Embed Size (px)
Citation preview
Manual do usuário
Controladores programáveis Micro810Códigos de catálogo 2080-LC10-12AWA, 2080-LC10-12QWB, 2080-LC10-12QBB, 2080-LC10-12DWD
Informações importantes ao usuárioO equipamento de estado sólido tem características operacionais diferentes daquelas dos equipamentos eletromecânicos. O documento Orientações de segurança para a aplicação, instalação e manutenção de controle de estado sólido (publicação SGI-1.1 disponível no escritório de vendas local da Rockwell Automation ou online em http://www.rockwellautomation.com/literature/) descreve algumas diferenças importantes entre o equipamento de estado sólido e os dispositivos eletromecânicos fisicamente conectados. Devido a essa diferença e também devido à ampla variedade de usos do equipamento de estado sólido, todas as pessoas responsáveis pela aplicação deste equipamento devem estar seguras de que cada aplicação desejada para este equipamento é aceitável.
Em nenhuma circunstância a Rockwell Automation, Inc. será responsável por danos indiretos ou decorrentes do uso ou aplicação deste equipamento.
Os exemplos e diagramas neste manual estão inclusos apenas para fins ilustrativos. Devido a muitas variáveis e especificações associadas com uma instalação em particular, a Rockwell Automation, Inc. não se responsabiliza pelo uso real com base nos exemplos e diagramas.
Nenhuma responsabilidade patente é assumida pela Rockwell Automation, Inc. com relação ao uso destas informações, circuitos, equipamentos ou programas descritos neste manual.
A reprodução do conteúdo deste manual, ao todo ou em parte, sem a permissão escrita da Rockwell Automation, Inc. é proibida.
Ao longo deste manual, quando necessário, usamos notas para alertá-lo sobre as considerações de segurança.
Allen-Bradley, Micro800, Micro810, Connected Components Workbench, Rockwell Software, Rockwell Automation e TechConnect são marcas comerciais da Rockwell Automation, Inc.
As marcas comerciais não pertencentes à Rockwell Automation são de propriedade de suas respectivas empresas.
ADVERTÊNCIA: Identifica as informações sobre práticas e circunstâncias que possam causar explosões em ambiente classificado, que podem resultar em ferimentos pessoais ou morte, danos à propriedade ou perda econômica.
ATENÇÃO: Identifica as informações sobre práticas ou circunstâncias que podem resultar em ferimentos pessoais ou morte, danos à propriedade ou perda econômica. Atenções ajudam a identificar e evitar um perigo e a reconhecer as consequências
PERIGO DE CHOQUE: Etiquetas podem estar localizadas dentro ou fora do equipamento (ex.: inversor ou motor) para alertar sobre a possível presença de tensão perigosa.
PERIGO DE QUEIMADURA: Etiquetas podem estar localizadas dentro ou fora do equipamento, por exemplo, um inversor ou motor, para alertar sobre a possibilidade de temperaturas perigosas.
PERIGO DE ARCO ELÉTRICO: As etiquetas podem estar no equipamento ou dentro dele, por exemplo, no centro de controle de motores, para alertar as pessoas sobre possível arco elétrico. Um arco elétrico causará ferimentos graves ou morte. Use equipamento de proteção individual (EPI) adequado. Siga TODOS os requisitos das regulamentações para práticas de trabalho seguro e para o equipamento de proteção individual (EPI).
IMPORTANTE Identifica as informações que são críticas para uma aplicação bem-sucedida e para a compreensão do produto.
Prefácio
Leia este prefácio para se familiarizar com o resto do manual. Ele fornece informações em relação a:
• Quem deve usar este manual• o objetivo deste manual• documentação relacionada
Quem deve usar este manual
Consulte este manual se você for responsável pelo projeto, instalação, programação ou localização de falhas em sistemas de controle com controladores Micro800™.
Você deve ter uma compreensão básica de circuitos elétricos e familiaridade com lógica ladder. Se não o tiver, obtenha um treinamento adequado antes de usar este produto.
Objetivo deste manual Este manual é um guia de referência para controladores Micro800, módulos de plug-in e acessórios. Ele descreve os procedimentos que são usados para instalar, conectar e localizar as falhas de seu controlador. Este manual:
• explica como instalar e conectar seus controladores• fornece uma visão geral do sistema de controlador Micro800
Consulte a ajuda online fornecida com o software Connected Components Workbench™ para obter mais informações sobre a programação do controlador Micro800.
Recursos adicionais Estes documentos contêm informações adicionais sobre produtos relacionados da Rockwell Automation.
Recurso Descrição
Fonte de alimentação CA externa do controlador programável Micro800 2080-IN001
Informações sobre a montagem e a fiação da fonte de alimentação opcional externa.
Diagramas de fiação do módulo plug-in, Adaptador Micro810 USB 2080-WD001
Informações sobre como montar e ligar por cabo o módulo adaptador de encaixe USB Micro810.
Diagramas de fiação da tela de LCD de 1,5 pol. e do Módulo de teclado do Micro800 2080-WD009
Informações sobre como montar e ligar por cabo o módulo de teclado e tela LCD de 1,5" Micro800.
Instruções gerais para controladores programáveis Micro800 2080-RM001
Informações sobre conjuntos de instruções para desenvolvimento de programas para uso nos sistemas de controle Micro800.
Orientação sobre fiação de automação industrial e aterramento, publicação 1770-4.1
Fornece orientações gerais para instalar um sistema industrial Rockwell Automation.
Site de certificações de produto, http://www.rockwellautomation.com/products/certification/
Fornece declarações de conformidade, certificados e outros detalhes de certificação.
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 iii

Prefácio
Você pode visualizar ou fazer download de publicações em http://www.rockwellautomation.com/literature/. Para pedir cópias impressas da documentação técnica, entre em contato com seu distribuidor local ou com seu representante de vendas Rockwell Automation.
Você pode fazer download da versão mais recente do software Connected Components Workbench para seu Micro800 na URL abaixo. http://www.rockwellautomation.com/global/products-technologies/connected-components/.
Orientações de segurança para a aplicação, instalação e manutenção de controle de estado sólido SGI-1.1
Uma descrição de diferenças importantes entre produtos de controlador programável de estado sólido e dispositivos eletromecânicos com fios.
National Electrical Code – publicado pela National Fire Protection Association of Boston, MA.
Um artigo sobre tipos e bitolas de cabos para aterramento de equipamentos elétricos.
Allen-Bradley Industrial Automation Glossary AG-7.1
Um glossário de termos e abreviações usados em automação industrial.
Recurso Descrição
iv Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
Sumário
Prefácio Quem deve usar este manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iiiObjetivo deste manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iiiRecursos adicionais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iii
Capítulo 1
Características gerais de hardware
Recursos de hardware. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1Micro810 Controladores de 12 pontos . . . . . . . . . . . . . . . . . . . . . . . 1
Capítulo 2
Sobre o controlador Software de programação para controladores Micro800. . . . . . . . . . . . 3Obtenha o software Connected Components Workbench . . . . . 3Utilize o Connected Components Workbench . . . . . . . . . . . . . . . 3
Certificações . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3Compatibilidade com as diretrizes da União Europeia . . . . . . . . . . . . . 3
Diretriz EMC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4Diretriz de baixa tensão . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Considerações sobre a instalação. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4Ambiente e gabinete . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6Prevenção de descarga eletrostática . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Considerações sobre segurança . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6Aprovação norte-americana para uso em áreas classificadas . . . . . 7Desconectando a alimentação principal. . . . . . . . . . . . . . . . . . . . . . . 7Circuitos de segurança . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8Distribuição de alimentação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8Testes periódicos do circuito do relé de controle mestre . . . . . . . . 8
Considerações sobre alimentação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9Transformadores de isolamento. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9Corrente de energização da fonte de alimentação . . . . . . . . . . . . . . 9Perda na fonte de alimentação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9Estados de entrada durante o desligamento . . . . . . . . . . . . . . . . . . 10Outros tipos de condições de linha . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Prevenindo superaquecimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10Relé de controle mestre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Utilizando chaves de parada de emergência . . . . . . . . . . . . . . . . . . 12Referência esquemática (utilizando símbolos IEC) . . . . . . . . . . . 13Referência esquemática (utilizando símbolos ANSI/CSA) . . . . 14
Capítulo 3
Instale o seu controlador Dimensões de montagem do controlador . . . . . . . . . . . . . . . . . . . . . . . . 15Dimensões de montagem. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15Espaçamento do módulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15Montagem em trilho DIN. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15Montagem em painel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 v
Sumário
Capítulo 4
Conecte o cabo do controlador Especificações de fiação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17Use supressores de surto. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Supressores de surto recomendados. . . . . . . . . . . . . . . . . . . . . . . . . . 19Aterre o controlador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20Diagramas de fiação. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20Fiação de E/S do controlador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Minimize o ruído elétrico. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21Orientações para fiação de canal analógico . . . . . . . . . . . . . . . . . . . 22Minimize o ruído elétrico nos canais analógicos. . . . . . . . . . . . . . . 22Faça o aterramento do cabo analógico . . . . . . . . . . . . . . . . . . . . . . . 23Exemplos de fiação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Capítulo 5
Localização de falhas Indicadores de status no controlador . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25Micro810 Controladores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Indicadores de status no módulo LCD . . . . . . . . . . . . . . . . . . . . . . . . . . 25Códigos de erro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Tipos de falhas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26Ação corretiva para falhas recuperáveis e não recuperáveis . . . . . 34
Modelo de recuperação de falha do controlador . . . . . . . . . . . . . . . . . . 35Ligar para a Rockwell Automation para obter assistência . . . . . . . . . . 36
Capítulo 6
Execução do programa no Micro800
Configure e programe o seu controlador Micro810 . . . . . . . . . . . . . . . 37Visão geral sobre a execução do programa . . . . . . . . . . . . . . . . . . . . . . . . 37
Regras para execução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39Energização e primeira varredura . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39Execução periódica de programas. . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Alocação de memória . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41Orientações e limitações . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Capítulo 7
Segurança do controlador Acesso exclusivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43Proteção por senha . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43Compatibilidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44Trabalhe com um controlador bloqueado. . . . . . . . . . . . . . . . . . . . . . . . 45
Upload a partir de um controlador protegido com senha . . . . . . 45Depure um controlador protegido por senha . . . . . . . . . . . . . . . . . 45Download para um controlador protegido por senha. . . . . . . . . . 45Transfira o programa do controlador e bloqueie o controlador receptor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46Faça backup e restaure um controlador protegido por senha . . . 46
Configure a senha do controlador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47Recuperando-se de uma perda de senha . . . . . . . . . . . . . . . . . . . . . . . . . . 47
vi Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
Capítulo 1
Apêndice A
Especificações Micro810 Controladores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49Fonte de alimentação CA externa do controlador programável Micro800 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Apêndice B
Sobre acessórios Acessórios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59Fonte de alimentação CA externa . . . . . . . . . . . . . . . . . . . . . . . . . . . 59Tela de cristal líquido de 1,5 pol. e módulo de teclado. . . . . . . . . 60Adaptador USB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
Apêndice C
Inícios rápidos Configure a senha do LCD. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63Ative a senha . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63Desative a senha . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64Troque a senha . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65Exclua a senha . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
Configure a senha do controlador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67Defina a senha do controlador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67Troque a senha . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69Apague a senha . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Utilize a função de relé inteligente do Micro810 . . . . . . . . . . . . . . . . . 72Ordem de execução de bloco de relé inteligente . . . . . . . . . . . . . . 72Navegue pela tela LCD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73Configure a Contagem incremental (CTU) . . . . . . . . . . . . . . . . . 73Teste a função CTU predefinida. . . . . . . . . . . . . . . . . . . . . . . . . . . . 76Configure o temporizador on-delay (TON) . . . . . . . . . . . . . . . . . 79Teste a função TON pré-definida . . . . . . . . . . . . . . . . . . . . . . . . . . . 80Configure o DOY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81Teste a função pré-definida DOY . . . . . . . . . . . . . . . . . . . . . . . . . . . 83Configure o TOW . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85Teste a função TOW pré-definida . . . . . . . . . . . . . . . . . . . . . . . . . . 87Configure a contagem regressiva (CTD). . . . . . . . . . . . . . . . . . . . . 89Teste a função CTD pré-definida . . . . . . . . . . . . . . . . . . . . . . . . . . . 90Configure o parâmetro TONOFF . . . . . . . . . . . . . . . . . . . . . . . . . . 92Teste a função TONOFF pré-definida . . . . . . . . . . . . . . . . . . . . . . 94Configure a temporização de pulso (TP). . . . . . . . . . . . . . . . . . . . . 95Teste a função TP pré-definida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96Configure o TOF. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98Teste a função TOF pré-definida . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
Atualize a memória flash do firmware do Micro800 . . . . . . . . . . . . . 100Estabelecendo comunicação entre o RSLinx e um controlador Micro810 de 12 pontos via USB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103Forçando E/S . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
Verifique se as forçagens (bloqueios) estão habilitadas. . . . . . . . 105Force de E/S após um ciclo de energização/desenergização . . . 106
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 vii

Sumário
Apêndice D
Bloco de funções IPID Como fazer o ajuste automático. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109Como o Autotune funciona . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
Localização de falhas no processo autotune . . . . . . . . . . . . . . . . . . . . 111Exemplo de aplicação PID. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
Amostra de código PID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
Índice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
viii Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
Capítulo 1
Características gerais de hardware
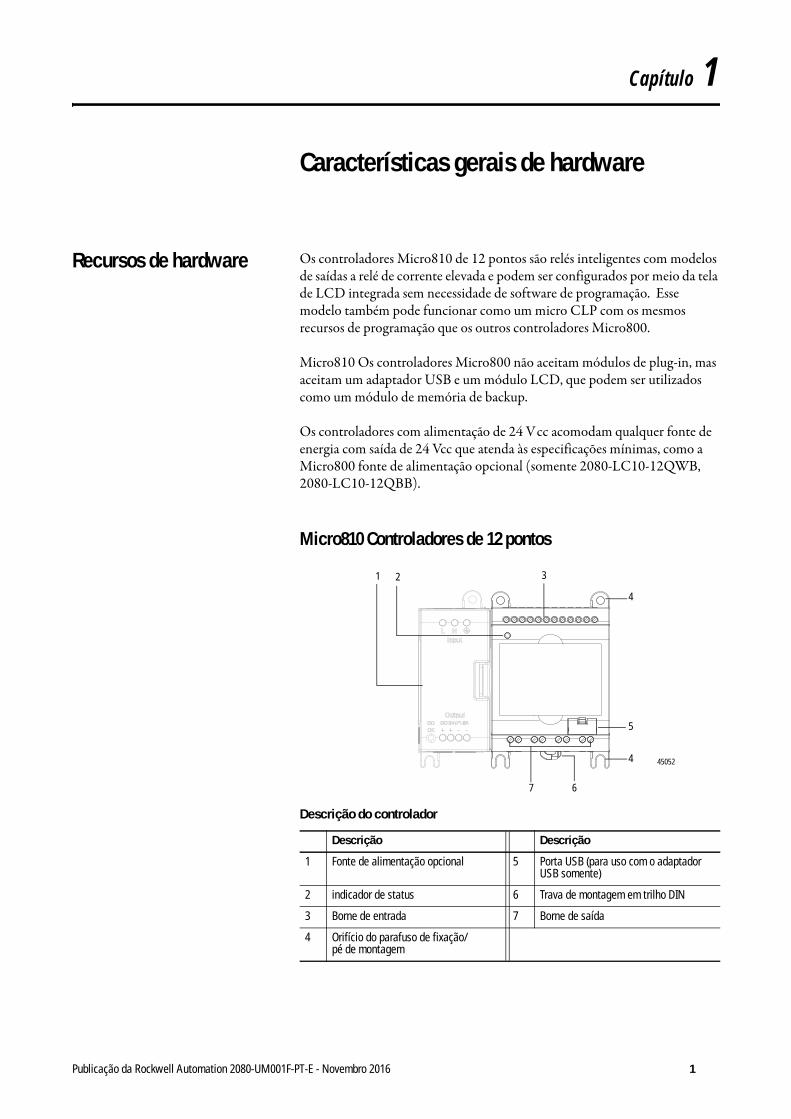
Recursos de hardware Os controladores Micro810 de 12 pontos são relés inteligentes com modelos de saídas a relé de corrente elevada e podem ser configurados por meio da tela de LCD integrada sem necessidade de software de programação. Esse modelo também pode funcionar como um micro CLP com os mesmos recursos de programação que os outros controladores Micro800.
Micro810 Os controladores Micro800 não aceitam módulos de plug-in, mas aceitam um adaptador USB e um módulo LCD, que podem ser utilizados como um módulo de memória de backup.
Os controladores com alimentação de 24 Vcc acomodam qualquer fonte de energia com saída de 24 Vcc que atenda às especificações mínimas, como a Micro800 fonte de alimentação opcional (somente 2080-LC10-12QWB, 2080-LC10-12QBB).
Micro810 Controladores de 12 pontos
Descrição do controlador
Descrição Descrição
1 Fonte de alimentação opcional 5 Porta USB (para uso com o adaptador USB somente)
2 indicador de status 6 Trava de montagem em trilho DIN
3 Borne de entrada 7 Borne de saída
4 Orifício do parafuso de fixação/pé de montagem
1 2 3
5
67
450524
4
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 1
Capítulo 1 Características gerais de hardware
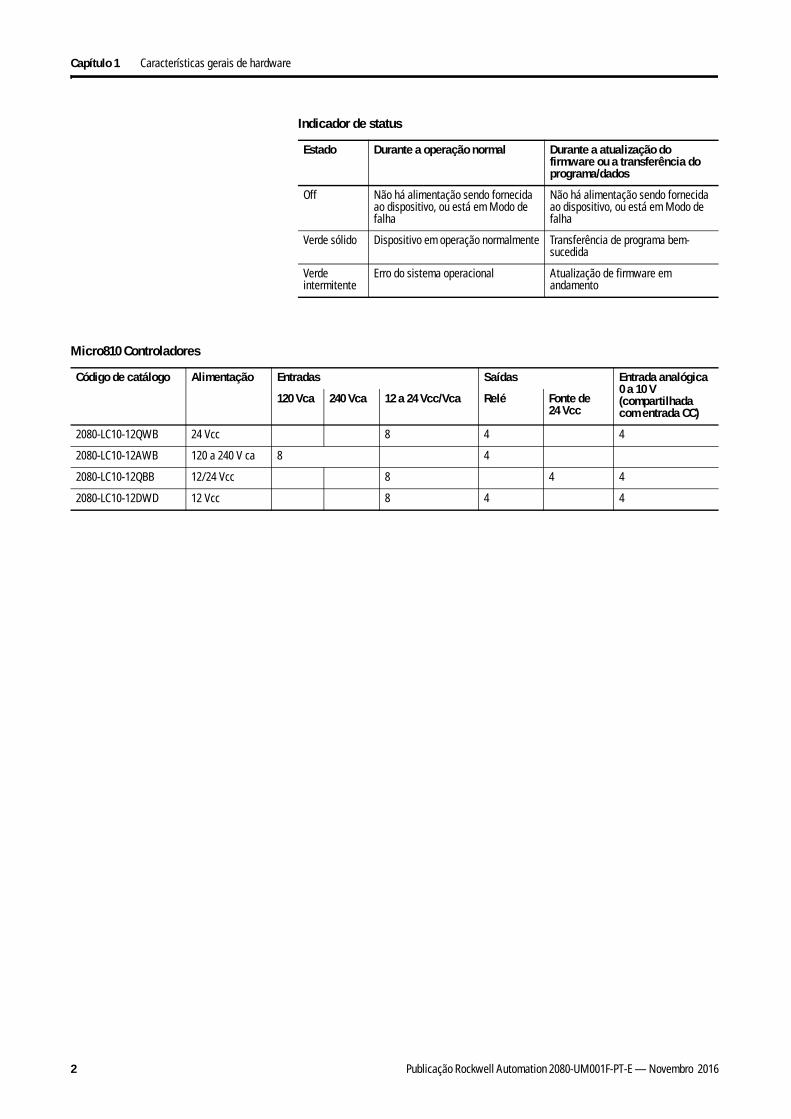
Indicador de status
Estado Durante a operação normal Durante a atualização do firmware ou a transferência do programa/dados
Off Não há alimentação sendo fornecida ao dispositivo, ou está em Modo de falha
Não há alimentação sendo fornecida ao dispositivo, ou está em Modo de falha
Verde sólido Dispositivo em operação normalmente Transferência de programa bem-sucedida
Verde intermitente
Erro do sistema operacional Atualização de firmware em andamento
Micro810 Controladores
Código de catálogo Alimentação Entradas Saídas Entrada analógica 0 a 10 V(compartilhada com entrada CC)
120 Vca 240 Vca 12 a 24 Vcc/Vca Relé Fonte de 24 Vcc
2080-LC10-12QWB 24 Vcc 8 4 4
2080-LC10-12AWB 120 a 240 V ca 8 4
2080-LC10-12QBB 12/24 Vcc 8 4 4
2080-LC10-12DWD 12 Vcc 8 4 4
2 Publicação Rockwell Automation 2080-UM001F-PT-E — Novembro 2016
Capítulo 2
Sobre o controlador
Software de programação para controladores Micro800
O software Connected Components Workbench é um conjunto de ferramentas colaborativas compatíveis com os controladores Micro800.É baseado em tecnologias da Rockwell Automation e Microsoft Visual Studio e oferece programação do controlador, configuração do dispositivo e integração com editor IHM. Utilize esse software para programar os seus controladores, configurar seus dispositivos e projetar as suas aplicações de interface de operação.
O software Connected Components Workbench oferece uma escolha de linguagens de programação IEC 61131-3 (diagrama de lógica ladder, diagrama de blocos de funções, texto estruturado) compatível com bloco de funções definido pelo usuário que otimiza o controle da máquina.
Obtenha o software Connected Components Workbench
Um download sem custo está disponível em:
http://www.rockwellautomation.com/global/products-technologies/connected-components/.
Utilize o Connected Components Workbench
Para ajudá-lo a programar o seu controlador por meio do software Connected Components Workbench, você pode consultar a ajuda online deste último (ela acompanha o seu software).
Certificações • Equipamento de controle industrial listado UL, certificado para os E.U.A. e Canadá. Certificação UL para Classe I, Áreas classificadas Divisão 2, Grupos A, B, C, D, certificado para EUA e Canadá.
• Com identificação CE para todas as diretrizes aplicáveis• Identificado com C-Tick para todas as ações aplicáveis
Compatibilidade com as diretrizes da União Europeia
Esse produto possui a identificação CE e é aprovado para instalação dentro da União Europeia e regiões da EEA. Foi projetado e testado para atender às diretrizes a seguir.
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 3
Capítulo 2 Sobre o controlador
Diretriz EMC
Esse produto é testado para atender à diretriz de conselho 2004/108/EC de compatibilidade eletromagnética (EMC) e os padrões a seguir, integral ou parcialmente, documentados em um arquivo de construção técnica:
• EN 61131-2; Controladores programáveis (cláusula 8, zonas A e B)• EN 61131-2; Controladores programáveis (cláusula 11)• EN 61000-6-4
EMC - Parte 6-4: Normas Genéricas - Emissão padrão para ambientes industriais
• EN 61000-6-2EMC - Parte 6-2: Normas Genéricas - Imunidade para ambientes industriais
Esse produto é destinado para utilização em um ambiente industrial.
Diretriz de baixa tensão
Este produto é testado para atender à diretriz do conselho 2006/95/EC de baixa tensão, aplicando as especificações de segurança de controladores programáveis EN 61131-2, Parte 2 – testes e especificações de equipamento.
Para informações específicas exigidas pela EN 61131-2, consulte as seções apropriadas nesta publicação, assim como as publicações da Allen-Bradley a seguir:
• Consulte Industrial Automation Wiring and Grounding Guidelines for Noise Immunity, publicação 1770-4.1
Considerações sobre a instalação
A maioria das aplicações exige instalação em um gabinete industrial (grau de poluição 2(1)) para reduzir os efeitos da interferência elétrica (sobretensão categoria II(2)) e exposição ambiental. Posicione seu controlador o mais distante possível das linhas de alimentação, linhas de carga e outras fontes de ruído elétrico, como chaves conectadas fisicamente, relés e inversores CA para motores. Para obter mais informações sobre as orientações adequadas de aterramento, consulte Industrial Automation Wiring and Grounding Guidelines publicação 1770-4.1.
(1) Grau de poluição 2 é um ambiente em que normalmente ocorre somente poluição não condutiva, exceto por condutividade temporária causada por condensação que deve ser esperada ocasionalmente.
(2) Sobretensão categoria II é a seção de nível de carga do sistema de distribuição elétrica. Nesse nível, tensões transientes são controladas e não excedem a capacidade de tensão de impulso do isolamento dos produtos.
4 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
Sobre o controlador Capítulo 2
ADVERTÊNCIA: Se você inserir ou remover o módulo enquanto a alimentação estiver aplicada, um arco elétrico pode ocorrer. Ele pode causar uma explosão em instalações nas áreas classificadas.Antes de continuar, verifique se a alimentação foi removida ou se a área não oferece perigo.
ADVERTÊNCIA: A porta do terminal de programação é destinada ao uso temporário somente e não deve ser conectado ou desconectado a menos que a área seja confirmada como não classificada.
ADVERTÊNCIA: Quando utilizado em uma área classificada Classe I, Divisão 2, este equipamento deve ser montado em um gabinete adequado com o método de fiação adequado que obedeça aos códigos elétricos vigentes.
ADVERTÊNCIA: Se você conectar ou desconectar a fiação quando a alimentação do lado do campo estiver ligada, um arco elétrico poderá ocorrer. Ele pode causar uma explosão em instalações nas áreas classificadas. Certifique-se de que a alimentação foi removida ou de que a área seja não classificada antes de continuar.
ADVERTÊNCIA: A porta USB é destinada para fins de programação local temporária somente não deve ser usada para conexão permanente. Se conectar ou desconectar o cabo USB com alimentação aplicada a este módulo ou a qualquer dispositivo na rede USB, um arco elétrico pode ocorrer. Ele pode causar uma explosão em instalações nas áreas classificadas.Antes de continuar, verifique se a alimentação foi removida ou se a área não oferece perigo.A porta USB é uma conexão de fiação de campo não inflamável para Classe I, Divisão 2, Grupos A, B, C e D.
ADVERTÊNCIA: A exposição a alguns produtos químicos pode reduzir as propriedades de vedação dos materiais usados nos relés. Recomenda-se que o usuário inspecione esses dispositivos periodicamente quanto à degradação de propriedades e substitua o módulo se qualquer degradação for encontrada.
ADVERTÊNCIA: Para atender à Diretriz de baixa tensão CE (LVD), este equipamento deve ser alimentado com uma fonte que esteja em conformidade: com tensão extrabaixa de segurança (SELV) ou com tensão extrabaixa protegida (PELV).
ADVERTÊNCIA: Para atender às restrições UL, este equipamento deve ser alimentado com uma fonte compatível com: Tensão/corrente limitada ou de classe 2.
ADVERTÊNCIA: Não ligue mais do que 2 condutores em um único terminal.
ADVERTÊNCIA: Tenha cuidado ao descascar os fios. Os fragmentos de fios que caírem no controlador podem causar danos. Quando a fiação estiver concluída, certifique-se de que o controlador está livre de fragmentos de metais.
ATTENTION: Não remova a proteção contra detritos até depois que o controlador e todos os outros equipamentos no painel próximos ao módulo estejam montados e conectados. Remova os detritos antes de energizar o controlador. Uma falha na remoção dos detritos antes da operação pode causar o superaquecimento.
ATTENTION: Uma descarga eletrostática pode danificar os equipamentos semicondutores dentro do módulo. Não toque nos pinos do conector ou em outras áreas sensíveis.
ATTENTION: Esse produto é destinado para instalação em uma superfície de montagem bem aterrada como um painel de metal. As conexões de aterramento adicionais das presilhas de montagem da fonte de alimentação ou do trilho DIN (se usado) não são necessárias a menos que a superfícies de montagem não possa ser aterrada. Consulte Industrial Automation Wiring and Grounding Guidelines, Allen-Bradley, publicação 1770-4.1, para obter informações adicionais.
ATTENTION: O cabo USB não deve exceder 3,0 m (9,84 pés).
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 5
Capítulo 2 Sobre o controlador
Ambiente e gabinete
Prevenção de descarga eletrostática
Considerações sobre segurança
Considerações de segurança são um elemento importante da instalação adequada do sistema. Pensar ativamente sobre a sua própria segurança e a dos outros, assim como as condições do seu equipamento, é de importância primária. Recomendamos que você revise as considerações de segurança a seguir.
Este equipamento é destinado ao uso em um ambiente industrial com grau de poluição 2, em aplicações de sobretensão de Categoria II (como definido no IEC 60664-1), em altitudes de até 2.000 m (6.562 pés) sem redução de capacidade, dissipação de calor.
Este equipamento é considerado Grupo 1, equipamento industrial Classe A, de acordo com o IEC/CISPR 11. Sem as precauções apropriadas, pode haver dificuldades com compatibilidade eletromagnética em ambientes residenciais e outros ambientes, devido às interferências por radiação ou condução.
Este equipamento é fornecido como equipamento tipo aberto. Ele deve ser instalado dentro de um gabinete projetado adequadamente para as condições ambientais específicas presentes e deve ser projetado adequadamente para prevenir ferimentos pessoais resultantes da possibilidade de acesso a partes energizadas. O gabinete precisa possuir propriedades adequadas de resistência a chamas para prevenir ou minimizar o espalhamento de chamas, em conformidade com uma taxa de espalhamento de chamas de 5 VA, V2, V1, V0 (ou equivalente) se for não metálico. O interior do gabinete deve ser acessível apenas através do uso de uma ferramenta. As seções subsequentes desta publicação podem conter informações adicionais sobre os graus de proteção do gabinetes específicos necessários para o cumprimento de determinadas certificações de segurança de produto.
Além desta publicação, consulte:
• Consulte Industrial Automation Wiring and Grounding Guidelines, Rockwell Automation publication 1770-4.1, para obter especificações adicionais de instalação.
• Norma NEMA 250 e IEC 60529, conforme o caso, para explicações sobre os graus de proteção oferecidos pelos diferentes tipos de gabinetes.
Este equipamento é sensível à descarga eletrostática, o que pode causar danos internos e afetar a operação normal. Siga estas orientações quando lidar com este equipamento:
• Toque o objeto aterrado para descarregar a estática potencial.• Utilize uma pulseira de aterramento aprovada.• Não toque nos conectores ou pinos nas placas de componente.• Não toque nos componentes do circuito dentro do equipamento.• Utilize uma estação de trabalho livre de estática, se disponível.• Armazene o equipamento em uma embalagem livre de estática, quando
não estiver em uso.
6 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
Sobre o controlador Capítulo 2
Aprovação norte-americana para uso em áreas classificadas
Desconectando a alimentação principal
A chave seccionadora principal da alimentação deve estar localizada onde os operadores e pessoal de manutenção tenham acesso rápido e fácil a ela. Além de desligar a alimentação elétrica, todas as outras fontes de energia (pneumática e hidráulica) devem ser desenergizadas antes de trabalhar com uma máquina ou processo comandada por um controlador.
As informações a seguir se aplicam durante a operação deste equipamento em áreas classificadas:
The following information applies when operating this equipment in hazardous locations:
Os produtos identificados como “CL I, DIV 2, GP A, B, C, D” são adequados para utilização apenas nos Grupos A, B, C, D, Classe I Divisão 2, áreas classificadas e não classificadas. Cada produto é fornecido com identificações na placa de identificação de classificação indicando o código de temperatura da área classificada. Quando combinar produtos dentro de um sistema, o código de temperatura mais adverso (menor número “T”) deve ser utilizado para auxiliar na determinação do código de temperatura global do sistema. As combinações de equipamentos em seu sistema estão sujeitas à fiscalização das autoridades locais competentes no momento da instalação.
Products marked "CL I, DIV 2, GP A, B, C, D" are suitable for use in Class I Division 2 Groups A, B, C, D, Hazardous Locations and nonhazardous locations only. Each product is supplied with markings on the rating nameplate indicating the hazardous location temperature code. When combining products within a system, the most adverse temperature code (lowest "T" number) may be used to help determine the overall temperature code of the system. Combinations of equipment in your system are subject to investigation by the local Authority Having Jurisdiction at the time of installation.
RISCO DE EXPLOSÃO• Não desconecte o equipamento, a não ser que a
alimentação tenha sido desligada ou que a área seja conhecida como não classificada.
• Não desconecte as conexões deste equipamento, a não ser que a alimentação tenha sido desligada ou que a área seja conhecida como não classificada. Fixe todas as conexões externas relacionadas a este equipamento através da utilização de parafusos, travas de dispositivo corrediço, conectores com rosca ou outros meios fornecidos com este produto.
• A substituição de qualquer componente pode prejudicar a adequação com a Classe I, Divisão 2.
• Se este produto contiver baterias, elas devem ser trocadas em uma área que seja conhecida como não classificada.
EXPLOSION HAZARD• Do not disconnect equipment unless power has been
removed or the area is known to be nonhazardous.
• Do not disconnect connections to this equipment unless power has been removed or the area is known to be nonhazardous. Secure any external connections that mate to this equipment by using screws, sliding latches, threaded connectors, or other means provided with this product.
• Substitution of any component may impair suitability for Class I, Division 2.
• If this product contains batteries, they must only be changed in an area known to be nonhazardous.
ADVERTÊNCIA: Risco de explosãoNão substitua componentes, conecte ou desconecte equipamento antes de desligar a alimentação.
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 7
Capítulo 2 Sobre o controlador
Circuitos de segurança
Circuitos instalados na máquina por razões de segurança, como chaves fim-de-curso de sobre-curso, botões pulsadores de parada e intertravamentos devem sempre ser fisicamente conectados diretamente ao relé de controle mestre. Esses dispositivos precisam ser ligados por cabo em série de modo que quando qualquer dispositivo ficar aberto, o relé de controle mestre será desenergizado, cortando portanto a alimentação para a máquina. Nunca altere esses circuitos para anular sua função. Ferimentos graves ou danos a máquina podem ocorrer como resultado.
Distribuição de alimentação
Existem alguns pontos sobre distribuição de potência que você deve conhecer:
• O relé de controle mestre precisa ser capaz de inibir todo o movimento da máquina ao cortar a alimentação aos dispositivos de E/S desta quando o relé é desenergizado. É recomendável que o controlador permaneça com alimentação mesmo quando o relé de controle mestre estiver desenergizado.
• Se você estiver utilizando uma fonte de alimentação CC, interrompa o lado da carga em vez da alimentação CA. Isso evita o atraso adicional no desligamento da fonte de alimentação. A fonte de alimentação CC deve ser alimentada diretamente a partir do secundário com fusível do transformador. Alimentação para os circuitos de entrada e saída CC deve ser ligada por meio de um conjunto de contatos do relé de controle mestre.
Testes periódicos do circuito do relé de controle mestre
Qualquer peça pode falhar, incluindo as chaves em um circuito de relé de controle mestre. A falha de uma dessas chaves muito provavelmente causaria um circuito aberto, o que seria uma falha com corte seguro da alimentação. Porém, se uma dessas chaves entrar em curto-circuito, ela não fornecerá mais nenhuma proteção de segurança. Essas chaves devem ser testadas periodicamente para garantir que irão parar o movimento da máquina quando necessário.
ADVERTÊNCIA: Risco de explosãoNão conecte ou desconecte conectores enquanto o circuito estiver vivo.
8 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
Sobre o controlador Capítulo 2
Considerações sobre alimentação
A explicação a seguir expõe considerações sobre alimentação para os microcontroladores.
Transformadores de isolamento
Você pode querer utilizar um transformador de isolamento na linha CA para o controlador. Esse tipo de transformador fornece isolamento do seu sistema de distribuição de potência para reduzir o ruído elétrico na alimentação do controlador e é utilizado frequentemente como um transformador de redução da tensão de linha. Qualquer transformador utilizado com o controlador precisa possuir uma potência nominal suficiente para sua carga. A potência nominal é expressa em volt-ampères (VA).
Corrente de energização da fonte de alimentação
Durante a energização, a fonte de alimentação Micro800 permite uma breve corrente de energização para carregar capacitores internos. Muitas linhas de alimentação e transformadores de controle podem fornecer corrente de irrupção for um período breve. Se a fonte de alimentação não pode fornecer essa corrente de irrupção, a tensão de fornecimento pode cair momentaneamente.
O único efeito de corrente de energização limitada e queda de tensão no Micro800 é que os capacitores da fonte de alimentação carregam mais lentamente. Porém, o efeito de uma queda de tensão em outros equipamentos deve ser considerado. Por exemplo, uma queda de tensão acentuada pode reinicializar um computador conectado à mesma fonte de alimentação. As considerações a seguir determinam se é necessário ou não que a fonte de alimentação forneça uma corrente de irrupção elevada:
• A sequência de energização de dispositivos em um sistema.• A quantidade de queda de tensão na fonte de alimentação caso a
corrente de irrupção não possa ser fornecida.• O efeito da queda de tensão em outros equipamentos no sistema.
Se você ligar a alimentação ao sistema todo simultaneamente, uma breve queda na tensão da fonte de alimentação normalmente não afetará nenhum equipamento.
Perda na fonte de alimentação
A fonte de alimentação opcional Micro800 CA é projetada para suportar perdas de potência breves sem afetar a operação do sistema. O tempo pelo qual o sistema permanece operacional durante a perda de potência chama-se tempo de sobrevida da varredura do programa após a perda de potência. A duração do tempo de sobrevida da fonte de alimentação depende do consumo
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 9
Capítulo 2 Sobre o controlador
de energia do sistema do controlador, mas geralmente fica entre 10 milissegundos e 3 segundos.
Estados de entrada durante o desligamento
O tempo de sobrevida da fonte de alimentação, como descrito acima, é geralmente mais longo que os tempos de início e desligamento das entradas. Por isso, a mudança de estado da entrada de “Ativada” para “Desativada” que ocorre quando a alimentação é cortada pode ser gravada pelo processador antes que a fonte de alimentação desligue o sistema. É importante entender bem esse conceito. O programa do usuário deve ser escrito para levar esse efeito em consideração.
Outros tipos de condições de linha
Ocasionalmente, a fonte de alimentação para o sistema pode ser temporariamente interrompida. Também é possível que o nível de tensão caia substancialmente abaixo da faixa de tensão normal por um período de tempo. Ambas essas condições são consideradas como sendo uma perda de potência para o sistema.
Prevenindo superaquecimento
Para a maioria das aplicações, resfriamento por convecção normal mantém o controlador dentro da faixa especificada para operação. Certifique-se de que a faixa de temperatura especificada seja mantida. Espaçamento apropriado entre os componentes dentro de um gabinete geralmente é suficiente para dissipação de calor.
Em algumas aplicações, uma quantia substancial de calor é produzida por outros equipamentos dentro ou fora do gabinete. Nesse caso, posicione ventiladores sopradores dentro do gabinete para auxiliar a circulação de ar e reduzir sobreaquecimentos localizados próximos ao controlador.
Medidas de resfriamento adicionais podem ser necessárias quando temperaturas ambiente elevadas forem encontradas.
DICA Não permita a entrada de ar externo não filtrado. Posicione o controlador em um gabinete para protegê-lo de uma atmosfera corrosiva. Contaminantes nocivos ou sujeira podem causar operação imprópria ou danificar os componentes. Em casos extremos, você pode precisar utilizar ar condicionado para proteção contra acúmulo de calor dentro do gabinete.
10 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
Sobre o controlador Capítulo 2
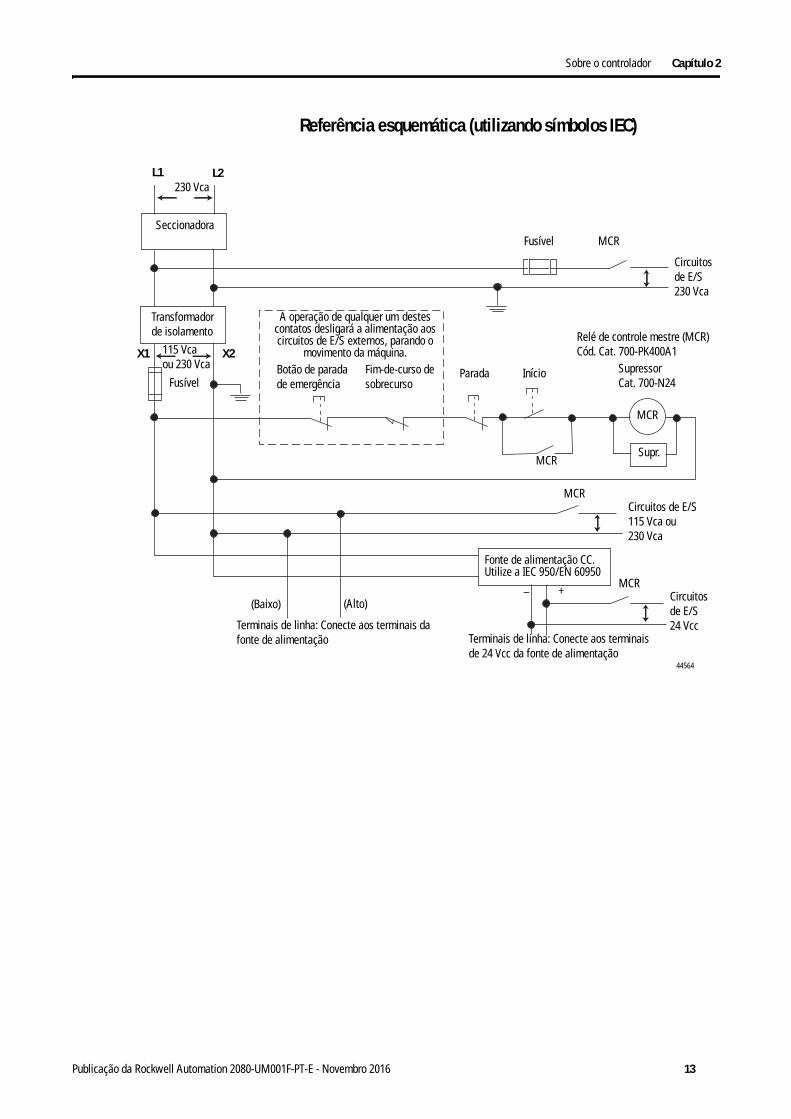
Relé de controle mestre Um relé de controle mestre (MCR) fisicamente conectado oferece um meio confiável para parada emergencial da máquina. Já que o relé de controle mestre permite o posicionamento de diversas chaves de parada de emergência em locais diferentes, a sua instalação é importante de um ponto de vista de segurança. Chaves de sobrecurso ou botões de emergência são ligados em série de modo que quando qualquer um deles for aberto, secciona-se a alimentação ao relé de controle mestre. Ele corta a alimentação para os circuitos de dispositivo de entrada e saída. Consulte as figuras nas páginas 13 e 14.
Posicione a chave seccionadora principal da alimentação onde os operadores e pessoal de manutenção tenham acesso rápido e fácil a ela. Se você montar uma chave seccionadora dentro do gabinete do controlador, posicione a manopla da chave no lado externo do gabinete, de modo que você possa cortar a alimentação sem abrir o gabinete.
Sempre que qualquer uma das chaves de parada de emergência for aberta, a alimentação para os dispositivos de entrada e saída deverá ser cortada.
Quando você utiliza o relé de controle mestre para remover a energia dos circuitos de E/S externos, a energia continua a ser fornecida para a fonte de alimentação do controlador de modo que os indicadores de diagnóstico no processador ainda possam ser observados.
O relé de controle mestre não é um substituto para uma seccionadora da alimentação ao controlador. Ele é destinado para qualquer situação em que o operador precise desenergizar rapidamente somente dispositivos de E/S. Ao inspecionar ou instalar conexões terminais, substituir fusíveis de saída ou trabalhar em equipamento localizado dentro do gabinete, utilize a seccionadora para cortar a alimentação ao resto do sistema.
ADVERTÊNCIA: Nunca altere esses circuitos para anular sua função, isso pode resultar em ferimentos graves e/ou danos à máquina.
DICA Se você estiver utilizando uma fonte de alimentação CC externa, interrompa o lado da saída CC em vez do lado da linha CA da fonte para evitar o atraso adicional no desligamento da fonte de alimentação.
A linha CA da fonte de alimentação de saída CC deve ser protegida com fusível.
Conecte um conjunto de relés de controle mestres em série com a potência CC alimentando os circuitos de entrada e saída.
DICA Não comande o relé de controle mestre com o controlador. Ofereça ao operador a segurança de uma conexão direta entre uma chave de parada de emergência e o relé de controle mestre.
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 11
Capítulo 2 Sobre o controlador
Utilizando chaves de parada de emergência
Ao utilizar chaves de parada de emergência, atenha-se aos pontos a seguir:• Não programe chaves de parada de emergência no programa do
controlador. Qualquer chave de parada de emergência deve desligar toda a alimentação à máquina pelo desligamento do relé de controle mestre.
• Observe todos os códigos locais aplicáveis com relação ao posicionamento e identificação de chaves de parada de emergência.
• Instale as chaves de parada de emergência e o relé de controle mestre no seu sistema. Certifique-se de que contatos de relé possuam uma classificação suficiente para a sua aplicação. Chaves de parada de emergência precisam ficar a fácil alcance.
• Na ilustração a seguir, circuitos de entrada e saída são demonstrados com proteção MCR. Porém, na maioria das aplicações, somente circuitos de saída exigem proteção MCR.
As ilustrações a seguir demonstram o relé de controle mestre ligado a um sistema aterrado.
DICA Na maioria das aplicações, circuitos de entrada não exigem proteção MCR; porém, se você precisar cortar a alimentação a todos os dispositivos de campo, você precisa incluir contatos MCR em série com a cablagem da alimentação de entrada.
12 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
Sobre o controlador Capítulo 2
Referência esquemática (utilizando símbolos IEC)
Seccionadora
Transformador de isolamento
Botão de parada de emergência
Fusível MCR
Circuitos de E/S230 Vca
A operação de qualquer um destes contatos desligará a alimentação aos circuitos de E/S externos, parando o
movimento da máquina.
FusívelFim-de-curso de sobrecurso
MCR
MCR
MCR
Parada Início
Terminais de linha: Conecte aos terminais da fonte de alimentação
Circuitos de E/S115 Vca ou 230 Vca
L1 L2230 Vca
Relé de controle mestre (MCR)Cód. Cat. 700-PK400A1
SupressorCat. 700-N24
MCR
Supr.
Circuitos de E/S24 Vcc
(Baixo) (Alto)
Fonte de alimentação CC.Utilize a IEC 950/EN 60950
X1 X2115 Vcaou 230 Vca
Terminais de linha: Conecte aos terminais de 24 Vcc da fonte de alimentação
_ +
44564
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 13
Capítulo 2 Sobre o controlador
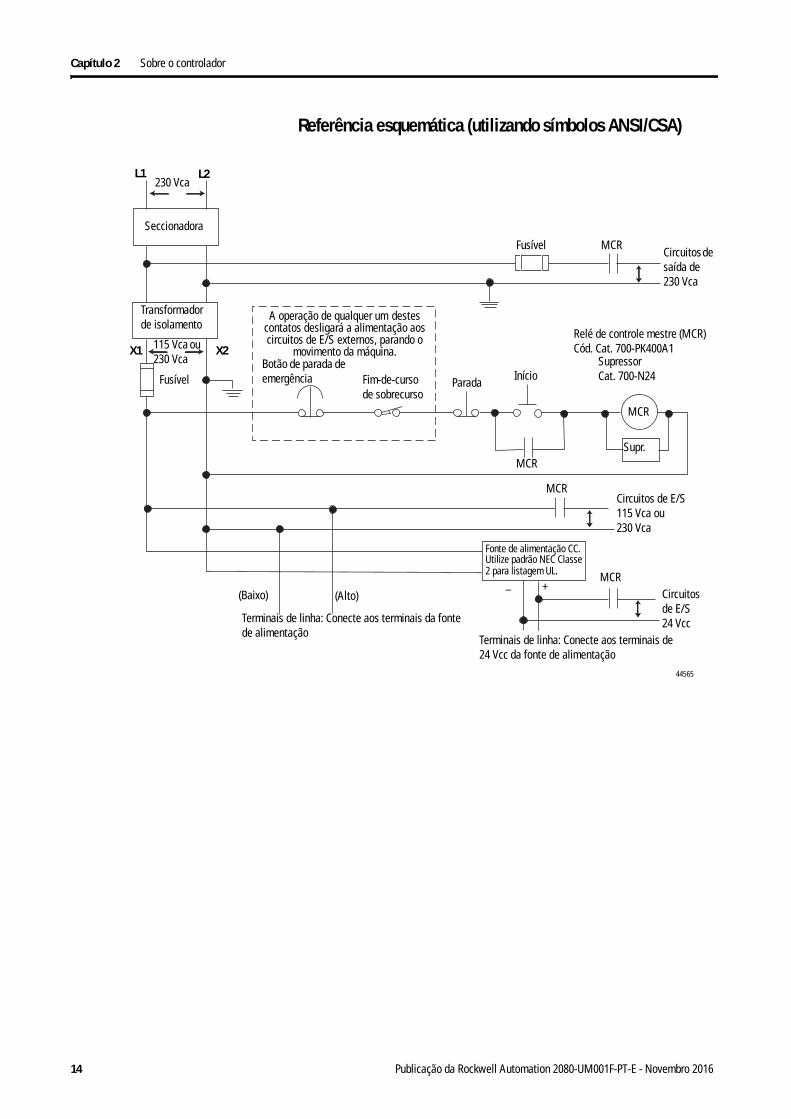
Referência esquemática (utilizando símbolos ANSI/CSA)
Botão de parada de emergência
230 Vca
A operação de qualquer um destes contatos desligará a alimentação aos circuitos de E/S externos, parando o
movimento da máquina.
Fusível MCR
Fusível
MCR
MCR
MCR
Parada Início
Terminais de linha: Conecte aos terminais da fonte de alimentação
Terminais de linha: Conecte aos terminais de 24 Vcc da fonte de alimentação
Circuitos de saída de 230 Vca
Seccionadora
Transformador de isolamento
Circuitos de E/S115 Vca ou 230 Vca
L1 L2
Relé de controle mestre (MCR)Cód. Cat. 700-PK400A1
SupressorCat. 700-N24
(Baixo) (Alto)
Fonte de alimentação CC. Utilize padrão NEC Classe 2 para listagem UL.
X1 X2115 Vca ou 230 Vca
_ +
MCR
Circuitos de E/S 24 Vcc
Supr.
Fim-de-curso de sobrecurso
44565
14 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
Capítulo 3
Instale o seu controlador
Dimensões de montagem do controlador
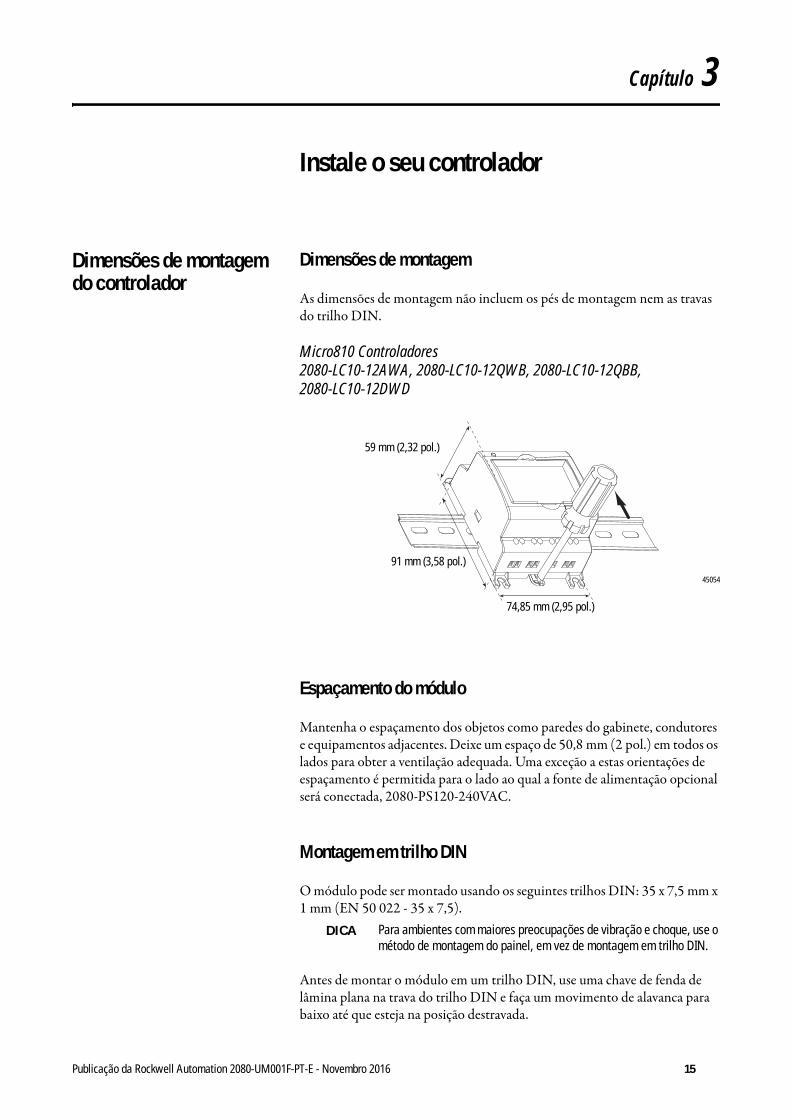
Dimensões de montagem
As dimensões de montagem não incluem os pés de montagem nem as travas do trilho DIN.
