Embed Size (px)
Citation preview

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 1
Programação Evolutiva
1 Introdução
L. FOGEL et al. (1966) propuseram a programação evolutiva como uma técnica de
simulação da evolução para desenvolver uma forma alternativa de inteligência
artificial.
O comportamento inteligente era visto como requerendo as seguintes habilidades:
Predizer um determinado ambiente, e
Responder apropriadamente a este ambiente tendo por base a predição feita.
O ambiente foi considerado de forma genérica como sendo descrito por uma
seqüência de símbolos tomados a partir de um alfabeto finito.
O problema evolutivo foi então definido como sendo a evolução de um algoritmo
que pudesse operar na seqüência de símbolos até então observada de tal forma a
produzir um símbolo de saída que maximizaria o desempenho do algoritmo em

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 2
relação ao próximo símbolo a ser apresentado, dada uma função custo bem
definida.
Máquinas de estado finito estabelecem uma representação apropriada a estes
propósitos.
2 Máquinas de Estados Finitos
Uma máquina de estados finitos (M) é uma estrutura de lógica matemática (BÄCK
et al., 2000a).
Uma máquina de estados finitos M é essencialmente um “programa
computacional”: ela representa uma seqüência de instruções a serem executadas,
cada qual dependendo de um estado atual da máquina e do estímulo atual.
Formalmente uma máquina de estados finitos pode ser descrita por uma 5-tupla
M = Q,,,s,o, onde Q é um conjunto finito de estados, é um conjunto finito de

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 3
símbolos de entrada, é um conjunto finito de símbolos de saída, s : Q Q é
a função do próximo estado, e o : Q é a função da próxima saída.
Qualquer 5-tupla de conjuntos e funções satisfazendo esta definição pode ser
interpretada como a descrição matemática de uma máquina que, dado um símbolo
de entrada x enquanto a máquina está no estado q, fornecerá como saída o símbolo
o(q,x) e mudará para o estado s(q,x).
A informação contida no estado atual da máquina é suficiente para descrever seu
comportamento em relação a uma dada entrada.
O conjunto de estados serve como uma espécie de memória da máquina.
Os correspondentes pares de símbolos de entrada-saída e transições para o
próximo estado de cada símbolo de entrada, tomados sobre cada estado,
especificam o comportamento de cada máquina de estados finitos dada uma
condição inicial.

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 4
2.1 Exemplo
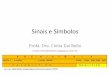
Considere a máquina M de três estados apresentada abaixo.
B
C A
0/
1/
0/
1/
0/
1/
Figura 1: Máquina de estados finitos de três estados. Os símbolos de entrada são
mostrados à esquerda da barra “/” e os símbolos de saída à direita (FOGEL et al.,
1966).

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 5
O alfabeto de símbolos de entrada é composto por {0,1}, o alfabeto de símbolos
de saída é composto por {,,} (FOGEL, 2000).
A máquina de estados finitos transforma uma seqüência de símbolos de entrada
em uma seqüência de símbolos de saída – pode ser vista como um codificador de
símbolos (e.g., códigos convolucionais).
Assume-se que a máquina atua quando um símbolo de entrada é percebido e
responde antes que o próximo sinal de entrada seja apresentado.
3 As Primeiras Técnicas de PE
FOGEL et al. (1966) propuseram a programação evolutiva para operar com
máquinas de estados finitos da seguinte forma:
Uma população de máquinas de estados finitos era exposta ao ambiente, ou
seja, à seqüência de símbolos observados até o momento.

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 6
Como cada símbolo era apresentado a cada máquina-pai, o símbolo de saída
era observado (predito) e comparado ao próximo símbolo de entrada.
A qualidade desta predição era medida utilizando-se uma dada função de
custo (e.g., erro absoluto ou erro quadrático).
Após a última predição ter sido feita, uma função de custo (payoff) para cada
símbolo indicava o fitness de cada máquina.
Máquinas-“filhas” eram geradas aplicando uma mutação aleatória em cada
máquina-pai e cada pai produzia um único filho. Cinco tipos básicos de
mutação foram concebidos para uma máquina de estados finitos:
Mude um símbolo de saída;
Mude uma transição de estado;
Adicione um estado;
Elimine um estado existente; e
Mude o estado inicial.

