Embed Size (px)
Citation preview

Jorge Carneiro da Costa
Projeto e desenvolvimento de umacentral hidráulica servo acionada
Jorg
e Ca
rneir
o da
Cos
ta
outubro de 2014UMin
ho |
201
4Pr
ojet
o e
dese
nvol
vim
ento
de
uma
cent
ral h
idrá
ulic
a se
rvo
acio
nada
Universidade do MinhoEscola de Engenharia
outubro de 2014
Dissertação de MestradoEngenharia Mecatrónica
Trabalho efetuado sob a orientação doProfessor Eurico Augusto Rodrigues de Seabra
Jorge Carneiro da Costa
Projeto e desenvolvimento de umacentral hidráulica servo acionada
Universidade do MinhoEscola de Engenharia
iii
Ao meu orientador, Professor Eurico Augusto Rodrigues de Seabra, por todo o apoio e
orientação, pelas palavras de motivação e encorajamento, pela sua análise e sábias sugestões
que contribuíram para o desenvolvimento deste trabalho.
A todos os meus amigos que com os seus comentários me proporcionaram uma visão mais
objetiva e desprendida sobre os temas em discussão.
Aos meus familiares que não deixaram de manifestar o seu apoio e em especial ao meu irmão
José Luís que se manifestou sempre disponível e atento.
AGRADECIMENTOS
iv
v
As centrais hidráulicas servo acionadas têm vindo a ser implementadas em alguns setores da
indústria, como forma de contrariar os crescentes custos da energia e a nossa pegada ecológica.
As vantagens associadas à utilização destas tecnologias levou-nos a tentar compreender os
desafios e oportunidades da sua integração.
Propõe-se caracterizar os sistemas em uso, demonstrando as suas vantagens relativamente aos
sistemas tradicionais e projetar um sistema alternativo que possa refletir as necessidades atuais.
O desenvolvimento do projeto teve como base a ideia de uma aplicação genérica, permitindo a
sua implementação em retrofitting e dispensando a intervenção de técnicos especializados que
oneram fortemente os sistemas hidráulicos.
A abordagem de cálculo e seleção dos componentes hidráulicos parte do principio do controlo
volumétrico, onde se estabelece um modelo matemático do sistema hidráulico e se faz uma
reflexão sobre a seleção dos seus componentes, justificando a sua utilização.
As simulações permitem concluir sobre as vantagens energéticas e ambientais do sistema de
controlo volumétrico apresentado, comparando-o com os sistemas existentes no mercado. Foi
ainda realizado um pequeno estudo económico com base num caso concreto, do qual se
pretende aferir sobre a viabilidade das tecnologias em estudo.
O projeto discutido ao longo deste trabalho revela uma solução alternativa de controlo
volumétrico, que embora com objetivos distintos das tecnologias existentes no mercado,
apresenta-se como uma solução a considerar. As distintas funcionalidades de cada projeto,
deixa um espaço para a implementação de cada solução em função das suas especificidades.
RESUMO

vi

vii
Servo driven hydraulic power stations have been implemented in some sectors of industry, as a
way to counter the rising costs of energy and our ecological footprint. The advantages
associated with the use of these technologies led us to try to understand the challenges and
opportunities of their integration.
It is proposed to characterize the systems in use, demonstrating its advantages with respect to
traditional systems and project an alternative system that would reflect the present needs.
The development of the project was based on the idea of a generic application, allowing its
implementation in retrofitting and dismissing the intervention of specialized technicians that
saddled the hydraulic systems.
The calculation approach and hydraulic components selection presented is based on the
principle of volumetric control, which provides a mathematical model of a hydraulic system
and makes considerations about component selection, justifying its use.
The simulations allow to conclude on the energy and environmental benefits of the presented
volumetric control system by comparing it with existing systems on the market. He was also an
accomplished small economic study on the basis of a concrete case, which seeks to gauge on
the viability of technologies under study.
The project discussed throughout this work reveals an alternative solution of volumetric control,
which although with distinct objectives of existing technologies in the market, presents itself as
a solution to consider. The different features of each project, leave a space for the
implementation of each solution in the light of their specific characteristics.
ABSTRACT
viii
ix
AGRADECIMENTOS .............................................................................................................. iii
RESUMO ................................................................................................................................... v
ABSTRACT ............................................................................................................................. vii
ÍNDICE ...................................................................................................................................... ix
ÍNDICE DE FIGURAS ............................................................................................................. xi
ÍNDICE DE TABELAS .......................................................................................................... xiii
1 Introdução ............................................................................................................................... 1
2 Estado da Arte ......................................................................................................................... 3
2.1 - Central hidráulica com bomba de débito constante ........................................................ 3
2.2 - Central hidráulica com bomba de caudal variável ......................................................... 5
2.3 - Central hidráulica com motor assíncrono e variador de frequência ............................... 7
2.4 - Central hidráulica servo acionada................................................................................... 9
2.5 - Acumuladores ............................................................................................................... 11
2.5.1 - Acumuladores de massas ....................................................................................... 11
2.5.2 - Acumuladores de mola. ......................................................................................... 11
2.5.3 - Acumuladores de pistão ......................................................................................... 12
2.5.4 - Acumuladores de membrana.................................................................................. 13
2.5.5 - Acumuladores de bexiga ........................................................................................ 13
2.6 - Bombas hidráulicas ...................................................................................................... 14
2.6.1 - Bomba de pistões radiais ....................................................................................... 15
2.6.2 - Bomba de palhetas ................................................................................................. 16
2.6.3 - Bomba de engrenagens externas ............................................................................ 16
2.6.4 - Bomba de engrenagens internas............................................................................. 17
2.7 - Motores eléctricos ........................................................................................................ 19
2.7.1 - Motores de indução. ............................................................................................... 19
2.7.2 - Motores síncronos de íman permanente ................................................................ 22
2.8 - Estudo do ploblema ...................................................................................................... 22
2.8.1 - Princípio de funcionamento ................................................................................... 24
ÍNDICE
x
2.9 - Conclusão ..................................................................................................................... 26
2.10 - Ambiente de simulação .............................................................................................. 27
3 Modelação ............................................................................................................................. 29
3.1 - Estudo do modelo hidráulico ........................................................................................ 30
3.2 - Cálculo do acumulador ................................................................................................. 36
3.3 - Cálculo da bomba ......................................................................................................... 38
3.4 - Cálculo do motor .......................................................................................................... 39
4 Exemplo de aplicação e simulação ....................................................................................... 43
4.1 - Central hidráulica com válvula reguladora de pressão ................................................. 44
4.2 - Central hidráulica servo acionada................................................................................. 50
4.2.1 - Cálculo da bomba .................................................................................................. 51
4.2.2 - Cálculo do motor.................................................................................................... 52
4.2.3 - Cálculo do acumulador .......................................................................................... 53
4.2.4 - Cálculo do controlador ........................................................................................... 54
4.2.5 - Especificação do motor e controlador.................................................................... 56
4.2.6 - Simulação ............................................................................................................... 57
4.3 - Discussão dos resultados .............................................................................................. 59
5 Conclusões ............................................................................................................................ 65
6 Trabalhos futuros .................................................................................................................. 67
Bibliografia ............................................................................................................................... 69
ANEXOS .................................................................................................................................. 73
Anexo I ................................................................................................................................. 75
Anexo II ................................................................................................................................ 77
Anexo III ............................................................................................................................... 83
Anexo IV ............................................................................................................................... 87
Anexo V ................................................................................................................................ 89
Anexo VI ............................................................................................................................... 91
xi
Figura 2.1 Central hidráulica com bomba débito constante e válvula reguladora de pressão. ... 4
Figura 2.2 Central hidráulica com bomba de débito fixo, válvula reguladora de pressão e de descarga ao reservatório. ............................................................................................................ 4
Figura 2.3 Central hidráulica com bomba de caudal variável compensada em pressão. ........... 6
Figura 2.4 Bomba variável de pistões axiais. A10VO. Adaptado de Bosch Rexroth Canada Corp., 2006. ................................................................................................................................ 7
Figura 2.5 Esquema hidráulico da bomba variável de pistões axiais. Reproduzido de Bosch Rexroth Canada Corp., 2006. ..................................................................................................... 7 Figura 2.6 Sistema DFEn 5000. Reproduzido de REXROTH BOSCH GROUP. Sytronix DFE. .................................................................................................................................................... 8
Figura 2.7 Sistema Sytronix SVP7000. Reproduzido de REXROTH BOSCH GROUP. Sytronix SvP – Servo Variable-Speed Pump Drive. ................................................................. 10 Figura 2.8 Acumulador de massas. Adaptado de Ferreira 2006. .............................................. 11 Figura 2.9 Acumulador de molas. Adaptado de Ferreira, 2006. .............................................. 12 Figura 2.10 Acumulador de pistão. Adaptado de Ferreira, 2006. ............................................ 12 Figura 2.11 Acumulador de membrana. Adaptado de Ferreira, 2006. ..................................... 13
Figura 2.12 Acumulador de bexiga. Adaptado de Ferreira, 2006. ........................................... 14
Figura 2.13 Bomba de pistões axiais, (a) débito fico (b) débito variável. Reproduzido de Ferreira, 2006. .......................................................................................................................... 15
Figura 2.14 Bomba de palhetas. Reproduzido de Ferreira, 2006. ............................................ 16 Figura 2.15 Bomba de engrenagens externas. Reproduzido de Ferreira, 2006. ....................... 17
Figura 2.16 Bomba de engrenagens internas. Reproduzido de Ferreira, 2006. ........................ 18
Figura 2.17 Classificação dos motores de indução. Adaptado de KUPHALDF, T. R. 2014 ... 21
Figura 2.18 Comparação entre as antigas e as atuais classes de eficiência de motores elétricos. Reproduzido de ZVEI. (12/2010). ............................................................................................ 21 Figura 2.19 Compensação do caudal pelo acumulador. ........................................................... 25 Figura 2.20 Esquema hidráulico com o princípio de funcionamento. ...................................... 25
Figura 2.21 Comparação em eficiência, dinâmica e custos das diferentes tecnologias. Adaptado de KOMSTA, J, (2014). ........................................................................................... 26 Figura 3.1 Esquema de blocos do princípio de funcionamento. ............................................... 29 Figura 3.2 Esquema de blocos do processo .............................................................................. 30 Figura 3.3 Comparação do processo adiabático e isométrico .................................................. 34 Figura 3.4 Modelo do sistema hidráulico ................................................................................. 36 Figura 3.5 Resposta da bomba à solicitação de caudal............................................................. 36 Figura 3.6 Rampa de arranque do motor. ................................................................................. 37 Figura 3.7 Fluxograma para a seleção do motor. ..................................................................... 40 Figura 3.8 Curvas de carga do motorMSK071D-0450. Reproduzido de Bosch Rexroth AG 2006 .......................................................................................................................................... 41
Figura 4.1 Central hidráulica com válvula reguladora de pressão e válvula proporcional. ..... 44
Figura 4.2 Motor de indução 4 kW 4 polos. ............................................................................. 45
ÍNDICE DE FIGURAS
xii
Figura 4.3 Potência ativa consumida pelo motor do circuito hidráulico .................................. 45
Figura 4.4 Potência ativa consumida pelo motor com descarga ao tanque do circuito hidráulico. ................................................................................................................................. 46
Figura 4.5 Circuito térmico correspondente ao circuito hidráulico da figura 4.1. ................... 46
Figura 4.6 Cálculo das perdas de energia na bomba em MATLAB Simulink. ........................ 47 Figura 4.7 Reservatório para central da figura 4.1. .................................................................. 49 Figura 4.8 Temperatura do fluido no período de 60 minutos. .................................................. 50 Figura 4.9 Central hidráulica com servo motor e acumulador. ................................................ 51 Figura 4.10 Carga do servo motor. Adaptado de Bosch Rexroth AG 2006. ............................ 53
Figura 4.11 Desvio da pressão no circuito em função do volume do acumulador. .................. 54
Figura 4.12 Controlador com base no erro da pressão. ............................................................ 55 Figura 4.13 Modelo simplificado do sistema. .......................................................................... 55 Figura 4.14 Processo de carga adiabático para o acumulador de 0.001 m³. ............................. 56
Figura 4.15 Esquema do bloco de acionamento em MATLAB Simulink. .............................. 57
Figura 4.16 Resposta do motor à solicitação máxima do caudal.............................................. 58 Figura 4.17 Consumo de energia e flutuação da pressão. ........................................................ 58 Figura 4.18 Comparação da potência do motor com o caudal de saída. .................................. 59
Figura 4.19 Retorno do investimento em função da carga do sistema ..................................... 61
Figura 4.20 Relação entre a viscosidade e eficiência da bomba.adaptado de Herzog et al., 2005. ......................................................................................................................................... 62
Figura 4.21 Propriedades do óleo SEA-50. Reproduzido do MATLAB R2014a. ................... 63
Figura 4.22 Perda de potência em função da temperatura do fluido. ....................................... 63
Figura 4.23 Relação entre a viscosidade e eficiência da bomba. Adaptado de Herzog et al., 2005. ......................................................................................................................................... 64
xiii
Tabela 2.1 Comparação de bombas hidráulicas. ...................................................................... 18 Tabela 4.1 Características base para o projeto das centrais hidráulicas. .................................. 43 Tabela 4.2 Dimensões do reservatório. .................................................................................... 49 Tabela 4.3 Características dimensionais dos elementos da central da figura 5.1. .................... 49
Tabela 4.4 Elementos para o cálculo de Kp. ............................................................................ 56 Tabela 4.5 Economia de energia em função da carga do sistema. ........................................... 60
Tabela 4.6 Identificação de componentes e custos dos componentes da central hidráulica tradicional. ................................................................................................................................ 60
Tabela 4.7 Identificação de componentes e custos dos componentes da central hidráulica servo acionada. ......................................................................................................................... 61
Tabela 4.8 Configuração para a simulação de perdas vs temperatura. ..................................... 64
ÍNDICE DE TABELAS
xiv
Projeto e desenvolvimento de uma central hidráulica servo acionada
Capítulo 1 – Introdução 1
1 Introdução
Os avanços tecnológicos, a abertura dos mercados, a democratização do consumo, a consciência
global sobre a limitação de recursos naturais e o aumento da população, levou o ser humano a
repensar os seus hábitos de consumo. É pois recorrente a preocupação com o consumo de
energia, não só pelo seu custo crescente mas também pela sua escassez. A preocupação com o
impacto ambiental, completa uma visão centrada no desenvolvimento tecnológico, procurando
reduzir os efeitos nefastos da produção em massa na preservação do planeta.
Apesar da evolução dos acionamentos elétricos e das suas inegáveis vantagens, os sistemas
hidráulicos desempenham um papel importante nas tecnologias atuais. Devido à capacidade de
operar enormes densidades de potência, a hidráulica industrial é insubstituível, quando são
necessárias grandes forças e binários.
Nos últimos anos a hidráulica tradicional evoluiu para a eletro-hidráulica. O uso da eletrónica
industrial e as metodologias de controlo tornaram-se complementos indispensáveis. A ideia de
que a hidráulica é uma fonte de transmissão de potência robusta mas difícil de controlar, tem
vindo a transformar-se.
Atualmente, a hidráulica é um meio extremamente eficaz de transmissão de potência e
acionamento mecânico, que rivaliza em precisão, velocidade, potência e rendimento com
qualquer sistema de servo acionamento elétrico. Neste sentido, tem vindo a ser alvo de
profundas melhorias, não só pelos métodos de produção e materiais disponíveis, mas sobretudo
pela introdução da eletrónica industrial no controlo de válvulas e produção de potência
hidráulica.
A eletrónica industrial tornou-se acessível em especial no que respeita aos meios de comando
e controlo. Os microcontroladores, anteriormente dispendiosos e de acesso limitado, estão hoje
Projeto e desenvolvimento de uma central hidráulica servo acionada
2
Capítulo 1 - Introdução
implementados em todo o tipo de equipamentos, dispondo de velocidades de processamento
que permitem o controlo em tempo real e com elevada resolução.
As centrais hidráulicas existentes no mercado, fruto dos desenvolvimentos referidos, são
baseadas no acoplamento de motores síncronos ou assíncronos às bombas de débito fixo ou
variável, permitindo o controlo de pressão e caudal no circuito de acionamento. As
metodologias de controlo necessárias requerem vastos conhecimentos em diversas áreas de
engenharia. Tal diversidade de conhecimentos, não está disponível para a concretização de um
objetivo que não é central na maior parte das pequenas e médias empresas.
O controlo de centrais hidráulicas pode ser resistivo ou volumétrico. O controlo resistivo,
”tradicional”, é realizado pela derivação do excesso de fluido óleo hidráulico, através de uma
válvula, (normalmente uma válvula proporcional controlada por pressão). No controlo
volumétrico, o fluxo é ajustado pelo deslocamento da bomba. Este, pode ser ajustado pela
variação da rotação, pela variação de débito da bomba, (bomba de caudal variável), ou por
ambos os métodos. O controlo resistivo possui excelentes propriedades dinâmicas, no entanto,
apresenta baixa eficiência energética. O controlo volumétrico é dispendioso devido ao elevado
custo das bombas e/ou sistemas de controlo.
A construção de centrais hidráulicas baseadas no controlo volumétrico requer um alto nível de
automação e sensorização que pressupõe desde logo uma utilização específica. Os custos de
desenvolvimento inerentes a este tipo de tecnologia limitam a sua utilização a aplicações mais
genéricas.
A construção de centrais hidráulicas servo acionadas de aplicação genérica são uma necessidade
para as pequenas e médias empresas que desejam competir com as vantagens associadas à
eficiência e dinâmica dos mais recentes desenvolvimentos na área.
O âmago desta dissertação de mestrado, centra-se no desenvolvimento de centrais hidráulicas
baseadas no controlo volumétrico, na sua eficiência e impacto ambiental, discutindo uma
metodologia complementar, compatível com as exigências atuais.
Projeto e desenvolvimento de uma central hidráulica servo acionada
Capítulo 2 – Estado da Arte 3
2 Estado da Arte
Uma central hidráulica pode ter diversas configurações, tentando otimizar recursos tais como:
consumo de energia, eficiência e impacto ambiental, sempre com o objetivo primeiro de
cumprir os requisitos para os quais foi projetado, ou seja, fornecer potência hidráulica.
Sem querer fazer uma análise exaustiva de todas as tipologias de acionamento, caracterizam-se
a seguir os sistemas mais comuns e as inovações existentes na atualidade.
2.1- Central hidráulica com bomba de débito constante
Este tipo de central hidráulica é a mais comum, com custos de investimento reduzidos e simples
de implementar. Tipicamente, uma bomba de engrenagens é acionada por um motor de indução
assíncrono. A pressão no circuito hidráulico é controlada por uma válvula reguladora que
deriva, o excesso de caudal para o reservatório.
O motor trabalha continuamente na sua rotação e potência nominal, ainda que, nenhum tipo de
acionamento esteja em curso. Uma vez que o dimensionamento da central é realizado tendo em
conta o caudal máximo dos atuadores, a sua eficiência fica marcada pelo número e frequência
do ciclo de trabalho dos mesmos.
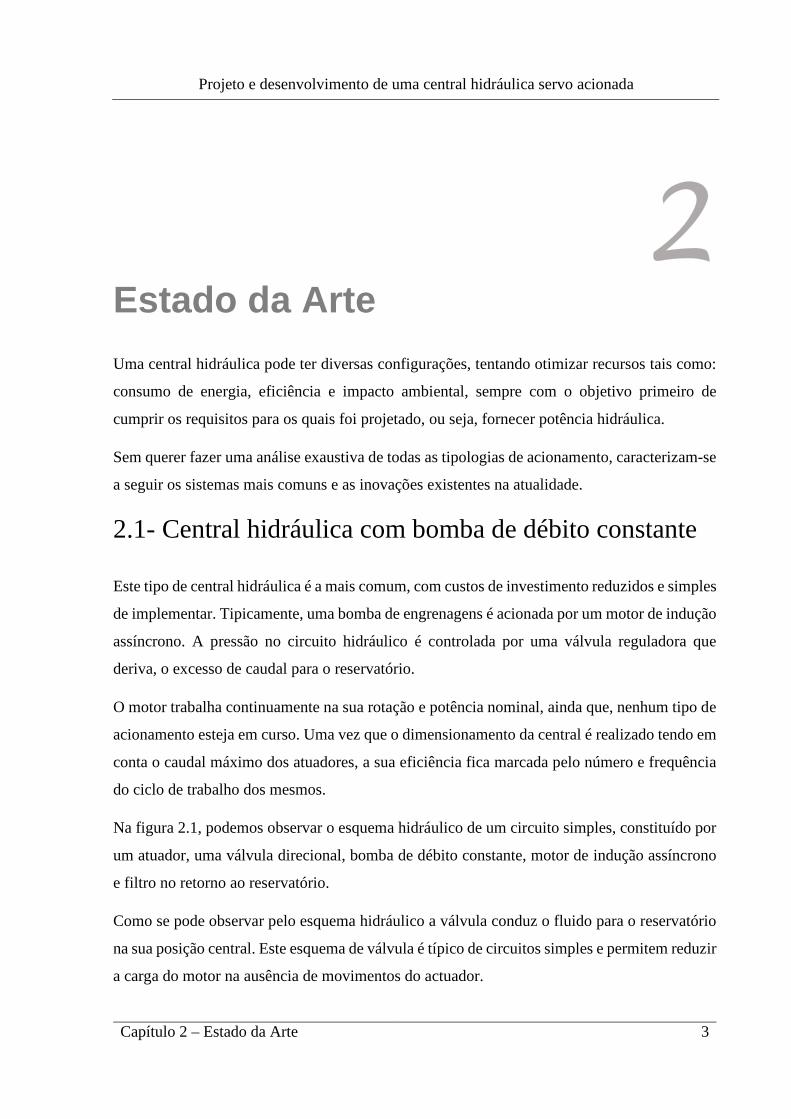
Na figura 2.1, podemos observar o esquema hidráulico de um circuito simples, constituído por
um atuador, uma válvula direcional, bomba de débito constante, motor de indução assíncrono
e filtro no retorno ao reservatório.
Como se pode observar pelo esquema hidráulico a válvula conduz o fluido para o reservatório
na sua posição central. Este esquema de válvula é típico de circuitos simples e permitem reduzir
a carga do motor na ausência de movimentos do actuador.
Projeto e desenvolvimento de uma central hidráulica servo acionada
4
Capítulo 2 – Estado da Arte
Devido à sua simplicidade e eficiência, este tipo de central hidráulica, produz muito calor que
é necessário dissipar. O calor armazenado no fluido é transportado ao longo do circuito
hidráulico provocando perturbações, avarias e baixando o rendimento de componentes
essenciais como válvulas, bombas e atuadores.
A dissipação da energia térmica torna-se ainda mais importante já que, para dissipar a energia
térmica é necessário fazer uso de mais energia elétrica, baixando deste modo o rendimento total.
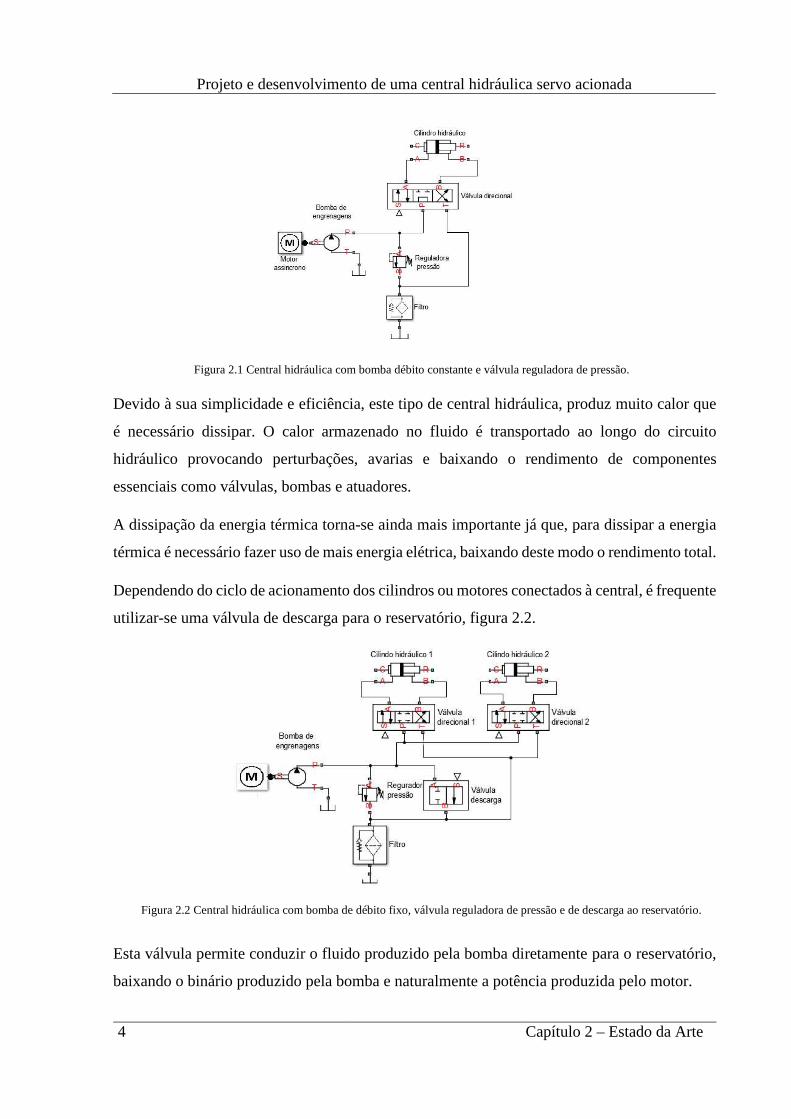
Dependendo do ciclo de acionamento dos cilindros ou motores conectados à central, é frequente
utilizar-se uma válvula de descarga para o reservatório, figura 2.2.
Esta válvula permite conduzir o fluido produzido pela bomba diretamente para o reservatório,
baixando o binário produzido pela bomba e naturalmente a potência produzida pelo motor.
Figura 2.1 Central hidráulica com bomba débito constante e válvula reguladora de pressão.
Figura 2.2 Central hidráulica com bomba de débito fixo, válvula reguladora de pressão e de descarga ao reservatório.

