Embed Size (px)
Citation preview

INTEL® FALCON™ 8+SISTEMA DE AERONAVES NÃO TRIPULADAS
PORTUGUÊS MAIO 2018
MANU
AL DO
UTILI
ZADO
R

DIREITOS DE AUTOREsta publicação está protegida por direitos de autor. Nenhuma parte da publicação pode ser usada, reproduzida ou traduzida, em qualquer formato sem o consentimento prévio, por escrito, da Intel Corporation. AscTec, Ascending Technologies, os logótipos da Ascending Technologies e Falcon são marcas registadas da Intel Corporation. © 2018 Intel Corporation. Todos os direitos reservados. Intel e o logótipo da Intel são marcas registadas da Intel Corporation. Outros nomes e marcas podem ser reivindicados como propriedade de terceiros.
ISENÇÃOA informação aqui contida pode ser sujeita a alterações sem aviso prévio. Todas as declarações, informações e recomendações contidas neste documento não constituem uma garantia de qualquer tipo sejam expressas ou implícitas. Todas as imagens destinam-se apenas à ilustração; itens atuais apresentados nas imagens podem variar, sem limitação, em termos de tamanho, cor e rotulagem. Reveja, por favor, o guia de produtos, cuidadosamente, prestando atenção particular a quaisquer seções de segurança, para garantir que usa o seu sistema de aeronave não tripulada de forma segura. A Intel Corporation reserva-se o direito de alterar, corrigir ou atualizar todos os documentos disponíveis, incluindo este Manual do Utilizador, a qualquer altura e sem aviso prévio, relativamente ao Intel® Falcon 8+ Unmanned Aircraft System. Contacte o seu representante da Intel Corporation ou aceda a http://intel.com/FalconManual para obter a última documentação sobre este produto. As funcionalidades e benefícios deste sistema de aeronave não tripulado depende de configuração do sistema e pode requerer hardware, software ou ativação de serviços permitidos. Os resultados técnicos podem ter sido estimados ou simulados usando análises internas ou simulação de arquitetura ou modelação por parte de qualquer uma das seguintes empresas, disponibilizada ao comprador para fins informativos: Intel Corporation, Ascending Technologies GmbH, que se tornaram subsidiárias da Intel Corporation após aquisição por parte da Intel Corporation, ou da Intel Deutschland GmbH, a subsidiária da Intel Corporation à qual se juntou a Ascending Technologies GmbH, após aquisição por parte da Intel Corporation. Quaisquer diferenças no hardware, software ou configuração do seu sistema pode afetar o desempenho atual. Saiba mais em http://intel.com/FalconManual.A Intel Corporation (Intel) e suas subsidiárias declinam todas as outras garantias, de qualquer tipo, de forma expressa, implícita ou estatutária, ou outras, especificações publicadas, incluindo, sem limitação, aquelas que se referem à comercialização, adequação para qualquer fim particular, não-violação, bem como qualquer garantia proveniente de qualquer curso de negociação, uso e comércio. Na medida em que for permitido pela lei aplicável, a Intel isenta-se de qualquer responsabilidade por quaisquer danos, direta ou indiretamente, decorrentes do uso do sistema de aeronave não tripulada UAS, fora dos limites previstos, no incumprimento das Diretrizes de Segurança, Precauções de Segurança da Intel Corporation ou qualquer outra documentação para o presente produto em violação de quaisquer leis ou regulamentos aplicáveis ou em violação de quaisquer limitações de operação da aeronave ou devido a qualquer erro do operador. © 2018 Intel Corporation. Todos os direitos reservados. Nenhuma licença de qualquer tipo, expressa, implícita, estatutária, por obstrução ou outra para quaisquer direitos de propriedade intelectual, tecnologia, software, em qualquer caso sejam num todo ou por partes, é garantido pela Intel ou qualquer uma das suas subsidiárias, neste Manual do Utilizador.

REVISÃO DE REVISTOS
NÚMERO DE REVISÃO DATA DE REVISÃO
Versão 1 Abril 2017
Versão 1.0.1 Maio 2017
Versão 2 Julho 2017
Versão 2.1 Julho 2017
Versão 2.2 Agosto 2017
Versão 2.2.1 Agosto 2017
Versão 2.2.2 Dezembro de 2017
Versão 2.3 Maio 2018
Versões Firmware Descritas:Pacote de versão de firmware 1.2
As alterações mais importantes nesta versão:• Instruções acrescentadas relativamente à substituição de trilhos para motor• Instruções acrescentadas sobre como trocar um adaptador de carga útil e como
atualizar uma carga útil do F8 para o F8+ • Instruções criadas para Intel® High Resolution Imaging Payload• Instruções criadas para Intel® Imaging Payload com desvio de obstáculos• Instruções atualizadas de carregamento das baterias • Alertas adicionais do sistema acrescentados e alertas desatualizados apagados• Instruções de embalagem para envio acrescentadas

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 4
ÍNDICE
1. INTEL® FALCON™ 8+ UAS ..................................................................................................71.1. SEGURANÇA PRIMEIRO ...........................................................................7
1.1.1. Uso Previsto ........................................................................................................... 71.1.2. Diretrizes de Segurança .................................................................................... 8
1.2. VERIFICAÇÃO UAS E DE SEGURANÇA ...........................................121.3. VERIFICAÇÃO PRÉ-VOO ......................................................................141.4. VERIFICAÇÃO PÓS-VOO ......................................................................17
2. DESCRIÇÃO DO SISTEMA ...............................................................................................192.1. O INTEL® FALCON™ 8+ UAV ...............................................................19
2.1.1. Unidade Central .................................................................................................212.1.2. Trilhos para motor do UAV ...........................................................................232.1.3. Suporte de Câmara Estabilizado de Forma Dinâmica
(Suporte Cardan) ................................................................................................242.2. O INTEL® COCKPIT CONTROLLER (CTR) .......................................25
2.2.1. O Visor de Estado ..............................................................................................302.2.2. O Tablet com Ecrã Tátil ...................................................................................31
2.3. O CONTROLO DE CÂMARA INDEPENDENTE (ICC) ...................312.4. O MONITOR DO 2.º OPERADOR .......................................................332.5. CARGAS ÚTEIS - OPÇÕES DE CÂMARA ........................................34
2.5.1. Mudar uma Carga Útil (Câmara) ..................................................................372.5.2. Calibração da carga útil e da bússola .......................................................392.5.3. Câmara de Enquadramento Total Sony Alpha 7R ..............................422.5.4. Carga Útil de Inspeção ...................................................................................472.5.5. Intel® High Resolution Imaging Payload ..................................................542.5.6. Intel® Imaging Payload ....................................................................................60
2.6. AS INTEL® POWERPACK BATTERIES ..............................................812.6.1. Carregar as Intel® Powerpack Batteries ...................................................842.6.2. Operar o Menu BMS .........................................................................................852.6.3. Atualização de bateria .....................................................................................892.6.4. Instruções de Segurança de Informação da Bateria e Alertas .......90
2.7. MALAS DE TRANSPORTE & INTEL® BACKPACK ........................942.7.1. Instruções de Embalagem .............................................................................952.7.2. Embalagem para o envio ................................................................................98
2.8. PACOTES DE FUNCIONALIDADES DE SOFTWARE ............... 1002.8.1. Ativar Pacotes de Funcionalidades de Software ...............................1032.8.2. Verificar Pacotes de Funcionalidades de Software .........................104
2.9. INTEL® FALCON™ 8+ UAV REGISTOS DE VOO ........................ 106

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 5
3. OPERAR O SISTEMA ..................................................................................................... 1103.1. PREPARAR O INTEL® FALCON™ 8+ UAV .................................... 1103.2. PREPARAR O INTEL® COCKPIT CONTROLLER (CTR) ............ 1123.3. O TABLET COM ECRÃ TÁTIL ........................................................... 114
3.3.1. Projetos PATH ..................................................................................................1183.3.2. Projetos de AscTec Navigator Software ...............................................126
3.4. VERIFICAÇÕES AUTOMATIZADAS DE ARRANQUE ............... 1313.4.1. Configuração regional ..................................................................................1313.4.2. Alerta de Campo Magnético ......................................................................132
3.5. LINK LOSS PROCEDURE ................................................................... 1323.6. MODOS DE VOO ................................................................................... 136
3.6.1. Modo GPS ..........................................................................................................1373.6.2. Modo Altitude ..................................................................................................1423.6.3. Modo Manual ....................................................................................................143
3.7. INICIAR E PARAR OS MOTORES .................................................... 1443.8. DESCOLAR .............................................................................................. 144
3.8.1. Arrancar em Modo GPS ...............................................................................1453.8.2. Arrancar em Modo Altitude ........................................................................1453.8.3. Arrancar em Modo Manual .........................................................................146
3.9. O VOO ....................................................................................................... 1473.9.1. Controlar o Intel® Falcon™ 8+ UAV a partir do CTR .........................1493.9.2. Planeamento da missão ..............................................................................1503.9.3. Em Voo ................................................................................................................1513.9.4. Dicas de Operação Gerais ...........................................................................151
3.10.EMERGÊNCIAS EM VOO .................................................................. 1533.11.ATERRAR ................................................................................................ 160
3.11.1.Aterrar em Modo GPS ...................................................................................1603.11.2.Aterrar em Modo Altitude ...........................................................................1613.11.3.Aterrar em Modo Manual ............................................................................1613.11.4.Desligar o UAS .................................................................................................162
3.12.ALERTAS ................................................................................................ 1633.12.1.Níveis críticos de bateria e alertas do UAS ..........................................1703.12.2.Alerta de Campo Magnético ......................................................................1723.12.3.Alertas de Ligação de Dados .....................................................................1753.12.4.Alerta GPS ..........................................................................................................1763.12.5.Alerta de Falha de Motor .............................................................................1763.12.6.Alertas do sistema AscTec Trinity Control Unit ................................177
3.13.LIMITAÇÕES DE OPERAÇÃO ......................................................... 189

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 6
4. VISOR DE ESTADO ...................................................................................................... 1904.1. SÍNTESE DO VISOR DE ESTADO ................................................... 190
4.1.1. Estrutura do Menu do Visor de Estado .................................................1914.1.2. Os Ecrãs de Informação Principal ............................................................204
5. FUNÇÕES ESPECIAIS ................................................................................................... 2095.1. CIRCLE OF INTEREST (COI) .............................................................. 2095.2. PANORAMA ............................................................................................ 2105.3. ASSISTENTE DE LEVANTAMENTO TOPOGRÁFICO
RÁPIDO ..................................................................................................... 2155.4. NAVEGAÇÃO POR WAYPOINTS Usando o
AscTec Navigator Software .............................................................. 2196. MANUTENÇÃO, RESOLUÇÃO DE PROBLEMAS E ASSISTÊNCIA ...................................... 220
6.1. MANUTENÇÃO ...................................................................................... 2206.1.1. Atualizações de firmware do Intel® Falcon™ 8+ UAS .....................2206.1.2. Cuidar do Intel® Falcon™ 8+ UAV .............................................................2266.1.3. Substituição de hélices ................................................................................2286.1.4. Substituição do trilho para o motor .......................................................2306.1.5. Trocar um adaptador de carga útil .........................................................2366.1.6. Atualizar uma carga útil de um AscTec Falcon 8 UAV para um
Intel Falcon 8+ UAV .......................................................................................2386.2. RESOLUÇÃO DE PROBLEMAS ........................................................ 241
6.2.1. Estabelecer uma conexão entre o CTR e o UAV ................................2416.2.2. Analisar Questões de Conexão de Ligação de Dados .....................2426.2.3. Nenhum vídeo de pré-visualização no tablet com ecrã tátil do
CTR ........................................................................................................................2426.2.4. Registos de voo ...............................................................................................243
6.3. ASSISTÊNCIA ......................................................................................... 2457. ESPECIFICAÇÕES TÉCNICAS ........................................................................................ 247LISTA DE FIGURAS .......................................................................................................... 253LISTA DE TABELAS ......................................................................................................... 256ÍNDICE REMISSIVO ..........................................................................................................257

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 7
1. INTEL® FALCON™ 8+ UASMuito obrigado por escolher o Intel® Falcon™ 8+ UAS!
O Intel® Falcon™ 8+ UAV é o drone de primeira escolha para as inspeções e operaçõesde levantamento topográfico profissional mais desafiante. Pequeno e portátil com umpeso de descolagem máximo de apenas 2,8 kg, mas com um peso de carga útil de0,8 kg, o Intel® Falcon™ 8+ UAV pode suportar câmaras profissionais, como a SonyAlpha 7R, oferecendo toda a qualidade de estúdio de imagem no ar. A AscTec TrinityControl Unit desenvolvida internamente, a estreia mundial de redundância tripla, aunidade de controlo totalmente adaptável para aeronaves multi-rotor, torna o Intel®Falcon™ 8+ UAV no mais avançado e fiável veículo aéreo não tripulado. Graças aoconceito modular, pode substituir, espontaneamente, a carga útil, em qualquermomento e obter o melhor de cada projeto, usando a câmara mais adequada.
No texto seguinte, o Unmanned Aircraft System (UAS) é usado se for referenciado todoo sistema (incluindo Intel® Cockpit™ Controller, carga útil, etc.); o Unmanned AerialVehicle (UAV) é usado quando for referida apenas a própria aeronave.
1.1. SEGURANÇA PRIMEIROA secção seguinte contém informações de segurança. Qualquer pessoa a operar o UAStem de ler, compreender e aceitar estes alertas e diretrizes, antes de operar o Intel®Falcon™ 8+ UAV.
1.1.1. Uso PrevistoO presente produto é um Unmanned Aircraft System (UAS), apenas previsto para usocomercial, bem como para inspeção visual da infraestrutura, levantamento topográficoe mapeamento. Não se destina a uso do consumidor ou para uso recreativo. Voosacrobáticos são proibidos.
Deve ler, entender e concordar com toda a documentação antes de usar o Intel®Falcon™ 8+ UAS. Ao usar o Intel® Falcon™ 8+ UAS certifica que leu e compreendeu todoo material contido neste documento, bem como toda a documentação do utilizador econcorda com os referidos materiais.
Use o Intel® Falcon™ 8+ UAS apenas como pretendido. Opere sempre de acordo com aslimitações de operação apresentadas na secção seguinte e no Manual do Utilizador.
Operar o sistema e ignorar estas diretrizes e alertas pode ser considerado ilegal e estarsujeito a multas.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 8
1.1.2. Diretrizes de SegurançaO não cumprimento destas diretrizes e alertas e operar dentro das limitaçõesoperacionais do UAS, pode resultar num acidente ou morte, ferimentos graves, danosmateriais ou danos no UAS.
• É responsável por conhecer e respeitar todas as leis e regulamentos aplicáveisao espaço aéreo no qual opera. Jurisdições têm regras de segurança diferentes,que dizem respeito à autorização para voar UAVs; voar próximo de aeroportos,aeronaves tripuladas ou pessoas; operação dentro da linha de visão; limites dealtitude; operação à noite ou ao anoitecer; operação de múltiplos UAVs emsimultâneo e uso do espaço aéreo. Conheça e compreenda as leis aplicáveisantes de voar. Siga sempre as leis aplicáveis.
• Algumas jurisdições têm também regras, que podem afetar a sua operação doUAS, tais como leis relacionadas com a recepção de sinais sem fios, fotografiaaérea, vigilância aérea, privacidade, segurança e transgressão. Tem de conhecere seguir todas as leis e regulamentos aplicados à sua região.
• Nalgumas jurisdições, o operador pode ter que ser portador de um certificadode piloto da Autoridade de Aviação ou aprovação avançada da Autoridade deAviação ou de Controlo do Tráfego Aéreo. Verifique as suas leis locais antes deoperar o UAS. É sempre responsável por operar o UAS de forma segura e comresponsabilidade e, em conformidade com todas as leis.
• Operadores profissionais de drones têm de respeitar todos os requisitosaplicáveis de seguro e responsabilidade específicos da aviação.
• A conclusão da verificação de segurança UAS, da verificação de pré-voo e daverificação pós-voo, de acordo com as seguintes secções antes de cadaoperação, é obrigatória para cada voo.
• Hélices em rotação podem causar sérios danos em pessoas e materiais.Mantenha uma distância de segurança e/ou use equipamento de segurançaapropriado (p. ex. óculos de protecção, luvas).
• O nosso UAS, tal como todos os sistemas de aeronaves comparáveis, pode, emcasos raros, sofrer falhas elétricas, mecânicas e/ou outras. Isto pode levar a umaperda parcial ou total da capacidade de voo. Como tal, o piloto é responsávelpor conduzir todos os voos a uma distância segura de pessoas, veículos emmovimento, etc., tal, que na eventualidade de perda de controlo do voo, não irãoocorrer danos pessoais ou materiais.
• Operar o UAS próximo de linhas elétricas, transformadores elétricos ou outraszonas de elevadas perturbações eletromagnéticas ou em zonas urbanas podemter efeitos severos na estabilidade do GPS e/ou no sensor de campo magnético,que pode, por fim, também ter efeito na estabilidade do GPS. O Intel® Falcon™8+ UAV foi concebido para compensar tais erros na maioria dos casos, mas ofuncionamento não está garantido em qualquer cenário. Assim, o piloto tem deter a formação, experiência e competência para voar o Intel® Falcon™ 8+ UAV em

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 9
Modo Altitude, em qualquer situação. Opere apenas nestes ambientes, se tiverformação adequada!
• Risco de fogo ou explosão: Não opere o UAS em ambientes potencialmenteexplosivos, tais como bombas de gasolina, zonas de abastecimento, instalaçõesde armazenamento de combustíveis ou químicos, ou zonas onde o ar possaconter químicos ou partículas de pós, tais como partículas de grãos ou pó demetal.
Se possível e se conseguir proceder de forma segura, remova este produto de tais ambientes. Não conecte quaisquer acessórios de cabos ou prima qualquer botão do produto, até estar fora destes ambientes.
• O Modo GPS irá limitar a sua velocidade máxima. Voar o Intel® Falcon™ 8+ UAV auma velocidade do vento acima dos 12 m/s, não é recomendado. Note, porfavor, que as condições do vento em terra diferem das condições no ar.
• Não voe fora da gama de temperatura especificada para o UAV, ver“ESPECIFICAÇÕES TÉCNICAS” na página 247, para mais detalhes.
• O UAS e as cargas úteis não são à prova de água. Não opere o UAS em condiçõesclimáticas adversas (tempestade de areia, chuva, nevoeiro, neve, etc.) ou denoite.
• Opere o UAV apenas em dias limpos e durante as horas do dia. O UAV dispõe deluzes de posicionamento do LED, mas não de luzes anti-colisão.
• O UAV não está equipado com um sistema de detetar e evitar. O operador éresponsável por ver e evitar todo o outro tráfego, pessoas, estruturas eobstáculos. Recomendamos a operação através de duas pessoas (piloto eobservador). Todo o bom senso e prevenção são efetuados pelo piloto e peloobservador.
• Evite a colocação do UAV ou do Intel® Cockpit Controller (CTR) próximo defontes de calor, deixar sob luz solar direta durante longos períodos ou num localem que a temperatura possa exceder os limites especificados (tais como numcarro estacionado num dia quente).
• Não desmonte o UAS.
• Não transporte o UAS em contentores que não tenham sido aprovados pelaIntel.
• Não modifique o UAS. Quaisquer modificações podem comprometer osdispositivos de segurança, aumentar o risco de ferimentos, morte ou danosmateriais. No interior deste UAS não existem peças, que possam ser reparadaspelo utilizador. Qualquer reparação deve ser efetuada pela sua assistência local.
• É proibido usar dispositivos em combinação com o UAS, diferentes daquelesque são aprovados pelo Intel (p. ex. baterias, carregadores de bateria, câmaras,etc.). Qualquer modificação não aprovada pela UAS é proibida.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 10
• O UAS está equipado com uma ligação de rádio de 2,4 GHz para controloremoto e uma ligação de rádio de 5,8 GHz para transmissão de vídeo. Note, porfavor, que podem ser aplicadas as leis locais e podem existir restrições no usode equipamento de rádio, na sua área. O UAV pode apenas ser usado para voarcom acessórios originais e sob condições ambientais definidas,
• O UAV está equipado com uma tecnologia Global Positioning System (GPS) ouAssisted GPS (AGPS), que pode ser usada para determinar a localizaçãoaproximada do UAV. Verifique, por favor, as configurações das aplicaçõesinstaladas para garantir que consegue gerir estes serviços com base nalocalização, em conformidade com as suas preferências de privacidade.
• O piloto de um Intel UAV deve sempre agir de acordo com o seu melhorjulgamento, focando-se na segurança da povoação e do ambiente por entre oqual está a voar.
• Cada piloto tem de se submeter a formação intensiva para operar o UAV emtodos os modos de voo e manter o UAV em condições de segurança eaeronavegável - o que é obrigatório.
• Não opere o UAS sob influência de álcool ou drogas.
• Mantenha sempre uma distância segura entre o UAV e pessoas.
• Não voe demasiado próximo de obstáculos (p. ex. casas, árvores, etc.). O UAVpode danificar a propriedade de terceiros e/ou o sinal de GPS pode ficar afetadopelo acompanhamento na sombra ou piorar a exatidão posicional.
• Não voe para além da linha de visão.
• Nunca voe em zonas fechadas ou restritas.
• Mantenha sempre ambas as mãos nos manípulos de controlo. Tem de ser capazde reagir a qualquer hora, para evitar situações críticas.
• Atenção aos cães ou pássaros, dado que podem atacar o seu UAV.
• Dê sempre prioridade a outras aeronaves! Cuidado com helicópteros a voarembaixinho!
CUIDADO: PEÇAS PERIGOSAS EM MOVIMENTO; MANTENHA OSDEDOS E OUTRAS PARTES DO CORPO AFASTADAS. ESTE PRODUTOUSA BATERIAS SUBSTITUÍVEIS; EXISTE O RISCO DE EXPLOSÃO, SEA BATERIA FOR SUBSTITUÍDA POR UMA DO TIPO ERRADO. ELIMINEAS BATERIAS USADAS DE ACORDO COM AS INSTRUÇÕES.
CUIDADO: VOE SEMPRE DE FORMA SEGURA E RESPONSÁVEL.
ISTO SIGNIFICA, POR EXEMPLO:

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 11
• Todas as entradas de controlo são dadas ao UAV, como se tivesse sentado noUAV como piloto.
• Recomendamos, fortemente, que frequente uma formação básica e pratiqueregularmente o Modo Altitude.
• Nunca exceda a velocidade de 16 m/s (35 mph) em Modo Altitude.
• Nunca desça a uma velocidade superior a 10 m/s (22 mph) em Modo Manual.
• Em caso de algum problema próximo do solo, suba para uma altura segura.
• Mantenha o manipulo de controlo esquerdo, que controla a altitude,completamente para baixo, quando o UAV estiver em terra e os motores afuncionar.
As presentes diretrizes de segurança estão sujeitas a alteração sem aviso prévio.Excetuam-se erros e omissões.
Direitos de Privacidade e PropriedadeEnquanto operador de um UAS, tem de cumprir com todas as leis aplicáveis,especialmente com as leis de privacidade, propriedade e direitos de autor. Isto inclui ostipos de regras comuns, em baixo, que possam estar em vigor na jurisdição na qual estáa operar. Consulte sempre as leis da sua jurisdição antes de operar o UAS, dado que asjurisdições têm leis diferentes.
• Monitorizar e filmar áreas públicas onde se encontram indivíduos, apenaspodem ser possíveis sob circunstâncias limitadas, p. ex. por questões desegurança e desde que sejam fornecidos avisos suficientes.
• Monitorizar ou filmar em zonas privadas podem requerer o consentimento doproprietário e, potencialmente, quaisquer residentes ou visitantes.
• Filmar indivíduos e usar as suas imagens (tal como partilhá-las) pode infringir osdireitos dos indivíduos na sua própria imagem.
• De acordo com as leis de direitos de autor, algumas imagens podem apenas serusadas para fins privados. Para além disso, tirar fotografias a edifícios podequebrar os direitos de autor.
• Descolagens e aterragens do UAV podem apenas ser permitidas comautorização expressa do proprietário da propriedade onde as descolagens/aterragens ocorrem.
Violações de leis e regulamentos referidos acima, podem levar a sanções, pedidos deindemnização de individuais ou mesmo procedimentos penais.
Esta informação é fornecida para efeitos informativos, não se tratando de umadescrição exaustiva de requisitos legais. A presente informação não foi concebida parafornecer qualquer aconselhamento legal ou incluir qualquer tipo de garantia, no querespeita a utilidade do UAS. Contacte, por favor, o seu advogado para qualquer tipo deaconselhamento específico e vinculativa no uso do UAS na sua jurisdição.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 12
1.2. VERIFICAÇÃO UAS E DE SEGURANÇAA verificação do UAS e de segurança tem de ser levada a cabo uma vez por dia, antesdo primeiro voo, ou em qualquer altura que seja necessária (p. ex. após qualquerincidente, tal como uma aterragem dura). Caso note qualquer coisa de invulgar(qualquer peça solta, barulho estranho proveniente dos motores ou qualquer outraocorrência anormal), contacte, por favor, a assistência através do seu revendedor, setiver efetuado a compra num revendedor, ou a assistência da Intel, se encomendardiretamente da Intel. Inclua, por favor, uma descrição detalhada da sua observação e,se possível, fotos.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 13
Tem de seguir estes passos para completar e fechar a inspeção do UAS e de segurança:
Tabela 1.1: Lista de Verificação de Segurança
1. A mala de transporte não apresenta danos visíveis?
Se existir um novo dano visível do último transporte, tenha especial atenção durante a inspeção de todo o UAS.
□2. O UAV não apresenta
danos visíveis?Se existirem danos visíveis, contacte, por favor, a sua assistência, tal como mencionado na tabela acima.
□3. Todas as hélices estão em
boas condições?Substitua as hélices se existirem cortes, que-bras ou outros danos. □
4. Todas as hélices estão firmemente montadas nos motores?
Mova cada hélice, suavemente, enquanto segura o motor conectado. A porca na parte de cima dos hélices é auto-ajustável. Apenas necessita que seja apertada manualmente (20 Ncm +- 5 Ncm). Nunca aperte-a com demasiada força, dado que pode danificar o motor.Para apertar a porca, use a chave de caixa fornecida. Coloque a chave de caixa em cima da porca, segure a cabeça do motor com o polegar e dedo indicador de uma mão e use o dedo indicador da outra para rodar a chave de caixa. Assim que a cabeça do motor come-çar a rodar também, foi exercida força sufi-ciente
□
5. Empurre cada hélice para que vire e verifique se existe algum som anormal, ou se uma hélice gira mais devagar do que as outras e para de girar, abruptamente.
Se ouvir um som de raspar ou se a hélice girar mais devagar do que as outras, sem qualquer som estranho associado, isso pode dever-se a um obstáculo existente no interior do motor. Experimente, por favor, ar pres-surizado em lata para limpar o motor. Se ouvir um som de chocalhar, isso pode dever-se ao facto da hélice não estar suficiente-mente apertada. Nesse caso verifique, cuida-dosamente, a porca de auto aperto, na parte de cima da hélice.Aperte a porca, tal como descrito no passo 4.
□

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 14
1.3. VERIFICAÇÃO PRÉ-VOOTem de seguir estes passos para fechar a verificação pré-voo:
6. O cartão SD de Utilizador da "Black Box" (registador de voo) está corretamente inserido?
Verifique o cartão SD de utilizador na parte de trás do Intel® Falcon™ 8+ UAV. Se o Visor de Estado do CTR apresentar a mensagem “No user SD card”, por favor retire o cartão, efetue uma cópia de segurança, formate-o e volte a inseri-lo no Intel® Falcon™ 8+ UAV.
□
7. O suporte cardan está corretamente montado e o parafuso manual instalado na parte detrás do Intel® Falcon™ 8+ UAV?
Certifique-se que o suporte da câmara está completamente empurrado para dentro e o parafuso manual colocado por aperto manual.
□
8. O adaptador de carga útil está firmemente conectado à unidade central?
Certifique-se de que a ficha do conector do adaptador está conectado ao seu equiva-lente na parte dianteira do UAV.Certifique-se de que a esfera do conector de ligação esférica do servo-rolo está fixa den-tro da respetiva entrada do adaptador de carga útil.
□
9. Todas as baterias estão completamente carregadas?
O nível de tensão pode ser facilmente verifi-cado usando o BMS das baterias. Será apre-sentado por LEDs na parte da frente das baterias.
□
ALERTA A VIOLAÇÃO DESTAS PRECAUÇÕES DE SEGURANÇA RESULTAEM PERDA DE GARANTIA!
Tabela 1.2: Lista de Verificação Pré-Voo
1. O UAS está em condições adequadas (de acordo com os pontos apresentados em "VERIFICAÇÃO UAS E DE SEGURANÇA" na página 12)? □
2. Certifique-se de que dispõe de um cartão SD vazio e devidamente formatado inserido na câmara. □
Tabela 1.1: Lista de Verificação de Segurança (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 15
3. Existem duas baterias completamente inseridas no Intel® Falcon™ 8+ UAV, com rótulo colorido virado para cima e fixo por molas de retenção? □
4. A bateria do Intel Cockpit Controller (CTR) está completamente inserida, com o rótulo colorido virado para baixo? □
5. O Intel® Cockpit Controller está em boas condições (sem peças soltas) e o painel de antena está extraído? □
6. Coloque o UAV na localização de descolagem e verifique o seguinte:• Existe espaço suficiente para a descolagem e aterragem (nenhumas
pessoas, animais ou obstáculos no raio de 10 m).
• Não existem obstáculos à volta, que possam camuflar o sinal de GPS.
• A superfície permite que todas as hélices rodem livremente.
• Não existem pequenas pedras, pó ou areia, que pudessem seraspirados para dentro dos motores.
• Não existem campos magnéticos espectáveis.
□
CUIDADO: PARA EVITAR INTERFERÊNCIAS COM O UAS, POR FAVOR,AJUSTE O SEU SMARTPHONE PARA O MODO AVIÃO (VOO), DADOQUE USAM AS MESMAS FREQUÊNCIAS DE 2,4 GHZ E 5,8 GHZ.
Tabela 1.3: Lista de Verificação Pré-Voo (Continuação)
7. Ligue sempre o UAS pela seguinte ordem:1. Carga útil2. Intel® Falcon™ 8+ UAV3. Tablet com ecrã tátil4. Intel® Cockpit Controller (CTR)Aguarde, até a ligação ser estabelecida.
□
8. O final do processo de inicialização é identificado por um triplo beep emitido pelo Intel® Falcon 8+ UAV. Durante a inicialização o Intel® Falcon™ 8+ UAV não necessita de estar parado. Pode ser movido, por exemplo, pode ser inicializado a partir de um barco em movimento.
□9. O processo de arranque está concluído quando a estabilização do suporte
da câmara começar a funcionar. Pode ser ouvido um som de zumbido suave a partir do suporte cardan.
□10. Certifique-se que cumpre todos os pontos da lista de verificação
apresentada no tablet com ecrã tátil. Confirme a lista de verificação no tablet.
□
Tabela 1.2: Lista de Verificação Pré-Voo (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 16
11. Confirme se a imagem de pré-visualização vídeo no tablet com ecrã tátil do Intel® Cockipit Controller está visível. □
12.Selecione um Link Loss Procedure, que for adequado para a missão de voo atual. □
13.A capacidade da bateria apresentada do CTR é suficiente para a missão planeada (apresentada em minutos no Visor de Estado - ver “VISOR DE ESTADO” na página 190).
□14.Confirme se a capacidade remanescente da bateria do UAV é de pelo
menos de 80% (apresentada na linha superior do tablet). □15.A linha inferior no Visor de Estado mostra OK. □16.A qualidade do GPS é superior ou igual a 4 bar? Isto é obrigatório, se
pretende voar em Modo GPS. □17.Confirme a velocidade do vento está dentro dos limites operacionais:
16 m/s em Modo Altitude ou 12 m/s em Modo GPS. □18.Selecione o modo de voo correto (habitualmente Modo GPS ou Modo
Altitude). □19.Ligue os motores (com ambas as mãos, apenas em modo inativo).
Enquanto o Intel® Falcon™ 8+ UAV estiver em terra, com os motores ligados, mantenha sempre o manípulo de controlo esquerdo, que controla a altitude, na posição completamente para baixo.
□20.Todos os motores estão a funcionar corretamente? □21.Pronto para levantar voo! □
ALERTA A VIOLAÇÃO DAS PRECAUÇÕES DE SEGURANÇA RESULTA EMPERDA DE GARANTIA!
Tabela 1.3: Lista de Verificação Pré-Voo (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 17
1.4. VERIFICAÇÃO PÓS-VOOTem de seguir estes passos para fechar a verificação pós-voo:
Tabela 1.4: Lista de Verificação Pós-Voo
1. Antes de aterrar o Intel® Falcon™ 8+ UAV, ajuste a câmara para a posição horizontal. □
2. Aterre o Intel® Falcon™ 8+ UAV.Mantenha sempre o manípulo de controlo esquerdo, que controla a altitude, na posição completamente para baixo, quando o sistema estiver em terra com os motores em funcionamento.
□3. Quando o sistema estiver em terra, desligue os motores.
Desligue sempre o sistema sempre pela seguinte ordem:• Câmara (dependendo da carga útil, aguarde pelo menos 10 segundos
até a câmara ter guardado todos os dados e ter sido completamentedesligada).
• Intel® Falcon™ 8+ UAV
• Prima e mantenha o botão de ligar premido.As luzes de posicionamento do LED irão aumentar o seu brilho.As luzes de posicionamento do LED irão diminuir o brilho e,simultaneamente, soará um breve bip proveniente do UAV.
• Após o beep, largue o botão.
• Tablet com ecrã tátil
• Prima e mantenha o botão de ligar premido até ser apresentado“Slide to shut down your PC”.
• Largue o botão.
• Siga as instruções no tablet para desligar completamente o tabletcom ecrã tátil.
• Intel® Cockpit Controller (CTR)
• Prima e mantenha o botão de LIGAR premido. O CTR irá vibrar alguns segundos depois.
• Largue o botão.
□
4. Remova todas as baterias do Intel® Falcon™ 8+ UAV. □

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 18
5. Guarde o UAV em segurança na mala de transporte ou na mochila. □6. Remova a bateria do CTR. □7. Dobre o painel de antena do CTR. □8. Remova o apoio de ombro do CTR. □9. Guarde o CTR e todos os seus acessórios em segurança na mala de
transporte ou na mochila. □CUIDADO: REMOVA SEMPRE TODAS AS BATERIAS DE AMBOS OSINTEL® FALCON™ 8+ UAV E CTR, QUANDO O SISTEMA JÁ NÃOESTIVER EM USO.
ALERTA A VIOLAÇÃO DESTAS PRECAUÇÕES DE SEGURANÇA RESULTAEM PERDA DE GARANTIA!
Tabela 1.4: Lista de Verificação Pós-Voo (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 19
2. DESCRIÇÃO DO SISTEMANeste capítulo, encontra uma descrição de todo o sistema e seus componentes.
• O Intel® Falcon™ 8+ UAV
• O Intel® Cockpit Controller (CTR)
• Cargas Úteis/Câmaras
• As Intel® Powerpack Batteries
2.1. O INTEL® FALCON™ 8+ UAV A secção que se segue descreve as peças individuais do Intel® Falcon™ 8+ UAV.
Figura 2.1: Os Componentes Intel® Falcon™ 8+ UAV
O Intel® Falcon™ 8+ UAV consiste em diversos componentes:(1) Suporte de câmara estabilizado de
forma dinâmica (suporte cardan) com câmara
(2) Trilhos para motor(3) Unidade central(4) Cruzeta em carbono
Os Componentes Intel® Falcon™ 8+ UAV vistos de baixo:(1) Suporte de câmara estabilizado de
forma dinâmica, com câmara(2) Trilhos para motor (3) Peça central da cruzeta com LEDs(4) Cruzeta em carbono(5) Pés de aterragemPor questões de orientação, o UAVdispõe de três luzes de posicionamentodo LED:
• branco em baixo• verde no lado direito• vermelho no lado esquerdo
1
2
2
3
4 4
4 4
1
2
2
3
4
4
5
5

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 20
O Intel® Falcon™ 8+ UAV visto de baixo, cruzeta em carbono com peça central de cruzeta, disposição de antena:As antenas de ligação de dados (2,4 GHz), bem como as antenas de liga-ção de vídeos (5,8 GHz) estão integradas nos pés de aterragem. Estão dispostas na diagonal, tal como apresentado na imagem à esquerda.
Figura 2.1: Os Componentes Intel® Falcon™ 8+ UAV (Continuação)
Dados
Dados
Vídeo
Vídeo

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 21
2.1.1. Unidade CentralAs seguintes figuras descrevem as peças individuais da Unidade Central.
Figura 2.2: Vista Traseira da Unidade Central sem Suporte Cardan (Suporte da Câmara)
A Unidade Central é composta por:(1) Chassis em fibra de carbono(2) Entrada para dispositivo USB (para
sistema de ficheiros até 16 GB: FAT32, tamanho da unidade de alocação: 32 kilobytes) para atualizações firmware
(3) Orifício para a haste de carbono do suporte da câmara, ver “Unidades do Suporte Cardan” na página 24
(4) Compartimentos da bateria com mola de retenção (7) para baterias
(5) Botão de ligar(6) Entrada para cartão Micro SD (cartão
SD: classe de velocidade mín. 10, para sistema de ficheiros até 16 GB: FAT32, tamanho da unidade de alocação: 32 kilobytes), para registos de voo (“Black Box”), têm de ser inseridos contactos acima
(7) Molas de retenção para as baterias(8) Local para o rótulo com o número de
série do UAV Construído no interior:• A eletrónica para estabilização de voo
e alimentação elétrica• Módulos de Ligação de Dados de
Diversidade• Módulo Transmissor de Vídeo
1
2
3
44
5
6
7 78

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 22
Figura 2.3: Vista Dianteira da Unidade Central sem Suporte Cardan (Suporte da Câmara)
Vista dianteira:(1) Orifício para a haste de carbono do
suporte da câmara(2) Entrada para conector para a ficha de
adaptador de carga útil, (ver n.º (1) em "Unidades do Suporte Cardan" na página 24
(3) Mola de retenção para o adaptador de carga útil
(4) Tubo de cabo (contém os cabos das antenas)
(5) Ventoinha para o arrefecimento interno por detrás das entradas
(6) Amortecedores de vibração
Figura 2.4: Vista Lateral da Unidade Central, Lado Esquerdo sem Suporte Cardan (Suporte da Câmara)
Vista lateral (esquerda):(1) Luz de posicionamento do LED
(vermelho quando o UAV estiver em funcionamento), o mesmo no lado direito (verde quando o UAV estiver em funcionamento)
(2) Amortecedores de vibração(3) Tubo de cabo (que contém, p. ex. os
cabos das antenas)
4
5
1
2
6 66 6
3
1
2
3
2

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 23
2.1.2. Trilhos para motor do UAVAs figuras seguintes apresentam a parte dianteira do trilho para o motor esquerdo.
Os trilhos do motor estão conectados por uma cruzeta em carbono, que consiste emquatro tubos de carbono conectados por uma peça central da cruzeta. O cabo da antena pode ser encontrado no interior do tubo da cruzeta em carbono.
Figura 2.5: Trilhos para o Motor e Equipamento
Trilhos para o motor e elementos relacio-nados são compostos por:(1) Hélices, montados diretamente nos
motores(2) Motores sem escova, montados
diretamente nos suportes do motor(3) Suporte do motor(4) Tubo em fibra de carbono(5) Conector entre cruzeta de carbono e
trilhos para motor (6) Pé de aterragem (frente esquerda
apresentada): a antena de ligação de vídeo (ou antena de ligação de dados, conforme aplicável) está integrada (ver “Os Componentes Intel® Falcon™ 8+ UAV” na página 19).
Cada trilho para o motor de quatro con-troladores de motor, assente por entre o tubo de carbono.
CUIDADO: PEÇAS PERIGOSAS EM MOVIMENTO, MANTENHA OSDEDOS E OUTRAS PARTES DO CORPO AFASTADAS.
1 1
2
2
3
34
5
6

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 24
2.1.3. Suporte de Câmara Estabilizado de Forma Dinâmica (Suporte Cardan)
A figura seguinte descreve as peças (ou sub-unidades) do suporte cardan.
Figura 2.6: Unidades do Suporte Cardan
O suporte de câmara estabilizado de forma dinâmica consiste em:(1) Circuito para controlo da câmara(2) Carga útil (p. ex. Sony Alpha 7R)(3) Servo-inclinação(4) Estrutura em fibra de carbono (5) Porca de fixação serrilhada,
estabilizada de forma dinâmica, para suporte da câmara
(6) Adaptador de carga útil (ver detalhes em baixo). O adaptador de carga útil é a ligação entre o suporte de câmara e a unidade central do UAV. É móvel quando montado em cima da haste do suporte da câmara e ligado com um cabo.
O adaptador de carga útil (lado traseiro)(1) A ficha do conector deve ser
conectada ao seu equivalente, na parte dianteira do UAV (ver n.º (2) em "Vista Dianteira da Unidade Central sem Suporte Cardan (Suporte da Câmara)" na página 22).
(2) Entrada do adaptador para o conector de ligação esférica do servo-rolo
(3) Mola de desbloqueio(4) Orifício para a haste de carbono do
suporte da câmara
12
3
4
5
6
3
1
2
4

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 25
2.2. O INTEL® COCKPIT CONTROLLER (CTR)O CTR é o núcleo de controlo principal para o Intel® Falcon™ 8+ UAV e as cargas úteisassociadas/câmaras. Foi concebido para ser transportado e operado por uma pessoa eapresenta toda a informação de voo relevante.
A comunicação entre o CTR e o Intel® Falcon™ 8+ UAV é realizada por duas ligações dedados digitais independentes de 2,4 GHz. O vídeo de pré-visualização é transmitidodigitalmente a 5,8 GHz. O CTR utiliza o mesmo tipo de bateria do Intel® Falcon™ 8+UAV. A bateria encontra-se no compartimento da bateria, que pode ser acedida a partirda parte inferior do CTR (ver “Preparar o CTR” na página 112).
O CTR serve como um dispositivo de interface para o sistema de voo. Está pré-programado e pronto a usar.
O Visor de Estado é usado para a comunicação entre o CTR e o Intel® Falcon™ 8+ UAV.
O tablet com ecrã tátil apresenta a pré-visualização de vídeos ao vivo, a partir dacâmara montada.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 26
Figura 2.7: Síntese Intel® Cockpit Controller (CTR)
Vista frontal, com painel de antena aberto:O CTR pode ser dividido em (de baixo para cima):(1) Unidade de controlo remota (2) Tablet com ecrã tátil (para vídeo de
pré-visualização e mais, ver “O TABLET COM ECRÃ TÁTIL” na página 114), apresentado sem proteção solar
(3) Painel de antena (aberto). Todas as comunicações entre o CTR e o Intel® Falcon™ 8+ UAV são enviadas e recebidas através do painel de antena. Compreende antenas de 2,4 GHz para toda a comunicação de controlo e de telemetria e antenas de 5,8 GHz para receber o vídeo de pré-visualização.
Síntese, vista lateral, lado direito.(1) Unidade de controlo remota (2) Tablet com ecrã tátil, apresentado
sem proteção solar(3) Painel de antena (aberto)
Para evitar reflexos, existe uma proteção solar permanentemente colocada no tablet com ecrã tátil. Dobra para armaze-namento e transporte.
1
2
3
12
3

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 27
Os elementos funcionais da unidade de controlo remoto CTR são:(1) Botão INICIAR/PARAR: inicia/para os
motores quando o manípulo esquerdo é simultaneamente mantido para baixo (ver “INICIAR E PARAR OS MOTORES” na página 144).
(2) Botão GPS: Modo GPS LIGADO (3) Botão HGT: Modo Altitude LIGADO
Quando ambos os botões forem LIGADOS/acesos, é ativado o Modo Manual
(4) Interruptor basculante esquerdo (R1) controla o ângulo de inclinação da câmara, o Interruptor basculante direito (R2) controla as diferentes funções da câmara, dependendo da carga útil adjacente
(5) Manípulos de controlo esquerdo e direito
(6) Visor de Estado (ver “VISOR DE ESTADO” na página 190).
(7) O botão de pressão esquerdo (B1) ajusta a câmara para ângulos predefinidos +/-90°, +/-45° e 0°, quando o interruptor basculante esquerdo R1 (4) é premido simultaneamente, o botão de pressão direito (B2) controla diferentes funções de câmara, dependendo da carga útil fixada
(8) Quatro botões de função para o Visor de Estado
(9) Botão REGRESSAR AO INÍCIO (10)Botão de LIGAR(11)Suportes de apoio de ombros
integrados
Figura 2.7: Síntese Intel® Cockpit Controller (CTR) (Continuação)
1 2 3
4 45 5
67 7
8
910
11

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 28
Existem diferentes conectores na parte detrás do CTR:• 4 X USB • 1 X HDMIA porta USB identificada como USB 1 apenas pode ser usada para efetuar as atualizações do firmware a partir de um dispositivo USB. A outra porta USB pode ser usada para conectar o Controlo de Câmara Independente (Independent Camera Control, ICC) ou dispositivos USB com missões de voo previamente pla-neadas.
Uma porta de auscultadores (conetor mini) está localizada no lado inferior direito da unidade de controlo remoto CTR (1). É possível conectar os ausculta-dores, que podem ser úteis em condi-ções de barulho.Sem auscultadores ligados, alertas acús-ticos são reproduzidos através de um pequeno altifalante (2) dentro do CTR.
Figura 2.7: Síntese Intel® Cockpit Controller (CTR) (Continuação)
2
1

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 29
CUIDADO: RISCO DE PERDA PERMAMANTE DE AUDIÇÃO DEVIDO AUSO DE AURICULARES OU AUSCULTADORES COM VOLUMEELEVADO COM ESTE PRODUTO.
ANTES DE COLOCAR AUSCULTADORES OU AURICULARESPRÓXIMOS DO OUVIDO, 1) PROCURE UM AMBIENTE CALMO, 2)BAIXE O VOLUME PARA O AJUSTE MÍNIMO DO PRODUTO, 3)CONECTE OS AURICULARES OU AUSCULTADORES AO PRODUTO, 4)COLOQUE OS AURICULARES OU AUSCULTADORES PRÓXIMOS DOOUVIDO E 5) AUMENTE LENTAMENTE O VOLUME DO PRODUTOPARA UM NÍVEL CONFORTÁVEL. EVITE AUMENTAR O VOLUMEACIMA DESSE NÍVEL.
AUMENTAR O VOLUME PARA QUE SEJA MAIS ALTO QUE OAMBIENTE BARULHENTO, TAL COMO NUMA RUA DA CIDADE, PODEFAZER COM QUE OS NÍVEIS EXCEDAM OS LIMITES DE SEGURANÇA.SE NOTAR DESCONFORTO OU ZUMBIDO NOS OUVIDOS, REDUZA OVOLUME OU TIRE OS AURICULARES OU AUSCULTADORES.
RISCO DE PERDA PERMANENTE DE AUDIÇÃO DEVIDO A USO DEALTIFALANTES DEMASIADO PRÓXIMOS DO OUVIDO.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 30
2.2.1. O Visor de EstadoO Visor de Estado mostra todas as informações relevantes para o voo. Estáincorporado na unidade de controlo do CTR. Para mais informações sobre comomanusear o Visor de Estado, ver “VISOR DE ESTADO” na página 190).
Figura 2.8: Visor de estado
Através do Visor de Estado, pode visuali-zar as configurações atuais e ajustar fun-ções específicas do UAV. Para tal, use os quatro botões localizados no canto infe-rior esquerdo do Visor de Estado.
O botão Escape (lado esquerdo) é usado para sair dos menus/sub-menus e apagar funções. No texto que se segue, é apresentado como ESC.Com o botão de seta ESQUERDO (ao meio, lado esquerdo)e o botão de seta DIREITO (ao meio, lado direito), pode percorrer os menus ou alterar os parâmetros.O botão Enter (lado direito) é usado para entrar nos menus e ativar fun-ções. No texto seguinte, é apresen-tado como ENT.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 31
2.2.2. O Tablet com Ecrã TátilO tablet com ecrã tátil do Windows® baseado na Intel® dispõe de um ecrã de 8,3polegadas, com uma resolução de 1920 X 1200 pixeis. Está diretamente montado naunidade remota do Intel® Cockpit Controller (CTR) e não pode ser removido. O tablet é ligado pela bateria do CTR e tem de ser ligada antes do CTR ser LIGADO. O tablet com ecrã tátil serve de monitor de vídeo, apresenta informação de voo e dáacesso a funcionalidades alargadas (ver “O TABLET COM ECRÃ TÁTIL” na página 114).
2.3. O CONTROLO DE CÂMARA INDEPENDENTE (ICC) O Controlo de Câmara Independente (ICC) é uma peça opcional do Pacote de Inspeção(ver “PACOTES DE FUNCIONALIDADES DE SOFTWARE” na página 100). Graças ao ICCo operador da câmara pode controlar as funções principais da câmara a partir dogamepad, que está conectado ao CTR através da porta USB (porta USB 2 – 4). As portasUSB encontram-se na parte de trás do CTR no canto superior esquerdo (ver “SínteseIntel® Cockpit Controller (CTR)” na página 26).
Figura 2.9: O Tablet com Ecrã Tátil
Botão de ligar na extremidade superior, lado direito (1).Nenhuma das 4 portas tapadas do lado direito do tablet (auscultador, USB, car-tão SD, carregamento via USB) está a ser utilizada.
Figura 2.10: Controlo de Câmara Independente (Independant Camera Control, ICC)
XBOX gamepadPara utilizar o gamepad XBOX como ICC, este terá de ser conectado ao CTR através de uma porta USB (porta USB 2 – 4), tal como apresentado.
1

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 32
A tabela seguinte apresenta uma síntese da atribuição de funções:
LOGITECH F310 gamepadPara utilizar o gamepad da LOGITECH F310 como ICC, este terá de ser conec-tado ao CTR através de uma porta USB (porta USB 2 – 4), tal como apresentado e descrito acima. O interruptor no fundo do gamepad (X--D) tem de estar ajustado para X.Quando o gamepad LOGITECH F310 for utilizado pela primeira vez com o CTR, será instalado automaticamente um con-trolador correspondente. Durante a insta-lação, a pré-visualização ao vivo pode atrasar-se. Após a instalação, é necessário reiniciar o tablet.
Tabela 2.1: Operar uma câmara por ICC
BOTÃO REFEREN-CIADO NO
ICC
CÂMARA
SONY ALPHA 7R CARGA ÚTIL DE INSPEÇÃO
(1) Iniciar/Parar vídeo /
(2) Disparo foto Disparo foto (ambas as câmaras)
(3) Ver última imagem /
(4) / Alterar a palete de cores (com FLIR ativo)
(5) Inclinação da câmara (para cima/para baixo)Guinada (esquerda/direita)
Inclinação da câmara (para cima/para baixo)Guinada (esquerda/direita)
(6) Inclinação da câmara (para cima/para baixo)Guinada (esquerda/direita)
Inclinação da câmara (para cima/para baixo)Guinada (esquerda/direita)
Figura 2.10: Controlo de Câmara Independente (Independant Camera Control, ICC)
1
2
3
4
5 6
7
8 9
10 11