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 7
Os filhos eram avaliados da mesma forma que os pais, e as máquinas com os
maiores valores de fitness eram selecionadas para compor a próxima geração.
Geralmente, a metade da quantidade total de máquinas (pais + filhos) era
selecionada de forma que o tamanho da população se mantivesse constante.
Este processo se repetia até que fosse requerida a predição de um (novo) símbolo.
O tipo de mutação é escolhido com base em uma distribuição de probabilidades
tipicamente uniforme.
A remoção de um estado e a mutação do estado inicial só são permitidas quando
existe mais de um estado inicial.
A quantidade de mutações também é escolhida de acordo com uma distribuição de
probabilidades (e.g., uma distribuição de Poisson), ou pode ser fixa a priori.
A seleção é similar à feita em uma estratégia evolutiva do tipo ( + )-EE.
Este procedimento possui certo grau de versatilidade:
A função custo pode ser arbitrariamente complexa e variante no tempo;

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 8
Não há nenhuma restrição quanto à utilização de uma medida clássica de erro
como, por exemplo, o erro quadrático médio;
A predição não precisa ser feita necessariamente um passo à frente; e
Ambientes multivariados podem ser tratados diretamente.
3.1 Alguns Experimentos Elementares
FOGEL et al. (1966) descreveram uma série de experimentos nos quais problemas
de predição cada vez mais complexos foram apresentados ao programa evolutivo.
Por exemplo, predição de seqüências cíclicas de múltiplos símbolos, predição
de seqüências contendo ruído, predição de seqüências geradas por outras
máquinas de estados finitos, seqüências não-estacionárias etc.
Em um exemplo, a capacidade de predizer se um número é “primo” foi testada.
Uma seqüência não-estacionária foi gerada classificando-se cada elemento de
uma seqüência de inteiros como sendo primo (símbolo 1) ou não (símbolo 0).

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 9
Assim, o ambiente consiste da seqüência 01101010001..., sendo que cada
símbolo indica se um dado número inteiro 1,2,3,4,5,6,7,8,9,10,11,... é primo
ou não.
Embora testar se um número é primo ou não possa ser feito de forma direta,
predizer se o próximo número inteiro será primo baseado na seqüência de
primos e não-primos observados não é trivial.
A função custo adotada para a predição foi do tipo tudo-ou-nada, ou seja, um
ponto para cada predição correta e nenhum ponto para cada erro, menos 0.01
vezes a quantidade de estados da máquina (para penalizar máquinas
excessivamente grandes).
Observação inicial: com frequência, a máquina “ótima” obtida possuía um único
estado, gerando como saída (para ambas as entradas) o símbolo 0. Como a
frequência relativa de números primos diminui, a tendência (assintótica) é que a
máquina atinja uma taxa de acerto cada vez maior.

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 10
Após alguns sucessos limitados com esta abordagem, o objetivo foi alterado tal
que uma predição correta de um primo resultasse em um valor “1” mais a
quantidade de primos precedentes.
Ou seja, a função de avaliação foi alterada.
FOGEL et al. (1966) indicaram que as máquinas tinham a capacidade de
rapidamente reconhecer que números divisíveis por 2 e 3 não são primos, e que
havia indicativos de que números divisíveis por 5 também não seriam primos.
Portanto, as máquinas geraram algumas evidências de aprendizagem da definição
do que é ser um número primo sem nenhum conhecimento antecipado da natureza
explícita de um número primo.
As aplicações da PE clássica se estenderam também para a teoria de jogos (FOGEL
& BURGIN, 1969), controle (WALSH et al., 1970), classificação (DEARHOLT, 1976),
e muitas outras áreas.

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 11
Muitas extensões da formulação de máquinas de estados finitos, proposta por
FOGEL et al. (1966), foram sugeridas com o objetivo de aplicar a PE a problemas
de otimização contínua (funções de valores reais). Três destas variações
importantes podem ser descritas como a seguir (BÄCK et al., 2000a):
PE original: PE onde o processo evolutivo (de busca) não envolve auto-
adaptação;
PE contínua: onde novos indivíduos são inseridos diretamente na população
durante uma geração (ou seja, um indivíduo passa a fazer parte da população
sem precisar esperar a conclusão de uma geração); e
Meta-PE: inclui o vetor de parâmetros na codificação de um indivíduo.
Na próxima seção discutiremos a PE original e a meta-PE para otimização de
funções contínuas.

