Embed Size (px)
Citation preview

1
Capí tulo 5Capí tu lo 5
MEDIDORES DE DESLOCAMENTOMEDIDORES DE DESLOCAMENTO
5.1 INTRODUÇÃO5.1 INTRODUÇÃO
5 .1 .1 Impo r tânc ia5 .1 .1 Impo r tânc ia
A medição de deslocamentos lineares e angulares é de fundamental importânciano campo da engenharia moderna. Cita-se como exemplos de aplicação:
- Movimentos em máquinas ferramentas, máquinas de medir, robôs industriais, etc.;- Conversão mecânica/elétrica em transdutores para grandezas como: força,
pressão, torque, aceleração, etc.;- Controle dimensional através da medição diferencial (pequenos deslocamentos)
como mais importante técnica de controle de qualidade automatizado;
Neste capítulo serão focalizados os medidores de aplicação mais corrente, e queoperam segundo princípios de transdução:
- Mecânico;- Pneumático;- Elétrico analógico;- Elétrico digital.
5.1 .2 Med i ção D i f e renc ia l5 .1 .2 Med i ção D i f e renc ia l
A produção em massa e de elevada qualidade na indústria mecânica exigemedição rápida, confiável e, se possível, com a mínima influência do operador. Estesrequisitos são preenchidos pela medição diferencial.
Os medidores de deslocamento, nesta aplicação, transformam um pequenodeslocamento captado por um sensor de medição em um deslocamento amplificado deum ponteiro, que possa ser lido num mostrador digital. O mensurando é portanto umdeslocamento linear, em geral, bastante pequeno.
Se o sistema de amplificação é de boa qualidade, pode-se obter facilmenteindicações da ordem de até décimos de micrometros (os medidores elétricos dedeslocamento podem oferecer resolução de até centésimos de micrometros).
A indicação representará sempre a diferença entre a dimensão da peça e a de umpadrão para o qual o sistema é ajustado.
A comparação se faz da seguinte maneira:
- Fixa-se o medidor de deslocamento em um dispositivo apropriado ( figura 5.1a );

2
- Coloca-se o padrão sob o sensor do medidor de deslocamento ( figura 5.1b ) e"zera-se" a indicação, por exemplo, através do giro do mostrador até acoincidência do ponteiro com o zero da escala ( figura 5.1c ), ou através do ajusteda altura da fixação do apalpador utilizando dispositivo apropriado;
- Retira-se o padrão, coloca-se a peça e procede-se a leitura da diferença ( figura5.1d ).
F igu ra 5 .1 : Med i ção d i f e r enc i a l .F i gu ra 5 .1 : Med i ção d i f e r enc i a l .
F i gu ra 5 .2 : Ap l i cações dos compa rado re s .F i gu ra 5 .2 : Ap l i cações dos compa rado re s .
Especiais vantagens do método de medição são o seu pequeno erro e sua força demedição quase constante. Como visto na descrição do paquímetro, pode-se cometererros consideráveis, devidos, por exemplo, a uma força de contato excessiva sobre apeça. A medição diferencial permite eliminar alguns destes erros, pois o operador não
3
interfere na operação de medição, a não ser na ajustagem final do instrumento e nacolocação da peça a ser medida.
Modernamente a medição diferencial adquire crescente importância em função deadequar-se amplamente à automatização com emprego de medidores elétricos dedeslocamento.
A medição diferencial tem também larga aplicação no trabalho de ajuste demáquinas, como exemplificado a figura 5.2.
5.2 MEDIDORES MECÂNICOS5.2 MEDIDORES MECÂNICOS
5 .2 .1 S i s t ema de Mo la To r c iona l5 .2 .1 S i s t ema de Mo la To r c iona l
Talvez o mais simples, mas o mais engenhoso dos medidores de deslocamento é oinstrumento projetado por Abramson. Na figura 5.3 é mostrado esquematicamente esteinstrumento. É um sistema de alavanca associada a uma mola torcional tipo fita.
Uma fita muito fina (1) tem fixo no seu centro (0), um ponteiro muito leve (2). A fitaé torcida em forma de hélice em todo o seu comprimento. Uma extremidade da fita éfixada em uma alavanca AOB angular tipo mola, um braço da qual é ligadodiretamente à haste do apalpador (4).
Quando a haste do apalpador se desloca, a alavanca angular gira em torno de 0e provoca um aumento de comprimento na fita. Isto provocará um giro na fita e oponteiro girará de um ângulo proporcional ao alongamento da fita. Pode ser mostradoque o fator de amplificação da fita é dado por:
d
d W n
0
1
9 1 12
= − , .
.
onde: 1 - comprimento da fita medido ao longo do seu eixo;W - largura da fita;n - número de voltas da fita;0 - giro no ponto médio da fita em relação às extremidades.
Para que o instrumento apresente elevada sensibilidade, as dimensões da seçãotransversal da fita devem ser bem reduzidas. Estas dimensões são da ordem de 6 x 2,5 µm e as tensões devidas à tração na fita, são normalmente aliviadas por pequenasperfurações executadas ao longo do seu comprimento. Estes comparadores podematingir uma ampliação de 5.000 vezes.
A função da barra ajustável (3) é possibilitar o ajuste da amplificação. Isto é umagrande vantagem do ponto de vista construtivo do instrumento, já que permite um últimoajuste em fábrica, ou na operação de manutenção.
As forças de medição, em geral, são de 2 a 3 N, podendo em alguns casos seremreduzidas até 0,5 N.