Micro810 Controladores2080-LC10-12AWA, 2080-LC10-12QWB, 2080-LC10-12QBB, 2080-LC10-12DWD
Espaçamento do módulo
Mantenha o espaçamento dos objetos como paredes do gabinete, condutores e equipamentos adjacentes. Deixe um espaço de 50,8 mm (2 pol.) em todos os lados para obter a ventilação adequada. Uma exceção a estas orientações de espaçamento é permitida para o lado ao qual a fonte de alimentação opcional será conectada, 2080-PS120-240VAC.
Montagem em trilho DIN
O módulo pode ser montado usando os seguintes trilhos DIN: 35 x 7,5 mm x 1 mm (EN 50 022 - 35 x 7,5).
Antes de montar o módulo em um trilho DIN, use uma chave de fenda de lâmina plana na trava do trilho DIN e faça um movimento de alavanca para baixo até que esteja na posição destravada.
DICA Para ambientes com maiores preocupações de vibração e choque, use o método de montagem do painel, em vez de montagem em trilho DIN.
45054
74,85 mm (2,95 pol.)
59 mm (2,32 pol.)
91 mm (3,58 pol.)
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 15

Capítulo 3 Instale o seu controlador
1. Enganche a parte superior da área de montagem do trilho DIN do controlador no próprio trilho DIN e pressione a parte inferior até que o controlador se encaixe no trilho DIN.
2. Empurre a trava do trilho DIN de volta para o ponto de retenção.Utilize as fixações de terminação dos trilhos DIN (número de peça Allen-Bradley 1492-EAJ35 ou 1492-EAHJ35) para ambientes de vibração ou choque.
Para remover seu controlador do trilho DIN, faça uma alavanca para baixo até que um trava do trilho DIN esteja na posição destravada.
Montagem em painel
O método de montagem recomendado é usar quatro parafusos M4 (nº 8) por módulo. Tolerância do espaçamento do furo: ±0,4 mm (0,016 pol.).
Siga essas etapas para instalar seu controlador usando os parafusos de fixação.
1. Coloque o controlador contra o painel em que ele está sendo montado. Certifique-se de que o controlador tenha o espaçamento correto.
2. Marque os locais dos furos através dos furos dos parafusos de montagem e os pés de montagem, em seguida, remova o controlador.
3. Faça os orifícios nas indicações, substitua o controlador e instale-o.Deixe a proteção contra detritos no lugar até terminar a fiação do controlador e de todos os outros dispositivos.
16 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
Capítulo 4
Conecte o cabo do controlador
Especificações de fiação
• Mantenha pelo menos 50 mm. (2 pol.) entre canaletas de fiação de E/S ou réguas de bornes e o controlador.
• Direcione alimentação em entrada para o controlador por um percurso separado da fiação do dispositivo. Onde os percursos precisarem se cruzar, sua intersecção deverá ser perpendicular.
• Separe a fiação por tipo de sinal. Agrupe cabos com características elétricas similares.
• Separe fiação de entrada da fiação de saída.• Etiquete a fiação para todos os dispositivos no sistema. Utilize fita,
tubo termorretrátil, ou outros meios confiáveis para fins de identificação/etiquetagem dos tubos. Além de etiquetagem, utilize isolamento colorido para identificar a fiação de acordo com características de sinal. Por exemplo, você pode utilizar azul para a fiação CC e vermelho para a fiação CA.
ADVERTÊNCIA: Antes de você instalar e ligar a fiação a qualquer dispositivo, desligue a alimentação para o sistema do controlador.
ADVERTÊNCIA: Calcule a corrente máxima possível em cada cabo comum e de alimentação. Observe todos os códigos elétricos determinando a corrente máxima permitida para cada bitola de cabo. Uma corrente acima das taxas máximas pode fazer com que o cabo sofra sobreaquecimento, podendo causar danos.Apenas para os Estados Unidos: Se o controlador estiver instalado em um ambiente potencialmente perigoso, toda a fiação precisará estar em conformidade com as especificações declaradas no Código elétrico nacional 501-10 (b).
DICA Não passe fiação de sinal ou comunicações e cablagem da alimentação no mesmo eletroduto. Cabos com características de sinal diferentes devem ser passados por percursos diferentes.
Especificações para fiação
Bitola do cabo
Micro810 Controladores
0,32 a 2,1 mm² (22 a 14 AWG) fio de cobre sólido ou 0,32 a 1,3 mm² (22 a 16 AWG) fio de cobre trançado classificado a 90 °C (194 °F) isolamento máx.
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 17
Capítulo 4 Conecte o cabo do controlador
Use supressores de surto Por causa dos picos de corrente potencialmente altos que ocorrem quando se comutam dispositivos de carga indutivos, como acionadores de motor e solenoides, é necessário usar algum tipo de supressor de picos para proteger e prolongar a vida útil dos contatos de saída dos controladores. A comutação de cargas indutivas sem a supressão de transiente pode reduzir significativamente a expectativa de vida dos contatos de relé. Adicionando-se um dispositivo de supressão através da bobina de um dispositivo indutivo, prolonga-se a vida da saída ou dos contatos de relé. Também são reduzidos os efeitos dos transientes de tensão e o ruído elétrico de irradiar para sistemas adjacentes.
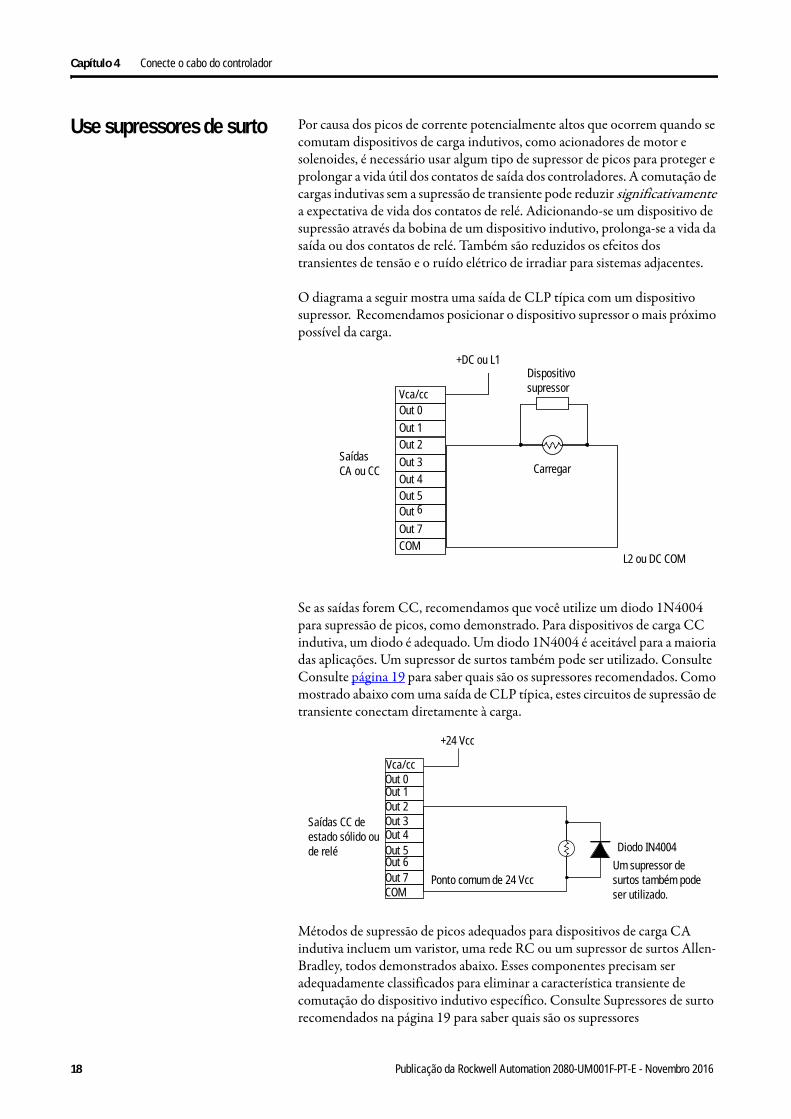
O diagrama a seguir mostra uma saída de CLP típica com um dispositivo supressor. Recomendamos posicionar o dispositivo supressor o mais próximo possível da carga.
Se as saídas forem CC, recomendamos que você utilize um diodo 1N4004 para supressão de picos, como demonstrado. Para dispositivos de carga CC indutiva, um diodo é adequado. Um diodo 1N4004 é aceitável para a maioria das aplicações. Um supressor de surtos também pode ser utilizado. Consulte Consulte página 19 para saber quais são os supressores recomendados. Como mostrado abaixo com uma saída de CLP típica, estes circuitos de supressão de transiente conectam diretamente à carga.
Métodos de supressão de picos adequados para dispositivos de carga CA indutiva incluem um varistor, uma rede RC ou um supressor de surtos Allen-Bradley, todos demonstrados abaixo. Esses componentes precisam ser adequadamente classificados para eliminar a característica transiente de comutação do dispositivo indutivo específico. Consulte Supressores de surto recomendados na página 19 para saber quais são os supressores
+DC ou L1Dispositivo supressor
L2 ou DC COM
Saídas CA ou CC Carregar
Vca/ccOut 0Out 1Out 2Out 3Out 4Out 5Out 6
Out 7COM
+24 Vcc
Diodo IN4004
Saídas CC de estado sólido ou de relé
Ponto comum de 24 Vcc
Vca/ccOut 0Out 1Out 2Out 3Out 4Out 5Out 6Out 7COM
Um supressor de surtos também pode ser utilizado.
18 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
Conecte o cabo do controlador Capítulo 4
recomendados.
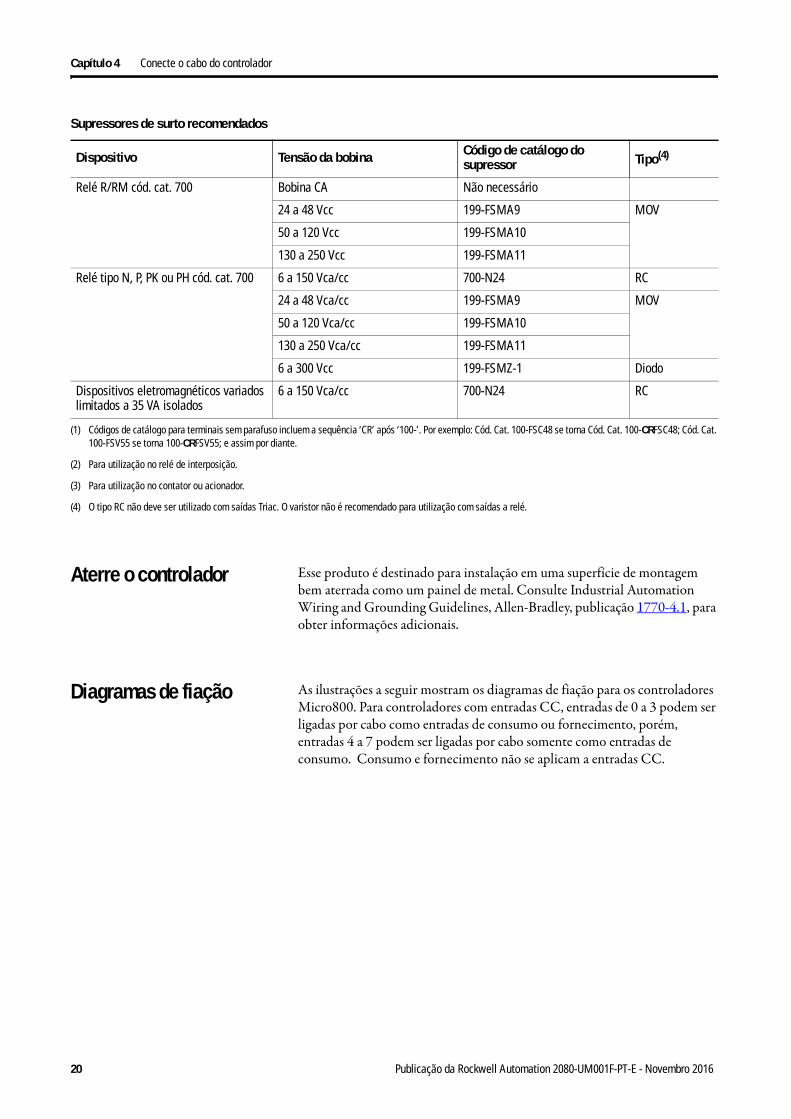
Supressores de surto recomendados
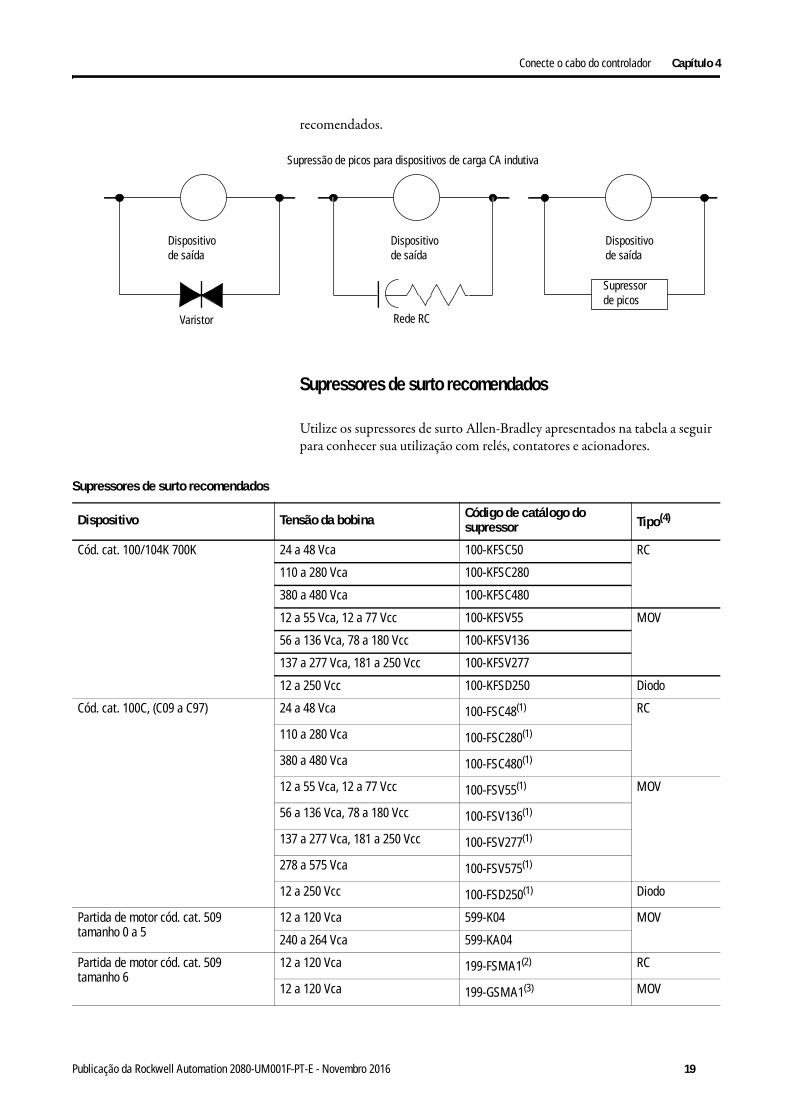
Utilize os supressores de surto Allen-Bradley apresentados na tabela a seguir para conhecer sua utilização com relés, contatores e acionadores.
Supressão de picos para dispositivos de carga CA indutiva
Dispositivo de saída
Dispositivo de saída
Dispositivo de saída
Varistor Rede RC
Supressor de picos
Supressores de surto recomendados
Dispositivo Tensão da bobina Código de catálogo do supressor Tipo(4)
Cód. cat. 100/104K 700K 24 a 48 Vca 100-KFSC50 RC
110 a 280 Vca 100-KFSC280
380 a 480 Vca 100-KFSC480
12 a 55 Vca, 12 a 77 Vcc 100-KFSV55 MOV
56 a 136 Vca, 78 a 180 Vcc 100-KFSV136
137 a 277 Vca, 181 a 250 Vcc 100-KFSV277
12 a 250 Vcc 100-KFSD250 Diodo
Cód. cat. 100C, (C09 a C97) 24 a 48 Vca 100-FSC48(1) RC
110 a 280 Vca 100-FSC280(1)
380 a 480 Vca 100-FSC480(1)
12 a 55 Vca, 12 a 77 Vcc 100-FSV55(1) MOV
56 a 136 Vca, 78 a 180 Vcc 100-FSV136(1)
137 a 277 Vca, 181 a 250 Vcc 100-FSV277(1)
278 a 575 Vca 100-FSV575(1)
12 a 250 Vcc 100-FSD250(1) Diodo
Partida de motor cód. cat. 509 tamanho 0 a 5
12 a 120 Vca 599-K04 MOV
240 a 264 Vca 599-KA04
Partida de motor cód. cat. 509 tamanho 6
12 a 120 Vca 199-FSMA1(2) RC
12 a 120 Vca 199-GSMA1(3) MOV
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 19
Capítulo 4 Conecte o cabo do controlador
Aterre o controlador Esse produto é destinado para instalação em uma superfície de montagem bem aterrada como um painel de metal. Consulte Industrial Automation Wiring and Grounding Guidelines, Allen-Bradley, publicação 1770-4.1, para obter informações adicionais.
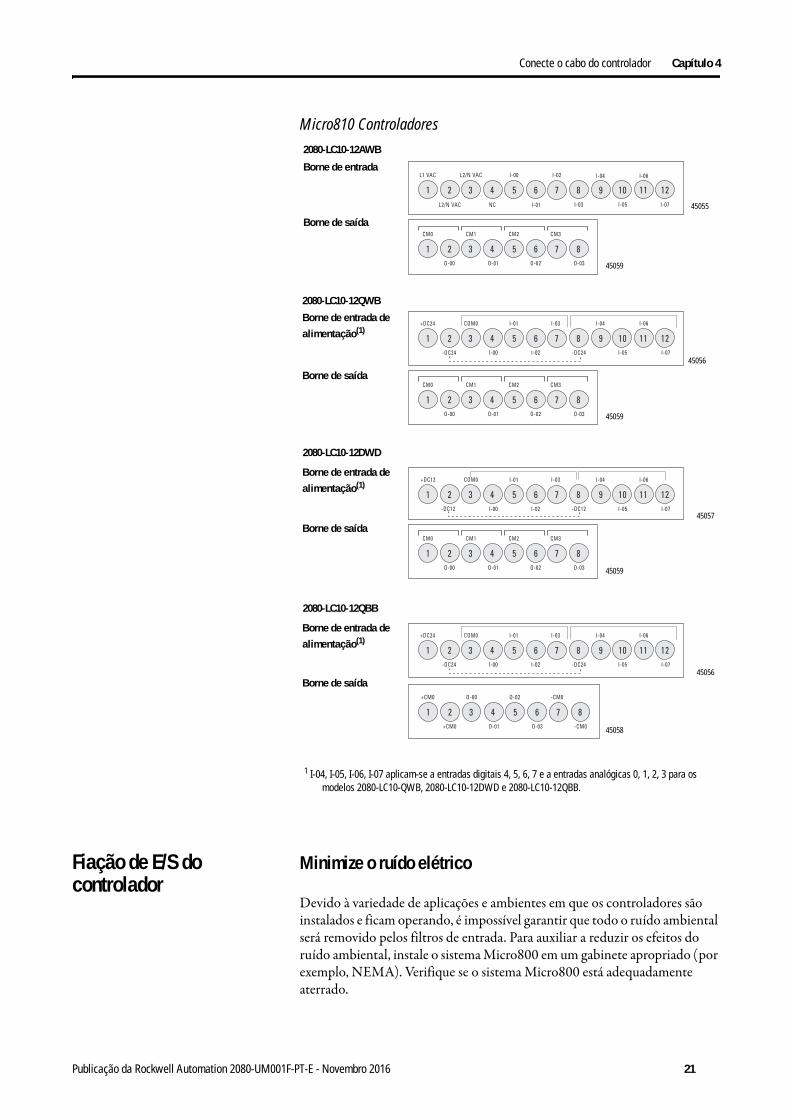
Diagramas de fiação As ilustrações a seguir mostram os diagramas de fiação para os controladores Micro800. Para controladores com entradas CC, entradas de 0 a 3 podem ser ligadas por cabo como entradas de consumo ou fornecimento, porém, entradas 4 a 7 podem ser ligadas por cabo somente como entradas de consumo. Consumo e fornecimento não se aplicam a entradas CC.
Relé R/RM cód. cat. 700 Bobina CA Não necessário
24 a 48 Vcc 199-FSMA9 MOV
50 a 120 Vcc 199-FSMA10
130 a 250 Vcc 199-FSMA11
Relé tipo N, P, PK ou PH cód. cat. 700 6 a 150 Vca/cc 700-N24 RC
24 a 48 Vca/cc 199-FSMA9 MOV
50 a 120 Vca/cc 199-FSMA10
130 a 250 Vca/cc 199-FSMA11
6 a 300 Vcc 199-FSMZ-1 Diodo
Dispositivos eletromagnéticos variados limitados a 35 VA isolados
6 a 150 Vca/cc 700-N24 RC
(1) Códigos de catálogo para terminais sem parafuso incluem a sequência ‘CR’ após ‘100-’. Por exemplo: Cód. Cat. 100-FSC48 se torna Cód. Cat. 100-CRFSC48; Cód. Cat. 100-FSV55 se torna 100-CRFSV55; e assim por diante.
(2) Para utilização no relé de interposição.
(3) Para utilização no contator ou acionador.
(4) O tipo RC não deve ser utilizado com saídas Triac. O varistor não é recomendado para utilização com saídas a relé.
Supressores de surto recomendados
Dispositivo Tensão da bobina Código de catálogo do supressor Tipo(4)
20 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
Conecte o cabo do controlador Capítulo 4
Micro810 Controladores
Fiação de E/S do controlador
Minimize o ruído elétrico
Devido à variedade de aplicações e ambientes em que os controladores são instalados e ficam operando, é impossível garantir que todo o ruído ambiental será removido pelos filtros de entrada. Para auxiliar a reduzir os efeitos do ruído ambiental, instale o sistema Micro800 em um gabinete apropriado (por exemplo, NEMA). Verifique se o sistema Micro800 está adequadamente aterrado.
L2/N VAC
L1 VAC L2/N VAC
NC
I-00
I-01
I-02
1 2 3 4 5 6 7 8 9 10 11 12I-05 I-07I-03
I-04 I-06
45055
Borne de entrada
Borne de saída
45056
Borne de entrada de alimentação(1)
Borne de saída
2080-LC10-12AWB
2080-LC10-12QWB
2080-LC10-12DWD
45057
45058
CM0 CM1
O-03O-01O-00
CM2
O-02
1 2 3 4 5 6 7 8
CM3
45059
+DC24 COM0
-DC24I-00-DC24
I-01
I-02
1 2 3 4 5 6 7 8 9 10 11 12
I-03 I-04 I-06
I-05 I-07
45059
Borne de entrada de alimentação(1)
Borne de saída
45059
2080-LC10-12QBB
Borne de entrada de alimentação(1)
Borne de saída45056
+DC24 COM0
-DC24I-00-DC24
I-01
I-02
1 2 3 4 5 6 7 8 9 10 11 12
I-03 I-04 I-06
I-05 I-07
COM0+DC12
-DC12I-00-DC12
I-01
I-02
1 2 3 4 5 6 7 8 9 10 11 12
I-03 I-04 I-06
I-05 I-07
+CM0 O-00
-CM0O-01 O-03+CM0
O-02
1 2 3 4 5 6 7 8
-CM0
CM0 CM1
O-03O-01O-00
CM2
O-02
1 2 3 4 5 6 7 8
CM3
CM0 CM1
O-03O-01O-00
CM2
O-02
1 2 3 4 5 6 7 8
CM3
1 I-04, I-05, I-06, I-07 aplicam-se a entradas digitais 4, 5, 6, 7 e a entradas analógicas 0, 1, 2, 3 para os modelos 2080-LC10-QWB, 2080-LC10-12DWD e 2080-LC10-12QBB.
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 21
Capítulo 4 Conecte o cabo do controlador
Um sistema pode apresentar falhas devido a uma alteração no ambiente de operação após um período de tempo. Convém verificar periodicamente a operação do sistema, especialmente quando novas máquinas ou outras fontes de ruído forem instaladas perto do sistema Micro800.
Orientações para fiação de canal analógico
Considere o seguinte quando for realizar a fiação de seus canais analógicos:• O ponto comum analógico (COM) é conectado ao ponto comum da
fonte de alimentação dentro do módulo. Esses terminais não são eletricamente isolados do sistema.
• Canais analógicos não são isolados uns dos outros.• Utilize cabo blindado Belden 8761 ou equivalente.• Sob condições normais, o fio dreno (blindagem) deve ser conectado ao
painel de montagem de metal no lado de campo (ligação à terra). Mantenha a conexão de blindagem à terra o mais curta possível.
• Para garantir precisão ideal para entradas de tipo de tensão, limite a impedância geral do cabo mantendo todos os cabos analógicos o mais curtos possível. Posicione o sistema E/S o mais próximo possível dos seus sensores de tipo de tensão ou atuadores.
Minimize o ruído elétrico nos canais analógicos
Entradas em canais analógicos utilizam filtros de alta frequência digitais que reduzem significativamente os efeitos do ruído elétrico nos sinais de entrada. Porém, devido à variedade de aplicações e ambientes em que os controladores analógicos são instalados e são operados, é impossível garantir que todo o ruído ambiental será removido pelos filtros de entrada.
Diversos passos específicos podem ser tomados para auxiliar a redução dos efeitos do ruído ambiental nos sinais analógicos:
• instale o sistema Micro800 em um gabinete adequadamente classificado, por exemplo, NEMA. Verifique se o sistema Micro800 está adequadamente aterrado.
• utilize cabo Belden 8761 para a fiação dos canais analógicos, certificando-se de que o fio dreno e a blindagem estão apropriadamente aterrados.
• Passe o cabo Belden por um percurso separado de qualquer fiação CA. Imunidade a ruído adicional pode ser obtida passando os cabos por um eletroduto aterrado.
22 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
Conecte o cabo do controlador Capítulo 4
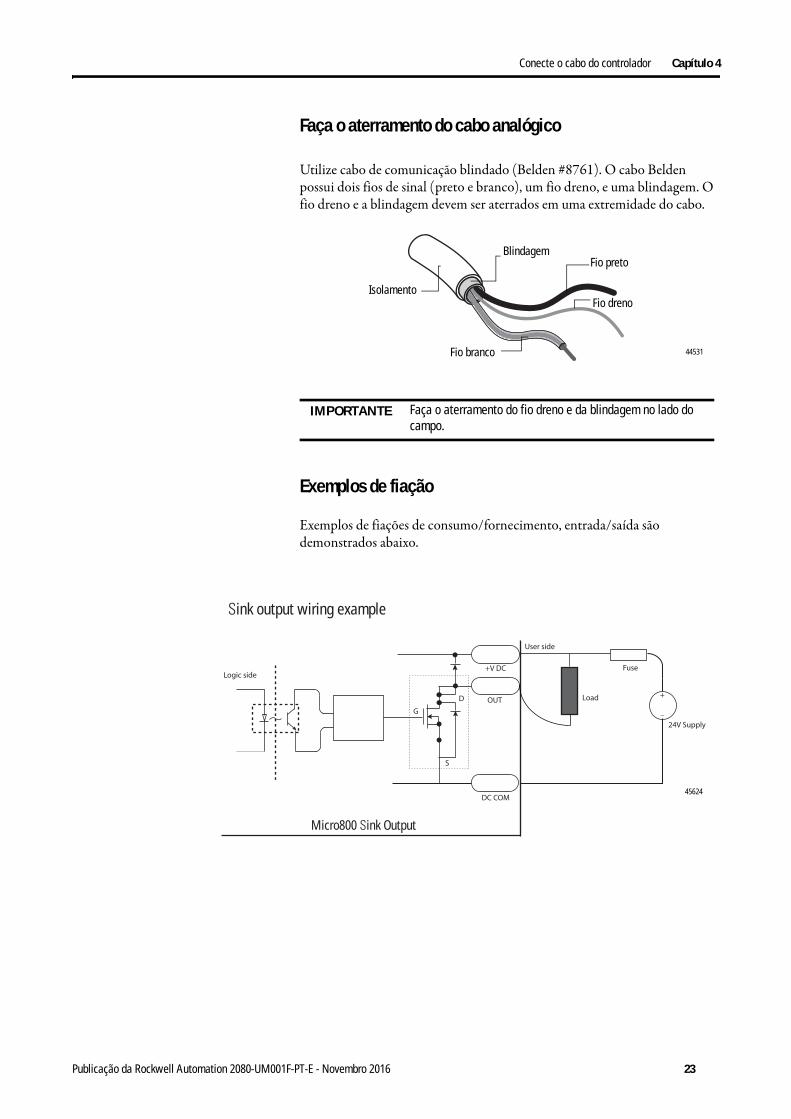
Faça o aterramento do cabo analógico
Utilize cabo de comunicação blindado (Belden #8761). O cabo Belden possui dois fios de sinal (preto e branco), um fio dreno, e uma blindagem. O fio dreno e a blindagem devem ser aterrados em uma extremidade do cabo.
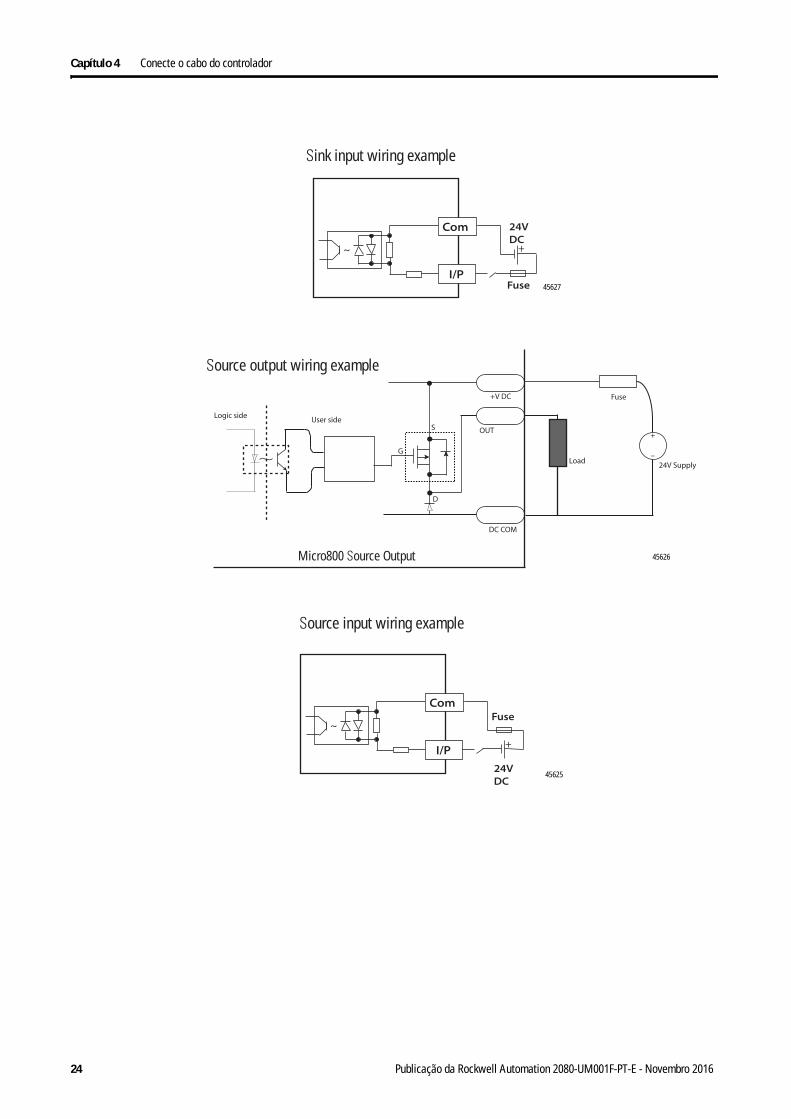
Exemplos de fiação
Exemplos de fiações de consumo/fornecimento, entrada/saída são demonstrados abaixo.
IMPORTANTE Faça o aterramento do fio dreno e da blindagem no lado do campo.
BlindagemFio preto
Fio dreno
Fio branco
Isolamento
44531
Sink output wiring example
D
DC COM
OUT
+V DC
S
G
+
–24V Supply
Logic side
User side
Micro800 Sink Output
Load
Fuse
45624
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 23
Capítulo 4 Conecte o cabo do controlador
Sink input wiring example
Com
Fuse
24VDC
I/P
+~
45627
Source output wiring example
Micro800 Source Output
D
DC COM
OUT
+V DC
S
G
+
–24V Supply
Logic sideUser side
Load
Fuse
45626
Source input wiring example
ComFuse
24VDC
I/P +
~
45625
24 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
Capítulo 5
Localização de falhas
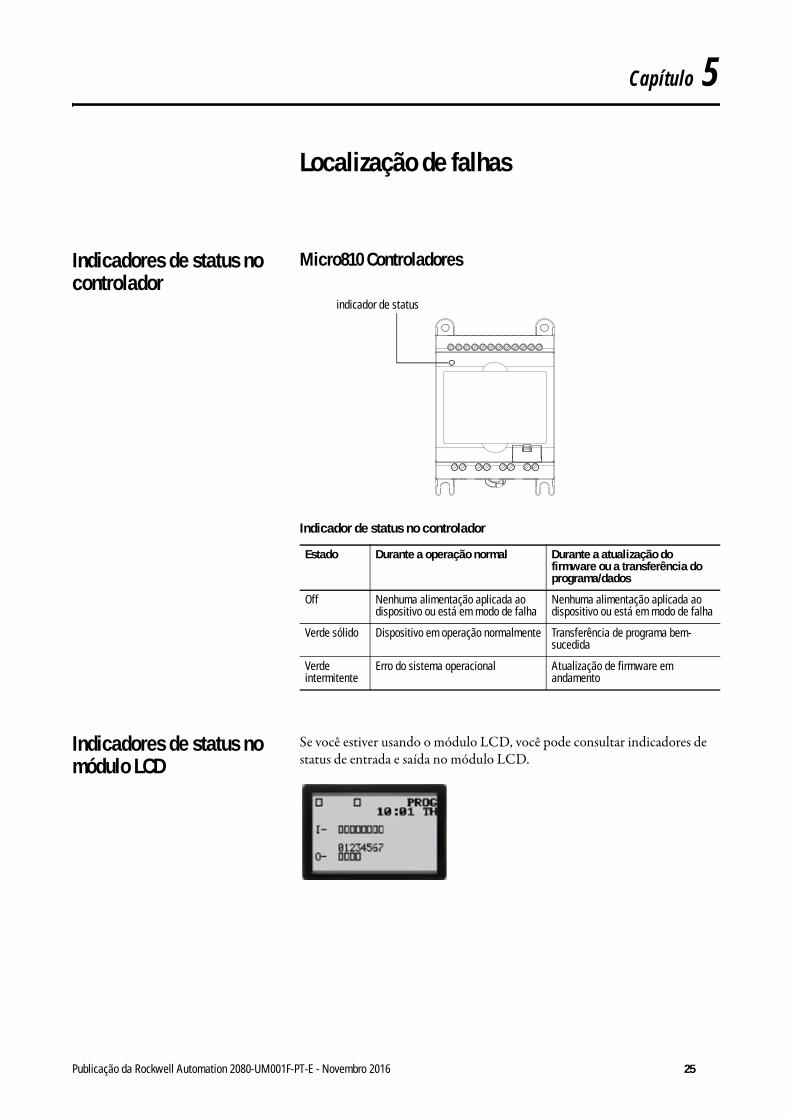
Indicadores de status no controlador
Micro810 Controladores
Indicadores de status no módulo LCD
Se você estiver usando o módulo LCD, você pode consultar indicadores de status de entrada e saída no módulo LCD.
Indicador de status no controlador
Estado Durante a operação normal Durante a atualização do firmware ou a transferência do programa/dados
Off Nenhuma alimentação aplicada ao dispositivo ou está em modo de falha
Nenhuma alimentação aplicada ao dispositivo ou está em modo de falha
Verde sólido Dispositivo em operação normalmente Transferência de programa bem-sucedida
Verde intermitente
Erro do sistema operacional Atualização de firmware em andamento
indicador de status
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 25
Capítulo 5 Localização de falhas
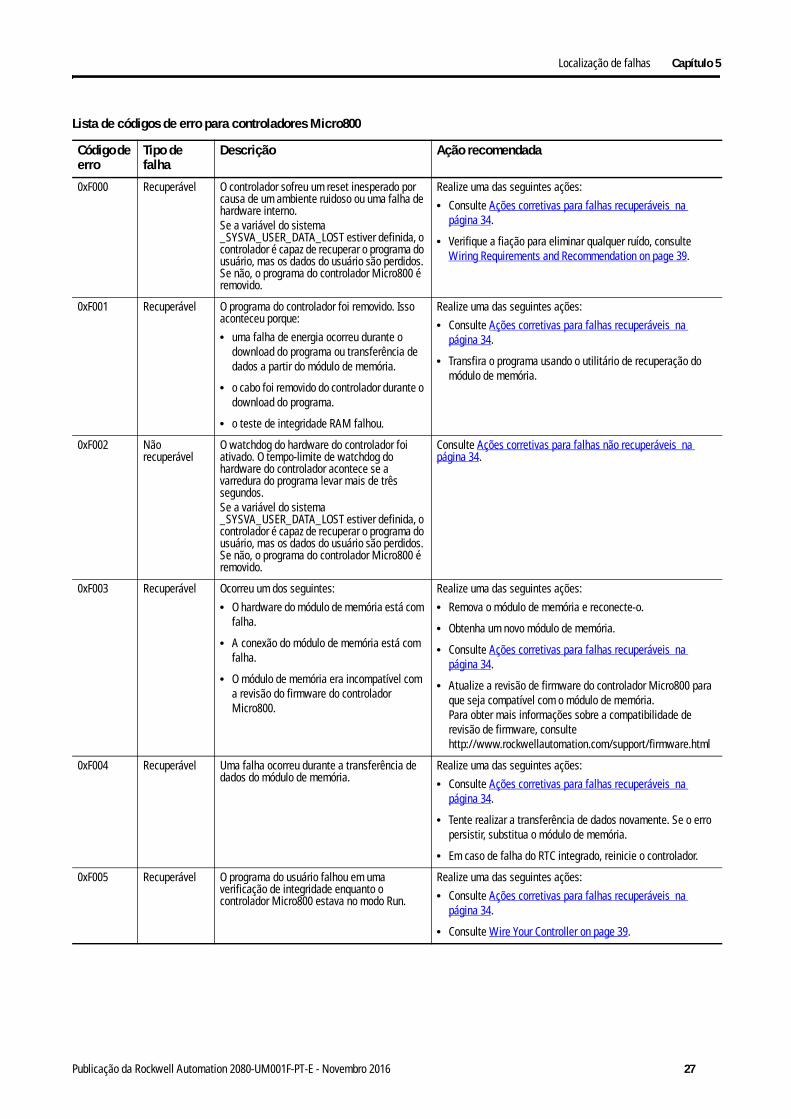
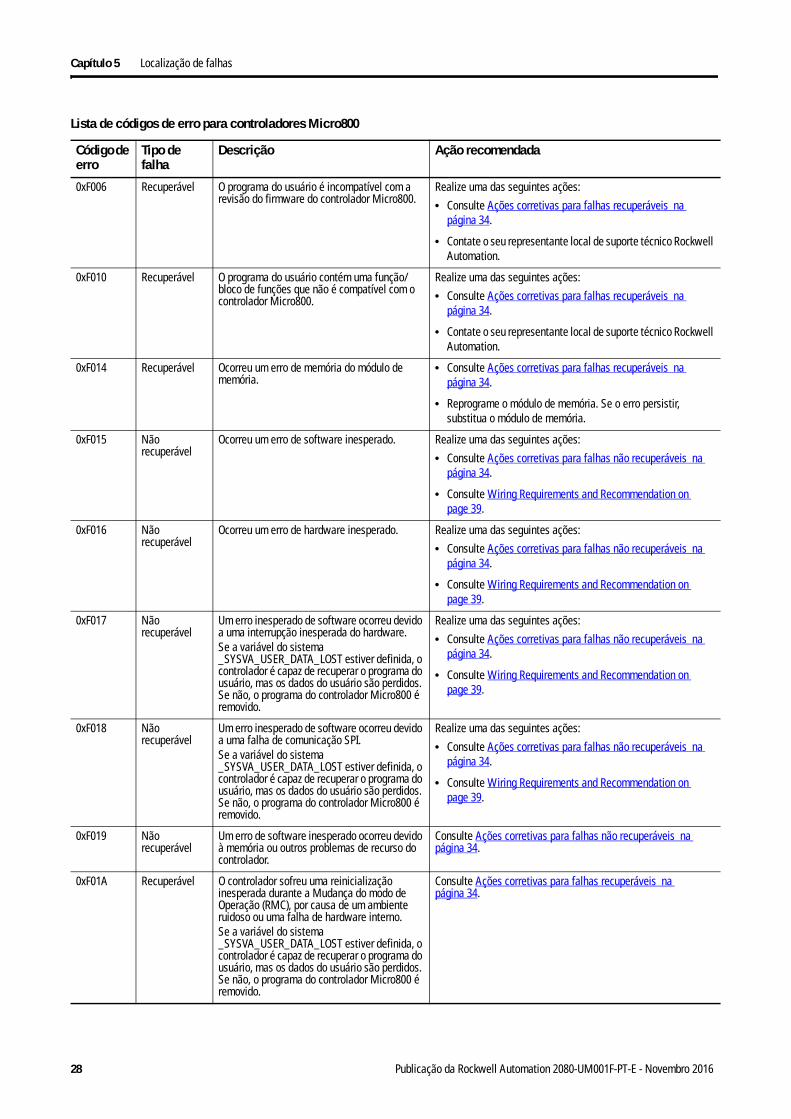
Códigos de erro Esta seção lista possíveis códigos de erro para o seu controlador, assim como as ações recomendadas para recuperação. As informações sobre a falha são armazenadas em um registro de falha, que pode ser acessado pela página de diagnósticos no software Connected Components Workbench. O registro de falha contém informações resumidas sobre a última falha e informações detalhadas sobre as últimas 10 falhas não recuperáveis que ocorreram.
Se um erro persistir após a realização da ação recomendada, entre em contato com seu representante de suporte técnico local Rockwell Automation. Para obter informações de contato, vá até http://support.rockwellautomation.com/MySupport.asp.
Tipos de falhas
Existem dois tipos básicos de falhas que podem ocorrer:• Recuperável – Uma falha recuperável pode ser removida sem precisar
reiniciar o controlador. O LED de falha pisca vermelho quando uma falha recuperável ocorre.
• Não recuperável – Uma falha não recuperável requer que o controlador seja reiniciado antes de remover a falha. Falhas não recuperáveis do controlador podem ser tornar recuperáveis depois que o controlador for reiniciado ou depois de realizar uma reinicialização automática. Se o controlador realiza uma reinicialização automática e a falha se tornar recuperável, ela não será registrada. Depois que o controlador tiver sido reiniciado ou reinicializado, verifique o registro de falhas na página de Diagnósticos do software Connected Components Workbench e, em seguida, remova a falha. O LED de falha fica vermelho contínuo quando uma falha não recuperável ocorre.
26 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
Localização de falhas Capítulo 5
Lista de códigos de erro para controladores Micro800
Código de erro
Tipo de falha
Descrição Ação recomendada
0xF000 Recuperável O controlador sofreu um reset inesperado por causa de um ambiente ruidoso ou uma falha de hardware interno.Se a variável do sistema _SYSVA_USER_DATA_LOST estiver definida, o controlador é capaz de recuperar o programa do usuário, mas os dados do usuário são perdidos. Se não, o programa do controlador Micro800 é removido.
Realize uma das seguintes ações:
• Consulte Ações corretivas para falhas recuperáveis na página 34.
• Verifique a fiação para eliminar qualquer ruído, consulte Wiring Requirements and Recommendation on page 39.
0xF001 Recuperável O programa do controlador foi removido. Isso aconteceu porque:
• uma falha de energia ocorreu durante o download do programa ou transferência de dados a partir do módulo de memória.
• o cabo foi removido do controlador durante o download do programa.
• o teste de integridade RAM falhou.
Realize uma das seguintes ações:
• Consulte Ações corretivas para falhas recuperáveis na página 34.
• Transfira o programa usando o utilitário de recuperação do módulo de memória.
0xF002 Não recuperável
O watchdog do hardware do controlador foi ativado. O tempo-limite de watchdog do hardware do controlador acontece se a varredura do programa levar mais de três segundos.Se a variável do sistema _SYSVA_USER_DATA_LOST estiver definida, o controlador é capaz de recuperar o programa do usuário, mas os dados do usuário são perdidos. Se não, o programa do controlador Micro800 é removido.
Consulte Ações corretivas para falhas não recuperáveis na página 34.
0xF003 Recuperável Ocorreu um dos seguintes:
• O hardware do módulo de memória está com falha.
• A conexão do módulo de memória está com falha.
• O módulo de memória era incompatível com a revisão do firmware do controlador Micro800.
Realize uma das seguintes ações:
• Remova o módulo de memória e reconecte-o.
• Obtenha um novo módulo de memória.
• Consulte Ações corretivas para falhas recuperáveis na página 34.
• Atualize a revisão de firmware do controlador Micro800 para que seja compatível com o módulo de memória. Para obter mais informações sobre a compatibilidade de revisão de firmware, consulte http://www.rockwellautomation.com/support/firmware.html
0xF004 Recuperável Uma falha ocorreu durante a transferência de dados do módulo de memória.
Realize uma das seguintes ações:
• Consulte Ações corretivas para falhas recuperáveis na página 34.
• Tente realizar a transferência de dados novamente. Se o erro persistir, substitua o módulo de memória.
• Em caso de falha do RTC integrado, reinicie o controlador.
0xF005 Recuperável O programa do usuário falhou em uma verificação de integridade enquanto o controlador Micro800 estava no modo Run.
Realize uma das seguintes ações:
• Consulte Ações corretivas para falhas recuperáveis na página 34.
• Consulte Wire Your Controller on page 39.
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 27
Capítulo 5 Localização de falhas
0xF006 Recuperável O programa do usuário é incompatível com a revisão do firmware do controlador Micro800.
Realize uma das seguintes ações:
• Consulte Ações corretivas para falhas recuperáveis na página 34.
• Contate o seu representante local de suporte técnico Rockwell Automation.
0xF010 Recuperável O programa do usuário contém uma função/bloco de funções que não é compatível com o controlador Micro800.
Realize uma das seguintes ações:
• Consulte Ações corretivas para falhas recuperáveis na página 34.
• Contate o seu representante local de suporte técnico Rockwell Automation.
0xF014 Recuperável Ocorreu um erro de memória do módulo de memória.
• Consulte Ações corretivas para falhas recuperáveis na página 34.
• Reprograme o módulo de memória. Se o erro persistir, substitua o módulo de memória.
0xF015 Não recuperável
Ocorreu um erro de software inesperado. Realize uma das seguintes ações:
• Consulte Ações corretivas para falhas não recuperáveis na página 34.
• Consulte Wiring Requirements and Recommendation on page 39.
0xF016 Não recuperável
Ocorreu um erro de hardware inesperado. Realize uma das seguintes ações:
• Consulte Ações corretivas para falhas não recuperáveis na página 34.
• Consulte Wiring Requirements and Recommendation on page 39.
0xF017 Não recuperável
Um erro inesperado de software ocorreu devido a uma interrupção inesperada do hardware.Se a variável do sistema _SYSVA_USER_DATA_LOST estiver definida, o controlador é capaz de recuperar o programa do usuário, mas os dados do usuário são perdidos. Se não, o programa do controlador Micro800 é removido.
Realize uma das seguintes ações:
• Consulte Ações corretivas para falhas não recuperáveis na página 34.
• Consulte Wiring Requirements and Recommendation on page 39.
0xF018 Não recuperável
Um erro inesperado de software ocorreu devido a uma falha de comunicação SPI.Se a variável do sistema _SYSVA_USER_DATA_LOST estiver definida, o controlador é capaz de recuperar o programa do usuário, mas os dados do usuário são perdidos. Se não, o programa do controlador Micro800 é removido.
Realize uma das seguintes ações:
• Consulte Ações corretivas para falhas não recuperáveis na página 34.
• Consulte Wiring Requirements and Recommendation on page 39.
0xF019 Não recuperável
Um erro de software inesperado ocorreu devido à memória ou outros problemas de recurso do controlador.
Consulte Ações corretivas para falhas não recuperáveis na página 34.
0xF01A Recuperável O controlador sofreu uma reinicialização inesperada durante a Mudança do modo de Operação (RMC), por causa de um ambiente ruidoso ou uma falha de hardware interno.Se a variável do sistema _SYSVA_USER_DATA_LOST estiver definida, o controlador é capaz de recuperar o programa do usuário, mas os dados do usuário são perdidos. Se não, o programa do controlador Micro800 é removido.
Consulte Ações corretivas para falhas recuperáveis na página 34.
Lista de códigos de erro para controladores Micro800
Código de erro
Tipo de falha
Descrição Ação recomendada
28 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
Localização de falhas Capítulo 5
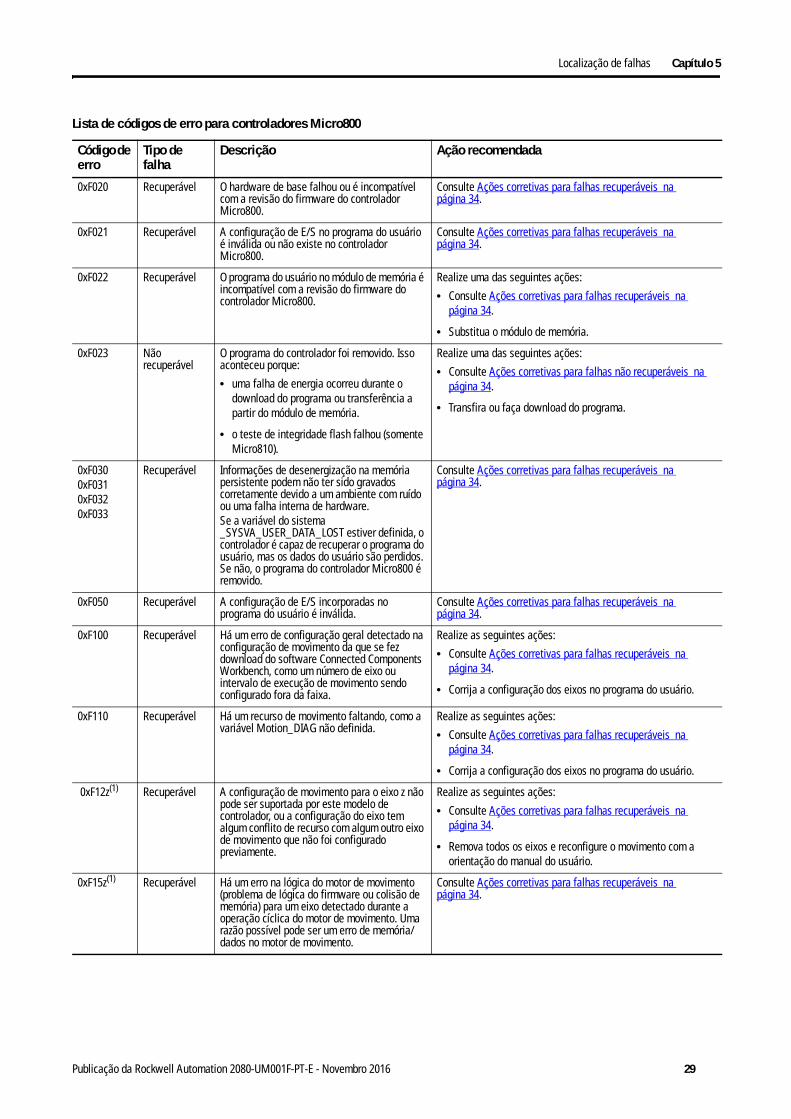
0xF020 Recuperável O hardware de base falhou ou é incompatível com a revisão do firmware do controlador Micro800.
