Embed Size (px)
Citation preview

UNIVERSIDADE ESTADUAL DE GOIÀS UNIDADE UNIVERSITÁRIA DE GOIÂNIA – ESEFFEGO
ESCOLA SUPERIOR DE EDUCAÇÃO FÍSICA E FISIOTERAPIA D O ESTADO DE GOIÁS
ALCENDINO CÂNDIDO JARDIM NETO
CLASSIFICAÇÃO E CARACTERIZAÇÃO DAS VARIÁVEIS FUNCIONAIS BÁSICAS DOS MÉTODOS DE SUSPENSÃO PARCIAL
DE PESO CORPORAL EMPREGADOS NA REABILITAÇÃO DA MARCHA.
GOIÂNIA, outubro de 2008.

UNIVERSIDADE ESTADUAL DE GOIÀS UNIDADE UNIVERSITÁRIA DE GOIÂNIA – ESEFFEGO
ESCOLA SUPERIOR DE EDUCAÇÃO FÍSICA E FISIOTERAPIA D O ESTADO DE GOIÁS
ALCENDINO CÂNDIDO JARDIM NETO
CLASSIFICAÇÃO E CARACTERIZAÇÃO DAS VARIÁVEIS FUNCIONAIS BÁSICAS DOS MÉTODOS DE SUSPENSÃO PARCIAL
DE PESO CORPORAL EMPREGADOS NA REABILITAÇÃO DA MARCHA.
Trabalho de Conclusão de Curso (TCC) orientado pela professora Ms. Flávia Martins Gervásio e apresentado à Universidade Estadual de Goiás – Unu Goiânia / ESEFFEGO - como requisito parcial para o recebimento do título de Bacharel em Fisioterapia.
GOIÂNIA, outubro de 2008.

UNIVERSIDADE ESTADUAL DE GOIÁS
CLASSIFICAÇÃO E CARACTERIZAÇÃO DAS VARIÁVEIS FUNCIONAIS BÁSICAS DOS MÉTODOS DE SUSPENSÃO PARCIAL DE PESO CORPORAL EMPREGADOS NA
REABILITAÇÃO DA MARCHA.
Elaborada por ALCENDINO CÂNDIDO JARDIM NETO
Aprovada por todos os membros da Banca Examinadora, foi aceita pelo Curso de graduação em Fisioterapia como requisito parcial para a obtenção do título de:
BACHAREL EM FISIOTERAPIA
Goiânia, 29 de outubro de 2008.
BANCA EXAMINADORA:
_________________________________ Profª Ms. Flávia Martins Gervásio
Orientadora Universidade Estadual de Goiás – ESEFFEGO
_________________________________ Prof. Adriano Luís Fonseca
Universidade Estadual de Goiás – ESEFFEGO
_________________________________ Profª Renata Cristina
Universidade Estadual de Goiás – ESEFFEGO

DEDICATÓRIA
A todos aqueles que, mesmo em vista das adversidades e limitações, nunca desistem dos seus sonhos.

AGRADECIMENTOS
Ao Senhor, acima de tudo, que me abençoa com o melhor momento da minha vida; À minha família que sempre me apoiou em TUDO e me ensinou o valor da educação,
trabalho duro e honestidade; Aos meus amigos, mais que companheiros, quase irmãos, que levarei para sempre como
minha maior conquista na Universidade; À Profª. Flávia, por acreditar nas minhas idéias, investindo seu tempo e dedicação.
Ao Prof. Gustavo, por sua inestimável ajuda no início deste projeto.

RESUMO
O Suporte Parcial de Peso Corporal (SPPC), definido como “um sistema de suspensão que reduz a força resultante entre as forças gravitacional e de suspensão”, é um recurso cada vez mais utilizado na resolução de alterações patológicas da marcha, alcançando excelentes resultados, mas que precisa ser mais bem estudado. Para tanto, este trabalho visou a classificação das variáveis funcionais básicas presentes nos métodos de SPPC empregados no treino da marcha. Isso foi realizado por meio de busca de artigos, trabalhos acadêmicos e livros, escritos entre 1991 e 2008, disponíveis em bibliotecas e bancos de dados virtuais. A elaboração do trabalho se deu em duas fases: na primeira foi feita a análise do termo “Suporte Parcial de Peso Corporal” e na segunda a classificação e caracterização do SPPC baseando-se em critérios físicos e funcionais. Após a análise dos materiais encontrados, chegou-se aos seguintes resultados: A) O termo Suporte Parcial de Peso Corporal não é o mais correto para nomear esse recurso, sugerindo-se Redução do Peso Corporal Aparente (RPCA) como melhor alternativa; B) As variáveis funcionais da RPCA classificadas foram: como variável principal o Tipo de Redução do Peso Corporal Aparente, e como variáveis secundárias a Estabilização, Fixação Corporal, Superfície de Apoio e Assistência na Execução da Marcha. Com o término do trabalho, chegou-se à conclusão de que estudos que descrevam com detalhes os efeitos produzidos especificamente por cada variável da RPCA no treino de marcha, assim como as situações clínicas em que seu emprego é o mais adequado, são bastante necessários. Palavras-chave: Suporte Parcial de Peso Corporal, marcha, reabilitação, classificação, Redução do Peso Corporal Aparente.

ABSTRACT
The Body Weight Support (BWS), defined as "a suspension system that reduces the force resulting from the gravitational forces and suspension" is a feature increasingly used in the resolution of pathological changes of the gait, achieving excellent results, but needs to be more thoroughly studied. For both, this study want make the classification of functional basic variables in BWS methods of training employees in the gait. This was done through a search of articles, scholarly papers and books, written between 1991 and 2008, available at libraries and databases online. The work took place in two phases: the first was the analysis of "Body Weight Support" name, and the second is the based on physical and functional criteria classification and characterization of the BWS. After the analysis of material found, it was the following results: A) The term of Body Weight Support is not the most correct name for this feature, suggesting it is Apparent Body Weight Reduction (ABWR) as a better alternative; B) The variables of functional ABWR were classified: as the main variable type Apparent Body Weight Reduction and secondary variables as the Stabilization, Setting Body, Surface Support and Assistance in the Implementation of Gait. With the finished work, came to the conclusion that studies that describe in detail the effects produced specifically for each variable in the gait training with ABWR, as well as clinical situations in which their employment is the most appropriate, are quite necessary. Key Words: Body Weight Support, gait, rehabilitation, classification, Apparent Body Weight Reduction.