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 12
4 Otimização de Funções Contínuas: meta-PE
A programação evolutiva foi estendida por D. B. FOGEL (1992) para operar com
vetores reais de atributos sujeitos a mutações com distribuição normal.
Os conceitos gerais e a notação apresentados para as estratégias evolutivas são
adequados para a programação evolutiva. Conceitos:
Auto-adaptação;
Vetor e espaço de atributos e de parâmetros;
Genótipo e fenótipo.
4.1 Representação e Avaliação do Fitness
Na proposta inicial de aplicação da PE para otimização de funções de valores
reais, os indivíduos da população são representados por vetores reais, v = x l.
Entretanto, FOGEL (1992) introduziu o conceito de meta-PE (meta-programação
evolutiva), que é essencialmente idêntica ao processo de auto-adaptação dos
desvios padrões nas estratégias evolutivas (BÄCK, 1994).

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 13
É importante mencionar que o conceito de meta-evolução é atualmente
utilizado para descrever aqueles algoritmos que permitem a evolução dos
operadores genéticos, parâmetros do algoritmos etc. juntamente com a
estrutura de dados.
Na PE, um indivíduo da população é representado por v = (x,var), onde x l,
var lvar, l é a dimensão de x, lvar {1,...,l}.
Ou seja, a meta-PE utiliza a variância var = 2, em vez do desvio padrão,
para atualizar o vetor de atributos.
Além disso, a variância também irá sofrer mutação.
Em uma terceira abordagem, chamada Rmeta-PE, FOGEL (1992, pp. 287-289)
também incorpora um vetor de coeficientes de correlação que irão sofrer auto-
adaptação.
Este mecanismo é essencialmente idêntico às mutações correlacionadas das
estratégias evolutivas.

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 14
Entretanto, a abordagem Rmeta-PE foi implementada e testada por Fogel em
uma quantidade restrita de problemas bi-dimensionais.
Como no caso das estratégias evolutivas, faz-se necessária a aplicação de um
método que garanta a determinação de uma matriz de correlação que seja
simétrica e semi-definida positiva.
Assim como no caso dos algoritmos genéticos, o valor do fitness é obtido através
de um escalonamento do valor da função objetivo.
A discussão a ser apresentada aqui se restringirá ao caso da meta-PE.
A inicialização na meta-PE é feita amostrando-se uma distribuição uniforme com
domínio pré-definido para o vetor de atributos e de variâncias.
4.2 Mutação
No caso padrão de programação evolutiva, um operador Gaussiano de mutação
com desvio padrão independente para cada componente xi de x é obtido a partir da

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 15
raiz quadrada de uma transformação linear aplicada ao valor de fitness do vetor x,
ou seja (BÄCK & SCHWEFEL, 1993):
xit+1= xi
t + i.N i(0,1)
iii fit )(. x
onde os parâmetros i e i devem ser ajustados de acordo com o problema a ser
tratado.
Para resolver os problemas de ajuste desta abordagem, a meta-PE auto-adapta l
variâncias por indivíduo de forma similar às estratégias evolutivas:
xit+1= xi
t + t
ivar .Ni(0,1)
varit+1= vari
t + t
ivarα. .Ni(0,1)
onde denota um parâmetro que garante que vari seja não-negativa, e Ni(0,1)
indica que a variável aleatória é amostrada de forma independente para cada i.

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 16
FOGEL (1992) propôs a regra simples vari 0, vari , onde é um valor
próximo de zero, mas é não-nulo.
Embora essa idéia seja semelhante à utilizada pelas estratégias evolutivas, a
metodologia estocástica por trás da meta-PE é fundamentalmente diferente (BÄCK,
1994).
4.3 Recombinação
Não existe recombinação em programação evolutiva.
4.4 Seleção
O mecanismo de seleção utilizado em programação evolutiva é similar à seleção
por torneio em algoritmos genéticos.