Consulte Ações corretivas para falhas recuperáveis na página 34.
0xF021 Recuperável A configuração de E/S no programa do usuário é inválida ou não existe no controlador Micro800.
Consulte Ações corretivas para falhas recuperáveis na página 34.
0xF022 Recuperável O programa do usuário no módulo de memória é incompatível com a revisão do firmware do controlador Micro800.
Realize uma das seguintes ações:
• Consulte Ações corretivas para falhas recuperáveis na página 34.
• Substitua o módulo de memória.
0xF023 Não recuperável
O programa do controlador foi removido. Isso aconteceu porque:
• uma falha de energia ocorreu durante o download do programa ou transferência a partir do módulo de memória.
• o teste de integridade flash falhou (somente Micro810).
Realize uma das seguintes ações:
• Consulte Ações corretivas para falhas não recuperáveis na página 34.
• Transfira ou faça download do programa.
0xF0300xF0310xF0320xF033
Recuperável Informações de desenergização na memória persistente podem não ter sido gravados corretamente devido a um ambiente com ruído ou uma falha interna de hardware.Se a variável do sistema _SYSVA_USER_DATA_LOST estiver definida, o controlador é capaz de recuperar o programa do usuário, mas os dados do usuário são perdidos. Se não, o programa do controlador Micro800 é removido.
Consulte Ações corretivas para falhas recuperáveis na página 34.
0xF050 Recuperável A configuração de E/S incorporadas no programa do usuário é inválida.
Consulte Ações corretivas para falhas recuperáveis na página 34.
0xF100 Recuperável Há um erro de configuração geral detectado na configuração de movimento da que se fez download do software Connected Components Workbench, como um número de eixo ou intervalo de execução de movimento sendo configurado fora da faixa.
Realize as seguintes ações:
• Consulte Ações corretivas para falhas recuperáveis na página 34.
• Corrija a configuração dos eixos no programa do usuário.
0xF110 Recuperável Há um recurso de movimento faltando, como a variável Motion_DIAG não definida.
Realize as seguintes ações:
• Consulte Ações corretivas para falhas recuperáveis na página 34.
• Corrija a configuração dos eixos no programa do usuário.
0xF12z(1) Recuperável A configuração de movimento para o eixo z não pode ser suportada por este modelo de controlador, ou a configuração do eixo tem algum conflito de recurso com algum outro eixo de movimento que não foi configurado previamente.
Realize as seguintes ações:
• Consulte Ações corretivas para falhas recuperáveis na página 34.
• Remova todos os eixos e reconfigure o movimento com a orientação do manual do usuário.
0xF15z(1) Recuperável Há um erro na lógica do motor de movimento (problema de lógica do firmware ou colisão de memória) para um eixo detectado durante a operação cíclica do motor de movimento. Uma razão possível pode ser um erro de memória/dados no motor de movimento.
Consulte Ações corretivas para falhas recuperáveis na página 34.
Lista de códigos de erro para controladores Micro800
Código de erro
Tipo de falha
Descrição Ação recomendada
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 29
Capítulo 5 Localização de falhas
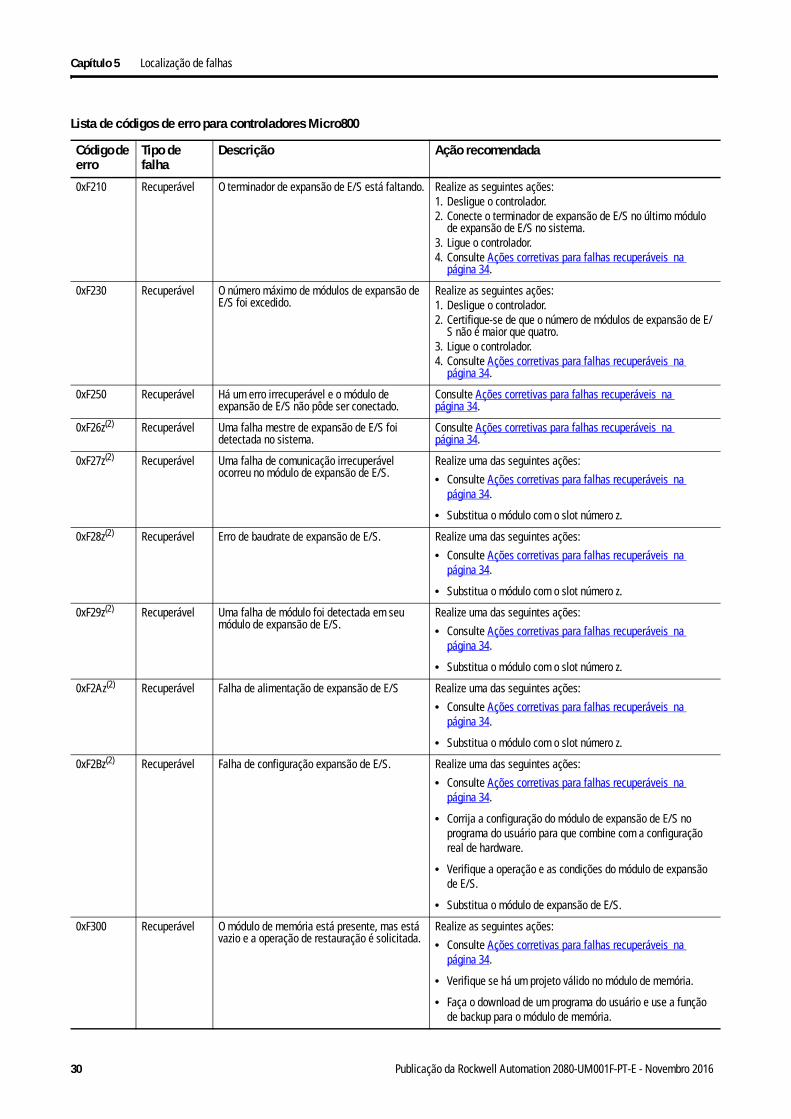
0xF210 Recuperável O terminador de expansão de E/S está faltando. Realize as seguintes ações:1. Desligue o controlador.2. Conecte o terminador de expansão de E/S no último módulo
de expansão de E/S no sistema.3. Ligue o controlador.4. Consulte Ações corretivas para falhas recuperáveis na
página 34.
0xF230 Recuperável O número máximo de módulos de expansão de E/S foi excedido.
Realize as seguintes ações:1. Desligue o controlador.2. Certifique-se de que o número de módulos de expansão de E/
S não é maior que quatro.3. Ligue o controlador.4. Consulte Ações corretivas para falhas recuperáveis na
página 34.
0xF250 Recuperável Há um erro irrecuperável e o módulo de expansão de E/S não pôde ser conectado.
Consulte Ações corretivas para falhas recuperáveis na página 34.
0xF26z(2) Recuperável Uma falha mestre de expansão de E/S foi detectada no sistema.
Consulte Ações corretivas para falhas recuperáveis na página 34.
0xF27z(2) Recuperável Uma falha de comunicação irrecuperável ocorreu no módulo de expansão de E/S.
Realize uma das seguintes ações:
• Consulte Ações corretivas para falhas recuperáveis na página 34.
• Substitua o módulo com o slot número z.
0xF28z(2) Recuperável Erro de baudrate de expansão de E/S. Realize uma das seguintes ações:
• Consulte Ações corretivas para falhas recuperáveis na página 34.
• Substitua o módulo com o slot número z.
0xF29z(2) Recuperável Uma falha de módulo foi detectada em seu módulo de expansão de E/S.
Realize uma das seguintes ações:
• Consulte Ações corretivas para falhas recuperáveis na página 34.
• Substitua o módulo com o slot número z.
0xF2Az(2) Recuperável Falha de alimentação de expansão de E/S Realize uma das seguintes ações:
• Consulte Ações corretivas para falhas recuperáveis na página 34.
• Substitua o módulo com o slot número z.
0xF2Bz(2) Recuperável Falha de configuração expansão de E/S. Realize uma das seguintes ações:
• Consulte Ações corretivas para falhas recuperáveis na página 34.
• Corrija a configuração do módulo de expansão de E/S no programa do usuário para que combine com a configuração real de hardware.
• Verifique a operação e as condições do módulo de expansão de E/S.
• Substitua o módulo de expansão de E/S.
0xF300 Recuperável O módulo de memória está presente, mas está vazio e a operação de restauração é solicitada.
Realize as seguintes ações:
• Consulte Ações corretivas para falhas recuperáveis na página 34.
• Verifique se há um projeto válido no módulo de memória.
• Faça o download de um programa do usuário e use a função de backup para o módulo de memória.
Lista de códigos de erro para controladores Micro800
Código de erro
Tipo de falha
Descrição Ação recomendada
30 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
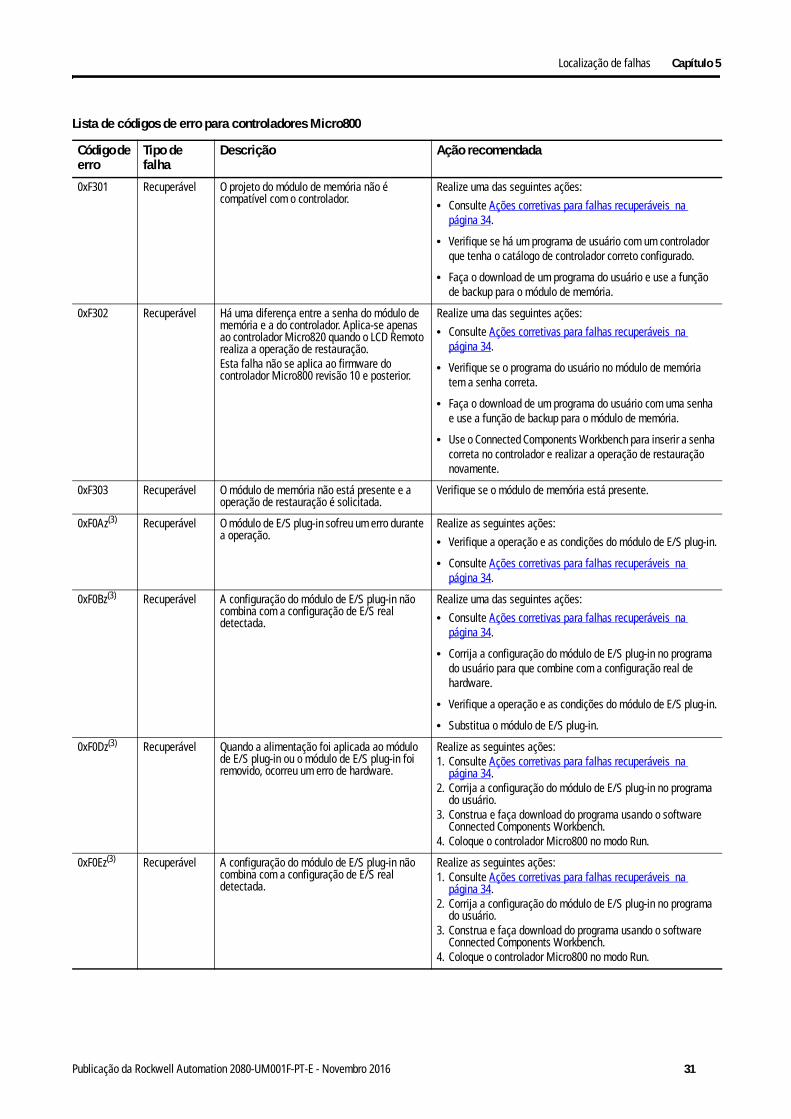
Localização de falhas Capítulo 5
0xF301 Recuperável O projeto do módulo de memória não é compatível com o controlador.
Realize uma das seguintes ações:
• Consulte Ações corretivas para falhas recuperáveis na página 34.
• Verifique se há um programa de usuário com um controlador que tenha o catálogo de controlador correto configurado.
• Faça o download de um programa do usuário e use a função de backup para o módulo de memória.
0xF302 Recuperável Há uma diferença entre a senha do módulo de memória e a do controlador. Aplica-se apenas ao controlador Micro820 quando o LCD Remoto realiza a operação de restauração.Esta falha não se aplica ao firmware do controlador Micro800 revisão 10 e posterior.
Realize uma das seguintes ações:
• Consulte Ações corretivas para falhas recuperáveis na página 34.
• Verifique se o programa do usuário no módulo de memória tem a senha correta.
• Faça o download de um programa do usuário com uma senha e use a função de backup para o módulo de memória.
• Use o Connected Components Workbench para inserir a senha correta no controlador e realizar a operação de restauração novamente.
0xF303 Recuperável O módulo de memória não está presente e a operação de restauração é solicitada.
Verifique se o módulo de memória está presente.
0xF0Az(3) Recuperável O módulo de E/S plug-in sofreu um erro durante a operação.
Realize as seguintes ações:
• Verifique a operação e as condições do módulo de E/S plug-in.
• Consulte Ações corretivas para falhas recuperáveis na página 34.
0xF0Bz(3) Recuperável A configuração do módulo de E/S plug-in não combina com a configuração de E/S real detectada.
Realize uma das seguintes ações:
• Consulte Ações corretivas para falhas recuperáveis na página 34.
• Corrija a configuração do módulo de E/S plug-in no programa do usuário para que combine com a configuração real de hardware.
• Verifique a operação e as condições do módulo de E/S plug-in.
• Substitua o módulo de E/S plug-in.
0xF0Dz(3) Recuperável Quando a alimentação foi aplicada ao módulo de E/S plug-in ou o módulo de E/S plug-in foi removido, ocorreu um erro de hardware.
Realize as seguintes ações:1. Consulte Ações corretivas para falhas recuperáveis na
página 34.2. Corrija a configuração do módulo de E/S plug-in no programa
do usuário.3. Construa e faça download do programa usando o software
Connected Components Workbench.4. Coloque o controlador Micro800 no modo Run.
0xF0Ez(3) Recuperável A configuração do módulo de E/S plug-in não combina com a configuração de E/S real detectada.
Realize as seguintes ações:1. Consulte Ações corretivas para falhas recuperáveis na
página 34.2. Corrija a configuração do módulo de E/S plug-in no programa
do usuário.3. Construa e faça download do programa usando o software
Connected Components Workbench.4. Coloque o controlador Micro800 no modo Run.
Lista de códigos de erro para controladores Micro800
Código de erro
Tipo de falha
Descrição Ação recomendada
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 31
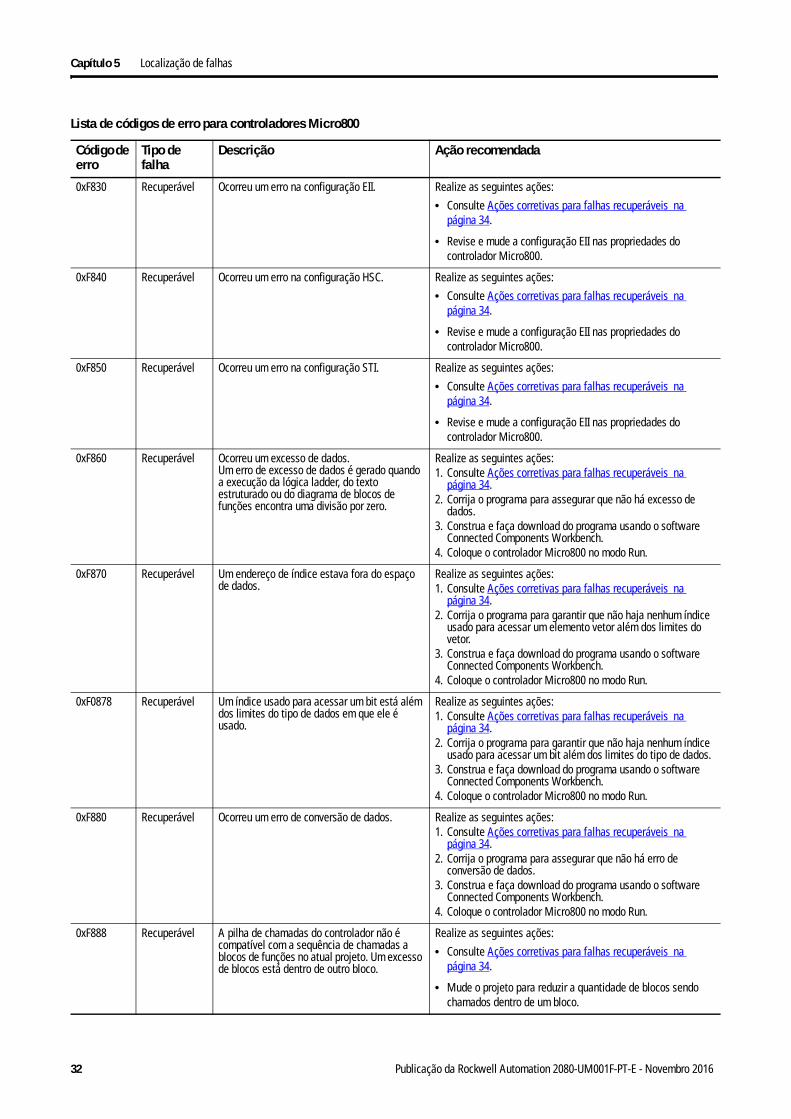
Capítulo 5 Localização de falhas
0xF830 Recuperável Ocorreu um erro na configuração EII. Realize as seguintes ações:
• Consulte Ações corretivas para falhas recuperáveis na página 34.
• Revise e mude a configuração EII nas propriedades do controlador Micro800.
0xF840 Recuperável Ocorreu um erro na configuração HSC. Realize as seguintes ações:
• Consulte Ações corretivas para falhas recuperáveis na página 34.
• Revise e mude a configuração EII nas propriedades do controlador Micro800.
0xF850 Recuperável Ocorreu um erro na configuração STI. Realize as seguintes ações:
• Consulte Ações corretivas para falhas recuperáveis na página 34.
• Revise e mude a configuração EII nas propriedades do controlador Micro800.
0xF860 Recuperável Ocorreu um excesso de dados.Um erro de excesso de dados é gerado quando a execução da lógica ladder, do texto estruturado ou do diagrama de blocos de funções encontra uma divisão por zero.
Realize as seguintes ações:1. Consulte Ações corretivas para falhas recuperáveis na
página 34.2. Corrija o programa para assegurar que não há excesso de
dados.3. Construa e faça download do programa usando o software
Connected Components Workbench.4. Coloque o controlador Micro800 no modo Run.
0xF870 Recuperável Um endereço de índice estava fora do espaço de dados.
Realize as seguintes ações:1. Consulte Ações corretivas para falhas recuperáveis na
página 34.2. Corrija o programa para garantir que não haja nenhum índice
usado para acessar um elemento vetor além dos limites do vetor.
3. Construa e faça download do programa usando o software Connected Components Workbench.
4. Coloque o controlador Micro800 no modo Run.
0xF0878 Recuperável Um índice usado para acessar um bit está além dos limites do tipo de dados em que ele é usado.
Realize as seguintes ações:1. Consulte Ações corretivas para falhas recuperáveis na
página 34.2. Corrija o programa para garantir que não haja nenhum índice
usado para acessar um bit além dos limites do tipo de dados.3. Construa e faça download do programa usando o software
Connected Components Workbench.4. Coloque o controlador Micro800 no modo Run.
0xF880 Recuperável Ocorreu um erro de conversão de dados. Realize as seguintes ações:1. Consulte Ações corretivas para falhas recuperáveis na
página 34.2. Corrija o programa para assegurar que não há erro de
conversão de dados.3. Construa e faça download do programa usando o software
Connected Components Workbench.4. Coloque o controlador Micro800 no modo Run.
0xF888 Recuperável A pilha de chamadas do controlador não é compatível com a sequência de chamadas a blocos de funções no atual projeto. Um excesso de blocos está dentro de outro bloco.
Realize as seguintes ações:
• Consulte Ações corretivas para falhas recuperáveis na página 34.
• Mude o projeto para reduzir a quantidade de blocos sendo chamados dentro de um bloco.
Lista de códigos de erro para controladores Micro800
Código de erro
Tipo de falha
Descrição Ação recomendada
32 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
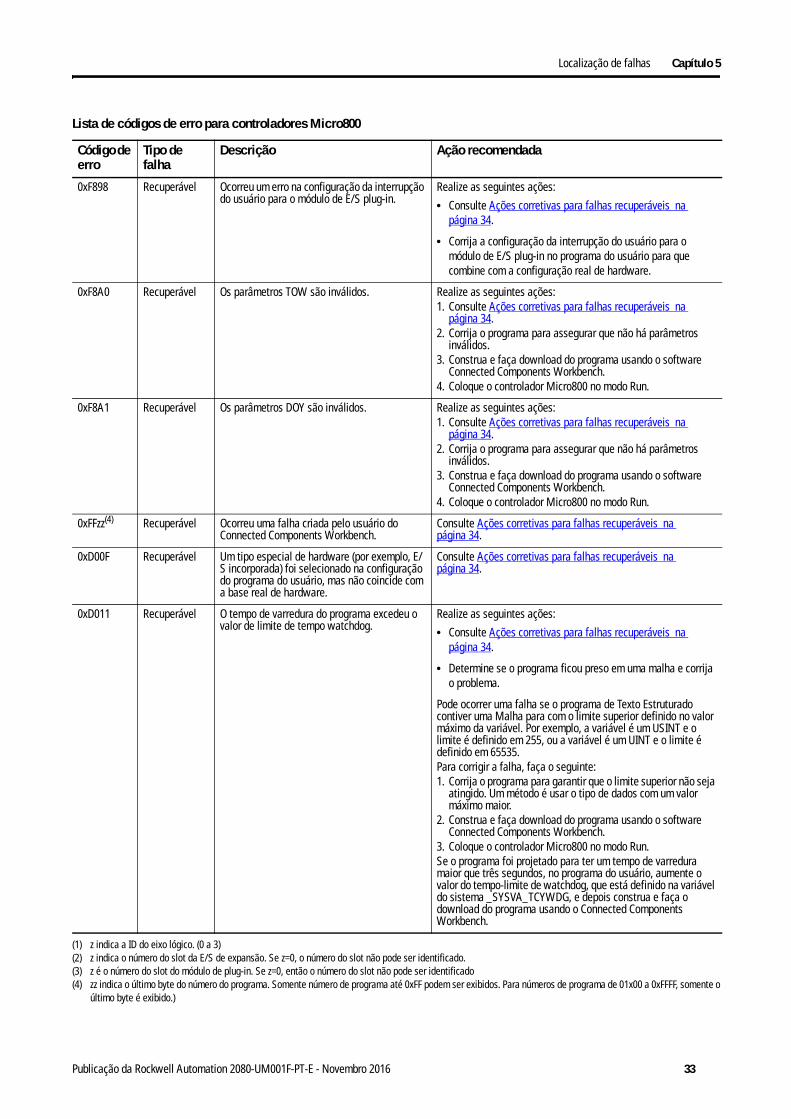
Localização de falhas Capítulo 5
0xF898 Recuperável Ocorreu um erro na configuração da interrupção do usuário para o módulo de E/S plug-in.
Realize as seguintes ações:
• Consulte Ações corretivas para falhas recuperáveis na página 34.
• Corrija a configuração da interrupção do usuário para o módulo de E/S plug-in no programa do usuário para que combine com a configuração real de hardware.
0xF8A0 Recuperável Os parâmetros TOW são inválidos. Realize as seguintes ações:1. Consulte Ações corretivas para falhas recuperáveis na
página 34.2. Corrija o programa para assegurar que não há parâmetros
inválidos.3. Construa e faça download do programa usando o software
Connected Components Workbench.4. Coloque o controlador Micro800 no modo Run.
0xF8A1 Recuperável Os parâmetros DOY são inválidos. Realize as seguintes ações:1. Consulte Ações corretivas para falhas recuperáveis na
página 34.2. Corrija o programa para assegurar que não há parâmetros
inválidos.3. Construa e faça download do programa usando o software
Connected Components Workbench.4. Coloque o controlador Micro800 no modo Run.
0xFFzz(4) Recuperável Ocorreu uma falha criada pelo usuário do Connected Components Workbench.
Consulte Ações corretivas para falhas recuperáveis na página 34.
0xD00F Recuperável Um tipo especial de hardware (por exemplo, E/S incorporada) foi selecionado na configuração do programa do usuário, mas não coincide com a base real de hardware.
Consulte Ações corretivas para falhas recuperáveis na página 34.
0xD011 Recuperável O tempo de varredura do programa excedeu o valor de limite de tempo watchdog.
Realize as seguintes ações:
• Consulte Ações corretivas para falhas recuperáveis na página 34.
• Determine se o programa ficou preso em uma malha e corrija o problema.
Pode ocorrer uma falha se o programa de Texto Estruturado contiver uma Malha para com o limite superior definido no valor máximo da variável. Por exemplo, a variável é um USINT e o limite é definido em 255, ou a variável é um UINT e o limite é definido em 65535.Para corrigir a falha, faça o seguinte:1. Corrija o programa para garantir que o limite superior não seja
atingido. Um método é usar o tipo de dados com um valor máximo maior.
2. Construa e faça download do programa usando o software Connected Components Workbench.
3. Coloque o controlador Micro800 no modo Run.Se o programa foi projetado para ter um tempo de varredura maior que três segundos, no programa do usuário, aumente o valor do tempo-limite de watchdog, que está definido na variável do sistema _SYSVA_TCYWDG, e depois construa e faça o download do programa usando o Connected Components Workbench.
(1) z indica a ID do eixo lógico. (0 a 3)(2) z indica o número do slot da E/S de expansão. Se z=0, o número do slot não pode ser identificado.(3) z é o número do slot do módulo de plug-in. Se z=0, então o número do slot não pode ser identificado(4) zz indica o último byte do número do programa. Somente número de programa até 0xFF podem ser exibidos. Para números de programa de 01x00 a 0xFFFF, somente o
último byte é exibido.)
Lista de códigos de erro para controladores Micro800
Código de erro
Tipo de falha
Descrição Ação recomendada
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 33
Capítulo 5 Localização de falhas
Ação corretiva para falhas recuperáveis e não recuperáveis
Ações corretivas para falhas recuperáveis
Realize as seguintes ações:
1. Opcionalmente, salve o registro de falhas do software Connected Components Workbench.
2. Limpe a falha recuperável usando o software Connected Components Workbench.
3. Se o problema persistir, entre em contato com o suporte técnico com o registro de falha.
Ações corretivas para falhas não recuperáveis
Realize as seguintes ações:
1. Reinicie o controlador Micro800.
2. O controlador irá para a falha recuperável. Opcionalmente, salve o registro de falhas do software Connected Components Workbench.
3. Limpe a falha recuperável usando o software Connected Components Workbench.
4. Se o programa estiver perdido, construa e faça o download do programa usando o software Connected Components Workbench.
5. Se o problema persistir, entre em contato com o suporte técnico com o registro de falha.
34 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
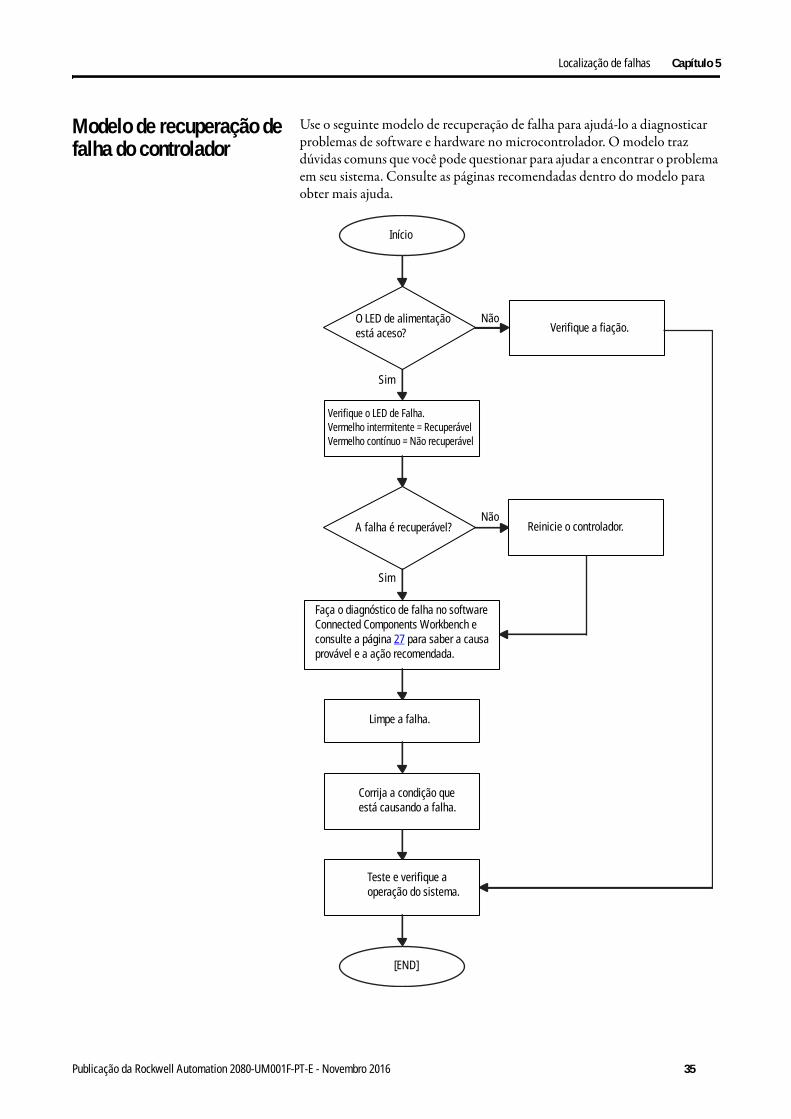
Localização de falhas Capítulo 5
Modelo de recuperação de falha do controlador
Use o seguinte modelo de recuperação de falha para ajudá-lo a diagnosticar problemas de software e hardware no microcontrolador. O modelo traz dúvidas comuns que você pode questionar para ajudar a encontrar o problema em seu sistema. Consulte as páginas recomendadas dentro do modelo para obter mais ajuda.
Faça o diagnóstico de falha no software Connected Components Workbench e consulte a página 27 para saber a causa provável e a ação recomendada.
Limpe a falha.
Corrija a condição que está causando a falha.
Verifique o LED de Falha.Vermelho intermitente = RecuperávelVermelho contínuo = Não recuperável
Teste e verifique a operação do sistema.
A falha é recuperável?
O LED de alimentação está aceso? Verifique a fiação.
Reinicie o controlador.
Início
Não
Não
Sim
Sim
[END]
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 35

Capítulo 5 Localização de falhas
Ligar para a Rockwell Automation para obter assistência
Se você precisar entrar em contato com a Rockwell Automation ou com seu distribuidor local para obter assistência,, convém obter o seguinte (antes de ligar):
• tipo do controlador, carta de série, carta de revisão e número de firmware (FRN) do controlador
• status do indicador do controlador
36 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
Capítulo 6
Execução do programa no Micro800
Configure e programe o seu controlador Micro810
O controlador Micro810 pode ser configurado por ambas as seguintes soluções:
• utilizando blocos de funções de relé inteligente com a tela 2080-LCD (e sem utilização do software de programação Connected Components Workbench), ou
• programado como um microcontrolador com recursos completos utilizando Connected Components Workbench.
Você não pode utilizar ambas as soluções, fazendo uso de blocos de funções de relé inteligente e também fazendo download de um programa Connected Components Workbench. Você precisa escolher um dos dois métodos. Blocos de funções de relé inteligente destinam-se a aplicações simples, como um relé temporizador para iluminação. Fazer download de um programa usando o Connected Components Workbench sobrescreve os blocos de função de relé inteligente. Em contrapartida, configurar os blocos de função de relé inteligente sobrescreve qualquer programa Connected Components Workbench.
Para obter instruções sobre como utilizar a funcionalidade do relé inteligente, consulte Utilize a função de relé inteligente do Micro810 na página 72. Para instruções de início rápido sobre como utilizar o Connected Components Workbench, consulte as publicações a seguir:
• Micro800 and Connected Components Workbench Application Guide, publicação 2080-QR001
• Micro800 and Connected Components Workbench Getting Started Guide, publicação 2080-QR002
Para execução de programas em Connected Components Workbench, consulte as próximas seções.
Visão geral sobre a execução do programa
Um ciclo ou varredura Micro800 consiste em leitura de entradas, execução de programas em ordem sequencial, atualização de saídas e realização de manutenção de comunicações.
Os nomes dos programas devem começar com uma letra ou sublinha, seguidos de até 127 letras, dígitos ou sublinhas simples. Use linguagens de programação como lógica ladder, diagrama de blocos de funções e texto estruturado.
Até 256 programas podem ser inclusos em um projeto, dependendo da memória de controlador disponível. Por padrão, os programas são cíclicos (executados uma vez por ciclo ou varredura). À medida que cada novo
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 37
Capítulo 6 Execução do programa no Micro800
programa é adicionado ao projeto, atribui-se a ele o próximo número de ordem consecutivo. Quando você inicia o Project Organizer no Connected Components Workbench, ele mostra os ícones do programa com base nessa ordem. Você pode visualizar e modificar o número de pedido de um programa nas propriedades do programa. Contudo, o Project Organizer não mostra a nova ordem até a próxima vez em que o projeto é aberto.
O Micro800 suporta saltos dentro de um programa. Chame uma sub-rotina de código dentro de um programa encapsulando esse código como uma Função definida pelo usuário (UDF) ou um Bloco de funções definido pelo usuário (UDFB). Ainda que um UDFB possa ser executado dentro de outro UDFB, uma profundidade máxima de encadeamento de cinco é suportada. Se ela for excedida, ocorre um erro de compilação.
De modo alternativo, você pode atribuir um programa a uma interrupção disponível e fazê-lo ser executado somente quando a interrupção é disparada. A rotina de falha de usuário é a única interrupção disponível em controladores Micro810. Um programa atribuído à rotina de falha do usuário roda uma vez logo antes de o controlador entrar em modo de falha.
As variáveis globais do sistema associadas com ciclos/varreduras são: • __SYSVA_CYCLECNT – Contador de ciclos • __SYSVA_TCYCURRENT – Tempo de ciclo atual • __SYSVA_TCYMAXIMUM – Tempo máximo do ciclo desde a
última partida.
38 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
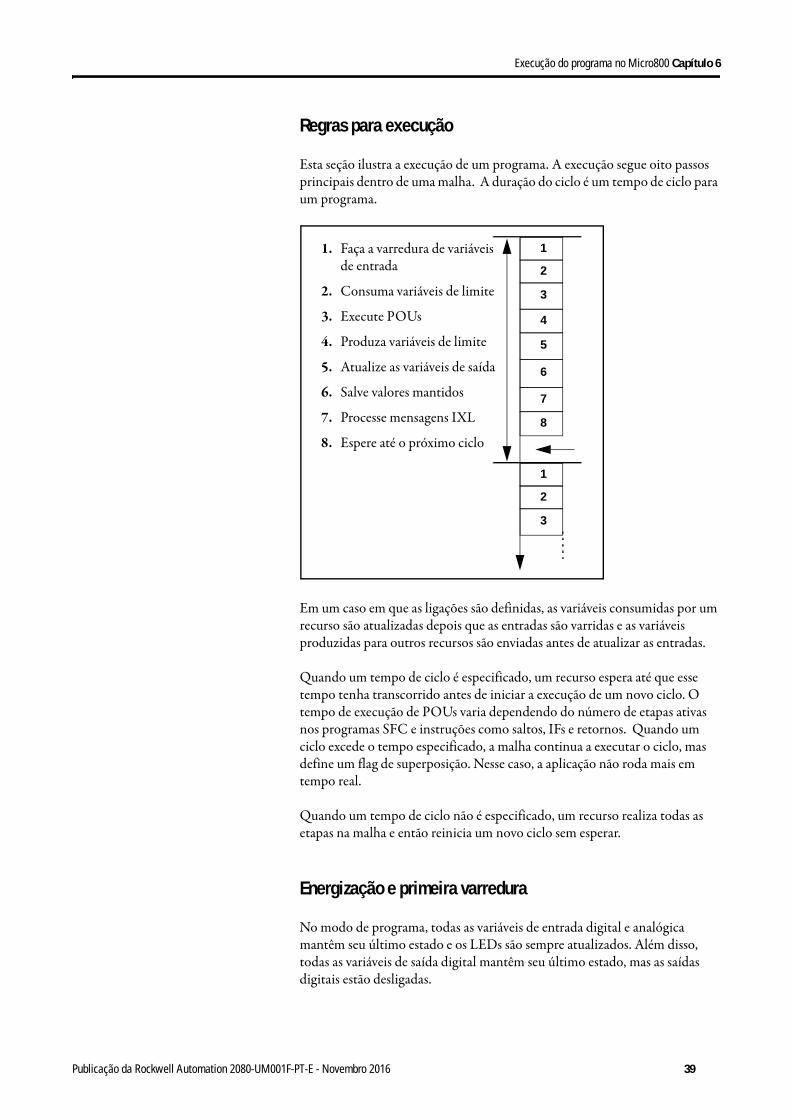
Execução do programa no Micro800 Capítulo 6
Regras para execução
Esta seção ilustra a execução de um programa. A execução segue oito passos principais dentro de uma malha. A duração do ciclo é um tempo de ciclo para um programa.
Em um caso em que as ligações são definidas, as variáveis consumidas por um recurso são atualizadas depois que as entradas são varridas e as variáveis produzidas para outros recursos são enviadas antes de atualizar as entradas.
Quando um tempo de ciclo é especificado, um recurso espera até que esse tempo tenha transcorrido antes de iniciar a execução de um novo ciclo. O tempo de execução de POUs varia dependendo do número de etapas ativas nos programas SFC e instruções como saltos, IFs e retornos. Quando um ciclo excede o tempo especificado, a malha continua a executar o ciclo, mas define um flag de superposição. Nesse caso, a aplicação não roda mais em tempo real.
Quando um tempo de ciclo não é especificado, um recurso realiza todas as etapas na malha e então reinicia um novo ciclo sem esperar.
Energização e primeira varredura
No modo de programa, todas as variáveis de entrada digital e analógica mantêm seu último estado e os LEDs são sempre atualizados. Além disso, todas as variáveis de saída digital mantêm seu último estado, mas as saídas digitais estão desligadas.
1. Faça a varredura de variáveis de entrada
2. Consuma variáveis de limite
3. Execute POUs
4. Produza variáveis de limite
5. Atualize as variáveis de saída
6. Salve valores mantidos
7. Processe mensagens IXL
8. Espere até o próximo ciclo
1
2
3
4
5
6
7
8
1
2
3
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 39
Capítulo 6 Execução do programa no Micro800
Ao fazer a transição do modo de programa para o modo Run, todas as variáveis de saída digital são removidas.
Duas variáveis de sistema também estão disponíveis na revisão 2 e mais recentes.
Execução periódica de programas
Não é recomendado que a variável do sistema __SYSVA_TCYCYCTIME seja usada para executar periodicamente todos os programas, já que isso faz com que a comunicação seja executada nessa taxa.
Variáveis do sistema para varredura e energização na versão de firmware 2 e posteriores
Variável Tipo Descrição
_SYSVA_FIRST_SCAN BOOL Primeiro bit de varredura.Pode ser utilizado para inicializar ou restaurar variáveis imediatamente após cada transição de modo Programa para Operação.Obs.: Verdadeiro apenas para a primeira varredura. Após esta, vá para operação.
_SYSVA_POWER_UP_BIT BOOL Bit de energização.Pode ser utilizado para inicializar ou restaurar variáveis imediatamente após o download a partir do software Connected Components Workbench ou imediatamente depois de ser carregado a partir do módulo de backup da memória (por exemplo, 2080-MEMBAK-RTC, 2080-LCD).Obs.: Verdadeiro apenas para a primeira varredura após a energização ou a execução de uma nova lógica ladder pela primeira vez.
ADVERTÊNCIA: Os tempos limite de comunicação podem ocorrer se o tempo de ciclo programado for definido como muito lento (por exemplo, 200 ms) para manter as comunicações.
Variável de tempo do sistema para tempo de ciclo programado
Variável Tipo Descrição
__SYSVA_TCYCYCTIME TIME Tempo de ciclo programado.Obs.: O tempo de ciclo programado somente aceita valores em múltiplos de 10 ms. Se o valor inserido não for um múltiplo de 10, ele será arredondado para cima para o próximo múltiplo de 10.
40 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
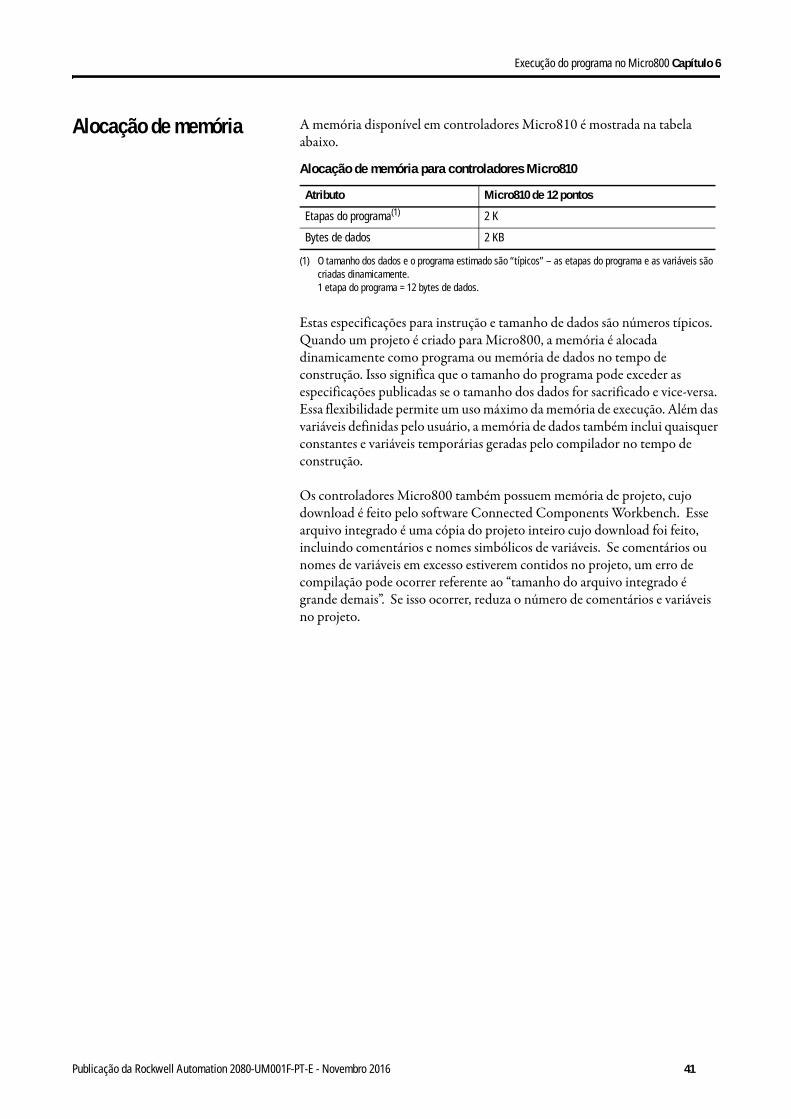
Execução do programa no Micro800 Capítulo 6
Alocação de memória A memória disponível em controladores Micro810 é mostrada na tabela abaixo.
Estas especificações para instrução e tamanho de dados são números típicos. Quando um projeto é criado para Micro800, a memória é alocada dinamicamente como programa ou memória de dados no tempo de construção. Isso significa que o tamanho do programa pode exceder as especificações publicadas se o tamanho dos dados for sacrificado e vice-versa. Essa flexibilidade permite um uso máximo da memória de execução. Além das variáveis definidas pelo usuário, a memória de dados também inclui quaisquer constantes e variáveis temporárias geradas pelo compilador no tempo de construção.
Os controladores Micro800 também possuem memória de projeto, cujo download é feito pelo software Connected Components Workbench. Esse arquivo integrado é uma cópia do projeto inteiro cujo download foi feito, incluindo comentários e nomes simbólicos de variáveis. Se comentários ou nomes de variáveis em excesso estiverem contidos no projeto, um erro de compilação pode ocorrer referente ao “tamanho do arquivo integrado é grande demais”. Se isso ocorrer, reduza o número de comentários e variáveis no projeto.
Alocação de memória para controladores Micro810
Atributo Micro810 de 12 pontos
Etapas do programa(1)
(1) O tamanho dos dados e o programa estimado são “típicos” – as etapas do programa e as variáveis são criadas dinamicamente. 1 etapa do programa = 12 bytes de dados.
2 K
Bytes de dados 2 KB
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 41
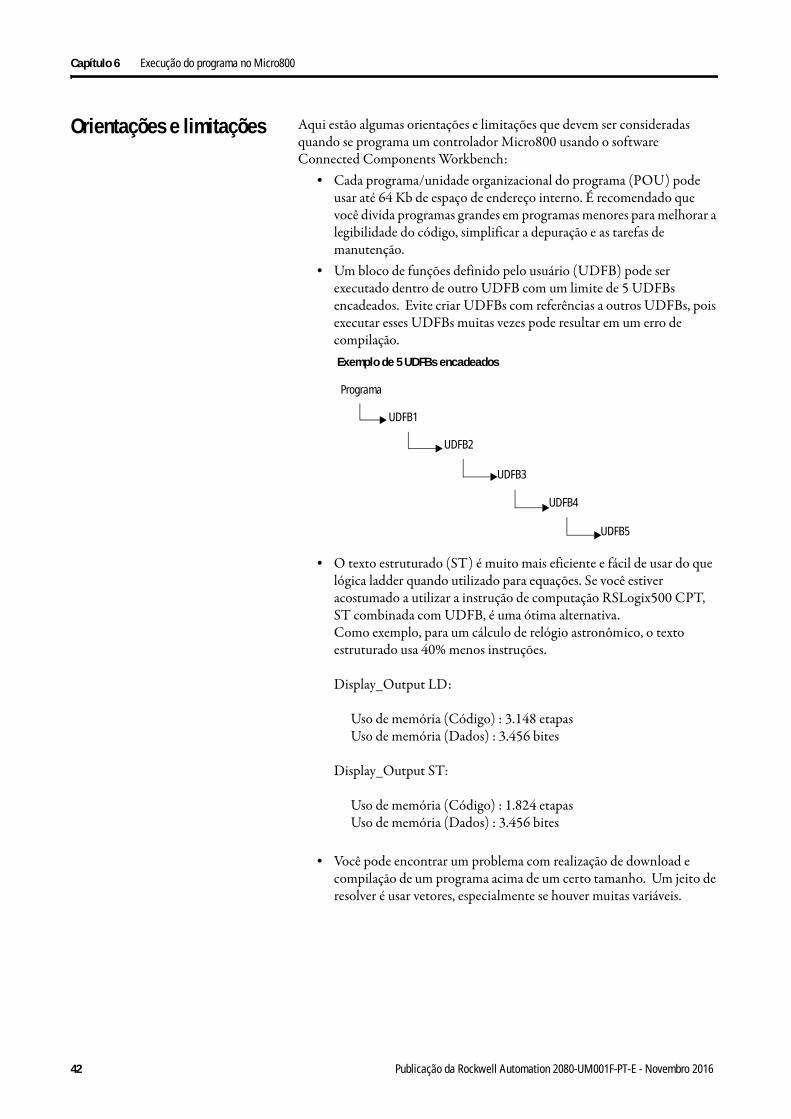
Capítulo 6 Execução do programa no Micro800
Orientações e limitações Aqui estão algumas orientações e limitações que devem ser consideradas quando se programa um controlador Micro800 usando o software Connected Components Workbench:
• Cada programa/unidade organizacional do programa (POU) pode usar até 64 Kb de espaço de endereço interno. É recomendado que você divida programas grandes em programas menores para melhorar a legibilidade do código, simplificar a depuração e as tarefas de manutenção.
• Um bloco de funções definido pelo usuário (UDFB) pode ser executado dentro de outro UDFB com um limite de 5 UDFBs encadeados. Evite criar UDFBs com referências a outros UDFBs, pois executar esses UDFBs muitas vezes pode resultar em um erro de compilação.
• O texto estruturado (ST) é muito mais eficiente e fácil de usar do que lógica ladder quando utilizado para equações. Se você estiver acostumado a utilizar a instrução de computação RSLogix500 CPT, ST combinada com UDFB, é uma ótima alternativa. Como exemplo, para um cálculo de relógio astronômico, o texto estruturado usa 40% menos instruções.
Display_Output LD:
Uso de memória (Código) : 3.148 etapasUso de memória (Dados) : 3.456 bites
Display_Output ST:
Uso de memória (Código) : 1.824 etapasUso de memória (Dados) : 3.456 bites
• Você pode encontrar um problema com realização de download e compilação de um programa acima de um certo tamanho. Um jeito de resolver é usar vetores, especialmente se houver muitas variáveis.
Programa
UDFB1
UDFB2
UDFB3
UDFB4
UDFB5
Exemplo de 5 UDFBs encadeados
42 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
Capítulo 7
Segurança do controlador
Segurança do Micro800 geralmente possui dois componentes:• Acesso exclusivo que previne a configuração simultânea do
controlador por dois usuários• Proteção por senha do controlador que garante a propriedade
intelectual contida no controlador e previne acesso não autorizado
Adicionalmente, para controladores Micro810, o 2080-LCD conta com um recurso de senha proteger a tela LCD.
Acesso exclusivo Acesso exclusivo é forçado no controlador Micro800 independentemente deste ter ou não proteção por senha. Isso significa que somente uma sessão do software Connected Components Workbench é autorizada por vez e que somente um cliente autorizado tem acesso exclusivo à aplicação do controlador. Isso garante que somente uma sessão de software possua acesso exclusivo à configuração específica da aplicação do Micro800.
Acesso exclusivo é forçado nas revisões de firmware 1 e 2 do Micro800. Quando um usuário do software Connected Components Workbench conecta-se a um controlador Micro800, esse usuário recebe acesso exclusivo àquele controlador.
Proteção por senha Ao configurar uma senha para o controlador um usuário efetivamente restringe, àquelas sessões de software que possam fornecer a senha correta, o acesso à conexão do software de programação do controlador. Essencialmente, operações do software Connected Components Workbench como upload e download são impedidas se o controlador estiver protegido com uma senha e a senha correta não for fornecida.
Controladores Micro800 com revisão de firmware 2 são enviados sem senha definida, mas pode-se definir uma por meio do software Connected Components Workbench (revisão 2 ou posterior).
IMPORTANTE Em controladores Micro810, o recurso de senha do controlador exige proteção por senha nas conexões de software ao controlador (ou seja, qualquer conexão pelo software Connected Components Workbench). A senha que é ativada no 2080-LCD restringe o acesso somente ao LCD e às funções do sistema que são acessíveis pelo LCD. Estas duas senhas são diferentes.
Para aprender mais sobre ativação de senhas no LCD, consulte Configure a senha do LCD na página 63.