SUMÁRIO
1. INTRODUÇÃO ........................................................................................... 07
2. REVISÃO DE LITERATURA ................................................................... 08
2.1. A marcha Humana ................................................................................ 08
2.1.1. As Fases da Marcha ................................................................... 08
2.1.2. O Controle Motor da Marcha .................................................... 10
2.1.3. Descrição da Marcha ................................................................. 12
2.2. A Utilização do SPPC na Reabilitação da Marcha ............................... 12
2.2.1. Histórico do Uso do SPPC ......................................................... 13
2.2.2. Parâmetros de Utilização do SPPC ............................................ 15
3. MATERIAIS E MÉTODOS ........................................................................ 17
3.1. Materiais ............................................................................................... 17
3.2. Métodos ................................................................................................ 17
4. RESULTADOS E DISCUSSÃO ................................................................. 19
4.1. Análise do termo “Suporte Parcial do Peso Corporal” ......................... 19
4.2. Classificação das Variáveis Funcionais Básicas do Sistema de SPPC . 19
4.2.1. Tipo de Redução ........................................................................ 20
4.2.1.1.Redução Restrita ................................................................... 21
4.2.1.2.Redução Irrestrita ................................................................ 22
4.2.2. Estabilização .............................................................................. 25
4.2.3. Fixação Corporal ....................................................................... 26
4.2.4. Superfície de Apoio ................................................................... 26
4.2.5. Assistência na Execução da Marcha .......................................... 27
5. CONCLUSÃO ............................................................................................. 29
REFERÊNCIAS BIBLIOGRÁFICAS .............................................................. 30

7
7
1 INTRODUÇÃO
Basicamente, sistemas de Suspensão Parcial de Peso Corporal (SPPC) são métodos
que permitem a redução da força resultante dos membros inferiores aplicada sobre a
superfície de contato. Utilizados com freqüência em pesquisas aeroespaciais, como um meio
de se determinar os efeitos da redução de gravidade sobre a postura e movimentação humana
e no treinamento de salto de ginastas e artistas circenses; esses sistemas passaram a ser
empregados como recurso no tratamento de diversos distúrbios da marcha.
Contudo, a ausência de classificação abrangente, falhas e divergências na
nomenclatura e conceituação, além da exígua disponibilidade de informações na literatura
nacional fazem com que a utilização desse recurso possa ser efetuada de maneira empírica. A
reunião e comparação crítica de publicações nessa área tornam o acesso a essas informações
mais fácil, além de agregar conhecimento ao campo da reabilitação de marcha, servindo de
base para outras pesquisas e sua utilização como recurso terapêutico.
Para tanto, este trabalho tem como objetivo geral classificar e caracterizar, com base
na literatura, as variáveis funcionais básicas dos métodos de SPPC mais utilizados em
pesquisas experimentais, revisões sistemáticas e ensaios clínicos aplicados à marcha humana,
enfocando suas formas de apresentação. Como meio para se alcançar o objetivo geral, foram
eleitos como objetivos específicos do trabalho:
• Escolher a definição mais abrangente de SPPC presente na literatura (conceito-guia);
• Levantar as técnicas aplicadas à marcha que se enquadram no conceito-guia;
• Identificar as variáveis funcionais básicas da SPPC;
• Levantar e comparar as formas de apresentação de cada variável encontradas na
literatura.

8
8
2 REVISÃO DE LITERATURA
2.1 A marcha humana
Definida como seqüência cíclica de movimentos com o objetivo de mover o corpo no
espaço de maneira estável, mantendo ao menos um dos membros inferiores em contato com a
superfície de apoio, a marcha é vista com uma sucessão constante entre “queda e ascensão”,
onde um dos membros serve de apoio para o corpo, que cai na direção e sentido do
deslocamento, enquanto o outro avança preparando-se para impedir a queda e assumindo o
papel de novo apoio (PERRY, 2005).
Essa seqüência de eventos, iniciada com o contato de um segmento na superfície de
apoio e finalizada com um novo contato do mesmo segmento, recebe o nome de Ciclo da
Marcha; sendo repetida até que o indivíduo alcance seu destino e interrompa o deslocamento
(PERRY, 2005).
2.1.1 As Fases da Marcha
Em virtude da complexidade desse ato motor, viu-se a necessidade de dividir o ciclo
da marcha em diferentes eventos para possibilitar uma melhor compreensão de suas
características e determinantes.A divisão mais simples é baseada em padrões de contato com a
superfície, separando o ciclo em dois períodos: apoio e balanço.
O apoio corresponde ao período no qual o membro encontra-se em contato com a
superfície de contato, sendo dividido em três intervalos determinados com base na relação
com o membro oposto: o duplo-apoio inicial (contato dos dois membros com superfície de
apoio), o apoio simples (contato de um único membro enquanto o oposto realiza o balanço) e
o duplo-apoio terminal (contato duplo ao fim do balanço do membro oposto). Já o balanço é
o período no qual o membro observado não toca a superfície de contato (PERRY, 2005).
Murray apud Perry (2005) relata que a duração dos períodos é de 60% do ciclo no
apoio e 40% no balanço, sendo 10% a duração de cada intervalo de duplo-apoio e 40% do
apoio simples. Contudo, essa distribuição pode mudar conforme a velocidade da marcha é
alterada. Quanto maior a velocidade de marcha, menor será a duração dos intervalos de duplo-
apoio e, consequentemente, maior a duração do apoio simples e balanço.

9
9
Durante o ciclo, diferentes padrões de movimentos são realizados pelas articulações
envolvidas na sua execução, correspondendo à demanda funcional exigida naquele momento.
Esses diferentes padrões de movimento foram denominados fases da marcha (Figura 1).
Figura 1 – FASES DA MARCHA
Fonte: adaptado de PERRY, 2005
De acordo com Perry (2005) o ciclo da marcha demanda o cumprimento de três tarefas
básicas: aceitação de peso, apoio simples e avanço do membro, executadas em oito fases,
com objetivos funcionais próprios: a aceitação de peso é cumprida pelas fases de contato
inicial e resposta à carga, o apoio simples pelas fases de apoio médio, apoio terminal e pré-
balanço, e a tarefa de avanço do membro elas fases de balanço inicial, balanço médio e
balanço terminal (Figura 2).
Figura 2 – DIVISÕES DO CICLO DA MARCHA
Fonte: adaptado de PERRY, 2005, p.8
Foi observado para cada fase do ciclo da marcha, o restante do corpo ou “unidade
passageiro” (PERRY, 2005) adquire uma nova posição. O Centro de Massa (CM), ponto de
representação da massa de um corpo (que no ser humano está localizado pouco acima da
PEGAR “TABELA” 2.1 DA PERRY
FIGURA ILUSTRANDO OS CICLOS DA MARCHA
10
10
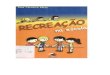
pelve), em uma representação tridimensional não descreve uma grande reta durante a marcha,
mas um conjunto de ondulações que demonstram a influência dos deslocamentos no plano
frontal sobre o eixo sagital ou de progressão (ROSE & GAMBLE, 1998) (Figura 3).
Entretanto, sem a influência compensatória produzida pelo sistema locomotor a oscilação do
CM seria ainda maior, tornando a marcha menos eficiente (PERRY, 2005).
Figura 3 – OSCILAÇÃO DO CENTRO DE MASSA DURANTE A MARCHA. A - Plano Transversal; B –
Plano Sagital; C – Plano Frontal.
Fonte: ROSE & GAMBLE, 1998, p.4.
2.1.2 O Controle Motor da Marcha
Controle motor é definido como a capacidade de regular ou orientar os mecanismos
essenciais para a realização do movimento (COOK apud PRUDENTE, 2006, p.10). Desde o
início do séc. XIX, pesquisadores como Sherrington (1910) e Brown (1911) citados por
Mackay-Lyons (2002) levantam a hipótese da existência de circuitos neuronais localizados na
medula capazes de produzir estímulos cíclicos necessários para a geração de movimentos de
marcha. Hoje, sabe-se que esses circuitos, embora ainda não comprovadamente em seres
humanos, estão presentes em diversas espécies de vertebrados, sendo capazes de gerar
movimentos rítmicos como a marcha sem a participação direta de estímulos conscientes ou