Projeto e desenvolvimento de uma central hidráulica servo acionada
Capítulo 2 – Estado da Arte 5
Nos instantes em que a válvula de descarga está aberta, a pressão no circuito é apenas a
necessária para fazer atuar as válvulas, a resistência hidráulica dos tubos e a queda de pressão
no filtro, consequentemente, a potência mecânica é muito reduzida. No entanto, a potência
consumida pelo motor é ainda significativa devido às perdas elétricas e mecânicas deste.
A colocação da válvula de descarga implica alguns cuidados e desvantagens que vale a pena
salientar:
- Os atuadores ficam em perda, isto é, devido às fugas hidráulicas das válvulas estes podem
movimentar-se uma vez sujeitos a cargas;
- O comando das válvulas deve ser precedido do fecho da válvula de descarga. Este facto
implica algum refinamento no circuito de controlo, em especial quando o circuito possui um
grande número de atuadores;
- Independentemente do fluxo necessário para os atuadores o motor e a bomba estarão a debitar
a sua potência máxima.
- Todos os componentes do circuito hidráulico (em especial a bomba) estão continuamente
sujeitos a choques hidráulicos, o que diminui a sua vida útil.
É importante notar que a função da válvula de descarga da figura 2.2. é realizada pela válvula
direcional da figura 2.1.
2.2- Central hidráulica com bomba de caudal variável
As bombas de caudal variável permitem ajustar o seu deslocamento ao débito solicitado pelo
circuito, mantendo a pressão de trabalho. O seu princípio de funcionamento baseia-se do ajuste
dos elementos de bombagem em função da pressão do circuito.
Ainda que sejam inegáveis as vantagens de uma bomba de caudal variável, algumas limitações,
porém, devem ser consideradas:
- A rotação do motor é constante, consumindo uma parte relevante de energia nas perdas
elétricas e mecânicas do mesmo;
- O rendimento da bomba e das válvulas proporcionais associadas representa uma considerável
perda de energia;
Projeto e desenvolvimento de uma central hidráulica servo acionada
6
Capítulo 2 – Estado da Arte
- O custo das bombas de caudal variável é muito elevado.
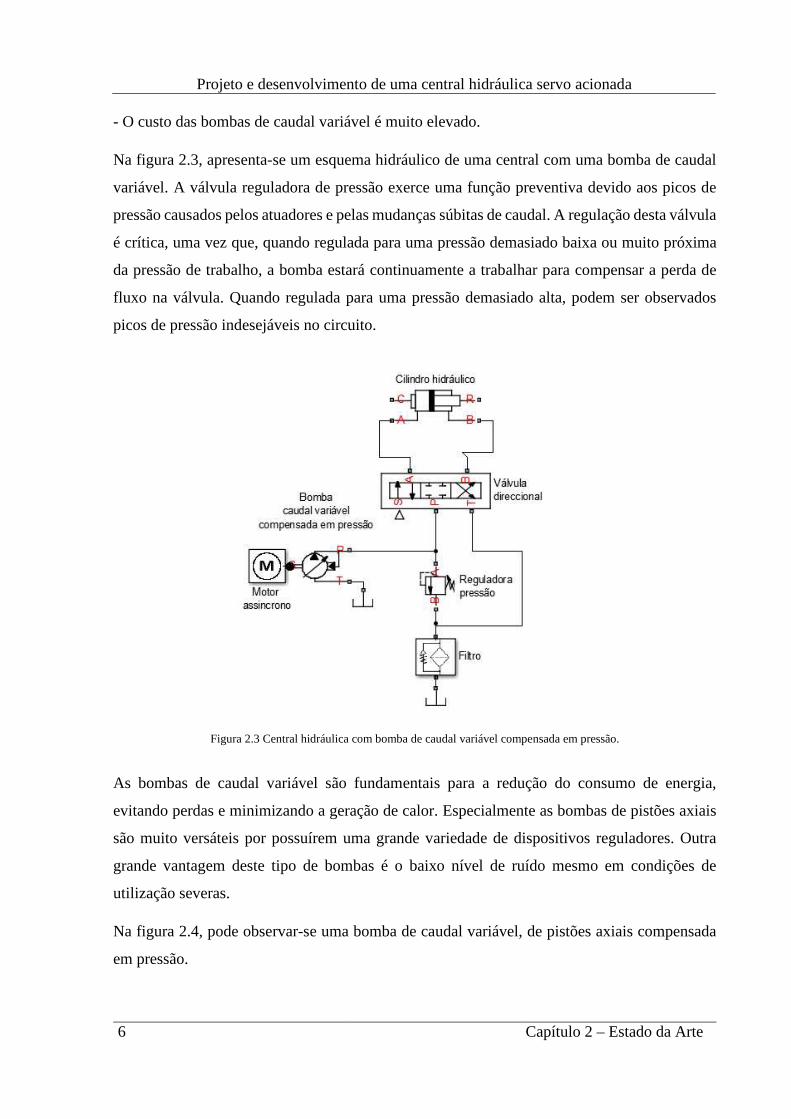
Na figura 2.3, apresenta-se um esquema hidráulico de uma central com uma bomba de caudal
variável. A válvula reguladora de pressão exerce uma função preventiva devido aos picos de
pressão causados pelos atuadores e pelas mudanças súbitas de caudal. A regulação desta válvula
é crítica, uma vez que, quando regulada para uma pressão demasiado baixa ou muito próxima
da pressão de trabalho, a bomba estará continuamente a trabalhar para compensar a perda de
fluxo na válvula. Quando regulada para uma pressão demasiado alta, podem ser observados
picos de pressão indesejáveis no circuito.
As bombas de caudal variável são fundamentais para a redução do consumo de energia,
evitando perdas e minimizando a geração de calor. Especialmente as bombas de pistões axiais
são muito versáteis por possuírem uma grande variedade de dispositivos reguladores. Outra
grande vantagem deste tipo de bombas é o baixo nível de ruído mesmo em condições de
utilização severas.
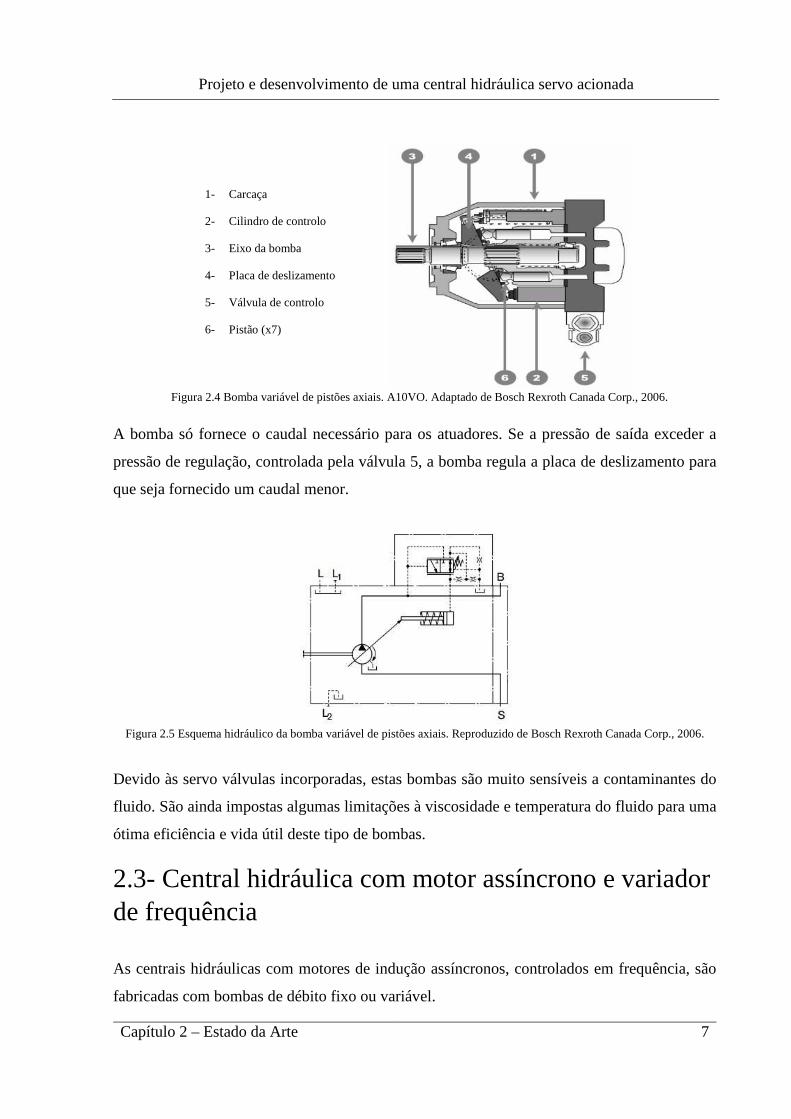
Na figura 2.4, pode observar-se uma bomba de caudal variável, de pistões axiais compensada
em pressão.
Figura 2.3 Central hidráulica com bomba de caudal variável compensada em pressão.
Projeto e desenvolvimento de uma central hidráulica servo acionada
Capítulo 2 – Estado da Arte 7
1- Carcaça
2- Cilindro de controlo
3- Eixo da bomba
4- Placa de deslizamento
5- Válvula de controlo
6- Pistão (x7)
A bomba só fornece o caudal necessário para os atuadores. Se a pressão de saída exceder a
pressão de regulação, controlada pela válvula 5, a bomba regula a placa de deslizamento para
que seja fornecido um caudal menor.
Devido às servo válvulas incorporadas, estas bombas são muito sensíveis a contaminantes do
fluido. São ainda impostas algumas limitações à viscosidade e temperatura do fluido para uma
ótima eficiência e vida útil deste tipo de bombas.
2.3- Central hidráulica com motor assíncrono e variador de frequência
As centrais hidráulicas com motores de indução assíncronos, controlados em frequência, são
fabricadas com bombas de débito fixo ou variável.
Figura 2.4 Bomba variável de pistões axiais. A10VO. Adaptado de Bosch Rexroth Canada Corp., 2006.
Figura 2.5 Esquema hidráulico da bomba variável de pistões axiais. Reproduzido de Bosch Rexroth Canada Corp., 2006.
Projeto e desenvolvimento de uma central hidráulica servo acionada
8
Capítulo 2 – Estado da Arte
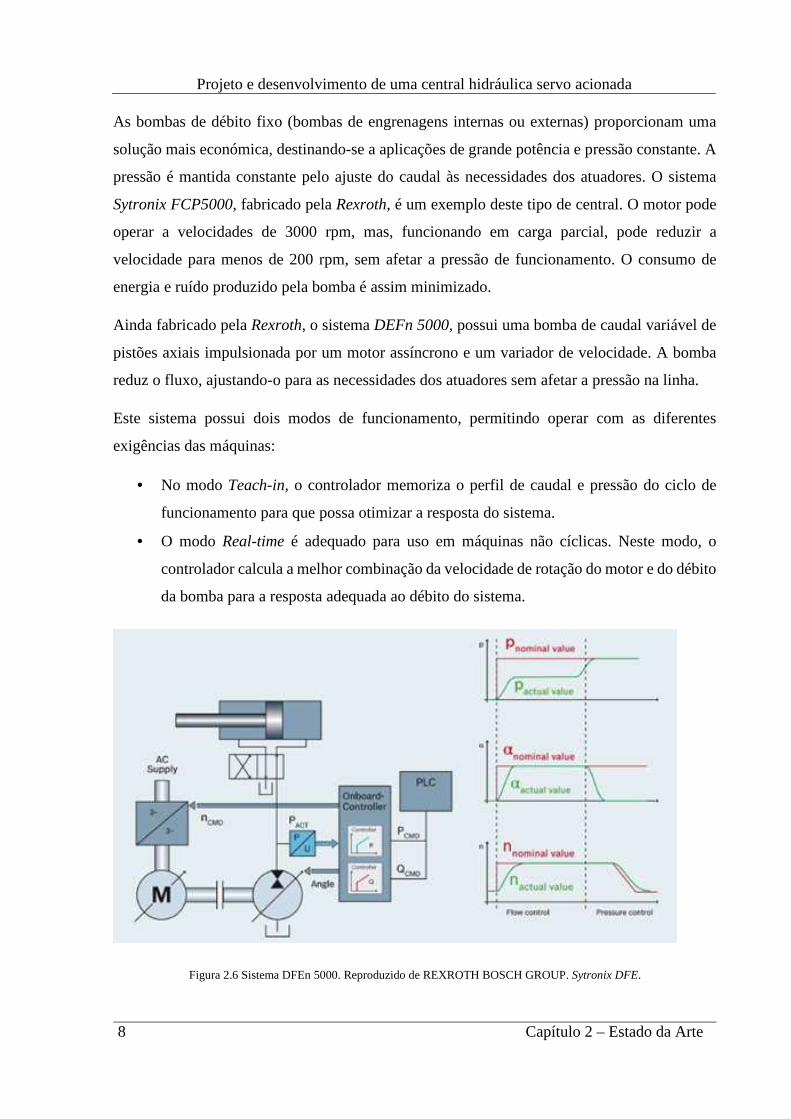
As bombas de débito fixo (bombas de engrenagens internas ou externas) proporcionam uma
solução mais económica, destinando-se a aplicações de grande potência e pressão constante. A
pressão é mantida constante pelo ajuste do caudal às necessidades dos atuadores. O sistema
Sytronix FCP5000, fabricado pela Rexroth, é um exemplo deste tipo de central. O motor pode
operar a velocidades de 3000 rpm, mas, funcionando em carga parcial, pode reduzir a
velocidade para menos de 200 rpm, sem afetar a pressão de funcionamento. O consumo de
energia e ruído produzido pela bomba é assim minimizado.
Ainda fabricado pela Rexroth, o sistema DEFn 5000, possui uma bomba de caudal variável de
pistões axiais impulsionada por um motor assíncrono e um variador de velocidade. A bomba
reduz o fluxo, ajustando-o para as necessidades dos atuadores sem afetar a pressão na linha.
Este sistema possui dois modos de funcionamento, permitindo operar com as diferentes
exigências das máquinas:
• No modo Teach-in, o controlador memoriza o perfil de caudal e pressão do ciclo de
funcionamento para que possa otimizar a resposta do sistema.
• O modo Real-time é adequado para uso em máquinas não cíclicas. Neste modo, o
controlador calcula a melhor combinação da velocidade de rotação do motor e do débito
da bomba para a resposta adequada ao débito do sistema.
Figura 2.6 Sistema DFEn 5000. Reproduzido de REXROTH BOSCH GROUP. Sytronix DFE.
Projeto e desenvolvimento de uma central hidráulica servo acionada
Capítulo 2 – Estado da Arte 9
Devido à utilização de um variador de frequência e uma bomba de caudal variável, este conjunto
possui um custo bastante elevado, destacando-se no entanto pela sua dinâmica, eficiência e
reduzido impacto ambiental.
2.4- Central hidráulica servo acionada
A utilização de servomotores acoplados a bombas hidráulicas permite obter uma melhor
capacidade de resposta, precisão e eficiência.
Estas centrais utilizam bombas de engrenagens internas ou de pistões axiais. Graças aos
servomotores, o binário disponível na bomba é máximo mesmo a rotações muito reduzidas. O
rendimento dos motores é muito elevado e o ruído produzido é baixo. A pressão é mantida à
custa da criteriosa rotação da bomba que compensa qualquer perda ou erro de posicionamento.
Nestes sistemas, o controlo da pressão e do caudal tem um efeito limitador sobre a rotação da
bomba. A pressão de trabalho pode ser alterada durante a operação, sem necessidade de válvulas
adicionais ou ajustes do circuito hidráulico. Deste modo, uma máquina pode operar com
diferentes pressões ao longo de um ciclo de trabalho, podendo mesmo fazer ajustes
progressivos.
As bombas de engrenagens internas são usadas em centrais hidráulicas de circuito aberto com
controlo de pressão e caudal para sistemas de posicionamento simples. Em sistemas mais
dinâmicos são usadas bombas de pistões axiais, em circuito fechado.
O funcionamento em circuito fechado, em combinação com a escolha criteriosa da bomba,
permite o funcionamento destes sistemas nos quatro quadrantes de operação, isto é, pressões e
caudais negativos e/ou positivos.
Em circuitos simples, podem ainda ser dispensadas as válvulas de controlo proporcionais e
direcionais, que constituem uma importante parcela no custo total dos equipamentos
hidráulicos.
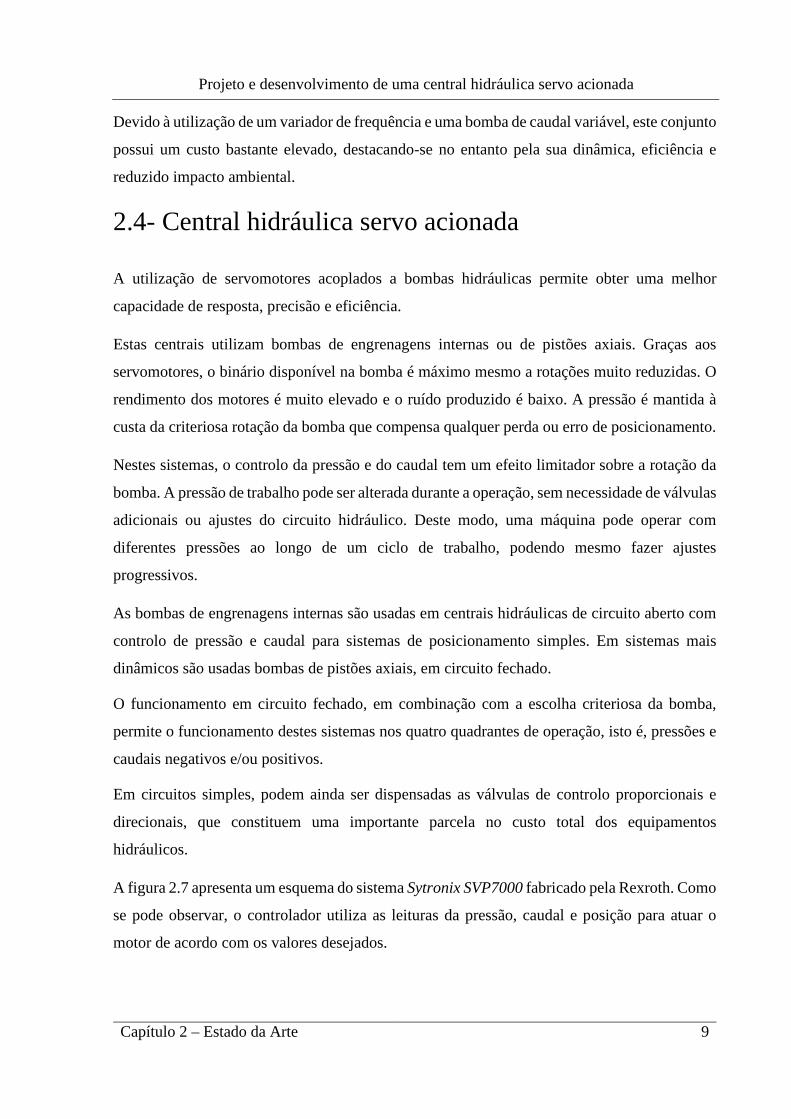
A figura 2.7 apresenta um esquema do sistema Sytronix SVP7000 fabricado pela Rexroth. Como
se pode observar, o controlador utiliza as leituras da pressão, caudal e posição para atuar o
motor de acordo com os valores desejados.
Projeto e desenvolvimento de uma central hidráulica servo acionada
10
Capítulo 2 – Estado da Arte
No esquema hidráulico apresentado, observa-se uma bomba de caudal variável, aumentando a
eficiência e dinâmica do sistema. Um sensor de deslocamento do cilindro permite corrigir
pequenos erros de velocidade e posição. O conhecimento das características de cada atuador,
assim como, a sua velocidade, pressão e posição é imprescindível para determinar a velocidade
do motor, impondo um nível de sensorização e controlo apreciável.
A implementação destes sistemas hidráulicos está dependente da sua total integração com as
máquinas que os acolhem.
A utilização típica destes sistemas destina-se ao acionamento de máquinas de injeção, prensas
e sistemas de aperto. Este tipo de máquinas apresentam ciclos de funcionamento mais ou menos
longos, proporcionando uma economia de energia significativa, (40 a 80%), segundo
KOMSTA, J. (2014).
Figura 2.7 Sistema Sytronix SVP7000. Reproduzido de REXROTH BOSCH GROUP. Sytronix SvP – Servo Variable-Speed Pump Drive.
Projeto e desenvolvimento de uma central hidráulica servo acionada
Capítulo 2 – Estado da Arte 11
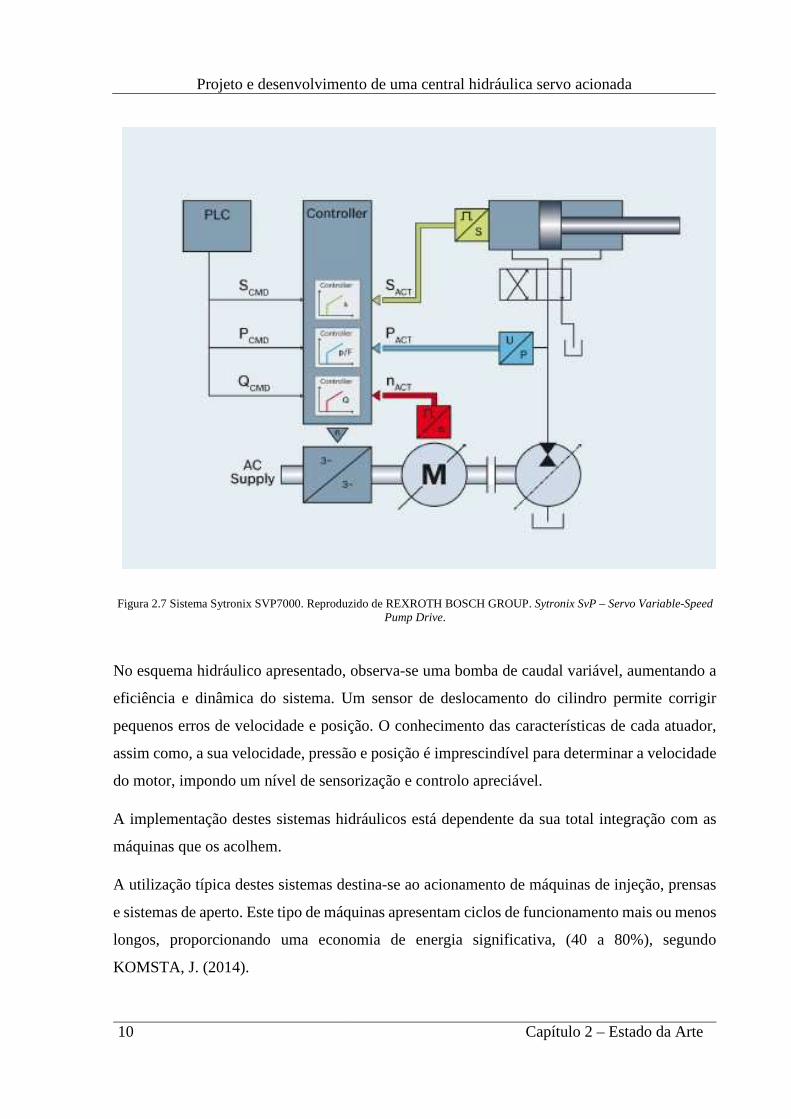
Figura 2.8 Acumulador de massas. Adaptado de Ferreira 2006.
2.5- Acumuladores
O acumulador destina-se a compensar o fluxo de entrada quando o sistema é sujeito a uma
súbita solicitação de caudal.
Os acumuladores podem ser classificados com base na forma como o acumulador exerce a força
no fluido que está armazenado:
• Acumuladores carregados por massas.
• Acumuladores carregador por mola.
• Acumuladores hidropneumáticos.
2.5.1- Acumuladores de massas
Os acumuladores carregados por massas, figura 2.8, são em geral de grandes dimensões e
podem operar vários sistemas ao mesmo tempo.
A sua capacidade de armazenar fluidos a pressões relativamente constantes torna-os vantajosos
relativamente a outro tipo de acumuladores. A força aplicada pelas massas sobre o fluido é
constante, independentemente da quantidade de fluido que se encontra no acumulador.
Por outro lado, a inércia das massas pode provocar variações momentâneas e significativas de
pressão quando a solicitação do fluxo é muito rápida.
2.5.2- Acumuladores de mola.
Os acumuladores carregados por mola, figura 2.9, exercem a força no fluido por meio de um
pistão sobre o qual atua uma mola. São em geral de dimensões reduzidas, de pequena
capacidade e operam normalmente a baixas pressões.
Projeto e desenvolvimento de uma central hidráulica servo acionada
12
Capítulo 2 – Estado da Arte
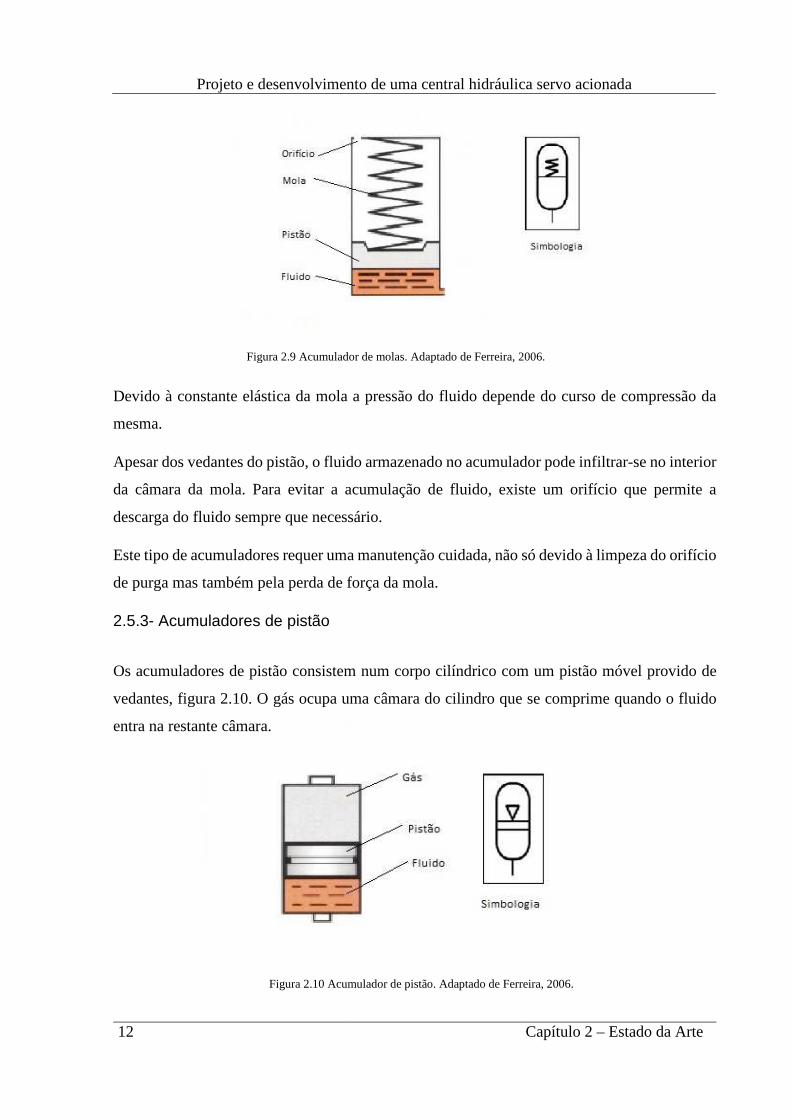
Figura 2.9 Acumulador de molas. Adaptado de Ferreira, 2006.
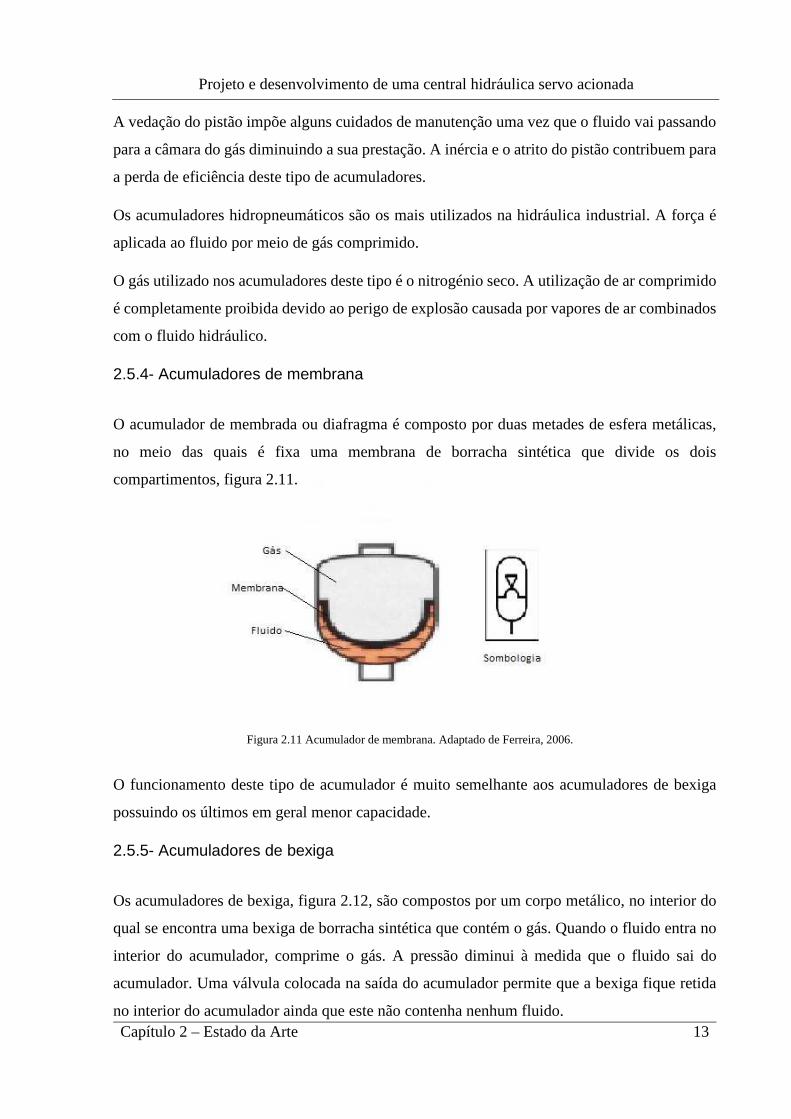
Figura 2.10 Acumulador de pistão. Adaptado de Ferreira, 2006.
Devido à constante elástica da mola a pressão do fluido depende do curso de compressão da
mesma.
Apesar dos vedantes do pistão, o fluido armazenado no acumulador pode infiltrar-se no interior
da câmara da mola. Para evitar a acumulação de fluido, existe um orifício que permite a
descarga do fluido sempre que necessário.
Este tipo de acumuladores requer uma manutenção cuidada, não só devido à limpeza do orifício
de purga mas também pela perda de força da mola.
2.5.3- Acumuladores de pistão
Os acumuladores de pistão consistem num corpo cilíndrico com um pistão móvel provido de
vedantes, figura 2.10. O gás ocupa uma câmara do cilindro que se comprime quando o fluido
entra na restante câmara.
Projeto e desenvolvimento de uma central hidráulica servo acionada
Capítulo 2 – Estado da Arte 13
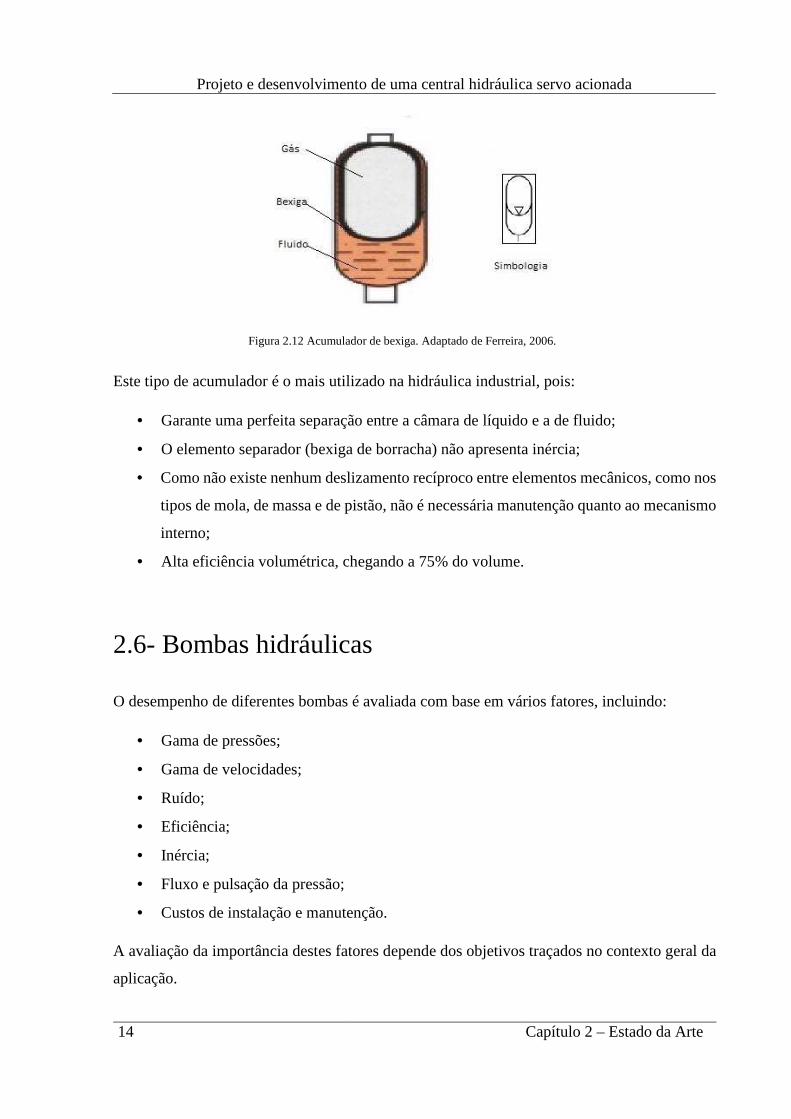
Figura 2.11 Acumulador de membrana. Adaptado de Ferreira, 2006.
A vedação do pistão impõe alguns cuidados de manutenção uma vez que o fluido vai passando
para a câmara do gás diminuindo a sua prestação. A inércia e o atrito do pistão contribuem para
a perda de eficiência deste tipo de acumuladores.
Os acumuladores hidropneumáticos são os mais utilizados na hidráulica industrial. A força é
aplicada ao fluido por meio de gás comprimido.
O gás utilizado nos acumuladores deste tipo é o nitrogénio seco. A utilização de ar comprimido
é completamente proibida devido ao perigo de explosão causada por vapores de ar combinados
com o fluido hidráulico.
2.5.4- Acumuladores de membrana
O acumulador de membrada ou diafragma é composto por duas metades de esfera metálicas,
no meio das quais é fixa uma membrana de borracha sintética que divide os dois
compartimentos, figura 2.11.
O funcionamento deste tipo de acumulador é muito semelhante aos acumuladores de bexiga
possuindo os últimos em geral menor capacidade.
2.5.5- Acumuladores de bexiga
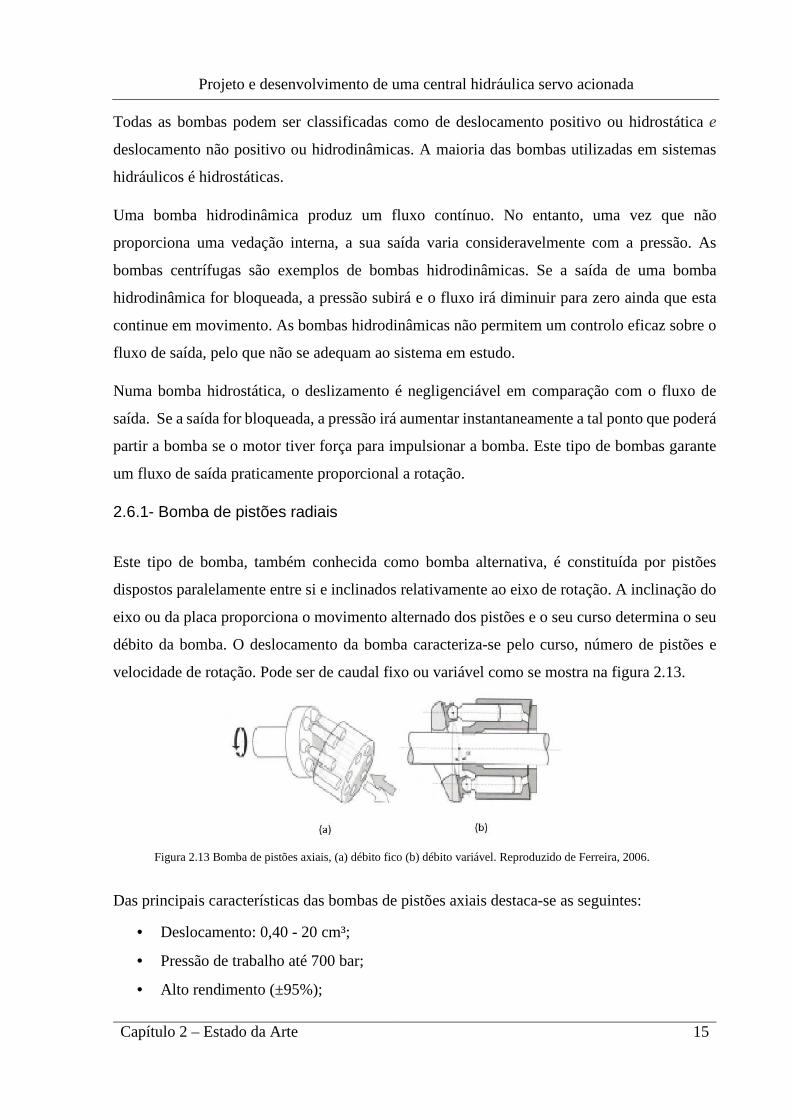
Os acumuladores de bexiga, figura 2.12, são compostos por um corpo metálico, no interior do
qual se encontra uma bexiga de borracha sintética que contém o gás. Quando o fluido entra no
interior do acumulador, comprime o gás. A pressão diminui à medida que o fluido sai do
acumulador. Uma válvula colocada na saída do acumulador permite que a bexiga fique retida
no interior do acumulador ainda que este não contenha nenhum fluido.
Projeto e desenvolvimento de uma central hidráulica servo acionada
14
Capítulo 2 – Estado da Arte
Figura 2.12 Acumulador de bexiga. Adaptado de Ferreira, 2006.
Este tipo de acumulador é o mais utilizado na hidráulica industrial, pois:
• Garante uma perfeita separação entre a câmara de líquido e a de fluido;
• O elemento separador (bexiga de borracha) não apresenta inércia;
• Como não existe nenhum deslizamento recíproco entre elementos mecânicos, como nos
tipos de mola, de massa e de pistão, não é necessária manutenção quanto ao mecanismo
interno;
• Alta eficiência volumétrica, chegando a 75% do volume.
2.6- Bombas hidráulicas
O desempenho de diferentes bombas é avaliada com base em vários fatores, incluindo:
• Gama de pressões;
• Gama de velocidades;
• Ruído;
• Eficiência;
• Inércia;
• Fluxo e pulsação da pressão;
• Custos de instalação e manutenção.
A avaliação da importância destes fatores depende dos objetivos traçados no contexto geral da
aplicação.
Projeto e desenvolvimento de uma central hidráulica servo acionada
Capítulo 2 – Estado da Arte 15
Figura 2.13 Bomba de pistões axiais, (a) débito fico (b) débito variável. Reproduzido de Ferreira, 2006.
Todas as bombas podem ser classificadas como de deslocamento positivo ou hidrostática e
deslocamento não positivo ou hidrodinâmicas. A maioria das bombas utilizadas em sistemas
hidráulicos é hidrostáticas.
Uma bomba hidrodinâmica produz um fluxo contínuo. No entanto, uma vez que não
proporciona uma vedação interna, a sua saída varia consideravelmente com a pressão. As
bombas centrífugas são exemplos de bombas hidrodinâmicas. Se a saída de uma bomba
hidrodinâmica for bloqueada, a pressão subirá e o fluxo irá diminuir para zero ainda que esta
continue em movimento. As bombas hidrodinâmicas não permitem um controlo eficaz sobre o
fluxo de saída, pelo que não se adequam ao sistema em estudo.
Numa bomba hidrostática, o deslizamento é negligenciável em comparação com o fluxo de
saída. Se a saída for bloqueada, a pressão irá aumentar instantaneamente a tal ponto que poderá
partir a bomba se o motor tiver força para impulsionar a bomba. Este tipo de bombas garante
um fluxo de saída praticamente proporcional a rotação.
2.6.1- Bomba de pistões radiais
Este tipo de bomba, também conhecida como bomba alternativa, é constituída por pistões
dispostos paralelamente entre si e inclinados relativamente ao eixo de rotação. A inclinação do
eixo ou da placa proporciona o movimento alternado dos pistões e o seu curso determina o seu
débito da bomba. O deslocamento da bomba caracteriza-se pelo curso, número de pistões e
velocidade de rotação. Pode ser de caudal fixo ou variável como se mostra na figura 2.13.
Das principais características das bombas de pistões axiais destaca-se as seguintes:
• Deslocamento: 0,40 - 20 cm³;
• Pressão de trabalho até 700 bar;
• Alto rendimento (±95%);