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 43
Capítulo 7 Segurança do controlador
A senha do controlador também é gravada no módulo de backup de memória (ou seja, 2080-MEMBAK-RTC para controladores Micro830 e Micro850, 2080-LCD para controladores Micro810 e cartão microSD para controladores Micro820). Se a senha no módulo de backup for diferente do módulo de memória de backup, então a operação de restauração falhará.
Compatibilidade O recurso de senha de controlador é suportado em:• Connected Components Workbench revisão 2 e posterior• Controladores Micro800 com firmware de revisão 2
Para usuários com versões anteriores do software e/ou hardware, consulte os casos de compatibilidade abaixo.
Connected Components Workbench revisão 1 com controlador Micro800 com revisão de firmware 2
Conexão a um controlador Micro800 com revisão de firmware 2 utilizando uma versão anterior do software Connected Components Workbench (revisão 1) é possível e as conexões serão bem-sucedidas. Porém, o software não será capaz de determinar se o controlador está bloqueado ou não.
Se o controlador não está bloqueado o acesso à aplicação do usuário será permitido, desde que o controlador não esteja ocupado com outra sessão. Se o controlador estiver bloqueado, o acesso à aplicação do usuário falhará. Usuários precisão atualizar a revisão do software Connected Components Workbench para a 2.
Connected Components Workbench revisão 2 com controlador Micro800 com revisão de firmware 1
O software Connected Components Workbench revisão 2 é capaz de “descobrir” e conectar-se a controladores Micro800 com revisão de firmware anterior à revisão 2 (ou seja, sem suporte ao recurso de senha de controlador). Porém, o recurso de senha de controlador não estará disponível para esses controladores. O usuário não será capaz de consultar interfaces associadas ao recurso de senha de controlador na sessão do software Connected Components Workbench.
Recomenda-se que os usuários atualizem o firmware. Consulte Atualize a memória flash do firmware do Micro800 na página 100 para obter instruções.
DICA Para obter instruções sobre como definir, trocar e excluir senhas do controlador, consulte Configure a senha do controlador na página 47.
44 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
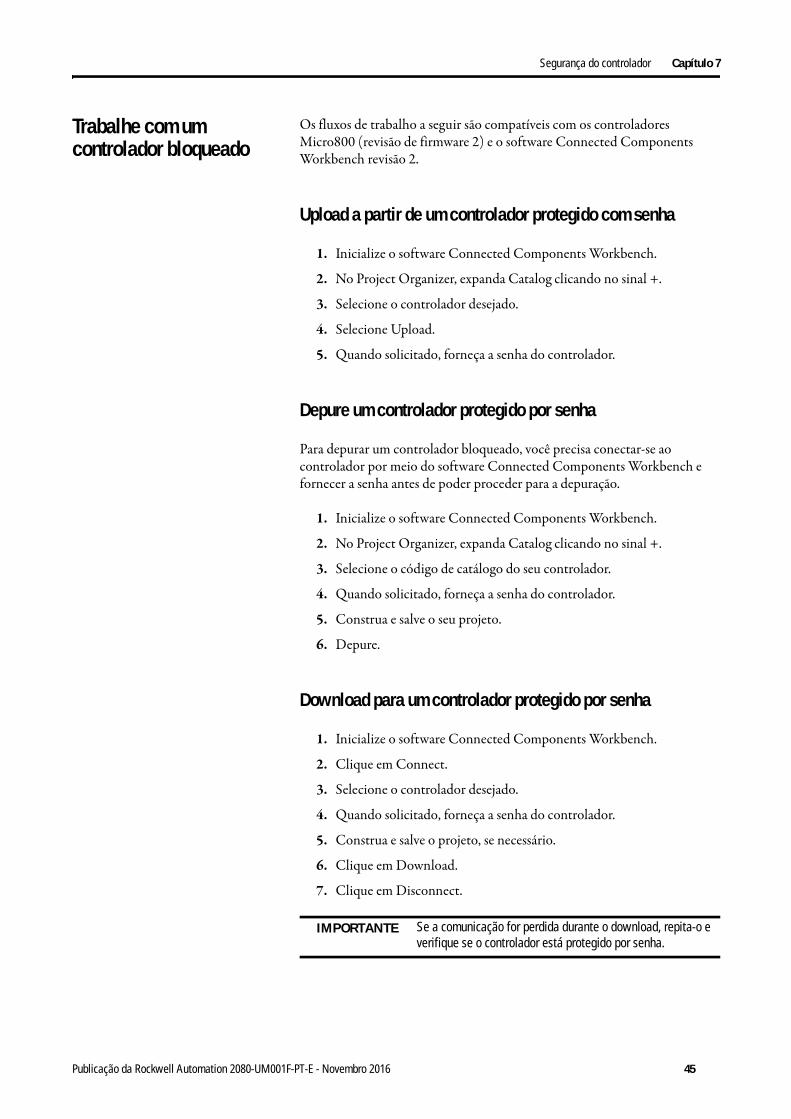
Segurança do controlador Capítulo 7
Trabalhe com um controlador bloqueado
Os fluxos de trabalho a seguir são compatíveis com os controladores Micro800 (revisão de firmware 2) e o software Connected Components Workbench revisão 2.
Upload a partir de um controlador protegido com senha
1. Inicialize o software Connected Components Workbench.
2. No Project Organizer, expanda Catalog clicando no sinal +.
3. Selecione o controlador desejado.
4. Selecione Upload.
5. Quando solicitado, forneça a senha do controlador.
Depure um controlador protegido por senha
Para depurar um controlador bloqueado, você precisa conectar-se ao controlador por meio do software Connected Components Workbench e fornecer a senha antes de poder proceder para a depuração.
1. Inicialize o software Connected Components Workbench.
2. No Project Organizer, expanda Catalog clicando no sinal +.
3. Selecione o código de catálogo do seu controlador.
4. Quando solicitado, forneça a senha do controlador.
5. Construa e salve o seu projeto.
6. Depure.
Download para um controlador protegido por senha
1. Inicialize o software Connected Components Workbench.
2. Clique em Connect.
3. Selecione o controlador desejado.
4. Quando solicitado, forneça a senha do controlador.
5. Construa e salve o projeto, se necessário.
6. Clique em Download.
7. Clique em Disconnect.
IMPORTANTE Se a comunicação for perdida durante o download, repita-o e verifique se o controlador está protegido por senha.
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 45
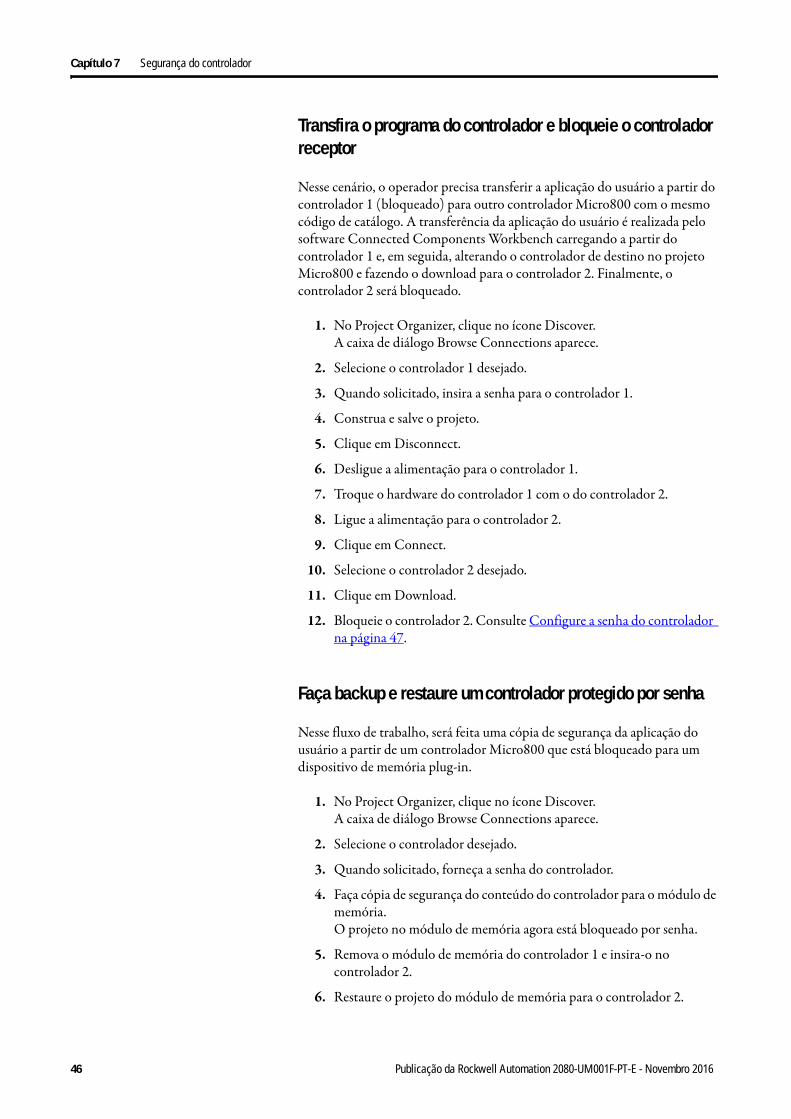
Capítulo 7 Segurança do controlador
Transfira o programa do controlador e bloqueie o controlador receptor
Nesse cenário, o operador precisa transferir a aplicação do usuário a partir do controlador 1 (bloqueado) para outro controlador Micro800 com o mesmo código de catálogo. A transferência da aplicação do usuário é realizada pelo software Connected Components Workbench carregando a partir do controlador 1 e, em seguida, alterando o controlador de destino no projeto Micro800 e fazendo o download para o controlador 2. Finalmente, o controlador 2 será bloqueado.
1. No Project Organizer, clique no ícone Discover.A caixa de diálogo Browse Connections aparece.
2. Selecione o controlador 1 desejado.
3. Quando solicitado, insira a senha para o controlador 1.
4. Construa e salve o projeto.
5. Clique em Disconnect.
6. Desligue a alimentação para o controlador 1.
7. Troque o hardware do controlador 1 com o do controlador 2.
8. Ligue a alimentação para o controlador 2.
9. Clique em Connect.
10. Selecione o controlador 2 desejado.
11. Clique em Download.
12. Bloqueie o controlador 2. Consulte Configure a senha do controlador na página 47.
Faça backup e restaure um controlador protegido por senha
Nesse fluxo de trabalho, será feita uma cópia de segurança da aplicação do usuário a partir de um controlador Micro800 que está bloqueado para um dispositivo de memória plug-in.
1. No Project Organizer, clique no ícone Discover.A caixa de diálogo Browse Connections aparece.
2. Selecione o controlador desejado.
3. Quando solicitado, forneça a senha do controlador.
4. Faça cópia de segurança do conteúdo do controlador para o módulo de memória.O projeto no módulo de memória agora está bloqueado por senha.
5. Remova o módulo de memória do controlador 1 e insira-o no controlador 2.
6. Restaure o projeto do módulo de memória para o controlador 2.
46 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
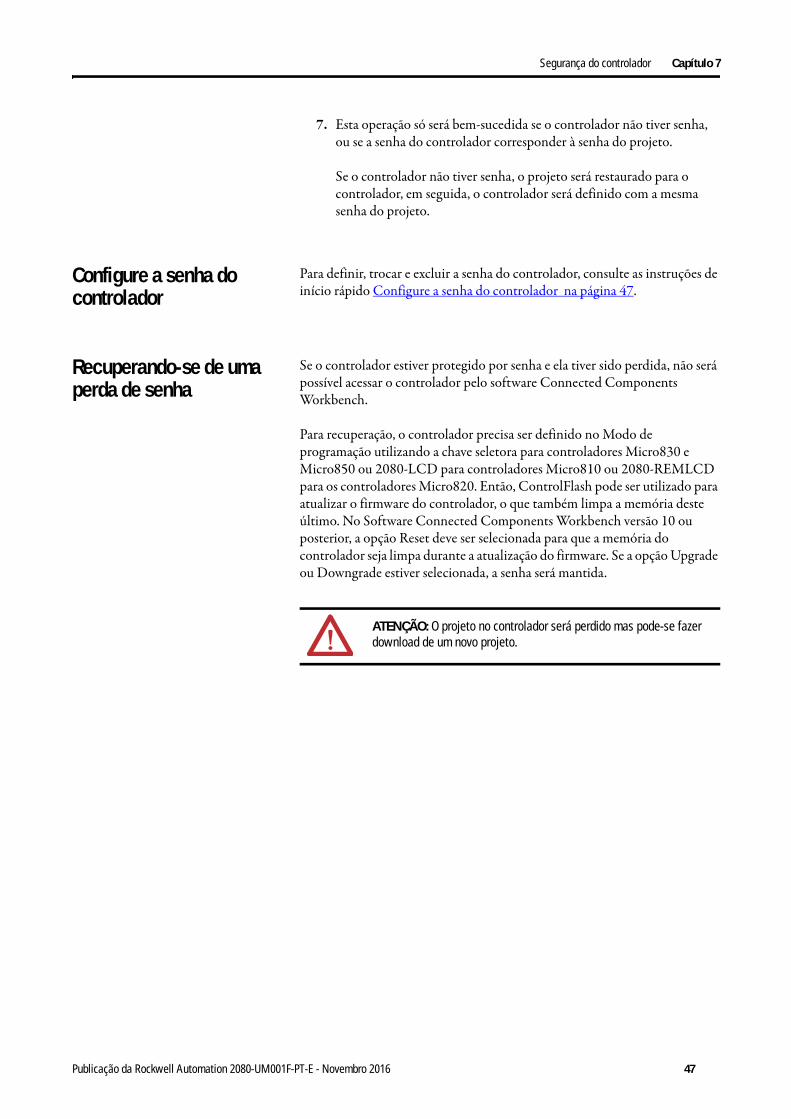
Segurança do controlador Capítulo 7
7. Esta operação só será bem-sucedida se o controlador não tiver senha, ou se a senha do controlador corresponder à senha do projeto.
Se o controlador não tiver senha, o projeto será restaurado para o controlador, em seguida, o controlador será definido com a mesma senha do projeto.
Configure a senha do controlador
Para definir, trocar e excluir a senha do controlador, consulte as instruções de início rápido Configure a senha do controlador na página 47.
Recuperando-se de uma perda de senha
Se o controlador estiver protegido por senha e ela tiver sido perdida, não será possível acessar o controlador pelo software Connected Components Workbench.
Para recuperação, o controlador precisa ser definido no Modo de programação utilizando a chave seletora para controladores Micro830 e Micro850 ou 2080-LCD para controladores Micro810 ou 2080-REMLCD para os controladores Micro820. Então, ControlFlash pode ser utilizado para atualizar o firmware do controlador, o que também limpa a memória deste último. No Software Connected Components Workbench versão 10 ou posterior, a opção Reset deve ser selecionada para que a memória do controlador seja limpa durante a atualização do firmware. Se a opção Upgrade ou Downgrade estiver selecionada, a senha será mantida.
ATENÇÃO: O projeto no controlador será perdido mas pode-se fazer download de um novo projeto.
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 47

Capítulo 7 Segurança do controlador
Notas:
48 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
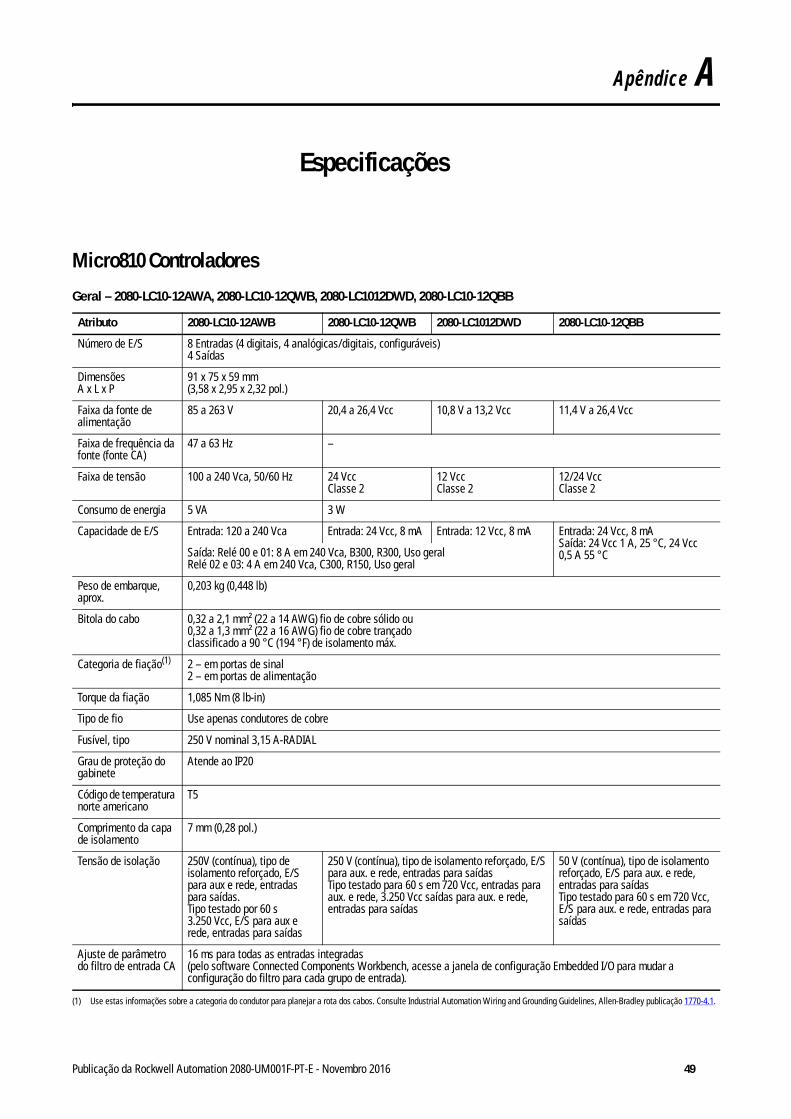
Apêndice A
Especificações
Micro810 Controladores
Geral – 2080-LC10-12AWA, 2080-LC10-12QWB, 2080-LC1012DWD, 2080-LC10-12QBB
Atributo 2080-LC10-12AWB 2080-LC10-12QWB 2080-LC1012DWD 2080-LC10-12QBB
Número de E/S 8 Entradas (4 digitais, 4 analógicas/digitais, configuráveis)4 Saídas
DimensõesA x L x P
91 x 75 x 59 mm(3,58 x 2,95 x 2,32 pol.)
Faixa da fonte de alimentação
85 a 263 V 20,4 a 26,4 Vcc 10,8 V a 13,2 Vcc 11,4 V a 26,4 Vcc
Faixa de frequência da fonte (fonte CA)
47 a 63 Hz –
Faixa de tensão 100 a 240 Vca, 50/60 Hz 24 VccClasse 2
12 VccClasse 2
12/24 VccClasse 2
Consumo de energia 5 VA 3 W
Capacidade de E/S Entrada: 120 a 240 Vca Entrada: 24 Vcc, 8 mA Entrada: 12 Vcc, 8 mA Entrada: 24 Vcc, 8 mASaída: 24 Vcc 1 A, 25 °C, 24 Vcc 0,5 A 55 °CSaída: Relé 00 e 01: 8 A em 240 Vca, B300, R300, Uso geral
Relé 02 e 03: 4 A em 240 Vca, C300, R150, Uso geral
Peso de embarque, aprox.
0,203 kg (0,448 lb)
Bitola do cabo 0,32 a 2,1 mm² (22 a 14 AWG) fio de cobre sólido ou 0,32 a 1,3 mm² (22 a 16 AWG) fio de cobre trançado classificado a 90 °C (194 °F) de isolamento máx.
Categoria de fiação(1) 2 – em portas de sinal2 – em portas de alimentação
Torque da fiação 1,085 Nm (8 lb-in)
Tipo de fio Use apenas condutores de cobre
Fusível, tipo 250 V nominal 3,15 A-RADIAL
Grau de proteção do gabinete
Atende ao IP20
Código de temperatura norte americano
T5
Comprimento da capa de isolamento
7 mm (0,28 pol.)
Tensão de isolação 250V (contínua), tipo de isolamento reforçado, E/S para aux e rede, entradas para saídas.Tipo testado por 60 s 3.250 Vcc, E/S para aux e rede, entradas para saídas
250 V (contínua), tipo de isolamento reforçado, E/S para aux. e rede, entradas para saídasTipo testado para 60 s em 720 Vcc, entradas para aux. e rede, 3.250 Vcc saídas para aux. e rede, entradas para saídas
50 V (contínua), tipo de isolamento reforçado, E/S para aux. e rede, entradas para saídasTipo testado para 60 s em 720 Vcc, E/S para aux. e rede, entradas para saídas
Ajuste de parâmetro do filtro de entrada CA
16 ms para todas as entradas integradas(pelo software Connected Components Workbench, acesse a janela de configuração Embedded I/O para mudar a configuração do filtro para cada grupo de entrada).
(1) Use estas informações sobre a categoria do condutor para planejar a rota dos cabos. Consulte Industrial Automation Wiring and Grounding Guidelines, Allen-Bradley publicação 1770-4.1.
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 49
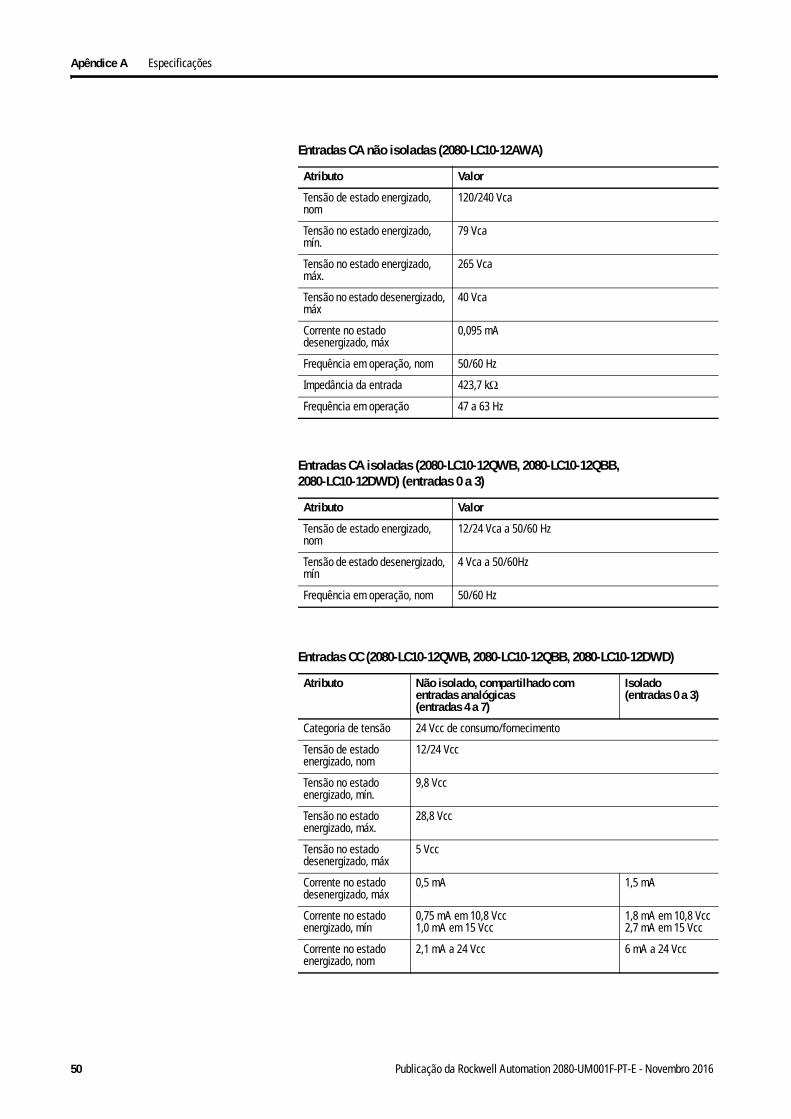
Apêndice A Especificações
Entradas CA não isoladas (2080-LC10-12AWA)
Atributo Valor
Tensão de estado energizado, nom
120/240 Vca
Tensão no estado energizado, mín.
79 Vca
Tensão no estado energizado, máx.
265 Vca
Tensão no estado desenergizado, máx
40 Vca
Corrente no estado desenergizado, máx
0,095 mA
Frequência em operação, nom 50/60 Hz
Impedância da entrada 423,7 kΩ
Frequência em operação 47 a 63 Hz
Entradas CA isoladas (2080-LC10-12QWB, 2080-LC10-12QBB, 2080-LC10-12DWD) (entradas 0 a 3)
Atributo Valor
Tensão de estado energizado, nom
12/24 Vca a 50/60 Hz
Tensão de estado desenergizado, mín
4 Vca a 50/60Hz
Frequência em operação, nom 50/60 Hz
Entradas CC (2080-LC10-12QWB, 2080-LC10-12QBB, 2080-LC10-12DWD)
Atributo Não isolado, compartilhado com entradas analógicas(entradas 4 a 7)
Isolado (entradas 0 a 3)
Categoria de tensão 24 Vcc de consumo/fornecimento
Tensão de estado energizado, nom
12/24 Vcc
Tensão no estado energizado, mín.
9,8 Vcc
Tensão no estado energizado, máx.
28,8 Vcc
Tensão no estado desenergizado, máx
5 Vcc
Corrente no estado desenergizado, máx
0,5 mA 1,5 mA
Corrente no estado energizado, mín
0,75 mA em 10,8 Vcc1,0 mA em 15 Vcc
1,8 mA em 10,8 Vcc2,7 mA em 15 Vcc
Corrente no estado energizado, nom
2,1 mA a 24 Vcc 6 mA a 24 Vcc
50 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
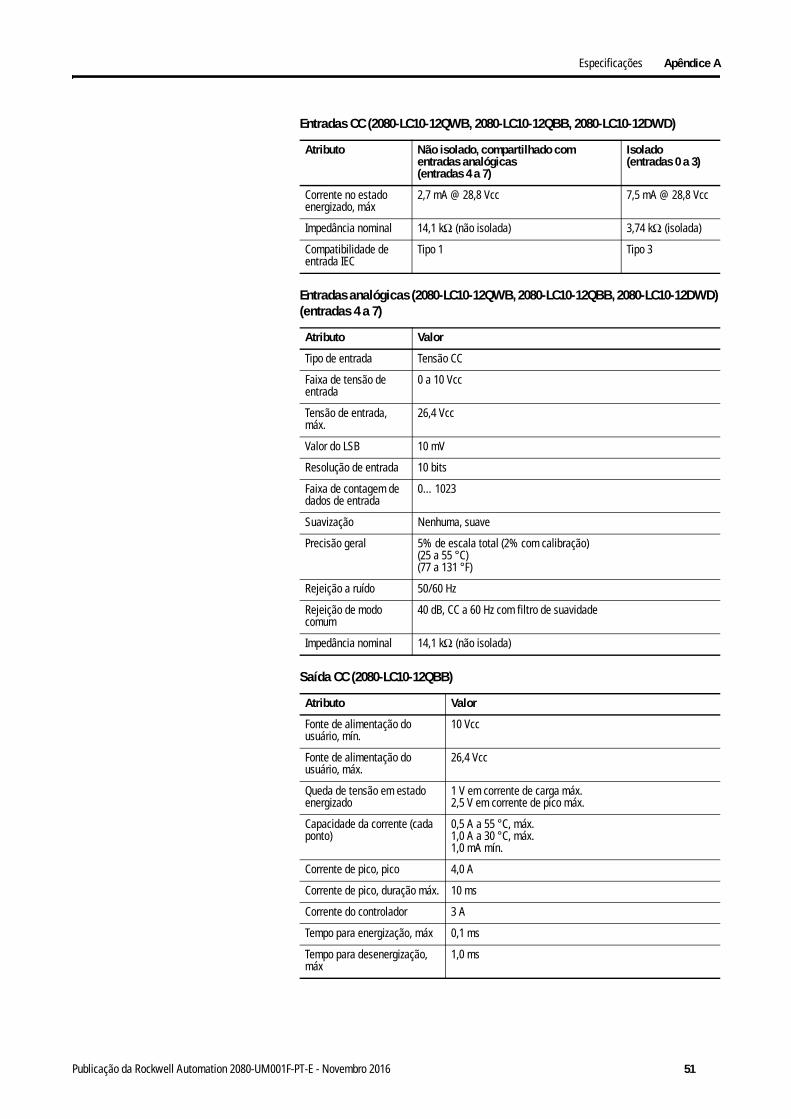
Especificações Apêndice A
Corrente no estado energizado, máx
2,7 mA @ 28,8 Vcc 7,5 mA @ 28,8 Vcc
Impedância nominal 14,1 kΩ (não isolada) 3,74 kΩ (isolada)
Compatibilidade de entrada IEC
Tipo 1 Tipo 3
Entradas analógicas (2080-LC10-12QWB, 2080-LC10-12QBB, 2080-LC10-12DWD) (entradas 4 a 7)
Atributo Valor
Tipo de entrada Tensão CC
Faixa de tensão de entrada
0 a 10 Vcc
Tensão de entrada, máx.
26,4 Vcc
Valor do LSB 10 mV
Resolução de entrada 10 bits
Faixa de contagem de dados de entrada
0…1023
Suavização Nenhuma, suave
Precisão geral 5% de escala total (2% com calibração)(25 a 55 °C)(77 a 131 °F)
Rejeição a ruído 50/60 Hz
Rejeição de modo comum
40 dB, CC a 60 Hz com filtro de suavidade
Impedância nominal 14,1 kΩ (não isolada)
Saída CC (2080-LC10-12QBB)
Atributo Valor
Fonte de alimentação do usuário, mín.
10 Vcc
Fonte de alimentação do usuário, máx.
26,4 Vcc
Queda de tensão em estado energizado
1 V em corrente de carga máx.2,5 V em corrente de pico máx.
Capacidade da corrente (cada ponto)
0,5 A a 55 °C, máx.1,0 A a 30 °C, máx.1,0 mA mín.
Corrente de pico, pico 4,0 A
Corrente de pico, duração máx. 10 ms
Corrente do controlador 3 A
Tempo para energização, máx 0,1 ms
Tempo para desenergização, máx
1,0 ms
Entradas CC (2080-LC10-12QWB, 2080-LC10-12QBB, 2080-LC10-12DWD)
Atributo Não isolado, compartilhado com entradas analógicas(entradas 4 a 7)
Isolado (entradas 0 a 3)
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 51
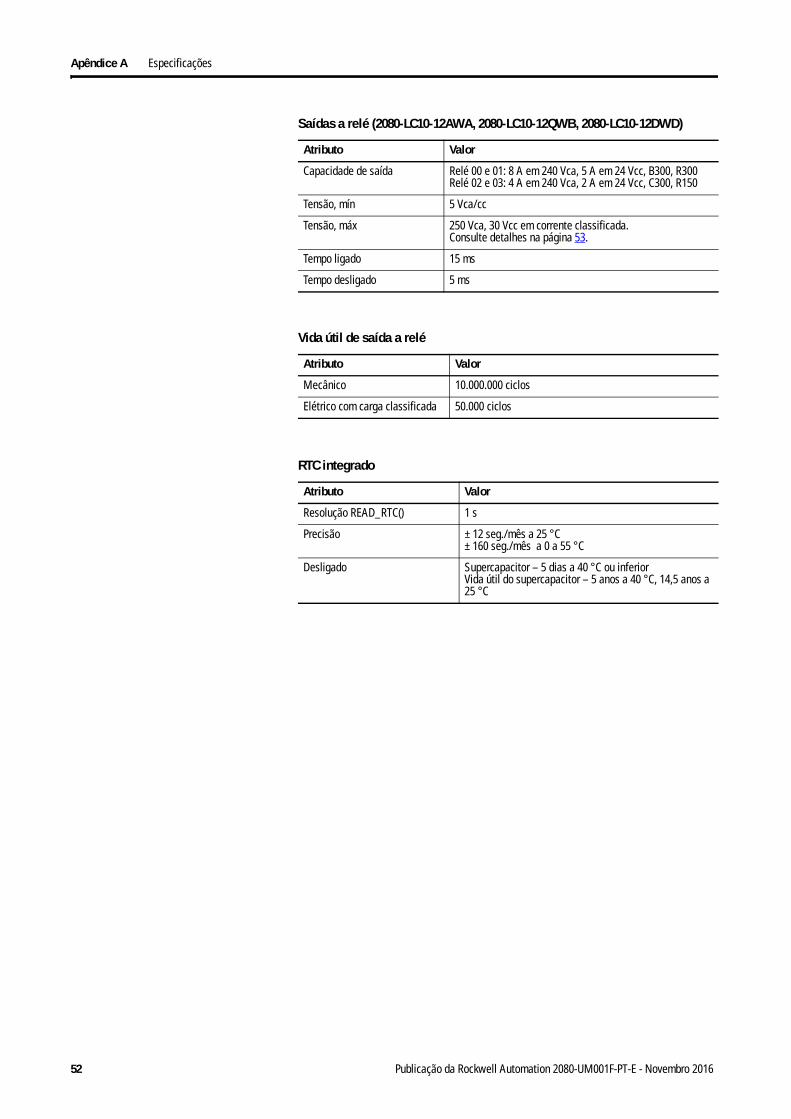
Apêndice A Especificações
Saídas a relé (2080-LC10-12AWA, 2080-LC10-12QWB, 2080-LC10-12DWD)
Atributo Valor
Capacidade de saída Relé 00 e 01: 8 A em 240 Vca, 5 A em 24 Vcc, B300, R300Relé 02 e 03: 4 A em 240 Vca, 2 A em 24 Vcc, C300, R150
Tensão, mín 5 Vca/cc
Tensão, máx 250 Vca, 30 Vcc em corrente classificada.Consulte detalhes na página 53.
Tempo ligado 15 ms
Tempo desligado 5 ms
Vida útil de saída a relé
Atributo Valor
Mecânico 10.000.000 ciclos
Elétrico com carga classificada 50.000 ciclos
RTC integrado
Atributo Valor
Resolução READ_RTC() 1 s
Precisão ± 12 seg./mês a 25 °C± 160 seg./mês a 0 a 55 °C
Desligado Supercapacitor – 5 dias a 40 °C ou inferior Vida útil do supercapacitor – 5 anos a 40 °C, 14,5 anos a 25 °C
52 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
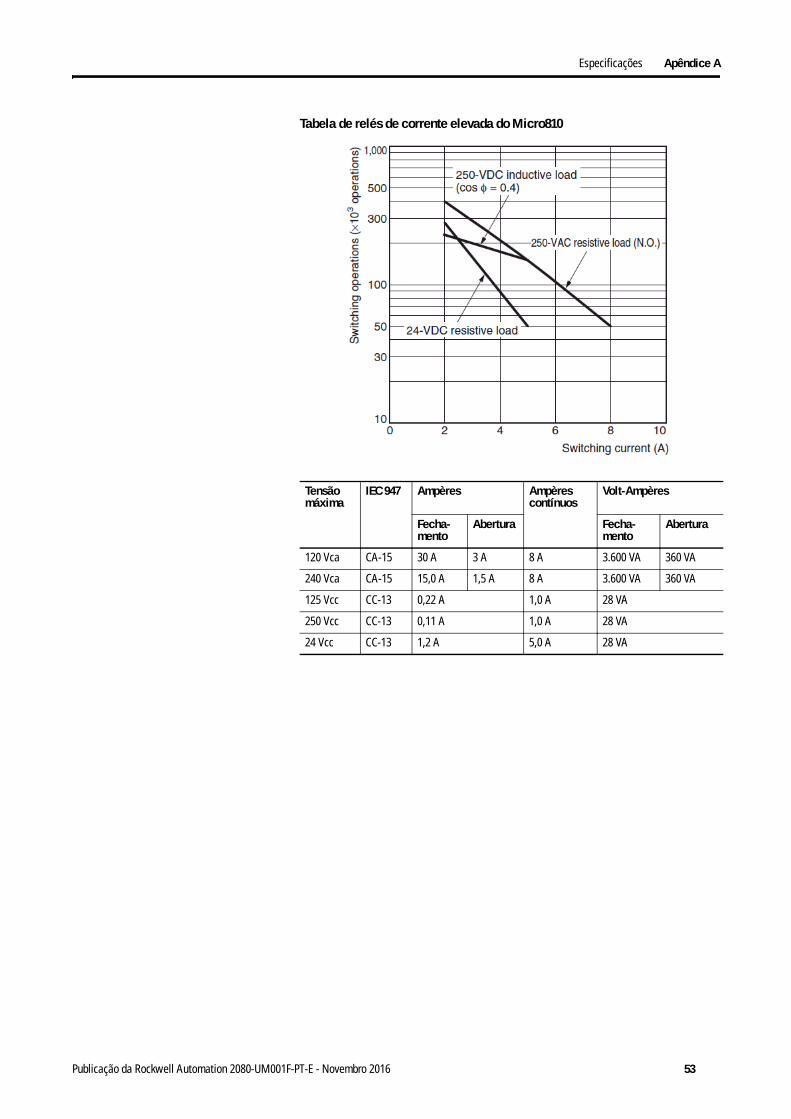
Especificações Apêndice A
Tabela de relés de corrente elevada do Micro810
Tensão máxima
IEC 947 Ampères Ampères contínuos
Volt-Ampères
Fecha-mento
Abertura Fecha-mento
Abertura
120 Vca CA-15 30 A 3 A 8 A 3.600 VA 360 VA
240 Vca CA-15 15,0 A 1,5 A 8 A 3.600 VA 360 VA
125 Vcc CC-13 0,22 A 1,0 A 28 VA
250 Vcc CC-13 0,11 A 1,0 A 28 VA
24 Vcc CC-13 1,2 A 5,0 A 28 VA
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 53
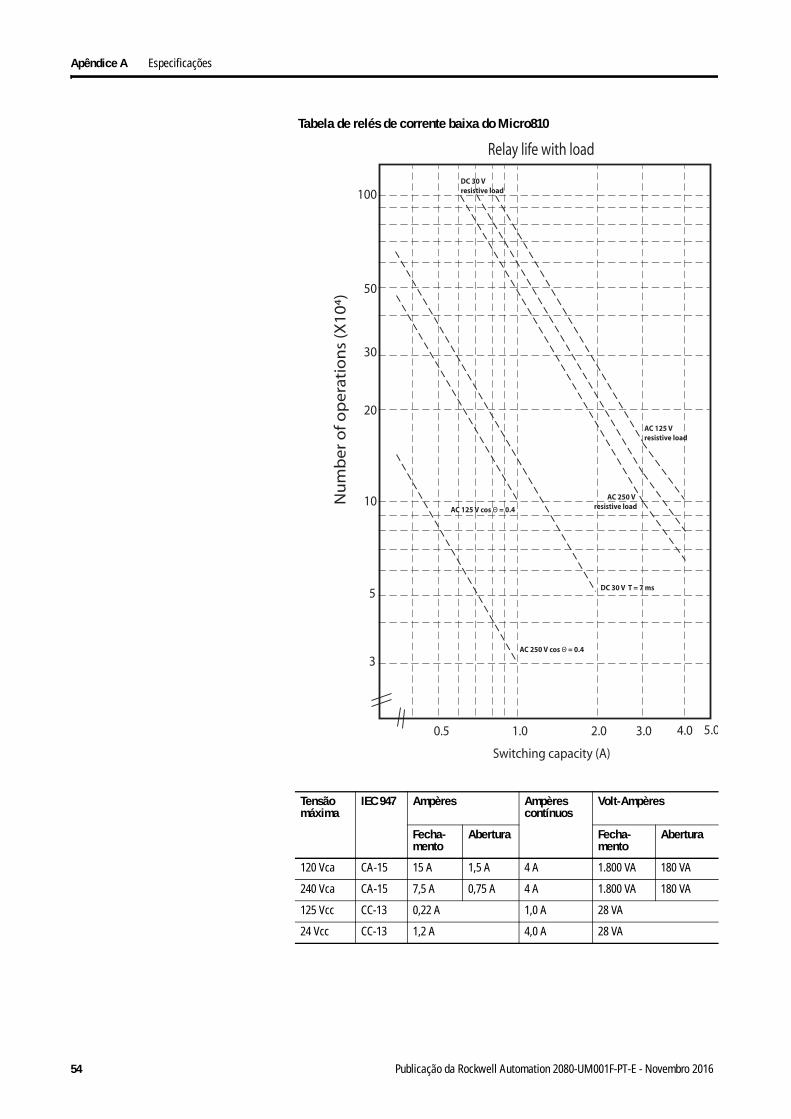
Apêndice A Especificações
Tabela de relés de corrente baixa do Micro810
Tensão máxima
IEC 947 Ampères Ampères contínuos
Volt-Ampères
Fecha-mento
Abertura Fecha-mento
Abertura
120 Vca CA-15 15 A 1,5 A 4 A 1.800 VA 180 VA
240 Vca CA-15 7,5 A 0,75 A 4 A 1.800 VA 180 VA
125 Vcc CC-13 0,22 A 1,0 A 28 VA
24 Vcc CC-13 1,2 A 4,0 A 28 VA
AC 250 V cos Θ = 0.4
AC 125 V cos Θ = 0.4
AC 125 V resistive load
DC 30 V T = 7 ms
0.5 1.0 2.0 3.0
5
3
10
20
30
50
100
Switching capacity (A)
Nu
mb
er o
f o
per
atio
ns
(X1
04)
Relay life with load
4.0 5.0
DC 30 V resistive load
AC 250 V resistive load
54 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
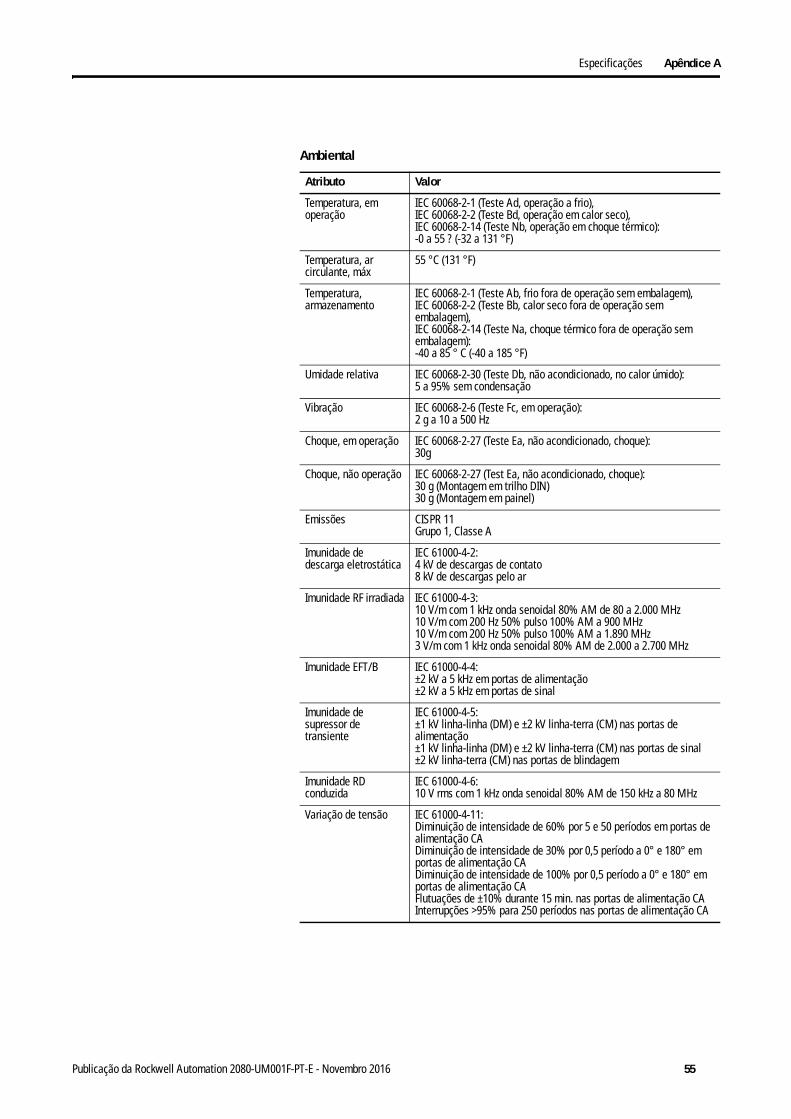
Especificações Apêndice A
Ambiental
Atributo Valor
Temperatura, em operação
IEC 60068-2-1 (Teste Ad, operação a frio),IEC 60068-2-2 (Teste Bd, operação em calor seco),IEC 60068-2-14 (Teste Nb, operação em choque térmico):-0 a 55 ? (-32 a 131 °F)
Temperatura, ar circulante, máx
55 °C (131 °F)
Temperatura, armazenamento
IEC 60068-2-1 (Teste Ab, frio fora de operação sem embalagem),IEC 60068-2-2 (Teste Bb, calor seco fora de operação sem embalagem),IEC 60068-2-14 (Teste Na, choque térmico fora de operação sem embalagem):-40 a 85 ° C (-40 a 185 °F)
Umidade relativa IEC 60068-2-30 (Teste Db, não acondicionado, no calor úmido):5 a 95% sem condensação
Vibração IEC 60068-2-6 (Teste Fc, em operação):2 g a 10 a 500 Hz
Choque, em operação IEC 60068-2-27 (Teste Ea, não acondicionado, choque):30g
Choque, não operação IEC 60068-2-27 (Test Ea, não acondicionado, choque):30 g (Montagem em trilho DIN)30 g (Montagem em painel)
Emissões CISPR 11Grupo 1, Classe A
Imunidade de descarga eletrostática
IEC 61000-4-2:4 kV de descargas de contato8 kV de descargas pelo ar
Imunidade RF irradiada IEC 61000-4-3:10 V/m com 1 kHz onda senoidal 80% AM de 80 a 2.000 MHz10 V/m com 200 Hz 50% pulso 100% AM a 900 MHz10 V/m com 200 Hz 50% pulso 100% AM a 1.890 MHz3 V/m com 1 kHz onda senoidal 80% AM de 2.000 a 2.700 MHz
Imunidade EFT/B IEC 61000-4-4:±2 kV a 5 kHz em portas de alimentação±2 kV a 5 kHz em portas de sinal
Imunidade de supressor de transiente
IEC 61000-4-5:±1 kV linha-linha (DM) e ±2 kV linha-terra (CM) nas portas de alimentação±1 kV linha-linha (DM) e ±2 kV linha-terra (CM) nas portas de sinal±2 kV linha-terra (CM) nas portas de blindagem
Imunidade RD conduzida
IEC 61000-4-6:10 V rms com 1 kHz onda senoidal 80% AM de 150 kHz a 80 MHz
Variação de tensão IEC 61000-4-11:Diminuição de intensidade de 60% por 5 e 50 períodos em portas de alimentação CADiminuição de intensidade de 30% por 0,5 período a 0° e 180° em portas de alimentação CADiminuição de intensidade de 100% por 0,5 período a 0° e 180° em portas de alimentação CAFlutuações de ±10% durante 15 min. nas portas de alimentação CAInterrupções >95% para 250 períodos nas portas de alimentação CA
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 55
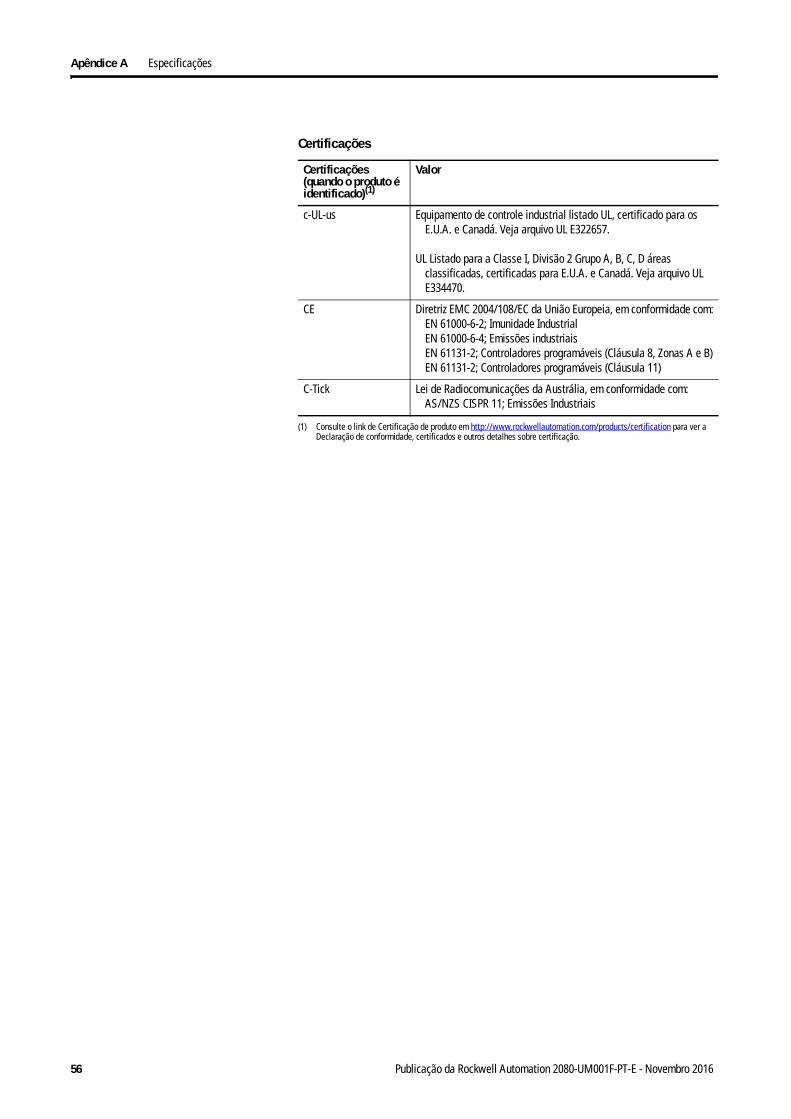
Apêndice A Especificações
Certificações
Certificações (quando o produto é identificado)(1)
(1) Consulte o link de Certificação de produto em http://www.rockwellautomation.com/products/certification para ver a Declaração de conformidade, certificados e outros detalhes sobre certificação.
Valor
c-UL-us Equipamento de controle industrial listado UL, certificado para os E.U.A. e Canadá. Veja arquivo UL E322657.
UL Listado para a Classe I, Divisão 2 Grupo A, B, C, D áreas classificadas, certificadas para E.U.A. e Canadá. Veja arquivo UL E334470.
CE Diretriz EMC 2004/108/EC da União Europeia, em conformidade com:EN 61000-6-2; Imunidade IndustrialEN 61000-6-4; Emissões industriaisEN 61131-2; Controladores programáveis (Cláusula 8, Zonas A e B)EN 61131-2; Controladores programáveis (Cláusula 11)
C-Tick Lei de Radiocomunicações da Austrália, em conformidade com:AS/NZS CISPR 11; Emissões Industriais
56 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
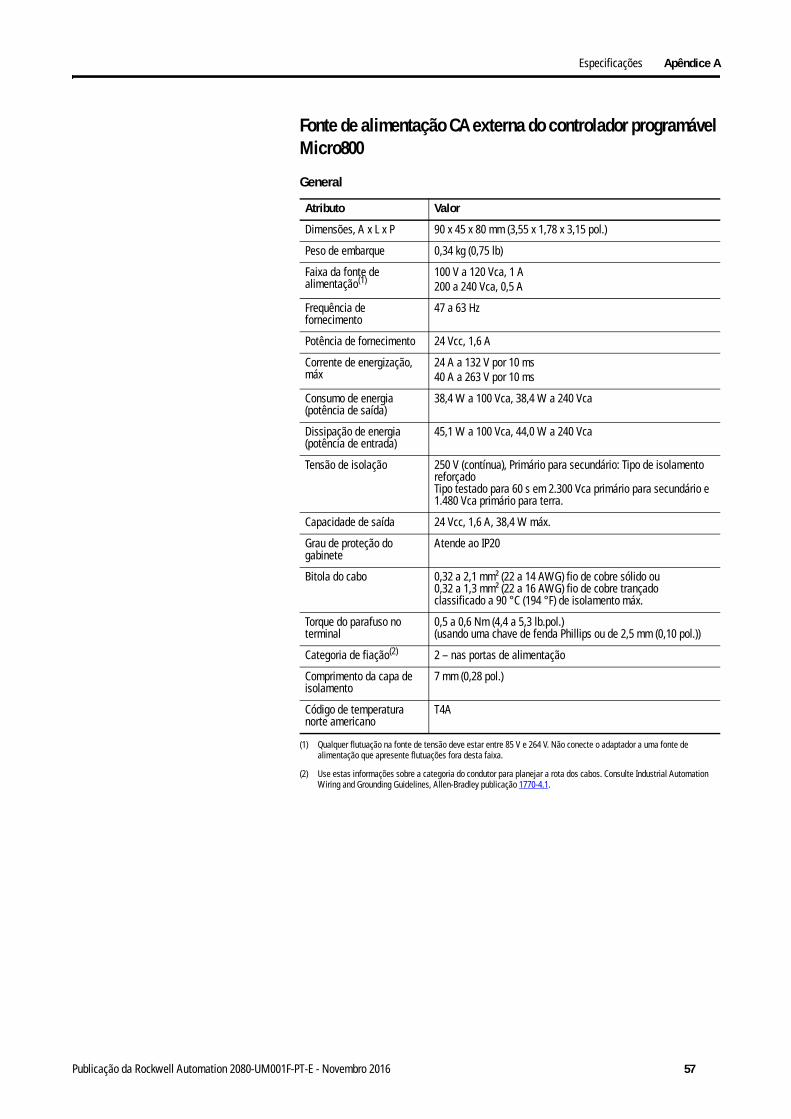
Especificações Apêndice A
Fonte de alimentação CA externa do controlador programável Micro800
General
Atributo Valor
Dimensões, A x L x P 90 x 45 x 80 mm (3,55 x 1,78 x 3,15 pol.)
