Embed Size (px)
Citation preview

28
SUMÁRIO
SUMÁRIO........................................................................................................................ 28 4. 2 - Introdução................................................................................................................ 31 4. 3 – A História dos Navios Liberty ................................................................................. 32 4. 4 – Uma Visão Geral da Mecânica da Fratura................................................................ 33 4. 6 - Revisão bibliográfica .............................................................................................. 41 5. 1 - Introdução................................................................................................................ 48 5. 2 – Teoria Microscópica da Resistência dos Materiais ................................................... 49 5.2.1 – Tensão de Ruptura dos Materiais ........................................................................... 52 5.2.2 – Resitência Teórica dos Materiais Cerâmicos.......................................................... 53 5. 3 – Critérios Fenomenológicos de Fratura ..................................................................... 58 5.3.1 - Estudo Fenomenológico das Trincas ...................................................................... 58 5.3.2 - Critério de Fratura dos Materiais ............................................................................ 61 5.3.3 - O Campo de Tensão ao Redor de uma Trinca Elíptica ............................................ 62 5. 4 - Fundamentos da Teoria da Elasticidade.................................................................... 63 5.3.1 - O comportamento mecânico dos sólidos................................................................. 63 5.4.2 – Determinação da rigidez e da flexibilidade de um material .................................... 65 5.4.3 - A energia elástica armazenada em um sólido.......................................................... 66 5.4.4 – A variação da flexibilidade de um material durante a fratura.................................. 67 5.5 - Introdução a Teoria Clássica da Mecânica da Fratura ................................................ 70 5.5.1 - A teoria de Inglis para a fratura e a sua abordagem dos concentradores de tensão ............................................................................................................................... 71 5.5.2 – A geometria da zona de acúmulo de tensão............................................................ 72 5.6.3 - O critério de fratura de Inglis ................................................................................. 75 5. 6 – Abordagem do Campo de Tensão Elástica............................................................... 78 6.3.1 – Dedução das equações do Campo de Tensão Elástico na ponta da Trinca .............. 84 6. 7 – Condições de Contorno ........................................................................................... 88 6. 8 – Resultados Analíticos de Fratura Lisa...................................................................... 89 6.2.1 - Modo I IC ICG K ............................................................................................ 92
6.2.2 - Modo II IIC IICG K ........................................................................................... 98
6.2.3 - Modo III – O Problema Antiplano IIIC IIICG K ................................................. 102 6.3.1 - Perfil de Tensões na ponta da Trinca ...................................................................... 109 6.4.1 - Fator Geométrico ou de Forma............................................................................... 113 6.4.2 - Critério de Fratura.................................................................................................. 116 6.4.3 - A Zona Plástica e a Tenacidade a Fratura ............................................................... 118 7. 3 - O Balanço Energético do Modelo de Griffith ........................................................... 125 6.6.4 – Interpretação do balanço energético de Griffith para a fratura baseado na geometria do campo de tensão ao redor do defeito ............................................................ 125 6.6.5 - O processo de nucleação e crescimento da trinca, o tamanho crítico e a tensão de fratura .......................................................................................................................... 130 6.6.6 - O tamanho crítico mínimo da fratura...................................................................... 133 7.2.1 - O balanço energético de Griffith para a fratura....................................................... 137 6.6.2 - Cálculo da energias envolvidas no balanço de Griffith ........................................... 139 7.2.3 – A abordagem variacional do balanço energético de Griffith para a fratura ............. 142 I) – Caso: Quando o deslocamento é constante e as forças externas não realizam trabalho (grampos fixos, F = Fo, constante) ....................................................................... 143

29
II) – Caso: Quando a carga ou a tensão aplicada é constante (F = Xo.u). ............................ 145 7.2.4 – O tamanho crítico, e o critério energético de Griffith para o crescimento de trinca................................................................................................................................. 149 7.3.1 - Teorema de Clapeyron ........................................................................................... 152 7.3.2 - Taxa de Energia Elástica Liberada ......................................................................... 154 7.3.3 - Principio Variacional da Energia Potencial Elástica................................................ 160 7.3.4 - Curva R para um Corpo Totalmente Frágil ............................................................. 162 7.5.1 – A modificação de Irwin para a teoria do balanço energético de Griffith ................. 171 7.5.2 – A taxa de energia elástica liberada, G, para o caminho liso .................................... 172 7.5.3 – A resistência ao crescimento da trinca, R, para o caminho liso............................... 175 7.5.4 – O critério de fratura segundo Griffith-Irwin e a relação entre G e R, para o caminho liso...................................................................................................................... 176 7.5.5 - O fator de intensidade de tensão, KI , e a flexibilidade ou módulo elastico, E, para o caminho liso ........................................................................................................... 177 7.5.6 - O fator de intensidade de tensão crítico, ou tenacidade a fratura, KIC, para o caminho liso...................................................................................................................... 178 7.5.7 - O crescimento de trinca em regime de fratura estável ou quase-estática e o conceito de curva G-R de Irwin......................................................................................... 180 6.8.8 – Cálculo do decaimento da carga com o comprimento da trinca .............................. 182 6.9.9 – Cálculo da Curva de Resistência a Fratura com o Comprimento da Trinca............. 184 6.6.5 - Limitações da Teoria de Griffith-Irwin-Orowan para trincas não retilíneas ............ 185 6.6.7 – O principio da máxima dissipação de energia na fratura......................................... 192 2.8.1 – A teoria de Irwin-Orowan...................................................................................... 196 2.8.2 – A modificação de Irwin-Orowan do balanço energético da teoria de Griffith ......... 196 2.8.3 – A taxa de energia elasto-plástica liberada, J, para o caminho liso ........................... 197 2.8.4 - O critério de Irwin-Orowan .................................................................................... 198 2.8.5 – A integral de Eshelby-Rice, para o caminho liso.................................................... 200 2.8.6 - O crescimento estável e o conceito de curva J-R, para o caminho liso .................... 202 7.2.2 – As taxas de energia elástica e elasto-plástica liberada para um caminho de trinca projetada em um plano ............................................................................................ 205

30
Capítulo IV
INTRODUCÃO À MECÂNICA DA FRATURA
CLÁSSICA
E aconteceu que, acabando ele de falar todas estas palavras, a terra que estava debaixo deles
se fendeu (Naum 16,31)
RESUMO
Palavras chave:
PACS números:
4. 1 – Objetivos do Capítulo

31
4. 2 - Introdução
A MF representa uma das mais importantes áreas interdisciplinares de estudos da
Ciência e Engenharia dos Materiais e da Engenharia Mecânica. Ela estuda o aparecimento de
falhas e defeitos e a sua influência sobre as propriedades mecânicas dos materiais. De uma
forma geral, a MF trata da descrição da formação, da propagação e do crescimento de trincas
e de superfícies de fratura. O entendimento dos mecanismos de formação e interação das
trincas e superfícies de fratura com a microestrutura do material, também é uma das suas
principais preocupações. Este entendimento permite compreender as propriedades mecânicas
dos materiais e os processos de dissipação de energia durante o crescimento e a propagação
das trincas. Através do conhecimento das propriedades dos materiais na presença de defeitos,
torna-se possível dar a cada material o uso correto adequando-os conforme a solicitação de
suas aplicações. Porque, por meio da MF é possível conhecer além do emprego mecânico
destinado aos diferentes materiais, as suas limitações, tanto para aqueles materiais
desenvolvidos em laboratórios, como para aqueles utilizados ou fabricados pela indústria de
uma forma geral, como prevê as suas limitações em serviço.
É importante lembrar que, a qualidade de um projeto em Engenharia está
relacionada à correta escolha dos materiais envolvidos. A aplicação de cada material deve ser
adequada às suas propriedades e limitações, a fim de preencher as necessidades e
especificações do projeto e manter o controle dos riscos e danos, dentro de uma margem
plausível, para que em uma situação crítica, seja possível prever quais são as consequências
existentes no caso de falha de um de seus componentes. Com isso é possível evitar futuros
acidentes (inclusive com vítimas), ou prejuízos, pelo uso indevido dos materiais além de suas
limitações.
O interesse particular de se conhecer os diferentes mecanismos que podem levar
um material à falha mecânica, ou a sua ruptura completa, tem a finalidade de otimizar as
diversas propriedades mecânicas oferecidas, e fornecer subsídios para o projeto de novos
materiais, os quais devem ser capazes de resistir a solicitações com limites superiores aos
limites dos materiais já existentes. A modificação das propriedades de um material pode ser
feita melhorando-se os mecanismos de tenacificação. A finalidade é proporcionar à peça, ou
ao produto, uma resistência mecânica, uma tenacidade, uma durabilidade, e um melhor
desempenho, conforme a especificação desejada.
As teorias e os modelos desenvolvidos na Mecânica da Fratura visam descrever as
propriedades mecânicas dos materiais na presença de defeitos e conseqüentemente explicar os

32
fenômenos ligados às falhas mecânicas, como por exemplo, o processo de dissipação de
energia durante o crescimento e a propagação das trincas. Este modelos também procuram
relacionar as medidas feitas em ensaios macroscópicos com os efeitos da fratura sobre a
microestrutura do material. Com isto é possível saber se um dado material pode, ou não,
resistir à solicitação externa desejada.
4. 3 – A História dos Navios Liberty
Esta é a história dos navios “Liberties” da Segunda Guerra Mundial – Estes foram
os primeiros navios fabricados com chapas de aço soldadas e produzidos em série. Assim,
graças à sua construção soldada, eles puderam ser fabricados numa produção superior à sua
destruição pela ação do inimigo. E assim, foram decisivos em manter a Grã-Bretanha durante
a guerra abastecida pela América do Norte.
A construção desses navios começou em 1941 e foram fabricados mais de 2700
“Liberties”. Em meados de 1943, começaram a surgir casos de fratura catastrófica. Isto
ocorria espontaneamente e subitamente, isto é, sem nenhuma causa óbvia, e acompanhada por
reportagens alarmantes publicadas nos principais jornais da época. Ao todo, cerca de 400
navios sofreram algum tipo de trincamento e cerca de 90 apresentaram danos de grandes
proporções, incluindo casos em que o processo de fratura foi tão catastrófico que causou a
separação do navio em duas partes.
Devido a essa crescente “epidemia” a Secretaria da Marinha Americana criou um
Comitê de Investigação para revisar o projeto e os métodos de construção de navios
mercantes fabricados com chapas de aço soldadas. Isto marcou o início dos estudos do
comportamento à fratura de aços. E em um curto intervalo de tempo conseguiu-se amenizar o
problema do colapso catastrófico deste tipo de navio, e a longo prazo, conseguiu-se aumentar
os conhecimentos para o entendimento dos mecanismos responsáveis pelo comportamento
frágil dos aços. O Comitê citado acima emitiu o seu relatório final em julho de 1946, mas as
pesquisas tanto na Grã-Bretanha como nos Estados Unidos da América continuaram e, como
conseqüência, forneceram os princípios básicos da ciência, hoje conhecida como “Mecânica
da Fratura”.

33
4. 4 – Uma Visão Geral da Mecânica da Fratura
A existência de falhas tipo trincas não pode ser excluída em qualquer engenharia
de estrutura. Ao mesmo, o aumento na demanda para conservação da energia e material são
fatores ditantes que as estruturas a serem projetadas com a menor margem de segurança.
Consequentemente, estimativas quantitativamente precisas ...
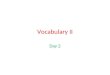
Os comportamentos de resistência à falhas de estruturas sujeitas à cargas
mecânicas, podem ser tanto do tipo fratura-dominante como escoamento-dominante. Os
defeitos são importantes para ambos os tipos de falhas. Mas aquele de importância primária
para a fratura difere de uma forma extrema daqueles cuja influência de escoamento e da
resistência ao fluxo plástico. Estas diferenças estão ilustradas esquematicamente na Figura - 4.
1.
Para falhas de escoamento-dominante os defeitos significantes são aqueles que
tendem a deformar e interromper os planos da rede cristalina, interferindo então com o
deslizamento de discordâncias e proporcionando uma resistência a deformação plástica que é
essencial para a resistência de metais de alta resistência mecânica. Exemplos de tais defeitos
são os átomos substitucionais “fora de tamanho” e os átomos intersticiais, contornos de grão,
precipitados coerentes e rede de discordâncias. Grandes defeitos como inclusões, porosidade,
superfícies riscadas e pequenas trincas podem influenciar na secção de bearing líquida efetiva
da carga, mas de outra forma tem pouco efeito sobre a resistência ao escoamento.
Figura - 4. 1. Tipos de falhas Estruturais

34
Para falhas de fratura-dominante, isto é, fratura antes do escoamento geral da
secção líquida, a escala de tamanho dos defeitos que são de maior significância é
essencialmente macroscópica, desde que a plasticidade geral não é envolvida mas somente os
campos de tensão-deformação locais associados com os defeitos. Os pequenos defeitos de
rede cristalina relacionados, que controlam a resistência ao fluxo plástico, não influenciam
diretamente.
É importante enfatizar o quanto a resistência ao fluxo plástico está relacionada à
susceptibilidade dos materiais a fratura.
A Mecânica da Fratura, que é o assunto deste curso, diz respeito à falha de
fratura-dominante quase totalmente. O primeiro sucesso da análise de um problema de
fratura-dominante foi o trabalho de Griffith em 1920, que considerou o crescimento de trincas
frágeis em vidros. Griffith formulou o agora bem conhecido conceito de que uma trinca
existente em um material cresce se, portanto a energia total do sistema é abaixada, e ele supôs
que existe um simples balanço de energia consistindo de uma diminuição na energia elástica
de deformação dentro do corpo tensionado, conforme a trinca se estende, em contrapartida a
energia necessária para criar as novas superfícies das trincas. Sua teoria conduz a estimativa
da resistência teórica dos sólidos frágeis e também em dá a correta relação entre a resistência
a fratura e o tamanho do defeito.
O conceito de Griffith foi primeiro relacionado a fratura frágil de materiais
metálicos por Zener e Hollman em 1944. Tão logo, Irwin apontou que o balanço de energia
tipo Griffith deve estar entre
(1) a energia de deformação armazenada
(2) a energia de superfície mais o trabalho realizado na deformação plástica.
Irwin também reconheceu que para materiais relativamente dúcteis a energia requerida
para formar novas superfícies de trincas é geralmente insignificante comparado ao
trabalho realizado na deformação plástica. Ele definiu uma propriedade G do material
como a energia total absorvida durante o trincamento, por aumento na unidade de
comprimento e por unidade de espessura. G é chamada de “taxa de energia elástica liberada”
ou “força promotora do trincamento frágil”.
Na metade da década de 50 Irwin contribuiu com outro avanço maior, mostrando
que a abordagem da energia é equivalente a abordagem do fator de Intensidade de tensão (K),
de acordo com a qual a fratura ocorre quando uma distribuição de tensão crítica, CK , na
frente da ponta da trinca é atingida. A propriedade do material que governa a fratura pode

35
portanto ser estabelecida como um fator de intensidade de tensão crítico, CK , ou em termos
da energia como um valor crítico, CG .
A demonstração da equivalência entre G e K fornece a base para o
desenvolvimento da disciplina da Mecânica da Fratura Elástica Linear. Isto porque a
forma da distribuição da tensão ao redor e próximo à ponta de uma trinca é sempre a mesma.
Então testes sobre formas adequadas e amostras carregadas para determinar CK torna
possível determinar quais falhas são toleráveis em uma estrutura real sob dadas condições.
Além disso, materiais podem ser comparados conforme sua utilidade em situações onde a
fratura é possível. Também tem sido descoberto que a sensibilidade de estruturas a
trincamentos subcríticos, tais como crescimento de trinca por fadiga e tensão de corrosão
podem, de alguma forma, ser predita com base nos testes usando a abordagem do fator de
intensidade de tensão.
Os primóridios da Mecânica da Fratura Elasto-Plástica (EPFM) pode ser traçado
com justiça ...... no desenvolvimento da Mecânica da Fratura Elástica Linear, notavelmente
com os trabalhos de Well sobre deslocamento de abertura de trinca (DAT), que foi publicado
em 1961. Contudo, a grande complexidade dos problemas de análises tem necessáriamente
levado a algo que reteve o progresso. A MFEP é ainda uma disciplina em grande
desenvolvimento.
4.3.1 – O Significado da Mecânica da Fratura
No século dezenove a Revolução Industrial resultou em um enorme aumento no
uso de metais (principalmente ferro e aço) para aplicações estruturais. Infelizmente, existiu
também muitos acidentes, com perda de vidas, devido a falhas destas estruturas. Em
particular, houve numerosos acidentes envolvendo explosões em Caldeiras de Vapor e
equipamentos de ferrovias.
Alguns destes acidentes foram devido a designes deficientes, mas isto foi também
gradualmente descoberto que as deficências nos materiais na forma de falhas pré-existentes
poderiam iniciar trincamento e fratura. Prevenções de tais falhas por melhores métodos de
produção reduziram o número de falhas a níveis mais aceitáveis.
Uma nova era de estruturas propensas a acidentes foi iniciada pelo advento de
designes totalmente soldados, notavelmente os navios Liberty e tanques T-2 da 2ª guerra
mundial. Cerca de 2500 navios Liberty, construídos durante a guerra, 145 quebraram em dois

36
e quase 700 experimentaram fraturas sérias. Muitas pontes e outras estruturas também
falharam. As falhas frequentemente ocorreram sob tensões muito baixas, por exemplo, mesmo
quando um navio estava aportado, e esta anomalia levou a investigações extensivas as quais
revelaram que as fraturas forma frágeis e que as falhas e concentrações de tensões foram
responsáveis. Também foi descoberto que a fratura frágil nos tipos de aços usados foi
promovida por baixas temperaturas. Isto é mostrado na Figura - 4. 2, acima de uma certa
temperatura de transição os aços comportam-se de uma forma dúctil e a energia requerida
para a fratura aumenta grandemente.
Figura - 4. 2. Esquema do efeito geral da temperatura sobre a resistência a fratura de metais estruturais.
Os procedimentos de fabricação e designes correntes podem prever a fratura
intrinsecamente frágil de estruturas de aço soldadas assegurando que o material tenha uma
temperatura de transição adequavelmente baixa e que o processo de soldagem não aumente
esta condição. Contudo, a fragilidade induzida por serviço, como por exemplo efeitos de
irradiação em containers de pressão nuclear e corrosão por fadiga em plataformas a pouca
distância da costa, permanecem uma causa para se pensar a respeito.
Olhando a situação presente pode ser visto da Figura - 4. 3 que desde a 2ª guerra
mundial o uso de materiais de alta resistência para aplicações estruturais tem sido
grandemente aumentada.

37
Figura - 4. 3. Introdução de materiais de alta resistência para aplicações estruturais.
Estes materiais são frequentementes selecionados para obter pesos econômicos.
Estruturas de aeronaves é um exemplo óbvio. Pesos econômicos adicionais têm vindo a partir
de refinamento em análise de tensões, que tem designe adequados levados a aumentar.
Contudo, não foi reconhecido até o fim do ano de 1950 que, embora estes materiais não são
intrinsecamente frágeis, a energia requerida para a fratura é comparativamente baixa, como
mostra a s Fig.. A possibilidade, e realmente a ocorrência, desta baixa energia de fratura em
materiais de alta resistência estimulou o moderno desenvolvimento da Mecânica da Fratura.
O objetivo da mecânica da fratura é fornecer respostas quantitativas a problemas
específicos concernente a trincas em estruturas. Como uma ilustração, considere uma
estrutura contendo falhas pré-existentes e/ou nas quais as trincas se iniciam em serviço. As
trincas podem crescer com o tempo devido a várias causas (por exemplo, fadiga, tensão,
corrosão, fluência) e geralmente crescerá progressivamente mais rápida, Figura - 4. 4a.
A resistência residual da estrutura, que é a resistência de falha como uma função
do tamanho da trinca, diminuirá com o aumento no tamanho da trinca, como mostrado na
Figura - 4. 4b. Depois de um tempo a resistência residual torna-se tão baixa que a estrutura
pode falhar em serviço.

38
4. 5 - O que estuda a Mecânica da Fratura e a sua importância
tecnológica na Engenharia dos Materiais
A mecânica da fratura trata da previsão da vida mecânica dos componentes
mecânicos e estruturas sólidas. Existem basicamente dois tipos de estruturas e componentes
estudados pela MFC. O primeiro tipo, é aquele constituído de materiais cujas falhas são
dominadas pela fratura e o segundo tipo, é aquele constituído de materiais cujas falhas são
dominadas pela fluência ou escoamento, conforme mostra a Tabela - IV. 1.
A MFC possui aplicações tecnológicas e científicas, das mais diversas, dentre as
quais destaca-se alguns exemplos:
- chips eletrônicos, elementos de estrutura, elementos de máquinas, pontes, aviões, navios,
vasos, tanques, caldeiras, autoclaves utilizados na armazenagem de fluidos sob pressão, para
acionamento de máquinas a vapor, etc. Em fim, todo tipo de elemento, objeto, ou estrutura,
soldada ou rebitada, que pode ser quebrada ou trincada.
Tabela - IV. 1: Tipos de estruturas e componentes comumentes estudadas pela MFC
Falhas de Estruturas e Componentes Materiais Frágeis: dominados pela fratura ou fratura-dominante
Materiais Dúcteis: dominados pelo escoamento ou escoamento-dominante
- A plasticidade é altamente localizada - Os tipos de defeitos que significantes controlam a resistência à fratura são essencialmente macroscópicos. - Introdução de defeitos no material Ex: falhas e defeitos em soldas, porosidades, defeitos superfíciais, trincas nucleadas por tensões, fadiga ou corrosão (com perda de massa), dobras em forjamento
- A plasticidade é generalizada - Os tipos de defeitos significantes que controlam a resistência ao escoamento plástico são essencialmente microscópicos. - Introdução de defeitos no material Ex: defeitos intersticiais, contorno de grão, precipitados, redes de discordâncias.
Na maioria das aplicações, os materiais são submetidos a esforços mecânicos
monotônicos contínuos e lentos (estáveis), rápidos (instáveis) ou cíclicos, conforme mostra a
Figura - 4. 4. Com isto, eles podem apresentar o fenômeno da fratura, lenta ou
quase-estática, da fratura rápida ou catastrófica e da fadiga, respectivamente. Por esta razão, o
estudo da fratura compreende, de uma forma geral, basicamente quatro áreas: (i) a fratura
estável, (ii) a fratura instável ou a dinâmica da fratura, (iii) a fadiga e (iv) o estudo da
fractografia.
(i) O estudo da fratura estável descreve o processo de crescimento de trincas em

39
situações próximas ao equilíbrio, ou seja, em situações em que as taxas de deformação não
dependem da velocidade de crescimento dessas trincas.
(ii) A dinâmica da fratura procura descrever o processo de formação crescimento e
propagação de trincas que são produzidas por altas taxas de deformação, onde a sua
velocidade de crescimento influencia os valores das grandezas energéticas, (caracterizando
um fenômeno não-linear). A dinâmica da fratura, ou a fratura produzida em condições
dinâmicas de instabilidade, por ser um fenômeno não-linear, apresenta situações de interesse
para a Física e para a Engenharia de Materiais. Para a Física por se tratar de um exemplo de
sistema instável, em processo de dissipação de energia. O entendimento deste processo de
dissipação, pode contribuir para o estudo e a compreensão de fenômenos análogos, de
complexidade ainda maior, como por exemplo, as avalanches, os terremotos e o movimento
das placas tectônicas da crosta terrestre. Para a Engenharia de Materiais porque a
compreensão deste fenômeno permite a otimização dos processos industriais e o projeto de
novos materiais.
(iii) O estudo da fadiga leva em conta o processo de propagação de trincas pelo
acúmulo de defeitos e trincas no material em função da velocidade, do tempo e da freqüência
de oscilação dos carregamentos cíclicos.
(iv) A fractografia é uma parte da MF que procura estudar o fenômeno do ponto
de vista mesoscópico. Ela envolve as três áreas citadas anteriormente e procura encontrar
explicações para o processo de fratura na microestrutura do material, conforme será descrito,
posteriormente, no Capítulo – IV.
A mecânica da fratura procura estudar o comportamento mecânico dos materiais e
sua propriedades frente as diferentes condições de carregamento ( Figura - 4. 4) e geometrias
de ensaio.

40
Figura - 4. 4. Diagramas típicos de carga x deslocamento. a) trincamento estável com diminuição da carga b) trincamento estável com carga constante c) trincamento estável com aumento da carga d) trincamento instável com fratura catastrófica e) trincamento com carga cíclica.
Considere agora os diversos tipos de ensaios onde se obtém os gráficos de carga X
(em Newtons) pela deflexão u (em milímetros) conforme mostra a Figura - 4. 4.
Os comportamentos representados nas Figura - 4. 4a) a Figura - 4. 4d)
podem ser estudados a partir de uma montagem conforme mostrado na Figura - 5. 14.
Com respeito a Figura - 4. 4 e dentro destes estudos a Mecânica da Fratura
deveria tentar fornecer respostas quantitativas para as seguintes perguntas:
1) Qual é a resistência residual do componente, ou estrutura, em função do tamanho da trinca?
2) Qual é o tamanho da trinca, que pode ser tolerada, sob um dado serviço de carregamento de
forças externas? Isto é, qual é o tamanho máximo permissível da trinca?
3) Quão longo é levada uma trinca a crescer a partir de um certo tamanho inicial, por
exemplo, o tamanho mínimo detectável de trinca, para o tamanho máximo permissível de
trinca.
4) Qual é a vida média de serviço de uma estrutura quando um certo tamanho de falha pré-
existente (por exemplo: defeito de fabricação) é suposto existir?
5) Qual é a velocidade de crescimento que uma trinca apresenta em função do meio ou das

41
condições de uso do material?
6) Qual é a taxa de crescimento que uma trinca apresenta por carregamento cíclicos em
função do meio e das condições de uso do material
7) Finalmente, quanto tempo leva para a trinca alcançar um tamanho crítico, isto é, qual é a
vida útil de um componente ou estrutura?
8) Durante o período disponível para a detecção de uma trinca quão frequentemente deveria a
estrutura ser inspecionada por ... trincas?
Este curso é intencionado mostrar como os conceitos da mecânica da fratura
podem ser aplicados tal que estas questões podem ser respondidas.
Nas secções remanescentes 1.4-1.10 deste capítulo introdutório uma visão geral
dos conceitos básicos e aplicações da Mecânica da Fratura Elástica Linear são dadas em
preparação para tratamentos mais detalhado em capítulos subseqüentes.
4. 6 - Revisão bibliográfica
A partir de agora será apresentado uma análise comparativa entre a Mecânica da
Fratura Estável (ou Quase-Estática) Clássica (MFEC) e a Teoria Dinâmica da Fratura Instável
(ou Catastrófica) Clássica (TDFIC)
4.5.1 - A Mecânica da Fratura Estável (ou Quase-Estática) Clássica
Griffith [1] e Irwin [2] desenvolveram os primeiros estudos teóricos e
experimentais da fratura estável, enquanto que Mott [2], Dulaney e Brace [4] são apontados
como os precursores dos estudos da fratura dinâmica ou instável, e são considerados como os
responsáveis pela visão moderna sobre o assunto, que persiste até o presente.
Desde que Griffith em 1920 [1] quebrou bastões de vidro em seu laboratório na
Inglaterra e percebeu que o crescimento de falhas somente é possível quando a energia
liberada pelo avanço de uma trinca é maior do que a energia necessária para criar as novas
superfícies [1]. A energia e a questão de como ela é dissipada, é tem sido no centro das
preocupações para o desenvolvimento quantitativo da mecânica da fratura.
Em 1947 Mott [3] percebeu que a inclusão de um termo de energia cinética no
formalismo de Griffith poderia estender a abordagem de Griffith para energia de forma a
incluir a dinâmica da fratura [2]. Ele achou que a velocidade de uma trinca deveria aproximar-
se assintoticamente de uma velocidade terminal. Em 1957 Stroh [3] propôs que esta

42
velocidade terminal deveria ser igual à velocidade das ondas de Rayleigh no material,
resultado que já estava implícito nos cálculos de já antecipado por Yoffe em 1951 [44]. Em
1960 Dulaney e Brace [4] corrigiram os cálculos efetuados por Mott para a dependência da
velocidade da trinca com o seu comprimento. Apesar do tremendo aumento na sofisticação
matemática da mecânica da fratura dinâmica, durante os 60 anos que se seguiram, o
argumento de escalonamento de Mott, permaneceu essencialmente inalterado, como é
evidenciado por Freund [45]. Contudo, continuou havendo uma dificuldade Um problema que
ainda se apresentava [46,47] era o fato de nunca se observar experimentalmente trincas em
materiais amorfos e frágeis que atingissem a velocidade limite das ondas de Rayleigh,
conforme previsto pela teoria. Gilman e Hull [48-51], mostraram que toda dificuldade em se
fazer esta constação, devido à complexidade do fenômeno, era mais aparente do que real. Pois
no caso de trincas que se propagam ao longo de planos de clivagem de cristais frágeis, ou ao
longo de interfaces fracas, observa-se que a velocidade de crescimento se aproxima à
velocidade limiar das ondas de Rayleigh quase é atingida [48-51]. Isto é facilmente explicado
pelo fato de que nestes casos a energia liberada por unidade comprimento, durante o
crescimento da trinca, é constante, conforme mostrado nas previsões feitas por Hall em 1953
[51], contrário ao que acontece em outras observações efetuadas em materiais amorfos e
polímeros frágeis. Nestes materiais, esta energia tende a aumentar com a velocidade de
crescimento, em virtude do surgimento de microtrincas e/ou discordâncias [46,52-55]. Além
disto, Irwin et al [25] mostraram que em materiais tais como: plásticos frágeis de PMMA,
Homalito 100, etc, as trincas não são bem definidas como nos exemplos anteriores, mas
surgem ramificações que se originam na trinca principal e se desvanecem no seio do material,
formando um certo angulo em relação a trinca principal [31-34]. Posteriormente, Doyle, Ravi-
Chandar e Knaus [56, 57] mostraram que o aumento de energia está associado a formação
destas ramificações. Por outro lado, nenhuma teoria da dinamica da fratura era capaz de fazer
qualquer predição sobre a velocidade de uma trinca sem fazer uma presuposição sobre a
energia por unidade de comprimento necessária para uma trinca se propagar. A maioria das
equações dinâmicas supõe que esta quantidade é uma constante [31]. Contudo, os resultados
experimentais indicam que esta suposição não é correta, ao contrário, a energia de fratura
tende a aumentar com a velocidade. Por um longo tempo tem sido mostrado que trincas em
polímeros frágeis com altos fatores de intensidade de tensão tendem a se ramificar, em ramos
que se desvanecem subsequentemente no seio do material, deixando atrás uma série de curtas
micro-trincas que formam um certo angulo em relação à trinca principal [26, 32-35]. Doyle

43
[36] e Ravi-Chandar e Knauss [37] mostraram que em plásticos frágeis de PMMA e
Homalito-100, o aumento na energia de fratura está relacionado à geração de microtrincas
logo abaixo da superfície de fratura.
Destas considerações concluiu-se que um dos problemas fundamentais da
dinâmica da fratura é a elucidação da causa do aumento abrupto no consumo da energia, após
atingida a velocidade crítica em que sugem as microtrincas. Ou, por que a velocidade média
de crescimento pára de aumentar quando o fluxo de energia para a ponta da trinca exede um
limiar crítico. Isto foi evidenciado em por meio de simulações em computador por Liu e
Marder [58-66]. Nestas simulações reproduziram aspectos do crescimento da trinca
observados em experimentos efetuados em laboratório., além do esperado, pois previam
Inclusive o fenômeno do aprisionamento da trinca na rede [67-69]. Entretanto este resultado
apenas é aparente (ou enganoso), pois conforme demonstrado por Hauch [70] este fenômeno é
característico da tri-dimensionalidade, não podendo portanto surgir na simulação bi-
dimensional. Este fato é um alerta ao excesso de confiança mostrado por alguns pesquisadores
nas técnicas de simulação em computador.
Uma tentativa para responder a esta questão foi feita por Liu e Marder [37-42 ] no
contexto do cálculo do crescimento de trincas em redes cristalinas. Usando modelos
analiticamente solúveis, bem como em extensas simulações em computadores, mostrou-se
que, quando o fluxo para a ponta da trinca ultrapassa um limiar crítico, surge uma
instabilidade que aparece algumas vezes acompanhada de micro-trincas e outras vezes
acompanhada de discordâncias [38-43]. Algumas das imagens produzidas por estas
simulações são semelhantes às imagens obtidas experimentalmente para o PMMA passado o
seu limiar de instabilidade [44, 45]. Os cálculos na escala atômica fizeram predições
adicionais com melhor precisão. O mais impressionante é que segundo estes cálculos, deveria
existir uma faixa de velocidade, rigorosamente entre 0% e 20% da velocidade das ondas
Rayleigh, na qual um movimento estácionario de trinca seria impossível [40, 41], um
processo também conhecido como aprisionamento na rede [46-48]. Hauch [ ] mostrou
experimentamente, usando a técnica da queda do potencial elétrico que, para materiais
cristalinos, este é um efeito tridimensional, e que este fenômeno do aprisionamento da rede
não existe para materiais amorfos.
Um outro tratamento teórico de interesse é o apresentado por Runde em 1994 [71]
quando tratou do problema da instabilidade das trincas e da dissipação da energia. Utilizando
um modelo de meio contínuo, mostrou que esta dissipação de energia por uma trinca é

44
semelhante à aquela que se verifica num flúido viscoso. Segundo este modelo, A instabilidade
dinâmica está relacionada a um mecanismo de dissipação de energia, que ocorre em um
regime caracterizado por um número de Reynolds suficientemente grande, de forma análoga
ao que acontece em diversas situações na mecânica dos fluidos.
Recentemente Slepyan em 1993 [72] propôs um Princípio de Máxima Dissipação
de Energia, para explicar a relação entre a inatingibilidade da velocidade das ondas Rayleigh,
a instabilidade e a formação dos padrões ramificados (microtrincas) na de dissipação de
energia. Esta idéia, da existência de um princípio físico geral capaz de explicar estes
fenômenos existentes na fratura, rupturas dielétricas, etc. é de consenso entre outros
pesquisadores do assunto [73], e é uma estratégia que pretendemos adotar.
Desta forma, as discrepâncias entre teoria e experimentos, que levam em conta a
velocidade de crescimento de uma trinca, apenas foram explicadas por equações
fenomenológicas para a dissipação. Até o presente momento nenhum mecanismo satisfatório
para a dissipação foi proposto. O fenômeno da instabilidade de crescimento de trincas
continua sendo um fenômeno obscuro, e segue-se a pesquisa procurando-se conhecer mais
sobre os numerosos mecanismos de dissipação.
A MFEC tem ampliado os horizontes da descrição da fratura em materiais por
meio da descrição analítica do fenômeno da fratura e da simulação computacional que se
estendem desde a descrição atômica até a descrição macroscópica. Contudo, na forma como é
usada comumente na Engenharia de Materiais ela trata da descrição da fratura, da propagação
e do crescimento de trincas sob os aspectos de tipos de entalhes, condições de carregamento,
campo de tensões, distribuição de defeitos no material, etc. É importante observar que esta
área da ciência utiliza basicamente duas abordagems clássicas, que se consolidaram com o
tempo e com os resultados experimentais. Estas abordagens são: a energética originalmente
proposta por GRIFFITH [1920] e a teoria elástica linear clássica desenvolvida por IRWIN
[1957] e WESTERGAARD [1989] e outros [OROWAN 1948; MUSKHELISVILI 1954;
BARENBLATT 1962]. Uma relação entre elas é feita pela integral G ou J (para materiais
frágeis ou dúcteis respectivamente) desenvolvida por RICE [1968], que aparece tanto no
formalismo da teoria elástica linear clássica, como no balanço energético de Griffith
[GRIFFITH 1920; ATKINS 1985]. Sob este aspecto, a MFC está fundamentada nas grandezas
que relacionam a área projetada(1) da fratura com as grandezas energéticas tais como: energia
1 A introdução da teoria fractal permite a consideração da área real da fratura ao invés da projetada, tornando a abordagem do problema mais autêntica, conforme será visto ao longo deste trabalho.

