relações constitutivas
4.1.1 Relações constitutivas da estrutura
Considerando-se uma estrutura qualquer isotrópica, com comportamento elástico
linear. Para reconhecer as forças restauradoras na estrutura, isto é, as reações internas do
sistema estrutural à ação de um carregamento externo conforme Waidemam (2004), e
analisar os esforços atuantes no sistema estrutural pode-se extrair um elemento cúbico
genérico, com volume infinitesimal (figura 4.1).
Figura 4.1 esquema das tensões principais atuando no elemento retirado de uma
estrutura qualquer.
Efetuando-se um corte perpendicular ao seu eixo, devem aparecer forças que
traduzem a ação das partes separadas para que estas continuem em equilíbrio.
Assim, surgem as tensões normais, perpendiculares à secção transversal, e
cisalhantes, tangenciais à secção transversal, agindo sobre o elemento.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
79
As relações constitutivas são, dessa forma, dadas pela lei de Hooke generalizada:
( )[ ]zyxs
x ES σσυσ +−= 1
(4.3)
( )[ ]zxys
y ES σσυσ +−= 1
(4.4)
( )[ ]yxzs
z ES σσυσ +−= 1
(4.5)
( )xy
sxy E
S τυ+= 12 (4.6)
( )
xzs
xz ES τυ+= 12
(4.7)
( )
yzs
yz ES τυ+= 12
(4.8)
Sendo S as deformações lineares e tangenciais do elemento, ES e υ
respectivamente o módulo de elasticidade e o coeficiente de Poisson e o sobrescrito s
denota que se trata de propriedades da estrutura.
Organizando-se as equações 4.3 a 4.8, obtem-se a relação entre as tensões e
deformações da estrutura, representada pela equação constitutiva:
SGss =σ (4.9)
Sendo

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
80
=
yz
xz
xy
z
y
x
s
τττσσσ
σ Tensões aplicadas (4.10)
=
yz
xz
xy
z
y
x
S
S
S
S
S
S
S Deformações (4.11)
( )( )
−
−
−−
−−
−+=
2
2100000
02
210000
002
21000
0001
0001
0001
211
υ
υ
υυυυ
υυυυυυ
υυs
s
EG coeficientes elásticos do material (4.12)
Utilizando-se operadores diferenciais é possível relacionar as deformações da
estrutura com as deformações u somente em função de x, y e z, colocando seu tensor na
forma matricial:
uLS u = (4.13)
Ou

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
81
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
=
z
y
x
yz
xz
xy
z
y
x
u
u
u
yz
xz
xy
z
y
x
S
S
S
S
S
S
0
0
0
00
00
00
(4.14)
sendo
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
=
yz
xz
xy
z
y
x
Lu
0
0
0
00
00
00
Matriz dos operadores diferenciais para elasticidade (4.15)
Substituindo a Eq. 4.1 na Eq. 4.13, temos que:
iuu u N LS = (4.16)
ou
iuBS u= (4.17)
na qual
Bu = Lu Nu (4.18)

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
82
4.1.2 Relações constitutivas dos materiais piezelétricos
A deformação, S, e a Tensão, σ , são as variáveis mecânicas geralmente utilizadas
nos cálculos da piezeletricidade. Para variáveis elétricas usa-se a polarização, P, ou o
deslocamento elétrico, D, e o campo elétrico, E.
Elementos piezelétricos apresentam histerese não-linear para elevados níveis de
excitação, no entanto, para aplicações estruturais pode-se utilizar aproximações lineares.
Sendo assim podemos usar as seguintes relações constitutivas lineares para o efeito
direto e inverso de materiais piezelétricos.
Equação do sensor: EST S eD ∈+= (Efeito direto)
(4.19)
Equação do Atuador: EE eScp −=σ (Efeito inverso)
(4.20)
Assume-se em geral que materiais piezelétricos são transversalmente
isotrópicos, ou seja, a polarização ocorre ao longo do eixo 3, que é o eixo isotrópico
transversal, como mostra a figura 4.2.
Figura 4.2: Efeito induzido nos dipolos de materiais piezelétricos
As equações (4.19) e (4.20) podem ser escritas na forma matricial, assim:

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
83
∈∈
∈+
=
3
2
1
33
22
11
12
31
23
33
22
11
333231
24
15
3
2
1
00
00
00
2
2
2000
00000
00000
E
E
E
S
S
S
S
S
S
eee
e
e
D
D
D
S
S
S
(4.21)
Equação do sensor: Efeito direto
−
=
3
2
1
15
24
33
23
31
12
31
23
33
22
11
66
55
44
332313
232212
131211
12
31
23
33
22
11
000
00
00
00
00
00
2
2
2
00000
00000
00000
000
000
000
E
E
E
e
e
e
e
e
S
S
S
S
S
S
c
c
c
ccc
ccc
ccc
E
E
E
EEE
EEE
EEE
σσσσσσ
(4.22)
Equação do atuador: Efeito inverso
D = deslocamento elétrico ou indução [C/m2].
[ ]e = Matriz de constantes de tensão piezelétrica[C/m2].
[ ]∈ = Matriz de permissividade dielétrica [C2/Nm2].
E = campo elétrico induzido nas extremidades da cerâmica piezelétrica [V/m;
N/C].
[ ]c = Matriz de rigidez elástica [N/m2].
( )S = Significa que os valores são medidos para deformação constante.
( )E = Significa que os valores são medidos para um campo elétrico constante.
( )p = Denota que se trata de propriedades piezelétricas
1 = eixo x ; 2 = eixo y ; 4 = eixo z
Na matriz de tensão piezelétrica, [ ]e , ije corresponde à tensão desenvolvida
na j-ésima direção devido a um campo elétrico aplicado na i-ésima direção, sendo
que i corresponde as linhas e j corresponde as colunas da matriz.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
84
Assim como para estruturas podemos relacionar suas deformações através de
operadores diferenciais (Eq. 4.13), pode-se escrever o campo elétrico da seguinte
forma:
φφ LE= (4.23)
onde φL é a matriz que contém os operadores diferenciais.
Substituindo a Eq. 4.3 na Eq. 4.20, vem:
iNLE φφφ = (4.24)
ou
iBE φφ= (4.25)
tal que
φB = φφ NL (4.26)
4.2 – Acoplamento eletromecânico
O elemento piezelétrico, quando interage com a estrutura base, ocasiona
mudanças internas e externas à estrutura. As mudanças internas levam em consideração
as alterações nas propriedades do material como massa, rigidez e amortecimento,
devido à presença do PZT e estão presentes mesmo quando não existe potencial elétrico
aplicado. A contribuição externa é devida a deformação induzida pelo PZT quando lhe é
aplicado um potencial elétrico gerando forças e momentos. Para a obtenção das
equações de equilíbrio em um sistema eletromecanicamente acoplado podem ser
utilizados o Princípio do Trabalho Virtual e o Princípio Variacional de Hamilton, além
das equações do movimento de Lagrange. A seguir o processo de obtenção dessas
equações é descrito através das equações do movimento de Lagrange.
Na formulação são considerados os graus de liberdade mecânicos (de
deslocamento) em cada elemento estrutural, definidos por ui e os graus de liberdade
elétricos em cada elemento, definidos pelo potencial elétrico φ i.
Na formulação das energias cinética e potencial, consideram-se as energias da
estrutura e do material piezelétrico. Desta forma, a energia cinética pode ser dada por:

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
85
p
V
Tps
V
Ts dVuu dVuu T
ps
&&&& ∫∫∫∫∫∫ += ρρ2
1
2
1 (4.30)
sendo ρ a massa específica, u e u& o vetor deslocamento e velocidade, respectivamente,
e V o volume. O sobrescrito (.)T significa transposto e, lembrando, os sobrescritos s e p
denotam propriedades da estrutura base e do material piezelétrico, respectivamente.
Substituindo a Eq. 4.1 na Eq. 4.30 obtém-se:
p
V
iuTu
Tips
V
iuTu
Tis dVuNNudVuNNuT
ps
∫∫∫∫∫∫ += &&&& ρρ2
1
2
1 (4.31)
A energia potencial pode ser escrita por:
∫∫∫∫∫∫ +=+=ps V
ppT
V
ssT
ps dVSdVSUUU σσ2
1
2
1 (4.32)
Substituindo a Eq. 4.17 na Eq. 4.9, tem-se o seguinte tensor tensão para a
estrutura base:
iusss uBGSG ==σ (4.33)
sendo Gs a matriz que contém os coeficientes elásticos do material da estrutura.
Substituindo as Eq. 4.17 e 4.25 na Eq. 4.20, da tensão mecânica no PZT, tem-se:
iiup BeuBc φσ φ E −= (4.34)
Sabendo-se que, pela Eq. 4.17:
iuBS u= (4.17)
Pode-se, então, substituindo-se as equações das tensões da estrutura (Eq. 4.33) e
do material piezelétrico (Eq. 4.34) e a Eq. 4.17 na Eq. 4.32, obter-se a equação da
energia potencial da piezoestrutura:

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
86
pi
V
Tu
Tipiu
V
Tu
Tisius
V
Tu
Ti dVBeBudVuBcBudVuBGBuU
pps
φφ 2
1
2
1
2
1 E∫∫∫∫∫∫∫∫∫ −+= (4.35)
Us Up
O trabalho realizado pelo campo elétrico aplicado na piezocerâmica é definido
por:
∫∫∫ Ε=PV
PT
e DdVW2
1 (4.36)
onde, como já visto anteriormente, E é o campo elétrico e D vetor deslocamento
elétrico. Assim, substituindo-se as Eqs. 4.17 e 4.25 na Eq. 4.19, do fluxo ou
deslocamento elétrico do PZT, tem-se:
iS
iT BuBeD φφ∈+= u (4.37)
Substituindo-se então as Eqs. 4.25 e 4.37 na Eq. 4.36, temos:
∫∫∫∫∫∫ ∈+=PP V
piSTT
i
V
PiTTT
ie dVBBdVuBeBW φφφ φφφ 2
1
2
1u (4.38)
Após descobertas as formulações de todas as energias envolvidas no
acoplamento, torna-se possível escrever, a partir das Eqs. 4.31, 4.35 e 4.38 substituídas
na Eq. 4.29 tem-se o Lagrangiano:
∫∫∫
∫∫∫∫∫∫∫∫∫
∫∫∫∫∫∫∫∫∫
∈
+++
−−+=
P
Ppp
sps
V
piSTT
i
V
PiTTT
ipiTu
Ti
V
piu
V
Tu
Ti
sius
V
Tu
Tip
V
iuTu
Tips
V
iuTu
Tis
dVBB
dVuBeBdVBeBudVuBcBu
dVuBGBudVuNNudVuNNuL
φφ
φφ
ρρ
φφ
φφ
2
1
2
1
2
1
2
1
2
1
2
1
2
1
uE
&&&&
(4.39)
Encontrado o Lagrangiano, as equações de movimento de Lagrange podem ser
calculadas.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
87
Assim, a partir da Eq. 4.27:
e
ii
Fdu
dL
ud
dL
dt
d =−
& (4.27)
1 2
Resolvendo 1:
ip
V
uTupis
V
uTus
i
udVNNudVNNud
dL
ps
&&&
+
= ∫∫∫∫∫∫ ρρ (4.40)
ip
V
uTupis
V
uTus
i
udVNNudVNNud
dL
dt
d
ps
&&&&&
+
=
∫∫∫∫∫∫ ρρ (4.41)
ou
iepi
es
i
u Mu Mud
dL
dt
d&&&&
&+=
(4.42)
com
sdVNNρM u
V
Tus
es
s
∫∫∫= Matriz elementar de massa da estrutura (4.43)
pu
V
Tup
ep dVNNρM
p
∫∫∫= Matriz elementar de massa do PZT (4.44)
Resolvendo agora 2:
Ti
V
puTT
i
V
pTu
ipu
V
Tuisus
V
Tu
i
pp
ps
dVB e BdVB e B
u dVBcBu dVBGBdu
dL
φφ φφ
+
+
−
−=
∫∫∫∫∫∫
∫∫∫∫∫∫
2
1
2
1
E
(4.45)
ou

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
88
ieui
epi
es
i
KuKuKdu
dL φφ +−−= (4.46)
com
sus
V
Tu
es dVBGBK
s
∫∫∫= Matriz global de rigidez da estrutura (4.47)
pu
V
Tu
ep dVBcBK
p
E∫∫∫= Matriz global de rigidez do PZT (4.48)
∫∫∫=PV
pTu
eu dV e BBK φφ Matriz do acoplamento eletromecânico (4.49)
A partir dessa vez da Eq. 4.28:
e
ii
Qd
dL
d
dL
dt
d =−
φφ& (4.28)
0=
id
dL
dt
d
φ& (4.50)
i
V
pST
ipuTT
V
Tip
Tu
Vi
P
pp
dVB B
u dVB eBu dVB eBd
dL
φ
φ
φφ
φφ
∈
+
+
=
∫∫∫
∫∫∫∫∫∫ 2
1
2
1
(4.51)
ou
ie
ieu
i
KuKd
dL φφ φφφ += (4.52)
com
∫∫∫=PV
puTTe
u dVB e BK φφ Matriz do acoplamento eletromecânico (4.53)
∫∫∫ ∈=PV
pSTe dVBBK φφφφ Matriz de capacitância piezelétrica (4.54)