4
F i gu ra 5 .3 : Compa rado r com a l a vanca e mo la t i po f i t a .F i gu ra 5 .3 : Compa rado r com a l a vanca e mo la t i po f i t a .
5 .2 .2 Re lóg io s comparado re s5 .2 .2 Re lóg io s comparado re s
São medidores de deslocamentos constituídos de um apalpador (que toca napeça), de um mecanismo de amplificação baseado num sistema cremalheira/trem deengrenagens e um mostrador circular onde desloca-se um ou dois ponteiros, àsemelhança de relógios.
Na figura 5.4 tem-se o mecanismo de um relógio comparador. Além doselementos básicos, estes medidores em geral possuem ainda:
- Mostrador giratório;- Indicação de voltas completas do ponteiro;- Eliminação de folgas nas engrenagens;- Dispositivo "anti-choque";- Compensação da força de medição.
Com respeito ao relógio comparador, faz-se ainda destaque aos seguintesaspectos:
a) O mostrador giratório ( EP ) permite que o " zero " da escala principal, quando doajuste inicial do relógio comparador, seja levado a coincidir com o ponteiro,qualquer que seja a posição do mesmo; desta maneira, a indicação inicial é zero,facilitando em muito a operação de medição.

5
b) Além da escala principal ( EP ), os relógios comparadores costumam ser equipadoscom uma escala auxiliar ( EA ), sobre a qual um ponteiro pequeno ( PP ) indica asvoltas completas do ponteiro principal ( P ), facilitando assim a leitura.
c) Para a eliminação de folgas do engrenamento, introduz-se uma protensão porintermédio da mola espiral ( ME ). Pela ação desta mola que atua sobre aengrenagem auxiliar ( EAX ), consegue-se que em todo o trem de engrenagens ocontato ocorra sempre no mesmo flanco dos dentes, qualquer que seja a direção domovimento da haste ( H ). Assim elimina-se, em grande parte, o curso morto nainversão do movimento do ponteiro ( histerese ).
d) A proteção do mecanismo contra o choque funciona da seguinte maneira: acremalheira (CR) não é usinada diretamente sobre a haste (H), mas sim sobre umabucha (BU) que, envolvendo a haste (H), pode deslizar sobre a mesma. Na situaçãonormal, bucha (BU) está pressionada pela força de protensão das engrenagens contrao batente (BA) (pino transversal na haste H). Ocorrendo um impacto no apalpador, ahaste (H) se desloca livremente para cima e o batente (BA) se desprende do contatocom a bucha (BU), que permanece inicialmente sem movimentar-se; em seguida, soba atuação da força de protensão, a bucha (BU) começa a se deslocar lentamentepara cima até que o contato com o batente (BA) seja reestabelecido.
e) Compensação da força de medição: A mola de retorno (M) não atua diretamentesobre a haste mas sim, por intermédio de uma alavanca (AL) (encostadaconvenientemente, por exemplo, sobre o batente BA). Deste modo, graças à forma daalavanca (AL) rotulada (em RO) o aumento da força da mola (M), devido aoalongamento crescente da mesma quando a haste (H) sobe, é compensado pelodecréscimo do braço B para b (sendo b < B) sobre o qual a força da mola atua.
F igu ra 5 .4 : Mecan i smo de um re lóg io compa rado r .F i gu ra 5 .4 : Mecan i smo de um re lóg io compa rado r .

6
F i gu ra 5 .5 : Re l óg i o compa rado r d i g i t a l e l e t r ôn i co .F i gu ra 5 .5 : Re l óg i o compa rado r d i g i t a l e l e t r ôn i co .
5.3 MEDIDORES PNEUMÁTICOS5.3 MEDIDORES PNEUMÁTICOS
Os medidores pneumáticos de deslocamento prestam-se com particularesvantagens para aplicações especiais em meios sob radiação nuclear ou camposmagnéticos, no controle de qualidade dimensional e outras. Na figura 5.6 apresenta-seo princípio de funcionamento e um exemplo da realização prática do mesmo.
O método de medição pneumático consiste essencialmente em transformar umdeslocamento em variações de pressão de ar. O princípio é baseado no comportamentodo fluxo de ar em uma câmara com dois orifícios ( figura 5.6 ).
F igu ra 5 .6 : P r i n c í p io de f unc ionamen to do med ido r de des locamen toF igu ra 5 .6 : P r i n c í p io de f unc ionamen to do med ido r de des locamen topneumá t i co .pneumá t i co .
O ar chega a uma pressão constante H. Passa através do orifício de controle G echega a câmara A. O tamanho do orifício G é constante, mas o tamanho efetivo doorifício S pode ser variado através de um deslocamento d. Se d varia, varia também a

7
pressão h, o que nos fornece uma avaliação de d. Por dimensionamento dos diâmetrosde G e S e do rígido controle da pressão H, a pressão h poderá variar linearmente como tamanho efetivo do orifício S. Para valores h/H entre aproximadamente 0,6 e 0,8 arelação entre a pressão h e a área do orifício S é linear. Estes valores são usados nodimensionamento de todo o sistema. A lei linear entre a área do orifício S e a pressão hé expressa na seguinte forma:
h a Hb H
AA= −.
..
12
onde: h -pressão na câmara A; H -pressão de entrada; A1 -área do orifício G; A2 -área efetiva do orifício S; a e b -são constantes
Como nos outros medidores, a sensibilidade é a relação entre a variação do sinal desaída em relação a variação do mensurando. No caso, o sinal de saída é dh e avariação do mensurando corresponde à variação de A2. Logo a sensibilidade é:
dh / dA2 = - bH / A1
Então a amplificação pneumática é proporcional a pressão de entrada einversamente proporcional a área (ou inversamente proporcional ao quadrado dodiâmetro) do orifício de controle (G).
É claro que um requisito necessário para este tipo de sistema de medição é apressão de entrada H ser rigorosamente constante. Para isto, deve-se ter um reguladorde pressão que controle a pressão de alimentação.
A figura 5.7 mostra um esquema do instrumento produzido pela Solex. O arcomprimido provém de um compressor e passa inicialmente por um filtro. A seguir passapor uma válvula de fluxo e onde a pressão é reduzida e mantida constante através deum tubo mergulhado em uma câmara de água, sendo a pressão do tubo equivalente aaltura da coluna d'água. O excesso de ar escapa para a atmosfera em uma forma deborbulhos.
O ar já com pressão reduzida para o valor H, passa através do orifício de controle(3) e sai pelo orifício de medição (5). A resposta de pressão no circuito (h) é indicadapela altura da coluna d'água no tubo manométrico. O tubo é graduado para indicar asvariações de pressão resultantes da variação do deslocamento d.
Amplificações de 50.000 vezes são possíveis neste sistema. A pressão H énormalmente 500 mm H2O. Na prática, a variação da área efetiva de (5) pode ser feitade três formas (figura 5.7 ):