11
11
sensoriais. Essas redes especializadas e independentes recebem o nome de Geradores de
Padrões Centrais (GPC) (MACKAY-LYONS, 2002, p.70).
Os GPCs podem ser considerados como o “hardware básico” para a execução dos
engramas motores ou programas motores, conjunto de comandos pré-determinados enviados
aos músculos com o “timing” correto (MARSDEN, ROTHWELL & DAY apud MACKAY-
LYONS, 2002, p. 71), determinando a organização sinérgica muscular necessária para a
marcha (DIETZ, 2008, p.460). Apesar de isoladamente produzirem padrões de movimento, os
GPC necessitam de estímulos moduladores, para que os movimentos produzidos sejam
adequados às demandas exigidas ao indivíduo. Esses estímulos podem ser divididos em três
grandes grupos: estímulos supra-espinhais, estímulos sensoriais, e neuromoduladores
(MACKAY-LYONS, 2002, p.72).
Orlovsky, citado por Mackay-Lyons (2002), identificou cinco grandes papéis
desempenhados pelos estímulos supra-espinhais: 1) a ativação do GPC espinhal; 2) o controle
da intensidade de atuação do GPC; 3) a manutenção do equilíbrio durante a marcha; 4) a
adaptação do membro a condições externas; 5) a coordenação da locomoção com outros atos
motores.
Apesar da influencia de outras áreas encefálicas, o cerebelo e os núcleos da base
destacam-se por sua grande importância no controle supre-espinhal do movimento. O
cerebelo, por meio dos tratos espino-cerebelar anterior, espino-cerebelar posterior e espino-
retículo-cerebelar recebe informações sobre o estado de ativação do GCP (MACKAY-
LYONS, 2002, p.73) assim como da atividade motora propriamente dita, através do estado de
contração dos músculos, a velocidade dos segmentos corporais e a tensão em cápsulas e
tendões (MACHADO, 1993, p.221). E os núcleos da base, por outro lado, estão envolvidos
em uma ampla variedade de atividades motoras superiores, como o “planejamento, iniciação,
execução e término de programas motores, bem como seu aprendizado” (MACKAY-LYONS,
2002, p.73).
Já estímulos sensoriais possuem função de regulação e não geração da atividade dos
GCP, atuando como parte do controle motor ao fornecer informações sobre a resposta do
organismo às influencias ambientais durante a realização do movimento. Pearson, citado por
Mackay-Lyons (2002), apresenta três possíveis papéis desses estímulos no processo de
geração de movimentos rítmicos: 1) Reforçar a atividade dos GCP; 2) Proporcionar uma
adaptação ideal, ao garantir que o estímulo produzido pelo GCP é adequado ao estado do
corpo em movimento, no que diz respeito a força, velocidade, direção e posição dos

12
12
segmento; 3) Facilitar a transição das fases, garantindo que uma nova fase do ciclo se inicie
quando determinada condição biomecânica for alcançada.
Neuromoduladores são substâncias provenientes do sangue ou do próprio neurônio
capazes de influenciar a transmissão do impulso neural, inibindo, facilitando ou até mesmo
iniciando a atividade de um GCP.
2.1.3 Descrição da Marcha
A descrição do fenômeno de marcha pode ser feita de diferentes formas. Sob a ótica da
biomecânica, dois tipos de análise são essenciais para a obtenção de dados: a cinemática e a
cinética.
A cinemática corresponde à descrição do movimento, independente das forças
envolvidas na sua produção (WINTER, 1991). Essa descrição é realizada tendo como
parâmetros os deslocamentos, velocidades e acelerações lineares e angulares. Uma maneira
simples de avaliar cinematicamente a marcha é relacionar o parâmetro desejado com eventos
bem definidos do ciclo. O deslocamento linear, por exemplo, pode ser obtido através do
tamanho do passo (intervalo entre o contato inicial sucessivo dos dois membros) ou passada
(intervalo entre o contato inicial de um mesmo membro); e a velocidade linear através do
calculo da cadência (número de passos por minuto) (PERRY, 2005).
Já a cinética, analisa a marcha através das forças e resultantes energéticas, internas e
externas, responsáveis pelo movimento. As forças atuantes no indivíduo durante o evento da
marcha são: a força gravitacional, as forças externas (tendo a Força de Reação ao Solo como
exemplo mais expressivo) e as forças musculares e ligamentares. Apesar de não medir
diretamente a força de contração muscular, a eletromiografia (EMG) é, em geral, relatada
juntamente com variáveis cinéticas por revelar quais os músculos ou grupos musculares estão
em atividade durante determinada fase do ciclo (WINTER, 1991).
2.2 A utilização do SPPC na reabilitação da marcha
Traduzida do inglês Body Weight Support (BWS), o Suporte Parcial de Peso Corporal
(ABRAHÃO, 2005), Suporte de Peso Corporal (FARIA et al, 2005) ou Sistema de Suspensão
Corporal (LEÃES, 2006) é um sistema através do qual ocorre a redução da força resultante

13
13
entre as forças gravitacional e de suspensão (ROESLER, 2005) garantindo estabilidade na
postura de pé, com redução da força de contato entre as faces articulares do sistema locomotor
e entre a extremidade inferior do paciente e a superfície de apoio.
2.2.1 Histórico do uso do SPPC
O primeiro sistema de “suporte de peso” empregado pelo homem foi a água. Utilizada
desde tempos imemoriais para o lazer e adoração mística, seu uso como recurso de tratamento
data de 1500 a.C. com os hindus e os egípcios. Contudo, passando por Homero e Hipócrates,
a consolidação da água como meio propício para a realização de exercícios terapêuticos se
deu apenas no fim do séc. XIX com a criação dos spas, centros de tratamento hidroterapêutico
(IRION, 2000).
No século XX, com aumento das pesquisas com GCPs da marcha, surgiu a
necessidade de um sistema que garantisse a estabilidade na postura de deambulação com
liberdade dos segmentos envolvidos nesse processo. Um dos primeiros sistemas desse tipo,
utilizado por Smith et al. (Mackay-Lyons, 2002, p.77) na avaliação do comportamento motor
de gatos com secção da medula espinhal, consistia de um colete fixo a uma haste
estabilizando o tronco e membros anteriores enquanto os posteriores eram estabilizados pela
cauda, sustentada pelo pesquisador enquanto o animal caminhava em uma esteira (Figura 4).
Nasce o conceito atual de Suporte Parcial do Peso Corporal.
Figura 4 – SISTEMA DE SUPORTE
Fonte: MACKAY-LYONS, 2002, p.77.
Com o avanço das pesquisas nos anos 80, a melhora do padrão de marcha em gatos
submetidos à estimulação dos GCPs através do treino prolongado da marcha com SPPC

