Embed Size (px)
Citation preview

GINEAD
MECÂNICA GERALUnidade 1 - Introdução a mecânica geral
UNIDADE 1
2
MECÂNICA GERAL
OBJETIVO Ao final desta unidade, esperamos que possa:
GINEAD
> Identificar o que a mecânica pode proporcionar;> Compreender e aplicar o conceito de produto escalar e vetorial nos vários seguimentos da mecânica;> Conhecer a definição de força, momento e seu conjugado, a fim de entender a sua aplicação;> Analisar e utilizar as unidades físicas e suas conversões de maneira coerente.
Todos os direitos reservados.
Prezado(a) aluno(a), este material de estudo é para seu uso pessoal, sendo
vedada, por quaisquer meios e a qualquer título, a sua reprodução, venda,
compartilhamento e distribuição.
3
MECÂNICA GERALGINEAD
1 INTRODUÇÃO A MECÂNICA GERAL
INTRODUÇÃO DA UNIDADEEsta unidade se destina a apresentar uma introdução sobre o que é a mecâ-nica, quais tipos de mecânica existem, qual estaremos estudando e, também, para que serve a mecânica e algumas aplicações reais. Além disso, entrare-mos na definição do que são vetores, operações com vetores e como os ve-tores podem nos auxiliar a obter informações importantes para a aplicação em mecânica e, em outras áreas. Vetores analisados isoladamente, às vezes não nos traz ricas informações, porém quando aplicamos produtos escalares e/ou vetoriais, podem nos fornece resultados valiosos. Após o entendimento e aplicação desses conceitos, estaremos aptos a entender o conceito de força, momento e conjugado, suas aplicações no ramo da ciência. Por fim, a com-preensão e o entendimento das unidades físicas são de grande importância para o estudo e, também, em como realizar suas conversões. Dessa forma, po-demos perceber que, o entendimento do tópico seguinte faz-se fundamental o conhecimento do anterior, de modo ao melhor aproveitamento do conteú-do por você aluno.
1.1 AFINAL, O QUE É A MECÂNICA?Por definição, a mecânica pode ser entendida como área das ciências físicas na qual se dedica ao estudo do repouso e movimento de objetos sujeitos à ação de forças. A mecânica engloba três áreas geralmente, que são a mecâ-nica dos corpos rígidos e deformáveis e a mecânica dos fluidos. (Beer, 2013, p.4) trata a mecânica como a ciência que descreve e prevê as condições de repouso e movimento dos corpos sob a ação de forças. Já (James, 2009, p.3) diz que a mecânica é a física que lida com os efeitos de forças sobre objetos. Além disso, (James, 2009, p.3) traduz que nenhum outro tema tem um papel maior nas análises de engenharia do que a mecânica.

4
MECÂNICA GERALGINEAD
FIGURA 1 - ILUSTRAÇÃO DOS CAMPOS DA MECÂNICA
Mecânica
Mecânicarígida
Mecânicados fluídos
Mecânicadeformável
Fonte: Elaborada pelo autor (2020).
A figura 1 ilustra os campos gerais da mecânica. Aplicações estão presentes em diversos setores, tais como: civil, mecânica, aeronáutica, em ramos das ciências (simulações geológicas), na área da medicina, problemas biomecâ-nicos, entre outras áreas de aplicação. Ambas as áreas podem ser tratadas em conjunto ou de forma isolada.
A forma como é abordada os campos da mecânica depende de uma análise prévia, por exemplo, na fisiologia do corpo, como em vasos sanguíneos, po-dendo englobar a mecânica dos fluidos (estudo do sangue), mecânica dos corpos rígidos (supondo uma parte da veia ou artéria como rígida) e mecâni-ca dos corpos deformáveis (a outra parte da veia ou artéria como deformável). Cabe ao professional analisar e avaliar se para a sua aplicação, a deformação dessa estrutura é relevante ou pode a mesma ser considerada rígida.
O conceito de mecânica dos corpos rígidos pode ser dividido em dois aspec-tos: estática, em que trata dos objetos em repouso sob ação de forças e a di-nâmica, que estuda as forças e suas ações sob corpos em movimento. Nesta disciplina será estudado a mecânica dos corpos rígidos estáticos, sendo estes considerados perfeitamente rígidos. Entretanto, na prática, todos os corpos são deformáveis. Cabe uma análise preliminar em suas aplicações, conforme explicitado anteriormente, para avaliação criteriosa, se a deformação deste corpo é relevante à aplicação em questão ou este mesmo corpo pode ser con-siderado rígido, sem grandes prejuízos.
5
MECÂNICA GERALGINEAD
1.2 VETORESNa mecânica e, em outros ramos de estudo, são utilizados dois tipos de gran-dezas: as grandezas escalares e as vetoriais. Quando tratamos de escalar, é associado apenas um valor a esta grandeza, seguida de sua unidade.
Dessa forma, a grandeza escalar, exprime um valor ou intensidade de uma grandeza física.
Já as grandezas vetoriais envolvem intensidade (módulo), direção e sentido. Exemplos de vetores são: força, velocidade, aceleração, deslocamento, mo-mento, dentre outras.
