IMPLEMENTAO DE POLTICAS DE GERENCIAMENTOCOM LGICA FUZZY E
ALGORITMO GENTICO VISANDO
MELHORIA DA QUALIDADE DE SERVIO (QOS)
Marcial Porto Fernandez, Aloysio de Castro P. Pedroza e Jos
Ferreira de Rezende
Resumo -O Gerenciamento Baseado em Polticas uma tc-nica para
coordenar a configurao de diversos equipamentosde uma rede, a
partir de contratos administrativos (SLAs).Esses contratos indicam
polticas abstratas difceis de sereminterpretadas e implementadas
pelos equipamentos de rede,que requerem informaes absolutas. Como a
lgica fuzzypossibilita a representao de valores abstratos, um
controla-dor fuzzy foi utilizado para implementar um mecanismo
deprovisionamento dinmico, reconfigurando os ns de acor-do como
trfego. Esse trabalho prope uma metodologia deconstruo de um
controlador para configurar o provisiona-mento de rede a partir de
polticas de gerenciamento visandomelhorar a QoS em um domnio
DiffServ. As funcionalida-des so demonstradas atravs de simulao de
uma aplicaode Telefonia IP cruzando um domnio DiffServ.
Palavras-chave: Qualidade de Servio, DiffServ, Provisio-namento
de Redes
Abstract - The policy based management is a technique
tocoordinate the configuration of several equipments in a net-work,
from Service Level Agreements (SLAs). These agree-ments produce
abstract policies difficult to be interpreted andimplemented by
network equipments, that requires absoluteinformation. As the fuzzy
logic has been used to representabstract values, a fuzzy controller
was used to implement adynamic provisioning mechanism to
reconfigure all nodes ac-cording ingress traffic. This work
proposes a methodology tomap management policies in fuzzy
controller parameters toachieve the desired QoS in a DiffServ
domain. The func-tionalities are demonstrated by simulation of a IP
Telephonyapplication crossing a DiffServ domain.
Keywords: Quality of Service, DiffServ, Network
Provision-ing
1. INTRODUO
A Diferenciao de Servios (DiffServ)[1] uma propostaque visa
oferecer garantias de qualidade de servio (QoS) naInternet,
consistindo em prover servios diferenciados para asagregaes de
fluxos de dados. A arquitetura DiffServ esca-
Marcial Porto Fernandez pesquisador do Instituto de Computa-o da
Universidade Federal Fluminense. Aloysio de Castro P. Pe-droza e
Jos Ferreira de Rezende so professores do Programa deEngenharia
Eltrica/COPPE e Escola Politcnica da UniversidadeFederal do Rio de
Janeiro. E-mails: [email protected], [email protected],
[email protected]
lvel, oferecendo garantias para as diferentes classes, porm aQoS
pode sofrer violaes quando ocorrer congestionamentona agregao de
vrios fluxos de uma mesma classe devidoao mau dimensionamento dos
recursos, o que compromete aQoS borda-a-borda.
Vi-se, portanto, que essa escalabilidade tem seu preo: nose pode
garantir a QoS para todos os fluxos de uma mesmaclasse. O trfego de
dados na Internet tem um comporta-mento aleatrio, portanto violaes
da QoS so esperadas.Solues como IntServ possibilitam o controle por
fluxo dedados, garantindo QoS para cada fluxo individualmente,
po-rm apresentam problemas de escalabilidade nos roteadoresde
ncleo.
A necessidade de oferecer garantias de QoS na Internet nosleva a
mecanismos de provisionamento dinmico. A caracte-rstica aleatria da
chegada de fluxos em diferentes classes deservio obriga a utilizao
de alguma tcnica de reconfigura-o dinmica dos mecanismos de
provisionamento. Em vir-tude da complexidade desses mecanismos,a
maioria das em-presas de telecomunicaes tem preferido
super-dimensionaros recursos para obter a QoS desejada. Esse
procedimento,no entanto, apresenta um custo muito alto, tanto pela
capaci-dade no utilizada na maioria do tempo (deve-se
provisionarpelo pico) como pela dificuldade do planejamento, pois a
es-timativa de trfego futuro tende a ser imprecisa.
Em trabalhos anteriores, mostramos experincias que de-monstraram
que um controlador fuzzy reconfigurando dina-micamente os ns
conforme o trfego entrante pode melho-rar a QoS em um domnio. Esse
controlador mostrou-se efi-ciente para melhorar a qualidade de
servio em um dom-nio DiffServ simples[2] e em um domnio complexo
comvrias topologias aleatrias de 40 ns[3]. A utilizao docontrolador
fuzzy justifica-se pela no linearidade e ausn-cia de um modelo
matemtico preciso para tratar estimativade trfego[4]. Comparado a
um controlador convencional, ocontrolador fuzzy apresenta vantagens
significativas no tra-tamento de variveis imprecisas. Para melhorar
a eficinciado controlador fuzzy, foram utilizadas tcnicas baseadas
emalgoritmos genticos (AG), que otimizam os parmetros docontrolador
fuzzy[5, 6].
O Gerenciamento Baseado em Polticas[7] tem se mostra-do uma
tcnica eficaz para coordenar a configurao de umarede para obter a
QoS desejada. A maioria dos trabalhos so-bre Gerenciamento Baseado
em Polticas foca na especifica-o de polticas e do modelo de
informaes das entidadesonde as polticas sero aplicadas. Entretanto,
pouco trabalhotem sido feito sobre como as entidades interpretam as
polti-cas e definem comandos de configurao nos equipamentosreais[8,
9]. Alm disso, ainda falta estudo sobre aplicao
1
Marcial Porto Fernandez, Aloysio de Castro P. Pedroza e Jos
Ferreira de RezendeImplementao de Polticas de Gerenciamento com
lgica Fuzzy e Alg. Gentico visando melhor QoS
de polticas em grandes domnios, onde interpretaes dife-rentes de
uma mesma poltica podem causar instabilidades efalhas na operao do
sistema[10].
Apresentamos nesse trabalho a arquitetura do sistema
degerenciamento baseado em polticas que coordena o provisi-onamento
dinmico dos ns de um domnio DiffServ. Apre-sentamos uma proposta de
mapeamento de polticas de geren-ciamento em parmetros de
controlador fuzzy, que ser utili-zado para reconfigurar o
provisionamento de recursos nos nsdo domnio. Mostramos ento, o
procedimento de otimizaodo controlador fuzzy para melhorar as
mtricas de QoS. Paravalidar a metodologia, foi construdo um
controlador fuzzyque implementa as polticas definidas inicialmente.
Assim,foi realizada uma simulao desse prottipo, com avaliaode tempo
de retardo, variao do retardo e descarte de fluxosde telefonia IP.
Posteriormente, apresentamos uma avaliaodo controlador fuzzy
mediante a variao de alguns parme-tros.
Esse artigo encontra-se organizado da seguinte forma: aseo2
apresenta a arquitetura do sistema e metodologia pa-ra construo do
controlador; a seo3 mostra a metodologiade mapeamento de polticas;
a seo4 apresenta a constru-o do controlador fuzzy; a seo5 mostra a
otimizao docontrolador fuzzy; a seo6 mostra a implementao do
pro-ttipo, seguindo a metodologia proposta; a seo7 apresentaos
resultados obtidos na simulao; e, finalmente, a seo8apresenta as
concluses do trabalho e sugere temas para tra-balhos futuros.
2. SISTEMA DE PROVISIONAMENTO DI-NMICO DE RECURSOS
Para coordenar a configurao de uma rede com requisi-tos de
qualidade, precisamos de um sistema que mantenha oprovisionamento
da rede coerente e que, como a arquiteturaDiffServ, tambm seja
escalvel. Definiu-se ento um contro-lador que implementa o
provisionamento dinmico nos nsa partir das polticas especificadas
pelo operador de redes.Abaixo, apresentamos a arquitetura do
sistema e a metodolo-gia para a construo desse controlador.
2.1 ARQUITETURA DO SISTEMA DE PROVI-SIONAMENTO DINMICO
A arquitetura do sistema de provisionamento dinmico temcomo
objetivo propiciar o melhor desempenho mantendo aescalabilidade do
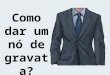
sistema. Apresentamos, na figura1, a ar-quitetura proposta.
Em cada n do domnio, seja de borda ou de ncleo, ocontrolador do
n realiza medidas do estado atual, calculao novo valor de
configurao, utilizando um mecanismo delgica fuzzy, e aplica o
comando de controle no n. Comoa lgica fuzzy relativamente leve
comparada ao AG, podeser executada em cada n do domnio sem
interferir muitono desempenho do roteador. O intervalo de operao
dessecontrolador da ordem de segundos e usar um
mecanismocomputacionalmente pesado pode impactar no desempenho
Ncleo
BordaBorda
GerenciadorOtimizao AGAnalisa medidasConfigura ns
Controlador FuzzyColeta medidas
Controlador FuzzyColeta medidas
Controlador FuzzyColeta medidas
Configura
Monitora
Fluxo de dados
Figura 1. Arquitetura do sistema proposto.
do roteador. O n tambm responsvel por coletar as infor-maes do
estado do equipamento e inform-las ao Gerenci-ador, utilizando um
protocolo de gerenciamento de redes, porexemplo o SNMP (Simple
Network Management Protocol).
Algumas decises exigem o conhecimento de um conjun-to de ns
(domnio), quando ento o gerenciador de polticasrealiza o clculo e
reconfigura todos os ns necessrios. Umexemplo dessa situao quando o
retardo na classe maisprioritria no interior do ncleo aumenta e no
existem maisrecursos para alocar, obrigando a uma reduo na taxa de
en-trada para no haver descarte no ncleo.
O gerenciador, nico no domnio, responsvel por con-solidar todas
as informaes colhidas pelos ns que sejamimportantes para
funcionamento do domnio. Realiza tam-bm a otimizao com algoritmo
gentico e reconfigura to-dos os ns regularmente, utilizando o
protocolo COPS (Com-mon Open Policy Service), por exemplo. Como o
algoritmogentico exige uma quantidade maior de recursos
computa-cionais, poderia interferir no desempenho dos roteadores,
sefosse executado neles. Outra observao importante que aotimizao
com algoritmo gentico ocorre a intervalos maio-res, da ordem de
horas ou dias, portanto a escalabilidade podeser mantida mesmo para
grandes domnios.
