Embed Size (px)
Citation preview

Kit RB1
Manual de Montagem
Revisão 1.0
Copyright © Academia de Robótica 2
Conteúdo
1. Introdução ............................................................................................................................. 3
2. Montagem do Chassis Magician ............................................................................................ 3
3. Montagem dos Bumpers ....................................................................................................... 4
4. Montagem do Sensor de Linha .............................................................................................. 5
5. Montagem do Suporte de Pilhas ........................................................................................... 5
6. Montagem do Controlador.................................................................................................... 6
7. Montagem do LDC ................................................................................................................. 8
8. Ligação dos Motores, Bumpers e Sensor de Linha ao Controlador ...................................... 8
9. Montagem do Sensor SONAR Frontal ................................................................................... 9
10. Montagem dos Sensores SONAR Laterais ........................................................................... 10
11. Montagem dos Botões de Pressão e do LED ....................................................................... 10
12. Montagem da Ventoinha .................................................................................................... 11
13. Montagem do Sensor de Infravermelhos ............................................................................ 12
14. Ligação dos botões, LED, Ventoinha e Sensor de infravermelhos ao Controlador ............. 13
15. Ligação do Suporte de Pilhas ............................................................................................... 13

Copyright © Academia de Robótica 3
1. Introdução
Este manual descreve a montagem passo a passo do Kit didáctico de robótica RB1.
É assumido que o utilizador tem conhecimentos básicos sobre como ligar sensores e motores a
controladores do tipo Arduino. Em caso de dúvidas peça ajuda, pois ligações erradas podem
danificar os componentes electrónicos.
Em algumas figuras são apresentadas ligações de cabos com cores que podem não
corresponder às cores dos cabos fornecidos no Kit.
Recomenda-se o uso do seguinte conjunto de ferramentas para montar o Kit:
Chave de fendas de cruz (fornecida com o Kit);
Alicate de pontas finas;
Alicate de corte.
2. Montagem do Chassis Magician
Lista de componentes
1 Kit do chassis Magician
2 Motores extra
Instruções 1. Monte o chassis Magician seguindo as
instruções incluídas no kit do chassis, mas tenha em consideração os pontos seguintes.