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 33
2.4. O MONITOR DO 2.º OPERADORO monitor do 2º operador é uma peça opcional do UAS e pode ser entregue como umacessório adicional.
Pode ser usado como monitor de pré-visualização para o 2.º piloto, especialmentequando for usado o ICC (ver “O CONTROLO DE CÂMARA INDEPENDENTE (ICC)” napágina 31). Não é apresentada mais nenhuma informação (de voo) neste monitor.
Graças ao 2º monitor, o operador da câmara pode controlar a pré-visualização devídeo da câmara usada. Está conectado ao CTR através da porta HDMI através de umcabo. A porta HDMI encontra-se na parte de trás do CTR no canto superior esquerdo(ver “Síntese Intel® Cockpit Controller (CTR)” na página 26).
(7) Inclinação horizontal (ajuste horizonte câmara) (esquerda/direita)Compensação de exposição +/- (para cima/para baixo)
Inclinação horizontal (ajuste horizonte câmara) (esquerda/direita)Interruptor da câmara (para cima/para baixo)
(8) Velocidade do obturador - Zoom + (quando a câmara RGB está ativa)
(9) Velocidade do obturador + Zoom - (quando a câmara RGB está ativa)
(10) Velocidade de inclinação da câmara -
Velocidade de inclinação da câmara -
(11) Velocidade de inclinação da câmara +
Velocidade de inclinação da câmara +
Tabela 2.1: Operar uma câmara por ICC (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 34
2.5. CARGAS ÚTEIS - OPÇÕES DE CÂMARADevido à integração profunda das câmaras, é possível alterar as definições, tais comoabertura, velocidade do obturador ou zoom (dependendo da câmara) diretamente apartir da unidade de controlo remoto do Intel® Cockpit Controller (CTR) e/ou daaplicação de Cockpit Control no tablet com ecrã tátil, enquanto o sistema estiver no ar.Para garantir a completa integração no Intel® Falcon™ 8+ UAV, cada carga útil tem deser submetida a alterações mecânicas e elétricas. Para tal, apenas são permitidascargas úteis aprovadas pela Intel. Cargas úteis que não tenham sido integradas, podemafetar a calibração da bússola, devido às emissões magnéticas através da câmara epodem ter efeitos prejudiciais ao desempenho em voo. Se necessitar de assistênciapara determinar qual a carga útil que deve escolher para a sua aplicação, contacte, porfavor, a equipa de assistência: [email protected].
Figura 2.11: Pacote de Monitor para 2º operador
Os elementos do pacote de monitor do 2º operador são:(1) Tripé(2) Proteção solar(3) Placa adaptadora para tripé(4) Adaptador de bateria(5) Adaptador de monitor(6) Moldura para proteção solar(7) Monitor(8) Cabo HDMI Não apresentado:• Bateria• Carregador
O 2º monitor do operador completa-mente equipado.
1
2
3 4 5
67
8

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 35
Figura 2.12: Controlo de Câmara via Intel® Cockpit Controller (CTR)
Todas as câmaras integradas no Intel® Falcon™ 8+ UAV podem ser controladas através do CTR. Diversos interruptores no CTR estão atribuídos aos controlos da câmara.(1) Botão de Pressão B1: ajusta a câmara
para ângulos predefinidos +/-90°, +/-45° e 0° quando for premido R1 (4) simultaneamente (ver em baixo para mais detalhes)
(2) Botão de Pressão B2: altera a função, dependendo da carga útil conectada
(3) Botão de Pressão B3: botão de disparo no topo esquerdo do manípulo de controlo (S1)
(4) Interruptor Basculante R1: inclinação da câmara
(5) Interruptor Basculante R2: muda a função dependendo da câmara usada
(6) Manípulo de controlo S2: rodar o manípulo de controlo direito (S2) controla o eixo de guinada do UAV.
(7) Visor de Estado e botões de controlo relacionados
(8) ESC, ESQUERDO, DIREITO, ENT: dependendo da carga útil, opções adicionais podem ser acedidas através do Visor de Estado. Premir ENT e selecionar Camera Options (Opções de Câmara) abre o respetivo menu (ver “Visor de estado” na página 30 e ver “VISOR DE ESTADO” na página 190).
Para detalhes exatos relativamente a funções acessíveis, ver as descrições da carga útil individual.
1 23
4 5
67
8

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 36
Ajustar o Ângulo da CâmaraO Ecrã Principal do Visor de Estado mostra o ângulo da câmara. 0° significa que a câmara está apontada para a frente e nivelada horizontalmente. -90° significa que a câmara está apontada para baixo, 90° significa que está a apontar para cima.Empurre o interruptor basculante R1 para longe de si, para inclinar a câmara para baixo. Puxe o interruptor basculante R1 para si, para inclinar a câmara para cima. Quanto mais continuar a puxar ou premir o R1, mais rápido é o movimento de incli-nação.Quando a câmara não estiver a 0°, um simples premir do botão B1 irá colocá-la de volta a 0°. Quando a câmara estiver a 0°, premir e manter o B1 premido e, simulta-neamente, premir o R1, de forma breve, irá ajustar a câmara para -45°; premir nova-mente, de forma breve, o R1 enquanto mantém o B1, irá ajustá-la para -90°. Ao puxar o R1 enquanto mantém o B1, a câmara pode ser inclinada para cima, em conformi-dade, em incrementos de 45°.
Figura 2.12: Controlo de Câmara via Intel® Cockpit Controller (CTR) (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 37
2.5.1. Mudar uma Carga Útil (Câmara)As câmaras foram concebidas para permanecerem por entre o suporte cardan (suportede câmara). O suporte cardan completo com a câmara pode ser substituído semferramentas. O Intel® Falcon™ 8+ UAV identifica automaticamente a câmara adjacente eos menus do Visor de Estado no CTR são alterados em conformidade.
Figura 2.13: Instalar o Suporte de Câmara.
Para instalar o suporte de câmara:1. Coloque a haste de carbono do
suporte da câmara na parte dianteira da unidade central (1). O parafuso manual (2) não é colocado, desta vez. Certifique-se que a haste de carbono não está em ângulo, quando for inserida.
2. Fixe o adaptador de carga útil (3).Certifique-se de que a ficha do conector do adaptador encaixa no seu equivalente na parte dianteira do UAV. Ver detalhe #1, em baixo.
3. No servo-rolo, certifique-se que o conector de ligação esférica está fixo na respetiva entrada no adaptador, quando fixar o suporte da câmara no UAV. Ver detalhe #2, em baixo.
4. Prima a mola de desbloqueio do adaptador de carga útil na respetiva abertura homóloga, na parte dianteira do UAV. Ver detalhe #3, em baixo.
5. Instale a porca do parafuso manual (2) na parte de trás da unidade central (aperto manual). Ver detalhe #4, em baixo.
1
2
3

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 38
O adaptador de carga útil é a ligação entre o suporte de câmara e a unidade central do UAV. O adaptador de carga útil é móvel, quando montado em cima da haste do suporte da câmara e ligado com um cabo. (1) Ficha do conector(2) Entrada do adaptador para o servo-
rolo com conector de ligação esférica inserido
(3) Mola de desbloqueio(4) Porca de fixação serrilhada,
estabilizada de forma dinâmica, do suporte da câmara
Figura 2.14: Remover Suporte da Câmara.
Para remover o suporte da câmara:1. Remova a porca de fixação serrilhada
(1) do suporte da câmara na parte traseira da unidade central.
2. Desconecte, cuidadosamente, o adaptador de carga útil exercendo pressão sobre a mola de desbloqueio do adaptador (2).
3. Desconecte a esfera do conector de ligação esférica do servo-rolo para fora da entrada do adaptador.
4. Retire o suporte da câmara, cuidadosamente. Certifique-se de que é retirado a direito (não de um ângulo)
Figura 2.13: Instalar o Suporte de Câmara. (Continuação)
4
2
1
3
1
2

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 39
2.5.2. Calibração da carga útil e da bússola
A calibração da carga útil é armazenada na própria carga útil e a calibração da bússolaé armazenada no UAV.
2.5.2.1. Calibração da carga útilA calibração da carga útil pode ser efetuada no interior com os motores desligados.
1. Coloque a carga útil na qual está a efetuar a calibração.2. LIGUE a carga útil, depois o Intel® Falcon™ 8+ UAV, depois o tablet com ecrã tátil e,
finalmente, o CTR.3. No CTR, prima o botão ENT do Visor de Estado e navegue para Settings >
Payload calib (ver “VISOR DE ESTADO” na página 190).4. Certifique-se de que a câmara se pode virar livremente da posição completamente
para baixo para a posição completamente para cima (com as cargas úteis de inspeção, pode necessitar de levantar um pouco o Intel® Falcon™ 8+ UAV, para se certificar de que a carga útil não bate no solo, quando inclina para baixo).
5. Prima ENT para iniciar a calibração. A câmara irá rodar completamente para baixo e depois mover-se progressivamente para a posição superior. Não toque no Intel® Falcon™ 8+ UAV durante o processo.
6. Quando a carga útil já não se mover, desligue a carga útil do Intel® Falcon™ 8+ UAV, depois o tablet com ecrã tátil e, por fim o CTR.
CUIDADO: QUANDO INSTALAR UMA NOVA CARGA ÚTIL NO INTEL®FALCON™ 8+ UAV, É NECESSÁRIO EFETUAR UMA CALIBRAÇÃO DACARGA ÚTIL E UMA CALIBRAÇÃO DA BÚSSOLA (ESTRITAMENTE PORESSA ORDEM).
O INTEL FALCON™ 8+ UAV IRÁ GUARDAR AS CALIBRAÇÕES COMESSA MESMA CARGA ÚTIL EXATA E LEMBRÁ-LA DA PRÓXIMA VEZQUE FOR USADA.
SE AS CALIBRAÇÕES NÃO FOREM EFETUADAS, O SISTEMA IRÁ USAROS PARÂMETROS PREDEFINIDOS, QUE PODEM LEVAR ÀDIMINUIÇÃO DA PRECISÃO.
PARA EFETUAR AS CALIBRAÇÕES, POR FAVOR SIGA OS PASSOSABAIXO.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 40
7. Reinicie o sistema na sequência especificada (ver passo #2 acima).
8. Repita os passos acima descritos para cada carga útil, que deve ser usada com o Intel® Falcon™ 8+ UAV. Uma vez que a carga útil esteja calibrada, o Intel® Falcon™ 8+ UAV irá recarregar as definições.
2.5.2.2. Calibração da bússolaA calibração da bússola tem de ser efetuada durante o voo.
1. Coloque a carga útil na qual está a efetuar a calibração. 2. Coloque o Intel® Falcon™ 8+ UAV lá fora, num local com boa recepção GPS e sem
perturbações magnéticas.3. LIGUE a carga útil, depois o Intel® Falcon™ 8+ UAV, depois o tablet com ecrã tátil e,
finalmente, o CTR; levante voo.4. Deixe o Intel® Falcon™ 8+ UAV a planar em Modo GPS, a uma altura de aprox. 30 m
de altitude, onde não devem ser esperadas perturbações magnéticas.5. No CTR, prima o botão ENT do Visor de Estado e navegue para Settings >
Compass Calib (ver “VISOR DE ESTADO” na página 190).6. Prima ENT para confirmar. O Intel® Falcon™ 8+ UAV irá fazer uma viragem de 400°. 7. Assim que o Intel® Falcon™ 8+ UAV tiver finalizado a viragem, aterre, desligue a
câmara, depois o Intel® Falcon™ 8+ UAV, depois o tablet com ecrã tátil e, por fim, o CTR. Reinicie completamente o sistema na sequência especificada (ver passo #2 acima).
8. Repita os passos acima descritos para cada carga útil, que deve ser usada com o Intel® Falcon™ 8+ UAV. Uma vez que a carga útil esteja calibrada, o Intel® Falcon™ 8+ UAV irá recarregar as definições.
CUIDADO: É IMPORTANTE REINICIAR O SISTEMA, IMEDIATAMENTE,APÓS CADA PROCESSO DE CALIBRAÇÃO. OS NOVOS PARÂMETROSDE CALIBRAÇÃO APENAS FICARÃO ATIVOS APÓS REINICIAR OSISTEMA.
CUIDADO: É IMPORTANTE REINICIAR O SISTEMA. IMEDIATAMENTE,APÓS CADA PROCESSO DE CALIBRAÇÃO. OS NOVOS PARÂMETROSDE CALIBRAÇÃO APENAS FICARÃO ATIVOS APÓS REINICIAR OSISTEMA.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 41
2.5.2.3. Ajustar o horizonte da câmaraA posição zero do horizonte da câmara e/ou ângulo de inclinação pode necessitar deajuste, ocasionalmente, dado que pode alterar devido a variações de temperatura. Acalibração do horizonte da câmara pode ser efetuada no interior com os motoresdesligados.
Para reajustar a posição zero, siga estes passos:
1. LIGUE o Intel® Falcon™ 8+ UAV e o CTR, como habitualmente.2. Selecione o Link Loss Procedure.3. Empurre o manípulo de controlo esquerdo do CTR completamente para cima e
mantenha-o.4. Enquanto mantem o manípulo de controlo esquerdo completamente para cima,
use o manípulo de controlo direito para ajustar a câmara. Agora, controla diretamente os ângulos da câmara.
5. Quando a posição for corretamente definida, solte ambos os manípulos de controlo. A posição será guardada automaticamente, como a nova posição zero.
É também possível ajustar o horizonte da câmara em voo, mas não o ângulo deinclinação. Para ajustar o horizonte em voo:
1. Entre no menu do Visor de Estado ao premir ENT.2. Navegue para Camera Options > Adjust Horizon.3. Prima ENT. 4. Use as teclas de seta ESQUERDO/DIREITO do Visor de Estado para alterar o
horizonte. 5. Prima ENT para confirmar.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 42
2.5.3. Câmara de Enquadramento Total Sony Alpha 7RO Sony Alpha 7R dispõe de dois mostradores da função principal, que podem sercontrolados através do CTR (ver “Controlo da câmara através do CTR” na página 43).
2.5.3.1. Cuidados Gerais• Trate o suporte cardan sempre com cuidado. Se necessitar de inclinar a câmara
manualmente (quando não conectado ou enquanto o Intel® Falcon™ 8+ UAVestiver desligado), efetue-o, por favor, com muito cuidado. Se for aplicadademasiada força, as rodas dentadas dos servo-motores podem quebrar.
• A câmara é acionada pela bateria do Intel® Falcon™ 8+ UAV para poupar peso.Quando desligar o sistema, desligue primeiro a câmara e aguarde 10 segundospara permitir que a câmara desligue, totalmente, e guarde todas as imagens edefinições. Só depois pode desligar o Intel® Falcon™ 8+ UAV. Se desligar o Intel®
Figura 2.15: Sony Alpha 7R e Entrada Cartão SD
Especificações:• Dimensões do sensor: 35,90 mm x
24,00 mm• Resolução: 36,4 Mpx (7360 x 4912 pixeis)• Lentes: Sonnar® T* FE 35 mm F2.8 ZA
(SEL35F28Z)• Peso incl. lente e suporte cardan: ~ 790 g.• Tempo de voo máx. aproximado: 16 min• Aplicações sugeridas: Fotografia aérea,
inspeção e vigilância aérea Lentes aprovadas: • Sonnar® T* FE 35 mm F2.8 ZA (SEL35F28Z)Note, por favor, que todas as outras lentes de enquadramento total são demasiado pesadas e não podem ser aprovadas
As imagens são arquivadas num cartão SD, que é inserido por baixo de uma tampa, na parte detrás, lado direito da câmara. Para transferir imagens para o computador, use, por favor, um leitor de cartões SD, que está conectado ao computador.Para mais informações: https://esu-pport.sony.com/US/p/model-home.pl?mdl=ILCE7R&LOC=3#/manualsTab

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 43
Falcon™ 8+ UAV demasiado cedo, irá cortar a alimentação elétrica da câmara earisca-se a perder dados.
• Mantenha o modo aeronave da câmara ligado, para evitar interferência de rádioa partir da câmara (MENU > >Airplane Mode > ON).
2.5.3.2. Controlo da câmara através do CTREsta secção descreve como o Sony Alpha 7R pode ser operado ao usar os elementosfuncionais do CTR.
Figura 2.16: Layout de Controlo Sony Alpha 7R CTR
Botão de Pressão B1 (1): ajusta a câmara para ângulos predefinidos +/-90°, +/-45° e 0° quando for premido o Interruptor Basculante R1 (4) simultaneamente (ver "Ajustar o Ângulo da Câmara" na página 36 para mais detalhes).Botão de Pressão B2 (2): altera a função, dependendo da carga útil conectada. Botão de Pressão B3 (3): botão de dis-paroInterruptor Basculante R1 (4): inclinação da câmara, altera ligeiramente o ângulo.Interruptor Basculante R2 (5): inclinação da câmara; Dial 1 ou Dial 2, dependendo do B2Manípulo de Controlo S2 (6): virar o manípulo de controlo direito (S2) con-trola o eixo de guinada do UAV. Visor de Estado (7): ver “Opções de Câmara através do Visor de Estado” na página 44 ESC, ESQUERDO, DIREITO, ENT (8): Botões de controlo do Visor de Estado (ver “Visor de estado” na página 30).
1 23
4 5
6
8
7

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 44
2.5.3.3. Opções de Câmara através do Visor de Estado
Prima o botão ENT do Visor de Estado para entrar no menu. Navegue para CameraOptions. As opções seguintes estão disponíveis para o Sony Alpha 7R.
O Sony Alpha 7R dispõe de dois mostra-dores da função principal, que podem ser controlados através do CTR. A função do Dial 1 no Sony A7R pode ser controlada pelo R2, quando o B2 estiver na posição 1 (LED desligado). A função do Dial 2 pode ser controlada pelo R2, quando o B2 estiver na posição 2 (LED ligado/azul) ou através do Visor de Estado ao premir ENT > Camera Options > Dial 2.As funções predefinidas do Dial 1 e do 2, dependem do modo de disparo selecio-nado na câmara. A tabela abaixo mostra as dependências.
Tabela 2.2: Controlo de Câmara Sony Alpha 7R Através das Funções de Câmara
B2 POSIÇÃO
R2 FUNÇÃO
CÂMARA DEFINIDA PARA
MODO S(PRIORIDADE
DE OBTURADOR)
CÂMARA DEFINIDA
PARAMODO A
(PRIORIDADE DE
ABERTURA)
CÂMARA DEFINIDA PARA
MODO M(MANUAL)
1 (LED desli-gado)
Dial 1 Velocidade do obturador
Abertura Abertura
2 (LED ligado/azul)
Dial 2 Compensação de exposição
Compensa-ção de exposi-ção
Velocidade do obturador
Figura 2.16: Layout de Controlo Sony Alpha 7R CTR (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 45
2.5.3.4. Definições da CâmaraA secção seguinte descreve as definições mais importantes da câmara, quando usadacom o Intel® Falcon™ 8+ UAV.
Tabela 2.3: Controlo de Câmara Sony Alpha 7R através do Visor de Estado
AS OPÇÕES SEGUINTES ESTÃO DISPONÍVEIS PARA O SONY ALPHA 7R.
Record/Stop (Gravar/Parar)
Inicia e para a gravação de vídeo
Dial 2 Ver tabela de detalhes anterior.
Review (Revi-são)
Revisão de imagens já arquivadas no cartão SD da câmara. Use o Interruptor Basculante R2 (n.º 5 na figura acima) para navegar.
Adjust Hori-zon (Ajuste Hori-zonte)
Ocasionalmente, a posição neutra dos servo-motores do suporte cardan pode ser reajustado. Use o comando para ajustar o horizonte (ângulo de rotação), durante o voo. Se o sistema ainda estiver em terra e os motores não estiverem a funcionar, também pode ser efetuado em ambos os eixos (rotação e incli-nação) através dos manípulos de controlo. ver “Ajustar o hori-zonte da câmara” na página 41.
Roll Comp. ON/OFF (Comp. Viragem Ligar/Desligar)
Predefinição = LIGADA.Durante Comp. Viragem = Desligado o suporte cardan já não irá compensar os movimentos de viragem do Intel® Falcon™ 8+ UAV.Isto pode ser usado ao fazer voos de vídeo dinâmico.
Figura 2.17: Definições da Câmara através da Câmara Sony Alpha 7R
As definições mais importantes podem ser acedidas, rapidamente, através dos botões:(1) Fn: ver em baixo(2) MENU: ver em baixo(3) C2: fornece acesso rápido ao Modo
Foco(4) WB: fornece acesso rápido ao
Balanço de BrancosISO pode ser facilmente acedido ao rodar a roda de controlo, na parte de trás da câmara.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 46
Depois de premir o botão Fn (número (1) acima) os parâmetros seguintes podem ser acedidos por predefinição:Linha de cima:Modo Drive / Modo Flash / Comp. Flash / Modo Foco / Área Foco / Comp. Exposi-çãoLinha de baixo:ISO / Modo Medição / Balanço de Bran-cos / DRO /Auto HDR / Estilo Criativo / Modo Disparo
O menu da câmara pode ser acedido ao premir o botão de MENU (número (2) acima). Na primeira página do menu, a Dimensão da Imagem e a Qualidade podem ser definidas. Consulte o manual da câmara para mais detalhes.
Figura 2.17: Definições da Câmara através da Câmara Sony Alpha 7R (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 47
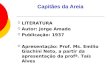
2.5.4. Carga Útil de InspeçãoA Carga Útil de Inspeção consiste em duas câmaras: Câmara Panasonic RGB einfravermelhos (IR) câmara FLIR TAU 2 640.
Figura 2.18: Carga Útil de Inspeção
Especificações da câmara Panasonic RGB:• Dimensões do sensor: Sensor CMOS 1/2.3”,
6,2 x 4,6 mm • Resolução: 12,1 Mpx (4000 x 3000 pixel)• Lentes: LEICA DC VARIO-ELMAR F3,3 - 6,4 /
Multistage Iris Diaphragma (F3,3 - 8,0 (W), F6,4 - 8,0 (T))
• Distância focal: 4,3 - 129 mm (24 - 720 mm, 35 mm equiv.)
• Zoom ótico: 30x• Peso incl. lente e suporte cardan: ~ 550 g.• Tempo de voo máx. aproximado: 18 min• Aplicações sugeridas: InspeçãoDependendo do modelo da câmara Panasonic, encontrará mais informações aqui:TZ71: https://www.panasonicstore.ie/wp-con-tent/uploads/2015/05/DMCTZ70.pdfZS50: ftp://ftp.panasonic.com/camera/om/dmc-zs50_adv_om.pdfNote, por favor, que a funcionalidade WiFi des-tas câmaras está desativada para a utilização com o Intel® Falcon™ 8+ UAV.Especificações da câmara IR FLIR Tau 2 640:• Termovisor: VOx microbolómetro não refri-
gerado• Resolução: 640 × 512 pixel• Espaçamento de pixeis: 17 μm• Banda espectral: 7,5 - 13,5 μm• Distância focal: 19 mm (~ 59 mm, 35 mm
eqiv.)Para mais detalhes: http://www.flir.com/cores/display/?id=54717

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 48
A câmara Panasonic necessita da sua própria bateria carregada para funcionar. A entrada da bateria pode ser acedida a partir da parte de baixo da carga útil. O cartão SD da câmara é inserido próximo da bateria.Um carregador em separado para as baterias Panasonic é fornecido com a carga útil.
A câmara FLIR Tau 2 640 é acionada pela bate-ria Intel® Falcon™ 8+ UAV para poupar peso e não necessita de ser LIGADA ou DESLIGADA. O cartão micro-SD da FLIR Tau é inserido de lado na câmara, com os contactos do micro-SD direcionados para a lente da câmara.Cada vez que o Intel® Falcon™ 8+ UAV é ligado, é criada uma novo sub-pasta, numerada sequencialmente (FLIR0000, FLIR0001, FLIR0002...) no cartão micro-SD. Nesta pasta são guardados até 128 ficheiro de imagem. Se forem tiradas mais do que 128 imagens durante um voo, será criada uma nova sub-pasta, onde as imagens adicionais serão guardadas. Antes da câmara poder ser usada, a tampa preta tem de ser retirada da lente.As imagens são arquivadas num formato de ficheiro proprietário .ARA. O formato de saída 14-bit RAW é capturado da câmara, o que per-mite a definição da gama da temperatura durante o pós-processamento. Usar um editor térmico (incluído no AscTec Navigator), as ima-gens RAW podem ser apresentadas e converti-das num ficheiro JPEG radiométrico compatível com ferramentas FLIR. O AscTec Navigator Software pode ser descar-regado da área: http://intel.com/FalconDown-loads. Está disponível um manual detalhado do sof-tware aqui: http://intel.com/FalconManual.
Figura 2.18: Carga Útil de Inspeção (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 49
Quando for anexada uma Carga Útil de Inspe-ção, o número 999 irá aparecer por baixo do ícone do modo de voo do menu do Visor de Estado. O número significa que o número de imagens, que podem ser arquivadas no cartão Micro SD do FLIR Tau 2 640. O número máximo que pode ser apresentado no ecrã é 999, con-tudo, o número atual de imagens do cartão SD consegue arquivar acima de 999. Como tal, o número apresentado não irá contar até o cartão SD atingir a capacidade de menos de 999 ima-gens.
Se o FLIR Tau 2 640 IR Raw Data Logger não conseguir aceder ao cartão SD, será apresen-tada uma mensagem de erro ERR, ao invés dos números de imagens remanescentes. No caso de tal ocorrer, por favor retire o cartão SD e resolva o problema.Se após a reinserção, a mensagem de erro con-tinuar, formate o cartão SD.Definições de formato são:• Sistema de ficheiro: FAT32• Tamanho da unidade de alocação: 64 kilo-
bytes• Etiqueta de volume: FLIRSD
Nota
O FLIR e a câmara Panasonic RGB conseguem gravar vídeo. Durante a gravação de vídeo na câmara Panasonic RGB, a câmara não irá apresentar nenhum vídeo de pré-visualização. Isto significa que o vídeo de pré-visualização no tablet com
ecrã tátil do CTR tem de ser comutado para apresentar a imagem FLIR (ver “Controlo de Carga Útil de Inspeção através do CTR” na página 50).
Figura 2.18: Carga Útil de Inspeção (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 50
2.5.4.1. Cuidados Gerais• Trate o suporte cardan sempre com cuidado. Se necessitar de inclinar a câmara
manualmente (quando não conectado ou enquanto o Intel® Falcon™ 8+ UAVestiver desligado), efetue-o, por favor, com muito cuidado. Se for aplicadademasiada força, as rodas dentadas dos servo-motores podem quebrar.
• Mantenha o modo aeronave da câmara ligado, para evitar interferência de rádioa partir da câmara (MENU > Setup > Page 2 > Airplane Mode > ON).
2.5.4.2. Controlo de Carga Útil de Inspeção através do CTRA figura seguinte descreve em detalhe como a Carga Útil de Inspeção pode sercontrolada através dos elementos funcionais do CTR.
Figura 2.19: Carga Útil de Inspeção: Layout de Controlo CTR
O FLIR Tau 2 640 efetua uma correção de campo plano (FFC). O FLIR efetua automa-ticamente uma FCC a cada 10 segundos (para mais informações sobre a FFC, con-sulte, por favor: http://www.flir.com/cvs/cores/knowledgebase/index.cfm?CFTREEITEMKEY=327&view=35774

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 51
Botão de Pressão B1 (1): ajusta a câmara para ângulos predefinidos +/-90°, +/-45° e 0° quando for premido R1 (4) simulta-neamente (ver "Ajustar o Ângulo da Câmara" na página 36 para mais deta-lhes).Botão de Pressão B2 (2): comuta entre as câmaras para pré-visualização ao vivo (FLIR e Panasonic).Botão de Pressão B3 (3): Botão de dis-paro. Ambas as câmaras serão dispara-das, simultaneamente, independentemente de qual a câmara que for selecionada para a pré-visualiza-ção ao vivo.Interruptor Basculante R1 (4): inclinação da câmara, altera ligeiramente o ângulo.Interruptor Basculante R2 (5): Altera a sua função dependendo de qual câmara é selecionada para a pré-visualização ao vivo. Ver tabela em baixo para mais deta-lhes.Manípulo de Controlo S2 (6): virar o manípulo de controlo direito (S2) con-trola o eixo de guinada do UAV. Visor de Estado (7): ver “Controlo de Carga Útil de Inspeção através do Visor de Estado” na página 52.ESC, ESQUERDO, DIREITO, ENT (8): Botões de controlo do Visor de Estado. (ver “Visor de estado” na página 30). A tabela em baixo apresenta os parâme-tros disponíveis, dependendo no modo de disparo da câmara.
Figura 2.19: Carga Útil de Inspeção: Layout de Controlo CTR (Continuação)
1 23
4 5
6
8
7

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 52
2.5.4.3. Controlo de Carga Útil de Inspeção através do Visor de EstadoPrima o botão ENT do Visor de Estado para entrar no menu. Navegue para CameraOptions. As opções seguintes estão disponíveis para a Carga Útil de Inspeção:
Tabela 2.4: Carga Útil de Inspeção: Layout de Controlo CTR
B2POSIÇÃO
CÂMARA ATIVADA
FUNÇÃO R2
1 (LED desligado)
Câmara Pana-sonic
Aumentar/diminuir zoom
Os parâmetros tais como a velocidade do obturador, abertura e ISO necessitam de ser ajustados direta-mente na câmara antes da descolagem.
2 (LED ligado/ver-melho)
FLIR Para cima - correção de campo plano de disparoPara baixo - ciclo pela paleta de cores
Os parâmetros, tais como isotermos e AGC (Automa-tic Gain Control - controlo automático de ganho), necessitam de ser ajusta-dos através do ficheiro de configuração no cartão SD da FLIR, antes da descola-gem.
Tabela 2.5: Controlo de Carga Útil de Inspeção através do Visor de Estado
AS SEGUINTES OPÇÕES ESTÃO DISPONÍVEIS PARA A CARGA ÚTIL DE INSPEÇÃO:
Switch Camera (Interruptor da Câmara)
Comuta a pré-visualização ao vivo no ecrã tátil entre o FLIR Tau 2 640 e a câmara Panasonic Lumix.
Adjust Hori-zon(Ajuste Hori-zonte)
Ocasionalmente, pode ser necessário reajustar a posição neutra dos servo-motores do suporte cardan. Use o comando para ajustar o hori-zonte (ângulo de rotação), durante o voo. Se o sistema ainda estiver em terra e os motores não estiverem a funcionar, também pode ser efe-tuado em ambos os eixos (rotação e inclinação) através dos manípulos de controlo, ver “Ajustar o horizonte da câmara” na página 41.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 53
Podem estar disponíveis câmaras adicionais. Verifique, por favor http://intel.com/FalconManual em termos de versão atualizada do manual.
Roll Comp. On/Off (Comp. Viragem Ligar/Des-ligar)
Predefinição = LIGADA. Durante Roll Comp. = Desligado, o suporte cardan já não irá compensar os movimentos de viragem do Intel® Fal-con™ 8+ UAV. Isto pode ser usado ao fazer voos de vídeo dinâmico.
Notas Os parâmetros de disparo necessitam de ser ajustados na câmara antes da descolagem.
Tabela 2.5: Controlo de Carga Útil de Inspeção através do Visor de Estado

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 54
2.5.5. Intel® High Resolution Imaging PayloadA Intel® High Resolution Imaging Payload é composta por uma câmara Sony RX1R IIcom um recetor Topcon B111 GNSS. Quando a Intel High Resolution Imaging Payloadé conectada, o recetor Topcon externo é utilizado como um recetor de backup deredundância para o recetor de GPS interno e para a georreferenciação de imagensdurante o pós-processamento. O recetor de GPS interno tem prioridade sobre orecetor Topcon e é usado para posicionar o UAV em voo. Se, por alguma razão, orecetor de GPS falhar, o recetor Topcon externo assume o controlo.
NotasA utilização de Intel Imaging Payload requer o pacote de versão de firmware
Intel Falcon 8+ UAS 1.2 ou superior (ver "Atualização de firmware" na página 69).
Figura 2.20: Especificações de Intel® High Resolution Imaging Payload
Especificações da câmara Sony RX1R II:• Dimensões do sensor: 35,90 mm x 24,00 mm• Resolução: 42,4 Mpx (7952 x 5304 pixeis)• Lente: lente de foco único ZEISS Sonnar T
35mm F2.0 (fixa)• Peso incl. lente e suporte cardan: ~ 796 g• Tempo de voo máximo aproximado: 16 min• Aplicações sugeridas: fotografia aérea, inspe-
ção e vigilância aérea.A antena do recetor Topcon B111 GNSS (1) situa-se no lado esquerdo da carga útil (vista frontal).
As imagens são guardadas no cartão SD, que é inserido por baixo da tampa, na parte de trás, no canto inferior direito da câmara (1). Para transferir imagens para um computador, use um leitor de cartões SD, que está conectado ao computador.Para mais informações, visite: https://esupport.sony.com/US/p/model-home.pl?mdl=DSCRX1RM2&LOC=3#/manualsTab
1
1

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 55
2.5.5.1. Cuidados gerais• Trate o suporte cardan sempre com cuidado. Se necessitar de inclinar a câmara
manualmente (quando não conectada ou enquanto o Intel® Falcon 8+ UAVestiver desligado), efetue-o, por favor, com muito cuidado. Se for aplicadademasiada força, as rodas dentadas dos servomotores podem quebrar.
• Não levante a carga útil pela antena do recetor Topcon B111 GNSS. Casocontrário, a ligação entre a antena e o suporte da câmara ficarápermanentemente danificada.
• A câmara é acionada pela bateria do Intel® Falcon 8+ UAV, para poupar peso.Quando desligar o sistema, desligue sempre primeiro a câmara, aguarde 10segundos para permitir que a câmara se desligue totalmente e guarde todas asimagens e definições. Depois, desligue o Intel Falcon 8+ UAV. Se desligar o IntelFalcon™ 8+ UAV demasiado cedo, irá cortar a alimentação elétrica da câmara earrisca-se a perder dados.
• Mantenha o modo de aeronave da câmara LIGADO, para evitar interferências derádio a partir da câmara (MENU > WIRELESS >Airplane Mode > ON).

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 56
2.5.5.2. Controlo da câmara através do CTREsta secção descreve como a Sony RX1R II pode ser operada usando os elementosfuncionais do Intel Cockpit Controller (CTR).
Figura 2.21: Layout de controlo Sony RX1R II CTR
Botão de Pressão B1 (1): ajusta a câmara para ângulos predefinidos +/-90°, +/-45° e 0° quando for premido o Interruptor Basculante R1 (4) simultaneamente (ver "Ajustar o Ângulo da Câmara" na página 36 para mais detalhes).Botão de Pressão B2 (2): ativa o modo de defi-nições da câmara (a imagem do visor no tablet com ecrã tátil fica preta e surge no ecrã Con-necting... USB (A ligar... USB), como apre-sentado à esquerda). Ao premir B2 enquanto se está no modo de definições da câmara, navega-se pelas defini-ções ajustáveis disponíveis (ISO, velocidade do obturador, compensação de exposição).Interruptor Basculante R2 (5): ao mover este interruptor para cima/para baixo, é possível aumentar ou baixar o valor da definição selecio-nada com B2.Tenha em conta que as definições ajustáveis dependem do modo de exposição selecionado da câmara, P (programa), A (abertura), S (obtura-dor), M (manual) que está selecionado na câmara. Se não for premido nenhum botão no espaço de 10 segundos, a câmara volta ao modo de captura de imagens e a imagem do visor fica novamente visível.Botão de Pressão B3 (3): botão de disparo; no modo de captura de imagens, aciona a câmara. Ao premir o botão de disparo no modo de defi-nições da câmara, volta ao modo de captura de imagens.Interruptor Basculante R1 (4): inclinação da câmara, altera ligeiramente o ângulo.
1 23
4 5

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 57
2.5.5.3. Definições da câmaraA secção que se segue descreve as funções mais importantes da câmara quando usadacom o Intel Falcon 8+ UAV.
Figura 2.22: Definições da câmara para Sony RX1R II
As funções mais importantes podem ser acedi-das rapidamente através dos botões:(1) Botão personalizado (identificado como C1
na câmara): permite o acesso rápido às definições de valores ISO.
(2) Seletor de controlo(3) Roda de controlo: a roda também funciona
como um teclado de 4 vias. Quando se pressiona a parte superior da roda, esta circula por vários modos de visualização.
(4) Interruptor de ligar(5) Seletor do modo de exposição: P
(programa), A (abertura), S (obturador), M (manual)
(6) Botão Fn (7) Botão de MENU(8) Seletor da compensação de exposição(9) Botão do obturador.É possível aceder rapidamente às funcionalida-des, tais como abertura, velocidade do obtura-dor, etc., rodando a roda de controlo (2) na parte traseira da câmara (a função desta roda depende do modo de operação usado).
Ao premir o botão Fn (número (6) acima), é possível, por predefinição, aceder aos seguintes parâmetros:Linha de cima Modo Drive/Modo Flash/Comp. Flash/Modo Foco/Área Foco/Comp. Exposição/ISOLinha de baixo: Modo Medição/Balanço de Brancos/DRO/Auto HDR/Estilo Criativo/Efeito LPF/Modo DisparoO menu da câmara pode ser acedido ao premir o botão de MENU (número (7) acima). Na primeira página do menu, é possível definir os parâmetros importantes, tais como a Dimensão da Imagem e a Qualidade. Consulte o manual da câmara para obter mais detalhes.
1
2
3
4
6
5
7
8
9

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 58
2.5.5.4. GeorreferenciaçãoÉ possível georreferenciar todas as imagens tiradas quando o UAS tinha um sinal GNSSválido durante o voo. Sempre que é disparada uma imagem, a informação posicional égravada no ficheiro de registo do Intel Falcon 8+ UAV. Durante o pós-processamento,esta informação pode ser extraída e combinada com as imagens. Consulte o capítulo"INTEL® FALCON™ 8+ UAV REGISTOS DE VOO" na página 106 para obter mais detalhes.
Alternativa possível:
• Aguarde alguns minutos. Pode demorar algum tempo até o recetor de GPS dacarga útil fazer a sincronização.
• Vá para um local com melhor receção GPS.
• Desligue e depois volte a ligar o UAV.
Se a mensagem desaparecer, o sinal de GPS é suficientemente forte.
Notas
Se a Intel® High Resolution Imaging Payload não receber suficiente sinal de GPS, surge "Payl. GPS not ready" (GPS carga útil não preparado) na linha inferior do
Visor de Estado do CTR. Enquanto for apresentada esta mensagem, não é possível guardar georreferências no ficheiro de registo supracitado.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 59
2.5.5.5. Atualização de firmwarePara uma operação adequada da carga útil, certifique-se de que o Intel Falcon 8+ UAVe a carga útil estão atualizados para a última versão disponível. Descarregue o firmwaredo Intel Falcon 8+ UAV em http://intel.com/FalconDownloads e instale-o comodescrito em "Atualizações de firmware do Intel® Falcon™ 8+ UAS" na página 220.
A carga útil também contém firmware atualizável. Verifique a versão de firmwareinstalada atualmente tocando no botão de INFO "i" no canto inferior esquerdo dotablet com ecrã tátil.
A seguinte secção descreve o processo de atualização do firmware da carga útil:
Figura 2.23: Atualização de firmware da carga útil
Para o processo de atualização de firmware da carga útil, a respetiva carga útil tem de estar montada e ligada ao Intel Falcon 8+ UAV.1. Descarregue o último firmware da carga
útil de http://intel.com/FalconDownloads e guarde este ficheiro (FW.BIN) no dispositivo USB.
2. Insira o dispositivo USB com o ficheiro de licença (FW.BIN) na porta USB da carga útil (ver figura à esquerda).
3. Com o dispositivo USB na porta USB da carga útil, ligue o Intel Falcon 8+ UAV. O processo de atualização iniciará automaticamente.
4. Aguarde 3 minutos, até o processo terminar. De seguida, pode ligar-se o Falcon 8+ UAV.
5. Remova o dispositivo USB e verifique se o nome do ficheiro de licença (FW.BIN) foi mudado.Depois de a atualização ser concluída com sucesso, o nome do ficheiro de licença muda para _FW.BIN (ao nome do ficheiro foi adicionado um caráter de sublinhado (underscore) como prefixo).A carga útil está agora pronta a utilizar.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 60
2.5.6. Intel® Imaging PayloadA Intel® Imaging Payload é composta por uma câmara Sony R10C RGB e uma placainterna de módulo de computação. Adicionalmente, a carga útil está equipada com atecnologia Intel® RealSense™, que permite ao Intel Falcon 8+ UAV detetar e desviar-sede obstáculos na sua trajetória de voo.
Existem dois módulos Intel RealSense na carga útil, um virado para a frente e outro 90graus para a esquerda. Juntas, estas câmaras permitem uma vista de um lado ao outrode aproximadamente 180 graus.
A placa interna de computação controla as câmaras dos módulos Intel RealSense,guarda as imagens da carga útil e cria um mapa de obstáculos das imediações quepossibilita a funcionalidade de desvio de obstáculos.
O desvio de obstáculos (OA) ajuda o piloto a manter o UAV a uma distância deafastamento do objeto que deseja inspecionar. O desvio de obstáculos (OA) tambémregista obstáculos nas proximidades imediatas e ajuda o piloto a desviar-se dosmesmos enquanto se foca na inspeção.
NotasA utilização de Intel Imaging Payload requer o pacote de versão de firmware
Intel Falcon 8+ UAS 1.2 ou superior (ver "Atualização de firmware" na página 69).

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 61
Pode encontrar informações sobre como utilizar a função de desvio de obstáculos (OA)na secção "Desvio de obstáculos (OA)" na página 73.
Figura 2.24: Especificações de Intel® Imaging Payload
1
23
4
(1) Módulo RealSense à esquerda
(2) Módulo RealSense à frente
(3) Cartão SD da carga útil para imagens e vídeos transferidos
(4) Conector USB-C para atualizações de firmware

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 62
Especificações da câmara Sony R10C 20MP:• Dimensões do sensor: sensor CMOS
APS-C tamanho 23,2 x 15,4 mm• Resolução: 20,1 Mpx (5456 x 3632
pixeis)• Lente: Sony Sonnar® T* E 24 mm
F1.8 ZA (alterável)• Distância focal: 24 mm• Formatos de imagem: JPEG, Sony
ARW• Formatos de vídeo: 1920 x 1080 @
30 fps, MP4 (os vídeos são guarda-dos no cartão SD da câmara)
• Peso incl. lente e suporte cardan: ~ 750 g (com 24 mm f/1.8 lente).
• Tempo de voo máximo aproximado: 16 min
• Aplicações sugeridas: inspeção e levantamento topográfico
Lentes aprovadas: • Sony Sonnar® T* E 24 mm F1.8 ZA
(SEL24F18Z) - 225g. Para missões de levantamento topográfico que reque-rem máxima qualidade de imagem (lente predefinida)
• Sony E PZ 16-50 mm F3.5-5.6 OSS (SELP1650) - 116g. Para tarefas de ins-peção, a capacidade de zoom e o esta-bilizador ótico prestam auxílio em tarefas de inspeção direta
• Sony Sonnar T* FE 35 mm F2.8 ZA (SEL35F28Z) - 120 g. Para tarefas de inspeção de distância fixa ou de levan-tamento topográfico de edifícios
• Sony E 20 mm F2.8 (SEL20F28) - 69 g. Lente leve rotativa, adequada para missões de levantamento topográfico com necessidade de cobertura de grande área
Tenha em conta que outras lentes, apesar de fisicamente compatíveis com a câmara, podem ser demasiado pesadas e não são aprovadas.
As imagens são guardadas no cartão SD da carga útil, que é inserido no canto esquerdo, como apresentado à esquerda. Os vídeos gravados também podem ser transferidos para este cartão SD da carga útil (ver abaixo).Para transferir ficheiros do cartão da carga útil para um computador, use um leitor de cartões SD conectado ao computador.
Figura 2.24: Especificações de Intel® Imaging Payload (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 63
Nota: A frequência de captação de imagens depende da velocidade com a qual osdados das imagens podem ser gravados no suporte de destino durante um voo.Durante os voos, as imagens são gravadas diretamente no cartão microSDHC dacarga útil substituível pelo utilizador, para se poder aceder facilmente aos ficheirospós-voo.
O tipo de barramento e a classe de velocidade do microSDHC, em conjunto com asespecificações de desempenho em condições reais do fabricante do cartão, definemo limite da frequência com a qual as imagens podem ser guardadas no suportedurante voos. Com o cartão microSDHC fornecido, a Intel validou com sucessocapturas contínuas repetidas de até 500 imagens com uma frequência de até 1captura de imagem a cada 1,5 segundos. Tenha em conta que, ao usar cartõesmicroSDXC na carga útil, estes funcionarão no modo de compatibilidade SDHC e odesempenho indicado da velocidade de leitura/escrita pode não ser atingido.
Os vídeos são guardados no cartão SD da câmara, que é inserido na parte traseira da câmara, sob a tampa da bateria. Por predefinição, os ficheiros de vídeo gravados durante uma missão podem ser automaticamente (após uma confirmação, ver figura "Confirmação da transferência de ficheiros de vídeo" na página 66) trans-feridos para o cartão SD da carga útil.Se for necessário aceder ao cartão SD da câmara: 1. Abra a tampa empurrando o cursor
OPEN (ABRIR) para a direita e mantendo-o nessa posição, enquanto empurra simultaneamente a tampa na direção indicada pela seta.
2. Retire o cartão micro SD da ranhura empurrando-o ligeiramente para dentro. De seguida, o cartão salta para fora, facilitando a remoção.
Figura 2.24: Especificações de Intel® Imaging Payload (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 64
Estrutura dos ficheiros de imagemAs imagens fotográficas são guardadas no cartão SD da carga útil com as convençõesdescritas a seguir.
Cada vez que o Intel® Falcon 8+ UAV é ligado, será criado um novo diretório deimagens com um número subsequente no cartão SD da carga útil.
Se estava disponível um sinal de GPS, a data e a hora no nome do diretório sãoretiradas do sinal de GPS.
• 000001_201802191200 = nome do diretório com um número de missãosubsequente (000001), data (_YYYY/MM/DD) e hora (hh/mm)
• R10C001234.JPG = imagem R10C com um número subsequente (001234)
• R10C001235.JPG = número de imagem R10C (001235)
• R10C001236.JPG = número de imagem R10C (001236)
• Etc.
• 000002_201802191223 = nome do diretório com um número de missãosubsequente (000002), data (_YYYY/MM/DD) e hora (hh/mm)
• R10C001237.JPG = imagem R10C com um número subsequente (001237)
• R10C001238.JPG = número de imagem R10C (001238)
• Etc.
Se a carga útil for utilizada em ambientes quentes com exposição solar direta, colo-que a pala para o sol na câmara, antes do voo (ver imagens à esquerda). A pala reflete a luz solar e garante o funciona-mento fiável da câmara. Para fixar a tampa:1. Monte a tampa na câmara 2. Incline-a ligeiramente para a esquerda. 3. Rode a tampa na direção da seta
CLOSE (FECHAR), para fixar a tampa no lugar.
Para remover a tampa:1. Mantenha a alavanca de abertura (1)
pressionada enquanto roda a tampa na direção da seta OPEN (ABRIR) e levante-a.
Figura 2.24: Especificações de Intel® Imaging Payload (Continuação)
1

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 65
Se não estava disponível nenhum sinal de GPS e, por conseguinte, não foi possíveldefinir a data e a hora atuais, a data e a hora no nome do diretório serão ajustadas parazero.
No diretório de missões, também podem ser encontrados ficheiros .JSON. Estesficheiros contêm geoinformação dos ficheiros de imagens tiradas durante o voo epodem ser usados noutras aplicações para o pós-processamento. Os prefixos dosficheiros .JSON são os mesmos que o número de missão, seguidos da palavra"geotags" (georreferenciadores) (p. ex., 000001_geotags.json).
Estrutura dos ficheiros de vídeoOs ficheiros de vídeo gravados durante o voo atual são guardados no cartão SD dacâmara (não no cartão SD da carga útil, ver figura "Especificações de Intel® ImagingPayload" na página 61).Diretamente após o voo, o piloto tem a possibilidade de transferir os ficheiros de vídeogravados do cartão SD da câmara para o cartão SD da carga útil (ver a descrição nafigura seguinte "Confirmação da transferência de ficheiros de vídeo" na página 66).
Se não transferir os ficheiros de vídeo diretamente após o voo atual, mas mais tarde, osficheiros de vídeos previamente feitos são transferidos para o diretório do voo atual nocartão SD da carga útil.
Para manter a estrutura de forma que todos os ficheiros (imagens e vídeos) quepertencem a um voo sejam guardados no mesmo diretório, aconselhamos quetransfira para o cartão SD da carga útil ficheiros de vídeo diretamente após cada voo.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 66
Para vídeos transferidos diretamente após o voo atual, é válida a estrutura de diretórioe ficheiros que se segue.
Os ficheiros de vídeo transferidos são guardados no mesmo diretório no cartão SD dacarga útil que os ficheiros de imagem do mesmo voo (ver acima):
• 000001_201802191200 = nome do diretório com um número de missãosubsequente (000001) data (_YYYY/MM/DD) e hora (hh/mm)
• MAH00001.MPG = ficheiro de vídeo com número subsequente (00001)
• MAH00002.MPG = número de ficheiro de vídeo (00002)
• Etc.
Figura 2.25: Confirmação da transferência de ficheiros de vídeo
Se tiverem sido gravados ficheiros de vídeo durante uma missão, estes podem ser transferi-dos do cartão SD da câmara para o cartão SD da carga útil, por forma a facilitar o acesso.No fim do voo, o/a piloto terá de confirmar se pretende transferir os ficheiros de vídeo. O piloto tem de confirmar a transferência dos ficheiros de vídeo para o cartão SD da carga útil. Após a confirmação, a transferência será reali-zada automaticamente.Durante a transferência, aparecerá um feedback no tablet com ecrã tátil (ver imagem à esquerda). Após uma transferência bem-sucedida para o cartão SD da carga útil, os ficheiros de vídeo serão apagados automaticamente do local ori-ginal no cartão SD da câmara.Se forem encontrados ficheiros de vídeo no car-tão SD da câmara, da próxima vez que ligar o UAS, é novamente apresentada a opção para os transferir para o cartão SD da carga útil. Se optar por transferir agora, os ficheiros de vídeos previamente feitos serão transferidos para o diretório gerado para o voo atual.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 67
2.5.6.1. Cuidados gerais• Trate o suporte cardan sempre com cuidado. Se necessitar de inclinar a câmara
manualmente (quando não conectada ou enquanto o Intel® Falcon 8+ UAVestiver desligado), efetue-o, por favor, com muito cuidado. Se for aplicadademasiada força, as rodas dentadas dos servomotores podem quebrar.
• Como a câmara é alimentada pela bateria do Intel Falcon 8+ UAV para pouparpeso, a câmara liga-se ou desliga-se quando o UAV se liga ou desliga.
• Antes de aterrar o Intel Falcon 8+ UAV, não se esqueça de ajustar a inclinação dacarga útil para 0°, para evitar danos na câmara ou na lente no caso de a carga útilapontar para baixo quando o UAV toca no chão.
• Mantenha as aberturas de ventilação da carga útil limpas e isentas de resíduospara um arrefecimento adequado da placa de computação.
2.5.6.2. Controlo da câmara através do CTREsta secção descreve como operar a Sony R10C utilizando os elementos funcionais doIntel Cockpit CTR.
Nota O interruptor ON/OFF (ligar/desligar) em si, situado no topo da câmara, não tem qualquer função.
CUIDADO: NÃO MONTE PARA-SÓIS DE LENTE OU ITENSSEMELHANTES FIXADOS À PARTE DA FRENTE DA LENTE, POISPODEM TAPAR A VISTA DO MÓDULO REALSENSE VIRADO PARAFRENTE DO SISTEMA DE DESVIO DE OBSTÁCULOS.
Figura 2.26: Layout de controlo Sony R10C CTR
Botão de Pressão B1 (1): ajusta a câmara para ângulos predefinidos +/-90°, +/-45° e 0° quando for premido o Interruptor Basculante R1 (4) simultaneamente (ver "Ajustar o Ângulo da Câmara" na página 36 para mais detalhes).Interruptor Basculante R2 (5): ao mover este interruptor para cima/para baixo, pode definir-se o valor da compensação de exposição.Botão de Pressão B2 (2): ao premir este botão, a compensação de exposição é reposta para 0.Botão de Pressão B3 (3): botão de disparo de fotoInterruptor Basculante R1 (4): inclinação da câmara, altera ligeiramente o ângulo.
1 23
4 5

