Embed Size (px)
Citation preview

UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA
CURSO DE ENGENHARIA INDUSTRIAL ELÉTRICA - ÊNFASE ELETROTÉCNICA JEFFERSON LUIS GRIEBELER
THAÍSA ALINE KIENEN WAGNER ROSA
DESENVOLVIMENTO DE UM KIT DIDÁTICO PARA DEMONSTRAÇÃO DA
ATUAÇÃO DE UM CONTROLADOR PID DIGITAL EM UMA PLANTA REAL
CURITIBA 2007

JEFFERSON LUIS GRIEBELER THAÍSA ALINE KIENEN
WAGNER ROSA
DESENVOLVIMENTO DE UM KIT DIDÁTICO PARA DEMONSTRAÇÃO DA
ATUAÇÃO DE UM CONTROLADOR PID DIGITAL EM UMA PLANTA REAL
Trabalho de Conclusão de Curso apresentado
na disciplina Projeto Final 2, do curso de
Engenharia Industrial Elétrica – Eletrotécnica,
sob orientação do professor Dr. Roger Gules.
CURITIBA
2007
JEFFERSON LUIS GRIEBELER THAISA ALINE KIENEN
WAGNER ROSA
DESENVOLVIMENTO DE UM KIT DIDÁTICO PARA DEMONSTRAÇÃO DA ATUAÇÃO DE UM CONTROLADOR PID DIGITAL EM UMA PLANTA REAL
Trabalho apresentado na disciplina de Projeto Final de Curso II como requisito
parcial para a conclusão do Curso de Engenharia Industrial Elétrica - Ênfase em Eletrotécnica - do Departamento Acadêmico de Eletrotécnica, Universidade Tecnológica Federal do Paraná.
Curitiba, 12 de novembro de 2007.
______________________________ Prof. Paulo Sérgio Walenia, Esp.
Coordenador de Curso Engenharia Industrial Elétrica - Eletrotécnica
______________________________ Prof. Ivan Eidt Colling, Dr.
Coordenador de Projeto Final de Graduação Engenharia Industrial Elétrica - Eletrotécnica
______________________________ Prof. Roger Gules, Dr.
Orientador
______________________________ Gustavo Emmendoerfer, Eng.
Membro da banca
______________________________ Prof. Jorge Assad Leludak, M.Sc.
Membro da banca
______________________________ Prof. Winderson Eugênio dos Santos, Dr.
Membro da banca

“O que ouço, eu esqueço;
o que vejo, eu lembro;
o que faço, eu aprendo.”
Confúcio - Filósofo Chinês

RESUMO
Este trabalho tem como objetivo a pesquisa e implementação de uma planta de
controle digital com finalidade didática.
O trabalho apresenta um referencial teórico dos conteúdos de controle e de
didática embasando o desenvolvimento do projeto. São apresentadas diversas
plantas possíveis de implementação com finalidades didáticas assim como a análise
destes sistemas.
Após a definição da planta a ser desenvolvida, são apresentados todos os itens
referentes ao seu projeto e implementação, tais como: planta escolhida e justificativa,
modelagem matemática, projeto e ensaios dos circuitos eletrônicos, software de
controle, simulações e resultados encontrados.
A conclusão do trabalho apresenta uma síntese dos objetivos alcançados,
recomendações para os trabalhos futuros e uma estimativa de custos. O manual de
instruções e o código da programação estão disponíveis nos apêndices.
Palavras chaves: Sistemas de controle, didática e controle de velocidade de
motor CC

RÉSUMÉ
Ce travail a comme objectif la recherche et montage d’un plan de contrôle numérique
d’utilisation didactique.
La présentation commence par un référentiel théorique nécessaire pour le
développement du projet et poursuivra par la présentation et analyse de plusieurs solutions
possibles et le choix final.
Le projet se concrétisera par le modelage du système y compris l’implantation du
circuit électronique et mécanique et il sera accompagné des résultats d’essais.
En conclusion, il apparaîtra la synthèse du projet, les recommandations pour les
futurs projets ainsi qu’une approche du budget nécessaire. Le manuel d’instructions et le code
de la programmation sont disponibles en annexes.
Mots clés : Systèmes de contrôle, didactique et contrôle de vitesse de moteur
CC.

ÍNDICE DE FIGURAS
Figura 2.1: Descrição simplificada de um sistema de controle. ......................................26
Figura 2.2: Diagrama de blocos dos sistemas de controle a malha aberta. ...................28
Figura 2.3: Diagrama de blocos dos sistemas de controle a malha fechada. ................29
Figura 2.4: Exemplo de um sistema linear e um sistema não linear. .............................30
Figura 2.5: Diagrama de blocos de um sistema a malha aberta......................................33
Figura 2.6: Diagrama de blocos de um sistema a malha fechada. ..................................33
Figura 2.7: Especificações de regime transitório. ..............................................................35
Figura 2.8: Definição do ângulo β. ......................................................................................36
Figura 2.9: Plano s..................................................................................................................38
Figura 2.10: Influência do lugar das raízes na resposta transitória do sistema. ...........39
Figura 2.11: Exemplo de diagrama de Bode. .....................................................................41
Figura 2.12: Exemplo de margem de ganho e margem de fase. .....................................42
Figura 2.13: Exemplo de diagrama de Nyquist.................................................................43
Figura 2.14: Exemplo de diagrama de magnitude logarítmica versus ângulo de fase.44
Figura 2.15: Ação do controlador proporcional ................................................................46
Figura 2.16: Ação do controlador integral .........................................................................47
Figura 2.17: Ação do controlador proporcional integral .................................................48
Figura 2.18: Ação do controlador derivativo.....................................................................49
Figura 2.19: Ação do controlador proporcional derivativo.............................................50
Figura 2.20: Ação do controlador proporcional integral derivativo ..............................51
Figura 2.21: Diagrama de blocos de um sistema de controle digital..............................52
Figura 2.22: Conversor digital-analógico. ..........................................................................53
Figura 2.23: Dispositivo sample-and-hold.............................................................................53
Figura 2.24: Sinal analógico..................................................................................................53
Figura 2.25: Trem de pulsos. ................................................................................................54
Figura 2.26: Sinal após o extrapolador de ordem zero.....................................................54
Figura 2.27: Relação entre o plano s e o plano z................................................................55
Figura 2.28: Diagrama de blocos de um típico microcontrolador. .................................57
Figura 3.1: Esquema de um sistema massa-mola..............................................................60

Figura 3.2: Esquema de um sistema térmico. ....................................................................61
Figura 3.3: esquema de motor CC.......................................................................................62
Figura 3.4: Esquema do sistema bola/aro..........................................................................64
Figura 3.5: Exemplo de um sistema pêndulo invertido. ..................................................65
Figura 3.6: Exemplo e esquema de um sistema equilíbrio de uma esfera.....................66
Figura 3.7: Esquema de um levitador magnético..............................................................67
Figura 4.1: Diagrama básico do sistema a ser implementado. ........................................69
Figura 4.2: Máquina CC elementar. ....................................................................................72
Figura 4.3: Circuito equivalente do motor CC. .................................................................72
Figura 4.4: Exemplo de controle pela tensão de armadura. ............................................75
Figura 4.5: Esquema de um motor de imãs permanentes................................................76
Figura 4.6: Diagrama de blocos do sistema .......................................................................78
Figura 5.1: Representação gráfica do grupo motor-gerador ...........................................81
Figura 5.2: Módulo MSP430F169.........................................................................................82
Figura 5.3: Esquemático das cargas ....................................................................................84
Figura 5.4: Cargas ..................................................................................................................84
Figura 5.5: Esquemático do regulador de tensão..............................................................85
Figura 5.6: Esquemático do conversor Buck......................................................................86
Figura 5.7: Esquemático filtro ButterWorth e divisor de tensão.....................................87
Figura 5.8: Tensão antes e depois do filtro Butterworth....................................................88
Figura 5.9: Tempo de resposta do filtro Butterworth.........................................................89
Figura 5.10: Gráfico tensão do tacogerador x velocidade do conjunto..........................89
Figura 5.11: Acoplamento do tacogerador.........................................................................90
Figura 5.12: Esquemático do display de sete segmentos...................................................91
Figura 5.13: Lay out do kit didático de controle de velocidade de um grupo motor-
gerador ....................................................................................................................................93
Figura 5.14: Esquemático do circuito de comunicação serial ..........................................94
Figura 5.15 : Placa de circuito impresso - hardware ...........................................................95
Figura 5.16: Placa de circuito impresso - interface............................................................95
Figura 5.17: Esquema do ensaio de levantamento da função de transferência ............97
Figura 5.18: Resposta do sistema ao degrau ......................................................................98

Figura 5.19: Determinação da constante de tempo...........................................................99
Figura 5.20: Resposta de tensão na saída do gerador ao degrau..................................101
Figura 5.21: Resposta de velocidade do sistema ao degrau ..........................................102
Figura 5.22: Diagrama de blocos do sistema ...................................................................102
Figura 6.1: Simulação do controle proporcional .............................................................107
Figura 6.2: Ensaio do controle proporcional....................................................................108
Figura 6.3: Sistema oscilatório para Kp>3........................................................................108
Figura 6.4: Simulação do controle proporcional para Kp > 3 .......................................109
Figura 6.5: Simulação do controle integral ......................................................................109
Figura 6.6: Ensaio do controle integral .............................................................................110
Figura 6.7: Simulação do controle proporcional integral...............................................111
Figura 6.8: Ensaio do controle proporcional integral .....................................................111
Figura 6.9: Simulação do controle proporcional derivativo..........................................112
Figura 6.10: Ensaio do controle proporcional derivativo ..............................................113
Figura 6.11: Comparação entre ensaios do controle proporcional derivativo............113
Figura 6.12: Simulação do controle PID ...........................................................................114
Figura 6.13: Ensaio do controle PID..................................................................................115

LISTA DE TABELAS
Tabela 6.1: Lista de materiais e custos da estrutura mecânica ......................................115
Tabela 6.2: Lista de materiais e custos dos circuitos eletrônicos gerais .......................116
Tabela 6.3: Lista de materiais e custos da placa de cargas.............................................116
Tabela 6.4: Lista de materiais e custos do regulador de tensão ....................................116
Tabela 6.5: Lista de materiais e custos do conversor Buck ............................................117
Tabela 6.6: Lista de materiais e custos do sensor de velocidade ..................................117
Tabela 6.7: Lista de materiais e custos do display ............................................................117
Tabela 6.8: Lista de materiais e custos dos potenciômetros ..........................................118
Tabela 6.9: Lista de materiais e custos do circuito de comunicação Serial..................118
Tabela 6.10: Custo total para montagem do kit...............................................................118

LISTA DE ABREVIAÇÕES
− A/D: Analógico/digital
− CC: Corrente contínua
− CPU: Central Processing Unit (unidade central de processamento)
− D/A: Digital/analógico
− DMA: Direct memory access (acesso direto da memória)
− DSP: Digital Signal Processor (processador de sinal digital)
− f.e.m.: Força eletro-motriz
− f.c.e.m.: Força contra eletro-motriz
− JTAG: Joint Test Action Group (módulo integrado de programação e teste)
− LCD: Liquid Crystal Display (tela de cristal líquido)
− MIPS: Milhões de instruções por segundo
− MOSFET: Metal Oxide Semiconductor Field Effect Transistor (transistor de efeito
de campo de metal-óxido semicondutor)
− PC: Personal computer (computador pessoal)
− PID: Proporcional, Integral e Derivativo
− PWM: Pulse-width modulation (modulação por largura de pulso)
− RAM: Random Access Memory (memória de acesso aleatório)
− RISC: Reduced Instruction Set Computer (computador com um conjunto
reduzido de instruções)
− ROM: Read Only Memory (memória apenas de leitura)
− SPI: Serial Peripheral Interface (periférico de interface serial)
− USART: Universal Synchronous Asynchronous Receiver Transmitter (transmissor
/ receptor universal síncrono e assíncrono)
− ZOH: Zero Order Hold (segurador de ordem zero)

LISTA DE SÍMBOLOS
− a: Pares de ramais internos do motor
− b: Atrito viscoso
− B(s): Sinal de retroação
− ce: Número de condutores eficazes de um motor
− C(s): Transformada de Laplace da saída de um sistema de controle
− c(t): Resposta total de um sistema de controle
− c(t)forçado: Resposta forçada de um sistema de controle
− c(t)natural: Resposta natural de um sistema de controle
− d: Erro da resposta em regime permanente
− E: Força contra eletro motriz [V]
− E(s): Sinal atuante de erro
− Fa: Força aplicada no eixo [kg.m/s2]
− G(s): Função de transferência de um sistema de controle analógico
− G(z): Função de transferência de um sistema de controle discreto
− Gc (s): Função de transferência do controlador PID
− H(s): Bloco de retroação
− h(t): Sinal amostrado após extrapolador de ordem zero
− I: Corrente [A]
− Ia: Corrente de armadura [A]
− If: Corrente de campo [A]
− J: Momento de inércia [kg.m2]
− K, Kb, Km, Ki: Constantes do motor
− Kf: Constante de campo
− Kp: Parâmetro proporcional do controlador PID
− La: Indutância de armadura [H]
− Lf: Indutância de campo [H]
− MF: Margem de Fase [º]
− MG: Margem de Ganho [dB]

− Mp: Máximo sobre sinal ou Overshoot da resposta de um sistema de controle
− n: Velocidade angular [rpm]
− p: Número de pólos
− Ra: Resistência de armadura [Ω]
− Rf: Resistência de campo [Ω]
− R(s): Transformada de Laplace da entrada de um sistema de controle
− r(t): Sinal analógico
− r*(t): Sinal amostrado
− s: Notação do plano s
− T: Período de amostragem [s]
− Ta: Tempo de acomodação da resposta de um sistema de controle [s]
− Td: Parâmetro derivativo do controlador PID
− Tp: Torque perturbador [N.m]
− Ti: Parâmetro integral do controlador PID
− TL: Torque da carga [N.m]
− Tmec: Torque mecânico [N.m]
− Tp: Tempo de pico da resposta de um sistema de controle [s]
− Ts: Tempo de subida da resposta de um sistema de controle [s]
− V: Tensão [V]
− Va: Tensão terminal de armadura [V]
− Vb: Tensão devido à força contra eletromotriz [V]
− Vf: Tensão de campo [V]
− w: Notação do plano w
− z: Notação do plano z
− δ : Símbolo da Transformada de Laplace
− ω: Parte complexa da variável s
− ωn: Freqüência natural [rad/s]
− ωd: Freqüência natural amortecida [rad/s]

− β: ângulo que define a linha de referência de mesmo sobre sinal no plano s
(ver figura 2.8) [º]
− ζ: Coeficiente de amortecimento
− σ: Parte real da variável s
− Φ: Fluxo no entreferro [Wb]
− τa: Constante de tempo da armadura
− τ1: Constante de tempo da armadura equivalente

SUMÁRIO
CAPÍTULO 1..........................................................................................................................18
1 INTRODUÇÃO GERAL ...............................................................................................18
1.1 Introdução.............................................................................................................18
1.2 Problema ...............................................................................................................19
1.3 Justificativa ...........................................................................................................20
1.4 Objetivos ...............................................................................................................20
1.4.1 Objetivo geral ..............................................................................................20
1.4.2 Objetivos específicos ..................................................................................21
1.5 Método de pesquisa ............................................................................................21
1.6 Estrutura do trabalho ..........................................................................................22
CAPÍTULO 2..........................................................................................................................24
2 REFERENCIAL TEÓRICO ...........................................................................................24
2.1 A importância de kits didáticos.........................................................................24
2.2 Os sistemas de controle.......................................................................................26
2.2.1 Histórico.......................................................................................................27
2.2.2 Configurações de sistemas ........................................................................28
2.2.3 Linearidade..................................................................................................30
2.2.4 Estabilidade .................................................................................................31
2.2.5 Modelagem no domínio da freqüência ...................................................32
2.2.6 Especificações de desempenho.................................................................34
2.2.7 Técnica do lugar das raízes .......................................................................38
2.2.8 Técnica de resposta de freqüência............................................................40
2.2.9 Controlador PID..........................................................................................44
2.2.10 Controle digital ...........................................................................................51
2.2.11 Discretização................................................................................................55
2.3 Microprocessador ................................................................................................56
2.3.1 Microcontrolador MSP430F169 ................................................................57
CAPÍTULO 3..........................................................................................................................60
3 ANÁLISE DAS POSSÍVEIS PLANTAS DE CONTROLE .....................................60
3.1 Sistema massa / mola .........................................................................................60
3.2 Sistema térmico ....................................................................................................61
3.3 Sistema elétrico – controle de velocidade de motor .......................................62
3.4 Sistema posição bola / aro. ................................................................................63
3.5 Sistema pêndulo invertido .................................................................................65
3.6 Sistema barra / esfera .........................................................................................66
3.7 Sistema levitação magnética de uma esfera.....................................................67

CAPÍTULO 4..........................................................................................................................69
4 DEFINIÇÃO DA PLANTA...........................................................................................69
4.1 Motores CC...........................................................................................................71
4.2 Controle de motores CC .....................................................................................74
4.2.1 Controle de velocidade ..............................................................................74
4.3 Modelagem matemática .....................................................................................75
4.4 Componentes do kit ............................................................................................79
CAPÍTULO 5..........................................................................................................................80
5 DESENVOLVIMENTO DO PROJETO......................................................................80
5.1 Grupo motor-gerador .........................................................................................80
5.2 Fonte CC 12V........................................................................................................81
5.3 Microcontrolador MSP430F169 .........................................................................81
5.4 Cargas....................................................................................................................82
5.5 Circuitos eletrônicos............................................................................................85
5.5.1 Regulador de tensão...................................................................................85
5.5.2 Acionamento do motor - conversor Buck ...............................................85
5.5.3 Sensor de velocidade do motor - tacogerador........................................86
5.5.4 Interface de saída - displays de sete segmentos.......................................90
5.5.5 Interface de entrada – potenciômetros ....................................................92
5.5.6 Lay out do kit para ensaios.........................................................................93
5.5.7 Projeto da placa de circuito impresso ......................................................94
5.6 Software ..................................................................................................................96
5.7 Modelo matemático do sistema.........................................................................97
5.7.1 Levantamento da função de transferência..............................................97
5.7.2 Validação da função de transferência....................................................100
5.7.3 Diagrama de blocos do sistema ..............................................................102
CAPÍTULO 6........................................................................................................................106
6 RESULTADOS..............................................................................................................106
6.1 Controle Proporcional.......................................................................................107
6.2 Controle Integral:...............................................................................................109
6.3 Controle Proporcional Integral........................................................................110
6.4 Controle Proporcional Derivativo...................................................................112
6.5 Controle Proporcional Integral Derivativo....................................................114
6.6 Lista de material e estimativa de custos para a montagem do kit..............115
CAPÍTULO 7........................................................................................................................119
7 CONCLUSÃO ...............................................................................................................119
7.1 Considerações finais..........................................................................................120

8 REFERÊNCIAS .............................................................................................................123
APÊNDICE A - Código do software ...............................................................................125
APÊNDICE B - Manual de instruções ............................................................................131
APÊNDICE C - Projeto das placas de circuito impresso.............................................143

18
CAPÍTULO 1
1 INTRODUÇÃO GERAL
1.1 Introdução
Devido ao grande desenvolvimento tecnológico das últimas décadas, à
crescente automatização das indústrias e com o emprego cada vez maior de
máquinas nos processos fabris, os engenheiros das diversas modalidades de
engenharia com conhecimento em sistemas de controle tornaram-se profissionais
amplamente solicitados pelo mercado de trabalho.
A fim de formar tais profissionais com uma base sólida de conhecimentos e já
com alguma experiência prática, as instituições de ensino necessitam de
determinadas ferramentas, que, muitas vezes, se tornam inviáveis devido seu alto
custo. Portanto, a pesquisa de alternativas viáveis para a melhor compreensão do
assunto pode ser a solução para ajudar no aprendizado dos futuros profissionais,
facilitando sua inserção no mercado de trabalho e atingindo as expectativas da
indústria.
Com a utilização de sistemas mecânicos simples, microcontroladores e
sensores encontrados com facilidade no mercado, é possível implementar sistemas
controlados que permitem uma visualização simplificada do seu comportamento e a
influência de determinados parâmetros e perturbações sobre a resposta fornecida
pelo sistema, ajudando assim na formação acadêmica.
Segundo Moreno (2006) implementar laboratórios que permitam alcançar os
objetivos enumerados e, ao mesmo tempo, contemplem a riqueza e diversidade dos
sistemas de controle não é tarefa trivial, tendo que lidar com condicionantes como
restrições orçamentárias, espaço físico adequado, estrutura de operação e
manutenção, disponibilidade humana de ensino e acompanhamento, obrigando à
seleção e priorização dos experimentos laboratoriais. Basicamente, as características

19
necessárias aos procedimentos, experimentos e fenômenos que devem ser
efetivamente contempladas nas práticas laboratoriais são:
− Demonstrar os conceitos teóricos importantes, necessários ao aprendizado da
engenharia de controle;
− Refletir os problemas fundamentais associados às situações reais, e que são
encontrados na vida prática;
− Fornecer aos estudantes sensações visuais e acústicas dos fenômenos
analisados;
− Possuir constantes de tempo razoáveis, permitindo que as dinâmicas
associadas sejam visualizadas pelos estudantes e, ao mesmo tempo,
possibilitando vários procedimentos durante um período de prática
laboratorial;
− Apresentar riscos mínimos à segurança dos usuários;
− Possuir custos acessíveis de aquisição, operação e manutenção;
− Apresentar dinâmicas de fácil compreensão, com definição clara de objetivos,
associados aos procedimentos operacionais simples.
1.2 Problema
As disciplinas dos cursos de engenharia que apresentam elevado conteúdo
matemático e teórico carecem de ferramentas que permitam ao futuro profissional
efetuar uma relação entre toda a fundamentação matemática e aplicabilidade prática
dos conhecimentos adquiridos.
Considerando a importância da consolidação dos conhecimentos teóricos a
partir de constatações práticas e a dificuldade econômica apresentada pela maioria
das instituições de ensino, a proposta da implementação de um kit didático que
permita ao aluno a visualização da resposta de um sistema físico sob influência de
determinados parâmetros de controle e perturbações aparece como uma boa solução
didática.

20
1.3 Justificativa
A disciplina de controle apresenta aos alunos um conteúdo de alto grau
teórico e matemático, por muitas vezes, de difícil compreensão. Apesar dos softwares
de simulação, como o MatLab, darem uma idéia aos alunos da relação entre a teoria
matemática e suas aplicações práticas, a implementação de um kit didático para as
disciplinas de controle disponibilizará uma ferramenta prática de estudo para os
alunos dos cursos de engenharia, que permitirá uma visualização real do
comportamento de um sistema físico controlado, semelhante ao que acontece no dia-
a-dia das indústrias, completando assim o ciclo de aprendizagem:
Conhecimento da teoria matemática – através das aulas teóricas;
Compreensão da sua relação com as aplicações práticas – através dos
softwares de simulação;
Visualização do resultado num sistema fisicamente compreensível – através
de um sistema real (kit didático).
O enriquecimento acadêmico que será absorvido dentro das áreas afins da
engenharia, a partir deste trabalho, será de grande relevância para a formação dos
futuros profissionais ressaltando que a programação de microcontroladores será um
desafio complementar a aplicação dos demais conceitos adquiridos durante o curso.
1.4 Objetivos
1.4.1 Objetivo geral
Pesquisar, desenvolver e implementar um kit didático para as disciplinas de
controle dos cursos de engenharia permitindo ao aluno a visualização e compreensão
prática dos conhecimentos adquiridos durante as aulas teóricas através da
demonstração das respostas de um sistema físico aos dispositivos de controle.
21
O sistema implementado deverá possuir as seguintes características:
Interface de entrada que permita o ajuste, dentro de uma faixa pré-
determinada, dos parâmetros dos controladores PID (Proporcional, Integral e
Derivativo);
Interface de saída que permita a visualização direta da resposta do sistema.
1.4.2 Objetivos específicos
Pesquisar os sistemas e plantas possíveis de serem implementados;
Analisar a aplicabilidade e eficiência didática dos possíveis sistemas;
Estabelecer o(s) sistema(s) que farão parte do kit proposto;
Projetar, desenvolver e implementar o(s) sistema(s);
Ensaiar o(s) sistema(s) proposto(s) para compor o kit didático;
Elaborar um manual / roteiro para utilização do kit desenvolvido.
1.5 Método de pesquisa
a) Elaboração de uma revisão bibliográfica dos conteúdos de teoria de
controle, modelagem linear e do microcontrolador MSP430F169 do fabricante Texas
Instruments.
Esta etapa será realizada através da revisão dos trabalhos afins apresentados e
consultas a todo tipo de fonte de informações que se fizer necessário.
b) Pesquisa e definição do(s) kit(s) a ser implementado.
Etapa que será realizada através da análise técnica dos sistemas possíveis de
serem implementados. A escolha do(s) sistema(s) a ser implementado será realizada
de acordo com os objetivos didáticos pré-estabelecidos.
22
c) Ambientação com a programação de microcontrolador.
Esta etapa consiste no estudo do microcontrolador MSP430F169, bem como a
programação do mesmo, esse estudo se dará através de livros, manuais e
“datasheets”.
d) Implementação do(s) sistema(s).
A implementação será realizada através do projeto dos circuitos e do
desenvolvimento do software de controle com o auxílio de programas de simulação.
Os ensaios dos circuitos e dispositivos de controle serão realizados a partir de uma
montagem em ProtBoard. Após sua validação será desenvolvido o projeto da placa de
circuito impresso e efetuada a sua montagem e integração com o sistema mecânico.
e) Ensaios e validação do sistema implementado.
Esta será a etapa onde serão feitos os ensaios do sistema de controle
desenvolvido, levantando suas características.
f) Elaboração do manual / roteiro de utilização do kit.
Após a realização de todos os ensaios e da validação final será redigido um
manual / roteiro de utilização do kit para que todas as suas aplicabilidades possam
ser compreendidas e absorvidas pelos futuros usuários.
1.6 Estrutura do trabalho
No capítulo 1 será feita a introdução e justificativa para o tema proposto, além
de tratar da estrutura e metodologia de trabalho.
O capítulo 2 conterá um resumo da história dos sistemas de controle, suas
aplicações atuais e a revisão bibliográfica sobre sistemas de controle e o
microcontrolador utilizado.
No capítulo 3 será feita a pesquisa, análise e definição dos sistemas possíveis
de serem implementados.

23
Por conseguinte, no capítulo 4, será estudada a implementação do sistema
escolhido, estabelecendo todos os componentes do kit didático a partir da
aplicabilidade e eficiência didática do sistema.
No capítulo 5 será realizada a modelagem do sistema e o projeto dos circuitos
eletrônicos e mecânicos que serão utilizados na implementação dos sistemas.
No capítulo 6 serão apresentados os resultados obtidos nos ensaios e o custo
de implementação do kit.
Finalmente, no capítulo 7, serão feitas as conclusões sobre o trabalho e
recomendações para projetos futuros, além das considerações finais.
Os apêndices deste trabalho conterão o código fonte do software implementado
para o desenvolvimento do projeto, o manual de instruções do kit e o projeto das
placas de circuito impresso.
24
CAPÍTULO 2
2 REFERENCIAL TEÓRICO
Neste capítulo será exposta a revisão teórica sobre os principais tópicos de
sistemas de controle que serão abordados durante o projeto. Será apresentada
também uma breve explanação sobre a importância dos kits didáticos e sobre o
microcontrolador que será utilizado como ferramenta para a implementação do
software de controle.
2.1 A importância de kits didáticos
Segundo Gauthier (1998), “didática” é o estudo daquilo que se relaciona com o
saber dos alunos, não só pelos conteúdos a serem aprendidos como na forma pela
qual os alunos se apropriam desses conteúdos (aprendizagem). A didática pode ser
definida como os trabalhos dos conteúdos que precedem a aula, enquanto a
pedagogia se preocupa com a interação em sala de aula. Baseando-se nesta afirmação
pode-se definir este trabalho como o desenvolvimento de um kit didático de cunho
pedagógico já que proporcionará a interação nas aulas de laboratório.
Conforme Monteiro e Gaspar (2005) a partir da década de 1970, começaram a
surgir em todo mundo museus e centros de ciências, locais onde as demonstrações
experimentais são o centro das atenções e do encantamento de seus visitantes. Esse
movimento deu início a um processo de resgate da prática da apresentação de
demonstrações experimentais de ciências em sala de aula. Os impactos que essas
demonstrações provocam nos seus visitantes em ambientes informais, mostram que
essa atividade pode ser pedagogicamente válida e significativa também em sala de
aula, apesar de serem consideradas pedagogicamente inócuas pelas teorias que
centram a construção do conhecimento na atividade do aluno.