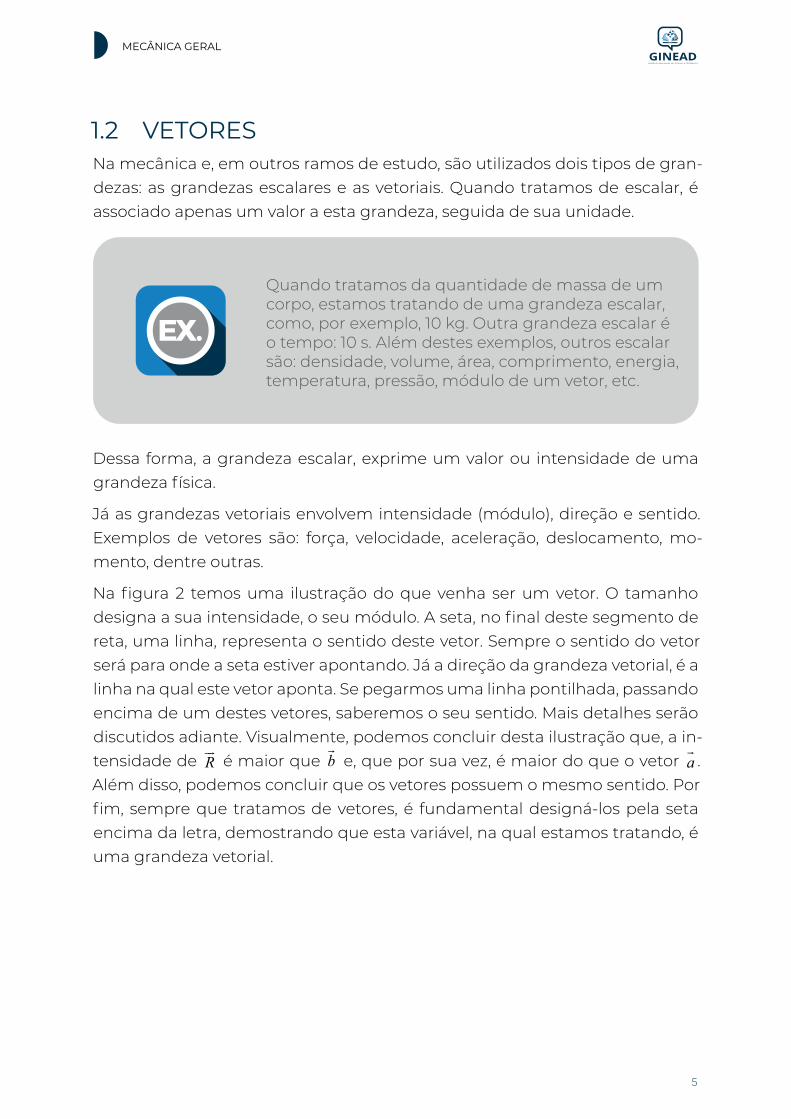
Na figura 2 temos uma ilustração do que venha ser um vetor. O tamanho designa a sua intensidade, o seu módulo. A seta, no final deste segmento de reta, uma linha, representa o sentido deste vetor. Sempre o sentido do vetor será para onde a seta estiver apontando. Já a direção da grandeza vetorial, é a linha na qual este vetor aponta. Se pegarmos uma linha pontilhada, passando encima de um destes vetores, saberemos o seu sentido. Mais detalhes serão discutidos adiante. Visualmente, podemos concluir desta ilustração que, a in-tensidade de R
�� é maior que b
� e, que por sua vez, é maior do que o vetor a
�.
Além disso, podemos concluir que os vetores possuem o mesmo sentido. Por fim, sempre que tratamos de vetores, é fundamental designá-los pela seta encima da letra, demostrando que esta variável, na qual estamos tratando, é uma grandeza vetorial.
Quando tratamos da quantidade de massa de um corpo, estamos tratando de uma grandeza escalar, como, por exemplo, 10 kg. Outra grandeza escalar é o tempo: 10 s. Além destes exemplos, outros escalar são: densidade, volume, área, comprimento, energia, temperatura, pressão, módulo de um vetor, etc.

6
MECÂNICA GERALGINEAD
FIGURA 2. GRANDEZAS VETORIAIS
ba R
Fonte: Uol (2020)
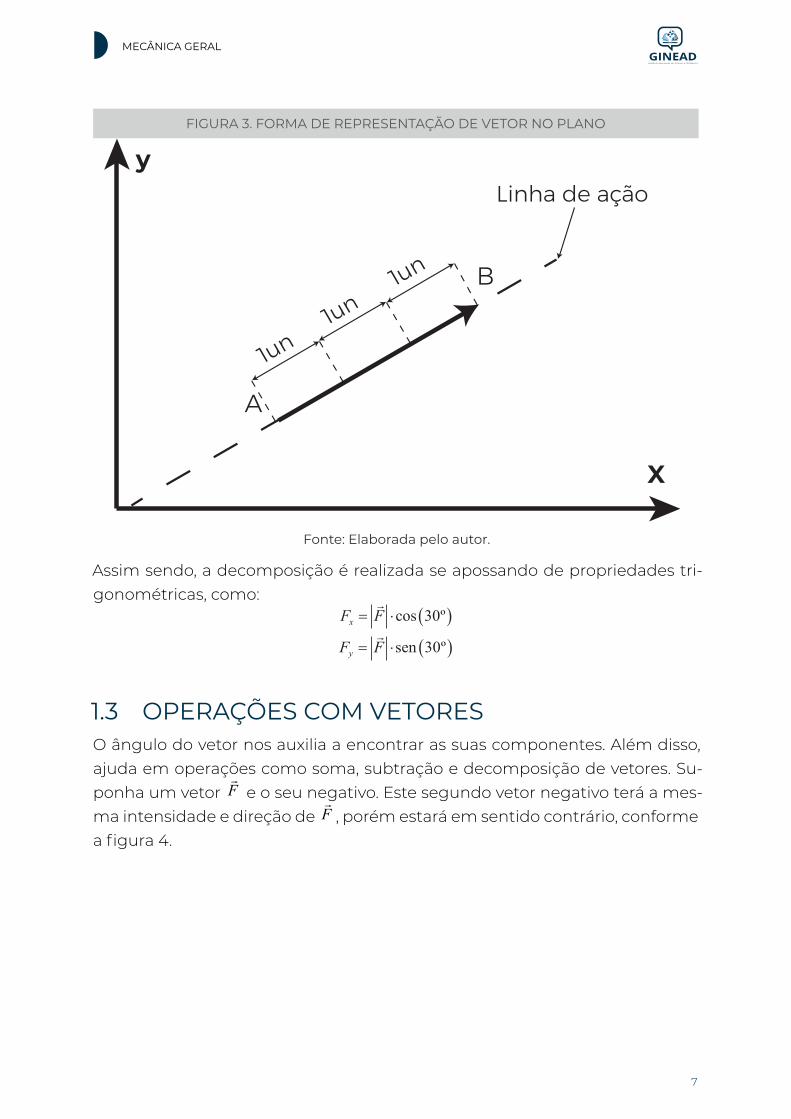
Exposto sobre os vetores, iremos nos atear sobre a sua representação. As gran-dezas vetoriais podem estar presentes em uma única dimensão, bidimensio-nais ou tridimensionais. A fim de exemplificação, a figura 3 nos mostra um vetor força, com intensidade, direção e sentido. A sua intensidade é de 3 uni-dades, onde o sentido é a indicado pela seta e a direção é a representada pela linha de ação deste vetor.