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 68
2.5.6.3. Definições da câmaraDepois de ligar a câmara, a hora predefinida está ajustada para 00:00, 1 de janeiro de2015 UTC. Logo que esteja disponível um sinal de GPS válido, a data e a hora dacâmara são definidas diretamente pelo Intel Falcon 8+ UAV, utilizando as informaçõesincorporadas nos dados de GPS.
É possível aceder às definições da câmara do lado esquerdo ou direito do ecrã dotablet com ecrã tátil do CTR, quando estiverem ativadas ao tocar na respetiva área nocanto inferior esquerdo e direito.
Figura 2.27: Definições da câmara através dos itens do menu de controlo no tablet com ecrã tátil
Ao tocar, p. ex., na área (1) no canto inferior esquerdo do tablet com ecrã tátil, abre-se um painel de controlo para definições da câmara ajustáveis.
1

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 69
2.5.6.4. Atualização de firmwarePara uma operação adequada da carga útil, certifique-se de que o Intel Falcon 8+ UAV,o CTR e o tablet com ecrã tátil estão atualizados para a última versão disponível.Descarregue o firmware do Intel Falcon 8+ UAS em http://intel.com/FalconDownloadse instale-o como descrito em "Atualizações de firmware do Intel® Falcon™ 8+ UAS" napágina 220.
A carga útil também contém firmware atualizável. Para atualizar o firmware da cargaútil da Intel® Imaging Payload, é necessário instalar a Intel Platform Flash Tool (PFT)Lite num computador.
A versão de firmware instalada atualmente pode ser verificada tocando no botão deINFO "i" no canto inferior esquerdo do tablet com ecrã tátil.
Para atualizar o firmware da carga útil com a ferramenta PFT, necessita de:
• Intel Falcon 8+ UAV, com a carga útil fixada. O UAV tem de estar DESLIGADO noinício do processo de atualização.
• Computador para executar a Intel Platform Flash Tool (PFT) Lite
• Cabo de USB tipo C para USB tipo A para ligar a carga útil ao computador (nãofornecido)
Pré-instruções para atualizar o firmware da carga útil:
Dependendo do tipo de lente e das definições atuais da câmara, podem ser ajustadas diferen-tes definições, como apresentado no exemplo à esquerda.A definição correspondente, no exemplo PITCH (INCLINAÇÃO) à esquerda, pode ser ajustada arrastando para o valor desejado o controlo de deslize apresentado.
Figura 2.27: Definições da câmara através dos itens do menu de controlo no tablet com ecrã tátil

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 70
1. Descarregue e instale a Intel Platform Flash Tool (PFT) Lite a partir de http://intel.com/FalconDownloads. Consulte a documentação da ferramenta Intel Platform Flash Tool (PFT) para obter instruções mais detalhadas e os sistemas operativos suportados.
2. Descarregue os controladores USB Intel Android do mesmo website supracitado. 3. Descarregue o último firmware da carga útil em http://intel.com/FalconDownloads
(em formato de ficheiro .ZIP)4. Apesar de não ser necessário, recomendamos que ligue o Intel Cockpit Controller
(CTR) para controlar o processo de atualização (flashing).
Figura 2.28: Processo de atualização de firmware
1. Instale o controlador USB Intel Android no mesmo computador em que instalou a ferramenta PFT.
2. Inicie a aplicação Intel PFT Lite.3. Abra o ficheiro de firmware (.ZIP)
selecionando Browse... (Procurar...) no canto superior direito.
4. Abra a pequena tampa do lado direito da parte dianteira da carga útil para expor a porta USB-C da carga útil.
5. Ligue uma ponta do cabo USB tipo C (não fornecido) à porta USB e a outra ponta ao computador que executa a ferramenta Intel PFT.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 71
6. Procure o botão DNX no fundo da carga útil (ao lado do conector USB; ver imagem à esquerda). O botão está acessível através de um pequeno orifício no fundo da carga útil. O botão pode ser pressionado com um clipe endireitado ou um objeto semelhante.
7. Insira o clipe no orifício e pressione o botão.Ao fazê-lo, ouve-se um clique.
8. Enquanto mantém este botão pressionado para baixo, ligue o Intel Falcon 8+ UAV. Assim, a carga útil vai para o modo de atualização de firmware.
9. Pode soltar-se o botão DNX aproximadamente 5 segundos depois de ligar o Intel Falcon 8+ UAV.
Figura 2.28: Processo de atualização de firmware (Continuação)
CUIDADO: NÃO VIRE NEM ACARGA ÚTIL NEM O UAV DECABEÇA PARA BAIXO PARAPREMIR E MANTER O BOTÃODNX PREMIDO. MANTENHA ACARGA ÚTIL NA POSIÇÃOHORIZONTAL DO ÂNGULO DEINCLINAÇÃO DE 0°, UMA VEZQUE OS SERVOMOTORES DOSUPORTE CARDAN DA CARGAÚTIL COMEÇARÃO ATRABALHAR AO LIGAR O UAV.NESSE CASO, OS MOVIMENTOSATIVOS DOS SERVOMOTORESATUARIAM CONTRA UMAEVENTUAL FORÇA EXTERNA,CAUSANDO DANOS NOSSERVOMOTORES.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 72
Em Intel PFT, aguarde até aparecer Intel DnX Device (Dispositivo Intel DnX). 10.Toque/clique no botão Start to
flash (Começar a atualizar) para iniciar o processo de atualização do firmware.O processo de atualização inicia-se.
Após algum tempo, surgirá a indicaçãoPower Cycling the device NOWto OS DNX (A reativar o dispositivoAGORA para OS DNX) e a carga útil seráreiniciada.
Depois de a carga útil reiniciar, o processo de atualização continuará e surgirá Wait for device to enumerate in OS DNX (A aguardar enumeração do disposi-tivo em OS DNX) no indicador do pro-gresso.Durante o processo de atualização, a fer-ramenta Intel PFT sofrerá um atraso de cerca de 86% durante um curto período de tempo, mas depois continuará normal-mente.Depois de concluída a atualização, o indi-cador de progresso fica verde e apresenta a mensagem representada à esquerda.11.Desconecte agora o cabo USB da
carga útil, mas mantenha a carga útil e o UAV ligados.
Após cerca de 40 - 50 segundos, a carga útil é reiniciada pela primeira vez.Após cerca de 2 minutos e 40 - 50 segun-dos, o segundo arranque está quase con-cluído.
Figura 2.28: Processo de atualização de firmware (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 73
2.5.6.5. Desvio de obstáculos (OA)O desvio de obstáculo (OA) permite ao Intel Falcon 8+ UAV obter uma perceção deprofundidade das imediações. Tal é possível através de duas câmaras de profundidadeIntel® RealSense™, montadas na carga útil, uma virada para a frente e outra 90 grauspara a esquerda. Juntas permitem uma vista de um lado ao outro de aproximadamente180 graus.
O desvio de obstáculos (OA) só funciona com cargas úteis compatíveis. Ao conectar aIntel Imaging Payload, a função de desvio de obstáculos (OA) na interface do utilizadordo tablet com ecrã tátil do Intel Cockpit Controller (CTR) fica ativada e permite aopiloto ativar ou desativar o desvio de obstáculo (OA).
Passados cerca de 3 minutos e 10 segun-dos, aparece a imagem do visor no tablet com ecrã tátil do CTR (se tiver sido ligado previamente). Se o CTR estiver LIGADO, é possível visualizar o ecrã de arranque do BIOS, bem como o logótipo da Intel duas vezes.Após o processo de atualização, é neces-sário desligar e depois voltar a ligar o UAV.
Figura 2.28: Processo de atualização de firmware (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 74
Condições para a utilização do desvio de obstáculosA capacidade de resposta do desvio de obstáculo (OA) aumenta com superfíciestexturizadas. Quanto maior for a textura, maior será a precisão da informação deprofundidade recolhida pelas câmaras Intel RealSense.
Preste especial atenção aos seguintes pontos:
• Mantenha as lentes dos módulos do desvio de obstáculos (OA) limpas everifique-as antes de cada voo.
• O desvio de obstáculos (OA) está inativo ao efetuar voos automatizados; p. ex.,voos por waypoints.
• O desvio de obstáculos (OA) está inativo durante a função RETURN TO HOME(REGRESSAR AO INÍCIO) e procedimentos Link Loss Procedures.
• O desvio de obstáculos (OA) é capaz de parar o drone em frente a um objeto aovoar até 4,5 m/s (= velocidade máx. standard em modo GPS). Se o piloto voar auma velocidade mais elevada no Modo Altitude ou Manual, e depois mudar parao Modo GPS com o desvio de obstáculos (OA) LIGADO, o drone pode não sercapaz de parar a tempo em frente a um objeto devido à velocidade.
CUIDADO: SUPERFÍCIES MENOS ADEQUADAS PARA O DESVIO DEOBSTÁCULOS (OA) SÃO, P. EX., JANELAS LIMPAS E OUTRASSUPERFÍCIES REFLETORAS SOB LUZ SOLAR INTENSA, UMA VEZ QUEDIFICULTAM A DISTINÇÃO DA PROFUNDIDADE DA SUPERFÍCIE, NÃODETETANDO A SUPERFÍCIE.
NEM TODOS OS OBSTÁCULOS SERÃO DETETADOS PELAFUNCIONALIDADE DE DESVIO DE OBSTÁCULOS. RECOMENDA-SEVIVAMENTE QUE O PILOTO SE FAMILIARIZE COM ASFUNCIONALIDADES E REAÇÕES DO INTEL FALCON 8+ UAV COM ODESVIO DE OBSTÁCULOS (OA), REALIZANDO VOOS DE ENSAIO SOBCONDIÇÕES CONTROLADAS. SE TIVER DÚVIDAS SE UM OBSTÁCULO ÉDETETÁVEL OU NÃO, FAÇA PRIMEIRO O TESTE NUM AMBIENTECONTROLADO E SEGURO, OU COM A AJUDA DE UM OBSERVADOR E ABAIXA VELOCIDADE.
DURANTE QUALQUER VOO, ESTEJA SEMPRE PREPARADO PARADESATIVAR O DESVIO DE OBSTÁCULOS (OA) E ASSUMIR O CONTROLODO UAV PARA SE DESVIAR DE POTENCIAIS OBSTÁCULOS NO CASO DEO DESVIO DE OBSTÁCULOS (OA) NÃO REAGIR COMO ESPERADO.
OS OBJETOS DIRETAMENTE ACIMA E ABAIXO DO UAV NÃO SÃODETETADOS, MESMO QUE A CÂMARA ESTEJA VIRADA NESSADIREÇÃO!

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 75
• Se voar a uma altitude inferior à distância de afastamento definida, o desvio deobstáculos (OA) continua a tentar evitar colisões, mas a distância deafastamento definida pode não ser mantida.
• Ao voar entre estruturas, certifique-se sempre de que a distância deafastamento definida pode ser mantida em todas as direções.
• O desvio de obstáculos (OA) pode não reconhecer:
• água e outras superfícies transparentes;
• superfícies com uma cor uniforme, como paredes brancas;
• superfícies sem textura clara;
• objetos pequenos como ramos de árvores.
• O desempenho do desvio de obstáculos (OA) pode baixar, p. ex., parardemasiado cedo, detetar obstáculos tarde, não manter a distância deafastamento definida, sob as seguintes circunstâncias:
• superfícies com padrões repetitivos, tais como azulejos ou ferrocorrugado;
• condições de baixa luminosidade;
• nevoeiro/neve/chuva;
• voar diretamente na direção de sol baixo, após/antes do nascer/pôr do sol;
• voar entre edifícios/estruturas, onde a receção do sinal de GPS pode estarobstruída.
Figura 2.29: Desvio de obstáculos: direções cobertas
Cada módulo RealSense cobre umcampo de visão de 91,2 graushorizontalmente e 58,0 grausverticalmente. Com um módulovirado para a frente e um 90°lateralmente para a esquerda, écriado um campo de visão total deaproximadamente 180°. Os dois cones diferentes de ambosos módulos RealSense tocam um nooutro a uma distância aproximada de2600 mm da câmara.
CUIDADO: O UAV NÃO É CAPAZ DE DETETAR OBSTÁCULOS FORA DOSCAMPOS DE VISÃO DESCRITOS ACIMA.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 76
Configurar o desvio de obstáculosA figura que se segue mostra a interface do utilizador do tablet com ecrã tátil do CTRao ligar uma carga útil que suporte o desvio de obstáculos (OA) e ao abrir o painel dedefinições do desvio de obstáculos (OA).
ATIVAR e DESATIVAR a função de desvio de obstáculos (OA):
1. Inicie o Intel Falcon 8+ UAV e descole no Modo GPS (caso possível). 2. Toque no indicador e botão do desvio de obstáculos (OA) no canto superior
esquerdo do ecrã do tablet com ecrã tátil.Abre-se o painel de definições do desvio de obstáculos (OA).
3. Arraste o controlo de deslize dentro do painel para ajustar a distância de afastamento desejada.O valor ajustado é apresentado.
Figura 2.30: GUI do tablet com uma carga útil com desvio de obstáculos (OA) montada
Tenha em conta que o desvio de obstáculos (OA) está sempre DESLIGADO por predefini-ção ao ligar o Intel Falcon 8+ UAV e não pode ser LIGADO enquanto o UAV estiver no chão.O indicador e botão do desvio de obstáculos (OA) no canto superior esquerdo (1) mostra o estado do desvio de obstáculos (OA). Uma cor cinzenta clara indica que o desvio de obstáculos (OA) está DESLIGADO. Uma cor preta indica que o desvio de obstáculos (OA) está LIGADO.Ao tocar neste botão, abre-se o painel de definições do desvio de obstáculos (OA), tal como apresentado à esquerda.Ao tocar no comutador (2) dentro do painel de definições, ativa-se ou desativa-se o des-vio de obstáculos.O controlo de deslize dentro do painel (3) permite ao piloto definir a distância de afas-tamento dos objetos e obstáculos. A distância de afastamento pode ser definida entre o mínimo e o máximo apresentado no painel de definições do desvio de obstáculos (OA).
1
2
3

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 77
4. Toque uma vez no comutador OFF/ON (DESLIGAR/LIGAR) no topo do painel de definições do desvio de obstáculos (OA) para ligar o desvio de obstáculos (OA).O campo do indicador do desvio de obstáculos (OA) ficará preto. Isso indica que o desvio de obstáculos (OA) está ativado.
5. Volte a tocar no indicador do desvio de obstáculos.O painel de definições do desvio de obstáculos (OA) fecha-se.
Para desativar o desvio de obstáculos (OA), abra o painel de definições do desvio deobstáculos (OA) como descrito e toque uma vez no comutador OFF/ON (DESLIGAR/LIGAR) para desligar o desvio de obstáculos (OA). O indicador do desvio de obstáculos(OA) fica cinzento claro.
O indicador e botão do desvio de obstáculos (OA) (número (1) acima) tambémapresenta a distância aproximada até um objeto medido pelos módulos RealSense,visualizada através de 3 barras. Quando uma barra está preenchida (preta), é atingidoum valor.
Distribuição de valores para as barras:
• 0 barras: a distância até ao próximo obstáculo é 3 vezes maior do que a distânciade afastamento definida pelo piloto
• 1 barra: a distância situa-se entre 3 e 2 vezes a distância definida
• 2 barras: a distância situa-se entre 2 e 1,5 vezes a distância definida
• 3 barras: a distância situa-se entre 1,5 vezes e a distância definida
Quando é atingida a distância mínima de afastamento definida pelo piloto ao deslocar-se para a frente ou para a esquerda, o UAV não avança mais. Se a distância diminuirainda mais (p. ex., devido a uma rajada de vento), o indicador do desvio de obstáculos(OA) começa a piscar. Este deixa de piscar logo que a distância seja novamente igual ousuperior à distância de afastamento definida.
Desvio de obstáculos e modos de vooDependendo do modo de voo ativado (Modo GPS, Modo Altitude ou Modo Manual), hádiferenças no funcionamento do desvio de obstáculos (OA).
Tabela 2.6: Exemplo de uma distância de afastamento ajustada para 5 m
BARRAS PREENCHIDAS
DISTÂNCIA ATÉ AO OBSTÁCULO EM METROS
0 bar > 15 m
1 bar 10 m - 15 m
2 bar 7,5 m - 10 m
3 bar 5 - 7,5 m

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 78
Modo GPS e Distance Hold (manutenção de distância)No modo GPS, o UAV executa uma ação "detetar e parar" quando o desvio deobstáculos (OA) está ativado. Logo que atinja uma distância de afastamento definidapelo utilizador (ver secção "Configurar o desvio de obstáculos" na página 76 para obtermais detalhes), manterá essa distância de afastamento atualmente ajustada. O pilotonão se pode aproximar mais do que a distância definida e quaisquer comandos decontrolo do CTR que levariam à redução dessa distância não são executados pelo UAV.
Enquanto o Modo GPS estiver ativo, o UAV cria um mapa de obstáculos preenchidocom os obstáculos que foram previamente detetados. As coordenadas GPS absolutasde cada obstáculo detetado são guardadas. Desse modo, é possível evitar obstáculospreviamente detetados, mesmo que se encontrem atualmente fora do campo de visãodireto dos módulos RealSense.
Modo Altitude e Distance Guard (proteção de distância)Com o desvio de obstáculos (OA) e o Modo Altitude ativados, através do piloto no CTRou automaticamente através do UAS em caso de qualidade de sinal de GPSinsuficiente, o desvio de obstáculos funciona como Distance Guard (proteção dedistância).
O modo Distance Guard (proteção de distância) deteta obstáculos dentro do campo devisão das câmaras RealSense, e conduz ativamente o UAV na direção contrária de umobstáculo quando a distância de afastamento definida pelo utilizador é atingida. Nãohá nenhum controlo de posição no Modo Altitude e o UAV pode sempre flutuar,dependendo das influências ambientais.
Nota Por questões de segurança, vire sempre o UAV de modo que um módulo RealSense fique apontado na direção do voo.
Nota
O mapa de obstáculos preenchido no modo GPS é apagado se a receção GPS se perder devido à qualidade de sinal insuficiente. Como as informações contidas
no mapa já não estão disponíveis, o UAV já não consegue evitar obstáculos fora do campo de visão direto dos módulos RealSense. Se a receção GPS for
restabelecida, o UAV começará a preencher novamente o mapa com obstáculos detetados.
CUIDADO: PODE OCORRER UMA COLISÃO DO UAV COM UMOBSTÁCULO DETETADO SE O PILOTO DER UM COMANDO DEMANÍPULO TÃO FORTE NA DIREÇÃO DO OBSTÁCULO DETETADO QUEO COMANDO SE SOBREPONHA À DISTANCE GUARD (PROTEÇÃO DEDISTÂNCIA)!

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 79
Modo ManualO desvio de obstáculos está sempre desativado no Modo Manual.
Aterrar o UAV com desvio de obstáculosDurante uma descida do UAV, se algum obstáculo entrar no campo de visão dosmódulos Intel RealSense dentro da distância de afastamento definida pelo piloto, oUAV pode voar para trás ou lateralmente em direção ao piloto, para manter a distânciade afastamento definida. Para evitar uma situação destas, desligue sempre o desvio deobstáculos (OA) antes da descida para aterrar o UAV.
Alertas do sistema do desvio de obstáculos (OA)Os alertas seguintes podem ocorrer na área de notificação no topo do tablet com ecrãtátil e/ou na linha inferior do Visor de Estado.
Tabela 2.7: Alertas do sistema relacionados com o desvio de obstáculos
TEXTO MOSTRADO MOTIVO SOLUÇÃO SUGERIDA
Tablet:Obstacle Avoidance not avail-able! (Desvio de obstáculos indis-ponível!)Visor de Estado: OBSTACLE AVOID. N/A! (Desvio de obstá-culos indisponí-vel)Se surgirem estas mensagens de texto, o CTR tam-bém vibrará.
Não é possível aceder aos módulos Real-Sense e o desvio de obstáculos não está disponível.
Se o alerta ocorreu durante o arranque do UAS, tente reiniciá-lo. Se a mensa-gem não reaparecer, a ligação aos módulos RealSense foi restabelecida. Em voo e no Modo GPS, o Intel Falcon 8+ UAV manterá a sua posição atual. Para evitar colisões, os manípulos de controlo serão desativados, até o piloto desligar o desvio de obstáculos. Quando o desvio de obstáculos estiver desativado, o piloto assume nova-mente o controlo dos manípulos de controlo.Se este alerta aparecer com o UAV em voo e no Modo Altitude, o piloto tem de se desviar imediatamente de qual-quer obstáculo.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 80
Tablet:Switched to Distance Guard! (Comu-tado para Dis-tance Guard)!
O Intel Falcon 8+ UAS comutou automatica-mente do Modo GPS para o Modo Altitude (devido à falta de qua-lidade GPS) e o desvio de obstáculos está agora a funcionar no modo Distance Guard (proteção de distância). Para mais detalhes, ver "Modo Altitude e Dis-tance Guard (proteção de distância)" na página 78.
Se o UAV mudar automaticamente para o Modo Altitude (HGT apresen-tado no canto superior direito do tablet com ecrã tátil, H apresentado no canto superior direito do Visor de Estado, botão GPS no CTR a piscar), a Intel recomenda vivamente que o piloto ative manualmente o Modo Alti-tude no CTR. Deste modo, pode evitar-se qualquer mudança inesperada do modo de voo. Continue a voar no Modo Altitude se tiver qualificação suficiente. Caso con-trário, aterre o sistema e apenas voe em áreas com qualidade de sinal de GPS suficiente.
Tabela 2.7: Alertas do sistema relacionados com o desvio de obstáculos
TEXTO MOSTRADO MOTIVO SOLUÇÃO SUGERIDA

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 81
2.6. AS INTEL® POWERPACK BATTERIESAs Intel® Powerpack batteries acionam o Intel® Falcon™ 8+ UAV e o Intel® CockpitController (CTR). A bateria dispõe de um botão único / interface de utilizador de 5LEDs, um sistema de gestão de bateria inteligente (BMS), balanceamento automático,modo de armazenamento e carga. Fornece acesso direto a informação geral da bateria;por exemplo, a restante vida útil da bateria, que é apresentada pelos cinco LEDs (ver“Operar o Menu BMS” na página 85).
O BMS monitoriza, de forma segura, o estado de cada uma das quatro células dabateria, para garantir um processo de carregamento seguro da bateria. A suatecnologia de balanceamento de células assegura a consistência no desempenho dasbaterias.
As secções seguintes fornecem-lhe informação sobre as Intel® Powerpack batteries deque necessita para o Intel® Falcon™ 8+ UAV e o CTR.
Para carregar a Intel® Powerpack Battery necessita de uma das unidades dealimentação elétrica fornecidas.
Tabela 2.8: Especificações Técnicas da Bateria
TIPO DE BATERIA
CARGA ELÉTRICA
[MAH]
VARIAÇÃO DE TEN-SÃO [V]
TENSÃO TOTAL-MENTE CARRE-
GADA [V]
TENSÃOMAIS BAIXA
RECOMENDADO (SOB CARGA) [V]
Nº DE CÉLU-
LAS
BateriaIntel®Powerpack™
4000 14,8 16,8 14,0 4

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 82
No painel dianteiro da bateria existe um autocolante. Uma área está marcada por umponto rodeado por um círculo (ver figura abaixo). Esta área tem a função de um botão.
Figura 2.31: Descrição do LED
Os LEDs estão integrados no painel dianteiro da bateria.Número/cor do LED da esquerda para a direita:• 1 / vermelho• 2 / amarelo• 3 / verde • 4 / verde• 5 / verde

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 83
Note, por favor, as limitações mencionadas nos rótulos da Intel® Powerpack Battery.
Figura 2.32: A Intel® Powerpack BatteryA parte da frente da Intel Powerpack battery A parte de trás da Intel Powerpack battery

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 84
Mesmo se a bateria não estiver em uso, é possível obter informação sobre o estado decarga atual da bateria através do BMS. Uma pressão rápida (<2 s) no botão(apresentado acima) indica o estado de carga da bateria, apresentando o respetivonúmero de LEDs.
2.6.1. Carregar as Intel® Powerpack BatteriesApós a receção de baterias Intel® Powerpack novas, deve carregá-las até aos 60 - 80%,para assegurar que as baterias não se descarregam completamente durante oarmazenamento. Para carregar as baterias, deve usar-se a unidade de alimentaçãoelétrica.
Durante o processo de carregamento (definido como se a bateria estivesse conectada àunidade de alimentação elétrica e a unidade de alimentação elétrica está conectada àtomada da parede 100 V - 240 V AC 50 Hz - 60 Hz) o estado atual da bateria e oprocesso de carregamento é apresentado automaticamente pelos LEDs.
Tal como apresentado no quadro acima, o número de LEDs acesos apresenta oprogresso atual de carga. Adicionalmente, o LED mais alto seguinte está a piscar. Istosignifica que esta etapa de carga ainda não está terminada.
Tabela 2.9: Estado de carga
OS LEDS MOSTRAM O ESTADO / FASE DE CARGA DA BATERIA.
ESTADO DO LED Nº 1 2 3 4 5 ESTADO DE CARGA
ACESO DESLIGADO DESLIGADO DESLIGADO DESLIGADO 0% - 20%
ACESO ACESO DESLIGADO DESLIGADO DESLIGADO 20% - 40%
ACESO ACESO ACESO DESLIGADO DESLIGADO 40% - 60%
ACESO ACESO ACESO ACESO DESLIGADO 60% - 80%
ACESO ACESO ACESO ACESO ACESO 80% - 100%
Figura 2.33: Carregar
Para carregar a Intel® Powerpack:1. Conecte a Intel® Powerpack Battery ao
adaptador da unidade de alimentação elétrica.
2. Conecte a unidade de alimentação elétrica à tomada de corrente na parede.
O carregamento irá iniciar imediatamente, indi-cado pelo piscar dos LEDs.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 85
Quando o processo de carga tiver terminado e a bateria estivar na sua capacidademáxima, todos os 5 LEDs continuarão a piscar em simultâneo.Quando o carregamento tiver terminado, basta desligar a bateria e o adaptador AC.
A Intel® Powerpack Battery possui um temporizador interno que mantém a bateriaLIGADA durante 3 segundos depois de a desconectar do carregador. Quando umabateria com os LEDs iluminados é conectada ao Intel Falcon 8+ UAV ou Intel CockpitController (CTR), a respetiva unidade liga-se automaticamente, sem que o utilizadorpressione o botão ON/OFF (LIGAR/DESLIGAR). Para evitar uma ligação automática,aguarde até as luzes LED da bateria se apagarem, antes de a inserir no Intel Falcon 8+UAV ou no CTR.
2.6.2. Operar o Menu BMSPara mais informação sobre a bateria, pode ativar o menu BMS. A bateria não necessitade ser conectada à unidade de alimentação elétrica para ativar o menu BMS.
Para ativar o menu:
1. Prima/mantenha o botão para baixo (>2 s). Quando o primeiro LED (nº 1, vermelho) está a piscar, a primeira opção do menu pode ser ativado através de um longo premir (> 2 s) do botão.
2. Cada premir seguinte (< 2 s) no botão navega para a opção de menu seguinte, que pode ser ativada por outro premir longo (> 2 s) no botão, indicado pelo piscar do respetivo LED.
Se não existir nenhuma entrada do utilizador, o menu de LED irá fechar após 33segundos.
As cinco opções do menu são as seguintes:
Opção de Menu 1, Estado de CargaQuando LED 1 está a piscar, a opção do menu 1, pode ser ativada. Quando ativado, osLEDs mostram o estado de carga da bateria (ver “Estado de carga” na página 84).Depois de mostrar o estado de carga da bateria durante 8 segundos, o menu é fechadoautomaticamente (todos os LEDs desligados).
Opção de Menu 2, Modo de CargaQuando LED 2 está a piscar, a opção do menu 2, pode ser ativada. Quando selecionaresta opção ao puxar/manter o botão para baixo durante mais de 2 segundos, o Modode Armazenamento de bateria é ativado. Quando este modo é ativado, todos os LEDS,excepto um, estão acesos. O LED desligado move-se da direita para a esquerda.
Em Modo de Armazenamento, o BMS balança automaticamente a bateria para baixopara 3,8V / Célula (= 15,2 V por bateria). O Modo de Armazenamento da bateria podeser desativada ao premir o botão da bateria durante mais de 2 segundos.
Recomendamos usar este modo quando tiver carregado completamente a bateria (80-100%), mas planear armazená-la durante 2 ou mais dias.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 86
Como existe apenas uma pequena carga resistiva, demorará bastante tempo paradescarregar as baterias cheias até à tensão de armazenamento. Para facilitar adescarga, use baterias completamente carregadas no Intel® Cockpit Controller ou Intel®Falcon™ 8+ UAV antes do armazenamento.
Opção de Menu 3, Ciclos de CargaQuando LED 3 está a piscar, a opção do menu 3, pode ser ativada. Os LEDs mostram osciclos de carga de bateria atual, i.e. quantas vezes a bateria foi carregada.
O número total de ciclos de carga da bateria é apresentado pelos LEDs no sistemabinário por capacidades de 2 da direita para a esquerda multiplicado por 10.
Tabela 2.10: Ciclos de Carga
OS LEDS MOSTRAM O NÚMERO TOTAL DE CICLOS DE CARGA DA BATERIA DA DIREITO PARA A ESQUERDO INICIANDO COM O LED 5 (VERDE) = 20. ESTE
NÚMERO DEVE SER MULTIPLICADO POR 10
ESTADO DO LED Nº 1 2 3 4 5 (EXEMPLOS) ESTADO DE CARGA
DESLIGADO DESLIGADO DESLIGADO DESLIGADO ACESO 20 = 1 X 10 ≙ 0 - 10
DESLIGADO DESLIGADO DESLIGADO ACESO DESLIGADO 21 = 2 X 10 ≙ 11 - 20
DESLIGADO DESLIGADO DESLIGADO ACESO ACESO 20 + 21 = 3 X 10 ≙ 21 - 30
DESLIGADO DESLIGADO ACESO DESLIGADO ACESO 20 + 22 = 5 X 10 ≙ 41 - 50
DESLIGADO ACESO ACESO ACESO ACESO 20 + 21 + 22 + 23 = 15 X 10 ≙ 141 - 150

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 87
Opção de Menu 4, Capacidade GlobalOpção de Menu 4, apresenta a possível quantidade de carga atual, que a bateriapoderá ter quando completamente carregada (em percentagem) comparado com acapacidade da bateria de fábrica.
Opção de Menu 5, Estado da BateriaA opção do menu 5 mostra a diferença (em percentagem) entre a tensão de célula maisalta medida e a tensão de células mais baixa medida, medida em simultâneo.
O BMS tenta equilibrar o estado de carga de todas as 4 células da bateria para omesmo nível. Ao medir a diferença entre a tensão de célula mais alta e a tensão decélula mais baixa, é determinado o estado atual da bateria. O estado pode sermostrado ao ativar o menu 5.
Tabela 2.11: Capacidade da bateria
OS LEDS MOSTRAM A POSSÍVEL CAPACIDADE ATUAL DA BATERIA EM PERCENTAGEM, COMPARADA COM A CAPACIDADE DA BATERIA DE FÁBRICA
ESTADO DO LED Nº 1 2 3 4 5 CAPACIDADE REMANESCENTE
ACESO DESLIGADO DESLIGADO DESLIGADO DESLIGADO 51% - 60%
ACESO ACESO DESLIGADO DESLIGADO DESLIGADO 61% - 70%
ACESO ACESO ACESO DESLIGADO DESLIGADO 71% - 80%
ACESO ACESO ACESO ACESO DESLIGADO 81% - 90%
ACESO ACESO ACESO ACESO ACESO > 90%

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 88
Para obter um resultado comparável, a verificação de estado desta bateria é efetuadamelhor diretamente após o uso/voo.
Tabela 2.12: Estado da Bateria
OS LEDS MOSTRAM O ESTADO DA BATERIA
ESTADO DO LED Nº 1 2 3 4 5 DIFE-RENÇA
DE TEN-SÃO
SIGNIFICADO
DESLIGADO DESLIGADO DESLIGADO DESLIGADO DESLIGADO <= 5% Ideal, a bateria pode ser usada
ACESO DESLIGADO DESLIGADO DESLIGADO DESLIGADO > 5% Ainda está tudo bem
ACESO ACESO DESLIGADO DESLIGADO DESLIGADO > 10% Bateria ainda pode ser usada
ACESO ACESO ACESO DESLIGADO DESLIGADO > 15% Mau, pense em carregar a bateria
ACESO ACESO ACESO ACESO DESLIGADO > 20% Muito mau (a bateria pode ainda estar a ser usada pelo CTR)
ACESO ACESO ACESO ACESO ACESO > 25% Pior (p. ex. 3,8 V na célula mais alta e 2,85 V na mais baixa, medido em simultâ-nea), o uso da bateria já não é possível.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 89
Modo Erro BMSSe durante o processo de carga os LEDs são acesos alternativamente LED2 e LED4LIGADOS com LED3 LIGADO, o processo de carga é interrompido por uma dasseguintes razões:
• As células da bateria estão demasiado quentes ou demasiado frias
• Circuito de Controlo de Carga demasiado quente
O processo de carga irá concluir automaticamente uma vez que a temperatura dascélulas estiver normalizada.
Quando a bateria apresentar LED1 LIGADO e LED5 LIGADO alternadamente com LED2e LED4 LIGADO, a bateria foi operada fora das especificações (p.ex. demasiado quentedurante a descarga).
Quando a bateria apresenta tal comportamento, pode ainda ser usada paradescarregar a capacidade remanescente, mas já não poderá ser usada.
Quando tem uma bateria que mostra o modo de erro, prima uma vez o botão dabateria. Como resultado, alguns LEDs irão acender. Tire, por favor, uma foto dos LEDsacesos ou anote quais estão acesos (nº 1 é o LED mais à esquerda, nº 5 é o LED mais àdireita). Contacte a equipa de assistência da Intel e forneça a informação, qual dos LEDsestão acesos. No caso deste estado ter ficado ativo durante um voo, por favor, forneçatambém um ficheiro de registo deste voo.
Se ver qualquer outro comportamento dos LEDs contacte a assistência da Intel.
2.6.3. Atualização de bateriaA versão firmware do BMS és gerido automaticamente pelo firmware do UAV. Assimque a bateria for inserida no UAV e usada, a versão firmware da bateria é verificada. Sea versão firmware do BMS na bateria for mais antiga do que a atualmente instalada noUAV, será notado e a bateria será automaticamente atualizada pelo UAV.
Durante este processo, que leva menos de um minuto, é apresentada uma mensagemna linha de estado, no fundo do Visor de Estado (ver “VISOR DE ESTADO” napágina 190) e não será possível iniciar o UAV.
Figura 2.34: Atualização de Bateria
O progresso da processo de atualização da bateria é apresentado em percentagem na linha de estado ao fundo do Visor de Estado. Pode demorar o máximo de 1 minuto.Durante este período, não é possível iniciar o UAV.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 90
2.6.4. Instruções de Segurança de Informação da Bateria e Alertas
• Baterias Polímero de Lítio (LiPo) não têm qualquer efeito de memória. Nuncadescarregue totalmente as baterias LiPo, dado que pode danificarpermanentemente as baterias.
• Não armazene baterias completamente carregadas. Irá levar a uma vida útilmenor da bateria. Use o Modo de Armazenamento da Bateria BMS paraarmazenamento a longo prazo (> 2 dias) (Ver Operar O Menu BMS, "Opção deMenu 2, Modo de Carga" na página 85.
• Baterias LiPo são voláteis. Falhar a leitura e seguir as instruções abaixo poderesultar em fogo, danos pessoais e danos materiais se carregadas ou usadasinapropriadamente.
• A zona de carregamento/descarregamento da bateria e de armazenamentodeve estar livre de quaisquer materiais inflamáveis, tais como: mesas demadeira, carpetes ou contentores com gasolina. A superfície ideal paracarregamento e armazenamento de baterias LiPo é metal, betão ou cerâmica.
• Meios de Extinção: Água, CO2.
• Procedimento especiais de combate ao fogo: Aparelho de respiração autónomo.
• Perigo de incêndio e explosão incomum: A célula pode ventilar devido aconteúdos de bateria sujeitas a exposição excessiva ao calor.
• Produtos de combustão perigosos: Monóxido de carbono, dióxido de carbono,fumos de óxido de lítio.
• Ao comprar esta bateria, o cliente assume todos os riscos associados a bateriaslítio. Se não concordar com estas condições, devolva imediatamente a bateriaantes de a usar.
Diretrizes Gerais e Alertas• É crucial que todas as células numa bateria LiPo mantenham a mesma tensão
por todas as células, em qualquer altura.
• Nunca carregue baterias sem supervisão. Ao carregar baterias LiPo, deve semprepermanecer próximo para monitorizar o processo de carga e reagir a potenciaisproblemas que possam ocorrer.
CUIDADO: LEIA, POR FAVOR, AS SEGUINTES INSTRUÇÕES DESEGURANÇA E ALERTAS, CUIDADOSAMENTE, ANTES DE CARREGAROU USAR AS BATERIAS!
A INTEL NÃO PODE ASSUMIR QUAISQUER GARANTIAS POR FALHASPARA CUMPRIMENTO DESTES ALERTAS E DIRETRIZES DESEGURANÇA.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 91
• Nunca continue a carregar baterias LiPo, se os LEDs de bateria falharem oreconhecimento de carga completa. Sobreaquecimento de células LiPo indicamum problema. Na eventualidade de sobreaquecimento, a bateria deve serimediatamente desconectada da alimentação elétrica e colocada num local àprova de fogo.
• Dado que pode ocorrer uma reação química retardada, o melhor é monitorizar abateria como uma precaução de segurança. A monitorização da bateria deveocorrer numa zona segura, fora de cada edifício ou veículo e longe de qualquermaterial combustível. Carregue sempre as baterias LiPo em locais à prova defogo.
• A bateria pode incendiar mesmo após o processo de carga ter sido completado.
• Na eventualidade de um embate, pode remover a bateria para observação ecolocá-la numa área aberta segura, afastada de qualquer material combustível,durante um período apropriado.
• Nunca armazene ou carregue uma bateria dentro do seu carro, exposto atemperaturas extremas, dado que a temperatura extrema poderia causar umincêndio.
Carregar• Antes de carregar, inspecione visualmente a bateria. Observe qualquer
conectores danificados ou outras irregularidades. Não a use, se encontrarqualquer um dos problemas com a bateria, acima referidos.
• Se qualquer dano à bateria for encontrado ou se a tensão for significativamenteinferior para a sua bateria do que aquilo que está especificado abaixo, não tentecarregar ou voar com a bateria; contacte o seu fornecedor.
• Nunca carregue baterias sem supervisão.
• Carregue numa área isolada, longe de materiais inflamáveis. Use sacos deproteção para baterias ou caixa não-inflamável para carregar.
• Permita que a bateria arrefeça para a temperatura ambiente antes de carregar.
• Pode assistir à bateria a insuflar como um balão ou a inchar. Isto pode levar àdeformação da caixa onde a bateria já não se encaixa, no compartimento dabateria do UAV. Se notar tal deformação, não comece a carregar esta bateria. Sejá começou a carregar, desconete o processo de carregamento, imediatamente.Desconete a bateria e observe-a num local seguro, durante um períodoapropriado. Continuar a carregar uma bateria, que começou a inchar, irá resultarem incêndio. Nunca usa uma bateria, se a encontrar inchada ou em balão.
DescarregarNão descarregue a bateria para um nível inferior a 3,5 V por célula. Descarregar célulasde bateria abaixo de 3,5 V pode reduzir o desempenho ou mesmo destruir a bateria.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 92
Armazenamento & TransporteAs baterias novas são fornecidas com menos de 30% de carga, para cumprir osregulamentos que permitem o transporte aéreo de baterias Li-Po. Como a bateria seauto-descarrega lentamente, é importante manter o estado de carga da bateria everificar regularmente o seu nível de carga para evitar descargas profundas. Para oefeito, a Intel recomenda que carregue regularmente as baterias durante oarmazenamento, de acordo com as instruções facultadas neste capítulo.
A Intel® Powerpack Battery possui um sistema de gestão de bateria inteligente (BMS),que necessita da energia da bateria para usar o circuito de carga. Se deixar o nível deenergia da bateria chegar a um "estado de zero", a bateria não será capaz de serecarregar devido a limites de segurança que impedem o carregamento de bateriasprofundamente descarregadas, o que não é recomendado. No entanto, armazenar umabateria completamente carregada tem efeitos negativos na sua vida útil.
Armazenamento de baterias/Recomendação de manutenção de carga• A Intel recomenda que carregue/recarregue as baterias para um nível entre 2 e 4
LEDs (40-80%) a cada 3 meses, para manter o desempenho perfeito e afiabilidade das células.
• Se uma bateria estiver carregada a 100% (5 LEDs), mas tiver de ser armazenada,pode ser novamente colocada no nível seguro de tensão ativando o Modo deArmazenamento da Bateria. (ver Operar O Menu BMS, "Opção de Menu 2, Modode Carga" na página 85).
• Carregue totalmente as baterias apenas imediatamente antes do próximo voo.
• Armazene as baterias sempre dentro das gamas de temperatura especificadas.Para mais detalhes, ver "ESPECIFICAÇÕES TÉCNICAS" na página 247.
• Não exponha as baterias a luz solar direta ou calor durante períodos longos.
• Para transportar e armazenar as baterias, use sacos ou caixas seguras para LiPo.
Cuidar das Baterias• Verifique, por favor, a tensão da bateria após estar a carregar. É apresentado no
Ecrã Principal do Visor de Estado e através dos LEDs da bateria.
• A tensão para uma bateria de 4 células deve ter entre 16,4V - 16,8 V.
• Não descarregue baterias para um nível inferior a 14 V. Descargas profundas,abaixo de 14 V irão deteriorar o desempenho da bateria.
• Nunca puncione as células da bateria. Células puncionadas podem causarincêndio.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 93
Temperaturas de OperaçãoConsulte "ESPECIFICAÇÕES TÉCNICAS" na página 247 para detalhes relativos àstemperaturas de operação.
Vida Útil da BateriaBaterias que tenham perdido 20% da sua capacidade (ver Operar O Menu BMS, "Opçãode Menu 5, Estado da Bateria" na página 87) têm de ser retiradas de serviço eeliminadas adequadamente.
EliminaçãoPara tratamento adequado, recuperação e reciclagem, deposite estes produtos noscentros de recolha designados, onde serão aceites a título gratuito. Em alternativa,envie a bateria para eliminação de volta à Intel. Eliminar este produto corretamente iráajudar a preservar recursos valiosos e a prevenir quaisquer potenciais efeitos negativosna saúde humana e no ambiente, que poderia, de outra forma surgir devido aotratamento inadequado de resíduos. Para a eliminação, descarregue, por favor abateria para 3 V ou abaixo, por células, depois coloque a bateria num saco paraeliminação.
Garantia de ProdutoA garantia do produto está limitada a defeitos originais de material e mão-de obra. Agarantia não cobre danos colaterais. Devido à natureza e ao uso deste produto, nãoexiste nenhuma garantia a longo prazo. Uso indevido, abuso, carregamento incorreto,falha em cumprir com os alertas e diretrizes acima e outro uso deste produto não estãocobertos pela garantia.
Figura 2.35: Temperatura Dependente da Capacidade da Bateria LiPo
A capacidade das baterias LiPo desce drastica-mente se a temperatura se situar abaixo de 5 °C. Mantenha, por favor, as baterias quentes quando voar em condições de frio ou aqueça-as a aproximadamente 30 °C antes de voar.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 94
2.7. MALAS DE TRANSPORTE & INTEL® BACKPACKO conjunto de transporte é composto por diferentes malas com entalhes de corte porjato de água concebidas para o Intel® Falcon™ 8+ UAS com todos os seus acessórios.Para o transporte fácil de uma só pessoa, as malas do Intel® Falcon™ 8+ UAS dispõemde pegas retráteis e de rodas. O Intel® Backpack não é seguro para transporte aéreo,mas muito útil para missões em áreas remotas, dado que é leve e relativamentecompacto.
Figura 2.36: Malas de Transporte e Mochila
As malas de transporte oferecem grandes van-tagens:• Graças às pegas dobráveis e às rodas,
podem ser facilmente transportadas por uma pessoa.
• O entalhe de reforço de esponja da mala da carga útil pode ser usado como segurança de carga para a carga útil, quando o UAV é transportado com a carga útil montada na mala do Intel® Falcon™ 8+ UAV.
Se transportado por avião - siga, por favor, as diretrizes prescritas da transportadora aérea.
CUIDADO: O INTEL® FALCON™ 8+ UAV E O INTEL® COCKPITCONTROLLER (CTR) TÊM DE SER TRANSPORTADOSCOMPLETAMENTE MONTADOS. PARA UM TRANSPORTE SEGURO,RECOMENDAMOS O USO DAS MALAS FORNECIDAS.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 95
2.7.1. Instruções de EmbalagemPara garantir um transporte seguro do seu sistema de voo, por favor, observe asimagens em baixa para um embalamento correto.
CUIDADO: QUANDO ENVIAR O INTEL® FALCON™ 8+ UAV NUMAMALA DE TRANSPORTE COM A CARGA ÚTIL MONTADA, TEM DEUSAR A ENTRADA DE ESPUMA DA MALA DA CARGA ÚTIL PARAEVITAR DANOS DURANTE O TRANSPORTE OU TEM DE OTRANSPORTAR NA MALA ESPECIAL DE CARGA ÚTIL (VERSEGUINTE).
Figura 2.37: Instruções de embalagem para as malas do Intel® Falcon™ 8+ UAS
Intel® Falcon™ 8+ System CaseEsta mala é usada para todas as peças necessárias do seu Intel® Falcon™ 8+ UAV.Seguindo os números, as embalagens con-têm:(1) Intel® Falcon™ 8+ UAV sem carga útil(2) Unidades de alimentação elétrica para
carregar as Intel® Powerpack batteries (6)
(3) Espaço para acessórios, p.ex. óculos de sol
(4) Caixa de ferramentas com hélices suplentes (ver em baixo)
(5) Espaço para a carga útil quando montada diretamente no UAV.Para segurança da carga, utilize a entrada forrada em espuma fornecida com a mala da carga útil.
(6) Espaço para as Intel® Powerpack batteries (opcional, enviado em separado)
(7) ICC gamepad (opcional)(8) Espaço para equipamento extra, se
existente, o que não está incluído no sistema, i.e. colete refletor de segurança ou óculos de vídeo
1
2
23 4
5
678

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 96
Caixa de ferramentas e peças de substitui-ção
Mala do Intel® Cockpit Controller (CTR)Esta mala contém:CTR com proteção solar montada(1) Quando transportar o CTR na mala, a
proteção solar tem de ser colocada como apresentado, para fornecer proteção extra do tablet com ecrã tátil contra riscos durante o transporte.
(2) Espaço adicional(3) Espaço adicional, p. ex. para um
fornecimento extra de alimentação elétrica.
Incluído na mala, mas não apresentado:apoio de ombros, localizado por baixo dotablet com ecrã tátil com proteção solar.
Mala da carga útilA carga útil do Intel® Falcon 8+ UAS tem de ser guardada, como apresentado na ima-gem. Certifique-se que é colocada, conve-nientemente, dentro do reforço de espuma. A tampa do reforço de espuma (não apresentada) localizada na parte de cima da carga útil, deve ser usada para fixar a carga útil, quando a mesma for transportada montada no UAV, na mala do Intel® Falcon 8+ UAV.
Figura 2.37: Instruções de embalagem para as malas do Intel® Falcon™ 8+ UAS
1
2
3