25
De acordo com Moreno (2006) a educação tecnológica enfrenta diversos
desafios, seja na relação ensino-aprendizagem, seja com relação às demandas sociais,
ou ainda com os problemas oriundos do ensino médio e fundamental. O ensino da
engenharia de automação enfrenta estas mesmas dificuldades somadas a outras
particulares tais como:
Dificuldades na integração multidisciplinar;
Área de atuação cujas bases epistemológicas são voltadas para a abstração;
A necessidade de uma sólida base matemática;
Dificuldade em cobrir um amplo domínio com carga horária restrita.
O desenvolvimento de trabalhos em busca de soluções para estes problemas
segue a linha da indicação de novas abordagens para os conteúdos: desenvolvimento
de experimentos e kits didáticos. Neste aspecto as contribuições de abordagem
pedagógica para construção de experimentos laboratoriais são importantes porque
propiciam uma aproximação entre a teoria e a prática equilibrando os aspectos
teleológicos e abstratos das teorias de controle.
Independente da escolha de materiais ou estruturas o ensino da disciplina
deve possibilitar a compreensão dos seguintes princípios: entendimento da noção de
sistemas dinâmicos, associando as respostas das plantas e dos sistemas controlados;
estabilidade para os diversos sistemas; noção de realimentação e conceito de
compensação dinâmica.
Um laboratório da disciplina de controle deve atender aos seguintes objetivos:
Motivar o conhecimento, a demonstração e a validação de conceitos
analíticos;
Introduzir problemas do mundo real associados ao controle e modelagem;
Fornecer estruturas que permitam procedimentos associados ao uso da
instrumentação e aquisição de sinais;
Confrontar os estudantes com as necessidades práticas profissionais tais
como elaboração de memórias de cálculo e relatórios técnicos;
Desenvolver trabalhos em equipe e direcionados a solução de problemas;
26
É em busca de atender a estes requisitos que será desenvolvido e implemen-
tado o kit didático.
2.2 Os sistemas de controle
Uma infinidade de sistemas de controle fazem parte do nosso cotidiano. Eles
podem ser os automatismos responsáveis pelo vai e vêm dos elevadores, pelo
funcionamento das portas de alguns estabelecimentos comerciais, pelos sinais de
trânsito, estando presentes também em vários componentes dos veículos, dentro das
indústrias nos mais diversos processos de fabricação, nos aviões, no lançamento de
satélites e naves espaciais. Até mesmo nosso organismo é composto por uma série de
sistemas de controle.
Segundo Nise (2002), um sistema de controle consiste em subsistemas e
processos reunidos com o propósito de controlar as saídas dos processos. Por
exemplo, uma caldeira produz calor como resultado do fluxo de combustível. Neste
processo, subsistemas chamados válvulas de combustível e atuadores de válvulas de
combustível são usados para regular a temperatura de uma sala, controlando a saída
de calor da caldeira. Outros subsistemas, como os termostatos, que se comportam
como sensores, medem a temperatura na sala. Na sua forma mais simples, um
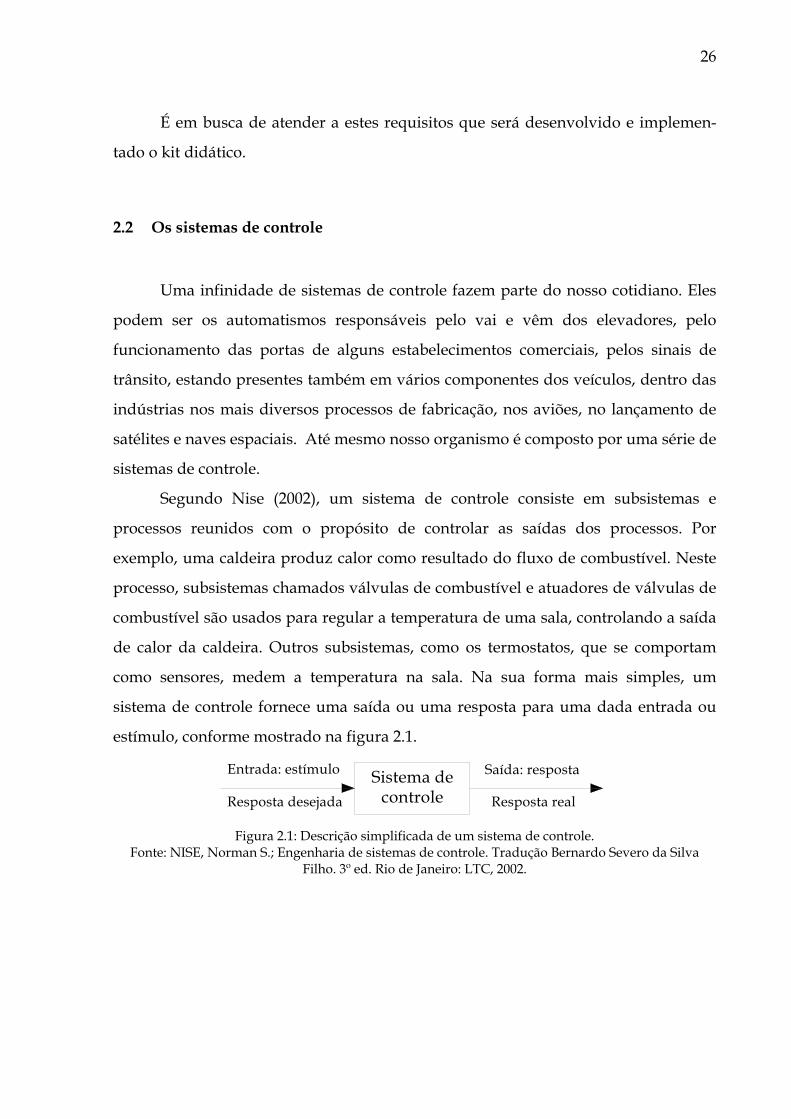
sistema de controle fornece uma saída ou uma resposta para uma dada entrada ou
estímulo, conforme mostrado na figura 2.1.
Sistema decontroleResposta desejada
Entrada: estímulo
Resposta real
Saída: resposta
Figura 2.1: Descrição simplificada de um sistema de controle.
Fonte: NISE, Norman S.; Engenharia de sistemas de controle. Tradução Bernardo Severo da Silva Filho. 3º ed. Rio de Janeiro: LTC, 2002.
27
2.2.1 Histórico
Os sistemas de controle são tão antigos quanto à humanidade, pois sistemas
de controle biológicos já faziam parte dos primeiros habitantes do nosso planeta
(NISE, 2002).
Segundo Nise (2002), os gregos começaram a engenharia de sistemas com
retroação por volta de 300 a.C. Um relógio de água, inventado por Ktesibios, operava
por meio de gotejamento de água, a uma taxa constante, dentro de um reservatório
medidor. Logo depois de Ktesibios, a idéia do controle de nível de líquido foi
aplicada em um lampião a óleo por Fílon.
A regulação de pressão de vapor começou por volta de 1681 com a invenção
da válvula de segurança de Denis Papin. Também no século XVII, Cornelis Drebbel,
na Holanda, inventou um sistema de controle de temperatura exclusivamente
mecânico para chocar ovos, e em 1745, o controle de velocidade era aplicado a um
moinho de vento por Edmund Lee.
Para Ogata (1998), o primeiro trabalho significativo em controle automático foi
o de James Watt, que construiu, no século XVIII, um controlador centrífugo para o
controle de velocidade de uma máquina a vapor.
A partir da década de 1920 os sistemas de controle vêm se desenvolvendo
rapidamente, a partir de 1922, quando Minorsky trabalhou em controladores
automáticos para pilotar navios. Dez anos mais tarde, Nyquist desenvolveu um
procedimento relativamente simples para determinar a estabilidade de sistemas a
malha fechada, com base na resposta estacionária de sistemas a malha aberta, a
excitações senoidais. Em 1934, Hazen, que introduziu o termo “servomecanismos”
para designar sistemas de controle de posição, discutiu o projeto de servome-
canismos a relé, capazes de seguir uma excitação variável no tempo.
Durante a década de 40, os métodos de resposta de freqüência tornaram
possível aos engenheiros projetar sistemas de controle a malha fechada satisfazendo
requisitos de desempenho. Somente a partir dos anos 60 a disponibilidade dos
computadores digitais tornou possível a análise, no domínio do tempo, de sistemas
complexos.
28
2.2.2 Configurações de sistemas
Segundo Ogata (1998), existem sistemas de controle a malha aberta e a malha
fechada:
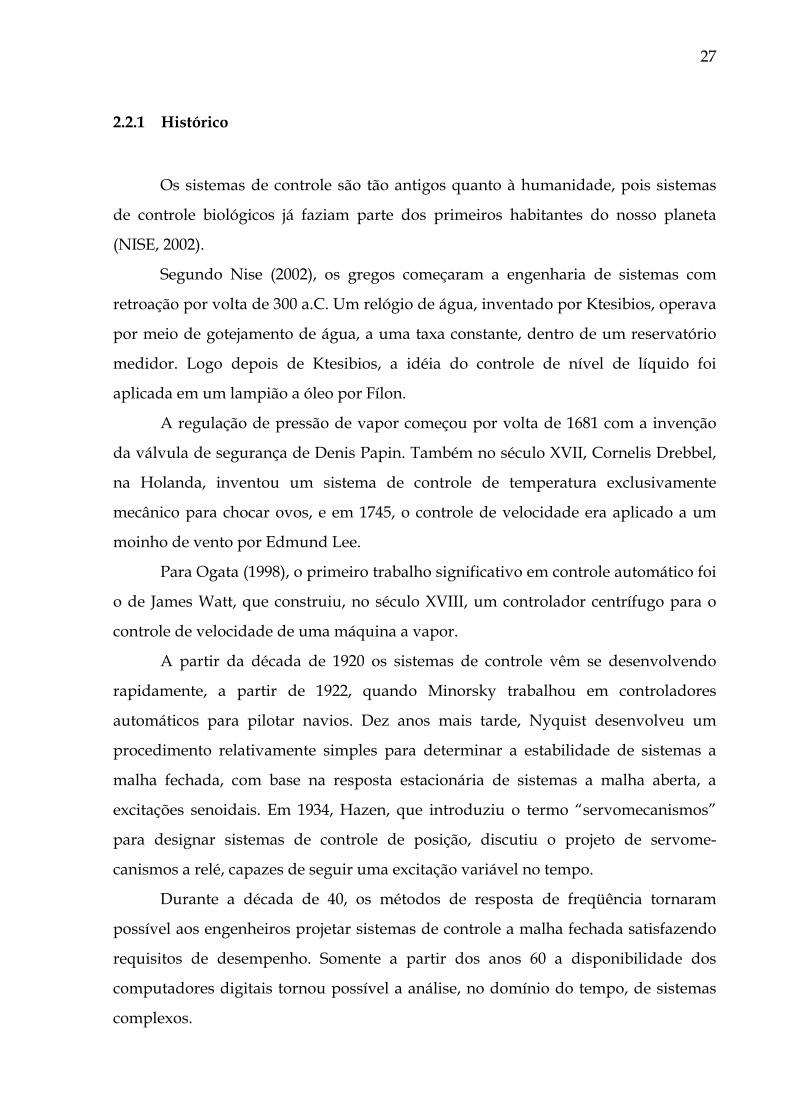
Malha aberta: sistemas nos quais o sinal de saída não afeta a ação de
controle. Nesse tipo de sistema não se mede o sinal de saída, nem tampouco
este sinal é enviado de volta para comparação com o sinal de entrada. Suas
principais características são sua aptidão, que, para desempenhar-se
precisamente, é determinada pela sua calibração, e o fato deles não serem
geralmente perturbados com problemas de instabilidade (DISTEFANO,
1975).
A figura 2.2 mostra o esquema de um sistema a malha aberta:
Entradaou
referência
Transdutorde entrada
Controlador Processoou Planta
Junçãode
adição
Perturbação 1
Junçãode
adição
Perturbação 2
Saída ouVariável
controlada
Figura 2.2: Diagrama de blocos dos sistemas de controle a malha aberta.
Fonte: NISE, Norman S.; Engenharia de sistemas de controle. Tradução Bernardo Severo da Silva Filho. 3º ed. Rio de Janeiro: LTC, 2002.
Malha fechada: neste tipo de sistema, o sinal atuante de erro, que é a
diferença entre a entrada e o sinal de retroação (que pode ser a própria
resposta ou uma função dela), excita o controlador de modo a reduzir o erro
e trazer o valor da resposta para o valor desejado.

29
A figura 2.3 mostra o esquema de um sistema a malha fechada:
Entradaou
referência
Transdutorde entrada
Controlador Processoou Planta
Junçãode
adição
Perturbação 1
Junçãode
adição
Perturbação 2
Saída ouVariável
controlada
Transdutorde saídaou Sensor
Junçãode adição
Erro ouSinal
atuante
Figura 2.3: Diagrama de blocos dos sistemas de controle a malha fechada.
Fonte: NISE, Norman S.; Engenharia de sistemas de controle. Tradução Bernardo Severo da Silva Filho. 3º ed. Rio de Janeiro: LTC, 2002.
Freqüentemente os termos controle com retroação e controle a malha fechada
são usados indistintamente. Porém, segundo Distefano (1975), retroação é a
propriedade do sistema de malha fechada que permite a saída (ou alguma outra
variável controlada do sistema) ser comparada com a entrada para o sistema (ou uma
entrada, para outro componente situado internamente ou subsistema), de modo que
a ação apropriada de controle pode ser formada como alguma função da saída e
entrada. As mais importantes características que a presença da retroação confere a
um sistema são as seguintes:
− Precisão aumentada;
− Sensibilidade reduzida da razão saída para a entrada às variações nas
características do sistema;
− Efeito reduzido das não linearidades;
− Largura de faixa aumentada (faixa de freqüência de entrada na qual o
sistema responderá satisfatoriamente);
− Tendência para oscilação ou instabilidade.
Silveira e Santos (1998) fazem uma analogia interessante para a compreensão
de um sistema de controle a malha fechada. Eles comparam um sistema de controle
com um homem regulando a temperatura da água para seu banho. A entrada seria a
temperatura desejada pelo homem, enquanto que o controlador seria o cérebro e o

30
atuador a mão que aciona as válvulas de água fria ou quente. O tato age como um
sensor de temperatura, pois quando a água entra em contato com a pele, esta informa
o cérebro (sinal de retroação) se a água está mais quente ou mais fria que o desejado.
2.2.3 Linearidade
Existem duas propriedades básicas que tornam fácil o reconhecimento de um
sistema linear, conhecidas como “superposição” e “homogeneidade”.
De acordo com Nise (2002), a propriedade da superposição significa que a
resposta na saída de um sistema à soma das entradas é a soma das respostas às
entradas individuais. Já a propriedade da homogeneidade diz que a multiplicação da
entrada por um escalar, faz com que a resposta seja multiplicada pelo mesmo escalar.
A figura 2.4 exemplifica um sistema linear e um segundo sistema não-linear:
1
2 3 4
2
f(x)
Saída
Entrada
x1
Sistema linear
1
2 3 4
2
f(x)
Saída
Entrada
x1
Sistema não-linear
Figura 2.4: Exemplo de um sistema linear e um sistema não linear. Fonte: NISE, Norman S.; Engenharia de sistemas de controle. Tradução Bernardo Severo da Silva
Filho. 3º ed. Rio de Janeiro: LTC, 2002.
Os sistemas de controle reais são geralmente não-lineares, porém eles podem
ser aproximados por meio de modelos matemáticos lineares, tornando-se possível
utilizar um dos muitos métodos de projeto bem detalhados (OGATA, 1998).
A saturação de um amplificador, zona morta de um motor ou a folga entre
engrenagens podem servir como exemplos de não-linearidades físicas.

31
2.2.4 Estabilidade
O problema mais importante em sistemas de controle lineares é o da
instabilidade (OGATA, 1998).
A estabilidade de um sistema é determinada pela sua resposta às entradas ou
perturbações. Intuitivamente, um sistema estável é aquele que permanecerá em
repouso a não ser quando excitado por fonte externa e retornará ao repouso se todas
as excitações forem removidas (DISTEFANO, 1975).
Segundo Nise (2002), a resposta total de um sistema é a soma das respostas
forçada e natural, ou seja:
( ) ( ) ( )naturalforçado tctctc += (2.1)
Usando estes conceitos, as seguintes definições de estabilidade, instabilidade e
estabilidade marginal são apresentadas:
Um sistema linear e invariante no tempo é estável se a resposta natural
tender a zero quando o tempo tender a infinito;
Um sistema linear e invariante no tempo é instável se a resposta natural
crescer, sem limites, à medida que o tempo tender para o infinito;
Um sistema linear e invariante no tempo é marginalmente estável quando a
resposta natural nem cresce nem se atenua, permanecendo constante ou
oscilante, à medida que o tempo tende para o infinito.
Caso seja difícil separar a resposta natural da resposta forçada, Nise (2002)
define que um sistema é estável se toda entrada limitada gerar uma saída limitada.
Segundo Distefano (1975), uma condição necessária para que o sistema seja
estável é que as partes reais das raízes da equação característica do sistema sejam
todas negativas. Isso assegura que a resposta ao impulso diminuirá exponen-
cialmente com o tempo. Se algumas raízes possuírem a parte real nula, mas nenhuma
com parte real positiva, o sistema é dito marginalmente estável. Neste caso, a
resposta ao impulso não diminui para zero, conquanto seja delimitada. Adicional-

32
mente, certas entradas produzirão saídas não delimitadas. Portanto, os sistemas
marginalmente estáveis podem ser tratados como instáveis.
Fisicamente, um sistema instável cuja resposta natural cresça sem limites
poderia causar danos ao sistema, às instalações adjacentes, ou à vida humana. Em
muitas ocasiões, os sistemas são projetados com limites de parada para evitar uma
perda de controle (NISE, 2002).
2.2.5 Modelagem no domínio da freqüência
A modelagem matemática de um sistema dinâmico é definida como um
conjunto de equações que representam a dinâmica do sistema com precisão, ou pelo
menos, de forma bastante aceitável. A dinâmica de muitos sistemas, sejam eles
mecânicos, elétricos, térmicos, econômicos, biológicos etc., pode ser descrita em
termos de equações diferenciais obtidas utilizando-se as leis da física que governam
um sistema particular, como por exemplo, as leis de Newton dos sistemas mecânicos
ou as leis de Kirchhoff dos circuitos elétricos (OGATA, 1998).
Função de transferência
A função de transferência, obtida aplicando-se a Transformada de Laplace à
equação diferencial do sistema, relaciona algebricamente a saída de um sistema à
entrada, permitindo assim, a separação da entrada, do sistema e da saída em três
partes separadas e distintas, diferentemente da equação diferencial (NISE, 2002).
( )[ ]
[ ]
( )( )( ) n1n
1n1
n0
m1m1m
1m
0
0iniciais.condições
asasasabsbsbsb
sRsC
sG
entradasaída
sG:ciatransferêndeFunção
++++
++++==
δ
δ=
−−
−−
=
L
L
(2.2)
A equação 2.2 separa a saída, C(s), a entrada, R(s), e o sistema, a relação de
polinômios em s na direita.

33
Diagrama de blocos
A função de transferência pode ser representada por um diagrama de blocos,
que, segundo Ogata (1998), nada mais é que uma representação pictórica das funções
desempenhadas por cada um dos componentes e do fluxo de sinais entre eles. A
figura 2.5 representa um diagrama de blocos de um sistema à malha aberta.
G(s)R(s) C(s)
Figura 2.5: Diagrama de blocos de um sistema a malha aberta.
Podemos obter a saída C(s) com a seguinte relação:
( ) ( ) ( )sG.sRsC = (2.3)
Já para sistemas a malha fechada, a saída C(s) retroage ao ponto de soma,
onde é comparada com o sinal de entrada de referência R(s), como mostra a
figura 2.6.
G(s)
Ponto desoma
H(s)
R(s) C(s)E(s)
B(s)
Ponto dederivação
Figura 2.6: Diagrama de blocos de um sistema a malha fechada.
Fonte: OGATA, Katsuhiko; Engenharia de controle moderno. Tradução Bernardo Severo. 3º ed. Rio de Janeiro: LTC, 1998.
O sinal de saída C(s) é obtido pela multiplicação da função de transferência
G(s) pelo sinal de entrada no bloco, E(s). A função de transferência de um sistema a
malha fechada é dado pela equação 2.4.
( )( )
( )( ) ( )sH.sG1sG
sRsC
+= (2.4)
O papel do elemento de retroação é modificar a natureza do sinal de saída
antes que este seja comparado com o sinal de entrada. Na maioria dos casos, o
elemento de retroação é um sensor que mede o valor da grandeza de saída do
34
processo a controlar. O sinal de saída do sensor é comparado com o sinal de entrada,
gerando-se o sinal de erro atuante (OGATA, 1998).
2.2.6 Especificações de desempenho
O desempenho de um sistema de controle pode, basicamente, ser analisado
em termos da resposta temporal do sistema a uma dada entrada padrão, tal como o
degrau unitário ou a rampa. Estas especificações relacionam, de um modo geral, a
exatidão, estabilidade relativa e velocidade de resposta.
A resposta de um sistema estável, a aplicação de uma dada entrada, pode ser
dividida em duas partes: a resposta transitória e a resposta em regime permanente. A
resposta transitória é um período de tempo que decorre logo após a aplicação de
uma nova entrada ao sistema, ou seja, é o tempo que o sistema se “acomoda” ou
“reage” a nova entrada. Por outro lado, a resposta em regime permanente caracteriza
o comportamento da saída do sistema quando o tempo tende ao infinito
(DA SILVA, 2000).
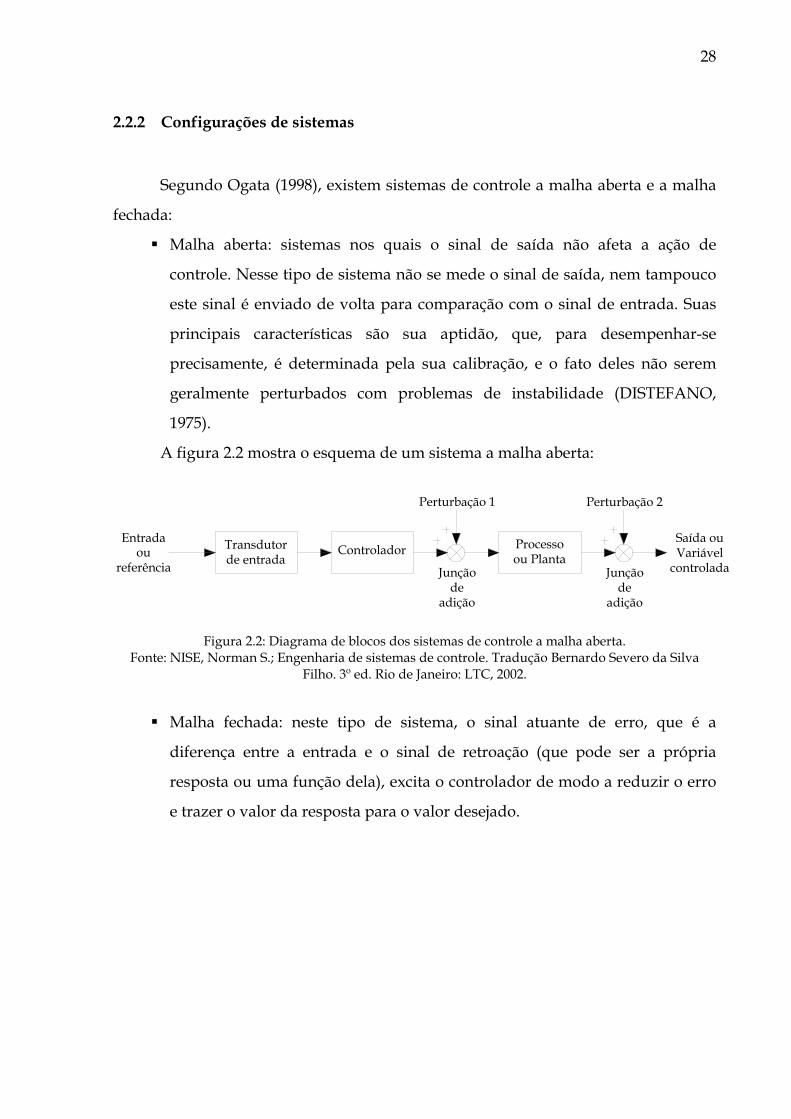
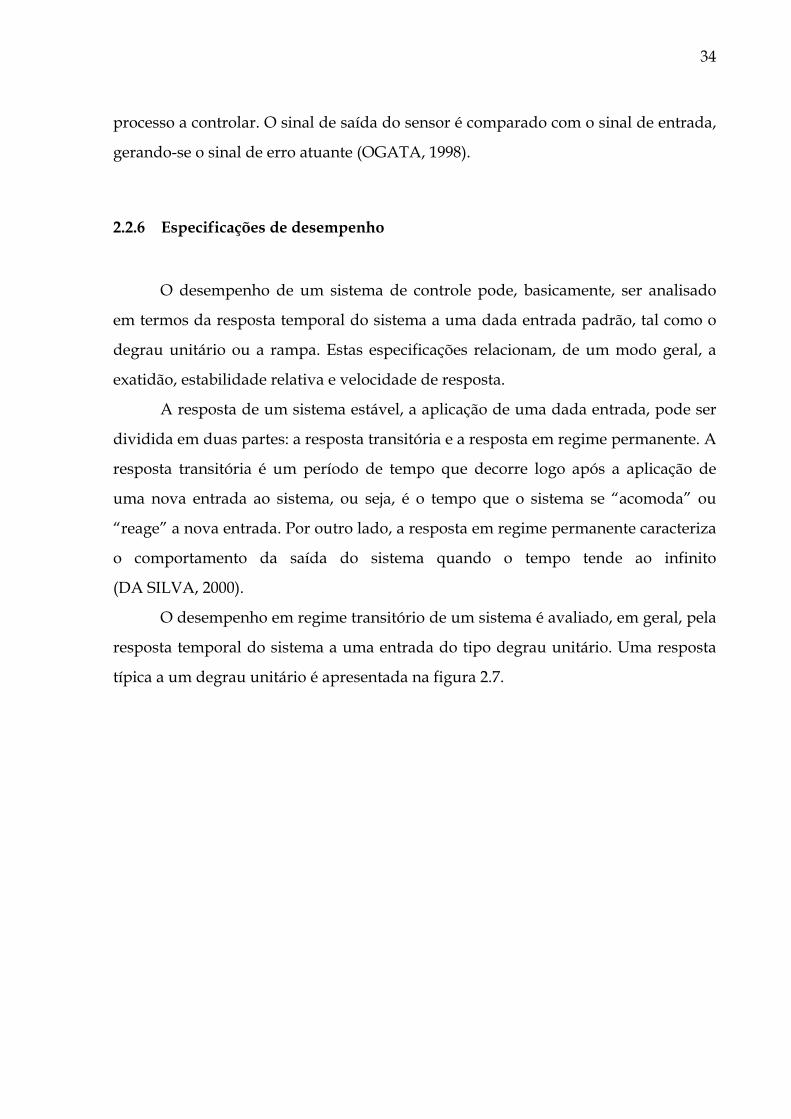
O desempenho em regime transitório de um sistema é avaliado, em geral, pela
resposta temporal do sistema a uma entrada do tipo degrau unitário. Uma resposta
típica a um degrau unitário é apresentada na figura 2.7.

35
Mp
tp ta
ts
1+d
1-d
1
0.9
0.1
Figura 2.7: Especificações de regime transitório.
Fonte: LIMA, Carlos Raimundo Erig. Controle e Servomecanismos I. Curitiba, Universidade Tecnológica Federal do Paraná. Apostila.
Duas grandezas são usadas para descrever as características da resposta
transitória de segunda ordem, são elas:
Freqüência natural - ωωωωn
A freqüência natural de um sistema de segunda ordem é a freqüência de
oscilação do sistema sem amortecimento (NISE, 2002).
Coeficiente de amortecimento - ζζζζ
Essa grandeza descreve quantitativamente a oscilação da resposta de um
sistema independente da escala de tempo. Nise (2002) explica a relação de
amortecimento comparando dois sistemas, sendo que no primeiro a resposta
transitória dura três ciclos em um milissegundo antes de atingir o estado
estacionário, e o segundo percorre três ciclos em um milênio antes de atingir o estado
estacionário. Estes dois sistemas possuem a mesma relação de amortecimento.