Substitua os motores que vêm com o kit do chassis pelos motores extra fornecidos. Estes últimos são um pouco mais lentos, mas têm mais força garantindo uma melhor manobrabilidade do robô. Monte os motores como na figura. O motor da esquerda fica com o fio vermelho em cima e o motor da direita fica com o fio preto em cima.
Monte o suporte de pilhas como é descrito no ponto 5 deste manual de
Fio Vermelho Fio Preto
Copyright © Academia de Robótica 4
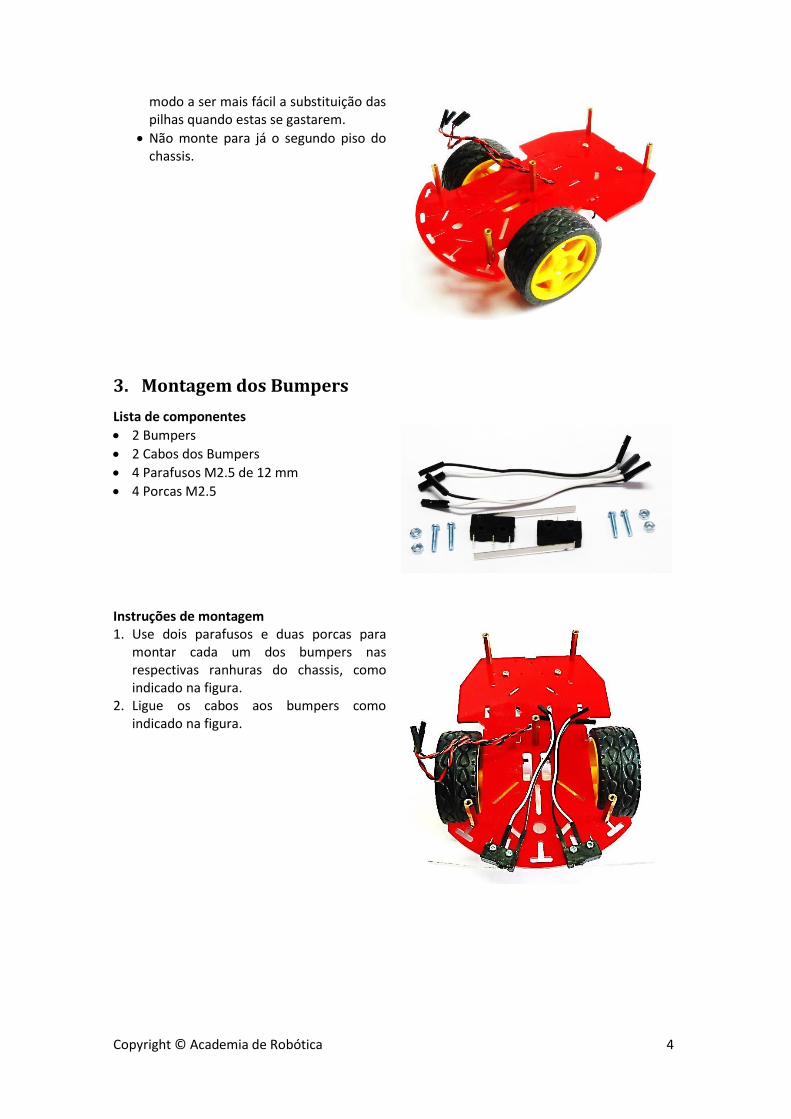
modo a ser mais fácil a substituição das pilhas quando estas se gastarem.
Não monte para já o segundo piso do chassis.
3. Montagem dos Bumpers
Lista de componentes
2 Bumpers
2 Cabos dos Bumpers
4 Parafusos M2.5 de 12 mm
4 Porcas M2.5
Instruções de montagem 1. Use dois parafusos e duas porcas para
montar cada um dos bumpers nas respectivas ranhuras do chassis, como indicado na figura.
2. Ligue os cabos aos bumpers como indicado na figura.

Copyright © Academia de Robótica 5
4. Montagem do Sensor de Linha
Lista de componentes
1 Sensor de Linha
1 Cabo do Sensor de Linha
1 Espaçador de 25 mm
2 Parafusos M3 de 6 mm
Instruções de montagem 1. Ligue um dos extremos do cabo aos
pinos 5V, GND e A0 do sensor. O sensor tem uma saída analógica (A0) e uma saída digital (D0). Usaremos apenas a saída analógica.
2. Monte o espaçador no local indicado na figura usando 1 dos parafusos.
3. Monte o sensor de linha no espaçador usando o outro parafuso.
4. Passe o cabo do sensor pela ranhura do chassis mostrada na figura.
5. Montagem do Suporte de Pilhas
Lista de componentes
1 Suporte de Pilhas
1 Tira de velcro
Instruções 1. Cole uma das faces da tira de velcro no
suporte de pilhas e a outra face no primeiro piso do chassis Magician. Actualmente a tira de velcro fornecida com o Kit é menor que a mostrada na figura. O tamanho menor facilita a fixação e remoção do suporte de pilhas.

Copyright © Academia de Robótica 6
6. Montagem do Controlador
Lista de componentes
1 Controlador Romeo BLE
4 Espaçadores de 20 mm
8 Parafusos de cruz de 6 mm
Instruções de montagem 1. Monte três espaçadores no segundo piso
do chassis, nos locais mostrados na figura usando três dos parafusos (não aperte totalmente os parafusos ainda).
2. Monte o controlador Romeo em cima dos espaçadores usando os outros três parafusos e aperte totalmente todos os parafusos.
3. Monte o quarto espaçador no
controlador. Note que o quarto espaçador não fica posiscionado em cima de uma ranhura que permita fixa-lo ao chassis. Pode optar por fazer um furo no chassis para fixar o quarto erspaçador ou montá-lo apenas no controlador como indicado.
Parafuso do
4º espaçador

Copyright © Academia de Robótica 7
Nos passos a seguir vai ser necessário ligar componentes ao controlador Romeo. Essas ligações
devem ser realizadas de forma correta de modo a não danificar os componentes e o próprio
controlador. A figura seguinte mostra as portas disponíveis no controlador Romeo BLE.