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 97
Intel® BackpackA mochila é uma solução opcional para transportar o UAS completo sobre terreno irregular ou em caminhadas mais longas.Quando colocar o UAV na mochila, alinhe sempre a parte de baixo de ambos os héli-ces (no topo, na imagem, com o Intel® Fal-con™ 8+ UAV virado para baixo) paralelo ao topo da mochila, tal como apresentado na imagem. As outras hélices estão orien-tadas para os trilhos para o motor. (1) Use as quatro fitas de Velcro grandes
para fixar o Intel® Falcon™ 8+ UAV dentro da mochila. Devem estar bem justo, para que "levantem" o sistema e afastado do CTR.
(2) Na parte de baixo, existe espaço para o CTR. Antes de o colocar dente da mochila, certifique-se de que a proteção solar está colocada como apresentado na imagem, para proteger o tablet com ecrã tátil e que o possa fixar com a fita de Velcro.
(3) Na parte exterior, existem dois bolsos em separado para as Intel® Powerpack batteries.
Um outro bolso maior está localizado na tampa (não apresentado na imagem). Existe espaço suficiente para itens, tais como uma outra Intel® Powerpack battery, a unidade de alimentação elétrica ou um notebook e o apoio de ombros.
As imagens dos itens acima servem apenas para fins ilustrativos, e o(s) item(ns) incluídos no seu Intel® Falcon 8+ UAS podem diferir daquele(s) aqui descritos, dependendo, por exemplo, da carga útil que encomendou.
Figura 2.37: Instruções de embalagem para as malas do Intel® Falcon™ 8+ UAS
1
2
3
11
1
3

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 98
2.7.2. Embalagem para o envioQuando recebe o seu Intel® Falcon™ 8+ UAS, a mala do sistema vem embalada numacaixa de cartão. Se necessitar de devolver o sistema UAV, coloque-o na respetiva malacomo descrito acima. Para o enviar, utilize adicionalmente a caixa de cartão com a quala mala do sistema vinha revestida aquando da entrega e embale-o como descrito nasinstruções que se seguem.
Figura 2.38: Instruções de embalagem para a caixa de cartão da mala do sistema UAV
O conjunto da caixa de cartão para embalar a mala do Intel® Falcon™ 8+ UAS (1) é composto pelas seguintes peças:Duas inserções de papelão ondulado para o topo e o fundo (2)Duas almofadas de espuma para as extremidades da mala (3)A caixa de cartão (4)
1
2
3
4
2
3

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 99
Para embalar a mala do sistema na caixa de cartão, siga os passos descritos:1. Coloque uma das inserções de
papelão ondulado no fundo da caixa.2. Coloque as duas almofadas sobre as
extremidades da mala.
3. Insira a mala equipada com as almofadas na caixa.
Figura 2.38: Instruções de embalagem para a caixa de cartão da mala do sistema UAV (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 100
2.8. PACOTES DE FUNCIONALIDADES DE SOFTWAREExistem pacotes de funcionalidades de software opcionais disponíveis para o Intel®Falcon™ 8+ UAS. Oferecem funções úteis para aplicações específicas.
Existem dois modelos de licenciamento diferentes para obter os pacotes defuncionalidade de software.
• Uma opção é uma licença de software vitalícia, que permanece no UAV. Avantagem de uma licença vitalícia é que a mesma se mantém no UAV e pode serusada com qualquer carga útil.
• A outra opção é uma licença de software anual. A mesma é armazenada na cargaútil e a licença termina um ano após a data de ativação, se a subscrição não forrenovada. A vantagem de uma licença anual é que pode ser usada com umacarga útil em qualquer Intel Falcon 8+ UAV.
O pacote de funcionalidades de software disponível pode ser adquirido em qualquer altura e desbloqueado remotamente pelo seu revendedor Intel® Falcon™ 8+ UAS. O Intel® Falcon™ 8+ UAS não necessita de ser devolvido.
4. Coloque a segunda inserção de papelão ondulado no topo da mala protegida com as almofadas e feche a caixa.
5. Sele a caixa fechada com fita adesiva de embalar, utilizando o método de 6 tiras, 3 tiras no topo e 3 tiras no fundo como apresentado.
Figura 2.38: Instruções de embalagem para a caixa de cartão da mala do sistema UAV (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 101
• Quando encomenda uma licença vitalícia, forneça, por favor, o número de sériedo UAV, que está localizado no topo da unidade central, bem como através doVisor de Estado (ver “Pacotes de Funcionalidades de Software Vitalícios” napágina 104).
• Quando encomenda uma licença anual, por favor forneça o número de série dacarga útil. (ver “Pacotes de Funcionalidades de Software Anuais” na página 104).
Por favor, consulte instruções detalhadas sobre como desbloquear pacotes defuncionalidades de software em "Ativar Pacotes de Funcionalidades de Software" napágina 103.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 102
Tabela 2.13: Descrições de pacotes
FUNCIONALIDADE
DESCRIÇÃO
PACOTE DE LEVANTAMENTO TOPOGRÁFICO
Plano de voo Voo e efetue o levantamento topográfico completamente auto-matizado. Pode planear missões de waypoint complexas no seu notebook, através do seu AscTec Navigator Software, mesmo antes de sair para o campo.Num futuro próximo, o AscTec Navigator será substituído pelo software avançado de planeamento de voo Intel Mission Con-trol. Para informações atualizadas, consulte:http://www.intel.com/IntelMissionControl
Levantamento topográfico rápido
Esta função permite-lhe gerar um voo de levantamento topográ-fico automatizado, enquanto estiver no campo (sem notebook), em segundos. Defina a distância da amostra no terreno (GSD), a área a cobrir e iniciar o voo de levantamento topográfico.
PACOTES DE INSPEÇÃO
WP+P Com a aplicação de Cockpit Control, pode criar, carregar, modifi-car e guardar os projetos PATH e quaisquer waypoints relaciona-dos no tablet com ecrã tátil do Intel® Cockpit Controller (CTR).
ICC Controlo de Câmara Independente (ver “O CONTROLO DE CÂMARA INDEPENDENTE (ICC)” na página 31). Esta função per-mite que um segundo operador controle a câmara através de um gamepad, que está conectado ao CTR, enquanto o piloto se pode concentrar totalmente no voo. Recomendado para voos de inspeção. Usam-se, habitualmente, óculos de vídeo, para que o segundo operador tenha uma pré-visualização vídeo indepen-dente.
COI Com o Circle of Interest (COI) é possível voar um círculo automa-tizado de 360° à volta de um objeto e tirar fotografias em posi-ções predefinidas. Estas fotos podem ser processadas posteriormente por um software de modelação 3D, tal como um Agisoft PhotoScan para construir um modelo 3D do objeto.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 103
2.8.1. Ativar Pacotes de Funcionalidades de SoftwarePara adquirir um pacote de funcionalidades de software, contacte, por favor, o seurevendedor local do Intel® Falcon™ 8+ UAS. Uma vez que tenha adquirido o seu pacotede funcionalidades de software, irá receber um email com o ficheiro com o seu códigode licença "f8p_license.asc", que é necessário para ativar os pacotes de funcionalidadesde software. Pode vir da Intel como anexo ou do seu representante de vendas.
Pode existir na forma de um ficheiro ZIP. Por favor, guarde este ficheiro no seucomputador, se necessário descompacte e siga as instruções em baixo passo a passo.
Se tiver questões relativas aos pacotes de funcionalidades de software ou necessitarde assistência, contacte, por favor o seu representante de vendas.
As instruções que se seguem são idênticas tanto para ativar licenças anuais comovitalícias.
Se desejar ativar uma licença anual para uma carga útil (ver acima), certifique-se de queestá montada no Intel® Falcon™ 8+ UAV a respetiva carga útil com o número de sériepara o qual a licença foi criada.
Para ativar uma licença anual ou vitalícia:
1. Tome o dispositivo USB do seu Intel® Falcon™ 8+ UAV.2. Introduza-o no seu computador.3. Formate o dispositivo USB (sistema de ficheiros: FAT32, tamanho da unidade de
alocação: 32 kilobytes).4. Copie o ficheiro “f8p_license.asc” para o dispositivo USB.5. Coloque o dispositivo USB no seu Intel® Falcon™ 8+ UAV.6. LIGUE o UAV.7. Após concluir a inicialização do Intel® Falcon™ 8+ UAV, aguarde 10 segundos.
Depois DESLIGUE o UAV. 8. Remova o dispositivo USB do Intel® Falcon™ 8+ UAV.9. Ligue o UAS e verifique os pacotes de funcionalidades de software ativados, como
descrito em "Verificar Pacotes de Funcionalidades de Software" na página 104.10.Efetue um voo de teste e experimente uma função de cada pacote de
funcionalidades de software, recentemente desbloqueado.11.Verifique o Ecrã Principal do Visor de Estado, certificando-se de que não são
apresentadas mensagens relativas aos pacotes em falta.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 104
2.8.2. Verificar Pacotes de Funcionalidades de SoftwareNa secção seguinte, irá encontrar instruções sobre como determinar quais os pacotesde funcionalidades de software que estão ativados no sistema.
Pacotes de Funcionalidades de Software VitalíciosPara verificar quais os pacotes de funcionalidades de software vitalícios estão ativadosno seu sistema, LIGUE o Intel® Falcon™ 8+ UAV, o tablet com ecrã tátil e o CTR econfirme o Link Loss Procedure.
1. Prima ENT para abrir o menu no Visor de Estado. 2. Use o botão da seta DIREITO para navegar para Settings. 3. Prima ENT para abrir o menu Settings.4. Use o botão de seta DIREITO para navegar para Falcon Info e confirme ao premir
ENT.O ecrã seguinte apresenta o número de série do UAV, as versões de firmwareinstaladas e os pacotes vitalícios ativados.
Pacotes de Funcionalidades de Software AnuaisPara verificar quais os pacotes de funcionalidades de software anuais estão ativadosno seu sistema, LIGUE o Intel® Falcon™ 8+ UAV, o tablet com ecrã tátil e o CTR econfirme o Link Loss Procedure.
1. Prima ENT para abrir o menu no Visor de Estado. 2. Use o botão da seta DIREITO para navegar para Settings. 3. Prima ENT para abrir o menu Settings.4. Use o botão de seta DIREITO para navegar para Payload Info e confirme ao
premir ENT.
Figura 2.39: Mostra a Licença Vitalícia Ativada.
Licenças vitalícias:No exemplo, estão dois pacotes de funcionalidades sof-tware vitalícios ativados.• Survey = Pacote levantamento topográfico • Inspec = Pacote de inspeção

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 105
O ecrã seguinte apresenta o número de série da carga útil, o tipo de câmara usada e ospacotes de funcionalidades de software anuais ativados com a respetiva data deexpiração.
Figura 2.40: Mostra a licença vitalícia ativada.
Licenças anuais:No exemplo, existem dois pacotes de funcionalidade de software anuais ativados, com a data de expiração (Ano/Mês/Dia):• Inspec = Pacote de inspeção• Survey = Pacote levantamento topográfico Apenas licenças/pacotes com a data de expiração apresen-tada são válidas.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 106
2.9. INTEL® FALCON™ 8+ UAV REGISTOS DE VOOO Intel® Falcon™ 8+ UAV está constantemente a registar todos os dados do controladorde voo em dois dispositivos de armazenamento diferentes: um cartão SD inserido naparte detrás do Intel® Falcon™ 8+ UAV (Cartão SD do utilizador) e um cartão SD interno,que apenas pode ser acedido ao abrir a cobertura da unidade central (Cartão SDinterno).
Os dados acedidos nos diferentes dispositivos podem diferir, razão pela qual em casode assistência, lhe solicitamos sempre, que envie os registos a partir do cartão SD doutilizador. Em ocasiões raras, podemos solicitar os registos a partir do cartão SDinterno. Em tais casos, iremos disponibilizar instruções sobre como aceder ao cartãoSD interno.
A estrutura de ficheiro é idêntica em todos os dispositivos de armazenamento.
Os registos são sempre guardados num diretório denominado ASCTEC. Cada vez que oIntel® Falcon™ 8+ UAV é ligado, será criado um novo diretório com númerossubsequentes, dentro do diretório ASCTEC. Todos os ficheiros têm sempre a mesmadata e hora de criação, mas se disponível, a hora do GPS será armazenada no registo.Um diretório de registo contém sempre quatro ficheiros: ASCHP.LOG, ASCTEC.IFO,ASCTEC.LOG, FLIGHT.KML.
Nenhum destes ficheiros pode ser acedido diretamente, mas ao usar o AscTecNavigator Software, é possível obter uma vista do mapa do voo ou exportar uma rotade voo como ficheiro .KML ou .GPX. O AscTec Navigator Software pode serdescarregado da área de download http://intel.com/FalconDownloads (ver“Atualizações de firmware do Intel® Falcon™ 8+ UAS” na página 220). O manual correspondente pode ser encontrado aqui: http://intel.com/FalconManual.
No AscTec Navigator Software, o registo de voo disponibiliza uma síntese cronológicade todos os voos armazenados nos cartões SD (ver seguinte):

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 107
Com o módulo Photo Tagger no AscTec Navigator, é possível georreferenciar asimagens tiradas durante o voo. Consulte o manual do AscTec Navigator Software paraobter mais detalhes.
Num futuro próximo, o AscTec Navigator Software será substituído pelo softwareavançado de planeamento de voo Intel Mission Control. Para informações atualizadas,consulte:
http://www.intel.com/IntelMissionControl
Pode acontecer que o Intel® Falcon™ 8+ UAV não consiga aceder a um dispositivo dearmazenamento de registo. Normalmente, é causado por um problema de conexãomecânica ou por um sistema de ficheiros corrompidos no dispositivo de
Figura 2.41: O Registo de Voo do AscTec Navigator Software
A vista de mapa mostra a trajetória do voo e as posições de disparo de foto, a vista de lista por debaixo do mapa mostra: o ID de registo (número subsequente), hora e data de início, a posição GPS (WGS84), o número de tags de imagem (disparos) durante o voo e o tempo de voo. Os botões acima da vista de mapa permitem a exportação de um simples voo como KML ou GPX ou uma síntese de todos os voos para ficheiro CSV. É igualmente possível exportar o ficheiro de registo como ficheiro ZIP, para permitir enviá-lo por email.Por favor, consulte o capítulo 5. Registo de voo no Manual do AscTec Navigator Sof-tware para mais detalhes. O manual pode ser encontrado aqui: http://intel.com/Fal-conManual.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 108
armazenamento. Se o Intel® Falcon™ 8+ UAV não conseguir aceder ao dispositivo dearmazenamento, será apresentado o respetivo alerta (ver seguinte).
Tabela 2.14: Alertas Possíveis
CAUSA SINAL VISUAL POSSÍVEL CORREÇÃO
Cartão SD de utilizador não pode ser ace-dido.
<- Check Msg aparece na linha de estado do Visor de Estado. Prima o respe-tivo botão de seta ESQUERDO no Intel® Cockpit Controller (CTR), até o Ecrã de Mensagem de Erro for apresentado. No user SD card será apresentado.
Retire o cartão SD de utilizador e faça uma cópia de segurança e formate-o (sistema de ficheiros: FAT32, tama-nho da unidade de alocação: 32 kilo-bytes). Depois de voltar a inserir o cartão SD no Intel® Falcon™ 8+ UAV, o mesmo deve voltar a estar acessível.Se não for necessária nenhuma cópia de segurança, o cartão SD do Utiliza-dor pode também ser formatado diretamente pelo UAV: Para tal:1. Prima ENT para abrir o menu no
Visor de Estado.2. Use o botão da seta DIREITO para
navegar para Settings. 3. Prima ENT e use o botão de seta
DIREITO para navegar para Format User SD.
4. Prima ENT para confirmar. Surge o ecrã apresentado:

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 109
O cartão SD não será apagado ou formatado pelo sistema de voo. Recomendamos queefetue, regularmente, uma cópia de segurança destes dispositivos de armazenamentoe reformatá-las posteriormente. Especialmente quando estiver a trabalhar em projetoscomplexos, durante os quais são necessários registos para a georreferência, ajuda seiniciar com um meio de armazenamento vazio.
5. Prima ENT para confirmar a formatação do cartão SD do utilizador. O processo inicia, é apresentada uma barra de progresso.Premir ESC cancela a função e irá regressar ao Ecrã Principal.
Quando terminar a formatação do cartão SD, o Intel® Falcon™ 8+ UAV irá criar, imediatamente um novo ficheiro de registo e iniciar, nova-mente o registo.
Cartão SD interno não pode ser ace-dido.
<- Check Msg aparece na linha de estado do Visor de Estado. Prima o respe-tivo botão de seta ESQUERDO no CTR, até o Ecrã de Mensagem de Erro ser apresentado. No internal SD card será apresentado.
DESLIGUE o INTEL® FALCON™ 8+ UAV Aguarde 10 segundos e LIGUE-O, novamente. Durante a inicialização, o cartão SD interno será formatado e deve voltar a estar acessível. Se não ajudar, contacte a equipa de assistên-cia Intel para obter instruções em como proceder.
Nota
O Intel® Falcon™ 8+ UAV consegue voar sem qualquer dispositivo de registo ativo. É da responsabilidade do utilizador, certificar-se de que todos os voos
podem ser registados adequadamente, caso seja um requisito legal no país em que o sistema é usado.
Tabela 2.14: Alertas Possíveis (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 110
3. OPERAR O SISTEMANeste capítulo irá encontrar uma descrição em como operar o Intel® Falcon™ 8+ UAS.
3.1. PREPARAR O INTEL® FALCON™ 8+ UAVA secção seguinte mostra e descreve como preparar o Intel® Falcon™ 8+ UAV para voo.
Quando usar o sistema Intel® Falcon 8+ pela primeira vez, são necessários algunspassos adicionais, que apenas têm de ser efetuados uma vez. Pode ser necessáriorepeti-los apenas em ocasiões excepcionais. Em detalhe, esses passos são:
• Estabeleça a ligação inicial entre o Intel® Falcon™ 8+ UAV e o Intel® CockpitController (CTR) (ver “Estabelecer uma conexão entre o CTR e o UAV” napágina 241).
• Defina a data e a hora do sistema no tablet com ecrã tátil do CTR (ver “O TABLETCOM ECRÃ TÁTIL” na página 114).
• Efetue uma calibração da carga útil e da bússola com cada carga útil nova (ver“Calibração da carga útil e da bússola” na página 39).
• Visite https://intel.com/FalconDownloads e instale o último firmware no sistema(ver “Atualizações de firmware do Intel® Falcon™ 8+ UAS” na página 220).Verifique atualizações no website com regularidade.
Siga sempre as instruções, rigorosamente, em "VERIFICAÇÃO PRÉ-VOO" na página 14para ter a certeza de que o UAV está em perfeitas condições e configurado para voar.
Figura 3.1: Preparar o UAV
1. Arraste as baterias com o rótulo colorido ("Intel") para cima (1) para dentro do compartimento da bateria. Deslize todos até pararem e estiverem alinhados com os finais dos encaixes. Verifique se cada bateria está presa na sua mola de retenção (2).
1
2
2
CUIDADO: O INTEL FALCON 8+ UAV TEM DE VOARSEMPRE COM DUAS BATERIAS INSERIDAS.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 111
2. Ligue a câmara e remova a proteção da lente. A imagem mostra a Sony Alpha 7R como um exemplo.
Note, por favor, que o interruptor LIGAR/DESLI-GAR é diferente para cada carga útil.
3. Prima o botão de ligar (1) durante aprox. 2 segundos, até ouvir um beep breve. Após aprox. 3 segundos, os LEDs, em ambos os lados do Intel® Falcon™ 8+ UAV, acendem, sendo possível ouvir a ventoinha interna a funcionar. O UAV é inicializado quando o suporte de câmara (suporte cardan) iniciar automaticamente a corrigir os movimentos do UAV, que também podem ser ouvidos. São necessários aprox.15 segundos para ligar completamente o UAV, sendo indicado por um bip triplo do Intel® Falcon™ 8+ UAV.O UAS está pronto para descolar, assim que a inicialização tiver terminado com sucesso e tiver sido estabelecida ligação ao CTR. A AscTec Trinity Control Unit permite-lhe iniciar o UAV, mesmo de uma plataforma em movimento, por exemplo um barco.
Baterias hot swapPara poupar tempo, é possível trocar as baterias enquanto o UAV fica LIGADO.1. Aterre o UAV.2. Deligue os motores e deixe o UAV LIGADO.3. Retire uma bateria vazia, a bateria remanescente manterá o UAV LIGADO.4. Insira uma bateria cheia na entrada de bateria livre do UAV.5. Retire a outra bateria vazia.6. Insira uma bateria cheia na entrada de bateria livre do UAV.7. Ligue os motores e continue a missão.Ao seguir este procedimento, e enquanto o UAV ficar LIGADO, será criado um ficheiro de registo contínuo. Só será criado um novo ficheiro de registo ao desligar e voltar a ligar o UAV. Se for necessário georreferenciar imagens, será útil acompanhar as ima-gens que pertencem a cada novo ficheiro de registo criado.
Figura 3.1: Preparar o UAV (Continuação)
1

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 112
3.2. PREPARAR O INTEL® COCKPIT CONTROLLER (CTR)A secção seguinte descreve como preparar o CTR.
Figura 3.2: Preparar o CTR
1. Abra a tampa do compartimento da bateria (1). Está localizada na parte de baixo do lado inferior esquerdo do CTR. A tampa do compartimento está equipada com um fecho magnético.
A Intel® Powerpack Battery fornece energia ao CTR, bem como ao tablet com ecrã tátil.
2. Deslize as baterias com o rótulo colorido "Intel" para baixo (1) para dentro do compartimento da bateria. Deslize-a toda para dentro da unidade, até parar e encaixar na extremidade do encaixe.A Intel® Powerpack battery fornece energia ao CTR, bem como ao tablet com ecrã tátil (a bateria é idêntica para o Intel® Falcon™ 8+; ver “AS INTEL® POWERPACK BATTERIES” na página 81)
3. Instale o apoio de ombros ao conectar os mosquetões do apoio ao primeiro ilhó do suporte integrado (círculo vermelho nesta figura) em cada lado do CTR.
4. Ligue o tablet com ecrã tátil ao premir o botão de ligar (1) na extremidade superior, lado direito, durante aprox. 2 segundos, até sentir uma breve vibração.
1
1
1

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 113
5. Abra o painel de antena na parte de trás do tablet com ecrã tátil. O painel de antena tem de apontar sempre para o UAV, para garantir a melhor qualidade de transmissão possível.
6. Ligue o CTR ao premir e manter o botão de LIGAR durante alguns segundos, até for sentida uma breve vibração.
ALERTA NÃO LIGUE OU OPERE O CTR SEM TER ABERTO TODO OPAINEL DA ANTENA.
CUIDADO: QUANDO LIGAR O CTR, A POSIÇÃO CENTRAL DOS DOISMANÍPULOS DE CONTROLO É CALIBRADA. CERTIFIQUE-SE DE QUENÃO OS MOVE, ENQUANTO O CTR ESTIVER A LIGAR. DE OUTRAFORMA, IRÁ OCORRER UMA MENSAGEM DE ERRO " JOYSTICKERROR" NO VISOR DE ESTADO E NA ÁREA DE NOTIFICAÇÃO DOTABLET COM ECRÃ TÁTIL E OS MOTORES NÃO CONSEGUEMARRANCAR. SE TAL OCORRER, DESLIGUE O CTR E VOLTE A LIGAR,NOVAMENTE, SEM TOCAR OS MANÍPULOS DE CONTROLO.
Figura 3.2: Preparar o CTR (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 114
3.3. O TABLET COM ECRÃ TÁTILO tablet com ecrã tátil do Windows® baseado na Intel® está diretamente montado naunidade de controlo remoto do Intel® Cockpit Controller (CTR) e não pode serremovido. Serve de monitor de vídeo, apresenta informação geral de voo e dadostelemétricos e permite ao utilizador ativar funções automáticas. A bateria do CTRfornece também energia ao tablet com ecrã tátil.
Para LIGAR ou DESLIGAR o tablet com ecrã tátil, prima o botão localizado naextremidade de topo do tablet com ecrã tátil, no lado direito da moldura, durantealguns segundos (ver “Preparar o CTR” na página 112).
Depois de LIGAR o tablet com ecrã tátil, irá ver, inicialmente, um ecrã azul de boas-vindas, que após alguns segundos irá mudar para apresentar a Lista de Verificação Pré-Voo, onde são apresentados os aspetos de segurança mais importantes.
Quando iniciar o tablet com ecrã tátil pela primeira vez, antes da Lista de VerificaçãoPré-Voo, irá ver a janela para definição de data e hora (ver figura seguinte).
Figura 3.3: A Aplicação de Cockpit Control
Definição de Data e HoraQuando iniciar o tablet com ecrã tátil pela primeira vez, é apresentada uma janela para definição de data e hora antes da Preflight Checklist. Se necessário, pode efetuar alterações aqui e confirme ao tocar no botão APPLY SETTINGS. Se tocar no botão SKIP SETTINGS, este ecrã será apre-sentado cada vez que inicia o seu tablet com ecrã tátil.Cada vez que instalar novas atualizações, esta janela será novamente apresentada.Ao tocar no botão SKIP SETTINGS, é apresentado um alerta.Ao tocar no botão CANCEL, regressa para as definições de data e hora.Ao tocar no botão OK, irá para a Pre-flight Checklist (ver em baixo).

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 115
Lista de Verificação Pré-Voo (Preflight Checklist)Certifique-se de que cumpre todos os aspetos da Lista de Verificação Pré-Voo. Verifique todos os 3 tópicos: Verifique permissões, verifique UAV e o ambiente e prima em OK antes da descolagem. Pode tocar em SKIP, porém é recomen-dado que siga a lista de verificação e toque em OK.Após tocar em OK ou SKIP, o ecrã princi-pal da aplicação é aberto (ver a imagem seguinte).Agora pode:• usar o ecrã tátil como monitor de pré-
visualização de vídeo;• carregar, modificar e guardar projetos
PATH e waypoints relacionados (opcional);
• carregar e voar projetos de AscTec Navigator Software.
Figura 3.3: A Aplicação de Cockpit Control (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 116
Ecrã PrincipalO centro do ecrã mostra o vídeo de pré-visualização da carga útil montada. Todos os símbolos e ícones apresentados aqui são criados pela câmara e não dispõem de nenhuma funcionalidade tátil. No exemplo acima, o Sony A7R é a carga útil usada. Por favor consulte "Câmara de Enquadramento Total Sony Alpha 7R" na página 42, e o manual da câmara Sony para mais informações. O manual da câmara Sony pode ser acedido online na página de assistência Sony: https://esupport.sony.com/US/p/modelhome.pl?mdl=ILCE7R&LOC=3#/manualstabNa área de notificação, no topo desta janela, é fornecida informação geral sobre o voo. No canto esquerdo em GPS (1), a qualidade do sinal de GPS pode ser visualizada, indicada por 1 a 5 barras. Próximo da parte direita da janela, pode encontrar o local para as mensagens do sis-tema (2). Se tudo estiver bem, é apresentado, SYSTEM OK numa barra verde. Em caso de serem apresentados alertas, o campo torna-se vermelho e apresenta o res-petivo alerta. Para possíveis alertas veja "Alertas e mensagens de erro", em baixo.Junto às mensagens do sistema, encontra-se uma outra barra verde, que indica a capacidade ainda restante da bateria do UAV em percentagem (3), seguida do tempo de voo decorrido (4) e o modo de voo selecionado (GPS) (5).
Figura 3.3: A Aplicação de Cockpit Control (Continuação)
12 3 4
5

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 117
Ecrã Principal (Continuação)Tocar neste botão, localizado no canto superior direito, apresenta o vídeo de pré-visualização em modo de ecrã inteiro (a área de notificação no topo está oculta) e o botão muda para o seguinte.
Ao tocar neste botão, sai do modo de ecrã inteiro e a área de notificação no topo é novamente apresentada.
No canto inferior direito, encontra mais informação de voo, que se refere ao UAV: Orientação (apresentada em gráfico), Height (Altitude) e Dis-tance (Distância) a partir do ponto de descolagem. Ao tocar no campo de informação de voo irá alternar a vista entre pré-visualização de vídeo e vista de mapa (no caso do mapa ter sido carregado de um projeto Asc-Tec Navigator). Aprenda mais sobre o AscTec Navigator em http://intel.com/FalconManual. Num futuro próximo, o AscTec Navigator será substituído pelo software avançado de planeamento de voo Intel Mission Control. Para informa-ções atualizadas, consulte:http://www.intel.com/IntelMissionControlDo lado esquerdo do ecrã principal (em GPS), pode encontrar os botões para três funções diferentes:Tocar no botão PATH abre a função PATH, onde pode armazenar e editar waypoints e paths individuais (ver “Projetos PATH” na página 118). Esta função é uma parte opcional do Pacote de Inspeção (ver “PACOTES DE FUNCIONALIDADES DE SOFTWARE” na página 100).
Tocar no botão NAVIGATOR abre a janela ASCTEC NAVIGATOR PROJECT, onde pode carregar e voar projetos Navigator existentes (ver “Projetos de AscTec Navigator Software” na página 126).
Ao tocar neste botão, abre-se uma janela, que lhe fornece informações sobre o software (versões, atualizações disponíveis, etc.) atualmente instalado no sistema. Tocar novamente no botão, fecha a janela.
Figura 3.3: A Aplicação de Cockpit Control (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 118
3.3.1. Projetos PATHEsta função é uma parte opcional do Pacote de Inspeção (ver “PACOTES DEFUNCIONALIDADES DE SOFTWARE” na página 100).
Através da aplicação de Cockpit Control, pode criar, carregar, modificar e guardarprojetos PATH e quaisquer waypoints relacionados. Para usar esta funcionalidade temde inserir um dispositivo USB (FAT 32 formatado) na porta USB, localizada na parte detrás do CTR.
Mensagens de Erro e AlertasSe for apresentado SYSTEM ERROR. CHECK STATUS DISPLAY! (ERRO DE SISTEMA! VERIFICAR VISOR DE ESTADO!) na área de notificação, no topo do tablet com ecrã tátil, tem de verificar o Visor de Estado no CTR. Se existir apenas um alerta, será total-mente apresentado na área de notifica-ção.Se ocorrer mais do que um alerta, é apre-sentado um menu popup & pendente. Tocar no botão pendente irá apresentar todos os alertas. É apresentado o texto relacionado: • em MAIÚSCULAS se tiver ocorrido
um erro, que foi verificado através do Visor de Estado,
• minúsculas no menu pendente.Se o alerta for crítico e pode levar a um encerramento iminente, o texto é apre-sentado numa barra vermelha, se for uma mensagem de alerta, é apresentada na barra amarela.Os alertas seguintes são apenas apre-sentados no tablet com ecrã tátil:Tablet battery weak! = A bateria do tablet com ecrã tátil está fraca.Tablet battery empty! = A bate-ria do tablet com ecrã tátil está vazia.Para mais detalhes de todos os alertas possíveis ver “ALERTAS” na página 163
Figura 3.3: A Aplicação de Cockpit Control (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 119
É possível armazenar e editar waypoints individuais (Posição GPS, altitude, direção dacâmara e ângulo de inclinação da câmara) no dispositivo USB, inserido no CTR. Umwaypoint pode ser consultado mais tarde e o Intel® Falcon™ 8+ UAV irá voar para estaposição e tirar uma imagem com a direção e o ângulo de inclinação armazenado. Asdefinições de câmara, tais como modo de disparo ou zoom, não podem serarmazenados e têm de ser definidos, manualmente, antes do voo. Múltiplos waypointspodem ser combinados para criar uma trajetória.
Figura 3.4: A Aplicação de Cockpit Control e Projetos PATH
PROJETO PATHTocar no botão PATH no ecrã principal abre a janela PATH PROJECT. Aqui pode criar, guardar e carregar projetos Path individuais (incluindo posição GPS, altitude, direção da câmara e ângulo de inclinação da câmara).Executar a função PATH através do tablet com ecrã tátil:Tocar em New Project abre a janela PATH PROJECT - NEW com um teclado integrado (ver em baixo)Tocar em Load Project abre uma janela, na qual pode carregar um projeto PATH já armazenado, do dispositivo USB que está inserido no CTR.Save project (Guardar o projeto): Este botão fica ativo depois de criar um projeto novo, ou modificar um projeto novo ou já existente. Toque neste botão para guardar o projeto PATH atual no dispositivo USB inserido.Close project (Fechar o projeto): Toque aqui para fechar o projeto PATH atual.
3

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 120
PROJETO PATH - NOVOPreparar e planear uma missão nova e gerar um novo projeto é efetuado da melhor forma antes de arrancar o UAV, quando ainda em terra. Ao tocar em New Project na janela PATH PROJECT (ver acima), abre a janela PATH PROJ-ECT - NEW. Nesta janela pode encon-trar um teclado ao fundo.Com auxílio deste teclado pode atribuir um nome ao novo projeto tocando nas teclas relacionadas. Por baixo do campo de Nome, é visualizado o campo de Description, onde pode descrever o projeto mais detalhadamente.
Ao tocar neste botão, oculta o teclado. O teclado também pode ser ocultado ao tocar em qualquer lado na área acima.Após ocultar o teclado, toque pri-meiro no botão, no canto inferior direito.Tocar neste botão abre uma janela com um resumo de dados do seu novo projeto e algumas instruções em como usar esta função. Se ainda não inseriu o dispositivo USB, irá visualizar o alerta corres-pondente a vermelho. Pode agora inserir o dispositivo USB.Toque neste botão se pretender efe-tuar alterações. Pode regressar à janela de entrada, onde pode efetuar alterações.Se pretender aceitar os dados do seu projeto, toque na marca de veri-ficação, no canto inferior direito.
Figura 3.4: A Aplicação de Cockpit Control e Projetos PATH (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 121
Tocar na marca de verificação guarda o novo projeto.
Quando criar um novo projeto, o mesmo é guardado num diretório gerado auto-maticamente <USB stick>:\CockpitCon-rol\projects.
Novo Projeto / Modo GravaçãoEsta funcionalidade permite ao piloto adicionar/gerar novos waypoints durante o voo, usando o disparador da câmara (manípulo de controlo esquerdo S1). O denominado modo teach-in é ativado ao usar o botão de gravação. Waypoints criados acidentalmente podem ser imediatamente apagados, ao tocar no botão apa-gar.O modo teach-in é parado ao tocar no botão de paragem (stop). Depois de finalizar a gravação, pode ser executado um voo automático para todos os waypoints armazenados, usando o ícone reproduzir (play). Projetos podem ser guardados no dispositivo USB inserido e podem ser recarrega-dos em qualquer altura.Depois de introduzir os dados do seu novo projeto e ao tocar na marca de verificação (ver acima), pode iniciar o seu projeto novo.1. Arrancar o UAV.2. Suba para uma altura mínima de 10 m de altitude.3. Toque no botão de gravação para ativar o modo gravação. 4. Voo para o primeiro waypoint desejado e certifique-se de que a câmara aponta
para o ponto desejado.5. Prima o disparador da câmara (manípulo de controlo esquerdo S1) para guardar
este e todos os seguintes waypoints desejados no seu projeto.Waypoints criados acidentalmente podem ser imediatamente apagados, ao tocar no botão apagar.
6. Para parar a gravação no final do seu trajeto, toque no botão de paragem (stop).
7. Para guardar o seu projeto PATH novo, toque no botão PATH no canto superior esquerdo. Isto abre novamente a janela do PATH PROJECT.
8. Toque no botão Save Project.O estado atual do seu projeto será guardado no dispositivo USB inserido.
Figura 3.4: A Aplicação de Cockpit Control e Projetos PATH (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 122
Carregar um Projeto ExistenteAo tocar em Load Project (Carregar projeto) na janela PATH PROJECT (PROJETO PATH) (ver acima), abre-se a janela PATH PROJECT - LOAD (PRO-JETO PATH - CARREGAR). Nesta janela pode selecionar/carregar um projeto já guardado, com waypoints gravados, para serem editados e/ou voados a partir de um dispositivo USB. O dispositivo USB tem de estar inserido na parte detrás do CTR.Tocar no nome de projeto, no lado esquerdo da janela, destaca-o e mostra os dados relacionados.
Tocar na marca de verificação, no canto inferior direito, abre o pro-jeto selecionado (ver imagem
seguinte). Ao tocar neste botão, no canto inferior esquerdo, regressa ao ecrã anterior.
No canto inferior direito da janela, o UAV está indicado por uma seta, com a sua orientação atual, Height (Altitude) e Distance (Distância), se existir uma conexão entre o UAV e o CTR.
Figura 3.4: A Aplicação de Cockpit Control e Projetos PATH (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 123
Voar um Projeto ExistenteDepois de carregar um projeto existente, pode voar (e/ou modificar) o trajeto e os waypoints relacionados.
Tocar no botão de reprodução faz com que o UAV (já arrancado) voe o trajeto e tire fotografias nos waypoints guardados.
Depois de tocar no botão de reprodução, o mesmo muda para o botão pausa, como apresentado em baixo.
Ao tocar neste botão, inicia o modo de gravação (modo teach-in). Cada vez que disparar uma fotografia adicional, com o manípulo de con-trolo esquerdo, gera um novo waypoint e quaisquer dados rela-cionados são guardados (ver acima). Tocar neste botão reduz o seu pro-jeto (todos os waypoints) para se ajustar ao tamanho da janela, p. ex., se aproximar ou afastar, ao reduzir e/ou ampliar.Ao tocar neste botão (apenas apre-sentado durante o voo), define a missão para standby.Ao tocar neste botão, para a mis-são.Este ícone mostra a posição base atual do UAV.
Waypoints completados serão marca-dos a verde na pré-visualização do tablet com ecrã tátil.
CUIDADO: QUANDO VOAR UM PROJETO PATH, O UAV VOA NUMATRAJETÓRIA DIREITO DIRETA ENTRE WAYPOINTS! TENHO ISTO EMCONSIDERAÇÃO DURANTE O TEACH-IN!
Figura 3.4: A Aplicação de Cockpit Control e Projetos PATH (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 124
Figura 3.5: A Aplicação de Cockpit Control e Projetos PATH

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 125
Modificar um Projeto ExistenteAssim que selecionar um ou mais waypoints para modificação, ao tocá-los, os botões ao fundo e as propriedades relacionadas no lado direito do ecrã são ativadas em conformidade. Para uma seleção mais fácil, é possível aproximar ou afastar ao redu-zir ou ampliar o ecrã. Para mover o setor de mapa/projeto arraste para alterar a vista, conforme necessário. Ao tocar em qualquer parte da área do mapa sem selecionar um waypoint irá desselecionar todos os waypoints anteriormente selecionados.Se apenas um waypoint for selecionado, as funções descritas a seguir podem ser executadas ao tocar no botão relacionado.Se forem selecionados múltiplos waypoints, apenas os botões "delete" (apagar), "move to right" (mover para a direita) e "move to left" (mover para a esquerda) estão ativos.
Ao tocar neste botão, seleciona o waypoint próximo do waypoint atualmente selecionado, contra a direção da ordem teach-in.Ao tocar neste botão, seleciona o waypoint próximo do waypoint atualmente selecionado, na direção da ordem teach-in.Ao tocar neste botão, define o waypoint selecionado como novo ponto de partida.
Ao tocar neste botão, define o waypoint selecionado como novo ponto de chegada.
Ao tocar no botão "delete", apaga o(s) waypoint(s) selecionado(s).
Ao tocar no botão "move to left", mostra a notificação "Choose the waypoint to follow the selected waypoints". Depois de tocar no waypoint correspon-dente, a ordem da direção dos waypoints selecionados é alterada contra a ordem teach-in.Ao tocar no botão "move to right", é apresentada a notificação: "Choose the waypoint to precede the selected waypoints". Depois de tocar no waypoint correspondente, a ordem da direção dos waypoints selecionados é alterada em direção à ordem teach-in.
No lado direito da janela, visualiza o número total e active (ativo) de waypoints, contido no projeto carregado. Após a seleção de um ou vários waypoints, é apresen-tado o número atualmente selecionado (selected) de waypoints.Em Properties (Propriedades), são apresentados os valores das propriedades de waypoints selecionados.
Figura 3.5: A Aplicação de Cockpit Control e Projetos PATH (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 126
3.3.2. Projetos de AscTec Navigator SoftwareCom auxílio da aplicação de Cockpit Control consegue carregar e voar projetos delevantamento topográfico criados pelo AscTec Navigator Software. Para tal, exporte oprojeto existente do AscTec Navigator Software ao clicar no AscTec Navigator Softwareno Menu pendente File no Export Cockpit project. Um ficheiro com aextensão .ANP será criado, que deverá guardar no dispositivo USB. Pode encontrar
Em Latitude e Longitude, são apresentadas as coordenadas relacionadas de pontos selecionados.Height (Altitude) mostra a altitude de pontos selecionados.Yaw (Guinada) apresenta o título com que os waypoints foram guardados.Camera Pitch (Inclinação da câmara) mostra o(s) ângulo(s) de inclinação da câmara atualmente guardado(s).Para alterar estas propriedades, selecione os waypoints que pretende alterar, para os destacar.
Ao tocar neste botão uma vez, subtrai o valor referido no Stepsize (tamanho do passo)..
Ao tocar neste botão uma vez, adiciona o valor referido no Stepsize (tama-nho do passo).
O tamanho de um passo pode ser alterado ao tocar no número à direita do Step-size (tamanho do passo). Isto abre um teclado numérico. Com auxílio do teclado pode introduzir um número novo. O número por detrás de Change Amount mostra com que frequência tocou num botão relacionado (número de passos acumulados).Para alterar as propriedades Height (Altitude), Yaw (Guinada) e Camera Pitch (Inclinação da câmara) de um ou mais waypoints selecionados, toque na propriedade que deseja alterar. Quando estiver realçada, ao tocar no valor da propriedade, abre-se um teclado numérico.Com ajuda do teclado, pode introduzir um novo valor.
Guardar Projeto PATHDepois de modificar um ou mais waypoints, pode guardar as modifica-ções ao tocar no botão PATH (canto superior esquerdo). A janela PATH PROJECT abre-se novamente (mostrado à esquerda). Ao tocar em Save Proj-ect, guarda as modificações no projeto.
Figura 3.5: A Aplicação de Cockpit Control e Projetos PATH (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 127
mais informações sobre o AscTec Navigator Software aqui: http://intel.com/FalconManual.
Insira o dispositivo USB, que contém o ficheiro .ANP exportado, na porta USB do CTR etoque no botão NAVIGATOR no ecrã principal da aplicação do Cockpit Control (ver “AAplicação de Cockpit Control” na página 114).
A considerar antes de voar numa missão de levantamento topográfico:
• Durante uma missão completa, o piloto tem de ser sempre capaz de assumir ocontrolo. Comandos dados no CTR irão sobrepor-se aos comandos de voo dewaypoint e parar o voo imediatamente.
• O sistema de voo tem sempre de permanecer por entre a linha de visão.
• Um bom sinal de GPS necessita de estar disponível em toda a zona na qual oUAV irá voar (> 75% = 4 bar).
• O espaço no qual o Intel® Falcon™ 8+ UAV irá voar, tem de estar livre deobstáculos.
• Planeie sempre missões com distância suficiente de obstáculos e pessoas. Irãosempre existir erros de posicionamento do seu UAV devido à flutuação do GPS ede influências externas, tais como o vento. Adicionalmente, o ficheiro de mapapode não estar absolutamente exato.
• Em condições de vento, o UAV pode não voar sempre em linha reta entre doiswaypoints. Planifique a missão em conformidade.
• Planifique sempre missões com suficiente altitude acima do solo. O UAV podeperder, temporariamente, tanto 5 metros de altitude quando voa entrewaypoints (devido a variações na pressão barométrica do ar - flutuação nosvalores do sensor). Devido a estas variações, é recomendado planear missões auma altitude de pelo menos 15 metros acima do objeto mais alto
Nota
As missões AscTec Navigator Software apenas podem ser executadas no CTR. Não é possível modificar projetos. Se for necessário, por favor abra o
projeto no AscTec Navigator Software, efetue as modificações e depois exporte-as para o CTR com auxílio do dispositivo USB.
Num futuro próximo, o AscTec Navigator Software será substituído pelo software avançado de planeamento de voo Intel Mission Control. Para
informações atualizadas, consulte:http://www.intel.com/IntelMissionControl

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 128
Figura 3.6: A Aplicação de Cockpit Control e Projetos de AscTec Navigator Software
PROJETO ASCTEC NAVIGATORTocar no botão NAVIGATOR na janela do ecrã principal da aplicação do Cockpit Control (ver “A Aplicação de Cockpit Control” na página 114) abre a janela ASCTEC NAVIGATOR PROJ-ECT. Nesta janela pode carregar um projeto AscTec Navigator Software exportado a partir de um dispositivo USB.
PROJETO ASCTEC NAVIGATOR - CARREGAR Ao tocar em Load Project na janela ASCTEC NAVIGATOR PROJECT (ver acima), abre a janela ASCTEC NAVIGATOR PROJECT - LOAD. Nesta janela seleciona o projeto dese-jado ao tocar no mesmo.A trajetória do waypoint previamente guardado e a vista do mapa do AscTec Navigator Software serão carregadas.
Ao tocar na marca de verificação, no canto inferior direito, por baixo da Pré-Visualização do Mapa, transfere o projeto exportado para o tablet com ecrã tátil.
A janela com informação de voo adicional, no canto inferior direito muda para a pré-visualiza-ção de vídeo.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 129
Iniciar e voar uma missão AscTec Navigator Software1. Quando estiver pronto, descole e suba para a altitude e posição aproximada do
primeiro waypoint. 2. Toque no botão de reprodução (ver anterior).
3. Intel® Falcon™ 8+ UAV começa a voar a missão. 4. Waypoints completados serão marcados a verde na pré-visualização do tablet com
ecrã tátil.
Voar um Projeto AscTec Navigator SoftwareDepois de carregar um projeto AscTec Naviga-tor Software pode voar a missão. Primeiro tem de descolar e subir a uma altura mínima de 10 m de altitude.
Depois de alcançar a altitude mínima e de tocar no botão de reprodução apresen-tado, o UAV inicia a missão e voa para o waypoint seguinte na trajetória. Depois de tocar no botão de reprodução preto, o mesmo muda para o botão pausa azul, como apresentado em baixo.
Depois de tocar no botão de reprodução, durante o voo, irá visualizar os botões no lado direito:
Ao tocar neste botão, define a missão para standby.Ao tocar no botão de paragem, para a missão. O UAV para e permanece na alti-tude e na posição atual.
Para mais informações sobre o AscTec Naviga-tor Software, consulte o manual do AscTec Navigator Software, que pode ser encontrado aqui: http://intel.com/FalconManual.
ALERTA OBJETOS ENTRE A POSIÇÃO INICIAL E O PRIMEIRO OU OWAYPOINT INTERMÉDIO E OS OBJETOS ENTRE WAYPOINTSTÊM DE SER CONSIDERADOS. O UAV IRÁ ABORDARWAYPOINTS DA MATRIZ EM LINHA RETA, SUBINDO (OUDESCENDO) CONTINUAMENTE POR SI, SE NECESSÁRIO.
Figura 3.6: A Aplicação de Cockpit Control e Projetos de AscTec Navigator Software

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 130
5. Quando todos os waypoints tiverem sido feitos, o UAV irá parar no último waypoint à altitude atual.
6. O UAV pode agora ser aterrado para mudança de baterias e estar preparado para a próxima missão.
Interromper uma missãoUm voo planeado pode ser interrompida em qualquer momento, por exemplo paramudar as baterias durante missões de levantamento topográfico maiores. Existem trêsformas de interromper, manualmente, um voo:
• Tocar no botão pausa (ver acima): o carregamento de novos waypoints irá serparado e o UAV irá parar e planar no ar, até que toque, novamente, no botão dereprodução (azul).
• Tocar no botão de paragem (ver acima): o carregamento de novos waypoints iráser parado e o UAV irá parar e planar no ar.
• Tomar o comando manualmente e dar ao UAV um comando a partir do CTR. Istoirá parar o voo do UAV, imediatamente, bem como a missão de voo.
Concluir uma missãoSe um voo de levantamento topográfico for interrompido, pode ser retomado naposição em que foi interrompido.
Se interrompeu a missão ao tocar no botão pause, retomar a missão é efetuadofacilmente:
1. Aceda o UAV, até a uma altitude mínima de 10 m. 2. Voe próximo do waypoint a partir do qual o voo deve prosseguir. 3. Toque no botão de reprodução.
O UAV retoma a missão automaticamente ao direcionar-se para o waypoint seguinte.
Se tiver de abortar uma missão ao tocar no botão de paragem, deve anotar o últimowaypoint passado, quando tocou no botão de paragem. O número deste waypoint éapresentado no lado direito da área do mapa no tablet com ecrã tátil. O número dewaypoints passados em comparação com o número total é apresentado mesmo juntode passed: localizado no lado direito do ecrã.
Para resumir a missão, tem de:
1. tocar no waypoint (para o selecionar no tablet com ecrã tátil) a partir do qual o voo irá prosseguir.
Nota
Um waypoint verde indica que o Intel® Falcon™ 8+ UAV passou o waypoint com sucesso, enviou um comando de disparo à câmara e foi
criado um tag no registo. Não significa, necessariamente, que a câmara disparou com sucesso e guardou a imagem.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 131
2. Toque no botão para definir o waypoint selecionado como novo ponto de partida.
3. Arranque o UAV, até subir para uma altitude mínima de 10 m.4. Certifique-se de que não existem obstáculos na trajetória direta entre o UAV e o
novo ponto de partida.5. Toque no botão de reprodução.
A missão irá continuar a partir do waypoint que foi selecionado como novo ponto de partida.
3.4. VERIFICAÇÕES AUTOMATIZADAS DE ARRANQUEAproximadamente 15 segundos após ligar o UAV, um triplo beep a partir da eletrónicado piloto automática sinaliza o fim da fase de inicialização.
Durante a inicialização, o sistema efetua uma verificação automatizada de arranque:
• Os sensores são verificados em termos de funcionalidade.
• Os dados de sensores são verificados em termos de plausibilidade.
• Todos as três unidades do controlador de voo são verificadas.
• O cartão SD da "Black Box" (registo do voo) é verificada.
• A versão de firmware da bateria é verificada (ver "Atualização de bateria" napágina 89).
• As configurações regionais relativamente à potência de transmissão sãoverificadas.
• O campo magnético atual é comparado com o campo magnético esperado.
Quaisquer irregularidades que possam afetar o comportamento de voo são reportadasatravés da respetiva notificação de erro no Visor de Estado (para descrições detalhadasde possíveis mensagens de erro, ver “ALERTAS” na página 163). Em caso de erro, tente,por favor, iniciar novamente o sistema, numa localização diferente. Se o erro persistir,contacte por favor o seu representante de assistência local.
3.4.1. Configuração regionalSe o Intel® Falcon™ 8+ UAV for ligado numa região diferente da última, verificaráautomaticamente e, se necessário, configurará todos os parâmetros de rádio emconformidade com a nova região. Tal é necessário porque cada região (p. ex.,compatível com FCC ou CE) pode ter limites diferentes no que diz respeito à potênciade transmissão. Logo que esteja disponível um sinal de GPS válido, a respetivaconfiguração inicia-se. Pode demorar até 5 minutos. Durante este processo, surgeCONFIGURING REGION (A configurar região) na linha inferior do Visor de Estado (ver