Peso de embarque 0,34 kg (0,75 lb)
Faixa da fonte de alimentação(1)
(1) Qualquer flutuação na fonte de tensão deve estar entre 85 V e 264 V. Não conecte o adaptador a uma fonte de alimentação que apresente flutuações fora desta faixa.
100 V a 120 Vca, 1 A200 a 240 Vca, 0,5 A
Frequência de fornecimento
47 a 63 Hz
Potência de fornecimento 24 Vcc, 1,6 A
Corrente de energização, máx
24 A a 132 V por 10 ms40 A a 263 V por 10 ms
Consumo de energia (potência de saída)
38,4 W a 100 Vca, 38,4 W a 240 Vca
Dissipação de energia (potência de entrada)
45,1 W a 100 Vca, 44,0 W a 240 Vca
Tensão de isolação 250 V (contínua), Primário para secundário: Tipo de isolamento reforçadoTipo testado para 60 s em 2.300 Vca primário para secundário e 1.480 Vca primário para terra.
Capacidade de saída 24 Vcc, 1,6 A, 38,4 W máx.
Grau de proteção do gabinete
Atende ao IP20
Bitola do cabo 0,32 a 2,1 mm² (22 a 14 AWG) fio de cobre sólido ou 0,32 a 1,3 mm² (22 a 16 AWG) fio de cobre trançado classificado a 90 °C (194 °F) de isolamento máx.
Torque do parafuso no terminal
0,5 a 0,6 Nm (4,4 a 5,3 lb.pol.) (usando uma chave de fenda Phillips ou de 2,5 mm (0,10 pol.))
Categoria de fiação(2)
(2) Use estas informações sobre a categoria do condutor para planejar a rota dos cabos. Consulte Industrial Automation Wiring and Grounding Guidelines, Allen-Bradley publicação 1770-4.1.
2 – nas portas de alimentação
Comprimento da capa de isolamento
7 mm (0,28 pol.)
Código de temperatura norte americano
T4A
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 57

Apêndice A Especificações
Notas:
58 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
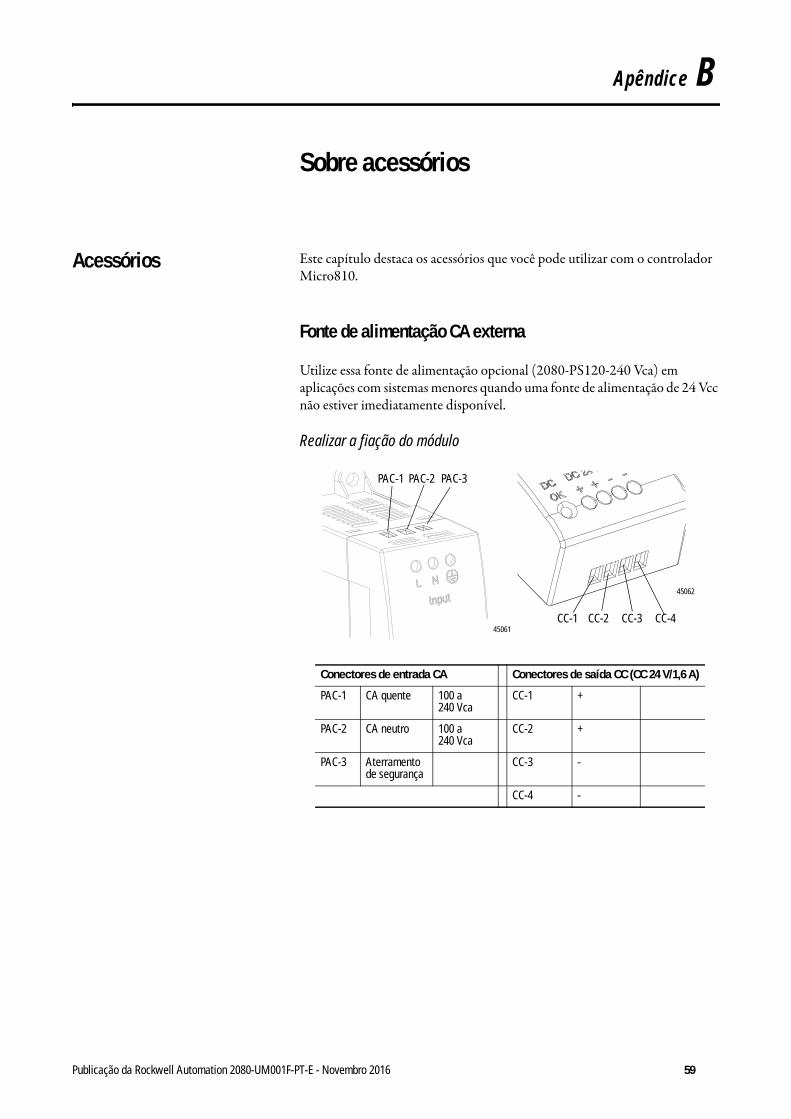
Apêndice B
Sobre acessórios
Acessórios Este capítulo destaca os acessórios que você pode utilizar com o controlador Micro810.
Fonte de alimentação CA externa
Utilize essa fonte de alimentação opcional (2080-PS120-240 Vca) em aplicações com sistemas menores quando uma fonte de alimentação de 24 Vcc não estiver imediatamente disponível.
Realizar a fiação do módulo
PAC-1 PAC-2 PAC-3
CC-1 CC-2 CC-3 CC-4
Conectores de entrada CA Conectores de saída CC (CC 24 V/1,6 A)
PAC-1 CA quente 100 a 240 Vca
CC-1 +
PAC-2 CA neutro 100 a 240 Vca
CC-2 +
PAC-3 Aterramento de segurança
CC-3 -
CC-4 -
45061
45062
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 59
Capítulo B Sobre acessórios
Tela de cristal líquido de 1,5 pol. e módulo de teclado
Esse módulo (2080-LCD) também funciona como um módulo de memória de backup para o controlador Micro810.
Esse módulo oferece um método simples e a um preço acessível de visualizar o status e de configurar o controlador Micro810. Com esse módulo de tela de cristal líquido, você também pode modificar blocos de funções de relé inteligente essenciais.
As instruções da tela de cristal líquido podem ser utilizadas para exibir mensagens personalizadas assim como para leitura de sequências de teclas.
Esse módulo pode ser inserido ou removido quando a alimentação é aplicada ao controlador, mas somente em áreas não classificadas. Certifique-se de que a alimentação foi removida ou de que a área seja não classificada antes de continuar.
Insira o módulo de tela de cristal líquido
1. Remova a placa que tampa o vão.
2. Empurre o módulo de tela de cristal líquido até que se encaixe em cima e embaixo.
Remova o módulo de tela de cristal líquido
1. Pressione as travas superior e inferior, então puxe para fora primeiramente a parte superior, depois a inferior.
ATTENTION: Certifique-se de inserir ou remover totalmente o módulo LCD, de outra forma, o controlador pode falhar.
60 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
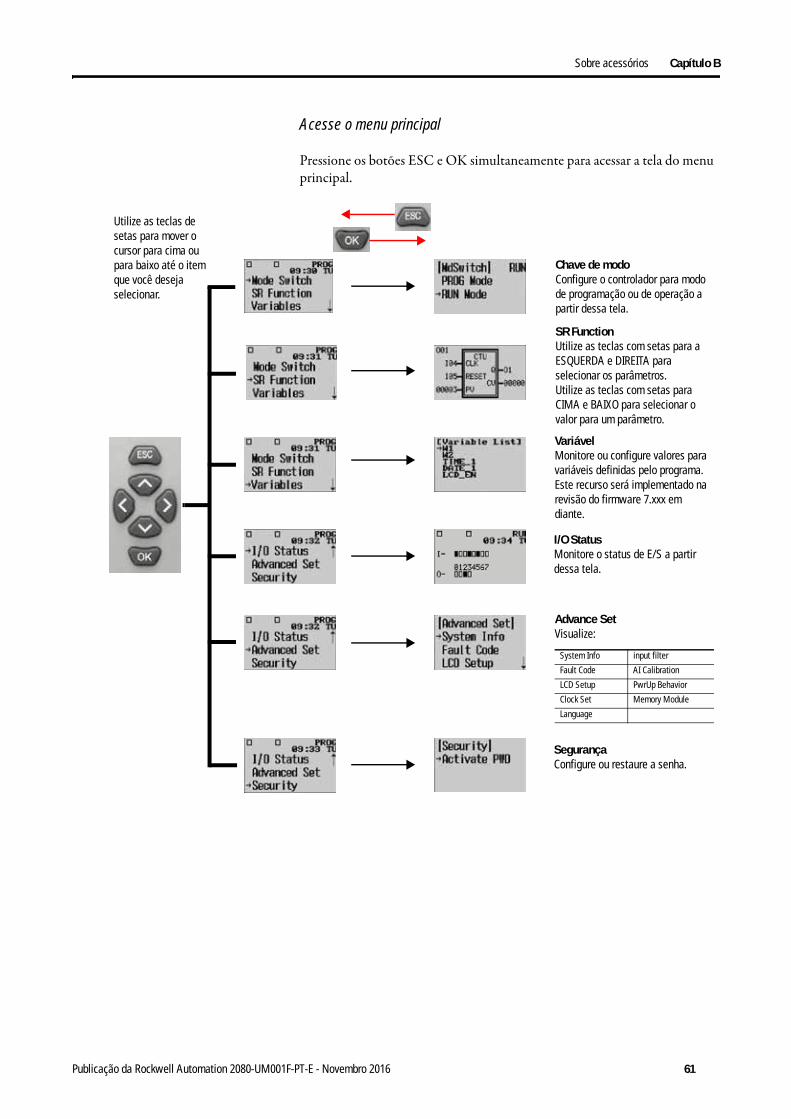
Sobre acessórios Capítulo B
Acesse o menu principal
Pressione os botões ESC e OK simultaneamente para acessar a tela do menu principal.
Utilize as teclas de setas para mover o cursor para cima ou para baixo até o item que você deseja selecionar.
SR FunctionUtilize as teclas com setas para a ESQUERDA e DIREITA para selecionar os parâmetros.Utilize as teclas com setas para CIMA e BAIXO para selecionar o valor para um parâmetro.
VariávelMonitore ou configure valores para variáveis definidas pelo programa. Este recurso será implementado na revisão do firmware 7.xxx em diante.
I/O StatusMonitore o status de E/S a partir dessa tela.
Chave de modoConfigure o controlador para modo de programação ou de operação a partir dessa tela.
Advance SetVisualize:
System Info input filter
Fault Code AI Calibration
LCD Setup PwrUp Behavior
Clock Set Memory Module
Language
SegurançaConfigure ou restaure a senha.
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 61
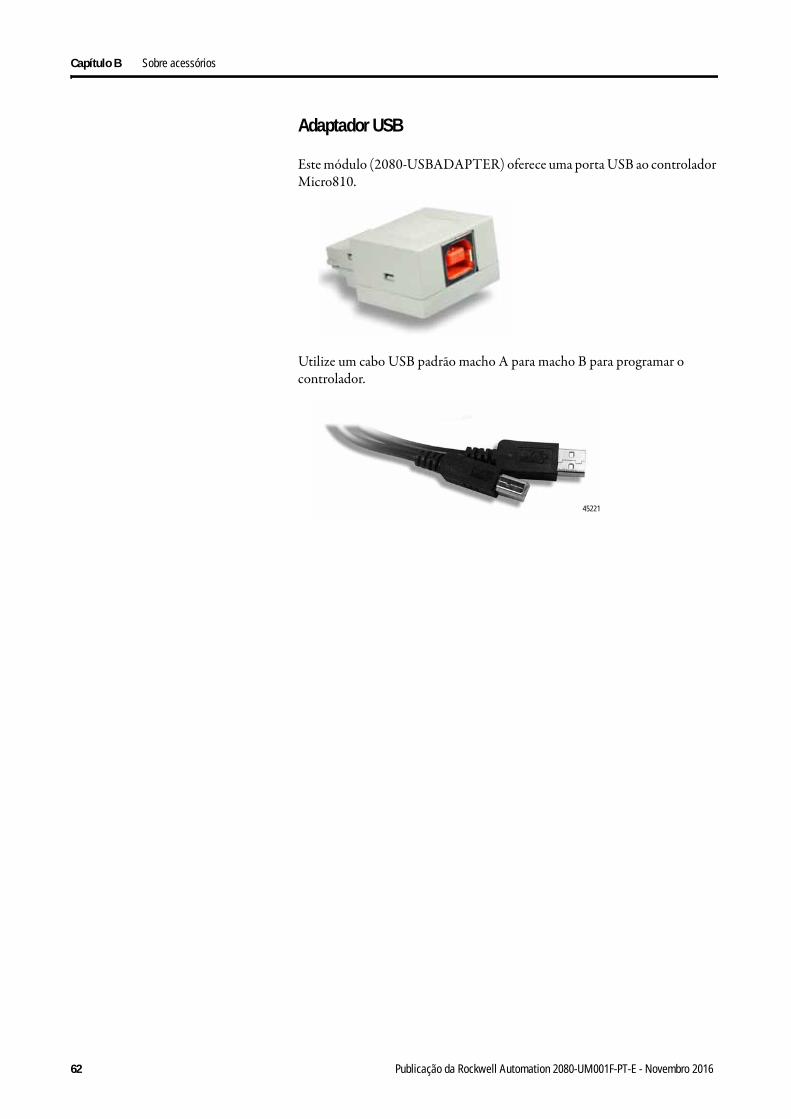
Capítulo B Sobre acessórios
Adaptador USB
Este módulo (2080-USBADAPTER) oferece uma porta USB ao controlador Micro810.
Utilize um cabo USB padrão macho A para macho B para programar o controlador.
45221
62 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
Apêndice C
Inícios rápidos
Este apêndice cobre algumas tarefas comuns para o controlador Micro810. Inclui as seguintes instruções de início rápido:
Configure a senha do LCD As configurações do relé de função do Micro810, que podem ser acessadas por meio do LCD, podem ser protegidas pro senha. A senha consiste em um valor entre 00000001 e 99999999.
Proteção por senha bloqueia acesso ao menu do sistema e portanto oferece proteção contra os seguintes eventos:
• modificação dos parâmetros do relé de função• modificação entre os modos de operação ou parada.• configurações do relógio em tempo real• comunicação com dispositivo individual• modificação dos parâmetros de sistema
– configuração de nova senha– seleção do idioma do menu – filtro de entrada– AI Calibration – comportamento de energização– Memory Module
Ative a senha
As senhas podem ser definidas no menu do sistema em ambos os modos de operação ou de parada. Todavia, se uma senha já tiver sido ativada, você não poderá acessar a maioria dos itens do menu do sistema, a não ser que você desative a senha.
Tópico Página
Configure a senha do LCD 63
Configure a senha do controlador 67
Utilize a função de relé inteligente do Micro810 72
Atualize a memória flash do firmware do Micro800 100
Estabelecendo comunicação entre o RSLinx e um controlador Micro810 de 12 pontos via USB
103
Forçando E/S 104
DICA A combinação numérica 00000000 é utilizada para apagar a senha.
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 63
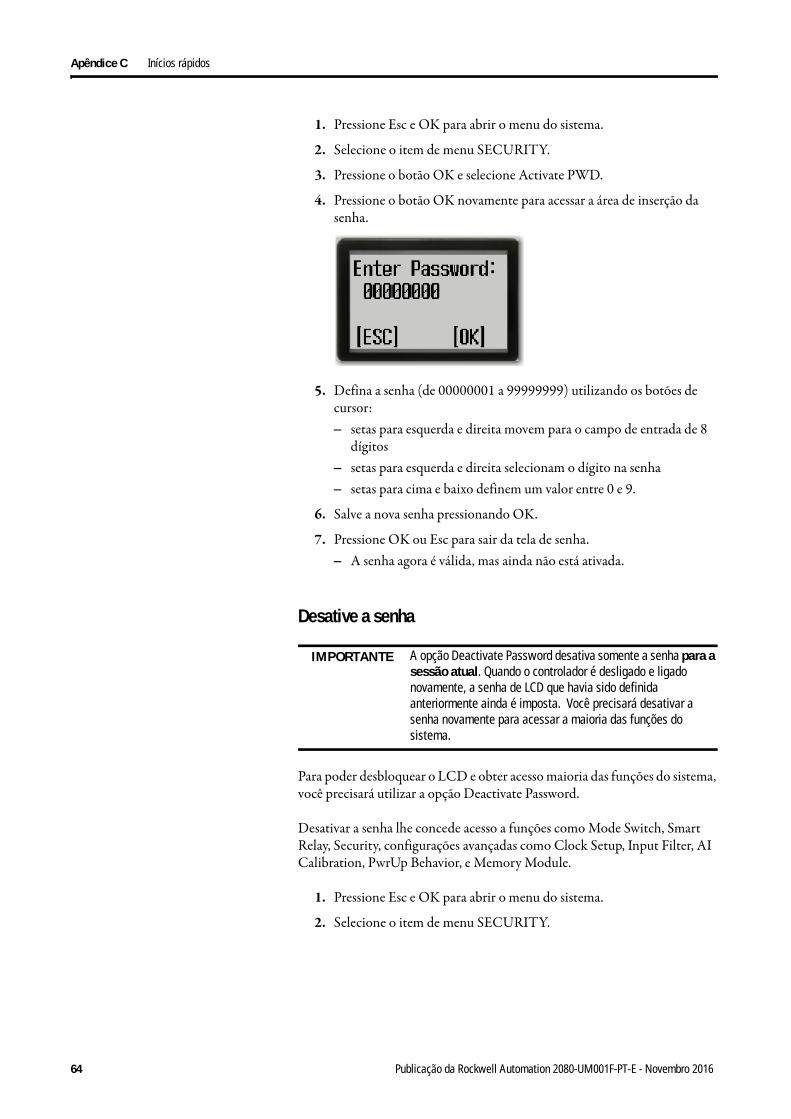
Apêndice C Inícios rápidos
1. Pressione Esc e OK para abrir o menu do sistema.
2. Selecione o item de menu SECURITY.
3. Pressione o botão OK e selecione Activate PWD.
4. Pressione o botão OK novamente para acessar a área de inserção da senha.
5. Defina a senha (de 00000001 a 99999999) utilizando os botões de cursor:– setas para esquerda e direita movem para o campo de entrada de 8
dígitos– setas para esquerda e direita selecionam o dígito na senha– setas para cima e baixo definem um valor entre 0 e 9.
6. Salve a nova senha pressionando OK.
7. Pressione OK ou Esc para sair da tela de senha.– A senha agora é válida, mas ainda não está ativada.
Desative a senha
Para poder desbloquear o LCD e obter acesso maioria das funções do sistema, você precisará utilizar a opção Deactivate Password.
Desativar a senha lhe concede acesso a funções como Mode Switch, Smart Relay, Security, configurações avançadas como Clock Setup, Input Filter, AI Calibration, PwrUp Behavior, e Memory Module.
1. Pressione Esc e OK para abrir o menu do sistema.
2. Selecione o item de menu SECURITY.
IMPORTANTE A opção Deactivate Password desativa somente a senha para a sessão atual. Quando o controlador é desligado e ligado novamente, a senha de LCD que havia sido definida anteriormente ainda é imposta. Você precisará desativar a senha novamente para acessar a maioria das funções do sistema.
64 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
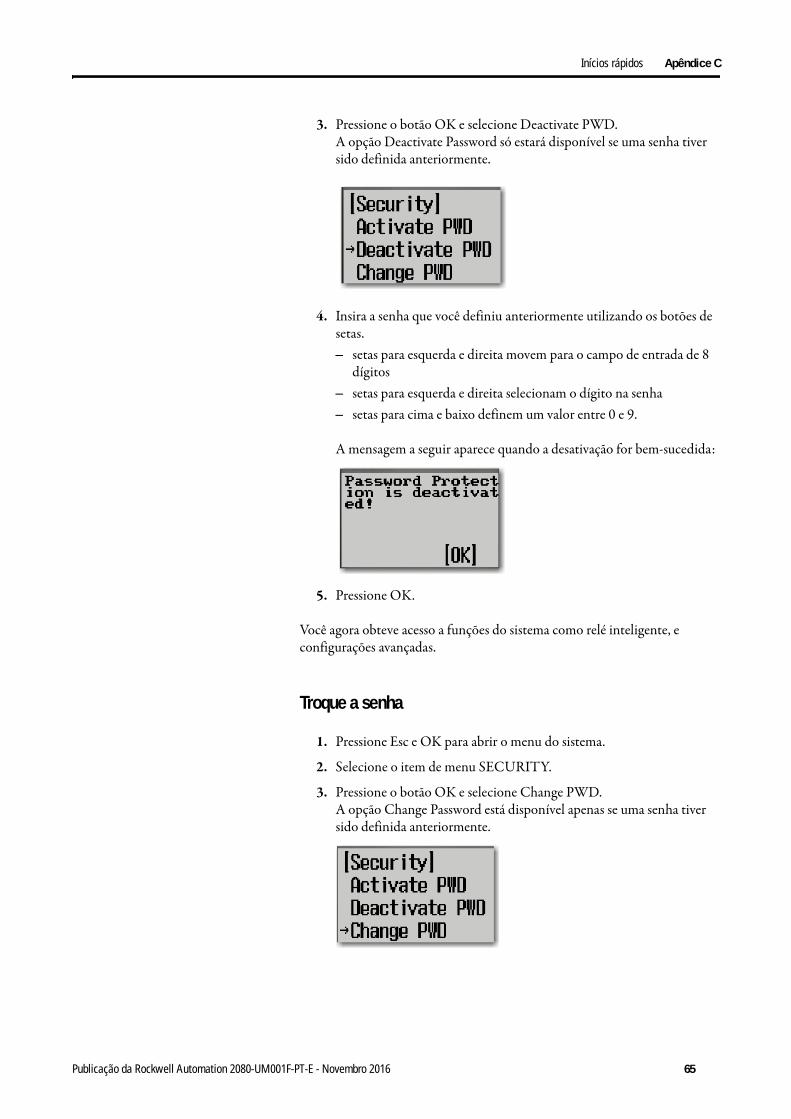
Inícios rápidos Apêndice C
3. Pressione o botão OK e selecione Deactivate PWD.A opção Deactivate Password só estará disponível se uma senha tiver sido definida anteriormente.
4. Insira a senha que você definiu anteriormente utilizando os botões de setas. – setas para esquerda e direita movem para o campo de entrada de 8
dígitos– setas para esquerda e direita selecionam o dígito na senha– setas para cima e baixo definem um valor entre 0 e 9.
A mensagem a seguir aparece quando a desativação for bem-sucedida:
5. Pressione OK.
Você agora obteve acesso a funções do sistema como relé inteligente, e configurações avançadas.
Troque a senha
1. Pressione Esc e OK para abrir o menu do sistema.
2. Selecione o item de menu SECURITY.
3. Pressione o botão OK e selecione Change PWD.A opção Change Password está disponível apenas se uma senha tiver sido definida anteriormente.
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 65
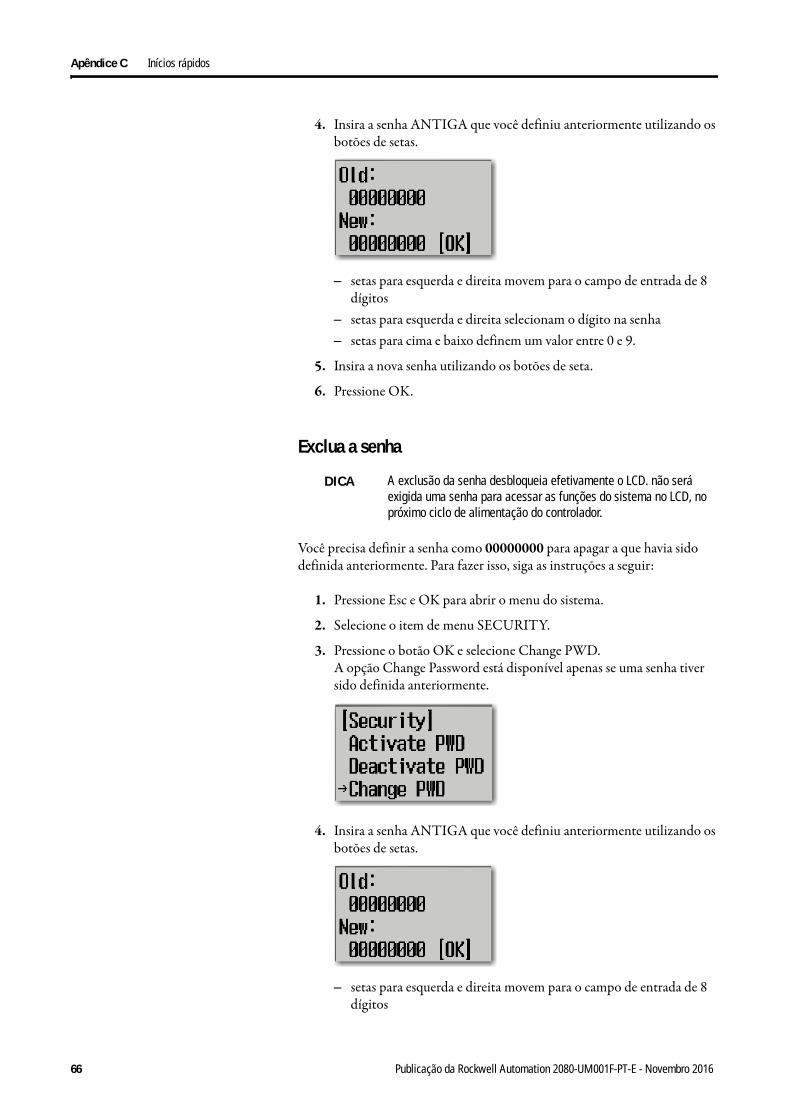
Apêndice C Inícios rápidos
4. Insira a senha ANTIGA que você definiu anteriormente utilizando os botões de setas.
– setas para esquerda e direita movem para o campo de entrada de 8 dígitos
– setas para esquerda e direita selecionam o dígito na senha– setas para cima e baixo definem um valor entre 0 e 9.
5. Insira a nova senha utilizando os botões de seta.
6. Pressione OK.
Exclua a senha
Você precisa definir a senha como 00000000 para apagar a que havia sido definida anteriormente. Para fazer isso, siga as instruções a seguir:
1. Pressione Esc e OK para abrir o menu do sistema.
2. Selecione o item de menu SECURITY.
3. Pressione o botão OK e selecione Change PWD.A opção Change Password está disponível apenas se uma senha tiver sido definida anteriormente.
4. Insira a senha ANTIGA que você definiu anteriormente utilizando os botões de setas.
– setas para esquerda e direita movem para o campo de entrada de 8 dígitos
DICA A exclusão da senha desbloqueia efetivamente o LCD. não será exigida uma senha para acessar as funções do sistema no LCD, no próximo ciclo de alimentação do controlador.
66 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
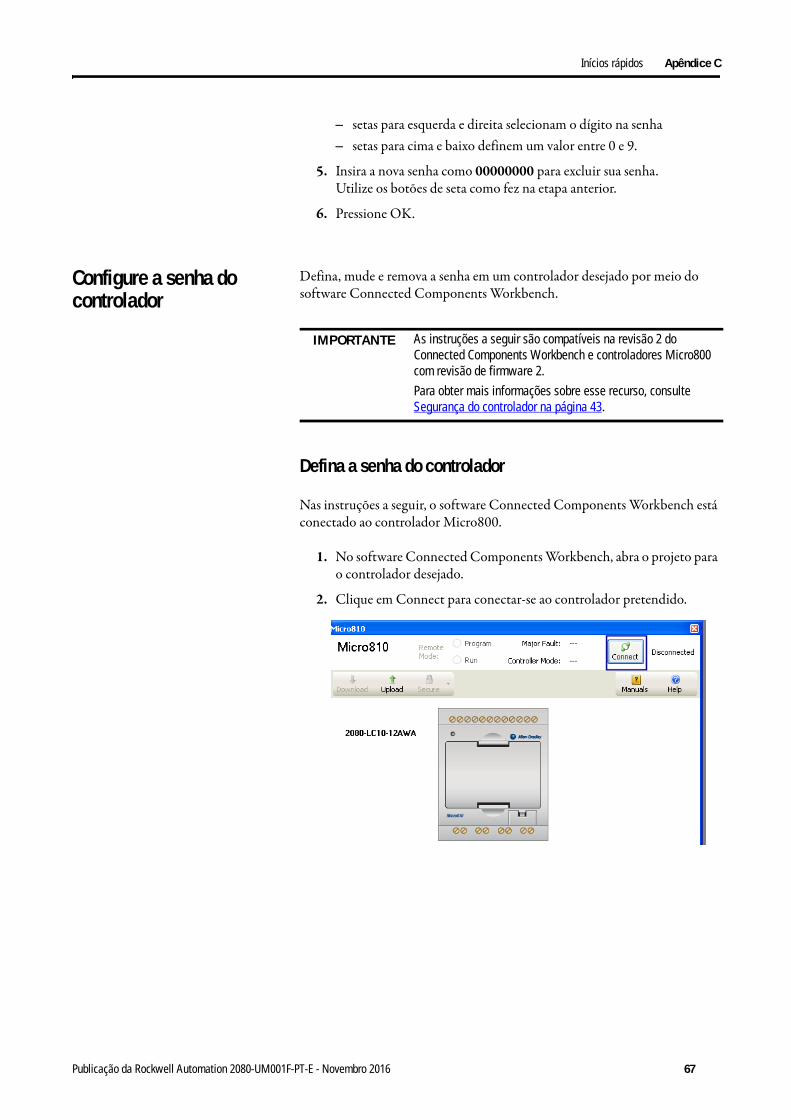
Inícios rápidos Apêndice C
– setas para esquerda e direita selecionam o dígito na senha– setas para cima e baixo definem um valor entre 0 e 9.
5. Insira a nova senha como 00000000 para excluir sua senha. Utilize os botões de seta como fez na etapa anterior.
6. Pressione OK.
Configure a senha do controlador
Defina, mude e remova a senha em um controlador desejado por meio do software Connected Components Workbench.
Defina a senha do controlador
Nas instruções a seguir, o software Connected Components Workbench está conectado ao controlador Micro800.
1. No software Connected Components Workbench, abra o projeto para o controlador desejado.
2. Clique em Connect para conectar-se ao controlador pretendido.
IMPORTANTE As instruções a seguir são compatíveis na revisão 2 do Connected Components Workbench e controladores Micro800 com revisão de firmware 2.
Para obter mais informações sobre esse recurso, consulte Segurança do controlador na página 43.
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 67
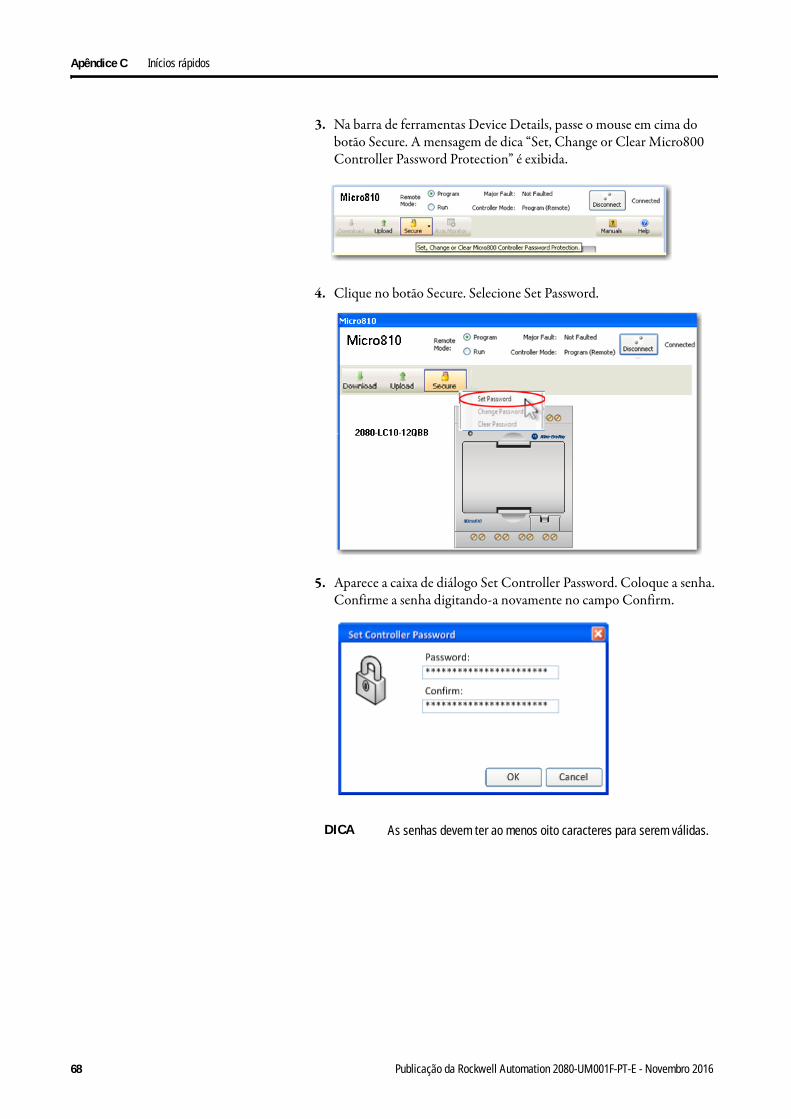
Apêndice C Inícios rápidos
3. Na barra de ferramentas Device Details, passe o mouse em cima do botão Secure. A mensagem de dica “Set, Change or Clear Micro800 Controller Password Protection” é exibida.
4. Clique no botão Secure. Selecione Set Password.
5. Aparece a caixa de diálogo Set Controller Password. Coloque a senha. Confirme a senha digitando-a novamente no campo Confirm.
DICA As senhas devem ter ao menos oito caracteres para serem válidas.
68 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016

Inícios rápidos Apêndice C
6. Clique em OK. A caixa de diálogo Confirmation surge para confirmar que a senha foi definida com sucesso.
7. Clique em OK.
Uma vez que uma senha tenha sido criada, quaisquer novas sessões que tentem conexão com o controlador precisarão fornecer uma senha para ganhar acesso exclusivo ao controlador desejado.
Troque a senha
Com uma sessão autorizada, você pode mudar a senha em um controlador desejado por meio do software Connected Components Workbench. O controlador desejado deve estar no status Connected.
1. Na barra de ferramentas Device Details, clique no botão Secure. Selecione Change Password.
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 69
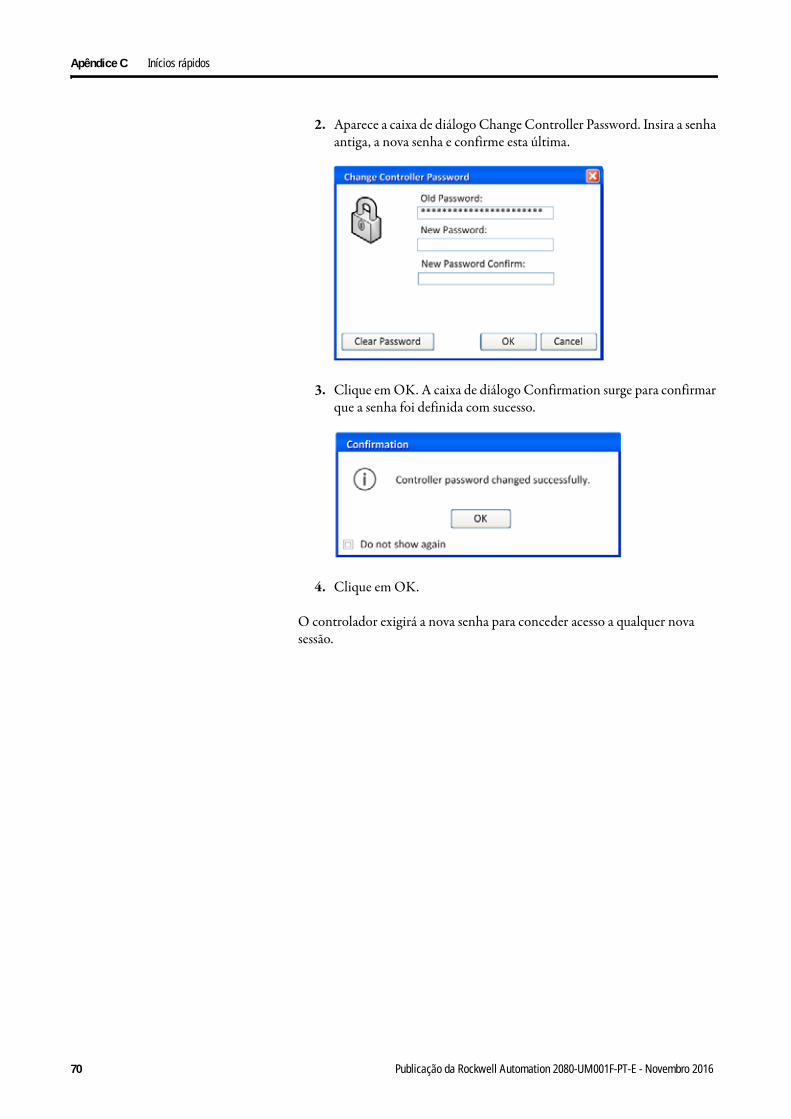
Apêndice C Inícios rápidos
2. Aparece a caixa de diálogo Change Controller Password. Insira a senha antiga, a nova senha e confirme esta última.
3. Clique em OK. A caixa de diálogo Confirmation surge para confirmar que a senha foi definida com sucesso.
4. Clique em OK.
O controlador exigirá a nova senha para conceder acesso a qualquer nova sessão.
70 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
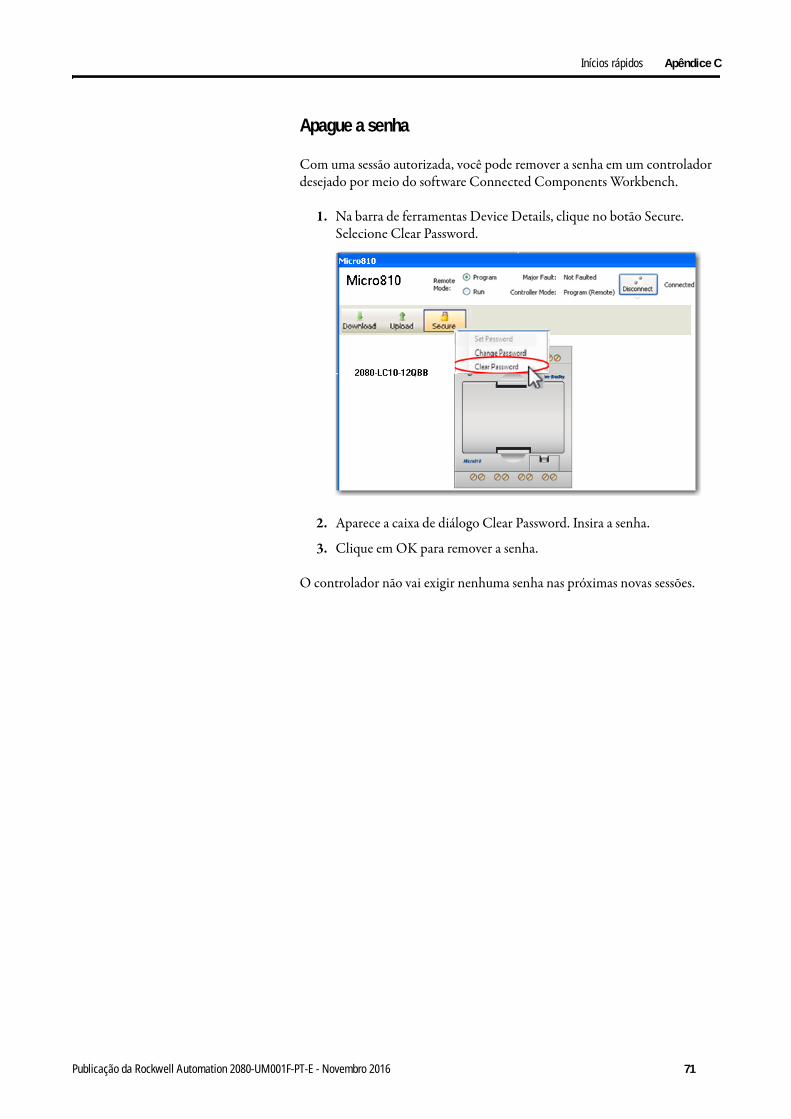
Inícios rápidos Apêndice C
Apague a senha
Com uma sessão autorizada, você pode remover a senha em um controlador desejado por meio do software Connected Components Workbench.
1. Na barra de ferramentas Device Details, clique no botão Secure. Selecione Clear Password.
2. Aparece a caixa de diálogo Clear Password. Insira a senha.
3. Clique em OK para remover a senha.
O controlador não vai exigir nenhuma senha nas próximas novas sessões.
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 71
Apêndice C Inícios rápidos
Utilize a função de relé inteligente do Micro810
O controlador Micro810 de 12 pontos (8 entradas e 4 saídas) vem com uma função de relé inteligente integrada que pode ser configurada utilizando a tela de LCD opcional e botões de pressão para controlar quatro saídas a relé (O00 a O03), sem utilizar nenhum software.
Cada bloco de relé inteligente controla uma saída a relé e pode ser configurado utilizando uma das instruções a seguir:
• TON – Temporizador on-delay• TOF – Temporizador off-delay• DOY – Ligando uma saída se o valor do relógio em tempo real estiver
dentro da faixa da configuração Year Time.• TOW – Ligando uma saída se o valor do relógio em tempo real estiver
dentro da faixa da configuração Day Time.• CTU – Contagem incremental• CTD – Contagem regressiva• TONOF – Temporizador on-delay em uma linha de programa
verdadeira e, em seguida, temporizador off-delay em uma linha de programa falsa.
• TP – Temporizador de pulso
Ordem de execução de bloco de relé inteligente
O bloco de relé inteligente que está configurado para saída de controle 00 é executado primeiro, seguido pelo bloco de relé inteligente para saída 01, então saída 02, com o bloco de relé inteligente para saída 03 sendo o último a ser executado.
Por exemplo, se TON estiver configurado para controlar O00, CTU para O01, TOW para O02, e outro CTU para O03, o sequenciamento de execução para as instruções de relé inteligente será TON (O00) → CTU (O01) → TOW (O02) → CTU (O03).
A configuração padrão é como demonstrado a seguir:
TON para saída 00CTU para saída 01TOW para saída 02DOY para saída 03
72 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
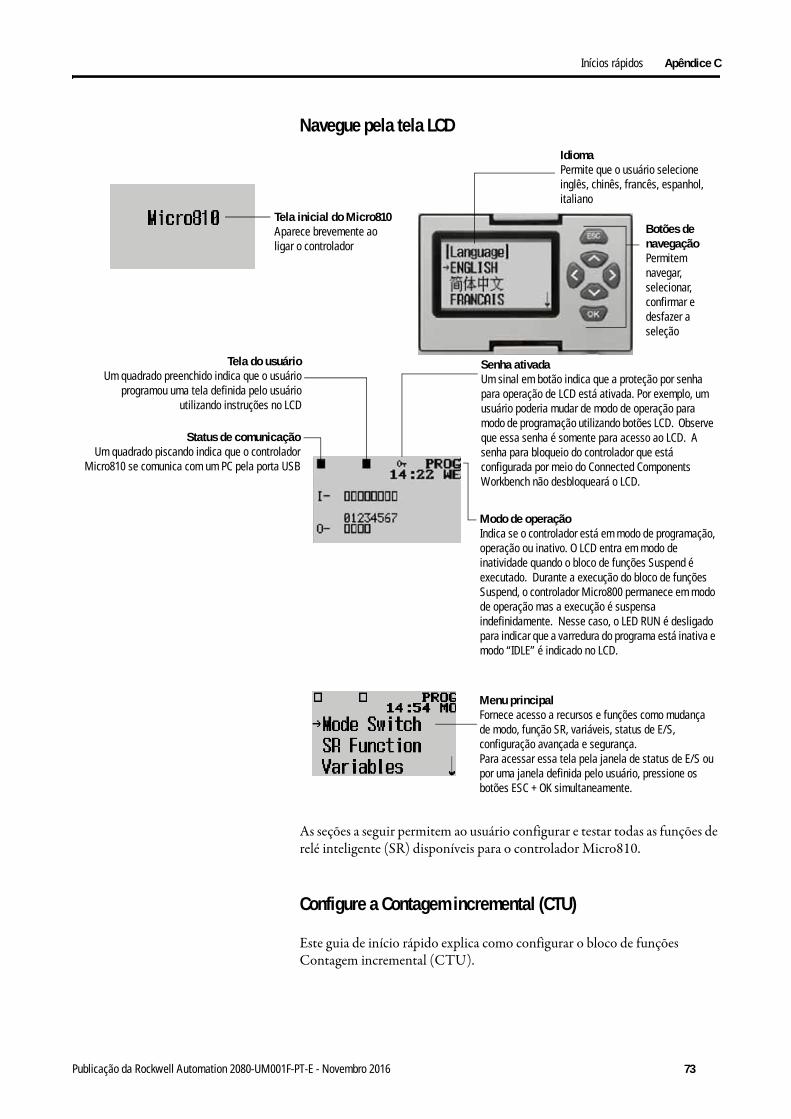
Inícios rápidos Apêndice C
Navegue pela tela LCD
As seções a seguir permitem ao usuário configurar e testar todas as funções de relé inteligente (SR) disponíveis para o controlador Micro810.
Configure a Contagem incremental (CTU)
Este guia de início rápido explica como configurar o bloco de funções Contagem incremental (CTU).
Tela inicial do Micro810Aparece brevemente ao ligar o controlador
IdiomaPermite que o usuário selecione inglês, chinês, francês, espanhol, italiano
Botões de navegaçãoPermitem navegar, selecionar, confirmar e desfazer a seleção
Status de comunicaçãoUm quadrado piscando indica que o controlador
Micro810 se comunica com um PC pela porta USB
Tela do usuárioUm quadrado preenchido indica que o usuário
programou uma tela definida pelo usuárioutilizando instruções no LCD
Senha ativadaUm sinal em botão indica que a proteção por senha para operação de LCD está ativada. Por exemplo, um usuário poderia mudar de modo de operação para modo de programação utilizando botões LCD. Observe que essa senha é somente para acesso ao LCD. A senha para bloqueio do controlador que está configurada por meio do Connected Components Workbench não desbloqueará o LCD.
Modo de operaçãoIndica se o controlador está em modo de programação, operação ou inativo. O LCD entra em modo de inatividade quando o bloco de funções Suspend é executado. Durante a execução do bloco de funções Suspend, o controlador Micro800 permanece em modo de operação mas a execução é suspensa indefinidamente. Nesse caso, o LED RUN é desligado para indicar que a varredura do programa está inativa e modo “IDLE” é indicado no LCD.
Menu principalFornece acesso a recursos e funções como mudança de modo, função SR, variáveis, status de E/S, configuração avançada e segurança.Para acessar essa tela pela janela de status de E/S ou por uma janela definida pelo usuário, pressione os botões ESC + OK simultaneamente.
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 73
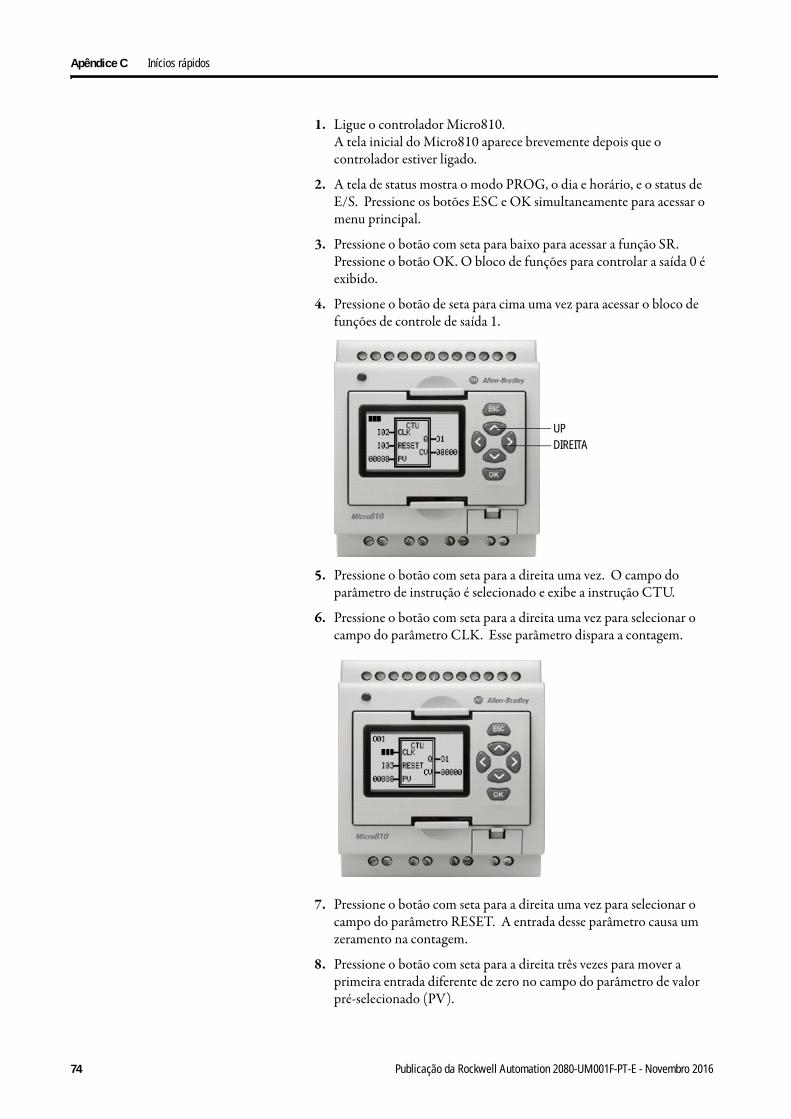
Apêndice C Inícios rápidos
1. Ligue o controlador Micro810.A tela inicial do Micro810 aparece brevemente depois que o controlador estiver ligado.
2. A tela de status mostra o modo PROG, o dia e horário, e o status de E/S. Pressione os botões ESC e OK simultaneamente para acessar o menu principal.
3. Pressione o botão com seta para baixo para acessar a função SR. Pressione o botão OK. O bloco de funções para controlar a saída 0 é exibido.
4. Pressione o botão de seta para cima uma vez para acessar o bloco de funções de controle de saída 1.
5. Pressione o botão com seta para a direita uma vez. O campo do parâmetro de instrução é selecionado e exibe a instrução CTU.