14
14
(BARBEAU & ROSSIGNOL apud THRELKELD, 2002, p.235) estimulou a realização de
trabalhos dessa ordem em seres humanos (FINCH & BARBEAU apud BARBEAU, 2004).
Para tanto, uma gama métodos de suspensão capazes de manter estabilidade na postura de
locomoção bípede foram desenvolvidos e utilizados (Figura 5), alcançando grande sucesso na
melhora do padrão de movimento de indivíduos acometidos por diferentes patologias
neurológicas: lesão medular (VISINTIN & BARBEAU apud MACKAY-LYONS, 2002),
AVE (VISINTIN, 1998), Doença de Parkinson (MIYAI, 2000), Paralisia Cerebral (Schindl,
2000), dentre outras. Em vista dos resultados alcançados, BARBEAU (2004, p.239) sugere
que a ocorrência de intensa atividade plástica neural é decorrente de alguns elementos
presentes nesse tipo de treinamento (Figura 6):
[...] “incluem (1) a especificidade do treino, (2) a geração de estímulos sensoriais apropriados, (3) desafiar a adaptação de postura e locomoção durante o treinamento, (4) adaptar a iniciação do treinamento apropriadamente, e (5) minimizar compensações.” [...]
[...] “include (1) task-specific training, (2) stimulating appropriate sensory inputs, (3) challenging both posture and locomotor adaptation while training, (4) timing the initiation of training appropriately, and (5) minimizing compensation.” [...]
Figura 5 – EQUIPAMENTOS DE SPPC
Fonte: A- PATIÑO (2007). B- VISINTIN (1998). C- WERNER (2002).
A B
C

15
15
Figura 6 – EVOLUÇÃO DO PADRÃO DE MARCHA DE PACIENTES PORTADORES DE LESÃO
MEDULAR TORÁCICA APÓS UTILIZAÇÃO DE SPPC: Gráfico de posicionamento do antepé ao longo do
ciclo da marcha. Cores mais quentes mostram superposição do marcador ao longo do tempo indicando
homogeneidade no posiocionamento: (A) Paciente com classificação ASIA-C. (B) Paciente com classificação
ASIA-B.
Fonte: GRASSO, 2004, p.1024.
Atualmente, a utilização do SPPC não se restringe apenas ao treinamento por
estimulação dos GCPs, produzindo também melhora de padrões alterados de marcha
provocados por desordens musculoesqueléticas como lombalgia (JOFFE apud
HAUPENTHAL et al, 2008) e pós-operatório de artroplastia total de quadril (HESSE et al.,
2003).
2.2.2 Parâmetros de utilização do SPPC
A porcentagem de suporte corporal tem sido o principal parâmetro empregado na
utilização do SPPC, sendo encontrada na metodologia da grande maioria dos trabalhos
pesquisados.

16
16
Sua mensuração é feita através da utilização de células de carga (ROESLER et al,
2005) ou pelo cálculo do contrapeso necessário à porcentagem de suporte desejada
(SCHINDL et al, 2000); dependendo do equipamento utilizado. Haupenthal et al (2008) relata
que na maioria dos trabalhos a medição é realizada com o paciente parado, podendo ser feita
durante a marcha se o equipamento utilizado possibilitar uma variação constante da carga
durante o movimento.
Embora não haja consenso quanto à porcentagem de suporte a ser oferecida, com
pesquisas utilizando de 10% (BARBEAU & VISINTIN, 2003) a 70% (FINCH, BARBEAU
& ARSENAUT, 1991) de redução, ou o tempo diário de tratamento, a maioria dos autores
utilizou 40% de suporte com 20 minutos de atendimento diário (HAUPENTHAL et al, 2008).

17
17
3 MATERIAIS E MÉTODOS
3.1 Materiais
Este trabalho de classificação e caracterização foi realizado com base em artigos
completos (publicados em periódicos indexados), trabalhos acadêmicos (dissertações e teses)
e capítulos de livros, publicados entre 1991 e 2008, obtidos em bibliotecas e bancos de dados
virtuais (Pubmed, Scielo e Sciencedirect) utilizando-se dos operadores boleares “and” e “or” e
os seguintes descritores:
• Na língua portuguesa: marcha, hipogravidade, suporte parcial de peso, SPPC,
suspensão, locomoção, controle motor, aprendizado motor, treino de marcha,
Fisioterapia, tratamento, reabilitação, gerador central de padrão, GCP e água.
• Na língua inglesa: gait, hypogravity, body weight support, BWS, suspension,
locomotion, motor control, motor learn, gait training, Physical Therapy,
treatment, rehabilitation, pattern central generator, PCG e water.
Os sites de busca Google e Google Acadêmico foram utilizados na buscas por artigos e
trabalhos acadêmicos específicos citados em artigos consultados.
3.2 Métodos
A elaboração deste trabalho se deu em duas fases: na primeira ocorreu a análise do
nome “Suporte Parcial de Peso Corporal” baseando-se em critérios físicos; na segunda fase
as variáveis funcionais básicas do SPPC foram classificadas e caracterizadas baseando-se em
critérios físicos e funcionais. A construção da segunda fase foi realizada em quatro etapas:
• Etapa 1: Escolha da definição de SPPC mais abrangente encontrada na
literatura. O conceito-guia escolhido para este trabalho foi o proposto por
Roesler et al. (2005, p.374), que definiu o SPPC como “um sistema de
suspensão que reduz a força resultante entre as forças gravitacional e de
suspensão”;

18
18
• Etapa 2: Busca na literatura de técnicas aplicadas ao estudo ou treinamento da
marcha, que se enquadrem no conceito-guia do trabalho, ainda que não
definidas como SPPC;
• Etapa 3: Identificação e caracterização das principais variáveis funcionais
presentes no SPPC;
• Etapa 4: Identificação e análise das formas de apresentação das variáveis
funcionais básicas das técnicas de SPPC.