45
ou trabalho total de fratura, wof, energia efetiva de superfície, eff, taxa de liberação da energia
elástica, G ou J, fator de intensidade de tensão, KI,II,III, (I, II, III, são os três modos de
carregamento fundamentais) etc. Estas grandezas são admitidas como sendo independentes da
velocidade de crescimento da trinca. Portanto, estas abordagens situam-se no campo da
fratura elástica linear, em regime de fratura estável ou quase-estática.
Uma terceira abordagem da MFEC se encontra no campo das simulações em
computador feitas por métodos numéricos de diferenças finitas, elementos finitos, etc.
[ANDERSON 1995] que não deixa de ser um modelo mesoscópico. Existem também
modelagens computacionais na escala atômica ou molecular (microscópica).
4.5.2 - A Teoria Dinâmica da Fratura Instável (ou Catastrófica) Clássica
Em primeiro lugar é preciso distinguir a Teoria Dinâmica da Fratura Instável (ou
Catastrófica) Clássica- TDFIC daquela que é estudada através dos ensaios cíclicos de fadiga.
A TDFIC inclui altas taxas de deformação e também a influência da velocidade de
crescimento da trinca no cálculo das grandezas energéticas clássicas, estendidas para o caso
dinâmico, sendo o impacto e a possível fragmentação um caso limite deste [KANNINEN
1985; ÅSTRÖM 1977; HORNIG 1996]. Tal abordagem, se encontra descrita nos livros textos
de KANNINEN [1985] e de FREUND [1990].
Estabelecendo-se um paralelismo entre a MFEC e a TDFIC (vide o quadro
resumo na Tabela - II.1), observa-se a existência de duas abordagens para a dinâmica da
fratura, análogas àquelas mencionadas na secção - 2.2.1. A primeira, é aquela descrita por
modelos elastodinâmicos não-lineares, também chamada de teoria elástica não-linear. Nela a
velocidade da trinca é levada em consideração, sendo uma extensão da teoria elástica linear
desenvolvida por WESTERGAARD [1939]. Trabalhos importantes nesta área, relacionados à
dinâmica da fratura, tem sido desenvolvidos por IRWIN [1948] e FREUND [1972a, 1972b,
1973, 1974] e FLETCHER [1975]. A segunda, é a abordagem termodinâmica, que
corresponde paralelamente a uma extensão dos trabalhos de Griffith [ANDERSON 1995],
feita por MOTT [1947], DULANEY e BRACE [1960], CHEREPANOV [1967],
NIKOLAEVSKIJ [1982, 1987] e outros. Extensões análogas, àquela mencionada na secção -
2.2.1, da integral G ou J de Rice, que conecta estas duas abordagens citadas acima, isto é, a
elastodinâmica e a termodinâmica, para o caso de crescimento instável, também se encontram
registradas na literatura [KANNINEN 1985; FREUND 1990; ANDERSON 1995]. Houveram

46
diferentes tentativas de se estender a integral G ou J de Eshelby-Rice para o caso
elastodinâmico contudo, a mais geral e portanto a mais importante extensão da integral G ou J
[RICE 1968; KANNINEN 1985, ANDERSON 1995] para o caso de fratura dinâmica tem
sido feita por FREUND [1972 a, 1972b, 1973, 1974, 1990] e FLETCHER [1975].
Tabela - IV. 1. Quadro comparativo da mecânica da fratura quase-estática e dinâmica com os seus principais avanços matemáticos. (Campos não divididos são comuns às duas abordagens)
MECÂNICA DA FRATURA
Fratura Quase-estática ou Estável (MFEC)
Dinâmica da Fratura ou Instável (TDFIC)
Fractografia e Caracterização Fractal Teoria Elástica Linear Teoria Elastodinâmica Não-Linear
Integral G ou J de Eshelby-Rice Teoria Termodinâmica de Griffith Teoria Termodinâmica de Nicolaesvsky
Critério de Instabilidade de Nguyen-Slepyan Métodos de Simulações em Computador: Numérica por Diferenças Finitas, Atomística
e Dinâmica Molecular Teoria dos Sistemas Não-Lineares e Teoria do Caos Deterministico
De forma análoga a secção - 2.2.1, a TDFIC está fundamentada nas grandezas que
relacionam a área projetada da fratura com as grandezas energéticas, (estendidas para o caso
dinâmico), tais como, K(I, II, III) D, GD, etc. Neste caso porém, estas grandezas, possuem uma
forte depedência com a velocidade de crescimento da trinca. A TDFIC portanto, envolve altas
taxas de liberação de energia elástica armazenada e se estende num âmbito entre a fratura
quase-estática e o estudo de impacto propriamente dito.
Continuando o paralelismo com a MFEC, uma terceira abordagem dinâmica para
o processo de fratura, se encontra no campo das modernas simulações em computador
[MARDER 1993a e 1993b, 1994], feita pelos modelos atomísticos [ABRAHAM 1994;
GUMBSCH 1995] e de Dinâmica Molecular [GUMBSCH 1996 e 1997]. Esta abordagem,
leva em conta os aspectos físicos de primeiros princípios existentes na fratura (considerações
de interação em escala atômica ou molecular). Ela se preocupa em descrever tanto o processo
de fratura estático quanto dinâmico. Considera-se juntamente com a fratura o aparecimento de
vários fenômenos decorrentes deste processo, tais como, o movimento de discordâncias,
instabilidades dinâmicas, emissão sonora, emissão de radiação, etc. Tais fenômenos tem sido
atualmente estudados dentro do âmbito da Dinâmica Não-Linear e da Teoria do Caos
[MOHAN 1994]. Neste sentido o processo de fratura tem sido tratado de forma análoga aos
Sistemas Dinâmicos Não-Lineares da Física [TAN 1995].

47
Percebe-se nos parágrafos anteriores a descrição paralela de três tipos de
abordagem diferentes da fratura, tanto para o caso estático como dinâmico, em que uma busca
complementar o conhecimento da outra (vide o quadro da Tabela - II.1 acima). Portanto um
estudo moderno da fratura deve envolver aspectos interdisciplinares entre a Física e a
Engenharia de Materiais.

48
Capítulo - V
INTRODUÇÃO A TEORIA CLÁSSICA DA MECÂNICA
DA FRATURA
RESUMO
5. 1 - Introdução

49
5. 2 – Teoria Microscópica da Resistência dos Materiais
Nós agora estamos interessados em saber quão forte e resistente é um material? E
quais os principais fatores que influenciam fundamentalmente nesta resistência, ou seja, a
resistência mecânica de um material é função de quais parâmetros?
Podemos responder a primeira pergunta acima dizendo que um material será tão
forte quanto for forte e resistente as suas ligações químicas entre os átomos ou moléculas de
sua estrutura. Desta forma nós recorremos a teoria das ligações químicas para descrever a
resistência teórica dos materiais.
Nós sabemos da Física dos Sólidos que os componentes de um dado material são
unidos por uma força de coesão resultante de uma parte atrativa e outra repulsiva entre os seus
átomos ou moléculas da seguinte forma:
2
04 n
repulsãoatração
e BUr r
, (5. 1)
onde, U é a energia total de coesão, e é a carga eletrônica, r, é a distância entre os íons, 0 é
permitividade elétrica do vácuo, B é uma constante de repulsão e 10n é o expoente de
repulsão.
Graficamente esta energia U é dada por:
Figura - 5. 1. Gráfico da energia potencial de coesão das partículas estruturais de um material.
Através desta curva explicaremos a expansão térmica e o ponto de fusão dos

50
materiais. Porque o poço de energia com altura minE está relacionado com a energia de fusão
do material. Pois quanto mais fundo o poço maior será o ponto de fusão do material. Usando a
relação de Boltzmann para os três graus de liberdade de vibração dos átomos ou molécula de
um material sólido nós temos 12
kT para cada grau de liberdade. Portanto,
min32 fusãoE kT , (5. 2)
Portanto, uma medida brusca da temperatura de fusão de um material é dada pela altura do
poço de energia.
min23fusão
ETK
, (5. 3)
onde, 231,308 10 /k J K é a constante de Boltzmann.
Como calcular a força de ligação?
Mas a força de coesão das partículas estruturais esta relacionada com a energia
potencial de coesão mda seguinte forma:
F U
, (5. 4)
ou
dUFdr
, (5. 5)
logo derivando a expressão ( ) temos:
2
2 104 n
e nBUr r , (5. 6)
Graficando esta expressão nós temos:

51
Figura - 5. 2. Gráfico da força de coesão das partículas estruturais de um material.
Para efeito de ensaios mecânicos nós devemos graficar não a força versus
distância interatômica ou intermoleculares, mas a tensão que é força por unidade de área
versus distância interatômica ou intermolecular. Pois estamos interessados em comparar a
teoria fundamental das ligações químicas com a fenomenologia da causa efeito e efeito.
Num ensaio de tração existe uma força tal que aplicada ao material é suficiente
para romper as ligações químicas o valor desta força está relacionado com a resistência do
material e ela mede exatamente a tensão de ruptura.
Teoricamente os materiais não se rompem por compressão pura, mas eles se
rompem por cisalhamento que mudam a direção da força de compressão para uma direção
favorável a ruptura.

52
5.2.1 – Tensão de Ruptura dos Materiais
É a tensão T de um corpo necessário para separá-lo em duas partes, ou seja, de
forma a romper todas as ligações químicas que as une.
Figura - 5. 3. Gráfico da tensão de coesão das partículas estruturais de um material.
Figura - 5. 4.

53
5.2.2 – Resitência Teórica dos Materiais Cerâmicos
Baseado no que foi descrito até aqui, nós podemos perguntar
Qual é a resistência teórica dos materiais?
É possível calcular a resistência teórica fazendo uso de uma aproximação
matemática sobre o gráfico da
Figura - 5. 5. Modelo aproximado para o gráfico da tensão versus distância interestrutural..
Esta curva pode ser associada com a função seno para podermos dar um
modelamento matemático da resistência dos materiais e calcular qual é a tensão de ruptura.
Neste modelo nós aproximaremos a tensão r por uma função seno. Mas nós
sabemos que um material se rompe por tração ou cisalhamento e não por compressão, porque
neste último caso ele se deforma sem romper. Logo devemos graficar em vez de r .
Sendo que a nível microscópico é dado por:
0
0
r rr
, (5. 7)

54
Figura - 5. 6. Gráfico de para o modelo senoidal.
Considerando um corpo de área transversal unitária, a força de coesão entre dois
planos varia com a distância interatômica, conforme mostra a . Parate desta curva pode ser
aproximada pela relação:
0sen/ 2coesão
r r
, (5. 8)
ou
02sencoesão
r r
, (5. 9)
Usando ( ) em ( ) temos que:
02sencoesãor
, (5. 10)
chamando de:
0 0x r r r r , (5. 11)
a distância a partir da posição de equilíbrio das partículas estruturais do material. Nós temos
que:
para:

55
0 0/ 4/ 2 0
coesão
xxx
, (5. 12)
No caso de pequenos deslocamentos x em torno da posição de equilíbrio 0r , isto é,
0x r nós temos que a parte inicial da curva válida a seguinte aproximação.
0 02 2sen r r
, (5. 13)
Portanto, a expressão ( ) fica:
02coesão
r
, (5. 14)
chamando de 0E o módulo elástico do material como sendo a grandeza
00
2coesão
rE
, (5. 15)
A expressão ( ) é a expressào da Lei de Hooke onde temos:
0E , (5. 16)
ou
00
rEr
, (5. 17)
O que corresponde a aproximar a curva na parte inicial da Fig por uma reta para pequenos
deslocamentos x em torno da posição de equilíbrio 0r

56
Figura - 5. 7. Aproximação da parte inicial da curva pela Lei de Hooke.
00
0
r rEr
, (5. 18)
Observe que se não fosse feito a aproximação o módulo elástico 0E definido pela
lei de Hooke não seria constante e dependeria do deslocamento da seguinte forma.
Calculando E pela tangente a cada ponto da curva isto é pela derivada em relação da
expressão ( ):
0 02 2coscoesãor rdE
d
, (5. 19)
ou
00 cos
t
EE E
, (5. 20)
onde 0E corresponde a expressão ( ) isto é:
00
2coesão
rE
, (5. 21)
Mas que ainda assim não corresponderia a uma expressão exata do que acontrece na realidade
com os materiais, pois a curva de tensão x deformação é muito diferente de ( ) para
deslocamentos muito grandes conforme mostra a

57
Figura - 5. 8. Curvas de tensão deformação para um material frágil e dúctil.

58
5. 3 – Critérios Fenomenológicos de Fratura
Vejamos agora como se comporta o rompimento de um corpo com a presença de
trincas. Porque existe esta diferença entre o valor da resistência teórica experimental.
5.3.1 - Estudo Fenomenológico das Trincas
Considere dois corpos cilíndricos idênticos A e B sujeitos ambos a uma mesma
solicitação de tração . Supondo que o corpo A possui secção transversal de área S e o corpo
B possuem a mesma secção transversal, porém com um entalhe ou trinca na metade do seu
comprimento, rodeando todo o corpo de formato cilíndrico, conforme mostra a Figura - 5. 9.
Figura - 5. 9. Ensaio de Tração em dois corpos idênticos a) sem entalhe ou trinca b) com entalhe ou trinca.
Nesta figura as tensões de ruptura dos mcorpos A e B são respectivamente A e B . Nós
queremos saber se A é igual a B , porque a redução da área da secção transversal do corpo
de prova B implica em uma redução proporcional na força necessária para romper o material?
Nós sabemos que a tensão é dada por:
FS
, (5. 22)
Seja A a resisatência do corpo A dada por:
AA
A
FS
, (5. 23)
onde AF é a força necessária para romper o corpo A e AS S é a área do corpo A sob

59
solicitação.
Seja B a resisatência do corpo A dada por:
BB
B
FS
, (5. 24)
onde BF é a força necessária para romper o corpo B e BS S é a área do corpo A sob
solicitação.
A princípio se poderia pensar que a força necessária para romper o corpo A é
maior do que a força necessária para romper o corpo B. Pois sendo as áreas sob solicitação
diferentes A BS S , na mesma proporção nós teríamos que B B , e, portanto a resistência
do corpo não dependeria das suas condições físicas (sob entalhe ou não). Mas isto não é
verdade, pois a força necessária para romper o corpo A é maior do que a força necessária para
romper o corpo B, porém o entalhe no corpo B reduz a energia que deve ser empregada para
romper este corpo, por causa dele algumas ligações químicas já foram quebradas e alguma
energia de superfície já foi liberada na formação do entalhe. Portanto, a energia que ainda está
contida no corpo A é maior do que a que está contida no corpo B.
A BU U , (5. 25)
mas na região de ruptura podemos escrever:
A A AU V , (5. 26)
e
B B BU V , (5. 27)
os volumes AV e BV são considerados iguais pois eles são volumes aparentes e não se faz
distinção entre os corpos A e B a não ser pelas trincas. Portanto, substituindo ( ) e ( ) nem ( )
temos:
A A A BV V , (5. 28)
Então
A B , (5. 29)
Como as tensões são uma medida da densidade de energia, nós podemos dizer que

60
para a ruptura o corpo A precisa-se concentrar mais energia por unidade de volume do que
para o corpo B. Como os corpos são do mesmo material nós podemos concluir que já existe
um efeito latente de concentração de energia no corpo B para compensar a diferença entre os
valores de A e B . Pois o valor de A corresponde ao que seria o valor teórico da
resistência do corpo B.
Este efeito de concentração de energia se dá pela força aplicada e pela área
atravessada por esta força no ponto de ruptura do corpo. Portanto, nós podemos dizer que o
efeito de concentração latente de energia no corpo B se dá pela concentração das linhas de
força na área do entalhe sob tração conforme mostra a Fig.
Figura - 5. 10. Trincas ou entalhe atuando como concentradores de tensão.
Pois para uma mesma força F aplicada igualmente nos dois corpos a tensão é
maior para o corpo B na região do entalhe. Fazendo com que se necessite de menos energia
para romper o corpo B na quela região do que o corpo A, conforme já foi visto antes. Desta
forma nós podemos dizer que na região considerada:
A B , (5. 30)
devido aos concentradores de tensão na broda do entalhe. Pois as trincas, os entalhes e os
cantos vivos atuam ou funcionam como concentradores de tensão, conforme mostra a Fig.

61
5.3.2 - Critério de Fratura dos Materiais

62
5.3.3 - O Campo de Tensão ao Redor de uma Trinca Elíptica
Figura - 5. 11. Campos de tensão em torno de uma trinca elíptica, usado na descrição do modelo de Inglis.

63
5. 4 - Fundamentos da Teoria da Elasticidade
A teoria da elasticidade estuda o comportamento mecânico de um material em
relação a solicitação de carga ou força externa, sob o ponto de vista da deformação elástica
reversível, até o limiar da fluência ou ruptura. Esta teoria possui seu suporte fundamental na
lei de Hooke.
5.3.1 - O comportamento mecânico dos sólidos
O comportamento mecânico para os materiais sólidos, no que diz respeito a
deformação, é dividido em frágeis e dúcteis ( Figura - 5. 12). Os frágeis, são aqueles que
se rompem logo após o fim do seu limite elástico, não apresentando quase nenhuma
deformação plástica (processo reversível).
Figura - 5. 12. Comportamento típico da tensão x deformação dos materiais frágéis e dúcteis.
A lei de Hooke diz que, de acordo com a Figura - 5. 12 e a Figura - 5.
13, um material, dentro do seu limite elástico linear, atuado por uma força, F, ou tensão, ,
apresentará uma deformação dada por:
E , (5. 31)
onde = F/A é a tensão aplicada e A é a área da secção transversal do corpo sob ação da força
F. E é o módulo elástico do material. O alongamento percentual ou deformação é dada por:
= l/l, conforme mostra a Figura - 5. 13.

64
Figura - 5. 13. Distensão máxima das ligações químicas de um material antes de se romper, mostrando o tamanho crítico mínimo, lo, a partir do qual a ruptura acontece, segundo o modelo de Griffith para um monocristal. Figura adaptada a partir da original contida em MARDER [1996].
A partir da relação (5. 31), percebe-se que um material frágil ideal apresenta
rigidez constante até a ruptura, enquanto que o dúctil não. Isto significa que, a separação entre
os planos cristalinos do material frágil ideal se dá continuamente, sem que ocorra quase
nenhum acúmulo de defeitos na forma de discordâncias ( Figura - 5. 13).
Os materiais dúcteis, por outro lado, são aqueles que após o limite elástico
apresentam deformações plásticas por meio de discordâncias na rede cristalina, acumulando
defeitos e se rompendo após o encruamento (processo irreversível, Figura - 5. 12). De
acordo com a teoria do encruamento (hardening) a relação entre a tensão, , e a deformação,
, é dada por:
m
pref
ref
, (5. 32)
onde:
ref é a tensão inical e ref é a deformação inicial, p é a deformação plástica do material e m, é
um expoente fracionário.
Observe que a relação (5. 32), mostra o termo em potência, que pode ser
relacionada a uma auto-similaridade com a escala da deformação, ref, que afeta o aspecto
microestrutural da superfície de fratura. Será mostrado, no modelamento fractal da superfície
de fratura no Capítulo – IV, que este fato está relacionado com a rugosidade desta superfície,
devido a auto-similaridade fractal onde o expoente de encruamento, m, estará relacionado
com a dimensão fractal, D, da mesma. Porque o material encrua antes de abrir uma trinca
rugosa.

65
A partir da relação (5. 32), percebe-se que no caso do material dúctil, tanto a
tensão de fratura, f, como a rigidez, E, passa a depender da presença, ou não, deste acúmulo
de defeitos microscópicos.
5.4.2 – Determinação da rigidez e da flexibilidade de um material
Existem diferentes métodos experimentais para se determinar a rigidez ou a
flexibilidade de um material. A Figura - 5. 14 apresenta uma montagem experimental
que pode ser usada para determinar a rigidez por meio da equação (5. 33) [DOS SANTOS
1999] abaixo.
uX
ewSE 3
3
4, (5. 33)
onde
S é a separação dos cilindros de apoio, w é a largura do corpo de prova, e é a sua espessura, X
é a carga aplicada e u é a sua deflexão do ponto de aplicação da força na direção vertical.
Figura - 5. 14. Montagem experimental do ensaio de flexão a três pontos com entalhe plano.
Até o limite de ruptura, o valor da rigidez do material pode ser calculado pela
equação (5. 33), conforme mostra na Figura - 5. 12. Caso ocorra um crescimento de
trinca acima deste limite máximo de carga tolerável pelo material, o valor da equação (5. 33)
passa a representar a flexibilidade do material ao invés do seu módulo elástico.
Para materias frágeis, ou até mesmo dúcteis, a relação (5. 31) é muito útil, porque
ela constitue a base da mecânica da fratura elástica linear, conforme será visto a seguir.

66
5.4.3 - A energia elástica armazenada em um sólido
Considere um corpo tracionado continuamente até o limite da sua ruptura,
conforme mostra a Figura - 5. 13. A energia de deformação total armazenada em um
material até este limite é dado pela área debaixo da curva mostrada na Figura - 5. 12, isto
é, pela integral da curva, x E, ou seja:
o
du )()( . (5. 34)
Embora existam diferentes comportamentos mecânicos, conforme mostra a
Figura - 5. 12, é interessante, a princípio, entender o mais simples deles, que
corresponde a um material frágil que segue a “lei elástica de Hooke”. Para este material frágil,
pode-se supor que o corpo responde a solicitação externa de acordo com a equação (5. 31).
Portanto, substituindo a expressão (5. 31) em (5. 34) tem-se que a energia de deformação
elástica total armazenada em um material frágil, até o limite de sua ruptura, calculada pela lei
de Hooke, é dado por:
0
2
2)( EdEu
o
, (5. 35)
reescrevendo (5. 35) em termos de (5. 31) tem-se:
Eu
2)(
2 . (5. 36)
Considerando o corpo totalmente distendido até o limite máximo de sua
resistência mecânica, tem-se que a tensão máxima de alongamento corresponde a tensão de
fratura do material, f. Logo, para o caso da fratura elástica linear (material frágil ideal), de
acordo com a lei de Hooke, dado em (5. 31), tem-se:
maxf E , (5. 37)
onde, f, é o módulo de ruptura ou a tensão de fratura(2) (para materiais frágeis), E é o seu
módulo elástico, máx é o alongamento máximo do corpo em relação ao seu comprimento
2 limite de ruptura

67
inicial. De acordo com a Figura - 5. 12 para os materiais frágeis, a integral é calculada
susbtituindo-se (5. 37) em (5. 36) e obtendo-se a energia de deformação elástica total por
unidade de volume que pode ser armazenada no corpo antes que ele se rompa, fornecendo
Eu f
f 2
2 . (5. 38)
Para um corpo de volume, Vc, tem-se que a densidade volumétrica de energia é
dada por::
dVdUu , (5. 39)
Logo, substituindo-se (5. 38) em (5. 39) tem-se:
cf
f VE
U2
2 . (5. 40)
Esta é a quantidade máxima de energia por unidade de volume que um corpo pode
armazenar, desde que se considere que este é formado por um material idealmente frágil,
como uma cerâmica, por exemplo.
5.4.4 – A variação da flexibilidade de um material durante a fratura
Observando o gráfico da Figura - 7. 5 e Figura - 5. 15, percebe-se
que a energia elástica armazenada (dado pela área sob o gráfico) aumenta para manter o
mesmo nível de tensão no interior do corpo de prova, cujo tamanho do defeito, Lo, continua
aumentando durante o ensaio. Como fica então a variação da energia elástica armazenada no
corpo, UL, com o aumento no tamanho do defeito? Ou seja, o que acontece com a energia
elástica armazenada no corpo (material frágil) quando uma trinca cresce?

68
Figura - 5. 15. Gráfico do comportamento da deformação do corpo, =l/l em função da tensão externa aplicada, ext.
De acordo com a expressão ( ) a variação na energia elástica armazenada, UL,
depende das grandezas, , Lo, e E. Considerando que, f, se mantém constante, resta apenas
analisar a influência desta variação na energia elástica armazenada, na rigidez ou na
flexibilidade do material.
Ao se aplicar uma tensão, , sobre um material que já possue uma trinca de
tamanho Lo, se a energia fornecida for suficiente para produzir um aumento na trinca,
observa-se que a rigidez E, ou a flexibilidade, do material diminuirá com o aumento no
tamanho do defeito. Veja o exemplo da Figura - 7. 3 e Figura - 5. 16.
Figura - 5. 16. Corpos A e B de mesmo material e sujeitos as mesmas condições de carga. A) sem entalhe B) com entalhe.

69
Figura - 5. 17. Comparação dos carregamentos entre os corpos A e B identicos conforme a Figura - 5. 16.
Considere o exemplo da Figura - 5. 16, onde dois corpos idênticos de mesmo
material são submetidos a mesma condição de ensaio. Porém, o corpo A não possui entalhe,
enquanto o corpo B já o possui. Veja, a partir do gráfico da Figura - 5. 17, que o corpo
B possui um rigidez, E, menor do que o corpo A e ainda uma maior deformação. Logo, a
energia elástica armazenada em B deve ser maior do que no corpo A, para o mesmo nível de
tensão (tensão constante).
Comparando-se as áreas dos triangulos na Figura - 5. 17 tem-se que:
2211 QOPQOP , (5.41)
logo
LBLA UU , (5.42)
ou seja
B
2
A
2
E21
E21
, (5.43)
portanto
BA EE . (5.44)
Por outro lado, quando o material está sujeito à transformações de fase, ou
microtrincas, geradas na ponta da trinca principal durante o ensaio, existe ainda uma
deformação residual, que não foi considerada nesta argumentação.