Na parte de cima da figura podemos ver o conjunto de portas digitais cujos pinos são de cor
verde. Notar que as portas são numeradas de 0 a 13. Junto do pino verde de cada porta existe
também um pino vermelho correspondente a tenção positiva VCC (+5 V) e um pino preto
correspondente à tensão de 0 V ou GND. Na parte de baixo da figura podemos ver o conjunto
de portas analógicas numeradas de 0 a 7, cujos pinos são de cor azul. Tal como acontece com
as portas digitais, junto do pino azul de cada porta analógica, existe um pino vermelho
correspondente a tenção positiva VCC (+5 V) e um pino preto correspondente a 0 V ou GND.
Tenha em conta estas localizações e disposições dos pinos das portas e as correspondentes
cores, no momento de efectuar as ligações indicadas nos passos a seguir.
Note ainda no lado direito e sensivelmente a meio da placa do controlador, os blocos de
encaixe com parafuso para ligar os motores de corrente contínua e mais a baixo (junto do
interruptor) os pinos do bus I2C identificados com os rótulos 5V, GND, SCL e SDA.

Copyright © Academia de Robótica 8
7. Montagem do LDC
Lista de componentes
1 LCD
1 Cabo do LCD
2 Espaçadores de 20 mm
4 Parafusos de cruz de 6 mm
Instruções de montagem 1. Ligue um dos extremos do cabo aos pinos
GND, VCC, SDA e SCL, do LCD. Anote as cores do cabo que ficaram associadas a cada pino.
2. Monte os dois espaçadores nos locais indicados na figura usando dois dos parafusos (não aperte totalmente os parafusos ainda).
3. Monte o LCD em cima dos espaçadores usando os outros dois parafusos e aperte totalmente todos os parafusos.
4. Passe o cabo por debaixo do controlador Romeo e ligue o outro extremo aos pinos do bus I2C do controlador como indicado na figura. Com base nas cores do cabo, faça corresponder os pinos GND, VCC, SDA e SCL do LCD com os pinos GND, VCC, SDA e SCL do Romeo. Como indicado no início deste manual, as cores dos cabos fornecidos no Kit podem não corresponder às cores dos cabos das figuras.
5. Monte o segundo piso do chassis em cima do primeiro.
8. Ligação dos Motores, Bumpers e Sensor de Linha ao
Controlador
Instruções de montagem 1. Estando o robô posicionado de frente
para nós, ligue o motor da direita ao bloco de encaixe com parafusos com o rótulo M1 e o motor da esquerda ao bloco de encaixe com parafusos com rótulo M2. Em ambos os motores, o fio preto deve ser ligado ao encaixe com rótulo “-“ e o fio vermelho ao encaixe
Copyright © Academia de Robótica 9
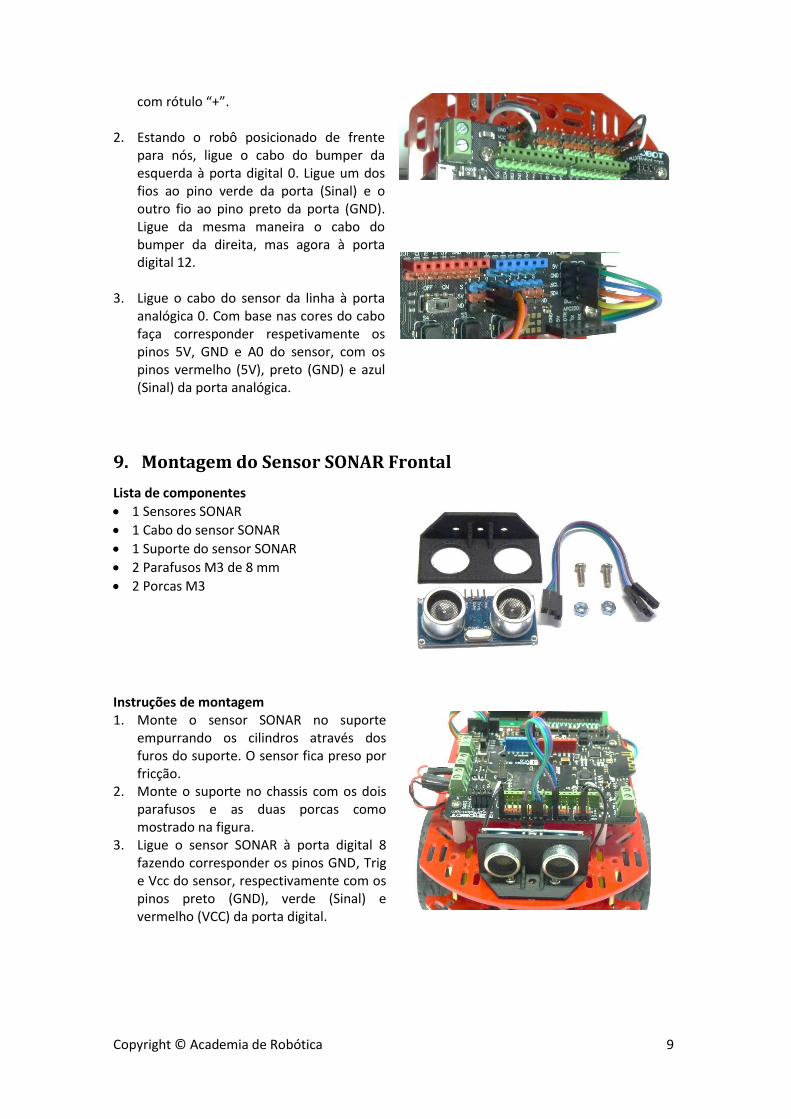
com rótulo “+”.