2.2 METODOLOGIA PARA CONSTRUO DOCONTROLADOR DE
PROVISIONAMENTO
A metodologia consiste na realizao de definio, otimi-zao e
teste, efetuadas continuamente para manter o siste-ma ajustado
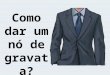
topologia usada. Apresentamos, na figura2,o fluxograma da
metodologia proposta. Nessa figura, os re-tngulos representam um
procedimento da metodologia e osparalelogramos representam as
interaes com os usurios dosistema ou com os equipamentos de rede.
Vamos supor queos operadores de rede de telecomunicaes devem
cumprirmtricas de QoS especificadas em contrato, por exemplo, queo
retardo mximo da rede seja de 100 ms.
O ponto de partida do presente trabalho so as especifi-caes de
polticas administrativas com base nos requisitosde QoS, conforme
mostrado na figura2(a). O detalhamentodessa fase apresentado na
seo3.2. A etapa seguinte, fi-gura2(b), mostra a definio do
controlador a partir dessaspolticas administrativas, por isso
apresentada uma propos-ta de mapeamento de polticas em parmetros do
controlador
2
Revista da Sociedade Brasileira de TelecomunicaesVolume 18,
Nmero 2, outubro 2003
Especificao daPoltica
AtendePoltica ?
Incio
Construo doControlador
Fuzzy
Otimizao comAlgoritmoGentico
Mapeamento daPoltica emLgica Fuzzy
Medio do Resultado(Simulao)
Seleo dosValores paraOtimizao
ConfiguraControlador
Fuzzy
(a)(b)
(c)(d)
(e) (f)
(g) (h)
SIMNO
Figura 2. Fluxograma da metodologia proposta.
fuzzy, na seo3.3.A prxima etapa a construo do controlador fuzzy,
mos-
trado na figura2(c). Essa etapa, apresentada na seo4, defi-ne os
parmetros do controlador fuzzy, como funes de per-tinncia e base de
regras, a partir da especificao de polticamapeada na etapa
anterior. Uma vez construdo o controla-dor, podemos aplic-lo aos
equipamentos da rede ou, comoem nosso experimento, realizar a
simulao. Nessa etapa,mostrada na figura2(d), pode-se coletar os
valores de entra-da e sada no controlador fuzzy e as medidas de
desempenhodesejadas como, por exemplo, retardo e descarte de
pacotes.
De posse desses valores, podemos escolher todas as combi-naes de
valores de entrada e sada que maximizam as me-didas de desempenho
desejadas. Essa etapa mostrada nafigura2(e) e detalhada na seo5.2.
A etapa seguinte consis-te na otimizao dos parmetros fuzzy atravs
do algoritmogentico, utilizando como referncia de funo objetivo
osvalores selecionados no tem anterior. Essa etapa mostradana
figura2(f) e detalhada na seo5.3.
A otimizao por algoritmo gentico pode distorcer as fun-es de
pertinncia e regras do controlador, fazendo com queo resultado do
controlador deixe de cumprir as polticas origi-nais. Na etapa2(g),
as novas funes de pertinncia e regrasso avaliadas com a especificao
das polticas; caso este-jam em desacordo, o controlador fuzzy
precisa ser redefinidona etapa2(c), mostrada com uma linha
tracejada. Caso ocontrolador produza um resultado coerente com as
polticasoriginais, pode ento ser usado nos equipamentos para
funci-onamento normal, conforme indicado na etapa2(h).
A metodologia admite que o processo de otimizao sejarealizado
continuamente, adaptando os controladores fuzzyde acordo com as
mudanas ocorridas na rede (ativao oudesativao de um canal, alterao
no padro de trfego gera-do pelos usurios etc.). Como normalmente
essas mudanasso pequenas e eventuais, o algoritmo gentico muito
efici-
ente na otimizao. O processo de adaptao mostrado nafigura2, com
uma linha cheia, considerando que as polticasadministrativas se
mantenham inalteradas. Caso contrrio,deve-se iniciar a metodologia
a partir da etapa inicial (figura2(a)).
3. IMPLEMENTAO DE POLTICAS DEGERENCIAMENTO
O Gerenciamento Baseado em Polticas[7] tem se mostra-do uma
tcnica eficaz para coordenar a configurao de umarede para obter a
QoS desejada. Podemos definir umapol-tica como umaregra que
direciona as opes de comporta-mento de um sistema de gerenciamento.
Para representar aspolticas, utilizamos a linguagem Ponder[11],
apresentada aseguir.
3.1 LINGUAGEM DE ESPECIFICAO DEPOLTICAS: PONDER
A linguagemPonderfoi proposta por Damianouet al.[12]para
especificar textualmente polticas de gerenciamento, deacordo com as
propostas de Sloman [7] e Lupu[13, 10]. uma linguagem declarativa
orientada a objetos e oferece aousurio uma interface simples para
especificao de polti-cas, aproximando-se o mximo possvel de regras
de polti-cas abstratas. A linguagem Ponder foi escolhida para
essetrabalho pois atendeu s necessidades requeridas e as
ferra-mentas de auxlio se mostraram eficientes para implementaro
prottipo.
Essa linguagem define quatro polticas bsicas:polticade
autorizao, que pode ser positiva (auth+), permitindo oacesso a um
determinado recurso, ou negativa(auth-), proi-bindo o
acesso;poltica de obrigao(oblig), que exige aexecuo de determinada
ao (previamente autorizada);po-ltica de proibio(refrain ), que
probe a execuo de umaao; epoltica de delegao(deleg), que permite a
um ele-mento delegar a outro o controle sobre determinado
objeto.
3.2 ESPECIFICAO DAS POLTICAS DEQOS
A partir dos requisitos administrativos, podemos especifi-car a
poltica de gerenciamento. Em nosso exemplo, defini-mos a poltica de
que toda prioridade deve ser dada clas-se EF(Expedited Forwarding).
A classe de melhor esforo,(BE - Best Effort)dever ter a prioridade
reduzida sempreque houver queda na qualidade da classe EF. Foram
definidasduas especificaes de poltica: uma para o escalonador,
apli-cvel em todos os ns, e uma para o condicionador,
aplicvelapenas aos ns de borda.
O cdigo1 mostra um trecho da especificao da polticado
escalonador emPonder. As linhas 4 a 8 definem os valo-res mximos
dos parmetros de QoS para uma determinadaclasse de servio (EF).
Podemos ver que o escalonador podevariar de 10% a 90% da banda de
sada e o retardo mximo
3
Marcial Porto Fernandez, Aloysio de Castro P. Pedroza e Jos
Ferreira de RezendeImplementao de Polticas de Gerenciamento com
lgica Fuzzy e Alg. Gentico visando melhor QoS
de 100 ms. Da linha 10 14, so estabelecidas as restriesbaseadas
nos valores previamente definidos. Nas linhas 16 a19, so definidos
os eventos de disparo das aes.
Cdigo 1. Exemplo de especificao Ponder do escalonador
/ / E s p e c i f i c a c a o do Con t ro lado r do Esca
lonador2 / // / De f i ne l i m i t e s minimos e maximos p e r m i
t i d o s
para o esca lonado r4cons t
minsched = 0 . 1 0 ; / / Esca lonador minimo 10%6 maxsched = 0 .
9 0 ; / / Esca lonador maximo 90%
MaxDelay = 1 0 0 ; / / Delay maximo 1 0 0 ms8
/ / De f i ne c o n d i c o e s de r e s t r i c a o10c o n s t
r a i n t
bwMin = bwShare < minsched ;12 bwMax = bwShare > maxsched
;
bwInc rease = bwShare < maxsched ;14 bwDecrease = bwShare
> minsched ;
16event / / D e f i n i c a o dos e v e n t o sl owde lay = 0 .
3 MaxDelay
18 mediumdelay = 0 . 5 MaxDelayh i g h d e l a y = 0 . 7
MaxDelay
20
/ / A u t o r i z a aumentar esca lonado r se menor
quemaxsched
22 auth + i n c r e a s e S c h e d u l e r A u t h {s u b j e c
t s ;
24 t a r g e t t ;a c t i o n increaseBW ( ) ;
26 when bwInc rease ;}
28 / / Obr iga aumentar 1 un idade esca lonado rquando r e t a r
d o do EF e medio
o b l i g i n c r e a s e S c h e d u l e r 1 {30 s u b j e c t
s ;
t a r g e t t ;32 on EF . mediumdelay ;
do increaseBW ( l e v e l ) ;34 }
A partir desse ponto, as polticas sero executadas pelo su-jeito
se aplicadas ao alvot. Nas linhas 22 a 27, especificadauma poltica
autorizando o controlador a executar o aumen-to da banda
(increaseBW()), quando a condio particiona-mento da banda atual
(bwIncrease) for menor que o mximopermitido (maxsched). Nas linhas
29 a 34, definida umapoltica determinando que a ao de aumentar a
banda (in-creaseBW()), previamente autorizada, seja executada
quandoo evento retardo na classe EF for mdio.
3.3 MAPEAMENTO DE ESPECIFICAO DEPOLTICAS EM PARMETROS DE
CON-TROLADOR FUZZY
A especificao de polticas traduz uma deciso adminis-trativa em
comando do sistema de gerenciamento. Por seremas regras de polticas
abstratas e prximas da percepo hu-mana, muito difcil mape-las em
regras computacionais,absolutas e exatas por natureza. A lgica
fuzzy tem a ca-racterstica de tratar variveis semnticas com certo
grau deimpreciso. Por isso, praticamente intuitiva a aproximaodas
regras de especificao de polticas de gerenciamento dosatributos de
um controlador fuzzy.
A linguagemPonderpermite especificar vrios elementosde polticas
de gerenciamento de forma textual. As funesrestrio e evento podem
ser representadas por funes depertinncia, enquanto as funes de
comando podem ser re-presentadas pela base de regras.