70
5.5 - Introdução a Teoria Clássica da Mecânica da Fratura
Partindo do princípio que os materiais são compostos de átomos ou moléculas,
que se mantém unidas por meio de ligações químicas, a fratura, nada mais é do que o processo
mecânico de quebra destas ligações mantendo-se, até certo ponto, inalterada as propriedades
químicas do material. Logo, a primeira pergunta que surge no estudo da fratura é:
Por que os corpos se rompem?
Conhecendo-se a estrutura da matéria podería-se dizer que, os corpos se rompem
porque, em um esforço mecânico, fornece-se a ele energia maior do que a energia das ligações
químicas que mantém os átomos unidos, fazendo com que estas se rompam entre si
abruptamente ( Figura - 5. 12 e a Figura - 5. 13).
É necessário lembrar que, de acordo com a teoria da elasticidade, para ocorrer a
quebra das ligações químicas em um corpo, geralmente, este acumula energia elástica antes da
sua ruptura. Isto significa que, na ruptura a energia por unidade de volume que se oferece ao
corpo, por meio do esforço mecânico, é maior ou igual do que a sua capacidade volumétrica
de armazenar esta energia. Portanto, definindo-se a densidade volumétrica de energia imposta
ao material como sendo dado por (5. 39), a partir da teoria da elasticidade, aplicada a escala
atômica, é possível encontrar uma expressão matemática geral, capaz de fornecer a tensão de
ruptura teórica dos materiais sólidos, substituindo-se uf = e/2ao em (5. 38), obtendo-se:
2/1
o
eteo a
E , (5. 45)
onde ao é o parâmetro de rede do material e e é a sua energia de superfície específica.
Observe que este simples modelo não leva em conta as irregularidades, ou defeitos,
encontrados na microestrutura do material tais como: discordâncias, inclusões, vacâncias, etc.
Para um material cristalino perfeito, poderia-se relacionar diretamente a seu
alongamento máximo com a porcentagem na qual este material distende suas ligações
químicas antes de se romper, (vide Figura - 5. 12 e Figura - 5. 13), ou seja, máx =
ao/ao (onde ao é o parâmetro de rede do cristal). Portanto neste caso, a relação entre o
módulo elástico, E, e a tensão de fratura, f, deveria ser direta, a menos de uma fator de
alongamento, máx, que depende de cada material [MARDER 1996], conforme mostra a
equação (5. 37). Contudo, os materiais apresentam defeitos que produzem diferenças entre as

71
elongações microscópicas, dadas por: = ao/ao, e as macroscópicas, dadas por: = l/l, isto
é:
o
o
a la l
, (5. 46)
onde l ;e o comprimento do corpo de prova, o que faz com que na prática, os valores previstos
teoricamente pela expressão (5. 45), não correspondam à aqueles medidos experimentalmente.
Isto significa que, os defeitos nos materiais têm uma importância fundamental na sua ruptura.
Este fato ocasionou todo o desenvolvimento da mecânica da fratura que se conhece até hoje.
Através da teoria da elasticidade, é possivel também prever a velocidade com que
ondas elásticas se propagam livremente em um material cristalino perfeito, considerando-se o
modelo do sólido harmônico. Esta velocidade é dada pela seguinte razão:
2/1
RE~c
, (5. 47)
onde E é o módulo elástico e é a densidade do material.
Esta velocidade, no caso da fratura, corresponde a velocidade máxima de
crescimento das trincas no meio, quando a taxa de energia elástica liberada não depende mais
do comprimento da trinca. Ela é também chamada de velocidade das ondas Rayleigh no
material. Um outro problema porém, é que esta situação ideal nunca foi observada na prática.
Mesmo para materias idealmente frágeis, ocorrem efeitos de instabilidade que influenciam no
crescimento das trincas, como será visto nos Capítulos – VII e VIII. Este é também um dos
problemas a serem abordados neste trabalho, e constitue a base do desenvolvimento da teoria
elastodinâmica da fratura até os dias de hoje.
Se nenhum material frágil apresentasse defeitos microestruturais, o modelo como
está apresentado até aqui estaria ótimo e explicaria tudo o que acontece com os materiais que
seguem a teoria elástica linear. Mas isso não se verifica na prática, o que tornou necessário
criar um modelo que levasse em conta a presença dos defeitos, conforme será visto a seguir.
5.5.1 - A teoria de Inglis para a fratura e a sua abordagem dos concentradores de
tensão
Inglis em 1912-1913 [INGLIS 1913] foi o primeiro a considerar os defeitos
presentes em um material, para explicar a discrepância entre os valores experimentais e

72
teóricos da resistência mecânica dos materiais à fratura. Ele utilizou um modelo de uma trinca
elíptica, passante, no centro de uma placa, plana e infinita, sujeita a uma tensão externa, ap,
conforme mostra a Figura - 5. 18.
Em seu modelo, Inglis imaginou que um defeito como este, no centro de uma
placa plana (Figura - 5. 18), deveria ser sufuciente para retratar os principais problemas
existentes em uma fratura. Entretanto, para explicar sua argumentação, ele considerou que a
placa se comportava como um meio contínuo sólido e elástico. Fora percebido por ele que, em
resposta à tensão externamente aplicada, deveria haver um campo local de deformações
elásticas, com diferentes valores de tensão ao redor do defeito. A presença deste defeito
deveria ser, portanto responsável pela concentração das linhas de força nas extremidades do
mesmo, de forma análoga as linhas de corrente ao redor de um obstáculo imerso em um
fluido.
Figura - 5. 18. Campos de tensão em torno de uma trinca elíptica, usado na descrição do modelo de Inglis.
5.5.2 – A geometria da zona de acúmulo de tensão
A partir da trinca elíptica, Inglis observou que a zona de processo onde ocorre o
maior acúmulo de tensões, ao redor do defeito(3) conforme mostra a Figura - 5. 19.
3 na forma de um cardióde para tensão plana e na forma de leminscata para deformação plana

73
Figura - 5. 19. Zona de processo eliptica ao redor do defeito, em cujo volume está armazenada a energia elástica de deformação.
Utilizando relações geométricas para o seu modelo elíptico, onde
[1 2 ]y apab
, (5. 48)
E sabendo que
1/ 2 2a a a a a bb r b r b r
, (5. 49)
então
2bra
, (5. 50)
Como neste caso oa L , Inglis encontrou o resultado para o cálculo do campo de tensões na
ponta da trinca, dependente do seu raio de curvatura, r, ( Figura - 5. 20) e de seu
comprimento, Lo, cuja expressão matemática é dada por:
1/2
[1 2 ]oy ap
Lr
, (5. 51)
onde:
y : é a tensão na ponta da trinca.
ap : é a tensão aplicada externamente, nas extremidades da placa.
a : é o semi-eixo maior da elipse que corresponde a metade do comprimento da trinca, ou
seja, 0a L .

74
b : é o semi-eixo menor da elipse, valendo a relação 2 20/ /r b a b L .
Figura - 5. 20. Modelo de Inglis para os defeitos concentradores de tensão
Como conseqüência de sua idéia fundamental Inglis sugeriu que os defeitos,
presentes no interior (microestrutura) dos materiais, atuam como concentradores das linhas de
força, sendo os responsáveis pela amplificação das tensões internas acumuladas ao seu redor.
Inglis definiu portanto o fator de concentração de tensão, Kt, da seguinte forma:
1/2[1 2( ) ]y oty
ap
LK
r
. (5. 52)
Observe que, de acordo com o desenho da Figura - 2.6, para o caso em que a
trinca é circular, tem-se que * *0cr L b , logo a tensão aplicada, ap , é igual a tensão de
fratura, ap f , e o fator de concentração de tensão, de acordo com (5. 52), é igual a três
unidades 3tyap
K
.

75
5.6.3 - O critério de fratura de Inglis
Inglis calculou qual deveria ser o valor da tensão máxima amplificada, máx,
presente na placa tendo em vista que as linhas de força se concentravam na ponta da trinca
(elipse), no limite quando esta se torna infinitamente alongada (raio de curvatura tendendo a
zero, r 0). Ele encontrou que:
1/2
max 2 oy ap
Lr
, (5. 53)
logo percebe-se que para uma trinca fina, isto é, r 0, o fator de concentração de tensão, Kt,
tende a infinito (Kt ) e a tensão aplicada, ap, que corresponde a tensão de fratura do
material, f, tende a zero (ap = f 0). Nestas condições o material tende a possuir uma
resistência mecânica, f, desprezível. Contudo, a tensão máxima, max, que um material pode
suportar na ponta da trinca corresponde a sua tensão de ruptura teórica, teo, dada por (5. 45),
isto é, max = teo. Logo, o valor de Kt, neste caso, passa a ser dado por um valor crítico:
2/1
*2
rL
K oc
ap
teotc
, (5. 54)
e o material se rompe.
A partir da equação (5. 54), observa-se que segundo o modelo de Inglis os defeitos
amplificam internamente a tensão aplicada externamente, pela concentração das linhas de
força ao seu redor, fazendo com que o material se rompa a uma resistência mecânica menor
do que aquela prevista pela teoria da elasticidade para o sólido cristalino. Desta forma, Inglis
estabeleceu o primeiro critério de fratura de que se tem notícia.
Se pensarmos em termos de taxa de energia elástica liberada a expresão (5. 53)
pode ser reescrita da seguinte forma:
2 2max 4 o
apLr
, (5. 55)
ou multiplicando os dois lados pelo módulo elástico e por temos:
22max
4ap
or L
E E
, (5. 56)
definindo a taxa de energia elástica liberada como sendo 2 /ap oG L E temos que a taxa de

76
energia elástica liberada na ponta da trinca é dada por:
2max
4rG
E
, (5. 57)
ou seja, a taxa de nergia elástica microscópica conta com com o aumento da tensão na ponta
da trinca, enquanto que se considera um valor de variação do comprimento da trinca é muito
menor na escala microscópica.
Um outro critério de fratura foi postulado por Irwin, considerando que a ruptura
ocorre quando máx da equação (5. 53) for igual a tensão teórica da equação (5. 45). Portanto,
maxteo , (5. 58)
ou
2/12/1
2
r
La
E o
o
e , (5. 59)
ou
ocfo
e LraE
222 . (5. 60)
Observe, no lado esquerdo de (5. 60), a presença de uma grandeza que não depende do
comprimento crítico da trinca. Esta é uma propriedade da fratura que será discutida mais
adiante. Logo, a tensão de fratura, f, nestas condições é dada por:
2/1
4
oco
ef La
rE , (5. 61)
o qual é chamado de critério de Irwin para o crescimento da trinca.
Observe de (5. 61) que a densidade de energia, dada em (5. 38), pode ser escrita
como:
2
2 8f e
o oc
rE a L
. (5. 62)
Reescrevendo a equação (5. 61) da seguinte forma:

77
2
22 16
f oce
o
L rE a
. (5. 63)
Observe que existe um termo que entre parêntesis existe um termo que envolve uma medida
relativa do raio de curvatura da trinca em relação a algum comprimento característico, ao que
no caso pode ser o parâmetro de rede ou em situações de material não cristalino o valor de ao
pode ser um comprimento mínimo de trinca se considerarmos um raio de curvatura mínimo
dado por
016r a . (5. 64)
Esta consideração será útil na correção da equação de Inglis e Griffith quando se considera
uma trinca rugosa de raio de curvatura definido.

78
5. 6 – Abordagem do Campo de Tensão Elástica

79
Capítulo - VI
FUNDAMENTOS DA TEORIA ELASTOSTÁTICA
CLÁSSICA DO CRESCIMENTO ESTÁVEL (OU
QUASE-ESTÁTICO) MECÂNICA DA FRATURA
ELÁSTICA LINEAR PARA O CAMINHO LISO
E aconteceu que, acabando ele de falar todas estas palavras, a terra que estava debaixo deles
se fendeu (Nm 16,31)
RESUMO Neste capítulo, é feito uma breve revisão bibliográfica dos principais avanços
matemáticos alcançados pela Mecânica da Fratura Clássica (MFC) ao longo das décadas, sem
levar em consideração a questão da rugosidade da superfície de fratura. Para isto a MFC será
tratada nas suas duas áreas: a Mecânica da Fratura Estável e a Mecânica da Fratura Dinâmica
ou Dinâmica da Fratura. Em primeiro lugar, será feita uma breve introdução a teoria da
elasticidade, com seus principais resultados. Em seguida, será feita uma revisão da mecânica
da fratura em si, e por último, uma abordagem rápida sobre a teoria termodinâmica da fratura,
aplicada a materiais frágeis e dúcteis, a qual será útil para inserir nos capítulos seguintes a
idéia da descrição geométrica fractal da fratura rugosa. O objetivo deste capítulo é, portanto,
abordar os tópicos básicos para o desenvolvimento dos modelos descritos ao longo dos
capítulos subseqüentes.
OBSERVAÇÃO IMPORTANTE: A rigor neste capítulo, e somente neste capítulo,
todas as equações deveriam possuir um índice (l) para denotar que se trata de uma teoria para
o caminho liso da trinca, Ll. Contudo, este índice, (l), será omitida de todas elas, para não

80
carregar a notação. Outros motivos para essa medida ficarão claros na secção 4.8 do Capítulo-
IV.
Palavras chave: Mecânica da Fratura, Regime Estável, Curva J-R, Fratura Quase-Estática,
Dinâmica da Fratura, Taxa de Energia Elastostática Liberada
PACS números:
6. 1 – Objetivos do Capítulo
i) Apresentar uma breve descrição da Mecânica da Fratura Clássica
ii) Desenvolver os principais conceitos e equações que serão utilizadas nos capítulos
subseqüentes.
iii) Fornecer uma base conceitual e matemática para o problema da fratura estável.
iv) Motivar a aplicação da correção da rugosidade à Mecânica da Fratura.
6. 2 – Introdução

81
6. 3 - A Mecânica da Fratura Elástica Linear Clássica para os
Materiais Frágeis
Irwin e Westergaard definiram a princípio três modos fundamentais de solicitação
de carga ou de carregamento, baseado nos três eixos principais do espaço tridimensional de
tensão, conforme mostra a Figura - 6. 1.
Figura - 6. 1. Modos fundamentais de solicitação de carga ou carregamento para a fratura.
Figura - 6. 2. Modos fundamentais de solicitação de carga ou carregamento para a fratura; a) Modo I: tração (opening); b) Modo II: cisalhamento (sliding); c) Modo III: rasgamento (tearing)..

82
Todos os sistemas de tensão na vizinhança da ponta de uma trinca podem ser
derivados a partir de três modos de carregamento conforme mostrado na Figura - 6. 2. No
que segue a dedução das equações de campo de tensão elástico será limitado ao Modo I, uma
vez que esta é a situação de tensão predominante em muitos casos práticos. Uma vez que esta
dedução é entendida, é possível obter um número de expressões úteis para as tensões e
deslocamentos na região da ponta da trinca. Contudo, o uso da abordagem do fator de
intensidade de tensão para geometrias práticas envolve algumas dificuldades matemáticas. Por
exemplo, trincas reais podem ser muito irregulares na forma, quando comparado as trincas
altamente idealizadas e frequentemente consideradas em tratamentos teóricos. Contudo,
suposições tais como a largura infinita de uma folha ou placa frequentemente não pode ser
mantida se qualquer resultado acurado é necessário. As conseqüências de desvios necessários
a partir de soluções teóricas será também discutido neste capítulo.
6. 4 – Campo de Tensão Elástico na Ponta da Trinca
Após os trabalhos de Inglis em 1912 e Griffith em 1920, tornou-se extremamente
interessante conhecer o comportamento do campo elástico de tensão na ponta de uma trinca
em um corpo idealmente frágil. Para isso Irwin e o matemático Westergard desenvolveram os
cálculos necessários baseados na teoria elástica linear. Eles imaginaram o campo de tensão
conforme mostrado na Figura - 6. 3.
Existem três formas distintas de carregamento de uma placa contendo uma trinca,
e cada orientação de carregamento tem sua própria designação. Os problemas associados com
estas diferentes configurações de carregamentos são comumente referidos como os Modos I,
II e III. O modo I é o principal modo de fratura que ocorre quando duas superfícies de uma
trinca estão sendo separadas por forças de tração as quais estão sendo aplicadas
perpendicularmente ao plano da trinca. Este tipo de carregamento é mostrado na Figura - 6.
4a. O modo II é algumas vezes chamado de modo de deslizamento de fratura e ocorre quando
forças de cisalhamento no plano são aplicadas ao corpo contendo uma trinca como na
Figura - 6. 4b. O modo III é frequentemente referido como o modo de rasgamento
da fratura ou o problema antiplano da trinca. Este modo de fratura possui forças cisalhantes
fora do plano agindo sobre uma placa da mesma forma que se usa rasgar uma folha de papel.
Este modo de orientação de carga é mostrado na Figura - 6. 4c.

83
Figura - 6. 3. Corpo de prova com um entalhe, Ll, carregado por forças, X, com deslocamento total, u, nos pontos de aplicação da carga.
Figura - 6. 4. Três modos principais de fratura com forças aplicadas F.
Nós agora investigaremos as soluções elásticas lineares correspondentes aos três
modos fundamentais de fratura para placas infinitas. O sistema de coordenadas cartesianas a
ser usado é mostrado na Figura - 6. 5. A origem das coordenadas “O” é localizada no
centro da trinca. O comprimento da trinca é 2a, a qual se estende de –a até +a ao longo do
eixo-x. A placa possui uma espessura arbitrária. A largura da trinca, i. e. a distância entre as

84
superfícies paralelas da trinca, é matematicamente idealizada ser zero antes do carregamento.
Figura - 6. 5. Coordenadas dos contornos e trinca de uma placa infinita.
6.3.1 – Dedução das equações do Campo de Tensão Elástico na ponta da Trinca
Esta secção nos fornece uma revisão da dedução das equações do campo de tensão
do Modo I. Tratamentos mais rigorosos podem ser achados nas referencias 1 e 2 da
bibliografia que está no final deste capítulo. A dedução cobre os seguintes tópicos:
- Equações de equilíbrio de tensão e equações de compatibilidade das
deformações.
- A Equação Biharmônica
- As Funções de Tensão de Airy
- As variáveis complexas e as Equações de Cauchy-Riemmann
- Condições de Contorno
- Uso de coordenadas polares
- A Solução de Westergaard
- A solução final para o Fator de Intensidade de tensão
Para resolver qualquer problema elástico plano as equações de equilíbrio das
tensões e as equações de compatibilidade das deformações devem ser obedecidas.
Airy demonstrou que para qualquer problema elástico existe uma função ,x y
a qual preenche totalmente os requisitos das equações de equilíbrio das tensões e as equações

85
de compatibilidades das deformações concomitantemente. As tensões , ,xx xy yy são
definidas como:
2
2xx y
, (6. 1)
2
2yy x
, (6. 2)
2
xy x y
, (6. 3)
Para as equações de compatibilidade das deformações as seguintes equações
biharmônicas podem ser deduzidas:
4 2 2 0 , (6. 4)
Toda função ,x y que satisfaz as equações (6. 4) é chamada de funções de
tensão de Airy.
Considere agora o problema específico de uma placa infinita carregada
biaxialmente contendo uma trinca. Para resolver este problema nós podemos tomar uma
função de tensão complexa de um tipo introduzio por Westergaard.
Re Imz y z , (6. 5)
Na equação (6. 5) z é uma função analítica da variável complexa z x iy e z e
z são as integrais de primeira e segunda ordem. Pode ser provado que as partes reais e
imaginárias de tais funções analíticas satisfazem a equação biharmônica, e que os produtos
destas partes com variáveis x e y também satisfazem. Então as funções analíticas como
aquelas na equação (6. 5) podem ser usadas como função de tensão.
Usando as equações de Cauchy-Riemmann:
Re Imz f zx y
, (6. 6)
e

86
Re Imz f zy x
, (6. 7)
É possível achar expressões para ,xx yy e xy pela derivação da equação (6. 5)
de acordo com as regras da equação (6. 1), (6. 2), (6. 3) esta fornece
Re Im ´xx z y z , (6. 8)
Re Im ´yy z y z , (6. 9)
Re ´xy y z , (6. 10)
onde ´ z é a derivada de primeira ordem. Note que as equações (6. 8), (6. 9) e (6. 10) são
soluções gerais as quais forneceram tensões para quaisquer z . Contudo, as tensões
corretas para um problema particular será obtida somente usando-se uma função z que
satisfaz um número de condições de contorno pertencente à aquele problema.
Figura - 6. 6. Placa infinita carregada biaxialmente contendo uma trinca.
A formulação de Kosolov para os problemas planos da elasticidade [ ] segue:

87
2 ' 'x y z z . (6. 11)
2 2 " 'y x xyi z z z . (6. 12)
2 'x yG u iu k z z z z . (6. 13)
Onde a “linha” denota as derivadas em relação a z, então ' /z d dz e ' /z d dz
3 43 / 1
v para deformação planak
v v para tensão plana
(6. 14)
Para uma placa infinita, carregada biaxialmente e contendo uma trinca como
mostrado na Figura - 6. 6 as condições de contorno são prontamente estabelecidos, como:
1) 0yy para a x a e 0y
2) yy conforme x
3) yy (isto é uma singularidade)
em x a uma vez que a trinca é um intensificador de tensão
Agora uma função z que satisfaz estas condições de contorno deve ser
escolhida. Um exemplo é a função:
2
21
azaz
, (6. 15)
Nós sabemos das equações (6. 8), (6. 9) e (6. 10) que ao longo do eixo- x (i. e.
0y ), Reyy z , e isto é visto a partir da equação (6. 15) que para a x a ,
Re 0z e portanto 0yy , como requerido pela primeira condição de contorno, Além
do mais, para z a equação (6. 15) fornece yyz e para z a ou a existe uma
singularidade, de tal forma que a segunda e a terceira condição de contorno são também
satisfeitas.
Contudo, se a origem é transladada para a ponta da trinca tomando-se z a ,
nós obtemos uma outra função de tensão adequada a qual torna-se mais fácil usar. Esta função
é:

88
2 2 2
21
a
a a aa
, (6. 16)
Uma aproximação de primeira ordem para esta equação, válida para a , é simplesmente:
22
a aa
, (6. 17)
Note que esta aproximação é o primeiro termo da expansão em série de Laurent. Usando a
equação (6. 17) uma variação pode ser facilmente feita para uma representação em
coordenadas polares ,r com origem na ponta da trinca como mostrado na Figura - 6. 6.
Então ire e
2
2ia e
r
, (6. 18)
ou
2
2ia e
r
, (6. 19)
A equação (6. 19) é somente válida para r a , apropriando a aproximação feita para obter a
equação (6. 17). Tendo obtido a equação (6. 18) e (6. 19) por álgebra direta esta pode ser
usada para achar Re z , Re ´ z e Im ´ z .
6. 5 – Condições de Contorno
As condições de contorno ao longo das superfícies da trinca para todos os três
modos de fratura são aquelas que são livres de tração. As implicações destas superfícies livres
de tração na tensão plana ao longo das faces da trinca C ( Figura - 6. 5) são para os
modos planos de fratura (I e II).
, 00 0, 0x y y xy
a x a yC
t t
. (6. 20)
As implicações das superfícies livre de tração sobre as tensões para o problema de
trinca antiplano (Modo III) são dados em (I.5.64) e (I.5.65 ),

89
A condição de contorno infinito depende do modo de fratura a ser investigado. As
trações de campo distrante dos três modos principais de fratura são mostrados na
Figura - 6. 7.
Figura - 6. 7. Campos de tração longe para os três modos principais de fratura
6. 6 – Resultados Analíticos de Fratura Lisa
A solução analítica do campo de tensão/deformação ao redor de uma trinca lisa
está presente em vários livros textos de Mecânica da Fratura e são apresentadas abaixo para os
Modos I, II e III.
Para cada um dos três modos eles encontraram as expressões das tensões em
função da posição r e do ângulo e do comprimento da trinca a, ou seja: , ,r a
De uma forma geral o fator de intensidade de tensão para os modos I,II,III pode
ser definido como:
, ,
2ijI II III
rK a
f
, (6. 21)
logo
, ,
2I II III
ij
Kf
r
, (6. 22)

90
O qual define uma propriedade do material para f , e ca a onde:
, ,
2ijIC IIC IIIC f
rK a
f
, (6. 23)
chamado de fator de intensidade de tensão crítico ou tenacidade a fratura.
Portanto,
, ,
2IC IIC IIIC
ij
Kf
r
, (6. 24)
Para os Modos I, II e III, todas estas tensões podem ser resumidas em uma única expressão do
tipo:
1/ 2
, ,2ijaa r f
, (6. 25)
Observe que no limite de 0r , para um ângulo 0 a tensão na ponta da
trinca tende a um limite que depende apenas do tamanho da trinca, ou seja:
0 0
lim , ,ij fr aa r
, (6. 26)
que corresponde a tensão de fratura do material
1/ 2
21c
fEG
v
, (6. 27)
e
2c e pG , (6. 28)
- tensão plana ou estado biaxial (estado plano de tensão)
- deformação plana ou triaxial (estado plano de deformação)
Observações
1) A derivação anterior é somente um dos métodos para obter a solução do campo
de tensão. Existem vários outro métodos mais gerais.
2) A derivação é específica para uma placa infinita biaxialmente carregada.
Contudo, ela pode ser mostrada que para uma placa uniaxialmente carregada a solução difere

91
das equações (6. 41), (6. 42) e (6. 43) somente que em um termo não-singular deve ser
subtraído da expressão para xx . Esta correção é frequentemente omitida, uma vez que o
primeiro termo na expressão é muito maior.
3) A solução é somente o primeiro termo em uma expansão em série e é válida
somente para , r a . Contudo, esta restrição leva a um resultado muito importante. Para
todo problema do Modo I a forma geral de z deve conter o fator 2
2
1
1 az
para assegurar
que 0yy para a x a . Então executando a transição z a significa que para
a todos as funções de tensão se reduzem á:
f
, (6. 29)
Contudo, por causa de que a , ele pode ser considerado tender a zero e f pode ser
substituída por um valor constante. Escolhendo este valor ser / 2IK , nós podemos
escrever:
lim2
IK
, (6. 30)
Comparando este resultado com a equação (6. 18) e (6. 19) é porque para todo Modo I a
função de tensão a parte geométrica ,f r permanece a mesma e somente IK varia. A
conseqüência é que na vizinhança da ponta da trinca a o campo total de tensão devido
a dois ou mais diferentes Modo I de sistemas de carregamento pode ser obtido por simples
soma algébrica dos respectivos fatores de intensidade de tensão. Este é um resultado muito
importante, como será mostrado na secção 2.6.
4) A solução é válida somente para uma trinca slit-shaped com raio de curvatura
zero na ponta da trinca. Na prática é algumas vezes necessário considerar uma trinca com raio
finito na ponta da trinca.

92
6.2.1 - Modo I IC ICG K
Para o Modo I nós assinalaremos uma tensão de tração bidimensional no infinito
N :
, , 0 , 0, 0, , 0
x y x xy
x y y x xy
x t tN
y t t
. (6. 31)
Note que nós temos aplicado uma tensão de carga constante na direção-x no infinito, a qual
não tem forças correspondentes na Figura - 6. 4a. Esta tração particular é introduzida para
simplificar a condição de contorno no infinito para um estado uniforme de tensão . Uma
tensão adicional será produzida na direção-x por esta tração específica. Esta tensão é
constante porque ela atua no plano da trinca e, portanto não é afetada pelas condições de
contorno internas que as superfícies da trinca seriam imposta de outra forma. Esta tensão
estranha pode ser subtraída da solução depois se desejada.
A solução elástica para o problema do modo I pode ser obtida pela substituição
nas seguintes funções complexas dentro das equações de Kosolov (6. 11)–(6. 13)
1 1' , ' '2 2I Iz Z z z zZ z . (6. 32)
onde IZ z é a chamada de função de Westergaard e é dada por:
2 2I
zZ zz a
. (6. 33)
e as derivadas e antiderivadas de IZ z em relação a z são designadas por
2
3/22 2' II
dZ aZ zdz z a
.
(6. 34)
e
1/ 22 2*I IZ z Z dz z a . (6. 35)
Note que a seguinte relação resulta da integração de (6. 32) por partes:

93
1 1*2 2I Iz Z z zZ z . (6. 36)
onde *IZ z é a integral de IZ z com relação a z, como dado por (6. 35).
Estas substituições resultam nas seguintes soluções elásticas lineares, as quais
encontram as condições de contorno (6. 20) e (6. 31).
2Rex y I I IZ z Z z Z z . (6. 37)
2 ' 2 '
2 Im ' Re 'x y xy I I
I I
i z z Z z yiZ z
y Z z i Z z
. (6. 38)
12 1 Re * Im2
1 1 Im * Re2
x y I I
I I
G u iu k Z z y Z z
i k Z z y Z z
. (6. 39)
onde Re e Im denotam as partes real e imaginária de uma função complexa, e o parâmetro k
é definido individualmente para tensão plana e deformação plana por:
3 / 13 4
v v tensão planak
v deformação plana
. (6. 40)
Note que esta formulação particular de Westergaard restringe as soluções a
aquelas que têm a propriedade x y e 0xy ao longo do eixo-x 0y . Então a
condição de contorno biaxial de tensão no infinito x y (veja a Figura - 6. 7 ) é uma
necessidade de forma a aplicar a técnica de Westergaard ao problema do Modo – I.
A solução elástica linear exata para as tensões e os deslocamentos para tensão
plana a qual encontra as condições de contorno no infinito são dadas no Capitulo – IV. Ao
redor da ponta da trinca , 0x a y , as funções , 'I IZ z Z z e *IZ z assumem a forma
assimtótica ( ) e ( ), respectivamente, onde r e são redefinidas sobre a ponta da trinca como
mostrado na Fig..

94
Por sua vez estas quantidades podem ser substituídas nas equações (6. 8), (6. 9) e
(6. 10), resultando na solução assimtótica associada para as tensões, a qual é válida para
ambos as tensões planas e a deformação plana para o modo I, é:
3cos 1 sen sen2 2 22xx
ar
, (6. 41)
3cos 1 sen sen2 2 22yy
ar
, (6. 42)
3cos sen cos2 2 22xy
ar
(6. 43)
onde
33 11 22v , (6. 44)
As equações (6. 41), (6. 42) e (6. 43) mostram que todas as tensões tendem ao
infinito em 0r (na ponta da trinca) e são produtos das posições geométricas 12
fr
e
um fator a , o qual é uma simples função da tensão remota e do comprimento da trinca.
Então o fator a determina a magnitude das tensões elásticas no campo na ponta da
trinca. Este fator a é chamado de Fator de Intensidade de Tensão do Modo I,
IK a :
Figura - 6. 8. Campo de Tensão xx no Modo I de Fratura com singularidade. Modelo Clássico
1/ 2

95
Figura - 6. 9. Campo de Tensão xy no Modo I de Fratura com singularidade. Modelo Clássico
1/ 2
Figura - 6. 10. Campo de Tensão yy no Modo I de Fratura com singularidade. Modelo Clássico
1/ 2
onde o parâmetro IK , chamado de fator de intensidade de tensão do modo I , é para a placa
infinita com uma trinca interna de comprimento 2a sujeito a uma tensão uniforme de tração,
aplicada remotamente
1/ 2IK a , (6. 45)
Nós podemos agora subtrair a tensão constante da distribuição de tensão x
(6. 41) de forma a eliminar a condição de contorno estranha no infinito na direção-x de
xt que foi introduzida anteriormente para facilitar a solução. Contudo, uma vez que x e
todas as outras tensões têm uma singularidade 1/ 21/ r , na ponta da trinca, esta tensão estranha
tem pouco efeito próximo da ponta da trinca e como tal é geralmente desprezada a partir do

96
modo I de solução assimtótica para a placa infinita.
Analogamente, os deslocamentos assimptóticos ao redor da ponta da trinca para o
modo I de tensão plana e deformação plana são achados a partir de (6. 39).
Sob tensão plana as condições de carregamento, os deslocamentos ou as deflexões
, , ,u u r a do Modo I são explicitamente.
1/22cos 1 2sen
2 2 2 2xa ru k
, (6. 46)
1/ 2 2/ 2 / cos / 2 2 1 cos / 2x Iu K E r v . (6. 47)
1/ 22
2 sen 1 2cos2 2 2 2
a ru k
, (6. 48)
1/2 2/ 2 / sen / 2 2 1 cos / 2y Iu K E r v . (6. 49)
onde k é definido como em (6. 40) como 31
vkv
onde a relação
2 1EG
v
. (6. 50)
foi usada para relacionar G com E.
Os deslocamentos assimptóticos para a deformação plana do modo I para uma
placa infinita são dada explicitamentes como ( ) e ( ) e o deslocamentos exatos para o modo I
de uma placa infinita são dada por ( ) e ( ). Estas soluções exatas são fairly complicadas
algebricamente, unlike que as soluções assimtóticas.
Para outras geometrias além da placa infinita, e para outros diferentes tipos de
carregamentos, somente o fator de intensidade de tensão IK varia com a forma (6. 45). Por
exemplo, o fator de intensidade de tensão para uma trinca na borda de comprimento a em uma
placa semi-infinita com uma tensão remotamente aplicada é aproximadamente:
1/ 21.12IK a , (6. 51)
Uma trinca na borda de uma placa de dimensões infinitas com forcas concentradas é ilustrada
na Figura - 6. 4.