Diante disto, os vetores são trabalhados decompostos nos eixos coordenados. A força, presente na figura 3, pode ser expresso da seguinte forma
ˆx yF F î F J= +
�
onde xF e yF representam a decomposição deste vetor no plano, e o ângu-lo nos auxiliara para realizar esta decomposição. Vetores tridimensionais são definidos da mesma forma, porém teríamos uma outra força na direção do outro eixo coordenado, ou seja,
� �x y zF F î F J F k= + +
�.
Já a intensidade deste vetor é definida pelo seu módulo,2 2 2 3x y zF F F F= + + =
�unidades (un)
7
MECÂNICA GERALGINEAD
FIGURA 3. FORMA DE REPRESENTAÇÃO DE VETOR NO PLANO
Linha de ação
A
y
X
1un1un
1un B
Fonte: Elaborada pelo autor.
Assim sendo, a decomposição é realizada se apossando de propriedades tri-gonométricas, como:
F Fx = ⋅ ( )�cos º30
F Fy = ⋅ ( )
�sen 30º
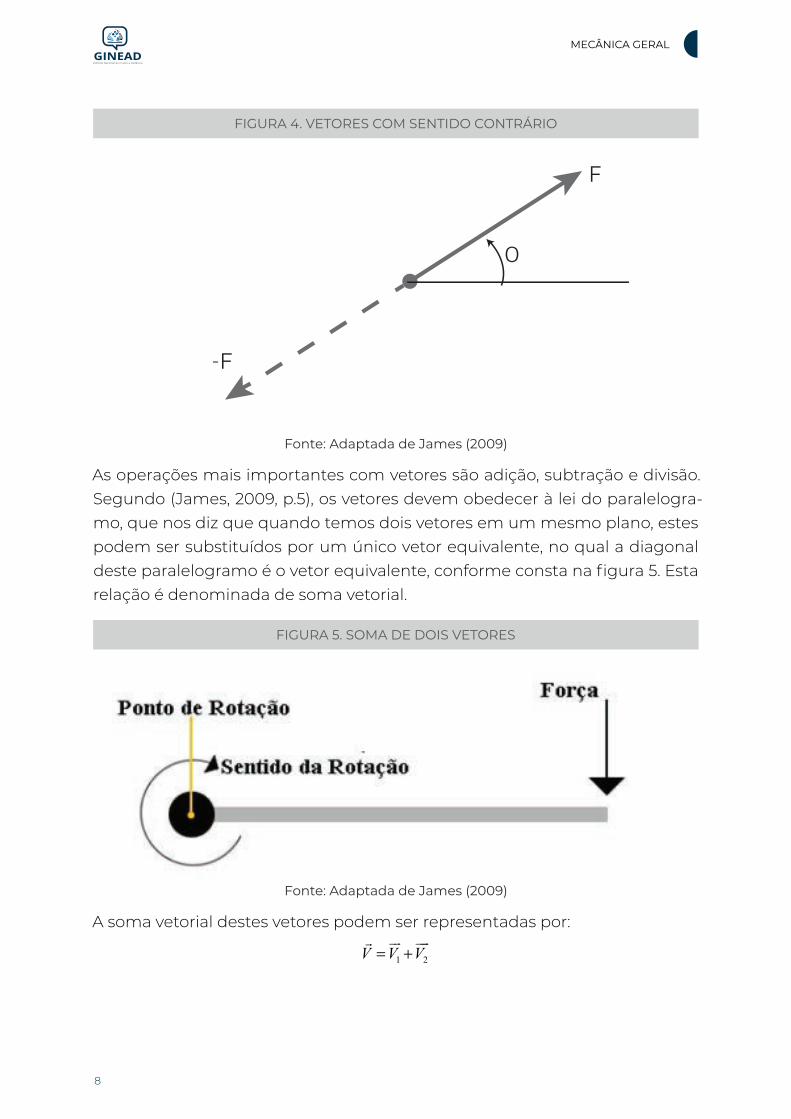
1.3 OPERAÇÕES COM VETORESO ângulo do vetor nos auxilia a encontrar as suas componentes. Além disso, ajuda em operações como soma, subtração e decomposição de vetores. Su-ponha um vetor F
� e o seu negativo. Este segundo vetor negativo terá a mes-
ma intensidade e direção de F�
, porém estará em sentido contrário, conforme a figura 4.