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
89
Nota-se das Eqs. 4.49 e 4.53 que ( )Teu
eu KK φφ = .
Nesse ponto já é possível a obtenção das matrizes locais elásticas e
eletroelásticas a partir da integração das Eqs. 4.43, 4.44, 4.47, 4.48, 4.49, 4.53 e 4.54.
Substituindo-se as equações acima em 4.27 e 4.28 obtém-se o sistema de duas
equações matriciais de equilíbrio, em coordenadas generalizadas locais:
( ) ( ) ( )( )
=+−
=−+++e
ie
ieu
ei
eui
ep
esi
ep
es
QKuK
FKuKKuMM
φ
φ
φφφ
φ && (4.55)
Enfim, lançando mão da técnica padrão de elementos finitos, montam-se as
matrizes globais, encontrando-se, então o sistema global de equações do movimento
para o modelo de uma estrutura com o efeito do acoplamento eletromecânico
incorporado:
=
+
Q
Fu
KK
KKuM
u
uuuuu
φφ φφφ
φ
&&
&&
00
0 (4.56)
sendo as matrizes globais definidas por:
( ) ( )∑∑==
+=np
jj
ep
ne
ii
esuu MMM
11
(4.57)
( ) ( )∑∑==
+=np
jj
ep
ne
ii
esuu KKK
11
(4.58)
( )∑=
−=np
jj
euu KK
1φφ (4.59)
( )∑=
−=np
jj
eKK1
φφφφ (4.60)

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
90
As matrizes globais são encontradas através da somatória das matrizes locais de
todos os elementos em que a estrutura base é discretizada (ne) e, no caso do PZT, do
número de PZTs inseridos na estrutura (np).
Manipulando-se convenientemente as equações do sistema global de equações
do movimento obtém-se a equação do sensor:
QKuK su =+ φφφφ (4.61)
Como não existe potencial elétrico aplicado ao sensor, a carga elétrica Q é igual
a zero, então:
uK K u1
s φφφφ −−= (4.62)
Para encontrar a força gerada no atuador, deve-se considerar a carga Q diferente
de zero, então, pode-se reescrever a Eq. 4.61 da seguinte forma:
QKuK Au =+ φφφφ (4.63)
ou
( )uKQ K uA φφφφ −= −1 (4.64)
Substituindo o potencial elétrico, Eq, 4.64, na equação global da força, Eq. 4.56,
tem-se:
eluu FFuKuM +=+ *&& (4.65)
onde:
uuuu KKKKK φφφφ1* −−= (4.66)
QKKF uel1 −−= φφφ (4.67)
Sendo Fel a força elétrica gerada no atuador com a aplicação de uma carga
elétrica Q.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
91
Se levados em consideração nos cálculos, o em geral presente grau de
amortecimento nas estruturas pode ser previsto. Esse grau é difícil de ser definido com
precisão mas pode ser considerado proporcional à massa e a rigidez. Assim:
KβMαDa += (4.68)
Uma vez definida a matriz de amortecimento, o sistema global de equações do
movimento é dado por:
QKKFuKuDuM ua1−−=++ φφφ&&& (4.69)
onde M, Da e K são as matrizes globais de massa, rigidez e amortecimento,
respectivamente.
4.3 - Elementos de Placa de Kirchoff e Viga de Euler-Bernoulli
Eletromecanicamente Acoplados
Na modelagem de uma estrutura via Método dos Elementos Finitos, a escolha do
tipo e tamanho de elemento finito que descreva de forma adequada o comportamento
trecho a trecho da estrutura depende do conhecimento da natureza física do problema a
ser representado, bem como da formulação do elemento escolhido traduzida pela sua
função de interpolação (Alves F. A. 2005).
Para a modelagem da estrutura eletromecanicamente acoplada proposta nesse
trabalho os tipos de elemento escolhidos foram o Elemento de Placa de Kirchoff e o
Elemento de Viga de Euler-Bernoulli, cuja modelagem para estruturas inteligentes foi
detalhada no capítulo 3.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
92
CAPÍTULO 5 – ESTUDO COMPARATIVO DE DIFERENTES MODELOS PROPOSTOS “NA LITERATURA”
Desde o inicio das investigações a respeito de Power Harvesting era possível
encontrar modelagens que simulavam os sistemas coletores e armazenadores de energia
envolvidos. Alguns desses modelos foram citados anteriormente no guia.
Com o passar dos anos e aumento da popularidade do assunto, muitos erros e
considerações antes desprezados passaram a ser levados em conta e a tendência é que se
encontrem modelos cada vez mais robustos, com mais parâmetros do sistema real
envolvidos.
5.1 Alguns exemplos de modelagens atuais
Geralmente, os trabalhos que investigam a otimização da captura, conversão e
armazenamento de energia analisam parâmetros lineares como os elementos dos
circuitos armazenadores, as propriedades geométricas e elementares dos transdutores,
ou o tipo de excitação a qual a estrutura é submetida.
Em estudos recentes, pesquisadores vão além, tentando otimizar a geração de
energia em equipamentos armazenadores através de mudanças não lineares em suas
propriedades.
Challa et. al. (2008) projetaram e testaram um dispositivo coletor de energia
(harvester) cuja frequência de ressonância pode ser sintonizada (“tunable”) se
utilizando uma técnica com força magnética (Figura 5.1).

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
93
Figura 5.1: Esquema do dispositivo para armazenar energia excitado através de
uma freqüência de ressonância. (Challa et. al. 2008)
O dispositivo é capaz de mudar sua frequência de ressonância em até ±20% da
frequência natural original. Uma viga piezelétrica engastada-livre com uma frequência
natural de 26 Hz é utilizada como colhedor de energia. Suas propriedades, freqüência
natural e rigidez, foram alteradas e a estrutura teve sua excitação otimizada com sucesso
em uma faixa de freqüências de 22 – 32 Hz, possibilitando uma geração contínua de 240
– 280 µW na faixa de freqüências testada. Por se utilizar força magnética tanto atrativa
como repulsiva, a freqüência de ressonância pode ser amplificada ou reduzida,
tornando-bidirecionalmente ajustável. A distância entre os ímãs é limitada pela rigidez
geométrica da viga e pela densidade do fluxo magnético dos ímãs. Foi construído um
mecanismo de ajuste semi-ativo, que pode ser aproveitado no projeto de um harvester
autônomo com capacidade de auto-ajuste, onde uma retroalimentação capaz de
controlar a força e a rigidez aplicada pelos ímãs e , consequentemente, a frequência de
ressonância do dispositivo, alterando a distância entre os ímãs para otimizar a
quantidade de energia captada. Um modelo teórico com amortecimento variável foi
desenvolvido e validado.
Em se tratando de modelagens matemáticas, de acordo com Erturk e Inman
(2008a), muitos autores tem considerado como modelo de sistema eletromecanicamente
acoplado para Power Harvesting uma viga engastada com uma ou duas camadas de
piezo cerâmicas, conectadas a uma carga resistiva. Os autores apresentaram soluções
analíticas para respostas elétricas e mecânicas de harvesters piezelétricos unimorfos e
bimorfos (Figura 5.2).

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
94
(a)
(b)
Figura 5.2: Esquema dos dispositivos harvesters (a) unimorfo e (b) bimorfo,
submetidos a excitações de base.
Os dispositivos foram submetidos a vibrações transversais e longitudinais
provocadas por uma excitação harmônica de base, excitações próximas das freqüências
naturais e acelerações de base não harmônicas. O equacionamento do sistema foi
encontrado através das equações elementares que regem a dinâmica do sistema
acoplado para cada configuração reduzida, já que o comportamento acoplado dos
harvesters pode ser investigado por meio dessas relações reduzidas, uma vez que são
relativamente fáceis de implementar e tão precisas quanto as soluções completas para
excitações em torno das freqüências naturais. Para estimar o histórico de voltagens
transientes, uma formulação foi dada pela combinação das funções analíticas de
resposta em freqüência com as acelerações de base não harmônicas transitórias,
representadas através de série de Fourier. As expressões foram validadas por meio de
um estudo de caso teórico. Constatou-se que o modelo pode prever a resposta em
freqüência da tensão com muita precisão para diferentes cargas resistivas.
No mesmo ano, Erturk e Inman (2008b) calcularam analogamente a solução
analítica de um harvester piezelétrico engastado-livre excitado pela base utilizando o
modelo de viga de Euler–Bernoulli. O modelo será detalhado a seguir. As expressões
resultantes da resposta do acoplamento mecânico e das saídas elétricas foram reduzidas
para expressões aproximadas para o caso particular de comportamento harmônico no
tempo. Expressões simples para a resposta do acoplamento mecânico, voltagem,
corrente e potência de saída também foram apresentadas para excitações em torno das

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
95
freqüências modais. O modelo foi usado no estudo de um caso paramétrico para um
harvester unimorfo, e importantes características do sistema com parâmetros
distribuídos, como por exemplo o comportamento com circuito aberto e fechado, foram
investigados em detalhe.
De Marqui et al. (2009) desenvolveram um modelo piezo-aero-elástico obtido
através da combinação de um modelo de elemento finito eletromecanicamente acoplado
(EF) com um modelo aerodinâmico instável. As matrizes de massa e rigidez do
elemento, os vetores de acoplamento eletromecânico e das forças externas e o termo
escalar de capacitância foram obtidos através do Principio Generalizado de Hamilton
juntamente com ambas as relações elétricas e mecânicas da estrutura e dos PZTs.
Constatou-se que o modelo EF eletromecanicamente acoplado mostrou resultados
satisfatórios quando comparados com os resultados analíticos obtidos da solução
aproximada dada por Erturk and Inman (2008b) para o dispositivo unimorfo sujeito à
excitação de base.
Motivados pelo grande número de modelos diversos que tem sido publicados por
muitos pesquisadores, Erturk and Inman (2008c) disponibilizaram algumas correções
para considerações físicas comumente errôneas praticadas por grupos de pesquisa para
futuros membros da comunidade que necessitarem de modelos matemáticos para
sistemas eletromecânicos e Power Harvesting. Os problemas existentes foram
investigados em dois temas como problemas na modelagem de parâmetros distribuídos.
Foram propostos, segundo os autores, modelos mais adequados e exemplos para cada
situação. Os problemas associados com os modelos com parâmetros distribuídos
existentes incluem: ignorar os efeitos da expansão modal e o fenômeno da ressonância;
não modelar o acoplamento piezelétrico na equação mecânica ou tratá-lo como simples
amortecimento viscoso; representação equivocada do termo força devido à excitação de
base; uso de equações referentes ao sensor e equações referentes ao atuador e do padrão
de flexão estática em um problema dinâmico.
Ward e Behens (2008) desenvolveram uma nova abordagem para captação de
energia de vibração. As abordagens existentes para captação de energia de vibração
normalmente utilizam um circuito retificador, que está sintonizado com a freqüência de
ressonância do harvester e da freqüência dominante da vibração. Essa nova abordagem
se adapta também às vibrações não-periódicas, de modo a extrair o máximo de energia
de vibração disponível. O conceito proposto foi validado experimentalmente em um