36
Lembrando que:
− ζ > 1 ⇒ sistema super amortecido.
− ζ = 1 ⇒ sistema criticamente amortecido.
− ζ < 1 ⇒ sistema sub-amortecido.
Conhecendo essas duas grandezas, podemos definir as especificações comu-
mente usadas em sistemas de segunda ordem:
Tempo de subida – Ts
Tempo necessário para que a resposta passe de 10% a 90% do seu valor final.
d
Tsω
β−π= (2.5)
O ângulo β é mostrado na figura 2.8.
Jwd
wn
-ζζζζwn
ββββ
Plano S
Figura 2.8: Definição do ângulo β.
Fonte: LIMA, Carlos Raimundo Erig. Controle e Servomecanismos I. Curitiba, Universidade Tecnológica Federal do Paraná. Apostila.
E ωd é a freqüência natural amortecida:
2nd 1 ζ−ω=ω (2.6)
37
Tempo de pico – Tp
Tempo necessário para que a resposta alcance o primeiro pico de ultrapas-
sagem (OGATA, 1998).
d
Tpω
π= (2.7)
Tempo de acomodação – Ta
Tempo necessário para que a curva de resposta alcance valores dentro de uma
faixa em torno do valor final e aí permaneça. O intervalo de valores dentro da faixa é
especificado por uma porcentagem absoluta do valor final (normalmente 2% ou 5%).
O tempo de acomodação está relacionado com a maior constante de tempo do
sistema de controle (OGATA, 1998).
n
n
3Ta
4Ta
ζω=
ζω=
(2.8)
Máximo sobre sinal ou overshoot – Mp
Máximo valor de pico da curva de resposta medido a partir do valor unitário
(OGATA,1998). Este parâmetro é medido em percentual.
21eMp ζ−ζπ−= (2.9)
Vale lembrar que o máximo sobre sinal e o tempo de subida são especificações
conflitantes. Em outras palavras, não se pode minimizar o máximo sobre sinal e o
tempo de subida simultaneamente. Se um deles for reduzido, o outro necessaria-
mente aumentará (OGATA, 1998).
Além dos parâmetros vistos para a resposta transitória, deve-se considerar
também o erro de estado estacionário, que, segundo Nise (2002), é a diferença entre a
entrada e a saída de um sistema para uma entrada de teste quando o tempo tende ao
(critério de 2%)
(critério de 5%)

38
infinito. As entradas de teste usadas para análise e projeto de erro de estado
estacionário são o degrau unitário, a rampa e a parábola.
2.2.7 Técnica do lugar das raízes
Antes de definir o lugar das raízes, deve ser apresentado o plano s, que nada
mais é do que um plano complexo, um sistema de coordenadas cartesianas
compostas de um eixo imaginário e outro real, onde são representados os pólos da
função de transferência à malha fechada de um sistema, sendo s uma variável
complexa (s=σ+jϖ). O plano s está representado na figura 2.9.
plano s
σ
jω
Figura 2.9: Plano s.
Já o método do lugar das raízes, introduzido por Evans em 1948, é um
poderoso método de análise e projeto visando à estabilidade e à resposta transitória
(NISE, 2002).
De acordo com Dorf e Bishop (1998), o lugar das raízes é o percurso das raízes
da equação característica traçado no plano s à medida que um parâmetro do sistema
é alterado. Eles concluem ainda que a estabilidade relativa e o desempenho de um
sistema de controle a malha fechada estão diretamente relacionados com a
localização das raízes da equação característica a malha fechada no plano s.
O método do lugar das raízes determina a localização de todos os pólos à
malha fechada a partir do conhecimento da localização dos pólos e zeros a malha
aberta à medida que o valor de um parâmetro (usualmente o ganho) é variado de
zero à infinito (OGATA, 1998).

39
Ou seja, o lugar das raízes inicia nos pólos de malha aberta, quando o ganho é
zero, e termina nos zeros de malha aberta ou no infinito, quando o ganho tende ao
infinito. Além disso, para que o sistema seja estável, todos os pólos e zeros contidos
no gráfico do lugar das raízes devem estar localizados no semi-plano esquerdo de s,
portanto, devem possuir a parte real negativa. Se o lugar das raízes cruzar para o
lado direito do plano s, é possível conhecer o ponto real no qual ocorre a interseção
do lugar das raízes com o eixo imaginário utilizando o critério de Routh-Hurzitz.
A localização das raízes no plano s indica claramente parâmetros como o
tempo de pico da resposta, tempo de acomodação e o amortecimento do sistema em
questão.
A figura 2.10 mostra a influência do lugar das raízes na resposta transitória do
sistema:
Figura 2.10: Influência do lugar das raízes na resposta transitória do sistema.
Fonte: KUO, Benjamin C.; GOLNARAGHI, Farid. Discrete-Data Control Systems. 8º ed. Danvers, MA: John Wiley & Sons, Inc, 2003.
Sendo que:
− 1 e 2 – Sistemas amortecidos, porém o sistema 1 possui um maior coeficiente
de amortecimento;
− 3 – Sistema oscilatório;
− 4 – Sistema instável.
40
2.2.8 Técnica de resposta de freqüência
Esta técnica leva em consideração a resposta em estado estacionário de um
sistema a um sinal de teste senoidal. A resposta de um sistema linear com
coeficientes constantes a um sinal de entrada senoidal é também senoidal, e com
mesma freqüência da entrada, porém com magnitude e fase diferentes, sendo esta
diferença uma função da freqüência de entrada. Assim é possível analisar a resposta
em regime permanente do sistema a uma entrada senoidal de freqüência variável
(DORF e BISHOP, 1998).
De acordo com Ogata (1998), uma das vantagens do enfoque da resposta em
freqüência é que os testes experimentais são simples e podem ser realizados com
exatidão a partir do uso de geradores de sinal senoidal e de equipamentos de medida
precisos.
Para Nise (2002), esta técnica tem vantagens distintas nas seguintes situações:
Quando se modelam funções de transferência a partir de dados físicos;
Quando se projetam compensadores de avanço de fase para atender o erro
de estado estacionário requerido e a resposta transitória requerida;
Ao se determinar a estabilidade de sistemas não-lineares;
Na remoção de ambigüidades ao se esboçar o lugar das raízes.
Há três representações gráficas da função de transferência senoidal, são elas:
diagramas de Bode ou gráficos logarítmicos, diagrama de Nyquist ou gráfico polar e
por fim o diagrama de magnitude logarítmica versus ângulo de fase. Comecemos
pelos diagramas de Bode.
Diagramas de Bode ou gráficos logarítmicos
Desenvolvido em 1945 por H. W. Bode, este diagrama consiste em dois
gráficos, sendo o primeiro um gráfico do logaritmo do módulo da função de
transferência senoidal, e o segundo um gráfico do ângulo de fase, ambos em função
41
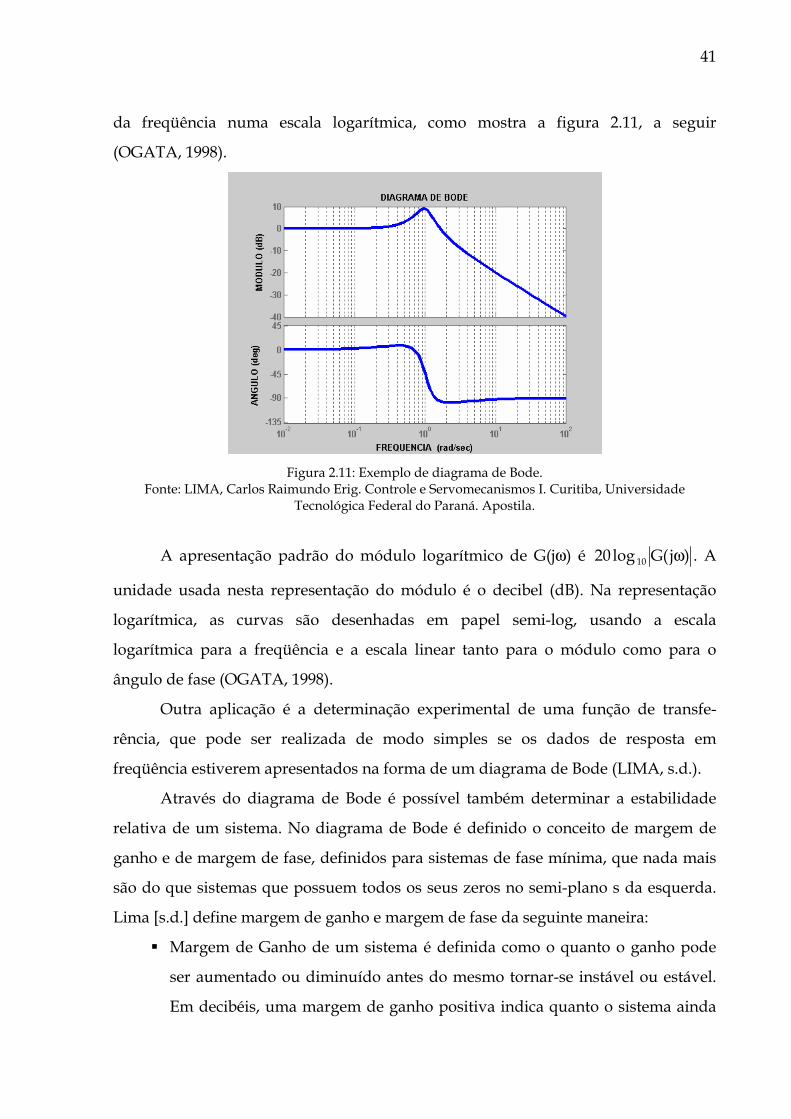
da freqüência numa escala logarítmica, como mostra a figura 2.11, a seguir
(OGATA, 1998).
Figura 2.11: Exemplo de diagrama de Bode.
Fonte: LIMA, Carlos Raimundo Erig. Controle e Servomecanismos I. Curitiba, Universidade Tecnológica Federal do Paraná. Apostila.
A apresentação padrão do módulo logarítmico de G(jω) é )j(Glog20 10 ω . A
unidade usada nesta representação do módulo é o decibel (dB). Na representação
logarítmica, as curvas são desenhadas em papel semi-log, usando a escala
logarítmica para a freqüência e a escala linear tanto para o módulo como para o
ângulo de fase (OGATA, 1998).
Outra aplicação é a determinação experimental de uma função de transfe-
rência, que pode ser realizada de modo simples se os dados de resposta em
freqüência estiverem apresentados na forma de um diagrama de Bode (LIMA, s.d.).
Através do diagrama de Bode é possível também determinar a estabilidade
relativa de um sistema. No diagrama de Bode é definido o conceito de margem de
ganho e de margem de fase, definidos para sistemas de fase mínima, que nada mais
são do que sistemas que possuem todos os seus zeros no semi-plano s da esquerda.
Lima [s.d.] define margem de ganho e margem de fase da seguinte maneira:
Margem de Ganho de um sistema é definida como o quanto o ganho pode
ser aumentado ou diminuído antes do mesmo tornar-se instável ou estável.
Em decibéis, uma margem de ganho positiva indica quanto o sistema ainda

42
pode ter seu ganho aumentado antes de tornar-se instável. Uma margem de
ganho negativa indica o quanto um sistema deve ter seu ganho diminuído
antes de tornar-se estável. Pode ser calculado como o módulo do sistema na
freqüência de cruzamento de fase. A margem de ganho será:
1
)j(Glog20MGω=ω
ω−= (2.10)
onde ω1 é a freqüência em que a curva de fase cruza -180°.
Margem de fase é o atraso adicional de fase do sistema, observado na
freqüência de cruzamento de ganho, necessário para levar o sistema ao limiar
de instabilidade, ou seja, -180°. A margem de fase será:
2
)j(Gº180MFω=ω
ω∠+= (2.11)
onde ω2 é a freqüência de cruzamento de ganho, ou seja, a freqüência em que
a curva de fase cruza 0 dB.
A figura 2.12 mostra um exemplo da margem de ganho e margem de fase:
Figura 2.12: Exemplo de margem de ganho e margem de fase.
Fonte: LIMA, Carlos Raimundo Erig. Controle e Servomecanismos I. Curitiba, Universidade Tecnológica Federal do Paraná. Apostila.
43
Em sistemas de segunda ordem, ou sistemas de ordem superior, cujo
comportamento dos pólos dominantes pode ser aproximado ao comportamento
dinâmico de um sistema de segunda ordem, é possível relacionar a resposta temporal
do sistema com o comportamento freqüêncial do mesmo. Especificamente é possível
relacionar:
Margem de fase com coeficiente de amortecimento.
Freqüência de ressonância com freqüência natural amortecida.
Valor de pico de ressonância com valor de pico temporal Mp.
Diagrama de Nyquist ou gráfico polar
Através deste método, o conhecimento da resposta de freqüência do sistema a
malha aberta conduz a informações sobre a estabilidade do sistema a malha fechada.
Este conceito é semelhante ao do lugar das raízes, onde começamos com informações
sobre o sistema a malha aberta, seus pólos e seus zeros, e desenvolvemos as
informações sobre o regime transitório e sobre a estabilidade do sistema a malha
fechada (NISE, 2002).
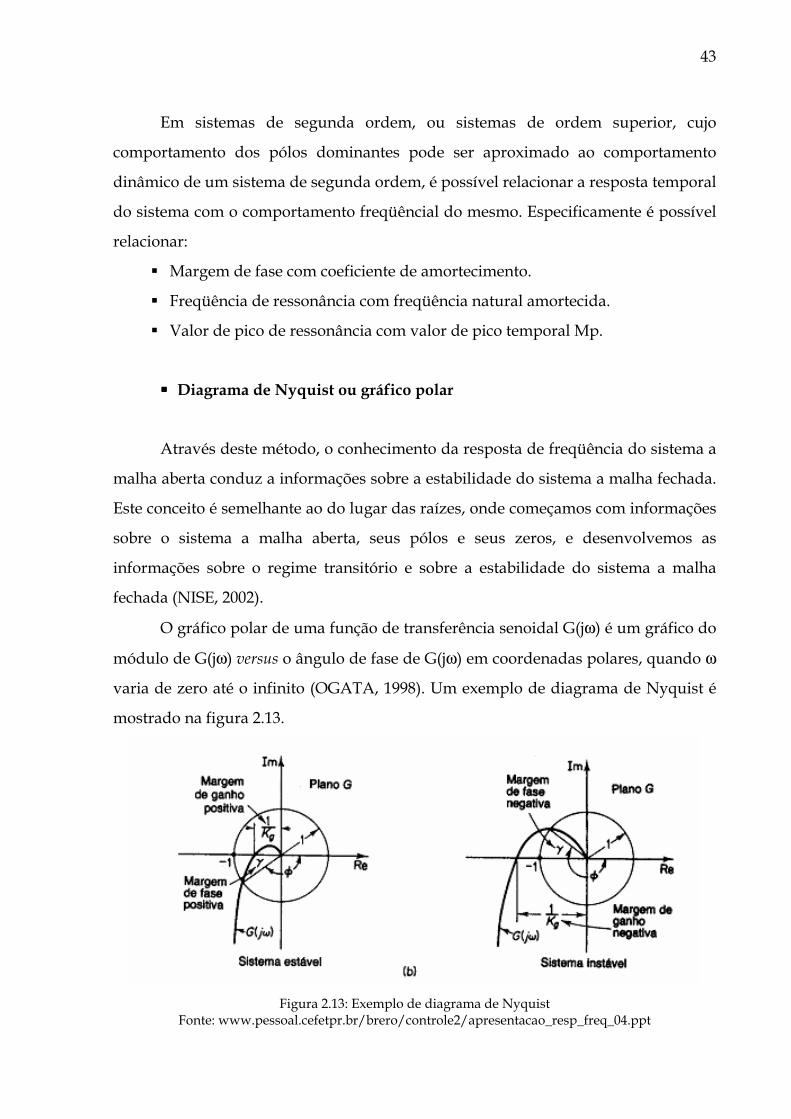
O gráfico polar de uma função de transferência senoidal G(jω) é um gráfico do
módulo de G(jω) versus o ângulo de fase de G(jω) em coordenadas polares, quando ω
varia de zero até o infinito (OGATA, 1998). Um exemplo de diagrama de Nyquist é
mostrado na figura 2.13.
Figura 2.13: Exemplo de diagrama de Nyquist
Fonte: www.pessoal.cefetpr.br/brero/controle2/apresentacao_resp_freq_04.ppt

44
Uma vantagem no uso do gráfico polar é que ele mostra as características de
resposta em freqüência de um sistema, em toda a faixa de freqüência, em um único
gráfico. Uma desvantagem é que o gráfico não indica claramente as contribuições de
cada um dos fatores individuais da função de transferência à malha aberta (OGATA,
1998).
Diagrama de magnitude logarítmica versus ângulo de fase
Também conhecido como gráfico de Nichols, nada mais é que as duas curvas
dos diagramas de Bode combinadas em um único gráfico. Suas vantagens são as
seguintes: a estabilidade relativa do sistema a malha fechada pode ser determinada
rapidamente e a compensação pode ser realizada com facilidade. Um exemplo de
diagrama de Nichols é mostrado na figura 2.14.
Figura 2.14: Exemplo de diagrama de magnitude logarítmica versus ângulo de fase Fonte: www.pessoal.cefetpr.br/brero/controle2/apresentacao_resp_freq_04.ppt
2.2.9 Controlador PID
A popularidade dos controladores PID (Proporcional, Integral e Derivativo)
pode ser atribuída ao seu desempenho robusto sobre uma grande faixa de condições
operacionais e em parte à sua simplicidade funcional, que permite aos engenheiros

45
operá-los de uma maneira simples e correta. Para implementar um controlador
destes, três parâmetros devem ser determinados para um dado processo: ganho
proporcional, ganho integral e ganho derivativo (DORF e BISHOP, 1998).
O controlador PID tem a seguinte função de transferência:
++= sT
sT1
1k)s(G di
PC (2.12)
De acordo com Ogata (1998), mais da metade dos controladores industriais em
uso nos dias atuais utiliza estratégias de controle PID ou PID modificadas.
Existem várias técnicas para a determinação dos parâmetros do controlador
que atendam às especificações para sistemas cujo modelo matemático do processo
seja conhecido. Porém, nos casos que o processo seja tão complicado que o modelo
matemático não possa ser obtido com facilidade, deve-se fazer uso das técnicas
experimentais de sintonia dos controladores PID (OGATA, 1998).
De um modo geral, observa-se que os controladores PID são úteis, particu-
larmente para reduzir o erro de estado estacionário e melhorar a resposta transitória
quando G(s) tem um ou dois pólos, ou pode ser aproximado de um sistema de
segunda ordem (DORF e BISHOP, 1998)
Controle proporcional
Segundo Campos e Teixeira (2006), o controlador proporcional gera um sinal
na sua saída proporcional ao erro e(t). O termo Kp é conhecido como o ganho do
controlador. A seguir, está mostrada a equação do controlador P.
( ) )t(e.Kptu = (2.13)
De acordo com a equação acima, pode-se observar que a ação proporcional
terá o mesmo aspecto que o sinal de erro, apenas multiplicado pelo ganho
proporcional. Se o erro não variar, a saída do controlador também se mantém
constante. Portanto este tipo de controlador permite um erro de regime permanente.

46
A figura 2.15 ilustra a ação do controle proporcional.
Figura 2.15: Ação do controlador proporcional
Controle integral
O controlador integral gera um sinal na sua saída proporcional à integral erro
e(t). A seguir é mostrada a equação do controlador integral:
( ) 0udt).t(e.Ti1
tu ∫ += (2.14)
Onde o termo 1/Ti é conhecido como o ganho integral do controlador, sendo
Ti o tempo integral.

47
A figura 2.16 mostra a ação do controlador integral. Observa-se que sua ação
será a “integral” do sinal de erro, ação esta que irá atuar na saída do sistema
indefinidamente enquanto o erro existir.
Figura 2.16: Ação do controlador integral
Controle proporcional – integral
O controlador proporcional e integral gera um sinal na sua saída proporcional
ao erro, e também proporcional à integral do erro. A seguir, é mostrada a equação do
controlador PI paralelo clássico, cujo ganho proporcional também multiplica o termo
integral:
( ) ∫ ++= 0udt).t(e.Ti1
.Kp)t(e.Kptu (2.15)
A figura 2.17 mostra a atuação do controlador PI, sendo que a ação
proporcional muda instantaneamente a saída quando ocorre um erro, mas é a ação
integral que continua atuando na saída enquanto o erro existir. Portanto o
controlador PI elimina o erro em regime permanente. O controlador PI adiciona um
zero em s = - Ki / Kp e um pólo em s = 0 à função de transferência de malha aberta
do sistema.

48
Figura 2.17: Ação do controlador proporcional integral
Controle derivativo
O controlador derivativo gera um sinal na sua saída proporcional à derivada
do erro. A seguir é mostrada a equação do controlador:
( ) 0u)t.(dtde.Tdtu += (2.16)
O fator multiplicativo Td é conhecido como o tempo derivativo do
controlador.
A figura 2.18 a seguir mostra a ação derivativa do controlador na presença de
uma perturbação. Sendo que a ação derivativa será a própria derivada do erro.

49
Figura 2.18: Ação do controlador derivativo
Controle proporcional – derivativo
Segundo Campos e Teixeira (2006), o controlador proporcional e derivativo
gera um sinal na sua saída proporcional ao erro e tembém proporcional à derivada
do erro. A seguir está mostrada a equação do controlador PD paralelo clássico, onde
o ganho proporcional também multiplica o termo derivativo:
( ) 0udt)t(de
.Td.Kp)t(e.Kptu ++= (2.17)
A figura 2.19 abaixo mostra a ação de um controlador PD, onde o termo
derivativo tenta “estimar” uma tendência de variação do erro. A ação derivativa tem,
portanto, uma função de antecipação, e surgiu para facilitar o controle e evitar
oscilações em processos lentos.
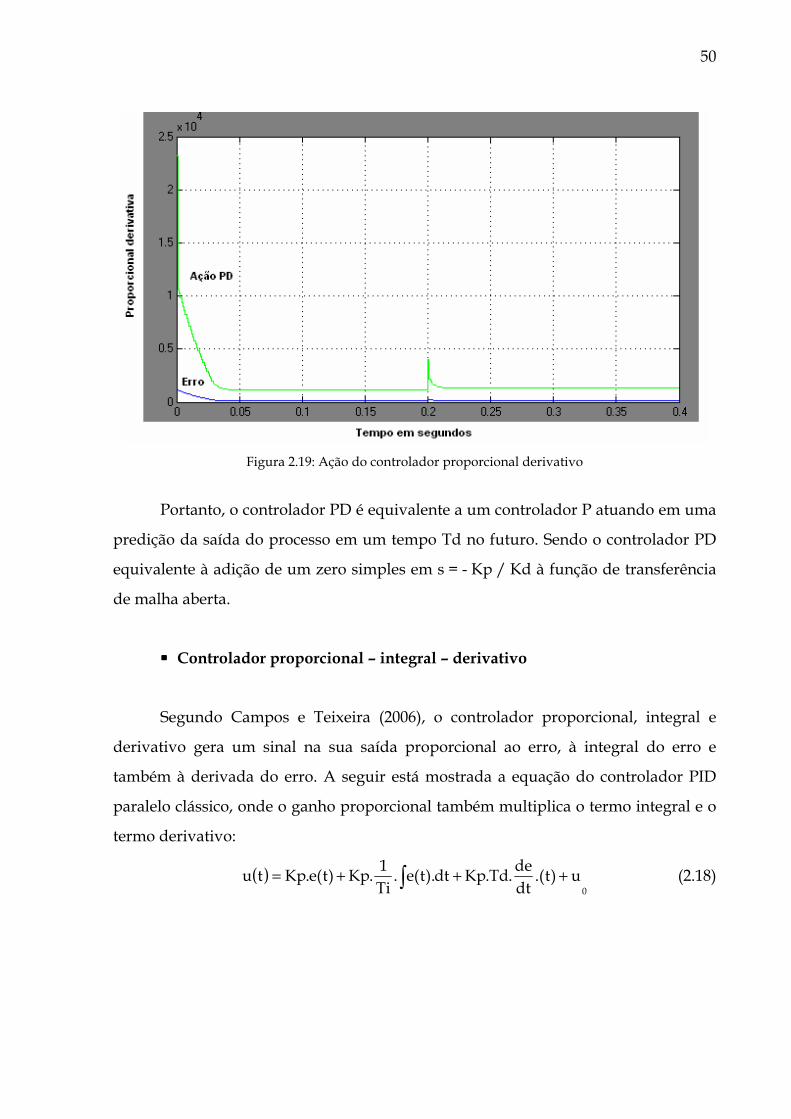
50
Figura 2.19: Ação do controlador proporcional derivativo
Portanto, o controlador PD é equivalente a um controlador P atuando em uma
predição da saída do processo em um tempo Td no futuro. Sendo o controlador PD
equivalente à adição de um zero simples em s = - Kp / Kd à função de transferência
de malha aberta.
Controlador proporcional – integral – derivativo
Segundo Campos e Teixeira (2006), o controlador proporcional, integral e
derivativo gera um sinal na sua saída proporcional ao erro, à integral do erro e
também à derivada do erro. A seguir está mostrada a equação do controlador PID
paralelo clássico, onde o ganho proporcional também multiplica o termo integral e o
termo derivativo:
( )0
u)t.(dtde.Td.Kpdt).t(e.
Ti1
.Kp)t(e.Kptu ∫ +++= (2.18)

