Embed Size (px)
Citation preview

Indice
Indice 1
A. Anexos 3
A.1. Dispositivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
A.1.1. Controladores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
A.1.2. sensores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
A.2. Construccion de la dinamica de primer orden para el sistema de temperatura . . 6
A.2.1. Descripcion y configuracion de los componentes . . . . . . . . . . . . . . 7
A.2.2. Procedimiento de la practica . . . . . . . . . . . . . . . . . . . . . . . . . 10
A.2.3. Toma de datos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
A.3. Construccion de la dinamica de primer orden para el sistema de nivel . . . . . . 13
A.3.1. Descripcion y configuracion de los componentes . . . . . . . . . . . . . . 13
A.3.2. Procedimiento de la practica . . . . . . . . . . . . . . . . . . . . . . . . . 17
A.3.3. Toma de datos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
A.4. Implementacion de estrategias de control ON-Off y PID para el sistema de
temperatura, utilizando el dispositivo controlador Maxthermo MC5438-201000. . 21
A.4.1. Descripcion y configuracion de los componentes . . . . . . . . . . . . . . 21
A.4.2. Procedimiento de la practica . . . . . . . . . . . . . . . . . . . . . . . . . 24
1

A.4.3. Toma de datos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
A.5. Implementacion de estrategias de control ON-Off y PID para el sistema de nivel,
utilizando el dispositivo controlador Maxthermo MC5438-301000 . . . . . . . . . 26
A.5.1. Descripcion y configuracion de los componentes . . . . . . . . . . . . . . 26
A.5.2. Controlador de flujo/nivel y presion MC 5438 - 301 000 . . . . . . . . . . 26
A.5.3. Procedimiento de la practica . . . . . . . . . . . . . . . . . . . . . . . . . 30
A.5.4. Toma de datos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
A.6. Implementacion de control ON-Off con banda para el sistema de temperatura,
utilizando el PLC Twido de Sneyder Electric TWD LCDE 40DRF . . . . . . . . 32
A.6.1. Descripcion y configuracion de los componentes . . . . . . . . . . . . . . 33
A.6.2. Procedimiento de la practica . . . . . . . . . . . . . . . . . . . . . . . . . 36
A.6.3. Toma de datos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
A.7. Adquisicion con matlab y DAQ 6008 . . . . . . . . . . . . . . . . . . . . . . . . 37
A.7.1. Adquisicion de temperatura con matlab y DAQ 6008 . . . . . . . . . . . 39
A.7.2. Adquisicion de nivel con matlab y DAQ 6008 . . . . . . . . . . . . . . . 42
Referencias 45
2

A. Anexos
A.1. Dispositivos
Antes de empezar a esbozar las practicas se hace necesario el reconocimiento de los dispositivos
y modos de conexion que se van a usar durante el desarrollo de las practicas, teniendo en cuenta
que solo se enmarcaran aspectos especıficos; para mayor informacion revisar hojas de datos.
A.1.1. Controladores
Para varias practicas se utilizara un dispositivo controlador Maxthermo el cual se puede ver en
la figura1 donde se especifica los diferentes ıtems que se pueden observar en el display.
Figura 1: Display del controlador Maxthermo
A continuacion se adjunta una tabla basica del modo de operacion del teclado del dispositivo
controlador Maxthermo.
3

Figura 2: Operacion del teclado Maxthermo
A.1.2. sensores
En esta seccion basicamente se mostraran y explicaran los modos de conexion de los diferentes
sensores utilizados.
Sensor ultrasonido U-GAGE Serie T30
La figura 3 presenta los indicadores y mandos utilizados para la configuracion del sensor.
Figura 3: Configuracion sensor ultrasonico
4

La figura 4 presenta el diagrama de conexion completo del U-GAGE Serie T30, para nuestras
necesidades solo se utilizaron el puerto de entrada azul, cafe y blanco.
(Azul)
(Cafe)
(Blanco)
(Negro)
(Gris)
Figura 4: Conexion sensor ultrasonico
Sitrans TH100
Es el dispositivo utilizado para convertir los valores de la resistencia obtenidos por la PT100,
en un lazo de corriente de 4 a 20mA, el cual sera la entrada al dispositivo controlador.
Figura 5: Dispositivo Sitrans TH100
En la figura 6 se presenta el diagrama de conexiones del dispositivo convertidor extraıdas de la
hoja de datos.
5

Figura 6: Conexion de alimentacion a Pt100
Por ultimo la figura 7 presenta el modo correcto de conexion entre la alimentacion, el sitrans
TH100 y el controlador.
+ - +- + -Entrada de Coriente
dispositivo controladorU auxSitrans
Fuente Alimentacion
24V
Figura 7: Conexion entre alimentacion, sitrans TH100 y controlador
A.2. Construccion de la dinamica de primer orden para el sistema
de temperatura
Se debe tener en cuenta que a la hora de representar un sistema se tienen diferentes tipos de
modelos, Para esta practica se realizara el modelado de primer orden, por identificacion del
sistema, es decir, a traves de datos tomados directamente de la planta.
Para un sistema de calefaccion de lıquido, se tienen algunos parametros que son fundamentales
6

a la hora de construir la dinamica como lo son, la cantidad de agua que se desea utilizar y la
potencia del calefactor.
En el proceso a desarrollar, primero se debe llevar el tanque a una altura deseada, se recomienda
15cm de altura y se lleva la variable de control, para este caso la temperatura desde un punto
estable inicial (tempera ambiente alrededor de 23oC) hasta un punto de saturacion; este punto
esta dado por la naturaleza del sistema que se desea controlar (95oC) que es la temperatura de
ebullicion del agua a la altura sobre el nivel del mar de la ciudad donde nos encontramos.
Este cambio de temperatura se realiza aplicando un escalon unitario, osea excitando la planta
al 100 % de su capacidad, es decir, conectando la resistencia calefactora a 208V el tiempo que
sea requerido para alcanzar la saturacion de la planta.
A.2.1. Descripcion y configuracion de los componentes
El banco de entrenamiento esta equipado con un dispositivo controlador que pueden ser
manipulado y programado manualmente, con el cual podemos visualizar la temperatura del
sistema.
La entrada al controlador sera una senal de 4 a 20mA, la cual proviene de un sitrans TH100,
donde 4mA traduce 0 oC y 20mA traduce 100 oC; para configurar esto en el Maxthermo, se
debe ingresar manualmente a la configuracion Input, donde se cargaran los siguientes datos.
Para seleccionar la funcion Input, se presiona 3 segundos funtion y set key (F/S) y se mueve con
el botone shift key hasta encontrar Input y se presiona de nuevo funtion y set key para ingresar
a la configuracion de los parametros de la entrada.
Input 1 selection (inP1) = lin (seleccionamos de la tabla 4 del documento del controlador
maxthermo el tipo de senal que vamos a obtener, para este caso temperatura, elegimos
tipo lineal)
Setting limit (LoSP) = 0 (este lımite debe ser menor o igual al lımite inferior de nuestra
7