8
- Por aproximação direta: a pressão varia conforme a posição do orifício de saídaem relação à peça a ser medida. É o caso dos bocais para a medição dediâmetros internos.
- Por aproximação indireta: o furo de saída é substituído por um obturador emforma de válvula e a saída de ar se efetua através do espaço entre o obturador eseu encosto. Neste caso, o obturador é acionado mecanicamente através de umapalpador e existe contato entre a peça e instrumento de medida.
- Por estrangulamento: a seção de saída é a própria peça a medir como porexemplo o gigleur de um carburador.
F igu ra 5 .7 : Med i ção de de s l o camen to pe lo p r i n c í p i o pneumá t i co .F i gu ra 5 .7 : Med i ção de de s l o camen to pe lo p r i n c í p i o pneumá t i co .
F igu ra 5 .8 : Fo rma cons t r u t i va dos t ampões .F igu ra 5 .8 : Fo rma cons t r u t i va dos t ampões .
Uma das aplicações mais importantes dos medidores pneumáticos é sem dúvida amedição diferencial de diâmetros internos de peças. Através de técnicas especiais deconstrução dos sensores, denominados tampões ( figura 5.8 ), consegue-se uminstrumento bastante simples de operar, de elevada confiabilidade e pequena incertezade medição .
9
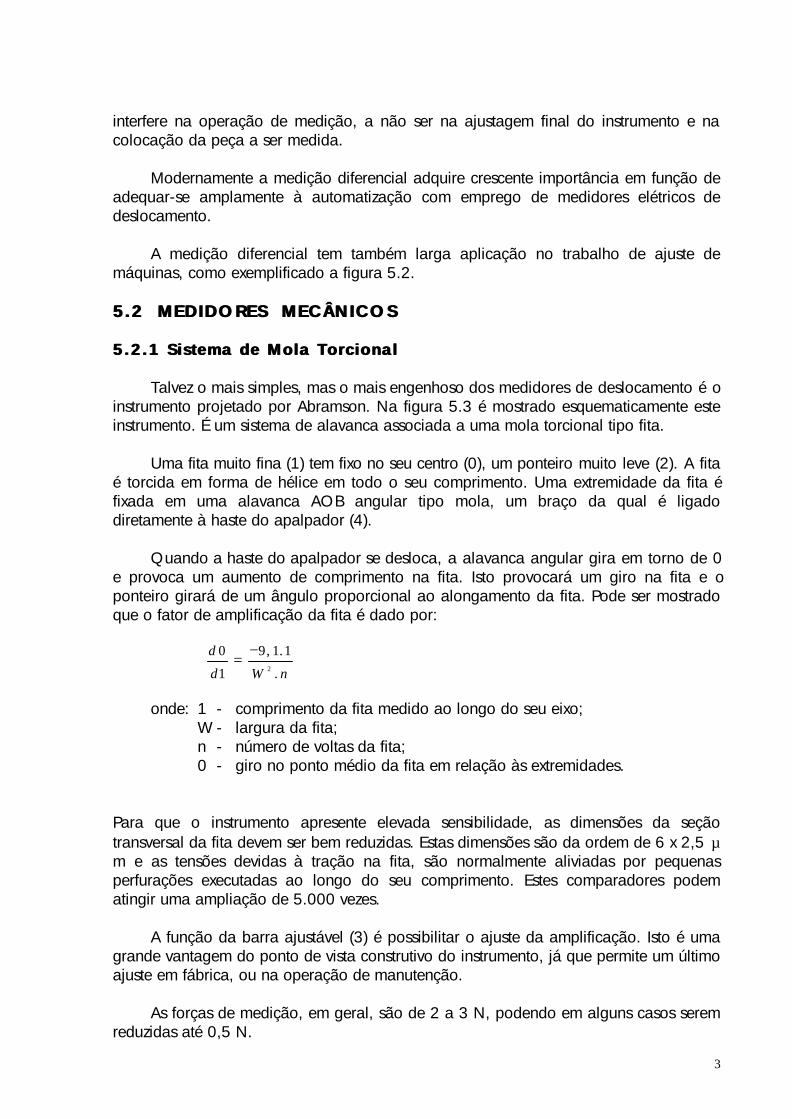
Uma outra forma construtiva é mostrada na figura 5.9. Neste sistema opera-se demodo diferencial, isto é, o sinal proporcional é gerado em função da diferença depressão entre a câmara padrão (canal de referência) e a câmara do medidor (canal demedição).
A medição de pressão é feita com manômetros diferencial que pode operarmecanicamente ( figura 5.9 ) ou eletricamente com as consequentes vantagens.
F igu ra 5 .9 : Med ido r pneumá t i co ( segundo Fede ra l ) .F i gu ra 5 .9 : Med ido r pneumá t i co ( segundo Fede ra l ) .
5.4 ELÉTR ICOS ANALÓGICOS5.4 ELÉTR ICOS ANALÓGICOS
Os medidores elétricos de deslocamento estão sendo cada vez mais utilizados emsubstituição aos sistemas mecânicos e pneumáticos, principalmente pela suasimplicidade de construção e facilidade de automatização.
Os transdutores eletro analógicos, segundo seu princípio de funcionamento sedividem em:
- Resistivos;- Indutivos;- Capacitivos;- Fotoelétricos.
A crescente evolução na área eletrônica permite que sejam construídos sistemas demedição com erros mínimos e alta imunidade a fatores ambientais.
5.4 .1 Res i s t i vo s5 .4 .1 Res i s t i vo s
Os transdutores à base da variação da resistência, por alteração dimensional doresistor efetivo, também conhecido por potenciômetros ( figura 5.10 ), encontram