97
O estado sob o qual o fator de intensidade de tensão é suficiente para caracterizar
as distribuições de tensão ao redor da vizinhança da ponta da trinca é chamado de fluência de
pequena escala.
Desprezando-se a geometria da amostra ou o tipo de carregamento de carga, a
intensidade da singularidade de todas estas tensões na ponta da trinca 0r permanece
1/ 21/ r para todos os problemas elásticos lineares. Isto não é verdade, contudo para as teorias
de deformação de plasticidade, a qual pode ser interpretada como teorias elásticas não-
lineares. Nós examinaremos problemas de trincas para estes tipos de materiais não-lineares
posteriormente.
Uma solução para o problema que leva em consideração uma trinca com raio
finito na ponta da trinca. foi obtida por Creager e Paris, que simplesmente moveu a origem do
sistema de coordenadas polares do sistema por uma quantidade igual a uma metade do raio da
ponta da trinca, como mostrado na Figura - 6. 11.
Figura - 6. 11. Trinca.com uma ponta de raio, , finito.
As seguintes expressões foram obtidas:
3 3cos 1 sen sen cos2 2 2 2 22 2
I Ix
K Krr r
, (6. 52)
3 3cos 1 sen sen cos2 2 2 2 22 2
I Iy
K Krr r
, (6. 53)
3 3cos sen cos sen2 2 2 2 22 2
I Ixy
K Krr r
, (6. 54)

98
6.2.2 - Modo II IIC IICG K
Como a solução do modo I, a solução elástica para o problema do modo I pode
ser obtida pela substituição da função de Westergaard ,
2 2II
zZ zz a
. (6. 55)
nas equações de Kosolov (6. 11)–(6. 13), onde:
1 1' , ' '2 2II II IIz iZ z z izZ z iZ z . (6. 56)
Estes potenciais de Westergaard diferem das funções anteriores (6. 32) em que elas geram
soluções que tem a propriedade de 0y e 0xy ao longo do eixo-x, e satisfaz as seguintes
condições de contorno no infinito Figura - 6. 7.
, 0 0,, 0 0,
x y x xy
x y y xy
x t tN
y t t
. (6. 57)
Os potenciais (6. 56) também satisfazem as condições de contorno (6. 20) e
produzem a solução elastica linear:
1 2 Im2x y II I IIi Z z Z z Z z . (6. 58)
2 ' 2
2 Re ' 2 Im 2 Im ' Rex y xy II II
II II II II
i i z z Z z iZ z
y Z z Z z i y Z z Z z
.
(6. 59)
12 1 Im * Re2
1 1 Im * Im2
x y II I
II II
G u iu k Z z y Z z
i k Z z y Z z
. (6. 60)
onde o parâmetro k é definido individualmente por (6. 40) para tensão plana e deformação
plana. A solução elástica linear exata para as tensões e os deslocamentos para a deformação
plana encontram condições de contorno no infinito dadas no Capítulo XX.
Ao redor da ponta da trinca em , 0x a y a função IIZ z assume a forma ( ). As
funções 'IIZ z e *IIZ z segue analogamente de ( ) e ( ) substituindo por .

99
A solução assimtótica para as tensões perto da ponta da trinca para o modo II sob
condições de carregamentos de tensão ou deformação plana.
3sen 2 cos cos2 2 22xx
ar
, (6. 61)
3cos 1 sen sen2 2 22xy
ar
, (6. 62)
3sen cos cos2 2 22yy
ar
, (6. 63)
onde
33 11 22v , (6. 64)
onde o parâmetro IIK é chamdo de fator de intensidade de tensão do modo II .
Para uma placa infinita com uma trinca interna de comprimento 2a sujeita a uma
tração de cisalhamento remotamente aplicada no plano (veja, Figura - 6. 7), o fator de
intensidade de tensão é:
1/ 2IK a , (6. 65)
Analogamente, os deslocamentos ou as deflexões , , ,u u r a assimptóticos
ao redor da ponta da trinca para o modo II de tensão plana e deformação plana são achados a
partir de (6. 60) ser:
1/ 2 2/ 2 / 2 sen / 2 1 2cos / 2x IIu K G r k . (6. 66)
1/ 22
1 sen 1 2sen2 2 2 2
a ru k
, (6. 67)
1/ 2 2/ 2 / 2 cos / 2 1 2sen / 2y IIu K G r k . (6. 68)
1/ 22
2 cos 1 2sen2 2 2 2
a ru k
, (6. 69)
onde k é definido como em (6. 40).

100
Sob tensão plana as condições de carregamento, os deslocamentos do Modo II são
explicitamente.
1/ 2 2/ 2 / sen / 2 2 1 cos / 2x IIu K E r v . (6. 70)
1/ 2 2/ 2 / cos / 2 2 1 cos / 2y IIu K E r v v . (6. 71)
onde a relação (6. 50) foi usada para relacionar G com E.
Os deslocamentos assimptóticos para a deformação plana do modo II para uma
placa infinita são dada explicitamentes como ( ) e ( ) e o deslocamentos exatos para o modo II
de uma placa infinita são dada por ( ) e ( ). Estas soluções exatas são fairly complicadas
algebricamente, unlike que as soluções assimtóticas.
Um método geral de solução de problemas planos por meio de um esquema de
mapeamento de variáveis complexas e das equações de Kosolov foi desenvolvido por N. I.
Muskhelishvili. Este método de solução é muito poderoso para solução de problemas
mecânicos elásticos lineares. Uma breve introdução a esta técnica pode ser achada em
[Timoshenko, Sokinlikov]
Figura - 6. 12. Campo de Tensão xx no Modo I de Fratura com singularidade. Modelo Clássico
1/ 2

101
Figura - 6. 13. Campo de Tensão xy no Modo I de Fratura com singularidade. Modelo Clássico
1/ 2
Figura - 6. 14.Campo de Tensão yy no Modo I de Fratura com singularidade. Modelo Clássico

102
6.2.3 - Modo III – O Problema Antiplano IIIC IIICG K
Por causa de sua relativa simplicidade o problema antiplano Modo III onde
1 2 0u u . (6. 72)
e
3 3 1 2,u u x x . (6. 73)
É considerado primeiro. A equação (6. 74) fornece os seguintes componentes de deformação
não nulas
12
jiij
j i
uux x
. (6. 74)
e
33
12
ux
. (6. 75)
onde 1, 2
De acordo com a equação (6. 76)
21 2ij ij ij kk
vv
. (6. 76)
as componentes das tensões não triviais são:
3 32 . (6. 77)
a partir de (2.110) a única equação relevante na ausência de força é:
3 0x
. (6. 78)
ou
31 32
1 2
0x x
. (6. 79)
Substituindo (6. 77) em (6. 78) temos:

103
32 0x
. (6. 80)
logo
32 0x
. (6. 81)
usando (6. 75) temos:
312 02
ux x
. (6. 82)
logo
23
2 0ux
. (6. 83)
para 1,2
2 22 3 3
3 2 21 2
0u uux x
. (6. 84)
Portanto a solução da equação (6. 84) pode ser escrita como:
31u f z f z . (6. 85)
onde
, ,f z u x y iv x y . (6. 86)
e
, ,f z u x y iv x y . (6. 87)
Introduzindo a equação (6. 85) em (6. 75) e usando (3.1.9) temos:
331
1 1
1 1 12 2
u f z f zx x
. (6. 88)
e

104
311 ' '
2f z f z
. (6. 89)
e
332
2 2
1 1 12 2
u f z f zx x
. (6. 90)
e
32 ' '2i f z f z . (6. 91)
A partir de (6. 77) temos:
31 312 ' 'f z f z . (6. 92)
e
32 322 ' 'i f z f z . (6. 93)
multiplicando (6. 93) por i e somando com (6. 92) temos:
31 32 31 322 2 'i i f z . (6. 94)
Figura - 6. 15. Região da ponta da rinca e o sistema de coordenadas
Considerando-se uma função holomórfica f z do tipo:

105
1f z Cz . (6. 95)
onde
C A iB . (6. 96)
e A,B e são cosntantes reais a serem determinadas. Para deslocamentos finitos no topo da
trinca temos que:
0 ; 1z r . (6. 97)
Substituindo (6. 95) em (6. 94) temos:
31 32 2 1 2 1
2 1 cos
i Cz A iB z
A iB isen z
. (6. 98)
onde
31 2 1 cos senr A B z . (6. 99)
32 2 1 sen cosr A B z . (6. 100)
As condições de contorno que requerem as superfícies da trinca sejam livres de
tração necessita que:
32 0 . (6. 101)
em conseqüentemente
sen cos 0sen cos 0
A BA B
. (6. 102)
Para evitar a solução trivial o determinante dos coeficientes das equações deve ser
nulo:
sen cos0
sen cos
. (6. 103)
temos:
sen cos sen cos 02sen cos sen 2 0
. (6. 104)

106
o qual para 1 tem-se as raízes:
1 , / 2 , 0,1, 2,...2
n n . (6. 105)
A partir de (6. 99) e (6. 93) para A = 0 e 12
temos:
1/ 2 1/ 231
12 1 sen sen2 2 2
r B r B . (6. 106)
1/ 2 1/ 232
12 1 cos cos2 2 2
r B r B . (6. 107)
a partir de (6. 85)temos:
1 13
1u A iB z A iB z
. (6. 108)
e
1 1
31 i iu A iB re A iB re
. (6. 109)
1 11 13
1 i iu A iB r e A iB r e
. (6. 110)
e
1
3 1
cos 1 sen 11
cos 1 sen 1
A iB r iu
A iB r i
. (6. 111)
logo
13
1 2 cos 1 2 sen 1u r A B
. (6. 112)
Para 0 1/ 2A e temos:
1/ 23
2 sen2
Bu r
. (6. 113)
Escolhendo B de tal forma que:

107
1/ 22IIIKB
.
(6. 114)
A partir de (6. 106) e (6. 107) temos:
31 sen22
ar
, (6. 115)
e
1/ 2
31 1/ 2 1/ 2sen sen2 22 2
III IIIK Krr
. (6. 116)
e
32 sen22
ar
, (6. 117)
e
1/ 2
32 1/ 2 1/ 2cos cos2 22 2
III IIIK Krr
. (6. 118)
e as deflexões , , ,u u r a são:
1/ 2
32 sen
2 2a ru
, (6. 119)
e
1/2
32 sen
2 2IIIK ru
. (6. 120)
onde IIIK é definido de tal forma que:
1/ 23 32 00
lim 2III rK u r
. (6. 121)

108
Figura - 6. 16. Campo de Tensão xy no Modo I de Fratura com singularidade. Modelo Clássico
1/ 2
Figura - 6. 17. Campo de Tensão yx no Modo I de Fratura com singularidade. Modelo Clássico
1/ 2

109
6.3.1 - Perfil de Tensões na ponta da Trinca
Após todos estes cálculos nós podemos ainda perguntar, qual é o perfil de
distribuição de tensão a partir da ponta da trinca até a superfície do material?
Quando tomamos como referência a ponta da trinca de tamanho de falha c . nós
temos o seguinte perfil de distribuição de tensões em função da distância r a partir da ponta da
trinca:
Figura - 6. 18. Perfil de tensão na ponta da trinca.
Para este perfil Irwin-Westergard encontraram a seguinte relação:
2y apcr
, (6. 122)
onde c é a metade do comprimento da falha, ou seja é o comprimento de uma trinca
superficial ou a metade do comprimento de uma trinca interna.
A equação (6. 122) só é válida para trincas elípticas, e dá o perfil de distribuição
de tensão na ponta da trinca até a a superfície do material.
O cálculo ou o valor de c, pode ser introduzido pela criação de uma falha através
de um entalhe no material, que pode passar a ser um defeito crítico (no caso de fratura
catastrófica) que leva ao rompimento do corpo cujas dimensões são conhecidas.
A expressão (6. 122) pode ser escrita como:

110
2y apcr
, (6. 123)
Observe que se:
0 yr , (6. 124)
e se
0yr , (6. 125)
Observe também que a equação (6. 122) ou (6. 123) apresenta singularidades, não podendo
ser calculada para casos extremos como, por exemplo, 0r , pois o próximo a este ponto
0r , o valor da tensão tende a um valor teórico y teo e antes que isso ocorra a tensão
de escoamento esc do material é atingida, pois por mais frágil que seja o material, na prática
existe uma deformação plástica residual na ponta da trinca, capaz de absorver energia e o
material apresenta escoamento. Portanto, a expressão (6. 123) serve apenas para demonstrar
as tendências nos casos extremos.
Se tivermos um corpo com dimensões infinitas onde A e r tendem ao infinito
( A e r ) então 0FA
, pois quando A o raio na frente da trinca pode também
ser prolongado até tender ao infinito r . E a carga dividida pela área infinita
FA
tende a zero ( 0 ).
Figura - 6. 19. Perfil de tensão na ponta da trinca.

111
A expressão geral para a tensão y em função da distância r e do ângulo a
partir da ponta da trinca é dada por:
3cos 1 sen sen2 2 22
apy
cr
, (6. 126)
onde é o ângulo formado entre a ponta da trinca e o raio de um ponto qualquer no interior
do material.
6. 7 – O Fator de Intensidade de Tensão
Definindo-se o fator de intensidade de tensão K (em 3/ 2/MN m ) como sendo:
apK c , (6. 127)
Portanto, a partir da definição acima nós temos que:
3cos 1 sen sen2 2 22y
Kr
, (6. 128)
e para 0 temos:
2yK
r
, (6. 129)
A partir da expressão (6. 129) nós podemos ver que o perfil de tensões na ponta da
trinca é o mesmo para qualquer geometria da trinca, pois o que muda com a geometria é o
valor de y , que depende diretamente do valor de K definido acima.
Para 0 , ou seja, posição perpendicular a solicitação da carga, nós temos a
condição limite onde a solicitação é máxima e a expressão (7.25) ou (7.26) é recuperada.
Para uma posição qualquer ao longo do eixo x, y é a condição crítica de
solicitação, pois neste eixo y é maior do que em qualquer outro ponto correspondente sobre
outro eixo considerado.

112
Figura - 6. 20. Modos de solicitação de carga.
Há ainda dois pontos importantes a considerar: nem sempre a trinca se encontra
no centro do corpo e também o fator de concentração de tensões da forma como foi definido
depende do tipo de aplicação de carga, ou seja, das diferentes situações de aplicação de carga,
ou do tipo de solicitação a qual o material está submetido, conforme mostra a Figura - 6.
20.
O formalismo matemático muda para os casos II e III, e não existe até hoje um
método reconhecido de cálculo que inclua as três situações simultaneamente.
Para a solicitação de tração IK K , para cisalhamento IIK K e para
rasgamento IIIK K .
A partir de (7.26) vê-se que se duas falhas de diferentes geometrias têm o mesmo
valor de K (desde que se situe no mesmo tipo de solicitação) então o campo de tensões em
torno delas são iguais demonstrando desta forma a importâancia da definição do fator
IK K .
Como dependência geométrica da trinca é um fator importante nós definirmos um
parâmetro y como sendo o “fator geométrico” da trinca onde a fórmula genérica será:
3cos 1 sen sen2 2 22
apy
Y cr
, (6. 130)
Portanto, para 0 temos:
2ap
y
Y cr
, (6. 131)
ou

113
2y apcYr
, (6. 132)
onde o fator de intensidade de tensão IK K para a tração na ponta da trinca é dado agora por:
I apK Y c , (6. 133)
6.4.1 - Fator Geométrico ou de Forma do Corpo Trincado sujeito a um Carregamento
O formalismo teórico para determinação do fator de amplificação de tensão K foi
realizado para uma trinca aguda em uma placa infinita, sendo que para outras geometrias em
corpo infinito temos que:
I apK Y c , (6. 134)
onde Y é o fator geométrico da trinca que considera os diferentes métodos de carregamento, a
forma da trinca, a posição e o tipo de defeito, a localização da trinca, o estado de solicitação,
etc. Este fator é tabelado, mas pode ser obtido pelo método matemático de elementos finitos,
como por exemplo:
Quando 1Y o corpo está submetido à tração e a trinca está localizada no seu
centro e quando I apK Y c esta expressão depende de qual é o valor de Y considerado e
quando I apK Y c , Y já está multiplicado por .
Figura - 6. 21. Efeito da largura e da posição da trinca em diferentes corpos sólidos sob tração.

114
Se a trinca é muito pequena em relação a largura do corpo de prova ou em relação
a área aplicada / 0c W então para efeitos de cálculo reais, pode-se igualar c/W a zero
/ 0c W pois c é da ordem de microns ( m ) e W é da ordem de centímetros logo
64
2
10/ 1010
m mc Wcm m
.
Considerando que / 1 1,12c W Y neste caso, portanto 1,99K c , pois
já está multiplicado por .
Considerando a geração de gráficos de /Y c W temos:
Figura - 6. 22. Gráfico do efeito da largura em corpos sólidos sob tração.
A partir da definição de K nós podemos escrever:
I apK Y c , (6. 135)
logo
1 Iap
KY c
, (6. 136)
Nós vemos que K tornou-se um parâmetro comparativo à tenacidade dos
materiais, conforme o exemplo abaixo:
Sejam três corpos de prova exatamente iguais, mas com tamanhos de defeitos
diferentes, conforme mostra a Figura - 6. 23.

115
Figura - 6. 23. Gráfico do efeito da largura em corpos sólidos sob tração.
como o valor de K é o mesmo para os três casos temos:
1 1 2 2 3 3I ap ap apK Y c Y c Y c , (6. 137)
Variando o tamanho ou a posição do defeito para o mesmo estado de solicitação
nós temos que K cte (é o mesmo para todos os três casos).
Portanto, se 1 2 3K K K então nós podemos concluir que 1 2 3ap ap ap .
Graficando /Y c W nós temos que:
Figura - 6. 24. Gráfico do efeito da largura em corpos sólidos sob tração.

116
No caso de uma trinca ou defeito de tamanho crítico para a ruptura nos definimos
o novo valor de IK (para tensão) como sendo o Fator Crítico de Intensidade de Tensão
I ICK K dado por:
IC fK Y c , (6. 138)
Portanto, para a ruptura temos:
1 1 ICIap f
KKY Yc c
, (6. 139)
Para aplicações práticas da expressão (6. 139) do fator de intensidade de tensão
crítica ICK não tenho o valor de c, mas tenho o valor de ICK , e se olhar para um gráfico de Y
contra /c W qual o valor de Y que se deve adotar? Como posso calcular o valor de c?
Se a espessura do corpo de prova for considerável adoto 0cW
. Senão posso
criar um defeito através de um entalhe no material que passa a ser um defeito crítico de
dimensões definidas.
6.4.2 - Critério de Fratura
Campos assintóticos para 0r
,K K a , (6. 140)
Por causa da natureza singular do campo de tensão elástica, existe uma região
inelástica (plástica) ao redor da ponta da trinca onde o processo de nucleação de vazios,
crescimento e coalescência que constituem a fratura dúctil ocorrem. Seja R a dimensão
representativa desta região inelástica. Uma estimativa de R pode ser obtida, para o Modo–I
equacionando-se 22 para fornecer a tensão y em r R e 0 , tal que:
22
1 0 0
3cos 1 sen sen2 2 22
IKr
, (6. 141)
e

117
2
221
22I I
y
K KRr
, (6. 142)
Dentro desta região a solução elástica linear é inválida. Não é possível, portanto,
caracterizar diretamente o processo de fratura com uma formulação elástica linear.
Figura - 6. 25. Base da Mecânica da Fratura elástica linear
Não é essencial admitir que a região inelástica está confinada à região do domínio
K. A situação onde R é pequeno comparado com D e qualquer outra dimensão geométrica e
referida como uma fluência de pequena escala.
A análise elástica indica que as distribuições de tensões e deformações dentro da
região de domínio K são as mesmas desprezando-se a configuração e o carregamento. Então,
dado dois corpos com diferente tamanhos de trinca e diferentes carregamentos do mesmo
modo, mas de outra forma idênticos, então próximos à ponta, campos de tensões e
deformações serão os mesmos se os fatores de intensidade de tensão são iguais.
1 1 2 2I f C f CK L L , (6. 143)
Conseqüentemente, o fator de intensidade de tensão caracteriza a carga ou a deformação
experimentada pela ponta da trinca e é uma medida da propensidade para extensão da trinca
ou para a força promotora do trincamento. Isto é, se o crescimento da trinca é observado
iniciar no primeiro corpo a um certo fator de intensidade de tensão crítico, então a extensão da
trinca no segundo corpo pode ser esperada quando seu fator de intensidade de tensão atinge o
mesmo valor crítico. Portanto, dentro do confinamento de fluência de pequena escala o
critério de fratura do MFEL para um crescimento de trinca pode ser expresso como:

118
, CK K a K , (6. 144)
onde, CK é o valor crítico do fator de intensidade de tensão K e é uma medida da resistência a
fratura do material.
6.4.3 - A Zona Plástica e a Tenacidade a Fratura
A Mecânica da Fratura Elástica Linear está baseada apenas na condição de que o
tamanho da zona plástica ao redor da ponta da trinca é pequeno quando comparado à região
K-dominante, ao comprimento da trinca ou a qualquer outro comprimento geométrico
característico. Dentro destas restrições a equivalência da fluência de pequena escala expressa
pela equação ( ) é justificável. Baseado apenas na análise elástica próxima a ponta da trinca,
estimativas do tamanho e forma da zona plástica e da tenacidade a fratura será examinado.
A equação (3.138) fornece
22 2IKr
, (6. 145)
para a distribuição de tensões no Modo-I idealmente elástico sobre o plano da trinca 0 .
Esta distribuição e uma distribuição elástica perfeitamente plástica são mostradas
esquematicamente na Figura - 6. 26. O comprimento
21
2I
yy
Kr
, (6. 146)
Identifica-se o ponto sobre o plano da trinca onde as tensões elásticas 22 da equação (6. 145)
são iguais a tensão de fluência uniaxial y . A fluência local perto da ponta da trinca em um
material real estende-se a uma redistribuição das tensões como mostrado na Figura - 6. 26.
Em uma primeira aproximação esta fluência causa a carga elástica sobre a região 0 yr r
sobre o plano da trinca de forma uniformemente distribuída sobre o comprimento pr , a
extensão da fluência sobre este plano, isto é:
220
yr
y pdr r , (6. 147)
a qual para a distribuição da equação (6. 145) provê:

119
212 I
py
Kr r
, (6. 148)
Figura - 6. 26. Distribuições de tensões no plano para trincas elásticas e inelásticas.
para um estado do plano de tensões. Irwin ( ) estimou que a restrição introduzido pelas
condições da deformação plana eleva a tensão requerida para produzir a fluência por um fator
de 3 . A deformação plana equivalente da equação (6. 148) é:
212
3I
p yy
Kr r
, (6. 149)
O modelo de Dugdale (veja Figura - ) pode também ser usado para prover ainda
uma outra estimativa para a extensão da zona plástica. Neste modelo a abertura da trinca por
uma tensão remota uniforme é restrita em parte por uma tensão uniforme 22 y na
lâmina coesiva ou zona plástica de comprimento d. A visão da trinca ser de comprimento
2 2a d e o emprego da superposição é deixado com o problema residual em 2 0x de
2 1p x para 1x a e 2 1 yp x para 1a x a d . Fazendo uso da equação ( ) e
a condição que o fator de intensidade de tensão para o modelo de Dugdale deve permanecer
para tensões não-singulares obtém-se:

120
02y
, (6. 150)
onde
1sen a
a d
, (6. 151)
segue-se da equação (6. 150) que:
sec 12 y
d a
, (6. 152)
chamando de 1/ 2IK a na ausência de fluência e tamanho como sendo pequeno
quando comparado a y , nós achamos a partir da equação (6. 152) a aproximação:
2
8I
y
Kd
, (6. 153)
para a extensão da fluência. O último compara-se favoravelmente com a estimativa da tensão
plana da equação (6. 148).
Um efeito de fluência é aumentar os deslocamentos ou, equivalentemente, reduzir
a rigidez do corpo em relação a um corpo idealmente elástico. Baseado apenas na solução
plástica perfeitamente elástica do problema anti-plano de Hult e Mcclintock ( ), Irwin ( )
argumentou que o mesmo efeito pode ser aproximado em um corpo idealmente elástico pelo
aumento do comprimento efetivo da trinca. Como uma primeira aproximação, Irwin foi quem
visualizou a ponta da trinca como sendo centrada em uma zona plástica, incrementando o
comprimento da trinca por um raio de zona plástica e introduzindo o comprimento efetivo da
trinca.
e ya a r , (6. 154)
a última expressa o que tem se tornado conhecida como a correção da zona plástica de Irwin
para o comprimento da trinca. Este comprimento efetivo é usado no cálculo do fator de
intensidade de tensão. Porque o fator de intensidade de tensão efetivo é uma função de ea , a
qual por sua vez depende apenas da forma, uma solução iterativa é geralmente requerida para
estabelecer o fator de inensidade de tensão efetivo.

121
As equações (6. 148) e (6. 149) e (6. 153) somente prover estimativas para o
tamanho da zona plástica. Antes da forma da zona ser estabelecida, um critério de fluência
deve ser especificado. O critério de Von Mises da equação ( ) pode ser expressa como:
2 2 2 21 2 2 3 3 1 2 y , (6. 155)
para os problemas planos as tensões principais são:
1/221 211 22 11 22
122 2 2
, (6. 156)
e
31 2
0 tensão planav deformação plana
, (6. 157)
Estritamente falando o campo das tensões a partir de uma análise elasto-plástica
deveria ser usado no estabelecimento da forma da zona plástica. Nós teremos que esperar até
o capitulo 5 para uma tal análise. No lugar disto, uma primeira aproximação à forma da zona
pode ser obtida usando-se os campos elásticos. A introdução da equação (3.138) para o Modo-
I do campo de tensão introduzido na equação (6. 156) e (6. 157) leva-nos a:
1
2
1 sen cos2 22
IKr
, (6. 158)
e
3
02 cos
22I
tensão planavK deformação plana
r
, (6. 159)
A substituição da equação (6. 158) na equação (6. 155) prover respectivamente.
2
2 22
31 2 1 cos sen4 2
Iy
y
Kr v
, (6. 160)
e
2
22
31 cos sen4 2
Iy
y
Kr
, (6. 161)

122
para as fronteiras da deformação plana e da tensão plana da tensão da zona plástica. A partir
de uma comparação destas fronteiras para 0,3v na Figura - 6. 27, é claro que a zona
na deformação plana é significantemente menor. As coordenadas ,x y dos pontos sobre estas
fronteiras são normalizadas em relação a 2/ /p I yr K para a tensão plana. A zona
plástica baseada apenas na condição de fluência de Tresca pode ser achada em Broek ( ), e
elas não diferem apreciavelmente na aparência desta. Enquanto que uma análise mais refinada
fornecerá algumas configurações diferentes para a interface elásto-plástica, mas nenhuma
mudança significante nos tamanhos relativos das envoltórias é esperado.
Figura - 6. 27. Contornos da zona plástica na tensão plana e deformação plana para 0,3v .

123
Capítulo - VII
A TEORIA TERMODINÂMICA PARA A FRATURA
RESUMO
7. 1 – Objetivos do Capítulo

124
7. 2 - Introdução

125
7. 3 - O Balanço Energético do Modelo de Griffith
Considerando uma quantidade imensurável de defeitos microscópicos,
semelhantes a aqueles imaginados por Inglis, no interior do material, é possível perceber que
todo o corpo estará sujeito a um campo de tensão global, dado pela superposição do campo de
tensão em cada defeito. Isto fará com que o material acumule uma quantidade de energia
elástica diferente daquela prevista pelo cálculo da teoria da elasticidade, para um material sem
defeitos. Nestas condições é necessário considerar o tamanho do defeito crítico a partir do
qual a trinca irá crescer. Percebe-se com isso que, a proposta de Inglis não foi suficiente para
explicar o efeito da variação da energia elástica, à medida que um defeito cresce até o material
se romper.
No entanto, Griffith foi o primeiro a considerar uma abordagem mais realista do
aumento no tamanho do defeito até um ponto crítico, a partir do qual o material se rompe. Ele
formulou uma teoria fenomenológica, baseado no balanço termodinâmico das energias
presente na fratura, conforme será visto a seguir.
6.6.4 – Interpretação do balanço energético de Griffith para a fratura baseado na
geometria do campo de tensão ao redor do defeito
Portanto, a partir de agora, será calculado, em particular, cada termo do balanço
energético da equação (7. 46) associando-se as energias em questão como sendo dadas pela
geometria elíptica da zona de acúmulo de tensões, conforme mostra a Figura – 5.5 (Livro
Parte IIa Fundamentos daMecânica da Fratura Clássica) Figura - 5. 19.da seguinte forma:
i) Cálculo da variação da energia de deformação elástica armazenada no corpo, UL,
causada pela introdução da trinca
A energia elástica armazenada no corpo, UL, pode ser calculada admitindo que as
tensões estão concentradas basicamente no volume da zona de processo ao redor do defeito
(Figura – 5.5 (Livro Parte IIa Fundamentos daMecânica da Fratura Clássica)Figura - 5. 19 e
Figura - 6. 28). É possível, a partir de (5. 39)(6.9), fazer a seguinte aproximação
para esta energia elástica armazenada no corpo considerando-se apenas a região da
concentração das linhas de força na região do defeito:

126
elipseL uVU , (7.1)
onde Velipse é o volume da zona de tensão ao redor da trinca, e u é a energia elástica de
deformação do corpo por unidade de volume, dada por (5. 36)(6.6). Logo a equação (7.1)
torna-se em:
elipseL VE
U2
21
. (7.2)
O valor de UL é dado de forma aproximada pela energia elástica armazenada no
volume da elipse conforme mostra a Figura – 5.5 (Livro Parte IIa Fundamentos daMecânica
da Fratura Clássica)Figura - 5. 19 e Figura - 6. 28. Conforme o caso esta energia em (7.2)
deve receber um sinal negativo ou positivo. Negativo se a condição inicial é de carga máxima
e a condição final é o aparecimento de uma trinca, de comprimento, Lo, como resultado de
uma relaxação das tensões no corpo, semelhante ao caso dos grampos fixos, onde as forças
externas não realizam trabalho durante o avanço da trinca, ou seja, F = constante. Positivo se,
por outro lado, o corpo já possuir uma trinca e esta deve avançar como resultado de uma carga
aplicada externamente, semelhante ao caso da carga constante que juntamente com o primeiro
também será estudado mais adiante. Logo
elipseL VE
U 2
21 . (7.3)
Calculando o volume desta elipse tem-se:
placadaespessuraelipsedaáreaVelipse . , (7.4)
ou seja
abeVelipse , (7.5)
onde a = 2Lo e b = Lo tem-se:
eLeLLV oooelipse22).2( , (7.6)
onde
Velipse = .a.b.e = 4Lo.Lo.e., (7.7)
De acordo com Griffith a energia elástica armazenada no corpo está concentrada

127
no volume correspondente ao cilíndro elipsoidal da Figura - 6. 28, logo substituindo
(7.6) em (7.2) tem-se:
ELeL
EU o
oL
222
2
221
, (7.8)
portanto a variação desta energia elastica armazenada é dada por:
EeLLU oo
L
22 . (7.9)
Figura - 6. 28. Defeito de tamanho crítico mínimo com uma zona de processo de geometria cilindrica elipsoidal ao seu redor, análogo a uma “bexiga”, em cujao volume está armazenado a energia elástica de deformação.
ii) Cálculo da variação na energia elástica de superficie causada pela formação das duas
superficies do defeito, Uo.
Esta energia é dada pelo produto da energia elástica específica de superficie, e
interna ao defeito, pela área superficial do defeito, ou seja:
entalhee AU . , (7.10)
onde Aentalhe é a área superfícial do entalhe da trinca inicial. Pois, quanto maior a área da
trinca, maior será o valor de U. Logo

128
entalhee AU . . (7.11)
Mas qual é a área do entalhe?
- Supondo-se que o entalhe é tão estreito que pode ser aproximado por um
retângulo ( Figura - 6. 29) cuja área é dada por:
placadaespesssuraentalhedoperímetroAentalhe . , (7.12)
ou seja
eLeLA ooentalhe 4)2(2 , (7.13)
logo
Aentalhe = 2(2Loe) = 4Lo.e. (7.14)
Figura - 6. 29. Area superficial do entalhe com tensão superficial e.
Portanto a energia necessária para gerar duas novas superfícies é dada
substituindo (7.13) em (7.10) tem-se:
eLU oe 4 , (7.15)
e a variação da enrgia de superfície é dada por:
eLU oe 4 . (7.16)
Somando-se as contribuições do volume e da superfície tem-se:
UUUU Lil , (7.17)
e substituindo-se (7.2) e (7.10) em (7.17) tem-se:

129
entalheeelipseil AVE
UU
2
2
. (7.18)
Substituindo-se ainda (7.8) e (7.15) em (7.17) tem-se:
eLE
eLUU oeo
il 4
22
. (7.19)
cujo gráfico esta mostrado na Figura - 6. 30.
Figura - 6. 30. Balanço entre as energias volumétrica liberada, UL e a energia das superficie geradas, U, de uma trinca em uma fina placa plana e infinita, sujeita a uma tensão externa, ext, quando nenhum trabalho é realizado por forças externas.