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
96
aparato experimental utilizando uma bobina de alto-falante como transdutor.
Resultados demonstraram eficiência de conversão de energia elétrica de 27-34%.
Embora o sistema de teste e de excitação tenham sido escolhidos para simplificar a
análise teórica de desempenho, a metodologia proposta é igualmente aplicável em
sistemas com dinâmica mais complexa
Nakano et al. (2007) apresentaram um modelo de rede que pode descrever
completamente a dinâmica eletromecânica dissociada do transdutor, incluindo a
interação entre a estrutura e a carga elétrica de uma forma unificada. Construído o
modelo, os autores o aplicaram em transdutores piezelétricos e eletromagnéticos. A
potência colhida por ambos os transdutores acoplados a uma viga simplesmente apoiada
foi calculada e as condições ideais de arranjo e a potência máxima colhida foram
obtidas teoricamente. Foram consideradas como condições ideais para a captura de
energia garantir que as partes mecânica e elétrica do transdutor se encontram em
ressonância, e usar uma carga elétrica combinada, formando uma resistência. A potência
máxima que poderia ser capturada foi calculada para cada tipo de transdutor.
Comparando estes valores, pôde-se observar que o transdutor piezelétrico captura mais
energia do que o transdutor eletromagnético neste exemplo, fenômeno difícil de mostrar
teoricamente, dada a complexidade das equações das potências máximas para cada
transdutor. Os autores ressaltaram algumas desvantagens de se utilizar transdutores
piezelétricos apesar da maior geração de energia, como por exemplo, a indutância ideal
torna-se bastante grande, sendo 298,6 H para o exemplo discutido. Um indutor passivo
deste tamanho não é apropriado para um sistema de alimentação leve e de captura.
Outro problema ressaltado foi que, fora da freqüência natural, o transdutor não captura
praticamente nenhuma energia, não sendo adequado para a colheita de energia em
vibrações de banda larga.
Para comparar os tipos de modelagens que eram feitas no início das pesquisas
sobre Power Harvesting e hoje em dia, será feita uma comparação entre dois modelos
de Harvesters Piezelétricos implementados por pesquisadores que contribuem
fortemente para o avanço das pesquisas no assunto desde o início. Um desses modelos
construído em 2003 e o outro em 2008. Os trabalhos têm um autor em comum, Dr. D. J.
Inman, por isso é possível acompanhar por meio da comparação desses trabalhos a
evolução da investigação sobre Power Harvesting dos grandes pesquisadores da área.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
97
Para comparar os tipos de modelagens que eram feitas no início das pesquisas
sobre Power Harvesting e hoje em dia, será feita uma comparação entre dois modelos
de Harvesters Piezelétricos implementados por pesquisadores que contribuem
fortemente para o avanço das pesquisas no assunto desde o início. Um desses modelos
construído em 2003 e o outro em 2008. Os trabalhos têm um autor em comum, Dr. D. J.
Inman, por isso é possível acompanhar por meio da comparação desses trabalhos a
evolução da investigação sobre Power Harvesting dos grandes pesquisadores da área.
5.2 Modelagem de uma viga piezelétrica
Primeiramente o trabalho de Sodano et Al desenvolveu um modelo de uma viga
engastada com elementos piezelétricos bimorfos acoplados que proporcionou uma
estimativa precisa da energia gerada através do efeito piezelétrico. Seu trabalho foi
citado no capítulo 1. Essa configuração foi escolhida baseada na verificação de que um
dispositivo piezelétrico acoplado a uma viga engastada é um mecanismo eficaz para
captar vibrações transversais e convertê-las em energia elétrica útil. O modelo
detalhado foi baseado em outros modelos mais generalizados. Foi adicionado um
complemento importante aos modelos anteriores utilizados que foi a consideração do
amortecimento na modelagem, dado que não havia sido levado em consideração até
então. Nota-se quão simples eram os modelos na época, já que hoje em dia existem
trabalhos inteiros dedicados apenas à análise de como considerar os diferentes
amortecimentos que influenciam um harvester.
Para a modelagem, os autores utilizaram o Princípio de Hamilton, que originou-
se da mecânica lagrangiana descrita no capítulo 3, O método hamiltoniano difere do
lagrangiano em que ao invés de expressar confinamentos diferenciais de segunda ordem
sobre um espaço coordenado n-dimensional, ela expressa confinamentos de primeira
ordem sobre um espaço de fases 2n-dimensional. Seguindo o principio, o indicador
variacional deve ser 0 a todo momento, assim:
Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
98
Onde:
U = Energia Potencial;
T =Energia Cinética;
f δx=Trabalho externo aplicado no sistema.
S = Deformação;
T = Tensão;
E = campo elétrico;
D = deslocamento elétrico;
V = Volume;
u = Deslocamento;
x = coordenada generalizada escolhida para o equacionamento do sistema
(posição ao longo da viga);
q = carga;
ρ = densidade;
f = forca aplicada;
Subscritos p e s significam propriedades relacionadas respectivamente ao
material piezelétrico e à estrutura.
Foram utilizadas as equações constitutivas dos materiais piezelétricos, como nas
eqs. 4.19 e 4.20:
Incorporando-se as relações piezelétricas nas equações de energia

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
99
Dessa forma, o indicador variacional fica:
Essa equação foi considerada pelos autores útil para resolver as equações de
movimento de qualquer sistema contendo elementos piezelétricos. Algumas suposições
foram consideradas, como os procedimentos de Rayleigh-Ritz que afirma que o
deslocamento da viga pode ser escrito como a soma dos modos da viga e uma
coordenada temporal, como segue:
Onde µ:() é o modo de vibrar que satisfaça a combinação de condições de
contorno, r(t) é a coordenada temporal do deslocamento e N é o número de modos a
serem incluídos na análise. As outras duas suposições foram que o potencial elétrico
através do elemento piezelétrico é constante e a aplicação do modelo de viga de Euller-
Bernoulli. Simplificando-se então o indicador variacional, têm-se as matrizes de massa
e rigidez da estrutura e do material piezelétrico.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
100
A matriz de acoplamento eletromecânico e de capacitância foram definidas por:
Reescrevendo-se o indicador variacional:
Representando respectivamente o movimento mecânico e as propriedades
elétricas do sistema, tem-se:
Para incorporar a dissipação de energia às equações governantes, utilizou-se a
Lei de Ohm e adicionou-se um elemento resistivo entre os eletrodos positivo e negativo
do piezelétrico para representar dissipações. Com a adição da carga resistiva, as
condições de contorno elétricas ficam:
Além disso, o amortecimento mecânico do sistema foi considerado. A
magnitude do amortecimento adicionado ao modelo foi determinada experimentalmente
pelo método de amortecimento proporcional. A razão de amortecimento é estimada por
meio da FRF medida. Encontrada a razão de amortecimento, o amortecimento
proporcional é encontrado de.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
101
Onde β é definido por:
Sendo ζi a razão de amortecimento encontrada da FRF da estrutura. Assim, o
modelo final do sistema para Power Harvesting fica:
As condições de contorno padrão da extremidade engastada indicam que a
declividade e deslocamento são nulos. Para o caso de excitação de base, os autores
optaram por representar a inércia da viga por uma função de força periódica, dada por:
5.3 Modelagem de uma viga eletromecânica engastada
A segunda modelagem a ser apresentada é uma solução exata eletromecânica de
uma estrutura composta por uma viga piezelétrica engastada, sujeita a vibrações
transversais. Foi utilizado o modelo de viga de Euler-Bernoulli. A viga modelada se
movia devido a uma excitação de base.
Nessa modelagem, o amortecimento foi calculado com mais acurácia do que no
modelo anterior, cujo cálculo se deu de uma maneira mais generalizada. Os autores
consideraram mecanismos mais sofisticados de amortecimento. Segundo Erturk, a taxa
de deformação interna de amortecimento e o amortecimento devido ao ar externo foram
tratados de forma mais precisa, já que os coeficientes de amortecimento foram definidos
separadamente. O circuito elétrico é composto por uma carga resistiva ligada aos
eletrodos da camada de PZT. Por isso, juntamente com a capacitância interna do PZT, o
circuito elétrico é um circuito RC de primeira ordem. Suas influências no sistema

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
102
começam a ser investigadas, diferente de outros autores ate então. Isso significa que só
nesse momento se iniciaram realmente os estudos dirigidos a Power Harvesting,
processo que inclui além do cálculo do potencial de saída da estrutura, seu
armazenamento reutilização.
A estrutura modelada se encontra na figura 5.3:
Figura 5.3: Esquema do harvester modelado.
O movimento wb de base x, t sobre o feixe pode ser representado como:
Sendo g(t) e h(t )respectivamente a translação e a rotação da viga.
Os autores escrevem a equação de movimento do sistema como:
Onde C(, ) = DGD @G?GD #m =amortecimento equivalente da seção transversal viga devido a sua
viscoelasticidade estrutural; #È= coeficiente de amortecimento viscoso do ar;
m = é a massa por unidade de comprimento da viga.
Ambos os mecanismos de amortecimento considerados satisfazem o critério de
amortecimento estrutural. Desse modo, eles são matematicamente convenientes para o
procedimento de solução da análise modal.
A taxa de deformação de amortecimento de fato mostra-se como um momento
interno na equação do movimento resultante, dado por:

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
103
Incorporando-se as relações constitutivas piezelétricas, o momento interno pode
ser escrito como:
Sendo P = tensão aplicada à estrutura; P² = tensão aplicada ao PZT;
b = largura da viga;
ha= posição da base da camada estrutural com relação ao eixo neutro;
hb= posição da base da camada piezelétrica com relação ao eixo neutro;
hc= posição do topo da camada estrutural com relação ao eixo neutro.
Expressando a tensão de flexão em termos de raio de curvatura e empregando as
relações piezelétricas e o momento interno:
Simplificando a equação:
YI se trata da rigidez flexional da seção transversal do compósito dada por:
E o termo de acoplamento:

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
104
Se a camada de PZT e / ou os eletrodos não cobrirem a totalidade do comprimento da viga, mas a região ≤ ≤ , então incorpora-se a função de Heaviside na equação do momento interno, obtendo-se:
Substituindo-se na equação de movimento, tem-se agora a influência do
acoplamento piezelétrico considerado:
Onde ¿() é o Delta de Dirac.
Para obter o circuito elétrico equação com acoplamento mecânico, deve-se
considerar a seguinte relação constitutiva piezelétrica:
ou
A carga elétrica qt desenvolvida no PZT e coletada pelos eletrodos pode ser
obtida através da integração do deslocamento elétrico
em função da área do eletrodo, assim:
onde D é o vetor de deslocamentos elétricos A corrente gerada pelo PZT pode
ser dada por

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
105
Aqui, a corrente gerada é uma função de dois componentes: O primeiro
componente é devido ao movimento vibratório da viga e o segundo componente inclui a
tensão sobre o PZT. O segundo termo da equacao de corrente é referente à capacitância
estática do PZT.
Uma vez que a expressão atual inclui as informações de capacitância do PZT,
neste modelo, é conveniente ligar diretamente ao PZT a carga resistiva como uma fonte
de corrente sem capacitância externa. Então, a tensão sobre a carga resistiva é:
ou
Observa-se dos dois modelos que a principal diferença entre um modelo de 2003
e um de 2008 se da na consideração da influência e dos componentes do circuito
armazenador de energia na modelagem do harvester. Relevância é dada também aos
detalhes, como, por exemplo, o avanço observado na maneira de se expressar o
fenômeno de perda de energia devido a dissipação pelo amortecimento da estrutura,
pelo acoplamento piezelétrico, pelo acoplamento do circuito, entre outros, levados em
consideração na modelagem.
Uma característica da modelagem de harvesters que era um pouco negligenciada
e hoje em dia é essencial para que o próprio sistema seja considerado um harvester é a
influência do circuito armazenador de energia na modelagem do sistema
eletromecânico.
Gonsalez (2009) construiu o modelo de um sistema contido por um transdutor
conectado ao equivalente de Thevenin para a estrutura vibrando e para a carga elétrica.
Esse modelo foi proposto por Nakano et al (2007). O esquema modelado se encontra na
figura 5.4.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
106
Figura 5.4: Esquema do sistema modelado.
Os parâmetros principais são os mesmos descritos no capitulo três na seção 6.3.
Para o transdutor a relação entre as variáveis mecânicas e elétricas é expressa
por:
= ¤\ P\ÃPÃ\ ¤Ã Ê@ sendo
@ = − PÃ\¤Ã + ¤Ã_ Ê
e = ¤\ − PÃ\P\äà + ¤Ã_ Ê
A força no transdutor é dada por: = Ë − ¤\Ê
Para fb sendo a força bloqueada da estrutura mecânica.
A velocidade da estrutura pode ser dada por:
Ê = Ë+¤\ − P\ÃPÃ\¤Ã + ¤Ã_,
Para Zm = Zmt +Zms
A potência dissipada pela carga elétrica é considerada a coletada para Power
Harvesting. Essa potência, para uma excitação harmônica, é:
ÌÍ = 12 ½M−@∗N

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
107
A autora modelou o transdutor piezelétrico baseada em estudos de Preumont
(2006) e Nakano et al (2007). O modelo foi utilizado para encontrar as impedâncias
elétricas e mecânicas e os coeficientes de transdução do transdutor.
Assumindo-se uma entrada harmônica, as equações constitutivas do PZT podem
ser transformadas em:
= ÏÐÐÑ 1\ −n44
−n44 1Ã ÒÓ
ÓÔ Õ\ÕÃ
F = força
V = voltagem; Õ\ = deflecção mecânica; ÕÃ = carga elétrica; n4 = constane do transdutor piezeletrico; \ = compliância mecânica com eletrodos abertos (ÕÃ = 0); Ã = capacitância elétrica do transdutor para uma geometria fixa (Õ\ = 0);
Definindo-se um coeficiente de acoplamento Ö:
Ö = |F44|√5×Ä Os outros parâmetros foram dados por: 1\ = ØÈ1 − Ö
ÙÅÚ = Ù (HÛ9 ) n44 = G F44 ØÈ (1 − Ö )
= ×Ä«GZ
ØÈ = «5 Z
C = capacitância do transdutor sem carregamento externo ( = 0); ØÈ = rigidez do transdutor para os eletrodos em curto circuito ( = 0);

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
108
A = área de secção transversal;
Finalmente, as impedâncias elétrica e mecânica e os coeficientes de transdução são
dados por:
¤\ = 1 \ (1 + Ü\)
¤Ã = 1 à (1 + ÜÃ)
P\Ã = PÃ\ = n44
sendo Ü\ and ÜÃ os fatores de perda das compliâncias mecânica e elétrica.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
109
CAPÍTULO 6 – SIMULAÇÕES NUMÉRICAS
Nesse capítulo, algumas simulações numéricas para a modelagem apresentada
no capitulo 4 foram realizadas e seus resultados discutidos. As simulações serão feitas
no programa SmartSys. As simulações numéricas são importantes não só para conhecer
bem o funcionamento do sistema, mas também para observar a inter-relação entre as
estruturas e os materiais piezelétricos a ela acoplados, bem como adquirir experiência
com programação numérica e procedimentos experimentais. As simulações ficaram
restritas à viga devido aos empecilhos encontrados para as análises com placas.
Vale lembrar que não se trata de análises de sistemas para Power Harvesting, já
que apenas é avaliado o potencial que sai do PZT e nada relacionado com o circuito
armazenador. Trata-se de simulações de estruturas inteligentes. São importan
6.1 Modelagem de uma viga engastada com PZTs acoplados no programa
SmartSys
O software utilizado para a modelagem da Viga engastada-livre deste trabalho
foi o “SmartSys”, programa em desenvolvimento pelo grupo GMSINT para modelagem
de estruturas com sensores e atuadores incorporados através do método numérico de
elementos finitos (FEM). Este programa usa a plataforma do software MATLAB® for
windows da “The MathWorks Inc”. O módulo de solução do sistema de equações já foi
implementado para as estruturas do tipo viga de Euller Bernoulli e placa de Kirchoff. O
programa possui interfaces gráficas para o módulo de pré-processamento, para entrada
de dados (geometria, propriedades dos materiais, condições de contorno, carregamentos,
etc) e para o módulo de pós-processamento, ou seja, a apresentação dos resultados
(tabelas, gráficos, análise de sinais, etc).