Projeto e desenvolvimento de uma central hidráulica servo acionada
16
Capítulo 2 – Estado da Arte
Figura 2.14 Bomba de palhetas. Reproduzido de Ferreira, 2006.
• Baixo nível de ruído;
• Elevada inércia;
• Custo elevado.
2.6.2- Bomba de palhetas
Consiste num rotor provido de ranhuras, onde se encontram as palhetas, que roda dentro de um
anel excêntrico, figura 2.14. As palhetas encostam-se na carcaça pela ação da força centrífuga,
formando com esta e as placas de desgaste a câmara da bomba. A pressão de saída provoca um
desequilíbrio da bomba e portanto maior desgaste, no entanto, este tipo de bombas tem uma
vida razoavelmente longa. Podem ainda ser encontradas no mercado bombas de palhetas
equilibradas e de caudal variável. Uma vez que é necessário manter as palhetas encostadas ao
anel excêntrico de forma a garantir a vedação, este tipo de bombas não são adequadas para
trabalhar com baixas velocidades de rotação.
Algumas das características mais importantes das bombas de palhetas, enumeram-se a seguir:
• Deslocamento: 18 - 193 cm³;
• Pressão de trabalho até 210 bar;
• Fácil manutenção;
• Baixa inércia;
• Baixo nívelde ruído.
2.6.3- Bomba de engrenagens externas
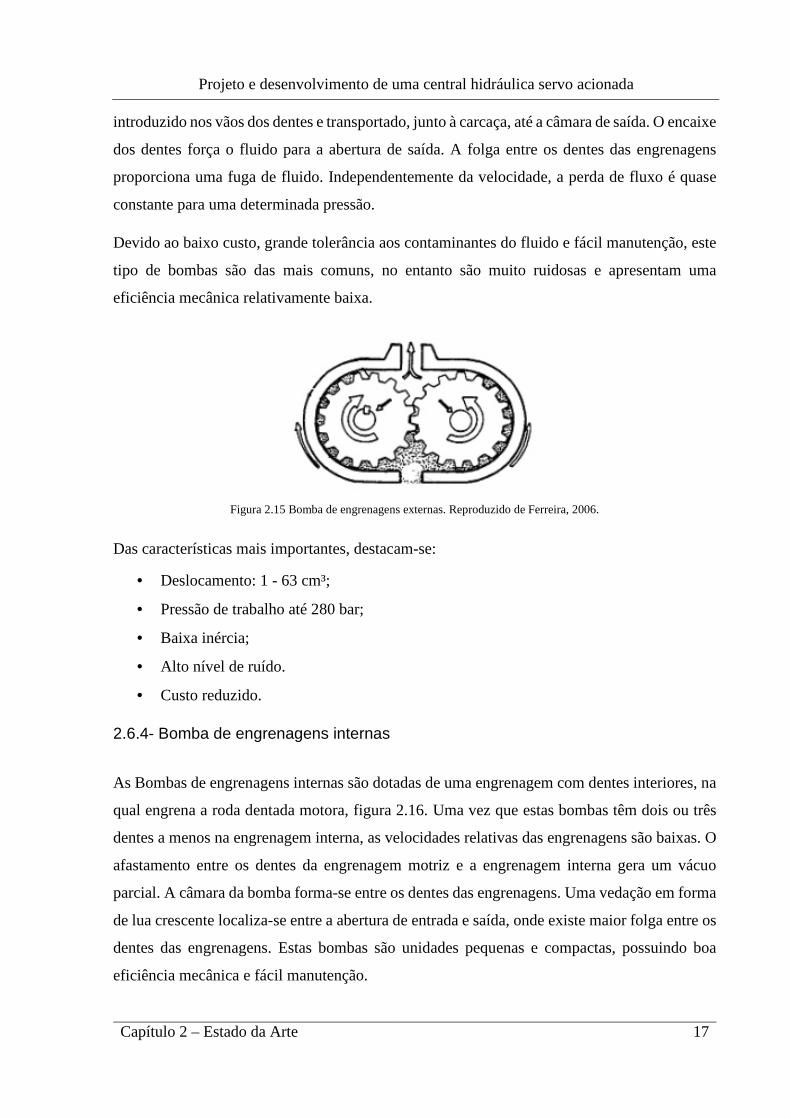
Um vácuo parcial é criado na câmara de entrada da bomba pelo movimento do par de
engrenagens, figura 2.15. As engrenagens podem ser do tipo reto ou helicoidal, sendo as últimas
mais silenciosas, acarretando no entanto um custo mais elevado de fabrico. O fluido é
Projeto e desenvolvimento de uma central hidráulica servo acionada
Capítulo 2 – Estado da Arte 17
Figura 2.15 Bomba de engrenagens externas. Reproduzido de Ferreira, 2006.
introduzido nos vãos dos dentes e transportado, junto à carcaça, até a câmara de saída. O encaixe
dos dentes força o fluido para a abertura de saída. A folga entre os dentes das engrenagens
proporciona uma fuga de fluido. Independentemente da velocidade, a perda de fluxo é quase
constante para uma determinada pressão.
Devido ao baixo custo, grande tolerância aos contaminantes do fluido e fácil manutenção, este
tipo de bombas são das mais comuns, no entanto são muito ruidosas e apresentam uma
eficiência mecânica relativamente baixa.
Das características mais importantes, destacam-se:
• Deslocamento: 1 - 63 cm³;
• Pressão de trabalho até 280 bar;
• Baixa inércia;
• Alto nível de ruído.
• Custo reduzido.
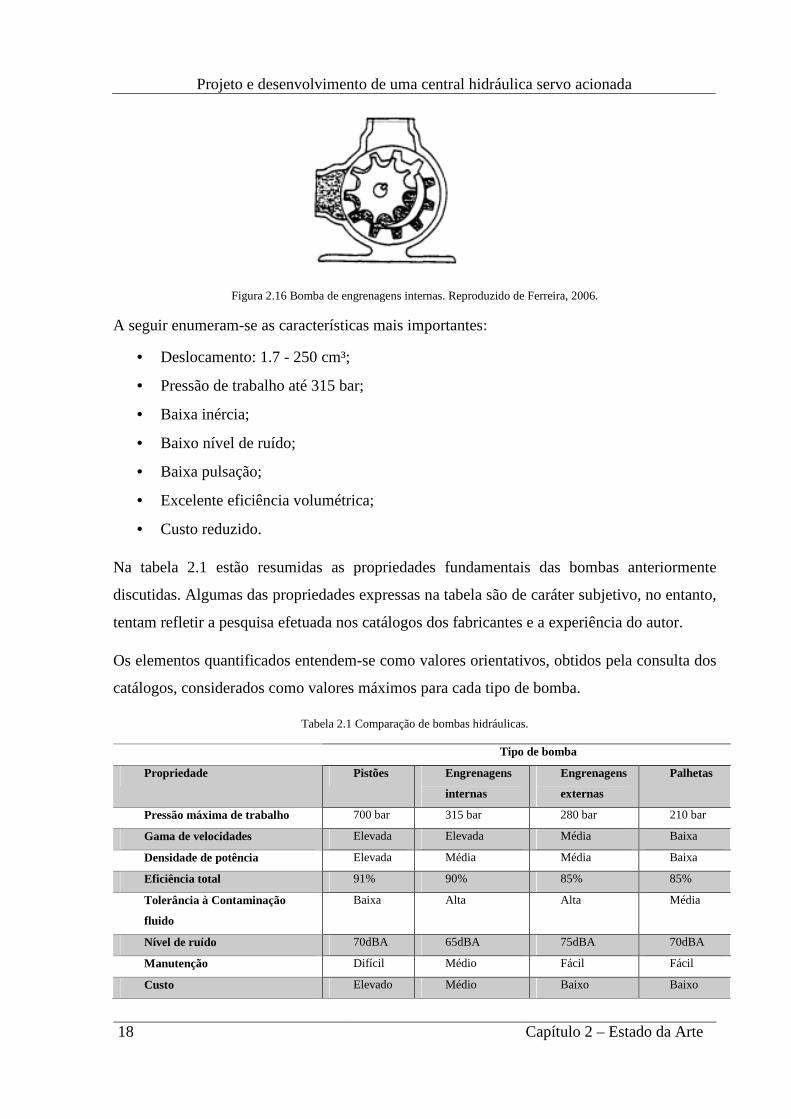
2.6.4- Bomba de engrenagens internas
As Bombas de engrenagens internas são dotadas de uma engrenagem com dentes interiores, na
qual engrena a roda dentada motora, figura 2.16. Uma vez que estas bombas têm dois ou três
dentes a menos na engrenagem interna, as velocidades relativas das engrenagens são baixas. O
afastamento entre os dentes da engrenagem motriz e a engrenagem interna gera um vácuo
parcial. A câmara da bomba forma-se entre os dentes das engrenagens. Uma vedação em forma
de lua crescente localiza-se entre a abertura de entrada e saída, onde existe maior folga entre os
dentes das engrenagens. Estas bombas são unidades pequenas e compactas, possuindo boa
eficiência mecânica e fácil manutenção.
Projeto e desenvolvimento de uma central hidráulica servo acionada
18
Capítulo 2 – Estado da Arte
Figura 2.16 Bomba de engrenagens internas. Reproduzido de Ferreira, 2006.
A seguir enumeram-se as características mais importantes:
• Deslocamento: 1.7 - 250 cm³;
• Pressão de trabalho até 315 bar;
• Baixa inércia;
• Baixo nível de ruído;
• Baixa pulsação;
• Excelente eficiência volumétrica;
• Custo reduzido.
Na tabela 2.1 estão resumidas as propriedades fundamentais das bombas anteriormente
discutidas. Algumas das propriedades expressas na tabela são de caráter subjetivo, no entanto,
tentam refletir a pesquisa efetuada nos catálogos dos fabricantes e a experiência do autor.
Os elementos quantificados entendem-se como valores orientativos, obtidos pela consulta dos
catálogos, considerados como valores máximos para cada tipo de bomba.
Tabela 2.1 Comparação de bombas hidráulicas.
Tipo de bomba
Propriedade Pistões Engrenagens
internas
Engrenagens
externas
Palhetas
Pressão máxima de trabalho 700 bar 315 bar 280 bar 210 bar
Gama de velocidades Elevada Elevada Média Baixa
Densidade de potência Elevada Média Média Baixa
Eficiência total 91% 90% 85% 85%
Tolerância à Contaminação
fluido
Baixa Alta Alta Média
Nível de ruído 70dBA 65dBA 75dBA 70dBA
Manutenção Difícil Médio Fácil Fácil
Custo Elevado Médio Baixo Baixo
Projeto e desenvolvimento de uma central hidráulica servo acionada
Capítulo 2 – Estado da Arte 19
2.7- Motores eléctricos
A seleção do motor é crucial na persecução dos objetivos traçados. A sua função é transformar
energia elétrica em energia mecânica o mais eficientemente e dinamicamente possível.
Das principais características do motor devem constar:
• Alta densidade de potência;
• Gama de velocidades elevada;
• Momento de saída constante ao longo de toda a gama de velocidades;
• Baixo momento de inércia;
• Capacidade para operar com longos ciclos de trabalho, alto duty cycle;
• Baixa manutenção;
• Alta fiabilidade.
2.7.1- Motores de indução.
Os motores de indução trifásicos são os motores mais comuns em aplicações industriais devido
a sua construção simples e robusta. O seu nome deriva do facto de que a corrente no rotor não
provém diretamente de uma fonte de alimentação, mas induzida pelo movimento relativo dos
condutores do rotor e do campo girante produzido pelas correntes no estator.
O motor de indução consiste de duas partes principais:
O estator, constituído por enrolamentos alojados nas ranhuras existentes na periferia interna de
um núcleo de ferro laminado (carcaça). Os enrolamentos do estator são alimentados com tensão
trifásica, que produz um campo magnético girante com velocidade síncrona.
O rotor pode ser do tipo bobinado ou em curto-circuito, (gaiola de esquilo), sendo os núcleos
magnéticos construídos em ferro laminado.
O rotor bobinado é constituído por um núcleo em tambor, provido de ranhuras onde são alojados
enrolamentos semelhantes ao do estator, e produzindo o mesmo número de polos. No motor
trifásico estes enrolamentos são geralmente ligados em estrela, e as três extremidades livres dos
Projeto e desenvolvimento de uma central hidráulica servo acionada
20
Capítulo 2 – Estado da Arte
enrolamentos são ligadas a três anéis coletores montados no eixo, permitindo a inserção de
resistências variáveis em série em cada fase.
O rotor tipo gaiola consta de um núcleo em tambor, providos de ranhuras, nas quais são alojados
fios ou barras de cobre curto circuitados nos extremos.
Os condutores do rotor são imersos no campo eletromagnético girante produzido pelo estator,
onde são produzidas forças eletromotrizes que proporcionam o binário necessário à rotação do
motor.
A velocidade do rotor nunca pode atingir a velocidade do campo girante, isto é, a velocidade
síncrona. Se esta velocidade fosse atingida, os condutores do rotor não seriam cortados pelas
linhas de força do campo girante, não se produzindo portanto, correntes induzidas, sendo então
nulo o binário do motor.
Quando o motor funciona sem carga, o rotor gira com velocidade quase igual à síncrona; com
carga o rotor roda mais lentamente em relação ao campo girante, proporcionando correntes
induzidas maiores, necessárias ao desenvolvimento do binário necessário.
Chama-se escorregamento, à seguinte relação:
� = �� − ���� ( 2.1 )
Em que:
�= Escorregamento;
��= Velocidade síncrona;
��= Velocidade do rotor.
O escorregamento é geralmente expresso em percentagem e varia com a carga apresentando
valores entre 1 e 5%.
A NEMA1, classifica os motores de indução para uso geral segundo quatro categorias, (A, B,
C e D), que se apresentam no gráfico da figura 2.17.
1National Electrical Manufacturers Association, (NEMA) é uma associação de fabricantes de equipamentos elétricos e imagiologia médica.
Fundada em 1926 e sediada em Rosslyn, Virginia, ( http://www.nema.org).
Projeto e desenvolvimento de uma central hidráulica servo acionada
Capítulo 2 – Estado da Arte 21
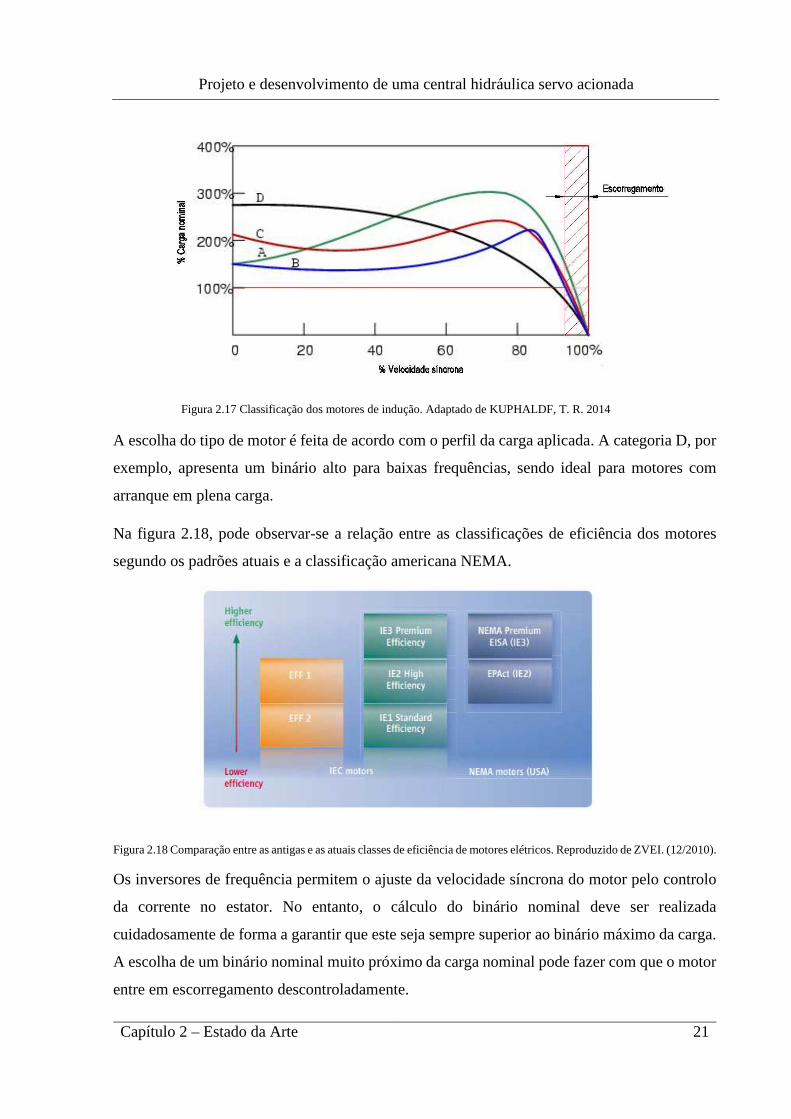
A escolha do tipo de motor é feita de acordo com o perfil da carga aplicada. A categoria D, por
exemplo, apresenta um binário alto para baixas frequências, sendo ideal para motores com
arranque em plena carga.
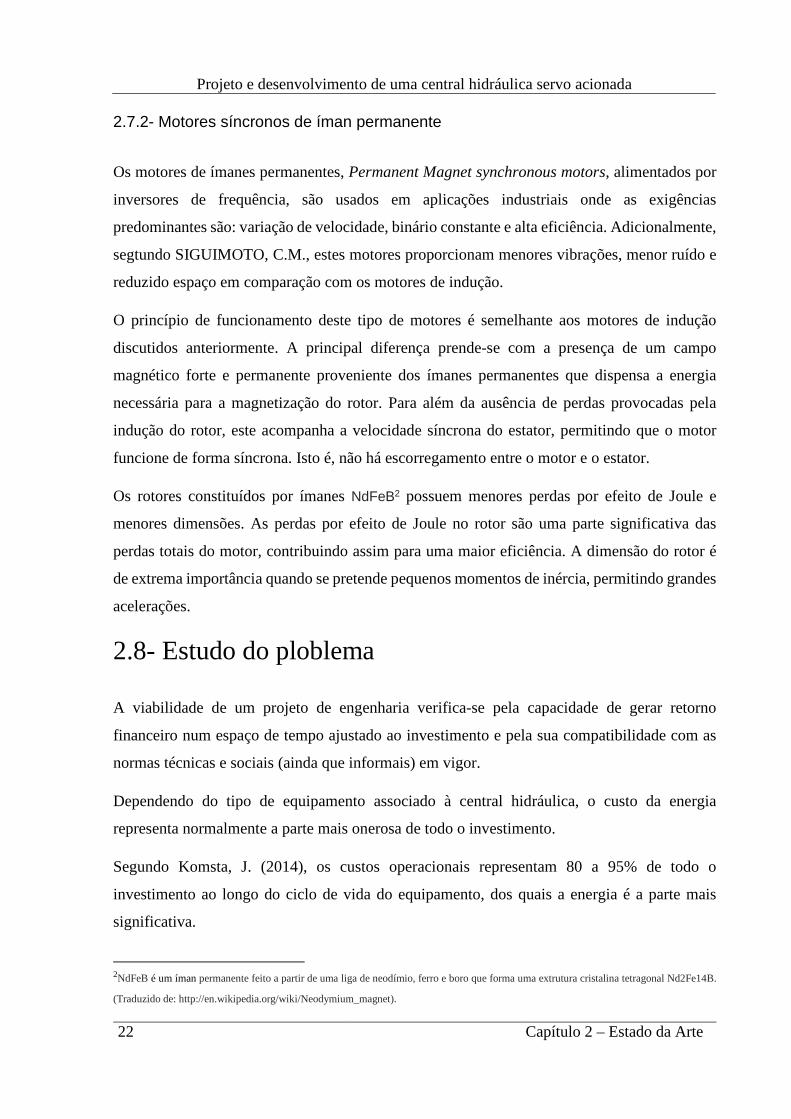
Na figura 2.18, pode observar-se a relação entre as classificações de eficiência dos motores
segundo os padrões atuais e a classificação americana NEMA.
Figura 2.18 Comparação entre as antigas e as atuais classes de eficiência de motores elétricos. Reproduzido de ZVEI. (12/2010).
Os inversores de frequência permitem o ajuste da velocidade síncrona do motor pelo controlo
da corrente no estator. No entanto, o cálculo do binário nominal deve ser realizada
cuidadosamente de forma a garantir que este seja sempre superior ao binário máximo da carga.
A escolha de um binário nominal muito próximo da carga nominal pode fazer com que o motor
entre em escorregamento descontroladamente.
Figura 2.17 Classificação dos motores de indução. Adaptado de KUPHALDF, T. R. 2014
Projeto e desenvolvimento de uma central hidráulica servo acionada
22
Capítulo 2 – Estado da Arte
2.7.2- Motores síncronos de íman permanente
Os motores de ímanes permanentes, Permanent Magnet synchronous motors, alimentados por
inversores de frequência, são usados em aplicações industriais onde as exigências
predominantes são: variação de velocidade, binário constante e alta eficiência. Adicionalmente,
segtundo SIGUIMOTO, C.M., estes motores proporcionam menores vibrações, menor ruído e
reduzido espaço em comparação com os motores de indução.
O princípio de funcionamento deste tipo de motores é semelhante aos motores de indução
discutidos anteriormente. A principal diferença prende-se com a presença de um campo
magnético forte e permanente proveniente dos ímanes permanentes que dispensa a energia
necessária para a magnetização do rotor. Para além da ausência de perdas provocadas pela
indução do rotor, este acompanha a velocidade síncrona do estator, permitindo que o motor
funcione de forma síncrona. Isto é, não há escorregamento entre o motor e o estator.
Os rotores constituídos por ímanes NdFeB2 possuem menores perdas por efeito de Joule e
menores dimensões. As perdas por efeito de Joule no rotor são uma parte significativa das
perdas totais do motor, contribuindo assim para uma maior eficiência. A dimensão do rotor é
de extrema importância quando se pretende pequenos momentos de inércia, permitindo grandes
acelerações.
2.8- Estudo do ploblema
A viabilidade de um projeto de engenharia verifica-se pela capacidade de gerar retorno
financeiro num espaço de tempo ajustado ao investimento e pela sua compatibilidade com as
normas técnicas e sociais (ainda que informais) em vigor.
Dependendo do tipo de equipamento associado à central hidráulica, o custo da energia
representa normalmente a parte mais onerosa de todo o investimento.
Segundo Komsta, J. (2014), os custos operacionais representam 80 a 95% de todo o
investimento ao longo do ciclo de vida do equipamento, dos quais a energia é a parte mais
significativa.
2NdFeB é um íman permanente feito a partir de uma liga de neodímio, ferro e boro que forma uma extrutura cristalina tetragonal Nd2Fe14B.
(Traduzido de: http://en.wikipedia.org/wiki/Neodymium_magnet).
Projeto e desenvolvimento de uma central hidráulica servo acionada
Capítulo 2 – Estado da Arte 23
Atendendo ao carácter alternativo e variado dos acionamentos normalmente conectados a uma
central hidráulica, verifica-se um desperdício de energia sempre que esta não está a ser
solicitada na sua plenitude. Menos significativas, mas relevantes, são as perdas energéticas
devidas ao baixo rendimento dos motores de acionamento. A economia de energia
proporcionada pela otimização dos fatores referidos, podem chegar aos 80%, de acordo com
Komsta, J. (2014).
Ainda que sejam inúmeras as possíveis configurações de uma central hidráulica, prevalece o
objetivo de encontrar um tipo que estabeleça um compromisso entre as características desejadas
e o impacto económico e ambiental da sua instalação.
Podemos caracterizar uma central hidráulica, ainda que de modo abstrato, da seguinte forma:
• Características mandatórias;
• Características de valorização.
As características mandatórias definem as variáveis fundamentais para o funcionamento de todo
o equipamento. Tais como:
• Pressão de trabalho;
• Potência hidráulica disponível;
• Características do fluido;
• Tolerância da pressão de trabalho e a sua estabilidade.
A pressão de trabalho é estabelecida de acordo com as características do equipamento a
montante da central. As limitações da pressão são fundamentalmente impostas pelo tipo de
bomba e potência hidráulica disponível.
A potência hidráulica é a característica de maior relevância numa central hidráulica e é
calculada como o produto da pressão pelo caudal disponível na central. Com base no cálculo
efetuado, determina-se a potência do motor de acionamento. É comum, recorrer a várias bombas
de diferentes deslocamentos, para obter o caudal desejável, aproximando a potência hidráulica
disponível à potência utilizada a cada instante.
As características do fluído são fundamentais para o funcionamento do circuito hidráulico, em
especial quando este é composto por servo válvulas.
Projeto e desenvolvimento de uma central hidráulica servo acionada
24
Capítulo 2 – Estado da Arte
São comuns os problemas relacionados com a regulação da temperatura do fluido e com a
alteração da viscosidade, proporcionada pelo seu envelhecimento. A alteração da viscosidade
afeta o rendimento da bomba, podendo proporcionar perda de potência disponível.
De acordo com as características do circuito a acionar, a variação da pressão de trabalho pode
ser maior ou menor. A forma como esta varia, é igualmente importante para o funcionamento
do circuito hidráulico.
A estabilidade da pressão de trabalho deve-se em grande parte ao próprio circuito hidráulico,
com especial destaque para a forma como os atuadores são acionados. Os choques hidráulicos
provocados pela comutação das válvulas e deslocamento dos atuadores podem ser minimizados
pela comutação seletiva das válvulas, colocação de válvulas proporcionais, câmaras de
amorticimento nos atuadores, etc.
As características de valorização, ainda que fundamentais, não são mandatórias. Fazem parte
da caracterização da central quanto ao seu impacto ambiental e económico. Tais como:
• Ruído;
• Eficiência;
• Dimensões;
• Custo.
As soluções existentes no mercado e sumariamente apresentadas ao longo deste capítulo,
refletem de uma forma geral as exigências atuais, ainda que, com algumas limitações. A
utilização de servomotores aí referida, está em grande parte condicionada ao conhecimento
prévio dos atuadores, suas posições e velocidades pretendidas. Este facto impõe um nível de
controlo nem sempre disponível ou economicamente aceitável, para equipamentos com edições
limitadas.
Qualquer que seja o motor utilizado para o controlo do fluxo de um circuito hidráulico, este,
não possui um tempo de resposta instantâneo pelo que, será necessário prever um método para
compensar a perda de fluxo provocada pela variação de velocidade.
2.8.1- Princípio de funcionamento
Reportando-nos às características mandatórias referidas anteriormente, a potência hidráulica
disponível pode ser garantida pelo conhecimento prévio da sua utilização (controlador com base
Projeto e desenvolvimento de uma central hidráulica servo acionada
Capítulo 2 – Estado da Arte 25
no conhecimento no atuador), pela sua produção preventiva (método tradicional de descarga ao
reservatório) ou pela acumulação da mesma, de forma a garantir o seu fornecimento no
intervalo de tempo necessário à sua restituição ao circuito.
É neste último aspeto que se vai centrar o trabalho desta dissertação.
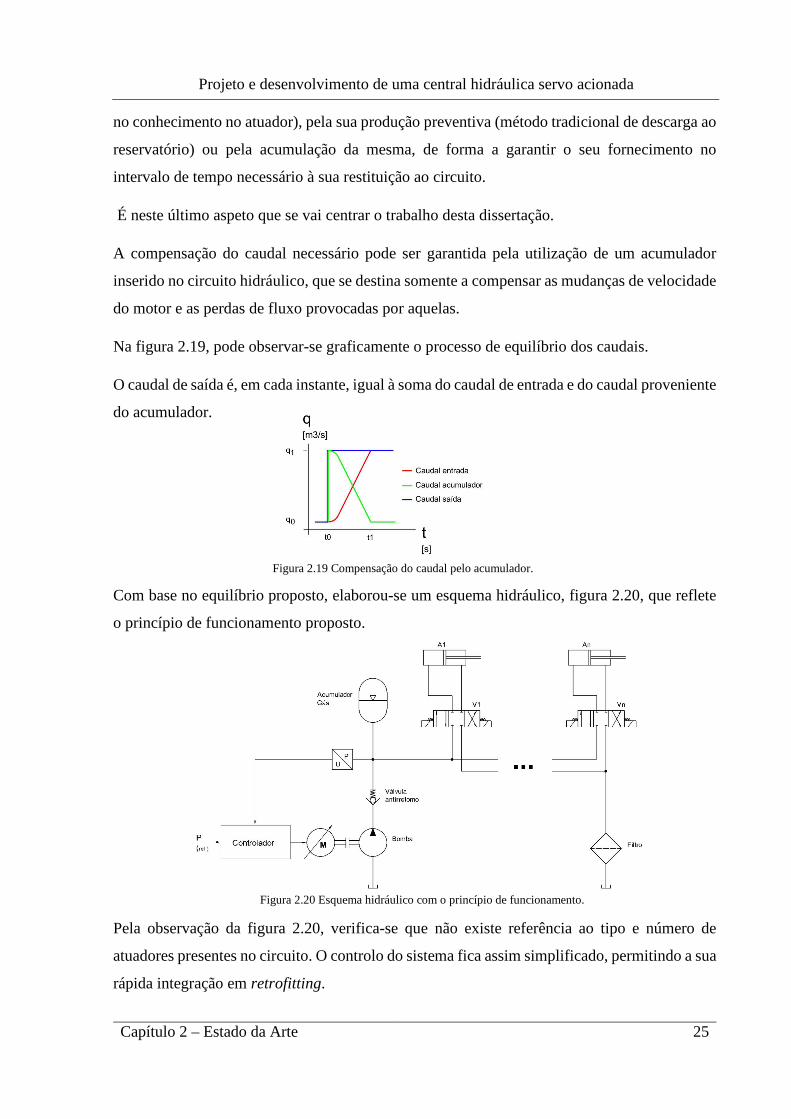
A compensação do caudal necessário pode ser garantida pela utilização de um acumulador
inserido no circuito hidráulico, que se destina somente a compensar as mudanças de velocidade
do motor e as perdas de fluxo provocadas por aquelas.
Na figura 2.19, pode observar-se graficamente o processo de equilíbrio dos caudais.
O caudal de saída é, em cada instante, igual à soma do caudal de entrada e do caudal proveniente
do acumulador.
Com base no equilíbrio proposto, elaborou-se um esquema hidráulico, figura 2.20, que reflete
o princípio de funcionamento proposto.
Pela observação da figura 2.20, verifica-se que não existe referência ao tipo e número de
atuadores presentes no circuito. O controlo do sistema fica assim simplificado, permitindo a sua
rápida integração em retrofitting.
Figura 2.20 Esquema hidráulico com o princípio de funcionamento.
Figura 2.19 Compensação do caudal pelo acumulador.
Projeto e desenvolvimento de uma central hidráulica servo acionada
26
Capítulo 2 – Estado da Arte
A válvula antirretorno impede a fuga hidráulica do fluxo do circuito quando a bomba se
encontra em baixas rotações ou parada.
O acumulador apresenta duas funções principais: garante a compensação de fluxo durante o
arranque ou mudança de velocidade do motor e a manutenção da pressão no circuito. A última
é especialmente importante para circuitos onde é necessário manter a força nos atuadores, ainda
que não existam movimentos destes, como é o exemplo de prensas hidráulicas.
2.9- Conclusão
A correta escolha de um tipo de central hidráulica considera não só o tipo de bomba, mas todo
o sistema de componentes que interagem com esta. A análise de custos deve considerar todo o
ciclo de vida, tendo em conta não só os aspetos económicos mas também os custos ambientais.
Segundo o Hydraulic Institute (Maio 2004), o custo de investimento inicial do equipamento
representa uma pequena parte do custo total ao longo do seu ciclo de vida. Um guia com uma
análise detalhada sobre o método de cálculo dos custos foi publicado pelo Hydraulic Institute
em conjunto com a Europump. Este guia explica de forma detalhada como os custos de uma
central hidráulica são influenciados pelo seu desenho e mostra em detalhe como usar a análise
de custos para retirar ilações sobre as escolhas efetuadas.
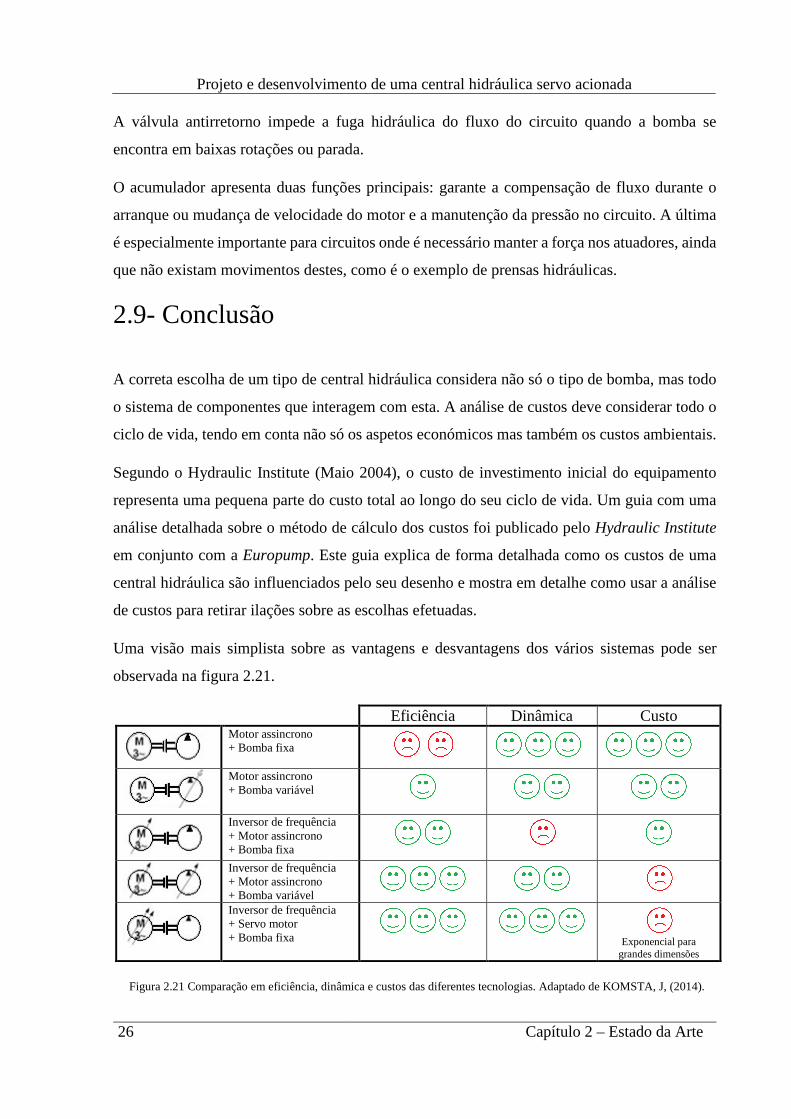
Uma visão mais simplista sobre as vantagens e desvantagens dos vários sistemas pode ser
observada na figura 2.21.
Eficiência Dinâmica Custo
Motor assincrono + Bomba fixa
Motor assincrono + Bomba variável
Inversor de frequência + Motor assincrono + Bomba fixa
Inversor de frequência + Motor assincrono + Bomba variável
Inversor de frequência + Servo motor + Bomba fixa
Exponencial para grandes dimensões
Figura 2.21 Comparação em eficiência, dinâmica e custos das diferentes tecnologias. Adaptado de KOMSTA, J, (2014).

Projeto e desenvolvimento de uma central hidráulica servo acionada
Capítulo 2 – Estado da Arte 27
Como se observa na imagem comparativa, as tecnologias mais “tradicionais” apresentam
vantagens ao nível dos custos dos equipamentos, deixando de lado o retorno que a eficiência
representa a longo prazo. As tecnologias mais recentes são fortemente penalizadas pelos custos
de aquisição, mas constituem um investimento sólido quando são projetadas a médio e longo
prazo. As vantágens ao nível da eficiência são notórias nos sistemas que fazem uso do controlo
volumétrico.
2.10- Ambiente de simulação
Devido à amplitude dos recursos necessários e à escassez dos meios disponíveis, entendeu-se
proceder ao desenvolvimento deste trabalho em ambiente de simulação.
Após análise dos vários softwares disponíveis, optou-se pela utilização do MATLAB,
(Simulink, 2014a). Dos vários softwares analisados destacam-se:
• LMS Imagine. Lab – SIEMENS
• LVSIM®-HYD – FESTO
• Automation Studio ™
• HYDROSYM – PARO Software & Engineering
O Simulink é uma ferramenta interativa do MATLAB utilizada para modelar, analisar e
simulação de aplicações dinâmicas de engenharia. Permite desenvolver estruturas complexas
através de blocos com funcionalidades específicas que uma vez interligadas modelam o
comportamento do sistema em estudo. O ambiente puramente matemático reduz os custos e
tempo de processo, permitindo obter resultados detalhados.
A biblioteca hidráulica possui um grande número de elementos parametrizáveis, possibilitando
a sua interligação com elementos de diferentes bibliotecas, como é exemplo a biblioteca de
elementos mecânicos. Os sensores disponíveis permitem efectuar medidas ao longo de todo o
circuito hidráulico de modo a monotirizar o seu funcionamento e interagir com os restantes
elementos, construindo-se assim modelos complexos e detalhados.
O acesso ao modelo matemático dos elementos inseridos no simulador permite a sua fácil
interpretação, assim como o acesso às suas variáveis. A ajuda disponibilizada referente aos
componentes em análise, com referências às suas fontes, limitações e exemplos
associados, concede a este software vantagens excecionais.
Projeto e desenvolvimento de uma central hidráulica servo acionada
28
Capítulo 2 – Estado da Arte
Apesar das vantagens mencionadas, o Simulink possui uma qualidade gráfica menos cuidada
em comparação com outros softwares disponíveis no mercado. A possibilidade de alteração dos
parâmetros ao longo de uma simulação é numa limitação comum a todos os simuladores
reduzindo fortemente a sua dinâmica.
Os modelos estudados foram construídos com base em elementos das bibliotecas de hidráulica,
mecânica, elétrica e controlo. A sua interligação foi possível graças ao recurso da simulação
em modo discreto. O período estabelecido como conveniente para a obtenção detalhada da
simulação foi de 75 ∗ 10� segundos.