10
frequente aplicação em função do seu baixo custo, sendo apropriados paradeslocamentos lineares e angulares. Apresentam como desvantagem a alteração de suascaracterísticas com o uso acentuado em função do desgaste. Não apresentam interesseno campo de controle geométrico.
F igu ra 5 .10 : T ransdu to re s r e s i s t i vo s de des locamen to .F igu ra 5 .10 : T ransdu to re s r e s i s t i vo s de des locamen to .
5.4 .2 I ndu t i vo5 .4 .2 I ndu t i vo
Os medidores eletroindutivos de deslocamentos são os mais usados atualmentedentre os medidores analógicos. Suas principais vantagens são:
- construção compacta;- elevada resposta dinâmica;- alta sensibilidade;- boa linearidade;- pouco desgaste;- boa imunidade às influências de fatores ambientais.
Basicamente distingue-se dois métodos de variação da indutância de umtransdutor:
- variação da indutância própria;- variação da indutância mútua entre dois indutores.
Na sequência são analisados alguns aspectos construtivos e operacionais dosmedidores do tipo indutivo:
a) Indutância própria (auto-indutância)
11
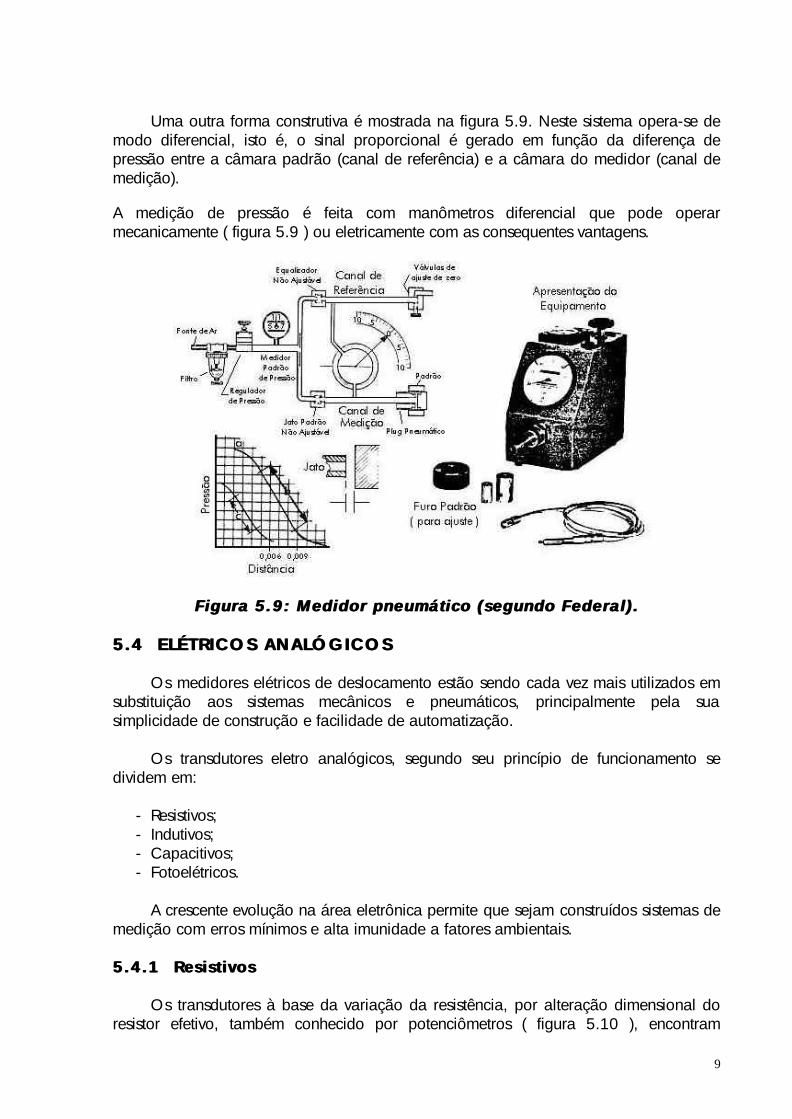
Ao tomar-se uma bobina de resistência elétrica desprezível e injetarmos nela umacorrente elétrica variável no tempo, será criada uma diferença de potencial sobre estabobina (figura 5.11a), dada por:
v Ld i
d t= − .
.
.
A constante de proporcionalidade L entre a tensão e o oposto da derivada dacorrente em relação ao tempo é chamada indutância (unidade no SI=Henry). Oelemento físico que apresenta uma indutância predominante é chamado indutor ( figura5.11d).
F igu ra 5 .11 : I ndu tânc i a p róp r i a e i ndu tânc i a mú tua .F i gu ra 5 .11 : I ndu tânc i a p róp r i a e i ndu tânc i a mú tua .
b) Indutância mútua
Uma característica importante dos indutores é a indutância mútua. A indutânciamútua é a propriedade de um indutor percorrido por uma corrente elétrica comamplitude variável, induzir uma tensão elétrica em um outro indutor próximo (figura5.11b).
Um transformador de tensão é um conjunto formado por dois indutores acopladosmagneticamente de forma eficaz, ou seja, através de um núcleo de alta permeabilidademagnética (figura 5.11c).
c) Características de um indutor
A forma fisica característica de um indutor é uma bobina enrolada sobre um núcleode alta permeabilidade magnética.