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 132
abaixo) e os LEDs do UAV piscam rapidamente. O botão de ligar do UAV estádesativado. Aguarde, até o processo estar concluído e não o interrompa manualmente.
3.4.2. Alerta de Campo MagnéticoDurante o voo, o Intel® Falcon™ 8+ UAV usa algoritmos para detetar distúrbios dossensores da bússola. Se existirem discrepâncias entre a saída do magnetómetro e aorientação esperada, a direção do UAV é estimada usando os outros sensores IMU(Inertial Measurement Unit, Unidade de Medida Inercial) disponíveis. Esta tecnologiapotencia a robustez do UAV contra distúrbios externos do campo magnético.
Durante o arranque, o campo magnético atual é comparado com o campo magnéticoesperado. Se existir alguma discrepância, existirá um sinal acústico ininterrupto. OVisor de Estado irá apresentar o alerta mostrado.
3.5. LINK LOSS PROCEDUREQuando o UAS for iniciado com sucesso, tem de ser selecionado um Link LossProcedure adequado, cada vez que o UAS for LIGADO.
O Link Loss Procedure do Intel® Falcon™ 8+ UAV é ativado automaticamente quandonão existe conexão da ligação de dados entre o Intel® Cockpit Controller (CTR) e o UAV.O UAV dispõe de uma ligação de dados completamente redundante, significando queexistem duas conexões de transmissor/receptor independentes. Se apenas uma dasconexões da ligação de dados for interrompida, o piloto continua a ter controlo totalsobre o UAV. O alerta LINK WEAK! (ligação fraca) será apresentado no Visor deEstado. Apenas se ambas as ligações se perderem, já não será mais possível controlar oUAV a partir do CTR. O alerta LINK LOST! (ligação perdida) será apresentado e o Link
Figura 3.7: Mensagem apresentada durante as configurações regionais
Durante o processo das configurações regionais automáticas, surge CONFIGURING REGION (A configurar região) na linha inferior do Visor de Estado.
Figura 3.8: Alerta de Campo Magnético
Para uma descrição detalhada deste alerta e solu-ções possíveis, ver “Alerta de Campo Magnético” na página 172.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 133
Loss Procedure é ativado. Isto pode ocorrer se o UAV for voado demasiado afastado doCTR e/ou a orientação do painel de antena não for a ideal. Influências externas, taiscomo acompanhamento na sombra (ver “Acompanhamento na Sombra” napágina 140) ou outras redes (p. ex., WiFi), podem também perturbar a ligação de dados.
Estão disponíveis três Link Loss Procedures diferentes. Um deles tem de ser escolhidodeliberadamente, cada vez que o UAS for ligado. Cada voo pode requerer umprocedimento diferente. Para tal, por favor selecione o procedimento,cuidadosamente, considerando a missão atual.Com os botões DIREITO/ESQUERDO, pode alternar entre três procedimentos. Aopremir ENT, seleciona o procedimento apresentado no ecrã do Visor de Estado.
Figura 3.9: Os Link Loss Procedures
ComeHome StraightEm caso de perda de conexão entre o CTR e o UAV (se for superior a 20 m acima da altura de descolagem) o UAV irá parar na sua posição atual e voar de volta para a posição base (onde os motores foram iniciados) à sua altitude atual. Se o UAV estiver inferior a 20 m na altura de perda de conexão, irá primeiro ascender a apro-ximadamente 20 m acima da altura de descola-gem e voar depois de volta para a base. Uma vez que o UAV alcançar o local acima da posição base, irá descer para 1,5 m/s até aterrar.
ComeHome HighEm caso de perda de conexão entre o CTR e o UAV, o UAV irá parar na sua posição atual e ascender. Depois de alcançada a altitude máxima alcançada durante este voo, irá voar de volta à posição base e descer a 1,5 m/s até ater-rar.
ALERTA SE A BATERIA ESTIVER BAIXA NO FINAL DO VOO, A POTÊNCIAEXTRA NECESSÁRIA PARA SUBIR, PODERÁ ESGOTAR ABATERIA E LEVAR A UMA SITUAÇÃO CRÍTICA.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 134
Home Position (Posição Base)A posição base é definida automaticamente cada vez que os motores forem inciados.
Note, por favor, os pontos seguintes:
• O trajeto de voo de volta para a posição base pode não ser em linha reta, maspode ser em curva, em condições de vento.
• Quando o UAV é voado em Modo Altitude (um H é apresentado no cantosuperior direito do Visor de Estado) ou em Modo Manual (um M é apresentadono canto superior direito do Visor de Estado) e o Link Loss Procedure é ativado,o UAV é automaticamente comutado para o Modo GPS (um G é apresentado nocanto superior direito do Visor de Estado) se o sinal de GPS estiver disponível.
Figura 3.10: Os Link Loss Procedures (Continuação)
Direct Landing (Aterragem Direta)No caso da conexão entre o CTR e o UAV se per-der, o UAV irá parar e iniciar uma descida con-trolada a 1,5 m/s na sua posição atual até aterrar. Se não existir nenhum GPS disponível, o UAV irá recorrer sempre à Direct Landing. Note, por favor, que numa situação sem sinal de GPS, o UAV irá flutuar com o vento durante a descida.
Figura 3.11: New Home Position (Nova Posição Base)
É possível definir uma nova posição base, enquanto o UAV estiver no ar. Para tal:1. Prima o botão ENT no Visor de Estado.
Entre no menu apresentado.2. Prima o botão da seta DIREITO uma vez para
destacar Navigation.3. Prima ENT.
Entre no menu apresentado. New Home Position está destacada.
4. Prima ENT. A nova posição base é definida para a localização atual do UAV, no momento que o botão ENT é pre-mido e regressa ao Ecrã Principal.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 135
• Se a conexão entre o CTR e o UAV for reestabelecida durante o Link LossProcedure, o UAV irá parar imediatamente o procedimento, entrar no modo devoo selecionado no CTR e seguir qualquer entrada de controlo do piloto.
• Se o UAV efetuar uma aterragem direta devido a conexão da ligação de dadosperdido e se tiver dificuldades em localizar o UAS, a última posição conhecidado Intel® Falcon™ 8+ UAV (que é guardada no Visor de Estado do CTR) poderáser útil.
Situações com receção GPS variável• Se não existir receção GPS disponível, quando a conexão da ligação de dados se
perder, o Intel® Falcon™ 8+ UAV irá usar Direct Landing.
• Se a receção GPS for perdida durante um procedimento ComeHome ativo, oIntel® Falcon™ 8+ UAV irá mudar imediatamente para Direct Landing.
• Se não existir nenhuma recepção GPS disponível, enquanto os motores foreminiciados, a posição base não pode ser definida. Se a recepção GPS ficardisponível mais tarde durante o voo, a posição base será definida para onde osinal GPS válido tiver sido recebido primeiro. A posição base será usada para osprocedimentos ComeHome. Se não for adequada à situação de voo, selecioneDirect Landing.
Se o sistema aterrou por si durante um Link Loss Procedure, as hélices irão continuar agirar durante 10 segundos, quando o UAV estiver já em terra. Depois disso, os motoresirão DESLIGAR automaticamente.
CUIDADO: EM CASO DO LINK LOSS PROCEDURE TIVER SIDOATIVADO, RECOMENDA-SE NÃO USAR O MODO MANUAL. DADOQUE O UAV IRÁ CONTROLAR AUTOMATICAMENTE A ALTITUDE,USAR O MODO GPS OU O MODO ALTITUDE IRÁ FACILITAR AREAÇÃO CORRETA DO PILOTO, QUANDO A LIGAÇÃO DE DADOS FORRESTABELECIDA E O LINK LOSS PROCEDURE INTERROMPIDO.
Figura 3.12: Last Known Position (Última Posição Conhecida)
Prima o botão de seta DIREITO do Visor de Estado uma vez (enquanto não conectado) e serão apre-sentadas a latitude e a longitude da última posição conhecida.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 136
3.6. MODOS DE VOOO Intel Falcon 8+ UAV pode operar em três modos de voo diferentes:
• Modo GPS
• Modo Altitude
• Modo Manual
Voar em Modo GPS é o mais fácil, dado que fornece o nível mais alto de automação.
Contudo, poderão existir situações em que nenhum sinal GPS está disponível e, comotal, é necessário que cada piloto seja capaz de controlar o UAV em segurança, emModo Altitude. Recomendamos vivamente que frequente uma das formações deoperadores da Intel® Falcon™ 8+ UAS, para aprender as bases para voar sob supervisãoqualificada. Se estiver interessado em frequentar um curso de formação, contacte oseu representante de vendas local.
Figura 3.13: Selecionar os modos de voo
Os modos de voo podem ser selecionados com dois botões, no canto superior direito do CTR (ver “O INTEL® COCKPIT CONTROLLER (CTR)” na página 25).• Quando o botão GPS for premido e aceso, o
Modo GPS fica ativo• Quando o botão HGT for premido e aceso, o
Modo Altitude fica ativo• Quando ambos os botões forem premidos
em simultâneo e estiverem ambos acesos, o Modo Manual fica ativo
Para a maioria das aplicações, o melhor é voar o Intel® Falcon™ 8+ UAV em Modo GPS. Se neces-sário, o Modo Altitude pode ser ativado ou desativado rápida e convenientemente com o dedo indicador da mão direita, sem largar o manípulo de controlo.
Quando o sistema for LIGADO, o Modo GPS será ativado por predefinição. Se não existir recepção GPS suficiente, o Modo Altitude será automaticamente ativado e o botão Modo Altitude acende. Nesse caso, o botão de Modo GPS irá acender-se para indicar que o sistema irá mudar para o Modo GPS assim que houver um sinal de GPS válido. Em tal situação, recomenda-se mudar ativamente para o Modo Alti-tude ao premir o respetivo botão, antes de descolar. Desta forma, qualquer mudança inesperada do modo de voo pode ser evitada.
1 2

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 137
Os diferentes modos de voo diferem no grau de automação.
3.6.1. Modo GPS
Quando não existir nenhuma entrada por parte do piloto, o UAV irá:
• Manter a orientação no ar.
Tabela 3.1: Parâmetros controlados dependendo do modo de voo
GPSBOTÃO
HGTBOTÃO
CONTROLO DE ALINHA-
MENTO
CON-TROLO DE ALTITUDE
CON-TROLO DE POSIÇÃO
Modo GPS LIGADO (aceso)
DESLI-GADO √ √ √
Modo Altitude DESLI-GADO
LIGADO (aceso) √ √ -
Modo Manual LIGADO (aceso)
LIGADO (aceso) √ - -
CUIDADO: O PILOTO TEM DER CONSEGUIR CONTROLAR O UAV NÃOAPENAS EM MODO GPS, MAS TAMBÉM EM MODO ALTITUDE!
SE O SISTEMA PARECER ESTAR INSTÁVEL OU TIVER DIFICULDADESEM MANTER A SUA POSIÇÃO ATUAL EM MODO GPS, ATIVE, PORFAVOR, IMEDIATAMENTE, O MODO ALTITUDE. ESTEJA PREPARADOPARA TER DE CONTROLAR A POSIÇÃO MANUALMENTE.
SE O SISTEMA EFETUAR ALTERAÇÕES DRÁSTICAS EM ALTITUDE,SEM QUALQUER COMANDO ASSOCIADO A PARTIR DO CTR, PORFAVOR ATIVE IMEDIATAMENTE O MODO MANUAL.
ESTEJA PREPARADO PARA TER DE CONTROLAR A POSIÇÃO E AALTITUDE MANUALMENTE.
Tabela 3.2: Parâmetros controlados em Modo GPS
HGTBOTÃO
GPSBOTÃO
CONTROLO DE ALINHA-
MENTO
CON-TROLO DE ALTITUDE
CON-TROLO DE POSIÇÃO
Modo GPS DESLI-GADO LIGADO √ √ √

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 138
• Manter a sua posição dentro dos limites de precisão do GPS (aprox. 2 - 5 m).
• Mantenha a sua altitude dentro dos limites do controlador de altitude (aprox. 1 -3 m).
• Compensar a velocidade do vento até 12 m/s.
Por razões de segurança e para tornar a operação o mais simples possível, existemalgumas limitações:
• Ângulos de rotação e inclinação estão limitados a 45°.
• Velocidade em voo horizontal está limitado a 4,5 m/s.
• Taxa de subida limitada a 3 m/s.
• Taxa de descida limitada a 3 m/s.
Neste modo as entradas via CTR controlam diretamente a velocidade do UAV. Porexemplo, mover o manípulo de controlo direito completamente para a esquerda (o quecontrola a inclinação e a rotação) significa que o sistema irá voar a 4,5 m/s para aesquerda, independentemente da força e da direção do vento.
CUIDADO: QUANDO A QUALIDADE DO GPS FOR INSUFICIENTE, OMODO ALTITUDE SERÁ AUTOMATICAMENTE ATIVADO. POUCOANTES DESSE PONTO, A EXATIDÃO POSICIONAL PODE JÁ ESTARDEMASIADO BAIXA, SENDO FORTEMENTE RECOMENDADO MUDARATIVAMENTE PARA O MODO ALTITUDE, EM SITUAÇÕES COMINSUFICIENTE QUALIDADE GPS.
SE O SISTEMA MUDAR AUTOMATICAMENTE DO MODO GPS PARA OMODO ALTITUDE, O BOTÃO DE MODO GPS IRÁ PISCAR, ENQUANTOO BOTÃO DE ALTITUDE FICARÁ ACESO PERMANENTEMENTE. ISTOINDICA QUE O SISTEMA IRÁ VOLTAR AUTOMATICAMENTE AOMODO GPS, QUANDO FOR RECEBIDO UM SINAL GPS VÁLIDO.
SE O SISTEMA PARECER ESTAR INSTÁVEL OU TIVER DIFICULDADESEM MANTER A SUA POSIÇÃO ATUAL EM MODO GPS, ATIVE,IMEDIATAMENTE, O MODO ALTITUDE. ESTEJA PREPARADO PARATER DE CONTROLAR A POSIÇÃO MANUALMENTE NO CTR.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 139
Figura 3.14: Precisão GPS
O módulo GPS do Intel® Falcon™ 8+ UAV suporta GPS e GLONASS. Em condições ideais, a precisão horizontal pode ser alcançada a +/- 2 m. A precisão a curto prazo é normalmente superior, devido à fusão de dados com outras saídas de sensor dispo-níveis a partir do IMU. A precisão vertical do GPS é inferior e a altitude medida pode variar até 15 m, dependendo na constelação de satélites. Para a altitude é usada uma medição barométrica ao invés de depender no GPS. A altitude é sempre medida abaixo do nível do solo e é reposta para zero quando os rotores forem iniciados. Durante a duração de uma missão, pode existir uma flutuação de +/- 5 m devido a todos os possíveis erros: temperatura, flutuação, alterações climáticas, etc.
IMPORTANTE:O módulo do receptor GPS do Intel® Falcon™ 8+ UAV é colocado direta-mente por baixo da cobertura da uni-dade central e é rodeada por uma antena. A cobertura do Intel® Falcon™ 8+ UAV é efetuada a partir de um mate-rial, que não influencia os sinais de satélite, mas qualquer coisa em cima do Intel® Falcon™ 8+ UAV pode, potencial-mente, perturbar o sinal. Nunca cubra o módulo receptor do GPS, nem a área da antena, para garantir a melhor recepção GPS possível.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 140
Figura 3.15: Acompanhamento na Sombra
A precisão da posição pode ser deficiente quando obstáculos bloqueia a linha direta devisão de muitos satélites. O obstáculo lança virtualmente uma sombra GNSS sobre aárea abrangida. Isto resulta em menos sinais de satélite recebidos e uma geometriaalterada dos próprios sinais. Este efeito é muito comum em zonas urbanas, onde ossatélites podem ser bloqueados por edifícios altos. Pode experimentar um lado da ruacom boa posição de precisão, enquanto no outro lado a posição de precisão éextremamente pobre. Se o UAV se mover para fora da sombra e mais sinais de satélitepoderem ser usados para calcular a posição, o UAV pode mudar, repentinamente a suaposição, devido ao novo cálculo. Para tal, o piloto necessita de ter atenção máxima emtais situações. Sempre que existirem potenciais sombras ao sinal de GPS, recomenda-se não usar o Modo GPS, mas ativar o Modo Altitude no CTR.
Quando o Intel® Falcon™ 8+ UAV deteta uma qualidade de GPS baixa, o Modo Altitudeé automaticamente ativado e emite o respetivo alerta de perda de GPS (ver “AlertaGPS” na página 176). Contudo, recomenda-se vivamente, a mudança ativa e préviapara o Modo Altitude no CTR, dado que é imprevisível, quando o sistema irá alternarentre modos de voo. Para além disso, o sistema pode apenas mudar para o ModoAltitude quando a precisão posicional já for baixa para a situação atual de voo.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 141
Figura 3.16: Efeitos Multi Path GPS
Quando o UAV for colocado próximo de parede, que possam refletir o sinal de satélite,o receptor GPS não tem possibilidade de identificar se o sinal provém de um reflexo oudiretamente de um satélite. Para tal, podem existir situações (muitas vezes ruasestreitas) onde reflexões são interpretadas de forma incorreta e a recepção total deGPS é apresentada, mas a precisão da posição atual é muito baixa. Para tal, o pilotonecessita de ter atenção máxima em tais situações. Sempre que existirem potenciaissombras ou reflexos do sinal de GPS, recomenda-se não usar o Modo GPS.
Estimativa de Erro da BússolaPara além dos sensores de bússola do Intel® Falcon™ 8+ UAS, o UAV está equipadocom um algoritmo de estimativa de erro da bússola.
A estimativa de erro da bússola usa, entre outros, dados GPS para estimar a direção doUAV. Para tal, são necessários movimentos de voo horizontais. Os dados recolhidossão usados para compensar potenciais distúrbios externos dos sensores de bússola.Diretamente depois de aceder, pode levar o estimador de erro da bússola até 30segundos para funcionar corretamente.
O estimador de erro da bússola está apenas ativo no Modo GPS. Não está ativo emModo Altitude e em Modo Manual. O que significa que, em caso de uma perturbaçãomagnética externa, a direção do UAV pode ser influenciada, resultando nummovimento de guinada não comandado do UAV, o que tem de ser compensado pelopiloto.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 142
3.6.2. Modo Altitude
O controlo de alinhamento e de altitude está ativo. Quando não existir nenhumaentrada por parte do piloto, o UAV irá apenas:
• Mantenha a sua orientação no ar (o sistema será nivelado).
• Mantenha a sua altitude dentro dos limites do controlador de altitude (aprox. 1 -3 m).
Por razões de segurança e para tornar a operação o mais simples possível, existemalgumas limitações:
• Os ângulos de rotação e inclinação estão limitados a 50°.
• Taxa de subida limitada a 3 m/s.
• Taxa de descida limitada a 3 m/s.
Neste modo as entradas via CTR controlam os ângulos de rotação e inclinação do UAV.Por exemplo, dar entrada completa à esquerda (usando o manípulo de controlo direito,que controla a inclinação e a rotação) significa que o UAV ir rolar 50º para a esquerda.Com esta configuração, a direção e a velocidade do vento irá influenciar a direção e avelocidade do UAV.
Tabela 3.3: Parâmetros controlados em Modo Altitude
HGTBOTÃO
GPSBOTÃO
CONTROLO DE ALINHA-
MENTO
CON-TROLO DE ALTITUDE
CON-TROLO DE POSIÇÃO
Modo Altitude LIGADO DESLI-GADO √ √ -
CUIDADO: O SISTEMA NÃO IRÁ MANTER A SUA POSIÇÃO NEMCOMPENSAR O VENTO. A POSIÇÃO TEM DE SER MANTIDAMANUALMENTE PELO PILOTO.
ALERTA EVITE ENTRADAS COMPLETAS DE CONTROLO EM MODOALTITUDE! O UAV PODE ESTAR LOTADO EM DETERMINADASSITUAÇÕES, TAIS COMO MANOBRAS DE VOO BRUSCAS COMBATERIA FRACA.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 143
3.6.3. Modo Manual
Apenas o controlo de alinhamento está ativo. Quando não existir nenhuma entrada porparte do piloto, o UAV irá:
• Mantenha a sua orientação no ar (o sistema será nivelado).
Por questões de segurança e para impossibilitar que o sistema vire:
• Os ângulos de rotação e inclinação estão limitados a 50°.
Neste modo, as entradas via CTR controlam os ângulos de rotação e inclinação e oimpulso do UAV. A direção e a velocidade do UAV são influenciados pela direção dovento e pela velocidade.
Mantendo o manípulo de controlo esquerdo no meio (50%) não significa que o UAVmantenha a altitude. Isto significa que o UAV irá, depender do peso da carga útil, subirou descer, quando muda de um qualquer modo para o Modo Manual! Na maioria doscasos com carga útil total, o sistema irá começar a descer. Esteja preparado para daralgum impulso para compensar o efeito descrito quando mudar para o Modo Manual.
Tabela 3.4: Parâmetros controlados dependendo do modo de voo
HGTBOTÃO
GPSBOTÃO
CONTROLO DE ALINHA-
MENTO
CON-TROLO DE ALTITUDE
CON-TROLO DE POSIÇÃO
Modo Altitude LIGADO LIGADO √ - -
CUIDADO: O UAV NÃO IRÁ MANTER A SUA POSIÇÃO E ALTITUDE,NEM COMPENSAR O VENTO. CONTROLAR A POSIÇÃO E A ALTITUDETEM DE SER EFETUADO MANUALMENTE PELO PILOTO A PARTIR DOCTR.
ALERTA O MODO MANUAL É APENAS PARA ESPECIALISTAS

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 144
3.7. INICIAR E PARAR OS MOTORES
3.8. DESCOLARA pré-condição para missões de voo bem sucedidas é uma zona de descolagem eaterragem, desobstruída num raio de pelo menos 10 m e com um espaço aéreo livre,dado que edifícios e árvores podem bloquear ou influenciar o sinal de GPS. As hélicesnecessitam de rodar livremente (se necessário remova quaisquer obstáculos). O pilotonecessita de uma vista desobstruída de toda a zona de operação.
Lembre-se, por favor:
• Mantenha sempre uma distância de segurança de pessoas, quando iniciar!
Figura 3.17: Iniciar os motores
Para iniciar os motores.1. Mantenha o manípulo de controlo esquerdo (S1)
na posição completamente para baixo (1). 2. Use a mão direita para premir o botão START/
STOP (INICIAR/PARAR) (2) e mantenha-o durante, pelo menos, um segundo. Os motores arrancarão um a seguir ao outro, começando pelo trilho esquerdo para o motor, da frente para trás, e continuando com o trilho direito para o motor, de trás para a frente.
Se, durante a sequência de arranque, o manípulo de controlo esquerdo não for mantido na posição completamente para baixo, a sequência de arran-que será interrompida como medida de segu-rança. Todos os motores que já estiverem a trabalhar, serão novamente desligados. Como tal, mantenha o manípulo de controlo esquerdo em baixo enquanto os motores estão a arrancar e não o mova. Enquanto o Intel® Falcon™ 8+ UAV estiver em terra com os motores a funcionar, mantenha sempre o manípulo de controlo esquerdo, que controla a altitude, na posição completamente para baixo, para evitar uma descolagem não intencional.Seguir o mesmo procedimento para voltar a DESLI-GAR, novamente, os motores
1
2

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 145
• Enquanto o Intel® Falcon™ 8+ UAV estiver em terra com os motores a funcionar,mantenha sempre o manípulo de controlo esquerdo, que controla a altitude, naposição completamente para baixo, para evitar uma descolagem nãointencional.
• Descolar em Modo GPS ou Altitude, mova o manípulo de controlo esquerda daposição totalmente para baixo para totalmente para cima, de uma vez, nummovimento rápido e suba para uma altitude segura. Em Modo Manual a taxa desubida é bastante superior. O manípulo de controlo esquerdo ainda tem que sermovido com um movimento rápido, mas evitar ao máximo a entrada de controlodo manípulo.
• Em voo, mantenha sempre ambas as mãos nos manípulos de controlo.
3.8.1. Arrancar em Modo GPSSempre que possível, é recomendado arrancar em Modo GPS. A qualidade GPSindicada no Visor de Estado e no tablet com ecrã tátil, tem que mostrar, pelo menos, 4barras.
Arrancar o Intel® Falcon™ 8+ UAV em Modo GPS:
1. Prima o botão GPS no CTR; o mesmo será iluminado. 2. Mantenha o manípulo de controlo esquerdo completamente para baixo (=descer).3. Prima o botão INICIAR/PARAR no CTR até pelo menos 1 segundo para iniciar os
motores.4. Mantenha o manípulo de controlo direito centrado (sem inclinação e rotação) e
empurre o manípulo de controlo esquerdo completamente para cima (=ascender) para aceder ao drone.
5. Mantenha a ascensão até alcançar uma altitude segura. Atenção que o Intel® Falcon™ 8+ UAV pode flutuar um pouco e pode ser necessário efetuar uma correção.
6. Uma vez alcançada uma altitude segura, coloque o manípulo de controlo esquerdo de volta ao centro. O Intel® Falcon™ 8+ UAV irá depois manter a sua posição, altitude e orientação atual, como descrito em "MODOS DE VOO" na página 136.
3.8.2. Arrancar em Modo Altitude
É necessário praticar este modo de voo frequentemente, dado que permite levantarvoo em áreas fechadas, áreas com distúrbios magnéticos ou áreas com fraca recepçãoGPS.
CUIDADO: ARRANCAR EM MODO ALTITUDE É APENASRECOMENDADO PARA PILOTOS EXPERIENTES!

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 146
Arrancar o Intel® Falcon™ 8+ UAV em Modo Altitude:
1. Prima o botão HGT no CTR.O mesmo será iluminado.
2. Mantenha o manípulo de controlo esquerdo completamente para baixo (=descer) enquanto prime o botão INICIAR/PARAR no CTR, durante pelo menos 1 segundo. Os motores irão iniciar diretamente.
3. Mantenha o manípulo de controlo direito centrado (sem inclinação e rotação) e empurre o manípulo de controlo esquerdo completamente para cima (=ascender). O UAV irá levantar rapidamente.
Uma vez no ar terá de usar o manípulo de controlo direito para compensar o vento (aoinclinar e rodar o UAV em conformidade).
3.8.3. Arrancar em Modo Manual
Em Modo Manual o piloto tem de controlar os eixos. Não existe regulação deautomação, nem prevenção de erros do piloto. Normalmente este modo não deve serusado.
Arrancar o Intel® Falcon™ 8+ UAV em Modo Manual:
1. Prima os botões GPS e HGT no CTR, em simultâneo. Ambos ficarão iluminados.
2. Mantenha o manípulo de controlo esquerdo completamente para baixo (=descer).3. Prima o botão INICIAR/PARAR no CTR até pelo menos 1 segundo para iniciar os
motores.4. Mantenha o manípulo de controlo direito centrado (sem inclinação e rotação) e
empurre o manípulo de controlo esquerdo quase completamente para cima (para a frente) para aceder ao drone.O UAV irá levantar muito rapidamente. Esteja preparado para reduzir, rapidamente, o impulso após a distância de segurança ao solo ter sido alcançada. A distância de segurança atual depende de circunstâncias específicas do local de descolagem (vento, distância aos obstáculos, etc.). Tenha atenção de que todos os eixos têm de ser controlados manualmente!
O manípulo de controlo esquerdo está agora a controlar diretamente a velocidade domotor, assim, para ascender tem de mover o manípulo de controlo esquerdo para cimacom movimentos fortes, mas muito cuidadosamente para baixo, para descer, dado queo UAV irá descer automaticamente quando não existir impulso suficiente.Normalmente, tem de conceder, pelo menos aprox. 50% de impulso para manter aaltitude (dependendo da carga útil adjacente).
CUIDADO: ARRANCAR EM MODO MANUAL É APENAS PARAEXPECIALISTAS.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 147
3.9. O VOOFigura 3.18: Princípios básicos de voo
Para redundância, o Intel® Falcon™ 8+ UAV dispõe de oito hélices. Quatro héli-ces rodam no sentido horário, quatro no sentido anti-horário, como apresentado na imagem. Isto elimina, o tanto quanto possível, o torque dos hélices individuais. Para além disso, o UAV não dispõe de nenhuma estabilidade inerente e um cir-cuito de controlo necessita de monitori-zar e controlar constantemente o UAV para o manter estável.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 148
Ao variar a taxa de viragem dos diferen-tes hélices, existem quatro direções con-troláveis ao longo de três eixos nos quais o UAV pode ser controlado:• Eixo de rotação: movimento para a
esquerda ou para a direita. Por exem-plo, quando rodarem para a direita os hélices do trilho para o motor esquerdo rodam mais rápido do que os hélices no lado direito do trilho para o motor.
• Eixo de inclinação: movimento para a frente e para trás. Por exemplo, para voar para a frente, os quatro hélices traseiros rodam mais rápido do que os quatro hélices da frente. O UAV toma um determinado ângulo ao longo do eixo de inclinação e voa para a frente.
• Eixo de guinada: ajusta o curso do UAV Quando guinado para a esquerdo (no sentido horário), todos os hélices que rodam à esquerda, rodam mais rápido do que os hélices que rodam à direita.
• Impulso: subir ou descer ao longo do eixo de guinada. Todos os hélices rodam mais rápido ou mais devagar para subir ou para descer.
CUIDADO: TURBULÊNCIA INFERIOR
TENTE EVITAR VOAR ATRAVÉS DA TURBULÊNCIA INFERIOR (ARTURBULENTO POR BAIXO DO UAV CAUSADO PELOS HÉLICES) PARAPOUPAR ENERGIA E PARA GARANTIR UMA DESCIDA SUAVE) PODESER EVITADA AO DESCER E SIMULTANEAMNETE VOARLATERALMENTE OU PARA TRÁS.
Figura 3.18: Princípios básicos de voo (Continuação)
Rotação
Guinada
Inclinação

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 149
3.9.1. Controlar o Intel® Falcon™ 8+ UAV a partir do CTRO modo de controlo é denominado Mode 2 Neste modo, o manípulo de controloesquerdo controla o impulso e a guinada. O manípulo de controlo direito controla ainclinação e a rotação.
A parte superior do manípulo de controlo direito pode ser virado, o que controla omovimento de guinada do UAV. Esta função especial torna o controlo do UAV bastanteintuitivo, dado que todos os controlos para movimentar o UAV no painel horizontalestão acessíveis a uma só mão.
Figura 3.19: Manípulos de controlo esquerdo e direito
Manípulo de controlo esquerdo: impulso & gui-nadaImpulsoPara cima = subirPara baixo = des-cer
Manípulo de controlo direito:inclinação & rotação & gui-nada
InclinaçãoPara cima = voar para a frentePara baixo = voar para trás
GuinadaEsquerda = virar curso para a esquerdaDireita = virar curso para a direita
RotaçãoEsquerda = voar para a esquerdaDireita = voar para a direita
GuinadaA parte superior do manípulo de controlo direito pode ser virado, o que controla o movimento de guinada do UAV. Esta função especial torna o controlo do UAV bas-tante intuitivo, dado que todos os controlos para movimentar o UAV no painel horizontal estão acessíveis a uma só mão.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 150
3.9.2. Planeamento da missãoIrá aumentar o tempo de voo, se dedicar o seu tempo a planear as suas missões.Decida sobre um trajeto e seleciona a posição e o ângulo da câmara antes de levantarvoo. Cuidado com o tamanho da área na qual planeia voar. Certifique-se sempre deque o Intel® Falcon™ 8+ UAV dispõe de capacidade de bateria suficiente para voar devolta à posição base - mesmo se o vento aumentar inadvertidamente.
NotaTodas as indicações de direção se referem sempre ao ponto de vista do UAV.
Dependendo da direção do UAV, as direções podem ser diferentes do ponto de vista do piloto.
CUIDADO: PARA GARANTIR UMA OPERAÇÃO SEGURA, TODOS OSPILOTOS TÊM SEMPRE QUE SEGUIR AS DIRETRIZES E ASPRECAUÇÕES DE SEGURANÇA EM "SEGURANÇA PRIMEIRO" NAPÁGINA 7. RECOMENDAMOS FORTEMENTE QUE FREQUENTE UMAFORMAÇÃO BÁSICA E PRATIQUE REGULARMENTE O MODOALTITUDE!

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 151
3.9.3. Em VooDurante o voo, toda a informação telemétrica relevante é apresentada no EcrãPrincipal do Visor de Estado do CTR. De cima para baixo:
Para mais detalhes referentes ao Visor de Estado e suas opções, consulte "VISOR DEESTADO" na página 190.
3.9.4. Dicas de Operação GeraisLembre-se, por favor: O UAV não está equipado com um sistema de detetar e evitar. Ooperador é responsável por ver e evitar outro tráfego, pessoas, estruturas e obstáculos.
Recomendamos a operação através de duas pessoas (piloto e observador). Todo obom senso e prevenção são efetuados pelo piloto e pelo observador.
Tente evitar situações tais como:
• Ventos fortes ou turbulências
• Interferência ou perda de ligação de dados
Figura 3.20: Informação de voo no ecrã principal do Visor de Estado
De cima para baixo:• Tensão da bateria do UAV: 15,3V• Capacidade remanescente da bateria do CTR em percen-
tagem: 32%• Letra G (= Modo GPS), H (= Modo Altitude) ou M (= Modo
Manual) indicando o modo de voo ativo• 0: Contagem de disparos enviada para a câmara. Se não
tiverem sido ainda enviadas, será apresentado 0. O visor pode variar consoante a carga útil. Para mais detalhes, ver "Carga Útil de Inspeção" na página 47.
• GPS: Qualidade GPS até 5 barras• Cam: Nível de inclinação da câmara: 0°• Height: Altitude atual: 0m• Flighttime (tempo de voo): inicia a contagem quando
os motores são iniciados• Linha inferior OK. Se existirem quaisquer alertas do sis-
tema, a linha inferior irá apresentar <- Check Msg. Prima o botão de seta ESQUERDO até a mensagem de alerta ser apresentada. Mais detalhes sobre a mensagem de alerta em "ALERTAS" na página 163.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 152
• Sinal de GPS fraco de acompanhamento na sombra ("Acompanhamento naSombra" na página 140)
• Áreas de voo estreitas
• Altitude acima de 1500 metros acima do nível do mar
Boa preparação é a chave para conseguir reagir corretamente em situaçõesdesafiantes.
Efetue sessões de formação frequentes, especialmente em Modo Altitude, para setornar num piloto competente. Analise cada missão, tendo em conta (mas não selimitando a) os fatores acima referidos.
Se descobrir que o Intel® Falcon™ 8+ UAV não reage às entradas de controlo, porexemplo, controlo de posição errada devido a má receção GPS, ative imediatamente oModo Altitude. Mantenha-se calmo e tente conduzir o UAV para um local onde sãoexpectáveis menos distúrbios.
Figura 3.21: Exemplos de situações a evitar
Turbulências podem ocorrer:
• Junto a edifícios ou outros objetos grandes (p. ex. árvo-res, madeiras).
• Junto a tempestades.• Por cima de uma fonte de calor (p. ex. fogo).
Interferências que possam afetar o UAV, podem ocorrer:
• Próximo de fontes magnéticas ou campos elétricos (p. ex. linhas elétricas, geradores elétricos, pólos de antena, estruturas ferromagnéticas grandes e/ou radiação nuclear).
• Junto a torres de comunicação sem fios fortes, tais como torres de rede celular ou antenas de radar.
Áreas urbanas:
• As casas circundantes irão provavelmente afetar o sinal GPS. Vento a soprar por cima das casas pode causar tur-bulência, bem como aumento de velocidade do vento devido ao efeito de túnel de vento. Nesta situação, pode esperar movimentos repentinos do UAV devido a uma precisão relativamente baixa e forças externas fortes, provenientes do vento. É necessário vigilância extra, quando voar próximo de edifícios.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 153
3.10. EMERGÊNCIAS EM VOOInterrupções ao comportamento de controlo normal podem ser causadas por fontesde interferências, tais como outros transmissores próximos do UAV. Podem perturbaro sinal de vídeo (banda de frequência 5,8 GHz), a conexão de ligação de dados (bandade frequência 2,4 GHz) e/ou o módulo GNSS ou outra eletrónica do sistema.
Nalguns casos, anomalias ou falhas de componentes eletrónicos podem tambémconduzir ao comportamento anormal do UAV.
Possíveis emergências e respostas recomendadas estão apresentadas abaixo.
Tabela 3.5: Diretrizes operacionais em caso de emergência
EVENTO POSSÍVEL AÇÃO
Em Modo GPS:A precisão de posição do UAV é baixa e o mesmo começa a flutuar a partir da sua posição atual.
Mude para o Modo Altitude e controle o UAV em Modo Altitude.Com uma qualidade de recepção GPS baixa, o UAV pode ainda não ter mudado automaticamente para o Modo Altitude e, como tal é possível flutuar na posi-ção atual antes de ser detetado pelos sensores.
Em Modo GPS:O UAV parece não reagir às entradas de controlo do piloto, enquanto a ligação de dados não é perturbada.
Mude para o Modo Altitude e controle o UAV em Modo Altitude.Em Modo GPS, o manípulo de controlo direito no CTR comanda uma velocidade específica. Se a preci-são de velocidade for baixa devido à qualidade de recepção GPS (mas ainda não ativada automatica-mente em Modo Altitude), as reações para controlar comandos pode ser lenta.
Em Modo GPS:O UAV afasta-se a flutuar da sua posição atual durante a descolagem vertical.
Mude para Modo Altitude e continue a descolagem vertical para alcançar uma distância segura do solo e de outros objetos, rapidamente. Controlar o UAV em Modo Altitude.Os sensores de bússola podem ter sido perturbadas no solo e os algoritmos de estimativa de erro da bús-sola ainda não dispõe de informação suficiente de outros sensores, para trabalhar com a precisão sufi-ciente. Depois de receber entradas suficientes dos sensores IMU, os algoritmos de estimativa de erro da bússola conseguem normalmente estabilizar o con-trolo de posição, mesmo em Modo GPS."MODOS DE VOO" na página 136 para mais informa-ção.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 154
Em Modo GPS ou Altitude:O UAV efetua grandes altera-ções de altitude, que não foram comandadas pelo CTR.
Mude para o Modo Manual e efetue uma aterragem controlada. Obtenha ajuda da assistência para anali-sar a causa.Ao longo da duração de uma missão, pode existir uma flutuação de +/- 5 m em altitude devido a todos os erros cumulativos: temperatura, flutuação, altera-ções climáticas, etc. Se ocorrerem alterações mais fortes, pode existir um mau funcionamento dos sen-sores barométricos, que necessitam de ser analisa-dos. Devido ao contro de voo triplamente redundante do Intel® Falcon™ 8+ UAV, existe uma probabilidade muito baixa para que esse mau funcionamento ocorra.
Perda de conexão da ligação de dados entre o UAV e o CTR
Verifique a orientação da antena.Tente encurtar a distância ao UAV, andando na sua direção.Antes de levantar voo:• Analise a situação de voo e planifique rotas para
voar. • Com base nesta avaliação, selecione um Link
Loss Procedure adequado para cada voo. • Certifique-se sempre de que não irão existir obs-
táculos entre o UAV e a sua posição base se tive-rem sido selecionados Link Loss Procedure ComeHome Straight ou ComeHome High.
O Intel® Falcon™ 8+ UAS compreende duas conexões de ligação de dados independentes.No caso de uma ligação ser perturbada, existe sem-pre uma segunda ligação independente num canal diferente na banda 2,4 GHz. Em caso de perda de ambas as ligações de dados, o UAV ativa automaticamente uma dos três Link Loss Procedures, que é forçado a escolher antes do início. Logo que a ligação for reestabelecida, pode voltar a ter controlo e continuar o voo.Todos os Link Loss Procedures vão para uma des-cida controlada.
Tabela 3.5: Diretrizes operacionais em caso de emergência (Continuação)
EVENTO POSSÍVEL AÇÃO

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 155
A perda simultânea de recep-ção GPS e a conexão da liga-ção de dados entre o UAV e o CTR
Verifique a orientação da antena.Tente encurtar a distância ao UAV, andando na sua direção.O Intel® Falcon™ 8+ UAV irá ativar o e Link Loss Pro-cedure devido à perda de conexão da ligação de dados. Dado que nenhum sinal GPS pode ser rece-bido, é impossível localizar a posição base e será efetuada uma Direct Landing (Aterragem Direta). Em tal situação, o UAV irá flutuar com o vento.
Um motor deixa de funcionar durante o voo.
1. Direcione o UAV, com comandos de controlo cuidadosos e evite entradas de manípulo de controlo fortes.
2. Aterre o sistema cuidadosamente.3. Identifique e repare as causas de falha antes de
voltar a voar.Se um dos motores avariar, será identificado pelo UAV e compensado em conformidade. Um sinal de alerta acústico e visual será dado e emitido a partir do CTR. Com a notificação, tudo o que tem de fazer é trazer o UAV de volta e aterrar em local seguro.
Tabela 3.5: Diretrizes operacionais em caso de emergência (Continuação)
EVENTO POSSÍVEL AÇÃO

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 156
Mais do que um motor para de funcionar durante o voo
Se possível, aterre imediatamente o sistema na sua localização atual com comandos de controlo cuida-dosos, evitando entradas de manípulo de comando fortes. Identifique e repare as causas de falha antes de voltar a voar.Se um ou mais motores se perderem, dependendo da sua posição, não podem continuar a ser garanti-das características de voo estáveis.Se faltar impulso suficiente, o sistema tem as seguin-tes prioridades:1. Alinhamento2. Posição3. AltitudeSignificando que, em caso de impulso insuficiente, o sistema irá primeiro descer. Se continuar a não exis-tir impulso suficiente, irá começar a flutuar, mas ainda tentando manter a alinhamento. Apenas se for fisicamente impossível, a alinhamento do sistema ficará igualmente comprometida.
Rajadas de vento acima dos limites do drone / demasiado vento
Em Modo GPS o Intel® Falcon™ 8+ UAV consegue voar com velocidades de vento até 12 m/s. Se o Modo GPS estiver ativo e existirem rajadas superio-res a 12 m/s tem que:1. Mude para o Modo Altitude.
Neste modo, o UAV consegue voar com velocidades de vento até 16 m/s.
2. Desça para um altitude mais baixa, dado que a velocidade do vento diminui, normalmente, a altitudes mais baixas.
3. Se estiver em Modo Altitude e a velocidade do vento exceder 16 m/s, desça e se o vento continuar demasiado forte, aterre o sistema.
Perda de informação no Visor de Estado do CTR
Desde que as características de voo do UAV se man-tenham inalteradas, voe para trás, aterre e analise a causa da falha do visor. Se as características referentes ao controlo da posi-ção ou da altitude alterarem, considere alterar do Modo Altitude para o Modo Manual.
Tabela 3.5: Diretrizes operacionais em caso de emergência (Continuação)
EVENTO POSSÍVEL AÇÃO

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 157
O UAV incendeia durante o arranque em terra
Mantenha o manípulo de controlo esquerdo para baixo e prima, imediatamente, o botão INICIAR/PARAR, também novamente, para desligar os moto-res. Apagar o incêndio. Aguarde até o UAV arrefecer. Siga a lista de verificação pós-voo para guardar o UAS. Contacte a assistência Intel para obter ajuda na determinação da causa.
O UAV incendeia durante o voo
Aterre o UAV imediatamente numa zona de aterra-gem segura. Prima o botão INICIAR/PARAR para des-ligar os motores. Apagar o incêndio. Aguarde até o UAV arrefecer. Siga a lista de verificação pós-voo para guardar o UAS. Contacte a assistência Intel para obter ajuda na determinação da causa.
Tabela 3.5: Diretrizes operacionais em caso de emergência (Continuação)
EVENTO POSSÍVEL AÇÃO

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 158
O UAV voa para fora (lateral ou verticalmente) do espaço previamente dedicado ao voo.
Ação 1 (antes da descolagem)Antes de descolar, pode certificar-se se o UAV irá permanecer no local destinado. Pode limitar a dis-tância máxima e a altura do espaço aéreo no qual o Intel Falcon 8+ UAV voa, definindo valores específi-cos que não serão excedidos pelo UAV. O centro desta caixa delimitadora está definido para a posição do UAV na qual está ativado Bounding Box (Caixa Delimitadora).Para definir tais limites no Ecrã Principal do Visor de Estado ( ver “VISOR DE ESTADO” na página 190):1. Premir ENT no Ecrã Principal.
O menu é aberto2. Use os botões de seta DIREITO/ESQUERDO para
selecionar Settings.3. Prima ENT.
O menu Settings é aberto.4. Use os botões de seta DIREITO/ESQUERDO para
selecionar Bounding Box.5. Prima ENT.
O respetivo menu é aberto. Radius está destacado.
6. Prima ENT. O campo por detrás do Radius está destacado.
7. Use os botões de seta DIREITO/ESQUERDO para determinar o raio a que o UAV deve voar.O raio pode ser definido de 10 m a 1000 m.
8. Prima ENT. O valor é armazenado. Radius está destacado.
9. Prima o botão de seta DIREITO uma vez para selecionar a Height.
10.Prima ENT. O campo por detrás da Height está destacado.
11.Use os botões de seta DIREITO/ESQUERDO para determinar a altitude que o UAV não deve exceder.A altitude pode ser definida de 10 m a 300 m.
Tabela 3.5: Diretrizes operacionais em caso de emergência (Continuação)
EVENTO POSSÍVEL AÇÃO

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 159
12.Prima ENT. O valor é armazenado. Height está destacado.
13.Prima o botão de seta DIREITO uma vez para selecionar Activate.
14.Prima ENT.Os limites estão ativados. Regressa ao Ecrã Principal.
Ação 2Mantenha-se calmo e voe de volta para a área de operação. Se necessário, mude para o Modo Altitude ou para o Modo Manual (ver “MODOS DE VOO” na página 136).Ação 3Tente ativar a função RETURN TO HOME a partir do CTR para trazer o Intel Falcon 8+ UAV de volta para onde levantou voo, premindo o respetivo botão no CTR (ver “Síntese Intel® Cockpit Controller (CTR)” na página 26).Ação 4Desligue o CTR para ativar o Link Loss Procedure.Antes de descolar, é forçado a selecionar um dos três Link Loss Procedures para determinar a aterra-gem automática, na eventualidade improvável de ambas as ligações de dados se perderem: Direct Landing, ComeHome Straight (mínimo 20 m de altitude ou na sua altitude atual, se for superior a 20 m) ou ComeHome High (à altitude máx. da mis-são). Para mais informações sobre Link Loss Procedure ver “LINK LOSS PROCEDURE” na página 132).
Tabela 3.5: Diretrizes operacionais em caso de emergência (Continuação)
EVENTO POSSÍVEL AÇÃO

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 160
3.11. ATERRARRecomenda-se o uso de espaços bem abertos como locais de aterragem(aproximadamente 10 m de raio à volta da posição de partida deve estar isenta deobstáculos).
3.11.1. Aterrar em Modo GPSÉ recomendado aterrar em Modo GPS. A qualidade GPS indicada no Visor de Estado eno tablet com ecrã tátil, tem que mostrar, pelo menos, 4 barras.
1. Ative o Modo GPS.2. Voe o UAV para uma zona de aterragem acima da desejada, a uma altitude segura,
de pelo menos 3 metros.3. Desça lentamente para um altitude de 1,5 metros e aguarde até o UAV estabilizar.4. Centre o manípulo de controlo direito, enquanto movimenta o manípulo de
controlo esquerdo para baixo, até meio, para descer lentamente.5. Pouco antes da aterragem - a 0,2 - 0,3 m - movimente o manípulo de controlo
esquerdo, gradualmente para baixo, até o UAV aterrar no solo. Enquanto o Intel® Falcon 8+ UAV estiver no solo com os motores a funcionar, mantenha sempre o manípulo de controlo esquerdo na posição completamente para baixo, para evitar qualquer descolagem não intencional.
Ação 5Force um embate intencional numa posição não crí-tica. Todos os hélices irão parar e o Intel Falcon 8+ UAV irá cair.Para tal:1. Mude para o Modo Manual. 2. Dê impulso total para baixo e simultaneamente 3. Prima o botão específico do motor START/STOP
(INICIAR/PARAR) no CTR, durante aprox. um segundo.
CUIDADO: ANTES DE ATERRAR O INTEL® FALCON™ 8+ UAV, AJUSTESEMPRE A CÂMARA PARA A POSIÇÃO HORIZONTAL, PARA EVITARDANIFICAR A LENTE NO SOLO.
Tabela 3.5: Diretrizes operacionais em caso de emergência (Continuação)
EVENTO POSSÍVEL AÇÃO