19
19
4 RESULTADOS E DISCUSSÃO
4.1 Análise do termo “Suporte Parcial do Peso Corporal”.
Após a análise do termo que nomeia o sistema conceituado por Roesler et al. (2005),
percebeu-se que ele é incorreto, em vista da relação entre as palavras Suporte e Peso.
A definição mais próxima do contexto utilizado, apresentada pelo Dicionário Aurélio,
conceitua suporte como “aquilo que suporta ou sustenta alguma coisa”. Já peso (P) é definido
por Halliday, Resnick & Walker (1996) como o vetor de força que atrai um corpo ao objeto
astronômico mais próximo, no caso a Terra, sendo demonstrada matematicamente como a
relação entre a massa do corpo (m) e o módulo da aceleração em queda livre ou aceleração da
gravidade (g). Fala-se também em Peso aparente, como a relação entre a massa do corpo e o
módulo de sua aceleração resultante no eixo y.
Visto que peso, por se tratar de uma força, é uma grandeza imaterial, o ato físico de
sustentá-lo torna-se irrealizável. Desta forma, este trabalho sugere que o nome mais adequado
para representar esse sistema é: REDUÇÃO DO PESO CORPORAL APARENTE (RPCA),
já que a intensidade da força pode ser reduzida e o sistema permite a alteração do peso
aparente do indivíduo submetido a ele.
Infelizmente não foi encontrado entre os trabalhos pesquisados qualquer apontamento
ou discussão quanto à nomeação do recurso de RCPA. A inexistência de tais informações
entre os materiais consultados impossibilita o aprofundamento desta discussão, mas
demonstra o pioneirismo desta pesquisa.
4.2 Classificação das variáveis funcionais básicas do sistema de RPCA.
Analisando os sistemas de RPCA relatados na literatura, foi possível realizar uma
classificação de suas variáveis funcionais básicas. Didaticamente, determinou-se como
elemento ou variável principal o tipo de redução do peso corporal aparente propriamente
dito, tratando-se da força vertical ascendente; e, como variáveis de apoio: estabilização,
fixação corporal, superfície de apoio e assistência na execução da marcha, responsáveis por
dar suporte ao elemento principal. Juntamente com as variáveis básicas, as secundárias e
formas de apresentação (Figura 7) são descritas a seguir.

20
20
Figura 7 – CLASSIFICAÇÃO DAS VARIÁVEIS FUNCIONAIS DA RPCA E SUAS FORMAS DE
APRESENTAÇÃO.
A única classificação encontrada na literatura divide a RPCA em “SPPC estático e
dinâmico” (AASLUND & MOE-NILSSEN, 2008), enquadrados adiante neste trabalho como
Redução Restrita com Posição Fixa e Redução Irrestrita por Contrapesos, respectivamente
4.2.1 Tipo de Redução
Classificado como elemento ou variável principal da RPCA, o Tipo de Redução diz
respeito ao modo como atua a força vertical ascendente gerada pelo sistema. Essa força tem a
função de substituir ou complementar a atividade muscular necessária para vencer a gravidade
e manter o indivíduo em pé, além de diminuir a compressão articular nos membros inferiores
e tronco.
RPCA
Fixação Corporal
Estabilização
Tipo de Redução
Superfície de Apoio
Assistência na
execução da marcha
Ponto de Ancora-
gem
Região Corporal
Redução Restrita
Redução Irrestrita
Posição Fixa
Fase-dependente
Contra-pesos
Força-elástica
Regulação Pneumá-
tica
Empuxo
Solo
Esteira
Treinador de
Marcha
Esteira
Terapeuta
Treinador de
Marcha
Ativa Passiva
Equilíbrio
Apoio de mão
Um ponto
2 pontos
Estabilizadores
laterais
Viscosi- dade
VARIÁVEIS BÁSICAS
VARIÁVEIS SECUND
FORMAS DE APRESENT.

21
21
Basicamente, as formas de apresentação dos tipos de redução foram classificados
baseando-se na amplitude de movimento permitida ao centro de massa (CM) e sua relação
com a aplicação da força vertical ascendente, resultando em dois tipos: Redução Restrita e
Redução Irrestrita.
4.2.1.1 Redução Restrita
Utilizada no princípio das pesquisas com GCP e pela maioria dos autores pesquisados
(VISINTIN et al., 1998; BARBEAU & VISINTIN, 2003; PATIÑO et al., 2007; FINCH,
BARBEAU & ARSENAUT, 1991; ROESLER et al, 2005; PHADKE et al., 2006;
SULLIVAN, KNOWTON & DOBKIN, 2002; THRELKELD et al. 2002; MILLER, QUINN
& SEDDON, 2002; EFFING et al., 2006; ABRAHÃO, 2005; FIELD-FOTE, 2001; RIBEIRO
et al., 2004; WERNER, et al.,2002; e DAVID et al., 2006), a Redução Restrita foi
conceituada como aquela em que a força vertical ascendente é aplicada de modo a limitar a
posição do CM a uma amplitude de movimento pré-estabelecida, impedindo o seu
deslocamento ou interrompendo a aplicação da força. Pode ser dividida em dois subtipos com
características específicas: Posição Fixa e Fase-dependente.
A Redução Restrita com Posição Fixa é a modalidade mais simples de
redução. Sua utilização consiste da suspensão do corpo de um indivíduo por meio da
diminuição do comprimento ou elevação de uma cinta “inextensível” acoplada a ele (Figura
8-A), produzindo uma força de tração (T) que se opõe à gravidade. Em razão disso, o CM é
impedido de se deslocar inferiormente ao ponto onde a tração é máxima e, acima deste ponto,
a tração deixa de existir (Figura 8-B). Isso foi confirmado por Gordon et al. ao demonstrar
que a redução da mobilidade do CM é diretamente proporcional à taxa de suspensão.
A BT=P T=0

22
22
Figura 8 – REDUÇÃO RESTRITA COM POSIÇÃO FIXA. A - Esquema básico da modalidade. B – Relação
entre posição do CM e tração aplicada.
Esse dado apresenta uma possibilidade de utilização da Redução Restrita com Posição
Fixa no tratamento de disfunções específicas da marcha, através do treino de estratégias de
compensação que minimizem a oscilação do CM , quando isso se fizer necessário. De total
acordo com Perry (2005, p.36), “minimizar o total de deslocamento do centro de gravidade do
corpo em relação à linha de progressão é o maior mecanismo para reduzir o esforço muscular
da marcha e, consequentemente, conservar energia”, lembrando que “os movimentos do
membro [de apoio] contribuem para suavizar a trajetória do deslocamento vertical do corpo”
(PERRY, 2005, p.38).
Outra modalidade de Redução Restrita, porém de uso mais recente (WERNER et al.,
2002 e DAVID et al., 2006), é a Fase-dependente. Esse tipo de redução, intimamente
associada ao uso do Treinador de Marcha descrito adiante, promove o deslocamento do
indivíduo em posições esperadas para a fase do ciclo de marcha em que ele se encontra.
Embora haja mobilidade do CM, dando a sensação de liberdade de movimento, seu
deslocamento fora do local pré-determinado naquele momento é impedido. Uma sugestão
para o uso desta modalidade seria a aplicação em pacientes com déficit na adequação entre a
posição do CM ou tronco e a fase da marcha correspondente.
4.2.1.2 Redução Irrestrita
Ao contrário da restrita, a Redução Irrestrita é aquela em que a aplicação da força
vertical ascendente ocorre independente da posição do CM no espaço. Empregada há séculos
por meio da água (IRION, 2000), esse tipo de redução passou a ser intensamente estudado e
aplicado através de outros meios desde o início da corrida espacial (metade do século XX),
em especial no programa Apollo (LEÃES, 2006), avaliando-se os efeitos da hipogravidade na
marcha (GRIFFIN, TOLANI & KRAM, 1999) e postura de astronautas. Contudo, somente no
final do século XX, com o sucesso do uso da RPCA na estimulação dos GCPs da marcha,
esse tipo de redução passou a ser utilizado em pesquisas aplicadas à correção de alterações na
marcha (HESSE et al., 1999; SCHINDL et al., 2000 e EFFING et al., 2006).
As formas de aplicação da Redução Irrestrita encontradas na literatura variam de
acordo com o recurso empregado na geração da força vertical ascendente, produzindo