8
MECÂNICA GERALGINEAD
FIGURA 4. VETORES COM SENTIDO CONTRÁRIO
F
-F
0
Fonte: Adaptada de James (2009)
As operações mais importantes com vetores são adição, subtração e divisão. Segundo (James, 2009, p.5), os vetores devem obedecer à lei do paralelogra-mo, que nos diz que quando temos dois vetores em um mesmo plano, estes podem ser substituídos por um único vetor equivalente, no qual a diagonal deste paralelogramo é o vetor equivalente, conforme consta na figura 5. Esta relação é denominada de soma vetorial.
FIGURA 5. SOMA DE DOIS VETORES
Fonte: Adaptada de James (2009)
A soma vetorial destes vetores podem ser representadas por:
1 2V V V= +�� ����

9
MECÂNICA GERALGINEAD
Da mesma forma, se o vetor 2V���
tivesse em sentido contrário da figura 5, este agora seria o negativo do vetor 2V
���, ou seja, 2V−
���. Dessa forma, a resultante V
�� é
dada por,
1 2V V V= −�� �� ���
.
Assim sendo, esta operação é uma subtração vetorial. Vale ressaltar que, na soma e subtração de vetores a ordem dos fatores não altera o produto. Supo-nha que estes vetores estão no plano, sendo:
1 1 1ˆ
x yV V î V J= +��
e 2 2 2ˆ
x yV V î V J= +���
.
Outra forma de representação destes vetores, não muito usual, mas que auxi-lia nos cálculos é dado abaixo:
V V Vx y1 1 1
��= ( ), e V V Vx y2 2 2
���= ( ),
Soma vetorial: V V V V î V V Jx x y y1 2 1 2 1 2
�� ���+ = +( ) + +( ) Æ
Subtração vetorial: V V V V î V V Jx x y y1 2 1 2 1 2
�� ���− = −( ) + −( ) Æ
Conforme discutido no tópico anterior sobre a decomposição de vetores no plano, temos também os vetores tridimensionais. A fim de um melhor en-tendimento sobre vetores e decomposição de vetores no espaço, observe a figura 6.
FIGURA 6. DECOMPOSIÇÃO DE VETORES NO ESPAÇO
Fonte: Adaptada de James (2009)

10
MECÂNICA GERALGINEAD
A decomposição dos vetores, neste caso, segue a mesma lógica do anterior, porém devemos nos atentar aos ângulos indicados. O vetor V e o seu módulo são representados por:
V V î V J V kx y z
�� �= + +Æ
Na forma decomposta, podemos expressar o vetor V como sendo,
V V î V J V kx y z
�� �= ( ) + ( ) + ( ) cos cos Æ cosθ θ θ ,
onde V representa o módulo do vetor, dado por:
V V V Vx y z= + +2 2 2 .
1.4 PRODUTO ESCALAR E PRODUTO VETORIALProduto escalar e produto vetorial também são operações com vetores, po-rém levam em consideração outros conceitos. Quando temos uma grande-za escalar (a e b, por exemplo), podemos simplesmente multiplicar os dois e obter o produto. Porém, quando se trata de vetores esta multiplicação é cha-mada de produto escalar e produto vetorial. A distinção entre esses dois tipos de produtos é que o produto escalar produz um número escalar e o produto vetorial resulta em um outro vetor.
Denomina-se produto escalar ou produto interno entre dois vetores, como sendo: � ��
A B A B A B A Bx x y y z z⋅ = + +
sendo este produto um número real, ou seja, um escalar. Todo produto escalar é designado por este ponto entre os dois vetores A B⋅
� �. Outra forma de escrita
do produto escalar é ,A B< >� �
e, a leitura deste produto é " A�
escalar B�
.
O produto escalar também pode ser utilizado de um vetor por uma matriz, desde que seja compatível o seu produto. Isto faz com que a ordem esta matriz seja reduzida. Suponha o produto de um vetor no espaço, por uma matriz 3x3. Este produto gerara um vetor de ordem 3. Portanto, nem sempre o produto escalar é um número real, servindo para reduzir a ordem de matrizes. Mas lembre-se, sempre o produto escalar entre dois vetores é um número real.

11
MECÂNICA GERALGINEAD
Umas das aplicações do produto escalar é a determinação do módulo de um vetor, no qual é definido como a raiz quadrada do produto escalar entre os dois vetores iguais, A A A= ⋅
� � �.
Além disso, o ângulo formado entre dois vetores, pode ser correlacionado com o seu produto escalar, da seguinte forma: � � � �A B A B⋅ = ( )cos θ .
Existem algumas propriedades para o produto escalar, independentemente dos vetores adotados. Sejam os vetores ( ), ,x y zA a a a=
�, ( ), ,x y zB b b b=�
e ( ), ,x y zC c c c=�
, e ainda, suponha uma constante k , real e qualquer. Diante do exposto, temos as seguintes propriedades:
I A B B A
II kA B kB A k A B B kA
III A
)
)
)
� � � �
� �� � � � � � �
�
⋅ = ⋅
⋅ ( ) = ⋅( ) = ⋅( ) = ⋅( )
⋅⋅ =
⋅ + = ⋅ + ⋅
� �
� �� �� � � � �
A A
IV A B C A B A C
2
) ( )
Caso um vetor seja perpendicular ao outro (condição de ortogonalidade), o seu produto escalar é zero.