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
110
O modelo estudado foi simulado inicialmente sem o acoplamento
eletromecânico, ou seja, somente o comportamento do elemento estrutural foi analisado.
Após a primeira análise, três elementos piezelétricos foram incorporados à viga como
mostra a figura 6.2 e uma nova simulação foi efetuada. Dessa forma foi possível a
realização de uma comparação entre ambas as simulações para observar as influências
que o acoplamento dos elementos poderia causar à estrutura. A viga foi dividida em 30
elementos de viga, com 31 nós e 62 graus de liberdade. Foram efetuadas análises no
domínio do tempo e da frequência para os dois casos. Suas propriedades estão
relacionadas na tabela 6.1.
Figura 6.1 Interface Gráfica de abertura do programa SmartSys.
Figura 6.2 Desenho ilustrando a viga engastada-livre com os PZTs acoplados.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
111
Tabela 6.1 - Dimensões e propriedades da viga
Parâmetro Valor
Módulo de Young (GPa) 70 Coeficiente de Poisson 0.31
Densidade (kg.m-3) 2710 Comprimento (mm) 600
Largura (mm) 25
Espessura (mm) 2.5
Inicialmente foi realizada uma análise modal da viga engastada-livre sem o
acoplamento dos PZTs. Na figura 6.3 são mostrados alguns dos 15 primeiros modos de
vibrar da viga, fornecidos pelo programa após a análise modal.
(a)
(b)

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
112
(c)
Figura 6.3 Gráficos representando o primeiro (a), segundo (b) e o terceiro (c)
modos de vibrar da viga.
Após a análise modal da viga, foram realizadas as análises dinâmicas no
domínio da freqüência e do tempo sem o acoplamento. Os resultados obtidos foram
guardados para posterior comparação.
Realizou-se, então o acoplamento dos PZTs conforme mostrado na figura 6.4.
Figura 6.4 Malha da viga modelada no programa Smartsys com PZTs acoplados
respectivamente nos elementos 9-10, 10-11 e 15-16.
Novamente foram realizadas a análise modal, e as dinâmicas nos domínios da
freqüência e do tempo.
Para a análise realizada no domínio da frequência foi adotada freqüência
máxima de 500 Hz.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
113
A tabela 6.2 mostra as freqüências naturais de vibração nos quinze primeiros
modos de vibrar da viga simulada.
Tabela 6.2 – Freqüências naturais da viga com e sem PZT
Modos fn (Hz) sem PZT fn (Hz) com PZT 1 6.86169 6.9324329 2 42.876157 42.891587 3 120.05482 120.36533 4 235.2617 236.3662 5 388.91278 389.48717 6 580.99243 587.24242 7 811.52635 816.53321 8 1080.5551 1085.3461
Ao comparar os gráficos FRF para as análises com e sem o acoplamento dos
PZTs, pôde-se constatar diferenças entre ambos (figura 6.5).
Figura 6.5 Gráficos FRF da viga com e sem os PZTs para uma excitação de entrada no
grau de liberdade 19 com respostas coletadas no grau de liberdade 59.
Os resultados comprovam a influência do acoplamento dos PZTs nas
propriedades dinâmicas do sistema analisado. Como visto acima, as frequências naturais
e o deslocamento da estrutura sofreu alterações significantes devido à incorporação dos
PZTs que podem ser divididas em influências na massa e rigidez e influências nas suas
propriedades adaptativas. Nos gráficos FRFs da figura 6.5, pôde-se observar pelos picos
o efeito de amortecimento da viga causado pelos PZTs, o chamado damping effect.
0 50 100 150 200 250 300 350 400 450 500-160
-140
-120
-100
-80
-60
-40
-20
Frequência [Hz]
Apl
itude
[db]
FRF entrada (GL 19) x saída (GL 59)
sem PZTcom PZT

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
114
Assim, pode-se afirmar que o acoplamento de materiais piezelétricos em
estruturas influencia seu comportamento.
6.2 – Aplicações numéricas e validações experimentais
Um sistema eletromecânico composto por uma viga engastada-livre de alumínio
com um PZT acoplado foi modelada com o programa Smartsys. Para que fosse
calculada a voltagem de saída do PZT, o sistema foi submetido a análises dinâmicas no
domínio do tempo. Diversos parâmetros foram analisados como condições de engaste
da estrutura, magnitude e posicionamento da aplicação da força no sistema e
posicionamento do PZT. Para a modelagem, a viga foi dividida em 21 elementos com
44 graus de liberdade. (22 nós). As propriedades físicas e dinâmicas da viga e do PZT
são listadas na Tabela 6.2.
Table 6.2: Propriedades físicas e geométricas do sistema eletromecanicamente
acoplado.
Propriedades PZT Viga
Módulo de Young [GPa] 62 70
Densidade [Kg/m3] 7500 2710
Poisson --- 0,3
Constante Dielétrica [F/m] 3,363e-8 ---
Coeficiente de tensão piezelétrica [C/m2] -16,37 ---
Capacitância [F] 6e-7 ---
Comprimento [m] 0.02 0.42
Largura [m] 0.02 0.0305
Espessura [m] 2.7e-4 0.002
Para se familiarizar com os aparatos e procedimentos para ensaios
experimentais, foram realizados diversos ensaios e testes. Em um destes testes, realizou-
se uma análise para observar a influência das condições de engaste na geração de
energia no sistema eletromecanicamente acoplado. Uma das extremidades da viga foi

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
115
engastada e um shaker, responsável pela aplicação da força harmônica à viga, foi
acoplado ao seu quarto elemento. O PZT utilizado foi o modelo PSI5H4E –
Piezosystems, propriedades listadas na Tabela 6.2. Ele foi acoplado ao quinto elemento
da viga. A voltagem de saída do PZT foi medida com a placa de aquisição de sinais
DSpace DS – 1103 Control Board. A placa é controlada por seu próprio software e pelo
Simulink® - Matlab. Assim, é possível fazer a leitura e salvar o sinal de saída.
O sistema foi excitado na condição engastado-livre e livre-livre (Figura 6.6).
(a)
(b)
(c)
Figura 6.6: Montagem experimental do sistema para (a) viga na condição livre-
livre e (b) na condição engastada-livre. (c) Detalhe mostrando o PZT utilizado.
Para cada condição, a estrutura foi excitada até que se atingisse sua freqüência
natural. Para a viga engastada-livre, as freqüências de excitação foram de 10,2 e 75 Hz
(primeira e segunda freqüência natural). Na condição livre-livre, a viga foi excitada à
56,5 Hz (primeira freqüência natural). Não foi possível para esse teste alcançar a
segunda freqüência natural da viga livre-livre. Os sinais das voltagens no PZT nas
diferentes situações foram medidos pela placa de aquisição e comparados. Destaca-se

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
116
que, devido ao acoplamento do shaker, a viga não se comporta exatamente nas
condições de contorno pretendidas.
As voltagens no PZT nas diferentes freqüências de excitação são ilustradas nas
figuras 6.7, 6.8 e 6.9.
Figura 6.7: Voltagem dissipada com a viga na primeira freqüência natural (10,2
Hz) na condição engastada-livre.
Figura 6.8: Voltagem dissipada com a viga na segunda freqüência natural (75
Hz) na condição engastada-livre.
0 0.5 1 1.5 2-10
-5
0
5
10
Tempo (s)
Vol
tage
m (
V)
0 0.5 1 1.5 2-8
-6
-4
-2
0
2
4
6
8
Tempo (s)
Vol
tage
m (
V)

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
117
Figura 6.9: Voltagem dissipada com a viga na primeira freqüência natural (56,5
Hz) na condição livre-livre.
Ao comparar o desempenho da conversão de energia pelo PZT primeiramente
para a viga engastada-livre vibrando na primeira e na segunda freqüência natural,
verifica-se que o PZT é capaz de gerar mais energia com a viga vibrando na primeira
freqüência natural. Nota-se durante o experimento que a viga flexiona mais no primeiro
modo. Dessa forma, o PZT se deforma mais, gerando mais energia.
Comparando a influência do engaste na geração de energia, na condição livre-
livre, a viga atingiu seu primeiro modo de vibrar a uma freqüência de vibração 5 vezes
maior do que quando engastada-livre. Na freqüência de 56.5 Hz o PZT alcançou os
mesmos picos de voltagem que quando excitado a 10,2 Hz na condição viga engastada-
livre.
Depois de se analisar a voltagem gerada pelo PZT acoplado à viga na condição
livre-livre e engastada-livre, verificou-se que um engaste favorece a deformação do
PZT, otimizando sua geração de energia a menores freqüências de excitação. Porém, ao
comparar as situações onde o PZT atingiu picos de energia de aproximadamente 10 V,
(Figuras 6.7 e 6.9), verifica-se que, na condição livre-livre, o PZT atinge esses picos
com uma maior freqüência, favorecendo e muito o armazenamento de energia por
circuitos para Power Harvesting. Deve-se ter cautela para as situações nas quais o PZT
possa estar posicionado em locais onde, durante a freqüência natural da viga, o
deslocamento é nulo (nós), prejudicando ou anulando a geração de energia.
0 0.5 1 1.5 2-10
-5
0
5
10
Tempo (s)
Vol
tage
m (
V)

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
118
Compreendendo bem o funcionamento dos equipamentos e os procedimentos
nos ensaios experimentais, partiu-se para as simulações numéricas.
A primeira das simulações numéricas visou validar o programa através de um
teste experimental. A viga foi modelada na condição engastada-livre, com excitação no
quarto elemento.
Primeiramente foi realizada uma análise modal no sistema para calcular suas
freqüências naturais. Conhecidos os modos de vibrar da estrutura (condizentes com as
encontradas experimentalmente), ela foi submetida a excitações harmônicas no seu
quarto elemento. O potencial gerado pelo PZT foi analisado para a estrutura vibrando na
sua primeira freqüência natural, quando sua amplitude de vibração aumenta,
favorecendo a deformação do PZT.
Para que a excitação harmônica aplicada ao sistema fosse a mesma na simulação
e no teste experimental, foi necessário realizar um teste para encontrar a
compatibilidade entre a amplitude da vibração fornecida pelo shaker, dada em volts, e a
amplitude da força aplicada na simulação, dada em Newtons. Para isso, durante o
experimento com a viga, um transdutor de força modelo 208C02 - Piezotronics, com
sensibilidade de 47,10 mV/lbf foi posicionado entre o shaker e a viga a fim de medir o
sinal de força aplicado para as duas primeiras freqüências naturais (10,2 e 75 Hz) e
posteriormente convertê-lo em Newtons.
A curva de calibração do transdutor fornecida pelo fabricante é ilustrada na
Figura 6.10. Os sinais de força em Newtons encontrados depois da análise para as duas
freqüências naturais da estrutura são ilustrados na Figura 6.11.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
119
Figura 6.10: Curva de calibração do transdutor de força.
Figura 6.11: Forças harmônicas aplicadas à viga ensaiada pelo shaker e
capturadas pelo transdutor de força.
sendo as equações referentes aos sinais em Newtons dadas por:
Para a excitação na primeira freqüência natural da estrutura:
( ) ( )NtsenF )83,62.32,8= (I)
Para a excitação na segunda freqüência natural da estrutura:
0 20 40 60 80 1000
500
1000
1500
2000
2500
3000
3500
4000
4500
5000
ENTRADA - LBFENTRADA - LBFENTRADA - LBFENTRADA - LBF
SA
ÍDA
- M
ILIV
OL
TS
(m
V)
SA
ÍDA
- M
ILIV
OL
TS
(m
V)
SA
ÍDA
- M
ILIV
OL
TS
(m
V)
SA
ÍDA
- M
ILIV
OL
TS
(m
V)
0 0.05 0.1 0.15 0.2-50
-40
-30
-20
-10
0
10
20
30
40
50
TEMPO (S)TEMPO (S)TEMPO (S)TEMPO (S)
EN
TR
AD
A (
N)
EN
TR
AD
A (
N)
EN
TR
AD
A (
N)
EN
TR
AD
A (
N)
10,2 Hz 75 Hz

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
120
( ) ( )NtsenF )95,464.33,48= (II)
Encontradas as forças harmônicas a serem aplicadas à estrutura, a voltagem de
saída do PZT pode ser medida experimentalmente e calculada numericamente. A Figura
6.12 mostra a comparação entre ambos os sinais obtidos numérica e experimentalmente
para a força F da Eq. I.
Figure 6.12: Comparação entre a voltagem de saída do PZT obtida
numérica e experimentalmente.
Como foi possível verificar através dos resultados numéricos e experimentais, os
resultados obtidos na solução numérica para a voltagem de saída do transdutor
piezelétrico se mostraram consistentes. Isso mostra que, para o caso viga engastada-
livre, mais comum entre os membros do Grupo, o programa Smartsys está correto para
as análises modal e transiente e os resultados obtidos condizem com a validação
experimental. O próximo passo na investigação do Smartsys no futuro é deixar o
programa robusto para que possam ser realizadas modelagens numéricas e análises
estáticas e dinâmicas confiáveis em vigas livres-livres, vigas duplamente engastadas e
placas sob diversas condições de engaste.
Testada a influência da freqüência de excitação à estrutura e das suas condições
de engaste na geração de energia pelo PZT, foi realizada uma análise com mais um PZT
acoplado à viga e com a aplicação da força localizada no seu último elemento. Assim é
0 0.5 1 1.5 2
-10
-5
0
5
10
TEMPO (s)TEMPO (s)TEMPO (s)TEMPO (s)
VO
LT
AG
EM
(V
)V
OL
TA
GE
M (
V)
VO
LT
AG
EM
(V
)V
OL
TA
GE
M (
V)
Numérico Experimental