planta)
High setting limit (HiSP) = 100 (este lımite debe ser mayor o igual al lımite superior de
nuestra planta)
Analog input range low (LoAn) = 0 (este valor debe ser el equivalente de temperatura
mınimo que corresponde al valor mınimo del lazo de corriente de la senal de entrada
analogica)
Analog input range high (HiAn) = 100 (este valor debe ser el equivalente de temperatura
maxima que corresponde al valor maximo del lazo de corriente de la senal de entrada
analogica)
Analog input scale low (A1LS) = 3601 (por defecto)
Analog input scale high (A1HS) = A18E (por defecto)
Unit selection (unit) = (se trabaja en grados Celsius)
Decimal point (dp) = (se trabaja con dos puntos decimales)
Digital filter (FiLt) = 0.6 (por defecto)
Input 2 selecction (inP2) = non (por defecto)
Para la obtencion del modelo del sistema se debe configurar del controlador (Cntl) el parametro
Ouput 1 proportional band (P1) = 0, lo cual se hace de la siguiente forma.
Para seleccionar la funcion Cntl, se presiona 3 segundos funtion y set key (F/S) y se mueve con
el botone shift key hasta encontrar Cntl y se presiona de nuevo funtion y set key para ingresar
a la configuracion de los parametros del controlador.
Ouput 1 proportional band (P1) = 0
8

Ouput 1 cicle time (Ct1) = 1 (es el periodo en segundos del pwm y se ingresa como 0 para
salida de corriente de 4 a 20mA o 1 para salidas de pulsos de tension (SSR) equivalente
un periodo de 1 segundo)
At offset (AtoF) = 0 (por defecto)
Anti-reset windup (Ar) = 100 (por defecto)
Calefactor resistivo y rele de estado solido SSR
Para elevar la temperatura del lıquido contenido en tanque de control, se cuenta con una
resistencia calefactora la cual es alimentada a 208 voltios; debido a que el voltaje y la corriente
consumidos son un poco elevados ,este dispositivo se debe manipular a traves de un rele de
estado solido o SSR (solid-state relays) este dispositivo usa transistores y tiristores o triac en
sustitucion de contactos metalicos, para controlar elevadas cargas de potencia a partir de las
senales entregadas por el controlador que son de bajo voltaje e intensidad.
Sensor Pt100 y Sitrans TH100
El sistema cuenta con un sensor Pt100 de temperatura que consiste en un alambre de Platino
que a 0 C tiene 100 ohm y que al aumentar la temperatura varia su resistencia electrica; el
sensor es adecuado a traves de un convertidor de senal Sitrans TH100.Este dispositivo tiene la
capacidad de trasformar el valor de resistencia en un equivalente de corriente continua de 4 a
20mA independiente de la carga a traves de convertidor digital-analogico para posterior mente
ser enviados al dispositivo controlador maxthermo [1].
Para realizar la vinculacion del sensor resistivo y el convertidor de senal Sitrans TH100, se realizo
una conexion de la Pt100 a 2 hilos; al convertidor se le asigna una fuente de alimentacion externa;
esta senal es trasformada en corriente continua y a su vez enviada al dispositivo controlador.
9

A.2.2. Procedimiento de la practica
Se llena el tanque al nivel deseado, se recomienda alrededor de 15cm visualizados en la
columna de lıquido, para realizar esto se debe cerrar la llave que se encuentra debajo
del tanque de control; posteriormente se abre la llave de paso que lleva el lıquido desde
la motobomba hasta el tanque y se enciende la motobomba activando el breaker A y la
resietecia calefactora con el breaker c. Cuando se alcanza el nivel deseado se apaga la
motobomba para frenar el llenado.
Para finalizar la configuracion se debe establecer el setpoint (SV es la parte amarilla del
display Maxthermo) en un valor de por encima de 100oC, para que el sistema nunca supere
este y llegue a condicion de control sino que siempre actue a carga maxima, se presiona
el boton Shift key para encontrar la variable deseada (SV) y con los botones Down key y
Up key se ingresa el valor a controlar.
Para empezar el proceso se conecta el breaker que alimenta el SSR y se inicia la toma de
datos tomando este valor como el tiempo cero.
A.2.3. Toma de datos
Para la toma de datos se establece un plano cartesiano de dos dimensiones, donde x es el tiempo
y Y la magnitud de la variable de proceso (PV).
Estos datos se pueden tomar como una lista del tiempo y la variable del proceso (PV) hasta
que el sistema de temperatura llegue a su punto de estabilizacion.
Si se desean tomar los datos utilizando la DAQ enlazada con el algoritmo en matlab remitirse
al anexo DAQ con matlab.
Con valores de los datos obtenidos se calcula el delta de temperatura.
∆T = Tf − Ti
10

Posteriormente se debe calcular el 63,2 % del mencionado delta, este es el valor de temperatura
al cual se tiene el primer tao.
T = ∆T ∗ 0, 632 + 23
Con este valor se obtiene graficamente el tiempo del primer tao, de forma similar al que se toma
en la grafica b de la figura 8.
τ= tiempo en (s)
Entrada
Tiempo
u(t)
20%
40%
60%
80%
100%
=63,2% τ =86% τ2 =98% τ4
ba
Figura 8: Respuesta tıpica de un sistema de primer orden ante una entrada de escalon unitario
u (t)
Con estos valores obtenidos del tiempo del tao y el delta de temperatura, se debe construir en
simulink la funcion de transferencia de primer orden como se observa en la figura 9, que debe
tener caracterısticas similares a la grafica roja de la figura 10 donde se observa el modelo para
una cantidad de lıquido diferente.
11

Step Transfer Fcn
23
Constant1
Scope3
ΔTemp s +1
τ
τ
Figura 9: Implementacion del sistema de temperatura en Simulink
Figura 10: Dinamica del sistema de temperatura real y calculada
En la figura 10 se consignan los datos medidos sobre la planta de temperatura en color azul,
comparandose con los datos en color rojos obtenidos de respuesta del sistema implementado en
simulink.
12