O produto vetorial, diferentemente do produto escalar, gera um novo vetor. Para entendermos melhor sobre, vamos explicitar a “regra da mão direita”, conforme segue a figura 7. Seja o produto vetorial entre os vetores V W×
�� ���. Pri-
meiramente, devemos colocar os quatro dedos da mão direita na direção do vetor V
��, girar em sentido o vetor W
��� e para onde apontar o polegar, será o
sentido do produto vetorial, sempre perpendicular ao plano forma pelos dois vetores. Além disso, o produto vetorial entre dois vetores perpendiculares é um vetor nulo.

12
MECÂNICA GERALGINEAD
FIGURA 7. REGRA DA MÃO DIREITA PARA PRODUTO VETORIAL
Fonte: Santos (2018)
Seja ˆˆx y zV V î V J V k= + +
� e �ˆ
x y zW W î W J W k= + +���
, o produto vetorial entre estes dois vetores é dado pelo determinante da seguinte matriz,
( ) ( ) � ( ) �x y z y z z y z x x z x y y x
x y z
i j kV W V V V V W V W î V W V W J V W V W k
W W W× = = − + − + −����
Suponha os seguintes vetores �ˆ1 3 4V î J k= − +�
e �ˆ5 4 3W î J k= − + −
���, o produto vetorial de V
� e W���
vale:
�3 4 1 4 1 3ˆ1 3 44 3 5 3 5 4
5 4 3
i j kV W î J k
− −× = − = − +
− − − −− −
����
�ˆ7 17 11V W î J k× = − − −����
A fim de complementar os estudos, busque sobre as propriedades do produto vetorial e, também sobre produto misto em: https://regijs.github.io/gaal/sum33.html.
13
MECÂNICA GERALGINEAD
1.5 FORÇA, MOMENTO DE UMA FORÇA E CONJUGADOForça pode ser entendida como uma quantificação da interação entre dois cor-pos físicos, ou seja, quando temos dois objetos entrando em contato entre si. (Beer, 2013, pg. 4) definem a força como sendo ação de um corpo sobre outro. Além disso, pode ser exercida devido o contato direto dos corpos ou por uma distância (forças gravitacionais e eletromagnéticas). (James, 2009, p.3) definem a força da mesma forma que (Beer, 2013). Entretanto, o mesmo nos diz que, exis-te uma tendência dessa força em colocar o corpo em movimento, tendo uma direção da sua linha de ação, pois a força é uma grandeza vetorial, conforme dito anteriormente.
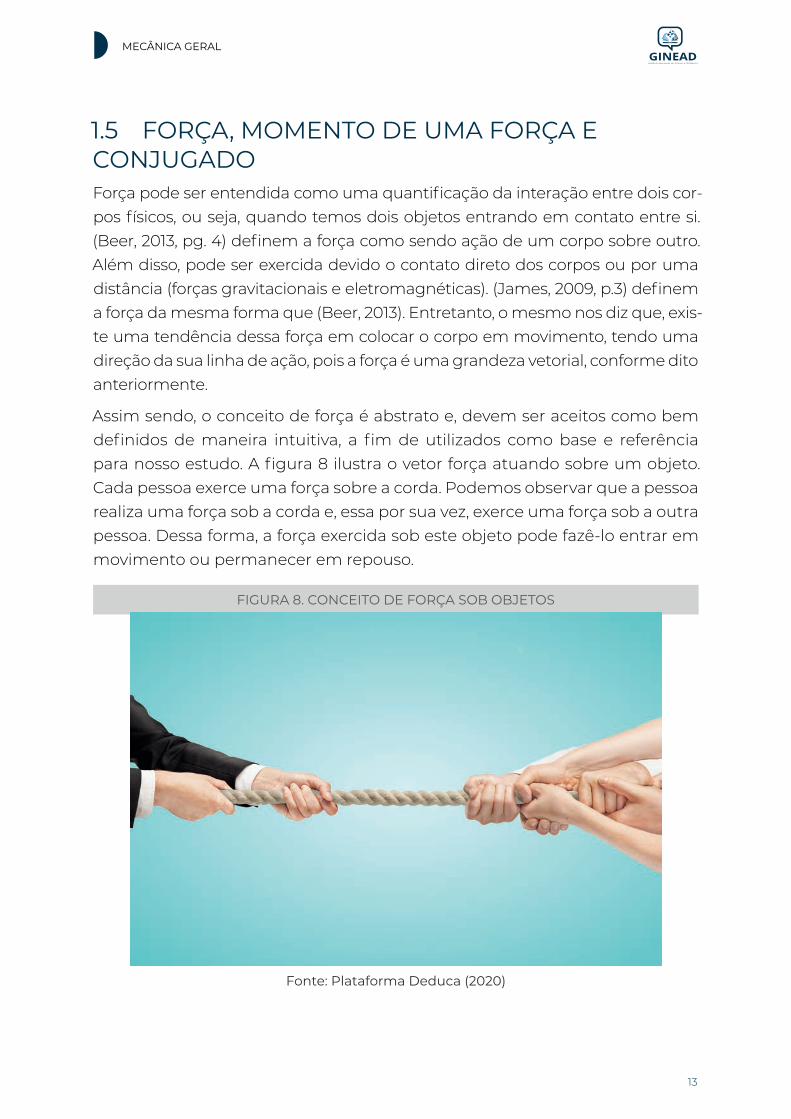
Assim sendo, o conceito de força é abstrato e, devem ser aceitos como bem definidos de maneira intuitiva, a fim de utilizados como base e referência para nosso estudo. A figura 8 ilustra o vetor força atuando sobre um objeto. Cada pessoa exerce uma força sobre a corda. Podemos observar que a pessoa realiza uma força sob a corda e, essa por sua vez, exerce uma força sob a outra pessoa. Dessa forma, a força exercida sob este objeto pode fazê-lo entrar em movimento ou permanecer em repouso.