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
121
possível avaliar o efeito do posicionamento do PZT na viga e da aplicação de força na
viga na geração de energia. O PZT 1 foi acoplado ao segundo elemento da viga e o PZT
2 ao quinto elemento. A Figura 6.13 mostra uma foto ilustrando os aparatos
experimentais e a posição dos sensores PZT.
Figura 6.13: Esquema experimental.
Na análise harmônica foi adotado um carregamento dinâmico dado por:
)40(5 tsenF π= .
Os gráficos com a comparação entre as voltagens de saída dos PZTs numérica e
experimentalmente são mostrados na Figura 6.14 e 6.15 para os PZTs 1 e 2,
respectivamente.
Figura 6.14: Voltagem de saída do PZT 1, que está acoplado ao Segundo
elemento da viga.
0 0.5 1 1.5 2-1.5
-1
-0.5
0
0.5
1
1.5
TEMPO (s )TEMPO (s )TEMPO (s )TEMPO (s )
VO
LT
AG
EM
(V
)V
OL
TA
GE
M (
V)
VO
LT
AG
EM
(V
)V
OL
TA
GE
M (
V)
NUMERICO EXPERIMENTAL

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
122
Figura 6.15: Voltagem de saída do PZT 2 acoplado ao quinto elemento da viga.
Os resultados da simulação mostraram que a tensão de saída de PZT 1 foi maior
do que a do PZT 2, como se esperava, pois quanto mais próximo o PZT se encontra do
engaste da viga, maior será a sua deformação e, conseqüentemente, maior será a sua
tensão de saída.
Apesar disso, o que se constatou nos resultados experimentais foi o oposto, o
PZT 2, mais distante do engaste, gerou mais energia e o PZT 1, além de ter gerado
menos energia do que o PZT 2, gerou bem menos energia do que a calculada
numericamente. Ao observar o comportamento da viga ao ser submetida à excitação no
seu último elemento, notou-se uma deformação diferente da normalmente esperada para
uma viga engastada-livre (Figura 6.16).
Figura 6.16: Ilustração mostrando a diferença entre o comportamento esperado
para a viga e o comportamento observado no experimento.
0 0.5 1 1.5 2-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
TEMPO (s)TEMPO (s)TEMPO (s)TEMPO (s)
VO
LT
AG
EM
(V
)V
OL
TA
GE
M (
V)
VO
LT
AG
EM
(V
)V
OL
TA
GE
M (
V)
NUMERICO EXPERIMENTAL

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
123
Os resultados numéricos e experimentais para o PZT 2 foram próximos, porém,
essa diferença de comportamento ocasionou uma grande disparidade na comparação
para o PZT 1, que praticamente não sofre os efeitos da vibração. Essa diferença também
explica o fenômeno da maior geração de energia pelo PZT 2.
Depois de uma atenta observação e pesquisa a resultados anteriormente obtidos
por outros pesquisadores, acredita-se que o conector do shaker à viga é o grande
responsável pela alteração na deformação da estrutura. Tal peça funciona na ocasião
como uma restrição à viga.
Deve-se, portanto, atentar durante os experimentos realizados com uma
excitação externa à maneira como esta excitação é aplicada para que interfira o mínimo
possível na resposta do sistema. Para ensaios futuros, sugere-se que a viga seja
engastada diretamente ao shaker, simulando assim uma excitação pela base.
Softwares como o Ansys® são utilizados para fazer simulações numéricas de
sistemas inteligentes. Um problema encontrado geralmente ao qual se deve ter atenção é
o aterramento dos PZTs na malha construída.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
124
CAPÍTULO 7 – CONSIDERAÇÕES FINAIS
Para que as pesquisas em certo assunto dêem resultados e tenham um bom
andamento, é necessária uma coleta de dados de anos de pesquisa e investigação. Os
grupos de pesquisa são criados justamente pra que haja essa fluidez na pesquisa. Para
que, estudante após estudante que passe pelo grupo pesquisando determinado assunto,
possa contribuir para que a pesquisa do grupo caminhe mais alguns passos, cada
estudante deve assimilar rapidamente o que já foi realizado até então e a partir daí,
inovar e agregar à pesquisa.
Esse guia foi elaborado para que os próximos estudantes que se tornarem
membros do Grupo de Materiais e Sistemas inteligentes – (GMSINT) possam guiar seus
estudos iniciais, entendendo a história, os avanços, e os conceitos básicos envolvidos
em Power Harvesting. Dessa forma, seu tempo de estudos inicial será minimizado e o
estudante será capaz de começar a produzir mais rapidamente.
Um bom embasamento no que se diz respeito à dinâmica de sistemas
eletromecanicamente acoplados é fundamental para que testes paramétricos sejam
efetuados. É por essa razão que o enfoque deste trabalho foi a modelagem de estruturas
inteligentes e os fundamentos relacionados à modelagem.
Como se trata de um assunto complexo que envolve muitas variáveis e
fenômenos, são muitos e variados os conceitos utilizados em Power Harvesting.
Espero contribuir dessa maneira um pouco para o Grupo que me proporcionou
tanto aprendizado.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
125
8- REFERÊNCIAS BIBLIOGRÁFICAS
[1]<http://ciencia.hsw.uol.com.br/questao124.htm>. Acesso em 20 jun. 2010.
Alves Filho A., Elementos Finitos: a base da tecnologia CAE / análise dinâmica.
Editora Érica, 2005, São Paulo-SP
Azevedo, A. F. M., 2003, Método dos Elementos Finitos, Universidade do Porto.
Challa R. V., Prasad M. G., Shi Y. and Fisher F. T., 2008, A vibration energy
harvesting device with bidirectional resonance frequency tenability. Smart
Materials Structures 17 015035.
Clark, R.L., Saunders, W.R., and Gibbs, G.P., 1998, Adaptive Structures: Dynamics
and Control, John Wiley & Sons, Inc.
De Marqui, Erturk A. and Inman D. J., 2009, Piezo-aero-elastic modeling and
analysis of a generator wing. Smart Materials and Structures, in review.
Erturk A. and Inman D. J., 2008a. Analytical Modeling of Cantilevered Piezoelectric
Energy Harvesters for Transverse and Longitudinal Base Motions. 49th
AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials
Erturk A. and Inman D. J., 2008b, A distributed parameter electromechanical model
for cantilevered piezoelectric energy harvesters. ASME Journal of Vibration
and Acoustics 130 041002.
Erturk A. and Inman D. J., 2008c, Issues in Mathematical Modeling of Piezoelectric
Energy Harvesters. Smart Materials and Structures 17 065016.
Fang HB, Liu JQ, Xu ZY, Dong L, Wang L, Chen D, Cai BC, Liu Y, Fabrication and
performance of MEMS-based piezoelectric power generator for vibration
energy harvesting, Microelectronics Journal 37 (2006) 1280–1284.
Ferrari M., Ferrari V., Guizzetti M., Marioli D., Taroni A. Piezoelectric
multifrequency energy converter for power harvesting in autonomous
Microsystems. Disponçivel em <www.sciencedirect.com>;

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
126
Gonsalez C. G., 2007, Modelagem de Estruturas Inteligentes, Relatório Final da
Pesquisa de Iniciação Científica, Encaminhado à FAPESP.
Gonsalez, Camila G.; Franco, Vitor R.; Souza, Flavilene S.; da Silva, Samuel; Brennan,
Michael; Lopes, Vicente J. Model of energy harvesting using a piezoelectric
transducer. Conem 2010.
González J L, Rubio A and Moll F 2002 Human powered piezoelectric batteries to
supply power to wearable electronic devices Int. J. Soc. Mater. Eng.
Resources 10 34–40.
Inman, D. J. (2001) Engineering Vibration. Prentice-Hall Inc., Upper Saddle River,
NJ.
Leo, Donald J. Engineering Analysis of Smart Material Systems. 2007. JOHN
WILEY & SONS, INC.
Lima Jr., J. J., 1999, Modelagem de Sensores e Atuadores Piezelétricos com
Aplicação em Controle Ativo de Estruturas, Tese de Doutorado, UNICAMP,
Campinas, SP, p209.
Liu JQ, Fanga HB, Xub ZY, Maob XH, Shena XC, Chena D, Liaob H, Caia BC. A
MEMS-based piezoelectric power generator array for vibration energy
harvesting. Microelectronics Journal; 15 December 2007.
Lu F, Lee H P and Lim S P 2004, Modeling and analysis of micro piezoelectric
power generators for micro-electromechanical-systems applications, Smart
Mater.
Marqui, C. R., Modelagem de Estruturas Piezelétricas para aplicação em
localização de falhas. Dissertação de Mestrado, Departamento de Engenharia
Mecânica da Faculdade de Engenharia de Ilha Solteira – Universidade Estadual
Paulista “Júlio de Mesquita Filho”(Feis/Unesp), 2007, Ilha Solteira, SP.
Martinelli, D. A. O., Monatanari, I., Savassi,W., 1986, Placas Elásticas: Equações
Gerais e Placas Retangulares. Conceituação Teórica, Método das Diferenças
Finitas e Elementos Finitos. São Carlos: EESC, 114p”.
Nakano K, Elliott S J and Rustighi, 2007, A unified approach to optimal conditions
of power harvesting using electromagnetic and piezoelectric transducers.
IOP Publishing Smart Materials And Structures.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
127
Netto, Luiz F. Conversão direta da energia (Parte1 - Conversões dinâmica e direta).
Disponível em: < http://www.feiradeciencias.com.br/sala21/21_12_01.asp >.
Acesso em: 21 jun. 2010.
Poulin G., Sarraute E., Costa F., Generation of electrical energy for portable devices.
Comparative study of an electromagnetic and a piezoelectric system.
Disponível em: <www.sciencedirect.com>.
Preumont A., Mechatronics Dynamics of Electromechanical and Piezoelectric
Systems. Solid Mechanics and its applications, Vol. 136, 2006; Published by
Springer (www.springer.com).
Rao, Singiresu S., 2009, Vibrações Mecânicas. Quarta Edição, Pearson Prentice Hall
Rocha, T. L., 2004, Modelagem de Estruturas Inteligentes. Dissertação de Mestrado,
Departamento de Engenharia Mecânica da Faculdade de Engenharia de Ilha
Solteira – Universidade Estadual Paulista “Júlio de Mesquita Filho”(Dem/
Feis/Unesp), Ilha Solteira, SP.
Shenck, N. and Paradiso, J. 2001. Energy Scavenging with Shoe- Mounted
Piezoelectrics, IEEE Micro, 21(3):30–42.1
Shenck, N. and Paradiso, J. 2001. Energy Scavenging with Shoe- Mounted
Piezoelectrics, IEEE Micro, 21(3):30–42.1
Silva, Rafael S. A. Propriedades estruturais e optoeletrônicas de ligas amorfas de
germânio. Materiais elétricos: compêndio de trabalhos. Volume 7. Disponível
em: < http://www.foz.unioeste.br/~lamat/downcompendio/compendiov7.pdf >.
Acesso em 02 mai 2009.
Smartfibres Ltd, 2000, Structural Health Monitoring , Disponível em:
<http://www.smartfibres.com>, Acesso: em 20 jun. 2010.
Sodano, H. A., Magliula, E. A., Park, G., and Inman, D. J., 2002, Electric Power
Generation from Piezoelectric Materials. in Proceedings of the 13th
International Conference on Adaptive Structures and Technologies, October 7–
9, Potsdam/Berlin, Germany.
Sodano, H.A., Park, G., Leo D. G. and Inman, D.J. 2003. Model of a Piezoelectric
Power Harvesting Beam. ASME International Mechanical Engineering
Congress and Exposition, IMECE 2003 43250.
Timoshenko, S. P., Goodier, J. N., 1970, Theory of Elasticity, 3rd Edition, McGraw-
Hill, 69-13617.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
128
Troyk, P.R., Frankovic R., Anderson J.E., 1991, ExperimentalTechniques for
Electrical Testing of Microelectronic Coatings, IEEE Trans Comp., Hybrids,
and Mauf. Tech. vol.14, p428-435.
Tseng, C. I., 1989, Electromechanical Dynamics of a Coupled Piezoelectric /
Mechanical System Applied to Vibration Control and Distributed , Ph. D.
Thesis, Department of Mechanical Engineering, University of Kentucky, 240 p
Visit site www.allaboutmems.com to discover more about MEMs devices.
Ward J K and Behrens S, 2008. Adaptive learning algorithms for vibration energy
harvesting. IOP Publishing Smart Materials And Structures.
WIKIPÉDIA. Energia. Disponível em: <http://pt.wikipedia.org/wiki/Energia>. Acesso
em 03 jun. 2010.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
129
ANEXO I – MANUAL DO PROGRAMA SMARTSYS