A.3. Construccion de la dinamica de primer orden para el sistema
de nivel
Se debe tener en cuenta que a la hora de representar un sistema se tienen diferentes tipos de
modelos, Para esta practica se realizara el modelado de primer orden, por identificacion del
sistema, es decir, a traves de datos tomados directamente de la planta.
En un sistema de nivel de lıquido para garantizar que el modelo sea de primer orden se debe
abrir la valvula de salida totalmente de otra manera la planta se comporta como un sistema
integrador que solo almacena lıquido.
Al igual que el sistema calefactor, este tambien tiene algunos parametros que son fundamentales
a la hora de establecer la dinamica del sistema, por un lado, se debe tener en cuenta el flujo
de entrada, que depende del diametro del ducto y de la presion de entrada del lıquido, para
nuestro caso se asume una entrada invariante con el tiempo, por otro lado, se tiene el flujo de
salida, el cual aumentara proporcionalmente con la raız cuadrada de la altura de la columna de
lıquido. De este modo el sistema se estabilizara en el momento que le flujo de salida sea igual
al flujo de entrada.
A.3.1. Descripcion y configuracion de los componentes
El banco de entrenamiento esta equipado con un dispositivo controlador que pueden ser
manipulado y programado manualmente, con el cual podemos visualizar el nivel del sistema.
La entrada al controlador sera una senal de 4 a 20mA, la cual proviene del sensor ultrasonico
U-GAGE T30, donde 4mA traducen el nivel mınimo 5cm y 20mA traduce el nivel maximo 50cm
; para configurar esto en el Maxthermo, se debe ingresar manualmente a la configuracion Input,
donde se cargaran los siguientes datos.
Para seleccionar la funcion Input, se presiona 3 segundos funtion y set key (F/S) y se mueve con
el botone shift key hasta encontrar Input y se presiona de nuevo funtion y set key para ingresar
13

a la configuracion de los parametros de la entrada.
Input 1 selection (inP1) = lin (seleccionamos de la tabla 4 del documento del controlador
maxthermo el tipo de senal que vamos a obtener, para este caso temperatura, elegimos
tipo lineal)
Setting limit (LoSP) = 0 (este lımite debe ser menor o igual al lımite inferior de nuestra
planta)
High setting limit (HiSP) = 100 (este lımite debe ser mayor o igual al lımite superior de
nuestra planta)
Analog input range low (LoAn) = 5 (este valor debe ser el equivalente de nivel mınimo
que corresponde al valor mınimo del lazo de corriente de la senal de entrada analogica)
Analog input range high (HiAn) = 50 (este valor debe ser el equivalente de nivel maxima
que corresponde al valor maximo del lazo de corriente de la senal de entrada analogica)
Analog input scale low (A1LS) = 3601 (por defecto)
Analog input scale high (A1HS) = A18E (por defecto)
Unit selection (unit) = (se trabaja sin unidades)
Decimal point (dp) = (se trabaja con dos puntos decimales)
Digital filter (FiLt) = 0.6 (por defecto)
Input 2 selecction (inP2) = non (por defecto)
Para la obtencion del modelo del sistema se debe configurar del controlador (Cntl) el parametro
Ouput 1 proportional band (P1) = 0, lo cual se hace de la siguiente forma.
Para seleccionar la funcion (Cntl) se presiona 3 segundos funtion y set key (F/S) y se mueve con
el botone shift key hasta encontrar Cntl y se presiona de nuevo funtion y set key para ingresar
a la configuracion de los parametros del controlador.
14

Ouput 1 proportional band (P1) = 0
Ouput 1 cicle time (Ct1) = 0 (es el periodo en segundos del pwm y se ingresa como 0 para
salida de corriente de 4 a 20mA o 1 para salidas de pulsos de tension (SSR) equivalente
un periodo de 1 segundo)
At offset (AtoF) = 0 (por defecto)
Anti-reset windup (Ar) = 100 (por defecto)
Valvula solenoidal proporcional servo-accionada de dos vıas tipo EV260B Para
controlar el nivel del lıquido se cuenta con un actuador tipo electrovalvula de La gama EV260B
que se compone de valvulas solenoides servo accionadas de 2 vıas con funcion de modulacion
proporcional y conexiones de tamanos comprendidos entre 1/4” y 3/4”. Mediante la regulacion
continua de la corriente de la bobina, es posible situar la armadura en cualquier posicion del
tubo de la armadura y, de este modo, ajustar la bobina entre las posiciones de cierre completo
y apertura completa. La valvula se abre totalmente cuando la corriente de la bobina alcanza su
maximo valor[2].
Nota: cabe resaltar que la salida del controlador que llega al actuador es una fuente de corriente
de 4 a 20mA, que esta disenada para una carga de 1500 ohmios y debido a que la valvula cuenta
con una resistencia de solo 1000 ohmios se debe conectar una resistencia de 500 ohmios en serie
con la entrada de la senal de 4 a 20mA.
Caracterıstica lineal en todo el rango de regulacion.
Rango de caudal completo: 0, 5 - 2, 7m3/h
Presion diferencial: 0, 5 - 10bar
Temperatura del medio: 10 - 800C
15

Temperatura ambiente: 500C,max
Proteccio n de la bobina: IP67, ax.
Viscosidad: 50cst, Max.
Sen alpiloto estandar de 4 - 20mA o de 0 - 10V
Sensor ultrasonido U-GAGE Serie T30 con salidas analogicas y discreta Debido a que
la universidad cuenta con una alta gama de sensores, entre ellos el ultrasonico U-GAGE Serie
T30 con salidas analogicas y discreta, el cual cumple con las caracterısticas deseadas y que se
ajusta a los requerimientos del banco de entrenamiento.
El U-GAGE Serie T30 con salidas analogicas y discreta, es un sensor ultrasonico facil de
usar, ideal para entornos exigentes; su programacion es simple; Excelente para aplicaciones
de medicion, tales como la deteccion de los niveles de lıquido en un tanque o, por ejemplo, la
determinacion de alturas de caja con fines de clasificacion.
El sensor incluye una salida analoga y discreta, que puede ser programado de forma
independiente con diferentes lımites de la ventana o una combinacion con lımites identicos.
Cada salida tiene la opcion de ser fijado con un punto de ajuste de deteccion dentro de una
ventana de 10 mm [3].
Los lımites de deteccion para el nivel se programan de la siguiente manera:
1. Seleccionar el tipo de salida (analogico o discreto) y mantener pulsado el boton
correspondiente hasta que el led verde de alimentacion se apaga y el led amarillo de
salida adecuada se pone en ON. Esto indica que el sensor esta a la espera para el primer
lımite.
2. Coloque el objetivo para el primer lımite y brevemente clic en el mismo boton. con eso se
programa el primer lımite del sensor. El led de salida de color amarillo parpadeara para
reconocer el primer lımite; ahora esta a la espera para el segundo lımite.
16