51
A figura 2.20 mostra a ação de um controlador PID.
Figura 2.20: Ação do controlador proporcional integral derivativo
2.2.10 Controle digital
Existem duas metodologias de projeto que possibilitam o projeto de sistemas
de controle digital: realizar o projeto diretamente no domínio z através de técnicas
como o lugar das raízes no plano z e resposta em freqüência no plano w, ou partir do
controlador contínuo e discretizá-lo realizando a sua transformação para digital.
No desenvolvimento deste projeto escolhemos a metodologia do projeto do
controlador contínuo para então realizar a discretização. Este procedimento
permitirá ao aluno compreender tantos os princípios do controle contínuo como do
controle discreto.
Nos últimos anos dados discretos e sistemas de controle digital têm se tornado
muito importante na indústria, principalmente devido aos avanços nos micropro-
cessadores e microcomputadores. Um sistema de controle digital é caracterizado por
possuir sinais digitalmente codificados em diversas partes do sistema. Entretanto, o
dispositivo de saída do sistema é geralmente um componente analógico, como um
motor CC, por exemplo (KUO e GOLNARAGHI, 2003).
52
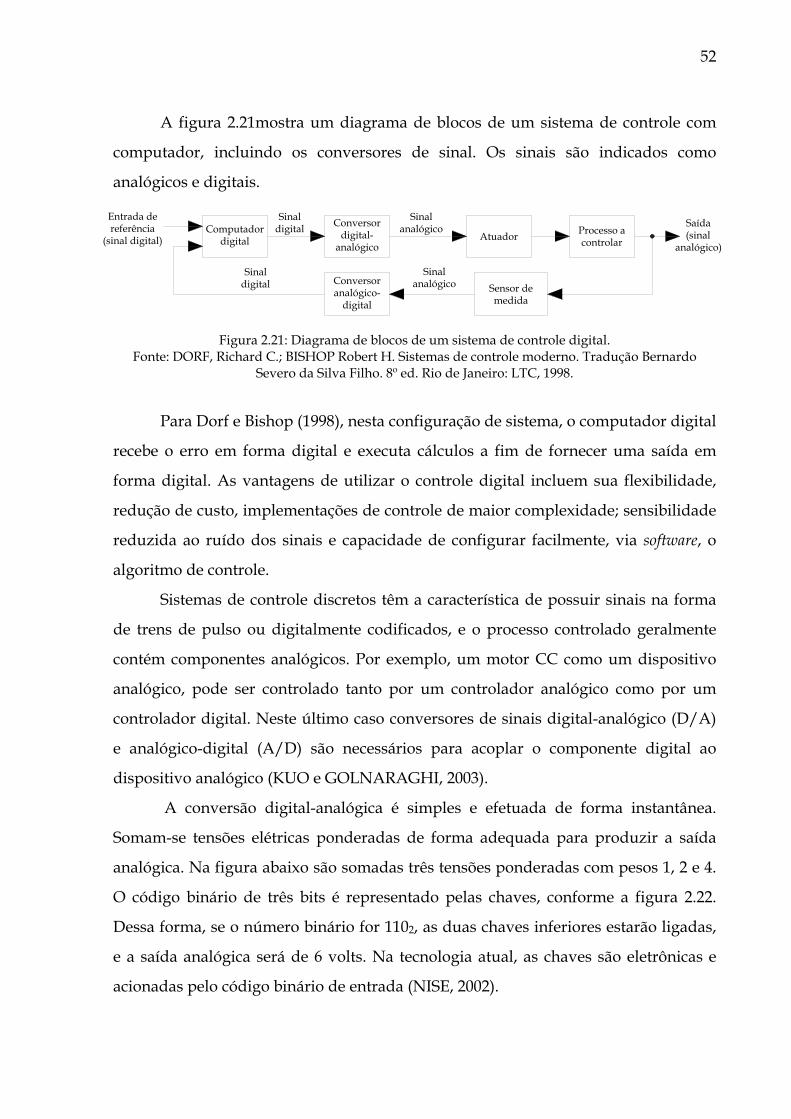
A figura 2.21mostra um diagrama de blocos de um sistema de controle com
computador, incluindo os conversores de sinal. Os sinais são indicados como
analógicos e digitais.
Processo acontrolarAtuador
SinalanalógicoConversor
digital-analógico
Saída(sinal
analógico)
SinaldigitalComputador
digital
Entrada dereferência
(sinal digital)
Sensor demedida
Sinalanalógico
Sinaldigital Conversor
analógico-digital
Figura 2.21: Diagrama de blocos de um sistema de controle digital.
Fonte: DORF, Richard C.; BISHOP Robert H. Sistemas de controle moderno. Tradução Bernardo Severo da Silva Filho. 8º ed. Rio de Janeiro: LTC, 1998.
Para Dorf e Bishop (1998), nesta configuração de sistema, o computador digital
recebe o erro em forma digital e executa cálculos a fim de fornecer uma saída em
forma digital. As vantagens de utilizar o controle digital incluem sua flexibilidade,
redução de custo, implementações de controle de maior complexidade; sensibilidade
reduzida ao ruído dos sinais e capacidade de configurar facilmente, via software, o
algoritmo de controle.
Sistemas de controle discretos têm a característica de possuir sinais na forma
de trens de pulso ou digitalmente codificados, e o processo controlado geralmente
contém componentes analógicos. Por exemplo, um motor CC como um dispositivo
analógico, pode ser controlado tanto por um controlador analógico como por um
controlador digital. Neste último caso conversores de sinais digital-analógico (D/A)
e analógico-digital (A/D) são necessários para acoplar o componente digital ao
dispositivo analógico (KUO e GOLNARAGHI, 2003).
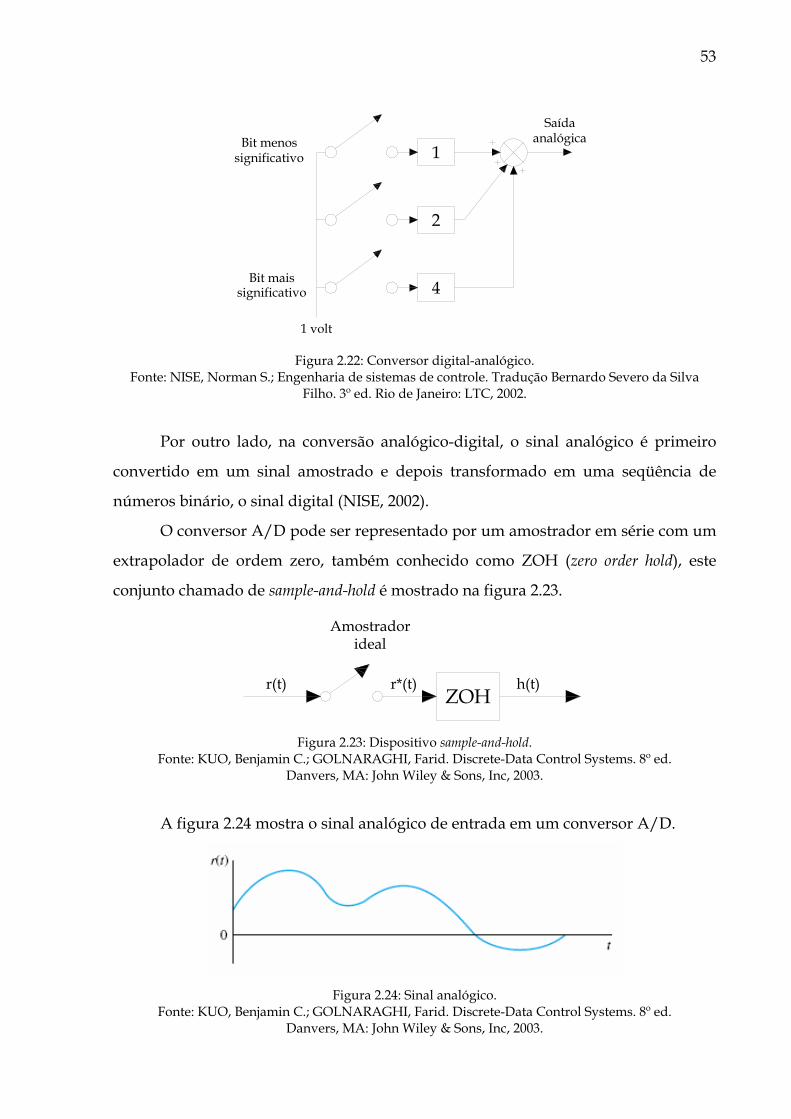
A conversão digital-analógica é simples e efetuada de forma instantânea.
Somam-se tensões elétricas ponderadas de forma adequada para produzir a saída
analógica. Na figura abaixo são somadas três tensões ponderadas com pesos 1, 2 e 4.
O código binário de três bits é representado pelas chaves, conforme a figura 2.22.
Dessa forma, se o número binário for 1102, as duas chaves inferiores estarão ligadas,
e a saída analógica será de 6 volts. Na tecnologia atual, as chaves são eletrônicas e
acionadas pelo código binário de entrada (NISE, 2002).
53
1
2
4
SaídaanalógicaBit menos
significativo
Bit maissignificativo
1 volt Figura 2.22: Conversor digital-analógico.
Fonte: NISE, Norman S.; Engenharia de sistemas de controle. Tradução Bernardo Severo da Silva Filho. 3º ed. Rio de Janeiro: LTC, 2002.
Por outro lado, na conversão analógico-digital, o sinal analógico é primeiro
convertido em um sinal amostrado e depois transformado em uma seqüência de
números binário, o sinal digital (NISE, 2002).
O conversor A/D pode ser representado por um amostrador em série com um
extrapolador de ordem zero, também conhecido como ZOH (zero order hold), este
conjunto chamado de sample-and-hold é mostrado na figura 2.23.
ZOH
Amostradorideal
r(t) r*(t) h(t)
Figura 2.23: Dispositivo sample-and-hold.
Fonte: KUO, Benjamin C.; GOLNARAGHI, Farid. Discrete-Data Control Systems. 8º ed. Danvers, MA: John Wiley & Sons, Inc, 2003.
A figura 2.24 mostra o sinal analógico de entrada em um conversor A/D.
Figura 2.24: Sinal analógico.
Fonte: KUO, Benjamin C.; GOLNARAGHI, Farid. Discrete-Data Control Systems. 8º ed. Danvers, MA: John Wiley & Sons, Inc, 2003.

54
Após a passagem pelo amostrador, o sinal analógico se torna um trem de
pulsos, sendo que cada pulso é amostrado em intervalos periódicos T, como mostra a
figura 2.25
Figura 2.25: Trem de pulsos.
Fonte: KUO, Benjamin C.; GOLNARAGHI, Farid. Discrete-Data Control Systems. 8º ed. Danvers, MA: John Wiley & Sons, Inc, 2003.
Já o extrapolador de ordem zero é responsável pela manutenção do valor de
cada pulso durante o período de amostragem, conforme a figura 2.26.
Figura 2.26: Sinal após o extrapolador de ordem zero.
Fonte: KUO, Benjamin C.; GOLNARAGHI, Farid. Discrete-Data Control Systems. 8º ed. Danvers, MA: John Wiley & Sons, Inc, 2003.
Depois da amostragem e da retenção, a conversão analógico-digital converte o
valor amostrado em um número binário.
Em sistemas com dados amostrados, a estabilidade e a resposta transitória
dependem também da taxa de amostragem. Em conseqüência disso, foi desenvolvida
a Transformada z, que contém a informação de amostragem, possibilitando assim,
que sistemas com dados amostrados possam ser modelados por meio de funções de
transferência, analisados e projetados com a facilidade e com a visão de conjunto que
usufruímos quando trabalhamos no plano s (NISE, 2002).
No plano s, a região de estabilidade é o semi-plano da esquerda. Se a função
de transferência, G(s), for transformada com dados amostrados, G(z), a região de
estabilidade sobre o plano z é o interior do círculo de raio unitário e centro na origem
do plano z (NISE, 2002).

55
A figura 2.27 mostra a relação entre as regiões de mapeamento do plano s no
plano z.
Figura 2.27: Relação entre o plano s e o plano z.
Fonte: KUO, Benjamin C.; GOLNARAGHI, Farid. Discrete-Data Control Systems. 8º ed. Danvers, MA: John Wiley & Sons, Inc, 2003.
2.2.11 Discretização
Segundo Barczak (1995), a discretização é o processo pelo qual se pode
converter sinais contínuos em discretos. Diz-se que um sistema controlado
digitalmente é discreto ou discretizado. Quando o sistema e as variáveis envolvidas
são contínuos, deve-se convertê-las em discretas por meio da amostragem (no tempo)
e quantização (em amplitude).
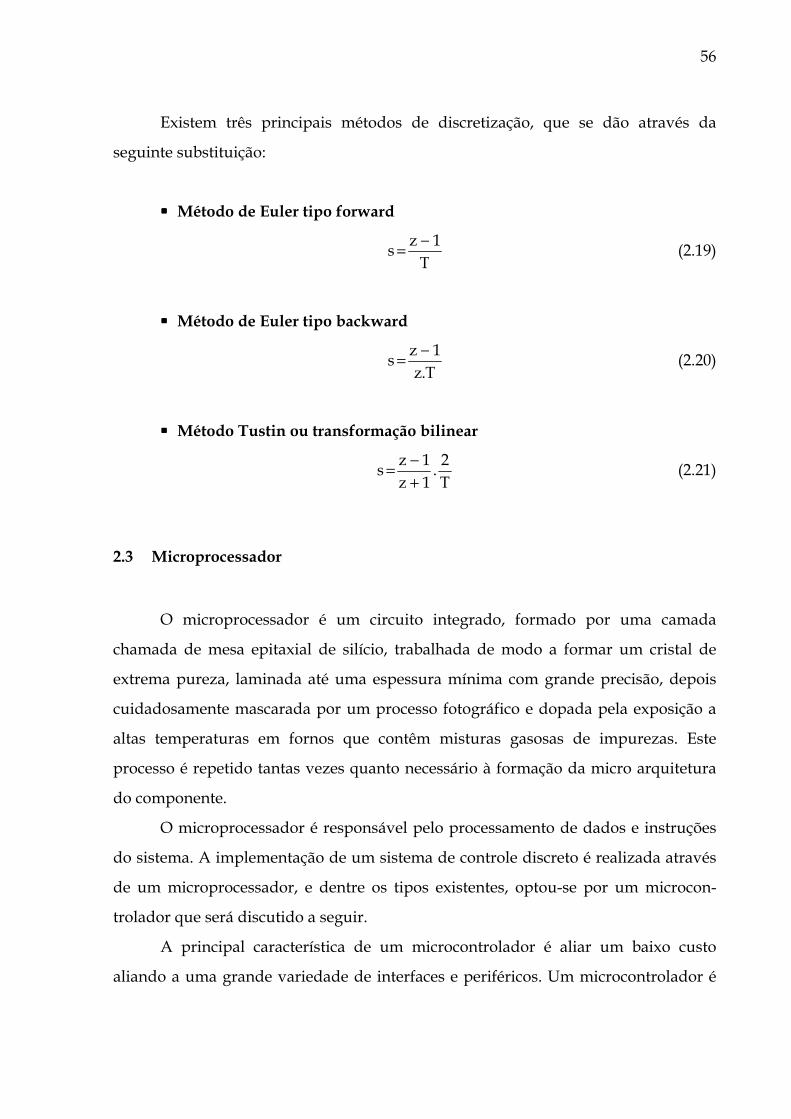
56
Existem três principais métodos de discretização, que se dão através da
seguinte substituição:
Método de Euler tipo forward
T1z
s−
= (2.19)
Método de Euler tipo backward
T.z1z
s−
= (2.20)
Método Tustin ou transformação bilinear
T2
.1z1z
s+
−= (2.21)
2.3 Microprocessador
O microprocessador é um circuito integrado, formado por uma camada
chamada de mesa epitaxial de silício, trabalhada de modo a formar um cristal de
extrema pureza, laminada até uma espessura mínima com grande precisão, depois
cuidadosamente mascarada por um processo fotográfico e dopada pela exposição a
altas temperaturas em fornos que contêm misturas gasosas de impurezas. Este
processo é repetido tantas vezes quanto necessário à formação da micro arquitetura
do componente.
O microprocessador é responsável pelo processamento de dados e instruções
do sistema. A implementação de um sistema de controle discreto é realizada através
de um microprocessador, e dentre os tipos existentes, optou-se por um microcon-
trolador que será discutido a seguir.
A principal característica de um microcontrolador é aliar um baixo custo
aliando a uma grande variedade de interfaces e periféricos. Um microcontrolador é

57
popularmente conhecido como “solução com único chip” e sua arquitetura básica é
mostrada na figura 2.28.
Figura 2.28: Diagrama de blocos de um típico microcontrolador.
Fonte: http://www.mzeditora.com.br/artigos/embut.htm
Segundo Pereira (2004) as facilidades de projeto obtidas com o uso de
microcontroladores são muitas, podendo ser destacadas:
− Redução do número de componente, já que os algoritmos de controle passam
a ser implementados no programa a ser executado pelo microcontrolador;
− Facilidade da implementação dos algoritmos de controle complexos;
− Redução no tempo necessário para desenvolvimento de novos projetos;
− Flexibilidade dos sistemas de controle, uma vez que é necessário somente a
alteração do programa do microcontrolador.
2.3.1 Microcontrolador MSP430F169
A escolha do microcontrolador MSP430F169 baseou-se nos seguintes critérios:
1) Durante as discussões e estruturação do projeto surgiu, como oportunidade
de melhoria da proposta apresentada, a inclusão do recurso de comunicação com o
microcomputador para visualização das curvas de resposta via software LabView.
Para facilitar esta implementação é ideal que o microcontrolador possua
internamente o hardware para transmissão e recepção via comunicação serial padrão

58
PC (assíncrona). O MSP430F169 possui diversos padrões síncronos e possui também
porta serial assíncrona no seu hardware interno. Portanto, uma vez configurado o
periférico, basta escrever no registro de transmissão ou ler o registro de recepção
quando chega um dado para fazer a comunicação, sem resultar em processamento
adicional para isto. Apesar deste objetivo não se enquadrar no escopo deste projeto é
relevante garantir a disponibilidade de acréscimo deste recurso como complemento
no desenvolvimento deste projeto ou como oportunidade de melhoria para futuros
projetos.
2) Disponibilidade de 8 conversores A/D’s de 12 bits o MSP430F169 permite
desenvolver algoritmos eficientes e diferentes técnicas de controle. A resolução deste
conversor (número de bits) é muito importante e tem influência direta no
desempenho do controle, pois define o erro de quantização. Este microcontrolador
permite ainda a verificação de duas outras variáveis através das saídas analógicas
com o auxílio de um osciloscópio.
3) O MSP430F169 garante a disponibilidade de vários sinais garantindo
flexibilidade na escolha da planta e dos sinais utilizados para o controle.
4) Grande parte dos sistemas de controle utilizam acionamento via PWM e a
estrutura interna do PWM do MSP430F169 é bastante eficiente garantindo que se
tenha disponível este recurso, se necessário.
5) O MSP430F169 possui um multiplicador por hardware, ou seja, um circuito
lógico físico que permite a execução da multiplicação de forma rápida, não
necessitando que a multiplicação seja desenvolvida por software, o que resultaria em
um tempo de processamento maior. A implementação dos algoritmos de controle é
baseada em somatórios de produtos das variáveis pelos seus respectivos coeficientes,
de forma que o multiplicador em hardware permite executar o processamento e
trabalhar com uma taxa de amostragem bem menor.
6) Mesmo não sendo a opção mais barata, o MSP430F169 tem um custo
acessível em relação a todos os recursos disponíveis e o bom desempenho. Para um
projeto didático, sem intenções de produção em grande escala, o bom desempenho e
eficiência são mais importantes que o custo.

59
Segundo Moribe [s.d.], as principais características da família MSP430:
− Ultra baixo consumo:
− 0,1µA para manter a RAM;
− 0,8µA real time clock mode;
− 250µA/MIPS ativo.
− Alta performance em medidas analógicas;
− Moderna CPU com arquitetura RISC 16 bits;
− Conversores A/D10-/12-/16-bit;
− Comparador;
− Driver para LCD.
Principais Características do MSP430F169:
− 60K+256 bytes de memória Flash;
− 2K bytes de memória RAM;
− Alimentação 1,8V a 3,6V;
− 16 bits com arquitetura RISC (125ns de ciclo de instrução);
− 3 canais internos de DMA;
− Conversor A/D de 12 bits (Sample-and-hold and autoscan);
− Conversor D/A de 12 bits com sincronização;
− 2 interfaces seriais USART0 e USART1 ou síncronas SPI / I2C;
− Supervisor de tensão com nível de detecção programável;
− Programação onboard (In-System Programmable Flash) via “JTAG”.

60
CAPÍTULO 3
3 ANÁLISE DAS POSSÍVEIS PLANTAS DE CONTROLE
Em busca da definição de uma planta que atenda a todos os requisitos
especificados, este capítulo será utilizado para uma análise sucinta das características
e limitações de algumas plantas passíveis de implementação.
3.1 Sistema massa / mola
Segundo Tavares [s.d.], um sistema massa-mola é dos mais básicos e simples
utilizados para estudo das teorias de controle. Um esquema deste sistema é mostrado
na figura 3.1.
Figura 3.1: Esquema de um sistema massa-mola.
Fonte: http://www.fisica.ufpb.br/~romero/objetosaprendizagem/Imagens/massa-mola.jpg
Características:
− Sistema linear de 2º ordem.
− Sistema naturalmente estável.
Vantagens:
− Sistema mecânico simples de ser implementado, através de uma mola e uma
massa.
− Permite uma visualização direta da atuação dos controladores PID sobre o
sistema e resposta a perturbações.
− Modelagem matemática simples e conhecida.
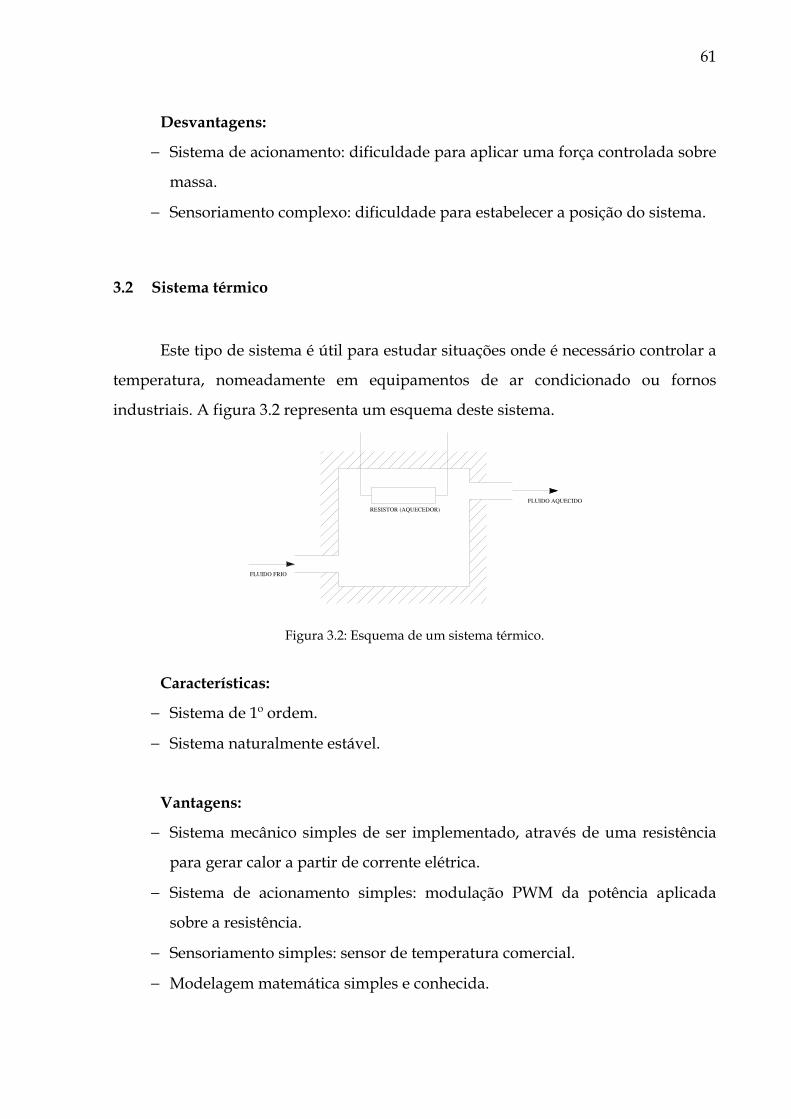
61
Desvantagens:
− Sistema de acionamento: dificuldade para aplicar uma força controlada sobre
massa.
− Sensoriamento complexo: dificuldade para estabelecer a posição do sistema.
3.2 Sistema térmico
Este tipo de sistema é útil para estudar situações onde é necessário controlar a
temperatura, nomeadamente em equipamentos de ar condicionado ou fornos
industriais. A figura 3.2 representa um esquema deste sistema.
FLUIDO AQUECIDO
FLUIDO FRIO
RESISTOR (AQUECEDOR)
Figura 3.2: Esquema de um sistema térmico.
Características:
− Sistema de 1º ordem.
− Sistema naturalmente estável.
Vantagens:
− Sistema mecânico simples de ser implementado, através de uma resistência
para gerar calor a partir de corrente elétrica.
− Sistema de acionamento simples: modulação PWM da potência aplicada
sobre a resistência.
− Sensoriamento simples: sensor de temperatura comercial.
− Modelagem matemática simples e conhecida.

62
Desvantagens:
− Sistema de resposta muito lenta.
− Não permite uma visualização direta da atuação dos controladores PID
necessitando da inclusão de uma interface, display para indicação dos
resultados.
3.3 Sistema elétrico – controle de velocidade de motor
Um sistema de controle da variação de velocidade de um motor CC pode ser
realizado tanto com a variação de tensão diretamente sobre o motor, quanto com
modulação PWM. A figura 3.3 mostra um esquema de um motor CC.
Figura 3.3: esquema de motor CC
Características:
− Sistema de 2º ordem.
− Sistema naturalmente estável.
Vantagens:
− Modelagem matemática conhecida.
− Sistema mecânico simples de ser implementado, através do acoplamento
entre 2 motores CC utilizados como motor / gerador e um motor CC de
menor potência.

63
− Permite implementar vários tipos de controle utilizando o mesmo hardware
através de alterações via software: controle de tensão no gerador, torque e
posição.
− Acionamento através de um conversor Buck e um sinal PWM.
− Sensoriamento simples: A velocidade do motor pode ser medida utilizando
um tacogerador acoplado ao eixo do motor, ou através de um sensor Hall
magnético, que gera um pulso de tensão a cada passagem de um pequeno
imã colado no eixo do motor.
Desvantagens:
− Não permite a visualização direta da atuação dos controladores PID apesar
de transmitir uma sensação auditiva dos fenômenos e permitir a indicação da
velocidade através da simples utilização de um display.
3.4 Sistema posição bola / aro.
Segundo Pérez-Cisneros [s.d.] o sistema bola aro é importante por ser possível
simular e estudar o controle das oscilações de conteúdos líquidos dentro de um
corpo quando este sofre mudanças de velocidade e direção.
A oscilação dos líquidos pode influenciar na movimentação do corpo que os
contêm, sendo esse efeito indesejável e até mesmo perigoso.
O sistema bola aro basicamente trata da dinâmica de uma esfera que roda na
parte interna de um aro circular. O aro se encontra montando verticalmente sobre o
eixo de um motor elétrico de maneira que possa rodar sobre seu próprio eixo.
Quando o aro gira, a bola tende a mover-se na direção da movimentação do aro, em
certo ponto a gravidade vence as forças de fricção sobre a esfera, ocasionando o
movimento oscilatório da mesma (PÉREZ-CISNEROS [s.d.]).
O motor elétrico é utilizado para rotacionar o aro de tal maneira que a posição
angular da esfera possa ser controlada, conforme mostra a figura 3.4.
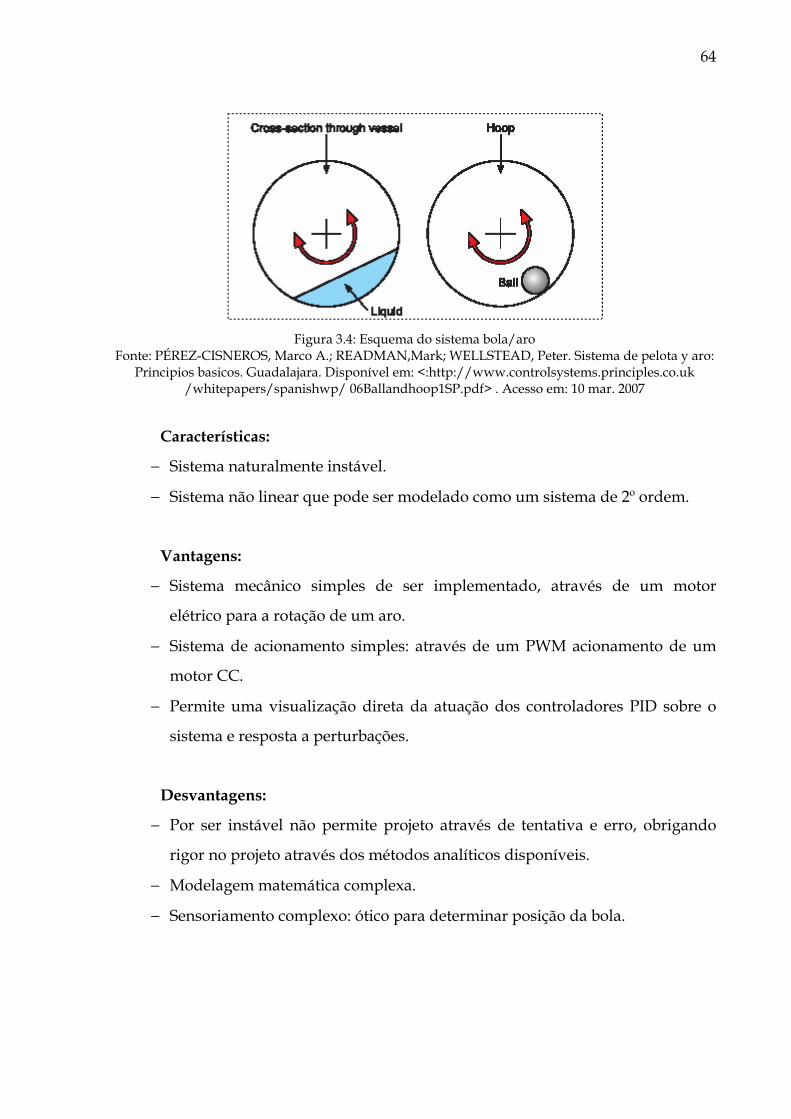
64
Figura 3.4: Esquema do sistema bola/aro
Fonte: PÉREZ-CISNEROS, Marco A.; READMAN,Mark; WELLSTEAD, Peter. Sistema de pelota y aro: Principios basicos. Guadalajara. Disponível em: <:http://www.controlsystems.principles.co.uk
/whitepapers/spanishwp/ 06Ballandhoop1SP.pdf> . Acesso em: 10 mar. 2007
Características:
− Sistema naturalmente instável.
− Sistema não linear que pode ser modelado como um sistema de 2º ordem.
Vantagens:
− Sistema mecânico simples de ser implementado, através de um motor
elétrico para a rotação de um aro.
− Sistema de acionamento simples: através de um PWM acionamento de um
motor CC.
− Permite uma visualização direta da atuação dos controladores PID sobre o
sistema e resposta a perturbações.
Desvantagens:
− Por ser instável não permite projeto através de tentativa e erro, obrigando
rigor no projeto através dos métodos analíticos disponíveis.
− Modelagem matemática complexa.
− Sensoriamento complexo: ótico para determinar posição da bola.

65
3.5 Sistema pêndulo invertido
O problema do pêndulo invertido é um dos clássicos da engenharia de
controle. Sultain (2003) compara o sistema do pêndulo invertido com uma criança
que busca equilibrar um cabo de vassoura através da movimentação e ajuste de
posição das suas mãos. Para a implementação em laboratório os sistemas são
desenvolvidos com apenas um grau de liberdade, como mostra a figura 3.5.
Figura 3.5: Exemplo de um sistema pêndulo invertido.
Fonte: CHARAIS, John; LOURENS, Ruan. Microchip-Software PID Control of an Inverted Pendulum Using the PIC16F684. Microchip Technology Incorporated, U.S.A., 2004.
Características:
− Sistema de 3º ordem não-linear que pode ser tratado como linear sem que
este procedimento venha a gerar um erro significativo.
− Sistema naturalmente instável.
Vantagens:
− Sistema mecânico simples de ser implementado, através de um motor
elétrico para a movimentação e uma haste para o pêndulo.
− Sistema de acionamento simples: movimentação de uma base através de um
motor.
− Sensoriamento simples: realizado através da relação entre a resistência e a
posição angular de um potenciômetro.
− Permite uma visualização direta da atuação dos controladores PID sobre o
sistema e resposta a perturbações.