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
130
III.1 Motivação
Por ser um programa de uso comum no Grupo de pesquisa, e por ter sido
construído de forma modular a fim de permitir a implementação de algoritmos de
controle e a modelagem de novos tipos de elementos, o programa Smartsys sempre se
encontrou aberto e suscetível a alterações em suas linhas de comando originais. Devido
a essa abertura, conforme os membros o utilizavam em suas simulações numéricas,
faziam pequenas alterações no programa original como, por exemplo, separar uma
rotina do programa que o interessava e por em um arquivo separado dentro da pasta de
rotinas do programa. Dessa maneira, conforme o tempo e os membros do Grupo
passavam, o programa sofria alterações no seu número de arquivos e conteúdo. Por fim,
ao iniciar os estudos no programa Smartsys, o pesquisador hoje em dia se depara com
resultados não palpáveis e um programa não amigável. se tornou um programa de uso
não amigável. Como o programa foi criado há alguns anos, seus criadores não podem
ser contatados com a ajuda dos antigos membros que o idealizaram para decifrá-lo.
Assim, iniciou sua investigação pelas rotinas e interfaces gráficas do programa
Smartsys. Isso demandou um tempo muito grande e que não estava previsto no
cronograma.
III.2 Estudos teóricos para compreender o funcionamento do programa.
O programa Smartsys foi construído para efetuar a modelagem de estruturas com
sensores e atuadores piezelétricos acoplados. O programa é implementado em ambiente
Matlab®, uma das aplicações disponíveis para prover dados e resultados e exibi-los em
uma variedade de representações gráficas. A forma de representação gráfica é a mais
utilizada e efetiva na apresentação dos resultados e dados.
O Matlab® oferece ferramentas de interface gráfica com o usuário - Graphical
User Interface (GUI’s) - como botões, campo de texto e menu proporcionando ao
progrmador se comunicar com o computador sem programar comandos.
Os componentes de interface são objetos de gráficos que são ordenados em duas
classes: interface de usuário, os uicontrols – criados com o propósito de executar uma
ação ou montar as opções para uma ação futura – e cardápios de interface de usuário, os
uimenus – especificam a ação que é executada quando o usuário utiliza o botão do
mouse dentro do uicontrol e residem na barra de menu que se encontra no topo de uma

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
131
janela de figura. Esses componentes podem ser combinados com outros objetos de
gráficos para criar GUI’s informativo, intuitivo, com uma aparência agradável. As
propriedades dos componetes são ilustradas na Tabela III.1.
Tabela III .1: Propriedades e objetos das componente uicontrol e uimenu.
UICONTROL UIMENU
Check Box
Representa dois estados de
uma opção como “on” ou
“off” que indicam
“verdadeiro” ou “falso”
“sim” ou “não”, sendo que
fora do seu estado a caixa
de cheque consistirá de um
vazio.
-----------------
Frame
Não serve a nenhum
propósito em termos de
respostas ação-relacionadas
com o uso do mouse pelo
usuário. Normalmente é
usado para servir como
uma ajuda visual
importante. É um método
extremamente efetivo de
organizar o GUI’s de
maneira lógica e intuitiva
(fundo sólido).
-----------------
Push Button
Indica qual ação deveria
acontecer imediatamente.
Normalmente rotulado
como a ação que acontece
se o usuário utilizar o botão
-----------------

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
132
do mouse. Possui um visual
tridimensional que faz
parecer que ele está sendo
apertado quando o usuário
o utiliza no objeto.
Callback
Especifica a ação que é executada quando o usuário
utiliza o botão do mouse dentro do uicontrol ou uimenu
como definido por sua propriedade de posição. A
propriedade de callback armazena uma seqüência que é
avaliada no espaço de trabalho do Matlab.
Enable
Pode ser fixada como “on”, “off” ou “inativa”. Se for
fixada como “off” ou “inativa”, o usuário não poderá
ativar o uicontrol e o uimenu e, nenhuma ação de
callback acontecerá com o resultado do uso do botão do
mouse. Quando fixado como “on” a ação definida por seu
Callback será executada quando o usuário clicar no
objeto.
Interruptible
Controla se a execução de um callback pode ser
interrompida por outro evento, como o clique do botão do
mouse num objeto de uicontrol e de uimenu.
“no”: A execução de um callback deve ser completada
antes da execução de um novo evento.
“132re”: O callback pode ser interrompido para a
execução da ação associada com outro evento.
UserData
Armazenamento que acompanha o objeto até que este
seja apagado. Como este não é afetado pelo comando
clear, então, é um lugar seguro para armazenar dados de
uma matriz que se queira associar com um uimenu ou
uicontrol, ou que se queira ter acesso embora esteja fora
do espaço de trabalho do Matlab.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
133
Visible
Normalmente, é fixada em “on” de forma que o objeto
pode ser visto pelo usuário. Porém, em certas
circunstâncias, pode-se desejar fazer o uicontrol e o
uimenu constar invisível (“off”). Isto é útil quando se
deseja limitar o número de objetos exibidos e quando
houver artigos de uma lista que não aplica à situação
particular no uimenu.
Accelerator -----------------
Define os “golpes” que o
usuário pode usar para
ativar o objeto de uimenu.
Proporciona para o usuário
uma alternativa para a
ativação do objeto.
Caminhos curtos podem ser
usados para reduzir o
tempo e esforço que leva
para realizar uma ação.
BackgroundColor -----------------
Define a cor do bloco da
região que contém o rótulo
descritivo do uimenu.
Separator -----------------
Especifica se um objeto de
uimenu terá ou não uma
linha horizontal puxada ao
longo de sua extremidade
de topo. A linha de
separação ajuda
visualmente, pois segrega
uma lista de escolhas de
forma que uma lista de
cardápio não subjugue o
usuário
Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
134
III.3 Investigação ao Programa Smartsys
Os três principais módulos do programa SMARTSYS são:
Pré processamento: Etapa da entrada de dados, onde são fornecidas as
propriedades físicas e geométricas da estrutura;
Solução: Nessa etapa são efetuados os cálculos pertinentes para que sejam
obtidos os resultados desejados – definição das condições de contorno; cálculo das
matrizes dos elementos estruturais e dos elementos piezelétricos; definição do sistema
global de coordenadas; montagem das matrizes globais da estrutura – bem como
realizadas análises – estática (resposta a carregamentos estáticos), modal (cálculo dos
modos de vibrar e freqüências naturais do sistema), dinâmica (cálculo de respostas no
domínio da freqüência – FRF – e no domínio do tempo – resposta a aplicação de
diversos tipos de carregamento. E aplicações para sistemas de controle).
Pós processamento: Apresentação dos resultados das análises: Estática
visualização da estrutura deformada e dos valores numéricos dos deslocamentos da
estrutura; Modal apresentação das 134freqüências naturais e modos de vibrar da
estrutura; Dinâmica visualização da FRF ou da resposta no domínio do tempo. Rocha
(2004) elaborou um fluxograma com a organização dos passos da modelagem efetuada
no Smartsys (Figura III.1)
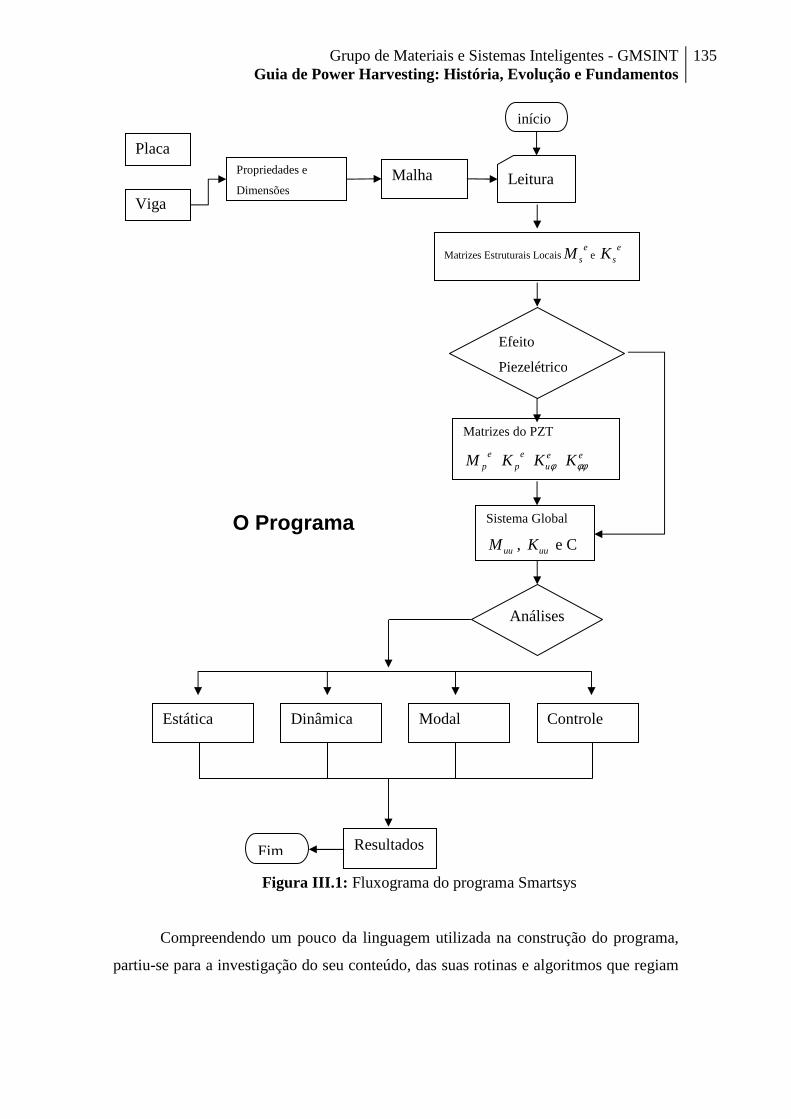
Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
135
Figura III.1: Fluxograma do programa Smartsys
Compreendendo um pouco da linguagem utilizada na construção do programa,
partiu-se para a investigação do seu conteúdo, das suas rotinas e algoritmos que regiam
Placa
Viga
início
Leitura
Matrizes Estruturais Locaise
sM e e
sK
Efeito
Piezelétrico
Matrizes do PZT
epM e
pK euK φ eKφφ
Sistema Global
uuM , uuK e C
Análises
Estática
Malha Propriedades e
Dimensões
Resultados Fim
O Programa
Dinâmica Modal Controle

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
136
cada processo executado. Foi realizado o mapeamento do programa que será
superficialmente descrito a seguir.
III.4 Mapeamento do programa Smartsys
A primeira providencia a ser tomada pela bolsista foi eliminar da pasta do
programa Smartsys todos os arquivos que não estavam diretamente ligados ao
programa, ou seja, que foram criados posteriormente por usuários de maneira
independente. Depois de muitos testes e de muito estudo de todos os arquivos existentes
na vastíssima pasta do Smartsys, a “limpeza” da pasta foi realizada com sucesso.
Depois da limpeza, começava o mapeamento do programa, a busca pela
compreensão da ordem dos arquivos requisitados conforme o programa essa executado.
Só assim a descoberta das falhas do programa seria possível. Os arquivos foram
divididos nos módulos nos quais o programa é dividido (pré e pós processamento e
solução).
III.4.1 – Pré processamento
O primeiro arquivo do programa Smartsys é o arquivo main.m (Figura III.2).
Esse arquivo dita as primeiras diretrizes a serem seguidas pelo programa. Nele, o
usuário tem acesso às decisões de pré e pós processamento e de solução.
main.m =
Figura III.2: Interface inicial do programa Smartsys.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
137
Iniciando-se pelo Pré processamento, a primeira escolha do usuário no
início da modelagem é o tipo de estrutura a ser modelada, placa ou viga (Figura III.3).
Figura III.3: Escolha do tipo de estrutura a ser modelada.
A cada escolha, o arquivo delega valores a algumas variáveis pertinentes e
direciona a lógica para outras rotinas para que se continue o processo de entrada de
informações de pré processamento.
No módulo de pré processamento a ordem dos arquivos executados é a mesma
para a viga e a placa. O que diferencia um do outro é que os arquivos referentes à viga
possuem um número “2” na frente do nome. A Tabela III.2 mostra posteriormente os
arquivos correspondentes a cada interface gráfica no módulo de pré processamento para
uma estrutura do tipo viga.
No Smartsys, os arquivos com prefixo “inter” como interprops.m , são
arquivos referentes às interfaces gráficas do programa, ao passo que os arquivos com
prefixo “find” , como findprops.m , são aqueles que capturam os dados fornecidos
pelo usuário nas interfaces correspondentes e os transformam em variáveis a serem
utilizadas posteriormente nos cálculos futuros. Dessa forma, por exemplo, na interface
intermesh.m os dados pedidos para o usuário são, clicado o botão “OK”, coletados
pelo arquivo findmesh.m.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
138
Depois de escolher o tipo de estrutura a ser modelada, no caso a VIGA , o
arquivo entrada2.m fornece a opção de trabalho via interatividade do usuário – ele
mesmo chama as rotinas – e a opção de rodar via arquivo como se vem fazendo.
Em seguida à janela principal, o arquivo interprops2.m é chamado. As
propriedades estruturais e dos materiais piezelétricos utilizados na modelagem são
fornecidos e armazenados no arquivo findprops2.m . Mais uma vez, ao apertar
“OK”, o arquivo intermesh2.m é chamado.
Os dados a respeito da malha que será formada para prosseguir com a solução
discreta do sistema pelo Método dos Elementos Finitos são requisitados. Esses dados
serão armazenados em variáveis pelo arquivo findmesh2.m onde também são
calculadas variáveis dependentes das variáveis obtidas da interface como o número de
graus de liberdade e o número total de nós do sistema. Tem-se nesse momento uma
malha construída para a estrutura, ilustrada em malha2.m , que calcula a matriz ”e”,
ilustrada na Tabela A.3, que será largamente utilizada nos cálculos futuros. Outros dois
arquivos são chamados por malha2.m : localização.m , que constrói uma matriz
para guardar a posição dos elementos, nós e respectivos graus de liberdade (Tabela
A.3); internodep2.m, interface responsável pela entrada das informações
referentes ao posicionamento e quantidade de PZTs a serem acoplados na estrutura.
Essas informações são guardadas por findnodep2.m e levadas de volta a
malha2.m onde são incorporadas à matriz “e” . Para placa, o arquivo
localização.m não é utilizado não existe arquivo equivalente.
Adquiridos os dados iniciais necessários para realizar as análises desejadas, o
pré processamento chega ao fim e a interface main2.m aparece e será o acesso para a
próxima etapa, a solução.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
139
Tabela III.2: Arquivos correspondentes às interfaces gráficas para estrutura do
tipo viga no módulo de pré processamento do programa Smartsys.
interprops2.m =
intermesh2.m =