6. Pressione o botão com seta para a direita uma vez para selecionar o campo do parâmetro CLK. Esse parâmetro dispara a contagem.
7. Pressione o botão com seta para a direita uma vez para selecionar o campo do parâmetro RESET. A entrada desse parâmetro causa um zeramento na contagem.
8. Pressione o botão com seta para a direita três vezes para mover a primeira entrada diferente de zero no campo do parâmetro de valor pré-selecionado (PV).
UPDIREITA
74 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
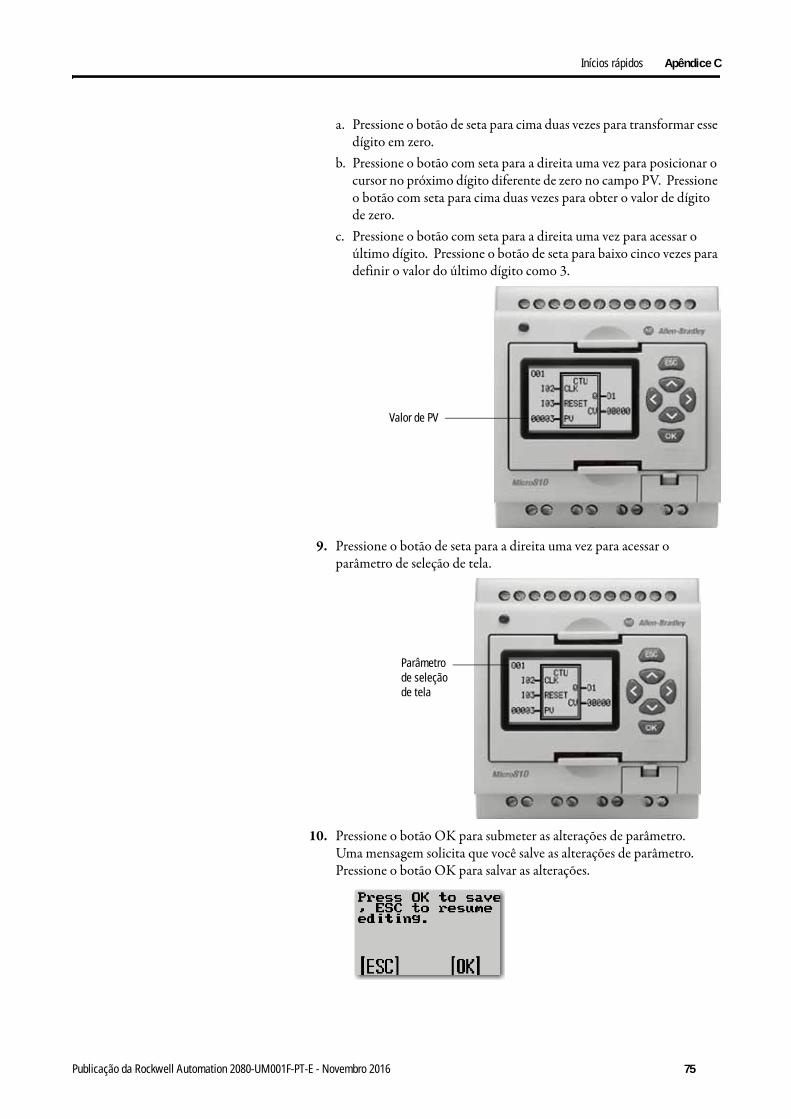
Inícios rápidos Apêndice C
a. Pressione o botão de seta para cima duas vezes para transformar esse dígito em zero.
b. Pressione o botão com seta para a direita uma vez para posicionar o cursor no próximo dígito diferente de zero no campo PV. Pressione o botão com seta para cima duas vezes para obter o valor de dígito de zero.
c. Pressione o botão com seta para a direita uma vez para acessar o último dígito. Pressione o botão de seta para baixo cinco vezes para definir o valor do último dígito como 3.
9. Pressione o botão de seta para a direita uma vez para acessar o parâmetro de seleção de tela.
10. Pressione o botão OK para submeter as alterações de parâmetro.Uma mensagem solicita que você salve as alterações de parâmetro. Pressione o botão OK para salvar as alterações.
Valor de PV
Parâmetro de seleção de tela
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 75
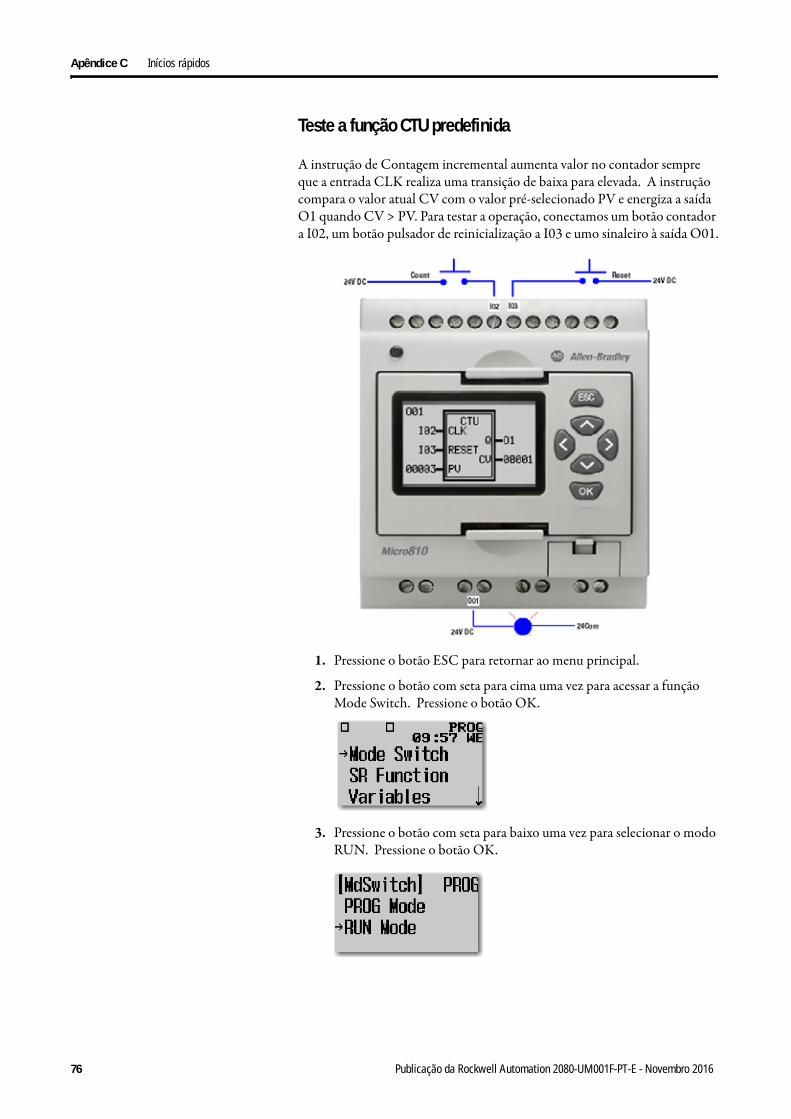
Apêndice C Inícios rápidos
Teste a função CTU predefinida
A instrução de Contagem incremental aumenta valor no contador sempre que a entrada CLK realiza uma transição de baixa para elevada. A instrução compara o valor atual CV com o valor pré-selecionado PV e energiza a saída O1 quando CV > PV. Para testar a operação, conectamos um botão contador a I02, um botão pulsador de reinicialização a I03 e umo sinaleiro à saída O01.
1. Pressione o botão ESC para retornar ao menu principal.
2. Pressione o botão com seta para cima uma vez para acessar a função Mode Switch. Pressione o botão OK.
3. Pressione o botão com seta para baixo uma vez para selecionar o modo RUN. Pressione o botão OK.
76 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
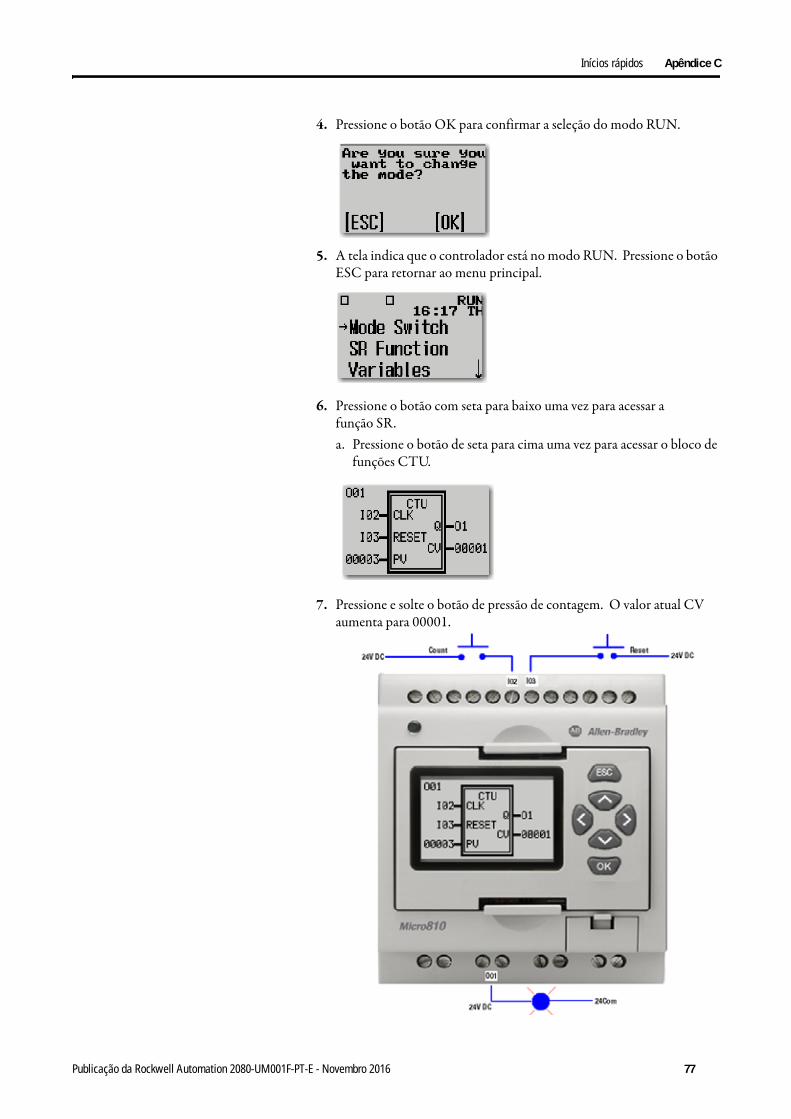
Inícios rápidos Apêndice C
4. Pressione o botão OK para confirmar a seleção do modo RUN.
5. A tela indica que o controlador está no modo RUN. Pressione o botão ESC para retornar ao menu principal.
6. Pressione o botão com seta para baixo uma vez para acessar a função SR. a. Pressione o botão de seta para cima uma vez para acessar o bloco de
funções CTU.
7. Pressione e solte o botão de pressão de contagem. O valor atual CV aumenta para 00001.
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 77
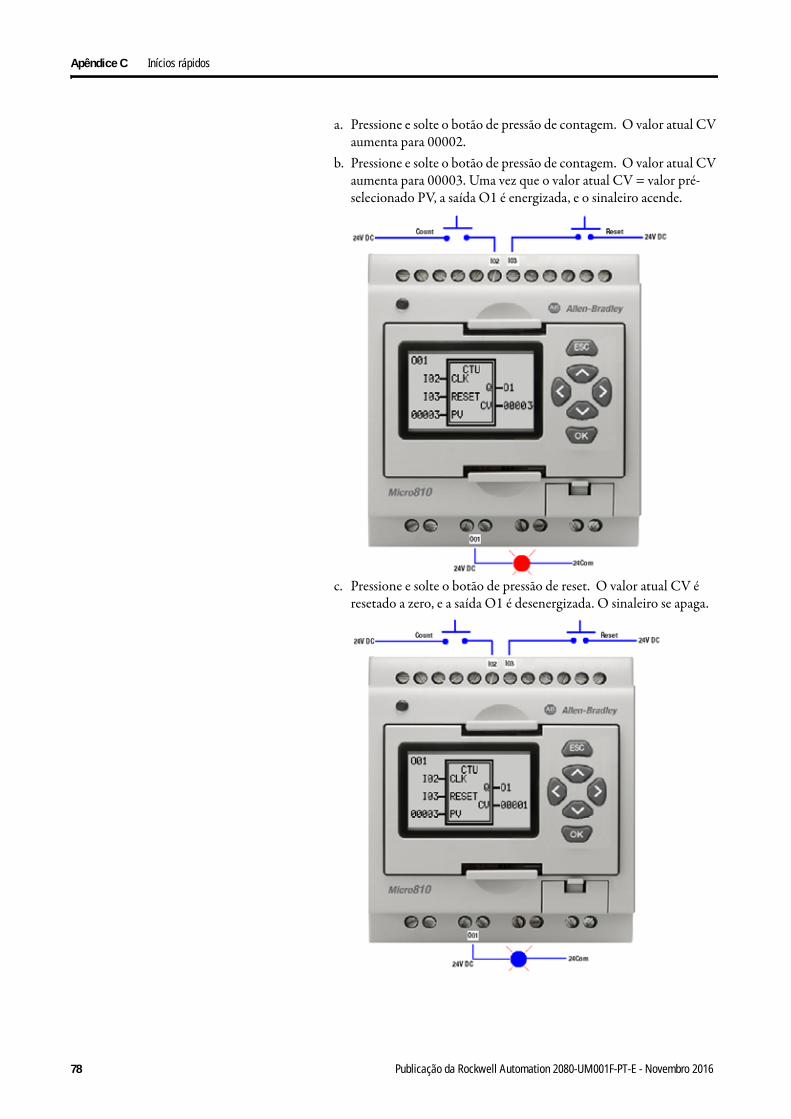
Apêndice C Inícios rápidos
a. Pressione e solte o botão de pressão de contagem. O valor atual CV aumenta para 00002.
b. Pressione e solte o botão de pressão de contagem. O valor atual CV aumenta para 00003. Uma vez que o valor atual CV = valor pré-selecionado PV, a saída O1 é energizada, e o sinaleiro acende.
c. Pressione e solte o botão de pressão de reset. O valor atual CV é resetado a zero, e a saída O1 é desenergizada. O sinaleiro se apaga.
78 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
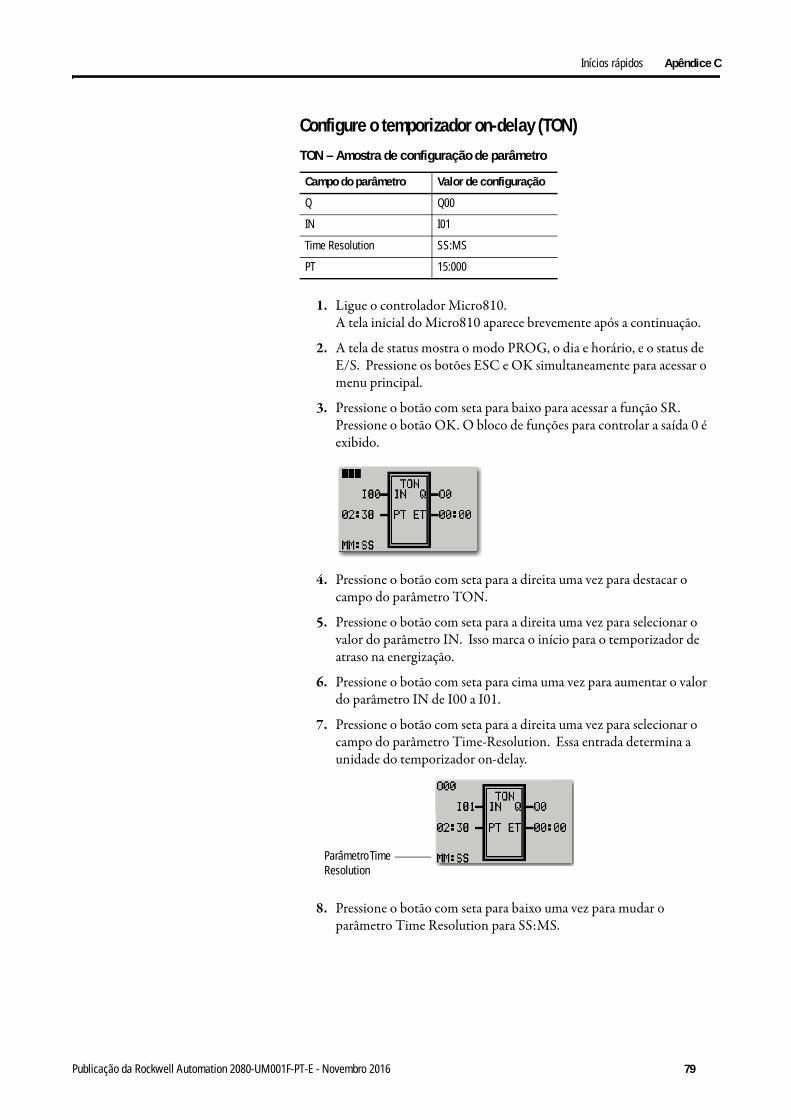
Inícios rápidos Apêndice C
Configure o temporizador on-delay (TON)
1. Ligue o controlador Micro810. A tela inicial do Micro810 aparece brevemente após a continuação.
2. A tela de status mostra o modo PROG, o dia e horário, e o status de E/S. Pressione os botões ESC e OK simultaneamente para acessar o menu principal.
3. Pressione o botão com seta para baixo para acessar a função SR. Pressione o botão OK. O bloco de funções para controlar a saída 0 é exibido.
4. Pressione o botão com seta para a direita uma vez para destacar o campo do parâmetro TON.
5. Pressione o botão com seta para a direita uma vez para selecionar o valor do parâmetro IN. Isso marca o início para o temporizador de atraso na energização.
6. Pressione o botão com seta para cima uma vez para aumentar o valor do parâmetro IN de I00 a I01.
7. Pressione o botão com seta para a direita uma vez para selecionar o campo do parâmetro Time-Resolution. Essa entrada determina a unidade do temporizador on-delay.
8. Pressione o botão com seta para baixo uma vez para mudar o parâmetro Time Resolution para SS:MS.
TON – Amostra de configuração de parâmetro
Campo do parâmetro Valor de configuração
Q Q00
IN I01
Time Resolution SS:MS
PT 15:000
Parâmetro Time Resolution
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 79
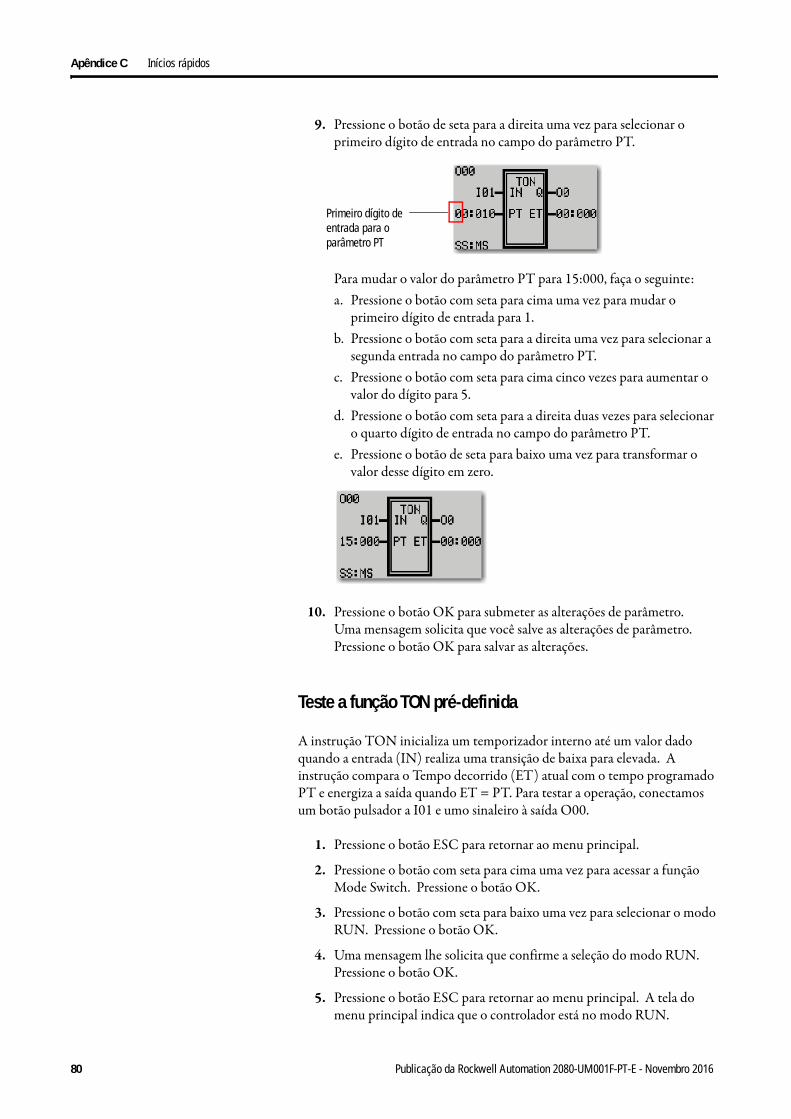
Apêndice C Inícios rápidos
9. Pressione o botão de seta para a direita uma vez para selecionar o primeiro dígito de entrada no campo do parâmetro PT.
Para mudar o valor do parâmetro PT para 15:000, faça o seguinte:a. Pressione o botão com seta para cima uma vez para mudar o
primeiro dígito de entrada para 1.b. Pressione o botão com seta para a direita uma vez para selecionar a
segunda entrada no campo do parâmetro PT.c. Pressione o botão com seta para cima cinco vezes para aumentar o
valor do dígito para 5.d. Pressione o botão com seta para a direita duas vezes para selecionar
o quarto dígito de entrada no campo do parâmetro PT.e. Pressione o botão de seta para baixo uma vez para transformar o
valor desse dígito em zero.
10. Pressione o botão OK para submeter as alterações de parâmetro.Uma mensagem solicita que você salve as alterações de parâmetro. Pressione o botão OK para salvar as alterações.
Teste a função TON pré-definida
A instrução TON inicializa um temporizador interno até um valor dado quando a entrada (IN) realiza uma transição de baixa para elevada. A instrução compara o Tempo decorrido (ET) atual com o tempo programado PT e energiza a saída quando ET = PT. Para testar a operação, conectamos um botão pulsador a I01 e umo sinaleiro à saída O00.
1. Pressione o botão ESC para retornar ao menu principal.
2. Pressione o botão com seta para cima uma vez para acessar a função Mode Switch. Pressione o botão OK.
3. Pressione o botão com seta para baixo uma vez para selecionar o modo RUN. Pressione o botão OK.
4. Uma mensagem lhe solicita que confirme a seleção do modo RUN. Pressione o botão OK.
5. Pressione o botão ESC para retornar ao menu principal. A tela do menu principal indica que o controlador está no modo RUN.
Primeiro dígito de entrada para o parâmetro PT
80 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
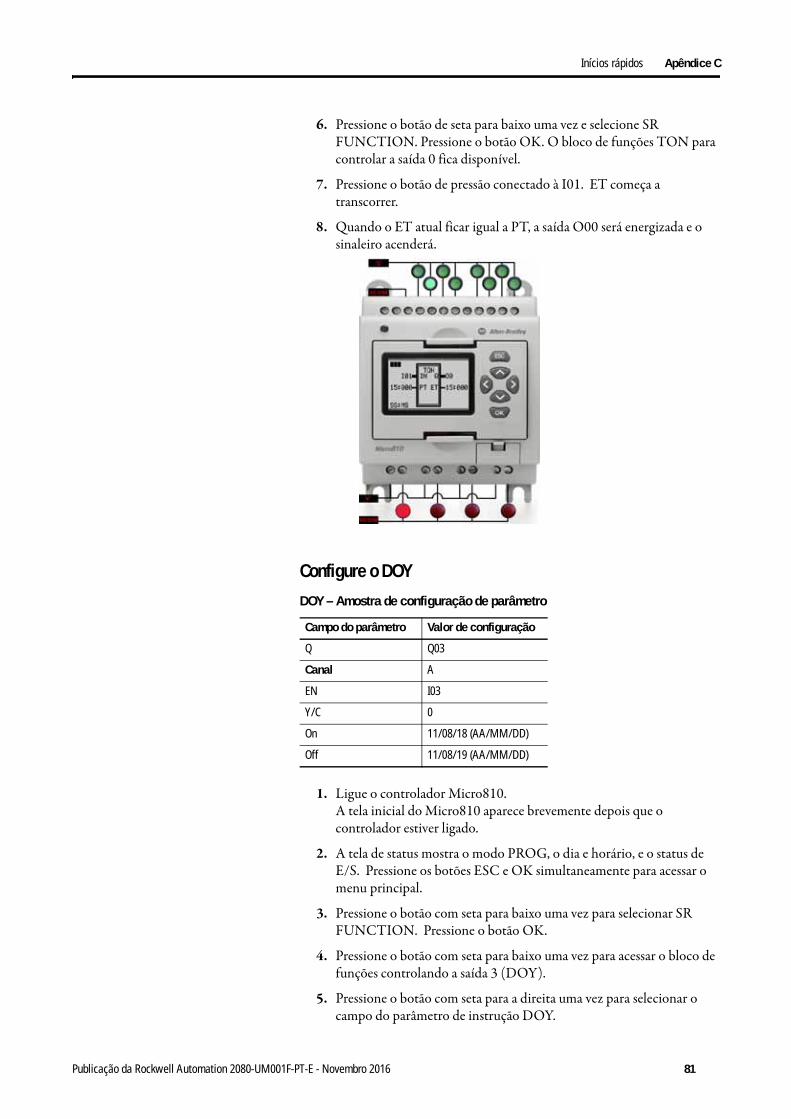
Inícios rápidos Apêndice C
6. Pressione o botão de seta para baixo uma vez e selecione SR FUNCTION. Pressione o botão OK. O bloco de funções TON para controlar a saída 0 fica disponível.
7. Pressione o botão de pressão conectado à I01. ET começa a transcorrer.
8. Quando o ET atual ficar igual a PT, a saída O00 será energizada e o sinaleiro acenderá.
Configure o DOY
1. Ligue o controlador Micro810. A tela inicial do Micro810 aparece brevemente depois que o controlador estiver ligado.
2. A tela de status mostra o modo PROG, o dia e horário, e o status de E/S. Pressione os botões ESC e OK simultaneamente para acessar o menu principal.
3. Pressione o botão com seta para baixo uma vez para selecionar SR FUNCTION. Pressione o botão OK.
4. Pressione o botão com seta para baixo uma vez para acessar o bloco de funções controlando a saída 3 (DOY).
5. Pressione o botão com seta para a direita uma vez para selecionar o campo do parâmetro de instrução DOY.
DOY – Amostra de configuração de parâmetro
Campo do parâmetro Valor de configuração
Q Q03
Canal A
EN I03
Y/C 0
On 11/08/18 (AA/MM/DD)
Off 11/08/19 (AA/MM/DD)
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 81
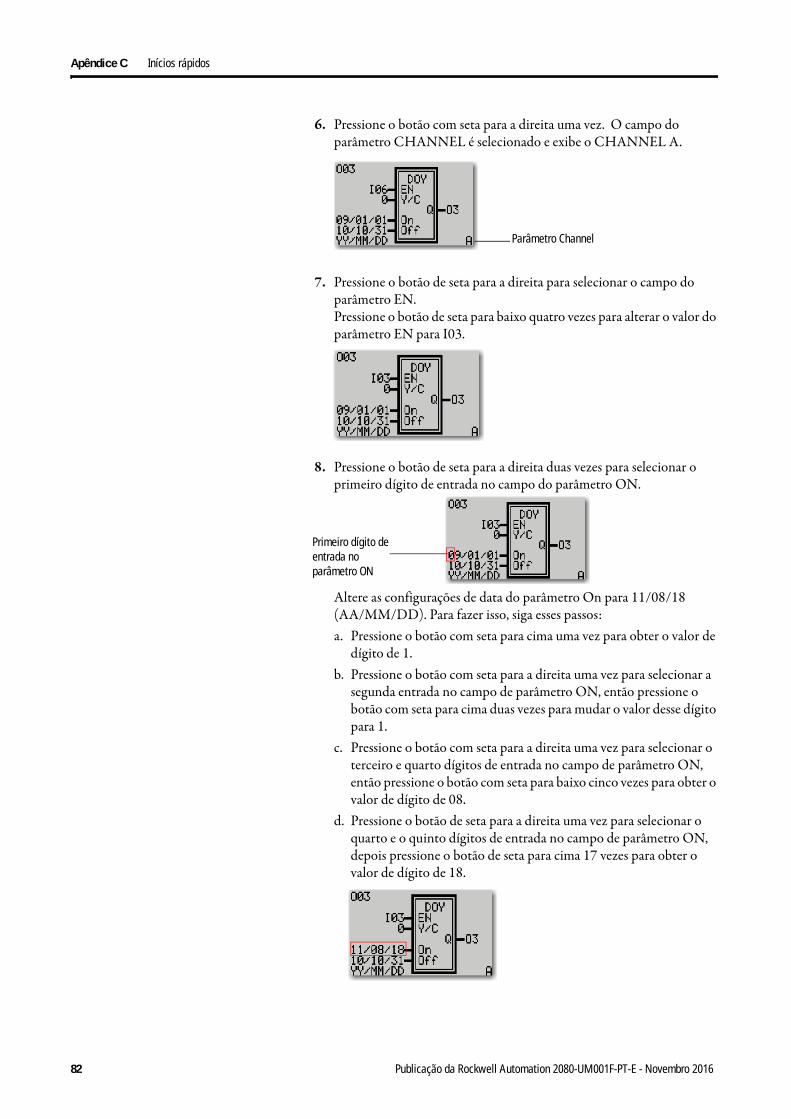
Apêndice C Inícios rápidos
6. Pressione o botão com seta para a direita uma vez. O campo do parâmetro CHANNEL é selecionado e exibe o CHANNEL A.
7. Pressione o botão de seta para a direita para selecionar o campo do parâmetro EN.Pressione o botão de seta para baixo quatro vezes para alterar o valor do parâmetro EN para I03.
8. Pressione o botão de seta para a direita duas vezes para selecionar o primeiro dígito de entrada no campo do parâmetro ON.
Altere as configurações de data do parâmetro On para 11/08/18 (AA/MM/DD). Para fazer isso, siga esses passos:a. Pressione o botão com seta para cima uma vez para obter o valor de
dígito de 1.b. Pressione o botão com seta para a direita uma vez para selecionar a
segunda entrada no campo de parâmetro ON, então pressione o botão com seta para cima duas vezes para mudar o valor desse dígito para 1.
c. Pressione o botão com seta para a direita uma vez para selecionar o terceiro e quarto dígitos de entrada no campo de parâmetro ON, então pressione o botão com seta para baixo cinco vezes para obter o valor de dígito de 08.
d. Pressione o botão de seta para a direita uma vez para selecionar o quarto e o quinto dígitos de entrada no campo de parâmetro ON, depois pressione o botão de seta para cima 17 vezes para obter o valor de dígito de 18.
Parâmetro Channel
Primeiro dígito de entrada no parâmetro ON
82 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016

Inícios rápidos Apêndice C
9. Pressione o botão com seta para a direita uma vez para selecionar a primeira entrada no campo do parâmetro OFF.Altere as configurações de data do parâmetro Off para 11/08/19 (AA/MM/DD). Para fazer isso, siga esses passos:a. Pressione o botão com seta para a direita uma vez para selecionar a
segunda entrada no campo do parâmetro OFF. Em seguida, pressione o botão com seta para cima uma vez para obter o valor de dígito de 1.
b. Pressione o botão com seta para a direita uma vez para selecionar a terceira e quarta entradas no campo de parâmetro OFF, então pressione o botão com seta para cima sete vezes para obter o valor de dígito de 08.
c. Pressione o botão de seta para a direita uma vez para selecionar o quarto e o quinto dígitos de entrada no campo de parâmetro OFF, depois pressione o botão de seta para cima 18 vezes para obter o valor de dígito de 19.
10. Pressione o botão OK para submeter as alterações de parâmetro. Uma tela confirma sua solicitação para salvar as alterações de parâmetro. Pressione o botão OK para salvar as alterações.
Teste a função pré-definida DOY
A instrução DOY ativa a saída se o valor do relógio em tempo real estiver dentro da configuração ano-horário em qualquer um dos quatro canais. Para testar a operação, conectamos um botão de pressão a I03, e um sinaleiro à saída O03.
Configure o relógio para teste
1. Pressione o botão ESC para retornar ao menu principal.
2. Pressione o botão com seta para baixo três vezes para acessar a seção Advanced Set. Pressione o botão OK.
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 83
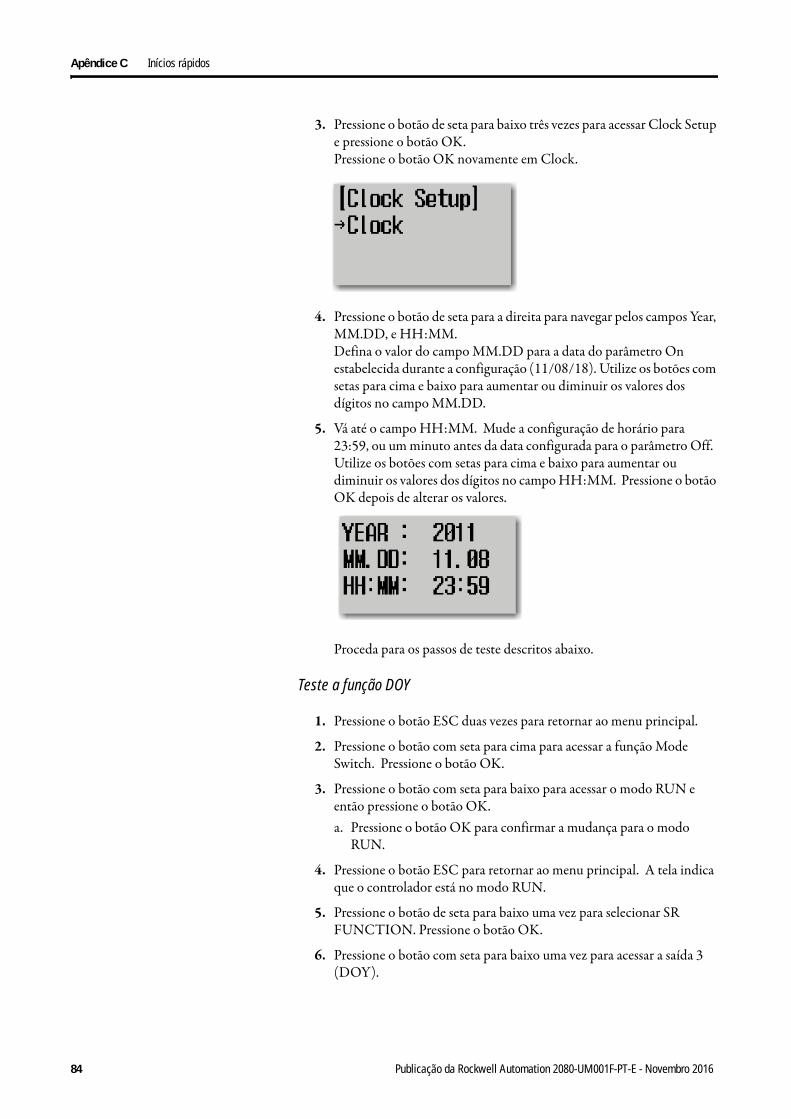
Apêndice C Inícios rápidos
3. Pressione o botão de seta para baixo três vezes para acessar Clock Setup e pressione o botão OK. Pressione o botão OK novamente em Clock.
4. Pressione o botão de seta para a direita para navegar pelos campos Year, MM.DD, e HH:MM. Defina o valor do campo MM.DD para a data do parâmetro On estabelecida durante a configuração (11/08/18). Utilize os botões com setas para cima e baixo para aumentar ou diminuir os valores dos dígitos no campo MM.DD.
5. Vá até o campo HH:MM. Mude a configuração de horário para 23:59, ou um minuto antes da data configurada para o parâmetro Off. Utilize os botões com setas para cima e baixo para aumentar ou diminuir os valores dos dígitos no campo HH:MM. Pressione o botão OK depois de alterar os valores.
Proceda para os passos de teste descritos abaixo.
Teste a função DOY
1. Pressione o botão ESC duas vezes para retornar ao menu principal.
2. Pressione o botão com seta para cima para acessar a função Mode Switch. Pressione o botão OK.
3. Pressione o botão com seta para baixo para acessar o modo RUN e então pressione o botão OK.a. Pressione o botão OK para confirmar a mudança para o modo
RUN.
4. Pressione o botão ESC para retornar ao menu principal. A tela indica que o controlador está no modo RUN.
5. Pressione o botão de seta para baixo uma vez para selecionar SR FUNCTION. Pressione o botão OK.
6. Pressione o botão com seta para baixo uma vez para acessar a saída 3 (DOY).
84 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
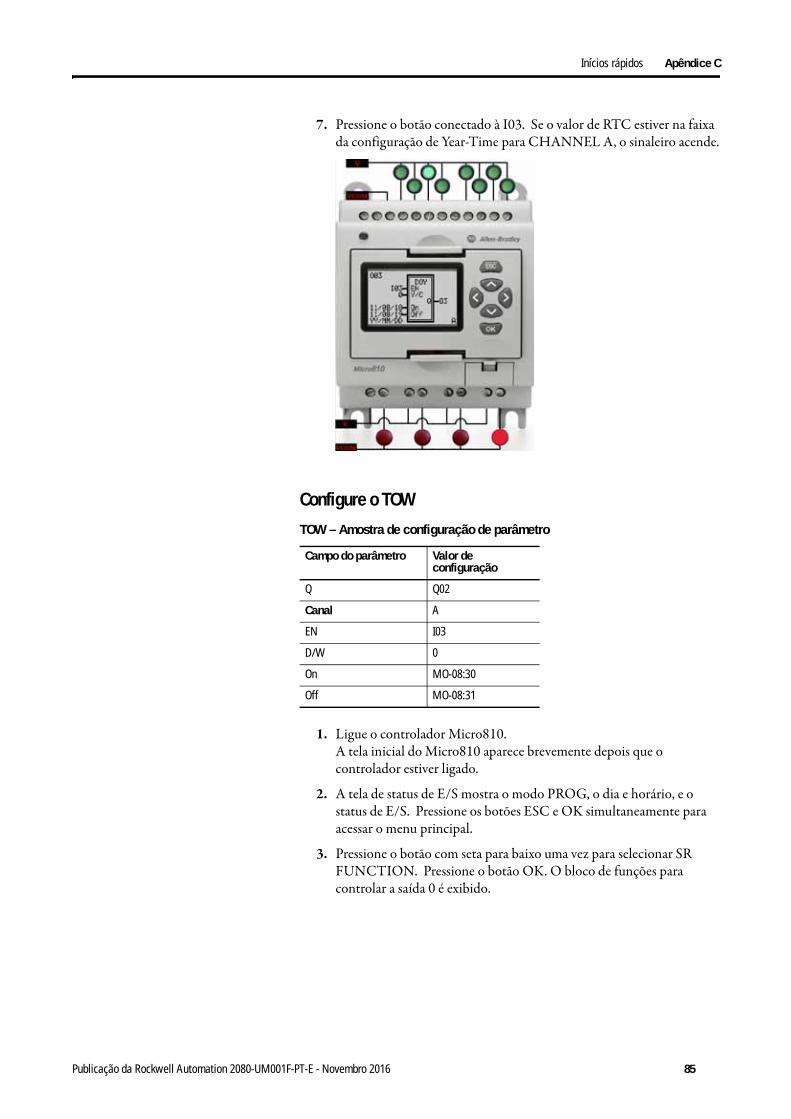
Inícios rápidos Apêndice C
7. Pressione o botão conectado à I03. Se o valor de RTC estiver na faixa da configuração de Year-Time para CHANNEL A, o sinaleiro acende.
Configure o TOW
1. Ligue o controlador Micro810. A tela inicial do Micro810 aparece brevemente depois que o controlador estiver ligado.
2. A tela de status de E/S mostra o modo PROG, o dia e horário, e o status de E/S. Pressione os botões ESC e OK simultaneamente para acessar o menu principal.
3. Pressione o botão com seta para baixo uma vez para selecionar SR FUNCTION. Pressione o botão OK. O bloco de funções para controlar a saída 0 é exibido.
TOW – Amostra de configuração de parâmetro
Campo do parâmetro Valor de configuração
Q Q02
Canal A
EN I03
D/W 0
On MO-08:30
Off MO-08:31
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 85
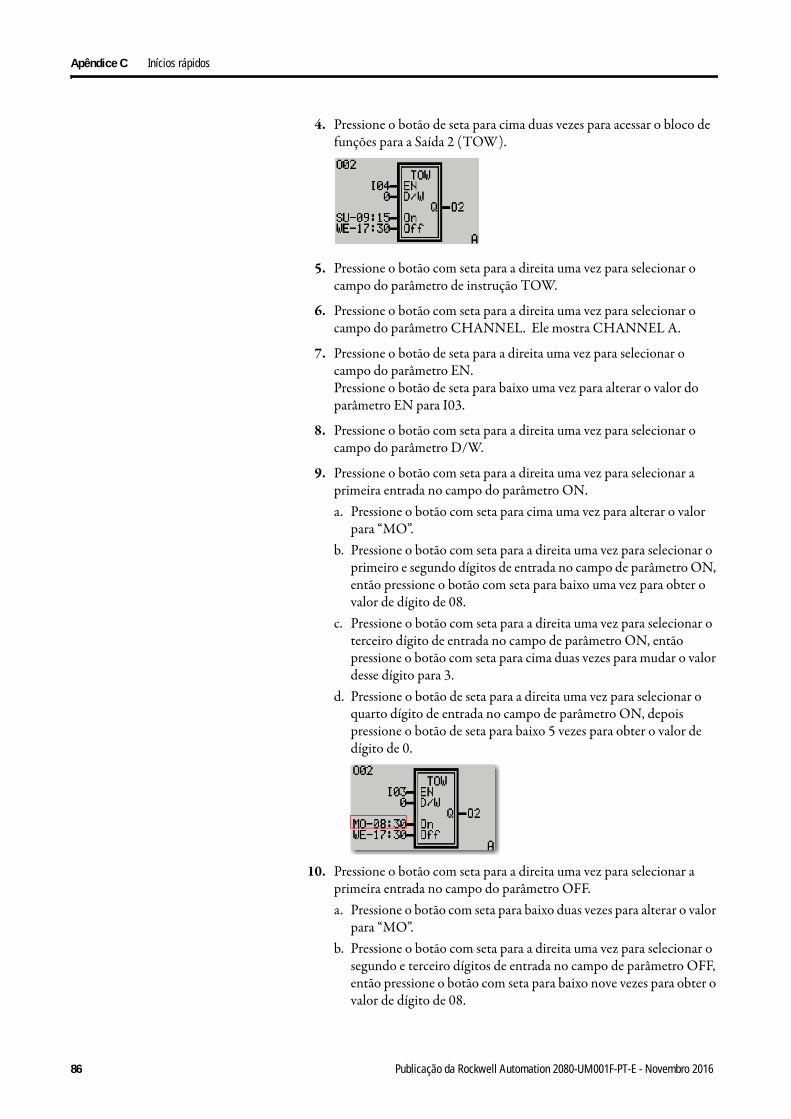
Apêndice C Inícios rápidos
4. Pressione o botão de seta para cima duas vezes para acessar o bloco de funções para a Saída 2 (TOW).
5. Pressione o botão com seta para a direita uma vez para selecionar o campo do parâmetro de instrução TOW.
6. Pressione o botão com seta para a direita uma vez para selecionar o campo do parâmetro CHANNEL. Ele mostra CHANNEL A.
7. Pressione o botão de seta para a direita uma vez para selecionar o campo do parâmetro EN.Pressione o botão de seta para baixo uma vez para alterar o valor do parâmetro EN para I03.
8. Pressione o botão com seta para a direita uma vez para selecionar o campo do parâmetro D/W.
9. Pressione o botão com seta para a direita uma vez para selecionar a primeira entrada no campo do parâmetro ON.a. Pressione o botão com seta para cima uma vez para alterar o valor
para “MO”.b. Pressione o botão com seta para a direita uma vez para selecionar o
primeiro e segundo dígitos de entrada no campo de parâmetro ON, então pressione o botão com seta para baixo uma vez para obter o valor de dígito de 08.
c. Pressione o botão com seta para a direita uma vez para selecionar o terceiro dígito de entrada no campo de parâmetro ON, então pressione o botão com seta para cima duas vezes para mudar o valor desse dígito para 3.
d. Pressione o botão de seta para a direita uma vez para selecionar o quarto dígito de entrada no campo de parâmetro ON, depois pressione o botão de seta para baixo 5 vezes para obter o valor de dígito de 0.
10. Pressione o botão com seta para a direita uma vez para selecionar a primeira entrada no campo do parâmetro OFF.a. Pressione o botão com seta para baixo duas vezes para alterar o valor
para “MO”.b. Pressione o botão com seta para a direita uma vez para selecionar o
segundo e terceiro dígitos de entrada no campo de parâmetro OFF, então pressione o botão com seta para baixo nove vezes para obter o valor de dígito de 08.
86 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
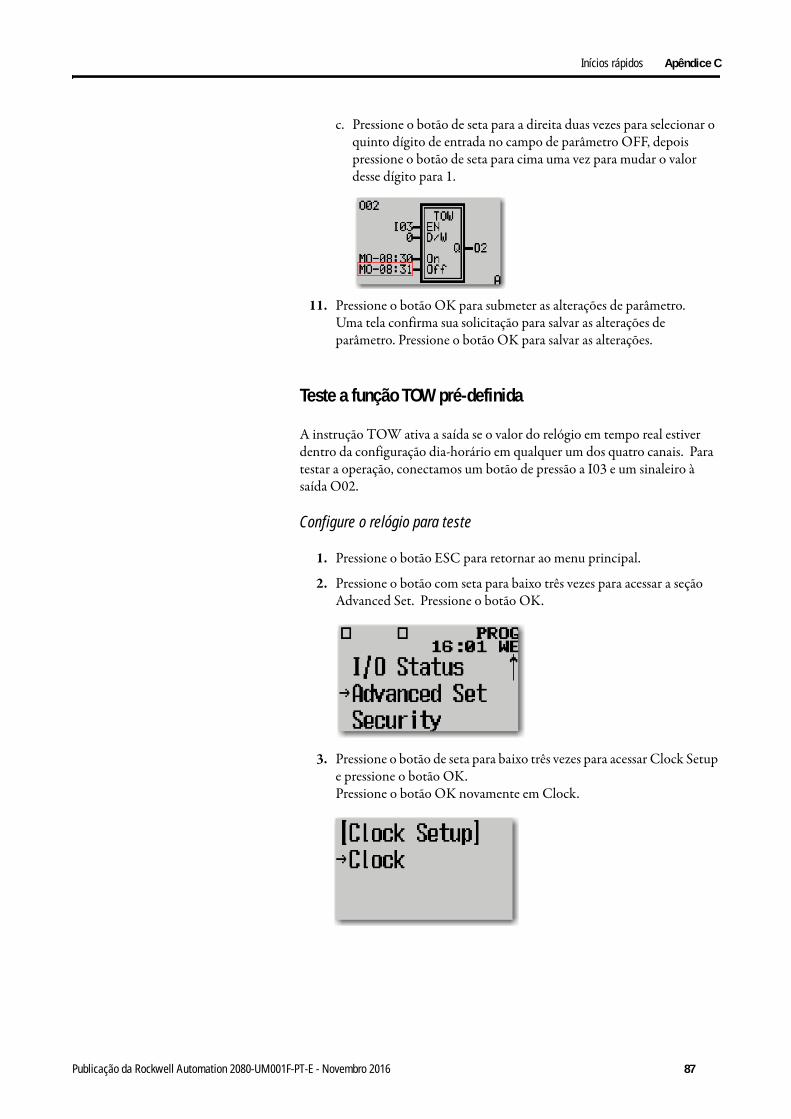
Inícios rápidos Apêndice C
c. Pressione o botão de seta para a direita duas vezes para selecionar o quinto dígito de entrada no campo de parâmetro OFF, depois pressione o botão de seta para cima uma vez para mudar o valor desse dígito para 1.
11. Pressione o botão OK para submeter as alterações de parâmetro. Uma tela confirma sua solicitação para salvar as alterações de parâmetro. Pressione o botão OK para salvar as alterações.
Teste a função TOW pré-definida
A instrução TOW ativa a saída se o valor do relógio em tempo real estiver dentro da configuração dia-horário em qualquer um dos quatro canais. Para testar a operação, conectamos um botão de pressão a I03 e um sinaleiro à saída O02.
Configure o relógio para teste
1. Pressione o botão ESC para retornar ao menu principal.
2. Pressione o botão com seta para baixo três vezes para acessar a seção Advanced Set. Pressione o botão OK.
3. Pressione o botão de seta para baixo três vezes para acessar Clock Setup e pressione o botão OK. Pressione o botão OK novamente em Clock.
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 87
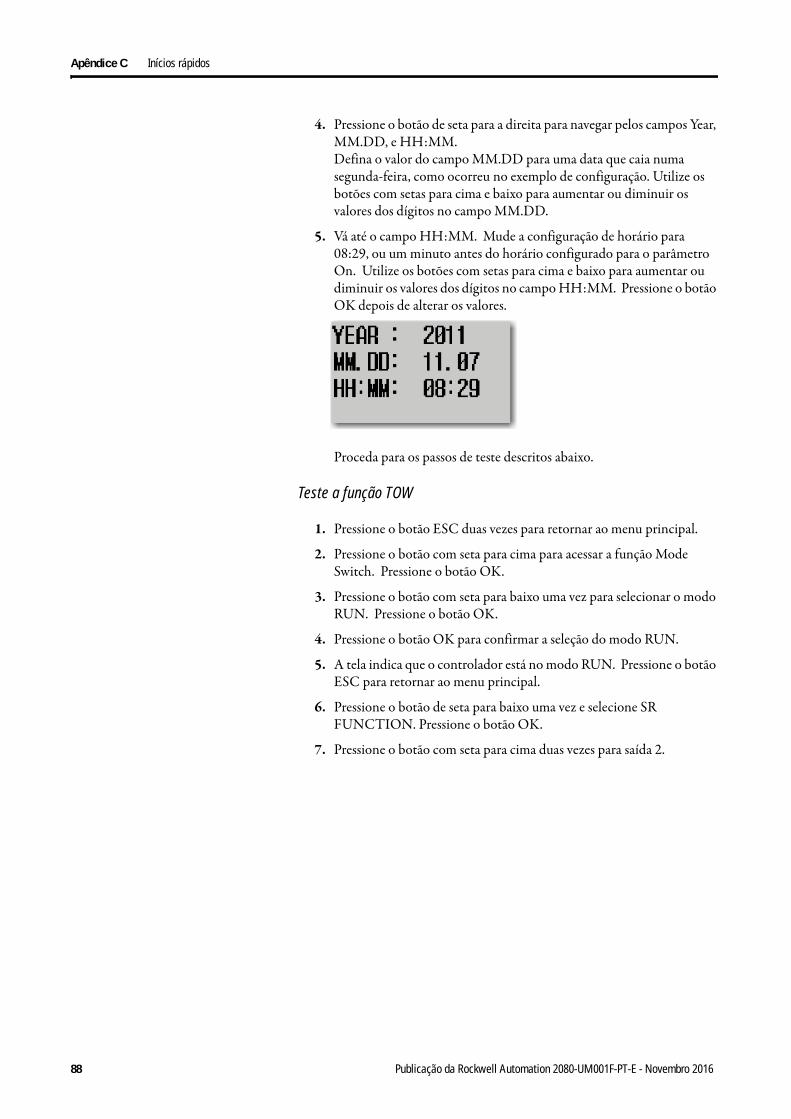
Apêndice C Inícios rápidos
4. Pressione o botão de seta para a direita para navegar pelos campos Year, MM.DD, e HH:MM. Defina o valor do campo MM.DD para uma data que caia numa segunda-feira, como ocorreu no exemplo de configuração. Utilize os botões com setas para cima e baixo para aumentar ou diminuir os valores dos dígitos no campo MM.DD.