Projeto e desenvolvimento de uma central hidráulica servo acionada
Capítulo 3 – Modelação 29
- - Atuador Processo Pressão Controlador +
3 Modelação
Ao longo deste capítulo discute-se as opções tomadas na seleção dos componentes referentes a
cada parte da central hidráulica e apresenta-se o modelo de cálculo para cada uma dessas partes.
O esquema de blocos apresentado na figura 3.1 reflete a totalidade do processo, associado a
uma central hidráulica.
O processo pode ser dividido em três grandes blocos, tendo como entrada a variável de
referência pressão.
O controlador varia a velocidade do atuador em função da diferença entre a pressão de
referência e a pressão no circuito hidráulico.
O processo é composto por todos os componentes hidráulicos, tendo como saída uma linha
hidráulica caracterizada pelas propriedades definidas como mandatórias no capítulo 2.
O atuador é composto por um motor controlado em velocidade e por inversor de frequência. A
entrada do atuador é uma velocidade angular e a saída caracteriza-se pela rotação do eixo do
referido motor.
Figura 3.1 Esquema de blocos do princípio de funcionamento.
Projeto e desenvolvimento de uma central hidráulica servo acionada
30
Capítulo 3 – Modelação
3.1- Estudo do modelo hidráulico
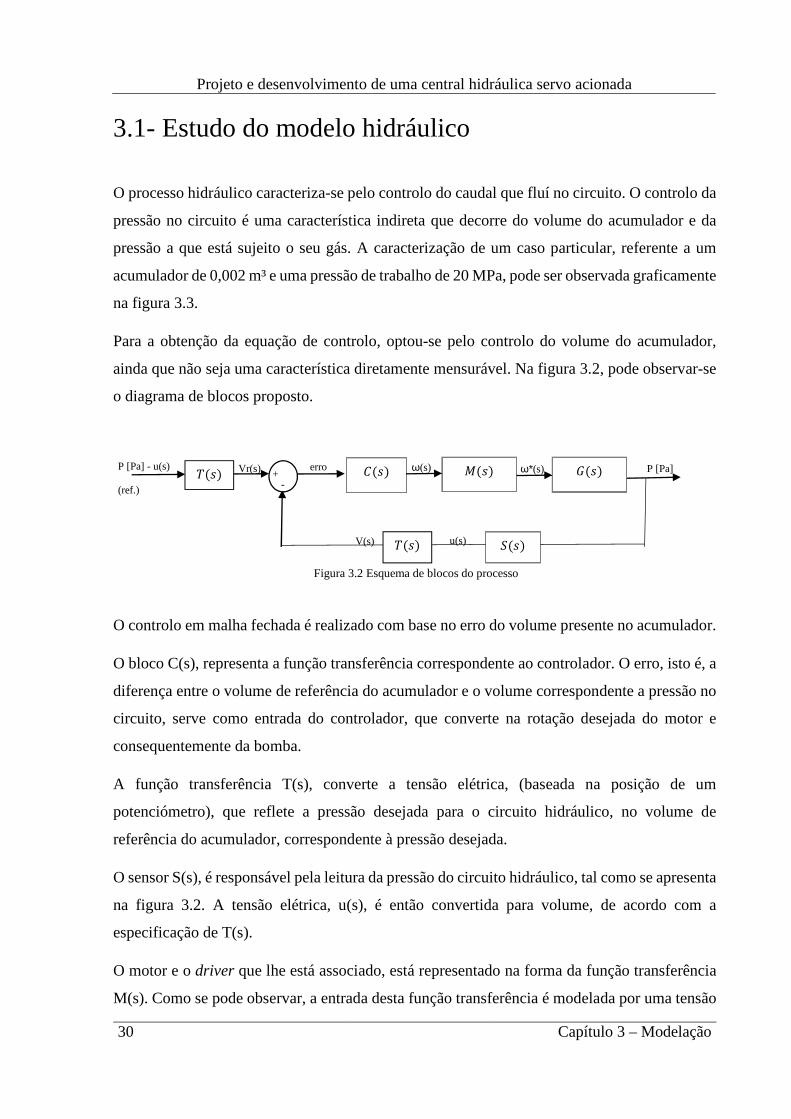
O processo hidráulico caracteriza-se pelo controlo do caudal que fluí no circuito. O controlo da
pressão no circuito é uma característica indireta que decorre do volume do acumulador e da
pressão a que está sujeito o seu gás. A caracterização de um caso particular, referente a um
acumulador de 0,002 m³ e uma pressão de trabalho de 20 MPa, pode ser observada graficamente
na figura 3.3.
Para a obtenção da equação de controlo, optou-se pelo controlo do volume do acumulador,
ainda que não seja uma característica diretamente mensurável. Na figura 3.2, pode observar-se
o diagrama de blocos proposto.
O controlo em malha fechada é realizado com base no erro do volume presente no acumulador.
O bloco C(s), representa a função transferência correspondente ao controlador. O erro, isto é, a
diferença entre o volume de referência do acumulador e o volume correspondente a pressão no
circuito, serve como entrada do controlador, que converte na rotação desejada do motor e
consequentemente da bomba.
A função transferência T(s), converte a tensão elétrica, (baseada na posição de um
potenciómetro), que reflete a pressão desejada para o circuito hidráulico, no volume de
referência do acumulador, correspondente à pressão desejada.
O sensor S(s), é responsável pela leitura da pressão do circuito hidráulico, tal como se apresenta
na figura 3.2. A tensão elétrica, u(s), é então convertida para volume, de acordo com a
especificação de T(s).
O motor e o driver que lhe está associado, está representado na forma da função transferência
M(s). Como se pode observar, a entrada desta função transferência é modelada por uma tensão
Figura 3.2 Esquema de blocos do processo
P [Pa] P [Pa] - u(s)
(ref.)
���� ���� ���� ���� erro
����
+ -
ω(s) ω*(s)
V(s)
Vr(s)
���� u(s)

Projeto e desenvolvimento de uma central hidráulica servo acionada
Capítulo 3 – Modelação 31
elétrica que reflete a velocidade desejável do motor, tendo como saída a mesma velocidade sob
a forma de uma rotação mecânica.
A função G(s), representa o comportamento do circuito hidráulico, tendo como entrada a
velocidade do eixo da bomba, ω*(s), e na saída, a pressão na linha do circuito hidráulico
provocada pela pressão do gás no acumulador.
O caudal do acumulador é resultado do equilíbrio entre o caudal de saída do circuito e do caudal
proporcionado pela bomba.
Podemos escrever a uma equação de equilíbrio do sistema tendo como base o equilíbrio dos
caudais:
q� = q� + q� ( 3.1 )
Caudal de entrada ou da bomba = �� [��/�]; Caudal na entrada do acumulador =�" [��/�]; Caudal de retorno ao tanque ou de saída =�� [��/�].
O caudal de entrada ou da bomba é resultado da rotação, rendimento e deslocamento da bomba.
De acordo com as equações utilizadas no modelo da bomba do Matlab Simulink, calcula-se a
seguir o caudal fornecido pela bomba em função da sua rotação, tendo em conta as perdas
volumétricas relacionadas com a pressão e propriedades do fluido.
�� = # ∗ $ − %&�"' ∗ ( ( 3.2 )
%&�"' = %)*+ ∗ , ( 3.3 )
%)* = # ∗ $-./. ∗ �1 − 12� ∗ +-./. ∗ ,-./.(-./. ( 3.4 )
Em que:
Deslocamento de bamba = D [m�. 456�7];
Projeto e desenvolvimento de uma central hidráulica servo acionada
32
Capítulo 3 – Modelação
Rotação da bomba = $ [456 · �−1];
Rendimento volumétrico = 12;
Coeficiente de perda = %&�"';
Pressão da linha = P [Pa];
Coeficiente Hagen – Poiseuille = %)*;
Viscosidade cinemática = + [mm2·��7];
Densidade do fluido = , [kg.���];
O caudal de retorno ao tanque é o somatório dos caudais de todos os atuadores.
�� = 9 �:-
;
( 3.5 )
De acordo com a lei de Hagen-Poiseuille3, o caudal de saída pode ser calculado em função da
pressão e da resistência hidráulica, �<=�: �� = ∆(<=
( 3.6 )
Em condições isotérmicas para gases ideais, a pressão e o volume estão relacionadas segundo
a lei de Boyle-Mariotte4, que pode ser simplificada da seguinte forma:
3A lei de Poiseuille ou equação de Poiseuille, relaciona a queda de pressão de um fluido ao longo de um tubo cilíndrico. Foi obtida
experimentalmente por Gotthilf Heinrich Ludwig Hagen em 1839 e Jean Léonard Marie Poiseuille em 1838, e publicada por Poiseuille em
1840 e 1846, (in wikipedia.org).
4A Lei de Boyle-Mariotte (geralmente citada somente como Lei de Boyle) enuncia que a pressão absoluta e o volume de uma certa quantidade
de gás confinado são inversamente proporcionais se a temperatura permanecer constante num sistema fechado. A lei recebe o nome de Robert
Boyle, que publicou a lei original em 1623 e de Edme Mariotte que posteriormente realizou os mesmo experimento e publicou seus resultados
na França em 1676, (in wikipedia.org).
Projeto e desenvolvimento de uma central hidráulica servo acionada
Capítulo 3 – Modelação 33
P;. V; = P7. V7 ( 3.7 )
Onde:
(; A (7= Pressão do gás inicial e final respetivamente;
B; A B7 = Volume do gás inicial e final respetivamente.
Nas condições da equação anterior, assume-se que a transformação ocorre num sistema
fechado, em que há troca de energia com os sistemas na sua vizinhança.
A troca de energia referida é típica de um reservatório sujeito a mudanças de pressão e volume,
suficientemente lentas, que permitem que todo o sistema se ajuste continuamente.
No processo adiabático não há troca de energia térmica entre o reservatório e os sistemas na
sua vizinhança. Toda a energia térmica produzida é transformada no processo de
compressão/expansão do nitrogénio no interior do acumulador.
A equação matemática que descreve um processo adiabático de um gás é a seguinte:
P ∗ VC= Constante ( 3.8 )
Onde:
P = Pressão do gás no acumulador;
V= Volume do gás no acumulador;
γ = EFEG Razão entre os calores específicos molares à pressão constante.
O gás utilizado nos acumuladores é o nitrogénio em que H = IJ = 1,4.
Podemos assim, rescrever (3.7) na seguinte forma:
P;. V;C = P7. V7C ( 3.9 )
De acordo com a Bosch Rexroth AG, o acumulador segue a lei isométrica e a descarga a lei
adiabática.
Projeto e desenvolvimento de uma central hidráulica servo acionada
34
Capítulo 3 – Modelação
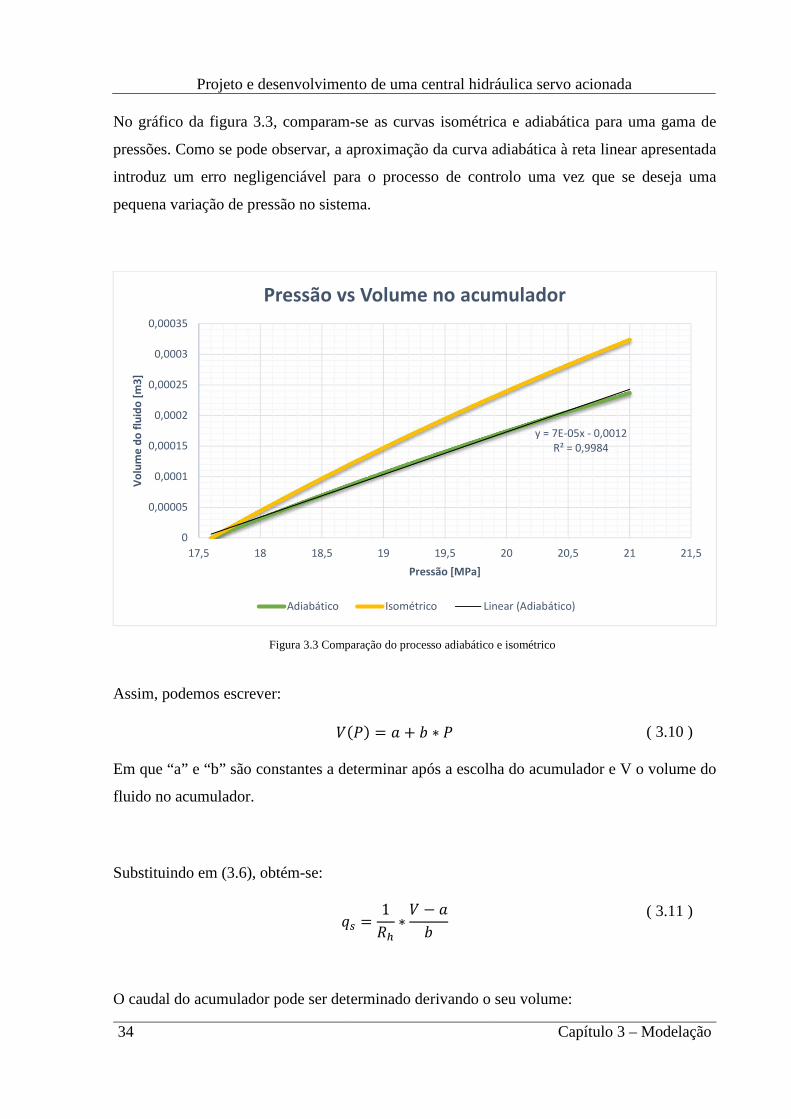
No gráfico da figura 3.3, comparam-se as curvas isométrica e adiabática para uma gama de
pressões. Como se pode observar, a aproximação da curva adiabática à reta linear apresentada
introduz um erro negligenciável para o processo de controlo uma vez que se deseja uma
pequena variação de pressão no sistema.
Assim, podemos escrever:
B�(� = 5 + M ∗ (
( 3.10 )
Em que “a” e “b” são constantes a determinar após a escolha do acumulador e V o volume do
fluido no acumulador.
Substituindo em (3.6), obtém-se:
�� � 1<=
∗ B � 5M
( 3.11 )
O caudal do acumulador pode ser determinado derivando o seu volume:
y = 7E-05x - 0,0012
R² = 0,9984
0
0,00005
0,0001
0,00015
0,0002
0,00025
0,0003
0,00035
17,5 18 18,5 19 19,5 20 20,5 21 21,5
Vo
lum
e d
o f
luid
o [
m3
]
Pressão [MPa]
Pressão vs Volume no acumulador
Adiabático Isométrico Linear (Adiabático)
Figura 3.3 Comparação do processo adiabático e isométrico
Projeto e desenvolvimento de uma central hidráulica servo acionada
Capítulo 3 – Modelação 35
Substituindo em (3.1) pelas equações (3.2), (3.10), (3.11) e (3.12), obtemos a equação
diferencial que relaciona o volume do acumulador com a velocidade do motor:
6N(O)6P + 1<= ∗ N�O� − 5M = # ∗ $�P� − %&�"' ∗ N�O� − 5M
( 3.13 )
Resolvendo esta equação diferencial em Laplace, obtém-se:
B��� = # ∗ Q���� + 7R'STUV∗WXWX∗Y
+ 5 ∗ �7R'STUV∗WXWX∗Y ��Z + 7R'STUV∗WXWX∗Y ∗ � + B�0�
� + 7R'STUV∗WXWX∗Y
( 3.14 )
De (3.14), destacam-se três parcelas com significados diferentes que importa explicar:
A equação (3.15), representa a resposta forçada do sistema e está representada na forma da
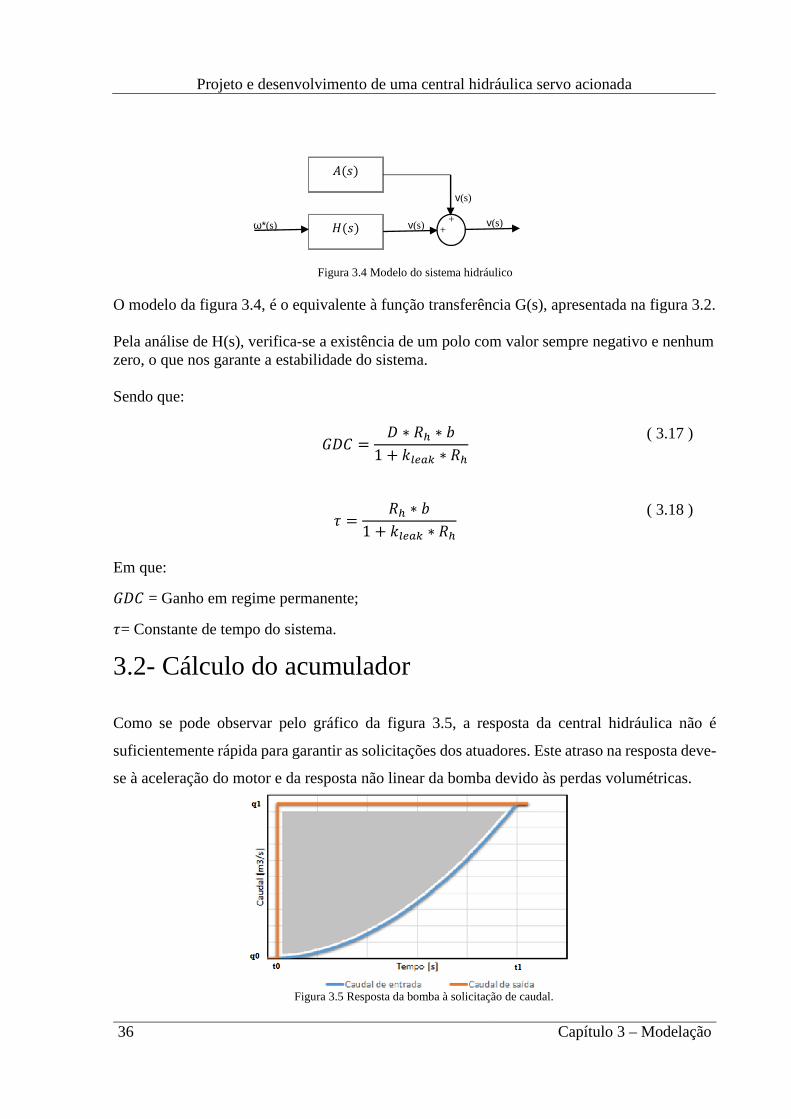
função transferência H(s) na figura 3.4.
[��� = B���Q��� = #� + 7R'STUV∗WXWX∗Y
( 3.15 )
A equação (3.16) representa a resposta livre e pressupões o estabelecimento de condições
iniciais. Uma vez que não foram estabelecidas condições iniciais, esta parcela pode ser
ignorada.
B��� = B�0�� + 7R'STUV∗WXWX∗Y
( 3.16 )
A restante parcela de (3.14), apresenta-se como uma perturbação para o sistema, como origem
na pressão a que está submetido o gás do acumulador e está apresentada na figura 3.4, como
sendo a função transferência A(s).
q� = dV�t�dt ( 3.12 )
Projeto e desenvolvimento de uma central hidráulica servo acionada
36
Capítulo 3 – Modelação
Figura 3.5 Resposta da bomba à solicitação de caudal.
O modelo da figura 3.4, é o equivalente à função transferência G(s), apresentada na figura 3.2. Pela análise de H(s), verifica-se a existência de um polo com valor sempre negativo e nenhum zero, o que nos garante a estabilidade do sistema. Sendo que: �#� � # ∗ <= ∗ M
1 + %&�"' ∗ <=
( 3.17 )
^ � <= ∗ M
1 + %&�"' ∗ <=
( 3.18 )
Em que:
�#� = Ganho em regime permanente;
^= Constante de tempo do sistema.
3.2- Cálculo do acumulador
Como se pode observar pelo gráfico da figura 3.5, a resposta da central hidráulica não é
suficientemente rápida para garantir as solicitações dos atuadores. Este atraso na resposta deve-
se à aceleração do motor e da resposta não linear da bomba devido às perdas volumétricas.
Figura 3.4 Modelo do sistema hidráulico
+ [(�)
_(�)
+
ω*(s) v(s)
v(s)
v(s)
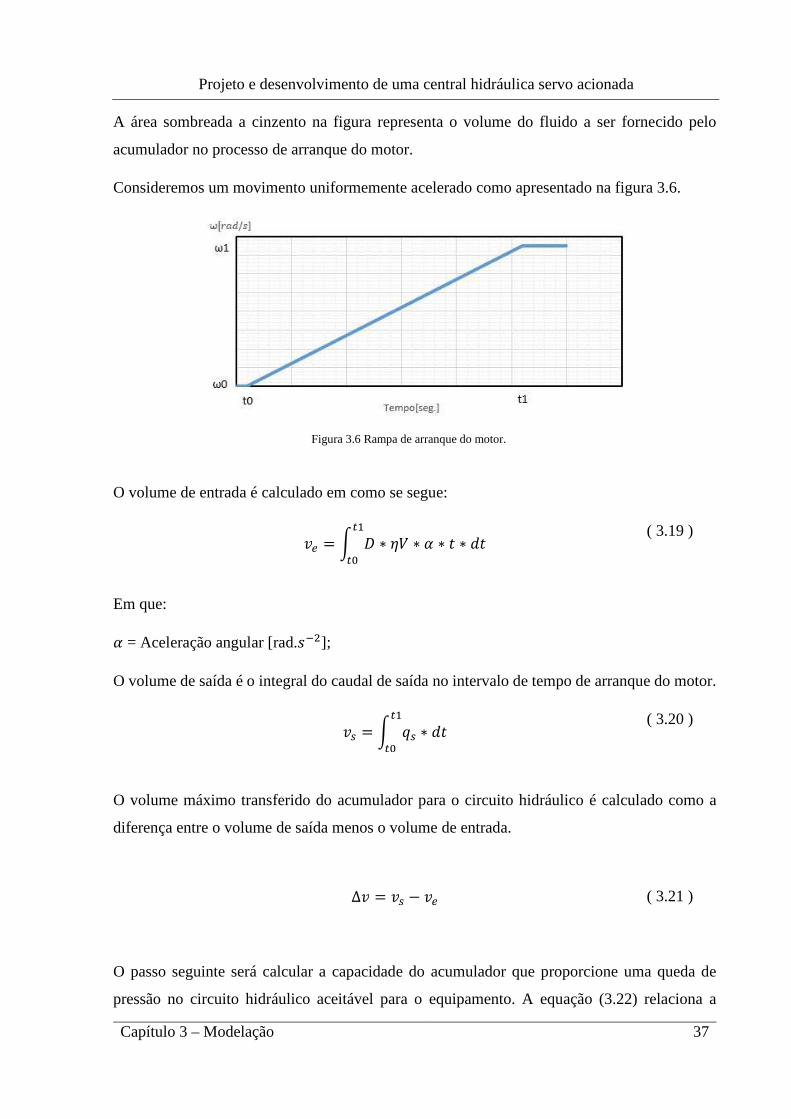
Projeto e desenvolvimento de uma central hidráulica servo acionada
Capítulo 3 – Modelação 37
A área sombreada a cinzento na figura representa o volume do fluido a ser fornecido pelo
acumulador no processo de arranque do motor.
Consideremos um movimento uniformemente acelerado como apresentado na figura 3.6.
O volume de entrada é calculado em como se segue:
N� � ` # ∗ 1B ∗ a ∗ P ∗ 6PO7O;
( 3.19 )
Em que:
a = Aceleração angular [rad.��Z];
O volume de saída é o integral do caudal de saída no intervalo de tempo de arranque do motor.
N� = ` �� ∗ 6PO7O;
( 3.20 )
O volume máximo transferido do acumulador para o circuito hidráulico é calculado como a
diferença entre o volume de saída menos o volume de entrada.
∆N = N� − N�
( 3.21 )
O passo seguinte será calcular a capacidade do acumulador que proporcione uma queda de
pressão no circuito hidráulico aceitável para o equipamento. A equação (3.22) relaciona a
Figura 3.6 Rampa de arranque do motor.

Projeto e desenvolvimento de uma central hidráulica servo acionada
38
Capítulo 3 – Modelação
capacidade do acumulador com o volume a compensar pelo acumulador, pressão do gás e a
pressão mínima e máxima do circuito.
B" � ∆N(*b
*c)c
V ∗ d1 − e*c*fgcVh
( 3.22 )
Em que;
(; ≤ 0,9 ∗ (7, Pressão do gás no acumulador [Pa];
(7= Pressão mínima de trabalho [Pa];
(Z= Pressão máxima de trabalho [Pa];
k = constante adiabática = 1,4;
B" = Capacidade do acumulador [��].
Algumas regras práticas devem ser observadas de forma a garantir os melhores resultados e a
preservar a vida útil do acumulador. As equações (3.23) e (3.24) estabelecem os critérios a
observar no processo de cálculo de acordo o datasheet do acumulador que se reproduz
parcialmente no anexo VI.
(Z ≤ 4 ∗ (;
( 3.23 )
B" = 1,5 … 3 ∗ ∆N
( 3.24 )
3.3- Cálculo da bomba
Neste trabalho utiliza-se uma bomba de engrenagens internas que satisfaz os requisitos
anteriores, atendendo aos produtos existentes no mercado e às considerações anteriormente
discutidas.
Considerando a eficiência volumétrica constante, podemos calcular o débito da bomba da
seguinte forma:

Projeto e desenvolvimento de uma central hidráulica servo acionada
Capítulo 3 – Modelação 39
m � # ∗ 12 ∗ $
( 3.25 )
m = 9 �:
:
;
( 3.26 )
Em que:
Q = Caudal máximo da central [��. ��7];
w = velocidade máxima do motor [456. ��7];
D = volume deslocado. [��. 456�7];
�: = Caudal requerido para o atuador “i” [��. ��7].
O binário máximo da bomba é importante para o cálculo do motor e é calculado como se segue:
�Y = # ∗ ∆(1=/
( 3.27 )
Em que:
∆( = Diferança de pressão entre a aspiração e a linha de pressão [Pa];
1=/ = Rendimento hidráulico/mecânico.
A seguir apresenta-se o método de cálculo da potência de acionamento da bomba. De referir
que se trata de potência mecânica. Para a determinação da potência do motor deve ser levado
em conta o rendimento deste, as perdas mecânicas e elétricas associadas ao controlador.
("n =o∗*pq1000
( 3.28 )
Em que:
("n = Potência mecânica de acionamento [kW];
1r = 12 ∗ 1=/, Rendimento total.
3.4- Cálculo do motor
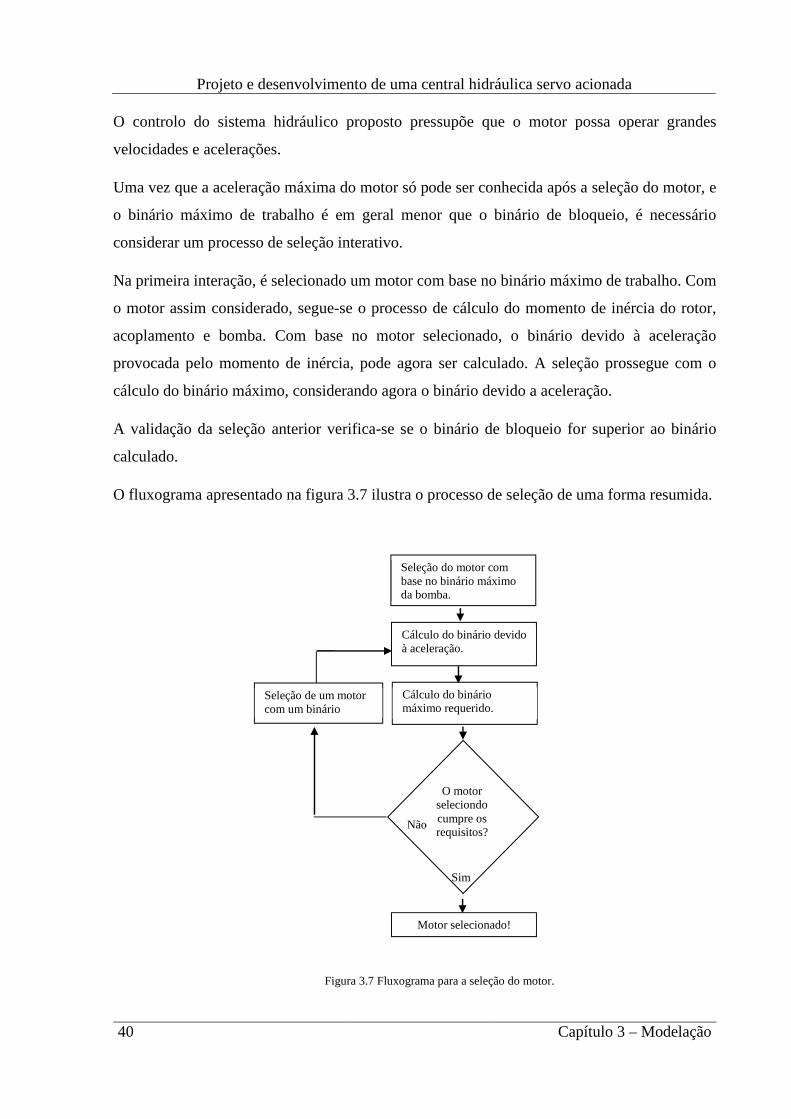
Projeto e desenvolvimento de uma central hidráulica servo acionada
40
Capítulo 3 – Modelação
O controlo do sistema hidráulico proposto pressupõe que o motor possa operar grandes
velocidades e acelerações.
Uma vez que a aceleração máxima do motor só pode ser conhecida após a seleção do motor, e
o binário máximo de trabalho é em geral menor que o binário de bloqueio, é necessário
considerar um processo de seleção interativo.
Na primeira interação, é selecionado um motor com base no binário máximo de trabalho. Com
o motor assim considerado, segue-se o processo de cálculo do momento de inércia do rotor,
acoplamento e bomba. Com base no motor selecionado, o binário devido à aceleração
provocada pelo momento de inércia, pode agora ser calculado. A seleção prossegue com o
cálculo do binário máximo, considerando agora o binário devido a aceleração.
A validação da seleção anterior verifica-se se o binário de bloqueio for superior ao binário
calculado.
O fluxograma apresentado na figura 3.7 ilustra o processo de seleção de uma forma resumida.
Figura 3.7 Fluxograma para a seleção do motor.
Seleção do motor com base no binário máximo da bomba.
Cálculo do binário devido à aceleração.
Cálculo do binário máximo requerido.
Seleção de um motor com um binário maior.
Não
Motor selecionado!
Sim
O motor seleciondo cumpre os requisitos?
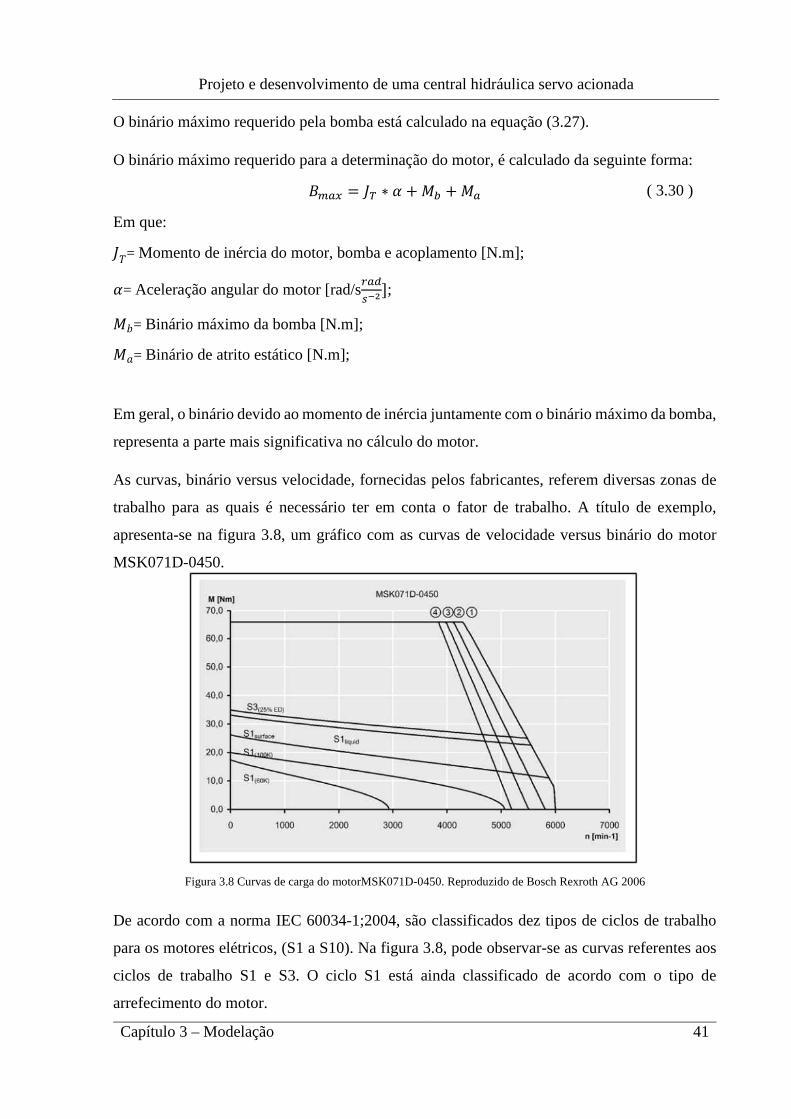
Projeto e desenvolvimento de uma central hidráulica servo acionada
Capítulo 3 – Modelação 41
O binário máximo requerido pela bomba está calculado na equação (3.27).
O binário máximo requerido para a determinação do motor, é calculado da seguinte forma:
s/"t � ur ∗ a + �Y + �" ( 3.30 )
Em que:
u�= Momento de inércia do motor, bomba e acoplamento [N.m];
a= Aceleração angular do motor [rad/s�"v�wf];
�M= Binário máximo da bomba [N.m];
�5= Binário de atrito estático [N.m];
Em geral, o binário devido ao momento de inércia juntamente com o binário máximo da bomba,
representa a parte mais significativa no cálculo do motor.
As curvas, binário versus velocidade, fornecidas pelos fabricantes, referem diversas zonas de
trabalho para as quais é necessário ter em conta o fator de trabalho. A título de exemplo,
apresenta-se na figura 3.8, um gráfico com as curvas de velocidade versus binário do motor
MSK071D-0450.
De acordo com a norma IEC 60034-1;2004, são classificados dez tipos de ciclos de trabalho
para os motores elétricos, (S1 a S10). Na figura 3.8, pode observar-se as curvas referentes aos
ciclos de trabalho S1 e S3. O ciclo S1 está ainda classificado de acordo com o tipo de
arrefecimento do motor.
Figura 3.8 Curvas de carga do motorMSK071D-0450. Reproduzido de Bosch Rexroth AG 2006
Projeto e desenvolvimento de uma central hidráulica servo acionada
42
Capítulo 3 – Modelação
A percentagem do ciclo de trabalho ou duty cycle é calculada de acordo com a seguinte
expressão:
x# � ∆Py�n
∗ 100% ( 3.31 )
Em que:
∆P{, Tempo de trabalho com carga constante [s];
�|, Tempo de ciclo [s].
Projeto e desenvolvimento de uma central hidráulica servo acionada
Capítulo 4 – Exemplo de aplicação e simulação 43
4 Exemplo de aplicação e simulação Após a exposição dos conceitos teóricos em torno do modelo apresentado no capítulo 3,
apresenta-se a seguir, o cálculo e simulação de dois exemplos comparativos, dos quais se
pretende inferir sobre a aplicabilidade e benefícios do processo em estudo.
O primeiro exemplo refere-se a uma central hidráulica tradicional, isto é, constituída por uma
bomba de débito constante e um motor de indução trifásico. A pressão de trabalho é estabelecida
por uma válvula reguladora de pressão.
O segundo exemplo será constituído por um servo motor, uma bomba de engrenagens internas
e um acumulador. O controlo volumétrico é baseado no erro entre o volume do acumulador e o
volume de referência para a pressão desejada. Os dados de carga da central são comuns aos dois
projetos. Na tabela 4.1, podem observar-se as características consideradas elementares para o
cálculo das duas centrais.
Tabela 4.1 Características base para o projeto das centrais hidráulicas.
Característica Valor Unidades
Caudal máximo de saída 0,0001 m³/s
Pressão de trabalho 20 MPa
Tolerância da pressão ± 2%
Para simplificar o processo de desenho, análise e simulação das centrais hidráulicas em estudo,
substituiu-se os atuadores por uma válvula proporcional com descarga direta para o
reservatório.
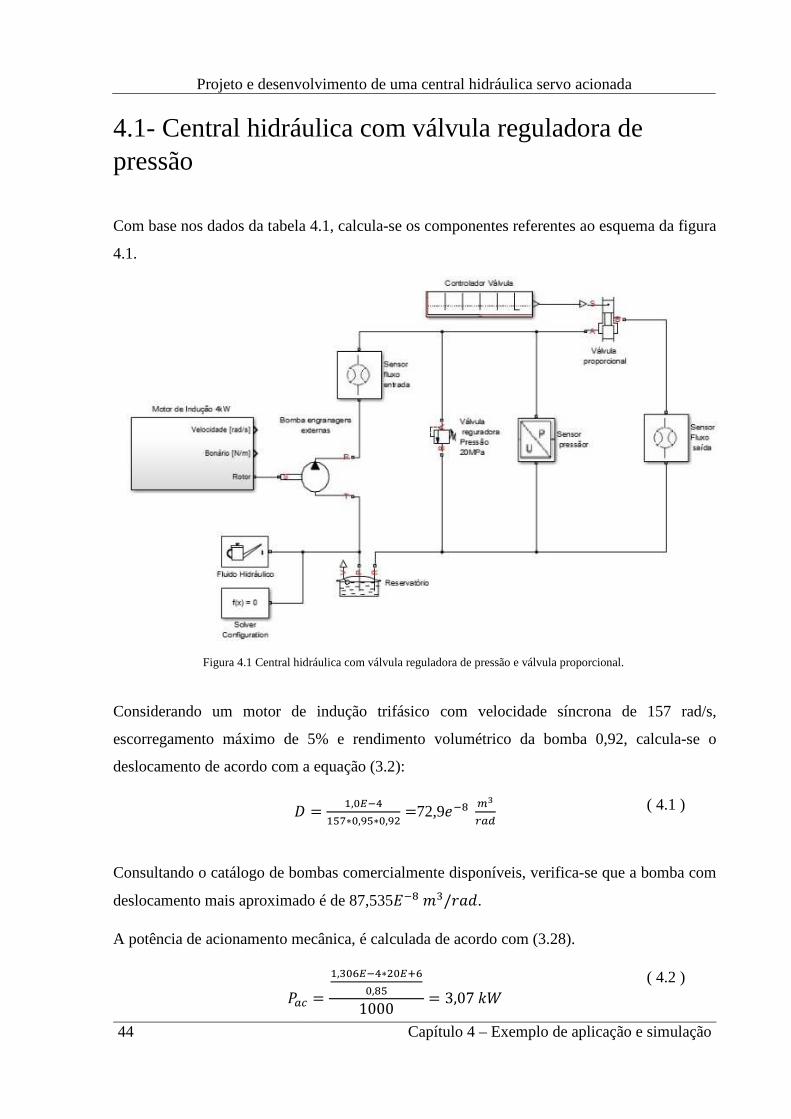
Projeto e desenvolvimento de uma central hidráulica servo acionada
44
Capítulo 4 – Exemplo de aplicação e simulação
Figura 4.1 Central hidráulica com válvula reguladora de pressão e válvula proporcional.
4.1- Central hidráulica com válvula reguladora de pressão
Com base nos dados da tabela 4.1, calcula-se os componentes referentes ao esquema da figura
4.1.
Considerando um motor de indução trifásico com velocidade síncrona de 157 rad/s,
escorregamento máximo de 5% e rendimento volumétrico da bomba 0,92, calcula-se o
deslocamento de acordo com a equação (3.2):
# � 7,;}�~7JI∗;,�J∗;,�Z =72,9A�� /�
�"v
( 4.1 )
Consultando o catálogo de bombas comercialmente disponíveis, verifica-se que a bomba com
deslocamento mais aproximado é de 87,535x�� ��/456.
A potência de acionamento mecânica, é calculada de acordo com (3.28).
("n =7,�; }�~∗Z;}R
;,�J1000 = 3,07 %Q ( 4.2 )
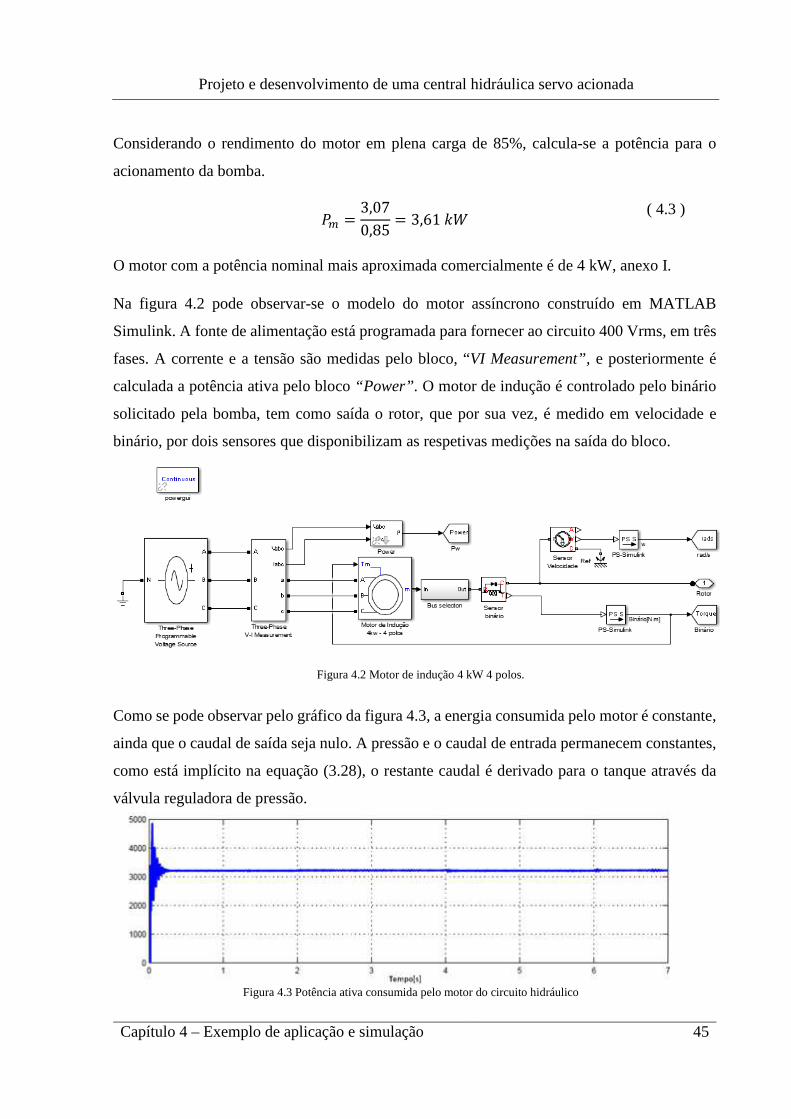
Projeto e desenvolvimento de uma central hidráulica servo acionada
Capítulo 4 – Exemplo de aplicação e simulação 45
Considerando o rendimento do motor em plena carga de 85%, calcula-se a potência para o
acionamento da bomba.
(/ � 3,070,85 � 3,61 %Q
( 4.3 )
O motor com a potência nominal mais aproximada comercialmente é de 4 kW, anexo I.
Na figura 4.2 pode observar-se o modelo do motor assíncrono construído em MATLAB
Simulink. A fonte de alimentação está programada para fornecer ao circuito 400 Vrms, em três
fases. A corrente e a tensão são medidas pelo bloco, “VI Measurement”, e posteriormente é
calculada a potência ativa pelo bloco “Power”. O motor de indução é controlado pelo binário
solicitado pela bomba, tem como saída o rotor, que por sua vez, é medido em velocidade e
binário, por dois sensores que disponibilizam as respetivas medições na saída do bloco.
Como se pode observar pelo gráfico da figura 4.3, a energia consumida pelo motor é constante,
ainda que o caudal de saída seja nulo. A pressão e o caudal de entrada permanecem constantes,
como está implícito na equação (3.28), o restante caudal é derivado para o tanque através da
válvula reguladora de pressão.
Figura 4.2 Motor de indução 4 kW 4 polos.
Figura 4.3 Potência ativa consumida pelo motor do circuito hidráulico
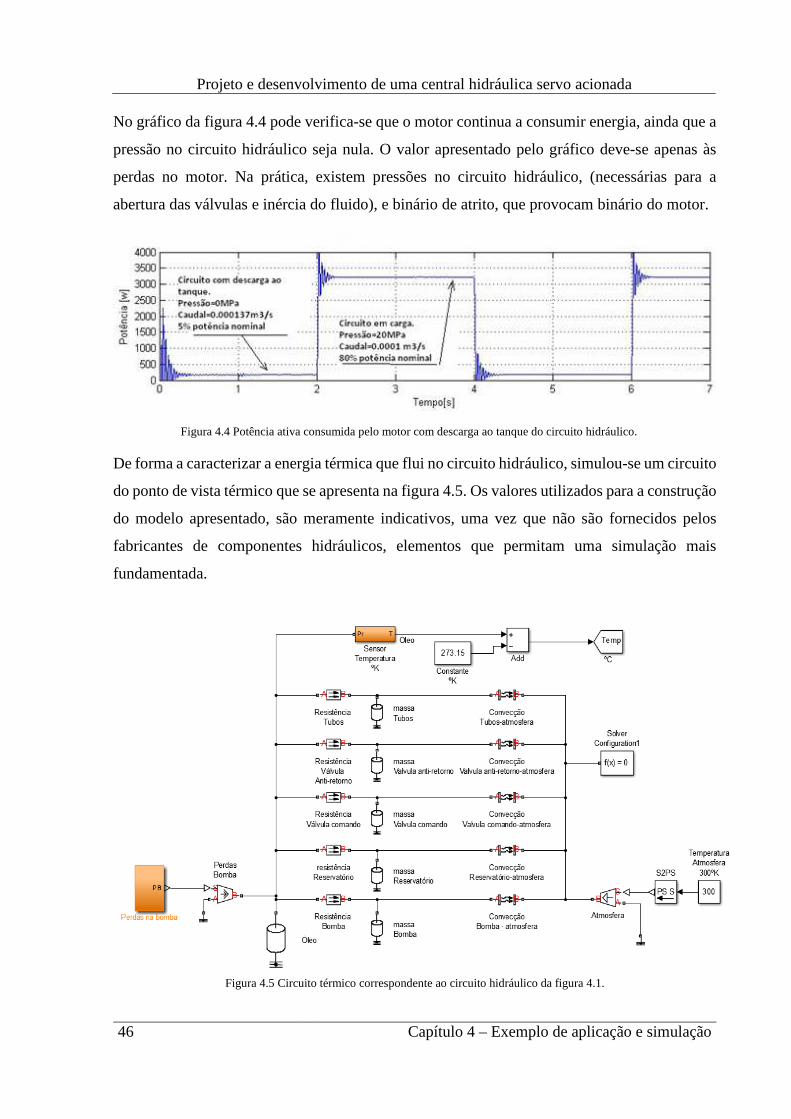
Projeto e desenvolvimento de uma central hidráulica servo acionada
46
Capítulo 4 – Exemplo de aplicação e simulação
No gráfico da figura 4.4 pode verifica-se que o motor continua a consumir energia, ainda que a
pressão no circuito hidráulico seja nula. O valor apresentado pelo gráfico deve-se apenas às
perdas no motor. Na prática, existem pressões no circuito hidráulico, (necessárias para a
abertura das válvulas e inércia do fluido), e binário de atrito, que provocam binário do motor.
De forma a caracterizar a energia térmica que flui no circuito hidráulico, simulou-se um circuito
do ponto de vista térmico que se apresenta na figura 4.5. Os valores utilizados para a construção
do modelo apresentado, são meramente indicativos, uma vez que não são fornecidos pelos
fabricantes de componentes hidráulicos, elementos que permitam uma simulação mais
fundamentada.
Figura 4.5 Circuito térmico correspondente ao circuito hidráulico da figura 4.1.
Figura 4.4 Potência ativa consumida pelo motor com descarga ao tanque do circuito hidráulico.
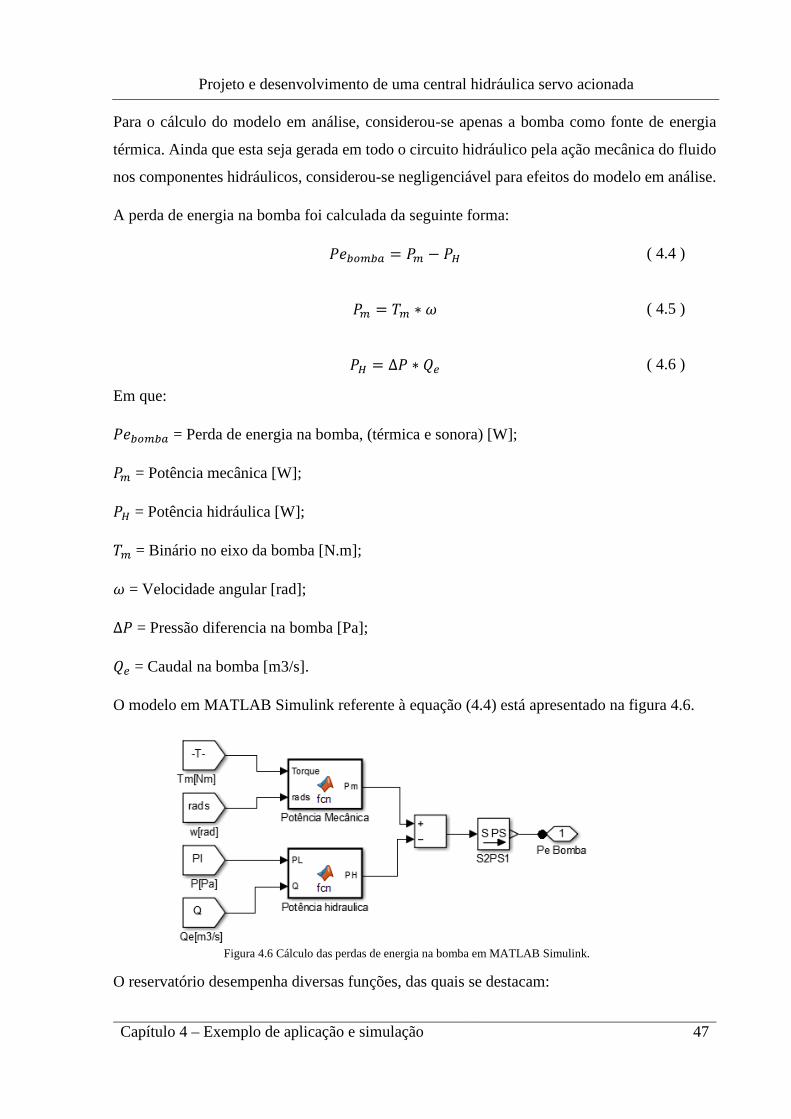
Projeto e desenvolvimento de uma central hidráulica servo acionada
Capítulo 4 – Exemplo de aplicação e simulação 47
Para o cálculo do modelo em análise, considerou-se apenas a bomba como fonte de energia
térmica. Ainda que esta seja gerada em todo o circuito hidráulico pela ação mecânica do fluido
nos componentes hidráulicos, considerou-se negligenciável para efeitos do modelo em análise.
A perda de energia na bomba foi calculada da seguinte forma:
(AY./Y" � (/ � () ( 4.4 )
(/ � �/ ∗ � ( 4.5 )
() = ∆( ∗ m� ( 4.6 )
Em que:
(AY./Y" = Perda de energia na bomba, (térmica e sonora) [W];
(/ = Potência mecânica [W];
() = Potência hidráulica [W];
�/ = Binário no eixo da bomba [N.m];
� = Velocidade angular [rad];
∆( = Pressão diferencia na bomba [Pa];
m� = Caudal na bomba [m3/s].
O modelo em MATLAB Simulink referente à equação (4.4) está apresentado na figura 4.6.
O reservatório desempenha diversas funções, das quais se destacam:
Figura 4.6 Cálculo das perdas de energia na bomba em MATLAB Simulink.