3. Coloque el objetivo para el segundo lımite y clic en el boton de nuevo. Con esto se programa
el segundo lımite. El led de salida de color amarillo se apaga y el LED verde se enciende;
el sensor se encuentra ahora en el modo de funcionamiento normal.
4. Repita el procedimiento para la otra salida (analogica o discreta) si se desea una segunda
salida.
NOTA: mantenga presionado el mismo boton mayor a 2 segundos (antes de programar
el segundo lımite) para salir del modo de programa sin guardar los cambios. El sensor
volvera al ultimo programa guardado.
Para la dinamica del nivel del tanque, los lımites se programaron de la siguiente forma:
1. Con el tanque vacio se posiciona el sensor para el primer lımite y se presiona durante 5
segundos el boton analogo; de esta forma se programa el nivel de maxima longitud y nivel
mınimo de agua.
2. Se llena el tanque al maximo y se presiona durante 5 segundos el boton analogo; de esta
forma se programa el nivel de mınima longitud y nivel maximo de agua.
A.3.2. Procedimiento de la practica
Inicialmente se abre la valvula de salida del tanque de control que se encuentra debajo, para
garantizar que el tanque esta vacıo, osea que se encuentra en el mınimo valor equivalente
a una salida de corriente de 4mA, posteriormente Se debe seleccionar el canal de entrada
del lıquido, por lo cual se bloquea la entrada directa y se habilita el llenado a traves de la
electrovalvula.
Para finalizar la configuracion se debe establecer el setpoint (SV que es la parte amarilla del
display Maxthermo) en un valor por encima de 50cm con el objetivo de que el dispositivo
nunca entre en un modo de control, ası la salida permanecera en 20mA constantes,
haciendo que la valvula se encuentre abierta permanentemente.
17

Como ultimo paso se enciende la motobomba activando el breaker A, se inicia la toma de
datos, tomando este valor como el tiempo cero.
A.3.3. Toma de datos
Para la toma de datos se establece un plano cartesiano de dos dimensiones, donde x es el
tiempo y Y la magnitud de la variable de proceso (PV).
Estos datos se pueden tomar como una lista del tiempo y la variable del proceso (PV)
hasta que el sistema de nivel llegue a su punto de estabilizacion.
Si se desean tomar los datos utilizando la DAQ enlazada con el algoritmo en matlab
remitirse al anexo DAQ con matlab.
Con valores de los datos obtenidos se saca el delta de nivel.
∆N = Nf −Ni
Se debe calcular el valor del nivel al cual se tiene el primer tao
T = ∆N ∗ 0, 632 + 23
Con este valor se obtiene graficamente el tiempo del primer tao, sobre la grafica de la
figura 11.
τ= tiempo en (s)
18

Entrada
Tiempo
u(t)
20%
40%
60%
80%
100%
=63,2% τ =86% τ2 =98% τ4
ba
Figura 11: respuesta tipica de un sistema de primer orden ante una entrada escalon unitario
u(t)
Con estos valores obtenidos del tiempo del tao y el delta de temperatura, se debe construir
en simulink la funcion de transferencia de primer orden como se observa en la figura 12,
que debe tener caracterısticas similares a la grafica roja de la figura 13 donde se observa
el modelo para un nivel liquido diferente.
Step Transfer Fcn
5
Scope3
ΔNivels +1 τ
Figura 12: Implementacion del sistema de nivel en Simulink
19

Figura 13: Dinamica del sistema nivel real y calculado
En la figura 13 se consignan los datos medidos sobre la planta de nivel en color
azul, comparandose con los datos en color rojos obtenidos de respuesta del sistema
implementado en simulink.
20

A.4. Implementacion de estrategias de control ON-Off y
PID para el sistema de temperatura, utilizando el dispositivo
controlador Maxthermo MC5438-201000.
MCu5438u-u2 SSR CalefactorResistivou208V
Sitrans Ptu100
Sensor
Planta
RTD
PreaccionadorControlador
Acondicionador
ActuadorTemperaturaudeuSistemaSetuPoint (PWMuDC) (PWMuAC)
(Resistencia)(4-20umA)
Figura 14: Diagrama de control del sistema de temperatura
A.4.1. Descripcion y configuracion de los componentes
El banco de entrenamiento esta equipado con un dispositivo controlador que pueden ser
manipulado y programado manualmente, con el cual podemos controlar la temperatura
del sistema.
Este dispositivo controlador cuenta con una informacion codificada en letras, que indica
las variables que puede manejar.
Controlador de temperatura MC 5438 - 201 000
• B→ 2 : V OLTAJE, PULSO DE V OLTAJE 20V DC/20mA SALIDA 1
• C→ 0 : NONE SALIDA 2
21

• D→ 1 : ALARMA 1
La entrada al controlador sera una senal de 4 a 20mA, la cual proviene de un sitrans
TH100, donde 4mA traduce 0 oC y 20mA traduce 100 oC; para configurar esto en el
Maxthermo, se debe ingresar manualmente a la configuracion Input, donde se cargaran
los siguientes datos.
Para seleccionar la funcion Input, se presiona 3 segundos funtion y set key (F/S) y se
mueve con el botone shift key hasta encontrar Input y se presiona de nuevo funtion y set
key para ingresar a la configuracion de los parametros de la entrada.
• Input 1 selection (inP1) = lin (seleccionamos de la tabla 4 del documento del
controlador maxthermo el tipo de senal que vamos a obtener, para este caso
temperatura, elegimos tipo lineal)
• Setting limit (LoSP) = 0 (este lımite debe ser menor o igual al lımite inferior de
nuestra planta)
• High setting limit (HiSP) = 100 (este lımite debe ser mayor o igual al lımite superior
de nuestra planta)
• Analog input range low (LoAn) = 0 (este valor debe ser el equivalente de temperatura
mınimo que corresponde al valor mınimo del lazo de corriente de la senal de entrada
analogica)
• Analog input range high (HiAn) = 100 (este valor debe ser el equivalente de
temperatura maxima que corresponde al valor maximo del lazo de corriente de la
senal de entrada analogica)
• Analog input scale low (A1LS) = 3601 (por defecto)
• Analog input scale high (A1HS) = A18E (por defecto)
• Unit selection (unit) = (se trabaja en grados Celsius)
• Decimal point (dp) = (se trabaja con dos puntos decimales)
• Digital filter (FiLt) = 0.6 (por defecto)
22