66
Desvantagens:
− Por ser instável não permite projeto através de tentativa e erro, obrigando
rigor no projeto através dos métodos analíticos disponíveis.
− Modelagem matemática complexa.
3.6 Sistema barra / esfera
É um problema clássico e simples que permite demonstrar com clareza os
princípios do controle moderno, sendo seus princípios aplicados em sistemas
aeroespaciais reais. Uma foto deste sistema é mostrada ao lado de um esquema do
mesmo, na figura 3.6.
Figura 3.6: Exemplo e esquema de um sistema equilíbrio de uma esfera.
Fonte: CONTROL SYSTEMS PRINCIPLES. Ball-and-beam System. Disponível em: <www.control-systems-principles.co.uk/whitepapers/ball-and-beam1.pdf>. Acesso em: 30 mar. 2007.
Características:
− Sistema de 2º ordem.
− Sistema naturalmente instável.
− Sistema não-linear que pode ser tratado como linear sem que este
procedimento venha a gerar um erro significativo.
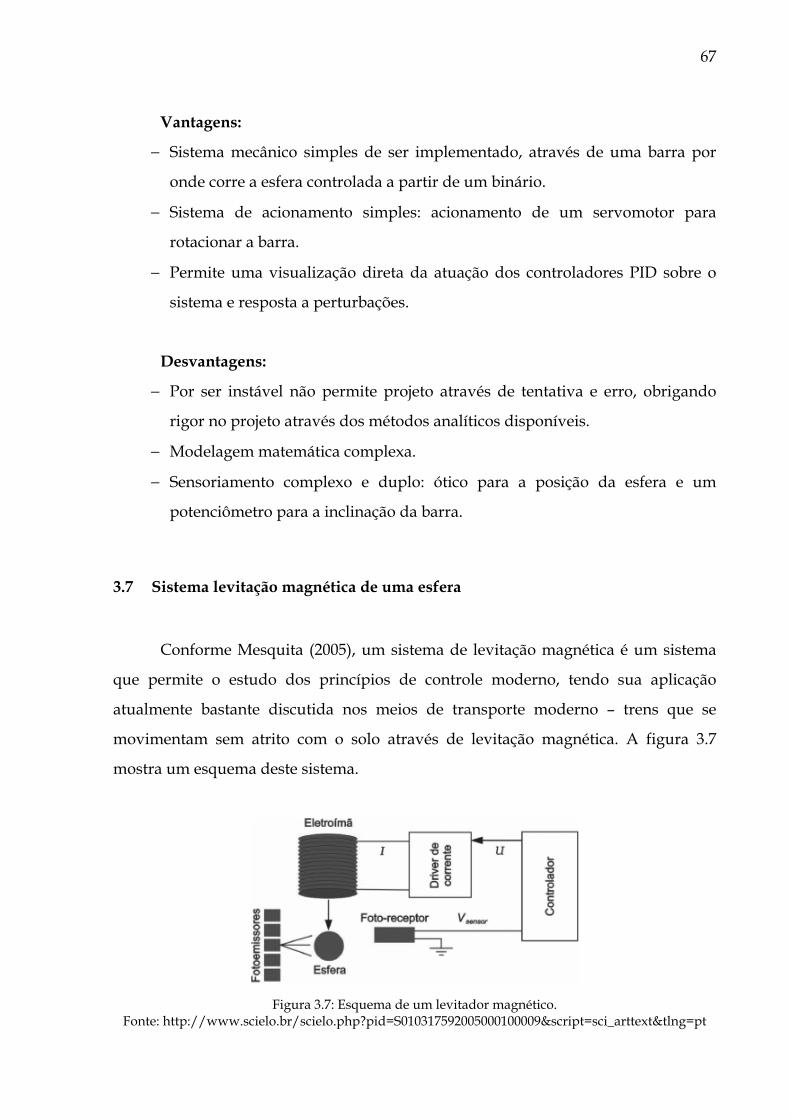
67
Vantagens:
− Sistema mecânico simples de ser implementado, através de uma barra por
onde corre a esfera controlada a partir de um binário.
− Sistema de acionamento simples: acionamento de um servomotor para
rotacionar a barra.
− Permite uma visualização direta da atuação dos controladores PID sobre o
sistema e resposta a perturbações.
Desvantagens:
− Por ser instável não permite projeto através de tentativa e erro, obrigando
rigor no projeto através dos métodos analíticos disponíveis.
− Modelagem matemática complexa.
− Sensoriamento complexo e duplo: ótico para a posição da esfera e um
potenciômetro para a inclinação da barra.
3.7 Sistema levitação magnética de uma esfera
Conforme Mesquita (2005), um sistema de levitação magnética é um sistema
que permite o estudo dos princípios de controle moderno, tendo sua aplicação
atualmente bastante discutida nos meios de transporte moderno – trens que se
movimentam sem atrito com o solo através de levitação magnética. A figura 3.7
mostra um esquema deste sistema.
Figura 3.7: Esquema de um levitador magnético.
Fonte: http://www.scielo.br/scielo.php?pid=S010317592005000100009&script=sci_arttext&tlng=pt

68
Características:
− Sistema de 2º ordem.
− Sistema naturalmente instável.
− Sistema não-linear que pode ser tratado como linear sem que este
procedimento venha a gerar um erro significativo.
Vantagens:
− Sistema mecânico: cilindro transparente e bobina eletromagnética.
− Sistema de acionamento: elétrico para variação do campo eletromagnético.
− Permite uma visualização direta da atuação dos controladores PID sobre o
sistema e resposta a perturbações.
Desvantagens:
− Não permite projeto através de tentativa e erro, obrigando rigor no projeto
através dos métodos analíticos disponíveis.
− Modelagem matemática complexa.
− Sensoriamento complexo: ótico.
− Limitação: capacidade magnética da bobina limita a movimentação da esfera
a um ∆h muito pequeno.

69
CAPÍTULO 4
4 DEFINIÇÃO DA PLANTA
Após análise sucinta das diversas plantas descritas no capítulo anterior,
optou-se pela implementação de um sistema de controle de velocidade de um motor
CC que atende aos objetivos do projeto didático e apresenta diversas vantagens tais
como: construção mecânica, sensoriamento, acionamento e modelagem matemática
simples, direta visualização do comportamento do sistema às perturbações e custo
acessível. Além destas características, o hardware construído para este controle
permite ainda a implementação via software de outros tipos de controle.
O objetivo do sistema de controle a ser implementado é o controle da
velocidade de rotação de um motor CC, que é acoplado a um segundo motor CC,
utilizado como carga. As perturbações que podem ser analisadas neste sistema são as
variações causadas pela introdução de cargas nos terminais do gerador. Cargas
conectadas aos terminais do gerador demandam correntes que interferem no torque
resistivo no eixo do motor, alterando a velocidade angular do grupo motor-gerador.
Como ilustra a figura 4.1, a planta a ser controlada consiste basicamente de
dois motores CC acoplados mecanicamente ao mesmo eixo, sendo que um dos
motores será a fonte de energia mecânica, e o segundo motor, um gerador CC.
ConversorBuck
MotorCC
GeradorCC Carga
Tacômetro
FiltroMicro-
controlador
PWM
FonteCC
Figura 4.1: Diagrama básico do sistema a ser implementado.
70
A escolha desta planta, dentre todas as estudadas, foi baseada em diversos
critérios detalhados a seguir:
1) Facilidade de construção do sistema mecânico a ser controlado: esta planta
apresenta uma facilidade de implementação quando comparada às demais plantas,
por ser constituída apenas de motores CC e pelo sensor de velocidade ser simples. As
plantas do pêndulo invertido, sistema bola e aro, levitação magnética e esfera/barra,
apresentam uma complexidade de componentes e sensoriamento maiores.
2) Sensoriamento Simples: realizado através do acoplamento de um motor CC
de menor potência ao eixo do grupo motor-gerador. Medindo a tensão gerada nos
terminais deste motor, filtrando-a com um filtro RC e ainda utilizando um divisor
resistivo caso a tensão do taco-gerador seja maior que a tensão do microcontrolador
utilizado, é possível obter a velocidade de rotação do equipamento, pois a relação
tensão x velocidade é linear e constante neste tipo de motor.
3) Acionamento Simples: através de um sinal PWM gerado pelo próprio
microcontrolador e transmitido ao motor através de um conversor Buck.
4) Simplicidade do modelo matemático a ser desenvolvido: um sistema com
motor CC não é um sistema de resposta linear, mas pode ser facilmente linearilizado
através de uma modelagem matemática simples e conhecida.
5) Visualização direta da variação dos parâmetros do sistema sem a
necessidade de instrumentos de medida: a planta escolhida não permite visualização
direta do comportamento do sistema, porém, com o auxilio de um display, onde é
mostrada a velocidade do motor, o aluno pode visualizar o comportamento sem
necessidade de equipamentos adicionais. Além disto, o aluno também poderá
perceber através da audição a variação de velocidade do motor, atendendo aí o
quesito de percepção direta dos fenômenos de controle.
6) Custo acessível: todos os componentes do sistema são facilmente
encontrados no mercado e não apresentam um preço proibitivo, uma vez que se
pretende apenas construir um kit didático não havendo a intenção de se produzir em
grande escala.

71
7) Bibliografia disponível: muitas das plantas pesquisadas apresentam uma
bibliografia restrita, enquanto o controle de motores CC é um tema bastante
discutido, com uma extensa bibliografia.
8) Permite a implementação de outros sistemas de controle utilizando o
mesmo hardware: além do controle de velocidade, é possível implementar na mesma
planta outros sistemas de controle, como o de tensão nos terminais do gerador,
torque ou posição.
9) Proximidade de uma aplicação industrial: sendo este um projeto de
conclusão de curso de engenharia industrial elétrica - eletrotécnica, a implementação
da planta de controle de velocidade de um motor CC, é, dentre todas as plantas
pesquisadas, a planta que apresenta maior proximidade às aplicações industriais. No
desenvolvimento do projeto serão requisitados e apresentados conceitos e conheci-
mentos na área de máquinas elétricas, acionamento e eletrônica de potência, além
dos conhecimentos de sistemas de controle.
4.1 Motores CC
Segundo Fitzgerald (2006) a grande característica das máquinas CC é a sua
versatilidade. Com a possibilidade de ligar o enrolamento de campo em derivação,
série ou independentemente consegue-se uma infinidade de características de tensão
versus corrente, ou de velocidade versus conjugado.
Para cada tipo de ligação do enrolamento de campo existe uma maneira mais
apropriada para o controle de motor. O controle pode ser realizado através do
controle da corrente de campo, da variação da resistência de armadura e da variação
da tensão dos terminais da armadura.
Como existe uma grande facilidade de controle de velocidade, estas máquinas
são utilizadas em aplicações onde se exige uma grande faixa de variação de
velocidade, ou ainda quando é necessário um controle preciso do motor.

72
A figura 4.2 representa o esquema de um motor CC.
Figura 4.2: Máquina CC elementar.
Fonte: www.gsep.ene.unb.br/osem/ivan/Conversao%20de%20Energia/MC.pdf
A figura 4.3 mostra o circuito equivalente de um motor CC.
Figura 4.3: Circuito equivalente do motor CC.
Fonte: www.gsep.ene.unb.br/osem/ivan/Conversao%20de%20Energia/MC.pdf
Em uma máquina CC, o estator tem pólos salientes, e é excitado por uma ou
mais bobinas de campo sendo que a distribuição do fluxo criado pelos enrolamentos
de campo no entreferro é simétrica em relação à linha central dos pólos de campo,
sendo esse eixo central chamado de eixo de campo.
O conjugado, também chamado “par motor”, é o momento da força que se
exerce tangencialmente à polia do motor em relação ao seu eixo. O par motor, pela
ação eletromagnética, é diretamente proporcional ao fluxo indutor e à corrente que
circula pelo induzido ou armadura.

73
ad
2
mec F..2p
.2
T Φ
π= (4.1)
Os condutores da armadura em rotação cortam o fluxo indutor. Pelo princípio
de Faraday aparece nos condutores uma f.e.m. induzida, cujo sentido, dado pela Lei
de Lenz, é inverso ao da tensão aplicada no motor. A tensão induzida nos condutores
recebe o nome de força contra-eletromotriz (f.c.e.m.), por se opor à tensão aplicada ao
rotor. A f.c.e.m. é calculada pela expressão:
ap.
10.60ce.n.
E 8
ϕ= (4.2)
É evidente que no início da marcha, devido a pouca velocidade da máquina, a
f.c.e.m. é baixa, subindo gradativamente até o normal, quando o motor atinge sua
velocidade de regime. Deve-se notar que o valor da f.c.e.m. deve ser inferior ao da
tensão aplicada ao motor.
Como a tensão aplicada às escovas do induzido, e a f.c.e.m. são opostas,
resulta que a tensão na armadura ou induzido é dada pela diferença das duas, ou
seja:
aaa IREV += (4.3)
A corrente da armadura é dada pela equação:
a
aa R
EVI
−= (4.4)
Esta equação demonstra que no início da marcha, quando a força contra-
eletromotriz é baixa, a corrente atinge um grande valor uma vez que a resistência
interna do induzido é pequena. Por isso para limitar a corrente de partida são
utilizados reostatos de arranque, colocados em série com o induzido.

74
4.2 Controle de motores CC
Antes da aplicação em larga escala dos acionamentos baseados na eletrônica
de potência para controlar as máquinas CA, os motores CC eram de longe as
máquinas escolhidas em aplicações que necessitassem de flexibilidade de controle.
Apesar dos acionamentos CA terem se tornado bem comuns nos últimos anos, a
facilidade de controle das máquinas CC assegura que continuem a ser utilizadas em
muitas aplicações (FITZGERALD, 2006).
4.2.1 Controle de velocidade
Devido ao seu princípio de funcionamento, as máquinas de corrente contínua
permitem uma variação de velocidade de zero até a velocidade nominal, aliada com
o fato de se ter conjugado constante. Devido esta característica é possível fazer o
acionamento em aplicações que exigem ampla faixa de variação de velocidade com
ótima regulação e precisão (FITZGERALD, 2006).
A velocidade de um motor de corrente contínua é dada pela equação:
( )Φ
−=
.KI.RV
n aaa (4.5)
Segundo Fitzgerald (2006), existem três métodos que são largamente
utilizados no controle de velocidade dos motores CC, por meio do controle da
corrente de campo, da variação da resistência associada ao circuito de armadura e da
variação da tensão dos terminais da armadura. Como os motores utilizados neste
projeto são de imãs permanentes a melhor maneira de se controlar a velocidade dos
motores é através do controle por tensão terminal de armadura.
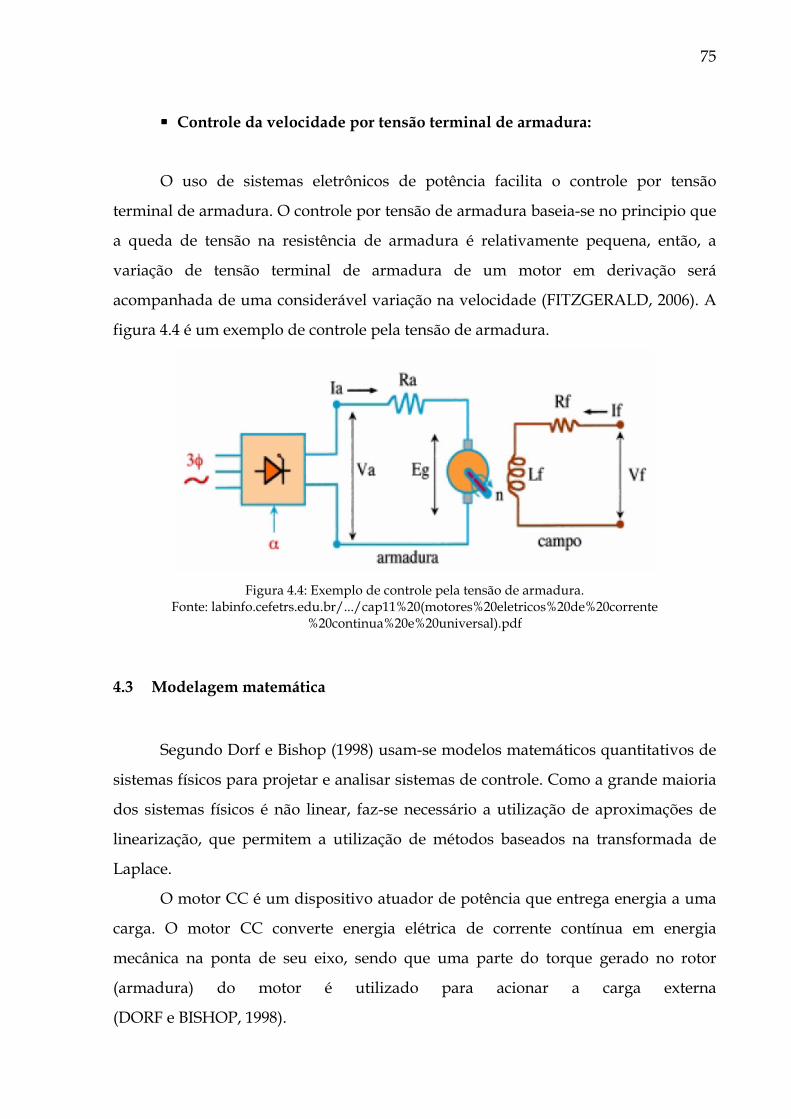
75
Controle da velocidade por tensão terminal de armadura:
O uso de sistemas eletrônicos de potência facilita o controle por tensão
terminal de armadura. O controle por tensão de armadura baseia-se no principio que
a queda de tensão na resistência de armadura é relativamente pequena, então, a
variação de tensão terminal de armadura de um motor em derivação será
acompanhada de uma considerável variação na velocidade (FITZGERALD, 2006). A
figura 4.4 é um exemplo de controle pela tensão de armadura.
Figura 4.4: Exemplo de controle pela tensão de armadura.
Fonte: labinfo.cefetrs.edu.br/.../cap11%20(motores%20eletricos%20de%20corrente %20continua%20e%20universal).pdf
4.3 Modelagem matemática
Segundo Dorf e Bishop (1998) usam-se modelos matemáticos quantitativos de
sistemas físicos para projetar e analisar sistemas de controle. Como a grande maioria
dos sistemas físicos é não linear, faz-se necessário a utilização de aproximações de
linearização, que permitem a utilização de métodos baseados na transformada de
Laplace.
O motor CC é um dispositivo atuador de potência que entrega energia a uma
carga. O motor CC converte energia elétrica de corrente contínua em energia
mecânica na ponta de seu eixo, sendo que uma parte do torque gerado no rotor
(armadura) do motor é utilizado para acionar a carga externa
(DORF e BISHOP, 1998).
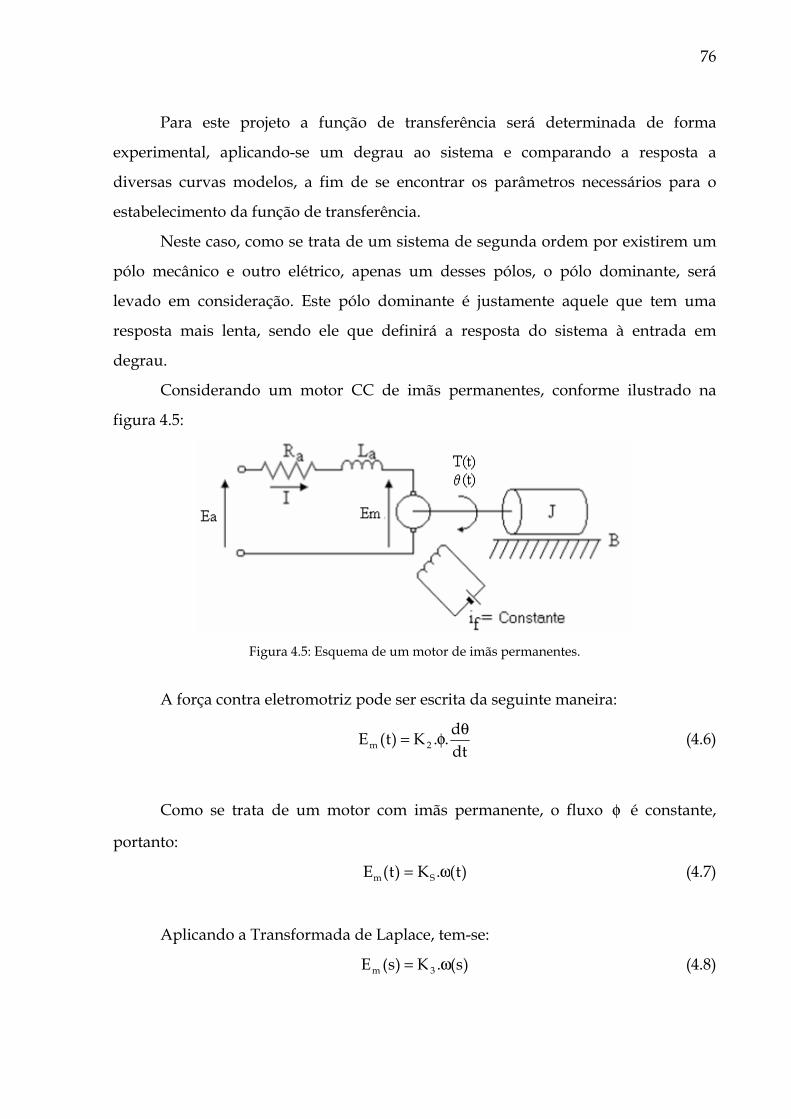
76
Para este projeto a função de transferência será determinada de forma
experimental, aplicando-se um degrau ao sistema e comparando a resposta a
diversas curvas modelos, a fim de se encontrar os parâmetros necessários para o
estabelecimento da função de transferência.
Neste caso, como se trata de um sistema de segunda ordem por existirem um
pólo mecânico e outro elétrico, apenas um desses pólos, o pólo dominante, será
levado em consideração. Este pólo dominante é justamente aquele que tem uma
resposta mais lenta, sendo ele que definirá a resposta do sistema à entrada em
degrau.
Considerando um motor CC de imãs permanentes, conforme ilustrado na
figura 4.5:
Figura 4.5: Esquema de um motor de imãs permanentes.
A força contra eletromotriz pode ser escrita da seguinte maneira:
dtd..K)t(E 2m
θφ= (4.6)
Como se trata de um motor com imãs permanente, o fluxo φ é constante,
portanto:
)t(.K)t(E Sm ω= (4.7)
Aplicando a Transformada de Laplace, tem-se:
)s(.K)s(E 3m ω= (4.8)

77
E a corrente para este sistema é:
a
maa Z
)t(E)t(E)t(I
−= (4.9)
Aplicando-se a Transformada de Laplace, tem-se:
aa
maa RL.s
)s(E)s(E)s(I
+
−= (4.10)
Já o torque é calculado como segue:
)t(I).t(.K)t(T a1 φ= (4.11)
Levando em conta novamente que o fluxo φ é constante:
)t(I.K)t(T am= (4.12)
E aplicando-se a Transformada de Laplace:
)s(I.K)s(T am= (4.13)
Temos ainda para o momento de inércia:
)t(.B)t(Tdt
)t(d.J ω−=
ω (4.14)
E após a aplicação da Transformada de Laplace:
BJ.s
1)s(T)s(
+=
ω (4.15)

78
A partir dessas equações encontradas, chegamos ao seguinte diagrama de
blocos que descreve o sistema a ser implementado, conforme figura 4.6:
Ea(s)
Em(s)
1s.La+Ra
Ia(s) T(s) w(s)Km 1
s.J+B
K3
pólo elétrico pólo mecânico
Figura 4.6: Diagrama de blocos do sistema
Deste diagrama de bloco extraímos a seguinte função de transferência:
)BJ.s).(RLa.s(K.K
1
)bJ.s).(RL.s(K
)s(E)s(
a
3m
aa
m
a
+++
++=
ω (4.16)
Portanto a função de transferência completa é a seguinte:
3maa
m
a K.K)bJ.s).(RL.s(K
)s(E)s(
+++=
ω (4.17)
Tendo em vista que Km e K3 são de valores muito próximos, podemos
considerar que Km.K3 = K2, e ainda, como K é um valor muito pequeno, considera-se
K2 ≈ 0, ou seja:
)bJ.s).(RL.s(
K)s(E)s(
aaa ++=
ω (4.18)
Contudo, normalmente o pólo mais lento é o pólo mecânico, desconsidera-se o
pólo elétrico. Lembrando que não é de importância relevante saber com qual pólo se
trata, apenas deve-se considerar aquele que seja mais lento.
)bJ.s(
K)s(E)s(
a +=
ω (4.19)

79
4.4 Componentes do kit
O kit é composto de dois motores CC de 100W e 12V acoplados através de seus
eixos, formando assim um grupo motor-gerador. Ligadas ao gerador estão quatro
cargas que geram perturbações no sistema e permitem visualizar a atuação do
sistema de controle de velocidade.
O grupo motor-gerador é acionado através de um conversor Buck alimentado
por uma fonte de computador, que fornece tensões de 5V ou 12V.
Um conjunto de displays de 7 segmentos mostra a velocidade do sistema que é
captada por um tacogerador acoplado ao eixo através de polias e uma correia. A
tensão gerada passa por um filtro Butterworth antes de ser processada e convertida
em velocidade.
Uma interface de entrada composta por quatro potenciômetros é utilizada
para o ajuste dos parâmetros dos controladores e da informação mostrada no
display.
O microcontrolador é responsável pela aquisição e tratamento dos dados da
interface de entrada e do tacogerador para utilização no controle. Também é
responsável pelo controle e envio das informações ao display, bem como outras
funções necessárias ao correto funcionamento do kit.

80
CAPÍTULO 5
5 DESENVOLVIMENTO DO PROJETO
Neste capítulo serão apresentados os componentes do kit, o desenvolvimento
dos circuitos eletrônicos necessários para a implementação do mesmo, bem como
toda a modelagem matemática do sistema, levantamento da função de transferência.
5.1 Grupo motor-gerador
São utilizados dois motores CC de 100W e 12V. Utilizados no acionamento da
ventoinha do radiador de automóveis, estes motores atendem aos requisitos de
robustez, tamanho, potência e tensão de acionamento necessários para demonstrar
num kit de tamanho relativamente pequeno o mesmo tipo de comportamento que
pode ser encontrado em sistemas de potência superior.
Os motores são acoplados através de um acoplamento especial de alumínio,
com um dispositivo de borracha para absorção de vibração, formando assim um
grupo motor-gerador, mostrado na figura a seguir. São fixados através de dois
grampos U num suporte de madeira para evitar que os eixos fiquem desalinhados. O
esquema de montagem do grupo motor-gerador está representado em vista
explodida na figura 5.1.

81
Figura 5.1: Representação gráfica do grupo motor-gerador
5.2 Fonte CC 12V
A fonte utilizada é uma fonte de computador com capacidade de corrente de
aproximadamente 10A. Para não haver problema de atuação de alguma proteção da
fonte durante a partida do motor foi programada uma partida em rampa via software
para diminuir a corrente de partida.
5.3 Microcontrolador MSP430F169
O microcontrolador MSP430F169 é utilizado para gerar e controlar a razão
cíclica do PWM para acionamento do circuito do grupo motor-gerador, rotina de
82
captação da velocidade do motor através do tacogerador e envio da mesma para os
displays de sete segmentos, conversão de sinais analógicos para digitais além da
execução do software de controle.
Foi utilizado um módulo que permite a programação e gravação on-board do
software facilitando as etapas de projeto e ensaios e garantindo que aplicações futuras
possam ser implementadas através de alterações no software. O módulo utilizado
pode ser visto na figura 5.2.
Figura 5.2: Módulo MSP430F169
Fonte: http://www.sctec.com.br/content/view/36/30/
5.4 Cargas
Um conjunto de quatro cargas compostas por resistores de baixa resistência e
LED’s de alto brilho é conectado ao gerador através de chaves. Podem ser inseridos e
retirados do circuito em blocos, gerando as perturbações do sistema que permitem a
visualização da atuação dos controladores PID.
Cada carga é composta por dois ou três resistores de 22R 10W em paralelo
com mais um resistor de 22R 5W e um LED de alto brilho que serve tanto como carga
quanto para a finalidade didática de indicar a entrada ou saída da carga do sistema.
Considerando que a máxima tensão fornecida à carga seja 12V então as cargas
foram projetadas para consumir uma potência suficiente para provocar perturbações
significativas no sistema.