23
23
alterações semelhantes na marcha (aumento do tempo de duração e comprimento da passada
(LEÃES, 2006), menor gasto energético (DANIELSON & SUNNERHAGEN, 2000), dentre
outros). São eles: contrapesos, força elástica, regulação pneumática e empuxo.
O uso de contrapesos (LEÃES, 2006; SCHINDL et al., 2000 e EFFING et al., 2006)
baseia-se na aplicação de uma força vertical ascendente em um corpo, transmitida por um
cabo e proveniente da força-peso de outro corpo suspenso (Figura 9). A porcentagem de
redução do peso aparente é estimada com base na relação entre a massa do indivíduo e do
contrapeso.
Figura 9 – REDUÇÃO IRRESTRITA POR MEIO DE CONTRAPESOS.
Já a força elástica (GRIFFIN, TOLANI & KRAM, 1999; DONELAM & KRAM,
2000; e HESSE et al. 1999) é produzida pela deformação de uma faixa elástica ou mola
fixada no indivíduo que faz uso do sistema de RPCA, sendo diretamente proporcional ao seu
estiramento e à sua constante elástica - Lei de Hooke (HALLIDAY, RESNICK & WALKER,
1996). Os equipamentos que fazem uso dessa força são semelhantes ao utilizado por Kram,
Domingo & Ferris (1997) (Figura 10).

24
24
Figura 10 – REDUÇÃO IRRESTRITA POR FORÇA ELÁSTICA
FONTE: KRAM, DOMINGO & FERRIS, 1996, p. 823.
O empuxo foi descrito por Arquimedes como a força para cima aplicada a um corpo
imerso completa ou parcialmente em um fluido, tendo intensidade igual ao peso do fluido
deslocado (HALLIDAY, RESNICK & WALKER, 1996). Seu uso como técnica de RPCA é
concretizado através da imersão parcial do corpo na água. Demonstrado por Barela, Stolf &
Duarte (2006); Masumoto et al.(2007) e Roesler et al. (2006), esse método tem como
parâmetro básico o nível de imersão do indivíduo, sendo utilizada com maior freqüência pelos
autores a imersão até o processo xifóide do paciente. Sua grande vantagem em relação a todas
as outras técnicas de redução do peso corporal aparente é a capacidade de aplicar a força
vertical ascendente a todos os segmentos corporais.
A Regulação Pneumática, utilizada por Grasso et al. (2004) e Gordon et al. é uma
técnica peculiar de Redução Irrestrita. Muito semelhante à Redução Restrita com Posição
Fixa, ela consiste de um cabo “inextensível” que tem sua tração corrigida constantemente por
um sistema pneumático comandado por computador, de modo a mantê-la o mais próximo
possível de um valor pré-determinado, independentemente da variação de posição produzida
pelo indivíduo (Figura 11).

25
25
Figura 11 – REDUÇÃO IRRESTRITA POR REGULAÇÃO PNEUMÁTICA
FONTE: GORDON et al.
4.2.2 Estabilização
Outra variável básica da RPCA, a estabilização corresponde ao conjunto de elementos
que atuam na manutenção da postura ideal para a realização do treino de marcha. Foi dividida
em dois grupos: ativa e passiva.
Estabilização Ativa corresponde a todo recurso empregado de maneira ativa pelo
indivíduo na manutenção de sua postura durante a realização da RPCA. Nesse grupo foram
identificados o equilíbrio e o apoio de mão (estrutura localizada anteriormente ou na lateral do
indivíduo de modo a oferecer suporte adicional ao paciente no caso de instabilidade).
Entretanto, a Estabilização Passiva caracteriza a manutenção da postura do indivíduo
independente de sua participação nesse processo. A maioria dos autores consultados utiliza o
cabo responsável pela redução do peso aparente como agente estabilizador passivo, uma vez
que fazendo o uso da Redução Restrita, esta impede o abaixamento do corpo, garantindo
estabilidade vertical e liberdade de rotação no eixo axial.
Outras formas de apresentação da estabilização passiva são a utilização de cabos
redutores paralelos (MILLER, QUINN & SEDON, 2002), que promovem maior estabilidade

26
26
no eixo axial; estabilizadores laterais (EFFING et al., 2006 e WERNER et al., 2002),
representados pelo auxílio do terapeuta ou faixas elásticas acopladas ao paciente, garantindo
estabilidade no plano frontal; e a viscosidade, presente no treino de marcha na água, realiza
uma força que se opõe ao movimento do indivíduo, auxiliando em sua estabilidade.
A estratégia de estabilização mais adequada varia a cada paciente, devendo sua
escolha ser feita objetivando o ponto de equilíbrio entre estabilidade e liberdade de
movimentos, bem como segurança e comodismo.
4.2.3 Fixação Corporal
Mais uma variável funcional básica dos sistemas de RPCA é a Fixação Corporal,
definida neste trabalho como o elemento responsável pela ligação entre o corpo do indivíduo
e o agente redutor do peso aparente. A forma de apresentação mais comum desta variável é o
colete ou cinta de fixação.
Duas variáveis secundárias foram observadas e, embora não tenham sido encontradas
pesquisas que as avaliasse, suas diferentes formas de apresentação podem influenciar de
maneira diversa o movimento e a postura do indivíduo submetido à RPCA. A primeira delas,
a Região Corporal representa, como o termo já diz, a região do corpo em que o agente fixador
está localizado. Nas pesquisas analisadas observou-se três regiões de fixação: a pelve, pelve e
abdômen, e pelve e tronco. Sua influência poderia ser percebida na liberdade de movimento
permitida ao tronco do indivíduo; contudo, não foram encontrados trabalhos que
confirmassem essa hipótese. Já a segunda variável secundária, o Ponto de Ancoragem, diz
respeito ao local onde o agente de redução se liga ao agente fixador. Uma hipótese é que a
relação entre o Ponto de Ancoragem e o CM do indivíduo pode influenciar drasticamente seu
grau de estabilidade.
4.2.4 Superfície de Apoio
A Superfície de Apoio corresponde à superfície de contato com a extremidade distal
dos membros inferiores do indivíduo. Foram encontradas, no material pesquisado, três formas
de apresentação desta variável: solo, esteira e treinador de marcha.