3.3.1 REPRESENTAO DO COMANDO CONS-TRAINT E AUTH
Os comandosconstraint eauth- indicam o limite de restri-o de uma
autorizao, geralmente definindo um valor mni-mo ou mximo para certa
funo. A associao em operaofuzzy consiste em estabelecer o valor
defuzificado da varivelde sada igual ao valor desejado.
Cdigo 2. Mapeamento do comando constraint
c o n s t r a i n t2 bwmin = bwShare < = 0 . 1 0 ;i n s t
4 auth schedu le rM in {s u b j e c t s ;
6 t a r g e t sched ;a c t i o n sched . reduceBW ( ) ;
8 when bwMin ;}
0
0.2
0.4
0.6
0.8
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
PMPB PA
Valor do escalonador (sada)
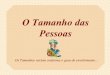
Figura 3. Funo pertinncia associada comando constraint
Apresentamos, no cdigo2, uma especificao usando
oscomandosconstraint eauth-. Nesse caso, a restrio da ban-da mnima
do escalonador seja 0.10 (ou seja, 10% da bandatotal). O menor
valor atingido por uma funo de pertinncia o centro de gravidade
(caso este seja o mtodo de defuzi-ficao utilizado) do menor valor
semntico da funo. Ocomandoauth- indica a no autorizao de executar o
co-mando de reduzir a banda do escalonador, caso a banda atualseja
menor ou igual ao valor mnimo.
A funo de pertinncia do controlador fuzzy correspon-dente a essa
especificao mostrada na figura3, onde as va-riveis "PB", "PM" e
"PA" significam Prioridade Baixa, Pri-oridade Mdia e Prioridade
Alta, respectivamente. Podemosobservar que o centro de gravidade do
polgono do valor se-mntico "PB" 0.1. Assim, quando o resultado
semntico forapenas "PB" (que o pior caso) o valor defuzificado ser
0.1.Poderamos fazer um mapeamento semelhante para a funo
4
Revista da Sociedade Brasileira de TelecomunicaesVolume 18,
Nmero 2, outubro 2003
peso mximo, que associaria o valor semntico "PA" com ovalor
defuzificado 0.9.
3.3.2 REPRESENTAO DO COMANDO EVENT
O comandoevent lista os eventos que disparam comandosde obrigao
(oblig) ou proibio (refrain ). Uma ao podeter vrios eventos
possveis, conforme a poltica desejada. Omapeamento desse comando
uma funo de pertinncia deuma varivel com seus valores semnticos.
Assim, o coman-doeventexprime a descrio de uma funo de
pertinncia.
Apresentamos, no cdigo3, uma especificao usando umcomandoevent e
oblig. Atribumos aos eventos RB, RM eRA, respectivamente, Retardo
Baixo, Retardo Mdio e Retar-do Alto, um valor de disparo. Esses
eventos sero utilizadosno comandooblig como condio de disparo, na
linha 10, eda aosched.increaseBW, na linha 11.
Cdigo 3. Mapeamento do comando event
event2 RB = 0 . 1 ; / / Re ta rdo Baixo
RM = 0 . 5 ; / / Re ta rdo Mdio4 RA = 0 . 9 ; / / Re ta rdo A l
t o
6 i n s to b l i g aumentaEsca lonador {
8 s u b j e c t s ;t a r g e t sched ;
10 on c l ass eEF .RA ;do sched . increaseBW ( )
12 }
0
0.2
0.4
0.6
0.8
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
RMRB RA
Retardo na classe EF (entrada)
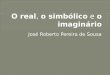
Figura 4. Funo de pertinncia associada ao comando event
A funo de pertinncia correspondente a essa especifica-o mostrada
na figura4. Podemos definir que cada eventoser associado a um valor
semntico da funo de pertinn-cia. Podemos notar que a
especificaoPonderatribui umvalor absoluto, sendo o critrio de
disparo atender ou no aesse valor. Para ser possvel o mapeamento,
consideramos ovalor absoluto como o valor central dos valores
semnticos earbitramos a forma geomtrica. O valor exato e o formato
dopolgono dessas variveis no so importantes, pois poderoser
alterados no processo de otimizao.
3.3.3 REPRESENTAO DO COMANDO OBLIG
O comandooblig indica a obrigao de execuo de umaao caso uma
determinada condio seja atendida (evento).O mapeamento, portanto,
quase que imediato. O parmetroon do comandooblig mapeado na condio
do comandoifda base de regras, e o parmetrodo mapeado na ao
docomandothen.
Apresentamos, no cdigo4, uma especificao usando ocomandooblig.
Consideramos as mesmas funo de per-tinncia apresentada na figuras4.
Nesse comando, casoocorra o evento retardo mdio na classe EF
(classeEF.RM), disparada a ao de aumentar a banda do
escalonador(sched.increaseBW()).
Cdigo 4. Mapeamento do comandooblig
i n s t2 o b l i g aumentaEsca lonador {
s u b j e c t s ;4 t a r g e t sched ;
on c l ass eEF .RM ;6 do sched . increaseBW ( )
}
O cdigo5 apresenta uma descrio JFS[14] da base deregras do
controlador fuzzy, a partir da especificao de po-ltica apresentada
no cdigo4. Podemos observar que o ma-peamento de um comando
increaseBW() foi desdobrado emvrias regrasif then para abranger
to-dos os valores semnticos da funo de pertinncia. A partirda
aoincreaseBW()em Ponder, definimos trs comandosJFS, por ser exigida
a especificao de ao para cada valorsemntico de entrada.
Cdigo 5. Cdigo JFS mapeado a partir com comandooblig
program2 i f c l ass eEF RMand sched PB then sched PM ;
i f c l ass eEF RMand sched PM then sched PA ;4 i f c l ass eEF
RMand sched PA then sched PA ;
4. CONSTRUO DO CONTROLADORFUZZY
A lgica fuzzy foi introduzida por Lofti Zedeh[15], comouma
generalizao da teoria clssica. A extenso sugeridapor Zadeh est na
possibilidade de um determinado elementopoder pertencer a um
conjunto com um valor chamado graude pertinncia. Assim, um elemento
no simplesmente per-tence ou no pertence a um conjunto, como na
lgica clssica,mas poder pertencer a um conjunto com grau de
pertinnciaque varia no intervalo [0,1], onde o valor 0 indica uma
com-pleta excluso, e o valor 1 representa completa incluso.
A lgica fuzzy utiliza variveis lingsticas no lugar de va-riveis
numricas. Variveis lingsticas admitem como va-lores apenas
expresses lingsticas, como "muito grande","pouco frio", "mais ou
menos jovem", que so representadaspor conjuntos fuzzy. A teoria da
construo de um contro-lador fuzzy foi mostrada em Lee[4]. A
construo de umsistema de controle fuzzy baseada na idia de se
incorporar
5
Marcial Porto Fernandez, Aloysio de Castro P. Pedroza e Jos
Ferreira de RezendeImplementao de Polticas de Gerenciamento com
lgica Fuzzy e Alg. Gentico visando melhor QoS
"experincia" ou "conhecimento especializado" de um ope-rador
humano para se obter a melhor estratgia de controle.Desse modo, a
forma das regras empregadas depende do pro-cesso a ser
controlado.
Os controladores fuzzy so a mais importante aplicaoda Teoria
Fuzzy. Seu funcionamento diferente dos contro-ladores
convencionais, pois estes exigem o desenvolvimen-to das equaes
diferenciais que descrevem o sistema. Emum controlador fuzzy, o
conhecimento pode ser expresso deforma intuitiva, usando as
variveis lingsticas. As aplica-es ideais para utilizao de
Controladores Fuzzy so asseguintes[16]:
1. Processos muito complexos, onde no h modelo mate-mtico
claro;
2. Processos altamente no lineares ou com comportamen-to
probabilstico;
3. Aquelas em que o processamento de conhecimento es-pecializado
(formulados lingisticamente) o nicopossvel.
Esses argumentos justificam a escolha do controladorfuzzy para
nossa proposta. Apresentamos, a seguir, o con-trolador fuzzy
apropriado para controlar o provisionamentodinmico em arquitetura
DiffServ obtendo como resultadouma melhor qualidade de servio. A
metodologia utilizadapara construo do controlador fuzzy foi baseada
na metodo-logia proposta por Cordn e Herrera[17].
4.1 FUNES DE PERTINNCIA
O controlador proposto utiliza variveis lingsticas trian-gulares
e trapezoidais, pela possibilidade de serem imple-mentadas com
cdigo mais simples e eficiente. Realizamostambm experincia com uma
funo gaussiana, porm os re-sultados obtidos no justificaram a
complexidade adicionada.
A arquitetura de nosso controlador foi dividida em duaspartes:
um controlador do escalonador existente em todos osns do domnio e
um controlador do condicionador existenteapenas nos ns de
borda.
4.1.1 CONTROLADOR DO ESCALONADOR
A varivel de sada, que possibilita o controle do escalo-nador,
depende do tipo do mecanismo utilizado. O escalo-nador controlvel
deve ser do tipo WRR (Weighted Round-Robin) ou WFQ (Weighted
Fair-Queueing), em que as filasso servidas de acordo com o peso
definido na configurao.Alterando-se esse peso, podemos modificar o
retardo dos pa-cotes em cada fila (classe).
A primeira varivel de entrada o retardo instantneo dopacote na
fila EF. Como os demais tempos do processamen-to do pacote so
praticamente irrelevantes, consideramos otempo de espera na fila
como o tempo total de permannciano n. Da mesma forma que o tempo de
espera do pacote,varivel equivalente seria o tamanho da fila, pois
direta-mente proporcional ao retardo esperado. A segunda
varivel
de entrada a taxa de descarte por transbordamento da filaBE,
indicando a exausto do recurso. Vrios mecanismos degerenciamento
ativo de fila podem ser utilizados neste caso,porm devemos
considerar que, na ocorrncia de descarte, hescassez de recurso de
rede. As variveis semnticas so:
Entrada:
Peso relativo atual do escalonador (EF/BE).
Retardo instantneo na classe EF.
Perda de pacotes na classe BE.
Sada:
Peso relativo no escalonador da fila EF/BE.