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 17
Seleção por torneio em GA
Na seleção por torneio, um grupo de q indivíduos é aleatoriamente selecionado,
com ou sem substituição, da população. Este grupo passa a fazer parte de um
torneio, de modo que um indivíduo vencedor é determinado dependendo do seu
valor de fitness em relação a seus competidores.
O melhor indivíduo (aquele possuindo o maior fitness) é geralmente
escolhido de forma determinística ou estocástica. Somente este indivíduo é
colocado na população.
O processo é repetido vezes até que uma nova população seja gerada.
Geralmente os torneios são feitos entre 2 indivíduos, num processo conhecido
como torneio binário.
Um torneio entre q indivíduos é chamado de q-torneio (q-tournament).

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 18
Seleção por torneio em PE
Após criar filhos a partir de pais através da mutação de cada pai, uma variação
da seleção estocástica por torneio seleciona indivíduos dentre pais e filhos.
Ou seja, trata-se de uma seleção ( + ) estocástica.
Para cada indivíduo vi P(t) P’(t), onde P(t) denota a população de pais na
geração t, e P’(t) a população de filhos (indivíduos mutados) na mesma geração t,
q indivíduos são selecionados aleatoriamente de P(t) P’(t) e comparados a vi em
relação a seus valores de fitness.
Dado vi, contam-se quantos indivíduos possuem fitness menores que o dele,
resultando em um score wi (i {1,...,2}), e os indivíduos com maior score
wi são selecionados para formar a próxima população.
Formalmente tem-se:
q
j
i
i
fitfitw
1
j
casos outros0
)()( se1 vv,

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 19
onde j {1,...,2} é uma variável aleatória inteira e uniforme amostrada para
cada comparação.
Quando o tamanho do torneio q é aumentado, o mecanismo torna-se cada vez
mais determinístico.
Como o melhor indivíduo irá receber o maior score q, a sobrevivência do melhor
indivíduo é garantida e, portanto, o mecanismo de seleção é elitista.
Em resumo, um algoritmo do tipo meta-PE pode ser implementado empregando-
se a seguinte seqüência de passos:
procedimento [P] = meta-PE()
inicialize indivíduos do tipo: v = (x,) e os armazene em P
avalie todos os indivíduos
t 1
enquanto NOT condição_de_parada, faça
mute os indivíduos de P e armazene em P’
avalie os indivíduos gerados em P’ (filhos)
selecione indivíduos de PP’ por torneio estocástico
t t + 1
fim enquanto
fim procedimento

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 20
5 Discussão
Tanto no caso das EEs quanto da PE aplicadas ao processo de otimização de
funções numéricas reais, o espaço de busca é geralmente irrestrito; restrições são
tipicamente consideradas na geração da população inicial de indivíduos.
Entretanto a otimização de problemas com restrições pode ser feita impondo-se as
seguintes condições (BÄCK et al., 2000a):
O operador de mutação deve ser formulado tal que apenas soluções factíveis
sejam produzidas; ou
Uma função de penalização deve ser aplicada às mutações que resultam em
indivíduos infactíveis, tal que eles não façam parte da próxima geração.
5.1 Abordagem Top-Down Bottom-Up
As estratégias evolutivas, assim como a programação evolutiva, possuem uma
proposta filosófica diferente da de outras abordagens de computação evolutiva.

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 21
Enquanto as EEs e a PE são vistas como abordagens top-down, os algoritmos
genéticos e a PG são considerados do tipo bottom-up.
Esta discussão tem sido apresentada por diversos autores, como FOGEL (1994a) e
BÄCK et al. (2000a).
A proposta de Fogel se baseava na ideia de utilizar evolução para criar
“organismos” cada vez mais “inteligentes” ao longo do tempo.
Assim como as estratégias evolutivas, a programação evolutiva emprega a
abstração da teoria da evolução como um processo top-down de simulação de
comportamentos adaptativos (evolução dos fenótipos) ao invés de um
processo bottom-up de genética adaptativa (FOGEL, 1994a). Existe uma
relação funcional entre cada pai e seu filho, e não uma relação genética.