130
6.6.5 - O processo de nucleação e crescimento da trinca, o tamanho crítico e a tensão
de fratura
A partir de agora será visualizado o processo de nucleação e crescimento de uma
trinca calculando a variação da energia total durante o avanço no tamanho do defeito, da
seguinte forma:
entalheeelipsel AVE
U 2
2
. (7.20)
a partir do gráfico da Figura - 6. 30 percebe-se que a posição de equilíbrio é dada por:
0 lU , (7.21)
logo, a razão entre a energia armazenada no volume, equação (7.3), pela energia armazenada
na superfície, equação (7.11), para o defeito em consideração, é dada por:
AVE
UU
e
L
)2/( 2
, (7.22)
onde as variações no volume e na área que contém a trinca são dados por (7.7) e (7.14), logo:
oo
oo LeL
eLLAV
44 , (7.23)
então substituindo (7.23) em (7.22) tem-se:
oeeo
ooL LEeL
eLLEU
U
)2/(44
2
22
, (7.24)
ou
ELL
EUU
e
o
e
oL
22
22
. (7.25)
Reescrevendo a relação (7.25) da seguinte forma,
oe
L LEUU
22
)2/( 2
, (7.26)
percebe-se que o termo 2Lo mostra que a zona de acúmulo de tensões é basicamente um

131
círculo, o qual contém a densidade volumétrica de energia elástica acumulada dada por (5.
36)(6.6) compensada pela energia para formar as duas superfícies 2e, conforme mostra a
Figura - 6. 28.
Ao quebrar bastões de vidro em seu laboratório na Inglaterra, GRIFFITH [1920]
percebeu que o crescimento de falhas, ou o avanço de uma trinca, somente é possível se só
acontece quando a energia elástica liberada ou cedida ao corpo for maior do que a energia
necessária gasta para formar ou criar as duas novas superfícies de fratura [ATKINS 1985].
Para entender a afirmação feita por Griffith, mencionada anteriormente, no parágrafo 2.4.2 é
necessário igualar a equação (7.22) a unidade, da seguinte forma:
1)2/( 2
AVE
UU
e
fL
. (7.27)
onde a variação da energia elástica armazenada contida no numerador de (7.27) é dada pela
equação (7.9) e a variação na energia gasta para formar as duas superfícies contida no
denominador de (7.27) é dada pela equação (7.16).
O critério de fratura introduzido por Griffith, pode ser matematicamente deduzido
comparando a equação (7.27) com a equação (7.26), onde observa-se que o valor do tamanho
crítico da trinca ou a tensão de de fratura será dado pela condição UL = U e obtendo:
oce
f
LE
21
2)2/( 2
, (7.28)
ou
2/12
oc
ef L
E
. (7.29)
Onde f é a tensão sob a qual a amostra se rompe em um um ensaio de tração pura.
Continuando a entender o processo de nucleação, crescimento e propagação de uma trinca
será visto agora o seguinte exemplo explicativo:
Considere um defeito cilíndrico elipsoidal de tamanho crítico, Loc, como sendo
análogo a uma “bexiga” (conforme mostra a Figura - 6. 28). Observe que quando a
energia armazenada no volume é maior do que a energia armazenada na superfície a “bexiga”
tende a “inflar-se” e o contrário faz a “bexiga” “muchar”. Portanto quando Lo = Loc (crítico)
tem-se que = f. Este resultado é o critério de fratura de Griffith que pode ser interpretado

132
da seguinte forma:
i) Para uma bexiga, a energia armazenada no volume, cc VE
U2
2 , é muito alta e a tensão,
, é muito baixa. Logo enchendo-se a bexiga, que corresponde a aumentar a tensão
externamente aplicada, consegue-se armazenar muita energia, onde o Loc da bexiga é ainda
muito pequeno. Furando-se a bexiga com uma agulha, gera-se um defeito na bexiga acima de
Loc (tolerável), logo ocorre um crescimento catastrófica do defeito (a bexiga estoura). A
energia a ser liberada é tão grande que o som emitido pela fratura é alto (máxima potência
dissipada).
ii) Para uma gelatina, embora a capacidade de evitar a geração de uma nova superfície, , seja
pequena, a capacidade de armazenar energia (2/2E) é muito baixa, por causa da baixa tensão
de fratura, f, logo Loc é muito alto, portanto o crescimento da trinca nunca é catastrófica, no
máximo é estável.
Percebe-se portanto que o comprimento da trinca é crítico, quando os valores
das variações na energia elástica armazenada e na energia de superfícies são iguais. Para o
caso de já haver uma trinca de tamanho crítico, Loc, esta irá crescer, quando aplica-se uma
carga suficiente para gerar duas novas superfícies, ou, quando a variação da energia elástica
desprendida, como resultado da carga aplicada externamente, é igual a variação da energia de
superfície.
Este exemplo serve para explicar a situação de tensão mecânica que ocorre nos
poros de um material levando-se em conta o modelo cilindrico elipsoidal destes poros, os
quais podem agir como concentradores de tensão, de acordo com o modelo de Inglis. Sabe-se
que a tensão de fratura, f, e o módulo elástico, E, de um material depende da sua
microestrutura. Existe porém um tamanho mínimo que um defeito pode assumir no interior da
microestrututra de um material. Este é dado a partir do cálculo do tamanho crítico para um
monocristal do material, conforme será visto em seguida.

133
6.6.6 - O tamanho crítico mínimo da fratura
A partir de agora será mostrado a existência de um tamanho mínimo, lo, de uma
fratura microscópica, utilizando os resultados matemáticos dos modelos abordados até aqui. A
idéia deste tamanho mínimo é util na explicação do fenômeno de nucleação de uma
microtrinca e será muito útil também, nos capitulos seguintes, na definição de uma “régua
mínima” para a medida fractal. Mas antes é preciso calcular, baseado nos modelos já visto até
aqui (elástico, de Inglis e de Griffith), o tamanho mínimo deste defeito imaginando-se que sua
geometria dever ser a de um elipsoide cilíndrico, conforme mostra a Figura - 6. 28.
Em primeira aproximação é possível calcular o tamanho mínimo para uma fratura
em um monocristal comparando-se o modelo elástico com o modelo de Griffith, isto é,
tomando-se o resultado da equação (5. 45) e igualando-se com a equação (7.29) e obtendo,
2/12/12
oc
e
o
e
LE
aE
. (7.30)
logo o menor tamanho possível, Loc = lo, para uma microtrinca em um monocristal é dado por:
lo = 2ao/ 0,63662ao. (7.31)
Este tamanho mínimo corresponde a extrair um átomo ou uma molécula da rede
cristalina. Do ponto de vista da Mecânica da Fratura este não é um tamanho realista. Porque
dentro do âmbito dos materiais normalmente estudados pela Mecânica da Fratura, uma
minimização de defeitos em um material que chegue a um nível tão rigoso como este, não
acontece na prática.
Um outro cálculo um pouco mais realista pode ser feito envolvendo-se, não só o
cálculo da tensão de ruptura teórica dos monocristais e a teoria de Griffith, mas também o
modelo Inglis através da relação entre o raio de curvatura, r, e os eixos, a e b, de uma elipse
da seguinte forma.
Considerando-se uma microtrinca elíptica e alongada será feito um outro paralelo
entre a teoria de Inglis e a teoria de Griffith, através da substituição da tensão de fratura dada
tomando-se o resultado da equação (5. 61) e igualando-se com a equação (7.29), e obtendo-se
o raio de curvatura mínimo dado por:

134
2/12/1
42
oco
e
oc
eap La
rEL
E
, (7.32)
ou
oco
e
oc
e
LarE
LE
42
, (7.33)
logo
r = 8ao/ 2,54648ao. (7.34)
Sendo
2I
f
Kr
(7. 35)
Substituindo ( ) em ( ) temos:
2
0 8I
f
Ka
(7. 36)
Este é o o menor raio de curvatura possível, de dimensões atômicas, que pode ser encontrado
para uma microtrinca elíptica em um monocristal de acordo com o modelo de Inglis. Isto leva
a pensar em um tamanho mínimo para a fratura cuja relação entre o raio de curvatura, r, na
extremidade da elipse e os eixos, a e b, é dado por:
r = b2/a, (7.37)
e ainda para uma elipse vale:
c2 + b2 = a2, (7.38)
substituindo (7.37) em (7.38) para a = Loc tem-se que:
Loc2 - rLoc - c2 = 0. (7.39)
Resolvendo a equação (7.39) é possivel calcular o tamanho deste defeito de raio de curvatura
mínimo:
Loc = ½[r (r2 + 4c2)1/2]. (7.40)
Tomando-se o valor de r dado em (7.34) e escolhendo-se o valor de c igual ao

135
valor dado em (7.31), ou seja, c = 0,63662ao e substituindo-o na expressão (7.40), tem-se que
o tamanho mínimo, Loc = lo, da microtrinca elíptica vale:,
2lo 5,39353ao. (7.41)
Este corresponde ao tamanho do menor defeito elíptico ( Figura - 6. 28) que pode ser
encontrado em um monocristal, a partir do qual uma microtrinca cresce.
Calculando o valor do semi-eixo meno da elipse, b, pela substituição de (7.41) em
(7.37) para a = lo e usando o valor de r dado em (7.34) tem-se:
b 2,62054ao. (7.42)
Comparando-se o valor dado em (7.34) com o valor de (7.42) observa-se que a
condição de equilíbrio de Griffith é satisfeita para uma microtrinca mínima de geometria
elipsoidal quase esférica, ou seja, r b.
Para uma elipse de uma forma geral, a razão entre o semi-eixo maior, a, e o semi-
eixo menor, b, é igual a razão entre o semi-eixo menor, b, e o seu raio de curvatura, r, numa
das extremidades alongadas, ou seja,
rb
ba . (7.43)
Na pior das hipóteses, para que uma microtrinca continue apresentando uma
geometria elíptica, isto é, uma geometria alongada na direção de crescimento, afim de que a
propriedade de defeito concentrador de tensão permança, deve-se fazer com que o semi-eixo
menor, b, da elipse seja igual ao tamanho de seu raio de curvatura, r, isto é, de acordo com a
equação (7.43) tem-se r = Loc. Isto corresponde a um círculo, que é um caso particular de uma
elipse. Neste caso específico a condição de equilíbrio de Griffith é satisfeita para uma trinca
mínima de geometria cilíndrica.
Como, o semi-eixo maior da elipse, a, corresponde ao comprimento da trinca, a =
Loc, observa-se portanto que esta trinca mínima será um círculo com diâmetro, 2Loc = 2lo =
16/, ou seja,
oo al 09296,52 . (7.44)
Outros valores podem ser calculados escolhendo-se o tamanho do semi-eixo
menor da elipse, b, como sendo igual ao valor dado em (7.31), ou seja, b = 0,63662ao, e
substituindo (7.34) em (7.43) para a = Lo = lo, obtem-se, lo 0,159152ao. Porém todos estes

136
resultados caem em valores menores do que o apresentado pelo resultado (7.41). Contudo,
este resultado (7.41) ainda não é realista, porque ele não leva em conta o efeito da
microplasticidade e do encruamento, resultante do empilhamento das discordâncias na matriz
cristalina do material. Um modelo satisfatório foi apresentado por MISHNAEVSKY Jr.
[1994] e será discutido no Capítulo – IV.

137
7. 4 - O Modelo de Griffith
O estudo da fratura e crescimento de trincas lentas, ou de quase-equilíbrio (fratura
estável), possui seu início com o trabalho de Griffith em 1920-1922 [GRIFFITH 1920]. Ele
retomou o modelo de uma trinca elíptica em uma placa, plana e infinita, utilizado por Inglis.
Pensando na questão do campo global no interior de um corpo, ele procurou elaborar sua
teoria, com a finalidade de calcular qual deveria ser o tamanho do defeito crítico, capaz de dar
início o crescimento de uma trinca. Com isto, ele explicou quantitativamente o decréscimo na
resistência dos materiais, devido a presença de um defeito de tamanho crítico. Este cálculo
contribuiu para o avanço da MFC, fornecendo as bases matemáticas para o cálculo da
resistência mecânica de um material. A importância do trabalho de Griffith se reflete até os
dias de hoje. Seu trabalho é considerado como o início da MFC, o que a tornou em uma
ciência quantitativa do comportamento mecânico dos materiais.
7.2.1 - O balanço energético de Griffith para a fratura
Considere um corpo elástico na forma de uma fina placa plana, de espessura
unitária, “e”, desprezível frente a sua largura, W, e módulo elástico, E. Suponha que esta placa
possui um entalhe (ou falha) central passante, através da sua espessura, na forma de uma
trinca elíptica, cujo comprimento do eixo maior, que corresponde ao comprimento do entalhe,
é 2Ll e ainda 0L w . Essa trinca é introduzida no corpo para se assegurar que o seu
crescimento se iniciará a partir dela, e não de outro ponto qualquer da placa. Suponha ainda
que esta placa está sujeita a um carregamento de tensão uniforme, , aplicada externamente
(ad infinitum) nas suas extremidades, na condição de placa infinita, onde 2Ll << w. A
Figura - 7. 1 esquematiza uma aproximação geométrica de tal placa.
Assim como Inglis, Griffith considerou uma trinca plana sem rugosidades
microestruturais e equacionou o balanço energético do sistema da Figura - 7. 1, somando as
diferentes contribuições, na seguinte equação geral:
L extF U T U U , (7. 45)
ou, para o caso quase-estático onde se despreza a energia cinética T, temos:
FUUUU Lil , (7. 46)
Logo

138
l i extU U U T , (7. 47)
onde:
Ul é a energia elástica total da placa contendo o entalhe e remotamente solicitada (carregada)
com uma tensão externa constante, ext = cte.
Ui: é a energia potencial elástica inicial armazenada no corpo sem o entalhe (ou trinca), antes
de aplicar a tensão externa, ext, à placa (é uma constante).
UL: é a variação na energia elástica de deformação, armazenada no corpo, causada pela
introdução do entalhe (ou trinca), de tamanho 2Ll na placa.
U: é a variação na energia elástica de superfície gasta para formar duas novas superfícies de
fratura (energia necessária para criar superfícies de fratura lisas devido ao entalhe).
Uext: é a energia dissipada para o meio externo
T: é a energia cinética da trinca
F = Xdu: é o trabalho realizado pelas forças externas, X, necessárias para aumentar o
tamanho do entalhe. du é o deslocamento infinitesimal do ponto de aplicação da carga, X. Este
trabalho deve ser subtraído na equação (7. 46), desde que ele não é parte da energia potencial
interna da placa.
Figura - 7. 1. Modelo de Griffith para o crescimento de uma trinca. Corpo elástico na forma de uma fina placa plana de espessura unitária “e” desprezível e largura w, sujeita a uma tensão aplicada, , com uma falha (ou trinca) central, que atravessa a espessura da placa, na forma de uma elipse de eixo maior, de comprimento 2Ll, na condição de placa infinita, onde 2 lL w .

139
Observe que a energia do corpo carregado sem defeito pode ser expressa como:
FUU iF , (7. 48)
onde:
UF: é a energia elástica total armazenada no corpo sem defeito, após a aplicação da tensão
externa, ext.
Para a condição de equilibrio proposta por Griffith, é razoável supor que as
energias, cinéticas, térmicas, acústicas e de discordâncias são desprezíveis frente as grandezas
da equação anterior.
6.6.2 - Cálculo da energias envolvidas no balanço de Griffith
A partir de agora será calculado, em particular e de forma matematicamente
rigorosa, cada termo do balanço de energia da equação (7. 46) utilizando-se a análise de
tensões desenvolvida por Inglis, com a finalidade de demonstrar a dependência das grandezas
citadas acima, por unidade de espessura “e”.
Figura - 6. 31. Deslocamento do flanco de uma trinca de comprimento, 2Ll, em uma placa plana infinita, remotamente carregada com uma tensão constante, .
Considerando o deslocamento, u, do flanco da trinca, conforme mostra a
Figura - 6. 31, a lei de Hooke permite escrever:
;xx yyx y
a b
(7. 49)

140
então
yy
xx
y ax b
(7. 50)
logo
yy xxy ax b
(7. 51)
ou
yy xxy ax b
(7. 52)
uE b . (7. 53)
onde b é o semi-eixo menor da elipse.
Pela proporções geométricas da elipse distendida temos:
l
u wvb L . (7. 54)
onde w é a deformação da trinca na direção horizontal. Logo,
l
u bvw L . (7. 55)
Para um módulo de Poisson 0,5v considerando-se a conservação do volume, temos:
lLb
E 2 . (7. 56)
Na verdade o cálculo de (7. 56) é feito de uma forma muito mais complexa do que
é apresentado aqui. Normalmente utiliza-se variáveis complexas e mapeamento conforme
aplicado teoria da elasticidade. Contudo a aproximação apresentada em (7. 56) é suficiente
para os propósitos de cálculo a serem realizados nesta secção.
Extraindo-se o valor de b da equação (7. 56) e substituindo-se este na equação da
elipse

141
12
2
2
2
by
ax . (7. 57)
onde a e b neste caso são os eixos maiores e menores da elipse, respectivamente.
Para a = 2Ll e y = u, tem-se que a equação do deslocamento, u, para a condição de
tensão plana (espessura da placa desprezível), o qual é dado por:
Para 2
lLa e y u , tem-se que a equação do deslocamento, u, para a condição
de deformação plana (espessura da placa desprezível), o qual é dado por:
2/122 )(2 xLE
u l . (7. 58)
A energia elástica de deformação necessária para abrir a trinca é:
XuuXU L )2.(21 , (7. 59)
onde X é a força requerida para um deslocamento total, 2u. A força, X, deve ser obtida pela
soma (ou integral) da tensão, , sobre o comprimento total da trinca, 2Ll. Então para tensão
plana tem-se que:
/ 2 /2 22 1/ 2
0 0
22 2 ( )4
l lL Ll
LLU udx x dx
E . (7. 60)
Logo, esta energia de deformação é então dada por:
2 2
2l
LLU
E
, (7. 61)
onde E é o módulo elástico do material e o índice “l” se refere as superfícies planas lisas.
A energia elástica para formar a superfície, U, é igual ao produto da energia
específica elástica de superfície do material, e, pela área das superfície da trinca (duas
superfícies, comprimento 22
lL
) portanto:
U = 2Lle, (7. 62)
onde e é a energia elástica específica de superfície do material.

142
7.2.3 – A abordagem variacional do balanço energético de Griffith para a fratura
O modelo de Griffith basea-se no balanço energético de um sistema
termodinâmico representado por um corpo sob tensão, contendo um entalhe na iminência de
um crescimento de trinca. Fazendo uso de um método de cálculo variacional da energia
contida no corpo e usando um critério de estabilidade estática, Griffith determinou as
condições de início do crescimento de uma trinca. Ele observou que o crescimento instável da
trinca só ocorrerá a partir de quando não houver nenhum acréscimo em Ul pelo acréscimo no
comprimento da trinca, Ll ( Figura - 7. 2), ou seja, a instabilidade ocorrerá se:
0l
l
dLdU . (7. 63)
Figura - 7. 2. Gráfico da energia total, Ul, na placa em função do comprimento da trinca, Ll.
Substituindo-se (7. 46) em (7. 63) tem-se:
0)( FUUUdLd
Lil
. (7. 64)
De acordo com a Figura - 7. 2, a condição de equilíbrio para a extensão da trinca é
obtida estabelecendo-se dUl/dLl igual a zero. Logo, a partir de (7. 64) tem-se:

143
0)( FUUUdLd
dLdU
Lill
l , (7. 65)
Será visto, a partir de agora, os critérios energéticos de crescimento de trinca
devido a Griffith, para os seguintes casos:
I) – Caso: Quando o deslocamento é constante e as forças externas não realizam
trabalho (grampos fixos, F = Fo, constante)
Supondo-se o caso em que as forças externas são nulas, e que nenhum trabalho é
realizado (F = constante), e ainda, a variação na energia elástica, UL, causada pela introdução
da trinca na placa, é negativa. Neste caso, existe um decréscimo na energia de deformação
elástica, UL, do corpo porque este perde uma parte de sua rigidez e consequentemente a carga
aplicada pelos grampos fixos cairá, conforme mostra a Figura - 7. 3.
Figura - 7. 3. Variação da energia elástica e da flexibilidade com o aumento no tamanho do defeito.
Portanto, a energia total, Ul, da placa trincada é dada somando-se as contribuições
de energias de deformação e superfíciais de acordo com a equação (7. 46). Logo, substituindo
(7. 61) e (7. 62) em (7. 46) tem-se:
2 2
22
ll i e l o
L eU U L e FE
. (7. 66)
O gráfico da dependência de Ul, na expressão (7. 66), com o comprimento da
trinca, Ll, para Ui = constante e F = constante, é mostrado na Figura - 7. 4.

144
Figura - 7. 4. Balanço entre as energias volumétrica liberada, UL, e a energia das superficies geradas, U, de uma trinca em uma fina placa, plana e infinita, sujeita a uma tensão externa, ext, quando nenhum trabalho é realizado por forças externas.
Desde que Ui é também constante, l
i
dLdU
é nulo. Logo a condição de equilibrio para o
comprimento da trinca é obtida fazendo:
)(0 críticopontodLdU
l
l . (7. 67)
Logo, substituindo-se (7. 66) na condição de equilíbrio (7. 67) obtem-se :
2 2
2 02
l li e l o
l l
dU L ed U L e FdL dL E
, (7. 68)
ou

145
220 2 02
l le
l
dU L e edL E
, (7. 69)
donde
022
eE
eLe
l . (7. 70)
Dividindo tudo por e tem-se:
022
el
EL
, (7. 71)
logo
constEL elc 22 . (7. 72)
Será visto posteriormente que, na condição de deformação plana, esta constante chamada de
tencidade a fratura ( 2IC lc eK L E const ) é uma propriedade do material que não
depende da espessura.
Portanto, calculando-se o ponto onde o valor de Ul é máximo, no balanço
energético de Grifith, obtém-se como conseqüência o valor crítico da tensão de fratura do
material, dada por:
2/12
lc
ef L
E
. (7. 73)
A equação (7. 73) apresenta o critério de Griffith para a determinação da tensão
necessária para crescer uma trinca.
II) – Caso: Quando a carga ou a tensão aplicada é constante (F = Xo.u).
Supondo que a carga aplicada é mantida fixa, (X = cte), à medida que a trinca
cresce, a energia elástica armazenada antes do crescimento da trinca, de acordo com a
Figura - 7. 5, será dada por:
OADtriângulodoÁreaU antes . (7. 74)

146
Considerando os triângulos OBC e
OAD tem-se que a variação no valor de
suas áreas com o comprimento da trinca, Ll, é dado por:
2.
2. ADODBCOCA , (7. 75)
mas DCODOC , ADBC e ABDC , então pode-se escrever:
ADODADDCODA )(21 , (7. 76)
Logo
1 .2
A OD AD .DC AD ODAD
, (7. 77)
e
ABBCADDCA .21.
21
. (7. 78)
Figura - 7. 5. Gráfico do carregamento de uma fratura a carga constante.
Como A = UL, tem-se:

147
'
.21.
21
OBOOABhachuriadotriangulodoárea
alturabase
L duXADDCU
. (7. 79)
mas de acordo com a Figura - 7. 5 tem-se que:
todeslocamenCargaDCADF .. , (7. 80)
ou
.F X du . (7. 81)
Comparando as expressões (7. 79) e (7. 81) tem-se que:
LL UFFU 221
. (7. 82)
Observe que o trabalho tem sinal oposto ao da energia elástica armazenada. Logo,
ao se realizar trabalho aumenta-se a energia elástica armazenada no corpo. Portanto, de
acordo com (7. 46), tem-se:
erfícieelástica
LF
Lil UUUUUsup
2 , (7. 83)
ou
UUUU Lil , (7. 84)
Substituindo os valores de (7. 61) e (7. 62) em (7. 84) tem-se:
2 2
22
ll i l e
L eU U L eE
, (7. 85)
cujo gráfico, análogo ao da Figura - 7. 4, é mostrado na Figura - 7. 6.

148
Figura - 7. 6. Balanço entre as energias volumétrica liberada, UL, e a energia das superficie geradas, U, de uma trinca em uma fina placa plana e infinita para a condição de carga externa, ext, constante.
A partir de agora será calculado a condição limite para o início do crescimento da
trinca. Griffith sugeriu que uma trinca só cresce quando o decréscimo na energia elástica
excede o aumento de energia superficial associada á formação de novas superfícies. Para
falhas elípticas de eixo maior 2Ll em uma placa fina ( Figura - 6. 31) esta condição pode
ser expressa por:
)(0 críticopontodLdU
l
l . (7. 86)
Logo substituindo-se (7. 85) em (7. 86) obtem-se:
2 2
2 02
l li e l
l l
dU L ed U L edL dL E
, (7. 87)
ou

149
220 2 02
l le
l
dU L e edL E
, (7. 88)
donde
022
eE
eLe
l . (7. 89)
Dividindo tudo por e tem-se:
022
el
EL
, (7. 90)
logo
constEL elc 22 . (7. 91)
Será visto posteriormente que, na condição de deformação plana, esta constante chamada de
tencidade a fratura ( 2IC lc eK L E const ) é uma propriedade do material que não
depende da espessura.
Portanto, calculando-se o ponto onde o valor de Ul é máximo, no balanço
energético de Grifith, obtem-se como conseqüência o valor crítico da tensão de fratura do
material, dada por:
2/12
lc
ef L
E
. (7. 92)
Com seu modelo e argumentos, Griffith explicou a discrepância que havia entre a
tensão de fratura teórica e aquela obtida experimentalmente, independentemente da geometria
do defeito. Observe que o resultado (7. 73) coincide com o resultado (7. 92) apenas por causa
da montagem particular mostrada na Figura - 7. 1, o que não aconteceria se esta
montagem fosse diferente, como por exemplo, a de uma dupla alavanca (double cantilever).
7.2.4 – O tamanho crítico, e o critério energético de Griffith para o crescimento de
trinca.
Dado um material de tensão de fratura, f, e módulo elástico, E, agora, pela
equação (7. 73) ou (7. 92), pode-se calcular o ponto crítico a partir do qual uma trinca (ou um

150
defeito) cresce, ou começa a se propagar. Nas condições energéticas do sistema de
deslocamento, ou carga constante, o comprimento crítico deste defeito, Llc, é dado igualmente
por (7. 92), ou seja:
22
f
elc
EL
. (7. 93)
A equação (2.17), mostra que o comprimento crítico, Llc, depende do material que
está sendo ensaiado (módulo elástico, E e energia de superfície, e) e da montagem
experimental, a qual é fornecida pela equação (7. 61), para a variação da energia de
deformação, UL, causada pela introdução da trinca com comprimento, Ll. Ou seja,
reescrevendo-se (7. 93) tem-se:
22
2 212
2
e e llc
lf
L eLL e
EE
. (7. 94)
Observe que o numerador da proporção dada em (7. 94) corresponde a energia necessária para
criar uma nova superfície, 2 e lU L e , dada por (7. 62), ou seja, é a resistência que o
material oferece a geração de uma nova superfície, enquanto que o denominador corresponde
a capacidade máxima de armazenar a energia elástica de um corpo de comportamento
mecânico linear, 2
lL
L eUE
, dado por (7. 61).
A partir da Figura - 7. 3 e da Figura - 7. 3 observa-se que o ponto de
ruptura é dado pelas coordenadas do gráfico (máx, f). Neste ponto, a energia elástica
acumulada no corpo começa a ser liberada na forma de uma trinca que cresce a partir do
defeito elíptico de tamanho Llc, ( Figura - 6. 31). Observe que, nestas condições se:
Ll = Llc; Este ponto sobre o gráfico da Figura - 7. 4 e da Figura - 7. 6 é ponto de
máximo, o que significa uma condição crítica limite, na qual o valor da variação da energia de
superfície é igual ao valor da variação da enegia elástica armazenada no corpo, UL = U.
Neste ponto, o valor da taxa de energia elástica liberada é igual ao valor da energia específica
de superfície, ou seja,
el
EL
2
2
(trinca estável) . (7. 95)

151
Ll < Llc; Nesta região o valor da variação da energia de superfície é maior do que o valor da
variação da energia elástica armazenada no corpo, UL < U. Logo, o valor energia
específica de superfície supera o valor da taxa de energia elástica, impedindo que esta seja
liberada pelo crescimento da trinca no corpo, ou seja,
el
EL
2
2
(a trinca não cresce) . (7. 96)
Ll > Llc; Nesta região predomina o valor da variação da energia elástica armazenada, sobre o
valor da variação da energia de superfície, UL > U. Logo a taxa de energia elástica liberada
é maior do que a energia específica gasta para formar as superfícies, ou seja,
el
EL
2
2
(a trinca cresce catastroficamente). (7. 97)
A partir dos resultados (7. 95) a (7. 97) Irwin percebeu a necessidade de se definir
uma nova grandeza para a MFC, e apresenta pela 1ª vez a chamada de taxa de energia elástica
liberada, G (em homenagem a Griffith). Esta grandeza deu uma outra interpretação ao
fenômeno da fratura na situação do balanço energético de Griffith para uma trinca, conforme
será mostrado a seguir.
7. 5 – Condições Energéticas de um Corpo Trincado
Griffith ( ) abordou a fratura de um material idealmente frágil a partir de um ponto
de vista termodinâmico. Ele postulou que durante um incremento infinitesimal de extensão de
trinca da , não pode haver nenhuma variação na energia total E composta da soma da energia
total E composta da soma da energia potencial de deformação e da energia de superfícies,
isto é:
0dE d dS (7. 98)
Para uma trinca em um campo de deformação bi-dimensional é conveniente
definir estas energias como sendo por unidade de espessura do corpo. Se denota a densidade
de energia de superfície por unidade de área, então,
2dS eda (7. 99)
para os dois incrementos de superfície de fratura formadas durante a extensão. No incipiente

152
ou durante o crescimento da trinca, a equação (7. 98) fornece:
0dE d dSda da da
(7. 100)
Logo
2 0dda
(7. 101)
Portanto,
2dda
(7. 102)
ou seja,
2G (7. 103)
onde
0lima
dGa da
(7. 104)
e
G a (7. 105)
é conhecida como sendo a taxa de energia elástica liberada por unidade de extensão da trinca.
Porque G é derivada de uma função potencial em muitas da mesma forma que uma força
conservativa, pode ser, ela é freqüentemente referida como uma força promotora da trinca. O
lado direito da equação (7. 103) representa a resistência a fratura que deve ser superada pela
força promotora de forma a produzir uma trinca de extensão unitária. Esta resistência é uma
característica do material onde G depende apenas do carregamento e da geometria do corpo
trincado.
7.3.1 - Teorema de Clapeyron
Considere um carregamento P, aplicado sobre um corpo elástico linear que se
deforma elasticamente até um valor , cuja energia de deformação U, é dada por:
U Pd (7. 106)
Considerando que o carregamento é proporcional ao deslocamento, ou seja:

153
P S (7. 107)
onde S é a rigidez do corpo, podemos escrever:
2
2U S d S (7. 108)
Reescrevendo U em temos de P temos:
2 22
2 2PU S
S S
(7. 109)
mas
1PSC
(7. 110)
onde C é a flexibilidade do material que é o inverso da rigidez S. Logo
2
212 / 2
PU PP P
(7. 111)
Portanto,
12
U P (7. 112)
Este é o resultado do Teorema de Clapeyron.
Figura - 7. 7. Carregamento P, em função do deslocamento .