FIGURA 8. CONCEITO DE FORÇA SOB OBJETOS
Fonte: Plataforma Deduca (2020)
14
MECÂNICA GERALGINEAD
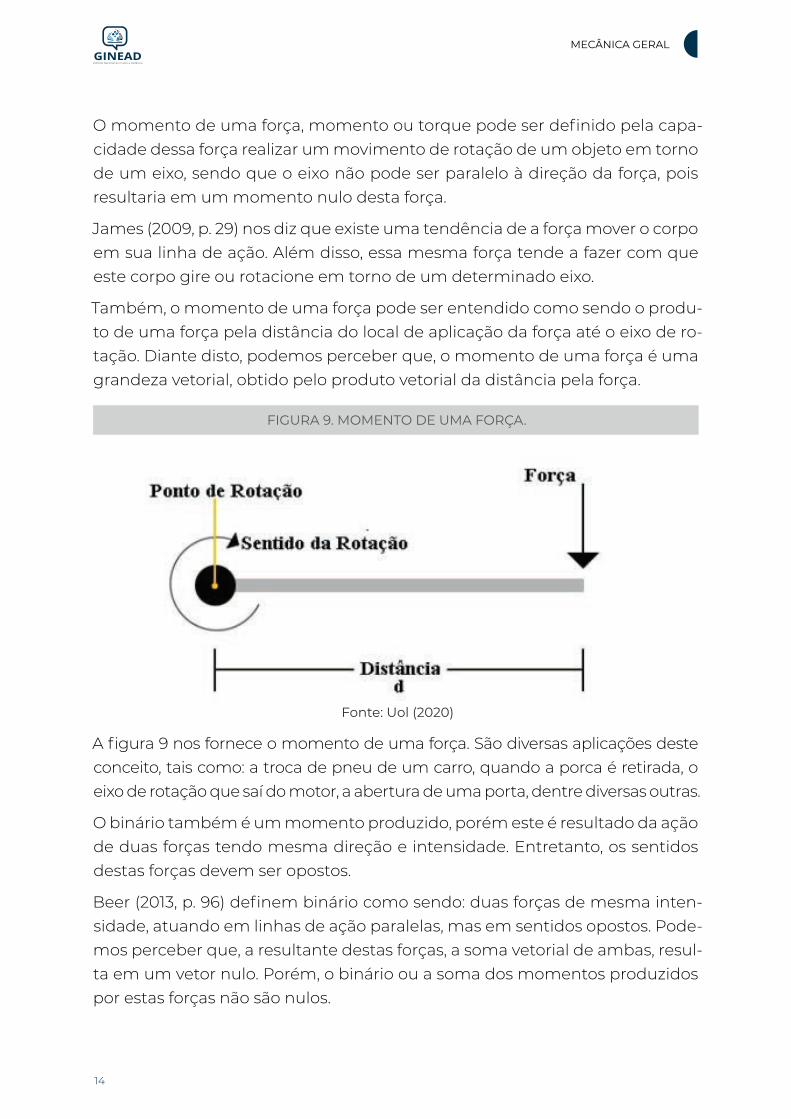
O momento de uma força, momento ou torque pode ser definido pela capa-cidade dessa força realizar um movimento de rotação de um objeto em torno de um eixo, sendo que o eixo não pode ser paralelo à direção da força, pois resultaria em um momento nulo desta força.
James (2009, p. 29) nos diz que existe uma tendência de a força mover o corpo em sua linha de ação. Além disso, essa mesma força tende a fazer com que este corpo gire ou rotacione em torno de um determinado eixo.
Também, o momento de uma força pode ser entendido como sendo o produ-to de uma força pela distância do local de aplicação da força até o eixo de ro-tação. Diante disto, podemos perceber que, o momento de uma força é uma grandeza vetorial, obtido pelo produto vetorial da distância pela força.
FIGURA 9. MOMENTO DE UMA FORÇA.
Fonte: Uol (2020)
A figura 9 nos fornece o momento de uma força. São diversas aplicações deste conceito, tais como: a troca de pneu de um carro, quando a porca é retirada, o eixo de rotação que saí do motor, a abertura de uma porta, dentre diversas outras.
O binário também é um momento produzido, porém este é resultado da ação de duas forças tendo mesma direção e intensidade. Entretanto, os sentidos destas forças devem ser opostos.
Beer (2013, p. 96) definem binário como sendo: duas forças de mesma inten-sidade, atuando em linhas de ação paralelas, mas em sentidos opostos. Pode-mos perceber que, a resultante destas forças, a soma vetorial de ambas, resul-ta em um vetor nulo. Porém, o binário ou a soma dos momentos produzidos por estas forças não são nulos.
15
MECÂNICA GERALGINEAD
Já James (2009, pg. 37) traduz que o binário é o momento produzido por duas forças não colineares, iguais e opostas. No fim das contas, ambos os autores, nos dizem as mesmas definições para binário, apenas relatados de formas diferentes.
FIGURA 10. REPRESENTAÇÃO DE BINÁRIO.