83
Pela lei de Ohm:
IRV ⋅= (5.1)
Se a máxima tensão é 12V, então para o pior caso os resistores deverão
suportar:
A545,0II2212 =→⋅= (5.2)
A potência suportada deve ser então igual a:
W5,6P545,012PIVP =→⋅=→⋅= (5.3)
A partir desta informação os resistores foram especificados para suportar 10W
e cada bloco composto por três resistores e um LED consome 19,5W e representa o
consumo de aproximadamente 20% da potência nominal dos motores. Cada bloco
composto por quatro resistores e um LED consome 26W e representa o consumo de
aproximadamente 26% da potência nominal dos motores.
O dimensionamento foi feito para que os resistores suportassem a máxima
tensão fornecida, mas seu desempenho enquanto carga atende as necessidades com a
operação em 1600rpm, velocidade estabelecida como referência para o
funcionamento do sistema. Com esta velocidade a tensão aproximada é de 4V na
saída do gerador o que representa uma potência de 6,5W para três resistores e 8,72W
para os quatro resistores. Os LED´s utilizados para sinalizar o acionamento das
cargas são LED´s de alto brilho com tensão nominal de 3V e corrente de 200mA.

84
A figura 5.3 ilustra o esquemático das cargas.
Figura 5.3: Esquemático das cargas
A figura 5.4 ilustra a placa montada com os blocos de cargas.
Figura 5.4: Cargas

85
5.5 Circuitos eletrônicos
Os circuitos eletrônicos podem ser subdivididos em blocos detalhados a
seguir.
5.5.1 Regulador de tensão
O circuito do regulador de tensão tem a função de fornecer alimentação
estável em 3,3V para o microcontrolador, uma vez que a fonte disponível fornece
tensões apenas em 5V e 12V. A figura 5.5 ilustra o esquemático do circuito regulador
de tensão.
Figura 5.5: Esquemático do regulador de tensão
Para implementar este circuito foi utilizado apenas um circuito integrado
regulador de tensão LM317 alimentado em 5V e a tensão de alimentação do
microcontrolador foi regulada para 3,3V através de um potenciômetro multi voltas.
5.5.2 Acionamento do motor - conversor Buck
O conversor Buck é bastante utilizado no controle de motores CC. Este tipo de
conversor permite que o motor seja acionado em apenas um sentido. Controlado por
um sinal PWM de baixa potência gerado no microcontrolador o driver IR2110 e o
MOSFET IRFZ48, que suportam até 50A de corrente dreno-source e alimentação de até

86
20V, garantem a potência necessária para o motor. O controle da razão cíclica do
PWM através do microcontrolador permite o controle da velocidade do motor. A
figura 5.6 ilustra o esquemático do conversor Buck.
Figura 5.6: Esquemático do conversor Buck.
Inicialmente o projeto previa um futuro controle de posição e, por isso, o
hardware foi pensado para possibilitar que o motor pudesse girar nos dois sentidos.
Problemas de reconhecimento do nível do sinal do microcontrolador pelo
IR2110 durante a fase de ensaios e validação levaram a adaptação da ponte H,
inicialmente montada, para o conversor Buck, representado anteriormente, onde é
necessário apenas um sinal de PWM. O conversor Buck apresentou um desempenho
satisfatório atendendo plenamente o objetivo de controle de velocidade.
5.5.3 Sensor de velocidade do motor - tacogerador
Um tacogerador é utilizado como sensor de velocidade do grupo motor-
gerador. A tensão gerada em seus terminais é filtrada através de um filtro Butterworth
e um divisor resistivo garante a máxima tensão de 3,3V na entrada do A/D do
microcontrolador.
O filtro Butterworth é usado para garantir que a tensão gerada pelo
tacogerador e lida pelo microcontrolador não apresente um ripple significativo e nem
ultrapasse os 3,3V máximos para a entrada A/D.

87
O filtro foi projetado para atuar como “passa-baixa” com freqüência de corte
de 100Hz pois o ripple detectado na saída do tacogerador apresentou uma freqüência
de 300Hz. A figura 5.7 apresenta o esquemático do filtro e do divisor resistivo.
Figura 5.7: Esquemático filtro ButterWorth e divisor de tensão
Para obtermos uma freqüência de corte de aproximadamente 100Hz, foram
utilizados dois resistores de 150Ω e dois capacitores eletrolíticos de 10µF como pode
ser visto no esquemático representado pela figura acima. A equação abaixo mostra
como esses componentes foram dimensionados.
Ω≅⇒µπ
=⇒π
= 150RR.10..2
1100
C.R..21
fc (5.4)
Para funcionar como um filtro Butterworth o ganho do amplificador
operacional deve ser igual a 1,586. Então:
Ω≅⇒+=⇒+= 6802Rk12R
1586,11R2R
1Ao (5.5)
Considerando que a máxima tensão fornecida pelo tacômetro, com o grupo
motor-gerador trabalhando sem carga com alimentação nominal de 12V , é de 7,2V
então a máxima tensão que temos na saída do filtro é:
V42,11VoV2,7Vo586,1ViVoAo =⇒=⇒= (5.6)

88
Como o A/D do microcontrolador suporta no máximo 3,3V foi calculado um
divisor resistivo que limita a tensão na entrada do A/D na faixa entre 0 e 3,0V.
Ω=⇒⋅+
=⇒⋅+
= k3,34R42,114Rk2,1
k2,10,3Vi
4R3R3R
Vo (5.7)
A figura 5.8 comprova a eficácia do filtro, comparando a forma de onda da
tensão gerada na saída do gerador, e a mesma tensão após ter passado pelo filtro e
pelo divisor resistivo.
Figura 5.8: Tensão antes e depois do filtro Butterworth
Contudo, o filtro deve eliminar o ripple da forma de onda da tensão gerada
pelo tacogerador sem atrasar a resposta do mesmo, para que não haja erro na leitura
da velocidade do sistema. A figura 5.9 ilustra que, para uma variação de velocidade,
a tensão do tacogerador após o filtro responde simultaneamente quando comparada
com a forma de onda nos terminais do gerador.
Depois do filtro
(Canal 1 – 500mV/div)
Antes do filtro
Canal 2 – 2V/div

89
Figura 5.9: Tempo de resposta do filtro Butterworth
A fim de mostrar a velocidade real no display, foi necessário encontrar a
relação existente entre esta e a tensão gerada nos terminais do tacogerador. O
procedimento realizado consiste em medir em vários pontos a velocidade real do
motor, com o auxilio de um tacômetro de contato, e medir a tensão nos terminais do
gerador para a mesma rotação. Após a medição em diversas velocidades, chegou-se
na reta ilustrada na figura 5.10.
Relação Tensão Microcontrolador x Velocidade Conjunto
0,0
0,5
1,0
1,5
2,0
2,5
3,0
3,5
0 500 1000 1500 2000 2500 3000
Velocidade Conjunto (rpm)
Te
ns
ão
AD
Mic
roc
on
tro
lad
or
( V
)
Figura 5.10: Gráfico tensão do tacogerador x velocidade do conjunto
Portanto a constante de proporcionalidade é 816.
Depois do filtro
(Canal 1 – 500mV/div)
Antes do filtro
Canal 2 – 2V/div

90
O tacogerador é acoplado ao eixo do grupo motor gerador através de polias
ligadas por uma correia, como mostra a figura 5.11.
Figura 5.11: Acoplamento do tacogerador
5.5.4 Interface de saída - displays de sete segmentos
Um conjunto de displays de sete segmentos é utilizado para mostrar alguns
parâmetros do circuito, tais como velocidade, erro ou razão cíclica do PWM.
A informação é enviada pelo microcontrolador para os displays através de 4
bits, código BCD e são convertidos para 7 segmentos por um decodificador CI4511.
Para evitar a perda de capacidade de processamento com a multiplexação dos
displays foi utilizada a função latch do decodificador e mais 4 bits de controle que são
responsáveis por “segurar” o valor em cada display enquanto a capacidade de
processamento é utilizada no software de controle.
Na fase de ensaios e validação foi necessário implementar um buffer para cada
bit que tem a função de proteger o microcontrolador contra consumo excessivo de
corrente pelo circuito e também fornecer um sinal de 5V, nível de tensão
compreendido como alto pelo decodificador. O buffer funciona também como porta
inversora, pois é montado com transistores NPN funcionando em corte e saturação.
O código BCD é enviado invertido, via software, para que o decodificador funcione
adequadamente. Para a versão final na placa de circuito impresso projetada é

91
utilizado um CI 74HC245N que tem a mesma função de reconhecer o sinal de 3,3V e
fornecer na saída um sinal com 5V com a vantagem de ser menos complexo e não
precisar da inversão da informação via software. A figura 5.12 mostra o esquemático
do circuito do display de sete segmentos.
Figura 5.12: Esquemático do display de sete segmentos

92
Como o primeiro projeto do circuito para a placa dos displays previa a
utilização de transistores 2n2222 com resistores de polarização de base de 1kΩ houve
um problema com a capacidade de corrente das saídas do microcontrolador. A
corrente necessária para a polarização de base destes transistores queimou a porta
utilizada. Os transistores foram trocados pelo BC547 com resistores de polarização de
10kΩ e nenhum outro problema foi encontrado.
5.5.5 Interface de entrada – potenciômetros
Quatro potenciômetros são utilizados como interface de entrada. Um controla
qual variável que será mostrada no display e os outros regulam o “parâmetro” ganho
do controlador PID. São conectados nos conversores A/D do microcontrolador.

93
5.5.6 Lay out do kit para ensaios
A figura 5.13 representa o lay out do kit desenvolvido para a etapa de ensaios e
validação.
Figura 5.13: Lay out do kit didático de controle de velocidade de um grupo motor-gerador
Grupo motor - gerador
Fonte de alimentação 12V e 5V
Potenciômetros para regulagem dos ganhos PID
Potenciômetro de ajuste do
display
Cargas resistivas
Circuito de controle (MSP430F149 +
regulador de tensão)
Display de sete segmentos Filtro ativo
Butterworth
Conversor Buck
Tacogerador
Acoplamento

94
5.5.7 Projeto da placa de circuito impresso
Após a validação de todas as funções do kit, foi projetada a placa de circuito
impresso que garante uma maior durabilidade e confiabilidade ao kit. Serão
confeccionadas três placas inicialmente, o que permite que sejam montados outros
kit’s, além do já montado, para utilização nas aulas de controle da UTFPR.
Foram projetadas duas placas de circuito impresso que se interconectam. Uma
delas para os circuitos de controle, potência e comunicação e outra de interface que
contém os displays e os potenciômetros. Um circuito para comunicação serial através
de um CI MAX232, conforme figura 5.14, foi disponibilizado no projeto final da placa
com o objetivo de permitir uma futura implementação do envio de dados do sistema
físico para o computador.
Figura 5.14: Esquemático do circuito de comunicação serial
Além dos circuitos foi projetada uma área em estilo “placa padrão” para que
futuramente possam ser montados outros circuitos permitindo a implementação de
outros tipos de controle aproveitando o mesmo hardware, tais como controle de
corrente do motor, controle de posição, interfaces analógicas, etc.

95
As fotos das placas de circuito impresso projetadas para a versão final do kit
são mostradas nas figuras 5.15 e 5.16.
Figura 5.15 : Placa de circuito impresso - hardware
Figura 5.16: Placa de circuito impresso - interface
Além das placas de circuito impresso devidamente montadas, o kit é
composto pela fonte de computador com capacidade de 10A, o grupo motor-gerador
e as cargas.

96
O projeto das placas encontram-se no apêndice C.
5.6 Software
O software contém algumas funções e o programa principal, detalhados a
seguir:
− Função configura portas: responsável por definir como serão utilizadas as
portas do microcontrolador, como A/D’s, saídas digitais, PWM, entre outros.
As portas não utilizadas são ajustadas como saídas digitais para evitar ruídos
no sistema.
− Função timers: este microcontrolador possui dois timers internos, sendo que
um é configurado para geração de um sinal PWM de freqüência 1kHz, e o
outro, também com freqüência de 1kHz, será responsável pela geração de
uma interrupção a cada 1ms..
− Função ADC: configura os cinco conversores analógicos – digitais que serão
utilizados, sendo três deles os potenciômetros de ajuste dos parâmetros de
entrada do controlador (ganhos do PID), um quarto potenciômetro que
seleciona o que será mostrado no display dentre as opções velocidade, erro e
razão cíclica do PWM e o quinto conversor que lê a tensão gerada no
tacogerador para que esta seja utilizada no cálculo da velocidade do grupo
motor-gerador.
− Função display: esta função envia dados aos displays de sete segmentos. O kit
dispõe de quatro displays, sendo que os dados são enviados em quatro bits e é
necessário mais quatro bits para selecionar o display em que o dado será
mostrado.
− Interrupção: uma interrupção é gerada a cada 1 milisegundo e é utilizada
para o decremento de variáveis responsáveis pela temporização de certas
funções, como o tempo em que os dados são mostrados no display (750
milisegundos), tempo da rampa de partida do motor (2 segundos), taxa de
amostragem do sistema de controle discreto (1 milisegundo), entre outros.

97
− Programa principal: esta parte inicia com algumas configurações do
microcontrolador, como o clock por exemplo, em seguida é feita a partida do
motor em rampa e logo após entra-se no loop principal, onde é executado
todo o processamento responsável pelo sistema de controle.
O código fonte do software se encontra no apêndice A.
5.7 Modelo matemático do sistema
5.7.1 Levantamento da função de transferência
Com o objetivo de encontrar a função de transferência, foi aplicado ao
enrolamento de armadura do motor do grupo motor-gerador um degrau de 12V,
com o auxilio de uma bateria. Com um osciloscópio digital, registrou-se a resposta ao
degrau na saída do gerador.
Para realização deste procedimento, foram utilizados os seguintes
equipamentos:
1 bateria selada de tensão 12V Panasonic LC-RB0610P;
1 osciloscópio digital Tektronix THS720A;
1 multímetro digital;
1 interruptor monopolar;
A figura 5.17 ilustra o esquema do ensaio:
Figura 5.17: Esquema do ensaio de levantamento da função de transferência
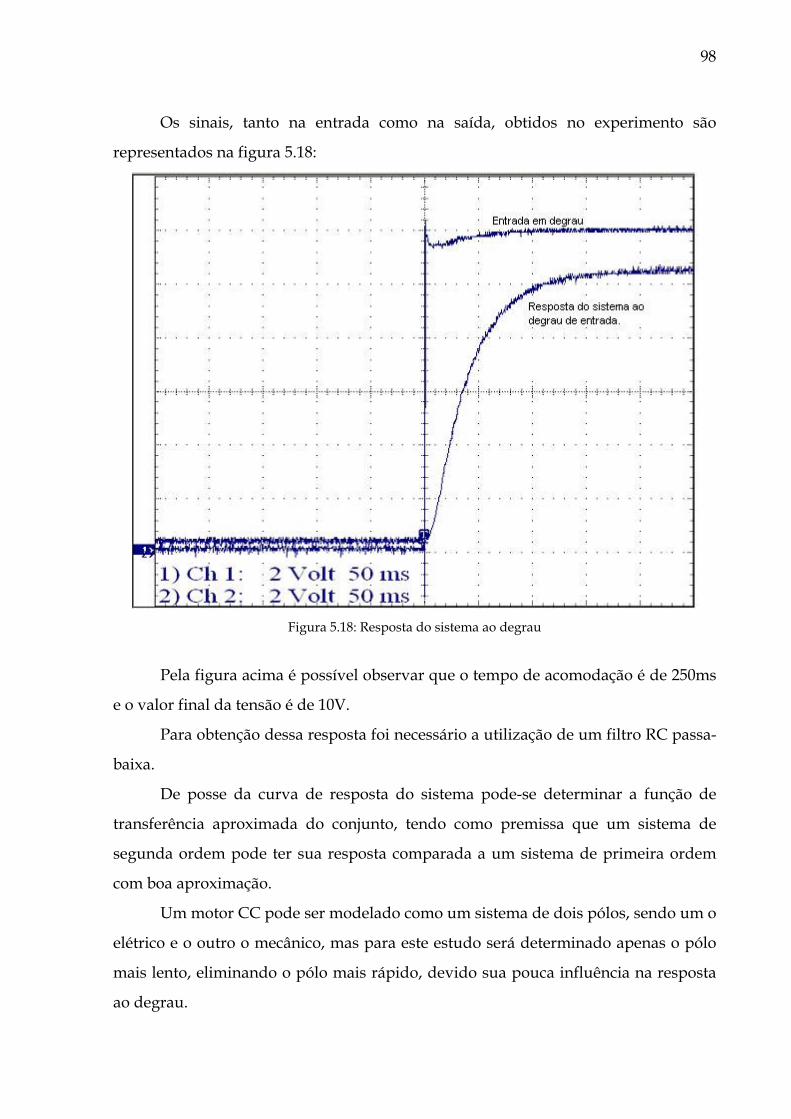
98
Os sinais, tanto na entrada como na saída, obtidos no experimento são
representados na figura 5.18:
Figura 5.18: Resposta do sistema ao degrau
Pela figura acima é possível observar que o tempo de acomodação é de 250ms
e o valor final da tensão é de 10V.
Para obtenção dessa resposta foi necessário a utilização de um filtro RC passa-
baixa.
De posse da curva de resposta do sistema pode-se determinar a função de
transferência aproximada do conjunto, tendo como premissa que um sistema de
segunda ordem pode ter sua resposta comparada a um sistema de primeira ordem
com boa aproximação.
Um motor CC pode ser modelado como um sistema de dois pólos, sendo um o
elétrico e o outro o mecânico, mas para este estudo será determinado apenas o pólo
mais lento, eliminando o pólo mais rápido, devido sua pouca influência na resposta
ao degrau.

99
Inicialmente deve-se determinar, a partir da curva de resposta, a constante de
tempo do sistema conforme a figura 5.19.
Figura 5.19: Determinação da constante de tempo
Fonte: Ogata, Katsuhiko; Engenharia de controle moderno. Tradução André Fábio Kohn e José Carlos Teixeira de Barros Moraes. X ed. Rio de Janeiro: Prentice, 1982.
No ponto da curva da tensão de saída onde a tensão é 63% da tensão total
temos a constante de tempo do sistema. Como no experimento a tensão de saída foi
de aproximadamente 10V, o ponto da curva que nos interessa é relativo a 6,3V que se
refere a uma constante de tempo de 40 milisegundos.
Como a constante de tempo é inversamente proporcional ao pólo mais lento:
m
m T1
P = (5.8)
Tem-se então que o pólo mais lento tem o valor de 25.
Levando-se em conta ainda o Teorema do Valor Final
)s(G.slim)t(glim0s0t →→
= (5.9)

100
Ainda considerando que aplicamos um degrau de valor 12V na entrada do
motor, teremos uma tensão de saída do sistema em regime permanente de:
p12.k
s12.)ps(
k.slim)s(G.slim)(Vs
0s0s=
+==∞
→→ (5.10)
12
p).(Vsk
∞= (5.11)
1225.10
k = (5.12)
Portanto, o valor do ganho será k = 20,83.
Obtemos assim a função de transferência do sistema, levando em conta apenas
o pólo mais lento:
)25s(
83,20)s(G
+= (5.13)
5.7.2 Validação da função de transferência
Depois de conhecida a função de transferência aproximada do sistema, a
mesma foi validada através de simulações no software MatLab 7.0.
A validação da função de transferência levantada é realizada através da
comparação entre a resposta encontrada no laboratório do sistema real com a
resposta obtida através de uma simulação. Realizada com o auxílio do MatLab, a
resposta ao degrau simulada utilizando a função aproximada deve apresentar as
mesmas características daquela levantada no sistema físico real.
De posse das duas respostas é possível verificar que existe similaridade entre
elas. A análise da curva resultante da simulação mostra que essa também apresenta
um valor em regime permanente de 10V e um tempo de acomodação de 250ms. A
comparação entre as duas curvas permitiu a validação da aproximação realizada e a
adoção desta para a realização das simulações futuras.
Conforme ilustrado na figura 5.20, a comparação entre as duas curvas de
resposta permite a constatação de que tanto o valor de regime permanente quanto o
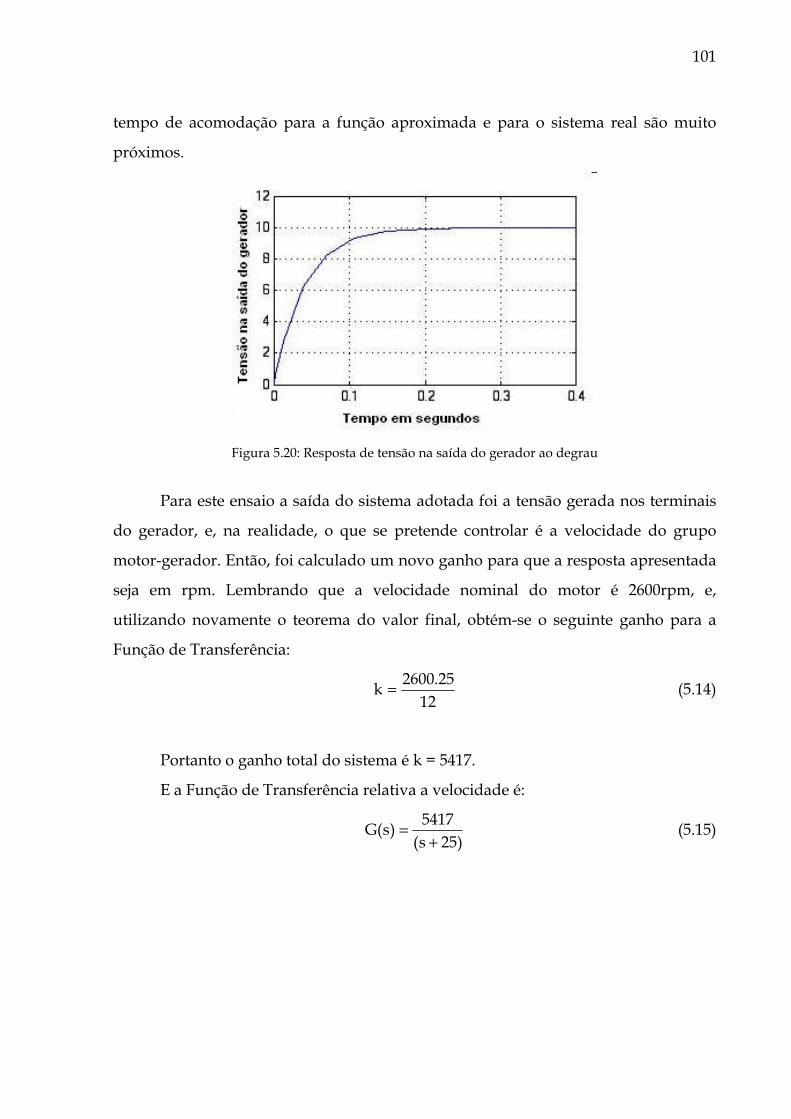
101
tempo de acomodação para a função aproximada e para o sistema real são muito
próximos.
Figura 5.20: Resposta de tensão na saída do gerador ao degrau
Para este ensaio a saída do sistema adotada foi a tensão gerada nos terminais
do gerador, e, na realidade, o que se pretende controlar é a velocidade do grupo
motor-gerador. Então, foi calculado um novo ganho para que a resposta apresentada
seja em rpm. Lembrando que a velocidade nominal do motor é 2600rpm, e,
utilizando novamente o teorema do valor final, obtém-se o seguinte ganho para a
Função de Transferência:
12
25.2600k = (5.14)
Portanto o ganho total do sistema é k = 5417.
E a Função de Transferência relativa a velocidade é:
)25s(
5417)s(G
+= (5.15)

102
A figura 5.21 ilustra a resposta do sistema a entrada em degrau de 12V,
resultando em uma rotação do sistema de 2600rpm.
Figura 5.21: Resposta de velocidade do sistema ao degrau
5.7.3 Diagrama de blocos do sistema
A partir da função de transferência e dos outros ganhos do sistema, é possível
estabelecer o diagrama de blocos do sistema, representado na figura 5.22.
Figura 5.22: Diagrama de blocos do sistema
Entrada em degrau: Esse bloco refere-se à fonte de alimentação do sistema
sendo que a tensão de alimentação vai de 0 a 3.3V na entrada do
microcontrolador. Portanto, esse bloco pode ser representado como um

103
degrau onde o valor de amplitude escolhido para esse bloco é a referência de
velocidade do sistema.
A/D: Representa o ganho no microcontrolador, ou seja, é onde a referência de
velocidade em tensão, que é um valor analógico, é transformada em um sinal
digital correspondente. Nesse conversor são possíveis 4096 posições, sendo
que quando a amplitude do degrau está selecionada para 3,3V, o sinal digital
equivale a posição 4096.
Zero-order hold: É o amostrador de ordem zero, sendo a representação da
discretizição da função de transferência que está no plano s.
K proporcional: Representa o ganho proporcional do controlador a ser
implementado. Pode atuar individualmente ou em paralelo com os outros
controladores.
Controlador integral: Representa a parte integral do controlador a ser
implementado. Pode atuar individualmente ou em paralelo com os outros
controladores.
K integral: Representa o ganho integral do controlador a ser implementado.
Controlador derivativo: Representa a parte derivativa do controlador a ser
implementado. Pode atuar individualmente ou em paralelo com os outros
controladores.
K derivativo: Representa o ganho derivativo do controlador a ser
implementado.
104
Saturador: É o bloco que representa a limitação física da fonte do sistema, ou
seja, limita o valor médio da tensão na entrada do motor em 12V que é a
tensão máxima da fonte do sistema.
PWM: Bloco que representa o conversor Buck, onde ocorre o chaveamento
dos mosfets. É a parte do sistema responsável por entregar a tensão PWM ao
motor.
Função de transferência: Representa através de uma equação matemática de
primeira ordem a planta a ser controlada.
Perturbação: Representa a entrada ou saída de perturbações externas ao
sistema. Para esse projeto as perturbações são resistências elétricas que
podem ser adicionadas ou extraídas do sistema. Essas perturbações podem
ser representadas através de degraus pela característica linear das
resistências além da sua interferência ou não no sistema estar condicionada a
posição de um interruptor.
Tacogerador: Bloco que representa o tacogerador do sistema. É responsável
por transformar a velocidade do sistema em um sinal de tensão. Quando o
sistema estiver em sua rotação nominal, 2600 rpm, será encontrada nos
terminais de saída do tacogerador uma tensão de 7.2V.
Filtro butterworth: Representa o filtro ativo responsável pela diminuição do
ripple do sinal de saída do tacogerador. Sendo que neste tipo de filtro existe
uma amplificação do sinal de 1,586 vezes o sinal de entrada.
Divisor resistivo: Bloco que representa o divisor resistivo do sistema. É
responsável por limitar a tensão na entrada do microcontrolador em 3V.

105
Divisor do A/D: Os sinais convertidos pelos A/D’s são divididos por dois
para que todos os valores fiquem na mesma escala.O valor máximo admitido
pelo PWM é 2048 devido a freqüência selecionada.

106
CAPÍTULO 6
6 RESULTADOS
Para a validação do sistema de controle foram realizados ensaios de maneira a
coletar informações que permitem evidenciar a atuação dos controladores PID.
Para a implementação de um controlador digital onde os ganhos são variáveis
é utilizada a equação diferença na sua forma literal. A seguir são apresentadas estas
equações para cada parâmetro do controlador PID, bem como a saída total.
e.KpP = (6.1)
)ee.(2T.Ki
.uI 1k1k −− += (6.2)
)ee.2e.(KdD 2k1k −− +−= (6.3)
DIPu ++= (6.4)
A variação dos ganhos dos controladores através dos potenciômetros permite
a realização dos ensaios com diversas combinações de ganhos.
Para cada uma das combinações de controladores possíveis (P, I, PI, PD e
PID), é realizada uma simulação no MatLab, na qual verifica-se a resposta do sistema
a uma perturbação em degrau, representando o acionamento das cargas no gerador.
Estas simulações podem ser comparadas com o resultado encontrado na prática. Para
esta simulação é utilizado o diagrama de blocos já apresentado na figura 5.22,
variando apenas os ganhos de cada controlador.
O ensaio do sistema real consiste no ajuste dos ganhos do controlador para os
mesmos valores usados na simulação, e, com o conjunto em operação, aplica-se uma
perturbação em degrau acionando um conjunto de cargas ligadas aos terminais do
gerador. Esta perturbação em degrau reduz a velocidade do grupo motor-gerador, e
a função do controlador é estabilizar a velocidade conforme a referência ajustada. Os
resultados capturados com o auxílio de um osciloscópio digital mostram a variação
da razão cíclica do PWM durante a aplicação da perturbação, evidenciando a atuação

107
do controlador, elevando a tensão média na entrada do motor para manter a
velocidade do conjunto constante. Para alguns casos optou-se por representar a
variação de velocidade do sistema durante a perturbação para facilitar a visualização
da atuação do controlador.
Os resultados encontrados são descritos a seguir.
6.1 Controle Proporcional
A simulação é realizada com Kp = 1, Ki = 0 e Kd = 0, e a resposta encontrada é
ilustrada na figura 6.1.
Figura 6.1: Simulação do controle proporcional
A figura 6.2 ilustra tanto a variação de velocidade do sistema durante a
perturbação, como a variação da razão cíclica do PWM na entrada do motor para o
sistema real.