4.1.2 CONTROLADOR DO CONDICIONADOR
O condicionador est presente apenas nos ns de borda dodomnio
DiffServ. O objetivo principal deste controlador policiar a entrada
de fluxos de dados no domnio, de manei-ra que os fluxos bem
comportados no sejam penalizados. Avarivel de controle depende do
tipo de condicionador utili-zado. De forma geral, seguem a
filosofia do balde de fichas(Token Bucket), que um repositrio onde
se colocam fichasa uma taxa constante.
A primeira varivel o descarte de pacotes da classe EFno
condicionador. Quando um pacote chega ao condiciona-dor e encontra
o balde vazio, o mesmo descartado, pelo quepodemos concluir que o
trfego entrante maior que a ta-xa contratada para sua entrada no
domnio. O condicionador,entretanto, no pode ter o valor da taxa de
enchimento do bal-de alterada, pois seu objetivo manter um trfego
suavizadoe conforme ao contratado, no havendo sentido em aumentarou
reduzir sua taxa. Por outro lado, o PHB EF em um do-mnio DiffServ s
deve descartar pacotes na borda[18], sen-do indesejveis os
descartes no interior do domnio. Quandono h mais recursos no ncleo
do domnio, devemos sina-lizar para os ns de borda uma reduo na taxa
de entrada,atravs da reduo da taxa de enchimento do balde. Assim,o
valor de retardo mximo nos ns de ncleo enviado aogerenciador, que
sinalizar a reduo da taxa de entrada paraos ns de borda.
A segunda varivel de entrada o retardo mximo da clas-se EF no
interior do domnio, que indicar a necessidade dereduzir a taxa de
enchimento do balde caso o retardo sejamuito alto.
Esta foi a poltica escolhida para tratar congestionamentono
ncleo, entretanto poderamos usar, dependendo das con-venincias do
contratante, o critrio de manter a taxa contra-tada e recusar a
entrada de novas conexes ou cortar algumasconexes (atuando no
marcador). As variveis semnticasso:
Entrada:
Taxa atual do Token Bucket do condicionador.
Perda de pacotes na classe EF no condicionador.
Retardo mximo na classe EF nos ns de ncleo.6
Revista da Sociedade Brasileira de TelecomunicaesVolume 18,
Nmero 2, outubro 2003
Sada:
Taxa do Token Bucket do condicionador.
4.2 BASE DE REGRAS
A base de regras o conjunto de regras SE-ENTO dosvalores
lingsticos, que representam o comportamento dese-jado do sistema
fuzzy. Conforme dito anteriormente, a basede regras deve ser
definida de acordo com a poltica admi-nistrativa. Para nosso
exemplo, utilizamos um conjunto deregras priorizando a classe EF em
qualquer situao e dei-xando para a classe BE um mnimo de 10% da
banda.
A escolha dos operadores fuzzy seguiram as recomenda-es e
metodologia de Cordn e Herrera[19], conforme o tipode aplicao
utilizada em nosso estudo. Os operadores sele-cionados forammximo
para unio e interseo (envoltriaexterna de todas as variveis
semnticas vlidas), enquanto aimplicao utilizada foi do tipomnimo, a
disjuno (OU) dotipo mximo e conjuno (E), do tipomnimo.
O valor de resposta semntico no tem valor prtico, porisso deve
ser convertido em um valor discreto (numrico),que ser aplicado ao
atuador do controlador. Esse processo chamado de defuzificao. O
mtodo mais usual para aplica-o em controladores o do centro de
gravidade que consisteem calcular o centro de gravidade da figura
obtida atravs dacombinao das funes de pertinncia.
5. OTIMIZAO DO CONTROLADORFUZZY
Com o objetivo de especificar um controlador
eficiente,utilizamos algumas ferramentas de otimizao. Na criaode
regras, usamos o algoritmo Wang-Mendel[20], que, a par-tir do
comportamento desejado, cria um conjunto de regrascoerentes. Para a
otimizao dos parmetros das funes depertinncia, usamos um algoritmo
gentico que descobre amelhor combinao de parmetros para obter o
resultado ide-al.
5.1 VERIFICAO DE REGRAS ATRAVS DOALGORITMO DE WANG-MENDEL
A lgica fuzzy apresenta a vantagem de permitir a repre-sentao de
conceitos ambguos e produzir uma resposta efi-caz mesmo com
entradas duvidosas. Porm, um comporta-mento eficiente requer a
definio de regras coerentes. Paraque isso no dependa inteiramente
do trabalho do projetistado sistema, desejvel a introduo de uma
metodologia paraproduzir funes de pertinncia e regras coerentes e
eficien-tes. Utilizamos o algoritmo Wang-Mendel[20], que, a
partirdo comportamento desejado, cria um conjunto de regras
coe-rentes. Seu funcionamento bsico apresentado no algoritmo1
seguindo a implementao apresentada por Cox[16].
A maior utilidade dessa metodologia verificar a consis-tncia do
conjunto de regras criadas pelo especialista identi-
Algoritmo 1 Algoritmo Wang-MendelEntrada: Base de regras nao
verificadacontador(i) 0 {Inicia contador de posto}contradicao(i) 0
{Marca todas as regras no contradi-trias}Normaliza as regras nao
verificadas na forma IF IS AND IS AND. . . THEN IS .enquantoExiste
regra a ser verificadafaa
seRegra j existe na base de regrasentoRegra no incluida
econtador(i) incrementado
seno seRegra ainda no existe e no contradiz nenhu-ma outra
regraento
Regra adicionada base de regras econtador(i) incrementado
seno seRegra contradiz alguma regra existenteentoRegra includa
na tabela de regras e marcacontradicao(i) = 1 e contador(i)
incrementado.
fim sefim enquantoRegras comcontradicao(i) = 0 sao includas na
base deregras final.Regras comcontradicao(i) = 1 inclue a regra
comcontador(i) maior e descarta a outra.
ficando a ocorrncia de regras contraditrias, que levariam
aresultados errneos.
5.2 SELEO DOS VALORES PARA OTIMI-ZAO DO CONTROLADOR FUZZY
O processo de otimizao por AG necessita de uma fun-o objetivo,
para onde a otimizao deve convergir. A gran-de dificuldade, no
entanto, definir essa funo objetivo[5].No caso do controlador do
escalonador, temos como entradaas variveis peso inicial do
escalonador, retardo na fila EF edescarte na fila BE e, como sada,
o peso do escalonador. Noentanto, a varivel a ser otimizada o
retardo da fila EF, quesomente pode ser avaliada em simulao.
Em vista disso, definimos uma metodologia para obter osvalores
utilizados na otimizao. Durante a simulao com asfunes de pertinncia
arbitradas pelo projetista, armazena-mos todas as combinaes de
parmetros de entrada do con-trolador fuzzy e as mtricas de avaliao
como, por exemplo,o valor de retardo obtido no perodo seguinte e a
taxa de des-carte de cada classe, ou seja, o resultado obtido pela
aplicaode parmetros na simulao.
De posse desses valores, escolhemos todas as combinaesde
parmetros que produzem um retardo baixo, aquelas queproduzem uma
maior reduo no retardo dos pacotes em me-didas consecutivas e
aquelas que produzem uma menor taxade descarte agregado (EF + BE).
Foi necessrio estabelecerum critrio para a ordenao das medidas,
pois elas so inde-pendentes e algumas at contraditrias, como baixo
retardo ebaixo descarte. Ordenamos as medidas individualmente
porordem crescente, para a primeira e terceira mtrica, e
decres-cente, para a segunda mtrica. Calculamos um valor de
posto
7
Marcial Porto Fernandez, Aloysio de Castro P. Pedroza e Jos
Ferreira de RezendeImplementao de Polticas de Gerenciamento com
lgica Fuzzy e Alg. Gentico visando melhor QoS
igual a mdia da posio de cada parmetro, isto , menorretardo
absoluto, maior reduo no retardo e menor descar-te. Como as duas
primeiras medidas esto relacionadas aoretardo, podemos dizer que a
otimizao utilizou uma ponde-rao de 66% para retardo e 33% para
descarte. Assim, esco-lhemos as melhores combinaes de parmetros
para nossoproblema, segundo a ponderao escolhida.
5.3 OTIMIZAO DE CONTROLADOR FUZZYATRAVS DE ALGORITMO GENTICO
O controlador definido com funes de pertinncia arbi-tradas pelo
projetista e com a base de regras verificado peloalgoritmo de
Wang-Mendel, mostrado na seo5.1, garantea definio de um controlador
correto, porm ainda sem ga-rantia de eficincia. Para otimizar o
resultado do controlador,precisamos escolher os melhores parmetros
do controladoratravs da utilizao do algoritmo gentico.
5.4 FUNCIONAMENTO DOS ALGORITMOSGENTICOS
O algoritmo gentico cria inicialmente um conjunto de so-lues, a
partir dos valores arbitrados inicialmente (indivdu-os), para um
determinado problema. Esse conjunto chama-do de populao. O posto de
cada indivduo calculado peloteste da soluo em relao ao valor
desejado. Os indivduoscom posto baixo so substitudos por novos
indivduos cria-dos a partir de indivduos com posto alto. Esse
processo con-tinua at uma soluo ser encontrada ou alguma condio
detrmino seja alcanada (por exemplo, nmero de geraes).O indivduo
com maior posto a soluo encontrada para oproblema.
A partir da tabela com valores de entrada e sada
desejados,escolhidos na seo5.2, o algoritmo gentico cria um
indiv-duo, verifica se o resultado calculado se aproxima do
valordesejado e pontua cada avaliao. A cada gerao,os indiv-duos
mais aptos so selecionados e combinados (atravs decrossover),
obtendo-se um conjunto de parmetros otimizadopara a tabela de
valores desejados. Eventualmente, os par-metros podem convergir
para um bom valor local, mas queno o melhor para o universo. Para
evitar isso, aplica-se oprocesso demutao, incluindo no conjunto de
avaliao umvalor aleatrio totalmente novo, que pode indicar uma
novaregio de otimizao.
Aps uma srie de iteraes, obtemos um conjunto de pa-rmetros
otimizado para o controlador. A grande vantagemdesse procedimento a
otimizao automtica dos parme-tros das funes de pertinncia, sem
depender do critrio doprojetista. No mtodosimples, que tem
funcionamento inter-medirio aos mtodosgeracionaleem regime, a
avaliao depais e filhos so realizadas em paralelo, possibilitando
umamelhor escolha de indivduos. Assim, obtemos uma conver-gncia
rpida para o caso da soluo estar prxima ou distan-te do ponto de
partida.