27
27
O uso do solo como superfície de apoio apresenta como vantagens a geração de maior
estimulação cognitiva pela constante alteração do campo visual (BARBEAU et al., 2004) e,
principalmente, a alta especificidade de treinamento (MILLER et al., 2002). A esteira, por
outro lado, oferece um ambiente controlado, adequado para o posicionamento de câmeras
para análise, não requerendo amplos espaços para sua execução (ALTON et al., 1998); além
de motivar o paciente a se auto-superar informando valores como velocidade e distância
percorrida (MILLER et al., 2002). Por último, o treinador de marcha, relatado por Werner et
al. (2002) e David et al. (2006), é uma superfície de apoio móvel que realiza movimentação
passiva dos pés, movimentando-os de maneira semelhante ao realizado durante marcha
normal. Assim como a esteira, não necessita de grandes espaços para sua utilização.
4.2.5 Assistência na execução da marcha
Em certos casos, quando o indivíduo que faz uso da RPCA não possui força ou
controle muscular suficiente para posicionar os membros inferiores de maneira adequada à
realização dos movimentos de marcha, é necessária a adoção de medidas auxiliares que visam
contornar o problema. Essa Assistência na execução da marcha foi encontrada na literatura
pesquisada, sobre três formas diferentes: esteira elétrica, terapeuta e treinador de marcha.
A assistência à marcha é realizada pela esteira elétrica no momento em que “o
membro de suporte [apoio] é carregado para trás” (ALTON et al., 1998), levando a crer que
haja maior facilitação na realização dos rolamentos de calcanhar, tornozelo e antepé. Outros
efeitos relatados do uso da esteira em relação ao solo durante a marcha na mesma velocidade,
são: o aumento da cadência com diminuição no tempo da fase de apoio, e maior amplitude de
movimento de quadril, especialmente na flexão (ALTON et al., 1998).
O terapeuta promove assistência à marcha posicionando manualmente os membros
inferiores do indivíduo na posição mais próxima possível ao desejado para a fase da marcha
correspondente (Figura 12). Contudo, apesar da maior eficácia, é um método mais desgastante
ao terapeuta, fazendo com que em alguns momentos sejam adotadas outras técnicas menos
desgastantes e talvez menos eficazes (KOSAK & REDING apud WERNER, 2002).

28
28
Figura 12 – ASSISTÊNCIA NA EXECUÇÃO DA MARCHA REALIZADA PELO TERAPÊUTA.
FONTE: adaptado de WERNER et al., 2002, p. 2897.
Todavia, o recurso de assistência na execução da marcha mais recentemente
desenvolvido é o treinador de marcha. Atuando também como Superfície de Apoio, ele
substitui o papel do terapeuta ao realizar a movimentação passiva ou ativo-assistida das
extremidades dos membros inferiores de maneira adequada. Werner et al. (2002) relata que o
treinador de marcha não produz alteração cinemática significativa quando comparado à
utilização de esteira e assistência promovida pelo terapeuta. Contudo, a eliminação da
necessidade de um profissional com função exclusiva de promoção de assistência na execução
da marcha torna a realização da RPCA mais barata e eficiente (Figura 13).
Figura 13 – TREINADOR DE MARCHA.
FONTE: adaptado de WERNER et al., 2002, p. 2897.

29
29
5 CONCLUSÃO
Com o término deste trabalho de classificação, percebeu-se que as diversas variáveis
funcionais básicas encontradas na RPCA merecem maior atenção por parte da comunidade
científica e de profissionais da saúde. Estudos que descrevam com detalhes os efeitos
produzidos especificamente por cada variável no treino de marcha, assim como as situações
clínicas em que seu emprego é o mais adequado, são bastante necessários.
Viu-se também que elementos aplicados ao estudo e tratamento da marcha como a
água e os Simuladores de Hipogravidade atendem ao conceito-guia do trabalho, podendo ser
definidos como meios promotores de RPCA, ainda que não sejam classificados na literatura
como “sistemas de SPPC”.
Além disso, o uso da RPCA mostrou-se um excelente recurso no tratamento de
distúrbios funcionais da marcha por oferecer, em teoria, subsídios à sua realização; suprindo
déficits de equilíbrio e força, além de estimular de maneira satisfatória os mecanismos neurais
envolvido na realização desse ato motor complexo.

30
30
REFERÊNCIAS
AASLUND, M. K. & MOE-NILSSEN, R. Treadmill walking with body weight support: Effect of treadmill, harness and body weight support systems. Gait and Posture. n. 28, 2008. p. 303-308. ABRAHÃO, F. Análise do Controle Motor Após Treino em Esteira com Suporte Parcial de Peso Corporal em Pacientes com Hemiplegia Crônica. Tese (Doutorado em Fisioterapia) – Universidade Federal de São Carlos, São Carlos, 2005. ALTON, F. et al. A kinematic comparison of overground and treadmill walking. Clinical Biomechanics. v. 13, 1998. p. 434-440. AURÉLIO. Dicionário de Língua Portuguesa. Rio de Janeiro: Nova Fronteira. 1° ed. BARBEAU, H. et al. Optimizing locomotor function with body weight support training and functional electrical stimulation. In: LATASH, M. L. & LEVIN, M. F. (Editors). Progress in Motor Control. Illinois: Human Kinetics, 2004. p.237-251. BARBEAU, H. & VISINTIN, M. Optimal Outcomes Obtained With Body-Weight Support Combined With Treadmill Training in Stroke Subjects. Archives of Physical Medicine and Rehabilitation. v. 84, 2003. p. 1458-1465. BARELA, A.; STOLF, S. & DUARTE, M.. Biomechanical characteristics of adults walking in shallow water and on land. Journal of Electromyography and Kinesiology. v. 16, 2006. p.250-256. DANIELSSON, A. & SUNNERHAGEN, K.. Oxygen Consumption During TreadmillWalking With andWithout BodyWeight Support in Patients With Hemiparesis After Stroke and in Healthy Subjects. Archives of Physical Medicine and Rehabilitation. v. 81, 2000. p. 953-957. DAVID, D. et al. Oxygen Consumption During Machine-Assisted and Unassisted Walking: A Pilot Study in Hemiplegic and Healthy Humans. Archives of Physical Medicine and Rehabilitation. v. 87, 2006. p. 482-489.