Projeto e desenvolvimento de uma central hidráulica servo acionada
48
Capítulo 4 – Exemplo de aplicação e simulação
• Retenção do fluido que circula no sistema hidráulico.
• Dissipação térmica.
• Remoção de ar do fluido.
• Decantação de partículas contaminantes.
• Separação de água condensada.
• Suporte de componentes hidráulicos, em especial filtros e bomba.
A troca de energia térmica do fluido com o meio ambiente é realizada essencialmente pela
convecção nas paredes laterais do reservatório. Desta forma, de acordo com PEDROSA, L.D.
(2006), calculou-se o volume do reservatório para determinar o volume do fluido e a superfície
metálica que permite a convecção com o exterior.
�W � (3 . . . 5 ∗ m� ∗ 60� + B"O
( 4.7 )
Em que:
�W = Capacidade do reservatório [��].
m� = Caudal máximo da bomba. [��/�].
B"O = Volume dos atuadores [��].
Independentemente do valor obtido, o reservatório deve ter volume suficiente para conter o
volume de todos os atuadores e tubos. Um espaço adicional de 10% a 15% de ar deve ser
acrescentado ao volume calculado em (4.7) de forma a absorver as variações de nível e a espuma
criada pelo fluido.
De acordo com a tabela 4.1, desprezando o volume dos tubos e atuadores, considerando um
volume adicional de 15% e considerando o volume do reservatório mais favorável do ponto de
vista da refrigeração do fluido, temos:
Com base no desenho da figura 4.7, calculou-se as dimensões do reservatório, que satisfazem
a capacidade calculada em (4.8), tabela 4.2.
�W = 5 ∗ 1,0x − 4 ∗ 60 ∗ 1,15 =0,0345 ��.
( 4.8 )
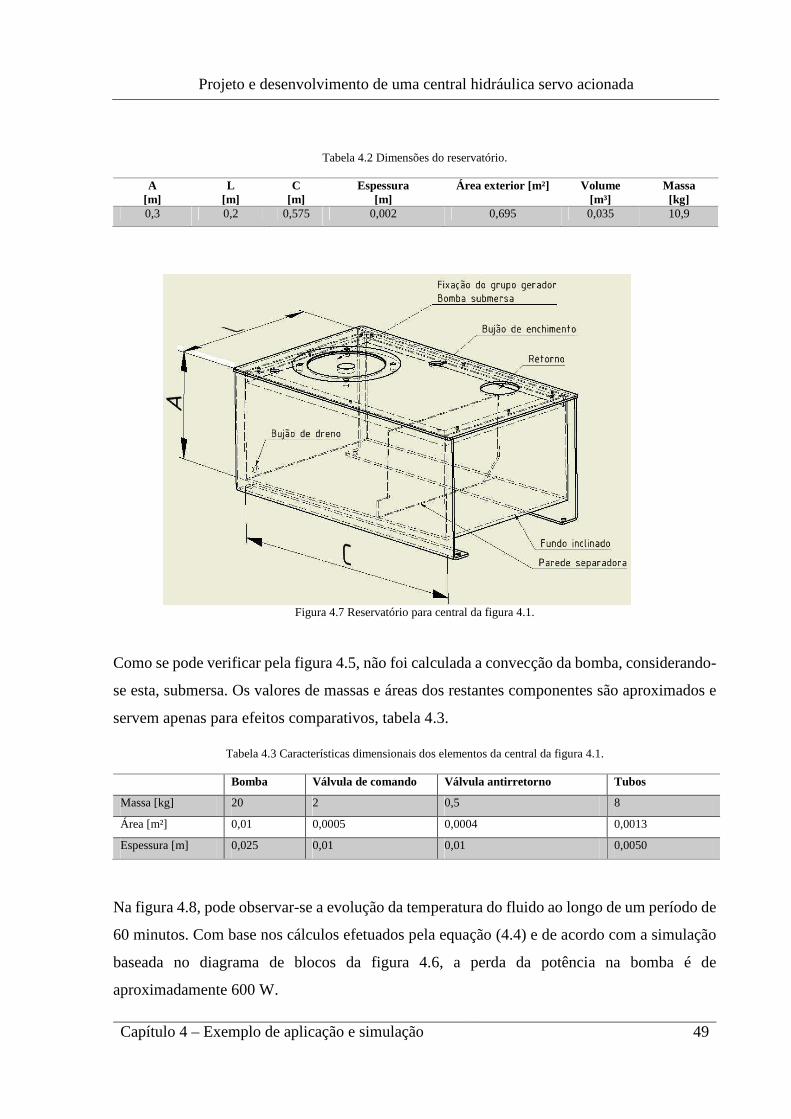
Projeto e desenvolvimento de uma central hidráulica servo acionada
Capítulo 4 – Exemplo de aplicação e simulação 49
Tabela 4.2 Dimensões do reservatório.
A [m]
L [m]
C [m]
Espessura [m]
Área exterior [m²] Volume [m³]
Massa [kg]
0,3 0,2 0,575 0,002 0,695 0,035 10,9
Como se pode verificar pela figura 4.5, não foi calculada a convecção da bomba, considerando-
se esta, submersa. Os valores de massas e áreas dos restantes componentes são aproximados e
servem apenas para efeitos comparativos, tabela 4.3.
Tabela 4.3 Características dimensionais dos elementos da central da figura 4.1.
Bomba Válvula de comando Válvula antirretorno Tubos
Massa [kg] 20 2 0,5 8
Área [m²] 0,01 0,0005 0,0004 0,0013
Espessura [m] 0,025 0,01 0,01 0,0050
Na figura 4.8, pode observar-se a evolução da temperatura do fluido ao longo de um período de
60 minutos. Com base nos cálculos efetuados pela equação (4.4) e de acordo com a simulação
baseada no diagrama de blocos da figura 4.6, a perda da potência na bomba é de
aproximadamente 600 W.
Figura 4.7 Reservatório para central da figura 4.1.
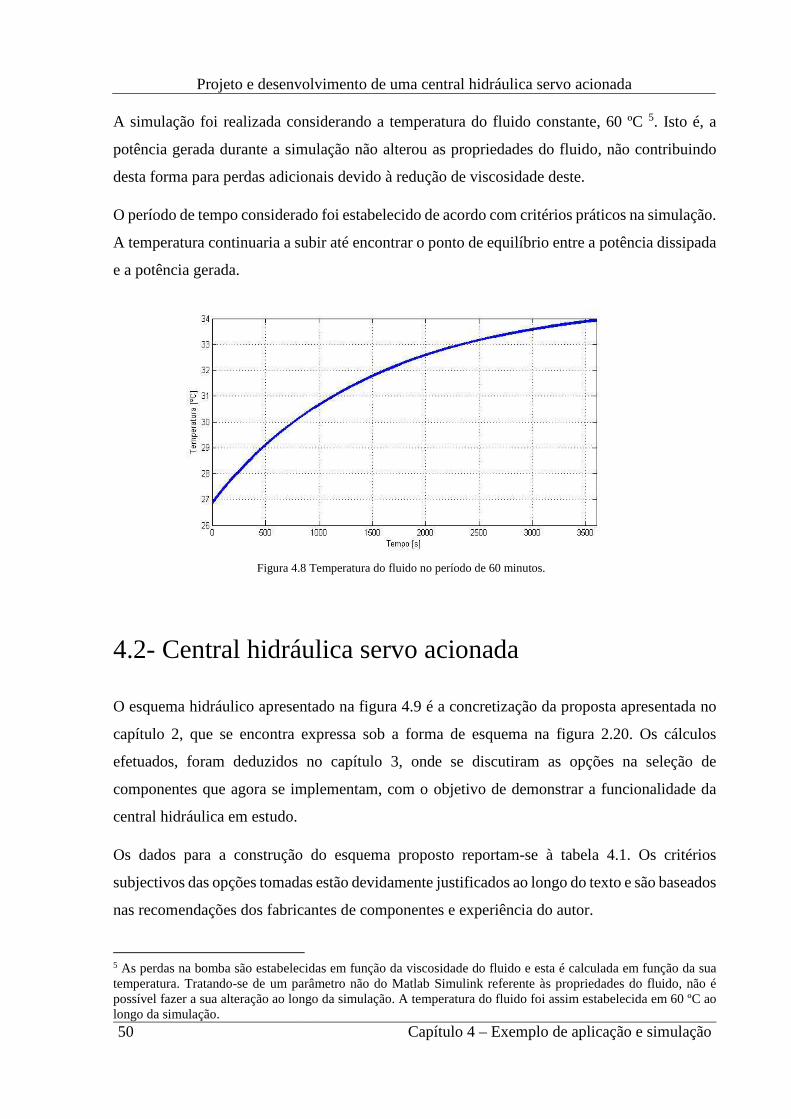
Projeto e desenvolvimento de uma central hidráulica servo acionada
50
Capítulo 4 – Exemplo de aplicação e simulação
Figura 4.8 Temperatura do fluido no período de 60 minutos.
A simulação foi realizada considerando a temperatura do fluido constante, 60 ºC 5. Isto é, a
potência gerada durante a simulação não alterou as propriedades do fluido, não contribuindo
desta forma para perdas adicionais devido à redução de viscosidade deste.
O período de tempo considerado foi estabelecido de acordo com critérios práticos na simulação.
A temperatura continuaria a subir até encontrar o ponto de equilíbrio entre a potência dissipada
e a potência gerada.
4.2- Central hidráulica servo acionada
O esquema hidráulico apresentado na figura 4.9 é a concretização da proposta apresentada no
capítulo 2, que se encontra expressa sob a forma de esquema na figura 2.20. Os cálculos
efetuados, foram deduzidos no capítulo 3, onde se discutiram as opções na seleção de
componentes que agora se implementam, com o objetivo de demonstrar a funcionalidade da
central hidráulica em estudo.
Os dados para a construção do esquema proposto reportam-se à tabela 4.1. Os critérios
subjectivos das opções tomadas estão devidamente justificados ao longo do texto e são baseados
nas recomendações dos fabricantes de componentes e experiência do autor.
5 As perdas na bomba são estabelecidas em função da viscosidade do fluido e esta é calculada em função da sua temperatura. Tratando-se de um parâmetro não do Matlab Simulink referente às propriedades do fluido, não é possível fazer a sua alteração ao longo da simulação. A temperatura do fluido foi assim estabelecida em 60 ºC ao longo da simulação.
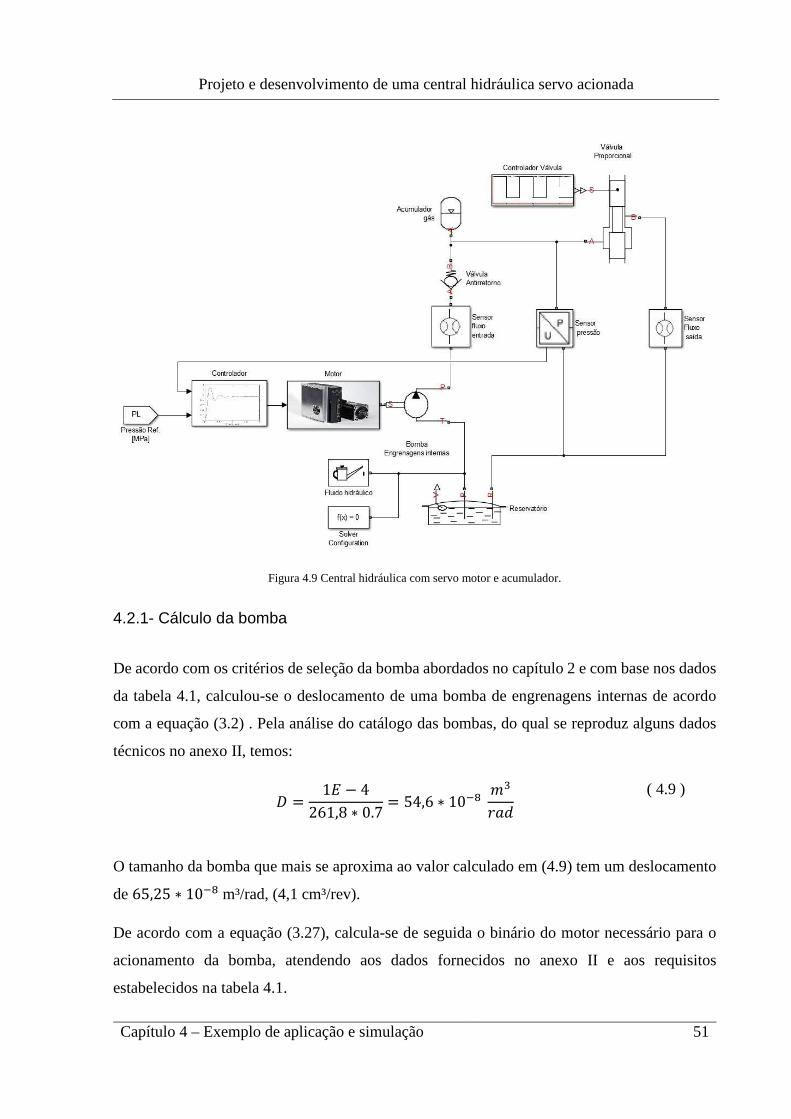
Projeto e desenvolvimento de uma central hidráulica servo acionada
Capítulo 4 – Exemplo de aplicação e simulação 51
4.2.1- Cálculo da bomba
De acordo com os critérios de seleção da bomba abordados no capítulo 2 e com base nos dados
da tabela 4.1, calculou-se o deslocamento de uma bomba de engrenagens internas de acordo
com a equação (3.2) . Pela análise do catálogo das bombas, do qual se reproduz alguns dados
técnicos no anexo II, temos:
# � 1x − 4261,8 ∗ 0.7 = 54,6 ∗ 10�� ��456
( 4.9 )
O tamanho da bomba que mais se aproxima ao valor calculado em (4.9) tem um deslocamento
de 65,25 ∗ 10�� m³/rad, (4,1 cm³/rev).
De acordo com a equação (3.27), calcula-se de seguida o binário do motor necessário para o
acionamento da bomba, atendendo aos dados fornecidos no anexo II e aos requisitos
estabelecidos na tabela 4.1.
Figura 4.9 Central hidráulica com servo motor e acumulador.
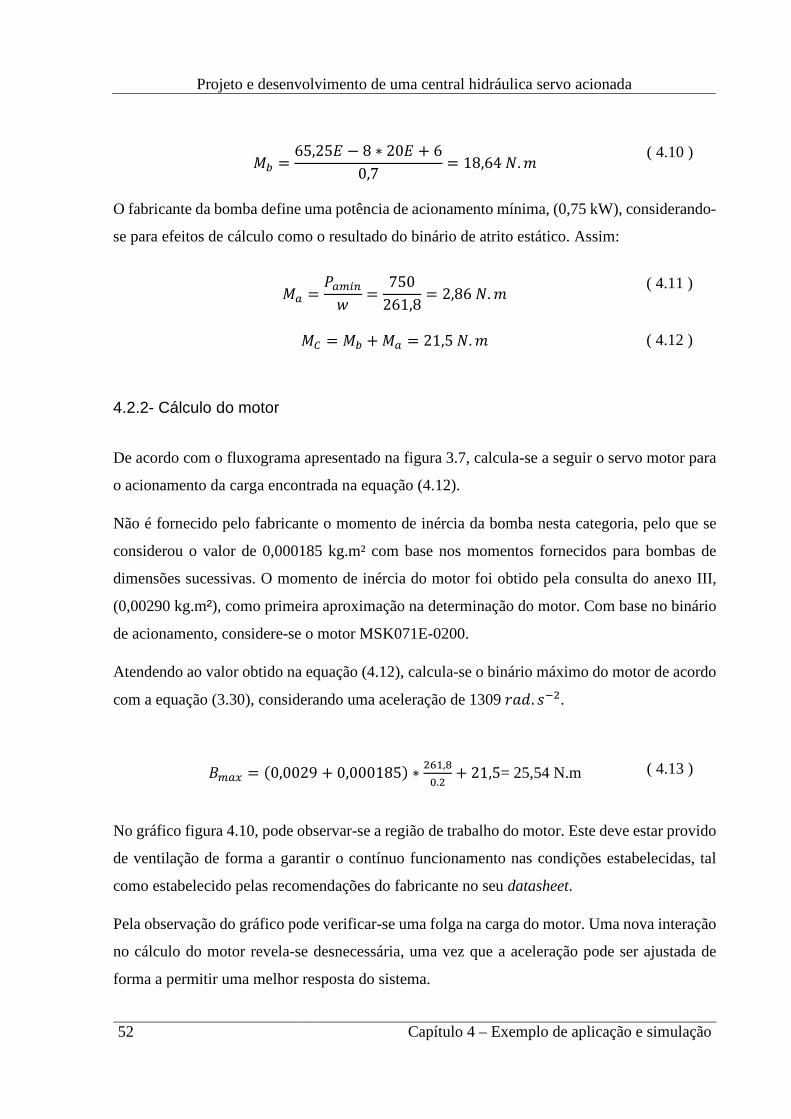
Projeto e desenvolvimento de uma central hidráulica servo acionada
52
Capítulo 4 – Exemplo de aplicação e simulação
�Y � 65,25x � 8 ∗ 20x + 60,7 = 18,64 �. �
( 4.10 )
O fabricante da bomba define uma potência de acionamento mínima, (0,75 kW), considerando-
se para efeitos de cálculo como o resultado do binário de atrito estático. Assim:
4.2.2- Cálculo do motor
De acordo com o fluxograma apresentado na figura 3.7, calcula-se a seguir o servo motor para
o acionamento da carga encontrada na equação (4.12).
Não é fornecido pelo fabricante o momento de inércia da bomba nesta categoria, pelo que se
considerou o valor de 0,000185 kg.m² com base nos momentos fornecidos para bombas de
dimensões sucessivas. O momento de inércia do motor foi obtido pela consulta do anexo III,
(0,00290 kg.m²), como primeira aproximação na determinação do motor. Com base no binário
de acionamento, considere-se o motor MSK071E-0200.
Atendendo ao valor obtido na equação (4.12), calcula-se o binário máximo do motor de acordo
com a equação (3.30), considerando uma aceleração de 1309 456. ��Z.
s/"t = �0,0029 + 0,000185� ∗ Z 7,�;.Z + 21,5= 25,54 N.m ( 4.13 )
No gráfico figura 4.10, pode observar-se a região de trabalho do motor. Este deve estar provido
de ventilação de forma a garantir o contínuo funcionamento nas condições estabelecidas, tal
como estabelecido pelas recomendações do fabricante no seu datasheet.
Pela observação do gráfico pode verificar-se uma folga na carga do motor. Uma nova interação
no cálculo do motor revela-se desnecessária, uma vez que a aceleração pode ser ajustada de
forma a permitir uma melhor resposta do sistema.
�" = ("/:-$ = 750261,8 = 2,86 �. �
( 4.11 )
�� = �Y + �" = 21,5 �. �
( 4.12 )
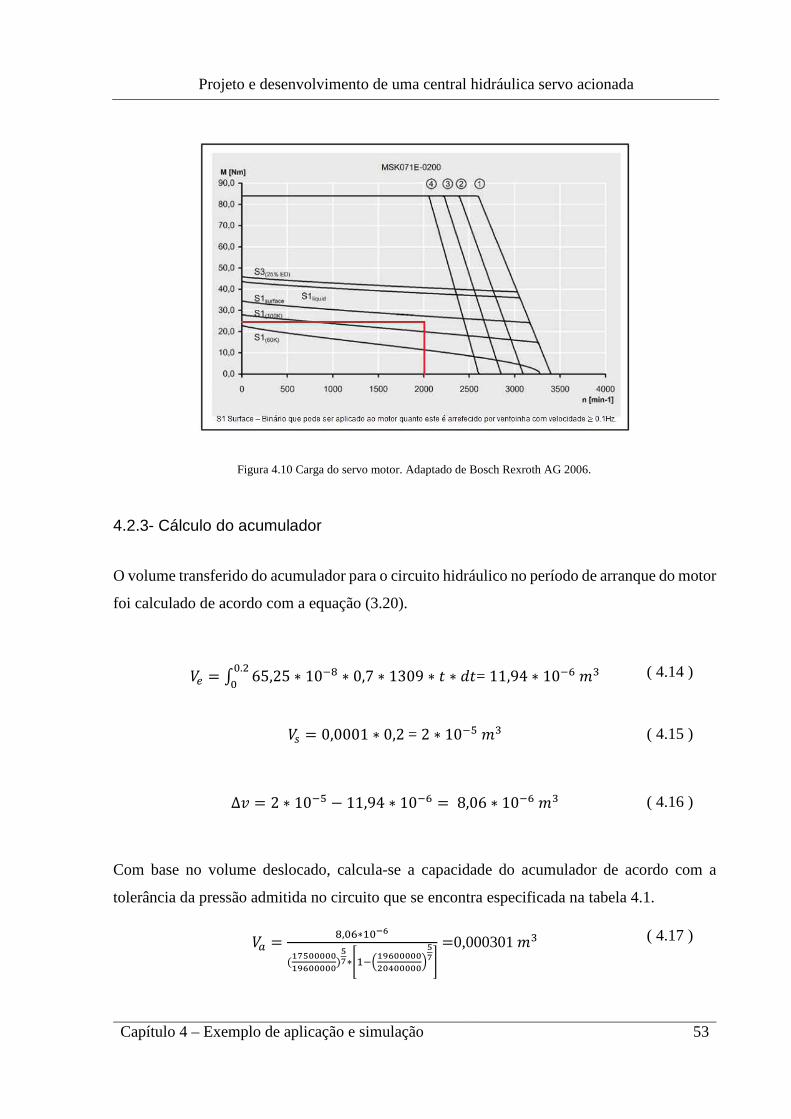
Projeto e desenvolvimento de uma central hidráulica servo acionada
Capítulo 4 – Exemplo de aplicação e simulação 53
4.2.3- Cálculo do acumulador
O volume transferido do acumulador para o circuito hidráulico no período de arranque do motor
foi calculado de acordo com a equação (3.20).
B� � � 65,25 ∗ 10�� ∗ 0,7 ∗ 1309 ∗ P ∗ 6P;.Z; = 11,94 ∗ 10� �� ( 4.14 )
B� = 0,0001 ∗ 0,2 = 2 ∗ 10�J ��
( 4.15 )
∆N = 2 ∗ 10�J − 11,94 ∗ 10� = 8,06 ∗ 10� ��
( 4.16 )
Com base no volume deslocado, calcula-se a capacidade do acumulador de acordo com a
tolerância da pressão admitida no circuito que se encontra especificada na tabela 4.1.
B" = �,; ∗7;w��c��bbbbbc��bbbbb���∗�7�ec��bbbbbfb�bbbbbg���
=0,000301 ��
( 4.17 )
Figura 4.10 Carga do servo motor. Adaptado de Bosch Rexroth AG 2006.
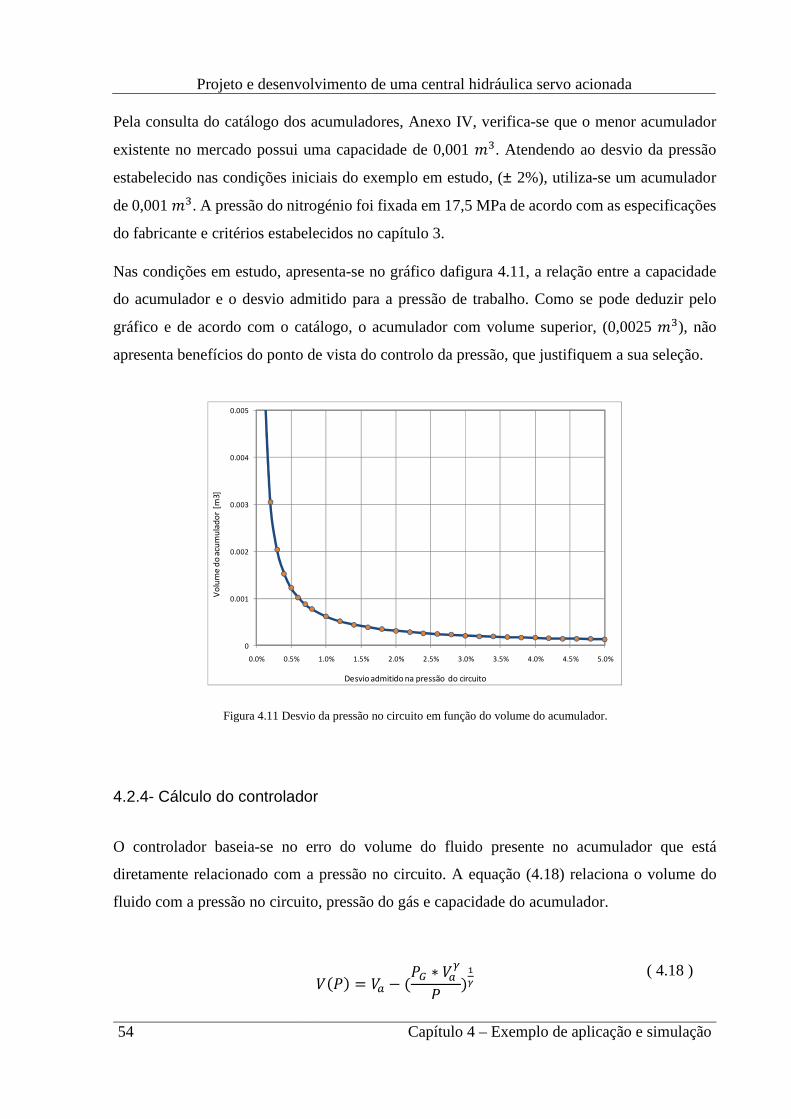
Projeto e desenvolvimento de uma central hidráulica servo acionada
54
Capítulo 4 – Exemplo de aplicação e simulação
0
0.001
0.002
0.003
0.004
0.005
0.0% 0.5% 1.0% 1.5% 2.0% 2.5% 3.0% 3.5% 4.0% 4.5% 5.0%
Vo
lum
e d
o a
cum
ula
do
r [m
3]
Desvio admitido na pressão do circuito
Pela consulta do catálogo dos acumuladores, Anexo IV, verifica-se que o menor acumulador
existente no mercado possui uma capacidade de 0,001 ��. Atendendo ao desvio da pressão
estabelecido nas condições iniciais do exemplo em estudo, (± 2%), utiliza-se um acumulador
de 0,001 ��. A pressão do nitrogénio foi fixada em 17,5 MPa de acordo com as especificações
do fabricante e critérios estabelecidos no capítulo 3.
Nas condições em estudo, apresenta-se no gráfico dafigura 4.11, a relação entre a capacidade
do acumulador e o desvio admitido para a pressão de trabalho. Como se pode deduzir pelo
gráfico e de acordo com o catálogo, o acumulador com volume superior, (0,0025 ��), não
apresenta benefícios do ponto de vista do controlo da pressão, que justifiquem a sua seleção.
4.2.4- Cálculo do controlador
O controlador baseia-se no erro do volume do fluido presente no acumulador que está
diretamente relacionado com a pressão no circuito. A equação (4.18) relaciona o volume do
fluido com a pressão no circuito, pressão do gás e capacidade do acumulador.
B(() � B" � ((� ∗ B"�( �c�
( 4.18 )
Figura 4.11 Desvio da pressão no circuito em função do volume do acumulador.
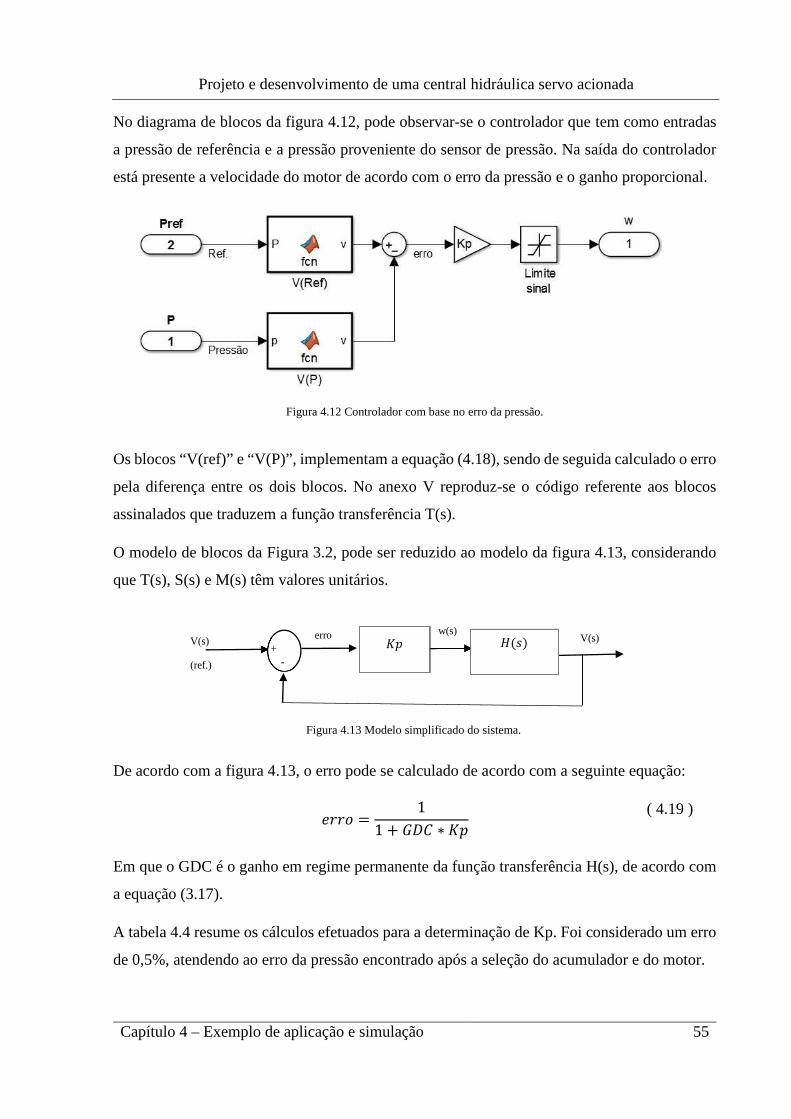
Projeto e desenvolvimento de uma central hidráulica servo acionada
Capítulo 4 – Exemplo de aplicação e simulação 55
No diagrama de blocos da figura 4.12, pode observar-se o controlador que tem como entradas
a pressão de referência e a pressão proveniente do sensor de pressão. Na saída do controlador
está presente a velocidade do motor de acordo com o erro da pressão e o ganho proporcional.
Os blocos “V(ref)” e “V(P)”, implementam a equação (4.18), sendo de seguida calculado o erro
pela diferença entre os dois blocos. No anexo V reproduz-se o código referente aos blocos
assinalados que traduzem a função transferência T(s).
O modelo de blocos da Figura 3.2, pode ser reduzido ao modelo da figura 4.13, considerando
que T(s), S(s) e M(s) têm valores unitários.
De acordo com a figura 4.13, o erro pode se calculado de acordo com a seguinte equação:
A44� � 11 + �#� ∗ �{
( 4.19 )
Em que o GDC é o ganho em regime permanente da função transferência H(s), de acordo com
a equação (3.17).
A tabela 4.4 resume os cálculos efetuados para a determinação de Kp. Foi considerado um erro
de 0,5%, atendendo ao erro da pressão encontrado após a seleção do acumulador e do motor.
Figura 4.12 Controlador com base no erro da pressão.
Figura 4.13 Modelo simplificado do sistema.
V(s) erro V(s)
(ref.)
�{ [(�)
+ -
w(s)
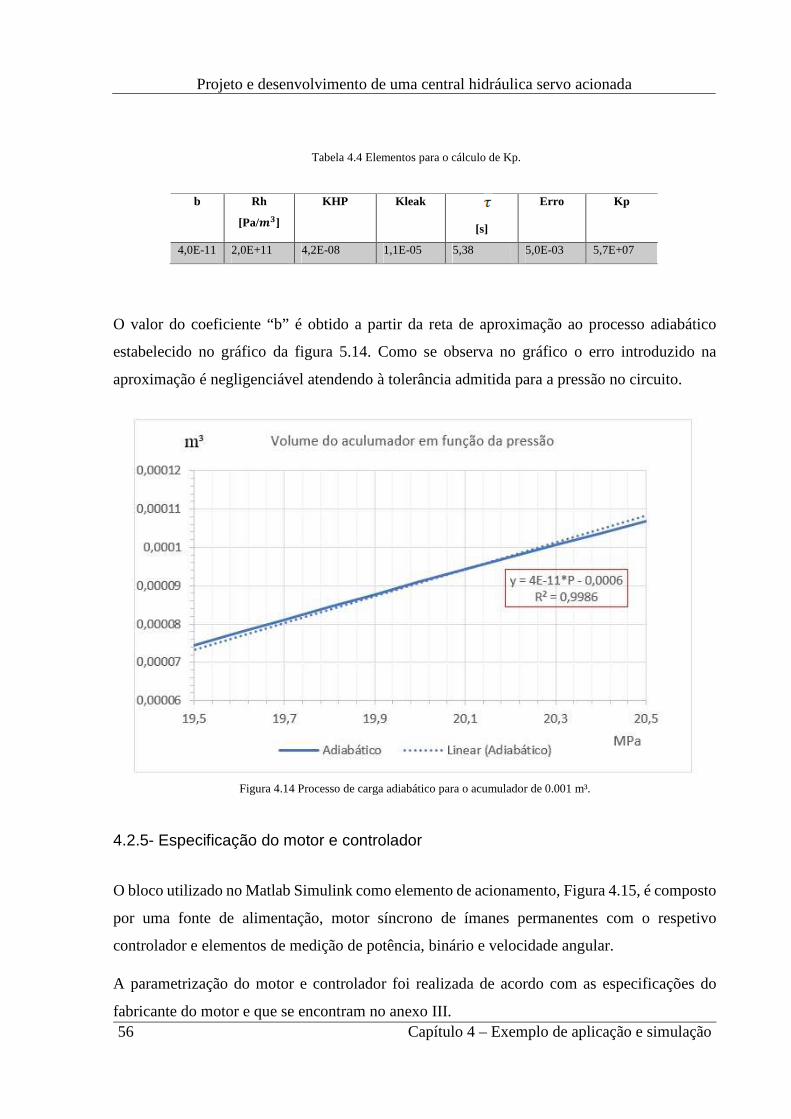
Projeto e desenvolvimento de uma central hidráulica servo acionada
56
Capítulo 4 – Exemplo de aplicação e simulação
Tabela 4.4 Elementos para o cálculo de Kp.
O valor do coeficiente “b” é obtido a partir da reta de aproximação ao processo adiabático
estabelecido no gráfico da figura 5.14. Como se observa no gráfico o erro introduzido na
aproximação é negligenciável atendendo à tolerância admitida para a pressão no circuito.
4.2.5- Especificação do motor e controlador
O bloco utilizado no Matlab Simulink como elemento de acionamento, Figura 4.15, é composto
por uma fonte de alimentação, motor síncrono de ímanes permanentes com o respetivo
controlador e elementos de medição de potência, binário e velocidade angular.
A parametrização do motor e controlador foi realizada de acordo com as especificações do
fabricante do motor e que se encontram no anexo III.
b Rh
[Pa/��]
KHP Kleak
[s]
Erro Kp
4,0E-11 2,0E+11 4,2E-08 1,1E-05 5,38 5,0E-03 5,7E+07
Figura 4.14 Processo de carga adiabático para o acumulador de 0.001 m³.
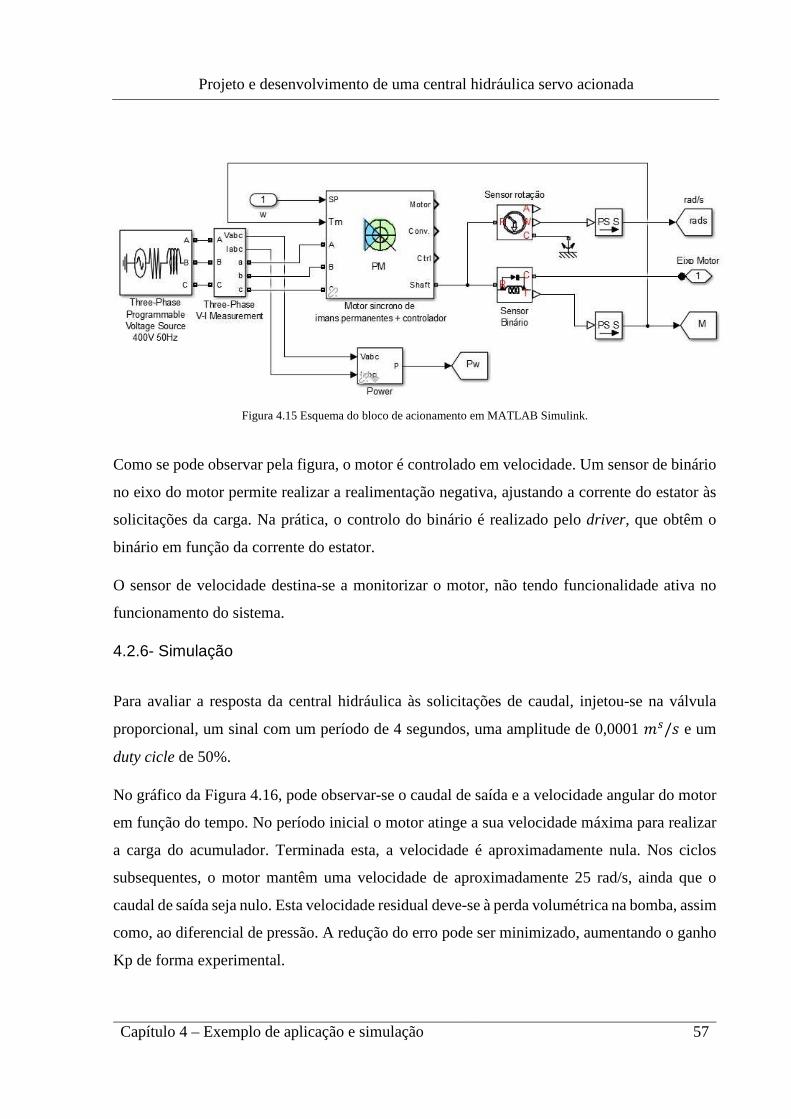
Projeto e desenvolvimento de uma central hidráulica servo acionada
Capítulo 4 – Exemplo de aplicação e simulação 57
Como se pode observar pela figura, o motor é controlado em velocidade. Um sensor de binário
no eixo do motor permite realizar a realimentação negativa, ajustando a corrente do estator às
solicitações da carga. Na prática, o controlo do binário é realizado pelo driver, que obtêm o
binário em função da corrente do estator.
O sensor de velocidade destina-se a monitorizar o motor, não tendo funcionalidade ativa no
funcionamento do sistema.
4.2.6- Simulação
Para avaliar a resposta da central hidráulica às solicitações de caudal, injetou-se na válvula
proporcional, um sinal com um período de 4 segundos, uma amplitude de 0,0001 ��/� e um
duty cicle de 50%.
No gráfico da Figura 4.16, pode observar-se o caudal de saída e a velocidade angular do motor
em função do tempo. No período inicial o motor atinge a sua velocidade máxima para realizar
a carga do acumulador. Terminada esta, a velocidade é aproximadamente nula. Nos ciclos
subsequentes, o motor mantêm uma velocidade de aproximadamente 25 rad/s, ainda que o
caudal de saída seja nulo. Esta velocidade residual deve-se à perda volumétrica na bomba, assim
como, ao diferencial de pressão. A redução do erro pode ser minimizado, aumentando o ganho
Kp de forma experimental.
Figura 4.15 Esquema do bloco de acionamento em MATLAB Simulink.
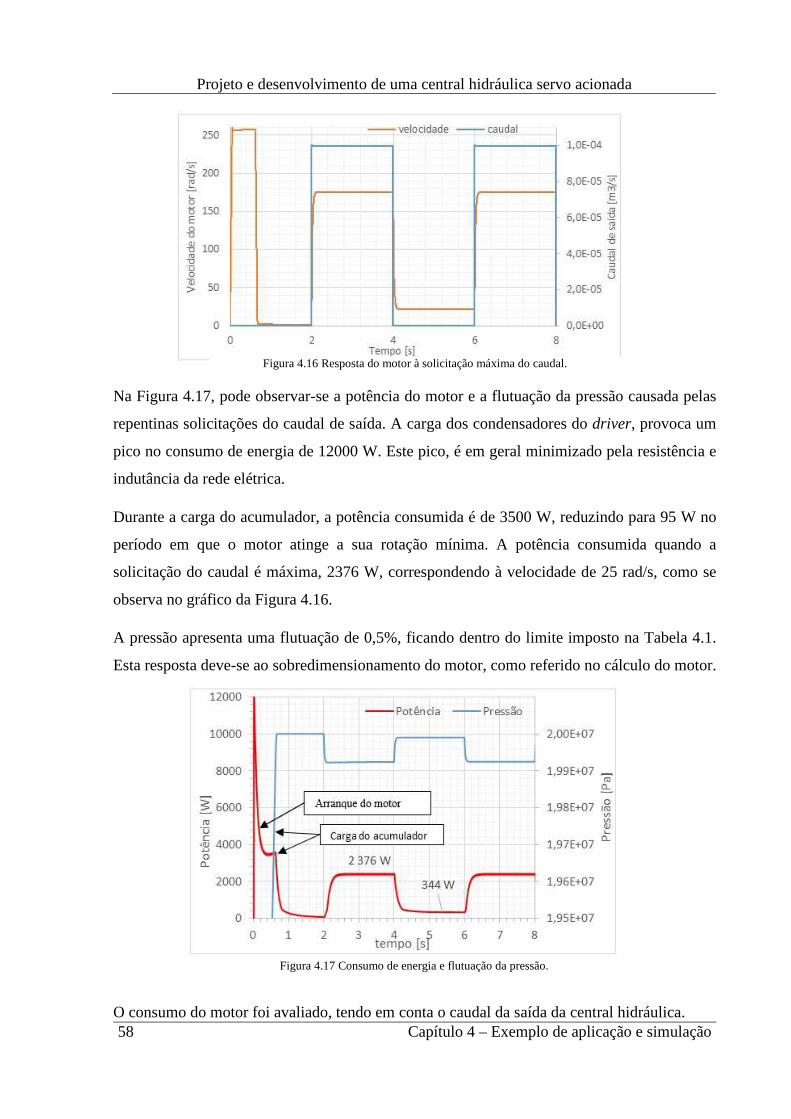
Projeto e desenvolvimento de uma central hidráulica servo acionada
58
Capítulo 4 – Exemplo de aplicação e simulação
Na Figura 4.17, pode observar-se a potência do motor e a flutuação da pressão causada pelas
repentinas solicitações do caudal de saída. A carga dos condensadores do driver, provoca um
pico no consumo de energia de 12000 W. Este pico, é em geral minimizado pela resistência e
indutância da rede elétrica.
Durante a carga do acumulador, a potência consumida é de 3500 W, reduzindo para 95 W no
período em que o motor atinge a sua rotação mínima. A potência consumida quando a
solicitação do caudal é máxima, 2376 W, correspondendo à velocidade de 25 rad/s, como se
observa no gráfico da Figura 4.16.
A pressão apresenta uma flutuação de 0,5%, ficando dentro do limite imposto na Tabela 4.1.
Esta resposta deve-se ao sobredimensionamento do motor, como referido no cálculo do motor.
O consumo do motor foi avaliado, tendo em conta o caudal da saída da central hidráulica.
Figura 4.17 Consumo de energia e flutuação da pressão.
Figura 4.16 Resposta do motor à solicitação máxima do caudal.
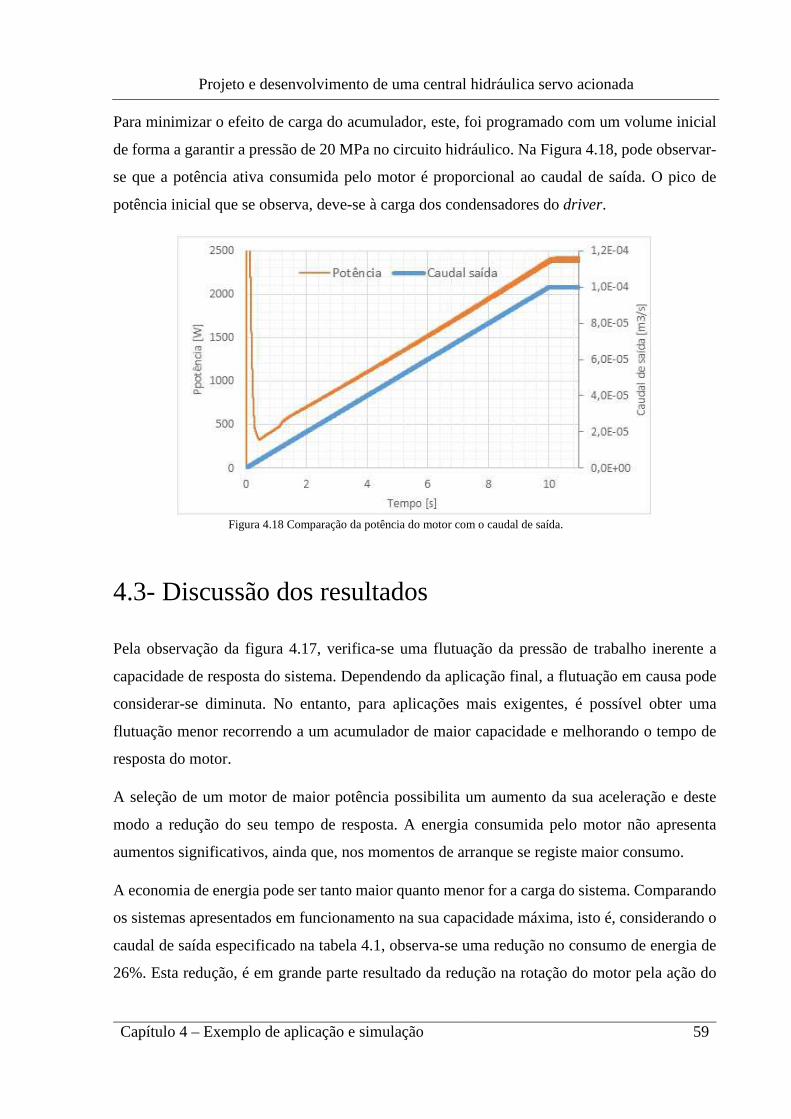
Projeto e desenvolvimento de uma central hidráulica servo acionada
Capítulo 4 – Exemplo de aplicação e simulação 59
Para minimizar o efeito de carga do acumulador, este, foi programado com um volume inicial
de forma a garantir a pressão de 20 MPa no circuito hidráulico. Na Figura 4.18, pode observar-
se que a potência ativa consumida pelo motor é proporcional ao caudal de saída. O pico de
potência inicial que se observa, deve-se à carga dos condensadores do driver.
4.3- Discussão dos resultados
Pela observação da figura 4.17, verifica-se uma flutuação da pressão de trabalho inerente a
capacidade de resposta do sistema. Dependendo da aplicação final, a flutuação em causa pode
considerar-se diminuta. No entanto, para aplicações mais exigentes, é possível obter uma
flutuação menor recorrendo a um acumulador de maior capacidade e melhorando o tempo de
resposta do motor.
A seleção de um motor de maior potência possibilita um aumento da sua aceleração e deste
modo a redução do seu tempo de resposta. A energia consumida pelo motor não apresenta
aumentos significativos, ainda que, nos momentos de arranque se registe maior consumo.
A economia de energia pode ser tanto maior quanto menor for a carga do sistema. Comparando
os sistemas apresentados em funcionamento na sua capacidade máxima, isto é, considerando o
caudal de saída especificado na tabela 4.1, observa-se uma redução no consumo de energia de
26%. Esta redução, é em grande parte resultado da redução na rotação do motor pela ação do
Figura 4.18 Comparação da potência do motor com o caudal de saída.
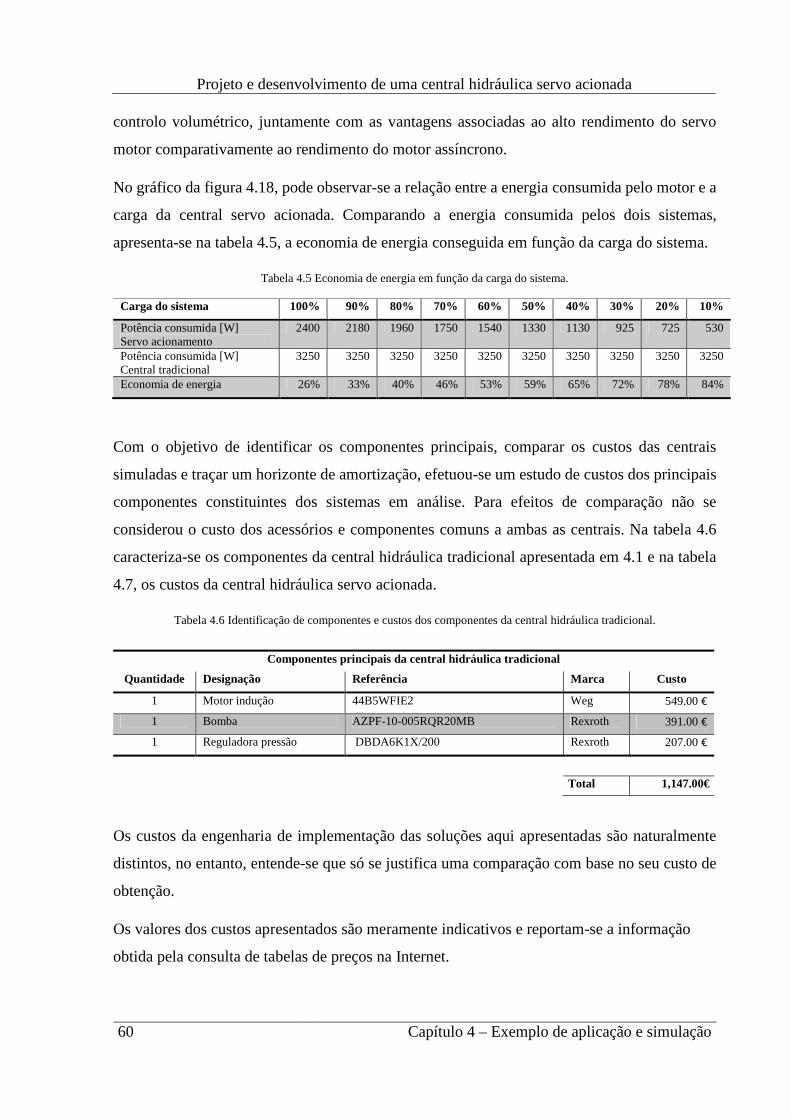
Projeto e desenvolvimento de uma central hidráulica servo acionada
60
Capítulo 4 – Exemplo de aplicação e simulação
controlo volumétrico, juntamente com as vantagens associadas ao alto rendimento do servo
motor comparativamente ao rendimento do motor assíncrono.
No gráfico da figura 4.18, pode observar-se a relação entre a energia consumida pelo motor e a
carga da central servo acionada. Comparando a energia consumida pelos dois sistemas,
apresenta-se na tabela 4.5, a economia de energia conseguida em função da carga do sistema.
Tabela 4.5 Economia de energia em função da carga do sistema.
Carga do sistema 100% 90% 80% 70% 60% 50% 40% 30% 20% 10%
Potência consumida [W] Servo acionamento
2400 2180 1960 1750 1540 1330 1130 925 725 530
Potência consumida [W] Central tradicional
3250 3250 3250 3250 3250 3250 3250 3250 3250 3250
Economia de energia 26% 33% 40% 46% 53% 59% 65% 72% 78% 84%
Com o objetivo de identificar os componentes principais, comparar os custos das centrais
simuladas e traçar um horizonte de amortização, efetuou-se um estudo de custos dos principais
componentes constituintes dos sistemas em análise. Para efeitos de comparação não se
considerou o custo dos acessórios e componentes comuns a ambas as centrais. Na tabela 4.6
caracteriza-se os componentes da central hidráulica tradicional apresentada em 4.1 e na tabela
4.7, os custos da central hidráulica servo acionada.
Tabela 4.6 Identificação de componentes e custos dos componentes da central hidráulica tradicional.
Os custos da engenharia de implementação das soluções aqui apresentadas são naturalmente
distintos, no entanto, entende-se que só se justifica uma comparação com base no seu custo de
obtenção.
Os valores dos custos apresentados são meramente indicativos e reportam-se a informação
obtida pela consulta de tabelas de preços na Internet.
Componentes principais da central hidráulica tradicional
Quantidade Designação Referência Marca Custo
1 Motor indução 44B5WFIE2 Weg 549.00 €
1 Bomba AZPF-10-005RQR20MB Rexroth 391.00 €
1 Reguladora pressão DBDA6K1X/200 Rexroth 207.00 €
Total 1,147.00€
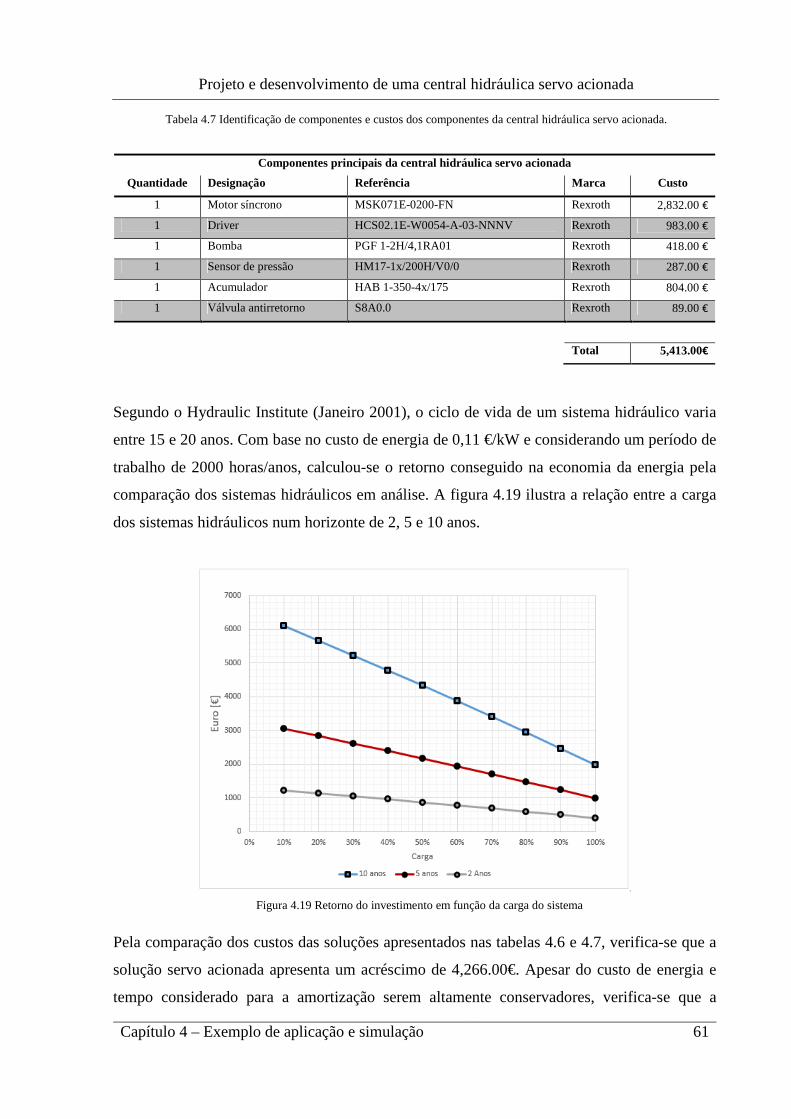
Projeto e desenvolvimento de uma central hidráulica servo acionada
Capítulo 4 – Exemplo de aplicação e simulação 61
Tabela 4.7 Identificação de componentes e custos dos componentes da central hidráulica servo acionada.
Segundo o Hydraulic Institute (Janeiro 2001), o ciclo de vida de um sistema hidráulico varia
entre 15 e 20 anos. Com base no custo de energia de 0,11 €/kW e considerando um período de
trabalho de 2000 horas/anos, calculou-se o retorno conseguido na economia da energia pela
comparação dos sistemas hidráulicos em análise. A figura 4.19 ilustra a relação entre a carga
dos sistemas hidráulicos num horizonte de 2, 5 e 10 anos.
Pela comparação dos custos das soluções apresentados nas tabelas 4.6 e 4.7, verifica-se que a
solução servo acionada apresenta um acréscimo de 4,266.00€. Apesar do custo de energia e
tempo considerado para a amortização serem altamente conservadores, verifica-se que a
Componentes principais da central hidráulica servo acionada
Quantidade Designação Referência Marca Custo
1 Motor síncrono MSK071E-0200-FN Rexroth 2,832.00 €
1 Driver HCS02.1E-W0054-A-03-NNNV Rexroth 983.00 €
1 Bomba PGF 1-2H/4,1RA01 Rexroth 418.00 €
1 Sensor de pressão HM17-1x/200H/V0/0 Rexroth 287.00 €
1 Acumulador HAB 1-350-4x/175 Rexroth 804.00 €
1 Válvula antirretorno S8A0.0 Rexroth 89.00 €
Total 5,413.00€
Figura 4.19 Retorno do investimento em função da carga do sistema
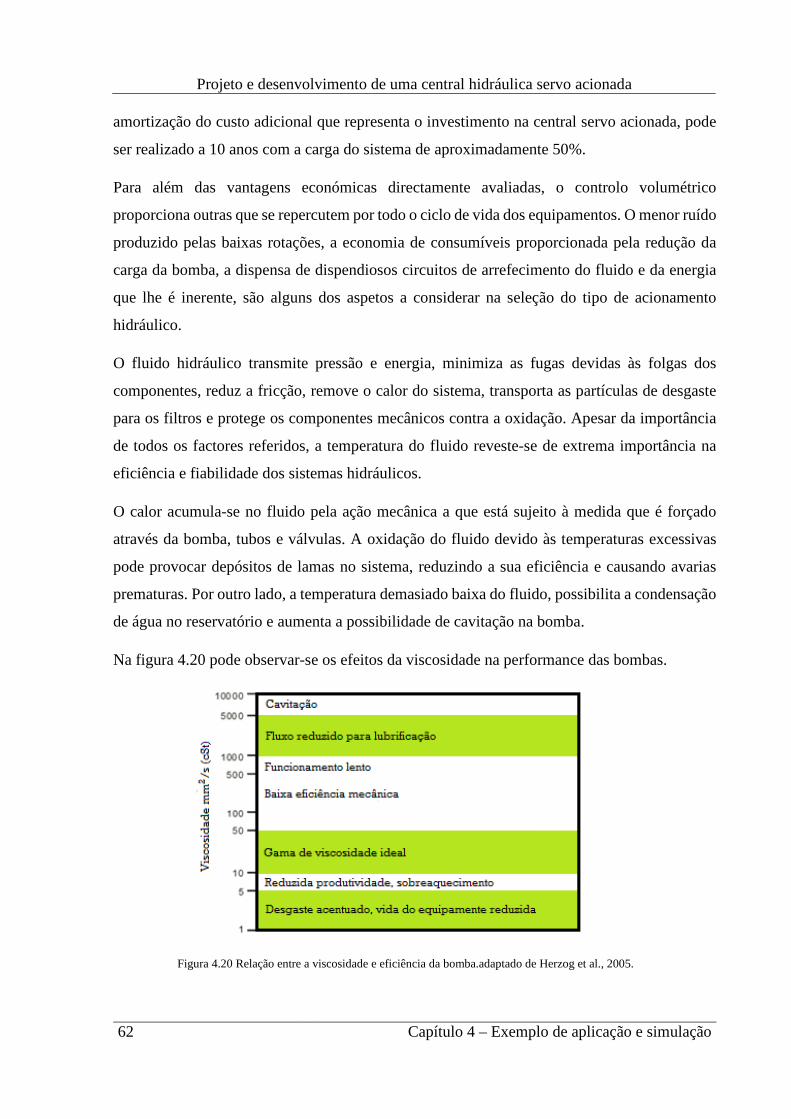
Projeto e desenvolvimento de uma central hidráulica servo acionada
62
Capítulo 4 – Exemplo de aplicação e simulação
amortização do custo adicional que representa o investimento na central servo acionada, pode
ser realizado a 10 anos com a carga do sistema de aproximadamente 50%.
Para além das vantagens económicas directamente avaliadas, o controlo volumétrico
proporciona outras que se repercutem por todo o ciclo de vida dos equipamentos. O menor ruído
produzido pelas baixas rotações, a economia de consumíveis proporcionada pela redução da
carga da bomba, a dispensa de dispendiosos circuitos de arrefecimento do fluido e da energia
que lhe é inerente, são alguns dos aspetos a considerar na seleção do tipo de acionamento
hidráulico.
O fluido hidráulico transmite pressão e energia, minimiza as fugas devidas às folgas dos
componentes, reduz a fricção, remove o calor do sistema, transporta as partículas de desgaste
para os filtros e protege os componentes mecânicos contra a oxidação. Apesar da importância
de todos os factores referidos, a temperatura do fluido reveste-se de extrema importância na
eficiência e fiabilidade dos sistemas hidráulicos.
O calor acumula-se no fluido pela ação mecânica a que está sujeito à medida que é forçado
através da bomba, tubos e válvulas. A oxidação do fluido devido às temperaturas excessivas
pode provocar depósitos de lamas no sistema, reduzindo a sua eficiência e causando avarias
prematuras. Por outro lado, a temperatura demasiado baixa do fluido, possibilita a condensação
de água no reservatório e aumenta a possibilidade de cavitação na bomba.
Na figura 4.20 pode observar-se os efeitos da viscosidade na performance das bombas.
Figura 4.20 Relação entre a viscosidade e eficiência da bomba.adaptado de Herzog et al., 2005.
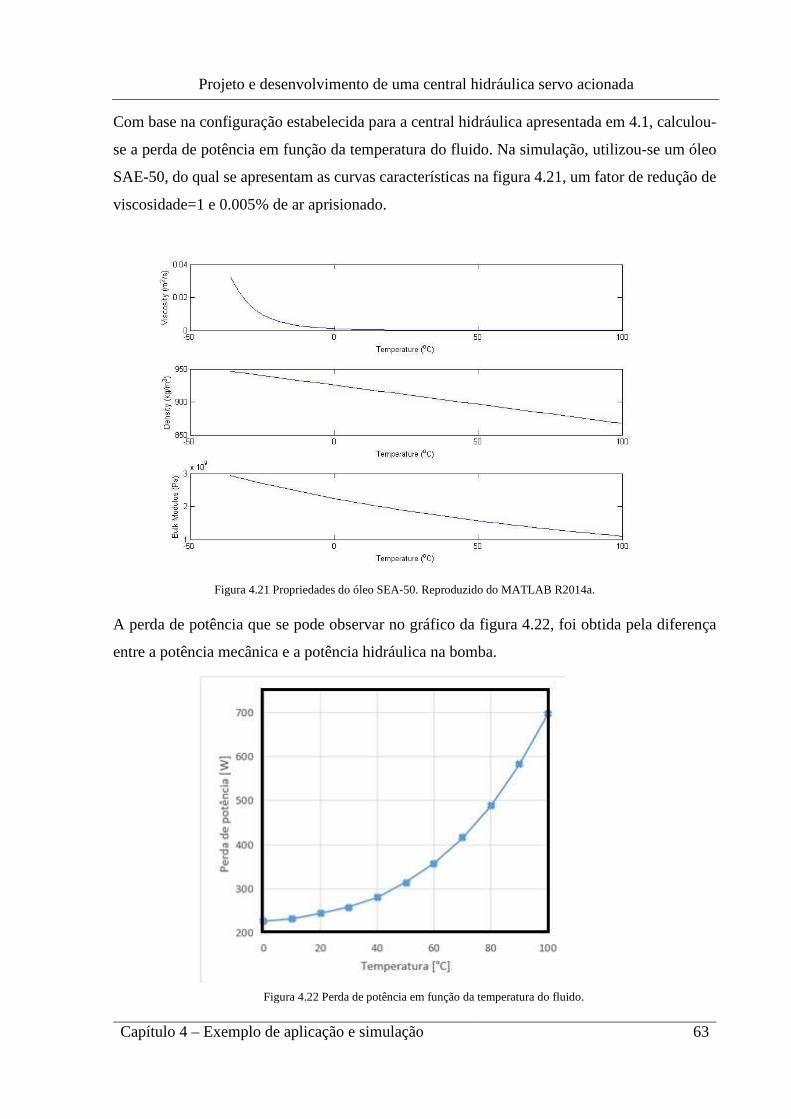
Projeto e desenvolvimento de uma central hidráulica servo acionada
Capítulo 4 – Exemplo de aplicação e simulação 63
Com base na configuração estabelecida para a central hidráulica apresentada em 4.1, calculou-
se a perda de potência em função da temperatura do fluido. Na simulação, utilizou-se um óleo
SAE-50, do qual se apresentam as curvas características na figura 4.21, um fator de redução de
viscosidade=1 e 0.005% de ar aprisionado.
A perda de potência que se pode observar no gráfico da figura 4.22, foi obtida pela diferença
entre a potência mecânica e a potência hidráulica na bomba.
Figura 4.22 Perda de potência em função da temperatura do fluido.
Figura 4.21 Propriedades do óleo SEA-50. Reproduzido do MATLAB R2014a.
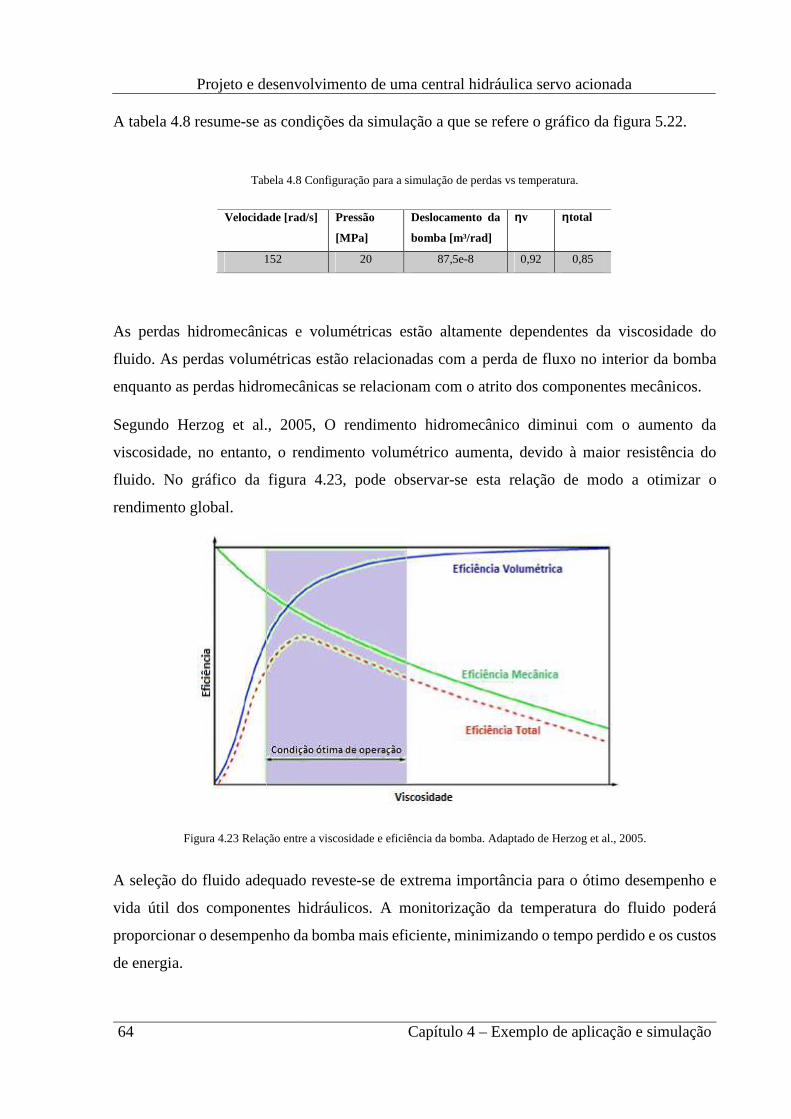
Projeto e desenvolvimento de uma central hidráulica servo acionada
64
Capítulo 4 – Exemplo de aplicação e simulação
A tabela 4.8 resume-se as condições da simulação a que se refere o gráfico da figura 5.22.
Tabela 4.8 Configuração para a simulação de perdas vs temperatura.
As perdas hidromecânicas e volumétricas estão altamente dependentes da viscosidade do
fluido. As perdas volumétricas estão relacionadas com a perda de fluxo no interior da bomba
enquanto as perdas hidromecânicas se relacionam com o atrito dos componentes mecânicos.
Segundo Herzog et al., 2005, O rendimento hidromecânico diminui com o aumento da
viscosidade, no entanto, o rendimento volumétrico aumenta, devido à maior resistência do
fluido. No gráfico da figura 4.23, pode observar-se esta relação de modo a otimizar o
rendimento global.
A seleção do fluido adequado reveste-se de extrema importância para o ótimo desempenho e
vida útil dos componentes hidráulicos. A monitorização da temperatura do fluido poderá
proporcionar o desempenho da bomba mais eficiente, minimizando o tempo perdido e os custos
de energia.
Velocidade [rad/s] Pressão
[MPa]
Deslocamento da
bomba [m³/rad]
ηv ηtotal
152 20 87,5e-8 0,92 0,85
Figura 4.23 Relação entre a viscosidade e eficiência da bomba. Adaptado de Herzog et al., 2005.
Projeto e desenvolvimento de uma central hidráulica servo acionada
Capítulo 5 – Conclusões 65
5 Conclusões
Devido à especificidade das centrais hidráulicas de controlo volumétrico existentes no mercado,
a sua utilização restringe-se a equipamentos de ampla divulgação, em especial nas indústrias de
plásticos, metalomecânica e papel. A sua reduzida divulgação, dificuldade de implementação e
desconhecimento das suas vantagens contribuem para a sua baixa implementação em soluções
mais genéricas.
A metodologia de controlo discutida ao longo desta dissertação, revela uma solução alternativa
de controlo volumétrico que embora com objetivos distintos das tecnologias existentes no
mercado, apresenta-se como uma solução a considerar, quer em novos equipamentos, quer em
rotroffiting, como provam globalmente os resultados obtidos.
As vantagens anunciadas pelas centrais de controlo volumétrico apresentadas no capítulo 2 são
equiparadas em eficiência e impacto ambiental à solução objeto de análise neste trabalho. As
distintas funcionalidades que caracterizam as diferentes soluções deixam um espaço para a
implementação de cada solução em função das especificidades do cada projeto.
O recurso ao MATLAB Simulink como ambiente de simulação revelou-se extremamente
versátil, possibilitando a rápida integração entre as diferentes áreas de engenharia utilizadas no
projeto. Apesar do défice de componentes da biblioteca, foram construídos novos componentes
com base nos modelos existentes, obtendo-se resultados muito satisfatórios.
Através do modelo matemático discutido no capítulo 4, foi possível estabelecer um raciocínio
de cálculo, que culminou na apresentação das simulações que confirmam as vantagens do
sistema proposto. Os parâmetros estabelecidos nos modelos do Simulink, correspondem em
detalhe aos elementos fornecidos pelos datasheet, permitindo a sua rápida implementação em
casos práticos.
Projeto e desenvolvimento de uma central hidráulica servo acionada
66
Capítulo 5 – Conclusões
A seleção e cálculo dos componentes podem ser alvo de uma simulação, no entanto, a escolha
do limiar de aceitabilidade é por vezes fruto da sensibilidade que se esbate na “imagem” que se
possui do sistema e suas possibilidades. Ainda que, todas as opções tomadas no processo de
seleção dos componentes tenham sido devidamente justificadas, não se pode excluir opções
distintas que se refletem em objetivos concretos para além do processo experimental. É exemplo
a escolha da bomba de engrenagens internas que apesar das vantagens enunciadas não exclui a
possibilidade de utilização de uma bomba de engrenagens externas ou de pistões axiais.
O estudo do volume dos acumuladores em função do erro da pressão no circuito, apresentado
no capítulo 5, proporciona uma visão objetiva sobre a sua determinação. Neste sentido, ficaram
demonstradas ainda que de forma limitada às dimensões dos sistemas simulados, as capacidades
de resposta da central hidráulica objeto de estudo deste trabalho. A reduzida dimensão dos
acumuladores necessários ao funcionamento da solução proposta proporciona a sua integração
num bloco compacto contribuindo para uma solução elegante e eficiente.
A flutuação da pressão nas simulações realizadas apresenta valores compatíveis com as
utilizações comuns, no entanto é possível melhorar esta característica recorrendo ao ajuste do
controlador, seleção de motores com maior binário e um acumulador maior. A implementação
do controlador derivativo pode proporcionar uma resposta melhor já que este faz uso das rápidas
variações de pressão causadas pelos atuadores. Embora o uso de um controlador integral possa
melhorar o tempo de resposta do motor e o erro em regime permanente, o seu uso pode provocar
indesejáveis picos de pressão na linha. Atendendo aos ótimos resultados obtidos nas simulações
realizadas com recurso ao controlador proporcional, não se considerou pertinente a
implementação dos controladores proporcional e integral.
A caracterização económica realizada confirma o retorno anunciado pelas soluções de controlo
volumétrico, justificando por si só a pertinência do tema. As vantagens relacionadas com os
efeitos ambientais estão implícitas na economia de energia obtida e na redução de ruído,
aumentando a qualidade do local de trabalho e dos custos relacionados com a implementação e
manutenção das centrais hidráulicas.
Projeto e desenvolvimento de uma central hidráulica servo acionada
Capítulo 6 – Trabalhos futuros 67
6 Trabalhos futuros
Ainda que fidedignas, as simulações não substituem a experimentação e as perturbações
naturais de um modelo real. Neste sentido, como trabalho futuro, sugere-se a construção de um
modelo laboratorial que permita confirmar a teoria aqui fundamentada pelas simulações.
Tendo como objetivo o fabrico de centrais hidráulicas de uso genérico e recorrendo a um nível
de automação mínimo, é de extrema importância a identificação de um controlador de fácil
implementação, capacidade de comunicação com os diferentes sistemas de máquinas e
possibilidade de operação com ampla gama de potências instaladas. O recurso à vigilância dos
diferentes elementos da central hidráulica, em especial dos consumíveis e às condições de
operação, proporciona uma mais-valia importante na solução estudada.
A completa caracterização económica necessita de uma estrutura de custos de espetro mais
amplo, permitindo determinar de uma forma inequívoca, o tempo de amortização do
equipamento controlado pelo método resistivo em comparação com o controlo volumétrico.
A estimativa de custos realizada no capitulo 5, permite identificar os componentes mais
onerosos. Neste sentido sugere-se a caracterização económica para diferentes potências
instaladas de forma a estabelecer um critério de implementação da solução estudada em função
do retorno estimado. Os componentes selecionados no estudo económico, nomeadamente os
servo motores e drivers, podem ainda ser objeto de análise atendendo à vasta oferta no mercado.
As vantagens anunciadas dos sistemas de controlo volumétrico devem ser confirmadas e
complementadas pela análise do tempo de vida dos componentes que fazem parte da central. A
durabilidade dos consumíveis, afetados pelo desgaste das condições extremas a que estão
sujeitos, representam um fator importante, não só no seu custo, mas também na manutenção e
falha do equipamento. O impacto ambiental e dinâmica do sistema são elementos importantes
para a completa caracterização do tema e requerem uma análise baseada na comparação das
tecnologias aqui abordas, ficando como sugestão para trabalhos futuros.