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 22
Abordagens Top-Down
O projeto ótimo de um sistema populacional é provavelmente conseqüência de um
conjunto de componentes que interagem fortemente.
A evolução natural projeta tais sistemas sem aplicar o processo de otimização a
componentes individuais; a seleção ocorre de forma top-down (FOGEL, 1994a).
Para sobreviver, cada organismo deve ser capaz de enfrentar as dificuldades
oferecidas pelo ambiente: encontrar comida suficiente, evitar os predadores,
encontrar abrigo etc.
A medida de seu sucesso é dada pela adequação do seu comportamento
global, e não de seus componentes individuais. Somente a sua resposta
comportamental possui valor seletivo, independentemente de como ela foi
gerada.
Os caracteres que condicionam o comportamento expresso afetam o valor seletivo
do indivíduo apenas em relação ao ambiente em que ele se encontra. Por exemplo,

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 23
é vantajoso ser alto quando se é jogador de basquete, mas essa característica pode
ser ruim caso você deseje ser um piloto de aeronaves de guerra.
MAYR (1989) coloca da seguinte forma: “Os genes não são as unidades da
evolução e nem são os alvos da seleção natural”.
As populações de organismos evoluem, não os componentes de cada organismo.
Sendo assim, FOGEL (1994a) sugere que é mais apropriado modelar a evolução
com o objetivo de projetar sistemas para a solução de problemas quando este
modelo otimiza o comportamento global do sistema.
Abordagens Bottom-Up
Como discutido anteriormente, os algoritmos genéticos enfocam a simulação da
evolução primariamente em termos dos mecanismos genéticos. A abordagem é do
tipo bottom-up.

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 24
A sugestão dos GAs é de que as soluções candidatas sejam codificadas utilizando-
se, geralmente, uma cadeia binária (que simula genes em um cromossomo), e, em
seguida, que sejam criadas novas soluções a partir da recombinação e mutação de
soluções existentes.
Os GAs estão fundamentados na teoria de que a recombinação e mutação vão
atuar de forma a combinar blocos construtivos de genes importantes pertencentes
a cadeias binárias individuais, e, assim, produzirão indivíduos melhores.
O argumento de FOGEL (1994a) é de que a restrição a uma representação e a
definição de uma forma de recombinação e variação genética são regras
heurísticas que podem ou não ser benéficas.
É possível afirmar que soluções ótimas podem ser encontradas através da
justaposição repetida de sub-seções sub-ótimas de soluções completas?

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 25
Se o objetivo é gerar “inteligência artificial”, ou seja, resolver problemas de
formas alternativas, então a utilização de um conjunto de regras é
inapropriado.
As regras utilizadas na resolução de um problema devem evoluir através de
um processo iterativo de mutação e seleção. Até mesmo a mutação deve
evoluir durante o processo.
Em um algoritmo genético, a teoria dos esquemas propõe que aqueles blocos
construtivos com fitness acima da média sofrem crescimento exponencial.
Entretanto, argumenta FOGEL (1994a), é impróprio atribuir um fitness a
componentes individuais (genes ou blocos de genes); vistos isoladamente eles não
possuem valor algum. Por exemplo, qual a utilidade de uma carta de baralho
individual em sua mão?

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 26
O Argumento Conclusivo de FOGEL (1994a)
Boa parte da ciência é tradicionalmente bottom-up, ou seja, uma análise é iniciada
enfocando-se os componentes, procedimentos e regras disponíveis em vez de
tentarmos entender adequadamente o propósito a ser atingido.
Entretanto, é preciso reconhecer que, para ser significativo, o propósito deve
indicar não apenas o resultado desejado, mas também a significância relativa dos
indivíduos. Na natureza, os organismos não são projetados pela combinação de
componentes otimizados individualmente, eles servem como hipóteses
representativas das propriedades lógicas do ambiente que eles habitam.
A seleção opera apenas na expressão fenotípica do genótipo; o código implícito do
fenótipo (genótipo) é afetado apenas indiretamente.
Nas EEs e PE, um indivíduo é avaliado apenas pelo seu fitness; não há nenhuma
tentativa de atribuir fitness a componentes (blocos construtivos) de um indivíduo.

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 27
Os operadores genéticos permitem a variação simultânea de todos os atributos dos
vetores.
5.2 EEs, PE e GAs
Além de uma comparação filosófica entre EEs, PE e GAs, como apresentado
acima, diversos autores têm comparado esses algoritmos em relação aos
operadores de seleção, recombinação, mutação, e desempenho quando aplicados a
problemas de teste e mundo real (FOGEL, 1994b; BÄCK, 1994; BÄCK &
SCHWEFEL, 1993).
Além das similaridades e diferenças entre GA, EE, PE e PG destacadas em tópicos
anteriores, é possível traçar as relações entre estas diversas abordagens em relação
ao mapeamento entre a visão computacional e a visão biológica dos diferentes
procedimentos.