A vantagem da utilizao de algoritmo gentico para oti-mizao sua
caracterstica de poder ser executado continu-
amente, a partir de medidas de desempenho da rede duranteo
funcionamento normal. Esse procedimento permite o ajus-te dos
parmetros quando ocorrem modificaes na topologiaou no padro de
trfego, durante a operao da rede. A exe-cuo do algoritmo gentico,
no entanto, no provoca quedano desempenho da rede, pois a otimizao
pode ser realizadaem equipamentos dedicados (os roteadores da rede
somenteexecutam o controlador fuzzy). Alm disso, a otimizao
noprecisa ocorrer em perodos muito curtos, pois as mudanasque
poderiam causar alteraes ocorrem na ordem de dias ousemanas.
A codificao do cromossomo usado foi nmero real comquatro casas
decimais, o mecanismo de funcionamento foi omtodo simples, o mtodo
de seleo foi da roleta e o cru-zamento foi do tipo multi-ponto. Os
mecanismos utilizadosnesse trabalho foram detalhados por
Michaelewicz[21].
5.5 PARMETROS DE CONFIGURAO DOALGORITMO GENTICO
A configurao correta dos parmetros do algoritmo ge-ntico , sem
dvida, um dos aspectos mais importantes naestratgia dos AGs. No
existe uma metodologia genrica,uma vez que tais configuraes
dependem da aplicao a serotimizada. importante tambm levar em
considerao ostempos de execuo do problema e os recursos
computacio-nais disponveis.
Os parmetros do algoritmo gentico utilizado na otimi-zao do
controlador fuzzy esto relacionados na tabela1.Foram usados valores
dentro das faixas usuais,conforme co-mentados em seguida, porm com
os ajustes para melhoriada eficincia.
Tabela 1. Parmetros do algoritmo gentico utilizados.Parmetro
Valor
Tamanho da populao 500Taxa de cruzamento 65%
Taxa de mutao 5%Critrio de parada 90% da populao igual
Nmero de geraes 600
Apresentamos a seguir os parmetros mais importantes esua
influncia no desempenho do algoritmo.
5.5.1 TAMANHO DA POPULAO
O tamanho da populaoN afeta o desempenho global ea eficincia dos
algoritmos genticos, j que uma populaopequena fornece uma cobertura
pequena do espao de busca-do problema. Uma grande populao fornece
uma coberturamaior do espao de busca, alm de prevenir
convergnciasprematuras para solues locais. No entanto, para se
traba-lhar com grandes populaes, so necessrios maiores recur-sos
computacionais e tempos muito longos para resoluo deproblemas
simples.
Assim, a escolha correta do tamanho de populao, queproduz
respostas corretas e rpidas, depende do problema e
8
Revista da Sociedade Brasileira de TelecomunicaesVolume 18,
Nmero 2, outubro 2003
da sua formulao. Geralmente, usa-se um tamanho de popu-lao
proporcional ao tamanho do cromossomo, isto , quan-to maior for o
cromossomo maior dever ser o tamanho dapopulao, para manter uma
diversidade razovel. A literatu-ra sugere populaes entre 50 e 100
cromossomos como bomcompromisso cobertura-desempenho[22].
O tamanho da populao utilizada foi de 500 indivduos,que
possibilitou uma melhor cobertura do espao, mas quese mostrou
eficiente em nossa experincia, pela capacidadecomputacional
disponvel.
5.5.2 TAXA DE CRUZAMENTO
A taxa de cruzamentoPC define a probabilidade de ocor-rer um
cruzamento. Quanto maior for essa taxa, mais rapi-damente novas
estruturas sero introduzidas na populao.Porm, estruturas com boas
aptides podero ser substitu-das mais rapidamente, perdendo-se boas
oportunidades paraachar uma soluo tima. Com um valor baixo, o
algoritmopode tornar-se muito lento, demorando a encontrar a
soluoideal. A maior parte da literatura recomenda uma taxa
decruzamento entre 50% e 95%[22].
A taxa de cruzamento utilizada foi de 65%, valor usual quese
mostrou adequado para nossa experincia.
5.5.3 TAXA DE MUTAO
A taxa de mutaoPM define a taxa de ocorrncia de mu-tao. Uma taxa
de mutao baixa diminui a incluso de indi-vduos novos na populao,
provocando o encontro de resul-tados baseados em mximos locais,
pois restringe o espao debusca. Uma taxa muito alta transforma a
busca do algoritmogentico em busca essencialmente aleatria.
Alguns pesquisadores recomendam a escolha da taxa demutao com
base no tamanho do cromossomo e da popula-o. De Jong [23] sugere
uma taxa de mutao inversamenteproporcional ao tamanho da populao. A
maior parte da li-teratura recomenda uma taxa de mutao entre 0,1% e
5%[22].
Utilizamos um valor de taxa de mutao alta (5%), pormdentro da
faixa recomendada. Esse valor se justifica pelo fatode usarmos o
mtodo de seleo da roleta, que pode produ-zir uma baixa diversidade
na populao e no atingir o valormximo global da funo.
5.5.4 NMERO DE GERAES
O nmero de geraes define a quantidade de populaescriadas at a
resposta final. Com um valor baixo, podemosencontrar rapidamente
uma soluo tima local, porm aindalonge da soluo global. Com um valor
alto, temos garantiade encontrar a soluo tima,porm o tempo para
chegarmos resposta pode ser longo, alm de, no caso de
problemassimples, criarmos novas geraes desnecessariamente, mes-mo
aps a soluo tima ter sido encontrada. O valor idealpara este
parmetro depende do problema e da sua formula-o. Em nossa
experincia, estabelecemos um limite relativo
vlido para qualquer problema: encerramos o processamentodo AG
quando 90% da populao for constituda de apenasum indivduo, que a
soluo desejada.
O programa JFS[14] oferece apenas duas formas de encer-rar o
processamento: pelo tempo decorrido ou pela quanti-dade de geraes.
No entanto, para podermos garantir queencontraramos o valor de timo
global, estabelecemos que apopulao contivesse pelo menos 90% de um
mesmo indiv-duo. Assim fomos obrigados a executar uma grande
quanti-dade de geraes e testar se o critrio de fim tinha sido
atingi-do. Em todas as otimizaes realizadas, a quantidade de
600geraes foi suficiente para atingir essa meta.
6. IMPLEMENTAO DO PROTTIPO
A partir da metodologia para construir o controlador
deprovisionamento apresentada na seo anterior, podemosdescrever,
nesta seo, o ambiente de simulao e a imple-mentao do mecanismo de
controle para nosso prottipo. Oobjetivo validar a metodologia
proposta, para definio deum controlador que implemente uma
especificao de polti-cas.
Os experimentos consistiram em realizar diversas simula-es
avaliando a QoS dos fluxos de telefonia IP concorrendocom outros
fluxos no prioritrios. Comparamos os resulta-dos sem a utilizao de
controlador, utilizando um controla-dor convencional e o
controlador proposto.
6.1 AMBIENTE DE SIMULAO
A metodologia utilizada para validao do modelo propos-to foi a
de simulao, com a plataforma do Network Simu-lator (ns), verso
2.1b8[24]. A ferramenta para especificaoe verificao de polticas foi
aPonder Toolkit[11], constitu-da por um editor de polticas e um
compilador da linguagem.Foi utilizada averso 1.0.1 doPonder Policy
Editore a verso0.2.1 doPonder Compiler. O controlador fuzzy foi
desenvol-vido com a ferramenta JFS, de Mortensen[14]. Essa
ferra-menta oferece um ambiente para desenvolvimento do prot-tipo
(especificao das funes de pertinncia, regras de in-ferncia e
defuzificador), alm de permitir verificao inicialdo modelo
especificado. Aps o desenvolvimento do modelo, gerada biblioteca em
cdigo C, que implementa o controla-dor, sendo, ento, integrada ao
simuladorns.
6.2 OTIMIZAO DO CONTROLADOR FUZZY
O controlador definido com funes de pertinncia arbi-tradas pelo
projetista, mostrado na seo4.1, e com a basede regras estabelecido
a partir da base de conhecimento se-mntico e atravs do algoritmo de
Wang-Mendel, mostradona seo5.1, garante a definio de um controlador
corretoporm sem garantia de eficincia. Para otimizar o resultadodo
controlador precisamos escolher os melhores parmetrosdo controlador
atravs da utilizao do algoritmo gentico,detalhado na seo5.3.
9
Marcial Porto Fernandez, Aloysio de Castro P. Pedroza e Jos
Ferreira de RezendeImplementao de Polticas de Gerenciamento com
lgica Fuzzy e Alg. Gentico visando melhor QoS
A grande dificuldade para uso do algoritmo gentico defi-nir a
funo objetivo para otimizao. Em nossa experincia,a definio da funo
objetivo agravado pelo fato de que ovalor a ser otimizado no obtido
diretamente da sada docontrolador. Enquanto o controlador do
escalonador forneceo peso de configurao do escalonador, a varivel
que deveser otimizada o retardo dos pacotes na classe EF,
obtidosapenas aps a simulao.
Sendo assim foi definida uma metodologia para obteros valores da
funo objetivo utilizados na otimizao. Apartir de funes de
pertinncia arbitradas pelo projetis-ta,executamos uma simulao com
esses valores. Os par-metros definidos a priori no so crticos, pois
o algoritmogentico converge para resultado timo a partir de
qualquerponto de partida. Obviamente a convergncia pode ser
maisrpida ou mais lenta de acordo com a escolha dos
parmetrosiniciais.
Durante a simulao armazenamos todas as combinaesde valores de
entrada do controlador fuzzy e o valor de retar-do obtido no perodo
seguinte, isto , o resultado obtido pelaaplicao dos valores de
entrada do controlador. De possedesses valores, podemos escolher as
combinaes de par-metros que produzem um retardo baixo e aquelas que
pro-duzem uma maior reduo no retardo dos pacotes entre duasmedidas
consecutivas. Finalmente, escolhemos as melhorescombinaes de
valores para nosso problema.