2. Estando o robô posicionado de frente para nós, ligue o cabo do bumper da esquerda à porta digital 0. Ligue um dos fios ao pino verde da porta (Sinal) e o outro fio ao pino preto da porta (GND). Ligue da mesma maneira o cabo do bumper da direita, mas agora à porta digital 12.
3. Ligue o cabo do sensor da linha à porta analógica 0. Com base nas cores do cabo faça corresponder respetivamente os pinos 5V, GND e A0 do sensor, com os pinos vermelho (5V), preto (GND) e azul (Sinal) da porta analógica.
9. Montagem do Sensor SONAR Frontal
Lista de componentes
1 Sensores SONAR
1 Cabo do sensor SONAR
1 Suporte do sensor SONAR
2 Parafusos M3 de 8 mm
2 Porcas M3
Instruções de montagem 1. Monte o sensor SONAR no suporte
empurrando os cilindros através dos furos do suporte. O sensor fica preso por fricção.
2. Monte o suporte no chassis com os dois parafusos e as duas porcas como mostrado na figura.
3. Ligue o sensor SONAR à porta digital 8 fazendo corresponder os pinos GND, Trig e Vcc do sensor, respectivamente com os pinos preto (GND), verde (Sinal) e vermelho (VCC) da porta digital.
Copyright © Academia de Robótica 10
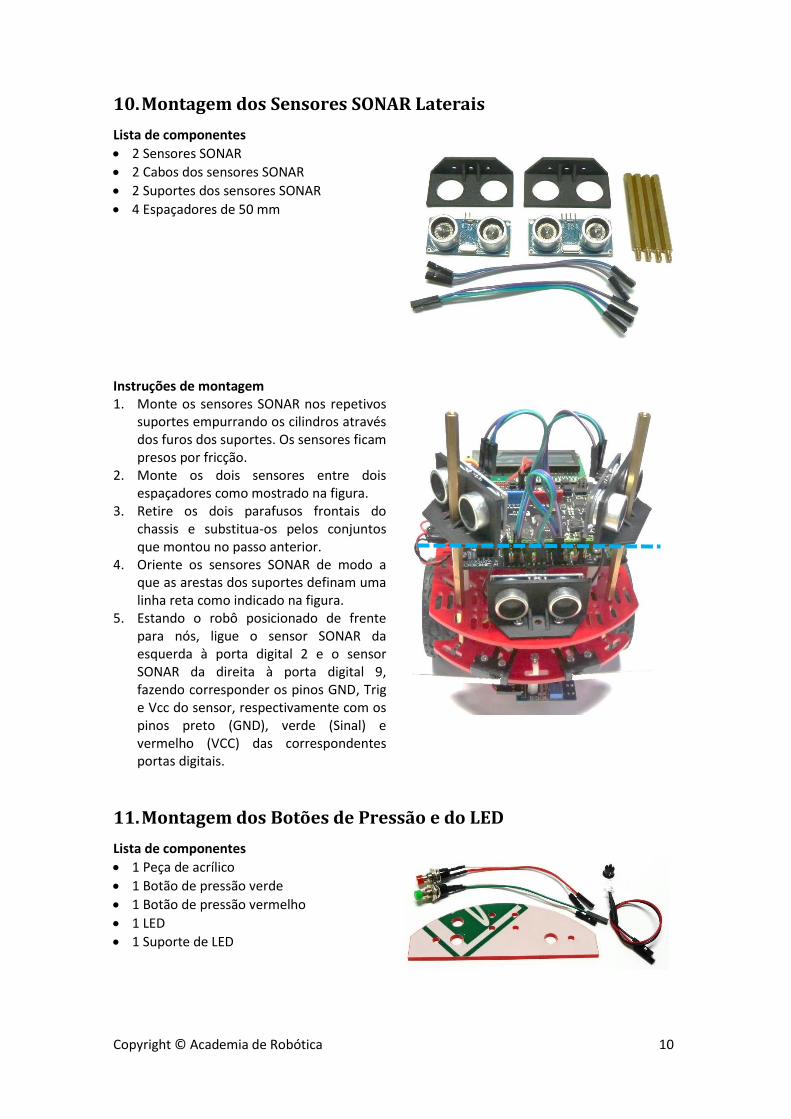
10. Montagem dos Sensores SONAR Laterais
Lista de componentes
2 Sensores SONAR
2 Cabos dos sensores SONAR
2 Suportes dos sensores SONAR
4 Espaçadores de 50 mm
Instruções de montagem 1. Monte os sensores SONAR nos repetivos
suportes empurrando os cilindros através dos furos dos suportes. Os sensores ficam presos por fricção.
2. Monte os dois sensores entre dois espaçadores como mostrado na figura.
3. Retire os dois parafusos frontais do chassis e substitua-os pelos conjuntos que montou no passo anterior.
4. Oriente os sensores SONAR de modo a que as arestas dos suportes definam uma linha reta como indicado na figura.