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 161
6. Mantenha o manípulo de controlo esquerdo na posição completamente para baixo e use a mão direita para, simultaneamente premir o botão INICIAR/PARAR no CTR, durante pelo menos um segundo, para parar os motores.
7. Siga a verificação pós-voo ("VERIFICAÇÃO PÓS-VOO" na página 17) para desligar com segurança e armazenar o sistema completo.
3.11.2. Aterrar em Modo Altitude
1. Ative o Modo Altitude.2. Voe o UAV para uma zona de aterragem acima da desejada, a uma altitude segura,
de pelo menos 3 metros.3. Desça lentamente para um altitude de 1,5 metros e aguarde até o UAV estabilizar.4. Use o manípulo de controlo direito para manter a posição atual, o mais precisa
possível, enquanto movimenta, cuidadosamente o manípulo de controlo esquerdo para baixo, para descer, lentamente.
5. Pouco antes da aterragem - a 0,2 a 0,3 m de altitude - movimente o manípulo de controlo esquerdo, gradualmente para baixo, até o UAV aterrar no solo. Enquanto o Intel® Falcon 8+ UAV estiver no solo com os motores a funcionar, mantenha sempre o manípulo de controlo esquerdo na posição completamente para baixo, para evitar qualquer descolagem não intencional.
6. Mantenha o manípulo de controlo esquerdo na posição completamente para baixo e use a mão direita para, simultaneamente premir o botão INICIAR/PARAR no CTR, durante pelo menos um segundo, para parar o motor.
7. Siga a verificação pós-voo ("VERIFICAÇÃO PÓS-VOO" na página 17) para desligar com segurança e armazenar o sistema completo.
3.11.3. Aterrar em Modo Manual
Em Modo Manual, o piloto tem de controlar todos os eixos diretamente, como se nãoexistisse nenhum controlo de assistência automática, nem prevenção de erros dopiloto.
1. Ative o Modo Manual.2. Voe o UAV para uma zona de aterragem acima da desejada, a uma altitude segura,
de pelo menos 3 metros.
CUIDADO: ATERRAR EM MODO ALTITUDE É APENASRECOMENDADO PARA PILOTOS EXPERIENTES.
CUIDADO: ATERRAR NO MODO MANUAL É APENAS PARAESPECIALISTAS.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 162
3. Desça lentamente para um altitude de 1,5 metros e aguarde até o UAV estabilizar.4. Use o manípulo de controlo direito para manter a posição atual, o mais precisa
possível, enquanto movimenta, cuidadosamente o manípulo de controlo esquerdo para baixo, para descer, lentamente.
5. Pouco antes da aterragem - a 0,2 a 0,3 m de altitude - movimente o manípulo de controlo esquerdo, gradualmente para baixo, até o UAV aterrar no solo. Enquanto o Intel® Falcon 8+ UAV estiver no solo com os motores a funcionar, mantenha sempre o manípulo de controlo esquerdo na posição completamente para baixo, para evitar qualquer descolagem não intencional.
6. Mantenha o manípulo de controlo esquerdo na posição completamente para baixo e use a mão direita para, simultaneamente premir o botão INICIAR/PARAR no CTR, durante pelo menos um segundo, para parar o motor.
7. Siga a verificação pós-voo ("VERIFICAÇÃO PÓS-VOO" na página 17) para desligar com segurança e armazenar o sistema completo.
3.11.4. Desligar o UASDESLIGUE sempre o UAS pela seguinte ordem:
1. Câmara (aguarde pelo menos 10 s até ter guardado todos os dados e ter sido completamente desligado).
2. Intel® Falcon™ 8+ UAV:• Prima e mantenha o botão de ligar premido.
As luzes de posicionamento do LED irão aumentar o seu brilho.As luzes de posicionamento do LED irão diminuir o brilho e, simultaneamente,soará um breve bip proveniente do UAV.
• Largue o botão.
3. CTR:• Prima e mantenha o botão de ligar do tablet com ecrã tátil premido durante
aprox. 3 segundos, até ser apresentado “Slide to shut down your PC”.
• Siga as instruções para desligar completamente o tablet com ecrã tátil.
• Prima e mantenha o botão de LIGAR premido no CTR. O CTR irá vibrar,brevemente.
• Largue o botão.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 163
3.12. ALERTASO Intel® Falcon™ 8+ UAS apresenta todos os alertas que possam ocorrer na linhainferior do Visor de Estado e na área de notificação no topo do tablet com ecrã tátil.Quando não existir nenhum alerta para apresentar, a linha inferior do Visor de Estadomostra OK. No tablet, é apresentado SYSTEM OK na área de notificação.
Adicionalmente, alguns alertas são anunciados acusticamente por voz, através de umpequeno altifalante integrado.
Este pequeno altifalante está conectado a uma porta de auscultador (mini jack), queestá localizada no lado superior esquerdo do CTR (ver "Síntese Intel® CockpitController (CTR)" na página 26). É possível conectar aqui os auscultadores, que podemser úteis para ouvir alertas em condições de barulho.
Tabela 3.6: Alertas Possíveis
TEXTO MOSTRADO MOTIVO SINAIS/NOTAS
Visor de Estado: BATTERY WEAK! (BATE-RIA FRACA!)Tablet: Falcon battery weak. Land soon! (Bateria do Cockpit fraca. Aterre em breve!)
A bateria do UAV está fraca.
Vibração no CTRAcústica: "Battery weak. Land soon!" (Bateria fraca. Aterre em breve!) repetida a cada 20 segundos.Visual: O visor de tensão do UAV no Visor de Estado pisca.
Visor de Estado: BATTERY EMPTY! (BATE-RIA VAZIA!)Tablet: Falcon bat-tery empty. Land now! (Aterre agora!)
A bateria do UAV está vazia.
Vibração no CTR Acústica: "Battery empty. Land now!" (Bateria vazia. Aterre agora!) repetida a cada 10 segundos se restar apenas um minuto de tempo de voo.Visual: O visor de tensão do UAV no Visor de Estado pisca.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 164
Visor de Estado: CP. BAT. WEAK! (BATE-RIA DO COCKPIT FRACA!) Tablet: Cockpit bat-tery weak. Land soon! (Bateria do Cockpit fraca. Aterre em breve!)
A bateria do CTR está fraca.
Vibração no CTRAcústica: "Battery weak. Land soon!" (Bateria fraca. Aterre em breve!) Visual: O tempo de opera-ção do CTR remanescente, apresentado em percenta-gem no Visor de Estado, está a piscar.
Visor de Estado: CP BAT. EMPTY! (BATE-RIA DO COCKPIT VAZIA!)Tablet: Cockpit bat-tery empty. (Bateria do cockpit vazia.) Land now! (Aterre agora!)
A bateria do CTR está vazia.
Vibração no CTR Acústica: "Battery empty. Land now!" (Bateria vazia. Aterre agora!) Visual: O tempo de opera-ção do CTR remanescente, apresentado em percenta-gem no Visor de Estado, está a piscar.
Visor de Estado: BATTERY OVERHEAT! (BATERIA SOBREAQUE-CIDA!)Tablet: Falcon battery temperature high! (Temperatura da bateria do Falcon elevada!)
As temperaturas das baterias UAV estão fora da gama permitida
Vibração no CTR
Visor de Estado: NO BATTERY REDUN-DANCY (SEM REDUNDÂN-CIA DE BATERIAS)Tablet: No battery redundancy! (Sem redundância de baterias!)
No UAV, é detetada apenas uma bateria em vez de duas.
Este alerta só ocorre se os motores estiverem ligados. Ver também "Alertas de bateria do UAV" na página 170
Visor de Estado: LINK WEAK! (LIGAÇÃO FRACA!) Tablet: Link weak! (Ligação fraca!)
Uma das duas cone-xões de ligação de dados falhou.
Vibração no CTRAcústica: "Link weak!" (Liga-ção fraca!)
Tabela 3.6: Alertas Possíveis (Continuação)
TEXTO MOSTRADO MOTIVO SINAIS/NOTAS

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 165
Visor de Estado: LINK LOST! (LIGAÇÃO PERDIDA!) Tablet: Link lost! (Ligação perdida!)
A conexão da ligação de dados foi perdida.
Vibração no CTRAcústica: "Link lost!" (Liga-ção perdida!)
Visor de Estado: GPS LOST! (GPS PER-DIDO!) Tablet: GPS signal lost! (Sinal de GPS per-dido!)
A qualidade do sinal de GPS não é suficiente.
Vibração no CTRAcústica: "GPS lost!" (GPS perdido!)
Visor de Estado: MOTOR FAILURE! (FALHA DO MOTOR!) Tablet: Motor failure. (Falha do motor.) Land now! (Aterre agora!)
Existe um erro com o motor, um controlador do motor ou o motor de transmissão.
Vibração no CTRAcústica: "Motor failure. Land now!" (Falha do motor. Aterre agora!)
Visor de Estado: JOYSTICK ERROR! (ERRO DE JOYSTICK!) Tablet: Joystick error. (Erro de joystick.) Land now! (Aterre agora!)
A calibração dos manípulos de controlo falhou, p. ex., porque o utilizador estava a empurrar um joystick durante a ativação ou algo está realmente danificado.
Vibração no CTRQuando o CTR estiver LIGADO, os joysticks são calibrados automatica-mente.Reinicie o CTR (cuidado para não exercer pressão em qualquer joystick) e veja se o alerta continua ativo. Se sim, a eletrónica do joys-tick pode estar danificada. Neste caso, contacte, por favor a assistência da Intel.
Tabela 3.6: Alertas Possíveis (Continuação)
TEXTO MOSTRADO MOTIVO SINAIS/NOTAS

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 166
Visor de Estado: CP.TEMP. HIGH! (Tem-peratura do cockpit ele-vada!) Tablet: Cockpit tem-perature high! (Tem-peratura do cockpit elevada!)
A temperatura do cockpit está fora da gama permitida.
Vibração no CTRVerifique se algo está a blo-quear a corrente de ar da ventoinha e se a ventoinha está a funcionar correta-mente. DESLIGUE o CTR para o arrefecer e volte a ligá-lo. Se o problema per-sistir, por favor contacte a assistência da Intel.
Visor de Estado: <- Check Msg Tablet: SYSTEM ERROR! CHECK STATUS DIS-PLAY! (ERRO DE SISTEMA! VERIFICAR VISOR DE ESTADO!)
Um alerta de sistema Trinity é apresentado no Ecrã de Mensagem de Erro do Visor de Estado.
Ver também "SÍNTESE DO VISOR DE ESTADO" na página 190
As mensagens que se seguem só são apresentadas se estiver montada uma Intel® Imaging Payload (ver "Intel® Imaging Payload" na página 60).
Visor de Estado: OBSTA-CLE AVOID. (DESVIO DE OBSTÁCULOS) N/A! (INDISPONÍVEL!)Tablet: Obstacle Avoidance not available! (Desvio de obstáculos indisponível!)
Não é possível aceder aos módulos Intel Real-Sense e o desvio de obstáculos já não está disponível.
Vibração no CTR
Switched to Dis-tance Guard! (Comu-tado para Distance Guard!)
O Intel Falcon 8+ comu-tou automaticamente do Modo GPS para o Modo Altitude (devido à falta de qualidade GPS) e o desvio de obstácu-los está agora a funcio-nar no modo Distance Guard (proteção de dis-tância).
Apenas mostrado no tablet
Tabela 3.6: Alertas Possíveis (Continuação)
TEXTO MOSTRADO MOTIVO SINAIS/NOTAS

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 167
Camera error! (Erro da câmara!)
Falha do hardware da câmara (é necessário reiniciar a carga útil). Se isso não resolver o pro-blema, entre em contato com a assistência.
Apenas mostrado no tablet
Camera lens not recognized! (Lente da câmara não reconhecida!)
Lente não reconhecida (é necessário remover e voltar a colocar a lente, ou limpar os contactos da lente).
Apenas mostrado no tablet
Camera SD card missing! (Falta o cartão SD da câmara!)
Nenhum cartão SD na carga útil (cartão não inserido ou não inse-rido corretamente)
Apenas mostrado no tablet
Camera SD card error! (Erro do cartão SD da câmara!)
Não é possível aceder ao cartão SD da câmara. As razões podem ser, entre outras:• A proteção contra
escrita está ativa no cartão SD
• Cartão SD formatado incorretamente
Apenas mostrado no tablet
Camera SD card full! (Cartão SD da câmara cheio!)
Espaço insuficiente no cartão SD da câmara (o cartão SD está cheio).
Apenas mostrado no tablet
Preparing Camera SD card (A preparar o cartão SD da câmara)
A preparação do cartão SD está em curso (a câmara está a criar uma base de dados no car-tão, ainda não está pronta para guardar imagens/vídeos).
Apenas mostrado no tablet
Tabela 3.6: Alertas Possíveis (Continuação)
TEXTO MOSTRADO MOTIVO SINAIS/NOTAS

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 168
Camera temperature high! (Temperatura ele-vada da câmara!)
Alerta de temperatura elevada da câmara (a câmara está a ficar demasiado quente, pode desligar-se breve-mente).
Apenas mostrado no tablet
Payload SD card missing! (Falta o cartão SD da carga útil!)
Nenhum cartão SD na carga útil (cartão não inserido ou não inse-rido corretamente).
Apenas mostrado no tablet
A mensagem que se segue só é apresentada se estiver montada uma Intel® High Resolution Imaging Payload (ver "Intel® High Resolution Imaging Payload" na página 54).
Visor de Estado: Payl. GPS not ready (GPS carga útil não prepa-rado)
A Intel® High Resolution Imaging Payload não capta sinal de GPS sufi-ciente.
Alternativa possível: • Aguarde alguns minu-
tos. Pode demorar algum tempo até o rece-tor de GPS da carga útil fazer a sincronização.
• Vá para um local com melhor receção GPS.
• Desligue e depois volte a ligar o UAV.
Tabela 3.6: Alertas Possíveis (Continuação)
TEXTO MOSTRADO MOTIVO SINAIS/NOTAS

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 169
As mensagens seguintes são apenas apresentados na área de notificação do tablet com ecrã tátil:
Tablet battery empty!
= A bateria do tablet com ecrã tátil está vazia. Apenas mostrado no tablet
Tablet battery weak!
= A bateria do tablet com ecrã tátil está fraca. Apenas mostrado no tablet
Gamepad requires inspection license! (O gamepad requer licença de inspeção!)
Foi ligado um gamepad para um segundo ope-rador da câmara, mas a função que faz parte do Pacote de Inspeção não está ativada no UAV (ver "O CONTROLO DE CÂMARA INDEPEN-DENTE (ICC)" na página 31.
Apenas mostrado no tablet
Tabela 3.6: Alertas Possíveis (Continuação)
TEXTO MOSTRADO MOTIVO SINAIS/NOTAS

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 170
3.12.1. Níveis críticos de bateria e alertas do UASA secção seguinte descreve sobretudo os alertas acústicos e visuais importantes (nalinha inferior do Visor de Estado e na área de notificação, no topo do tablet com ecrãtátil), que o avisam no caso de baterias fracas ou vazias no UAS.
Alertas de bateria do UAV
ALERTA O UAV TEM DE ATERRAR IMEDIATAMENTE APÓS ESTESALERTAS.
Nota
O Intel Falcon 8+ tem em consideração diversos pontos de dados para calcular o tempo de voo restante. O mesmo inclui, entre outros, o
consumo médio de energia atual, carga remanescente da bateria e o potencial de uma bateria que diminui mais depressa do que outra. Por esse motivo, os alertas de bateria podem aparecer mais cedo do que o
expectável (quando o consumo médio de energia reduz repentinamente), e mesmo voltar a desaparecer. Em caso de dúvida,
pode verificar a tensão da bateria no Ecrã Principal do Visor de Estado. Recomenda-se preparar o procedimento de aterragem a
14,2 V e permanecer no solo a 14,0 V. Fora de 14,0 V o sistema pode tornar-se instável.
CUIDADO: O SISTEMA SEMPRE TEM DE SER ATERRADO PELOPILOTO! NÃO EXISTE ATERRAGEM AUTOMÁTICA EM CASO DEBATERIA FRACA OU VAZIA.
Tabela 3.7: Alertas dependendo dos níveis críticos de bateria do UAV
SINAIS EXPLICAÇÃO
Acústica: "Battery weak, land soon!" (Bateria fraca, aterrar em breve!)Tátil: Vibração no CTRTexto no Visor de Estado: BATTERY WEAK! (BATE-RIA FRACA!) Texto no tablet: Falcon battery weak. Land soon! (Bateria do Falcon fraca. Aterre em breve!)Adicionalmente, o visor de tensão no Visor de Estado começa a piscar.
Tensão do UAV: ~ <= 14,4 V ou o tempo de execução remanescente do UAV é inferior a 4 minutos. O alerta sonoro é repetido a cada 20 s.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 171
Acústica: "Battery empty, land now!" (Bateria vazia, aterrar agora!)Tátil: Vibração no CTRTexto no Visor de Estado: BATTERY EMPTY! (BATERIA VAZIA!) Texto no tablet: Falcon battery empty. Land now! (Aterre agora!)Adicionalmente, o visor de tensão no Visor de Estado está a piscar.
Tensão do UAV: ~ <= 14,1 V ou o tempo de execução remanescente do UAV é inferior a 2 minutos. O alerta sonoro é repetido cada 10 segundos, quando o tempo de voo remanescente for < 1 minuto.Tem de aterrar imediata-mente. A bateria e/ou UAV pode ser danificado se o voo continuar.
Texto no Visor de Estado: NO BATTERY REDUNDANCY (SEM REDUNDÂNCIA DE BATERIAS) Texto no tablet: No battery redundancy! (Sem redundância de baterias!)
Este alerta só ocorre se os motores estiverem ligados. O tempo total de voo será redu-zido e não estará disponível qualquer redundância de baterias.S o alerta tiver ocorrido durante o voo com duas baterias inseridas, aterre ime-diatamente e descubra qual é a razão. As razões possíveis podem ser, entre outras:• Uma bateria não foi inse-
rida corretamente• Uma bateria tem uma
célula defeituosa.
Tabela 3.7: Alertas dependendo dos níveis críticos de bateria do UAV (Continuação)
SINAIS EXPLICAÇÃO

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 172
Alertas de bateria do CTR
Os seguintes alertas referem-se à bateria do CTR:
3.12.2. Alerta de Campo MagnéticoEnquanto inicia o Intel® Falcon™ 8+ UAV, pode ocorrer um alerta de campo magnético.
Normalmente os distúrbios no solo provêm de linhas subterrâneas e podem serrapidamente resolvidas ao desligar o Intel® Falcon™ 8+ UAV, movendo-o para um localdiferente e iniciando de uma nova localização.
Em alternativa é possível iniciar em Modo Altitude para evitar quaisquer correções deposição pelo sistema, o que pode ocorrer em Modo GPS e depois ativar o GPS apenasquando estiver no ar. A perturbação magnética estará então a uma distância segura eos algoritmos de estimativa estarão ativos.
Tabela 3.8: Alertas dependendo dos níveis críticos de bateria do CTR
SINAIS EXPLICAÇÃO
Acústica: "Battery weak, land soon!" (Bateria fraca, aterrar em breve!)Tátil: Vibração no CTRTexto no Visor de Estado: CP. BAT. WEAK! (BATERIA DO COCKPIT FRACA!) Texto no tablet: Cockpit battery weak. Land soon! (Bateria do Cockpit fraca. Aterre em breve!)Adicionalmente, o tempo de operação remanescente do CTR, apresentado em percentagem no Visor de Estado, começa a piscar.
A bateria do CTR está fraca. O alerta sonoro é repetido a cada 20 s.
Acústica: "Battery empty, land now!" (Bateria vazia, aterrar agora!)Tátil: Vibração no CTRTexto no Visor de Estado: CP. BAT. EMPTY! (BATERIA DO COCKPIT VAZIA!) Texto no tablet: Cockpit battery empty. Land now! (Aterre agora!)Adicionalmente, o tempo de operação do CTR rema-nescente, apresentado em percentagem no Visor de Estado, está a piscar.
A bateria do CTR está vazia. O alerta sonoro é repetido cada 10 segundos, quando o tempo de operação remanes-cente for < 1 minuto.Tem de aterrar imediata-mente. A bateria e/ou UAV pode ser danificado se o voo continuar.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 173
CUIDADO: SE ESSE ALERTA OCORRER, NUNCA EFETUE UMADESCOLAGEM DESSE LOCAL EM MODO GPS! PODE LEVAR AALTERAÇÕES POSICIONAIS NÃO EXPECTÁVEIS DO UAV.
Tabela 3.9: Alerta acústico e visual de campo magnético
SINAIS EXPLICAÇÃO
Acústica:Ouve-se um beep sonoro constante.Visual no Visor de Estado:
Este alerta aparece apenas quando o sistema ainda não está a voar. Significa que o UAV está próximo de um campo magnético, que perturba a correta determinação da orientação do UAV. Apesar disso, iniciar o Modo GPS pode levar a um movimento não controlado do UAV, na tentativa de manter a posição exata.Para resolver este alerta:1. Desligue o Intel® Falcon™ 8+ UAV, o tablet com ecrã
tátil e o CTR.2. Mova o UAV para um local diferente e LIGUE todo o
sistema, novamente.3. Se o alerta desaparecer, pode descolar em Modo GPS.Se o alerta continuar ou se for impossível levantar voo de outro local, pode:1. Mudar para Modo Altitude e descolar em Modo
Altitude para evitar quaisquer correções de posição pelo sistema, que possam ocorrer em Modo GPS.
2. Voe para um espaço aberto e mantenha o Modo Altitude ativo durante pelo menos 20 segundos (irá ajudar os algoritmos de estimativa se forem efetuados movimentos para a frente, para trás, para a esquerda e para a direita).
3. Mude para Modo GPS em espaço aberto. A perturbação magnética estará então a uma distância segura e os algoritmos de estimativa estarão ativos.
4. Esteja sempre preparado para mudar para o Modo Altitude, em qualquer momento.
Para mais informações sobre os diversos modos de voo, ver “MODOS DE VOO” na página 136.O alerta pode ser cancelado ao premir o botão ENT do Visor de Estado no Intel® Cockpit Controller (CTR).

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 174
Durante o voo, o Intel® Falcon™ 8+ UAV usa algoritmos para detetar distúrbios dossensores da bússola. Se existirem discrepâncias entre a saída do magnetómetro e aorientação esperada, a direção do UAV é estimada usando os outros sensores IMUdisponíveis. Esta tecnologia potencia a robustez do UAS contra distúrbios externos docampo magnético.
Nota
Desde que os sensores IMU, tais como os acelerómetros, são necessários para estimar a direção, a estimativa da bússola não funciona se o UAV estiver parado no solo. Durante o arranque, o campo magnético atual é
comparado com o campo magnético esperado. Se existir alguma discrepância, existirá um alerta, como descrito acima. O alerta pode ser
cancelado ao premir o botão ENT do Visor de Estado no CTR.
CUIDADO: É IMPORTANTE NOTAR QUE, ENQUANTO O INTEL®FALCON™ 8+ UAV PERMANECER LIGADO, O ALERTA DE CAMPOMAGNÉTICO CANCELADO NÃO SE IRÁ REPETIR.
SE O INTEL® FALCON™ 8+ UAV FOR MOVIDO PARA UMALOCALIZAÇÃO DIFERENTE, ENQUANTO ESTIVER LIGADO, NÃOEXISTIRÁ NENHUM ALERTA, MESMO SE EXISTIR UMAPERTURBAÇÃO MAGNÉTICA.
Se esse alerta ocorrer, nunca efetue uma descolagem desse local em Modo GPS! Pode levar a alterações posicionais não expectáveis do UAV.O alerta pode ser cancelado ao premir o botão ENT do Visor de Estado no Intel® Cockpit Controller (CTR).

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 175
3.12.3. Alertas de Ligação de DadosOs seguintes alertas de ligação de dados podem ocorrer na linha inferior do Visor deEstado.
Tabela 3.10: Alertas de ligação de dados de diversidade
SINAIS EXPLICAÇÃO
Acústica: "Link weak!" (Liga-ção fraca!) Tátil: Vibração no CTR Visual no Visor de Estado:
Texto no tablet: Link weak! (Ligação fraca!)
O Intel® Falcon™ 8+ UAV dispõe de duas conexões de ligação de dados independentes. No caso de uma liga-ção com perturbação, a mensagem LINK WEAK é apresentada. Apesar disso, o sistema continua a poder ser totalmente controlado através da segunda ligação independente, num canal diferente, na banda 2,4 GHz.Verifique se o painel de antena do CTR está completa-mente aberto e reduza a distância ao UAV até o sinal ser reforçado.Se surgir esta mensagem, ao premir três vezes o botão de seta DIREITO, abre-se o ecrã apresentado com detalhes sobre a força de sinal de ambas as conexões da ligação de dados.
Acústica: "Link lost!" (Liga-ção perdida!)Tátil: Vibração no CTR Visual no Visor de Estado:
Texto no tablet: Link lost! (Ligação per-dida!)
O UAV voou para fora de alcance e já não existe cone-xão da ligação de dados entre o UAV e o CTR. Neste caso, o Link Loss Procedure pré-selecionado é ativado automaticamente.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 176
3.12.4. Alerta GPSO alerta de GPS que se segue pode ocorrer na linha inferior do Visor de Estado.
3.12.5. Alerta de Falha de MotorO alerta de motor que se segue pode ocorrer na linha inferior do Visor de Estado.
Tabela 3.11: Alerta de sinal de GPS
SINAIS EXPLICAÇÃO
Acústica: "GPS lost!" (GPS perdido!)Tátil: Vibração no CTRVisual no Visor de Estado:
Texto no tablet: GPS signal lost! (Sinal de GPS perdido!)
A qualidade do sinal de GPS não é suficiente para manter a posição fiável do UAV. Irá mudar, automati-camente, para o Modo Altitude. O piloto tem de conseguir sempre controlar o UAV em Modo Altitude!Se o sistema mudar automaticamente do Modo GPS para o Modo Altitude, o botão de Modo GPS irá piscar, enquanto o botão de Modo Altitude ficará aceso per-manentemente. Isto indica que o sistema irá voltar automaticamente ao Modo GPS, quando for recebido um sinal GPS válido. Em situações em que a perda de sinal de GPS é previsível, é sempre melhor mudar manualmente para o Modo Altitude.
Tabela 3.12: Alerta de motor (controlador)
SINAIS EXPLICAÇÃO
Acústica: "Motor failure, land now!" (Falha do motor, aterre agora!)Tátil: Vibração no CTR Texto no Visor de Estado: MOTOR FAILURE! (FALHA DO MOTOR!) Texto no tablet: Motor failure. Land now! (Falha do motor. Aterre agora!)
Um motor, controlador de motor e/ou hélice não está a funcionar corretamente. Na maioria das situações, o sistema de propulsão redundante irá compensar uma combinação motor/rotor em falha.Aterre imediatamente, controlando o UAV com cui-dado, manobras suaves e tente identificar e solucionar a causa do problema.Se surgir esta mensagem, prima uma vez o botão de seta ESQUERDO do Visor de Estado, quando o Ecrã Principal for apresentado. Isto abre um ecrã que ajuda a identificar o motor que está a causar o alerta.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 177
3.12.6. Alertas do sistema AscTec Trinity Control UnitSempre que existir um alerta de sistema, (apresentado como SYSTEM ERROR na áreade notificação no tablet com ecrã tátil), a linha inferior do Visor de Estado iráapresentar <- Check Msg.
A tabela em baixo mostra todos os alertas possíveis, o seu significado e possibilidadesde os resolver. Todas as mensagens têm um dos seguintes prefixos N1U / N1C / N2U /N2C, que significam:
• N1 = Processador de navegação 1
• N2 = Processador de navegação 2
• U = mensagem relativa ao utilizador - pode ser crítico para a aplicação, mas nãopara o voo
• C = mensagem relativa ao núcleo - crítico para o voo!
Figura 3.22: Alertas do sistema
Se for apresentado <- Check Msg na linha de estado, não existirá alerta acústico. Neste caso, prima o botão de seta ESQUERDO cinco vezes (quando ini-ciar no Ecrã Principal do Visor de Estado).
O Ecrã de Mensagem de Erro (apresentado à esquerda) é aberto e os detalhes são apresentados.
Tabela 3.13: Alertas do sistema AscTec Trinity Control Unit
CATEGO-RIA
ALERTA/ERRO SIGNIFICADO CONSEQUÊN-CIA
POSSÍVEL CORREÇÃO
Chip de Licença
UUID chip mal-func-tion! (Avaria no UUID chip!)
UUID chip não funcional (não pode ser insta-lado/não progra-mado/com defeito).
O número de série é 31000 (predefinição), não podem ser armazenadas referências.
Contactar a assistência.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 178
Chip de Licença
License chip: too many read errors (Chip de Licença: demasiado erros de leitura)
UUID chip não funcional (não pode ser insta-lado/não progra-mado/com defeito).
Pode ser nenhum, pode ser nenhum número de série.
Contactar a assistência.
Chip de Licença
License chip: too many write errors (Chip de Licença: demasiado erros de escrita)
UUID chip não funcional (não pode ser insta-lado/não progra-mado/com defeito).
Pode ser nenhum, pode ser nenhum número de série.
Contactar a assistência.
Parâme-tros
No parame-ter file found! (Nenhum ficheiro do parâmetro encontrado!) Restoring default parame-ters. (Res-taurar parâmetros predefinidos.)
Quadro Trinity fresco da produ-ção.
Nenhum, resol-vido após reiní-cio do sistema.
Reiniciar o Sistema.
Tabela 3.13: Alertas do sistema AscTec Trinity Control Unit (Continuação)
CATEGO-RIA
ALERTA/ERRO SIGNIFICADO CONSEQUÊN-CIA
POSSÍVEL CORREÇÃO

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 179
Parâme-tros
Parameter version conflict => auto upt-date done! (Conflito de versão de parâ-metro => atua-lização automática efe-tuada!)
Novo firmware por vezes requer definição de novos parâme-tros, que são automatica-mente escritos na memória FLASH.
Nenhum, resol-vido após reiní-cio do sistema.
Reiniciar o Sistema.
Funcionali-dade em falta
SURVEY PACKAGE not installed (PACOTE DE LEVANTA-MENTO TOPO-GRÁFICO não instalado)
A funcionali-dade necessita de ser desblo-queada.
Não é possível usar a funciona-lidade.
Contacte a assistência para adquirir as funcionali-dades em falta.
Dados do sensor cor-rompidos - crítico!
Position input data corrupt! (Dados de entrada de posição cor-rompidos!) Position fusion dis-abled! (Fusão de posição desativada!)
Comporta-mento não usual
Reiniciar sis-tema ou con-tactar a assistência.
Tabela 3.13: Alertas do sistema AscTec Trinity Control Unit (Continuação)
CATEGO-RIA
ALERTA/ERRO SIGNIFICADO CONSEQUÊN-CIA
POSSÍVEL CORREÇÃO

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 180
Dados do sensor cor-rompidos - crítico!
GPS2COG compen-sated posi-tion data corrupt! (Dados de posi-ção compen-sada GPS2COG corrompidos!)
Comporta-mento não usual
Reiniciar sis-tema ou con-tactar a assistência.
Dados do sensor cor-rompidos - crítico
Magnetic inclina-tion/ dec-lination data cor-rupt! (Dados de inclinação/declinação magnética cor-rompidos!)
Comporta-mento não usual
Reiniciar sis-tema ou con-tactar a assistência.
Dados do sensor cor-rompidos - crítico!
Data-fusion input data corrupt! (Dados de entrada de fusão de dados corrompidos!)
Comporta-mento não usual
Reiniciar sis-tema ou con-tactar a assistência.
Dados de sensor cor-rompidos - normal-mente não é crítico devido à redundân-cia IMU
IMU1/IMU2/ IMU3 data corrupt! (Dados IMU1/IMU2/ IMU3 corrompidos!)
Qualquer valor de sensor fora da gama.
Habitualmente nenhum
Reiniciar o sis-tema.
Tabela 3.13: Alertas do sistema AscTec Trinity Control Unit (Continuação)
CATEGO-RIA
ALERTA/ERRO SIGNIFICADO CONSEQUÊN-CIA
POSSÍVEL CORREÇÃO

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 181
Cartão SD
No inter-nal SD card! (Nenhum car-tão SD interno!)
O cartão SD interno não pode ser usado (em falta, cheio, sis-tema de ficheiros corrompido).
Nenhum registo interno de dados (dados NAV1).
Insira / refor-mate o cartão SD.
Cartão SD
No user SD card! (Nenhum car-tão SD do utili-zador!)
Cartão SD na parte dianteira da unidade central avariado (em falta, cheio, sis-tema de ficheiros corrompido).
Nenhum registo externo de dados (dados NAV2).
Insira / refor-mate o cartão SD; use um cartão SD diferente.
Cartão SD
FAT Write to Sector 0??? (Escrita FAT para Setor 0???)
Erro com registo de cartão SD, car-tão SD possivel-mente com defeito.
O registo de cartão SD não funciona neste voo.
Reiniciar sis-tema ou con-tactar a assistência caso acon-teça repetida-mente.
Navegação
Waypoint sanity check failed (Verifi-cação de corre-ção de waypoint falhou)
Problema de transmissão de waypoint.
Nenhuma nave-gação de waypoint.
Reenviar waypoints/missão.
Navegação
Navigation data cor-rupt (Dados de navegação corrompidos)
Problema de cál-culo de spline.
Nenhuma nave-gação de waypoint.
Reenviar waypoints/missão.
Tabela 3.13: Alertas do sistema AscTec Trinity Control Unit (Continuação)
CATEGO-RIA
ALERTA/ERRO SIGNIFICADO CONSEQUÊN-CIA
POSSÍVEL CORREÇÃO

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 182
Navegação
Trajectory flight in progress -> CMD ignored! (Voo trajetória em progresso -> CMD igno-rado!)
Nenhuma rea-ção à transmis-são de dados.
Reenviar waypoints / missão
Navegação
Can't fly home - no home posi-tion set! (Não consegue voar para a base - nenhuma posi-ção base defi-nida!)
ComeHome não funciona. Nenhum GPS?
Navegação
N2U: Tra-jectory flight in progress -> CMD ignored! (Voo trajetória em progresso -> CMD igno-rado!)
O utilizador ten-tou executar um voo de levanta-mento topográ-fico, enquanto um voo de levan-tamento topo-gráfico iniciado anteriormente continua em curso. O comando enviado para o UAV será igno-rado e o voo de levantamento topográfico atual será continuado.
Aborte o voo de levanta-mento topo-gráfico em curso e envie novos parâ-metros de voo, nova-mente.
Tabela 3.13: Alertas do sistema AscTec Trinity Control Unit (Continuação)
CATEGO-RIA
ALERTA/ERRO SIGNIFICADO CONSEQUÊN-CIA
POSSÍVEL CORREÇÃO

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 183
Calibração
No calib on payload found (Nenhuma calib. de carga útil encontrada)
Tempo esgo-tado: Não conse-gue ler a calibração de carga útil da câmara EEPROM 15 segundos após o arranque. Habitualmente a ocorrer com car-gas úteis novas / Cargas úteis nunca calibraram num Intel® Fal-con™ 8+ UAV.
Possível mau alinhamento da guinada.
Correr a cali-bração da carga útil.
Calibração
Invalid payload calib - please recali-brate! (Cali-bração de carga útil inválida - por favor recali-brar!)
Calibração da carga útil invá-lida A razão pode ser que menos de 3 IMUs estão dis-poníveis durante o processo de calibração.
Possível mau alinhamento da guinada.
Correr a cali-bração da carga útil novamente.
Calibração
No payload installed or payload config faulty (Nenhuma carga útil insta-lada ou config. da carga útil danificada)
Não foi possível encontrar a carga útil.
A carga útil não funciona.
Verificar a ligação da carga útil; reiniciar a câmara tipo EEPROM.
Tabela 3.13: Alertas do sistema AscTec Trinity Control Unit (Continuação)
CATEGO-RIA
ALERTA/ERRO SIGNIFICADO CONSEQUÊN-CIA
POSSÍVEL CORREÇÃO

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 184
Calibração
Payload calibra-tion not success-ful! (A cali-bração da carga útil não foi bem sucedida!)
A calibração da carga útil falhou.
Possível mau alinhamento da guinada.
Correr a cali-bração da carga útil novamente. Se a mensa-gem voltar a ser apresen-tada, con-tacte a assistência.
Calibração
Could not write CC for Payloa-dID (Não foi possível escre-ver CC para IDCarga útil)
A calibração da bússola em voo com carga útil específica falhou.
Possível mau alinhamento da guinada.
Correr nova-mente a cali-bração da bússola em voo. Se a mensagem voltar a ser apresentada, contacte a assistência.
Calibração
in-flight CC stored to FLASH (CC em voo arma-zenada em FLASH)
A calibração da bússola foi arma-zenada com sucesso.
A calibração da bússola foi armazenada com sucesso.
Calibração
No c.calib. matching pID, using default. (Nenhuma calib c. correspon-dente pID, a usar predefini-ção.)
Não foi encon-trada nenhuma calibração da bússola em voo correspondente à carga útil insta-lada.
Possível mau alinhamento da guinada.
Correr cali-bração de bússola em voo.
Tabela 3.13: Alertas do sistema AscTec Trinity Control Unit (Continuação)
CATEGO-RIA
ALERTA/ERRO SIGNIFICADO CONSEQUÊN-CIA
POSSÍVEL CORREÇÃO

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 185
Calibração
No in-flight com-pass cali-bration found! (Nenhuma cali-bração de bús-sola em voo encontrada!)
Não foi encon-trada nenhuma calibração de bússola em voo.
Possível mau alinhamento da guinada.
Correr cali-bração de bússola em voo.
Calibração - crítica!
No tempera-ture cali-bration found! (Nenhuma cali-bração de tem-peratura encontrada!)
Contactar a assistência.
Calibração - crítica!
Acc and/or mag cali-bration missing! (Calibração Acc e/ou mag. em falta!)
Contactar a assistência.
Calibração - crítica!
IMU1/IMU2/ IMU3 MAG calibra-tion prob-lem (Problema de calibração IMU1/IMU2/ IMU3 MAG)
Contactar a assistência.
Tabela 3.13: Alertas do sistema AscTec Trinity Control Unit (Continuação)
CATEGO-RIA
ALERTA/ERRO SIGNIFICADO CONSEQUÊN-CIA
POSSÍVEL CORREÇÃO

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 186
Comunica-ção de carga útil
Payload EEPROM com-promised! (EEPROM da carga útil com-prometida!)
É detetada uma carga útil, mas a informação da eeprom flash não é válida.
Não será possí-vel controlar a carga útil a par-tir do CTR. Os pacotes de fun-cionalidades de software anuais guardados na carga útil não estarão acessí-veis. Podem ser apresentados alertas adicio-nais relaciona-dos com a carga útil.
Contacte a assistência e indique o tipo de carga útil, bem como o número de série.
Vídeo
Falcon video flash corrupted (A, F, I, M or S) (Flash de vídeo do Falcon danifi-cado (A, F, I, M ou S))
Há um problema com o flash de vídeo.
Sem receção de vídeo.
Descarregue e instale o fir-mware mais recente do Intel Falcon 8+ UAS. Se isso não aju-dar, contacte a assistência e forneça a mensagem de erro exata, incluindo a letra entre parêntesis.
Tabela 3.13: Alertas do sistema AscTec Trinity Control Unit (Continuação)
CATEGO-RIA
ALERTA/ERRO SIGNIFICADO CONSEQUÊN-CIA
POSSÍVEL CORREÇÃO

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 187
Vídeo
Cockpit video flash corrupted (A, F, I, M or S) (Flash de vídeo do cockpit danifi-cado (A, F, I, M ou S))
Há um problema com o flash de vídeo.
Sem receção de vídeo.
Descarregue e instale o fir-mware mais recente do Intel Falcon 8+ UAS. Se isso não aju-dar, contacte a assistência e forneça a mensagem de erro exata, incluindo a letra entre parêntesis.
Motores
Motor tem-perature too high! (Temperatura do motor demasiado ele-vada!) Land now! (Aterre agora!)
A temperatura de um ou vários motores está demasiado ele-vada.
Possível falha do motor.
Aterre imedia-tamente. Dire-cione o UAV, com coman-dos de con-trolo cuidadosos e evite entra-das de manípulo de controlo for-tes. Aterre o sistema cui-dadosa-mente. Contacte a assistência e forneça fichei-ros de registo.
Tabela 3.13: Alertas do sistema AscTec Trinity Control Unit (Continuação)
CATEGO-RIA
ALERTA/ERRO SIGNIFICADO CONSEQUÊN-CIA
POSSÍVEL CORREÇÃO

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 188
Comunica-ção motor bus
Not all Motors detected (Nem todos os motores dete-tados)
1 ou mais contro-ladores de motor não forneceram uma atualização de estado.
Comunicação de pelo menos 1 controlador de motor falhou.UAV não irá ini-ciar/descolar.
Problema de hardware ou conexão, não voar! Contac-tar a assistên-cia.
Comunica-ção motor bus
Too many CRC errors on motor bus! (Dema-siados erros CRC no motor bus!) Land now! (Aterre agora!)
Comunicação com os controla-dores do motor está perturbada.
Perigo do motor parar de trabalhar
Aterre imedia-tamente! Con-tactar a assistência. Por favor for-neça o registo de voo do voo onde ocorreu o problema.
Motor bus comunica-ção
Motor bus not work-ing! (Motor bus não fun-ciona!) Land now! (Aterre agora!)
Perda de comuni-cação de todos os controladores do motor.
Falha de comu-nicação ou do hardware com-pleto.
Verificar conexões.
Tabela 3.13: Alertas do sistema AscTec Trinity Control Unit (Continuação)
CATEGO-RIA
ALERTA/ERRO SIGNIFICADO CONSEQUÊN-CIA
POSSÍVEL CORREÇÃO

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 189
3.13. LIMITAÇÕES DE OPERAÇÃOO Intel® Falcon™ 8+ UAS tem os seguintes limites operacionais:
• Velocidades do vento até 16 m/s em Modo Altitude, respetivo a 12 m/s emModo GPS. Acima destes limites o UAV não conseguirá manter a sua posição.
• Temperatura de operação Intel® Falcon™ 8+ UAV: -5 °C e 45 °C (23 °F a 113 °F).
• Temperatura de operação Intel® Cockpit Controller: -5 °C e 45 °C (23 °F a 113 °F).
• Temperatura de operação Intel® Powerpack battery: -5 °C e 40 °C (23 °F a 104 °F).
A temperatura de operação de um UAS, i.e, o sistema completo incluindo todos oscomponentes está atualmente limitado pelas temperaturas de operação da bateria.Assim, a temperatura de operação do Intel® Falcon™ 8+ UAS é de -5 °C e 40 °C (23 °F a104 °F). O limite superior da temperatura pode aumentar com a introdução de umanova tecnologia da bateria no futuro.
• É recomendada uma distância máxima de 250 metros entre o UAV e o piloto.Fora desta gama, o UAV torna-se demasiado pequeno para ser visto.
• O UAV não é à prova de água. Voar com chuva, nevoeiro ou neve ocorre por suaprópria conta e risco e não recomendado.
• Voar em zonas poeirentas ou arenosas pode danificar as câmaras e os motorespermanentemente.
• Altitudes superiores a 3500 metros acima do nível do mar são ariscadas. Tempode voo e estabilidades diminuem drasticamente.
• Não levante voo em áreas com fortes campos magnéticos externos, se nãoestiver habituado a voar em Modo Altitude.
• Voos acrobáticos são proibidos.
Tabela 3.14: Peso da carga útil
CARGA ÚTIL ATIVAMENTESUPORTE ESTABILIZADO
CARGA ÚTIL REMANESCENTE
800 g ~ 200 g ~ 600 g