• Input 2 selecction (inP2) = non (por defecto)
La configuracion de los parametros del controlador (Cntl) se ingresaron de la siguiente
manera para el control de temperatura; la unica variacion son las constantes del PID y el
ciclo del tiempo del PWM.
Para seleccionar la funcion Cntl, se presiona 3 segundos funtion y set key (F/S) y se mueve
con el botone shift key hasta encontrar Cntl y se presiona de nuevo funtion y set key para
ingresar a la configuracion de los parametros del controlador.
• Ouput 1 proportional band (P1) = (se ingresa el valor de la banda proporcional
disenado)
• Ouput 1 integral time (i1) = (se ingresa el valor del tiempo derivativo disenado)
• Ouput 1 derivate time (d1) = (se ingresa el valor del tiempo integral disenado)
• Ouput 1 cicle time (Ct1) = (es el periodo en segundos del pwm y se ingresa como
0 para salida de corriente de 4 a 20mA o 1 para salidas de pulsos de tension (SSR)
equivalente un periodo de 1 segundo)
• At offset (AtoF) = 0 (por defecto)
• Anti-reset windup (Ar) = 100 (por defecto)
Calefactor resistivo y rele de estado solido SSR
Para elevar la temperatura del lıquido contenido en tanque de control, se cuenta con una
resistencia calefactora la cual es alimentada a 208 voltios; debido a que el voltaje y la
corriente consumidos son un poco elevados ,este dispositivo se debe manipular a traves
de un rele de estado solido o SSR (solid-state relays) este dispositivo usa transistores y
tiristores o triac en sustitucion de contactos metalicos, para controlar elevadas cargas de
potencia a partir de las senales entregadas por el controlador que son de bajo voltaje e
intensidad.
Sensor Pt100 y Sitrans TH100
23

El sistema cuenta con un sensor Pt100 de temperatura que consiste en un alambre de
Platino que a 0 C tiene 100 ohm y que al aumentar la temperatura varia su resistencia
electrica; el sensor es adecuado a traves de un convertidor de senal Sitrans TH100.Este
dispositivo tiene la capacidad de trasformar el valor de resistencia en un equivalente
de corriente continua de 4 a 20mA independiente de la carga a traves de convertidor
digital-analogico para posterior mente ser enviados al dispositivo controlador maxthermo
[1].
Para realizar la vinculacion del sensor resistivo y el convertidor de senal Sitrans TH100,
se realizo una conexion de la Pt100 a 2 hilos; al convertidor se le asigna una fuente de
alimentacion externa; esta senal es trasformada en corriente continua y a su vez enviada
al dispositivo controlador.
A.4.2. Procedimiento de la practica
• Se llena el tanque al nivel deseado alrededor de 15cm visualizados en la columna
de lıquido, para realizar esto se debe cerrar la llave que se encuentra debajo del
tanque de control; posteriormente se abre la llave de paso que lleva el lıquido desde
la motobomba hasta el tanque y se enciende la motobomba activando el breaker A
y se enciende la resistencia calefactora con el breaker C. Cuando se alcanza el nivel
deseado se apaga la motobomba para frenar el llenado.
• Segun el tipo de control que se desee implementar en el maxthermo se le cargan
diferentes constantes; para el caso del control On-Off simplemente se le ingresa un
cero al valor de la banda proporcional como se indica en la parte de configuracion de
los parametros del controlador; Si se desea un control PID se debe tener en cuenta
que el controlador no recibe las constantes Kp, Ki y Kd sino sus equivales conocimos
como PB, Ti y Td y se calculan como se indica a continuacion:
La ganancia proporcional puede ser expresada como banda proporcional (PB);
la relacion entre las dos esta determinada por.
PB = 100 %/Kp
24

La ganancia integral es el inverso del tiempo integral.
Ti = 1/Ki
La ganancia derivativa esta en unidades de tiempo.
Td = Kd
• Para finalizar la configuracion se debe establecer el setpoint (SV) en un valor de
35oC, que es la parte amarilla del display Maxthermo: se presiona el boton Shift key
para encontrar la variable deseada (SV) y con los botones Down key y Up key se
ingresa el valor a controlar.
• Para empezar el proceso de control se conecta el breaker que alimenta el SSR
A.4.3. Toma de datos
Para la toma de datos se establece un plano cartesiano de dos dimensiones, donde x es el
tiempo y (Y) la magnitud de la variable de proceso (PV) que es la parte roja del display
maxthermo.
Estos datos se pueden tomar como una lista del tiempo y la variable del proceso (PV)
hasta que el sistema de temperatura llegue a su punto de estabilizacion.
Si se desean tomar los datos utilizando la DAQ enlazada con el algoritmo en matlab
remitirse al anexo DAQ con matlab.
25

A.5. Implementacion de estrategias de control ON-Off y PID
para el sistema de nivel, utilizando el dispositivo controlador
Maxthermo MC5438-301000
MCG5438G-G3 RG500GOhm ElectroValvulaEV260B
UltrasonicoU-GAGEGT30
Planta
AcondicionadorControlador
Sensor
ActuadorNivelGdeGSistemaSetGPoint )4G-20GmA) )4G-G20GmA)
)4-20GmA)
Figura 15: Diagrama de control del sistema de nivel
A.5.1. Descripcion y configuracion de los componentes
El banco de entrenamiento esta equipado con un dispositivo controlador que pueden ser
manipulado y programado manualmente, con el cual podemos controlar el nivel de lıquido
del sistema.
Este dispositivo controlador cuenta con una informacion codificada en letras, que indica
las variables que puede manejar.
A.5.2. Controlador de flujo/nivel y presion MC 5438 - 301 000
• B→ 3 : CORRIENTE DE 4 A 20mA SALIDA 1
• C→ 0 : NONE SALIDA 2
• D→ 1 : ALARMA 1
26