Os valores selecionados so utilizados como base de co-nhecimento
para a aplicao do algoritmo gentico, que pro-duzir o melhor
conjunto de parmetros do controlador fuzzypara atingir a otimizao
desejada. Utilizamos como refe-rncia para escolha os 20% melhores
valores de retardo e re-duo do retardo. Fizemos experincia
escolhendo tambm10% e 30% dos melhores valores, porm os resultados
obti-dos foram semelhantes,mostrando que a quantidade de valo-res
escolhida no importante para a otimizao, pelo menospara os
percentuais testados.
Apresentamos na figura5 o grfico da evoluo da apti-do mdia e
aptido mxima ao longo do tempo. Podemosobservar na figura5(a) que a
convergncia do controlador doescalonador bastante rpida, atingindo
valores semelhantesaps 150 geraes. Na figura5(b) notamos que a
conver-gncia um pouco mais lenta, atingindo valores semelhantesaps
500 geraes.
Aps a realizao do procedimento de otimizao obtive-mos como
resultado novas funes de pertinncia para o con-trolador fuzzy.
Apresentamos na figura6 a funo de perti-nncia da varivelretardo na
classe EF, utilizada pelo con-trolador do escalonador. A figura6(a)
mostra a funo depertinncia original, especificada pelo projetista,
onde nota-mos uma distribuio equilibrada dos valores semnticos
aolongo do intervalo de operao. A figura6(b) mostra a fun-o de
pertinncia otimizada, obtida aps a aplicao da oti-mizao atravs de
algoritmo gentico. Podemos notar que ovalor semntico "RB" (Retardo
Baixo) foi reduzido ao mni-mo possvel e que o valor semntico "RM"
(Retardo Mdio)e "RA" (Retardo Alto) sofreram um leve deslocamento
paraaproxim-los ao valor "RB". Deslocar todos os valores se-mnticos
para a esquerda determina que a base de regra exe-cutar mais cedo
aes de aumento da banda de sada do esca-
0.7
0.75
0.8
0.85
0.9
0.95
1
0 100 200 300 400 500 600
Apt
ido
Quantidade de geraes criadas
Evoluo de aptido mxima e mdia do Escalonador
Aptido mximaAptido mdia
(a) Controlador do Escalonador
0
20
40
60
80
100
0 100 200 300 400 500 600
Apt
ido
Quantidade de geraes criadas
Evoluo de aptido mxima e mdia do Condicionador
Aptido mximaAptido mdia
(b) Cntrolador do Condicionador
Figura 5. Evoluo da aptido mxima e mdia
lonador, fazendo que se obtenha um valor de retardo
menor,comparando-se com o controlador original no otimizado.
A grande vantagem do algoritmo gentico o processocontnuo de
otimizao, utilizando valores de vrias simu-laes ou at mesmo de
dados reais de uma rede em funcio-namento. Esse procedimento
permite a atualizao contnuados parmetros de acordo com a mudana de
topologias epadres de trfego, comuns em uma situao real.
6.3 TOPOLOGIA DE SIMULAO
A topologia utilizada para a simulao, apresentada na fi-gura7.
Essa topologia forma um domnio DiffServ com cincons, sendo dois de
ncleo e trs de borda. Podemos notar queexistem dois pontos de
congestionamento, o primeiro entrens de borda e do ncleo e outro
entre dois ns de ncleo.
6.4 MODELO DE TRFEGO DE SIMULAO
A aplicao de Telefonia IP foi implementada com trfegosCBR e
On-Off exponencial, sobre protocolo UDP. O trfegoCBR tem
comportamento determinstico e exige mais banda
10
Revista da Sociedade Brasileira de TelecomunicaesVolume 18,
Nmero 2, outubro 2003
0
0.2
0.4
0.6
0.8
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1Retardo na classe EF
(normalizado)
Retardo na classe EF (entrada)
RB RM RA
(a) Controlador no otimizado
0
0.2
0.4
0.6
0.8
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1Retardo na classe EF
(normalizado)
Retardo na classe EF (entrada)
RB RM RA
(b) Controlador otimizado
Figura 6. Funo de pertinncia de entrada retardo na classeEF
da rede, enquanto o trfego On-Off com distribuio expo-nencial
mais prximo de uma conversao normal. No en-tanto, a taxa mdia das
fontes On-Off sensivelmente menorque no caso CBR, por isso
adicionamos mais fontes de tr-fego On-Off para se obter o
congestionamento desejado. Otrfego de voz foi direcionado para
classe EF[18] e o trfegoconcorrente para classe BE. O trfego
concorrente foi defi-nido como CBR/UDP para provocar uma
concorrncia maissevera com o trfego de voz na classe EF.
A figura 8 mostra a quantidade de fontes de trfego devoz(classe
EF), utilizada durante o perodo de teste de 100segundos. A variao
de trfego serviu para demonstrar ofuncionamento do controlador
nessa situao. Cada fonte devoz CBR foi definida com 64 Kbps, ou
seja, um canal de vozPCM. No caso de fonte On-off, utilizamos uma
taxa de 64Kbps, com tempo de rajada de 400 ms e tempo de silnciode
600 ms,representando uma taxa mdia de 25,6 Kbps. Otamanho do pacote
escolhido foi de 576 bytes, que corres-ponde a 91,7% dos pacotes de
um codificador G.711 (PCM)a 64 Kbps[25].
Enquanto o trfego CBR variou de 40 a 120 fontes, o tr-fego
On-Off variou de 100 a 300 fontes, exatamente porquea taxa mdia do
trfego On-Off aproximadamente 2,5 ve-
FONTE
FONTE
10 MBPS
NCLEO NCLEO BORDA DRENO
10 MBPS10 MBPS
10 MBPS
BORDA
BORDA
BE
BE
EF
EF
BE
BE
EF
EF
Figura 7. Topologia de simulao.
zes menor. Utilizamos 300 fontes BE concorrentes, com taxatambm
de 64 Kbps. O tempo de propagao de cada enlacede 10 Mbps de 5 ms.
Todas as filas tm o tamanho de 50pacotes, representando um retardo
mximo de aproximada-mente 23 ms por n.
6.5 CONTROLADOR CONVENCIONAL
Com o objetivo de validar nossa proposta, e tendo em vistaque os
resultados com a utilizao de qualquer controladorseriam melhores
que a situao sem controlador, definimos,para comparao, um
controlador PD (Proporcional e Deriva-tivo). A idia desse
controlador guardar as ltimas trs me-didas de retardo da classe EF,
ajustar uma reta a esses pontos.A inclinao dessa reta aplicada ao
peso do escalonador,aumentando ou reduzindo conforme a inclinao da
reta.
7. RESULTADOS
Nesta seo mostramos as tabela de percentil de retardo,percentil
da variao do retardo e taxa de descarte em trssituaes: sem a
utilizao de controlador, com controladorconvencional e com o
controlador fuzzy. Todas as simula-es iniciam com alocao de 50% da
banda de sada paracada classe. Para eliminar medidas com a rede sem
trfego,iniciamos as medidas aps 5 segundos do incio da
simula-o.
Os resultados apresentados aqui usaram o intervalo de 1s entre
as amostragens e, conseqentemente, o intervalo deatuao do
controlador. O tamanho do pacote escolhido foide 576 bytes.
Apresentamos, nas sees7.1 e 7.2, uma dis-cusso sobre o
comportamento dos diversos mecanismos decontrole com a variao do
intervalo de operao do contro-lador e do tamanho do pacote.
A primeira medida avaliada o retardo fim-a-fim de paco-tes
pertencentes classe EF, desde a fonte at o destino dotrfego,
mostrada na tabela2. Essa avaliao apresenta o per-centil 50, 90 e
95 para trfegos CBR e On-Off comparando
11
Marcial Porto Fernandez, Aloysio de Castro P. Pedroza e Jos
Ferreira de RezendeImplementao de Polticas de Gerenciamento com
lgica Fuzzy e Alg. Gentico visando melhor QoS
0
20
40
60
80
100
120
140
0 10 20 30 40 50 60 70 80 90 100
Qua
ntid
ade
de fo
ntes
EF
Tempo de simulao (seg)
Quantidade de fontes de trfego CBR na classe EF
(a) Fontes CBR
0
50
100
150
200
250
300
350
0 10 20 30 40 50 60 70 80 90 100
Qua
ntid
ade
de fo
ntes
EF
Tempo de simulao (seg)
Quantidade de fontes de trfego OnOff na classe EF
(b) Fontes On-Off Exponencial
Figura 8. Quantidade de fontes de trfego EF durante a
si-mulao
as situaes sem controlador, com controlador convencionale com
controlador fuzzy. A tabela3 apresenta os valores depercentil 50,
90 e 95 para medidas de variao de retardo pa-ra trfego CBR e On-Off
sem o uso de controlador, usando ocontrolador convencional e o
controlador fuzzy.
Tabela 2. Retardo na classe EF (ms)Trfego Mdio Perc 50 Perc 90
Perc 95
CBR S/Ctrl 43.4 43.0 65.8 75.3CBR Conven. 33.6 30.3 58.8 71.3CBR
Fuzzy 19.3 17.3 34.9 41.1OO S/Ctrl 17.9 16.6 33.2 36.9OO Conven.
14.9 14.7 27.1 32.3OO Fuzzy 5.6 3.7 11.7 12.4
A tabela4 apresenta a taxa de descarte de pacotes (paco-tes
descartados/pacotes transmitidos) para o trfego CBR ea tabela5
mostra a taxa de descarte para o trfego On-Off.Mostramos as taxas
de descarte nas classes EF e BE sem ouso de controlador, usando o
controlador convencional e ocontrolador fuzzy.