31
31
DIETZ, V. Body weight supported gait training: from laboratory to clinical setting. Brain Research Bulletin. n.76, 2008. DONELAM, M. & KRAM, R.. Exploring dynamic similarity in human running using simulated reduced gravity. The Journal of Experimental Biology. v. 203, 2000. p.2405-2415. EFFING, T. W. et al. Body weight-supported treadmill training in chronic incomplete spinal cord injury: a pilot study evaluating functional health status and quality of life. Spinal Cord. v. 44, 2006. p. 287-296. FARIA, C. D. V. Utilização do suporte de peso corporal em solo no treino De marcha do lesado medular. Acta Fisiatrica, v.12, n. 1, 2005. p.21-25. FIELD-FOTE, E. Combined Use of Body Weight Support, Functional Electric Stimulation, and Treadmill Training to Improve Walking Ability in Individuals With Chronic Incomplete Spinal Cord Injury. Archives of Physical Medicine and Rehabilitation. v. 82, 2001. p. 818-824. FINCH, L.; BARBEAU, H. & ARSENAULT, B. Influence of Body Weight Support on Normal Human Gait: Development of a Gait Retraining Strategy. Physical Therapy. v. 71, n. 11. nov 1991. p.842-856. GORDON, K. et al. The Importance of Using an Appropriate Body Weight Support System in Locomotor Training. Disponível em: www.harkema.ucla.edu/bwsposter. Acesso em: 14 de outubro de 2008. GRASSO, R. et al. Distributed Plasticity of Locomotor Pattern Generators in Spinal Cord Injured Patients. Brain. v. 127, n. 5, 2004. p. 1019-1034. GRIFFIN, T.; TOLANI, N. & KRAM, R.. Walking in simulated reduced gravity: mechanical energy fluctuations and exchange. J Appl Physiol. v.88, 1999. p.383-390. HALLIDAY, D.; RESNICK, R. & WALKER, J. Fundamentos da Física. Rio de Janeiro: LTC, 1996. v.1: Mecânica. v. 2: Gravitação, Ondas e Termodinâmica. HAUPENTHAL, A. et al. Análise do Suporte de Peso Corporal para o Treino de Marcha. Fisioterapia e Movimento. v. 2, n. 21. abr/jun 2008. p.85-92.

32
32
HESSE, S. et al. Treadmill Training With Partial Body-Weight Support After Total Hip Arthroplasty: A Randomized Controlled Trial. Archives of Physical Medicine and Rehabilitation. v. 84, 2003. p. 1767-1773. HESSE, S. et al. Treadmill Walking With Partial Body Weight Support Versus Floor Walking in Hemiparetic Subjects. Archives of Physical Medicine and Rehabilitation. v. 80, 1999. p. 421-427. IRION, J. M. Panorama Histórico da Reabilitação Aquática. In: RUOTI, Richard G., MORRIS, David M. & COLE, Andrew J. Reabilitação Aquática. São Paulo: Manole, 2000. Cap. 1. KRAM, R.; DOMINGO, A. & FERRIS, D. Effect of reduced gravity on the preferred walk–run transition speed. The Journal of Experimental Biology. v. 200, 1997. p.821-826. LEÃES, R. N. Desenvolvimento de um Sistema para Avaliação de Marcha em Simulação de Hipogravidade (SAMSH). Dissertação (Mestrado em Engenharia Elétrica) – Pontifícia Universidade Católica do Rio Grande do Sul, Porto Alegre, 2006. MACHADO, A. Neuroanatomia Funcional. Belo Horizonte: Atheneu. 2 ed. 1993. p. 221. MACKAY-LYONS, M. Central Pattern Generation of Locomotion: A Review of the Evidence. Physical Therapy, v.82, n.1, p.69-83, 2002. MASUMOTO, K et al. A comparison of muscle activity and heart rate response during backward and forward walking on an underwater treadmill. Gait & Posture. v. 25, 2007. p.222-228. MILLER, E. W; QUINN, M & SEDDON, P. Body Weight Support Treadmill and Overground Ambulation Training for Two Patients With Chronic Disability Secondary to Stroke. Physical Therapy. v. 82, n. 1. jan. 2002. p.53-61. MIYAI, I. et al. Treadmill Training With Body Weight Support: Its Effect on Parkinson’s Disease. Archives of Physical Medicine and Rehabilitation. v. 81, 2000. p. 849-852. PATIÑO, M.S. et al. Características cinemáticas, cinéticas e eletromiográficas do andar de adultos jovens com e sem suporte parcial de peso corporal. Revista Brasileira de Fisioterapia, São Carlos, v. 11, n. 1, jan./fev., 2007. p. 19-15

33
33
PERRY, J. Análise de Marcha. Barueri: Manole, 2005. v.1: Marcha normal. PHADKE, C. P. et al. Soleus H-reflex modulation in response to change in percentage of leg loading in standing after incomplete spinal cord injury. Neuroscience Letters. n. 403, 2006. p. 6-10. PRUDENTE,C.O.M. Comportamento motor em crianças com paralisia cerebral: efeitos do treino de marcha em esteira com suspensão de peso e conceito neuroevolutivo bobath associado ou não ao reforço tangível. Dissertação (Mestrado em Ciências Ambientais e Saúde) - Universidade Católica de Goiás, Goiânia, 2006. RIBEIRO, L.H. et al.. Treino de marcha com equipamento de suspensão em pacientes com lesão medular – estudo preliminar. Medicina da Reabilitação. v. 23, n. 2, 2004. p.25-28. ROESLER, H. et al. Desenvolvimento e teste de suporte de peso corporal Instrumentalizado para o treino de marcha em esteira. Revista Brasileira de Fisioterapia, São Carlos v. 9, n. 3, 2005. p. 373-376. ROESLER, H. et al. Dynamometric analysis of the maximum force applied in aquatic human gait at 1.3 m of immersion. Gait & Posture. v. 24, 2006. p. 412-417. ROSE, J. & GAMBLE, J. . Marcha Humana. São Paulo:Editorial Premier,1998. SCHINDL, M. R. et al. Treadmill Training With Partial Body Weight Support in nonambulatory Patients With Cerebral Palsy. Archives of Physical Medicine and Rehabilitation. v. 81, 2000. p. 301-306. SULLIVAN, K.; KNOWTON, B. & DOBKIN, B.. Step Training With Body Weight Support: Effect of Treadmill Speed and Practice Paradigms on Poststroke Locomotor Recovery. Archives of Physical Medicine and Rehabilitation. v. 83, 2002. p. 683-691. THRELKELD, A. J. et al. Temporospatial and kinematic gait alterations during treadmill walking with body weight suspension. Gait and Posture. n. 17, 2002. p. 235-245. VISINTIN, M. et al. A New Approach to Retrain Gait in Stroke Patients Through Body Weight Support and Treadmill Stimulation. American Heart Association. Disponível em: http://www.strokeaha.org, p.1122-1128, mar. 1998. Acesso em: 09 abr. 2008.

34
34
WERNER, M.A.C., et al. Treadmill Training With Partial Body Weight Support and an Electromechanical Gait Trainer for Restoration of Gait in Subacute Stroke Patients: A Randomized Crossover Study. American Heart Association. Disponível em: http://www.strokeaha.org, p.2895-2901, dez. 2002. Acesso em: 09 abr. 2008. WINTER, D. A. The biomechanics and motor control of human gait: normal, elderly and pathological. 2 ed. Waterloo: University of Waterloo, 1991.