5. Estando o robô posicionado de frente para nós, ligue o sensor SONAR da esquerda à porta digital 2 e o sensor SONAR da direita à porta digital 9, fazendo corresponder os pinos GND, Trig e Vcc do sensor, respectivamente com os pinos preto (GND), verde (Sinal) e vermelho (VCC) das correspondentes portas digitais.
11. Montagem dos Botões de Pressão e do LED
Lista de componentes
1 Peça de acrílico
1 Botão de pressão verde
1 Botão de pressão vermelho
1 LED
1 Suporte de LED

Copyright © Academia de Robótica 11
Instruções de montagem 1. Retire a pelicula protectora da peça de
acrílico. 2. Monte o botão de pressão verde no
corresponde furo do lado direito, enfiando-o no furo e apertando-o do outro lado com a anilha e a porca.
3. Repita o passo anterior para o botão vermelho.
4. Monte o suporte do LED no correspondente furo junto do botão vermelho.
5. Fixe o LED no suporte empurrando o LED através deste até que fique preso.
12. Montagem da Ventoinha
Lista de componentes
1 Ventoinha
1 Cabo da ventoinha
1 Suporte do Sensor de Infravermelhos
2 Espaçadores de 8 mm
2 Parafuso M3 de 8 mm
2 Parafusos M3 de 6 mm
Instruções de montagem 1. Monte os depois espaçadores na
ventoinha usando os parafusos de 6 mm. 2. Fixe a ventoinha e o suporte do sensor de
infravermelhos à peça de acrílico, como mostrado na figura, usando os parafusos de 8 mm. Fixe o conjunto nos dois furos mais perto da borda da peça de acrílico.

Copyright © Academia de Robótica 12
13. Montagem do Sensor de Infravermelhos
Lista de componentes
1 Sensor de Infravermelhos
Instruções de montagem 1. Monte o sensor de infravermelhos no
respectivo suporte, como mostrado na figura. Posicione o sensor de infravermelhos de modo a que o rótulo “Top” fique em cima e de modo a que fique à face da porca que o fixa ao suporte.
2. Monte a peça de acrílico nos separadores onde estão montados os sensores SONAR. Use os parafusos retirados anteriormente do chassis.