Fonte: Elaborada pelo autor (2020).
Observa-se na figura 10, que temos duas forças de mesma intensidade e dire-ção, porém, em sentidos contrários separadas por uma certa distância. A atu-ação destas forças irá gerar um binário, fazendo com que este corpo rotacione em um eixo perpendicular ao plano da folha.
1.6 UNIDADES FÍSICASAs chamadas unidades físicas podem ser denominadas, também, de gran-dezas físicas. Quando se trata de grandezas, estamos nos referindo a algo no qual pode ser medido, tais como: massa, tempo, velocidade, força, momento. Embora existam diversas unidades físicas, alguns padrões são definidos por grandezas fundamentais e as demais chamadas de grandezas derivadas.
Em meados dos anos 1960, as quantidades de unidades de medidas eram muito vastas. Basicamente, cada região do mundo possuía a sua unidade de medição. Porém, esta grandiosidade de grandezas de medidas atrapalham os trabalhos de medidas, além de muitas divergências. Assim sendo, houve uma padronização mundial, surgindo o Sistema Internacional de Unidades (SI). Além deste sistema, também existe o Sistema Inglês de Unidades, sendo estes os dois mais utilizados em todo o mundo nos dias atuais.
16
MECÂNICA GERALGINEAD
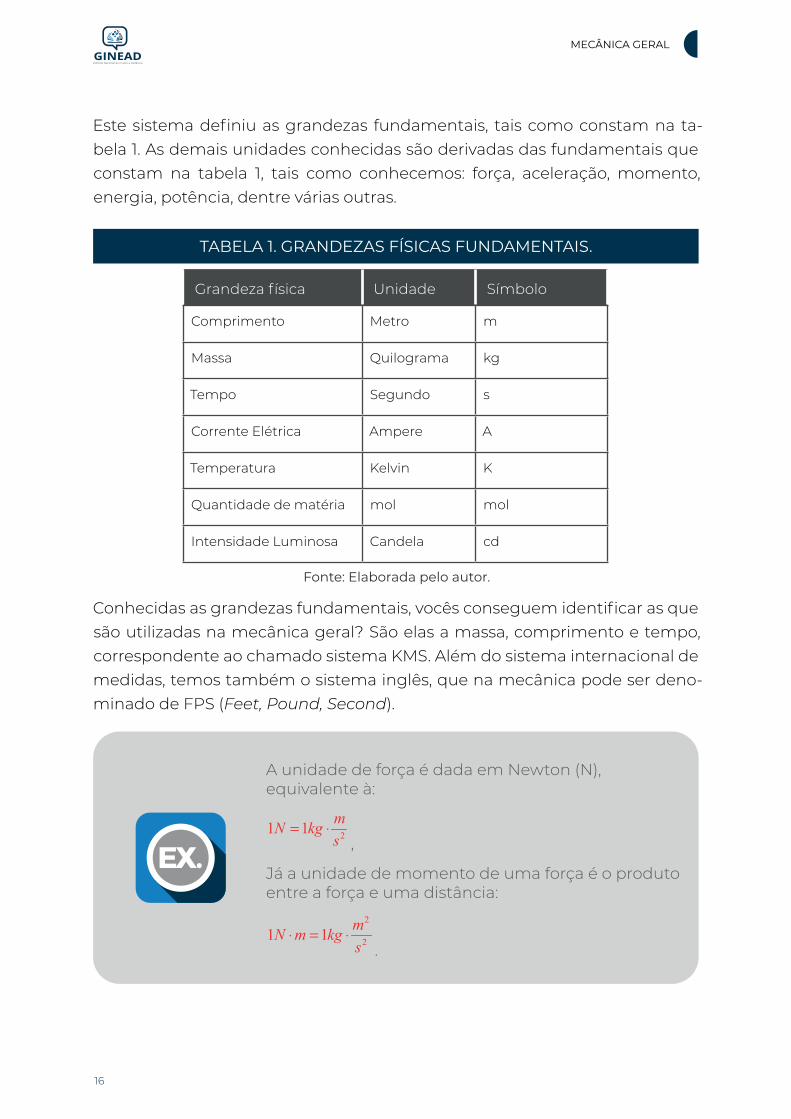
Este sistema definiu as grandezas fundamentais, tais como constam na ta-bela 1. As demais unidades conhecidas são derivadas das fundamentais que constam na tabela 1, tais como conhecemos: força, aceleração, momento, energia, potência, dentre várias outras.
TABELA 1. GRANDEZAS FÍSICAS FUNDAMENTAIS.
Grandeza física Unidade Símbolo
Comprimento Metro m
Massa Quilograma kg
Tempo Segundo s
Corrente Elétrica Ampere A
Temperatura Kelvin K
Quantidade de matéria mol mol
Intensidade Luminosa Candela cd
Fonte: Elaborada pelo autor.
Conhecidas as grandezas fundamentais, vocês conseguem identificar as que são utilizadas na mecânica geral? São elas a massa, comprimento e tempo, correspondente ao chamado sistema KMS. Além do sistema internacional de medidas, temos também o sistema inglês, que na mecânica pode ser deno-minado de FPS (Feet, Pound, Second).
A unidade de força é dada em Newton (N), equivalente à:
21 1 mN kgs
= ⋅,
Já a unidade de momento de uma força é o produto entre a força e uma distância:
2
21 1 mN m kgs
⋅ = ⋅.