108
Figura 6.2: Ensaio do controle proporcional
Devido ao ganho baixo, o sistema conserva um erro em regime permanente,
porém a variação do PWM deixa claro a atuação do controlador.
Para ganhos proporcionais acima de três o sistema apresenta comportamento
oscilatório, conforme figura 6.3.
Figura 6.3: Sistema oscilatório para Kp>3
Este comportamento é justificado através de uma simulação com as mesmas
características do sistema real. Esta simulação é ilustrada na figura 6.4.

109
Figura 6.4: Simulação do controle proporcional para Kp > 3
6.2 Controle Integral:
A simulação é realizada com Kp = 0, Ki = 2, e Kd = 0, e a resposta encontrada é
representada pela figura 6.5.
Figura 6.5: Simulação do controle integral
A figura 6.6 ilustra a variação de velocidade do sistema durante a perturbação
para o sistema real.

110
Figura 6.6: Ensaio do controle integral
Apesar da oscilação durante a entrada e saída da carga, observa-se que o
controlador desempenha sua função de eliminar o erro em regime permanente.
6.3 Controle Proporcional Integral
A simulação é realizada com o ganho Kp = 1, Ki = 1 e Kd = 0, e a reposta
encontrada é representada pela figura 6.7.
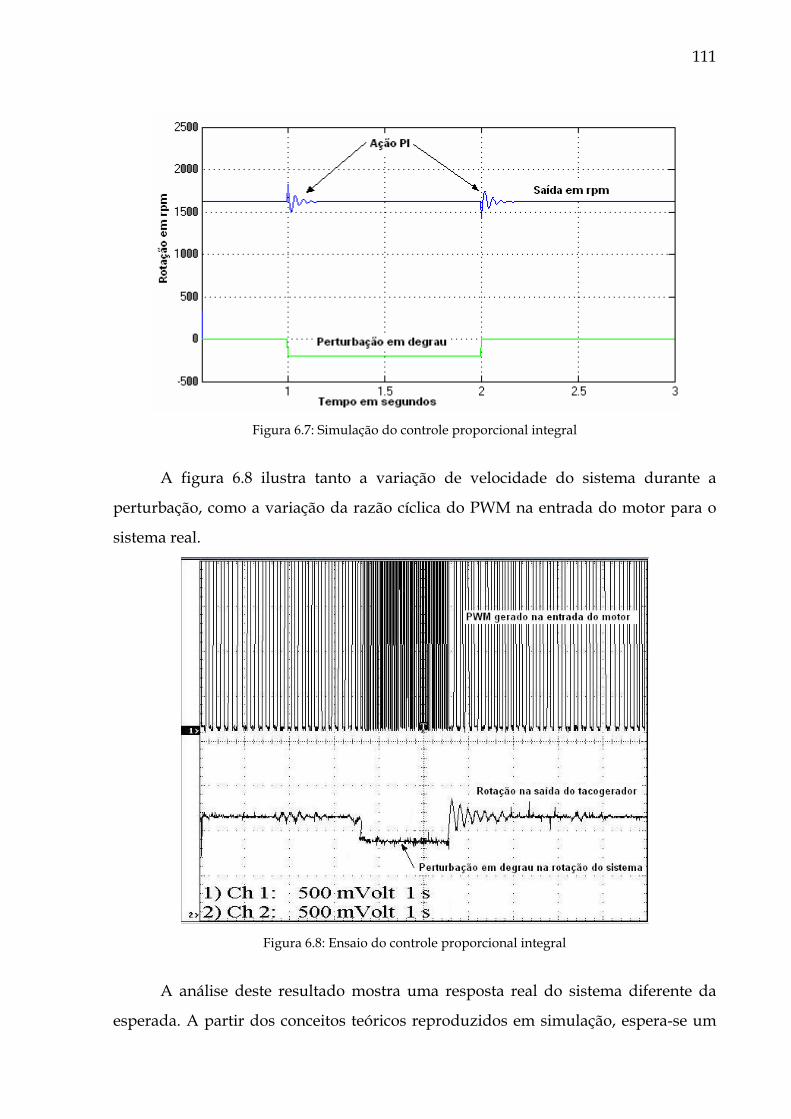
111
Figura 6.7: Simulação do controle proporcional integral
A figura 6.8 ilustra tanto a variação de velocidade do sistema durante a
perturbação, como a variação da razão cíclica do PWM na entrada do motor para o
sistema real.
Figura 6.8: Ensaio do controle proporcional integral
A análise deste resultado mostra uma resposta real do sistema diferente da
esperada. A partir dos conceitos teóricos reproduzidos em simulação, espera-se um
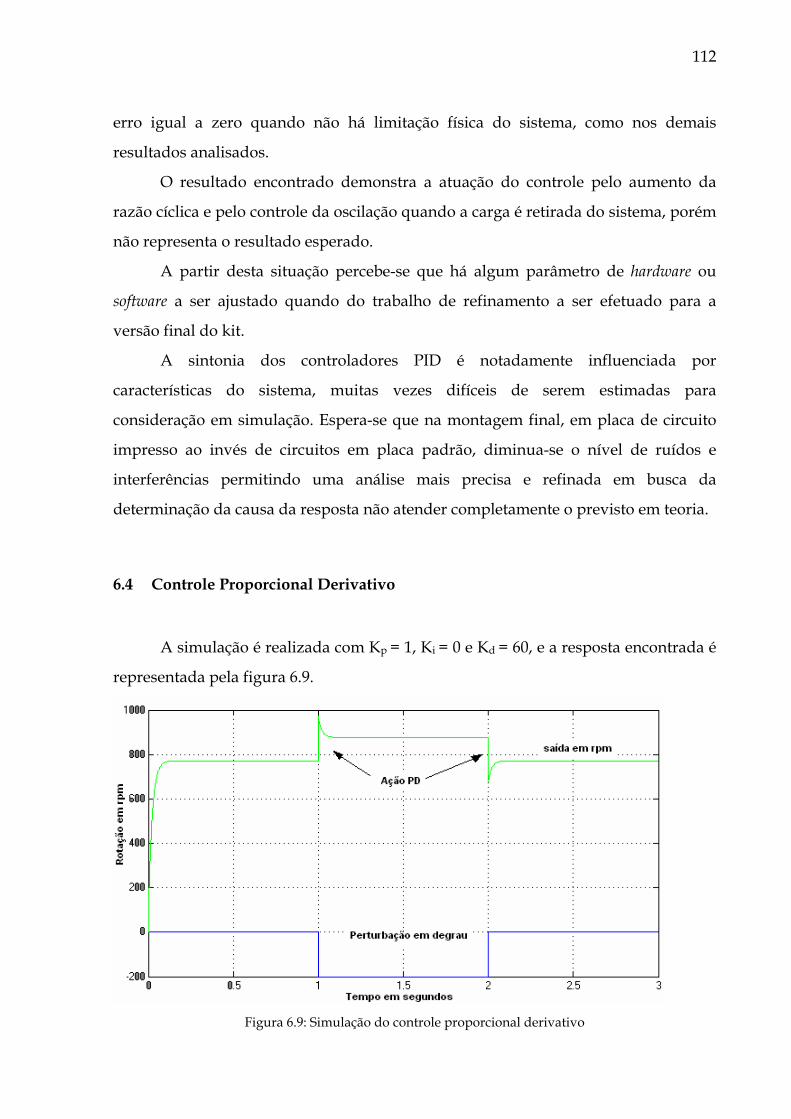
112
erro igual a zero quando não há limitação física do sistema, como nos demais
resultados analisados.
O resultado encontrado demonstra a atuação do controle pelo aumento da
razão cíclica e pelo controle da oscilação quando a carga é retirada do sistema, porém
não representa o resultado esperado.
A partir desta situação percebe-se que há algum parâmetro de hardware ou
software a ser ajustado quando do trabalho de refinamento a ser efetuado para a
versão final do kit.
A sintonia dos controladores PID é notadamente influenciada por
características do sistema, muitas vezes difíceis de serem estimadas para
consideração em simulação. Espera-se que na montagem final, em placa de circuito
impresso ao invés de circuitos em placa padrão, diminua-se o nível de ruídos e
interferências permitindo uma análise mais precisa e refinada em busca da
determinação da causa da resposta não atender completamente o previsto em teoria.
6.4 Controle Proporcional Derivativo
A simulação é realizada com Kp = 1, Ki = 0 e Kd = 60, e a resposta encontrada é
representada pela figura 6.9.
Figura 6.9: Simulação do controle proporcional derivativo

113
A figura 6.10 ilustra a variação da razão cíclica do PWM durante a perturbação
para o sistema real.
Figura 6.10: Ensaio do controle proporcional derivativo
Apesar desta imagem deixar clara a atuação do controlador, não é possível
distinguir a atuação do controle derivativo, que deve atuar quando o erro varia,
portanto outras duas imagens foram captadas, comparando a resposta do sistema
para condições em que o ganho da segunda amostra é o dobro da primeira. Estas
imagens são mostradas na figura 6.11.
Figura 6.11: Comparação entre ensaios do controle proporcional derivativo
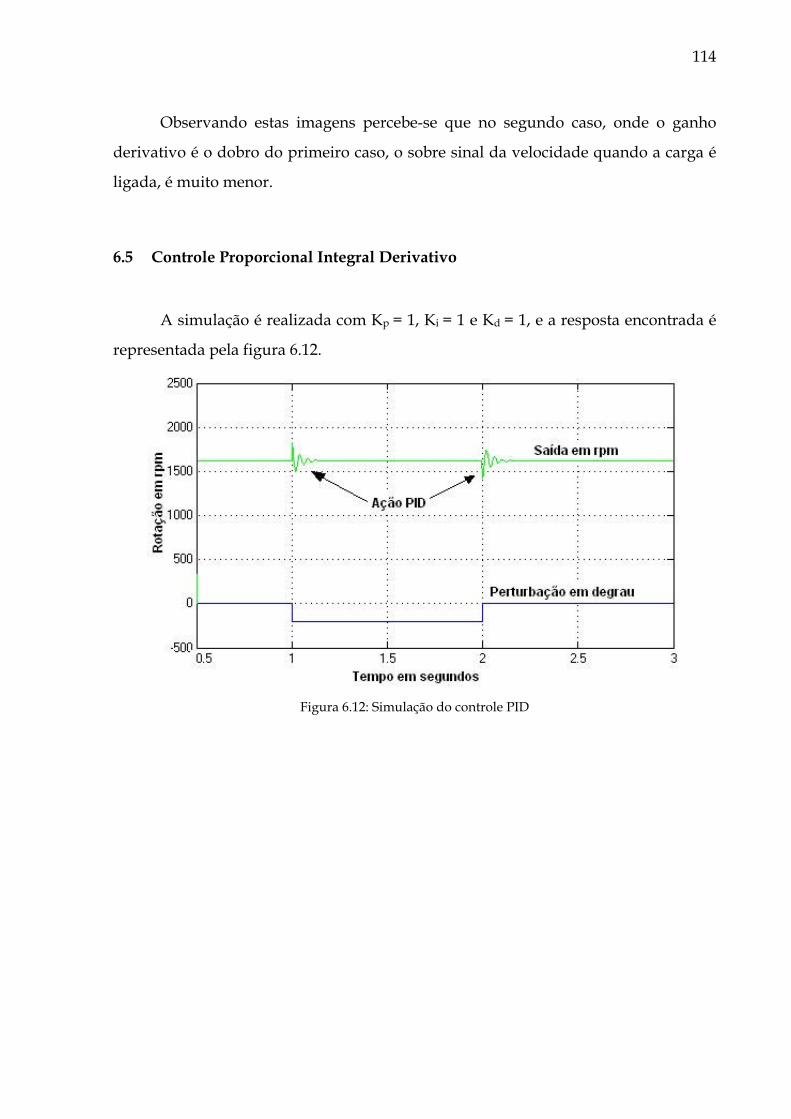
114
Observando estas imagens percebe-se que no segundo caso, onde o ganho
derivativo é o dobro do primeiro caso, o sobre sinal da velocidade quando a carga é
ligada, é muito menor.
6.5 Controle Proporcional Integral Derivativo
A simulação é realizada com Kp = 1, Ki = 1 e Kd = 1, e a resposta encontrada é
representada pela figura 6.12.
Figura 6.12: Simulação do controle PID

115
A figura 6.13 ilustra a variação da razão cíclica do PWM durante a perturbação
para o sistema real.
Figura 6.13: Ensaio do controle PID
6.6 Lista de material e estimativa de custos para a montagem do kit
Tabela 6.1: Lista de materiais e custos da estrutura mecânica
Qtde Preço Total ReferênciaBase de Madeira 1 R$ 20,00 R$ 20,00 xAcoplamento Aluminio 1 R$ 70,00 R$ 70,00 xMotores 100W / 12V 2 R$ 123,00 R$ 246,00 xGrampo U 2 R$ 2,00 R$ 4,00 xMotor tacogerador 1 R$ 15,00 R$ 15,00 xSuporte tacogerador 1 R$ 5,00 R$ 5,00 x
1) Estrutura Mecânica
Sub-Total R$ 360,00

116
Tabela 6.2: Lista de materiais e custos dos circuitos eletrônicos gerais
Qtde Preço Total ReferênciaPlaca Circuito Impresso 1 R$ 180,00 R$ 180,00Microcontrolador MSP430F169 1 R$ 114,00 R$ 114,00
Sub-Total R$ 294,00
2) Circuitos Eletrônicos
Tabela 6.3: Lista de materiais e custos da placa de cargas
Qtde Preço Total ReferênciaResistores 22R 10W 10 R$ 0,85 R$ 8,50 xResistores 22R 5W 4 R$ 0,70 R$ 2,80 xLed de Alto Brilho 10mm 4 R$ 1,75 R$ 7,00 xChaves 4 R$ 1,50 R$ 6,00 xPlaca Padrão 1 R$ 7,50 R$ 7,50 x
2.1 )Cargas
Sub-Total R$ 31,80
Tabela 6.4: Lista de materiais e custos do regulador de tensão
Qtde Preço Total ReferênciaCap. Poli. 100nF 50V 1 R$ 0,07 R$ 0,07 C1CI LM317 1 R$ 0,45 R$ 0,45 IC1Potenciometro 4k7 1 R$ 0,80 R$ 0,80 R2Resistor 1k8 1/4W 1 R$ 0,02 R$ 0,02 R1Cap. Ele. 10uF 50V 1 R$ 0,05 R$ 0,05 C2
2.2) Regulador Tensão 3,3V
Sub-Total R$ 1,39

117
Tabela 6.5: Lista de materiais e custos do conversor Buck
Qtde Preço Total ReferênciaDiodo Zener 3,3V 3 R$ 0,15 R$ 0,45 D1, D2, D5Res. 10K 1/4W 3 R$ 0,02 R$ 0,06 R3, R4, R6Cap. Poli. 100nF 50V 1 R$ 0,07 R$ 0,07 C4Cap. Ele. 10uF 50V 3 R$ 0,05 R$ 0,15 C3, C5, C6Diodo UF4007 1 R$ 0,20 R$ 0,20 D3Res. 22R 1/4W 1 R$ 0,02 R$ 0,02 R5Mosfet IRFZ48 1 R$ 2,75 R$ 2,75 T1Cap. Ele. 1000uF 1 R$ 0,80 R$ 0,80 C7Cap. Polipropileno 1uF 1 R$ 3,70 R$ 3,70 C8Diodo MUR820 1 R$ 1,20 R$ 1,20 D4CI IR2110 1 R$ 12,50 R$ 12,50 CI1Soquete torneado 1 R$ 0,80 R$ 0,80 CI1
2.3) Conversor Buck
Sub-Total R$ 22,70
Tabela 6.6: Lista de materiais e custos do sensor de velocidade
Qtde Preço Total ReferênciaRes. 150R 1/4W 2 R$ 0,02 R$ 0,04 xCap. Ele. 10uF 50V 2 R$ 0,05 R$ 0,10 xRes. 1k2 1/4W 2 R$ 0,02 R$ 0,04 xRes. 680R 1/4W 1 R$ 0,02 R$ 0,02 xRes. 3k3 1/4W 1 R$ 0,02 R$ 0,02 xCap. Poli. 100nF 50V 1 R$ 0,07 R$ 0,07 xCI LM741 1 R$ 0,30 R$ 0,30 x
2.4) Sensor de velocidade
Sub-Total R$ 0,59
Tabela 6.7: Lista de materiais e custos do display
Qtde Preço Total ReferênciaDisplays 7 Segmentos 4 R$ 0,35 R$ 1,40 Dsp1, Dsp2, Dsp3, Dsp4Resistor 680R 1/4W 28 R$ 0,02 R$ 0,56 R1 ~ R28CI 4511 4 R$ 0,25 R$ 1,00 IC2 ~ IC5CI 74HC245 1 R$ 0,50 R$ 0,50 IC1Cap. Ceram. 100nF 4 R$ 0,07 R$ 0,28 C1 ~ C4
2.5 ) Displays
Sub-Total R$ 3,74

118
Tabela 6.8: Lista de materiais e custos dos potenciômetros
Qtde Preço Total ReferênciaPotenciometro 4k7 4 R$ 1,50 R$ 6,00 x
2.6) Potenciometros
Sub-Total R$ 6,00
Tabela 6.9: Lista de materiais e custos do circuito de comunicação Serial
Qtde Preço Total ReferênciaCI MAX 232 1 R$ 1,20 R$ 1,20 IC2Res. 1K 1/4W 1 R$ 0,02 R$ 0,02 R7Cap. Ele. 1uF 50V 5 R$ 0,05 R$ 0,25 C9, C10, C11 e C12Conector placa Serial 1 R$ 1,50 R$ 1,50 CN3
Sub-Total R$ 2,97
2.7) Comunicação Serial
Tabela 6.10: Custo total para montagem do kit
Descrição PreçoEstrutura mecânica R$ 360,00Circuitos geral R$ 294,00Cargas R$ 31,80Regulador tensão R$ 1,39Conversor R$ 22,70Tacogerador R$ 0,59Displays R$ 3,74Potenciômetros R$ 6,00Comunicação Serial R$ 2,97
TOTAL R$ 723,19
Custo total

119
CAPÍTULO 7
7 CONCLUSÃO
O objetivo principal do projeto: pesquisar, desenvolver e implementar um kit
didático para as disciplinas de controle dos cursos de engenharia que permita ao
aluno a visualização e compreensão prática dos conhecimentos adquiridos durante
as aulas teóricas através da demonstração das respostas de um sistema físico aos
dispositivos de controle, foi atingido com êxito.
Para a comprovação da atuação dos controladores foi desenvolvida uma
interface de entrada onde são ajustados os parâmetros de entrada do controlador e é
selecionada a informação mostrada no display, onde são exibidos os valores que
comprovam a atuação do controlador, como a velocidade de rotação do sistema,
razão cíclica do PWM e valor do erro estacionário, cumprindo assim sua função
didática. Além da interface dos displays, que cumpre o objetivo da visualização
direta da resposta, é possível captar alguns sinais (PWM, tensão na saída do
tacogerador/filtro) com o osciloscópio o que permite enriquecer os recursos do
sistema e a aprendizagem dos alunos.
O kit contém ainda o microcontrolador que é o responsável pela integração de
todos os periféricos, coletando e tratando os dados e enviando-os ao sistema e a
interface de saída. Como o microcontrolador disponível é um módulo didático, este
estará disponível para programação onboard. A flexibilidade que este módulo de
programação permite aos seus usuários é que, além da visualização dos parâmetros
pré-estabelecidos, podem ser realizadas alterações no software a qualquer momento,
permitindo futuras implementações de outros sistemas de controle através do
mesmo hardware e que sejam realizados outros ensaios com o mesmo sistema.
A análise da aplicabilidade e eficiência didática dos possíveis sistemas foi
realizada também durante a primeira etapa de desenvolvimento do projeto e
consistiu em uma análise sucinta sobre as características, vantagens e desvantagens
de cada sistema.

120
O sistema escolhido teve o seu protótipo desenvolvido e é composto por um
grupo motor-gerador, que tem sua velocidade de rotação controlada quando da
inserção de perturbações no sistema. O controle de velocidade de um grupo motor-
gerador se mostrou a planta ideal principalmente por sua forte ligação com o curso
de Engenharia Industrial Elétrica com ênfase em Eletrotécnica, possibilitando assim
aos futuros alunos usuários do protótipo uma maior identificação com a matéria
estudada.
O projeto e desenvolvimento do sistema foi realizado através da montagem
dos circuitos eletrônicos em placa padrão, do microcontrolador e de todos os itens
constantes no kit para a realização de testes para operacionalizar o hardware. Após a
validação do funcionamento do hardware foi projetada uma placa de circuito
impresso que garante uma maior durabilidade ao kit.
O ensaio do sistema consistiu em verificar suas características de resposta aos
controladores e garantir que, didaticamente, sua atuação seja percebida através das
interfaces disponibilizadas no protótipo.
O manual foi elaborado facilitando a compreensão dos usuários quanto as
característica do sistema, permitindo um melhor aproveitamento da planta
implementada.
Disponibilizando o kit didático com o hardware e o software operacionais para
o estudo de controle digital, contribuiu-se com o progresso da UTFPR, facilitando a
compreensão dos conteúdos da disciplina de Controle e o processo de aprendizado
dos alunos.
7.1 Considerações finais
Com os objetivos propostos atingidos as considerações finais sobre o
desenvolvimento deste projeto ressaltam as dificuldades encontradas e o
conhecimento agregado após 9 meses de dedicação.
O cumprimento do cronograma estabelecido no início do projeto foi a
ferramenta utilizada para a garantia de que os resultados seriam atingidos no prazo e

121
para o sucesso do projeto. Com o cronograma bem elaborado os atrasos que surgem
naturalmente durante o desenvolvimento de qualquer projeto puderam ser
compensados com o bom desempenho da equipe em outras etapas. A distribuição de
tarefas e responsabilidades assim como o comprometimento de todos os membros da
equipe foi fundamental para o bom andamento do projeto.
A primeira grande dificuldade foi com relação à montagem e a colocação em
operação dos diversos circuitos eletrônicos que compõem o kit. A segunda grande
dificuldade apareceu com a falta de experiência no trabalho com o microcontrolador.
A ambientação com este componente fundamental para o sistema, sua programação,
conhecimento de todas suas funções demandaram um tempo considerável de
pesquisa e estudo, além de muitas horas de simulações para compreender e
operacionalizar suas funções. As duas principais dificuldades citadas acima estão
relacionadas com as etapas do projeto que demandaram conhecimentos pouco
explorados durante o curso de Engenharia Industrial Elétrica – ênfase em
Eletrotécnica. Ter tido a oportunidade de trabalhar com hardware e software foi
enriquecedor, apesar da falta de prática ter nos demandado um precioso tempo que
poderia ter sido utilizado no estudo do sistema de controle em si.
O fácil acesso a estrutura da Universidade e o apoio do professor orientador,
que se mostrou sempre disponível, foi de fundamental importância para a
transposição dessas dificuldades.
Após o desenvolvimento deste projeto, fica a sugestão de trabalhos futuros
para um melhor aproveitamento do hardware implementado:
− Implementação do controle de outras variáveis do sistema, como a posição,
tensão no gerador ou corrente de armadura;
− Comunicação com o software LabView para aquisição de dados do período
transitório, o hardware para comunicação serial já está disponível na versão
final do kit;
− Implementação de um display de LCD para que várias variáveis possam ser
monitoradas simultaneamente;
− Implementação de teclas para interface de entrada para facilitar a aquisição
de dados e criar uma interface mais amigável e precisa;
122
Além do aperfeiçoamento deste kit com as sugestões listadas acima fica como
sugestão para projetos futuros a implementação de outros kits didáticos para as aulas
de controle. Neste trabalho foram pesquisadas diversas plantas e todas podem ser
implementadas, contribuindo para o processo de aprendizagem da disciplina de
controle na nossa instituição.
Apesar de todas as dificuldades encontradas, a equipe está satisfeita com o
trabalho concluído, com os obstáculos vencidos, as metas cumpridas e com o
crescimento pessoal de cada um, proporcionado por estes longos meses de trabalho.
Além da satisfação, fica o entusiasmo para dar continuidade ao projeto, melhorando
o protótipo além do que foi proposto. Tanto os membros da equipe como seu
orientador reconhecem e comemoram os resultados atingidos com este trabalho de
conclusão de curso.

123
8 REFERÊNCIAS
BARCZAK, Czeslau L.; Controle digital de sistemas dinâmicos. São Paulo: Edgard Blücher, 1995. CAMPOS, Mário César; TEIXEIRA, Herbert C.G. Controles típicos de equipamentos e processos industriais. 1º ed. São Paulo: Editora Edgard Blucher, 2006. CHARAIS, John; LOURENS, Ruan. Microchip-Software PID Control of an Inverted Pendulum Using the PIC16F684. Microchip Technology Incorporated, U.S.A., 2004. CONTROL SYSTEMS PRINCIPLES. Ball-and-beam System. Disponível em: <http://www.control-systems-principles.co.uk/whitepapers/ball-and-beam1.pdf>. Acesso em: 30 mar. 2007. DA SILVA, João Manoel Gomes. Desempenho de sistemas de controle. [S.l.], 2000. Disponível em: <http://www.ece.ufrgs.br/~jmgomes/pid/Apostila/apostila/ node12.html>. Acesso em 27 de mar. De 2007. DA SILVEIRA, Paulo Rogério; DOS SANTOS, Winderson E. Automação e controle discreto. 7º ed. São Paulo: Érica, 1998. DISTEFANO, Joseph J.; STUBBERUD, Allen R.; WILLIANS, Ivan J. Sistemas de retroação e controle. Tradução Ostend Abilhôa Cardim. São Paulo: McGraw-Hill, 1975. DORF, Richard C.; BISHOP Robert H. Sistemas de controle moderno. Tradução Bernardo Severo da Silva Filho. 8º ed. Rio de Janeiro: LTC, 1998. FITZGERALD, A. E.; KINGSLEY Jr, Charles; UMANS, Stephen D. Máquinas Elétricas. Tradução Anatólio Laschuk. 6º ed. Porto Alegre: Bookman, 2006. GAUTHIER, C. et al. Por uma teoria da pedagogia. Ijuí/RS: Unijuí, 1998. p. 132-145. JACQUOT, Raymond G..Modern digital control systems. 2º ed. New York: Marcel Dekker,1995. KUO, Benjamin C.; GOLNARAGHI, Farid. Discrete-Data Control Systems. 8º ed. Danvers, MA: John Wiley & Sons, Inc, 2003. LIMA, Carlos Raimundo Erig. Controle e Servomecanismos I. Curitiba: Universidade Tecnológica Federal do Paraná. Apostila.