12
A indutância de um indutor ideal pode ser dada em função das característicasgeométricas da bobina, da permeabilidade magnética do meio, e do número total deespiras ( figura 5.11d), ou seja:
L n A= 2 1. . . µ
onde: n - número de espiras da bobina por unidade de comprimento;1 - comprimento da bobina;A - área da seção transversal da bobina;µ - permeabilidade magnética do meio.
Cosiderando que N = n.l, onde N é o número total de espiras tem-se:
L NA= 2
1. . µ
A princípio qualquer um dos parâmetros da equação acima pode ser usado paravariar a indutância do indutor. O parâmetro mais usado, pela facilidade de construçãodo transdutor e dos ótimos resultados metrológicos e operacionais alcançados é apermeabilidade magnética "µ".
d) Transdutor Diferencial pela Auto-indutância
Na figura 5.12a pode-se ver um transdutor indutivo de variação da indutânciaprópria constituído de um só indutor. Este tipo de transdutor possui uma característicaaltamente não linear. Como forma de compensar esta característica, usa-se o artifício daligação diferencial ( figura 5.12b), conseguindo-se uma resposta de maior sensibilidadee linearidade.
Na figura 5.12b está mostrada a configuração normalmente encontrada emmedidores de deslocamento indutivo com contato, pela variação da indutância própriade forma diferencial, ou seja, variação da indutância de dois indutores, umaaumentando e outra diminuindo de valor, simultaneamente.
Pela variação da indutância de um indutor conforme visto na figura 5.12, foramdesenvolvidos diferentes tipos de transdutores de deslocamento indutivos. O transdutormais difundido é o deslocamento linear com cursor (contato). Na figura 5.13, tem-se aforma construtiva de um tipo comercial. A faixa de medição é função das dimensões doscomponentes, atingindo a faixa de até ± 0,5 m.
Suas principais vantagens são robustez, erros mínimos, estabilidade e resolução,que pode, dependendo da unidade de tratamento do sinal, ser até da ordem de 0,01 µm.
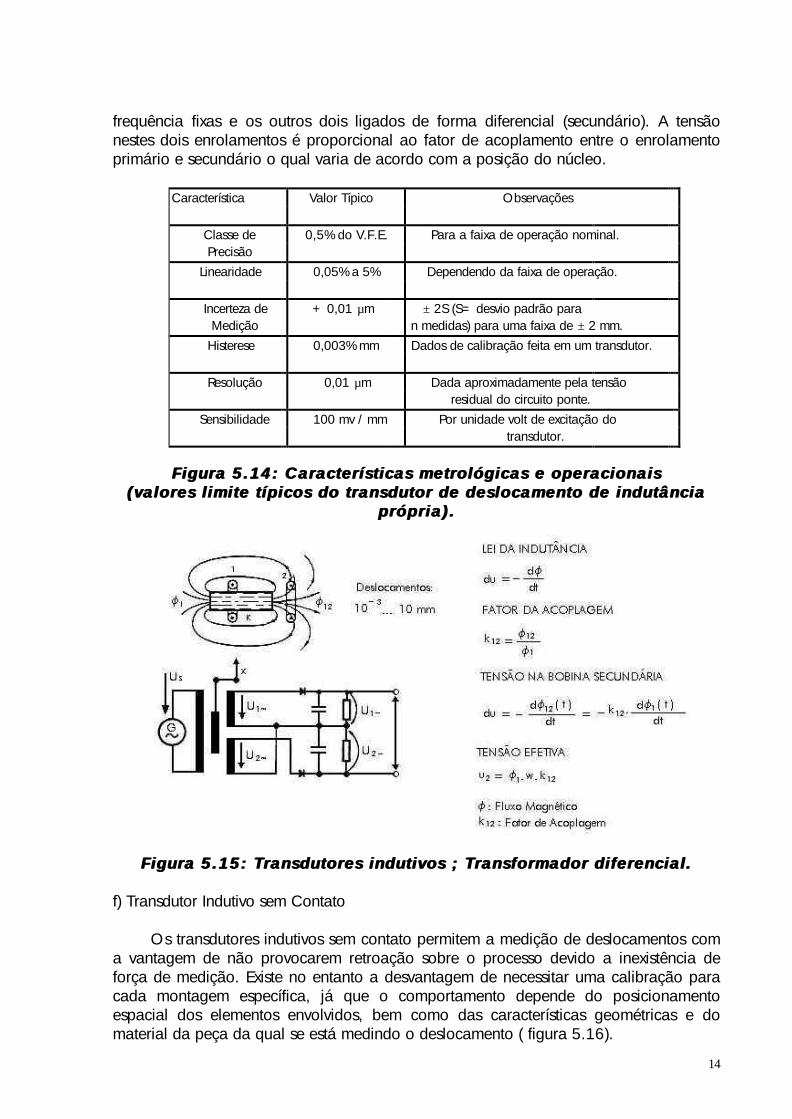
As principais características metrológicas e operacionais deste tipo de transdutorpodem ser vistas no quadro da figura 5.14.