La entrada al controlador sera una senal de 4 a 20mA, la cual proviene del sensor
ultrasonico U-GAGE T30, donde 4mA traducen el nivel mınimo 5cm y 20mA traduce el
nivel maximo 50cm ; para configurar esto en el Maxthermo, se debe ingresar manualmente
a la configuracion Input, donde se cargaran los siguientes datos.
Para seleccionar la funcion Input, se presiona 3 segundos funtion y set key (F/S) y se
mueve con el botone shift key hasta encontrar Input y se presiona de nuevo funtion y set
key para ingresar a la configuracion de los parametros de la entrada.
• Input 1 selection (inP1) = lin (seleccionamos de la tabla 4 del documento del
controlador maxthermo el tipo de senal que vamos a obtener, para este caso
temperatura, elegimos tipo lineal)
• Setting limit (LoSP) = 0 (este lımite debe ser menor o igual al lımite inferior de
nuestra planta)
• High setting limit (HiSP) = 50 (este lımite debe ser mayor o igual al lımite superior
de nuestra planta)
• Analog input range low (LoAn) = 5 (este valor debe ser el equivalente de nivel
mınimo que corresponde al valor mınimo del lazo de corriente de la senal de entrada
analogica)
• Analog input range high (HiAn) = 50 (este valor debe ser el equivalente de nivel
maxima que corresponde al valor maximo del lazo de corriente de la senal de entrada
analogica)
• Analog input scale low (A1LS) = 3601 (por defecto)
• Analog input scale high (A1HS) = A18E (por defecto)
• Unit selection (unit) = (se trabaja sin unidades)
• Decimal point (dp) = (se trabaja con dos puntos decimales)
• Digital filter (FiLt) = 0.6 (por defecto)
• Input 2 selecction (inP2) = non (por defecto)
27

La configuracion de los parametros del controlador (Cntl) se ingresaron de la siguiente
manera para el control de nivel de lıquido; la unica variacion son las constantes del PID
y el ciclo del tiempo del PWM.
Para seleccionar la funcion Cntl, se presiona 3 segundos funtion y set key (F/S) y se mueve
con el botone shift key hasta encontrar Cntl y se presiona de nuevo funtion y set key para
ingresar a la configuracion de los parametros del controlador.
• Ouput 1 proportional band (P1) = (se ingresa el valor de la banda proporcional
disenado)
• Ouput 1 integral time (i1) = (se ingresa el valor del tiempo derivativo disenado)
• Ouput 1 derivate time (d1) = (se ingresa el valor del tiempo integral disenado)
• Ouput 1 cicle time (Ct1) = (es el periodo en segundos del pwm y se ingresa como
0 para salida de corriente de 4 a 20mA o 1 para salidas de pulsos de tension (SSR)
equivalente un periodo de 1 segundo)
• At offset (AtoF) = 0 (por defecto)
• Anti-reset windup (Ar) = 100 (por defecto)
Valvula solenoidal proporcional servo-accionada de dos vıas tipo EV260B Para
controlar el nivel del lıquido se cuenta con un actuador tipo electrovalvula de La gama
EV260B que se compone de valvulas solenoides servo accionadas de 2 vıas con funcion
de modulacion proporcional y conexiones de tamanos comprendidos entre 1/4” y 3/4”.
Mediante la regulacion continua de la corriente de la bobina, es posible situar la armadura
en cualquier posicion del tubo de la armadura y, de este modo, ajustar la bobina entre las
posiciones de cierre completo y apertura completa. La valvula se abre totalmente cuando
la corriente de la bobina alcanza su maximo valor[2].
Nota: cabe resaltar que la salida del controlador que llega al actuador es una fuente de
corriente de 4 a 20mA, que esta disenada para una carga de 1500 ohmios y debido a que
la valvula cuenta con una resistencia de solo 1000 ohmios se debe conectar una resistencia
de 500 ohmios en serie con la entrada de la senal de 4 a 20mA.
28

• Caracterıstica lineal en todo el rango de regulacion.
• Rango de caudal completo: 0, 5 - 2, 7m3/h
• Presion diferencial: 0, 5 - 10bar
• Temperatura del medio: 10 - 800C
• Temperatura ambiente: 500C,max
• Proteccio n de la bobina: IP67, ax.
• Viscosidad: 50cst, Max.
• Sen alpiloto estandar de 4 - 20mA o de 0 - 10V
Sensor ultrasonido U-GAGE Serie T30 con salidas analogicas y discreta Debido
a que la universidad cuenta con una alta gama de sensores, entre ellos el ultrasonico
U-GAGE Serie T30 con salidas analogicas y discreta, el cual cumple con las caracterısticas
deseadas y que se ajusta a los requerimientos del banco de entrenamiento.
El U-GAGE Serie T30 con salidas analogicas y discreta, es un sensor ultrasonico facil de
usar, ideal para entornos exigentes; su programacion es simple; Excelente para aplicaciones
de medicion, tales como la deteccion de los niveles de lıquido en un tanque o, por ejemplo,
la determinacion de alturas de caja con fines de clasificacion.
El sensor incluye una salida analoga y discreta, que puede ser programado de forma
independiente con diferentes lımites de la ventana o una combinacion con lımites identicos.
Cada salida tiene la opcion de ser fijado con un punto de ajuste de deteccion dentro de
una ventana de 10 mm [3].
Los lımites de deteccion para el nivel se programan de la siguiente manera:
1. Seleccionar el tipo de salida (analogico o discreto) y mantener pulsado el boton
correspondiente hasta que el led verde de alimentacion se apaga y el LED amarillo
29

de salida adecuada se pone en ON. Esto indica que el sensor esta a la espera para el
primer lımite.
2. Coloque el objetivo para el primer lımite y brevemente clic en el mismo boton. Con eso
se programa el primer lımite del sensor. El led de salida de color amarillo parpadeara
para reconocer el primer lımite; ahora esta a la espera para el segundo lımite.
3. Coloque el objetivo para el segundo lımite y clic en el boton de nuevo. Con esto se
programa el segundo lımite. El led de salida de color amarillo se apaga y el led verde
se enciende; el sensor se encuentra ahora en el modo de funcionamiento normal.
4. Repita el procedimiento para la otra salida (analogica o discreta) si se desea una
segunda salida.
NOTA: mantenga presionado el mismo boton mayor a 2 segundos (antes de programar
el segundo lımite) para salir del modo de programa sin guardar los cambios. El sensor
volvera al ultimo programa guardado.
Para el control de nivel del tanque, los lımites se programaron de la siguiente forma:
1. Con el tanque vacıo se posiciona el sensor para el primer lımite y se presiona durante
5 segundos el boton analogo; de esta forma se programa el nivel de maxima longitud
y nivel mınimo de agua.
2. Se llena el tanque al maximo y se presiona durante 5 segundos el boton analogo; de
esta forma se programa el nivel de mınima longitud y nivel maximo de agua.
A.5.3. Procedimiento de la practica
• Inicialmente se abre la valvula de salida del tanque de control que se encuentra
debajo, para garantizar que el tanque esta vacio, osea que se encuentra en el mınimo
valor equivalente a una salida de corriente de 4mA, posteriormente Se debe seleccionar
el canal de entrada del lıquido, por lo cual se bloquea la entrada directa y se habilita
el llenado a traves de la electrovalvula.
30