5. Vá até o campo HH:MM. Mude a configuração de horário para 08:29, ou um minuto antes do horário configurado para o parâmetro On. Utilize os botões com setas para cima e baixo para aumentar ou diminuir os valores dos dígitos no campo HH:MM. Pressione o botão OK depois de alterar os valores.
Proceda para os passos de teste descritos abaixo.
Teste a função TOW
1. Pressione o botão ESC duas vezes para retornar ao menu principal.
2. Pressione o botão com seta para cima para acessar a função Mode Switch. Pressione o botão OK.
3. Pressione o botão com seta para baixo uma vez para selecionar o modo RUN. Pressione o botão OK.
4. Pressione o botão OK para confirmar a seleção do modo RUN.
5. A tela indica que o controlador está no modo RUN. Pressione o botão ESC para retornar ao menu principal.
6. Pressione o botão de seta para baixo uma vez e selecione SR FUNCTION. Pressione o botão OK.
7. Pressione o botão com seta para cima duas vezes para saída 2.
88 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
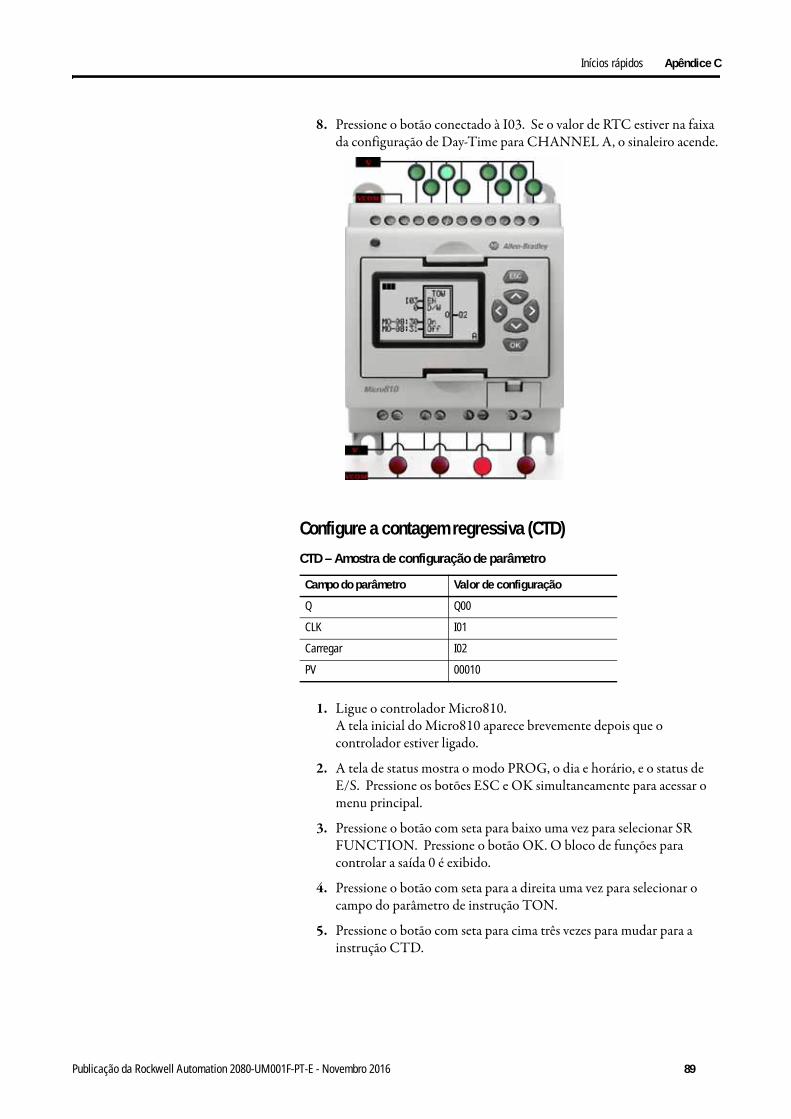
Inícios rápidos Apêndice C
8. Pressione o botão conectado à I03. Se o valor de RTC estiver na faixa da configuração de Day-Time para CHANNEL A, o sinaleiro acende.
Configure a contagem regressiva (CTD)
1. Ligue o controlador Micro810. A tela inicial do Micro810 aparece brevemente depois que o controlador estiver ligado.
2. A tela de status mostra o modo PROG, o dia e horário, e o status de E/S. Pressione os botões ESC e OK simultaneamente para acessar o menu principal.
3. Pressione o botão com seta para baixo uma vez para selecionar SR FUNCTION. Pressione o botão OK. O bloco de funções para controlar a saída 0 é exibido.
4. Pressione o botão com seta para a direita uma vez para selecionar o campo do parâmetro de instrução TON.
5. Pressione o botão com seta para cima três vezes para mudar para a instrução CTD.
CTD – Amostra de configuração de parâmetro
Campo do parâmetro Valor de configuração
Q Q00
CLK I01
Carregar I02
PV 00010
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 89
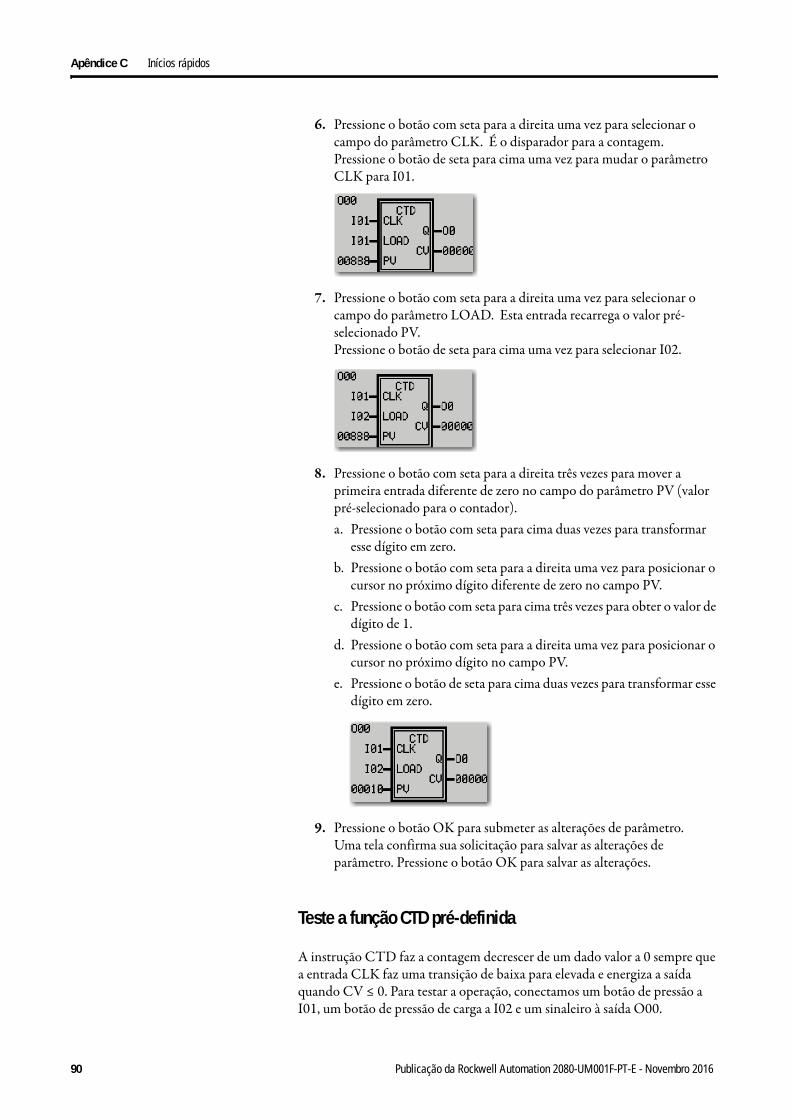
Apêndice C Inícios rápidos
6. Pressione o botão com seta para a direita uma vez para selecionar o campo do parâmetro CLK. É o disparador para a contagem.Pressione o botão de seta para cima uma vez para mudar o parâmetro CLK para I01.
7. Pressione o botão com seta para a direita uma vez para selecionar o campo do parâmetro LOAD. Esta entrada recarrega o valor pré-selecionado PV.Pressione o botão de seta para cima uma vez para selecionar I02.
8. Pressione o botão com seta para a direita três vezes para mover a primeira entrada diferente de zero no campo do parâmetro PV (valor pré-selecionado para o contador).a. Pressione o botão com seta para cima duas vezes para transformar
esse dígito em zero.b. Pressione o botão com seta para a direita uma vez para posicionar o
cursor no próximo dígito diferente de zero no campo PV. c. Pressione o botão com seta para cima três vezes para obter o valor de
dígito de 1.d. Pressione o botão com seta para a direita uma vez para posicionar o
cursor no próximo dígito no campo PV.e. Pressione o botão de seta para cima duas vezes para transformar esse
dígito em zero.
9. Pressione o botão OK para submeter as alterações de parâmetro.Uma tela confirma sua solicitação para salvar as alterações de parâmetro. Pressione o botão OK para salvar as alterações.
Teste a função CTD pré-definida
A instrução CTD faz a contagem decrescer de um dado valor a 0 sempre que a entrada CLK faz uma transição de baixa para elevada e energiza a saída quando CV ≤ 0. Para testar a operação, conectamos um botão de pressão a I01, um botão de pressão de carga a I02 e um sinaleiro à saída O00.
90 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
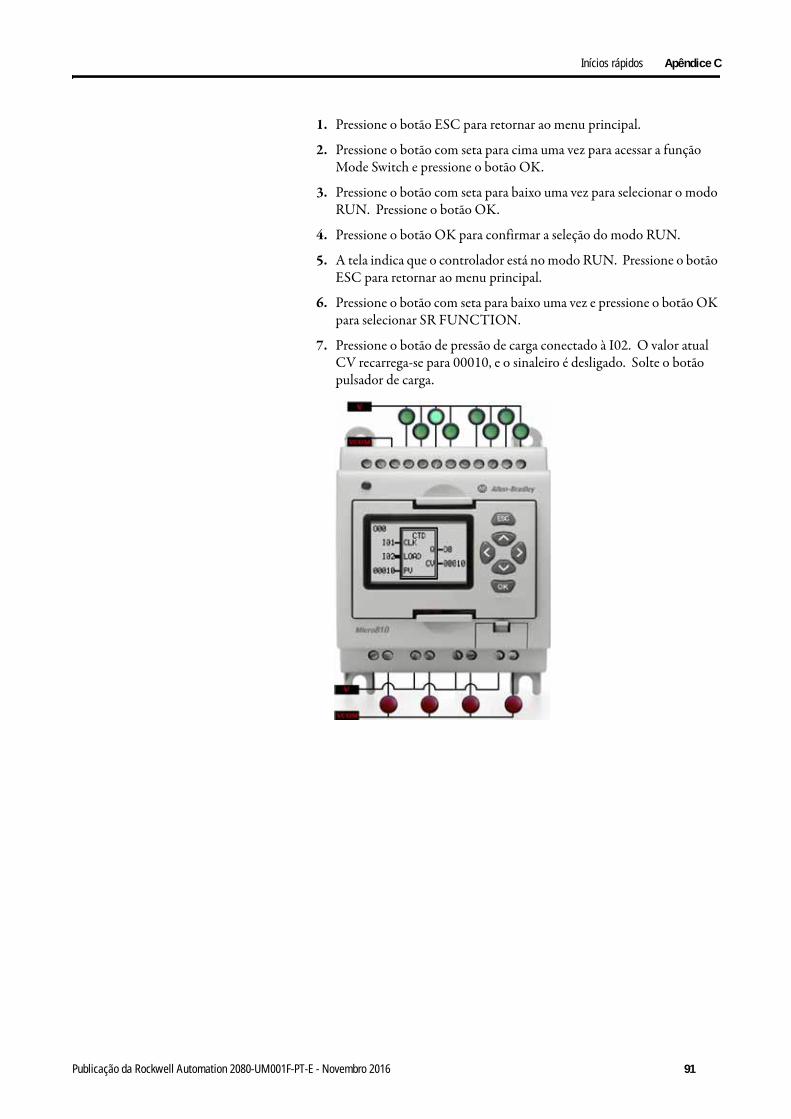
Inícios rápidos Apêndice C
1. Pressione o botão ESC para retornar ao menu principal.
2. Pressione o botão com seta para cima uma vez para acessar a função Mode Switch e pressione o botão OK.
3. Pressione o botão com seta para baixo uma vez para selecionar o modo RUN. Pressione o botão OK.
4. Pressione o botão OK para confirmar a seleção do modo RUN.
5. A tela indica que o controlador está no modo RUN. Pressione o botão ESC para retornar ao menu principal.
6. Pressione o botão com seta para baixo uma vez e pressione o botão OK para selecionar SR FUNCTION.
7. Pressione o botão de pressão de carga conectado à I02. O valor atual CV recarrega-se para 00010, e o sinaleiro é desligado. Solte o botão pulsador de carga.
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 91
Apêndice C Inícios rápidos
8. Pressione e libere o botão de pressão de contagem conectado à I01. O valor atual CV diminui para 00009.Repita a etapa 8 nove vezes até que CV diminua para 00000. Quando CV = 0, a saída O00 é energizada e o sinaleiro acende.
Configure o parâmetro TONOFF
1. Ligue o controlador Micro810. A tela inicial do Micro810 aparece brevemente depois que o controlador estiver ligado.
2. A tela de status mostra o modo PROG, o dia e horário, e o status de E/S. Pressione os botões ESC e OK simultaneamente para acessar o menu principal.
3. Pressione o botão com seta para baixo uma vez para selecionar SR FUNCTION. Pressione o botão OK. O bloco de funções para controlar a saída 0 é exibido.
4. Pressione o botão com seta para cima uma vez para selecionar a saída 1 (CTU).
5. Pressione o botão com seta para a direita uma vez para selecionar o campo do parâmetro de instrução CTU.
TONOFF – Amostra de configuração de parâmetro
Campo do parâmetro Valor de configuração
Q Q01
IN I03
Time Resolution SS:MS
PT 15:000
PTOFF 20:000
92 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
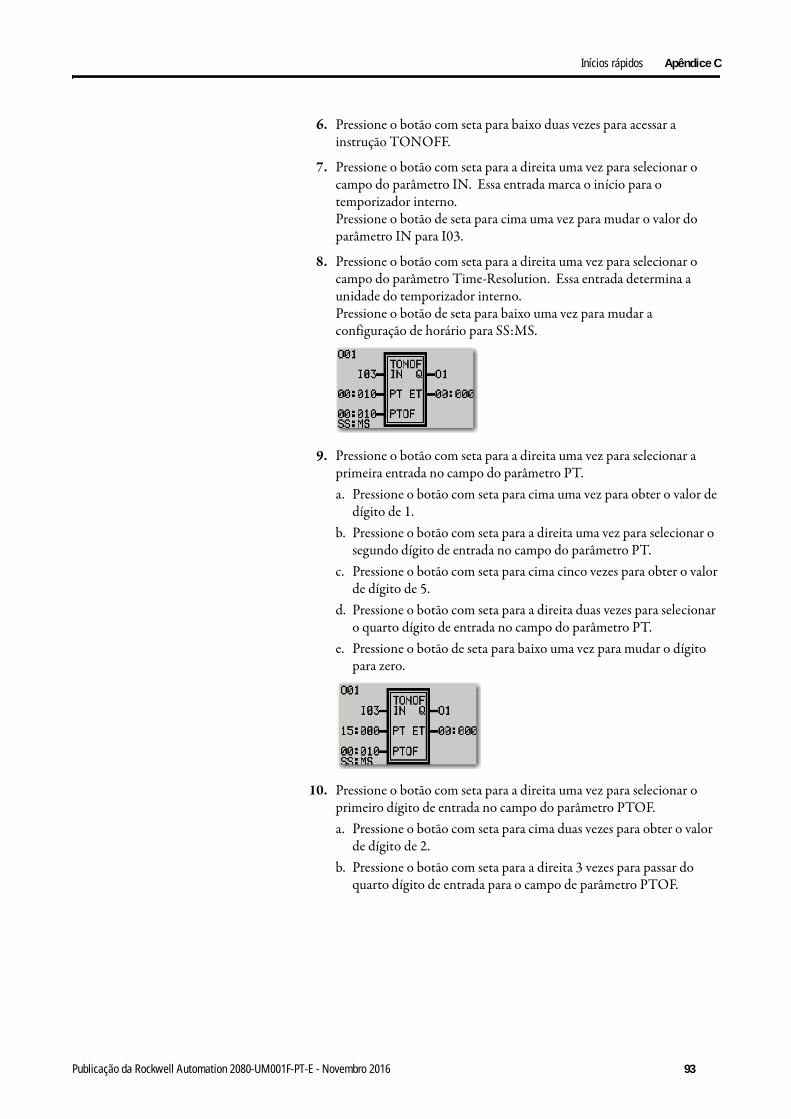
Inícios rápidos Apêndice C
6. Pressione o botão com seta para baixo duas vezes para acessar a instrução TONOFF.
7. Pressione o botão com seta para a direita uma vez para selecionar o campo do parâmetro IN. Essa entrada marca o início para o temporizador interno.Pressione o botão de seta para cima uma vez para mudar o valor do parâmetro IN para I03.
8. Pressione o botão com seta para a direita uma vez para selecionar o campo do parâmetro Time-Resolution. Essa entrada determina a unidade do temporizador interno.Pressione o botão de seta para baixo uma vez para mudar a configuração de horário para SS:MS.
9. Pressione o botão com seta para a direita uma vez para selecionar a primeira entrada no campo do parâmetro PT.a. Pressione o botão com seta para cima uma vez para obter o valor de
dígito de 1.b. Pressione o botão com seta para a direita uma vez para selecionar o
segundo dígito de entrada no campo do parâmetro PT.c. Pressione o botão com seta para cima cinco vezes para obter o valor
de dígito de 5.d. Pressione o botão com seta para a direita duas vezes para selecionar
o quarto dígito de entrada no campo do parâmetro PT.e. Pressione o botão de seta para baixo uma vez para mudar o dígito
para zero.
10. Pressione o botão com seta para a direita uma vez para selecionar o primeiro dígito de entrada no campo do parâmetro PTOF.a. Pressione o botão com seta para cima duas vezes para obter o valor
de dígito de 2.b. Pressione o botão com seta para a direita 3 vezes para passar do
quarto dígito de entrada para o campo de parâmetro PTOF.
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 93
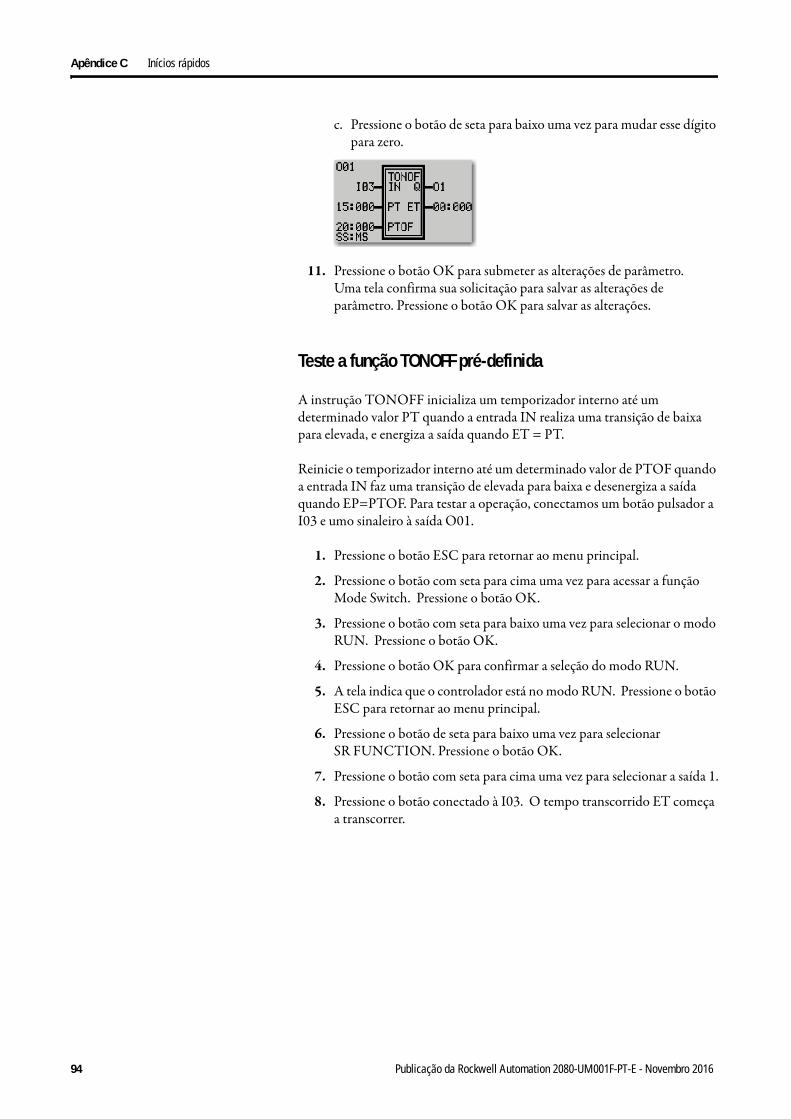
Apêndice C Inícios rápidos
c. Pressione o botão de seta para baixo uma vez para mudar esse dígito para zero.
11. Pressione o botão OK para submeter as alterações de parâmetro.Uma tela confirma sua solicitação para salvar as alterações de parâmetro. Pressione o botão OK para salvar as alterações.
Teste a função TONOFF pré-definida
A instrução TONOFF inicializa um temporizador interno até um determinado valor PT quando a entrada IN realiza uma transição de baixa para elevada, e energiza a saída quando ET = PT.
Reinicie o temporizador interno até um determinado valor de PTOF quando a entrada IN faz uma transição de elevada para baixa e desenergiza a saída quando EP=PTOF. Para testar a operação, conectamos um botão pulsador a I03 e umo sinaleiro à saída O01.
1. Pressione o botão ESC para retornar ao menu principal.
2. Pressione o botão com seta para cima uma vez para acessar a função Mode Switch. Pressione o botão OK.
3. Pressione o botão com seta para baixo uma vez para selecionar o modo RUN. Pressione o botão OK.
4. Pressione o botão OK para confirmar a seleção do modo RUN.
5. A tela indica que o controlador está no modo RUN. Pressione o botão ESC para retornar ao menu principal.
6. Pressione o botão de seta para baixo uma vez para selecionar SR FUNCTION. Pressione o botão OK.
7. Pressione o botão com seta para cima uma vez para selecionar a saída 1.
8. Pressione o botão conectado à I03. O tempo transcorrido ET começa a transcorrer.
94 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
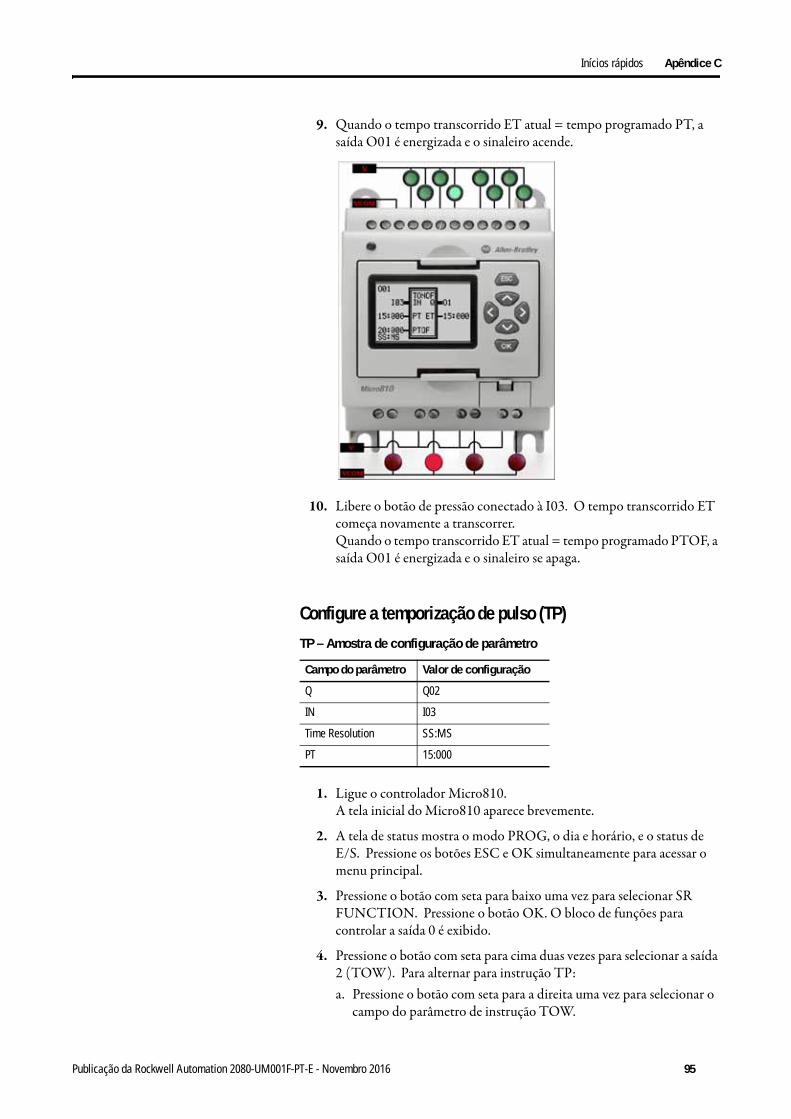
Inícios rápidos Apêndice C
9. Quando o tempo transcorrido ET atual = tempo programado PT, a saída O01 é energizada e o sinaleiro acende.
10. Libere o botão de pressão conectado à I03. O tempo transcorrido ET começa novamente a transcorrer.Quando o tempo transcorrido ET atual = tempo programado PTOF, a saída O01 é energizada e o sinaleiro se apaga.
Configure a temporização de pulso (TP)
1. Ligue o controlador Micro810. A tela inicial do Micro810 aparece brevemente.
2. A tela de status mostra o modo PROG, o dia e horário, e o status de E/S. Pressione os botões ESC e OK simultaneamente para acessar o menu principal.
3. Pressione o botão com seta para baixo uma vez para selecionar SR FUNCTION. Pressione o botão OK. O bloco de funções para controlar a saída 0 é exibido.
4. Pressione o botão com seta para cima duas vezes para selecionar a saída 2 (TOW). Para alternar para instrução TP:a. Pressione o botão com seta para a direita uma vez para selecionar o
campo do parâmetro de instrução TOW.
TP – Amostra de configuração de parâmetro
Campo do parâmetro Valor de configuração
Q Q02
IN I03
Time Resolution SS:MS
PT 15:000
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 95

Apêndice C Inícios rápidos
b. Pressione o botão com seta para baixo quatro vezes para alternar para instrução TP.
5. Pressione o botão com seta para a direita uma vez para selecionar o campo do parâmetro IN. Isso marca a inicialização do temporizador interno.
6. Pressione o botão com seta para a direita uma vez para selecionar o campo do parâmetro Time-Resolution. Essa entrada determina a unidade do temporizador interno.Pressione o botão de seta para baixo uma vez para mudar a configuração de horário para SS:MS.
7. Pressione o botão com seta para a direita uma vez para selecionar a primeira entrada no campo do parâmetro PT.a. Pressione o botão com seta para cima uma vez para transformar o
valor desse dígito em zero.b. Pressione o botão com seta para a direita uma vez para selecionar o
segundo dígito de entrada no campo do parâmetro PT.c. Pressione o botão com seta para cima cinco vezes para transformar o
valor desse dígito em 5.d. Pressione o botão com seta para a direita duas vezes para selecionar
o quarto dígito de entrada no campo do parâmetro PT.e. Pressione o botão de seta para baixo uma vez para mudar o valor do
dígito para zero.
8. Pressione o botão OK para submeter as alterações de parâmetro.Uma tela confirma sua solicitação para salvar as alterações de parâmetro. Pressione o botão OK para salvar as alterações.
Teste a função TP pré-definida
A instrução TP inicializa um temporizador interno quando a entrada IN faz uma transição de baixa para elevada, e energiza a saída simultaneamente. Quando o tempo transcorrido ET aumenta até o valor dado PT, ele desenergiza a saída. Para testar a operação, conectamos um botão de pressão a I03 e um sinaleiro à saída O02.
1. Pressione o botão ESC para retornar ao menu principal.
96 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
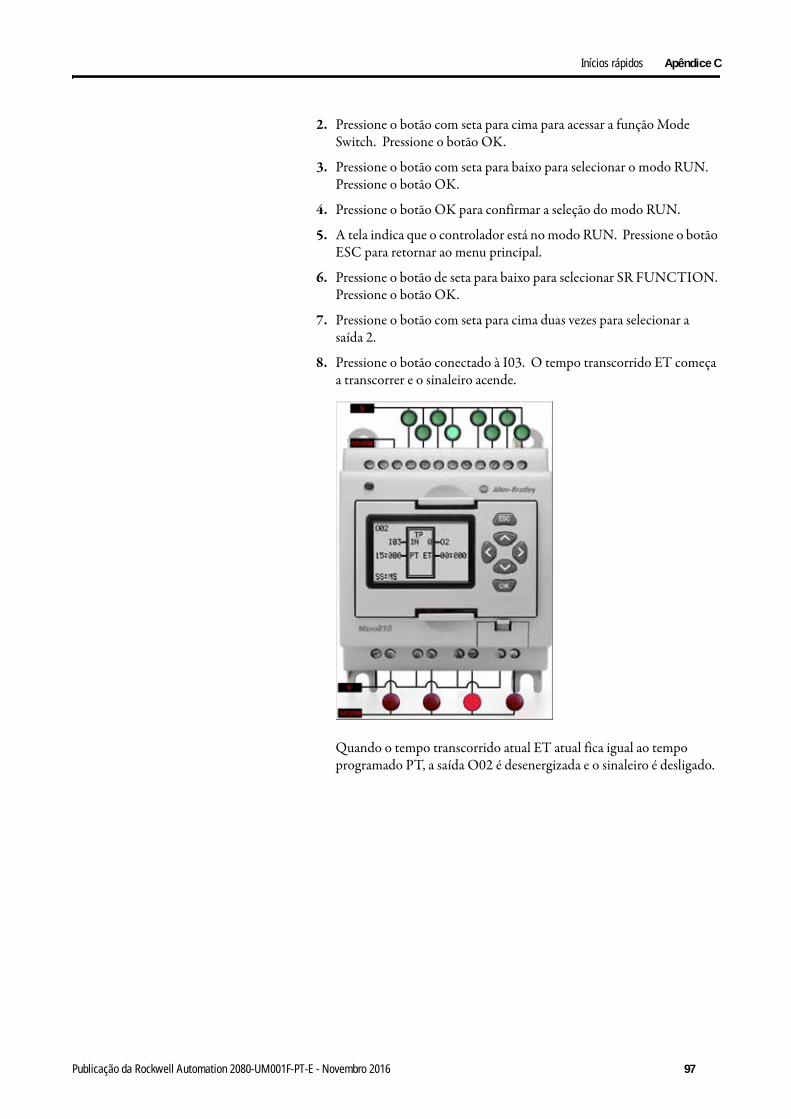
Inícios rápidos Apêndice C
2. Pressione o botão com seta para cima para acessar a função Mode Switch. Pressione o botão OK.
3. Pressione o botão com seta para baixo para selecionar o modo RUN. Pressione o botão OK.
4. Pressione o botão OK para confirmar a seleção do modo RUN.
5. A tela indica que o controlador está no modo RUN. Pressione o botão ESC para retornar ao menu principal.
6. Pressione o botão de seta para baixo para selecionar SR FUNCTION. Pressione o botão OK.
7. Pressione o botão com seta para cima duas vezes para selecionar a saída 2.
8. Pressione o botão conectado à I03. O tempo transcorrido ET começa a transcorrer e o sinaleiro acende.
Quando o tempo transcorrido atual ET atual fica igual ao tempo programado PT, a saída O02 é desenergizada e o sinaleiro é desligado.
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 97
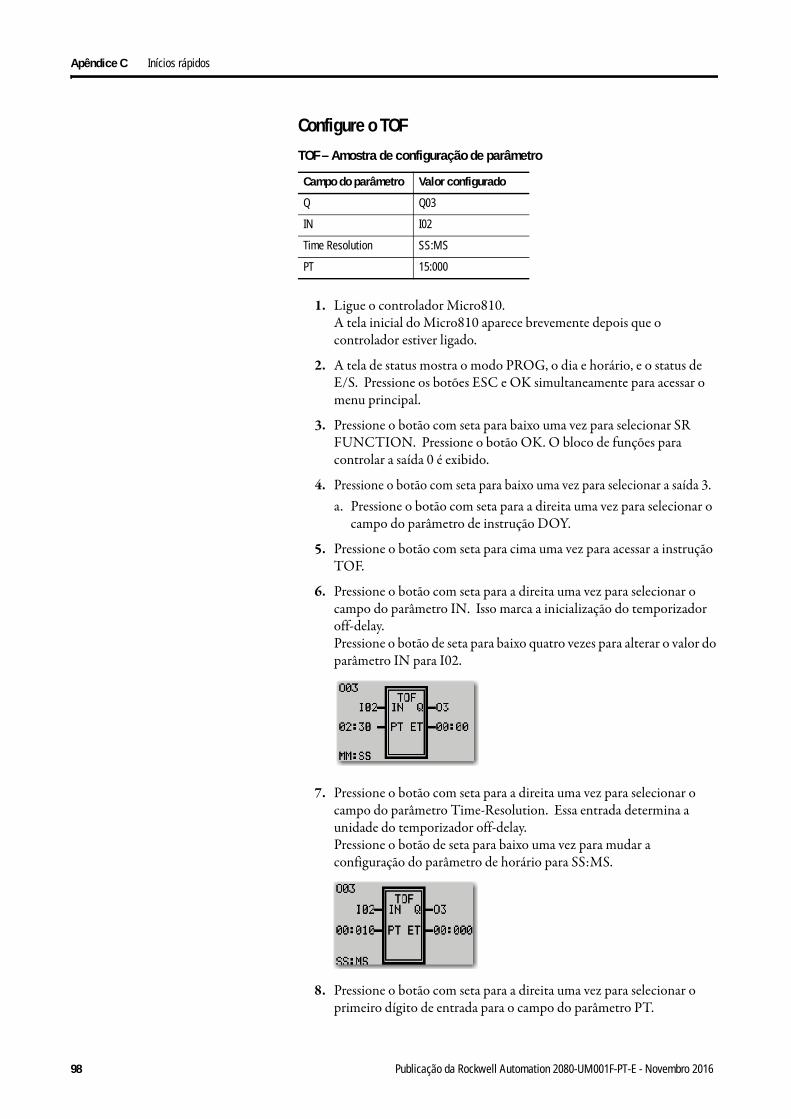
Apêndice C Inícios rápidos
Configure o TOF
1. Ligue o controlador Micro810. A tela inicial do Micro810 aparece brevemente depois que o controlador estiver ligado.
2. A tela de status mostra o modo PROG, o dia e horário, e o status de E/S. Pressione os botões ESC e OK simultaneamente para acessar o menu principal.
3. Pressione o botão com seta para baixo uma vez para selecionar SR FUNCTION. Pressione o botão OK. O bloco de funções para controlar a saída 0 é exibido.
4. Pressione o botão com seta para baixo uma vez para selecionar a saída 3.a. Pressione o botão com seta para a direita uma vez para selecionar o
campo do parâmetro de instrução DOY.
5. Pressione o botão com seta para cima uma vez para acessar a instrução TOF.
6. Pressione o botão com seta para a direita uma vez para selecionar o campo do parâmetro IN. Isso marca a inicialização do temporizador off-delay.Pressione o botão de seta para baixo quatro vezes para alterar o valor do parâmetro IN para I02.
7. Pressione o botão com seta para a direita uma vez para selecionar o campo do parâmetro Time-Resolution. Essa entrada determina a unidade do temporizador off-delay.Pressione o botão de seta para baixo uma vez para mudar a configuração do parâmetro de horário para SS:MS.
8. Pressione o botão com seta para a direita uma vez para selecionar o primeiro dígito de entrada para o campo do parâmetro PT.
TOF – Amostra de configuração de parâmetro
Campo do parâmetro Valor configurado
Q Q03
IN I02
Time Resolution SS:MS
PT 15:000
98 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
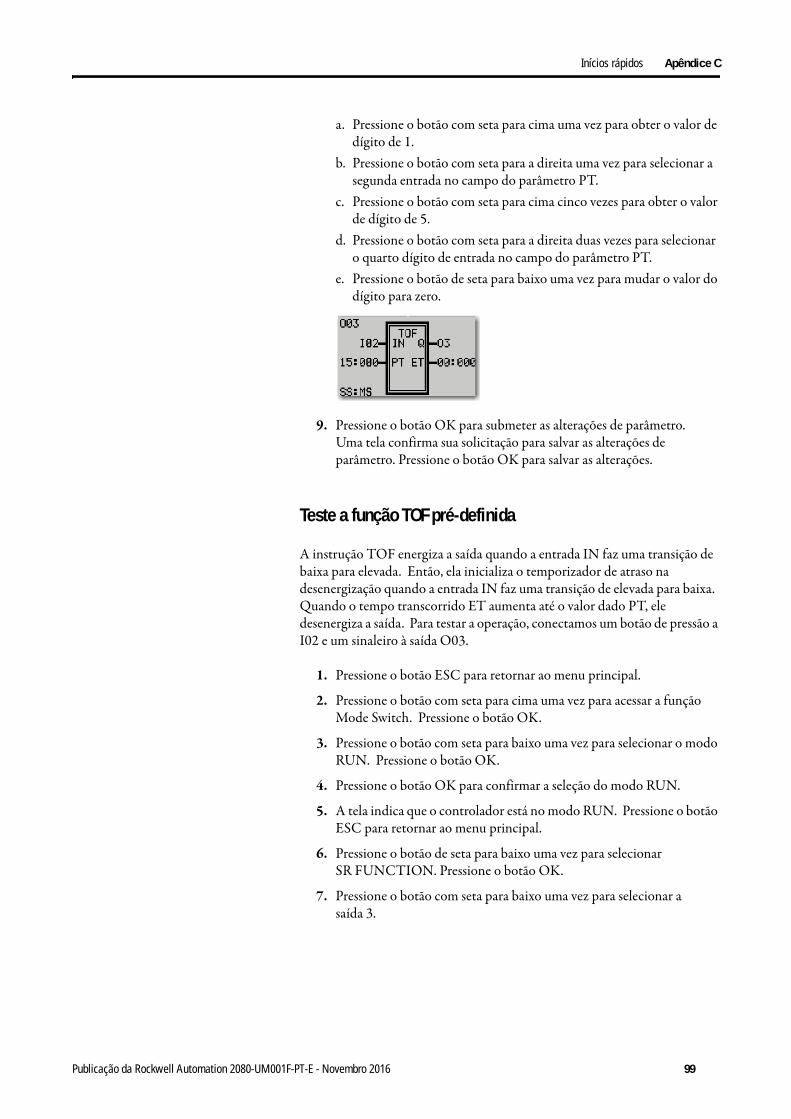
Inícios rápidos Apêndice C
a. Pressione o botão com seta para cima uma vez para obter o valor de dígito de 1.
b. Pressione o botão com seta para a direita uma vez para selecionar a segunda entrada no campo do parâmetro PT.
c. Pressione o botão com seta para cima cinco vezes para obter o valor de dígito de 5.
d. Pressione o botão com seta para a direita duas vezes para selecionar o quarto dígito de entrada no campo do parâmetro PT.
e. Pressione o botão de seta para baixo uma vez para mudar o valor do dígito para zero.
9. Pressione o botão OK para submeter as alterações de parâmetro.Uma tela confirma sua solicitação para salvar as alterações de parâmetro. Pressione o botão OK para salvar as alterações.
Teste a função TOF pré-definida
A instrução TOF energiza a saída quando a entrada IN faz uma transição de baixa para elevada. Então, ela inicializa o temporizador de atraso na desenergização quando a entrada IN faz uma transição de elevada para baixa. Quando o tempo transcorrido ET aumenta até o valor dado PT, ele desenergiza a saída. Para testar a operação, conectamos um botão de pressão a I02 e um sinaleiro à saída O03.
1. Pressione o botão ESC para retornar ao menu principal.
2. Pressione o botão com seta para cima uma vez para acessar a função Mode Switch. Pressione o botão OK.
3. Pressione o botão com seta para baixo uma vez para selecionar o modo RUN. Pressione o botão OK.
4. Pressione o botão OK para confirmar a seleção do modo RUN.
5. A tela indica que o controlador está no modo RUN. Pressione o botão ESC para retornar ao menu principal.
6. Pressione o botão de seta para baixo uma vez para selecionar SR FUNCTION. Pressione o botão OK.
7. Pressione o botão com seta para baixo uma vez para selecionar a saída 3.
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 99
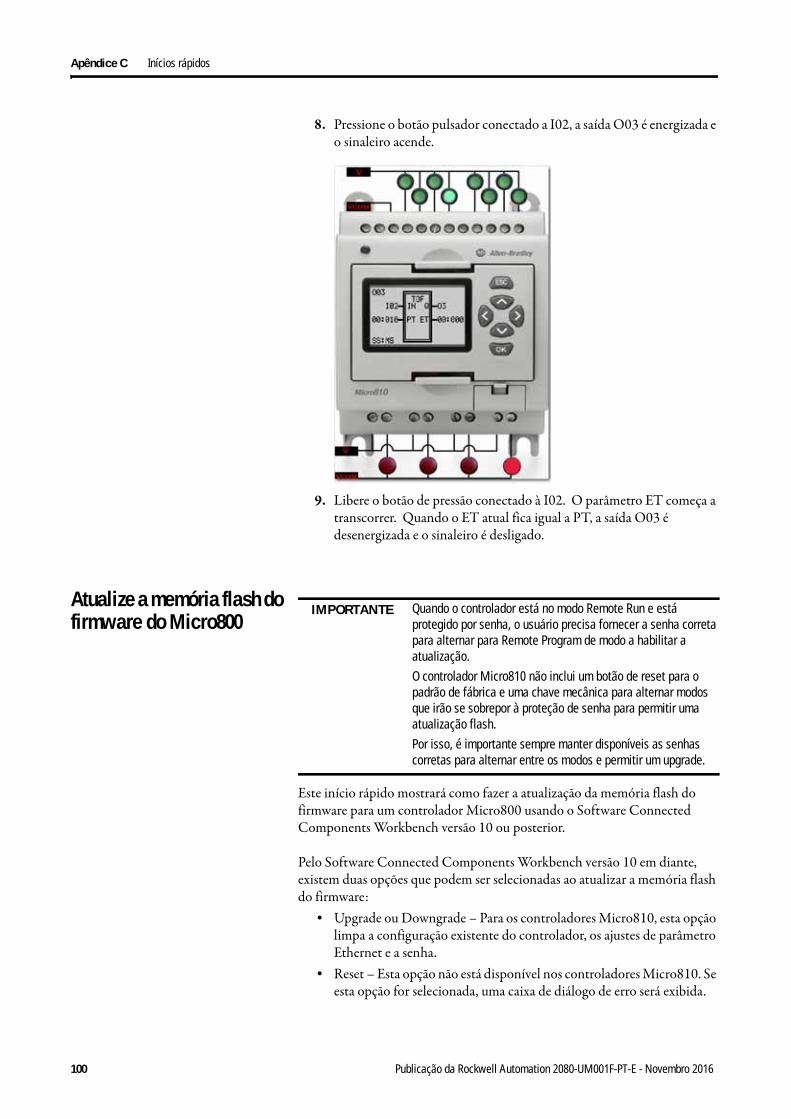
Apêndice C Inícios rápidos
8. Pressione o botão pulsador conectado a I02, a saída O03 é energizada e o sinaleiro acende.
9. Libere o botão de pressão conectado à I02. O parâmetro ET começa a transcorrer. Quando o ET atual fica igual a PT, a saída O03 é desenergizada e o sinaleiro é desligado.
Atualize a memória flash do firmware do Micro800
Este início rápido mostrará como fazer a atualização da memória flash do firmware para um controlador Micro800 usando o Software Connected Components Workbench versão 10 ou posterior.
Pelo Software Connected Components Workbench versão 10 em diante, existem duas opções que podem ser selecionadas ao atualizar a memória flash do firmware:
• Upgrade ou Downgrade – Para os controladores Micro810, esta opção limpa a configuração existente do controlador, os ajustes de parâmetro Ethernet e a senha.
• Reset – Esta opção não está disponível nos controladores Micro810. Se esta opção for selecionada, uma caixa de diálogo de erro será exibida.
IMPORTANTE Quando o controlador está no modo Remote Run e está protegido por senha, o usuário precisa fornecer a senha correta para alternar para Remote Program de modo a habilitar a atualização.
O controlador Micro810 não inclui um botão de reset para o padrão de fábrica e uma chave mecânica para alternar modos que irão se sobrepor à proteção de senha para permitir uma atualização flash.
Por isso, é importante sempre manter disponíveis as senhas corretas para alternar entre os modos e permitir um upgrade.
100 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
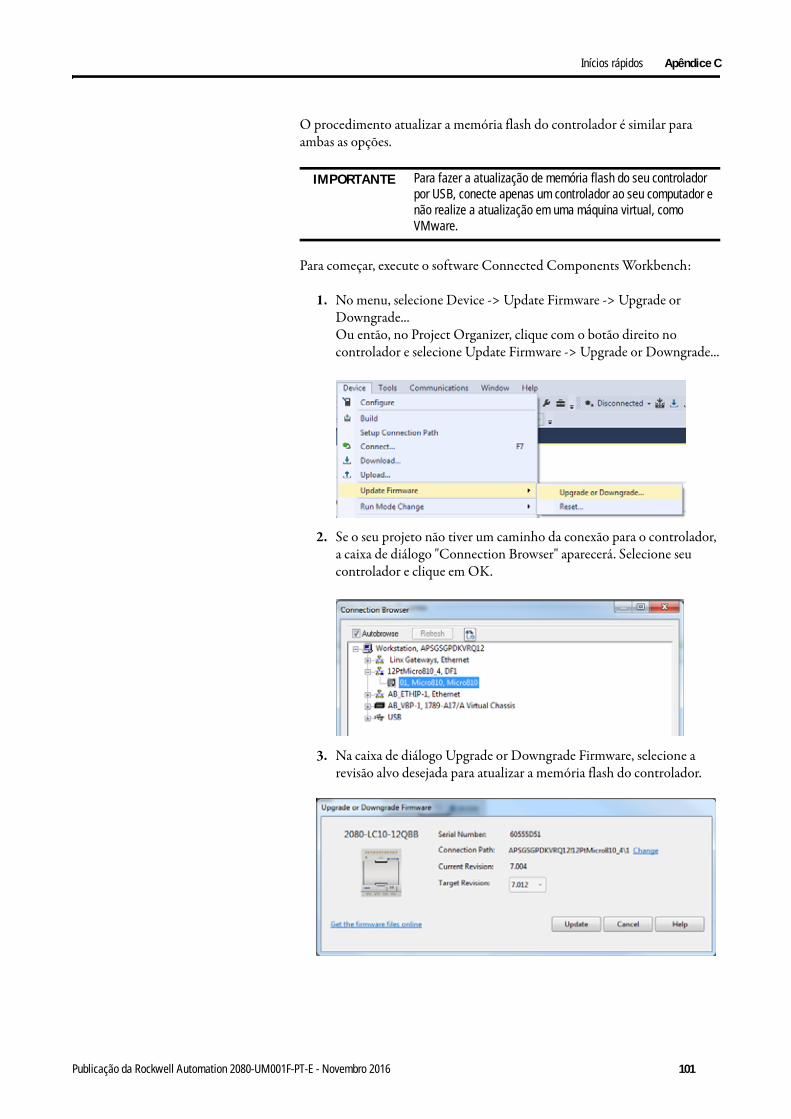
Inícios rápidos Apêndice C
O procedimento atualizar a memória flash do controlador é similar para ambas as opções.
Para começar, execute o software Connected Components Workbench:
1. No menu, selecione Device -> Update Firmware -> Upgrade or Downgrade... Ou então, no Project Organizer, clique com o botão direito no controlador e selecione Update Firmware -> Upgrade or Downgrade...
2. Se o seu projeto não tiver um caminho da conexão para o controlador, a caixa de diálogo "Connection Browser" aparecerá. Selecione seu controlador e clique em OK.
3. Na caixa de diálogo Upgrade or Downgrade Firmware, selecione a revisão alvo desejada para atualizar a memória flash do controlador.
IMPORTANTE Para fazer a atualização de memória flash do seu controlador por USB, conecte apenas um controlador ao seu computador e não realize a atualização em uma máquina virtual, como VMware.
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 101
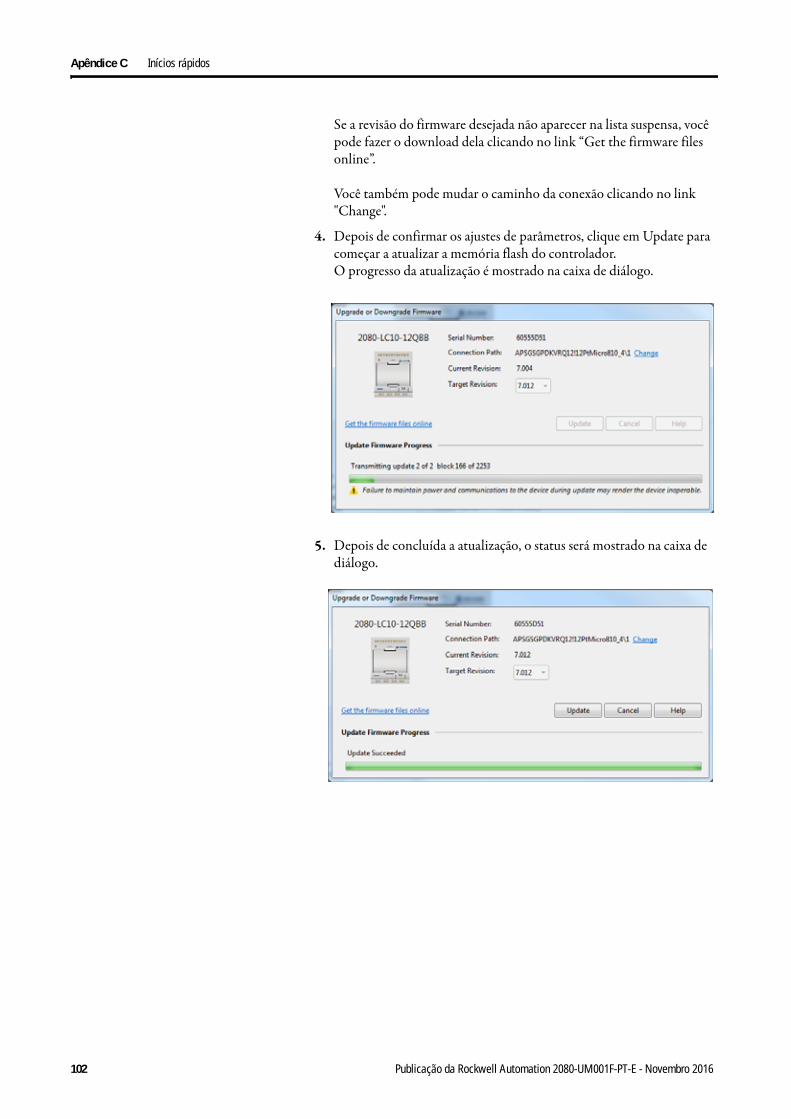
Apêndice C Inícios rápidos
Se a revisão do firmware desejada não aparecer na lista suspensa, você pode fazer o download dela clicando no link “Get the firmware files online”.
Você também pode mudar o caminho da conexão clicando no link "Change".
4. Depois de confirmar os ajustes de parâmetros, clique em Update para começar a atualizar a memória flash do controlador.O progresso da atualização é mostrado na caixa de diálogo.