154
7.3.2 - Taxa de Energia Elástica Liberada
Considere um corpo elástico linear trincado como mostrado na Figura - 7. 8.
Figura - 7. 8. Carregamento P, em um corpo com um entalhe de comprimento a.
Seja P a força generalizada por unidade de espessura e seja o deslocamento do
ponto de carga generalizado correspondente, através do qual P realiza trabalho. A energia
potencial (conforme a equação ( )) para um P prescrito (carregamento morto) é:
*U P U (7. 113)
onde U e U* são, respectivamente, a energia de deformação e a energia complementar de
deformação.
Pelo teorema de Clapeyron temos que:
2PU
(7. 114)
e a equação (7. 113) torna-se
*
2P P U
(7. 115)
*
2P U
(7. 116)
Substituindo a equação (7. 116) na equação (7. 104) temos:

155
* 12 2P cte P cteP cte
d U d PG Pda a da a
(7. 117)
Note que neste desenvolvimento matemático somente uma única ponta da trinca,
tem sido considerada. Quando existem duas pontas igualmente carregadas – por exemplo, o
problema de Griffith – será necessário substituir a diferenciação com relação a “a” por “2a”
de forma a obter a taxa de energia liberada por ponta da trinca. A falta de uma consideração
própria neste ponto tem sido uma fonte de confusão e erro.
Para um corpo elástico linear temos:
CP (7. 118)
onde, C denota a flexibilidade do corpo por unidade de espessura e é uma função da
geometria do corpo e de suas constantes elásticas. Combinando as equações (7. 117) e (7.
118) obtém-se que:
2
2 2 2P PCP CP
(7. 119)
logo
2 2
2
12 2
P dC dCGa da C da
(7. 120)
Se a flexibilidade do corpo é conhecida, então a equação (7. 120) fornece a taxa de energia
que seria liberada durante uma extensão virtual da ponta da trinca. A taxa de energia liberada
pode também ser estabelecida experimentalmente a partir da medida da flexibilidade do corpo
trincado. A trinca é então estendida a um pequeno incremento a , pelo corte, e a variação na
flexibilidade C é medida. A razão aC / é usada para aproximar a derivada na equação
(7. 120). È claro que, deve-se tomar cuidado nestas medidas porque estamos tratando com
diferenças de quantidade aproximadamente de mesma magnitude.
Se o ponto de deslocamento da carga é prescrito (carregamento de grampos
fixos) então a energia potencial é:
2
PU (7. 121)
E segue da equação (7. 104) que:

156
12cte cte
U PGa a
(7. 122)
Substituindo a equação (7. 118) na equação (7. 122) nós chegamos a equação (7. 120) e
concluímos que a taxa de energia liberada é independente do tipo de carregamento. Devido a
forma da equação (7. 122), G é também conhecida como taxa de energia de deformação
liberada. A introdução de uma mola, representando a flexibilidade de um dispositivo de
carregamento rígido, entre a amostra e a carga não mudará a equação (7. 120) desde que a
energia armazenada na mola é independente de a.
Para equações (7. 117) e (7. 122) podem ser dadas uma interpretação gráfica.
Considere a curva de carga versus deslocamento do ponto de carga para um corpo trincado
(veja Figura – 3.6 do cap do livro ???). Agora estendendo a trinca (por exemplo por corte) de
uma quantidade da sob carga constante. A área do triangulo OAB na Figura - 7. 9a é o
aumento na energia complementar uma carga fixada. De acordo com a equação (7. 117) esta
área é Gda . Se este procedimento é repetido mas com o deslocamento mantido fixado, então
a área OAC na Figura - 7. 9b é o decréscimo na energia de deformação e pela equação (7.
122) é igual a Gda . Desde que a diferença entre as áreas OAB e OAC é a área infinitesimal
ABC de alta ordem, a área entre as duas curvas para carregamentos intermediários a carga
fixada e deslocamento fixado é também Gda . Esta interpretação oferece uma alternativa para
determinação experimental da taxa de energia liberada de um corpo trincado pela medida da
área entre as curvas P para comprimentos de trincas ligeiramente diferentes.
Para estabelecer a conexão entre o fator de intensidade de tensão, K e a taxa de
energia liberada, G, considere o duplo carregamento de dois corpos elásticos lineares que são
de outra forma idênticos exceto que o primeiro tem uma trinca de comprimento a onde o
segundo tem uma trinca aa . Ambos os corpos podem ser vistos como tendo uma trinca de
comprimento aa exceto que a trinca do primeiro é estreitada por uma quantidade a por
tensões i2 agindo sobre a superfície da trinca.
aaxa 1 (7. 123)
Por meio do teorema de Clapeyron a energia potencial por unidade de espessura
do corpo na ausência de forças internas é:
TS
ii dSauTa21 (7. 124)

157
onde TS é a porção do contorno do corpo no qual as trações são prescritas. Na equação (7.
124) acima, aui é usado para denotar o campo de deslocamento associado com uma trinca
de comprimento a. De forma similar para o segundo corpo:
TS
ii dSaauTaa´2
1 (7. 125)
onde TS´ é a união de TS e as superfícies das trincas livres de tração adicionais com o
incremento do comprimento de trinca a . Desde que 0iT sobre as superfícies anteriores,
então:
S
iii dSauaauTaaa21 (7. 126)
A integral acima tem sido estendida sobre todo o contorno S do primeiro corpo desde que
auaau ii sobre uS .
O campo de deslocamento aui do primeiro corpo é um campo cinematicamente
admissível para o segundo corpo. Se as componentes das tensões i2 em aaxa 1 e
2 0x são incluídas como parte das trações, então o campo aaui do segundo corpo é
cinematicamente para o primeiro corpo. O princípio do trabalho virtual permite escrever:
Aijij
aa
axiii
Siii
dAaaa
dxaauaaudSauaauT
1022 (7. 127)
onde aaui e aaui são as componentes dos deslocamentos das faces das trincas
superior e inferior, respectivamente. O teorema da reciprocidade de Betti e o principio do
trabalho virtual provê que:
S
iiA
ijijA
ijij dSauTdAaaadAaaa (7. 128)
A combinação das equações (7. 127) e (7. 128) leva-nos a:
1022
dxaaauaaudSauaauTaa
axiii
Siii
(7. 129)
Substituindo a equação (7. 129) na equação (7. 126) e fazendo a mudança de variável

158
axX i 1 , nós obtemos:
10222
1 dxaaauaauaaaaa
axiii
(7. 130)
10222
1 dXaaauaauaaaaa
axiii
(7. 131)
O lado direito desta equação é o trabalho que deve ser realizado durante a
aplicação quase-estática da tensão plana-trinca i2 onde aaxa 1 e 01x para perto
de uma trinca de comprimento aa por uma quantidade a . A integral da equação (7. 131)
é referida como a integral fechada de trinca ( ). Por causa da natureza reversível dos corpos
elásticos, este é também a energia que seria liberada durante uma extensão virtual quase-
estática de trinca a . Então,
10
020 221lim dXaaauaau
aG
a
xiiia (7. 132)
Para o Modo I, 22 uu e 02321 em 02 x . As formas assintóticas são:
2/1
1022 22 X
aKa Ix
(7. 133)
e
2/1
12 22
1
XaaaKkaau I (7. 134)
A partir das equações ( ) e ( ) são suficientes avaliar o lado direito da equação (7. 132). Os
fatores de intensidade de tensão para o carregamento prescrito e para os comprimentos das
trincas a e aa são denotadas, respectivamente por aK I e aaK I . Portanto,
´8
1
41lim
22
1
2/1
0 1
1
0
EKKk
dXX
Xaa
aKaaKkG
II
aII
a
(7. 135)
Onde ´EE para tensão plana e 21/´ vEE para a deformação plana. Esta relação entre

159
G e IK foi estabelecida por Irwin ( ). Quando todos os três modos da deformação são
presentes, a equação (7. 132) fornece:
222
21
´1
IIIIIII KKKE
G
(7. 136)
Quando IK , por exemplo, atinge o seu valor crítico, então G deve também atingir seu valor
crítico e a equação (7. 135) implica que:
´
2
EKG C
C (7. 137)
Consequentemente, para corpos elásticos lineares, a abordagem do fator de
intensidade de tensão de Irwin-Westergaard e a abordagem do balanço de energia de Griffith
são equivalentes.
Se a equação (7. 137) fosse usada para computar CG a partir de CK , digamos para
um metal, o valor de CG assim determinado deveria ser várias ordens de magnitude maiores
do que a energia de superfície 2 . Ou, contrariamente, se G fosse equacionado para a energia
de superfície, então irrealisticamente pequenas cargas de falhas seria predita para metais. Até
aproximadamente 1950 pensava-se que a teoria do balanço da energia de Griffith da fratura
era somente aplicável a materiais frágeis tais como um vidro. Aproximadamente naquele
tempo Irwin [ ] e Orowan [ ] independentemente reconheceram que a parte mais significante
da energia liberada não ia para dentro da energia de superfície, mas era dissipada no fluxo
plástico ao redor da ponta da trinca e na criação de uma nova zona plástica, conforme a ponta
da trinca se estende. A abordagem do balanço da energia para a fratura é conhecida como a
teoria de Griffith-Orowan-Irwin e o critério de fratura é frequentemente escrito como:
2RGG C (7. 138)
Onde R e 2 são variavelmente referidas como a taxa de dissipação de energia plástica,
trabalho de fratura, ou simplesmente tenacidade a fratura. Interpretações literais da última
tem sido fonte de muitas confusões. É talvez melhor considerá-los simplesmente como o
valor crítico da taxa de energia liberada (parâmetro) em uma extensão incipiente da trinca;
cf. K e CK .

160
7.3.3 - Principio Variacional da Energia Potencial Elástica
Seja a energia potencial elástica dada por:
U P (7. 139)
onde
*
2PU U
(7. 140)
Logo
*
2P U
(7. 141)
Derivando em relação ao tempo temos:
12
d dP dPdt dt dt
(7. 142)
como
CP (7. 143)
Isto implica que:
d dC dPP Cdt dt dt (7. 144)
substituindo (7. 143) e (7. 144) em (7. 142) temos:
12
d dP dC dPCP P P Cdt dt dt dt
(7. 145)
ou
21 22
d dP dC d daPC Pdt dt dt da dt
(7. 146)
Aplicando o cálculo variacional a /d dt temos:
21 2 02
d dP dCPC Pdt dt dt
(7. 147)
e

161
21 2 2 02
dP dP dP dC dCP C P C PC P P Pdt dt dt dt dt
(7. 148)
e
2PdP dC dP dP dCC P C C P
dt dt P dt dt dt
(7. 149)
e
2
dP dC dCC P PP dt dt dtdP dCP C Pdt dt
(7. 150)
e
0
0
1 1ln ln2 2
dP dC dCC PP dt dt dt dP
dP dC dP dCP C P C Pdt dt dt dt
(7. 151)
ou
0
0
1 1ln ln2 2
dP dCC PP dC dPdt dt
dP dC dP dCP dtC P C Pdt dt dt dt
(7. 152)
logo 12
00
1exp2
dP dCC PdC dPdt dtP P
dP dC dP dCdtC P C Pdt dt dt dt
(7. 153)

162
7.3.4 - Curva R para um Corpo Totalmente Frágil
Vamos agora calcular teoricamente a curva de resistência a fratura de um corpo
totalmente frágil. Considere um carregamento cujo crescimento de trinca se dá a tensão
constante e um um carregamento equivalente que se dá a deformação constante.
Figura - 7. 9. Gráfico de carga x deslocamento (X x u) para os casos de a) Deslocamento constante (grampos fixos) b) Carga constante
Considerando que a perda da energia elástica nos dois carregamentos, dada pela
ára sob a curva, são iguais podemos escrever:
OAB OAC (7. 154)
A partir da Fig. temos que:
1 12 2
P P (7. 155)
logo
1 1 02 2
P P (7. 156)
ou
0d P (7. 157)
Portanto,
P cte (7. 158)
como

163
CP (7. 159)
temos:
2PCP CP cte (7. 160)
então
cteP
(7. 161)
ou substituindo (7. 112) em (7. 161) temos:
02UP
(7. 162)
Figura - 7. 10. Carregamento P, em um corpo com um entalhe de comprimento a.
Para a montagem da Fig temos que o fator de intensidade de tensão crítico é dado
por:
3/ 2IPS aK f
BW W
(7. 163)
sendo
2RK RE (7. 164)
temos que:
2RKR
E (7. 165)
Conderando um ensaio de multipplos corpos de prova onde a cada ensaio o tamanho crítico da

164
trinca aumenta construindo os pontos da curva de resistência podemos substituir ( ) em ( ) e
obter:
2 22
2 3
P S aR fB EW W
(7. 166)
substituindo ( ) em ( )
22 2
2 3 2
afcte S WRB EW
(7. 167)
ou
22 2
02 3 2
4af
U S WRB EW
(7. 168)
como os valores de 0 , . , ,U B E E S são todos constantes a curva R fica sendo uma função
apenas de ,R R a e vale:
2
2
afWR C
(7. 169)
Figura - 7. 11. Curva de resistência de um corpo totalmente frágil .

165
7. 6 – Fratura em Tensão-Plana e Curva-R
Conforme já foi notado, a tenacidade a fratura ICK é independente da espessura
do corpo e da extensão do comprimento da trinca, quando a restrição triaxial é tal que um
estado de deformação plana é atingido. Por outro lado, quando existe espessura insuficiente
para esta restrição – isto é, quando o tamanho da zona plástica não é tão pequeno quando
comparado com a espessura – a resistência à fratura depende apenas da espessura. Ao
contrário do caso da deformação plana, a resistência a fratura na tensão plana é
frequentemente observado aumentar com o aumento do comprimento da trinca. A resistência a
fratura pode aumentar várias vezes seu valor no inicio da trinca. Portanto, existe uma reserva
potencial da tenacidade que pode ser explorada.
Ao lado da temperatura e espessura a resistência à fratura é geralmente é uma
função somente da quantidade de extensão da trinca a e independente do comprimento
inicial da trinca. A resistência à fratura como uma função do comprimento da trinca é referida
como uma curva de resistência ou curva-R. A curva-R pode ser expressa em termos de K, G,
do deslocamento da abertura da trinca ou de qualquer outro parâmetro equivalente dentro do
contexto do MFEL ou da fluência de pequena escala. Uma análise usando qualquer um destes
parâmetros de fratura pode ser executada. Em seguida uma abordagem da energia é
selecionada, porque esta pode ser prontamente estendida à analise do crescimento de trinca
elasto-plástica estável. Um tratamento paralelo baseado apenas na curva de resistência-K é
dado por Hutchinson [ ].
Durante o crescimento da trinca o equilíbrio entre a força promotora do
trincamento e a resistência à fratura pode ser expresso como:
aRaG (7. 170)
onde aaa 0 é o comprimento corrente da trinca e 0a é o comprimento inicial da trinca.
Uma curva-R típica é mostrada na Figura - 7. 12a. A corrente configuração é estável se um
ligeiro (infinitesimal) aumento do comprimento da trinca em carregamento constante não dar
lugar a força promotora que excede a resistência do material. Esta condição implica que em
acréscimo para satisfazer a equação (7. 170),

166
P
dG dRda d a
(7. 171)
Para um crescimento de trinca estável. Em outras palavras, o comprimento da trinca é estável
se a taxa de aumento de força promotora com o comprimento da trinca não excede a taxa de
aumento da resistência do material ao crescimento da trinca. O limite de crescimento estável é
expresso por:
P
dG dRda d a
(7. 172)
As equações (7. 170) e (7. 172) representam duas equações para determinação da
força promotora e da extensão do crescimento da trinca na instabilidade. Em uma solução
gráfica destas equações, G e R a são superimpostas sobre o mesmo gráfico como
mostrado na Figura - 7. 12b. Uma família de curvas-G pode ser graficada para as cargas
prescritas 3 2 1P P P como mostradas lá. O ponto de intersecção das curvas da força
promotora e da curva de resistência define a quantidade de comprimento da trinca para aquela
carga.
Figura - 7. 12. Análise da curva-R.
As equações (7. 170) e (7. 172) implicam que o limite de crescimento estável de
trinca ocorre quando a curva da força promotora da trinca para a carga crítica CP é tangente a
curva-R. É claro a partir deste diagrama que um aumento na carga acima de CP dará lugar a
uma força que excede a resistência a fratura e o crescimento instável de trinca acontecerá.

167
Para um tratamento mais geral, considere o carregamento flexível da componente
trincado na Figura - 7. 13. Seja P a carga por unidade de espessura do componente devido ao
deslocamento total prescrito T e seja o deslocamento do ponto de carga. Denotando por
MC a rigidez total do dispositivo de carregamento tal que o deslocamento prescrito pode ser
escrito como:
T MC P (7. 173)
onde M MC C B . Tratando G e como funções de P e a , bem como outros parâmetros
invariantes, pode-se escrever:
0T Ma P
d C dP dP daP a
(7. 174)
e
a P
G GdG dP daP a
(7. 175)
A combinação das equações (7. 174) e (7. 175) fornece
1
T
MP a P a
dG G G Cda a P a P
(7. 176)
Pode ser mostrado através de manipulações das equações (7. 170), (7. 173) e (7.
175) que a equação (7. 172) é equivalente ao valor estacionário de T , isto é, 0TddG
. A
condição anterior geralmente corresponderá a um máximo de T (ponto limite) além do qual
nenhuma solução para a equação (7. 170) existe.
Desde que CP , onde C C a é a rigidez do componente tendo uma
espessura unitária, então
; 'P P
C PCP a
(7. 177)
onde a linha é usada para denotar uma derivada em relação ao argumento da função. Quando
existe m pontos de trinca igualmente carregados, segue-se que:

168
2' ";2a P
G PC G P CP m a m
(7. 178)
As equações (7. 176)-(7. 178) leva-nos à:
22 '"2
T M
PCdG P Cda m C C m
(7. 179)
para a taxa de aumento na força promotora para o T fixado.
Enquanto a força promotora da trinca é independente da rigidez do dispositivo de
carregamento, sua taxa de variação depende apenas desta rigidez. Para o carregamento morto
MC a equação (7. 179) se reduz a:
2 "2
T P
dG P C dGda m da
(7. 180)
onde para carregamento a grampos fixos 0MC , a equação (7. 179) fornece:
22 '"2
T
PCdG P C dGda m mC da
(7. 181)
A condição para o crescimento estável é:
T a
dG dRda d
(7. 182)
Um crescimento de trinca instável e incipiente
P a
dG dRda d
(7. 183)
Uma comparação das equações (7. 179) e (7. 180) mostra que:
TP
dG dGda da
(7. 184)
Conseqüentemente, para a mesma força promotora, a carga prescrita apresenta uma condição
de carregamento mais severa do que o deslocamento prescrito, para o crescimento estável da
trinca.

169
Figura - 7. 13.

170
7. 7 – Balanço Energético de Griffith-Irwin
GRIFFITH [1920] e IRWIN [1957] desenvolveram os primeiros estudos teóricos
e experimentais da fratura, dando início ao que mais tarde foi chamada de Mecânica da
Fratura Elástica Linear (MFEL). A partir de agora será vista a modificação conceitual
introduzida por Irwin na teoria de Griffith.
Figura - 7. 14. Corpo de prova com um entalhe, Ll, carregado por forças, X, com deslocamento total, u, nos pontos de aplicação da carga.
Devido a equivalência energética proposta por Irwin, para se tratar a fratura
rugosa utilizando-se as mesmas equações da Mecânica da Fratura para o caminho liso, a partir
deste ponto até o fim deste capítulo, somente, o caminho projetado da fratura rugosa, Lo,
(denotado, a partir de agora, pelo índica “o”) será tratado indistintamente do caminho liso, Ll,(
denotado até aqui pelo índice “l “). Portanto, desde este ponto em diante será considerado um
corpo de prova com um entalhe, Lo, ao invés de 2Ll, carregado por forças, X, com
deslocamento total, u, nos pontos de aplicação da carga. Logo, todas as equaçãoes anteriores
que dependiam do tamanho do entalhe, Ll sofrerão uma correção de um fator ½, em especial
as equações das energias de deformação, UL e da energia de superfície, U, dadas
respectivamente (7. 61) e (7. 62) por passarão a serem reescritas da seguinte forma:
ELU o
L 2
22 , (7. 185)
e para duas superfícies, comprimento, Lo, tem-se

171
U = 2Loe, (7. 186)
7.5.1 – A modificação de Irwin para a teoria do balanço energético de Griffith
Irwin considerou, a partir da equação (7. 64), que se dUl/dLl é menor ou igual a
zero, (dUl/dLl 0), esta equação pode ser reescrita como:
oiL
o dLdU
UUFdLd )( . (7. 187)
onde Ui é constante, (Ui = cte).
No lado esquerdo da equação (7. 187), dF/dLo, representa a energia fornecida pelo
trabalho da força externa, X, por unidade de extensão da trinca, Lo, e dUL/dLo é o aumento da
energia elástica devido ao trabalho externo, dF/dLo. Então dF/dLo – dUL/dLo é a quantidade de
energia que permanece disponível para aumentar a extensão da trinca de uma quantidade dLo.
O lado direito, da equação (7. 187), dU /dLo, representa a energia elástica que deve ser gasta
para formar a superfície da trinca. Esta é a energia necessária para a trinca crescer, isto é, a
resistência a fratura ou o crescimento da trinca.
Derivando-se a equação (7. 187) em relação a Lo tem-se:
oL
o dLdU
UFdLd )( (7. 188)
Utilizando-se a equação (7. 185) e (7. 186) em (7. 188) e levando em conta o caso
em que F = constante, para grampos fixos, desde que UL = -2Lo2/2E decresce, tem-se que:
oeo
o
oL
dLd
ELF
dLd
2
2
22
. (7. 189)
e para a condição de carga, ou tensão constante, onde LUF 2 , desde que UL = 2Lo2/2E
cresce com o trabalho externo, tem-se:
oeo
o
oL
dLd
ELF
dLd
22
22
. (7. 190)
Logo a partir das equações (7. 189) e (7. 190) tem-se os mesmos resultados

172
mostrados de (7. 95) a (7. 97), percebendo-se imediatamente a necessidade que Irwin teve em
definir a taxa de energia elástica liberada, G, para a MFC.
7.5.2 – A taxa de energia elástica liberada, G, para o caminho liso
Irwin definiu de uma forma genérica, satisfazendo o balanço energético da
equação (7. 187), a taxa de energia elástica liberada, G, contabilizada sobre a superfície plana,
Ao, como sendo dada por:
)( Vo
UFdAdG (7. 191)
onde dF = Xdu é o incremento infinitesimal no trabalho realizado pela força externa aplicada,
X. du é o deslocamento infinitesimal do ponto de aplicação da força externa, X. UV é a energia
de deformação elástica armazenada no volume do corpo.
É importante lembrar que, a taxa de energia elástica liberada é a força motriz para
a trinca crescer. No caso de deformação plana, pode-se escrever a expressão (7. 191) da taxa
de energia elástica liberada, G, por unidade de área, Ao, em termos do perfil plano da fratura,
Lo, isto é:
)( Lo
UFdLdG (7. 192)
A rigor o termo de energia de deformação na equação (7. 192) deveria ser
denotado pelo índice, A, ao invés do índice, L. Mas como no caso de deformação plana, a área
de fratura é dada por, Ao = Loe, e nestas condições as grandezas da fratura não dependem da
espessura, e, porque esta se cancela nas equações, conservaremos a notação usando o índice
L, como já vem sendo feito até aqui.
Para descobrir a dependência de G com as demais grandezas pode-se reescrever a
equação (7. 192) de forma a satisfazer o balanço de energia dada pela seguinte equação:
Xdu = dUL + GdLo (7. 193)
dUL é a variação infinitesimal da energia elástica de deformação e G é a taxa de liberação de
energia elástica definida durante o incremento infinitesimal do comprimento projetado dLo.
Então,

173
dudLG
dudUX oL (7. 194)
Por outro lado, para a fratura elástica linear vale a relação de Clapeyron, extraida
a partir da lei de Hooke, pela integral da área sob a curva de carga X u ,dada por:
UL = ½ Xu (7. 195)
onde UL é a energia elástica de deformação, logo
dUL = ½ d(Xu) = ½(Xdu + udX) (7. 196)
substituindo (7. 196) em (7. 193) tem-se:
Xdu = ½(Xdu + udX)+ GdLo (7. 197)
ou
Xdu - udX = 2GdLo (7. 198)
dividindo tudo por X2 tem-se:
odLXG
XdXu
Xdu
22 2 (7. 199)
que corresponde a diferencial de (u/X) ou seja:
odLXG
Xud 22)( (7. 200)
onde u/X: é a flexibilidade do sistema
Portanto, expressão genérica da taxa de energia elástica liberada, G, por unidade
de espessura do corpo, é dada por:
221 ( / ) 1( , , )
2 2oo o
d u X u dCG u X L XdL C dL
(7. 201)
onde uCX
Esta expressão pode ser calculada para deslocamento constante, u = uc, e para
carga constante, X = Xc, obtendo-se respectivamente.
i) para u cte

174
21( , , )2oG u X L X
2
uX o u uc
dXdL
(7. 202)
e
ucuoco dL
dXuLXuG
21),,( (7. 203)
e
ii) para X cte ¨
21( , , )2oG u X L X
2
1X o X Xc
dudL
(7. 204)
e
XcXoco dL
duXLXuG
21),,( (7. 205)
A expressão (7. 201) é válida para o regime de fratura elástica linear estável. A
expressão (7. 201) também pode ser escrita em termos da tensão aplicada, dividindo-se toda
ela por Lw2, onde Lw = w – Lo , e dLw = -dLo, tem-se:
ww
wo dL
XudLLXLXuG )/(
21),,( 2
2
(7. 206)
chamanho de = X/Lw tem-se:
woo dL
XudLwLXuG )/()(21),,( 22
(7. 207)
Substituindo a expressão (7. 185) em (7. 192) para o caso de deslocamento
constante (grampos fixos), onde a s forças externas, X, não realizam trabalho, ou seja, F =
constante, tem-se que G (quasiestático) é igual á:
EL
dLdUUF
dLdG o
o
LL
o
2
)( (7. 208)
Observe a partir de (7. 189) e (7. 190) que este resultado é igual para o caso para

175
2 LF U onde a tensão é constante. Observe que, neste caso a taxa de energia elástica
liberada é linear com o comprimento projetado da trinca, Lo, o que não vai ocorrer mais
adiante na secção - 4.9.3, quando estas equações forem modificadas para levar em conta a
rugosidade da superfície de fratura.
7.5.3 – A resistência ao crescimento da trinca, R, para o caminho liso
O conceito de resistência ao crescimento da fratura, R, é definido apenas para a
superfície plana, da seguinte forma:
odAdU
R (7. 209)
Considerando a condição de deformação plana, a resistência ao crescimento da
trinca, por unidade de espessura “e” do material, é dada por:
odLdU
R . (7. 210)
Portanto, substituindo-se a equação (7. 186) na equação (7. 210) tem-se que:
o
eo
dLLdR )2(
(7. 211)
logo a partir de (7. 211) tem-se que:
R = 2e (7. 212)
De acordo com o modelo apresentado até aqui a resistência a fratura, Ro, não
depende das dimensões da trinca. Este modelo só é valido para materiais idealmente frágeis,
onde não ocorre quase nenhuma deformação plástica na ponta da trinca. Ele corresponde
basicamente ao modelo apresentado por Griffith, tendo apenas sido modificado a sua
interpretação pela introdução do conceito de curva R para o caminho plano feito por Irwin.
A análise que segue é baseada no balanço de energia de Griffith-Irwin para o
crescimento estável, conforme já foi abordado nos parágrafos anteriores.