124
MESQUITA, Alexandre Rodrigues; KIENITZ, Heinz. Otimização em tempo de execução de controladores usando hardware computacional na configuração mestre-escravo. Sba Controle & Automação vol.16 nº.1 Campinas Jan./Mar. 2005. MONTEIRO, I. C. C. ; GASPAR, Alberto . Atividades experimentais de demonstração em sala de aula: uma análise segundo o referencial da teoria de Vigotski. Investigações em Ensino de Ciências (Online), Instituto de Física, UFRGS, v. 10, n. 2, 2005. Disponível em: <http://www.if.ufrgs.br/public/ensino/ revista.htm>. Acesso em 10 mar. 2007. MORENO, Franco Ubirajara. Introdução a Controle e Automação: História e Epistemologia. [S.l.], 2006. Disponível em: <www.das.ufsc.br/~moreno/ manual%20CA/sbaeduca4.pdf>. Acesso em 08 fev. 2007. MORIBE, Sérgio. Página da disciplina de microcontroladores – Introdução ao MSP430. Disponível em: <http://pessoal.cefetpr.br/moribe/downloads.htm>. Acesso em: 30 abr. 2007. NISE, Norman S.; Engenharia de sistemas de controle. Tradução Bernardo Severo da Silva Filho. 3º ed. Rio de Janeiro: LTC, 2002. OGATA, Katsuhiko; Engenharia de controle moderno. Tradução Bernardo Severo. 3º ed. Rio de Janeiro: LTC, 1998. PEREIRA, Fábio; Microcontroladores HC908Q: Teoria e Prática. 1º ed. São Paulo: Érica, 2004. PÉREZ-CISNEROS, Marco A.; READMAN, Mark; WELLSTEAD, Peter. Sistema de pelota y aro: Principios basicos. Guadalajara. Disponível em: <:http://www.controlsystems.principles.co.uk/whitepapers/spanishwp/ 06Ballandhoop1SP.pdf> . Acesso em: 10 mar. 2007 SULTAIN, Khalil. Inverted Pendulum: Analysis, Design and Implementation V1.0. Karashi – Pakistão: Institute of Industrial Electronics Engineering, 2003. TAVARES, Romero. Objetos de Aprendizagem. Disponível em: <www.fisica.ufpb.br/~romero>. Acesso em: 23 mar. 2007. UNIVERSISDADE FEDERAL DE SANTA CATARINA. Laboratório de simulação no ensino de sinais e sistemas lineares. Florianópolis. Disponível em: <http://www.pp.ufu.br/Cobenge2001/trabalhos/NTM031.pdf>. Acesso em: 10 mar. 2007

125
APÊNDICE A - CÓDIGO DO SOFTWARE

126
//***********************************************************************//
// Software para controle de velocidade de um grupo motor-gerador //
// Autores: Jefferson Luis Griebeler //
// Thaisa Aline Kienen //
// Wagner Rosa //
// Data inicio: 10/08/2007 //
// Data fim: 17/10/2007 //
// //
//***********************************************************************//
//******************************* Início ******************************//
#include "msp430x16x.h"
#include "main.h"
#include "adc.h"
#include "portas.h"
#include "timers.h"
#include "interrupcoes.h"
#include "adc.h"
#include "display.h"
unsigned int uiDisplay, kp, ki, kd, ref, taco, taco_1=0, taco_2=0,
taco_3=0;
signed int pwm=0, pwm_1=0, erro_1=0, erro_2=0, erro, pk=0, pd=0, pi=0;
volatile unsigned int uiTR;
volatile unsigned char ucTRPWM, ucTPool;
float D;
void main()
WDTCTL = WDTPW + WDTHOLD; //stop watchdog timer
Configura_Portas();
DCOCTL = (MOD0 + MOD1 + MOD2); //configuração do CLOCK
BCSCTL1 = (RSEL0 + RSEL1 + RSEL2);
BCSCTL2 = 0x00; //SMCLK = DCO, DCO com resistor
//interno e MCLK = DCO ~ 5Mhz
Init_Timers();
Liga_AD();
Init_Display();
asm("EINT"); //habilita interrupção
uiTR = 200;
while(uiTR); //Inicio do software, aguarda as conversões iniciarem
uiTR = 2000; //tempo que a rampa irá atuar (2s)
ucTRPWM = 15; //tempo de incremento do PWM (15ms)
ref = 1600; //referência de velocidade
CCR2 = pwm;
//********************* programação da rampa **************************//
while(uiTR)
if (ucTRPWM == 0)
ucTRPWM = 15;
taco = ADC12MEM7 / 2; //lê tacogerador (varia de 0 a 2048)
if (((taco) >= ref) || (pwm == 2048))

127
break;
pwm = pwm + ESCALA/100; //step da rampa do PWM
CCR2 = pwm;
//************************** Loop principal ***************************//
#define TEMPOPOOL 1 //define a taxa de amostragem (1ms)
ucTPool = TEMPOPOOL; //armazena a taxa de amostragem
while(1)
if (ucTPool == 0) //teste p/ manter taxa amostragem cte
P1OUT ^= 0x01; //faz TOGGLE no pino 1 da placa p/
//informar a taxa de amostragem
ucTPool = TEMPOPOOL;
taco = ADC12MEM7 / 2; //lê tacogerador
taco = (taco+taco_1+taco_2+taco_3)/8; //filtro digital
ref = 1400; //referência de velocidade
erro = (ref - taco);
kp = ADC12MEM1 / 256; //ganho proporcional (varia de 1 a 16)
ki = ADC12MEM2 / 256; //ganho integral (varia de 1 a 16)
kd = ADC12MEM4 / 256; //ganho derivativo (varia de 1 a 16)
pk = kp*(erro); //calcula o proporcional
pi = pwm_1+((ki*0.001)/2)*(erro+erro_1); //calcula o integral
pd = (kd)*(erro-2*erro_1+erro_2)*100; //calcula o derivativo
pwm = (pk + pi + pd); //calcula o PID
if (pwm > 2048)
pwm = 2048;
if (pwm < 0)
pwm = 0;
CCR2 = pwm; //atualiza a saída
erro_2 = erro_1; //armazena o erro anterior
erro_1 = erro;
pwm_1 = pwm; //armazena a saída anterior
taco_3 = taco_2; //armazena a velocidade anterior p/ filtro
taco_2 = taco_1;
taco_1 = taco;
D = (pwm / 20.48); //calcula razão cíclica do PWM
if (ADC12MEM5 < 1365) //seleciona o que é mostrado no display
if (erro < 0)
MostraDisplay(0);
else MostraDisplay(erro);
else if (ADC12MEM5 > 2730)
MostraDisplay(taco * 1.27);
else if (ADC12MEM5 > 1365 && ADC12MEM5 < 2730)
MostraDisplay(D);

128
//**************** Função de configuração dos timers ******************//
#include "msp430x16x.h"
#include "timers.h"
#include "main.h"
void Init_Timers(void)
//TIMER A - PWM's
TACCR0 = ESCALA; //PWM Period
TACCTL2 = OUTMOD_6; //CCR2 toggle/set
TACCR2 = 0; //CCR2 PWM duty cycle
TACTL = TASSEL_2 + MC_1; //clock-SMCLK, up mode
//TIMER B - Modo contínuo para ~1ms (interrupção)
TBCCR0 = 32; //Frequência do Timer = 1024 Hz ~= 1ms
TBCTL = CNTL_0 + TASSEL_1 + MC_1 + TBIE; //16 bits counter, ACLK, up mode
//**************** Função de configuração das portas ******************//
#include "msp430x16x.h"
#include "portas.h"
void Configura_Portas()
//PxDIR = 1 -> configura como saída
//PxDIR = 0 -> configura como entrada
//PxSEL = 1 -> configura como modo alternativo
//PxSEL = 0 -> configura como GPIO
//PxIE = 0 -> interrupção do pino desabilitada (somente P1 e P2)
//PxIE = 1 -> interrupção do pino habilitada (somente P1 e P2)
//Port1 (PWM)
P1DIR = 0xFF; //Todas output
P1SEL = 0x0C; //P1.2 TA1 alternate
P1OUT |= ~0x0C;
P1IE = 0x00;
//Port2 – saída digital (display)
P2DIR = 0xFF;
P2SEL = 0x00;
P2OUT = 0xFF;
P2IE = 0x00;
//Port3 – saída digital
P3DIR = 0xFF;
P3SEL = 0x00;
//Port4 – saída digital
P4DIR = 0xFF;
P4SEL = 0x00;
//Port5 – saída digital
P5DIR = 0xFF;
P5SEL = 0x00;
129
//Port6 - A/D’s
P6DIR = ~0xB3; //inverte B3=0100.1100. 0 representa portas de entrada
P6SEL = 0xB3; //configura portas modo alternativo - 5 entradas A/D
//*************** Função configuração dos A/D bit 6.0 *****************//
#include "msp430x16x.h"
#include "adc.h"
void Liga_AD()
ADC12CTL0 = ADC12ON+MSC+SHT0_0; //liga o ADC12, múltiplas conversões
//e tempo do sample and hold = 4
ADC12CTL1 = SHP+CONSEQ_3+CSTARTADD_1+ADC12SSEL_2; //repete uma seqüência,
//define primeira memória para conversão, Clock como MCLK
ADC12MCTL1 = INCH_1; //ref+=AVcc, canal = A1
ADC12MCTL2 = INCH_2; //ref+=AVcc, canal = A2
ADC12MCTL3 = INCH_10; //sensor de Temperatura - não será utilizado
ADC12MCTL4 = INCH_4; //ref+=AVcc, canal = A4
ADC12MCTL5 = INCH_5; //ref+=AVcc, canal = A5
ADC12MCTL6 = INCH_10; //sensor de Temperatura - não será utilizado
ADC12MCTL7 = INCH_7 + EOS; //ref+=AVcc, canal = A7 e fim de conversão
ADC12CTL0 |= ENC; //habilita conversões
ADC12CTL0 |= ADC12SC; //inicia a conversão
//***************** Função de interrupção do TIMER B ******************//
#include "msp430x16x.h"
#include "interrupcoes.h"
#include "display.h"
#include "main.h"
#pragma vector = TIMERB1_VECTOR //interrupção do Timer B
__interrupt void isrTimerB(void)
TBCTL &= ~TBIFG; //desabilita interrupção pendente
if (uiTR) uiTR--; //decrementa variáveis
if (ucTRPWM) ucTRPWM--;
if (ucTPool) ucTPool--;
if (uiTempoDisplay) uiTempoDisplay--;
//*************************** Função display ****************************//
#include <msp430x16x.h>
#include "display.h"
#define TEMPODISPLAY 750; //tempo de atualização do display - 750ms
unsigned int uiValDisplay;
volatile unsigned int uiTempoDisplay;
unsigned char ucNumDisplay[4];
void Init_Display(void)
uiTempoDisplay = 0;

130
uiValDisplay = 0;
void MostraDisplay(unsigned int num)
if (uiTempoDisplay) return;
if (num == uiValDisplay) return;
uiTempoDisplay = TEMPODISPLAY;
uiValDisplay = num;
IntToBCD(num);
P2OUT &= 0x0F; //reseta os enables dos 4 displays
asm( "NOP"); //temporização segundo datasheet
asm( "NOP"); asm( "NOP"); asm( "NOP"); asm( "NOP"); asm( "NOP");
P2OUT |= 0x0F; //seta os bits de envio de dados
P2OUT &= ~ucNumDisplay[3]; //manda o valor negado, devido hardware
P2OUT |= 0x80; //habilita o display de milhar
asm( "NOP"); asm( "NOP"); asm( "NOP"); asm( "NOP");
P2OUT &= 0x0F;
asm( "NOP"); asm( "NOP"); asm( "NOP"); asm( "NOP");
P2OUT |= 0x0F;
P2OUT &= ~ucNumDisplay[2];
P2OUT |= 0x40; //habilita o display da centena
asm( "NOP"); asm( "NOP"); asm( "NOP"); asm( "NOP");
P2OUT &= 0x0F;
asm( "NOP"); asm( "NOP"); asm( "NOP"); asm( "NOP");
P2OUT |= 0x0F;
P2OUT &= ~ucNumDisplay[1];
P2OUT |= 0x20; //habilita o display da dezena
asm( "NOP"); asm( "NOP"); asm( "NOP"); asm( "NOP");
P2OUT &= 0x0F;
asm( "NOP"); asm( "NOP"); asm( "NOP"); asm( "NOP");
P2OUT |= 0x0F;
P2OUT &= ~ucNumDisplay[0];
P2OUT |= 0x10; //habilita o display da unidade
asm( "NOP"); asm( "NOP"); asm( "NOP"); asm( "NOP");
P2OUT &= 0x0F; //reseta os enables
asm( "NOP"); asm( "NOP"); asm( "NOP"); asm( "NOP");
// Rotina para desmembrar um número de quatro algarismos em quatro unidades
//independentes
void IntToBCD(unsigned int uiNum)
static unsigned int uiTemp, uiTemp2;
uiTemp2 = uiNum / 1000;
ucNumDisplay[3] = (unsigned char)uiTemp2;
uiTemp = uiNum - (uiTemp2*1000);
uiTemp2 = uiTemp / 100;
ucNumDisplay[2] = (unsigned char)uiTemp2;
uiTemp = uiTemp - (uiTemp2*100);
uiTemp2 = uiTemp / 10;
ucNumDisplay[1] = (unsigned char)uiTemp2;
uiTemp = uiTemp - (uiTemp2*10);
ucNumDisplay[0] = (unsigned char)uiTemp;

131
APÊNDICE B - MANUAL DE INSTRUÇÕES
132
MANUAL DE
INSTRUÇÕES
Kit didático para estudo de
controle digital
Autores:
Jefferson Luis Griebeler
Thaísa Aline Kienen
Wagner Rosa
133
Kit didático para estudo de controle digital
ÍNDICE
1. Introdução ......................................................................................................................134
2. Componentes do kit .....................................................................................................135
3. Descrição do sistema....................................................................................................137
4. Princípio de funcionamento .......................................................................................140
5. Modo de operação.........................................................................................................141

134
Kit didático para estudo de controle digital
Jefferson Luis Griebeler Thaísa Aline Kienen Wagner Rosa
1. Introdução
Este manual foi elaborado para ajudar na correta utilização do kit didático
para estudo de controle digital, implementado pelos alunos Jefferson Luis Griebeler,
Thaísa Aline Kienen e Wagner Rosa, sob orientação do Professor Roger Gules, como
projeto de conclusão do curso de engenharia industrial elétrica, ênfase eletrotécnica
da Universidade Tecnológica Federal do Paraná.
O objetivo deste equipamento é que o estudante de sistemas de controle
digital possa verificar na prática a resposta de um sistema de controle de acordo com
a regulagem dos parâmetros dos controladores proporcional (P), integral (I) e
derivativo (D), tanto em regime transitório como em regime permanente, podendo
ainda simular perturbações no próprio sistema.
O kit consiste no controle de velocidade de um grupo motor-gerador CC de
12V, que contém ainda uma interface de entrada para regulagem dos parâmetros dos
controladores e uma interface de saída que permite a visualização de determinadas
informações do sistema, como a velocidade em regime permanente, o erro
estacionário e a largura de pulso do sinal PWM que aciona o motor no display de sete
segmentos. Com o auxílio de um osciloscópio e do acionamento dos blocos de carga
disponíveis é possível visualizar outras características de resposta do sistema como a
regulação da velocidade durante o regime transitório.

135
Kit didático para estudo de controle digital
Jefferson Luis Griebeler Thaísa Aline Kienen Wagner Rosa
2. Componentes do kit
A - 1 grupo motor-gerador CC de 12V, o qual será controlado a velocidade;
B - 1 fonte de alimentação CC, com saídas de 12V e 5V;
C – 1 tacogerador;
D - 3 potenciômetros que serão utilizados para regulagem manual dos parâ-
metros PID;
E - 1 potenciômetro no qual será selecionado qual valor será mostrado no
display;
F – 4 blocos de cargas resistivas na saída do gerador;
G - 1 circuito de controle contendo o microcontrolador MSP430F169 da Texas
Instruments, além de um regulador de tensão para sua alimentação;
H – 1 display de sete segmentos e seu circuito de acionamento;
I – 1 filtro ativo de segunda ordem, do tipo Butterworth;
J - 1 circuito de potência para alimentação do grupo motor-gerador, através de
um conversor Buck;
A figura da próxima página apresenta o lay out do kit.

136
Kit didático para estudo de controle digital
Jefferson Luis Griebeler Thaísa Aline Kienen Wagner Rosa
Figura 2.1: Lay out do kit didático de controle de velocidade de um grupo motor-gerador
Grupo motor - gerador
Fonte de alimentação 12V e 5v
Potenciômetros para regulagem dos ganhos PID
Potenciômetro de ajuste do
display
Cargas resistivas
Circuito de controle (MSP430F149 +
regulador de tensão)
Display de sete segmentos Filtro ativo
Butterworth
Conversor Buck
Tacogerador
Acoplamento

137
Kit didático para estudo de controle digital
Jefferson Luis Griebeler Thaísa Aline Kienen Wagner Rosa
3. Descrição do sistema
A planta deste kit didático para estudo de controle é representada no seguinte
esquema:
Figura 3.1: Esquema da planta do kit didático
Seu diagrama de blocos é ilustrado a seguir:
Ea(s)
Em(s)
1s.La+Ra
Ia(s) T(s) w(s)Km 1
s.J+B
K3
pólo elétrico pólo mecânico
Figura 3.2: Diagrama de blocos do sistema
A Função de Transferência que descreve este sistema aparece abaixo:
Considerando apenas o pólo mais significativo, a função de transferência pode
ser aproximada:
)bJ.s(K
)s(E)s(
a +=
ω.
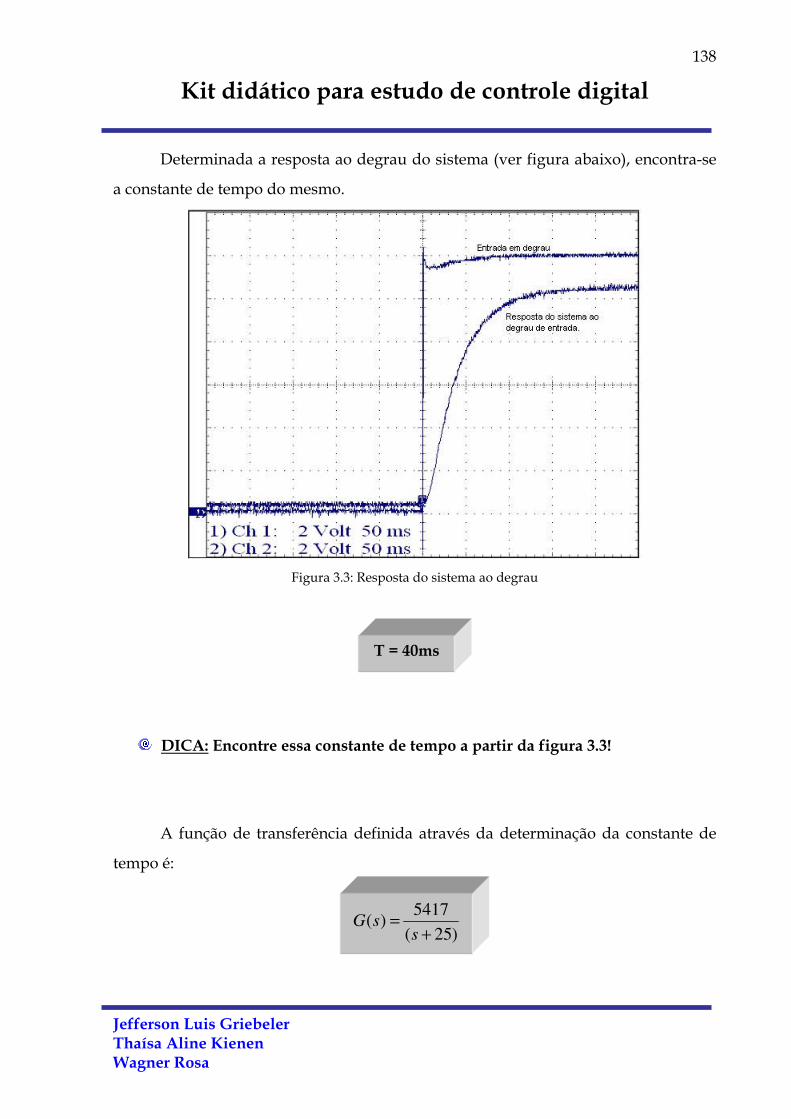
138
Kit didático para estudo de controle digital
Jefferson Luis Griebeler Thaísa Aline Kienen Wagner Rosa
Determinada a resposta ao degrau do sistema (ver figura abaixo), encontra-se
a constante de tempo do mesmo.
Figura 3.3: Resposta do sistema ao degrau
DICA: Encontre essa constante de tempo a partir da figura 3.3!
A função de transferência definida através da determinação da constante de
tempo é:
T = 40ms
)25(
5417)(
+=
ssG
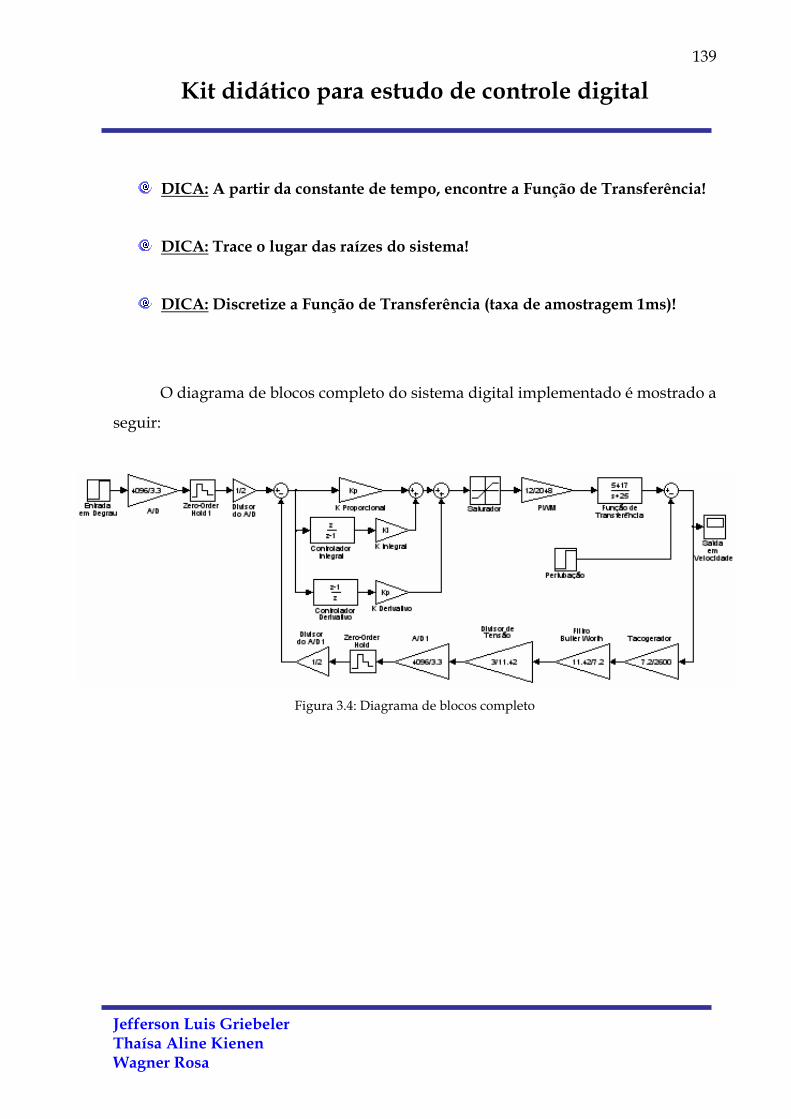
139
Kit didático para estudo de controle digital
Jefferson Luis Griebeler Thaísa Aline Kienen Wagner Rosa
DICA: A partir da constante de tempo, encontre a Função de Transferência!
DICA: Trace o lugar das raízes do sistema!
DICA: Discretize a Função de Transferência (taxa de amostragem 1ms)!
O diagrama de blocos completo do sistema digital implementado é mostrado a
seguir:
Figura 3.4: Diagrama de blocos completo

140
Kit didático para estudo de controle digital
Jefferson Luis Griebeler Thaísa Aline Kienen Wagner Rosa
4. Princípio de funcionamento
Quando é aplicada uma carga a um motor elétrico, sua velocidade de rotação
diminui proporcionalmente a potência da carga. A fim de manter essa velocidade
constante é necessária a implementação de um sistema de controle. O grupo motor-
gerador deste kit é acionado por um sinal de PWM através de um conversor Buck. O
controlador é responsável pela variação da razão cíclica deste sinal PWM de acordo
com perturbações causadas voluntariamente no sistema. Cargas conectadas ao
gerados simulam perturbações no sistema.
A resposta do sistema depende do ajuste dos ganhos do controlador PID. A
demonstração da atuação e influência na resposta causada por cada parâmetro desse
controlador é o objetivo deste kit.
Os ganhos do controlador são ajustados através dos três potenciômetros
indicados na interface com o usuário como “P” (proporcional), “I” (integral) e “D”
(derivativo).
A resposta em regime permanente é facilmente visualizada no display de sete
segmentos disponível também na interface com o usuário. Através de um quarto
potenciômetro é possível selecionar as variáveis “erro”, “razão cíclica do PWM” e
“velocidade em regime permanente”.
Com o auxílio de um osciloscópio pode-se obter imagens dos períodos
transitórios, medir a taxa de amostragem, visualizar a variação da razão cíclica do
PWM durante uma perturbação, entre outros.
Além das perturbações causadas pelo acionamento das cargas elétricas,
perturbações podem ser simuladas simplesmente travando o eixo do motor.

141
Kit didático para estudo de controle digital
Jefferson Luis Griebeler Thaísa Aline Kienen Wagner Rosa
5. Modo de operação
5.1 Ligando o kit
Apenas ligando a fonte, o sistema já entra em operação.
5.2 Ajustando os parâmetros
A interface de entrada com o usuário é composta por quatro potenciômetros.
O primeiro potenciômetro é responsável pela seleção da variável que será mostrada
no display. Entre as opções estão o erro em rpm, a razão cíclica em porcentagem e a
velocidade nominal do grupo motor-gerador também em rpm.
Os ganhos do controlador PID são ajustados nos outros três potenciômetros.
A figura abaixo ilustra a interface de entrada e seus comandos:
D
I
P
Erro
Razão ciclica do PWM
Velocidade

142
Kit didático para estudo de controle digital
Jefferson Luis Griebeler Thaísa Aline Kienen Wagner Rosa
5.3 Provocando perturbações no sistema
O kit contém quatro blocos de cargas ligados aos terminais do gerador. Estas
cargas representam as perturbações que podem ser introduzidas no sistema. Ao ligar
ou desligar um bloco de cargas ou um conjunto deles, a velocidade do sistema varia.
De acordo com o ajuste dos ganhos do controlador, tem-se uma resposta diferente à
perturbação provocada, tendendo a regular a velocidade para aquela de referência,
se o sistema estiver dentro dos limites de estabilidade. Além das cargas elétricas,
simplesmente segurando o eixo do grupo motor-gerador é possível simular uma
perturbação.
A figura seguinte ilustra as cargas do sistema.
Agora é só coletar as informações para os mais variados ganhos e interpretar a
ação que cada parâmetro do controlador PID exerce sobre o sistema de controle.
Resistores LED de alto brilho Chave liga-desliga

143
APÊNDICE C - PROJETO DAS PLACAS DE CIRCUITO IMPRESSO
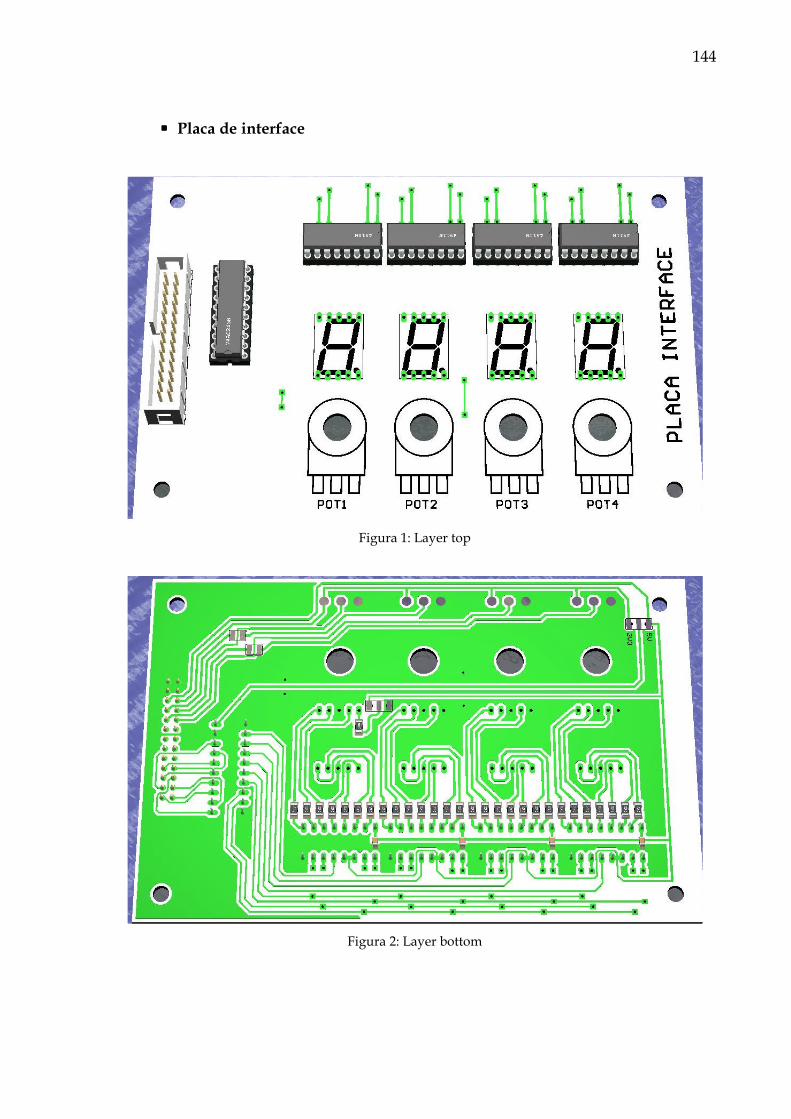
144
Placa de interface
Figura 1: Layer top
Figura 2: Layer bottom

145
Figura 3: Esquemático

146
Placa de processamento
Figura 4: Layer top
Figura 5: Layer bottom

147
Figura 6: Esquemático
























![Tese Doutorado Nori Paulo Griebeler[1]](https://img.document.onl/doc/110x75/55cf97b8550346d03393341b/tese-doutorado-nori-paulo-griebeler1.jpg)