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 190
4. VISOR DE ESTADONeste capítulo, irá encontrar uma descrição de todas as mensagens e operaçõespossíveis, usando o Visor de Estado.
4.1. SÍNTESE DO VISOR DE ESTADOO Visor de Estado do Intel® Cockpit Controller (CTR) mostra todas as informaçõesrelevantes para voar.
Figura 4.1: Visor de estado
No Visor de Estado, pode visualizar as con-figurações atuais e ajustar funções especí-ficas do UAV. Para tal use os quatro botões.
O botão Escape (lado esquerdo) é usado para sair dos menus/submenus e apagar funções. No texto que se segue, é apresentado como ESC.Com o botão de seta ESQUERDO (ao meio, lado esquerdo) e o botão de seta DIREITO (ao meio, lado direito), pode percorrer os menus ou alterar os parâmetros. O botão Enter (lado direito) é usado para entrar nos menus e ativar funções. No texto seguinte, é apresentado como ENT.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 191
4.1.1. Estrutura do Menu do Visor de EstadoPara mais informações em termos de Visor de Estado ver “O Visor de Estado” napágina 30.
Tabela 4.1: Estrutura do Menu do Visor de Estado
Depois de ligar o CTR, o pri-meiro ecrã que visualiza no Visor de Estado é oEcrã de Boas-Vindas.
Após alguns segundos, o ecrã muda para o Ecrã Inicial.
Se o UAV esti-ver ligado e não existe conexão esta-belecida para o CTR, deve premir ENT. É apresentado o ecrã seguinte:
Para introdu-zir o número de série ver “Estabelecer uma conexão entre o CTR e o UAV” na página 241.
Ao premir o botão de seta DIREITO da latitude e da longitude da última posição conhecida do UAV são apre-sentadas:
Ao premir ESC no ecrã, com a última posição conhecida, irá regressar ao Ecrã Principal.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 192
Quando o Fal-con F8 for ligado e já existir uma conexão esta-belecida com o CTR, o ecrã muda, após alguns segun-dos, para o Ecrã Principal.
Neste ecrã irá encontrar a seguinte infor-mação:15,3V: Nível de tensão da bateria do UAV
32%: Capaci-dade remanes-cente da bateria do CTRGPS: Força de sinal de GPS; são necessá-rias pelo menos quatro barras para voar em Modo GPS.Cam: Ângulo de inclinação do suporte cardan da câmara. Valo-res variam de aprox. -100° a +100° (-90° significa que a câmara está a apontar verti-calmente para baixo).
Height: A altitude medida baro-metricamente acima do nível do solo (0m = onde os héli-ces são inicia-dos).Flight-time: O con-tador de tempo de voo irá iniciar quando os hélices forem ligados e será atualizado assim que uma bateria estiver carregada.G: Modo de voo (G, H, M, ver “MODOS DE VOO” na página 136)
0: Contagem de disparos enviada para a câmara. OK: Linha de estado. Tudo está OK no sis-tema. Caso contrário, haverá o alerta <- Check Msg. Neste caso, prima o botão de seta ESQUERDO 5 vezes, até que o Ecrã de Men-sagem de Erro seja apresen-tado. ver “Aler-tas do sistema AscTec Trinity Control Unit” na página 177.
Após alguns segundos, o ecrã muda para Link loss proc.
Aqui terá de selecionar o modo que determina como o UAV se comporta em caso de perda de ligação. Para ajudar a selecionar o modo, ver “LINK LOSS PROCEDURE” na página 132.
Depois de selecionar o Link Loss Pro-cedure ade-quado ao premir ENT, confirme as alterações de ecrã ao Ecrã Principal.
Tabela 4.1: Estrutura do Menu do Visor de Estado (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 193
Premir os botões de seta DIREITO/ESQUERDO no Ecrã Principal leva-o para ecrãs diferentes. Para mais informação sobre estes ecrãs ver “Os Ecrãs de Informação Prin-cipal” na página 204.
O Ecrã de Orientação
mostra:• Estado da
bateria• Força do
sinal de GPS
• Distância para Posi-ção Base
• Orientação UAV
• Alertas Possíveis
• Modo de Voo
O Ecrã de Info GPS
mostra:• Latitude• Longitude• Velocidade• Qualidade
de recep-ção
• Precisão horizontal
• Presisão velocidade
• Alertas Possíveis
• Modo de Voo
O Ecrã de Ligação de Dados
mostra:• Esquerda e
direita a transmitir e a receber pacotes
• Gráf. • analisador• Qualidade
de sinal• Alertas
Possíveis• Modo de
Voo
O Ecrã Ângulo de Alinha-mento
mostra:• Ângulo de
inclinação• Ângulo de
rotação• Ângulo de
guinada• Alertas
Possíveis• Modo de
Voo
Tabela 4.1: Estrutura do Menu do Visor de Estado (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 194
O Ecrã do Controlador de Voo
mostra:• NAV1• NAV2• Alertas• Redundân-
cia• Alertas
Possíveis
O Ecrã de Mensagem deErro (opcional)
mostra:• Possível
controla-dor de voo (p. ex. N1C/N2C)
Para alertas do sistema ver “Alertas do sis-tema AscTec Trinity Control Unit” na página 177.
O Ecrã do Motor
mostra:• Gráfico do
Intel® Fal-con™ 8+ UAV com hélices a rodar
• Velocidade de cada hélice (como um coeficiente)
• Modo de Voo
O Ecrã de Bateria
mostra para a bateria 1 e 2:• Corrente
atual em ampere (A)
• Tensão atual do sistema em decivolt (dV)
• Estado de carga de cada bate-ria em per-centagem
• Número de erros
O Ecrã BMS
mostra:• Tempo de
execução remanes-cente do UAV em minutos
• Tensão UAV atual
• Estado de carga do UAV em percenta-gem
• Número de bateria inseridas
• Número de erros
Ao premir os botões de seta DIREITO/ESQUERDO nestes ecrãs, regressa ao Ecrã Principal.
Tabela 4.1: Estrutura do Menu do Visor de Estado (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 195
Premir ENT no Ecrã Principal abre as telas seguintes:
Premir ENT quando Goto Home estiver destacado ativa a função Goto Home.
A função Goto Home pode apenas ser ati-vada em Modo GPS. Quando ati-vada, o UAV mantém a alti-tude e regressa à posição base (onde os héli-ces foram ini-ciados) usando a trajetória mais rápida.
Certifique-se que não exis-tem obstácu-los entre o UAV e a posi-ção base. Depois de alcançar a posição base, o Intel® Fal-con™ 8+ UAV irá aguardar na altitude atual. Não irá aterrar automatica-mente.
Ao premir o botões de seta DIREITO/ESQUERDO pode selecio-nar um destes pontos de menu.
Selecionar Navigation e premir ENT abre o ecrã seguinte:
Premir ENT quando New Home Posi-tion estiver destacada, define a posi-ção atual do UAV como a nova posição base, indepen-dentemente se o UAV está no ar ou no solo e regressa ao Ecrã Principal.
Por predefini-ção, a posição base é definida onde os héli-ces foram ini-ciados. Esta função per-mite definir a posição base num local dife-rente.
Irá afetar a função Goto Home e a posi-ção de aterra-gem, quer esteja selecio-nado como Link Loss Pro-cedure Come-Home Straight ou ComeHome High.
Tabela 4.1: Estrutura do Menu do Visor de Estado (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 196
Ao premir ENT com Circle of Interest destacado ,
abre-se o ecrã Rotation Angle (Ângulo de Rotação) que visualiza à direita.
Rotation Angle (Ângulo de Rotação)
Neste ecrã, pode definir o ângulo e o raio do círculo que o UAV deve efetuar.
Existe mais informação sobre a fun-ção Circle of Inter-est em "CIR-CLE OF INTEREST (COI)" na página 209.
Ao premir os botões de seta DIREITO/ESQUERDO, pode selecio-nar um destes pontos de menu.
Selecionar Panorama e premir ENT abre o ecrã seguinte:
Aqui pode decidir se pre-tende um panorama cilíndrico ou esférico.
Premir ENT quando Cylindric estiver desta-cado abre o ecrã seguinte:
Neste ecrã, pode iniciar a função e deci-dir quantas imagens foram tiradas durante uma rotação do UAV.
Pode encon-trar mais infor-mação sobre a opção Cylindric da função Panorama em "PANO-RAMA" na página 210.
Tabela 4.1: Estrutura do Menu do Visor de Estado (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 197
Ao premir ENT com Spheri-cal (Esférico) destacado ,
abre-se o ecrã à direita.
Neste ecrã, pode iniciar a função e modi-ficar o compri-mento do foco.
Pode encon-trar mais infor-mação sobre a opção Spherical da função Panorama em "PANO-RAMA" na página 210.
Ao premir os botões de seta DIREITO/ESQUERDO pode selecio-nar um destes pontos de menu.Ao selecionar Camera Options, o ecrã seguinte depende da carga útil mon-tada (câmara).
Esta informa-ção sobre como contro-lar uma carga útil específica (câmara) com o Visor de Estado pode ser encon-trada na res-petiva secção em "CARGAS ÚTEIS - OPÇÕES DE CÂMARA" na página 34.
Tabela 4.1: Estrutura do Menu do Visor de Estado (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 198
Ao premir os botões de seta DIREITO/ESQUERDO pode selecio-nar um destes pontos de menu.
Selecionar Survey Assist e pre-mir ENT, abre os seguintes ecrãs introdu-tórios:
Aqui visualiza os comandos sobre como navegar atra-vés desta fun-ção.
Premir ENT (OK) abre o ecrã seguinte.
Aqui pode começar a determinar parâmetros para um mapeamento de voo para área retangu-lares.
Com esta fun-ção, pode determinar parâmetros para um mapeamento de voo para área retangu-lares.
Pode encon-trar mais infor-mação sobre a função Sur-vey Assist em "ASSIS-TENTE DE LEVANTA-MENTO TOPOGRÁ-FICO RÁPIDO" na página 215.
Tabela 4.1: Estrutura do Menu do Visor de Estado (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 199
Ao premir os botões de seta DIREITO/ESQUERDO, pode selecio-nar um destes pontos de menu.
Selecionar Settings e premir ENT abre o ecrã seguinte:
Ao premir os botões de seta DIREITO/ESQUERDO pode selecio-nar o ponto de menu que pre-tende contro-lar.
Ao premir ENT quando o ponto de menu ficar destacado, abre o respe-tivo ecrã.Existem 12 pontos de menu diferen-tes disponí-veis no menu Settings: • Link
loss proc.
• Falcon Info
• Video Bind (Ligação Vídeo)
• Volume
• Lan-guage (Idioma)
• Compass Calib (Calib. Bús-sola)
• Payload Calib (Calib. carga útil)
• Def. Params
• Service Fcts (Fat. Assistên-cia)
• Enter FalcoN ID (Intro-duzir ID Falcon)
• Format User SD (Formatar SD Utiliza-dor)
• Bound-ing Box (Caixa Deli-mitadora)
Para Link Loss proc. ver “LINK LOSS PROCE-DURE” na página 132.Para Compass Calib. e Payload Calib. ver “Calibração da carga útil e da bússola” na página 39
Tabela 4.1: Estrutura do Menu do Visor de Estado (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 200
Ao selecionar Falcon Info
e premir ENT, abre-se um ecrã de infor-mações.
Aqui pode visualizar o número de série e as ver-sões do fir-mware dos componentes de hardware atuais. Na última coluna são apresenta-dos os pacotes de funcionali-dades ativa-dos.
Para mais detalhes, ver “Verificar Pacotes de Funcionalida-des de Sof-tware” na página 104. Ao premir ESC, regressa ao menu.
Ao selecionar Video Bind
(Ligação Vídeo)e premir ENT, é (novamente) estabelecida a conexão vídeo entre o UAV e o CTR.
Ao selecionar Volume
e premir ENT, é destacado o número atrás.
Ao premir os botões de seta DIREITO/ESQUERDO pode modifi-car o volume das mensa-gens audíveis do Visor de Estado do CTR.
Está disponível uma gama entre 10 (volume baixo) e 100 (volume alto). Premir ENT confirma a seleção. Ao premir ESC regressa ao menu.
ver “Síntese Intel® Cockpit Con-troller (CTR)” na página 26
Tabela 4.1: Estrutura do Menu do Visor de Estado (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 201
Ao selecionar Language (Idioma)
e premir ENT, é destacado o campo à direita.
Ao premir os botões de seta DIREITO/ESQUERDO, pode selecio-nar entre Inglês (ENG) e Alemão (GER). Ao premir ENT confirma e ao premir ESC regressa ao menu.
Ao selecionar Def.Params (Def. Parâm.)
e premir ENT, abre-se um novo ecrã. Aqui, pode repor as defi-nições de fábrica do CTR no caso de perda de conexão ao ID do UAV. É necessário realizar um novo empare-lhamento.
Ao selecionar Service Fcts. (Fat. Assistência)
e premir ENT, abre-se um ecrã especial. Esta função é apenas para pessoal da assistência.
Para Compass Calib. e Payload Calib. ver “Calibração da carga útil e da bússola” na página 39
Ao selecionar Enter Fal-conID (Intro-duzir ID Falcon)
e premir ENT, abre-se o ecrã seguinte.
Aqui pode conectar a outro Intel® Falcon™ 8+ UAV ao intro-duzir o número de série (ID) do respetivo UAV (ver acima) e premir ENT (OK).
Ao premir ESC, regressa ao Ecrã Principal.
Tabela 4.1: Estrutura do Menu do Visor de Estado (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 202
Ao selecionar Format User SD (Formatar SD Utilizador)
e premir ENT, abre-se o ecrã seguinte.
Esta função permite for-matar o cartão SD do Utiliza-dor.
Premir ENT confirma a for-matação do cartão SD do Utilizador. O processo ini-cia e é apre-sentada uma barra de pro-gresso.
Premir ESC cancela a fun-ção e irá regressar ao Ecrã Principal.
ver “INTEL® FALCON™ 8+ UAV REGIS-TOS DE VOO” na página 106 para mais detalhes.
Tabela 4.1: Estrutura do Menu do Visor de Estado (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 203
Ao selecionar Bounding Box (Caixa Delimitadora)
e premir ENT, abre-se o ecrã seguinte.
Esta função está apenas disponível em Modo GPS. Aqui, pode limitar a dis-tância e a altura do espaço aéreo no qual o Intel Falcon 8+ UAV voa, definindo valores especí-ficos. O centro desta caixa delimitadora está definido para a posição do UAV na qual está ati-vado Bound-ing Box (Caixa Delimi-tadora).Quando o UAV atingir o raio ou altitude definidos, pára e não irá voar mais.
Ao premir os botões de seta DIREITA/ ESQUERDA, consegue mudar entre as definições para Radius e Height e Activate e Deactivate.
Premir ENT com Radius ou Height selecionado destaca o campo por detrás. Ao pre-mir os botões de seta DIREITO/ESQUERDO, pode modifi-car o valor selecionado. Selecionar Activate/ Deactivate ativa/ desativa a função.Premir ENT confirma a seleção e irá regressar ao Ecrã Principal.
Tabela 4.1: Estrutura do Menu do Visor de Estado (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 204
4.1.2. Os Ecrãs de Informação PrincipalA secção seguinte descreve os nove ecrãs de informação principal do Visor de Estado,em detalhe.
Figura 4.2: Ecrãs de Informação Principal
Ecrã de Orientação Apresenta a orientação do UAV, tendo em conta a sua posição inicial. O formato V do UAV apresen-tado irá virar, respetivamente, quando a direção do Intel® Falcon™ 8+ UAV for alterada. Isto pode auxiliar quando a orientação do UAV for difícil de ver em situações de baixo contraste, tais como, quando voa em frente a árvores escuras. O ecrã apresenta a seguinte informação:Bat: 16,1V = Nível de tensão da bateria do Intel® Falcon™ 8+ UAV. Esta é a mesma informa-ção apresentada no Ecrã Principal.G = Modo de Voo. Esta é a mesma informação apresentada no Ecrã Principal.GPS = Indicador de qualidade do sinal de GPS. Esta é a mesma informação apresentada no Ecrã Principal.Distance = Distancia da linha de visão direta entre o UAV e a Posição Base e apenas visível quando no ar a uma distância de pelo menos 10 m.Visor gráfico da orientação do UAV = Orientação do UAV tendo em conta a Posição Base e apenas visível quando no ar a uma distância de pelo menos 10 m.OK = Linha de estado. Informação idêntica à apre-sentada no Ecrã Principal.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 205
Ecrã de Info GPSApresenta detalhes relativamente à qualidade de recepção GNSS.Lat. = Latitude da posição do UAV.G = Modo de Voo. Esta é a mesma informação apresentada no Ecrã Principal.Long. = Longitude da posição do UAV.Speed = Velocidade de voo medida por GPS no UAV.Qual. = Qualidade de receção de satélite.Sats: = Número de satélites que podem ser recebidos.Hor.Acc. = Precisão horizontal em metros (m).Vel.Acc. = Precisão de velocidade em metros por segundo (m/s).OK = Linha de estado. Esta é a mesma informação apresentada no Ecrã Principal.
Figura 4.2: Ecrãs de Informação Principal (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 206
Ecrã de Ligação de Dados Apresenta a qualidade de ambas as ligações de dados do sistema. Ajuda a analisar a situação se ocorrerem alertas Link Weak! .G = Modo de Voo. Esta é a mesma informação apresentada no Ecrã Principal.Barras esquerda (L) e direita (R) = Força de sinal da ligação de dados esquerda e direita (derivada de número de pacotes de dados transmitidos).Gráfico esquerdo
• linha sólida = sinal de razão de ruído naligação de dados esquerda do CTR
• linha pontilhada = SNR na ligação de dadosdireita do CTR
Gráfico direito• linha sólida = SNR na ligação de dados
esquerda do Intel® Falcon™ 8+ UAV
• linha pontilhada = SNR na ligação de dadosdireita do Intel® Falcon™ 8+ UAV
UP Pack = Pacotes de dados carregados por segundo do CTR para o sistema de voo.DN Pack = Pacotes de dados descarregados por segundo do sistema de voo para o CTR.OK = Linha de estado. Esta é a mesma informação apresentada no Ecrã Principal.
Ecrã Ângulo de Alinhamento Apresenta os ângulos de inclinação, rotação e guinada do UAV.Pitch = Ângulo de inclinação do UAV.G = Modo de Voo. Esta é a mesma informação apresentada no Ecrã Principal.Roll = Ângulo de rotação do UAV.Yaw = Direção do UAVOK = Linha de estado. Esta é a mesma informação apresentada no Ecrã Principal.
Figura 4.2: Ecrãs de Informação Principal (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 207
Ecrã do Controlador de Voo Mostra uma síntese de dois módulos de controla-dores de voo Trinity (NAV1 e NAV2). O 3º contro-lador de voo (PER-processador periférico) está a monitorizar ambos. Em voo, um controlador está ativo e é apresentado como redundante. Assim que o terceiro detetar o problema, irá mudar para NAV2 e emitir um sinal acústico e ótico.NAV1 = 1.º módulo de controlo de voo Trinity (processador navegacional 1).NAV2 = 2.º módulo de controlo de voo Trinity (processador navegacional 2).Mode = Modo atual dos módulos NAV1 e NAV2 Trinity.ACTV = NAV1 está ativo.STBY = NAV2 está em standby.ALL OKAY = Nenhuns problemas detetados pelo sistema.REDUND = Nenhuns problemas detetados pelo sistema e os controladores de voo estão a funcio-nar de forma redundante.OK = Linha de estado. Esta é a mesma informação apresentada no Ecrã Principal.
Ecrã de Mensagem de Erro (opcional) Este ecrã é apenas apresentado se existirem aler-tas de sistema. Neste caso, a linha de estado irá apresentar <- Check Msg.Em "Alertas do sistema AscTec Trinity Control Unit" na página 177, pode encontrar descrições detalhadas e uma lista de possíveis alertas do sis-tema.N1C:n´t fly home - (= não consegue voar para base) alerta do 1.º controlador de voo Trinity (sem sinal GPS e Goto Home ativado).N2C:n´t fly home - (= não consegue voar para base) alerta do 2.º controlador de voo Trinity (sem sinal GPS e Goto Home ativado).<- Check Msg na linha de estado. É apresen-tado sempre que existir um alerta do sistema.
Figura 4.2: Ecrãs de Informação Principal (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 208
Ecrã do MotorA velocidade de cada motor é apresentada grafi-camente e indicada por um número. Os números não são ciclos por minuto, mas antes coeficientes. O ecrã pode ser usado para analisar um alerta de defeito de motor, ver “Alerta de Falha de Motor” na página 176 para mais detalhes.G = Modo de Voo. Informação idêntica à apresen-tada no Ecrã Principal.0 = Motores não estão agora a rodarOK = Linha de estado. Informação idêntica à apre-sentada no Ecrã Principal.
Ecrã de BateriaApresenta o estado atual para cada uma das 2 baterias inseridas no UAV. Current = Corrente atual de cada bateria em ampereVoltage = Tensão atual para cada bateria em decivolt (dV)Charge = Estado de carga de cada bateria em percentagemError = Número de erros OK = Linha de estado. Esta é a mesma informa-ção apresentada no Ecrã Principal.
Ecrã BMSMostra o estado atual do UAV.Rem. Runt.: = Tempo de execução remanes-cente do UAV em minutosSys. Volt.: = Tensão de carga atual do sis-temaCharge: = Estado de carga do UAV em percenta-gem# of Bat.: = Número de baterias inseridas no UAVError: = Número de erros OK = Linha de estado. Esta é a mesma informação apresentada no Ecrã Principal.
Figura 4.2: Ecrãs de Informação Principal (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 209
5. FUNÇÕES ESPECIAISEste capítulo apresenta a descrição de diversas função para efetuar voos semi-automáticos diretamente a partir do Intel® Cockpit Controller (CTR). A maioria destasfunções apenas podem ser executadas em Modo GPS e requerem uma boa recepçãode GPS.
5.1. CIRCLE OF INTEREST (COI)Esta função é uma parte opcional do Pacote de Inspeção (ver Capítulo 2.8 “Pacotes deFuncionalidades de Software”). Com o Circle of Interest (COI) é possível voar um círculoautomatizado de 360º à volta de um objeto e tirar fotografias em posiçõespredefinidas. Estas fotos podem ser processadas posteriormente por um software demodelação 3D, tal como um Agisoft PhotoScan para construir um modelo 3D doobjeto.
Figura 5.1: Circle of Interest
Premir ENT no Ecrã Principal abre o ecrã em baixo:
Selecionar Navigation e premir ENT abre o ecrã seguinte:
Selecionar Circle of Interest e premir ENT abre o ecrã seguinte:
Rotation Angle (Ângulo de Rotação): Define o ângulo após o qual a foto seguinte será tirada. Por exemplo, uma imagem a cada 30° = 360° / 30° = 12 imagens. Prima ENT para alterar o ângulo. Use o botão de seta DIREITO/ESQUERDO para aumentar ou diminuir o ângulo. Con-firme ao premir ENT.
SET CENTER->: Define o centro do Circle of Interest na posição atual do UAV. Voo para o centro exato do Circle of Interest. Incline a câmara para baixo em 90º e use a imagem de vídeo de pré-visualização para identificar o centro. Na posição desejada, prima ENT para confirmar SET CENTER->.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 210
5.2. PANORAMACom a função panorama, o Intel® Falcon™ 8+ UAV pode tirar imagens em posiçõespredefinidas, otimizada para posteriormente juntar as imagens numa só, disparo depanorama grande. A velocidade do Intel® Falcon™ 8+ UAV é definida automaticamentesempre 2 segundos entre as imagens. Qualquer software de edição de fotografia com afuncionalidade de juntar o panorama ou software de panorama especializado, pode serusado no pós-processamento da imagem.
Alerta:Certifique-se de que não existem obstáculos na trajetória de voo do Circle of Interest!
O ecrã seguinte é aberto.
Voo para trás. A distância do UAV para o centro, (que foi definido no passo anterior) define o raio do Circle of Inte-rest.Se necessário ajuste a altitude do UAV (manípulo de con-trolo esquerdo) para a altura desejada, se necessário.Ajuste o ângulo de inclinação da câmara ao usar o inter-ruptor basculante R1 no CTR para obter o enquadra-mento de imagem desejado.Confirme START! ao premir ENT. O UAV irá voar em cír-culo com os parâmetros definidos.
Durante o voo COI, o Visor de Estado mostra uma barra de progresso. Também apresenta:Bat: tensão da bateriaY: ângulo de guinadaH: altitudeGPS: qualidade do sinal de GPSFT: tempo de vooDist: distância da posição baseO voo COI pode ser interrompido ao dar um comando de manípulo de controlo forte no CTR ou ao premir o botão ESC do Visor de Estado.
Figura 5.1: Circle of Interest (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 211
Dicas gerais para fotografia panorâmicaDefinições de câmara recomendadas:
• Qualidade de imagem: RAW (dada a enorme quantidade de dados, é importanteusar um cartão SD rápido na câmara. De outra forma, existe o perigo de que nemtodas as imagens do panorama são capturadas, todos os dados não conseguemser armazenados com rapidez suficiente.)
• Balanço branco: manual
• Modo de disparo: M
• Foco: manual
• ISO: manual
• Define o visor para mostrar o histograma
Passos para definir os parâmetros de disparo:
• Em terra:
• Define a abertura largamente aberta
• Ajusta o tempo do obturador, de forma a que o vídeo de pré-visualizaçãopossa ser visto claramente.
• Foque manualmente um ponto a uma distância hiper focal (nunca pordetrás do objeto mais próximo da imagem).
• Dependendo das condições de luz, defina a abertura de aproximadamente8 e a velocidade do obturador para aproximadamente 1/1000 s.
• Levante voo e voo para a posição panorama.
• Vire o Intel® Falcon™ 8+ UAV e a câmara para a zona mais escura da imagem.
• Ajuste a abertura e a velocidade do obturador (não use uma velocidade deobturador inferior a 1/640 s e tente evitar aberturas inferiores a 5,6 ou superiora 14), de forma a que a imagem seja sub-exposta por um máximo de 1,3paragens f.
• Vire o Intel® Falcon™ 8+ UAV e a câmara para a zona mais clara da imagem.
• Use o histograma para verificar e exposição. Certifique-se que a imagem não ésobreposta a mais de 1,3 paragens f. Se necessário, ajuste a exposição.
Graças ao formato RAW, imagens sub-expostas podem ser corrigidas no pós-processamento. Para unir as imagens, use qualquer software com a respetivafuncionalidade para criar panoramas.
São disponibilizadas duas opções, panorama cilíndrico e espérico.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 212
Figura 5.2: Panorama Cilíndrico
Para criar imagens para um panorama cilíndrico, o Intel® Falcon™ 8+ UAV irá manter a sua posição atual e efetuar uma viragem de 360° à volta do eixo de guinada, com um ângulo de inclinação fixo da câmara. Siga estes passos para efetuar um panorama cilíndrico: Efetue todos os ajustes de câmara necessários, levante voo e voo o Intel® Falcon™ 8+ UAV para a posição desejada. Ajuste o ângulo de inclinação da câmara.
Prima ENT no Ecrã Prin-cipal do Visor de Estado: O ecrã em baixo é aberto.
Selecionar Panorama e premir ENT abre o ecrã seguinte: Selecionar Cylindric e premir ENT abre o ecrã
seguinte.
Por predefinição o Intel® Falcon™ 8+ UAV irá tirar uma imagem a cada 30°, enquanto vira em torno dos eixos de guinada. Significando que 360°/30° = 12 imagens serão criadas. Para ajustar o ângulo de rotação, use o botão de seta ESQUERDO para ativar Rotation Inc. e con-firme ao premir ENT. O campo por detrás da Rotation Inc. está destacado.
Use o botão de seta DIREITO/ESQUERDO para ajustar o ângulo em passos de 5° e confirme ao premir ENT.O ângulo de inclinação da câmara é também apresentado e pode ainda ser ajustado ao usar o interruptor bascu-lante R1 no CTR.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 213
Use o botão de seta ESQUERDO novamente para selecio-nar START! e confirme ao premir ENT.O Intel® Falcon™ 8+ UAV efetua uma viragem de 360° à volta do eixo de guinada e tira todas as imagens com as definições determinadas no passo anterior.O panorama pode ser parado em qualquer momento pelo piloto ao dar uma comando forte ao manípulo de con-trolo no CTR.
Figura 5.3: Panorama Esférico
Para criar imagens para um panorama esférico, o Intel® Falcon™ 8+ UAV irá manter a sua posição atual e efetuar múltiplas viragens de 360° à volta do eixo de guinada. O ângulo de guinada da câmara está definido para apontar para baixo durante a pri-meira viragem. Com cada viragem subsequente, a câmara irá ser inclinada um pouco mais para cima, até apontar completamente para cima durante a última viragem. Siga estes passos para efetuar um panorama esférico:Efetue todos os ajustes de câmara necessários, levante voo e voo o Intel® Falcon™ 8+ UAV para a posição desejada.
Prima ENT no Ecrã Prin-cipal do Visor de Estado: O ecrã apresen-tado é aberto.
Selecionar Panorama e premir ENT abre o ecrã seguinte:
Selecionar Spherical e premir ENT abre o ecrã seguinte.
Existem duas predefinições disponíveis para compri-mento focal de 19 mm e 30 mm (referentes a sensores do tamanho APS-C, equivalentes a aprox. 28 mm e 45 mm referentes a enquadramento total). Use o botão de seta DIREITO para ativar Foc.Length e confirme ao premir ENT. O campo por detrás da Foc.Length está desta-cado.
Figura 5.2: Panorama Cilíndrico (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 214
Tabela 5.1: Posições de Imagem de Panorama Esférico Definidas para 19 mm de Comprimento Focal
Use os botões de seta DIREITO/ESQUERDO para alterar o comprimento focal. Confirme ao premir ENT.
Use o botão de seta ESQUERDO para ativar START! e confirme ao premir ENT.A câmara irá ser inclinada para baixo e o Falcon irá come-çar a fazer múltiplas viragens de 360º, enquanto inclina lentamente a câmara mais para cima, até o panorama esférico estar completo.O panorama pode ser parado em qualquer momento pelo piloto ao dar uma comando forte ao manípulo de con-trolo no CTR.
ÂNGULO DE INCLINA-ÇÃO DA
CÂMARA(GRAUS)
ÂNGULOS DE GUINADA UAV (GRAUS)
Linha 1 -74 0 90 180 270Linha 2 -55 0 51 102 154 205 257 308Linha 3 -37 0 36 72 108 144 180 216 252 288 324Linha 4 -18 0 30 60 90 120 150 180 210 240 270 300 330Linha 5 0 0 30 60 90 120 150 180 210 240 270 300 330Linha 6 18 0 30 60 90 120 150 180 210 240 270 300 330Linha 7 37 0 36 72 108 144 180 216 252 288 324Linha 8 55 0 51 102 154 205 257 308Linha 9 74 0 90 180 270Total: 78 imagens
Figura 5.3: Panorama Esférico (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 215
Tabela 5.2: Posições de Imagem de Panorama Esférico Definidas para 30 mm de Comprimento Focal
5.3. ASSISTENTE DE LEVANTAMENTO TOPOGRÁFICO RÁPIDOEsta função está disponível como parte integrante do Pacote LevantamentoTopográfico. O Assistente de Levantamento Topográfico (Survey Assist) oferece umaforma fácil e rápida de efetuar um voo de mapeamento sobre a área retangular,diretamente a partir do CTR, sem planeamento prévio no computador. Para tal, o Intel®Falcon™ 8+ UAV é colocado num canto da área a ser mapeada e os parâmetros chavesão inseridos: câmara montada / combinação de lente, distância de amostra de solodesejada, sobreposições de imagem, comprimento das linhas e número de linhas. Comestes dados, a altitude resultante e o trajeto de voo são calculados e levados a cabo.Um assistente guia o utilizador através dos passos necessários.
S.A. ÂNGULOS DE GUINADA UAV (GRAUS)Linha 1 -83 0 180Linha 2 -69 0 51 102154205257308Linha 3 -55 0 32 65 98 130163196229261294327Linha 4 -41 0 25 51 77 102128154180205231257282308334Linha 5 -27 0 22 45 67 90 112135157180202225247270292315337Linha 6 -13 0 20 40 60 80 100120140160180200220240260280300320340Linha 7 0 0 20 40 60 80 100120140160180200220240260280300320340Linha 8 13 0 20 40 60 80 100120140160180200220240260280300320340Linha 9 27 0 22 45 67 90 112135157180202225247270292315337Linha 10 41 0 25 51 77 102128154180205231257282308334Linha 11 55 0 32 65 98 130163196229261294327Linha 12 69 0 51 102154205257308Linha 13 83 0 180
Total: 154 imagens

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 216
As imagens podem ser processadas posteriormente com software de fotogrametria,como com qualquer voo regular previamente planeado. Mais voos complexos devemser planeados e levados a cabo com o AscTec Navigator Software.
Num futuro próximo, o AscTec Navigator Software será substituído pelo softwareavançado de planeamento de voo Intel Mission Control. Para informações atualizadas,consulte:http://www.intel.com/IntelMissionControl.
Figura 5.4: Assistente de Levantamento Topográfico Rápido
Premir ENT no Ecrã Principal abre o ecrã à esquerda:Use o botão de seta DIREITO/ESQUERDO para selecionar Survey Assist e prima ENT.
Um ecrã de introdução é aberto, explicando os comandos para navegar o menu.Premir ENT abre o ecrã seguinte. Ao premir ESC regressa ao ecrã anterior.Use o botão de seta ESQUERDO/DIREITO para aumentar ou diminuir valores.
At end of line: Defina a direção na qual o Intel® Fal-con™ 8+ UAV vira depois de completar a primeira linha de imagens.Use o botão de seta DIREITO/ESQUERDO para selecionar Turn Right ou Turn Left e prima ENT. O ecrã seguinte abre.
Inline Overlap: Define a percentagem de sobreposi-ção de imagem na direção de voo (ao longo da rota).
Side Overlap: Define a percentagem de sobreposição de imagem entre linhas (rota cruzada).

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 217
Select Cam: Seleciona a combinação câmara/lente montada no Intel® Falcon™ 8+ UAV. As câmaras mais comuns usadas estão disponíveis como predefinição. FOV: mostra o ângulo do Field Of View (Campo De Visão). RES: mostra a resolução da imagem única em pixeis.A convenção é descrita em resolução pixel com o con-junto de dois números inteiros positivos, onde o primeiro número é o número de colunas de pixel (largura) e o segundo o número de linhas de pixel (altura), por exem-plo 7680 por 6876.Se a sua câmara não estiver disponível como predefini-ção, selecione a partir da lista, que corresponde à resolu-ção e ao campo de visão.
Ground Sampling Dist.: Defina a distância de amostra de solo necessária (GSD). A altitude de voo resul-tante (Altitude) é calculada e apresentada acima do valor do GSD.
Figura 5.4: Assistente de Levantamento Topográfico Rápido (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 218
Speed in m/s: Defina a velocidade com a qual o voo de mapeamento deve ser efetuado (1 m/s – 10 m/s).Quando definir a velocidade, certifique-se sempre de que a câmara dispõe de tempo suficiente entre waypoints. O tempo necessário para a câmara para disparar e guardar todas as imagens de um voo waypoint de forma fiável, depende de:
• Resolução de imagem: Quanto maior for aresolução, mais serão os dados a processar e aarmazenar.
• Formato de ficheiro e qualidade de imagem:Imagens RAW contêm a maioria da informação esão os ficheiros maiores, as definições desegurança irão necessitar de mais tempo durante acompressão JPEG e mais espaço para arquivo.
• Velocidade de escrita do cartão SD: Se o cartão fordemasiado lento, isso irá desacelerar o processode gravação.
• Conteúdo de imagem: Motivos com estruturascomplexas (i.e. prados, florestas) irão necessitar demais tempo e espaço durante a compressão JPEG,do que motivos sóbrios e simples (i.e. estradas,superfícies planas não estruturadas).
No of Pics per Line: Defina o número de imagens por linha. O comprimento resultante coberto pelas ima-gens é calculado e apresentado (Line Len:) por baixo do número de imagens.
No of Lines: Defina o número de linhas que devem ser voadas. A área resultante, que cobre as imagens, é cal-culada e apresentada em ha (hectare). O tempo de voo estimado necessário para efetuar o voo, também está apresentado.
Please fly to 1.WP!: Voe o Intel® Falcon™ 8+ UAV para o canto do retângulo, onde o voo de mapeamento é suposto iniciar com a primeira imagem. Ajuste a direçao (guinada) do sistema para definir a direção do voo. Use a pré-visualização vídeo como uma ajuda para definir com precisão a direção.
Figura 5.4: Assistente de Levantamento Topográfico Rápido (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 219
5.4. NAVEGAÇÃO POR WAYPOINTS USANDO O ASCTEC NAVIGATOR SOFTWAREEsta função é uma parte opcional do Pacote de Levantamento Topográfico (ver“PACOTES DE FUNCIONALIDADES DE SOFTWARE” na página 100). O AscTec NavigatorSoftware permite planear e efetuar padrões de voo complexos para aplicações delevantamento topográfico remotas. Missões de voo AscTec Navigator Softwarepreviamente planeadas são exportadas para um dispositivo USB, que está conetado auma das portas USB, numeradas de 2-4 no CTR. Este voo pode ser carregado eexecutado usando a função NAVIGATOR, da aplicação de Cockpit Control no tabletcom ecrã tátil (ver “Projetos de AscTec Navigator Software” na página 126). Em cadawaypoint é disparada uma imagem e a posição atual é armazenada no registo Intel®Falcon™ 8+ UAV. Informação de imagens e GPS podem ser usadas posteriormente nosoftware de fotogrametria para criar ortomosaicos, modelos de superfície digital oumodelos 3D.
Consulte por favor o Manual do AscTec Navigator Software, para obter informaçõesdetalhadas. O manual pode ser encontrado aqui: http://intel.com/FalconManual.
Num futuro próximo, o AscTec Navigator Software será substituído pelo softwareavançado de planeamento de voo Intel Mission Control. Para informações atualizadas,consulte:http://www.intel.com/IntelMissionControl.
ENT=Done!: Quando o sistema estiver no ponto e na orientação correta, confirme ao premir ENT. O Intel® Fal-con™ 8+ UAV irá primeiro voar para calcular a altitude e depois efetuar o voo de mapeamento com os parâmetros definidos.
Flying...: Durante o voo, uma barra mostra o pro-gresso. No final da matriz o Intel® Falcon™ 8+ irá parar automaticamente. Prima ESC para sair do ecrã e regressar ao menu principal.Um voo de Assistente de Levantamento Topográfico pode ser sempre interrompido ao fornecer um forte comando do manípulo de controlo no CTR ao premir ESC.
Figura 5.4: Assistente de Levantamento Topográfico Rápido (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 220
6. MANUTENÇÃO, RESOLUÇÃO DE PROBLEMAS E ASSISTÊNCIA
Este capítulo disponibiliza-lhe respostas a questões, que possam surgir durante o seutrabalho com o Intel® Falcon™ 8+ UAS. Na primeira secção informamos sobre comomanter o seu Intel® Falcon™ 8+ UAS atualizado e damos instruções para preservarfuncionalidade. Na segunda secção, encontra soluções para resolução de problemaspara problemas comuns com ligações de dados. A terceira secção disponibiliza-lhe osdados necessários quando necessitar de ajuda direta.
6.1. MANUTENÇÃOTal como descrito na diretriz e em "SEGURANÇA PRIMEIRO" na página 7, a condiçãogeral do sistema tem de ser verificada antes de cada voo. Siga criteriosamente as listasde verificação para ter a certeza que o sistema está em perfeitas condições. Se fordetetado algo de incomum, que não possa ser resolvido, não voe, ao invés entre emcontacto com a equipa de assistência. Certifique-se sempre de que tem a última versãodo firmware instalada no seu sistema.
6.1.1. Atualizações de firmware do Intel® Falcon™ 8+ UAS O último firmware Intel® Falcon™ 8+ UAS e instruções de atualização passo a passoestão disponíveis na área de download: http://intel.com/FalconDownloads.
Verifique atualizações do firmware neste website com regularidade. Para garantir umfuncionamento perfeito, o Intel Cockpit Controller e o Intel Falcon 8+ UAV têm depossuir sempre a mesma versão de firmware.
A atualização do firmware para o Intel® Falcon™ 8+ UAS consiste em quatro ficheirosseparados, que são compactados num ficheiro .ZIP. O ficheiro .ZIP é denominado porIF8P_firmware_vx.x.ZIP, com x.x sendo a última versão do firmware, p. ex.IF8P_firmware_v1.0.ZIP. Depois do ficheiro .ZIP estar descompactado, surgirão osquatro ficheiros seguintes:
• TRINITY.ATF:Ficheiro de atualização do firmware para o Intel® Falcon™ 8+ UAV
• COCKPIT.ATF:Ficheiro de atualização do firmware para o Intel® Cockpit Controller (CTR)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 221
• CockpitControlInstaller_vx.x.x.exe:Ficheiro de atualização para a aplicação Intel® Cockpit Control que corre notablet com ecrã tátil
• Intel-OBL-Mobile-Computing-Platform-Software-Limited-License.pdf:Outbound license file (OBL). Leia, por favor, o ficheiro da licença antes deinstalar o firmware/software. Ao instalar o firmware/software está a concordarcom o OBL incluído.
O firmware do Intel® Falcon™ 8+ UAV consiste em dois componentes diferentes:
• NAV: Processador Navegacional = módulo de controlo de voo da AscTec TrinityControl Unit. Existem dois Processadores Navegacionais, NAV1 e NAV2,incorporados no Intel® Falcon™ 8+ UAV.
• PER: Processador Periférico = módulo de controlo de voo da AscTec TrinityControl Unit. Adicionalmente a ambos os Processadores Navegacionais, existeum terceiro controlador de voo incorporado.
Cada firmware/software (TRINITY.ATF, COCKPIT.ATF e CockpitControl-Installer_vx.x.x.exe) tem o seu próprio número de versão. As versões do firmwareatualmente instaladas podem ser verificadas no menu do Visor de Estado. Premir ENTno Ecrã Principal abre o menu: Navegue até Settings > Falcon Info.
Para verificar a versão instalada da aplicação de Cockpit Control, toque no botão deinfo, no canto inferior esquerdo, quando a aplicação estiver a correr. O ecrã Aboutapresenta a versão atualmente instalada.
Depois de efetuar a atualização, recomendamos que verifique, no ecrã Falcon Infodo Visor de Estado e no ecrã About da aplicação de Cockpit Control, se a versão dofirmware recentemente instalada é apresentada corretamente. Se for apresentada umaversão diferente, a atualização não foi bem sucedida e tem de ser repetida.
Atualizar o Intel® Falcon™ 8+ UASVisite http://intel.com/FalconDownloads e descarregue o último firmwareIntelFalcon8+_firmware_vx.x.ZIP.
Nota
No website é também disponibilizado um ficheiro, que fornece informação referente a alterações e problemas conhecidos do firmware/software mais
recente. Antes de atualizar o firmware/software do UAS, certifique-se de que lê as notas de lançamento por ordem, para compreender o comportamento
expetável devido a alterações efetuadas no firmware/software.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 222
Após ler as notas de lançamento e descarregar o ficheiro .ZIP do IntelFalcon8+firmware, descompacte o ficheiro para o seu computador. Leia, por favor, a Intel-OBL-Mobile-Computing-Platform-Software-Limited-License.pdf (OBL). Ao instalar ofirmware/software está a concordar com o OBL incluído.
Copie os ficheiros TRINITY.ATF, COCKPIT.ATF e CockpitControlInstaller_vx.x.x.exepronto para um dispositivo USB vazio (máx. 16 GB, sistema de ficheiros: FAT32,tamanho da alocação: 32 kilobytes) e remova o dispositivo USB no seu computador,em segurança.
CUIDADO: QUANDO EFETUARA UMA ATUALIZAÇÃO DO FIRMWARE/SOFTWARE, USE SEMPRE BATERIAS COMPLETAMENTECARREGADAS. INSIRA SEMPRE DUAS BATERIAS NO INTEL®FALCON™ 8+ UAV. ENQUANTO EFETUA UMA ATUALIZAÇÃO, NUNCAREMOVA AS BATERIAS E NUNCA DESLIGUE O INTEL® FALCON™ 8+UAV, O CTR OU O TABLET COM ECRÃ TÁTIL. PODE DANIFICAR O SEUSISTEMA.
Nota
Mantenha, por favor, o dispositivo USB original, que foi fornecido com o UAS, se possível, e use este dispositivo USB para todas as atualizações. Se
encontrar quaisquer dificuldades durante o processo de atualização, p. ex. que o USB não foi detetado pelo UAV ou pelo Cockpit Controler, tente reformatar o dispositivo USB com parâmetros referido anteriormente.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 223
6.1.1.1. Atualizar o Intel® Falcon™ 8+ UAVO Intel® Falcon™ 8+ UAV é atualizado por um ficheiro denominado TRINITY.ATF. Esteficheiro tem de ser copiado para o dispositivo USB antes de começar.
Tabela 6.1: Atualizar o Intel® Falcon™ 8+ UAV
PASSO OPERAÇÃO
1. Insira o dispositivo USB contendo o ficheiro TRINITY.ATF na porta USB na parte de trás do Intel® Falcon™ 8+ UAV (ver n.º (2) em "Vista Traseira da Unidade Central sem Suporte Cardan (Suporte da Câmara)" na página 21).
2. Prima o botão do Intel® Falcon™ 8+ UAV até se ouvir um breve beep do UAV.
3. Largue o botão de ligar.As luzes de posição LED do UAV irá começar a piscar com o início do procedimento de atualização.Dependente dos componentes de atualização, a atualização pode demorar entre 10 e 45 minutos.O fim do processo de atualização está indicado por uma breve melodia do UAV e as luzes de posicionamento LED irá parar de piscar.
4. Para DESLIGAR o UAV prima o botão de ligar do Intel® Falcon™ 8+ UAV, até se ouvir um breve beep do UAV.
5. Largue o botão de ligar.
6. Uma vez que o UAV esteja DESLIGADO, desconete o dispositivo USB.Se a atualização for bem sucedida, o ficheiro no dispositivo USB irá ser renomeado para _TRINITY.ATF.
7. Verifique se o ficheiro foi renomeado e, adicionalmente, verifique se a nova versão é apresentada no ecrã Falcon Info do Visor de Estado.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 224
6.1.1.2. Atualizar o Intel® Cockpit Controller (CTR)O CTR é atualizado por um ficheiro denominado COCKPIT.ATF. Este ficheiro tem de sercopiado para o dispositivo USB antes de começar.
NotaA atualização do firmware do CTR apenas pode ser efetuada com a porta denominada USB 1 na parte de trás do CTR (ver Figura 2-7. Síntese Intel®
Cockpit Controller (CTR).)
Tabela 6.2: Atualização do Firmware para o CTR
PASSO OPERAÇÃO
1. Conete o dispositivo USB que contém o ficheiro COCKPIT.ATF na porta USB 1 na parte de trás do CTR.
2. LIGUE o tablet com ecrã tátil e aguarde até ser apresentada a Pre-flight Checklist (Lista de Verificação de Pré-Voo).
3. LIGUE o CTR.Quando o processo de atualização iniciar, o Visor de Estado irá apre-sentar Starting X%... e o número de percentagem irá aumentar à medida que a atualização progride.Adicionalmente, o Visor de Estado irá apresentar diversas mensagens referentes ao estado de atualização dos componentes internos.Dependente dos componentes de atualização, a atualização pode demorar entre 10 e 45 minutos.No final do processo de atualização irá aparecer Done, de forma breve, e o Visor de Estado irá apresentar o Ecrã Inicial.
4. DESLIGUE o tablet com ecrã tátil.
5. DESLIGUE o CTR.
6. Desconecte o dispositivo USB.Se a atualização for bem sucedida, o ficheiro no dispositivo USB irá ser renomeado para _COCKPIT.ATF.
7. Verifique se o ficheiro foi renomeado e, adicionalmente, verifique se a nova versão é apresentada no ecrã Falcon Info do Visor de Estado.
Nota Para poupar tempo é possível efetuar a atualização do CTR e do Intel® Falcon™ 8+ UAV, em paralelo.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 225
6.1.1.3. Atualizar a Aplicação de Cockpit ControlA aplicação de Cockpit Control é atualizada por um ficheiro denominadoCockpitControl-Installer_vx.x.x.exe. Este ficheiro tem de ser copiado para o dispositivoUSB antes de começar.
NotaA atualização do firmware da aplicação Cockpit Control apenas pode ser efetuada através das portas USB 2 a 4 na parte de trás do CTR ("Síntese
Intel® Cockpit Controller (CTR)" na página 26).
Tabela 6.3: Atualizar o Firmware da Aplicação de Cockpit Control
PASSO OPERAÇÃO
1. Insira o dispositivo USB, que contém o ficheiro CockpitControlIns-taller_vx.x.x.exe, numa das portas USB identificadas por USB 2, USB 3 ou USB 4 na parte de trás do CTR.
2. LIGUE o tablet com ecrã tátil.
3. LIGUE o CTR.
4. Confirme a Preflight Checklist (Lista de Verificação Pré-Voo) da aplicação de Cockpit Control.
5. Toque no botão de info, no canto inferior esquerdo do tablet com ecrã tátil.
6. No ecrã seguinte, toque em Updates no canto inferior esquerdo.Todos os ficheiros de atualização encontrados no dispositivo USB serão apresentados no centro do ecrã.
7. Toque no ficheiro de atualização, que deve ser instalado. Irá aparecer uma caixa de diálogo.
8. Toque em YES para confirmar a caixa de diálogo.A aplicação de Cockpit Control será fechada.
9. Confirme o diálogo seguinte Cockpit Control Setup Wizard ao tocar em Install.Será apresentada uma barra de progresso.Quando a atualização estiver concluída, será apresentada a respetiva mensagem.
10. Toque em Finish para confirmar esta mensagem.Ser-lhe-á solicitado para reiniciar o sistema.
11. Toque em Yes para confirmar. Depois de reiniciar, é apresentada a caixa de diálogo para definição da data e da hora.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 226
6.1.2. Cuidar do Intel® Falcon™ 8+ UAVConsidere, por favor, os pontes seguintes, por forma a manter o UAV em boascondições; assim estará pronto para usar em qualquer altura.
• A conformidade rigorosa com as Diretrizes de Segurança e com as Precauçõesde Segurança garante que sejam detetados defeitos antes do voo (UAV everificação de segurança, verificação de pré-voo e verificação de pós-voo, ver“VERIFICAÇÃO UAS E DE SEGURANÇA” na página 12).
• Recomendamos uma verificação anual efetuada pelo fabricante durante a qual osistema é completamente testado. Para mais detalhes, contacte o seurevendedor ou a assistência da Intel.
LimparSe necessário, deve limpar o UAV após cada missão e antes de o guardar.
• Use um pano sem fios (p. ex. micro fibra) para limpar as partes exteriores (trilhospara o motor, cobertura, hélices), cuidadosamente.
• Se indicado, pode humedecer o pano com água morna, à qual pode adicionarum detergente suave, se necessário.
• Um pequeno pincel pode ser usado para limpeza a seco.
12. Se necessário, ajuste a data e a hora.
13. Toque em APPLY SETTINGS.
14. Confirme a Preflight Checklist (Lista de Verificação de Pré-Voo).
15. Toque no botão de info, no canto inferior esquerdo.
16. Verifique a versão do Controlo de Cockpit instalado, no diálogo.A versão recentemente instalada deve estar visível.
CUIDADO: SE USAR ÁGUA, NENHUMA HUMIDADE/ÁGUA DEVEENTRAR EM CONTACTO COM OS MOTORES OU CONTACTOSELÉTRICOS.
Tabela 6.3: Atualizar o Firmware da Aplicação de Cockpit Control (Continuação)
PASSO OPERAÇÃO