Tabela 3. Variao do retardo na classe EF (ms)Trfego Mdio Perc 50
Perc 90 Perc 95
CBR S/Ctrl 1.7 0.4 0.4 7.3CBR Conven. 1.5 0.4 0.4 6.0CBR Fuzzy
1.0 0.4 0.4 0.4OO S/Ctrl 1.2 0.3 3.6 5.7OO Conven. 1.1 0.2 3.3
4.6OO Fuzzy 0.5 0.1 1.3 1.9
Tabela 4. Taxa de descarte com trfego CBRControlador EF BE
Sem Ctrl 0.0198 0.0766Convencional 0.0125 0.0843Fuzzy 0.0068
0.0795
Tabela 5. Taxa de descarte com trfego On-OffControlador EF
BE
Sem Ctrl 0.0379 0.1388Convencional 0.0272 0.1439Fuzzy 0.0027
0.1486
Podemos observar que h uma melhora na QoS e reduono descarte da
classe EF como controlador fuzzy comparados situaes sem controlador
e com controlador convencio-nal. Obviamente, quando se reduz a taxa
de descarte da clas-se EF, provocamos um aumento na taxa da classe
BE, poisa rede est com sua capacidade esgotada. No entanto,
pode-mos observar que o uso do controlador fuzzy diminui a taxade
descarte agregada, isto , a soma das taxas das classes EFe BE menor
que as demais taxas agregadas, produzindo ummelhor desempenho
global.
7.1 AVALIAO DO INTERVALO DE OPERA-O DO CONTROLADOR
O primeiro parmetro avaliado foi o intervalo de operaodo
controlador que mostrado na figura9. A figura9(a) mos-tra a avaliao
do retardo na classe EF para trfego CBR e afigura 9(b) mostra o
retardo para trfego On-Off. Medimoso resultado de percentil 90 do
retardo variando o intervalo deoperao do controlador em 0,1 s, 0,5
s, 1 s, 2 s, 5 s e 10s. Utilizamos o tamanho de pacote 576 bytes.
Para efeito decomparao, indicamos com uma linha contnua o
percentil90 do retardo da situao sem controlador.
Podemos observar que a resposta do controlador fuzzy melhor para
qualquer intervalo de operao, sendo pratica-mente constante para
intervalos at 2 segundos e aproxima-damente linear para intervalos
a partir de 5 s. Esse comporta-mento justificado pela variao do
perfil do trfego a cada10 segundos (vide figura8). Somente a partir
desse intervalo(10 s), podemos notar uma degradao na resposta do
contro-lador fuzzy.
Podemos tambm notar que a diferena do retardo do tr-fego On-Off
obtido pelo controlador fuzzy, comparado como caso sem controlador,
maior do que no caso com trfego
12
Revista da Sociedade Brasileira de TelecomunicaesVolume 18,
Nmero 2, outubro 2003
20
30
40
50
60
70
80
0.1 0.2 0.5 1 2 5 10
Per
cent
il 90
do
reta
rdo
(mse
g)
Intervalo de operao do controlador (seg)
Avaliao intervalo do controlador com trfego CBR
Sem CtrlCtrl ConvCtrl Fuzzy
(a) Trfego CBR
5
10
15
20
25
30
35
40
45
0.1 0.2 0.5 1 2 5 10
Per
cent
il 90
do
reta
rdo
(mse
g)
Intervalo de operao do controlador (seg)
Avaliao intervalo do controlador com trfego OnOff
Sem CtrlCtrl ConvCtrl Fuzzy
(b) Trfego On-Off
Figura 9. Avaliao do intervalo de atuao do controlador
CBR,mostrando a maior eficincia do controlador fuzzy pa-ra
tratar trfego On-Off. O critrio para a escolha do valor1 segundos
para intervalo de operao do controlador foi oequilbrio entre
resultado da QoS obtida e a sobrecarga com-putacional para ambos os
controladores.
Outra concluso desses resultados a demonstrao queo controlador
fuzzy implementa um controle mais eficienteque o convencional.
Mesmo reconhecendo a maior necessi-dade de recursos computacionais
exigidos pelo controladorfuzzy, ele pode ser aplicado em intervalos
maiores do que ocontrolador convencional. Assim, podemos indicar,
pelo me-nos,um equilbrio na necessidade de recursos
computacionaisem ambos os controladores.
7.2 AVALIAO DA VARIAO DO TAMA-NHO DO PACOTE IP
O segundo parmetro avaliado foi o tamanho do pacote,mostrado na
figura10. Variamos o tamanho do pacote desde100 bytes,
correspondente ao trfego produzido por um codi-ficador H.323, at
576 bytes, correspondente ao trfego pro-duzido por um codificador
G.711. Os valores medidos foramo percentil 90 do retardo para
pacotes com 100, 300 e 576
bytes. O tempo de operao do controlador foi de 1 segundo.Na
avaliao com trfego CBR, mostrada na figura10(a),
podemos notar que com pacotes pequenos (100 bytes) os re-tardos
esto prximos, apesar do controlador fuzzy j mos-trar uma pequena
superioridade. A justificativa para o retar-do ser baixo com
pacotes pequenos em qualquer controlador o melhor intercalamento
dos pacotes no escalonador. Como aumento do tamanho dos pacotes o
retardo aumenta qua-se linearmente. Para qualquer tamanho de pacote
avaliado, opercentil 90 do retardo obtido com controlador fuzzy
semprefoi inferior aos retardos obtidos pelo controlador
convencio-nal e no caso sem controlador, nesta ordem.
0
20
40
60
80
100 200 300 400 500 600
Per
cent
il 90
do
reta
rdo
(mse
g)
Tamanho do Pacote (bytes)
Avaliao tamanho do pacote
Sem CtrlCtrl ConvCtrl Fuzzy
(a) Trfego CBR
0
5
10
15
20
25
30
35
40
100 200 300 400 500 600
Per
cent
il 90
do
reta
rdo
(mse
g)
Tamanho do Pacote (bytes)
Avaliao tamanho do pacote
Sem CtrlCtrl ConvCtrl Fuzzy
(b) Trfego On-Off
Figura 10. Avaliao da influncia do tamanho dos pacotes
Na avaliao com trfego On-Off, mostrada na figura10(b), podemos
notar que o retardo obtido com o controladorfuzzy foi sempre
inferior aos retardos obtidos com contro-lador convencional e sem
controlador. Observamos tambmque o retardo,nesses dois ltimos
casos, semelhante parapacotes pequenos, devido ao melhor
intercalamento dos pa-cotes, conforme explicado anteriormente. Com
pacotes mai-ores que 300 bytes, os retardos com controlador
convencionalso inferiores aos obtidos sem controlador.
Notamos tambm que a diferena do retardo com trfegoOn-Off obtido
pelo controlador fuzzy comparado com o con-trolador convencional e
sem controlador, maior que no caso
13
Marcial Porto Fernandez, Aloysio de Castro P. Pedroza e Jos
Ferreira de RezendeImplementao de Polticas de Gerenciamento com
lgica Fuzzy e Alg. Gentico visando melhor QoS
com trfego CBR, mais uma vez mostrando a melhor efici-ncia do
controlador fuzzy para tratar trfego On-Off. Final-mente, conclumos
que o resultado obtido com o controladorfuzzy melhor que o
controlador convencional e sem contro-lador para qualquer tamanho
de pacote.
8. CONCLUSO E TRABALHOS FUTU-ROS
Apresentamos nesse trabalho, uma arquitetura de sistemade
gerenciamento para manter a QoS em uma arquiteturaDiffServ. Foi
proposta, tambm, uma metodologia para re-alizar o mapeamento de
polticas de gerenciamento em pa-rmetros de controlador fuzzy. Esse
controlador implementaum mecanismo de provisionamento dinmico, que
coordena-das pelo sistema de gerenciamento, melhora a QoS no
mbitodo domnio.
O gerenciamento baseado em polticas permite que o con-trolador
seja genrico, podendo definir o comportamento dosistema de acordo
com as decises administrativas do opera-dor de rede do domnio. Alm
disso, o comportamento podeser facilmente alterado em todo o
domnio, durante o fun-cionamento normal do sistema. A proposta de
mapeamentode polticasPonderem parmetros de controlador fuzzy
de-monstra a capacidade da lgica fuzzy de representar requisi-tos
de QoS abstratos.
As simulaes realizadas para validar o modelo utilizaramexemplo
com classes EF e BE. Apesar de conceitualmentesimples, as avaliaes
de retardo e variao de retardo sodificultadas pela impreciso e
incerteza do trfego que entrano domnio[26]. Os resultados obtidos
atravs de simulaodemonstram a viabilidade da proposta, pela sensvel
melho-ria nas medidas da qualidade de servio, comparadas quelasdas
situaes sem controlador ou com um controlador con-vencional.
Foram realizadas simulaes variando-se o intervalo deoperao do
controlador e o tamanho dos pacotes transmi-tidos. Quando variamos
o intervalo de operao do contro-lador mostramos que, com intervalo
pequeno, o resultado docontrolador fuzzy apenas um pouco melhor que
o do con-trolador convencional, tornando-se mais significativo em
in-tervalos maiores. O controlador fuzzy mostrou-se mais efici-ente
que o convencional para qualquer intervalo de operao.Outra observao
importante o intervalo ideal que propor-cional ao tempo mdio das
conexes dos fluxos que cruzamo domnio. Comparando os resultados de
trfego CBR e On-Off notamos que o controlador fuzzy apresenta-se
mais efi-ciente com trfego On-Off, ou seja, trfegos encontrados
emuma rede real.
Quando variamos o tamanho do pacote, observamos que,com pacotes
pequenos, as medidas de QoS so semelhantespara todas as situaes.
Esse fato, j conhecido nas redesATM, demonstra que reduzir os
tamanhos dos pacotes umamedida eficaz para melhorar a QoS. Como
aumento do tama-nho do pacote, observamos uma degradao na QoS em
todasas situaes, porm o controlador fuzzy continua apresentan-do o
melhor resultado. Novamente podemos observar queo controlador fuzzy
produz um melhor resultado comparati-
vo quando trata trfego On-Off em relao ao trfego CBR,confirmando
sua melhor eficincia para tratar trfegos reais.
Finalmente, podemos concluir que mecanismos de provi-sionamento
dinmico apresentam vantagens em manter QoS,quando ocorre variaes
normais nos fluxos de trfego. Aatitude usual de
super-provisionamento possibilita a manu-teno da qualidade, porm o
custo para manter essa infra-estrutura extra alto. Mostramos tambm
que a lgica fuzzyfoi adequada para tratar trfegos com alta variao,
comunsnas situaes reais. A arquitetura proposta permitiu a
cons-truo de um sistema escalvel e eficiente. A utilizao
degerenciamento baseado em polticas facilitou a especificaodos
requisitos de QoS desejados.