13
F igu ra 5 .12 : T ran sdu to r i ndu t i vo .F i gu ra 5 .12 : T ran sdu to r i ndu t i vo .
F i gu ra 5 .13 : T ran sdu to r i ndu t i vo com con ta to .F i gu ra 5 .13 : T ran sdu to r i ndu t i vo com con ta to .
e) Transdutor Diferencial de Indutância Mútua
Este tipo de transdutor baseia-se no princípio de variação da indutância mútuaentre dois indutores. O tipo mais comum está mostrado na figura 5.15. É formado portrês indutores, sendo que um (primário) é excitado com uma tensão de amplitude e
14
frequência fixas e os outros dois ligados de forma diferencial (secundário). A tensãonestes dois enrolamentos é proporcional ao fator de acoplamento entre o enrolamentoprimário e secundário o qual varia de acordo com a posição do núcleo.
Característica Valor Típico Observações
Classe de 0,5% do V.F.E. Para a faixa de operação nominal. Precisão
Linearidade 0,05% a 5% Dependendo da faixa de operação.
Incerteza de + 0,01 µm ± 2S (S= desvio padrão para Medição n medidas) para uma faixa de ± 2 mm.
Histerese 0,003% mm Dados de calibração feita em um transdutor.
Resolução 0,01 µm Dada aproximadamente pela tensão residual do circuito ponte.
Sensibilidade 100 mv / mm Por unidade volt de excitação do transdutor.
F igu ra 5 .14 : Ca rac t e r í s t i c a s me t ro l óg i ca s e ope rac i ona i sF i gu ra 5 .14 : Ca rac t e r í s t i c a s me t ro l óg i ca s e ope rac i ona i s( va lo re s l im i t e t í p i co s do t r an sdu to r de de s l ocamen to de i ndu tânc i a( va lo re s l im i t e t í p i co s do t r an sdu to r de de s l ocamen to de i ndu tânc i a
p r ó p r i a ) .p r ó p r i a ) .
F i gu ra 5 .15 : T ransdu to re s i ndu t i vo s ; T rans fo rmado r d i f e r enc ia l .F i gu ra 5 .15 : T ransdu to re s i ndu t i vo s ; T rans fo rmado r d i f e r enc ia l .
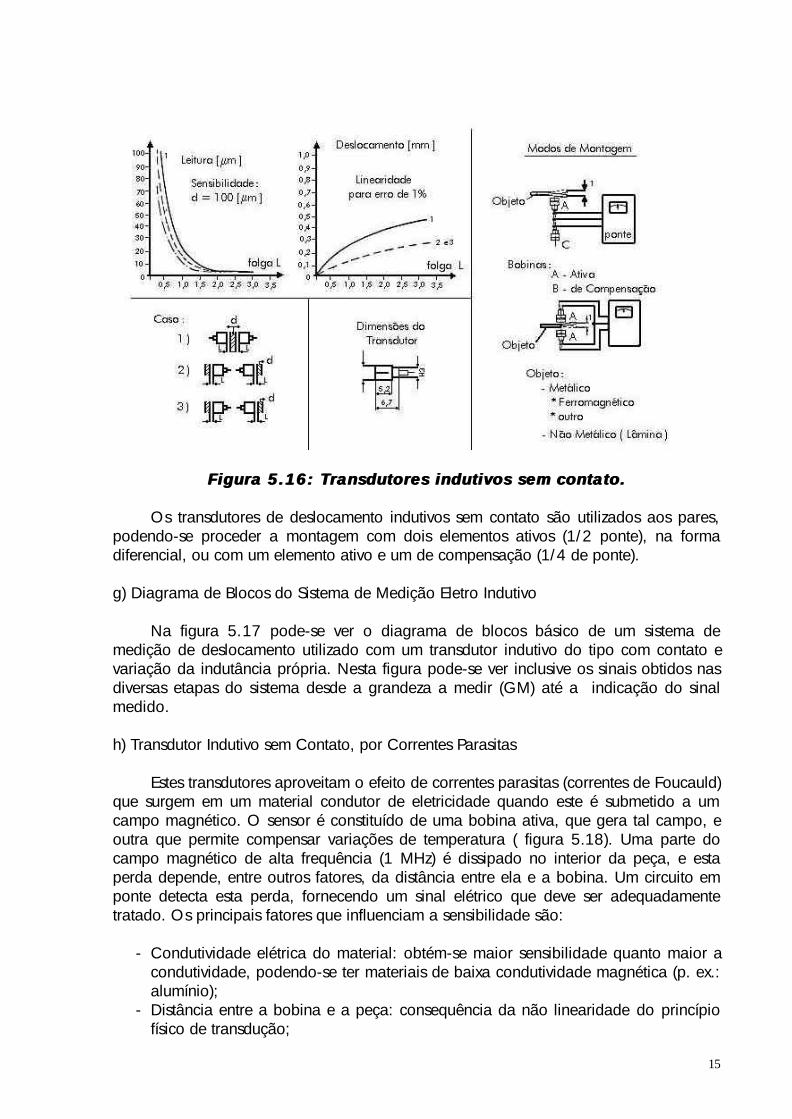
f) Transdutor Indutivo sem Contato
Os transdutores indutivos sem contato permitem a medição de deslocamentos coma vantagem de não provocarem retroação sobre o processo devido a inexistência deforça de medição. Existe no entanto a desvantagem de necessitar uma calibração paracada montagem específica, já que o comportamento depende do posicionamentoespacial dos elementos envolvidos, bem como das características geométricas e domaterial da peça da qual se está medindo o deslocamento ( figura 5.16).
15
F igu ra 5 .16 : T ransdu to re s i ndu t i vo s sem con ta to .F igu ra 5 .16 : T ransdu to re s i ndu t i vo s sem con ta to .
Os transdutores de deslocamento indutivos sem contato são utilizados aos pares,podendo-se proceder a montagem com dois elementos ativos (1/2 ponte), na formadiferencial, ou com um elemento ativo e um de compensação (1/4 de ponte).
g) Diagrama de Blocos do Sistema de Medição Eletro Indutivo
Na figura 5.17 pode-se ver o diagrama de blocos básico de um sistema demedição de deslocamento utilizado com um transdutor indutivo do tipo com contato evariação da indutância própria. Nesta figura pode-se ver inclusive os sinais obtidos nasdiversas etapas do sistema desde a grandeza a medir (GM) até a indicação do sinalmedido.
h) Transdutor Indutivo sem Contato, por Correntes Parasitas
Estes transdutores aproveitam o efeito de correntes parasitas (correntes de Foucauld)que surgem em um material condutor de eletricidade quando este é submetido a umcampo magnético. O sensor é constituído de uma bobina ativa, que gera tal campo, eoutra que permite compensar variações de temperatura ( figura 5.18). Uma parte docampo magnético de alta frequência (1 MHz) é dissipado no interior da peça, e estaperda depende, entre outros fatores, da distância entre ela e a bobina. Um circuito emponte detecta esta perda, fornecendo um sinal elétrico que deve ser adequadamentetratado. Os principais fatores que influenciam a sensibilidade são:
- Condutividade elétrica do material: obtém-se maior sensibilidade quanto maior acondutividade, podendo-se ter materiais de baixa condutividade magnética (p. ex.:alumínio);
- Distância entre a bobina e a peça: consequência da não linearidade do princípiofísico de transdução;