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 28
Em resumo (Adaptado de BÄCK, 1994):
AG EE PE PG
Gene Cada bit ou
segmento de bits Cada xi, i, i Cada xi, i Cada função e
terminal
Cromossomo Cadeia binária
completa
Vetores completos
x, ,
Vetores
completos x,
Cada programa
Genótipo Coleção de cadeias
binárias
Coleção de
cromossomos: (x,
, )
Coleção de
cromossomos: (x,
)
Coleção de
programas
Fenótipo Valor decodificado
de x
Componente x Componente x Valor retornado
pelo programa

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 29
6 Exemplos de Aplicações
Referências: RECHENBERG, 1994; FOGEL, 1993a, 1993b.
6.1 Caixeiro Viajante
Codificação: permutações.
O espírito de um operador de mutação em PE requer: (1) a manutenção de uma
conexão comportamental entre cada pai e seus descendentes, e (2) uma
perspectiva “contínua” de surgimento de novos comportamentos.
Por isso, a proposta de FOGEL (1993a) foi um operador de inversão: selecione
duas cidades no percurso e reverta a ordem do trecho definido entre estas cidades.
Seleção: competição estocástica, levando em conta a distância Euclidiana total
associada a cada percurso.

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 30
Após 4 × 107 avaliações, uma solução a 5% do comprimento ótimo foi encontrada.
6.2 Evolução de Uma Lente Ocular
Os céticos em relação à teoria Darwiniana geralmente apontam para o problema
da evolução do olho: “5% de um olho” não pode funcionar como um olho, e,
portanto, não é possível haver evolução se não existe um olho de pior qualidade.

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 31
Figura 2: O olho humano.
Entretanto, a evolução do olho procedeu em vários passos pequenos, onde uma
possível seqüência lógica seria:

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 32
o Concentração das células sensitivas a luz;
o Identação da camada de pigmentos;
o Cobertura da identação com uma geléia;
o Formação da geléia em um concentrador de luz.
Possíveis passos evolutivos seriam:
o Olho plano;
o Olho em forma de taça;
o Olho com uma pequena depressão (identação); e
o Olho em forma de lente.
Seja o caso apenas do concentrador de luz ocular. A Figura 2 apresenta uma
película deformável de vidro com espessura dk (k = 1,...,n).

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 33
Os raios de um feixe paralelo de luz atravessam a lente de vidro e sofrem difração
em diferentes direções.
Um ajuste apropriado da espessura dk permite focalizar todos os raios em um
ponto P (propriedade de uma lente coletora).
o Essa medida de qualidade pode ser calculada somando-se os quadrados dos
desvios dos raios de luz. Sendo assim, o objetivo torna-se:
Distribuição dos raios = min qk2, onde qk é a distância do raio k ao ponto P.
Um organismo cujo olho é capaz de concentrar melhor os raios de luz pode
enxergar presas e/ou predadores mais rapidamente.
Na formulação matemática do problema, uma lâmina de vidro foi utilizada, e
permitiu-se variar a espessura desta lâmina em posições eqüidistantes.
A figura abaixo mostra a evolução da lâmina de vidro para uma “lente ocular”.

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 34

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 35
6.3 Evolução de Um Conjunto Articulado em um Túnel de Vento
De acordo com a figura abaixo, 6 placas foram conectadas em seus eixos
longitudinais. As juntas podem ser ajustadas individualmente em intervalos
angulares de 2o, cada junta permitindo 51 passos.
o Sendo assim, todo o conjunto permite 515 diferentes configurações.
Inicialmente o conjunto estava dobrado de forma irregular.
O objetivo é o de encontrar uma configuração com menor coeficiente de arrasto
quando colocado em um túnel de vento. A solução é trivial e conhecida.