Projeto e desenvolvimento de uma central hidráulica servo acionada
68
Capítulo 7 – Trabalhos futuros
Projeto e desenvolvimento de uma central hidráulica servo acionada
Bibliografia 69
Bibliografia
Bosch Rexroth AG. (2012). Bladder-type accumulator, datasheet. http://www.boschrexroth.com/ics/content/UpToDate/PDF/re50170_2012-02.pdf
Bosch Rexroth AG (2006). Rexroth IndraDyn S MSK Synchronous Motors, Project Planning Manual. http://www.boschrexroth.com/country_units/america/united_states/sub_websites/brus_dcc/documentation_downloads/ProductDocumentation/CurrentProducts/Motors/IndraDyn_S/29628905IndraDynSprojectV05.pdf
Bosch Rexroth Canada Corp. (2006). A10VO Variable Displacement Piston Pump Technical Information Manual. http://www.parmafluid.it/modules/Download/files/download-a10vo_-_eng.pdf
BOSE, B.K. (1997). Power Electronics and Variable Frequency Drivers. IEEE Press Markting, New York.
CARVALHO, J. L. M. (2000). Sistemas de Controle Automático. LTC – Livros Técnicos e Cientificos Editora S.A., Rio de Janeiro.
DODDANNAVAR R., BARNARD A. & GANESH J. (2005). Practical Hydraulic Systems Operation and Troubleshooting for Engineers and Technicians. Ed. 1. ELSEVIER, Netherlands.
DORF, R.C. & BISHOP, R.H. (2001). Sistemas de Controle Modernos, Ed. 8. LTC – Livros Técnicos e Cientificos Editora S.A, Rio de Janeiro.
DÖRR, H., EWALD, R., HUTTER, J., KRETZ, D., LIEDHEGENER, F. & SCHMITT, A. (1986). The hydraulic Trainer, Vol.2. Mannesmann Rexroth Gmbh, Lohr am Main.
DREXLER, P., FAATZ, H., FEICHT, F., GEIS, H., MORLOK, J. & WIESMANN, E. (1989). Planning and Design of Hydraulic Power Systems, Vol. 3. Mannesmann Rexroth Gmbh, Lohr am Main.
DUCOS, C. (1992). OLÉO-HIDRAULIQUE Recueil de SCHÉMAS et de PROBLÈMES, Ed. 4. Technique et Documentation – Lavoisier, Paris.
FERREIRA D. M. B. (2006). Noções de Hidráulica. ftp://ftp.cefetes.br/cursos/Mecanica/Dario%20-%20IEE7/Apostila%20de%20No%E7%F5es%20de%20Hidr%E1ulica.pdf
FEUSER, A., KORDAK, R. & LIEBLER, G. (1989). Accionamientos hidrrostátios com regulación secundaria, Vol. 6. Mannesmann Rexroth Gmbh, Lohr am Main.
FRANKENFIELD, T.C. (1984). USING INDUSTRIAL HYDRAULICS, Ed. 2. HYDRAULICS & PNEUMATICS Magazine, Cleveland, Ohio.
Projeto e desenvolvimento de uma central hidráulica servo acionada
70
Bibliografia
GIERAS, J.F., WANG, R. & KAMPER, M.J. (2008). Axial Flux Permanent Magnet Brushless Machines, Ed. 2. Springer, South Africa.
HERZOGS. & NEVEU C. &PLACEK D. (2005). The Benefits of Maximum Efficiency Hydraulic Fluids.http://www.machinerylubrication.com/Read/776/maximum-efficiency-hydraulic-fluids
Hydraulic Institute & Europump & U.S. Dapartment of Energy, (Mai 2004). Variable Speed Pumping. A Guide to Successful Applications. https://www1.eere.energy.gov/manufacturing/tech_assistance/pdfs/variable_speed_pumping.pdf
Hydraulic Institute & Europump & U.S. Dapartment of Energy, (Janeiro 2001). Pump Life Cycle Costs: A Guide to LCC Analysis for Pumping Systems. https://www1.eere.energy.gov/manufacturing/tech_assistance/pdfs/pumplcc_1001.pdf
JOHNSON, J.E. (1996). Hydraulics for Engineering Technology. Prentice Hall, New Jersey.
KOMSTA, J. (2014). Variable Speed pump Drivers for Industrial Machinery – System Considerations. http://www.nfpa.com/events/pdf/2013-fpsc/013-komsta-powerpoint-presentation.pdf
KUPHALDF, T. R. (2014). Lessons In Electric Circuits. http://www.ibiblio.org/kuphaldt/electricCircuits/AC/AC_13.html#xtocid992823
LEÓN A. D. C. (2008). Manual de Oleohidráulica. Creaciones Copyright, S.L., Spain.
McCloy, D. Martin H.R. (1980). CONTROL OF FLUID POWER Analysis and Design, Ed. 2. ELLIS HORWOOD LIMITED, New York.
MILLER R., MILLER M R. & STEWART H. (2004). Pumps and Hydraulics. Ed. 6. Wiey Publishing, Inc., Indianapolis, Indiana.
MOREIRA I.S. (2012). Sistemas hidráulicos Industriais. Ed. 2. Serviço Nacional de Aprendizagem Industrial, São Paulo.
PAUL, C.K. & Oleg, W. (1989). Electromechanical motion devices. McGraw-Hill International Editions, Singapore.
PEDROSA, L.D. (2006). Hidráulica, Manual de consulta. Fluipress Automação Ltda. http://www.fluipress.com.br/downloads/Manual-Hidraulica.pdf
PIPPENGER J.J. & HICKS T.G. (1962). Industrial Hydraulics Fluids, Pumps, Motors, Controls, Circuits, Servo Systems, Electrical Devices. McGRAW-HILL BOOK COMPANY, INC., New York.
SIGUIMOTO, C.M. PM. Motors and Drivers Systems – Benefits for the Users. R & D Department WEG Equipamentos Eléctricos S.A. http://ecatalog.weg.net/files/wegnet/WEG-pm-motors-and-drive-systems-technical-article-english.pdf
RASHID M.H. (1999). Eletrônica de Potência, Circuitos, Dispositivos e Aplicações. MAKRON Books, São Paulo.
Projeto e desenvolvimento de uma central hidráulica servo acionada
Bibliografia 71
REXROTH BOSCH GROUP. Sytronix DFE – the variable speed pressure and flow rate control system. http://www.boschrexroth.com/en/xc/products/product-groups/industrial-hydraulics/sytronix-variable-speed-pump-drives/products-and-solutions/sytronix-dfe/function/function-2
REXROTH BOSCH GROUP. Sytronix SvP – Servo Variable-Speed Pump Drive. http://www.boschrexroth.com/en/us/products/systems-and-modules/sytronix-variable-speed-pump-drives/products-and-solutions/sytronix-svp/function/index
SCHMITT, A., LANG, R.A. & BROKOFF, E. (1989). TEcnica de las válvulas insertables de 2 vías, Vol. 4. Mannesmann Rexroth Gmbh, Lohr am Main.
ZVEI - Zentralverband Elektrotechnik- und Elektronikindustrie e.V. (12/2010) Electric Motors and Variable Speed Drives. http://www.zvei.org/Publikationen/ZVEI%20Electric%20Motors%20and%20Variable%20Speed%20Drives%202nd%20Edition.pdf

Projeto e desenvolvimento de uma central hidráulica servo acionada
72
Bibliografia
Projeto e desenvolvimento de uma central hidráulica servo acionada
Anexos 73
ANEXOS

Projeto e desenvolvimento de uma central hidráulica servo acionada
74
Anexos
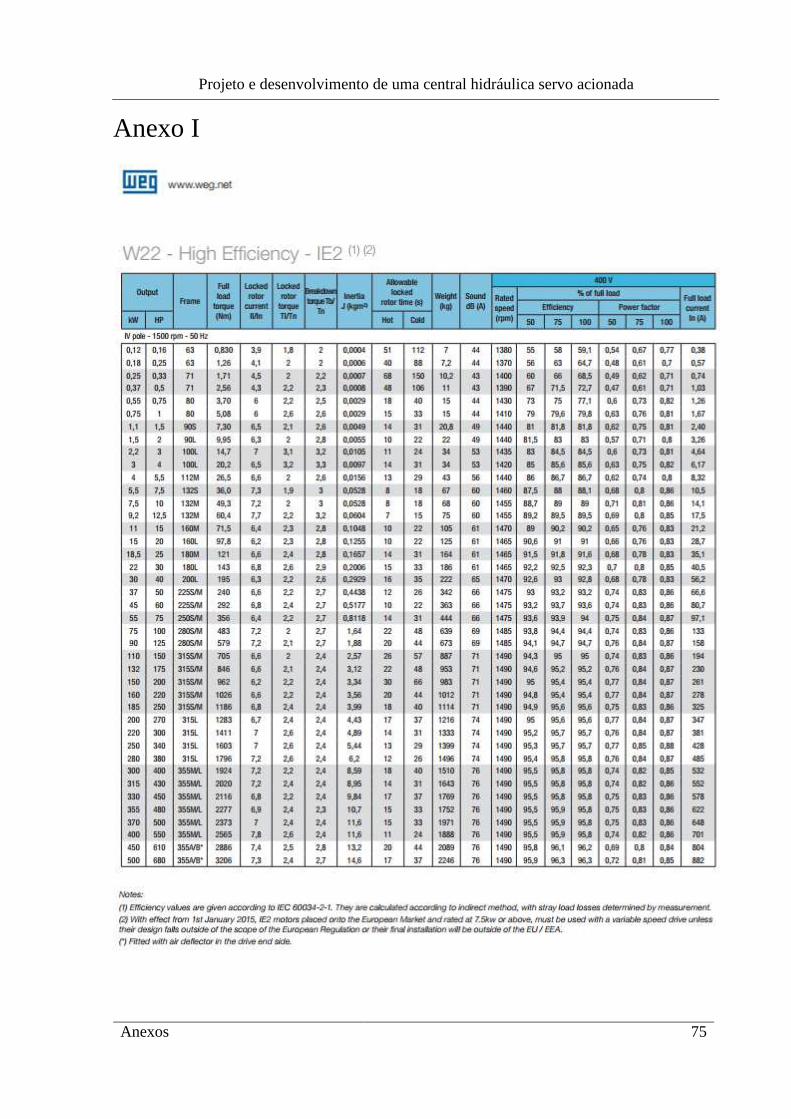
Projeto e desenvolvimento de uma central hidráulica servo acionada
Anexos 75
Anexo I