16
- Geometria da peça - a superfície sobre a qual incidem as linhas de campomagnético, existindo restrições quanto à mínima espessura da peça (1 mm).
Estes sistemas devem ser calibrados para as específicas condições de utilização. Nosentido de compensar a não linearidade, estes sistemas contam com circuitos analógicosde compensação, ou até mesmo, microprocessadores que permitem uma calibração eajustagem para cada aplicação.
F igu ra 5 .17 : Med ido r i ndu t i vo de des locamen to ; Módu lo s do s i s t emaF igu ra 5 .17 : Med ido r i ndu t i vo de des locamen to ; Módu lo s do s i s t emade med i ção .de med i ção .
5 .4 .3 Capac i t a t i vo5 .4 .3 Capac i t a t i vo
Conforme mostrado na figura 5.19, a capacitância de um capacitador pode seralterada em função da variação do afastamento das placas, da área superposta deplacas e do dielétrico. Todos os três recursos podem ser utilizados para a medição dedeslocamentos, conforme esquematizado na figura 5.19.
A montagem diferencial de dois capacitadores é utilizada para obter-selinearidade e alta sensibilidade na medição de pequenos deslocamentos ( figura 5.19).
Uma das vantagens do sistema capacitativo é permitir medições de deslocamentosem meios sujeitos a grandes variações de temperatura.

17
F igu ra 5 .18 : Med ido r i ndu t i vo de des locamen to ;F i gu ra 5 .18 : Med ido r i ndu t i vo de des locamen to ;T i po sem con ta to , po r co r r en te s pa ra s i t a s .T i po sem con ta to , po r co r r en te s pa ra s i t a s .
F i gu ra 5 .19 : T ran sdu to re s capac i t i vo s ; Mé todos de va r i a ção daF igu ra 5 .19 : T ran sdu to re s capac i t i vo s ; Mé todos de va r i a ção dacapac i t ân c i a .capac i t â n c i a .

18
5.4 .4 Fo toe l é t r i co5 .4 .4 Fo toe l é t r i co
Os medidores fotoelétricos analógicos são formados por um substratosemicondutor e um circuito elétrico complementar ( figura 5.20 ). Eles fornecem um sinalde tensão "V", proporcional à posição do feixe luminoso (∆d) incidente no substrato.Possuem boa linearidade, boa sensibilidade e velocidade de operação entre 0 e 10 kHz.Sua principal desvantagem é a de não poderem trabalhar em meios expostos à poeira,óleo e outras impurezas.
F igu ra 5 .20 : T ran sdu to r ana lóg i co f o t oe l é t r i co .F i gu ra 5 .20 : T ran sdu to r ana lóg i co f o t oe l é t r i co .
5.5 MEDIDORES ELÉTR ICOS DIGITAIS5.5 MEDIDORES ELÉTR ICOS DIGITAIS
Os principais medidores elétricos digitais utilizam transdutores de deslocamentoque operam com escalas eletro-ópticas.
As escalas eletro-ópticas baseiam-se na codificação de uma barra ou disco pormarcações que interferem na transmissão de luz de uma fonte até um fotodetector. Afigura 5.21 mostra os dois princípios distintos de medição com as escalas eletro-ópticas:o incremental e o absoluto.
F igu ra 5 .21 : E s ca la s e l e t roóp t i ca s i n c remen ta i s .F i gu ra 5 .21 : E s ca la s e l e t roóp t i ca s i n c remen ta i s .

19
5.5 .1 Med ido re s com Esca la s E l e t roóp t i ca s I nc remen ta i s5 .5 .1 Med ido re s com Esca la s E l e t roóp t i ca s I nc remen ta i s
As escalas incrementais devido ao seu custo inferior e características metrológicassuperiores, têm uso predominante em aplicações práticas.
Opticamente elas podem ser de dois tipos:
- Reflexiva: um feixe luminoso incide sobre uma escala polida com gravações detraços opacos, refletindo sobre ela em direção a um fotodetector. Com omovimento da escala, este fotodetector libera um sinal elétrico proporcional àintensidade luminosa incidente;
- Transparente: enquanto se desloca, uma escala de vidro gravada com traçosescuros interrompe de modo alternado um feixe luminoso entre a fonte e umfotodetector (figura 5.21).
Em ambos os casos, o fotodetector fornece um sinal senoidal cujo períodocorresponde ao espaçamento entre os traços da escala e que, após um tratamento, éinjetado em um contador. Com o número de pulsos contados e o espaçamento entrefranjas, é possivel calcular o deslocamento relativo da escala.
F i gu ra 5 .22 : Med i ção op to - e l e t r ôn i ca de pos i ção l i nea r .F i gu ra 5 .22 : Med i ção op to - e l e t r ôn i ca de pos i ção l i nea r .
Uma maior resolução é obtida com um segundo conjunto de fotodetectores, cujaposição em relação ao primeiro resulta na emissão de um sinal eletricamente defasadoem 90° (figura 5.22). Por uma combinação lógica dos níveis dos dois sinais, é possivelinterpolar deslocamentos menores do que o espaçamento entre franjas e identificar osentido do movimento. Traços adicionais, separados da escala principal, podem serprevistos para definir uma posição de referência localizável quando se deseja inicializaros contadores com um valor pré-estabelecido.