5. Depois de concluída a atualização, o status será mostrado na caixa de diálogo.
102 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
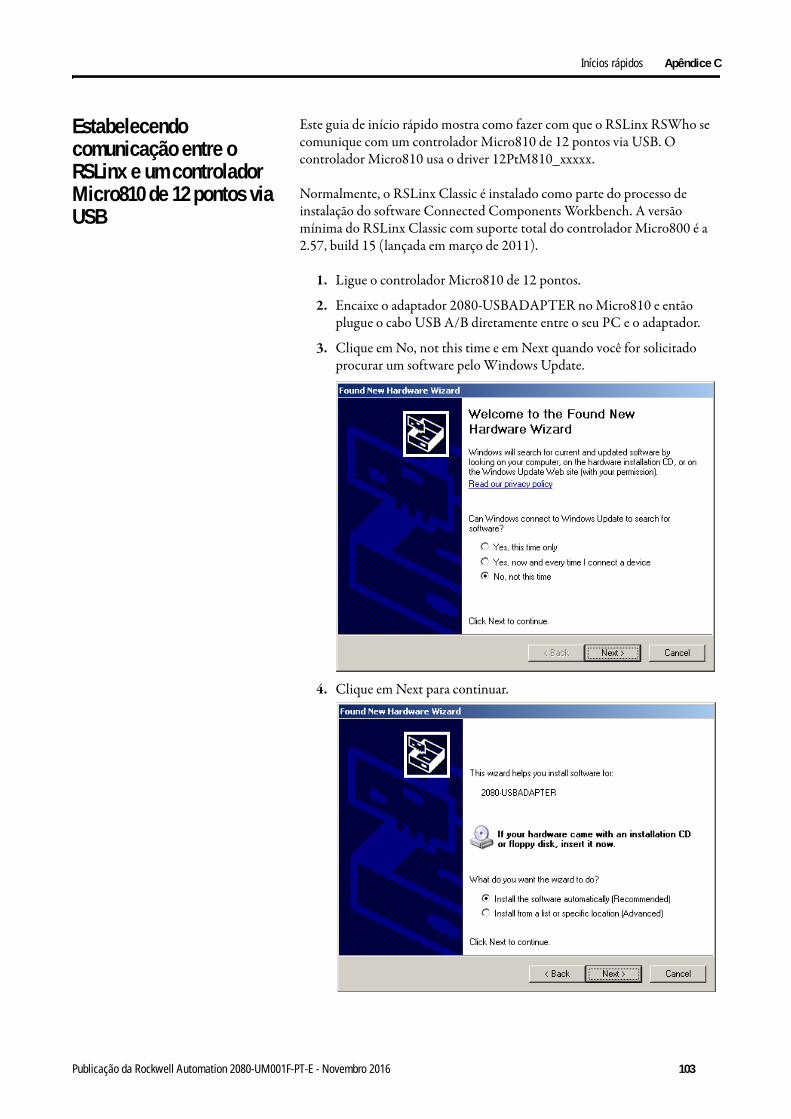
Inícios rápidos Apêndice C
Estabelecendo comunicação entre o RSLinx e um controlador Micro810 de 12 pontos via USB
Este guia de início rápido mostra como fazer com que o RSLinx RSWho se comunique com um controlador Micro810 de 12 pontos via USB. O controlador Micro810 usa o driver 12PtM810_xxxxx.
Normalmente, o RSLinx Classic é instalado como parte do processo de instalação do software Connected Components Workbench. A versão mínima do RSLinx Classic com suporte total do controlador Micro800 é a 2.57, build 15 (lançada em março de 2011).
1. Ligue o controlador Micro810 de 12 pontos.
2. Encaixe o adaptador 2080-USBADAPTER no Micro810 e então plugue o cabo USB A/B diretamente entre o seu PC e o adaptador.
3. Clique em No, not this time e em Next quando você for solicitado procurar um software pelo Windows Update.
4. Clique em Next para continuar.
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 103
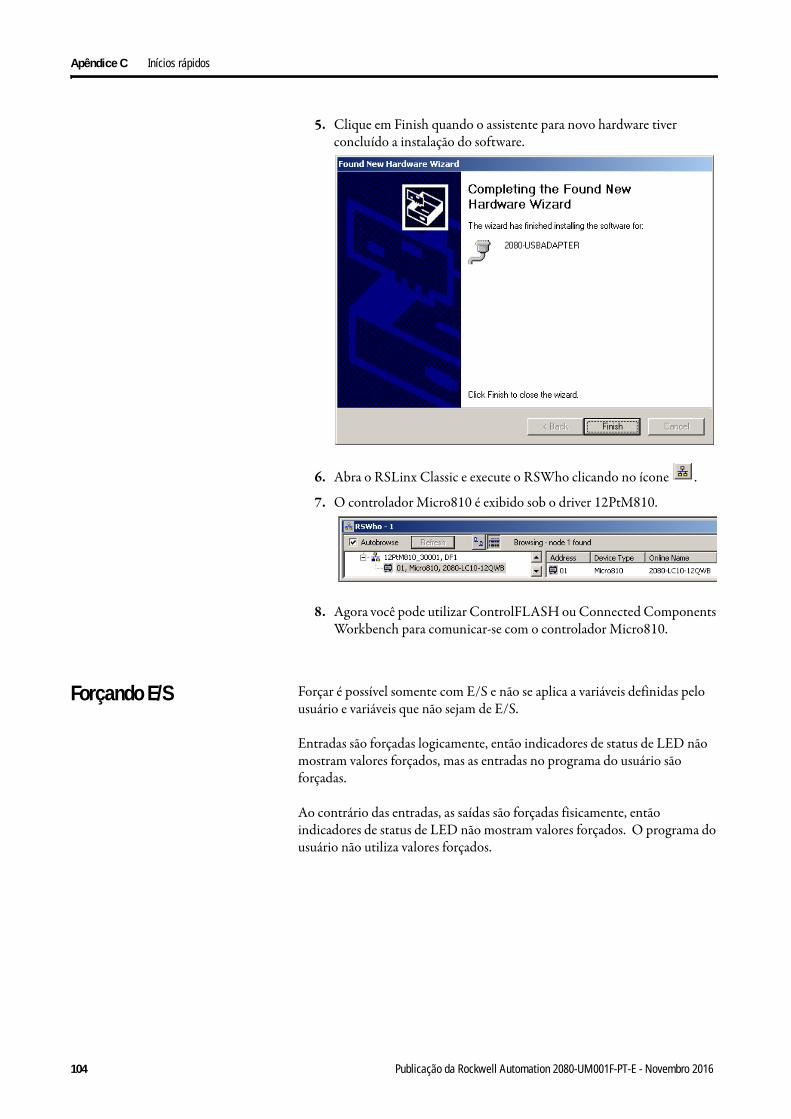
Apêndice C Inícios rápidos
5. Clique em Finish quando o assistente para novo hardware tiver concluído a instalação do software.
6. Abra o RSLinx Classic e execute o RSWho clicando no ícone .
7. O controlador Micro810 é exibido sob o driver 12PtM810.
8. Agora você pode utilizar ControlFLASH ou Connected Components Workbench para comunicar-se com o controlador Micro810.
Forçando E/S Forçar é possível somente com E/S e não se aplica a variáveis definidas pelo usuário e variáveis que não sejam de E/S.
Entradas são forçadas logicamente, então indicadores de status de LED não mostram valores forçados, mas as entradas no programa do usuário são forçadas.
Ao contrário das entradas, as saídas são forçadas fisicamente, então indicadores de status de LED não mostram valores forçados. O programa do usuário não utiliza valores forçados.
104 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
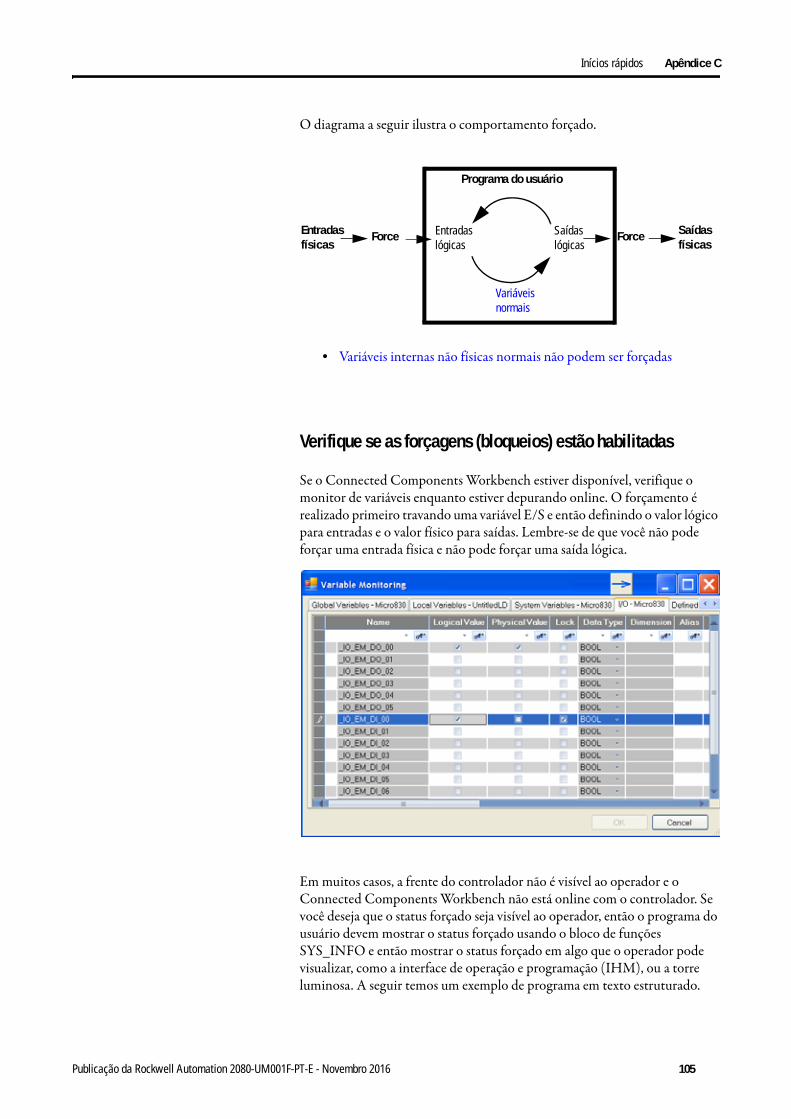
Inícios rápidos Apêndice C
O diagrama a seguir ilustra o comportamento forçado.
Verifique se as forçagens (bloqueios) estão habilitadas
Se o Connected Components Workbench estiver disponível, verifique o monitor de variáveis enquanto estiver depurando online. O forçamento é realizado primeiro travando uma variável E/S e então definindo o valor lógico para entradas e o valor físico para saídas. Lembre-se de que você não pode forçar uma entrada física e não pode forçar uma saída lógica.
Em muitos casos, a frente do controlador não é visível ao operador e o Connected Components Workbench não está online com o controlador. Se você deseja que o status forçado seja visível ao operador, então o programa do usuário devem mostrar o status forçado usando o bloco de funções SYS_INFO e então mostrar o status forçado em algo que o operador pode visualizar, como a interface de operação e programação (IHM), ou a torre luminosa. A seguir temos um exemplo de programa em texto estruturado.
Programa do usuário
Entradas lógicas
Saídas lógicas
Variáveis normais
ForceEntradas físicas
Force Saídas físicas
• Variáveis internas não físicas normais não podem ser forçadas
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 105
Apêndice C Inícios rápidos
Se a parte frontal do controlador está visível, e não bloqueada pela estrutura do gabinete, controladores Micro830 e superiores possuem um indicador LED de forçagem.
Force de E/S após um ciclo de energização/desenergização
Depois que um controlador é desligado e ligado, todas as forces de E/S são removidas da memória.
106 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
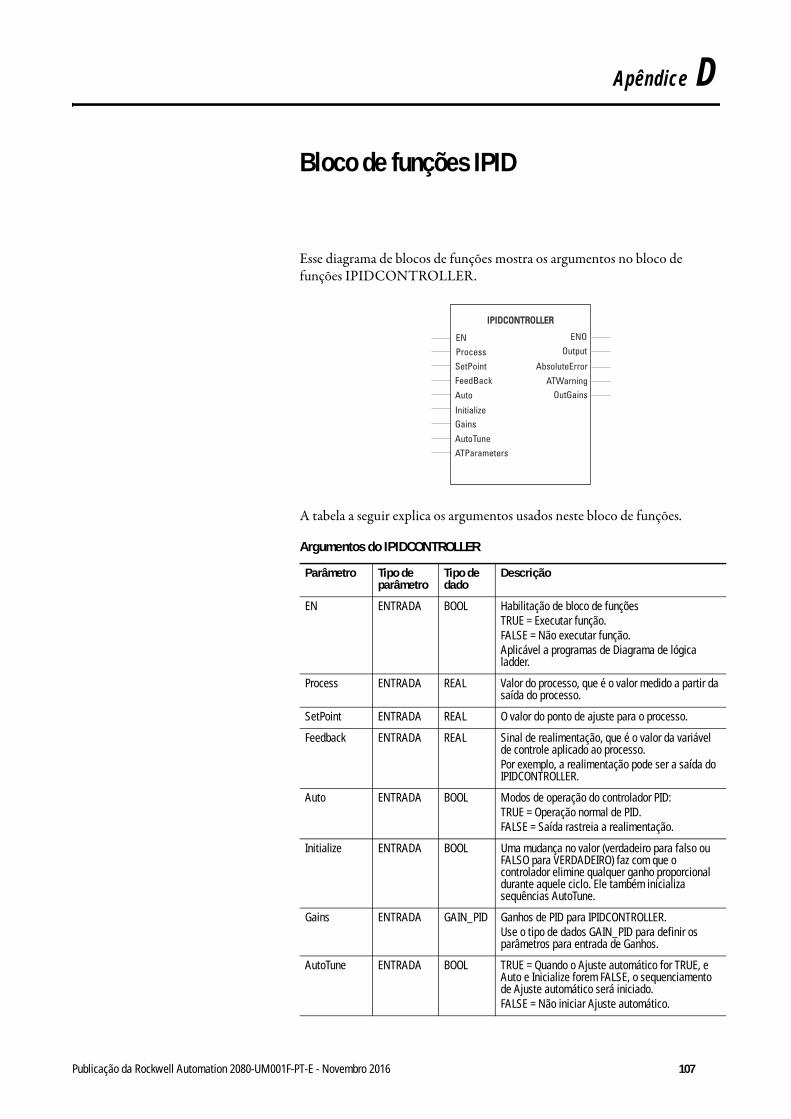
Apêndice D
Bloco de funções IPID
Esse diagrama de blocos de funções mostra os argumentos no bloco de funções IPIDCONTROLLER.
A tabela a seguir explica os argumentos usados neste bloco de funções.
Argumentos do IPIDCONTROLLER
Parâmetro Tipo de parâmetro
Tipo de dado
Descrição
EN ENTRADA BOOL Habilitação de bloco de funçõesTRUE = Executar função.FALSE = Não executar função.Aplicável a programas de Diagrama de lógica ladder.
Process ENTRADA REAL Valor do processo, que é o valor medido a partir da saída do processo.
SetPoint ENTRADA REAL O valor do ponto de ajuste para o processo.
Feedback ENTRADA REAL Sinal de realimentação, que é o valor da variável de controle aplicado ao processo.Por exemplo, a realimentação pode ser a saída do IPIDCONTROLLER.
Auto ENTRADA BOOL Modos de operação do controlador PID:TRUE = Operação normal de PID.FALSE = Saída rastreia a realimentação.
Initialize ENTRADA BOOL Uma mudança no valor (verdadeiro para falso ou FALSO para VERDADEIRO) faz com que o controlador elimine qualquer ganho proporcional durante aquele ciclo. Ele também inicializa sequências AutoTune.
Gains ENTRADA GAIN_PID Ganhos de PID para IPIDCONTROLLER.Use o tipo de dados GAIN_PID para definir os parâmetros para entrada de Ganhos.
AutoTune ENTRADA BOOL TRUE = Quando o Ajuste automático for TRUE, e Auto e Inicialize forem FALSE, o sequenciamento de Ajuste automático será iniciado.FALSE = Não iniciar Ajuste automático.
IPIDCONTROLLERIPIDCONTROLLER
Process
ENOOutput
AbsoluteErrorSetPointFeedBack
Auto
InitializeGains
AutoTuneATParameters
ATWarningOutGains
EN
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 107
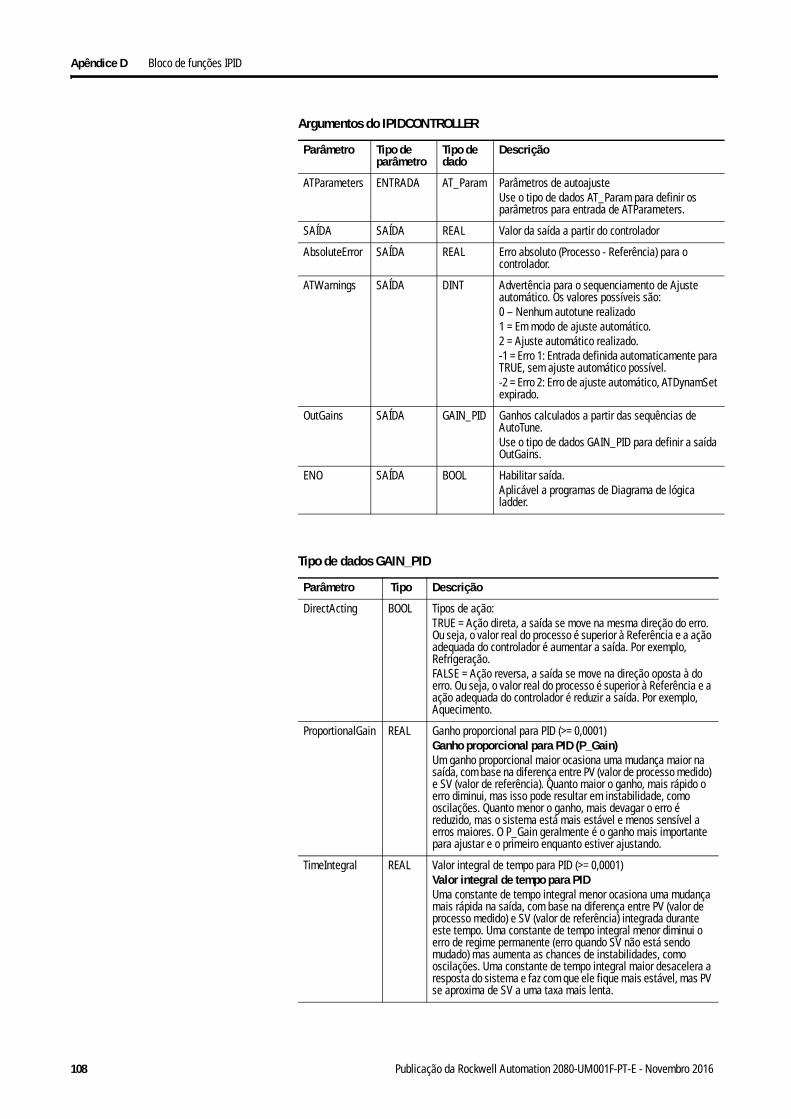
Apêndice D Bloco de funções IPID
ATParameters ENTRADA AT_Param Parâmetros de autoajusteUse o tipo de dados AT_Param para definir os parâmetros para entrada de ATParameters.
SAÍDA SAÍDA REAL Valor da saída a partir do controlador
AbsoluteError SAÍDA REAL Erro absoluto (Processo - Referência) para o controlador.
ATWarnings SAÍDA DINT Advertência para o sequenciamento de Ajuste automático. Os valores possíveis são:0 – Nenhum autotune realizado1 = Em modo de ajuste automático.2 = Ajuste automático realizado.-1 = Erro 1: Entrada definida automaticamente para TRUE, sem ajuste automático possível.-2 = Erro 2: Erro de ajuste automático, ATDynamSet expirado.
OutGains SAÍDA GAIN_PID Ganhos calculados a partir das sequências de AutoTune.Use o tipo de dados GAIN_PID para definir a saída OutGains.
ENO SAÍDA BOOL Habilitar saída.Aplicável a programas de Diagrama de lógica ladder.
Tipo de dados GAIN_PID
Parâmetro Tipo Descrição
DirectActing BOOL Tipos de ação:TRUE = Ação direta, a saída se move na mesma direção do erro. Ou seja, o valor real do processo é superior à Referência e a ação adequada do controlador é aumentar a saída. Por exemplo, Refrigeração.FALSE = Ação reversa, a saída se move na direção oposta à do erro. Ou seja, o valor real do processo é superior à Referência e a ação adequada do controlador é reduzir a saída. Por exemplo, Aquecimento.
ProportionalGain REAL Ganho proporcional para PID (>= 0,0001)Ganho proporcional para PID (P_Gain)Um ganho proporcional maior ocasiona uma mudança maior na saída, com base na diferença entre PV (valor de processo medido) e SV (valor de referência). Quanto maior o ganho, mais rápido o erro diminui, mas isso pode resultar em instabilidade, como oscilações. Quanto menor o ganho, mais devagar o erro é reduzido, mas o sistema está mais estável e menos sensível a erros maiores. O P_Gain geralmente é o ganho mais importante para ajustar e o primeiro enquanto estiver ajustando.
TimeIntegral REAL Valor integral de tempo para PID (>= 0,0001)Valor integral de tempo para PIDUma constante de tempo integral menor ocasiona uma mudança mais rápida na saída, com base na diferença entre PV (valor de processo medido) e SV (valor de referência) integrada durante este tempo. Uma constante de tempo integral menor diminui o erro de regime permanente (erro quando SV não está sendo mudado) mas aumenta as chances de instabilidades, como oscilações. Uma constante de tempo integral maior desacelera a resposta do sistema e faz com que ele fique mais estável, mas PV se aproxima de SV a uma taxa mais lenta.
Argumentos do IPIDCONTROLLER
Parâmetro Tipo de parâmetro
Tipo de dado
Descrição
108 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
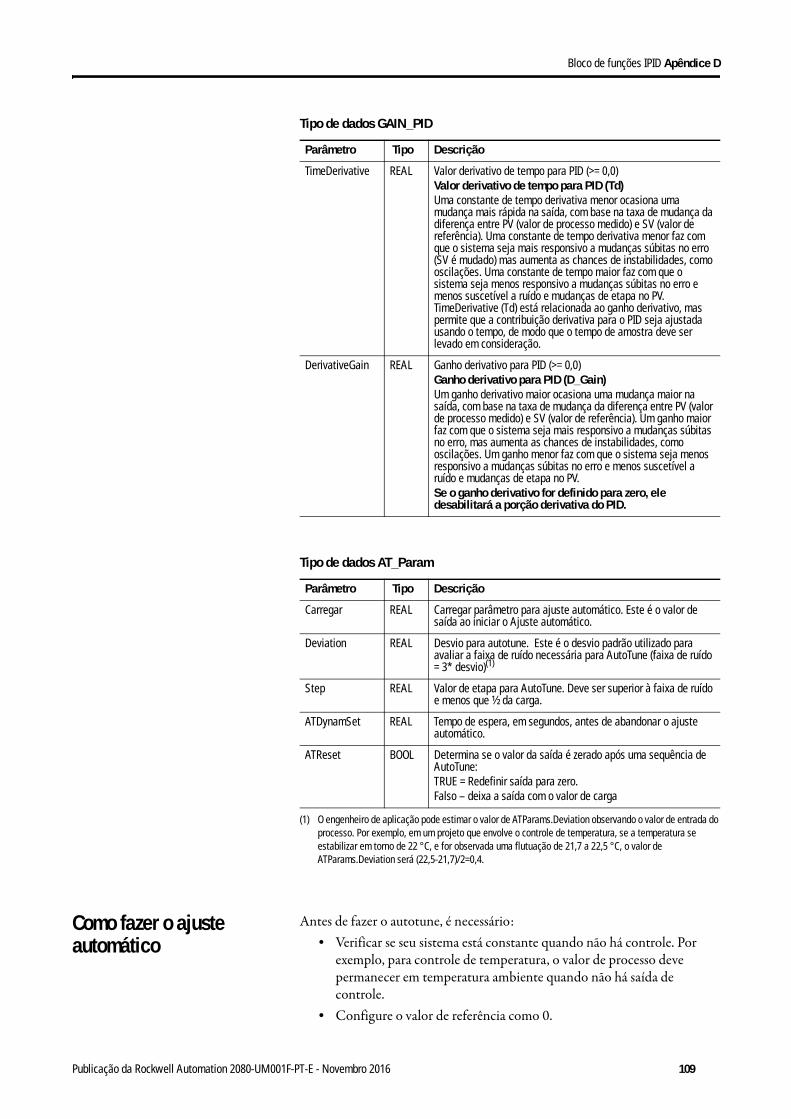
Bloco de funções IPID Apêndice D
Como fazer o ajuste automático
Antes de fazer o autotune, é necessário:• Verificar se seu sistema está constante quando não há controle. Por
exemplo, para controle de temperatura, o valor de processo deve permanecer em temperatura ambiente quando não há saída de controle.
• Configure o valor de referência como 0.
TimeDerivative REAL Valor derivativo de tempo para PID (>= 0,0)Valor derivativo de tempo para PID (Td)Uma constante de tempo derivativa menor ocasiona uma mudança mais rápida na saída, com base na taxa de mudança da diferença entre PV (valor de processo medido) e SV (valor de referência). Uma constante de tempo derivativa menor faz com que o sistema seja mais responsivo a mudanças súbitas no erro (SV é mudado) mas aumenta as chances de instabilidades, como oscilações. Uma constante de tempo maior faz com que o sistema seja menos responsivo a mudanças súbitas no erro e menos suscetível a ruído e mudanças de etapa no PV. TimeDerivative (Td) está relacionada ao ganho derivativo, mas permite que a contribuição derivativa para o PID seja ajustada usando o tempo, de modo que o tempo de amostra deve ser levado em consideração.
DerivativeGain REAL Ganho derivativo para PID (>= 0,0)Ganho derivativo para PID (D_Gain)Um ganho derivativo maior ocasiona uma mudança maior na saída, com base na taxa de mudança da diferença entre PV (valor de processo medido) e SV (valor de referência). Um ganho maior faz com que o sistema seja mais responsivo a mudanças súbitas no erro, mas aumenta as chances de instabilidades, como oscilações. Um ganho menor faz com que o sistema seja menos responsivo a mudanças súbitas no erro e menos suscetível a ruído e mudanças de etapa no PV.Se o ganho derivativo for definido para zero, ele desabilitará a porção derivativa do PID.
Tipo de dados AT_Param
Parâmetro Tipo Descrição
Carregar REAL Carregar parâmetro para ajuste automático. Este é o valor de saída ao iniciar o Ajuste automático.
Deviation REAL Desvio para autotune. Este é o desvio padrão utilizado para avaliar a faixa de ruído necessária para AutoTune (faixa de ruído = 3* desvio)(1)
(1) O engenheiro de aplicação pode estimar o valor de ATParams.Deviation observando o valor de entrada do processo. Por exemplo, em um projeto que envolve o controle de temperatura, se a temperatura se estabilizar em torno de 22 °C, e for observada uma flutuação de 21,7 a 22,5 °C, o valor de ATParams.Deviation será (22,5-21,7)/2=0,4.
Step REAL Valor de etapa para AutoTune. Deve ser superior à faixa de ruído e menos que ½ da carga.
ATDynamSet REAL Tempo de espera, em segundos, antes de abandonar o ajuste automático.
ATReset BOOL Determina se o valor da saída é zerado após uma sequência de AutoTune:TRUE = Redefinir saída para zero.Falso – deixa a saída com o valor de carga
Tipo de dados GAIN_PID
Parâmetro Tipo Descrição
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 109
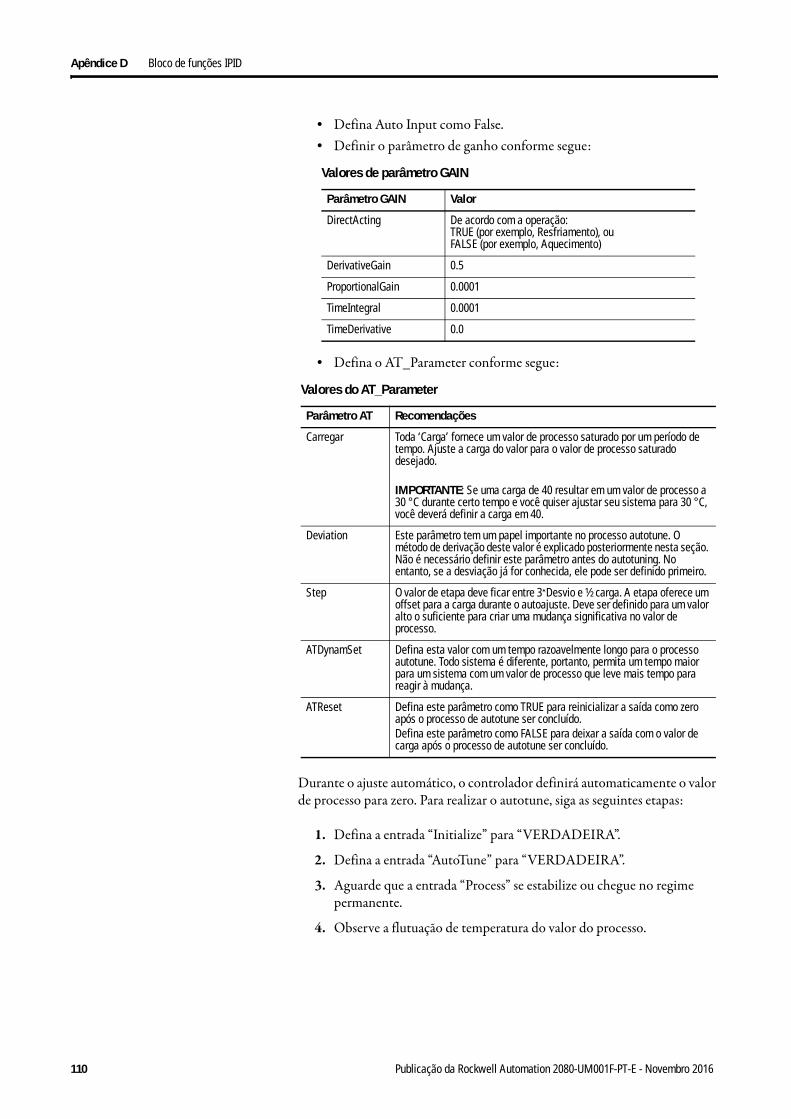
Apêndice D Bloco de funções IPID
• Defina Auto Input como False.• Definir o parâmetro de ganho conforme segue:
• Defina o AT_Parameter conforme segue:
Durante o ajuste automático, o controlador definirá automaticamente o valor de processo para zero. Para realizar o autotune, siga as seguintes etapas:
1. Defina a entrada “Initialize” para “VERDADEIRA”.
2. Defina a entrada “AutoTune” para “VERDADEIRA”.
3. Aguarde que a entrada “Process” se estabilize ou chegue no regime permanente.
4. Observe a flutuação de temperatura do valor do processo.
Valores de parâmetro GAIN
Parâmetro GAIN Valor
DirectActing De acordo com a operação:TRUE (por exemplo, Resfriamento), ou FALSE (por exemplo, Aquecimento)
DerivativeGain 0.5
ProportionalGain 0.0001
TimeIntegral 0.0001
TimeDerivative 0.0
Valores do AT_Parameter
Parâmetro AT Recomendações
Carregar Toda ‘Carga’ fornece um valor de processo saturado por um período de tempo. Ajuste a carga do valor para o valor de processo saturado desejado.
IMPORTANTE: Se uma carga de 40 resultar em um valor de processo a 30 °C durante certo tempo e você quiser ajustar seu sistema para 30 °C, você deverá definir a carga em 40.
Deviation Este parâmetro tem um papel importante no processo autotune. O método de derivação deste valor é explicado posteriormente nesta seção. Não é necessário definir este parâmetro antes do autotuning. No entanto, se a desviação já for conhecida, ele pode ser definido primeiro.
Step O valor de etapa deve ficar entre 3*Desvio e ½ carga. A etapa oferece um offset para a carga durante o autoajuste. Deve ser definido para um valor alto o suficiente para criar uma mudança significativa no valor de processo.
ATDynamSet Defina esta valor com um tempo razoavelmente longo para o processo autotune. Todo sistema é diferente, portanto, permita um tempo maior para um sistema com um valor de processo que leve mais tempo para reagir à mudança.
ATReset Defina este parâmetro como TRUE para reinicializar a saída como zero após o processo de autotune ser concluído.Defina este parâmetro como FALSE para deixar a saída com o valor de carga após o processo de autotune ser concluído.
110 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016

Bloco de funções IPID Apêndice D
5. Calcule o valor de desvio com relação à flutuação. Por exemplo, se a temperatura estabilizar em torno de 22 °C (72 °F) com uma flutuação entre 21,7 e 22,5 °C (71 e 72,5 °F), o valor de ‘ATParams.Deviation’ será:
6. Defina o valor de desvio, caso ainda não tenha sido definido.
7. Mude a entrada “Initialize” para “FALSA”.
8. Aguarde até que ‘AT_Warning’ exiba 2. O processo autotune foi correto.
9. Obtenha o valor em sintonia de “OutGains”.
Como o Autotune funciona
O processo de ajuste automático inicia quando ‘Initialize’ for definido como FALSE (Etapa 7.) Neste momento, a saída de controle aumenta com base na quantidade de ‘Etapas’ e o processo espera até o valor de processo atingir ou exceder o ‘primeiro pico’.
O primeiro pico é definido como:
Para Operação direta: Primeiro pico = PV1 - (12 x Desvio)Para Operação reversa: Primeiro pico = PV1 + (12 x Desvio)Onde PV1 é o valor de processo quando Initialize for definido como FALSE.
Uma vez que o valor de processo atinge o primeiro pico, a saída de controle reduz o equivalente à Step e aguarda até que o valor de processo caia para o segundo pico.
O segundo pico é definido como:
Para Operação direta: Segundo pico = PV1 - (3 x Desvio)Para Operação reversa: Segundo pico = PV1 + (3 x Desvio)Quando o valor de processo atingir o segundo pico ou cair abaixo dele, os cálculos iniciam e um conjunto de ganhos será gerado para o parâmetro OutGains.
Localização de falhas no processo autotune
É possível dizer o que ocorre no segundo plano do processo de autotune através das sequências da saída de controle. Aqui há algumas sequências conhecidas de saída de controle e o que significa se o autotune falhar. Para facilitar a ilustração do sequenciamento da saída de controle, definimos:Carga: 50Etapa: 20
Para °C:22.5 - 21.7
2= 0.4 Para °F:
72.5 - 712
= 0.75
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 111
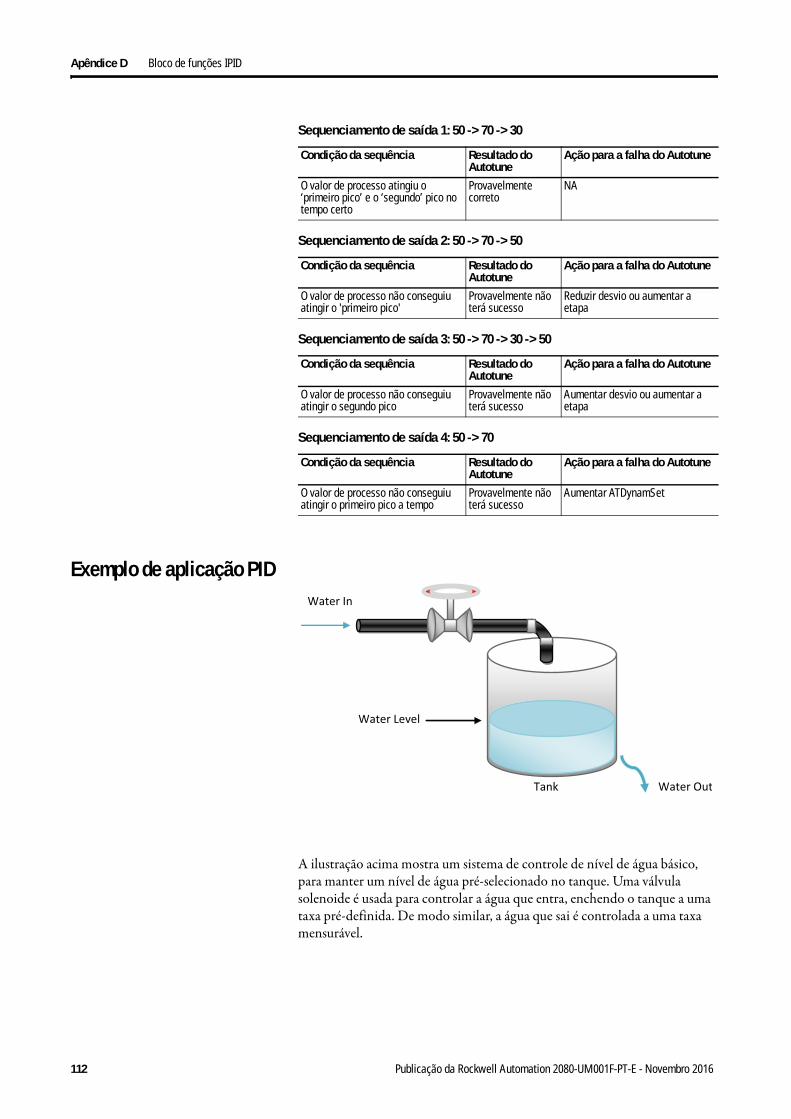
Apêndice D Bloco de funções IPID
Exemplo de aplicação PID
A ilustração acima mostra um sistema de controle de nível de água básico, para manter um nível de água pré-selecionado no tanque. Uma válvula solenoide é usada para controlar a água que entra, enchendo o tanque a uma taxa pré-definida. De modo similar, a água que sai é controlada a uma taxa mensurável.
Sequenciamento de saída 1: 50 -> 70 -> 30
Condição da sequência Resultado do Autotune
Ação para a falha do Autotune
O valor de processo atingiu o ‘primeiro pico’ e o ‘segundo’ pico no tempo certo
Provavelmente correto
NA
Sequenciamento de saída 2: 50 -> 70 -> 50
Condição da sequência Resultado do Autotune
Ação para a falha do Autotune
O valor de processo não conseguiu atingir o 'primeiro pico'
Provavelmente não terá sucesso
Reduzir desvio ou aumentar a etapa
Sequenciamento de saída 3: 50 -> 70 -> 30 -> 50
Condição da sequência Resultado do Autotune
Ação para a falha do Autotune
O valor de processo não conseguiu atingir o segundo pico
Provavelmente não terá sucesso
Aumentar desvio ou aumentar a etapa
Sequenciamento de saída 4: 50 -> 70
Condição da sequência Resultado do Autotune
Ação para a falha do Autotune
O valor de processo não conseguiu atingir o primeiro pico a tempo
Provavelmente não terá sucesso
Aumentar ATDynamSet
Water In
Water Level
Tank Water Out
112 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
Bloco de funções IPID Apêndice D
Autotune IPID para sistemas de primeira e segunda ordem
O autotune de IPID somente pode funcionar em sistemas de primeira e segunda ordem.
Um sistema de primeira ordem pode ser descrito por um elemento de armazenamento de energia independente simples. Exemplos de sistemas de primeira ordem são o resfriamento de um tanque de fluido, o fluxo de fluido de um tanque, um motor com torque constante conduzindo um volante a disco ou um uma rede condutora RC elétrica. O elemento de armazenamento de energia para esses sistemas são energia térmica, energia potencial, energia cinética rotacional e energia de armazenamento capacitivo, respectivamente.
De forma padrão, pode ser escrito como f(t) = τdy/dt + y(t), onde τ é a constante de tempo do sistema, f é a função de força e y é a variável de estado do sistema.
No exemplo de resfriamento do tanque de fluido, ele pode ser modelado pela capacitância térmica C do fluido e resistência térmica R das paredes do tanque. A constante de tempo do sistema será RC, a função de força será a temperatura ambiente e a variável de estado do sistema será a temperatura do fluido.
Um sistema de segunda ordem pode ser descrito por dois elementos de armazenamento de energia independentes que intercambiam energia armazenada. Exemplos de sistemas de segunda ordem são um motor comandando um volante de disco com o motor acoplado ao volante por meio de um eixo com rigidez de torção ou um circuito elétrico composto de uma fonte de corrente comandando uma série LR (indutor e resistor) com um desvio C (capacitor). Os elementos de armazenamento de energia para esses sistemas são a energia cinética rotacional e a energia de mola de torção para o primeiro e a energia de armazenamento capacitiva para o último. Sistemas de acionamento de motor e sistemas de aquecimento podem ser modelados tipicamente pelo circuito elétrico C e LR.
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 113
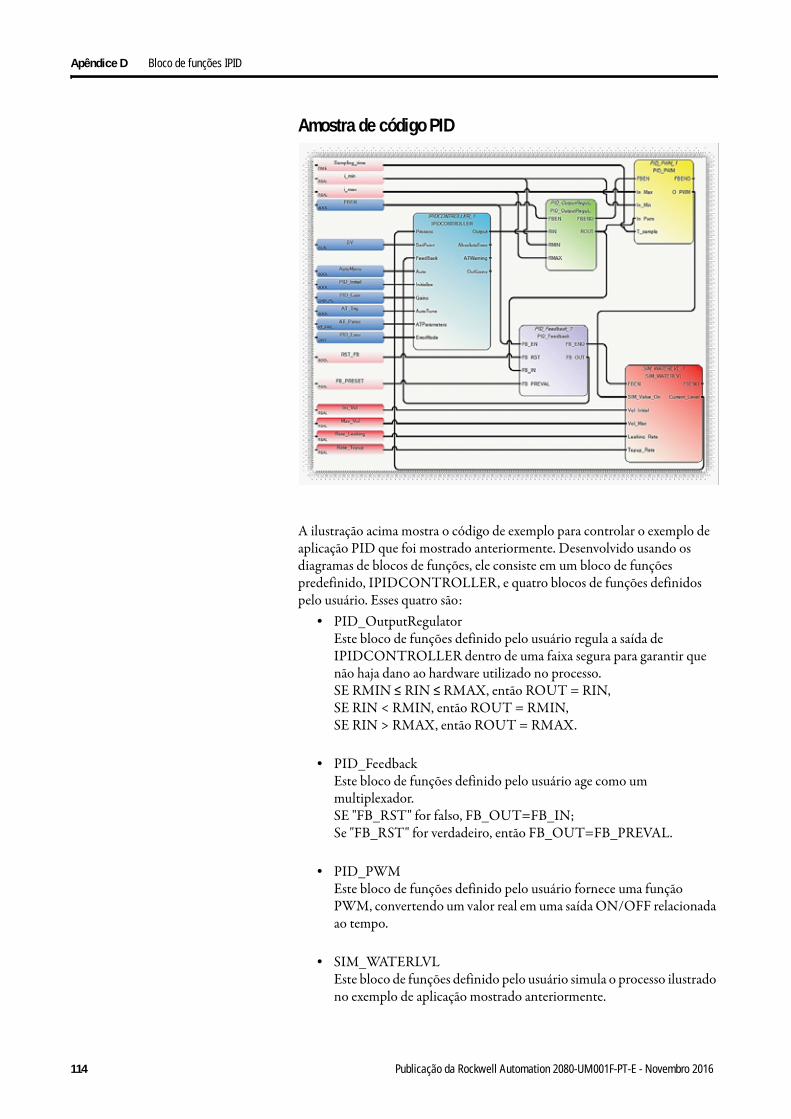
Apêndice D Bloco de funções IPID
Amostra de código PID
A ilustração acima mostra o código de exemplo para controlar o exemplo de aplicação PID que foi mostrado anteriormente. Desenvolvido usando os diagramas de blocos de funções, ele consiste em um bloco de funções predefinido, IPIDCONTROLLER, e quatro blocos de funções definidos pelo usuário. Esses quatro são:
• PID_OutputRegulatorEste bloco de funções definido pelo usuário regula a saída de IPIDCONTROLLER dentro de uma faixa segura para garantir que não haja dano ao hardware utilizado no processo.SE RMIN ≤ RIN ≤ RMAX, então ROUT = RIN,SE RIN < RMIN, então ROUT = RMIN,SE RIN > RMAX, então ROUT = RMAX.
• PID_FeedbackEste bloco de funções definido pelo usuário age como um multiplexador. SE "FB_RST" for falso, FB_OUT=FB_IN; Se "FB_RST" for verdadeiro, então FB_OUT=FB_PREVAL.
• PID_PWMEste bloco de funções definido pelo usuário fornece uma função PWM, convertendo um valor real em uma saída ON/OFF relacionada ao tempo.
• SIM_WATERLVLEste bloco de funções definido pelo usuário simula o processo ilustrado no exemplo de aplicação mostrado anteriormente.
114 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016

Bloco de funções IPID Apêndice D
IMPORTANTE O tempo de varredura do programa do usuário é importante
O método de autotune precisa fazer com que a saída da malha de controle oscile. Para identificar o período de oscilação, o IPID deve ser chamado com frequência suficiente para ser capaz de obter uma amostra de oscilação adequada. O tempo de varredura do programa do usuário deve ser menos da metade do período de oscilação. Na essência, o teorema de Shannon, ou Nyquist-Shannon, ou o teorema de amostragem devem ser respeitados.
Além disso, é importante que o bloco de funções seja executado a um intervalo de tempo relativamente constante.
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 115

Apêndice D Bloco de funções IPID
Notas:
116 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016
Índice
Numéricas1492-EAHJ35 161492-EAJ35 162080-LC10-12QBB 12080-LC10-12QW 12080-PS120-240VAC 15
Aacesso exclusivo 43Acessórios 59acionadores de motor (cód. cat. 509)
supressores de surto 19Adaptador USB 62ajuste automático 109alocação de memória 41Amostra de código PID 114antes de ligar para obter assistência 36aterramento do cabo analógico 23aterramento do controlador 20Atualização da memória flash do firmware do
Micro800 100
BBloco de funções Contagem incremental (CTU) 73Bloco de funções Contagem regressiva (CTD) 89bloco de funções de relé
CTD 72CTU 72DOY 72TOF 72TON 72TONOF 72TOW 72TP 72
Bloco de funções definido pelo usuário (UDFB) 38Bloco de funções IPID 107
CCabo Belden 8761 22Certificações 3chaves de parada de emergência 12circuito do relé de controle mestre
testes periódicos 8circuitos de segurança 8Códigos de erro 26códigos de erro 27Compatibilidade com a diretriz da União Europeia 3
Diretriz EMC 4Compatibilidade com as diretrizes da União Europeia 3
Diretriz de baixa tensão 4conecte o cabo
seu controlador 17Connected Components Workbench iv
senha do controlador 43
considerações gerais 4considerações sobre alimentação 9
corrente de energização da fonte de alimentação 9estados de entrada durante o desligamento 10outras condições de linha 10perda na fonte de alimentação 9transformadores de isolamento 9visão geral 9
considerações sobre segurança 6área classificada 7circuitos de segurança 8desconectando a alimentação principal 7distribuição de alimentação 8testes periódicos do circuito do relé de controle mestre 8
contador de ciclos 38controlador
aterramento 20descrição 1dimensões de montagem 15fiação de E/S 21minimizando o ruído elétrico 21prevenindo superaquecimento 10
Controladores Micro810 de 12 pontos 1corrente de energização 9corrente de energização da fonte de alimentação
considerações sobre alimentação 9
Ddesconectando a alimentação principal 7Dimensões de montagem 15Diretriz EMC 4distribuição de alimentação 8
Eentradas analógicas
orientações para fiação de canal analógico 22espaçamento do módulo 15Especificações 49especificações
controladores Micro810 49Fonte de alimentação CA externa 57
Estabelecendo comunicação entre o RSLinx e o Micro810 via USB 103
estados de entrada durante o desligamento 10Etiqueta CE 3, 4execução do programa 37Executando programas com o Micro800 37Exemplo de aplicação PID 112
Ffiação
diagramas 20exemplos 23recomendação 17
fonte de alimentaçãoperda na 9
Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 117
Índice
fonte de alimentação CA externa 59fonte de alimentação Micro800 1Forçando E/Ss 104Funções definidas pelo usuário (UDF) 38
Iindicadores de status 25
no controlador 25no módulo LCD 25
Inícios rápidos 63instalação
considerações 4dimensões de montagem do controlador 15espaçamento do módulo 15
IPIDCONTROLLER 107parâmetros 107
Lligar para obter assistência 36Localização de falhas 25
Mminimizando o ruído elétrico 21minimizando o ruído elétrico nos canais analógicos 22modelo de recuperação de erro 35montagem em painel 16Montagem em trilho DIN 15
OOrientações e limitações 42orientações para fiação de canal analógico 22
Pprevenindo superaquecimento 10proteção superaquecimento 10
RRecursos adicionais iiirecursos de hardware 1regras para execução 39relé de controle mestre 11
chaves de parada de emergência 12referência esquemática, utilizando símbolos ANSI/CSA 14referência esquemática, utilizando símbolos IEC 13
RSLinx Classic 103
Ssenha do controlador 43
apagar 71compatibilidade 44configure 47definir 67trocar 69
senha do LCD 63ativar 63desativar 64excluir 66trocar 65
Sobre acessórios 59Sobre o controlador 3supressão de transiente 18
para acionadores de motor 19supressores de surto recomendados 19usando 18
Ttabela de relés de corrente
baixa 54elevada 53
tabela de relés de corrente baixa 54Tabela de relés de corrente baixa do Micro810 55tabela de relés de corrente elevada 53Tabela de relés de corrente elevada do Micro810 53Tela de cristal líquido de 1,5 pol. e módulo de teclado 60tempo de ciclo atual 38Testando a função Contagem incremental (CTU)
predefinida 76Texto estruturado 42transformador de isolamento 9
considerações sobre alimentação 9
UUnidade organizacional do programa (POU) 42
118 Publicação da Rockwell Automation 2080-UM001F-PT-E - Novembro 2016

Publicação Rockwell Automation 2080-UM001F-PT-E - Novembro 2016 120 © 2016 Rockwell Automation, Inc. Todos os direitos reservados.
Suporte Rockwell Automation
A Rockwell Automation disponibiliza informações técnicas na web para ajudá-lo na utilização de seus produtos. Em http://www.rockwellautomation.com/support/, você pode encontrar manuais técnicos, uma base de conhecimento de perguntas frequentes, observações técnicas e de aplicação, códigos de amostra e links para pacotes de serviço de software, e um recurso MySupport que você pode personalizar para fazer o melhor uso destas ferramentas.
Para um nível adicional de suporte técnico por telefone para instalação, configuração e localização de falhas, oferecemos os programas de suporte TechConnect. Para obter mais informações, entre em contato com seu distribuidor ou representante Rockwell Automation local ou visite http://www.rockwellautomation.com/support/.
Assistência à instalação
Se ocorrer algum problema nas primeiras 24 horas após a instalação, reveja as informações contidas neste manual.Você pode entrar em contato com o suporte ao cliente para obter uma ajuda inicial e colocar seu produto em funcionamento.
Devolução de novos produtos
A Rockwell Automation testa todos os seus produtos para assegurar que estejam totalmente em operação ao serem enviados para as instalações de produção. Porém, caso seu produto não esteja funcionando e precise ser devolvido, siga estes procedimentos.
Comentários sobre a documentação
Seus comentários nos ajudarão a suprir melhor suas necessidades de documentação. Para sugestões sobre como aprimorar este documento, preencha este formulário, publicação RA-DU002, disponível em http://www.rockwellautomation.com/literature/.
Estados Unidos ou Canadá 1.440.646.3434
Fora dos Estados Unidos ou Canadá
Use o Worldwide Locator em http://www.rockwellautomation.com/support/americas/phone_en.html, ou entre em contato com o representante Rockwell Automation local.
Estados Unidos Entre em contato com seu distribuidor. Você deve fornecer um número de Suporte ao Cliente (ligue para o número acima para obter um) ao seu distribuidor para completar o processo de devolução.
Fora dos Estados Unidos Entre em contato com um representante local da Rockwell Automation para obter informações sobre o procedimento de devolução.





