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 227
• Para a limpeza (especialmente dos motores) e para secar, pode também usar arcomprimido enlatado, que é disponibilizado em muitas lojas de computadores.
Armazenar• Desconete sempre todas as baterias quando o sistema já não for mais usado.
• Armazene num local que não esteja sujeito a grande flutuações de temperaturae luz solar direta.
• Certifique-se de que o local de armazenamento está seco e que nenhumacondensação de humidade possa entrar em contacto com o sistema.
• A melhor prática é sempre manter o UAV numa mala aprovada fechada.
TransporteTransporte o sistema apenas na mala ou na mochila, como descrito, ver “MALAS DETRANSPORTE & INTEL® BACKPACK” na página 94.
CUIDADO: QUANDO UTILIZAR AR COMPRIMIDO PARA LIMPAR OUAV É OBRIGATÓRIO SEGURAR/FIXAR OS HÉLICES DURANTE OPROCEDIMENTO DE SOPRAMENTO. DE OUTRA FORMA, TENSÕESPODEM SER GERADAD, QUE PODEM DANIFICAR A ELETRÓNICA DOSISTEMA.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 228
6.1.3. Substituição de hélicesAntes da descolagem verifique todos os hélices em termos de quaisquer sinais dedefeito, tais como arranhões, rachas ou pontos de tensão (branqueamento - alteraçãoda cor da superfície dos hélices causados por dobragem anormal). Se a lâminaapresentar algum defeito, deve ser substituída antes do voo seguinte.
CUIDADO:
• A INSTALAÇÃO CORRETA DE TODAS AS HÉLICES É ESSENCIAL PARA OPERAR E PILOTAR O UAV EM SEGURANÇA.
• A INSTALAÇÃO INCORRETA DE UMA DAS HÉLICES - NO CASO DE COLOCAÇÃO INCORRETA DE UMA OU MAIS HÉLICES RESUL-TANDO NA QUEDA DA(S) MESMA(S) DURANTE O VOO OU NO CASO DE COLOCAÇÃO DE UMA HÉLICE NA DIREÇÃO ERRADA (P. EX., INSERINDO UMA HÉLICE COM ROTAÇÃO À ESQUERDA NUM SUPORTE DE HÉLICE COM ROTAÇÃO À DIREITA OU VICE-VERSA) SIGNIFICA QUE:
• SE UMA HÉLICE FOR INSTALADA INCORRETAMENTE, OUAV PODE SER INCAPAZ DE COMPENSAR A PERDADESSA HÉLICE E
• SE FOR INSTALADA INCORRETAMENTE MAIS DO QUEUMA HÉLICE, É MUITO PROVÁVEL QUE O UAV SE TORNEINSTÁVEL, INCONTROLÁVEL E CAIA.
• A INSTALAÇÃO INCORRETA DE UMA HÉLICE AO APERTAR A PORCA QUE SEGURA A RESPETIVA HÉLICE COM UM BINÁRIO ACIMA DO ESPECIFICADO DE 20 NCM +-5 NCM FARÁ COM QUE O EIXO DO MOTOR PUXE PARA CIMA E O MOTOR APRESENTE UMA RESISTÊNCIA MUITO MAIS ELEVADA AO RODAR A HÉLICE, SENDO NECESSÁRIA MAIS POTÊNCIA PARA GIRAR O MOTOR. NESSE CASO, O MOTOR ENVELHECE MAIS RAPIDAMENTE E PODE EVENTUALMENTE PARAR DURANTE O VOO.
• SE ISSO VIESSE A ACONTECER COM UM MOTOR, O UAVPODERIA FICAR INCAPAZ DE O COMPENSAR,CAUSANDO UMA COLISÃO; E
• SE ISSO ACONTECER COM MAIS DO QUE UM MOTOR, ÉMUITO PROVÁVEL QUE O UAV SE TORNE INSTÁVEL,INCONTROLÁVEL E CAIA.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 229
É obrigatório testar o UAV após a substituição/montagem de uma hélice. Siga à risca averificação do UAS e de segurança ("VERIFICAÇÃO UAS E DE SEGURANÇA" napágina 12). Se não notar nada fora do comum (uma peça solta, ruídos estranhos dos
Figura 6.1: Substituir as hélices do UAV
A única ferramenta necessária para substituir uma lâmina de hélice é uma chave inglesa de 5,5 mm, que é fornecida juntamente com o seu Intel® Fal-con™ 8+ UAV.
1. Solte a porca, do hélice com defeito com a chave inglesa de 5,5 mm.
2. Levante o hélice, cuidadosamente - sem demasiada pressão para baixo no motor.
Nota: Exitem duas variedade de hélices (com rotação à direita e à esquerda). A direção do hélice é apresentada no hélice através de uma seta (ver exemplo para um hélice com rotação à direita, na figura à esquerda).3. Verifique a rotação do hélice, do hélice
desmontado.4. Alinhe um hélice novo com a rotação correta do
hélice, para encaixar no suporte de hélices.5. Pressione a hélice completamente para baixo
no suporte.6. Coloque a nova porca de auto-aperto no eixo
do motor.7. Segure a cabeça do motor com o polegar e o
dedo indicador de uma mão para evitar que o eixo do motor rode.
8. Aperte a porca com a chave inglesa de 5,5 mm (20 Ncm +- 5 Ncm). Para tal, rode a chave de parafusos com o dedo indicador da outra mão. Assim que a cabeça do motor começar a rodar também, foi exercida força suficiente.
9. Verifique se o hélice está a rodar livremente, quando lhe tocar. Dependendo da força aplicada, o hélice tem de efetuar várias rotações.
10.Verifique a orientação do hélice, mais uma vez, e compare o movimento com o de outro hélice.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 230
motores ou qualquer outra ocorrência invulgar), prepare o UAS para efetuar um voo deteste num campo aberto amplo, sem que existam obstáculos por perto.
Siga à risca a verificação de pré-voo ("VERIFICAÇÃO PRÉ-VOO" na página 14) parapreparar o Intel Falcon 8+ UAS para a descolagem. Quando estiver no ar, realizemanobras de voo em todas as direções e verifique se o UAV se move como esperado.Caso afirmativo, aterre o sistema e proceda à verificação pós-voo ("VERIFICAÇÃO PÓS-VOO" na página 17). Se notar um mau desempenho de voo, aterre imediatamente oUAV e tente identificar a causa. Se tiver dúvidas ou necessitar de ajuda profissional,contacte a assistência através do seu revendedor. Inclua, por favor, uma descriçãodetalhada da sua observação e, se possível, fotos.
6.1.4. Substituição do trilho para o motorSe for necessário substituir um trilho para o motor, siga os procedimentos descritosneste capítulo.
Para encomendar um trilho para o motor, contacte o seu distribuidor. Não há qualquerdiferença entre o trilho esquerdo e o direito do motor do Intel Falcon 8+ UAV.
Além do trilho para o motor, são necessários os seguintes materiais e ferramentas:
• Chave de fendas Torx T6 (incluída na mala do Intel Falcon 8+ UAS)
• Loctite 248 (incluído na mala do Intel Falcon 8+ UAS)
• 2 x parafusos M2x18 mm TX, FK (reutilizados do trilho para o motor que serásubstituído)
As figuras que se seguem mostram instruções passo a passo para a substituição de ummotor.Nas imagens individuais,
• utilizam-se setas vermelhas e círculos vermelhos para realçar uma zonaespecífica ou um detalhe de uma peça ou de um conjunto,
• são utilizadas setas brancas para indicar um movimento (seta reta) ou umarotação (seta curvada) de uma peça ou de um conjunto.
Figura 6.2: O trilho para o motor
Por razões de embalagem, um trilho de substi-tuição para o motor será entregue com as duas hélices exteriores desmontadas. Para obter ins-truções de como montar as hélices, consulte o capítulo "Substituição de hélices" na página 228. A imagem à direita mostra o trilho para o motor com hélices já montadas.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 231
Figura 6.3: Remover um trilho para o motor de um Intel Falcon F8+ UAV
1. Remova o parafuso M2x18 mm TX, FK do trilho para o motor na parte dianteira do UAV.Use uma chave de fendas Torx T6.
2. Remova o parafuso M2x18 mm TX, FK do trilho para o motor na parte traseira do UAV.Use uma chave de fendas Torx T6.
3. Afaste as duas pontas da ficha de ligação do tubo transversal frontal do trilho para o motor. Exerça pouca força. Rode ligeiramente o trilho para o motor de modo a soltar o conector.
NOTA: Possível quebra do conector.Não rode demasiado o trilho para o motor.
4. Retire o trilho para o motor diretamente da ficha de ligação do tubo transversal frontal.
5. Afaste as duas pontas da ficha de ligação do tubo transversal traseiro do trilho para o motor. Exerça pouca força. Rode ligeiramente o trilho para o motor de modo a soltar o conector.
NOTA: Possível quebra do conector.Não rode demasiado o trilho para o motor.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 232
Antes de montar um trilho para o motor, verifique o seguinte:
6. Retire o trilho para o motor diretamente da ficha de ligação do tubo transversal traseiro.
Figura 6.4: Verificações a realizar antes de montar um trilho para o motor
1. No Intel Falcon 8+ UAV, certifique-se de que os pinos dourados dos conectores do tubo transversal:
• não apresentam desgaste;• estão isentos de sujidade;• não estão curvados.
2. Certifique-se de que as fichas de ligação do tubo transversal estão isentas de rachas e danos.
3. Certifique-se de que as buchas roscadas das fichas de ligação do tubo transversal estão isentas de danos.
4. No trilho de substituição para o motor, certifique-se de que os conectores do controlador de velocidade do motor:
• não apresentam desgaste;• estão isentos de rachas;• estão isentos de sujidade.
Figura 6.3: Remover um trilho para o motor de um Intel Falcon F8+ UAV (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 233
Depois de realizadas as verificações descritas acima, pode então montar o trilho para omotor.
CUIDADO:
A INSTALAÇÃO CORRETA DE UM TRILHO NOVO PARA O MOTOR É ESSENCIAL PARA OPERAR E PILOTAR O UAV EM SEGURANÇA.UMA INSTALAÇÃO INCORRETA DE UM NOVO TRILHO PARA O MOTOR SE ESTE NÃO FOR CORRETAMENTE FIXADO À CRUZETA EM CARBONO, COMO APRESENTADO NAS IMAGENS EM BAIXO, FARÁ COM QUE O TRILHO PARA O MOTOR FIQUE SOLTO EM VOO DEVIDO À VIBRAÇÃO DO UAV, LEVANDO À PERDA DE CONTROLO E COLI-SÃO, BEM COMO A EVENTUAIS FERIMENTOS OU DANOS MATE-RIAIS.
Figura 6.5: Montar um trilho para o motor num Intel Falcon F8+ UAV
1. Alinhe o trilho para o motor com os tubos transversais. Certifique-se de que não existe qualquer inclinação horizontal do trilho para o motor.
NOTA: Risco de danos nos conectores do trilho para o motor e nos controlados do trilho para o motor se o trilho estiver fixado com desvio late-ral.Certifique-se de que não existe qualquer desvio lateral entre o trilho para o motor e os conecto-res do tubo transversal.
2. Fixe o trilho para o motor ao tubo transversal traseiro.
Veja na imagem como alinhar o furo da ficha de ligação com o furo do trilho para o motor.NOTA: Comece sempre pelo tubo transversal traseiro.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 234
3. Afaste as duas pontas da ficha de ligação do tubo transversal traseiro uma da outra.Introduza o trilho para o motor na ficha de ligação do tubo transversal.Não exerça força.
4. Rode ligeiramente o trilho para o motor, até encaixar.
NOTA: Possível quebra do conector.Não rode demasiado o trilho para o motor.Certifique-se de que o pino da cruzeta central está inserido no conector do trilho para o motor.Se necessário, retire o trilho para o motor e comece novamente.
5. Afaste as duas pontas da ficha de ligação do tubo transversal frontal uma da outra.Introduza o trilho para o motor na ficha de ligação do tubo transversal.Não exerça força.
6. Rode ligeiramente o trilho para o motor, até encaixar.
NOTA: Possível quebra do conector.Não rode demasiado o trilho para o motor.Certifique-se de que o pino da cruzeta central está inserido no conector do trilho para o motor.Se necessário, retire o trilho para o motor e comece novamente.
7. Certifique-se de que os furos das fichas de ligação frontal e traseira estão corretamente alinhados com os furos do trilho para o motor.
Figura 6.5: Montar um trilho para o motor num Intel Falcon F8+ UAV (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 235
É obrigatório testar o UAV após a substituição de um trilho para o motor. Siga à risca averificação do UAS e de segurança ("VERIFICAÇÃO UAS E DE SEGURANÇA" napágina 12). Se não notar nada fora do comum (uma peça solta, ruídos estranhos dosmotores ou qualquer outra ocorrência invulgar), prepare o UAS para efetuar um voo deteste num campo aberto amplo, sem que existam obstáculos por perto.
Siga à risca a verificação de pré-voo ("VERIFICAÇÃO PRÉ-VOO" na página 14) parapreparar o Intel Falcon 8+ UAS para a descolagem. Quando estiver no ar, realizemanobras de voo em todas as direções e verifique se o UAV se move como esperado.Caso afirmativo, aterre o sistema e proceda à verificação pós-voo ("VERIFICAÇÃO PÓS-VOO" na página 17). Se notar um mau desempenho de voo, aterre imediatamente oUAV e tente identificar a causa. Se tiver dúvidas ou necessitar de ajuda profissional,contacte a assistência através do seu revendedor. Inclua, por favor, uma descriçãodetalhada da sua observação e, se possível, fotos.
8. Aplique agente de fixação de roscas Loctite 248 nos 2 parafusos M2x18 mm TX, FK.
9. Insira o parafuso M2x18 mm TX, FK no tubo transversal frontal. Use uma chave de fendas Torx T6.
Certifique-se de que o parafuso pode ser fixado sem arrastar.10.Aperte o parafuso.
11. Insira os parafusos M2x18 mm TX, FK no tubo transversal traseiro. Use uma chave de fendas Torx T6.
Certifique-se de que o parafuso pode ser fixado sem arrastar.12.Aperte os parafusos.Certifique-se de que não é possível rodar nem mover o trilho para o motor.
13.Certifique-se de que não existe nenhuma folga entre o trilho para o motor e as fichas de ligação do tubo transversal frontal e traseiro.
Figura 6.5: Montar um trilho para o motor num Intel Falcon F8+ UAV (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 236
6.1.5. Trocar um adaptador de carga útilO adaptador de carga útil é a ligação entre o suporte de câmara e a unidade central doUAV. Se necessário, pode ser trocado. A única ferramenta necessária para trocar um adaptador de carga útil é uma chave defendas Torx, que é fornecida juntamente com o seu Intel® Falcon™ T6 8+ UAV.
Para encomendar um adaptador de carga útil, contacte o seu distribuidor.
O adaptador de carga útil é composto pelas seguintes peças:
As figuras que se seguem mostram instruções passo a passo para a troca de umadaptador de carga útil.Nas imagens individuais,
• utilizam-se setas vermelhas e círculos vermelhos para realçar uma zonaespecífica ou um detalhe de uma peça ou de um conjunto;
• são utilizadas setas brancas para indicar um movimento (seta reta) ou umarotação (seta curvada) de uma peça ou de um conjunto.
Figura 6.6: As peças do adaptador de carga útil
(1) Rolamento de esferasO rolamento de esferas pode parecer diferente do representado. Há versões feitas de plástico ou metal.
(2) Placa de circuito(3) Placa traseira(4) Placa frontal(5) Quatro parafusos C2.2x6.5 mm TX, SK
Figura 6.7: Remover um adaptador de carga útil de uma carga útil
1. Remova os 4 parafusos C2.2x6,5 mm TX, SK. Use uma chave de fendas Torx T6.Certifique-se de que não aplica força no servomotor.
1
23
4
5

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 237
As figuras que se seguem mostram instruções passo a passo para a fixação à carga útilde um adaptador de carga útil novo. O adaptador de carga útil é fornecido em peças.Para cada peça do adaptador de carga útil, ver "As peças do adaptador de carga útil" napágina 236.
2. Desconecte a placa frontal e a placa traseira do adaptador de carga útil.
3. Desconecte o conector de fios de 10 pinos.
4. Remova a placa frontal da haste da carga útil.5. Remova a placa traseira da haste da carga
útil.
Figura 6.8: Fixar um adaptador de carga útil novo
1. Fixe a placa à placa traseira.
2. Fixe o rolamento de esferas à placa frontal.
Figura 6.7: Remover um adaptador de carga útil de uma carga útil (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 238
6.1.6. Atualizar uma carga útil de um AscTec Falcon 8 UAV para um Intel Falcon 8+ UAV
É possível atualizar as seguintes cargas úteis para o AscTec Falcon 8 UAV, de forma aficarem compatíveis com o Intel Falcon 8+ UAV:
• Sony Alpha 7R
• Carga útil de inspeção para a Panasonic Lumix DMC-TZ71
A atualização requer três passos:
1. Atualize o hardware com um adaptador de carga útil.Consulte a secção "Trocar um adaptador de carga útil" na página 236 para obter instruções.
3. Deslize o conjunto da placa frontal para a haste da carga útil.
4. Deslize o conjunto da placa traseira para a haste da carga útil.
5. Alinhe o cabo de fita corretamente na abertura da placa frontal.
6. Conecte o conector de fios de 10 pinos.7. Fixe o conjunto da placa traseira ao conjunto
da placa frontal.Certifique-se de que não aplica força no servomotor.
8. Insira e aperte os 4 parafusos C2.2x6.5 mm TX, SK com uma chave de fendas Torx T6.
Figura 6.8: Fixar um adaptador de carga útil novo

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 239
2. Realize uma calibração da carga útil. Ao conectar a carga útil pela primeira vez, surgirão duas mensagens de alerta, No calib on payload found (Nenhuma calib. de carga útil encontrada) e Payload EEPROM compromised! (EEPROM da carga útil comprometida!). Realize uma calibração da carga útil executando todos os passos descritos no capítulo "Calibração da carga útil" na página 39. Isso resolverá o alerta No calib on payload found (Nenhuma calib. de carga útil encontrada).
3. Atualize a eeprom flash da carga útil.Contacte a equipa de assistência da Intel e forneça as seguintes informações:• Tipo de carga útil (Sony Alpha 7R ou carga útil de inspeção TZ71)
• Número de série da carga útil (pode ser encontrado numa etiqueta no fundo dosuporte cardan). Cargas úteis mais antigas podem não ter uma etiqueta com onúmero de série no suporte cardan. Se não existir nenhuma na sua carga útil,mencione isso também.
Com as informações fornecidas por si, a equipa de assistência é capaz de criar umficheiro de atualização chamado "f8p_license.asc", que lhe será enviado por email.Poderá receber o ficheiro sob a forma de um ficheiro ZIP. Por favor, guarde esteficheiro no seu computador, se necessário descompacte e siga as instruções em baixopasso a passo.
1. Tome o dispositivo USB do seu Intel® Falcon™ 8+ UAV.2. Introduza-o no seu computador.3. Formate o dispositivo USB (sistema de ficheiros: FAT32, tamanho da unidade de
alocação: 32 kilobytes).4. Copie o ficheiro "f8p_license.asc" para o diretório de raiz do dispositivo USB.5. Coloque o dispositivo USB no seu Intel® Falcon™ 8+ UAV.6. LIGUE o UAV.7. Após concluir a inicialização do Intel® Falcon™ 8+ UAV, aguarde 10 segundos.
Depois DESLIGUE o UAV.8. Remova o dispositivo USB do Intel® Falcon™ 8+ UAV.9. Ligue o UAS.10.Verifique se a mensagem EEPROM compromised (EEPROM comprometida) já
não está presente.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 240
11.Verifique se os controlos da câmara do CTR funcionam como descrito no capítulo correspondente relacionado com esta câmara.
Para voltar a converter uma carga útil para o AscTec Falcon 8 UAV, é necessárioremover o adaptador de carga útil e realizar uma calibração da carga útil no AscTecFalcon 8 UAV. Consulte o capítulo "2.4.1 Calibração de carga útil e bússola" do manualdo utilizador do AscTec Falcon 8 UAS para obter uma descrição detalhada sobre comorealizar uma calibração da carga útil.
O AscTec Falcon 8 UAV apresentará inicialmente uma mensagem de erro No calibon payload found (Nenhuma calib. de carga útil encontrada), quando estiverconectada uma carga útil que foi usada no Intel Falcon 8+ UAV. A calibração da cargaútil resolverá esta mensagem de erro.
Se for necessário utilizar novamente a carga útil no Intel Falcon 8+ UAV, basta voltar amontar o adaptador de carga útil e realizar uma calibração da carga útil. O ficheiro deatualização "f8p_license.asc" já não será mais necessário depois de ter sido usado comsucesso durante a conversão inicial.
Nota
Uma carga útil atualizada para ficar compatível com o Intel Falcon 8+ UAV pode ser novamente convertida para a utilização com o AscTec Falcon 8
UAV. No AscTec Falcon 8 UAV, tem de estar instalada a versão de firmware NAV/PER 0.50 ou mais recente. Para obter instruções como consultar o
firmware atualmente instalado e onde descarregar a versão de firmware mais recente, consulte o capítulo "6.1.1 Firmware e atualizações" do manual
do utilizador do AscTec Falcon 8 UAS.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 241
6.2. RESOLUÇÃO DE PROBLEMASEste capítulo descreve soluções para problemas especiais.
6.2.1. Estabelecer uma conexão entre o CTR e o UAVO UAV e o CTR são ex works pré-configurados.
Contudo, a primeira vez que o Intel Falcon 8+ UAV e o CTR forem ligados, o Visor deEstado irá apresentar o Ecrã Inicial, sendo necessário configurar a conexão entre o UAVe o CTR.
Se o UAV e o respetivo CTR tiverem sido ligados anteriormente, o UAV irá conectar,automaticamente ao CTR, assim que ambos forem ligados.
Nalguns casos, pode ser necessário estabelecer uma conexão manual, novamente.
Nota Poupa algum tempo ligar primeiro o UAV, de forma a que a verificação do sistema seja levada a cabo. Ligue depois o tablet com ecrã tátil seguido do CTR.
Figura 6.9: Conectar o CTR ao UAV
Se o UAV e o CTR não conectarem automaticamente, o Visor de Estado irá notá-lo no Ecrã Inicial. Se for este o caso, tem de estabelecer a conexão manualmente.1. Prima o botão ENT do Visor de Estado (ver “VISOR DE
ESTADO” na página 190). Irá ver o ecrã para introduzir o número de série do Falcon (número de série de 5 dígitos do Intel® Falcon™ 8+ UAV, impresso no topo do UAV, acima do compartimento da bateria, por exemplo 31123). O primeiro dígito está destacado (ver a figura em baixo).
2. Prima ENT para ativar o primeiro dígito.3. Introduza o primeiro dígito do número de série,
usando os botões de seta DIREITO/ESQUERDO para aumentar/diminuir o número. DIREITO aumenta o número, ESQUERDO diminui-o.
4. Prima ENT para confirmar o primeiro dígito. O dígito seguinte pode ser introduzido.
5. Repita o procedimento cinco vezes (para cada dígito)6. Prima ENT para confirmar o número de série. OK está
destacado.7. Prima ENT e a conexão será estabelecida.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 242
6.2.2. Analisar Questões de Conexão de Ligação de DadosNalguns casos, a ligação de dados pode estar perturbada. Se tal acontecer, proceda daseguinte forma:
1. Verifique se o painel de antena do CTR está aberto e orientado para o UAV e, que não existem defeitos visíveis, tais como rachas ou quebras.
2. Ao efetuar um teste, certifique-se de que não existem redes (WiFi) com distúrbio na gama 2,4 GHz. Estes irão influenciar os resultados.
3. Use o Ecrã de Ligação de Dados do Visor de Estado (ver “Os Ecrãs de Informação Principal” na página 204) para verificar se um problema ocorre sempre na mesma ligação.
4. Se um problema persistir em uma das ligações de dados, pode ser um defeito nos módulos de transmissão / de recepção do UAV ou nos módulos de transmissão / de recepção do CTR. Para verificar este defeito, teste, por favor, o seguinte, caso tenha um segundo CTR / Intel® Falcon™ 8+ UAV disponível:• Retire o CTR do Intel® Falcon™ 8+ UAV problemático e ligue-o a um Intel®
Falcon™ 8+ UAV diferente e repita o teste. Se o problema persistir, é muito provável que seja do CTR, se o problemadesaparecer, é muito provável que seja do Intel® Falcon™ 8+ UAV.
• Tire o novo CTR e ligue-o ao Intel® Falcon™ 8+ UAV problemático e repita oteste.Se o problema persistir é muito provável que seja do Intel® Falcon™ 8+ UAV, se oproblema desaparecer, é muito provável que seja do CTR.
Se o problema tiver sido isolado, por favor contacte a equipa de assistência, descreve oque aconteceu com precisão e esteja preparado para fornecer ficheiros de registo dostestes de voo.
Se não tiver um segundo CTR / Intel® Falcon™ 8+ UAV disponível, contacte a assistênciada Intel.
6.2.3. Nenhum vídeo de pré-visualização no tablet com ecrã tátil do CTR
Se não existir nenhuma imagem de pré-visualização de vídeo, por favor verifique:
• A ligação entre a câmara e o Intel® Falcon™ 8+ UAV.
• Se a câmara, o Intel® Falcon™ 8+ UAV, o tablet de ecrã tátil e o CTR estãocorretamente LIGADOS
• Carga útil:O sinal proveniente da carga útil pode não estar a alimentar corretamente oIntel® Falcon™ 8+ UAV. Por favor verifique o adaptador de carga útil. Se tiverdiferentes cargas úteis disponíveis, por favor coloque-as e verifique a recepçãovídeo.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 243
• Transmissor de vídeo do Intel® Falcon™ 8+ UAV:Se tiver um disponível, por favor use um sistema de Intel® Falcon™ 8+ UAVdiferente e verifique se consegue receber o sinal de vídeo desse Intel® Falcon™8+ UAV com o CTR original.Se conseguir receber o vídeo de um UAV diferente, existe um problema natransmissão de vídeo do Intel® Falcon™ 8+ UAV original.
• Receptor de vídeo do Intel® Falcon™ 8+ UAV:Se tiver um disponível, por favor use um CTR diferente, conete-o ao seu Intel®Falcon™ 8+ UAV e verifique se consegue receber o sinal de vídeo com esse CTR. Se conseguir receber um vídeo com um CTR diferente, existe um problema nareceção de vídeo no CTR original.Se o problema tiver sido isolado, por favor contacte a equipa de assistência,descreva o sucedido com precisão e esteja preparado para fornecer ficheiros deregisto dos voos de teste.Se não tiver um segundo CTR / Intel® Falcon™ 8+ UAV disponível, contacte aassistência da Intel.
6.2.4. Registos de vooPode acontecer que o Intel® Falcon™ 8+ UAV não consiga aceder ao dispositivo dearmazenamento de registo (ver “INTEL® FALCON™ 8+ UAV REGISTOS DE VOO” napágina 106). Na maioria das vezes, a razão é um problema de conexão mecânica ou umsistema de ficheiros corrompidos, no dispositivo de armazenamento.
Se o Intel® Falcon™ 8+ UAV não conseguir aceder ao dispositivo de armazenamento,será apresentado o respetivo alerta.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 244
Tabela 6.4: Alertas Possíveis
CAUSA SINAL VISUAL POSSÍVEL CORREÇÃO
Cartão SD de utiliza-dor não pode ser acedido.
<- Check Msg aparece na linha de estado do Visor de Estado. Prima o respetivo botão de seta ESQUERDO no CTR, até o Ecrã de Mensagem de Erro for apresentado. No user SD card será apre-sentado.
Retire o cartão SD de utilizador e faça uma cópia de segurança e formate-o (sistema de ficheiros: FAT32, tama-nho da unidade de alocação: 32 kilo-bytes). Depois de voltar a inserir o cartão SD no Intel® Falcon™ 8+ UAV, o mesmo deve estar acessível.Se não for necessária nenhuma cópia de segurança, o cartão SD do Utiliza-dor pode também ser formatado diretamente pelo UAV: Para tal:1. Prima ENT para abrir o menu no
Visor de Estado.2. Use o botão da seta DIREITO para
navegar para Settings. 3. Prima ENT e use o botão de seta
DIREITO para navegar para Format User SD.
4. Prima ENT para confirmar. Surge o ecrã apresentado:
5. Prima ENT para confirmar a formatação do cartão SD do utilizador. O processo inicia, é apresentada uma barra de progresso. Premir ESC cancela a função e irá regressar ao Ecrã Principal.
Quando terminar a formatação do cartão SD, o Intel® Falcon™ 8+ UAV irá criar, imediatamente um novo ficheiro de registo e iniciar, novamente o registo.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 245
O cartão SD não será apagado ou formatado pelo sistema de voo. Recomendamos queefetue, regularmente, uma cópia de segurante destes dispositivos de armazenamentoe reformatá-las posteriormente. Especialmente quando estiver a trabalhar em projetoscomplexos, durante os quais são necessários registos para a georreferência, ajuda seiniciar com um meio de armazenamento vazio.
6.3. ASSISTÊNCIASe necessitar de assistência, não hesite em contactar o seu parceiro de assistêncialocal. Se assumir qualquer avaria ou tiver ocorrido um acidente com o UAV, certifique-se de que fornece sempre as seguintes informações:
• Número de série Intel® Falcon™ 8+ UAV (número com 5 dígitos do Intel® Falcon™8+ UAV, impresso no topo do UAV, por cima do compartimento da bateria, porexemplo 31123, ver “Unidade Central” na página 21.
• Versões do firmware Intel® Falcon™ 8+ UAS:Obtém acesso à informação acima referida ao usar o Visor de Estado.
1. Premir ENT no Ecrã Principal. Um menu abre.
2. Use o botão de seta DIREITO para selecionar Settings.
3. Prima ENT.Um novo ecrã é aberto.
4. Use o botão de seta DIREITO para selecionar Falcon Info.
Cartão SD interno não pode ser ace-dido.
<- Check Msg aparece na linha de estado do Visor de Estado. Prima o respetivo botão de seta ESQUERDO no CTR, até o Ecrã de Mensagem de Erro for apresentado. No internal SD card será apresentado.
Desligue o INTEL® FALCON™ 8+ UAV. Aguarde 10 segundos e ligue-o, nova-mente. Durante a inicialização, o car-tão SD interno será formatado e deve voltar a estar acessível. Se não ajudar, contacte a equipa de assistência para obter instruções em como proceder.
Nota
O Intel® Falcon™ 8+ UAV consegue voar sem qualquer dispositivo de registo ativo. É da responsabilidade do utilizador, certificar-se de que todos os voos podem ser registados adequadamente, caso seja um requisito legal no país
em que o sistema é usado.
Tabela 6.4: Alertas Possíveis (Continuação)
CAUSA SINAL VISUAL POSSÍVEL CORREÇÃO

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 246
5. Prima ENT.Agora, pode visualizar o número de série e as versões do firmware dos componentes de hardware atuais. Na última coluna são apresentados os pacotes de funcionalidades ativados.
6. Prima ESC.Regressa ao menu Settings.
Mais informações necessárias:
• Descrição detalhada do incidente / defeito
• Imagens ou vídeos, se aplicável (por favor inclua comentário ou explicaçõesadicionais ao longo das imagens, se for necessário). Em caso de acidente, porfavor tire fotografias do local onde o incidente ocorreu, para nos ajudar areconstruir a situação.
• Ficheiros de registo do cartão SD do Utilizador, ver “INTEL® FALCON™ 8+ UAVREGISTOS DE VOO” na página 106. Indique por favor, com maior precisãopossível, o número do ficheiro de registo no qual o incidente ocorreu ou anote ahora local exata na qual ocorreu o incidente.
• Cenário de reprodução:Por favor, descreva, passo a passo, o que faz e em que circunstâncias /condições a falha ocorre.
• Se pretender relatar o incidente ou requerer assistência, por favor descarregue epreencha o Formulário de Pedido de Assistência de: http://intel.com/FalconDownloads e envie-o para a equipa de assistência da Intel.
Se o sistema necessitar de ser enviado para reparação, contacte por favor, primeiro aequipa de assistência. Eles irão aconselhar sobre os próximos passos.
Nota
Se o UAV efetuar uma aterragem direta devido a conexão da ligação de dados perdido e se tiver dificuldades em localizá-los, a última posição
conhecida do Intel® Falcon™ 8+ UAV (que é guardada no Visor de Estado do CTR) poderá ser útil. Prima o botão de seta DIREITO do Visor de Estado uma vez (enquanto não conectado) e serão apresentadas a latitude e a longitude
da última posição conhecida.

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 247
7. ESPECIFICAÇÕES TÉCNICASFigura 7.1: Dados Técnicos

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 248
Tabela 7.1: Dados Técnicos
INTEL® FALCON™ 8+ UAV
TIPO Octóptero em forma de V
TAMANHO 768 x 817 x 160 mm
MOTORES 8 motores elétricos sem escova (sem sensor) com 125 W de potência máx. cada um
DIÂMETRO DO ROTOR 20,32 cm (8 in)
NÚMERO DE ROTORS 8
PESO DO ROTOR 6 g (0,21 oz)
PESO VAZIO 1,2 kg (2,65 lbs)
MÁX. PESO DA CARGA ÚTIL (CÂMARA E SUPORTE CARDAN) 0,8 kg (1,76 lbs)
MÁX. RETIRAR PESO 2,8 kg (6,17 lbs)
MÁX. TEMPO DE VOO SEM CARGA ÚTIL* 26 min
MÁX. TEMPO DE VOO COM MÁX. PESO DE CARGA ÚTIL* 16 min
MÁX. TEMPO DE VOO COM A7R 16 min
MÁX. TEMPO DE VOO COM CARGA ÚTIL DE INSPEÇÃO 18 min
MÁX. GAMA DATA LINK** 1 km (versão FCC) (3281 pés)850 m (versão CE) (2788 pés)
MÁX. TETO DE SERVIÇO** 4000 m MSL (13123 pés)
MÁX. ALTITUDE ACIMA DO NÍVEL DO SOLO **
Varia por país no qual opera o UAV e requer que verifique os regulamentos que se aplicam ao seu país de operação.
MÁX. GAMA VIDEO LINK** 500 m (versão FCC e CE) (1640 pés)
MÁX. VELOCIDADE TOLERÁVEL DE VENTO
12 m/s (26 mph) (Modo GPS)16 m/s (35 mph) (Modo Altitude, Modo Manual)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 249
MÁX. PRECIPITAÇÃO Não recomendado para operar em qual-quer forma de precipitação
TEMPERATURA DE OPERAÇÃO -5 °C a 45 °C (23 °F a 113 °F)
TEMPERATURA DE ARMAZENAMENTO A CURTO PRAZO
(ATÉ UM MÊS)-5 °C a 40 °C (23 °F a 104 °F)
TEMPERATURA DE ARMAZENAMENTO A LONGO PRAZO
(SUPERIOR A UM MÊS)-5 °C a 25 °C (41 °F a 77 °F)
ALIMENTAÇÃO ELÉTRICA 2 x Intel® Powerpack 4000 (configuração redundante)
SENSORES DE NAVEGAÇÃO
ASCTEC TRINITY CONTROL UNIT Unidade de Medição por Inércia de redundância Tripla (IMU: barómetro, bússola, acelerómetros, giroscópios)
SISTEMA DE NAVEGAÇÃO GLOBAL POR SATÉLITE (GNSS) GPS e GLONASS
MÁX. VELOCIDADE DO AR
MODO MANUAL 18 m/s (40 mph)
MODO ALTITUDE 18 m/s (40 mph)
MODO GPS 4,5 m/s (10 mph) padrão;até 10 m/s (22 mph) no mapeamento de voos
MÁX. TAXA DE SUBIDA/DESCIDA
MODO MANUAL 6 a 10 m/s (13 a 22 mph)
MODO ALTITUDE 3 m/s (6 mph)
MODO GPS 3 m/s (6 mph)
MÁX. TAXA DE VIRAGEM
MODO MANUAL / MODO ALTITUDE 115°/s
MODO GPS 75°/s
MÁX. ÂNGULOS DE INCLINAÇÃO E ROTAÇÃO
Tabela 7.1: Dados Técnicos (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 250
MODO MANUAL / MODO ALTITUDE 50°
MODO GPS 45°
COMUNICAÇÃO SEM FIOS
2 LIGAÇÕES DE COMANDO E CONTROLO INDEPENDENTES
(DIVERSIDADE)
Ligação FHSS adaptativa 2,4 GHz com 100 mW
VIDEO LINK DIGITAL Ligação digital de latência baixa. 5,1 Ghz a 5,8 GHz com no máximo 24 dBM/250 mW (versão compatível com FCC).5,1 Ghz a 5,8 GHz com no máximo 20 dBM/100 mW (versão compatível com CE).Resolução dependente da carga útil até 1080 p Full HD
INTEL® COCKPIT CONTROLLER (CTR)
DIMENSÃO (L X C X A) 320 x 380 x 135 mm (12,60 x 14,96 x 5,31 pés)
PESO 2,7 kg (5,95 lbs) (sem bateria) 3,1 kg (6,83 lbs) (com bateria)
ALIMENTAÇÃO ELÉTRICA 1 x Intel® Powerpack Battery
TEMPO DE OPERAÇÃO* 2 h
TEMPERATURA DE OPERAÇÃO -5 °C a 45 °C (23 °F a 113 °F)
TEMPERATURA DE ARMAZENAMENTO A CURTO PRAZO
(ATÉ UM MÊS)-5 °C a 40 °C (23 °F a 104 °F)
TEMPERATURA DE ARMAZENAMENTO A LONGO PRAZO
(SUPERIOR A UM MÊS)-5 °C a 25 °C (23 °F a 77 °F)
ÉCRÃ TÁTIL Dimensão 8.3'', resolução 1980 x 1200 px
CONEXÕES 4 x USB, 1 x HDMI
Tabela 7.1: Dados Técnicos (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 251
INTEL® POWERPACK BATTERY
TIPO Polímero de Lítio (LiPo) 4S
CAPACIDADE 4000 mAh
TENSÃO (NOMINAL) 14,8 V
ENERGIA 59,2 Wh
TEMPERATURA DE OPERAÇÃO*** -5 °C a 40 °C (23 °F a 104 °F)
TEMPERATURA DE CARGA Recomendado: 10 °C a 30 °C (50 °F a 86 °F)Máx.: 5 °C a 40 °C (41 °F a 104 °F)
TEMPERATURA DE ARMAZENAMENTO A CURTO PRAZO
(ATÉ UM MÊS)-5 °C a 40 °C (23 °F a 104 °F)
TEMPERATURA DE ARMAZENAMENTO A LONGO PRAZO
(SUPERIOR A UM MÊS)18 °C to 28 °C (64 °F to 82 °F)
TENSÃO DE ARMAZENAMENTO RECOMENDADA 3,7 V por célula
MÁXIMA POTÊNCIA DE CARGA 80 W
CICLO DE VIDA TÍPICO 150 ciclos
PESO 398 g (14 oz) (tolerância +/- 5%)
ADAPTADOR AC (CARREGADOR PARA POWERPACK PP4000)
TENSÃO DE ENTRADA 100-240 V, 50/60 Hz
MÁXIMA CORRENTE DE ENTRADA 1,5 A
MÁXIMA CORRENTE DE SAÍDA 4,74 A
TENSÃO DE SAÍDA 19,0 V
*Dados baseados em baterias novas, completamente carregadas e a temperatura ambiente. Os voos de recolha de dados foram efetuados a aproximadamente 0 m (0 pés) acima do nível do mar, a uma temperatura exterior de aproximadamente 15 ºC (59 ºF), sem vento, com manobras de voo lentas e constantes, sem planar. Todas as medições foram efetuadas conforme a International Standard Atmosphere (Atmos-fera Padrão Internacional) (ISA). Outros valores podem ter influenciado os resulta-dos,
Tabela 7.1: Dados Técnicos (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 252
** O piloto é responsável por conhecer e respeitar todas as leis e regulamentos apli-cáveis ao espaço aéreo no qual o sistema Intel® Falcon™ 8+ é operado. As jurisdições dispõem de diferentes regras de segurança relacionadas com a autorização de voo de aeronaves não-tripuladas; voar próximo de aeroportos, aeronaves tripuladas ou pessoas; operação dentro da linha de visão; limites de altitude e outros. Os voos de recolha de dados foram efetuados a aproximadamente 120 m (393 pés) acima do solo em Modo GPS, drone afastado do piloto, antena de cockpit orientada exata-mente na direção do drone, sem obstáculos por entre a linha de visão do drone e 400 m de raio à volta do drone e do piloto, sem distúrbios externos das bandas de 2,4 GHz e 5,8 GHz. Todas as medições foram efetuadas conforme a International Standard Atmosphere (Atmosfera Padrão Internacional) (ISA). Outros valores podem ter influenciado os resultados,
***A temperatura máxima para a Intel® Powerpack depende do sistema e da configu-ração com que é usado:
• O Intel® Falcon™ 8+ combinado com o Intel® Cockpit Controller - temperaturade operação é 45°C (113°F)
• O Intel® Falcon™ 8+ sem uma carga útil e duas baterias completamentecarregadas inseridas - temperatura máxima de operação é 45°C (113°F)
• O Intel® Falcon™ 8+ com carga útil - temperatura máxima de operação é 40°C(104°F).Devido à necessidade de uma corrente mais elevada, as baterias irão produzirmais calor.
Tabela 7.1: Dados Técnicos (Continuação)

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 253
LISTA DE FIGURAS2.1 Os Componentes Intel® Falcon™ 8+ UAV .................................................................192.2 Vista Traseira da Unidade Central sem Suporte Cardan
(Suporte da Câmara) .........................................................................................................212.3 Vista Dianteira da Unidade Central sem Suporte Cardan
(Suporte da Câmara) .........................................................................................................222.4 Vista Lateral da Unidade Central, Lado Esquerdo sem Suporte Cardan
(Suporte da Câmara) .........................................................................................................222.5 Trilhos para o Motor e Equipamento ........................................................................232.6 Unidades do Suporte Cardan .......................................................................................242.7 Síntese Intel® Cockpit Controller (CTR) ....................................................................262.8 Visor de estado ...................................................................................................................302.9 O Tablet com Ecrã Tátil ...................................................................................................312.10 Controlo de Câmara Independente (Independant Camera Control, ICC) ..312.11 Pacote de Monitor para 2º operador .........................................................................342.12 Controlo de Câmara via Intel® Cockpit Controller (CTR) ...................................352.13 Instalar o Suporte de Câmara. ......................................................................................372.14 Remover Suporte da Câmara. .......................................................................................382.15 Sony Alpha 7R e Entrada Cartão SD ..........................................................................422.16 Layout de Controlo Sony Alpha 7R CTR ..................................................................432.17 Definições da Câmara através da Câmara Sony Alpha 7R ...............................452.18 Carga Útil de Inspeção .....................................................................................................472.19 Carga Útil de Inspeção: Layout de Controlo CTR .................................................502.20 Especificações de Intel® High Resolution Imaging Payload .............................542.21 Layout de controlo Sony RX1R II CTR .......................................................................562.22 Definições da câmara para Sony RX1R II .................................................................572.23 Atualização de firmware da carga útil .......................................................................592.24 Especificações de Intel® Imaging Payload ...............................................................612.25 Confirmação da transferência de ficheiros de vídeo ..........................................662.26 Layout de controlo Sony R10C CTR ...........................................................................672.27 Definições da câmara através dos itens do menu de controlo no tablet
com ecrã tátil ........................................................................................................................682.28 Processo de atualização de firmware ........................................................................702.29 Desvio de obstáculos: direções cobertas ................................................................752.30 GUI do tablet com uma carga útil com desvio de obstáculos (OA)
montada .................................................................................................................................762.31 Descrição do LED ...............................................................................................................82

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 254
2.32 A Intel® Powerpack Battery ............................................................................................832.33 Carregar ..................................................................................................................................842.34 Atualização de Bateria ......................................................................................................892.35 Temperatura Dependente da Capacidade da Bateria LiPo ..............................932.36 Malas de Transporte e Mochila ....................................................................................942.37 Instruções de embalagem para as malas do Intel® Falcon™ 8+ UAS ...........952.38 Instruções de embalagem para a caixa de cartão da mala do
sistema UAV .........................................................................................................................982.39 Mostra a Licença Vitalícia Ativada. ...........................................................................1042.40 Mostra a licença vitalícia ativada. .............................................................................1052.41 O Registo de Voo do AscTec Navigator Software .............................................1073.1 Preparar o UAV ................................................................................................................1103.2 Preparar o CTR ................................................................................................................1123.3 A Aplicação de Cockpit Control ................................................................................1143.4 A Aplicação de Cockpit Control e Projetos PATH .............................................1193.5 A Aplicação de Cockpit Control e Projetos PATH .............................................1243.6 A Aplicação de Cockpit Control e Projetos de AscTec Navigator
Software ..............................................................................................................................1283.7 Mensagem apresentada durante as configurações regionais .....................1323.8 Alerta de Campo Magnético .......................................................................................1323.9 Os Link Loss Procedures ..............................................................................................1333.10 Os Link Loss Procedures (Continuação) ................................................................1343.11 New Home Position (Nova Posição Base) .............................................................1343.12 Last Known Position (Última Posição Conhecida) ............................................1353.13 Selecionar os modos de voo ......................................................................................1363.14 Precisão GPS .....................................................................................................................1393.15 Acompanhamento na Sombra ..................................................................................1403.16 Efeitos Multi Path GPS ..................................................................................................1413.17 Iniciar os motores ............................................................................................................1443.18 Princípios básicos de voo ............................................................................................1473.19 Manípulos de controlo esquerdo e direito ...........................................................1493.20 Informação de voo no ecrã principal do Visor de Estado ..............................1513.21 Exemplos de situações a evitar .................................................................................1523.22 Alertas do sistema ..........................................................................................................1774.1 Visor de estado ................................................................................................................1904.2 Ecrãs de Informação Principal ...................................................................................2045.1 Circle of Interest ..............................................................................................................2095.2 Panorama Cilíndrico .......................................................................................................212

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 255
5.3 Panorama Esférico ..........................................................................................................2135.4 Assistente de Levantamento Topográfico Rápido ............................................2166.1 Substituir as hélices do UAV ......................................................................................2296.2 O trilho para o motor .....................................................................................................2306.3 Remover um trilho para o motor de um Intel Falcon F8+ UAV ...................2316.4 Verificações a realizar antes de montar um trilho para o motor ................2326.5 Montar um trilho para o motor num Intel Falcon F8+ UAV ..........................2336.6 As peças do adaptador de carga útil ......................................................................2366.7 Remover um adaptador de carga útil de uma carga útil ................................2366.8 Fixar um adaptador de carga útil novo ..................................................................2376.9 Conectar o CTR ao UAV ................................................................................................2417.1 Dados Técnicos ................................................................................................................247

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 256
LISTA DE TABELAS1.1 Lista de Verificação de Segurança ..............................................................................131.2 Lista de Verificação Pré-Voo .........................................................................................141.3 Lista de Verificação Pré-Voo (Continuação) ...........................................................151.4 Lista de Verificação Pós-Voo ........................................................................................172.1 Operar uma câmara por ICC ..........................................................................................322.2 Controlo de Câmara Sony Alpha 7R Através das Funções de Câmara .......442.3 Controlo de Câmara Sony Alpha 7R através do Visor de Estado ..................452.4 Carga Útil de Inspeção: Layout de Controlo CTR .................................................522.5 Controlo de Carga Útil de Inspeção através do Visor de Estado ...................522.6 Exemplo de uma distância de afastamento ajustada para 5 m ......................772.7 Alertas do sistema relacionados com o desvio de obstáculos .......................792.8 Especificações Técnicas da Bateria ............................................................................812.9 Estado de carga ...................................................................................................................842.10 Ciclos de Carga ....................................................................................................................862.11 Capacidade da bateria .....................................................................................................872.12 Estado da Bateria ...............................................................................................................882.13 Descrições de pacotes ..................................................................................................1022.14 Alertas Possíveis ..............................................................................................................1083.1 Parâmetros controlados dependendo do modo de voo ...............................1373.2 Parâmetros controlados em Modo GPS ................................................................1373.3 Parâmetros controlados em Modo Altitude ........................................................1423.4 Parâmetros controlados dependendo do modo de voo ...............................1433.5 Diretrizes operacionais em caso de emergência ...............................................1533.6 Alertas Possíveis ..............................................................................................................1633.7 Alertas dependendo dos níveis críticos de bateria do UAV .........................1703.8 Alertas dependendo dos níveis críticos de bateria do CTR ..........................1723.9 Alerta acústico e visual de campo magnético .....................................................1733.10 Alertas de ligação de dados de diversidade ........................................................1753.11 Alerta de sinal de GPS ...................................................................................................1763.12 Alerta de motor (controlador) ...................................................................................1763.13 Alertas do sistema AscTec Trinity Control Unit .................................................1773.14 Peso da carga útil ............................................................................................................1894.1 Estrutura do Menu do Visor de Estado ..................................................................1915.1 Posições de Imagem de Panorama Esférico Definidas para 19 mm de
Comprimento Focal .......................................................................................................2145.2 Posições de Imagem de Panorama Esférico Definidas para 30 mm de
Comprimento Focal .......................................................................................................2156.1 Atualizar o Intel® Falcon™ 8+ UAV ............................................................................2236.2 Atualização do Firmware para o CTR ......................................................................2246.3 Atualizar o Firmware da Aplicação de Cockpit Control ..................................2256.4 Alertas Possíveis ..............................................................................................................2447.1 Dados Técnicos ................................................................................................................248

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 257
ÍNDICE REMISSIVOA
Acompanhamento na Sombra ..........................................................................................140Adaptador AC ...........................................................................................................................251Adaptador de carga útil .......................................................................................................236Ajustar o horizonte da câmara .............................................................................................41Alerta de Campo Magnético ...............................................................................................132Alertas ..........................................................................................................................................163Alertas do sistema do desvio de obstáculos (OA) .......................................................79Alertas do UAV e do CTR, níveis críticos de bateria .................................................170Alertas, AscTec Trinity Control Unit System ...............................................................177Alertas, Bateria .........................................................................................................................170Alertas, Campo Magnético ..................................................................................................172Alertas, CTR ...............................................................................................................................177Alertas, Falha do Motor ........................................................................................................176Alertas, GPS ...............................................................................................................................176Alertas, Ligação de Dados ...................................................................................................175Analisar Questões de Conexão de Ligação de Dados .............................................242Armazenar ..................................................................................................................................227Arrancar, Modo Altitude .......................................................................................................145Arrancar, Modo GPS ..............................................................................................................145Arrancar, Modo Manual ........................................................................................................146AscTec Navigator Software, Navegação por Waypoint ..........................................219Assistência ...................................................................................................................... 220, 245Assistente de Levantamento Topográfico Rápido ...................................................215Aterrar ..........................................................................................................................................160Aterrar, Modo Altitude ..........................................................................................................161Aterrar, Modo GPS ..................................................................................................................160Aterrar, Modo Manual ...........................................................................................................161Atualização de Bateria .............................................................................................................89Atualização de firmware Sony R10C .................................................................................69Atualização de firmware Sony RX1R II ..............................................................................59Atualizações de firmware ....................................................................................................220Atualizar, Aplicação de Cockpit Control .......................................................................225Atualizar, Intel® Cockpit Controller (CTR) .....................................................................224Atualizar, Intel® Falcon™ 8+ UAV ......................................................................................223
BBaterias hot swap ...................................................................................................................111Baterias, Cuidar ...........................................................................................................................92Baterias, hot swap ..................................................................................................................111Botão DNX ....................................................................................................................................71

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 258
CCalibração da bússola ......................................................................................................39, 40Calibração da carga útil ...........................................................................................................39Câmara de Enquadramento Total Sony Alpha 7R .......................................................42Câmara Sony R10C RGB .........................................................................................................60Capacidade da bateria .............................................................................................................87Carga Útil de Inspeção .............................................................................................................47Carga Útil de Inspeção, Cuidados Gerais .........................................................................50Cargas úteis - Opções de câmara .......................................................................................34Carregar .........................................................................................................................................84Ciclos de Carga ...........................................................................................................................86Circle of Interest (COI) ...........................................................................................................209Comunicação sem fios ..........................................................................................................250Configuração regional ..........................................................................................................131Controlar o Intel® Falcon™ 8+ UAV, CTR .......................................................................149Controlo de Câmara Independente (Independant Camera Control, ICC) ..........31Controlo de Câmara, CTR .......................................................................................................43Controlo de Carga Útil de Inspeção, CTR ........................................................................50Controlo de Carga Útil de Inspeção, Visor de Estado ................................................52
DDescolar ......................................................................................................................................144Desligar o UAS .........................................................................................................................162Desvio de obstáculos (OA) .............................................................................................60, 73Dicas de Operação .................................................................................................................151Direitos de Privacidade e Propriedade .............................................................................11Diretrizes de Segurança ............................................................................................................ 8Diretrizes Gerais e Alertas, Baterias ...................................................................................90Distance Guard (proteção de distância) ...........................................................................78Distance Hold (manutenção de distância) ......................................................................78Distância de afastamento ...............................................................................................60, 75
EEcrãs de Informação Principal ...........................................................................................204Eliminação da Bateria ...............................................................................................................93Em Voo ........................................................................................................................................151Emergências, Em Voo ...........................................................................................................153Especificações Técnicas .......................................................................................................247Estabelecer uma conexão entre o CTR e o UAV ........................................................241Estado da Bateria .......................................................................................................................87Estado de carga ..........................................................................................................................85Estimativa de Erro da Bússola ...........................................................................................141

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 259
FFunções Especiais ...................................................................................................................209
GGarantia de Produto .................................................................................................................93Georreferência ............................................................................................................................58
HHome Position (Posição Base) ...........................................................................................134
IInstruções de Embalagem .....................................................................................................95Instruções de Segurança de Informação da Bateria ...................................................90Intel Platform Flash Tool (PFT) ............................................................................................69Intel® Backpack ...........................................................................................................................94Intel® Cockpit Controller (CTR) ................................................................................. 25, 250Intel® Falcon™ 8+ UAS ................................................................................................................ 7Intel® Falcon™ 8+ UAV ................................................................................................... 19, 248Intel® Falcon™ 8+ UAV, Cuidar ...........................................................................................226Intel® High Resolution Imaging Payload ..........................................................................54Intel® Imaging Payload ............................................................................................................60Intel® Powerpack Batteries ....................................................................................................81Intel® Powerpack Batteries, carregamento .....................................................................84Intel® Powerpack Battery .....................................................................................................251
LLimitações de Operação ......................................................................................................189Limitações, Operação ............................................................................................................189Limpar ..........................................................................................................................................226Link Loss Procedure ..............................................................................................................132
MMalas de Transporte .................................................................................................................94Manutenção ..............................................................................................................................220Menu BMS .....................................................................................................................................85Missão AscTec Navigator Software, concluir uma missão ....................................130Missão AscTec Navigator Software, iniciar e voar uma missão ..........................129Missão AscTec Navigator Software, interromper uma missão ............................130Modo Altitude ..........................................................................................................................142Modo Altitude, Arrancar .......................................................................................................145Modo Altitude, Aterrar ..........................................................................................................161Modo de Carga ............................................................................................................................85Modo Erro BMS ...........................................................................................................................89

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 260
Modo GPS ..................................................................................................................................137Modo GPS, Arrancar ..............................................................................................................145Modo GPS, Aterrar ..................................................................................................................160Modo Manual ............................................................................................................................143Modo Manual, Arrancar ........................................................................................................146Modo Manual, Aterrar ...........................................................................................................161Modos de Voo ..........................................................................................................................136Motores, Arrancar e Parar ...................................................................................................144Mudar uma Carga Útil (Câmara) ...........................................................................................37
NNavegação por Waypoint ....................................................................................................219Nenhum Vídeo de Pré-visualização no Tablet com Ecrã Tátil do CTR ............242
OOpções de Câmara, Visor de Estado .................................................................................44Operar o Sistema ....................................................................................................................110
PPacotes de Funcionalidades de Software ....................................................................100Pacotes de Funcionalidades de Software, Anuais ....................................................104Pacotes de Funcionalidades de Software, Ativar ......................................................103Pacotes de Funcionalidades de Software, Vitalícios ...............................................104Panorama ...................................................................................................................................210Planeamento da missão .......................................................................................................150Preparar o Intel® Cockpit Controller (CTR) ..................................................................112Preparar o Intel® Falcon™ 8+ UAV ....................................................................................110Projetos PATH ..........................................................................................................................118
RRealSense™ ...................................................................................................................................60Recetor GNSS ..............................................................................................................................54Registos de Voo ............................................................................................................ 106, 243Resolução de Problemas .......................................................................................... 220, 241
SSegundo monitor de operação ............................................................................................33Segurança primeiro ..................................................................................................................... 7Sensores de Navegação .......................................................................................................249Situações com Receção GPS Variável ............................................................................135Sony Alpha 7R, Cuidados Gerais .........................................................................................42Sony Alpha 7R, Definições de Câmara .............................................................................45Sony RX1R II .................................................................................................................................54Substituição de hélices ........................................................................................................228

USER MANUALINTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 261
Substituição do trilho para o motor ...............................................................................230Suporte Cardan ..........................................................................................................................24Suporte de Câmara Estabilizado de Forma Dinâmica ...............................................24
TTablet com ecrã tátil ...................................................................................................... 31, 114Taxas de Subida/Descida ....................................................................................................249Taxas de Viragem ...................................................................................................................249Transporte .................................................................................................................................227Trilhos para motor ....................................................................................................................23
UUnidade Central .........................................................................................................................21Uso Previsto ................................................................................................................................... 7
VVelocidade do Ar ....................................................................................................................249Verificação pós-voo ..................................................................................................................17Verificação pré-voo ...................................................................................................................14Verificação UAS e de segurança ..........................................................................................12Verificações Automatizadas de Arranque ....................................................................131Vida Útil da Bateria ....................................................................................................................93Visor de estado ................................................................................................................ 30, 190Voo ................................................................................................................................................147








![cfc.org.br · Web view[ ] O(s) autor(es) cede(m) os direitos autorais da publicação à Revista Brasileira de Contabilidade e ao Conselho Federal de Contabilidade. [ ] O(s) autor(es)](https://img.document.onl/doc/110x75/605643033cba4c37402f973b/cfcorgbr-web-view-os-autores-cedem-os-direitos-autorais-da-publicao.jpg)