• Segun el tipo de control que se desee implementar en el maxthermo se le cargan
diferentes constantes; para el caso del control On-Off simplemente se le ingresa un
cero al valor de la banda proporcional como se indica en la parte de configuracion de
los parametros del controlador; Si se desea un control PID se debe tener en cuenta
que el controlador no recibe las constantes Kp, Ki y Kd sino sus equivales conocimos
como PB, Ti y Td y se calculan como se indica a continuacion:
La ganancia proporcional puede ser expresada como banda proporcional (PB);
la relacion entre las dos esta determinada por.
PB = 100 %/Kp
La ganancia integral es el inverso del tiempo integral.
Ti = 1/Ki
La ganancia derivativa esta en unidades de tiempo.
Td = Kd
Para finalizar la configuracion se debe establecer el setpoint (SV) en un valor de 15cm, que
es la parte amarilla del display Maxthermo: se presiona el boton Shift key para encontrar la
variable deseada (SV) y con los botones Down key y Up key se ingresa el valor a controlar.
Como ultimo paso se enciende la motobomba activando el breaker A.
A.5.4. Toma de datos
Para la toma de datos se establece un plano cartesiano de dos dimensiones, donde x es el
tiempo y Y la magnitud de la variable de proceso (PV) que es la parte roja del display
maxthermo.
Estos datos se pueden tomar como una lista del tiempo y la variable del proceso (PV)
hasta que el sistema de nivel llegue a su punto de estabilizacion.
Si se desean tomar los datos utilizando la DAQ enlazada con el algoritmo en matlab
remitirse al anexo DAQ con matlab.
31

A.6. Implementacion de control ON-Off con banda para el
sistema de temperatura, utilizando el PLC Twido de Sneyder
Electric TWD LCDE 40DRF
TWDuLCDEu40DRF SSR CalefactorResistivou208V
Sitrans Ptu100
Sensor
Planta
RTD
PreaccionadorControlador
Acondicionador
ActuadorTemperaturaudeuSistemaBANDA MSET-RESET6 MSET-RESET6
MResistencia6M4-20umA6
TWDuAMMu6HT
Figura 16: Diagrama de control On-Off con banda del sistema de temperatuna
Para esta ultima practica se desarrollara un control On Off con banda, el cual ofrese la
ventaja de poder reducir la frecuencia de activacion de la planta ya que el actuador solo
se activara mientras el sistema se encuentre por debajo del lımite inferior y se desactivara
cuando la planta se encuentre por encima del lımite superior.
El laboratorio, ademas, de los dispositivos controladores cuenta con un automata
programable Twido sneyder electric de referencia TWD LCDE 40DRF, esto es una
base compacta que cuenta con 24 entradas digitales, 14 salidas de rele y 2 salidas de
transistor. Tambien cuenta con un modulo de expansion de entradas y salidas analogicas
de referencia TWD AMM 6HT que posee 4 entradas configurables a tension (0-10V)
o corriente (4-20mA) y 2 salidas tambien configurables a tension (0-10V) o corriente
(4-20mA).
32

A.6.1. Descripcion y configuracion de los componentes
Se hara una descripcion breve de la configuracion y programacion del automata Twido,
en donde se resaltaran las caracterısticas principales a tener en cuenta en el momento de
la manipulacion de este dispositivo.
La figura 17 ilustra los pasos a seguir para la debida seleccion de la base compacta Twido
TWD LCDE 40DRF y posteriormente seleccion del modulo analogo de expansion TWD
AMM 6HT.
Figura 17: Descripcion automata Twido
En la figura18 podemos encontrar la forma deconfigurar y asignar normes a las variables;
para este caso se le asigana PT100 a la entrada 1 del modulo analogo, ajustando el tipo
de senal a medir de 4 a 20mA o 0 a 10V.
33

Figura 18: Configuraon automata Twido
Como posterior a la seleccion y descripcion del automata Twido se procede a desarrollar
la programacion en lenguaje de instrucciones.
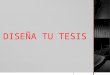
A continuacion en la figura 19 se ilustra un ejemplo en que se implementa un control
On-Off con banda, donde inicialmente se toman 3 muestras de la entrada PT 100, se
promedian y se comparan con los lımites establecidos, para este caso lımite superior 36oC
y lımite inferior 35oC.
Como se puede observar la seleccion de la salida Q4 es set reset, que es una salida de tipo
relec, la cual comanda la activacion y desactivacion del rele de estado solido (SSR).
34

Figura 19: Programacion automata Twido
35

Calefactor resistivo y rele de estado solido SSR
Para elevar la temperatura del lıquido contenido en tanque de control, se cuenta con una
resistencia calefactora la cual es alimentada a 208 voltios; debido a que el voltaje y la
corriente consumidos son un poco elevados ,este dispositivo se debe manipular a traves
de un rele de estado solido o SSR (solid-state relays) este dispositivo usa transistores y
tiristores o triac en sustitucion de contactos metalicos, para controlar elevadas cargas de
potencia a partir de las senales entregadas por el controlador que son de bajo voltaje e
intensidad.
Sensor Pt100 y Sitrans TH100
El sistema cuenta con un sensor Pt100 de temperatura que consiste en un alambre de
Platino que a 0 C tiene 100 ohm y que al aumentar la temperatura varia su resistencia
electrica; el sensor es adecuado a traves de un convertidor de senal Sitrans TH100.Este
dispositivo tiene la capacidad de trasformar el valor de resistencia en un equivalente
de corriente continua de 4 a 20mA independiente de la carga a traves de convertidor
digital-analogico para posterior mente ser enviados al dispositivo controlador maxthermo
[1].
Para realizar la vinculacion del sensor resistivo y el convertidor de senal Sitrans TH100,
se realizo una conexion de la Pt100 a 2 hilos; al convertidor se le asigna una fuente de
alimentacion externa; esta senal es trasformada en corriente continua y a su vez enviada
al dispositivo controlador.
A.6.2. Procedimiento de la practica
• Se llena el tanque al nivel deseado alrededor de 15cm visualizados en la columna
de lıquido, para realizar esto se debe cerrar la llave que se encuentra debajo del
tanque de control; posteriormente se abre la llave de paso que lleva el lıquido desde
la motobomba hasta el tanque y se enciende la motobomba activando el breaker A
y se enciende la resistencia calefactora con el breaker C. Cuando se alcanza el nivel
deseado se apaga la motobomba para frenar el llenado.
36