20
Algumas escalas têm gravados códigos correspondentes à posição absoluta daescala, permitindo rapidamente recuperar a indicação no mostrador, após, porexemplo, ter sido desligado o contador.
De maneira análoga às escalas lineares, configura-se escalas angulares com discosópticos e fotodetectores orientados radialmente.
Como principais vantagens destas escalas, apresentam-se a sua estabilidade como tempo e frente a variaçoes de temperatura, bem como a grande faixa de operaçãoque se pode obter pela justaposição de segmentos de escala. A principal fonte de errosreside no espaçamento entre os traços e, com menor significado, erros de interpolaçãoentre duas franjas adjacentes.
Os sistemas de medição comerciais, baseados em escalas eletro-ópticas, têm sidocolocados à disposição com incremento digital de até 0,1 µm. A associação deprincípios interferométricos na detecção de franjas, estas agora gravadas em umacamada de ouro depositada sobre uma fita de aço, permite alcançar uma incrementodigital de 0,02 µm.
5.5 .2 Med ido re s com Esca la s E l e t roóp t i ca s Abso lu ta s5 .5 .2 Med ido re s com Esca la s E l e t roóp t i ca s Abso lu ta s
Nas escalas absolutas existe uma codificação de posição gravada na suasuperfície, baseada em regiões que transmitem ou não o feixe luminoso de uma fonteaté um fotodetector ( figura 5.23 ). Um conjunto de fotodetectores capta, a cadaposição da escala, os sinais de passagem ou não do feixe nas diversas regiõescodificadas determinando-se a posição da escala pela combinação lógica destes sinais.
A principal desvantagem deste tipo de escala é a menor resolução que se podealcançar, muito embora já sejam disponíveis com sistemas com incremento digital de1 µm.
F i gu ra 5 .23 : Cod i f i c a ção ab so l u t a de po s i ção .F i gu ra 5 .23 : Cod i f i c a ção ab so l u t a de po s i ção .

21
5.5 .3 O Lase r I n t e r f e romé t r i co5 .5 .3 O Lase r I n t e r f e romé t r i co
O laser interferométrico é um instrumento de grande versatilidade e qualidadepara a medição de deslocamentos lineares que vão de décimos de µm a dezenas demetros. A seguir é descrito o seu princípio de funcionamento.
Um laser a gás He-Ne, tipo Zeemann, é o elemento central do LaserInterferométrico modular. Ele pode alimentar simultaneamente até 6 módulos demedição nos quais se mede, independentemente, uma grandeza por módulo.
Baseado na figura 5.24, pode-se expor resumidamente o princípio defuncionamento. O laser emite um raio com duas frequências f1 e f2 bastante próximas eestáveis. Pela deflexão de parte do raio sobre um fotodetetor, é gerado por interferência,um sinal elétrico com uma frequência (f1 - f2). O restante da energia do raio é colocadoà disposição dos módulos. Na figura 5.24 está esquematizado um módulo genérico.
F igu ra 5 .24 : Componen te s bás i co s do l a se r i n t e r f e romé t r i co modu la r .F i gu ra 5 .24 : Componen te s bás i co s do l a se r i n t e r f e romé t r i co modu la r .
O raio proveniente do laser é, num interferômetro, dividido em suas componentes f1 ef2. Estes raios são, por sua vez, reencaminhados ao interferômetro pelos retro-refletores,de onde seguem, conjuntamente, até o fotodetetor localizado no captador. Ali, gera-sepor interferência no estado estático dos componentes ópticos, um sinal de frequência (f1- f2). Este sinal e o sinal de referência gerado no cabeçote, são encaminhados acontadores eletrônicos dos quais é, ciclicamente, realizada a diferença, e esta transferidaa um acumulador. Havendo um movimento dos retrorefletores, ocorre uma alteração nafrequência (± ∆f1 e ou ± ∆f2) em função do efeito Doppler. O sinal gerado terá, então,durante o deslocamento, uma frequência (f1 ± ∆f1) - (f2 ± ∆f2), sendo em função distoregistrada uma diferença nos contadores. O valor acumulado corresponde à diferençado caminho óptico de f1 e f2.
No interferômetro linear (figura 5.25), um dos retrorefletores é fixo com relação aointerferômetro (∆f2 = 0). Havendo um deslocamento dx do outro retrorefletor, adiferença do caminho óptico entre f1 e f2 será proporcional ao deslocamento dx, que

22
pode ser medido com uma resolução da ordem de 0,16 µm ao longo de 60 m comuma incerteza de ± 1 µm/m sob condições ideais. O valor de f1 não é alterado porpequenos deslocamentos transversais e inclinações do retrorefletor.
Alguns sistemas mais modernos alcançam uma resolução de 0,01 µm.
Na figura 5.25 está esquematizado o interferômetro linear de espelho plano. Aquitambém um dos raios não altera o caminho óptico em relação ao interferômetro (f2),ficando o sinal resultante dependente da variação sofrida pelo outro (f1). Com o duplopercurso do raio entre interferômetro e refletor (espelho plano) a diferença do caminhoóptico com um deslocamento dx será dupla em relação ao interferômetro linear,duplicando consequentemente a sensibilidade. O refletor, sendo um espelho plano,poderá ser deslocado, transversalmente, sem influenciar o valor medido.
F igu ra 5 .25 : I n t e r f e rôme t ro s pa ra med i ção de des locamen tos l i nea re s .F igu ra 5 .25 : I n t e r f e rôme t ro s pa ra med i ção de des locamen tos l i nea re s .
F i gu ra 5 .26 : I n t e r f e rôme t ro angu la r .F i gu ra 5 .26 : I n t e r f e rôme t ro angu la r .

23
Na figura 5.26 mostra-se a viabilidade da medição de pequenos deslocamentosangulares, fazendo-se um arranjo especial de componentes ópticos.
5.6 NORMAS RELAT IVAS AOS MEDIDORES DE DESLOCAMENTO5.6 NORMAS RELAT IVAS AOS MEDIDORES DE DESLOCAMENTO
NBR 6388 "Relógios Comparadores com leitura de 0,01 mm".NBR 10125 "Relógios Comparadores com leitura de 0,001 mm".DIN 878 "Messuhren"DIN 879, Teil 1 "Fõnzeiger mit mechanischer Anzeige"JIS B7536 "Eletrical Comparators"ISO/R463 "Metric dial gauges for linear measurement"ASME/ANSI B89.1.10M "Dial Indicators ( For Linear Measurements )"JIS B 7503 "Dial Gauges Reading in 0,01 mm"