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
140
malha2.m =
internodep2.m =

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
141
main2.m =
Tabela III.3: Matrizes geradas nos arquivos malha2.m e localização.m .
malha2.m =

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
142
localização.m =
O fluxograma da Figura III.4 mostra a ordem seguida na primeira etapa da
modelagem. Lembrando que a ordem dos arquivos para placa é análoga a da viga, que
não foi colocado no fluxograma.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
143
Figura III.4: Fluxograma da ordem de execução dos arquivos para o módulo de
pré processamento.
main.m
VIGA
PLACA
entrada2.m
entrada.m
OTHER
Enable ”off ”
interprops2.m
findprops2.m
intermesh2.m
findmesh2.m
malha2.m
localização.m
internodep.m
findnodep.m
malha2.m
main2.m
interprops.m
findprops.m
intermesh.m

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
144
A.4.2 – Solução
Como dito anteriormente, é na solução que são encontradas as equações de
movimento do sistema e onde se realizam análises que podem ser estática, modal ou
dinâmica no domínio da freqüência e no domínio do tempo.
O primeiro passo na solução se trata de escolher a análise que se deseja fazer.
Isso se dá na interface main2.m (Figura III.5).
Figura III.5: Escolha do tipo de análise a ser realizada.
Ao escolher qualquer uma das análises, o arquivo intersolve2.m será
chamado para a estrutura do tipo viga (para placa o arquivo é o intersolve.m ) e,
primeiramente, serão calculadas as equações de movimento do sistema. A Figura III.6
mostra a interface do intersolve2.m e intersolve.m e a Tabela A.4 mostra os
arquivos que são executados e as variáveis que são definidas a cada comando que é
apertado.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
145
(a)
(b)
Figura III.6: Interface correspondente aos arquivos (a) intersolve2.m e
(b)intersolve.m .
Tabela III.4: Comandos executados através do intersolve.m .
BOTÃO PLACA VIGA
Livre-Livre cc = 0 cc = 0
Engastada cc = 1, bound.m cc = 1, rr = [1
2] (matriz usada no
normode.m)
Outras interother.m ---
Estrutura find amor.m,
placa.m (feeldof.m,
feasmbl1.m,
feeldofmas.m, feasmbl1mas.m,
restritos.m)
findamor.m
viga.m
Efeito PZT piezo.m piezobeam.m
Controle imsc.m controlbeam.m
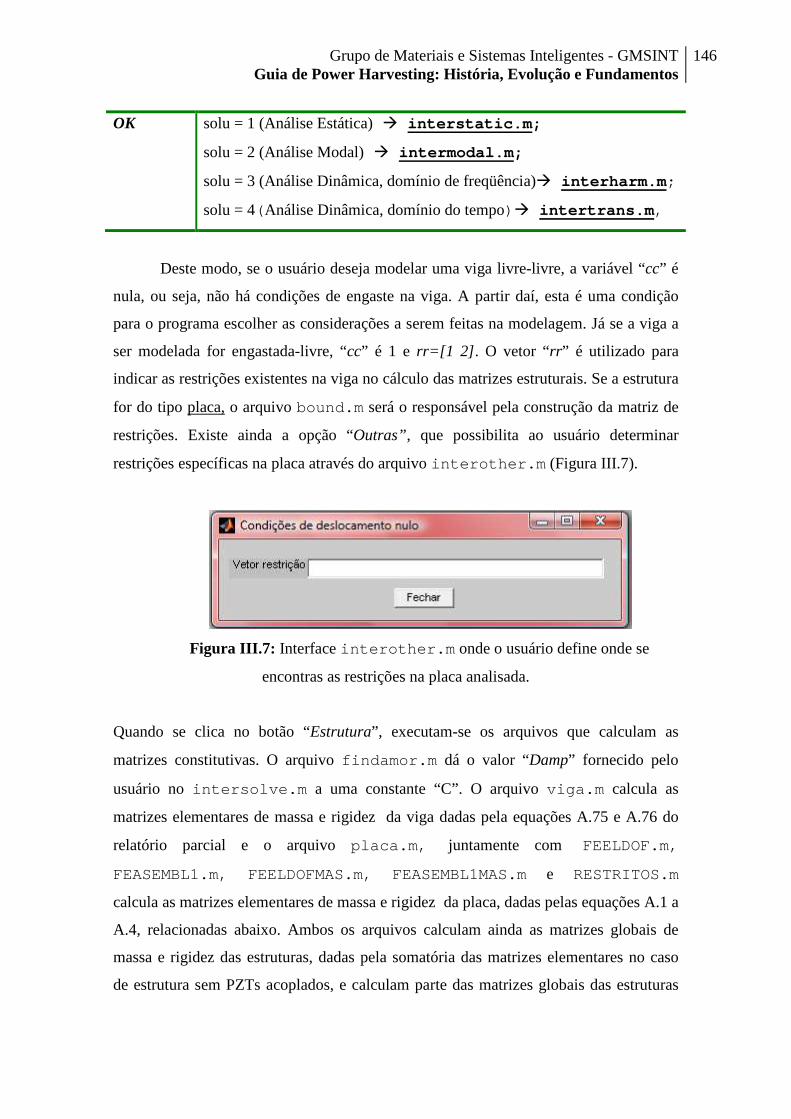
Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
146
OK solu = 1 (Análise Estática) interstatic.m ;
solu = 2 (Análise Modal) intermodal.m ;
solu = 3 (Análise Dinâmica, domínio de freqüência) interharm.m ;
solu = 4( Análise Dinâmica, domínio do tempo) intertrans.m ,
Deste modo, se o usuário deseja modelar uma viga livre-livre, a variável “cc” é
nula, ou seja, não há condições de engaste na viga. A partir daí, esta é uma condição
para o programa escolher as considerações a serem feitas na modelagem. Já se a viga a
ser modelada for engastada-livre, “cc” é 1 e rr=[1 2] . O vetor “rr ” é utilizado para
indicar as restrições existentes na viga no cálculo das matrizes estruturais. Se a estrutura
for do tipo placa, o arquivo bound.m será o responsável pela construção da matriz de
restrições. Existe ainda a opção “Outras”, que possibilita ao usuário determinar
restrições específicas na placa através do arquivo interother.m (Figura III.7).
Figura III.7: Interface interother.m onde o usuário define onde se
encontras as restrições na placa analisada.
Quando se clica no botão “Estrutura”, executam-se os arquivos que calculam as
matrizes constitutivas. O arquivo findamor.m dá o valor “Damp” fornecido pelo
usuário no intersolve.m a uma constante “C”. O arquivo viga.m calcula as
matrizes elementares de massa e rigidez da viga dadas pela equações A.75 e A.76 do
relatório parcial e o arquivo placa.m, juntamente com FEELDOF.m,
FEASEMBL1.m, FEELDOFMAS.m, FEASEMBL1MAS.m e RESTRITOS.m
calcula as matrizes elementares de massa e rigidez da placa, dadas pelas equações A.1 a
A.4, relacionadas abaixo. Ambos os arquivos calculam ainda as matrizes globais de
massa e rigidez das estruturas, dadas pela somatória das matrizes elementares no caso
de estrutura sem PZTs acoplados, e calculam parte das matrizes globais das estruturas

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
147
com PZTs (Eqs. A.57 e A.58 do relatório parcial), em cuja construção ainda se
encontram outras matrizes relacionadas aos materiais piezelétricos que são incorporadas
mais tarde às matrizes globais. Embora estas matrizes tenham sido apresentadas no
relatório parcial, foram repetidas aqui para facilidade de compreensão de futuros
usuários. As variáveis estão definidas no relatório parcial.
ξdNNtbaρM uTussss
es ∫=
1
0
−−−−−−
=
22
22
422313
221561354
313422
135422156
420
aaaa
aa
aaaa
aa
tbaM sssse
s
ρ (III.75)
∫=1
03
ξdBBa
IEK u
Tu
s
sses
−−−−
−−
=
222
2
22
3
4626
612612
2646
612612
aaaa
aa
aaaa
aa
a
IEK
s
sses (III.76)
I,Jm176400
eS
ab tM
ρ
=
(III.1)
I,J
2
2
2 2
2 2
2 2
m
24178
3227 560
3227 441 560
8582 1918 1393 24178
1918 420 294 3227 560
1393 294 280 3227 441 560
2758 812 812 8582 1393 1918 24178
812 210 196 1393 280 294
simétrica
b b
- a - ab a
b - a
- b - b ab - b b
- a - ab a - a ab a
b - a - b - a
- b - b ab - b b ab
=
2
2
2 2 2 2
2 2
3227 560
812 196 210 1918 294 420 3227 441 560
8582 1393 1918 2758 812 812 8582 1918 1393 24178
1393 280 294 812 210 196 1918 420 294 3227 560
1918 294 420 812 196 210 1
- b b
a ab - a a - ab - aa a - ab aa
b - a - b - a - b a
b b - ab b - b - ab b - b ab b b
a ab - a a - ab - a 2 2393 294 280 3227 441 560a - ab a a ab a
(III.2)

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
148
=
IIII,III,
II,
2
3
kk
k
112
E
simétrica
) a b-ν (
tK e
S (III.3)
( )
( ) ( )
I,I
42 3
25 3 63
25 622
6 54 42 3 3 2 2 3
26 3 6 5 33 3
k
45
4 42
5 3 15
442
5 3 15
2 2 2 45 5 5 5
2 1 42 0 2
5 3 15 5 3
b b
a ab a simétrica
b a
b b b
ββ β
β β ββ
β βββ ν
β ββ ββ β β β β β
β β β β ββ β
=
+ +
+ +
− + − +
− − − + − + + +
+ − − + +
26
2 25 6 5 62 22 2
4
15
4 42 40 2
5 3 15 5 3 15
b
a a a ab a
β
β β β ββ ββ β ν
− + − − + +
,
( ) ( )
II,I
6 6 5 64 42 3 3 2 2 3 3 2
2 26 3 6 5 3 63 3
26 6 622 2
k
2 2 2 25 5 5 5 5 5
1 1 2 40 0
5 3 15 5 3 15
110 2
5 3 15 5
b a b a
b b b b
a a
β β β ββ ββ β β β β β β β
β β β β β ββ β
β β βββ β
=
− + + − − − − + − − − − − +
− + − − −
− + + − +
( ) ( )
262
5 6 6 64 42 3 3 2 2 3 3 2
2 25 3 6 6 3 63 3
26 622
120
3 15
2 2 2 25 5 5 5 5 5
2 4 1 10 0
5 3 15 5 3 15
122 0
5 3 15
a a
b a b a
b b b b
a a
ββ
β β β ββ ββ β β β β β β β
β β β β β ββ β
β βββ
−
− − − − + − + + − − − +
− − − + +
− + − −
26 622
110
5 3 15a a
β βββ
+ +
e

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
149
( )
( ) ( )
II,II
42 3
25 3 63
25 622
6 54 42 3 3 2 2 3
26 3 6 5 33 3
k
45
4 42
5 3 15
442
5 3 15
2 2 2 45 5 5 5
2 1 42 0 2
5 3 15 5
b b
a ab a simétrica
b a
b b b
ββ β
β β ββ
β βββ ν
β ββ ββ β β β β β
β β β β ββ β
=
+ +
− + +
+ − +
− − + − − + + +
− + − +
26
2 25 6 5 62 22 2
4
3 15
4 42 40 2
5 3 15 5 3 15
b
a a a ab a
β
β β β ββ ββ β ν
+
− − + − + +
(III.4)
sendo β1 = b/a, β2 = β12, βA = 1/β2, β4 = 14 – 4ν, β5 = 1 + 4ν e β6 = 1 - ν.
( ) ( )∑∑==
+=np
jj
ep
ne
ii
esuu MMM
11
(III.57)
( ) ( )∑∑==
+=np
jj
ep
ne
ii
esuu KKK
11
(III.58)
Após o cálculo das equações de massa e rigidez da estrutura, vem a opção Efeito
PZT, escolhida caso haja presença de PZTs acoplados à estrutura. Os arquivos que são
executados ao apertar esse botão são o piezo.m para placa e o piezobeam.m para a
viga. O arquivo piezobeam.m realiza a incorporação do efeito piezelétrico (e
acoplamento eletromecânico) na estrutura e a construção do seu sistema global. Já
piezo.m , incorpora elementos piezelétricos do tipo viga (UZ,ROTX) em uma
estrutura tipo placa com elementos retangulares (UZ,ROTX,ROTY). No caso da placa,
não é piezo.m que efetua o acoplamento eletromecânico mas sim CONEC.m, ligado a
ele.
Muitos problemas foram encontrados nesses arquivos, como por exemplo:
- Presença de apenas um PZT: Nas primeiras simulações com apenas um PZT, o
programa acusava incompatibilidade em algumas matrizes. Esse problema foi
solucionado;
- Presença de PZT no primeiro elemento da viga: A incompatibilidade nas
matrizes também acontecia;