Projeto e desenvolvimento de uma central hidráulica servo acionada
76
Anexos
Projeto e desenvolvimento de uma central hidráulica servo acionada
Anexos 77
Anexo II
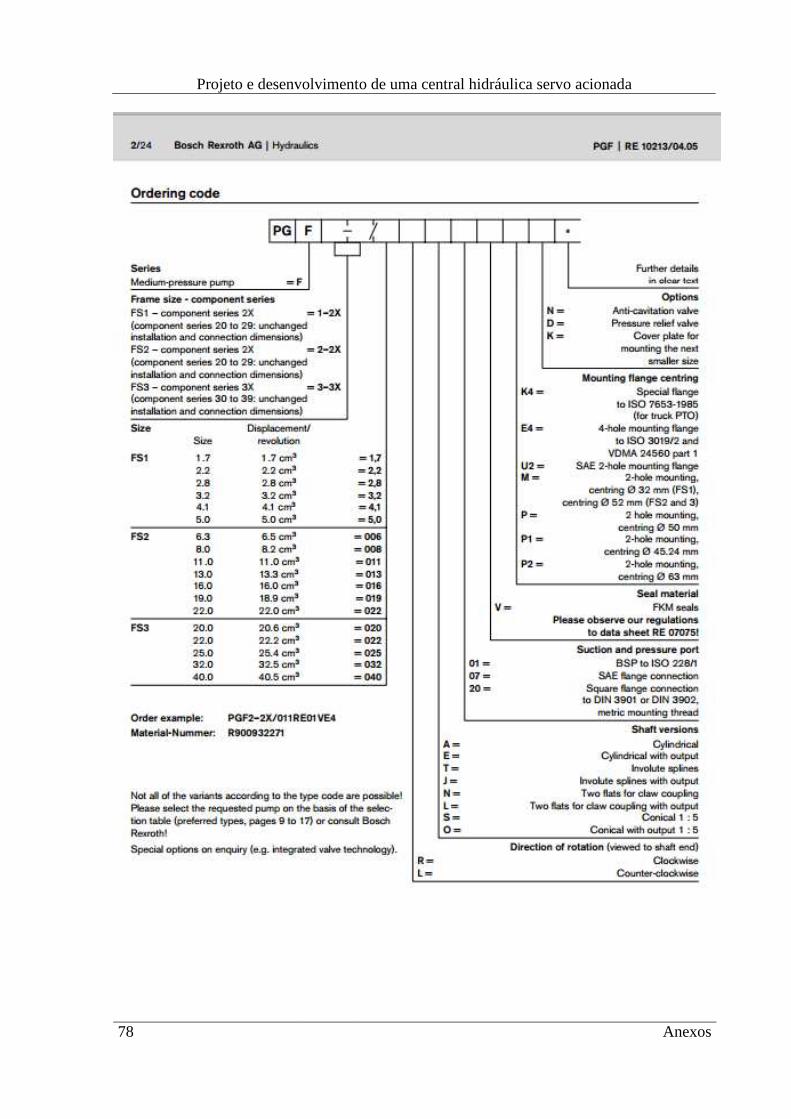
Projeto e desenvolvimento de uma central hidráulica servo acionada
78
Anexos
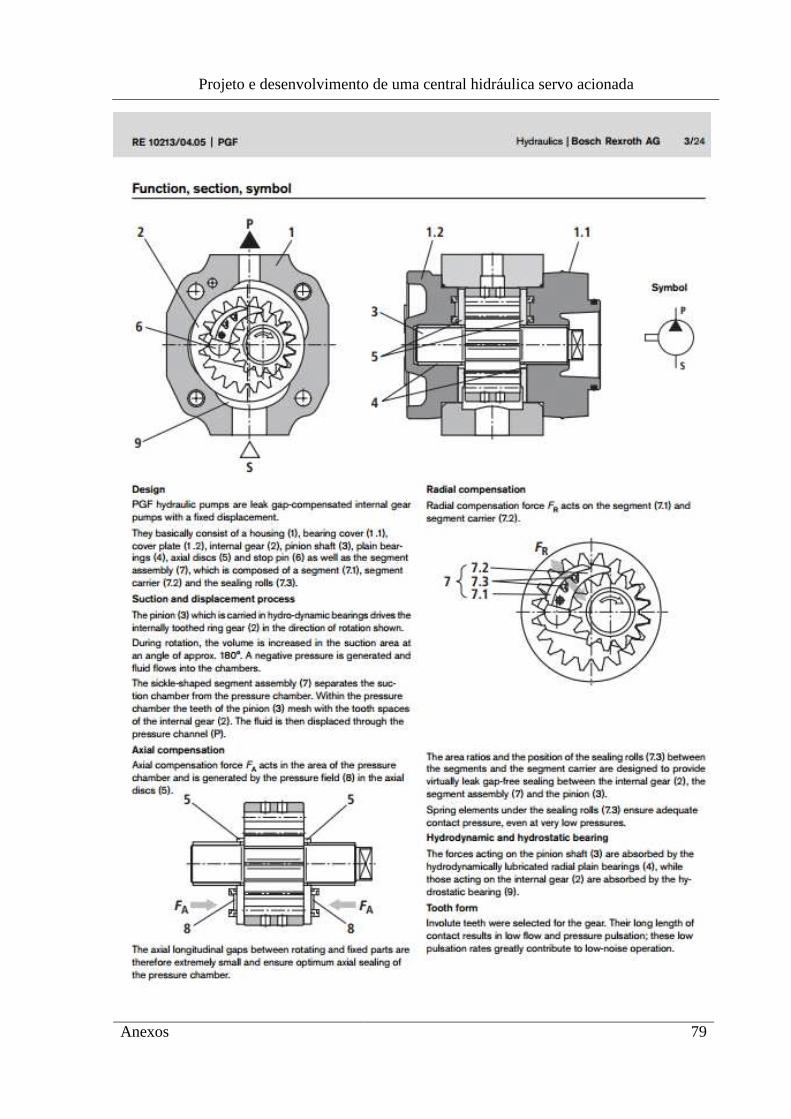
Projeto e desenvolvimento de uma central hidráulica servo acionada
Anexos 79
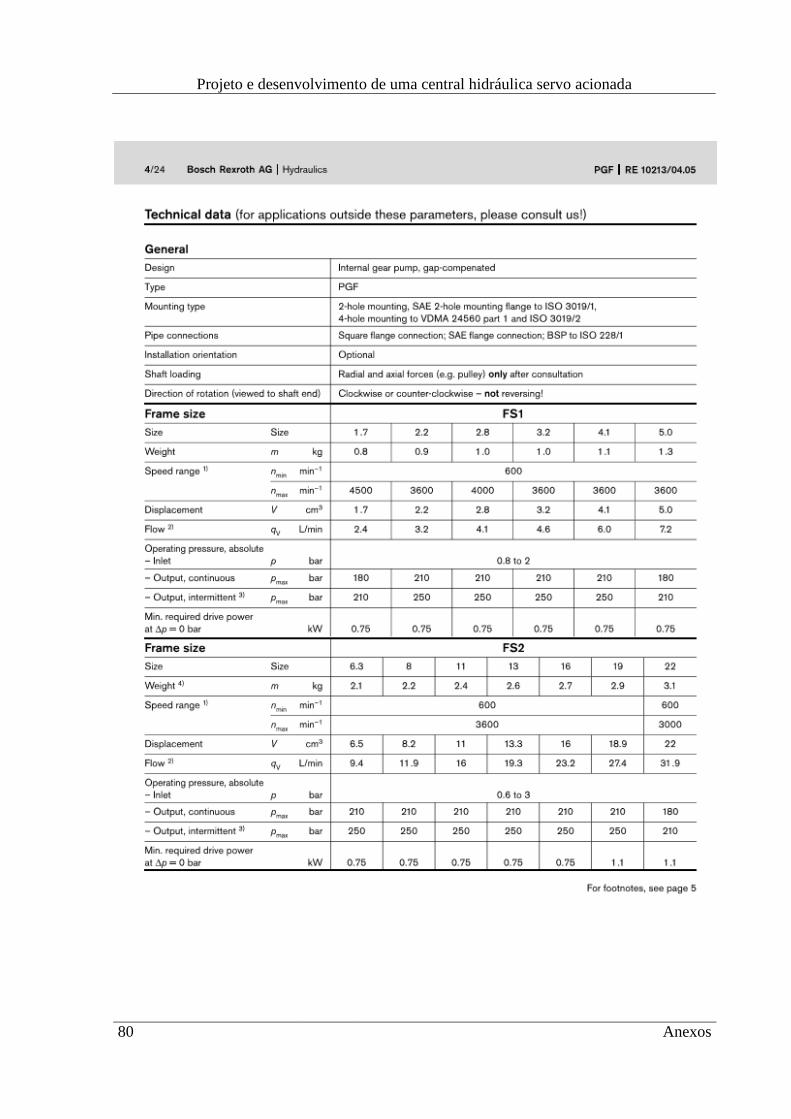
Projeto e desenvolvimento de uma central hidráulica servo acionada
80
Anexos
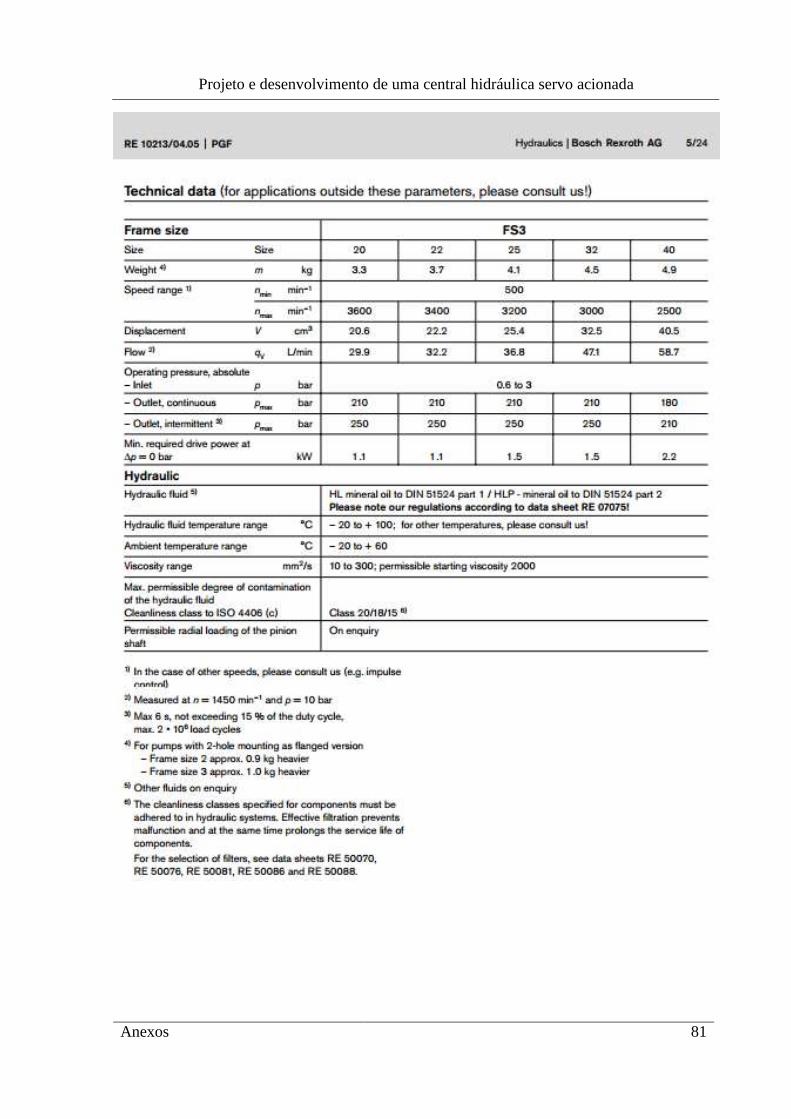
Projeto e desenvolvimento de uma central hidráulica servo acionada
Anexos 81
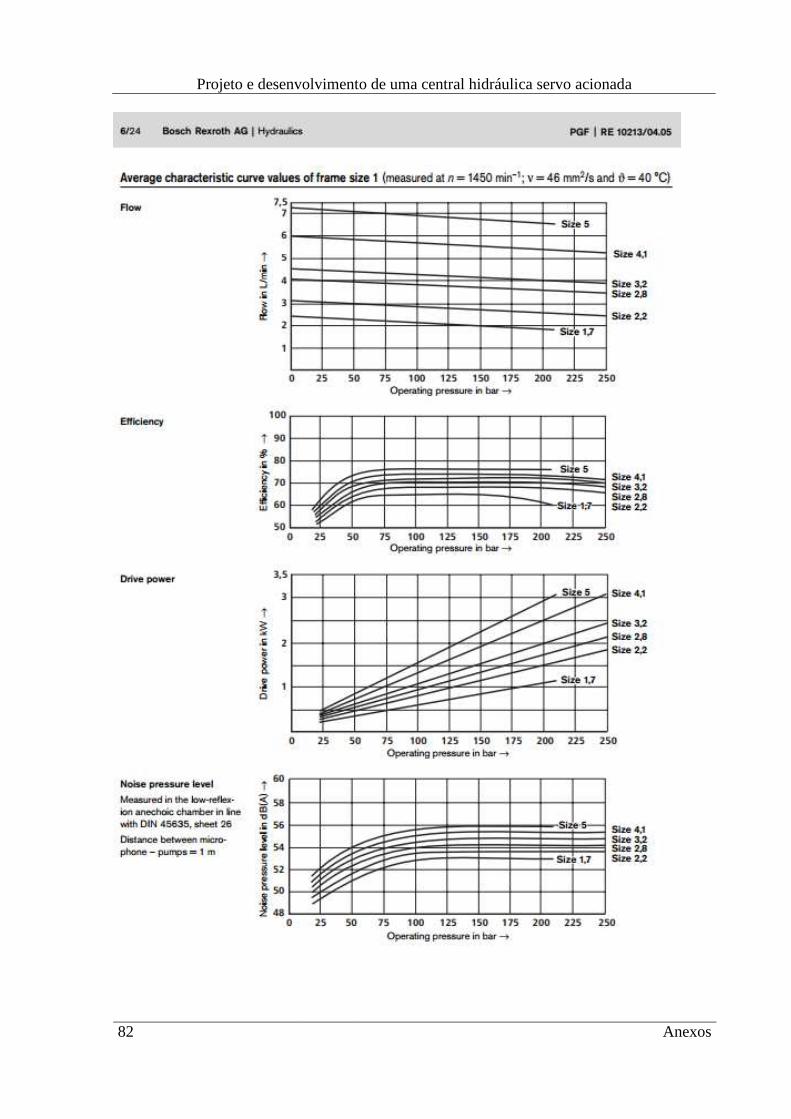
Projeto e desenvolvimento de uma central hidráulica servo acionada
82
Anexos

Projeto e desenvolvimento de uma central hidráulica servo acionada
Anexos 83
Anexo III
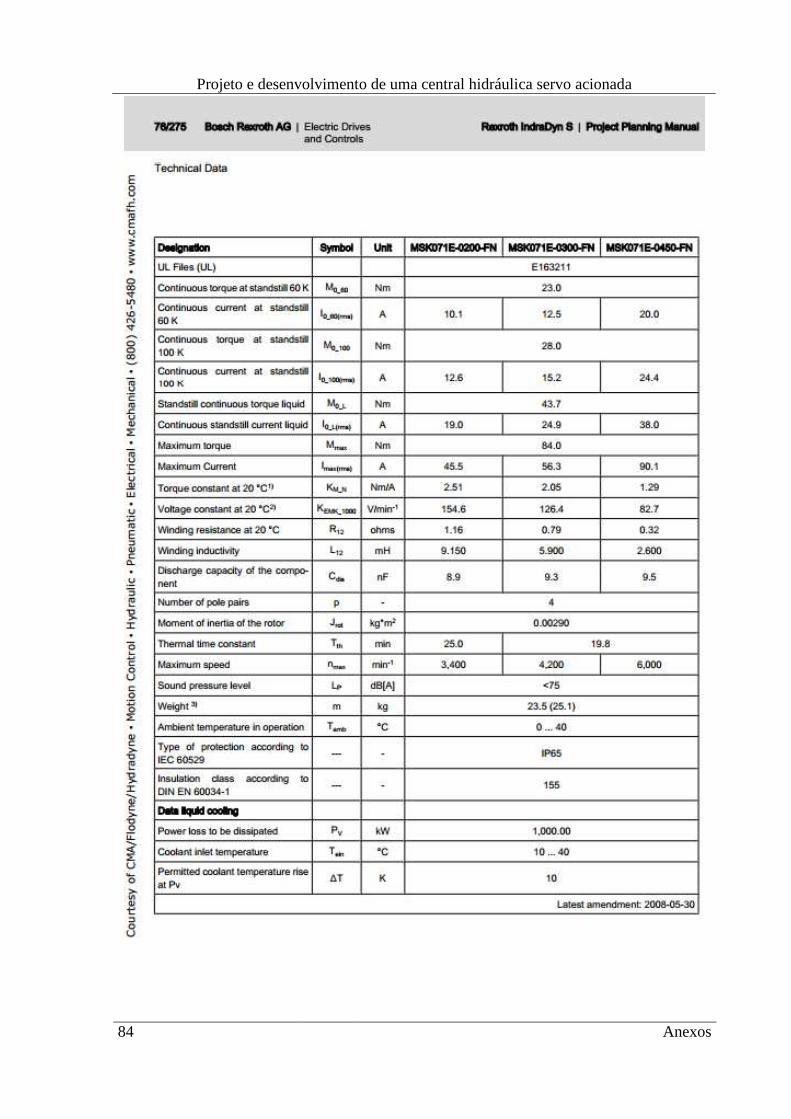
Projeto e desenvolvimento de uma central hidráulica servo acionada
84
Anexos
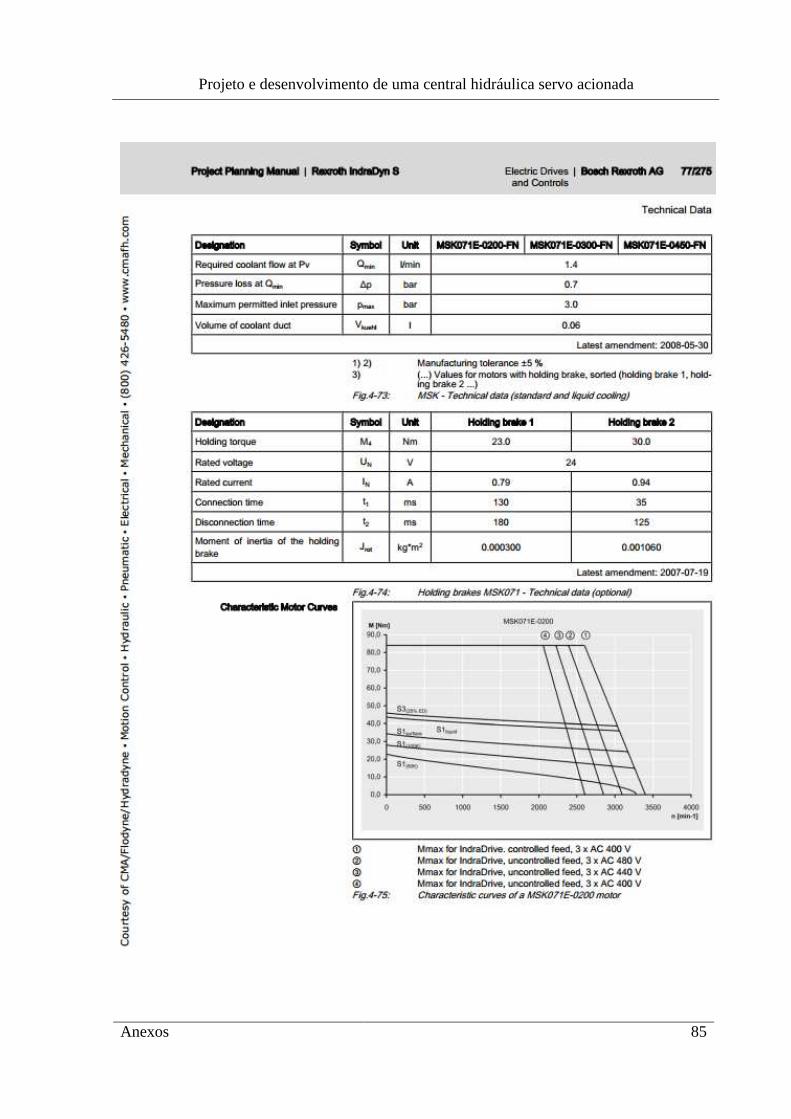
Projeto e desenvolvimento de uma central hidráulica servo acionada
Anexos 85

Projeto e desenvolvimento de uma central hidráulica servo acionada
86
Anexos
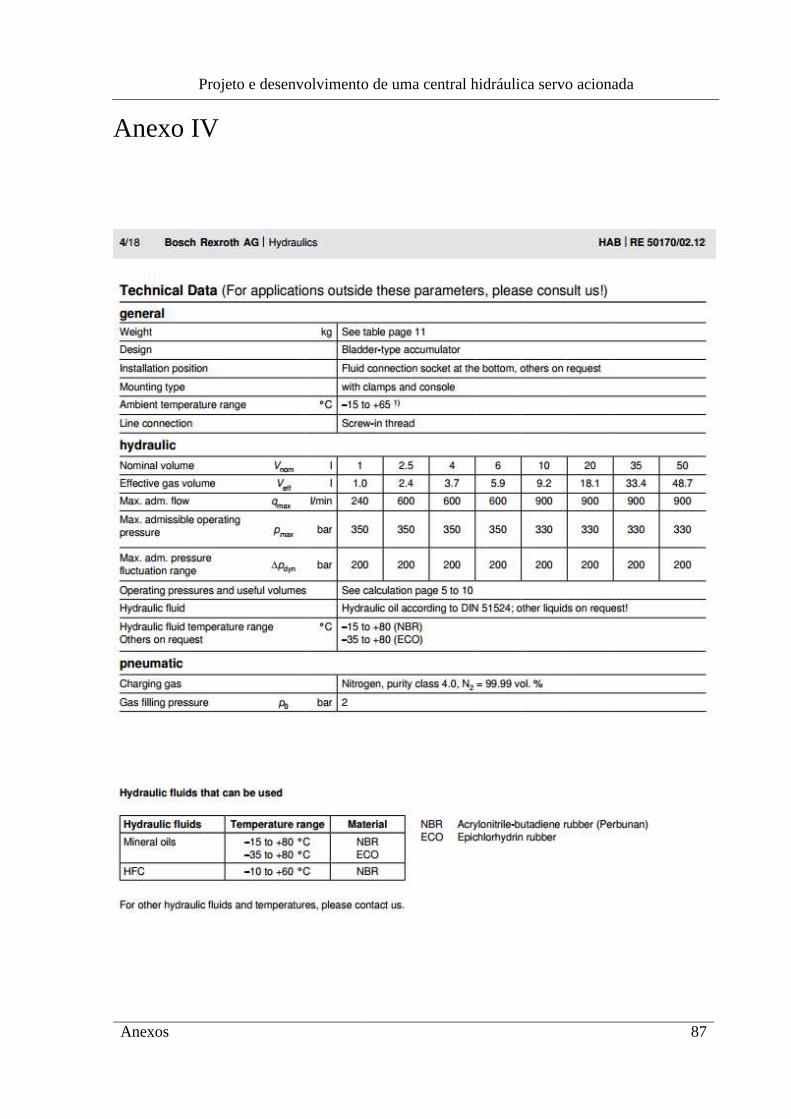
Projeto e desenvolvimento de uma central hidráulica servo acionada
Anexos 87
Anexo IV

Projeto e desenvolvimento de uma central hidráulica servo acionada
88
Anexos
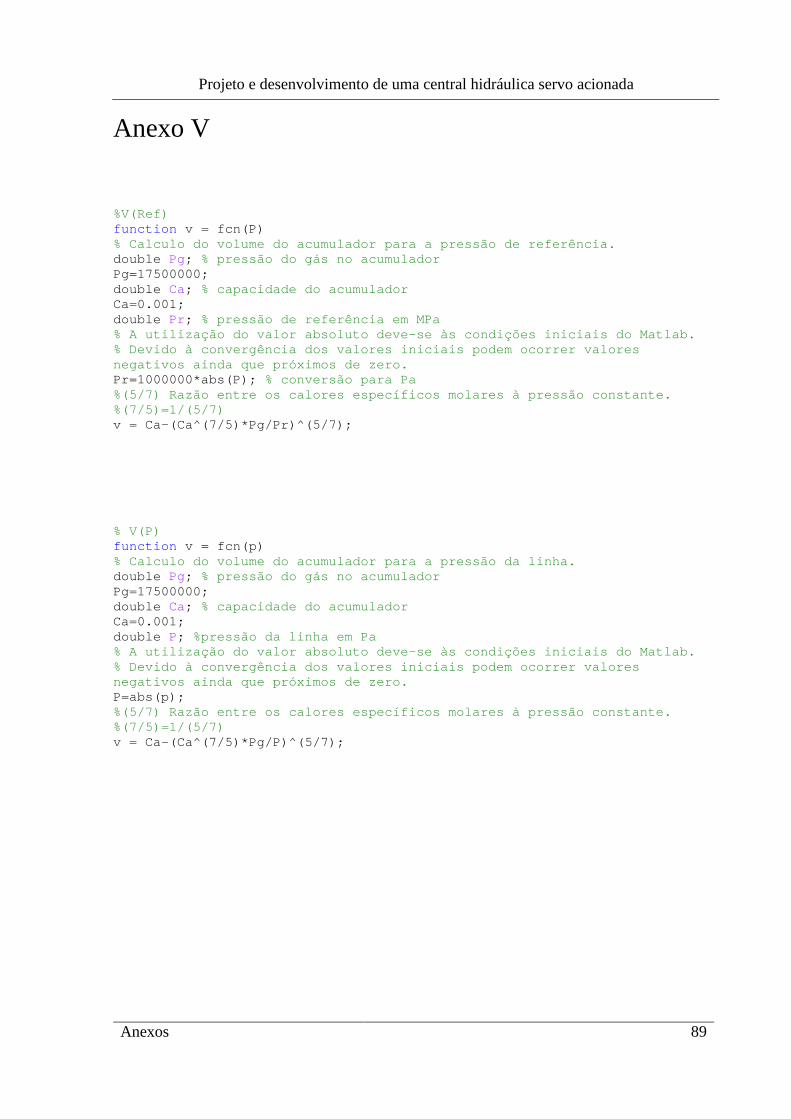
Projeto e desenvolvimento de uma central hidráulica servo acionada
Anexos 89
Anexo V
%V(Ref) function v = fcn(P) % Calculo do volume do acumulador para a pressão de referência. double Pg; % pressão do gás no acumulador Pg=17500000; double Ca; % capacidade do acumulador Ca=0.001; double Pr ; % pressão de referência em MPa % A utilização do valor absoluto deve-se às condiçõ es iniciais do Matlab. % Devido à convergência dos valores iniciais podem ocorrer valores negativos ainda que próximos de zero. Pr=1000000*abs(P); % conversão para Pa %(5/7) Razão entre os calores específicos molares à pressão constante. %(7/5)=1/(5/7) v = Ca-(Ca^(7/5)*Pg/Pr)^(5/7);
% V(P) function v = fcn(p) % Calculo do volume do acumulador para a pressão da linha. double Pg; % pressão do gás no acumulador Pg=17500000; double Ca; % capacidade do acumulador Ca=0.001; double P; %pressão da linha em Pa % A utilização do valor absoluto deve-se às condiçõ es iniciais do Matlab. % Devido à convergência dos valores iniciais podem ocorrer valores negativos ainda que próximos de zero. P=abs(p); %(5/7) Razão entre os calores específicos molares à pressão constante. %(7/5)=1/(5/7) v = Ca-(Ca^(7/5)*Pg/P)^(5/7);

Projeto e desenvolvimento de uma central hidráulica servo acionada
90
Anexos
Projeto e desenvolvimento de uma central hidráulica servo acionada
Anexos 91
Anexo VI
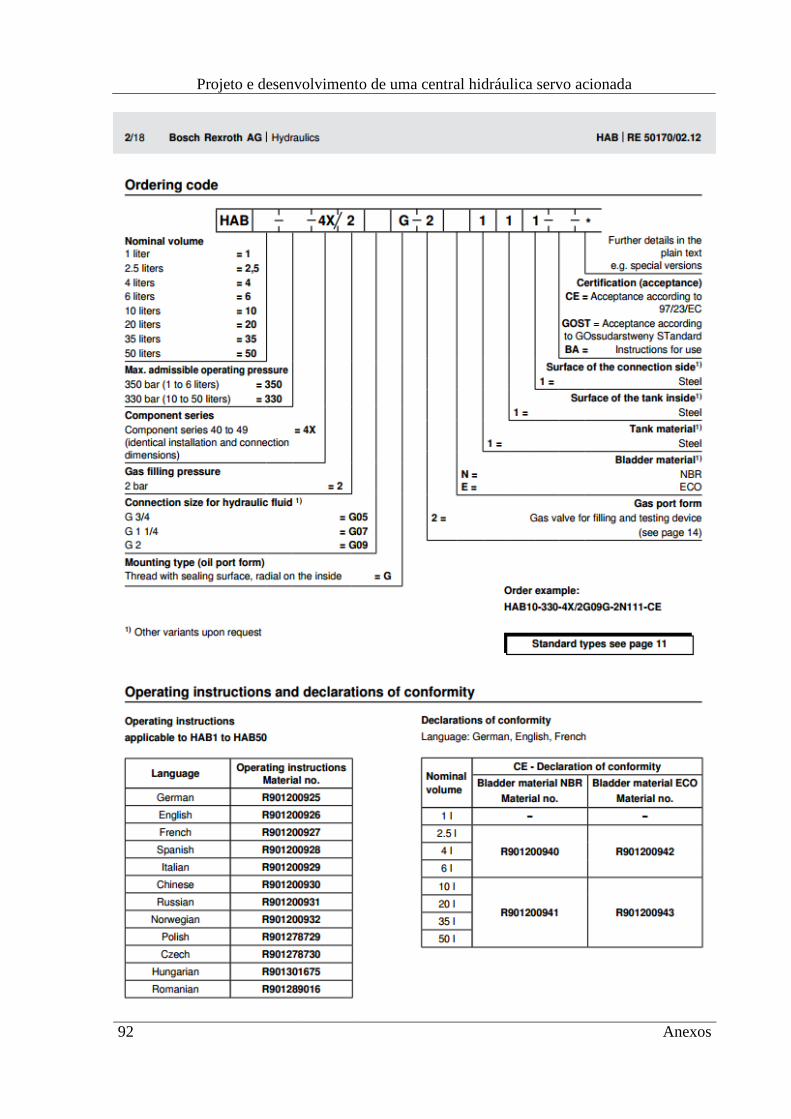
Projeto e desenvolvimento de uma central hidráulica servo acionada
92
Anexos
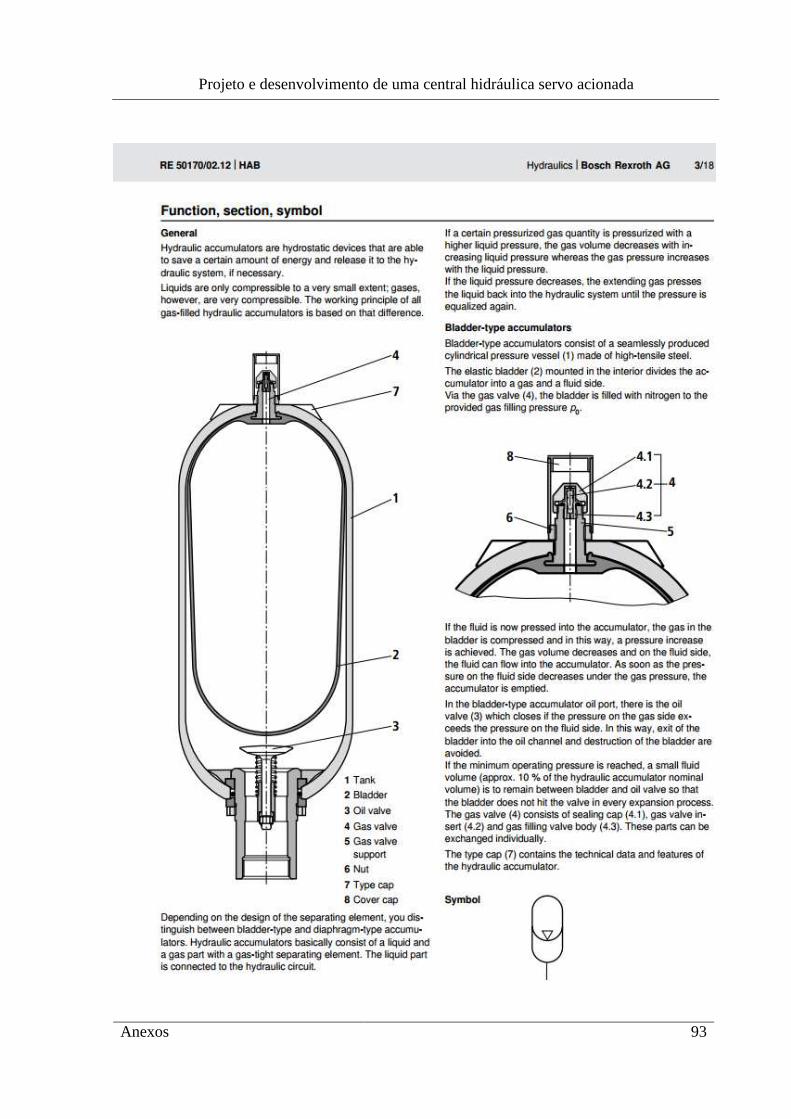
Projeto e desenvolvimento de uma central hidráulica servo acionada
Anexos 93
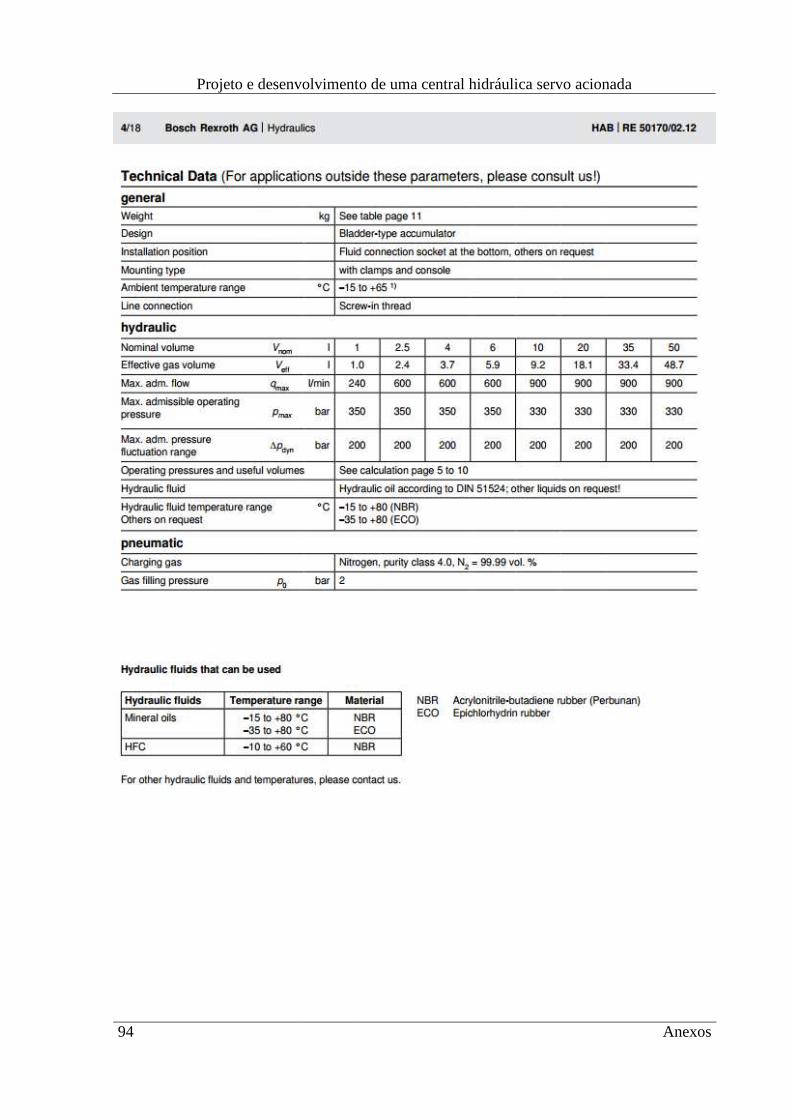
Projeto e desenvolvimento de uma central hidráulica servo acionada
94
Anexos
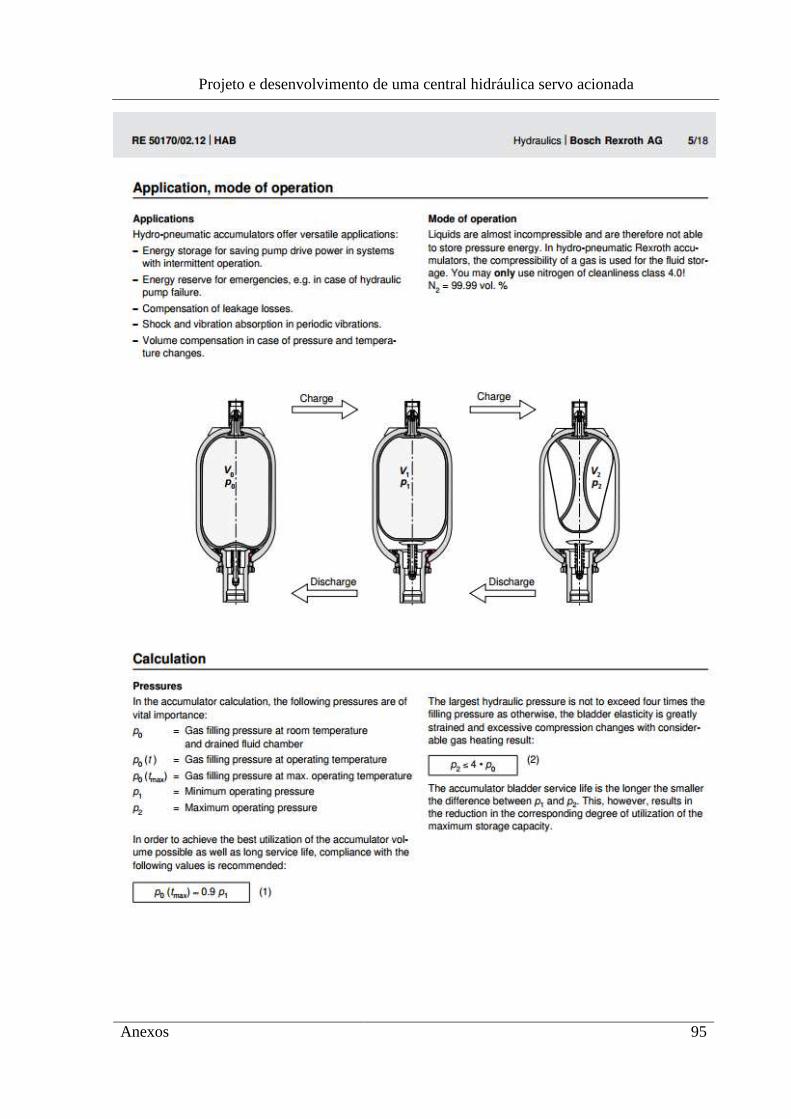
Projeto e desenvolvimento de uma central hidráulica servo acionada
Anexos 95
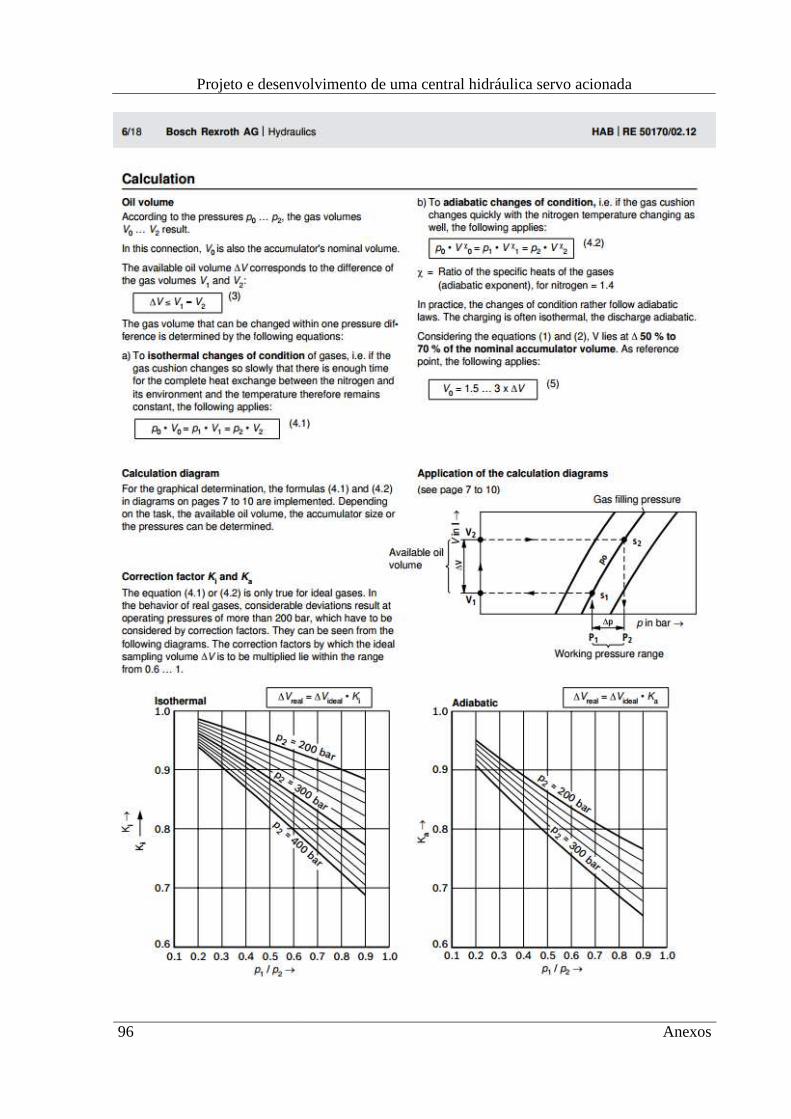
Projeto e desenvolvimento de uma central hidráulica servo acionada
96
Anexos