176
7.5.4 – O critério de fratura segundo Griffith-Irwin e a relação entre G e R, para o
caminho liso
Comparando (7. 188) com (7. 192) e (7. 210) tem-se o critério de Griffith-Irwin.
Na concepção de Irwin a condição de instabilidade é expressa como:
RG (7. 213)
Usando os resultados (7. 208) e (7. 212) em (7. 213) tem-se a partir desta equação
que:
eo
ELG
22
. (7. 214)
Dividindo-se a equação (7. 212) por (7. 208) tem-se que:
o
e
LE
GR
22
. (7. 215)
Retomando-se a equação (7. 215) e multiplicando e dividindo ela por f2 tem-se que:
2
212
f
of
e
LE
GR (7. 216)
escrevendo (7. 216) em termos de (7. 93) tem-se:
2
f
o
oc
LL
GR (7. 217)
para o caso em que = f fica-se com:
o
oc
LL
GR (7. 218)
ou ainda, substituindo-se (7. 212) em (7. 217) tem-se que:
22
f
o
oc
o
e
LL
G (7. 219)
novamente para o caso em que = f , fica-se com:

177
o
oc
o
e
LL
G
2 (7. 220)
Os resultados (7. 217), (7. 218) e (7. 220) serão utilizados mais adiante e também
na reformulação da MFC utilizando a teoria fractal de medida
7.5.5 - O fator de intensidade de tensão, KI , e a flexibilidade ou módulo elastico, E,
para o caminho liso
Retornando-se a equação (7. 214) e multiplicando-se os dois lados de (7. 213) por
E podemos rescrevê-la da seguinte forma:
REGE . (7. 221)
Como o lado direito de (7. 221) corresponde ao produto de duas grandezas é
conveniente definir o lado esquerdo como sendo o quadrado de uma grandeza, que será
chamada de fator de intensidade de tensão, KI, onde:
GEK I 2 . (7. 222)
Portanto a equação (7. 222) equivale a definir, KI, como:
GEK I . (7. 223)
Retornando-se a (7. 221) e comparando-se esta com (7. 222) tem-se:
REK I 2 . (7. 224)
Substituindo-se (7. 214) em (7. 222) e (7. 212) em (7. 224) esta última equação pode ser
reescrita da seguinte forma:
EL eo 22 . (7. 225)
Comparando-se (7. 224) com (7. 225) pode-se, portanto, escrever naturalmente que o valor do
fator de intensidade de tensão, KI e concluir que este é dado por:
ELK eoI 2 . (7. 226)
Para I ICK K RE temos:

178
0IC CK L . (7. 227)
Observe ainda que, a partir de (7. 201), pode-se escrever:
oo
oI
dLXud
LLwKG )/()(
21 22
. (7. 228)
Desde que se defina o módulo de rigidez, E, como sendo dado por:
)/()(2
2 XuddL
LwLE o
o
o
. (7. 229)
No caso em que E é uma constante para os materiais, ele é chamado de módulo elástico ou
módulo de Young.
Portanto a equação (7. 228) pode ser expressa como:
EKG I
2
(7. 230)
Para I ICK K RE temos:
2ICKR
E . (7. 231)
7.5.6 - O fator de intensidade de tensão crítico, ou tenacidade a fratura, KIC, para o
caminho liso
A condição de deformação plana é uma condição matemática que procura eliminar
os efeitos de bordas do campo de tensão. Esta condição permite definir uma grandeza
chamada de KIC a qual não depende da espessura do material, ou seja, ela é uma propriedade
do mesmo.
Levando em consideração o critério de Griffith-Irwin, a partir de (7. 188), para a
condição de equilíbrio instável, ou seja :
oo
L
dLdU
dLUFd
)( . (7. 232)
Ou a partir de (7. 192) e (7. 210) tem-se:

179
RG . (7. 233)
A partir de (7. 208), (7. 212) e (7. 233) observa-se que a tensão de fratura plana no
material será dada por (7. 92), e o tamanho crítico da fratura plana, segundo Griffith, é dado
por (7. 93). Contudo, considerando-se a condição (7. 233) nas equações (7. 223) e (7. 224)
percebe-se que nesta condição, o valor de KI é específico, correspondendo a um valor
determinado para a condição crítica de equilíbrio instável, donde conclui-se a partir de (7.
226), (7. 224), (7. 223) e (7. 233) que o fator de intensidade de tensão crítico é definido por:
ELK eocfIC 2 . (7. 234)
Observa-se, a partir do lado esquerdo da equação (7. 234), que o fator de
intensidade de tensão crítico da trinca, KIC, para materiais idealmente frágeis, é governada
pelo produto da tensão de fratura aplicada na ponta da trinca, f, com a raiz quadrada do
comprimento crítico da trinca, Loc, e do lado direito desta mesma equação, é dado pelo
produto de duas propriedades do material, E e e. Sendo assim, se o lado direito de (7. 234)
possui grandezas que são propriedades do material, então, o lado esquerdo também deve ser
uma propriedade do material e no caso é uma constante característica do processo de fratura
no material idealmente frágil, chamada de tenacidade a fratura, KIC. Portanto, por meio da
teoria da fratura elástica linear e levando-se em conta a condição de deformação plana, é
possível definir o fator de intensidade de tensão crítico, ou a tenacidade a fratura para o
caminho plano, KIC, como sendo uma propriedade dos materiais, dependente apenas da
temperatura. Fica claro que a resistência mecânica real de um material, é um compromisso
energético entre a resistência mecânica, dada por f, e a tenacidade a fratura, KIC. Logo, a
suspeita em (7. 225), de que havia uma propriedade embutida nesta relação, é confirmada.
Mais especificamente a partir da relação (7. 230) tem-se que a condição de equilíbrio expressa
em (7. 233) pode ser escrita como:
cIC
c RE
KG 2
(7. 235)
Desta forma, a medida da tenacidade a fratura, KIC, pode ser relacionada com a
taxa de energia elástica liberada crítica, Gc, e com a resistência no início do crescimento da
trinca, Rc, por meio de uma relação única dada por (7. 235). A partir de agora será modelado o
crescimento quasiestática da fratura para o caminho plano liso de acordo com os trabalhos de

180
Griffith e Irwin.
7.5.7 - O crescimento de trinca em regime de fratura estável ou quase-estática e o
conceito de curva G-R de Irwin
Irwin analisou o problema da fratura sob o ponto de vista da teoria elástica linear
e juntamente com alguns matemáticos como, Westergaard, Hutchinson, et al., calcularam o
campo de tensões em um material com uma trinca, para os três modos básicos de solicitação
ou carregamento, conforme mostra a Figura - 7. 15. Através de seus cálculos estes
cientistas perceberam o problema da triaxialidade e da biaxialidade das tensões na ponta da
trinca. Conforme o regime do crescimento da trinca, estas duas situações podem se
manisfestar revelando um estado de tensão plana e/ou um estado de deformação plana,
respectivamente. Esta distinção possibilitou definir as condições em que estavam situados os
modelos de Inglis e Grifftih.
Figura - 7. 15. Modos fundamentais de solicitação de carga ou carregamento para a fratura.
Irwin percebeu que as condições de tensão e deformação planas, mencionadas
anteriormente, poderiam ser incluidas em uma única medida de resistência do material o
crescimento da trinca, a qual foi chamada posteriormente de curva – R. Para isso ele
considerou que as condições de equilíbrio (7. 233) deveriam ser mantidas ao longo de todo o
processo de crescimento da trinca, por uma condição que foi chamada de fratura quase-
estática, dada por:

181
RELK ofIR (7. 236)
onde
RE
KG IR 2
(7. 237)
Esta nova visão do balanço de Griffith introduzida na equação (7. 237) estendeu
as condições do início do crescimento da trinca (modelo de Griffith para a nucleação de
trincas apresentado na secção - 2.6 e no Apêndice – A2.11)(4) para o caso de fratura quase-
estática. A partir desta idéia foi que nasceu o conceito de curva - R. Desta forma a Mecânica
da Fratura Elástica Linear (MFEL) passou a caracterizar o crescimento estável de trinca pela
curva - R [EWALDS 1993].
Da equação (7. 213) percebe-se que a instabilidade ocorre a partir de G = R e
dG/dLo = dR/dLo. Este é o critério de fratura de Griffith-Irwin, que também determina a
criação de um tamanho de defeito crítico, Loc, conforme mostra a equação (7. 93). Portanto,
um processo de crescimento quase-estático, que produz uma trinca longitudinal em um corpo,
é obtido quando a solicitação da carga é tal que a taxa de energia elástica liberada, G,
corresponde exatamente igual ao valor da taxa e energia gasta para formar as superfícies de
fratura (G = R, dG/dLo = dR/dLo). Nestas condições a curva R é obtida experimentalmente
plotando-se G e R em função do comprimento projetado da trinca, Lo. Neste caso, a trinca
pode ser retilínea ou não, dependendo da microestrutura do material. Se o material for
cristalino ou vítreo, a trinca produzida é retilínea, como uma clivagem em um monocristal. Se
por outro lado, o material possuir uma microestrutura mais complexa (material policristalino,
por exemplo), a trinca interage com esta microestrutura, sendo desviada do crescimento
retilíneo, produzindo uma superfície irregular rugosa.
Mesmo no caso de um material que contém inúmeros defeitos distribuídos
aleatoriamente no seu interior, a ruptura neste caso, também se dá de forma que a energia a ser
usada G, seja exatamente igual a resistência mecânica do material ao crescimento da trinca R
(G = R). Pode-se imaginar que, a escolha do caminho de crescimento da trinca, terá um
caracter puramente estatístico. Sabe-se porém, que uma trinca só cresce, se a tensão na ponta
da mesma, , ultrapassa um valor crítico dado pela tensão de ruptura do material f ( f ,
ou G R, critério para início do crescimento de trinca), caso contrário a trinca se mantém 4 Apresentado na secção do Apêndice – A2.11 o processo de nucleação e crescimento da trinca e a tensão de fratura.

182
estável. De qualquer forma, a trinca produzida neste processo, corresponde exatamente a
resposta do corpo à solicitação externa, definindo, portanto, a resistência R ao crescimento da
trinca ( Figura - 7. 16a e Figura - 7. 16b).
Figura - 7. 16. Fratura Estável a) num material cristalino b) num material policristalino.
Como resultado de um ensaio de crescimento quase-estática, o gráfico de X x u
apresenta o aspecto mostrado na Figura - 7. 17.
6.8.8 – Cálculo do decaimento da carga com o comprimento da trinca
A dependência de X com u, para um ensaio de crescimento de trinca quase-
estático, pode ser determinada retornando-se a equação (7. 201) e considerando-se nesta
equação G = R, e X = Xc, e obtendo:
o
c
dLXud
RX )/(22
(7. 238)
Por outro lado, igualando ( ) com ( ) temos:
3
2 3
2( ) ( / ) 4
o o
o
L dL S XEw L d u X w e u
. (7. 239)
logo,
3
2 3
2 ( / )( ) 4 ( / )
oo
o
L S d u XdLw L w e u X
. (7. 240)
integrando temos:
2 3
2 3 ln( ) 4
o
o
L S uw L w e X
. (7. 241)

183
ou
3 2
2 3
4exp( )
o
o
w eLuX w L S
. (7. 242)
logo
3 2
2 3
4exp( )
oo
o o
w eLuX Xu w L S
. (7. 243)
Como resultado de um ensaio de crescimento quase-estática, o gráfico de X x u
apresenta o aspecto mostrado na Figura - 7. 17.
Figura - 7. 17. Variação da carga ou tensão elástica com o deslocamento para a fratura estável.
A partir da Figura - 7. 17 e da equação (7. 201), tem-se que para uma fratura
estável após o crescimento da trinca, as grandeza dX/du e dUL/du assumem um valor mínimo.
A equação (7. 238) e (7. 243) dá a relação de único valor entre X, u e Lo ao longo de um locus
de liberação constante da energia de deformação, G, em um corpo elástico linear trincado. Se
o trincamento é quase-estático, o valor crítico Gc balanceia com o trabalho específico de
fratura, R, na zona de processo na ponta da trinca. De forma que, se G = R a fratura é estável
e se G > R a fratura é instável; se G < R a fratura não ocorre.

184
6.9.9 – Cálculo da Curva de Resistência a Fratura com o Comprimento da Trinca
A curva – R pode ser calculada a partide ( ) da seguinte forma:
Sendo atensão dada por:
o
Xw L
(7. 244)
e considerando-se nesta equação G = R, e X = Xc, e obtendo:
o
c
dLXud
RX )/(22
(7. 245)
temos a partir de (7. 226) e a partir da Figura - 7. 17, tem-se para uma fratura estável
que:
22
2o
Io
X LKw L
(7. 246)
com o
Xw L
logo
222 I o
o
K w LX
L
(7. 247)
substituindo ( ) em ( ) temos:
222 3 22
2 3
8exp( )
I o oo
o o o
K w L w eLuXL u w L S
(7. 248)
como
2IRKRE
(7. 249)
temos:
22 3 2
2 2 3
8exp( )
o o o
o oo
L X w eLuRu w L Sw L
(7. 250)
A suposição básica desta teoria consiste em que a taxa energia elástica liberada, G

185
ou J, a energia total de fratura, wof, e outras grandezas energéticas, não dependem da
velocidade de crescimento da trinca, e no caso de materiais frágeis, a resistência à fratura R
não depende das dimensões da trinca. Por outro lado, é bem conhecido que o crescimento da
curva - R é correlacionado com a rugosidade (morfologia) da superfície fraturada
[SWANSON 1987; HÜBNER 1977]. No caso da condição de grampos fixos (trabalho zero
realizado pela carga sobre o corpo de prova), a equação (7. 208) mostra que G tem uma
dependência linear com o comprimento da trinca, Lo, enquanto que os resultados
experimentais [EWALDS 1993; KRAFF 1962] mostram que a curva de resistência, R, cresce
de uma forma não-linear com o aumento no comprimento da trinca. Desde o estabelecimento
do critério de Griffith em (7. 213) permanece a questão de como a energia é dissipada, e até o
presente momento, esta questão tem sido o centro das preocupações para o desenvolvimento
quantitativo da mecânica da fratura. Seguramente esta problemática está associada à
morfologia da superfície de fratura, a qual será abordado na secção 4.10 do Capítulo – IV.
6.6.5 - Limitações da Teoria de Griffith-Irwin-Orowan para trincas não retilíneas
O caso de uma situação de equilíbrio instável, como o caso de um material
defeituoso sujeito a uma tensão, a condição de equilíbrio de forças descreve apenas parte do
fenômeno. Nada, porém pode ser dito após o inicio do crescimento da trinca, a não ser pela
condição expressa pela seguinte desigualdade:
20 12
2f
e p
LE
(7.251)
Esta representa uma condição de crescimento segundo o critério de Griffith. Se a condição
descrita em (7. 213) for re-examinada mais um pouco de cuidado, será possível chegar a
conclusões muito interessantes sobre uma consideração mais geral, que tem como caso
particular o equilíbrio das forças. Neste caso pode-se recorrer ao PMDEE ou PMDIE como
um princípio mais geral, capaz de descrever a situação fora do equilíbrio., conforme será
mostrado a seguir.
Integrando a expressão (7. 193) obtém-se que:
L extF U U U . (7.252)
A partir das expressões (7. 61), (7. 62) tem-se:

186
2 20
04feff ext
eLF eL U
E
(7.253)
ou
2 20
04fext eff
eLU F eL
E
(7.254)
Observe da Figura – 6.2 Figura - 5. 12. Comportamento típico da tensão x
deformação dos materiais frágéis e dúcteis. e da Figura - 7. 6 que, para o caso de grampos
fixo, deslocamento constante, onde as forças externas não realizam trabalho, (F = constante),
se o valor da expressão (7.252) assume um valor máximo no ponto crítico, Lo = Loc, então Uext
assume um valor mínimo e igual a zero (Uext = 0), desde que dado por (6.275)Erro! Fonte de
referência não encontrada. ‘igual a 2 2min 0 /f cF eL E . Isto significa que, uma vez que uma
tensão é fornecida a um material, este dissipará internamente esta energia sob as mais diversas
formas, deixando para o meio externo apenas uma quantidade miníma. Observe que a
derivada segunda de (7.254) é positiva, mostrando a validade desta afirmação
Usando-se o fato de que a energia dissipada Uext em (7.254) assume um valor
mínimo, haverá consequentemente o fato de que a energia dissipada internamente pelo
material dada por:
2 20
int 04 feff
eLU eL
E
(7.255)
na forma de trinca e na forma de deformação plástica, assume um valor máximo no ponto de
iminência de crescimento e continua crescendo a medida que a trinca cresce e a medida que a
velocidade de crescimento aumenta com a solicitação externa, F. Logo a diferencial de
(7.254) ou (7. 74) é nula, conforme demonstra a expressão (7. 65) e (7. 233).
Se por outro lado, for considerado o caso em que a tensão é constante, onde de
acordo com (7. 82) tem-se F = 2UL, tem-se a partir de que:
2 20
04fext eff
eLU eL
E
(7.256)
Tomando-se o valor crítico do tamanho da tinca em (7. 93) e substituindo em (7.254) obtém-
se:

187
,2 2 2
0 0 02f f cext
eL eL LU
E E
(7.257)
ou
2 20 0
0
21f cext
eL LUE L
(7.258)
Observe ainda que como as energias de superficie plástica e elástica são constantes pode-se
concluir que a energia dissipada por unidade de área de trincamento é limitada.
Para este caso dinâmico o excesso de energia no crescimento da trinca mostrado
na condição (7.251) é convertida em energia cinética Uc, logo a expressão (7.252) fica sendo
L c extF U U U U (7.259)
A potência externamente dissipada no processo dinâmico de trincamento pode ser
expressa a partir de (7.259) como:
ext cLext
dUdU dUdUdFdt dt dt dt dt
(7.260)
Considerando o ensaio a tensão constante tem-se 2 2
02 f eLF
E
, logo:
2 20 0 04 2
4f f cext eff
eL eL dL dUeE E dt dt
(7.261)
ou
2 2
0 00 00 0
2 24f fc
ext eff c
eL eLdL dU dLe L LE dt dt E dt
(7.262)
Portanto a variação da energia cinética e igual a variação da energia potencial
elástica, ou seja:
20 02
4fceff
LdU dLedt E dt
(7.263)
Usando (7. 93) em (7.280) tem-se:

188
2 20 0 02 2f f cc L LdU dLe
dt E E dt
(7.264)
Ou
2
00 0
2 fcc
dU dLL L edt E dt
(7.265)
Reescrevendo (7.282) tem-se:
20 0 0
0
21fc c
LdU L dLedt E L dt
(7.266)
Usando (7. 208) em (7.283) tem-se:
00 0
0
1c cdU LG vdt L
(7.267)
Onde
0
0
1 cc L
LU UL
(7.268)
A partir de (7.255) obtém-se:
20 0
int
24 f
eff
eL dLeE dt
(7.269)
O critério de Griffith fornece uma barreira de potencial para nucleação da trinca,
pode-se dizer que: até a trinca alcançar o tamanho crítico o material absorve energia elástica,
depois disto, é que ele passar a dissipar a energia sob a forma de fratura, pois para Lo Loc o
processo é reversível, e para Lo Loc o processo passa a ser irreversível. E como a energia
acumulada deve ser igual a energia dissipada (pela conservação da energia), tem-se que a
quantidade de energia dissipada internamente é igual a quantidade de energia que uma vez foi
acumulada até o tamanho crítico da trinca.
Somando-se as dissipações interna e externa tem-se:
2 2
0 00 0
2 24 f f
eff c
eL e dLe L LE E dt
(7.270)

189
Logo usando (7. 93) em (7.287) tem-se:
20 02
4 f ceff
eL dLeE dt
(7.271)
Portanto o balanço total de energia é nulo:
int 0ext (7.272)
Neste caso o valor de Uint se conserva igual ao caso anterior, valendo o resultado da equação
(7. 74). Portanto conclui-se que:
dtdU
dtdU intext (7.273)
onde a força resultante é nula
Observe que este resultado corrobora o suposição de Griffith numa visão muito
mais ampla, onde o caso geral é dado por:
0 (7.274)
Logo tem-se um resultado que concorda com as expressão (7. 233). Portanto vale
as seguintes proposições:
1) A condição de Griffith em (7. 213) pode ser extendida para uma situação mais
geral, que envolve a cinética do crescimento da trinca.
2) A taxa de energia elástica de tensão liberada, G, deve ser substituida por um
valor correspondente ao fenômeno elastodinâmico, GD, que na suposição de estado
estacionario, não depende do comprimento da trinca, mas somente do tempo e da velocidade
de crescimento da trinca.
3) Após o trincamento os termos, Uc e Uext , não permanecem no material,
enquanto que os termos UL e U tornam-se visíveis através da deformação plástica e das
superfícies de fraturas geradas, respectivamente.
4) Situações de criticalidade como esta mostrada em (7.272), em que é feito o
balanço de energia num material com uma trinca sujeito a uma tensão externa aplicada, é
muito bem descrita pela condição de equilibrio de forças. Porém quando inicia-se o
crescimento da trinca, é preciso recorrer imediatamente a um princípio mais geral que permita
equacionar o fênomeno fora do ponto crítico de equilíbrio instável. Nesta situação o
fenômeno pode ser equacionado usando-se um Princípio de Mínima Dissipação Externa de

190
Energia (PMDEE) ou um Princípio de Máxima Dissipação Interna de Energia (PMDIE)
análogo ao caso de “estado estacionário”.
Após o início do crescimento da trinca, apesar do equilíbrio de forças não ser mais
válido, o PMDEI ou o PMDEE permanece. Pois, a partir de ensaios experimentais observa-se
que um material, sujeito a uma carga maior ou igual a carga crítica, possui a tendência natural
de se livrar desta carga da forma mais rápida e eficiente possível e isto só é possível por meio
de um Principio de Máxima Dissipação de Energia (PMDEI).
O valor da energia externa mínima dissipada pode ser calculado fazendo-se o
limite Lo Loc na equação (7.258) da seguinte forma:
2 2
00 0min min /f c
ext c
eLU p L L
E
(7.275)
Observe ainda que como as energias de superficie plástica e elástica são
constantes pode-se concluir que a energia dissipada por unidade de área de trincamento é
limitada. Observe que f é fixo para cada material, logo a expressão em (7.275) só depende
diretamente da espessura e. Se esta é fixa logo Uext no ponto crítico também é.
A afirmação mais forte para garantir o PMDEI é o fato de o valor acumulado da
energia ser limitada pelo valor mínimo dado em (7.275).
6) Sabe-se que a energia específica de superfície, , não depende da área fraturada
e neste caso tem-se que:
7) No caso dinâmico, o excesso de energia no crescimento da trinca mostrado na
condição (7.251) é convertida em energia cinética Uc, logo a expressão (7.252) fica sendo
L c extF U U U U (7.276)
8) A potência externamente dissipada no processo dinâmico de trincamento pode
ser expressa a partir de (7.276) como:
ext cLext
dUdU dUdUdFdt dt dt dt dt
(7.277)
Considerando o ensaio a tensão constante tem-se F = 2f2eLo
2/E, logo:
2 20 0 04 2
4f f cext eff
eL eL dL dUeE E dt dt
(7.278)
A dissipação interna será máxima se a externa for mínima logo a partir de (7.275) tem-se:

191
20 02
4 0f cext eff
eL dL dUeE dt dt
(7.279)
Portanto a variação da energia cinética e igual a variação da energia potencial
elástica.
20 02
4fceff
eLdU dLedt E dt
(7.280)
Usando (7. 93) em (7.280) tem-se:
2 20 0 02 2f f cc L LdU dLe
dt E E dt
(7.281)
Ou
2
00 0
2 fcc
dU dLL L edt E dt
(7.282)
Reescrevendo (7.282) tem-se:
20 0 0
0
21fc cLdU L dLe
dt E L dt
(7.283)
Usando (7. 208) em (7.283) tem-se:
00 0
0
1c cdU LG vdt L
(7.284)
Onde
0
0
1 cc L
LU UL
(7.285)
A partir de (7.277) obtém-se:
20 0
int
4 fext ext
L dLdFdt E dt
(7.286)
Mas de (7.279) tem-se:

192
20 0
int
4 f L dLE dt
(7.287)
onde a força de deformação é dada por:
20
int
4 f LX
E
(7.288)
Somando-se as dissipações interna e externa tem-se:
20 04
0f L dLE dt
(7.289)
Este é um resultado geral da termodinâmica dos processos irreversíveis. Portanto
a fratura elasto-plástica, envolvendo processos dissipativos de instabilidade e deformação
plástica, que não é considerada pela teoria de Griffith, pode a partir de agora receber uma
nova abordagem considerando que esta fratura cresce por um PMDEI.
6.6.7 – O principio da máxima dissipação de energia na fratura
Observe a partir da equação (7. 200) e da Figura - 7. 3 e Figura - 7. 5 que a
rigidez (X/u) tende a ser mínima nos dois casos considerados aqui, grampos fixos, e carga
constante. Logo a flexibilidade (u/X) tende a ser máxima. Com isto vemos que d(u/X)/dAo
deve ser máximo e X é minimo ou constante para u = umáx. GURNEY & HUNT [1967]
apontaram para o fato de que maximizando GdAo/du conforme descrito anteriormente a
entropia total produzida, S, no sistema é também maximizada. Ou ainda :
0)(21 2
XudXGdATdS o . (7.290)
Onde T é a temperatura do material.
Observe que esta consideração concorda com um princípio da máxima dissipação
de energia (PMDE) ou máxima produção interna de entropia (PMPIE) se considerarmos que o
balanço total de entropia, , é nulo, ou seja:
0)/(21 2
dtXudX
dtdAG
dtdST o . (7.291)

193
e a função dissipação, int, dada pela produção interna de entropia como:
dtdAG
dtdST oint
int . (7.292)
Logo o fluxo de entropia, ext = dSext/dt, é consequentemente dada por:
dtXudX
dtdSext
ext)/(
21 2 . (7.293)
Observe desta equação que se a carga X é máxima e a variação da rigidez no tempo é
máxima, o que corresponde a um tempo de fratura mínimo em uma velocidade máxima, como
velocidade do som no material, então a taxa de variação da entropia para o meio externo é
máxima, justificando assim o Princípio da Máxima Dissipação em uma fratura catastrófica.
Estas considerações mostram que todas estas observações dos experimentos
quase-estático são consistentes com um critério de maximização de RdAo ao longo do
caminho da trinca. Isto é, um trabalho de fratura de máxima absorção. Equivalentemente (e
também para o crescimento não-estática ou instável) o caminho da trinca corresponde com
uma máxima taxa de liberação de energia de deformação GdAo dentro do caminho da trinca. É
preciso lembrar que o nome alternativo para o Princípio da Mínima Energia Potencial é o
Princípio do Trabalho Mínimo, isto é quase-estáticamente a partir de um estado de equilíbrio
a outro (de um comprimento da trinca a um maior) o sistema naturalmente fará isto com o
mínimo esforço dispensado.
A2.9.8 - A teoria estatistica de Weibull para a fratura em materiais frágeis

194
Capítulo - VIII
A MECÂNICA DA FRATURA ELASTO-PLÁSTICA
RESUMO
8. 1 – Objetivos do Capítulo

195
8. 2 – Introdução

196
8. 3 – A Mecânica da Fratura Elasto-Plástica Clássica para os
materiais frágeis e dúcteis
Apesar das modificações introduzidas por Irwin a teoria elástica linear precisou
receber uma extensão que pudesse incluir a fratura elasto-plástica onde a parte irreversível do
processo de fratura fosse considerada. Para isso OROWAN [1948] e IRWIN [1948]
perceberam que na ponta da trinca havia uma região de deformação plástica que poderia ser
incluída na descrição de Griffith, conforme será descrito a seguir.
2.8.1 – A teoria de Irwin-Orowan
A teoria de Irwin-Orowan passou a ser uma extensão da teoria de Griffith onde os
efeitos da zona de deformação plástica na ponta da trinca de um material foram considerados.
Orowan levou em conta esta deformação plástica, até o limite onde o módulo elástico, E, se
mantém constante. Com isto ele percebeu que poderia acrescentar um termo de energia de
superfície ao termo elástico, responsável pela deformação plástica na plástica sem modificar
essencialmente a teoria de Griffith-Irwin.
2.8.2 – A modificação de Irwin-Orowan do balanço energético da teoria de Griffith
Em 1948 Irwin e Orowan [OROWAN 1948] modificaram a teoria da fratura de
Griffith para incluir também os materiais chamados dúcteis (metais), que apresentam o
processo de deformação plástica. Este processo é um fenômeno muito importante que
acontece durante o processo de crescimento da trinca ( Figura - 8. 1). É por meio dele, que
surge a chamada zona de processo da fratura. A modificação introduzida por Irwin-Orowan,
no balanço energético de Griffith, foi descrever a zona de deformação plástica na ponta da
trinca por um termo de energia de superfície, p, análogo a energia de superfície elástica, e.
Portanto a energia de superfície efetiva da fratura passou a ser descrita por:
eff = e + p (8. 1)
onde p = p(T) é uma função apenas da temperatura, T, e do estado de tensão e
consequentemente da espessura do material.

197
Figura - 8. 1. Zona de processo com deformação plástica na ponta da trinca (ZPA – zona plasticamente afetada5).
Do ponto de vista matemático a separação entre materiais dúcteis e frágeis tornou-
se em:
Materiais dúcteis (metais em geral): plástico >> elástico
Materiais frágeis (óxidos em geral): plástico << elástico.
Portanto, a equação de Griffith para a tensão de fratura passou a ser escrita como:
o
pef L
E
)(2
(8. 2)
2.8.3 – A taxa de energia elasto-plástica liberada, J, para o caminho liso
Com a introdução da energia específica de deformação plástica, p, feita por Irwin
e Orowan, a taxa de energia elástica liberada, G, teve que ser estendida para o conceito de
taxa de energia elasto-plástica liberada, J, cuja definição matemática é análoga a definição
anterior (7. 191), ou seja:
)( Vo
UFdAdJ (8. 3)
Para as propostas deste trabalho é conveniente escrever (8. 3) de forma análoga a
(7. 192) como sendo:
5 na condição de tensão plana temos uma cardióde e na deformação plana temos uma leminiscata

198
)( plLo
UUFdLdJ (8. 4)
De forma análoga a equação (7. 193) tem-se:
Xdu = dUL + dUpl + JdLo (8. 5)
Para a fratura elástica, J é mais familiarmente conhecida como a taxa de perda da
energia elástica G. J G para corpos elásticos lineares (Hookeanos).
Logo a equação (7. 201) passa a ser escrita como:
o
pl
oo dL
dUdL
XudXLXuJ )/(
21),,( 2 (8. 6)
Observe que a flexibilidade pode ser separada na parte elástica e plástica
elástico plástico
u u uX X X
(8. 7)
Logo, a partir de (7. 230) tem-se:
o
plI
dLdU
EKJ
2
(8. 8)
2.8.4 - O critério de Irwin-Orowan
A relação entre a teoria termodinâmica de Griffith e a teoria elástica linear de
Irwin-Westergaard [WESTERGAARD 1939] foi obtida com sucesso por meio da definição da
integral - G (para materias frágeis) ou J (para materiais dúcteis), feita por Eshelby e Rice
[RICE 1968]. Portanto o critério de fratura passou a ser dado de acordo com (7. 235) por:
cIC
c RE
KJ 2
(8. 9)
Enquanto as sugestões de Orowan eram inseridas na MFC uma análise
matemática mais profunda do campo de tensão ao redor da ponta da trinca começou a ser
realizado por cientistas e matemáticos da época. Hutchinson, Rice e Rosengren perceberam
que as propriedades mecânicas de um material, sujeito a um campo de tensão com uma trinca,

199
deveriam estar contido dentro o seguinte triângulo de propriedades ( Figura - 8. 2).
Figura - 8. 2. Triângulo de caracterização de um material quanto as suas propriedades mecânicas da fratura.
Esta visão ampla da fratura levou Elshelby e Rice a definirem uma integral de
linha independente do caminho de circuitação ao redor da ponta da trinca que representa a
conservação de energia durante um processo de fratura estável, conforme será mostrado a
seguir.