Copyright © Academia de Robótica 13
14. Ligação dos botões, LED, Ventoinha e Sensor de
infravermelhos ao Controlador
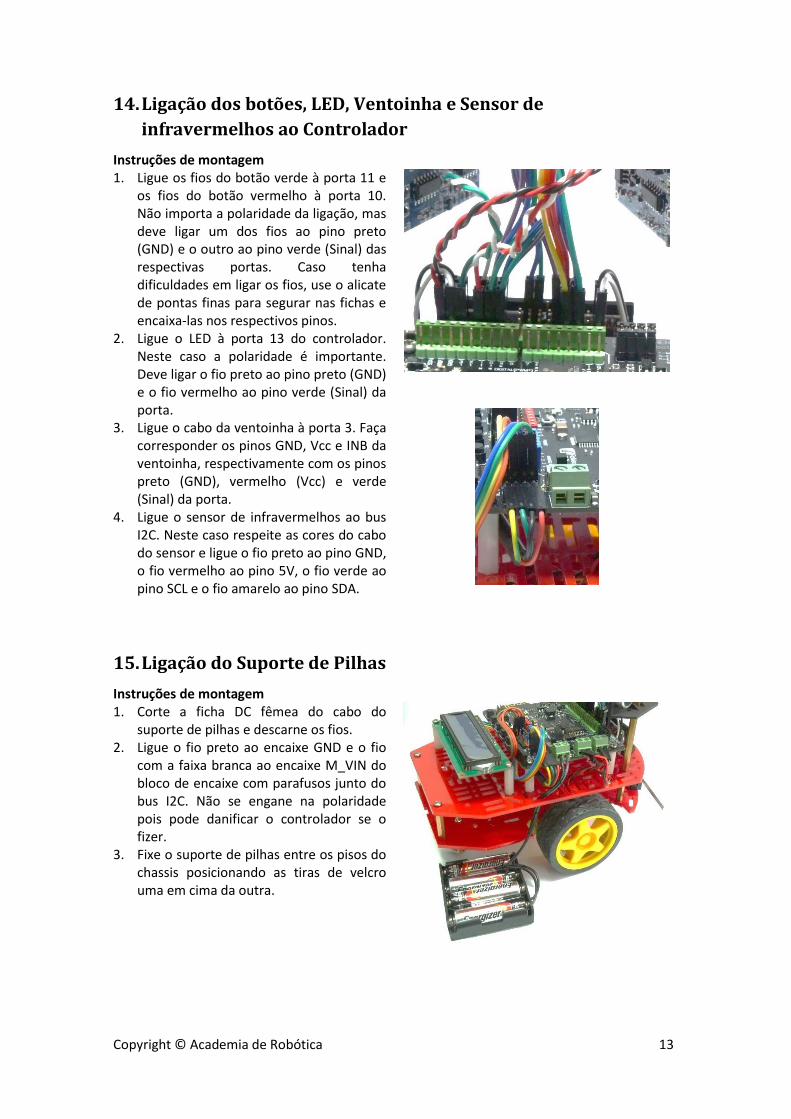
Instruções de montagem 1. Ligue os fios do botão verde à porta 11 e
os fios do botão vermelho à porta 10. Não importa a polaridade da ligação, mas deve ligar um dos fios ao pino preto (GND) e o outro ao pino verde (Sinal) das respectivas portas. Caso tenha dificuldades em ligar os fios, use o alicate de pontas finas para segurar nas fichas e encaixa-las nos respectivos pinos.
2. Ligue o LED à porta 13 do controlador. Neste caso a polaridade é importante. Deve ligar o fio preto ao pino preto (GND) e o fio vermelho ao pino verde (Sinal) da porta.
3. Ligue o cabo da ventoinha à porta 3. Faça corresponder os pinos GND, Vcc e INB da ventoinha, respectivamente com os pinos preto (GND), vermelho (Vcc) e verde (Sinal) da porta.
4. Ligue o sensor de infravermelhos ao bus I2C. Neste caso respeite as cores do cabo do sensor e ligue o fio preto ao pino GND, o fio vermelho ao pino 5V, o fio verde ao pino SCL e o fio amarelo ao pino SDA.
15. Ligação do Suporte de Pilhas
Instruções de montagem 1. Corte a ficha DC fêmea do cabo do
suporte de pilhas e descarne os fios. 2. Ligue o fio preto ao encaixe GND e o fio
com a faixa branca ao encaixe M_VIN do bloco de encaixe com parafusos junto do bus I2C. Não se engane na polaridade pois pode danificar o controlador se o fizer.
3. Fixe o suporte de pilhas entre os pisos do chassis posicionando as tiras de velcro uma em cima da outra.