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
150
- Posicionamento dos PZTs no acoplamento: Para que haja o acoplamento entre
os PZTs e a viga, dependendo do posicionamento desses PZTs (consecutivos ou não),
deve-se eliminar um número de linhas e colunas das matrizes de rigidez referentes aos
graus de liberdade elétricos aterrados dos PZTs, como ilustra o esquema na Tabela III.5.
Esse problema foi aparentemente solucionado.
Tabela III.5: Análise do procedimento para o acoplamento de PZTs
dependendo do número e posicionamento dos PZTs (Kff matriz dos graus de
liberdade elétricos dos elementos piezelétricos (capacitância piezelétrica)).
POSICIONAMENTO DOS PZTs E
GRAUS DE LIBERDADE ELÉTRICOS
REALIZAÇÃO DO ACOPLAMENTO
Kff (3x3) Elimina a última linha e
coluna resulta numa matriz (2x2)
Kff (4x4) Elimina a primeira e última
linha e coluna resulta numa matriz
(2x2)
Kff (4x4) Elimina a terceira linha e
coluna resulta numa matriz (3x3)
Kff (5x5) Elimina a terceira e ultima
linha e coluna resulta numa matriz
(3x3)
Kff (6x6) Elimina a segunda, quarta e
sexta linha e coluna resulta numa
matriz (3x3)
A parte referente ao controle não foi investigada pela bolsista devido ao foco do
trabalho na voltagem de saída do PZT. Quando estes objetivos forem cumpridos, todas
as funções do programa serão estudadas.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
151
Os procedimentos acima descritos são, como antes dito, executados para todas as
soluções. Feita essa parte, ao clicar em “OK” na interface do intersolve.m ,
dependendo da análise que deseja ser feita é atribuído um valor para a constante “solu”.
Para se fazer uma análise modal, por exemplo, ao clicar em “OK”, solu=2. Os valores
de solu e os respectivos arquivos chamados para cada valor se encontram na Tabela
III.4. O fluxograma da Figura III.8 esquematiza a ordem de execução dos arquivos no
módulo de solução.
Figura III.8: Fluxograma da ordem de execução dos arquivos para o módulo de
solução.
main2.m
intersolve2.m
LIVRE - LIVRE
ENGASTADA
ESTRUTURA
EFEITO PZT
CONTROLE
CC = O
CC = 1 ; rr = [1 2]
findamor.m
VIGA viga.m
piezobeam.m
imsc.m / controlbeam.m
OK
PARA solu = 1
interstatic.m
PARA solu = 4
PARA solu = 3
PARA solu = 2
intermodal.m
interharm.m
intertrans.m
PLACA placa.m
FEELDOF.m
FEASMBL1.m
FEELDOFMAS.m
FEASMBL1MAS.m
RESTRITOS.m
piezo.m
CONEC.m

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
152
Todas as análises foram investigadas e muitos problemas encontrados. Por
exemplo, os resultados obtidos em algumas análises independiam das condições de
contorno impostas à estrutura. Como citado anteriormente, a constante “cc” indica para
as rotinas se a estrutura é livre-livre ou engastada-livre. As análises mais comumente
efetuadas são em vigas engastadas-livres. Por isso, acredita-se que a causa de os
resultados obtidos nas análises serem os mesmos para as duas condições de contorno
são alterações feitas pelos usuários nas rotinas do programa pertinentes apenas à viga
engastada e que afetam a lógica para vigas livres-livres, desabilitando os processos de
seleção de condição de engaste e fazendo com que considerações sejam feitas para
ambas as condições. Trata-se de um problema complexo, já que alterações desse tipo
podem ter sido feitas em qualquer arquivo. Muitas dessas alterações foram revisadas,
porém outras ainda corrompem os resultados do programa.
Apesar de todas as análises terem sido investigadas, não houve tempo de
aprofundar a revisão em todos os arquivos de cada análise em busca de erros. Assim
apenas a ordem das funções para cada análise será ilustrada e o foco será dado à solução
dinâmica no domínio do tempo, através da qual se obtém a voltagem de saída dos PZTs.
No breve estudo dos arquivos relacionados à análise dinâmica no domínio da
freqüência, problemas com as condições de engaste da estrutura foram novamente
detectados ao não se encontrar o arquivo que calcula a FRF da placa para outras
condições além da livre-livre-livre-livre.
A Tabela III.6 ilustra as interfaces relacionadas às análise estática, modal,
dinâmica do domínio da freqüência e dinâmica no domínio do tempo, e os respectivos
arquivos correspondentes. A Figura III.9 mostra o fluxograma com a ordem de
execução dos arquivos para cada solução. A Tabela III.7 mostra as funções executadas
pelos arquivos.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
153
Tabela III.6: Interface das soluções e arquivos correspondentes.
interstatic =
intermodal.m =
interharm.m =
intertrans.m =

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
154
Figura III.9: Fluxograma da ordem de execução dos arquivos para cada análise
realizada.
Tabela III.7: Funções executadas pelos arquivos utilizados nas análises estática,
modal e dinâmicas.
findstatic.m
Recebe do interstatic.m os
valores da forca e do potencial elétrico
aplicados à estrutura e os locais de
aplicação; Calcula a resposta da estrutura à
força e/ou potencial elétrico aplicados a
ela, incluindo deslocamento, voltagem e
carga elétrica de saída.
findmodal.m
Recebe do intermodal.m o
valor com o número máximo de modos de
vibração da estrutura a serem calculados e
efetua o cálculo das freqüências naturais
OK
interstatic.m
findstatic.m
intertrans.m
interharm.m
intermodal.m
findmodal.m
fnffff.m (PLACA)
normode.m
beamff.m (VIGA)
findharm.m
newmark.m

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
155
do sistema, com o auxílio dos arquivos
beamff.m, fnffff.m e
normode.m.
fnffff.m Calcula as freqüências naturais de
uma placa livre-livre-livre-livre.
beamff.m Calcula as freqüências naturais de
uma viga livre-livre.
normode.m
Calcula as freqüências naturais
para a viga em qualquer condição de
contorno.
findharm.m
Recebe do interharm.m os
dados necessários para obter a resposta em
freqüência (FRF) da estrutura, como a
freqüência máxima desejada e os graus de
liberdade de excitação e de aquisição de
resposta na estrutura; Calcula a resposta
em freqüência para a estrutura.
newmark.m
Recebe do intertrans.m
informações a respeito do tipo, intensidade
e local de aplicação da força a qual a
estrutura será submetida. Calcula a
resposta dinâmica do sistema no domínio
do tempo incluindo deslocamento,
velocidade e aceleração da estrutura no
tempo e potencial elétrico gerado pelo
sensor piezelétrico.
Tratando-se do estudo do potencial elétrico gerado pelo PZT, o arquivo mais
importante a ser analisado é o newmark.m . É esse arquivo que soluciona as equações
diferenciais que regem o comportamento da estrutura eletromecanicamente acoplada.
Esse arquivo passou por muitas modificações no decorrer da investigação do programa

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
156
Smartsys. Muitas variáveis e funções independentes do programa foram retiradas e a
lógica da rotina melhor explicada.
III.4.3 – Pós processamento
De volta à interface main2.m (Figura III.10), os arquivos relacionados ao pós
processamento na modelagem são responsáveis pela apresentação dos resultados antes
calculados sob representação gráfica ou em forma de listas.
Figura III .10: Montagem para ilustrar as opções de pós processamento no
main2.m .
Algo curioso é que, ao observar o menu da interface main.m , o uimenu do pós
processamento é diferente para a análise estática, como mostra a Figura III.11.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
157
Figura III .11: Diferença do menu do pós processamento do main.m quando
comparada com main2.m .
A opção “Deformed structure” equivale à opção “Graphics” do main2.m , já
que, ao escolher essa opção, aparece o gráfico correspondente ao staticplot.m . A
diferença é que o arquivo chamado para plotar os gráficos é o plotdisplac.m
diretamente, enquanto na opção “Graphics” vem a seqüência: staticplot.m
findgrafic.m plotdisplac.m . Porém, acontece um erro e o gráfico
aparece sobreposto à janela principal, como mostra a Figura III.12.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
158
Figura III .12: Erro na aparição da interface que apresenta o gráfico de
deslocamento da estrutura na análise estática.
A Tabela III.8 ilustra as interfaces das representações gráficas e das listas que
apresentam os resultados das análises para estrutura do tipo viga. Nota-se que a maioria
das interfaces no pós processamento chamam o arquivo findgrafic.m . É ele o
principal arquivo responsável pela plotagem dos resultados das análises. Para cada
análise realizada, a interface que apresentará os resultados obtidos atribui um valor à
variável “opt”. O arquivo findgrafic.m plotará os resultados de acordo com esse
valor. Por exemplo, ao apertar o botão “Displacement” é atribuído valor 22 a essa
variável e no findgrafic.m será chamado o arquivo plotdisplac.m e plotado o
gráfico dos deslocamentos da estrutura devido à aplicação de uma carga estática.
Ao se trabalhar com a estrutura de placa, a falha nas análises para estruturas com
condições de contorno diferentes da livre-livre-livre-livre foi novamente notada. Ao
solicitar ao programa a visualização dos resultados das análises para placas com
restrições, o programa não respondeu. Algumas causas foram constatadas mas não
suficientes para resolver o problema.
A Figura III.13 mostra o fluxograma com a ordem de execução dos arquivos
para cada comando. A Tabela III.9 mostra as funções executadas pelos arquivos e os
valores atribuídos a opt de acordo com os resultados que se quer visualizar.
Tabela III .8: Interfaces das representações gráficas e das listas que apresentam
os resultados das análises.
staticplot.m =

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
159
finddisplac.m =
findmodo.m =
findfreq.m =

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
160
interfreq.m =
intertime.m =
Tabela III .9: Valores atribuídos a opt de acordo com os resultados desejados e
as funções executadas pelos arquivos utilizados no módulo de pós processamento do
programa.
staticplot.m findgrafic.m
Displacement Opt = 22 plotdisplac.m = Plota os deslocamentos
da análise estatica
Voltage Opt = 11 Plota a voltagem gerada pelos PZTs em função
do comprimento da estrutura na análise estática.
Charge electric Opt = 5
Calcula a carga elétrica em função do
deslocamento e da velocidade da estrutura e das
matrizes de acoplamento eletromecânico; Plota a
carga elétrica em função do tempo.
findmodo.m
Ele mesmo plota os gráficos

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
161
modosplotviga.m
Modes Opt = 15
Plota os modos de vibrar da estrutura em função
da amplitude dos deslocamentos e do seu
comprimento
interfreq.m
Receptance Opt = 6 Plota a FFT do deslocamento da estrutura em
resposta à excitação imposta.
Mobility Opt = 7 Plota a FFT da velocidade da estrutura em
resposta à excitação imposta.
Accelerance Opt = 8 Plota a FFT da aceleração da estrutura em
resposta à excitação imposta.
intertime.m
Displacement Opt = 1 Plota os deslocamentos da estrutura com o tempo
em decorrência da força aplicada.
Velocity Opt = 2 Plota a velocidade da estrutura com o tempo em
decorrência da força aplicada.
Acceleration Opt = 3 Plota a aceleração da estrutura com o tempo em
decorrência da força aplicada.
Voltage Opt = 4 Calcula e plota o potencial elétrico do sensor na
estrutura sobre um carregamento dinâmico.
Charge Electric Opt = 5 Plota o gráfico da carga elétrica do atuador.

Grupo de Materiais e Sistemas Inteligentes - GMSINT Guia de Power Harvesting: História, Evolução e Fundamentos
162
Figura III.13: Fluxograma da ordem de execução dos arquivos para o módulo
de pós processamento do programa.
main2.m
STATICS
GRAFICS
DYNAMIC
MODAL
MODES
FRFs
staticplot.m
DISPLACEMENTS
finddisplac.m
FREQUENCY
findfreq.m
TIME
interfreq.m
intertime.m
findgrafic.m
findgrafic.m
DEFORMED STRUCTURE
plotdisplac.m
findgrafic.m
plotdisplac.m
PLACA LIVRE
VIGA
findmodo.m
find modo.m
modosviga.m
modosplotviga.m








![Guia de Instalação4a54f0271b66873b1ef4-ddc094ae70b29d259d46aa8a44a90623.r7.cf2.rackcdn.com/... · “Limited Power Source” [Fonte de Energia Limitada] com saída classificada](https://img.document.onl/doc/110x75/5be65b7e09d3f288458d2b38/guia-de-instalacao4a54f0271b66873b1ef4-ddc094ae70b29d259d46aa8a44a90623r7cf2.jpg)