200
2.8.5 – A integral de Eshelby-Rice, para o caminho liso
O conceito da integral - J de Eshelby-Rice nasceu como uma extensão da
definição dada por Irwin-Orowan, definindo-se a função “energia potencial”, , da seguinte
forma:
VdUdF . (8. 10)
Sabendo que dF = Xdu pode-se escrever:
XdudUV , (8. 11)
onde dVWUV é a integral da densidade de energia, W, dada por:
ijijdW . (8. 12)
Por conveniência a taxa de energia elasto-plástica, J definida em (8. 4) será
reescrita como:
o
V
o dAdU
dAXdu
dAdJ . (8. 13)
No lugar da somatória das componentes do trabalho realizado pelas forças
externas ii duXXdu na equação (8. 11), será considerado as condições ao longo do
contorno C ao redor da ponta da trinca, mas do lado de fora da zona de processo, conforme
mostra a Figura - 8. 3. Observe que, sobre condições de carga em equilíbrio, existe energia
de deformação dentro do contorno, e trações, T, e deslocamentos, u, sobre o próprio contorno.
Portanto, para a função na região de volume, V, encapsulada pelo contorno, C,
vale:
dsWdVV C
..uT , (8. 14)
onde s é a distancia ao longo do contorno e a integração é realizada no sentido anti-horário.
Então de acordo com a equação (8. 13) tem-se:

201
dsWdV
dAd
dAdJ
V Coo..uT . (8. 15)
No caso bidimensional com um corpo de espessura unitária, dV = dxdy, e (8. 15)
torna-se:
dsWdxdy
dLd
dLdJ
Coo..uT , (8. 16)
onde dLo é o aumento incremental no comprimento da trinca. Com um contorno fixo, d/dLo =
d/dx tal que:
dsxuWdy
dLdJ
CCo..
T , (8. 17)
Desde que a equação (8. 5) é uma relação (para a qual todas as deformações são
independentes do caminho, isto é, são reversíveis) a integral de contorno na equação (8. 17) é
também independente do caminho.
Figura - 8. 3. Contorno da integral – J na zona ponta da trinca (ATKINS 1985).
A equação (8. 17) apresenta uma forma alternativa de se calcular J (ou G e

202
portanto KI) em problemas elásticos, contudo, historicamente a integral de contorno não
emergiu de estudos de fratura elástica. Ela foi primeiro apresentada no final de 1960 por Rice
e utilizada pelos engenheiros da Westinghouse Laboratories como um critério para a fratura
elasto-plástica considerando-se a teoria da plasticidade de Hencky, a qual permitiu tratar o
problema plástico, real (irreversível), como um problema elástico não-linear reversível
ATKINS [1985]. Rice utilizou o símbolo, J, para designar a fratura elasto-plástica e a integral
de contorno independente do caminho em (8. 17) é hoje em dia familiarmente conhecida
como Integral – J.
De acordo com este resultado, J é a diferença entre as taxas (com relação ao
comprimento da trinca, d/dLo) de transferência de energia do sistema para o corpo (primeiro
termo da equação (8. 17)) e o consumo de energia na fratura (segundo termo da equação (8.
17)), ou seja, J, é a taxa de energia disponível para a trinca crescer, ou ainda, a força motriz da
fratura elástica não-linear.
2.8.6 - O crescimento estável e o conceito de curva J-R, para o caminho liso
Considere a Figura - 8. 4 onde mostra-se o gráfico do carregamento, X, em
função do deslocamento do ponto de aplicação da força, u, para uma material que possui
comportamento elasto-plástico.
Figura - 8. 4. Variação da carga ou tensão elasto-plástica com o deslocamento para a fratura estável de um material dúctil ASTM [ ].
De uma forma geral a integral J para um material dúctil pode ser escrita como:
2( ) ( )
( ) ( )i pl i
i pl io
K dUJ J R
E dA (8. 18)
Onde i, são os diferentes pontos sobre a curva de carga do corpo de prova, conforme mostra a

203
Figura - 8. 4. Jpl(i), é a componente plástica de J, K(i) são os diferentes fatores de intensidade
de tensão para cada modo de solicitação de carga. Upl(i) é a energia de deformação plástica
neste modos. Desde que
)()(2)(
)(oN
pl
o
iplipl LwB
iAdA
dUJ
(8. 19)
Onde BN é a espessura liquida do corpo de prova, Apl é área definida pelo gráfico da
Figura - 8. 4.
Um material dúctil apresenta uma deformação plástica irreversível de tal forma
que ao se realizar um ciclo de carga e descarga da força, X ocorre o aparecimento de uma
“histerese” de deformação. Portanto, para um crescimento estável de trinca, a determinação da
curva JR, em um ensaio de fratura, pode ser realizada por um processo em que a condição
elástica não-linear (reversível) é mantida, de forma a retratar a condição elasto-plástica
(irreversível). Isto significa que durante a medida de J, a cada ponto de uma curva de X x u
análoga a aquela mostrada no gráfico da Figura - 8. 4, o ciclo de carregamento e
descarregamento não pode exceder a um valor de aproximadamente 20% do valor da carga,
naquele ponto, para que ao se retornar ao ponto de carregamento de inicial as condições
elásticas não-lineares sejam mantidas.
Quando uma fratura quase-estática (ou regime estável) ocorre, as grandezas J ou
G assumem valores críticos, Jc, ou ,Gc, respectivamente, os quais exatamente representam o
trabalho específico de fratura requerido na zona de processo dado por R(6). Experimentos
mostram que R é uma quantidade reprodutível sobre uma faixa útil de variáveis (tensão,
deformação, taxa, temperatura ambiente, etc) e pode-se escrever para um incremento quase-
estático de crescimento de trinca em um corpo, contendo uma trinca existente de área A,
sendo carregado por um par de força externas auto-equilibrantes, X, associada com os
deslocamentos u, da seguinte forma:
RJ (8. 20)
C C CJ G R no início do crescimento da trinca e RJ R , geralmente na fratura de
equilíbrio.
6

204
2IR
RKJ R
E (8. 21)
8. 4 – Relação entre a Integral-J e o Fator de Intensidade de
Tensão

205
Apêndices
7.2.2 – As taxas de energia elástica e elasto-plástica liberada para um caminho de
trinca projetada em um plano
A Mecânica da Fratura Clássica é brevemente apresentada antes de se introduzir a
geometria fractal na teoria. Baseado no balanço de energia de Griffith-Irwin-Orowan's
[EWALDS] para o crescimento estável de trinca [SWANSON, ANDERSON], a resistência a
fratura Ro por espessura unitária é definida como:
oo dL
dUR
(7.294)
onde U é o produto da energia de superfície elástica específica e do material pela área
superficial da trinca (duas superfícies de comprimento Lo) mais a contribuição da energia de
deformação plástica especifica p, então
U = (2e+p)Lo (7.295)
A taxa de energia elástica linear liberada por espessura unitária Go é definida por:
o
Loo dL
UFdG )( (7.296)
onde F é o trabalho realizado pelas forces externas sobre o corpo e ULo é a variação na energia
elástica de deformação causada pela introdução de uma trinca de comprimento Lo. Para
problemas de deformação plana nós temos [EWALDS],
ELU o
Lo 2
22 (7.297)

206
onde E é o modulo de Young e é a tensão aplicada. Para deslocamentos constantes das
bordas (condição de grampos fixos no experimento de Griffth) as forças externas não realizam
trabalho durante o processo de extensão da trinca, / 0odF dL , e a taxa de energia elástica
liberada é dada por:
EL
dLdUG o
o
Loo
2 (7.298)
De forma a ter uma fratura estável, a abordagem do balanço de energia de
Griffith-Irwin-Orowan requer que:
Go = Ro (7.299)
Combinando as Eqs. (7.294), (7.298) e (7.299), o comprimento crítico da trinca Loc é dado
por:
2
)2(
f
peoc
EL
(7.300)
onde f é a tensão de fratura crítica. A equação (7.300) mostra que o comprimento crítico
Loc depende do material que está sendo testado (E,e e p) e do arranjo experimental o qual
forneceu a equação (7.297).
Observe que a formulação original de Griffith-Irwin-Orowan não considera o
efeito da rugosidade da trinca, mas considera uma equivalência enérgica entre o caminho de
trinca rugoso e o caminho de trinca projetado no plano.
A taxa de energia elasto-plástico liberada Jo para uma trinca de caminho projetado
no plano pode ser estendida a partir da abordagem de Irwin-Orowan [ATKINS]. É possível
definir a taxa de energia elasto-plástico liberada de uma forma análoga a definição da taxa de
energia elástica liberada, como
( )Voo
o
d F UJdL
(7.301)
onde UVo é a energia volumétrica de deformação dada por:
Vo Lo plU U U (7.302)
onde Upl é a contribuição para a energia de deformação plástica no material.

207
Considerando o trabalho externo dF = Xdu, onde X são as forces externas
aplicadas ao corpo e substituindo esta relação e a equação (7.302) na equação (7.301), tem-se
ooplLo dLJdUdUXdu (7.303)
usando ULo=1/2Xu dado pelo teorema de Clapeyron, após algumas manipulações algébricas
encontra-se
o
pl
ooo dL
dUdL
XudXLXuJ )/(
21),,( 2 (7.304)
uma vez que:
EvK
dLXudXLXuG e
ooo
)1()/(21),,(
222
(7.305)
onde Ke é o fator de intensidade elástico de tensão e substituindo (7.305) em (7.304), tem-se
ple
oo JE
vKLXuJ
)1(
),,(22
(7.306)
a qual representa a extensão da abordagem de Irwin-Orowan para a taxa de energia elasto-
plástica Jo, com
)(2
oN
pl
o
plpl LwB
AdA
dUJ
(7.307)
onde BN é a espessura líquida do corpo de prova e Apl é a área definida pelo gráfico da
Figura - 7.18.

208
Figura - 7.18. Loading variation or elastic-plastic stress versus displacement for a stable fracture of a ductile material as ASTM E1737-1996[ASTM E1737-96].
Como na formulação elástica, a taxa de energia elasto-plástica não-linear liberada
Jo não considera a rugosidade da trinca.

209
REFERÊNCIAS BIBLIOGRÁFICAS
ANDERSON, T. L. Fracture Mechanics, Fundamental and applications, (CRC Press, 2nd Edition), 1995.
ASTM E1737-96 – “Standard Test Method for J-integral characterization of fracture toughness”, Designation ASTM E1737-96, pp.1-24, (1996).
ATKINS, A. G. & Mai, Y-M. Elastic and Plastic Fracture. Ellis Horwood, Chichester, 1985.
BARENBLATT, G. I. “The mathemathical theory of equilibrium cracks in brittle fracture”, Advances in Applied Mechanics, 7, p.55-129, 1962.
DOS SANTOS, Sergio Francisco; Aplicação do conceito de fractais para análise do processo de fratura de materiais cerâmicos, Dissertação de Mestrado, Universidade Federal de São Carlos. Centro de Ciências Exatas e de Tecnologia, Programa de Pós-Graduação em Ciência e Engenharia de Materiais, São Carlos, 1999.
EWALDS, H. L. and R. J. H. Wanhill, Fracture Mechanics, (Edward Arnold Publishers), 1993. FINEBERG, J.; S. P. Gross, M. Marder, and H. L. Swinney, Instability in dynamic fracture. Physical Review Letters, vol. 67 , 457-460, 1991. GRIFFITH, A. A., “The phenonmena of rupture and flow in solids”, Phil. Trans. R. Soc. London (Mechanical Engineering) A221 , p. 163-198, 1920.
GURNEY, C.; Hunt, J. - “Quasi-static crack propagation”, Proc. Royal Soc. London, Series-A, Mathematical and Physical Sciences, vol. 299, n.1459, 25 July 1967.
HÜBNER, Heinz and W. Jillek, Subcritical crack extension and crack resistance in polycrystaline alumina, J. Mater. Sci., vol. 12, n. 1, p. 117-125, 1977.
INGLIS, C. E. Stressess in a plate due to the presence of cracks and sharp corners, Transactions of the Royal Intitution of Naval Architects, v. 60, p. 219-241, 1913.
IRWIN, G. R., “Fracture Dynamics”, Fracturing of Metals, American Society for Metals, Cleveland, pp. 147-166, 1948.
IRWIN, G. R., “Analysis of stresses and strains near the end of a crack traversing a plate”, Journal of Applied Mechanics, vol. 24, p. 361-364, 1957.
KANNINEN, Melvin F.; Popelar, Carl H., Advanced fracture mechanics, THE OXFORD ENGINEERING SCIENCE SERIES 15, Editors: A. ACRIVOS, et al. Oxford University Press, New York, CLAREDON PRESS, Oxford, 1985.
KRAFF, J. M.; A. M. Sullivan and R. W., Boyle, Effect of Dimensions on Fast Fracture Instability of Notched Sheets, Proceedings of the Craks Propagagtion Symposium Cranfield, 1962, (The College of Aeronautics, Cranfield, England, 1962), vol. 1. p. 8-28, 1962.
LAWN, Brian; Fracture of brittle solids, 2a. Edition, Cambridge Solid State Science Series, Editors: E. A. Davis and I. M. Ward FRS, Cambridge University Press, 1993.

210
LEI, Weisheng and Bingsen Chen, Fractal characterization of some fracture phenomena, Engineering Fracture Mechanics, vol. 50, n. 2, p. 149-155, 1995. LIN, G. M.; J. K. L. Lai, Fractal characterization of fracture surfaces in a resin-based composite, Journal of Materials Science Letters, vol. 12, p. 470-472, 1993. LUNG, C. W. and Z. Q. Mu, Fractal dimension measured with perimeter area relation and toughness of materials, Physical Review B, vol. 38, n. 16, p. 11781-11784, 1 December 1988. MANDELBROT, Benoit B, Fractal: form chance and dimension, Freeman, San Francisco, 1977. MARDER, Michael and Jay Fineberg, “How things break”, Physics Today, p. 24-29, September 1996b.
MARIANO Paolo Maria o, Influence of the material substructure on crak propagation: a unified treatment, arXiv:math-ph/0305004v1, May 2003. MECHOLSKY, J. J.; T. J. Mackin and D. E. Passoja, “Self-similar crack propagation in brittle materials”. (In: Advances in Ceramics, vol. 22, Fractography of Glasses and Ceramics, The American Ceramic Society, Inc), p. 127-134, Edited by J. Varner and V. D. Frechette. America Ceramic Society, Westerville, OH, 1988. MECHOLSKY,, J. J.; D. E. Passoja and K. S. Feinberg-Ringel; Quantitative analysis of brittle fracture surfaces using fractal geometry, J. Am. Ceram. Soc., vol. 72, n. 1, p. 60-65, 1989. MU, Z. Q. and C. W. Lung, Studies on the fractal dimension and fracture toughness of steel, J. Phys. D: Appl. Phys., vol. 21, p. 848-850, 1988.
MISHNAEVSKY Jr., L. L., “A new approach to the determination of the crack velocity versus crack length relation”, Fatigue Fract. Engng. Mater. Struct, vol. 17, n. 10, p. 1205-1212, 1994.
MUSKHELISVILI, N. I., Some basic problems in the mathemathical theory of elasticity, Nordhoff, The Netherlands, 1954.
OROWAN, E., “Fracture and strength of solids”, Reports on Progress in Physics, XII, p. 185, 1948.
RICE, J. R., “A path independent integral and the approximate analysis of strain concentrations by notches and cracks”, Journal of Applied Mechanics, 35, p. 379-386, 1968.
RODRIGUES, J. A.; Pandolfelli, V. C.; CERÂMICA 42(275) MAI/JUN, 1996.
SWANSON, Peter L. Carolyn J. Fairbanks; Brian R. Lawn; Yiu-Ming Mai and Bernard J. Hockey; Crack-interface grain bridging as a fracture resistance mechanism in ceramics: I, experimental study on alumina, J. Am. Ceram. Soc., vol. 70, n. 4, p. 279-289, 1987.
WESTERGAARD, H. M., “Bearing pressures and Cracks” Journal of Applied Mechanics, Vol. 6, pp. 49-53, 1939.

211
Ewalds, 1993 H. L. and R. J. H. Wanhill in Fracture Mechanics, Delftse Uitgevers Maatschappij Third edition, Netherlands 1986, (co-publication of Edward Arnold Publishers, London 1993).
Kraff, 1962 J. M.; A. M. Sullivan and R. W., Boyle, Effect of Dimensions on Fast Fracture Instability of Notched Sheets, Proceedings of the Cracks Propagation Symposium Cranfield, 1962, (The College of Aeronautics, Cranfield, England, 1962), vol. 1. pp. 8-28.
Swanson, 1987 Peter L.; Carolyn J. Fairbanks; Brian R. Lawn; Yiu-Ming Mai and Bernard J. Hockey; et al, Crack-interface grain bridging as a fracture resistance mechanism in ceramics: I, experimental study on alumina J. Am. Ceram. Soc., vol. 70, n. 4, 1987, pp. 279-289.
Hübner, 1977 Heinz and W. Jillek, Sub critical crack extension and crack resistance in polycrystalline alumina, J. Mater. Sci., vol. 12, n. 1, 1977, pp. 117-125. DOI: 10.1007/BF00738476
Underwood, 1992 Erwin E. and Kingshuk Banerji, Fractal Analysis of Fracture Surfaces,. Engineering Aspects of Failure and Failure Analysis - ASM - Handbook - vol. 12, Fractography - The materials information society (1992) , pp. 210-215.
Rodrigues, 1998 José Anchieta; Pandolfelli, Victor Carlos, “Insights on the fractal-fracture behavior relationship”, Materials Research, vol.1, n. 1, 1998b, pp. 47-52.
Herrmann Jr, 1990 Hans.; Roux, Stéphane, “Statistical Models for the Fracture of Disordered Media, Random Materials and Processes”, Series Editors: H. Eugene Stanley and Etienne Guyon, North-Holland Amsterdam 1990.
Mecholsky, 1989 J. J., D. E. Passoja and K. S. Feinber-Ringel, J. Am. Ceram. Soc., 72, 1, (1989), pp. 60-65.
Xie, 1989 Heping, The fractal effect of irregularity of crack branching on the fracture toughness of brittle materials, International Journal of Fracture, vol. 41, 1989, pp. 267-274.
Lin, 1993 G. M.; J. K. L. Lai, “Fractal characterization of fracture surfaces in a resin-based composite”, Journal Mat. Science Letters, vol. 12, (1993) , pp. 470-472.
Nagahama, 1994 Hiroyuki; “A fractal criterion for ductile and brittle fracture”, J. Appl. Phys., vol. 75, n. 6, , 15 March 1994. pp. 3220-3222, DOI:10.1063/1.356128
Lei, 1995 Weisheng, and Bingsen Chen, Fractal characterization of some fracture phenomena, Engineering Fracture Mechanics, vol. 50, n. 2, 1995, pp. 149-155.

212
Tanaka, 1996 M, “Fracture toughness and crack morphology in indentation fracture of brittle materials”, Journal of Materials Science, vol. 31, 1996. pp. 749-755.
Williford, 1990 R. E., Fractal Fatugue, Scripta METALLURGICA et MATERIALIA, Vol. 24, 1990, pp. 455-460.
Gong, 1993 Bo and Zu Han Lai, Fractal characteristics of J-R Resistance curves of Ti-6Al-4V alloys, Eng. Fract. Mech.. vol. 44, n. 6, 1993, pp. 991-995.
Chelidze, 1990 T.; Y. Guegen, Evidence of fractal fracture, (Technical Note), Int. J. Rock Mech. Min. Sci. & Geomech. Abstr. Vol. 27, n. 3, (1990), pp. 223-225.
Borodich, 1997 F. M., “Some fractals models of fracture”, J. Mech. Phys. Solids, 45, n. 2 (1997), pp. 239-259.
Alves, 2001 Lucas Máximo; Rosana Vilarim da Silva, Bernhard Joachim Mokross, The influence of the crack fractal geometry on the elastic plastic fracture mechanics. Physica A: Statistical Mechanics and its Applications. Vol. 295, n. 1/2, 12 June 2001, pp. 144-148. DOI: 10.1016/S0378-4371(01)00067-X
Alves, 2005 Lucas Máximo: Fractal geometry concerned with stable and dynamic fracture mechanics. Journal of Theorethical and Applied Fracture Mechanics, Vol 44/1, pp 44-57, 2005. DOI:10.1016/j.tafmec.2005.05.004
Mandelbrot, 1984 Benoit B; Dann E. Passoja & Alvin J. Paullay, “Fractal character of fracture surfaces of metals”, Nature (London), vol. 308 [5961], , 19 April, 1984, pp. 721-722. DOI:10.1038/308721a0
Carpinteri, 1996 Alberto and Bernardino Chiaia, Crack-resistance as a consequenca of self-similar fracture topologies, International Journal of Fracture, 76, 1996, pp. 327-340.
Bouchaud, 1994 E.; J. P. Bouchaud, Fracture surfaces: Apparent roughness, relevant length scales, and fracture toughness, Physical Review B, vol. 50, n. 23, 15 December 1994-I, pp. 17752-17755. DOI: 10.1103/PhysRevB.50.17752
Bouchaud, 1997 Elisabeth, Scaling properties of cracks, J. Phy. Condens. Matter 9 (1997), pp. 4319-4344.
Dauskardt, 1990 R. H.; F. Haubensak and R. O. Ritchie, On the interpretation of the fractal character of fracture surfaces. Acta Metal. Mater. vol. 38, n. 2, (1990), pp. 143-159.
Kostron, 1949 H. Arch Metallkd; vol. 3, n. 6, pp. 193-203, 1949.
Alves, 2004a Lucas Máximo; et al., Verificação de um Modelo Fractal do Perfil de Fratura de Argamassa de Cimento, 48º Congresso Brasileiro de Cerâmica, realizado no período de 28 de junho a 1º de julho de 2004, em Curitiba – Paraná.
Alves, 2004b Lucas Máximo; et al., Estudo do perfil fractal de fratura de cerâmica vermelha, 48º Congresso Brasileiro de Cerâmica, realizado no período de 28 de junho a 1º de julho de 2004, em Curitiba – Paraná.

213
Voss, 1991 Richard F. In: Dynamics of Fractal Surfaces, Edited by Family, Fereydoon. and Vicsék, Tamás, World Scientific, Singapore, (1991), pp. 40-45.
Barabási, 1995 Albert – László; H. Eugene Stanley, Fractal concepts in surface growth, Cambridge University Press, 1995.
Anderson, 1995 T. L, FRACTURE MECHANICS, fundamentals and applications, (CRC Press, 2th Edition, 1995).
Atkins, 1985 A. G. & Mai, Y-M. Elastic and Plastic Fracture. Ellis Horwood, Chichester, 1985.
ASTM E813-89 – “Standard Test Method for JIC, A measure of Fracture Toughness”, Designation, ASTM E813-89, (1989).
Dos Santos, 1999, Sergio Francisco; Aplicação do conceito de fractais para análise do processo de fratura de materiais cerâmicos, Dissertação de Mestrado, Universidade Federal de São Carlos. Centro de Ciências Exatas e de Tecnologia, Programa de Pós-Graduação em Ciência e Engenharia de Materiais, São Carlos (1999).
Mandelbrot, 1991 B. B. Mandelbrot, in: Dynamics of Fractal Surfaces, Edited by Family, Fereydoon. and Vicsék, Tamás, World Scientific, Singapore, pp.19-39, 1991.
Bernardes, 1998 A. T, Comunicação pessoal 1998
Fung, 1969 Y. C. Fung, A first course in continuum mechanics, Prentice-Hall, INC, Englewood Criffs, N. J., 1969.
Holian, 1997 Brad Lee Holian1, Raphael Blumenfeld1,2, and Peter Gumbsch, An Einstein Model of Brittle Crack Propagation, Phys. Rev. Lett. 78, (1997), pp. 78 – 81, DOI: 10.1103/PhysRevLett.78.78.
Herrmann Jr., 1989 H.; Kertész, J.; De Arcangelis, L. - “Fractal Shapes of Deterministic Cracks”, Europhys. Lett. 10 (2), (1989). pp.147-152
Mu, 1988 Z. Q. and C. W. Lung, Studies on the fractal dimension and fracture toughness of steel, J. Phys. D: Appl. Phys., vol. 21, p. 848-850, 1988.
Lung, 1988 C. W. and Z. Q. Mu, Fractal dimension measured with perimeter area relation and toughness of materials, Physical Review B, vol. 38, n. 16, p. 11781-11784, 1 December 1988.
Mecholsky, 1989 J. J.; D. E. Passoja and K. S. Feinberg-Ringel, Quantitative analysis of brittle fracture surfaces using fractal geometry, J. Am. Ceram. Soc., vol. 72, n. 1, p. 60-65, 1989.
Mecholsky, 1988 J. J.; T. J. Mackin and D. E. Passoja, “Self-similar crack propagation in brittle materials”. (In: Advances in Ceramics, vol. 22, Fractography of Glasses and Ceramics, The American Ceramic Society, Inc), p. 127-134, Edited by J. Varner and V. D. Frechette. America Ceramic Society, Westerville, OH, 1988.
.Mandelbrot, 1982 Benoit B. Mandelbrot, The Fractal Geometry of Nature, Freeman, San Francisco - New York 1982.

214
Alves, 2010, Lucas Máximo, The fractality analysis of geometric artifacts distribution on fracture surfaces by a new non destructive method, to be submmited.
Alves, 2010, Lucas Máximo, A fractal modeling of the crack rugged path and of a fracture surface for a geometric description of crack growth, to be submmited.
Zaiser, 2004 Michael, Frederic Madani Grasset, Vasileios Koutsos, and Elias C. Aifantis, , Self-Affine Surface Morphology of Plastically Deformed Metals, Phys. Rev. Lett. 93, 195507 (2004)
Weiss, 2001 Jérome, Self-affinity of fracture surfaces and implications on a possible size effect on fracture energy, Int. Jour. Fract. 109, 2001, p. 365-381.

215
Alves Lucas Máximo, Silva Rosana Vilarim da, Mokross Bernhard Joachim, The influence of the crack fractal geometry on the elastic plastic fracture mechanics. Physica A: Statistical Mechanics and its Applications. 295, 1/2:144-148, 12 June 2001. Alves Lucas Máximo, Fractal geometry concerned with stable and dynamic fracture mechanics. Journal of Theorethical and Applied Fracture Mechanics, 44/1:44-57, 2005. Alves, Lucas Máximo, Silva, Rosana Vilarim da, Lacerda, Luiz Alkimin De, Fractal modeling of the J-R curve and the influence of the rugged crack growth on the stable elastic-plastic fracture mechanics, Engineering Fracture Mechanics, 77:2451-2466, 2010. Alves – Alves, Lucas Máximo; et al., Verificação de um Modelo Fractal do Perfil de Fratura de Argamassa de Cimento, 48º Congresso Brasileiro de Cerâmica, realizado no período de 28 de junho a 1º de julho de 2004, em Curitiba – Paraná. Alves, Lucas Máximo; Lacerda, Luiz Alkimin De, Application of a generalized fractal model for rugged fracture surface to profiles of brittle materials , artigo em preparação, 2010. Bammann, D. J. and Aifantis, E. C., On a proposal for a Continuum with Microstructure, Acta Mechanica, 45:91-121, 1982. Balankin , A.S and P. Tamayo, Revista Mexicana de Física 40, 4:506-532, 1994. Barenblatt, G. I. The mathematical theory of equilibrium cracks in brittle fracture, Advances in Applied Mechanics, 7:55-129, 1962. Blyth, M. G. , Pozrikidis, C., Heat conduction across irregular and fractal-like surfaces, International Journal of Heat and Mas Transfer, 46: 1329-1339, 2003. Carpinteri, A.; Puzzi, S., Complexity: a new paradigm for fracture mechanics, Frattura ed Integrità Strutturale,10, 3-11, 2009, DOI:10.3221/IGF-ESIS.1001 Dyskin, A. V., Effective characteristics and stress concetrations in materials with self-similar microstructure, International Journal of Solids and Structures, 42:477-502, 2005 Duda, Fernando Pereira; Souza, Angela Crisina Cardoso, On a continuum theory of brittle materials with microstructure, Computacional and Applied Mathemathics, 23, 2-3:327-343, 2007. Engelbrecht, J., Complexity in Mechanics, Rend. Sem. Mat. Univ. Pol. Torino, 67, 3:293-325, 2009 Fineberg, Jay; Gross; Steven Paul; Marder, Michael and Swinney, Harry L. Instability in dynamic fracture, Physical Review Letters, 67, 4:457-460, 22 July 1991. Fineberg, Jay; Steven Paul Gross, Michael Marder, and Harry L. Swinney, Instability in the propagation of fast cracks. Physical Review B, 45, 10:5146-5154 (1992-II), 1 March, 1992. Forest, S. Mechanics of generalized continua: construction by homogenization, J. Phys. IV, France, 8:39-48, 1998. Hyun, S. L.; Pei, J. –F.; Molinari, and Robbins, M. O., Finite-element analysis of contact between elastic self-affine surfaces, Physical Review E, 70:026117, 2004. Hornbogen, E.; Fractals in microstructure of metals; International Materials Reviews, 34. 6:277-296, 1989. Hutchinson, J.W., Plastic Stress and Strain Fields at a Crack Tip., J. Mech. Phys. Solids, 16:337-347, 1968. Irwin, G. R., “Fracture Dynamics”, Fracturing of Metals, American Society for Metals, Cleveland, 147-166, 1948. Lazarev, V. B., Balankin, A. S. and Izotov, A. D., Synergetic and fractal thermodynamics of inorganic materials. III. Fractal thermodynamics of fracture in solids, Inorganic materials, 29, 8:905-921,1993.

216
Mariano Paolo Maria o, Influence of the material substructure on crack propagation: a unified treatment, arXiv:math-ph/0305004v1, May 2003. Morel, Sthéphane, Jean Schmittbuhl, Juan M.Lopez and Gérard Valentin, Size effect in fracture, Phys. Rev. E, 58, 6, Dez 1998. Mosolov, A. B., Zh. Tekh. Fiz. 61, 7, 1991. (Sov. Phys. Tech. Phys., 36, 75, 1991). Mosolov, A. B. and F. M. Borodich Fractal fracture of brittle bodies during compression, Sovol. Phys. Dokl., 37, 5:263-265, May 1992. Mosolov, A. B., Mechanics of fractal cracks in brittle solids, Europhysics Letters, 24, n. 8:673-678, 10 December 1993. Muskhelisvili, N. I., Some basic problems in the mathematical theory of elasticity, Nordhoff, The Netherlands, 1954. Panagiotopoulos, P.D. Fractal geometry in solids and structures, Int. J. Solids Structures, 29, 17:2159-2175, 1992. Panin, V. E., The physical foundations of the mesomechanics of a medium with structure, Institute of Strength Physics and Materials Science, Siberian Branch of the Russian Academy of Sciences. Translated from Izvestiya Vysshikh Uchebnykh Zavedenii, Fizika, 4:5-18, Plenum Publishing Corporation, 305 - 315, April, 1992. Ponson, L., D. Bonamy, H. Auradou, G. Mourot, S. Morel, E. Bouchaud, C. Guillot, J. P. Hulin, Anisotropic self-affine properties of experimental fracture surfaces, arXiv:cond-mat/0601086, 1, 5 Jan 2006. Rice, J. R., A path independent integral and the approximate analysis of strain concentrations by notches and cracks, Journal of Applied Mechanics, 35:379-386, 1968. Rupnowski, Przemysław; Calculations of J integrals around fractal defects in plates, International Journal of Fracture, 111: 381–394, 2001. Su, Yan; LEI, Wei-Cheng, International Journal of Fracture, 106:L41-L46, 2000. Tarasov, Vasily E. Continuous medium model for fractal media, Physics Leters A 336:167-174, 2005.. Trovalusci, P. and Augusti, G., A continuum model with microstructure for materials with flaws and inclusions, J. Phys. IV, France, 8:353-, 1998. Xie, Heping; Effects of fractal cracks, Theor. Appl. Fract. Mech., 23:235-244, 1995. Xie, J. F., S. L. Fok and A. Y. T. Leung, A parametric study on the fractal finite element method for two-dimensional crack problems, International Journal for Numerical Methods in Engineering, 58:631-642, 2003. (DOI: 10.1002/nme.793) Yavari, Arash, The fourth mode of fracture in fractal fracture mechanics, International Journal of Fracture, 101:365-384, 2000. Yavari, Arash, The mechanics of self-similar and self-affine fractal cracks, International Journal of Fracture, 114:1-27, 2002, Yavari, Arash, On spatial and material covariant balance laws in elasticity, Journal of Mathematical Physics, 47, 042903:1-53, 2006. Weiss, Jérôme; Self-affinity of fracture surfaces and implications on a possible size effect on fracture energy, International Journal of Fracture, 109: 365–381, 2001.

![o-servicos2.sjc.sp.gov.br/legislacao/Decretos/1979/3193.pdf1>n/eltu1'0 de tSão ]o.U do.J Campo.J tdtado de tSào 1Jaulo LIVRO N.0 FLS. N.O DECRETO N9 3193/79 de 11 de dezembro de](https://img.document.onl/doc/110x75/5ea7a08cf096b506ce3b73a7/o-1neltu10-de-tso-ou-doj-campoj-tdtado-de-tso-1jaulo-livro-n0-fls.jpg)