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 36
O experimento foi conduzido da seguinte forma:
o Calcule o coeficiente de arrasto da configuração pai;
o Efetue pequenas mutações aleatórias nos ângulos;
o Calcule o coeficiente de arrasto da configuração mutada;
o Selecione a configuração com menor arrasto.
Este experimento, apesar de parecer elementar, foi crucial para o sucesso das EEs.

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 37
6.4 Projeto Evolutivo de Uma Ponte Articulada
Dada uma estrutura similar a uma ponte sobre um pavimento horizontal, uma
carga constante é aplicada ao longo da estrutura.
Problema: determine as coordenadas x e y dos 10 nós superiores e dos 11 nós
inferiores da ponte, tal que o peso da estrutura seja mínimo.
Para posições específicas dos nós, as forças nos elementos da estrutura podem ser
calculadas diretamente utilizando-se condições de equilíbrio estático.
o O peso da estrutura é função da espessura do material a ser utilizado (barras).
A figura abaixo mostra a evolução da EE quando aplicada a este problema.
o O peso inicial da estrutura é de 51 964 Kg, enquanto a estrutura otimizada
possui um peso de somente 17 129 Kg.

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 38

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 39
7 Referências
BÄCK, T., FOGEL, D.B. & MICHALEWICZ, Z. (eds.) “Evolutionary Computation 1: Basic Algorithms and Operators”,
Institute of Physics Publishing, 2000a.
BÄCK, T., FOGEL, D.B. & MICHALEWICZ, Z. (eds.) “Evolutionary Computation 2: Advanced Algorithms and
Operators”, Institute of Physics Publishing, 2000b.
BÄCK, T. & SCHWEFEL, H.-P (1993), “An Overview of Evolutionary Algorithms for Parameter Optimization”,
Evolutionary Computation, 1(1), pp. 1-23.
BÄCK, T., “Evolutionary Algorithms: Comparison of Approaches”, in R. Paton (ed.) Computing with Biological
Metaphors, Chapman & Hall, Capítulo 14, pp. 227-243, 1994.
DEARHOLT, D. W. (1976), “Some Experiments on Generalization Using Evolving Automata”, In Proc. 9th
Int. Conf.
on Systems Sciences, Honolulu, HI, pp. 131-133.
FOGEL, D. B. Evolutionary Computation – Toward a New Philosophy of Machine Intelligence, 2a edição, IEEE Press,
2000.
FOGEL, L. J. (1993a), “Applying Evolutionary Programming to Selected Traveling Salesman Problems”, Cybernetics
and Systems, vol. 24, pp. 27-36.
FOGEL, L. J. (1993b), “Empirical Estimation of the Computation Required to Discover Approximate Solutions to the
Traveling Salesman Problem Using Evolutionary Programming”, Proceedings of the Second Annual
Conference on Evolutionary Programming, pp. 56-61.

IA707 – Profs. Leandro de Castro/Fernando Von Zuben/Romis Attux/Levy Boccato
Tópico 8 – Programação Evolutiva (PE) 40
FOGEL, L. J. (1994a), “Evolutionary Programming in Perspective: The Top-Down View”, In J. M. Zurada, Marks II,
R. J. and Robinson, C. J., Computational Intelligence Imitating Life, IEEE Press.
FOGEL, D. B. (1994b), What’s Evolutionary Programming, [On line] http://www.kanadas.com/whats-ep.html.
FOGEL, D. B. (1992), Evolving Artificial Intelligence, Doctoral Dissertation, UCSD.
FOGEL, L. J., BURGIN, G. H. (1969), “Competitive Goal Seeking through Evolutionary Programming”, Air Force
Cambridge Research Laboratories Final report Contract AF19(628)-5927..
FOGEL, L.J., OWENS, A.J. & WALSH, M.J. (1966) “Artificial Intelligence through Simulated Evolution”. John Wiley.
MAYR, E. (1989), Toward a New Philosophy of Biology: Observations of an Evolutionist, Belknap, Harvard, MA.
RECHENBERG, I. (1994), “Evolution Strategy”, In J. M. Zurada, R. J. Marks II, and C. J. Robinson Computational
Intelligence Imitating Life, pp. 147-159.
WALSH, M. J., BURGIN, G. H. AND FOGEL, L. J. (1970), “Prediction and Control through the Use of Automata and
their Evolution”, US Navy Final Report Contract N00014-66-C0234.