17
MECÂNICA GERALGINEAD
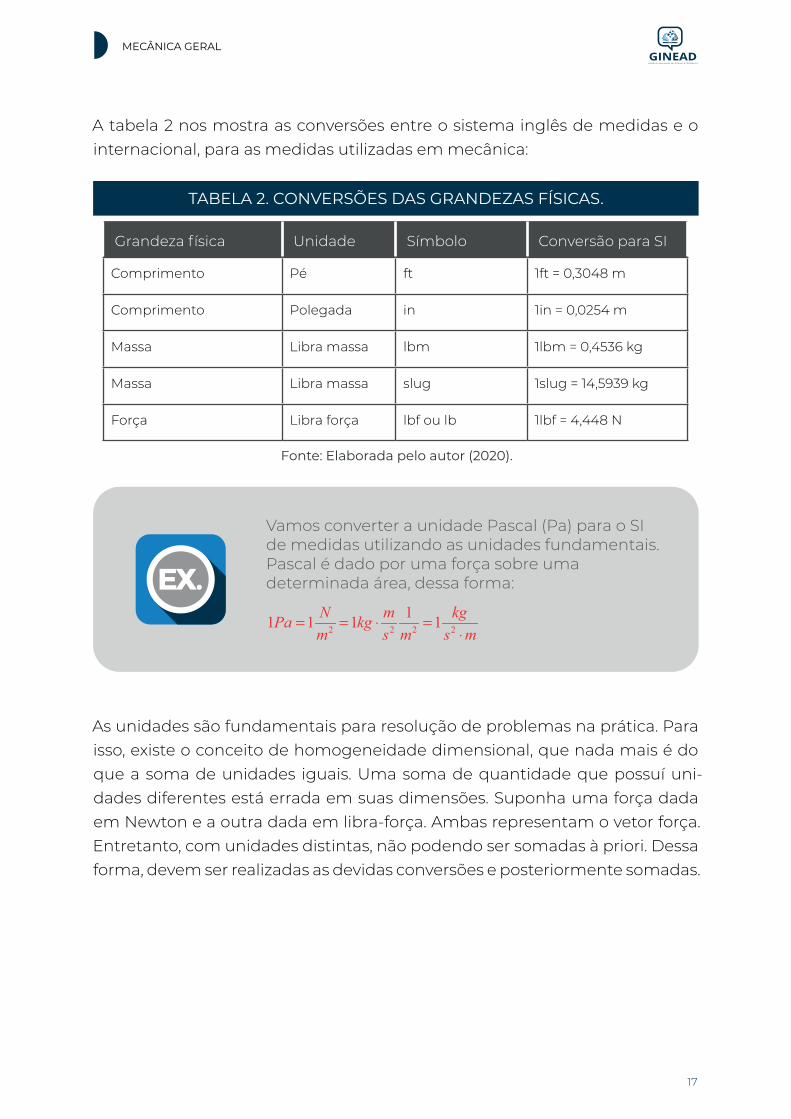
A tabela 2 nos mostra as conversões entre o sistema inglês de medidas e o internacional, para as medidas utilizadas em mecânica:
TABELA 2. CONVERSÕES DAS GRANDEZAS FÍSICAS.
Grandeza física Unidade Símbolo Conversão para SI
Comprimento Pé ft 1ft = 0,3048 m
Comprimento Polegada in 1in = 0,0254 m
Massa Libra massa lbm 1lbm = 0,4536 kg
Massa Libra massa slug 1slug = 14,5939 kg
Força Libra força lbf ou lb 1lbf = 4,448 N
Fonte: Elaborada pelo autor (2020).
As unidades são fundamentais para resolução de problemas na prática. Para isso, existe o conceito de homogeneidade dimensional, que nada mais é do que a soma de unidades iguais. Uma soma de quantidade que possuí uni-dades diferentes está errada em suas dimensões. Suponha uma força dada em Newton e a outra dada em libra-força. Ambas representam o vetor força. Entretanto, com unidades distintas, não podendo ser somadas à priori. Dessa forma, devem ser realizadas as devidas conversões e posteriormente somadas.
Vamos converter a unidade Pascal (Pa) para o SI de medidas utilizando as unidades fundamentais. Pascal é dado por uma força sobre uma determinada área, dessa forma:
2 2 2 2
11 1 1 1N m kgPa kgm s m s m
= = ⋅ =⋅
18
MECÂNICA GERALGINEAD
CONCLUSÃOEsta unidade apresentou o conceito sobre a mecânica, de forma, geral. Além disso, foi introduzido o conceito de vetores, operações com vetores, produto escalar e vetorial. Também, o conceito de força, momento de uma força e conjugado foram apresentados. Por fim, as unidades físicas foram discutidas e suas conversões.
Dessa forma, somos capazes de determinar as componentes de vetores, a in-tensidade, além de realizar operações com os mesmos. Além disso, os concei-tos de força, momento e conjugado foram apresentados e podem ser discu-tidos sobre seus conceitos. Conversões de unidades físicas e a sua utilização de maneira adequada é de suma importância. Com o exposto ao longo da unidade, somos capazes de identificar e converter as unidades.
A fim de complementar o estudo, assistam o vídeo do professor Ferreto. Ele explica com bastante clareza os detalhes do sistema de unidades e, também, sobre conversões de unidades. Fonte: Farreto, 2018, Sistema métrico nacional – Transformações de unidades – Matemática básica – Aula 13




![[7707 - 24246]unidade1](https://img.document.onl/doc/110x75/55cf9216550346f57b936c94/7707-24246unidade1.jpg)



![[6740 - 16810]unidade1](https://img.document.onl/doc/110x75/5571fc41497959916996da1f/6740-16810unidade1.jpg)