• Se carga el programa previamente disenado en el automata Twido con las bases que
se indicaron en la parte inicial de esta practica.
• Para empezar el proceso de control se conecta el breaker que alimenta el SSR
A.6.3. Toma de datos
Para la toma de datos se establece un plano cartesiano de dos dimensiones, donde x es el
tiempo y (Y) la magnitud de la variable de proceso que se puede observar en la memoria
MW6 de las lıneas del programa.
Estos datos se pueden tomar como una lista del tiempo y la variable del proceso hasta
que el sistema de temperatura llegue a su punto de estabilizacion.
Si se desean tomar los datos utilizando la DAQ enlazada con el algoritmo en matlab
remitirse al anexo DAQ con matlab.
A.7. Adquisicion con matlab y DAQ 6008
La recoleccion de datos se efectua a traves de un dispositivo de adquisicion DAQ 6008de
la National Instruments.
Nota: cabe resaltar que para la toma de datos con la DAQ es necesrio remover el puente
que se encuentra en color naranja que va hacia la entrada del sensor Maxthermo, tanto
para el sensor de nivel como el de temperatura; de lo contrario se debe dejar el puente.
Para la adquisicion de datos en matlab se cuenta con dos interfaces, por un lado el legacy
interface y por el otro session based interface, esta segunda esta optimizada para el manejo
de dispositivos de la National Instruments.
La utilizacion de la session based interface requiere primero encontrar los dispositivos
conectados, despues se crea una seccion para el dispositivo y posteriormente se configura la
rata de muestreo, por ultimo se anade un canal analogo con sus respectiva parametrizacion,
quedando el dispositivo configurado para recibir datos.
37

Se debe resaltar que los sensores utilizados entregan senales de corriente continua y el
dispositivo DAQ, esta disenado para sensar senales de tension, por lo que se hace necesario
conectar una resistencia en serie con el lazo de corriente, sobre la cual se mide una tension,
la cual se traduce a los respectivos valores de temperatura y nivel captados por los sensores.
Nota: para el calculo de la resistencia adicionada se debe tener en cuenta la maxima carga
que puede soportar el sensor en su lazo de corriente, para los dispositivos Maxthermo se
puede usar una resistencia hasta de 500 ohm, mientras que para el automata Twido, la
resistencia puede maxima de 250 ohm. Dependiendo de la resistencia que se use varıa la
funcion de conversion entre el dato medido por la DAQ que es un voltaje y la variable
de interes que puede ser un nivel o temperatura. Tomaremos como ejemplo la conversion
para la temperatura.
• Cuando el sensor entrega 4mA que son equivalentes a una temperatura de 0oC, la
DAQ con una resistencia de 500 ohm sensara una tension de 2 voltios
V = 500Ω ∗ 4mA = 2V
• Si el sensor entrega 20mA que son equivalentes a una temperatura de 100oC, la DAQ
con una resistencia de 500 ohm sensara una tension de 10V
V = 500Ω ∗ 20mA = 10V
Con esta informacion podemos obtener la conversion lineal, donde
Primero se calcula la pendiente
m =100− 0
10− 2= 12, 5
Despues se obtiene la interseccion con el eje y
0 = 12, 5 ∗ 2 + b
b = 25
38

y por ultimo calcula la temperatura con la ecuacion siguiente.
T (temperatura) = 12, 5 ∗ (voltaje sensado)− 25
A continuacion se adjuntara el pseudocodigo necesario para la recepcion y
acondicionamiento del una senal de tension, donde la toma de datos se hace a traves
del inputsinglescan por un tiempo determinado.
A.7.1. Adquisicion de temperatura con matlab y DAQ 6008
clc
clearall
closeall
d = daq.getDevices; %Encontrareldispocitivo
s = daq.createSession(′ni′); %
s.Rate = 100; %
addAnalogInputChannel(s,′Dev1′, 0,′Voltage′);
39

tic
plot(0, 0)
i = 1;
whiletoc < 20 ∗ 60
y(i) = s.inputSingleScan ∗ 12,5− 25;
x(i) = toc;
ify(i) > 20
i = i + 1;
holdon
plot(x, y)
pause(0,05)
end
end
toc
%Eliminadorceros
y2 = y;
fork = 2 : length(x);
ify2(k) < 20
y2(k) = y2(k− 1);
end
end
holdoff
figure
plot(x, y2,′ b′, 0, 0)
40

%Eliminadorceros
y2 = y;
fork = 2 : length(x);
ify2(k) < 20
y2(k) = y2(k− 1);
end
end
holdoff
figure
plot(x, y2,′ b′, 0, 0)
%filtradodeespurios
fork = 5 : length(x);
ifmean(y2(k− 4 : k− 1))− 2 > y2(k)
y2(k) = mean(y2(k− 4 : k− 1));
end
end
holdon
plot(x, y2,′ k.′)
41

%Promediador1
y3 = y2;
tamFil = 8;
y3(1 : tamFil) = mean(y3(1 : tamFil));
fork = tamFil + 1 : length(x)− tamFil;
y3(k) = mean(y3(k− tamFil : k + tamFil));
end
y3(k : end) = y3(k);
holdon
plot(x, y3,′ b.′)
%Promediador2
y4 = y3;
tamFil = 16;
fork = tamFil + 1 : length(x)− tamFil;
y4(k) = mean(y4(k− tamFil : k + tamFil));
end
holdon
plot(x, y4,′ r′)
figure
plot(x, y3,′ b.′, x, y4,′ r′)
A.7.2. Adquisicion de nivel con matlab y DAQ 6008
42

clc
clearall
closeall
d = daq.getDevices; %Encontrareldispocitivo
s = daq.createSession(′ni′); %
s.Rate = 100; %
addAnalogInputChannel(s,′Dev1′, 0,′Voltage′);
tic
plot(0, 0)
i = 1;
whiletoc < 5 ∗ 60
y(i) = s.inputSingleScan ∗ 5,625− 6,5;
x(i) = toc;
ify(i) > 4
i = i + 1;
holdon
plot(x, y)
pause(0,01)
end
end
toc
43

%Eliminamosceros
fork = 2 : length(x);
ify2(k) < 4
y2(k) = y2(k− 1);
end
end
figure
plot(x, y2,′ k′, 0, 0)
44

Referencias
[1] J. C. V. Guzman and Angel Arturo Hernandez De La O, Sensores. Instituto Tecnologico
de Villahermosa, Mexico, 2011.
[2] Danfoss, Folleto tecnico,Valvulas solenoides proporcionales servoaccionadas de 2 vıas Tipo
EV260B, Danfoss A/S (RC-MDP / RJA), 2014-10.
[3] U-GAGE T30 Series with Analog and Discrete Outputs.
45