Como continuao do trabalho, poder ser definido umcontrolador que
inclua suporte a outras classes DiffServ, co-mo AF (Assured
Forwarding). Essa classe segue filosofia di-ferente, devendo o
controlador tratar variveis distintas dasconsideradas neste
trabalho. Assim, teremos um controla-dor completo, com capacidade
de ajustar dinamicamente osparmetros de todas as classes DiffServ,
de acordo com asvariaes do trfego e polticas especificadas.
Outro desafio o tratamento de redes mveis. Como previsto que
qualquer infra-estrutura de redes em um futuroprximo tenha
segmentos mveis e areos, seria interessanteavaliara aplicao da
metodologia aqui proposta nesse caso.O tratamento de QoS em
ambiente mvel ainda um proble-ma em aberto.
Outro trabalho futuro deve ser a avaliao de desempenho,tanto nos
equipamentos de rede como no gerenciador cen-tral. Como todas as
avaliaes foram realizadas em simula-o, no foi possvel avaliar o
impacto dos novos mecanismosadicionados rede.
AGRADECIMENTOS
Esse trabalho foi realizado com recursos da UFRJ, CNPq,CAPES e
FAPERJ.
REFERNCIAS
[1] S. Blake, D. Black e M. Carlson, An architecture for
differen-tiated services. RFC 2475, dezembro de 1998.
[2] M. P. Fernandez, A. de Castro P. Pedroza e J. F. de
Rezen-de, Quality of service in a DiffServ domain using
policy-based management, inXVII International Teletraffic Con-gress
(ITC17), Salvador, Brazil, dezembro de 2001.
[3] M. P. Fernandez, A. de Castro P. Pedroza e J. F. de
Rezen-de, QoS provisioning across a DiffServ domain using
policy-based management, in(Globecom 2001), San Antonio,
USA,novembro de 2001.
[4] C. C. Lee, Fuzzy Logic in control systems: Fuzzy logic
con-troller, Part II, IEEE Transactions on Systems, Man, and
Cy-bernetics, vol. 20, no. 2, pp. 419435, maro de 1990.
[5] F. Herrera, M. Lozano e J. Verdegay, Tuning fuzzy logic
con-trollers by genetic algorithms,International Journal of
Ap-proximate Reasoning, vol. 12, no. 3, pp. 299315, junho
de1995.
[6] J. Velasco e L. Magdalena, Genetic algorithms in fuzzy
con-trol systems, inGenetic Algorithms in Engineering and Com-puter
Science(G. Winter, J. Periaux, M. Galan e P. Cuesta,eds.), pp.
141165, John Wiley & Sons, 1995.
14
Revista da Sociedade Brasileira de TelecomunicaesVolume 18,
Nmero 2, outubro 2003
[7] M. Sloman, Policy driven management for distributed
sys-tems, Journal of Networking and Systems Management,vol. 2, no.
4, no. 4, pp. 333360, 1994. Plenum Press.
[8] DMTF, Common Information Model (CIM) specificati-on -
version 2.2. Distributed Management Task
Force.http://www.dtmf.org/spec/cims.html, junho de 1999.
[9] B. Moore, J. Strassner e E. Elleson, Policy core
informa-tion model. Internet Draft
draft-ietf-policy-core-info-model-08.txt, outubro de 2000.
[10] E. Lupu e M. Sloman, Conflicts in policy-based
distributedsystems management,IEEE Transactions on Software
Engi-neering, Special Issue on Inconsistency Management, vol.
25,no. 6, no. 6, pp. 852869, 1999. IEEE.
[11] N. Damianou, N. Dulay, E. Lupu e M. Sloman,Ponder Policy
Specification Language.
http://www-dse.doc.ic.ac.uk/policies/ponder.shtml.
[12] N. Damianou, N. Dulay, E. Lupu e M. Sloman, The
Ponderpolicy specification language, inPolicy 2001: Workshop
onPolicies for Distributed Systems and Networks, Bristol, UK,pp.
1839, janeiro de 2001.
[13] E. Lupu e M. Sloman, Towards a role based framework
fordistributed systems management,Journal of Network andSystems
Management, vol. 5, no. 1, pp. 530, janeiro de 1997.Plenum Press
Publishing.
[14] J. E. Mortensen, JFS Fuzzy System.http://www.inet.uni2.dk/
jemor/jfs.htm, 1998.
[15] L. A. Zadeh, Fuzzy sets,Information and Control, vol. 8,pp.
338353, 1965.
[16] E. Cox,Fuzzy logic for business and industry. Charles
RiverMedia, outubro de 1995.
[17] O. Cordn, F. Herrera e A. Peregrn, A practical study onthe
implementation of fuzzy logic controllers,The Internati-onal
Journal of Intelligent Control and Systems, vol. 3, no. 3,pp. 4991,
junho de 1999.
[18] V. Jacobson, K. Nichols e K. Poduri, An expedited
forwardingPHB. RFC 2598, junho de 1999.
[19] O. Cordn, F. Herrera e A. Peregrn, Looking for the best
de-fuzzification method features for each implication operator
todesign accurate fuzzy models, tech. rep., University of Gra-nada,
abril de 1999. Technical Report DECSAI-99108, Dept.of Computer
Science and A.I., University of Granada.
[20] L. X. Wang e J. Mendel, Generating fuzzy rules by
learningfrom examples,IEEE Transactions on Systems, Man, and
Cy-bernetics, vol. 22, no. 2, pp. 14141427, julho de 1992.
[21] Z. Michaelewicz,Genetic algorithms + data structure =
evo-lution programs. Springer-Verlag, maro de 1996.
[22] M. Mitchell, An Introduction to Genetic Algorithms.
MITPress, maro de 1996.
[23] K. De Jong,An Analysis of the Behavior of a class of
GeneticAdaptive System. Tese de Doutorado, University of
Michigan,1975.
[24] S. McCanne e S. Floyd, ns Network Simulator - Version
2.http://www.isi.edu/nsnam/ns/, 1998.
[25] H. Hsiung, M. J. Fischer, D. M. Masi, D. Cuffie e S.
Scheurich,An approach to IP telephony performance measurement
andmodeling in government environments, in9th Annual Confe-rence of
the Internet Society, INET99, San Jose, USA, julhode 1999.
[26] D. Lorenz e G. Orda, QoS routing in networks with
uncertainparameters, inIEEE Infocom 98, 1998.
Marcial Porto Fernandez graduado em Engenharia Eletrnicapela
Universidade Federal do Rio de Janeiro (UFRJ) em 1988, re-cebeu o
ttulo de mestre e doutor em Engenharia Eltrica no Gru-po de
Teleinformtica e Automao (GTA) na COPPE/UFRJ em
1998 e 2002, respectivamente. Atualmente pesquisador do
Insti-tuto de Computao da Universidade Federal Fluminense,
Niteri.Suas reas de interesse so Gerenciamento de Redes e Qualidade
deServio na Internet.
Aloysio de Castro P. Pedroza graduado em Engenharia Eletr-nica
pela Universidade Federal do Rio de Janeiro (UFRJ) em 1975,recebeu
ttulo de mestre em Engenharia Eltrica na COPPE/UFRJem 1980 e doutor
em Engenharia Eltrica e Cincia da Computaopela Universite
Paul-Sabatier/LAAS, Frana, em 1985. Atualmente professor adjunto da
UFRJ, Rio de Janeiro. Suas reas de interes-se so linguagens de
especificao, verificao e implementao desoftware e hardware de
sistemas distribudos.
Jos Ferreira de Rezenderecebeu o diploma de Engenheiro
Eletr-nico e o ttulo de Mestre em Engenharia Eltrica pela
UniversidadeFederal do Rio de Janeiro (UFRJ) em 1988 e 1992,
respectivamente,e o ttulo de Dr. em Cincia da Computao pela
Universit Pierreet Marie-Curie (Paris 6), em 1997. Desde 1998 ele
professor ad-junto do Programa de Engenharia Eltrica da COPPE/UFRJ.
Suasatividades de pesquisa concentram-se nas seguintes reas:
aplica-es multimdia distribudas, comunicao de grupo, redes de
altavelocidade, redes mveis e QoS na Internet.
15
IntroduoSistema de provisionamento dinmico de
recursosArquitetura do sistema de provisionamento
dinmicoMetodologia para construo do controlador de
provisionamento
Implementao de polticas de gerenciamentoLinguagem de especificao
de polticas: PonderEspecificao das polticas de QoSMapeamento de
especificao de polticas em parmetros de controlador
fuzzyRepresentao do comando PD1T1ptmptmmmnnconstraint e
PD1T1ptmptmmmnnauthRepresentao do comando
PD1T1ptmptmmmnneventRepresentao do comando PD1T1ptmptmmmnnoblig
Construo do controlador fuzzyFunes de PertinnciaControlador do
EscalonadorControlador do Condicionador
Base de Regras
Otimizao do Controlador FuzzyVerificao de regras atravs do
algoritmo de Wang-MendelSeleo dos valores para otimizao do
controlador fuzzyOtimizao de controlador fuzzy atravs de algoritmo
genticoFuncionamento dos algoritmos genticosParmetros de configurao
do algoritmo genticoTamanho da populaoTaxa de cruzamentoTaxa de
mutaoNmero de geraes
Implementao do ProttipoAmbiente de SimulaoOtimizao do
Controlador FuzzyTopologia de simulaoModelo de trfego de
simulaoControlador convencional
ResultadosAvaliao do intervalo de operao do controladorAvaliao
da variao do tamanho do pacote IP
Concluso e Trabalhos Futuros








![Busca em Profundidade Para encontrar um caminho de solução Sol, de um dado nó para algum nó objetivo Se N é um nó objetivo, então Sol=[N] Se há um nó N1](https://img.document.onl/doc/110x75/552fc105497959413d8c06e9/busca-em-profundidade-para-encontrar-um-caminho-de-solucao-sol-de-um-dado-no-para-algum-no-objetivo-se-n-e-um-no-objetivo-entao-soln-se-ha-um-no-n1.jpg)